Endast Uneces texter i original har bindande folkrättslig verkan. Dessa föreskrifters status och dagen för deras ikraftträdande bör kontrolleras i den senaste versionen av Uneces statusdokument TRANS/WP.29/343, som finns på
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Föreskrifter nr 140 från Förenta nationernas ekonomiska kommission för Europa (Unece) – Enhetliga bestämmelser om godkännande av personbilar med avseende på system för elektronisk stabilitetskontroll (ESC-system) [2018/1592]
Inbegripet all giltig text till och med:
Supplement 2 till föreskrifterna i deras ursprungliga lydelse – dag för ikraftträdande: 29 december 2018
INNEHÅLL
FÖRESKRIFTER
|
1. |
Tillämpningsområde |
|
2. |
Definitioner |
|
3. |
Ansökan om godkännande |
|
4. |
Godkännande |
|
5. |
Allmänna krav |
|
6. |
Funktionskrav |
|
7. |
Prestandakrav |
|
8. |
Provningsförhållanden |
|
9. |
Provningsförfarande |
|
10. |
Ändring av fordonstyp eller ESC-system och utökning av godkännande |
|
11. |
Produktionsöverensstämmelse |
|
12. |
Påföljder vid bristande produktionsöverensstämmelse |
|
13. |
Slutgiltigt upphörande av produktionen |
|
14. |
Namn på och adress till typgodkännandemyndigheter och de tekniska tjänster som ansvarar för att utföra godkännandeprovningar |
BILAGOR
|
1. |
Meddelande |
|
2. |
Godkännandemärkenas utformning |
|
3. |
Simulering av dynamisk stabilitet |
|
4. |
Simuleringsverktyg för dynamisk stabilitet och dess validering |
|
5. |
Provningsrapport för simuleringsverktyg för fordonsstabilitetsfunktion |
1. TILLÄMPNINGSOMRÅDE
1.1 Dessa föreskrifter gäller godkännande av fordon av kategori M1 och N1 (1) med avseende på deras system för elektronisk stabilitetskontroll.
1.2 Dessa föreskrifter gäller inte för
|
1.2.1 |
fordon med en konstruktiv hastighet på högst 25 km/tim, |
|
1.2.2 |
fordon anpassade för förare med funktionsnedsättning. |
2. DEFINITIONER
I dessa föreskrifter gäller följande definitioner:
2.1 godkännande av ett fordon : godkännande av en fordonstyp med avseende på system för elektronisk stabilitetskontroll.
2.2 fordonstyp : kategori av fordon som inte skiljer sig åt i sådana väsentliga avseenden som
|
2.2.1 |
tillverkarens handelsnamn eller varumärke, |
|
2.2.2 |
fordonsfunktioner som betydligt påverkar prestandan hos systemet för elektronisk stabilitetskontroll (t.ex. maximal vikt, tyngdpunktsläge, spårvidd, axelavstånd, däckdimension och bromssystemets utformning), |
|
2.2.3 |
utformningen av systemet för elektronisk stabilitetskontroll. |
2.3 maximal vikt : den högsta vikt som enligt fordonstillverkaren är tekniskt tillåten (denna vikt får överstiga ”den maximalt tillåtna vikt” som fastställts av de nationella myndigheterna).
2.4 fördelning av vikten mellan axlarna : fördelningen av gravitationskraften på fordonets vikt och/eller last mellan axlarna.
2.5 hjul-axelbelastning : den vertikala statiska reaktionen (kraften) hos den del av vägytan som är i kontakt med hjulet eller hjulen på axeln.
2.6 Ackermann-styrvinkel : den vinkel vars tangent är hjulbasen dividerat med vändradien vid mycket låg hastighet.
2.7 system för elektronisk stabilitetskontroll (ESC-system): system som har samtliga följande kännetecken:
|
2.7.1 |
Det förbättrar fordonets riktningsstabilitet genom att det åtminstone har förmåga att automatiskt styra de enskilda bromsmomenten för vänster och höger hjul på varje axel (2) för att åstadkomma en korrigerande girrörelse baserad på en utvärdering av fordonets faktiska beteende jämfört med en bestämning av det fordonsbeteende som föraren begärt. |
|
2.7.2 |
Det styrs av en dator som använder en algoritm i en sluten krets för att begränsa fordonets över- och understyrning baserat på en utvärdering av fordonets faktiska beteende i jämförelse med en bestämning av det fordonsbeteende som föraren begärt. |
|
2.7.3 |
Det kan direkt fastställa fordonets girhastighet och uppskatta dess sidoförskjutning eller derivatan av sidoförskjutningen med avseende på tiden. |
|
2.7.4 |
Det kan övervaka förarens styrning. |
|
2.7.5 |
Det har en algoritm för att fastställa behovet av och metoderna för att modifiera framdrivningsmomentet, om så krävs, för att hjälpa föraren att behålla kontrollen över fordonet. |
2.8 sidoacceleration : den komponent av accelerationsvektorn för en punkt i fordonet som är vinkelrät mot fordonets x-axel (längsgående) och parallell med vägplanet.
2.9 överstyrning : förhållande vid vilket fordonets girhastighet är större än den girhastighet som skulle uppstå vid fordonets hastighet som en följd av Ackermann-styrvinkeln.
2.10 sidoförskjutning eller sidoförskjutningsvinkel : arcustangens för förhållandet mellan hastigheten i sidled och hastigheten i längdled för fordonets tyngdpunkt.
2.11 understyrning : förhållande vid vilket fordonets girhastighet är mindre än den girhastighet som skulle uppstå vid fordonets hastighet som en följd av Ackermann-styrvinkeln.
2.12 girhastighet : ändringsgraden för fordonets kursvinkel mätt i grader/s av rotationen runt en vertikal axel genom fordonets tyngdpunkt.
2.13 toppbromskoefficient (PBC): måttet på ytfriktionen mellan däck och väg beräknat på maximal retardation för ett rullande däck.
2.14 gemensamt utrymme : område där mer än en indikator, visare, identifieringssymbol eller annat meddelande får visas, dock inte samtidigt.
2.15 statisk stabilitetsfaktor : fordonets halva spårvidd dividerad med höjden för dess tyngdpunkt, även uttryckt som SSF = T/2H, där T = spårvidden (för fordon med mer än en spårvidd används medelvärdet; för axlar med dubbelhjul används de yttre hjulen vid beräkning av T) och H = höjden för fordonets tyngdpunkt.
