Edición especial en croata: Capítulo 07 Tomo 012 p. 249 - 313
English
Select your language
Official EU languages:
Access to European Union law
EUR-Lex
Access to European Union law
This document is an excerpt from the EUR-Lex website
Use quotation marks to search for an "exact phrase". Append an asterisk (*) to a search term to find variations of it (transp*, 32019R*). Use a question mark (?) instead of a single character in your search term to find variations of it (ca?e finds case, cane, care).
Need more search options? Use the
Advanced search
Document 32012D0088
2012/88/EU: Commission Decision of 25 January 2012 on the technical specification for interoperability relating to the control-command and signalling subsystems of the trans-European rail system (notified under document C(2012) 172) Text with EEA relevance
2012/88/UE: Decisión de la Comisión, de 25 de enero de 2012 , sobre la especificación técnica de interoperabilidad relativa a los subsistemas de control-mando y señalización del sistema ferroviario transeuropeo [notificada con el número C(2012) 172] Texto pertinente a efectos del EEE
2012/88/UE: Decisión de la Comisión, de 25 de enero de 2012 , sobre la especificación técnica de interoperabilidad relativa a los subsistemas de control-mando y señalización del sistema ferroviario transeuropeo [notificada con el número C(2012) 172] Texto pertinente a efectos del EEE
DO L 51 de 23.2.2012, p. 1–65
(BG, ES, CS, DA, DE, ET, EL, EN, FR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV) Este documento se ha publicado en una o varias ediciones especiales
(HR)
 No longer in force, Date of end of validity: 04/07/2016; derogado por 32016R0919
No longer in force, Date of end of validity: 04/07/2016; derogado por 32016R0919
Language
HTML
PDF
Official Journal
|
23.2.2012 |
ES |
Diario Oficial de la Unión Europea |
L 51/1 |
DECISIÓN DE LA COMISIÓN
de 25 de enero de 2012
sobre la especificación técnica de interoperabilidad relativa a los subsistemas de control-mando y señalización del sistema ferroviario transeuropeo
[notificada con el número C(2012) 172]
(Texto pertinente a efectos del EEE)
(2012/88/UE)
LA COMISIÓN EUROPEA,
Visto el Tratado de Funcionamiento de la Unión Europea,
Vista la Directiva 2008/57/CE del Parlamento Europeo y del Consejo, de 17 de junio de 2008, sobre la interoperabilidad del sistema ferroviario dentro de la Comunidad (1) y, en particular, su artículo 6, apartado 1, segundo párrafo,
Considerando lo siguiente:
|
(1) |
La Decisión 2006/679/CE de la Comisión, de 28 de marzo de 2006, sobre la especificación técnica de interoperabilidad referente al subsistema de control y mando y señalización del sistema ferroviario transeuropeo convencional (2) establece las especificaciones técnicas de interoperabilidad («ETI») relativas al subsistema de control-mando y señalización del sistema ferroviario transeuropeo convencional. |
|
(2) |
La Decisión 2006/860/CE de la Comisión, de 7 de noviembre de 2006, sobre la especificación técnica de interoperabilidad relativa al subsistema de control-mando y señalización del sistema ferroviario transeuropeo de alta velocidad (3) establece las ETI relativas al subsistema de control-mando y señalización del sistema ferroviario transeuropeo de alta velocidad. |
|
(3) |
Los requisitos esenciales para la red convencional y la red de alta velocidad deben ser idénticos, así como sus especificaciones funcionales y técnicas, sus componentes de interoperabilidad e interfaces y los procedimientos de evaluación de la conformidad o idoneidad del uso de los componentes de interoperabilidad o la verificación «CE» de sus subsistemas de control-mando y señalización. |
|
(4) |
Las estrategias de aplicación deben seguir siendo específicas de cada tipo de red y los requisitos actuales de la red transeuropea convencional y de la red transeuropea de alta velocidad deben permanecer intactos. La Agencia Ferroviaria Europea («la Agencia») ha recibido un mandato marco para llevar a cabo ciertas actividades. |
|
(5) |
El 31 de enero de 2011, la Agencia emitió su recomendación sobre la especificación técnica de interoperabilidad relativa a los subsistemas de «control-mando y señalización» del sistema ferroviario transeuropeo (4). La presente Decisión se basa en dicha recomendación. |
|
(6) |
En aras de la claridad, procede sustituir por tanto las Decisiones 2006/679/CE y 2006/860/CE por la presente Decisión. |
|
(7) |
Las modificaciones introducidas en relación con los requisitos de seguridad (sección 4.2.1 del anexo III) se basan en el hecho de que el texto de las ETI de CMS vigentes dejan cierto margen para la interpretación. Los cambios introducidos no merman el nivel de seguridad general. |
|
(8) |
La instalación de ERTMS/ETCS debería ser obligatoria en caso de nuevas instalaciones o mejoras de la parte de protección del tren de un conjunto de CMS en los proyectos de infraestructura ferroviaria que reciban apoyo financiero de la UE. En principio, dicha instalación debería realizarse en el marco de un proyecto financiado por la UE. No obstante, en algunos casos será necesario conceder una excepción a esta norma de aplicación. El alcance de dicha excepción se limitará a la estrategia de aplicación de la «ETI de control, mando y señalización». |
|
(9) |
La Agencia ha recogido en el documento técnico «Lista de sistemas de clase B de CMS» los sistemas nacionales de control-mando y señalización heredados («sistemas de clase B»). Dichos sistemas todavía pueden exigirse a bordo de locomotoras y unidades de tracción para circular en determinadas líneas. |
|
(10) |
Los sistemas de clase B obstaculizan notablemente la interoperabilidad de las locomotoras y las unidades de tracción, pero desempeñan una importante función en el mantenimiento del alto nivel de seguridad de la red transeuropea. Por esta razón, es importante evitar la creación de obstáculos adicionales a la interoperabilidad, por ejemplo modificando estos sistemas nacionales heredados o introduciendo nuevos sistemas. |
|
(11) |
Para evitar que se creen obstáculos adicionales a la interoperabilidad, los Estados miembros deben garantizar que la funcionalidad de los sistemas heredados de clase B y sus interfaces se mantengan tal como están especificados actualmente, excepto cuando se requieran cambios para mitigar fallos que afecten a la seguridad en dichos sistemas. Los Estados miembros deben garantizar también que los sistemas que no figuran en la lista de sistemas de clase B no creen obstáculos adicionales a la interoperabilidad. |
|
(12) |
La disponibilidad de las frecuencias GSM-R es esencial para un funcionamiento seguro e interoperable de la explotación ferroviaria. |
|
(13) |
Procede, por tanto, derogar las Decisiones 2006/679/CE y 2006/860/CE. |
|
(14) |
Las medidas previstas en la presente Decisión se ajustan al dictamen del Comité al que se hace referencia en el artículo 29, apartado 1, de la Directiva 2008/57/CE. |
HA ADOPTADO LA PRESENTE DECISIÓN:
Artículo 1
1. Se aprueba la especificación técnica de interoperabilidad («ETI») relativa al subsistema de «control-mando y señalización en tierra» y a los «subsistemas de control-mando y señalización a bordo» del sistema ferroviario transeuropeo, conforme a lo estipulado en el anexo III.
2. La ETI recogida en el anexo III de la presente Decisión se aplicará al subsistema de control-mando y señalización en tierra descrito en el punto 2.3 y al subsistema de control-mando y señalización a bordo descrito en el punto 2.4 del anexo II de la Directiva 2008/57/CE.
Artículo 2
1. Los Estados miembros velarán por que, cuando se requiera un sistema nacional de control-mando de protección a bordo del material rodante destinado a circular en una determinada línea o parte de la red transeuropea, dicho sistema esté incluido en la lista de sistemas de clase B, que tiene el mismo valor legal que los anexos de la ETI.
2. Los Estados miembros garantizarán que la funcionalidad, prestaciones e interfaces de los sistemas de clase B se mantengan tal como están especificadas actualmente, excepto cuando se requieran modificaciones para mitigar fallos de dichos sistemas que afecten a la seguridad.
Artículo 3
Cada Estado miembro notificará a los demás Estados miembros y a la Comisión, en relación con los sistemas de clase B y con las cuestiones calificadas como puntos abiertos en el apéndice G de la ETI adoptada mediante la presente Decisión, en el plazo de seis meses desde la notificación de la presente Decisión, lo siguiente:
|
a) |
la lista de normas técnicas aplicables; |
|
b) |
los procedimientos de evaluación de la conformidad y de verificación que deberán seguirse para garantizar la aplicación efectiva de las normas técnicas aplicables; |
|
c) |
los organismos designados para llevar a cabo dichos procedimientos de evaluación de la conformidad y de verificación. |
En caso de haber notificado ya estos elementos en el marco de las Decisiones 2006/679/CE y 2006/860/CE, se considerará que ha satisfecho esta obligación.
Artículo 4
1. La Comisión podrá otorgar una excepción a la obligación estipulada en la sección 7.3.2.4 del anexo III en relación con el equipamiento obligatorio de las líneas con el sistema europeo de control de trenes (ETCS) en el marco de proyectos financiados por la UE (sección 7.3.2.4), cuando la señalización se renueve en tramos cortos (menos de 150 km) y discontinuos de una línea y siempre que el ETCS se instale antes de la primera de las dos fechas siguientes:
|
— |
cinco años tras el final del proyecto, o |
|
— |
la fecha en que el tramo de esa línea esté conectado con otra línea equipada con ETCS. |
2. El Estado miembro afectado deberá remitir un expediente sobre el proyecto a la Comisión. Dicho expediente contendrá un análisis económico que demuestre que la puesta en funcionamiento del ERTMS en la primera de las dos fechas indicadas en la sección 1, y no durante la ejecución del proyecto financiado por la UE, genera una ventaja técnica y/o económica sustancial.
3. La Comisión estudiará el expediente remitido, así como las medidas propuestas por el Estado miembro, y notificará los resultados de la evaluación al Comité mencionado en el artículo 29 de la Directiva 2008/57/CE. En caso de otorgarse una excepción, el Estado miembro garantizará que el ERTMS se instale antes de la primera de las dos fechas mencionadas en la sección 1.
Artículo 5
La Decisión 2011/291/UE de la Comisión, de 26 de abril de 2011, sobre la especificación técnica de interoperabilidad del subsistema de material rodante «locomotoras y material rodante de viajeros» del sistema ferroviario transeuropeo convencional (5), se modifica de la siguiente manera:
|
1) |
el segundo guion bajo el epígrafe «Medidas legislativas en vigor» de la sección 1.4 «Documentos de referencia» del anexo se sustituye por «ETI de control-mando y señalización»; |
|
2) |
la sección 4.2.3.3.1 se sustituye por el anexo I de la presente Decisión; |
|
3) |
el cuadro 10 de la sección 4.3.4 se sustituye por el anexo II de la presente Decisión. |
Artículo 6
El documento técnico de la ERA, Especificación de Requisitos del Sistema ERTMS/ETCS (SRS), con la referencia «subset-026» en la versión 3.2.0, con fecha de 22 de diciembre de 2010, podrá utilizarse como base para la licitación del equipamiento de líneas con ETCS y para realizar pruebas, pero no se podrá exigir el equipamiento de los trenes con el referencial 3 (baseline 3) antes de la entrada en vigor de dicho referencial 3.
Artículo 7
Por la presente se derogan las Decisiones 2006/679/CE y 2006/860/CE. Sin embargo, sus disposiciones seguirán aplicándose en relación con el mantenimiento de los proyectos autorizados con arreglo a las ETI anexas a dichas Decisiones y, salvo que el solicitante pida la aplicación de la presente Decisión para proyectos de subsistemas nuevos, renovados o mejorados que se hallen en fase avanzada de desarrollo o bien sean objeto de contratos en curso de ejecución en la fecha de notificación de la presente Decisión.
Artículo 8
La presente Decisión se aplicará seis meses después de su notificación a los Estados miembros.
Artículo 9
Los destinatarios de la presente Decisión serán los Estados miembros.
Hecho en Bruselas, el 25 de enero de 2012.
Por la Comisión
Siim KALLAS
Vicepresidente
(1) DO L 191 de 18.7.2008, p. 1.
(2) DO L 284 de 16.10.2006, p. 1.
(3) DO L 342 de 7.12.2006, p. 1.
(4) ERA/REC/2011-03/ERTMS
(5) DO L 139 de 26.5.2011, p. 1.
ANEXO I
«4.2.3.3.1.
En las cláusulas 4.2.3.3.1.1, 4.2.3.3.1.2 y 4.2.3.3.1.3 se establece el conjunto de características del material rodante para la compatibilidad con los sistemas objetivo de detección de trenes.
Se hace referencia a las cláusulas de la especificación mencionada en el anexo A, índice 77 de la ETI de CMS.
El conjunto de características con las que el material rodante es compatible se consignará en el registro del material rodante definido en la cláusula 4.8 de la presente ETI.
4.2.3.3.1.1. CARACTERÍSTICAS DEL MATERIAL RODANTE PARA LA COMPATIBILIDAD CON LOS SISTEMAS DE DETECCIÓN DE TRENES BASADOS EN CIRCUITOS DE VÍA
|
— |
Geometría del vehículo
|
|
— |
Diseño del vehículo
|
|
— |
Emisiones aislantes
|
|
— |
EMC
|
4.2.3.3.1.2. CARACTERÍSTICAS DEL MATERIAL RODANTE PARA LA COMPATIBILIDAD CON LOS SISTEMAS DE DETECCIÓN DE TRENES BASADOS EN CONTADORES DE EJES
|
— |
Geometría del vehículo
|
|
— |
Geometría de ruedas
|
|
— |
Diseño del vehículo
|
|
— |
EMC
|
4.2.3.3.1.3. CARACTERÍSTICAS DEL MATERIAL RODANTE PARA LA COMPATIBILIDAD CON EL EQUIPO DE LAZO
|
— |
Diseño del vehículo La masa metálica de los vehículos es un punto abierto en la especificación a la que hace referencia la cláusula 3.1.7.2 del anexo A, índice 77, de la ETI de CMS.». |
ANEXO II
«Cuadro 10
Interfaz con el subsistema de control-mando y señalización
|
Referencia de la ETI de locomotoras y material rodante de viajeros del ferrocarril convencional |
|
Referencia de la ETI de control-mando y señalización del ferrocarril |
|
|
Parámetro |
Cláusula |
Parámetro |
Cláusula |
|
Características del material rodante compatibles con el sistema de detección de trenes basado en circuitos de vía |
4.2.3.3.1.1 |
Geometría del vehículo Diseño del vehículo Emisiones de aislamiento EMC |
Especificación a la que se hace referencia en el anexo A, índice 77 de la ETI de CMS |
|
Características del material rodante compatibles con el sistema de detección de trenes basado en contadores de ejes |
4.2.3.3.1.2 |
Geometría del vehículo Geometría de ruedas Diseño del vehículo EMC |
Especificación a la que se hace referencia en el anexo A, índice 77 de la ETI de CMS |
|
Características del material rodante compatibles con el equipo de lazo |
4.2.3.3.1.3 |
Diseño del vehículo |
Especificación a la que se hace referencia en el anexo A, índice 77 de la ETI de CMS |
|
Mando del freno de emergencia |
4.2.4.4.1 |
Funcionalidad ETCS a bordo |
4.2.2 |
|
Prestaciones del frenado de emergencia |
4.2.4.5.2 |
Prestaciones y características garantizadas de frenado del tren |
4.2.2 |
|
Visibilidad exterior |
4.2.9.1.3 |
Visibilidad de los objetos de control-mando en tierra |
4.2.15» |
ANEXO III
ÍNDICE
|
1. |
Introducción |
|
1.1. |
Ámbito de aplicación técnico |
|
1.2. |
Ámbito geográfico |
|
1.3. |
Contenido de la presente ETI |
|
2. |
Definición del subsistema y ámbito de aplicación |
|
2.1. |
Introducción |
|
2.2. |
Ámbito de aplicación |
|
2.3. |
Niveles de aplicación (ERTMS/ETCS) |
|
3. |
Requisitos esenciales de los subsistemas de control-mando y señalización |
|
3.1. |
Generalidades |
|
3.2. |
Aspectos específicos de los subsistemas de control-mando y señalización |
|
3.2.1. |
Seguridad |
|
3.2.2. |
Fiabilidad y disponibilidad |
|
3.2.3. |
Salud |
|
3.2.4. |
Protección del medio ambiente |
|
3.2.5. |
Compatibilidad técnica |
|
3.2.5.1. |
Compatibilidad de ingeniería |
|
3.2.5.1.1. |
Condiciones físicas ambientales |
|
3.2.5.1.2. |
Compatibilidad electromagnética interna del ferrocarril |
|
3.2.5.2. |
Compatibilidad del control-mando y señalización |
|
4. |
Caracterización de los subsistemas |
|
4.1. |
Introducción |
|
4.2. |
Especificaciones funcionales y técnicas de los subsistemas |
|
4.2.1. |
Características de seguridad del control-mando y señalización relevantes para la interoperabilidad |
|
4.2.1.1. |
Seguridad |
|
4.2.1.2. |
Fiabilidad/disponibilidad |
|
4.2.2. |
Funcionalidad ERTMS/ETCS a bordo |
|
4.2.3. |
Funcionalidad ERTMS/ETCS en tierra |
|
4.2.4. |
Funciones de comunicaciones móviles GSM-R para los ferrocarriles |
|
4.2.4.1. |
Función de comunicación básica |
|
4.2.4.2. |
Aplicaciones de comunicación de voz y comunicación operativa |
|
4.2.4.3. |
Aplicaciones de comunicación de datos para ETCS |
|
4.2.5. |
Interfaces aire de ERTMS/ETCS y GSM-R |
|
4.2.5.1. |
Radiocomunicaciones con el tren |
|
4.2.5.2. |
Comunicación por Eurobaliza con el tren |
|
4.2.5.3. |
Comunicación por Eurolazo con el tren |
|
4.2.6. |
Interfaces a bordo internas de control-mando y señalización |
|
4.2.6.1. |
Protección del tren ERTMS/ETCS y de clase B |
|
4.2.6.2. |
Interfaz entre la comunicación de datos por radio GSM-R y el ERTMS/ETCS |
|
4.2.6.3. |
Odometría |
|
4.2.7. |
Interfaces en tierra internas de control-mando y señalización |
|
4.2.7.1. |
Interfaz funcional entre RBC |
|
4.2.7.2. |
RBC/RBC |
|
4.2.7.3. |
GSM-R/ETCS en tierra |
|
4.2.7.4. |
Eurobaliza/LEU |
|
4.2.7.5. |
Eurolazo/LEU |
|
4.2.8. |
Gestión de claves |
|
4.2.9. |
Gestión del ETCS-ID |
|
4.2.10. |
Sistemas de detección de trenes en tierra |
|
4.2.11. |
Compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra |
|
4.2.12. |
DMI (interfaz conductor-máquina) de ERTMS/ETCS |
|
4.2.13. |
DMI (interfaz conductor-máquina) de GSM-R |
|
4.2.14. |
Interfaz con el registro de datos a efectos reguladores |
|
4.2.15. |
Visibilidad de los objetos de control-mando y señalización en tierra |
|
4.2.16. |
Condiciones ambientales |
|
4.3. |
Especificaciones funcionales y técnicas de las interfaces con otros subsistemas |
|
4.3.1. |
Interfaz con el subsistema de explotación y gestión del tráfico |
|
4.3.2. |
Interfaz con el subsistema de material rodante |
|
4.3.3. |
Interfaces con el subsistema de infraestructura |
|
4.3.4. |
Interfaces con el subsistema de energía |
|
4.4. |
Reglas operativas |
|
4.5. |
Reglas de mantenimiento |
|
4.5.1. |
Responsabilidad del fabricante de los equipos |
|
4.5.2. |
Responsabilidad del solicitante de la verificación del subsistema |
|
4.6. |
Competencias profesionales |
|
4.7. |
Condiciones de seguridad y salud |
|
4.8. |
Registros |
|
5. |
Componentes de interoperabilidad |
|
5.1. |
Definición |
|
5.2. |
Lista de componentes de interoperabilidad |
|
5.2.1. |
Componentes de interoperabilidad básicos |
|
5.2.2. |
Agrupación de componentes de interoperabilidad |
|
5.3. |
Prestaciones y especificaciones de los componentes |
|
6. |
Evaluación de la conformidad y/o idoneidad para el uso de los componentes y verificación de los subsistemas |
|
6.1. |
Introducción |
|
6.1.1. |
Principios generales |
|
6.1.2. |
Principios para la realización de pruebas en el ERTMS/ETCS y GSM-R |
|
6.2. |
Componentes de interoperabilidad |
|
6.2.1. |
Procedimientos de evaluación de los componentes de interoperabilidad de control-mando y señalización |
|
6.2.2. |
Módulos para los componentes de interoperabilidad de control-mando y señalización |
|
6.2.3. |
Requisitos de evaluación |
|
6.2.4. |
Cuestiones especiales |
|
6.2.4.1. |
El ERTMS/ETCS a bordo |
|
6.2.4.2. |
El módulo de transmisión específico (STM) |
|
6.2.4.3. |
Contenido de la declaración de conformidad «CE» |
|
6.3. |
Subsistemas de control-mando y señalización |
|
6.3.1. |
Procedimientos de evaluación de los subsistemas de control-mando y señalización |
|
6.3.2. |
Módulos para subsistemas de control-mando y señalización |
|
6.3.2.1. |
Subsistema a bordo |
|
6.3.2.2. |
Subsistema en tierra |
|
6.3.2.3. |
Condiciones de utilización de los módulos para subsistemas a bordo y en tierra |
|
6.3.3. |
Requisitos de evaluación para un subsistema a bordo |
|
6.3.4. |
Requisitos de evaluación para un subsistema en tierra |
|
6.4. |
Disposiciones sobre la conformidad parcial |
|
6.4.1. |
Introducción |
|
6.4.2. |
Evaluación de partes de los subsistemas de control-mando y señalización |
|
6.4.3. |
Conformidad parcial de los subsistemas de control-mando y señalización debido a unas condiciones de uso restringidas de su(s) componente(s) de interoperabilidad |
|
7. |
Aplicación de la ETI control-mando y señalización |
|
7.1. |
Introducción |
|
7.2. |
Normas de aplicación general |
|
7.2.1. |
Mejora o renovación del subsistema de control-mando en tierra o de partes del mismo |
|
7.2.2. |
Sistemas heredados |
|
7.2.3. |
Disponibilidad de módulos de transmisión específicos |
|
7.2.4. |
Equipos de clase B adicionales en líneas equipadas con sistemas de clase A |
|
7.2.5. |
Material rodante con equipos de clase A y de clase B |
|
7.2.6. |
Condiciones de las funciones obligatorias y opcionales |
|
7.2.7. |
Reglas de implementación específicas de GSM-R |
|
7.2.7.1. |
Instalaciones en tierra: |
|
7.2.7.2. |
Instalaciones a bordo: |
|
7.2.8. |
Reglas de implementación específicas para los sistemas de detección de trenes |
|
7.2.9. |
Casos específicos |
|
7.2.9.1. |
Introducción |
|
7.2.9.2. |
Bélgica |
|
7.2.9.3. |
Reino Unido |
|
7.2.9.4. |
Francia |
|
7.2.9.5. |
Polonia |
|
7.2.9.6. |
Lituania y Letonia |
|
7.2.9.7. |
Suecia |
|
7.2.9.8. |
Luxemburgo |
|
7.3. |
Reglas para ERTMS |
|
7.3.1. |
El plan de despliegue europeo del ERTMS |
|
7.3.2. |
Implementación en tierra del ERTMS |
|
7.3.2.1. |
Corredores |
|
7.3.2.2. |
Conexión con los principales puertos, centros de clasificación, terminales de mercancías y zonas de transporte de mercancías europeos |
|
7.3.2.3. |
Red de alta velocidad |
|
7.3.2.4. |
Proyectos financiados por la UE |
|
7.3.2.5. |
Notificación |
|
7.3.2.6. |
Retrasos |
|
7.3.3. |
Implementación a bordo del ERTMS |
|
7.3.3.1. |
Red de alta velocidad |
|
7.3.4. |
Líneas específicas que constituyen los corredores |
|
7.3.5. |
Principales puertos, centros de clasificación, terminales de carga y zonas de transporte de mercancías de Europa |
1. INTRODUCCIÓN
1.1. Ámbito de aplicación técnico
La presente ETI se aplica al subsistema de control-mando y señalización a bordo y al subsistema de control-mando y señalización en tierra.
