This document is an excerpt from the EUR-Lex website
Document 32019R0838
Commission Implementing Regulation (EU) 2019/838 of 20 February 2019 on technical specifications for vessel tracking and tracing systems and repealing Regulation (EC) No 415/2007
Prováděcí nařízení Komise (EU) 2019/838 ze dne 20. února 2019 o technických specifikacích pro systémy sledování polohy a pohybu plavidel a o zrušení nařízení (ES) č. 415/2007
Prováděcí nařízení Komise (EU) 2019/838 ze dne 20. února 2019 o technických specifikacích pro systémy sledování polohy a pohybu plavidel a o zrušení nařízení (ES) č. 415/2007
C/2019/1114
Úř. věst. L 138, 24.5.2019, p. 31–69
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
24.5.2019 |
CS |
Úřední věstník Evropské unie |
L 138/31 |
PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) 2019/838
ze dne 20. února 2019
o technických specifikacích pro systémy sledování polohy a pohybu plavidel a o zrušení nařízení (ES) č. 415/2007
EVROPSKÁ KOMISE,
s ohledem na Smlouvu o fungování Evropské unie,
s ohledem na směrnici Evropského parlamentu a Rady 2005/44/ES ze dne 7. září 2005 o harmonizovaných říčních informačních službách (RIS) na vnitrozemských vodních cestách ve Společenství (1), a zejména na čl. 5 odst. 1 písm. d) uvedené směrnice,
vzhledem k těmto důvodům:
|
(1) |
Technické specifikace pro systémy sledování polohy a pohybu plavidel stanovené nařízením Komise (ES) č. 415/2007 (2) by měly být aktualizovány a vyjasněny s ohledem na zkušenosti získané při jejich používání, jakož i na technologický pokrok a aktualizace základních mezinárodních norem. |
|
(2) |
Technické specifikace pro systémy sledování polohy a pohybu plavidel by měly vycházet z technických zásad stanovených v příloze II směrnice 2005/44/ES. |
|
(3) |
V souladu s čl. 1 odst. 2 směrnice 2005/44/ES musí technické specifikace náležitě zohlednit práci mezinárodních organizací. Musí být zajištěna návaznost na služby pro řízení provozu u jiných druhů dopravy, zejména na služby pro řízení provozu námořních plavidel a na informační služby týkající se provozu námořních plavidel. |
|
(4) |
V zájmu zvýšení efektivity dopravy po vnitrozemských vodních cestách by technické specifikace měly být rozšířeny tak, aby zahrnovaly ustanovení týkající se aplikačně specifických zpráv pro systémy sledování polohy a pohybu plavidel. |
|
(5) |
Za účelem zlepšení bezpečnosti plavby by technické specifikace pro systémy sledování polohy a pohybu plavidel měly být rozšířeny tak, aby zahrnovaly ustanovení týkající se plavební pomoci (AIDS to Navigation) ve vnitrozemské plavbě. |
|
(6) |
Tímto nařízením by neměla být dotčena ustanovení směrnice Evropského parlamentu a Rady (EU) 2016/1148 (3) o opatřeních k zajištění vysoké společné úrovně bezpečnosti sítí a informačních systémů v Unii. |
|
(7) |
Podle čl. 12 odst. 2 směrnice 2005/44/ES by technické specifikace měly vstoupit v platnost ihned po jejich zveřejnění a členské státy by měly mít povinnost tyto specifikace uplatňovat nejpozději dvanáct měsíců po jejich vstupu v platnost. |
|
(8) |
Nařízení (ES) č. 415/2007 by proto mělo být zrušeno. |
|
(9) |
Opatření stanovená tímto nařízením jsou v souladu se stanoviskem výboru uvedeného v článku 11 směrnice 2005/44/ES, |
PŘIJALA TOTO NAŘÍZENÍ:
Článek 1
Technické specifikace pro systémy sledování polohy a pohybu plavidel ve vnitrozemské vodní dopravě jsou stanoveny v příloze tohoto nařízení.
Článek 2
Nařízení (ES) č. 415/2007 se zrušuje. Odkazy na zrušené nařízení se považují za odkazy na toto nařízení.
Článek 3
Toto nařízení vstupuje v platnost prvním dnem po vyhlášení v Úředním věstníku Evropské unie.
Použije se ode dne 13. června 2020.
Toto nařízení je závazné v celém rozsahu a přímo použitelné ve všech členských státech.
V Bruselu dne 20. února 2019.
Za Komisi
předseda
Jean-Claude JUNCKER
(1) Úř. věst. L 255, 30.9.2005, s. 152.
(2) Nařízení Komise (ES) č. 415/2007 ze dne 13. března 2007 o technických o technických specifikacích pro systémy sledování polohy a pohybu plavidel podle článku 5 směrnice Evropského parlamentu a Rady 2005/44/ES o harmonizovaných říčních informačních službách (RIS) na vnitrozemských vodních cestách ve Společenství (Úř. věst. L 105, 23.4.2007, s. 35).
(3) Směrnice Evropského parlamentu a Rady (EU) 2016/1148 ze dne 6. července 2016 o opatřeních k zajištění vysoké společné úrovně bezpečnosti sítí a informačních systémů v Unii (Úř. věst. L 194, 19.7.2016, s. 1).
PŘÍLOHA
Standardní sledování polohy a pohybu plavidel pro vnitrozemskou plavbu
OBSAH
|
1. |
Obecná ustanovení | 37 |
|
1.1. |
Úvod | 37 |
|
1.2. |
Odkazy | 37 |
|
1.3. |
Definice | 38 |
|
1.4. |
Služby sledování polohy a pohybu plavidel a minimální požadavky na systémy sledování polohy a pohybu plavidel | 40 |
|
2. |
Funkce sledování polohy a pohybu vnitrozemských plavidel | 41 |
|
2.1. |
Úvod | 41 |
|
2.2. |
Navigace | 41 |
|
2.2.1. |
Navigace ve střednědobém předstihu | 41 |
|
2.2.2. |
Navigace v krátkodobém předstihu | 41 |
|
2.2.3. |
Navigace ve velmi krátkodobém předstihu | 42 |
|
2.3. |
Řízení plavebního provozu | 42 |
|
2.3.1. |
Služby plavebního provozu | 42 |
|
2.3.1.1. |
Informační služba | 42 |
|
2.3.1.2. |
Služba plavební pomoci | 42 |
|
2.3.1.3. |
Služba organizace dopravy | 42 |
|
2.3.2. |
Plánování a provoz plavebních komor | 43 |
|
2.3.2.1. |
Dlouhodobé plánování plavebních komor | 43 |
|
2.3.2.2. |
Střednědobé plánování plavebních komor | 43 |
|
2.3.2.3. |
Provoz plavební komory | 43 |
|
2.3.3. |
Plánování a provoz mostů | 43 |
|
2.3.3.1. |
Střednědobé plánování mostů | 43 |
|
2.3.3.2. |
Krátkodobé plánování mostů | 44 |
|
2.3.3.3. |
Provoz mostů | 44 |
|
2.4. |
Zásahy při nehodách | 44 |
|
2.5. |
Řízení dopravy | 44 |
|
2.5.1. |
Plánování cesty | 44 |
|
2.5.2. |
Dopravní logistika | 44 |
|
2.5.3. |
Řízení intermodálních přístavů a terminálů | 44 |
|
2.5.4. |
Řízení nákladu a loďstva | 45 |
|
2.6. |
Vymáhání zákonů | 45 |
|
2.7. |
Poplatky za používání vodních cest a za infrastrukturu přístavů | 45 |
|
2.8. |
Informační potřeby | 45 |
|
3. |
Technické specifikace vnitrozemského AIS | 46 |
|
3.1. |
Úvod | 46 |
|
3.2. |
Oblast působnosti | 47 |
|
3.3. |
Požadavky | 48 |
|
3.3.1. |
Obecné požadavky | 48 |
|
3.3.2. |
Obsah informací | 48 |
|
3.3.2.1. |
Statické informace plavidla | 49 |
|
3.3.2.2. |
Dynamické informace plavidla | 49 |
|
3.3.2.3. |
Cestovní informace plavidla | 50 |
|
3.3.2.4. |
Počet osob na palubě | 50 |
|
3.3.2.5. |
Bezpečnostní zprávy | 50 |
|
3.3.3. |
Interval hlášení přenosu informací | 50 |
|
3.3.4. |
Technologická platforma | 52 |
|
3.3.5. |
Kompatibilita s pohyblivými stanicemi třídy A systému AIS | 52 |
|
3.3.6. |
Jedinečný identifikátor | 52 |
|
3.3.7. |
Požadavky na aplikaci | 52 |
|
3.3.8. |
Schválení typu | 52 |
|
3.4. |
Změny protokolu pro pohyblivou stanici vnitrozemského AIS | 52 |
|
3.4.1. |
Tabulka 3.2 | 52 |
|
3.4.2. |
Statické informace a cestovní údaje plavidla (zpráva 5) | 54 |
|
3.4.3. |
Příkaz skupinového přidělení (zpráva 23) | 57 |
|
3.5. |
Zprávy vnitrozemského AIS | 57 |
|
3.5.1. |
Doplňující zprávy vnitrozemského AIS | 57 |
|
3.5.2. |
Identifikátor aplikace pro aplikačně specifické zprávy vnitrozemského AIS | 57 |
|
3.5.3. |
Obsah informací předávaných prostřednictvím aplikačně specifických zpráv | 57 |
|
3.5.3.1. |
Statické informace a cestovní údaje vnitrozemského plavidla (zpráva specifická pro vnitrozemskou plavbu FI 10) | 57 |
|
3.5.3.2. |
Počet osob na palubě (zpráva specifická pro vnitrozemskou plavbu FI 55) | 58 |
|
4. |
Ostatní pohyblivé stanice AIS na vnitrozemských vodních cestách | 59 |
|
4.1. |
Úvod | 59 |
|
4.2. |
Obecné požadavky na pohyblivé stanice třídy B systému AIS na vnitrozemských vodních cestách | 60 |
|
5. |
Plavební pomoc AIS ve vnitrozemské plavbě | 60 |
|
5.1. |
Úvod | 60 |
|
5.2. |
Použití zprávy 21: Hlášení o plavební pomoci | 60 |
|
5.3. |
Prodloužení zprávy 21 uvedením typu AtoN specifického pro vnitrozemskou plavbu | 64 |
1. OBECNÁ USTANOVENÍ
1.1. Úvod
Technické specifikace pro systémy sledování polohy a pohybu plavidel (VTT) vycházejí z činnosti prováděné v této oblasti příslušnými mezinárodními organizacemi, zejména ze stávajících norem a technických specifikací pro vnitrozemskou plavbu, námořní dopravu nebo jiné důležité oblasti.
V důsledku používání systémů VTT v oblastech smíšeného provozu, včetně prostředí vnitrozemské i námořní plavby, jako jsou námořní přístavy a pobřežní oblasti, musí být systémy VTT kompatibilní s pohyblivými stanicemi třídy A systému AIS, jak je uvedeno v kapitole V úmluvy SOLAS.
Pokud systémy VTT poskytují základní služby, jak jsou definovány ve směrnici (EU) 2016/1148 (1) o opatřeních k zajištění vysoké společné úrovně bezpečnosti sítí a informačních systémů v Unii, použijí se ustanovení uvedené směrnice.
1.2. Odkazy
V této příloze se odkazuje na tyto mezinárodní dohody, doporučení, normy a pokyny:
|
Název dokumentu |
Organizace |
Datum vydání |
|
Pokyny a doporučení pro říční informační služby světového sdružení pro infrastrukturu vodní dopravy World Association for Waterborne Transport Infrastructure (PIANC) |
PIANC |
2011 |
|
Mezinárodní úmluva o bezpečnosti lidského života na moři (úmluva SOLAS), Mezinárodní námořní organizace (IMO), kapitola V – Bezpečnost plavby, 1974, v platném znění |
IMO |
1974 |
|
Mezinárodní námořní organizace (IMO) Rezoluce IMO MSC.74(69), příloha 3, „Doporučení k výkonovým normám pro lodní systém automatické identifikace (AIS)“, 1998 |
IMO |
1998 |
|
Rezoluce IMO A.915(22), „Revidovaná námořní politika a požadavky na budoucí Globální plavební satelitní systém (GNSS)“, 2002 |
IMO |
2002 |
|
Rezoluce IMO A.1106(29), Revidované pokyny pro využívání lodního systému automatické identifikace (AIS) při provozu na palubě, 2015 |
IMO |
2015 |
|
Doporučení Mezinárodní telekomunikační unie ITU-R M.585, „Přidělování a používání identit v námořní pohyblivé službě“, 2015 |
ITU |
2015 |
|
Doporučení Mezinárodní telekomunikační unie ITU-R M.1371, „Technické charakteristiky pro univerzální lodní systém automatické identifikace využívající mnohonásobný přístup s časovým dělením kanálů v námořním mobilním pásmu VHF“ |
ITU |
2014 |
|
Mezinárodní norma Mezinárodní elektrotechnické komise (IEC) 61993-2, „Námořní plavební a radiokomunikační zařízení a systémy – Systém automatické identifikace (AIS), část 2: Lodní zařízení třídy A všeobecného systému automatické identifikace (AIS)“ |
IEC |
2018 |
|
Série mezinárodních norem IEC 61162, „Námořní plavební a radiokomunikační zařízení a systémy – Digitální rozhraní“, část 1: Jeden vysílač a více přijímačů; část 2: Jeden vysílač a více přijímačů, velmi rychlý přenos |
IEC |
část 1: 2016 část 2: 1998 |
|
Mezinárodní norma Mezinárodní elektrotechnické komise (IEC): série mezinárodních norem 62287, Námořní plavební a radiokomunikační zařízení a systémy – Lodní zařízení třídy B systému automatické identifikace (AIS), část 1: Techniky vícenásobného přístupu s časovým dělením reagující na nosnou (CSTDMA); část 2: Techniky vícenásobného přístupu s časovým dělením a samoorganizací (SOTDMA) |
IEC |
2017 |
|
Radiotechnická komise pro námořní služby (RTCM), doporučené normy pro diferenciální GNSS (globální družicové navigační systémy) |
RTCM |
2010 |
|
Doporučení EHK OSN č. 28 „Kódy pro typy dopravních prostředků“ |
EHK OSN |
2010 |
1.3. Definice
V této příloze se používají tyto definice:
|
a) |
Systém automatické identifikace Systém automatické identifikace (AIS)
Vnitrozemský AIS
Sledování polohy a pohybu
Trasa
|
|
b) |
Služby Říční informační služby (RIS)
Řízení plavebního provozu (VTM)
Vnitrozemské služby provozu plavidel (VTS)
Plavební informace
Taktické informace o provozu (TTI)
Strategické informace o provozu (STI)
Sledování polohy a pohybu plavidel (VTT)
Identifikátor námořní pohyblivé služby (MMSI)
Mezinárodní elektronické hlášení (ERI)
Systém k zobrazování elektronických plavebních map a informací pro vnitrozemskou plavbu (vnitrozemský ECDIS)
Subjekty Velitel plavidla
Vůdce plavidla
Příslušný orgán pro RIS
Provozovatel RIS
Uživatelé RIS
|
1.4. Služby sledování polohy a pohybu plavidel a minimální požadavky na systémy sledování polohy a pohybu plavidel
Systémy VTT musí být schopny podporovat tyto služby:
|
— |
navigace, |
|
— |
informace o provozu, |
|
— |
řízení provozu, |
|
— |
zásahy při nehodách, |
|
— |
řízení dopravy, |
|
— |
vymáhání zákonů, |
|
— |
poplatky za používání vodních cest a za infrastrukturu přístavů, |
|
— |
služby informací o plavební dráze, |
|
— |
statistiky. |
Tímto ustanovením nejsou dotčena ustanovení nařízení (ES) č. 414/2007, která se na tyto služby vztahují.