3. ANSÖKAN OM GODKÄNNANDE
3.1 Ansökan om godkännande av en fordonstyp med avseende på system för elektronisk stabilitetskontroll ska lämnas in av fordonstillverkaren eller dennes behöriga ombud.
3.2 Ansökan ska åtföljas av nedan nämnda dokument i tre exemplar och av följande upplysningar:
|
3.2.1 |
en beskrivning av fordonstypen med avseende på de uppgifter som anges i punkt 2.2. De siffror och/eller symboler som identifierar fordonstypen och motortypen ska anges. |
|
3.2.2 |
en förteckning över de vederbörligen identifierade komponenter som utgör ESC-systemet. |
|
3.2.3 |
en skiss över det monterade ESC-systemet och en beskrivning av komponenternas placering på fordonet. |
|
3.2.4 |
detaljerade ritningar av varje komponent så att den lätt kan lokaliseras och identifieras. |
3.3 Ett fordon som är representativt för den fordonstyp som ska godkännas ska lämnas in till den tekniska tjänst som utför godkännandeprovningarna.
4. GODKÄNNANDE
4.1 Om den fordonstyp som lämnas in för godkännande enligt dessa föreskrifter uppfyller kraven i punkterna 5, 6 och 7 ska godkännande av den fordonstypen beviljas.
4.2 Varje godkänd typ ska tilldelas ett godkännandenummer vars två första siffror ska ange den ändringsserie (innehållande de senaste större tekniska ändringarna av föreskrifterna) som gäller vid tidpunkten för utfärdandet av godkännandet. Samma part i överenskommelsen får inte tilldela samma nummer till en annan fordonstyp med avseende på elektronisk stabilitetskontroll.
4.3 Ett meddelande om beviljat eller ej beviljat godkännande av en fordonstyp enligt dessa föreskrifter ska lämnas till de parter i överenskommelsen som tillämpar dessa föreskrifter, med hjälp av ett formulär som överensstämmer med mallen i bilaga 1 till dessa föreskrifter tillsammans med en sammanfattning av uppgifterna i de dokument som anges i punkterna 3.2.1–3.2.4. De ritningar som tillhandahålls av den som ansöker om godkännande ska vara i ett format som inte är större än A4 (210 × 297 mm), eller vikt till detta format, och i lämplig skala.
4.4 Varje fordon som överensstämmer med en fordonstyp som godkänts enligt dessa föreskrifter ska på en väl synlig och lättillgänglig plats som anges i godkännandeformuläret vara märkt med ett internationellt godkännandemärke bestående av följande:
|
4.4.1 |
en cirkel som omger bokstaven E, följd av det särskiljande numret för det land som beviljat godkännandet (3). |
|
4.4.2 |
numret på dessa föreskrifter följt av bokstaven R, ett bindestreck och godkännandenumret till höger om den cirkel som föreskrivs i punkt 4.4.1. |
4.5 Om fordonet överensstämmer med en fordonstyp som godkänts enligt en eller flera andra föreskrifter som är fogade till överenskommelsen, i det land som beviljat godkännande enligt dessa föreskrifter, behöver den symbol som föreskrivs i punkt 4.4.1 inte upprepas. I så fall ska föreskrifternas nummer, godkännandenummer och tilläggssymboler för alla de föreskrifter enligt vilka godkännande har beviljats i det land som beviljat godkännandet enligt dessa föreskrifter anges i kolumner till höger om den symbol som föreskrivs i punkt 4.4.1.
4.6 Godkännandemärket ska vara lätt läsbart och outplånligt.
4.7 Godkännandemärket ska placeras nära eller på skylten med fordonsdata.
4.8 I bilaga 1 till dessa föreskrifter ges exempel på godkännandemärkenas utformning.
5. ALLMÄNNA KRAV
5.1 Fordonen ska vara utrustade med ett ESC-system som uppfyller de funktionella kraven i punkt 6 och prestandakraven i punkt 7 enligt det provningsförfarande som anges i punkt 9 och under de provningsförhållanden som anges i punkt 8 i dessa föreskrifter.
5.1.1 Som ett alternativ till kraven i punkt 5.1 får fordon av kategorierna M1 och N1 med en vikt i körklart tillstånd på mer än 1 735 kg vara utrustade med en fordonsstabilitetsfunktion som omfattar vältkontroll och riktningskontroll och som uppfyller de tekniska kraven och övergångsbestämmelserna i föreskrifter nr 13, bilaga 21. Dessa fordon behöver inte uppfylla de funktionella kraven i punkt 6 och prestandakraven i punkt 7 enligt det provningsförfarande som anges i punkt 9 och under de provningsförhållanden som anges i punkt 8 i dessa föreskrifter.
5.2 ESC-systemet ska vara utformat, konstruerat och monterat på ett sådant sätt att fordonet vid normal användning, trots de vibrationer som det kan utsättas för, överensstämmer med bestämmelserna i dessa föreskrifter.
5.3 I synnerhet ska ESC-systemet vara utformat, konstruerat och monterat så att det kan motstå den korrosion och det åldrande som det utsätts för.
5.4 ESC-systemets effektivitet får inte påverkas negativt av magnetiska eller elektriska fält. Detta ska visas genom överensstämmelse med de tekniska kraven och övergångsbestämmelserna i föreskrifter nr 10 genom tillämpning av
|
a) |
ändringsserie 03 för fordon utan ett kopplingssystem för laddning av det uppladdningsbara elenergilagringssystemet (framdrivningsbatterier), |
|
b) |
ändringsserie 04 för fordon med ett kopplingssystem för laddning av det uppladdningsbara elenergilagringssystemet (framdrivningsbatterier). |
5.5 Bedömningen av ESC-systemets säkerhetsaspekter, med avseende på dess direkta påverkan på bromssystemet, ska inkluderas i den övergripande säkerhetsbedömningen av bromssystemet enligt de krav i föreskrifter nr 13-H som är förenade med komplexa elektroniska styrsystem. Detta anses vara uppfyllt vid uppvisande av ett intyg enligt föreskrifter nr 13-H som omfattar det ESC-system som ska godkännas.
5.6 Bestämmelser om regelbunden teknisk inspektion av ESC-system
5.6.1 Vid en regelbunden teknisk inspektion ska det vara möjligt att bekräfta korrekt driftstatus genom en visuell kontroll av varningssignalerna efter det att systemet slagits på.
5.6.2 Vid tidpunkten för typgodkännandet ska det under sekretess redogöras för de metoder som införts som skydd mot enkel obehörig ändring av varningssignalernas funktion. Alternativt är detta krav på skydd uppfyllt om det finns en sekundär metod för att kontrollera att systemets driftstatus är korrekt.