1.2. Ámbito geográfico
El ámbito geográfico de la presente ETI es el sistema ferroviario transeuropeo, es decir, los sistemas ferroviarios transeuropeos convencional y de alta velocidad descritos en los puntos 1 y 2 del anexo I de la Directiva 2008/57/CE (Directiva de interoperabilidad ferroviaria).
1.3. Contenido de la presente ETI
Con arreglo al artículo 5, apartado 3, de la Directiva de interoperabilidad ferroviaria, la presente ETI:
|
1) |
indica su ámbito de aplicación — capítulo 2 (Definición del subsistema y ámbito de aplicación); |
|
2) |
establece los requisitos esenciales para los subsistemas de control-mando y señalización y para sus interfaces con otros subsistemas — capítulo 3 (Requisitos esenciales de los subsistemas de control-mando y señalización); |
|
3) |
establece las especificaciones funcionales y técnicas que deben respetar los subsistemas y sus interfaces con otros subsistemas — capítulo 4 (Caracterización del subsistema); |
|
4) |
determina los componentes de interoperabilidad y las interfaces que han de ser objeto de especificaciones europeas, incluidas las normas europeas, y que son necesarios para lograr la interoperabilidad dentro del sistema ferroviario transeuropeo — capítulo 5 (Componentes de interoperabilidad); |
|
5) |
establece, en cada caso considerado, qué procedimientos deben emplearse para evaluar la conformidad o la idoneidad para el uso de los componentes de interoperabilidad y para la verificación CE de los subsistemas — capítulo 6 (Evaluación de la conformidad y/o la idoneidad para el uso de los componentes y verificación de los subsistemas); |
|
6) |
indica la estrategia de aplicación de la presente ETI — capítulo 7 (Aplicación de la ETI de subsistemas de control-mando y señalización); |
|
7) |
indica las competencias profesionales y las condiciones de seguridad e higiene en el trabajo requeridas para el personal encargado de la explotación y el mantenimiento de dichos subsistemas, así como de la aplicación de las ETI — capítulo 4 (Caracterización del subsistema). |
De conformidad con el artículo 5, apartado 5, de la Directiva de interoperabilidad ferroviaria, las disposiciones correspondientes a los casos específicos se indican en el capítulo 7 (Aplicación de la ETI de subsistemas de control-mando y señalización).
Esta ETI también especifica, en el capítulo 4 (Caracterización de los subsistemas), las reglas de explotación y mantenimiento que se aplican específicamente al ámbito de aplicación indicado en las secciones 1.1 y 1.2 anteriores.
2. DEFINICIÓN DEL SUBSISTEMA Y ÁMBITO DE APLICACIÓN
2.1. Introducción
Los subsistemas de control-mando y señalización se definen en el anexo II de la Directiva de interoperabilidad ferroviaria como «Todos los equipos necesarios para garantizar la seguridad, el mando y el control de la circulación de los trenes autorizados a transitar por la red».
Las características de los subsistemas de control-mando y señalización son:
|
1) |
las funciones que son esenciales para el control seguro del tráfico ferroviario y para su explotación, incluidas las que son necesarias en modos degradados (1); |
|
2) |
las interfaces; |
|
3) |
el nivel de prestaciones necesario para cumplir los requisitos esenciales. |
2.2. Ámbito de aplicación
La ETI de subsistemas de control-mando y señalización únicamente especifica aquellos requisitos que son necesarios para garantizar la interoperabilidad del sistema ferroviario transeuropeo y la conformidad con los requisitos esenciales.
Los subsistemas de control-mando y señalización incluyen las siguientes partes:
|
1) |
protección del tren; |
|
2) |
radiocomunicación; |
|
3) |
detección de trenes. |
El sistema de protección del tren de clase A es el ERTMS/ETCS, mientras que el sistema de radio de clase A es el GSM-R.
En relación con la detección de trenes de clase A, la presente ETI solo especifica los requisitos de la interfaz con otros sistemas.
Los sistemas de clase B constituyen un conjunto limitado de sistemas de protección del tren, mando-control y señalización heredados que estaban en funcionamiento antes del 20 de abril de 2001. La lista de sistemas de clase B se incluye en el documento técnico de la Agencia Ferroviaria Europea «Lista de sistemas de CMS de clase B», ERA/TD/2011-11, versión 1.0.
Los requisitos para el subsistema de control-mando y señalización a bordo se especifican en relación con los móviles de radio y la protección del tren de clase A.
Los requisitos para el subsistema de control-mando y señalización en tierra se especifican en relación con:
|
1) |
la red de radio de clase A; |
|
2) |
la protección del tren de clase A; |
|
3) |
los requisitos de interfaz para sistemas de detección de trenes, con el objeto de garantizar su compatibilidad con el material rodante. |
2.3. Niveles de aplicación (ERTMS/ETCS)
Las interfaces especificadas en la presente ETI definen los medios de transmisión de datos hacia y (cuando corresponda) desde los trenes. Las especificaciones de ERTMS/ETCS a que se hace referencia en la presente ETI ofrecen niveles de aplicación a partir de los cuales un proyecto puede elegir los medios de transmisión que se ajusten a sus necesidades.
La presente ETI define los requisitos para todos los niveles de aplicación.
Un tren equipado con un sistema de protección del tren a bordo de clase A para un determinado nivel de aplicación debe ser capaz de prestar servicio en ese nivel y en cualquier otro nivel inferior. En consecuencia:
|
— |
un tren equipado con un sistema de protección del tren a bordo de clase A para nivel 2 debe ser capaz de prestar servicio en las líneas de ese nivel y de nivel 1, |
|
— |
un tren equipado con un sistema de protección del tren a bordo de clase A para el nivel 1 no necesita estar equipado con una radio de transmisión de datos GSM-R, pero sí debe implementar todas las funciones de nivel 2 a fin de garantizar que la simple conexión de una radio de transmisión de datos GSM-R en un momento posterior asegure que esté equipado para el nivel 2. |
3. REQUISITOS ESENCIALES DE LOS SUBSISTEMAS DE CONTROL-MANDO Y SEÑALIZACIÓN
3.1. Generalidades
La Directiva de interoperabilidad ferroviaria establece que los subsistemas y componentes de interoperabilidad, incluidas las interfaces, deben cumplir los requisitos esenciales definidos en términos generales en el anexo III de la Directiva.
Dichos requisitos esenciales son:
|
1) |
seguridad; |
|
2) |
fiabilidad y disponibilidad; |
|
3) |
salud; |
|
4) |
protección del medio ambiente; |
|
5) |
compatibilidad técnica. |
Los requisitos esenciales para los sistemas de clase A se describen a continuación.
Los requisitos para los sistemas de clase B son responsabilidad de cada Estado miembro.
3.2. Aspectos específicos de los subsistemas de control-mando y señalización
3.2.1. Seguridad
Todos los proyectos a los que se aplique la presente especificación adoptarán las medidas necesarias para garantizar que el riesgo de un incidente que tenga lugar dentro del ámbito de los subsistemas de control-mando y señalización no sea superior al objetivo establecido para el servicio. Con este fin se aplicará el Reglamento (CE) no 352/2009 de la Comisión, de 24 de abril de 2009, relativo a la adopción de un método común de seguridad para la evaluación del riesgo con arreglo a lo dispuesto en el artículo 6, apartado 3, letra a), de la Directiva 2004/49/CE del Parlamento Europeo y del Consejo (2) (método común de seguridad).
Con objeto de garantizar que las medidas adoptadas para alcanzar la seguridad no pongan en peligro la interoperabilidad, deberán respetarse los requisitos del parámetro básico definido en la sección 4.2.1 (Características de seguridad del control-mando y señalización relevantes para la interoperabilidad).
Para el sistema ERTMS/ETCS de clase A, el objetivo de seguridad se distribuye entre los subsistemas de control-mando y señalización a bordo y en tierra. Los requisitos detallados se especifican en el parámetro básico definido en la sección 4.2.1 (Características de seguridad del control-mando y señalización relevantes para la interoperabilidad). Este requisito de seguridad debe cumplirse conjuntamente con los requisitos de disponibilidad definidos en la sección 3.2.2 (Fiabilidad y disponibilidad).
3.2.2. Fiabilidad y disponibilidad
Para el sistema de clase A, los objetivos de fiabilidad y disponibilidad se distribuyen entre los subsistemas de control-mando y señalización a bordo y en tierra. Los requisitos detallados se especifican en el parámetro básico definido en la sección 4.2.1 (Características de seguridad del control-mando y señalización relevantes para la interoperabilidad).
Deberá supervisarse el nivel de riesgo a medida que los componentes del sistema vayan envejeciendo y desgastándose. Deberán respetarse los requisitos de mantenimiento definidos en la sección 4.5.
3.2.3. Salud
De conformidad con la normativa de la UE y con la normativa nacional que sea compatible con la legislación europea, se tomarán medidas para garantizar que los materiales utilizados en los subsistemas de control-mando y señalización y su diseño no constituyan un peligro para la salud de las personas que accedan a los mismos.
3.2.4. Protección del medio ambiente
De conformidad con la normativa de la UE y con la normativa nacional que sea compatible con la legislación europea:
|
1) |
los equipos de control-mando y señalización sometidos a condiciones de calor excesivo o incendio no superarán los límites aplicables a las emisiones de humos o gases nocivos para el medio ambiente; |
|
2) |
los equipos de control-mando y señalización no contendrán sustancias que puedan contaminar el medio ambiente durante su uso normal; |
|
3) |
los equipos de control-mando y señalización estarán sujetos a la legislación europea en vigor que regula los límites de emisión y la susceptibilidad a las interferencias electromagnéticas a lo largo de los límites del dominio ferroviario; |
|
4) |
los equipos de control-mando y señalización se ajustarán a la normativa vigente en materia de contaminación sonora; |
|
5) |
los equipos de control-mando y señalización no darán lugar a niveles inadmisibles de vibraciones que pudieran comprometer la integridad de la infraestructura (cuando la infraestructura se halla en el estado de mantenimiento correcto). |
3.2.5. Compatibilidad técnica
La compatibilidad técnica incluye las funciones, las interfaces y las prestaciones necesarias para lograr la interoperabilidad.
Los requisitos de compatibilidad técnica se subdividen en las tres categorías siguientes:
|
1) |
la primera categoría establece los requisitos de ingeniería generales aplicables a la interoperabilidad, concretamente las condiciones ambientales, la compatibilidad electromagnética interna (CEM) dentro de los límites del ferrocarril y la instalación. Estos requisitos de compatibilidad se definen en el presente capítulo; |
|
2) |
la segunda categoría describe cómo deben aplicarse técnicamente los subsistemas de control-mando y señalización y qué funciones deben realizar para garantizar la interoperabilidad. Esta categoría se define en el capítulo 4; |
|
3) |
la tercera categoría describe cómo hay que explotar los subsistemas de control-mando y señalización para conseguir la interoperabilidad. Esta categoría se define en el capítulo 4. |
3.2.5.1.
3.2.5.1.1.
Los equipos de control-mando y señalización deberán ser capaces de funcionar en las condiciones físicas y climáticas propias de la zona en la que se encuentre la parte relevante del sistema ferroviario transeuropeo.
Deberán respetarse los requisitos del parámetro básico 4.2.16 (Condiciones ambientales).
3.2.5.1.2.
De conformidad con la normativa de la UE y con la normativa nacional que sea compatible con la legislación europea, los equipos de control-mando y señalización no provocarán interferencias ni serán interferidos por otros equipos de control-mando y señalización u otros subsistemas.
El parámetro básico aplicable para la compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra se describe en la sección 4.2.11 (Compatibilidad electromagnética).
3.2.5.2.
El capítulo 4 define los requisitos de interoperabilidad de los subsistemas de control-mando y señalización.
Además, en lo que se refiere a los subsistemas de control-mando y señalización, la presente ETI garantiza la interoperabilidad técnica entre los sistemas ferroviarios transeuropeos de alta velocidad y convencional cuando ambos están equipados con sistemas de clase A.
4. CARACTERIZACIÓN DE LOS SUBSISTEMAS
4.1. Introducción
De conformidad con los requisitos esenciales relevantes, los subsistemas de control-mando y señalización se caracterizan por los siguientes parámetros básicos:
|
1) |
características de seguridad del control-mando y señalización relevantes para la interoperabilidad (sección 4.2.1); |
|
2) |
funcionalidad ERTMS/ETCS a bordo (sección 4.2.2); |
|
3) |
funcionalidad ERTMS/ETCS en tierra (sección 4.2.3); |
|
4) |
funciones de comunicaciones móviles para los ferrocarriles — GSM-R (sección 4.2.4); |
|
5) |
interfaces aire de ERTMS/ETCS y GSM-R (sección 4.2.5); |
|
6) |
interfaces a bordo internas del control-mando y señalización (sección 4.2.6); |
|
7) |
interfaces en tierra internas del control-mando y señalización (sección 4.2.7); |
|
8) |
gestión de claves (sección 4.2.8); |
|
9) |
gestión del ETCS-ID (sección 4.2.9); |
|
10) |
sistemas de detección de trenes (sección 4.2.10); |
|
11) |
compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra (sección 4.2.11); |
|
12) |
DMI (interfaz conductor-máquina) de ERTMS/ETCS (sección 4.2.12); |
|
13) |
DMI (interfaz conductor-máquina) de GSM-R (sección 4.2.13); |
|
14) |
interfaz con el registro de datos a efectos reguladores (sección 4.2.14); |
|
15) |
visibilidad de los objetos de control-mando y señalización en tierra (sección 4.2.15); |
|
16) |
condiciones ambientales (sección 4.2.16). |
Todos los requisitos de la sección 4.2 (Especificaciones funcionales y técnicas de los subsistemas) para cumplir los parámetros básicos indicados deberán aplicarse a los sistemas de clase A.
Los requisitos para los sistemas de clase B y para los STM (que permiten que el sistema de clase A a bordo funcione en una infraestructura de clase B) son responsabilidad del Estado miembro correspondiente.
La presente ETI se basa en principios que permiten que el subsistema de control-mando y señalización en tierra sea compatible con los subsistemas de control-mando y señalización a bordo conformes con la ETI. Con este fin:
|
1) |
las funciones, interfaces y prestaciones del subsistema de control-mando y señalización a bordo están normalizadas para asegurar que cada tren reaccione a los datos recibidos de tierra de manera predecible; |
|
2) |
las comunicaciones tierra a tren y tren a tierra en el subsistema de control-mando y señalización en tierra están completamente normalizadas en la presente ETI. Las especificaciones a las que se hace referencia en los siguientes apartados permiten que la funcionalidad en tierra del control-mando y señalización se apliquen de un modo flexible para optimizar su integración en el sistema ferroviario. Esta flexibilidad deberá utilizarse sin limitar el movimiento de los subsistemas a bordo conformes con la ETI. |
Las funciones del control-mando y señalización se clasifican en categorías que indican si son opcionales (O) u obligatorias (M). Las categorías se definen en el anexo A, 4.1 a, para ERTMS/ETCS, y en el anexo A, 4.1 b, para GSM-R, donde se indica también cómo se clasifican las funciones.
El anexo A, 4.1 c, contiene el glosario de términos y definiciones de ERTMS/ETCS, que se utilizan en las especificaciones a que se refiere el anexo A.
