BILAGA II
Bilaga IIIA till förordning (EG) nr 692/2008 ska ändras på följande sätt:
|
1. |
Punkt 2.1 ska ersättas med följande: ”2.1 Not-to-exceed-utsläppsgränser Utsläppen från en fordonstyp godkänd enligt förordning (EG) nr 715/2007 som fastställts enligt kraven i denna bilaga och som släpps ut under varje möjlig RDE-provning som utförs i enlighet med kraven i denna bilaga, får inte under fordonets normala livstid överstiga följande NTE-värden (not-to-exceed): NTEpollutant = CFpollutant × TF(p1,…, pn) × EURO-6 där EURO-6 är den tillämpliga Euro 6-utsläppsgränsen enligt tabell 2 i bilaga I till förordning (EG) nr 715/2007.” |
|
2. |
Följande punkter ska införas som punkterna 2.1.1, 2.1.2 och 2.1.3: ”2.1.1 Slutliga överensstämmelsefaktorer Överensstämmelsefaktorn CFpollutant för respektive förorening ska vara enligt följande:
margin : en parameter som tar hänsyn till de ytterligare mätosäkerheter som härrör från PEMS-utrustningen, vilken årligen ska ses över och ändras som ett resultat av den förbättrade kvaliteten i PEMS-förfarandet eller den tekniska utvecklingen. 2.1.2 Tillfälliga överensstämmelsefaktorer Under en period av 5 år och 4 månader efter de datum som fastställs i artikel 10.4 och 10.5 i förordning (EG) nr 715/2007 ska, genom undantag från bestämmelserna i punkt 2.1.1 och på begäran av tillverkaren, följande tillfälliga överensstämmelsefaktorer gälla:
Tillämpningen av tillfälliga överensstämmelsefaktorer ska registreras i intyget om överensstämmelse för fordonet. 2.1.3 Överföringsfunktioner Överföringsfunktionen TF(p1,…, pn) som avses i punkt 2.1 fastställs till 1 för samtliga parametrar pi (i = 1,…,n). Om överföringsfunktionen TF(p1,…, pn) ändras, ska detta ske på ett sätt som inte påverkar miljön eller RDE-provningarnas effektivitet negativt. Särskilt ska följande villkor gälla: ∫ TF (p1,…, pn) * Q (p1,…, pn) dp = ∫ Q (p1,…, pn) dp där
|
|
3. |
Följande punkt ska införas som punkt 3.1.0:
|
|
4. |
Punkt 5.3 ska utgå. |
|
5. |
Punkt 5.4 ska ersättas med följande: ”5.4 Dynamiska förhållanden De dynamiska förhållandena omfattar effekten av vägens lutning, motvind och kördynamik (acceleration, retardation) samt hjälpsystem på provfordonets energiförbrukning och utsläpp. Kontrollen av att de dynamiska förhållandena är normala ska göras efter det att provningen är slutförd med hjälp av registrerade PEMS-data. Kontrollen ska utföras i 2 steg:
|
|
6. |
Punkt 6.8 ska ersättas med följande:
|
|
7. |
I punkt 6.11 ska följande mening läggas till: ”Dessutom ska andelen kumulativ positiv höjdökning vara mindre än 1 200 m/100 km och fastställas enligt tillägg 7b.” |
|
8. |
Punkt 9.5 ska ersättas med följande:
|
|
9. |
Tillägg 1 ska ändras på följande sätt:
|
|
10. |
I tillägg 2 ska fotnot 2 till tabell 4 i punkt 8 ersättas med följande:
|
|
11. |
I punkt 2 i tillägg 6 ska följande definition utgå
|
 , [m/s
, [m/s|
12. |
I punkt 2 i tillägg 6 ska följande definitioner införas:
|

|
13. |
