This document is an excerpt from the EUR-Lex website
Document 32017R2400
Commission Regulation (EU) 2017/2400 of 12 December 2017 implementing Regulation (EC) No 595/2009 of the European Parliament and of the Council as regards the determination of the CO2 emissions and fuel consumption of heavy-duty vehicles and amending Directive 2007/46/EC of the European Parliament and of the Council and Commission Regulation (EU) No 582/2011 (Text with EEA relevance. )
Verordnung (EU) 2017/2400 der Kommission vom 12. Dezember 2017 zur Durchführung der Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates hinsichtlich der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen sowie zur Änderung der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates sowie der Verordnung (EU) Nr. 582/2011 der Kommission (Text von Bedeutung für den EWR. )
Verordnung (EU) 2017/2400 der Kommission vom 12. Dezember 2017 zur Durchführung der Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates hinsichtlich der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen sowie zur Änderung der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates sowie der Verordnung (EU) Nr. 582/2011 der Kommission (Text von Bedeutung für den EWR. )
ABl. L 349 vom 29.12.2017, p. 1–247
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force: This act has been changed. Current consolidated version: 01/01/2024
In force: This act has been changed. Current consolidated version: 01/01/2024
|
29.12.2017 |
DE |
Amtsblatt der Europäischen Union |
L 349/1 |
VERORDNUNG (EU) 2017/2400 DER KOMMISSION
vom 12. Dezember 2017
zur Durchführung der Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates hinsichtlich der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen sowie zur Änderung der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates sowie der Verordnung (EU) Nr. 582/2011 der Kommission
(Text von Bedeutung für den EWR)
DIE EUROPÄISCHE KOMMISSION —
gestützt auf den Vertrag über die Arbeitsweise der Europäischen Union,
gestützt auf die Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates vom 18. Juni 2009 über die Typgenehmigung von Kraftfahrzeugen und Motoren hinsichtlich der Emissionen von schweren Nutzfahrzeugen (Euro VI) und über den Zugang zu Reparatur- und Wartungsinformationen für Fahrzeuge, zur Änderung der Verordnung (EG) Nr. 715/2007 und der Richtlinie 2007/46/EG sowie zur Aufhebung der Richtlinien 80/1269/EWG, 2005/55/EG und 2005/78/EG (1), insbesondere auf Artikel 4 Absatz 3 und Artikel 5 Absatz 4 Buchstabe e,
gestützt auf die Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates vom 5. September 2007 zur Schaffung eines Rahmens für die Genehmigung von Kraftfahrzeugen und Kraftfahrzeuganhängern sowie von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge (Rahmenrichtlinie) (2), insbesondere Artikel 39 Absatz 7,
in Erwägung nachstehender Gründe:
|
(1) |
Die Verordnung (EG) Nr. 595/2009 ist einer der Einzelrechtsakte im Rahmen des Typgenehmigungsverfahrens gemäß der Richtlinie 2007/46/EG. Durch sie wird die Kommission befugt, Maßnahmen in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch von schweren Nutzfahrzeugen zu erlassen. Mit der vorliegenden Verordnung sollen Maßnahmen festgelegt werden, um genaue Angaben zu den CO2-Emissionen und zum Kraftstoffverbrauch von schweren Nutzfahrzeugen zu erhalten, die in der Union in Verkehr gebracht werden. |
|
(2) |
In der Richtlinie 2007/46/EG werden die vorgegebenen Anforderungen für die Typgenehmigung von vollständigen Fahrzeugen dargelegt. |
|
(3) |
Die Verordnung (EU) Nr. 582/2011 (3) der Kommission enthält die Anforderungen für die Genehmigung von schweren Nutzfahrzeugen hinsichtlich der Emissionen und des Zugangs zu Reparatur- und Wartungsinformationen. Maßnahmen zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen sollten Teil des durch diese Verordnung eingeführten Typgenehmigungssystems sein. Eine Lizenz zur Durchführung von Simulationen zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs eines Fahrzeugs wird für die Erlangung der genannten Genehmigungen vorausgesetzt. |
|
(4) |
Auf Emissionen von Lkws, Stadtbussen und Fernbussen, bei denen es sich um die am häufigsten vertretenen Klassen schwerer Nutzfahrzeuge handelt, entfallen derzeit 25 % der CO2-Emissionen im Straßenverkehr und es wird erwartet, dass dieser Anteil in Zukunft noch steigen wird. Um das Ziel der Verringerung der CO2-Emissionen im Straßenverkehr bis 2050 um 60 % zu erreichen, müssen wirksame Maßnahmen zur Minderung der Emissionen von schweren Nutzfahrzeugen eingeführt werden. |
|
(5) |
Bisher wurde in den Rechtsakten der Union noch keine gemeinsame Methode zur Messung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen festgelegt, wodurch es unmöglich ist, die Leistung der Fahrzeuge objektiv zu vergleichen oder Maßnahmen einzuführen, sei es auf Unionsebene oder auf nationaler Ebene, die die Einführung energieeffizienterer Fahrzeuge fördern würden. Infolgedessen ist der Markt hinsichtlich der Energieeffizienz von schweren Nutzfahrzeugen nicht transparent. |
|
(6) |
Der Sektor für schwere Nutzfahrzeuge ist sehr diversifiziert – er weist eine erhebliche Zahl unterschiedlicher Fahrzeugtypen und -modelle auf und ist sehr bedarfsorientiert. Die Kommission hat eine eingehende Analyse der verfügbaren Optionen zur Messung der CO2-Emissionen und des Kraftstoffverbrauchs dieser Fahrzeuge vorgenommen und ist zu dem Schluss gekommen, dass die CO2-Emissionen und der Kraftstoffverbrauch von schweren Nutzfahrzeugen mithilfe einer Simulationssoftware bestimmt werden sollten, um für jedes hergestellte Fahrzeug zu möglichst geringen Kosten eindeutige Daten zu erhalten. |
|
(7) |
Um die Vielfalt der Branche widerzuspiegeln, sollten schwere Nutzfahrzeuge in Gruppen von Fahrzeugen mit ähnlicher Radachsenkonfiguration, Fahrgestellkonfiguration und technisch zulässiger Gesamtmasse im beladenen Zustand eingeteilt werden. Anhand dieser Merkmale wird der Zweck eines Fahrzeugs bestimmt, und daher sollten sie auch herangezogen werden, um die Prüfzyklen zu bestimmen, die für die Zwecke der Simulation benutzt werden. |
|
(8) |
Da auf dem Markt keine Software verfügbar ist, die den Anforderungen für die Beurteilung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen entspricht, sollte die Kommission eine spezielle Software für die Zwecke entwickeln. |
|
(9) |
Diese Software sollte öffentlich verfügbar, quelloffen, herunterladbar und ausführbar sein. Sie sollte ein Simulationsinstrument für die Berechnung der CO2-Emissionen und des Kraftstoffverbrauchs bestimmter schwerer Kraftfahrzeuge umfassen. Dieses Instrument sollte so konzipiert sein, dass es auf den Daten basiert, die die Merkmale der Bauteile, selbstständigen technischen Einheiten und Systeme widerspiegeln, die eine erhebliche Auswirkung auf die CO2-Emissionen und den Kraftstoffverbrauch von schweren Nutzfahrzeugen haben – Motoren, Getriebe und weitere Antriebskomponenten, Achsen, Reifen, Aerodynamik und Hilfseinrichtungen. Die Software sollte Vorverarbeitungsinstrumente zur Überprüfung und Vorverarbeitung der den Motor und den Luftwiderstand des Fahrzeugs betreffenden Daten, die in das Simulationsinstrument eingegeben werden, sowie ein Hash-Instrument zur Verschlüsselung der Eingabe- und Ausgabedateien des Simulationsinstruments umfassen. |
|
(10) |
Um eine realistische Beurteilung möglich zu machen, sollte das Simulationsinstrument mit einer Reihe von Funktionen ausgestattet sein, die die Simulation von Fahrzeugen mit unterschiedlichen Nutzlasten und Kraftstoffen im Laufe von spezifischen Prüfzyklen, die einem Fahrzeug entsprechend seiner Verwendung zugewiesen werden, ermöglichen. |
|
(11) |
In Anbetracht der Bedeutung des ordnungsgemäßen Funktionierens der Software zur korrekten Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Fahrzeugen und des Schritthaltens mit dem technologischen Fortschritt sollte die Kommission die Software warten und sie aktualisieren, wann immer dies nötig ist. |
|
(12) |
Die Simulationen sollten von den Fahrzeugherstellern vor der Zulassung, dem Verkauf oder der Inbetriebnahme eines neuen Fahrzeugs in der Union durchgeführt werden. Darüber hinaus sollten Vorschriften zur Lizenzierung der Verfahren der Kraftfahrzeughersteller zur Berechnung der CO2-Emissionen und des Kraftstoffverbrauchs von Fahrzeugen festgelegt werden. Die Verfahren für den Umgang mit und die Verwendung von Daten durch die Fahrzeughersteller zum Zwecke der Berechnung der CO2-Emissionen und des Kraftstoffverbrauchs mithilfe des Simulationsinstruments sollten von den Genehmigungsbehörden beurteilt und genau überwacht werden, um sicherzustellen, dass die Simulationen korrekt durchgeführt werden. Daher sollten Vorschriften festgelegt werden, mit denen die Fahrzeughersteller verpflichtet werden, eine Lizenz für den Einsatz des Simulationsinstruments zu erwerben. |
|
(13) |
Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteile, selbständigen technischen Einheiten und Systeme, die eine erhebliche Auswirkung auf die CO2-Emissionen und den Kraftstoffverbrauch von schweren Nutzfahrzeugen haben, sollten als Eingabedaten für das Simulationsinstrument verwendet werden. |
|
(14) |
Um die Besonderheiten der einzelnen Bauteile, selbstständigen technischen Einheiten und Systeme widerzuspiegeln und um eine genauere Bestimmung ihrer mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften zu ermöglichen, sollten Vorschriften zur Zertifizierung solcher Eigenschaften auf der Grundlage von Prüfungen festgelegt werden. |
|
(15) |
Zur Begrenzung der Zertifizierungskosten sollten die Hersteller die Möglichkeit haben, Bauteile, selbständige technische Einheiten und Systeme ähnlicher Bauart und mit ähnlichen Eigenschaften in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch in Familien zusammenzufassen. Ein Bauteil, eine selbständige technische Einheit bzw. ein System je Familie, das die am wenigsten günstigen Eigenschaften in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch innerhalb dieser Familie aufweist, sollte geprüft werden, und die Ergebnisse sollten für die gesamte Familie gelten. |
|
(16) |
Die Kosten im Zusammenhang mit der Prüfung können ein erhebliches Hindernis darstellen, insbesondere für Unternehmen, die Bauteile, selbständige technische Einheiten oder Systeme in geringer Stückzahl herstellen. Um eine wirtschaftlich tragfähige Alternative zur Zertifizierung zur Verfügung zu stellen, sollten Pauschalwerte für bestimmte Bauteile, selbständige technische Einheiten und Systeme festgelegt und die Möglichkeit geschaffen werden, diese Werte anstelle der zertifizierten Werte, die auf der Grundlage von Prüfungen bestimmt wurden, zu verwenden. Die Pauschalwerte sollten jedoch so festgelegt werden, dass die Lieferanten von Bauteilen, selbständigen technischen Einheiten und Systemen dadurch ermutigt werden, die Zertifizierung zu beantragen. |
|
(17) |
Um sicherzustellen, dass die von den Lieferanten von Bauteilen, selbständigen technischen Einheiten und Systemen sowie von Fahrzeugherstellern angegebenen Ergebnisse in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch korrekt sind, sollten Vorschriften zur Überprüfung und Gewährleistung der Konformität des Betriebs des Simulationsinstruments sowie der Eigenschaften im Zusammenhang mit den CO2-Emissionen und dem Kraftstoffverbrauch der betreffenden Bauteile, selbständigen technischen Einheiten und Systeme festgelegt werden. |
|
(18) |
Um sicherzustellen, dass die nationalen Behörden und die Industrie genügend Vorlaufzeit haben, sollte die Verpflichtung, die CO2-Emissionen und den Kraftstoffverbrauch von Neufahrzeugen zu bestimmen und anzugeben, für unterschiedliche Fahrzeuggruppen schrittweise eingeführt werden, beginnend mit den Fahrzeugen, die am meisten zu den CO2-Emissionen des Sektors schwere Nutzfahrzeuge beitragen. |
|
(19) |
Die Vorschriften in dieser Verordnung sind Teil des Rahmens, der mit der Richtlinie 2007/46/EG geschaffen wurde und ergänzen die Vorschriften über die Typgenehmigung hinsichtlich der Emissionen und über den Zugang zu Reparatur- und Wartungsinformationen für Fahrzeuge gemäß der Verordnung (EU) Nr. 582/2011. Um eine eindeutige Verbindung zwischen diesen Vorschriften und dieser Verordnung herzustellen, sollten die Richtlinie 2007/46/EG und die Verordnung (EU) Nr. 582/2011 entsprechend geändert werden. |
|
(20) |
Die in dieser Verordnung vorgesehenen Maßnahmen entsprechen der Stellungnahme des Technischen Ausschusses „Kraftfahrzeuge“ — |
HAT FOLGENDE VERORDNUNG ERLASSEN:
KAPITEL 1
ALLGEMEINE BESTIMMUNGEN
Artikel 1
Gegenstand
Diese Verordnung ergänzt den mit der Verordnung (EU) Nr. 582/2001 geschaffenen Rechtsrahmen für die Typgenehmigung von Kraftfahrzeugen und Motoren hinsichtlich der Emissionen und den Zugang zu Reparatur- und Wartungsinformationen durch Festlegung der Vorschriften für die Erteilung von Lizenzen für den Betrieb eines Simulationsinstruments zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Neufahrzeugen, die in der Union verkauft, zugelassen oder in Betrieb genommen werden sollen, und für den Betrieb dieses Simulationsinstruments und die Meldung der damit bestimmten Werte für die CO2-Emissionen und den Kraftstoffverbrauch.
Artikel 2
Geltungsbereich
(1) Vorbehaltlich des Artikels 4 Absatz 2 gilt diese Verordnung für Fahrzeuge der Klasse N2 gemäß der Begriffsbestimmung in Anhang II der Richtlinie 2007/46/EG, mit einer Gesamtmasse von höchstens 3,5 Tonnen, und für alle Fahrzeuge der Klasse N3 gemäß diesem Anhang.
(2) Im Falle einer Mehrstufen-Typgenehmigung gemäß Absatz 1 gilt diese Verordnung nur für Basisfahrzeuge, die mindestens mit Fahrgestell, Motor, Getriebe, Achsen und Reifen ausgerüstet sind.
(3) Diese Verordnung gilt nicht für Geländefahrzeuge, Fahrzeuge mit besonderer Zweckbestimmung und Geländefahrzeuge mit besonderer Zweckbestimmung gemäß der Begriffsbestimmung in Anhang II Teil A Nummern 2.1, 2.2 bzw. 2.3 der Richtlinie 2007/46/EG.
Artikel 3
Begriffsbestimmungen
Im Sinne dieser Verordnung bezeichnet der Ausdruck
|
1. |
„mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängende Eigenschaften“ besondere, für ein Bauteil, eine selbstständige technische Einheit oder ein System ermittelte Eigenschaften, von denen die Auswirkungen des Bauteils, der selbstständigen technischen Einheit oder des Systems auf die CO2-Emissionen und den Kraftstoffverbrauch eines Fahrzeugs abhängen; |
|
2. |
„Eingabedaten“ vom Simulationsinstrument zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs eines Fahrzeugs genutzte Informationen über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften eines Bauteils, einer selbstständigen technischen Einheit oder eines Systems; |
|
3. |
„Eingabeinformationen“ vom Simulationsinstrument zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs eines Fahrzeugs genutzte Informationen über die Eigenschaften eines Fahrzeugs, die nicht zu den Eingabedaten gehören; |
|
4. |
„Hersteller“ die Person oder Organisation, die gegenüber der Genehmigungsbehörde für alle Angelegenheiten im Zusammenhang mit dem Zertifizierungsverfahren sowie für die Sicherstellung der Konformität der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbstständigen technischen Einheiten und Systemen verantwortlich ist. Die Person oder Organisation braucht nicht bei allen Phasen der Fertigung des Bauteils, der selbstständigen technischen Einheit oder des Systems, das oder die Gegenstand der Zertifizierung ist, direkt mitzuwirken; |
|
5. |
„befugte Stelle“ eine nationale Behörde, die von einem Mitgliedstaat dazu befugt wurde, von den Herstellern und Fahrzeugherstellern einschlägige Informationen über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften eines spezifischen Bauteils, einer spezifischen selbstständigen technischen Einheit oder eines spezifischen Systems bzw. über die CO2-Emissionen und den Kraftstoffverbrauch neuer Fahrzeuge zu erheben; |
|
6. |
„Getriebe“ eine aus mindestens zwei schaltbaren Gängen bestehende Einrichtung, die Drehmoment und Drehzahl in einem festgelegten Verhältnis verändert; |
|
7. |
„Drehmomentwandler“ ein hydrodynamisches Anfahrelement als separates Bauteil des Antriebsstrangs oder des Getriebes mit seriellem Leistungsfluss, das die Drehzahl von Motor und Rädern anpasst und eine Drehmomentvervielfachung bewirkt; |
|
8. |
„sonstiges Drehmoment übertragendes Bauteil“ ein mit dem Antriebsstrang verbundenes rotierendes Bauteil, das in Abhängigkeit von seiner eigenen Drehgeschwindigkeit Drehmomentverluste bewirkt; |
|
9. |
„zusätzliches Bauteil des Antriebsstrangs“ ein rotierendes Bauteil des Antriebsstrangs, das Leistung an andere Bauteile des Antriebsstrangs überträgt oder verteilt und in Abhängigkeit von seiner eigenen Drehgeschwindigkeit Drehmomentverluste bewirkt; |
|
10. |
„Achse“ eine zentrale Welle eines rotierenden Rades oder Zahnrades als Antriebsachse eines Fahrzeugs; |
|
11. |
„Luftwiderstand“ die Eigenschaft einer Fahrzeugkonfiguration in Bezug auf die aerodynamische Kraft, die entgegen der Richtung des Luftstroms auf das Fahrzeug wirkt und bei fehlendem Seitenwind als Produkt des Luftwiderstandskoeffizienten und der Querschnittsfläche bestimmt wird; |
|
12. |
„Hilfseinrichtungen“ Fahrzeugbauteile einschließlich eines Motorventilators, der Lenkanlage, der elektrischen Anlage, der Druckluft- und der Klimaanlage, deren Eigenschaften in Bezug auf CO2 -Emissionen und Kraftstoffverbrauch in Anhang IX definiert wurden; |
|
13. |
„Bauteilfamilie“, „Familie selbstständiger technischer Einheiten“ oder „Systemfamilie“ die von einem Hersteller vorgenommene Gruppierung von Bauteilen, selbstständigen technischen Einheiten oder Systemen, die aufgrund ihrer Bauart ähnliche, mit den CO2- Emissionen und dem Kraftstoffverbrauch zusammenhängende Eigenschaften aufweisen; |
|
14. |
„Stamm-Bauteil“, „Stamm einer selbstständigen technischen Einheit“ oder „Stammsystem“ ein Bauteil, eine selbstständige technische Einheit oder ein System, das aus einer Bauteilfamilie, einer Familie selbstständiger technischer Einheiten oder einer Systemfamilie ausgewählt wurde und dessen oder deren mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängende Eigenschaften den ungünstigsten Fall für die jeweilige Bauteilfamilie, Familie selbstständiger technischer Einheiten oder Systemfamilie darstellen. |
Artikel 4
Fahrzeuggruppen
Für die Zwecke dieser Verordnung werden Kraftfahrzeuge gemäß Anhang I Tabelle 1in Fahrzeuggruppen eingeteilt.
Die Artikel 5 bis 22 gelten nicht für Kraftfahrzeuge der Fahrzeuggruppen 0, 6, 7, 8, 13, 14, 15 und 17.
Artikel 5
Elektronische Werkzeuge
(1) Die Kommission stellt die folgenden elektronischen Werkzeuge in Form einer herunterladbaren und ausführbaren Software bereit:
|
a) |
ein Simulationswerkzeug; |
|
b) |
Vorverarbeitungsinstrumente; |
|
c) |
ein Hash-Instrument. |
Die Kommission wartet die elektronischen Werkzeuge und stellt Änderungen und Aktualisierungen für die Werkzeuge zur Verfügung.
(2) Die Kommission stellt die in Absatz 1 genannten elektronischen Werkzeuge über eine öffentlich zugängliche spezielle elektronische Verbreitungsplattform bereit.
(3) Das Simulationsinstrument ist zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Neufahrzeugen einzusetzen. Es muss für den Betrieb auf der Grundlage der in Anhang III spezifizierten Eingabedaten sowie der in Artikel 12 Absatz 1 genannten Eingabedaten ausgelegt sein.
(4) Die Vorverarbeitungsinstrumente werden benutzt für die Zwecke der Überprüfung und der Zusammenstellung der Prüfergebnisse und die Durchführung zusätzlicher Berechnungen betreffend die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften bestimmter Bauteile, selbständiger technischer Einheiten oder Systeme und ihre Umwandlung in ein Format, das von dem Simulationsinstrument verwendet wird. Die Vorverarbeitungsinstrumente werden vom Hersteller nach der Durchführung der in Anhang V Nummer 4 genannten Prüfungen für Motoren und der in Anhang VIII Nummer 3 genannten Prüfungen des Luftwiderstands angewandt.
(5) Das Hash-Instrument wird benutzt, um eine eindeutige Zuordnung der zertifizierten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften eines Bauteils, einer selbständigen technischen Einheit oder Systems zu der jeweiligen Zertifizierungsbescheinigung herzustellen, sowie zur eindeutigen Zuordnung eines Fahrzeuges zu dem Datenprotokoll seines Herstellers gemäß Anhang IV Nummer 1.
KAPITEL 2
LIZENZ ZUM BETRIEB DES SIMULATIONSINSTRUMENTS ZUM ZWECKE DER TYPGENEHMIGUNG HINSICHTLICH DER EMISSIONEN UND DES ZUGANGS ZU REPARATUR- UND WARTUNGSINFORMATIONEN
Artikel 6
Antrag auf Erteilung einer Lizenz zum Betrieb des Simulationsinstruments zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Neufahrzeugen
(1) Der Fahrzeughersteller stellt bei der Genehmigungsbehörde einen Antrag auf Erteilung einer Lizenz zum Betrieb des in Artikel 5 Absatz 3 genannten Simulationsinstruments zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Neufahrzeugen, die zu einer oder mehreren Fahrzeuggruppen gehören (im Folgenden „Lizenz“).
(2) Der Antrag auf Erteilung einer Lizenz hat die Form eines Beschreibungsbogens entsprechend dem Muster in Anhang II Anlage 1.
(3) Dem Antrag auf Erteilung einer Lizenz muss eine angemessene Beschreibung der Verfahren beiliegen, die der Hersteller zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs aller betroffenen Fahrzeuggruppen gemäß Anhang II Nummer 1 eingerichtet hat.
Darüber hinaus ist der Beurteilungsbericht beizulegen, der von der Genehmigungsbehörde nach der Durchführung einer Beurteilung gemäß Anhang II Nummer 2 erstellt wurde.
(4) Der Fahrzeughersteller reicht den gemäß den Absätzen 2 und 3 erstellten Antrag auf Erteilung einer Lizenz bei der Genehmigungsbehörde spätestens zusammen mit dem Antrag auf eine EG-Typgenehmigung für ein Fahrzeug mit einem hinsichtlich der Emissionen und der Reparatur- und Wartungsinformationen genehmigten Motorsystem gemäß Artikel 7 der Verordnung (EU) Nr. 582/2011 oder mit dem Antrag auf eine EG-Typgenehmigung für ein Fahrzeug hinsichtlich der Emissionen und der Reparatur- und Wartungsinformationen gemäß Artikel 9 dieser Verordnung ein. Der Antrag auf Erteilung einer Lizenz muss die Fahrzeuggruppe betreffen, zu der das Fahrzeug gehört, für das die Typgenehmigung beantragt wird.
Artikel 7
Verwaltungsvorschriften betreffend die Erteilung der Lizenz
(1) Die Genehmigungsbehörde erteilt die Lizenz, wenn der Hersteller einen Antrag gemäß Artikel 6 stellt und nachweist, dass er die in Anhang II enthaltenen Anforderungen in Bezug auf die betroffenen Fahrzeuggruppen erfüllt.
Werden die Anforderungen in Anhang II nur hinsichtlich einiger der Fahrzeuggruppen erfüllt, die in dem Antrag auf Erteilung einer Lizenz aufgeführt werden, so wird die Lizenz nur für diese Fahrzeuggruppen erteilt.
(2) Die Lizenz wird gemäß dem Muster des Beschreibungsbogens in Anhang II Anlage 2 ausgestellt.
Artikel 8
Spätere Änderungen der Verfahren zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von Fahrzeugen
(1) Eine Lizenz wird erweitert auf Fahrzeuggruppen außer denjenigen, für die eine Lizenz gemäß Artikel 7 Absatz 1 erteilt wurde, wenn der Fahrzeughersteller nachweist, dass die von ihm eingerichteten Verfahren zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs der unter die Lizenz fallenden Fahrzeuggruppen den Anforderungen in Anhang II auch in Bezug auf andere Fahrzeuggruppen voll entsprechen.
(2) Der Fahrzeughersteller beantragt die Erweiterung der Lizenz gemäß Artikel 6 Absätze 1, 2 und 3.
(3) Nach Erhalt der Lizenz teilt der Fahrzeughersteller der Genehmigungsbehörde unverzüglich etwaige Änderungen an den Verfahren mit, die er zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs der unter die Lizenz fallenden Fahrzeuggruppen eingerichtet hat, die Auswirkungen auf die Genauigkeit, Zuverlässigkeit und Stabilität dieser Verfahren haben könnten.
(4) Nach Erhalt der Mitteilung gemäß Absatz 3 teilt die Genehmigungsbehörde dem Fahrzeughersteller mit, ob die von den Änderungen betroffenen Verfahren weiterhin von der erteilten Lizenz abgedeckt werden, ob die Lizenz gemäß den Absätzen 1 und 2 erweitert werden muss oder ob gemäß Artikel 6 eine neue Lizenz beantragt werden sollte.
(5) Werden die Änderungen nicht von der Lizenz abgedeckt, so muss der Hersteller innerhalb eines Monats nach Erhalt der in Absatz 4 genannten Informationen eine Erweiterung der Lizenz oder die Erteilung einer neuen Lizenz beantragen. Stellt der Hersteller innerhalb dieser Frist keinen Antrag auf Erweiterung der Lizenz oder Erteilung einer neuen Lizenz, oder wird der Antrag abgelehnt, so wird die Lizenz entzogen.
KAPITEL 3
BETRIEB DES SIMULATIONSINSTRUMENTS ZUM ZWECKE DER BESTIMMUNG DER CO2-EMISSIONEN UND DES KRAFTSTOFFVERBRAUCHS FÜR DIE ZULASSUNG, DEN VERKAUF UND DIE INBETRIEBNAHME VON NEUFAHRZEUGEN
Artikel 9
Verpflichtung zur Bestimmung und Angabe der CO2-Emissionen und des Kraftstoffverbrauchs von Neufahrzeugen
(1) Der Kraftfahrzeughersteller bestimmt die CO2-Emissionen und den Kraftstoffverbrauch jedes Neufahrzeugs, das in der Union verkauft, zugelassen oder in Betrieb genommen werden soll, anhand der neuesten Version des in Artikel 5 Absatz 3 genannten Simulationsinstruments.
Der Kraftfahrzeughersteller kann das Simulationsinstrument für die Zwecke dieses Artikels nur dann betreiben, wenn er eine Lizenz besitzt, die gemäß Artikel 7 für die betroffene Fahrzeuggruppe erteilt wurde oder gemäß Artikel 8 Absatz 1 auf die betroffene Fahrzeuggruppe erweitert wurde.
(2) Der Fahrzeughersteller verzeichnet die Ergebnisse der Simulation, die nach Absatz 1 Unterabsatz 1 durchgeführt wurde, in dem Hersteller-Datenprotokoll, das entsprechend dem Muster in Anhang IV Teil I erstellt wurde.
Mit Ausnahme der in Artikel 21 Absatz 3 Unterabsatz 2 und in Artikel 23 Absatz 6 aufgeführten Fälle sind alle späteren Änderungen an dem Hersteller-Datenprotokoll untersagt.
(3) Der Hersteller erstellt einen kryptografischen Hash des Hersteller-Datenprotokolls und bedient sich dabei des in Artikel 5 Absatz 5 genannten Hash-Instruments.
(4) Jedes Fahrzeug, das zugelassen, verkauft oder in Betrieb genommen werden soll, muss mit den Kundeninformationen ausgestattet sein, die der Hersteller entsprechend dem Muster in Anhang IV Teil II erstellt hat.
Jede Kundeninformation enthält einen Abdruck des kryptografischen Hashs des Hersteller-Datenprotokolls gemäß Absatz 3.
(5) Jedes Fahrzeug, das zugelassen, verkauft oder in Betrieb genommen werden soll, muss mit einer Übereinstimmungsbescheinigung versehen sein, die einen Abdruck des kryptografischen Hashs des Hersteller-Datenprotokolls gemäß Absatz 3 enthält.
Unterabsatz 1 gilt nicht im Falle von Fahrzeugen, die gemäß Artikel 24 der Richtlinie 2007/46/EG genehmigt wurden.
Artikel 10
Änderungen, Aktualisierungen und Fehlfunktionen der elektronischen Instrumente
(1) Im Falle von Änderungen oder Aktualisierungen des Simulationsinstruments beginnt der Hersteller mit der Benutzung des geänderten oder aktualisierten Simulationsinstruments spätestens drei Monate, nachdem die Änderungen oder Aktualisierungen auf der speziellen elektronischen Verbreitungsplattform zur Verfügung gestellt wurden.
(2) Können die CO2-Emissionen und der Kraftstoffverbrauch von Neufahrzeugen aufgrund einer Fehlfunktion des Simulationsinstruments nicht gemäß Artikel 9 Absatz 1 bestimmt werden, so setzt der Fahrzeughersteller die Kommission über die spezielle elektronische Verbreitungsplattform unverzüglich davon in Kenntnis.
(3) Können die CO2-Emissionen und der Kraftstoffverbrauch von Neufahrzeugen aufgrund einer Fehlfunktion des Simulationsinstruments nicht gemäß Artikel 9 Absatz 1 bestimmt werden, so führt der Fahrzeughersteller spätestens 7 Kalendertage nach dem in Nummer 1 genannten Datum die Simulation dieser Fahrzeuge durch. Bis dahin werden die aus Artikel 9 hervorgehenden Pflichten für die Fahrzeuge, bei denen die Bestimmung der CO2-Emissionen nach wie vor unmöglich ist, ausgesetzt.
Artikel 11
Zugänglichkeit der Eingabe- und Ausgabeinformationen des Simulationsinstruments
(1) Das Hersteller-Datenprotokoll wird zusammen mit den Bescheinigungen über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteile, Systeme und selbständigen technischen Einheiten vom Kraftfahrzeughersteller mindestens 20 Jahre nach der Herstellung des Fahrzeugs aufbewahrt und der Genehmigungsbehörde und der Kommission auf Verlangen zur Verfügung gestellt.
(2) Auf Ersuchen einer bevollmächtigten Einrichtung eines Mitgliedstaats oder der Kommission legt der Hersteller innerhalb von 15 Arbeitstagen das Hersteller-Datenprotokoll vor.
(3) Auf Ersuchen einer bevollmächtigten Einrichtung eines Mitgliedstaats oder der Kommission legt die Genehmigungsbehörde, die die Lizenz gemäß Artikel 7 erteilt hat oder die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteile, selbständigen technischen Einheiten oder Systeme gemäß Artikel 17 bescheinigt hat, innerhalb von 15 Arbeitstagen den in Artikel 6 Absatz 2 bzw. Artikel 16 Absatz 2 genannten Beschreibungsbogen vor.
KAPITEL 4
MIT DEN CO2-EMISSIONEN UND DEM KRAFTSTOFFVERBRAUCH ZUSAMMENHÄNGENDE EIGENSCHAFTEN VON BAUTEILEN, SELBSTÄNDIGEN TECHNISCHEN EINHEITEN UND SYSTEMEN
Artikel 12
Für die Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs maßgebliche Bauteile, selbständige technische Einheiten und Systeme
(1) Die in Artikel 5 Absatz 3 genannten Eingabedaten für das Simulationsinstrument umfassen Informationen über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der folgenden Bauteile, selbständigen technischen Einheiten und Systeme:
|
a) |
Motoren; |
|
b) |
Getriebe; |
|
c) |
Drehmomentwandler; |
|
d) |
sonstige Drehmoment übertragende Bauteile; |
|
e) |
weitere Antriebskomponenten; |
|
f) |
Achsen; |
|
g) |
Luftwiderstand des Fahrgestells oder Anhängers; |
|
h) |
Hilfseinrichtungen; |
|
i) |
Reifen. |
(2) Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der in Absatz 1 Buchstaben b bis g und i genannten Bauteile, selbständigen technischen Einheiten und Systeme beruhen entweder auf den gemäß Artikel 17 für jede Bauteilfamilie, jede Familie selbständiger technischer Einheiten oder jede Systemfamilie bestimmten und gemäß Artikel 17 zertifizierten Werten (im Folgenden „zertifizierte Werte“) oder in Ermangelung zertifizierter Werte auf den gemäß Artikel 13 bestimmten Pauschalwerten.
(3) Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften beruhen auf den gemäß Artikel 14 für jede Motorenfamilie festgelegten und gemäß Artikel 17 zertifizierten Werten.
(4) Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Hilfseinrichtungen beruhen auf den gemäß Artikel 13 bestimmten Pauschalwerten.
(5) Im Falle eines Basisfahrzeugs gemäß Artikel 2 Absatz 2 beruhen die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von in Absatz 1 Buchstaben g und h genannten Bauteilen, selbständigen technischen Einheiten und Systemen, die nicht für das Basisfahrzeug bestimmt werden können, auf den Pauschalwerten. Für in Buchstabe h genannte Bauteile, selbständige technische Einheiten und Systeme ist vom Hersteller die Technologie mit den größten Energieverlusten zu wählen.
Artikel 13
Pauschalwerte
(1) Die Pauschalwerte für Getriebe werden gemäß Anhang VI Anlage 8 bestimmt.
(2) Die Pauschalwerte für Drehmomentwandler werden gemäß Anhang VI Anlage 9 bestimmt.
(3) Die Pauschalwerte für sonstige Drehmoment übertragende Bauteile werden gemäß Anhang VI Anlage 10 bestimmt.
(4) Die Pauschalwerte für weitere Antriebskomponenten werden gemäß Anhang VI Anlage 11 bestimmt.
(5) Die Pauschalwerte für Achsen werden gemäß Anhang VII Anlage 3 bestimmt.
(6) Die Pauschalwerte für den Luftwiderstand des Fahrgestells oder des Anhängers werden gemäß Anhang VIII Anlage 7 bestimmt.
(7) Die Pauschalwerte für Hilfseinrichtungen werden gemäß Anhang IX bestimmt.
(8) Der Pauschalwert für Reifen ist der für Reifen der Klasse C3 gemäß Anhang II Teil B Tabelle 2 der Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates (4) festgesetzte Wert.
Artikel 14
Zertifizierte Werte
(1) Die gemäß den Absätzen 2 bis 9 bestimmten Werte können vom Fahrzeughersteller als Eingabedaten für das Simulationsinstrument verwendet werden, wenn sie gemäß Artikel 17 zertifiziert sind.
(2) Die zertifizierten Werte für Motoren werden gemäß Anhang V Nummer 4 bestimmt.
(3) Die zertifizierten Werte für Getriebe werden gemäß Anhang VI Nummer 3 bestimmt.
(4) Die zertifizierten Werte für Drehmomentwandler werden gemäß Anhang VI Nummer 4 bestimmt.
(5) Die zertifizierten Werte für sonstige Drehmoment übertragende Bauteile werden gemäß Anhang VI Nummer 5 bestimmt.
(6) Die zertifizierten Werte für weitere Antriebskomponenten werden gemäß Anhang VI Nummer 6 bestimmt.
(7) Die zertifizierten Werte für Achsen werden gemäß Anhang VII Nummer 4 bestimmt.
(8) Die zertifizierten Werte für den Luftwiderstand des Fahrgestells oder des Anhängers werden gemäß Anhang VIII Nummer 3 bestimmt.
(9) Die zertifizierten Werte für Reifen werden gemäß Anhang X bestimmt.
Artikel 15
Familienkonzept betreffend Bauteile, selbständige technische Einheiten und Systeme anhand von zertifizierten Werten
(1) Vorbehaltlich der Absätze 3 bis 6 gelten die zertifizierten Werte, die für ein Stamm-Bauteil, eine selbständige technische Stamm-Einheit oder ein Stammsystem bestimmt wurden, ohne weitere Prüfung auch für alle Familienmitglieder gemäß der Begriffsbestimmung einer Familie in:
|
— |
Anhang VI Anlage 6 hinsichtlich des Familienkonzepts für Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile und weitere Antriebskomponenten; |
|
— |
Anhang VII Anlage 4 hinsichtlich des Familienkonzepts für Achsen; |
|
— |
Anhang VIII Anlage 5 hinsichtlich des Familienkonzepts für die Zwecke der Bestimmung des Luftwiderstands. |
(2) Ungeachtet Absatz 1 werden die zertifizierten Werte für Motoren für alle Mitglieder einer Motorenfamilie, die gemäß der Begriffsbestimmung einer Familie in Anhang V Anlage 3 geschaffen wurde, gemäß Anhang V Absätze 4, 5 und 6 abgeleitet.
Für Reifen besteht eine Familie nur aus einem Reifentyp.
(3) Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften des Stamm-Bauteils, der selbständigen technischen Stammeinheit oder des Stammsystems dürfen nicht besser sein als die Eigenschaften jedes anderen Mitglieds derselben Familie.
(4) Der Hersteller weist gegenüber der Genehmigungsbehörde nach, dass der Stamm-Bauteil, die selbständige technische Stammeinheit oder das Stammsystem die Bauteilfamilie, die Familie selbständiger technischer Einheiten oder die Systemfamilie voll und ganz vertritt.
Wenn die Genehmigungsbehörde im Rahmen der Prüfung für die Zwecke des Artikels 16 Absatz 3 Unterabsatz 2 bestimmt, dass der ausgewählte Stamm-Bauteil, die ausgewählte selbständige technische Stammeinheit oder das ausgewählte Stammsystem die Bauteilfamilie, die Familie selbständiger technischer Einheiten oder die Systemfamilie nicht voll und ganz vertritt, so kann die Genehmigungsbehörde ein anderes Referenzbauteil, eine andere selbständige technische Referenzeinheit oder ein anderes Referenzsystem auswählen, prüfen und als Stamm-Bauteil, selbständige technische Stammeinheit oder Stammsystem festlegen.
(5) Auf Ersuchen des Herstellers und vorbehaltlich der Zustimmung der Genehmigungsbehörde können die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften eines bestimmten Bauteils, einer bestimmten selbständigen technischen Einheit oder eines bestimmten Systems mit Ausnahme eines Stamm-Bauteils, einer selbständigen technischen Stammeinheit bzw. eines Stammsystems auf der Bescheinigung über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteilfamilie, der Familie selbständiger technischer Einheiten oder der Systemfamilie angegeben werden.
Die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften dieses bestimmten Bauteils, dieser bestimmten selbständigen technischen Einheit oder dieses bestimmten Systems werden gemäß Artikel 14 bestimmt.
(6) Führen die gemäß Absatz 5 bestimmten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften des bestimmten Bauteils, der bestimmten selbständigen technischen Einheit oder des bestimmten Systems zu CO2-Emissions- und Kraftstoffverbrauchswerten, die höher sind als die des Stamm-Bauteils, der selbständigen technischen Stammeinheit bzw. des Stammsystems, so schließt der Hersteller diese aus der bestehenden Familie aus, teilt sie einer neuen Familie zu und legt sie als neuen Stamm-Bauteil, neue selbständige technische Stammeinheit oder neues Stammsystem für die Familie fest oder beantragt eine Erweiterung der Zertifizierung gemäß Artikel 18.
Artikel 16
Antrag auf Zertifizierung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbständigen technischen Einheiten oder Systemen
(1) Der Antrag auf Zertifizierung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteilfamilie, der Familie selbständiger technischer Einheiten oder der Systemfamilie wird bei der Genehmigungsbehörde gestellt.
(2) Der Antrag auf Zertifizierung hat die Form eines Beschreibungsbogens entsprechend dem Muster in:
|
— |
Anhang V Anlage 2 hinsichtlich Motoren; |
|
— |
Anhang VI Anlage 2 hinsichtlich Getrieben; |
|
— |
Anhang VI Anlage 3 hinsichtlich Drehmomentwandlern; |
|
— |
Anhang VI Anlage 4 hinsichtlich sonstiger Drehmoment übertragender Bauteile; |
|
— |
Anhang VI Anlage 5 hinsichtlich weiterer Antriebskomponenten; |
|
— |
Anhang VII Anlage 2 hinsichtlich Achsen; |
|
— |
Anhang VIII Anlage 2 hinsichtlich des Luftwiderstands; |
|
— |
Anhang X Anlage 2 hinsichtlich Reifen. |
(3) Der Antrag auf Zertifizierung ist zusammen mit einer Erläuterung der Konstruktionsteile der betroffenen Bauteilfamilie, der betroffenen Familie selbständiger technischer Einheiten oder der betroffenen Systemfamilie einzureichen, die nicht unerhebliche Auswirkungen auf die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der betroffenen Bauteile, der betroffenen selbständigen technischen Einheiten oder der betroffenen Systeme haben.
Darüber hinaus sind dem Antrag die von einer Genehmigungsbehörde erstellten einschlägigen Prüfberichte, die Prüfergebnisse sowie eine von eine Genehmigungsbehörde gemäß Anhang X Nummer 1 der Richtlinie 2007/46/EG ausgestellte Erklärung über die Einhaltung beizufügen.
Artikel 17
Verwaltungsvorschriften für die Zertifizierung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbständigen technischen Einheiten oder Systemen
(1) Werden alle geltenden Anforderungen erfüllt, so zertifiziert die Genehmigungsbehörde die Werte in Bezug auf die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der betroffenen Bauteilfamilie, der betroffenen Familie selbständiger technischer Einheiten oder der betroffenen Systemfamilie.
(2) In dem in Absatz 1 genannten Fall stellt die Genehmigungsbehörde eine Bescheinigung über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften aus, entsprechend dem Muster in:
|
— |
Anhang V Anlage 1 hinsichtlich Motoren; |
|
— |
Anhang VI Anlage 1 hinsichtlich Getrieben, Drehmomentwandlern, sonstiger Drehmoment übertragender Bauteile und weiterer Antriebskomponenten; |
|
— |
Anhang VII Anlage 1 hinsichtlich Achsen; |
|
— |
Anhang VIII Anlage 1 hinsichtlich des Luftwiderstands; |
|
— |
Anhang X Anlage 1 hinsichtlich Reifen. |
(3) Die Genehmigungsbehörde teilt eine Zertifizierungsnummer zu, entsprechend dem Nummerierungssystem in:
|
— |
Anhang V Anlage 6 hinsichtlich Motoren; |
|
— |
Anhang VI Anlage 7 hinsichtlich Getrieben, Drehmomentwandlern, sonstiger Drehmoment übertragender Bauteile und weiterer Antriebskomponenten; |
|
— |
Anhang VII Anlage 5 hinsichtlich Achsen; |
|
— |
Anhang VIII Anlage 8 hinsichtlich des Luftwiderstands; |
|
— |
Anhang X Anlage 1 hinsichtlich Reifen. |
Die Genehmigungsbehörde teilt dieselbe Nummer keiner anderen Bauteilfamilie, Familie selbständiger technischer Einheiten oder Systemfamilie zu. Die Zertifizierungsnummer dient als Kennziffer für den Prüfbericht.
(4) Die Genehmigungsbehörde erzeugt mithilfe des in Artikel 5 Absatz 5 genannten Hash-Instruments einen kryptografischen Hash der Datei mit den Prüfergebnissen, darunter die Zertifizierungsnummer. Dieses Hashing findet unmittelbar nach der Erstellung der Prüfergebnisse statt. Die Genehmigungsbehörde druckt diesen Hash zusammen mit der Zertifizierungsnummer auf der Bescheinigung über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften ab.
Artikel 18
Erweiterung einer Bauteilfamilie, einer Familie selbständiger technischer Einheiten oder einer Systemfamilie um ein neues Bauteil, eine neue selbständige technische Einheit oder ein neues System
(1) Auf Ersuchen des Herstellers und nach Genehmigung der Genehmigungsbehörde kann ein neues Bauteil, eine neue selbständige technische Einheit oder ein neues System als Mitglied einer zertifizierten Bauteilfamilie, einer zertifizierten Familie selbständiger technischer Einheiten oder einer zertifizierten Systemfamilie aufgenommen werden, wenn sie den Kriterien für die Definition der Familie entsprechen, die hier zu finden sind:
|
— |
in Anhang VII Anlage 3 hinsichtlich des Familienkonzepts für Motoren; |
|
— |
in Anhang VI Anlage 6 hinsichtlich des Familienkonzepts von Getrieben, Drehmomentwandlern, sonstigen Drehmoment übertragenden Bauteilen und weiteren Antriebskomponenten; |
|
— |
in Anhang VII Anlage 4 hinsichtlich des Familienkonzepts für Achsen; |
|
— |
in Anhang VIII Anlage 5 hinsichtlich des Familienkonzepts für die Zwecke der Bestimmung des Luftwiderstands. |
In solchen Fällen stellt die Genehmigungsbehörde eine überarbeitete Bescheinigung mit einer Erweiterungsnummer aus.
Der Hersteller ändert den in Artikel 16 Absatz 2 genannten Beschreibungsbogen und stellt ihn der Genehmigungsbehörde zur Verfügung.
(2) Führen die gemäß Absatz 1 bestimmten mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften des bestimmten Bauteils, der bestimmten selbständigen technischen Einheit oder des bestimmten Systems zu CO2-Emissions- und Kraftstoffverbrauchswerten, die höher sind als die des Stamm-Bauteils, der selbständigen technischen Stammeinheit bzw. des Stammsystems, so werden diese zum neuen Stamm-Bauteil, zur neuen selbständigen technischen Stammeinheit oder zum neuen Stammsystem.
Artikel 19
Für die Zertifizierung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbständigen technischen Einheiten oder Systemen relevante spätere Änderungen
(1) Der Hersteller teilt der Genehmigungsbehörde jede Änderung an der Konstruktion oder am Herstellungsverfahren der betroffenen Bauteile, selbständigen technischen Einheiten oder Systeme mit, die nach der Zertifizierung der Werte betreffend die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der relevanten Bauteilfamilie, der relevanten Familie selbständiger technischer Einheiten oder der relevanten Systemfamilie nach Artikel 17 vorgenommen wurden und die nicht unerhebliche Auswirkungen auf die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften dieser Bauteile, selbständigen technischen Einheiten und Systeme haben können.
(2) Nach Erhalt der in Absatz 1 genannten Mitteilung teilt die Genehmigungsbehörde dem Hersteller mit, ob die von den Änderungen betroffenen Bauteile, selbständigen technischen Einheiten oder Systeme weiter von der ausgestellten Bescheinigung abgedeckt werden oder nicht oder ob weitere Prüfungen gemäß Artikel 14 erforderlich sind, um die Auswirkungen der Änderungen auf die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der Bauteile, selbständigen technischen Einheiten oder Systeme zu überprüfen.
(3) Werden die von den Änderungen betroffenen Bauteile, selbständigen technischen Einheiten oder Systeme nicht von der Bescheinigung abgedeckt, so beantragt der Hersteller innerhalb eines Monats nach Erhalt dieser Mitteilung der Genehmigungsbehörde eine neue Zertifizierung oder eine Erweiterung gemäß Artikel 18. Stellt der Hersteller innerhalb dieser Frist keinen Antrag auf eine neue Zertifizierung oder Erweiterung oder wird der Antrag abgelehnt, so wird die Bescheinigung zurückgezogen.
KAPITEL 5
KONFORMITÄT DES BETRIEBS DES SIMULATIONSINSTRUMENTS, DER EINGABEINFORMATIONEN UND DER EINGABEDATEN
Artikel 20
Zuständigkeiten des Fahrzeugherstellers und der Genehmigungsbehörde hinsichtlich der Konformität des Betriebs des Simulationsinstruments
(1) Der Fahrzeughersteller ergreift die erforderlichen Maßnahmen, um sicherzustellen, dass die Verfahren, die zum Zwecke der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs für alle Fahrzeuggruppen, die unter die nach Artikel 7 erteilte Lizenz oder die Erweiterung der Lizenz gemäß Artikel 8 Absatz 1 fallen, eingerichtet wurden, weiter diesem Zweck genügen.
(2) Die Genehmigungsbehörde führt viermal jährlich eine Beurteilung nach Anhang II Nummer 2 durch, um zu überprüfen, ob die Verfahren, die vom Hersteller zur Bestimmung der CO2-Emissionen oder des Kraftstoffverbrauchs aller von der Lizenz abgedeckten Fahrzeuggruppen eingesetzt wurden, weiterhin zweckentsprechend sind. Die Beurteilung umfasst auch die Überprüfung der Auswahl der Eingabeinformationen und der Eingabedaten sowie die Wiederholung der vom Hersteller durchgeführten Simulationen.
Artikel 21
Mängelbeseitigungsmaßnahmen in Bezug auf die Konformität des Betriebs des Simulationsinstruments
(1) Stellt die Genehmigungsbehörde gemäß Artikel 20 Absatz 2 fest, dass die vom Fahrzeughersteller eingerichteten Verfahren zur Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs der betroffenen Fahrzeuggruppen nicht mit der Lizenz oder mit dieser Verordnung übereinstimmen oder zu einer fehlerhaften Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs der betroffenen Fahrzeuge führen können, so fordert die Genehmigungsbehörde den Hersteller auf, spätestens 30 Kalendertage nach Erhalt der Aufforderung der Genehmigungsbehörde einen Mängelbeseitigungsplan vorzulegen.
Weist der Hersteller nach, dass für die Einreichung des Mängelbeseitigungsplans mehr Zeit erforderlich ist, kann die Genehmigungsbehörde eine Fristverlängerung um bis zu 30 Kalendertage einräumen.
(2) Der Mängelbeseitigungsplan gilt für alle Fahrzeuggruppen, die die Genehmigungsbehörde in ihrer Aufforderung aufgeführt hat.
(3) Der Mängelbeseitigungsplan wird von der Genehmigungsbehörde innerhalb von 30 Kalendertagen nach Erhalt genehmigt oder abgelehnt. Die Genehmigungsbehörde informiert den Hersteller und alle Mitgliedstaaten über ihre Entscheidung, den Mängelbeseitigungsplan zu genehmigen oder abzulehnen.
Die Genehmigungsbehörde kann den Fahrzeughersteller auffordern, ein neues Hersteller-Datenprotokoll, neue Kundeninformationen und eine neue Konformitätsbescheinigung auf der Grundlage einer neuen Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs zu erstellen, die die gemäß dem Mängelbeseitigungsplan durchgeführten Änderungen widerspiegelt.
(4) Für die Ausführung des Mängelbeseitigungsplans in der gebilligten Form ist der Hersteller verantwortlich.
(5) Wurde der Mängelbeseitigungsplan von der Genehmigungsbehörde abgelehnt oder stellt die Genehmigungsbehörde fest, dass die Mängelbeseitigungsmaßnahmen nicht korrekt umgesetzt werden, so ergreift sie die erforderlichen Maßnahmen, um die Konformität des Betriebs des Simulationsinstruments sicherzustellen oder die Lizenz zurückzunehmen.
Artikel 22
Zuständigkeiten des Herstellers und der Genehmigungsbehörde in Bezug auf die Konformität der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbständigen technischen Einheiten und Systemen
(1) Der Hersteller ergreift die erforderlichen Maßnahmen gemäß Anhang X der Richtlinie 2007/46/EG, um sicherzustellen, dass die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der in Artikel 12 Absatz 1 aufgeführten Bauteile, selbständigen technischen Einheiten und Systeme, die Gegenstand der Zertifizierung gemäß Artikel 17 waren, nicht von den zertifizierten Werten abweichen.
Diese Maßnahmen umfassen auch Folgendes:
|
— |
die Verfahren in Anhang V Anlage 4 für Motoren; |
|
— |
die Verfahren in Anhang VI Anlage 7 für Getriebe; |
|
— |
die Verfahren in Anhang VII Nummern 5 und 6 für Achsen; |
|
— |
die Verfahren in Anhang VIII Anlage 6 für den Luftwiderstand des Fahrgestells oder des Anhängers; |
|
— |
die Verfahren in Anhang X Nummer 4 für Reifen. |
Wurden die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften einer Bauteilfamilie, einer Familie selbständiger technischer Einheiten oder einer Systemfamilie gemäß Artikel 15 Absatz 5 zertifiziert, so ist der Bezugswert für die Überprüfung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der für dieses Familienmitglied zertifizierte Wert.
Wird festgestellt, dass eine Abweichung von den zertifizierten Werten auf die in den Unterabsätzen 1 und 2 genannten Maßnahmen zurückzuführen ist, teilt der Hersteller dies der Genehmigungsbehörde unverzüglich mit.
(2) Der Hersteller legt der Genehmigungsbehörde, die die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der betroffenen Bauteilfamilie, der betroffenen Familie selbständiger technischer Einheiten oder der betroffenen Systemfamilie zertifiziert hat, jährlich Prüfberichte mit den Ergebnissen der in Absatz 1 Unterabsatz 2 genannten Verfahren vor. Der Hersteller stellt den Prüfbericht der Kommission auf Ersuchen zur Verfügung.
(3) Der Hersteller stellt sicher, dass mindestens jedes 25. Verfahren nach Absatz 1 Unterabsatz 2 oder, mit Ausnahme von Reifen, mindestens ein Verfahren pro Jahr in Bezug auf eine Bauteilfamilie, eine Familie selbständiger technischer Einheiten oder eine Systemfamilie von einer anderen Genehmigungsbehörde überwacht wird als der an der Zertifizierung der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der betroffenen Bauteilfamilie, der betroffenen Familie selbständiger technischer Einheiten oder der betroffenen Systemfamilie nach Artikel 16 beteiligten Genehmigungsbehörde.
(4) Jede Genehmigungsbehörde kann jederzeit Überprüfungen im Zusammenhang mit den Bauteilen, selbständigen technischen Einheiten und Systemen in jeder Einrichtung des Herstellers und des Fahrzeugherstellers durchführen, um zu überprüfen, ob die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften dieser Bauteile, selbständigen technischen Einheiten und Systeme nicht von den zertifizierten Werten abweichen.
Der Hersteller und der Fahrzeughersteller stellen der Genehmigungsbehörde innerhalb von 15 Werktagen nach dem Ersuchen der Genehmigungsbehörde alle einschlägigen Unterlagen, Proben und andere in seinem Besitz befindliche Materialien zur Verfügung und führen die Überprüfungen im Zusammenhang mit einem Bauteil, einer selbständigen technischen Einheit oder einem System durch.
Artikel 23
Mängelbeseitigungsmaßnahmen in Bezug auf die Konformität der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von Bauteilen, selbständigen technischen Einheiten oder Systemen
(1) Stellt die Genehmigungsbehörde gemäß Artikel 22 fest, dass die vom Hersteller ergriffenen Maßnahmen, um sicherzustellen, dass die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften von in Artikel 12 Absatz 1 aufgeführten Bauteilen, selbständigen technischen Einheiten und Systemen, die Gegenstand einer Zertifizierung gemäß Artikel 17 waren, nicht von den zertifizierten Werten abweichen, nicht angemessen sind, so fordert die Genehmigungsbehörde den Hersteller auf, spätestens 30 Kalendertage nach Erhalt des Ersuchens der Genehmigungsbehörde einen Mängelbeseitigungsplan zu erstellen.
Weist der Hersteller nach, dass für die Einreichung des Mängelbeseitigungsplans mehr Zeit erforderlich ist, kann die Genehmigungsbehörde eine Fristverlängerung um bis zu 30 Kalendertage einräumen.
(2) Der Mängelbeseitigungsplan gilt für alle Bauteilfamilien, Familien selbständiger technischer Einheiten oder Systemfamilien, die die Genehmigungsbehörde in ihrer Aufforderung aufgeführt hat.
(3) Der Mängelbeseitigungsplan wird von der Genehmigungsbehörde innerhalb von 30 Kalendertagen nach Erhalt genehmigt oder abgelehnt. Die Genehmigungsbehörde informiert den Hersteller und alle Mitgliedstaaten über ihre Entscheidung, den Mängelbeseitigungsplan zu genehmigen oder abzulehnen.
Die Genehmigungsbehörde kann die Fahrzeughersteller, die die betroffenen Bauteile, selbständigen technischen Einheiten und Systeme in ihre Fahrzeuge eingebaut haben, auffordern, ein neues Hersteller-Datenprotokoll, neue Kundeninformationen und eine neue Konformitätsbescheinigung auf der Grundlage der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften dieser Bauteile, selbständigen technischen Einheiten und Systeme zu erstellen, die anhand der in Artikel 22 Absatz 1 aufgeführten Maßnahmen festgestellt wurden.
(4) Für die Ausführung des Mängelbeseitigungsplans in der gebilligten Form ist der Hersteller verantwortlich.
(5) Der Hersteller hat über jede(s) zurückgerufene und reparierte oder veränderte Bauteil, selbständige technische Einheit oder System sowie über die Werkstatt, die die Reparatur durchgeführt hat, Buch zu führen. Während der Ausführung des Mängelbeseitigungsplans und während eines Zeitraums von fünf Jahren nach Abschluss der Ausführung erhält die Genehmigungsbehörde auf Ersuchen Zugang zu diesen Aufzeichnungen.
(6) Wurde der Mängelbeseitigungsplan von der Genehmigungsbehörde abgelehnt, oder stellt die Genehmigungsbehörde fest, dass die Mängelbeseitigungsmaßnahmen nicht korrekt angewandt werden, so ergreift sie die erforderlichen Maßnahmen, um die Konformität der mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften der betroffenen Bauteilfamilie, der betroffenen Familie selbständiger technischer Einheiten und der betroffenen Systemfamilie sicherzustellen oder sie widerruft die Bescheinigung über die mit den CO2-Emissionen und dem Kraftstoffverbrauch zusammenhängenden Eigenschaften.
KAPITEL 6
SCHLUSSBESTIMMUNGEN
Artikel 24
Übergangsbestimmungen
(1) Wurden die in Artikel 9 genannten Verpflichtungen nicht eingehalten, so verbieten die Mitgliedstaaten unbeschadet des Artikels 10 Absatz 3 die Zulassung, den Verkauf oder die Inbetriebnahme von:
|
(a) |
Fahrzeugen der Gruppen 4, 5, 9 und 10 gemäß Anhang I Tabelle 1 ab dem 1. Juli 2019; |
|
(b) |
Fahrzeugen der Gruppen 1, 2, und 3 gemäß Anhang I Tabelle 1 ab dem 1. Januar 2020; |
|
(c) |
Fahrzeugen der Gruppen 11, 12, und 16 gemäß Anhang I Tabelle 1 ab dem 1. Juli 2020. |
(2) Unbeschadet des Absatzes 1 Buchstabe a gelten die in Artikel 9 genannten Verpflichtungen ab dem 1. Januar 2019 in Bezug auf alle Fahrzeuge der Gruppen 4, 5, 9 und 10 mit Produktionsdatum am oder nach dem 1. Januar 2019. Das Produktionsdatum ist das Datum der Unterzeichnung der Konformitätsbescheinigung oder das Datum der Ausstellung der einzelnen Genehmigungsbescheinigung.
Artikel 25
Änderung der Richtlinie 2007/46/EG
Die Anhänge I, III, IV, IX und XV der Richtlinie 2007/46/EG werden entsprechend Anhang XI dieser Verordnung geändert.
Artikel 26
Änderung der Verordnung (EU) Nr. 582/2011
Die Verordnung (EU) Nr. 582/2011 wird wie folgt geändert:
|
1. |
In Artikel 3 Absatz 1 wird folgender Unterabsatz angefügt: „Für die EG-Typgenehmigung eines Fahrzeugs mit einem genehmigten Motorsystem hinsichtlich der Emissionen und der Reparatur- und Wartungsinformationen oder die EG-Typgenehmigung eines Fahrzeugs hinsichtlich der Emissionen und der Reparatur- und Wartungsinformationen weist der Hersteller außerdem nach, dass die Anforderungen in Artikel 6 und Anhang II der Verordnung (EU) 2017/2400 der Kommission (*1) in Bezug auf die betroffene Fahrzeuggruppe erfüllt werden. Diese Anforderung gilt jedoch nicht, wenn der Hersteller angibt, dass neue Fahrzeuge des zu genehmigenden Typs nicht an oder nach den in Artikel 24 Absatz 1 Buchstaben a, b und c der Verordnung (EU) 2017/2400 für die jeweilige Fahrzeuggruppe festgelegten Daten in der Union zugelassen, verkauft oder in Betrieb genommen werden. (*1) Verordnung (EU) 2017/2400 der Kommission vom 12. Dezember 2017 zur Durchführung der Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates in Bezug auf die Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs schwerer Nutzfahrzeuge und zur Änderung der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates sowie der Verordnung (EU) Nr. 582/2011 der Kommission (ABl. L 349 vom 29.12.2017, S. 1).“;" |
|
2. |
Artikel 8 wird wie folgt geändert:
|
|
3. |
Artikel 10 wird wie folgt geändert:
|
Artikel 27
Inkrafttreten
Diese Verordnung tritt am zwanzigsten Tag nach ihrer Veröffentlichung im Amtsblatt der Europäischen Union in Kraft.
Diese Verordnung ist in allen ihren Teilen verbindlich und gilt unmittelbar in jedem Mitgliedstaat.
Brüssel, den 12. Dezember 2017
Für die Kommission
Der Präsident
Jean-Claude JUNCKER
(1) ABl. L 188 vom 18.7.2009, S. 1.
(2) ABl. L 263 vom 9.10.2007, S. 1.
(3) Verordnung (EU) Nr. 582/2011 der Kommission vom 25. Mai 2011 zur Durchführung und Änderung der Verordnung (EG) Nr. 595/2009 des Europäischen Parlaments und des Rates hinsichtlich der Emissionen von schweren Nutzfahrzeugen (Euro VI) und zur Änderung der Anhänge I und III der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates (ABl L 167 vom 25.6.2011, S. 1).
(4) Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates vom 13. Juli 2009 über die Typgenehmigung von Kraftfahrzeugen, Kraftfahrzeuganhängern und von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge hinsichtlich ihrer allgemeinen Sicherheit (ABL. L 200 vom 31.7.2009, S. 1).
ANHANG I
EINSTUFUNG VON FAHRZEUGEN IN FAHRZEUGGRUPPEN
1. Einstufung von Fahrzeugen für die Zwecke dieser Verordnung
1.1. Einstufung von Fahrzeugen der Klasse N
Tabelle 1
Fahrzeuggruppen für Fahrzeuge der Klasse N
|
Beschreibung von Merkmalen zur Einstufung in Fahrzeuggruppen |
Fahrzeuggruppe |
Verwendungsprofil und Fahrzeugkonfiguration |
Standardaufbau |
||||||||||
|
Achsenkonfiguration |
Fahrgestellkonfiguration |
Technisch zulässige Gesamtmasse im beladenen Zustand (Tonnen) |
Langstrecke |
Langstrecke (EMS) |
Regionale Verwendung |
Regionale Verwendung (EMS) |
Stadtverkehr |
Kommunale Verwendung |
Baugewerbe |
||||
|
4 × 2 |
Solofahrzeug |
> 3,5 – < 7,5 |
(0) |
|
|||||||||
|
Solofahrzeug (oder Zugmaschine) (**) |
7,5 – 10 |
1 |
|
|
R |
|
R |
|
|
B1 |
|||
|
Solofahrzeug (oder Zugmaschine) (**) |
> 10 – 12 |
2 |
R + T1 |
|
R |
|
R |
|
|
B2 |
|||
|
Solofahrzeug (oder Zugmaschine) (**) |
> 12 – 16 |
3 |
|
|
R |
|
R |
|
|
B3 |
|||
|
Solofahrzeug |
> 16 |
4 |
R + T2 |
|
R |
|
|
R |
|
B4 |
|||
|
Zugmaschine |
> 16 |
5 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
|
|
|||
|
4 × 4 |
Solofahrzeug |
7,5 – 16 |
(6) |
|
|||||||||
|
Solofahrzeug |
> 16 |
(7) |
|
||||||||||
|
Zugmaschine |
> 16 |
(8) |
|
||||||||||
|
6 × 2 |
Solofahrzeug |
alle Gewichte |
9 |
R + T2 |
R + D + ST |
R |
R + D + ST |
|
R |
|
B5 |
||
|
Zugmaschine |
alle Gewichte |
10 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
|
|
|||
|
6 × 4 |
Solofahrzeug |
alle Gewichte |
11 |
R + T2 |
R + D + ST |
R |
R + D + ST |
|
R |
R |
B5 |
||
|
Zugmaschine |
alle Gewichte |
12 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
R |
|
|||
|
6 × 6 |
Solofahrzeug |
alle Gewichte |
(13) |
|
|||||||||
|
Zugmaschine |
alle Gewichte |
(14) |
|
||||||||||
|
8 × 2 |
Solofahrzeug |
alle Gewichte |
(15) |
|
|||||||||
|
8 × 4 |
Solofahrzeug |
alle Gewichte |
16 |
|
|
|
|
|
|
R |
(generisches Gewicht + CdxA) |
||
|
8 × 6 8 × 8 |
Solofahrzeug |
alle Gewichte |
(17) |
|
|||||||||
|
|||||||||||||
(**) In diesen Fahrzeugklassen werden Zugmaschinen wie Solofahrzeuge, jedoch mit dem spezifischen Leergewicht der Zugmaschine behandelt.
|
T |
= |
Zugmaschine |
|
R |
= |
Solofahrzeug & Standardaufbau |
|
T1, T2 |
= |
Standardanhänger |
|
ST |
= |
Standardsattelanhänger |
|
D |
= |
Standarddolly |
ANHANG II
ANFORDERUNGEN UND VERFAHREN IM ZUSAMMENHANG MIT DEM BETRIEB DES SIMULATIONSINSTRUMENTS
1. Vom Fahrzeughersteller einzurichtende Verfahren im Hinblick auf den Betrieb des Simulationsinstruments
|
1.1. |
Der Hersteller muss mindestens die folgenden Verfahren einrichten:
|
2. Bewertung durch die Genehmigungsbehörde
|
2.1. |
Die Genehmigungsbehörde muss überprüfen, ob die unter Absatz 1 genannten Verfahren in Bezug auf den Betrieb des Simulationsinstruments eingerichtet wurden. Die Genehmigungsbehörde muss ferner Folgendes überprüfen:
Für die Zwecke von Buchstabe a zweiter Absatz muss in der Überprüfung eine Ermittlung der CO2-Emissionen und des Kraftstoffverbrauchs von mindestens einem Fahrzeug aus jeder Fahrzeuggruppe, für die die Genehmigung beantragt wurde, durchgeführt werden. |
Anlage 1
MUSTER EINES BESCHREIBUNGSBOGENS ZUM BETRIEB DES SIMULATIONSINSTRUMENTS FÜR DIE BESTIMMUNG DER CO2-EMISSIONEN UND DES KRAFTSTOFFVERBRAUCHS VON NEUFAHRZEUGEN
ABSCHNITT I
1 Name und Anschrift des Herstellers:
2 Fertigungsstätten für die die in Ziffer 1 des Anhangs II der Verordnung (EU) 2017/2400 der Kommission genannten Verfahren für den Betrieb des Simulationsinstruments eingerichtet wurden:
3 Erfasste Fahrzeuggruppen:
4 (Ggf.) Name und Anschrift des Bevollmächtigten des Herstellers:
ABSCHNITT II
1. Zusätzliche Angaben
1.1. Beschreibung der Daten und der Verwaltung der Prozessabläufe (z. B. Flussdiagramm)
1.2. Beschreibung des Qualitätssicherungsprozesses
1.3. Zusätzliche Qualitätsmanagementbescheinigungen (ggf.)
1.4. Beschreibung der Erschließung von Datenquellen, der Datenverarbeitung und der Datenspeicherung durch das Simulationsinstrument
1.5. Weitere Unterlagen (ggf.):
2. Datum: …
3. Unterschrift: …
Anlage 2
MUSTER EINER LIZENZ ZUM BETRIEB DES SIMULATIONSINSTRUMENTS FÜR DIE BESTIMMUNG VON CO2-EMISSIONEN UND DES KRAFTSTOFFVERBRAUCHS VON NEUFAHRZEUGEN
Größtformat: A4 (210 × 297 mm)
LIZENZ ZUM BETRIEB DES SIMULATIONSINSTRUMENTS FÜR DIE BESTIMMUNG VON CO2-EMISSIONEN UND DES KRAFTSTOFFVERBRAUCHS VON NEUFAHRZEUGEN
|
Mitteilung über:
|
Behördenstempel
|
der Lizenz zum Betrieb eines Simulationsinstruments hinsichtlich der Verordnung (EG) Nr. 595/2009 durchgeführt durch die Verordnung (EU) 2017/2400 der Kommission.
Nummer der Lizenz:
Grund für die Erweiterung: …
ABSCHNITT I
0.1. Name und Anschrift des Herstellers:
0.2. Fertigungsstätten, für die die in Ziffer 1 des Anhangs II der Verordnung (EU) 2017/2400 der Kommission genannten Verfahren für den Betrieb des Simulationsinstruments eingerichtet wurden
0.3. Erfasste Fahrzeuggruppen:
ABSCHNITT II
1. Zusätzliche Angaben
1.1. Von einer Genehmigungsbehörde erstellter Beurteilungsbericht
1.2. Beschreibung der Daten und der Verwaltung der Prozessabläufe (z. B. Flussdiagramm)
1.3. Beschreibung des Qualitätssicherungsprozesses
1.4. Zusätzliche Qualitätsmanagementbescheinigungen (ggf.)
1.5. Beschreibung der Erschließung von Datenquellen, der Datenverarbeitung und der Datenspeicherung durch das Simulationsinstrument
1.6. Weitere Unterlagen (ggf.)
2. Genehmigungsbehörde, die für die Durchführung der Beurteilung zuständig ist
3. Datum des Beurteilungsberichts
4. Nummer des Beurteilungsberichts
5. Bemerkungen (sofern vorhanden): siehe Beiblatt
6. Ort
7. Datum
8. Unterschrift
(1) Nichtzutreffendes streichen (trifft mehr als eine Angabe zu, ist unter Umständen nichts zu streichen).
ANHANG III
EINGABEINFORMATIONEN ZU DEN EIGENSCHAFTEN DES FAHRZEUGS
1. Einleitung
Dieser Anhang enthält die Liste der vom Fahrzeughersteller für das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
2. Begriffsbestimmungen
|
(1) |
„Parameter ID“: im „Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen (Vehicle Energy Consumption calculation Tool)“ verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten |
|
(2) |
„Type“: Datentyp des Parameters
|
|
(3) |
„Unit“: … physikalische Einheit des Parameters |
|
(4) |
„korrigierte tatsächliche Fahrzeugmasse“ bezeichnet die gemäß der Verordnung (EG) Nr. 1230/2012 (1) der Kommission unter „tatsächliche Fahrzeugmasse“ angegebene Masse, wobei jedoch die Tanks zu mindestens 50 % ihres Fassungsvermögens zu füllen sind, ohne Aufbauten und berichtigt um das zusätzliche Gewicht der nicht eingebauten Standardausrüstung gemäß Absatz 4.3, sowie die Masse einer Standardkarosserie und eines Standard-Sattelanhängers oder -Anhängers zur Simulierung des vollständigen Fahrzeugs oder der vollständigen Fahrzeug-Anhänger- bzw. Fahrzeug-Sattelanhänger-Kombination. Teile, die am und über dem Hauptrahmen angebracht sind, gelten als Teile des Aufbaus, wenn sie nur zur Erleichterung der Anbringung eines Aufbaus dienen, der unabhängig von den für den fahrbereiten Zustand notwendigen Teilen ist. |
3. Satz Eingabeparameter
Tabelle 1
Eingabeparameter „Vehicle/General“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Manufacturer |
P235 |
token |
[-] |
|
|
ManufacturerAddress |
P252 |
token |
[-] |
|
|
Model |
P236 |
token |
[-] |
|
|
VIN |
P238 |
token |
[-] |
|
|
Date |
P239 |
dateTime |
[-] |
Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
|
LegislativeClass |
P251 |
string |
[-] |
Zulässige Werte: „N3“ |
|
VehicleCategory |
P036 |
string |
[-] |
Zulässige Werte: „Rigid Truck“, „Tractor“ |
|
AxleConfiguration |
P037 |
string |
[-] |
Zulässige Werte: „4x2“, „6x2“, „6x4“, „8x4“ |
|
CurbMassChassis |
P038 |
int |
[kg] |
|
|
GrossVehicleMass |
P041 |
int |
[kg] |
|
|
IdlingSpeed |
P198 |
int |
[1/min] |
|
|
RetarderType |
P052 |
string |
[-] |
Zulässige Werte: „None“, „Losses included in Gearbox“, „Engine Retarder“, „Transmission Input Retarder“, „Transmission Output Retarder“ |
|
RetarderRatio |
P053 |
double, 3 |
[-] |
|
|
AngledriveType |
P180 |
string |
[-] |
Zulässige Werte: „None“, „Losses included in Gearbox“, „Separate Angledrive“ |
|
PTOShaftsGearWheels |
P247 |
string |
[-] |
Zulässige Werte: „none“, „only the drive shaft of the PTO“, „drive shaft and/or up to 2 gear wheels“, „drive shaft and/or more than 2 gear wheels“, „only one engaged gearwheel above oil level“ |
|
PTOOtherElements |
P248 |
string |
[-] |
Zulässige Werte: „none“, „shift claw, synchronizer, sliding gearwheel“, „multi-disc clutch“, „multi-disc clutch, oil pump“ |
|
CertificationNumberEngine |
P261 |
token |
[-] |
|
|
CertificationNumberGearbox |
P262 |
token |
[-] |
|
|
CertificationNumberTorqueconverter |
P263 |
token |
[-] |
|
|
CertificationNumberAxlegear |
P264 |
token |
[-] |
|
|
CertificationNumberAngledrive |
P265 |
token |
[-] |
|
|
CertificationNumberRetarder |
P266 |
token |
[-] |
|
|
CertificationNumberTyre |
P267 |
token |
[-] |
|
|
CertificationNumberAirdrag |
P268 |
token |
[-] |
|
Tabelle 2
Eingabeparameter „Vehicle/AxleConfiguration“ pro Radachse
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
TwinTyres |
P045 |
boolean |
[-] |
|
|
AxleType |
P154 |
string |
[-] |
Zulässige Werte: „VehicleNonDriven“, „VehicleDriven“ |
|
Steered |
P195 |
boolean |
|
|
Tabelle 3
Eingabeparameter „Vehicle/Auxiliaries“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Fan/Technology |
P181 |
string |
[-] |
Zulässige Werte: „Crankshaft mounted - Electronically controlled visco clutch“, „Crankshaft mounted - Bimetallic controlled visco clutch“, „Crankshaft mounted - Discrete step clutch“, „Crankshaft mounted - On/off clutch“, „Belt driven or driven via transm. - Electronically controlled visco clutch“, „Belt driven or driven via transm. - Bimetallic controlled visco clutch“, „Belt driven or driven via transm. - Discrete step clutch“, „Belt driven or driven via transm. - On/off clutch“, „Hydraulic driven - Variable displacement pump“, „Hydraulic driven - Constant displacement pump“, „Electrically driven - Electronically controlled“ |
|
SteeringPump/Technology |
P182 |
string |
[-] |
Zulässige Werte: „Fixed displacement“, „Fixed displacement with elec. control“, „Dual displacement“, „Variable displacement mech. controlled“, „Variable displacement elec. controlled“, „Electric“ Für jede gelenkte Radachse ist ein separater Eintrag erforderlich |
|
ElectricSystem/Technology |
P183 |
string |
[-] |
Zulässige Werte: „Standard technology“, „Standard technology - LED headlights, all“ |
|
PneumaticSystem/Technology |
P184 |
string |
[-] |
Zulässige Werte: „Small“, „Small + ESS“, „Small + visco clutch“, „Small + mech. clutch“, „Small + ESS + AMS“, „Small + visco clutch + AMS“, „Small + mech. clutch + AMS“, „Medium Supply 1-stage“, „Medium Supply 1-stage + ESS“, „Medium Supply 1-stage + visco clutch“, „Medium Supply 1-stage + mech. clutch“, „Medium Supply 1-stage + ESS + AMS“, „Medium Supply 1-stage + visco clutch + AMS“, „Medium Supply 1-stage + mech. clutch + AMS“, „Medium Supply 2-stage“, „Medium Supply 2-stage + ESS“, „Medium Supply 2-stage + visco clutch“, „Medium Supply 2-stage + mech. clutch“, „Medium Supply 2-stage + ESS + AMS“, „Medium Supply 2-stage + visco clutch + AMS“, „Medium Supply 2-stage + mech. clutch + AMS“, „Large Supply“, „Large Supply + ESS“, „Large Supply + visco clutch“, „Large Supply + mech. clutch“, „Large Supply + ESS + AMS“, „Large Supply + visco clutch + AMS“, „Large Supply + mech. clutch + AMS“; „Vacuum pump“ |
|
HVAC/Technology |
P185 |
string |
[-] |
Zulässige Werte: „Default“ |
Tabelle 4
Eingabeparameter „Vehicle/EngineTorqueLimits“ pro Gang (optional)
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Gear |
P196 |
integer |
[-] |
Es sind nur diejenigen Gänge anzugeben, bei denen die für das Fahrzeug geltenden Grenzwerte für das Motordrehmoment gemäß Absatz 6 zutreffen |
|
MaxTorque |
P197 |
integer |
[Nm] |
|
4. Fahrzeugmasse
4.1. Bei der Eingabe in das Simulationsinstrument muss als Fahrzeugmasse die korrigierte tatsächliche Fahrzeugmasse verwendet werden.
Die korrigierte tatsächliche Masse basiert auf Fahrzeugen, die so ausgestattet sind, dass sämtliche Rechtsvorschriften aus Anhang IV und Anhang XI der Richtlinie 2007/46/EG, die für die jeweilige Fahrzeugklasse gelten, eingehalten werden.
4.2. Wenn nicht die komplette Standardausrüstung montiert ist, muss der Hersteller zur korrigierten tatsächlichen Fahrzeugmasse das Gewicht folgender Bauteile hinzufügen:
|
a) |
Vorderer Unterfahrschutz gemäß Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates (2) |
|
b) |
Hinterer Unterfahrschutz gemäß Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates |
|
c) |
Seitliche Schutzvorrichtungen gemäß Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates |
|
d) |
Sattelkupplung gemäß Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates |
4.3. Die in Absatz 4.2 genannten Bauteile müssen jeweils folgendes Gewicht aufweisen:
|
|
Bei Fahrzeugen der Gruppen 1, 2 und 3
|
|
|
Bei Fahrzeugen der Gruppen 4, 5, 9 bis 12 und 16:
|
5. Hydraulisch und mechanisch angetriebene Achsen
Bei Fahrzeugen mit:
|
a) |
hydraulisch angetriebener Achse gilt die Achse als nicht antreibbar, und der Hersteller darf sie bei der Ermittlung der Achsenkonfiguration eines Fahrzeugs nicht berücksichtigen; |
|
b) |
mechanisch angetriebener Achse gilt die Achse als antreibbar, und der Hersteller muss sie bei der Ermittlung der Achsenkonfiguration eines Fahrzeugs berücksichtigen. |
6. Von der Fahrzeugsteuerung vorgegebene Grenzwerte für das Motordrehmoment je Gang
Für die oberen 50 % der Gänge (z. B. bei einem 12-Gang-Getriebe: Gänge 7 bis 12) kann der Fahrzeughersteller je Gang einen Höchstwert für das Motordrehmoment festlegen, der nicht höher sein darf als 95 % des maximalen Motordrehmoments.
7. Fahrzeugspezifische Leerlaufdrehzahl des Motors
7.1. In VECTO muss für jedes einzelne Fahrzeug die Leerlaufdrehzahl des Motors festgelegt werden. Diese muss gleich oder größer sein als der Wert, der in der Genehmigung für die jeweiligen Motor-Eingabedaten angegeben ist.
(1) Verordnung (EU) Nr. 1230/2012 der Kommission vom 12. Dezember 2012 zur Durchführung der Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates hinsichtlich der Anforderungen an die Typgenehmigung von Kraftfahrzeugen und Kraftfahrzeuganhängern bezüglich ihrer Massen und Abmessungen und zur Änderung der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates (ABl. L 353 vom 21.12.2012, S. 31).
(2) Verordnung (EG) Nr. 661/2009 des Europäischen Parlaments und des Rates vom 13. Juli 2009 über die Typgenehmigung von Kraftfahrzeugen, Kraftfahrzeuganhängern und von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge hinsichtlich ihrer allgemeinen Sicherheit (ABl. L 200 vom 31.7.2009, S. 1).
ANHANG IV
MUSTER DES DATENPROTOKOLLS DES HERSTELLERS UND DER KUNDENINFORMATIONEN
TEIL I
CO2-Emissionen und Kraftstoffverbrauch des Fahrzeugs – Datenprotokoll des Herstellers
Das Datenprotokoll des Herstellers wird durch das Simulationsinstrument erzeugt und muss mindestens die folgenden Informationen enthalten:
1. Daten über: Fahrzeug, Bauteil, selbstständige technische Einheit und Systeme
1.1. Fahrzeugdaten
1.1.1. Name und Anschrift des Herstellers
1.1.2. Fahrzeugmodell
1.1.3. Fahrzeug-Identifizierungsnummer (FIN) …
1.1.4. Fahrzeugklasse (N1, N2, N3, M1, M2, M3) …
1.1.5. Radachsenkonfiguration …
1.1.6. Maximal zulässiges Gesamtgewicht des Fahrzeugs (t) …
1.1.7. Fahrzeuggruppe gemäß Tabelle 1 …
1.1.8. tatsächliche Leermasse, korrigiert (kg) …
1.2. Hauptmotorspezifikationen
1.2.1. Motormodell
1.2.2. Motor-Zertifizierungsnummer …
1.2.3. Nennleistung des Motors (kW) …
1.2.4. Leerlaufdrehzahl (1/min) …
1.2.5. Nenndrehzahl des Motors (1/min) …
1.2.6. Hubvolumen (ltr) …
1.2.7. Typ des Bezugskraftstoff (Dieselkraftstoff/Flüssiggas/Erdgas …) …
1.2.8. Hash des Kraftstoffkennfelds/-dokuments …
1.3. Spezifikationen des Hauptgetriebes
1.3.1. Getriebemodell
1.3.2. Getriebe-Zertifizierungsnummer …
1.3.3. Zur Ermittlung des Verlustkennfelds verwendete Hauptoption (Option1/Option2/Option3/Standardwerte) …:
1.3.4. Getriebeart (SMT, AMT, APT-S,APT-P) …
1.3.5. Anzahl der Gänge …
1.3.6. Übersetzungsverhältnis Hinterachse …
1.3.7. Typ des Retarders …
1.3.8. Nebenantrieb (ja/nein) …
1.3.9. Hash des Wirkungsgradkennfelds/-dokuments …
1.4. Spezifikationen des Retarders
1.4.1. Retardermodell
1.4.2. Retarder-Zertifizierungsnummer …
1.4.3. Zur Ermittlung des Verlustkennfelds verwendete Zertifizierungsoption (Standardwerte oder Messung) …
1.4.4. Hash des Wirkungsgradkennfelds/-dokuments …
1.5. Spezifikation des Drehmomentwandlers
1.5.1. Drehmomentwandler-Modell
1.5.2. Drehmomentwandler-Zertifizierungsnummer …
1.5.3. Zur Ermittlung des Verlustkennfelds verwendete Zertifizierungsoption (Standardwerte oder Messung) …
1.5.4. Hash des Wirkungsgradkennfelds/-dokuments …
1,6. Spezifikationen des Winkelgetriebes
1.6.1. Winkelgetriebe-Modell
1.6.2. Achsen-Zertifizierungsnummer …
1.6.3. Zur Ermittlung des Verlustkennfelds verwendete Zertifizierungsoption (Standardwerte oder Messung) …
1.6.4. Winkelgetriebe-Modell …
1.6.5. Hash des Wirkungsgradkennfelds/-dokuments …
1.7. Spezifikationen der Achse
1.7.1. Achsenmodell
1.7.2. Achsen-Zertifizierungsnummer …
1.7.3. Zur Ermittlung des Verlustkennfelds verwendete Zertifizierungsoption (Standardwerte oder Messung) …
1.7.4. Achsentyp (z. B. Standard-Einzelantriebsachse) …
1.7.5. Achsübersetzung …
1.7.6. Hash des Wirkungsgradkennfelds/-dokuments …
1.8. Aerodynamik
1.8.1. Modell
1.8.2. Zur Ermittlung von CdxA verwendete Zertifizierungsoption (Standardwerte oder Messung) …
1.8.3. CdxA-Zertifizierungsnummer (falls zutreffend) …
1.8.4. CdxA-Wert …
1.8.5. Hash des Wirkungsgradkennfelds/-dokuments …
1.9. Hauptreifenspezifikationen
1.9.1. Reifenabmessung, Achse 1 …
1.9.2. Reifen-Zertifizierungsnummer …
1.9.3. Spezifischer Rollwiderstandskoeffizient (RRC) aller Reifen auf Achse 1 …
1.9.4. Reifenabmessung, Achse 2 …
1.9.5. Doppelachse (ja/nein), Achse 2 …
1.9.6. Reifen-Zertifizierungsnummer …
1.9.7. Spezifischer Rollwiderstandskoeffizient (RRC) aller Reifen auf Achse 2 …
1.9.8. Reifenabmessung, Achse 3 …
1.9.9. Doppelachse (ja/nein), Achse 3 …
1.9.10. Reifen-Zertifizierungsnummer …
1.9.11. Spezifischer Rollwiderstandskoeffizient (RRC) aller Reifen auf Achse 3 …
1.9.12. Reifenabmessung, Achse 4 …
1.9.13. Doppelachse (ja/nein), Achse 4 …
1.9.14. Reifen-Zertifizierungsnummer …
1.9.15. Spezifischer Rollwiderstandskoeffizient (RRC) aller Reifen auf Achse 4 …
1.10. Hauptzusatzspezifikationen
1.10.1. Motorkühlventilator …
1.10.2. Steuerpumpe …
1.10.3. Elektrisches System …
1.10.4. Pneumatisches System …
1.11. Motordrehmomentbegrenzungen
1.11.1. Motordrehmomentgrenze bei Gang 1 (% des maximalen Motordrehmoments) …
1.11.2. Motordrehmomentgrenze bei Gang 2 (% des maximalen Motordrehmoments) …
1.11.3. Motordrehmomentgrenze bei Gang 3 (% des maximalen Motordrehmoments) …
1.11.4. Motordrehmomentgrenze bei Gang … (% des maximalen Motordrehmoments)
2. Verwendungsprofil und beladungsabhängige Werte
2.1. Simulationsparameter (für jedes Verwendungsprofil/jede Last/jedes Kraftstoffgemisch)
2.1.1. Verwendungsprofil (Langstrecke/regional/städtisch/kommunal/Bau) …
2.1.2. Last (gemäß Definition im Simulationsinstrument) (kg) …
2.1.3. Kraftstoff (Diesel/Benzin/LPG/CNG/…) …
2.1.4. Fahrzeuggesamtmasse in Simulation (kg) …
2.2. Antriebsleistung des Fahrzeugs und Informationen für die Qualitätskontrolle der Simulation
2.2.1. Mittlere Geschwindigkeit (km/h) …
2.2.2. Mindestmomentangeschwindigkeit (km/h) …
2.2.3. Höchstmomentangeschwindigkeit (km/h) …
2.2.4. Maximale Verzögerung (m/s2) …
2.2.5. Maximale Beschleunigung (m/s2) …
2.2.6. Volllastanteil an Lenkzeiten …
2.2.7. Gesamtzahl der Schaltvorgänge …
2.2.8. Gefahrene Entfernung insgesamt
2.3. Kraftstoff und CO2-Ergebnisse
2.3.1. Kraftstoffverbrauch (g/km) …
2.3.2. Kraftstoffverbrauch (g/t-km) …
2.3.3. Kraftstoffverbrauch (g/p-km) …
2.3.4. Kraftstoffverbrauch (g/m3-km) …
2.3.5. Kraftstoffverbrauch (l/100 km) …
2.3.6. Kraftstoffverbrauch (l/t-km) …
2.3.7. Kraftstoffverbrauch (l/p-km) …
2.3.8. Kraftstoffverbrauch (l/m3-km) …
2.3.9. Kraftstoffverbrauch (MJ/km) …
2.3.10. Kraftstoffverbrauch (MJ/t-km) …
2.3.11. Kraftstoffverbrauch (MJ/p-km) …
2.3.12. Kraftstoffverbrauch (MJ/m3-km) …
2.3.13. CO2 (g/km) …
2.3.14. CO2 (g/t-km) …
2.3.15. CO2 (g/p-km) …
2.3.16. CO2 (g/m3-km) …
3. Software und Angaben zum Nutzer
3.1. Software und Angaben zum Nutzer
3.1.1. Version des Simulationsinstruments (X.X.X) …
3.1.2. Datum und Uhrzeit der Simulation
3.1.3. Hash der Eingabeinformationen des Simulationsinstruments und der Eingabedaten …
3.1.4. Hash des Ergebnisses des Simulationsinstruments
TEIL II
CO2-Emissionen von Fahrzeugen und Kraftstoffverbrauch – Kundeninformationen
1. Daten über: Fahrzeug, Bauteil, selbstständige technische Einheit und Systeme
1.1. Fahrzeugdaten
1.1.1. Fahrzeug-Identifizierungsnummer (FIN) …
1.1.2. Fahrzeugklasse (N1 N2, N3, M1, M2, M3) …
1.1.3. Radachsenkonfiguration …
1.1.4. Maximal zulässiges Gesamtgewicht des Fahrzeugs (t) …
1.1.5. Fahrzeuggruppe …
1.1.6. Name und Anschrift des Herstellers …
1.1.7. Marke (Handelsmarke des Herstellers) …
1.1.8. tatsächliche Leermasse, korrigiert (kg) …
1.2. Daten über: Bauteil, selbstständige technische Einheit und Systeme
1.2.1. Nennleistung des Motors (kW) …
1.2.2. Hubvolumen (ltr) …
1.2.3. Typ des Bezugskraftstoff (Dieselkraftstoff/Flüssiggas/Erdgas …) …
1.2.4. Getriebewerte (Standardwerte oder Messung) …
1.2.5. Getriebeart (SMT, AMT, AT-S, AT-S) …
1.2.6. Anzahl der Gänge …
1.2.7. Retarder (ja/nein) …
1.2.8. Achsübersetzung …
1.2.9. Durchschnittlicher Rollwiderstandsbeiwert aller Reifen:
TEIL III
CO2-Emissionen und Kraftstoffverbrauch des Fahrzeugs (für jede Nutzlast/Kraftstoffkombination)
Niedrige Nutzlast [kg]:
|
|
Durch-schnittliche Fahrzeug-geschwin-digkeit |
CO2-Emissionen |
Kraftstoffverbrauch |
||||
|
Langstrecke |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Langstrecke (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Regionale Verwendung |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Regionale Verwendung (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Stadtverkehr |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Kommunale Verwendung |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Baugewerbe |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
Repräsentative Nutzlast [kg]:
|
|
Durchschnittliche Fahrzeuggeschwindigkeit |
CO2-Emissionen |
Kraftstoffverbrauch |
||||
|
Langstrecke |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Langstrecke (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Regionale Verwendung |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Regionale Verwendung (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Stadtverkehr |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Kommunale Verwendung |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Baugewerbe |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Software- und Nutzerinformationen |
Version des Simulationsinstruments |
[X.X.X] |
|
Datum und Uhrzeit der Simulation |
[-] |
Kryptografischer Hash der Ausgabedatei:
ANHANG V
ÜBERPRÜFUNG DER MOTORDATEN
1. Einleitung
Das in diesem Anhang beschriebene Motorprüfverfahren dient zur Erstellung der Motor-Eingabedaten für das Simulationswerkzeug.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs gelten die Begriffsbestimmungen der UNECE-Regelung Nr. 49 Rev. 6; zusätzlich dazu bezeichnet:
|
(1) |
„CO2-Motorenfamilie“ die von einem Hersteller festgelegte Gruppe von Motoren gemäß der Definition in Absatz 1 Anlage 3 Absatz; |
|
(2) |
„CO2-Stammmotor“ einen aus einer CO2-Motorenfamilie gemäß Anlage 3 ausgewählten Motor; |
|
(3) |
„Nettoheizwert“ den Nettoheizwert eines Kraftstoffs gemäß Absatz 3.2; |
|
(4) |
„spezifische Emissionsmasse“ die Gesamtemissionsmasse geteilt durch die Gesamt-Motorarbeit in einem bestimmten Zeitraum in g/kWh; |
|
(5) |
„spezifischer Kraftstoffverbrauch“ den Gesamt-Kraftstoffverbrauch geteilt durch die Gesamt-Motorarbeit in einem bestimmten Zeitraum in g/kWh; |
|
(6) |
„FCMC“ (fuel consumption mapping cycle) den Zyklus der Abbildung des Kraftstoffverbrauchs; |
|
(7) |
„Volllast“ das Drehmoment oder die Leistung, das bzw. die der Motor bei maximaler Bedieneingabe bei einer bestimmten Drehzahl abgibt. |
Die Begriffsbestimmungen in Anhang 4 Absätze 3.1.5 und 3.1.6 der UNECE-Regelung 49 Rev. 06 gelten nicht.
3. Allgemeine Anforderungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen der ISO/TS 16949, ISO 9000 Reihen oder der ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale und internationale Prüfnormen zurückführbar sein.
Motoren sind zu CO2-Motorenfamilien gemäß Definition in Anlage 3 zusammenzufassen. Absatz 4.1 enthält eine Erläuterung dazu, welche Prüfläufe durchgeführt werden müssen, damit für eine bestimmte CO2-Motorenfamilie eine Zertifizierung ausgestellt werden kann.
3.1. Prüfbedingungen
Sämtliche Prüfläufe, die zum Zwecke der Zertifizierung einer bestimmten, gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie durchgeführt werden, müssen an demselben physikalischen Motor und mit unverändertem Aufbau von Motorenprüfstand und Motorsystem erfolgen. Mögliche Ausnahmen hierzu sind in Absatz 4.2 und in Anlage 3 aufgeführt.
3.1.1. Bedingungen für Laborprüfungen
Die Prüfungen müssen unter Umgebungsbedingungen durchgeführt werden, die über den gesamten Prüflauf folgende Voraussetzungen erfüllen:
|
(1) |
Parameter fa, mit dem die Bedingungen für Laborprüfungen beschrieben werden und der gemäß Anhang 4 Absatz 6.1 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt wird, muss innerhalb folgender Grenzwerte liegen: 0,96 ≤ fa ≤ 1,04. |
|
(2) |
Die absolute Temperatur (Ta) der Motoransaugluft in Kelvin, die gemäß Anhang 4 Absatz 6.1 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt wird, muss innerhalb folgender Grenzwerte liegen: 283 K ≤ Ta ≤ 303 K. |
|
(3) |
Der atmosphärische Druck, der gemäß Anhang 4 Absatz 6.1 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt wird, muss innerhalb folgender Grenzwerte liegen: 90 kPa ≤ ps ≤ 102 kPa. |
Werden Prüfungen in Prüfräumen durchgeführt, in denen Druckbedingungen simuliert werden können, die sich von den in der Atmosphäre auf dem jeweiligen Prüfgelände herrschenden unterscheiden, muss der Wert für fa anhand der im Konditionierungssystem simulierten Werte für den atmosphärischen Druck ermittelt werden. Für die Ansaugluft und die Abgaswege sowie für alle anderen betroffenen Motorsysteme muss derselbe Referenzwert für den simulierten atmosphärischen Druck verwendet werden. Der tatsächliche Wert für den simulierten atmosphärischen Druck muss für die Ansaugluft und die Abgaswege sowie für alle anderen betroffenen Motorsysteme innerhalb der Grenzwerte laut Ziffer 3 liegen.
Doch auch in Fällen, in denen der auf dem jeweiligen Prüfgelände herrschende Umgebungsdruck in der Atmosphäre den oberen Grenzwert von 102 kPa übersteigt, können Prüfungen im Einklang mit diesem Anhang erfolgen. In solch einem Fall müssen die Prüfungen mit dem jeweiligen Umgebungsdruck in der Atmosphäre durchgeführt werden.
In Fällen, in denen sich im Prüfraum die Temperatur, der Druck und/oder die Luftfeuchtigkeit der Motoransaugluft unabhängig von den Umgebungsbedingungen regeln lassen, müssen bei allen Prüfläufen, die zum Zwecke der Zertifizierung einer bestimmten, gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie durchgeführt werden, dieselben Einstellungen für diese Parameter verwendet werden.
3.1.2. Motormontage
Der Prüfmotor muss entsprechend Anhang 4 Absätze 6.3 bis 6.6 der UNECE-Regelung Nr. 49 Rev. 6 montiert werden.
Sollten Hilfseinrichtungen/Vorrichtungen, die für den Betrieb des Motorsystems erforderlich sind, nicht ordnungsgemäß entsprechend Anhang 4 Absatz 6.3 der UNECE-Regelung Nr. 49 Rev. 6 montiert sein, müssen sämtliche Messwerte für das Motordrehmoment um die Leistung korrigiert werden, die für den Antrieb dieser Bauteile im Sinne dieses Anhangs entsprechend Anhang 4 Absatz 6.3 der UNECE-Regelung Nr. 49 Rev. 6 nötig ist.
Die Leistungsaufnahme der folgenden Motorbauteile, die das für den Antrieb dieser Motorbauteile erforderliche Motordrehmoment nach sich zieht, muss gemäß Anlage 5 dieses Anhangs ermittelt werden:
|
(1) |
Ventilator |
|
(2) |
für den Betrieb des Motorsystems erforderliche elektrisch angetriebene Hilfseinrichtungen/Vorrichtungen |
3.1.3. Kurbelgehäuseemissionen
Bei einem geschlossenen Kurbelgehäuse muss der Hersteller eine Ausführung des Motorentlüftungssystems verwenden, bei der keine Freigabe von Emissionen aus dem Kurbelgehäuse an die Atmosphäre möglich ist. Bei offener Ausführung des Kurbelgehäuses müssen diese Emissionen entsprechend den Bestimmungen laut Anhang 4 Absatz 6.10 der UNECE-Regelung Nr. 49 Rev. 6 gemessen und zu den Emissionen am Auspuffendrohr hinzugerechnet werden.
3.1.4. Motoren mit Ladeluftkühlung
Bei allen Prüfläufen muss das auf dem Prüfstand verwendete Ladeluftkühlsystem unter solchen Bedingungen betrieben werden, die für die Anwendung im Fahrzeuginnern bei Referenzumgebungsbedingungen repräsentativ sind. Als Referenzumgebungsbedingungen gelten eine Lufttemperatur von 293 K und ein Druck von 101,3 kPa.
Die Labor-Ladeluftkühlung für Prüfungen gemäß dieser Verordnung muss den Bestimmungen laut Anhang 4 Absatz 6.2 der UNECE-Regelung Nr. 49 Rev. 6 genügen.
3.1.5. Motorkühlsystem
|
(1) |
Bei allen Prüfläufen muss das auf dem Prüfstand verwendete Motorkühlsystem unter solchen Bedingungen betrieben werden, die für die Anwendung am Fahrzeug bei Referenzumgebungsbedingungen repräsentativ sind. Als Referenzumgebungsbedingungen gelten eine Lufttemperatur von 293 K und ein Druck von 101,3 kPa. |
|
(2) |
Das Motorkühlsystem muss mit Thermostaten ausgestattet sein, die nach Herstellerangaben für den Einbau in Fahrzeuge vorgesehen sind. Bei Einbau eines funktionsuntüchtigen Thermostats oder bei Verzicht auf einen Thermostat gilt Ziffer 3. Die Einstellung für das Kühlsystem muss gemäß Ziffer 4 erfolgen. |
|
(3) |
Bei Verzicht auf einen Thermostat oder bei Einbau eines funktionsuntüchtigen Thermostats muss die Prüfstandsanlage das Verhalten des Thermostats unter allen Prüfbedingungen berücksichtigen. Die Einstellung für das Kühlsystem muss gemäß Ziffer 4 erfolgen. |
|
(4) |
Für den Durchsatz des Motorkühlmittels (bzw. die Druckdifferenz an der Motorseite des Wärmetauschers) und die Motorkühlmitteltemperatur muss jeweils ein Wert eingestellt werden, der für die Anwendung im Fahrzeuginnern bei Referenzumgebungsbedingungen repräsentativ ist, wenn der Motor bei Nenndrehzahl und Volllast betrieben wird und der Motorthermostat vollständig geöffnet ist. Mit dieser Einstellung wird die Kühlmittelreferenztemperatur festgelegt. Bei allen Prüfläufen, die zum Zwecke der Zertifizierung eines bestimmten Motors aus einer CO2-Motorenfamilie durchgeführt werden, darf die Einstellung für das Kühlsystem nicht geändert werden, und zwar weder an der Motorseite noch an der Prüfstandseite des Kühlsystems. Die Temperatur des Kühlmittels an der Prüfstandseite muss nach bestem technischen Ermessen weitgehend konstant gehalten werden. Das Kühlmittel an der Prüfstandseite des Wärmetauschers darf die zulässige Öffnungstemperatur des dem Wärmetauscher nachgeschalteten Thermostats nicht übersteigen. |
|
(5) |
Bei allen Prüfläufen, die zum Zwecke der Zertifizierung eines bestimmten Motors aus einer CO2-Motorenfamilie durchgeführt werden, muss die Temperatur des Motorkühlmittels, sobald es nach dem Kaltstart des Motors die angegebene Öffnungstemperatur des Thermostats erreicht hat, zwischen folgenden zwei Werten gehalten werden: dem Nennwert der Öffnungstemperatur des Thermostats gemäß Herstellerangaben und der Kühlmittelreferenztemperatur entsprechend Ziffer 4. |
|
(6) |
Die spezifischen Ausgangsbedingungen, die für die WHTC-Kaltstartprüfung gemäß Nummer 4.3.3 gelten, sind in Anhang 4 Absätze 7.6.1 und 7.6.2 der UNECE-Regelung Nr. 49 Rev. 6 aufgeführt. Wird eine Simulation des Thermostatverhaltens gemäß Ziffer 3 vorgenommen, darf am Wärmetauscher erst dann Kühlmittel fließen, wenn das Motorkühlmittel nach dem Kaltstart die angegebene zulässige Öffnungstemperatur des Thermostats erreicht hat. |
3.2. Kraftstoffe
Als Bezugskraftstoff für die zu prüfenden Motorsysteme muss eine der in Tabelle 1 aufgeführten Kraftstoffarten gewählt werden. Die Kraftstoffeigenschaften der in Tabelle 1 aufgeführten Bezugskraftstoffe entsprechen denen in Anhang IX der Verordnung (EU) Nr. 582/2011 der Kommission.
Um zu gewährleisten, dass bei allen Prüfläufen, die zum Zwecke der Zertifizierung einer bestimmten CO2-Motorenfamilie durchgeführt werden, der gleiche Kraftstoff verwendet wird, darf der für die Versorgung des Motorsystems eingesetzte Tank weder aufgefüllt noch ausgetauscht werden. Im Ausnahmefall ist eine Auffüllung oder ein Austausch zulässig, wenn gewährleistet werden kann, dass der Ersatzkraftstoff exakt dieselben Eigenschaften aufweist wie der zuvor verwendete Kraftstoff (gleiche Produktionscharge).
Der Nettoheizwert des verwendeten Kraftstoffs muss anhand zweier separater Messungen ermittelt werden, die entsprechend den jeweiligen Normen, die für die einzelnen in Tabelle 1 angegebenen Kraftstoffarten gelten, durchzuführen sind. Die beiden separaten Messungen müssen von zwei unterschiedlichen Laboren durchgeführt werden, die unabhängig von dem die Zertifizierung beantragenden Hersteller arbeiten. Das mit den Messungen betraute Labor muss die Anforderungen der ISO/IEC 17025 erfüllen. Die Genehmigungsbehörde muss gewährleisten, dass die zur Ermittlung des Nettoheizwerts verwendete Kraftstoffprobe der Charge Kraftstoff entnommen wird, die bei allen Prüfläufen zum Einsatz kommt.
Weichen die beiden separat ermittelten Werte für den Nettoheizwert um mehr als 440 Joule pro Gramm Kraftstoff voneinander ab, müssen sie für nichtig erklärt und die Messkampagne wiederholt werden.
Der Mittelwert aus den beiden separat ermittelten Werten für den Nettoheizwert, die nicht um mehr als 440 Joule pro Gramm Kraftstoff voneinander abweichen, müssen in MJ/kg dokumentiert werden, und zwar gerundet auf drei Nachkommastellen gemäß ASTM E 29-06.
Für gasförmige Kraftstoffe ist in den Normen zur Ermittlung des Nettoheizwerts (Tabelle 1) die Berechnung des Heizwerts anhand der Kraftstoffzusammensetzung enthalten. Zur Ermittlung des Nettoheizwerts muss die Zusammensetzung des betreffenden gasförmigen Kraftstoffs der Analyse der für die Zertifizierungsprüfungen verwendeten Referenzcharge des gasförmigen Kraftstoffs entnommen werden. Zur Ermittlung der Zusammensetzung des gasförmigen Kraftstoffs, anhand dessen der Nettoheizwert ermittelt wurde, ist nur eine einzelne Analyse eines Labors erforderlich, das unabhängig von dem die Zertifizierung beantragenden Hersteller arbeitet. Bei gasförmigen Kraftstoffen muss der Nettoheizwert nicht anhand eines Mittelwerts aus zwei separat ermittelten Werten für den Nettoheizwert, sondern anhand dieser einzelnen Analyse ermittelt werden.
Tabelle 1
Bezugskraftstoffe für Prüfungen
|
Kraftstoffart/Motortyp |
Bezugskraft-stoffart |
Zur Ermittlung des Nettoheizwerts verwendete Norm |
|
Diesel/CI |
B7 |
mindestens ASTM D240 oder DIN 59100-1 (empfohlen wird ASTM D4809) |
|
Ethanol/CI |
ED95 |
mindestens ASTM D240 oder DIN 59100-1 (empfohlen wird ASTM D4809) |
|
Benzin/PI |
E10 |
mindestens ASTM D240 oder DIN 59100-1 (empfohlen wird ASTM D4809) |
|
Ethanol/PI |
E85 |
mindestens ASTM D240 oder DIN 59100-1 (empfohlen wird ASTM D4809) |
|
LPG/PI |
LPG Kraftstoff B |
ASTM 3588 oder DIN 51612 |
|
Erdgas/PI |
G25 |
ISO 6976 oder ASTM 3588 |
3.3. Schmiermittel
Als Schmieröl, das in allen gemäß diesem Anhang durchzuführenden Prüfläufen zu verwenden ist, muss ein handelsübliches Öl mit uneingeschränkter Herstellerzulassung unter normalen Betriebsbedingungen gemäß Angaben in Anhang 8 Absatz 4.2 der UNECE-Regelung Nr. 49 Rev. 6 eingesetzt werden. Schmiermittel, deren Verwendung auf bestimmte Sonderbetriebsbedingungen für das Motorsystem beschränkt ist oder für die ein ungewöhnlich kurzes Ölwechselintervall gilt, dürfen nicht für Prüfläufe gemäß diesem Anhang verwendet werden. Es dürfen keinerlei Änderungen an dem handelsüblichen Öl vorgenommen und auch keine Additive hinzugefügt werden.
Für alle Prüfläufe, die zum Zwecke der Zertifizierung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften einer bestimmten CO2--Motorenfamilie durchgeführt werden, muss derselbe Schmieröltyp verwendet werden.
3.4. Kraftstoffdurchsatzmesssystem
Sämtliche vom gesamten Motorsystem verbrauchte Kraftstoffdurchsätze müssen vom Kraftstoffdurchsatzmesssystem erfasst werden. Zusätzliche Kraftstoffdurchsätze, die dem Verbrennungsprozess in den Motorzylindern nicht direkt zugeführt werden, müssen bei allen Prüfläufen in das Kraftstoffdurchsatzsignal aufgenommen werden. Zusätzliche Einspritzdüsen (z. B. Kaltstarteinrichtungen), die für den Betrieb des Motorsystems nicht erforderlich sind, müssen bei allen Prüfläufen von der Kraftstoffversorgungsleitung abgeklemmt sein.
3.5. Technische Vorgaben für Messeinrichtungen
Die Messeinrichtungen müssen die Anforderungen laut Anhang 4 Absatz 9 der UNECE-Regelung Nr. 49 Rev. 6 erfüllen.
Unbeschadet der Anforderungen laut Anhang 4 Absatz 9 der UNECE-Regelung Nr. 49 Rev. 6 müssen die in Tabelle 2 aufgeführten Messsysteme die Grenzwerte laut Tabelle 2 einhalten.
Tabelle 2
Anforderungen an Messsysteme
|
|
Linearität |
|
||||
|
Messsystem |
Achsabschnitt | xmin × (a1 – 1) + a0 | |
Steigung a1 |
Standard-abweichung vom Schätzwert SEE |
Bestimmungs-koeffizient r2 |
Messgenauigkeit (1) |
Anstieg-zeit (2) |
|
Motordrehzahl |
≤ 0.2 % max. Kalibrierung (3) |
0,999–1,001 |
≤ 0,1 % max. Kalibrierung (3) |
≥ 0,9985 |
0,2 % vom Ablesewert oder 0,1 % von der max. Kalibrierung (3) für die Drehzahl; es gilt der jeweils größere Wert |
≤ 1 s |
|
Motordreh-moment |
0,5 % max. Kalibrierung (3) |
0,995–1,005 |
≤ 0,5 % max. Kalibrierung (3) |
≥ 0,995 |
0,6 % vom Ablesewert oder 0,3 % von der max. Kalibrierung (3) für das Drehmoment; es gilt der jeweils größere Wert |
≤ 1 s |
|
Kraftstoffmassendurchsatz für flüssige Kraftstoffe |
≤ 0,5 % max. Kalibrierung (3) |
0,995–1,005 |
≤ 0,5 % max. Kalibrierung (3) |
≥ 0,995 |
0,6 % vom Ablesewert oder 0,3 % von der max. Kalibrierung (3) für den Durchsatz; es gilt der jeweils größere Wert |
≤ 2 s |
|
Kraftstoff-massendurchsatz für gasförmige Kraftstoffe |
≤ 1 % max. Kalibrierung (3) |
0,99–1,01 |
≤ 1 % max. Kalibrierung (3) |
≥ 0,995 |
1 % vom Ablesewert oder 0,5 % von der max. Kalibrierung (3) für den Durchsatz; es gilt der jeweils größere Wert |
≤ 2 s |
|
Stromzufuhr |
≤ 1 % max. Kalibrierung (3) |
0,98–1,02 |
≤ 2 % max. Kalibrierung (3) |
≥ 0,990 |
k. A. |
≤ 1 s |
|
Stromstärke |
≤ 1 % max. Kalibrierung (3) |
0,98–1,02 |
≤ 2 % max. Kalibrierung (3) |
≥ 0,990 |
k. A. |
≤ 1 s |
|
Spannung |
≤ 1 % max. Kalibrierung (3) |
0,98–1,02 |
≤ 2 % max. Kalibrierung (3) |
≥ 0,990 |
k. A. |
≤ 1 s |
Der Wert „xmin“ wird für die Berechnung des Werts für den Achsabschnitt in Tabelle 2 verwendet und muss dem 0,9-Fachen des prognostizierten Mindestwerts entsprechen, der für das jeweilige Messsystem in allen Prüfläufen erwartet wird.
Die Signalübertragungsrate der in Tabelle 2 aufgeführten Messsysteme muss, mit Ausnahme des Messsystems für den Massendurchsatz des Kraftstoffs, mindestens 5 Hz betragen (empfohlen werden ≥ 10 Hz). Für die Signalübertragungsrate des Messsystems für den Massendurchsatz des Kraftstoffs gilt ein Mindestwert von 2 Hz.
Sämtliche Messdaten müssen mit einer Abtastrate von mindestens 5 Hz aufgezeichnet werden (empfohlen werden ≥ 10 Hz).
3.5.1. Überprüfung der Messeinrichtungen
Für jedes Messsystem muss eine Überprüfung der in Tabelle 2 genannten Vorgaben erfolgen. Mindestens zehn gemäß Absatz 3.5 zu ermittelnde Referenzwerte zwischen xmin und dem Wert für die „max. Kalibrierung“ müssen in das jeweilige Messsystem eingegeben werden. Der vom Messsystem ausgegebene Wert wird dann als Messwert aufgezeichnet.
Zur Überprüfung der Linearität müssen die Messwerte mit den Referenzwerten durch lineare Regression nach der Fehlerquadratmethode gemäß Anhang 4 Anlage 3 Absatz A.3.2 der UNECE-Regelung Nr. 49 Rev. 6 verglichen werden.
4. Prüfverfahren
Vorbehaltlich anderslautender Angaben in diesem Anhang müssen sämtliche Messdaten gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt werden.
4.1. Übersicht der durchzuführenden Prüfläufe
In Tabelle 3 sind sämtliche Prüfläufe dargestellt, die zum Zwecke der Zertifizierung einer bestimmten, gemäß Anlage 3 festgelegten CO2-Motorenfamilie durchzuführen sind.
Außer beim CO2-Stammmotor der CO2-Motorenfamilie gilt bei allen anderen Motoren, dass weder die Ermittlung des Zyklus der Abbildung des Kraftstoffverbrauchs gemäß Absatz 4.3.5 noch die Aufzeichnung der Schiebebetriebskurve des Motors gemäß Absatz 4.3.2 vorzunehmen sind.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, müssen auch bei dem fraglichen Motor die Ermittlung des Zyklus der Abbildung des Kraftstoffverbrauchs gemäß Absatz 4.3.5 und die Aufzeichnung der Schiebebetriebkurve des Motors gemäß Absatz 4.3.2 vorgenommen werden.
Tabelle 3
Übersicht der durchzuführenden Prüfläufe
|
Prüflauf |
Verweis: Absatz |
Prüflauf am CO2-Stammmotor erforderlich |
Prüflauf an anderen Motoren der CO2-Familie erforderlich |
|
Volllastkurve Motor |
4.3.1 |
ja |
ja |
|
Schiebebetriebs-kurve Motor |
4.3.2 |
ja |
nein |
|
WHTC-Prüfung |
4.3.3 |
ja |
ja |
|
WHSC-Prüfung |
4.3.4 |
ja |
ja |
|
Zyklus der Abbildung des Kraftstoff-verbrauchs |
4.3.5 |
ja |
nein |
4.2. Zulässige Änderungen am Motorsystem
Der Zielwert für den Leerlaufdrehzahlregler des Motors in der elektronischen Motorsteuereinheit darf auf einen niedrigeren Wert geändert werden, und zwar bei allen Prüfläufen mit Leerlaufereignissen, damit Interferenzen zwischen dem Leerlaufdrehzahlregler des Motors und dem Drehzahlregler des Prüfstands verhindert werden.
4.3. Prüfläufe
4.3.1. Volllastkurve des Motors
Die Volllastkurve des Motors muss entsprechend Anhang 4 Absätze 7.4.1 bis 7.4.5 der UNECE-Regelung Nr. 49 Rev. 6 aufgezeichnet werden.
4.3.2. Schiebebetriebskurve des Motors
Außer bei dem gemäß Anlage 3 festgelegten CO2-Stammmotor der CO2-Motorenfamilie gilt bei allen anderen Motoren, dass die Schiebebetriebskurve des Motors entsprechend diesem Absatz nicht aufzuzeichnen ist. Gemäß Absatz 6.1.3 gilt die für den CO2-Stammmotor der CO2-Motorenfamilie aufgezeichnete Schiebebetriebskurve des Motors auch für alle anderen Motoren derselben CO2-Motorenfamilie.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, muss auch bei dem fraglichen Motor die Schiebebetriebskurve des Motors aufgezeichnet werden.
Die Schiebebetriebskurve des Motors muss entsprechend Anhang 4 Absatz 7.4.7 Option b der UNECE-Regelung Nr. 49 Rev. 6 aufgezeichnet werden. Bei dieser Prüfung wird das negative Drehmoment ermittelt, das erforderlich ist, um den Motor bei minimaler Bedieneingabe zwischen der höchsten und der niedrigsten Abbildungsdrehzahl anzutreiben.
Die Prüfung muss direkt nach der Abbildung der Volllastkurve des Motors gemäß Absatz 4.3.1 fortgesetzt werden. Auf Antrag des Herstellers kann die Schiebebetriebskurve separat aufgezeichnet werden. In diesem Fall muss die Temperatur des Motoröls am Ende des Prüflaufs zur Aufzeichnung der Volllastkurve gemäß Nummer 4.3.1 erfasst werden, und der Hersteller muss gegenüber der zuständigen Genehmigungsbehörde nachweisen, dass die Temperatur des Motoröls am Anfang der Schiebebetriebskurve der zuvor genannten Temperatur (mit einer Toleranz von ± 2 K) entspricht.
Zu Beginn des Prüflaufs für die Aufzeichnung der Schiebebetriebskurve des Motors muss der Motor bei minimaler Bedieneingabe und höchster Abbildungsdrehzahl gemäß Anhang 4 Absatz 7.4.3 der UNECE-Regelung Nr. 49 Rev. 6 betrieben werden. Sobald sich das Schiebedrehmoment über einen Zeitraum von mindestens 10 Sekunden bei ± 5 % seines Mittelwerts stabilisiert hat, kann die Datenaufzeichnung beginnen, wobei die Motordrehzahl mit einer mittleren Geschwindigkeit von 8 ± 1 min– 1/s von der höchsten auf die niedrigste Abbildungsdrehzahl entsprechend Festlegung in Anhang 4 Absatz 7.4.3 der UNECE-Regelung Nr. 49 Rev. 6 verringert werden muss.
4.3.3. WHTC-Prüfung
Die WHTC-Prüfung muss entsprechend Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 durchgeführt werden. Die gewichteten Ergebnisse der Emissionsprüfungen müssen innerhalb der geltenden Grenzwerte laut Verordnung (EG) Nr. 595/2009 liegen.
Die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des Motors muss zur Entnormierung des Referenzzyklus und für alle Berechnungen der Referenzwerte gemäß Anhang 4 Absätze 7.4.6, 7.4.7 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 verwendet werden.
4.3.3.1. Messsignale und Datenaufzeichnung
Zusätzlich zu den Bestimmungen gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 muss auch der vom Motor verbrauchte tatsächliche Massendurchsatz des Kraftstoffs entsprechend Absatz 3.4 aufgezeichnet werden.
4.3.4. WHSC-Prüfung
Die WHSC-Prüfung muss entsprechend Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 durchgeführt werden. Die Ergebnisse der Emissionsprüfungen müssen innerhalb der geltenden Grenzwerte laut Verordnung (EG) Nr. 595/2009 liegen.
Die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des Motors muss zur Entnormierung des Referenzzyklus und für alle Berechnungen der Referenzwerte gemäß Anhang 4 Absätze 7.4.6, 7.4.7 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 verwendet werden.
4.3.4.1. Messsignale und Datenaufzeichnung
Zusätzlich zu den Bestimmungen gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 muss auch der vom Motor verbrauchte tatsächliche Massendurchsatz des Kraftstoffs entsprechend Absatz 3.4 aufgezeichnet werden.
4.3.5. Zyklus der Abbildung des Kraftstoffverbrauchs (FCMC)
Außer beim CO2-Stammmotor der CO2-Motorenfamilie gilt bei allen anderen Motoren, dass der Zyklus der Abbildung des Kraftstoffverbrauchs (FCMC) entsprechend diesem Absatz nicht aufzuzeichnen ist. Die für den CO2-Stammmotor der CO2-Motorenfamilie aufgezeichneten Kraftstoffabbildungsdaten gelten auch für alle anderen Motoren derselben CO2-Motorenfamilie.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, muss auch bei dem fraglichen Motor der Zyklus der Abbildung des Kraftstoffverbrauchs aufgezeichnet werden.
Gemäß Absatz 4.3.5.2 muss die Motorkraftstoffabbildung in einer Folge von stationären Motorbetriebspunkten gemessen werden. Kennzahl für diese Abbildung ist der Kraftstoffverbrauch in g/h in Abhängigkeit der Motordrehzahl in U/min und des Motordrehmoments in Nm.
4.3.5.1. Unterbrechungen während der FCMC-Aufzeichnung
Finden bei Motoren, die mit einem Abgasnachbehandlungssystem mit periodischer Regenerierung gemäß Definition laut Anhang 4 Absatz 6.6 der UNECE-Regelung Nr. 49 Rev. 6 ausgestattet sind, während der FCMC-Aufzeichnung Regenerierungsvorgänge im Rahmen der Nachbehandlung statt, sind alle in dieser Motordrehzahlprüfphase erfassten Messwerte ungültig. Nachdem der Regenerierungsvorgang abgeschlossen ist, muss das Verfahren gemäß Beschreibung in Absatz 4.3.5.1.1 fortgesetzt werden.
Für den Fall einer unvorhergesehenen Unterbrechung, Fehlfunktion oder Störung während der FCMC-Aufzeichnung sind alle in dieser Motordrehzahlprüfphase erfassten Messwerte ungültig. Für das weitere Vorgehen kann der Hersteller aus einer der folgenden Optionen wählen:
|
(1) |
Das Verfahren wird gemäß Beschreibung in Absatz 4.3.5.1.1 fortgesetzt. |
|
(2) |
Die gesamte FCMC-Aufzeichnung wird entsprechend den Absätzen 4.3.5.4 und 4.3.5.5 wiederholt. |
4.3.5.1.1. Vorgaben für die Fortsetzung der FCMC-Aufzeichnung
Der Motor muss entsprechend Anhang 4 Absatz 7.4.1 der UNECE-Regelung Nr. 49 Rev. 6 gestartet und aufgewärmt werden. Nach dem Warmlaufen muss der Motor vorkonditioniert werden, indem er 20 Minuten lang in Prüfphase 9 gemäß Festlegung in Anhang 4 Absatz 7.2.2 Tabelle 1 der UNECE-Regelung Nr. 49 Rev. 6 betrieben wird.
Die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des Motors ist zur Entnormierung der Referenzwerte für Prüfphase 9 gemäß Anhang 4 Absätze 7.4.6, 7.4.7 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 zu verwenden.
Direkt nach der Vorkonditionierung müssen die Zielwerte für die Motordrehzahl und das Drehmoment innerhalb von 20 bis 46 Sekunden linear auf den höchsten Zieleinstellpunkt für das Drehmoment geändert werden, der bei dem Zieleinstellpunkt für die Motordrehzahl zu verzeichnen ist, der direkt über dem Punkt liegt, bei dem die FCMC-Aufzeichnung unterbrochen wurde. Wird der Zieleinstellpunkt in weniger als 46 Sekunden erreicht, wird die verbleibende Zeit zur Stabilisierung genutzt.
Zur Stabilisierung muss der Motor von diesem Punkt an entsprechend der Prüfsequenz gemäß Absatz 4.3.5.5 weiter betrieben werden, ohne dass Messwerte aufgezeichnet werden.
Wenn der höchste Zieleinstellpunkt für das Drehmoment erreicht wird, der bei demjenigen Zieleinstellpunkt für die Motordrehzahl zu verzeichnen ist, bei dem die Aufzeichnung unterbrochen wurde, muss die Aufzeichnung von Messwerten von diesem Punkt an entsprechend der Prüfsequenz gemäß Absatz 4.3.5.5 fortgesetzt werden.
4.3.5.2. Raster der Zieleinstellpunkte
Das Raster der Zieleinstellpunkte ist normiert und enthält 10 Zieleinstellpunkte für die Motordrehzahl sowie 11 Zieleinstellpunkte für das Drehmoment. Die Umwandlung der normierten Einstellpunkte in die tatsächlichen Zielwerte für die Motordrehzahl und die Einstellpunkte für das Drehmoment muss für den jeweiligen zu prüfenden Motor auf der Grundlage der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des CO2--Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie erfolgen.
4.3.5.2.1. Bestimmung der Zieleinstellpunkte für die Motordrehzahl
Die 10 Zieleinstellpunkte für die Motordrehzahl ergeben sich aus 4 Standard-Zieleinstellpunkten für die Motordrehzahl sowie 6 Zusatz-Zieleinstellpunkten für die Motordrehzahl.
Die Motordrehzahlen nidle, nlo, npref, n95h und nhi müssen anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie ermittelt werden, und zwar durch Anwendung der Definitionen zu den charakteristischen Motordrehzahlen gemäß Anhang 4 Absatz 7.4.6 der UNECE-Regelung Nr. 49 Rev. 6.
Für die Ermittlung der Motordrehzahl n57 gilt folgende Gleichung:
n57 = 0,565 × (0,45 × nlo + 0,45 × npref + 0,1 × nhi – nidle) × 2,0327 + nidle
Die 4 Standard-Zieleinstellpunkte für die Motordrehzahl sind wie folgt definiert:
|
(1) |
Standard-Motordrehzahl 1: nidle |
|
(2) |
Standard-Motordrehzahl 2: nA = n57 – 0,05 × (n95h – nidle) |
|
(3) |
Standard-Motordrehzahl 3: nB = n57 + 0,08 × (n95h – nidle) |
|
(4) |
Standard-Motordrehzahl 4: n95h |
Für die Ermittlung der potenziellen Abstände zwischen den Drehzahleinstellpunkten gelten folgende Gleichungen:
|
(1) |
dnidleA_44 = (nA – nidle) / 4 |
|
(2) |
dnB95h_44 = (n95h – nB) / 4 |
|
(3) |
dnidleA_35 = (nA – nidle) / 3 |
|
(4) |
dnB95h_35 = (n95h – nB) / 5 |
|
(5) |
dnidleA_53 = (nA – nidle) / 5 |
|
(6) |
dnB95h_53 = (n95h – nB) / 3 |
Für die Ermittlung der absoluten Werte für die potenziellen Abweichungen zwischen den beiden Abschnitten gelten folgende Gleichungen:
|
(1) |
dn44 = ABS(dnidleA_44 – dnB95h_44) |
|
(2) |
dn35 = ABS(dnidleA_35 – dnB95h_35) |
|
(3) |
dn53 = ABS(dnidleA_53 – dnB95h_53) |
Die 6 Zusatz-Zieleinstellpunkte für die Motordrehzahl müssen anhand des kleinsten von drei Werten – dn44, dn35 oder dn53 – entsprechend folgenden Vorgaben ermittelt werden:
|
(1) |
Für den Fall, dass dn44 der kleinste der drei Werte ist, müssen die 6 Zusatz-Zieleinstellpunkte für die Motordrehzahl derart ermittelt werden, dass jeder der beiden Bereiche, einer von nidle bis nA und der andere von nB bis n95h, in 4 Abschnitte mit gleichem Abstand geteilt wird. |
|
(2) |
Für den Fall, dass dn35 der kleinste der drei Werte ist, müssen die 6 Zusatz-Zieleinstellpunkte für die Motordrehzahl derart ermittelt werden, dass der Bereich von nidle bis nA in 3 Abschnitte mit gleichem Abstand und der Bereich von nB bis n95h in 5 Abschnitte mit gleichem Abstand geteilt wird. |
|
(3) |
Für den Fall, dass dn53 der kleinste der drei Werte ist, müssen die 6 Zusatz-Zieleinstellpunkte für die Motordrehzahl derart ermittelt werden, dass der Bereich von nidle bis nA in 5 Abschnitte mit gleichem Abstand und der Bereich von nB bis n95h in 3 Abschnitte mit gleichem Abstand geteilt wird. |
In Abbildung 1 ist die Bestimmung der Zieleinstellpunkte für die Motordrehzahl gemäß Ziffer 1 beispielhaft veranschaulicht.
Abbildung 1
Bestimmung der Drehzahleinstellpunkte