De acuerdo con la sección 2.2 (Ámbito de aplicación), los subsistemas de control-mando y señalización están formados de tres partes.
El siguiente cuadro recoge los parámetros básicos que son relevantes para cada subsistema y para cada parte.
|
Subsistema |
Parte |
Parámetros básicos |
|
Control-mando y señalización a bordo |
protección del tren |
4.2.1, 4.2.2, 4.2.5, 4.2.6, 4.2.8, 4.2.9, 4.2.12, 4.2.14, 4.2.16 |
|
radiocomunicación |
4.2.4, 4.2.5, 4.2.6, 4.2.13, 4.2.14, 4.2.16 |
|
|
Control-mando y señalización en tierra |
protección del tren |
4.2.3, 4.2.5, 4.2.7, 4.2.8, 4.2.9, 4.2.15, 4.2.16 |
|
radiocomunicación |
4.2.4, 4.2.5, 4.2.7, 4.2.16 |
|
|
detección de trenes |
4.2.10, 4.2.11, 4.2.16 |
En lo relativo a los requisitos esenciales establecidos en el capítulo 3, las especificaciones funcionales y técnicas de los subsistemas de control-mando y señalización son las siguientes.
4.2. Especificaciones funcionales y técnicas de los subsistemas
4.2.1. Características de seguridad del control-mando y señalización relevantes para la interoperabilidad
Este parámetro básico describe los requisitos aplicables al subsistema de control-mando y señalización a bordo y en tierra en relación con la sección 3.2.1 (Seguridad) y la sección 3.2.2 (Fiabilidad y disponibilidad).
Con objeto de conseguir la interoperabilidad, deberán respetarse las siguientes disposiciones en la implementación de los subsistemas de control-mando y señalización a bordo y en tierra:
|
1) |
el diseño, la implementación y la utilización del subsistema de control-mando y señalización a bordo o en tierra no exportarán ningún requisito
|
|
2) |
Deberán respetarse los requisitos recogidos en las secciones 4.2.1.1 y 4.2.1.2. |
4.2.1.1.
Los subsistemas de control-mando y señalización a bordo y en tierra respetarán los requisitos para los equipos e instalaciones ERTMS/ETCS establecidos en la presente ETI.
Para el riesgo «superación de los límites de velocidad y/o distancia indicados al ERTMS/ETCS», la tasa tolerable (THR) es de 10-9 h-1 para fallos aleatorios, para el ERTMS/ETCS a bordo y para el ERTMS/ETCS en tierra. Véase el anexo A, 4.2.1 a.
Para conseguir la interoperabilidad, el ERTMS/ETCS a bordo deberá cumplir plenamente todos los requisitos recogidos en el anexo A, 4.2.1. No obstante, para el ERTMS/ETCS en tierra son aceptables requisitos de seguridad menos estrictos siempre que, en combinación con subsistemas de control-mando y señalización a bordo conformes con la ETI, se alcance el nivel de seguridad para el servicio.
Los requisitos para los riesgos relacionados con errores en la interfaz entre el conductor y el ERTMS/ETCS a bordo son un punto abierto.
4.2.1.2.
Los subsistemas de control-mando y señalización a bordo y en tierra respetarán los requisitos recogidos en la presente ETI. Los requisitos de fiabilidad/disponibilidad se definen en el anexo A, 4.2.1 b.
El nivel de riesgo deberá controlarse durante toda la vida útil de los conjuntos. Deberán respetarse los requisitos de mantenimiento definidos en la sección 4.5 (Reglas de mantenimiento).
4.2.2. Funcionalidad ERTMS/ETCS a bordo
El parámetro básico para la funcionalidad ERTMS/ETCS a bordo describe todas las funciones necesarias para la circulación segura de un tren. La función principal consiste en proporcionar protección automática del tren y señalización en cabina:
|
1) |
estableciendo las características del tren (por ejemplo, velocidad máxima del tren, prestaciones de frenado); |
|
2) |
seleccionando el modo de supervisión sobre la base de la información recibida de tierra; |
|
3) |
ejecutando funciones de odometría; |
|
4) |
localizando al tren en un sistema de coordenadas basado en las ubicaciones de las Eurobalizas; |
|
5) |
calculando el perfil de velocidad dinámico para su misión sobre la base de las características del tren y de la información recibida de tierra; |
|
6) |
supervisando el perfil de velocidad dinámico durante la misión; |
|
7) |
proporcionando la función de intervención. |
Estas funciones deberán implementarse de conformidad con el anexo A, 4.2.2 b, y sus prestaciones deberán cumplir lo dispuesto en el anexo A, 4.2.2 a.
Los requisitos para las pruebas se especifican en el anexo A, 4.2.2 c.
Las identidades ETCS de los equipos deberán gestionarse de conformidad con la sección 4.2.9 (Gestión del ETCS-ID).
La funcionalidad principal se basa en otras funciones, a las cuales se aplica también el anexo A, 4.2.2 a, y el anexo A, 4.2.2 b, junto con las especificaciones adicionales indicadas a continuación.
|
1. |
Comunicación con el subsistema de control-mando y señalización en tierra.
|
|
2. |
Comunicación con el conductor. Véase el anexo A, 4.2.2 e, y la sección 4.2.12 (DMI de ERTMS/ETCS). |
|
3. |
Comunicación con los STM. Véase la sección 4.2.6.1 (Interfaz entre ERTMS/ETCS y STM). Esta función incluye:
|
|
4. |
Gestión de información sobre la completitud del tren (integridad del tren) — obligatoria para el nivel 3, no exigida para los niveles 1 o 2. |
|
5. |
Control del estado de los equipos y asistencia en modo degradado. Esta función incluye:
|
|
6. |
Apoyo al registro de datos a efectos reguladores. Véase la sección 4.2.14 (Interfaz con el registro de datos a efectos reguladores). |
|
7. |
Envío de información/órdenes y recepción de información de estado del material rodante:
|
4.2.3. Funcionalidad ERTMS/ETCS en tierra
Este parámetro básico describe la funcionalidad ERTMS/ETCS en tierra. Contiene toda la funcionalidad ERTMS/ETCS necesaria para facilitar un recorrido seguro a un tren específico.
La funcionalidad principal consiste en:
|
1) |
localización de un tren determinado en un sistema de coordenadas basado en ubicaciones de las Eurobalizas (niveles 2 y 3); |
|
2) |
traducción de la información procedente de los equipos de señalización en tierra a un formato estándar para el subsistema de control-mando y señalización a bordo; |
|
3) |
envío de autorizaciones de movimiento, incluyendo descripción de la vía y órdenes asignadas a un tren determinado. |
Dichas funciones deberán implementarse de conformidad con el anexo A, 4.2.3 b, y sus prestaciones deberán respetar lo dispuesto en el anexo A, 4.2.3 a.
Los requisitos para las pruebas se especifican en el anexo A, 4.2.3 c.
Las identidades ETCS de los equipos deberán gestionarse de conformidad con la sección 4.2.9 (Gestión del ETCS-ID).
La funcionalidad principal se basa en otras funciones, a las que también se aplica el anexo A, 4.2.3 a, y el anexo A, 4.2.3 b, junto con las especificaciones adicionales indicadas a continuación.
|
1. |
Comunicación con el subsistema de control-mando y señalización a bordo. Esto incluye:
|
|
2. |
Generación de información/órdenes al ERTMS/ETCS a bordo, por ejemplo información sobre el cierre/apertura de las trampillas de aire, la bajada/elevación del pantógrafo, la apertura/cierre del disyuntor, el cambio del sistema de tracción A al sistema de tracción B. La aplicación de esta funcionalidad es opcional en tierra. |
|
3. |
La gestión de las transiciones entre zonas supervisadas por los diferentes centros de bloqueo radio (RBC) (solo relevante en los niveles 2 y 3). Véanse las secciones 4.2.7.1 (Interfaz funcional entre RBC) y 4.2.7.2 (Interfaz técnica entre RBC). |
4.2.4. Funciones de comunicaciones móviles GSM-R para los ferrocarriles
Este parámetro básico describe las funciones de radiocomunicación. Dichas funciones deberán implementarse en los subsistemas de control-mando y señalización a bordo y en tierra, de conformidad con las especificaciones indicadas más abajo.
4.2.4.1.
Los requisitos generales se especifican en el anexo A, 4.2.4 a.
Además, deberán respetarse las siguientes especificaciones:
|
1) |
características ASCI; anexo A, 4.2.4 b; |
|
2) |
tarjeta SIM; anexo A, 4.2.4 c; |
|
3) |
señalización usuario a usuario; anexo A, 4.2.4 d; |
|
4) |
direccionamiento en función de la localización; anexo A, 4.2.4 e. |
4.2.4.2.
Los requisitos generales se definen en el anexo A, 4.2.4 f.
Los requisitos para las pruebas se especifican en el anexo A, 4.2.4 g.
Además, deberán respetarse las siguientes especificaciones:
|
1) |
confirmación de las llamadas de alta prioridad; anexo A, 4.2.4 h; |
|
2) |
direccionamiento funcional; anexo A 4.2.4 j; |
|
3) |
presentación de números funcionales; anexo A, 4.2.4 k; |
4.2.4.3.
Los requisitos generales se definen en el anexo A, 4.2.4 f.
Los requisitos para las pruebas se especifican en el anexo A, 4.2.4 g.
Esta funcionalidad es obligatoria únicamente para los niveles 2 y 3 de ETCS, así como para las aplicaciones de infill radio.
4.2.5. Interfaces aire de ERTMS/ETCS y GSM-R
Este parámetro básico especifica los requisitos para la interfaz aire entre los subsistemas de control-mando y señalización a bordo y en tierra; deberá tenerse en cuenta en conjunto con los requisitos para las interfaces entre los equipos ERTMS/ETCS y GSM-R, tal como se especifica en las secciones 4.2.6 (Interfaces a bordo internas de control-mando y señalización) y 4.2.7 (Interfaces en tierra internas de control-mando y señalización).
Este parámetro básico incluye:
|
1) |
los valores físicos, eléctricos y electromagnéticos que deben respetarse para conseguir un funcionamiento seguro; |
|
2) |
el protocolo de comunicaciones que debe utilizarse; |
|
3) |
la disponibilidad del canal de comunicación. |
Las especificaciones aplicables se indican a continuación.
4.2.5.1.
Las interfaces de radiocomunicación de clase A operarán en la banda GSM-R-véase el anexo A, 4.2.5 a.
Los protocolos deberán cumplir el anexo A, 4.2.5 b.
Cuando se aplique la función de infill radio, deberán respetarse los requisitos recogidos en el anexo A, 4.2.5 c.
4.2.5.2.
Las interfaces de comunicación por Eurobaliza se ajustarán al anexo A, 4.2.5 d.
4.2.5.3.
Las interfaces de comunicación por Eurolazo se ajustarán al anexo A, 4.2.5 e.
4.2.6. Interfaces a bordo internas de control-mando y señalización
El parámetro básico consta de tres partes.
4.2.6.1.
Cuando estén instaladas a bordo las funciones de protección del tren ERTMS/ETCS y de clase B, las transiciones entre ellas pueden gestionarse con una interfaz normalizada como se especifica en el anexo A, 4.2.6 a.
El anexo A, 4.2.6 b, especifica la interfaz K (para permitir a determinados STM que lean la información de las balizas de clase B a través de la antena ERTMS/ETCS a bordo) y el anexo A, 4.2.6 c, especifica la interfaz G (interfaz aire entre la antena ETCS a bordo y las balizas de clase B).
La aplicación de la interfaz K es opcional, pero si se realiza deberá respetar lo dispuesto en el anexo A, 4.2.6 b.
Además, si está implementada la interfaz K, la funcionalidad del canal de transmisión a bordo debe poder tratar las propiedades del anexo A, índice 4.2.6 c.
Si las transiciones entre la protección del tren a bordo ERTMS/ETCS y de clase B no se gestionan mediante la interfaz normalizada especificada en el anexo A, 4.2.6 a, deben adoptarse medidas para garantizar que el método utilizado no imponga requisitos adicionales al subsistema de control-mando y señalización en tierra.
4.2.6.2.
Los requisitos para la interfaz entre la radio de clase A y la funcionalidad ERTMS/ETCS a bordo se especifican en el anexo A, 4.2.6 d.
Cuando se aplique la función de infill radio, deberán respetarse los requisitos recogidos en el anexo A, 4.2.6 e.
4.2.6.3.
La interfaz entre la función de odometría y el ETCS a bordo cumplirá los requisitos del anexo A, 4.2.6 f. Esta interfaz solo contribuye a este parámetro básico cuando se suministra el equipo de odometría como un componente de interoperabilidad separado (véase la sección 5.2.2. Agrupación de componentes de interoperabilidad).
4.2.7. Interfaces en tierra internas de control-mando y señalización
Este parámetro básico consta de cinco partes.
4.2.7.1.
Esta interfaz define los datos que se intercambian entre RBC adyacentes para permitir la circulación segura de un tren desde una zona de un RBC al siguiente:
|
1) |
información facilitada por el RBC que efectúa el traspaso al RBC que lo acepta: |
|
2) |
información facilitada por el RBC que acepta el traspaso al RBC que lo efectúa. |
Los requisitos se especifican en el anexo A, 4.2.7 a.
4.2.7.2.
Se trata de la interfaz técnica entre dos RBC. Los requisitos se especifican en el anexo A, 4.2.7 b.
4.2.7.3.
Se trata de la interfaz entre el sistema de radiocomunicación de clase A y la funcionalidad ETCS en tierra. Los requisitos se especifican en el anexo A, 4.2.7 c.
4.2.7.4.
Se trata de la interfaz entre la Eurobaliza y el LEU. Los requisitos se especifican en el anexo A, 4.2.7 d.
Esta interfaz solo contribuye a este parámetro básico cuando la Eurobaliza y el LEU se suministran como componentes de interoperabilidad separados (véase la sección 5.2.2, Agrupación de componentes de interoperabilidad).
4.2.7.5.
Se trata de la interfaz entre el Eurolazo y el LEU. Los requisitos se especifican en el anexo A, 4.2.7 e.
Esta interfaz solo contribuye a este parámetro básico cuando el Eurolazo y el LEU se suministran como componentes de interoperabilidad separados (véase la sección 5.2.2, Agrupación de componentes de interoperabilidad).
4.2.8. Gestión de claves
Este parámetro básico especifica los requisitos para la gestión de claves criptográficas utilizadas para la protección de los datos transmitidos por radio.
Los requisitos se especifican en el anexo A, 4.2.8 a. El ámbito de aplicación de la presente ETI únicamente abarca los requisitos relativos a las interfaces de los equipos de control-mando y señalización.
4.2.9. Gestión del ETCS-ID
Este parámetro básico se refiere a las identidades ETCS (ETCS-ID) de los subsistemas de control-mando y señalización en tierra y a bordo.
Los requisitos se especifican en el anexo A, 4.2.9 a.
4.2.10. Sistemas de detección de trenes en tierra
Este parámetro básico especifica los requisitos de la interfaz entre los sistemas de detección de trenes en tierra y el material rodante.
Los requisitos de interfaz que deberán respetarse en los sistemas de detección de trenes se especifican en el anexo A, 4.2.10 a.
4.2.11. Compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra
Este parámetro básico especifica los requisitos de la interfaz para la compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra.
Los requisitos de interfaz que deberán respetarse en el sistema de detección de trenes se especifican en el anexo A, 4.2.11 a.
4.2.12. DMI (Interfaz conductor-máquina) de ERTMS/ETCS
Este parámetro básico describe la información facilitada por el sistema ERTMS/ETCS al conductor e introducida en el sistema ERTMS/ETCS de a bordo por el conductor. Véase el anexo A, 4.2.12 a.
Incluye:
|
1) |
ergonomía (incluida la visibilidad); |
|
2) |
funciones ERTMS/ETCS que deben visualizarse; |
|
3) |
funciones ERTMS/ETCS activadas por el conductor. |
4.2.13. DMI (Interfaz conductor-máquina) de GSM-R
Este parámetro básico describe la información facilitada por el sistema GSM-R al conductor e introducida en el sistema GSM-R de a bordo por el conductor. Véase el anexo A, 4.2.13 a.
Incluye:
|
1) |
ergonomía (incluida la visibilidad); |
|
2) |
funciones GSM-R que deben visualizarse; |
|
3) |
información saliente relacionada con la llamada; |
|
4) |
información entrante relacionada con la llamada. |
4.2.14. Interfaz con el registro de datos a efectos reguladores
Este parámetro básico describe:
|
1) |
el intercambio de datos entre el sistema ERTMS/ETCS a bordo y el dispositivo registrador del material rodante; |
|
2) |
los protocolos de comunicación; |
|
3) |
la interfaz física. |
Véase el anexo A, 4.2.14 a.
4.2.15. Visibilidad de los objetos de control-mando y señalización en tierra
Este parámetro básico describe:
|
1) |
las características de las señales retrorreflectantes para asegurar una correcta visibilidad; |
|
2) |
las características de los paneles indicadores interoperables. |
Véase el anexo A, 4.2.15 a.
Además, la instalación de objetos de control-mando y señalización en tierra deberá ser compatible con el campo de visión del conductor y los requisitos de la infraestructura.
4.2.16. Condiciones ambientales
Deberán respetarse las condiciones ambientales estipuladas en las especificaciones a las que se hace referencia en la presente ETI.
