Samo izvirna besedila UN/ECE so pravno veljavna v skladu z mednarodnim javnim pravom. Status in datum začetka veljavnosti tega pravilnika je treba preveriti v najnovejši različici dokumenta UN/ECE TRANS/WP.29/343, ki je na voljo naslovu:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html.
Pravilnik št. 140 Ekonomske komisije Združenih narodov za Evropo (UN/ECE) – Enotne določbe o homologaciji osebnih avtomobilov glede na sisteme elektronskega nadzora stabilnosti (ESC) [2018/1592]
Vključuje vsa veljavna besedila do:
Dopolnila 2 izvirne različice Pravilnika – datum začetka veljavnosti: 29. december 2018
VSEBINA
PRAVILNIK
|
1. |
Področje uporabe |
|
2. |
Opredelitev pojmov |
|
3. |
Vloga za podelitev homologacije |
|
4. |
Homologacija |
|
5. |
Splošne zahteve |
|
6. |
Zahteve glede delovanja |
|
7. |
Zahteve glede zmogljivosti |
|
8. |
Preskusni pogoji |
|
9. |
Preskusni postopek |
|
10. |
Sprememba tipa vozila ali sistema ESC in razširitev homologacije |
|
11. |
Skladnost proizvodnje |
|
12. |
Kazni za neskladnost proizvodnje |
|
13. |
Dokončno prenehanje proizvodnje |
|
14. |
Nazivi in naslovi tehničnih služb, ki izvajajo homologacijske preskuse, in homologacijskih organov |
PRILOGE
|
1. |
Sporočilo |
|
2. |
Namestitev homologacijskih oznak |
|
3. |
Uporaba simulacije dinamične stabilnosti |
|
4. |
Orodje za simulacijo dinamične stabilnosti in njegovo potrjevanje |
|
5. |
Poročilo o preskusu funkcije stabilnosti vozila s simulacijskim orodjem |
1. PODROČJE UPORABE
1.1 Ta pravilnik se uporablja za homologacijo vozil kategorij M1 in N1 (1) glede na njihov sistem elektronskega nadzora stabilnosti.
1.2 Ta pravilnik ne zajema:
|
1.2.1 |
vozil, katerih konstrukcijsko določena hitrost ne presega 25 km/h; |
|
1.2.2 |
vozil, opremljenih za invalidne voznike. |
2. OPREDELITEV POJMOV
V tem pravilniku:
|
2.1 |
„homologacija vozila“ pomeni homologacijo tipa vozila glede na sistem elektronskega nadzora stabilnosti; |
|
2.2 |
„tip vozila“ pomeni kategorijo vozil, ki se ne razlikujejo v naslednjih bistvenih vidikih:
|
|
2.3 |
„največja masa“ pomeni največjo maso, ki jo je proizvajalec vozila določil kot tehnično dovoljeno (ta masa je lahko večja od „največje dovoljene mase“, ki jo določi državni upravni organ); |
|
2.4 |
„porazdelitev mase med osi“ pomeni porazdelitev vpliva sile težnosti na maso vozila in/ali njegovega tovora med osi; |
|
2.5 |
„obremenitev koles/osi“ pomeni navpično statično reakcijo (silo) površine ceste v dotikališču na kolesa osi; |
|
2.6 |
„Ackermannov krmilni kot“ pomeni kot, katerega tangens je medosna razdalja, deljena s polmerom obrata pri zelo nizki hitrosti; |
|
2.7 |
„sistem elektronskega nadzora stabilnosti (ESC)“ pomeni sistem, ki ima vse naslednje lastnosti:
|
|
2.8 |
„bočni pospešek“ pomeni sestavni del vektorja pospeška točke v vozilu, ki je pravokotna na os vozila x (vzdolžno) in vzporedna z ravnino ceste; |
|
2.9 |
„prekrmiljenje“ pomeni stanje, ko je hitrost spremembe smeri vozila višja od hitrosti spremembe smeri, ki bi bila pri dani hitrosti vozila posledica Ackermannovega krmilnega kota; |
|
2.10 |
„stranski zdrs ali odklon stranskega zdrsa“ pomeni obratno funkcijo tangente razmerja bočne hitrosti in vzdolžne hitrosti težišča vozila; |
|
2.11 |
„podkrmiljenje“ pomeni stanje, ko je hitrost spremembe smeri vozila nižja od hitrosti spremembe smeri, ki bi bila pri dani hitrosti vozila posledica Ackermannovega krmilnega kota; |
|
2.12 |
„hitrost spremembe smeri“ pomeni hitrost spremembe kota smeri vozila, merjeno v stopinjah na sekundo vrtenja okrog navpične osi skozi težišče vozila; |
|
2.13 |
„največji koeficient zaviranja (NKZ)“ pomeni mero za trenje med pnevmatiko in cestiščem na podlagi največjega pojemka kotaleče se pnevmatike; |
|
2.14 |
„skupni prostor“ pomeni območje, na katerem je lahko prikazanih več opozorilnih signalov, kazalnikov, identifikacijskih simbolov ali drugih sporočil, vendar ne hkrati; |
|
2.15 |
„faktor statične stabilnosti“ pomeni polovico širine koloteka vozila deljeno z višino težišča vozila, izraženo tudi kot SSF = T/2H, pri čemer je T širina koloteka (za vozila z več kot enim kolotekom se uporabi povprečje; za osi z dvojnimi kolesi se pri izračunu „T“ uporabijo zunanja kolesa), H pa višina težišča vozila. |
3. VLOGA ZA PODELITEV HOMOLOGACIJE
3.1 Vlogo za podelitev homologacije tipa vozila glede na sistem ESC vloži proizvajalec vozila ali njegov ustrezno pooblaščeni zastopnik.
3.2 Vlogi se v treh izvodih priložijo dokumenti, navedeni v nadaljevanju, in naslednji podatki:
|
3.2.1 |
opis tipa vozila glede na postavke iz odstavka 2.2. Navesti je treba številke in/ali simbole, ki opredeljujejo tip vozila in tip motorja; |
|
3.2.2 |
seznam ustrezno opredeljenih sestavnih delov sistema ESC; |
|
3.2.3 |
diagram sestavljenega sistema ESC in navedba položaja njegovih sestavnih delov na vozilu; |
|
3.2.4 |
podrobne risbe vsakega sestavnega dela, s pomočjo katerih je mogoče te dele enostavno prepoznati in ugotoviti, kje so nameščeni. |
3.3 Vozilo, ki je predstavnik tipa vozila v postopku homologacije, se predloži tehnični službi, ki izvaja homologacijske preskuse.
4. HOMOLOGACIJA
4.1 Če tip vozila, predložen v homologacijo v skladu s tem pravilnikom, izpolnjuje zahteve iz odstavkov 5, 6 in 7, se homologacija navedenega tipa vozila podeli.
