02015R0068 — SL — 09.06.2018 — 002.001
To besedilo je zgolj informativne narave in nima pravnega učinka. Institucije Unije za njegovo vsebino ne prevzemajo nobene odgovornosti. Verodostojne različice zadevnih aktov, vključno z uvodnimi izjavami, so objavljene v Uradnem listu Evropske unije. Na voljo so na portalu EUR-Lex. Uradna besedila so neposredno dostopna prek povezav v tem dokumentu
|
►B
|
DELEGIRANA UREDBA KOMISIJE (EU) 2015/68
z dne 15. oktobra 2014
o dopolnitvi Uredbe (EU) št. 167/2013 Evropskega parlamenta in Sveta glede zahtev za zavorne sisteme vozil za homologacijo kmetijskih in gozdarskih vozil
(Besedilo velja za EGP)
(UL L 017 23.1.2015, str. 1)
|
spremenjena z:
▼B
DELEGIRANA UREDBA KOMISIJE (EU) 2015/68
z dne 15. oktobra 2014
o dopolnitvi Uredbe (EU) št. 167/2013 Evropskega parlamenta in Sveta glede zahtev za zavorne sisteme vozil za homologacijo kmetijskih in gozdarskih vozil
(Besedilo velja za EGP)
POGLAVJE I
VSEBINA IN OPREDELITVE POJMOV
Člen 1
Predmet urejanja
Ta uredba določa podrobne tehnične zahteve in preskusne postopke za funkcionalno varnost v zvezi z zavornim učinkom za homologacijo in tržni nadzor kmetijskih in gozdarskih vozil ter sistemov, sestavnih delov in samostojnih tehničnih enot, namenjenih za takšna vozila, v skladu z Uredbo (EU) št. 167/2013.
Člen 2
Opredelitve pojmov
▼M1
V tej uredbi se uporabljajo opredelitve pojmov iz člena 2 ter prilog XII in XXXIII k Delegirani uredbi Komisije (EU) 2015/208 (
1
). Poleg tega se uporabljajo naslednje opredelitve:
▼B
1. „zavorni sistem“ pomeni vse dele, katerih funkcija je postopno zmanjševanje hitrosti premikajočega se vozila ali njegovo ustavljanje oziroma zadrževanje na mestu, če je že ustavljeno; sistem je sestavljen iz upravljalnega elementa, prenosnega sistema in zavore;
2. „delovni zavorni sistem“ pomeni zavorni sistem, ki omogoča vozniku upravljanje gibanja vozila ter varno, hitro in učinkovito ustavitev pri vseh hitrostih in obremenitvah, za katere je vozilo homologirano, in pri vseh naklonih navzgor ali navzdol;
3. „stopnjevano zaviranje“ pomeni zaviranje, ki znotraj običajnega območja delovanja opreme med aktiviranjem ali popuščanjem zavor izpolnjuje vse naslednje pogoje:
(a) voznik lahko kadar koli poveča ali zmanjša zavorno silo z uporabo upravljalnega elementa;
(b) zavorna sila deluje v smeri premikanja upravljalnega elementa (monotono delovanje);
(c) zavorna sila se zlahka uravnava z zadostno natančnostjo;
4. „upravljalni element“ pomeni pripravo, ki jo neposredno aktivira voznik, da prenosni sistem oskrbi z energijo, potrebno za zaviranje ali krmiljenje. Ta energija je lahko fizična energija voznika ali energija iz drugega vira, ki ga upravlja voznik, ali v ustreznih primerih kinetična energija vlečenega vozila ali kombinacija teh različnih vrst energije;
▼M1
5. „prenosni sistem“ pomeni vse sestavne dele med upravljalnim elementom in zavorami, razen krmilnih, napajalnih in dodatnih vodov med traktorji in vlečenimi vozili, ki so funkcionalno povezani z mehanskimi, hidravličnimi, pnevmatskimi ali električnimi povezavami ali s kombinacijo teh povezav; če zavorna moč izvira iz vira energije ali k njej prispeva vir energije, ki je neodvisen od voznika, je zaloga energije v sistemu prav tako del prenosnega sistema;
▼B
6. „prenos krmiljenja“ pomeni vse sestavne dele prenosnega sistema, ki krmilijo delovanje zavor, in potrebnih zalog energije;
7. „prenos energije“ pomeni vse sestavne dele, ki zavore oskrbujejo z energijo, potrebno za njihovo delovanje;
8. „torna zavora“ pomeni zavoro, pri kateri se sile ustvarjajo s trenjem med dvema deloma vozila, ki se premikata relativno eden proti drugemu;
9. „tekočinska zavora“ pomeni zavoro, pri kateri se sile ustvarjajo z delovanjem tekočine, ki je med dvema deloma vozila, ki se premikata relativno eden proti drugemu; tekočina je kapljevina v primeru „hidravlične zavore“ in zrak v primeru „pnevmatske zavore“;
10. „motorna zavora“ pomeni zavoro, pri kateri sile izhajajo iz nadzorovanega povečanja zaviranja z motorjem, ki se prenaša na kolesa;
11. „parkirna zavora“ pomeni sistem, ki omogoča, da vozilo ostane na mestu na klancu navzgor ali navzdol tudi takrat, ko voznika ni v vozilu;
12. „povezano zaviranje“ pomeni zaviranje vozil v skupini vozil z napeljavo, ki ima vse naslednje značilnosti:
(a) en upravljalni element, ki ga voznik aktivira s svojega sedeža postopoma in z enim gibom;
(b) energija, ki se uporablja za zaviranje vozil v skupini vozil, izhaja iz istega vira;
(c) zavorna napeljava zagotavlja hkratno ali primerno stopnjevano zaviranje vsakega posameznega vozila v skupini ne glede na njegov položaj v njej;
13. „polpovezano zaviranje“ pomeni zaviranje vozil v skupini vozil z napeljavo, ki ima vse naslednje značilnosti:
(a) en upravljalni element, ki ga voznik aktivira s svojega sedeža postopoma in z enim gibom;
(b) energija, ki se uporablja za zaviranje vozil v skupini vozil, izhaja iz dveh različnih virov;
(c) zavorna napeljava zagotavlja hkratno ali primerno stopnjevano zaviranje vsakega posameznega vozila v skupini ne glede na njegov položaj v njej;
14. „samodejno zaviranje“ pomeni zaviranje vlečenega vozila ali vlečenih vozil, ki se samodejno aktivira v primeru ločitve katerega koli vozila v skupini vozil, do katere lahko pride tudi zaradi zloma naprave za spajanje med temi vozili, ne da bi to vplivalo na učinkovitost zaviranja preostalega dela skupine vozil;
15. „vztrajnostno zaviranje“ pomeni zaviranje z uporabo sil, ki nastanejo pri naletu vlečenega vozila na traktor;
16. „stalni prenosni sistem“ pomeni prenosni sistem, pri katerem se tlak, sila ali navor neprekinjeno prenaša v vsakem trenutku med premikanjem vozila v sistemu za prenos moči med motorjem vozila in kolesi in v zavornem sistemu med upravljalnim elementom zavor in kolesi;
▼M1 —————
▼B
18. „obremenitev koles“ pomeni navpično statično silo površine ceste v dotikališču na kolo;
19. „obremenitev osi“ pomeni vsoto navpičnih statičnih sil površine ceste v dotikališču na kolesa osi;
20. „največja statična obremenitev koles“ pomeni statično obremenitev koles v stanju, ko je vozilo obremenjeno do največje tehnično dovoljene mase;
21. „največja statična obremenitev osi“ pomeni statično obremenitev osi v stanju, ko je vozilo obremenjeno do največje tehnično dovoljene mase;
22. „vlečeno vozilo“ pomeni priklopnik iz člena 3(9) Uredbe (EU) št. 167/2013 ali zamenljivo vlečeno opremo iz člena 3(10) navedene uredbe;
23. „vlečeno vozilo z vlečnim ojesom“ pomeni vlečeno vozilo kategorije R ali S z najmanj dvema osema, od katerih je najmanj ena krmiljena, opremljeno z vlečno napravo, ki se lahko premika navpično glede na vlečeno vozilo in ki ne prenaša pomembne statične navpične obremenitve na traktor;
24. „vlečeno vozilo s centralno osjo“ pomeni vlečeno vozilo kategorije R ali S, pri katerem je ena ali več osi blizu težišča vozila, kadar je enakomerno obremenjeno, tako da se na traktor prenaša samo majhna statična navpična obremenitev, ki ne presega 10 % največje mase vlečenega vozila ali obremenitve 1 000 daN, kar od tega je manjše;
25. „vlečeno vozilo s togim vlečnim ojesom“ pomeni vlečeno vozilo kategorije R ali S z eno osjo ali eno skupino osi, ki je opremljeno z vlečnim ojesom, ki zaradi svoje konstrukcije prenaša pomembno statično obremenitev na traktor, in ki ne ustreza opredelitvi vlečenega vozila s centralno osjo; naprave za spajanje za skupino vozil ne sestavljata kraljevi čep in sedlo; pri togem vlečnem ojesu lahko pride do rahlega navpičnega premikanja; hidravlično nastavljivo zgibno vlečno oje se šteje za togo vlečno oje;
26. „trajnostni zavorni sistem“ pomeni dodatni zavorni sistem z zmožnostjo zagotavljanja in ohranjanja zavornega učinka v daljšem časovnem obdobju brez pomembnejšega zmanjšanja učinkovitosti, vključno s krmilno napravo, ki je lahko sestavljena iz ene naprave ali kombinacije več naprav, od katerih ima lahko vsaka svoj upravljalni element;
27. „elektronsko krmiljeni zavorni sistem“ („EBS“) pomeni zavorni sistem, pri katerem se krmiljenje sproži in obdeluje v obliki električnega signala v prenosu krmiljenja in izhodnih električnih signalov za naprave, ki ustvarjajo aktivirne sile iz shranjene ali ustvarjene energije;
28. „samodejno krmiljeno zaviranje“ pomeni funkcijo v kompleksnem elektronskem krmilnem sistemu, pri kateri se z namenom upočasnjevanja vozila aktivirajo zavorni sistemi ali zavore posameznih osi z neposrednim delovanjem voznika ali brez njega na podlagi samodejne ocene informacij, ki jih posredujejo sistemi vozila;
29. „selektivno zaviranje“ pomeni funkcijo v kompleksnem elektronskem krmilnem sistemu, pri kateri se posamezne zavore aktivirajo samodejno in kjer je sprememba vedenja vozila pomembnejša od upočasnjevanja vozila;
30. „električni krmilni vod“ pomeni električno povezavo med dvema voziloma, ki omogoča krmiljenje zavor na vlečenem vozilu v skupini; sestavljen je iz električne napeljave in priključka ter vključuje dele za podatkovno komunikacijo in oskrbo z električno energijo za prenos krmiljenja vlečenega vozila;
31. „vzmetna kompresijska komora“ pomeni komoro, v kateri dejansko nastajajo spremembe tlaka, ki povzročajo stiskanje vzmeti;
32. „hidrostatični pogon“ pomeni tip pogona vozila, ki uporablja hidrostatični prenos moči, z odprtim ali zaprtim tokokrogom, v katerem tekočina kot energijski medij kroži med eno ali več hidravličnimi črpalkami in enim ali več hidravličnimi motorji;
33. „kompleksni elektronski krmilni sistem vozila“ je elektronski krmilni sistem, za katerega velja hierarhija krmiljenja, v kateri lahko krmiljeno funkcijo preglasi elektronska krmilna funkcija višje ravni ali funkcija, ki jo izvaja elektronski krmilni sistem višje ravni;
34. „protiblokirni zavorni sistem“ pomeni del delovnega zavornega sistema, ki med zaviranjem samodejno uravnava stopnjo zdrsa v smeri vrtenja kolesa na enem ali več kolesih vozila;
35. „neposredno krmiljeno kolo“ pomeni kolo, katerega zavorna sila se spreminja skladno s podatki, ki jih zagotavlja vsaj njegovo lastno tipalo;
36. „enovodna hidravlična povezava“ pomeni povezavo zavor med traktorjem in vlečenim vozilom v obliki enega voda s hidravlično tekočino;
▼M1
37. „vir energije“ pomeni napravo, ki zagotavlja potrebno energijo za aktiviranje zavor, neposredno ali posredno prek naprave za shranjevanje energije;
38. „naprava za shranjevanje energije“ pomeni napravo, ki shranjuje energijo, ki jo zagotavlja vir energije, da uporabi ali sprosti zavore.
▼B
POGLAVJE II
ZAHTEVE ZA ZAVORNE NAPRAVE IN ZAVORNE SPOJKE PRIKLOPNIKOV
Člen 3
Zahteve za vgradnjo in dokazovanje v zvezi z zavornim učinkom
1. Proizvajalci opremijo kmetijska in gozdarska vozila s sistemi, sestavnimi deli in samostojnimi tehničnimi enotami, ki vplivajo na njihov zavorni učinek in so zasnovani, izdelani ter sestavljeni tako, da omogočajo vozilu, ki se normalno uporablja in vzdržuje ob upoštevanju predpisov proizvajalca, da ustreza podrobnim tehničnim zahtevam in preskusnim postopkom iz členov od 4 do 17.
2. Proizvajalci s prikazom dejanskega preskusa homologacijskemu organu dokažejo, da kmetijska in gozdarska vozila, ki so na voljo na trgu, registrirana ali se dajejo v uporabo v Uniji, ustrezajo podrobnim tehničnim zahtevam in preskusnim postopkom iz členov od 4 do 17.
3. Proizvajalci zagotovijo, da nadomestni deli, ki so na voljo na trgu ali se dajejo v uporabo v Uniji, ustrezajo podrobnim tehničnim zahtevam in preskusnim postopkom iz te uredbe.
4. Namesto izpolnjevanja zahtev iz te uredbe lahko proizvajalec v opisni mapi predloži poročilo o preskusu sestavnega dela ali ustrezno dokumentacijo, ki dokazuje skladnost sistema ali vozila z zahtevami iz Pravilnika UN/ECE št. 13, kot je navedeno v Prilogi X.
5. Namesto izpolnjevanja zahtev iz te uredbe lahko proizvajalec v opisni mapi predloži ustrezno dokumentacijo, ki dokazuje skladnost protiblokirnih zavornih sistemov za vlečena vozila, če so vgrajeni, z zahtevami iz odstavka 5 Priloge 19 k Pravilniku UN/ECE št. 13, kot je navedeno v Prilogi X.
6. Sestavni deli in sistemi iz odstavkov 4 in 5 bodo navedeni v izvedbenem aktu, sprejetem v skladu s členom 68 Uredbe (EU) št. 167/2013.
Člen 4
Zahteve za izdelavo in vgradnjo zavornih naprav in zavornih spojk priklopnikov
Preskusni postopki in zahteve za izdelavo in vgradnjo zavornih naprav in zavornih spojk priklopnikov se izvedejo in potrdijo v skladu s Prilogo I.
Člen 5
Zahteve za preskušanje in učinkovitost zavornih sistemov, zavornih spojk priklopnikov in vozil, opremljenih z njimi
Preskusni postopki in zahteve za učinkovitost za zavorne sisteme, zavorne spojke priklopnikov in vozila, opremljena z njimi, se izvedejo in potrdijo v skladu s Prilogo II.
Člen 6
Zahteve za merjenje odzivnega časa
Preskusni postopki in zahteve za učinkovitost za odzivni čas zavornih naprav in zavornih spojk priklopnikov se izvedejo in potrdijo v skladu s Prilogo III.
Člen 7
Zahteve za vire energije in naprave za shranjevanje energije zavornih sistemov in zavornih spojk priklopnikov ter za vozila, opremljena z njimi
Preskusni postopki in zahteve za učinkovitost za vire energije in naprave za shranjevanje energije zavornih sistemov in zavornih spojk priklopnikov ter za vozila, opremljena z njimi, se izvedejo in potrdijo v skladu s Prilogo IV.
Člen 8
Zahteve za vzmetne zavore in vozila, opremljena z njimi
Preskusni postopki in zahteve za učinkovitost za vzmetne zavore in vozila, opremljena z njimi, se izvedejo in potrdijo v skladu s Prilogo V.
Člen 9
Zahteve za parkirne zavore, opremljene z napravo za mehansko blokiranje zavornih valjev
Zahteve za učinkovitost za parkirne zavore, opremljene z napravo za mehansko blokiranje zavornih valjev, se potrdijo v skladu s Prilogo VI.
Člen 10
Alternativne preskusne zahteve za vozila, za katera preskusi tipa I, tipa II ali tipa III niso obvezni
1. Pogoji, pod katerimi preskusi tipa I, tipa II ali tipa III niso obvezni za nekatere tipe vozil, so določeni v Prilogi VII.
2. Preskusni postopki in zahteve za učinkovitost za vozila in njihove zavorne naprave, za katere preskusi tipa I, tipa II ali tipa III niso obvezni v skladu z odstavkom 1, se izvedejo in potrdijo v skladu s Prilogo VII.
Člen 11
Zahteve za preskušanje vztrajnostnih zavornih sistemov, zavornih naprav, zavornih spojk priklopnikov in vozil, opremljenih z njimi, glede zaviranja
Postopki in zahteve za preskušanje vztrajnostnih zavornih sistemov, zavornih naprav, zavornih spojk priklopnikov in vozil, opremljenih z njimi, glede zaviranja se izvedejo in potrdijo v skladu s Prilogo VIII.
Člen 12
Zahteve za vozila s hidrostatičnim pogonom ter njihove zavorne naprave in zavorne sisteme
Preskusni postopki in zahteve za učinkovitost za vozila s hidrostatičnim pogonom ter njihove zavorne naprave in zavorne sisteme se izvedejo in potrdijo v skladu s Prilogo IX.
Člen 13
Zahteve za varnostne vidike kompleksnih elektronskih krmilnih sistemov vozil
Preskusni postopki in zahteve za učinkovitost za varnostne vidike kompleksnih elektronskih krmilnih sistemov vozil se izvedejo in potrdijo v skladu s Prilogo X.
Člen 14
Zahteve in preskusni postopki za protiblokirne zavorne sisteme in vozila, opremljena z njimi
Preskusni postopki in zahteve za protiblokirne zavorne sisteme in vozila, opremljena z njimi, se izvedejo in potrdijo v skladu s Prilogo XI.
Člen 15
Zahteve za sisteme EBS vozil s pnevmatskimi zavornimi sistemi ali vozil s podatkovno komunikacijo prek polov 6 in 7 priključka iz standarda ISO 7638 in za vozila, opremljena s takšnimi sistemi EBS
Preskusni postopki in zahteve za učinkovitost za sisteme EBS vozil s pnevmatskimi zavornimi sistemi ali vozil s podatkovno komunikacijo prek polov 6 in 7 priključka iz standarda ISO 7638 in za vozila, opremljena s takšnimi sistemi EBS, se izvedejo in potrdijo v skladu s Prilogo XII.
▼M2
Člen 16
Zahteve za enovodne hidravlične povezave in traktorje, opremljene z njimi
1. Zahteve za učinkovitost za enovodne hidravlične povezave zavornih naprav in zavornih spojk priklopnikov ter za traktorje, opremljene z enovodnimi hidravličnimi povezavami, so določene v Prilogi XIII. Te zahteve se uporabljajo do 31. decembra 2024.
2. Proizvajalci ne smejo vgrajevati enovodnih hidravličnih povezav v nove traktorje po 31. decembru 2024.
▼B
POGLAVJE III
OBVEZNOSTI DRŽAV ČLANIC
Člen 17
Homologacija vozil, sistemov, sestavnih delov in samostojnih tehničnih enot
V skladu s členom 6(2) Uredbe (EU) št. 167/2013 in z učinkom od 1. januarja 2016 homologacijski organi iz razlogov, povezanih s funkcionalno varnostjo v zvezi z zavornim učinkom, ne zavrnejo podelitve EU-homologacije tipom kmetijskih in gozdarskih vozil, ki izpolnjujejo zahteve iz te uredbe.
▼M2 —————
▼B
Z učinkom od 1. januarja 2018 nacionalni organi v primeru novih vozil, ki niso v skladu z Uredbo (EU) št. 167/2013 in določbami te uredbe o funkcionalni varnosti v zvezi z zavornim učinkom, prepovejo, da bi se takšna vozila dajala na trg, registrirala ali dajala v uporabo.
▼M2
Z učinkom od 1. januarja 2025 nacionalni organi prepovejo dajanje na trg, registracijo ali začetek uporabe novih traktorjev, ki so opremljeni z enovodnimi hidravličnimi povezavami.
▼B
Člen 18
Nacionalna homologacija vozil, sistemov, sestavnih delov in samostojnih tehničnih enot
Nacionalni organi ne zavrnejo podelitve nacionalne homologacije tipu vozila, sistema, sestavnega dela ali samostojne tehnične enote iz razlogov, povezanih s funkcionalno varnostjo v zvezi z zavornim učinkom, če vozilo, sistem, sestavni del ali samostojna tehnična enota izpolnjuje zahteve iz te uredbe, razen zahtev za enovodne hidravlične povezave.
POGLAVJE IV
KONČNA DOLOČBA
Člen 19
Začetek veljavnosti in uporaba
Ta uredba začne veljati dvajseti dan po objavi v Uradnem listu Evropske unije.
Uporablja se od 1. januarja 2016.
Ta uredba je zavezujoča v celoti in se neposredno uporablja v vseh državah članicah.
SEZNAM PRILOG
|
Številka priloge
|
Naslov priloge
|
|
I
|
Zahteve za izdelavo in vgradnjo zavornih naprav in zavornih spojk priklopnikov
|
|
II
|
Zahteve za preskušanje in učinkovitost zavornih sistemov, zavornih spojk priklopnikov in vozil, opremljenih z njimi
|
|
III
|
Zahteve za merjenje odzivnega časa
|
|
IV
|
Zahteve za vire energije in naprave za shranjevanje energije zavornih sistemov in zavornih spojk priklopnikov ter za vozila, opremljena z njimi
|
|
V
|
Zahteve za vzmetne zavore in vozila, opremljena z njimi
|
|
VI
|
Zahteve za parkirne zavore, opremljene z napravo za mehansko blokiranje zavornih valjev
|
|
VII
|
Alternativne preskusne zahteve za vozila, za katera so bili izvedeni preskusi, enakovredni preskusom tipa I, tipa II ali tipa III
|
|
VIII
|
Zahteve za preskušanje vztrajnostnih zavornih sistemov, zavornih naprav, zavornih spojk priklopnikov in vozil, opremljenih z njimi, glede zaviranja
|
|
IX
|
Zahteve za vozila s hidrostatičnim pogonom ter njihove zavorne naprave in zavorne sisteme
|
|
X
|
Zahteve za varnostne vidike kompleksnih elektronskih krmilnih sistemov vozil
|
|
XI
|
Zahteve in preskusni postopki za protiblokirne zavorne sisteme in vozila, opremljena z njimi
|
|
XII
|
Zahteve za sisteme EBS vozil s pnevmatskimi zavornimi sistemi ali vozil s podatkovno komunikacijo prek polov 6 in 7 priključka iz standarda ISO 7638:2003 in za vozila, opremljena s takšnimi sistemi EBS
|
|
XIII
|
Zahteve za enovodne hidravlične povezave in vozila, opremljena z njimi
|
PRILOGA I
Zahteve za izdelavo in vgradnjo zavornih naprav in zavornih spojk priklopnikov
1.
Opredelitve pojmov
V tej prilogi:
1.1 „naprava za upravljanje sile spoja“ pomeni sistem ali funkcijo za samodejno uravnavanje zavornega razmerja traktorja in vlečenega vozila;
1.2 „nazivna vrednost zahteve“ pomeni značilnost naprave za upravljanje sile spoja, ki povezuje signal vlečne glave z zavornim razmerjem in ki se lahko dokaže pri homologaciji v mejah območij združljivosti iz Dodatka 1 k Prilogi II.
▼M1 —————
▼B
2.
Zahteve za izdelavo in vgradnjo
2.1 Splošno
Največja konstrukcijsko določena hitrost v tej prilogi velja za vožnjo vozila v smeri naprej, razen če je izrecno navedeno drugače.
▼M1
2.1.1 Sestavni deli in deli zavor
|
2.1.1.1
|
Sestavni deli in deli zavor morajo biti zasnovani, izdelani in vgrajeni tako, da vozilo, ne glede na tresljaje, ki jim je lahko izpostavljeno, pri normalni uporabi izpolnjuje zahteve iz te priloge.
|
|
2.1.1.2
|
Sestavni deli in deli zavor morajo biti zasnovani, izdelani in vgrajeni zlasti tako, da so odporni proti koroziji in staranju, ki so jima izpostavljeni.
|
▼B
|
2.1.1.3
|
Zavorne obloge ne smejo vsebovati azbesta.
|
▼M1
|
2.1.1.4
|
Prepovedano je vgrajevati kakršne koli nastavljive ventile, s katerimi bi lahko uporabnik vozila spremenil učinkovitost zavornega sistema tako, da med uporabo ne bi več izpolnjeval zahtev iz te uredbe. Dovoljeni so le nastavljivi ventili, ki jih lahko upravlja samo proizvajalec z uporabo posebnih orodij ali namestitvijo neuničljive plombe, pod pogojem, da uporabnik vozila ne more spremeniti nastavitev tega ventila ali da lahko organi pregona zlahka prepoznajo kakršne koli spremembe, ki jih izvede uporabnik.
|
▼B
|
2.1.1.5
|
Vlečeno vozilo mora biti opremljeno s samodejnim regulatorjem zavorne sile glede na obremenitev osi, z izjemo naslednjih primerov:
▼M1
2.1.1.5.1 Če vozil kategorije Ra z največjo konstrukcijsko določeno hitrostjo, ki ne presega 30 km/h, in vozil kategorije Sa iz tehničnih razlogov ni mogoče opremiti s samodejnim regulatorjem zavorne sile glede na obremenitev osi, se lahko opremijo z napravo, ki ima vsaj tri različne nastavitve za upravljanje zavornih sil.
2.1.1.5.2 V posebnem primeru, ko zasnova vlečenega vozila kategorije Ra z največjo konstrukcijsko določeno hitrostjo, ki ne presega 30 km/h, in vozila kategorije Sa omogoča uporabo samo dveh različnih stanj obremenitve „neobremenjeno“ in „obremenjeno“, ima lahko vozilo samo dve različni nastavitvi za upravljanje zavornih sil.
2.1.1.5.3 Vozila kategorije S, ki nimajo nobene druge obremenitve razen koristnega tovora v obliki potrošnega materiala, ki znaša največ 10 % vsote tehnično dovoljenih mas na os.
▼B
|
2.1.2 Funkcije zavornega sistema
Zavorni sistem mora izpolnjevati naslednje funkcije:
2.1.2.1 Delovni zavorni sistem
Omogočeno mora biti stopnjevano zaviranje z delovnim zavornim sistemom. Vozniku mora biti omogočeno takšno zaviranje z njegovega položaja za vožnjo, ne da bi moral umakniti roke z volana.
2.1.2.2 Pomožni zavorni sistem
Pomožni zavorni sistem omogoča ustavitev vozila v primerni razdalji v primeru okvare delovnega zavornega sistema. Na traktorjih mora biti mogoče takšno zaviranje izvajati stopnjevano. Vozniku mora biti omogočeno takšno zaviranje z njegovega sedeža, pri čemer lahko vsaj z eno roko še vedno drži volan. Zaradi teh zahtev se predvideva, da se hkrati lahko pojavi le ena okvara delovnega zavornega sistema.
▼M1
2.1.2.3 Parkirna zavora
Parkirna zavora omogoča, da vozilo ostane na mestu na klancu navzgor ali navzdol tudi takrat, ko voznika ni v vozilu, pri čemer delujoče dele zavornega sistema blokira samo mehanska naprava. Vozniku mora biti omogočeno takšno zaviranje z njegovega sedeža, pri čemer za vlečena vozila veljajo zahteve iz točke 2.2.2.10.
Delovni zavorni sistem (pnevmatski ali hidravlični) vlečenega vozila in parkirna zavora traktorja se lahko upravljata sočasno, pod pogojem, da lahko voznik kadar koli preveri, ali je učinek parkirne zavore skupine vozil, ki se doseže s samo mehanskim delovanjem parkirne zavore traktorja, zadosten.
▼B
|
2.1.3
|
Za vozila in njihove zavorne sisteme veljajo ustrezne zahteve iz Dodatka 1 k Prilogi II.
|
|
2.1.4
|
Povezave med traktorji in vlečenimi vozili za pnevmatske zavorne sisteme
|
2.1.4.1
|
Povezave pnevmatskih zavornih sistemov med traktorji in vlečenimi vozili morajo biti v skladu s točko 2.1.4.1.1, 2.1.4.1.2 ali 2.1.4.1.3:
2.1.4.1.1 en pnevmatski napajalni vod in en pnevmatski krmilni vod;
2.1.4.1.2 en pnevmatski napajalni vod, en pnevmatski krmilni vod in en električni krmilni vod;
2.1.4.1.3 en pnevmatski napajalni vod in en električni krmilni vod. Dokler se ne sprejmejo enotni tehnični standardi, ki zagotavljajo združljivost in varnost, povezave med traktorji in priklopniki v skladu z določbami te točke niso dovoljene.
|
|
|
2.1.5
|
Povezave med traktorji in vlečenimi vozili s hidravličnimi zavornimi sistemi 2.1.5.1 Tip povezav
|
2.1.5.1.1
|
Hidravlični krmilni vod: to je povezovalni vod z moškim priključkom na traktorju in ženskim priključkom na vlečenem vozilu. Priključki morajo biti skladni s standardom ISO 5676:1983.
|
|
2.1.5.1.2
|
Hidravlični dodatni vod: to je povezovalni vod z moškim priključkom na traktorju in ženskim priključkom na vlečenem vozilu. Priključki morajo biti skladni s standardom ISO 16028:2006, velikost 10.
|
|
2.1.5.1.3
|
►M1
————— ◄ Priključek iz standarda ISO 7638:2003 se lahko uporabi s 5 poli ali 7 poli, kot je ustrezno.
Položaj priključkov iz točk 2.1.5.1.1 in 2.1.5.1.2 na traktorju mora ustrezati prikazu na sliki 1.