4.3. Especificaciones funcionales y técnicas de las interfaces con otros subsistemas
4.3.1. Interfaz con el subsistema de explotación y gestión del tráfico
|
Interfaz con la ETI de explotación y gestión del tráfico |
|||
|
Referencia ETI de CMS |
Referencia ETI de explotación y gestión del tráfico |
||
|
Parámetro |
Cláusula |
Parámetro |
Cláusula |
|
Reglas operativas (condiciones normales y degradadas) |
4.4 |
Reglamento |
4.2.1.2.1 |
|
Reglas operativas |
4.4 |
||
|
Visibilidad de los objetos de control-mando y señalización en tierra |
4.2.15 |
Visualización de señales e indicadores en tierra |
4.2.2.8 |
|
Prestaciones y características de frenado del tren |
4.2.2 |
Prestación de frenado |
4.2.2.6 |
|
Uso de equipos de enarenado |
|
|
|
|
Lubricación de pestañas del tren |
4.2.10 |
Reglamento |
4.2.1.2.1 |
|
Uso de bloques de freno de material compuesto |
|
|
|
|
Interfaz con el registro de datos a efectos reguladores |
4.2.14 |
Registro de datos a bordo |
4.2.3.5 |
|
DMI de ETCS |
4.2.12 |
Número de circulación del tren |
4.2.3.2.1 |
|
DMI de GSM-R |
4.2.13 |
Número de circulación del tren |
4.2.3.2.1 |
4.3.2. Interfaz con el subsistema de material rodante
|
Interfaz con la ETI de material rodante |
||||
|
Referencia ETI de CMS |
|
Referencia ETI de material rodante |
|
|
|
Parámetro |
Cláusula |
Parámetro |
|
Cláusula |
|
Compatibilidad con los sistemas de detección de trenes en tierra: diseño del vehículo |
4.2.10 |
Características del material rodante que deben ser compatibles con los sistemas de detección de trenes basados en circuitos de vía |
ETI MR AV |
|
|
ubicación del juego de ruedas |
4.2.7.9.2 |
|||
|
carga por eje |
4.2.3.2 |
|||
|
arenado |
4.2.3.10 |
|||
|
resistencia eléctrica entre ruedas |
4.2.3.3.1 |
|||
|
ETI de LOC y PAS |
4.2.3.3.1.1 |
|||
|
ETI Vagones |
4.2.3.2 |
|||
|
Características del material rodante que deben ser compatibles con los sistemas de detección de trenes basados en contadores de ejes |
ETI MR AV |
|
||
|
geometría del juego de ruedas |
4.2.7.9.2 |
|||
|
ruedas |
4.2.7.9.3 |
|||
|
ETI de LOC y PAS |
4.2.3.3.1.2 |
|||
|
ETI Vagones |
4.2.3.3.1 |
|||
|
Características del material rodante que deben ser compatibles con el equipo de lazo |
ETI MR AV |
Ninguna |
||
|
ETI de LOC y PAS |
4.2.3.3.1.3 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Compatibilidad electromagnética entre el material rodante y los equipos de control-mando y señalización en tierra |
4.2.11 |
Características del material rodante que deben ser compatibles con los sistemas de detección de trenes basados en circuitos de vía |
ETI MR AV |
4.2.6.6.1 |
|
ETI de LOC y PAS |
4.2.3.3.1 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Características del material rodante que deben ser compatibles con los sistemas de detección de trenes basados en contadores de ejes |
ETI MR AV |
4.2.6.6.1 |
||
|
ETI de LOC y PAS |
4.2.3.3.2 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Prestaciones y características de frenado del tren |
4.2.2 |
Prestaciones del frenado de emergencia |
ETI MR AV |
|
|
Frenado de emergencia |
4.2.4.1 |
|||
|
Frenado de servicio |
4.2.4.4 |
|||
|
ETI de LOC y PAS |
|
|||
|
Frenado de emergencia |
4.2.4.5.2 |
|||
|
Frenado de servicio |
4.2.4.5.3 |
|||
|
ETI Vagones |
4.2.4.1.2 |
|||
|
Posición de las antenas de control-mando y señalización a bordo |
4.2.2 |
Gálibo cinemático |
ETI MR AV |
4.2.3.1 |
|
ETI de LOC y PAS |
4.2.3.1 |
|||
|
ETI Vagones |
ninguna |
|||
|
Aislamiento de la funcionalidad ERTMS/ETCS a bordo |
4.2.2 |
Reglas operativas |
ETI MR AV |
4.2.7.9.1 |
|
ETI de LOC y PAS |
4.2.12.3 |
|||
|
ETI Vagones |
ninguna |
|||
|
Interfaces de datos |
4.2.2 |
Conceptos de supervisión y diagnóstico |
ETI MR AV |
4.2.7.10 |
|
ETI de LOC y PAS |
4.2.1.1 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Visibilidad de los objetos de control-mando y señalización en tierra |
4.2.15 |
Visibilidad exterior Luces de cabeza |
ETI MR AV |
4.2.7.4.1.1 |
|
ETI de LOC y PAS |
4.2.7.1.1 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Campo de visión exterior del conductor |
ETI MR AV |
|
||
|
línea de visión |
4.2.2.6 b |
|||
|
parabrisas |
4.2.2.7 |
|||
|
ETI de LOC y PAS |
|
|||
|
línea de visión |
4.2.9.1.3.1 |
|||
|
parabrisas |
4.2.9.2 |
|||
|
ETI Vagones |
Ninguna |
|||
|
Interfaz con el registro de datos a efectos reguladores |
4.2.14 |
Aparato registrador |
ETI MR AV |
4.2.7.10 |
|
ETI de LOC y PAS |
4.2.9.6 |
|||
|
ETI Vagones |
ninguna |
|||
|
Órdenes a los equipos del material rodante |
4.2.2 |
Separación de fases |
ETI MR AV |
4.2.8.3.6.7 |
|
4.2.3 |
ETI de LOC y PAS |
4.2.8.2.9.8 |
||
|
ETI Vagones |
ninguna |
|||
|
Mando del freno de emergencia |
4.2.2 |
Mando del freno de emergencia |
ETI MR AV |
ninguna |
|
ETI de LOC y PAS |
4.2.4.4.1 |
|||
|
ETI Vagones |
ninguna |
|||
4.3.3. Interfaces con el subsistema de infraestructura
|
Interfaz con la ETI de infraestructura |
||||
|
Referencia ETI de CMS |
Referencia ETI de infraestructura |
|||
|
Parámetro |
Cláusula |
Parámetro |
|
Cláusula |
|
Sistemas de detección de trenes (espacio para la instalación) |
4.2.10 |
Gálibo mínimo de infraestructura |
HS |
4.2.3 |
|
Gálibo de estructura |
CR |
4.2.4.1 |
||
|
Comunicación por Eurobaliza (espacio para la instalación) |
4.2.5.2 |
Gálibo mínimo de infraestructura |
HS |
4.2.3 |
|
Gálibo de estructura |
CR |
4.2.4.1 |
||
|
Comunicación por Eurolazo (espacio para la instalación) |
4.2.5.3 |
Gálibo mínimo de infraestructura |
HS |
4.2.3 |
|
Gálibo de estructura |
CR |
4.2.4.1 |
||
|
Visibilidad de los objetos de control-mando y señalización en tierra |
4.2.15 |
Gálibo mínimo de infraestructura |
HS |
4.2.3 |
|
Gálibo de estructura |
CR |
4.2.4.1 |
||
4.3.4. Interfaces con el subsistema de energía
|
Interfaz con ETI de energía |
||||
|
Referencia ETI de CMS |
Referencia ETI de energía |
|||
|
Parámetro |
Cláusula |
Parámetro |
|
Cláusula |
|
Órdenes a los equipos del material rodante |
4.2.2 |
Secciones de separación de fases |
ETI ENE AV |
4.2.21 |
|
4.2.3 |
||||
|
Secciones de separación de sistemas |
4.2.22 |
|||
|
Secciones de separación de fases |
ETI ENE CONV |
4.2.19 |
||
|
Secciones de separación de sistemas |
4.2.20 |
|||
4.4. Reglas operativas
Las reglas operativas de un servicio ferroviario con ERTMS/ETCS se especifican en la ETI de explotación y gestión del tráfico.
4.5. Reglas de mantenimiento
Las reglas de mantenimiento de los subsistemas contemplados en la presente ETI deberán garantizar que los valores citados en los parámetros básicos indicados en el capítulo 4 permanezcan dentro de los límites exigidos durante toda la vida útil de los subsistemas. No obstante, es posible que, durante el mantenimiento preventivo o correctivo, el subsistema no pueda respetar los valores citados en los parámetros básicos; las reglas de mantenimiento deberán garantizar que la seguridad no se vea mermada durante estas actividades.
La entidad encargada de los subsistemas de control-mando y señalización deberá establecer reglas de mantenimiento para alcanzar los objetivos anteriores. Para facilitar la preparación de dichas reglas, deberán respetarse los siguientes requisitos.
4.5.1. Responsabilidad del fabricante de los equipos
El fabricante de los equipos incorporados en el subsistema deberá especificar:
|
1) |
todos los requisitos y procedimientos de mantenimiento (incluyendo el control del estado, el diagnóstico de eventos, los métodos de ensayo y las herramientas, así como las competencias profesionales requeridas) necesarios para el logro de los requisitos esenciales y de los valores citados en los requisitos obligatorios de la presente ETI durante todo el ciclo de vida de los equipos (transporte y almacenamiento previos a la instalación, funcionamiento normal, averías, actividades de reparación, verificaciones e intervenciones de mantenimiento, retirada del servicio, etc.); |
|
2) |
los riesgos para la salud y la seguridad que pueden afectar al público y al personal de mantenimiento; |
|
3) |
las condiciones de mantenimiento de primer nivel, es decir, la definición de las unidades sustituibles en línea (LRU), la definición de las versiones compatibles aprobadas de hardware y software, los procedimientos de sustitución de las LRU averiadas, las condiciones de almacenamiento y reparación de las LRU averiadas; |
|
4) |
las verificaciones que deben realizarse en caso de que los equipos estén sometidos a un esfuerzo excepcional (por ejemplo, condiciones ambientales adversas o impactos anormales); |
|
5) |
las verificaciones que deben realizarse durante el mantenimiento de equipos diferentes de los equipos de control-mando y señalización que influyan en los subsistemas de control-mando y señalización (por ejemplo, modificación del diámetro de rueda). |
4.5.2. Responsabilidad del solicitante de la verificación del subsistema
El solicitante deberá:
|
1) |
asegurar que estén definidos los requisitos de mantenimiento descritos en la sección 4.5.1 (Responsabilidad del fabricante de los equipos) para todos los componentes que entren en el ámbito de aplicación de la presente ETI, con independencia de que sean componentes de interoperabilidad o no; |
|
2) |
reunir los requisitos anteriores, teniendo en cuenta los riesgos debidos a las interacciones de diferentes componentes del subsistema y las interfaces con otros subsistemas. |
4.6. Competencias profesionales
Los fabricantes de los equipos y del subsistema deberán proporcionar suficiente información para definir las competencias profesionales necesarias para la instalación, la verificación final y el mantenimiento de los subsistemas de control-mando y señalización. Véase la sección 4.5 (Reglas de mantenimiento).
4.7. Condiciones de seguridad y salud
Deberán tomarse precauciones para garantizar la seguridad y salud del personal de mantenimiento y operación, de conformidad con la normativa de la UE y la normativa nacional compatible con la legislación europea.
Los fabricantes señalarán los riesgos para la salud y la seguridad derivados de la utilización y mantenimiento de sus equipos y subsistemas. Véanse las secciones 4.4 (Reglas operativas) y 4.5 (Reglas de mantenimiento).
4.8. Registros
Los datos que deben facilitarse para los registros según los artículos 34 y 35 de la Directiva 2008/57/CE son los indicados en la Decisión de Ejecución 2011/665/UE de la Comisión (3), y en la Decisión de Ejecución 2011/633/UE de la Comisión (4).
5. COMPONENTES DE INTEROPERABILIDAD
5.1. Definición
De acuerdo con el artículo 2, letra f), de la Directiva de interoperabilidad ferroviaria, los componentes de interoperabilidad son «todo componente elemental, grupo de componentes, subconjunto o conjunto completo de materiales incorporados o destinados a ser incorporados en un subsistema, de los que dependa directa o indirectamente la interoperabilidad del sistema ferroviario. El concepto de «componente» engloba no solo objetos materiales, sino también inmateriales, como los programas informáticos».
5.2. Lista de componentes de interoperabilidad
5.2.1. Componente de interoperabilidad básicos
Los componentes de interoperabilidad básicos de los subsistemas de control-mando y señalización se definen en:
|
1) |
el cuadro 5.1 a para el subsistema de control-mando y señalización a bordo; |
|
2) |
el cuadro 5.2 a para el subsistema de control-mando y señalización en tierra. |
5.2.2. Agrupación de componentes de interoperabilidad
Las funciones de los componentes básicos de interoperabilidad pueden combinarse para formar un grupo. Entonces se define este grupo por esas funciones y por sus interfaces externas remanentes. Todo grupo así formado deberá considerarse un componente de interoperabilidad.
|
1. |
El cuadro 5.1 b enumera los grupos de componentes de interoperabilidad del subsistema de control-mando y señalización a bordo. |
|
2. |
El cuadro 5.2 b enumera los grupos de componentes de interoperabilidad del subsistema de control-mando y señalización en tierra. |
5.3. Prestaciones y especificaciones de los componentes
Para cada componente básico de interoperabilidad o grupo de componentes de interoperabilidad, los cuadros del capítulo 5 describen:
|
1) |
en la columna 3, las funciones e interfaces; obsérvese que algunos componentes de interoperabilidad tienen funciones y/o interfaces que son opcionales; |
|
2) |
en la columna 4, las especificaciones obligatorias para la evaluación de la conformidad de cada función o interfaz (cuando proceda) mediante referencia a la sección correspondiente del capítulo 4. |
Cuadro 5.1.a
Componentes básicos de interoperabilidad en el subsistema de control-mando y señalización a bordo
|
N |
Componente de interoperabilidad CI |
Características |
Requisitos específicos que deben evaluarse en referencia al capítulo 4 |
|
1 |
ERTMS/ETCS a bordo |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ETCS a bordo (excluida la odometría) |
4.2.2 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R |
4.2.5 |
||
|
4.2.5.1 |
||
|
4.2.5.1 |
||
|
4.2.5.2 |
||
|
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.6.1 |
||
|
4.2.6.2 |
||
|
4.2.6.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.12 |
||
|
4.2.2 |
||
|
4.2.14 |
||
|
Condiciones ambientales físicas |
4.2.16 |
||
|
2 |
Equipo de odometría |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS a bordo: solo odometría |
4.2.2 |
||
|
Interfaces |
|
||
|
4.2.6.3 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
3 |
Interfaz de STM externo |
Interfaces |
|
|
4.2.6.1 |
||
|
4 |
Radio cabina GSM-R de voz Nota: La tarjeta SIM, la antena, los cables de conexión y los filtros no forman parte de este componente de interoperabilidad |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) Nota: Ningún requisito de seguridad |
4.2.1 4.5.1 |
|
Funciones de comunicación básicas |
4.2.4.1 |
||
|
Aplicaciones de comunicaciones de voz y operativas |
4.2.4.2 |
||
|
Interfaces |
|
||
|
4.2.5.1 |
||
|
4.2.13 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
5 |
Radio GSM-R de datos ETCS únicamente Nota: La tarjeta SIM, la antena, los cables de conexión y los filtros no forman parte de este componente de interoperabilidad |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) Nota: Ningún requisito de seguridad |
4.2.1 4.5.1 |
|
Funciones de comunicación básicas |
4.2.4.1 |
||
|
Aplicaciones de comunicación de datos de ETCS |
4.2.4.3 |
||
|
Interfaces |
|
||
|
4.2.6.2 |
||
|
4.2.5.1 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
6 |
Tarjeta SIM de GSM-R |
Funciones de comunicación básicas |
4.2.4.1 |
|
Condiciones ambientales |
4.2.16 |
Cuadro 5.1.b
Grupos de componentes de interoperabilidad en el subsistema de control-mando y señalización a bordo
Este cuadro es un ejemplo ilustrativo de la estructura. Se admiten otros grupos
|
N |
Grupo de componentes de interoperabilidad |
Características |
Requisitos específicos que deben evaluarse en referencia al capítulo 4 |
|
1 |
ERTMS/ETCS a bordo Equipo de odometría |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS a bordo |
4.2.2 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R |
4.2.5 |
||
|
4.2.5.1 |
||
|
4.2.5.1 |
||
|
4.2.5.2 |
||
|
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.6.1 |
||
|
4.2.6.2 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.12 |
||
|
4.2.2 |
||
|
4.2.14 |
||
|
Condiciones físicas ambientales |
4.2.16 |
Cuadro 5.2.a
Componentes básicos de interoperabilidad en el subsistema de control-mando y señalización en tierra
|
N |
Constituyente de interoperabilidad CI |
Características |
Requisitos específicos que deben evaluarse en referencia al capítulo 4 |
|
1 |
RBC |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluyendo la comunicación mediante Eurobalizas, infill radio y Eurolazo) |
4.2.3 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo radiocomunicación con el tren |
4.2.5.1 |
||
|
Interfaces |
|
||
|
4.2.7.1, 4.2.7.2 |
||
|
4.2.7.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
2 |
Unidad de infill radio |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluida la comunicación mediante Eurobalizas, Eurolazo y funcionalidad de nivel 2/3) |
4.2.3 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo radiocomunicación con el tren |
4.2.5.1 |
||
|
Interfaces |
|
||
|
4.2.7.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.3 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
3 |
Eurobaliza |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo comunicación mediante Eurobaliza con el tren |
4.2.5.2 |
||
|
Interfaces |
|
||
|
4.2.7.4 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
4 |
Eurolazo |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo comunicación mediante Eurolazo con el tren |
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.7.5 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
5 |
LEU-Eurobaliza |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluyendo la comunicación mediante infill radio, Eurolazo y funcionalidad de nivel 2 y de nivel 3) |
4.2.3 |
||
|
Interfaces |
|
||
|
4.2.7.4 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
6 |
LEU-Eurolazo |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluida la comunicación mediante infill radio, Eurobaliza y funcionalidad de nivel 2 y de nivel 3) |
4.2.3 |
||
|
Interfaces |
|
||
|
4.2.7.5 |
||
|
Condiciones ambientales |
4.2.16 |
Cuadro 5.2.b
Grupos de constituyentes de interoperabilidad en el subsistema de control-mando y señalización en tierra
Este cuadro es un ejemplo ilustrativo de la estructura. Se admiten otros grupos
|
N |
Grupo de constituyentes de interoperabilidad |
Características |
Requisitos específicos que deben evaluarse en referencia al capítulo 4 |
|
1 |
Eurobaliza LEU-Eurobaliza |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluyendo la comunicación mediante Eurolazo y funcionalidad de nivel 2 y de nivel 3) |
4.2.3 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo comunicación mediante Eurobaliza con el tren |
4.2.5.2 |
||
|
Condiciones ambientales |
4.2.16 |
||
|
2 |
Eurolazo LEU-Eurolazo |
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
4.2.1 4.5.1 |
|
Funcionalidad ERTMS/ETCS en tierra (excluida la comunicación mediante Eurobaliza y funcionalidad de nivel 2 y de nivel 3) |
4.2.3 |
||
|
Interfaces aire de ERTMS/ETCS y GSM-R: solo comunicación mediante Eurolazo con el tren |
4.2.5.3 |
||
|
Condiciones ambientales |
4.2.16 |
6. EVALUACIÓN DE LA CONFORMIDAD Y/O IDONEIDAD PARA EL USO DE LOS COMPONENTES Y VERIFICACIÓN DE LOS SUBSISTEMAS
6.1. Introducción
6.1.1. Principios generales
El cumplimiento de los requisitos esenciales citados en el capítulo 3 de la presente ETI deberá garantizarse mediante la conformidad con los parámetros básicos especificados en el capítulo 4.
Dicha conformidad se demostrará mediante:
|
1) |
la evaluación de la conformidad de los componentes de interoperabilidad especificados en el capítulo 5 (véase la sección 6.2); |
|
2) |
la verificación de los subsistemas (véase la sección 6.3). |
No obstante, en algunos casos, parte de los requisitos esenciales pueden satisfacerse a través de la normativa nacional en virtud de:
|
1) |
el uso de sistemas de clase B; |
|
2) |
puntos abiertos en la ETI; |
|
3) |
excepciones con arreglo al artículo 9 de la Directiva de interoperabilidad ferroviaria; |
|
4) |
los casos específicos descritos en el punto 7.2.9. |
En tales casos, la correspondiente evaluación de conformidad con dichas normas se llevará a cabo bajo la responsabilidad del Estado miembro interesado conforme a procedimientos notificados.
6.1.2. Principios para la realización de pruebas en el ERTMS/ETCS y GSM-R
Los subsistemas de control-mando y señalización a bordo amparados por una declaración de verificación «CE» deberán ser capaces de funcionar en todos los subsistemas de control-mando y señalización en tierra amparados por una declaración de verificación «CE», según las condiciones estipuladas en la presente ETI, sin necesidad de verificaciones adicionales.