6. FUNKTIONSKRAV
Varje fordon som lämnas in för godkännande enligt dessa föreskrifter ska vara utrustat med ett system för elektronisk stabilitetskontroll (ESC-system) som uppfyller följande krav:
6.1 Det ska klara att anbringa bromsvridmoment individuellt på alla fyra hjulen (4) och ha en kontrollalgoritm som utnyttjar denna förmåga.
6.2 Det ska vara funktionsdugligt över fordonets hela hastighetsområde, under alla körfaser inklusive acceleration, frirullning och retardation (inklusive bromsning), förutom
|
6.2.1 |
när föraren har avaktiverat ESC-systemet, |
|
6.2.2 |
när fordonets hastighet är lägre än 20 km/tim, |
|
6.2.3 |
under tiden som det inledande självtestet och rimlighetskontroller utförs, vilket ska ta högst 2 min vid körning under de förhållanden som anges i punkt 9.10.2, |
|
6.2.4 |
när fordonets backas. |
6.3 Det ska fortfarande kunna aktiveras även om det låsningsfria bromssystemet eller antispinnsystemet också är aktiverat.
7. PRESTANDAKRAV
Under varje provning som utförs under provningsförhållandena i punkt 8 och enligt provningsförfarandet i punkt 9.9 ska fordonet med ESC-systemet aktiverat uppfylla kriterierna för riktningsstabilitet i punkterna 7.1 och 7.2, och det ska uppfylla känslighetskriteriet i punkt 7.3 under varje provning som utförs med en kontrollerad rattvinkel (5) som är lika med 5A eller större men begränsad enligt punkt 9.9.4, där A är den rattvinkel som beräknats i punkt 9.6.1.
Om ett fordon har provats fysiskt i enlighet med punkt 8 får överensstämmelsen för versioner eller varianter av samma fordonstyp visas med datorsimulering, med hänsyn tagen till provningsförhållandena i punkt 8 och provningsförfarandet i punkt 9.9. Användningen av simulator fastställs i bilaga 4 till dessa föreskrifter.
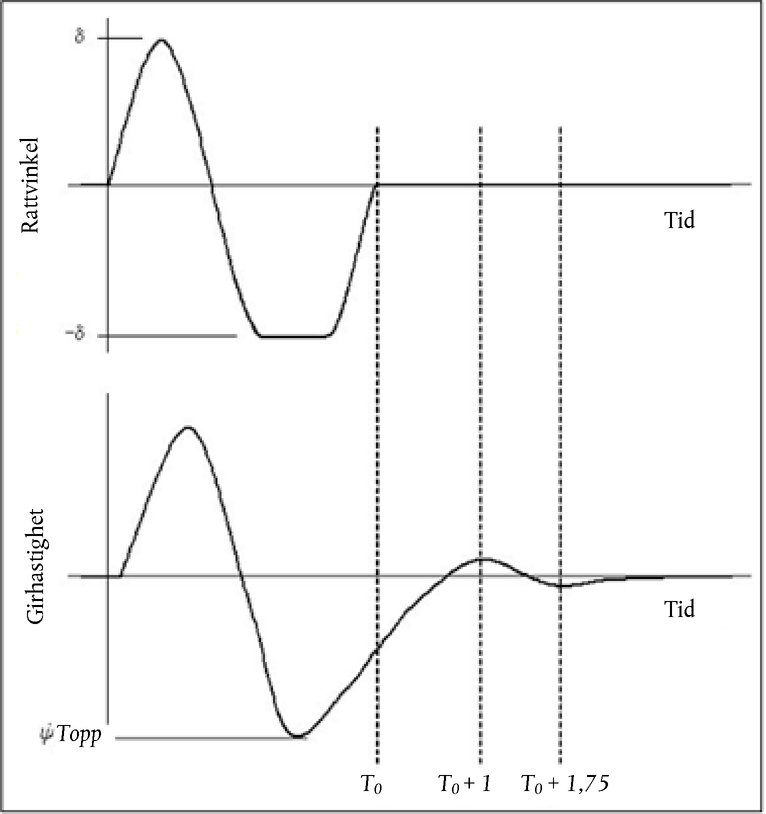
7.1 Girhastigheten uppmätt 1 s efter slutförd ”Sine with Dwell”-styrning (tiden 0 + 1 i figur 1) får inte överstiga 35 % av det första toppvärdet på girhastigheten som registreras efter det att rattvinkeln ändrar tecken (mellan första och andra toppen) ( i figur 1) under samma provningskörning.
i figur 1) under samma provningskörning.
Figur 1
Information om rattläget och girhastigheten, som används för att bedöma sidostabiliteten
 Text av bilden
Text av bilden
7.2 Girhastigheten uppmätt 1,75 s efter slutförd ”Sine with Dwell”-styrning får inte överstiga 20 % av det första toppvärdet på girhastigheten som registreras efter det att rattvinkeln ändrar tecken (mellan första och andra toppen) under samma provningskörning.
7.3 Förskjutningen i sidled av fordonets tyngdpunkt med avseende på dess ursprungliga raka kurs ska vara minst 1,83 m för fordon med en bruttovikt på högst 3 500 kg, och 1,52 m för fordon med en maximal vikt på mer än 3 500 kg beräknad 1,07 s efter att styrningen påbörjats (Beginning of Steer, BOS). BOS definieras i punkt 9.11.6.
7.3.1 Förskjutningen i sidled beräknas med dubbel integrering med avseende på tid för mätningen av sidoaccelerationen vid fordonets tyngdpunkt, enligt följande formel:

En alternativ mätmetod får tillåtas vid typgodkännandeprovning, under förutsättning att den uppvisar en precisionsgrad som minst är likvärdig med den dubbla integreringsmetodens.
7.3.2 Tiden t = 0 för integreringen är det ögonblick då styrningen initieras, även benämnt Beginning of Steer (BOS). BOS definieras i punkt 9.11.6.
7.4 Detektering av funktionsfel i ESC-systemet
Fordonet ska vara utrustat med en indikator som varnar föraren om det förekommer något funktionsfel som påverkar genereringen eller överföringen av styrtransmissioner eller svarssignaler i fordonets system för elektronisk stabilitetskontroll.