|
|
2.1.5.2
|
Pri delujočem motorju in polno aktivirani parkirni zavori traktorja:
2.1.5.2.1 tlak v dodatnem vodu znaša 0+100 kPa in/ali
2.1.5.2.2 v krmilnem vodu se ustvari tlak med 11 500 kPa in 15 000 kPa.
|
|
2.1.5.3
|
Pri delujočem motorju in popolnoma popuščeni parkirni zavori traktorja mora biti tlak v dodatnem vodu med vrednostma iz točke 2.2.1.18.3.
|
|
2.1.5.4
|
Ko motor deluje in ni aktiviran noben upravljalni element zavor na traktorju (vožnja ali stanje pripravljenosti), se mora do vlečne glave krmilnega voda dovajati tlak iz točke 2.2.1.18.2.
|
|
2.1.5.5
|
Pri delujočem motorju in polno aktiviranem upravljalnem elementu delovne zavore na traktorju se mora v krmilnem vodu ustvariti tlak med 11 500 kPa in 15 000 kPa. Za vzpostavitev tlaka v krmilnem vodu med aktiviranjem delovne zavore mora traktor izpolnjevati zahtevo iz točke 3.6 Priloge III.
|
|
|
2.1.6
|
Gibke cevi in kabli, ki povezujejo traktorje in vlečena vozila, morajo biti del vlečenega vozila.
|
|
2.1.7
|
Izklopne naprave, ki se ne aktivirajo samodejno, niso dovoljene.
|
|
2.1.8
|
Priključki za preverjanje tlaka
|
2.1.8.1
|
Za določitev zavornih sil vsake osi vozila s pnevmatskim zavornim sistemom med uporabo so potrebni priključki za preverjanje tlaka zraka:
2.1.8.1.1 v vsakem neodvisnem tokokrogu zavornega sistema, in sicer na lahko dostopnem mestu čim bliže zavornemu valju, ki je nameščen najbolj neugodno glede na odzivni čas iz Priloge III;
▼M1
2.1.8.1.2 v zavornem sistemu, ki vključuje napravo, ki uravnava zračni tlak v prenosnem sistemu zavore, kot je določena v točki 6.2 Dodatka I k Prilogi II, in sicer v tlačnem vodu pred in za to napravo, na najbližjem dostopnem mestu. Če se ta naprava upravlja pnevmatsko, je za simulacijo obremenitve potreben dodatni priključek za preverjanje. Če takšna naprava ni vgrajena, se mora zagotoviti en priključek za preverjanje tlaka, ki je enakovreden priključku, nameščenemu za to napravo in navedenemu v točki 2.1.5.1 te Priloge. Ti priključki za preverjanje morajo biti nameščeni na mestu, ki je zlahka dostopno s tal ali iz vozila;
▼B
2.1.8.1.3 na lahko dostopnem mestu čim bliže napravi za shranjevanje energije, ki je nameščena na najbolj neugodnem mestu v smislu točke 2.4. oddelka A Priloge IV.
2.1.8.1.4 v vsakem neodvisnem tokokrogu zavornega sistema, tako da je mogoče preveriti vhodni in izhodni tlak celotnega prenosnega voda;
2.1.8.1.5 priključki za preverjanje tlaka morajo biti v skladu s točko 4 standarda ISO 3583:1984.
|
|
2.2 Zahteve za zavorne sisteme
2.2.1 Vozila kategorij T in C
|
2.2.1.1
|
Sklop zavornih sistemov, s katerimi je opremljeno vozilo, mora izpolnjevati zahteve, ki so predpisane za delovne, pomožne in parkirne zavorne sisteme.
Zaradi lažjega krmiljenja vozila (da se omogoči diferencialno zaviranje na terenu) je lahko delovni zavorni sistem traktorja sestavljen iz dveh neodvisnih zavornih tokokrogov, od katerih je vsak povezan z eno ločeno desno ali levo stopalko zavore.
▼M1
Za traktorje kategorije Tb: če je aktivirana funkcija diferencialnega zaviranja, hitrost vožnje ne sme preseči 40 km/h, pri hitrostih nad 40 km/h pa se mora funkcija diferencialnega zaviranja onemogočiti. Skladnost s tema zahtevama mora biti zagotovljena samodejno.
▼B
Če je aktiviran diferencialni način, aktiviranje delovnega zavornega sistema vlečenega vozila ni potrebno do hitrosti 12 km/h.
Pri traktorjih, v katerih je mogoče ročno povezati ločeni stopalki, mora vozniku biti omogočeno, da s svojega položaja za vožnjo zlahka preveri, ali sta stopalki povezani.
|
|
2.2.1.2
|
Oprema, ki omogoča delovanje delovne, pomožne in parkirne zavore, lahko ima skupne sestavne dele, če ti sestavni deli izpolnjujejo naslednje pogoje:
2.2.1.2.1 Vgrajena morata biti vsaj dva upravljalna elementa, namenjena vsak drugačnemu zavornemu sistemu, ki sta med seboj neodvisna in ju voznik med vožnjo zlahka doseže s svojega sedeža. Pri vseh kategorijah vozil mora biti vsak upravljalni element zavor (razen upravljalnega elementa trajnostnega zavornega sistema) zasnovan tako, da se po popustitvi vrne v popolnoma izklopljen položaj. Ta zahteva ne velja za upravljalni element parkirne zavore (ali ta del kombinirane naprave za upravljanje), kadar je mehansko blokirana v aktiviranem položaju ali uporabljena za pomožno zaviranje ali v obeh primerih.
2.2.1.2.2 Upravljalni element delovnega zavornega sistema mora biti neodvisen od upravljalnega elementa parkirne zavore.
2.2.1.2.3 Če imata delovni in pomožni zavorni sistem isti upravljalni element, se učinkovitost povezave med tem upravljalnim elementom in raznimi sestavnimi deli prenosnih sistemov po določenem času uporabe ne sme zmanjšati.
2.2.1.2.4 Če imata delovni in pomožni zavorni sistem isti upravljalni element, mora biti parkirna zavora zasnovana tako, da jo je mogoče aktivirati med vožnjo. Ta zahteva ne velja, če je mogoče delovni zavorni sistem vozila aktivirati, tudi delno, s pomožnim upravljalnim elementom.
2.2.1.2.5 V primeru okvare katerega koli sestavnega dela razen zavor ali sestavnih delov iz točke 2.2.1.2.7 ali v primeru katerih koli drugih okvar delovnega zavornega sistema (napaka v delovanju, delna ali popolna poraba zaloge energije) se mora z uporabo pomožnega zavornega sistema ali tistega dela delovnega zavornega sistema, na katerega okvara ne vpliva, vozilo ustaviti v pogojih, predpisanih za pomožno zaviranje.
2.2.1.2.6 Zlasti v primerih, ko imata pomožni zavorni sistem in delovni zavorni sistem skupni upravljalni element in skupni prenosni sistem:
▼M1
2.2.1.2.6.1 Če se delovni zavorni sistem aktivira s fizično močjo voznika ob pomoči vira energije ali ene ali več zalog energije, mora v primerih, ko energije iz tega vira ali zalog ni mogoče izkoristiti, zagotoviti učinek pomožne zavore fizična moč voznika ob pomoči zalog energije, če katere od njih okvara ni prizadela, pri čemer sila, s katero deluje na upravljalni element, ne sme presegati predpisanih zgornjih mej.
▼B
2.2.1.2.6.2 Če sta sila in prenosni sistem delovne zavore odvisna izključno od uporabe zaloge energije, ki jo upravlja voznik, morata obstajati vsaj dve popolnoma neodvisni zalogi energije, pri čemer ima vsaka od njiju lasten neodvisni prenosni sistem; vsaka lahko deluje samo na zavore dveh ali več koles, ki so izbrana tako, da lahko sama zagotovijo predpisano stopnjo pomožnega zaviranja, pri čemer ne smejo ogroziti stabilnosti vozila med zaviranjem; poleg tega mora biti vsaka od navedenih zalog energije opremljena z opozorilno napravo. V vsakem tokokrogu delovnega zavornega sistema mora biti v vsaj eni od posod za zrak naprava za odvod in črpanje na ustreznem in lahko dostopnem mestu.
2.2.1.2.6.3 Če sta sila in prenosni sistem delovne zavore odvisna izključno od uporabe zaloge energije, se šteje, da je za prenosni sistem dovolj ena zaloga energije, pod pogojem, da se predpisano pomožno zaviranje zagotovi s fizično močjo voznika, ki deluje na upravljalni element delovne zavore, in da so izpolnjene zahteve iz točke 2.2.1.5.
2.2.1.2.7 Nekateri deli, kot so stopalka in njen ležaj, glavni valj in bati (hidravlični sistemi), krmilni ventil (hidravlični ali pnevmatski sistemi), povezovalni členi med stopalko in glavnim valjem ali krmilnim ventilom, zavorni valji in bati (hidravlični ali pnevmatski sistemi) ter sklopi vzvoda in odmikača zavor, se ne štejejo za podvržene okvaram, če so ustrezno dimenzionirani, zlahka dostopni za vzdrževanje in imajo vsaj takšne varnostne značilnosti, kot je predpisano za druge bistvene sestavne dele vozila (na primer krmilno vzvodje). Če bi okvara katerega koli takega dela onemogočila zaviranje vozila z vsaj takšnim učinkom, kot je predpisan za pomožni zavorni sistem, mora biti takšen del izdelan iz kovine ali iz materiala z enakimi lastnostmi in ne sme biti podvržen znatnim deformacijam pri običajnem delovanju zavornih sistemov.
|
|
2.2.1.3
|
Če obstajata ločena upravljalna elementa delovnega in pomožnega zavornega sistema, ne sme hkratno aktiviranje upravljalnih elementov povzročiti odpovedi delovanja delovnega zavornega sistema in pomožnega zavornega sistema, niti takrat, ko oba zavorna sistema delujeta brezhibno, ali takrat, ko je eden od njiju v okvari.
|
|
2.2.1.4
|
Če se uporablja druga energija in ne fizična moč voznika, zadošča en sam vir takšne energije (hidravlična črpalka, zračni kompresor itd.), vendar mora biti način pogona naprave, ki zagotavlja ta vir energije, čim bolj zanesljiv.
|
2.2.1.4.1
|
V primeru okvare na katerem koli delu prenosnega sistema v zavornem sistemu vozila, ki je sestavljen iz dveh delovnih zavornih tokokrogov in izpolnjuje zahteve iz točke 2.2.1.25, mora biti zagotovljeno neprekinjeno dovajanje energije za del, na katerega okvara ni vplivala, kjer je to nujno za ustavitev vozila s stopnjo učinkovitosti, ki je predpisana za preostalo in/ali pomožno zaviranje. Ta pogoj mora biti izpolnjen s samodejnimi napravami.
|
|
2.2.1.4.2
|
Poleg tega so naprave za shranjevanje energije, ki so nameščene za to napravo, takšne, da je v primeru izpada dovoda energije po štirikratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema pod pogoji preskušanja, ki so, glede na vrsto zavornega sistema, predpisani v točki 1.2 oddelka A ali v točki 1.2 oddelka B ali v točki 1.2 oddelka C Priloge IV, vozilo pri petem aktiviranju še vedno mogoče ustaviti s stopnjo učinkovitosti, ki je predpisana za pomožno zaviranje.
|
|
2.2.1.4.3.
|
Pri hidravličnih zavornih sistemih s shranjeno energijo se šteje, da so zahteve iz točk 2.2.1.4.1 in 2.2.1.4.2 izpolnjene, če je zadoščeno zahtevam iz točke 1.2.2 Dela C Priloge IV k tej uredbi.
|
|
2.2.1.4.4.
|
Pri delovnem zavornem sistemu, ki ga sestavlja samo en zavorni tokokrog, se zahteva, da je v primeru okvare ali nerazpoložljivosti vira energije vozilo mogoče ustaviti z upravljalnim elementom delovne zavore s stopnjo učinkovitosti, ki je predpisana za pomožno zaviranje.
|
|
|
2.2.1.5
|
Zahteve iz točk 2.2.1.2, 2.2.1.4 in 2.2.1.25 morajo biti izpolnjene brez uporabe kakršne koli samodejne naprave, katere neučinkovitost bi lahko spregledali, ker se deli, ki so običajno v položaju „mirovanja“, aktivirajo šele v primeru okvare zavornega sistema.
|
|
2.2.1.6
|
Pri vozilih, katerih največja konstrukcijsko določena hitrost ne presega 30 km/h, mora delovni zavorni sistem delovati na vsa kolesa vsaj ene osi. V vseh drugih primerih mora delovni zavorni sistem delovati na vsa kolesa vozila. V primeru vozil z eno zavirano osjo in samodejnim vklopom pogona za vse druge osi med zaviranjem pa se šteje, da so vsa kolesa zavirana.
Pri vozilih kategorije C se šteje, da je ta pogoj izpolnjen, če so zavirana vsa kolesa gosenic vozila. Pri vozilih kategorije C s konstrukcijsko določeno hitrostjo pod 30 km/h se šteje, da je ta pogoj izpolnjen, če je zavirano vsaj eno kolo gosenice na vsaki strani vozila.
Pri vozilih, opremljenih s sedežem v obliki sedla in krmilom, lahko delovna zavora deluje na sprednjo ali zadnjo os pod pogojem, da so izpolnjene vse zahteve glede učinka iz točke 2 Priloge II k tej uredbi.
Pri zgibnih traktorjih kategorije Ta z zavirano osjo ter diferencialom med delovno zavoro in kolesi se šteje, da so zavirana vsa kolesa navedene osi, če se z aktiviranjem delovnega zavornega sistema samodejno vklopi zapora diferenciala na tej osi.
▼M1
2.2.1.6.1 Zmogljivost hidravličnih vodov in sklopov gibkih cevi v primeru vozil z eno zavirano osjo in samodejnim vklopom pogona za vse druge osi med zaviranjem
Hidravlični vodi hidravličnega prenosnega sistema morajo prenesti porušitveni tlak, ki je najmanj štirikrat večji od največjega običajnega delovnega tlaka (T), kot ga je določil proizvajalec vozila. Sklopi gibkih cevi morajo ustrezati standardom ISO 1402:2009, 6605:2002 in 7751:1997+A1:2011.
▼B
|
|
2.2.1.7
|
Če delovni zavorni sistem deluje na vsa kolesa ali kolesa gosenic vozila, mora biti delovanje ustrezno porazdeljeno med osi.
►M1
————— ◄
|
2.2.1.7.1
|
Pri vozilih z več kot dvema osema se, da bi preprečili zablokiranje koles ali obrabo zavornih oblog, zavorna sila na nekaterih oseh lahko samodejno zmanjša na nič, ko je obremenitev zelo majhna, pod pogojem, da vozilo izpolnjuje vse zahteve glede učinka, ki so predpisane v Prilogi II.
|
|
|
2.2.1.8
|
Delovanje delovnega zavornega sistema mora biti porazdeljeno med kolesa ali kolesa gosenic iste osi simetrično glede na vzdolžno srednjo ravnino vozila.
|
|
2.2.1.9
|
Delovni, pomožni in parkirni zavorni sistemi morajo delovati na zavorne površine, ki so prek sestavnih delov ustrezne trdnosti trajno povezane s kolesi. Zavorne površine ne sme biti mogoče ločiti od koles; takšna ločitev pa je dovoljena pri parkirni zavori, če jo upravlja izključno voznik s svojega sedeža prek sistema, ki ga puščanje ne more aktivirati. Če se običajno zavira več kot ena os v primeru vozil kategorij T in C, katerih največja konstrukcijsko določena hitrost ne presega 60 km/h, se lahko ena os odklopi, če aktiviranje delovnega zavornega sistema samodejno spet priklopi to os in če se v primeru okvare oskrbe z energijo ali okvare prenosa krmiljenja naprave za ponovni priklop ponovni priklop izvede samodejno.
|
|
2.2.1.10
|
►M1
Obrabo delovnih zavor mora biti mogoče izravnati s sistemom ročnega ali samodejnega nastavljanja. ◄ Pri vozilih kategorij Tb in Cb se obraba delovnih zavor izravna s sistemom samodejnega nastavljanja. Poleg tega morajo imeti upravljalni element in sestavni deli prenosnega sistema ter zavor rezervni gib in, če je treba, ustrezne naprave za izravnavo, ki ob pregretju zavor ali ko se zavorne obloge obrabijo do določene stopnje, zagotavljajo učinkovito zaviranje, ne da bi bilo za to potrebno takojšnje nastavljanje zavornih oblog.
Za vozila kategorij Ta in Ca ni nujno, da so opremljena s sistemom samodejnega nastavljanja za izravnavo obrabe zavor. Če pa so vozila teh kategorij opremljena s sistemom samodejnega nastavljanja za izravnavo obrabe zavor, mora ta sistem izpolnjevati iste zahteve kot v primeru vozil kategorij Tb in Cb.
|
2.2.1.10.1
|
►M1
Naprave za samodejno izravnavo obrabe, če so vgrajene, morajo po segretju in ohladitvi omogočati prosti tek, kot je določeno v točki 2.3.4 Priloge II, po preskusu tipa I iz točke 2.3 navedene priloge. ◄
To obrabo oblog delovne zavore mora biti mogoče preprosto preveriti z zunanje ali spodnje strani vozila samo z uporabo orodja ali opreme, ki je navadno v vozilu; na primer prek primernih kontrolnih odprtin ali drugače. Prav tako so sprejemljive zvočne ali optične naprave, ki voznika na njegovem sedežu opozorijo, ko je treba zamenjati obloge.
|
|
2.2.1.10.2
|
Zahteve iz točk 2.2.1.10 in 2.2.1.10.1 ne veljajo za zavore, potopljene v olje, ki so zasnovane za trajno delovanje brez servisiranja.
|
|
|
2.2.1.11
|
Pri hidravličnih zavornih sistemih:
2.2.1.11.1 Nalivne odprtine posod za zavorno tekočino morajo biti lahko dostopne; poleg tega morajo biti posode z rezervno tekočino izdelane tako, da se nivo rezervne tekočine zlahka preveri, ne da bi bilo treba posode odpreti. Če zadnji pogoj ni izpolnjen, mora rdeči opozorilni signal iz točke 2.2.1.29.1.1 voznika opozoriti na vsak padec nivoja rezervne tekočine, zaradi katerega bi lahko prišlo do okvare zavornega sistema.
▼M1
Pri hidravličnih zavornih sistemih, kjer je tip tekočine, ki se uporablja za hidravlični prenos, enak kot pri tekočini, ki se uporablja v drugih napravah vozila v skupni posodi, je dovoljeno tudi zaznavanje pravilne ravni tekočine z napravo, ki zahteva odprto posodo.
2.2.1.11.2 Na okvaro v hidravličnem prenosnem sistemu, zaradi katere ni mogoče doseči predpisanega zavornega učinka delovne zavore, mora voznika opozoriti naprava z opozorilnim signalom iz točke 2.2.1.29.1.1. Dovoljeno je tudi, da ga ta naprava opozori tako, da zasveti, ko je nivo tekočine v posodi nižji od nivoja, ki ga določi proizvajalec.
▼M1
Pri hidravličnih zavornih sistemih, kjer je tip tekočine, ki se uporablja za hidravlični prenos, enak kot pri tekočini, ki se uporablja v drugih napravah vozila v skupni posodi, je dovoljeno tudi zaznavanje padca tlaka v hidravličnem prenosnem sistemu do določene vrednosti, ki jo je navedel proizvajalec.
2.2.1.11.3 Tip tekočine, ki ga je treba uporabiti v hidravličnem prenosnem sistemu zavornih sistemov, mora biti označen s simbolom v skladu s sliko 1 ali 2 iz standarda ISO 9128:2006.
►M1
Simbol mora biti nameščen največ 100 mm od nalivnih odprtin posod s tekočino v skladu z zahtevami, določenimi v členu 24 Delegirane uredbe (EU) 2015/208. ◄ Proizvajalci lahko zagotovijo dodatne informacije. Ta zahteva velja samo za vozila z ločeno nalivno odprtino za zavorno tekočino.
|
|
2.2.1.12
|
Opozorilna naprava
|
2.2.1.12.1
|
Vsako vozilo, opremljeno z delovnim zavornim sistemom, ki se ga aktivira z zbiralnikom energije, mora biti v primeru, ko predpisanega učinka pomožnega zaviranja ni mogoče doseči s tem zavornim sistemom brez uporabe shranjene energije, opremljeno z opozorilno napravo – poleg merilnika tlaka, če je vgrajen – ki z optičnim ali zvočnim signalom opozori, ko shranjena energija v katerem koli delu sistema pade na vrednost, pri kateri je mogoče brez ponovnega polnjenja zbiralnika in ne glede na obremenjenost vozila po štirikratnem polnem aktiviranju še petič aktivirati upravljalni element delovnega zavornega sistema in doseči predpisani učinek pomožnega zaviranja (brez napak v prenosnem sistemu delovne zavore in z zavorami, nastavljenimi čim tesneje). Opozorilna naprava mora biti neposredno in trajno priključena na tokokrog. Ko motor deluje v običajnih delovnih pogojih in v zavornem sistemu ni napak, opozorilna naprava ne sme oddajati nobenih signalov, razen v času, ki je potreben za polnjenje zbiralnikov energije po zagonu motorja.
|
2.2.1.12.1.1
|
Pri vozilih, za katera se šteje, da izpolnjujejo zahteve iz točke 2.2.1.4.1, ker izpolnjujejo zahteve iz točke 1.2.2 oddelka C Priloge IV, pa mora imeti opozorilna naprava poleg optičnega tudi zvočni signal. Za te naprave ni nujno, da delujejo sočasno, če vsaka od njih izpolnjuje zgornje zahteve in če se zvočni signal ne aktivira pred optičnim signalom.
|
|
|
2.2.1.12.2
|
Ta zvočna naprava je lahko izklopljena med uporabo parkirne zavore ali, po izbiri proizvajalca, ko je v vozilu s samodejnim menjalnikom prestavna ročica v položaju za parkiranje ali v obeh primerih.
|
|
▼M1
|
2.2.1.13
|
Traktorji kategorije Tb z največjo konstrukcijsko določeno hitrostjo nad 60 km/h Brez poseganja v zahteve iz točke 2.1.2.3, mora biti tam, kjer je uporaba pomožnega vira energije nujna za delovanje zavornega sistema, zaloga energije takšna, da zagotavlja zadostni zavorni učinek za ustavitev vozila pod predpisanimi pogoji, če se motor ustavi ali pride do okvare pogona vira energije. Poleg tega, če voznikovo fizično moč pri upravljanju parkirne zavore poveča kakšen drug vir, mora biti v primeru okvare tega vira aktiviranje parkirne zavore vseeno zagotovljeno, po potrebi z zalogo energije, neodvisno od tiste, ki običajno zagotavlja takšno pomoč. Ta zaloga energije je lahko tista, ki je namenjena za delovni zavorni sistem.
|
▼B
|
2.2.1.14
|
V primeru traktorja, na katerega se lahko priključi vlečeno vozilo, opremljeno z zavoro, ki jo upravlja voznik traktorja, mora biti delovni zavorni sistem traktorja opremljen z napravo, ki je zasnovana tako, da je v primeru okvare zavornega sistema vlečenega vozila ali prekinitve napajalnega voda (ali kakšne druge vrste povezave) med traktorjem in vlečenim vozilom še vedno mogoče zavreti traktor tako učinkovito, kot je predpisano za pomožni zavorni sistem; skladno s tem je predpisano zlasti, da mora biti ta naprava vgrajena v delovni zavorni sistem traktorja, da se zagotovi, da se traktor lahko vseeno zavre z delovnim zavornim sistemom tako učinkovito, kot je predpisano za pomožni zavorni sistem.
|
|
2.2.1.15
|
Pnevmatski ali hidravlični pomožni opremi je treba energijo samodejno dovajati tako, da se lahko med njenim delovanjem doseže predpisani učinek in da celo v primeru okvare vira energije delovanje pomožne opreme ne more povzročiti, da bi zaloge energije, ki napajajo zavorne sisteme, padle pod raven iz točke 2.2.1.12.
|
|
2.2.1.16
|
Traktor, ki lahko vleče vozilo kategorije R2, R3, R4 ali S2, mora izpolnjevati naslednje pogoje:
2.2.1.16.1 Ko se aktivira delovni zavorni sistem traktorja, se sproži tudi stopnjevano zaviranje na vlečenem vozilu (glej tudi točko 2.2.1.18.4).
2.2.1.16.2 Ko se aktivira pomožni zavorni sistem traktorja, se sproži tudi zaviranje na vlečenem vozilu. V primeru traktorjev kategorij Tb in Cb mora biti to zaviranje stopnjevano.
2.2.1.16.3 V primeru okvare delovnega zavornega sistema traktorja, in če ta sistem sestavljata vsaj dva neodvisna sklopa, morajo biti sklopi, na katere okvara ne vpliva, zmožni delno ali polno aktivirati zavore vlečenega vozila. Ta zahteva ne velja, če od dveh neodvisnih sklopov en sklop zavira leva kolesa in drugi sklop zavira desna kolesa z namenom omogočitve diferencialnega zaviranja za zavijanje na terenu. Če v slednjem primeru pride do okvare delovnega zavornega sistema traktorja, mora biti pomožni zavorni sistem zmožen delno ali polno aktivirati zavore vlečenega vozila. Če se za ta postopek uporabi ventil, ki običajno miruje, se lahko ta ventil uporabi samo, če lahko voznik zlahka preveri njegovo pravilno delovanje, in sicer v kabini ali zunaj vozila in brez uporabe orodja.
|
|
2.2.1.17
|
Dodatne zahteve v primeru traktorjev, ki lahko vlečejo vlečena vozila s pnevmatskimi zavornimi sistemi:
|
2.2.1.17.1
|
V primeru okvare (npr. pretrganja) v enem od pnevmatskih povezovalnih vodov, prekinitve ali napake v električnem krmilnem vodu mora imeti voznik kljub temu možnost, da polno ali delno aktivira zavore vlečenega vozila prek upravljalnega elementa delovne zavore, upravljalnega elementa pomožne zavore ali upravljalnega elementa parkirne zavore, razen če okvara samodejno sproži zaviranje vlečenega vozila z učinkom, predpisanim v točki 3.2.3 Priloge II.
|
|
2.2.1.17.2
|
Šteje se, da je samodejno zaviranje iz točke 2.2.1.17.1 doseženo, če so izpolnjeni naslednji pogoji:
2.2.1.17.2.1 Ko se določen upravljalni element zavor, ki spada med naprave iz točke 2.2.1.17.1, polno aktivira, mora tlak v napajalnem vodu v naslednjih dveh sekundah pasti na 150 kPa; poleg tega se mora v napajalnem vodu znova vzpostaviti tlak, ko se upravljalni element zavor popusti.
2.2.1.17.2.2 Pri praznjenju napajalnega voda s hitrostjo vsaj 100 kPa/s se mora samodejno zaviranje vlečenega vozila sprožiti, preden tlak v napajalnem vodu pade na 200 kPa.
|
▼M1
|
2.2.1.17.3
|
V primeru okvare enega od krmilnih vodov, ki povezujejo dve vozili, opremljeni v skladu s točko 2.1.4.1.2 te priloge, mora krmilni vod, na katerega okvara ni vplivala, samodejno zagotoviti zavorni učinek, ki je za vlečeno vozilo predpisan v točki 3.2.1 Priloge II.
|
▼B
|
2.2.1.17.4
|
V primeru pnevmatskega delovnega zavornega sistema, ki je sestavljen iz dveh ali več neodvisnih sklopov, se mora kakršno koli puščanje med temi sklopi pri upravljalnem elementu ali za njim neprekinjeno odvajati v ozračje.
|
|
|
2.2.1.18
|
Dodatne zahteve v primeru traktorjev, ki lahko vlečejo vlečena vozila s hidravličnimi zavornimi sistemi:
|
2.2.1.18.1
|
Tlak, ki se pri izklopljenem motorju dovaja do obeh vlečnih glav, mora vedno biti 0 kPa.
|
|
2.2.1.18.2
|
Ko motor deluje in na upravljalni element zavor ne deluje nobena sila, se mora do vlečne glave krmilnega voda dovajati tlak 0+200 kPa.
|
|
2.2.1.18.3
|
Pri delujočem motorju mora biti mogoče na vlečni glavi dodatnega voda ustvariti tlak, ki znaša najmanj 1 500 kPa in največ 3 500 kPa.
|
|
2.2.1.18.4
|
Z odstopanjem od zahteve iz točke 2.2.1.16.1 je stopnjevano zaviranje na vlečenem vozilu potrebno samo, ko se pri delujočem motorju aktivira delovni zavorni sistem traktorja.
|
|
2.2.1.18.5
|
V primeru okvare (npr. pretrganja ali puščanja) v dodatnem vodu mora imeti voznik kljub temu možnost, da polno ali delno aktivira zavore vlečenega vozila prek upravljalnega elementa delovnega zavornega sistema ali upravljalnega elementa parkirne zavore, razen če okvara samodejno sproži zaviranje vlečenega vozila z učinkom, predpisanim v točki 3.2.3 Priloge II.
|
▼M1
|
2.2.1.18.6
|
V primeru okvare (npr. pretrganja ali puščanja) v krmilnem vodu mora tlak v dodatnem vodu v naslednjih dveh sekundah po polnem aktiviranju upravljalnega elementa delovne zavore pasti na 1 000 kPa. Poleg tega se mora v dodatnem vodu znova vzpostaviti tlak, ko se upravljalni element delovne zavore popusti (glej tudi točko 2.2.2.15.2).
|
▼B
|
2.2.1.18.7
|
Tlak v dodatnem vodu mora v naslednji sekundi po polnem aktiviranju upravljalnega elementa parkirne zavore pasti s svoje največje vrednosti na 0+300 kPa.
Da se preveri čas praznjenja, se na dodatni vod traktorja priključi dodatni vod simulatorja vlečenega vozila v skladu s točko 3.6.2.1 Priloge III.
Zbiralniki simulatorja se nato napolnijo do največje vrednosti, ki jo ustvari traktor z delujočim motorjem in popolnoma zaprto odzračevalno napravo (točka 1.1 Dodatka 2 Priloge III).
|
|
2.2.1.18.8
|
Da se omogoči priklop in odklop hidravličnih povezovalnih vodov tudi pri delujočem motorju in aktivirani parkirni zavori, se lahko v traktor vgradi ustrezna naprava.
Ta naprava mora biti zasnovana in izdelana tako, da se tlak v povezovalnih vodih vrne v položaj mirovanja najpozneje ob samodejni popustitvi upravljalnega elementa (npr. gumba) te naprave (npr. ventil se samodejno vrne v običajni delovni položaj).
|
|
2.2.1.18.9
|
►M1
Traktorji, ki vlečejo vozila kategorije R ali S in ki lahko izpolnjujejo zahteve glede zavornega učinka delovnega zavornega sistema, parkirne zavore ali samodejnega zavornega sistema samo s pomočjo energije, shranjene v napravi za shranjevanje hidravlične energije, morajo biti opremljeni s priključkom iz standarda ISO 7638:2003, da lahko prikažejo nizko raven shranjene energije v vlečenem vozilu, ki jo prejme slednje, kot je določeno v točki 2.2.2.15.1.1, z ločenim opozorilnim signalom prek pola 5 električnega priključka v skladu s standardom ISO 7638:2003 iz točke 2.2.1.29.2.2. (glej tudi točko 2.2.2.15.1). ◄ Priključek iz standarda ISO 7638:2003 se lahko uporabi s 5 poli ali 7 poli, kot je ustrezno.
|
|
|
2.2.1.19
|
V primeru traktorja, ki lahko vleče vozilo kategorije R3, R4 ali S2, se lahko delovni zavorni sistem vlečenega vozila upravlja samo skupaj z delovnim, pomožnim ali parkirnim zavornim sistemom traktorja. Če pa traktor samodejno sproži delovanje zavor vlečenega vozila, pri čemer je edini namen tega dejanja stabiliziranje vozila, se lahko samodejno aktivirajo samo zavore vlečenega vozila.
|
2.2.1.19.1
|
Z odstopanjem od točke 2.2.1.19 je z namenom izboljšanja obnašanja skupine vozil med vožnjo s spreminjanjem sile spoja med traktorjem in vlečenim vozilom dovoljeno, da se zavore vlečenega vozila samodejno aktivirajo do 5 sekund brez delovanja delovnega, pomožnega ali parkirnega zavornega sistema traktorja.
|
|
|
2.2.1.20
|
▼M1
Če je skladnost s točko 3.1.3.4 Priloge II mogoče zagotoviti samo z izpolnjevanjem pogojev iz točke 3.1.3.4.1.1 Priloge II:
▼B
2.2.1.20.1 se mora v primeru pnevmatskega zavornega sistema pri polnem aktiviranju enega upravljalnega elementa prenesti tlak krmilnega voda (ali enakovredna digitalna vrednost) vsaj 650 kPa, kar aktivira tudi parkirno zavoro traktorja. To mora biti zagotovljeno tudi, če je stikalo za vžig/zagon izklopljeno in/ali ključ odstranjen;
2.2.1.20.2 se mora v primeru hidravličnega zavornega sistema pri polnem aktiviranju enega upravljalnega elementa v dodatnem vodu ustvariti tlak 0+100 kPa.
|
|
2.2.1.21.
|
Protiblokirni zavorni sistemi za traktorje kategorije Tb
|
2.2.1.21.1
|
Traktorji kategorije Tb z največjo konstrukcijsko določeno hitrostjo nad 60 km/h morajo biti opremljeni s protiblokirnimi zavornimi sistemi kategorije 1 v skladu z zahtevami iz Priloge XI.
|
▼M2 —————
▼B
|
|
2.2.1.22
|
Traktorji, ki lahko vlečejo vozilo, opremljeno s protiblokirnim zavornim sistemom, morajo biti opremljeni tudi s posebnim električnim priključkom za električni prenos krmiljenja, ki ustreza standardu ISO 7638:2003. Priključek iz standarda ISO 7638:2003 se lahko uporabi s 5 poli ali 7 poli, kot je ustrezno.
|
▼M2
|
2.2.1.23
|
Traktorji, razen tistih iz točke 2.2.1.21.1, ki so opremljeni s protiblokirnimi zavornimi sistemi, morajo izpolnjevati zahteve iz Priloge XI.
|
▼B
|
2.2.1.24
|
Zahteve iz Priloge X veljajo za varnostne vidike vseh kompleksnih elektronskih krmilnih sistemov vozil, ki zagotavljajo prenos krmiljenja zavorne funkcije ali pa so njegov del, vključno s tistimi, ki uporabljajo zavorne sisteme za samodejno krmiljeno zaviranje ali selektivno zaviranje.
|
|
2.2.1.25
|
V primeru traktorjev kategorije Tb z največjo konstrukcijsko določeno hitrostjo nad 60 km/h mora delovni zavorni sistem, v kombinaciji s pomožnim zavornim sistemom ali ne, biti takšen, da se v primeru okvare dela njegovega prenosnega sistema z aktiviranjem upravljalnega elementa delovne zavore še vedno zavira zadostno število koles; ta kolesa morajo biti izbrana tako, da preostali učinek delovnega zavornega sistema izpolnjuje zahteve iz točke 3.1.4 Priloge II.
Deli, na katere okvara ne vpliva, morajo biti zmožni delno ali polno aktivirati zavore vlečenega vozila.
▼M1 —————
▼B
|
|
2.2.1.26
|
Posebne dodatne zahteve za električni prenosni sistem parkirne zavore 2.2.1.26.1 Traktorji z največjo konstrukcijsko določeno hitrostjo nad 60 km/h
|
2.2.1.26.1.1
|
V primeru okvare električnega prenosnega sistema je treba preprečiti vsako nenamerno aktiviranje parkirne zavore.
|
▼M1
|
2.2.1.26.1.2
|
V primeru električne okvare v upravljalnem elementu ali pretrganja napeljave v električnem prenosu krmiljenja zunaj elektronskih krmilnih enot, razen oskrbe z energijo, mora še vedno biti mogoče aktivirati parkirno zavoro z voznikovega sedeža, pri čemer mora biti mogoče obremenjeno vozilo zadržati na mestu na 8-odstotnem klancu navzgor ali navzdol.
|
▼B
2.2.1.26.2 Traktorji, katerih največja konstrukcijsko določena hitrost ne presega 60 km/h
|
2.2.1.26.2.1
|
V primeru električne okvare v upravljalnem elementu ali pretrganja napeljave v električnem prenosu krmiljenja zunaj krmilnih enot, razen oskrbe z energijo,
2.2.1.26.2.1.1 je treba preprečiti vsako nenamerno aktiviranje parkirne zavore pri hitrosti vozila nad 10 km/h;
2.2.1.26.2.1.2 mora še vedno biti mogoče aktivirati parkirno zavoro z voznikovega sedeža, pri čemer mora biti mogoče obremenjeno vozilo zadržati na mestu na 8-odstotnem klancu navzgor ali navzdol.
|
▼M1
|
2.2.1.26.3
|
Za razliko od zahtev glede učinka parkirne zavore iz točk 2.2.1.26.1.2 in 2.2.1.26.2.1.2 so dovoljene tudi alternativne zahteve, določene v točkah 2.2.1.26.3.1 in 2.2.1.26.3.2.
2.2.1.26.3.1 Samodejno aktiviranje parkirne zavore je dovoljeno, ko vozilo miruje, pod pogojem, da se doseže učinek iz točk 2.2.1.26.1.2 in 2.2.1.26.2.1.2 in da parkirna zavora, ko je enkrat uporabljena, ostane aktivirana ne glede na stanje stikala za vžig (zagon). V tem primeru se parkirna zavora samodejno popusti takoj, ko začne voznik premikati vozilo.
2.2.1.26.3.2 Uporaba parkirne zavore z voznikovega sedeža s pomožnim upravljalnim elementom, pri čemer mora biti mogoče obremenjeno vozilo zadržati na mestu na 8-odstotnem klancu navzgor ali navzdol. V tem primeru morajo biti izpolnjene tudi zahteve iz točke 2.2.1.26.7.
|
▼B
|
2.2.1.26.4
|
Poleg tega mora biti mogoče po potrebi popustiti parkirno zavoro z orodji in/ali pomožno napravo, shranjeno/pritrjeno v vozilu.
|
|
2.2.1.26.5
|
Na pretrganje napeljave v električnem prenosnem sistemu ali električno okvaro v upravljalnem elementu parkirne zavore mora voznika opozoriti rumeni opozorilni signal iz točke 2.2.1.29.1.2. V primeru pretrganja napeljave v električnem prenosu krmiljenja parkirne zavore se mora ta rumeni opozorilni signal sprožiti takoj, ko se napeljava pretrga, v primeru traktorjev, katerih največja konstrukcijsko določena hitrost ne presega 60 km/h, pa najpozneje ob aktiviranju ustreznega upravljalnega elementa zavor. Poleg tega mora voznika na takšno električno okvaro v krmilni napravi ali pretrganje napeljave zunaj elektronskih krmilnih enot in izpad oskrbe z energijo opozarjati utripajoči opozorilni signal iz točke 2.2.1.29.1.1, dokler je stikalo za vžig (zagon) vklopljeno, vključno z vsaj 10-sekundnim obdobjem po tem, in dokler je upravljalni element aktiviran.
Če pa parkirni zavorni sistem zazna, da je parkirna zavora pravilno vpeta, se utripajoči opozorilni signal lahko prekine in uporabi se neutripajoči rdeči signal, ki prikazuje, da je parkirna zavora aktivirana.
▼M1
Če na aktiviranje parkirne zavore običajno opozarja ločen opozorilni signal, ki izpolnjuje vse zahteve iz točke 2.2.1.29.4, se mora ta signal uporabiti zaradi izpolnjevanja zahteve za rdeči signal, določene v prvem in drugem odstavku te točke.
▼B
|
|
2.2.1.26.6
|
Pomožno opremo lahko z energijo oskrbuje električni prenosni sistem parkirne zavore, če je oskrba z energijo zadostna, da omogoči aktiviranje parkirne zavore poleg električne obremenitve vozila v stanju brez napak. Če zalogo energije uporablja tudi delovni zavorni sistem, veljajo tudi zahteve iz točke 4.1.7 Priloge XII.
|
|
2.2.1.26.7
|
Po izklopu stikala za vžig/zagon, ki upravlja električno energijo za zavorno opremo, in/ali odstranitvi ključa mora biti še vedno mogoče aktivirati parkirno zavoro, medtem ko mora biti popustitev preprečena.
Popustitev parkirnega zavornega sistema je dovoljena, če mora biti za popustitev parkirnega zavornega sistema upravljalni element mehansko deblokiran.
|
|
|
2.2.1.27
|
Veljajo zahteve iz Priloge XII glede vozil s sistemom EBS ali vozil s „podatkovno komunikacijo“ prek polov 6 in 7 priključka iz standarda ISO 7638:2003.
|
|
2.2.1.28
|
Posebne zahteve za napravo za upravljanje sile spoja
|
2.2.1.28.1
|
Naprava za upravljanje sile spoja je dovoljena samo na traktorju.
|
|
2.2.1.28.2
|
Učinek naprave za upravljanje sile spoja mora biti zmanjšanje razlike med dinamičnimi zavornimi razmerji traktorjev in vlečenih vozil. Delovanje naprave za upravljanje sile spoja je treba preveriti v času homologacije. O metodi preverjanja se morata dogovoriti proizvajalec vozila in tehnična služba, pri čemer morajo biti metoda ocene in rezultati priloženi poročilu o homologaciji.
|
2.2.1.28.2.1
|
Z napravo za upravljanje sile spoja se lahko upravlja zavorno razmerje TM/FM (točka 2 Dodatka 1 k Prilogi II) in/ali vrednosti zahtev za zaviranje za vlečeno vozilo. V primeru traktorja, ki je opremljen z dvema krmilnima vodoma v skladu s točko 2.1.4.1.2 te priloge, za oba signala veljajo podobne nastavitve naprave za upravljanje.
|
|
2.2.1.28.2.2
|
Naprava za upravljanje sile spoja ne sme preprečiti uporabe največjih možnih zavornih tlakov.
|
|
|
2.2.1.28.3
|
Vozilo mora izpolnjevati zahteve glede združljivosti obremenitve iz Dodatka 1 k Prilogi II, vendar se lahko med delovanjem naprave za upravljanje sile spoja oddalji od teh zahtev, da izpolni cilje iz točke 2.2.1.28.2.
|
|
2.2.1.28.4
|
Na okvaro naprave za upravljanje sile spoja mora voznika opozoriti rumeni opozorilni signal, na primer signal iz točke 2.2.1.29.1.2. V primeru okvare morajo biti izpolnjene ustrezne zahteve iz Dodatka 1 k Prilogi II.
|
|
2.2.1.28.5
|
Na izravnavo sistema naprave za upravljanje sile spoja mora opozoriti rumeni opozorilni signal iz točke 2.2.1.29.1.2, če ta izravnava preseže nazivno vrednost zahteve za več kot 150 kPa (pnevmatski sistem) ali 2 600 kPa (hidravlični sistem) do omejitve 650 kPa v pm (ali enakovredne digitalne vrednosti) oziroma 11 500 kPa (hidravlični sistem). Nad ravnjo 650 kPa oziroma 11 500 kPa (hidravlični sistem) se mora opozorilo aktivirati, če je zaradi izravnave točka delovanja zunaj območja združljivosti obremenitve, kot je določeno v Dodatku 1 k Prilogi II za traktorje.
|
|
2.2.1.28.6
|
Sistem naprave za upravljanje sile spoja mora upravljati samo sile spoja, ki jih ustvari delovni zavorni sistem traktorja in vlečenega vozila. Sil spoja, ki nastanejo zaradi delovanja trajnostnih zavornih sistemov, ne sme izravnati delovni zavorni sistem traktorja ali vlečenega vozila. Šteje se, da trajnostni zavorni sistemi niso del delovnih zavornih sistemov.
|
|
|
2.2.1.29
|
Opozorilni signali v zvezi z okvarami in napakami zavor Zahteve za optične opozorilne signale, katerih funkcija je obveščanje voznika o določenih posebnih napakah ali okvarah zavorne opreme traktorja ali vlečenega vozila, so določene v točkah od 2.2.1.29.1 do 2.2.1.29.6.3. Funkcija teh signalov je izključno prikaz napak ali okvar zavorne opreme. Vendar pa se lahko optični opozorilni signal iz točke 2.2.1.29.6 dodatno uporablja za prikaz napak ali okvar tekalnega mehanizma.
|
2.2.1.29.1
|
Traktorji morajo biti zmožni zagotavljati optične opozorilne signale v zvezi z okvarami in napakami zavor na naslednji način:
▼M1
2.2.1.29.1.1 rdeč opozorilni signal v skladu z zahtevami, določenimi v Prilogi XXVI Delegirane uredbe (EU) št. 1322/2014, ki opozarja na okvare v zavorni opremi vozila, kot je določeno v drugih točkah te priloge ter v prilogah V, VII, IX in XIII, ki predpisujejo doseganje predpisanega učinka delovne zavore ali delovanje vsaj enega od dveh neodvisnih delovnih zavornih tokokrogov;
2.2.1.29.1.2 kjer pride v poštev, rumen opozorilni signal v skladu z zahtevami iz člena 29 Delegirane uredbe (EU) št. 1322/2014, ki opozarja na električno zaznano napako v zavorni opremi vozila, na katero ne opozarja opozorilni signal iz točke 2.2.1.29.1.1.
▼B
|
|
2.2.1.29.2
|
►M1
Traktorji, ki so opremljeni z električnim krmilnim vodom in/ali lahko vlečejo vozilo, opremljeno z električnim prenosom krmiljenja, morajo biti zmožni zagotoviti ločen opozorilni signal v skladu z zahtevami iz člena 29 Delegirane uredbe (EU) št. 1322/2014, ki opozarja na napako v električnem prenosu krmiljenja zavorne opreme vlečenega vozila. ◄ Signal se mora aktivirati iz vlečenega vozila prek pola 5 električnega priključka, ki ustreza standardu ISO 7638:2003, pri čemer se mora signal, ki ga pošlje vlečeno vozilo, vedno prikazati brez znatne zamude ali spremembe v traktorju. Ta opozorilni signal ne sme zasvetiti, ko je priklopljeno vlečeno vozilo brez električnega krmilnega voda in/ali električnega prenosa krmiljenja ali ko ni priklopljeno nobeno vlečeno vozilo. Ta funkcija mora biti samodejna.
|
2.2.1.29.2.1
|
V primeru traktorja, ki je opremljen z električnim krmilnim vodom in je električno povezan z vlečenim vozilom z električnim krmilnim vodom, se opozorilni signal iz točke 2.2.1.29.1.1 uporablja tudi za opozarjanje na nekatere navedene okvare v zavorni opremi vlečenega vozila, kadar vlečeno vozilo zagotavlja ustrezne informacije o okvari prek dela električnega krmilnega voda za podatkovno komunikacijo. To opozarjanje mora biti zagotovljeno poleg opozorilnega signala iz točke 2.2.1.29.2.
►M1
Namesto uporabe opozorilnega signala iz točke 2.2.1.29.1.1 te priloge in spremljajočega opozorilnega signala, navedenega v tej točki, se lahko v traktorju zagotovi ločen rdeč opozorilni signal v skladu z zahtevami iz člena 29 Delegirane uredbe (EU) št. 1322/2014, ki opozarja na takšno napako v zavorni opremi vlečenega vozila. ◄
|
|
2.2.1.29.2.2
|
Traktorji, ki so opremljeni z električnim priključkom, ki ustreza standardu ISO 7638:2003 in ki omogoča prikaz nizke ravni shranjene energije v vlečenem vozilu, kot se zahteva v skladu s točkama 2.2.2.15.1.1 in 2.2.2.15.2, morajo vozniku prikazati ločeni rumeni opozorilni signal iz točke 2.2.1.29.2, ko vlečeno vozilo pošlje opozorilni signal v traktor prek pola 5 električnega priključka, ki ustreza standardu ISO 7638:2003.
|
|
|
2.2.1.29.3
|
Če ni navedeno drugače:
2.2.1.29.3.1 morajo zgoraj navedeni opozorilni signali voznika opozoriti na navedeno okvaro ali napako najpozneje ob aktiviranju ustreznega upravljalnega elementa zavor;
2.2.1.29.3.2 morajo opozorilni signali ostati prikazani, dokler se okvara ali napaka ne odpravi in je stikalo za vžig (zagon) vklopljeno;
2.2.1.29.3.3 mora biti opozorilni signal neprekinjen (ne sme utripati).
|
|
2.2.1.29.4
|
Opozorilni signali morajo biti vidni tudi pri dnevni svetlobi; ustrezno stanje signalov mora biti zlahka preverljivo z voznikovega sedeža; okvara sestavnega dela opozorilnih naprav ne sme povzročiti nobene izgube učinka zavornega sistema.
|
|
2.2.1.29.5
|
Zgoraj navedeni opozorilni signali morajo zasvetiti, ko se električni opremi vozila (in zavornega sistema) dovaja energija. Če vozilo miruje, mora zavorni sistem, preden signali ugasnejo, preveriti, ali ni prisotna nobena od navedenih okvar ali napak. Navedene okvare ali napake, ki naj bi aktivirale zgoraj navedene opozorilne signale, vendar niso zaznane v statičnih pogojih, se morajo shraniti po zaznavi ter prikazati ob zagonu in vedno, kadar je stikalo za vžig (zagon) vklopljeno, dokler okvara ali napaka ni odpravljena.
|
|
2.2.1.29.6
|
Na okvare ali napake, ki niso navedene, ali druge informacije v zvezi z zavorami ali voznim mehanizmom traktorja lahko opozori signal iz točke 2.2.1.29.1.2, če so izpolnjeni vsi naslednji pogoji:
2.2.1.29.6.1 vozilo miruje;
2.2.1.29.6.2 ko zavorni sistem dobi energijo in signal po postopkih, podrobno opisanih v točki 2.2.1.29.5, pokaže, da ni ugotovljena nobena navedena okvara (ali napaka), in
2.2.1.29.6.3 na napake, ki niso navedene, ali druge informacije mora opozoriti samo utripanje opozorilnega signala. Opozorilni signal se mora izklopiti, ko vozilo prvič preseže hitrost 10 km/h.
|
|
|
2.2.1.30
|
Zaradi napak v delovanju električnega prenosa krmiljenja se zavore ne smejo aktivirati proti voznikovi volji.
|
|
2.2.1.31
|
Traktorji, opremljeni s hidrostatičnim pogonom, morajo izpolnjevati vse ustrezne zahteve iz te priloge ali iz Priloge IX.
|
2.2.2 Vozila kategorij R in S
|
2.2.2.1
|
►M1
Za vozila kategorij R1a in S1a ni nujno, da so opremljena z delovnim zavornim sistemom. Za vozila kategorij R1b in S1b, pri katerih vsota tehnično dovoljenih mas na os ne presega 750 kg, ni nujno, da so opremljena z delovnim zavornim sistemom. ◄ Če pa so vozila teh kategorij opremljena z delovnim zavornim sistemom, mora ta sistem izpolnjevati iste zahteve kot v primeru vozil kategorije R2 ali S2, kot je ustrezno.
|
|
2.2.2.2
|
►M1
Vozila kategorij R1b in S1b, pri katerih vsota tehnično dovoljenih mas na os presega 750 kg, ter R2 morajo biti opremljena z delovnim zavornim sistemom povezanega, polpovezanega ali vztrajnostnega (naletnega) tipa. ◄ Če imajo vozila teh kategorij delovni zavorni sistem povezanega ali polpovezanega tipa, morajo izpolnjevati iste zahteve kot vozila kategorije R3.
|
|
2.2.2.3
|
Če vlečeno vozilo spada v kategorijo R3, R4 ali S2, mora delovni zavorni sistem biti povezanega ali polpovezanega tipa.
|
2.2.2.3.1
|
Z odstopanjem od zahteve iz točke 2.2.2.3 se lahko v vozila kategorij R3a in S2a, katerih največja masa ne presega 8 000 kg, vgradi vztrajnostni zavorni sistem pod naslednjimi pogoji:
2.2.2.3.1.1 konstrukcijsko določena hitrost ne presega 30 km/h, ko zavore ne delujejo na vsa kolesa;
2.2.2.3.1.2 konstrukcijsko določena hitrost ne presega 40 km/h, ko zavore delujejo na vsa kolesa;
▼M1 —————
▼B
|
|
|
2.2.2.4
|
Delovni zavorni sistem:
2.2.2.4.1 mora delovati vsaj na dve kolesi vsake osi pri vlečenih vozilih kategorij Rb in Sb;
2.2.2.4.2 mora svoje delovanje ustrezno porazdeliti med osi;
2.2.2.4.3 mora imeti v vsaj eni od posod za zrak, če so vgrajene, napravo za odvod in črpanje na ustreznem in lahko dostopnem mestu.
|
|
2.2.2.5
|
Delovanje vsakega zavornega sistema mora biti porazdeljeno med kolesa vsake osi simetrično glede na vzdolžno srednjo ravnino vlečenega vozila.
|
2.2.2.5.1
|
Pri vozilih z znatno drugačnimi obremenitvami koles na levi in desni strani vozila pa lahko skladno s tem delovanje zavornega sistema odstopa od simetrične porazdelitve zavorne sile.
|
|
|
2.2.2.6
|
Zaradi napak v delovanju električnega prenosa krmiljenja se zavore ne smejo aktivirati proti voznikovi volji.
|
|
2.2.2.7
|
Zavorne površine, ki so potrebne za doseganje predpisane stopnje učinkovitosti, morajo biti v stalnem stiku s kolesi, in sicer togo ali prek sestavnih delov, ki niso izpostavljeni okvaram.
|
|
2.2.2.8
|
Obrabo zavor mora biti mogoče preprosto izravnati s sistemom ročnega ali samodejnega nastavljanja. Poleg tega morajo imeti upravljalni element in sestavni deli prenosnega sistema ter zavor rezervni gib in, če je treba, ustrezne naprave za izravnavo, ki ob pregretju zavor ali ko se zavorne obloge obrabijo do določene stopnje, zagotavljajo učinkovito zaviranje, ne da bi bilo za to potrebno takojšnje nastavljanje zavornih oblog.
|
2.2.2.8.1
|
Izravnava obrabe mora biti pri delovnih zavorah samodejna. Vgradnja naprav za samodejno nastavljanje pa ni obvezna za vozila kategorij R1, R2, R3a, S1 in S2a. Zavore, ki so opremljene z napravami za samodejno nastavljanje zavor, morajo po segretju in ohladitvi omogočati prosti tek iz točke 2.5.6 Priloge II po preskusu tipa I ali tipa III iz navedene priloge, kot je ustrezno.
|
2.2.2.8.1.1
|
Pri vlečenih vozilih kategorij:
— R3b, R4b, S2b, kjer vsota tehnično dovoljenih mas na os ne presega 10 000 kg,
se šteje, da so zahteve glede učinka iz točke 2.2.2.8.1 izpolnjene, če so izpolnjene zahteve iz točke 2.5.6 Priloge II. Dokler se ne sprejmejo enotne tehnične določbe za pravilno oceno funkcije naprave za samodejno nastavljanje zavor, se zahteva o prostem teku šteje za izpolnjeno, ko je pri vseh preskusih zavor, predpisanih za zadevni priklopnik, ugotovljen prosti tek.
|
|
2.2.2.8.1.2
|
Pri vlečenih vozilih kategorij R3b, R4b in S2b, kjer vsota tehnično dovoljenih mas na os presega 10 000 kg, se šteje, da so zahteve glede učinka iz točke 2.2.2.8.1 izpolnjene, če so izpolnjene zahteve iz točke 2.5.6 Priloge II.
|
|
|
|
2.2.2.9
|
Zavorni sistem mora biti narejen tako, da se vlečeno vozilo samodejno ustavi, če se vlečna naprava odklopi, medtem ko se vlečeno vozilo premika.
|
2.2.2.9.1
|
Vozila kategorij R1 in S1 brez zavornega sistema morajo poleg glavne vlečne naprave imeti še pomožni spoj (verigo, žično vrv itd.), ki v primeru odklopa glavne vlečne naprave prepreči, da bi se vlečno oje dotaknilo tal, in zagotovi zasilno krmiljenje vlečenega vozila.
|
|
2.2.2.9.2
|
Vozila kategorij R1, R2, R3a, S1 in S2a z vgrajenim vztrajnostnim zavornim sistemom morajo biti opremljena z napravo (verigo, žično vrvjo itd.), ki v primeru odklopa vlečne naprave aktivira zavore vlečenega vozila.
|
|
2.2.2.9.3
|
Pri vlečenih vozilih s hidravličnim zavornim sistemom se morajo povezovalni vodi iz točk 2.1.5.1.1 in 2.1.5.1.2 odklopiti na traktorju ali vlečenem vozilu z zanemarljivim puščanjem med ločevanjem vlečne naprave. Sila, potrebna za odklop enega povezovalnega voda, ne sme presegati vrednosti iz standarda ISO 5675:2008. Z odstopanjem od predpisanih vrednosti iz odstavka 4.2.4 tega standarda odklopna sila za oba voda ne sme presegati 2 500 N.
|
|
|
2.2.2.10
|
Na vsakem vlečenem vozilu, ki mora biti opremljeno z delovnim zavornim sistemom, mora biti parkirno zaviranje zagotovljeno tudi, če je vlečeno vozilo ločeno od traktorja. Omogočeno mora biti, da parkirno zavoro aktivira oseba, ki stoji na tleh.
|
|
2.2.2.11
|
Če ima vlečeno vozilo vgrajeno napravo, ki omogoča izklop aktiviranja zavornega sistema razen parkirne zavore, mora biti naprava zasnovana in izdelana tako, da se vrne v položaj mirovanja najpozneje ob ponovnem dotoku stisnjenega zraka, hidravličnega olja ali električnega napajanja v vlečeno vozilo.
|
|
2.2.2.12
|
Na vsakem vlečenem vozilu, ki je opremljeno s hidravličnim delovnim zavornim sistemom, mora biti zavorni sistem zasnovan tako, da se parkirna zavora ali delovni zavorni sistem samodejno aktivira, ko je dodatni vod odklopljen.
|
|
2.2.2.13
|
Vozila kategorij R3, R4 in S2 morajo izpolnjevati pogoje iz točke 2.2.1.17.2.2 za pnevmatske zavorne sisteme ali pogoje iz točke 2.2.2.15.3 za hidravlične zavorne sisteme.
|
|
2.2.2.14
|
Če se pomožni opremi dovaja energija iz delovnega zavornega sistema, mora biti delovni zavorni sistem zaščiten, da se zagotovi, da se v napravah delovne zavore za shranjevanje vzdržuje tlak, enakovreden vsaj 80 odstotkom tlaka v krmilnem vodu ali enakovredni digitalni vrednosti iz točk 2.2.3.2 in 2.2.3.3 Priloge II.
|
|
2.2.2.15
|
Poleg zgornjega morajo vlečena vozila s hidravličnimi zavornimi sistemi izpolnjevati tudi naslednje zahteve:
2.2.2.15.1 Če lahko vlečeno vozilo izpolnjuje zahteve delovnega zavornega sistema in/ali parkirne zavore in/ali samodejnega zaviranja samo s pomočjo energije, shranjene v napravi za shranjevanje hidravlične energije, mora vlečeno vozilo samodejno aktivirati zavore ali zagotoviti, da zavore ostanejo aktivirane, če ni električno povezano (vžig traktorja je vklopljen) z dovodom energije prek priključka iz standarda ISO 7638:2003 (glej tudi točko 2.2.1.18.9). Priključek iz standarda ISO 7638:2003 se lahko uporabi s 5 poli ali 7 poli, kot je ustrezno.
2.2.2.15.1.1
►M1
Če tlak v napravah za shranjevanje hidravlične energije pade pod tlak, ki ga je navedel proizvajalec vozila v opisni mapi in pri katerem predpisani zavorni učinki niso zagotovljeni, mora biti ta nizki tlak vozniku prikazan z ločenim opozorilnim signalom iz točke 2.2.1.29.2.2 prek pola 5 električnega priključka, ki ustreza standardu ISO 7638:2003. ◄
▼M2 —————
▼M2
2.2.2.15.1.1.1 Ta nizki tlak v napravah za shranjevanje hidravlične energije ne sme presegati 11 500 kPa v sistemih z napravami za shranjevanje energije z največjim delovnim tlakom 15 000 kPa.
2.2.2.15.1.1.2 Ta nizki tlak v napravah za shranjevanje hidravlične energije lahko presega 11 500 kPa v sistemih z napravami za shranjevanje energije, ki se za izpolnjevanje predpisanega zavornega učinka polnijo na največji delovni tlak, ki presega 15 000 kPa.
▼B
2.2.2.15.2 Če tlak v dodatnem vodu pade na 1 200 kPa, se mora vklopiti samodejno zaviranje vlečenega vozila (glej tudi točko 2.2.1.18.6).
2.2.2.15.3 V vlečeno vozilo se lahko vgradi naprava, ki začasno popusti zavore, če ni na voljo nobeno ustrezen traktor. Na to napravo se začasno priključi dodatni vod. Ko je dodatni vod odklopljen s te naprave, se morajo zavore samodejno vrniti v aktivirano stanje.
|
|
2.2.2.16
|
Vlečena vozila kategorij R3b, R4b in S2b z največjo konstrukcijsko določeno hitrostjo nad 60 km/h morajo biti opremljena s protiblokirnim zavornim sistemom v skladu s Prilogo XI. Če največja dovoljena masa vlečenih vozil presega 10 ton, je dovoljen samo protiblokirni zavorni sistem kategorije A.
|
|
2.2.2.17
|
Če so vlečena vozila, ki niso omenjena v točki 2.2.2.16, opremljena s protiblokirnimi zavornimi sistemi, morajo izpolnjevati zahteve iz Priloge XI.
|
|
2.2.2.18
|
Vlečena vozila, opremljena z električnim krmilnim vodom, in vlečena vozila kategorije R3b ali R4b, opremljena s protiblokirnim zavornim sistemom, morajo biti opremljena s posebnim električnim priključkom za zavorni sistem in protiblokirni zavorni sistem ali za samo enega od teh dveh sistemov, ki ustreza standardu ISO 7638:2003. Prečne preseke prevodnikov iz standarda ISO 7638:2003 za priklopnik je mogoče zmanjšati, če je priklopnik opremljen z lastno neodvisno varovalko. Nazivna moč varovalke mora biti takšna, da ni presežen nazivni tok prevodnikov. To odstopanje ne velja za priklopnike, opremljene za vleko drugega priklopnika. Opozorilni signali vlečenega vozila za okvaro, ki so določeni v tej uredbi, se morajo aktivirati prek zgornjega priključka. Zahteve glede prenosa opozorilnih signalov za okvare, ki veljajo za vlečena vozila, morajo biti tiste zahteve, kot je ustrezno, ki so predpisane za traktorje v točkah 2.2.1.29.3, 2.2.1.29.4, 2.2.1.29.5 in 2.2.1.29.6.
►M1
Navedena vozila morajo imeti neizbrisno oznako v skladu z zahtevami iz člena 24 Delegirane uredbe (EU) 2015/208, da se označi delovanje zavornega sistema, ko je priključek iz standarda ISO 7638:2003 priklopljen in odklopljen. ◄ Oznaka mora biti nameščena tako, da je vidna pri priključevanju pnevmatskih in električnih vmesniških priključkov.
|
2.2.2.18.1
|
Dovoljeno je priključiti zavorni sistem na oskrbo z energijo poleg oskrbe, ki je na voljo prek zgornjega priključka iz standarda ISO 7638:2003. V primeru dodatne oskrbe z energijo veljajo naslednje določbe:
2.2.2.18.1.1 v vseh primerih je oskrba z energijo iz standarda ISO 7638:2003 glavni vir energije za zavorni sistem ne glede na morebitno dodatno priključeno oskrbo z energijo. Dodatna oskrba je namenjena kot rezerva v primeru okvare oskrbe z energijo iz standarda ISO 7638:2003;
2.2.2.18.1.2 ne sme negativno vplivati na delovanje zavornega sistema v normalnem stanju in stanju odpovedi;
2.2.2.18.1.3 v primeru okvare oskrbe z energijo iz standarda ISO 7638:2003 zaradi energije, ki jo porabi zavorni sistem, največja energija, ki je na voljo iz dodatne oskrbe, ne sme biti presežena;
2.2.2.18.1.4 vlečeno vozilo ne sme imeti nobene oznake ali nalepke, ki prikazuje, da je opremljeno z dodatno oskrbo z energijo;
2.2.2.18.1.5 opozorilna naprava za okvaro na vlečenem vozilu ni dovoljena za namene opozarjanja v primeru okvare zavornega sistema vlečenega vozila, kadar je zavorni sistem napajan iz dodatne oskrbe;
2.2.2.18.1.6 če je na voljo dodatna oskrba z energijo, mora biti mogoče preveriti delovanje zavornega sistema, napajanega iz tega vira energije;
2.2.2.18.1.7 v primeru okvare oskrbe z električno energijo prek priključka iz standarda ISO 7638:2003 veljajo zahteve iz točke 4.2.3 Priloge XII in točke 4.1 Priloge XI v zvezi z opozarjanjem na okvaro ne glede na delovanje zavornega sistema, napajanega iz dodatnega vira energije.
|
|
|
2.2.2.19
|
Poleg zahtev iz točk 2.2.1.17.2.2 in 2.2.1.19 se lahko zavore vlečenega vozila uporabijo tudi samodejno, če se aktivirajo prek zavornega sistema vlečenega vozila po vrednotenju informacij iz vozila.
|
3.
Preskusi
Preskusi zaviranja, ki se morajo izvajati za vozila v postopku homologacije, in zahtevan zavorni učinek so opisani v Prilogi II.
PRILOGA II
Zahteve za preskušanje in učinkovitost zavornih sistemov, zavornih spojk priklopnikov in vozil, opremljenih z njimi
1.
Opredelitve pojmov
V tej prilogi:
1.1 „skupina osi“ pomeni več osi, pri čemer je razmik med eno osjo in njeno sosednjo osjo največ 2,0 m. Če je razmik med eno osjo in njeno sosednjo osjo večji kot 2,0 m, se vsaka posamezna os šteje za neodvisno skupino osi;
▼M1
1.2 „krivulja izkoristka oprijema“ pomeni značilno krivuljo razmerja zavorne sile brez kotalnega upora in normalno reakcijo površine ceste na dano os pri zaviranju glede na stopnjo zaviranja vozila.
▼B
2.
Preskusi zaviranja
2.1 Splošno
Največja konstrukcijsko določena hitrost v tej prilogi velja za vožnjo vozila v smeri naprej, razen če je izrecno navedeno drugače.
|
2.1.1
|
Učinek, predpisan za zavorne sisteme, temelji na zavorni razdalji in povprečnem polnem pojemku ali na samo eni od teh količin. Učinek zavornega sistema se določi z merjenjem zavorne razdalje glede na začetno hitrost vozila in z merjenjem povprečnega polnega pojemka med preskusom ali z merjenjem samo ene od teh količin. Obe količini, tako zavorno razdaljo kot povprečni polni pojemek, ali pa samo eno od njiju je treba predpisati in izmeriti na podlagi predpisanega preskusa.
|
|
2.1.2
|
Zavorna razdalja je razdalja, ki jo prevozi vozilo od trenutka, ko začne voznik aktivirati upravljalni element zavornega sistema, do trenutka, ko se vozilo ustavi; začetna hitrost vozila (v1) je hitrost v trenutku, ko začne voznik aktivirati upravljalni element zavornega sistema; začetna hitrost ne sme biti manjša od 98 % predpisane hitrosti za zadevni preskus. Povprečni polni pojemek dm se izračuna kot pojemek, katerega povprečje se izračuna glede na razdaljo od vb do ve v skladu z naslednjo formulo:

pri čemer je:
|
v1
|
=
|
začetna hitrost vozila, ki se izračuna tako, kot je opisano v prvem pododstavku;
|
|
vb
|
=
|
hitrost vozila pri 0,8 v1 v km/h;
|
|
ve
|
=
|
hitrost vozila pri 0,1 v1 v km/h;
|
|
sb
|
=
|
razdalja v metrih, prevožena med v1 in vb;
|
|
se
|
=
|
razdalja v metrih, prevožena med v1 in ve.
|
Hitrost in razdalja se določita z uporabo merilnih naprav s točnostjo ± 1 % pri hitrosti, predpisani za preskus. Za določitev vrednosti dm se lahko poleg merjenja hitrosti in razdalje uporabijo tudi druge metode; v tem primeru mora biti točnost vrednosti dm v območju ± 3 %.
|
|
2.1.3
|
Za homologacijo katerega koli vozila je treba zavorni učinek izmeriti med preskusi na cesti, ki se jih izvaja pod naslednjimi pogoji:
2.1.3.1 Masa vozila mora biti enaka masi, ki je predpisana za vsak tip preskusa, in navedena v poročilu o preskusu.
2.1.3.2 Preskus se mora izvesti pri hitrostih, predpisanih za vsak tip preskusa; če je največja konstrukcijsko določena hitrost vozila manjša od hitrosti, predpisane za preskus, se mora preskus izvesti pri največji konstrukcijsko določeni hitrosti vozila.
2.1.3.3 Sila, ki deluje na upravljalni element zavornega sistema z namenom, da se doseže predpisani učinek, med preskusi ne sme presegati 600 N v primeru nožnega upravljalnega elementa ali 400 N v primeru ročnega upravljalnega elementa.
2.1.3.4 Cesta mora imeti površino, ki zagotavlja dober oprijem, razen če ni določeno drugače.
2.1.3.5 Preskuse je treba izvajati v brezvetrju, da veter ne bi vplival na rezultate.
2.1.3.6 Na začetku preskusov morajo biti pnevmatike hladne in morajo imeti tlak, kakršen je predpisan za obremenitev, ki jo kolesa dejansko prenašajo, ko vozilo miruje.
2.1.3.7 Predpisani učinek je treba doseči brez blokiranja koles, brez odmika vozila s poti in brez neobičajnega tresenja. Blokiranje koles je dovoljeno, kjer je to izrecno navedeno.
|
|
2.1.4
|
Obnašanje vozila med zaviranjem
|
2.1.4.1
|
Pri preskusih zaviranja, zlasti pri veliki hitrosti, je treba preverjati splošno obnašanje vozila med zaviranjem.
|
|
2.1.4.2
|
Obnašanje vozila med zaviranjem na cesti, na kateri je oprijem zmanjšan:
▼M1
Obnašanje vozil kategorij Tb, R2b, R3b, R4b in S2b na cesti, na kateri je oprijem zmanjšan, mora izpolnjevati ustrezne zahteve iz Dodatka 1 te priloge ali, če je vozilo opremljeno s sistemom ABS, zahteve iz Priloge XI.
▼B
|
|
2.2 Preskus zaviranja tipa 0 (navaden preskus učinkovitosti pri hladnih zavorah)
2.2.1 Splošno
|
2.2.1.1
|
Zavora mora biti hladna. Šteje se, da je zavora hladna, če je izpolnjen eden od naslednjih pogojev:
2.2.1.1.1 Izmerjena temperatura na kolutu ali zunanji strani bobna je nižja od 100 °C.
2.2.1.1.2 Pri popolnoma zaprtih zavorah, vključno z zavorami, potopljenimi v olje, je izmerjena temperatura na zunanji strani ohišja nižja od 50 °C.
2.2.1.1.3 Zavore niso bile uporabljene eno uro pred preskusom.
|
|
2.2.1.2
|
Če se os brez zavore lahko izklopi, med preskusom zaviranja ne sme biti povezana z zavirano osjo. V primeru traktorjev z eno zavirano osjo in samodejnim vklopom pogona za vse druge osi med zaviranjem pa se šteje, da so vsa kolesa zavirana.
|
|
2.2.1.3
|
Preskus je treba opraviti pod naslednjimi pogoji:
2.2.1.3.1 Vozilo se obremeni do največje dovoljene mase, ki jo je navedel proizvajalec, pri čemer se nezavirana os obremeni do največje dovoljene mase. Kolesa zavirane osi morajo imeti pnevmatike z največjim premerom, ki ga je za ta tip vozila in obremenitev z največjo dovoljeno maso predvidel proizvajalec. Pri vozilih, ki zavirajo z vsemi kolesi, mora biti sprednja os obremenjena do največje dovoljene mase.
2.2.1.3.2 Preskus je treba ponoviti na neobremenjenem vozilu, ki v primeru traktorjev prevaža samo voznika in, če je treba, osebo, odgovorno za nadzor rezultatov preskusa.
2.2.1.3.3 Mejne vrednosti, ki so predpisane za najmanjši učinek, tako za preskuse z neobremenjenim vozilom kot tudi za preskuse z obremenjenim vozilom, so določene v nadaljevanju za vsako kategorijo vozil. Vozilo mora izpolnjevati tako predpisano zavorno razdaljo kot tudi predpisan povprečni polni pojemek za ustrezno kategorijo vozil, vendar ni treba dejansko izmeriti obeh parametrov.
2.2.1.3.4 Cesta mora biti ravna.
|
2.2.2 Preskus tipa 0 za vozila kategorij T in C
|
2.2.2.1
|
Preskus se mora izvesti pri največji konstrukcijsko določeni hitrosti vozila in z odklopljenim motorjem. Za to hitrost lahko veljajo določena dovoljena odstopanja. V vsakem primeru pa je treba doseči najmanjši predpisani učinek. Predpisana največja zavorna razdalja (po formuli za zavorno razdaljo) se izračuna z dejansko preskusno hitrostjo.
|
▼M1
|
2.2.2.2
|
Za preverjanje izpolnjevanja zahtev iz točke 2.2.1.2.4 Priloge I se izvede preskus tipa 0 z odklopljenim motorjem in pri začetni hitrosti 30 km/h.
Ob uporabi upravljalnega elementa parkirne zavore, povprečni polni pojemek in pojemek, tik preden se vozilo ustavi, ne smeta biti manjša od 1,5 m/s2. Enaka zahteva velja v primeru pomožnega upravljalnega elementa iz točke 2.2.1.2.4 Priloge I.
Preskus je treba izvajati z obremenjenim vozilom. Sila, ki deluje na upravljalni element zavore, ne sme presegati določenih vrednosti.
|
▼B
|
2.2.2.3
|
Pri vozilih, opremljenih s sedežem v obliki sedla in krmilom ali opremljenih z volanom in sedežno klopjo ali školjkastimi sedeži v eni ali več vrstah, ki so opremljena tudi s stalnim prenosnim sistemom, kot lahko dokaže proizvajalec pri preskušanju zaviranja, se preskus tipa 0 izvede z vklopljenim motorjem.
|
2.2.3 Preskus tipa 0 za vozila kategorij R in S:
|
2.2.3.1
|
Zavorni učinek vlečenega vozila se lahko izračuna iz zavornega razmerja traktorja z vlečenim vozilom in izmerjene sile na vlečni sklopki ali, v nekaterih primerih, iz zavornega razmerja traktorja z vlečenim vozilom, kjer je zavirano samo vlečeno vozilo. Motor traktorja mora biti med preskusom zaviranja odklopljen.
|
|
2.2.3.2
|
Če je vlečeno vozilo opremljeno s pnevmatskim zavornim sistemom, tlak v napajalnem vodu med preskusom zavor ne sme presegati 700 kPa, vrednost signala v krmilnem vodu pa ne sme presegati naslednjih vrednosti glede na napeljavo:
2.2.3.2.1 650 kPa v pnevmatskem krmilnem vodu;
2.2.3.2.2 digitalna vrednost, ki ustreza 650 kPa v električnem krmilnem vodu (kot je določeno v standardu ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007).
|
|
2.2.3.3
|
Če je vlečeno vozilo opremljeno s hidravličnim zavornim sistemom:
2.2.3.3.1 Predpisani najmanjši zavorni učinek mora biti dosežen s tlakom na vlečni glavi krmilnega voda, ki ne presega 11 500 kPa.
2.2.3.3.2 Največji tlak, ki se dovaja do vlečne glave krmilnega voda, ne sme presegati 15 000 kPa.
|
|
2.2.3.4
|
Z izjemo primerov v skladu s točkama 2.2.3.5 in 2.2.3.6 je za določitev zavornega razmerja vlečenega vozila treba izmeriti zavorno razmerje traktorja z vlečenim vozilom in silo na vlečni sklopki. Traktor mora izpolnjevati zahteve iz Dodatka 1 v zvezi z odnosom med razmerjem TM/FM in tlakom pm,
pri čemer je:
|
TM
|
=
|
vsota zavornih sil na obodu vseh koles traktorjev;
|
|
FM
|
=
|
skupna normalna statična reakcija površine cestišča na kolesa traktorjev;
|
|
pm
|
=
|
tlak na vlečni glavi krmilnega voda.
|
Zavorno razmerje vlečenega vozila se izračuna v skladu z naslednjo formulo:
zR = zR + M + D/FR
pri čemer je:
|
zR
|
=
|
zavorno razmerje vlečenega vozila;
|
|
zR + M
|
=
|
zavorno razmerje traktorja z vlečenim vozilom;
|
|
D
|
=
|
sila na vlečni sklopki (vlečna sila D > 0; tlačna sila D < 0);
|
|
FR
|
=
|
skupna normalna statična reakcija površine cestišča na vsa kolesa vlečenega vozila.
|
|
|
2.2.3.5
|
Če ima vlečeno vozilo povezan ali polpovezan zavorni sistem, kjer se tlak v sprožilih zavore med zaviranjem ne spreminja kljub premiku dinamičnih obremenitev po oseh, se lahko zavira samo vlečeno vozilo. Zavorno razmerje zR vlečenega vozila se izračuna v skladu z naslednjo formulo:

pri čemer je:
|
R
|
=
|
vrednost kotalnega upora:
— 0,02 pri vozilih, katerih največja konstrukcijsko določena hitrost ne presega 40 km/h;
— 0,01 pri vozilih z največjo konstrukcijsko določeno hitrostjo nad 40 km/h;
|
|
FM
|
=
|
skupna normalna statična reakcija površine cestišča na kolesa traktorjev;
|
|
FR
|
=
|
skupna normalna statična reakcija površine cestišča na vsa kolesa vlečenega vozila.
|
|
|
2.2.3.6
|
Zavorno razmerje vlečenega vozila se lahko določi tudi samo z zaviranjem vlečenega vozila. V tem primeru je treba uporabiti enak tlak, kot je bil izmerjen v sprožilih zavore med zaviranjem skupine vozil.
|
2.3 Preskus tipa I (preskus pojemanja zavornega učinka)
Ta tip preskusa se izvede v skladu z zahtevami iz točke 2.3.1 ali 2.3.2, kot je ustrezno.
2.3.1 S ponavljajočim se zaviranjem
Za traktorje kategorij T in C se izvede preskus tipa I s ponavljajočim se zaviranjem.
|
2.3.1.1
|
Delovni zavorni sistem traktorjev, ki jih zajema ta uredba, se preskusi z večkratnim zaporednim aktiviranjem in popuščanjem zavor. Vozilo se popolnoma obremeni in preskusi v skladu s pogoji, navedenimi v naslednji tabeli:
|
Kategorija vozil
|
Pogoji
|
|
v1 [km/h]
|
v2 [km/h]
|
Δt [s]
|
n
|
|
T, C
|
80 % vmax
|
½ v1
|
60
|
20
|
pri čemer je:
|
v1
|
=
|
hitrost na začetku zaviranja;
|
|
v2
|
=
|
hitrost na koncu zaviranja;
|
|
vmax
|
=
|
največja konstrukcijsko določena hitrost vozila;
|
|
Δt
|
=
|
trajanje cikla zaviranja (čas, ki mine od začetka prvega pritiska na zavoro do začetka drugega pritiska na zavoro).
|
|
2.3.1.1.1
|
V primeru traktorjev, katerih največja konstrukcijsko določena hitrost ne presega 40 km/h, se lahko namesto preskusnih pogojev iz tabele v točki 2.3.1.1 uporabijo pogoji iz naslednje tabele:
|
Kategorija vozil
|
Pogoji
|
|
v1 [km/h]
|
v2 [km/h]
|
Δt [s]
|
n
|
|
T, C
|
80 % vmax
|
0,05 v1
|
60
|
18
|
|
|
|
2.3.1.2
|
Če zaradi značilnosti vozila ni mogoče upoštevati časa, ki je predpisan za Δt, se trajanje lahko podaljša; v vsakem primeru se poleg časa, potrebnega za zaviranje in pospeševanje vozila, v vsakem ciklu dovoli 10 sekund za stabilizacijo hitrosti v1.
|
|
2.3.1.3
|
Pri teh preskusih je treba silo, ki deluje na upravljalni element, prilagoditi tako, da se doseže povprečni polni pojemek 3 m/s2 pri prvi uporabi zavor. Ta sila mora ostati nespremenjena pri vseh nadaljnjih uporabah zavore.
|
|
2.3.1.4
|
Med uporabo zavor mora biti stalno vklopljeno najvišje prestavno razmerje (razen hitre prestave itd.).
►M1
Kot alternativa je dovoljena tudi izvedba preskusa z odklopljenim motorjem, če je ustrezno, med uporabo zavor. ◄
|
|
2.3.1.5
|
Pri pospeševanju po zaviranju se mora menjalnik uporabljati tako, da se v čim krajšem času doseže hitrost v1 (največji pospešek, ki ga dopuščata motor in menjalnik).
|
|
2.3.1.6
|
Pri vozilih, ki so opremljena z napravami za samodejno nastavljanje zavor, morajo biti zavore pred zgornjim preskusom tipa I nastavljene v skladu z naslednjimi postopki, kot je ustrezno:
2.3.1.6.1 Pri vozilih, ki so opremljena s pnevmatskimi zavorami, morajo biti zavore nastavljene tako, da omogočajo delovanje naprave za samodejno nastavljanje zavor. V ta namen mora biti gib sprožila nastavljen na:
so ≥ 1,1 · spon.nast.
(zgornja mejna vrednost ne sme presegati vrednosti, ki jo priporoča proizvajalec)
pri čemer je:
|
S pon.nast.
|
gib za ponovno nastavitev v skladu s specifikacijo proizvajalca naprave za samodejno nastavljanje zavor, tj. gib, pri katerem se sproži ponovna nastavitev voznega profila zavore s tlakom v sprožilu, ki je enak 15 odstotkom delovnega tlaka zavornega sistema, vendar ne manjši od 100 kPa.
Če po dogovoru s tehnično službo merjenje giba sprožila ni izvedljivo, se je treba o začetni nastavitvi dogovoriti s tehnično službo.
Glede na zgornji pogoj mora biti zavora aktivirana 50-krat zapored s tlakom v sprožilu, ki je enak 30 odstotkom delovnega tlaka zavornega sistema, vendar ne manjši od 200 kPa. Temu sledi enkratno zaviranje s tlakom v sprožilu nad 650 kPa.
|
2.3.1.6.2 Pri vozilih, ki so opremljena s hidravličnimi kolutnimi zavorami, se zahteve glede nastavljanja ne štejejo za potrebne.
2.3.1.6.3 Pri vozilih, ki so opremljena s hidravličnimi bobnastimi zavorami, mora nastavitev zavor določiti proizvajalec.
|
2.3.2 S povezanim zaviranjem
▼M1
|
2.3.2.1
|
Delovni zavorni sistem vozil kategorij R1, R2, S1, R3a, R4a in S2a ter vozil kategorij R3b in S2b, pri katerih vsota tehnično dovoljenih mas na os ne presega 10 000 kg, se preskusijo tako, da je pri obremenjenem vozilu zavorna energija enaka energiji, ki je bila zabeležena v istem časovnem obdobju, ko se je preskušano obremenjeno vozilo premikalo s stalno hitrostjo 40 km/h na razdalji 1,7 km po 7-odstotnem klancu navzdol.
Lahko pa se šteje, da je ta zahteva izpolnjena za vozila kategorij R3a, R4a, S2a ter za vozila kategorij R3b in S2b, pri katerih vsota tehnično dovoljenih mas na os ne presega 10 000 kg, če so ta vozila opravila preskus tipa III v skladu s točko 2.5.
|
▼B
|
2.3.2.2
|
Preskus se lahko izvede na ravni cesti, pri čemer vlečeno vozilo vleče kmetijsko vozilo; med preskusom mora biti sila, ki deluje na upravljalni element, prilagojena tako, da se vzdržuje nespremenljiv upor vlečenega vozila (7 % največje statične obremenitve osi vlečenega vozila). Če moč, zagotovljena za vleko, ni zadostna, se preskus lahko opravi pri manjši hitrosti, vendar na večji razdalji, kot je prikazano v naslednji tabeli:
|
Hitrost (km/h)
|
Razdalja (v m)
|
|
40
|
1 700
|
|
30
|
1 950
|
|
20
|
2 500
|
|
15
|
3 100
|
|
|
2.3.2.3
|
Pri vlečenih vozilih, ki so opremljena z napravami za samodejno nastavljanje zavor, morajo biti zavore pred zgoraj predpisanim preskusom tipa I nastavljene v skladu s postopkom iz točke 2.5.4.
|
2.3.3 Zavorni učinek pri zaviranju s segretimi zavorami
|
2.3.3.1
|
Ob koncu preskusa tipa I (preskusa, opisanega v točki 2.3.1, ali preskusa, opisanega v točki 2.3.2) je treba zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema izmeriti pod enakimi pogoji (in še zlasti pri uporabi nespremenjene sile za upravljanje, ki ni večja kot dejansko uporabljena povprečna sila) kot za preskus tipa 0 pri odklopljenem motorju (temperaturni pogoji so lahko različni).
|
|
2.3.3.2
|
Pri traktorjih zavorni učinek pri zaviranju s segretimi zavorami ne sme biti manjši od 80 % predpisanega zavornega učinka za zadevno kategorijo in od 60 % vrednosti, dosežene pri preskusu tipa 0 pri odklopljenem motorju.
|
|
2.3.3.3
|
Pri vlečenih vozilih zavorna sila segretih zavor na obodu koles, izmerjena pri preskusu pri hitrosti 40 km/h, ne sme biti manjša od 36 % največje statične obremenitve koles vlečenih vozil z vmax > 30 km/h ali od 26 % največje statične obremenitve koles vlečenih vozil z vmax ≤ 30 km/h ali od 60 % vrednosti, zabeležene pri preskusu tipa 0 pri enaki hitrosti.
|
2.3.4 Preskus prostega teka
Pri traktorjih, ki so opremljeni z napravami za samodejno nastavljanje zavor, se morajo zavore po opravljenih preskusih iz točke 2.3.3 ohladiti do temperature, ki ustreza temperaturi hladnih zavor (tj. ≤ 100 °C), pri čemer je treba preveriti, ali vozilo omogoča prosti tek z izpolnjevanjem enega od naslednjih pogojev:
2.3.4.1 kolesa se prosto obračajo (tj. jih je mogoče vrteti ročno);
▼M1
2.3.4.2 potrjeno je, da se lahko preostali zavorni navor šteje za sprejemljivega, če asimptotične temperature ne presegajo povečanja temperature bobna/koluta za 80 °C, kadar vozilo vozi z nespremenjeno hitrostjo v = 60 km/h ali največjo konstrukcijsko določeno hitrostjo vlečenega vozila, kar je manj, in s popuščenimi zavorami.
▼B
2.4 Preskus tipa II (preskus obnašanja vozila pri vožnji po klancu navzdol)
Traktorji kategorij Tb in Cb z največjo dovoljeno maso nad 12 t morajo poleg preskusa tipa I opraviti tudi preskus tipa II.
|
2.4.1
|
Obremenjen traktor je treba preskusiti tako, da je zavorna energija enaka energiji, ki je bila zabeležena v istem časovnem obdobju pri obremenjenem traktorju, ki vozi s povprečno hitrostjo 30 km/h na razdalji 6 km po 6-odstotnem klancu navzdol, ob uporabi ustrezne prestave in trajnostnega zavornega sistema, če je vozilo opremljeno z njim. Uporabiti je treba takšno prestavo, ki zagotavlja, da vrtilna frekvenca motorja (min-1) ne preseže največje vrednosti, ki jo je predpisal proizvajalec.
|
|
2.4.2
|
Pri vozilih, pri katerih energijo prevzame samo motorna zavora, je dovoljena toleranca ± 5 km/h za povprečno hitrost, in vklopiti je treba prestavo, ki omogoča stabiliziranje hitrosti pri vrednosti, ki je najbližja 30 km/h na 6-odstotnem klancu navzdol. Če se učinek same motorne zavore določi z merjenjem pojemka, zadostuje, če je izmerjeni povprečni pojemek vsaj 0,5 m/s2.
|
|
2.4.3
|
Ob koncu preskusa je treba zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema izmeriti pod enakimi pogoji kot za preskus tipa 0 pri odklopljenem motorju (temperaturni pogoji so lahko različni). Pri tem zavornem učinku pri zaviranju s segretimi zavorami zavorna razdalja ne sme presegati naslednjih vrednosti, povprečni polni pojemek pa ne sme biti manjši od naslednjih vrednosti, pri čemer sila za upravljanje ne sme presegati 60 daN:
|
0,15 v + (1,33 v2/115)
|
(drugi izraz ustreza povprečnemu polnemu pojemku dm = 3,3 m/s2).
|
|
2.5 Preskus tipa III (preskus pojemanja zavornega učinka) za obremenjena vozila naslednjih kategorij:
|
2.5.1
|
R3b, R4b, S2b, kjer vsota tehnično dovoljenih mas na os presega 10 000 kg,
ali kategorije
|
|
2.5.2
|
R3a, R4a, S2a, če ta vozila niso bila preskušena v skladu s točko 2.3.2;
|
▼M1
|
2.5.3
|
R3b in S2b, kjer vsota tehnično dovoljenih mas na os ne presega 10 000 kg.
|
▼B
|
2.5.4
|
Preskus na progi za preskušanje
|
2.5.4.1
|
Zavore morajo biti pred spodnjim preskusom tipa III nastavljene v skladu z naslednjimi postopki, kot je ustrezno:
2.5.4.1.1 Pri vlečenih vozilih, ki so opremljena s pnevmatskimi zavorami, morajo biti zavore nastavljene tako, da omogočajo delovanje naprave za samodejno nastavljanje zavor. V ta namen mora biti gib sprožila nastavljen na:
so ≥ 1,1 · spon-nast
(zgornja mejna vrednost ne sme presegati vrednosti, ki jo priporoča proizvajalec)
pri čemer je:
|
spon-nast
|
gib za ponovno nastavitev v skladu s specifikacijo proizvajalca naprave za samodejno nastavljanje zavor, tj. gib, pri katerem se sproži ponovna nastavitev voznega profila zavore s tlakom v sprožilu, ki znaša 100 kPa.
|
Če po dogovoru s tehnično službo merjenje giba sprožila ni izvedljivo, se je treba o začetni nastavitvi dogovoriti s tehnično službo.
V skladu z zgornjim pogojem je treba zavoro aktivirati 50-krat zapored s tlakom v sprožilu 200 kPa. Temu sledi enkratno zaviranje s tlakom v sprožilu vsaj 650 kPa.
2.5.4.1.2 Pri vlečenih vozilih, ki so opremljena s hidravličnimi kolutnimi zavorami, se zahteve glede nastavljanja ne štejejo za potrebne.
2.5.4.1.3 Pri vlečenih vozilih, ki so opremljena s hidravličnimi bobnastimi zavorami, mora nastavitev zavor določiti proizvajalec.
|
|
2.5.4.2
|
Za preskuse na cesti veljajo naslednji pogoji:
|
Število zaviranj
|
20
|
|
Trajanje cikla zaviranja
|
60 s
|
|
Začetna hitrost ob začetku zaviranja
|
60 km/h
|
|
Uporaba zavor
|
Pri teh preskusih je treba silo, ki deluje na upravljalni element, prilagoditi tako, da se doseže povprečni polni pojemek 3 m/s2 glede na maso vlečenega vozila PR pri prvi uporabi zavor; ta sila mora ostati nespremenjena pri vseh nadaljnjih uporabah zavor.
|
Zavorno razmerje vlečenega vozila se izračuna v skladu s formulo iz točke 2.2.3.5:

Hitrost ob koncu zaviranja:
pri čemer je:
|
zR
|
=
|
zavorno razmerje vlečenega vozila;
|
|
zR + M
|
=
|
zavorno razmerje skupine vozil (traktor in vlečeno vozilo);
|
|
R
|
=
|
vrednost kotalnega upora = 0,01;
|
|
FM
|
=
|
skupna normalna statična reakcija med površino cestišča in kolesi traktorja (N);
|
|
FR
|
=
|
skupna normalna statična reakcija med površino cestišča in kolesi vlečenega vozila (N);
|
|
F1
|
=
|
normalna statična reakcija dela mase vlečenega vozila, ki jo nosijo nezavirane osi (N);
|
|
F2
|
=
|
normalna statična reakcija dela mase vlečenega vozila, ki jo nosijo zavirane osi (N);
|
|
v1
|
=
|
začetna hitrost (km/h);
|
|
v2
|
=
|
končna hitrost (km/h).
|
|
|
|
2.5.5
|
Zavorni učinek pri zaviranju s segretimi zavorami Ob koncu preskusa v skladu s točko 2.5.4 je treba zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema izmeriti pod enakimi pogoji kot za preskus tipa 0, vendar pod drugačnimi temperaturnimi pogoji in z začetno hitrostjo 60 km/h. Zavorna sila segretih zavor na obodu koles ne sme biti manjša od 40 odstotkov največje statične obremenitve koles in od 60 odstotkov vrednosti, ki je zabeležena pri preskusu tipa 0 pri enaki hitrosti.
|
|
2.5.6
|
Preskus prostega teka Po opravljenih preskusih iz točke 2.5.5 se morajo zavore ohladiti do temperature, ki ustreza temperaturi hladnih zavor (tj. < 100 °C), pri čemer je treba preveriti, ali vlečeno vozilo omogoča prosti tek z izpolnjevanjem enega od naslednjih pogojev:
2.5.6.1 kolesa se prosto obračajo (tj. jih je mogoče vrteti ročno);
2.5.6.2 potrjeno je, da se lahko preostali zavorni navor šteje za sprejemljivega, če asimptotične temperature ne presegajo povečanja temperature bobna/koluta za 80 °C, kadar vlečeno vozilo vozi z nespremenjeno hitrostjo v = 60 km/h in s popuščenimi zavorami.
|
3.
Učinek zavornih sistemov
3.1 Vozila kategorij T in C
3.1.1 Delovni zavorni sistemi
|
3.1.1.1
|
V skladu s pogoji tipa 0 se mora delovni zavorni sistem preskusiti pod pogoji, navedenimi v naslednji tabeli,
|
|
vmax ≤ 30 km/h
|
vmax > 30 km/h
|
|
v
|
= vmax
|
= vmax
|
|
s (v metrih)
|
≤ 0,15 v + v2/92
|
≤ 0,15 v + v2/130
|
|
dm
|
≥ 3,55 m/s2
|
≥ 5 m/s2
|
|
F (nožni upravljalni element)
|
≤ 600 N
|
≤ 600 N
|
|
F (ročni upravljalni element)
|
≤ 400 N
|
≤ 400 N
|
pri čemer je:
|
vmax
|
=
|
največja konstrukcijsko določena hitrost vozila;
|
|
v
|
=
|
predpisana preskusna hitrost;
|
|
dm
|
=
|
povprečni polni pojemek;
|
|
F
|
=
|
sila, ki deluje na upravljalni element.
|
|
|
3.1.1.2
|
►M1
V primeru traktorja, ki lahko vleče nezavirano vozilo kategorije R ali S, je treba zahtevani najmanjši učinek skupine vozil, kot je predpisan v točki 3.1.1.2.1, doseči, ko je nezavirano vlečeno vozilo priključeno na traktor in obremenjeno do največje mase, ki jo določi proizvajalec traktorja. ◄
Učinek skupine vozil je treba preveriti z izračuni, ki se nanašajo na največji zavorni učinek, ki ga dejansko doseže samo obremenjen in neobremenjen (lahko tudi delno obremenjen, kot določi proizvajalec traktorja) traktor med preskusom tipa 0 z odklopljenim motorjem, in sicer z naslednjo formulo (praktični preskusi s priključenim nezaviranim vlečenim vozilom niso potrebni):
pri čemer je:
|
dM + R
|
=
|
izračunan povprečni polni pojemek traktorja, ko je nanj priključeno nezavirano vlečeno vozilo, v m/s2;
|
|
dM
|
=
|
največji povprečni polni pojemek samega traktorja, ki se doseže med preskusom tipa 0 z odklopljenim motorjem, v m/s2;
|
|
PM
|
=
|
masa traktorja (vključno z dodatnimi utežmi in/ali podporno obremenitvijo, če pride v poštev);
|
|
PM_obrem
|
=
|
masa obremenjenega traktorja;
|
|
PM_del_obrem
|
=
|
masa delno obremenjenega traktorja;
|
|
PM_neobr
|
=
|
masa neobremenjenega traktorja;
|
|
PR
|
=
|
del največje mase, ki jo nosijo osi vlečenega vozila brez delovne zavore, ki se lahko priključi (kot navede proizvajalec traktorja);
|
▼M1
|
PM + R
|
=
|
skupna masa (vsota mase PM in navedene mase nezaviranega vlečenega vozila PR).
|
▼B
3.1.1.2.1 Zahtevani najmanjši učinek skupine vozil
Najmanjši učinek skupine vozil ne sme biti manjši od 4,5 m/s2 pri traktorjih, kjer je vmax > 30 km/h, in od 3,2 m/s2 pri traktorjih, kjer je vmax ≤ 30 km/h, in sicer v obremenjenem in neobremenjenem stanju. Po presoji proizvajalca traktorja lahko tehnična služba opravi dodatni preskus tipa 0 za maso delno obremenjenega traktorja, ki jo navede proizvajalec, da se določi največja dovoljena masa nezaviranega vlečenega vozila, ki omogoča doseganje zahtevanega najmanjšega učinka skupine vozil za takšno „skupno maso“.
Izmerjene vrednosti „dm“ za zgoraj navedeno stanje obremenitve in ustrezne izračunane vrednosti „dM + R“ se zabeležijo v poročilo o preskusu.
Največja navedena vrednost za maso nezaviranega vlečenega vozila ne sme presegati 3 500 kg.
|
3.1.2 Pomožni zavorni sistem
Pomožni zavorni sistem, tudi če se upravljalni element, ki ga aktivira, uporablja tudi za druge zavorne funkcije, mora zagotoviti zavorno razdaljo, ki ne presega naslednjih vrednosti, in povprečni polni pojemek, ki ni manjši od naslednjih vrednosti:
|
traktorji, kjer je vmax ≤ 30 km/h:
|
0,15 v + (v2/39)
|
|
(drugi izraz ustreza povprečnemu polnemu pojemku dm = 1,5 m/s2);
|
|
traktorji, kjer je vmax > 30 km/h:
|
0,15 v + (v2/57)
|
|
(drugi izraz ustreza povprečnemu polnemu pojemku dm = 2,2 m/s2).
|
Predpisani učinek se doseže tako, da se na upravljalni element deluje s silo, ki ne presega 600 N v primeru nožnega upravljalnega elementa ali 400 N v primeru ročnega upravljalnega elementa. Upravljalni element se namesti tako, da jo lahko voznik uporabi preprosto in hitro.
3.1.3 Parkirna zavora
|
3.1.3.1
|
Parkirna zavora mora biti, tudi če je kombinirana z drugo zavorno napravo, zmožna zadržati na mestu obremenjen traktor na 18-odstotnem klancu navzgor in navzdol. Ta zahteva mora biti izpolnjena tudi med ohlajanjem. Šteje se, da je ohlajanje končano, ko zavore dosežejo temperaturo, ki je od temperature okolice višja za 10 °C.
|
|
3.1.3.2
|
Pri vozilih kategorije T4.3 mora biti parkirna zavora, tudi če je kombinirana z drugo zavorno napravo, zmožna zadržati na mestu obremenjen traktor na 40-odstotnem klancu navzgor in navzdol. Ta zahteva mora biti izpolnjena tudi med ohlajanjem. Šteje se, da je ohlajanje končano, ko zavore dosežejo temperaturo, ki je od temperature okolice višja za 10 °C.
|
|
3.1.3.3
|
Preskus zavornega učinka segrete in hladne parkirne zavore Da se preveri, ali parkirna zavora lahko zadrži obremenjen traktor na klancu navzgor in navzdol v skladu z zahtevami iz točk 3.1.3.1 in 3.1.3.2, se izvedejo meritve pod naslednjimi pogoji:
— segretje zavor na temperaturo najmanj 100 °C (izmerjeno na torni površini koluta ali na zunanji strani bobna),
— statični preskus segrete parkirne zavore pri temperaturi najmanj 100 °C,
— statični preskus hladne parkirne zavore pri temperaturi največ 10 °C nad temperaturo okolice,
▼M1
— Med ohlajanjem se parkirna zavora ne sme ponovno nastaviti ročno.
▼B
Pri zavorah, potopljenih v olje, se o metodi, po kateri se izvaja to preverjanje, dogovorita proizvajalec vozila in tehnična služba. Metoda ocenjevanja in rezultati se dodajo k poročilu o homologaciji.
▼M1
Statični preskus segrete parkirne zavore se lahko izpusti, če parkirna zavora deluje izključno na zavorne površine, ki se ne uporabljajo med zaviranjem z delovno zavoro.
▼B
|
|
3.1.3.4
|
Pri traktorjih, na katere se lahko priključijo vlečena vozila, mora biti parkirna zavora traktorja zmožna zadržati na mestu na 12-odstotnem klancu navzgor ali navzdol skupino vozil z največjo dovoljeno maso, ki jo je navedel proizvajalec traktorja.
▼M1
Če te zahteve ni mogoče izpolniti zaradi fizičnih omejitev (npr. omejen oprijem med pnevmatiko in cesto, zaradi česar traktor ne more ustvariti zadostnih zavornih sil, ali v primeru, ko samo mehanski učinek parkirne zavore traktorja, kot je opisano v točki 3.1.3.1, ne zadostuje za zadržanje na mestu skupine vozil), se šteje, da je ta zahteva izpolnjena, če je izpolnjena alternativna zahteva iz točke 3.1.3.4.1 te priloge v povezavi s točko 2.2.1.20 Priloge I.
|
3.1.3.4.1
|
Zahteve iz točke 3.1.3.4 se štejejo za izpolnjene, če so pri vlečenem vozilu z delovno zavoro izpolnjeni pogoji iz točke 3.1.3.4.1.1 ali če so pri nezaviranem ali vztrajnostno zaviranem vlečenem vozilu izpolnjeni pogoji iz točke 3.1.3.4.1.2.
3.1.3.4.1.1 Tudi če motor traktorja ne deluje, skupina vozil z največjo dovoljeno maso ostane na mestu na predpisanem naklonu, ko voznik z aktiviranjem enega samega upravljalnega elementa s svojega sedeža uporabi parkirno zavoro traktorja in delovni zavorni sistem vlečenega vozila ali samo parkirno zavoro traktorja.
3.1.3.4.1.2 Parkirna zavora traktorja lahko zadrži na mestu traktor, na katerega je priključeno nezavirano ali vztrajnostno zavirano vlečeno vozilo, z maso, ki je enaka največji „skupni masi PM+R“, navedeni v poročilu o preskusu. Ta masa se določi na naslednji način:
(a) pri nezaviranem vlečenem vozilu: PM+R = skupna masa (vsota mase PM in navedene mase nezaviranega vlečenega vozila PR) v skladu s točko 3.1.1.2;
(b) pri vztrajnostno zaviranem vlečenem vozilu: PM+R = skupna masa (vsota mase PM in navedene mase vztrajnostno zaviranega vlečenega vozila, kot jo je določil proizvajalec).
PM = masa traktorja (vključno z dodatnimi utežmi ali podporno obremenitvijo ali obojim, če pride v poštev).
|
▼B
|
|
3.1.3.5
|
Dovoljena je parkirna zavora, ki jo je treba večkrat aktivirati, preden se doseže predpisani učinek.
|
3.1.4 Preostali zavorni učinek po okvari prenosnega sistema
|
3.1.4.1
|
Pri traktorjih kategorije Tb z največjo konstrukcijsko določeno hitrostjo nad 60 km/h mora v primeru okvare na delu prenosnega sistema preostali učinek delovnega zavornega sistema zagotoviti zavorno razdaljo, ki ne presega naslednjih vrednosti, in povprečni polni pojemek, ki ni manjši od naslednjih vrednosti, ko se uporabi sila za upravljanje, ki ne presega 70 daN, pri preskusu tipa 0 z odklopljenim motorjem od naslednjih začetnih hitrosti za ustrezno kategorijo vozil:
|
v [km/h]
|
Zavorna razdalja pri OBREMENJENEM vozilu – [m]
|
dm [m/s2]
|
Zavorna razdalja pri NEOBREMENJENEM vozilu – [m]
|
dm [m/s2]
|
|
40
|