La consecución de este objetivo se facilitará mediante:
|
1) |
reglas para el diseño e instalación de los subsistemas de control-mando y señalización instalados a bordo y en tierra; |
|
2) |
especificaciones de ensayo para demostrar la conformidad de los subsistemas de control-mando y señalización a bordo y en tierra con los requisitos de esta ETI y su compatibilidad mutua. |
Con objeto de mejorar la eficiencia de la evaluación de la conformidad de los equipos ERTMS/ETCS y GSM-R y ayudar a conseguir el objetivo mencionado anteriormente, cada Estado miembro facilitará a la Comisión Europea escenarios de prueba operativas para comprobar la parte del sistema ERTMS/ETCS y GSM-R del subsistema de control-mando y señalización en tierra, así como su interacción con la parte correspondiente del subsistema de control-mando y señalización a bordo. Los escenarios de prueba en cuestión:
|
1) |
deberán corresponderse con las especificaciones citadas en la presente ETI y suministrar una descripción técnica de las funciones y prestaciones (por ejemplo tiempos de repuesta) cuando resulten relevantes para la interacción entre los subsistemas a bordo y en tierra; |
|
2) |
se presentarán en un formato estándar. Véase el anexo A, 4.2.2 c; |
|
3) |
abarcarán como mínimo, salvo que se indique lo contrario en el anexo A, 4.2.2 c, el inicio de la misión, la transición entre niveles, la transición entre los modos que pueden utilizarse en la línea, las principales situaciones degradadas identificadas, el envío de mensajes de emergencia y cualquier otro aspecto relevante específico de la línea. |
La Agencia Ferroviaria Europea:
|
1) |
publicará previamente los escenarios de prueba operativas, permitiendo a las partes interesadas que aporten comentarios sobre la coherencia de los escenarios de prueba con las especificaciones citadas en la presente ETI y su impacto sobre otras implementaciones o desarrollos. El período para la presentación de comentarios se definirá en cada publicación y no superará los seis meses; |
|
2) |
si los comentarios con negativos, coordinará las acciones de las partes implicadas para alcanzar un acuerdo, por ejemplo modificando los escenarios de prueba operativas; |
|
3) |
desarrollará progresivamente y pondrá a disposición pública una base de datos de los escenarios de prueba que han superado con éxito el paso descrito anteriormente y que representan situaciones que se producen en diferentes implementaciones; |
|
4) |
utilizará la base de datos indicada anteriormente para evaluar si se requieren especificaciones de prueba obligatorias adicionales y si resulta necesario elaborar reglas de ingeniería adicionales para los subsistemas de control-mando y señalización instalados a bordo y en tierra. |
6.2. Componentes de interoperabilidad
6.2.1. Procedimientos de evaluación de los componentes de interoperabilidad de control-mando y señalización
Antes de poner en el mercado un componente de interoperabilidad y/o grupos de componentes de interoperabilidad, el fabricante o su representante autorizado establecido en la Unión Europea deberán expedir una declaración de conformidad «CE», con arreglo al artículo 13, apartado 1, y al anexo IV de la Directiva de interoperabilidad ferroviaria.
El procedimiento de evaluación se realizará aplicando uno de los módulos definidos en la sección 6.2.2 (Módulos para los componentes de interoperabilidad de control-mando y señalización).
Los componentes de interoperabilidad de control-mando y señalización no precisan de una declaración «CE» de idoneidad para el uso, puesto que deben respetar plenamente todos los parámetros básicos pertinentes. Dicha conformidad se demuestra mediante la declaración de conformidad «CE» y será suficiente para ponerlos en el mercado (5).
6.2.2. Módulos para los componentes de interoperabilidad de control-mando y señalización
Para la evaluación de la conformidad de los componentes de interoperabilidad pertenecientes a los subsistemas de control-mando y señalización, el fabricante o su representante autorizado establecido en la Unión Europea podrán optar por:
|
1) |
el procedimiento de examen de tipo (módulo CB) para la fase de diseño y desarrollo, en combinación con el procedimiento de sistema de gestión de la calidad de la producción (módulo CD) para la fase de producción, o |
|
2) |
el procedimiento de examen de tipo (módulo CB) para la fase de diseño y desarrollo, en combinación con el procedimiento de verificación de los productos (módulo CF), o |
|
3) |
el procedimiento de sistema de gestión de la calidad total con examen del diseño (módulo CH1). |
Además, para comprobar el componente de interoperabilidad tarjeta SIM, el fabricante o su representante autorizado podrán optar por el módulo CA.
Los módulos se describen detalladamente en la Decisión 2010/713/UE de la Comisión, de 9 de noviembre de 2010, sobre los módulos para los procedimientos de evaluación de la conformidad, idoneidad para el uso y verificación «CE» que deben utilizarse en las especificaciones técnicas de interoperabilidad adoptadas en virtud de la Directiva 2008/57/CE del Parlamento Europeo y del Consejo (6).
Las aclaraciones siguientes son aplicables al uso de algunos de los módulos:
|
1) |
en referencia al capítulo 2 del «módulo CB», el examen de tipo «CE» deberá realizarse mediante una combinación del tipo de producción y el tipo de diseño; |
|
2) |
en referencia al capítulo 3 del «módulo CF» (verificación de los productos), no se permite una verificación estadística, es decir, deben examinarse uno por uno todos los componentes de interoperabilidad. |
6.2.3. Requisitos de evaluación
Independientemente del módulo seleccionado:
|
1) |
deberán respetarse los requisitos estipulados en la sección 6.2.4.1 de la presente ETI para el componente de interoperabilidad «ERTMS/ETCS a bordo»; |
|
2) |
deberán realizarse las actividades indicadas en el cuadro 6.1 cuando se evalúe la conformidad de un componente de interoperabilidad o de un grupo de componentes de interoperabilidad, tal como se indica en el capítulo 5 de la presente ETI. Todas las verificaciones deberán realizarse tomando como referencia el cuadro aplicable del capítulo 5 y los parámetros básicos recogidos en el mismo. |
Cuadro 6.1
|
Aspecto |
Qué debe evaluarse |
Pruebas pertinentes |
||||||||||||||||||||
|
Funciones, interfaces y prestaciones |
Comprobar que se han implementado todas las funciones, interfaces y prestaciones obligatorias, según lo indicado en los parámetros básicos a los que se hace referencia en el cuadro pertinente del capítulo 5, y que cumplen los requisitos de la presente ETI |
Documentación de diseño y ejecución de los casos y escenarios de prueba, tal como se describe en los parámetros básicos a los que hace referencia el cuadro pertinente del capítulo 5 |
||||||||||||||||||||
|
Comprobar qué otras funciones e interfaces opcionales están implementadas, según lo indicado en los parámetros básicos a los que se hace referencia en el cuadro pertinente del capítulo 5, y que cumplen los requisitos de la presente ETI |
Documentación de diseño y ejecución de los casos y escenarios de prueba, tal como se describe en los parámetros básicos a los que hace referencia el cuadro pertinente del capítulo 5 |
|||||||||||||||||||||
|
Comprobar qué funciones e interfaces adicionales (no especificadas en la presente ETI) están implementadas y que no generan conflictos con las funciones implementadas especificadas en la presente ETI |
Análisis de impacto |
|||||||||||||||||||||
|
Medio ambiente |
Comprobar la conformidad con las condiciones ambientales obligatorias, cuando se especifique en los parámetros básicos citados en el cuadro pertinente del capítulo 5 |
Ensayos para garantizar que se cumplen los requisitos de los parámetros básicos citados en el cuadro pertinente del capítulo 5 |
||||||||||||||||||||
|
Además, comprobar que el componente de interoperabilidad funciona correctamente en las condiciones ambientales para las que ha sido diseñado |
Ensayos conforme a las especificaciones del solicitante |
|||||||||||||||||||||
|
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
Comprobar la conformidad con los requisitos de seguridad descritos en los parámetros básicos citados en el cuadro pertinente del capítulo 5, es decir:
|
Nota: La norma deberá cumplir, como mínimo, los siguientes requisitos:
Véase el anexo A, cuadro A 3. |
||||||||||||||||||||
|
Comprobar que se alcanza el objetivo de fiabilidad cuantitativo indicado por el solicitante |
Cálculos |
|||||||||||||||||||||
|
Comprobar la conformidad con los requisitos de mantenimiento — Sección 4.5.1 |
Comprobación de los documentos |
6.2.4. Cuestiones especiales
6.2.4.1.
Deberá prestarse especial atención a la evaluación de la conformidad del componente de interoperabilidad del ERTMS/ETCS a bordo, dado que es complejo y desempeña una función clave para conseguir la interoperabilidad.
Independientemente de que se opte por el módulo CB o CH1, el organismo notificado comprobará que un ejemplar del componente de interoperabilidad haya pasado el conjunto completo de secuencias de prueba obligatorio, indicadas en la sección 4.2.2 (funcionalidad ERTMS/ETCS a bordo) y que dichos ensayos se hayan realizado en un laboratorio acreditado para llevar a cabo este tipo de ensayos según el Reglamento (CE) no 765/2008 del Parlamento Europeo y del Consejo, de 9 de julio de 2008, por el que se establecen los requisitos de acreditación y vigilancia del mercado relativos a la comercialización de los productos y por el que se deroga el Reglamento (CEE) no 339/93 (7).
Además, para mayor garantía de que el ERTMS/ETCS a bordo pueda explotarse correctamente con diferentes aplicaciones en tierra, se recomienda ensayar el ERTMS/ETCS a bordo utilizando escenarios de la base de datos gestionada por la Agencia y que no forman parte de las especificaciones de prueba obligatorias; véase la sección 6.1.2 (Principios para la realización de pruebas de ERTMS/ETCS y GSM-R). La documentación adjunta al certificado indicará los escenarios de la base de datos utilizados para comprobar el componente de interoperabilidad.
6.2.4.2.
Cada Estado miembro será responsable de la verificación de la conformidad de los STM con sus requisitos nacionales.
La verificación de la interfaz del STM con el ERTMS/ETCS a bordo exige una evaluación de conformidad realizada por un organismo notificado.
6.2.4.3.
La declaración de conformidad «CE» descrita en el anexo IV de la Directiva de interoperabilidad ferroviaria incluirá los siguientes datos sobre el componente de interoperabilidad:
|
1) |
qué funciones opcionales y adicionales están implementadas; |
|
2) |
las condiciones ambientales aplicables. |
6.3. Subsistemas de control-mando y señalización
6.3.1. Procedimientos de evaluación de los subsistemas de control-mando y señalización
El presente capítulo se refiere a la declaración de verificación «CE» para el subsistema de control-mando y señalización a bordo y la declaración de verificación «CE» para el subsistema de control-mando y señalización en tierra.
A instancia del solicitante, el organismo notificado llevará a cabo la verificación «CE» de un subsistema de control-mando y señalización a bordo o en tierra con arreglo al anexo VI de la Directiva de interoperabilidad ferroviaria.
El solicitante deberá redactar la declaración de verificación «CE» para el subsistema de control-mando y señalización a bordo o en tierra con arreglo al artículo 18, apartado 1, y al anexo V de la Directiva de interoperabilidad ferroviaria.
El contenido de la declaración de verificación «CE» se ajustará al anexo V de la Directiva de interoperabilidad ferroviaria.
El procedimiento de evaluación se realizará aplicando uno de los módulos definidos en la sección 6.3.2 (Módulos para los subsistemas de control-mando y señalización).
Se considerará que las declaraciones de verificación «CE» para un subsistema de control-mando y señalización a bordo y para un subsistema de control-mando y señalización en tierra, junto con los certificados de conformidad, son suficientes para garantizar que los subsistemas son compatibles en las condiciones especificadas en la presente ETI.
6.3.2. Módulos para subsistemas de control-mando y señalización
Todos los módulos que se indican a continuación están especificados en la Decisión 2010/713/UE.
6.3.2.1.
Para verificar el subsistema de control-mando y señalización a bordo, el solicitante podrá optar por:
|
1) |
el procedimiento de examen de tipo (módulo SB) para la fase de diseño y desarrollo, en combinación con el procedimiento de sistema de gestión de la calidad de la producción (módulo SD) para la fase de producción, o |
|
2) |
el procedimiento de examen de tipo (módulo SB) para la fase de diseño y desarrollo, en combinación con el procedimiento de verificación de los productos (módulo SF), o |
|
3) |
el procedimiento de sistema de gestión de la calidad total con examen del diseño (módulo SH1). |
6.3.2.2.
Para verificar el subsistema de control-mando y señalización en tierra, el solicitante podrá optar por:
|
1) |
el procedimiento de verificación por unidad (módulo SG), o |
|
2) |
el procedimiento de examen de tipo (módulo SB) para la fase de diseño y desarrollo, en combinación con el procedimiento de sistema de gestión de la calidad de la producción (módulo SD) para la fase de producción, o |
|
3) |
el procedimiento de examen de tipo (módulo SB) para la fase de diseño y desarrollo, en combinación con el procedimiento de verificación de los productos (módulo SF), o |
|
4) |
el procedimiento de sistema de gestión de la calidad total con examen del diseño (módulo SH1). |
6.3.2.3.
En referencia a la sección 4.2 del módulo SB (examen de tipo), se exige el análisis del diseño.
En referencia a la sección 4.2 del módulo SH1 (sistema de gestión de la calidad total con examen del diseño), se exige un ensayo tipo.
6.3.3. Requisitos de evaluación para un subsistema a bordo
El cuadro 6.2 muestra las comprobaciones que deben realizarse cuando se verifique un subsistema de control-mando y señalización a bordo y los parámetros básicos que deben respetarse.
Independientemente del módulo elegido:
|
1) |
la verificación demostrará que el subsistema de control-mando y señalización a bordo cumple los parámetros básicos cuando está integrado en el vehículo; |
|
2) |
la funcionalidad y prestaciones de los componentes de interoperabilidad que estén amparados por la declaración de conformidad «CE» no requerirán verificaciones adicionales. |
Cuadro 6.2
|
Aspecto |
Qué debe evaluarse |
Pruebas pertinentes |
||||
|
Uso de componentes de interoperabilidad |
Comprobar si los componentes de interoperabilidad que se van a integrar en el subsistema están, todos ellos, amparados por una declaración de conformidad «CE» y el certificado correspondiente |
Existencia y contenido de los documentos |
||||
|
Comprobar las restricciones de uso de los componentes de interoperabilidad teniendo en cuenta las características del subsistema y del entorno |
Análisis mediante comprobación de los documentos |
|||||
|
Para los componentes de interoperabilidad que hayan sido certificados basándose en versiones anteriores de la ETI de CMS, comprobar que el certificado todavía garantiza la conformidad con los requisitos de la ETI actualmente en vigor |
Análisis del impacto mediante comprobación de los documentos |
|||||
|
Integración de los componentes de interoperabilidad en el subsistema |
Comprobar la correcta instalación y funcionamiento de los interfaces internos del subsistema — Parámetro básico 4.2.6 |
Comprobaciones especificadas |
||||
|
Comprobar que las funciones adicionales (no especificadas en la presente ETI) no tienen impacto en las obligatorias |
Análisis de impacto |
|||||
|
Comprobar que los valores de ETCS ID se encuentren dentro del margen permitido — Parámetro básico 4.2.9 |
Comprobación de las especificaciones de diseño |
|||||
|
Integración con el material rodante |
Comprobar la correcta instalación de los equipos —Parámetros básicos 4.2.2, 4.2.4, 4.2.14 y condiciones de instalación del equipo, según las especificaciones del fabricante |
Resultados de las comprobaciones (según las especificaciones citadas en los parámetros básicos y las reglas de instalación del fabricante) |
||||
|
Comprobar que el subsistema de control-mando y señalización a bordo es compatible con el entorno del material rodante |
Comprobación de documentos (certificados de los componentes de interoperabilidad y posibles métodos de integración contrastados con las características del material rodante) |
|||||
|
Comprobar que los parámetros (por ejemplo, parámetros de frenado) estén correctamente configurados y que se encuentren dentro del margen permitido |
Comprobación de los documentos (valores de los parámetros contrastados con las características del material rodante) |
|||||
|
Integración con la clase B |
Comprobar que el STM externo esté conectado al ERTMS/ETCS a bordo con interfaces conformes con la ETI |
Nada que comprobar: Existe una interfaz normalizada, comprobada anteriormente a nivel del componente de interoperabilidad. Su funcionamiento ya ha sido comprobado al verificar la integración de los componentes de interoperabilidad en el subsistema |
||||
|
Comprobar que las funciones de clase B implementadas en el ERTMS/ETCS a bordo – Parámetro básico 4.2.6.1-no generen requisitos adicionales para el subsistema de control-mando y señalización en tierra a causa de las transiciones |
Nada que comprobar: Ya se ha comprobado todo a nivel del componente de interoperabilidad |
|||||
|
Comprobar que los equipos de clase B independientes que no estén conectados al ERTMS/ETCS a bordo —Parámetro básico 4.2.6.1— no generen requisitos adicionales para el subsistema de control-mando y señalización en tierra a causa de las transiciones |
Nada que comprobar: ninguna interfaz (8) |
|||||
|
Comprobar que los equipos de clase B independientes conectados al ERTMS/ETCS a bordo y que utilizan interfaces (parcialmente) no conformes con la ETI — Parámetro básico 4.2.6.1— no generen requisitos adicionales para el subsistema de control-mando y señalización en tierra a causa de las transiciones. Comprobar asimismo que no afectan a las funciones ERTMS/ETCS |
Análisis de impacto |
|||||
|
Integración con los subsistemas de control-mando y señalización en tierra |
Comprobar la lectura correcta de los telegramas de Eurobaliza (el ámbito de este ensayo se limita a verificar que la antena haya sido correctamente instalada. No deben repetirse los ensayos que ya se hayan realizado a nivel del componente de interoperabilidad) — Parámetro básico 4.2.5 |
Ensayo con una Eurobaliza certificada: La capacidad de leer correctamente el telegrama será la prueba pertinente. |
||||
|
Comprobar la lectura correcta de los telegramas de Eurolazo (si procede) — Parámetro básico 4.2.5 |
Ensayo con un Eurolazo certificado: La capacidad de leer correctamente el telegrama será la prueba pertinente. |
|||||
|
Comprobar que el equipo pueda gestionar una llamada GSM-R, tanto de voz como de datos (si procede) — Parámetro básico 4.2.5 |
Ensayo con una red GSM-R certificada. La capacidad de establecer, mantener y desconectar una conexión será la prueba pertinente. |
|||||
|
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
Comprobar que los equipos respeten los requisitos de seguridad — Parámetro básico 4.2.1 |
Aplicación de los procedimientos especificados en el método común de seguridad |
||||
|
Comprobar que se alcance el objetivo de fiabilidad cuantitativa — Parámetro básico 4.2.1 |
Cálculos |
|||||
|
Comprobar la conformidad con los requisitos de mantenimiento — Sección 4.5.2 |
Comprobación de los documentos |
|||||
|
Integración con los subsistemas de control-mando y señalización en tierra y otros subsistemas: Ensayos en condiciones operativas |
Comprobar el comportamiento del subsistema en el mayor número de condiciones operativas diferentes que sea razonablemente posible (por ejemplo gradientes de línea, velocidad del tren, vibraciones, potencia de tracción, condiciones meteorológicas, diseño de la funcionalidad de control-mando y señalización en tierra). El ensayo deberá ser capaz de verificar:
Estos ensayos también deben mejorar la confianza en que no se producirán fallos sistemáticos. El alcance de estas pruebas excluye los ensayos que ya se hayan realizado en fases anteriores: Deberán tenerse en cuenta los ensayos realizados en los componentes de interoperabilidad y los ensayos realizados en el subsistema en un entorno simulado. No se requieren ensayos en condiciones operativas para el equipo GSM-R de voz a bordo. |
Informes de las circulaciones de pruebas. Nota: Indicar en el certificado las condiciones probadas, las normas aplicadas y los criterios para considerar completados los ensayos. |
6.3.4. Requisitos de evaluación para un subsistema en tierra
El objetivo de las evaluaciones realizadas en el ámbito de aplicación de la presente ETI consiste en verificar que los equipos cumplan los requisitos estipulados en el capítulo 4.
No obstante, en lo que se refiere al diseño de la parte ERTMS/ETCS del subsistema de control-mando y señalización en tierra, se necesita información específica de la aplicación que incluya:
|
1) |
las características de la línea, tales como gradientes, distancias, posición de elementos de la ruta y Eurobalizas/Eurolazos, puntos que deben protegerse, etc.; |
|
2) |
los datos y reglas de señalización que debe manejar el sistema ERTMS/ETCS. |
La presente ETI no cubre las comprobaciones para evaluar si la información específica de la aplicación es correcta.