7.4.1 Indikatorn för funktionsfel i ESC-systemet ska uppfylla följande krav:
|
7.4.1.1 |
Den ska uppfylla relevanta tekniska krav i föreskrifter nr 121. |
|
7.4.1.2 |
Med undantag för vad som anges i punkt 7.4.1.3 ska indikatorn för funktionsfel i ESC-systemet tändas när ett funktionsfel föreligger och fortsätta att vara kontinuerligt tänd enligt de villkor som anges i punkt 7.4 så länge som funktionsfelet kvarstår och tändningsomkopplaren är påslagen. |
|
7.4.1.3 |
Med undantag för vad som anges i punkt 7.4.2 ska varje indikator för funktionsfel i ESC-systemet aktiveras såsom en kontroll av lampans funktion, antingen när tändningsomkopplaren slås på när motorn inte är i drift, eller när tändningsomkopplaren är i ett läge mellan påslaget (körläge) och start som av tillverkaren är avsett som kontrolläge. |
|
7.4.1.4 |
Indikatorn ska släckas vid nästa tändningscykel efter att funktionsfelet har åtgärdats i enlighet med punkt 9.10.4. |
|
7.4.1.5 |
Indikatorn får även användas för att ange ett funktionsfel i tillhörande system/funktioner, inklusive antispinn, släpfordonsstabiliseringshjälp, kurvbromskontroll och andra liknande funktioner som använder gas och/eller individuell momentstyrning för att använda och dela gemensamma komponenter med ESC-systemet. |
7.4.2 Indikatorn för funktionsfel i ESC-systemet behöver inte aktiveras om en startspärr är i drift.
7.4.3 Kravet i punkt 7.4.1.3 gäller inte indikatorer som visas i ett gemensamt utrymme.
7.4.4 Tillverkaren får använda indikatorn för funktionsfel i ESC-systemet i ett blinkande läge för att ange att ESC-systemet eller relaterade system tillämpas (relaterade system förtecknas i punkt 7.4.1.5) och att ESC-systemet tillämpas på styrvinkeln för ett eller flera hjul i fordonsstabilitetssyfte.
7.5 ”ESC av” och andra systemkontakter
Tillverkaren får inkludera en kontakt för ”ESC av” som ska vara upplyst när fordonets strålkastare är aktiverade, och vars syfte är att försätta ESC-systemet i ett läge i vilket det inte längre uppfyller prestandakraven i punkterna 7, 7.1, 7.2 och 7.3. Tillverkare får även tillhandahålla kontakter för andra system som har en hjälpeffekt på ESC-systemets funktion. Båda dessa kontakttyper som försätter ESC-systemet i ett läge där det inte längre kan uppfylla prestandakraven i punkterna 7, 7.1, 7.2 och 7.3 är tillåtna, under förutsättning att systemet även uppfyller kraven i punkterna 7.5.1, 7.5.2 och 7.5.3.
7.5.1 Fordonets ESC-system ska alltid återgå till tillverkarens ursprungliga standardläge som uppfyller kraven i punkterna 6 och 7 vid initieringen av varje ny tändningscykel, oavsett vilket läge som föraren tidigare hade valt. Fordonets ESC-system behöver dock inte återgå till ett läge som uppfyller kraven i punkterna 7–7.3 vid initieringen av varje ny tändningscykel om kraven i en av följande två punkter är uppfyllda:
|
7.5.1.1 |
Fordonet är i en av föraren vald fyrhjulsdriven konfiguration för terrängkörning i låg hastighet, i vilken drivväxlarna för fram- och bakaxlarna låses ihop och ger en extra nedväxling mellan motorvarvtalet och fordonshastigheten på minst 1,6, eller |
|
7.5.1.2 |
fordonet är i en av föraren vald fyrhjulsdriven konfiguration som är utformad för användning vid högre hastigheter på snö- och sandtäckta vägar samt obelagda vägar, i vilken drivväxlarna för fram- och bakaxlarna låses ihop, förutsatt att fordonet i detta läge uppfyller stabilitetskraven i punkterna 7.1 och 7.2 under de provningsförhållanden som anges i punkt 8. Om systemet har mer än ett ESC-läge som uppfyller kraven i punkterna 7.1 och 7.2 i den körkonfiguration som valts under föregående tändningscykel, ska ESC-systemet dock vid initieringen av varje ny tändningscykel återgå till tillverkarens ursprungliga ESC-standardläge för den körkonfigurationen. |
7.5.2 En kontakt vars enda syfte är att försätta ESC-systemet i ett läge där det inte längre uppfyller prestandakraven i punkterna 7, 7.1, 7.2 och 7.3 ska uppfylla de relevanta tekniska kraven i föreskrifter nr 121.
7.5.3 En kontakt för ett ESC-system vars syfte är att försätta ESC-systemet i olika lägen, varav åtminstone ett innebär att systemet inte längre uppfyller prestandakraven i punkterna 7, 7.1, 7.2 och 7.3, ska uppfylla de relevanta tekniska kraven i föreskrifter nr 121.
Alternativt ska förardisplayen, i det fall då ESC-systemets läge regleras av en kontakt med flera funktioner, tydligt visa föraren kontaktens inställning av läget med symbolen för ”ESC av”, i enlighet med föreskrifter nr 121.
7.5.4 En kontakt för ett annat system som har som hjälpeffekt att försätta ESC-systemet i ett läge där det inte längre uppfyller prestandakraven i punkterna 7, 7.1, 7.2 och 7.3 behöver inte identifieras med symbolen för ”ESC av” i punkt 7.5.2.
7.6 Indikatorn för ”ESC av”
Om tillverkaren väljer att installera en kontakt för att stänga av eller minska ESC-systemets prestanda enligt punkt 7.5, ska kraven på indikatorn i punkterna 7.6.1–7.6.4 uppfyllas för att uppmärksamma föraren på att ESC-systemet är avstängt eller begränsat. Detta krav gäller inte för det förarvalda läge som avses i punkt 7.5.1.2.
7.6.1 Fordonstillverkaren ska tillhandahålla en indikator som visar att fordonet försatts i ett läge som gör att det inte kan uppfylla kraven i punkterna 7, 7.1, 7.2 och 7.3, om ett sådant läge finns.