4.2 Vsakemu homologiranemu tipu se dodeli homologacijska številka, pri čemer prvi dve števki označujeta spremembe, vključno z zadnjimi večjimi tehničnimi spremembami Pravilnika ob izdaji homologacije. Ista pogodbenica ne sme dodeliti enake številke drugemu tipu vozila glede na sistem elektronskega nadzora stabilnosti.
4.3 Obvestilo o podelitvi ali zavrnitvi homologacije tipa vozila v skladu s tem pravilnikom se pošlje pogodbenicam Sporazuma, ki uporabljajo ta pravilnik, na obrazcu, ki je v skladu z vzorcem iz Priloge 1 k temu pravilniku, skupaj s povzetkom informacij iz dokumentacije, navedene v odstavkih 3.2.1 do 3.2.4, pri čemer so risbe, ki jih predloži vložnik, v formatu, ki ni večji od A4 (210 × 297 mm), ali zložene na ta format in v ustreznem merilu.
4.4 Na vsakem vozilu, ki je v skladu s tipom vozila, homologiranim po tem pravilniku, je na vidnem in zlahka dostopnem mestu, opredeljenem na homologacijskem obrazcu, nameščena mednarodna homologacijska oznaka, sestavljena iz:
|
4.4.1 |
kroga, ki obkroža črko „E“ in številčno oznako države, ki je podelila homologacijo (3), in |
|
4.4.2 |
številke tega pravilnika, ki ji sledijo črka „R“, pomišljaj in homologacijska številka, na desni strani kroga iz odstavka 4.4.1. |
4.5 Če je vozilo v skladu s tipom vozila, homologiranim po enem ali več drugih pravilnikih, ki so priloženi Sporazumu, v državi, ki je podelila homologacijo v skladu s tem pravilnikom, simbola iz odstavka 4.4.1 ni treba ponoviti; v takem primeru se v navpičnih stolpcih na desni strani simbola iz odstavka 4.4.1 navedejo številke pravilnikov, homologacijske številke in dodatni simboli vseh pravilnikov, v skladu s katerimi je bila podeljena homologacija v državi, ki je podelila homologacijo v skladu s tem pravilnikom.
4.6 Homologacijska oznaka mora biti jasno berljiva in neizbrisna.
4.7 Homologacijska oznaka se namesti blizu napisne ploščice vozila ali nanjo.
4.8 V Prilogi 1 k temu pravilniku so prikazani primeri namestitev homologacijskih oznak.
5. SPLOŠNE ZAHTEVE
5.1 Vozila morajo biti opremljena s sistemom ESC, ki izpolnjuje zahteve glede delovanja iz odstavka 6 in zahteve glede zmogljivosti iz odstavka 7 v preskusnih postopkih iz odstavka 9 in v preskusnih pogojih iz odstavka 8 tega Pravilnika.
5.1.1 Namesto zahtev iz odstavka 5.1 so vozila kategorij M1 in N1 z maso v stanju, pripravljenem za vožnjo, večjo od 1 735 kg, lahko opremljena s funkcijo stabilnosti vozila, ki vključuje nadzor proti prevrnitvi in nadzor smeri ter izpolnjuje tehnične zahteve in prehodne določbe iz Priloge 21 k Pravilniku št. 13. Tem vozilom ni treba izpolnjevati zahtev glede delovanja iz odstavka 6 in zahtev glede zmogljivosti iz odstavka 7 v preskusnih postopkih iz odstavka 9 in v preskusnih pogojih iz odstavka 8 tega Pravilnika.
5.2 Sistem ESC mora biti zasnovan, izdelan in vgrajen tako, da kljub morebitnim tresljajem omogoča, da je vozilo pri običajni uporabi skladno z določbami tega pravilnika.
5.3 Sistem ESC mora biti zasnovan, izdelan in vgrajen zlasti tako, da je odporen proti koroziji in staranju, ki jima je izpostavljen.
5.4 Magnetna ali električna polja ne smejo negativno vplivati na delovanje sistema ESC. To se dokaže z izpolnjevanjem tehničnih zahtev in upoštevanjem prehodnih določb Pravilnika št. 10 z uporabo:
|
(a) |
sprememb 03 za vozila brez priklopnega sistema za napajanje sistema za shranjevanje električne energije z možnostjo ponovnega polnjenja (pogonski akumulatorji); |
|
(b) |
sprememb 04 za vozila s priklopnim sistemom za napajanje sistema za shranjevanje električne energije z možnostjo ponovnega polnjenja (pogonski akumulatorji). |
5.5 Celovita ocena varnosti zavornega sistema mora vključevati oceno varnostnih vidikov sistema ESC glede na njegov neposreden učinek na zavorni sistem, kot je določeno v zahtevah iz Pravilnika 13-H v zvezi s kompleksnimi elektronskimi krmilnimi sistemi. To se šteje za izpolnjeno ob predložitvi certifikata v skladu s Pravilnikom št. 13-H, ki vključuje sistem ESC, ki je v postopku homologacije.
5.6 Določbe za redni tehnični pregled sistemov ESC
5.6.1 Med rednim tehničnim pregledom mora biti mogoče potrditi pravilno stanje delovanja z opazovanjem opozorilnih signalov po vklopu.
5.6.2 V času homologacije je treba sredstva za zaščito pred preprostim nepooblaščenim spreminjanjem delovanja opozorilnih znakov opisati zaupno. Ta zahteva glede zaščite pa je izpolnjena tudi, kadar je na voljo sekundarni način preverjanja pravilnega stanja delovanja.
6. ZAHTEVE GLEDE DELOVANJA
Vsako vozilo, predloženo v homologacijo v skladu s tem pravilnikom, mora biti opremljeno s sistemom elektronskega nadzora stabilnosti (ESC), ki:
6.1 lahko zagotavlja zavorni navor na vsakem od štirih koles posamično (4) in ima nadzorni algoritem, ki izkorišča to zmogljivost;
6.2 lahko deluje pri vseh hitrostih vozila, v vseh fazah vožnje, vključno s pospeševanjem, iztekanjem in zmanjševanjem hitrosti (vključno z zaviranjem), razen:
|
6.2.1 |
ko je voznik izklopil ESC; |
|
6.2.2 |
ko je hitrost vozila manjša od 20 km/h; |
|
6.2.3 |
po zaključku začetnega zagonskega samopreskusa in preverjanj verodostojnosti največ dve minuti pri vožnji v pogojih iz odstavka 9.10.2; |
|
6.2.4 |
pri vzvratni vožnji vozila; |
6.3 se lahko aktivira, tudi če je aktiviran protiblokirni zavorni sistem ali sistem za preprečevanje zdrsa pogonskih koles.