4.3.5.2.2. Bestimmung der Zieleinstellpunkte für das Drehmoment
Die 11 Zieleinstellpunkte für das Drehmoment ergeben sich aus 2 Standard-Zieleinstellpunkten für das Drehmoment sowie 9 Zusatz-Zieleinstellpunkten für das Drehmoment. Die beiden Standard-Zieleinstellpunkte für das Drehmoment sind durch ein Nulldrehmoment des Motors und den gemäß Absatz 4.3.1 ermittelten Maximalwert der Volllast des CO2-Stammmotors (Gesamt-Maximaldrehmoment Tmax_overall) definiert. Die 9 Zusatz-Zieleinstellpunkte für das Drehmoment werden derart ermittelt, dass der Bereich vom Nulldrehmoment bis zum Gesamt-Maximaldrehmoment (Tmax_overall) in 10 Abschnitte mit gleichem Abstand geteilt wird.
Sämtliche Zieleinstellpunkte für das Drehmoment, die bei einem bestimmten Zieleinstellpunkt für die Motordrehzahl zu verzeichnen sind, bei dem der Grenzwert überschritten wird, der durch den Volllastwert des Drehmoments bei diesem bestimmten Zieleinstellpunkt für die Motordrehzahl minus 5 Prozent von Tmax_overall definiert ist, müssen durch den Volllastwert für das Drehmoment bei diesem bestimmten Zieleinstellpunkt für die Motordrehzahl ersetzt werden. In Abbildung 2 ist die Bestimmung der Zieleinstellpunkte für das Drehmoment beispielhaft veranschaulicht.
Abbildung 2
Bestimmung der Drehmomenteinstellpunkte
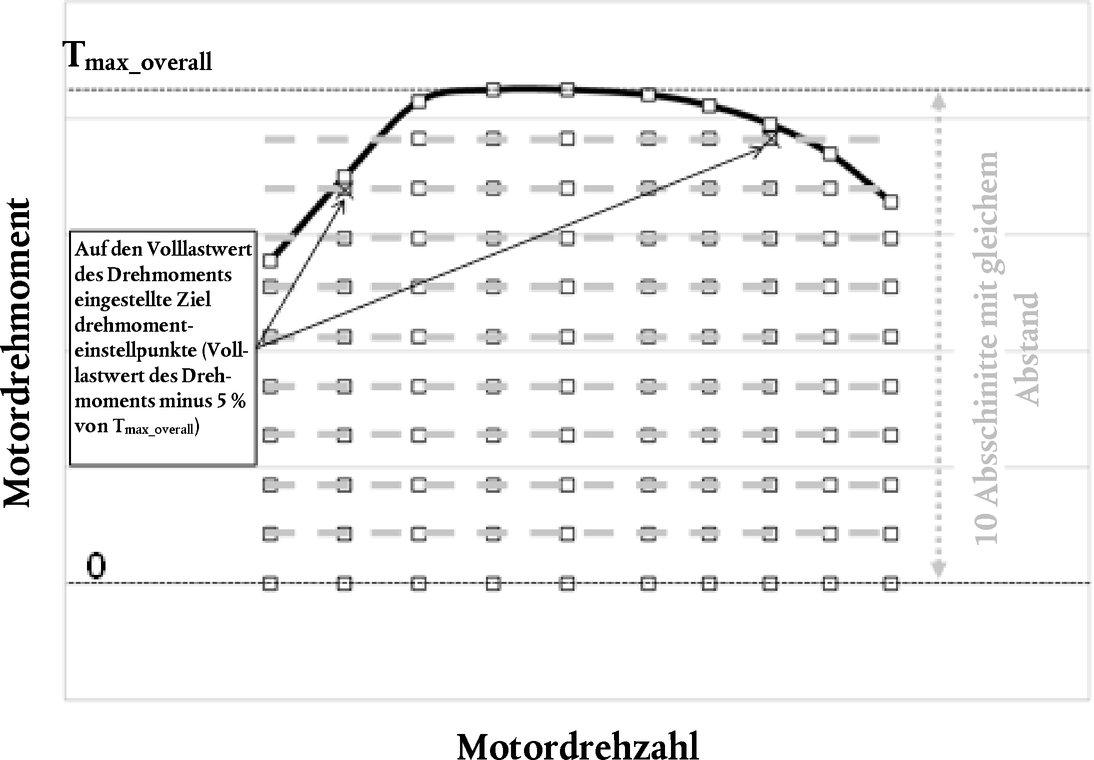
4.3.5.3. Messsignale und Datenaufzeichnung
Folgende Messdaten müssen aufgezeichnet werden:
|
(1) |
Motordrehzahl |
|
(2) |
Motordrehmoment, korrigiert gemäß Absatz 3.1.2 |
|
(3) |
vom gesamten Motorsystem verbrauchter Massendurchsatz des Kraftstoffs gemäß Absatz 3.4 |
|
(4) |
gasförmige Schadstoffe laut Definition in der UNECE-Regelung Nr. 49 Rev. 6. Die Emission von partikelförmigen Schadstoffen und Ammoniak muss während des FCMC-Prüflaufs nicht überwacht werden. |
Die Messung gasförmiger Schadstoffe muss entsprechend Anhang 4 Absätze 7.5.1, 7.5.2, 7.5.3, 7.5.5, 7.7.4, 7.8.1, 7.8.2, 7.8.4 und 7.8.5 der UNECE-Regelung Nr. 49 Rev. 6 erfolgen.
Im Sinne von Anhang 4 Absatz 7.8.4 der UNECE-Regelung Nr. 49 Rev. 6 bezeichnet der im angegebenen Absatz erwähnte „Prüfzyklus“ die vollständige Sequenz von der Vorkonditionierung gemäß Beschreibung in Absatz 4.3.5.4 bis zum Ende der Prüfsequenz gemäß Angaben in Absatz 4.3.5.5.
4.3.5.4. Vorkonditionierung des Motorsystems
Der Motor und gegebenenfalls das Verdünnungssystem müssen entsprechend Anhang 4 Absatz 7.4.1 der UNECE-Regelung Nr. 49 Rev. 6 gestartet und aufgewärmt werden.
Nach dem Warmlaufen müssen der Motor und das Probenahmesystem vorkonditioniert werden, indem der Motor gemäß Festlegung in Anhang 4 Absatz 7.2.2 Tabelle 1 der UNECE-Regelung Nr. 49 Rev. 6 20 Minuten lang in Prüfphase 9 betrieben wird, während gleichzeitig das Verdünnungssystem läuft.
Die entsprechend Nummer 4.3.1 aufgezeichnete Volllastkurve des CO2-Stammmotors der CO2-Motorenfamilie muss zur Entnormierung der Referenzwerte für Prüfphase 9 gemäß Anhang 4 Absätze 7.4.6, 7.4.7 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 verwendet werden.
Direkt nach der Vorkonditionierung müssen die Zielwerte für die Motordrehzahl und das Drehmoment innerhalb von 20 bis 46 Sekunden linear auf den ersten Zieleinstellpunkt der Prüfsequenz gemäß Absatz 4.3.5.5 geändert werden. Wird der erste Zieleinstellpunkt in weniger als 46 Sekunden erreicht, wird die verbleibende Zeit zur Stabilisierung genutzt.
4.3.5.5. Prüfsequenz
Die Prüfsequenz besteht aus stabilen Zieleinstellpunkten mit festgelegten Motordrehzahl- und Drehmomentwerten für jeden Zieleinstellpunkt entsprechend Absatz 4.3.5.2 sowie definierten Stufen, um von einem Zieleinstellpunkt zum nächsten zu gelangen.
Für jede Zielmotordrehzahl muss der höchste Zieleinstellpunkt für das Drehmoment bei maximaler Bedieneingabe erreicht werden.
Der erste Zieleinstellpunkt ist für den höchsten Zieleinstellpunkt für die Motordrehzahl und den höchsten Zieleinstellpunkt für das Drehmoment definiert.
Zur Erfassung aller Zieleinstellpunkte müssen folgende Schritte ausgeführt werden:
|
(1) |
Für jeden Zieleinstellpunkt muss der Motor über einen Zeitraum von 95 ± 3 Sekunden betrieben werden. Die ersten 55 ± 1 Sekunden dieses Zeitraums gelten jeweils als Stabilisierungszeitraum. Im anschließenden Zeitraum von 30 ± 1 Sekunden muss der Mittelwert für die Motordrehzahl wie folgt geregelt werden:
Die aufgezeichneten Werte gemäß Beschreibung in Absatz 4.3.5.3 müssen als über einen Zeitraum von 30 ± 1 Sekunden gemittelter Wert gespeichert werden. Der verbleibende Zeitraum von 10 ± 1 Sekunden kann bei Bedarf für die Datennachbearbeitung und Speicherung genutzt werden. Während dieses Zeitraums muss der Zieleinstellpunkt für den Motor gehalten werden. |
|
(2) |
Nach der Messung an einem Zieleinstellpunkt muss der Zielwert für die Motordrehzahl konstant bei ± 20 U/min des Zieleinstellpunkts für die Motordrehzahl gehalten werden, und der Zielwert für das Drehmoment muss innerhalb von 20 ± 1 Sekunden linear auf den nächstniedrigeren Zieleinstellpunkt verringert werden. Anschließend ist die Messung gemäß Ziffer 1 durchzuführen. |
|
(3) |
Nachdem der Einstellpunkt für das Nulldrehmoment gemäß Ziffer 1 gemessen wurde, müssen die Zielmotordrehzahl linear auf den nächstniedrigeren Zieleinstellpunkt für die Motordrehzahl verringert und gleichzeitig das Zieldrehmoment innerhalb von 20 bis 46 Sekunden linear auf den höchsten Zieleinstellpunkt für das Drehmoment erhöht werden, der beim nächstniedrigeren Zieleinstellpunkt für die Motordrehzahl zu verzeichnen ist. Wird der nächste Zieleinstellpunkt in weniger als 46 Sekunden erreicht, wird die verbleibende Zeit zur Stabilisierung genutzt. Für die Messung muss nun das Stabilisierungsverfahren gemäß Ziffer 1 gestartet werden, und anschließend müssen die Zieleinstellpunkte für das Drehmoment bei konstanter Zielmotordrehzahl entsprechend Ziffer 2 angepasst werden. |
In Abbildung 3 sind die drei verschiedenen Schritte veranschaulicht, die im Rahmen der Prüfung gemäß Ziffer 1 an jedem Messeinstellpunkt ausgeführt werden müssen.
Abbildung 3
An den einzelnen Messeinstellpunkten auszuführende Schritte

In Abbildung 4 ist die Sequenz der stabilen Messeinstellpunkte, die im Rahmen der Prüfung eingehalten werden muss, beispielhaft veranschaulicht.
Abbildung 4
Sequenz der stabilen Messeinstellpunkte

4.3.5.6. Datenauswertung für die Überwachung der Emissionen
Während des FCMC-Prüflaufs müssen gasförmige Schadstoffe nach Absatz 4.3.5.3 überwacht werden. Es gelten die Definitionen zu den charakteristischen Motordrehzahlen laut Anhang 4 Absatz 7.4.6 der UNECE-Regelung Nr. 49 Rev. 6.
4.3.5.6.1. Festlegung des Kontrollbereichs
Der Kontrollbereich für die Überwachung der Emissionen während des FCMC-Prüflaufs ist entsprechend den Absätzen 4.3.5.6.1.1 und 4.3.5.6.1.2 festzulegen.
4.3.5.6.1.1. Motordrehzahlbereich für den Kontrollbereich
|
(1) |
Der Motordrehzahlbereich für den Kontrollbereich ist auf der Grundlage der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie zu ermitteln. |
|
(2) |
Der Kontrollbereich muss alle Motordrehzahlwerte einschließen, die mindestens dem 30-Prozent-Wert der kumulativen Drehzahlverteilung entsprechen, die während des gemäß Absatz 4.3.3 (n30) für die in Ziffer 1 genannte Volllastkurve des Motors durchgeführten Warmstart-WHTC-Prüfzyklus aus allen Motordrehzahlen (einschließlich Leerlauf) in aufsteigender Reihenfolge ermittelt wird. |
|
(3) |
Der Kontrollbereich muss alle Motordrehzahlwerte einschließen, die höchstens dem Wert nhi entsprechen, der anhand der in Ziffer 1 genannten Volllastkurve des Motors ermittelt wird. |
4.3.5.6.1.2. Motordrehmoment- und -leistungsbereich für den Kontrollbereich
|
(1) |
Die untere Grenze des Motordrehmomentbereichs für den Kontrollbereich muss anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve desjenigen Motors bestimmt werden, der innerhalb der CO2-Motorenfamilie die niedrigste Motorleistung aufweist. |
|
(2) |
Der Kontrollbereich muss alle Belastungspunkte des Motors einschließen, bei denen das Drehmoment mindestens 30 Prozent des höchsten Drehmoments beträgt, das anhand der in Ziffer 1 genannten Volllastkurve des Motors ermittelt wird. |
|
(3) |
Unbeschadet der Bestimmungen gemäß Ziffer 2 müssen Drehzahl- und Drehmomentpunkte unter 30 Prozent des höchsten Leistungswerts, der anhand der in Ziffer 1 genannten Volllastkurve des Motors ermittelt wird, aus dem Kontrollbereich ausgeschlossen werden. |
|
(4) |
Unbeschadet der Bestimmungen gemäß Ziffern 2 und 3 muss die obere Grenze des Kontrollbereichs auf der Grundlage der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie ermittelt werden. Der Drehmomentwert für jede anhand der Volllastkurve des CO2--Stammmotors ermittelte Motordrehzahl muss um 5 Prozent des gemäß Absatz 4.3.5.2.2 bestimmten Gesamt-Maximaldrehmoments (Tmax_overall) erhöht werden. Der erhöhte Wert für die Volllastkurve des CO2-Stammmotors wird als obere Grenze für den Kontrollbereich verwendet. |
In Abbildung 5 ist die Bestimmung der Motordrehzahl-, Motordrehmoment- und Motorleistungsbereiche für den Kontrollbereich beispielhaft veranschaulicht.
Abbildung 5
Beispielhafte Bestimmung der Motordrehzahl-, Motordrehmoment- und Motorleistungsbereiche für den Kontrollbereich
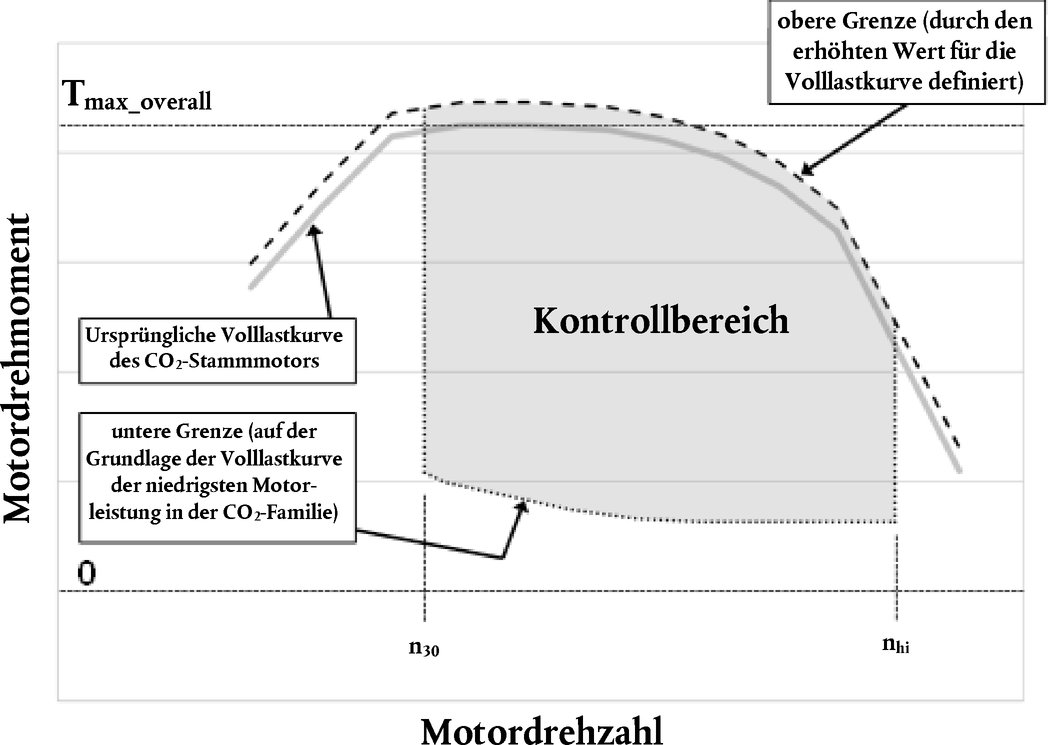
4.3.5.6.2. Festlegung der Rasterzellen
Der gemäß Absatz 4.3.5.6.1 bestimmte Kontrollbereich muss zum Zwecke der Überwachung der Emissionen während des FCMC-Prüflaufs in mehrere Rasterzellen unterteilt werden.
Bei Motoren mit einer Nenndrehzahl von weniger als 3 000 U/min muss das Raster 9 Zellen und bei Motoren mit einer Nenndrehzahl von mindestens 3 000 U/min muss es 12 Zellen enthalten. Die Raster müssen entsprechend folgenden Vorgaben definiert sein:
|
(1) |
Die Außengrenzen der Raster fluchten mit dem gemäß Nummer 4.3.5.6.1 bestimmten Kontrollbereich. |
|
(2) |
Bei 9-Zellen-Raster verlaufen 2 vertikale Geraden mit gleichem Abstand zwischen den Motordrehzahlwerten n30 und dem 1,1-Fachen von n95h und bei 12-Zellen-Raster verlaufen 3 vertikale Geraden mit gleichem Abstand zwischen den Motordrehzahlwerten n30 und dem 1,1-Fachen von n95h. |
|
(3) |
2 Kurven für das Motordrehmoment schneiden gleich verteilt (d. h. in 1/3-Abständen) jede nach Ziffern 1 und 2 definierte vertikale Gerade für die Motordrehzahl. |
Alle Motordrehzahlwerte in U/min und alle Drehmomentwerte in Newtonmeter, die die Grenzen der Rasterzellen ausmachen, müssen gemäß ASTM E 29-06 auf zwei Nachkommastellen gerundet werden.
In Abbildung 6 ist die Festlegung der Rasterzellen für den Kontrollbereich beispielhaft für ein 9-Zellen-Raster veranschaulicht.
Abbildung 6
Beispielhafte Festlegung der Rasterzellen für den Kontrollbereich bei einem 9-Zellen-Raster