7.6.2 Indikatorn för ”ESC av” ska uppfylla följande krav:
|
7.6.2.1 |
Den ska uppfylla relevanta tekniska krav i föreskrifter nr 121. |
|
7.6.2.2 |
Den ska vara kontinuerligt tänd så länge som ESC-systemet är i ett läge som gör att det inte kan uppfylla kraven i punkterna 7, 7.1, 7.2 och 7.3. |
|
7.6.2.3 |
Med undantag för vad som anges i punkterna 7.6.3 och 7.6.4 ska varje indikator för ”ESC av” aktiveras såsom en kontroll av lampans funktion, antingen när tändningsomkopplaren slås på när motorn inte är i drift eller då tändningsomkopplaren är i ett läge mellan påslaget (körläge) och start som av tillverkaren är avsett som kontrolläge. |
|
7.6.2.4 |
Den ska släckas när ESC-systemet har återgått till tillverkarens ursprungliga standardläge. |
7.6.3 Indikatorn för ”ESC av” behöver inte aktiveras om en startspärr är i drift.
7.6.4 Kravet i punkt 7.6.2.3 gäller inte indikatorer som visas i ett gemensamt utrymme.
7.6.5 Tillverkaren får använda indikatorn för ”ESC av” för att ange en annan ESC-funktionsnivå än tillverkarens ursprungliga standardläge även om fordonet på denna nivå av ESC-funktionalitet skulle uppfylla kraven i punkterna 7, 7.1, 7.2 och 7.3.
7.7 Teknisk dokumentation av ESC-system
Dokumentationspaketet ska, som en bekräftelse på att fordonet är utrustat med ett ESC-system som överensstämmer med definitionen i punkt 2.7 i dessa föreskrifter, omfatta fordonstillverkarens dokumentation såsom specificeras i punkterna 7.7.1–7.7.4.
7.7.1 En schematisk skiss över ESC-systemet som identifierar all maskinvara i systemet. Skissen ska identifiera de komponenter som används för att generera bromsvridmoment för varje hjul liksom för att fastställa fordonets girhastighet, uppskattad sidoförskjutning eller sidoförskjutningens derivata och förarens styrning.
7.7.2 En kortfattad skriftlig förklaring som är tillräcklig för att beskriva ESC-systemets grundläggande funktioner. Denna förklaring ska inkludera en sammanfattande beskrivning av systemets förmåga att anbringa bromsvridmoment för varje hjul och hur systemet modifierar framdrivningsmomentet då det är aktiverat, och ska visa att fordonets girhastighet fastställs direkt, även under förhållanden där ingen information om hjulhastighet finns tillgänglig. Förklaringen ska även specificera det hastighetsområde för fordonet och de körfaser (acceleration, retardation, frirullning, under aktivering av ABS-systemet eller antispinnsystemet) under vilka ESC-systemet kan aktiveras.
7.7.3 Principskiss. Denna skiss stöder förklaringen i punkt 7.7.2.
7.7.4 Understyrningsinformation. En sammanfattande beskrivning av relevanta indata till den dator som styr ESC-systemets maskinvara och hur de används för att begränsa fordonets understyrning.
8. PROVNINGSFÖRHÅLLANDEN
8.1 Omgivningsförhållanden
8.1.1 Omgivningstemperaturen ska vara mellan 0 och 45 °C.
8.1.2 Den maximala vindhastigheten ska inte vara större än 10 m/s för fordon med statisk stabilitetsfaktor (SSF) > 1,25 och 5 m/s för fordon med SSF ≤ 1,25.
8.2 Vägprovningsyta
8.2.1 Provningarna ska utföras på en torr, enhetlig, belagd yta. Ytor med ojämnheter och vågigheter, såsom sänkor och stora sprickor, är olämpliga.
8.2.2 Vägprovningsytan ska ha en nominell (6) toppbromskoefficient (PBC) på 0,9, om inget annat anges, vid mätning med ett av följande alternativ:
|
8.2.2.1 |
Standardreferensprovningsdäck E1136 från American Society for Testing and Materials (ASTM), i enlighet med ASTM-metoden E1337-90, vid en hastighet av 40 mph, eller |
|
8.2.2.2 |
den k-provningsmetod som anges i tillägg 2 till bilaga 6 till föreskrifter nr 13-H. |
8.2.3 Provningsytan ska ha en jämn lutning på mellan 0 och 1 %.
8.3 Fordonsförhållanden
8.3.1 ESC-systemet ska vara aktiverat vid all provning.
8.3.2 Fordonets vikt. Fordonet ska vara lastat med bränsletanken fylld till minst 90 % av sin kapacitet, och en total inre last på 168 kg bestående av provningsföraren och cirka 59 kg provningsutrustning (automatisk styrmaskin, datainhämtningssystem och strömförsörjning till styrmaskinen) samt den mängd ballast som krävs för att kompensera för eventuell undervikt hos provningsförare och provningsutrustning. När så krävs ska ballast placeras på golvet bakom det främre passagerarsätet eller vid behov även på området för framsätespassagerarens fötter. All ballast ska förankras på ett sätt som förhindrar den från att lossna vid provning.
8.3.3 Däck. Däcken ska vara fyllda till det eller de tryck som tillverkaren rekommenderar för kalla däck, (anges t.ex. på fordonsskylten eller däcktrycksmärkningen). Slangar får monteras för att förhindra avkrängning.
8.3.4 Utriggare. Utriggare får användas vid provning om det anses nödvändigt för provningsförarens säkerhet. I detta fall gäller följande för fordon med en statisk stabilitetsfaktor (SSF) ≤ 1,25:
|
8.3.4.1 |
Fordon med en vikt i körklart skick på under 1 588 kg ska vara utrustade med utriggare av lättviktstyp. Lättviktsutriggare ska konstrueras med en maximal vikt på 27 kg och ett maximalt rulltröghetsmoment på 27 kg · m2. |
|
8.3.4.2 |
Fordon med en vikt i körklart skick på mellan 1 588 kg och 2 722 kg ska vara utrustade med utriggare av standardtyp. Standardutriggare ska konstrueras med en maximal vikt på 32 kg och ett maximalt rulltröghetsmoment på 35,9 kg · m2. |
|
8.3.4.3 |
Fordon med en vikt i körklart skick som är lika med eller högre än 2 722 kg ska vara utrustade med utriggare av högviktstyp. Högviktsutriggare ska konstrueras med en maximal vikt på 39 kg och ett maximalt rulltröghetsmoment på 40,7 kg · m2. |
8.3.5 Automatisk styrmaskin. En styrrobot som är programmerad för att utföra det önskade styrmönstret ska användas för punkterna 9.5.2, 9.5.3, 9.6 och 9.9. Styrmaskinen ska klara att leverera styrvridmoment mellan 40 och 60 Nm. Styrmaskinen ska klara att anbringa dessa vridmoment vid ratthastigheter på upp till 1 200 grader/s.
9. PROVNINGSFÖRFARANDEN
9.1 Fyll däcken till det eller de tryck som tillverkaren rekommenderar för kalla däck (anges t.ex. på fordonsskylten eller däcktrycksmärkningen).