7. ZAHTEVE GLEDE ZMOGLJIVOSTI
Med vsakim preskusom, ki se izvaja v preskusnih pogojih iz odstavka 8 in v preskusnem postopku iz odstavka 9.9, mora vozilo z vklopljenim sistemom ESC izpolnjevati merila smerne stabilnosti iz odstavkov 7.1 in 7.2 ter merilo odzivnosti iz odstavka 7.3 med vsakim od navedenih preskusov, ki se izvajajo z volanskim kotom (5) 5A ali večjim, vendar omejenim v skladu z odstavkom 9.9.4, pri čemer je A volanski kot, izračunan v odstavku 9.6.1.
Če se vozilo fizično preskusi v skladu z odstavkom 8, se skladnost različic ali variant istega tipa vozila lahko dokaže z računalniško simulacijo, ki upošteva preskusne pogoje iz odstavka 8 in preskusni postopek iz odstavka 9.9. Uporaba simulatorja je opredeljena v Prilogi 4 k temu pravilniku.
7.1 Hitrost spremembe smeri, izmerjena 1 sekundo po zaključku sinusnega krmilnega manevra s prekinitvijo krmiljenja (čas T0 + 1 na sliki 1) ne sme presegati 35 odstotkov prve najvišje vrednosti hitrosti spremembe smeri, zabeležene, potem ko volanski kot spremeni znak (med prvo in drugo najvišjo vrednostjo) ( na sliki 1) v istem preskusu.
na sliki 1) v istem preskusu.
Slika 1
Položaj volana in podatki o hitrosti spremembe smeri, ki se uporabljajo za ocenjevanje bočne stabilnosti
 Besedilo slike
Besedilo slike
7.2 Hitrost spremembe smeri, izmerjena 1,75 sekunde po zaključku sinusnega krmilnega manevra s prekinitvijo krmiljenja, ne sme presegati 20 odstotkov prve najvišje vrednosti hitrosti spremembe smeri, zabeležene, potem ko volanski kot spremeni znak (med prvo in drugo najvišjo vrednostjo) v istem preskusu.
7.3 Bočni premik težišča vozila glede na njegovo začetno ravno pot mora biti najmanj 1,83 m za vozila s skupno maso 3 500 kg ali manj in 1,52 m za vozila z največjo maso več kot 3 500 kg, če se izračuna 1,07 sekunde po začetku krmiljenja (BOS). BOS je opredeljen v odstavku 9.11.6.
7.3.1 Bočni premik se izračuna z dvojnim integriranjem glede na čas merjenja bočnega pospeška v težišču vozila, in sicer po naslednji formuli:

Pri homologacijskem preskušanju je dovoljena tudi druga metoda merjenja, če se doseže vsaj enakovredna raven točnosti kot pri metodi dvojnega integriranja.
7.3.2 Čas t = 0 za integriranje je trenutek začetka krmiljenja, ki se imenuje začetek krmiljenja (BOS). BOS je opredeljen v odstavku 9.11.6.
7.4 Zaznava okvare ESC
Vozilo mora biti opremljeno z opozorilno svetilko, ki voznika s signalom opozori, da je prišlo do okvare, ki vpliva na proizvajanje ali prenos nadzornih ali odzivnih signalov v sistemu elektronskega nadzora stabilnosti vozila.
7.4.1 Opozorilni signal za okvaro ESC:
|
7.4.1.1 |
mora izpolnjevati ustrezne tehnične zahteve iz Pravilnika št. 121; |
|
7.4.1.2 |
razen v primerih iz odstavka 7.4.1.3 mora opozorilni signal za okvaro ESC zasvetiti v primeru okvare in svetiti v pogojih iz odstavka 7.4, dokler okvara traja, če je sistem za blokiranje vžiga v položaju „on“ (vklopljen); |
|
7.4.1.3 |
razen v primerih iz odstavka 7.4.2 se mora vsak opozorilni signal za okvaro ESC aktivirati zaradi preverjanja delovanja opozorilne svetilke, ko je sistem za blokiranje vžiga v položaju „on“ (vklopljen) in motor ne deluje ali ko je sistem za blokiranje vžiga v položaju med „on“ (vklopljen) in „start“ (zagon), ki ga proizvajalec določi kot položaj preverjanja; |
|
7.4.1.4 |
mora ugasniti v naslednjem ciklu vžiga, ko je okvara odpravljena v skladu z odstavkom 9.10.4; |
|
7.4.1.5 |
lahko se uporablja tudi za označevanje okvare povezanih sistemov/funkcij, vključno s preprečevanjem zdrsa pogonskih koles, pomočjo pri stabilnosti priklopnika, upravljanjem kotne zavore in drugimi podobnimi funkcijami, ki za delovanje uporabljajo dušilko in/ali upravljanje posameznega navora in imajo z ESC skupne sestavne dele. |
7.4.2 Aktiviranje opozorilnega signala za okvaro ESC ni potrebno, ko deluje zapora zaganjalnika.
7.4.3 Zahteva iz odstavka 7.4.1.3 se ne uporablja za opozorilne signale, prikazane v skupnem prostoru.
7.4.4 Proizvajalec lahko za označevanje posega sistema ESC in/ali sistemov, povezanih z ESC (navedenih v odstavku 7.4.1.5), ter za delovanje ESC na odklon krmiljenega kolesa ali več krmiljenih koles za zagotovitev stabilnosti vozila uporabi utripanje opozorilnega signala za okvaro ESC.
7.5 Upravljalni element „izklop ESC“ in drugi upravljalni elementi sistema
Proizvajalec lahko vključi upravljalni element „izklop ESC“, ki mora zasvetiti, ko se vklopijo žarometi vozila, in katerega namen je, da preklopi sistem ESC v način delovanja, v katerem ta ne izpolnjuje več zahtev glede zmogljivosti iz odstavkov 7, 7.1, 7.2 in 7.3. Proizvajalci lahko zagotovijo tudi upravljalne elemente za druge sisteme, ki imajo pomožni učinek na delovanje ESC. Upravljalni elementi obeh vrst, ki preklopijo sistem ESC v način delovanja, v katerem ta morda ne izpolnjuje več zahtev glede zmogljivosti iz odstavkov 7, 7.1, 7.2 in 7.3, so dovoljeni, če sistem izpolnjuje tudi zahteve iz odstavkov 7.5.1, 7.5.2 in 7.5.3.