Nejdůležitější informace systémů VTT se týkají totožnosti plavidla a jeho polohy. Systémy VTT musí být schopny automaticky a pravidelně poskytovat jiným plavidlům a pobřežním stanicím alespoň následující informace, a to za předpokladu, že tato plavidla nebo pobřežní stanice jsou vhodně vybaveny:
|
— |
jedinečné identifikační číslo plavidla: jedinečné evropské identifikační číslo plavidla (ENI)/číslo Mezinárodní námořní organizace (číslo IMO), |
|
— |
název plavidla, |
|
— |
volací znak plavidla, |
|
— |
provozní stav plavidla, |
|
— |
druh plavidla nebo sestavy, |
|
— |
rozměry plavidla nebo sestavy, |
|
— |
ponor, |
|
— |
označení nebezpečného nákladu (počet modrých kuželů v souladu s ADN), |
|
— |
stav naložení (náklad/bez nákladu), |
|
— |
místo určení, |
|
— |
předpokládaný čas příjezdu (ETA) do místa určení, |
|
— |
počet osob na palubě, |
|
— |
poloha (+ údaj o kvalitě), |
|
— |
rychlost (+ údaj o kvalitě), |
|
— |
kurz vůči zemi (Course Over Ground, COG) (+ údaj o kvalitě), |
|
— |
kurz (Heading, HDG) (+ údaj o kvalitě), |
|
— |
rychlost otáčení (Rate Of Turn, ROT), |
|
— |
informace týkající se modrého znaku, |
|
— |
časové razítko určení polohy. |
Tyto minimální požadavky ukazují potřeby uživatelů a údaje nezbytné pro systémy VTT ve vnitrozemské plavbě.
Systém VTT je navržen tak, aby poskytoval dostatečnou flexibilitu pro uspokojení budoucích dodatečných požadavků.
2. FUNKCE SLEDOVÁNÍ POLOHY A POHYBU VNITROZEMSKÝCH PLAVIDEL
2.1. Úvod
Tento oddíl stanoví požadavky týkající se informací VTT pro různé kategorie služeb RIS. Požadavky na jednotlivé kategorie služeb jsou uvedeny s popisem skupin uživatelů a používání informací VTT.
Přehled informačních potřeb z hlediska VTT je uveden v tabulce 2.1 na konci tohoto oddílu.
2.2. Navigace
Sledování polohy a pohybu plavidla může být použito k podpoře aktivní navigace na palubě. Hlavní skupinou uživatelů jsou vůdci plavidel.
Proces navigace lze rozdělit do tří fází:
|
a) |
navigace ve střednědobém předstihu; |
|
b) |
navigace v krátkodobém předstihu; |
|
c) |
navigace ve velmi krátkodobém předstihu. |
Požadavky uživatelů pro každou fázi se liší.
2.2.1. Navigace ve střednědobém předstihu
Navigace ve střednědobém předstihu je tou fází navigace, kdy vůdce plavidla sleduje a analyzuje dopravní situaci ve výhledu minut až jedné hodiny a zvažuje možnosti, kde potká, mine nebo předjede jiná plavidla.
Potřebný dopravní obraz představuje typický „pohled za roh“ a je obvykle mimo dosah palubního radaru.
Četnost aktualizace dat závisí na daném úkolu a liší se podle situace, v níž se plavidlo nachází.
2.2.2. Navigace v krátkodobém předstihu
Navigace v krátkodobém předstihu je fází rozhodování v procesu navigace. V této fázi jsou dopravní informace relevantní pro vlastní proces navigace, včetně případných opatření proti kolizi, je-li třeba. Tato funkce spočívá ve sledování ostatních plavidel v blízkém okolí plavidla.
Aktuální dopravní informace se předávají průběžně nejméně každých deset sekund. Pro některé trasy mohou orgány stanovit předem definovanou četnost aktualizace dat (maximálně každé dvě sekundy).
2.2.3. Navigace ve velmi krátkodobém předstihu
Navigace ve velmi krátkodobém předstihu je procesem provozní navigace. Spočívá ve vykonávání rozhodnutí, která byla učiněna dříve, v daném místě a sledování jejich důsledků. Dopravní informace potřebné od ostatních plavidel zvláště v této situaci se týkají podmínek vlastního plavidla, jako je relativní poloha nebo relativní rychlost. V této fázi je nezbytné sledovat vysoce přesné informace.
Informace získané v rámci sledování polohy a pohybu tudíž nelze pro velmi krátkodobou navigaci použít.
2.3. Řízení plavebního provozu
Řízení plavebního provozu (VTM) zahrnuje alespoň tyto prvky:
|
a) |
služby plavebního provozu; |
|
b) |
plánování a provoz plavebních komor; |
|
c) |
plánování a provoz mostů. |
2.3.1. Služby plavebního provozu
Služby plavebního provozu zahrnují tyto služby:
|
a) |
informační služba; |
|
b) |
služba plavební pomoci; |
|
c) |
služba organizace dopravy. |
Skupinami uživatelů služeb plavebního provozu (VTS) jsou provozovatelé VTS a vůdci plavidel.
Potřeby uživatelů související s informacemi o provozu jsou uvedeny v bodech 2.3.1.1 až 2.3.1.3.
2.3.1.1.
Informační služba je poskytována vysíláním informací v pevně určených časech a intervalech, nebo když to VTS považují za nezbytné nebo na žádost plavidla a může zahrnovat zprávy o poloze, totožnosti a záměrech ostatních plavidel, podmínkách vodní cesty, povětrnostních podmínkách, nebezpečných situacích nebo o jakýchkoli jiných faktorech, které mohou ovlivnit proplavení plavidla.
Pro informační služby se vyžaduje přehled provozu v síti nebo na úseku plavební dráhy.
Příslušný orgán může stanovit předem definovanou četnost aktualizace dat, je-li to zapotřebí pro bezpečné a spolehlivé proplutí oblastí.
2.3.1.2.
Služba plavební pomoci informuje vůdce plavidla o obtížných podmínkách splavnosti nebo meteorologických podmínkách nebo mu pomáhá v případě poruch nebo závad. Tato služba je běžně poskytována na žádost plavidla, nebo když to VTS považují za nezbytné.
Pro poskytnutí individuální informace vůdci plavidla potřebuje provozovatel VTS aktuální podrobný obraz provozu.
Aktuální dopravní informace musejí být vyměňovány průběžně (každé tři sekundy, téměř v reálném čase nebo s jinou četností aktualizace dat předem stanovenou příslušným orgánem).
Všechny ostatní informace musejí být k dispozici na požádání provozovatele VTS nebo za zvláštních okolností.
2.3.1.3.
Služba organizace dopravy se zabývá řízením dopravního provozu a plánováním pohybu plavidel tak, aby nedocházelo k dopravní zácpě nebo nebezpečným situacím, a je zvláště významná v době vysoké hustoty provozu, nebo když pohyb zvláštní dopravy může ovlivnit plynulost ostatního provozu. Služba může zahrnovat také vytvoření a provozování systému dopravních odstupů nebo plavebních plánů VTS nebo obojího v souvislosti s prioritou pohybu plavidel, přidělením prostoru (jako jsou kotviště, plavební komora, plavební trasy), povinným hlášením pohybu plavidel v oblasti VTS, vymezenou trasou, stanovenými omezeními rychlosti nebo další vhodná opatření, která orgán VTS považuje za nezbytná.
2.3.2. Plánování a provoz plavebních komor
Procesy dlouhodobého a střednědobého plánování plavebních komor a provozu plavebních komor jsou popsány v bodech 2.3.2.1 až 2.3.2.3. Hlavní skupiny uživatelů jsou provozovatelé plavebních komor, vůdci plavidel, velitelé plavidel a správci loďstev.
2.3.2.1.
Dlouhodobé plánování plavebních komor se zabývá plánováním plavební komory v předstihu hodin až jednoho dne.
V tomto případě se dopravní informace používají ke zpřesnění údajů o čekacích a průjezdních dobách plavebních komor, které původně vycházejí ze statistických údajů.
Předpokládaný čas příjezdu (ETA) musí být k dispozici na požádání nebo musí být sdělen, jestliže odchylka od původního předpokládaného času příjezdu překročí odchylku povolenou příslušným orgánem. Požadovaný čas příjezdu (RTA) je odezvou na hlášení předpokládaného času příjezdu nebo může být odeslán z plavební komory za účelem navržení času proplavení.
2.3.2.2.
Střednědobé plánování plavebních komor se zabývá plánováním plavební komory v předstihu dvou až čtyř cyklů plavební komory.
V tomto případě se dopravní informace použijí k přiřazení připlouvajících plavidel k dostupným cyklům plavební komory a na základě plánování ke sdělení požadovaného času příjezdu (RTA) vůdcům plavidel.
Předpokládaný čas příjezdu (ETA) musí být k dispozici na požádání nebo musí být sdělen, jestliže odchylka od původního předpokládaného času příjezdu překročí odchylku povolenou příslušným orgánem. Všechny ostatní informace musejí být k dispozici hned při prvním kontaktu nebo na požádání. Požadovaný čas příjezdu (RTA) je odezvou na hlášení předpokládaného času příjezdu nebo může být odeslán z plavební komory za účelem navržení času proplavení.
2.3.2.3.
Ve fázi provozu plavební komory probíhá vlastní proces proplavování plavební komorou.
Aktuální dopravní informace musejí být vyměňovány průběžně nebo s jinou četností aktualizace dat předem stanovenou příslušným orgánem.
Přesnost informací VTT neumožňuje použití aplikací vyžadujících vysokou přesností, jako je zavírání vrat plavebních komor.
2.3.3. Plánování a provoz mostů
Procesy střednědobého a krátkodobého plánování mostů a provozní proces mostů jsou popsány v bodech 2.3.3.1 až 2.3.3.3. Hlavními skupinami uživatelů jsou provozovatelé mostů, vůdci plavidel, velitelé plavidel a správci loďstev.
2.3.3.1.
Proces střednědobého plánování mostů se zabývá optimalizací plavebního provozu tak, aby mosty byly včas otevřeny k proplavení plavidel (zelená vlna). Časový horizont plánování se pohybuje v rozmezí od patnácti minut do dvou hodin. Časový rámec závisí na místní situaci.
Předpokládaný čas příjezdu (ETA) a informace o poloze musí být k dispozici na vyžádání nebo musí být poskytnuty, jakmile odchylka mezi aktualizovaným předpokládaným časem příjezdu a původním předpokládaným časem příjezdu překročí hodnotu předem stanovenou příslušným orgánem. Všechny ostatní informace musejí být k dispozici hned při prvním kontaktu nebo na požádání. Požadovaný čas příjezdu (RTA) je odezvou na hlášení předpokládaného času příjezdu (ETA) nebo jej lze zaslat z mostu za účelem navržení času proplavení.
2.3.3.2.
V případě krátkodobého plánování mostů jsou přijímána rozhodnutí na základě strategie otevření mostu.
Aktuální dopravní informace o poloze, rychlosti a směru musejí být k dispozici na požádání nebo sděleny s četností aktualizace dat předem stanovenou příslušným orgánem, např. každých pět minut. Předpokládaný čas příjezdu (ETA) a informace o poloze musí být k dispozici na vyžádání nebo musí být poskytnuty, jakmile odchylka mezi aktualizovaným předpokládaným časem příjezdu a původním předpokládaným časem příjezdu překročí hodnotu předem stanovenou příslušným orgánem. Všechny ostatní informace musejí být k dispozici hned při prvním kontaktu nebo na požádání. Požadovaný čas příjezdu (RTA) je odezvou na hlášení předpokládaného času příjezdu (ETA) nebo jej lze zaslat z mostu za účelem navržení času proplavení.