4.3.5.6.3. Berechnung der spezifischen Emissionsmasse
Die spezifische Emissionsmasse der gasförmigen Schadstoffe ergibt sich aus dem Mittelwert jeder gemäß Absatz 4.3.5.6.2 festgelegten Rasterzelle. Der Mittelwert jeder Rasterzelle ergibt sich aus dem arithmetischen Mittel der spezifischen Emissionsmasse aller während des FCMC-Prüflaufs gemessenen Motordrehzahl- und Drehmomentpunkte, die sich in derselben Rasterzelle befinden.
Die spezifische Emissionsmasse für den einzelnen Motordrehzahl-/Drehmomentpunkt, der während des FCMC-Prüflaufs gemessen wird, ergibt sich aus dem gemittelten Wert über den Messzeitraum von 30 ± 1 Sekunden gemäß Festlegung in Absatz 4.3.5.5 Ziffer 1.
Befindet sich ein Motordrehzahl-/Drehmomentpunkt direkt auf einer Kurve, die einzelne Rasterzellen voneinander trennt, muss dieser Motordrehzahl-/Drehmomentpunkt für die Ermittlung der Mittelwerte aller benachbarten Rasterzellen verwendet werden.
Die Berechnung der Gesamtemissionsmasse jedes gasförmigen Schadstoffs (mFCMC,i in Gramm) an jedem Motordrehzahl-/Drehmomentpunkt, der über den Messzeitraum von 30 ± 1 Sekunden gemäß Festlegung in Absatz 4.3.5.5 Ziffer 1 während des FCMC-Prüflaufs gemessen wird, muss entsprechend Anhang 4 Absatz 8 der UNECE-Regelung Nr. 49 Rev. 6 erfolgen.
Die tatsächliche Motorarbeit (WFCMC,i in kWh) an jedem Motordrehzahl-/Drehmomentpunkt, der über den Messzeitraum von 30 ± 1 Sekunden gemäß Festlegung in Absatz 4.3.5.5 Ziffer 1 während des FCMC-Prüflaufs gemessen wird, muss anhand der entsprechend Absatz 4.3.5.3 aufgezeichneten Motordrehzahl- und Drehmomentwerte ermittelt werden.
Die spezifische Emissionsmasse gasförmiger Schadstoffe (eFCMC,i in g/kWh) an jedem Motordrehzahl-/Drehmomentpunkt, der während des FCMC-Prüflaufs gemessen wird, muss anhand folgender Gleichung ermittelt werden:
eFCMC,i = mFCMC,i / WFCMC,i
4.3.5.7. Gültigkeit der Daten
4.3.5.7.1. Anforderungen an die Validierungsstatistik für die FCMC-Prüfläufe
Für einen FCMC-Prüflauf muss eine lineare Regressionsanalyse des tatsächlichen Werts für die Motordrehzahl (nact), das Motordrehmoment (Mact) und die Motorleistung (Pact) an den jeweiligen Referenzwerten (nref, Mref, Pref) durchgeführt werden. Die tatsächlichen Werte für nact, Mact und Pact müssen anhand der gemäß Absatz 4.3.5.3 aufgezeichneten Werte ermittelt werden.
Die Stufen, die verwendet werden, um von einem Zieleinstellpunkt zum nächsten zu gelangen, müssen von dieser Regressionsanalyse ausgenommen werden.
Zur Verringerung der Verzerrungswirkung der Zeitverzögerung zwischen den tatsächlichen Werten und den Referenzzykluswerten kann die gesamte Sequenz der Messwerte für die Motordrehzahl und das Drehmoment gegenüber der Sequenz der entsprechenden Referenzwerte zeitlich vorgezogen oder verzögert werden. Bei einer Verschiebung der Messwerte müssen Drehzahl und Drehmoment um den gleichen Betrag und in die gleiche Richtung verschoben werden.
Für die Regressionsanalyse muss die Fehlerquadratmethode gemäß Anhang 4 Anlage 3 Absätze A.3.1 und A.3.2 der UNECE-Regelung Nr. 49 Rev. 6 angewandt werden, mit der Formel für die beste Anpassung gemäß Festlegung in Anhang 4 Absatz 7.8.7 der UNECE-Regelung Nr. 49 Rev. 6. Es wird empfohlen, diese Analyse bei 1 Hz durchzuführen.
Ausschließlich zum Zwecke dieser Regressionsanalyse ist es zulässig, vor der Regressionsberechnung Punktstreichungen gemäß Anhang 4 Tabelle 4 (Zulässige Punktstreichungen aus der Regressionsanalyse) der UNECE-Regelung Nr. 49 Rev. 6 vorzunehmen. Darüber hinaus müssen ausschließlich zum Zwecke dieser Regressionsanalyse alle Werte für das Motordrehmoment und die Motorleistung an Punkten mit maximaler Bedieneingabe ausgelassen werden. Bei anderen Berechnungen, die Gegenstand dieses Anhangs sind, dürfen die zum Zwecke der Regressionsanalyse gestrichenen Punkte jedoch nicht ausgelassen werden. Eine Punktstreichung darf auf den gesamten Zyklus oder auch nur auf einen Teil davon angewandt werden.
Als Voraussetzung dafür, dass die Daten als gültig anerkannt werden, muss das Kriterium laut Anhang 4 Tabelle 3 (Toleranzen der Regressionsgeraden für WHSC) der UNECE-Regelung Nr. 49 Rev. 6 erfüllt sein.
4.3.5.7.2. Anforderungen an die Überwachung der Emissionen
Die aus den FCMC-Prüfungen gewonnenen Daten werden als gültig anerkannt, wenn die spezifische Emissionsmasse der regulierten gasförmigen Schadstoffe, die gemäß Absatz 4.3.5.6.3 für jede Rasterzelle ermittelt wird, innerhalb der in Anhang 10 Absatz 5.2.2 der UNECE-Regelung Nr. 49 Rev. 6 angegebenen Grenzen für gasförmige Schadstoffe liegt. Für den Fall, dass innerhalb derselben Rasterzelle weniger als 3 Motordrehzahl-/Drehmomentpunkte vorliegen, findet dieser Absatz für die betreffende Rasterzelle keine Anwendung.
5. Nachbearbeitung der Messdaten
Sämtliche in diesem Abschnitt angegebene Berechnungen müssen für jeden einzelnen Motor einer CO2-Motorenfamilie separat durchgeführt werden.
5.1. Berechnung der Motorarbeit
Die Gesamt-Motorarbeit über einen Zyklus oder einen festgelegten Zeitraum muss anhand der aufgezeichneten Werte der Motorleistung ermittelt werden, die gemäß Anhang 4 Absatz 3.1.2 sowie Absätze 6.3.5 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 bestimmt wird.
Für die Ermittlung der Motorarbeit über einen vollständigen Prüfzyklus oder jeden einzelnen WHTC-Teilzyklus müssen die aufgezeichneten Werte für die Motorleistung gemäß der folgenden Formel integriert werden:

dabei gilt:
|
Wact, i |
= |
Gesamt-Motorarbeit über den Zeitraum von t0 bis t1 |
|
t0 |
= |
Zeit am Anfang des Zeitraums |
|
t1 |
= |
Zeit am Ende des Zeitraums |
|
n |
= |
Anzahl der aufgezeichneten Werte über den Zeitraum von t0 bis t1 |
|
Pk [0 … n] |
= |
aufgezeichnete Werte für die Motorleistung über den Zeitraum von t0 bis t1 in chronologischer Reihenfolge, wobei k von 0 bei t0 bis n bei t1 verläuft |
|
h |
= |
Intervallbreite zwischen zwei benachbarten aufgezeichneten Werten, definiert wie folgt: |

5.2. Berechnung des integrierten Kraftstoffverbrauchs
Alle aufgezeichneten negativen Werte für den Kraftstoffverbrauch müssen für die Berechnungen des integrierten Werts direkt verwendet und dürfen nicht gleich Null gesetzt werden.
Für die Ermittlung der gesamten Kraftstoffmasse, die vom Motor über einen vollständigen Prüfzyklus oder jeden einzelnen WHTC-Teilzyklus verbraucht wird, müssen die aufgezeichneten Werte für den Massendurchsatz des Kraftstoffs gemäß folgender Formel integriert werden:

dabei gilt:
|
Σ FCmeas, i |
= |
gesamte Kraftstoffmasse, die vom Motor über den Zeitraum von t0 bis t1 verbraucht wird |
|
t0 |
= |
Zeit am Anfang des Zeitraums |
|
t1 |
= |
Zeit am Ende des Zeitraums |
|
n |
= |
Anzahl der aufgezeichneten Werte über den Zeitraum von t0 bis t1 |
|
mffuel,k [0 … n] |
= |
aufgezeichnete Werte für den Massendurchsatz des Kraftstoffs über den Zeitraum von t0 bis t1 in chronologischer Reihenfolge, wobei k von 0 bei t0 bis n bei t1 verläuft |
|
h |
= |
Intervallbreite zwischen zwei benachbarten aufgezeichneten Werten, definiert wie folgt: |

5.3. Berechnung des spezifischen Kraftstoffverbrauchs
Die Korrektur- und Ausgleichsfaktoren, die in das Simulationsinstrument eingegeben werden müssen, werden von dem Motorvorbehandlungsinstrument auf Grundlage der Messwerte für den spezifischen Kraftstoffverbrauch des Motors gemäß den Absätzen 5.3.1 und 5.3.2 errechnet.
5.3.1. Spezifische Kraftstoffverbrauchswerte für den WHTC-Korrekturfaktor
Die spezifischen Kraftstoffverbrauchswerte, die für den WHTC-Korrekturfaktor benötigt werden, müssen anhand der tatsächlichen Messwerte für die Warmstart-WHTC-Prüfung, die gemäß Absatz 4.3.3 aufgezeichnet wurden, wie folgt errechnet werden:
|
|
SFCmeas, Urban = Σ FCmeas, WHTC-Urban / Wact, WHTC-Urban |
|
|
SFCmeas, Rural = Σ FCmeas, WHTC-Rural / Wact, WHTC-Rural |
|
|
SFCmeas, MW = Σ FCmeas, WHTC-MW / Wact, WHTC-M) |
dabei gilt:
|
SFCmeas, i |
= |
spezifischer Kraftstoffverbrauch über den WHTC-Teilzyklus i [g/kWh] |
|
Σ FCmeas, i |
= |
gesamte Kraftstoffmasse, die vom Motor über den WHTC-Teilzyklus i [g] verbraucht wird, ermittelt gemäß Absatz 5.2 |
|
Wact, i |
= |
Gesamt-Motorarbeit über den WHTC-Teilzyklus i [kWh], ermittelt gemäß Absatz 5.1 |
Die 3 einzelnen Teilzyklen der WHTC-Prüfung – innerstädtisch, außerstädtisch und Autobahn – sind wie folgt definiert:
|
(1) |
innerstädtisch: von Zyklusbeginn bis ≤ 900 Sekunden nach Zyklusbeginn |
|
(2) |
außerstädtisch: von > 900 Sekunden bis ≤ 1 380 Sekunden nach Zyklusbeginn |
|
(3) |
Autobahn (MW): von > 1 380 Sekunden nach Zyklusbeginn bis Zyklusende |
5.3.2. Spezifische Kraftstoffverbrauchswerte für den Kalt-Warm-Emissionsausgleichsfaktor
Die spezifischen Kraftstoffverbrauchswerte, die für den Kalt-Warm-Emissionsausgleichsfaktor benötigt werden, müssen anhand der tatsächlichen Messwerte sowohl für die Warmstart- als auch die Kaltstart-WHTC-Prüfung, die gemäß Absatz 4.3.3 aufgezeichnet wurden, errechnet werden. Die Berechnungen müssen für die Warmstart- und für die Kaltstart-WHTC-Prüfung separat wie folgt vorgenommen werden:
|
|
SFCmeas, hot = Σ FCmeas, hot / Wact, hot |
|
|
SFCmeas, cold = Σ FCmeas, cold / Wact, cold |
dabei gilt:
|
SFCmeas, j |
= |
spezifischer Kraftstoffverbrauch [g/kWh] |
|
Σ FCmeas, j |
= |
gesamter Kraftstoffverbrauch über den WHTC-Prüfzyklus [g] ermittelt gemäß Absatz 5.2 dieses Anhangs |
|
Wact, j |
= |
Gesamt-Motorarbeit über den WHTC-Prüfzyklus [kWh] ermittelt gemäß Absatz 5.1 dieses Anhangs |
5.3.3. Spezifische Kraftstoffverbrauchswerte über den WHSC-Prüfzyklus
Die spezifischen Kraftstoffverbrauchswerte über den WHSC-Prüfzyklus müssen anhand der tatsächlichen Messwerte für den WHSC-Prüfzyklus, die gemäß Absatz 4.3.4 aufgezeichnet wurden, wie folgt errechnet werden:
SFCWHSC = (Σ FCWHSC) / (WWHSC)
dabei gilt:
|
SFCWHSC |
= |
spezifischer Kraftstoffverbrauch über den WHSC-Prüfzyklus [g/kWh] |
|
Σ FCWHSC |
= |
gesamter Kraftstoffverbrauch über den WHSC-Prüfzyklus [g], ermittelt gemäß Absatz 5.2 dieses Anhangs |
|
WWHSC |
= |
Gesamt-Motorarbeit über den WHSC-Prüfzyklus [kWh], ermittelt gemäß Absatz 5.1 dieses Anhangs |
5.3.3.1. Korrigierte spezifische Kraftstoffverbrauchswerte über den WHSC-Prüfzyklus
Der errechnete spezifische Kraftstoffverbrauch über den WHSC-Prüfzyklus, SFCWHSC, ermittelt gemäß Absatz 5.3.3, muss auf den Wert SFCWHSC,corr korrigiert werden, damit auch die Differenz zwischen dem Nettoheizwert des bei der Prüfung verwendeten Kraftstoffs und dem Standard-Nettoheizwert für die entsprechende Motorkraftstofftechnik berücksichtigt wird, die sich aus folgender Gleichung ergibt:

dabei gilt:
|
SFCWHSC,corr |
= |
korrigierter spezifischer Kraftstoffverbrauch über den WHSC-Prüfzyklus [g/kWh] |
|
SFCWHSC |
= |
spezifischer Kraftstoffverbrauch über den WHSC-Prüfzyklus [g/kWh] |
|
NCVmeas |
= |
Nettoheizwert des bei der Prüfung verwendeten Kraftstoffs, ermittelt gemäß Absatz 3.2 [MJ/kg] |
|
NCVstd |
= |
Standard-Nettoheizwert gemäß Tabelle 4 [MJ/kg] |
Tabelle 4
Standard-Nettoheizwerte der verschiedenen Kraftstoffarten
|
Kraftstoffart/Motortyp |
Bezugskraft-stoffart |
Standard-Nettoheizwert [MJ/kg] |
|
Diesel/CI |
B7 |
42,7 |
|
Ethanol/CI |
ED95 |
25,7 |
|
Benzin/PI |
E10 |
41,5 |
|
Ethanol/PI |
E85 |
29,1 |
|
LPG/PI |
LPG Kraftstoff B |
46,0 |
|
Erdgas/PI |
G25 |
45,1 |
5.3.3.2. Sonderbestimmungen für Bezugskraftstoff B7
Für den Fall, dass der Bezugskraftstoff des Typs B7 (Diesel/CI) entsprechend Absatz 3.2 bei der Prüfung verwendet wurde, darf die in Absatz 5.3.3.1 beschriebene Normierungskorrektur nicht ausgeführt werden, und als korrigierter Wert SFCWHSC,corr muss der unkorrigierte Wert SFCWHSC festgelegt werden.
5.4. Korrekturfaktor für Motoren mit Abgasnachbehandlungssystem mit periodischer Regenerierung
Bei Motoren, die mit einem Abgasnachbehandlungssystem mit periodischer Regenerierung gemäß Definition laut Anhang 4 Absatz 6.6.1 der UNECE-Regelung Nr. 49 Rev. 6 ausgestattet sind, muss der Kraftstoffverbrauch über einen Korrekturfaktor so angepasst werden, dass auch Regenerierungsvorgänge berücksichtigt werden.
Dieser Korrekturfaktor CFRegPer muss entsprechend Anhang 4 Absätze 6.6.2 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt werden.
Bei Motoren mit einem Abgasnachbehandlungssystem mit laufender Regenerierung gemäß Definition laut Anhang 4 Absatz 6.6 der UNECE-Regelung Nr. 49 Rev. 6 wird kein Korrekturfaktor ermittelt, und als Wert für den Faktor CFRegPer muss „1“ festgelegt werden.
Die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des Motors muss zur Entnormierung des WHTC-Referenzzyklus und für alle Berechnungen der Referenzwerte gemäß Anhang 4 Absätze 7.4.6, 7.4.7 und 7.4.8 der UNECE-Regelung Nr. 49 Rev. 6 verwendet werden.
Zusätzlich zu den Bestimmungen gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 6 muss auch der vom Motor verbrauchte tatsächliche Massendurchsatz des Kraftstoffs entsprechend Absatz 3.4 aufgezeichnet werden, und zwar für jede WHTC-Warmstartprüfung gemäß Anhang 4 Absatz 6.6.2 der UNECE-Regelung Nr. 49 Rev. 6.
Die Berechnung des spezifischen Kraftstoffverbrauchs für jede WHTC-Warmstartprüfung muss anhand folgender Gleichung erfolgen:
SFCmeas, m = (Σ FCmeas, m) / (Wact, m)
dabei gilt:
|
SFCmeas, m |
= |
spezifischer Kraftstoffverbrauch [g/kWh] |
|
Σ FCmeas,m |
= |
gesamter Kraftstoffverbrauch über den WHTC-Prüfzyklus [g], ermittelt gemäß Absatz 5.2 dieses Anhangs |
|
Wact, m |
= |
Gesamt-Motorarbeit über den WHTC-Prüfzyklus [kWh], ermittelt gemäß Absatz 5.1 dieses Anhangs |
|
m |
= |
Index zur Identifizierung jeder einzelnen WHTC-Warmstartprüfung |
Die spezifischen Kraftstoffverbrauchswerte für die einzelnen WHTC-Warmstartprüfungen müssen anhand folgender Gleichung gewichtet werden:

dabei gilt:
|
n |
= |
die Anzahl der WHTC-Warmstartprüfungen ohne Regenerierung |
|
nr |
= |
die Anzahl der WHTC-Warmstartprüfungen mit Regenerierung (als Mindestanzahl gilt eine Prüfung) |
|
SFCavg |
= |
der durchschnittliche spezifische Kraftstoffverbrauch, ermittelt aus allen WHTC-Warmstartprüfungen ohne Regenerierung [g/kWh] |
|
SFCavg,r |
= |
der durchschnittliche spezifische Kraftstoffverbrauch, ermittelt aus allen WHTC-Warmstartprüfungen mit Regenerierung [g/kWh] |
Der Korrekturfaktor CFRegPer muss anhand folgender Gleichung errechnet werden:

6. Anwendung des Motorvorbehandlungsinstruments
Das Motorvorbehandlungsinstrument muss für jeden Motor einer CO2-Motorenfamilie mit Hilfe der unter Absatz 6.1 genannten Eingabe aufgerufen werden.
Die Ausgabedaten des Motorvorbehandlungsinstruments stellen das Endergebnis des Motorprüfverfahrens dar und müssen dokumentiert werden.
6.1. In das Motorvorbehandlungsinstrument einzugebende Daten
Folgende Eingabedaten müssen im Zuge des in diesem Anhang angegebenen Prüfverfahrens erzeugt werden und dienen schließlich als Eingabe für das Motorvorbehandlungsinstrument.
6.1.1. Volllastkurve des CO2-Stammmotors
Als Eingabe wird die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie verwendet.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, muss die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des betreffenden Motors als Eingabe verwendet werden.
Die Eingabedaten müssen im CSV-Dateiformat bereitgestellt werden, wobei als Trennungszeichen das Unicode-KOMMA (U+002C) („,“) zu verwenden ist. Die erste Zeile der Datei muss als Kopfzeile verwendet werden und darf keine aufgezeichneten Daten enthalten. Ab der zweiten Zeile der Datei müssen aufgezeichnete Daten eingetragen sein.
In der ersten Spalte der Datei muss die Motordrehzahl in U/min (min-1) eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06. In der zweiten Spalte muss das Drehmoment in Nm eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06.
6.1.2. Volllastkurve
Als Eingabe wird die entsprechend Absatz 4.3.1 aufgezeichnete Volllastkurve des Motors verwendet.
Die Eingabedaten müssen im CSV-Dateiformat bereitgestellt werden, wobei als Trennungszeichen das Unicode-KOMMA (U+002C) („,“) zu verwenden ist. Die erste Zeile der Datei muss als Kopfzeile verwendet werden und darf keine aufgezeichneten Daten enthalten. Ab der zweiten Zeile der Datei müssen aufgezeichnete Daten eingetragen sein.
In der ersten Spalte der Datei muss die Motordrehzahl in U/min (min-1) eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06. In der zweiten Spalte muss das Drehmoment in Nm eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06.
6.1.3. Schiebebetriebskurve des CO2-Stammmotors
Als Eingabe wird die entsprechend Absatz 4.3.2 aufgezeichnete Schiebebetriebskurve des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie verwendet.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, muss die entsprechend Absatz 4.3.2 aufgezeichnete Schiebebetriebskurve des betreffenden Motors als Eingabe verwendet werden.
Die Eingabedaten müssen im CSV-Dateiformat bereitgestellt werden, wobei als Trennungszeichen das Unicode-KOMMA (U+002C) („,“) zu verwenden ist. Die erste Zeile der Datei muss als Kopfzeile verwendet werden und darf keine aufgezeichneten Daten enthalten. Ab der zweiten Zeile der Datei müssen aufgezeichnete Daten eingetragen sein.
In der ersten Spalte der Datei muss die Motordrehzahl in U/min (min– 1) eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06. In der zweiten Spalte muss das Drehmoment in Nm U/min eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06.
6.1.4. Abbildung des Kraftstoffverbrauchs des CO2-Stammmotors
Als Eingabe werden die entsprechend Absatz 4.3.5 aufgezeichneten Werte für die Motordrehzahl, das Motordrehmoment und den Massendurchsatz des Kraftstoffs verwendet, die für den CO2-Stammmotor der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie ermittelt wurden.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, müssen die entsprechend Absatz 4.3.5 aufgezeichneten Werte für die Motordrehzahl, das Motordrehmoment und den Massendurchsatz des Kraftstoffs des betreffenden Motors als Eingabe verwendet werden.
Als Eingabedaten dürfen ausschließlich die gemittelten Messwerte für die Motordrehzahl, das Motordrehmoment und den Massendurchsatz des Kraftstoffs über den Messzeitraum von 30 ± 1 Sekunden gemäß Festlegung in Absatz 4.3.5.5 Ziffer 1 verwendet werden.
Die Eingabedaten müssen im CSV-Dateiformat bereitgestellt werden, wobei als Trennungszeichen das Unicode-KOMMA (U+002C) („,“) zu verwenden ist. Die erste Zeile der Datei muss als Kopfzeile verwendet werden und darf keine aufgezeichneten Daten enthalten. Ab der zweiten Zeile der Datei müssen aufgezeichnete Daten eingetragen sein.
In der ersten Spalte der Datei muss die Motordrehzahl in U/min (min-1) eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06. In der zweiten Spalte muss das Drehmoment in Nm eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06. In der dritten Spalte muss der Massendurchsatz des Kraftstoffs in g/h eingetragen sein, gerundet auf zwei Nachkommastellen gemäß ASTM E 29-06.
6.1.5. Spezifische Kraftstoffverbrauchswerte für den WHTC-Korrekturfaktor
Als Eingabe werden die drei gemäß Absatz 5.3.1 ermittelten Werte für den spezifischen Kraftstoffverbrauch über die einzelnen Teilzyklen der WHTC-Prüfung – innerstädtisch, außerstädtisch und Autobahn – in g/kWh verwendet.
Die Werte müssen auf zwei Nachkommastellen gemäß ASTM E 29-06 gerundet werden.
6.1.6. Spezifische Kraftstoffverbrauchswerte für den Kalt-Warm-Emissionsausgleichsfaktor
Als Eingabe werden die zwei gemäß Absatz 5.3.2 ermittelten Werte für den spezifischen Kraftstoffverbrauch bei der Warm- und Kaltstart-WHTC-Prüfung in g/kWh verwendet.
Die Werte müssen auf zwei Nachkommastellen gemäß ASTM E 29-06 gerundet werden.
6.1.7. Korrekturfaktor für Motoren mit Abgasnachbehandlungssystem mit periodischer Regenerierung
Als Eingabe wird der gemäß Absatz 5.4 ermittelte Korrekturfaktor CFRegPer verwendet.
Bei Motoren mit einem Abgasnachbehandlungssystem mit laufender Regenerierung gemäß Definition laut Anhang 4 Absatz 6.6.1 der UNECE-Regelung Nr. 49 Rev. 6 muss als Wert für diesen Faktor entsprechend Absatz 5.4 „1“ festgelegt werden.
Der Wert muss auf zwei Nachkommastellen gemäß ASTM E 29-06 gerundet werden.
6.1.8. Nettoheizwert des Prüfkraftstoffs
Als Eingabe wird der gemäß Absatz 3.2 ermittelte Nettoheizwert des Prüfkraftstoffs in MJ/kg verwendet.
Der Wert muss auf drei Nachkommastellen gemäß ASTM E 29-06 gerundet werden.
6.1.9. Art des Prüfkraftstoffs
Als Eingabe wird die gemäß Absatz 3.2 ausgewählte Art des Prüfkraftstoffs verwendet.
6.1.10. Leerlaufdrehzahl des CO2-Stammmotors
Als Eingabe wird die Leerlaufdrehzahl nidle in U/min des CO2-Stammmotors der gemäß Anlage 3 dieses Anhangs festgelegten CO2-Motorenfamilie verwendet. Dabei muss der Wert eingegeben werden, der vom Hersteller in seinem Antrag auf Zertifizierung im Beschreibungsbogen gemäß Muster in Anlage 2 angegeben wurde.
Für den Fall, dass auf Antrag des Herstellers die Bestimmungen gemäß Artikel 15 Absatz 5 dieser Verordnung Anwendung finden, muss die Leerlaufdrehzahl des betreffenden Motors als Eingabe verwendet werden.
Der Wert muss auf die nächste ganze Zahl gemäß ASTM E 29-06 gerundet werden.
6.1.11. Leerlaufdrehzahl des Motors
Als Eingabe wird die Leerlaufdrehzahl des Motors nidle in U/min (min– 1) verwendet, die vom Hersteller in seinem Antrag auf Zertifizierung im Beschreibungsbogen gemäß Muster in Anlage 2 dieses Anhangs angegeben wurde.
Der Wert muss auf die nächste ganze Zahl gemäß ASTM E 29-06 gerundet werden.
6.1.12. Hubraum des Motors
Als Eingabe wird der Hubraum des Motors in cm3 verwendet, der vom Hersteller in seinem Antrag auf Zertifizierung im Beschreibungsbogen gemäß Muster in Anlage 2 dieses Anhangs angegeben wurde.
Der Wert muss auf die nächste ganze Zahl gemäß ASTM E 29-06 gerundet werden.
6.1.13. Nenndrehzahl des Motors
Als Eingabe wird die Nenndrehzahl des Motors in U/min verwendet, die vom Hersteller in seinem Antrag auf Zertifizierung unter Nummer 3.2.1.8 des Beschreibungsbogens gemäß Anlage 2 dieses Anhangs angegeben wurde.
Der Wert muss auf die nächste ganze Zahl gemäß ASTM E 29-06 gerundet werden.
6.1.14. Nennleistung des Motors
Als Eingabe wird die Nennleistung des Motors in kW verwendet, die vom Hersteller in seinem Antrag auf Zertifizierung unter Nummer 3.2.1.8 des Beschreibungsbogens gemäß Anlage 2 dieses Anhangs angegeben wurde.
Der Wert muss auf die nächste ganze Zahl gemäß ASTM E 29-06 gerundet werden.
6.1.15. Hersteller
Als Eingabe wird die Bezeichnung des Motorherstellers in Form einer im ISO8859-1-Zeichensatz kodierten Zeichenfolge verwendet.
6.1.16. Modell
Als Eingabe wird die Bezeichnung des Motormodells in Form einer im ISO8859-1-Zeichensatz kodierten Zeichenfolge verwendet.
6.1.17. ID des technischen Berichts
Als Eingabe wird eine eindeutige Kennung des für die Typgenehmigung des betreffenden Motors erstellten technischen Berichts verwendet. Diese Kennung muss in Form einer im ISO8859-1-Zeichensatz kodierten Zeichenfolge bereitgestellt werden.
(1) „Messgenauigkeit“ bezeichnet die Abweichung des abgelesenen Messwerts von einem Referenzwert, der auf eine nationale oder internationale Prüfnorm zurückführbar ist.
(2) „Anstiegzeit“ bezeichnet die Zeitspanne zwischen der Anzeige von 10 Prozent und 90 Prozent des abgelesenen Endwerts (t90 – t10).
(3) Die Werte für die „max. Kalibrierung“ müssen dem 1,1-Fachen des prognostizierten Höchstwerts entsprechen, der für das jeweilige Messsystem in allen Prüfläufen erwartet wird.
Anlage 1
MUSTER EINER BESCHEINIGUNG EINES BAUTEILS, EINER SELBSTSTÄNDIGEN TECHNISCHEN EINHEIT ODER EINES SYSTEMS
Größtformat: A4 (210 × 297 mm)
BESCHEINIGUNG ÜBER MIT CO2-EMISSIONEN UND DEM KRAFTSTOFFVERBRAUCH VERBUNDENEN EIGENSCHAFTEN EINER MOTORENFAMILIE
|
Mitteilung über:
|
Behördenstempel
|
einer Bescheinigung über mit CO2-Emissionen und dem Kraftstoffverbrauch verbundenen Eigenschaften einer Motorenfamilie gemäß der Verordnung (EU) 2017/2400 der Kommission.
Verordnung (EU) 2017/2400 der Kommission, zuletzt geändert durch …
Nummer der Bescheinigung:
Hash:
Grund für die Erweiterung:
ABSCHNITT I
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Typ:
0.3. Merkmale zur Typidentifizierung:
0.3.1. Anbringungsstelle des Zeichens der Bescheinigung:
0.3.2. Anbringungsmethode für das Zeichen der Bescheinigung:
0.5. Name und Anschrift des Herstellers:
0.6. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.7. (Ggf.) Name und Anschrift des Bevollmächtigten des Herstellers:
ABSCHNITT II
1. Zusätzliche Angaben (soweit vorhanden): siehe Beiblatt
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts:
4. Nummer des Prüfberichts:
5. Bemerkungen (ggf.): siehe Beiblatt
6. Ort:
7. Datum:
8. Unterschrift:
Anlagen:
Beschreibungsunterlagen, Prüfbericht
Anlage 2
Motorbeschreibungsbogen
Erläuterungen zum Ausfüllen der Tabelle
Die Buchstaben A, B, C, D und E für die zur CO2-Motorenfamilie gehörigen Motoren sind durch die tatsächliche Bezeichnung des jeweiligen Motors der CO2-Motorenfamilie zu ersetzen.
Gilt bei einem bestimmten Motormerkmal derselbe Wert/dieselbe Beschreibung für alle der CO2-Motorenfamilie zugehörigen Motoren, sind die Tabellenzellen A-E zu verbinden.
Besteht die CO2-Motorenfamilie aus mehr als 5 Motoren, sind neue Spalten hinzuzufügen.
Die „Anlage zum Beschreibungsbogen“ ist zu kopieren und für jeden Motor innerhalb einer CO2-Familie gesondert auszufüllen.
Erläuternde Fußnoten sind am Ende dieser Anlage zu finden.
|
|
|
CO2-Stamm-Motor |
Motoren einer CO2-Motorenfamilie |
||||
|
A |
B |
C |
D |
E |
|||
|
0. |
Allgemeines |
||||||
|
0.l. |
Fabrikmarke (Firmenname des Herstellers) |
|
|||||
|
0.2. |
Typ |
|
|||||
|
0.2.1. |
Handelsname(n), sofern vorhanden |
|
|
|
|
|
|
|
0.5. |
Name und Anschrift des Herstellers |
|
|||||
|
0.8. |
Name(n) und Anschrift(en) der Fertigungsstätte(n) |
|
|
|
|
|
|
|
0.9. |
(Ggf.) Name und Anschrift des Bevollmächtigten des Herstellers |
|
|||||
TEIL 1
Wesentliche Merkmale des (Stamm-)Motors und der Motortypen in einer Motorenfamilie
|
|
|
Stamm-Motor oder Motortyp |
Motoren einer CO2-Motorenfamilie |
|||||||
|
A |
B |
C |
D |
E |
||||||
|
3.2. |
Verbrennungsmotor |
|
|
|
|
|
|
|||
|
3.2.1. |
Einzelangaben über den Motor |
|
|
|
|
|
|
|||
|
3.2.1.1 |
Arbeitsweise: Fremdzündung/Selbstzündung (1) Viertakt/Zweitakt/Drehkolbenmotor (1) |
|
||||||||
|
3.2.1.2 |
Zahl und Anordnung der Zylinder |
|
|
|
|
|
|
|||
|
3.2.1.2.1. |
Bohrung (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.2. |
Hub (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.3. |
Zündfolge |
|
|
|
|
|
|
|||
|
3.2.1.3. |
Hubvolumen (4) cm3 |
|
|
|
|
|
|
|||
|
3.2.1.4. |
Volumetrisches Verdichtungsverhältnis (5) |
|
|
|
|
|
|
|||
|
3.2.1.5. |
Zeichnungen des Brennraums, des Kolbenbodens und (bei Fremdzündungsmotoren) der Kolbenringe |
|
|
|
|
|
|
|||
|
3.2.1.6. |
Normale Leerlaufdrehzahl (5) U/min |
|
|
|
|
|
|
|||
|
3.2.1.6.1. |
Erhöhte Leerlaufdrehzahl (5) U/min |
|
|
|
|
|
|
|||
|
3.2.1.7. |
Volumenbezogener Kohlenmonoxidgehalt der Abgase bei Leerlauf (5): in % wie vom Hersteller angegeben (nur Fremdzündungsmotoren) |
|
|
|
|
|
|
|||
|
3.2.1.8. |
Höchste Nutzleistung (6) … kW bei … U/min (vom Hersteller angegebener Wert) |
|
|
|
|
|
|
|||
|
3.2.1.9. |
Höchste zulässige, vom Hersteller vorgegebene Motordrehzahl (U/min) |
|
|
|
|
|
|
|||
|
3.2.1.10. |
Maximales Nettodrehmoment (6) (Nm) bei … U/min (vom Hersteller angegebener Wert) |
|
|
|
|
|
|
|||
|
3.2.1.11. |
Herstellerverweise auf die Dokumentation gemäß den Absätzen 3.1, 3.2 und 3.3 der UNECE-Regelung Nr. 49 Rev. 6, die es der Typgenehmigungsbehörde ermöglichen, die Emissionsminderungsstrategien und die Motorsysteme zu bewerten, die ein ordnungsgemäßes Arbeiten der Einrichtungen zur Begrenzung der NOx-Emissionen gewährleisten |
|
|
|
|
|
|
|||
|
3.2.2. |
Kraftstoff |
|
|
|
|
|
|
|||
|
3.2.2.2. |
Für Schwere Nutzfahrzeuge: Diesel/Benzin/Flüssiggas/NG-H/NG-L/NG-HL/Ethanol (ED95)/Ethanol (E85) (1) |
|
|
|
|
|
|
|||
|
3.2.2.2.1. |
Vom Hersteller als für den Motor geeignet erklärte Kraftstoffe gemäß Absatz 4.6.2 der UNECE-Regelung Nr. 49 Rev. 6 (falls zutreffend) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.4. |
Kraftstoffversorgung |
|
|
|
|
|
|
|||
|
3.2.4.2. |
Durch Kraftstoffeinspritzung (nur für Selbstzündungsmotoren): ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.1. |
Systembeschreibung |
|
|
|
|
|
|
|||
|
3.2.4.2.2. |
Arbeitsverfahren: Direkteinspritzung / Vorkammer / Wirbelkammer (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.3. |
Einspritzpumpe |
|
|
|
|
|
|
|||
|
3.2.4.2.3.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.3. |
Maximale Einspritzmenge (1) (5) … mm3 /je Hub oder Takt bei einer Motordrehzahl von … U/min oder wahlweise Kennlinie (Ist eine Ladedruckregelung vorhanden, so sind die charakteristische Kraftstoffzufuhr und der Ladedruck bezogen auf die jeweilige Motordrehzahl anzugeben.) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.4. |
Statischer Einspritzzeitpunkt (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.5. |
Verstellkurve des Spritzverstellers (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.6. |
Kalibrierverfahren: auf dem Prüfstand/am Motor (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4. |
Regler |
|
|
|
|
|
|
|||
|
3.2.4.2.4.1. |
Typ |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2. |
Abregeldrehzahl |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.1. |
Abregeldrehzahl unter Last (U/min) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.2. |
Höchstdrehzahl ohne Last (U/min) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.3. |
Leerlaufdrehzahl (U/min) |
|
|
|
|
|
|
|||
|
3.2.4.2.5. |
Einspritzleitungen |
|
|
|
|
|
|
|||
|
3.2.4.2.5.1. |
Länge (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.2. |
Innendurchmesser (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.3. |
Hochdruckspeicher (common rail), Marke und Typ |
|
|
|
|
|
|
|||
|
3.2.4.2.6. |
Einspritzdüse(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.3. |
Öffnungsdruck (5): |
kPa oder Kennlinie (5) |
|
|
|
|
|
|
||
|
3.2.4.2.7. |
Kaltstarteinrichtung |
|
|
|
|
|
|
|||
|
3.2.4.2.7.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.7.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.2.7.3. |
Beschreibung |
|
|
|
|
|
|
|||
|
3.2.4.2.8. |
Zusätzliche Starthilfe |
|
|
|
|
|
|
|||
|
3.2.4.2.8.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.8.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.2.8.3. |
Systembeschreibung |
|
|
|
|
|
|
|||
|
3.2.4.2.9. |
Elektronisch geregelte Einspritzung: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3. |
Beschreibung des Systems (bei anderen als kontinuierlichen Einspritzsystemen sind entsprechende Detailangaben zu machen) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.1. |
Fabrikmarke und Typ des elektronischen Steuergeräts (ECU) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.2. |
Fabrikmarke und Typ des Kraftstoffreglers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.3. |
Fabrikmarke und Typ des Luftmengenmessers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.4. |
Fabrikmarke und Typ des Mengenteilers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.5. |
Fabrikmarke und Typ des Klappenstutzens |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.6. |
Fabrikmarke und Typ des Wassertemperaturfühlers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.7. |
Fabrikmarke und Typ des Lufttemperaturfühlers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.8. |
Fabrikmarke und Typ des Luftdruckmessers |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.9. |
Kennnummer(n) der Softwarekalibrierung |
|
|
|
|
|
|
|||
|
3.2.4.3. |
Durch Kraftstoffeinspritzung (nur für Fremdzündungsmotoren): ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.4.3.1. |
Arbeitsverfahren Ansaugkrümmer (Zentral-, Mehrpunkt-, Direkteinspritzung (1), sonstige - genaue Angabe) |
|
|
|
|
|
|
|||
|
3.2.4.3.2. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.4.3.3. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.4.3.4. |
Beschreibung des Systems (bei anderen als kontinuierlichen Einspritzsystemen sind entsprechende Detailangaben zu machen) |
|
|
|
|
|
|
|||
|
3.2.4.3.4.1. |
Fabrikmarke und Typ des elektronischen Steuergeräts (ECU) |
|
|
|
|
|
|
|||
|
3.2.4.3.4.2. |
Fabrikmarke und Typ des Kraftstoffreglers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.3. |
Fabrikmarke und Typ des Luftmengenmessers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.4. |
Fabrikmarke und Typ des Mengenteilers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.5. |
Fabrikmarke und Typ des Druckreglers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.6. |
Fabrikmarke und Typ des Mikroschalters |
|
|
|
|
|
|
|||
|
3.2.4.3.4.7. |
Fabrikmarke und Typ der Leerlaufeinstellschraube |
|
|
|
|
|
|
|||
|
3.2.4.3.4.8. |
Fabrikmarke und Typ des Klappenstutzens |
|
|
|
|
|
|
|||
|
3.2.4.3.4.9. |
Fabrikmarke und Typ des Wassertemperaturfühlers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.10. |
Fabrikmarke und Typ des Lufttemperaturfühlers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.11. |
Fabrikmarke und Typ des Luftdruckmessers |
|
|
|
|
|
|
|||
|
3.2.4.3.4.12. |
Kennnummer(n) der Softwarekalibrierung |
|
|
|
|
|
|
|||
|
3.2.4.3.5. |
Einspritzventile: Öffnungsdruck (5) (kPa) oder Kennlinie (5) |
|
|
|
|
|
|
|||
|
3.2.4.3.5.1. |
Fabrikmarke |
|
|
|
|
|
|
|||
|
3.2.4.3.5.2. |
Typ |
|
|
|
|
|
|
|||
|
3.2.4.3.6. |
Einspritzeinstellung |
|
|
|
|
|
|
|||
|
3.2.4.3.7. |
Kaltstarteinrichtung |
|
|
|
|
|
|
|||
|
3.2.4.3.7.1. |
Arbeitsweise |
|
|
|
|
|
|
|||
|
3.2.4.3.7.2. |
Grenzen des Betriebsbereichs/Einstellwerte (1) (5) |
|
|
|
|
|
|
|||
|
3.2.4.4. |
Kraftstoffpumpe |
|
|
|
|
|
|
|||
|
3.2.4.4.1. |
Öffnungsdruck (5) (kPa) oder Kennlinie (5) |
|
|
|
|
|
|
|||
|
3.2.5. |
Elektrische Anlage |
|
|
|
|
|
|
|||
|
3.2.5.1. |
Nennspannung (V), Anschluss an Masse positiv/negativ (1) |
|
|
|
|
|
|
|||
|
3.2.5.2. |
Lichtmaschine |
|
|
|
|
|
|
|||
|
3.2.5.2.1. |
Typ |
|
|
|
|
|
|
|||
|
3.2.5.2.2. |
Nennleistung (VA) |
|
|
|
|
|
|
|||
|
3.2.6. |
Zündung (nur Motoren mit Fremdzündung) |
|
|
|
|
|
|
|||
|
3.2.6.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.6.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.6.3. |
Arbeitsverfahren |
|
|
|
|
|
|
|||
|
3.2.6.4. |
Zündverstellkurve oder Kennfeld (5) |
|
|
|
|
|
|
|||
|
3.2.6.5. |
Statische Zündzeitpunkteinstellung (5) (Grad vor dem oberen Totpunkt) |
|
|
|
|
|
|
|||
|
3.2.6.6. |
Zündkerzen |
|
|
|
|
|
|
|||
|
3.2.6.6.1. |
Fabrikmarke |
|
|
|
|
|
|
|||
|
3.2.6.6.2. |
Typ |
|
|
|
|
|
|
|||
|
3.2.6.6.3. |
Elektrodenabstand (mm) |
|
|
|
|
|
|
|||
|
3.2.6.7. |
Zündspule(n) |
|
|
|
|
|
|
|||
|
3.2.6.7.1. |
Fabrikmarke |
|
|
|
|
|
|
|||
|
3.2.6.7.2. |
Typ |
|
|
|
|
|
|
|||
|
3.2.7. |
Kühlsystem Flüssigkeit/Luft (1) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.7.2. |
Flüssigkeitskühlung |
|
|
|
|
|
|
|||
|
3.2.7.2.1. |
Art der Flüssigkeit |
|
|
|
|
|
|
|||
|
3.2.7.2.2. |
Kühlmittelpumpe(n): ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.7.2.3. |
Merkmale |
|
|
|
|
|
|
|||
|
3.2.7.2.3.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.7.2.3.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.7.2.4. |
Übersetzungsverhältnis(se) |
|
|
|
|
|
|
|||
|
3.2.7.3. |
Luftkühlung |
|
|
|
|
|
|
|||
|
3.2.7.3.1. |
Lüfter: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.7.3.2. |
Merkmale |
|
|
|
|
|
|
|||
|
3.2.7.3.2.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.7.3.2.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.7.3.3. |
Übersetzungsverhältnis(se) |
|
|
|
|
|
|
|||
|
3.2.8. |
Einlasssystem |
|
|
|
|
|
|
|||
|
3.2.8.1. |
Lader: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.8.1.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.8.1.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.8.1.3. |
Beschreibung des Systems (z. B. maximaler Ladedruck …… kPa, Ladedruckregelventil, falls zutreffend) |
|
|
|
|
|
|
|||
|
3.2.8.2. |
Ladeluftkühler: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.8.2.1. |
Typ: Luft-Luft/Luft-Wasser (1) |
|
|
|
|
|
|
|||
|
3.2.8.3. |
Unterdruck im Einlasssystem bei Nenndrehzahl und Volllast (nur bei Selbstzündungsmotoren) |
|
|
|
|
|
|
|||
|
3.2.8.3.1. |
minimal zulässig (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.3.2. |
maximal zulässig (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.4. |
Beschreibung und Zeichnungen der Ansaugleitungen und ihres Zubehörs (Ansaugluftsammler, Vorwärmvorrichtung, zusätzliche Lufteinlässe usw.) |
|
|
|
|
|
|
|||
|
3.2.8.4.1. |
Beschreibung des Ansaugkrümmers (einschließlich Zeichnungen und/oder Fotos) |
|
|
|
|
|
|
|||
|
3.2.9. |
Auspuffsystem |
|
|
|
|
|
|
|||
|
3.2.9.1. |
Beschreibung und/oder Zeichnung des Auspuffkrümmers |
|
|
|
|
|
|
|||
|
3.2.9.2. |
Beschreibung und/oder Zeichnung der Auspuffanlage |
|
|
|
|
|
|
|||
|
3.2.9.2.1. |
Beschreibung und/oder Zeichnungen der Teile des Auspuffsystems, die Bestandteil des Motorsystems sind |
|
|
|
|
|
|
|||
|
3.2.9.3. |
Maximal zulässiger Abgasgegendruck bei Nenndrehzahl und Volllast (nur bei Selbstzündungsmotoren) (kPa) (7) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.9.7. |
Volumen der Auspuffanlage (dm3) |
|
|
|
|
|
|
|||
|
3.2.9.7.1. |
Zulässiges Volumen der Auspuffanlage: (dm3) |
|
|
|
|
|
|
|||
|
3.2.10. |
Mindestquerschnittsflächen der Einlass- und Auslasskanäle und Kanalgeometrie |
|
|
|
|
|
|
|||
|
3.2.11. |
Ventilsteuerzeiten oder entsprechende Daten |
|||||||||
|
3.2.11.1. |
Maximaler Ventilhub, Öffnungs- und Schließwinkel oder Angaben über Steuerzeiten bei alternativen Steuerungssystemen bezogen auf die Totpunkte. Bei veränderlichen Steuerzeiten Angabe des frühesten und spätesten Zeitpunkts |
|
|
|
|
|
|
|||
|
3.2.11.2 |
Bezugsgrößen und/oder Einstellbereich (7) |
|
|
|
|
|
|
|||
|
3.2.12. |
Maßnahmen gegen Luftverunreinigung |
|||||||||
|
|
||||||||||
|
3.2.12.1.1. |
Einrichtung zur Rückführung der Kurbelgehäusegase: ja/nein (1) Falls ja, Beschreibung und Zeichnungen Falls nein, muss Absatz 6.10 von Anhang 4 der UNECE-Regelung Nr. 49 Rev. 06 erfüllt sein |
|
|
|
|
|
|
|||
|
3.2.12.2 |
Zusätzliche emissionsmindernde Einrichtungen (falls vorhanden und nicht an anderer Stelle erwähnt): |
|
|
|
|
|
|
|||
|
3.2.12.2.1. |
Katalysator: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.1. |
Anzahl der Katalysatoren und Monolithen (nachstehende Angaben sind für jede Einheit einzeln anzugeben) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.2. |
Abmessungen, Form und Volumen des Katalysators (der Katalysatoren) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.3. |
Art der katalytischen Reaktion |
|
|
|
|
|
|
|||
|
3.2.12.2.1.4. |
Gesamtbeschichtung mit Edelmetallen |
|
|
|
|
|
|
|||
|
3.2.12.2.1.5. |
Konzentrationsverhältnis der Edelmetalle |
|
|
|
|
|
|
|||
|
3.2.12.2.1.6. |
Trägerkörper (Aufbau und Werkstoff) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.7. |
Zellendichte |
|
|
|
|
|
|
|||
|
3.2.12.2.1.8. |
Art des Katalysatorgehäuses |
|
|
|
|
|
|
|||
|
3.2.12.2.1.9. |
Lage des Katalysators (der Katalysatoren) (Ort und Bezugsentfernung innerhalb der Abgasleitung) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.10. |
Wärmeschutzschild: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11. |
Regenerationssysteme/-verfahren für Abgasnachbehandlungssysteme, Beschreibung |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.1.11.5. |
Normaler Betriebstemperaturbereich (K) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.6. |
Selbstverbrauchende Reagenzien: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.7. |
Art und Konzentration des für die katalytische Reaktion erforderlichen Reagens |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.8. |
Normaler Betriebstemperaturbereich des Reagens (K) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.9. |
Internationale Norm |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.10. |
Häufigkeit der Nachfüllung des Reagensvorrates: erforderlich im laufenden Betrieb/bei der planmäßigen Wartung (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.12. |
Marke des Katalysators |
|
|
|
|
|
|
|||
|
3.2.12.2.1.13. |
Teilenummer |
|
|
|
|
|
|
|||
|
3.2.12.2.2. |
Sauerstoffsonde: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.2.1. |
Fabrikmarke |
|
|
|
|
|
|
|||
|
3.2.12.2.2.2. |
Lage |
|
|
|
|
|
|
|||
|
3.2.12.2.2.3. |
Regelbereich |
|
|
|
|
|
|
|||
|
3.2.12.2.2.4. |
Typ |
|
|
|
|
|
|
|||
|
3.2.12.2.2.5. |
Teilenummer |
|
|
|
|
|
|
|||
|
3.2.12.2.3. |
Lufteinblasung: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.3.1. |
Art (Selbstansaugung, Luftpumpe usw.) |
|
|
|
|
|
|
|||
|
3.2.12.2.4. |
Abgasrückführung (AGR): ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.4.1. |
Kennwerte (Fabrikmarke, Typ, Durchflussmenge usw.) |
|
|
|
|
|
|
|||
|
3.2.12.2.6. |
Partikelfilter: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.1. |
Abmessungen, Form und Volumen des Partikelfilters |
|
|
|
|
|
|
|||
|
3.2.12.2.6.2. |
Aufbau des Partikelfilters |
|
|
|
|
|
|
|||
|
3.2.12.2.6.3. |
Lage (Bezugsentfernung innerhalb des Auspuffstranges) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.4. |
Verfahren oder Einrichtung zur Regenerierung, Beschreibung und/oder Zeichnung |
|
|
|
|
|
|
|||
|
3.2.12.2.6.5. |
Fabrikmarke des Partikelfilters |
|
|
|
|
|
|
|||
|
3.2.12.2.6.6. |
Teilenummer |
|
|
|
|
|
|
|||
|
3.2.12.2.6.7. |
Normaler Betriebstemperaturbereich (K) und Betriebsdruckbereich (kPa) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.8. |
Bei periodischer Regenerierung |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.6.8.1.1. |
Zahl der WHTC-Prüfzyklen ohne Regenerierungsvorgang (n) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
3.2.12.2.6.8.2.1. |
Zahl der WHTC-Prüfzyklen mit Regenerierungsvorgang (nR) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9. |
Andere Einrichtungen: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9.1. |
Beschreibung und Arbeitsweise |
|
|
|
|
|
|
|||
|
3.2.12.2.7. |
On-Board-Diagnosesystem (OBD-System) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.1. |
Zahl der OBD-Motorenfamilien innerhalb der Motorenfamilie |
|
||||||||
|
3.2.12.2.7.0.2. |
Liste der OBD-Motorenfamilien (falls zutreffend) |
OBD-Motorenfamilie 1: … |
||||||||
|
OBD-Motorenfamilie 2: … |
||||||||||
|
usw. |
||||||||||
|
3.2.12.2.7.0.3. |
Nummer der OBD-Motorenfamilie, zu der der Stammmotor/Motor gehört |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.4. |
Herstellerverweise auf die OBD-Dokumentation gemäß Absatz 3.1.4 Buchstabe c und Absatz 3.3.4 der UNECE-Regelung Nr. 49 Rev. 06, für die Zwecke der Genehmigung des OBD-Systems in Anhang 9A der UNECE-Regelung Nr. 49 Rev. 06 angegeben. |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.5. |
Gegebenenfalls Herstellerverweis auf die Dokumentation über den Einbau eines Motorsystems mit OBD in ein Fahrzeug |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.2. |
Liste aller vom OBD-System überwachten Bauteile und ihrer Funktionen (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3. |
Schriftliche Darstellung (allgemeine Arbeitsweise) für |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1. |
Fremdzündungsmotoren (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.1. |
Überwachung des Katalysators8 |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.2. |
Erkennung von Verbrennungsaussetzern (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.3. |
Überwachung der Sauerstoffsonde (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.4. |
Sonstige vom OBD-System überwachte Bauteile |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2. |
Selbstzündungsmotoren (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.1. |
Überwachung des Katalysators (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.2. |
Überwachung des Partikelfilters (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.3. |
Überwachung des elektronischen Kraftstoffsystems (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.4. |
Überwachung des deNOx-Systems (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.5. |
Sonstige vom OBD-System überwachte Bauteile (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.4. |
Kriterien für die Aktivierung des Störungsmelders (feste Anzahl von Fahrzyklen oder statistische Methode) (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.5. |
Liste aller vom OBD-System verwendeten Ausgabecodes und -formate (jeweils mit Erläuterung) (8) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.6.5. |
OBD-Datenübertragungsprotokoll nach Norm (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7. |
Herstellerverweis auf die OBD-bezogenen Angaben gemäß Absatz 3.1.4 Buchstabe d und Absatz 3.3.4 der UNECE-Regelung Nr. 49 Rev. 06, für die Zwecke der Übereinstimmung mit den Vorschriften für den Zugang zu Informationen über OBD-Systeme, oder |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7.1. |
alternativ zu einem Herstellerverweis nach Absatz 3.2.12.2.7.7 Verweis auf die Anlage dieses Anhangs, die folgende Tabelle enthält, die einmal entsprechend dem nachstehenden Beispiel auszufüllen ist: Bauteil - Fehlercode - Überwachungsstrategie - Kriterien für die Meldung von Fehlfunktionen - Kriterien für die Aktivierung der Fehlfunktionsanzeige - Sekundärparameter - Vorkonditionierung - Nachweisprüfung SCR-Katalysator – P20EE – Signale der NOx-Sonden 1 und 2 – Unterschied zwischen den Signalen von Sensor 1 und Sensor 2 – 2. Zyklus – Motordrehzahl, Motorlast, Katalysatortemperatur, Aktivität des Reagens, Massendurchsatz des Abgases – ein OBD-Prüfzyklus (WHTC, heißer Teil) – OBD-Prüfzyklus (WHTC, heißer Teil) |
|
|
|
|
|
|
|||
|
3.2.12.2.8. |
Andere Einrichtung (Beschreibung, Wirkungsweise) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.1. |
Einrichtungen zur Gewährleistung der vollen Wirkung der Vorkehrungen für die Minderung der NOx-Emissionen |
|
|
|
|
|
|
|||
|
3.2.12.2.8.2. |
Motor mit ständiger Deaktivierung des Fahreraufforderungssystems, zur Verwendung durch Rettungsdienste oder in Fahrzeugen, die für den Einsatz durch die Streitkräfte, den Katastrophenschutz, die Feuerwehr und die Ordnungskräfte konstruiert und gebaut sind: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.3. |
Zahl der OBD-Motorenfamilien innerhalb der betreffenden Motorenfamilie bezüglich des ordnungsgemäßen Arbeitens der Einrichtungen zur Begrenzung der NOx-Emissionen |
|
||||||||
|
3.2.12.2.8.4. |
Liste der OBD-Motorenfamilien (falls zutreffend) |
OBD-Motorenfamilie 1: … OBD-Motorenfamilie 2: … usw. |
||||||||
|
3.2.12.2.8.5. |
Nummer der OBD-Motorenfamilie, zu der der Stammmotor/Motor gehört |
|
|
|
|
|
|
|||
|
3.2.12.2.8.6. |
Niedrigste Konzentration des Reagenswirkstoffs, die das Warnsystem nicht aktiviert (CDmin) (Vol.-%): |
|
||||||||
|
3.2.12.2.8.7. |
Ggf. Herstellerverweis auf die Dokumentation über den Einbau von Systemen in ein Fahrzeug, die das ordnungsgemäße Arbeiten von Einrichtungen zur Begrenzung der NOx-Emissionen sicherstellen |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.17. |
Spezifische Informationen bezüglich gasbetriebener Motoren schwerer Nutzfahrzeuge (Bei anders ausgelegten Systemen sind entsprechende Angaben vorzulegen.) |
|
|
|
|
|
|
|||
|
3.2.17.1 |
Kraftstoff: LPG /NG-H/NG-L /NG-HL (1) |
|
|
|
|
|
|
|||
|
3.2.17.2. |
Druckregler oder Verdampfer/Druckregler (1) |
|
|
|
|
|
|
|||
|
3.2.17.2.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.2.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.2.3. |
Anzahl der Druckminderungsstufen |
|
|
|
|
|
|
|||
|
3.2.17.2.4. |
Druck in der Endstufe mindestens (kPa) – höchstens (kPa) |
|
|
|
|
|
|
|||
|
3.2.17.2.5. |
Anzahl der Haupteinstellpunkte |
|
|
|
|
|
|
|||
|
3.2.17.2.6. |
Anzahl der Leerlaufeinstellpunkte |
|
|
|
|
|
|
|||
|
3.2.17.2.7. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.3. |
Kraftstoffzufuhr: Mischer /Gaseinblasung/Flüssigkeitseinspritzung/Direkt-einspritzung (1) |
|
|
|
|
|
|
|||
|
3.2.17.3.1. |
Gemischregelung |
|
|
|
|
|
|
|||
|
3.2.17.3.2. |
Beschreibung des Systems und/oder Diagramm und Zeichnungen |
|
|
|
|
|
|
|||
|
3.2.17.3.3. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.4. |
Mischer |
|
|
|
|
|
|
|||
|
3.2.17.4.1. |
Anzahl |
|
|
|
|
|
|
|||
|
3.2.17.4.2. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.4.3. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.4.4. |
Lage |
|
|
|
|
|
|
|||
|
3.2.17.4.5. |
Einstellmöglichkeiten |
|
|
|
|
|
|
|||
|
3.2.17.4.6. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.5. |
Motorsaugrohreinspritzung |
|
|
|
|
|
|
|||
|
3.2.17.5.1. |
Einspritzverfahren: Zentraleinspritzung/Mehrpunkteinspritzung (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.2. |
Einspritzverfahren: kontinuierlich/simultan/sequentiell (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.3. |
Einspritzsystem |
|
|
|
|
|
|
|||
|
3.2.17.5.3.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.5.3.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.5.3.3. |
Einstellmöglichkeiten |
|
|
|
|
|
|
|||
|
3.2.17.5.3.4. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.5.4. |
Förderpumpe (falls erforderlich) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.3. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.5.5. |
Einspritzdüse(n) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.3. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.6. |
Direkteinspritzung |
|
|
|
|
|
|
|||
|
3.2.17.6.1. |
Einspritzpumpe/Druckregler (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.3. |
Einspritzeinstellung |
|
|
|
|
|
|
|||
|
3.2.17.6.1.4. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.6.2. |
Einspritzdüse(n) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.3. |
Öffnungsdruck oder Kennlinie (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.4. |
Nummer der Typgenehmigung |
|
|
|
|
|
|
|||
|
3.2.17.7. |
Elektronisches Steuergerät (ECU) |
|
|
|
|
|
|
|||
|
3.2.17.7.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.2.17.7.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.2.17.7.3. |
Einstellmöglichkeiten |
|
|
|
|
|
|
|||
|
3.2.17.7.4. |
Kennnummer(n) der Softwarekalibrierung |
|
|
|
|
|
|
|||
|
3.2.17.8. |
Erdgasspezifische Ausrüstung |
|
|
|
|
|
|
|||
|
3.2.17.8.1. |
Variante 1 (nur wenn für einen Motor eine Genehmigung für mehrere bestimmte Kraftstoffzusammensetzungen erteilt werden soll) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.1. |
Selbstanpassung? ja/nein (1) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.2. |
Kalibrierung für eine bestimmte Gaszusammensetzung NG-H/NG-L/NG-HL1 Umwandlung für eine bestimmte Gaszusammensetzung NG-Ht/NG-Lt/NG-HLt 1 |
|
|
|
|
|
|
|||
|
3.2.17.8.1.1. |
Methan (CH4) … Basis (Mol-%) Ethan (C2H6) … Basis (Mol-%) Propan (C3H8) … Basis (Mol-%) Butan (C4H10) … Basis (Mol-%) C5/C5+: … Basis (Mol-%) Sauerstoff (O2) … Basis (Mol-%) Inertgas (N2, He usw.) … Basis (Mol-%) |
min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) |
max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) |
|||||||
|
3.5.5. |
Spezifischer Kraftstoffverbrauch und Korrekturfaktoren |
|
|
|
|
|
|
|||
|
3.5.5.1. |
Spezifischer Kraftstoffverbrauch (SFC) während des Zyklus WHSC „SFCWHSC“ gemäß Absatz 5.3.3 g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.2. |
Korrigierter spezifischer Kraftstoffverbrauch (SFC) während des Zyklus WHSC „SFCWHSC,corr“ gemäß Absatz 5.3.3.1 … g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.3. |
Korrekturfaktor für städtischen Anteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.5.5.4. |
Korrekturfaktor für außerstädtischen Anteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.5.5.5. |
Korrekturfaktor für Autobahnanteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.5.5.6. |
Ausgleichsfaktor für Kaltstart-/Warmstart-Emissionen (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.5.5.7. |
Korrekturfaktor CFRegPer für Motoren mit Abgasnachbehandlungssystem mit periodischer Regenierung (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.5.5.8. |
Korrekturfaktor für Standard-Nettoheizwert (Wert aus dem Motor-Vorverarbeitungsinstrument) |
|
|
|
|
|
|
|||
|
3.6. |
Zulässige Temperaturen nach Angabe des Herstellers |
|
|
|
|
|
|
|||
|
3.6.1. |
Kühlsystem |
|
|
|
|
|
|
|||
|
3.6.1.1. |
Flüssigkeitskühlung: Höchste Temperatur am Motoraustritt (K) |
|
|
|
|
|
|
|||
|
3.6.1.2. |
Luftkühlung |
|
|
|
|
|
|
|||
|
3.6.1.2.1. |
Bezugspunkt |
|
|
|
|
|
|
|||
|
3.6.1.2.2. |
Höchste Temperatur am Bezugspunkt (K) |
|
|
|
|
|
|
|||
|
3.6.2. |
Höchsttemperatur am Austritt aus dem Ladeluftkühler (K) |
|
|
|
|
|
|
|||
|
3.6.3. |
Höchste Abgastemperatur an dem Punkt in der Abgasleitung, der dem Austrittsflansch des Abgaskrümmers oder Turboladers (K) benachbart ist. |
|
|
|
|
|
|
|||
|
3.6.4. |
Kraftstofftemperatur: Mindesttemperatur (K) – Höchsttemperatur (K) bei Dieselmotoren am Einlass der Einspritzpumpe, bei Gasmotoren an der Druckregler-Endstufe |
|
|
|
|
|
|
|||
|
3.6.5. |
Schmiermitteltemperatur Mindesttemperatur (K) – Höchsttemperatur (K) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.8. |
Schmiersystem |
|
|
|
|
|
|
|||
|
3.8.1. |
Beschreibung des Systems |
|
|
|
|
|
|
|||
|
3.8.1.1. |
Lage des Schmiermittelbehälters |
|
|
|
|
|
|
|||
|
3.8.1.2. |
Zuführungssystem (durch Pumpe/Einspritzung in den Einlass/Mischung mit Kraftstoff usw.) (1) |
|
|
|
|
|
|
|||
|
3.8.2. |
Schmiermittelpumpe |
|
|
|
|
|
|
|||
|
3.8.2.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.8.2.2. |
Typ(en) |
|
|
|
|
|
|
|||
|
3.8.3. |
Mischung mit Kraftstoff |
|
|
|
|
|
|
|||
|
3.8.3.1. |
Prozentsatz |
|
|
|
|
|
|
|||
|
3.8.4. |
Ölkühler: ja/nein (1) |
|
|
|
|
|
|
|||
|
3.8.4.1. |
Zeichnung(en) |
|
|
|
|
|
|
|||
|
3.8.4.1.1. |
Marke(n) |
|
|
|
|
|
|
|||
|
3.8.4.1.2. |
Typ(en) |
|
|
|
|
|
|
|||
Anmerkungen:
|
(1) |
Nichtzutreffendes streichen (trifft mehr als eine Angabe zu, ist unter Umständen nichts zu streichen). |
|
(3) |
Diese Zahl ist auf das nächste Zehntel eines Millimeters zu runden. |
|
(4) |
Dieser Wert ist auf den nächsten vollen cm3 zu runden. |
|
(5) |
Einschließlich Toleranzangabe. |
|
(6) |
Gemäß den Anforderungen von Regelung Nr. 85. |
|
(7) |
Den Größt- und Kleinstwert für jede Variante eintragen. |
|
(8) |
Zu dokumentieren im Fall einer einzigen OBD-Motorenfamilie und wenn noch nicht in den Unterlagen gemäß dieser Anlage Teil 1 Absatz 3.2.12.2.7.0.4 dokumentiert. |
Anlage zum Beschreibungsbogen
Prüfbedingungen
1. Zündkerzen
1.1. Fabrikmarke
1.2. Typ
1.3. Elektrodenabstand
2. Zündspule
2.1. Fabrikmarke
2.2. Typ
3. Schmiermittel
3.1. Fabrikmarke
3.2. Typ (Wenn das Schmiermittel dem Kraftstoff zugesetzt ist, ist der prozentuale Anteil des Öls in der Mischung anzugeben.)
3.3. Spezifikationen des Schmiermittels
4. Verwendeter Prüfkraftstoff
4.1. Kraftstofftyp (gemäß Anhang V Absatz 6.1.9 der Verordnung (EU) 2017/2400 der Kommission [OP, please insert the publication number of this Regulation.]
4.2. Eindeutige Identifizierungsnummer (Nummer der Herstellungscharge) des verwendeten Kraftstoffs
4.3. Nettoheizwert (gemäß Anhang V Absatz 6.1.8 der Verordnung (EU) 2017/2400 der Kommission
5. Vom Motor angetriebene Nebenaggregate
5.1. Die durch die Hilfseinrichtungen/Nebenaggregate aufgenommene Leistung ist nur zu ermitteln, wenn
|
a) |
notwendige Hilfseinrichtungen/Nebenaggregate nicht am Motor angebracht sind und/oder |
|
b) |
nicht notwendige Hilfseinrichtungen/Nebenaggregate am Motor angebracht sind. |
|
Hinweise: |
Bei der Emissionsprüfung und der Leistungsprüfung gelten unterschiedliche Anforderungen für vom Motor angetriebene Nebenaggregate. |
5.2. Aufzählung und Einzelheiten
5.3. Leistungsaufnahme bei für die Emissionsprüfung spezifischen Motordrehzahlen
Tabelle 1
Leistungsaufnahme bei für die Emissionsprüfung spezifischen Motordrehzahlen
|
Ausrüstung |
|
||||
|
|
Leerlauf |
Niedrige Drehzahl |
Hohe Drehzahl |
Vorzugs-drehzahl (2) |
n95h |
|
Pa Hilfseinrichtungen / Nebenaggregate gemäß Anhang 4 Anlage 6 der UNECE-Regelung Nr. 49 Rev. 06 erforderlich |
|
|
|
|
|
|
Pb Hilfseinrichtungen / Nebenaggregate gemäß Anhang 4 Anlage 6 der UNECE-Regelung Nr. 49 Rev. 06 nicht erforderlich |
|
|
|
|
|
5.4. Ventilatorkonstante gemäß Anlage 5 dieses Anhangs (falls zutreffend)
5.4.1. Cavg-fan (falls zutreffend)
5.4.2. Cind-fan (falls zutreffend)
Tabelle 2
Wert der Ventilatorkonstante Cind-fan für unterschiedliche Motordrehzahlen
|
Wert |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
Motor-drehzahl |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
Motordrehzahl (U/min) |
|
|
|
|
|
|
|
|
|
|
|
Ventilator-konstante Cind-fan,i |
|
|
|
|
|
|
|
|
|
|
6. Motorleistung (Herstellerangaben)
6.1. Motorprüfdrehzahlen für Emissionsprüfungen gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 06 (1)
|
Niedrige Drehzahl (nlo): |
… U/min |
|
Hohe Drehzahl (nhi): |
… U/min |
|
Leerlaufdrehzahl |
… U/min |
|
Vorzugsdrehzahl |
… U/min |
|
n95h |
… U/min |
6.2. Erklärte Werte für die Leistungsprüfung gemäß Regelung Nr. 85
|
6.2.1. |
Leerlaufdrehzahl |
… U/min |
|
6.2.2. |
Drehzahl bei Höchstleistung |
… U/min |
|
6.2.3. |
Höchstleistung |
… kW |
|
6.2.4. |
Drehzahl bei maximalem Drehmoment |
… U/min |
|
6.2.5. |
Maximales Drehmoment |
… Nm |
(1) Bitte Toleranz angeben; muss im Bereich von ± 3 % der vom Hersteller angegebenen Werte liegen.
Anlage 3
CO2-Motorenfamilie
1. Parameter zur Bestimmung der CO2-Motorenfamilie
Die vom Hersteller festgelegte CO2-Motorenfamilie muss die Zugehörigkeitskriterien laut Anhang 4 Absatz 5.2.3 der UNECE-Regelung Nr. 49 Rev. 06 erfüllen. Eine CO2-Motorenfamilie kann auch nur einen einzigen Motor umfassen.
Zusätzlich zu diesen Zugehörigkeitskriterien muss die vom Hersteller festgelegte CO2-Motorenfamilie auch die in den Absätzen 1.1 bis 1.9 dieser Anlage aufgeführten Zugehörigkeitskriterien erfüllen.
Zusätzlich zu den nachstehenden Parametern kann der Hersteller weitere Kriterien einführen, mit denen die Festlegung enger gefasster Familien möglich ist. Diese Parameter müssen nicht zwangsläufig mit der Höhe des Kraftstoffverbrauchs in Verbindung stehen.
1.1. Verbrennungsbezogene geometrische Daten
1.1.1. Hubraum pro Zylinder
1.1.2. Zylinderanzahl
1.1.3. Daten zu Bohrung und Hub
1.1.4. Brennraumgeometrie und Verdichtungsverhältnis
1.1.5. Ventildurchmesser und Öffnungsgeometrie
1.1.6. Einspritzdüsen (Konstruktion und Lage)
1.1.7. Konstruktion des Zylinderkopfs
1.1.8. Konstruktion von Kolben und Kolbenringen
1.2. Für die Luftaufbereitung relevante Bauteile
1.2.1. Art der Einrichtung zur Aufladung (Wastegate-Turbolader, Variable-Turbinengeometrie-Lader, zweistufig, sonstige) und thermodynamische Kenndaten
1.2.2. Konzept der Ladeluftkühlung
1.2.3. Konzept der Ventilsteuerzeiten (fest, teilweise flexibel, flexibel)
1.2.4. AGR-Konzept (ungekühlt/gekühlt, hoher/niedriger Druck, AGR-Steuerung)
1.3. Einspritzsystem
1.4. Antriebskonzept für Hilfseinrichtungen/Vorrichtungen (mechanisch, elektrisch, sonstige)
1.5. Abwärmenutzung (ja/nein; Konzept und System)
1.6. Nachbehandlungssystem
1.6.1. Kenndaten des Reagens-Dosiersystems (Reagens- und Dosierkonzept)
1.6.2. Katalysator und DPF (Anordnung, Material und Beschichtung)
1.6.3. Kenndaten des HC-Dosiersystems (Gestaltungs- und Dosierkonzept)
1.7. Volllastkurve
1.7.1. Die Drehmomentwerte bei jeder Motordrehzahl der entsprechend Absatz 4.3.1 ermittelten Volllastkurve des CO2-Stammmotors müssen mindestens genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie bei derselben Motordrehzahl über den gesamten aufgezeichneten Motordrehzahlbereich.
1.7.2. Die Drehmomentwerte bei jeder Motordrehzahl der entsprechend Absatz 4.3.1 ermittelten Volllastkurve desjenigen Motors, der innerhalb der CO2-Motorenfamilie die niedrigste Nennleistung aufweist, dürfen maximal genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie bei derselben Motordrehzahl über den gesamten aufgezeichneten Motordrehzahlbereich.
1.8. Charakteristische Motorprüfdrehzahlen
1.8.1. Die Leerlaufdrehzahl nidle des CO2-Stammmotors, die vom Hersteller in seinem Antrag auf Zertifizierung im Beschreibungsbogen gemäß Anlage 2 dieses Anhangs angegeben wurde, darf maximal genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie.
1.8.2. Die Motordrehzahl n95h aller Motoren derselben CO2-Familie (außer dem CO2-Stammmotor), die anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des Motors ermittelt wird, und zwar durch Anwendung der Definitionen zu den charakteristischen Motordrehzahlen gemäß Anhang 4 Absatz 7.4.6 der UNECE-Regelung Nr. 49 Rev. 6, darf von der Motordrehzahl n95h des CO2-Stammmotors nicht mehr als ± 3 Prozent abweichen.
1.8.3. Die Motordrehzahl n57 aller Motoren derselben CO2-Familie (außer dem CO2-Stammmotor), die anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des Motors ermittelt wird, und zwar durch Anwendung der Definitionen gemäß Absatz 4.3.5.2.1, darf von der Motordrehzahl n57 des CO2-Stammmotors nicht mehr als ± 3 Prozent abweichen.
1.9. Mindestanzahl von Punkten in der Abbildung des Kraftstoffverbrauchs
1.9.1. Bei allen Motoren derselben CO2-Familie müssen in der Abbildung des Kraftstoffverbrauchs mindestens 54 Punkte unterhalb ihrer jeweiligen, entsprechend Absatz 4.3.1 ermittelten Volllastkurve des Motors liegen.
2. Wahl des CO2-Stammmotors
Der CO2-Stammmotor der CO2-Motorenfamilie ist nach den folgenden Kriterien auszuwählen:
2.1. Höchste Nennleistung aller Motoren innerhalb der CO2-Motorenfamilie.
Anlage 4
Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
1. Allgemeine Bestimmungen
1.1. Anhand der Darstellung in den Zertifizierungen gemäß Anlage 1 dieses Anhangs sowie der Darstellung im Beschreibungsbogen gemäß Anlage 2 dieses Anhangs muss überprüft werden, ob die CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften mit den geltenden Vorgaben übereinstimmen.
1.2. Wurde eine Motorzertifizierung bereits verlängert, müssen die Prüfungen an den Motoren durchgeführt werden, die im Informationspaket der entsprechenden Verlängerung beschrieben sind.
1.3. Alle zu prüfenden Motoren müssen aus der Serienproduktion stammen, die die Auswahlkriterien gemäß Absatz 3 dieser Anlage erfüllen.
1.4. Die Prüfungen dürfen mit den entsprechenden handelsüblichen Kraftstoffen durchgeführt werden. Auf Antrag des Herstellers dürfen die in Absatz 3.2 angegebenen Bezugskraftstoffe verwendet werden.
1.5. Werden Prüfungen, mit denen die Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften von Gasmotoren (Erdgas, LPG) mit den geltenden Vorgaben überprüft werden soll, mit handelsüblichen Kraftstoffen durchgeführt, muss der Motorhersteller gegenüber der Genehmigungsbehörde die geeignete Ermittlung der Zusammensetzung des Gaskraftstoffs nachweisen, anhand derer der Nettoheizwert gemäß Absatz 4 dieser Anlage nach bestem technischen Ermessen bestimmt werden kann.
2. Anzahl der zu prüfenden Motoren und CO2-Motorenfamilien
2.1. 0,05 Prozent aller Motoren, die im vergangenen Produktionsjahr hergestellt wurden und unter diese Regelung fallen, bilden die Grundlage für die Ableitung der Anzahl der CO2-Motorenfamilien und die Anzahl der Motoren innerhalb dieser CO2-Familien, die jährlich geprüft werden müssen, um die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften zu überprüfen. Der erhaltene Wert für diese 0,05 Prozent der betreffenden Motoren muss auf die nächste ganze Zahl gerundet werden. Dieses Ergebnis sei nCOP,base.
2.2. Unbeschadet der Bestimmungen gemäß Absatz 2.1 muss für nCOP,base mindestens 30 verwendet werden.
2.3. Das gemäß den Absätzen 2.1 und 2.2 dieser Anlage ermittelte Ergebnis für nCOP,base muss durch 10 geteilt und anschließend auf die nächste ganze Zahl gerundet werden. Dies ist die Anzahl der CO2-Motorenfamilien (nCOP,fam), die jährlich geprüft werden müssen, um die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften zu überprüfen.
2.4. Für den Fall, dass ein Hersteller weniger CO2-Familien hat als die gemäß Absatz 2.3 ermittelte Zahl nCOP,fam, gilt als Anzahl der zu prüfenden CO2-Familien (nCOP,fam) die Gesamtzahl der CO2-Familien des Herstellers.
3. Auswahl der zu prüfenden CO2-Motorenfamilien
Von der Anzahl der zu prüfenden CO2-Motorenfamilien gemäß Festlegung in Absatz 2 dieser Anlage müssen die ersten beiden CO2-Familien diejenigen mit der höchsten Produktionszahl sein.
Die verbleibende Anzahl der zu prüfenden CO2-Motorenfamilien muss unter allen vorhandenen CO2-Motorenfamilien zufällig ausgewählt und gemeinsam von Hersteller und Genehmigungsbehörde vereinbart werden.
4. Durchzuführender Prüflauf
Zur Ermittlung der Anzahl der Motoren jeder CO2-Motorenfamilie, die mindestens zu prüfen sind (nCOP,min), muss nCOP,base durch nCOP,fam geteilt werden, wobei diese beiden Werte gemäß Nummer 2 zu ermitteln sind. Sollte der erhaltene Wert nCOP,min kleiner als 4 sein, muss „4“ für ihn festgelegt werden.
Zu jeder der gemäß Absatz 3 dieser Anlage ermittelten CO2-Motorenfamilien müssen mindestens nCOP,min Motoren dieser Familie geprüft werden, damit für die Prüfung entsprechend Absatz 9 dieser Anlage eine positive Entscheidung getroffen werden kann.
Die Aufteilung der Anzahl der erforderlichen Prüfläufe innerhalb einer CO2-Motorenfamilie auf die verschiedenen Motoren dieser CO2-Familie muss zufällig erfolgen und gemeinsam von Hersteller und Genehmigungsbehörde vereinbart werden.
Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss überprüft werden, indem die Motoren der WHSC-Prüfung gemäß Absatz 4.3.4 unterzogen werden.
Es gelten sämtliche in diesem Anhang festgelegten Randbedingungen für die Zertifizierungsprüfung, jedoch mit folgenden Ausnahmen:
|
(1) |
Die Laborprüfbedingungen gemäß Absatz 3.1.1 dieses Anhangs. Die Bedingungen laut Absatz 3.1.1 haben keinen verbindlichen, sondern lediglich einen empfehlenden Charakter. Unter bestimmten Umgebungsbedingungen am Prüfstandsort können Abweichungen entstehen, die jedoch nach bestem technischen Ermessen möglichst gering zu halten sind. |
|
(2) |
Für den Fall, dass der Bezugskraftstoff des Typs B7 (Diesel/CI) entsprechend Absatz 3.2 dieses Anhangs verwendet wird, ist die Ermittlung des Nettoheizwerts gemäß Absatz 3.2 dieses Anhangs nicht erforderlich. |
|
(3) |
Für den Fall, dass ein handelsüblicher Kraftstoff oder ein anderer Bezugskraftstoff verwendet wird als B7 (Diesel/CI), muss der Nettoheizwert des Kraftstoffs entsprechend den geltenden Normen laut Tabelle 1 dieses Anhangs ermittelt werden. Außer bei Gasmotoren muss die Messung des Nettoheizwerts nicht von zwei unabhängig vom Motorenhersteller arbeitenden Laboren durchgeführt werden, wie es in Absatz 3.2 dieses Anhangs vorgesehen ist, sondern lediglich von einem. Der Nettoheizwert für gasförmige Bezugskraftstoffe (G25, LPG Kraftstoff B) muss entsprechend den geltenden Normen laut Tabelle 1 dieses Anhangs anhand der vom Lieferanten des jeweiligen gasförmigen Bezugskraftstoffs vorgelegten Kraftstoffanalyse errechnet werden. |
|
(4) |
Das Schmieröl muss dasselbe sein wie das Öl, das bei der Motorenherstellung eingefüllt wird, und darf nicht ausgetauscht werden, wenn die Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften geprüft werden soll. |
5. Einfahren neu hergestellter Motoren
5.1. Die Prüfungen müssen an neu hergestellten Motoren durchgeführt werden, die aus der Serienproduktion stammen und vor Beginn des Prüflaufs, anhand dessen die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften gemäß Absatz 4 dieser Anlage geprüft werden soll, höchstens 15 Stunden eingefahren werden.
5.2. Auf Antrag des Herstellers dürfen die Prüfungen auch an Motoren durchgeführt werden, die bis zu 125 Stunden eingefahren wurden. In diesem Fall muss das Einfahrverfahren vom Hersteller durchgeführt werden, der an diesen Motoren keine Einstellungen vornehmen darf.
5.3. Wenn der Hersteller ein Einfahrverfahren gemäß Absatz 5.2 dieser Anlage beantragt, kann dies an folgenden Motoren durchgeführt werden:
|
a) |
an allen zu prüfenden Motoren |
|
b) |
am neu hergestellten Motor, wobei der wie folgt bestimmte Evolutionskoeffizient angewandt wird:
|
5.4. Sollten die Bestimmungen aus Absatz 5.3 Buchstabe b dieser Anlage Anwendung finden, darf an den nachfolgenden Motoren, die für die Prüfung der Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften ausgewählt wurden, nicht das Einfahrverfahren angewandt werden. Stattdessen muss bei ihnen der spezifische Kraftstoffverbrauch über die WHSC-Prüfung, der an dem neu hergestellten Motor nach einer Einfahrzeit von höchstens 15 Stunden gemäß Absatz 5.1 dieser Anlage ermittelt wird, mit dem Evolutionskoeffizienten multipliziert werden.
5.5. Für den in Absatz 5.4 dieser Anlage beschriebenen Fall gelten folgende Werte für den spezifischen Kraftstoffverbrauch über die WHSC-Prüfung:
|
a) |
für den Motor, der zur Ermittlung des Evolutionskoeffizienten gemäß Absatz 5.3 Buchstabe b dieser Anlage verwendet wird: der Wert aus der zweiten Prüfung |
|
b) |
für die anderen Motoren: die Werte, die an dem neu hergestellten Motor nach einer Einfahrzeit von höchstens 15 Stunden gemäß Absatz 5.1 dieser Anlage ermittelt werden, multipliziert mit dem entsprechend Absatz 5.3 Buchstabe b Absatz C dieser Anlage ermittelten Evolutionskoeffizienten |
5.6. Statt eines Einfahrverfahrens gemäß den Absätzen 5.2 bis 5.5 dieser Anlage kann auf Antrag des Herstellers ein generischer Evolutionskoeffizient von 0,99 verwendet werden. In diesem Fall muss der spezifische Kraftstoffverbrauch über die WHSC-Prüfung, der an dem neu hergestellten Motor nach einer Einfahrzeit von höchstens 15 Stunden gemäß Absatz 5.1 dieser Anlage ermittelt wird, mit dem generischen Evolutionskoeffizienten von 0,99 multipliziert werden.
5.7. Wird der Evolutionskoeffizient laut Absatz 5.3 Buchstabe b dieser Anlage mit Hilfe des Stammmotors einer Motorenfamilie gemäß Anhang 4 Absätze 5.2.3 und 5.2.4 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt, kann er auf alle Mitglieder einer CO2-Familie übertragen werden, die gemäß Anhang 4 Absatz 5.2.3 der UNECE-Regelung Nr. 49 Rev. 6 zu derselben Motorenfamilie gehören.
6. Zielwert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
Als Zielwert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften gilt der korrigierte spezifische Kraftstoffverbrauch über die WHSC-Prüfung (SFCWHSC,corr) in g/kWh, ermittelt gemäß Absatz 5.3.3 und dokumentiert im Beschreibungsbogen als Teil der Zertifizierungen gemäß Anlage 2 dieses Anhangs für den jeweiligen geprüften Motor.
7. Tatsächlicher Wert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
7.1. Der spezifische Kraftstoffverbrauch über den WHSC-Prüfzyklus (SFCWHSC) muss gemäß Absatz 5.3.3 dieses Anhangs anhand der entsprechend Absatz 4 dieser Anlage durchgeführten Prüfläufe ermittelt werden. Auf Antrag des Herstellers wird der ermittelte Wert für den spezifischen Kraftstoffverbrauch durch Anwendung der Bestimmungen gemäß den Absätzen 5.3 bis 5.6 dieser Anlage geändert.
7.2. Wurde bei der Prüfung ein handelsüblicher Kraftstoff gemäß Absatz 1.4 dieser Anlage verwendet, muss der in Absatz 7.1 dieser Anlage ermittelte spezifische Kraftstoffverbrauch über die WHSC-Prüfung (SFCWHSC) auf den korrigierten Wert SFCWHSC,corr gemäß Absatz 5.3.3.1 dieses Anhangs geändert werden.
7.3. Wurde bei der Prüfung gemäß Absatz 1.4 dieser Anlage ein Bezugskraftstoff verwendet, müssen auf den in Absatz 7.1 dieser Anlage ermittelten Wert die Sonderbestimmungen gemäß Absatz 5.3.3.2 dieses Anhangs Anwendung finden.
7.4. Die gemessenen Emissionen gasförmiger Schadstoffe über die gemäß Absatz 4 durchgeführte WHSC-Prüfung müssen um den geltenden Verschlechterungsfaktor korrigiert werden, der für den jeweiligen Motor im Beiblatt des EG-Typgenehmigungsbogens angegeben ist, der gemäß der Verordnung der Kommission (EU) Nr. 582/2011 ausgestellt wurde.
8. Grenzwert für die Übereinstimmung einer einzelnen Prüfung
Bei Dieselmotoren gilt als Grenzwert für die Beurteilung der Übereinstimmung eines einzelnen geprüften Motors der gemäß Absatz 6 ermittelte Zielwert, erhöht um 3 Prozent.
Bei Gasmotoren gilt als Grenzwert für die Beurteilung der Übereinstimmung eines einzelnen geprüften Motors der gemäß Absatz 6 ermittelte Zielwert, erhöht um 4 Prozent.
9. Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
9.1. Die gemäß Absatz 7.4 dieser Anlage ermittelten Ergebnisse der Emissionsprüfungen über den WHSC-Prüfzyklus für alle gasförmigen Schadstoffe (außer Ammoniak) müssen innerhalb der geltenden Grenzwerte gemäß Festlegung in Anhang I der Verordnung (EG) Nr. 595/2009 liegen. Andernfalls gilt die Prüfung im Sinne der Beurteilung, ob die zertifizierten CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften mit den geltenden Vorgaben übereinstimmen, als ungültig.
9.2. Das Ergebnis einer einzelnen Prüfung eines gemäß Absatz 4 dieser Anlage geprüften Motors gilt als negativ, wenn der tatsächliche Wert gemäß Absatz 7 dieser Anlage größer ist als der Grenzwert gemäß Festlegung laut Absatz 8 dieser Anlage.
9.3. Für die aktuelle Stichprobengröße der geprüften Motoren innerhalb einer CO2-Familie gemäß Absatz 4 dieser Anlage muss der statistische Prüfwert ermittelt werden, der die kumulierte Anzahl an negativen Prüfungen gemäß Absatz 9.2 dieser Anlage bei der n-ten Prüfung quantifiziert.
|
a) |
Entspricht die gemäß Absatz 9.3 dieser Anlage ermittelte kumulierte Anzahl an negativen Prüfungen bei der n-ten Prüfung höchstens dem der Stichprobengröße entsprechenden Wert für eine positive Entscheidung, der in Anlage 3 Tabelle 4 der UNECE-Regelung Nr. 49 Rev. 6 angegeben ist, so wird eine positive Entscheidung getroffen. |
|
b) |
Entspricht die gemäß Absatz 9.3 dieser Anlage ermittelte kumulierte Anzahl an negativen Prüfungen bei der n-ten Prüfung mindestens dem der Stichprobengröße entsprechenden Wert für eine negative Entscheidung, der in Anlage 3 Tabelle 4 der UNECE-Regelung Nr. 49 Rev. 6 angegeben ist, so wird eine negative Entscheidung getroffen. |
|
c) |
Andernfalls wird ein weiterer Motor gemäß Absatz 4 dieser Anlage geprüft, und das Berechnungsverfahren gemäß Absatz 9.3 dieser Anlage wird auf die um eine Einheit vergrößerte Stichprobe angewandt. |
9.4. Wird weder eine positive noch eine negative Entscheidung getroffen, kann der Hersteller die Prüfung jederzeit abbrechen. In diesem Fall wird eine negative Entscheidung festgehalten.
Anlage 5
Ermittlung der Leistungsaufnahme der Motorbauteile
1. Ventilator
Das Motordrehmoment muss bei im Schiebebetrieb befindlichen Motor zum einen bei aktiviertem und zum anderen bei deaktiviertem Ventilator nach der folgenden Vorgehensweise gemessen werden:
|
i. |
Den Ventilator vor dem Prüflauf entsprechend dem Produkthandbuch montieren. |
|
ii. |
Warmlaufphase: Der Motor muss entsprechend der Herstellerempfehlung und nach bestem technischen Ermessen warmlaufen (indem er z. B. 20 Minuten lang in Prüfphase 9 gemäß Festlegung in Anhang 4 Absatz 7.2.2 Tabelle 1 der UNECE-Regelung Nr. 49 Rev. 6 betrieben wird). |
|
iii. |
Stabilisierungsphase: Nach dem Warmlaufen bzw. nach dem optionalen Warmlaufschritt (v) muss der Motor bei minimaler Bedieneingabe (Schiebebetrieb) 130 ± 2 Sekunden lang bei einer Motordrehzahl von npref mit deaktiviertem Ventilator (nfan_disengage < 0,25*nengine*rfan) betrieben werden. Die ersten 60 ± 1 Sekunden dieses Zeitraums gelten als Stabilisierungszeitraum, in dem die tatsächliche Motordrehzahl mit einer Toleranz von ± 5 U/min auf npref gehalten werden muss. |
|
iv. |
Messphase: In den darauffolgenden 60 ± 1 Sekunden muss die tatsächliche Motordrehzahl mit einer Toleranz von ± 2 U/min auf npref gehalten werden, während sich die Kühlmitteltemperatur in einem Toleranzbereich von ± 5 °C bewegen darf. Nun müssen über diesen Zeitraum von 60 ± 1 Sekunden das Drehmoment für den Schiebebetrieb des Motors bei deaktiviertem Ventilator, die Ventilatordrehzahl und die Motordrehzahl als Mittelwerte aufgezeichnet werden. Der verbleibende Zeitraum von 10 ± 1 Sekunden kann erforderlichenfalls für die Datennachbearbeitung und Speicherung genutzt werden. |
|
v. |
Optionale Warmlaufphase: Auf Antrag des Herstellers und nach bestem technischen Ermessen kann Schritt (ii) wiederholt werden (z. B. wenn die Temperatur um mehr als 5 °C gefallen ist). |
|
vi. |
Stabilisierungsphase: Nach der optionalen Warmlaufphase muss der Motor bei minimaler Bedieneingabe (Schiebebetrieb) 130 ± 2 Sekunden lang bei einer Motordrehzahl von npref mit aktiviertem Ventilator (nfan_engage > 0,9*nengine*rfan) betrieben werden. Die ersten 60 ± 1 Sekunden dieses Zeitraums gelten als Stabilisierungszeitraum, in dem die tatsächliche Motordrehzahl mit einer Toleranz von ± 5 U/min auf npref gehalten werden muss. |
|
vii. |
Messphase: In den darauffolgenden 60 ± 1 Sekunden muss die tatsächliche Motordrehzahl mit einer Toleranz von ± 2 U/min auf npref gehalten werden, während sich die Kühlmitteltemperatur in einem Toleranzbereich von ± 5 °C bewegen darf. Nun müssen über diesen Zeitraum von 60 ± 1 Sekunden das Drehmoment für den Schiebebetrieb des Motors bei aktiviertem Ventilator, die Ventilatordrehzahl und die Motordrehzahl als Mittelwerte aufgezeichnet werden. Der verbleibende Zeitraum von 10 ± 1 Sekunden kann erforderlichenfalls für die Datennachbearbeitung und Speicherung genutzt werden. |
|
viii. |
Schritte (iii) bis (vii) müssen bei den Drehzahlen n95h und nhi (statt npref) wiederholt werden. Sofern erforderlich, um die Kühlmitteltemperatur stabil zu halten (± 5 °C), wird nach bestem technischen Ermessen vor jedem Stabilisierungsschritt der optionale Warmlaufschritt (v) durchgeführt. |
|
ix. |
Beträgt die Standardabweichung aller berechneten Werte Ci gemäß nachstehender Gleichung bei den drei Drehzahlen npref, n95h und nhi mindestens 3 Prozent, muss die Messung für alle Motordrehzahlen durchgeführt werden, die das Raster für das Kraftstoffabbildungsverfahren (FCMC) gemäß Absatz 4.3.5.2.1 ausmachen. |
Die tatsächliche Ventilatorkonstante muss anhand der Messdaten gemäß nachstehender Gleichung errechnet werden:

dabei gilt:
|
Ci |
Ventilatorkonstante bei einer bestimmten Motordrehzahl |
|
MDfan_disengage |
gemessenes Motordrehmoment im Schiebebetrieb bei deaktiviertem Ventilator (Nm) |
|
MDfan_engage |
gemessenes Motordrehmoment im Schiebebetrieb bei aktiviertem Ventilator (Nm) |
|
nfan_engage |
Ventilatordrehzahl bei aktiviertem Ventilator (U/min) |
|
nfan_disengage |
Ventilatordrehzahl bei deaktiviertem Ventilator (U/min) |
|
rfan |
Ventilatorverhältnis |
Beträgt die Standardabweichung aller berechneten Werte Ci bei den drei Drehzahlen npref, n95h und nhi weniger als 3 %, muss für die Ventilatorkonstante der Mittelwert Cavg-fan verwendet werden, ermittelt aus den drei Drehzahlen npref, n95h und nhi.
Beträgt die Standardabweichung aller berechneten Werte Ci bei den drei Drehzahlen npref, n95h und nhi mindestens 3 %, müssen für die Ventilatorkonstante Cind-fan,i die verschiedenen Werte für die einzelnen Motordrehzahlen gemäß Nummer ix verwendet werden. Der Wert der Ventilatorkonstante für die tatsächliche Motordrehzahl Cfan muss durch lineare Interpolation zwischen den einzelnen Werten Cind-fan,i der Ventilatorkonstante ermittelt werden.
Das zum Antreiben des Ventilators erforderliche Motordrehmoment muss anhand nachstehender Gleichung errechnet werden:
Mfan = Cfan · nfan 2 · 10– 6
dabei gilt:
|
Mfan |
zum Antreiben des Ventilators erforderliches Motordrehmoment (Nm) |
|
Cfan |
Ventilatorkonstante Cavg-fan oder Cind-fan,i, die nengine entspricht |
Die vom Ventilator aufgenommene mechanische Leistung muss anhand des zum Antreiben des Ventilators erforderlichen Motordrehmoments und der tatsächlichen Motordrehzahl errechnet werden. Die mechanische Leistung und das Motordrehmoment müssen gemäß Absatz 3.1.2 berücksichtigt werden.
2. Elektrische Bauteile/Anlagen
Es muss die elektrische Energie gemessen werden, die den elektrischen Motorbauteilen von außen zugeführt wird. Dieser gemessene Wert muss anschließend in mechanische Leistung umgewandelt werden, indem er durch den generischen Wirkungsgrad 0,65 geteilt wird. Die mechanische Leistung und das entsprechende Motordrehmoment müssen gemäß Absatz 3.1.2 berücksichtigt werden.
Anlage 6
1. Kennzeichnungen
Wird ein Motor entsprechend diesem Anhang zertifiziert, muss er mit Folgendem gekennzeichnet werden:
1.1. Herstellername und Marke
1.2. Fabrikmarke und Typenbezeichnung gemäß Angaben in Anlage 2 Ziffern 0.1 und 0.2 dieses Anhangs
1.3. Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben „e“ umgibt, gefolgt von der Kennzahl des Mitgliedstaats, der die Zertifizierung ausgestellt hat:
|
|
1 für Deutschland |
|
|
2 für Frankreich |
|
|
3 für Italien |
|
|
4 für die Niederlande |
|
|
5 für Schweden |
|
|
6 für Belgien |
|
|
7 für Ungarn |
|
|
8 für die Tschechische Republik |
|
|
9 für Spanien |
|
|
11 für das Vereinigte Königreich |
|
|
12 für Österreich |
|
|
13 für Luxemburg |
|
|
17 für Finnland |
|
|
18 für Dänemark |
|
|
19 für Rumänien |
|
|
20 für Polen |
|
|
21 für Portugal |
|
|
23 für Griechenland |
|
|
24 für Irland |
|
|
25 für Kroatien |
|
|
26 für Slowenien |
|
|
27 für die Slowakei |
|
|
29 für Estland |
|
|
32 für Lettland |
|
|
34 für Bulgarien |
|
|
36 für Litauen |
|
|
49 für Zypern |
|
|
50 für Malta |
1.4. Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die „Grundgenehmigungsnummer“ gemäß Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang VII der Richtlinie 2007/46/EG vermerkt sein. Dieser Nummer müssen die beiden Ziffern für die laufende Nummer vorausgehen, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde, sowie das Zeichen „E“, mit dem angegeben wird, dass die Genehmigung für einen Motor erteilt wurde.
Für diese Verordnung ist die laufende Nummer „00“.
1.4.1. Beispielhaftes Zertifizierungszeichen samt Abmessungen (separate Kennzeichnung)

Das obige, an einem Motor angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (00) geben die laufende Nummer an, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde. Der nächste Buchstabe gibt an, dass die Zertifizierung für einen Motor ausgestellt wurde (E). Die letzten vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundgenehmigungsnummer für den Motor dar.
1.5. Für den Fall, dass die Zertifizierung gemäß dieser Verordnung zur gleichen Zeit ausgestellt wird wie die Typgenehmigung gemäß Verordnung (EU) Nr. 582/2011, können auch die in Ziffer 1.4 aufgeführten Kennzeichnungsanforderungen im Anschluss an die in Anhang I Anlage 8 der Verordnung (EU) Nr. 582/2011 aufgeführten Kennzeichnungsanforderungen angegeben werden. In diesem Fall sind beide Kennzeichnungen durch ein „/“ voneinander getrennt.
1.5.1. Beispielhaftes Zertifizierungszeichen (kombinierte Kennzeichnung)

Das obige, an einem Motor angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß Verordnung (EU) Nr. 582/2011 (Verordnung (EU) Nr. 133/2014) in Polen zertifiziert wurde (e20). Das „D“ steht für Diesel. Das anschließende „C“ gibt die Emissionsstufe an. Die folgenden zwei Ziffern (00) geben die laufende Nummer an, die der aktuellsten technischen Änderung der oben genannten Verordnung zugewiesen wurde. Die nächsten vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundgenehmigungsnummer für den Motor nach Verordnung (EU) Nr. 582/2011 dar. Nach dem Schrägstrich stellen die ersten beiden Ziffern die laufende Nummer dar, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde, gefolgt von dem Buchstaben „E“, das für „engine“ (engl. für Motor) steht, und weiteren vier Ziffern, die von der Genehmigungsbehörde zum Zwecke der Zertifizierung gemäß dieser Verordnung („Grundgenehmigungsnummer“ nach dieser Verordnung) vergeben wurden.
1.6. Auf Ersuchen des Antragstellers für die Zertifizierung und nach vorheriger Abstimmung mit der Genehmigungsbehörde können andere Typengrößen verwendet werden als die in den Ziffern 1.4.1 und 1.5.1 angegebenen. Diese anderen Typengrößen müssen in gut lesbarem Zustand erhalten bleiben.
1.7. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer des Motors ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden.
2. Nummerierung
2.1. Zertifizierungsnummern für Motoren müssen Folgendes enthalten:
eX*YYY/YYYY*ZZZ/ZZZZ*E*0000*00
|
Abschnitt 1 |
Abschnitt 2 |
Abschnitt 3 |
Zusätzlicher Buchstabe zu Abschnitt 3 |
Abschnitt 4 |
Abschnitt 5 |
|
Angabe des die Zertifizierung ausstellenden Landes |
CO2-Zertifizierungs-rechtsakt (…/2017) |
Letzter Änderungs-rechtsakt (zzz/zzzz) |
E – engine (= Motor) |
Grund-genehmigungs-nummer 0000 |
Erweiterung 00 |
Anlage 7
Eingabeparameter für das Simulationsinstrument
Einleitung
Diese Anlage enthält die Liste der vom Bauteilehersteller für das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Die XML-Datei wird vom Motorvorbehandlungsinstrument automatisch erzeugt.
Begriffsbestimmungen
(1) „Parameter ID“: Im „Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen“ verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten
(2) „Type“: Datentyp des Parameters
string … Zeichenabfolge in ISO8859-1-Kodierung
token … Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende
date … Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DDTHH:MM:SSZ, wobei kursive Zeichen unveränderlich sind, z. B. „2002-05-30T09:30:10Z“
integer … Wert mit integralem Datentyp ohne führende Nullen, z. B. „1800“
double, X … Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen („.“) und ohne führende Nullen, z. B. für „double, 2“: „2345.67“, für „double, 4“: „45.6780“
(3) „Unit“ …: physikalische Einheit des Parameters
Satz Eingabeparameter
Tabelle 1
Eingabeparameter „Engine/General“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Manufacturer |
P200 |
token |
[-] |
|
|
Model |
P201 |
token |
[-] |
|
|
TechnicalReportId |
P202 |
token |
[-] |
|
|
Date |
P203 |
dateTime |
[-] |
Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
|
AppVersion |
P204 |
token |
[-] |
Versionsnummer des Motorvorbehandlungsinstruments |
|
Displacement |
P061 |
int |
[cm3] |
|
|
IdlingSpeed |
P063 |
int |
[1/min] |
|
|
RatedSpeed |
P249 |
int |
[1/min] |
|
|
RatedPower |
P250 |
int |
[W] |
|
|
MaxEngineTorque |
P259 |
int |
[Nm] |
|
|
WHTCUrban |
P109 |
double, 4 |
[-] |
|
|
WHTCRural |
P110 |
double, 4 |
[-] |
|
|
WHTCMotorway |
P111 |
double, 4 |
[-] |
|
|
BFColdHot |
P159 |
double, 4 |
[-] |
|
|
CFRegPer |
P192 |
double, 4 |
[-] |
|
|
CFNCV |
P260 |
double, 4 |
[-] |
|
|
FuelType |
P193 |
string |
[-] |
Zulässige Werte: „Diesel CI“, „Ethanol CI“, „Benzin PI“, „Ethanol PI“, „Flüssiggas“, „Erdgas“ |
Tabelle 2
Eingabeparameter „Engine/FullloadCurve“ für jeden Rasterpunkt der Volllastkurve
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
EngineSpeed |
P068 |
double, 2 |
[1/min] |
|
|
MaxTorque |
P069 |
double, 2 |
[Nm] |
|
|
DragTorque |
P070 |
double, 2 |
[Nm] |
|
Tabelle 3
Eingabeparameter „Engine/FuelMap“ für jeden Rasterpunkt in der Kraftstoffabbildung
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
EngineSpeed |
P072 |
double, 2 |
[1/min] |
|
|
Drehmoment |
P073 |
double, 2 |
[Nm] |
|
|
FuelConsumption |
P074 |
double, 2 |
[g/h] |
|
Anlage 8
Wichtige Auswertungsschritte und Gleichungen des Motorvorbehandlungsinstruments
Diese Anlage enthält eine Beschreibung der wichtigsten Auswertungsschritte und der Gleichungen, die dem Motorvorbehandlungsinstrument als Grundlage dienen. Die folgenden Schritte werden bei der Auswertung der Eingabedaten in der angegebenen Reihenfolge ausgeführt:
1. Einlesen der Eingabedateien und automatisches Prüfen der Eingabedaten
1.1. Überprüfen der Eingabedaten hinsichtlich der Anforderungen gemäß Begriffsbestimmungen in Absatz 6.1 dieses Anhangs
1.2. Überprüfen der aufgezeichneten FCMC-Daten hinsichtlich der Anforderungen gemäß Festlegungen in Absatz 4.3.5.2 und Absatz 4.3.5.5 Ziffer 1 dieses Anhangs
2. Berechnen der charakteristischen Motordrehzahlen anhand der Volllastkurven des Stammmotors und des zu zertifizierenden Motors gemäß Festlegungen in Absatz 4.3.5.2.1 dieses Anhangs
3. Bearbeiten der Abbildung des Kraftstoffverbrauchs (FC)
3.1. Die FC-Werte bei nidle werden zur Motordrehzahl (nidle – 100 U/min) in der Abbildung kopiert
3.2. Die FC-Werte bei n95h werden zur Motordrehzahl (n95h + 500 U/min) in der Abbildung kopiert
3.3. Extrapolation der FC-Werte bei allen Motordrehzahl-Einstellpunkten auf einen Drehmomentwert des 1,1-Fachen von Tmax_overall, und zwar durch lineare Regression der Fehlerquadratmethode auf Grundlage der drei gemessenen FC-Punkte mit den höchsten Drehmomentwerten bei jedem Motordrehzahl-Einstellpunkt in der Abbildung
3.4. Addieren von FC = 0 für die interpolierten Schiebebetrieb-Drehmomentwerte bei allen Motordrehzahl-Einstellpunkten in der Abbildung
3.5. Addieren von FC = 0 für ein Minimum der interpolierten Schiebebetrieb-Drehmomentwerte aus Unterziffer (3.4) minus 100 Nm bei allen Motordrehzahl-Einstellpunkten in der Abbildung
4. Simulation von FC und Zyklusarbeit über die WHTC-Prüfung und die jeweiligen Teilzyklen für den zu zertifizierenden Motor
4.1. WHTC-Referenzpunkte werden anhand der Eingaben für die Volllastkurve in der ursprünglich aufgezeichneten Auflösung entnormiert
4.2. FC wird für die entnormierten WHTC-Referenzwerte für die Motordrehzahl und das Drehmoment aus Ziffer 4.1 berechnet
4.3. Für die Berechnung von FC wird als Motorträgheit „0“ verwendet
4.4. Für die Berechnung von FC wird eine aktive Standard-PT1-Funktion (wie bei der allgemeinen Fahrzeugsimulation) für das Ansprechverhalten des Motordrehmoments verwendet
4.5. Für FC wird bei allen Schiebebetriebpunkten „0“ festgelegt
4.6. Die Berechnung von FC für alle Punkte bei nicht im Schiebebetrieb laufendem Motor erfolgt anhand der FC-Abbildung durch das Delaunay-Interpolationsverfahren (wie bei der allgemeinen Fahrzeugsimulation)
4.7. Die Berechnung von Zyklusarbeit und FC erfolgt anhand der Gleichungen laut Absatz 5.1 und Absatz 5.2 dieses Anhangs
4.8. Die Berechnung der simulierten spezifischen FC-Werte erfolgt analog zu den Gleichungen laut Absatz 5.3.1 und 5.3.2 dieses Anhangs für die gemessenen Werte
5. Berechnung der WHTC-Korrekturfaktoren
5.1. Die gemessenen Werte aus der Eingabe in das Vorbehandlungsinstrument und die simulierten Werte aus Absatz 4 werden entsprechend den Gleichungen laut den Ziffernn 5.2 bis 5.4 verwendet
5.2. CFUrban = SFCmeas,Urban / SFCsimu,Urban
5.3. CFRural = SFCmeas,Rural / SFCsimu,Rural
5.4. CFMW = SFCmeas,MW / SFCsimu,MW
5.5. Für den Fall, dass der berechnete Wert für einen Korrekturfaktor weniger als 1 beträgt, wird für den betreffenden Korrekturfaktor „1“ festgelegt
6. Berechnung des Kalt-Warm-Emissionsausgleichsfaktors
6.1. Dieser Faktor wird anhand der Gleichung laut Absatz 6.2 berechnet
6.2. BFcold-hot = 1 + 0,1 × (SFCmeas,cold – SFCmeas,hot) / SFCmeas,hot
6.3. Für den Fall, dass der berechnete Wert für diesen Faktor weniger als 1 beträgt, wird für ihn „1“ festgelegt
7. Korrektur der FC-Werte in der FC-Abbildung auf den Standard-Nettoheizwert
7.1. Diese Korrektur wird anhand der Gleichung laut Absatz 7.2 vorgenommen
7.2. FCcorrected = FCmeasured,map × NCVmeas / NVCstd
7.3. FCmeasured,map sei der FC-Wert in den Eingabedaten der FC-Abbildung, bearbeitet gemäß Absatz 3
7.4. NCVmeas und NVCstd muss entsprechend Absatz 5.3.3.1 dieses Anhangs festgelegt werden
7.5. Für den Fall, dass bei der Prüfung der Bezugskraftstoff des Typs B7 (Diesel/CI) entsprechend Absatz 3.2 dieses Anhangs verwendet wurde, wird die Korrektur gemäß den Absätzen 7.1 bis 7.4 nicht vorgenommen.
8. Umwandlung der Werte für die Motorvolllast und das Schiebebetriebsdrehmoment des zu zertifizierenden Motors in eine Messrate für die Motordrehzahl von 8 U/min
8.1. Die Umwandlung erfolgt durch arithmetische Mittelung über Intervalle von ± 4 U/min des gegebenen Einstellpunkts für die Ausgabedaten, und zwar anhand der Eingaben für die Volllastkurve in der ursprünglich aufgezeichneten Auflösung
ANHANG VI
ÜBERPRÜFUNG DER DATEN ZU GETRIEBE, DREHMOMENTWANDLER, SONSTIGEN DREHMOMENT ÜBERTRAGENDEN BAUTEILEN UND ZUSÄTZLICHEN BAUTEILEN DES ANTRIEBSSTRANGS
1. Einleitung
Dieser Anhang enthält eine Beschreibung der Zertifizierungsvorschriften hinsichtlich der Drehmomentverluste von Getrieben, Drehmomentwandlern (torque converter, TC), sonstigen Drehmoment übertragenden Bauteilen (other torque transferring components, OTTC) und zusätzlichen Bauteilen des Antriebsstrangs (additional driveline components, ADC) für schwere Nutzfahrzeuge. Außerdem werden darin Berechnungsverfahren für die Pauschal-Drehmomentverluste festgelegt.
Drehmomentwandler (TC), sonstige Drehmoment übertragende Bauteile (OTTC) und zusätzliche Bauteile des Antriebsstrangs (ADC) können in Kombination mit einem Getriebe oder als selbstständige Einheit geprüft werden. Falls die genannten Bauteile als selbstständige Einheiten geprüft werden, gelten die Bestimmungen der Absätze 4, 5 und 6. Drehmomentverluste durch den Antriebsmechanismus zwischen dem Getriebe und den genannten Bauteilen können vernachlässigt werden.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs bezeichnet der Begriff
|
(1) |
„Verteilergetriebe“ eine Einrichtung, die die Motorleistung eines Fahrzeugs aufteilt und sie zur vorderen und hinteren angetriebenen Achse leitet. Es ist hinter dem Getriebe angebracht und sowohl mit der vorderen als auch mit der hinteren Antriebswelle verbunden. Es besteht entweder aus einem Zahnradsatz oder einem Kettenantriebssystem, in dem die Leistung vom Getriebe auf die Achsen verteilt wird. Das Verteilergetriebe ermöglicht typischerweise ein Umschalten zwischen Standardfahrbetrieb (Vorder- oder Hinterradantrieb), Betrieb mit hoher Traktion (Vorder- und Hinterradantrieb), Betrieb mit niedriger Traktion und Leerlauf; |
|
(2) |
„Getriebeübersetzung“ bei Vorwärtsgängen das Verhältnis zwischen der Drehzahl der Eingangswelle (zum Primärantrieb) zur Drehzahl der Ausgangswelle (zu den Antriebsrädern) ohne Schlupf (i = nin/nout ); |
|
(3) |
„Übersetzungsbereich“ das Verhältnis zwischen dem Vorwärtsgang eines Getriebes mit der größten Getriebeübersetzung zu dem mit der kleinsten: φtot = imax/imin ; |
|
(4) |
„Verbundgetriebe“ ein Getriebe mit einer großen Zahl von Vorwärtsgängen und/oder einem großen Übersetzungsbereich, bestehend aus Teilgetrieben, die kombiniert werden, sodass die meisten leistungsübertragenden Teile in mehreren Vorwärtsgängen eingesetzt werden; |
|
(5) |
„Hauptgetriebe“ in einem Verbundgetriebe das Teilgetriebe mit der größten Zahl von Vorwärtsgängen; |
|
(6) |
„Nachschaltgetriebe“ ein mit dem Basisgetriebe normalerweise in Reihenschaltung verbundenes Teilgetriebe eines Verbundgetriebes. Ein Nachschaltgetriebe hat normalerweise zwei schaltbare Vorwärtsgänge. Die niedrigeren Vorwärtsgänge des Gesamtgetriebes werden mithilfe des niedrigeren Ganges des Nachschaltgetriebes dargestellt. Die höheren Gänge werden mithilfe des höheren Ganges des Nachschaltgetriebes dargestellt; |
|
(7) |
„Vorschaltgetriebe“ eine Bauart, bei der die Gänge des Hauptgetriebes in (normalerweise) zwei Stufen, den niedrigen und den hohen Halbgang, mit im Vergleich zum Übersetzungsbereich des Getriebes nah aneinander liegenden Übersetzungsverhältnissen aufgeteilt werden. Bei einem Vorschaltgetriebe kann es sich um ein selbstständiges Teilgetriebe, eine an das Hauptgetriebe angebaute oder darin integrierte Zusatzeinrichtung oder eine Kombination daraus handeln; |
|
(8) |
„Zahnkupplung“ eine Kupplung, bei der das Drehmoment vor allem durch Normalkräfte zwischen ineinandergreifenden Zähnen übertragen wird. Eine Zahnkupplung kann entweder ein- oder ausgekuppelt sein. Sie wird nur unbelastet betätigt (z. B. beim Gangwechsel in einem manuellen Getriebe); |
|
(9) |
„Winkelgetriebe“ eine Einrichtung, die Drehleistung zwischen nicht parallelen Wellen überträgt und oft bei quer eingebautem Motor und Kraftübertragung an die Antriebsachse in Längsrichtung verwendet wird; |
|
(10) |
„Reibungskupplung“ eine Kupplung zur Übertragung von Antriebsdrehmoment, bei der das Drehmoment dauerhaft durch Reibungskräfte übertragen wird. Eine Reibungskupplung kann schleifend Drehmoment übertragen, daher kann sie (muss aber nicht) beim Anfahren und beim Lastschalten (Gangwechsel ohne Unterbrechung der Leistungsübertragung) betätigt werden; |
|
(11) |
„Synchronring“ eine Art der Zahnkupplung, bei der die Drehzahl der zu verbindenden drehenden Teile mittels einer Reibungsvorrichtung angeglichen wird; |
|
(12) |
„Zahneingriff-Wirkungsgrad“ das Verhältnis der Ausgangsleistung zur Eingangsleistung in einem Vorwärtsgang bei Übertragung in einem Zahneingriff mit Relativbewegung; |
|
(13) |
„Kriechgang“ einen niedrigen Vorwärtsgang (mit einer stärkeren Drehzahlreduktion als bei Nicht-Kriechgängen), der für seltene Verwendung, z. B. bei Manövern mit geringer Geschwindigkeit oder zum gelegentlichen Anfahren an Steigungen, konzipiert ist; |
|
(14) |
„Nebenabtrieb (Power take-off, PTO)“ eine Einrichtung an einem Getriebe oder einem Motor, an die eine angetriebene Hilfseinrichtung, etwa eine Hydraulikpumpe, angeschlossen sein kann; |
|
(15) |
„Nebenabtriebs-Antriebsmechanismus“ eine Einrichtung in einem Getriebe, die den Einbau eines Nebenabtriebs ermöglicht; |
|
(16) |
„Wandlerüberbrückungskupplung“ eine Reibungskupplung in einem hydrodynamischen Drehmomentwandler; sie kann Eingang und Ausgang verbinden und so den Schlupf beseitigen; |
|
(17) |
„Anfahrkupplung“ eine Kupplung, die beim Anfahren des Fahrzeugs für den Ausgleich des Drehzahlunterschieds zwischen Motor und Antriebsrädern sorgt. Die Anfahrkupplung ist normalerweise zwischen Motor und Getriebe angebracht; |
|
(18) |
„synchronisiertes manuelles Getriebe“ ein manuell bedientes Getriebe mit zwei oder mehr wählbaren Gängen, die mithilfe von Synchronringen eingelegt werden. Für den Gangwechsel wird normalerweise das Getriebe mithilfe einer Kupplung (üblicherweise der Anfahrkupplung des Fahrzeugs) vorübergehend vom Motor getrennt; |
|
(19) |
„automatisiertes Schaltgetriebe“ ein automatisch schaltendes Getriebe mit zwei oder mehr wählbaren Gängen, die mithilfe von Zahnkupplungen (unsynchronisiert/synchronisiert) eingelegt werden. Für den Gangwechsel wird das Getriebe vorübergehend vom Motor getrennt. Der Gangwechsel wird von einem elektronisch gesteuerten System durchgeführt, das den Zeitpunkt des Gangwechsels, die Betätigung der Kupplung zwischen Motor und Getriebe sowie Drehzahl und Drehmoment des Motors kontrolliert. Das System wählt automatisch den geeignetsten Vorwärtsgang aus und legt ihn ein, kann jedoch vom Fahrer in einem manuellen Modus übersteuert werden; |
|
(20) |
„Doppelkupplungsgetriebe“ ein automatisch schaltendes Getriebe mit zwei Reibungskupplungen und mehreren wählbaren Gängen, welche mithilfe von Zahnkupplungen eingelegt werden. Der Gangwechsel wird von einem elektronisch gesteuerten System durchgeführt, das den Zeitpunkt des Gangwechsels, die Betätigung der Kupplungen sowie Drehzahl und Drehmoment des Motors kontrolliert. Das System wählt automatisch den geeignetsten Gang aus, kann jedoch vom Fahrer in einem manuellen Modus übersteuert werden; |
|
(21) |
„Dauerbremseinrichtung“ eine für Dauerbremsungen dienende zusätzliche Bremseinrichtung im Antriebsstrang eines Fahrzeugs; |
|
(22) |
„Fall S“ die serielle Anordnung eines Drehmomentwandlers und der damit verbundenen mechanischen Teile des Getriebes; |
|
(23) |
„Fall P“ die parallele Anordnung eines Drehmomentwandlers und der damit verbundenen mechanischen Teile des Getriebes (z. B. in Anlagen mit Leistungsaufteilung); |
|
(24) |
„automatisches Lastschaltgetriebe“ ein automatisch schaltendes Getriebe mit mehr als zwei Reibungskupplungen und mehreren wählbaren Gängen, welche hauptsächlich mithilfe der genannten Reibungskupplungen eingelegt werden. Der Gangwechsel wird von einem elektronisch gesteuerten System durchgeführt, das den Zeitpunkt des Gangwechsels, die Betätigung der Kupplungen sowie Drehzahl und Drehmoment des Motors kontrolliert. Das System wählt automatisch den geeignetsten Gang aus, kann jedoch vom Fahrer in einem manuellen Modus übersteuert werden. Der Gangwechsel erfolgt normalerweise ohne Traktionsunterbrechung (von Reibungskupplung zu Reibungskupplung); |
|
(25) |
„Ölkonditionierungssystem“ ein externes System zur Konditionierung des Getriebeöls bei der Prüfung. Das System leitet Öl in einem Kreislauf in das Getriebe und aus ihm ab. Das Öl wird dabei gefiltert und/oder temperiert; |
|
(26) |
„intelligentes Schmiersystem“ ein System, das die lastunabhängigen Verluste des Getriebes (auch als Dreh- oder Schleppverluste bezeichnet) in Abhängigkeit vom Eingangsdrehmoment und/oder dem Leistungsfluss durch das Getriebe beeinflusst. Beispiele hierfür sind gesteuerte Hydraulikdruckpumpen für Bremsen und Kupplungen in einem automatischen Lastschaltgetriebe, die Steuerung des Ölstandes im Getriebe und die Steuerung des variablen Ölflusses/Öldrucks zur Schmierung und Kühlung des Getriebes. Intelligente Schmierung kann auch die Kontrolle der Getriebeöltemperatur umfassen, jedoch werden intelligente Schmiersysteme, die lediglich der Temperatursteuerung dienen, hier nicht berücksichtigt, da die Getriebeprüfungen bei festgelegten Prüftemperaturen vorgenommen werden; |
|
(27) |
„elektrische Getriebe-Hilfseinrichtung“ eine elektrische Hilfseinrichtung für das Funktionieren des im Stetigbetrieb laufenden Getriebes. Ein typisches Beispiel ist eine elektrische Pumpe zur Kühlung/Schmierung (aber keine elektrischen Schalt-Aktuatoren und elektronischen Steuersysteme einschließlich elektrischer Magnetventile, da diese insbesondere im Stetigbetrieb wenig Energie verbrauchen); |
|
(28) |
„Viskositätsgrad der Ölart“ einen Viskositätsgrad gemäß der Definition in SAE J306; |
|
(29) |
„ab Werk eingefülltes Öl“ den Viskositätsgrad der Ölart, die im Werk eingefüllt wird und dazu bestimmt ist, im ersten Wartungsintervall im Getriebe, im Drehmomentwandler, in den sonstigen Drehmoment übertragenden Bauteilen oder in einem zusätzlichen Bauteil des Antriebsstrangs zu verbleiben; |
|
(30) |
„Getriebeschema“ die Anordnung der Wellen, Zahnräder und Kupplungen in einem Getriebe; |
|
(31) |
„Leistungsfluss“ den Übertragungsweg der Leistung vom Eingang bis zum Ausgang eines Getriebes über Wellen, Zahnräder und Kupplungen. |
3. Prüfverfahren für Getriebe
Zur Prüfung der Verluste eines Getriebes muss die Abbildung der Drehmomentverluste für jede einzelne Getriebeart gemessen werden. Getriebe können zu Familien mit ähnlichen oder gleichen CO2-relevanten Daten gemäß den Bestimmungen in Anlage 6 dieses Anhangs zusammengefasst werden.
Zur Bestimmung der Drehmomentverluste eines Getriebes muss der Antragsteller für die Zertifizierung eines der folgenden Verfahren für jeden Vorwärtsgang (Kriechgänge ausgenommen) anwenden:
|
(1) |
Option 1: Messung der drehmomentunabhängigen Verluste, Berechnung der drehmomentabhängigen Verluste. |
|
(2) |
Option 2: Messung der drehmomentunabhängigen Verluste, Messung des Drehmomentverlusts bei maximalem Drehmoment und Interpolation der drehmomentabhängigen Verluste anhand eines linearen Modells. |
|
(3) |
Option 3: Messung des gesamten Drehmomentverlusts. |
3.1. Option 1: Messung der drehmomentunabhängigen Verluste, Berechnung der drehmomentabhängigen Verluste.
Der Drehmomentverlust Tl ,in an der Eingangswelle des Getriebes wird wie folgt berechnet:
Tl,in (nin , Tin , gear) = T l,in,min_loss + fT * Tin + floss_corr * Tin + T l,in,min_el + fel_corr * Tin
Der Korrekturfaktor für die drehmomentabhängigen hydraulischen Drehmomentverluste wird wie folgt berechnet:

Der Korrekturfaktor für die drehmomentabhängigen elektrischen Drehmomentverluste wird wie folgt berechnet:

Der durch die Leistungsaufnahme von elektrischen Getriebe-Hilfseinrichtungen verursachte Drehmomentverlust an der Eingangswelle des Getriebes wird wie folgt berechnet:

dabei gilt:
|
Tl,in |
= |
Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
|
Tl,in,min_loss |
= |
Drehmomentunabhängiger Verlust bei minimalem hydraulischen Verlust (minimaler Hauptdruck, Kühl-/Schmiermitteldurchsatz usw.), gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
|
Tl,in,max_loss |
= |
Drehmomentunabhängiger Verlust bei maximalem hydraulischen Verlust (maximaler Hauptdruck, Kühl-/Schmiermitteldurchsatz usw.), gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
|
floss_corr |
= |
Korrektur des hydraulischen Verlusts in Abhängigkeit vom Eingangsdrehmoment [-] |
|
nin |
= |
Drehzahl an der Eingangswelle des Getriebes (ggf. dem Drehmomentwandler nachgeschaltet) [U/min] |
|
fT |
= |
Drehmomentverlustkoeffizient = 1-ηT |
|
Tin |
= |
Drehmoment an der Eingangswelle [Nm] |
|
ηT |
= |
Drehmomentabhängiger Wirkungsgrad (zu berechnen); bei einem direkten Gang fT = 0,007 (ηT= 0,993) [-] |
|
fel_corr |
= |
Korrektur des Verlusts der elektrischen Leistung in Abhängigkeit des Eingangsdrehmoments [-] |
|
Tl,in,el |
= |
Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle [Nm] |
|
Tl,in,min_el |
= |
Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei minimaler elektrischer Leistung [Nm] |
|
Tl,in,max_el |
= |
Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei maximaler elektrischer Leistung [Nm] |
|
Pel |
= |
Elektrische Leistungsaufnahme durch Stromverbraucher im Getriebe, gemessen bei der Prüfung der Verluste des Getriebes [W] |
|
Tmax,in |
= |
Maximal zulässiges Eingangsdrehmoment für alle Vorwärtsgänge des Getriebes [Nm] |
3.1.1. Die drehmomentabhängigen Verluste eines Getriebesystems müssen gemäß folgender Beschreibung ermittelt werden:
Mehrere parallele Leistungsflüsse mit gleicher Nennleistung, etwa bei Doppelvorgelegewellen oder mehreren Planetenrädern in einem Planetengetriebe, können in diesem Abschnitt als ein Leistungsfluss behandelt werden.
3.1.1.1. Für jeden indirekten Gang g herkömmlicher Getriebe ohne Leistungsteilung und mit gewöhnlichem Aufbau (kein Planetengetriebe) müssen folgende Schritte durchgeführt werden:
3.1.1.2. Für jeden aktiven Zahneingriff ist als drehmomentabhängiger Wirkungsgrad jeweils ein konstanter Wert für hm festzulegen:
|
Zahneingriffe außen-außen |
: |
ηm = 0,986 |
|
Zahneingriffe außen-innen |
: |
ηm = 0,993 |
|
Zahneingriffe an Winkelgetrieben |
: |
ηm = 0,97 |
(Winkelgetriebeverluste können alternativ durch eine gesonderte Prüfung gemäß Nummer 6 dieses Anhangs ermittelt werden)
3.1.1.3. Das Produkt dieser drehmomentabhängigen Wirkungsgrade aktiver Zahneingriffe ist mit dem drehmomentabhängigen Lagerwirkungsgrad ηb= 99,5 % zu multiplizieren.
3.1.1.4. Der drehmomentabhängige Gesamtwirkungsgrad ηTg von Gang g wird wie folgt berechnet:
η Tg = η b * η m,1 * η m,2 * […] * η m,n
3.1.1.5. Der drehmomentabhängige Verlustkoeffizient fTg von Gang g wird wie folgt berechnet:
fTg = 1 – η Tg
3.1.1.6. Der drehmomentabhängige Verlust Tl,inTg an der Eingangswelle für Gang g wird wie folgt berechnet:
Tl,inTg = fTg * Tin
3.1.1.7. Der drehmomentabhängige Wirkungsgrad des Planetennachschaltgetriebes in einer niedrigen Ganggruppe kann für den Sonderfall, dass das Getriebe aus einem vorgelegewellenartigen Basisgetriebe und einem dazu in Reihe geschalteten Planetennachschaltgetriebe (mit nicht-rotierendem Außenrad und mit der Ausgangswelle verbundenem Planetenträger) besteht, alternativ zu dem in Absatz 3.1.1.8 beschriebenen Verfahren wie folgt berechnet werden:

dabei gilt:
|
ηm,ring |
= |
Drehmomentabhängiger Wirkungsgrad des Zahneingriffs von Außen- zu Planetenrad = 99,3 % [-] |
|
ηm,sun |
= |
Drehmomentabhängiger Wirkungsgrad des Zahneingriffs von Planeten- zu Sonnenrad = 98,6 % [-] |
|
zsun |
= |
Anzahl der Zähne des Sonnenrads des Nachschaltgetriebes [-] |
|
zring |
= |
Anzahl der Zähne des Außenrads des Nachschaltgetriebes [-] |
Das Planetennachschaltgetriebe gilt als zusätzlicher Zahneingriff im Vorgelegewelle-Basisgetriebe, und sein drehmomentabhängiger Wirkungsgrad ηlowrange muss bei der Ermittlung der drehmomentabhängigen Gesamtwirkungsgrade ηTg der niedrigen Gänge in die Berechnung gemäß Absatz 3.1.1.4 einbezogen werden.
3.1.1.8. Bei allen anderen Getriebearten mit komplexeren Leistungsteilungen und/oder Planetengetrieben (z. B. bei einem herkömmlichen automatischen Planetengetriebe) muss das folgende vereinfachte Verfahren zur Ermittlung des drehmomentabhängigen Wirkungsgrads angewandt werden. Dieses Verfahren gilt für Getriebesysteme mit herkömmlichem Aufbau (kein Planetengetriebe) und/oder für Planetengetriebe, die aus Außen-, Planeten- und Sonnenrädern bestehen. Alternativ kann der drehmomentabhängige Wirkungsgrad auf Grundlage der VDI-Richtlinie Nr. 2157 berechnet werden. Bei beiden Berechnungen muss derselbe konstante Wert für den Wirkungsgrad des Zahneingriffs gemäß Absatz 3.1.1.2 verwendet werden.
In diesem Fall sind für jeden indirekten Gang g die folgenden Schritte durchzuführen:
3.1.1.9. Unter der Bedingung, dass als Eingangsdrehzahl 1 rad/s und als Eingangsdrehmoment 1 Nm gelten, wird eine Tabelle mit Werten für die Drehzahl (Ni ) und das Drehmoment (Ti ) für alle Zahnräder mit fester Drehachse (Sonnenräder, Außenräder und gewöhnliche Zahnräder) sowie Planetenträger erzeugt. Die Drehzahl- und Drehmomentwerte müssen der Rechte-Hand-Regel folgen, wobei für die Motordrehung die positive Richtung gilt.
3.1.1.10. Für jedes Planetengetriebe werden die Relativgeschwindigkeiten Sonnenrad-zu-Planetenträger und Außenrad-zu-Planetenträger wie folgt berechnet:
|
|
Nsun–carrier = Nsun – Ncarrier |
|
|
Nring–carrier = Nring – Ncarrier |
dabei gilt:
|
Nsun |
= |
Drehgeschwindigkeit des Sonnenrads [rad/s] |
|
Nring |
= |
Drehgeschwindigkeit des Außenrads [rad/s] |
|
Ncarrier |
= |
Drehgeschwindigkeit des Planetenträgers [rad/s] |
3.1.1.11. Die Verluste verursachenden Leistungen an den Zahneingriffen sind wie folgt zu berechnen:
|
|
Für jedes Getriebe mit gewöhnlichem Aufbau (kein Planetengetriebe) wird die Leistung P wie folgt berechnet:
dabei gilt:
|
|
|
Für jedes Planetengetriebe wird die virtuelle Leistung von Sonnenrad Pv,sun und Außenrad Pv,ring wie folgt berechnet:
dabei gilt:
Ein negativer Leistungswert kennzeichnet die Leistung am Getriebeausgang, ein positiver Leistungswert kennzeichnet die Leistung am Getriebeeingang. Die verlustbereinigten Leistungen Padj an den Zahneingriffen sind wie folgt zu berechnen: |
|
|
Für jedes Getriebe mit gewöhnlichem Aufbau (kein Planetengetriebe) ist die negative Leistung mit dem entsprechenden drehmomentabhängigen Wirkungsgrad ηm zu multiplizieren:
dabei gilt:
|
|
|
Für jedes Planetengetriebe ist die negative virtuelle Leistung mit den drehmomentabhängigen Wirkungsgraden für Sonnen- zu Planetenrad ηmsun und für Außen- zu Planetenrad ηmsun zu multiplizieren:
dabei gilt:
|
3.1.1.12. Alle verlustbereinigten Leistungswerte sind zu addieren, um so den drehmomentabhängigen Leistungsverlust Pm,loss am Zahneingriff des die Eingangsleistung betreffenden Getriebesystems zu erhalten:
Pm,loss = ΣPi,adj
dabei gilt:
|
i |
= |
Alle Zahnräder mit fester Drehachse [-] |
|
Pm,loss |
= |
Drehmomentabhängiger Leistungsverlust am Zahneingriff des Getriebesystems [W] |
3.1.1.13. Der drehmomentabhängige Verlustkoeffizient für Lager und der drehmomentabhängige Verlustkoeffizient für den Zahneingriff
fT,bear = 1 – ηbear = 1 – 0,995 = 0,005
sind zu addieren, um so den drehmomentabhängigen

Gesamt-Verlustkoeffizienten fT für das Getriebesystem zu erhalten:
fT = fT,gearmesh + fT,bear
dabei gilt:
|
fT |
= |
Drehmomentabhängiger Gesamt-Verlustkoeffizient für das Getriebesystem [-] |
|
fT,bear |
= |
Drehmomentabhängiger Verlustkoeffizient für die Lager [-] |
|
fT,gearmesh |
= |
Drehmomentabhängiger Verlustkoeffizient für die Zahneingriffe [-] |
|
Pin |
= |
Feste Eingangsleistung des Getriebes; Pin = (1 Nm * 1 rad/s) [W] |
3.1.1.14. Die drehmomentabhängigen Verluste an der Eingangswelle des betreffenden Getriebes sind wie folgt zu berechnen:
Tl,inT = fT * Tin
dabei gilt:
|
Tl,inT |
= |
Drehmomentabhängiger Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
|
Tin |
= |
Drehmoment an der Eingangswelle [Nm] |
3.1.2. Die drehmomentunabhängigen Verluste sind entsprechend dem nachfolgend beschriebenen Verfahren zu messen.
3.1.2.1. Allgemeine Anforderungen
Das für die Messungen verwendete Getriebe muss den Zeichnungsvorgaben für Seriengetriebe entsprechen und neu sein.
Änderungen am Getriebe sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass das Getriebe die in diesem Anhang genannten Prüfanforderungen erfüllt, z. B. zur Anbringung von Messsensoren oder zur Anpassung eines externen Ölkonditionierungssystems.
Die Toleranzgrenzen in diesem Abschnitt beziehen sich auf Messwerte ohne Sensorunsicherheiten.
Die pro Bestimmungsfahrzeugteil und Gang geprüfte Gesamtzeit darf das 2,5-Fache der tatsächlichen Prüfzeit pro Gang nicht überschreiten (erforderlichenfalls darf das Getriebe bei Mess- oder Aufbaufehlern erneut geprüft werden).
Dasselbe Bestimmungsfahrzeugteil darf für maximal zehn verschiedene Prüfungen verwendet werden, z. B. für Prüfungen der Drehmomentverluste des Getriebes bei Varianten mit und ohne Dauerbremseinrichtung (mit unterschiedlichen Temperaturanforderungen) oder mit unterschiedlichen Ölen. Wird dasselbe Bestimmungsfahrzeugteil für Prüfungen unterschiedlicher Öle verwendet, muss das empfohlene, ab Werk eingefüllte Öl zuerst geprüft werden.
Dieselbe Prüfung mehrmals durchzuführen, um die Prüfserie mit den besten Ergebnissen auszuwählen, ist nicht zulässig.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass die in diesem Anhang aufgeführten Anforderungen erfüllt sind.
3.1.2.2. Differenzmessungen
Um Einflussgrößen, die durch den Prüfstandsaufbau (z. B. Lager, Kupplungen) bedingt sind, von den gemessenen Drehmomentverlusten abzuziehen, sind Differenzmessungen zulässig, in deren Rahmen sich diese parasitären Drehmomente ermitteln lassen. Die Messungen müssen bei denselben Drehzahlstufen und denselben Prüfstandslagertemperaturen ± 3 K wie bei der eigentlichen Prüfung durchgeführt werden. Die Messunsicherheit des Drehmomentsensors muss weniger als 0,3 Nm betragen.
3.1.2.3. Einlaufen
Auf Ersuchen des Antragstellers kann das Getriebe einem Einlaufverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einlaufverfahren:
3.1.2.3.1. Pro Gang darf das Verfahren nicht länger als 30 Stunden und insgesamt nicht länger als 100 Stunden dauern.
3.1.2.3.2. Die Anwendung des Eingangsdrehmoments ist auf 100 % des maximalen Eingangsdrehmoments beschränkt.
3.1.2.3.3. Die maximale Eingangsdrehzahl ist durch die angegebene maximale Drehzahl des Getriebes beschränkt.
3.1.2.3.4. Die Drehzahl und der Drehmomentverlauf für das Einlaufverfahren werden vom Hersteller festgelegt.
3.1.2.3.5. Das Einlaufverfahren muss vom Hersteller im Hinblick auf Laufzeit, Drehzahl, Drehmoment und Öltemperatur dokumentiert und der Genehmigungsbehörde mitgeteilt werden.
3.1.2.3.6. Die Anforderungen bezüglich der Umgebungstemperatur (Absatz 3.1.2.5.1), der Messgenauigkeit (Absatz 3.1.4), der Prüfanordnung (Absatz 3.1.8) und des Einbauwinkels (Absatz 3.1.3.2) gelten nicht für das Einlaufverfahren.
3.1.2.4. Vorkonditionierung
3.1.2.4.1. Es ist zulässig, das Getriebe und die Prüfstandseinrichtungen vorzukonditionieren, damit vor dem Einlauf- und Prüfverfahren die richtige Temperatur erreicht und aufrechterhalten wird.
3.1.2.4.2. Die Vorkonditionierung ist am direkten Gang durchzuführen, ohne dass an der Ausgangswelle ein Drehmoment anliegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt.
3.1.2.4.3. Die maximale Eingangsdrehzahl ist durch die angegebene maximale Drehzahl des Getriebes beschränkt.
3.1.2.4.4. Die Gesamtzeit für die Vorkonditionierung darf bei einem Getriebe höchstens 50 Stunden betragen. Da die komplette Prüfung eines Getriebes in mehrere Prüfsequenzen unterteilt werden kann (z. B. kann jeder Gang mit einer individuellen Sequenz geprüft werden), kann auch die Vorkonditionierung in mehrere Sequenzen unterteilt werden. Die Dauer einer einzelnen Vorkonditionierungssequenz darf jedoch höchstens 60 Minuten betragen.
3.1.2.4.5. Die Zeit für die Vorkonditionierung darf nicht zu der Zeitspanne hinzugerechnet werden, die für das Einlaufen oder das Prüfverfahren vorgesehen ist.
3.1.2.5. Prüfbedingungen
3.1.2.5.1. Umgebungstemperatur
Die bei der Prüfung herrschende Umgebungstemperatur muss in einem Bereich von 25 °C ± 10 K liegen.
Die Messung der Umgebungstemperatur muss 1 m seitlich neben dem Getriebe erfolgen.
Der für die Umgebungstemperatur angegebene Grenzwert gilt nicht für das Einlaufverfahren.
3.1.2.5.2. Öltemperatur
Mit Ausnahme des Öls ist keine externe Beheizung zulässig.
Während der Messung (außer in der Stabilisierungsphase) gelten folgende Temperaturgrenzwerte:
|
|
Bei SMT/AMT/DCT-Getrieben darf die Öltemperatur am Ablassstopfen bei Messungen ohne Dauerbremseinrichtung höchstens 83 °C und bei Messungen mit am Getriebe montierter Dauerbremseinrichtung höchstens 87 °C betragen. Für den Fall, dass Messungen eines Getriebes ohne Dauerbremseinrichtung mit gesonderten Messungen einer Dauerbremseinrichtung kombiniert werden, gilt der geringere Temperaturgrenzwert, damit der Antriebsmechanismus der Dauerbremseinrichtung und das Übersetzungsgetriebe sowie – bei abschaltbarer Dauerbremseinrichtung – die Kupplung ausgeglichen werden können. |
|
|
Bei Drehmomentwandler-Planetengetrieben und bei Getrieben mit mehr als zwei Reibungskupplungen darf die Öltemperatur am Ablassstopfen ohne Dauerbremseinrichtung höchstens 93 °C und mit Dauerbremseinrichtung höchstens 97 °C betragen. |
Damit die vorgenannten höheren Temperaturgrenzwerte auf Prüfungen mit Dauerbremseinrichtung angewandt werden dürfen, muss die Dauerbremseinrichtung im Getriebe integriert sein oder ein integriertes Kühl- oder Ölsystem im Getriebe nutzen.
Für das Einlaufen gelten dieselben Vorgaben für die Öltemperatur wie für die reguläre Prüfung.
Unter folgenden Bedingungen sind für die Öltemperatur außerordentliche Spitzenwerte von bis zu 110 °C zulässig:
|
(1) |
während des Einlaufverfahrens, und zwar über höchstens 10 % der angewandten Einlaufzeit, |
|
(2) |
während der Stabilisierungsphase. |
Die Öltemperatur ist am Ablassstopfen oder im Ölsumpf zu messen.
3.1.2.5.3. Ölqualität
Für die Prüfung ist neues, für den europäischen Markt empfohlenes Öl für die erste Befüllung zu verwenden. Für die Drehmomentmessungen darf dieselbe Ölfüllung verwendet werden wie für das Einlaufen.
3.1.2.5.4. Ölviskosität
Gibt es mehrere Empfehlungen für die erste Ölbefüllung, werden sie gleichwertig behandelt, sofern sich ihre jeweilige kinematische Viskosität bei gleicher Temperatur um nicht mehr als 10 % voneinander unterscheidet (innerhalb des angegebenen Toleranzbereichs für KV100). Bei einem Öl mit geringerer Viskosität als bei dem in der Prüfung verwendeten Öl wird angenommen, dass die Verluste bei Prüfungen mit dieser Option niedriger ausfallen. Bei zusätzlichen Ölsorten für die erste Befüllung muss die Viskosität entweder in den vorgenannten 10-%-Toleranzbereich fallen oder geringer sein als bei dem in der Prüfung verwendeten Öl, damit für sie dieselbe Zertifizierung gilt.
3.1.2.5.5. Ölstand und Ölkonditionierung
Der Ölstand muss den für das Getriebe geltenden Vorgaben genügen.
Kommt ein externes Ölkonditionierungssystem zum Einsatz, muss eine solche Menge Öl im Getriebe aufrechterhalten werden, die dem angegebenen Ölstand entspricht.
Um sicherzustellen, dass sich das externe Ölkonditionierungssystem nicht auf die Prüfergebnisse auswirkt, muss ein Prüfpunkt einmal mit eingeschaltetem und einmal mit ausgeschaltetem Konditionierungssystem gemessen werden. Die Abweichung zwischen diesen beiden Messungen des Drehmomentverlusts (= Eingangsdrehmoment) muss unter 5 % liegen. Der Prüfpunkt ist wie folgt definiert:
|
(1) |
Gang = höchster indirekter Gang, |
|
(2) |
Eingangsdrehzahl = 1 600 U/min, |
|
(3) |
Temperaturen gemäß Angaben in Absatz 3.1.2.5. |
Bei Getrieben mit hydraulischer Druckregelung oder intelligentem Schmiersystem muss die Messung der drehmomentunabhängigen Verluste mit zwei verschiedenen Einstellungen erfolgen: einmal bei einem eingestelltem Getriebesystemdruck von mindestens dem Wert, der bei eingekuppeltem Gang gilt, und ein zweites Mal bei höchstmöglichem Hydraulikdruck (siehe Absatz 3.1.6.3.1).
3.1.3. Montage
3.1.3.1. Die elektrische Maschine und der Drehmomentsensor müssen an die Eingangsseite des Getriebes montiert werden. Die Ausgangswelle muss sich ungehindert drehen können.
3.1.3.2. Beim Einbau in das Fahrzeug muss für das Getriebe ein Neigungswinkel gemäß Homologationszeichnung von ± 1° bzw. von 0° ± 1° eingehalten werden.
3.1.3.3. Die interne Ölpumpe muss im Getriebe enthalten sein.
3.1.3.4. Ist bei dem betreffenden Getriebe der Einsatz eines Ölkühlers optional oder erforderlich, gilt für die Prüfung, dass der Kühler ausgeschlossen oder ein anderer Ölkühler verwendet werden darf.
3.1.3.5. Die Prüfung des Getriebes kann mit oder ohne Nebenabtriebs-Antriebsmechanismus und/oder Nebenabtrieb erfolgen. Zur Ermittlung der Leistungsverluste des Nebenabtriebs und/oder des Nebenabtriebs-Antriebsmechanismus werden die Werte aus Anhang VII dieser Verordnung angewandt. Bei diesen Werten wird davon ausgegangen, dass das Getriebe ohne Nebenabtriebs-Antriebsmechanismus und/oder Nebenabtrieb geprüft wird.
3.1.3.6. Die Messung des Getriebes kann mit oder ohne montierte Einzel-Trockenkupplung (mit einer oder zwei Scheiben) erfolgen. Bei anderen Kupplungstypen muss die Prüfung mit montierter Kupplung erfolgen.
3.1.3.7. Der Einfluss der jeweiligen parasitären Lasten muss für jeden einzelnen Prüfstandsaufbau und jeden einzelnen Drehmomentsensor gemäß der Beschreibung in Absatz 3.1.8 berechnet werden.
3.1.4. Messeinrichtungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen von ISO/TS 16949, der ISO 9000 Reihen oder ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale (internationale) Normen zurückführbar sein.
3.1.4.1. Drehmoment
Die Messunsicherheit des Drehmomentsensors muss weniger als 0,3 Nm betragen.
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich der Teil der Unsicherheit, der 0,3 Nm überschreitet, errechnen lässt und zum gemessenen Drehmomentverlust gemäß der Beschreibung in Absatz 3.1.8 (Messunsicherheit) hinzugerechnet wird.
3.1.4.2. Drehzahl
Die Unsicherheit der Drehzahlsensoren darf höchstens ± 1 U/min betragen.
3.1.4.3. Temperatur
Die Unsicherheit der für die Messung der Umgebungstemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
Die Unsicherheit der für die Messung der Öltemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
3.1.4.4. Druck
Die Unsicherheit der Drucksensoren darf höchstens 1 % des maximal gemessenen Drucks betragen.
3.1.4.5. Spannung
Die Unsicherheit des Spannungsmessers darf höchstens 1 % der maximal gemessenen Spannung betragen.
3.1.4.6. Elektrische Stromstärke
Die Unsicherheit des Strommessers darf höchstens 1 % der maximal gemessenen Stromstärke betragen.
3.1.5. Messsignale und Datenaufzeichnung
Mindestens folgende Signale müssen während der Messung aufgezeichnet werden:
|
(1) |
Eingangsdrehmoment [Nm] |
|
(2) |
Eingangsdrehzahl [U/min] |
|
(3) |
Umgebungstemperatur [°C] |
|
(4) |
Öltemperatur [°C] |
Ist das Getriebe mit einem Gangschaltungs- und/oder Kupplungssystem mit hydraulischer Druckregelung oder aber mit einem mechanisch angetriebenen intelligenten Schmiersystem ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
|
(5) |
Öldruck [kPa] |
Ist das Getriebe mit einer elektrischen Getriebe-Hilfseinrichtung ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
|
(6) |
Spannung der elektrischen Getriebe-Hilfseinrichtung [V] |
|
(7) |
Stromstärke der elektrischen Getriebe-Hilfseinrichtung [A] |
Bei Differenzmessungen zum Ausgleich von Einflussgrößen, die durch den Prüfstandsaufbau bedingt sind, ist zusätzlich Folgendes aufzuzeichnen:
|
(8) |
Temperatur der Prüfstandslager [°C] |
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Um Messfehler möglichst gering zu halten, ist ein Tiefpassfilter zu verwenden.
3.1.6. Prüfverfahren
3.1.6.1. Kompensation Nulldrehmomentsignal:
Das Nullsignal der Drehmomentsensoren ist zu messen. Zum Zwecke der Messung müssen die Sensoren in den Prüfstand montiert werden. Am Antriebsstrang des Prüfstands (Eingang und Ausgang) darf keine Last anliegen. Die gemessene Signalabweichung vom Nullwert ist auszugleichen.
3.1.6.2. Drehzahlbereich:
Für folgende Drehzahlstufen ist der Drehmomentverlust zu messen (Drehzahl der Eingangswelle): 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000 […] U/min bis zur höchsten Drehzahl pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
Die Drehzahlübergangsphase (Zeit für den Wechsel zwischen zwei Drehzahlstufen) darf höchstens 20 Sekunden dauern.
3.1.6.3. Messsequenz:
|
3.1.6.3.1. |
Ist das Getriebe mit einem intelligenten Schmiersystem und/oder mit elektrischen Getriebe-Hilfseinrichtungen ausgestattet, muss die Messung mit zwei verschiedenen Messeinstellungen dieser Systeme erfolgen:
|
|
3.1.6.3.2. |
Die Messungen müssen so durchgeführt werden, dass mit der niedrigsten Drehzahl begonnen und mit der höchsten Drehzahl geendet wird. |
|
3.1.6.3.3. |
Bei jeder Drehzahlstufe sind mindestens 5 Sekunden zur Stabilisierung innerhalb der in Absatz 3.1.2.5 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung sind die Öl- und Umgebungstemperatur aufzuzeichnen. |
|
3.1.6.3.4. |
Nach der Stabilisierungszeit sind die in Absatz 3.1.5 aufgeführten Messsignale 5 bis 15 Sekunden lang für den Prüfpunkt aufgezeichnet werden. |
|
3.1.6.3.5. |
Jede Messung ist mit jeder Messeinstellung jeweils zweimal durchzuführen. |
3.1.7. Validierung der Messwerte
3.1.7.1. Für jede der Messungen ist das arithmetische Mittel von Drehmoment, Drehzahl, (ggf.) Spannung und Stromstärke für die 5 bis 15 Sekunden langen Messungen zu berechnen.
3.1.7.2. Die gemittelte Drehzahlabweichung muss für jeden gemessenen Punkt in der gesamten Drehmomentverlustserie weniger als ± 5 U/min des Drehzahleinstellpunkts betragen.
3.1.7.3. Die mechanischen Drehmomentverluste und (ggf.) die elektrische Leistungsaufnahme werden für jede der Messungen wie folgt berechnet:
|
|
Tloss = Tin |
|
|
Pel = I * U |
Es ist zulässig, durch den Prüfstandsaufbau bedingte Einflussgrößen von den Drehmomentverlusten abzuziehen (Absatz 3.1.2.2).
3.1.7.4. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme aus beiden Messserien sind zu mitteln (arithmetischer Mittelwert).
3.1.7.5. Die Abweichung zwischen den gemittelten Werten für die Drehmomentverluste an beiden Messpunkten muss bei jeder Einstellung unter ± 5 % des gemittelten Werts bzw. ±1 Nm liegen, wobei der jeweils größere Wert maßgeblich ist. Dann muss das arithmetische Mittel der beiden gemittelten Leistungswerte verwendet werden.
3.1.7.6. Liegt eine größere Abweichung vor, ist der größte gemittelte Drehmomentverlust zu verwenden; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.1.7.7. Die Abweichung zwischen den gemittelten Werten für die elektrische Leistungsaufnahme (Spannung*Stromstärke) bei beiden Messungen muss bei jeder Messeinstellung unter ± 10 % des gemittelten Werts bzw. ± 5 W liegen, wobei der jeweils größere Wert maßgeblich ist. Dann ist das arithmetische Mittel der beiden gemittelten Leistungswerte zu verwenden.
3.1.7.8. Liegt eine größere Abweichung vor, sind diejenigen gemittelten Werte für die Spannung/Stromstärke zu verwenden, die der größten gemittelten Leistungsaufnahme entsprechen; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.1.8. Messunsicherheit
Der Teil der berechneten Gesamtunsicherheit UT,loss , der 0,3 Nm überschreitet, muss zu Tloss des gemeldeten Drehmomentverlusts Tloss,rep hinzugerechnet werden. Wenn UT,loss kleiner als 0,3 Nm, dann Tloss,rep = Tloss .
Tloss,rep = Tloss + MAX (0, (UT,loss – 0,3 Nm))
Die Gesamtunsicherheit UT,loss des Drehmomentverlusts muss anhand folgender Parameter berechnet werden:
|
(1) |
Temperatureinfluss |
|
(2) |
Parasitäre Lasten |
|
(3) |
Kalibrierfehler (z. B. Empfindlichkeitstoleranz, Linearität, Hysterese und Wiederholbarkeit) |
Die Gesamtunsicherheit des Drehmomentverlusts (UT,loss ) basiert auf den Unsicherheiten der Sensoren bei einem Vertraunsbereich von 95 %. Zur Berechnung wird die Quadratwurzel aus der Summe von Quadraten gezogen („Gaußsches Fehlerfortpflanzungsgesetz“).
|
|
|