7.5.1 Na začetku vsakega novega cikla vžiga se mora sistem ESC vozila vedno vrniti v proizvajalčev privzeti način, ki izpolnjuje zahteve iz odstavkov 6 in 7, ne glede na način, ki ga je voznik prej izbral. Ni pa treba, da se sistem ESC vozila vrne v način delovanja, ki izpolnjuje zahteve iz odstavkov 7 do 7.3 po začetku vsakega novega cikla vžiga, če:
|
7.5.1.1 |
se vozilo uporablja v konfiguraciji štirikolesnega pogona, ki jo voznik izbere za terensko vožnjo pri nizki hitrosti in ki hkrati blokira pogonske prestave na sprednji in zadnji osi ter zagotavlja dodatno zmanjševalno prestavno razmerje med vrtilno frekvenco motorja in hitrostjo vozila najmanj 1,6; ali |
|
7.5.1.2 |
je voznik izbral konfiguracijo štirikolesnega pogona, ki je namenjena za vožnjo pri višjih hitrostih po snegu, pesku ali blatnih cestah in ki hkrati blokira pogonske prestave na sprednji in zadnji osi, pod pogojem, da vozilo v tem načinu izpolnjuje zahteve glede zmogljivosti stabilnosti iz odstavkov 7.1 in 7.2 v preskusnih pogojih iz odstavka 8. Če pa ima sistem več kot en način delovanja ESC, ki izpolnjuje zahteve iz odstavkov 7.1 in 7.2 s konfiguracijo vožnje, ki je bila izbrana za prejšnji cikel vžiga, se mora ESC na začetku vsakega novega cikla vžiga vrniti v proizvajalčev privzeti način ESC za navedeno konfiguracijo vožnje. |
7.5.2 Upravljalni element, katerega edini namen je, da preklopi sistem ESC v način delovanja, v katerem ta ne izpolnjuje več zahtev glede zmogljivosti iz odstavkov 7, 7.1, 7.2 in 7.3, mora izpolnjevati ustrezne tehnične zahteve iz Pravilnika št. 121.
7.5.3 Upravljalni element sistema ESC, katerega namen je, da preklopi sistem ESC v različne načine delovanja, od katerih najmanj eden ne izpolnjuje več zahtev glede zmogljivosti iz odstavkov 7, 7.1, 7.2 in 7.3, mora izpolnjevati ustrezne tehnične zahteve iz Pravilnika št. 121.
V primeru, ko se način delovanja sistema ESC upravlja z večfunkcijskim upravljalnim elementom, mora biti na voznikovem prikazovalniku jasno označen položaj upravljalnega elementa za ta način s simbolom „off“ za sistem elektronskega nadzora stabilnosti, kot je opredeljen v Pravilniku št. 121.
7.5.4 Ni potrebno, da je upravljalni element drugega sistema, katerega stranski učinek je, da preklopi sistem v ESC v način delovanja, v katerem ta ne izpolnjuje več zahtev glede zmogljivosti iz odstavkov 7, 7.1, 7.2 in 7.3, označen s simbolom „ESC Off“ (izklop ESC) iz odstavka 7.5.2.
7.6 Opozorilni signal „ESC Off“ (izklop ESC)
Če se proizvajalec odloči za namestitev upravljalnega elementa, ki izklopi ali zmanjša zmogljivost sistema ESC na podlagi odstavka 7.5, morajo biti zahteve glede opozorilnega signala iz odstavkov 7.6.1 do 7.6.4 izpolnjene, da je voznik opozorjen o stanju oviranega ali zmanjšanega delovanja sistema ESC. Ta zahteva se ne uporablja za način iz odstavka 7.5.1.2, ki ga izbere voznik.
7.6.1 Proizvajalec vozila mora zagotoviti opozorilni signal, ki označuje, da je vozilo v načinu delovanja, v katerem ne more izpolnjevati zahtev iz odstavkov 7, 7.1, 7.2 in 7.3, če je tak način zagotovljen.
7.6.2 Opozorilni signal „ESC Off“
|
7.6.2.1 |
mora izpolnjevati ustrezne tehnične zahteve iz Pravilnika št. 121; |
|
7.6.2.2 |
mora svetiti, dokler je ESC v načinu delovanja, v katerem ne more izpolnjevati zahtev iz odstavkov 7, 7.1, 7.2 in 7.3; |
|
7.6.2.3 |
razen v primerih iz odstavkov 7.6.3. in 7.6.4 se mora vsak opozorilni signal „ESC Off“ aktivirati zaradi preverjanja delovanja opozorilne svetilke, ko je sistem za blokiranje vžiga v položaju „on“ (vklopljeno) in motor ne deluje ali ko je sistem za blokiranje vžiga v položaju med „on“ (vklopljen) in „start“ (zagon), ki ga proizvajalec določi kot položaj preverjanja; |
|
7.6.2.4 |
mora ugasniti, ko se sistem ESC vrne v proizvajalčev privzeti način. |
7.6.3 Aktiviranje opozorilnega signala „ESC Off“ ni potrebno, ko deluje zapora zaganjalnika.
7.6.4 Zahteva iz odstavka 7.6.2.3 tega oddelka ne velja za opozorilne signale, prikazane v skupnem prostoru.
7.6.5 Proizvajalec lahko uporabi opozorilni signal „ESC Off“ za označevanje ravni delovanja ESC, ki je drugačna od proizvajalčevega privzetega načina, tudi če bi vozilo na navedeni ravni delovanja ESC izpolnjevalo zahteve iz odstavkov 7, 7.1, 7.2 in 7.3 tega oddelka.
7.7 Tehnična dokumentacija sistema ESC
Dokumentacija mora vključevati dokumentacijo proizvajalca vozila, kot je določena v odstavkih 7.7.1 do 7.7.4, kot potrditev, da je vozilo opremljeno s sistemom ESC, ki ustreza opredelitvi „sistema ESC“ iz odstavka 2.7 tega pravilnika.
7.7.1 Diagram sistema, ki označuje vso strojno opremo sistema ESC. V diagramu morajo biti označeni vsi sestavni deli, ki se uporabljajo za ustvarjanje zavornega navora na vsakem kolesu, določanje hitrosti spremembe smeri vozila, oceno stranskega zdrsa ali izpeljanko stranskega zdrsa in voznikovo krmiljenje.
7.7.2 Kratka obrazložitev, v kateri so opisane osnovne operativne značilnosti sistema ESC. Ta obrazložitev mora vsebovati opis sposobnosti sistema, da omogoča delovanje zavornega navora na vsako kolo, in načina, kako sistem med aktiviranjem sistema ESC spreminja pogonski navor, ter prikazati, da je hitrost spremembe smeri vozila določena neposredno, tudi v pogojih, v katerih ni na voljo informacij o hitrosti koles. Obrazložitev mora tudi določati razpon hitrosti vozila in faze vožnje (pospešek, pojemek, iztekanje, med aktiviranjem sistema ABS ali preprečevanja zdrsa pogonskih koles), v katerih se sistem ESC lahko aktivira.