9.2 Kontroll av indikatorlampan. Slå på tändningsomkopplaren till körläget när fordonet är stillastående och tändningen är avstängd eller, om så är tillämpligt, till avsett läge för kontroll av lampor. Indikatorn för funktionsfel i ESC-systemet ska tändas som en kontroll av lampans funktion, såsom anges i punkt 7.4.1.3, och om det finns en indikator för ”ESC av” ska även den tändas som en kontroll av lampans funktion, såsom anges i punkt 7.6.2.3. Kontrollen av indikatorlampan krävs inte för en indikator som visas i ett gemensamt utrymme enligt punkterna 7.4.3 och 7.6.4.
9.3 Kontroll av kontakten för ”ESC av”. För fordon utrustade med en kontakt för ”ESC av” slås tändningsomkopplaren på när fordonet är stillastående och tändningen är av. Aktivera kontakten för ”ESC av” och kontrollera att indikatorn ”ESC av” tänds enligt punkt 7.6.2. Stäng av tändningsomkopplaren. Slå på tändningsomkopplaren igen och kontrollera att indikatorn ”ESC av” har släckts, vilket anger att ESC-systemet har återställts enligt punkt 7.5.1.
9.4 Bromskonditionering
Konditionera fordonsbromsarna på det sätt som beskrivs i punkterna 9.4.1–9.4.4.
9.4.1 Tio stopp ska göras från en hastighet av 56 km/tim, med en medelretardation på cirka 0,5 g.
9.4.2 Omedelbart efter serien med tio stopp vid 56 km/tim ska ytterligare tre stopp göras från 72 km/tim med högre retardation.
9.4.3 Vid utförandet av stoppen i punkt 9.4.2 ska tillräckligt med kraft anbringas på bromspedalen så att fordonets låsningsfria bromssystem (ABS) aktiveras under huvuddelen av varje bromstillfälle.
9.4.4 Efter att det sista stoppet enligt punkt 9.4.2 har genomförts ska fordonet köras med hastighet av 72 km/tim under 5 min för att kyla bromsarna.
9.5 Däckskonditionering
Däcken ska konditioneras enligt förfarandet i punkterna 9.5.1–9.5.3 så att beläggning från tillverkningen slits bort och en driftstemperatur uppnås omedelbart före provningskörningarna i punkterna 9.6 och 9.9.
9.5.1 Provfordonet ska köras tre varv medurs följt av tre varv moturs runt en cirkel med diametern 30 meter vid en hastighet som ger en sidoacceleration på cirka 0,5–0,6 g.
9.5.2 Med ett sinusformat styrmönster med frekvensen 1 Hz, en toppamplitud för rattvinkeln motsvarande en toppsidoacceleration på 0,5–0,6 g och en fordonshastighet på 56 km/tim, ska fordonet köras genom fyra provningspass och 10 cykler sinusformad styrning ska utföras under varje pass.
9.5.3 Rattvinkelamplituden för den sista cykeln på det sista passet ska vara dubbelt så stor som under andra cykler. Maximalt tillåten tid mellan varje varv samt mellan varje pass är 5 min.
9.6 Långsamt ökande styrningsförfarande
Fordonet ska utsättas för två serier körningar med långsamt ökande styrningsprovning med en konstant fordonshastighet av 80 ± 2 km/tim och ett styrmönster som ökar med 13,5 grader/s tills en sidoacceleration på cirka 0,5 g uppnås. Varje provningsserie ska upprepas tre gånger. Under en serie används moturs styrning och under de andra serierna används medurs styrning. Maximalt tillåten tid mellan varje provningskörning är 5 min.
9.6.1 Från provningarna med långsamt ökande styrning fastställs storheten A. A är rattvinken i grader som ger provfordonet en jämn sidoacceleration (korrigerad med de metoder som anges i punkt 9.11.3) på 0,3 g. A beräknas med linjär regressionsanalys till närmaste 0,1 grader ur var och en av de sex provningarna med långsamt ökande styrning. Medelvärdet av det absoluta värdet av de sex beräknade värdena för A beräknas och avrundas till närmaste 0,1 grader för att ge den slutliga storheten A, som används nedan.
9.7 När A har fastställts ska det däckskonditioneringsförfarande som beskrivs i punkt 9.5 utföras på nytt, utan att däcken byts ut, omedelbart före ”Sine with Dwell”-provningen i punkt 9.9. Initieringen av den första ”Sine with Dwell”-provserien ska ske inom två timmar efter det att provningarna med långsamt ökande styrning i punkt 9.6 har slutförts.
9.8 Kontrollera att ESC-systemet är aktiverat genom att se till att indikatorerna för funktionsfel i ESC-systemet och ”ESC av” (i förekommande fall) inte är tända.
9.9 ”Sine with Dwell”-provning av ingripande mot överstyrning och känslighet
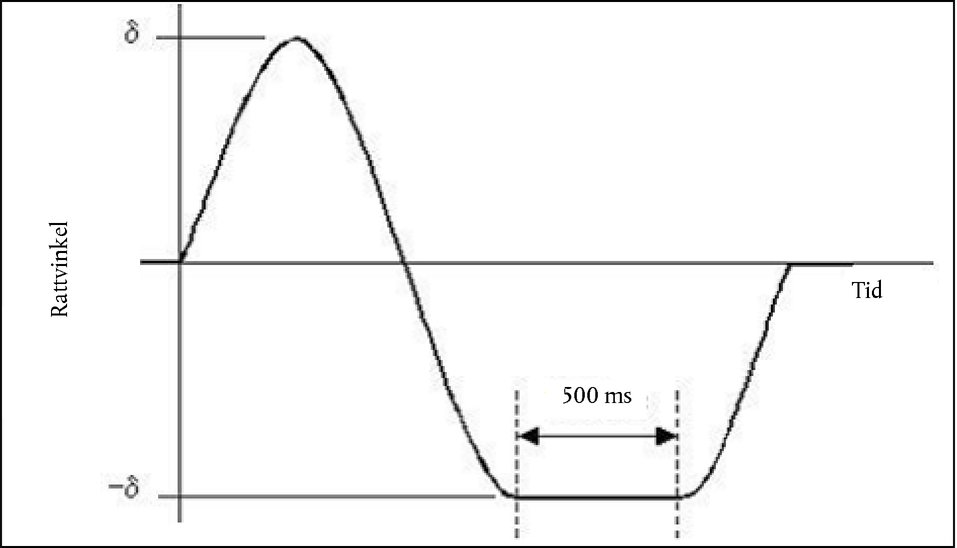
Fordonet ska genomgå två serier provningskörningar med sinusformat styrmönster med frekvensen 0,7 Hz med 500 ms fördröjning med start vid den andra toppamplituden enligt figur 2 (”Sine with Dwell”-provningar). Under en serie används moturs styrning under den första halvan av cykeln och under den andra serien används medurs styrning under den första halvan av cykeln. Fordonet får svalna stillastående under en period på 1,5–5 min mellan varje provningskörning.