|
|
|

|
|
|

|
|
|

|
|
|

|
|
wpara = senspara * ipara |
dabei gilt:
|
Tloss |
= |
Gemessener Drehmomentverlust (unkorrigiert) [Nm] |
|
Tloss,rep |
= |
Gemeldeter Drehmomentverlust (nach Korrektur der Unsicherheit) [Nm] |
|
UT,loss |
= |
Gesamte erweiterte Unsicherheit bei der Messung des Drehmomentverlusts bei einem Vertrauensbereich von 95 % [Nm] |
|
UT,in |
= |
Unsicherheit bei der Messung des Eingangsdrehmomentverlusts [Nm] |
|
uTKC |
= |
Durch den Temperatureinfluss bedingte Unsicherheit am Signal für das momentane Drehmoment [Nm] |
|
wtkc |
= |
Temperatureinfluss am Signal für das momentane Drehmoment pro Kref gemäß Angaben des Sensorherstellers [%] |
|
uTK0 |
= |
Durch den Temperatureinfluss bedingte Unsicherheit am Nulldrehmomentsignal (bezogen auf das Nenndrehmoment) [Nm] |
|
wtk0 |
= |
Temperatureinfluss am Nulldrehmomentsignal pro Kref (bezogen auf das Nenndrehmoment) gemäß Angaben des Sensorherstellers [%] |
|
Kref |
= |
Referenztemperaturbereich für uTKC und uTK0, wtk0 und wtkc gemäß Angaben des Sensorherstellers [K] |
|
ΔK |
= |
Zwischen Kalibrierung und Messung vorliegende Differenz der Sensortemperatur [K]. Sollte die Sensortemperatur nicht gemessen werden können, muss der Standardwert von ΔK = 15 K verwendet werden. |
|
Tc |
= |
Momentaner/gemessener Drehmomentwert am Drehmomentsensor [Nm] |
|
Tn |
= |
Nenndrehmomentwert des Drehmomentsensors [Nm] |
|
ucal |
= |
Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
|
Wcal |
= |
Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
|
kcal |
= |
Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
|
upara |
= |
Durch parasitäre Lasten bedingte Unsicherheit [Nm] |
|
wpara |
= |
senspara * ipara Relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden |
|
senspara |
= |
Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor gemäß Angaben des Sensorherstellers [%]; wurde kein spezifischer Wert für parasitäre Lasten vom Sensorhersteller angegeben, wird als Wert 1,0 % festgelegt |
|
ipara |
= |
Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor in Abhängigkeit von der Prüfanordnung (A/B/C gemäß nachstehender Festlegung). |
|
|
= |
A) 10 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor eine elastische Kupplung (oder Kardanwelle) funktional montiert ist (vor- oder nachgelagert); darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z. B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 1. Abbildung 1 Prüfanordnung A für Option 1 
|
|
|
= |
B) 50 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor keine elastische Kupplung funktional montiert ist; darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z. B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 2. Abbildung 2 Prüfanordnung B für Option 1 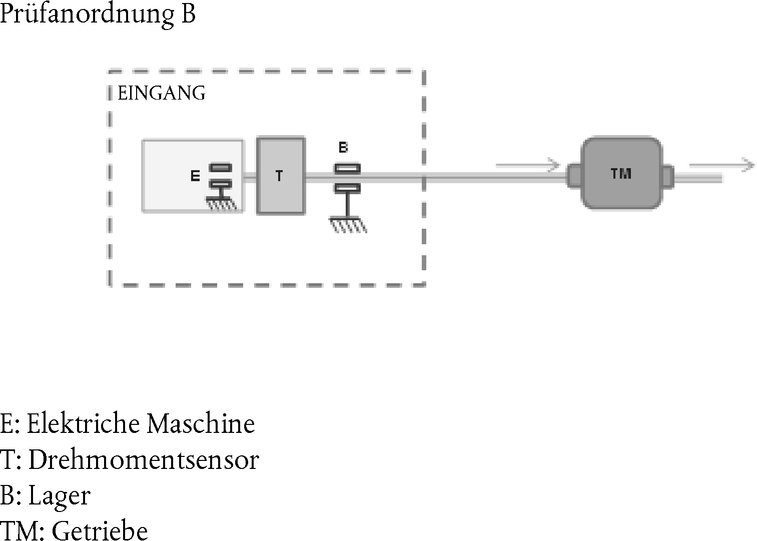
|
|
|
= |
C) 100 % für alle anderen Prüfaufbauten |
3.2. Option 2: Messung der drehmomentunabhängigen Verluste, Messung des Drehmomentverlusts bei maximalem Drehmoment und Interpolation der drehmomentabhängigen Verluste anhand eines linearen Modells.
Bei Option 2 wird der Drehmomentverlust durch Kombination aus Messungen und linearer Interpolation ermittelt. Messungen müssen für die drehmomentunabhängigen Verluste des Getriebes und für einen Lastpunkt der drehmomentabhängigen Verluste (maximales Eingangsdrehmoment) erfolgen. Auf Grundlage der Drehmomentverluste bei Betrieb ohne Last und bei maximalem Eingangsdrehmoment müssen die Drehmomentverluste für die dazwischen liegenden Eingangsdrehmomentwerte mit Hilfe des Drehmomentverlustkoeffizienten fTlimo berechnet werden.
Der Drehmomentverlust Tl,in an der Eingangswelle des Getriebes wird wie folgt berechnet:
Tl,in (nin , Tin , gear) = Tl,in,min_loss + fTlimo * Tin + T l,in,min_el + fel_corr * Tin
Der auf dem linearen Modell fTlimo basierende Drehmomentverlustkoeffizient wird wie folgt berechnet:

dabei gilt:
|
Tl,in |
= |
Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
|
Tl,in,min_loss |
= |
Schleppdrehmomentverlust am Getriebeeingang, gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
|
nin |
= |
Drehzahl an der Eingangswelle [U/min] |
|
fTlimo |
= |
Auf dem linearen Modell basierender Drehmomentverlustkoeffizient [-] |
|
Tin |
= |
Drehmoment an der Eingangswelle [Nm] |
|
Tin,maxT |
= |
Höchstes geprüftes Drehmoment an der Eingangswelle (normalerweise 100 % Eingangsdrehmoment, siehe Absätze 3.2.5.2 und 3.4.4) [Nm] |
|
Tl,maxT |
= |
Drehmomentverlust in Bezug auf die Eingangswelle bei Tin = Tin,maxT |
|
fel_corr |
= |
Korrektur des Verlusts der elektrischen Leistung in Abhängigkeit vom Eingangsdrehmoment [-] |
|
Tl,in,el |
= |
Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle [Nm] |
|
Tl,in,min_el |
= |
Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei minimaler elektrischer Leistung [Nm] |
Der Korrekturfaktor für die drehmomentabhängigen elektrischen Drehmomentverluste fel_corr und der Drehmomentverlust an der Eingangswelle des Getriebes, der durch die Leistungsaufnahme der elektrischen Getriebe-Hilfseinrichtung Tl,in,el verursacht wird, ist gemäß der Beschreibung in Absatz 3.1 zu berechnen.
3.2.1. Die Drehmomentverluste sind entsprechend dem nachfolgend beschriebenen Verfahren zu messen.
3.2.1.1. Allgemeine Anforderungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.1.
3.2.1.2. Differenzmessungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.2.
3.2.1.3. Einlaufen
Siehe Angaben für Option 1 in Absatz 3.1.2.3.
3.2.1.4. Vorkonditionierung
Siehe Angaben für Option 3 in Absatz 3.3.2.1.
3.2.1.5. Prüfbedingungen
3.2.1.5.1. Umgebungstemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.1.
3.2.1.5.2. Öltemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.2.
3.2.1.5.3. Ölqualität/Ölviskosität
Siehe Angaben für Option 1 in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
3.2.1.5.4. Ölstand und Ölkonditionierung
Siehe Angaben für Option 3 in Absatz 3.3.3.4.
3.2.2. Montage
Siehe Angaben für Option 1 in Absatz 3.1.3 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.4 für die Messung der drehmomentabhängigen Verluste.
3.2.3. Messeinrichtungen
Siehe Angaben für Option 1 in Absatz 3.1.4 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.5 für die Messung der drehmomentabhängigen Verluste.
3.2.4. Messsignale und Datenaufzeichnung
Siehe Angaben für Option 1 in Absatz 3.1.5 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.7 für die Messung der drehmomentabhängigen Verluste.
3.2.5. Prüfverfahren
Die Abbildung der Drehmomentverluste, die für das Simulationsinstrument zur Anwendung kommt, enthält die Drehmomentverlustwerte eines Getriebes in Abhängigkeit von der Eingangsdrehzahl und dem Eingangsdrehmoment.
Um die Abbildung der Drehmomentverluste eines Getriebes zu ermitteln, müssen die Eckdaten für die Abbildung der Drehmomentverluste gemäß diesem Abschnitt gemessen und berechnet werden. Die Ergebnisse für die Drehmomentverluste müssen gemäß Nummer 3.4 ergänzt und gemäß Anlage 12 formatiert werden, um die weitere Verarbeitung durch das Simulationsinstrument zu ermöglichen.
3.2.5.1. Die drehmomentunabhängigen Verluste müssen nach dem in Absatz 3.1.1 für die drehmomentunabhängigen Verluste für Option 1 beschriebenen Verfahren nur für diejenige Einstellung der elektrischen und hydraulischen Verbraucher ermittelt werden, bei der ein geringer Verlust zu verzeichnen ist.
3.2.5.2. Für jeden Gang sind die drehmomentabhängigen Verluste nach dem in Absatz 3.3.6 für Option 3 beschriebenen Verfahren zu ermitteln, wobei für den betreffenden Drehmomentbereich folgende Abweichung gilt:
Drehmomentbereich:
Die Drehmomentverluste für jeden Gang sind bei 100 % des maximalen Eingangsdrehmoments des Getriebes pro Gang zu messen.
Für den Fall, dass das Ausgangsdrehmoment 10 kNm überschreitet (bei einem theoretischen verlustfreien Getriebe) oder die Eingangsleistung die angegebene maximale Eingangsleistung überschreitet, findet Absatz 3.4.4 Anwendung.
3.2.6. Validierung der Messwerte
Siehe Angaben für Option 3 in Absatz 3.3.8.
3.2.7. Messunsicherheit
Siehe Angaben für Option 1 in Absatz 3.1.8 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.9 für die Messung der drehmomentabhängigen Verluste.
3.3. Option 3: Messung des gesamten Drehmomentverlusts.
Bei Option 3 wird der Drehmomentverlust durch vollständige Messung der drehmomentabhängigen Verluste ermittelt, einschließlich der drehmomentunabhängigen Verluste des Getriebes.
3.3.1. Allgemeine Anforderungen
Siehe Angaben für Option 1 in Absatz 3.1.2.1.
3.3.1.1. Differenzmessungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.2.
3.3.2. Einlaufen
Siehe Angaben für Option 1 in Absatz 3.1.2.3.
3.3.2.1. Vorkonditionierung
Siehe Angaben für Option 1 in Absatz 3.1.2.4, wobei folgende Ausnahme gilt:
|
|
Die Vorkonditionierung ist am direkten Gang durchzuführen, und zwar unter der Voraussetzung, dass an der Ausgangswelle kein Drehmoment anliegt oder als Zieldrehmoment für die Ausgangswelle null festgelegt wird. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt. Oder es gelten die Anforderungen gemäß Absatz 3.1.2.4 – mit folgender Ausnahme: |
|
|
Die Vorkonditionierung ist am direkten Gang durchzuführen, und zwar unter der Voraussetzung, dass an der Ausgangswelle kein Drehmoment anliegt oder das Drehmoment an der Ausgangswelle bei +/- 50 Nm liegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt. oder, falls beim Prüfstand eine (Haupt-Reibungs-)Kupplung an der Eingangswelle vorhanden ist: Es gelten die Anforderungen gemäß Absatz 3.1.2.4 – mit folgender Ausnahme: |
|
|
Die Vorkonditionierung ist am direkten Gang durchzuführen, ohne dass an der Ausgangswelle oder an der Eingangswelle ein Drehmoment anliegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt. Das Getriebe würde dann von der Ausgangsseite angetrieben werden. Diese Vorschläge können auch in Kombination übernommen werden. |
3.3.3. Prüfbedingungen
3.3.3.1. Umgebungstemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.1.
3.3.3.2. Öltemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.2.
3.3.3.3. Ölqualität/Ölviskosität
Siehe Angaben für Option 1 in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
3.3.3.4. Ölstand und Ölkonditionierung
Es gelten die Anforderungen gemäß den Angaben in Absatz 3.1.2.5.5 – mit folgenden Abweichungen:
Der Prüfpunkt für das externe Ölkonditionierungssystem ist wie folgt festgelegt:
|
(1) |
höchster indirekter Gang, |
|
(2) |
Eingangsdrehzahl = 1 600 U/min, |
|
(3) |
Eingangsdrehmoment = maximales Eingangsdrehmoment für den höchsten indirekten Gang |
3.3.4. Montage
Für den Prüfstand sind als Antrieb elektrische Maschinen (Eingang und Ausgang) einzusetzen.
Drehmomentsensoren müssen an der Eingangs- und Ausgangsseite des Getriebes montiert sein.
Als sonstige Anforderungen gelten die Angaben gemäß Absatz 3.1.3.
3.3.5. Messeinrichtungen
Für die Messung der drehmomentunabhängigen Verluste gelten die Anforderungen an Messeinrichtungen gemäß den Angaben für Option 1 in Absatz 3.1.4.
Für die Messung der drehmomentabhängigen Verluste gelten folgende Anforderungen:
Die Messunsicherheit der Drehmomentsensoren muss unter 5 % des gemessenen Drehmomentverlusts oder 1 Nm liegen (es gilt der jeweils größere Wert).
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich die Teile der Unsicherheit, die 5 % oder 1 Nm überschreiten, errechnen lassen und der kleinere dieser Teile zum gemessenen Drehmomentverlust hinzugerechnet wird.
Die Messunsicherheit für das Drehmoment ist gemäß der Beschreibung in Absatz 3.3.9 zu errechnen und einzubeziehen.
Als sonstige Anforderungen an die Messeinrichtungen gelten die Angaben für Option 1 in Absatz 3.1.4.
3.3.6. Prüfverfahren
3.3.6.1. Kompensation Nulldrehmomentsignal:
Siehe Angaben in Absatz 3.1.6.1.
3.3.6.2. Drehzahlbereich
Der Drehmomentverlust ist für folgende Drehzahlstufen zu messen (Drehzahl der Eingangswelle): 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000 […] U/min bis zur höchsten Drehzahl pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
Die Drehzahlübergangsphase (Zeit für den Wechsel zwischen zwei Drehzahlstufen) darf höchstens 20 Sekunden dauern.
3.3.6.3. Drehmomentbereich
Für jede Drehzahlstufe ist der Drehmomentverlust für folgende Eingangsdrehmomente zu messen: 0 (frei rotierende Ausgangswelle), 200, 400, 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, 3 500, 4 000 […] Nm bis zum höchsten Eingangsdrehmoment pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehmomentstufe vor dem festgelegten maximalen Drehmoment und/oder zur letzten Drehmomentstufe vor dem Ausgangsdrehmoment von 10 kNm.
Für den Fall, dass das Ausgangsdrehmoment 10 kNm überschreitet (bei einem theoretischen verlustfreien Getriebe) oder die Eingangsleistung die angegebene maximale Eingangsleistung überschreitet, findet Absatz 3.4.4 Anwendung.
Die Drehmomentübergangsphase (Zeit für den Wechsel zwischen zwei Drehmomentstufen) darf höchstens 15 Sekunden (bei Option 2: höchstens 180 Sekunden) dauern.
Zur Erfassung des gesamten Drehmomentbereichs eines Getriebes in der vorstehenden Abbildung können an der Eingangs-/Ausgangsseite verschiedene Drehmomentsensoren mit begrenzten Messbereichen eingesetzt werden. Dazu kann die Messung in mehrere Abschnitte unterteilt werden, bei denen derselbe Satz von Drehmomentsensoren zum Einsatz kommt. Die gesamte Abbildung der Drehmomentverluste muss sich aus diesen Messabschnitten zusammensetzen.
3.3.6.4. Messsequenz
3.3.6.4.1. Die Messungen sind so durchzuführen, dass mit der niedrigsten Drehzahl begonnen und mit der höchsten Drehzahl geendet wird.
3.3.6.4.2. Das Eingangsdrehmoment muss entsprechend den vorstehenden Drehmomentstufen geändert werden, angefangen vom niedrigsten bis zum höchsten Drehmoment, das für jede Drehzahlstufe vom Sensor für das momentane Drehmoment erfasst wird.
3.3.6.4.3. Bei jeder Drehzahl- und Drehmomentstufe sind mindestens 5 Sekunden zur Stabilisierung innerhalb der in Absatz 3.3.3 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden (bei Option 2: maximal 180 Sekunden) verlängert werden. Während der Stabilisierung sind die Öl- und Umgebungstemperatur aufzuzeichnen.
3.3.6.4.4. Die Messserie ist insgesamt zweimal durchzuführen. Dafür ist es zulässig, mit demselben Satz von Drehmomentsensoren eine sequentielle Wiederholung von Abschnitten vorzunehmen.
3.3.7. Messsignale und Datenaufzeichnung
Mindestens folgende Signale müssen während der Messung aufgezeichnet werden:
|
(1) |
Eingangs- und Ausgangsdrehmoment [Nm] |
|
(2) |
Eingangs- und Ausgangsdrehzahl [U/min] |
|
(3) |
Umgebungstemperatur [°C] |
|
(4) |
Öltemperatur [°C] |
Ist das Getriebe mit einem Gangschaltungs- und/oder Kupplungssystem mit hydraulischer Druckregelung oder aber mit einem mechanisch angetriebenen intelligenten Schmiersystem ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
|
(5) |
Öldruck [kPa] |
Ist das Getriebe mit einer elektrischen Getriebe-Hilfseinrichtung ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
|
(6) |
Spannung der elektrischen Getriebe-Hilfseinrichtung [V] |
|
(7) |
Stromstärke der elektrischen Getriebe-Hilfseinrichtung [A] |
Bei Differenzmessungen zum Ausgleich von durch den Prüfstandsaufbau bedingten Einflussgrößen ist zusätzlich Folgendes aufzuzeichnen:
|
(8) |
Temperatur der Prüfstandslager [°C] |
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Zur Vermeidung von Messfehlern ist ein Tiefpassfilter zu verwenden.
3.3.8. Validierung der Messwerte
3.3.8.1. Für jede der beiden Messungen ist das arithmetische Mittel von Drehmoment, Drehzahl, ggf. Spannung und Stromstärke für die 5 bis 15 Sekunden langen Messungen zu berechnen.
3.3.8.2. Die gemessene und gemittelte Drehzahl an der Eingangswelle müssen für jeden gemessenen Betriebspunkt in der gesamten Drehmomentverlustserie weniger als ± 5 U/min des Drehzahleinstellpunkts betragen. Das gemessene und gemittelte Drehmoment an der Eingangswelle muss für jeden gemessenen Betriebspunkt in der gesamten Drehmomentverlustserie weniger als ± 5 Nm bzw. ± 5 % des Drehmomenteinstellpunkts betragen, wobei der jeweils größere Wert maßgeblich ist.
3.3.8.3. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme sind für jede der Messungen wie folgt zu berechnen:
|
|
|

|
|
Pel = I * U |
Es ist zulässig, durch den Prüfstandsaufbau bedingte Einflussgrößen von den Drehmomentverlusten abzuziehen (Absatz 3.3.2.2).
3.3.8.4. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme aus beiden Messserien sind zu mitteln (arithmetisches Mittel).
3.3.8.5. Die Abweichung zwischen den gemittelten Werten für die Drehmomentverluste der beiden Messserien muss unter ± 5 % des gemittelten Werts bzw. ± 1 Nm liegen (es gilt der jeweils größere Wert). Es ist das arithmetische Mittel der beiden gemittelten Werte für die Drehmomentverluste zu verwenden. Liegt eine größere Abweichung vor, ist der größte gemittelte Drehmomentverlust zu verwenden; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.3.8.6. Die Abweichung zwischen den gemittelten Werten für die elektrische Leistungsaufnahme (Spannung*Stromstärke) bei beiden Messserien muss unter ± 10 % des gemittelten Werts bzw. ± 5 W liegen, wobei der jeweils größere Wert maßgeblich ist. Dann ist das arithmetische Mittel der beiden gemittelten Leistungswerte zu verwenden.
3.3.8.7. Liegt eine größere Abweichung vor, sind diejenigen gemittelten Werte für die Spannung/Stromstärke zu verwenden, die der größten gemittelten Leistungsaufnahme entsprechen; alternativ kann die Prüfung für den Gang wiederholt werden.
3.3.9. Messunsicherheit
Der Teil der berechneten Gesamtunsicherheit UT,loss , der 5 % von Tloss bzw. 1 Nm (ΔUT,loss ) überschreitet, wobei der jeweils kleinere Wert von ΔUT,loss maßgeblich ist, ist zu Tloss des gemeldeten Drehmomentverlusts Tloss,rep hinzuzurechnen. Wenn UT,loss kleiner als 5 % von Tloss bzw. 1 Nm, dann Tloss,rep = Tloss .
Tloss,rep = Tloss + MAX (0, ΔUT,loss)
ΔUT,loss = MIN ((UT,loss – 5 % * Tloss), (UT,loss – 1 Nm))
Für jede Messserie ist die Gesamtunsicherheit UT,loss des Drehmomentverlusts anhand folgender Parameter zu berechnen:
|
(1) |
Temperatureinfluss |
|
(2) |
Parasitäre Lasten |
|
(3) |
Kalibrierfehler (z. B. Empfindlichkeitstoleranz, Linearität, Hysterese und Wiederholbarkeit) |
Die Gesamtunsicherheit des Drehmomentverlusts (UT,loss ) basiert auf den Unsicherheiten der Sensoren bei einem Vertrauensbereich von 95 %. Zur Berechnung wird die Quadratwurzel aus der Summe von Quadraten gezogen („Gaußsches Fehlerfortpflanzungsgesetz“).
|
|
|

|
|
|

|
|
|

|
|
|

|
|
|

|
|
|

|
|
wpara = senspara * ipara |
dabei gilt:
|
Tloss |
= |
Gemessener Drehmomentverlust (unkorrigiert) [Nm] |
|
Tloss,rep |
= |
Gemeldeter Drehmomentverlust (nach Korrektur der Unsicherheit) [Nm] |
|
UT,loss |
= |
Gesamte erweiterte Unsicherheit bei der Messung des Drehmomentverlusts bei einem Vertrauensbereich von 95 % [Nm] |
|
uT,in/out |
= |
Messunsicherheit für die Eingangs-/Ausgangsdrehmomentverluste, getrennt nach Eingangs- und Ausgangsdrehmomentsensor [Nm] |
|
igear |
= |
Gangübersetzung [-] |
|
uTKC |
= |
Durch den Temperatureinfluss bedingte Unsicherheit am Signal für das momentane Drehmoment [Nm] |
|
wtkc |
= |
Temperatureinfluss am Signal für das momentane Drehmoment pro Kref gemäß Angaben des Sensorherstellers [%] |
|
uTK0 |
= |
Durch den Temperatureinfluss bedingte Unsicherheit am Nulldrehmomentsignal (bezogen auf das Nenndrehmoment) [Nm] |
|
wtk0 |
= |
Temperatureinfluss am Nulldrehmomentsignal pro Kref (bezogen auf das Nenndrehmoment) gemäß Angaben des Sensorherstellers [%] |
|
Kref |
= |
Bezugstemperaturbereich für uTKC und uTK0, wtk0 und wtkc gemäß Angaben des Sensorherstellers [K] |
|
ΔK |
= |
Zwischen Kalibrierung und Messung vorliegende Differenz der Sensortemperatur [K]. Sollte die Sensortemperatur nicht gemessen werden können, muss der Standardwert von ΔK = 15 K verwendet werden. |
|
Tc |
= |
Momentaner/gemessener Drehmomentwert am Drehmomentsensor [Nm] |
|
Tn |
= |
Nenndrehmomentwert des Drehmomentsensors [Nm] |
|
ucal |
= |
Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
|
Wcal |
= |
Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
|
kcal |
= |
Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
|
upara |
= |
Durch parasitäre Lasten bedingte Unsicherheit [Nm] |
|
wpara |
= |
senspara * ipara Relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden [%] |
|
senspara |
= |
Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor gemäß Angaben des Sensorherstellers [%]; wurde kein spezifischer Wert für parasitäre Lasten vom Sensorhersteller angegeben, wird als Wert 1,0 % festgelegt |
|
ipara |
= |
Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor in Abhängigkeit von der Prüfanordnung (A/B/C gemäß nachstehender Festlegung). |
|
|
= |
A) 10 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor eine elastische Kupplung (oder Kardanwelle) funktional montiert ist (vor- oder nachgelagert); darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z. B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 3. Abbildung 3 Prüfanordnung A für Option 3 
|
|
|
= |
B) 50 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor keine elastische Kupplung funktional montiert ist; darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z. B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 4. Abbildung 4 Prüfanordnung B für Option 3 
|
|
|
= |
C) 100 % für alle anderen Prüfaufbauten |
3.4. Ergänzung zu den Eingabedateien für das Simulationsinstrument
Für jeden Gang ist eine Abbildung der Drehmomentverluste zu ermitteln, in der die festgelegten Eingangsdrehzahl- und Eingangsdrehmomentstufen enthalten sind, und zwar mit einer der angegebenen Prüfoptionen oder den Pauschalwerten für den Drehmomentverlust. Hinsichtlich der Eingabedatei für das Simulationsinstrument muss diese Grundabbildung der Drehmomentverluste gemäß folgender Beschreibung ergänzt werden:
3.4.1. In den Fällen, in denen es sich bei der höchsten geprüften Eingangsdrehzahl um die letzte Drehzahlstufe unterhalb des festgelegten zulässigen Höchstwerts für die Getriebedrehzahl handelt, ist eine Extrapolation des Drehmomentverlusts bis zur höchsten Drehzahl mit linearer Regression anhand der beiden letzten gemessenen Drehzahlstufen vorzunehmen.
3.4.2. In den Fällen, in denen es sich bei dem höchsten geprüften Eingangsdrehmoment um die letzte Drehmomentstufe unterhalb des festgelegten zulässigen Höchstwerts für das Getriebedrehmoment handelt, ist eine Extrapolation des Drehmomentverlusts bis zum höchsten Drehmoment mit linearer Regression anhand der beiden letzten gemessenen Drehmomentstufen für die zugehörige Drehzahlstufe vorzunehmen. Um Toleranzen des Motordrehmoments usw. zu berücksichtigen, nimmt das Simulationsinstrument erforderlichenfalls eine Extrapolation des Drehmomentverlusts für Eingangsdrehmomentwerte vor, die bis zu 10 % über dem festgelegten zulässigen Höchstwert für das Getriebedrehmoment liegen.
3.4.3. Für den Fall, dass eine Extrapolation der Drehmomentverlustwerte gleichzeitig sowohl für den Höchstwert der Eingangsdrehzahl als auch für den Höchstwert des Eingangsdrehmoments vorgenommen wird, ist der Drehmomentverlust für den gemeinsamen Punkt von höchster Drehzahl und höchstem Drehmoment anhand einer zweidimensionalen linearen Extrapolation zu berechnen.
3.4.4. Sollte das höchste Ausgangsdrehmoment 10 kNm überschreiten (bei einem theoretischen verlustfreien Getriebe) und/oder bei allen Drehzahl- und Drehmomentpunkten, bei denen die Eingangsleistung höher ist als die angegebene maximale Eingangsleistung, ist es dem Hersteller gestattet, die Drehmomentverlustwerte für alle Drehmomente über 10 kNm und/oder für alle Drehzahl- und Drehmomentpunkte mit einer höheren Eingangsleistung als der angegebenen maximalen Eingangsleistung zu verwenden, und zwar jeweils von einer der folgenden Möglichkeiten:
|
(1) |
Berechnete Ausweichwerte (Anlage 8) |
|
(2) |
Option 1 |
|
(3) |
Option 2 oder 3 in Kombination mit einem Drehmomentsensor für höhere Ausgangsdrehmomentwerte (falls erforderlich) |
Für die Fälle i und ii in Option 2 sind die Drehmomentverluste bei Last an demjenigen Eingangsdrehmoment zu messen, das einem Ausgangsdrehmoment von 10 kNm und/oder der angegebenen maximalen Eingangsleistung entspricht.
3.4.5. Für Drehzahlen unter der festgelegten Mindestdrehzahl und für die zusätzliche Eingangsdrehzahlstufe von 0 U/min sind die für die kleinste Drehzahlstufe ermittelten gemeldeten Drehmomentverluste zu übernehmen.
3.4.6. Zur Erfassung des Bereichs mit den negativen Eingangsdrehmomentwerten beim Ausrollen sind für diese negativen Werte die Drehmomentverlustwerte für die entsprechenden positiven Eingangsdrehmomentwerte zu übernehmen.
3.4.7. Mit Zustimmung einer Genehmigungsbehörde können die Drehmomentverluste für die Eingangsdrehzahlen unter 1 000 U/min durch die Drehmomentverluste bei 1 000 U/min ersetzt werden, wenn die Messung aus technischen Gründen nicht möglich ist.
3.4.8. Ist die Messung von Drehzahlpunkten aus technischen Gründen nicht möglich (z. B. aufgrund der Eigenfrequenz), ist es dem Hersteller gestattet, die Drehmomentverluste mit Zustimmung der Genehmigungsbehörde durch Interpolation oder Extrapolation zu berechnen (diese Möglichkeit ist auf max. 1 Drehzahlstufe pro Gang begrenzt).
3.4.9. Die Daten für die Abbildung der Drehmomentverluste sind gemäß den Angaben in Anlage 12 dieses Anhangs zu formatieren und zu speichern.
4. Drehmomentwandler
Als Kenndaten des Drehmomentwandlers müssen für die Eingabe in das Simulationsinstrument folgende Werte bestimmt werden: Tpum 1000 (Bezugsdrehmoment bei einer Eingangsdrehzahl von 1 000 U/min) und μ (Drehmomentverhältnis des Drehmomentwandlers). Beide Werte hängen vom Übersetzungsverhältnis v (= Drehzahl am Ausgang (Turbinenrad)/Drehzahl am Eingang (Pumpenrad) für den Drehmomentwandler) des Drehmomentwandlers ab.
Zur Bestimmung der Kenndaten des Wandlers muss der Antragsteller für die Zertifizierung – unabhängig von der gewählten Option für die Beurteilung der Drehmomentverluste des Getriebes – folgendes Verfahren anwenden.
Zur Berücksichtigung der beiden möglichen Anordnungen des Wandlers und der mechanischen Getriebeteile wird wie folgt zwischen Fall S und Fall P unterschieden:
|
Fall S |
: |
Wandler und mechanische Getriebeteile in serieller Anordnung |
|
Fall P |
: |
Wandler und mechanische Getriebeteile in paralleler Anordnung (Anlage mit Leistungsteilung) |
Bei Anordnungen gemäß Fall S können die Kenndaten des Wandlers entweder gesondert vom mechanischen Getriebe oder zusammen mit diesem bewertet werden. Bei Anordnungen gemäß Fall P ist die Bewertung der Kenndaten des Wandlers nur zusammen mit dem mechanischen Getriebe möglich. In diesem Fall sowie bei den zu messenden hydromechanischen Getrieben gilt die gesamte Anordnung, d. h. Drehmomentwandler und mechanisches Getriebe, als Wandler mit ähnlichen Kennlinien wie bei einem einzigen Drehmomentwandler.
Zur Bestimmung der Kenndaten des Drehmomentwandlers können zwei Messoptionen verwendet werden:
|
i) |
Option A: Messung bei konstanter Eingangsdrehzahl |
|
ii) |
Option B: Messung bei konstantem Eingangsdrehmoment gemäß SAE J643 |
Bei Anordnungen gemäß Fällen S und P kann der Hersteller zwischen Option A und B wählen.
Im Hinblick auf die Eingabe in das Simulationsinstrument sind das Drehmomentverhältnis μ und das Bezugsdrehmoment Tpum des Drehmomentwandlers für einen Bereich von v ≤ 0,95 (= Fahrzeug im Fahrbetrieb) zu messen. Der Bereich von v ≥ 1,00 (= ausrollendes Fahrzeug) kann entweder gemessen oder den Pauschalwerten aus Tabelle 1 entnommen werden.
Bei Messungen, die zusammen mit einem mechanischen Getriebe erfolgen, kann der Freilaufpunkt von v = 1,00 abweichen, so dass der Bereich der gemessenen Übersetzungsverhältnisse entsprechend angepasst werden muss.
Bei Verwendung von Pauschalwerten dürfen die Daten, die als Kenndaten des Drehmomentwandlers in das Simulationsinstrument eingegeben werden, nur für den Bereich von v ≤ 0,95 (oder das angepasste Übersetzungsverhältnis) gelten. Das Simulationsinstrument fügt automatisch die Pauschalwerte für Freilaufbedingungen hinzu.
Tabelle 1
Pauschalwerte für v ≥ 1,00
|
v |
μ |
T pum 1000 |
|
1,000 |
1,0000 |
0,00 |
|
1,100 |
0,9999 |
– 40,34 |
|
1,222 |
0,9998 |
– 80,34 |
|
1,375 |
0,9997 |
– 136,11 |
|
1,571 |
0,9996 |
– 216,52 |
|
1,833 |
0,9995 |
– 335,19 |
|
2,200 |
0,9994 |
– 528,77 |
|
2,500 |
0,9993 |
– 721,00 |
|
3,000 |
0,9992 |
– 1 122,00 |
|
3,500 |
0,9991 |
– 1 648,00 |
|
4,000 |
0,9990 |
– 2 326,00 |
|
4,500 |
0,9989 |
– 3 182,00 |
|
5,000 |
0,9988 |
– 4 242,00 |
4.1. Option A: Gemessene Kenndaten des Drehmomentwandlers bei konstanter Drehzahl
4.1.1. Allgemeine Anforderungen
Der für die Messungen verwendete Drehmomentwandler muss den Zeichnungsvorgaben für Seriendrehmomentwandler entsprechen.
Änderungen am Wandler sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass die in diesem Anhang genannten Prüfvorschriften erfüllt werden, z. B. zur Anbringung von Messsensoren.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass er die in diesem Anhang aufgeführten Anforderungen erfüllt.
4.1.2. Öltemperatur
Die Öltemperatur am Eingang des Wandlers muss folgende Anforderungen erfüllen:
|
|
Die Öltemperatur für Messungen am Wandler, die unabhängig vom Getriebe erfolgen, muss 90 °C +7/– 3 K betragen. |
|
|
Die Öltemperatur für Messungen am Wandler, die zusammen mit dem Getriebe erfolgen (Fälle S und P), muss 90 °C +20/– 3 K betragen. |
Die Öltemperatur muss am Ablassstopfen oder im Ölsumpf gemessen werden.
Für den Fall, dass die Kenndaten des Wandlers gesondert vom Getriebe gemessen werden, muss die Messung der Öltemperatur vor dem Prüfstand/der Prüftrommel für den Wandler erfolgen.
4.1.3. Öldurchsatz und Öldruck
Der Öldurchsatz am Wandlereingang und der Öldruck am Wandlerausgang sind in den für den Betrieb des Drehmomentwandlers angegebenen Grenzwerten zu halten, die von der zugehörigen Getriebeart und der geprüften maximalen Eingangsdrehzahl abhängig sind.
4.1.4. Ölqualität/Ölviskosität
Siehe Angaben für die Getriebeprüfung in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
4.1.5. Montage
Der Drehmomentwandler ist mit einem Drehmoment- und einem Drehzahlsensor sowie einer elektrischen Maschine an seiner Eingangs- und Ausgangswelle auf einen Prüfstand zu montieren.
4.1.6. Messeinrichtungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen von ISO/TS 16949, den ISO 9000 Reihen oder von ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale (internationale) Normen zurückführbar sein.
4.1.6.1. Drehmoment
Die Messunsicherheit der Drehmomentsensoren muss unter 1 % des gemessenen Drehmoments liegen.
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich der Teil der Unsicherheit, der 1 % des gemessenen Drehmoments überschreitet, errechnen lässt und zum gemessenen Drehmomentverlust gemäß Absatz 4.1.7 hinzugerechnet wird.
4.1.6.2. Drehzahl
Die Unsicherheit der Drehzahlsensoren darf höchstens ± 1 U/min betragen.
4.1.6.3. Temperatur
Die Unsicherheit der für die Messung der Umgebungstemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
Die Unsicherheit der für die Messung der Öltemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
4.1.7. Prüfverfahren
4.1.7.1. Kompensation Nulldrehmomentsignal
Siehe Angaben in Absatz 3.1.6.1.
4.1.7.2. Messsequenz
4.1.7.2.1. Die Eingangsdrehzahl npum des Wandlers ist auf eine konstante Drehzahl zu bringen, die innerhalb des folgenden Bereichs liegt:
1 000 U/min ≤ npum ≤ 2 000 U/min
4.1.7.2.2. Das Übersetzungsverhältnis v ist so anzupassen, dass die Ausgangsdrehzahl ntur von 0 U/min bis zum festgelegten Wert npum erhöht wird.
4.1.7.2.3. Für den Bereich des Übersetzungsverhältnisses, der zwischen 0 und 0,6 liegt, ist als Schrittweite 0,1 zu verwenden, für den Bereich zwischen 0,6 und 0,95 hingegen 0,05.
4.1.7.2.4. Als Obergrenze für das Übersetzungsverhältnis kann vom Hersteller ein Wert unter 0,95 festgelegt werden. In diesem Fall sind mindestens sieben gleichmäßig verteilte Punkte zwischen v = 0 und einem Wert von v < 0,95 im Rahmen der Messung zu erfassen.
4.1.7.2.5. Bei jedem Schritt sind mindestens 3 Sekunden zur Stabilisierung innerhalb der in Absatz 4.1.2 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung ist die Öltemperatur aufzuzeichnen.
4.1.7.2.6. Bei jedem Schritt sind die in Absatz 4.1.8 angegebenen Signale 3 bis 15 Sekunden lang für den Prüfpunkt aufzuzeichnen.
4.1.7.2.7. Die Messsequenz (Absätze 4.1.7.2.1 bis 4.1.7.2.6) muss insgesamt zweimal durchgeführt werden.
4.1.8. Messsignale und Datenaufzeichnung
Während der Messung sind mindestens folgende Signale aufzuzeichnen:
|
(1) |
Drehmoment am Eingang (Pumpenrad) Tc,pum [Nm] |
|
(2) |
Drehmoment am Ausgang (Turbinenrad) Tc,tur [Nm] |
|
(3) |
Drehzahl am Eingang (Pumpenrad) npum [U/min] |
|
(4) |
Drehzahl am Ausgang (Turbinenrad) ntur [U/min] |
|
(5) |
Öltemperatur am Wandlereingang KTCin [°C] |
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Zur Vermeidung von Messfehlern ist ein Tiefpassfilter zu verwenden.
4.1.9. Validierung der Messwerte
4.1.9.1. Für jede der beiden Messungen ist das arithmetische Mittel von Drehmoment und Drehzahl für die 3 bis 15 Sekunden langen Messungen zu berechnen.
4.1.9.2. Die in beiden Messserien gemessenen Werte für das Drehmoment und die Drehzahl sind zu mitteln (arithmetisches Mittel).
4.1.9.3. Die Abweichung zwischen den gemittelten Drehmomentwerten beider Messserien muss unter ± 5 % des gemittelten Werts bzw. ± 1 Nm liegen (es gilt der jeweils größere Wert). Es muss das arithmetische Mittel der beiden gemittelten Drehmomentwerte verwendet werden. Liegt eine größere Abweichung vor, ist für die Absätze 4.1.10. und 4.1.11. folgender Wert zu verwenden; alternativ kann die Prüfung für den Wandler wiederholt werden.
|
— |
für die Berechnung von ΔUT,pum/tur: kleinster gemittelter Drehmomentwert für Tc,pum/tur |
|
— |
für die Berechnung des Drehmomentverhältnisses μ: größter gemittelter Drehmomentwert für Tc,pum |
|
— |
für die Berechnung des Drehmomentverhältnisses μ: kleinster gemittelter Drehmomentwert für Tc,tur |
|
— |
für die Berechnung des Bezugsdrehmoments Tpum1000: kleinster gemittelter Drehmomentwert für Tc,pum |
4.1.9.4. Die gemessenen und gemittelten Werte für die Drehzahl und das Drehmoment an der Eingangswelle müssen für jeden gemessenen Betriebspunkt in der gesamten Übersetzungsverhältnisserie weniger als ± 5 U/min und ± 5 Nm des Einstellpunkts für Drehzahl und Drehmoment betragen.
4.1.10. Messunsicherheit
Der Teil der errechneten Messunsicherheit UT,pum/tur , der 1 % des gemessenen Drehmoments Tc,pum/tur überschreitet, ist für die Korrektur des Kennwerts für den Wandler gemäß folgender Festlegung zu verwenden.
ΔUT,pum/tur = MAX (0, (UT,pum/tur – 0,01 * Tc,pum/tur))
Die Messunsicherheit UT,pum/tur für das Drehmoment ist anhand des folgenden Parameters zu berechnen:
|
i) |
Kalibrierfehler (z. B. Empfindlichkeitstoleranz, Linearität, Hysterese und Wiederholbarkeit) |
Die Messunsicherheit (UT,pum/tur ) für das Drehmoment basiert auf den Unsicherheiten der Sensoren bei einem Vertrauensbereich von 95 %.
|
|
UT,pum/tur = 2 * ucal |
|
|
|

dabei gilt:
|
Tc,pum/tur |
= |
Momentaner/gemessener Drehmomentwert am Eingangs-/Ausgangsdrehmomentsensor [Nm] |
|
Tpum |
= |
Drehmoment am Eingang (Pumpenrad) (nach Korrektur der Unsicherheit) [Nm] |
|
UT,pum/tur |
= |
Messunsicherheit für das Eingangs-/Ausgangsdrehmoment bei einem Vertrauensbereich von 95 %, getrennt nach Eingangs- und Ausgangsdrehmomentsensor [Nm] |
|
Tn |
= |
Nenndrehmomentwert des Drehmomentsensors [Nm] |
|
ucal |
= |
Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
|
Wcal |
= |
Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
|
kcal |
= |
Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
4.1.11. Berechnung der Kenndaten des Wandlers
Für jeden Messpunkt sind die Messdaten folgenden Berechnungen zu unterziehen:
|
|
Das Drehmomentverhältnis des Wandlers errechnet sich aus:
|

|
|
Das Übersetzungsverhältnis des Wandlers errechnet sich aus:
|

|
|
Das Bezugsdrehmoment bei 1 000 U/min errechnet sich aus:
|

dabei gilt:
|
μ |
= |
Drehmomentverhältnis des Wandlers [-] |
|
v |
= |
Übersetzungsverhältnis des Wandlers [-] |
|
Tc, pum |
= |
Drehmoment am Eingang (Pumpenrad) (korrigiert) [Nm] |
|
npum |
= |
Drehzahl am Eingang (Pumpenrad) [U/min] |
|
ntur |
= |
Drehzahl am Ausgang (Turbinenrad) [U/min] |
|
Tpum1000 |
= |
Bezugsdrehmoment bei 1 000 U/min [Nm] |
4.2. Option B: Messung bei konstantem Eingangsdrehmoment (gemäß SAE J643)
4.2.1. Allgemeine Anforderungen
Siehe Angaben in Absatz 4.1.1.
4.2.2. Öltemperatur
Siehe Angaben in Absatz 4.1.2.
4.2.3. Öldurchsatz und Öldruck
Siehe Angaben in Absatz 4.1.3.
4.2.4. Ölqualität
Siehe Angaben in Absatz 4.1.4.
4.2.5. Montage
Siehe Angaben in Absatz 4.1.5.
4.2.6. Messeinrichtungen
Siehe Angaben in Absatz 4.1.6.
4.2.7. Prüfverfahren
4.2.7.1. Kompensation Nulldrehmomentsignal
Siehe Angaben in Absatz 3.1.6.1.
4.1.7.2. Messsequenz
4.2.7.2.1. Als Eingangsdrehmoment Tpum ist ein positiver Wert bei npum = 1 000 U/min einzustellen, wobei die Ausgangswelle des Wandlers nicht rotieren darf (Ausgangsdrehzahl ntur = 0 U/min).
4.2.7.2.2. Das Übersetzungsverhältnis v ist so anzupassen, dass die Ausgangsdrehzahl ntur von 0 U/min bis zu einem Wert von ntur erhöht und der nutzbare Bereich von v mit mindestens sieben gleichmäßig verteilten Drehzahlpunkten erfasst wird.
4.2.7.2.3. Für den Bereich des Übersetzungsverhältnisses, der zwischen 0 und 0,6 liegt, ist als Schrittweite 0,1 zu verwenden, für den Bereich zwischen 0,6 und 0,95 hingegen 0,05.
4.2.7.2.4. Als Obergrenze für das Übersetzungsverhältnis kann vom Hersteller ein Wert unter 0,95 festgelegt werden.
4.2.7.2.5. Bei jedem Schritt sind mindestens 5 Sekunden zur Stabilisierung innerhalb der unter 4.2.2 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung muss die Öltemperatur aufgezeichnet werden.
4.2.7.2.6. Bei jedem Schritt sind die unter 4.2.8 angegebenen Werte 5 bis 15 Sekunden lang für den Prüfpunkt aufzuzeichnen.
4.2.7.2.7. Die Messsequenz (Absätze 4.2.7.2.1 bis 4.2.7.2.6) ist insgesamt zweimal durchzuführen.
4.2.8. Messsignale und Datenaufzeichnung
Siehe Angaben in Absatz 4.1.8.
4.2.9. Validierung der Messwerte
Siehe Angaben in Absatz 4.1.9.
4.2.10. Messunsicherheit
Siehe Angaben in Absatz 4.1.9.
4.2.11. Berechnung der Kenndaten des Wandlers
Siehe Angaben in Absatz 4.1.11.
5. Sonstige Drehmoment übertragende Bauteile
Gegenstand dieses Abschnitts sind unter anderem Motorbremsen, Getriebebremsen, Antriebsstrangbremsen und Bauteile, die im Sinne des Simulationsinstruments als Dauerbremseinrichtungen gelten. Zu diesen Bauteilen zählen z. B. Anfahrelemente für Fahrzeuge wie einfache nasse Getriebeeingangskupplungen oder hydrodynamische Kupplungen.
5.1. Verfahren zur Ermittlung der Schleppverluste von Dauerbremseinrichtungen
Beim Schleppdrehmomentverlust einer Dauerbremseinrichtung handelt es sich um eine Funktion der Drehzahl des Bremsenrotors. Da für die Dauerbremseinrichtung verschiedene Einbauorte innerhalb des Antriebsstrangs des Fahrzeugs in Frage kommen, ist die Drehzahl des Bremsenrotors vom Antriebsteil (= Drehzahlreferenz) und vom Übersetzungsverhältnis zwischen dem Antriebsteil und dem Bremsenrotor abhängig – siehe Tabelle 2.
Tabelle 2
Drehzahlen des Bremsenrotors
|
Anordnung |
Drehzahlreferenz |
Berechnung der Drehzahl des Bremsenrotors |
||
|
Motordrehzahl |
nretarder = nengine * istep-up |
||
|
Drehzahl der Getriebeeingangswelle |
nretarder = ntransm.input * istep-up = ntransm.output * itransm * istep-up |
||
|
Drehzahl der Getriebeausgangswelle |
nretarder = ntransm.output * istep-up |
dabei gilt:
|
istep-up |
= |
Übersetzungsverhältnis ins Schnelle = Drehzahl des Bremsenrotors/Drehzahl des Antriebsteils |
|
itransm |
= |
Übersetzungsverhältnis = Getriebeeingangsdrehzahl/Getriebeausgangsdrehzahl |
Dauerbremseinrichtungen, die untrennbar in den Motor eingebaut sind, müssen zusammen mit dem Motor geprüft werden. Diese untrennbar in den Motor eingebauten Dauerbremseinrichtungen sind nicht Gegenstand dieses Abschnitts.
Für Dauerbremseinrichtungen, die vom Antriebsstrang oder Motor durch gleich welche Art von Kupplung getrennt werden können, gilt im getrennten Zustand eine Rotordrehzahl von null, wodurch sich keinerlei Leistungsverluste ergeben.
Die Messung der Schleppverluste der Bremseinrichtungen muss anhand eines der beiden folgenden Verfahren erfolgen:
|
(1) |
Messung an der Dauerbremseinrichtung als Einzelkomponente |
|
(2) |
Messung zusammen mit dem Getriebe |
5.1.1. Allgemeine Anforderungen
Falls die Verluste an der Dauerbremseinrichtung als Einzelkomponente gemessen werden, wirken sich die Drehmomentverluste in den Lagern der Prüfanordnung auf die Messergebnisse aus. Es ist zulässig, diese Lagerverluste zu messen und anschließend von den Messergebnissen für die Schleppverluste der Bremseinrichtungen abzuziehen.
Der Hersteller muss dafür sorgen, dass die für die Messungen verwendete Dauerbremseinrichtung den Zeichnungsvorgaben für Seriendauerbremseinrichtungen entspricht.
Änderungen an der Dauerbremseinrichtung sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass die in diesem Anhang genannten Prüfanforderungen erfüllt werden, z. B. zur Anbringung von Messsensoren oder zur Anpassung externer Ölkonditionierungssysteme.
Auf Grundlage der in Anlage 6 dieses Anhangs beschriebenen Familie können die bei Getrieben mit Dauerbremseinrichtung gemessenen Schleppverluste für das gleiche (bzw. ein ähnliches) Getriebe ohne Dauerbremseinrichtung verwendet werden.
Zur Messung von Drehmomentverlusten bei Varianten mit und ohne Dauerbremseinrichtung ist es zulässig, die gleiche Getriebeeinheit zu verwenden.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass die in diesem Anhang aufgeführten Anforderungen erfüllt werden.
5.1.2. Einlaufen
Auf Ersuchen des Antragstellers kann die Dauerbremseinrichtung einem Einlaufverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einlaufverfahren:
5.1.2.1 Für den Fall, dass der Hersteller die Dauerbremseinrichtung einem Einlaufverfahren unterzieht, darf die Einlaufzeit für die Bremseinrichtung ohne aufgebrachtes Drehmoment höchstens 100 Stunden betragen. Optional kann das Einlaufverfahren anteilig – bis zu 6 Stunden – mit aufgebrachtem Drehmoment durchgeführt werden.
5.1.3. Prüfbedingungen
5.1.3.1. Umgebungstemperatur
Die bei der Prüfung herrschende Umgebungstemperatur muss in einem Bereich von 25 °C ± 10 K liegen.
Die Messung der Umgebungstemperatur muss 1 m seitlich neben der Dauerbremseinrichtung erfolgen.
5.1.3.2. Umgebungsdruck
Bei magnetischen Dauerbremseinrichtungen muss der Umgebungsdruck entsprechend der internationalen Standardatmosphäre (ISA) laut ISO 2533 mindestens 899 hPa betragen.
5.1.3.3. Öl- bzw. Wassertemperatur
Bei hydrodynamischen Dauerbremseinrichtungen:
Mit Ausnahme der Flüssigkeit ist keine externe Beheizung zulässig.
Für den Fall, dass die Prüfung als Einzelkomponente erfolgt, darf die Temperatur der Flüssigkeit (Öl oder Wasser) höchstens 87 °C betragen.
Erfolgt die Prüfung zusammen mit dem Getriebe, finden die für die Getriebeprüfung geltenden Grenzwerte für die Öltemperatur Anwendung.
5.1.3.4. Öl- bzw. Wasserqualität
Für die Prüfung muss neues, für den europäischen Markt empfohlenes Öl für die erste Befüllung verwendet werden.
Bei Dauerbremseinrichtungen auf Wasserbasis muss die Wasserqualität den Vorgaben genügen, die der Hersteller für die Bremseinrichtung festgelegt hat. Als Wasserdruck muss ein fester Wert eingestellt werden, der den Fahrzeugbedingungen nahekommt (relativer Druck von 1 ± 0,2 bar am Eingangsschlauch der Dauerbremseinrichtung).
5.1.3.5. Ölviskosität
Gibt es mehrere Empfehlungen für die erste Ölbefüllung, werden sie als gleichwertig behandelt, sofern sich ihre jeweilige kinematische Viskosität bei gleicher Temperatur um nicht mehr als 50 % voneinander unterscheidet (innerhalb des angegebenen Toleranzbereichs für KV100).
5.1.3.6. Öl- bzw. Wasserstand
Der Öl-/Wasserstand muss den für die Dauerbremseinrichtung geltenden Vorgaben genügen.
5.1.4. Montage
Die elektrische Maschine, der Drehmomentsensor und der Drehzahlsensor müssen an der Eingangsseite der Dauerbremseinrichtung bzw. des Getriebes montiert sein.
Beim der Anbringung muss für die Dauerbremseinrichtung (und das Getriebe) ein Neigungswinkel wie beim Einbau in das Fahrzeug gemäß Homologationszeichnung ± 1° bzw. von 0° ± 1° eingehalten werden.
5.1.5. Messeinrichtungen
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.4.
5.1.6. Prüfverfahren
5.1.6.1. Kompensation Nulldrehmomentsignal:
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.6.1.
5.1.6.2. Messsequenz
Die Messsequenz für die Drehmomentverluste bei der Prüfung der Dauerbremseinrichtung muss den für die Getriebeprüfung geltenden Bestimmungen gemäß Absatz 3.1.6.3.2 bis 3.1.6.3.5 entsprechen.
5.1.6.2.1. Messung an der Dauerbremseinrichtung als Einzelkomponente
Wird die Dauerbremseinrichtung als Einzelkomponente geprüft, muss die Messung der Drehmomentverluste unter Verwendung folgender Drehzahlpunkte erfolgen:
200, 400, 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, 3 500, 4 000, 4 500, 5 000 und weiter bis zur maximalen Drehzahl des Bremsenrotors.
5.1.6.2.2. Messung zusammen mit dem Getriebe
5.1.6.2.2.1. Für den Fall, dass die Dauerbremseinrichtung zusammen mit einem Getriebe geprüft wird, muss der gewählte Getriebegang zulassen, dass die Dauerbremseinrichtung mit maximaler Rotordrehzahl betrieben wird.
5.1.6.2.2. Der Drehmomentverlust muss bei der Betriebsdrehzahl gemessen werden, die für die zugehörige Getriebeprüfung angegeben ist.
5.1.6.2.2.3. Auf Wunsch des Herstellers können bei Getriebeeingangsdrehzahlen von unter 600 U/min weitere Messpunkte hinzugefügt werden.
5.1.6.2.2.4. Der Hersteller hat die Möglichkeit, die Verluste der Dauerbremseinrichtung von den Verlusten des Getriebes insgesamt abzugrenzen, indem er die Prüfungen in der nachstehend beschriebenen Reihenfolge vornimmt:
|
(1) |
Die Messung des lastunabhängigen Drehmomentverlusts für das gesamte Getriebe einschließlich Dauerbremseinrichtung erfolgt bei Prüfungen in einem der höheren Gänge gemäß Absatz 3.1.2 = Tl,in,withret |
|
(2) |
Die Dauerbremseinrichtung samt zugehöriger Teile wird durch Teile ersetzt, die für die entsprechende Getriebevariante ohne Dauerbremseinrichtung erforderlich sind. Die Messung von Punkt 1 wird wiederholt. = Tl,in,withoutret |
|
(3) |
Zur Ermittlung des lastunabhängigen Drehmomentverlusts der Dauerbremseinrichtung werden die Differenzen zwischen den beiden Prüfdatensätzen berechnet = Tl,in,retsys = Tl,in,withret – Tl,in,withoutret |
5.1.7. Messsignale und Datenaufzeichnung
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.5.
5.1.8. Validierung der Messwerte
Alle aufgezeichneten Daten müssen derart geprüft und verarbeitet werden, wie es für die Getriebeprüfung unter Absatz 3.1.7 beschrieben ist.
5.2. Ergänzung zu den für das Simulationsinstrument zu verwendenden Eingabedateien
5.2.1. Als Drehmomentverlust der Dauerbremseinrichtung für Drehzahlen unter der niedrigsten Messdrehzahl muss der bei dieser niedrigsten Messdrehzahl gemessene Drehmomentverlust eingestellt werden.
5.2.2. Für den Fall, dass die Verluste der Dauerbremseinrichtung durch Berechnung der Differenzen zwischen den Datensätzen (Prüfung mit und ohne Dauerbremseinrichtung, siehe Absatz 5.1.6.2.2.4) von den Gesamtverlusten abgegrenzt wurden, sind die tatsächlichen Drehzahlen des Bremsenrotors vom Einbauort der Dauerbremseinrichtung und/oder von der gewählten Gangübersetzung sowie vom Übersetzungsverhältnis der Dauerbremseinrichtung abhängig und können demnach von den gemessenen Drehzahlen an der Eingangswelle des Getriebes abweichen. Das Verhältnis zwischen den tatsächlichen Drehzahlen des Bremsenrotors und den gemessenen Schleppverlustdaten muss gemäß der Beschreibung in Absatz 5.1 (Tabelle 2) berechnet werden.
5.2.3. Die Daten für die Abbildung der Drehmomentverluste müssen gemäß den Angaben in Anlage 12 dieses Anhangs formatiert und gespeichert werden.
6. Zusätzliche Bauteile des Antriebsstrangs/Winkelgetriebe
6.1. Verfahren zur Ermittlung der Winkelgetriebeverluste
Die Winkelgetriebeverluste müssen entsprechend einem der folgenden Fälle ermittelt werden:
6.1.1. Fall A: Messung an einem separaten Winkelgetriebe
Für die Messung der Drehmomentverluste bei einem separaten Winkelgetriebe stehen die drei Optionen zur Verfügung, die für die Ermittlung der Getriebeverluste gelten:
|
Option 1 |
: |
Gemessene drehmomentunabhängige Verluste und berechnete drehmomentabhängige Verluste (Getriebeprüfoption 1) |
|
Option 2 |
: |
Gemessene drehmomentunabhängige Verluste und gemessene drehmomentabhängige Verluste bei Volllast (Getriebeprüfoption 2) |
|
Option 3 |
: |
Messung unter Volllastpunkten (Getriebeprüfoption 3) |
Die Winkelgetriebeverluste sind nach dem Verfahren gemäß der Beschreibung für die zugehörige Getriebeprüfoption in Absatz 3 zu messen, wobei für die Anforderungen folgende Abweichung gilt:
6.1.1.1. Geltender Drehzahlbereich:
Von 200 U/min (an der Welle, die mit dem Winkelgetriebe verbunden ist) bis zur maximalen Drehzahl gemäß Spezifikationen des Winkelgetriebes oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
6.1.1.2 Größe der Drehzahlstufen: 200 U/min
6.1.2. Fall B: Einzelne Messung eines Winkelgetriebes, das mit einem Getriebe verbunden ist
Für den Fall, dass das Winkelgetriebe zusammen mit einem Getriebe geprüft wird, muss die Prüfung entsprechend einer der für die Getriebeprüfung festgelegten Optionen erfolgen:
|
Option 1 |
: |
Gemessene drehmomentunabhängige Verluste und berechnete drehmomentabhängige Verluste (Getriebeprüfoption 1) |
|
Option 2 |
: |
Gemessene drehmomentunabhängige Verluste und gemessene drehmomentabhängige Verluste bei Volllast (Getriebeprüfoption 2) |
|
Option 3 |
: |
Messung unter Volllastpunkten (Getriebeprüfoption 3) |
6.1.2.1. Der Hersteller hat die Möglichkeit, die Winkelgetriebeverluste von den Verlusten des Getriebes insgesamt abzugrenzen, indem er die Prüfungen in der nachstehend beschriebenen Reihenfolge vornimmt:
|
(1) |
Der Drehmomentverlust für das gesamte Getriebe einschließlich Winkelgetriebe wird gemäß den Angaben für die entsprechende Getriebeprüfoption gemessen = Tl,in,withad |
|
(2) |
Das Winkelgetriebe samt zugehöriger Teile wird durch Teile ersetzt, die für die entsprechende Getriebevariante ohne Winkelgetriebe erforderlich sind. Die Messung von Punkt 1 wird wiederholt. = Tl,in,withoutad |
|
(3) |
Zur Ermittlung des Drehmomentverlusts des Winkelgetriebes werden die Differenzen zwischen den beiden Prüfdatensätzen = Tl,in,adsys = Tl,in,withad – Tl,in,withoutad |
6.2. Ergänzung zu den Eingabedateien für das Simulationsinstrument
6.2.1 Als Drehmomentverlust für Drehzahlen unter der oben genannten Mindestdrehzahl ist der Drehmomentverlust bei der Mindestdrehzahl einzustellen.
6.2.2. In den Fällen, in denen es sich bei der höchsten geprüften Eingangsdrehzahl des Winkelgetriebes um die letzte Drehzahlstufe unterhalb des festgelegten zulässigen Höchstwerts für die Winkelgetriebedrehzahl handelt, ist eine Extrapolation des Drehmomentverlusts bis zur höchsten Drehzahl mit linearer Regression anhand der beiden letzten gemessenen Drehzahlstufen vorzunehmen.
6.2.3. Zur Berechnung der Drehmomentverlustdaten für die Eingangswelle des mit dem Winkelgetriebe zu verbindenden Getriebes ist auf die lineare Interpolation und Extrapolation zurückzugreifen.
7. Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
7.1. Alle Getriebe, Drehmomentwandler, sonstigen Drehmoment übertragenden Bauteile und zusätzlichen Bauteile des Antriebsstrangs müssen so hergestellt werden, dass sie mit dem genehmigten Typ übereinstimmen, was die Beschreibung laut Zertifizierung und deren Anhängen anbelangt. Die zertifizierten CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften müssen mit den Vorgaben nach Artikel 12 der Richtlinie 2007/46/EG übereinstimmen.
7.2. Der Drehmomentwandler, sonstige Drehmoment übertragende Bauteile und zusätzliche Bauteile des Antriebsstrangs sind von den Bestimmungen für die Prüfung der Übereinstimmung der Produktion nach Abschnitt 8 dieses Anhangs ausgenommen.
7.3. Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss anhand der Beschreibung in den Zertifizierungen laut Anlage 1 dieses Anhangs überprüft werden.
7.4. Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss entsprechend den in diesem Abschnitt genannten besonderen Bedingungen bewertet werden.
7.5. Einmal pro Jahr muss der Hersteller mindestens die Anzahl der Getriebe prüfen, die in Tabelle 3 angegeben ist, wobei die Gesamtproduktionszahl des Herstellers für Getriebe zugrunde gelegt wird. Zur Ermittlung der Produktionszahlen werden nur diejenigen Getriebe berücksichtigt, für die die in dieser Verordnung genannten Anforderungen gelten.
7.6. Jedes vom Hersteller geprüfte Getriebe muss repräsentativ für eine bestimmte Familie sein. Unbeschadet der Bestimmungen gemäß Absatz 7.10. muss nur ein Getriebe pro Familie geprüft werden.
7.7. Bei einer Jahresgesamtproduktion von 1 001 bis 10 000 Getrieben muss die Wahl der Familie, an der die Prüfung erfolgen soll, gemeinsam vom Hersteller und der Genehmigungsbehörde getroffen werden.
7.8. Bei einer Jahresgesamtproduktion von mehr als 10 000 Getrieben muss stets die Getriebefamilie mit dem höchsten Produktionsvolumen geprüft werden. Der Hersteller muss der Genehmigungsbehörde gegenüber die Anzahl der durchgeführten Prüfungen und die Wahl der Familien begründen (z. B. durch Nachweis der Verkaufszahlen). Die Wahl der übrigen Familien, an denen die Prüfungen durchgeführt werden sollen, muss gemeinsam vom Hersteller und der Genehmigungsbehörde getroffen werden.
Tabelle 3
Stichprobengröße für die Übereinstimmungsprüfung
|
Jahresgesamtproduktion an Getrieben |
Anzahl der Prüfungen |
|
0 – 1 000 |
0 |
|
> 1 000 – 10 000 |
1 |
|
> 10 000 – 30 000 |
2 |
|
> 30 000 |
3 |
|
> 100 000 |
4 |
7.9. Für die Prüfungen, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt werden sollen, muss die Genehmigungsbehörde gemeinsam mit dem Hersteller die zu prüfenden Getriebetypen festlegen. Dabei muss die Genehmigungsbehörde sicherstellen, dass die ausgewählten Getriebearten nach denselben Normen hergestellt werden wie bei der Serienproduktion.
7.10. Liegt das Ergebnis einer Prüfung gemäß Nummer 8 über den in Absatz 8.1.3 genannten Angaben, müssen drei weitere Getriebe aus derselben Familie geprüft werden. Besteht mindestens ein weiteres Getriebe die Prüfung nicht, gelten die Bestimmungen von Artikel 23.
8. Überprüfung der Übereinstimmung der Produktion
Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist in vorheriger Absprache zwischen einer Genehmigungsbehörde und dem Antragsteller folgendes Verfahren anzuwenden:
8.1. Übereinstimmungsprüfungen für Getriebe
8.1.1. Der Wirkungsgrad des Getriebes ist anhand des vereinfachten Verfahrens gemäß der Beschreibung in diesem Abschnitt zu ermitteln.
8.1.2.1. Es gelten sämtliche in diesem Anhang festgelegten Randbedingungen für die Zertifizierungsprüfung.
Werden für die Ölart, die Öltemperatur und den Neigungswinkel andere Randbedingungen verwendet, muss der Hersteller den Einfluss dieser Bedingungen und derer, die für die Zertifizierung betreffend den Wirkungsgrad verwendet wurden, deutlich aufzeigen.
8.1.2.2. Für die Messung muss dieselbe Prüfoption verwendet werden wie für die Zertifizierungsprüfung, begrenzt auf die Betriebspunkte gemäß Angaben in diesem Abschnitt.
8.1.2.2.1. Für den Fall, dass Option 1 für die Zertifizierungsprüfung verwendet wurde, müssen die drehmomentunabhängigen Verluste für die beiden Drehzahlen laut Angaben in Absatz 8.1.2.2.2 Ziffer 3 gemessen und für die Berechnung der Drehmomentverluste an den drei höchsten Drehmomentstufen verwendet werden.
Für den Fall, dass Option 2 für die Zertifizierungsprüfung verwendet wurde, müssen die drehmomentunabhängigen Verluste für die beiden Drehzahlen nach Absatz 8.1.2.2.2 Ziffer 3 gemessen werden. Die drehmomentabhängigen Verluste bei maximalem Drehmoment müssen bei denselben beiden Drehzahlen gemessen werden. Die Drehmomentverluste an den drei höchsten Drehmomentstufen müssen per Interpolation gemäß der Beschreibung im Zertifizierungsverfahren ermittelt werden.
Für den Fall, dass Option 3 für die Zertifizierungsprüfung verwendet wurde, müssen die Drehmomentverluste für die 18 Betriebspunkte nach den Angaben in Absatz 8.1.2.2.2 gemessen werden.
8.1.2.2.2. Der Wirkungsgrad des Getriebes muss für 18 Betriebspunkte ermittelt werden, für die folgende Anforderungen gelten:
|
(1) |
Zu verwendende Gänge: Für die Prüfung müssen die 3 höchsten Gänge des Getriebes verwendet werden. |
|
(2) |
Drehmomentbereich: Es müssen die 3 höchsten Drehmomentstufen, die für die Zertifizierung gemeldet wurden, geprüft werden. |
|
(3) |
Drehzahlbereich: Es müssen folgende zwei Eingangsdrehzahlen des Getriebes geprüft werden: 1 200 U/min und 1 600 U/min. |
8.1.2.3 Für jeden der 18 Betriebspunkte muss der Wirkungsgrad des Getriebes anhand folgender Gleichung berechnet werden:

dabei gilt:
|
η i |
= |
Wirkungsgrad jedes Betriebspunkts von 1 bis 18 |
|
Tout |
= |
Ausgangsdrehmoment [Nm] |
|
Tin |
= |
Eingangsdrehmoment [Nm] |
|
nin |
= |
Eingangsdrehzahl [U/min] |
|
nout |
= |
Ausgangsdrehzahl [U/min] |
8.1.2.4 Der Gesamtwirkungsgrad während der Prüfungen, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt werden (ηA,CoP ), errechnet sich aus dem arithmetischen Mittel der Wirkungsgrade aller 18 Betriebspunkte.