I punkt 3.1 i tillägg 6 ska första stycket ersättas med följande: ”Den faktiska effekten vid hjulen Pr,i är den totala effekten för att övervinna luftmotstånd, rullmotstånd, vägens lutning, fordonets längsgående tröghet och hjulens rotationströghet.” |
|
14. |
I tillägg 6 ska punkt 3.2 ersättas med följande: ”3.2 Klassificering av de glidande medelvärdena i stads-, landsvägs- och motorvägskörning Standardeffektfrekvenserna ska definieras för stadskörning och för den totala trippen (se punkt 3.4) och en separat utvärdering av utsläppen ska göras för den totala trippen och för stadskörningsdelen. De tresekunders glidande medelvärden som beräknas enligt punkt 3.3 ska därför senare fördelas mellan stadskörning och körning utanför stad enligt hastighetssignalen (vi) från den faktiska sekunden i enligt tabell 1-1. Tabell 1-1 Hastighetsintervall för fördelning av provningsdata på stads-, landsvägs- och motorvägskörning enligt metoden med indelning i effektklasser
|
|
15. |
I tillägg 6 ska punkt 3.9 ersättas med följande: ”3.9 Beräkning av de viktade distansspecifika utsläppen De tidsbaserade viktade genomsnitten av utsläppen under provningen ska omvandlas till distansbaserade utsläpp en gång för datamängden från stadskörning och en gång för den totala datamängden enligt följande ekvationer:
Med hjälp av dessa ekvationer ska viktade genomsnitt beräknas för följande föroreningar för den totala trippen och för stadskörningsdelen av trippen:
|


|
16. |
De följande tilläggen 7a och 7b ska införas: ”Tillägg 7a Kontroll av total trippdynamik 1. INLEDNING I detta tillägg beskrivs beräkningarna för att kontrollera den totala trippdynamiken, för att fastställa det totala överskottet eller avsaknaden av dynamik under stads-, landsvägs- och motorvägskörning. 2. SYMBOLER
Index i avser tidssteg. Index j avser tidssteg med datauppsättningar med positiv acceleration. Index k avser kategori (t = total, u = stad, r = landsväg, m = motorväg).
3. TRIPPINDIKATORER 3.1 Beräkningar 3.1.1 Förbehandling av data Dynamiska parametrar såsom acceleration, v · apos eller RPA ska fastställas med en hastighetssignal med en noggrannhet av 0,1 % över 3 km/tim och en provtagningsfrekvens av 1 Hz. Detta noggrannhetskrav uppfylls i allmänhet av hjulhastighetssignaler (rotationshastighetssignaler). Hastighetsspåret ska kontrolleras för felaktiga eller osannolika avsnitt. Sådana avsnitt av fordonshastighetsspåret kännetecknas av steg, hopp, terasserade hastighetsspår eller uteblivna värden. Korta felaktiga avsnitt ska korrigeras, exempelvis med hjälp av datainterpolering eller riktmärkning mot en sekundär hastighetssignal. Alternativt kan korta trippar med felaktiga avsnitt uteslutas från den efterföljande dataanalysen. I ett andra steg ska accelerationsvärdena rangordnas i stigande ordning, i syfte att fastställa accelerationsupplösningen ares (minimivärde för acceleration > 0). Om ares ≤ 0,01 m/s 2 är mätningen av fordonshastigheten tillräckligt noggrann. Om 0,01 < ares ≤ rmax m/s2 ska utjämning utföras med hjälp av ett T4253-hannutjämningsfilter. Om ares > rmax m/s2 är trippen