2.3.3.3.
Ve fázi provozu mostů probíhá vlastní otevření mostu a proplavení plavidla.
Aktuální dopravní informace musejí být předávány průběžně nebo s jinou četností aktualizace dat stanovenou příslušným orgánem.
Přesnost informací VTT neumožňuje použití aplikací vyžadujících vysokou přesností, jako je otevření nebo zavření mostu.
2.4. Zásahy při nehodách
Zásahy při nehodách v tomto kontextu se zaměřují na represivní opatření: řešení nastalých nehod a poskytování pomoci v nouzových situacích. Hlavními skupinami uživatelů jsou operátoři v pohotovostním středisku, provozovatelé VTS, vůdci plavidel, velitelé plavidel a příslušné orgány.
V případě nehody mohou být dopravní informace poskytnuty automaticky nebo o tyto informace požádá příslušná organizace.
2.5. Řízení dopravy
Řízení dopravy je rozděleno do těchto čtyř činností:
|
a) |
plánování cesty; |
|
b) |
dopravní logistika; |
|
c) |
řízení přístavů a terminálů; |
|
d) |
řízení nákladu a loďstva. |
Hlavními skupinami uživatelů jsou velitelé plavidel, zprostředkovatelé, správci loďstev, odesílatelé, příjemci, dodavatelé přepravy, přístavní orgány, provozovatelé terminálů, provozovatelé plavebních komor a provozovatelé mostů.
2.5.1. Plánování cesty
Plánování cesty v tomto kontextu se zaměřuje na plánování během plavby. V průběhu plavby velitel plavidla ověřuje původní plánovanou cestu.
2.5.2. Dopravní logistika
Dopravní logistiku tvoří organizace, plánování, realizace a kontrola dopravy.
Veškeré dopravní informace je třeba předat na požádání majitele lodi nebo logistických subjektů.
2.5.3. Řízení intermodálních přístavů a terminálů
Řízení intermodálních přístavů a terminálů se týká plánování zdrojů v přístavech a terminálech.
Správce terminálu a přístavu si vyžádá dopravní informace nebo dá souhlas k tomu, aby v předem definovaných situacích byly dopravní informace zaslány automaticky.
2.5.4. Řízení nákladu a loďstva
Řízení nákladu a loďstva se týká plánování a optimalizace využití plavidel, uspořádání nákladu a přepravy.
Dopravní informace si vyžádá odesílatel nákladu nebo majitel lodi nebo budou zaslány v předem definovaných situacích.
2.6. Vymáhání zákonů
Rozsah úkolu vymáhání zákonů je omezen na služby kontroly nebezpečného zboží, imigrační kontroly a celní kontroly. Hlavními skupinami uživatelů jsou celní orgány, příslušné orgány a velitelé plavidel.
Dopravní informace se vyměňují s příslušnými orgány. Výměna dopravních informací probíhá na žádost nebo v pevných, předem stanovených bodech nebo za zvláštních okolností definovaných příslušným orgánem.
2.7. Poplatky za používání vodních cest a za infrastrukturu přístavů
V různých místech Unie se za použití vodních cest a přístavů platí poplatky. Hlavními skupinami uživatelů jsou příslušné orgány, velitelé plavidel, správci loďstev, orgány říční správy a přístavní orgány.
Dopravní informace se předávají na žádost nebo v pevných bodech definovaných příslušným orgánem vodní cesty nebo přístavním orgánem.
2.8. Informační potřeby
Tabulka 2.1 podává přehled informačních potřeb v rámci různých služeb.
Tabulka 2.1
Přehled informačních potřeb
|
|
Identifikace |
Název |
Volací znak |
Provozní stav plavidla |
Typ |
Rozměry |
Ponor |
Nebezpečný náklad |
Stav naložení |
Místo určení |
Předpokládaný čas příjezdu (ETA) do místa určení |
Počet osob |
Poloha a čas |
Rychlost |
Kurz/směr |
Kurz |
Rychlost otáčení |
Modrý znak |
Další informace |
|
Navigace ve střednědobém předstihu |
X |
X |
|
X |
X |
X |
|
X |
X |
X |
|
|
X |
X |
X |
|
|
X |
|
|
Navigace v krátkodobém předstihu |
X |
X |
|
X |
X |
X |
|
X |
X |
X |
|
|
X |
X |
X |
X |
|
X |
|
|
Navigace ve velmi krátkodobém předstihu |
VTT v současné době nesplňuje požadavky. |
||||||||||||||||||
|
VTM – služby VTS |
X |
X |
|
X |
X |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
|
|
X |
|
|
VTM – provoz plavební komory |
X |
X |
|
X |
X |
|
X |
X |
|
|
|
|
X |
|
X |
|
|
|
Podjezdná výška |
|
VTM – plánování plavebních komor |
X |
X |
|
X |
X |
X |
X |
X |
|
|
|
|
X |
X |
X |
|
|
|
Počet pomocných vlečných člunů, podjezdná výška, ETA/RTA |
|
VTM – provoz mostů |
X |
X |
|
|
X |
X |
|
|
|
|
|
|
X |
X |
X |
|
|
|
Podjezdná výška |
|
VTM – plánování mostů |
X |
X |
|
X |
X |
X |
|
|
|
|
|
|
X |
X |
X |
|
|
|
Podjezdná výška, ETA/RTA |
|
Zásahy při nehodách |
X |
X |
|
|
X |
|
|
X |
X |
X |
|
X |
X |
|
X |
|
|
|
|
|
TM – plánování cesty |
X |
X |
|
|
|
X |
X |
|
X |
X |
|
|
X |
X |
|
|
|
|
Podjezdná výška, ETA/RTA |
|
TM – dopravní logistika |
X |
X |
|
|
|
|
|
|
|
|
X |
|
X |
|
X |
|
|
|
|
|
TM – řízení přístavů a terminálů |
X |
X |
|
X |
X |
X |
|
X |
X |
|
|
|
X |
|
X |
|
|
|
ETA/RTA |
|
TM – řízení nákladu a loďstva |
X |
X |
|
X |
|
|
X |
|
X |
X |
|
|
X |
|
X |
|
|
|
ETA/RTA |
|
Vymáhání zákonů |
X |
X |
|
X |
X |
|
|
X |
|
X |
X |
X |
X |
|
X |
|
|
|
|
|
Poplatky za infrastrukturu vodních cest a přístavů |
X |
X |
|
|
X |
X |
X |
|
|
X |
|
|
X |
|
|
|
|
|
|
3. TECHNICKÉ SPECIFIKACE VNITROZEMSKÉHO AIS
3.1. Úvod
Mezinárodní námořní organizace (IMO) zavedla vybavení systémem automatické identifikace (Automatic Identification System, AIS) v námořní plavbě: veškerá plavidla plující po moři při mezinárodní plavbě, která spadají do kapitoly V úmluvy SOLAS, musí být od konce roku 2004 vybavena pohyblivými stanicemi třídy A systému AIS.
Směrnice Evropského parlamentu a Rady 2002/59/ES (4) stanoví kontrolní a informační systém Společenství pro provoz námořních plavidel přepravujících nebezpečné nebo znečišťující látky s využitím AIS pro hlášení a sledování lodí.
AIS se považuje za vhodné řešení pro automatickou identifikaci a sledování polohy a pohybu plavidel také ve vnitrozemské plavbě. Zvláště činnost systému AIS v reálném čase a dostupnost celosvětových norem a pokynů je pro aplikace související s bezpečností přínosná.
Aby systém AIS vyhovoval zvláštním požadavkům vnitrozemské plavby, je nutné jej dále vyvíjet do podoby tzv. technických specifikací vnitrozemského AIS při zachování plné slučitelnosti s námořním AIS a již existujícími normami a technickými specifikacemi pro vnitrozemskou plavbu.
Vzhledem k tomu, že vnitrozemský AIS je slučitelný s námořním AIS, umožňuje přímou výměnu dat mezi námořními a vnitrozemskými plavidly plujícími v oblastech smíšeného provozu.
AIS:
|
— |
je systém zavedený Mezinárodní námořní organizací (IMO) za účelem podpory námořní bezpečnosti při plavbě; je požadavek na povinné vybavení všech plavidel v souladu s kapitolou V úmluvy SOLAS, |
|
— |
pracuje v režimu přímého spojení z lodi na loď i v režimu přenosu z lodi do pobřežní stanice a z pobřežní stanice na loď, |
|
— |
je bezpečnostní systém s vysokými požadavky na dostupnost, nepřetržitost a spolehlivost, |
|
— |
je systém pracující v reálném čase díky přímému přenosu dat z lodi na loď, |
|
— |
je systém pracující autonomně na principu samouspořádání bez řídicí stanice. Centrální řídicí dispečink není potřeba, |
|
— |
zakládá se na mezinárodních normách a postupech v souladu s kapitolou V úmluvy SOLAS, |
|
— |
je typově schváleným systémem zvyšujícím bezpečnost plavby po certifikační proceduře, |
|
— |
je globálně interoperabilní. |
Účelem tohoto oddílu je definovat veškeré nezbytné technické požadavky, změny a rozšíření stávajících pohyblivých stanic třídy A systému AIS, aby tak vznikla pohyblivá stanice vnitrozemského AIS určená pro použití ve vnitrozemské plavbě.
3.2. Oblast působnosti
Systém automatické identifikace (AIS) je lodní rádiový datový systém, který přenáší statické a dynamické informace a cestovní údaje plavidla mezi jím vybavenými plavidly vzájemně a mezi jím vybavenými plavidly a pobřežními stanicemi. Lodní stanice AIS vysílají v pravidelných intervalech data o totožnosti, poloze plavidla a další údaje. Díky příjmu těchto přenosů mohou lodní nebo pozemní stanice AIS v rádiovém dosahu automaticky lokalizovat, identifikovat a sledovat plavidla vybavená systémem automatické identifikace na příslušném zobrazovacím zařízení, jako je radar nebo systémy k zobrazování elektronických plavebních map, jako je systém k zobrazování elektronických plavebních map a informací pro vnitrozemskou plavbu (vnitrozemský ECDIS), jak definuje prováděcí nařízení Komise (EU) č. 909/2013 (5). AIS je určen k posílení bezpečnosti plavby při použití mezi loděmi vzájemně, dohledu (VTS), sledování polohy a pohybu plavidel a zásazích při nehodách.
Pohyblivé stanice AIS se dělí na tyto typy:
|
a) |
pohyblivé stanice třídy A určené pro všechna plavidla na moři, na která se vztahují požadavky na vybavení podle kapitoly V úmluvy SOLAS; |
|
b) |
pohyblivá stanice vnitrozemského AIS, která disponuje kompletními funkcemi třídy A na úrovni datového spojení v pásmu VHF, lišící se v doplňkových funkcích a určená pro použití na vnitrozemských plavidlech; |
|
c) |
pohyblivé stanice třídy B SO/CS s omezenými funkcemi, které mohou být používány na plavidlech, na něž se nevztahují požadavky na vybavení pro pohyblivé stanice třídy A nebo pohyblivé stanice vnitrozemského AIS; |
|
d) |
pobřežní stanice AIS, včetně základních stanic AIS a retranslačních stanic AIS. |
Rozlišuje se několik režimů provozu:
|
a) |
provoz loď – loď: všechna plavidla vybavená systémem AIS jsou schopna přijímat statické a dynamické informace od všech ostatních plavidel vybavených systémem AIS v rádiovém dosahu; |
|
b) |
provoz loď – pobřežní stanice: data z plavidel vybavených systémem AIS mohou přijímat také pobřežní stanice AIS napojené na centrum říčních informačních služeb (RIS), kde je možné vytvořit obraz provozu (taktický a/nebo strategický obraz provozu); |
|
c) |
provoz pobřežní stanice – loď: údaje související s cestou a bezpečností lze přenášet z pobřežní stanice do plavidla. |
Charakteristickým rysem AIS je autonomní režim s využitím samoorganizovaného mnohonásobného přístupu s časovým dělením kanálů (Self Organizing Time Division Multiple Access, SOTDMA) bez nutnosti organizovat provoz řídicí stanicí. Rádiový protokol je navržen tak, aby lodní stanice pracovaly autonomně samoorganizovaným způsobem, když si mezi sebou sdělí parametry přístupu. Čas se rozdělí do jednominutových úseků se 2 250 časovými intervaly pro každý rádiový kanál, které jsou synchronizované podle koordinovaného světového času (UTC) v Globálním plavebním satelitním systému GNSS. Každý účastník si organizuje svůj přístup k rádiovému kanálu tak, že si zvolí volné časové intervaly s ohledem na budoucí využití časových intervalů dalšími stanicemi. Centrální dispečink, který by řídil přidělování intervalů, není potřeba.
Pohyblivou stanici vnitrozemského AIS tvoří následující součásti:
|
a) |
vysílač–přijímač VHF (jeden vysílač, dva přijímače); |
|
b) |
přijímač GNSS; |
|
c) |
datový procesor. |
Univerzální lodní systém automatické identifikace (AIS), definovaný IMO, ITU a IEC a doporučený pro použití ve vnitrozemské plavbě, využívá SOTDMA v mobilním námořním pásmu VHF. Systém AIS pracuje na mezinárodních přidělených frekvencích VHF AIS 1 (161,975 MHz) a AIS 2 (162,025 MHz) a lze jej přepnout na jiné frekvence v mobilním námořním pásmu VHF.
Aby systém AIS vyhovoval zvláštním požadavkům vnitrozemské plavby, je třeba jej dále vyvíjet do podoby tzv. vnitrozemského AIS při zachování plné slučitelnosti s námořním AIS.