8.1.3 Die Prüfung, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt wird, gilt als bestanden, wenn folgende Bedingung zutrifft:
Der Wirkungsgrad des geprüften Getriebes während der Prüfung, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt wird (ηA,CoP ), darf nicht unter X % des für den Getriebetyp genehmigten Wirkungsgrads ηA,TA liegen.
ηA,TA – ηA,CoP ≤ X
Bei Schaltgetrieben, automatisierten Schaltgetrieben und Doppelkupplungsgetrieben muss X durch 1,5 % und bei Automatikgetrieben bzw. bei Getrieben mit mehr als 2 Reibungsschaltkupplungen durch 3 % ersetzt werden.
Anlage 1
MUSTER EINER BESCHEINIGUNG FÜR EIN BAUTEIL, EINE SELBSTÄNDIGE TECHNISCHE EINHEIT ODER EIN SYSTEM
Größtes Format: A4 [210 × 297 mm]
BESCHEINIGUNG DER EIGENSCHAFTEN EINER GETRIEBEFAMILIE/DREHMOMENTWANDLERFAMILIE/FAMILIE SONSTIGER DREHMOMENT ÜBERTRAGENDER BAUTEILE/FAMILIE ZUSÄTZLICHER BAUTEILE DES ANTRIEBSSTRANGS (1) IN BEZUG AUF DIE CO2-EMISSIONEN UND DEN KRAFTSTOFFVERBRAUCH
|
Mitteilung über:
|
Stempel der Behörde
|
einer Bescheinigung im Hinblick auf die Verordnung (EG) Nr. 595/2009, durchgeführt durch die Verordnung (EU) 2017/2400.
Verordnung (EG) Nr. XXXXX und Verordnung (EU) 2017/2400, zuletzt geändert durch …
Nummer der Bescheinigung:
Hash:
Grund für die Erweiterung:
ABSCHNITT I
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Typ:
0.3. Kennzeichen zur Typidentifizierung, sofern am Bauteil vorhanden
0.3.1. Stelle, an der diese Bezeichnung angebracht ist:
0.4. Name und Anschrift des Herstellers:
0.5. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.6. Namen und Anschriften der Fertigungsstätten:
0.7. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
ABSCHNITT II
1. (Gegebenenfalls) zusätzliche Angaben: siehe Beiblatt
1.1. Gewählte Möglichkeit zur Bestimmung der Drehmomentverluste
1.1.1. Bei Getrieben: für jeden Getriebegang separat für die beiden Ausgangsdrehmomentbereiche 0-10 kNm und >10 kNm angeben.
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts
4. Nummer des Prüfberichts
5. Bemerkungen (falls zutreffend): siehe Beiblatt
6. Ort
7. Date
8. Unterschrift
Anlagen:
|
1. |
Beschreibungsbogen |
|
2. |
Prüfprotokoll |
(1) Nichtzutreffendes streichen (trifft mehr als eine Angabe zu, ist unter Umständen nichts zu streichen).
Anlage 2
Getriebe-Beschreibungsbogen
|
Beschreibungsbogen Nr.: |
Betrifft: Ausstellungsdatum: Änderungsdatum: |
gemäß …
Getriebetyp
…
0. ALLGEMEIN
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Getriebetyp
0.4. Getriebefamilie:
0.5. Getriebetyp als selbstständige technische Einheit/Getriebefamilie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am Getriebe vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
TEIL 1
WESENTLICHE MERKMALE DES (STAMM-) GETRIEBES UND DER GETRIEBETYPEN INNERHALB EINER GETRIEBEFAMILIE
|
|
Stammgetriebe |
Mitglied einer Getriebefamilie| |
|
||
|
|
|||||
|
oder Getriebetyp |
|
||||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. ALLGEMEIN
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Type
0.3. Handelsnamen (sofern vorhanden):
0.4. Merkmale zur Typidentifizierung:
0.5. Anbringungsstelle dieser Merkmale
0.6. Name und Anschrift des Herstellers:
0.7. Anbringungsstelle und Anbringungsart des Genehmigungszeichens
0.8. Namen und Anschriften der Fertigungsstätten
0.9. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
1.0. SPEZIFISCHE ANGABEN ZUM GETRIEBE/ZUR GETRIEBEFAMILIE
1.1. Getriebeübersetzung, Getriebeschema und Leistungsfluss
1.2. Abstand der Wellenachsen bei Getrieben mit Vorlegewelle
1.3. Art der Lager an den entsprechenden Stellen (falls vorhanden)
1.4. Art der Schaltelemente (Zahnkupplungen einschließlich Synchronringe oder Reibungskupplungen) an den entsprechenden Stellen (falls vorhanden)
1.5. Zahnradbreite für Option 1 oder Zahnradbreite ± 1 mm für Option 2 oder 3
1.6. Gesamtzahl der Vorwärtsgänge
1.7. Zahl der Zahnschaltkupplungen
1.8. Zahl der Synchronringe
1.9. Zahl der Scheiben bei Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben)
1.10. Außendurchmesser der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben)
1.11. Oberflächenrauheit der Zähne (einschließlich Zeichnungen)
1.12. Zahl der dynamischen Wellendichtringe
1.13. Ölfluss zur Schmierung und Kühlung pro Umdrehung der Getriebeeingangswelle
1.14. Viskosität des Öls bei 100 °C (± 10 %)
1.15. Systemdruck bei hydraulisch gesteuerten Getrieben
1.16. Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen.
1.17. Angegebener Ölstand (± 1mm)
1.18. Getriebeübersetzungen [-] und maximales Eingangsdrehmoment [Nm], maximale Eingangsleistung (kW) und maximale Eingangsdrehzahl [U/min]
|
|
1. Gang |
|
|
2. Gang |
|
|
3. Gang |
|
|
4. Gang |
|
|
5. Gang |
|
|
6. Gang |
|
|
7. Gang |
|
|
8. Gang |
|
|
9. Gang |
|
|
10. Gang |
|
|
11. Gang |
|
|
12. Gang |
|
|
n. Gang |
LISTE DER ANLAGEN
|
Nr. |
Beschreibung: |
Ausstellungsdatum: |
|
1 |
Angaben zu den Bedingungen der Getriebeprüfung |
… |
|
2 |
… |
|
Anlage 1 zum Getriebe-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
|
ja/nein |
||
|
ja/nein |
||
|
|
||
|
|
Anlage 3
Beschreibungsbogen für einen hydrodynamischen Drehmomentwandler (TC)
|
Beschreibungsbogen Nr.: |
Betrifft: Ausstellungsdatum: Änderungsdatum: |
gemäß …
TC-Typ
…
0. ALLGEMEIN
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. TC-Typ
0.4. TC-Familie
0.5. TC-Typ als selbstständige technische Einheit/TC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am TC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
TEIL 1
WESENTLICHE MERKMALE DES (STAMM-) TC UND DER TC-TYPEN INNERHALB EINER TC-FAMILIE
|
|
Stamm-TC oder |
TC einer TC-Familie |
|
||
|
|
|||||
|
TC-Typ |
#1 |
#2 |
#3 |
|
|
|
|
|||||
|
|
|||||
|
|
|
|
|
|
|
0.0. ALLGEMEIN
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Type
0.3. Handelsnamen (sofern vorhanden):
0.4. Merkmale zur Typidentifizierung:
0.5. Anbringungsstelle dieser Kennzeichnung
0.6. Name und Anschrift des Herstellers:
0.7. Anbringungsstelle und Anbringungsart des Genehmigungszeichens
0.8. Namen und Anschriften der Fertigungsstätten
0.9. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
1.0. SPEZIFISCHE ANGABEN ZUM DREHMOMENTWANDLER/ZUR DREHMOMENTWANDLERFAMILIE
1.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
1.1.1. Außendurchmesser des torusförmigen Arbeitsraums
1.1.2. Innendurchmesser des torusförmigen Arbeitsraums
1.1.3. Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung
1.1.4. Breite des torusförmigen Arbeitsraums
1.1.5. Ölart gemäß den Prüfvorschriften
1.1.6. Konstruktion der Schaufeln;
1.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe (parallele Anordnung)
1.2.1. Außendurchmesser des torusförmigen Arbeitsraums
1.2.2. Innendurchmesser des torusförmigen Arbeitsraums
1.2.3. Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung
1.2.4. Breite des torusförmigen Arbeitsraums
1.2.5. Ölart gemäß den Prüfvorschriften
1.2.6. Konstruktion der Schaufeln;
1.2.7. Getriebeschema und Leistungsfluss im Drehmomentwandelmodus;
1.2.8. Art der Lager an den entsprechenden Positionen (falls vorhanden);
1.2.9. Art der Kühl-/Schmiermittelpumpe (Verweis auf die Teileliste)
1.2.10. Art der Schaltelemente (Zahnkupplungen (einschließlich Synchronringe) ODER Reibungskupplungen) an den entsprechenden Positionen, falls vorhanden.
1.2.11. Ölstand entsprechend Zeichnung bezogen auf die zentrale Achse
LISTE DER ANLAGEN
|
Nr. |
Beschreibung: |
Ausstellungsdatum: |
|
1 |
Angaben zu den Bedingungen der Drehmomentwandlerprüfung |
… |
|
2 |
… |
|
Anlage 1 zum Drehmomentwandler-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
1. Messverfahren
1.1. TC mit mechanischem Getriebe
ja/nein
1.2. TC als selbstständige Einheit
ja/nein
Anlage 4
Beschreibungsbogen für sonstige Drehmoment übertragende Bauteile (OTTC)
|
Beschreibungsbogen Nr.: |
Betrifft: Ausstellungsdatum: Änderungsdatum: |
gemäß …
Typ des OTTC
…
0. ALLGEMEIN
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Typ des OTTC
0.4. OTTC-Familie
0.5. OTTC-Typ als selbstständige technische Einheit/OTTC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am OTTC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
TEIL 1
WESENTLICHE MERKMALE DES (STAMM-) OTTC UND DER OTTC-TYPEN INNERHALB EINER OTTC-FAMILIE
|
|
Stamm-OTTC |
Mitglied einer OTTC-Familie |
|
||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. ALLGEMEIN
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Type
0.3. Handelsnamen (sofern vorhanden):
0.4. Merkmale zur Typidentifizierung:
0.5. Anbringungsstelle dieser Kennzeichnung
0.6. Name und Anschrift des Herstellers:
0.7. Anbringungsstelle und Anbringungsart des Genehmigungszeichens
0.8. Namen und Anschriften der Fertigungsstätten
0.9. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
1.0. SPEZIFISCHE ANGABEN ZUM OTTC
1.1. Für hydrodynamische Drehmoment übertragende Bauteile (OTTC)/Dauerbremseinrichtungen
1.1.1. Außendurchmesser des torusförmigen Arbeitsraums
1.1.2. Breite des torusförmigen Arbeitsraums
1.1.3. Konstruktion der Schaufeln;
1.1.4. Betriebsfluid
1.1.5. Außendurchmesser des torusförmigen Arbeitsraums – Innendurchmesser des torusförmigen Arbeitsraums (OD-ID)
1.1.6. Zahl der Schaufeln
1.1.7. Viskosität des Betriebsfluids
1.2. Für magnetisch Drehmoment übertragende Bauteile (OTTC)/Dauerbremseinrichtungen
1.2.1. Konstruktion der Trommel (Dauerbremseinrichtung mit Elektro- oder Dauermagneten)
1.2.2. Außendurchmesser des Rotors
1.2.3. Konstruktion der Kühlschaufeln
1.2.4. Konstruktion der Schaufeln;
1.2.5. Betriebsfluid
1.2.6. Außendurchmesser des Rotors – Innendurchmesser des Rotors (OD-ID)
1.2.7. Zahl der Rotoren
1.2.8. Zahl der Kühlschaufeln/Schaufeln
1.2.9. Viskosität des Betriebsfluids
1.2.10. Zahl der Arme
1.3. Für Drehmoment übertragenden Bauteile (OTTC)/hydrodynamische Kupplung
1.3.1. Außendurchmesser des torusförmigen Arbeitsraums
1.3.2. Breite des torusförmigen Arbeitsraums
1.3.3. Konstruktion der Schaufeln
1.3.4. Viskosität des Betriebsfluids
1.3.5. Außendurchmesser des torusförmigen Arbeitsraums – Innendurchmesser des torusförmigen Arbeitsraums (OD-ID)
1.3.6. Zahl der Schaufeln
LISTE DER ANLAGEN
|
Nr. |
Beschreibung: |
Ausstellungsdatum: |
|
1 |
Angaben zu den Bedingungen der OTTC-Prüfung |
… |
|
2 |
… |
|
Anlage 1 zum OTTC-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
1. Messverfahren
|
|
Mit Getriebe ja/nein |
|
|
Mit Motor ja/nein |
|
|
Antriebsmechanismus ja/nein |
|
|
direkt ja/nein |
2. Maximale Prüfdrehzahl des Teils des OTTC mit der größten Drehmomentaufnahme, z. B. des Rotors der Dauerbremseinrichtung [U/min]
Anlage 5
Beschreibungsbogen für zusätzliche Bauteile des Antriebsstrangs (ADC)
|
Beschreibungsbogen Nr.: |
Betrifft: Ausstellungsdatum: Änderungsdatum: |
gemäß …
ADC-Typ:
…
0. ALLGEMEIN
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. ADC-Typ:
0.4. ADC-Familie:
0.5. ADC-Typ als selbstständige technische Einheit/ADC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am ADC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
TEIL 1
WESENTLICHE MERKMALE DES (STAMM-)ADC UND DER ADC-TYPEN INNERHALB EINER ADC-FAMILIE
|
|
Stamm-ADC |
Mitglied einer ADC-Familie |
|
||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. ALLGEMEIN
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Type
0.3. Handelsnamen (sofern vorhanden):
0.4. Merkmale zur Typidentifizierung:
0.5. Anbringungsstelle dieser Kennzeichnung
0.6. Name und Anschrift des Herstellers:
0.7. Anbringungsstelle und Anbringungsart des Genehmigungszeichens
0.8. Namen und Anschriften der Fertigungsstätten
0.9. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
1.0. SPEZIFISCHE ANGABEN ZUM ADC/zum WINKELGETRIEBE
1.1. Getriebeübersetzung und Getriebeschema
1.2. Winkel zwischen Ein- und Ausgangswelle
1.3. Art der Lager an den entsprechenden Positionen.
1.4. Anzahl der Zähne pro Gangrad
1.5. Zahnradbreite
1.6. Zahl der dynamischen Wellendichtringe
1.7. Viskosität des Öls (± 10 %)
1.8. Oberflächenrauheit der Zähne
1.9. Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen.
1.10. Ölstand innen (± 1mm)
LISTE DER ANLAGEN
|
Nr. |
Beschreibung: |
Ausstellungsdatum: |
|
1 |
Angaben zu den Bedingungen der ADC-Prüfung |
… |
|
2 |
… |
|
Anlage 1 zum ADC-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
1. Messverfahren
|
mit Getriebe |
ja/nein |
|
Antriebsmechanismus |
ja/nein |
|
direkt |
ja/nein |
2. Maximale Prüfgeschwindigkeit am ADC-Eingang [U/min]
Anlage 6
Familienkonzept
1. Allgemeines
Eine Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs ist durch Konstruktions- und Leistungsmerkmale gekennzeichnet. Diese müssen für alle Mitglieder einer Familie die gleichen sein. Welche Getriebe, Drehmomentwandler, sonstige Drehmoment übertragenden Bauteile oder zusätzlichen Bauteile des Antriebsstrangs zu einer Familie gehören, kann der Hersteller nach eigenem Ermessen festlegen, solange er sich dabei an die Vorschriften dieser Anlage hält. Die entsprechende Familie ist von der Genehmigungsbehörde zu genehmigen. Der Hersteller muss der Genehmigungsbehörde die entsprechenden Daten zu den Mitgliedern einer Familie zur Verfügung stellen.
1.1. Sonderfälle
In manchen Fällen können Wechselwirkungen zwischen den Parametern vorliegen. Dies muss berücksichtigt werden, damit gewährleistet ist, dass einer Familie nur Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile oder zusätzliche Bauteile des Antriebsstrangs mit ähnlichen Eigenschaften zugeordnet werden. Diese Fälle sind vom Hersteller zu ermitteln und der Genehmigungsbehörde mitzuteilen. Sie werden anschließend als Kriterium zur Festlegung einer neuen Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs berücksichtigt.
Sind Einrichtungen oder Merkmale vorhanden, die in Absatz 9 nicht aufgeführt sind, aber die Leistung stark beeinflussen, so muss sie der Hersteller nach den anerkannten Regeln der Technik feststellen und der Genehmigungsbehörde mitteilen. Sie werden anschließend als Kriterium zur Festlegung einer neuen Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs berücksichtigt.
1.2. Im Familienkonzept werden Kriterien und Parameter festgelegt, die die Hersteller in die Lage versetzen sollen, Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile oder zusätzliche Bauteile des Antriebsstrangs in Familien und Typen mit ähnlichen oder gleichen CO2-relevanten Daten einzuteilen.
2. Die Genehmigungsbehörde kann zu dem Schluss gelangen, dass der höchste Drehmomentverlust der Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder Familie von zusätzlichen Bauteilen des Antriebsstrangs durch zusätzliche Prüfungen am besten zu bestimmen ist. In diesem Fall muss der Hersteller die geeigneten Angaben zur Bestimmung des Getriebes, des Drehmomentwandlers, des sonstigen Drehmoment übertragenden Bauteils oder des zusätzlichen Bauteils des Antriebsstrangs mit dem voraussichtlich höchsten Drehmomentverlust der Familie vorlegen.
Weisen die Mitglieder einer Familie weitere Merkmale auf, von denen man einen Einfluss auf die Drehmomentverluste erwarten kann, sind diese Merkmale ebenfalls zu bestimmen und bei der Auswahl des Stammmitglieds der Familie zu berücksichtigen.
3. Parameter für die Festlegung der Getriebefamilie
3.1. Folgende Kriterien müssen bei allen zu derselben Familie gehörenden Getrieben gleich sein:
|
a) |
Getriebeübersetzung, Getriebeschema und Leistungsfluss (nur für Vorwärtsgänge mit Ausnahme von Kriechgängen); |
|
b) |
Abstand der Wellenachsen bei Getrieben mit Vorlegewelle; |
|
c) |
Art der Lager an den entsprechenden Positionen (falls vorhanden); |
|
d) |
Art der Schaltelemente (Zahnkupplungen, einschließlich Synchronringe oder Reibungskupplungen an den entsprechenden Positionen) (falls vorhanden). |
3.2. Folgende Kriterien müssen bei allen Getrieben einer Getriebefamilie gleich sein. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Zahradbreite ± 1mm; |
|
b) |
Gesamtzahl der Vorwärtsgänge; |
|
c) |
Zahl der Zahnschaltkupplungen; |
|
d) |
Zahl der Synchronringe; |
|
e) |
Zahl der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben); |
|
f) |
Außendurchmesser der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben); |
|
g) |
Oberflächenrauheit der Zähne; |
|
h) |
Zahl der dynamischen Wellendichtringe; |
|
i) |
Ölfluss zur Schmierung und Kühlung pro Umdrehung der Eingangswelle; |
|
j) |
Viskosität des Öls (± 10 %); |
|
k) |
Systemdruck bei hydraulisch gesteuerten Getrieben; |
|
l) |
Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen. |
|
m) |
angegebener Ölstand (± 1mm) |
4. Wahl des Stammgetriebes
Das Stammgetriebe ist nach den nachfolgend aufgeführten Kriterien auszuwählen.
|
a) |
Größte Zahnradbreite bei Option 1 oder größte Zahnradbreite ± 1 mm bei Option 2 oder Option 3; |
|
b) |
größte Gesamtzahl der Gänge; |
|
c) |
höchste Zahl der Zahnschaltkupplungen; |
|
d) |
höchste Zahl der Synchronringe; |
|
e) |
höchste Zahl der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben); |
|
f) |
größter Außendurchmesser der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben); |
|
g) |
größter Oberflächenrauheitswert der Zähne; |
|
h) |
größte Zahl der dynamischen Wellendichtringe; |
|
i) |
größter Ölfluss zur Schmierung und Kühlung pro Umdrehung der Eingangswelle; |
|
j) |
höchste Ölviskosität; |
|
k) |
höchster Systemdruck bei hydraulisch gesteuerten Getrieben; |
|
l) |
höchster angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen. |
|
m) |
höchster angegebener Ölstand (± 1mm). |
5. Parameter für die Festlegung der Drehmomentwandlerfamilie
5.1. Folgende Kriterien müssen bei allen zu derselben Familie gehörenden Drehmomentwandlern (TC) gleich sein.
5.1.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
|
a) |
Außendurchmesser des torusförmigen Arbeitsraums; |
|
b) |
Innendurchmesser des torusförmigen Arbeitsraums; |
|
c) |
Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung; |
|
d) |
Breite des torusförmigen Arbeitsraums; |
|
e) |
Ölart gemäß den Prüfvorschriften; |
|
f) |
Konstruktion der Schaufeln. |
5.1.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe (parallele Anordnung)
|
a) |
Außendurchmesser des torusförmigen Arbeitsraums; |
|
b) |
Innendurchmesser des torusförmigen Arbeitsraums; |
|
c) |
Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung; |
|
d) |
Breite des torusförmigen Arbeitsraums; |
|
e) |
Ölart gemäß den Prüfvorschriften; |
|
f) |
Konstruktion der Schaufeln; |
|
g) |
Getriebeschema und Leistungsfluss im Drehmomentwandelmodus; |
|
h) |
Art der Lager an den entsprechenden Positionen (falls vorhanden); |
|
i) |
Typ der Kühl-/Schmiermittelpumpe (Verweis auf die Teileliste); |
|
j) |
Art der Schaltelemente (Zahnkupplungen (einschließlich Synchronringe) oder Reibungskupplungen) an den entsprechenden Positionen, falls vorhanden. |
5.1.3. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von hydrodynamischen Drehmomentwandlern mit mechanischem Getriebe (parallele Anordnung) gleich sein. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Ölstand entsprechend Zeichnung bezogen auf die zentrale Achse. |
6. Wahl des Stammdrehmomentwandlers
6.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
Solange alle Kriterien nach Nummer 5.1.1 identisch sind, kann jeder Drehmomentwandler ohne mechanisches Getriebe einer Familie als Stammdrehmomentwandler ausgewählt werden.
6.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe
Der Stamm der Familie hydrodynamischer Drehmomentwandler mit mechanischem Getriebe (Parallelanordnung) ist nach dem nachfolgend aufgeführten Kriterium auszuwählen.
|
a) |
Höchster Ölstand entsprechend Zeichnung bezogen auf die zentrale Achse. |
7. Parameter für die Festlegung der Familie sonstiger Drehmoment übertragender Bauteile (OTTC)
7.1. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von hydrodynamischen Drehmoment übertragenden Bauteilen oder Dauerbremseinrichtungen gleich sein:
|
a) |
Außendurchmesser des torusförmigen Arbeitsraums; |
|
b) |
Breite des torusförmigen Arbeitsraums; |
|
c) |
Konstruktion der Schaufeln. |
|
d) |
Betriebsfluid. |
7.2. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen gleich sein:
|
a) |
Konstruktion der Trommel (Dauerbremseinrichtung mit Elektro- oder Dauermagneten); |
|
b) |
Außendurchmesser des Rotors; |
|
c) |
Konstruktion der Kühlschaufeln; |
|
d) |
Konstruktion der Schaufeln. |
7.3. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen gleich sein:
|
a) |
Außendurchmesser des torusförmigen Arbeitsraums; |
|
b) |
Breite des torusförmigen Arbeitsraums; |
|
c) |
Konstruktion der Schaufeln. |
7.4. Folgende Kriterien müssen alle Mitglieder einer Familie von hydrodynamischen Drehmoment übertragenden Bauteilen oder Dauerbremseinrichtungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Außendurchmesser des torusförmigen Arbeitsraums – Innendurchmesser des torusförmigen Arbeitsraums (OD-ID); |
|
b) |
Zahl der Schaufeln; |
|
c) |
Viskosität des Betriebsfluids (± 50 %). |
7.5. Folgende Kriterien müssen alle Mitglieder einer Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Außendurchmesser des Rotors – Innendurchmesser des Rotors (OD-ID); |
|
b) |
Zahl der Rotoren; |
|
c) |
Zahl der Kühlschaufeln/Schaufeln; |
|
d) |
Zahl der Arme. |
7.6. Folgende Kriterien müssen alle Mitglieder einer Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Viskosität des Betriebsfluids (± 10 %); |
|
b) |
Außendurchmesser des torusförmigen Arbeitsraums – Innendurchmesser des torusförmigen Arbeitsraums (OD-ID); |
|
c) |
Zahl der Schaufeln. |
8. Wahl des Stammbauteils der Familie von Drehmoment übertragenden Bauteilen
8.1. Das Stammbauteil der Familie von hydrodynamischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
|
a) |
Höchstwert: Außendurchmesser des torusförmigen Arbeitsraums – Innendurchmesser des torusförmigen Arbeitsraums (OD-ID); |
|
b) |
größte Zahl der Schaufeln; |
|
c) |
höchste Viskosität des Betriebsfluids. |
8.2. Das Stammbauteil der Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
|
a) |
größter Außendurchmesser des Rotors – größter Innendurchmesser des Rotors (OD-ID); |
|
b) |
größte Zahl der Rotoren; |
|
c) |
größte Zahl der Kühlschaufeln/Schaufeln; |
|
d) |
größte Zahl der Arme. |
8.3. Das Stammbauteil der Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
|
a) |
höchste Viskosität des Betriebsfluids (± 10 %); |
|
b) |
größter Außendurchmesser des torusförmigen Arbeitsraums – größter Innendurchmesser des torusförmigen Arbeitsraums (OD-ID); |
|
c) |
größte Zahl der Schaufeln. |
9. Parameter zur Definition der Familie von zusätzlichen Bauteilen des Antriebsstrangs
9.1 Folgende Kriterien müssen bei allen Mitgliedern einer Familie von zusätzlichen Bauteilen des Antriebsstrangs/von Winkelgetrieben gleich sein:
|
a) |
Getriebeübersetzung und Getriebeschema; |
|
b) |
Winkel zwischen Ein- und Ausgangswelle; |
|
c) |
Art der Lager an den entsprechenden Positionen. |
9.2. Folgende Kriterien müssen alle Mitglieder einer Familie von zusätzlichen Bauteilen des Antriebsstrangs/von Winkelgetrieben gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
|
a) |
Zahnradbreite; |
|
b) |
Zahl der dynamischen Wellendichtringe; |
|
c) |
Viskosität des Öls (± 10 %); |
|
d) |
Oberflächenrauheit der Zähne; |
|
e) |
Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen. |
10. Wahl des Stammbauteils der Familie von zusätzlichen Bauteilen des Antriebsstrangs
10.1. Das Stammbauteil der Familie von zusätzlichen Bauteilen des Antriebsstrangs/Winkelgetrieben ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
|
a) |
größte Zahnradbreite; |
|
a) |
größte Zahl der dynamischen Wellendichtringe; |
|
c) |
höchste Viskosität des Öls (± 10 %); |
|
d) |
höchste Oberflächenrauheit der Zähne; |
|
e) |
höchster angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen. |
Anlage 7
Kennzeichnung und Nummerierung
1. Kennzeichnungen
Ein nach diesem Anhang zertifiziertes Bauteil muss folgende Kennzeichnungen tragen:
1.1. Herstellername und Handelsmarke;
1.2. Handelsmarke und identifizierende Typangabe gemäß Teil 1 Nummern 0.2 und 0.3 der Anlagen 2-5 dieses Anhangs
1.3. Das Zertifizierungszeichen (falls zutreffend) besteht aus einem Rechteck, das den Kleinbuchstaben „e“ umgibt, gefolgt von der jeweiligen Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
|
|
1 für Deutschland, |
|
|
2 für Frankreich, |
|
|
3 für Italien, |
|
|
4 für die Niederlande, |
|
|
5 für Schweden, |
|
|
6 für Belgien, |
|
|
7 für Ungarn, |
|
|
8 für die Tschechische Republik, |
|
|
9 für Spanien, |
|
|
11 für das Vereinigte Königreich, |
|
|
12 für Österreich, |
|
|
13 für Luxemburg, |
|
|
17 für Finnland, |
|
|
18 für Dänemark, |
|
|
19 für Rumänien, |
|
|
20 für Polen, |
|
|
21 für Portugal, |
|
|
23 für Griechenland, |
|
|
24 für Irland, |
|
|
25 für Kroatien, |
|
|
26 für Slowenien, |
|
|
27 für die Slowakei, |
|
|
29 für Estland, |
|
|
32 für Lettland, |
|
|
34 für Bulgarien, |
|
|
36 für Litauen, |
|
|
49 für Zypern, |
|
|
50 für Malta. |
1.4. Das Zertifizierungszeichen muss in der Nähe des Rechtecks die in Anhang VII der Richtlinie 2007/46/EG für Abschnitt 4 der Typgenehmigungsnummer vorgeschriebene „Basis-Typgenehmigungsnummer“ umfassen, davor steht die zweistellige laufende Nummer zur Bezeichnung der letzten technischen Änderung dieser Verordnung und ein Buchstabe zur Bezeichnung des Teils, für das die Zertifizierung ausgestellt wurde.
Für diese Verordnung ist die laufende Nummer 00.
Der Buchstabe für diese Verordnung ist in Tabelle 1 festgelegt.
Tabelle 1
|
T |
Getriebe |
|
C |
Drehmomentwandler (TC) |
|
O |
Sonstiges Drehmoment übertragendes Bauteil (OTTC) |
|
D |
Zusätzliches Bauteil des Antriebsstrangs (ADC) |
1.5. Beispiel für das Zertifizierungszeichen

Das oben dargestellte, an einem Getriebe, Drehmomentwandler (TC), sonstigen Drehmoment übertragenden Bauteil (OTTC) oder zusätzlichen Bauteil des Antriebsstrangs (ADC) angebrachte Zertifizierungszeichen besagt, dass der betreffende Typ in Polen (e20) gemäß dieser Verordnung genehmigt wurde. Die beiden ersten Ziffern (00) beziehen sich auf die laufende Nummer der letzten technischen Änderung dieser Verordnung. Das nachfolgende Zeichen gibt an, dass die Zertifizierung für ein Getriebe (T) erteilt wurde. Die letzten vier Ziffern (0004) sind die dem Getriebe von der Typgenehmigungsbehörde zugeteilte Basis-Typgenehmigungsnummer.
1.6. Auf Antrag der Person, die die Zertifizierung beantragt und nach vorheriger Einigung mit der Typgenehmigungsbehörde können auch andere Zeichengrößen als unter Nummer 1.5 angegeben verwendet werden. Diese müssen weiterhin deutlich lesbar sein.
1.7. Die Kennzeichnungen, Label, Schilder oder Aufkleber müssen die gesamte Nutzlebensdauer des Getriebes, Drehmomentwandlers (TC), sonstigen Drehmoment übertragenden Bauteils (OTTC) oder zusätzlichen Bauteils des Antriebsstrangs (ADC) halten, deutlich lesbar und dauerhaft sein. Der Hersteller stellt sicher, dass die Kennzeichnungen, Label, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unleserlich werden.
1.8. Werden von derselben Genehmigungsbehörde für ein Getriebe, einen Drehmomentwandler, ein sonstiges Drehmoment übertragendes Bauteil oder ein zusätzliches Bauteil des Antriebsstrangs separate Zertifizierungen ausgestellt und werden diese Teile kombiniert eingebaut, genügt die Angabe eines der Zertifizierungszeichen nach Nummer 1.3. Auf dieses Zertifizierungszeichen folgen, abgetrennt durch „/“, die für das jeweilige Getriebe, den Drehmomentwandler, das sonstige Drehmoment übertragende Bauteil oder zusätzliche Bauteil des Antriebsstrangs geltenden Kennzeichen nach Nummer 1.4.
1.9. Das Zertifizierungszeichen muss sichtbar sein, wenn das Getriebe, der Drehmomentwandler, das sonstige Drehmoment übertragende Bauteil oder das zusätzliche Bauteil des Antriebsstrangs in das Fahrzeug eingebaut ist, und ist an einem für den normalen Betrieb notwendigen Teil anzubringen, das während der Lebensdauer des Bauteils normalerweise nicht ausgetauscht werden muss.
1.10. Falls Drehmomentwandler oder sonstige Drehmoment übertragende Bauteile so gebaut sind, dass sie nach Zusammenbau mit einem Getriebe nicht zugänglich und/oder nicht sichtbar sind, ist das Zertifizierungszeichen des Drehmomentwandlers oder sonstigen Drehmoment übertragenden Bauteils am Getriebe anzubringen.
In dem in Absatz 1 beschriebenen Fall ist bei einem Drehmomentwandler oder sonstigen Drehmoment übertragenden Bauteil, der oder das nicht zertifiziert wurde, anstatt der Zertifizierungsnummer „–“ auf dem Getriebe neben dem Buchstaben gemäß Nummer 1.4 anzugeben.
2. Zertifizierungsnummer
2.1. Die Zertifizierungsnummer für Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile und zusätzliche Bauteile des Antriebsstrangs muss Folgendes umfassen:
eX*YYY/YYYY*ZZZ/ZZZZ*X*0000*00
|
Abschnitt 1 |
Abschnitt 2 |
Abschnitt 3 |
Zusätzlicher Buchstabe für Abschnitt 3 |
Abschnitt 4 |
Abschnitt 5 |
|
Angabe des Landes, das die Zertifizierung ausstellt |
Rechtsakt über die CO2-Zertifizierung (…/2017) |
Letzter Änderungsrechtsakt (zzz/zzzz) |
Siehe Tabelle 1 dieser Anlage |
Basiszertifizierungsnummer 0000 |
Erweiterung 00 |
Anlage 8
Pauschalwerte für den Drehmomentverlust – Getriebe
Errechnete Ausweichwerte auf der Grundlage des maximalen Nenndrehmoments des Getriebes:
|
|
Der Drehmomentverlust Tl,in durch die Eingangswelle des Getriebes wird folgendermaßen berechnet:
Dabei gilt:
|

|
|
Bei Getrieben mit Zahnschaltkupplungen (synchronisierte manuelle Getriebe (SMT), automatisierte Schaltgetriebe (AMT) und Doppelkupplungsgetrieben (DCT)) wird das Schleppdrehmoment Tdx folgendermaßen berechnet:
Dabei gilt:
|

|
|
Bei Getrieben mit Reibungsschaltkupplungen (> 2 Reibungskupplungen) wird das Schleppdrehmoment Tdx folgendermaßen berechnet:
„Reibungskupplung“ bezeichnet in diesem Zusammenhang eine Kupplung oder Bremse, die mit Reibung arbeitet und in mindestens einem Gang zur dauernden Drehmomentübertragung erforderlich ist. |

|
|
Bei Getrieben mit einem Winkelgetriebe (z. B. einem Kegelrad) ist das zusätzliche Schleppdrehmoment Taddx in der Berechnung von Tdx zu berücksichtigen:
(nur falls zutreffend) |

Anlage 9
Allgemeines Modell – Drehmomentwandler
Allgemeines Drehmomentwandlermodell auf der Grundlage von Standardtechnologie:
Zur Bestimmung der Eigenschaften des Drehmomentwandlers kann, in Abhängigkeit von spezifischen Motoreigenschaften, ein allgemeines Drehmomentwandlermodell angewandt werden.
Das allgemeine Drehmomentwandlermodell beruht auf den folgenden Motordaten:
|
nrated |
= |
Maximale Motordrehzahl bei maximaler Leistung (bestimmt mithilfe der vom Motor-Vorverarbeitungsinstrument berechneten Volllastkurve) [U/min] |
|
Tmax |
= |
Maximales Motordrehmoment (bestimmt mithilfe der vom Motor-Vorverarbeitungsinstrument berechneten Volllastkurve) [Nm] |
Die Eigenschaften des allgemeinen Drehmomentwandlermodells sind dadurch nur für Kombinationen mit einem Motor gültig, der dieselben spezifischen Eigenschaften aufweist.
Beschreibung des Vier-Punkte-Modells für den Drehmomentverlauf des Drehmomentwandlers:
Allgemeiner Drehmomentverlauf und allgemeines Drehmomentverhältnis:
Abbildung 1
Allgemeiner Drehmomentverlauf
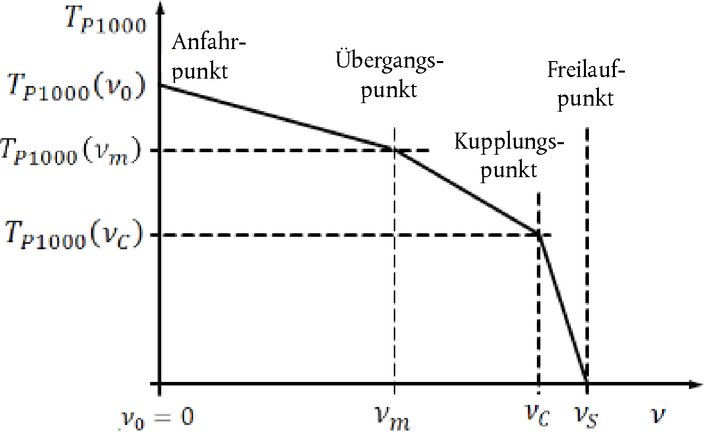
Abbildung 2
Allgemeines Drehmomentverhältnis

Dabei gilt:
|
TP1000 |
= |
Bezugsdrehmoment der Pumpe |
|
v |
= |
Drehzahlverhältnis |
|
μ |
= |
Drehmomentverhältnis |
|
vs |
= |
Drehzahlverhältnis am Freilaufpunkt Bei Drehmomentwandlern mit rotierendem Gehäuse (Typ Trilock) ist vs typischerweise 1. Bei sonstigen Drehmomentwandlerkonstruktionen, speziell bei Konstruktionen mit Leistungsteilung, kann vs auch andere Werte als 1 haben. |
|
vc |
= |
Drehzahlverhältnis am Kupplungspunkt; |
|
v0 |
= |
Anfahrpunkt v 0 = 0 [U/min] |
|
vm |
= |
Übergangs-Drehzahlverhältnis |
 [Nm]
[Nm] [-]
[-] [-]
[-] [-]
[-] [-]
[-] [-]
[-]Das Modell erfordert folgende Definitionen zur Berechnung des allgemeinen Drehmomentverlaufs:
|
|
Anfahrpunkt:
|

|
|
Übergangspunkt:
|

|
|
Kupplungspunkt:
|

|
|
Freilaufpunkt:
|

Das Modell erfordert folgende Definitionen zur Berechnung des allgemeinen Drehmomentverhältnisses:
|
|
Anfahrpunkt:
|

|
|
Übergangspunkt:
|
|
|
Kupplungspunkt:
|

|
|
Freilaufpunkt:
|

|
|
Wirkungsgrad: n = μ * v |
Zwischen den berechneten spezifischen Punkten ist eine lineare Interpolation vorzunehmen.
Anlage 10
Pauschalwerte für den Drehmomentverlust - sonstige Drehmoment übertragende Bauteile
Berechnete Pauschalwerte für den Drehmomentverlust für sonstige Drehmoment übertragende Bauteile:
|
|
Für hydrodynamische Dauerbremseinrichtungen (Öl oder Wasser) ist das Schleppdrehmoment der Dauerbremseinrichtung folgendermaßen zu berechnen:
|

|
|
Für magnetische Dauerbremseinrichtungen (Dauer- oder Elektromagneten) ist das Schleppdrehmoment der Dauerbremseinrichtung folgendermaßen zu berechnen:
|

Dabei gilt:
|
Tretarder |
= |
Drehmomentverlust der Dauerbremseinrichtung [Nm] |
|
nretarder |
= |
Rotordrehzahl der Dauerbremseinrichtung [U/min] (siehe Absatz 5.1 dieses Anhangs) |
|
istep-up |
= |
Übersetzungsverhältnis = Rotordrehzahl der Dauerbremseinrichtung/Drehzahl des Antriebsbauteils (siehe Absatz 5.1 dieses Anhangs) |
Anlage 11
Pauschalwerte für den Drehmomentverlust – Winkelgetriebe
Entsprechend dem Berechnungsverfahren für die Pauschalwerte des Drehmomentverlusts eines Getriebes mit Winkelgetriebe nach Anlage 8 sind die Pauschal-Drehmomentverluste eines Winkelgetriebes ohne Getriebe folgendermaßen zu berechnen:

Dabei gilt:
|
Tl,in |
= |
Drehmomentverlust durch die Eingangswelle des Getriebes [Nm] |
|
Taddx |
= |
Zusätzliches Schleppdrehmoment bei Winkelgetriebe bei x U/min [Nm] (falls zutreffend) |
|
nin |
= |
Drehzahl der Eingangswelle des Getriebes [U/min] |
|
fT |
= |
1-η; η= Wirkungsgrad fT_add = 0,04 für den Winkelgetriebe |
|
Tin |
= |
Drehmoment an der Eingangswelle des Getriebes [Nm] |
|
Tmax,in |
= |
maximal zulässiges Eingangsdrehmoment in einem beliebigen Vorwärtsgang des Getriebes [Nm] |
|
|
= |
max(Tmax,in,gear) |
|
Tmax,in |
= |
maximal zulässiges Eingangsdrehmoment in einem bestimmten Gang, wobei Gang = 1, 2, 3, … größter Gang) |

Die nach dem vorstehenden Verfahren berechneten Drehmomentverluste können zu den nach den Optionen 1 bis 3 ermittelten Drehmomentverlusten eines Getriebes hinzugefügt werden, um die Drehmomentverluste des jeweiligen Getriebes in Kombination mit einem Winkelgetriebe zu erhalten.
Anlage 12
Eingabeparameter für das Simulationsinstrument
Einführung
Diese Anlage enthält eine beschreibende Aufstellung der vom Hersteller des Getriebes, des Drehmomentwandlers (TC), der sonstigen Drehmoment übertragenden Bauteile (OTTC) und der sonstigen Bauteile des Antriebsstrangs (ADC) für das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Begriffsbestimmungen
(1)
(2)
|
string … |
Zeichenabfolge in ISO8859-1-Kodierung |
|
token … |
Zeichenabfolge in ISO8859-1-Kodierung ohne Leerzeichen am Anfang/am Ende |
|
date … |
Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DDTHH:MM:SSZ, wobei kursive Zeichen unveränderlich sind, z. B. „2002-05-30T09:30:10Z“ |
|
integer … |
Wert mit integralem Datentyp ohne führende Nullen, z. B. „1800“ |
|
double, X … |
Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen („.“) und ohne führende Nullen, z. B. für „double, 2“: 2345.67, für „double, 4“: „45.6780“ |
(3)
Satz von Eingabeparametern
Tabelle 1
Eingabeparameter „Transmission/General“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
Manufacturer |
P205 |
Token |
[-] |
|
|
Model |
P206 |
Token |
[-] |
|
|
TechnicalReportId |
P207 |
Token |
[-] |
|
|
Date |
P208 |
dateTime |
[-] |
Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
|
AppVersion |
P209 |
Token |
[-] |
|
|
TransmissionType |
P076 |
String |
[-] |
Zulässige Werte: „SMT“, „AMT“, „APT-S“, „APT-P“ |
|
MainCertificationMethod |
P254 |
String |
[-] |
Zulässige Werte: „Option 1“, „Option 2“, „Option 3“, „Standard values“ |
Tabelle 2
Eingabeparameter „Transmission/Gears“ pro Gang
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
GearNumber |
P199 |
integer |
[-] |
|
|
Ratio |
P078 |
double, 3 |
[-] |
|
|
MaxTorque |
P157 |
integer |
[Nm] |
fakultativ |
|
MaxSpeed |
P194 |
integer |
[1/min] |
fakultativ |
Tabelle 3
Eingabeparameter „Transmission/LossMap“ pro Gang und für jeden Gitterpunkt in der Verlustabbildung
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
InputSpeed |
P096 |
double, 2 |
[1/min] |
|
|
InputTorque |
P097 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P098 |
double, 2 |
[Nm] |
|
Tabelle 4
Eingabeparameter „TorqueConverter/General“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
Manufacturer |
P210 |
token |
[-] |
|
|
Model |
P211 |
token |
[-] |
|
|
TechnicalReportId |
P212 |
token |
[-] |
|
|
Date |
P213 |
dateTime |
[-] |
Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
|
AppVersion |
P214 |
string |
[-] |
|
|
CertificationMethod |
P257 |
string |
[-] |
Zulässige Werte: „Measured“, „Standard values“ |
Tabelle 5
Eingabeparameter „TorqueConverter/Characteristics“ für jeden Gitterpunkt der charakteristischen Kurve
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
SpeedRatio |
P099 |
double, 4 |
[-] |
|
|
TorqueRatio |
P100 |
double, 4 |
[-] |
|
|
InputTorqueRef |
P101 |
double, 2 |
[Nm] |
|
Tabelle 6
Eingabeparameter „Angledrive/General“ (nur erforderlich, wenn entsprechendes Bauteil vorhanden)
|
Parametername |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
Manufacturer |
P220 |
token |
[-] |
|
|
Model |
P221 |
token |
[-] |
|
|
TechnicalReportId |
P222 |
token |
[-] |
|
|
Date |
P223 |
dateTime |
[-] |
Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
|
AppVersion |
P224 |
string |
[-] |
|
|
Ratio |
P176 |
double, 3 |
[-] |
|
|
CertificationMethod |
P258 |
string |
[-] |
Zulässige Werte: „Option 1“, „Option 2“, „Option 3“, „Standard values“ |
Tabelle 7
Eingabeparameter „Angledrive/LossMap“ für jeden Gitterpunkt in der Verlustabbildung (nur erforderlich, wenn entsprechendes Bauteil vorhanden)
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
InputSpeed |
P173 |
double, 2 |
[1/min] |
|
|
InputTorque |
P174 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P175 |
double, 2 |
[Nm] |
|
Tabelle 8
Eingabeparameter „Retarder/General“ (nur erforderlich, wenn entsprechendes Bauteil vorhanden)
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
Manufacturer |
P225 |
token |
[-] |
|
|
Model |
P226 |
token |
[-] |
|
|
TechnicalReportId |
P227 |
token |
[-] |
|
|
Date |
P228 |
dateTime |
[-] |
Datum und Zeitpunkt der Erstellung des Bauteil-Hashes |
|
AppVersion |
P229 |
string |
[-] |
|
|
CertificationMethod |
P255 |
string |
[-] |
Zulässige Werte: „Measured“, „Standard values“ |
Tabelle 9
Eingabeparameter „Retarder/LossMap“ für jeden Gitterpunkt in der charakteristischen Kurve (nur erforderlich, wenn entsprechendes Bauteil vorhanden)
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Bezug |
|
RetarderSpeed |
P057 |
double, 2 |
[1/min] |
|
|
TorqueLoss |
P058 |
double, 2 |
[Nm] |
|
ANHANG VII
ÜBERPRÜFUNG DER ACHSDATEN
1. Einleitung
In diesem Anhang werden die Zertifizierungsvorschriften zu den Drehmomentverlusten der Antriebsachsen für schwere Nutzfahrzeuge beschrieben. Alternativ zur Zertifizierung der Achsen kann zur Bestimmung der fahrzeugspezifischen CO2-Emissionen das Berechnungsverfahren für die Standard-Drehmomentverluste gemäß der Definition in Anlage 3 dieses Anhangs angewandt werden.
2. Begriffsbestimmungen
Im Sinne dieses gs gelten folgende Begriffsbestimmungen:
|
1) |
„Einfach untersetzte Achse“ (single reduction axle, SR) bezeichnet eine Antriebsachse mit nur einer Untersetzung, typischerweise einem Kegelradgetriebe mit oder ohne Achsversatz. |
|
2) |
„Portalachse“ (single portal axle, SP) bezeichnet eine Achse, bei der die Drehachse des Kronenrads und die des Rades typischerweise höhenversetzt angeordnet sind, um eine höhere Bodenfreiheit oder, im Rahmen der Niederflurbauweise für Stadtbusse, einen niedrigeren Fahrzeugboden zu erzielen. Typischerweise erfolgt die erste Untersetzung über ein Kegelradgetriebe und die zweite über ein höhenversetzt nah an den Rädern angeordnetes Stirnradgetriebe. |
|
3) |
„Nabenuntersetzungsachse (hub reduction axle, HR)“ bezeichnet eine Antriebsachse mit zwei Untersetzungen. Bei der ersten handelt es sich typischerweise um ein Kegelradgetriebe mit oder ohne Achsversatz. Bei der zweiten handelt es sich um ein Planetengetriebe, das typischerweise im Bereich der Radnaben angebracht ist. |
|
4) |
„Einfach untersetzte Durchtriebsachse“ (single reduction tandem axle, SRT) bezeichnet eine Antriebsachse, die grundsätzlich einer einzelnen Antriebsachse gleicht, jedoch auch dazu dient, Drehmoment vom Eingangsflansch über einen Ausgangsflansch an eine weitere Achse zu übertragen. Das Drehmoment kann mithilfe eines Zahnradgetriebes am Eingangsflansch übertragen werden, um eine höhenversetzte Anordnung des Ausgangsflanschs zu ermöglichen. Eine weitere Möglichkeit ist der Einsatz eines zweiten Ritzels im Kegelradgetriebe, das das Drehmoment am Kronenrad abnimmt. |
|
5) |
„Nabenuntersetzungsachse mit Durchtrieb“ (hub reduction tandem axle, HRT) bezeichnet eine Nabenuntersetzungsachse, die die Möglichkeit hat, Drehmoment auf die in der Begriffsbestimmung für „einfach untersetzte Durchtriebsachse“ beschriebene Weise nach hinten zu übertragen. |
|
6) |
„Achsgehäuse“ bezeichnet die Gehäuseteile, die für die strukturelle Tauglichkeit und als Träger der Antriebsstrangteile sowie der Lager und Dichtungen der Achse erforderlich sind. |
|
7) |
„Ritzel“ bezeichnet einen Teil eines normalerweise aus zwei Zahnrädern bestehenden Kegelradgetriebes. Das Ritzel ist das treibende, mit dem Eingangsflansch verbundene Zahnrad. Bei einer einfach untersetzten Durchtriebsachse/Nabenuntersetzungsachse mit Durchtrieb kann ein zweites Ritzel eingebaut werden, um Drehmoment vom Kronenrad abzunehmen. |
|
8) |
„Kronenrad“ bezeichnet einen Teil eines normalerweise aus zwei Zahnrädern bestehenden Kegelradgetriebes. Das Kronenrad ist das angetriebene Zahnrad und ist mit dem Differentialgehäuse verbunden. |
|
9) |
„Nabenuntersetzung“ bezeichnet das Planetengetriebe, das bei Nabenuntersetzungsachsen normalerweise außerhalb des Planetenträgers angebracht ist. Das Getriebe besteht aus drei verschiedenen Zahnrädern, dem Sonnenrad, den Planetenrädern und dem Hohlrad. Das Sonnenrad befindet sich im Zentrum, die Planetenräder rotieren um das Sonnenrad und sind mit dem Planetenträger verbunden, der an der Radnabe befestigt ist. Die Zahl der Planetenräder beträgt typischerweise zwischen drei und fünf. Das Hohlrad rotiert nicht und ist am Achskörper befestigt. |
|
10) |
„Planetenräder“ bezeichnet die Zahnräder, die innerhalb des Hohlrades eines Planetengetriebes um das Sonnenrad rotieren. Sie sind über Lager mit einem Planetenträger verbunden, welcher an einer Nabe befestigt ist. |
|
11) |
„Viskositätsgrad der Ölart“ bezeichnet einen Viskositätsgrad gemäß der Definition in SAE J306. |
|
12) |
„Ab Werk eingefülltes Öl“ bezeichnet den Viskositätsgrad der Ölart, die im Werk eingefüllt wird und dazu bestimmt ist, im ersten Wartungsintervall in der Achse zu verbleiben. |
|
13) |
„Achsenreihe“ bezeichnet eine Gruppe von Achsen, die dieselben grundlegenden Achsenfunktionen gemäß der Definition im Familienkonzept teilen. |
|
14) |
„Achsenfamilie“ bezeichnet die von einem Hersteller festgelegte Gruppe von Achsen mit konstruktionsbedingt ähnlichen Eigenschaften in Bezug auf Bauart, CO2-Emissionen und Kraftstoffverbrauch gemäß Anlage 4 dieses Anhangs. |
|
15) |
„Schleppdrehmoment“ bezeichnet das zur Überwindung der inneren Reibung einer Achse notwendige Drehmoment, wenn die Radenden mit einem Ausgangsdrehmoment von 0 Nm frei rotieren. |
|
16) |
„Spiegelbildliches Achsgehäuse“ bezeichnet ein in der Vertikalebene spiegelbildliches Achsgehäuse. |
|
17) |
„Achseingang“ bezeichnet die Seite der Achse, an der das Drehmoment an die Achse abgegeben wird. |
|
18) |
„Achsausgang“ bezeichnet die Seiten der Achse, an denen das Drehmoment an die Räder abgegeben wird. |
3. Allgemeine Anforderungen
Die Achsgetriebe und alle Lager außer den zur Messung verwendeten Radendlagern bleiben unbenutzt.
Auf Ersuchen des Antragstellers können verschiedene Gangübersetzungen in ein und demselben Achsgehäuse unter Verwendung der gleichen Radenden geprüft werden.
Verschiedene Achsübersetzungen von Nabenuntersetzungsachsen (Außenplanetenachsen, Nabenuntersetzungsachsen mit Durchtrieb) und Portalachsen können bereits durch den Austausch der Nabenuntersetzung gemessen werden. Es gelten die in Anlage 4 dieses Anhangs festgelegten Bestimmungen.
Die Gesamtlaufzeit für das optionale Einfahren und die Messung einer einzelnen Achse (das Achsgehäuse und die Radenden ausgenommen) darf 120 Stunden nicht übersteigen.
Zur Prüfung der Verluste einer Achse wird das Kennfeld der Drehmomentverluste für jede Übersetzung einer einzelnen Achse gemessen, wobei die Achsen gemäß den Bestimmungen in Anlage 4 dieses Anhangs Achsenfamilien zugeordnet werden können.
3.1. Einfahren
Auf Ersuchen des Antragstellers kann die Achse einem Einfahrverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einfahrverfahren:
3.1.1. Für das Einfahrverfahren darf ausschließlich ab Werk eingefülltes Öl verwendet werden. Das für das Einfahren benutzte Öl darf nicht für die in Absatz 4 beschriebene Prüfung verwendet werden.
3.1.2. Drehzahl- und Drehmomentverlauf für das Einfahrverfahren werden vom Hersteller festgelegt.
3.1.3. Das Einfahrverfahren ist vom Hersteller im Hinblick auf Laufzeit, Drehzahl, Drehmoment und Öltemperatur zu dokumentieren und der Genehmigungsbehörde mitzuteilen.
3.1.4. Die Anforderungen bezüglich Öltemperatur (4.3.1), Messgenauigkeit (4.4.7) und Prüfanordnung (4.2) gelten nicht für das Einfahrverfahren.
4. Prüfverfahren für Achsen
4.1. Prüfbedingungen
4.1.1. Umgebungstemperatur
Die Temperatur im Prüfraum muss bei 25 oC ± 10 oC liegen. Die Umgebungstemperatur wird in einem Abstand von 1 m zum Achsgehäuse gemessen. Eine erzwungene Erhitzung der Achse darf nur durch ein externes Ölkonditionierungssystem gemäß 4.1.5 vorgenommen werden.
4.1.2. Öltemperatur
Die Öltemperatur ist in der Mitte des Ölsumpfs oder an einer anderen geeigneten Stelle nach den allgemein anerkannten Regeln der Technik zu messen. Bei externer Ölkonditionierung kann die Öltemperatur auch in der vom Achsgehäuse zum Konditioniersystem verlaufenden Auslassleitung in einem Bereich von 5 cm unterhalb des Auslasses gemessen werden. In beiden Fällen darf die Öltemperatur 70 oC nicht überschreiten.
4.1.3. Ölqualität
Für die Messung sind nur vom Achsenhersteller empfohlene ab Werk eingefüllte Öle zu verwenden. Wenn verschiedene Gangübersetzungsstufen unter Verwendung ein und desselben Achsgehäuses geprüft werden, muss für jede Einzelmessung neues Öl eingefüllt werden.
4.1.4. Ölviskosität
Sind verschiedene Öle mit mehreren Viskositätsgraden für die ab Werk eingefüllten Öle angegeben, ist vom Hersteller für die Messungen an der Stammachse das Öl mit dem höchsten Viskositätsgrad zu wählen.
Falls für eine Achsenfamilie mehrere Öle mit demselben Viskositätsgrad als ab Werk eingefülltes Öl angegeben sind, kann der Antragsteller eines dieser Öle für die zur Zertifizierung benötigten Messungen wählen.
4.1.5. Ölstand und Konditionierung
Der Ölstand bzw. die Füllmenge ist auf den in den Wartungsvorschriften des Herstellers angegebenen Höchststand einzustellen.
Ein externes Ölkonditionierungs- und Filtersystem ist erlaubt. Das Achsgehäuse darf für den Einbau des Ölkonditionierungssystems verändert werden.
Das Ölkonditionierungssystem darf entsprechend den allgemein anerkannten Regeln der Technik nicht in einer Weise eingebaut werden, dass die Ölstände einer Achse verändert werden könnten, um so die Effizienz zu steigern oder Antriebsdrehmomente zu erzeugen.
4.2. Prüfanordnung
Zur Messung des Drehmomentverlustes sind verschiedene Prüfanordnungen gemäß den Absätzen 4.2.3 und 4.2.4 erlaubt.
4.2.1. Einbau der Achsen
Handelt es sich um eine Tandemachse, sind beide Achsen jeweils getrennt zu messen. Die erste Achse mit Längsdifferenzial ist zu sperren. Die Ausgangswelle der Durchtriebsachsen muss frei drehbar eingebaut werden.
4.2.2. Einbau von Drehmomentmessern
4.2.2.1. Bei einer Prüfanordnung mit zwei Elektromotoren sind die Drehmomentmesser am Eingangsflansch und an einem Radende anzubringen, während das andere Ende gesperrt ist.
4.2.2.2. Bei einer Prüfanordnung mit drei Elektromotoren sind die Drehmomentmesser am Eingangsflansch und an jedem Radende anzubringen.
4.2.2.3. Halbwellen unterschiedlicher Länge sind in einer Prüfanordnung mit zwei Motoren gestattet, um das Differenzial zu sperren und so zu gewährleisten, dass beide Radenden sich drehen.
4.2.3. Prüfanordnung „Typ A“
Eine Prüfanordnung „Typ A“ besteht aus einem Prüfstand auf der Seite des Achseingangs und mindestens einem Prüfstand auf der/den Seite/n des Achsausgangs. Geräte zur Messung des Drehmoments sind an der oder den Achseingangs- und Achsausgangsseiten anzubringen. Bei Prüfanordnungen des Typs A mit nur einem Prüfstand an der Ausgangsseite muss das frei drehbare Ende der Achse gesperrt werden.
Um parasitäre Verluste durch die Prüfanordnung zu vermeiden, sind die Geräte zur Drehmomentmessung möglichst nahe an der oder den Achseingangs- und Ausgangsseiten anzubringen und durch passende Lager zu stützen.
Zusätzlich können die Drehmomentsensoren von den parasitären Lasten der Wellen mechanisch entkoppelt werden, beispielsweise durch Einbau zusätzlicher Lager und einer elastischen Kupplung oder einer Leichtbaukardanwelle zwischen den Sensoren und einem dieser Lager. Abbildung 1 zeigt ein Beispiel für eine Prüfanordnung des Typs A mit zwei Prüfständen.
Für die Konfiguration von Prüfanordnungen des Typs A muss der Hersteller eine Analyse der parasitären Lasten zur Verfügung stellen. Auf Grundlage dieser Analyse entscheidet die Genehmigungsbehörde über den maximalen Einfluss der parasitären Lasten. Der Wert ipara darf jedoch nicht niedriger als 10 % sein.
Abbildung 1
Beispiel für eine Prüfanordnung „Typ A“
 Text von Bild
Text von Bild
4.2.4. Prüfanordnung „Typ B“
Jede andere Konfiguration einer Prüfanordnung wird als Prüfanordnung „Typ B“ bezeichnet. Der maximale Einfluss der parasitären Lasten ipara für diese Konfigurationen ist auf 100 % einzustellen.
Niedrigere Werte für ipara sind in Absprache mit der Genehmigungsbehörde zulässig.
4.3. Prüfverfahren
Um das Kennfeld der Drehmomentverluste einer Achse zu ermitteln, sind deren grundlegende Daten gemäß Absatz 4.4 zu messen und zu berechnen. Die Ergebnisse für den Drehmomentverlust sind im Einklang mit Absatz 4.4.8 zu ergänzen und gemäß Anlage 6 zur weiteren Verarbeitung durch das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen zu formatieren.
4.3.1. Messeinrichtungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen der ISO/TS 16949, ISO-9000-Reihen oder der ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale und internationale Prüfnormen zurückführbar sein.
4.3.1.1. Drehmomentmessung
Die Unsicherheit der Drehmomentmessung ist gemäß Absatz 4.4.7 zu berechnen und einzubeziehen.
Die Abtastrate der Drehmomentsensoren muss 4.3.2.1 entsprechen.
4.3.1.2. Drehgeschwindigkeit
Die Unsicherheit der Drehgeschwindigkeitssensoren zur Messung der Eingangs- und der Ausgangsdrehzahl darf ± 2 U/min nicht überschreiten.
4.3.1.3. Temperaturen
Die Unsicherheit der Temperatursensoren zur Messung der Umgebungstemperatur darf ± 1 °C nicht überschreiten.
Die Unsicherheit der Temperatursensoren zur Messung der Öltemperatur darf ± 0,5 °C nicht überschreiten.
4.3.2. Messsignale und Datenaufzeichnung
Zum Zweck der Berechnung der Drehmomentverluste sind die folgenden Signale aufzuzeichnen:
|
i) |
Eingangs- und Ausgangsdrehmoment [Nm] |
|
ii) |
Eingangs- und/oder Ausgangsdrehzahl [U/min] |
|
iii) |
Umgebungstemperatur [°C] |
|
iv) |
Öltemperatur [°C] |
|
v) |
Temperatur am Drehmomentsensor |
4.3.2.1. Es gelten folgende Mindestabtastfrequenzen der Sensoren:
|
|
Drehmoment: 1 kHz |
|
|
Drehgeschwindigkeit: 200 Hz |
|
|
Temperaturen: 10 Hz |
4.3.2.2. Die Datenaufzeichnungsrate zur Bestimmung der arithmetischen Mittelwerte eines jeden Rasterpunkts muss 10 Hz oder höher sein. Rohdaten müssen nicht mitgeteilt werden.
Eine Signalfilterung kann in Absprache mit der Genehmigungsbehörde angewandt werden. Aliasing-Effekte jeglicher Art sind zu vermeiden.
4.3.3. Drehmomentbereich:
Der Umfang des zu messenden Kennfelds der Drehmomentverluste ist beschränkt auf:
|
— |
ein Ausgangsdrehmoment von 10 kNm |
|
— |
oder ein Eingangsdrehmoment von 5 kNm |
|
— |
oder die maximale Motorleistung, die vom Hersteller für eine bestimmte Achse toleriert wird, oder im Falle mehrerer Antriebsachsen die maximale Motorleistung entsprechend der nominalen Leistungsverteilung. |
4.3.3.1. Der Hersteller kann die Messung auf ein Ausgangsdrehmoment von bis zu 20 kNm ausweiten, indem er eine lineare Extrapolation der Drehmomentverluste vornimmt oder Messungen mit einem Ausgangsdrehmoment von bis zu 20 kNm in Stufen von 2 000 Nm durchführt. Für diesen zusätzlichen Drehmomentbereich sind ein weiterer Drehmomentsensor auf Ausgangsseite mit einem maximalen Drehmoment von 20 kNm (bei einer Anordnung mit zwei Motoren) oder zwei 10 kNm-Sensoren (bei einer Anordnung mit drei Motoren) zu verwenden.
Wenn der Durchmesser des kleinsten Reifens (z. B. aufgrund einer Produktentwicklung) nach Abschluss der Messung einer Achse verringert wird oder wenn die physischen Grenzen des Prüfstandes erreicht sind (z. B. durch entwicklungsbedingte Änderungen des Produkts), kann der Hersteller die fehlenden Punkte aus dem vorhandenen Kennfeld extrapolieren. Die extrapolierten Punkte dürfen nicht mehr als 10 % aller Punkte in dem Kennfeld darstellen, und für diese Punkte ist ein Drehmomentverlust von 5 % als Straffaktor zu den extrapolierten Punkten zu addieren.
4.3.3.2. Zu messende Ausgangsdrehmomentstufen:
|
250 Nm < Tout < 1 000 Nm |
: |
Stufen von 250 Nm |
|
1 000 Nm ≤ Tout ≤ 2 000 Nm |
: |
Stufen von 500 Nm |
|
2 000 Nm ≤ Tout ≤ 10 000 Nm |
: |
Stufen von 1 000 Nm |
|
Tout > 10 000 Nm |
: |
Stufen von 2 000 Nm |
Ist das maximale Eingangsdrehmoment vom Hersteller begrenzt, dann ist als letzte Drehmomentstufe diejenige unter diesem Höchstwert zu messen, wobei etwaige Verluste nicht berücksichtigt werden. In diesem Fall ist eine Extrapolation des Drehmomentverlustes bis zu dem Drehmoment vorzunehmen, das dem Grenzwert des Herstellers entspricht, wobei die lineare Regression auf den Drehmomentstufen der entsprechenden Drehzahlstufe basiert.
4.3.4. Drehzahlbereich
Der Prüfdrehzahlbereich muss zwischen einer Raddrehzahl von 50 U/min und der maximalen Drehzahl liegen. Die zu messende maximale Prüfdrehzahl ist entweder durch die maximale Achseingangsdrehzahl oder die maximale Raddrehzahl definiert, abhängig davon, welche der folgenden Bedingungen zuerst erfüllt ist:
|
4.3.4.1. |
Die anwendbare maximale Achseingangsdrehzahl ist möglicherweise durch die Bauartspezifikation der Achse begrenzt. |
|
4.3.4.2. |
Die maximale Raddrehzahl wird für den kleinsten anwendbaren Reifendurchmesser bei einer Fahrzeuggeschwindigkeit von 90 km/h für Lastkraftwagen und von 110 km/h für Kraftomnibusse berechnet. Ist der kleinste anwendbare Reifendurchmesser nicht definiert, findet Absatz 4.3.4.1 Anwendung. |
4.3.5. Zu messende Raddrehzahlstufen
Für die Prüfung ist ein Raddrehzahlstufen-Intervall von 50 U/min zu verwenden.
4.4. Messung des Kennfelds der Drehmomentverluste für Achsen
4.4.1. Prüfsequenz für das Kennfeld der Drehmomentverluste
Für jede Drehzahlstufe ist der Drehmomentverlust für die einzelnen Ausgangsdrehmomentstufen beginnend von 250 Nm aufwärts bis zum Höchstwert sowie abwärts bis zum niedrigsten Wert zu messen. Die Folge der Drehzahlstufen kann beliebig sein.
Eine Unterbrechung der Sequenz für den Zweck der Kühlung oder Erwärmung ist zulässig.
4.4.2. Messdauer
Die Messdauer für jeden einzelnen Rasterpunkt muss zwischen 5 und 15 Sekunden betragen.
4.4.3. Mittelung der Rasterpunkte
Die innerhalb des in Nummer 4.4.2 angegebenen Intervalls von 5 bis 15 Sekunden aufgezeichneten Werte für jeden Rasterpunkt sind arithmetisch zu mitteln.
Aus allen vier gemittelten Intervallen der einander entsprechenden Drehzahl- und Drehmoment-Rasterpunkte der beiden jeweils aufwärts und abwärts durchgeführten Messfolgen ist ein arithmetisches Mittel zu bilden, das einen einzelnen Wert für den Drehmomentverlust ergibt.
4.4.4. Der Drehmomentverlust (auf Eingangsseite) der Achse ist wie folgt zu berechnen:

dabei gilt:
|
Tloss, |
= |
Drehmomentverlust der Achse auf Eingangsseite [Nm] |
|
Tin |
= |
Eingangsdrehmoment [Nm] |
|
igear |
= |
Achsgetriebeübersetzung [-] |
|
Tout |
= |
Ausgangsdrehmoment [Nm] |
4.4.5. Validierung der Messung
4.4.5.1. Die gemittelten Drehzahlwerte pro Rasterpunkt (Intervall von 20 s) dürfen für die Ausgangsdrehzahl nicht mehr als ± 5 U/min von den Einstellwerten abweichen.
4.4.5.2. Die gemäß 4.4.3 gemittelten Ausgangsdrehmoment-Werte für jeden Rasterpunkt dürfen nicht mehr als ± 20 Nm oder ± 1 % (je nachdem, welcher Wert höher ist) vom Drehmoment-Sollwert für den betreffenden Rasterpunkt abweichen.
4.4.5.3. Werden die oben stehenden Kriterien nicht erfüllt, ist die Messung ungültig. In diesem Fall muss die Messung für die gesamte betreffende Drehzahlstufe wiederholt werden. Wenn die wiederholte Messung gültig ist, sind die Daten zu konsolidieren.
4.4.6. Berechnung der Unsicherheit
Die Gesamtunsicherheit UT,loss des Drehmomentverlustes ist auf Grundlage der folgenden Parameter zu berechnen:
|
i. |
Temperatureffekt |
|
ii. |
Parasitäre Lasten |
|
iii. |
Unsicherheit (einschließlich Empfindlichkeitstoleranz, Linearität, Hysterese und Wiederholbarkeit) |
Die Gesamtunsicherheit des Drehmomentverlustes (UT,loss ) beruht auf den Unsicherheiten der Sensoren mit einem Konfidenzniveau von 95 %. Die Berechnung erfolgt für jeden verwendeten Sensor (z. B. bei einer Anordnung mit drei Motoren: UT,in, UT,out,1, UT,out,2) als Quadratwurzel der Summe der Quadrate („Gaußsches Fehlerfortpflanzungsgesetz“).






wpara = senspara * ipara
dabei gilt:
|
UT,in/out |
= |
Unsicherheit der Messung des Eingangs-/Ausgangsdrehmomentverlustes, getrennt für Eingangs- und Ausgangsdrehmoment; [Nm] |
|
igear |
= |
Achsgetriebeübersetzung [-] |
|
UTKC |
= |
Unsicherheit durch den Temperatureinfluss auf das aktuelle Drehmomentsignal; [Nm] |
|
wtkc |
= |
Temperatureinfluss auf das aktuelle Drehmomentsignal pro Kref, vom Sensorhersteller angegeben; [%] |
|
UUTK0 |
= |
Unsicherheit durch den Temperatureinfluss auf das Nulldrehmomentsignal (bezogen auf das Nenndrehmoment); [Nm] |
|
wtk0 |
= |
Temperatureinfluss auf das Nulldrehmomentsignal pro Kref (bezogen auf das Nenndrehmoment), vom Sensorhersteller angegeben; [%] |
|
Kref |
= |
Bezugstemperatur-Messbereichsgrenze für tkc und tk0, vom Sensorhersteller angegeben; [°C] |
|
ΔK |
= |
absolute Differenz der am Drehmomentsensor zwischen der Kalibrierung und der Messung gemessenen Sensortemperatur; kann die Sensortemperatur nicht gemessen werden, ist der Standardwert ΔK = 15 K zu verwenden; [°C] |
|
Tc |
= |
aktueller/gemessener Drehmomentwert am Drehmomentsensor; [Nm] |
|
Tn |
= |
Drehmomentnennwert des Drehmomentsensors; [Nm] |
|
Ucal |
= |
Unsicherheit durch die Kalibrierung des Drehmomentsensors; [Nm] |
|
wcal |
= |
relative Kalibrierungsunsicherheit (bezogen auf das Nenndrehmoment); [%] |
|
kcal |
= |
Kalibrierfaktor (falls vom Sensorhersteller angegeben, andernfalls = 1) |
|
Upara |
= |
Unsicherheit durch parasitäre Lasten; [Nm] |
|
wpara |
= |
senspara * ipara relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden |
|
senspara |
= |
maximaler Einfluss parasitärer Lasten für einen gegebenen Drehmomentsensor, vom Sensorhersteller angegeben, [%]; wird vom Sensorhersteller kein bestimmter Wert für die parasitären Lasten angegeben, ist der Wert auf 1,0 % einzustellen |
|
ipara |
= |
maximaler Einfluss parasitärer Lasten für einen gegebenen Drehmomentsensor abhängig von der Prüfanordnung wie in den Abschnitten 4.2.3 und 4.2.4 dieses Anhangs angegeben |
4.4.7. Bewertung der Gesamtunsicherheit des Drehmomentverlustes
Falls die berechneten Unsicherheiten UT,in/out unter den folgenden Grenzwerten liegen, ist davon auszugehen, dass der gemeldete Drehmomentverlust Tloss,rep mit dem gemessenen Drehmomentverlust Tloss übereinstimmt.
UT,in : 7,5 Nm oder 0,25 % des gemessenen Drehmoments, abhängig davon, welcher zulässige Unsicherheitswert höher ist
UT,out : 15 Nm oder 0,25 % des gemessenen Drehmoments, abhängig davon, welcher zulässige Unsicherheitswert höher ist
Falls die berechneten Unsicherheiten höher sind, ist der Teil der berechneten Unsicherheit, der die oben stehenden Grenzwerte überschreitet, zu Tloss für den gemeldeten Drehmomentverlust Tloss,rep wie folgt zu addieren:
Falls die Grenzwerte von UT,in überschritten werden:
|
|
Tloss,rep = Tloss + ΔUTin |
|
|
ΔUT,in = MIN((UT,in – 0,25 % * Tc) oder (UT,in – 7,5 Nm)) |
Falls die Grenzwerte von UT,out überschritten werden:
|
|
Tloss,rep = Tloss + ΔUT,out /igear |
|
|
ΔUT,out = MIN((UT,out – 0,25 % * Tc) oder (UT,out – 15 Nm)) |
dabei gilt:
|
UT,in/out |
= |
Unsicherheit der Messung des Eingangs-/Ausgangsdrehmomentverlustes, getrennt für Eingangs- und Ausgangsdrehmoment; [Nm] |
|
igear |
= |
Achsgetriebeübersetzung [-] |
|
ΔUT |
= |
der Teil der berechneten Unsicherheit, der die angegebenen Grenzwerte überschreitet |
4.4.8. Ergänzung der Daten für das Kennfeld der Drehmomentverluste
4.4.8.1. Wenn die Drehmomentwerte den Grenzwert des oberen Bereichs überschreiten, ist eine lineare Extrapolation durchzuführen. Für die Extrapolation ist die Steigung der linearen Regression auf Basis aller für die entsprechende Drehzahlstufe gemessenen Drehmomentpunkte zu verwenden.
4.4.8.2. Für Werte des Ausgangsdrehmomentbereichs unter 250 Nm müssen die Drehmomentverlustwerte am Punkt 250 Nm verwendet werden.
4.4.8.3. Bei einer Raddrehzahl von 0 U/min sind die Drehmomentverlustwerte der Drehzahlstufe 50 U/min zu verwenden.
4.4.8.4. Bei negativen Eingangsdrehmomenten (z. B. Schiebebetrieb, Freilauf) ist der Wert des Drehmomentverlustes zu verwenden, der für das betreffende positive Eingangsdrehmoment gemessen wird.
4.4.8.5. Bei einer Tandemachse ist das kombinierte Kennfeld der Drehmomentverluste für beide Achsen anhand der Prüfergebnisse für die einzelnen Achsen zu berechnen.
Tloss,rep,tdm = Tloss,rep,1 + Tloss,rep,2
5. Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften
5.1. Jeder im Einklang mit diesem Anhang genehmigte Achsentyp muss in der Weise hergestellt werden, dass er im Hinblick auf die Beschreibung im Zertifizierungsformular und dessen Anlagen mit dem genehmigten Typ übereinstimmt. Die Verfahren zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften müssen mit den Bestimmungen in Artikel 12 der Richtlinie 2007/46/EG konform sein.
5.2. Die Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist auf Grundlage der Angaben in der in Anlage 1 dieses Anhangs beschriebenen Bescheinigung und der im vorliegenden Absatz aufgeführten besonderen Bedingungen zu überprüfen.
5.3. Vom Hersteller ist jährlich mindestens die in Tabelle 1 angegebene Anzahl von Achsen auf der Grundlage der jährlichen Produktionszahlen zu prüfen. Bei der Festlegung der Produktionszahlen sind nur Achsen zu berücksichtigen, für die die Anforderungen der vorliegenden Verordnung gelten.
5.4. Jede vom Hersteller geprüfte Achse muss für eine bestimmte Achsenfamilie repräsentativ sein.
5.5. Die Anzahl der Familien von einfach untersetzten Achsen und anderen Achsen, für die Prüfungen durchgeführt werden müssen, ist Tabelle 1 zu entnehmen.
Tabelle 1
Stichprobengröße für die Konformitätsprüfung
|
Produktionszahlen |
Anzahl der Prüfungen für einfach untersetzte Achsen |
Anzahl der Prüfungen für andere Achsen (ohne einfach untersetzte Achsen) |
|
0 – 40 000 |
2 |
1 |
|
40 001 – 50 000 |
2 |
2 |
|
50 001 – 60 000 |
3 |
2 |
|
60 001 – 70 000 |
4 |
2 |
|
70 001 – 80 000 |
5 |
2 |
|
80 001 und mehr |
5 |
3 |
5.6. Die beiden Achsenfamilien mit den höchsten Produktionsvolumen müssen immer geprüft werden. Der Hersteller muss die Anzahl der durchgeführten Prüfungen und die Auswahl der Familien gegenüber der Genehmigungsbehörde nachweisen (z. B. durch Angabe der Umsatzzahlen). Die restlichen Familien, für die Prüfungen durchzuführen sind, werden zwischen dem Hersteller und der Genehmigungsbehörde vereinbart.
5.7. Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ermittelt die Genehmigungsbehörde in Absprache mit dem Hersteller den bzw. die zu prüfenden Achsentypen. Die Genehmigungsbehörde stellt sicher, dass die ausgewählte(n) Achsentypen gemäß denselben Standards wie für die Serienproduktion hergestellt werden.
5.8. Wenn das Ergebnis einer gemäß Nummer 6 durchgeführten Prüfung die in Nummer 6.4 angegebenen Werte überschreitet, müssen drei weitere Achsen derselben Familie geprüft werden. Wenn mindestens eine dieser Achsen die Prüfung nicht besteht, gelten die Bestimmungen in Artikel 23.
6. Überprüfung der Übereinstimmung der Produktion
6.1. Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist in vorheriger Absprache zwischen der Genehmigungsbehörde und dem Antragsteller eines der folgenden Verfahren anzuwenden:
|
a) |
Die Messung des Drehmomentverlustes gemäß diesem Anhang unter Anwendung des vollständigen Verfahrens wird auf die in Absatz 6.2 beschriebenen Rasterpunkte begrenzt. |
|
b) |
Die Messung des Drehmomentverlustes gemäß diesem Anhang unter Anwendung des vollständigen Verfahrens wird auf die in Absatz 6.2 beschriebenen Rasterpunkte begrenzt, mit Ausnahme des Einfahrverfahrens. Zur Berücksichtigung der Einfahreigenschaften einer Achse kann ein Korrekturfaktor angewandt werden. Dieser Faktor ist nach bestem technischem Ermessen in Absprache mit der Genehmigungsbehörde festzulegen. |
|
c) |
Messung des Schleppdrehmoments gemäß Absatz 6.3. Der Hersteller kann ein Einfahrverfahren nach bestem technischem Ermessen von bis zu 100 Stunden wählen. |
6.2. Erfolgt die Bewertung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gemäß Absatz 6.1 Buchstabe a oder b, sind die Rasterpunkte für diese Messung auf vier Rasterpunkte aus dem genehmigten Kennfeld der Drehmomentverluste begrenzt.
6.2.1. Zu diesem Zweck ist das komplette Kennfeld der Drehmomentverluste der Achse, die zur Überstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften zu prüfen ist, in drei abstandsgleiche Drehzahlbereiche und in drei Drehmomentbereiche zu unterteilen, um neun Kontrollbereiche zu definieren (siehe Abbildung 2).
Abbildung 2
Drehzahl- und Drehmomentbereiche zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften
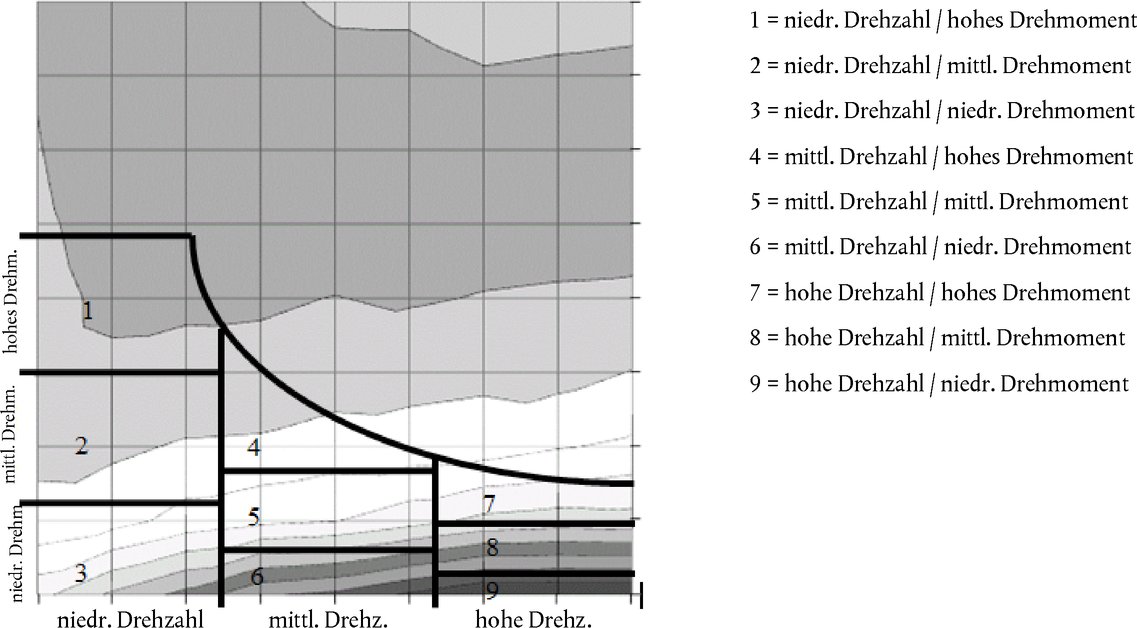
6.2.2. Für vier Kontrollbereiche ist gemäß dem vollständigen Verfahren ein einzelner Punkt auszuwählen, zu messen und auszuwerten, wie in Absatz 4.4 beschrieben. Jeder Kontrollpunkt ist wie folgt auszuwählen:
|
i) |
Die Kontrollbereiche sind abhängig von der Achsenreihe auszuwählen:
|
|
ii) |
Der ausgewählte Punkt muss in der Mitte des Bereichs liegen, der sich auf den Drehzahlbereich und den anwendbaren Drehmomentbereich für die betreffende Drehzahl bezieht. |
|
iii) |
Um einen korrespondierenden Punkt für den Vergleich mit dem für die Zertifizierung gemessenen Kennfeld der Verluste zu erhalten, ist der ausgewählte Punkt zu dem am nächsten liegenden gemessenen Punkt aus dem genehmigten Kennfeld zu verschieben. |
6.2.3. Für jeden gemessenen Punkt zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften und dessen korrespondierenden Punkt dem typgenehmigten Kennfeld wird die Effizienz wie folgt berechnet:

dabei gilt:
|
ηi |
= |
Effizienz des Rasterpunkts aus den einzelnen Kontrollbereichen 1 bis 9 |
|
Tout |
= |
Ausgangsdrehmoment [Nm] |
|
Tin |
= |
Eingangsdrehmoment [Nm] |
|
iaxle |
= |
Achsübersetzung [-] |
6.2.4. Die durchschnittliche Effizienz des Kontrollbereichs ist wie folgt zu berechnen:
|
|
Für einfach untersetzte Achsen:
|



|
|
Für Nabenuntersetzungsachsen:
|



dabei gilt:
|
ηavr,low speed |
= |
durchschnittliche Effizienz für niedrige Drehzahl |
|
ηavr,mid speed |
= |
durchschnittliche Effizienz für mittlere Drehzahl |
|
ηavr,high speed |
= |
durchschnittliche Effizienz für hohe Drehzahl |
|
ηavr,total |
= |
vereinfachte gemittelte Effizienz für die Achse |
6.2.5. Erfolgt die Bewertung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gemäß Absatz 6.1 Buchstabe c, ist das Schleppdrehmoment der Stammachse der Familien, der die geprüfte Achse angehört, während der Zertifizierung zu bestimmen. Dies kann vor oder nach dem Einfahrverfahren gemäß Absatz 3.1 oder durch eine lineare Extrapolation aller Werte des Kennfelds der Drehmomente für jede Drehzahlstufe bis hinunter zu 0 Nm durchgeführt werden.
6.3. Bestimmung des Schleppdrehmoments
6.3.1. Zur Bestimmung des Schleppdrehmoments einer Achse ist eine vereinfachte Prüfanordnung mit nur einem Elektromotor und nur einem Drehmomentsensor auf der Eingangsseite erforderlich.
6.3.2. Es gelten die Prüfbedingungen gemäß Absatz 4.1. Die auf das Drehmoment bezogene Unsicherheitsberechnung kann entfallen.
6.3.3. Die Messung des Schleppdrehmoments ist innerhalb des Drehzahlbereichs des genehmigten Typs gemäß Absatz 4.3.4 unter Berücksichtigung der in 4.3.5 genannten Drehzahlstufen durchzuführen.
6.4. Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften
6.4.1. Die Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist erfolgreich, wenn eine der folgenden Bedingungen erfüllt ist:
|
a) |
Wird eine Messung des Drehmomentverlustes gemäß Absatz 6.1 Buchstabe a oder b durchgeführt, darf die durchschnittliche Effizienz einer Achse, die während der Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften geprüft wurde, bei einfach untersetzten Achsen nicht um mehr als 1,5 % und bei allen anderen Achsenreihen nicht um mehr als 2,0 % von der entsprechenden durchschnittlichen Effizienz der typgenehmigten Achse abweichen. |
|
b) |
Wird eine Messung des Schleppdrehmoments gemäß Absatz 6.1 Buchstabe c durchgeführt, darf die Abweichung des Schleppdrehmoments der Achse, die während der Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften geprüft wurde, die in Tabelle 2 angegebenen Werte nicht überschreiten. |
Tabelle 2
|
Achsenreihe |
Toleranzen für Achsen, gemessen bei Überprüfung der Übereinstimmung der Produktion nach Einfahren Vergleich mit Td0 |
Toleranzen für Achsen, gemessen bei Überprüfung der Übereinstimmung der Produktion ohne Einfahren Vergleich mit Td0 |
||||||
|
für i |
Toleranz Td0_Eingang [Nm] |
für i |
Toleranz Td0_Eingang [Nm] |
für i |
Toleranz Td0_Eingang [Nm] |
für i |
Toleranz Td0_Eingang [Nm] |
|
|
SR |
≤ 3 |
15 |
> 3 |
12 |
≤ 3 |
25 |
> 3 |
20 |
|
SRT |
≤ 3 |
16 |
> 3 |
13 |
≤ 3 |
27 |
> 3 |
21 |
|
SP |
≤ 6 |
11 |
> 6 |
10 |
≤ 6 |
18 |
> 6 |
16 |
|
HR |
≤ 7 |
10 |
> 7 |
9 |
≤ 7 |
16 |
> 7 |
15 |
|
HRT |
≤ 7 |
11 |
> 7 |
10 |
≤ 7 |
18 |
> 7 |
16 |
|
i |
= |
Gangübersetzung |
Anlage 1
MUSTER DER BESCHEINIGUNG FÜR EIN BAUTEIL, EINE SELBSTSTÄNDIGE TECHNISCHE EINHEIT ODER EIN SYSTEM
Größtformat: A4 (210 × 297 mm)
BESCHEINIGUNG ÜBER DIE EIGENSCHAFTEN EINER ACHSENFAMILIE IN BEZUG AUF DIE CO2-EMISSIONEN UND DEN KRAFTSTOFFVERBRAUCH
|
Mitteilung über:
|
Behördenstempel
|
einer Bescheinigung über die Eigenschaften einer Achsenfamilie in Bezug auf die CO2-Emissionen und den Kraftstoffverbrauch gemäß Verordnung (EU) 2017/2400
Verordnung (EU) 2017/2400 der Kommission, zuletzt geändert durch …
Nummer der Bescheinigung:
Hash:
Grund für die Erweiterung:
ABSCHNITT I
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Typ:
0.3. Merkmale zur Typidentifizierung, sofern an der Achse vorhanden:
0.3.1. Anbringungsstelle dieser Kennzeichnung:
0.4. Name und Anschrift des Herstellers:
0.5. Bei Bauteilen und selbstständigen technischen Einheiten Lage und Anbringungsart des EG-Zertifizierungszeichens:
0.6. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.7. (Ggf.) Name und Anschrift des Bevollmächtigten des Herstellers:
ABSCHNITT II
1. Zusätzliche Angaben (falls zutreffend): siehe Beiblatt
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts:
4. Nummer des Prüfberichts:
5. Gegebenenfalls Bemerkungen: siehe Beiblatt
6. Ort:
7. Datum:
8. Unterschrift:
Anlagen:
|
1. |
Beschreibungsbogen |
|
2. |
Prüfbericht |
(1) Nichtzutreffendes streichen (Trifft mehr als eine Angabe zu, ist unter Umständen nichts zu streichen.)
Anlage 2
Achsen-Beschreibungsbogen
|
Beschreibungsbogen Nr.: |
Gegenstand: Ausstellungsdatum: Datum der Änderung: |
gemäß …
Achstyp:
…
0. ALLGEMEINES
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers):
0.3. Achstyp:
0.4. Achsenfamilie (falls zutreffend):
0.5. Achstyp als selbstständige technische Einheit / Achsenfamilie als selbstständige technische Einheit
0.6. Handelsname(n) (sofern vorhanden):
0.7. Merkmale zur Typidentifizierung, sofern an der Achse vorhanden:
0.8. Bei Bauteilen und selbstständigen technischen Einheiten Anbringungsstelle und Anbringungsart des Zertifizierungszeichens:
0.9. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
TEIL 1
WESENTLICHE MERKMALE DER (STAMM-)ACHSE UND DER ACHS-TYPEN IN DER ACHSENFAMILIE
|
|
Stammachse |
Familienmitglied |
|
||
|
|
|||||
|
oder Achstyp |
Nr. 1 |
Nr. 2 |
Nr. 3 |
|
|
|
|
|||||
0.0. ALLGEMEINES
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Typ:
0.3. Handelsname(n) (sofern vorhanden):
0.4. Merkmale zur Typidentifizierung:
0.5. Anbringungsstelle dieser Merkmale:
0.6. Name und Anschrift des Herstellers:
0.7. Anbringungsstelle und Anbringungsart des Zertifizierungszeichens:
0.8. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.9. Ggf. Name und Anschrift des Bevollmächtigten des Herstellers:
1.0. EINZELANGABEN ÜBER DIE ACHSE
|
1.1 |
Achslinie (SR, HR, SP, SRT, HRT) |
… |
|
… |
… |
… |
|
|
1.2 |
Achsenübersetzung |
|
… |
|
… |
… |
… |
|
1.3 |
Achsgehäuse (Anzahl / ID / Zeichnung) |
|
… |
|
… |
… |
… |
|
1.4 |
Getriebespezifikationen |
… |
|
… |
… |
|
|
|
1.4.1 |
Kronenrad-Durchmesser; [mm] |
|
… |
|
… |
|
|
|
1.4.2 |
Vertikaler Versatz Ritzel / Kronenrad; [mm] |
… |
|
|
|
|
|
1.4.3. Ritzel: Winkel zur horizontalen Ebene; [°]
1.4.4. nur bei Portalachsen:
Winkel zwischen Ritzel-Achse und Kronenrad-Achse; [°]
1.4.5. Anzahl der Zähne Getrieberad
1.4.6. Anzahl der Zähne Kronenrad
1.4.7. Horizontaler Versatz des Ritzels; [mm]
1.4.8. Horizontaler Versatz Getrieberad / Tellerrad; [mm]
1.5. Ölvolumen; [cm3]
1.6. Ölstand; [mm]
1.7. Öl-Spezifikationen
1.8. Lagertyp (Anzahl / ID / Zeichnung)
1.9. Dichtungstyp (Hauptdurchmesser, Lippenanzahl); [mm]
1.10. Radenden (Anzahl / ID / Zeichnung)
1.10.1. Lagertyp (Anzahl / ID / Zeichnung)
1.10.2. Dichtungstyp (Hauptdurchmesser, Lippenanzahl); [mm]
1.10.3. Schmiermitteltyp
1.11. Anzahl der Planeten- / Zahnradgetriebe
1.12. Kleinste Breite der Planeten- / Zahnradgetriebe; [mm]
1.13. Getriebeübersetzung der Nabenuntersetzung
LISTE DER ANLAGEN
|
Nr. |
Beschreibung: |
Ausstellungsdatum: |
|
1 |
… |
… |
|
2 |
… |
|
Anlage 3
Berechnung des Standard-Drehmomentverlusts
Die Standard-Drehmomentverluste für Achsen sind in Tabelle 1 aufgeführt. Die Standardwerte der Tabelle bestehen aus der Summe eines Wertes des allgemeinen konstanten Wirkungsgrads zur Abbildung der lastabhängigen Verluste und einem allgemeinen Wert für den Schleppverlust zur Abbildung der Schleppverluste bei geringer Last.
Durchtriebsachsen werden anhand einer kombinierten Effizienz für eine Achse einschließlich Durchtrieb (SRT, HRT) zuzüglich der zughörigen Einzelachse (SR, HR) berechnet.
Tabelle 1
Allgemeiner Wirkungsgrad und Schleppverlust
|
Grundfunktion |
Allgemeiner Wirkungs-grad η |
Schlepp-dreh-moment (Radseite) Td0 = T0 + T1 * igear |
|
Einfach untersetzte Achse (SR) |
0,98 |
T0 = 70 Nm T1 = 20 Nm |
|
Einfach untersetzte Durchtriebs-achse (SRT) / Portalachse (SP) |
0,96 |
T0 = 80 Nm T1 = 20 Nm |
|
Nabenunter-setzungsachse (HR) |
0,97 |
T0 = 70 Nm T1 = 20 Nm |
|
Nabenunter-setzungsachse mit Durchtrieb (HRT) |
0,95 |
T0 = 90 Nm T1 = 20 Nm |
Der allgemeine Schleppverlust (Radseite) wird mit folgender Formel berechnet:
Td0 = T0 + T1 * igear,
wobei die Werte aus Tabelle 1 verwendet werden.
Der Standard-Drehmomentverlust Tloss,std auf der Radseite wird mit folgender Formel berechnet:

Dabei gilt:
|
Tloss,std |
= |
Standard-Drehmomentverlust auf der Radseite [Nm] |
|
Td0 |
= |
Allgemeiner Schleppverlust über den gesamten Drehzahlbereich [Nm] |
|
igear |
= |
Achsenübersetzung [-] |
|
η |
= |
Allgemeiner Wirkungsgrad bei lastabhängigen Verlusten [-] |
|
Tout |
= |
Ausgangsdrehmoment [Nm] |
Anlage 4
Familienkonzept
1. Der Antragsteller legt der Genehmigungsbehörde einen Antrag auf Erteilung einer Bescheinigung für eine Achsenfamilie im Sinne der in Absatz 3 genannten Kriterien vor.
Eine Achsenfamilie ist durch ihre Konstruktions- und Leistungsparameter bestimmt. Diese müssen für alle Achsen einer Familie die gleichen sein. Welche Achsen zu einer Familie gehören, kann der Achsenhersteller nach eigenem Ermessen festlegen, solange er sich dabei an die Vorschriften von Absatz 4 hält. Zusätzlich zu den in Absatz 4 aufgeführten Parametern kann der Hersteller weitere Kriterien für die Festlegung kleinerer Achsenfamilien einführen. Diese Parameter sind nicht unbedingt solche, die sich auf das Leistungsniveau auswirken. Die Achsenfamilie ist von der Genehmigungsbehörde zu genehmigen. Der Hersteller muss der Genehmigungsbehörde die entsprechenden Daten zur Leistung der Achsen einer Familie zur Verfügung stellen.
2. Sonderfälle
In manchen Fällen können Wechselwirkungen zwischen den Parametern vorliegen. Dies muss berücksichtigt werden, damit gewährleistet ist, dass einer Achsenfamilie nur Achsen mit ähnlichen Eigenschaften zugeordnet werden. Diese Fälle sind vom Hersteller zu ermitteln und der Genehmigungsbehörde mitzuteilen. Sie sind dann bei der Festlegung einer neuen Achsenfamilie zu berücksichtigen.
Sind Parameter vorhanden, die in Absatz 3 nicht aufgeführt sind, aber das Leistungsniveau stark beeinflussen, so muss sie der Hersteller nach den anerkannten Regeln der Technik feststellen und der Genehmigungsbehörde mitteilen.
3. Parameter für die Festlegung der Achsenfamilie
3.1. Achsenkategorie
|
a) |
Einfach untersetzte Achse (SR) |
|
b) |
Nabenuntersetzungsachse (HR) |
|
c) |
Portalachse (SP) |
|
d) |
Einfach untersetzte Durchtriebsachse (SRT) / |
|
e) |
Nabenuntersetzungsachse mit Durchtrieb (HRT) |
|
f) |
Gleiche Geometrie des inneren Achsgehäuses zwischen Differenziallagern und der horizontalen Ebene des Zentrums der Ritzelwelle nach Angabe auf Zeichnung (Ausnahme Portalachsen (SP)). Änderungen der Geometrie aufgrund des wahlweisen Einbaus einer Differenzialsperre sind innerhalb derselben Achsenfamilie erlaubt. Bei spiegelbildlichen Achsgehäusen können die spiegelbildlichen Achsen in dieselbe Familie eingeordnet werden wie die Originalachsen, vorausgesetzt, die Kegelradgetriebe sind für die andere Laufrichtung geeignet (Änderung der Spiralrichtung). |
|
g) |
Kronenrad-Durchmesser (+ 1,5/– 8 % rel. zum größten Durchmesser nach Zeichnung) |
|
h) |
Vertikaler Achsversatz Ritzel/Kronenrad innerhalb ± 2 mm |
|
i) |
Bei Portalachsen (SP): Getrieberad-Winkel zur horizontalen Ebene innerhalb ± 5° |
|
j) |
Bei Portalachsen (SP): Winkel zwischen Ritzel-Achse und Kronenrad-Achse innerhalb ± 3,5° |
|
k) |
Bei Nabenuntersetzungs- und Portalachsen (HR, HRT FHR, SP): Gleiche Anzahl von Planeten- und Stirnrädern |
|
l) |
Übersetzungsverhältnis jeder Gangstufe in einer Achse im Bereich 1, solange nur ein Getriebe gewechselt wird |
|
m) |
Ölstand innerhalb ± 10 mm oder Ölvolumen innerhalb ± 0,5 l zur Angabe auf der Zeichnung und Einbauort im Fahrzeug |
|
n) |
Gleicher Viskositätsgrad der Ölart (empfohlenes ab Werk eingefülltes Öl) |
|
o) |
Hinsichtlich aller Lager: gleicher Roll-/Gleitkreisdurchmesser (innerer/äußerer) und gleiche Roll-/Gleitkreisbreite innerhalb von ± 2 mm bezogen auf die Zeichnung |
|
p) |
Gleicher Dichtungstyp (Hauptdurchmesser, Anzahl der Öllippen) innerhalb von ± 0,5 mm bezogen auf die Zeichnung |
4. Wahl der Stammachse
4.1. Die Stammachse einer Achsenfamilie wird als die Achse mit der größten Achsübersetzung definiert. Wenn mehr als zwei Achsen dieselbe Achsübersetzung aufweisen, muss der Hersteller eine Analyse vorlegen, damit die Achse mit den schlechtesten Werten als Stammachse definiert werden kann.
4.2. Die Genehmigungsbehörde kann zu dem Schluss kommen, dass der stärkste Drehmomentverlust innerhalb der Familie am besten durch Überprüfung weiterer Achsen ermittelt werden kann. In diesem Fall muss der Achsenhersteller Angaben machen, mit denen die Achse mit den voraussichtlich höchsten Drehmomentverlusten innerhalb der Familie ermittelt werden kann.
4.3. Weisen die Motoren einer Achsenfamilie weitere Merkmale auf, von denen man einen Einfluss auf die Drehmomentverluste erwarten kann, so sind diese Merkmale ebenfalls zu bestimmen und bei der Auswahl der Stammachse zu berücksichtigen.
Anlage 5
Kennzeichnungen und Nummerierung
1. Kennzeichnungen
Wenn eine Achse gemäß diesem Anhang typgenehmigt wird, muss die Achse folgende Angaben aufweisen:
|
1.1. |
Herstellername und Handelsmarke |
|
1.2. |
Fabrikmarke und Typenbezeichnung gemäß Angaben in Anlage 2 Absätze 0.2 und 0.3 dieses Anhangs |
|
1.3. |
Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben „e“ umgibt, gefolgt von der Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
|
1.4. Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die „Grundzertifizierungsnummer“ gemäß den Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang VII der Richtlinie 2007/46/EG vermerkt sein. Davor stehen die zweistellige laufende Nummer, die die jeweils letzte technische Änderung der vorliegenden Verordnung bezeichnet, sowie der Buchstabe „L“ zur Angabe, dass die Zertifizierung für eine Achse erteilt wurde.
Die laufende Nummer für die vorliegende Verordnung ist „00“.
1.4.1. Beispiel für ein Zertifizierungszeichen samt Abmessungen
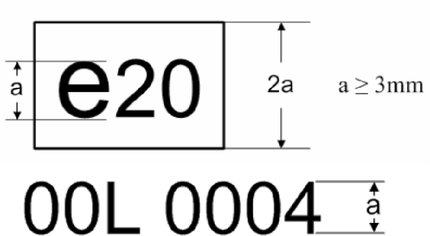
Das obige an einer Achse angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (00) geben die laufende Nummer an, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet. Der folgende Buchstabe gibt an, dass die Zertifizierung für eine Achse (L) erteilt wurde. Die letzten vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundzertifizierungsnummer für die Achse dar.
1.5. Auf Ersuchen des Antragstellers für die Zertifizierung und nach vorheriger Abstimmung mit der Typgenehmigungsbehörde können andere Typengrößen als die in 1.4.1 angegebenen verwendet werden. Diese alternativen Typengrößen müssen weiterhin deutlich lesbar sein.
1.6. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer der Achse ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden.
1.7. Die Zertifizierungsnummer muss bei eingebauter Achse in das Fahrzeug sichtbar sein und an einem für den normalen Betrieb notwendigen Teil angebracht werden, das während seiner Lebensdauer in der Regel nicht ausgetauscht werden muss.
2. Nummerierung:
2.1. Die Zertifizierungsnummer für Achsen setzt sich wie folgt zusammen:
eX*YYY/YYYY*ZZZ/ZZZZ*L*0000*00
|
Abschnitt 1 |
Abschnitt 2 |
Abschnitt 3 |
Zusätzlicher Buchstabe zu Abschnitt 3 |
Abschnitt 4 |
Abschnitt 5 |
|
Land, das die Zertifizierung erteilt hat |
CO2-Zertifizierungsrechtsakt (…/2017) |
Letzter Änderungs-rechtsakt (zzz/zzzz) |
L = Achse |
Grundzertifizierungsnummer 0000 |
Erweiterung 00 |
Anlage 6
Eingabeparameter für das Simulationsinstrument
Einleitung
Diese Anlage enthält die Liste der vom Bauteilehersteller für die Eingabe in das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Begriffsbestimmungen
(1)
(2)
string … Zeichenabfolge in ISO8859-1-Kodierung
token … Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende
date … Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DD T HH:MM:SS Z , wobei kursive Zeichen unveränderlich sind, z. B. „2002-05-30T09:30:10Z“
integer … Wert mit integralem Datentyp ohne führende Nullen, z. B. „1800“
double, X … Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen („.“) und ohne führende Nullen, z. B. für „double, 2“: „2345.67“, für „double, 4“: „45.6780“
(3)
Satz Eingabeparameter
Tabelle 1
Eingabeparameter „Axlegear/General“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Manufacturer |
P215 |
token |
[-] |
|
|
Model |
P216 |
token |
[-] |
|
|
TechnicalReportId |
P217 |
token |
[-] |
|
|
Date |
P218 |
dateTime |
[-] |
Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
|
AppVersion |
P219 |
token |
[-] |
|
|
LineType |
P253 |
string |
[-] |
Zulässige Werte: „Single reduction axle“, „Single portal axle“, „Hub reduction axle“, „Single reduction tandem axle“, „Hub reduction tandem axle“ |
|
Ratio |
P150 |
double, 3 |
[-] |
|
|
CertificationMethod |
P256 |
string |
[-] |
Zulässige Werte: „Measured“, „Standard values“ |
Tabelle 2
Eingabeparameter „Axlegear/LossMap“ für jeden Rasterpunkt im Drehmomentverlust-Kennfeld
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
InputSpeed |
P151 |
double, 2 |
[1/min] |
|
|
InputTorque |
P152 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P153 |
double, 2 |
[Nm] |
|
ANHANG VIII
ÜBERPRÜFUNG DER DATEN ZUM LUFTWIDERSTAND
1. Einleitung
In diesem Anhang ist das Prüfverfahren für die Überprüfung der Daten zum Luftwiderstand beschrieben.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs gelten folgende Begriffsbestimmungen:
|
1) |
„Aktive aerodynamische Einrichtung“ bezeichnet Maßnahmen, die von einer Steuereinheit zur Verringerung des Luftwiderstands des gesamten Fahrzeugs aktiviert werden. |
|
2) |
„Aerodynamisches Zubehör“ bezeichnet zulässige Einrichtungen, die dazu dienen, den Luftstrom um das gesamte Fahrzeug herum zu beeinflussen. |
|
3) |
„A-Säule“ bezeichnet eine tragende Struktur, die das Fahrerhausdach und die Stirnwand miteinander verbindet. |
|
4) |
„Geometrie der Rohkarosserie“ bezeichnet die tragende Struktur einschließlich der Windschutzscheibe des Fahrerhauses. |
|
5) |
„B-Säule“ bezeichnet eine tragende Struktur, die in der Mitte des Fahrerhauses dessen Boden und Dach verbindet. |
|
6) |
„Fahrerhaus-Unterbau“ bezeichnet die tragende Struktur des Fahrerhausbodens. |
|
7) |
„Fahrerhaushöhe über dem Rahmen“ bezeichnet den Abstand des Fahrerhaus-Bezugspunkts zum Rahmen in der Senkrechten z. Der Abstand wird von der Oberkante des horizontalen Rahmens bis zum Fahrerhaus-Bezugspunkt in der Senkrechten z gemessen. |
|
8) |
„Fahrerhaus-Bezugspunkt“ bezeichnet den Bezugspunkt (x/y/z = 0/0/0) im CAD-Koordinatensystem des Fahrerhauses oder einen klar definierten Punkt des Fahrerhauspakets, z. B. den Fersenpunkt. |
|
9) |
„Fahrerhausbreite“ bezeichnet den horizontalen Abstand zwischen der linken und rechten B-Säule des Fahrerhauses. |
|
10) |
„Prüfung mit konstanter Geschwindigkeit“ bezeichnet das auf einer Prüfstrecke durchzuführende Messverfahren zur Ermittlung des Luftwiderstands. |
|
11) |
„Datensatz“ bezeichnet die bei einem einfachen Durchfahren eines Messabschnitts aufgezeichneten Daten. |
|
12) |
„EMS“ bezeichnet das europäische modulare System (EMS) gemäß der Richtlinie 96/53/EG des Rates. |
|
13) |
„Rahmenhöhe“ bezeichnet den Abstand des Radmittelpunktes zur Oberkante des Rahmens in der z-Achse. |
|
14) |
„Fersenpunkt“ bezeichnet den Punkt, an dem die Ferse des Schuhs den niedergedrückten Bodenbelag berührt, wenn die Schuhunterseite mit dem nicht niedergetretenen Gaspedal in Kontakt ist und das Fußgelenk einen Winkel von 87° bildet. (ISO 20176:2011) |
|
15) |
„Messfläche“ bezeichnet ausgewiesene Teile der Prüfstrecke, bestehend aus mindestens einem Messabschnitt und einem davorliegenden Stabilisierungsabschnitt. |
|
16) |
„Messabschnitt“ bezeichnet einen für die Datenaufzeichnung und -auswertung relevanten ausgewiesenen Teil der Prüfstrecke. |
|
17) |
„Dachhöhe“ bezeichnet den Abstand des Fahrerhaus-Bezugspunktes vom höchsten Punkt des Daches ohne Schiebedach in der Senkrechten z. |
3. Bestimmung des Luftwiderstands
Zur Bestimmung der Luftwiderstandseigenschaften ist das Verfahren zur Prüfung mit konstanter Geschwindigkeit anzuwenden. Während der Prüfung mit konstanter Geschwindigkeit sind die wichtigsten Signale wie Antriebsdrehmoment, Fahrzeuggeschwindigkeit, Luftströmungsgeschwindigkeit und Gierwinkel bei zwei unterschiedlichen konstanten Fahrzeuggeschwindigkeiten (niedrige und hohe Geschwindigkeit) unter festgelegten Bedingungen auf einer Prüfstrecke zu messen. Die während dieser Prüfung mit konstanter Geschwindigkeit aufgezeichneten Messdaten sind in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten einzugeben. Dieses Instrument bestimmt das Produkt aus dem Luftwiderstandskoeffizienten und der Querschnittsfläche bei fehlendem Seitenwind Cd Acr (0), das in das Simulationsinstrument einfließt. Von dem die Zertifizierung beantragenden Antragsteller muss ein Wert für Cd · Adeclared angegeben werden, der in folgendem Bereich liegt: von gleich Cd · Acr (0) bis maximal +0,2 m2 höher als dieser Wert. Der Wert Cd · Adeclared dient als Eingabe für das CO2-Simulationsinstrument und als Bezugswert für die Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften.
Für Fahrzeuge, die nicht der Prüfung mit konstanter Geschwindigkeit unterzogen werden, sind die in Anlage 7 dieses Anhangs angegebenen Standardwerte für Cd · Adeclared zu verwenden. In diesem Fall müssen keine Eingabedaten zum Luftwiderstand vorgelegt werden. Die Standardwerte werden vom Simulationsinstrument automatisch zugewiesen.
3.1. Anforderungen an die Prüfstrecke
3.1.1. Die Prüfstrecke muss folgende Geometrie haben:
|
i. |
Kreisförmige Strecke (befahrbar in einer Richtung (*): mit zwei Messflächen jeweils auf einem geraden Absatz, die eine maximale Abweichung von weniger als 20 Grad haben;
oder |
|
ii. |
Kreisförmige oder gerade Prüfstrecke (befahrbar in beiden Richtungen): mit nur einer Messfläche (oder zwei Messflächen mit der oben angegebenen maximalen Abweichung); zwei Optionen sind möglich: unterschiedliche Fahrtrichtung entweder nach jedem Prüfabschnitt oder nach einem festzulegenden Satz von Prüfabschnitten, z. B. zehn Mal Fahrtrichtung 1 gefolgt von zehn Mal Fahrtrichtung 2. |
3.1.2. Messabschnitte
Auf der Prüfstrecke sind ein oder mehrere Messabschnitte mit einer Länge von 250 m mit einer Toleranz von ± 3 m zu definieren.
3.1.3. Messflächen
Eine Messfläche muss aus mindestens einem Messabschnitt und einem Stabilisierungsabschnitt bestehen. Dem ersten Messabschnitt einer Messfläche muss ein Stabilisierungsabschnitt vorangehen, um Geschwindigkeit und Drehmoment zu stabilisieren. Der Stabilisierungsabschnitt muss mindestens 25 m lang sein. Die Prüfstrecke ist so zu gestalten, dass das Fahrzeug bereits mit der während der Prüfung vorgesehenen Höchstgeschwindigkeit in den Stabilisierungsabschnitt eintreten kann.
Breite und Länge des Anfangs- und Endpunkts eines jeden Messabschnitts sind mit einer Genauigkeit von mindestens 0,15 m, d. h. 95 % Kreisfehlerwahrscheinlichkeit (DGPS-Genauigkeit), festzulegen.
3.1.4. Form der Messabschnitte
Mess- und Stabilisierungsabschnitt müssen eine Gerade sein.
3.1.5. Längsneigung der Messabschnitte
Die durchschnittliche Längsneigung eines jeden Messabschnitts und des Stabilisierungsabschnitts darf nicht mehr als ± 1 % betragen. Eine Abweichung der Neigung im Messabschnitt darf nicht zu Geschwindigkeits- und Drehmomentänderungen führen, welche die in 3.10.1.1 Ziffern vii. und viii. dieses Anhangs angegebenen Schwellenwerte überschreiten.
3.1.6. Oberfläche der Prüfstrecke
Die Prüfstrecke muss aus Asphalt oder Beton bestehen. Ein Messabschnitt muss eine einheitliche Oberfläche haben. Verschiedene Messabschnitte dürfen unterschiedliche Oberflächen aufweisen.
3.1.7. Stillstandbereich
Die Prüfstrecke muss einen Stillstandbereich umfassen, in dem das Fahrzeug angehalten werden kann, um die Nullstellung und die Driftüberprüfung des Drehmomentmesssystems durchzuführen.
3.1.8. Abstand zu straßenseitigen Hindernissen und lichte Höhe
Auf beiden Seiten des Fahrzeugs dürfen sich innerhalb eines Abstands von 5 m keine Hindernisse befinden. Sicherheitsbarrieren bis zu einer Höhe von 1 m mit mehr als 2,5 m Abstand zum Fahrzeug sind zulässig. Über dem Messabschnitt dürfen sich keine Brücken oder ähnlichen Bauwerke befinden. Die Prüfstrecke muss über eine ausreichende lichte Höhe verfügen, damit das Anemometer wie in Absatz 3.4.7 dieses Anhangs beschrieben am Fahrzeug angebracht werden kann.
3.1.9. Höhenprofil
Vom Hersteller ist festzulegen, ob bei der Auswertung der Prüfung eine Höhenkorrektur vorgenommen werden muss. Ist dies der Fall, muss das Höhenprofil für jeden Messabschnitt zur Verfügung gestellt werden. Die Daten müssen folgende Anforderungen erfüllen:
|
i. |
Die Messungen für das Höhenprofil sind in einem Rasterabstand von kleiner oder gleich 50 m in Fahrtrichtung durchzuführen. |
|
ii. |
Für jeden Rasterpunkt sind Länge, Breite und Höhe an mindestens einem Punkt („Höhenmesspunkt“) beidseitig der Fahrbahnmittellinie zu messen. Anschließend ist ein Mittelwert für den Rasterpunkt zu bilden. |
|
iii. |
Die Rasterpunkte, die in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten eingehen, müssen in einem Abstand von weniger als 1 m zur Mittellinie des Messabschnitts liegen. |
|
iv. |
Die Lage der Höhenmesspunkte zur Fahrbahnmittellinie (senkrechter Abstand, Anzahl der Punkte) ist so zu wählen, dass das resultierende Höhenprofil für die vom Prüffahrzeug gefahrene Neigung repräsentativ ist. |
|
v. |
Das Höhenprofil muss eine Genauigkeit von ± 1 cm oder besser aufweisen. |
|
vi. |
Die Messdaten dürfen nicht älter als zehn Jahre sein. Eine Erneuerung der Oberfläche innerhalb der Messfläche erfordert eine neue Messung des Höhenprofils. |
3.2. Anforderungen an die Umgebungsbedingungen
3.2.1. Die Umgebungsbedingungen sind mit den in Absatz 3.4 angegebenen Messeinrichtungen zu messen.
3.2.2. Die Umgebungstemperatur muss im Bereich von 0 °C bis 25 °C liegen. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des Signals für die am Fahrzeug gemessene Umgebungstemperatur geprüft. Dieses Kriterium gilt nur für Datensätze, die während der Prüfsequenz „niedrige Geschwindigkeit – hohe Geschwindigkeit – niedrige Geschwindigkeit“ aufgezeichnet werden; es gilt nicht für die Versatzkalibrierungsprüfung und die Warmlaufphasen.
3.2.3. Die Bodentemperatur darf 40 °C nicht überschreiten. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des Signals für die von einem Infrarotsensor am Fahrzeug gemessene Bodentemperatur geprüft. Dieses Kriterium gilt nur für Datensätze, die während der Prüfsequenz „niedrige Geschwindigkeit – hohe Geschwindigkeit – niedrige Geschwindigkeit“ aufgezeichnet werden; es gilt nicht für die Versatzkalibrierungsprüfung und die Warmlaufphasen.
3.2.4. Während der Prüfsequenz „niedrige Geschwindigkeit – hohe Geschwindigkeit – niedrige Geschwindigkeit“ muss die Straßenoberfläche trocken sein, damit vergleichbare Rollwiderstandskoeffizienten erhalten werden.
3.2.5. Die Windbedingungen müssen innerhalb des folgenden Bereichs liegen:
|
i. |
Durchschnittliche Windgeschwindigkeit: ≤ 5 m/s |
|
ii. |
Böengeschwindigkeit (1 s zentraler gleitender Durchschnitt): ≤ 8 m/s Die Ziffern i und ii gelten nur für Datensätze, die während der Prüfung mit hoher Geschwindigkeit und während der Versatzkalibrierungsprüfung aufgezeichnet werden; sie gelten nicht für die Prüfungen mit niedriger Geschwindigkeit. |
|
iii. |
Durchschnittlicher Gierwinkel (β):
|
Die Gültigkeit der Windbedingungen wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage der Signale geprüft, die am Fahrzeug nach Durchführung der Grenzschichtkorrektur aufgezeichnet werden. Messdaten, die unter Bedingungen erfasst werden, welche die oben stehenden Grenzwerte überschreiten, werden automatisch aus der Berechnung ausgeschlossen.
3.3. Aufbau des Fahrzeugs
3.3.1. Das Fahrgestell muss den Abmessungen der Standardkarosserie oder des Standard-Sattelanhängers entsprechen, wie in Anlage 5 dieses Anhangs definiert.
3.3.2. Die gemäß Absatz 3.5.3.1 Ziffer vii bestimmte Fahrzeughöhe muss innerhalb der in Anlage 4 dieses Anhangs angegebenen Grenzwerte liegen.
3.3.3. Der Mindestabstand zwischen Fahrerhaus und Kasten oder Sattelanhänger muss den Herstellervorgaben und den Anweisungen des Herstellers für den Karosseriebauer entsprechen.
3.3.4. Fahrerhaus und aerodynamisches Zubehör (z. B. Spoiler) sind so anzupassen, dass sie für die definierte Standardkarosserie oder den definierten Standard-Sattelanhänger optimal geeignet sind.
3.3.5. Das Fahrzeug muss die rechtlichen Anforderungen für eine Typgenehmigung von vollständigen Fahrzeugen erfüllen. Ausrüstung, die zur Durchführung der Prüfung mit konstanter Geschwindigkeit erforderlich ist (z. B. Gesamtfahrzeughöhe einschließlich Anemometer), ist von dieser Bestimmung ausgenommen.
3.3.6. Der Sattelanhänger ist gemäß den Vorgaben in Anlage 4 dieses Anhangs einzurichten.
3.3.7. Das Fahrzeug ist mit Reifen auszustatten, die die folgenden Anforderungen erfüllen:
|
i. |
Beste oder zweitbeste Reifenklasse in Bezug auf den Rollwiderstand, die zum Zeitpunkt der Prüfung verfügbar ist. |
|
ii. |
Maximale Profiltiefe von 10 mm am gesamten Fahrzeug einschließlich Anhänger. |
|
iii. |
Die Reifen müssen den vom Reifenhersteller angegebenen maximal zulässigen Druck aufweisen. |
3.3.8. Die Achseinstellung muss innerhalb der Herstellerangaben liegen.
3.3.9. Während der Prüfungen mit niedriger Geschwindigkeit – hoher Geschwindigkeit – niedriger Geschwindigkeit dürfen keine aktiven Reifendruckkontrollsysteme verwendet werden.
3.3.10. Wenn das Fahrzeug mit einer aktiven aerodynamischen Einrichtung ausgestattet ist, muss gegenüber der Genehmigungsbehörde Folgendes nachgewiesen werden:
|
i. |
Die Einrichtung ist stets aktiviert und wirksam, um den Luftwiderstand bei einer Fahrzeuggeschwindigkeit über 60 km/h zu verringern. |
|
ii. |
Die Einrichtung ist bei allen Fahrzeugen der Familie auf die gleiche Weise installiert und wirksam. |
Wenn die in Ziffer i und ii genannten Voraussetzungen nicht erfüllt sind, muss die aktive aerodynamische Einrichtung während der Prüfung mit konstanter Geschwindigkeit vollständig deaktiviert werden.
3.3.11. Das Fahrzeug darf nicht über irgendwelche temporären Funktionen, Modifikationen oder Einrichtungen verfügen, die ausschließlich dazu dienen sollen, den Luftwiderstandswert zu verringern, z. B. verschlossene Öffnungen. Modifikationen, die vorgenommen wurden, um die aerodynamischen Eigenschaften des geprüften Fahrzeugs mit den für das Stammfahrzeug definierten Bedingungen in Einklang zu bringen (z. B. Verschließen von Montagelöchern für Schiebedächer), sind zulässig.
3.3.12. Alle abnehmbaren Zusatzteile wie Sonnenblenden, Hupen, zusätzliche Frontscheinwerfer, Signalleuchten oder Frontschutzbügel werden bei der Berechnung des Luftwiderstands für die CO2-Regulierung nicht berücksichtigt. Solche abnehmbaren Zusatzteile müssen vor der Luftwiderstandsmessung vom Fahrzeug entfernt werden.
3.3.13. Die Messung ist ohne Nutzlast durchzuführen.
3.4. Messeinrichtungen
Das Kalibrierlabor muss die Anforderungen der ISO/TS 16949, ISO 9000 Reihen oder der ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale und internationale Prüfnormen zurückführbar sein.
3.4.1. Drehmoment
3.4.1.1. Zur Messung des direkten Drehmoments an allen Antriebsachsen ist eines der folgenden Messsysteme zu verwenden:
|
a. |
Naben-Drehmomentmesser |
|
b. |
Felgen-Drehmomentmesser |
|
c. |
Halbwellen-Drehmomentmesser |
3.4.1.2. Jedes Drehmomentmessgerät muss durch Kalibrierung die folgenden Systemanforderungen erfüllen:
|
i. |
Nichtlinearität: < ± 6 Nm |
|
ii. |
Wiederholbarkeit: < ± 6 Nm |
|
iii. |
Nebensprechen: < ± 1 % FSO (gilt nur für Felgen-Drehmomentmesser) |
|
iv. |
Messrate: ≥ 20 Hz |
dabei gilt:
|
|
„Nichtlinearität“ bedeutet die maximale Abweichung zwischen den idealen und den tatsächlichen Eigenschaften des Ausgangssignals bezogen auf die Messgröße in einem bestimmten Messbereich. |
|
|
„Wiederholbarkeit“ gibt den Grad der Übereinstimmung zwischen den Ergebnissen aufeinanderfolgender Messungen derselben Messgröße an, die unter denselben Messbedingungen durchgeführt werden. |
|
|
„Nebensprechen“ ist ein Signal am Hauptausgang eines Sensors (My), das von einer auf den Sensor wirkenden Messgröße (Fz) erzeugt wird und das sich von der diesem Ausgang zugeordneten Messgröße unterscheidet. Das Bezugssystem wird gemäß ISO 4130 definiert. |
|
|
„FSO“ (Full Scale Output) bedeutet die gesamte Spanne des kalibrierten Messbereichs. |
Die aufgezeichneten Drehmomentdaten sind für den vom Lieferanten bestimmten Messgerätefehler zu korrigieren.
3.4.2. Fahrzeuggeschwindigkeit
Die Fahrzeuggeschwindigkeit wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Grundlage des CAN-Bus-Vorderachsensignals bestimmt, dessen Kalibrierung auf einer der folgenden Größen basiert:
|
Option a) |
: |
einer Bezugsgeschwindigkeit, die sich errechnet aus einer Delta-Zeit von zwei festen optoelektronischen Schranken (siehe Absatz 3.4.4 dieses Anhangs) und der bekannten Länge des oder der Messabschnitte oder |
|
Option b) |
: |
einem durch die Delta-Zeit bestimmten Geschwindigkeitssignal vom Positionssignal eines DGPS und der bekannten Länge des oder der Messabschnitte, von den DGPS-Koordinaten abgeleitet. |
Zur Kalibrierung der Fahrzeuggeschwindigkeit werden die während der Prüfung mit hoher Geschwindigkeit aufgezeichneten Daten verwendet.
3.4.3. Referenzsignal zur Berechnung der Drehgeschwindigkeit der Räder an der Antriebsachse
Zur Berechnung der Drehgeschwindigkeit der Räder an der Antriebsachse ist das CAN-Motordrehzahlsignal zusammen mit den Übersetzungsverhältnissen (Gänge für die Prüfung mit niedriger Geschwindigkeit und für die Prüfung mit hoher Geschwindigkeit, Achsübersetzung) zur Verfügung zu stellen. Für das CAN-Motordrehzahlsignal ist nachzuweisen, dass das für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten gelieferte Signal mit dem Signal identisch ist, das für die Prüfung in Betrieb befindlicher Fahrzeuge oder Motoren gemäß Anhang I der Verordnung (EU) Nr. 582/2011 der Kommission zu verwenden ist.
Bei Fahrzeugen mit einem Drehmomentwandler, die nicht in der Lage sind, die Prüfung mit niedriger Geschwindigkeit mit geschlossener Wandlerüberbrückungskupplung zu durchlaufen, müssen zusätzlich das Drehzahlsignal der Kardanwelle und die Achsübersetzung oder das Signal der durchschnittlichen Raddrehzahl für die Antriebsachse für die Eingabe in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung gestellt werden. Es muss nachgewiesen werden, dass die anhand dieses zusätzlichen Signals berechnete Motordrehzahl im Vergleich zur CAN-Motordrehzahl innerhalb eines Bereichs von 1 % liegt. Dieser Nachweis erfolgt für den durchschnittlichen Wert über einen Messabschnitt, der mit der niedrigstmöglichen Fahrzeuggeschwindigkeit bei geschlossener Wandlerüberbrückungskupplung und bei der Prüfung mit hoher Geschwindigkeit mit der anwendbaren Fahrzeuggeschwindigkeit durchfahren wird.
3.4.4. Optoelektronische Schranken
Das Signal der Schranken ist für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung zu stellen, damit Anfang und Ende des Messabschnitts und die Kalibrierung des Fahrzeuggeschwindigkeitssignals ausgelöst werden. Die Messrate des Auslösesignals muss größer oder gleich 100 Hz sein. Alternativ kann ein DGPS-System verwendet werden.
3.4.5. (D)GPS-System
Option a) nur für die Positionsmessung: GPS
Erforderliche Genauigkeit:
|
i. |
: |
Position |
: |
< 3 m 95 % Kreisfehlerwahrscheinlichkeit |
|
ii. |
: |
Aktualisierungsrate |
: |
≥ 4 Hz |
Option b) für die Kalibrierung der Fahrzeuggeschwindigkeit und die Positionsmessung: Differential GPS-System (DGPS)
Erforderliche Genauigkeit:
|
i. |
: |
Position |
: |
0,15 m 95 % Kreisfehlerwahrscheinlichkeit |
|
ii. |
: |
Aktualisierungsrate |
: |
≥ 100 Hz |
3.4.6. Stationäre Wetterstation
Umgebungsdruck und Feuchtigkeit der Umgebungsluft werden mithilfe einer stationären Wetterstation ermittelt. Diese meteorologische Vorrichtung ist in einem Abstand von weniger als 2 000 m zu einer der Messflächen sowie in einer Höhe aufzustellen, die mindestens derjenigen der Messflächen entspricht.
Erforderliche Genauigkeit:
|
i. |
: |
Temperatur |
: |
± 1 °C |
|
ii. |
: |
Feuchtigkeit |
: |
± 5 % RH |
|
iii. |
: |
Druck |
: |
± 1 mbar |
|
iv. |
: |
Aktualisierungsrate |
: |
≤ 6 Minuten |
3.4.7. Mobiles Anemometer
Die Luftströmungsbedingungen, d. h. die Luftströmungsgeschwindigkeit und der Gierwinkel (β) zwischen dem Gesamtluftstrom und der Längsachse des Fahrzeugs, sind mit einem mobilen Anemometer zu messen.
3.4.7.1. Erforderliche Genauigkeit
Das Anemometer ist in Einrichtungen gemäß ISO 16622 zu kalibrieren. Die Anforderungen an die Genauigkeit gemäß Tabelle 1 müssen erfüllt sein:
Tabelle 1
Erforderliche Genauigkeit des Anemometers
|
Luftgeschwindigkeitsbereich [m/s] |
Genauigkeit der Luftgeschwindigkeit [m/s] |
Gierwinkelgenauigkeit im Gierwinkelbereich von 180 Grad ± 7 Grad [Grad] |
|
20 ± 1 |
± 0,7 |
± 1,0 |
|
27 ± 1 |
± 0,9 |
± 1,0 |
|
35 ± 1 |
± 1,2 |
± 1,0 |
3.4.7.2. Installationsposition
Das mobile Anemometer ist am Fahrzeug an der vorgeschriebenen Position zu installieren:
|
i. |
x-Position: Lastkraftwagen: Frontseite ± 0,3 m vom Sattelanhänger oder dem Kastenaufbau entfernt |
|
ii. |
y-Position: Symmetrieebene mit einer Toleranz von ± 0,1 m |
|
iii. |
z-Position: Die Installationshöhe über dem Fahrzeug muss ein Drittel der gesamten Fahrzeughöhe betragen mit einer Toleranz von 0,0 m bis +0,2 m. |
Die Instrumentierung muss so genau wie möglich unter Verwendung geometrischer oder optischer Hilfen erfolgen. Bei jedem verbleibenden Versatz muss eine entsprechende Kalibrierung gemäß Absatz 3.6 dieses Anhangs durchgeführt werden.
3.4.7.3. Die Aktualisierungsrate des Anemometers muss 4 Hz oder mehr betragen.
3.4.8. Temperaturaufnehmer für die Umgebungstemperatur am Fahrzeug
Die Temperatur der Umgebungsluft ist am Pol des mobilen Anemometers zu messen. Die Installationshöhe darf höchstens 600 mm unter dem mobilen Anemometer liegen. Der Sensor ist vor Sonnenlicht abzuschirmen.
Erforderliche Genauigkeit: ± 1 °C
Aktualisierungsrate: ≥ 1 Hz
3.4.9. Temperatur des Prüfgeländes
Die Temperatur des Prüfgeländes ist am Fahrzeug mittels eines kontaktlosen Infrarotsensors im Langwellenbereich (8 bis 14 μm) zu erfassen. Für ein Asphalt- oder Betonfeld ist ein Emissivitätsfaktor von 0,90 anzuwenden. Der Infrarotsensor muss gemäß ASTM E 2847 kalibriert werden.
Erforderliche Kalibriergenauigkeit: Temperatur: ± 2,5 °C
Aktualisierungsrate: ≥ 1 Hz
3.5. Verfahren zur Prüfung mit konstanter Geschwindigkeit
Für jede anwendbare Kombination von Messabschnitt und Fahrtrichtung ist das Verfahren zur Prüfung mit konstanter Geschwindigkeit, das sich aus einer ersten Prüfung mit niedriger Geschwindigkeit, einer anschließenden Prüfung mit hoher Geschwindigkeit und einer zweiten Prüfung mit niedriger Geschwindigkeit (wie im Folgenden beschrieben) zusammensetzt, in derselben Richtung durchzuführen.
3.5.1. Bei der Prüfung mit niedriger Geschwindigkeit muss die durchschnittliche Geschwindigkeit in einem Messabschnitt zwischen 10 und 15 km/h liegen.
3.5.2. Bei der Prüfung mit hoher Geschwindigkeit muss die durchschnittliche Geschwindigkeit in einem Messabschnitt innerhalb des folgenden Bereichs liegen:
|
|
Höchstgeschwindigkeit: 95 km/h |
|
|
Mindestgeschwindigkeit: 85 km/h oder 3 km/h unter der Höchstgeschwindigkeit, mit der das Fahrzeug die Prüfstrecke befahren kann, je nachdem, welcher Wert niedriger ist. |
3.5.3. Die Prüfung ist strikt nach der in den Absätzen 3.5.3.1 bis 3.5.3.9 dieses Anhangs angegebenen Reihenfolge durchzuführen.
3.5.3.1. Vorbereitung des Fahrzeugs und der Messsysteme
|
i. |
Anbringung der Drehzahlmesser an den Antriebsachsen des Prüffahrzeugs und Überprüfung der Installation und der Signaldaten gemäß den Herstellerangaben. |
|
ii. |
Dokumentation der relevanten allgemeinen Fahrzeugdaten für die offizielle Prüfvorlage gemäß Absatz 3.7 dieses Anhangs. |
|
iii. |
Zur Berechnung der Beschleunigungskorrektur durch das Instrument zur Vorverarbeitung der Luftwiderstandsdaten ist vor der Prüfung das tatsächliche Fahrzeuggewicht in einem Bereich von ± 500 kg zu ermitteln. |
|
iv. |
Überprüfung der Reifen zur Feststellung des maximal zulässigen Reifendrucks und Dokumentation der Reifendruckwerte. |
|
v. |
Vorbereitung der optoelektronischen Schranken an dem oder den Messabschnitten oder Überprüfung der korrekten Funktion des DGPS-Systems. |
|
vi. |
Anbringung des mobilen Anemometers am Fahrzeug und/oder Kontrolle der Installation, der Position und der Ausrichtung. Jedes Mal, wenn das Anemometer neu am Fahrzeug angebracht wurde, muss eine Versatzkalibrierungsprüfung durchgeführt werden. |
|
vii. |
Überprüfung der Einrichtung des Fahrzeugs hinsichtlich maximaler Höhe und Geometrie, bei laufendem Motor. Die maximale Fahrzeughöhe ist durch Messungen an den vier Ecken des Kastens oder des Sattelanhängers zu bestimmen. |
|
viii. |
Einstellung der Höhe des Sattelanhängers auf den Zielwert und ggf. erneute Bestimmung der Fahrzeughöhe. |
|
ix. |
Spiegel oder optische Systeme, Luftleitkörper auf dem Dach oder andere aerodynamische Einrichtungen müssen sich in ihrer normalen Fahrstellung befinden. |
3.5.3.2. Warmlaufphase
Zum Warmlaufen des Systems muss das Fahrzeug mindestens 90 Minuten lang mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Zielgeschwindigkeit betrieben werden. Ein wiederholter Warmlauf (z. B. nach einer Konfigurationsänderung, einer ungültigen Prüfung usw.) muss mindestens so lange dauern wie die Stillstandszeit. Die Warmlaufphase kann genutzt werden, um die Versatzkalibrierungsprüfung gemäß Absatz 3.6 dieses Anhangs durchzuführen.
3.5.3.3. Nullstellung der Drehzahlmesser
Die Nullstellung der Drehzahlmesser ist wie folgt durchzuführen:
|
i. |
Fahrzeug zum Stillstand bringen. |
|
ii. |
Räder, an denen die Messgeräte angebracht sind, vom Boden abheben. |
|
iii. |
Nullstellung der Verstärkeranzeige der Drehmomentmesser durchführen. |
Die Stillstandsphase darf 10 Minuten nicht überschreiten.
3.5.3.4. Ein weiterer Warmlauf über mindestens 10 Minuten mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Zielgeschwindigkeit ist durchzuführen.
3.5.3.5. Erste Prüfung mit niedriger Geschwindigkeit
Durchführen der ersten Messung bei niedriger Geschwindigkeit. Folgendes ist sicherzustellen:
|
i. |
Das Fahrzeug muss auf einer möglichst geraden Linie durch den Messabschnitt gefahren werden. |
|
ii. |
Die durchschnittliche Fahrgeschwindigkeit im Messabschnitt und im davorliegenden Stabilisierungsabschnitt muss mit den in Absatz 3.5.1 dieses Anhangs angegebenen Werten übereinstimmen. |
|
iii. |
Die Stabilität der Fahrgeschwindigkeit innerhalb der Mess- und der Stabilisierungsabschnitte muss die Kriterien in Absatz 3.10.1.1 Ziffer vii dieses Anhangs erfüllen. |
|
iv. |
Die Stabilität des innerhalb der Mess- und der Stabilisierungsabschnitte gemessenen Drehmoments muss die Kriterien in Absatz 3.10.1.1 Ziffer viii dieses Anhangs erfüllen. |
|
v. |
Anfang und Ende der Messabschnitte müssen in den Messdaten durch ein aufgezeichnetes Auslösesignal (optoelektronische Schranken plus aufgezeichnete GPS-Daten) oder durch Verwendung eines DGPS-Systems klar erkennbar sein. |
|
vi. |
Die Teile der Prüfstrecke, die außerhalb der Messabschnitte und der davorliegenden Stabilisierungsabschnitte liegen, sind ohne Verzögerung zu befahren. Während dieser Phasen sind unnötige Manöver (z. B. Fahren von Schlangenlinien) zu vermeiden. |
|
vii. |
Die Prüfung mit niedriger Geschwindigkeit darf höchstens 20 Minuten dauern, um eine Abkühlung der Reifen zu verhindern. |
3.5.3.6. Ein weiterer Warmlauf über mindestens 5 Minuten mit der für die Prüfung mit hoher Geschwindigkeit festgelegten Zielgeschwindigkeit ist durchzuführen.
3.5.3.7. Prüfung mit hoher Geschwindigkeit
Durchführen der Messung bei hoher Geschwindigkeit. Folgendes ist sicherzustellen:
|
i. |
Das Fahrzeug muss auf einer möglichst geraden Linie durch den Messabschnitt gefahren werden. |
|
ii. |
Die durchschnittliche Fahrgeschwindigkeit im Messabschnitt und im davorliegenden Stabilisierungsabschnitt muss mit den in Absatz 3.5.2 dieses Anhangs angegebenen Werten übereinstimmen. |
|
iii. |
Die Stabilität der Fahrgeschwindigkeit innerhalb der Mess- und der Stabilisierungsabschnitte muss die Kriterien in Absatz 3.10.1.1 Ziffer vii. dieses Anhangs erfüllen. |
|
iv. |
Die Stabilität des innerhalb der Mess- und der Stabilisierungsabschnitte gemessenen Drehmoments muss die Kriterien in Absatz 3.10.1.1 Ziffer viii dieses Anhangs erfüllen. |
|
v. |
Anfang und Ende der Messabschnitte müssen in den Messdaten durch ein aufgezeichnetes Auslösesignal (optoelektronische Schranken plus aufgezeichnete GPS-Daten) oder durch Verwendung eines DGPS-Systems klar erkennbar sein. |
|
vi. |
Während der Fahrphasen außerhalb der Messabschnitte und der davorliegenden Stabilisierungsabschnitte sind unnötige Manöver (z. B. Fahren von Schlangenlinien, unnötiges Beschleunigen oder Abbremsen) zu vermeiden. |
|
vii. |
Der Abstand zwischen dem geprüften Fahrzeug und einem anderen auf der Prüfstrecke fahrenden Fahrzeug muss mindestens 500 m betragen. |
|
viii. |
Mindestens zehn gültige Durchgänge pro Rubrik sind aufzuzeichnen. |
Die Prüfung mit hoher Geschwindigkeit kann dazu dienen, den Versatz des Anemometers zu bestimmen, sofern die Bestimmungen in Absatz 3.6 erfüllt sind.
3.5.3.8. Zweite Prüfung mit niedriger Geschwindigkeit
Die zweite Prüfung mit niedriger Geschwindigkeit ist unmittelbar nach der Prüfung mit hoher Geschwindigkeit durchzuführen. Für diese Prüfung gelten dieselben Bestimmungen wie für die erste Prüfung mit niedriger Geschwindigkeit.
3.5.3.9. Driftüberprüfung der Drehmomentmesser
Unmittelbar nach Abschluss der zweiten Prüfung mit niedriger Geschwindigkeit ist die Driftüberprüfung der Drehmomentmesser entsprechend dem folgenden Verfahren durchzuführen:
|
1. |
Fahrzeug zum Stillstand bringen. |
|
2. |
Räder, an denen die Messgeräte angebracht sind, vom Boden abheben. |
|
3. |
Die Drift jedes Drehmomentmessers, die aus dem Durchschnitt der Mindestsequenz von 10 Sekunden berechnet wird, muss unter 25 Nm betragen. |
Wird dieser Grenzwert überschritten, ist die Prüfung ungültig.
3.6. Versatzkalibrierungsprüfung
Der Versatz des Anemometers ist durch eine Versatzkalibrierungsprüfung auf der Prüfstrecke zu bestimmen.
3.6.1. Mindestens fünf gültige Durchgänge für einen geraden Absatz mit einer Länge von 250 m ± 3 m, der in jeder Richtung mit hoher Fahrzeuggeschwindigkeit befahren wird, sind erforderlich.
3.6.2. Es gelten die Kriterien für die Gültigkeit die Windbedingungen gemäß Absatz 3.2.5 dieses Anhangs sowie die Kriterien für die Prüfstrecke gemäß Absatz 3.1 dieses Anhangs.
3.6.3. Die während der Versatzkalibrierungsprüfung aufgezeichneten Daten sind vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Berechnung des Versatzfehlers und zur Durchführung der entsprechenden Korrektur zu verwenden. Bei der Auswertung werden die Signale für die Raddrehmomente und die Motordrehzahl nicht berücksichtigt.
3.6.4. Die Versatzkalibrierungsprüfung kann unabhängig vom Verfahren zur Prüfung mit konstanter Geschwindigkeit durchgeführt werden. Wird die Versatzkalibrierungsprüfung getrennt durchgeführt, ist folgendermaßen vorzugehen:
|
i. |
Vorbereitung der optoelektronischen Schranken an dem 250 m (± 3 m) langen Messabschnitt oder Überprüfung der korrekten Funktion des DGPS-Systems. |
|
ii. |
Überprüfung der Einrichtung des Fahrzeugs hinsichtlich Höhe und Geometrie gemäß Absatz 3.5.3.1 dieses Anhangs. Die Höhe des Sattelanhängers ist ggf. gemäß den Vorgaben in Anlage 4 dieses Anhangs anzupassen. |
|
iii. |
Für den Warmlauf gibt es keine Vorgaben. |
|
iv. |
Die Versatzkalibrierungsprüfung ist anhand von mindestens fünf gültigen Durchläufen (wie oben beschrieben) durchzuführen. |
3.6.5. In folgenden Fällen ist eine neue Versatzkalibrierungsprüfung erforderlich:
|
a. |
Das Anemometer wurde vom Fahrzeug entfernt. |
|
b. |
Das Anemometer wurde verschoben. |
|
c. |
Eine andere Zugmaschine oder ein anderer Lastkraftwagen wird verwendet. |
|
d. |
Die Fahrerhausfamilie wurde geändert. |
3.7. Prüfvorlage
Zusätzlich zur Aufzeichnung der modalen Messdaten ist die Prüfung in einer Vorlage zu dokumentieren, die mindestens die folgenden Daten enthält:
|
i. |
allgemeine Fahrzeugbeschreibung (Spezifikationen siehe Anlage 2 – Informationsdokument) |
|
ii. |
tatsächliche maximale Fahrzeughöhe, bestimmt gemäß Absatz 3.5.3.1 Ziffer vii. |
|
iii. |
Datum und Uhrzeit des Prüfungsbeginns |
|
iv. |
Fahrzeugmasse in einem Bereich von ± 500 kg |
|
v. |
Reifendrücke |
|
vi. |
Namen der Messdatendateien |
|
vii. |
Dokumentation außergewöhnlicher Ereignisse (mit Zeit und Anzahl der Messabschnitte), z. B.
|
3.8. Datenverarbeitung
3.8.1. Die aufgezeichneten Daten sind zu synchronisieren und mithilfe des arithmetischen Mittels, der Nearest-Neighbour-Interpolation oder der linearen Interpolation auf eine zeitliche Auflösung von 100 Hz auszurichten.
3.8.2. Alle aufgezeichneten Daten sind auf Fehler zu überprüfen. Messdaten sind in folgenden Fällen aus der weiteren Berücksichtigung auszuschließen:
|
— |
Datensätze wurden aufgrund von Ereignissen während der Messung ungültig (siehe Absatz 3.7 Ziffer vii); |
|
— |
Geräteübersteuerung während Messabschnitten (z. B. starke Windböen, die eventuell zu einer Übersteuerung des Anemometersignals geführt haben); |
|
— |
Messungen, in denen die zulässigen Grenzwerte für die Drift des Drehmomentmessers überschritten wurden. |
3.8.3. Für die Auswertung der Prüfungen mit konstanter Geschwindigkeit muss unbedingt die neueste verfügbare Version des Instruments zur Vorverarbeitung der Luftwiderstandsdaten verwendet werden. Von der oben aufgeführten Datenverarbeitung abgesehen, werden alle Auswertungsschritte, einschließlich Gültigkeitsprüfungen (mit Ausnahme der oben genannten Liste), vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten ausgeführt.
3.9. Eingabedaten für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen – Luftwiderstandsinstrument
Die folgenden Tabellen enthalten die Anforderungen für die Aufzeichnung von Messdaten und die vorbereitende Datenverarbeitung für die Eingabe in das Instrument zur Vorverarbeitung der Luftwiderstandsdaten:
|
|
Tabelle 2 für die Datei der Fahrzeugdaten |
|
|
Tabelle 3 für die Datei der Umgebungsbedingungen |
|
|
Tabelle 4 für die Datei der Konfiguration der Messabschnitte |
|
|
Tabelle 5 für die Datei der Messdaten |
|
|
Tabelle 6 für die Datei des Höhenprofils (optionale Eingabedaten) |
Eine ausführliche Beschreibung der geforderten Datenformate, der Eingabedateien und der Auswertungsgrundsätze ist in der technischen Dokumentation des Instruments zur Berechnung des Energieverbrauchs von Fahrzeugen – Luftwiderstandsinstrument zu finden. Die Datenverarbeitung muss gemäß Abschnitt 3.8 dieses Anhangs vorgenommen werden.
Tabelle 2
Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten – Datei der Fahrzeugdaten
|
Eingabedaten |
Einheit |
Anmerkungen |
|
Code der Fahrzeuggruppe |
[-] |
1 – 17 für Lastkraftwagen |
|
Fahrzeugkonfiguration mit Anhänger |
[-] |
Wenn das Fahrzeug ohne Anhänger (Eingabe „Nein“) oder mit Anhänger, d. h. als Kombination aus Lastkraftwagen und Anhänger oder aus Zugmaschine und Sattelanhänger (Eingabe „Ja“), gemessen wurde. |
|
Fahrzeugprüfmasse |
[kg] |
Tatsächliche Masse während der Messungen |
|
Höchstzulässiges Gesamtgewicht |
[kg] |
Höchstzulässiges Gesamtgewicht des Solofahrzeugs oder der Zugmaschine (ohne Anhänger oder Sattelanhänger) |
|
Achsübersetzung |
[-] |
|
|
Gangübersetzung hohe Geschwindigkeit |
[-] |
Übersetzungsverhältnis des während der Prüfung mit hoher Geschwindigkeit eingelegten Gangs (1) |
|
Gangübersetzung niedrige Geschwindigkeit |
[-] |
Übersetzungsverhältnis des während der Prüfung mit niedriger Geschwindigkeit eingelegten Gangs (1) |
|
Anemometerhöhe |
[m] |
Höhe über dem Boden des Messpunkts des installierten Anemometers |
|
Fahrzeughöhe |
[m] |
Maximale Fahrzeughöhe gemäß 3.5.3.1 Ziffer vii |
|
Getriebetyp |
[-] |
Manuelles oder automatisches Getriebe: „MT_AMT“ Automatisches Getriebe mit Drehmomentwandler: „AT“ |
|
Fahrzeughöchstgeschwindigkeit |
[km/h] |
Höchstgeschwindigkeit, mit der das Fahrzeug beim praktischen Test auf der Prüfstrecke betrieben werden kann (3) |
Tabelle 3
Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten – Datei der Umgebungsbedingungen
|
Signal |
Spalten-kennung in Eingabedatei |
Einheit |
Messrate |
Anmerkungen |
|
Zeit |
<t> |
[s] seit Tages-beginn (erster Tag) |
— |
— |
|
Umgebungstemperatur |
<t_amb_stat> |
[°C] |
Mindestens 1 gemittelter Wert pro 6 Minuten |
Stationäre Wetterstation |
|
Umgebungsdruck |
<p_amb_stat> |
[mbar] |
Stationäre Wetterstation |
|
|
Relative Luftfeuchtigkeit |
<rh_stat> |
[%] |
Stationäre Wetterstation |
Tabelle 4
Eingabedaten für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen – Luftwiderstandsinstrument – Datei der Konfiguration der Messabschnitte
|
Eingabedaten |
Einheit |
Anmerkungen |
|
Verwendung des Auslösesignals |
[-] |
1 = Auslösesignal verwendet; 0 = Auslösesignal nicht verwendet |
|
ID des Messabschnitts |
[-] |
Benutzerdefinierte Kennnummer |
|
ID der Fahrtrichtung |
[-] |
Benutzerdefinierte Kennnummer |
|
Kurs |
[°] |
Kurs des Messabschnitts |
|
Länge des Messabschnitts |
[m] |
— |
|
Breite Startpunkt des Abschnitts |
Dezimalgrade oder Dezimalminuten |
Standard-GPS, Einheit Dezimalgrade: mindestens 5 Stellen nach dem Dezimalzeichen |
|
Länge Startpunkt des Abschnitts |
Standard-GPS, Einheit Dezimalminuten: Mindestens 3 Stellen nach dem Dezimalzeichen |
|
|
Breite Endpunkt des Abschnitts |
DGPS, Einheit Dezimalgrade: Mindestens 7 Stellen nach dem Dezimalzeichen |
|
|
Länge Endpunkt des Abschnitts |
DGPS, Einheit Dezimalminuten: mindestens 5 Stellen nach dem Dezimalzeichen |
|
|
Pfad und/oder Dateiname der Datei der Höhenwerte |
[-] |
Nur für die Prüfungen mit konstanter Geschwindigkeit (nicht für die Versatzkalibrierungsprüfung) erforderlich und nur, wenn die Höhenkorrektur aktiviert ist |
Tabelle 5
Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten – Datei der Messdaten
|
Signal |
Spaltenkennung in Eingabedatei |
Einheit |
Messrate |
Anmerkungen |
|
Zeit |
<t> |
[s] seit Tagesbeginn (des ersten Tages) |
100 Hz |
Rate auf 100 Hz festgelegt; Verwendung des Zeitsignals für die Korrelation mit den Wetterdaten und für die Überprüfung der Frequenz |
|
Breite (D)GPS |
<lat> |
Dezimalgrade oder Dezimalminuten |
GPS: ≥ 4 Hz DGPS: ≥ 100 Hz |
Standard-GPS, Einheit Dezimalgrade: mindestens 5 Stellen nach dem Dezimalzeichen |
|
Länge (D)GPS |
<long> |
Standard-GPS, Einheit Dezimalminuten: Mindestens 3 Stellen nach dem Dezimalzeichen DGPS, Einheit Dezimalgrade: Mindestens 7 Stellen nach dem Dezimalzeichen DGPS, Einheit Dezimalminuten: mindestens 5 Stellen nach dem Dezimalzeichen |
||
|
Kurs (D)GPS |
<hdg> |
[°] |
≥ 4 Hz |
|
|
Geschwindigkeit DGPS |
<v_veh_GPS> |
[km/h] |
≥ 20 Hz |
|
|
Fahrzeuggeschwindigkeit |
<v_veh_CAN> |
[km/h] |
≥ 20 Hz |
CAN-Bus-Rohsignal von der Vorderachse |
|
Luftgeschwindigkeit |
<v_air> |
[m/s] |
≥ 4 Hz |
Rohdaten (Instrumentenablesung) |
|
Anströmwinkel (Beta) |
<beta> |
[°] |
≥ 4 Hz |
Rohdaten (Instrumentenablesung); „180°“ bezieht sich auf den Luftstrom von vorne |
|
Motor- oder Kardanwellendrehzahl |
<n_eng> oder <n_card> |
[rpm] |
≥ 20 Hz |
Drehzahl der Kardanwelle für Fahrzeuge mit Drehmomentwandler, deren Wandlerüberbrückungskupplung während der Prüfung mit niedriger Geschwindigkeit nicht geschlossen ist |
|
Drehmomentmesser (linkes Rad) |
<tq_l> |
[Nm] |
≥ 20 Hz |
— |
|
Drehmomentmesser (rechtes Rad) |
<tq_r> |
[Nm] |
≥ 20 Hz |
|
|
Umgebungstemperatur am Fahrzeug |
<t_amb_veh> |
[°C] |
≥ 1 Hz |
|
|
Auslösesignal |
<trigger> |
[-] |
100 Hz |
Optionales Signal; erforderlich, wenn die Messabschnitte mithilfe von optoelektronischen Barrieren erkannt werden (Option „trigger_used=1“) |
|
Temperatur des Prüfgeländes |
<t_ground> |
[°C] |
≥ 1 Hz |
|
|
Gültigkeit |
<valid> |
[-] |
— |
Optionales Signal (1 = gültig; 0 = ungültig) |
Tabelle 6
Eingabedaten für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten – Datei des Höhenprofils
|
Eingabedaten |
Einheit |
Anmerkungen |
|
Breite |
Dezimalgrade oder Dezimalminuten |
Einheit Dezimalgrade: Mindestens 7 Stellen nach dem Dezimalzeichen |
|
Länge |
Einheit Dezimalminuten: mindestens 5 Stellen nach dem Dezimalzeichen |
|
|
Höhe |
[m] |
Mindestens 2 Stellen nach dem Dezimalzeichen |
3.10. Gültigkeitskriterien
In diesem Abschnitt werden die Kriterien für den Erhalt gültiger Ergebnisse im Instrument zur Vorverarbeitung der Luftwiderstandsdaten beschrieben.
3.10.1. Gültigkeitskriterien für die Prüfung mit konstanter Geschwindigkeit
3.10.1.1. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten akzeptiert die während der Prüfung mit konstanter Geschwindigkeit aufgezeichneten Datensätze, wenn die folgenden Gültigkeitskriterien erfüllt sind:
|
i. |
Die durchschnittliche Fahrzeuggeschwindigkeit liegt innerhalb der in 3.5.2 definierten Kriterien. |
|
ii. |
Die Umgebungstemperatur liegt innerhalb des in 3.2.2 angegebenen Bereichs. Dieses Kriterium wird vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten auf Basis der am Fahrzeug gemessenen Umgebungstemperatur überprüft. |
|
iii. |
Die Temperatur des Prüfgeländes liegt innerhalb des in 3.2.3 angegebenen Bereichs. |
|
iv. |
Gültige durchschnittliche Windgeschwindigkeit gemäß Nummer 3.2.5 Ziffer i. |
|
v. |
Gültige Böengeschwindigkeit gemäß Nummer 3.2.5 Ziffer ii. |
|
vi. |
Gültiger durchschnittlicher Gierwinkel gemäß Nummer 3.2.5 Ziffer iii. |
|
vii. |
Stabilitätskriterien für die Fahrzeuggeschwindigkeit erfüllt:
|


|
viii. |
Stabilitätskriterien für das Fahrzeugdrehmoment erfüllt:
|



|
ix. |
Gültiger Kurs des Fahrzeugs beim Durchfahren eines Messabschnitts (< 10° Abweichung vom Zielkurs für die Prüfung mit niedriger Geschwindigkeit, die Prüfung mit hoher Geschwindigkeit und die Versatzkalibrierungsprüfung). |
|
x. |
Die anhand der kalibrierten Fahrzeuggeschwindigkeit berechnete zurückgelegte Distanz innerhalb des Messabschnitts weicht von der Zieldistanz nicht um mehr als 3 Meter ab (gilt für die Prüfung mit niedriger Geschwindigkeit und die Prüfung mit hoher Geschwindigkeit). |
|
xi. |
Plausibilitätsprüfung der Motor- oder der Kardanwellendrehzahl, abhängig davon, welche anwendbar ist:
Die Plausibilitätsprüfung für die Drehzahl der Kardanwelle wird analog durchgeführt, wobei neng,1s durch ncard,1s (1 s zentraler gleitender Durchschnitt der Kardanwellendrehzahl im Messabschnitt mit hoher Geschwindigkeit) und neng,float durch ncard,float (gleitender Durchschnitt der Kardanwellendrehzahl mit einer Zeitbasis von Xms Sekunden im Messabschnitt mit niedriger Geschwindigkeit) ersetzt und igear auf den Wert 1 eingestellt wird. |