7.7.3 Logični diagram. Ta diagram podpira obrazložitev iz odstavka 7.7.2.
7.7.4 Podatki o podkrmiljenju. Opis primernih vnosov v računalnik, ki upravljajo strojno opremo sistema ESC, in kako se uporabljajo za omejevanje podkrmiljenja vozila.
8. PRESKUSNI POGOJI
8.1 Okoljski pogoji
8.1.1 Temperatura okolice mora biti od 0 °C do 45 °C.
8.1.2 Najvišja hitrost vetra ne sme presegati 10 m/s za vozila s SSF > 1,25 in 5 m/s za vozila s SSF ≤ 1,25.
8.2 Preskusna površina ceste
8.2.1 Preskusi se morajo izvajati na suhi, enotni in dobro asfaltirani površini. Površine z nepravilnostmi in valovite površine, kot so nagibi in velike razpoke, niso primerne.
8.2.2 Če ni določeno drugače, mora imeti preskusna površina ceste nazivni (6) največji koeficient zaviranja (NKZ) 0,9, pri merjenju s:
|
8.2.2.1 |
standardno referenčno preskusno pnevmatiko Ameriškega združenja za testiranje in materiale (ASTM) E1136, v skladu z metodo ASTM E1337-90 pri hitrosti 40 milj na uro, ali |
|
8.2.2.2 |
preskusno metodo k, ki je opredeljena v Dodatku 2 k Prilogi 6 k Pravilniku št. 13-H. |
8.2.3 Preskusna površina mora imeti stalen nagib med 0 in 1 odstotkom.
8.3 Stanje vozila
8.3.1 Sistem ESC mora biti omogočen za vsa preskušanja.
8.3.2 Masa vozila. Posoda za gorivo mora biti napolnjena do najmanj 90 odstotkov prostornine, skupna notranja obremenitev mora biti 168 kg, in sicer preskusni voznik, približno 59 kg preskusne opreme (avtomatska krmilna naprava, sistem za pridobivanje podatkov in oskrba krmilne naprave z električno energijo) in dodatne uteži, ki nadomestijo morebitno premajhno težo preskusnega voznika in preskusne opreme. Kadar je to potrebno, je treba dodatne uteži položiti na tla za sprednjim potniškim sedežem ali po potrebi v predel za noge potnika spredaj. Vse dodatne uteži je treba zavarovati, da se med preskušanjem ne premikajo.
8.3.3 Pnevmatike. Pnevmatike se napolnijo do tlaka v mrzlih pnevmatikah, ki ga priporoča proizvajalec, npr. kot je določeno na tablici vozila ali na oznaki o tlaku v pnevmatikah. Lahko so nameščene cevi za preprečevanje izpraznjenja.
8.3.4 Prevese. Za preskušanje se lahko uporabljajo prevese, če je to potrebno zaradi varnosti preskusnih voznikov. V tem primeru se za vozila s faktorjem statične stabilnosti (SSF) ≤ 1,25 uporablja naslednje:
|
8.3.4.1 |
vozila, ki imajo v stanju, pripravljenem za vožnjo, maso, manjšo od 1 588 kg, morajo biti opremljena z „lahkimi“ prevesami. Največja masa lahkih preves sme biti 27 kg, največji vrtilni vztrajnostni moment pa 27 kg m2; |
|
8.3.4.2 |
vozila, ki imajo v stanju, pripravljenem za vožnjo, maso od 1 588 kg do 2 722 kg, morajo biti opremljena s „standardnimi“ prevesami. Največja masa standardnih preves sme biti 32 kg, največji vrtilni vztrajnostni moment pa 35,9 kg m2; |
|
8.3.4.3 |
vozila, ki imajo v stanju, pripravljenem za vožnjo, maso 2 722 kg ali več, morajo biti opremljena s „težkimi“ prevesami. Največja masa težkih preves sme biti 39 kg, največji vrtilni vztrajnostni moment pa 40,7 kg m2. |
8.3.5 Avtomatska krmilna naprava. V odstavkih 9.5.2, 9.5.3, 9.6 in 9.9 se uporablja krmilni robot, programiran za izvajanje zahtevanega vzorca krmiljenja. Krmilna naprava mora biti sposobna zagotavljati krmilni navor od 40 do 60 Nm. Krmilna naprava lahko ta navor zagotavlja, ko deluje z volanskimi hitrostmi do 1 200 stopinj na sekundo.
9. PRESKUSNI POSTOPKI
9.1 Pnevmatike vozila se napolnijo do tlaka v mrzlih pnevmatikah, ki ga priporoča proizvajalec, npr. kot je določeno na tablici vozila ali na oznaki o tlaku v pnevmatikah.
9.2 Preverjanje žarnice opozorilne svetilke. Ko vozilo miruje in je sistem za blokiranje vžiga v položaju „lock“ (blokiran) ali „off“ (izklopljen), se vžig vklopi s premikom v položaj „on“ (vklopljen) ali, kjer je primerno, v ustrezen položaj za preverjanje opozorilne svetilke. Opozorilni signal za okvaro ESC zasveti zaradi preverjanja delovanja opozorilne svetilke, kot je določeno v odstavku 7.4.1.3, če pa je vozilo opremljeno tudi z opozorilnim signalom „ESC Off“ (izklop ESC), med preverjanjem delovanja opozorilne svetilke zasveti tudi ta signal, kot je določeno v odstavku 7.6.2.3. Pri opozorilnem signalu, ki je prikazan v skupnem prostoru, kot je določeno v odstavkih 7.4.3 in 7.6.4, preverjanje žarnice opozorilne svetilke ni potrebno.
9.3 Preverjanje upravljalnega elementa „izklop ESC“ Pri vozilih, ki so opremljena z upravljalnim elementom „izklop ESC“, se pri mirujočem vozilu in ko je sistem za blokiranje vžiga v položaju „lock“ (blokiran) ali „off“ (izklopljen), sistem za blokiranje vžiga vklopi s premikom v položaj „on“ (vklopljen). Upravljalni element „izklop ESC“ se aktivira in preveri se, ali zasveti opozorilni signal „ESC Off“, kot je določeno v odstavku 7.6.2. Sistem za blokiranje vžiga se obrne v položaj „lock“ (blokiran) ali „off“ (izklopljen). Nato se sistem za blokiranje vžiga spet vklopi s premikom v položaj „on“ (vklopljen) in preveri se, ali je opozorilni signal „ESC Off“ ugasnil, kar kaže, da se je sistem ESC vrnil v prvotni položaj, kot je določeno v odstavku 7.5.1.
9.4 Kondicioniranje zavor
Zavore vozila se kondicionirajo tako, kot je opisano v odstavkih 9.4.1 do 9.4.4.