Systémy sledování polohy a pohybu plavidel ve vnitrozemské plavbě musejí být kompatibilní s pohyblivými stanicemi třídy A systému AIS definovanými IMO. Zprávy vnitrozemského AIS proto musejí být schopny poskytovat tyto druhy informací:
|
a) |
statické informace, jako je například oficiální číslo plavidla, volací znak plavidla, název plavidla, typ plavidla; |
|
b) |
dynamické informace, jako je například poloha plavidla s uvedením přesnosti a stavu neporušenosti; |
|
c) |
cestovní informace plavidla, jako je například délka a šířka sestavy, nebezpečný náklad na palubě; |
|
d) |
informace specifické pro vnitrozemskou plavbu, například počet modrých kuželů/světel podle ADN nebo ETA k plavební komoře/mostu/terminálu/hranici. |
U pohybujících se plavidel se četnost aktualizace dynamických informací na taktické úrovni pohybuje mezi dvěma a deseti sekundami. U kotvících plavidel se doporučuje četnost aktualizace jednou za několik minut, nebo vždy při změně údaje.
Pohyblivá stanice vnitrozemského AIS nenahrazuje, nýbrž doplňuje plavební služby, jako jsou radarové sledování cílů a VTS. Pohyblivá stanice vnitrozemského AIS poskytuje další vstup pro plavební informace: její přidaná hodnota spočívá v zajištění prostředků pro sledování polohy a pohybu plavidel vybavených vnitrozemským AIS. Přesnost polohy získané z pohyblivé stanice vnitrozemského AIS pomocí vnitřních (neupravených) GNSS je obvykle vyšší než deset metrů. Když je poloha opravena pomocí DGNSS buď ze služby diferenční korekce námořního majáku, zprávy 17 systému AIS, nebo EGNOS (SBAS), přesnost se obvykle pohybuje pod pěti metry. Z důvodu rozdílných charakteristik se pohyblivá stanice vnitrozemského AIS a radar vzájemně doplňují.
3.3. Požadavky
3.3.1. Obecné požadavky
Pohyblivá stanice vnitrozemského AIS vychází z pohyblivé stanice třídy A systému AIS v souladu s úmluvou SOLAS.
Pohyblivá stanice vnitrozemského AIS musí zajišťovat hlavní funkce pohyblivých stanic třídy A systému AIS s přihlédnutím ke zvláštním požadavkům vnitrozemské plavby.
Vnitrozemský AIS musí být kompatibilní s námořním AIS a musí umožňovat přímou výměnu dat mezi námořními a vnitrozemskými plavidly plovoucími v oblastech smíšeného provozu.
Požadavky stanovené v bodech 3.3 až 3.5 jsou doplňkové nebo dodatečné požadavky pro vnitrozemský AIS, který se liší od pohyblivých stanic třídy A systému AIS.
Koncepce pohyblivé stanice vnitrozemského AIS musí zohledňovat dokument o technických upřesněních k normě pro systémy sledování a pohybu plavidel (Technical clarifications on Vessel Tracking and Tracing Standard).
Výchozí nastavení vysílacího výkonu musí být vysoký výkon a nastavení na nízký výkon se použije, pouze pokud to nařídí příslušný orgán.
3.3.2. Obsah informací
Pohyblivá stanice vnitrozemského AIS musí přenášet pouze informace o sledování polohy a pohybu a informace související s bezpečností.
Obsah informací uvedených v bodech 3.3.2.1 až 3.3.2.5 musí být proveden tak, aby mohl být zaslán z pohyblivé stanice vnitrozemského AIS, aniž by bylo potřeba použít externí aplikaci.
Zprávy vnitrozemského AIS musí obsahovat tyto informace (s položkami označenými „*“ se musí nakládat odlišně než u námořních plavidel):
3.3.2.1.
Statické informace vnitrozemských plavidel musejí mít stejné parametry a stejnou strukturu jako v pohyblivých stanicích třídy A systému AIS, pokud to připadá v úvahu. Případné převody z vnitrozemských na námořní parametry se provedou automaticky, je-li to proveditelné. Nepoužitá pole parametrů musejí být nastavena na „není k dispozici“.
Musejí být doplněny specificky vnitrozemské statické informace plavidla.
Statické informace plavidla jsou vysílány z plavidla autonomně nebo na žádost.
|
Identifikátor uživatele (MMSI) |
ve všech zprávách |
|
Název plavidla |
Zpráva 5 systému AIS |
|
Volací znak plavidla |
Zpráva 5 systému AIS |
|
Číslo IMO |
Zpráva 5 systému AIS (není k dispozici pro vnitrozemská plavidla) |
|
Typ plavidla/sestavy a nákladu * |
Zpráva 5 systému AIS + vnitrozemský FI 10 |
|
Celková délka (s přesností na decimetry) * |
Zpráva 5 systému AIS + vnitrozemský FI 10 |
|
Celková šířka (s přesností na decimetry)* |
Zpráva 5 systému AIS + vnitrozemský FI 10 |
|
Jedinečné evropské identifikační číslo plavidla (ENI) |
Vnitrozemský FI 10 |
|
Referenční bod pro hlášenou polohu plavidla (umístění antény) * |
Zpráva 5 systému AIS |
3.3.2.2.
Dynamické informace vnitrozemských plavidel musejí mít stejné parametry a stejnou strukturu jako v pohyblivých stanicích třídy A systému AIS, pokud to připadá v úvahu. Nepoužitá pole parametrů musejí být nastavena na „není k dispozici“.
Musejí být doplněny specificky vnitrozemské dynamické informace plavidla.
Dynamické informace plavidla jsou vysílány z plavidla autonomně nebo na žádost.
|
Poloha podle Světového geodetického systému z roku 1984 (WGS 84) |
Zpráva AIS 1, 2 a 3 |
|
Rychlost vůči zemi (SOG) |
Zpráva AIS 1, 2 a 3 |
|
Kurz COG |
Zpráva AIS 1, 2 a 3 |
|
Kurz HDG |
Zpráva AIS 1, 2 a 3 |
|
Rychlost otáčení ROT |
Zpráva AIS 1, 2 a 3 |
|
Přesnost polohy (GNSS/DGNSS) |
Zpráva AIS 1, 2 a 3 |
|
Čas elektronického zařízení pro určování polohy |
Zpráva AIS 1, 2 a 3 |
|
Provozní stav plavidla |
Zpráva AIS 1, 2 a 3 |
|
Stav modrého znaku * |
Zpráva AIS 1, 2 a 3 |
|
Kvalita informace o rychlosti |
Vnitrozemský FI 10 |
|
Kvalita informace o kurzu vůči zemi |
Vnitrozemský FI 10 |
|
Kvalita informace o kurzu |
Vnitrozemský FI 10 |
3.3.2.3.
Cestovní informace vnitrozemských plavidel musejí mít stejné parametry a stejnou strukturu jako v pohyblivých stanicích třídy A systému AIS, pokud to připadá v úvahu. Nepoužitá pole parametrů musejí být nastavena na „není k dispozici“.
Musejí být doplněny specificky vnitrozemské cestovní informace plavidla.
Cestovní informace plavidla jsou vysílány z lodi autonomně nebo na žádost.
|
Místo určení (kód lokality podle ISRS) |
Zpráva 5 systému AIS |
|
Kategorie nebezpečného nákladu |
Zpráva 5 systému AIS |
|
Předpokládaný čas příjezdu (ETA) |
Zpráva 5 systému AIS |
|
Maximální současný statický ponor* |
Zpráva 5 systému AIS + vnitrozemský FI 10 |
|
Označení nebezpečného nákladu |
Vnitrozemský FI 10 |
|
Plavidlo s nákladem/bez nákladu |
Vnitrozemský FI 10 |
3.3.2.4.
Údaj o počtu osob na palubě se přenáší buď jako zpráva určená všem, nebo jako adresovaná zpráva z plavidla k pobřežní stanici na žádost nebo při nastalé události.
|
Počet členů posádky na palubě |
Vnitrozemský FI 55 |
|
Počet cestujících na palubě |
Vnitrozemský FI 55 |
|
Počet členů personálu na palubě |
Vnitrozemský FI 55 |
3.3.2.5.
Bezpečnostní zprávy (tj. textové zprávy) se přenášejí v případě potřeby jako zprávy určené všem nebo adresované zprávy.
|
Adresovaná bezpečnostní zpráva |
Zpráva 12 systému AIS |
|
Bezpečnostní zpráva určená všem |
Zpráva 14 systému AIS |
3.3.3. Interval hlášení přenosu informací
Různé typy informací obsažených ve zprávách vnitrozemského AIS musejí být přenášeny s různou četností hlášení.
U pohybujících se plavidel v oblastech vnitrozemských vodních cest je možné přepínat četnost hlášení dynamických informací mezi autonomním režimem a přiděleným režimem. V přiděleném režimu lze četnost hlášení zvýšit až na dvě sekundy. Režim hlášení musí být přepnutelný ze základní stanice AIS (pomocí zprávy 23 systému AIS pro skupinové přidělení nebo zprávy 16 pro individuální přidělení) a pomocí příkazů externích lodních systémů přes rozhraní IEC 61162, jak definuje dodatek B.
Pro statické informace a cestovní údaje plavidla musí být četnost hlášení každých šest minut, na žádost nebo vždy při změně údaje.
Četnost hlášení je stanovena takto:
|
Statické informace plavidla: |
Každých šest minut, na žádost nebo při změně údajů |
|
Dynamické informace plavidla: |
Závisí na provozním stavu plavidla a na provozním režimu plavidla, buď autonomní režim (výchozí), nebo přidělený režim, viz tabulka 3.1 |
|
Cestovní informace plavidla: |
Každých šest minut, na žádost nebo při změně údajů |
|
Počet osob na palubě: |
Podle potřeby nebo na žádost |
|
Bezpečnostní zprávy: |
Podle potřeby |
|
Aplikačně specifické zprávy: |
Podle potřeby (definuje příslušný orgán) |
Tabulka 3.1
Četnost aktualizace dynamických informací o plavidle
|
Dynamické podmínky plavidla |
Nominální interval hlášení |
|
Stav plavidla „kotvení“ a pohyb ne rychlejší než 3 uzly |
3 minuty (6) |
|
Stav plavidla „kotvení“ a pohyb rychlejší než 3 uzly |
10 sekund (6) |
|
Plavidlo v autonomním režimu, rychlost 0 až 14 uzlů |
10 sekund (6) |
|
Plavidlo v autonomním režimu, rychlost 0 až 14 uzlů a měnící kurz |
3 1/3 sekundy (6) |
|
Plavidlo v autonomním režimu, rychlost 14 až 23 uzlů |
6 sekund (6) |
|
Plavidlo v autonomním režimu, rychlost 14 až 23 uzlů a měnící kurz |
2 sekundy |
|
Plavidlo v autonomním režimu, rychlost vyšší než 23 uzlů |
2 sekundy |
|
Plavidlo v autonomním režimu, rychlost vyšší než 23 uzlů a měnící kurz |
2 sekundy |
|
Plavidlo v přiděleném režimu (7) |
stanoví se v rozpětí 2 sekund až 10 sekund |
3.3.4. Technologická platforma
Platformou pro pohyblivou stanici vnitrozemského AIS je pohyblivá stanice třídy A systému AIS.
Technické řešení pohyblivé stanice vnitrozemského AIS vychází ze stejných technických norem jako pohyblivé stanice třídy A systému AIS (doporučení ITU-R M.1371 a mezinárodní norma IEC 61993-2).
3.3.5. Kompatibilita s pohyblivými stanicemi třídy A systému AIS
Pohyblivé stanice vnitrozemského AIS musejí vyhovovat pohyblivým stanicím třídy A systému AIS a musejí být schopny přijímat a zpracovávat všechny zprávy AIS (podle doporučení ITU-R M.1371 a technického vysvětlení IALA (International Association of aids to navigation and Lighthouse Authorities) k doporučení ITU-R M.1371) a dále zprávy definované v bodě 3.4.
3.3.6. Jedinečný identifikátor
Aby byla zaručena kompatibilita s námořními plavidly, musí být pro pohyblivé stanice vnitrozemského AIS použito číslo identifikátoru námořní pohyblivé služby (MMSI) jako jedinečný identifikátor stanice (identifikátor rádiového zařízení).
3.3.7. Požadavky na aplikaci
Informace uvedené v bodě 3.3.2 se zadávají, ukládají a zobrazují přímo v pohyblivé stanici vnitrozemského AIS.
Pohyblivá stanice vnitrozemského AIS musí být schopna ukládat do vnitřní paměti také specificky vnitrozemské statické informace, aby byly informace zachovány v případě výpadku napájení jednotky.
Nezbytné datové převody obsahu informací vnitrozemského AIS pro malý tlačítkový displej (MKD) (např. uzly na km/h) nebo vstup MKD a zobrazení informací týkajících se typů vnitrozemských plavidel se provádí v pohyblivé stanici vnitrozemského AIS.
Aplikačně specifické zprávy (ASM) by měly být zadávány/zobrazovány externí aplikací s výjimkou ASM vnitrozemského AIS DAC = 200 FI = 10 (statické informace a cestovní údaje vnitrozemského plavidla) a DAC = 200 FI = 55 (počet osob na palubě vnitrozemského plavidla), které jsou prováděny přímo v pohyblivé stanici vnitrozemského AIS.
Pro účely naprogramování údajů specifických pro vnitrozemskou plavbu do odpovídače AIS jsou v dodatku B definovány věty digitálního rozhraní.
Pohyblivá stanice vnitrozemského AIS musí poskytovat – přinejmenším – vnější rozhraní pro zadávání oprav a informací o neporušenosti údajů DGNSS v souladu s ustanoveními zvláštního výboru Radiotechnické komise pro námořní služby č. 104 o DGNSS.