|
1,3
|

|
1,3
|
Ta zahteva ne pomeni odstopanja od zahtev v zvezi s pomožnim zaviranjem.
|
|
3.1.4.2
|
Preskus preostalega zavornega učinka se izvede s simuliranjem pogojev pri dejanski okvari delovnega zavornega sistema.
|
3.2 Vozila kategorij R in S
3.2.1 Delovni zavorni sistem
3.2.1.1 Zahteva v zvezi s preskusi vozil kategorije R1 ali S1
Če so vlečena vozila kategorije R1 ali S1 opremljena z delovnim zavornim sistemom, mora učinek sistema izpolnjevati zahteve za vozila kategorije R2 ali S2.
3.2.1.2 Zahteva v zvezi s preskusi vozil kategorije R2
Če je delovni zavorni sistem povezanega ali polpovezanega tipa, mora biti vsota sil, ki delujejo na obod zaviranih koles, vsaj X % največje statične obremenitve koles.
|
X
|
=
|
50 za vlečeno vozilo z največjo konstrukcijsko določeno hitrostjo nad 30 km/h
|
|
X
|
=
|
35 za vlečeno vozilo, katerega največja konstrukcijsko določena hitrost ne presega 30 km/h
|
Če je vlečeno vozilo opremljeno s pnevmatskim zavornim sistemom, med preskusom zavor tlak v krmilnem vodu ne sme presegati 650 kPa (in/ali ustrezne digitalne vrednosti v električnem krmilnem vodu, kot je določeno v standardu ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007) in tlak v napajalnem vodu ne sme presegati 700 kPa.
Če je vlečeno vozilo opremljeno s hidravličnim zavornim sistemom, med preskusom zavor tlak v krmilnem vodu ne sme presegati 11 500 kPa, tlak v dodatnem vodu pa mora biti med 1 500 kPa in 1 800 kPa.
Preskusna hitrost je 60 km/h ali največja konstrukcijsko določena hitrost vlečenega vozila, kar je manj.
Če je zavorni sistem vztrajnostnega tipa, mora izpolnjevati pogoje, ki jih določa Priloga VIII.
3.2.1.3 Zahteva v zvezi s preskusi vozil kategorije R3, R4 ali S2
Vsota sil, ki delujejo na obod zaviranih koles, mora biti vsaj X % največje statične obremenitve koles.
|
X
|
=
|
50 za vlečeno vozilo kategorij R3, R4 in S2 z največjo konstrukcijsko določeno hitrostjo nad 30 km/h
|
|
X
|
=
|
35 za vlečena vozila kategorij R3a, R4a in S2a, katerih največja konstrukcijsko določena hitrost ne presega 30 km/h
|
Če je vlečeno vozilo opremljeno s pnevmatskim zavornim sistemom, med preskusom zavor tlak v krmilnem vodu ne sme presegati 650 kPa in tlak v napajalnem vodu ne sme presegati 700 kPa.
▼M1
Preskusna hitrost je 60 km/h ali največja konstrukcijsko določena hitrost vlečenega vozila, kar je manj.
▼B
Če je vlečeno vozilo opremljeno s hidravličnim zavornim sistemom, med preskusom zavor tlak v krmilnem vodu ne sme presegati 11 500 kPa, tlak v dodatnem vodu pa mora biti med 1 500 kPa in 1 800 kPa.
|
3.2.1.4
|
V skupini osi je med postopkom preskusa tipa 0 dovoljeno blokiranje koles na eni osi. Ta zahteva ne pomeni odstopanja od zahteve iz točke 6.3.1 Priloge XI v zvezi z blokiranjem neposredno upravljanih koles.
|
3.2.2 Parkirna zavora
|
3.2.2.1
|
Parkirna zavora, s katero je opremljeno vlečeno vozilo, mora biti zmožna zadržati obremenjeno vlečeno vozilo na mestu na 18-odstotnem klancu navzgor in navzdol, če je ločeno od traktorja.
|
|
3.2.2.2
|
Zahteve iz točke 3.2.2.1 morajo biti izpolnjene tudi med ohlajanjem. Šteje se, da je ohlajanje končano, ko zavore dosežejo temperaturo, ki je od temperature okolice višja za 10 °C.
|
|
3.2.2.3
|
Preskus zavornega učinka segrete in hladne parkirne zavore Velja preskusna zahteva iz točke 3.1.3.3.
|
▼M1
3.2.3. Samodejni zavorni sistem
Učinek samodejnega zaviranja v primeru okvare iz točk 2.2.1.17.1 in 2.2.1.18.5 Priloge I pri preskušanju obremenjenega vozila od hitrosti 40 km/h ali 0,8 vmax (kar je manj) ne sme biti manjši od 13,5 % največje statične obremenitve koles. Blokiranje koles je dovoljeno pri stopnjah učinka nad 13,5 %.
▼B
3.3 Odzivni čas za vozila kategorij T, C, R in S
|
3.3.1
|
Če je vozilo opremljeno z delovnim zavornim sistemom, ki je povsem ali delno odvisen od vira energije, ki ni fizična moč voznika, morajo biti izpolnjene naslednje zahteve:
3.3.1.1 Pri hitrem zaviranju v sili čas, ki poteče med trenutkom, ko se aktivira upravljalni element, in trenutkom, ko zavorna sila na najbolj neugodni osi doseže raven, ki ustreza predpisanemu učinku, ne sme presegati 0,6 sekunde.
3.3.1.2 Pri vozilih s pnevmatskimi zavornimi sistemi, vlečenih vozilih s hidravličnimi zavornimi sistemi ali traktorjih s hidravličnim krmilnim vodom se šteje, da so zahteve iz točke 3.3.1 izpolnjene, če je vozilo skladno z določbami Priloge III.
3.3.1.3 Pri traktorjih, opremljenih s hidravličnimi zavornimi sistemi, se šteje, da so zahteve iz točke 3.3.1 izpolnjene, če pri hitrem zaviranju v sili pojemek vozila ali tlak v najneugodnejšem zavornem valju doseže raven, ki ustreza predpisanemu učinku, v 0,6 sekunde.
3.3.1.4 Pri traktorjih z eno zavirano osjo in samodejnim vklopom pogona za vse druge osi med zaviranjem se šteje, da so zahteve iz točke 3.3.1 izpolnjene, če traktor izpolnjuje tako predpisano zavorno razdaljo kot tudi predpisan povprečni polni pojemek za ustrezno kategorijo vozil v skladu s točko 3.1.1.1, vendar v tem primeru ni treba dejansko izmeriti obeh parametrov.
|
Dodatek 1
Porazdelitev zaviranja med osi vozil ter zahteve glede združljivosti traktorja in vlečenega vozila
1.
Splošne zahteve
1.1 Vozila kategorij T, C, R in S
|
1.1.1
|
Vozila kategorij Ta, Ca, R2a, R3a, R4a in S2a z največjo konstrukcijsko določeno hitrostjo nad 30 km/h morajo izpolnjevati naslednje zahteve iz tega dodatka:
1.1.1.1 zahteve glede združljivosti v zvezi z diagramoma 2 in 3, kot je ustrezno; če se uporablja posebna naprava, mora delovati samodejno. Za priklopnike z elektronskim nadzorom porazdelitve zavorne sile veljajo zahteve iz tega dodatka samo, če je priklopnik električno povezan s traktorjem s priključkom iz standarda ISO 7638:2003;
1.1.1.2 v primeru okvare upravljanja posebne naprave mora biti dosežen zavorni učinek iz točke 5 za ustrezno vozilo;
1.1.1.3 zahteve za označevanje iz točke 6.
|
|
1.1.2
|
Vozila kategorij Tb, R2b, R3b, R4b in S2b morajo izpolnjevati ustrezne zahteve iz tega dodatka. Če se uporablja posebna naprava, mora delovati samodejno.
|
|
1.1.3.
|
▼M1
Vozila kategorij iz točk 1.1.1 in 1.1.2, ki so opremljena s protiblokirnim zavornim sistemom kategorije 1 ali 2 (traktorji) in kategorije A ali B (vlečena vozila) in ki izpolnjujejo ustrezne zahteve iz Priloge XI, morajo izpolnjevati tudi ustrezne zahteve iz tega dodatka z naslednjimi izjemami ali pogoji:
▼B
1.1.3.1 skladnost z zahtevami glede izkoristka oprijema v zvezi z diagramom 1 ni potrebna;
1.1.3.2 pri traktorjih in vlečenih vozilih skladnost z zahtevami glede združljivosti neobremenjenih vozil v zvezi z diagramoma 2 in 3, kot je ustrezno, ni potrebna. Kljub temu pa mora biti pri vseh stanjih obremenitve zavorno razmerje med tlakom 20 kPa in 100 kPa (pnevmatski zavorni sistemi) ter med 350 in 1 800 kPa (hidravlični zavorni sistemi) ali enakovredno digitalno vrednostjo na vlečni glavi krmilnih vodov;
1.1.3.3 za vozila, ki so opremljena s posebno napravo za samodejno uravnavanje porazdelitve zaviranja med osi ali samodejno uravnavanje zavorne sile glede na obremenitev osi, veljajo zahteve iz točk 5 in 6.
|
|
1.1.4
|
Če je vozilo opremljeno s trajnostnim zavornim sistemom, se pri določanju učinkovitosti vozila v zvezi z določbami te priloge ne upošteva upočasnjevalna sila.
|
▼M1
|
1.1.5
|
Zahteve iz tega dodatka se uporabljajo za zavorno opremo s pnevmatikami z največjim premerom, ki ga je proizvajalec predvidel za ta tip vozila.
|
|
1.1.6
|
Skladnost z zahtevami glede izkoristka oprijema in zahtevami glede združljivosti v zvezi z diagrami 1, 2 in 3 iz tega dodatka, se dokaže z izračunom.
|
▼B
|
1.2
|
Zahteve, ki so v zvezi z diagrami iz točk 3.1.6.1, 4.1 in 4.2, veljajo za vozila s pnevmatskim in električnim krmilnim vodom v skladu s točko 2.1.4 Priloge I ali s hidravličnim krmilnim vodom v skladu s točko 2.1.5 Priloge I. V vseh primerih bo referenčna vrednost (abscisa diagramov) vrednost tlaka ali električnega signala, ki se prenaša po krmilnem vodu:
1.2.1 za vozila, opremljena v skladu s točko 2.1.4.1.1 Priloge I, bo ta vrednost dejanski pnevmatski tlak v krmilnem vodu (pm);
1.2.2 za vozila, opremljena v skladu s točko 2.1.4.1.2 ali 2.1.4.1.3 Priloge I, bo ta vrednost tlak, ki ustreza preneseni digitalni vrednosti v električnem krmilnem vodu v skladu s standardom ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007.
Vozila, opremljena v skladu s točko 2.1.4.1.2 Priloge I (s pnevmatskim in električnim krmilnim vodom), morajo izpolnjevati zahteve diagramov v zvezi z obema krmilnima vodoma, ne zahtevata pa se identični krivulji značilnosti zaviranja za oba krmilna voda;
1.2.3 za vozila, opremljena v skladu s točko 2.1.5.1 Priloge I, bo ta vrednost dejanski hidravlični tlak v krmilnem vodu (pm).
|
|
1.3
|
Potrjevanje razvoja zavorne sile
|
1.3.1
|
Pri homologaciji je treba preveriti, ali je razvoj zaviranja na osi vsake neodvisne skupine osi v okviru naslednjih območij tlaka:
1.3.1.1 Obremenjena vozila:
Vsaj ena os mora začeti razvijati zavorno silo, ko je tlak na vlečni glavi v območju od 20 do 100 kPa (pnevmatski zavorni sistemi) ali od 350 do 1 800 kPa (hidravlični zavorni sistemi) ali enakovredne digitalne vrednosti.
Vsaj ena os vsake druge skupine osi mora začeti razvijati zavorno silo, ko je tlak na vlečni glavi največ 120 kPa (pnevmatski zavorni sistemi) ali 2 100 kPa (hidravlični zavorni sistemi) ali toliko, kot znaša enakovredna digitalna vrednost.
1.3.1.2 Neobremenjena vozila:
Vsaj ena os mora začeti razvijati zavorno silo, ko je tlak na vlečni glavi v območju od 20 do 100 kPa (pnevmatski zavorni sistemi) ali od 350 do 1 800 kPa (hidravlični zavorni sistemi) ali enakovredne digitalne vrednosti.
1.3.1.3 Če so kolesa na oseh dvignjena in se prosto vrtijo, je treba uporabiti povečano zaviranje in izmeriti tlak na vlečni glavi v trenutku, ko koles ni več mogoče vrteti ročno. Pri traktorjih kategorije C se lahko za potrjevanje razvoja zavorne sile uporabi alternativni postopek (npr. z odstranitvijo gosenic). V tem stanju se določi razvoj zavorne sile.
|
|
2.
Simboli
|
i
|
=
|
indeks osi (i = 1, sprednja os; i = 2, druga os; itd.)
|
|
ER
|
=
|
razdalja med priklopno točko in središčem osi vlečenega vozila s togim vlečnim ojesom in vlečenega vozila s centralno osjo
|
|
fi
|
=
|
Ti/Ni, izkoriščeni oprijem osi i
|
|
Fi
|
=
|
normalna reakcija površine cestišča na os i pri statičnih pogojih
|
|
FM
|
=
|
skupna normalna statična reakcija površine cestišča na kolesa traktorja
|
|
g
|
=
|
gravitacijski pospešek: g = 9,81 m/s2
|
|
h
|
=
|
višina težišča nad tlemi, ki jo določi proizvajalec in s katero se strinjajo tehnične službe, ki izvajajo homologacijski preskus
|
|
k
|
=
|
teoretični koeficient oprijema med pnevmatiko in cesto
|
|
Ni
|
=
|
normalna reakcija površine cestišča na os i pri zaviranju
|
|
pm
|
=
|
tlak na vlečni glavi krmilnega voda
|
|
FR
|
=
|
skupna normalna statična reakcija površine cestišča na vsa kolesa vlečenega vozila
|
|
FRmax
|
=
|
vrednost FR pri največji masi vlečenega vozila
|
|
Ti
|
=
|
sila, s katero delujejo zavore na os i pod normalnimi pogoji zaviranja na cesti
|
|
TM
|
=
|
vsota zavornih sil na obodu vseh koles traktorjev
|
|
TR
|
=
|
vsota zavornih sil Ti na obodu vseh koles vlečenega vozila
|
|
z
|
=
|
zavorno razmerje vozila = J/g
|
▼M1
3.
Zahteve za traktorje kategorije T
3.1 Dvoosni traktorji
3.1.1 Za vrednosti k med 0,2 in 0,8:

Določbe iz te točke ne vplivajo na zahteve iz Priloge II v zvezi z zavornim učinkom. Če pa se pri preskušanju na podlagi določb iz te točke dosežejo zavorni učinki, ki so večji od učinkov, predpisanih v Prilogi II, veljajo določbe v zvezi s krivuljami izkoristka oprijema na območjih diagrama 1, določenih s premicama k = 0,8 in z = 0,8.
3.1.2 Za vse stopnje zaviranja med 0,15 in 0,30:
3.1.2.1 Krivulje izkoristka oprijema za vsako os ležijo med dvema vzporednicama k črti idealnega izkoristka oprijema, ki se izračuna z enačbo k = z +/– 0,08, kot je prikazano na diagramu 1, pri čemer krivulja izkoristka oprijema za zadnjo os za stopnje zaviranja z > 0,3 ustreza neenačbi:

3.1.3 Za traktorje, ki lahko vlečejo vozila kategorij R3b, R4b in S2b, ki so opremljena s pnevmatskimi zavornimi sistemi:
3.1.3.1 Pri preskusu z odklopljenim virom energije, blokiranim napajalnim vodom, zbiralnikom s prostornino 0,5 litra, povezanim s pnevmatskim krmilnim vodom, ter sistemom pod vklopnim in odklopnim tlakom mora biti tlak pri polni uporabi upravljalnega elementa zavor med 650 in 850 kPa na vlečnih glavah napajalnega voda in pnevmatskega krmilnega voda, ne glede na stanje obremenitve vozila.
3.1.3.2 Za vozila z električnim krmilnim vodom mora polna uporaba upravljalnega elementa delovnega zavornega sistema zagotoviti digitalno vrednost, ki ustreza tlaku med 650 in 850 kPa (glej standard ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007).
3.1.3.3 Te vrednosti morajo biti na traktorju dokazljivo prisotne, ko nima priključenega vlečenega vozila. Območja združljivosti na diagramih iz točk 3.1.6, 4.1 in 4.2 ne smejo presegati 750 kPa in/ali ustrezne digitalne vrednosti (glej standard ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007).
3.1.3.4 Zagotoviti je treba, da je na spojni glavi napajalnega voda tlak vsaj 700 kPa, ko je sistem pod vklopnim tlakom. Ta tlak mora biti prikazan brez uporabe delovnih zavor.
3.1.4 Za traktorje, ki lahko vlečejo vozila kategorij R3b, R4b in S2b, ki so opremljena s hidravličnimi zavornimi sistemi:
3.1.4.1 Pri preskusu z virom energije pri vrtilni frekvenci prostega teka in pri 2/3 največje vrtilne frekvence motorja je krmilni vod simulatorja vlečenega vozila (točka 3.6 Priloge III) priključen na hidravlični krmilni vod. Pri polni uporabi upravljalnega elementa zavor mora tlak biti med 11 500 in 15 000 kPa v hidravličnem krmilnem vodu ter med 1 500 in 3 500 kPa v dodatnem vodu, ne glede na stanje obremenitve vozila.
3.1.4.2 Te vrednosti morajo biti na traktorju dokazljivo prisotne, ko nima priključenega vlečenega vozila. Območja združljivosti na diagramih iz točk 3.1.6, 4.1 in 4.2 ne smejo presegati 13 300 kPa.
3.1.5 Preverjanje zahtev iz točk 3.1.1 in 3.1.2
3.1.5.1 Za preverjanje zahtev iz točk 3.1.1 in 3.1.2 proizvajalec predloži krivulji izkoristka oprijema za sprednjo in zadnjo os, ki se izračunata z naslednjima formulama:

Krivulji je treba narisati za obe naslednji stanji obremenitve:
3.1.5.1.1 neobremenjeno vozilo, pri čemer ni presežena najmanjša masa, ki jo navede proizvajalec v opisnem listu;
3.1.5.1.2 obremenjeno vozilo; če so predvidene različne možnosti porazdelitve obremenitve, se upošteva tista, pri kateri je sprednja os najbolj obremenjena.
3.1.5.2 Posebne zahteve v primeru traktorjev, pri katerih so vse osi stalno togo povezane (stopnja blokiranja 100 %) s pogonom na vsa kolesa ali so med zaviranjem samodejno povezane s pogonom na vsa kolesa (stopnja blokiranja 100 %).
3.1.5.2.1 Matematično preverjanje v skladu z odstavkom 3.1.5.1 ni potrebno.
3.1.5.3 Traktorji s stalnim pogonom na vsa kolesa, ki niso zajeti v točki 3.1.5.2.
3.1.5.3.1 Če za vozila s stalnim pogonom na vsa kolesa ali v stanju, v katerem se pogon na vsa kolesa vklopi med zaviranjem, ni mogoče izvesti matematičnega preverjanja v skladu s točko 3.1.5.1, lahko proizvajalec s preskusom zaporedja blokiranja koles preveri, da se blokiranje sprednjih koles sproži hkrati z blokiranjem zadnjih koles ali pred njim.
3.1.5.4 Vendar pri traktorjih, pri katerih se pogon na vsa kolesa vklopi samodejno, ko se aktivira zaviranje pri hitrosti vozila nad 20 km/h, ne vklopi se pa samodejno, ko se aktivira delovni zavorni sistem pri hitrosti največ 20 km/h, ni treba dokazovati skladnosti s točko 3.1.5.1 za stanje, v katerem se pogon na vsa kolesa ne vklopi med zaviranjem.
3.1.5.5 Postopek preverjanja zahtev iz točke 3.1.5.3
3.1.5.5.1 Preskus zaporedja blokiranja koles se izvede pri obremenjenem in neobremenjenem vozilu na cestnih površinah, ki imajo tako raven oprijema, da pride do blokiranja koles na prvi osi pri stopnjah zaviranja med 0,55 in 0,8 pri začetni preskusni hitrosti, določeni v točki 3.1.5.5.2.
3.1.5.5.2 Preskusna hitrost:
0,9 vmax, vendar ne več kot 60 km/h.
3.1.5.5.3 Pritisk na stopalko lahko preseže dovoljene sile za aktiviranje v skladu s točko 3.1.1 Priloge II.
3.1.5.5.4 Pritisk na stopalko se uporabi in poveča tako, da bo drugo kolo na vozilu blokiralo med 0,5 in 1 s po začetku aktiviranja zavor, dokler ne blokirata obe kolesi na eni osi (med preskusom lahko blokirajo tudi dodatna kolesa, npr. pri sočasnem blokiranju).
3.1.5.5.4.1 Če med preskusom obremenjenega vozila ni mogoče blokirati drugega kolesa v 1 s, se ta preskus lahko izpusti, pod pogojem, da je mogoče med preskusom neobremenjenega vozila dokazati blokiranje koles pod pogoji, predpisanimi v točki 3.1.5.5.4.
Če tudi v preskusu neobremenjenega vozila ni mogoče blokirati drugega kolesa v 1 s, se izvede tretji odločilni preskus na cestnih površinah s koeficientom oprijema največ 0,3 od preskusne hitrosti 0,8 vmax km/h, vendar ne več kot 60 km/h.
3.1.5.5.4.2 Za namene preskusov v skladu s točko 3.1.5.5 se sočasno blokiranje sprednjih in zadnjih koles nanaša na razmere, ko časovni interval med prvim blokiranjem zadnjega (drugega) kolesa na zadnji osi in prvim blokiranjem zadnjega (drugega) kolesa na sprednji osi ni večji od 0,3 sekunde.
3.1.6 Traktorji, ki lahko vlečejo vlečena vozila
3.1.6.1 Dovoljeno razmerje med stopnjo zaviranja TM/FM in tlakom pm mora biti znotraj območij z diagrama 2 za vse tlake med 20 in 750 kPa (pri pnevmatskem zavornem sistemu) ter med 350 in 13 300 kPa (pri hidravličnem zavornem sistemu).
3.2 Traktorji z več kot dvema osema
Za vozila z več kot dvema osema veljajo zahteve iz točke 3.1. Zahteve iz točke 3.1.2 glede zaporedja blokiranja koles se štejejo za izpolnjene, če je pri stopnji zaviranja med 0,15 in 0,30 izkoriščeni oprijem vsaj ene od sprednjih osi večji od izkoriščenega oprijema vsaj ene od zadnjih osi.
▼B
4.
Zahteve za vlečena vozila
|
4.1
|
Za vlečena vozila z vlečnim ojesom, opremljena s pnevmatskimi in hidravličnimi zavornimi sistemi:
4.1.1 Za vlečena vozila z vlečnim ojesom in dvema osema veljajo naslednje zahteve:
4.1.1.1 Za vrednosti k med 0,2 in 0,8:
z ≥ 0,1 + 0,85 (k – 0,2)
Določbe iz točke 3.1.1 ne vplivajo na zahteve iz Priloge II v zvezi z zavornim učinkom. Če pa se pri preskušanju na podlagi določb iz točke 3.1.1 dosežejo zavorni učinki, ki so večji od učinkov, predpisanih v Prilogi II, veljajo določbe v zvezi s krivuljami izkoristka oprijema na območjih z diagrama 1 iz te priloge, določenih z ravnima črtama k = 0,8 in z = 0,8.
4.1.1.2 Za nobeno stopnjo obremenitve vozila krivulja izkoristka oprijema zadnje osi ne sme biti nad krivuljo izkoristka oprijema sprednje osi za vsa zavorna razmerja med 0,15 in 0,30. Šteje se, da je ta pogoj izpolnjen tudi, če sta za zavorna razmerja med 0,15 in 0,30 izpolnjena naslednja pogoja:
4.1.1.2.1 krivulje izkoristka oprijema za vsako os ležijo med dvema vzporednicama k črti idealnega izkoristka oprijema, ki se izračunata z enačbama k = z + 0,08 in k = z – 0,08, kot je prikazano na diagramu 1,
in
4.1.1.2.2 krivulja izkoristka oprijema za zadnjo os za zavorna razmerja z ≥ 0,3 ustreza razmerju z ≥ 0,3 + 0,74 (k – 0,38).
4.1.1.3 Za preverjanje zahtev iz točk 4.1.1.1 in 4.1.1.2 se uporabi postopek, ki je predpisan z določbami iz točke 3.1.5.
4.1.2 Za vlečena vozila z vlečnim ojesom in več kot dvema osema veljajo zahteve iz točke 4.1.1. Zahteve iz točke 4.1.1 glede zaporedja blokiranja koles se štejejo za izpolnjene, če je pri zavornih razmerjih med 0,15 in 0,30 izkoriščeni oprijem vsaj ene od sprednjih osi večji od izkoriščenega oprijema vsaj ene od zadnjih osi.
4.1.3 Dovoljeno razmerje med zavornim razmerjem TR/FR in tlakom pm mora biti znotraj območij z diagrama 3 za vse tlake med 20 in 750 kPa (pnevmatski sistem) ali med 350 in 13 300 kPa (hidravlični sistem) v obremenjenem in neobremenjenem stanju.
|
|
4.2
|
Za vlečena vozila s togim vlečnim ojesom in vlečena vozila s centralno osjo, opremljena s pnevmatskimi in hidravličnimi zavornimi sistemi:
4.2.1 Dovoljeno razmerje med zavornim razmerjem TR/FR in tlakom pm mora biti med dvema območjema, ki izhajata iz diagrama 3, tako da se merilo navpične osi množi z 0,95. Ta zahteva mora biti izpolnjena pri vseh tlakih med 20 in 750 kPa (pnevmatski sistem) ali med 350 in 13 300 kPa (hidravlični sistem) v obremenjenem in neobremenjenem stanju.
|
|
4.3
|
Za vlečena vozila z vlečnim ojesom in vztrajnostnim zavornim sistemom:
|
4.3.1
|
Zahteve iz točke 4.1.1 veljajo tudi za vlečena vozila z vlečnim ojesom in vztrajnostnim zavornim sistemom.
|
|
4.3.2
|
Za vlečena vozila z vlečnim ojesom, vztrajnostnim zavornim sistemom in več kot dvema osema veljajo zahteve iz točke 4.1.2 tega dodatka.
|
|
4.3.3
|
Pri izračunu za preverjanje skladnosti z določbami iz točke 4.1.1.3 ni treba upoštevati vpliva dovoljene sile na vlečno oje D* (točka 10.3.1 Priloge VIII).
|
|
5.
Zahteve, ki morajo biti izpolnjene v primeru okvare sistema porazdelitve zaviranja
Če so zahteve iz tega dodatka izpolnjene z uporabo posebne naprave (npr. mehansko upravljane prek vzmetenja vozila), mora biti v primeru okvare njenega mehanizma za upravljanje vozilo mogoče ustaviti pod pogoji, določenimi za pomožno zaviranje pri traktorjih; pri traktorjih, ki lahko vlečejo vozilo, opremljeno s pnevmatskim ali hidravličnim zavornim sistemom, mora biti mogoče na vlečni glavi krmilnega voda doseči tlak v območju iz točk 3.1.3 in 3.1.4. V primeru okvare mehanizma za upravljanje naprave pri vlečenih vozilih je treba doseči učinek delovne zavore, ki znaša vsaj 30 % učinka, predpisanega za zadevno vozilo.
6.
Oznake
|
6.1
|
▼M1
Vozila, ki izpolnjujejo zahteve iz tega dodatka z uporabo naprave, ki je mehansko upravljana prek vzmetenja vozila, morajo biti označena v skladu z zahtevami iz člena 24 Delegirane uredbe (EU) 2015/208 in opremljena z ustreznimi podatki, ki prikazujejo uporabni gib naprave med položajema za neobremenjeno in obremenjeno vozilo, ter dodatnimi informacijami, ki omogočajo preverjanje nastavitve naprave.
▼B
|
6.1.1
|
Če se regulator zavorne sile glede na obremenitev osi upravlja na kakršen koli drug način prek vzmetenja vozila, morajo biti na vozilu navedeni podatki, ki omogočajo preverjanje nastavitve naprave.
|
|
|
6.2
|
Če so zahteve iz tega dodatka izpolnjene z uporabo naprave, ki uravnava zračni ali hidravlični tlak v prenosnem sistemu zavore, morajo biti na vozilu navedeni obremenitve osi na tleh, nazivni izhodni tlaki naprave in vhodni tlak, ki ne sme biti manjši od 80 % največjega konstrukcijsko določenega vhodnega tlaka, kot ga je navedel proizvajalec vozila, za naslednje stopnje obremenitve:
6.2.1 največja tehnično dovoljena obremenitev osi za osi, ki upravljajo napravo;
6.2.2 obremenitve osi, ki ustrezajo masi neobremenjenega vozila v stanju, pripravljenem za vožnjo, kot je navedeno v poročilu o preskusu za homologacijo zavornega sistema;
6.2.3 obremenitve osi, ki jih določi proizvajalec in ki omogočajo preverjanje nastavitve naprave pri vozilih v uporabi, če te odstopajo od vrednosti obremenitev iz točk 6.2.1 in 6.2.2.
|
|
6.3
|
Oznake iz točk 6.1 in 6.2 morajo biti nameščene na vidnem mestu in v neizbrisni obliki.
►M1
Prikazan je primer oznak za mehansko upravljano napravo v vozilu s pnevmatskim ali hidravličnim zavornim sistemom v skladu z zahtevami iz člena 5 Izvedbene uredbe Komisije (EU) 2015/504 (
2
). ◄
|
|
6.4
|
Sistemi elektronsko upravljane porazdelitve zavorne sile, ki ne morejo izpolniti zahtev iz točk 6.1, 6.2 in 6.3, morajo imeti postopek samopreverjanja funkcij, ki vplivajo na porazdelitev zavorne sile. Poleg tega mora biti med mirovanjem vozila mogoče izvesti preverjanja iz točke 1.3.1 s proizvajanjem tlaka nazivne vrednosti, ki ustreza začetku zaviranja v obremenjenem in neobremenjenem stanju.
|
7.
Preskušanje vozil
Med homologacijo mora tehnična služba preveriti skladnost z zahtevami iz tega dodatka in izvesti vse dodatne preskuse, za katere meni, da so potrebni. Poročilo o vseh dodatnih preskusih mora biti priloženo poročilu o homologaciji.
Diagram 1
Traktorji kategorije Tb in vlečena vozila z vlečnim ojesom kategorij R3b, R4b in S2b
(glej točki 3.1.2.1 in 4.1.1.2)

Opomba: Spodnja meja k = z – 0,08 ne velja za izkoristek oprijema zadnje osi.
Diagram 2
▼M1
Dovoljeno razmerje med stopnjo zaviranja TM/FM in tlakom na vlečni glavi pm za traktorje kategorij T in C s pnevmatskim ali hidravličnim zavornim sistemom
▼B
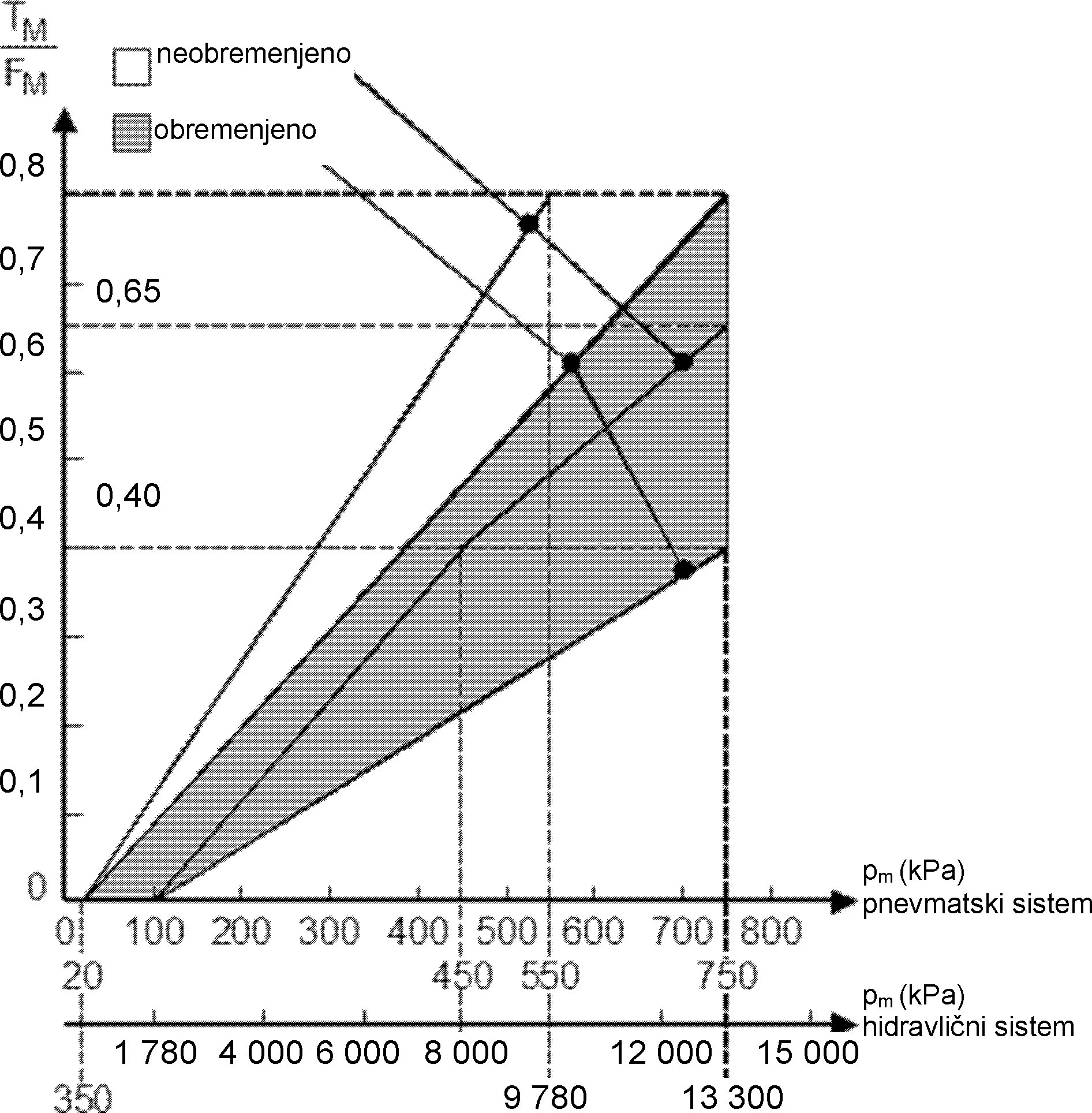
Diagram 3
Dovoljeno razmerje med zavornim razmerjem TR/FR in tlakom na vlečni glavi pm za vlečena vozila kategorij S2, R3 in R4 s pnevmatskim ali hidravličnim zavornim sistemom

PRILOGA III
Zahteve za merjenje odzivnega časa
1.
Splošne zahteve
|
1.1
|
Odzivni čas delovnih zavornih sistemov se določi pri mirujočem vozilu, tlak pa je treba izmeriti pri odprtini najbolj neugodno nameščene zavore. Na vozilih, ki so opremljena z regulatorji zavorne sile glede na obremenitev osi, morajo biti te naprave nastavljene na stanje „obremenjeno“.
|
|
1.2
|
Med preskusi mora biti gib zavornih valjev posameznih osi skladen z zavorami, ki so nastavljene čim tesneje.
|
|
1.3
|
Odzivni časi, dobljeni v skladu s točkami 2.2, 2.3, 2.4, 2.6, 3.3, 3.4, 3.5, 3.6.5, 4.1, 4.5.1, 4.5.2, 4.5.3, 5.3.6, 6.2, se zaokrožijo na najbližjo desetinko sekunde. Če je številka, ki prikazuje stotinke, 5 ali več, se odzivni čas zaokroži na zgornjo desetinko.
|
|
1.4
|
Na slikah v dodatkih 1 in 2 so prikazani primeri pravilne nastavitve in uporabe ustreznega simulatorja.
|
2.
Traktorji, opremljeni s pnevmatskimi zavornimi sistemi
|
2.1
|
Ob začetku vsakega preskusa mora biti tlak v napravi za shranjevanje energije enak tlaku, pri katerem regulator znova sproži napajanje sistema. Pri sistemih, ki niso opremljeni z regulatorjem (npr. kompresorji z omejenim tlakom), mora biti tlak v napravi za shranjevanje energije ob začetku vsakega preskusa enak 90 % tlaka, ki ga navede proizvajalec in ki je določen v točki 1.2.2.1 dela A Priloge IV ter ki se uporablja za preskuse, predpisane v tej prilogi.
|
|
2.2
|
Odzivni časi kot funkcija časa aktiviranja (tf) se morajo določiti z večkratnim zaporednim polnim aktiviranjem, in sicer od najkrajšega mogočega časa aktiviranja do 0,4 sekunde. Izmerjene vrednosti morajo biti prikazane z diagramom.
|
|
2.3
|
Odzivni čas, ki se mora upoštevati za namen preskusa, ustreza času aktiviranja 0,2 sekunde. Ta odzivni čas se lahko razbere iz diagrama z interpolacijo.
|
|
2.4
|
Pri času aktiviranja 0,2 sekunde čas, ki poteče od začetka aktiviranja upravljalnega elementa zavornega sistema do trenutka, ko tlak v zavornem valju doseže 75 % svoje asimptotične vrednosti, ne sme presegati 0,6 sekunde.
|
|
2.5
|
Pri traktorjih s pnevmatskim krmilnim vodom za vlečena vozila je treba poleg zahtev iz točke 1.1 odzivni čas izmeriti na koncu 2,5-metrske cevi z notranjim premerom 13 mm, ki se priključi na vlečno glavo krmilnega voda delovnega zavornega sistema. Med tem preskusom mora biti na vlečno glavo napajalnega voda priključena prostornina 385 ± 5 cm3 (ki se šteje za enakovredno prostornini 2,5-metrske cevi z notranjim premerom 13 mm pod tlakom 650 kPa). Dolžino in notranji premer cevi je treba vnesti pri točki 2.4 poročila o preskusu.
|
|
2.6
|
Čas, ki poteče od začetka aktiviranja zavorne stopalke do trenutka, ko:
2.6.1 tlak, izmerjen na vlečni glavi pnevmatskega krmilnega voda;
2.6.2 digitalna vrednost v električnem krmilnem vodu, izmerjena v skladu s standardom ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007 doseže x % svoje asimptotične, tj. končne vrednosti, ne sme presegati časov iz spodnje tabele:
|
x [%]
|
t [s]
|
|
10
75
|
0,2
0,4
|
|
|
2.7
|
Pri traktorjih, ki lahko vlečejo vozila kategorije R3 ali R4, opremljena s pnevmatskimi zavornimi sistemi, se poleg zahtev iz točke 2.6 z naslednjim preskusom preverja tudi skladnost s predpisi iz točke 2.2.1.17.2.1 Priloge I:
2.7.1 z merjenjem tlaka na koncu 2,5-metrske cevi z notranjim premerom 13 mm, ki se priključi na vlečno glavo napajalnega voda;
2.7.2 s simulacijo okvare krmilnega voda na vlečni glavi;
2.7.3 z aktiviranjem upravljalnega elementa delovne zavore v 0,2 sekunde, kot je opisano v točki 2.3.
|
3.
Traktorji, opremljeni s hidravličnimi zavornimi sistemi
|
3.1
|
Preskusi odzivnega časa se izvajajo pri temperaturi okolice med 15 °C in 30 °C.
|
|
3.2
|
Ob začetku vsakega preskusa mora biti tlak v napravi za shranjevanje energije enak tlaku, pri katerem regulator znova sproži napajanje sistema. Pri sistemih, ki niso opremljeni z regulatorjem (npr. hidravlične črpalke z omejenim tlakom), mora biti tlak v napravi za shranjevanje energije ob začetku vsakega preskusa enak 90 % tlaka, ki ga navede proizvajalec in ki je določen v točki 1.2.1.2 dela C Priloge IV ter ki se uporablja za preskuse, predpisane v tej prilogi.
|
|
3.3
|
Odzivni časi kot funkcija časa aktiviranja (tf) se morajo določiti z večkratnim zaporednim polnim aktiviranjem, in sicer od najkrajšega mogočega časa aktiviranja do 0,4 sekunde. Izmerjene vrednosti morajo biti prikazane z diagramom.
Pri delovnem zavornem sistemu, ki se aktivira samo z omejeno pomočjo energije ali brez nje, se uporabi sila za upravljanje, ki zagotavlja vsaj predpisani zavorni učinek delovne zavore.
|
|
3.4
|
Odzivni čas, ki se mora upoštevati za namen preskusa, ustreza času aktiviranja 0,2 sekunde. Ta odzivni čas se lahko razbere iz diagrama z interpolacijo.
|
|
3.5
|
Pri času aktiviranja 0,2 sekunde čas, ki poteče od začetka aktiviranja upravljalnega elementa zavornega sistema do trenutka, ko tlak v zavornem valju doseže 75 % svoje največje vrednosti, ne sme presegati 0,6 sekunde.
Pri delovnem zavornem sistemu s polno pomočjo energije, kjer zavorni tlak v sprožilu zavore doseže začasni največji tlak, ki nato pade na povprečni stabilizirani tlak, se za izračun 75-odstotne vrednosti uporabi ta povprečni stabilizirani tlak.
|
|
3.6
|
Traktorji, ki so opremljeni s hidravličnim krmilnim vodom za vlečena vozila
|
3.6.1
|
Poleg zahtev iz točke 1.1 je treba odzivni čas izmeriti s simulatorjem vlečenega vozila (glej točko 1 Dodatka 2), ki se priključi na vlečni glavi hidravličnega krmilnega voda in dodatnega voda traktorja.
|
|
3.6.2
|
Simulator vlečenega vozila mora imeti naslednje sestavne dele in značilnosti:
3.6.2.1 Simulator vlečenega vozila z dodatnim vodom
|
3.6.2.1.1
|
Dodatni vod z žensko spojko, ki ustreza standardu ISO 16028:2006, z odprtino premera 0,6+ 0.2 mm za omejitev pretoka med preskusom.
|
|
3.6.2.1.2
|
Batni zbiralnik (ali enakovredna naprava), ki je v skladu z naslednjimi značilnostmi in preskusnimi pogoji:
▼M1 —————
▼B
3.6.2.1.2.2 začetni polnilni tlak 1 000 ± 100 kPa pri iztisnjeni prostornini 0 cm3;
3.6.2.1.2.3 največji tlak 1 500 kPa pri iztisnjeni prostornini 500± 5 cm3.
|
|
3.6.2.1.3
|
Batni zbiralnik (ali enakovredna naprava) je povezan z dodatnim vodom prek povezave z notranjim premerom 12,5 mm, sestavljene iz gibke cevi (v skladu s standardom EN853:2007) dolžine 1,0 m.
|
|
3.6.2.1.4
|
Čim bližje ženske spojke, skladne s standardom ISO 16028:2006, mora biti zagotovljena preskusna odprtina.
|
|
3.6.2.1.5
|
Za odzračevanje simulatorja pred preskusom in po njem mora biti zagotovljena odzračevalna naprava.
|
3.6.2.2 Simulator vlečenega vozila z krmilnim vodom
|
3.6.2.2.1
|
Krmilni vod z žensko spojko, ki ustreza standardu ISO 5676:1983
|
|
3.6.2.2.2
|
Naprava za shranjevanje energije z batom (ali enakovredna naprava), ki je v skladu z naslednjimi značilnostmi in preskusnimi pogoji:
3.6.2.2.2.1 začetni polnilni tlak 500± 100 kPa pri iztisnjeni prostornini 0 cm3;
3.6.2.2.2.2 vmesni preskusni tlak 2 200 ± 200 kPa pri iztisnjeni prostornini 100± 3 cm3;
3.6.2.2.2.3 končni tlak 11 500 ± 200 kPa pri iztisnjeni prostornini 140± 5 cm3.
|
|
3.6.2.2.3
|
Naprava za shranjevanje energije z batom (ali enakovredna naprava) je povezana z krmilnim vodom prek povezave z notranjim premerom 10 mm, sestavljene iz 3-metrske gibke cevi (v skladu s standardom EN853:2007) in 4,5-metrske toge cevi.
|
|
3.6.2.2.4
|
Čim bližje ženske spojke, skladne s standardom ISO 5676:1983, in naprave za shranjevanje energije z batom (ali enakovredne naprave) morajo biti zagotovljene preskusne odprtine.
|
|
3.6.2.2.5
|
Za odzračevanje povezovalnih cevi pred preskusom mora biti zagotovljena odzračevalna naprava.
|
|
|
3.6.3
|
Preskus je treba opraviti pod naslednjimi pogoji:
3.6.3.1 pred preskusom je treba odzračiti povezovalne cevi;
3.6.3.2 vrtilna frekvenca motorja traktorja mora biti 25 % nad vrtilno frekvenco prostega teka;
3.6.3.3 odzračevalna naprava simulatorja vlečenega vozila z dodatnim vodom mora biti popolnoma odprta.
|
|
3.6.4
|
V zvezi z merjenjem odzivnega časa v skladu s točkama 3.3 in 3.4 mora biti sila za upravljanje zavor takšna, da se na vlečni glavi krmilnega voda doseže vsaj tlak 11 500 kPa z vrtilno frekvenco motorja 25 % nad vrtilno frekvenco prostega teka.
|
|
3.6.5
|
Pri času aktiviranja 0,2 sekunde čas, ki poteče od začetka aktiviranja upravljalnega elementa zavornega sistema do trenutka, ko tlak v preskusni odprtini blizu naprave za shranjevanje energije z batom (ali enakovredne naprave) doseže 75 % svoje največje vrednosti v skladu s točko 3.5, ne sme presegati 0,6 sekunde.
Največja vrednost pa je tukaj povezana s tlakom, izmerjenim v preskusni odprtini, in ne z zavornim tlakom iz točke 3.5.
|
|
4.
Vlečena vozila, opremljena s pnevmatskimi zavornimi sistemi
|
4.1
|
Odzivne čase vlečenega vozila je treba izmeriti brez traktorja. Za nadomestitev traktorja je treba zagotoviti simulator, na katerega se priključijo vlečna glava napajalnega voda, vlečna glava pnevmatskega krmilnega voda in/ali priključek električnega krmilnega voda.
|
|
4.2
|
Tlak v napajalnem vodu mora biti 650 kPa.
|
|
4.3
|
Simulator za pnevmatske krmilne vode mora imeti naslednje značilnosti:
4.3.1 Imeti mora posodo s prostornino 30 litrov, ki se pred vsakim preskusom napolni s tlakom 650 kPa, med posameznimi preskusi pa se ne polni. Na izhodu upravljalnega elementa zavor mora imeti simulator odprtino s premerom od 4,0 do vključno 4,3 mm. Prostornina cevi, izmerjena od odprtine do vključno vlečne glave, mora biti 385 ± 5 cm3 (kar se šteje za enakovredno prostornini 2,5-metrske cevi z notranjim premerom 13 mm pod tlakom 650 kPa). Tlake v krmilnem vodu iz točke 4.3.3 je treba izmeriti takoj za odprtino.
4.3.2 Upravljalni element mora biti zasnovan tako, da preskuševalec ne vpliva na njegov učinek pri delovanju.
4.3.3 Simulator je treba npr. z izbiro odprtine v skladu s točko 4.3.1 nastaviti tako, da je čas, ki je potreben za dvig tlaka s 65 na 490 kPa (tj. z 10 % na 75 % nazivnega tlaka 650 kPa), 0,2 ± 0,01 sekunde, če je na simulator priključena posoda s prostornino 385 ± 5 cm3. Če se navedena posoda zamenja s posodo s prostornino 1 155 ± 15 cm3, mora biti čas, ki je potreben za dvig tlaka s 65 na 490 kPa brez dodatnih nastavitev, 0,38 ± 0,02 sekunde. Med tema dvema vrednostma tlaka se mora tlak dvigovati približno linearno. Te posode morajo biti povezane z vlečno glavo brez uporabe gibkih cevi, pri čemer mora biti notranji premer najmanj 10 mm.
4.3.4 Na slikah v Dodatku 1 je prikazan primer pravilne nastavitve in uporabe simulatorja.
|
|
4.4
|
Simulator za preverjanje odziva na signale, ki se pošiljajo prek električnega krmilnega voda, mora imeti naslednje značilnosti:
4.4.1 Simulator mora proizvesti digitalni signal v električnem krmilnem vodu v skladu s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007 ter zagotoviti ustrezne informacije vlečenemu vozilu prek polov 6 in 7 priključka iz standarda ISO 7638:2003. Za merjenje odzivnega časa lahko simulator na zahtevo proizvajalca vlečenemu vozilu pošlje informacije, da ni na voljo noben pnevmatski krmilni vod in da signal v električnem krmilnem vodu ustvarjata dva neodvisna tokokroga (glej odstavka 6.4.2.2.24 in 6.4.2.2.25 standarda ISO 11992-2:2003 in njegovih sprememb 1:2007).
4.4.2 Upravljalni element zavor mora biti zasnovan tako, da preskuševalec ne vpliva na njegov učinek pri delovanju.
4.4.3 Za merjenje odzivnega časa mora biti signal, ki ga ustvari električni simulator, enakovreden linearnemu povečanju pnevmatskega tlaka z 0,0 na 650 kPa v 0,2 ± 0,01 sekunde.
|
|
4.5
|
Zahteve glede učinka
|
4.5.1
|
Pri vlečenih vozilih s pnevmatskim krmilnim vodom čas, ki poteče od trenutka, ko tlak, ki ga v krmilnem vodu ustvari simulator, doseže 65 kPa, do trenutka, ko tlak v sprožilu zavore vlečenega vozila doseže 75 odstotkov svoje asimptotične vrednosti, ne sme presegati 0,4 sekunde.
|
4.5.1.1
|
Vlečena vozila, ki so opremljena s pnevmatskim krmilnim vodom in imajo električni prenos upravljanja, se morajo preveriti med oskrbo vlečenega vozila z električno energijo prek priključka (s 5 ali 7 poli) iz standarda ISO 7638:2003.
|
|
|
4.5.2
|
Pri vlečenih vozilih z električnim krmilnim vodom čas, ki poteče od trenutka, ko signal, ki ga ustvari simulator, preseže vrednost, enakovredno 65 kPa, do trenutka, ko tlak v sprožilu zavore vlečenega vozila doseže 75 % svoje asimptotične vrednosti, ne sme presegati 0,4 sekunde.
|
|
4.5.3
|
Pri vlečenih vozilih, ki so opremljena s pnevmatskim in električnim krmilnim vodom, je treba merjenje odzivnega časa za vsak krmilni vod določiti neodvisno in glede na ustrezni postopek, opisan v točkah 4.5.1.1 in 4.5.2.
|
|
5.
Vlečena vozila, opremljena s hidravličnimi zavornimi sistemi
|
5.1
|
Preskusi se izvajajo pri temperaturi okolice med 15 °C in 30 °C.
|
|
5.2
|
Odzivne čase vlečenega vozila je treba izmeriti brez traktorja. Za simuliranje traktorja je treba zagotoviti simulator traktorja, na katerega se priključita vlečni glavi krmilnega voda in dodatnega voda. Če je vlečeno vozilo opremljeno z električnim priključkom iz točke 2.1.5.1.3 Priloge I, se na simulator traktorja priključi tudi ta priključek (glej točko 2 Dodatka 2).
|
|
5.3
|
Simulator traktorja mora imeti naslednje značilnosti:
5.3.1 Simulator traktorja mora biti opremljen s tipi priključkov iz točk od 2.1.5.1.1 do 2.1.5.1.3 Priloge I v zvezi s traktorjem.
5.3.2 Ko se aktivira simulator traktorja (npr. z električnim stikalom):
5.3.2.1 se mora na vlečni glavi krmilnega voda ustvariti tlak 11 500 + 500 kPa;
5.3.2.2 mora biti na vlečni glavi dodatnega voda tlak 1 500 + 300 kPa.
5.3.3 Če krmilni vod vlečenega vozila ni priključen, mora biti simulator traktorja zmožen ustvariti tlak 11 500 kPa na vlečni glavi krmilnega voda v 0,2 sekunde po aktiviranju (npr. z električnim stikalom).
5.3.4 Hidravlična tekočina, ki se uporablja v simulatorju traktorja, mora imeti pri temperaturi 40± 3 °C viskoznost 60± 3 mm2/s (npr. hidravlična tekočina s specifikacijo SAE 10W30). Med preskusom s simulatorjem traktorja temperatura hidravlične tekočine ne sme preseči 45 °C.
5.3.5 Če je vlečeno vozilo zaradi izpolnjevanja zahtev za delovni zavorni sistem opremljeno z napravami za shranjevanje hidravlične energije, je treba pred meritvami odzivnega časa naprave za shranjevanje energije napolniti do tlaka v skladu s proizvajalčevim poročilom o preskusu, da se doseže najmanjši predpisani zavorni učinek delovne zavore.
5.3.6 Če je simulator traktorja priključen na krmilni vod simulatorja vlečenega vozila (kot je navedeno v točki 3.6.2), mora biti simulator traktorja umerjen tako, da čas, ki poteče od aktiviranja simulatorja traktorja do trenutka, ko tlak v napravi za shranjevanje energije z batom (ali enakovredni napravi) krmilnega voda simulatorja vlečenega vozila doseže 11 500 kPa, znaša 0,6+ 0.1 sekunde. Da se doseže takšen učinek, je treba zagotoviti uravnavanje pretoka simulatorja traktorja (npr. z regulatorjem pretoka). Pred tem umerjanjem je treba odzračiti povezovalne cevi krmilnega voda simulatorja vlečenega vozila.
5.3.7 Upravljalni element simulatorja traktorja mora biti zasnovan tako, da preskuševalec ne vpliva na njegov učinek.
|
|
5.4
|
Zahteve glede učinka
|
5.4.1
|
Ko je umerjeni simulator traktorja (glej točko 5.3.6) povezan z vlečenim vozilom, čas, ki poteče od trenutka aktiviranja simulatorja traktorja (npr. z električnim stikalom) do trenutka, ko tlak v najbolj neugodnem sprožilu zavore doseže 75 % svoje največje vrednosti, ne sme presegati 0,6 sekunde.
Pri delovnem zavornem sistemu, kjer zavorni tlak v sprožilu zavore doseže začasni največji tlak, ki nato pade na povprečni stabilizirani tlak, se za izračun 75-odstotne vrednosti uporabi povprečni stabilizirani tlak.
|
|
6.
Traktorji, opremljeni z delovnim zavornim sistemom z vzmetnimi zavorami
|
6.1
|
Merjenje odzivnega časa se mora izvesti s čim tesneje nastavljenimi vzmetnimi zavorami. Začetni tlak v vzmetni kompresijski komori, ki ustreza tej zahtevi za preskušanje, mora določiti proizvajalec.
|
|
6.2
|
Čas, ki poteče od aktiviranja upravljalnega elementa delovne zavore (zavore popolnoma popuščene) do trenutka, ko tlak v vzmetni kompresijski komori najbolj neugodnega zavornega valja doseže vrednost, ki ustreza 75 % predpisanega zavornega učinka, ne sme presegati 0,6 sekunde.
|
Dodatek 1
Primeri pnevmatskih simulatorjev
1. Nastavitev simulatorja