Independientemente del módulo seleccionado:
|
1) |
el cuadro 6.3 muestra las comprobaciones que deben realizarse para verificar un subsistema de control-mando y señalización en tierra y los parámetros básicos que deben respetarse; |
|
2) |
la funcionalidad y prestaciones que ya se hayan comprobado en relación con los componentes de interoperabilidad no requieren verificaciones adicionales. |
Cuadro 6.3
|
Aspecto |
Qué debe evaluarse |
Pruebas pertinentes |
||||
|
Uso de componentes de interoperabilidad |
Comprobar que todos los componentes de interoperabilidad que se van a integrar en el subsistema están amparados por una declaración de conformidad «CE» y el certificado correspondiente. |
Existencia y contenido de los documentos |
||||
|
Comprobar las restricciones de uso de los componentes de interoperabilidad teniendo en cuenta las características del subsistema y del entorno |
Análisis de impacto mediante comprobación de los documentos |
|||||
|
Para los componentes de interoperabilidad que hayan sido certificados basándose en versiones anteriores de la ETI de control-mando y señalización, comprobar que el certificado todavía garantiza la conformidad con los requisitos de la ETI actualmente en vigor. |
Análisis de impacto mediante comparación con las especificaciones referenciadas en la ETI y los certificados de los componentes de interoperabilidad |
|||||
|
Uso de sistemas de detección de trenes |
Comprobar que los tipos seleccionados cumplen los requisitos de la ETI de control-mando y señalización —Parámetros básicos 4.2.10, 4.2.11 |
Comprobación de los documentos |
||||
|
Integración de los componentes de interoperabilidad en el subsistema |
Comprobar que las interfaces internas del subsistema hayan sido correctamente instaladas y funcionan correctamente — Parámetros básicos 4.2.5, 4.2.7 |
Comprobaciones especificadas |
||||
|
Comprobar que las funciones adicionales (no especificadas en la presente ETI) no afectan a las obligatorias |
Análisis de impacto |
|||||
|
Comprobar que los valores de ETCS ID están dentro del margen permitido — Parámetro básico 4.2.9 |
Comprobación de las especificaciones de diseño |
|||||
|
Integración con la infraestructura |
Comprobar la correcta instalación de los equipos —Parámetros básicos 4.2.3, 4.2.4 y condiciones de instalación especificadas por el fabricante |
Resultados de las comprobaciones (según las especificaciones citadas en los parámetros básicos y las reglas de instalación del fabricante) |
||||
|
Comprobar que el subsistema de control-mando y señalización en tierra es compatible con el entorno en tierra |
Comprobación de documentos (certificados de los componentes de interoperabilidad y posibles métodos de integración contrastados con las características en tierra) |
|||||
|
Integración con la señalización en tierra |
Comprobar que todas las funciones que necesita la aplicación se han implementado de conformidad con las especificaciones citadas en la presente ETI — Parámetro básico 4.2.3 |
Comprobación de documentos (especificación de diseño del solicitante y certificados de los componentes de interoperabilidad) |
||||
|
Comprobar la correcta configuración de los parámetros (telegramas de Eurobaliza, mensajes de RBC, posiciones de los paneles indicadores, etc.) |
Comprobación de los documentos (valores de los parámetros contrastados con las características en tierra y de la señalización) |
|||||
|
Comprobar que las interfaces están correctamente instaladas y funcionan adecuadamente. |
Verificación del diseño y pruebas según la información facilitada por el solicitante |
|||||
|
Comprobar que el subsistema de control-mando y señalización en tierra funciona correctamente según la información presente en las interfaces con la señalización en tierra (por ejemplo generación adecuada de telegramas de Eurobaliza por un LEU o de un mensaje por el RBC) |
Verificación del diseño y ensayos según la información facilitada por el solicitante |
|||||
|
Integración con los subsistemas de control-mando y señalización a bordo y con el material rodante |
Comprobar la cobertura de GSM-R — Parámetro básico 4.2.4 |
Mediciones in situ |
||||
|
Comprobar la conformidad de los sistemas de detección de trenes con los requisitos de la presente ETI —Parámetro básico 4.2.10 |
Mediciones in situ |
|||||
|
Comprobar que los sistemas de detección de trenes cumplen los requisitos de la presente ETI — Parámetros básicos 4.2.10 y 4.2.11 |
Comprobación de las pruebas disponibles para las instalaciones existentes (para sistemas que ya estén en uso); realización de pruebas según las normas para nuevos tipos |
|||||
|
Comprobar que todas las funciones que necesita la aplicación se han implementado de conformidad con las especificaciones citadas en la presente ETI —Parámetros básicos 4.2.3, 4.2.4 y 4.2.5 |
Informes de ensayo de los escenarios operativos especificados en la sección 6.1.2 con diferentes subsistemas de control-mando y señalización a bordo certificados. El informe indicará los escenarios operativos que han sido probados, los equipos a bordo utilizados y si las pruebas se han realizado en laboratorios, líneas de pruebas o en la implementación real. |
|||||
|
Fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
Comprobar la conformidad con los requisitos de seguridad — Parámetro básico 4.2.1 |
Aplicación de los procedimientos especificados en el método común de seguridad |
||||
|
Comprobar que se respetan los objetivos de fiabilidad cuantitativa — Parámetro básico 4.2.1 |
Cálculos |
|||||
|
Comprobar la conformidad con los requisitos de mantenimiento — Sección 4.5.2 |
Comprobación de los documentos |
|||||
|
Integración con los subsistemas de control-mando y señalización a bordo y el material rodante: Pruebas en condiciones operativas |
Comprobar el comportamiento del subsistema en el mayor número de condiciones operativas diferentes que sea viable (por ejemplo velocidad del tren, número de trenes en la línea, condiciones meteorológicas). La prueba debe ser capaz de verificar:
Estas pruebas también mejorarán la confianza en que no se producirán averías sistemáticas. El alcance de estas pruebas excluye los ensayos que ya se hayan realizado en etapas previas: Deberán tenerse en cuenta los ensayos realizados en los componentes de interoperabilidad y los ensayos realizados al subsistema en un entorno simulado. |
Informes de los ensayos. Nota: Indicar en el certificado las condiciones probadas, las normas aplicadas y los criterios para considerar completados los ensayos. |
6.4. Disposiciones sobre la conformidad parcial
6.4.1. Introducción
Según el artículo 18, apartado 4, de la Directiva de interoperabilidad ferroviaria, «el organismo notificado podrá expedir verificaciones de declaración intermedias para cubrir determinadas fases del procedimiento de verificación o partes del subsistema».
Tal como se indica en la sección 2.2 (Ámbito de aplicación) de la presente ETI, los subsistemas de control-mando y señalización están formados por tres partes, especificadas en la sección 4.1 (Introducción).
La sección 6.4.2 trata de la verificación de dichas partes de los subsistemas de control-mando y señalización.
La sección 6.4.3 se refiere a la verificación de la conformidad parcial de los subsistemas de control-mando y señalización cuando existen condiciones restringidas de uso de su(s) componente(s) de interoperabilidad.
6.4.2. Evaluación de partes de los subsistemas de control-mando y señalización
La evaluación de la conformidad de los subsistemas de control-mando y señalización en tierra o a bordo con los requisitos de la presente ETI es un proceso que puede realizarse en varias etapas sucesivas, uno para cada una de las tres partes. En cada etapa, el evaluador comprueba únicamente que esa parte específica cumple los requisitos de la ETI.
Independientemente del módulo seleccionado, el organismo notificado comprobará que:
|
1) |
se hayan respetado los requisitos de la ETI de la parte en cuestión; |
|
2) |
no se vean perjudicados los requisitos de la ETI ya evaluados. |
No será necesario volver a comprobar las funciones ya evaluadas que no experimenten ningún cambio y no estén afectadas en esa etapa.
6.4.3. Conformidad parcial de los subsistemas de control-mando y señalización debido a unas condiciones de uso restringidas de su(s) componente(s) de interoperabilidad
Podrá emitirse un certificado de conformidad parcial para un componente de interoperabilidad, incluso si no se ha implementado alguna función, interfaz o prestación, siempre que:
|
1) |
la función, interfaz o prestación no implementada no sea necesaria para la integración del componente de interoperabilidad en un subsistema debido a las condiciones específicas de utilización, por ejemplo (9),
|
|
2) |
el certificado indique qué funciones, interfaces o prestaciones no se han implementado y establezca las correspondientes restricciones para el uso del componente de interoperabilidad. Esta información permitirá identificar las condiciones en que puede utilizarse el componente de interoperabilidad y las restricciones que se aplicarán a la interoperabilidad de un subsistema que lo incorpore. |
En cualquier caso, los organismos notificados y la Agencia coordinarán las condiciones de emisión de dichos certificados con restricciones en un grupo de trabajo formado al amparo del artículo 21 bis, apartado 5, del Reglamento (CE) no 881/2004 del Parlamento Europeo y del Consejo, de 29 de abril de 2004, por el que se crea una Agencia Ferroviaria Europea (Reglamento de la Agencia) (10).
Cuando el componente de interoperabilidad se integre en un subsistema de control-mando y señalización a bordo o en tierra, si las funciones, interfaces o prestaciones no implementadas no permiten evaluar si el subsistema cumple plenamente los requisitos de la presente ETI, únicamente se podrá emitir una declaración de verificación intermedia. Indicará qué requisitos han sido evaluados y estipulará las restricciones correspondientes aplicables a la utilización del subsistema y su compatibilidad con otros subsistemas.
7. APLICACIÓN DE LA ETI CONTROL-MANDO Y SEÑALIZACIÓN
7.1. Introducción
En este capítulo se exponen la estrategia y las medidas técnicas asociadas para la aplicación de la ETI, y en particular las condiciones para la migración a los sistemas de clase A.
Debe tenerse en cuenta que, ocasionalmente, la aplicación de una ETI tendrá que coordinarse con la aplicación de otras ETI.
7.2. Normas de aplicación general
7.2.1. Mejora o renovación del subsistema de control-mando en tierra o de partes del mismo
La mejora o renovación del subsistema de control-mando y señalización en tierra puede afectar a cualquiera o a todas de las partes siguientes:
|
1) |
protección del tren; |
|
2) |
radiocomunicación; |
|
3) |
detección de trenes. |
Por lo tanto, pueden mejorarse o renovarse separadamente estas partes diferentes del subsistema de control-mando y señalización en tierra si no va en detrimento de la interoperabilidad. El trabajo en cuestión pueden afectar a:
|
1) |
las funciones e interfaces de GSM-R; |
|
2) |
las funciones e interfaces de ERTMS/ETCS; |
|
3) |
la compatibilidad del sistema de detección de trenes con el material rodante. |
Véase el capítulo 4.1 (Introducción) para la definición de los parámetros básicos para cada parte.
7.2.2. Sistemas heredados
Los Estados miembros velarán por que la funcionalidad de los sistemas heredados y sus interfaces no sufran modificaciones, excepto cuando las modificaciones sean necesarias para mitigar problemas de seguridad de estos sistemas.
7.2.3. Disponibilidad de módulos de transmisión específicos
Si las líneas que entran en el ámbito de aplicación de la presente ETI no están equipadas con sistemas de protección de trenes de clase A, el Estado miembro no escatimará esfuerzos para garantizar la disponibilidad de un módulo de transmisión específico (STM) para su sistema o sistemas heredados de protección de trenes de clase B.
En este contexto, deberá velarse para garantizar un mercado abierto de los STM en condiciones comerciales equitativas. Cuando, por razones técnicas o comerciales (11), no pueda garantizarse la disponibilidad de un STM, el Estado miembro de que se trate deberá informar al Comité de los motivos subyacentes al problema y de las medidas paliativas que pretende aplicar con el fin de permitir el acceso —en particular a operadores extranjeros— a su infraestructura.
7.2.4. Equipos de clase B adicionales en líneas equipadas con sistemas de clase A
En una línea equipada con ERTMS/ETCS y/o GSM-R podrán instalarse equipos de clase B para permitir la operación con material rodante no compatible con la clase A durante la fase de migración. Se pueden utilizar los equipos de clase B a bordo como respaldo del sistema de clase A. No obstante, el administrador de la infraestructura no podrá exigir que los trenes interoperables que circulen por dicha línea tengan sistemas de clase B a bordo.
Además, los sistemas instalados en tierra deberán permitir las transiciones entre la clase A y la clase B, sin imponer requisitos adicionales a los especificados en la presente ETI sobre el subsistema de control-mando y señalización a bordo.
7.2.5. Material rodante con equipos de clase A y de clase B
El material rodante puede ir equipado con sistemas de clase A y de clase B para permitir su explotación en varias líneas.
El Estado miembro afectado podrá restringir la utilización de un sistema de clase B a bordo en líneas donde el sistema correspondiente no esté instalado en tierra.
Cuando se circule por una línea equipada con sistemas de clase A y de clase B, un tren equipado con sistemas de clase A y de clase B podrá utilizar los sistemas de clase B como alternativa de respaldo. Esta condición no podrá constituir un requisito para la interoperabilidad.
Los sistemas de protección del tren de clase B pueden implementarse:
|
1) |
mediante un STM que funcione a través de una interfaz estándar («STM externo»), o |
|
2) |
integrados en los equipos de ERTMS/ETCS o conectados a través de una interfaz no estándar, o |
|
3) |
de forma independiente al equipo de ERTMS/ETCS, por ejemplo mediante un sistema que permita la conmutación entre equipos. La empresa ferroviaria deberá garantizar que las transiciones entre la protección del tren de clase A y de clase B se realicen de conformidad con los requisitos de la presente ETI y con la normativa nacional para el sistema de clase B. |
7.2.6. Condiciones de las funciones obligatorias y opcionales
Dependiendo de las características del subsistema de control-mando y señalización en tierra y sus interfaces con otros subsistemas, en determinadas aplicaciones puede ser necesario implementar alguna funcionalidad en tierra no clasificada como obligatoria para cumplir los requisitos esenciales.
La implementación en tierra de funciones nacionales u opcionales no debe impedir la utilización de dicha infraestructura por un tren que cumpla solamente los requisitos obligatorios del sistema de clase A a bordo, excepto en la medida requerida por las siguientes funciones opcionales a bordo:
|
— |
una aplicación en tierra ETCS nivel 3 requiere supervisión de la integridad del tren a bordo, |
|
— |
una aplicación en tierra ETCS de nivel 1 con infill requiere la correspondiente funcionalidad infill a bordo si la velocidad de liberación se fija en cero por razones de seguridad (por ejemplo protección de puntos de peligro), |
|
— |
si ETCS requiere la radiotransmisión de datos, los servicios GSM-R de transmisión de datos deberán ajustarse a los requisitos ETCS correspondientes, |
|
— |
un conjunto instalado a bordo que incorpore un STM KER podrá requerir la implementación de la interfaz K. |
7.2.7. Reglas de implementación específicas de GSM-R
7.2.7.1.
La instalación de GSM-R es obligatoria cuando:
|
1) |
se instale por primera vez la parte radio de un subsistema de control-mando y señalización en tierra; |
|
2) |
se mejore la parte radio de un subsistema de control-mando y señalización en tierra que ya esté en servicio, de tal modo que se modifiquen las funciones o las prestaciones del subsistema. Se excluyen las modificaciones que se juzguen necesarias para atenuar los problemas de seguridad en la instalación heredada. |
7.2.7.2.
La instalación de GSM-R en el material rodante para su utilización en una línea que incluya al menos una sección equipada con interfaces de clase A (incluso superpuesta a un sistema de clase B), será obligatoria cuando:
|
1) |
se instale por primera vez la parte radio de un subsistema de control-mando y señalización a bordo; |
|
2) |
se mejore la parte de la radio de un subsistema de control-mando y señalización a bordo que ya esté en servicio, de tal modo que se modifiquen las funciones o las prestaciones del subsistema. Se excluyen las modificaciones que se juzguen necesarias para atenuar los problemas de seguridad en la instalación heredada. |
7.2.8. Reglas de implementación específicas para los sistemas de detección de trenes
En el contexto de la presente ETI, el sistema de detección de trenes se refiere al equipo instalado en tierra que detecta la presencia o ausencia de vehículos, ya sea en toda la línea de una ruta o en un tramo local de la misma.
Los sistemas instalados en tierra (por ejemplo sistemas de enclavamiento o pasos a nivel) que utilicen información del equipo de detección no se consideran partes del sistema de detección de trenes.
La presente ETI especifica los requisitos para la interfaz con el material rodante en la medida necesaria para garantizar la compatibilidad entre la infraestructura y el material rodante conforme con la ETI.
La implementación de un sistema de detección de trenes conforme con los requisitos de la ETI de subsistemas de control-mando y señalización puede realizarse de forma independiente de la instalación del ERTMS/ETCS o GSM-R, pero puede depender de los sistemas de señalización de clase B o de requisitos especiales, por ejemplo para los equipos de pasos a nivel.
Deberán respetarse los requisitos relativos a los sistemas de detección de trenes de la presente ETI cuando:
|
1) |
se mejore el sistema de detección de trenes; |
|
2) |
se renueve el sistema de detección de trenes, siempre que el respeto de los requisitos de la presente ETI no implique modificaciones o mejoras no deseadas de otros sistemas instalados en tierra o a bordo; |
|
3) |
se renueve el sistema de detección de trenes, cuando sea necesario debido a la mejora o renovación de los sistemas instalados en tierra que utilizan información del sistema de detección de trenes; |
|
4) |
se retiren los sistemas de protección del tren de clase B (cuando los sistemas de detección de trenes y de protección del tren están integrados). |
Durante la fase de migración deberán tomarse medidas para garantizar que la instalación de un sistema de detección de trenes conforme con la ETI tenga el mínimo impacto negativo sobre al material rodante existente que no es conforme con la ETI.
Con este fin se recomienda que el administrador de la infraestructura escoja un sistema de detección de trenes conforme con la ETI que, al mismo tiempo, sea compatible con el material rodante no conforme con la ETI que ya está en funcionamiento en dicha infraestructura.
7.2.9. Casos específicos
7.2.9.1.
Se autorizan las siguientes disposiciones particulares en los casos específicos que se indican a continuación.
Estos casos específicos pertenecen a dos categorías: las disposiciones se aplican de forma permanente (caso «P») o temporal (caso «T»).
En la presente ETI, el caso temporal «T3» se define como los casos temporales que seguirán existiendo después de 2020.
Los casos específicos indicados en las secciones 7.2.9.2 a 7.2.9.7 deberán leerse en combinación con las secciones correspondientes del capítulo 4 y/o las especificaciones citadas en el mismo.
Los casos específicos sustituyen a los requisitos correspondientes estipulados en el capítulo 4.
Cuando los requisitos establecidos en la sección correspondiente del capítulo 4 no están sujetos a un caso específico, esos requisitos no se han repetido en las secciones 7.2.9.2 a 7.2.9.7 y seguirán aplicándose sin modificaciones.