3.3.8. Schválení typu
Pohyblivá stanice vnitrozemského AIS musí získat schválení typu z hlediska souladu s těmito technickými specifikacemi.
3.4. Změny protokolu pro pohyblivou stanici vnitrozemského AIS
Z důvodu vývoje doporučení ITU-R M.1371 umožňuje několik parametrů používání nových stavových kódů. To nenarušuje fungování systému AIS, ale může to vést k zobrazení nerozpoznaných stavových kódů v zařízeních vycházejících z předchozích revizí normy.
3.4.1. Tabulka 3.2
Tabulka 3.2
Hlášení polohy
|
Parametr |
Počet bitů |
Popis |
|
ID zprávy |
6 |
Identifikátor pro tuto zprávu 1, 2 nebo 3 |
|
Indikátor opakování |
2 |
Používá opakovač k označení toho, kolikrát byla zpráva opakována. 0–3; výchozí hodnota = 0; 3 = dále neopakovat |
|
ID uživatele (MMSI) |
30 |
Číslo MMSI |
|
Provozní stav plavidla |
4 |
0 = na cestě s použitím motoru; 1 = kotvení; 2 = bez velení; 3 = omezená manévrovatelnost; 4 = omezeno ponorem; 5 = vyvázání; 6 = na mělčině; 7 = rybolov; 8 = na cestě s použitím plachet; 9 = vyhrazeno pro budoucí změny provozních stavů plavidla pro vysokorychlostní plavidla; 10 = vyhrazeno pro budoucí změny provozních stavů plavidla pro plavidla typu WIG (Wing In Ground); 11 = motorové plavidlo s tažným zařízením na zádi (regionální použití) (8); 12 = motorové plavidlo se zařízením pro tlačení nebo tažení na boku (regionální použití) (8); 13 = vyhrazeno pro budoucí použití; 14 = AIS-SART (aktivní); 15 = není definováno = výchozí hodnota (rovněž použito AIS) |
|
Rychlost otáčení ROT AIS |
8 |
0 až + 126 = otáčení vpravo při 708 stupních za minutu nebo více 0 až –126 = otáčení vlevo při 708 stupních za minutu nebo více Hodnoty mezi 0 a 708 stupňů za minutu kódované ROTAIS = 4,733 stupně SQRT(ROTsensor) stupňů za minutu, přičemž ROTsensor je rychlost otáčení získaná jako vstupní údaj z externího snímače rychlosti otáčení. ROTAIS se zaokrouhluje na nejbližší celé číslo + 127 = otáčení vpravo při více než 5 stupních za 30 sekund (snímač rychlosti otáčení není k dispozici) – 127 = otáčení vlevo při více než 5 stupních za 30 sekund (snímač rychlosti otáčení není k dispozici) – 128 (80 hex) znamená, že nejsou k dispozici žádné údaje o otáčení (výchozí hodnota). Údaje o ROT by neměly být odvozeny z informací o COG |
|
Rychlost vůči zemi |
10 |
Rychlost vůči zemi v jednotkách 1/10 uzlu (0–102,2 uzlu) 1 023 = není k dispozici; 1 022 = 102,2 uzlu nebo více (9) |
|
Přesnost polohy |
1 |
Příznak přesnosti polohy (PA) by měl být stanoven v souladu s ITU-R M.1371. 1 = vysoká (= < 10 m) 0 = nízká (> 10 m) 0 = výchozí hodnota |
|
Zeměpisná délka |
28 |
Zeměpisná délka v 1/10 000 min. (±180 stupňů, východně = kladná hodnota (dvojkový doplněk), západně = záporná hodnota (dvojkový doplněk), 181 = (6791AC0 hex) = není k dispozici = výchozí hodnota) |
|
Zeměpisná šířka |
27 |
Zeměpisná šířka v 1/10 000 minut (±90 stupňů, severně = kladná hodnota (dvojkový doplněk), jižně = záporná hodnota (dvojkový doplněk), 91 stupňů (3412140 hex) = není k dispozici = výchozí hodnota) |
|
Kurz vůči zemi |
12 |
Kurz vůči zemi v 1/10° (0–3599). 3 600 (E10 hex) = není k dispozici = výchozí hodnota; 3 601 –4 095 se nesmí používat. |
|
Skutečný kurz |
9 |
Stupně (0–359) (511 označuje, že údaj není k dispozici = výchozí hodnota). |
|
Časové razítko |
6 |
Sekunda UTC, kdy byla zpráva vygenerována elektronickým systémem pro určování polohy (EPFS) (0–59, nebo 60, jestliže časové razítko není k dispozici, což musí být nastaveno také jako výchozí hodnota, nebo 61, jestliže systém pro určování polohy pracuje v režimu ručního zadávání, nebo 62, jestliže elektronický systém pro určování polohy pracuje v režimu výpočtové navigace (stanovení polohy přibližným výpočtem), nebo 63, jestliže systém pro určování polohy je mimo provoz). |
|
Ukazatel zvláštního manévru: modrý znak |
2 |
Označení, zda je modrý znak nastaven (10) 0 = není k dispozici = výchozí hodnota, 1 = zvláštní manévr neproveden = modrý znak není nastaven 2 = zvláštní manévr proveden = modrý znak je nastaven ano, 3 nepoužito |
|
Rezerva |
3 |
Nepoužívá se. Je třeba nastavit na nulu. Vyhrazeno pro budoucí použití. |
|
Příznak RAIM |
1 |
Označení monitorování nezávislé integrity vysílače RAIM (Receiver Autonomous Integrity Monitoring) elektronického zařízení pro určování polohy; 0 = RAIM se nepoužívá = výchozí hodnota; 1 = RAIM se používá. Příznak RAIM by měl být stanoven v souladu s ITU-R M.1371. |
|
Stav komunikace |
19 |
Stav komunikace by měl být stanoven v souladu s ITU-R M.1371. |
|
Celkem |
168 |
Obsazuje jeden interval. |
3.4.2. Statické informace a cestovní údaje plavidla (zpráva 5)
Tabulka 3.3
Hlášení statických a dynamických informací plavidla
|
Parametr |
Počet bitů |
Popis |
|
ID zprávy |
6 |
Identifikátor pro tuto zprávu 5 |
|
Indikátor opakování |
2 |
Odesílá opakovač k označení toho, kolikrát byla zpráva opakována 0–3; výchozí hodnota = 0; 3 = dále neopakovat |
|
ID uživatele (MMSI) |
30 |
Číslo MMSI |
|
Indikátor verze AIS |
2 |
0 = stanice splňující požadavky doporučení ITU-R M.1371-1; 1 = stanice splňující požadavky doporučení ITU-R M.1371-3 (nebo novější verze), 2 = stanice splňující požadavky doporučení ITU-R M.1371-5 (nebo novější verze), 3 = stanice splňující požadavky budoucích vydání |
|
Číslo IMO |
30 |
0 = není k dispozici = výchozí hodnota – nepoužije se pro letadlo pro pátrání a záchranu 0000000001–0000999999 nepoužito 0001000000–0009999999 = platné číslo IMO; 0010000000–1073741823 = oficiální číslo státu vlajky. (11) |
|
Volací znak |
42 |
7 znaků v 6bitovém kódu ASCII, „@@@@@@@“ = není k dispozici = výchozí hodnota. Plavidla, která jsou spojena s mateřským plavidlem, by měla používat písmeno „A“ následované posledními šesti číslicemi MMSI mateřského plavidla. Mezi příklady těchto plavidel patří vlečná plavidla, záchranářské čluny, tendry, záchranné čluny a záchranné vory |
|
Název |
120 |
Max. 20 znaků v 6bitovém kódu ASCII, viz ITU-R M.1371; @@@@@@@@@@@@@@@@@@@@ = není k dispozici = výchozí hodnota. Pokud jde o letadla pro pátrání a záchranu (SAR), měl by být nastaven na „SAR AIRCRAFT NNNNNNN“, kde NNNNNNN je registrační číslo letadla. |
|
Typ plavidla a nákladu |
8 |
0 = není k dispozici nebo žádné plavidlo = výchozí hodnota; 1–99 = podle definice v ITU-R M.1371; (12) 100–199 = vyhrazeno, pro regionální použití; 200–255 = vyhrazeno, pro budoucí použití Nepoužije se u letadel SAR. |
|
Celkové rozměry plavidla/sestavy a referenční bod pro polohu |
30 |
Referenční bod pro hlášenou polohu; označuje také rozměry plavidla v metrech (viz ITU-R M.1371). V případě letadel SAR může o použití tohoto pole rozhodnout příslušný orgán. V případě použití by měly být uvedeny maximální rozměry plavidla. Jako výchozí hodnota by A = B = C = D mělo být nastaveno na „0“ (13) (14) (15) |
|
Typ elektronického zařízení pro určování polohy |
4 |
0 = nedefinován (výchozí hodnota), 1 = GPS, 2 = GLONASS, 3 = kombinovaný GPS/GLONASS, 4 = (Loran-C), 5 = Čajka, 6 = integrovaný navigační systém, 7 = sledovaný, 8 = Galileo, 9–14 = nepoužívá se, 15 = vnitřní GNSS |
|
Předpokládaný čas příjezdu (ETA) |
20 |
ETA; MMDDHHMM UTC Bity 19–16: měsíc; 1–12; 0 = není k dispozici = výchozí hodnota; Bity 15–11: den; 1–31; 0 = není k dispozici = výchozí hodnota; Bity 10–6: hodina; 0–23; 24 = není k dispozici = výchozí hodnota; Bity 5–0: minuta; 0–59; 60 = není k dispozici = výchozí hodnota V případě letadel SAR může o použití tohoto pole rozhodnout příslušný orgán. |
|
Maximální současný statický ponor |
8 |
v 1/10 m, 255 = ponor 25,5 m nebo větší, 0 = není k dispozici = výchozí hodnota (16) |
|
Místo určení |
120 |
Maximálně 20 znaků v 6bitovém kódu ASCII; @@@@@@@@@@@@@@@@@@@@ = není k dispozici. (17) |
|
Koncové datové zařízení (DTE) |
1 |
Datový terminál připraven (0 = dostupný, 1 = není k dispozici = výchozí hodnota). |
|
Rezerva |
1 |
Rezerva. Nepoužívá se. Musí být nastaveno na nulu. Vyhrazeno pro budoucí použití. |
|
Celkem |
424 |
Obsazuje dva intervaly. |
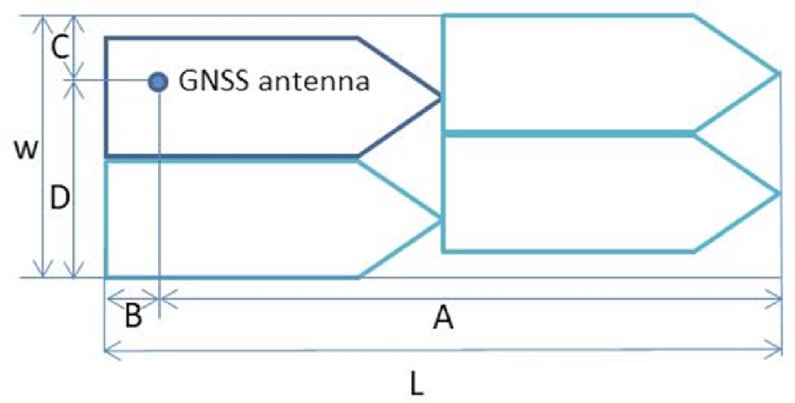
Obrázek 3.1
Referenční bod pro hlášenou polohu a celkový rozměr plavidla/sestavy
|
|
Počet bitů |
Bitová pole |
Vzdálenost (m) |
|
|
A |
9 |
Bity 21–29 |
0–511 511 = 511 m nebo větší |
Referenční bod pro hlášenou polohu |
|
B |
9 |
Bity 12–20 |
0–511 511 = 511 m nebo větší |
|
|
C |
6 |
Bity 6–11 |
0–63 63 = 63 m nebo větší |
|
|
D |
6 |
Bity 0–5 |
0–63 63 = 63 m nebo větší |
|
|
L = A + B |
Definováno ve vnitrozemském FI 10 |
Celkový rozměr použitý v pohyblivé stanici vnitrozemského AIS |
||
|
W = C + D |
||||
|
Rozměr by měl být ve směru přenášených informací o kurzu (příď). Referenční bod pro hlášenou polohu není k dispozici, ale rozměry plavidla/sestavy jsou dostupné: A = C = 0 a B ≠ 0 a D ≠ 0. Referenční bod pro hlášenou polohu ani rozměry plavidla/sestavy nejsou k dispozici: A = B = C = D = 0 (= výchozí hodnota). Pro použití tabulky zpráv, A = nejvýznamnější pole, D = nejméně významné pole |
||||
3.4.3. Příkaz skupinového přidělení (zpráva 23)
Pohyblivým stanicím vnitrozemského AIS se určí skupinové přidělení pomocí zprávy 23 za použití typu stanice „6 = vnitrozemské vodní cesty“.
3.5. Zprávy vnitrozemského AIS
3.5.1. Doplňující zprávy vnitrozemského AIS
Pro zajištění souladu s informačními potřebami jsou definovány zvláštní zprávy vnitrozemského AIS. Kromě obsahu informací, který se provádí přímo ve stanici vnitrozemského AIS, může pohyblivá stanice vnitrozemského AIS předávat doplňující informace prostřednictvím aplikačně specifických zpráv (ASM). Tento obsah informací zpravidla zpracovává externí aplikace, jako je vnitrozemský ECDIS.
Za použití ASM vnitrozemského AIS odpovídá říční komise nebo příslušné orgány.