Figur 2
”Sine with dwell”-provning
 Text av bilden
Text av bilden
9.9.1 Styrningsrörelsen ska initieras med fordonet frirullande på hög växel i 80 ± 2 km/tim.
9.9.2 Styrningsamplituden för den inledande körningen i varje serie ska vara 1,5 A, där A är den rattvinkel som fastställs i punkt 9.6.1.
9.9.3 Under varje serie av provningskörningar ska styrningsamplituden ökas med 0,5 A för varje körning, under förutsättning att ingen sådan körning ger en styrningsamplitud som är större än den för den slutliga körning som specificeras i punkt 9.9.4.
9.9.4 Styrningsamplituden under den slutliga körningen i varje serie är den större av 6,5 A eller 270 grader, under förutsättning att det beräknade värdet för 6,5 A är mindre än eller lika med 300 grader. Om någon ökning med 0,5 A upp till 6,5 A är större än 300 grader, ska styrningsamplituden för den slutliga körningen vara 300 grader.
9.9.5 När det två serierna med provningskörningar har avslutats utförs efterbehandling av data för girhastighet och sidoacceleration enligt punkt 9.11.
9.10 Detektering av funktionsfel i ESC-systemet
9.10.1 Simulera ett eller flera funktionsfel i ESC-systemet genom att koppla bort strömförsörjningen till någon ESC-komponent eller den elektriska anslutningen mellan ESC-komponenter (med fordonets tändning avstängd). Vid simulering av funktionsfel i ESC-systemet får de elektriska anslutningarna till indikatorlampan (indikatorlamporna) och/eller eventuella kontakter till ESC-systemet inte kopplas bort.
9.10.2 Slå på tändningsomkopplaren och starta motorn med fordonet initialt stillastående och tändningen i avstängt eller låst läge. Kör fordonet framåt för att komma upp i en hastighet av 48 ± 8 km/tim. Senast 30 s efter det att motorn har startats och under följande 2 min vid denna hastighet utförs minst en mjuk svängningsmanöver åt vänster och en åt höger utan förlorad riktningsstabilitet, samt en bromsansättning. Kontrollera att indikatorn för funktionsfel i ESC-systemet tänds i enlighet med punkt 7.4 i slutet av dessa manövrer.
9.10.3 Stanna fordonet och stäng av tändningsomkopplaren. Slå på tändningsomkopplaren och starta motorn efter en period på 5 min. Kontrollera att indikatorn för funktionsfel i ESC-systemet tänds igen för att indikera ett funktionsfel och att den förblir tänd så länge som motorn går eller tills felet har åtgärdats.
9.10.4 Stäng av tändningsomkopplaren. Återställ ESC-systemet till normalt driftläge, slå på tändningen och starta motorn. Utför den manöver som beskrivs i punkt 9.10.2 igen och kontrollera att indikatorn släcks inom denna tid eller omedelbart därefter.
9.11 Efterbehandling av data – beräkningar av prestandavärden
Mätningar och beräkningar av girhastighet och förskjutning i sidled ska behandlas med de metoder som anges i punkterna 9.11.1–9.11.8.
9.11.1 Rådata för rattvinkel filtreras med ett 12-poligt faslöst Butterworth-filter och en gränsfrekvens på 10 Hz. Filtrerade data nollas sedan för att ta bort givarförskjutning med statiska förprovningsdata.
9.11.2 Rådata för girhastighet filtreras med ett 12-poligt faslöst Butterworth-filter och en gränsfrekvens på 6 Hz. Filtrerade data nollas sedan för att ta bort givarförskjutning med statiska förprovningsdata.
9.11.3 Rådata för sidoacceleration filtreras med ett 12-poligt faslöst Butterworth-filter och en gränsfrekvens på 6 Hz. Filtrerade data nollas sedan för att ta bort givarförskjutning med statiska förprovningsdata. Data för sidoaccelerationen vid fordonets tyngdpunkt fastställs genom borttagning av de effekter som orsakas av fordonets karossrullning och genom korrigering för givarplaceringen via användning av koordinatöverföring. Vid insamlingen av data ska mätaren för sidoaccelerationen vara placerad så nära fordonets tyngdpunkt som möjligt i längdled och sidled.
9.11.4 Ratthastigheten fastställs genom derivering av filtrerade data för rattvinkel. Data för ratthastighet filtreras sedan med ett glidande medelvärdesfilter på 0,1 s.
9.11.5 Datakanaler för sidoacceleration, girhastighet och rattvinkel nollas med ett fastställt ”nollningsområde”. De metoder som används för att upprätta nollningsområdet anges i punkterna 9.11.5.1 och 9.11.5.2.
9.11.5.1 Med hjälp av data för ratthastighet som beräknats med de metoder som beskrivs i punkt 9.11.4 identifieras det första tillfället då ratthastigheten är större än 75 grader/s. Från denna tidpunkt ska ratthastigheten förbli större än 75 grader/s i minst 200 ms. Om det andra villkoret inte är uppfyllt identifieras nästa tillfälle då ratthastigheten är större än 75 grader/s och kravet på 200 ms kontrolleras. Denna iterativa process fortsätter tills båda villkoren till slut är uppfyllda.
9.11.5.2 Nollningsområdet definieras som den period på 1,0 s som föregår det ögonblick då ratthastigheten är större än 75 grader/s (dvs. det ögonblick då ratthastigheten blir större än 75 grader/s definieras som nollningsområdets slutpunkt).
9.11.6 Styrningens inledning (Beginning of Steer, BOS) definieras som det första ögonblick då filtrerade och nollade rattvinkeldata uppnår – 5 grader (när den initiala styrningen sker moturs) eller +5 grader (när den initiala styrningen sker medurs) efter en tid som definierar nollningsområdets slutpunkt. Värdet för tiden vid BOS interpoleras.
9.11.7 Styrningens slut (Completion of Steer, COS) definieras som den tidpunkt då rattvinkeln återgår till noll efter slutförandet av ”Sine with Dwell”-styrningsmanövern. Värdet för tiden vid noll graders rattvinkel interpoleras.
9.11.8 Den andra toppen för girhastigheten definieras som den första lokala girhastighetstoppen som uppstår vid rattens återgång. Girhastigheterna vid 1,0 och 1,75 s efter COS fastställs genom interpolering.