ogiltig. T4253-hannutjämningsfiltret utför följande beräkningar: Utjämnaren startar med en löpande median på 4, centrerad med en median på 2. Därefter återutjämnar den dessa värden genom att tillämpa en löpande median på 5, en löpande median på 3 och hannutjämning (löpande vägda genomsnitt). Restvärdena beräknas genom subtraktion av de utjämnade serierna från de ursprungliga serierna. Hela detta förfarande upprepas därefter på de beräknade restvärdena. De utjämnade restvärdena beräknas slutligen genom subtraktion av de utjämnade värdena som erhölls första gången genom förfarandet. Det korrekta hastighetsspåret utgör grunden för ytterligare beräkningar och den indelning i klasser som beskrivs i punkt 3.1.2. 3.1.2 Beräkning av sträcka, acceleration och v · a Följande beräkningar ska utföras under hela den tidsperiod som hastighetsspåret bygger på (med en upplösning på 1 Hz) från sekund 1 till sekund (sista sekunden). Sträckan per dataprov ska beräknas enligt följande: di = vi /3,6; i = 1 till Nt där
Accelerationen ska beräknas enligt följande: ai = (v i + 1 – v i – 1)/(2 · 3,6), i = 1 till Nt där ai är accelerationen i tidssteg i [m/s2]. För: i = 1: vi – 1 = 0, för: i = Nt : vi + 1 = 0. Produkten av fordonshastigheten per acceleration ska beräknas enligt följande: (v · a)i = vi · ai /3,6, i = 1 till Nt där (v · a)i är produkten av den faktiska fordonshastigheten per acceleration i tidssteg i [m2/s3 eller W/kg]. 3.1.3 Indelning av resultaten i klasser Efter beräkningen av ai och (v · a)i , ska värdena vi , di , ai och (v · a)i rangordnas i stigande ordning efter fordonshastigheten. Alla datauppsättningar med vi ≤ 60 km/tim tillhör hastighetsklassen stadskörning, alla datauppsättningar med 60 km/tim < vi ≤ 90 km/tim tillhör hastighetsklassen landsvägskörning och alla datauppsättningar med vi > 90 km/tim tillhör hastighetsklassen motorvägskörning. Antalet datauppsättningar med accelerationsvärden ai > 0,1 m/s2 ska vara minst 150 i varje hastighetsklass. För varje hastighetsklass ska den genomsnittliga fordonshastigheten
där Nk är det totala antal prover av stads-, landsvägs- respektive motorvägskörning. 3.1.4 Beräkning av v · apos_[95] per hastighetsklass Den 95:e percentilen av v · apos -värdena ska beräknas enligt följande: (v · a) i,k -värdena i varje hastighetsklass ska rangordnas i stigande ordning för alla datauppsättningar med ai,k ≥ 0,1 m/s2 och det totala antalet av dessa prover Mk ska fastställas. Percentilvärden ska sedan tilldelas (v · apos ) j,k -värden med ai,k ≥ 0,1 m/s2 enligt följande: Det lägsta v · apos -värdet tilldelas percentilen 1/Mk , det andra lägsta 2/Mk , det tredje lägsta 3/Mk och det högsta värdet Mk /Mk = 100 %. (v · apos ) k _[95] är (v · apos ) j,k -värdet, med j/Mk = 95 %. Om j/Mk = 95 % inte kan uppfyllas, ska (v · apos ) k _[95] beräknas genom linjär interpolering mellan de på varandra följande proven j och j + 1 med j/Mk = 95 % och (j + 1)/Mk > 95 %. Den relativa positiva accelerationen per hastighetsklass ska beräknas enligt följande: RPAk = Σ j (Δt · (v · apos ) j,k )/Σ idi,k , j = 1 till Mk,i = 1 till Nk,k = u,r,m där RPAk är den relativa positiva accelerationen för andelarna stads-, landsvägs- och motorvägskörning i [m/s2 eller kWs/(kg × km)],