3.5.2. Identifikátor aplikace pro aplikačně specifické zprávy vnitrozemského AIS
Aplikačně specifické zprávy tvoří rámec pohyblivých stanic třídy A systému AIS podle doporučení ITU-R M.1371 (ID zprávy, indikátor opakování, ID zdroje, ID místa určení), identifikátor aplikace (AI = DAC + FI) a datový obsah (proměnné délky až do stanoveného maxima).
16bitový identifikátor aplikace (AI = DAC + FI) sestává z těchto prvků:
|
a) |
10bitový kód určené oblasti (DAC): mezinárodní (DAC = 1) nebo regionální (DAC > 1); |
|
b) |
6bitový funkční identifikátor (FI) – umožňuje 64 jedinečných aplikačně specifických zpráv. |
Pro aplikačně specifické zprávy evropského harmonizovaného vnitrozemského AIS se používá DAC „200“.
V místních ASM lze kromě toho používat vnitrostátní (regionální) DAC, např. zkušební piloti. Důrazně se však doporučuje vyvarovat se používání regionálních ASM.
3.5.3. Obsah informací předávaných prostřednictvím aplikačně specifických zpráv
ASM vnitrozemského AIS DAC = 200 FI = 10 (statické informace a cestovní údaje vnitrozemského plavidla) a DAC = 200 FI = 55 (počet osob na palubě vnitrozemského plavidla) se provádějí přímo v pohyblivé stanici vnitrozemského AIS (viz body 3.5.3.1 a 3.5.3.2).
3.5.3.1.
Tuto zprávu použijí pouze vnitrozemská plavidla, a to k vyslání statických informací a cestovních údajů plavidla nad rámec zprávy 5. Zpráva musí být odeslána s binární zprávou 8 co nejdříve (z hlediska AIS) po zprávě 5.
Tabulka 3.4
Hlášení údajů vnitrozemského plavidla
|
|
Parametr |
Počet bitů |
Popis |
|
ID zprávy |
6 |
Identifikátor pro zprávu 8; vždy 8 |
|
|
Indikátor opakování |
2 |
Používá opakovač k označení toho, kolikrát byla zpráva opakována. 0–3; výchozí hodnota = 0; 3 = dále neopakovat |
|
|
ID zdroje |
30 |
Číslo MMSI |
|
|
Rezerva |
2 |
Nepoužívá se, musí být nastaveno na nulu. Vyhrazeno pro budoucí použití. |
|
|
Binární údaje |
Identifikátor aplikace |
16 |
DAC = 200, FI = 10 |
|
Jedinečné evropské identifikační číslo plavidla (ENI) |
48 |
8 znaků v 6bitovém kódu ASCII. 00000000 = ENI nepřiděleno = výchozí hodnota |
|
|
Délka plavidla/sestavy |
13 |
1–8 000 (zbývající nepoužívat) délka plavidla/sestavy v 1/10 m; 0 = výchozí hodnota |
|
|
Šířka plavidla/sestavy |
10 |
1–1 000 (zbývající nepoužívat) šířka plavidla/sestavy v 1/10 m; 0 = výchozí hodnota |
|
|
Typ plavidla nebo sestavy |
14 |
Číselné označení typu plavidla nebo sestavy v souladu s dodatkem C 0 = není k dispozici = výchozí hodnota |
|
|
Označení nebezpečného nákladu |
3 |
Počet modrých kuželů/světel 0–3; 4 = příznak B, 5 = výchozí hodnota = neznámý |
|
|
Maximální současný statický ponor |
11 |
1–2 000 (zbývající nepoužívat) ponor v 1/100 m, 0 = výchozí hodnota = neznámý |
|
|
Náklad/bez nákladu |
2 |
1 = náklad, 2 = bez nákladu, 0 = není k dispozici/výchozí hodnota, 3 se nesmí používat. |
|
|
Kvalita informace o rychlosti |
1 |
1 = vysoká, 0 = nízká/GNSS = výchozí hodnota (*1) |
|
|
Kvalita informace o kurzu vůči zemi |
1 |
1 = vysoká, 0 = nízká/GNSS = výchozí hodnota (*1) |
|
|
Kvalita informace o kurzu |
1 |
1 = vysoká, 0 = nízká = výchozí hodnota (*1) |
|
|
Rezerva |
8 |
Nepoužívá se, musí být nastaveno na nulu. Vyhrazeno pro budoucí použití. |
|
|
|
Celkem |
168 |
Obsazuje jeden interval. |
3.5.3.2.
Tuto zprávu odesílají pouze vnitrozemská plavidla, a to ke sdělení počtu osob (cestujících, členů posádky, členů personálu) na palubě. Zpráva musí být odeslána s binární zprávou 6, pokud možno v případě nastalé události nebo na žádost, s použitím binární funkční zprávy 2 IAI.
Tabulka 3.5
Hlášení počtu osob na palubě
|
|
Parametr |
Bit |
Popis |
|
ID zprávy |
6 |
Identifikátor pro zprávu 6; vždy 6 |
|
|
Indikátor opakování |
2 |
Používá opakovač k označení toho, kolikrát byla zpráva opakována. 0–3; výchozí hodnota = 0; 3 = dále neopakovat |
|
|
ID zdroje |
30 |
Číslo MMSI zdrojové stanice |
|
|
Pořadové číslo |
2 |
0–3 |
|
|
ID místa určení |
30 |
Číslo MMSI stanice místa určení |
|
|
Znak retranslace |
1 |
Znak retranslace se nastaví při retranslaci: 0 = žádná retranslace = výchozí hodnota; 1 = retranslace provedena |
|
|
Rezerva |
1 |
Nepoužívá se, musí být nastaveno na nulu. Vyhrazeno pro budoucí použití. |
|
|
Binární údaje |
Identifikátor aplikace |
16 |
DAC = 200, FI = 55 |
|
Počet členů posádky na palubě |
8 |
0–254 členů posádky, 255 = neznámý = výchozí hodnota |
|
|
Počet cestujících na palubě |
13 |
0–8 190 cestujících, 8 191 = neznámý = výchozí hodnota |
|
|
Počet členů personálu na palubě |
8 |
0–254 členů personálu, 255 = neznámý = výchozí hodnota |
|
|
Rezerva |
51 |
Nepoužívá se, musí být nastaveno na nulu. Vyhrazeno pro budoucí použití. |
|
|
|
Celkem |
168 |
Obsazuje jeden interval. |
4. OSTATNÍ POHYBLIVÉ STANICE AIS NA VNITROZEMSKÝCH VODNÍCH CESTÁCH
4.1. Úvod
Plavidla, která nejsou povinna provozovat pohyblivé stanice vnitrozemského AIS, mohou používat jiné pohyblivé stanice systému AIS. Lze použít tyto pohyblivé stanice:
|
a) |
pohyblivá stanice třídy A systému AIS v souladu s čl. 35 odst. 2 a 3 směrnice Evropského parlamentu a Rady 2014/90/EU (18); |
|
b) |
pohyblivá stanice třídy B systému AIS v souladu s bodem 4.2. |
Použití těchto stanic na vnitrozemských vodních cestách závisí na rozhodnutí příslušného orgánu odpovědného za plavbu v této oblasti.
Jsou-li tyto stanice používány dobrovolně, velitel plavidla neustále aktualizuje ručně vložené údaje AIS. Žádné nesprávné údaje se prostřednictvím AIS nepředávají.
4.2. Obecné požadavky na pohyblivé stanice třídy B systému AIS na vnitrozemských vodních cestách
Třída B systému AIS má v porovnání s pohyblivými stanicemi vnitrozemského AIS omezené funkce. Zprávy zaslané pohyblivou stanicí třídy B systému AIS jsou v porovnání s pohyblivými stanicemi vnitrozemského AIS přenášeny s nižší prioritou.
Kromě požadavků vyplývajících z jiných právních aktů Unie, a to zejména směrnice Evropského parlamentu a Rady 1999/5/ES (19) a rozhodnutí Komise 2005/53/ES (20), pohyblivé stanice třídy B systému AIS instalované na plavidlech provozovaných na vnitrozemských vodních cestách v Unii splňují požadavky stanovené v:
|
a) |
doporučení ITU-R M.1371; |
|
b) |
mezinárodní normě IEC 62287 (včetně správy kanálů DSC). |
|
Pozn.: |
Příslušný orgán odpovědný za plavbu v dané oblasti je povinen před vydáním licence pro stanici plavidla a přidělením čísla identifikátoru námořní pohyblivé služby (MMSI) zjistit, zda jsou pohyblivé stanice třídy B systému AIS v souladu s normami a požadavky uvedenými v druhém pododstavci, a to například prostřednictvím schválení typu příslušných pohyblivých stanic třídy B systému AIS. |
5. PLAVEBNÍ POMOC AIS VE VNITROZEMSKÉ PLAVBĚ
5.1. Úvod
Plavební pomoc (známá též jako podpůrné prostředky pro plavbu nebo AtoN (AIDS to Navigation)) je značení, které pomáhá při plavbě. Tato pomoc zahrnuje značení pro majáky, bóje, mlhové signály a denní majáky. Seznam typů AtoN je uveden v tabulce 5.2.
Technologie AIS umožňuje dynamicky přenášet informace o AtoN.
Pro použití ve vnitrozemské plavbě je třeba hlášení o AtoN námořního AIS (zpráva 21) rozšířit tak, aby byla zahrnuta specifika systému značení vnitrozemských plavebních drah.
Hlášení o AtoN námořního AIS je založeno na systému značení plavebních drah IALA. Pro vnitrozemskou plavbu musí hlášení o AtoN systému AIS odrážet systém AtoN pro evropskou vnitrozemskou plavbu popsaný v oddíle 5.
Hlášení o AtoN systému AIS předává polohu a význam AtoN, jakož i informaci, zda se bóje nachází na požadované poloze (na poloze), či nikoli (mimo polohu).
5.2. Použití zprávy 21: Hlášení o plavební pomoci
Pro použití na vnitrozemských vodních cestách se používá hlášení o AtoN systému AIS (zpráva 21), jak je definuje doporučení ITU-R M.1371. Další typy AtoN pro evropskou vnitrozemskou plavbu jsou kódovány pomocí bitů „stav AtoN“.
Tabulka 5.1
Hlášení o AtoN systému AIS
|
Parametr |
Počet bitů |
Popis |
|
ID zprávy |
6 |
Identifikátor pro tuto zprávu 21 |
|
Indikátor opakování |
2 |
Používá opakovač k označení toho, kolikrát byla zpráva opakována. 0–3; výchozí hodnota = 0; 3 = dále neopakovat |
|
Označení |
30 |
Číslo MMSI (viz článek 19 RR a doporučení ITU-R M.585) |
|
Typ plavební pomoci |
5 |
0 = není k dispozici = výchozí hodnota; viz příslušná definice stanovená IALA; viz obrázek 5-1 (21) |
|
Název plavební pomoci |
120 |
Maximálně 20 znaků v 6bitovém kódu ASCII, jak definuje tabulka 47, „@@@@@@@@@@@@@@@@@@@@“ = není k dispozici = výchozí hodnota. Název AtoN lze prodloužit pomocí parametru „Prodloužení názvu plavební pomoci“ níže. |
|
Přesnost polohy (PA) |
1 |
1 = vysoká (≤ 10 m), 0 = nízká (> 10 m), 0 = výchozí hodnota. Příznak PA by měl být stanoven v souladu s tabulkou „Stanovení informací o přesnosti polohy“ v doporučení ITU-R M.1371. |
|
Zeměpisná délka |
28 |
Zeměpisná délka polohy AtoN v 1/10 000 minut (±180 stupňů, východně = kladná hodnota, západně = záporná hodnota, 181 = (6791AC0h) = není k dispozici = výchozí hodnota) |
|
Zeměpisná šířka |
27 |
Zeměpisná šířka polohy AtoN v 1/10 000 minut (±90 stupňů, severně = kladná hodnota, jižně = záporná hodnota, 91 = (3412140h) = není k dispozici = výchozí hodnota) |
|
Rozměr/referenční bod pro polohu |
30 |
Referenční bod pro hlášenou polohu; je-li to relevantní, také uvádí rozměr AtoN (m) (viz obrázek 5-1) (22) |
|
Typ elektronického zařízení pro určování polohy |
4 |
0 = nedefinován (výchozí hodnota) 1 = GPS 2 = GLONASS 3 = kombinovaný GPS/GLONASS 4 = Loran-C 5 = Čajka 6 = integrovaný navigační systém 7 = sledovaný. Pro stacionární AtoN a virtuální AtoN by se měla použít zaznamenaná poloha. Přesná poloha zlepšuje její funkci jako referenčního radarového cíle. 8 = Galileo 9–14 = nepoužito 15 = vnitřní GNSS |
|
Časové razítko |
6 |
Sekunda UTC, kdy byla zpráva vygenerována EPFS (0–59 nebo 60, jestliže časové razítko není k dispozici (mělo by být nastaveno také jako výchozí hodnota), nebo 61, jestliže systém pro určování polohy pracuje v režimu ručního zadávání, nebo 62, jestliže elektronický systém pro určování polohy pracuje v režimu výpočtové navigace (stanovení polohy přibližným výpočtem), nebo 63, jestliže systém pro určování polohy je mimo provoz). |
|
Indikátor polohy mimo polohu |
1 |
Pouze u plovoucí AtoN: 0 = na poloze; 1 = mimo polohu. Pozn. 1 – Tento příznak by měla přijímací stanice považovat za platný, pouze pokud je AtoN plovoucí plavební pomocí a je-li časové razítko rovné nebo nižší než 59. U plovoucí AtoN by se měly při instalaci stanovit parametry ochranné zóny. |
|
Stav AtoN |
8 |
Vyhrazeno pro informaci o stavu AtoN 00000000 = výchozí hodnota (23) |
|
Příznak RAIM |
1 |
Příznak RAIM (monitorování nezávislé integrity vysílače) elektronického zařízení pro určování polohy; 0 = RAIM se nepoužívá = výchozí hodnota; 1 = RAIM se používá; viz tabulka „Stanovení informací o přesnosti polohy“ v doporučení ITU-R M.1371 |
|
Příznak virtuální AtoN |
1 |
0 = výchozí hodnota = skutečná AtoN na uvedené poloze; 1 = virtuální AtoN, fyzicky neexistuje (24) |
|
Příznak přiděleného režimu |
1 |
0 = stanice pracující v autonomním a nepřetržitém režimu = výchozí hodnota, 1 = stanice pracující v přiděleném režimu |
|
Rezerva |
1 |
Rezerva. Nepoužívá se. Je třeba nastavit na nulu. Vyhrazeno pro budoucí použití. |
|
Prodloužení názvu plavební pomoci |
0, 6, 12, 18, 24, 30, 36, … 84 |
Tento parametr tvořený až 14 dalšími 6bitovými znaky kódu ASCII pro dvouintervalovou zprávu lze zkombinovat s parametrem „Název plavební pomoci“ na konci uvedeného parametru, pokud je pro název AtoN zapotřebí více než 20 znaků. Tento parametr by měl být vynechán, pokud není pro název AtoN potřeba více než 20 znaků celkem. Měl by být předán pouze požadovaný počet znaků, tj. neměl by se použít žádný znak @. |
|
Rezerva |
0, 2, 4 nebo 6 |
Rezerva. Použije se pouze v případě použití parametru „Prodloužení názvu plavební pomoci“. Je třeba nastavit na nulu. Počet rezervních bitů by měl být upraven tak, aby bylo možné pozorovat hranice bytů. |
|
Celkem |
272–360 |
Obsazuje dva intervaly. |
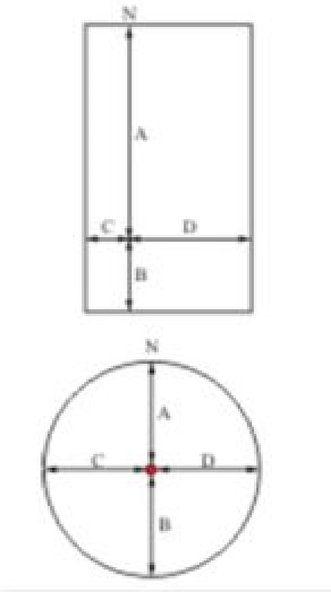
Obrázek 5-1
Referenční bod pro hlášenou polohu námořní AtoN nebo rozměr AtoN
|
|
|
Počet bitů |
Bitová pole |
Vzdálenost (m) |
|
A |
9 |
Bity 21–29 |
0–511 511–511 m nebo větší |
|
|
B |
9 |
Bity 12–20 |
0–511 511–511 m nebo větší |
|
|
C |
6 |
Bity 6–11 |
0–63 63–63 m nebo větší |
|
|
D |
6 |
Bity 0–5 |
0–63 63–63 m nebo větší |
Je-li typ AtoN, který má být přenesen, zahrnut ve stávajících typech AtoN podle IALA (podle tabulky 5.2), není třeba provádět žádné změny.