7.2.9.2.
|
Caso específico |
Categoría |
Notas |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.2.4: La distancia entre el primer eje y el último L-(b1 + b2) (fig. 1) será, como mínimo, de 15 000 mm. |
T3 |
Aplicable en HS L1. Este caso específico está relacionado con la utilización del TVM. |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.8:
|
T3 |
Aplicable a HS L1, L2, L3, L4. Este caso específico está relacionado con la utilización del TVM. |
7.2.9.3.
|
Caso específico |
Categoría |
Notas |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.2.4: La distancia entre el primer eje y el último L-(b1 + b2) (fig. 1) será, como mínimo, de 15 000 mm |
T3 |
Aplicable a alta velocidad L1. Este caso específico está relacionado con la utilización de TVM. |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.4.1: Además de los requisitos de la sección 3.1.4.1, el arenado con fines de tracción en unidades múltiples:
|
T3 |
|
||||
|
4.2.12 DMI (Interfaz conductor-máquina) de ERTMS/ETCS Índice 51: Se autoriza el uso de un teclado alfanumérico para introducir el número de circulación del tren si la norma técnica notificada a este respecto requiere el uso de códigos de circulación de trenes alfanuméricos. |
T3 |
Este caso específico será necesario en cuanto se cierre la cuestión pendiente relativa a la especificación del DMI. No tiene impacto en la interoperabilidad. |
||||
|
4.2.12 DMI (Interfaz conductor-máquina) de ERTMS/ETCS Índice 51: Se autoriza que el DMI de ETCS muestre información sobre la velocidad dinámica del tren en millas por hora (e indique «mph») cuando circule en tramos de la red de líneas principales de Gran Bretaña. |
T3 |
Este caso específico será necesario en cuanto se cierre el punto abierto relativo a la especificación del DMI. No tiene impacto en la interoperabilidad. |
7.2.9.4.
|
Caso específico |
Categoría |
Notas |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.2.4: La distancia entre el primer eje y el último L-(b1 + b2) (fig. 1) será, como mínimo, de 15 000 mm. |
T3 |
Este caso específico está relacionado con la utilización del TVM. |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.9:
|
T3 |
Este caso específico podrá revisarse cuando se cierre el punto abierto relativo a la gestión de la frecuencia para circuitos de vía. |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.8:
|
T3 |
Este caso específico está relacionado con la utilización del TVM |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.3.2:
|
5 años |
|
7.2.9.5.
|
Caso específico |
Categoría |
Notas |
||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.9:
|
T3 |
Este caso específico podrá revisarse cuando se cierre el punto abierto relativo a la gestión de la frecuencia para circuitos de vía. |
7.2.9.6.
|
Caso específico |
Categoría |
Notas |
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.3.4: El rango de la dimensión Sh (fig 2) no será inferior a 26,25 mm |
T3 |
Este caso específico resultará necesario mientras circulen locomotoras ČME en la red de 1 520 mm de Lituania |
7.2.9.7.
|
Caso específico |
Categoría |
Notas |
|
4.2.4 Funciones de comunicaciones móviles para los ferrocarriles-GSM-R Índice 65, declaración 4.2.3: Se autoriza la puesta en servicio de subsistemas de control-mando y señalización a bordo equipados con radio cabinas de voz GSM-R de 2 vatios y equipos de radio para transmisión de datos ETCS únicamente. Los subsistemas serán ser capaces de funcionar en redes con -82 dBm. |
P |
No tiene impacto en la interoperabilidad |
7.2.9.8.
|
Caso específico |
Categoría |
Notas |
||||||||
|
4.2.10 Sistemas de detección de trenes en tierra Índice 77, sección 3.1.2.4:
|
T3 |
|
7.3. Reglas para ERTMS
7.3.1. El plan de despliegue europeo del ERTMS
En esta sección se describe la estrategia (plan de despliegue europeo del ERTMS) para la implementación de la ETI. Se especifican las etapas que deben completarse para hacer una transición gradual de la situación existente a la situación final, en la cual el cumplimiento de las ETI será lo normal.
El plan de despliegue europeo del ERTMS no aplica a las líneas ubicadas en el territorio de un Estado miembro cuya red ferroviaria se halle en un enclave o esté aislada por el mar o separada por unas condiciones geográficas especiales, o cuando dicha red sea de un ancho de vía diferente del de la red ferroviaria del resto de la Unión.
7.3.2. Implementación en tierra del ERTMS
El objetivo del plan de despliegue europeo del ERTMS consiste en garantizar que las locomotoras, automotores y otros vehículos ferroviarios equipados con ERTMS puedan acceder gradualmente a un número mayor de líneas, puertos, terminales y centros de clasificación sin necesidad de equipos nacionales adicionales al ERTMS.
Esto no significa que deban retirarse los sistemas de clase B ya existentes de las líneas incluidas en el plan. No obstante, en la fecha indicada en el plan de implementación, las locomotoras, automotores y demás vehículos ferroviarios equipados con ERTMS deberán poder acceder a las líneas incluidas en el plan de despliegue sin necesidad de estar equipados con un sistema de clase B.
Las zonas terminales, como puertos, o líneas específicas en un puerto que no estén equipadas con un sistema de clase B cumplen los requisitos estipulados en la sección 7.3.2.2 si los vehículos ferroviarios pueden acceder a dichas zonas terminales sin imponer requisito alguno sobre el equipamiento con un sistema de protección automática del tren.
Se considerará que una línea formada por dos o más vías está equipada si están equipadas dos de sus vías, de modo que se permita la circulación en ambos sentidos. Cuando haya más de una línea en un tramo de un corredor, al menos una de las líneas del tramo debe estar equipada y se considerará que todo el corredor está equipado en cuanto al menos una línea esté equipada en toda la longitud del corredor.
7.3.2.1.
Los seis corredores descritos en la sección 7.3.4 deberán estar equipados con ERTMS según el calendario especificado en dicha sección (12).
7.3.2.2.
Los puertos, centros de clasificación, terminales de mercancías y zonas de transporte de mercancías enumerados en 7.3.5 deberán estar conectados al menos a uno de los seis corredores indicados en 7.3.4 en la fecha y en las condiciones especificadas en 7.3.5.
7.3.2.3.
Es obligatorio instalar un ERTMS/ETCS en tierra cuando:
|
1) |
se instale por primera vez la parte de protección del tren de un subsistema de control-mando y señalización en tierra (con o sin sistema de clase B), o |
|
2) |
se mejore la parte existente de protección del tren de un subsistema de control-mando y señalización en tierra, cuando ello suponga una modificación de las funciones, prestaciones y/o interfaces relevantes para la interoperabilidad (interfaces aire) del sistema heredado existente. Se excluyen las modificaciones que se juzguen necesarias para atenuar los problemas de seguridad en la instalación heredada. |
Se recomienda instalar el ERTMS/ETCS cuando se mejore, renueve o realice el mantenimiento de la infraestructura o del subsistema de energía de un tramo de línea que ya esté en funcionamiento, siempre que la instalación de ERTMS/ETCS en dicho tramo de la línea represente menos del 10 % de la inversión total en la mejora, renovación o mantenimiento.
7.3.2.4.
Sin perjuicio de lo dispuesto en las secciones 7.3.2.1, 7.3.2.2 y 7.3.2.3, en el caso de los proyectos de infraestructuras ferroviarias que reciben ayuda financiera del Fondo Europeo de Desarrollo Regional y/o del Fondo de Cohesión [Reglamento (CE) no 1083/2006 del Consejo, de 11 de julio de 2006, por el que se establecen las disposiciones generales relativas al Fondo Europeo de Desarrollo Regional, al Fondo Social Europeo y al Fondo de Cohesión (13)] y/o fondos de la RTE-T [Decisión 1692/96/CE del Parlamento Europeo y del Consejo (14)], la instalación de ERTMS/ETCS será obligatoria cuando:
|
1) |
se instale por primera vez la parte de protección del tren de un subsistema de control-mando y señalización, o |
|
2) |
se mejore la parte de protección del tren de un subsistema de control-mando y señalización que ya esté en servicio, de tal modo que se modifiquen las funciones o las prestaciones del subsistema. |
7.3.2.5.
Para cada tramo de corredor descrito en 7.3.4, los Estados miembros notificarán a la Comisión el calendario detallado para equipar el tramo de corredor con ERTMS o confirmarán que ya ha sido equipado. La información se notificará a la Comisión a más tardar tres años antes de la fecha tope para equipar del tramo de corredor, que se especifica en 7.3.4.
Para cada puerto, centro de clasificación, terminal de carga o zona de transporte de mercancías mencionados en el punto 7.3.5, los Estados miembros notificarán las líneas específicas que han de utilizarse para conectar con uno de los corredores mencionados en 7.3.4. Esta información se notificará a la Comisión a más tardar tres años antes de la fecha especificada en 7.3.5, con una indicación de la fecha tope para equipar ese puerto, centro de clasificación, terminal de carga o zona de transporte de mercancías. Si procede, la Comisión Europea podrá solicitar ajustes, especialmente para garantizar la coherencia entre líneas equipadas en las fronteras. Los Estados miembros notificarán a la Comisión el calendario detallado para equipar esas líneas específicas con ERTMS o confirmarán que ya han sido equipadas. Esta información se notificará a la Comisión a más tardar tres años antes de la fecha especificada en 7.3.5, con indicación de la fecha tope para equipar ese puerto, centro de clasificación, terminal de carga o zona de transporte de mercancías.
Los calendarios detallados especificarán, en particular, la fecha en que concluirá la licitación para el equipamiento de la línea, los procedimientos establecidos para garantizar la interoperabilidad del corredor con los países vecinos y los principales hitos del proyecto. Los Estados miembros informarán a la Comisión cada doce meses sobre los avances en materia de equipamiento de estas líneas enviando un calendario actualizado.
7.3.2.6.
Si un Estado miembro prevé razonablemente que se producirán retrasos respecto de los plazos que establece la presente Decisión, informará de inmediato a la Comisión. Remitirá a la Comisión un expediente con una descripción técnica del proyecto y un plan de implementación actualizado. En el expediente se explicarán asimismo los motivos del retraso y las medidas correctivas aplicadas por el Estado miembro.
Podrá concederse al Estado miembro una prórroga del plazo de no más de tres años si el retraso se debe a causas ajenas al control que razonablemente puede esperarse del Estado miembro, como la quiebra de los proveedores o problemas en el proceso de autorización por falta de los vehículos de prueba adecuados. El Estado miembro solo podrá invocar esta prórroga si se cumplen los siguientes requisitos:
|
1) |
las notificaciones mencionadas en la sección 7.3.2.5 se recibieron, en su caso, dentro del plazo previsto y eran completas; |
|
2) |
el expediente a que se refiere el párrafo primero de la sección 7.3.2.6 contiene pruebas fehacientes de que los motivos del retraso escapaban al control del Estado miembro; |
|
3) |
una autoridad competente es responsable de la coordinación de los proveedores de equipos de a bordo y de vía, así como de la integración y de la prueba de los productos; |
|
4) |
se ha hecho un uso adecuado de los laboratorios existentes; |
|
5) |
se ha demostrado que se han aplicado las medidas adecuadas para reducir al mínimo el retraso adicional. |
La Comisión estudiará el expediente remitido, así como las medidas propuestas por el Estado miembro, y notificará el resultado de la evaluación al Comité mencionado en el artículo 29 de la Directiva 2008/57/CE.
7.3.3. Implementación a bordo del ERTMS
Las nuevas locomotoras, los nuevos automotores y otros vehículos ferroviarios nuevos capaces de circular sin tracción y equipados con cabina de conducción, pedidos después del 1 de enero de 2012 o puestos en servicio después del 1 de enero de 2015, deberán estar equipados con ERTMS.
Este requisito no se aplicará a nuevas locomotoras de maniobras y otras locomotoras nuevas, nuevos automotores y otros vehículos ferroviarios nuevos equipados con cabina de conducción, si se destinan exclusivamente al servicio nacional o al servicio transfronterizo regional. Ahora bien, los Estados miembros podrán introducir requisitos adicionales a escala nacional, especialmente para:
|
1) |
permitir el acceso a líneas equipadas con ERTMS solamente a las locomotoras equipadas con ERTMS, de tal forma que puedan ir desmantelándose los sistemas nacionales existentes; |
|
2) |
exigir que las nuevas locomotoras de maniobras y/u otros vehículos ferroviarios nuevos equipados con cabina de conducción, incluso si están destinados exclusivamente al servicio nacional o al servicio transfronterizo regional, sean equipados con ERTMS. |
7.3.3.1.
Será obligatorio instalar ERTMS/ETCS a bordo cuando:
|
1) |
se instale cualquier parte de protección del tren nueva en un subsistema de control-mando y señalización a bordo, o |
|
2) |
se mejore cualquier parte existente de protección del tren de un subsistema de control-mando y señalización a bordo, siempre que ello suponga una modificación de las funciones, prestaciones y/o interfaces relevantes para la interoperabilidad del sistema heredado existente. Se excluyen las modificaciones que se juzguen necesarias para atenuar los problemas de seguridad del sistema heredado. |
7.3.4. Líneas específicas que constituyen los corredores
Corredor A (deberá estar equipado a más tardar en 2015)

Corredor B (15)

Corredor C (16)

Corredor D (17)

Corredor E

Corredor F
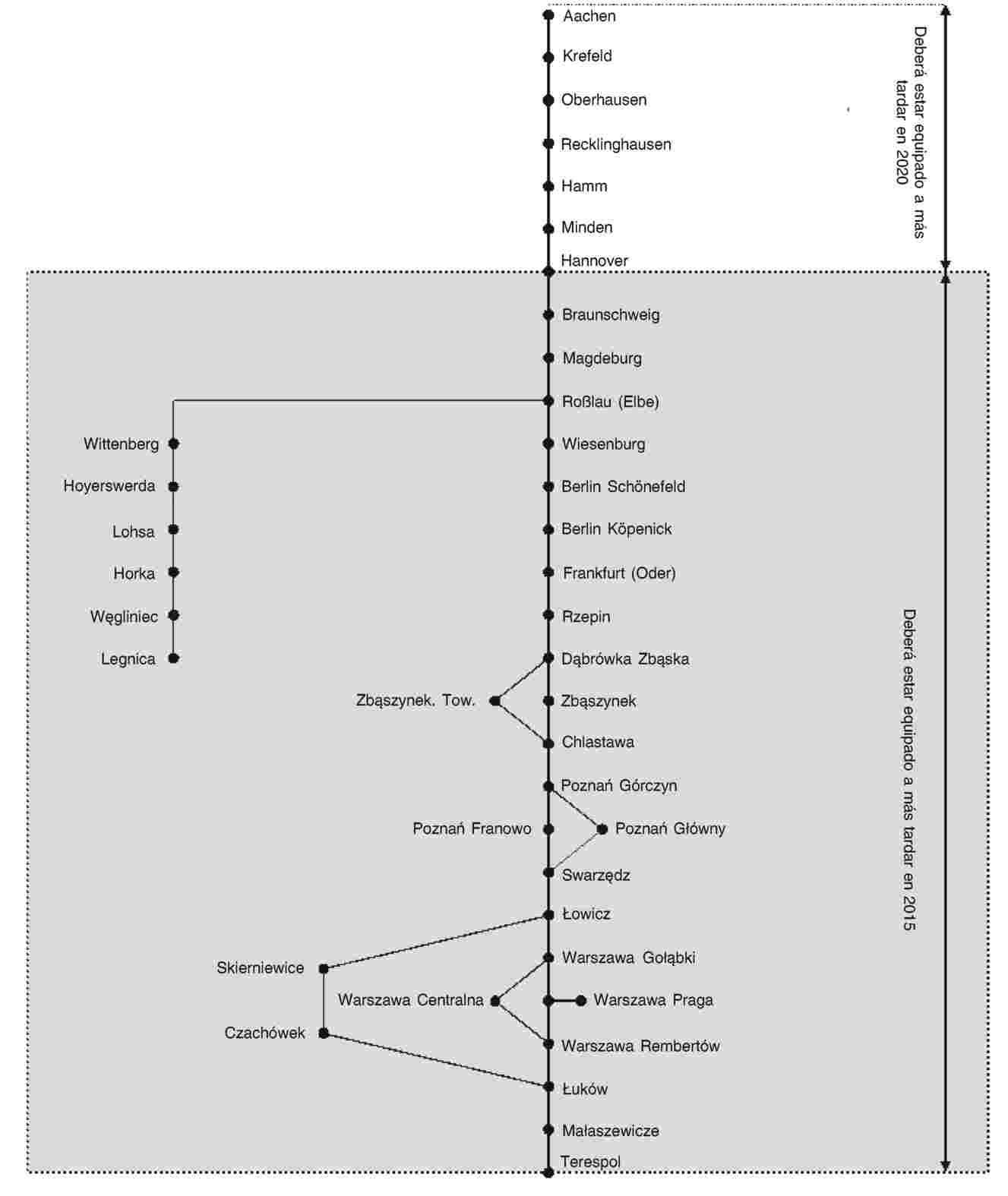
7.3.5. Principales puertos, centros de clasificación, terminales de carga y zonas de transporte de mercancías de Europa
|
País |
Zona de transporte de mercancías |
Fecha |
Observaciones |
|
Bélgica |
Amberes |
31.12.2015 |
También se ofrecerá un enlace con Rotterdam a más tardar en 2020. |
|
Gante |
31.12.2020 |
|
|
|
Zeebrugge |
31.12.2020 |
|
|
|
Bulgaria |
Burgas |
31.12.2020 |
La conexión con el corredor E supone equipar las secciones Burgas-Sofía, Sofía-Vidin-Calafat y Calafat-Curtici en Rumanía (PP22). |
|
República Checa |
Praga |
31.12.2015 |
|
|
Lovosice |
31.12.2020 |
|
|
|
Dinamarca |
Taulov |
31.12.2020 |
Conectar esta terminal supone que la línea Flensburg-Padborg se seleccione para ser un enlace equipado con ERTMS (véase la nota a pie de página del corredor B). |
|
Alemania |
Dresde (18) |
31.12.2020 |
A más tardar en 2020, también habrá un enlace directo entre el corredor E y el corredor F (de Dresde a Hannover). |
|
Lübeck |
31.12.2020 |
|
|
|
Duisburgo |
31.12.2015 |
|
|
|
Hamburgo (19) |
31.12.2020 |
|
|
|
Colonia |
31.12.2015 |
|
|
|
Munich |
31.12.2015 |
|
|
|
Hannover |
31.12.2015 |
|
|
|
Rostock |
31.12.2015 |
|
|
|
Ludwigshafen/Mannheim |
31.12.2015 |
|
|
|
Nuremberg |
31.12.2020 |
|
|
|
Grecia |
El Pireo |
31.12.2020 |
La conexión con el corredor E supone equipar la sección Kulata-Sofía en Bulgaria. |
|
España |
Algeciras |
31.12.2020 |
|
|
Madrid |
31.12.2020 |
|
|
|
Pamplona |
31.12.2020 |
Se solicitan tres conexiones. Una conexión a París vía Hendaya, una conexión de Pamplona a Madrid y una conexión de Pamplona al corredor D vía Zaragoza. |
|
|
Zaragoza |
31.12.2020 |
|
|
|
Tarragona |
31.12.2020 |
|
|
|
Barcelona |
31.12.2015 |
|
|
|
Valencia |
31.12.2020 |
|
|
|
Francia |
Marsella |
31.12.2020 |
|
|
Perpiñán |
31.12.2015 |
|
|
|
Aviñón |
31.12.2015 |
|
|
|
Lyon |
31.12.2015 |
|
|
|
Le Havre |
31.12.2020 |
|
|
|
Lille |
31.12.2020 |
|
|
|
Dunkerque |
31.12.2020 |
|
|
|
París |
31.12.2020 |
A más tardar en 2020 se ofrecerán las siguientes conexiones: i) Hendaya, ii) Túnel del Canal de la Mancha, iii) Dijon, iv) Metz vía Epernay y Châlons-en-Champagne. |
|
|
Italia |
La Spezia |
31.12.2020 |
|
|
Génova |
31.12.2015 |
|
|
|
Gioia Tauro |
31.12.2020 |
|
|
|
Verona |
31.12.2015 |
|
|
|
Milán |
31.12.2015 |
|
|
|
Taranto |
31.12.2020 |
|
|
|
Bari |
31.12.2020 |
|
|
|
Padua |
31.12.2015 |
|
|
|
Trieste |
31.12.2015 |
|
|
|
Novara |
31.12.2015 |
|
|
|
Venecia |
31.12.2020 |
|
|
|
Bolonia |
31.12.2020 |
|
|
|
Roma |
31.12.2020 |
|
|
|
Luxemburgo |
Bettembourg |
31.12.2015 |
|
|
Hungría |
Budapest |
31.12.2015 |
|
|
Países Bajos |
Amsterdam |
31.12.2020 |
|
|
Rotterdam |
31.12.2015 |
También se ofrecerá un enlace con Amberes a más tardar en 2020. |
|
|
Austria |
Graz |
31.12.2020 |
|
|
Viena |
31.12.2020 |
|
|
|
Polonia |
Gdynia |
31.12.2015 |
|
|
Katowice |
31.12.2020 |
|
|
|
Wrocław |
31.12.2015 |
A más tardar en 2020 estará equipada la línea Wroclaw-Legnica para garantizar un enlace directo con la frontera alemana (Görlitz). |
|
|
Gliwice |
31.12.2015 |
|
|
|
Poznań |
31.12.2015 |
|
|
|
Varsovia |
31.12.2015 |
|
|
|
Portugal |
Sines |
31.12.2020 |
|
|
Lisboa |
31.12.2020 |
|
|
|
Rumanía |
Constanța |
31.12.2015 |
|
|
Eslovenia |
Koper |
31.12.2015 |
|
|
Liubliana |
31.12.2015 |
|
|
|
Eslovaquia |
Bratislava |
31.12.2015 |
|
|
Reino Unido |
Bristol |
|
Esta terminal quedará conectada, ya que el corredor C se amplía al túnel del Canal de la Mancha. |
(1) Modos degradados son los modos de funcionamiento diseñados para hacer frente a averías. Se han tenido en cuenta a la hora de diseñar los subsistemas de control-mando y señalización.