4. KONTROLL AV TRIPPENS GILTIGHET 4.1.1 Kontroll av v × apos_[95] per hastighetsklass (med v i [km/tim]) Om och
är uppfyllda, är trippen ogiltig. Om 4.1.2 Kontroll av RPA per hastighetsklass Om Om Tillägg 7b Förfarande för att fastställa den sammanlagda positiva höjdökningen under en tripp 1. INLEDNING I detta tillägg beskrivs förfarandet för att fastställa den sammanlagda höjdökningen under en RDE-tripp. 2. SYMBOLER
3. ALLMÄNNA KRAV Den sammanlagda positiva höjdökningen under en RDE-tripp ska fastställas utifrån tre parametrar: fordonets momentana höjd över havet hGPS,i [m över havet] mätt med GPS, den momentana fordonshastigheten [km/tim] registrerad vid en frekvens av 1 Hz och den motsvarande tid t [s] som har förflutit sedan provningens start. 4. BERÄKNING AV SAMMANLAGD POSITIV HÖJDÖKNING 4.1 Allmänt Den sammanlagda positiva höjdökningen under en RDE-tripp ska beräknas i ett förfarande med tre steg, bestående av i) en bedömning och principgranskning av datakvaliteten, ii) en korrigering av momentana data för fordonets höjd över havet och iii) en beräkning av den sammanlagda positiva höjdökningen. 4.2 Bedömning och principgranskning av datakvaliteten Data för fordonets momentana hastighet ska kontrolleras med avseende på fullständighet. Korrigering för data som saknas är tillåten om luckorna håller sig inom de krav som anges i punkt 7 i tillägg 4, annars ska provningsresultaten ogiltigförklaras. Data för fordonets momentana höjd över havet ska kontrolleras med avseende på fullständighet. Dataluckor ska fyllas genom interpolering. Riktigheten av interpolerade data ska verifieras med hjälp av en topografisk karta. Det rekommenderas att korrigera interpolerade data om följande villkor gäller: |hGPS(t) – hmap(t)| > 40 m Korrigeringen av höjd över havet ska tillämpas så att: h(t) = hmap(t) där
4.3 Korrigering av data för fordonets momentana höjd över havet Höjden över havet h(0) vid trippens start d(0) ska mätas med GPS och uppgiftens korrekthet ska kontrolleras med hjälp av en topografisk karta. Avvikelsen får inte vara större än 40 m. Data för momentan höjd över havet h(t) ska korrigeras om följande villkor gäller: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) Korrigeringen av höjd över havet ska tillämpas så att: hcorr(t) = hcorr (t-1) där
När korrigeringen har slutförts har en giltig uppsättning data för höjd över havet etablerats. Denna datauppsättning ska användas för den slutliga beräkningen av den sammanlagda positiva höjdökningen enligt punkt 4.4. 4.4 Slutlig beräkning av sammanlagd positiv höjdökning 4.4.1 Upprättandet av en enhetlig rumslig upplösning Den totala sträcka dtot [m] som en tripp omfattar ska fastställas som summan av de momentana sträckorna d i. Den momentana sträckan d i ska fastställas enligt följande:
där