|
xii. |
Der jeweilige Teil der Messdaten wurde in der Eingabedatei für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten nicht als „ungültig“ gekennzeichnet. |
3.10.1.2. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten schließt einzelne Datensätze aus der Auswertung aus, wenn die Anzahl von Datensätzen für eine bestimmte Kombination von Messabschnitt und Fahrtrichtung für die erste und die zweite Prüfung mit niedriger Geschwindigkeit nicht übereinstimmt. In diesem Fall werden die ersten Datensätze aus dem Durchlauf mit niedriger Geschwindigkeit, der eine höhere Anzahl von Datensätzen aufweist, ausgeschlossen.
3.10.1.3. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten schließt einzelne Kombinationen von Messabschnitt und Fahrtrichtung in folgenden Fällen aus der Auswertung aus:
|
i. |
Aus der ersten und/oder der zweiten Prüfung mit niedriger Geschwindigkeit ist kein gültiger Datensatz verfügbar. |
|
ii. |
Es sind weniger als zwei gültige Datensätze aus der Prüfung mit hoher Geschwindigkeit vorhanden. |
3.10.1.4. In folgenden Fällen wird die gesamte Prüfung mit konstanter Geschwindigkeit vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten als ungültig betrachtet:
|
i. |
Die in 3.1.1 beschriebenen Anforderungen an die Prüfstrecke sind nicht erfüllt. |
|
ii. |
Es sind weniger als 10 Datensätze pro Kurs vorhanden (Prüfung mit hoher Geschwindigkeit). |
|
iii. |
Es sind weniger als 5 gültige Datensätze pro Kurs vorhanden (Versatzkalibrierungsprüfung). |
|
iv. |
Die Rollwiderstandskoeffizienten (RRC) für die erste und die zweite Prüfung mit niedriger Geschwindigkeit weichen um mehr als 0,40 kg/t ab. Dieses Kriterium wird für jede Kombination von Messabschnitt und Fahrtrichtung getrennt überprüft. |
3.10.2. Gültigkeitskriterien für die Versatzkalibrierungsprüfung
3.10.2.1. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten akzeptiert die während der Versatzkalibrierungsprüfung aufgezeichneten Datensätze, wenn die folgenden Gültigkeitskriterien erfüllt sind:
|
i. |
Die durchschnittliche Fahrzeuggeschwindigkeit liegt innerhalb der für die Prüfung mit hoher Geschwindigkeit in 3.5.2 definierten Kriterien. |
|
ii. |
Gültige durchschnittliche Windgeschwindigkeit gemäß Nummer 3.2.5 Ziffer i. |
|
iii. |
Gültige Böengeschwindigkeit gemäß Nummer 3.2.5 Ziffer ii. |
|
iv. |
Gültiger durchschnittlicher Gierwinkel gemäß Nummer 3.2.5 Ziffer iii. |
|
v. |
Stabilitätskriterien für die Fahrzeuggeschwindigkeit erfüllt: 
dabei gilt:
|
3.10.2.2. In folgenden Fällen werden die Daten aus einem einzelnen Messabschnitt vom Instrument zur Vorverarbeitung der Luftwiderstandsdaten als ungültig betrachtet:
|
i. |
Die durchschnittlichen Fahrzeuggeschwindigkeiten aus allen gültigen Datensätzen für jede Fahrtrichtung weichen um mehr als 2 km/h ab. |
|
ii. |
Es sind weniger als 5 Datensätze pro Kurs vorhanden. |
3.10.2.3. Das Instrument zur Vorverarbeitung der Luftwiderstandsdaten betrachtet die gesamte Versatzkalibrierungsprüfung als ungültig, wenn kein gültiges Ergebnis für einen einzelnen Messabschnitt verfügbar ist.
3.11. Angabe des Luftwiderstandswerts
Basiswert für die Angabe des Luftwiderstandswerts ist das Endergebnis für Cd · Acr (0) gemäß der Berechnung des Instruments zur Vorverarbeitung der Luftwiderstandsdaten. Von dem die Zertifizierung beantragenden Antragsteller muss ein Wert für Cd · Adeclared angegeben werden, der in folgendem Bereich liegt: von gleich Cd · Acr (0) bis maximal +0,2 m2 höher als dieser Wert. Mit dieser Toleranz werden die Unsicherheiten berücksichtigt, die sich aus der Wahl der Stammfahrzeuge für den ungünstigsten Fall aller zu prüfenden Fahrzeuge aus der jeweiligen Fahrzeugfamilie ergeben. Der Wert Cd · Adeclared dient als Eingabe für das Simulationsinstrument und als Bezugswert für die Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften.
Weitere Familien mit anderen angegebenen Werten für Cd · Adeclared können auf Grundlage eines einzelnen gemessenen Werts für Cd · Acr (0) erstellt werden, solange die für die Familie gemäß Anlage 5 Nummer 4 geltenden Bestimmungen erfüllt sind.
(1) Angabe der Übersetzungsverhältnisse mit mindestens drei Stellen nach dem Dezimalzeichen.
(2) Wenn das Raddrehzahlsignal für das Instrument zur Vorverarbeitung der Luftwiderstandsdaten zur Verfügung gestellt wird (Option für Fahrzeuge mit Drehmomentwandler siehe Abschnitt 3.4.3), muss die Achsübersetzung auf „1.000“ eingestellt werden.
(3) Eine Eingabe ist nur erforderlich, wenn der Wert niedriger als 88 km/h ist.
Anlage 1
MUSTER EINER BESCHEINIGUNG FÜR EIN BAUTEIL, EINE SELBSTSTÄNDIGE TECHNISCHE EINHEIT ODER EIN SYSTEM
Größtformat: A4 (210 × 297 mm)
BESCHEINIGUNG DER FÜR DIE CO2-EMISSIONEN UND DEN KRAFTSTOFFVERBRAUCH MASSGEBLICHEN EIGENSCHAFTEN EINER LUFTWIDERSTANDSFAMILIE
|
Mitteilung über:
|
Behördenstempel
|
einer Zertifizierung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen Eigenschaften einer Luftwiderstandsfamilie gemäß Verordnung (EU) 2017/2400 der Kommission.
Verordnung (EU) 2017/2400 der Kommission, zuletzt geändert durch …
Zertifizierungsnummer:
Hash:
Grund für die Erweiterung:
ABSCHNITT I
0.1. Fabrikmarke (Firmenname des Herstellers):
0.2. Fahrzeugaufbau und Luftwiderstandstyp/-familie (falls zutreffend):
0.3. Fahrzeugaufbau und Mitglied der Luftwiderstandsfamilie (im Falle einer Familie):
0.3.1. Fahrzeugaufbau und Luftwiderstandsstamm:
0.3.2. Fahrzeugaufbau und Luftwiderstandstypen innerhalb der Familie:
0.4. Merkmale zur Typidentifizierung, sofern vorhanden:
0.4.1. Anbringungsstelle dieser Merkmale:
0.5. Name und Anschrift des Herstellers:
0.6. Bei Bauteilen und selbstständigen technischen Einheiten Lage und Anbringungsart des EG-Zertifizierungszeichens:
0.7. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.9. (ggf.) Name und Anschrift des Bevollmächtigten des Herstellers
ABSCHNITT II
1. Zusätzliche Angaben (soweit vorhanden): siehe Beiblatt
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts:
4. Nummer des Prüfberichts:
5. Bemerkungen (sofern vorhanden): siehe Beiblatt
6. Ort:
7. Datum:
8. Unterschrift:
Anlagen
Beschreibungsmappe, Prüfbericht
Anlage 2
Beschreibungsbogen für Fahrzeugaufbau und Luftwiderstand
|
Nr. des Beschreibungsbogens: |
Ausgabe: vom: Änderung: |
|
Gemäß … Fahrzeugaufbau und Luftwiderstandstyp oder -familie (falls zutreffend): Allgemeine Anmerkung: Für Eingabedaten in das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen muss ein elektronisches Dateiformat für den Datenimport in dieses Instrument definiert werden. Die Eingabedaten für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen können sich von den im Beschreibungsbogen verlangten Daten unterscheiden und umgekehrt (ist festzulegen). Eine Datendatei ist insbesondere dann erforderlich, wenn große Datenmengen wie Wirkungsgradkennfelder zu bearbeiten sind (keine manuelle Übermittlung/Eingabe notwendig). … |
0.0. ALLGEMEINES
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers):
0.3. Fahrzeugaufbau und Luftwiderstandstyp (ggf. Familie):
0.4. Handelsname(n) (sofern vorhanden):
0.5. Merkmale zur Typidentifizierung, sofern am Fahrzeug vorhanden:
0.6. Bei Bauteilen und selbstständigen technischen Einheiten Lage und Anbringungsart des Zertifizierungszeichens:
0.7. Name(n) und Anschrift(en) der Fertigungsstätte(n):
0.8. Name und Anschrift des Bevollmächtigten des Herstellers
TEIL 1
WESENTLICHE MERKMALE DES (STAMM)-FAHRZEUGAUFBAUS UND DES LUFTWIDERSTANDS
Typen innerhalb einer Fahrzeugaufbau- und Luftwiderstandsfamilie
|
Stamm Fahrzeugkonfiguration |
||
|
1.0. |
SPEZIFISCHE LUFTWIDERSTANDSINFORMATIONEN |
|
|
1.1.0. |
FAHRZEUG |
|
|
1.1.1. |
Gruppe der schweren Nutzfahrzeuge gemäß CO2-Schema für schwere Nutzfahrzeuge |
|
|
1.2.0. |
Fahrzeugmodell |
|
|
1.2.1. |
Achsenkonfiguration |
|
|
1.2.2. |
Höchstzulässiges Gesamtgewicht |
|
|
1.2.3. |
Fahrerhausreihe |
|
|
1.2.4. |
Fahrerhausbreite (Höchstwert in y-Richtung) |
|
|
1.2.5. |
Fahrerhauslänge (Höchstwert in x-Richtung) |
|
|
1.2.6. |
Dachhöhe |
|
|
1.2.7. |
Radstand |
|
|
1.2.8. |
Fahrerhaushöhe über dem Rahmen |
|
|
1.2.9. |
Rahmenhöhe |
|
|
1.2.10. |
Aerodynamisches Zubehör (z. B. Dachspoiler, Seitenspoiler, Seitenschweller, Eck-Luftleitbleche) |
|
|
1.2.11. |
Reifenabmessungen Vorderachse |
|
|
1.2.12. |
Reifenabmessungen Antriebsachse(n) |
|
|
1.3. |
Aufbauspezifikationen (gemäß der Definition für den Normaufbau) |
|
|
1.4. |
Spezifikationen zum Anhänger (Sattelanhänger) (gemäß der Spezifikation für den Normanhänger (Norm-Sattelanhänger) |
|
|
1.5. |
Parameter zur Definition der Familie gemäß der Beschreibung des Antragstellers (Kriterien des Stamms und abgeleitete Familienkriterien) |
|
VERZEICHNIS DER ANLAGEN
|
Nr. |
Beschreibung |
Ausstellungsdatum |
|
1 |
Informationen zu Prüfbedingungen |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Anlage 1 zum Beschreibungsbogen
Informationen zu Prüfbedingungen (sofern zutreffend)
Prüfstrecke, auf der die Prüfungen durchgeführt wurden:
Gesamtfahrzeugmasse während der Messung [kg]:
Maximale Fahrzeughöhe während der Messung [m]:
Durchschnittliche Umgebungsbedingungen während der ersten Prüfung mit niedriger Geschwindigkeit [°C]:
Durchschnittliche Fahrzeuggeschwindigkeit während der Prüfungen mit hoher Geschwindigkeit [km/h]:
Produkt aus dem Luftwiderstandskoeffizienten (Cd ) und der Querschnittsfläche (Acr ) bei fehlendem Seitenwind CdAcr(0) [m2]:
Produkt aus dem Luftwiderstandskoeffizienten (Cd ) und der Querschnittsfläche (Acr ) für durchschnittliche Seitenwindbedingungen während der Prüfung mit konstanter Geschwindigkeit CdAcr(β) [m2]:
Durchschnittlicher Gierwinkel während der Prüfung mit konstanter Geschwindigkeit β [°]:
Angegebener Luftwiderstandswert Cd · Adeclared [m2]:
Anlage 3
Anforderungen an die Fahrzeughöhe
|
1. |
Fahrzeuge, für die Messungen während der Prüfung mit konstanter Geschwindigkeit gemäß Abschnitt 3 dieses Anhangs durchgeführt werden, müssen die in Tabelle 7 angegebenen Anforderungen an die Fahrzeughöhe erfüllen. |
|
2. |
Die Fahrzeughöhe ist gemäß Nummer 3.5.3.1 Ziffer vii zu bestimmen. |
|
3. |
Fahrzeuge der nicht in Tabelle 7 aufgeführten Fahrzeuggruppen unterliegen nicht der Prüfung mit konstanter Geschwindigkeit. |
Tabelle 7
Anforderungen an die Fahrzeughöhe
|
Fahrzeuggruppe |
Minimale Fahrzeughöhe [m] |
Maximale Fahrzeughöhe [m] |
|
1 |
3,40 |
3,60 |
|
2 |
3,50 |
3,75 |
|
3 |
3,70 |
3,90 |
|
4 |
3,85 |
4,00 |
|
5 |
3,90 |
4,00 |
|
9 |
Ähnliche Werte wie für das Solofahrzeug mit demselben höchstzulässigen Gesamtgewicht (Gruppe 1, 2, 3 oder 4) |
|
|
10 |
3,90 |
4,00 |
Anlage 4
Konfigurationen mit Standardkarosserien und Standard-Sattelanhängern
|
1. |
Fahrzeuge, für die Messungen während der Prüfung mit konstanter Geschwindigkeit gemäß Abschnitt 3 dieses Anhangs durchgeführt werden, müssen die Anforderungen an Standardkarosserien und Standard-Sattelanhänger gemäß dieser Anlage erfüllen. |
|
2. |
Die anwendbare Standardkarosserie oder der anwendbare Standard-Sattelanhänger ist anhand Tabelle 8 zu bestimmen. Tabelle 8 Zuordnung von Standardkarosserien und Standard-Sattelanhängern für die Prüfung mit konstanter Geschwindigkeit
|
|
3. |
Die Standardkarosserien B1, B2, B3, B4 und B5 müssen als Hartschalen-Aufbauten in Trockenausführung des Kastens konzipiert werden. Sie sind mit zwei Hecktüren und ohne Seitentüren auszustatten. Die Standardkarosserien dürfen keine Hebebühnen am Heck und keine Frontspoiler oder seitlichen Luftleitkörper zur Verringerung des Luftwiderstands aufweisen. Die Spezifikationen der Standardkarosserien sind in den folgenden Tabellen enthalten:
Die Massenangaben in den Tabelle 9 bisTabelle 13 sind nicht Gegenstand der auf die Luftwiderstandsprüfung bezogenen Untersuchung. |
|
4. |
Die Anforderungen an Typ und Fahrgestell für den Standard-Sattelanhänger ST1 sind in Tabelle 14 aufgeführt. Die Spezifikationen sind in Tabelle 15 enthalten. |
|
5. |
Alle Abmessungen und Massen, für die nicht ausdrücklich Toleranzen angegeben sind, müssen die in der Verordnung (EU) Nr. 1230/2012 in Anhang 1, Anlage 2 genannten Toleranzen erfüllen (d. h., sie müssen innerhalb des Bereichs von ± 3 % des Zielwerts liegen). Tabelle 9 Spezifikationen der Standardkarosserie „B1“
Tabelle 10 Spezifikationen der Standardkarosserie „B2“
Tabelle 11 Spezifikationen der Standardkarosserie „B3“
Tabelle 12 Spezifikationen der Standardkarosserie „B4“
Tabelle 13 Spezifikationen der Standardkarosserie „B5“
Tabelle 14 Typ und Fahrgestellkonfiguration für den Standard-Sattelanhänger „ST1“
Tabelle 15 Spezifikationen des Standard-Sattelanhängers „ST1“
|
Anlage 5
Luftwiderstandsfamilie für Lastkraftwagen
1. Allgemeines
Eine Luftwiderstandsfamilie ist durch Konstruktions- und Leistungsparameter charakterisiert. Diese gelten für alle Fahrzeuge innerhalb der Familie. Der Hersteller kann entscheiden, welche Fahrzeuge zu einer Luftwiderstandsfamilie gehören, solange die in Absatz 4 aufgeführten Zugehörigkeitskriterien erfüllt sind. Die Luftwiderstandsfamilie muss von der Genehmigungsbehörde genehmigt werden. Der Hersteller muss der Genehmigungsbehörde die betreffenden Luftwiderstandsdaten der einer Luftwiderstandsfamilie zugehörigen Mitglieder bereitstellen.
2. Sonderfälle
In einigen Fällen sind Überschneidungen zwischen den Parametern möglich. Diese Situation ist zu berücksichtigen, damit gewährleistet ist, dass nur Fahrzeuge mit den gleichen Eigenschaften ein und derselben Luftwiderstandsfamilie zugeordnet werden. Der Hersteller muss solche Fälle ermitteln und der Genehmigungsbehörde mitteilen. Diese Sachlage ist anschließend als Kriterium für die Erstellung einer neuen Luftwiderstandsfamilie zu berücksichtigen.
Zusätzlich zu den in Absatz 4 aufgeführten Parametern kann der Hersteller weitere Kriterien einführen, mit denen die Festlegung enger gefasster Familien möglich ist.
3. Alle Fahrzeuge innerhalb einer Familie erhalten denselben Luftwiderstandswert wie das betreffende „Stammfahrzeug“ der Familie. Für diesen Luftwiderstandswert ist eine Messung für das Stammfahrzeug entsprechend dem Verfahren zur Prüfung mit konstanter Geschwindigkeit gemäß Abschnitt 3 im Hauptteil dieses Anhangs durchzuführen.
4. Parameter zur Definition der Luftwiderstandsfamilie:
4.1. Fahrzeuge dürfen in einer Familie zusammengefasst werden, wenn die folgenden Kriterien erfüllt sind:
|
a) |
Gleiche Fahrerhausbreite und gleiche Geometrie der Rohkarosserie bis zur B-Säule und über den Fersenpunkt ohne Fahrerhaus-Unterbau (z. B. Motortunnel). Alle Fahrzeuge der Familie dürfen maximal um ± 10 mm vom Stammfahrzeug abweichen. |
|
b) |
Gleiche Dachhöhe in der Senkrechten z. Alle Fahrzeuge der Familie dürfen maximal um ± 10 mm vom Stammfahrzeug abweichen. |
|
c) |
Gleiche Fahrerhaushöhe über dem Rahmen. Dieses Kriterium ist erfüllt, wenn die Abweichung der Fahrerhaushöhe über dem Rahmen innerhalb von z < 175 mm liegt. |
Die Erfüllung der auf das Familienkonzept bezogenen Anforderungen sind anhand von CAD-(Computer Aided Design-)Daten nachzuweisen.
Abbildung 1
Definition einer Familie

4.2. Eine Luftwiderstandsfamilie besteht aus zu prüfenden Mitgliedern sowie aus Fahrzeugkonfigurationen, die nicht gemäß der vorliegenden Verordnung geprüft werden können.
4.3. Bei den zu prüfenden Mitgliedern einer Familie handelt es sich um Fahrzeugkonfigurationen, die die Anforderungen an den in 3.3 im Hauptteil dieses Anhangs beschriebenen Aufbau des Fahrzeugs erfüllen.
5. Auswahl des Stammfahrzeugs für die Luftwiderstandsfamilie
5.1. Das Stammfahrzeug für jede Familie ist gemäß den folgenden Kriterien auszuwählen:
5.2. Das Fahrgestell muss den Abmessungen der Standardkarosserie oder des Standard-Sattelanhängers entsprechen, wie in Anlage 4 dieses Anhangs definiert.
5.3. Alle zu prüfenden Mitglieder der Familie müssen einen Luftwiderstandswert aufweisen, der dem für das Stammfahrzeug angegebenen Wert für Cd · Adeclared entspricht oder kleiner als dieser Wert ist.
5.4. Der Antragsteller für eine Zertifizierung muss anhand wissenschaftlicher Methoden, beispielsweise numerische Strömungsmechanik (CFD), Windkanalergebnisse oder allgemein anerkannte Regeln der Technik, nachweisen können, dass die Auswahl des Stammfahrzeugs die Bestimmungen in 5.3 erfüllt. Diese Bestimmung gilt für alle Fahrzeugvarianten, die mithilfe der Prüfung mit konstanter Geschwindigkeit gemäß diesem Anhang geprüft werden können. Andere Fahrzeugkonfigurationen (z. B. Fahrzeughöhen, die nicht mit den Bestimmungen in Anlage 4 konform sind, oder Radstände, die nicht den Abmessungen der Standardkarosserie gemäß Anlage 5 entsprechen) erhalten ohne weiteren Nachweis denselben Luftwiderstandswert wie das zu prüfende Stammfahrzeug innerhalb der Familie. Da Reifen als Teil der Messeinrichtungen betrachtet werden, ist ihr Einfluss beim Nachweis des ungünstigsten Szenarios nicht zu berücksichtigen.
5.5. Die Luftwiderstandswerte können für die Bildung von Familien in anderen Fahrzeugklassen verwendet werden, sofern die Familienkriterien gemäß Nummer 5 dieser Anlage unter Berücksichtigung der in Tabelle 16 genannten Bestimmungen erfüllt sind.
Tabelle 16
Bestimmungen für die Übertragung von Luftwiderstandswerten auf andere Fahrzeugklassen
|
Fahrzeuggruppe |
Übertragungsregel |
Anmerkungen |
|
1 |
Fahrzeuggruppe 2 – 0,2 m2 |
Nur zulässig, wenn der Wert für die zugehörige Familie in Gruppe 2 gemessen wurde |
|
2 |
Fahrzeuggruppe 3 – 0,2 m2 |
Nur zulässig, wenn der Wert für die zugehörige Familie in Gruppe 3 gemessen wurde |
|
3 |
Fahrzeuggruppe 4 – 0,2 m2 |
|
|
4 |
Keine Übertragung zulässig |
|
|
5 |
Keine Übertragung zulässig |
|
|
9 |
Fahrzeuggruppe 1, 2, 3, 4 + 0,1 m2 |
Die für die Übertragung anwendbare Gruppe muss mit dem höchstzulässigen Gesamtgewicht übereinstimmen. Übertragung bereits übertragener Werte zulässig |
|
10 |
Fahrzeuggruppe 1, 2, 3, 5 + 0,1 m2 |
|
|
11 |
Fahrzeuggruppe 9 |
Übertragung bereits übertragener Werte zulässig |
|
12 |
Fahrzeuggruppe 10 |
Übertragung bereits übertragener Werte zulässig |
|
16 |
Keine Übertragung zulässig |
Nur Tabellenwert anwendbar |
Anlage 6
Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
|
1. |
Die Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist durch Prüfungen mit konstanter Geschwindigkeit gemäß Abschnitt 3 im Hauptteil dieses Anhangs zu überprüfen. Damit eine Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gegeben ist, gelten die folgenden zusätzlichen Bestimmungen:
Alle Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften sind von der Genehmigungsbehörde zu beaufsichtigen. |
|
2. |
Ein Fahrzeug besteht die Prüfung zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften nicht, wenn der gemessene Wert für Cd Acr (0) höher ist als der für das Stammfahrzeug angegebene Wert für Cd · Adeclared , zuzüglich einer Toleranzspanne von 7,5 %. Ist die erste Prüfung nicht erfolgreich, dürfen für dasselbe Fahrzeug bis zu zwei weitere Prüfungen an verschiedenen Tagen durchgeführt werden. Wenn der in allen Prüfungen gemessene durchschnittliche Wert für Cd Acr (0) höher ist als der für das Stammfahrzeug angegebene Wert für Cd · Adeclared , zuzüglich einer Toleranzspanne von 7,5 %, findet Artikel 23 der vorliegenden Verordnung Anwendung. |
|
3. |
Die Anzahl der Fahrzeuge, die für jedes Produktionsjahr auf Übereinstimmung mit den für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften zu prüfen sind, ist auf Grundlage von Tabelle 17 zu bestimmen. Tabelle 17 Anzahl der Fahrzeuge, die für jedes Produktionsjahr auf Übereinstimmung mit den für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften zu prüfen sind
Zur Ermittlung der Produktionszahlen sind nur diejenigen Luftwiderstandsdaten zu berücksichtigen, für die die Anforderungen der vorliegenden Verordnung gelten und denen keine Luftwiderstands-Standardwerte gemäß Anlage 8 dieses Anhangs zugewiesen wurden. |
|
4. |
Zur Auswahl der Fahrzeuge für die Prüfungen zur Bestätigung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften gelten die folgenden Bestimmungen:
|
|
5. |
Nach Auswahl eines Fahrzeugs für die Prüfung der Übereinstimmung mit den für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften muss der Hersteller die Übereinstimmung dieser Eigenschaften innerhalb von 12 Monaten überprüfen. Der Hersteller kann bei der Genehmigungsbehörde eine Verlängerung dieses Zeitraums um bis zu 6 Monate beantragen, wenn er nachweisen kann, dass die Überprüfung innerhalb des geforderten Zeitraums aufgrund der Wetterverhältnisse nicht möglich war. |
Anlage 7
Standardwerte
|
1. |
Die Standardwerte für den angegebenen Luftwiderstandswert Cd · Adeclared werden gemäß Tabelle 18 festgelegt. Wenn Standardwerte anzuwenden sind, müssen keine Luftwiderstandsdaten für die Eingabe in das Simulationsinstrument bereitgestellt werden. In diesem Fall werden die Standardwerte vom Simulationsinstrument automatisch zugewiesen. Tabelle 18 Standardwerte für Cd · Adeclared
|
|
2. |
Für Fahrzeugkonfigurationen bestehend aus „Solofahrzeug + Anhänger“ wird der Gesamt-Luftwiderstandswert vom Simulationsinstrument berechnet, indem die Standard-Deltawerte für den Einfluss des Anhängers gemäß Tabelle 19 zum Wert für Cd · Adeclared für das Solofahrzeug addiert werden. Tabelle 19 Luftwiderstands-Standard-Deltawerte für den Einfluss des Anhängers
|
|
3. |
Für EMS-Fahrzeugkonfigurationen wird der Luftwiderstandswert der gesamten Fahrzeugkonfiguration vom Simulationsinstrument berechnet, indem die Standard-Deltawerte für den EMS-Einfluss gemäß Tabelle 20 zum Luftwiderstandswert für die Basis-Fahrzeugkonfiguration addiert werden. Tabelle 20 C d A cr (0)-Standard-Deltawerte für den EMS-Einfluss
|
Anlage 8
Kennzeichnungen
Wenn ein Fahrzeug gemäß diesem Anhang typgenehmigt wird, muss das Fahrerhaus folgende Angaben aufweisen:
|
1.1. |
Herstellername und Handelsmarke |
|
1.2. |
Fabrikmarke und Typenbezeichnung gemäß Angaben in Anlage 2 Absätze 0.2 und 0.3 dieses Anhangs |
|
1.3. |
Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben „e“ umgibt, gefolgt von der Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
|
|
1.4. |
Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die „Grundzertifizierungsnummer“ gemäß den Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang VII der Richtlinie 2007/46/EG vermerkt sein. Davor stehen die zweistellige laufende Nummer, die die jeweils letzte technische Änderung der vorliegenden Verordnung bezeichnet, sowie der Buchstabe „P“ zur Angabe, dass die Zertifizierung für einen Luftwiderstand erteilt wurde. Die laufende Nummer für die vorliegende Verordnung ist „00“. 1.4.1. Beispiel für ein Zertifizierungszeichen samt Abmessungen
Das obige an einem Fahrerhaus angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (00) geben die laufende Nummer an, die die jeweils letzte technische Änderung dieser Verordnung bezeichnet. Der folgende Buchstabe gibt an, dass die Zertifizierung für einen Luftwiderstand (P) erteilt wurde. Die letzten vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundzertifizierungsnummer für den Motor dar. |

|
1.5. |
Das Zertifizierungszeichen ist in einer Weise am Fahrerhaus anzubringen, dass es deutlich lesbar und von dauerhafter Natur ist. Es muss bei eingebautem Fahrerhaus in das Fahrzeug sichtbar sein und an einem für den normalen Fahrerhausbetrieb notwendigen Teil angebracht werden, das während der Lebensdauer des Fahrerhauses in der Regel nicht ausgetauscht werden muss. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer des Luftwiderstands ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden. |
2. Nummerierung
2.1. Die Zertifizierungsnummer für den Luftwiderstand setzt sich wie folgt zusammen:
eX*YYY/YYYY*ZZZ/ZZZZ*P*0000*00
|
Abschnitt 1 |
Abschnitt 2 |
Abschnitt 3 |
Zusätzlicher Buchstabe zu Abschnitt 3 |
Abschnitt 4 |
Abschnitt 5 |
|
Land, das die Zertifizierung erteilt hat |
CO2-Zertifizierungsrechtsakt (…/2017) |
Letzter Änderungsrechtsakt (zzz/zzzz) |
P = Luftwiderstand |
Grundzertifizierungsnummer 0000 |
Erweiterung 00 |
Anlage 9
Eingabeparameter für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen
Einleitung
Diese Anlage enthält die Liste der vom Fahrzeughersteller für die Eingabe in das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Die XML-Datei wird vom „Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen“ – Luftwiderstandsinstrument automatisch erstellt.
Begriffsbestimmungen
(1)
(2)
string … Zeichenabfolge in ISO8859-1-Kodierung
token … Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende
date … Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DD T HH:MM:SS Z , wobei kursive Zeichen unveränderlich sind, z. B. „2002-05-30T09:30:10Z“
integer … Wert mit integralem Datentyp ohne führende Nullen, z. B. „1800“
double, X … Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen („.“) und ohne führende Nullen, z. B. für „double, 2“: „2345.67“, für „double, 4“: „45.6780“
(3)
Satz Eingabeparameter
Tabelle 1
Eingabeparameter „AirDrag“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Manufacturer |
P240 |
token |
|
|
|
Model |
P241 |
token |
|
|
|
TechnicalReportId |
P242 |
token |
|
Kennung des Bauteils gemäß der Verwendung im Zertifizierungsverfahren |
|
Date |
P243 |
date |
|
Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
|
AppVersion |
P244 |
token |
|
Nummer zur Angabe der Version des Instruments zur Vorverarbeitung der Luftwiderstandsdaten |
|
CdxA_0 |
P245 |
double, 2 |
[m2] |
Endergebnis des Instruments zur Vorverarbeitung der Luftwiderstandsdaten |
|
TransferredCdxA |
P246 |
double, 2 |
[m2] |
CdxA_0 an zugehörige Familien in anderen Fahrzeuggruppen gemäß Tabelle 18 in Anlage 5 übertragen. Falls keine Übertragungsregel angewandt wurde, muss CdxA_0 bereitgestellt werden. |
|
DeclaredCdxA |
P146 |
double, 2 |
[m2] |
Angegebener Wert für die Luftwiderstandsfamilie |
Falls im „Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen“ Standardwerte gemäß Anlage 7 verwendet werden sollen, müssen keine Eingabedaten für die Luftwiderstandskomponente bereitgestellt werden. Die Standardwerte werden automatisch gemäß dem Schema der Fahrzeuggruppen zugewiesen.
ANHANG IX
ÜBERPRÜFUNG DER DATEN ZU HILFSEINRICHTUNGEN VON LASTKRAFTWAGEN
1. Einleitung
In diesem Anhang werden die Bestimmungen hinsichtlich der Leistungsaufnahme der Hilfseinrichtungen für schwere Nutzfahrzeuge zur Ermittlung der fahrzeugspezifischen CO2-Emissionen beschrieben.
Im Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen ist die Leistungsaufnahme der folgenden Hilfseinrichtungen unter Verwendung technologiespezifischer durchschnittlicher Standardleistungswerte zu berücksichtigen:
|
a) |
Ventilator |
|
b) |
Lenkanlage |
|
c) |
Elektrische Anlage |
|
d) |
Pneumatische Anlage |
|
e) |
Klimaanlage |
|
f) |
Nebenabtrieb |
Die Standardwerte sind in das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen integriert und werden bei Auswahl der betreffenden Technologie automatisch verwendet.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs bezeichnet der Begriff
|
(1) |
„an der Kurbelwelle angebrachter Ventilator“ einen in Fortsetzung der Kurbelwelle angebrachten und von ihr, oft über einen Flansch, angetriebenen Ventilator; |
|
(2) |
„Ventilator mit Riemenantrieb oder Getriebe“ einen Ventilator, der so angebracht ist, dass ein zusätzlicher Riemen, ein Spannsystem oder ein Getriebe erforderlich ist; |
|
(3) |
„hydraulisch angetriebener Ventilator“ einen durch Hydraulik angetriebenen Ventilator, der oft entfernt vom Motor angebracht ist. Das Hydrauliksystem mit Ölkreislauf, Pumpe und Ventilen beeinflusst die Verluste im System und seine Effizienz; |
|
(4) |
„Ventilator mit Elektroantrieb“ einen von einem Elektromotor angetriebenen Ventilator; es wird die Effizienz der vollständigen Energieumwandlung, einschließlich der in die Batterie eingespeisten und von der Batterie abgegebenen Energie, berücksichtigt; |
|
(5) |
„elektronisch gesteuerte Viscokupplung“ eine Kupplung, in der der Flüssigkeitsstrom in der Viscokupplung mithilfe einer Reihe von Sensoreingaben zusammen mit SW-Logik elektronisch ausgelöst wird; |
|
(6) |
„bimetallgesteuerte Viscokupplung“ eine Kupplung, in der eine Temperaturänderung mithilfe einer Bimetallverbindung in mechanische Bewegung umgesetzt wird. Durch die mechanische Bewegung wird anschließend die Viscokupplung betätigt; |
|
(7) |
„Kupplung mit diskreten Stufen“ eine mechanische Einrichtung, die eine graduelle Betätigung nur in einzelnen Stufen (nicht kontinuierlich) zulässt; |
|
(8) |
„Ein-Aus-Kupplung“ eine mechanische Kupplung, die entweder vollständig betätigt oder vollständig unbetätigt ist; |
|
(9) |
„Pumpe mit variabler Verdrängung“ eine Einrichtung, die mechanische Energie in hydraulische Fließenergie verwandelt. Die pro Umdrehung gepumpte Flüssigkeitsmenge kann während des Betriebs der Pumpe verändert werden; |
|
10) |
„Pumpe mit konstanter Verdrängung“ eine Einrichtung, die mechanische Energie in hydraulische Fließenergie verwandelt. Die pro Umdrehung gepumpte Flüssigkeitsmenge kann während des Betriebs der Pumpe nicht verändert werden; |
|
(11) |
„Steuerung mittels Elektromotor“ die Verwendung eines Elektromotors zum Antrieb eines Ventilators. Der Elektromotor wandelt elektrische in mechanische Energie um. Leistung und Drehzahl werden durch die konventionelle Technik für Elektromotoren gesteuert; |
|
(12) |
„Pumpe mit fester Verdrängung (Standardtechnik)“ eine Pumpe mit interner Durchsatzbegrenzung; |
|
(13) |
„elektronisch gesteuerte Pumpe mit fester Verdrängung“ eine Pumpe mit elektronisch gesteuertem Durchsatz; |
|
(14) |
„duale Verdrängungspumpe“ eine Pumpe mit zwei Kammern (mit derselben oder unterschiedlicher Verdrängung), die kombiniert oder einzeln genutzt werden können, und interner Durchsatzbegrenzung; |
|
(15) |
„mechanisch gesteuerte Pumpe mit variabler Verdrängung“ eine Pumpe, deren Verdrängung intern mechanisch gesteuert wird (interne Druckskalen); |
|
(16) |
„elektrisch gesteuerte Pumpe mit variabler Verdrängung“ eine Pumpe, deren Verdrängung intern mechanisch gesteuert wird (interne Druckskalen). Der Durchsatz wird zusätzlich durch ein Ventil elektrisch gesteuert; |
|
(17) |
„elektrische Lenkungspumpe“ eine Pumpe, in der ein elektrisches System ohne Fluid zum Einsatz kommt; |
|
(18) |
„Basiskompressor“ einen konventionellen Kompressor ohne Technologie zur Treibstoffersparnis; |
|
(19) |
„Kompressor mit Energiesparsystem (ESS)“ einen Kompressor, der die Leistungsaufnahme beim Abblasen reduziert, indem beispielsweise die Ansaugseite geschlossen wird; das Energiesparsystem wird durch Luftdruck gesteuert; |
|
(20) |
„Kompressorpumpe (Visco)“ einen abkoppelbaren Kompressor, dessen Kupplung durch den Systemluftdruck (keine intelligente Strategie) gesteuert wird; die Viscokupplung verursacht im abgekoppelten Zustand geringfügige Verluste; |
|
(21) |
„Kompressorkupplung (mechanisch)“ einen abkoppelbaren Kompressor, dessen Kupplung durch den Systemluftdruck (keine intelligente Strategie) gesteuert wird; |
|
(22) |
„Belüftungssystem (AMS) mit optimaler Regenerierung“ eine elektronische Luftaufbereitungseinheit, in der ein elektronisch gesteuerter Lufttrockner zur Optimierung der Luftregenerierung mit einer unter Freilaufbedingungen bevorzugten Förderleistung kombiniert ist (erfordert eine Kupplung oder ein Energiesparsystem); |
|
(23) |
„Leuchtdioden (LED)“ Halbleitereinrichtungen, die sichtbares Licht aussenden, wenn sie von einem elektrischen Strom durchflossen werden; |
|
(24) |
„Klimaanlage“ ein System bestehend aus einem Kühlmittelkreislauf mit Kompressor und Wärmetauschern, zur Kühlung des Innenraums eines Lastwagenfahrerhauses oder eines Busses; |
|
(25) |
„Nebenabtrieb“ eine Einrichtung an einem Getriebe oder einem Motor, an die eine angetriebene Hilfseinrichtung, etwa eine Hydraulikpumpe, angeschlossen sein kann; ein Nebenabtrieb ist normalerweise optional; |
|
(26) |
„Nebenabtriebs-Antriebsmechanismus“ eine Einrichtung in einem Getriebe, das den Einbau eines Nebenabtriebs ermöglicht; |
|
(27) |
„Zahnkupplung“ eine Kupplung, bei der das Drehmoment vor allem durch Normalkräfte zwischen ineinander gefügten Zähnen übertragen wird. Eine Zahnkupplung kann entweder ein- oder ausgekuppelt sein. Sie wird nur unbelastet betätigt (z. B. beim Gangwechsel in einem manuellen Getriebe); |
|
(28) |
„Synchronring“ eine Art der Zahnkupplung, bei der die Drehzahl der zu verbindenden drehenden Teile mittels einer Reibungsvorrichtung angeglichen wird; |
|
(29) |
„Mehrscheibenkupplung“ eine Kupplung, in der mehrere Reibbeläge parallel angeordnet sind, wobei auf alle Reibungspaare dieselbe Anpresskraft wirkt. Mehrscheibenkupplungen sind kompakt und können unter Last ein- und ausgekuppelt werden. Sie können als Trocken- oder als Feuchtkupplungen konzipiert sein; |
|
(30) |
„Schaltrad“ ein als Schaltungselement verwendetes Gangrad, das für den Schaltvorgang auf seiner Welle in den Zahneingriff des betreffenden Ganges hinein- oder aus ihm herausgeschoben wird. |
3. Ermittlung der technologiespezifischen durchschnittlichen Standardleistungswerte
3.1. Ventilator
Für die Ventilatorleistung sind die in Tabelle 1 aufgeführten Standardwerte abhängig vom Einsatzprofil und der Technologie zu verwenden:
Tabelle 1:
Mechanischer Leistungsbedarf des Ventilators
|
Ventilatorantriebsgruppe |
Ventilatorsteuerung |
Ventilatorleistungsaufnahme [W] |
||||
|
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
||
|
An der Kurbelwelle angebracht |
elektronisch gesteuerte Viscokupplung |
618 |
671 |
516 |
566 |
1 037 |
|
bimetallgesteuerte Viscokupplung |
818 |
871 |
676 |
766 |
1 277 |
|
|
Kupplung mit diskreten Stufen |
668 |
721 |
616 |
616 |
1 157 |
|
|
Ein-Aus-Kupplung |
718 |
771 |
666 |
666 |
1 237 |
|
|
Antrieb per Riemen oder Getriebe |
elektronisch gesteuerte Viscokupplung |
989 |
1 044 |
833 |
933 |
1 478 |
|
bimetallgesteuerte Viscokupplung |
1 189 |
1 244 |
993 |
1 133 |
1 718 |
|
|
Kupplung mit diskreten Stufen |
1 039 |
1 094 |
983 |
983 |
1 598 |
|
|
Ein-Aus-Kupplung |
1 089 |
1 144 |
1 033 |
1 033 |
1 678 |
|
|
Hydraulisch angetrieben |
Pumpe mit variabler Verdrängung |
938 |
1 155 |
832 |
917 |
1 872 |
|
Pumpe mit konstanter Verdrängung |
1 200 |
1 400 |
1 000 |
1 100 |
2 300 |
|
|
Elektrisch angetrieben |
elektronisch gesteuert |
700 |
800 |
600 |
600 |
1 400 |
Wenn eine neue Technologie innerhalb einer Ventilatorantriebsgruppe (z. B. an der Kurbelwelle angebracht) nicht in der Liste enthalten ist, müssen die höchsten Leistungswerte innerhalb dieser Gruppe verwendet werden. Ist eine neue Technologie in keiner der Gruppen aufgeführt, müssen die Werte der ungünstigsten Technologie verwendet werden (z. B. hydraulisch angetriebener Ventilator – Pumpe mit konstanter Verdrängung).
3.2. Lenkanlage
Für die Leistung der Lenkungspumpe sind die in Tabelle 2 aufgeführten Standardwerte [W] abhängig von der Anwendung in Kombination mit Korrekturfaktoren zu verwenden:
Tabelle 2:
Mechanischer Leistungsbedarf der Lenkungspumpe
|
Fahrzeugkonfiguration |
|
Leistungsaufnahme der Lenkanlage P [W] |
|||||||||||||||||
|
Anzahl der Achsen |
Achsenkonfiguration |
Fahrgestellkonfiguration |
Technisch zulässige Gesamtmasse im beladenen Zustand (Tonnen) |
Fahrzeugklasse |
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
||||||||||
|
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
|||||
|
2 |
4 × 2 |
Solofahrzeug + (Zugmaschine) |
7,5 t – 10 t |
1 |
|
|
|
240 |
20 |
20 |
220 |
20 |
30 |
|
|
|
|
|
|
|
|
Solofahrzeug + (Zugmaschine) |
> 10 t – 12 t |
2 |
340 |
30 |
0 |
290 |
30 |
20 |
260 |
20 |
30 |
|
|
|
|
|
|
|
|
|
Solofahrzeug + (Zugmaschine) |
> 12 t – 16 t |
3 |
|
|
|
310 |
30 |
30 |
280 |
30 |
40 |
|
|
|
|
|
|
|
|
|
Solofahrzeug |
> 16 t |
4 |
510 |
100 |
0 |
490 |
40 |
40 |
|
|
|
430 |
30 |
50 |
|
|
|
|
|
|
Zugmaschine |
> 16 t |
5 |
600 |
120 |
0 |
540 |
90 |
40 |
480 |
80 |
60 |
|
|
|
|
|
|
|
|
4 × 4 |
Solofahrzeug |
7,5 t – 16 t |
6 |
— |
|||||||||||||||
|
|
Solofahrzeug |
> 16 t |
7 |
— |
|||||||||||||||
|
|
Zugmaschine |
> 16 t |
8 |
— |
|||||||||||||||
|
3 |
6 × 2/2-4 |
Solofahrzeug |
alle |
9 |
600 |
120 |
0 |
490 |
60 |
40 |
|
|
|
430 |
30 |
50 |
|
|
|
|
|
Zugmaschine |
alle |
10 |
450 |
120 |
0 |
440 |
90 |
40 |
|
|
|
|
|
|
|
|
|
|
|
6 × 4 |
Solofahrzeug |
alle |
11 |
600 |
120 |
0 |
490 |
60 |
40 |
|
|
|
430 |
30 |
50 |
640 |
50 |
80 |
|
|
|
Zugmaschine |
alle |
12 |
450 |
120 |
0 |
440 |
90 |
40 |
|
|
|
|
|
|
640 |
50 |
80 |
|
|
6 × 6 |
Solofahrzeug |
alle |
13 |
— |
|||||||||||||||
|
|
Zugmaschine |
alle |
14 |
||||||||||||||||
|
4 |
8x2 |
Solofahrzeug |
alle |
15 |
— |
||||||||||||||
|
8 × 4 |
Solofahrzeug |
alle |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
640 |
50 |
80 |
|
|
8 × 6/8 × 8 |
Solofahrzeug |
alle |
17 |
— |
|||||||||||||||
dabei gilt:
|
U |
= |
Unbeladen – Pumpen von Öl ohne benötigten Lenkdruck |
|
F |
= |
Reibung – Reibung in der Pumpe |
|
B |
= |
Überhöhung – Lenkkorrektur aufgrund Überhöhung der Straße oder Seitenwind |
|
S |
= |
Lenkung – Leistungsbedarf der Lenkungspumpe aufgrund von Kurvenfahrt und Manövern |
Zur Berücksichtigung der Wirkung unterschiedlicher Technologien sind technologieabhängige Skalierungsfaktoren, wie in den Tabellen 3 und 4 dargestellt, anzuwenden.
Tabelle 3
Skalierungsfaktoren in Abhängigkeit von der Technologie
|
|
Faktor c1 abhängig von der Technologie |
||
|
Technologie |
c1, U+F |
c1, B |
c1,s |
|
Feste Verdrängung |
1 |
1 |
1 |
|
Feste Verdrängung mit elektrischer Steuerung |
0,95 |
1 |
1 |
|
Duale Verdrängung |
0,85 |
0,85 |
0,85 |
|
Variable Verdrängung mit mechanischer Steuerung |
0,75 |
0,75 |
0,75 |
|
Variable Verdrängung mit elektrischer Steuerung |
0,6 |
0,6 |
0,6 |
|
Elektrisch |
0 |
1,5/nalt |
1/nalt |
mit ηalt = Generatoreffizienz = konst. = 0,7
Wenn eine neue Technologie nicht aufgeführt ist, muss die Technologie „Feste Verdrängung“ im Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen berücksichtigt werden.
Tabelle 4
Skalierungsfaktoren in Abhängigkeit von der Anzahl der gelenkten Achsen
|
|
Faktor c2 abhängig von der Anzahl der gelenkten Achsen |
||||||||||||||
|
Anzahl der gelenkten Achsen |
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
||||||||||
|
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
2 |
1 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
|
3 |
1 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
|
4 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
Der endgültige Leistungsbedarf wird wie folgt berechnet:
Werden für mehrfach gelenkte Achsen unterschiedliche Technologien verwendet, sind die Mittelwerte der jeweiligen Faktoren c1 zu verwenden.
Der endgültige Leistungsbedarf wird wie folgt berechnet:
Ptot = Σi(PU+F*mean(c1,U+F)*(c2i,U+F)) + Σi(PB*mean(c1,B)*(c2i,B)) + Σi(PS*mean(c1,S)*(c2i,S))
dabei gilt:
|
Ptot |
= |
Gesamtleistungsbedarf [W] |
|
P |
= |
Leistungsbedarf [W] |
|
c1 |
= |
Korrekturfaktor in Abhängigkeit von der Technologie |
|
c2 |
= |
Korrekturfaktor in Abhängigkeit von der Anzahl der gelenkten Achsen |
|
U+F |
= |
Unbeladen + Reibung [-] |
|
B |
= |
Überhöhung [-] |
|
S |
= |
Lenkung [-] |
|
i |
= |
Anzahl der gelenkten Achsen |
3.3. Elektrische Anlage
Für die Leistung der elektrischen Anlage sind die in Tabelle 5 aufgeführten Standardwerte [W] abhängig von der Anwendung und der Technologie in Kombination mit den Werten für die Generatoreffizienz zu verwenden:
Tabelle 5
Elektrischer Leistungsbedarf der elektrischen Anlage
|
Die elektrische Leistungsaufnahme beeinflussende Technologien |
Elektrische Leistungsaufnahme [W] |
||||
|
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
|
|
Elektrische Leistung Standardtechnologie [W] |
1 200 |
1 000 |
1 000 |
1 000 |
1 000 |
|
LED-Hauptscheinwerfer |
– 50 |
– 50 |
– 50 |
– 50 |
– 50 |
Zur Ableitung der mechanischen Leistung ist ein von der Generatortechnologie abhängiger Effizienzfaktor gemäß Tabelle 6 anzuwenden.
Tabelle 6:
Generatoreffizienzfaktor
|
Technologien des Generators (zur Leistungsumwandlung) Allgemeine Effizienzwerte für spezifische Technologien |
Effizienz ηalt |
||||
|
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
|
|
Standardgenerator |
0,7 |
0,7 |
0,7 |
0,7 |
0,7 |
Wenn die im Fahrzeug verwendete Technologie nicht aufgeführt ist, muss die Technologie „Standardgenerator“ im Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen berücksichtigt werden.
Der endgültige Leistungsbedarf wird wie folgt berechnet:

dabei gilt:
|
Ptot |
= |
Gesamtleistungsbedarf [W] |
|
Pel |
= |
elektrischer Leistungsbedarf [W] |
|
ηalt |
= |
Generatoreffizienz [-] |
3.4. Pneumatische Anlage
Für pneumatische Anlagen, die mit Überdruck arbeiten, sind die in Tabelle 7 aufgeführten Standardleistungswerte [W] abhängig von der Anwendung und der Technologie zu verwenden.
Tabelle 7
Mechanischer Leistungsbedarf pneumatischer Anlagen (Überdruck)
|
Menge der Luftzufuhr |
Technologie |
Fernverkehr |
Regional-Lieferverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
|
Pmean |
Pmean |
Pmean |
Pmean |
Pmean |
||
|
[W] |
[W] |
[W] |
[W] |
[W] |
||
|
Gering Verdrängung ≤ 250 cm3 1 Zyklus/2 Zyklen |
Basiskompressor |
1 400 |
1 300 |
1 200 |
1 200 |
1 300 |
|
+ ESS |
– 500 |
– 500 |
– 400 |
– 400 |
– 500 |
|
|
+ Viscokupplung |
– 600 |
– 600 |
– 500 |
– 500 |
– 600 |
|
|
+ mech. Kupplung |
– 800 |
– 700 |
– 550 |
– 550 |
– 700 |
|
|
+ AMS |
– 400 |
– 400 |
– 300 |
– 300 |
– 400 |
|
|
Mittel 250 cm3 < Verdrängung ≤ 500 cm3 1 Zyklus/2 Zyklen 1-stufig |
Basiskompressor |
1 600 |
1 400 |
1 350 |
1 350 |
1 500 |
|
+ ESS |
– 600 |
– 500 |
– 450 |
– 450 |
– 600 |
|
|
+ Viscokupplung |
– 750 |
– 600 |
– 550 |
– 550 |
– 750 |
|
|
+ mech. Kupplung |
– 1 000 |
– 850 |
– 800 |
– 800 |
– 900 |
|
|
+ AMS |
– 400 |
– 200 |
– 200 |
– 200 |
– 400 |
|
|
Mittel 250 cm3 < Verdrängung ≤ 500 cm3 1 Zyklus/2 Zyklen 2-stufig |
Basiskompressor |
2 100 |
1 750 |
1 700 |
1 700 |
2 100 |
|
+ ESS |
– 1 000 |
– 700 |
– 700 |
– 700 |
– 1 100 |
|
|
+ Viscokupplung |
– 1 100 |
– 900 |
– 900 |
– 900 |
– 1 200 |
|
|
+ mech. Kupplung |
– 1 400 |
– 1 100 |
– 1 100 |
– 1 100 |
– 1 300 |
|
|
+ AMS |
– 400 |
– 200 |
– 200 |
– 200 |
-500 |
|
|
Hoch Verdrängung > 500 cm3 1 Zyklus/2 Zyklen 1-stufig/2-stufig |
Basiskompressor |
4 300 |
3 600 |
3 500 |
3 500 |
4 100 |
|
+ ESS |
– 2 700 |
– 2 300 |
– 2 300 |
– 2 300 |
– 2 600 |
|
|
+ Viscokupplung |
– 3 000 |
– 2 500 |
– 2 500 |
– 2 500 |
– 2 900 |
|
|
+ mech. Kupplung |
– 3 500 |
– 2 800 |
– 2 800 |
– 2 800 |
– 3 200 |
|
|
+ AMS |
– 500 |
– 300 |
– 200 |
– 200 |
– 500 |
Für pneumatische Anlagen, die mit Vakuum (negativem Druck) arbeiten, sind die in Tabelle 8 aufgeführten Standardleistungswerte [W] zu verwenden.
Tabelle 8
Mechanischer Leistungsbedarf pneumatischer Anlagen (Unterdruck)
|
|
Fernverkehr |
Regional-Lieferverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
|
Pmean |
Pmean |
Pmean |
Pmean |
Pmean |
|
|
[W] |
[W] |
[W] |
[W] |
[W] |
|
|
Vakuumpumpe |
190 |
160 |
130 |
130 |
130 |
Technologien zur Treibstoffersparnis können berücksichtigt werden, indem der betreffende Leistungsbedarf vom Leistungsbedarf des Basiskompressors subtrahiert wird.
Die folgenden Kombinationen von Technologien werden nicht berücksichtigt:
|
a) |
Energiesparsystem (ESS) und Kupplungen |
|
b) |
Viscokupplung und mechanische Kupplung |
Bei einem zweistufigen Kompressor ist die Verdrängung der ersten Stufe zu verwenden, um die Größe der Kompressoranlage zu beschreiben.
3.5. Klimaanlage
Bei Fahrzeugen mit einer Klimaanlage sind die in Tabelle 9 aufgeführten Standardwerte [W] abhängig von der Anwendung zu verwenden.
Tabelle 9
Mechanischer Leistungsbedarf der Klimaanlage
|
Fahrzeugkonfiguration |
|
Leistungsaufnahme der Klimaanlage [W] |
|||||||
|
Anzahl der Achsen |
Achsenkonfiguration |
Fahrgestellkonfiguration |
Technisch zulässige Gesamtmasse im beladenen Zustand (Tonnen) |
Fahrzeugklasse |
Fernverkehr |
Regionalverkehr |
Städtischer Lieferverkehr |
Städtische Müllabfuhr |
Bauverkehr |
|
2 |
4 × 2 |
Solofahrzeug + (Zugmaschine) |
7,5 t – 10 t |
1 |
|
150 |
150 |
|
|
|
|
Solofahrzeug + (Zugmaschine) |
> 10 t – 12 t |
2 |
200 |
200 |
150 |
|
|
|
|
|
Solofahrzeug + (Zugmaschine) |
> 12 t – 16 t |
3 |
|
200 |
150 |
|
|
|
|
|
Solofahrzeug |
> 16 t |
4 |
350 |
200 |
|
300 |
|
|
|
|
Zugmaschine |
> 16 t |
5 |
350 |
200 |
|
|
|
|
|
4 × 4 |
Solofahrzeug |
7,5 t – 16 t |
6 |
— |
|||||
|
|
Solofahrzeug |
> 16 t |
7 |
— |
|||||
|
|
Zugmaschine |
> 16 t |
8 |
— |
|||||
|
3 |
6 × 2/2-4 |
Solofahrzeug |
alle |
9 |
350 |
200 |
|
300 |
|
|
|
Zugmaschine |
alle |
10 |
350 |
200 |
|
|
|
|
|
6 × 4 |
Solofahrzeug |
alle |
11 |
350 |
200 |
|
300 |
200 |
|
|
|
Zugmaschine |
alle |
12 |
350 |
200 |
|
|
200 |
|
|
6 × 6 |
Solofahrzeug |
alle |
13 |
— |
|||||
|
|
Zugmaschine |
alle |
14 |
||||||
|
4 |
8 × 2 |
Solofahrzeug |
alle |
15 |
— |
||||
|
8 × 4 |
Solofahrzeug |
alle |
16 |
|
|
|
|
200 |
|
|
8 × 6/8 × 8 |
Solofahrzeug |
alle |
17 |
— |
|||||
3.6. Nebenabtrieb (PTO)
Bei Fahrzeugen, deren Getriebe einen Nebenabtrieb und/oder einen Nebenabtriebs-Antriebsmechanismus aufweist, ist die Leistungsaufnahme durch festgelegte Standardwerte zu berücksichtigen. Die betreffenden Standardwerte stellen diese Leistungsverluste im normalen Fahrbetrieb dar, wenn der Nebenabtrieb abgeschaltet ist (kein Eingriff). Anwendungsbezogene Leistungsaufnahmen bei zugeschaltetem Nebenabtrieb werden vom Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen addiert und werden im Folgenden nicht beschrieben.
Tabelle 10
Mechanischer Leistungsbedarf eines abgeschalteten Nebenabtriebs (kein Eingriff)
|
Bauartvarianten hinsichtlich Leistungsverlusten (im Vergleich zu einem Getriebe ohne Nebenabtrieb und/oder Nebenabtriebs-Antriebsmechanismus) |
|
|
|
|
Zusätzliche für Schleppverluste maßgebliche Teile |
Nebenabtrieb inkl. Antriebsmechanismus |
Nur Nebenabtriebs-Antriebsmechanismus |
|
|
Wellen/Zahnräder |
Andere Elemente |
Leistungsverlust [W] |
Leistungsverlust [W] |
|
Nur ein eingreifendes Zahnrad, über dem angegebenen Ölstand gelegen (ohne zusätzlichen Zahneingriff) |
— |
— |
0 |
|
Nur Antriebswelle des Nebenabtriebs |
Zahnkupplung (inkl. Synchronring) oder Schieberad |
50 |
50 |
|
Nur Antriebswelle des Nebenabtriebs |
Mehrscheibenkupplung |
1 000 |
1 000 |
|
Nur Antriebswelle des Nebenabtriebs |
Mehrscheibenkupplung und Ölpumpe |
2 000 |
2 000 |
|
Antriebswelle und/oder bis zu 2 eingreifende Zahnräder |
Zahnkupplung (inkl. Synchronring) oder Schieberad |
300 |
300 |
|
Antriebswelle und/oder bis zu 2 eingreifende Zahnräder |
Mehrscheibenkupplung |
1 500 |
1 500 |
|
Antriebswelle und/oder bis zu 2 eingreifende Zahnräder |
Mehrscheibenkupplung und Ölpumpe |
3 000 |
3 000 |
|
Antriebswelle und/oder mehr als 2 eingreifende Zahnräder |
Zahnkupplung (inkl. Synchronring) oder Schieberad |
600 |
600 |
|
Antriebswelle und/oder mehr als 2 eingreifende Zahnräder |
Mehrscheibenkupplung |
2 000 |
2 000 |
|
Antriebswelle und/oder mehr als 2 eingreifende Zahnräder |
Mehrscheibenkupplung und Ölpumpe |
4 000 |
4 000 |
ANHANG X
ZERTIFIZIERUNGSVERFAHREN FÜR LUFTREIFEN
1. Einleitung
In diesem Anhang werden die Zertifizierungsvorschriften für Reifen im Hinblick auf deren Rollwiderstandskoeffizienten beschrieben. Zur Berechnung des in das Simulationsinstrument einzugebenden Rollwiderstands des Fahrzeugs sind von dem die Luftreifengenehmigung ersuchenden Antragsteller der anwendbare Reifen-Rollwiderstandskoeffizient Cr für jeden an die Erstausrüster (OEM) gelieferten Reifen sowie die zugehörige Reifenprüflast FZTYRE anzugeben.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs gelten die folgenden Begriffsbestimmungen zusätzlich zu denen in der UNECE-Regelung Nr. 54 und der UNECE-Regelung Nr. 117:
|
1) |
„Rollwiderstandskoeffizient Cr“ bezeichnet den Quotienten aus Rollwiderstand dividiert durch die Belastung des Reifens; |
|
2) |
„Belastung des Reifens FZTYRE“ bezeichnet die während der Rollwiderstandsprüfung auf den Reifen aufgebrachte Last; |
|
3) |
„Reifentyp“ bezeichnet eine Reifenbaureihe, die bei den nachstehenden Merkmalen keine Unterschiede aufweist:
|
3. Allgemeine Anforderungen
3.1. Die Reifenfertigungsstätte muss nach ISO/TS 16949 zertifiziert sein.
3.2. Reifen-Rollwiderstandskoeffizient
Der Rollwiderstandskoeffizient des Reifens ist der in N/kN ausgedrückte Messwert im Einklang mit Anhang I Teil A der Verordnung Nr. 1222/2009; er ist gemäß ISO 800001, Anhang B, Abschnitt B3, Regel B (Beispiel 1) auf die erste Dezimalstelle zu runden.
3.3. Messvorschriften
Vom Reifenhersteller sind die Prüfungen in einem Labor eines in Artikel 41 der Richtlinie 2007/46/EG definierten technischen Dienstes durchzuführen, wobei die in Absatz 3.2 genannte Prüfung in der eigenen Einrichtung des technischen Dienstes oder auch in den Einrichtungen des Herstellers durchgeführt werden kann, sofern:
|
i) |
ein Bevollmächtigter eines von der Genehmigungsbehörde bezeichneten technischen Dienstes anwesend ist und für die Prüfung verantwortlich zeichnet oder |
|
ii) |
der Reifenhersteller als technischer Dienst der Kategorie A gemäß Richtlinie 2007/46/EG Artikel 41 bezeichnet ist. |
3.4. Kennzeichnung und Rückverfolgbarkeit
3.4.1. Der Reifen muss im Hinblick auf seine Bescheinigung zur Zertifizierung des für ihn geltenden Rollwiderstandskoeffizienten eindeutig identifizierbar sein; dazu sind herkömmliche Reifenaufschriften auf seiner Seitenwand gemäß Anlage 1 dieses Anhangs anzubringen.
3.4.2. Sollte eine eindeutige Identifikation des Rollwiderstandskoeffizienten durch die in Nummer 3.4.1 bezeichneten Kennzeichnungen nicht möglich sein, muss der Hersteller ein zusätzliches Kennzeichen am Reifen anbringen. Dieses zusätzliche Kennzeichen muss einen eindeutigen Verweis auf den Reifen und seinen Rollwiderstandskoeffizienten gewährleisten. Es kann folgende Form haben:
|
— |
Quick Response-(QR-)Code |
|
— |
Strichcode |
|
— |
Funkfrequenzkennzeichnung (RFID) |
|
— |
ein zusätzliches Zeichen oder |
|
— |
eine sonstige Einrichtung, die die Anforderungen in 3.4.1 erfüllt. |
3.4.3. Ein solches zusätzliches Kennzeichen muss so lange lesbar bleiben, bis das Fahrzeug verkauft wird.
3.4.4. Für einen im Einklang mit der vorliegenden Verordnung zertifizierten Reifen ist gemäß Artikel 19 Absatz 2 der Richtlinie 2007/46/EG kein Typgenehmigungszeichen erforderlich.
4. Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
4.1. Jeder im Einklang mit der vorliegenden Verordnung zertifizierte Reifen muss den gemäß Absatz 3.2 dieses Anhangs angegebenen Rollwiderstandswert einhalten.
4.2. Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften sind der Serienproduktion zufällige Stichproben von Reifen zu entnehmen, die gemäß den Bestimmungen in Absatz 3.2 zu prüfen sind.
4.3. Häufigkeit der Prüfungen
4.3.1. Der Reifenrollwiderstand ist für mindestens einen Reifen eines für den Verkauf an Erstausrüster (OEM) vorgesehenen bestimmten Reifentyps pro 20 000 Stück dieses Typs pro Jahr zu prüfen (z. B. sind für einen Reifentyp mit jährlichen Verkaufszahlen an die Erstausrüster zwischen 20 001 und 40 000 Stück zwei Konformitätsüberprüfungen pro Jahr durchzuführen).
4.3.2. Werden jährlich zwischen 500 und 20 000 Stück eines für den Verkauf an Erstausrüster vorgesehenen bestimmten Reifentyps geliefert, muss für diesen Typ mindestens eine Konformitätsüberprüfung pro Jahr durchgeführt werden.
4.3.3. Liegen die jährlichen Lieferungen eines für den Verkauf an Erstausrüster vorgesehenen bestimmten Reifentyps unter 500 Stück, ist mindestens eine Konformitätsüberprüfung alle zwei Jahre gemäß Absatz 4.4 durchzuführen.
4.3.4. Wenn die in 4.3.1 angegebenen Stückzahlen für die an die Erstausrüster gelieferten Reifen innerhalb von 31 Kalendertagen erreicht sind, ist die in Absatz 4.3 angegebene maximale Anzahl der Konformitätsüberprüfungen auf jeweils eine Überprüfung pro 31 Kalendertage begrenzt.
4.3.5. Der Hersteller muss der Genehmigungsbehörde gegenüber die Anzahl der durchgeführten Prüfungen begründen (z. B. durch Nachweis der Verkaufszahlen).
4.4. Überprüfungsverfahren
4.4.1. Ein einzelner Reifen ist gemäß Absatz 3.2 zu prüfen. Standardmäßig ist als Maschinenabgleich-Gleichung die zum Zeitpunkt der Überprüfung gültige Gleichung zu verwenden. Ein Reifenhersteller kann die Anwendung der Abgleich-Gleichung ersuchen, die während der Zertifizierungsprüfung verwendet und im Beschreibungsbogen angegeben wurde.
4.4.2. Wenn der Messwert mit dem angegebenen Wert plus 0,3 N/kN übereinstimmt oder niedriger ist, gilt der Reifen als übereinstimmend.
4.4.3. Überschreitet der Messwert den angegebenen Wert um mehr als 0,3 N/kN, müssen drei weitere Reifen geprüft werden. Wenn der Rollwiderstandswert für mindestens einen dieser drei Reifen den angegebenen Wert um mehr als 0,4 N/kN überschreitet, gelten die Bestimmungen in Artikel 23.
Anlage 1
MUSTER EINER BESCHEINIGUNG FÜR EIN BAUTEIL, EINE SELBSTSTÄNDIGE TECHNISCHE EINHEIT ODER EIN SYSTEM
Größtformat: A4 (210 × 297 mm)
BESCHEINIGUNG DER FÜR DIE CO2-EMISSIONEN UND DEN KRAFTSTOFFVERBRAUCH MASSGEBLICHENEIGENSCHAFTEN EINER REIFENFAMILIE
|
Mitteilung über:
|
Behördenstempel
|
einer Zertifizierung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen Eigenschaften einer Reifenfamilie gemäß Verordnung (EU) 2017/2400 der Kommission.
Zertifizierungsnummer: …
Grund für die Erweiterung: …
|
1. |
Name und Anschrift des Herstellers: … |
|
2. |
(ggf.) Name und Anschrift des Bevollmächtigten des Herstellers: … |
|
3. |
Markenname oder Handelsmarke: … |
|
4. |
Beschreibung des Reifentyps: …
|
|
5. |
Ggf. Reifenkennnummer(n) und Technologie(n) zur Kennzeichnung:
|
|
6. |
Technischer Dienst und ggf. Prüflabor, das für Genehmigungsprüfungen oder Überprüfungen der Übereinstimmung der Produktion zugelassen ist: |
|
7. |
Angegebene Werte:
|
|
8. |
Bemerkungen: |
|
9. |
Ort: |
|
10. |
Datum: |
|
11. |
Unterschrift: |
|
12. |
Dieser Mitteilung ist Folgendes beigefügt: |
(1) „Nichtzutreffendes löschen“
Anlage 2
Beschreibungsbogen zum Reifen-Rollwiderstandskoeffizienten
ABSCHNITT I
0.1. Name und Anschrift des Herstellers
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Name und Anschrift des Antragstellers
0.4. Markenname/Handelsbezeichnung
0.5. Reifenklasse (gemäß Verordnung (EG) Nr. 661/2009)
0.6. Größenbezeichnung des Reifens
0.7. Reifenbauart (Diagonal-, Radialbauart)
0.8. Verwendungsart (normaler Reifen, M + S-Reifen, Spezialreifen)
0.9. Geschwindigkeitskategorie(n)
0.10. Tragfähigkeitskennzahl(en)
0.11. Handelsbezeichnung
0.12. angegebener Reifen-Rollwiderstandskoeffizient
0.13. Einrichtung(en) zum Anbringen eines zusätzlichen Kennzeichens für den Rollwiderstandskoeffizienten am Reifen (sofern zutreffend)
0.14 Rollwiderstand des Reifens (in N/kN, gerundet auf die erste Dezimalstelle gemäß ISO 800001, Anhang B, Abschnitt B3, Regel B (Beispiel 1)) Cr, … [N/kN]
0.15. Belastung FZTYRE: … [N]
0.16. Abgleich-Gleichung: …
ABSCHNITT II
1. Genehmigungsbehörde oder technischer Dienst [oder zugelassenes Labor]:
2. Nummer des Prüfberichts:
3. Etwaige Bemerkungen:
4. Datum der Prüfung:
5. Bezeichnung der Prüfmaschine und Angabe von Trommeldurchmesser/-oberfläche:
6. Merkmale des Prüfreifens:
|
6.1. |
Größenbezeichnung und Betriebskennung des Reifens: |
|
6.2. |
Reifenmarke und Handelsbezeichnung: |
|
6.3. |
Bezugsdruck: kPa |
7. Prüfdaten:
|
7.1. |
Messmethode: |
|
7.2. |
Prüfgeschwindigkeit: km/h |
|
7.3. |
Belastung FZTYRE : N |
|
7.4. |
Anfangsreifendruck bei der Prüfung: kPa |
|
7.5. |
Abstand in Metern von der Radachse zur Außenfläche der Trommel im stationären Zustand, rL: m |
|
7.6. |
Breite der Prüffelge und Material: |
|
7.7. |
Umgebungstemperatur: °C |
|
7.8. |
Belastung beim Berührungslauf (außer bei der Verzögerungsmethode): N |
8. Rollwiderstandskoeffizient:
|
8.1. |
Anfangswert (oder Durchschnittswert bei mehr als 1): N/kN |
|
8.2. |
Temperaturkorrigierter Wert: … N/kN |
|
8.3. |
Um Temperatur und Trommeldurchmesser berichtigter Wert: N/kN |
|
8.4. |
Um Temperatur und Trommeldurchmesser berichtigter Wert im Einklang mit dem EU-Labornetz, Cr E : N/kN |
9. Datum der Prüfung:
Anlage 3
Eingabeparameter für das Instrument zur Berechnung des Energieverbrauchs von Fahrzeugen
Einleitung
Diese Anlage enthält die Liste der vom Bauteilehersteller für die Eingabe in das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Begriffsbestimmungen
(1)
(2)
string … Zeichenabfolge in ISO8859-1-Kodierung
token … Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende
date … Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DD T HH:MM:SS Z , wobei kursive Zeichen unveränderlich sind, z. B. „2002-05-30T09:30:10Z“
integer … Wert mit integralem Datentyp ohne führende Nullen, z. B. „1800“
double, X … Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen („.“) und ohne führende Nullen, z. B. für „double, 2“: „2345.67“, für „double, 4“: „45.6780“
(3)
Satz Eingabeparameter
Tabelle 1
Eingabeparameter „Tyre“
|
Parameter name |
Parameter ID |
Type |
Unit |
Beschreibung/Referenz |
|
Manufacturer |
P230 |
token |
|
|
|
Model |
P231 |
token |
|
Firmenname des Herstellers |
|
TechnicalReportId |
P232 |
token |
|
|
|
Date |
P233 |
date |
|
Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
|
AppVersion |
P234 |
token |
|
Versionsnummer zur Angabe des Auswertungsinstruments |
|
RRCDeclared |
P046 |
double, 4 |
[N/N] |
|
|
FzISO |
P047 |
integer |
[N] |
|
|
Dimension |
P108 |
string |
[-] |
Zulässige Werte: „9.00 R20“, „9.00 R22.5“, „9.50 R17.5“, „10.00 R17.5“, „10.00 R22.5“, „10.00 R20“, „11.00 R22.5“, „11.00 R20“, „11.00 R22.5“, „12.00 R22.5“, „12.00 R20“, „12.00 R24“, „12.50 R20“, „13.00 R22.5“, „14.00 R20“, „14.5 R20“, „16.00 R20“, „205/75 R17.5“, „215/75 R17.5“, „225/70 R17.5“, „225/75 R17.5“, „235/75 R17.5“, „245/70 R17.5“, „245/70 R19.5“, „255/70 R22.5“, „265/70 R17.5“, „265/70 R19.5“, „275/70 R22.5“, „275/80 R22.5“, „285/60 R22.5“, „285/70 R19.5“, „295/55 R22.5“, „295/60 R22.5“, „295/80 R22.5“, „305/60 R22.5“, „305/70 R19.5“, „305/70 R22.5“, „305/75 R24.5“, „315/45 R22.5“, „315/60 R22.5“, „315/70 R22.5“, „315/80 R22.5“, „325/95 R24“, „335/80 R20“, „355/50 R22.5“, „365/70 R22.5“, „365/80 R20“, „365/85 R20“, „375/45 R22.5“, „375/50 R22.5“, „375/90 R22.5“, „385/55 R22.5“, „385/65 R22.5“, „395/85 R20“, „425/65 R22.5“, „495/45 R22.5“, „525/65 R20.5“, |
Anlage 4
Nummerierung
1. Nummerierung:
2.1. Die Zertifizierungsnummer für Reifen setzt sich wie folgt zusammen:
eX*YYY/YYYY*ZZZ/ZZZZ*T*0000*00
|
Abschnitt 1 |
Abschnitt 2 |
Abschnitt 3 |
Zusätzlicher Buchstabe zu Abschnitt 3 |
Abschnitt 4 |
Abschnitt 5 |
|
Land, das die Zertifizierung erteilt hat |
CO2-Zertifizierungsrechtsakt (…/2017) |
Letzter Änderungsrechtsakt (zzz/zzzz) |
T = Reifen |
Grundzertifizierungsnummer 0000 |
Erweiterung 00 |
ANHANG XI
ÄNDERUNGEN DER RICHTLINIE 2007/46/EG
|
1) |
In Anhang I wird die folgende Nummer 3.5.7 eingefügt: 3.5.7. Zertifizierung der CO2-Emissionen und des Kraftstoffverbrauchs (für schwere Nutzfahrzeuge gemäß Artikel 6 der Verordnung (EU) 2017/2400) 3.5.7.1. Lizenznummer des Simulationsinstruments:“ |
|
2) |
In Anhang III, Teil I A (Fahrzeuge der Klassen M und N) werden die folgenden Nummern 3.5.7 und 3.5.7.1 eingefügt: 3.5.7. Zertifizierung der CO2-Emissionen und des Kraftstoffverbrauchs (für schwere Nutzfahrzeuge gemäß Artikel 6 der Verordnung (EU) 2017/2400) 3.5.7.1. Lizenznummer des Simulationsinstruments:“ |
|
3) |
In Anhang IV wird Teil I wie folgt geändert:
|
|
4) |
Anhang IX wird wie folgt geändert:
|
|
5) |
In Anhang XV wird in Nummer 2 die folgende Zeile eingefügt:
|