Tabulka 5.2
Typy plavební pomoci (AtoN)
|
Kód |
Definice (námořní doprava) |
|
|
|
0 |
Výchozí hodnota, typ AtoN nespecifikován |
|
|
1 |
Referenční bod |
|
|
2 |
RACON |
|
|
3 |
Stacionární pobřežní konstrukce, jako jsou ropné plošiny, větrné elektrárny. (Pozn. 1 – Tento kód by měl označovat překážku, na níž je osazena stanice AIS AtoN) |
|
|
4 |
Nouzová bóje pro označení ztroskotaného plavidla |
|
Stacionární AtoN |
5 |
Světlo, bez sektorů |
|
6 |
Světlo, se sektory |
|
|
7 |
Naváděcí světlo přední |
|
|
8 |
Naváděcí světlo zadní |
|
|
9 |
Maják, severní kardinální znak |
|
|
10 |
Maják, východní kardinální znak |
|
|
11 |
Maják, jižní kardinální znak |
|
|
12 |
Maják, západní kardinální znak |
|
|
13 |
Maják, levá strana plavební dráhy |
|
|
14 |
Maják, pravá strana plavební dráhy |
|
|
15 |
Maják, levá strana upřednostňované plavební dráhy |
|
|
16 |
Maják, pravá strana upřednostňované plavební dráhy |
|
|
17 |
Maják, izolované nebezpečí |
|
|
18 |
Maják, bezpečné vody |
|
|
19 |
Maják, zvláštní značka |
|
|
Plovoucí AtoN |
20 |
Severní kardinální znak |
|
21 |
Východní kardinální znak |
|
|
22 |
Jižní kardinální znak |
|
|
23 |
Západní kardinální znak |
|
|
24 |
Bóje na levé straně plavební dráhy |
|
|
25 |
Bóje na pravé straně plavební dráhy |
|
|
26 |
Bóje na levé straně upřednostňované plavební dráhy |
|
|
27 |
Bóje na pravé straně upřednostňované plavební dráhy |
|
|
28 |
Izolované nebezpečí |
|
|
29 |
Bezpečné vody |
|
|
30 |
Zvláštní značka |
|
|
31 |
Majáková loď/LANBY/vrtné věže |
|
|
Pozn. 1 – Typy AtoN uvedené výše vycházejí v příslušných případech ze systému námořního značení IALA. Pozn. 2 – Při rozhodování o tom, zda je prostředek plavební pomoci osvětlen nebo neosvětlen, se mohou objevit nejasnosti. Příslušné orgány mohou pro tyto účely případně použít regionální/lokální oddíl zprávy. |
||
5.3. Prodloužení zprávy 21 uvedením typu AtoN specifického pro vnitrozemskou plavbu
Pole parametru „Stav AtoN“ se používá k prodloužení zprávy 21 pomocí uvedení typu AtoN specifického pro vnitrozemskou plavbu.
Pole parametru „Stav AtoN“ je rozděleno na osm stránek, z toho stránka s ID 0 je 0 = výchozí hodnota, stránka s ID 1 až 3 je určena pro regionální použití a stránka s ID 4 až 7 pro mezinárodní použití. První tři bity pole stavu AtoN definují ID stránky, zbývajících 5 bitů obsahuje informace stránky.
Region, na který se ID stránky 1 až 3 použije, je definován pomocí kódu země podle ITU v rámci MMSI odesílající stanice AIS AtoN. Bitový kód 5 informačních bitů v poli stavu AtoN se tudíž použije pouze v tomto konkrétním regionu.
Pokud jde o vnitrozemské vodní cesty v Unii, na stránce s ID 1 pole stavu AtoN je uveden seznam použitých typů AtoN specifických pro vnitrozemskou plavbu.
Typ AtoN specifický pro vnitrozemskou plavbu se nastaví ve zprávě 21 dvěma kroky. Za prvé je nutné nastavit parametr „Typ plavební pomoci“ ve zprávě 21 na „0 = výchozí nastavení, typ AtoN nespecifikován“. Za druhé je třeba nastavit parametr „Stav AIS“ na ID stránky 1 a uvést odpovídající kód typu AtoN specifického pro vnitrozemskou plavbu:
Zpráva 21 – stav AtoN:
|
Bity: |
|
|
LSB |
|
kódování: |
ID stránky |
typ AtoN (0–31) |
|
(1) Směrnice Evropského parlamentu a Rady (EU) 2016/1148 ze dne 6. července 2016 o opatřeních k zajištění vysoké společné úrovně bezpečnosti sítí a informačních systémů v Unii (Úř. věst. L 194, 19.7.2016, s. 1).
(2) Směrnice Evropského parlamentu a Rady 2005/44/ES ze dne 7. září 2005 o harmonizovaných říčních informačních službách (RIS) na vnitrozemských vodních cestách ve Společenství (Úř. věst. L 255, 30.9.2005, s. 152).
(3) Nařízení Komise (ES) č. 414/2007 ze dne 13. března 2007 o technických pokynech pro plánování, zavádění a provozování říčních informačních služeb (RIS) podle článku 5 směrnice Evropského parlamentu a Rady 2005/44/ES o harmonizovaných říčních informačních službách (RIS) na vnitrozemských vodních cestách ve Společenství (Úř. věst. L 105, 23.4.2007, s. 1).
(4) Směrnice Evropského parlamentu a Rady 2002/59/ES ze dne 27. června 2002, kterou se stanoví kontrolní a informační systém Společenství pro provoz plavidel a kterou se zrušuje směrnice Rady 93/75/EHS (Úř. věst. L 208, 5.8.2002, s. 10).
(5) Prováděcí nařízení Komise (EU) č. 909/2013 ze dne 10. září 2013 o technických specifikacích pro systém k zobrazování elektronických plavebních map a informací pro vnitrozemskou plavbu (vnitrozemský ECDIS) podle směrnice Evropského parlamentu a Rady 2005/44/ES (Úř. věst. L 258, 28.9.2013, s. 1).
(6) Jakmile pohyblivá stanice zjistí, že jde o semafor (viz doporučení ITU-R M.1371, příloha 2, § 3.1.1.4), četnost hlášení se musí zvýšit na jedenkrát za dvě sekundy (viz doporučení ITU-R M.1371, příloha 2, § 3.1.3.3.2).
(7) Musí být v případě potřeby přepnuto příslušným orgánem.
(8) Pro účely tohoto nařízení se v Unii nepoužije.
(9) Uzly přepočítává na km/h externí palubní zařízení.
(10) Vyhodnocuje se pouze tehdy, jestliže zpráva přichází z pohyblivé stanice vnitrozemského AIS a jestliže je informace zjištěna automatickými prostředky (přímé spojení se spínačem).
(11) Pro vnitrozemská plavidla musí být nastaveno na hodnotu 0.
(12) Pro vnitrozemskou plavbu musí být použit nejblíže odpovídající typ plavidla (viz dodatek C).
(13) Rozměry musejí být nastaveny na maximální obdélníkový obrys sestavy.
(14) Decimetrová přesnost údaje pro vnitrozemskou plavbu se zaokrouhlí nahoru.
(15) Informace o referenčním bodu musí být vyňata z věty rozhraní SSD rozlišením pole „identifikátor zdroje“. Informace o referenčním bodu polohy s identifikátorem zdroje AI musí být uložena jako interní. Další identifikátory zdrojů povedou k informacím o referenčních bodech pro externí referenční bod.
(16) Centimetrová přesnost údaje pro vnitrozemskou plavbu se zaokrouhlí nahoru.
(17) Použijí se kódy lokality podle ISRS v rámci indexu RIS odvozené ze systému ERDMS (European Reference Data Management System), který vede Evropská komise.
(*1) Musí být nastaveno na hodnotu 0, jestliže k odpovídači není připojen žádný typově schválený snímač (např. gyroskop).
(18) Směrnice Evropského parlamentu a Rady 2014/90/EU ze dne 23. července 2014 o lodní výstroji a o zrušení směrnice Rady 96/98/ES (Úř. věst. L 257, 28.8.2014, s. 146).
(19) Směrnice Evropského parlamentu a Rady 1999/5/ES ze dne 9. března 1999 o rádiových zařízeních a telekomunikačních koncových zařízeních a vzájemném uznávání jejich shody (Úř. věst. L 91, 7.4.1999, s. 10).
(20) Rozhodnutí Komise 2005/53/ES ze dne 25. ledna 2005 o použití čl. 3 odst. 3 písm. e) směrnice Evropského parlamentu a Rady 1999/5/ES na rádiová zařízení určená k účasti na automatickém systému zjišťování totožnosti lodí (AIS) (Úř. věst. L 22, 26.1.2005, s. 14).
(21) V případě, že se přenáší kód typu vnitrozemské AlonN, nastaví se toto pole (typ AtoN) na 0 = nedefinován.
(22) Při použití obrázku 5-1 pro AtoN je nutno dbát na toto:
|
— |
V případě stacionární AtoN, virtuální AtoN nebo pobřežních konstrukcí musí orientace určená rozměrem A ukazovat ke skutečnému severu. |
|
— |
U plovoucí plavební pomoci větší než 2 m * 2 m se rozměry AtoN vždy uvádějí aproximované kružnicí, tj. rozměry vždy musí být uvedené takto: A = B = C = D ≠ 0. (Je to proto, že orientace plovoucí AtoN se nepřenáší. Referenčním bodem pro hlášenou polohu je střed kružnice.) |
|
— |
A = B = C = D = 1 označuje předměty (stacionární nebo plovoucí), jejichž rozměry jsou menší nebo rovné 2 m * 2 m. (Referenčním bodem pro hlášenou polohu je střed kružnice.) |
|
— |
Plovoucí pobřežní konstrukce, které nejsou stacionární, jako jsou vrtné věže, se považují za typ označený kódem 31 z tabulky 5.2. U těchto konstrukcí se parametr „Rozměr/referenční bod pro polohu“ určí, jak je uvedeno výše v pozn. 1. U stacionárních pobřežních konstrukcí, typu označeného kódem 3 z tabulky 5.2, se parametr Rozměr/referenční bod pro polohu určí, jak je uvedeno výše v pozn. 1. Proto se u všech pobřežních AtoN a konstrukcí rozměr určuje stejným způsobem a skutečné rozměry jsou uvedeny ve zprávě 21. |
(23) V případě hlášení o AtoN vnitrozemského AIS se toto pole použije k označení typu vnitrozemské AtoN pomocí strany 001.
(24) Při přenosu informací o virtuální AtoN, tj. kdy se příznak cíle virtuální/pseudo-AtoN nastaví na 1, se rozměry nastaví na A = B = C = D = 0 (výchozí hodnota). Totéž se provede také při přenosu informací o „referenčním bodu“.