Den sammanlagda höjdökningen ska beräknas utifrån data med en konstant rumslig upplösning av 1 m från och med den första mätningen vid trippens start d(0). De enskilda datapunkterna med en upplösning av 1 m betecknas som vägpunkter, och kännetecknas av ett visst värde d för sträckan (t.ex. 0, 1, 2, 3 m…) och motsvarande höjd över havet h(d) [m ovanför havsnivån]. Höjden över havet för varje diskret vägpunkt d ska beräknas genom interpolering av den momentana höjden över havet hcorr(t) enligt följande:
där
4.4.2 Ytterligare datautjämning De data för höjd över havet som erhållits för varje diskret vägpunkt ska utjämnas genom ett förfarande i två steg; d a och d e betecknar den första respektive sista datapunkten (figur 1). Den första utjämningen ska göras enligt följande:
h int,sm,1(d) = h int,sm,1(d – 1 m) + road grade,1(d), d = da + 1 till de h int,sm,1(da ) = hint (da ) + road grade,1(da ) där
Den andra utjämningen ska göras enligt följande:
där
Figur 1 Illustration över förfarandet för att utjämna interpolerade signaler för höjd över havet 
4.4.3 Beräkning av det slutliga resultatet Den sammanlagda positiva höjdökningen ska beräknas genom att integrera alla positiva interpolerade och utjämnade väglutningar, dvs. roadgrade,2(d). Resultatet ska normaliseras genom den totala provningssträckan d tot och uttryckas i meter kumulativ höjdökning per hundra kilometer sträcka. 5. EXEMPEL Tabellerna 1 och 2 visar de steg som vidtas i syfte att beräkna den positiva höjdökningen på grundval av data som registrerats under en provning på väg som utförs med PEMS. Av utrymmesskäl visas här ett utdrag från 800 m och 160 s. 5.1 Bedömning och principgranskning av datakvalitet Bedömningen och principgranskningen av datakvaliteten består av två steg. För det första kontrolleras att data för fordonshastighet är fullständiga. Inga dataluckor när det gäller fordonshastighet förekommer i det aktuella dataprovet (se tabell 1). För det andra kontrolleras att data för höjd över havet är fullständiga. I den aktuella datauppsättningen saknas data för höjd över havet för sekunderna 2 och 3. Dessa luckor fylls genom interpolering av GPS-signalen. Dessutom kontrolleras GPS-data med hjälp av en topografisk karta. Denna kontroll inkluderar höjden över havet h(0) vid trippens start. Data för höjd över havet avseende sekunder 112–114 korrigeras på basis av en topografisk karta för att uppfylla följande villkor: hGPS(t) – hmap(t) < – 40 m Till följd av den utförda datakontrollen erhålls de data som anges i den femte kolumnen h(t). 5.2 Korrigering av data för fordonets momentana höjd över havet I ett nästa steg korrigeras data för höjd över havet avseende sekunderna 1–4, 111–112 och 159–160 med utgångspunkt från värdena för höjd över havet för sekunderna 0, 110 respektive 158 eftersom följande villkor gäller: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) Till följd av den utförda datakorrigeringen erhålls de data som anges i den sjätte kolumnen hcorr(t). Effekten av den tillämpade kontrollen och korrigeringen av data för höjd över havet illustreras i figur 2. 