9.11.9 Fastställ hastigheten i sidled genom att integrera korrigerade, filtrerade och nollade data för sidoaccelerationen. Nolla hastigheten i sidled vid BOS-tidpunkten. Fastställ förskjutningen i sidled genom att integrera nollad hastighet i sidled. Nolla förskjutningen i sidled vid BOS-punkten. Mätningen av förskjutningen i sidled görs 1,07 s efter BOS-tidpunkten och fastställs genom interpolering.
10. ÄNDRING AV FORDONSTYP ELLER ESC-SYSTEM OCH UTÖKNING AV GODKÄNNANDE
10.1 Varje ändring av en befintlig fordonstyp ska anmälas till den typgodkännandemyndighet som godkände fordonstypen.
Myndigheten ska sedan antingen
|
a) |
i samråd med tillverkaren besluta att ett nytt typgodkännande ska beviljas, eller |
|
b) |
tillämpa det förfarande som anges i punkt 10.1.1 (Revidering) och, i tillämpliga fall, det förfarande som anges i punkt 10.1.2 (Utökning). |
10.1.1 Revidering
Om uppgifter i informationsdokumenten har ändrats och typgodkännandemyndigheten anser att ändringarna sannolikt inte kommer att få några märkbara negativa effekter och att pedalerna i vilket fall som helst fortfarande uppfyller kraven, ska ändringen betecknas som en revidering.
Typgodkännandemyndigheten ska då i nödvändig utsträckning utfärda de reviderade bladen i informationsdokumenten, och på varje reviderat blad tydligt markera vilket slag av ändring det rör sig om och vilket datum det nya bladet utfärdats. En konsoliderad, uppdaterad version av informationsdokumenten tillsammans med en detaljerad beskrivning av ändringen ska anses uppfylla detta krav.
10.1.2 Utökning
Ändringen ska betecknas som en utökning om något av följande förhållanden råder, utöver ändringen av uppgifterna i informationsdokumenten:
|
a) |
Om det krävs ytterligare kontroller eller provningar. |
|
b) |
Om några uppgifter i meddelandedokumentet (med undantag för bilagorna) har ändrats. |
|
c) |
Om godkännande enligt en senare ändringsserie begärs efter dess ikraftträdande. |
10.2 De parter i överenskommelsen som tillämpar dessa föreskrifter ska via det förfarande som anges i punkt 4.3 underrättas om huruvida godkännande beviljats eller ej, och ska då också få information om vilka ändringar som gjorts. Dessutom ska indexet till informationsdokumenten och provningsrapporterna, som ska bifogas meddelandeformuläret i bilaga 1, ändras så att datumet för den senaste revideringen eller utökningen anges.
10.3 Den behöriga myndighet som utfärdar utökningen av godkännandet ska ge varje meddelandeformulär som upprättas för en sådan utökning ett serienummer.
11. PRODUKTIONSÖVERENSSTÄMMELSE
Produktionsöverensstämmelsen ska kontrolleras enligt det förfarande som fastställts i tillägg 2 till överenskommelsen (E/ECE/324-E/ECE/TRANS/505/Rev.2), med följande krav:
|
11.1 |
Ett fordon som godkänns enligt dessa föreskrifter ska vara tillverkat så att det överensstämmer med den godkända typen genom att uppfylla kraven i punkterna 5, 6 och 7. |
|
11.2 |
Den typgodkännandemyndighet som har beviljat typgodkännandet får när som helst kontrollera de metoder för produktionsöverensstämmelse som tillämpas på varje tillverkningsanläggning. Dessa kontroller ska normalt ske en gång vartannat år. |
12. PÅFÖLJDER VID BRISTANDE PRODUKTIONSÖVERENSSTÄMMELSE
12.1 Ett godkännande som beviljats för en fordonstyp enligt dessa föreskrifter får återkallas om kraven i punkt 8.1 inte uppfylls.
12.2 Om någon av de parter i överenskommelsen som tillämpar dessa föreskrifter återkallar ett godkännande som den tidigare beviljat, ska den omedelbart rapportera detta till de övriga parter i överenskommelsen som tillämpar dessa föreskrifter, med hjälp av ett meddelandeformulär som överensstämmer med mallen i bilaga 1 till dessa föreskrifter.
13. SLUTGILTIGT UPPHÖRANDE AV PRODUKTIONEN
En innehavare av ett godkännande som slutgiltigt upphör att tillverka en fordonstyp som godkänts enligt dessa föreskrifter ska meddela detta till den myndighet som beviljade godkännandet. När myndigheten har mottagit det aktuella meddelandet ska den underrätta övriga parter i överenskommelsen som tillämpar dessa föreskrifter, med hjälp av ett meddelandeformulär som överensstämmer med mallen i bilaga 5 till dessa föreskrifter.
14. NAMN PÅ OCH ADRESS TILL TYPGODKÄNNANDEMYNDIGHETERNA OCH DE TEKNISKA TJÄNSTER SOM UTFÖR GODKÄNNANDEPROVNINGAR
De parter i överenskommelsen som tillämpar dessa föreskrifter ska meddela Förenta nationernas sekretariat namn på och adress till de tekniska tjänster som ansvarar för att utföra godkännandeprovningarna och de typgodkännandemyndigheter som beviljar godkännande och till vilka formulär om beviljat, utökat, ej beviljat eller återkallat godkännande som utfärdats i andra länder ska skickas.
(1) Fordonskategorierna M1 och N1 definieras i den konsoliderade resolutionen om fordonskonstruktion (R.E.3.), dokument ECE/TRANS/WP.29/78/Rev. 4, punkt 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) En axelgrupp ska behandlas som en enkelaxel och dubbelhjul ska behandlas som ett enkelhjul.
(3) De särskiljande numren för parterna i 1958 års överenskommelse återges i bilaga 3 till den konsoliderade resolutionen om fordonskonstruktion (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, bilaga 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) En axelgrupp ska behandlas som en enkelaxel och dubbelhjul ska behandlas som ett enkelhjul.
(5) I dessa föreskrifter förutsätts att fordonets styrning kontrolleras med en ratt. Fordon som har andra typer av styranordning får också godkännas enligt denna bilaga om tillverkaren kan visa för den tekniska tjänsten att prestandakraven i dessa föreskrifter kan uppfyllas med en styrning som är likvärdig med den styrning som föreskrivs i punkt 7 i dessa föreskrifter.
(6) Det nominella värdet ska förstås som det teoretiska målvärdet.