9.4.1 Deset ustavljanj se opravi pri hitrosti 56 km/h, s povprečnim pojemkom približno 0,5 g.
9.4.2 Takoj po desetih ustavljanjih pri hitrosti 56 km/h se še trikrat ustavi pri hitrosti 72 km/h pri višjem pojemku.
9.4.3 Med ustavljanji iz odstavka 9.4.2 se na zavorno stopalko deluje z zadostno silo, da protiblokirni zavorni sistem vozila (ABS) deluje v pretežnem delu vsakega zaviranja.
9.4.4 Po zadnjem ustavljanju iz odstavka 9.4.2 se vozilo pet minut vozi s hitrostjo 72 km/h, da se zavore ohladijo.
9.5 Kondicioniranje pnevmatik
Pnevmatike se kondicionirajo po postopku iz odstavkov 9.5.1 do 9.5.3, da se obrabi sijaj kalupa in da se doseže obratovalna temperatura tik pred začetkom preskusov iz odstavkov 9.6 in 9.9.
9.5.1 Preskusno vozilo se vozi v krogu s premerom 30 metrov s hitrostjo, ki v treh krogih v smeri urinega kazalca, ki mu sledijo trije krogi v nasprotni smeri urinega kazalca, proizvaja bočni pospešek približno 0,5 do 0,6 g.
9.5.2 S sinusoidnim vzorcem krmiljenja pri frekvenci 1 Hz, največjo amplitudo volanskega kota, ki ustreza največjemu bočnemu pospešku 0,5 do 0,6 g, in hitrostjo vozila 56 km/h se vozilo vozi v štirih prehodih in v vsakem prehodu naredi 10 ciklov sinusoidnega krmiljenja.
9.5.3 Amplituda volanskega kota zadnjega cikla zadnjega prehoda mora biti dvakratnik amplitude drugih ciklov. Najdaljši dovoljen čas med vsakim krogom in prehodom je pet minut.
9.6 Postopek počasi naraščajočega postopka krmiljenja
Vozilo se preskusi v dveh serijah preskusov s počasi naraščajočim krmiljenjem pri stalni hitrosti 80 ± 2 km/h in vzorcem krmiljenja, ki se povečuje za 13,5 stopinj vsako sekundo, dokler ni dosežen bočni pospešek približno 0,5 g. Vsaka serija preskusov se trikrat ponovi. Pri eni seriji se uporablja krmiljenje v nasprotni smeri urinega kazalca, pri drugih pa krmiljenje v smeri urinega kazalca. Najdaljši dovoljen čas med vsakim preskušanjem je pet minut.
9.6.1 Med preskusi počasi naraščajočega krmiljenja se določi količina „A“. „A“ je volanski kot v stopinjah, ki povzroča stabilno stanje bočnega pospeška (popravljen z metodo, določeno v odstavku 9.11.3) 0,3 g za preskusno vozilo. Pri vsakem od šestih preskusov počasi naraščajočega krmiljenja se z linearno regresijo izračuna A do 0,1 stopinje. Iz absolutne vrednosti šestih vrednosti A se izračuna povprečje, ki se zaokroži na 0,1 stopinje natančno, in to je končna vrednost A, uporabljena spodaj.
9.7 Ko je določena količina A, se brez zamenjave pnevmatik tik pred izvedbo preskusa sinusnega krmilnega manevra s prekinitvijo krmiljenja iz odstavka 9.9 izvede postopek kondicioniranja pnevmatik, opisan v odstavku 9.5. Prva serija preskusov sinusnega krmilnega manevra s prekinitvijo krmiljenja se začne v dveh urah po zaključku preskusov počasi naraščajočega krmiljenja iz odstavka 9.6.
9.8 Treba je preveriti, ali je sistem ESC omogočen, in sicer tako, da se preveri, da opozorilni signal za okvaro ESC in opozorilni signal „ESC Off“ (če je vgrajen) ne svetita.
9.9 Preskus posega in odzivnosti pri prekrmiljenju s sinusnim krmilnim manevrom s prekinitvijo krmiljenja
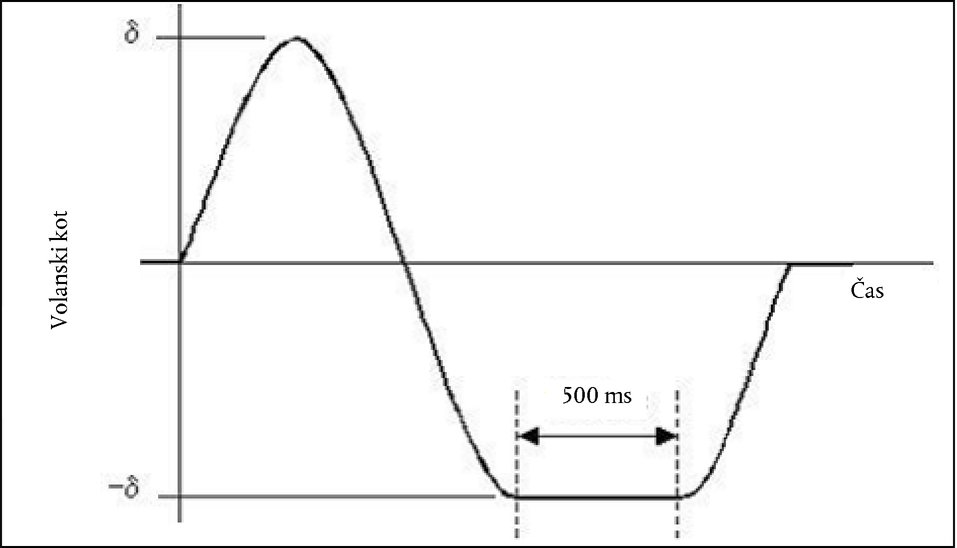
Vozilo se preskusi v dveh serijah preskusov z vzorcem krmiljenja sinusnega vala pri frekvenci 0,7 Hz s 500 ms zamikom, ki se začne pri drugi najvišji amplitudi, kot je prikazano na sliki 2 (preskusi sinusnega krmilnega manevra s prekinitvijo krmiljenja). Pri eni seriji se v prvi polovici cikla uporablja krmiljenje v nasprotni smeri urinega kazalca, pri drugih pa se v prvi polovici cikla uporablja krmiljenje v smeri urinega kazalca. Vozilo se lahko med preskusi v mirujočem stanju 1,5 do 5 minut ohlaja.
Slika 2
Sinusni krmilni manever s prekinitvijo krmiljenja
 Besedilo slike
Besedilo slike
9.9.1 Gibanje krmiljenja se začne, ko vozilo vozi z izklopljenim motorjem v visoki prestavi s hitrostjo 80 ± 2 km/h.
9.9.2 Amplituda krmiljenja za začetni preskus vsake serije je 1,5 A, pri čemer je A volanski kot, določen v odstavku 9.6.1.