5.3 Beräkning av sammanlagd positiv höjdökning 5.3.1 Upprättandet av en enhetlig rumslig upplösning Den momentana sträckan di beräknas genom att dividera den momentana fordonshastigheten mätt i km/tim med 3,6 (kolumn 7 i tabell 1). Omberäkning av data för höjd över havet för att erhålla en enhetlig rumslig upplösning av 1 m ger de diskreta vägpunkterna d (kolumn 1 i tabell 2) och deras motsvarande värden för höjd över havet hint(d) (kolumn 7 i tabell 2). Höjden över havet för varje diskret vägpunkt d beräknas genom interpolering av den uppmätta momentana höjden över havet hcorr enligt följande:
5.3.2 Ytterligare datautjämning I tabell 2 är den första och den sista diskreta vägpunkten d a = 0 m respektive d e = 799 m. Data för höjd över havet för varje diskret vägpunkt utjämnas genom ett förfarande i två steg. Den första utjämningen består av följande:
vald för att visa utjämningen för d ≤ 200 m
vald för att visa utjämningen för 200 m < d < (599 m)
vald för att visa utjämningen för d ≥ (599 m) Den utjämnade och interpolerade höjden över havet beräknas enligt följande: h int,sm,1(0) = hint (0) + road grade,1(0) = 120,3 + 0,0033 ≈ 120,3033 m h int,sm,1(799) = h int,sm,1(798) + road grade,1(799) = 121,2550 – 0,0220 = 121,2330 m Den andra utjämningen består av följande:
vald för att visa utjämningen för d ≤ 200 m
vald för att visa utjämningen för 200 m < d < (599 )
vald för att visa utjämningen för d ≥ (599 m) 5.3.3 Beräkning av det slutliga resultatet Den sammanlagda positiva höjdökningen beräknas genom att integrera alla positiva interpolerade och utjämnade väglutningar, dvs. roadgrade,2(d). I det givna exemplet var den totala sträckan dtot = 139,7 km och alla positiva interpolerade och utjämnade väglutningar uppgick till 516 m. Således uppnåddes en sammanlagd positiv höjdökning på 516 × 100/139,7 = 370 m/100 km. Tabell 1 Korrigering av data för fordonets momentana höjd över havet
Tabell 2 Beräkning av väglutning
Figur 2 Effekten av kontroll och korrigering av data – Profilen för höjd över havet mätt med GPS hGPS(t), profilen för höjd över havet enligt topografisk karta hmap(t), profilen för höjd över havet som erhålls efter bedömning och principgranskning av datakvaliteten h(t) och korrigering hcorr(t) av data från tabell 1 
Figur 3 Jämförelse mellan den korrigerade profilen för höjd över havet hcorr(t) och den utjämnade och interpolerade höjden över havet hint,sm,1 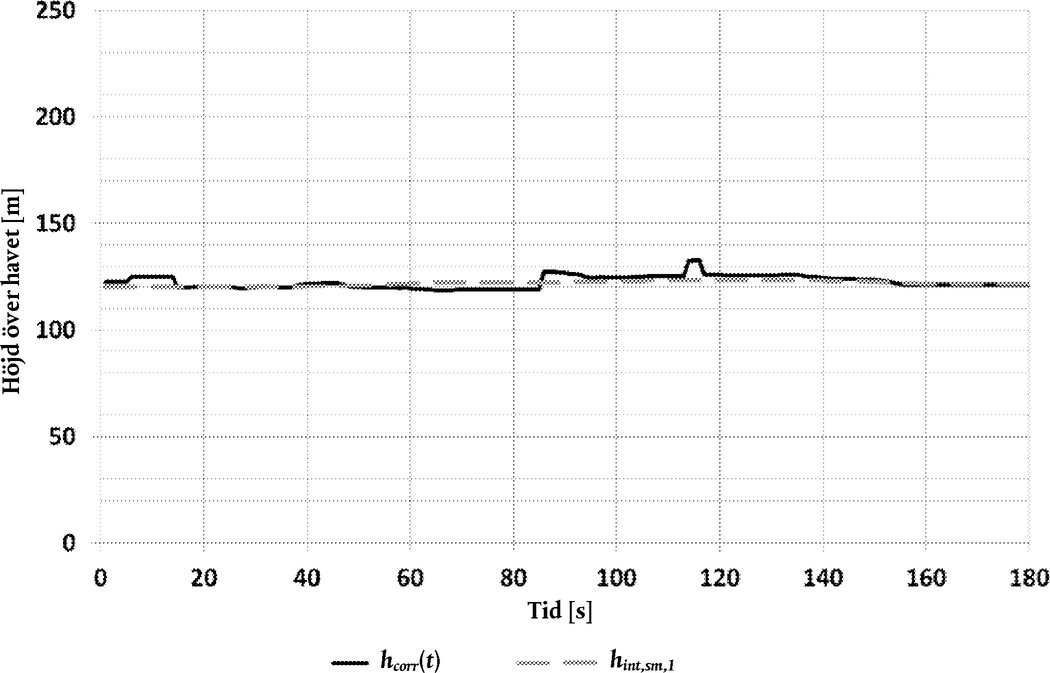
Tabell 2 Beräkning av den positiva höjdökningen
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 beräknas enligt följande:
beräknas enligt följande: ,
, 

 och
och  är uppfyllda, är trippen ogiltig.
är uppfyllda, är trippen ogiltig. och
och  är uppfyllda, är trippen ogiltig.
är uppfyllda, är trippen ogiltig. och RPA
och RPA















(1) Utsläppen av kolmonoxid ska mätas och registreras under RDE-provningar.
(2) Utsläppen av kolmonoxid ska mätas och registreras under RDE-provningar.