Dodatek A
ZKRATKY
|
AI |
Application Identifier (identifikátor aplikace) |
|
AIS |
Automatic Identification System (systém automatické identifikace) |
|
ADN |
European Agreement concerning the International Carriage of Dangerous Goods by Inland Waterways (Evropská dohoda o mezinárodní přepravě nebezpečných věcí po vnitrozemských vodních cestách) |
|
ASCII |
American Standard Code for Information Interchange (Americký standardní kód pro výměnu informací) |
|
ASM |
Application Specific Message (aplikačně specifická zpráva) |
|
AtoN |
AIDS to Navigation (prostředky plavební pomoci) |
|
DAC |
Designated Area Code (kód určené oblasti) |
|
DGNSS |
Differential GNSS (diferenciální GNSS) |
|
FI |
Functional Identifier (funkční identifikátor) |
|
GLONASS |
(ruský) Globální plavební satelitní systém |
|
GNSS |
Global Navigation Satellite System (Globální družicový navigační systém) |
|
GPS |
Global Positioning System (globální polohový systém) |
|
HDG |
Heading (kurz) |
|
IAI |
International Application Identifier (Mezinárodní identifikátor aplikace) |
|
ID |
Identifikátor |
|
ITU |
International Telecommunication Union (Mezinárodní telekomunikační unie) |
|
MMSI |
Maritime Mobile Service Identifier (Identifikátor námořní pohyblivé služby) v souladu s doporučením Mezinárodní telekomunikační unie ITU-R M585 |
|
ROT |
Rate Of Turn (rychlost otáčení) |
|
Třída B SO/CS |
Pohyblivé stanice třídy B, které používají techniku vícenásobného přístupu s časovým dělením reagující na nosnou (CSTDMA) („CO“) nebo techniku vícenásobného přístupu s časovým dělením a samoorganizací (SOTDMA) („SO“) |
|
SOLAS |
Safety Of Life At Sea (bezpečnost lidského života na moři) |
|
SQRT |
Square Root (druhá mocnina) |
|
UTC |
Universal Time Coordinated (světový koordinovaný čas) |
|
VHF |
Very High Frequency (velmi vysoká frekvence) |
|
VTS |
Vessel Traffic Services (služby provozu plavidel) |
Dodatek B
VĚTY DIGITÁLNÍHO ROZHRANÍ PRO VNITROZEMSKÝ AIS
B.1 Vstupní věty
Sériové digitální rozhraní AIS podporují stávající věty podle IEC 61162. Podrobné popisy vět digitálního rozhraní lze nalézt v IEC 61162.
Pro pohyblivou stanici vnitrozemského AIS jsou navíc definovány tyto věty digitálního rozhraní.
B.2 Statické údaje plavidla na vnitrozemské vodní cestě
Tato věta se používá ke změně nastavení, která nejsou zahrnuta v SSD a VSD.
$PIWWSSD,cccccccc,xxxx,x.x,x.x,x,x,x,x.x,x.x,x.x,x.x*hh<CR><LF>
pole 1 2 3 4 5 6 7 8 9 10 11
|
Pole |
Formát |
Popis |
|
1 |
cccccccc |
Číslo ENI |
|
2 |
xxxx |
typ vnitrozemského plavidla podle dodatku C |
|
3 |
x,x |
délka plavidla 0 až 800,0 metrů |
|
4 |
x,x |
šířka plavidla 0 až 100,0 metrů |
|
5 |
x |
kvalita informace o rychlosti 1 = vysoká nebo 0 = nízká |
|
6 |
x |
kvalita informace o kurzu vůči zemi 1 = vysoká nebo 0 = nízká |
|
7 |
x |
kvalita informace o kurzu 1 = vysoká nebo 0 = nízká |
|
8 |
x,x |
B hodnota vnitřní referenční polohy (referenční bod vzdálenosti od zádi) |
|
9 |
x,x |
C hodnota vnitřní referenční polohy (referenční bod vzdálenosti od levoboku) |
|
10 |
x,x |
B hodnota vnější referenční polohy (referenční bod vzdálenosti od zádi) |
|
11 |
x,x |
C hodnota vnější referenční polohy (referenční bod vzdálenosti od levoboku) |
B.3 Údaje o plavbě plavidla po vnitrozemské vodní cestě
Tato věta se používá k zadávání údajů o plavbě plavidla po vnitrozemské vodní cestě do pohyblivé stanice vnitrozemského AIS. Cestovní údaje plavidla po vnitrozemské vodní cestě se nastaví pomocí věty $PIWWIVD s tímto obsahem:
$PIWWIVD,x,x,x,x.x,x.x,x,xxx,xxxx,xxx,x.x,x.x,x.x,x.x*hh<CR><LF>
pole 1 2 3 4 5 6 7 8 9 10 11 12 13
|
Pole |
Formát |
Popis |
|
1 |
x |
viz doporučení ITU-R M.1371, zpráva 23 – nastavení intervalu hlášení, výchozí nastavení: 0 |
|
2 |
x |
počet modrých kuželů: 0–3, 4 = příznak B, 5 = výchozí hodnota = neznámý |
|
3 |
x |
0 = není k dispozici = výchozí hodnota, 1 = náklad, 2 = bez nákladu, ostatní nepoužito |
|
4 |
x.x |
statický ponor plavidla 0 až 20,00 metrů, 0 = neznámý = výchozí hodnota, ostatní nepoužito |
|
5 |
x.x |
podjezdná výška plavidla 0 až 40,00 metrů, 0 = neznámá = výchozí hodnota, ostatní nepoužito |
|
6 |
x |
počet pomocných vlečných člunů 0–6, 7 = výchozí hodnota = neznámý, ostatní nepoužito |
|
7 |
xxx |
počet členů posádky na palubě 0 až 254, 255 = neznámý = výchozí hodnota, ostatní nepoužito |
|
8 |
xxxx |
počet cestujících na palubě 0 až 8 190 , 8 191 = neznámý = výchozí hodnota, ostatní nepoužito |
|
9 |
xxx |
počet členů personálu na palubě 0 až 254, 255 = neznámý = výchozí hodnota, ostatní nepoužito |
|
10 |
x.x |
prodloužení sestavy na přídi (metr.decimetr = rozlišení v dm) |
|
11 |
x.x |
prodloužení sestavy na zádi (metr.decimetr = rozlišení v dm) |
|
12 |
x.x |
rozšíření sestavy na levoboku (metr.decimetr = rozlišení v dm) |
|
13 |
x.x |
rozšíření sestavy na pravoboku (metr.decimetr = rozlišení v dm) |
V případě polí s nulovou hodnotou se odpovídající nastavení konfigurace nemění.
Dodatek C
TYPY VNITROZEMSKÝCH PLAVIDEL A SESTAV
Tato srovnávací tabulka vychází z výňatku z „Kódů pro typy dopravních prostředků“ podle doporučení EHK OSN č. 28 a typů námořních lodí definovaných v doporučení ITU-R M.1371 „Technické charakteristiky pro univerzální lodní systém automatické identifikace využívající mnohonásobný přístup s časovým dělením kanálů v námořním mobilním pásmu VHF“.
|
Typ plavidla nebo sestavy |
Typ námořního plavidla |
||
|
Kód |
Název plavidla |
První číslice |
Druhá číslice |
|
8000 |
Plavidlo, typ neznámý |
9 |
9 |
|
8010 |
Motorová nákladní loď |
7 |
9 |
|
8020 |
Tanková motorová loď |
8 |
9 |
|
8021 |
Tanková motorová loď, kapalný náklad, typ N |
8 |
0 |
|
8022 |
Tanková motorová loď, kapalný náklad, typ C |
8 |
0 |
|
8023 |
Tanková motorová loď, suchý náklad, jako by byl kapalný (např. cement) |
8 |
9 |
|
8030 |
Kontejnerová loď |
7 |
9 |
|
8040 |
Tanková loď pro přepravu plynu |
8 |
0 |
|
8050 |
Motorová nákladní loď, remorkér |
7 |
9 |
|
8060 |
Tanková motorová loď, remorkér |
8 |
9 |
|
8070 |
Motorová nákladní loď s jednou nebo více lodí po boku |
7 |
9 |
|
8080 |
Motorová nákladní loď s tankovou lodí |
8 |
9 |
|
8090 |
Motorová nákladní loď, která tlačí jednu nebo více nákladních lodí |
7 |
9 |
|
8100 |
Motorová nákladní loď, která tlačí alespoň jednu tankovou loď |
8 |
9 |
|
8110 |
Remorkér, nákladní loď |
7 |
9 |
|
8120 |
Remorkér, tanková loď |
8 |
9 |
|
8130 |
Remorkér, nákladní loď, svázaná |
3 |
1 |
|
8140 |
Remorkér, nákladní/tanková loď, svázaná |
3 |
1 |
|
8150 |
Nákladní člun |
9 |
9 |
|
8160 |
Tankový člun |
9 |
9 |
|
8161 |
Tankový člun, kapalný náklad, typ N |
9 |
0 |
|
8162 |
Tankový člun, kapalný náklad, typ C |
9 |
0 |
|
8163 |
Tankový člun, suchý náklad, jako by byl kapalný (např. cement) |
9 |
9 |
|
8170 |
Nákladní člun s kontejnery |
8 |
9 |
|
8180 |
Tankový člun pro přepravu plynu |
9 |
0 |
|
8210 |
Plavidlo k tlačení/vlečení, jeden nákladní člun |
7 |
9 |
|
8220 |
Plavidlo k tlačení/vlečení, dva nákladní čluny |
7 |
9 |
|
8230 |
Plavidlo k tlačení/vlečení, tři nákladní čluny |
7 |
9 |
|
8240 |
Plavidlo k tlačení/vlečení, čtyři nákladní čluny |
7 |
9 |
|
8250 |
Plavidlo k tlačení/vlečení, pět nákladních člunů |
7 |
9 |
|
8260 |
Plavidlo k tlačení/vlečení, šest nákladních člunů |
7 |
9 |
|
8270 |
Plavidlo k tlačení/vlečení, sedm nákladních člunů |
7 |
9 |
|
8280 |
Plavidlo k tlačení/vlečení, osm nákladních člunů |
7 |
9 |
|
8290 |
Plavidlo k tlačení/vlečení, devět nebo více nákladních člunů |
7 |
9 |
|
8310 |
Plavidlo k tlačení/vlečení, jeden tankový člun/člun pro přepravu plynu |
8 |
0 |
|
8320 |
Plavidlo k tlačení/vlečení, dva čluny, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8330 |
Plavidlo k tlačení/vlečení, tři čluny, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8340 |
Plavidlo k tlačení/vlečení, čtyři čluny, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8350 |
Plavidlo k tlačení/vlečení, pět člunů, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8360 |
Plavidlo k tlačení/vlečení, šest člunů, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8370 |
Plavidlo k tlačení/vlečení, sedm člunů, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8380 |
Plavidlo k tlačení/vlečení, osm člunů, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8390 |
Plavidlo k tlačení/vlečení, devět nebo více člunů, alespoň jeden tankový člun nebo člun pro přepravu plynu |
8 |
0 |
|
8400 |
Remorkér, samostatný |
5 |
2 |
|
8410 |
Remorkér, jedno nebo více vlečení |
3 |
1 |
|
8420 |
Remorkér, který pomáhá jinému plavidlu nebo propojené kombinaci |
3 |
1 |
|
8430 |
Tlačná loď, samostatná |
9 |
9 |
|
8440 |
Osobní loď, převozní loď, loď Červeného kříže, výletní loď |
6 |
9 |
|
8441 |
Převozní loď |
6 |
9 |
|
8442 |
Loď Červeného kříže |
5 |
8 |
|
8443 |
Výletní loď |
6 |
9 |
|
8444 |
Osobní loď bez ubytování |
6 |
9 |
|
8445 |
Vysokorychlostní výletní loď |
6 |
9 |
|
8446 |
Křídlová výletní loď |
6 |
9 |
|
8447 |
Výletní plachetnice |
6 |
9 |
|
8448 |
Osobní plachetnice bez ubytování |
6 |
9 |
|
8450 |
Obslužné plavidlo, policejní hlídkový člun, loď pro služby v přístavu |
9 |
9 |
|
8451 |
Obslužné plavidlo |
9 |
9 |
|
8452 |
Policejní hlídkový člun |
5 |
5 |
|
8453 |
Loď pro služby v přístavu |
9 |
9 |
|
8454 |
Loď plavebního dozoru |
9 |
9 |
|
8460 |
Plavidlo, údržbářská loď, plovoucí jeřáb, kabelová loď, plovoucí bóje, rypadlo |
3 |
3 |
|
8470 |
Objekt, ve vleku, blíže nespecifikován |
9 |
9 |
|
8480 |
Rybářská loď |
3 |
0 |
|
8490 |
Loď pro zásobování palivem |
9 |
9 |
|
8500 |
Tankový člun, pro přepravu chemikálií |
8 |
0 |
|
8510 |
Objekt, blíže nespecifikovaný |
9 |
9 |
|
1500 |
Námořní plavidlo pro přepravu běžného nákladu |
7 |
9 |
|
1510 |
Námořní plavidlo pro přepravu kontejnerů |
7 |
9 |
|
1520 |
Námořní plavidlo pro přepravu volně ložených nákladů |
7 |
9 |
|
1530 |
Tanková loď |
8 |
0 |
|
1540 |
Tanková loď pro přepravu zkapalněného plynu |
8 |
0 |
|
1850 |
Rekreační plavidlo, delší než 20 metrů |
3 |
7 |
|
1900 |
Rychlá loď |
4 |
9 |
|
1910 |
Křídlová loď |
4 |
9 |
|
1920 |
Rychlý katamarán |
4 |
9 |