9.9.3 V vsaki seriji preskusov se amplituda krmiljenja pri vsakem preskusu poveča za 0,5 A, pod pogojem, da taka amplituda krmiljenja ni višja od amplitude v zadnjem preskusu, določene v odstavku 9.9.4.
9.9.4 Amplituda krmiljenja v zadnjem preskusu v vsaki seriji je 6,5 A ali 270 stopinj, kar je večje, če je izračunana velikost 6,5 A nižja ali enaka 300 stopinjam. Če je katero koli povečanje 0,5 A do 6,5 A večje od 300 stopinj, mora biti amplituda krmiljenja v zadnjem preskusu 300 stopinj.
9.9.5 Po zaključku obeh serij preskušanj se opravi naknadna obdelava podatkov o hitrosti spremembe smeri in bočnem pospešku, kot je določeno v odstavku 9.11.
9.10 Zaznava okvare ESC
9.10.1 Ena ali več okvar ESC se simulira tako, da se prekine napajanje katerega koli sestavnega dela ESC ali da se prekine električna povezava med sestavnimi deli ESC (z izklopljenim pogonom vozila). Pri simuliranju okvare ESC se električne povezave za opozorilne svetilke in/ali neobvezne upravljalne elemente sistema ESC ne smejo prekiniti.
9.10.2 Pri mirujočem vozilu in ko je sistem za blokiranje vžiga v položaju „lock“ (blokiran) ali „off“ (izklopljen), se sistem za blokiranje vžiga vklopi s premikom v položaj „start“ (zagon) in motor se zažene. Vozilo se vozi naprej, dokler ne doseže hitrosti 48 ± 8 km/h. Najpozneje v 30 sekundah po zagonu motorja in v dveh minutah pri tej hitrosti je treba vsaj enkrat in z enim zaviranjem gladko zaviti levo in desno, ne da se izgubi smerna stabilnost. Treba je preveriti, ali do konca teh manevrov kazalnik okvare ESC zasveti v skladu z odstavkom 7.4.
9.10.3 Vozilo je treba ustaviti in sistem za blokiranje vžiga premakniti v položaj „off“ (izklopljen) ali „lock“ (blokiran). Po petih minutah je treba sistem za blokiranje vžiga vozila premakniti v položaj „start“ (zagon) in zagnati motor. Treba je preveriti, ali kazalnik okvare ESC spet zasveti, da opozori na okvaro, in sveti, dokler motor deluje ali dokler se napaka ne odpravi.
9.10.4 Sistem za blokiranje vžiga se premakne v položaj „off“ (izklopljen) ali „lock“ (blokiran). Sistem ESC je treba vrniti v prvotni položaj običajnega delovanja ter sistem vžiga premakniti v položaj „start“ (zagon) in zagnati motor. Še enkrat je treba opraviti manever, opisan v odstavku 9.10.2, in preveriti, ali je opozorilni signal ugasnil v tem času ali takoj po tem.
9.11 Naknadna obdelava podatkov – izračuni za metriko učinka
Meritve in izračune hitrosti spremembe smeri in bočnega premika je treba obdelati s tehnikami, določenimi v odstavkih 9.11.1 do 9.11.8.
9.11.1 Neobdelani podatki o volanskem kotu se filtrirajo z 12-polnim brezfaznim filtrom Butterworth in mejno frekvenco 10 Hz. Filtrirani podatki se nato nastavijo na nič, da se s pomočjo statičnih podatkov pred preskusom odstrani izravnava senzorja.
9.11.2 Neobdelani podatki o hitrosti spremembe smeri se filtrirajo z 12-polnim brezfaznim filtrom Butterworth in mejno frekvenco 6 Hz. Filtrirani podatki se nato nastavijo na nič, da se s pomočjo statičnih podatkov pred preskusom odstrani izravnava senzorja.
9.11.3 Neobdelani podatki o bočnem pospešku se filtrirajo z 12-polnim brezfaznim filtrom Butterworth in mejno frekvenco 6 Hz. Filtrirani podatki se nato nastavijo na nič, da se s pomočjo statičnih podatkov pred preskusom odstrani izravnava senzorja. Podatki o bočnem pospešku v težišču vozila se določijo z odstranitvijo učinkov, ki jih povzroči nagib karoserije vozila, in s preoblikovanjem koordinat se popravi namestitev senzorja. Pri zbiranju podatkov je merilnik bočnega pospeška nameščen čim bližje položaju vzdolžnega in bočnega težišča vozila.
9.11.4 Volanska hitrost se določi z razlikovanjem filtriranih podatkov o volanskem kotu. Podatki o volanski hitrosti se nato filtrirajo s filtrom drsečega povprečja 0,1 sekundnega delovanja.
9.11.5 Podatkovni kanali bočnega pospeška, hitrosti spremembe smeri in volanskega kota se nastavijo na nič z opredeljenim „razponom nastavitve na nič“. Metode določanja razpona nastavitve na nič so opredeljene v odstavkih 9.11.5.1 in 9.11.5.2.
9.11.5.1 S podatki o volanski hitrosti, izračunanimi z metodami, opisanimi v odstavku 9.11.4, se določi prvi trenutek, ko volanska hitrost preseže 75 stopinj/sekundo. Od tega trenutka mora volanska hitrost najmanj 200 ms presegati 75 stopinj/sekundo. Če drugi pogoj ni izpolnjen, se določi naslednji trenutek, ko volanska hitrost preseže 75 stopinj/sekundo, in se znova preveri pogoj 200 ms. Ta postopek se ponavlja, dokler nista izpolnjena oba pogoja.
9.11.5.2 „Razpon nastavitve na nič“ je opredeljen kot obdobje 1,0 sekunde pred trenutkom, ko volanska hitrost preseže 75 stopinj/sekundo (tj. trenutek, ko volanska hitrost preseže 75 stopinj/sekundo, opredeljuje konec „razpona nastavitve na nič“).
9.11.6 Začetek krmiljenja (BOS) je opredeljen kot prvi trenutek, ko filtrirani podatki o volanskem kotu, nastavljeni na nič, dosežejo –5 stopinj (ko je začetno krmiljenje v nasprotni smeri urinega kazalca) ali +5 stopinj (ko je začetno krmiljenje v smeri urinega kazalca) po času, ki opredeljuje konec „razpona nastavitve na nič“. Vrednost časa na začetku krmiljenja se interpolira.
9.11.7 Zaključek krmiljenja (COS) je opredeljen kot čas, ko se volanski kot vrne na nič ob zaključku sinusnega krmilnega manevra s prekinitvijo krmiljenja. Vrednost časa pri volanskem kotu nič stopinj se interpolira.