(2) DO L 108 de 29.4.2009, p. 4.
(3) DO L 264 de 8.10.2011, p. 32.
(4) DO L 256 de 1.10.2011, p. 1.
(5) La verificación de que un componente de interoperabilidad se utiliza correctamente forma parte de la verificación CE global de los subsistemas de control-mando y señalización a bordo y en vía, según se explica en 6.3.3 y 6.3.4.
(6) DO L 319 de 4.12.2010, p. 1.
(7) DO L 218 de 13.8.2008, p. 30.
(8) En este caso, la evaluación de la gestión de las transiciones deberá realizarse de acuerdo con las especificaciones nacionales.
(9) Los procedimientos descritos en el presente capítulo se aplicarán sin perjuicio de la posibilidad de agrupar los componentes.
(10) DO L 164 de 30.4.2004, p. 1.
(11) Por ejemplo, que no se pueda garantizar técnicamente la viabilidad del concepto de STM externo, o que problemas potenciales relacionados con la titularidad de los derechos de propiedad intelectual de los sistemas de clase B impidan el oportuno desarrollo de un producto STM.
(12) En la sección 7.3.4 se fijan los plazos para equipar dichos corredores, con el objeto de construir gradualmente una red de ERTMS coherente. En algunos casos, se han acordado voluntariamente plazos más cortos.
(13) DO L 210 de 31.7.2006, p. 25.
(14) DO L 228 de 9.9.1996, p. 1.
(15) Sin perjuicio de la legislación aplicable a la red transeuropea de alta velocidad, podrán proporcionarse enlaces mediante ampliaciones de líneas de alta velocidad, siempre que se asignen rutas a los trenes de mercancías. Se ofrecerá al menos un enlace equipado con ERTMS entre Dinamarca y Alemania (Flensburg-Hamburgo o Rødby-Puttgarden) a más tardar en 2020, pero no necesariamente dos. El túnel a través de la base del Brennero estará equipado con ERTMS en cuanto acaben las obras de infraestructura (fecha objetivo: 2020).
(16) Se ofrecerá un enlace entre Nancy y Reding a más tardar en 2020.
(17) Se equiparán dos nuevos ramales a más tardar en 2020: Montmélian – Grenoble – Valence y Lyon – Valence – Arles – Miramas (margen izquierda del Ródano).
(18) Alemania hará todo lo posible por equipar el tramo del corredor E entre Dresde y la frontera checa en una fecha anterior.
(19) Alemania equipará un enlace ferroviario con Hamburgo, pero puede que la zona del puerto solo esté equipada parcialmente en el año 2020.
ANEXO A
Referencias
Para cada referencia hecha en los parámetros básicos (capítulo 4 de la presente ETI), el siguiente cuadro indica las especificaciones obligatorias correspondientes, a través del índice del cuadro 2.
Cuadro A 1
|
Referencia en el capítulo 4 |
Número de índice (véase el cuadro A 2) |
|
4.1 |
|
|
4.1 a |
1 |
|
4.1 b |
32 |
|
4.1 c |
3 |
|
|
|
|
4.2.1 |
|
|
4.2.1 a |
27, 78 |
|
4.2.1 b |
28 |
|
|
|
|
4.2.2 |
|
|
4.2.2 a |
14 |
|
4.2.2 b |
1, 4, 13, 15 |
|
4.2.2 c |
31, 37 |
|
4.2.2 d |
18, 20 |
|
4.2.2 e |
6 |
|
4.2.2 f |
7 |
|
|
|
|
4.2.3 |
|
|
4.2.3 a |
14 |
|
4.2.3 b |
1, 4, 13, 15 |
|
4.2.3 c |
31, 37 b, c, d |
|
4.2.3 d |
18, 21 |
|
|
|
|
4.2.4 |
|
|
4.2.4 a |
64, 65 |
|
4.2.4 b |
66 |
|
4.2.4 c |
67 |
|
4.2.4 d |
68 |
|
4.2.4 e |
73, 74 |
|
4.2.4 f |
32, 33 |
|
4.2.4 g |
48 |
|
4.2.4 h |
69, 70 |
|
4.2.4 j |
71, 72 |
|
4.2.4 k |
75, 76 |
|
|
|
|
4.2.5 |
|
|
4.2.5 a |
64, 65 |
|
4.2.5 b |
10, 39, 40 |
|
4.2.5c |
19, 20 |
|
4.2.5 d |
9, 43 |
|
4.2.5 e |
16, 50 |
|
|
|
|
4.2.6 |
|
|
4.2.6 a |
8, 25, 26, 49 |
|
4.2.6 b |
45 |
|
4.2.6 c |
46 |
|
4.2.6 d |
34 |
|
4.2.6 e |
20 |
|
4.2.6 f |
44 |
|
|
|
|
4.2.7 |
|
|
4.2.7 a |
12 |
|
4.2.7 b |
62, 63 |
|
4.2.7 c |
34 |
|
4.2.7 d |
9 |
|
4.2.7 e |
16 |
|
|
|
|
4.2.8 |
|
|
4.2.8 a |
11 |
|
|
|
|
4.2.9 |
|
|
4.2.9 a |
23 |
|
|
|
|
4.2.10 |
|
|
4.2.10 a |
77 (sección 3.1) |
|
|
|
|
4.2.11 |
|
|
4.2.11 a |
77 (sección 3.2) |
|
|
|
|
4.2.12 |
|
|
4.2.12 a |
51 |
|
|
|
|
4.2.13 |
|
|
4.2.13 a |
32, 33, 51 |
|
|
|
|
4.2.14 |
|
|
4.2.14 a |
5 |
|
|
|
|
4.2.15 |
|
|
4.2.15 a |
38 |
Especificaciones
Para la aplicación de la presente ETI, todas las especificaciones enumeradas en el cuadro A 2 que figura a continuación serán vinculantes jurídicamente en la versión indicada en el cuadro A 2. Los documentos citados en una especificación que figure en el cuadro A 2 se tendrán en cuenta exclusivamente con fines informativos, salvo que se estipule lo contrario en el cuadro A 2.
En aquellos casos en que las declaraciones de las especificaciones recogidas en el cuadro A 2 contradigan las disposiciones mencionadas anteriormente, tendrán prioridad estas últimas.
|
Nota: |
Las especificaciones calificadas como «reservada» en el cuadro A 2 corresponden a los puntos abiertos recogidos en el anexo G. |
Cuadro A 2
Lista de especificaciones obligatorias
|
No de índice |
Referencia |
Nombre de la especificación |
Versión |
Notas |
|
1 |
ERA/ERTMS/003204 |
ERTMS/ETCS Functional requirement specification |
5.0 |
|
|
2 |
Suprimida deliberadamente |
|
|
|
|
3 |
UNISIG SUBSET-023 |
Glossary of terms and abbreviations |
2.0.0 |
|
|
4 |
UNISIG SUBSET-026 |
System requirement specification |
2.3.0 |
|
|
5 |
UNISIG SUBSET-027 |
FFFIS Juridical recorder-downloading tool |
2.3.0 |
Nota 1 |
|
6 |
UNISIG SUBSET-033 |
FIS for man-machine interface |
2.0.0 |
|
|
7 |
UNISIG SUBSET-034 |
FIS for the train interface |
2.0.0 |
|
|
8 |
UNISIG SUBSET-035 |
Specific transmission module FFFIS |
2.1.1 |
|
|
9 |
UNISIG SUBSET-036 |
FFFIS for Eurobalise |
2.4.1 |
|
|
10 |
UNISIG SUBSET-037 |
EuroRadio FIS |
2.3.0 |
|
|
11 |
UNISIG SUBSET-038 |
Offline key management FIS |
2.3.0 |
|
|
12 |
UNISIG SUBSET-039 |
FIS for the RBC/RBC handover |
2.3.0 |
|
|
13 |
UNISIG SUBSET-040 |
Dimensioning and engineering rules |
2.3.0 |
|
|
14 |
UNISIG SUBSET-041 |
Performance requirements for interoperability |
2.1.0 |
|
|
15 |
ERA SUBSET-108 |
Interoperability related consolidation on TSI Annex A documents |
1.2.0 |
|
|
16 |
UNISIG SUBSET-044 |
FFFIS for Euroloop subsystem |
2.3.0 |
|
|
17 |
Suprimida deliberadamente |
|
|
|
|
18 |
UNISIG SUBSET-046 |
Radio infill FFFS |
2.0.0 |
|
|
19 |
UNISIG SUBSET-047 |
Track-side-trainborne FIS for radio infill |
2.0.0 |
|
|
20 |
UNISIG SUBSET-048 |
Trainborne FFFIS for radio infill |
2.0.0 |
|
|
21 |
UNISIG SUBSET-049 |
Radio infill FIS with LEU/interlocking |
2.0.0 |
|
|
22 |
Suprimida deliberadamente |
|
|
|
|
23 |
UNISIG SUBSET-054 |
Assignment of values to ETCS variables |
2.1.0 |
|
|
24 |
Suprimida deliberadamente |
|
|
|
|
25 |
UNISIG SUBSET-056 |
STM FFFIS Safe time layer |
2.2.0 |
|
|
26 |
UNISIG SUBSET-057 |
STM FFFIS Safe link layer |
2.2.0 |
|
|
27 |
UNISIG SUBSET-091 |
Safety requirements for the technical interoperability of ETCS in levels 1 and 2 |
2.5.0 |
|
|
28 |
Reservada |
Reliability — availability requirements |
|
|
|
29 |
UNISIG SUBSET-102 |
Test specification for interface «k» |
1.0.0 |
|
|
30 |
Suprimida deliberadamente |
|
|
|
|
31 |
UNISIG SUBSET-094 |
Functional requirements for an onboard reference test facility |
2.0.2 |
|
|
32 |
EIRENE FRS |
GSM-R Functional requirements specification |
7 |
|
|
33 |
EIRENE SRS |
GSM-R System requirements specification |
15 |
|
|
34 |
A11T6001 12 |
(MORANE) Radio transmission FFFIS for EuroRadio |
12 |
|
|
35 |
Suprimida deliberadamente |
|
|
|
|
36 a |
Suprimida deliberadamente |
|
|
|
|
36 b |
Suprimida deliberadamente |
|
|
|
|
36 c |
UNISIG SUBSET-074-2 |
FFFIS STM Test cases document |
1.0.0 |
|
|
37 a |
Suprimida deliberadamente |
|
|
|
|
37 b |
UNISIG SUBSET-076-5-2 |
Test cases related to features |
2.3.1 |
|
|
37 c |
UNISIG SUBSET-076-6-3 |
Test sequences |
2.3.1 |
|
|
37 d |
UNISIG SUBSET-076-7 |
Scope of the test specifications |
1.0.2 |
|
|
37 e |
Suprimida deliberadamente |
|
|
|
|
38 |
06E068 |
ETCS Marker-board definition |
2.0 |
|
|
39 |
UNISIG SUBSET-092-1 |
ERTMS EuroRadio conformance requirements |
2.3.0 |
|
|
40 |
UNISIG SUBSET-092-2 |
ERTMS EuroRadio test cases safety layer |
2.3.0 |
|
|
41 |
Suprimida deliberadamente |
|
|
|
|
42 |
Suprimida deliberadamente |
|
|
|
|
43 |
UNISIG SUBSET 085 |
Test specification for Eurobalise FFFIS |
2.2.2 |
|
|
44 |
Reservada |
Odometry FIS |
|
|
|
45 |
UNISIG SUBSET-101 |
Interface «K» specification |
1.0.0 |
|
|
46 |
UNISIG SUBSET-100 |
Interface «G» specification |
1.0.1 |
|
|
47 |
Suprimida deliberadamente |
|
|
|
|
48 |
Reservada |
Test specification for mobile equipment GSM-R |
|
|
|
49 |
UNISIG SUBSET-059 |
Performance requirements for STM |
2.1.1 |
|
|
50 |
UNISIG SUBSET-103 |
Test specification for Euroloop |
1.0.0 |
|
|
51 |
Reservada |
Ergonomic aspects of the DMI |
|
|
|
52 |
UNISIG SUBSET-058 |
FFFIS STM Application layer |
2.1.1 |
|
|
53 |
Suprimida deliberadamente |
|
|
|
|
54 |
Suprimida deliberadamente |
|
|
|
|
55 |
Suprimida deliberadamente |
|
|
|
|
56 |
Suprimida deliberadamente |
|
|
|
|
57 |
Suprimida deliberadamente |
|
|
|
|
58 |
Suprimida deliberadamente |
|
|
|
|
59 |
Suprimida deliberadamente |
|
|
|
|
60 |
Suprimida deliberadamente |
|
|
|
|
61 |
Suprimida deliberadamente |
|
|
|
|
62 |
Reservada UNISIG SUBSET-099 |
RBC-RBC Test specification for safe communication interface |
|
|
|
63 |
UNISIG SUBSET-098 |
RBC-RBC Safe communication interface |
1.0.0 |
|
|
64 |
EN 301 515 |
Global System for Mobile Communication (GSM); Requirements for GSM operation on railways |
2.3.0 |
Nota 2 |
|
65 |
TR 102 281 |
Detailed requirements for GSM operation on railways |
1.0.0 |
Nota 3 |
|
66 |
(MORANE) A 01 T 0004 1 |
ASCI Options for Interoperability |
1 |
|
|
67 |
(MORANE) P 38 T 9001 |
FFFIS for GSM-R SIM Cards |
4.1 |
|
|
68 |
ETSI TS 102 610 |
Railway Telecommunication; GSM; Usage of the UUIE for GSM operation on railways |
1.1.0 |
|
|
69 |
(MORANE) F 10 T 6002 |
FFFS for Confirmation of High Priority Calls’ |
4 |
|
|
70 |
(MORANE) F 12 T 6002 |
FIS for Confirmation of High Priority Calls |
4 |
|
|
71 |
(MORANE) E 10 T 6001 |
FFFS for Functional Addressing |
4 |
|
|
72 |
(MORANE) E 12 T 6001 |
FIS for Functional Addressing |
5.1 |
|
|
73 |
(MORANE) F 10 T6001 |
FFFS for Location Dependent Addressing |
4 |
|
|
74 |
(MORANE) F 12 T6001 |
FIS for Location Dependent Addressing |
3 |
|
|
75 |
(MORANE) F 10 T 6003 |
FFFS for Presentation of Functional Numbers to Called and Calling Parties |
4 |
|
|
76 |
(MORANE) F 12 T 6003 |
FIS for Presentation of Functional Numbers to Called and Calling Parties |
4 |
|
|
77 |
ERA/ERTMS/033281 |
Interfaces between CCS track-side and other subsystems |
1.0 |
|
|
78 |
Reservada |
Safety requirements for ETCS DMI functions |
|
|
|
Nota 1: |
Solamente es obligatoria la descripción funcional de la información a registrar, no las características técnicas de la interfaz. |
|
Nota 2: |
Las especificaciones indicadas en la sección 2.1 de la EN 301 515 son obligatorias. |
|
Nota 3: |
Las solicitudes de cambio (CR) indicadas en los cuadros 1 y 2 de TR 102 281 son obligatorias. |
Cuadro A 3
Lista de normas obligatorias
Las normas enumeradas en el siguiente cuadro se aplicarán en el proceso de certificación, sin perjuicio de las disposiciones de los capítulos 4 y 6 de la presente ETI.
|
No |
Referencia |
Nombre del documento y observaciones |
Versión |
|
A1 |
EN 50126 |
Aplicaciones Ferroviarias — Especificación y demostración de la fiabilidad, disponibilidad, mantenibilidad y seguridad (RAMS) |
1999 |
|
A2 |
EN 50128 |
Aplicaciones ferroviarias — Sistemas de comunicación, señalización y procesamiento — Software para sistemas de control y protección de ferrocarril |
2001 |
|
A3 |
EN 50129 |
Aplicaciones ferroviarias — Sistemas de comunicación, señalización y procesamiento — Sistemas electrónicos relacionados con la seguridad para la señalización |
2003 |
|
A4 |
EN 50159-1 |
Aplicaciones ferroviarias — Sistemas de comunicación, señalización y procesamiento – Parte 1: Comunicación segura en sistemas de transmisión cerrados |
2001 |
|
A5 |
EN 50159-2 |
Aplicaciones ferroviarias — Sistemas de comunicación, señalización y procesamiento – Parte 2: Comunicación segura en sistemas de transmisión abiertos |
2001 |
ANEXO B
Suprimido deliberadamente
ANEXO C
Suprimido deliberadamente
ANEXO D
Suprimido deliberadamente
ANEXO E
Suprimido deliberadamente
ANEXO F
Suprimido deliberadamente
ANEXO G
PUNTOS ABIERTOS
|
Punto abierto |
Notas |
|
Aspectos de frenado |
Este punto abierto se solucionará mediante la baseline 3 de ERTMS/ETCS. El modelo de frenado armonizado ya se incluye a efectos informativos en el anexo A, cuadro A 2, índice 15 |
|
Índice 28, disponibilidad |
La ocurrencia frecuente de situaciones degradadas provocadas por averías de los equipos de mando-control y señalización disminuirán la seguridad del sistema. Para evitarlo, se especificarán requisitos mínimos de fiabilidad/disponibilidad. |
|
Índice 78, requisitos de seguridad para las funciones del DMI de ETCS |
Este punto abierto está relacionado con la interfaz entre el ETCS a bordo y el conductor, es decir, errores en la visualización de la información y en la introducción de datos y órdenes. |
|
Índice 51, aspectos ergonómicos del DMI |
Este punto abierto se solucionará mediante la baseline 3 de ERTMS/ETCS. Ya existe una especificación a efectos informativos. |
|
Diámetro mínimo de rueda para velocidades superiores a 350 km/h |
Véase el anexo A, cuadro A 2, índice 77 |
|
Distancia mínima entre ejes para velocidades superiores a 350 km/h |
Véase el anexo A, cuadro A 2, índice 77 |
|
Espacio libre de componentes metálicos e inductivos entre ruedas |
Véase el anexo A, cuadro A 2, índice 77 Este no es un punto abierto para los vagones de mercancías |
|
Características de la arena aplicada a las vías |
Véase el anexo A, cuadro A 2, índice 77 |
|
Masa metálica del vehículo |
Véase el anexo A, cuadro A 2, índice 77 |
|
Combinación de características del material rodante para una adecuada impedancia dinámica de shuntado |
Véase el anexo A, cuadro A 2, índice 77 |
|
Interferencias electromagnéticas (corriente de tracción) |
Véase el anexo A, cuadro A 2, índice 77 |
|
Interferencias electromagnéticas (campos electromagnéticos) |
Véase el anexo A, cuadro A 2, índice 77 Este no es un punto abierto para sistemas eléctricos que no sean de CC |
|
Componentes de baja frecuencia y de CC de la corriente de tracción |
Véase el anexo A, cuadro A 2, índice 77 |
|
Uso de frenos magnéticos/de Foucault |
Véase el anexo A, cuadro A 2, índice 77 |