9.11.8 Druga najvišja hitrost spremembe smeri je opredeljena kot prva najvišja lokalna hitrost spremembe smeri, ki nastane zaradi obračanja volana. hitrosti spremembe smeri pri 1,0 in 1,75 sekunde po zaključku krmiljenja se določijo z interpolacijo.
9.11.9 Bočna hitrost se določi z integriranjem popravljenih in filtriranih podatkov o bočnem pospešku, ki so nastavljeni na nič. Bočna hitrost v točki BOS se nastavi na nič. Bočni premik se določi z integriranjem bočne hitrosti, nastavljene na nič. Bočni premik v točki BOS se nastavi na nič. Bočni premik se izmeri 1,07 sekunde po točki BOS in se določi z interpolacijo.
10. SPREMEMBA TIPA VOZILA ALI SISTEMA ESC IN RAZŠIRITEV HOMOLOGACIJE
10.1 Vsaka sprememba obstoječega tipa vozila se sporoči homologacijskemu organu, ki je podelil homologacijo za tip vozila.
Organ lahko potem:
|
(a) |
ob posvetu s proizvajalcem odloči, da se podeli nova homologacija, ali |
|
(b) |
uporabi postopek iz odstavka 10.1.1 (Revizija) in, če je primerno, postopek iz odstavka 10.1.2 (Razširitev). |
10.1.1 Revizija
Kadar se podatki v opisni dokumentaciji spremenijo ter homologacijski organ presodi, da spremembe verjetno ne bodo povzročile znatnih škodljivih učinkov in da stopalke v vsakem primeru še vedno izpolnjujejo zahteve, se sprememba označi kot „revizija“.
V takem primeru homologacijski organ po potrebi izda revidirane strani opisne dokumentacije, pri čemer vsako revidirano stran označi tako, da sta jasno vidna narava spremembe in datum ponovne izdaje. Tej zahtevi ustreza tudi izdaja konsolidirane posodobljene različice opisne dokumentacije z izčrpnim opisom spremembe.
10.1.2 Razširitev
Sprememba se označi kot „razširitev“, če so bili podatki v opisni dokumentaciji spremenjeni in
|
(a) |
so potrebni dodatni pregledi ali preskusi ali |
|
(b) |
so bile spremenjene katere koli informacije v sporočilu (razen v njegovih prilogah) ali |
|
(c) |
se je zahtevala homologacija v skladu s poznejšimi spremembami Pravilnika po začetku njihove veljavnosti. |
10.2 Potrditev ali zavrnitev homologacije se z navedbo sprememb v skladu s postopkom iz odstavka 4.3 sporoči pogodbenicam Sporazuma, ki uporabljajo ta pravilnik. Poleg tega se ustrezno spremeni seznam opisnih listov in poročil o preskusu, priložen dokumentu s sporočilom iz Priloge 1, da se zabeleži datum najnovejše revizije ali razširitve.
10.3 Pristojni organ, ki izda razširitev homologacije, dodeli zaporedno številko vsakemu obrazcu sporočila, ki je bil sestavljen za takšno razširitev.
11. SKLADNOST PROIZVODNJE
Postopki preverjanja skladnosti proizvodnje morajo biti v skladu s postopki iz Dodatka 2 k Sporazumu (E/ECE/324-E/ECE/TRANS/505/Rev.2) ob upoštevanju naslednjih zahtev:
|
11.1 |
vozilo, homologirano v skladu s tem pravilnikom, mora biti izdelano tako, da ustreza homologiranemu tipu in izpolnjuje zahteve iz odstavkov 5, 6 in 7; |
|
11.2 |
homologacijski organ, ki je podelil homologacijo, lahko kadar koli preveri metode preverjanja skladnosti, ki se uporabljajo v vsakem proizvodnem obratu. Ta preverjanja se običajno opravijo enkrat na dve leti. |
12. KAZNI ZA NESKLADNOST PROIZVODNJE
12.1 Homologacija, ki je bila podeljena za tip vozila v skladu s tem pravilnikom, se lahko prekliče, če niso izpolnjene zahteve iz odstavka 8.1.
12.2 Če pogodbenica Sporazuma, ki uporablja ta pravilnik, prekliče homologacijo, ki jo je predhodno podelila, o tem nemudoma uradno obvesti druge pogodbenice, ki uporabljajo ta pravilnik, z izvodom sporočila na obrazcu, ki je v skladu z vzorcem iz Priloge 1 k temu pravilniku.
13. DOKONČNO PRENEHANJE PROIZVODNJE
Če imetnik homologacije povsem preneha proizvajati tip vozila, homologiran v skladu s tem pravilnikom, o tem obvesti organ, ki je podelil homologacijo. Ko navedeni organ prejme ustrezno sporočilo, mora o tem obvestiti druge pogodbenice Sporazuma, ki uporabljajo ta pravilnik, z izvodom sporočila na obrazcu, ki je v skladu z vzorcem iz Priloge 5 k temu pravilniku.
14. NAZIVI IN NASLOVI TEHNIČNIH SLUŽB, KI IZVAJAJO HOMOLOGACIJSKE PRESKUSE, IN HOMOLOGACIJSKIH ORGANOV
Pogodbenice Sporazuma, ki uporabljajo ta pravilnik, sekretariatu Združenih narodov sporočijo nazive in naslove tehničnih služb, ki izvajajo homologacijske preskuse, ter homologacijskih organov, ki podeljujejo homologacije in katerim se pošljejo obrazci, ki potrjujejo podelitev, razširitev, zavrnitev ali preklic homologacije v drugih državah.
(1) Kategoriji vozil M1 in N1 sta opredeljeni v Konsolidirani resoluciji o konstrukciji vozil (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, odst. 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(2) Skupina osi se obravnava kot ena os in dvojna kolesa se obravnavajo kot eno kolo.
(3) Številčne oznake pogodbenic Sporazuma iz leta 1958 so navedene v Prilogi 3 h Konsolidirani resoluciji o konstrukciji vozil (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, Priloga 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(4) Skupina osi se obravnava kot ena os in dvojna kolesa se obravnavajo kot eno kolo.
(5) Besedilo tega pravilnika predpostavlja, da se krmiljenje vozila upravlja z volanom. Vozila, ki uporabljajo druge vrste upravljalnega elementa krmiljenja, so tudi lahko homologirana po tej prilogi, če proizvajalec tehnični službi lahko dokaže, da so lahko zahteve glede zmogljivosti v tej prilogi izpolnjene z uporabo krmiljenja, ki je enakovredno krmiljenju, določenemu v odstavku 7 tega dela.
(6) „Nazivna“ vrednost se razume kot teoretična ciljna vrednost.