2. Preskušanje priklopnika

|
A
|
=
|
napajalni priključek z zapornim ventilom
|
|
C1
|
=
|
tlačno stikalo v simulatorju, nastavljeno na 65 kPa in 490 kPa
|
|
C2
|
=
|
tlačno stikalo, ki se priključi na sprožilo zavore vlečenega vozila, za delovanje pri 75 % asimptotičnega tlaka v sprožilu zavore CF
|
|
L
|
=
|
vod od odprtine O do vključno vlečne glave TC, ki ima notranjo prostornino 385 ± 5 cm3 pri tlaku 650 kPa
|
|
O
|
=
|
odprtina s premerom najmanj 4 mm in največ 4,3 mm
|
|
PP
|
=
|
priključek za preverjanje tlaka
|
|
R1
|
=
|
30-litrska posoda za zrak z drenažnim ventilom
|
|
R2
|
=
|
posoda za umerjanje, skupaj z vlečno glavo TC, s prostornino 385 ± 5 cm3
|
|
R3
|
=
|
posoda za umerjanje, skupaj z vlečno glavo TC, s prostornino 1 155 ± 15 cm3
|
|
TA
|
=
|
vlečna glava, napajalni vod
|
|
V
|
=
|
upravljalni element zavornega sistema
|
|
TC
|
=
|
vlečna glava, krmilni vod
|
|
VRU
|
=
|
zavorni ventil vlečenega vozila
|
3. Primer simulatorja za električne krmilne vode

|
ECL
|
=
|
električni krmilni vod, ki ustreza standardu ISO 7638:2003
|
|
SIMU
|
=
|
simulator zloga 3,4 EBS 11 v skladu s standardom ISO 11992:2003, z izhodnimi signali na začetku, 65 kPa in 650 kPa
|
|
A
|
=
|
napajalni priključek z zapornim ventilom
|
|
C2
|
=
|
tlačno stikalo, ki se priključi na sprožilo zavore vlečenega vozila, za delovanje pri 75 % asimptotičnega tlaka v sprožilu zavore CF
|
|
PP
|
=
|
priključek za preverjanje tlaka
|
|
TA
|
=
|
vlečna glava, napajalni vod
|
|
VRU
|
=
|
zavorni ventil vlečenega vozila
|
Dodatek 2
Primeri hidravličnih simulatorjev
1 Simulator vlečenega vozila
1.1 Simulator vlečenega vozila z dodatnim vodom
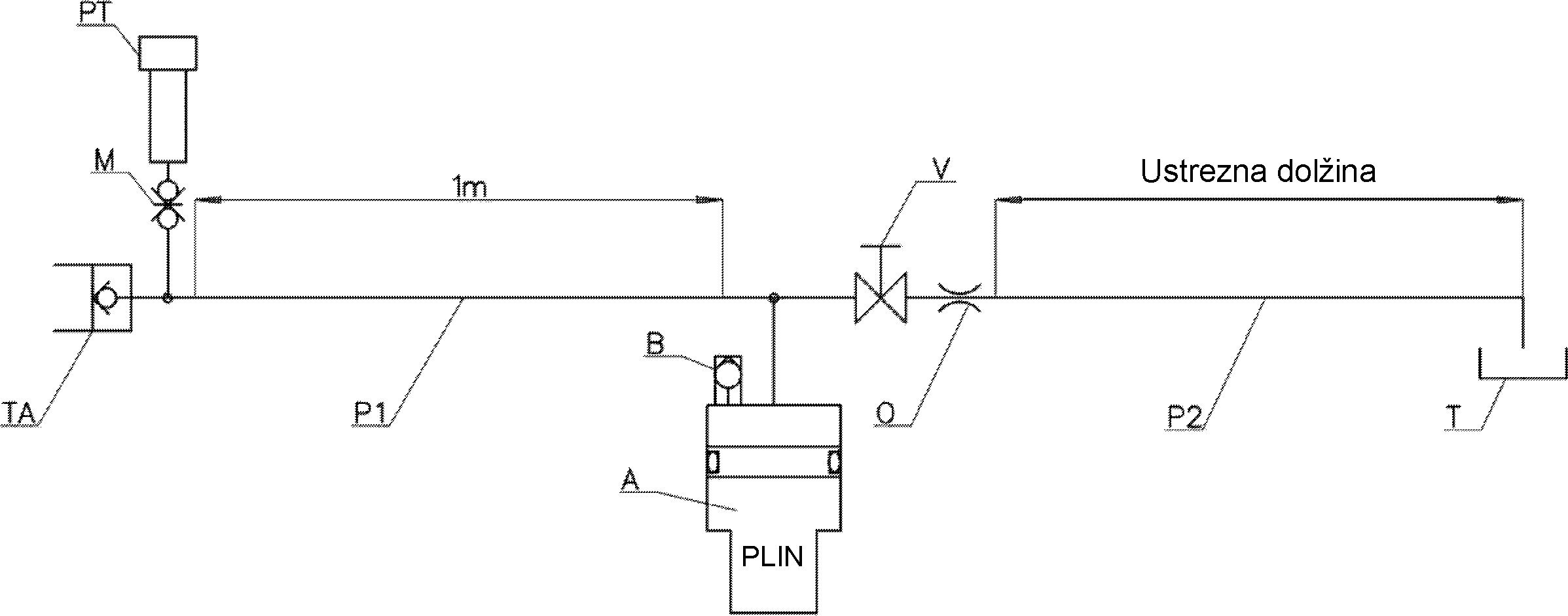
|
TA
|
=
|
vlečna glava, dodatni vod (ženska spojka, ki ustreza standardu ISO 16028:2006)
|
|
M
|
=
|
odprtina za preverjanje tlaka
|
|
PT
|
=
|
tipalo diferenčnega tlaka
|
|
P1
|
=
|
gibka cev v skladu s standardom EN853:2007 z notranjim premerom 12,5 mm
|
▼M1
|
A
|
=
|
hidravlični zbiralnik (tlak predhodnega polnjenja: 1 000 kPa)
|
▼B
|
P2
|
=
|
gibka cev z notranjim premerom 10 mm
|
|
T
|
=
|
povratni vod v posodo traktorja
|
1.2 Simulator vlečenega vozila z krmilnim vodom

|
TA
|
=
|
vlečna glava, krmilni vod (ženska spojka, ki ustreza standardu ISO 5676:1983)
|
|
M
|
=
|
odprtina za merilnik tlaka ali tipalo diferenčnega tlaka
|
|
FP
|
=
|
gibka cev v skladu s standardom EN853:2007 z notranjim premerom 10 mm
|
|
RP
|
=
|
toga cev z notranjim premerom 10 mm
|
|
PT
|
=
|
tipalo diferenčnega tlaka
|
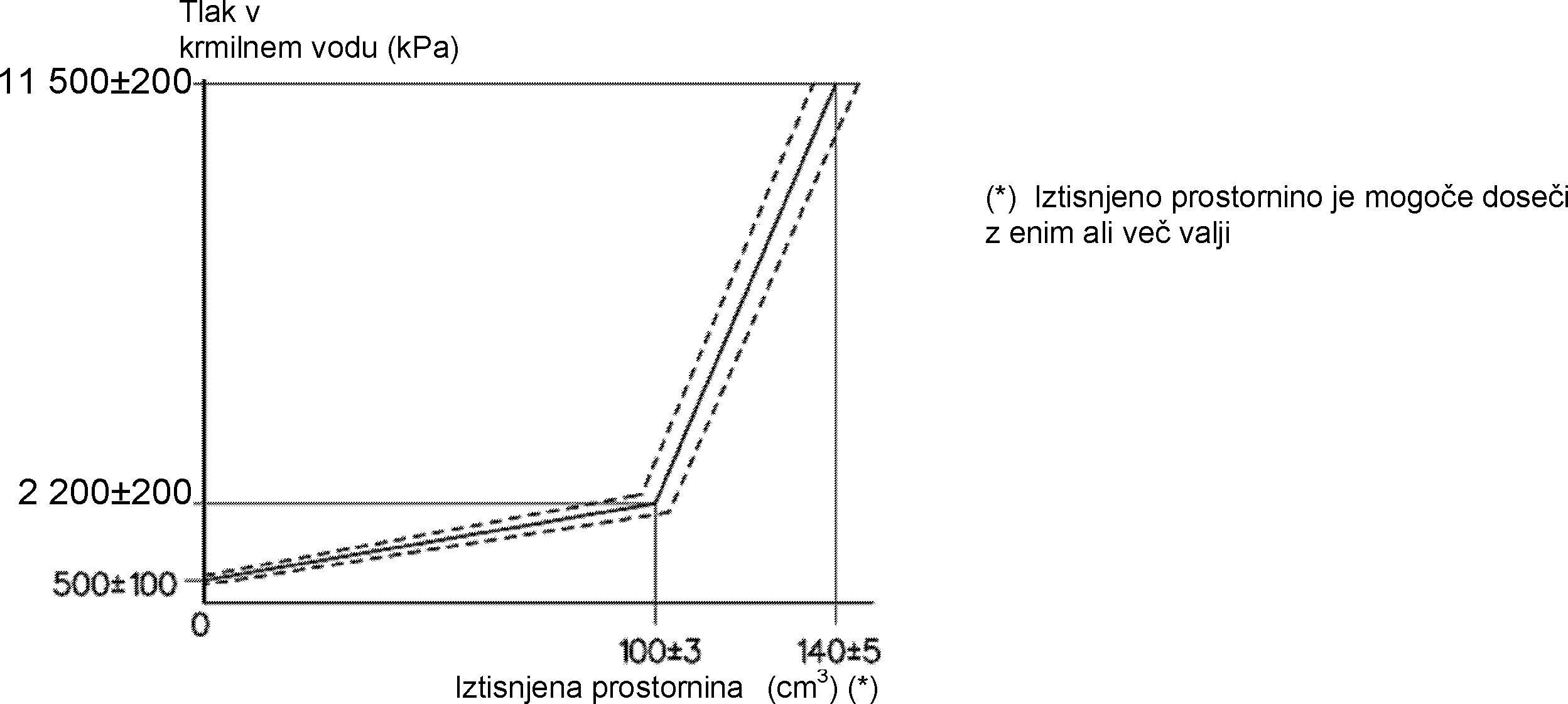
2 Simulator traktorja

|
PT
|
=
|
tipala diferenčnega tlaka
|
|
CLRV
|
=
|
razbremenilni ventil krmilnega voda
|
|
SLRV
|
=
|
razbremenilni ventil dodatnega voda
|
|
SV
|
=
|
tripotni elektromagnetni ventil
|
|
MV
|
=
|
proporcionalni modulacijski ventil
|
|
TA
|
=
|
vlečna glava, dodatni vod (moška spojka, ki ustreza standardu ISO 16028:2006)
|
|
TC
|
=
|
vlečna glava, krmilni vod (moška spojka, ki ustreza standardu ISO 5676:1983)
|
|
EC
|
=
|
električni priključek (ženski, v skladu s standardom ISO 7638:2003)
|
PRILOGA IV
Zahteve za vire energije in naprave za shranjevanje energije zavornih sistemov in zavornih spojk priklopnikov ter za vozila, opremljena z njimi
1.
Opredelitve pojmov
V tej prilogi:
1.1 „hidravlični ali pnevmatski zavorni sistem s shranjeno energijo“ pomeni zavorni sistem, v katerem energijo zagotavlja hidravlična tekočina ali zrak pod tlakom, ki sta shranjena v eni ali več napravah za shranjevanje energije, ki jih napaja ena ali več tlačnih črpalk ali kompresorjev, od katerih je vsak opremljen z napravo za omejevanje tlaka na največjo vrednost (ki jo določi proizvajalec).
A. PNEVMATSKI ZAVORNI SISTEMI
1.
Prostornina naprav za shranjevanje energije (zbiralnikov energije)
1.1 Splošne zahteve
|
1.1.1
|
Vozila, pri katerih zavorni sistem za delovanje potrebuje stisnjeni zrak, morajo biti opremljena z zbiralniki s prostornino, ki izpolnjuje zahteve iz točk 1.2 in 1.3.
|
|
1.1.2
|
Ni pa nujno, da imajo zbiralnike s predpisano zmogljivostjo zavorni sistemi, ki lahko v primeru pomanjkanja zaloge energije z upravljalnim elementoma delovnega zavornega sistema dosežejo vsaj takšen zavorni učinek, kot je predpisan za pomožni zavorni sistem.
|
|
1.1.3
|
Pri preverjanju skladnosti z zahtevami iz točk 1.2 in 1.3 morajo biti zavore nastavljene čim tesneje.
|
1.2 Vozila kategorije T
|
1.2.1
|
Zbiralniki v pnevmatskem zavornem sistemu vozil morajo biti zasnovani tako, da po osemkratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema preostali tlak v zbiralniku pnevmatskega zavornega sistema ni manjši od tlaka, ki je potreben za predpisani učinek pomožnega zaviranja.
|
|
1.2.2
|
Med preskusom morajo biti izpolnjene naslednje zahteve:
1.2.2.1 Začetni tlak v zbiralnikih mora ustrezati vrednostim, ki jih določa proizvajalec. Ta tlak mora omogočiti, da se doseže predpisani učinek delovnega zavornega sistema.
►M1
Začetni tlak mora biti naveden v opisni mapi. ◄
1.2.2.2 Zbiralniki se ne smejo napajati; poleg tega morajo biti zbiralniki za pomožno opremo odklopljeni.
1.2.2.3 Pri vozilih, ki lahko vlečejo vozilo, se napajalni vod blokira in na krmilni vod se priključi zbiralnik s prostornino 0,5 litra. Tlak v tem zbiralniku se pred vsakim aktiviranjem zavor sprosti. Po preskusu, navedenem v točki 1.2.1, tlak v krmilnem vodu ne sme biti manjši od polovice tlaka, ki je bil dosežen pri prvi uporabi zavor.
|
1.3 Vozila kategorij R in S
|
1.3.1
|
Zbiralniki na vlečenih vozilih morajo biti izdelani tako, da po osemkratnem polnem aktiviranju delovnega zavornega sistema traktorja tlak, ki se dovaja delom delovnega mehanizma, ne pade pod polovico vrednosti, dosežene pri prvi uporabi zavor, ne da bi se pri tem aktiviral samodejni ali parkirni zavorni sistem vlečenega vozila.
|
|
1.3.2
|
Med preskusom morajo biti izpolnjene naslednje zahteve:
1.3.2.1 Na začetku preskusa mora biti tlak v zbiralnikih 850 kPa.
1.3.2.2 Napajalni vod mora biti blokiran; poleg tega morajo biti zbiralniki za pomožno opremo odklopljeni.
1.3.2.3 Med preskusom se zbiralnik ne sme napajati.
1.3.2.4 Za vsako uporabo zavore mora biti tlak v krmilnem vodu 750 kPa.
1.3.2.5 Za vsako uporabo zavore mora biti digitalna vrednost v električnem krmilnem vodu enaka pnevmatskemu tlaku 750 kPa.
|
2.
Zmogljivost virov energije
2.1 Splošne določbe
Kompresor mora izpolnjevati zahteve iz naslednjih točk:
2.2 Simboli, ki se uporabljajo v tem oddelku
2.2.1 p1 je tlak, ki ustreza 65 % tlaka p2 iz točke 2.2.2.
2.2.2 p2 je vrednost iz točke 1.2.2.1, ki jo določi proizvajalec.
2.2.3 t1 je čas, ki je potreben, da se relativni tlak dvigne z 0 na p1; t2 je čas, ki je potreben, da se relativni tlak dvigne z 0 na p2.
2.3 Merilni pogoji
|
2.3.1
|
V vseh primerih mora biti vrtilna frekvenca kompresorja takšna, kot je dosežena, ko motor deluje z vrtilno frekvenco, ki ustreza njegovi največji moči, ali z vrtilno frekvenco, ki jo dopušča regulator.
|
|
2.3.2
|
Med preskusi za določanje časov t1 in t2 morajo biti zbiralniki pomožne opreme odklopljeni.
|
|
2.3.3
|
Pri vozilih, ki so izdelana za vleko vozil, mora biti za vlečeno vozilo vgrajena posoda za zrak, katere največji relativni tlak p (izražen v kPa/100) je takšen, kot se ga lahko dovaja prek dovodnega tokokroga traktorja, in katere prostornina V (izražena v litrih) se izračuna s formulo p × V = 20 R (pri čemer je R največja dovoljena masa, izražena v tonah, na oseh vlečenega vozila).
|
2.4 Razlaga rezultatov
|
2.4.1
|
Čas t1 za najbolj neugodno nameščeno napravo za shranjevanje energije ne sme presegati:
2.4.1.1 treh minut pri vozilih, na katera ni dovoljeno priključiti vlečenega vozila;
2.4.1.2 šest minut pri vozilih, na katera je dovoljeno priključiti vlečeno vozilo.
|
|
2.4.2
|
Čas t2 za najbolj neugodno nameščen zbiralnik ne sme presegati:
2.4.2.1 šest minut pri vozilih, na katera ni dovoljeno priključiti vlečenega vozila;
2.4.2.2 devet minut pri vozilih, na katera je dovoljeno priključiti vlečeno vozilo.
|
2.5 Dodatni preskus
|
2.5.1
|
Če je vozilo opremljeno z zbiralniki za pomožno opremo s skupno prostornino, ki presega 20 % skupne prostornine zbiralnikov zavornega sistema, se izvede dodatni preskus, med katerim ne sme prihajati do motenja delovanja ventilov, ki uravnavajo polnjenje zbiralnikov za pomožno opremo. Med tem preskusom se preverja, ali je čas t3, ki je potreben za dvig tlaka v zbiralnikih zavornega sistema z vrednosti 0 na p2, manjši od:
2.5.1.1 osmih minut pri vozilih, na katera ni dovoljeno priključiti vlečenega vozila;
2.5.1.2 enajstih minut pri vozilih, na katera je dovoljeno priključiti vlečeno vozilo.
|
|
2.5.2
|
Preskus se mora izvajati v pogojih, ki so predpisani v točkah 2.3.1. in 2.3.3.
|
2.6 Traktorji
|
2.6.1
|
Vozila, na katera je dovoljeno priključiti vlečeno vozilo, morajo prav tako izpolnjevati zgornje zahteve za vozila, na katera ni dovoljeno priključiti vlečenega vozila. V tem primeru se preskusi iz točk 2.4.1, 2.4.2 in 2.5.1 izvajajo brez zbiralnika iz točke 2.3.3.
|
3.
Priključki za preverjanje tlaka
|
3.1
|
Priključek za preverjanje tlaka mora biti nameščen na zlahka dostopnem mestu čim bližje najbolj neugodno nameščenemu zbiralniku v smislu točke 2.4.
|
|
3.2
|
Priključki za preverjanje tlaka morajo ustrezati točki 4 standarda ISO 3583-1984.
|
B. VAKUUMSKI ZAVORNI SISTEMI
1.
Prostornina naprav za shranjevanje energije (zbiralnikov energije)
1.1 Splošno
|
1.1.1
|
Vozila, pri katerih zavorni sistem za delovanje potrebuje podtlak, morajo biti opremljena z zbiralniki s prostornino, ki izpolnjuje zahteve iz točk 1.2 in 1.3.
|
|
1.1.2
|
Ni pa nujno, da imajo zavorni sistemi, ki lahko v primeru pomanjkanja zaloge energije dosežejo vsaj takšen zavorni učinek, kot je predpisan za pomožni zavorni sistem, zbiralnike s predpisano zmogljivostjo.
|
|
1.1.3
|
Pri preverjanju skladnosti z zahtevami iz točk 1.2 in 1.3 morajo biti zavore nastavljene čim tesneje.
|
1.2 Vozila kategorij T in C
|
1.2.1
|
Zbiralniki kmetijskih vozil morajo biti takšni, da je še vedno mogoče doseči učinek, predpisan za pomožni zavorni sistem:
1.2.1.1 po osemkratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema, kadar je vir energije vakuumska črpalka, in
1.2.1.2 po štirikratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema, kadar je vir energije motor.
|
|
1.2.2
|
Preskuse je treba izvajati skladno z naslednjimi zahtevami:
1.2.2.1 Začetno raven energije v zbiralnikih določi proizvajalec. Začetna raven energije mora zagotoviti predpisani zavorni učinek delovne zavore in ustrezati podtlaku, ki ne presega 90 % največjega podtlaka, ki ga ustvarja vir energije.
►M1
Začetna raven energije mora biti navedena v opisni mapi. ◄
1.2.2.2 Zbiralniki se ne smejo napajati; poleg tega morajo biti zbiralniki za pomožno opremo odklopljeni.
1.2.2.3 Pri kmetijskih vozilih, ki lahko vlečejo vlečeno vozilo, se napajalni vod blokira in na krmilni vod se priključi zbiralnik s prostornino 0,5 litra. Po preskusu iz točke 1.2.1 raven podtlaka v krmilnem vodu ne sme pasti pod raven, enakovredno polovici vrednosti, ki je bila izmerjena pri prvi uporabi zavor.
|
1.3 Vozila kategorij R1, R2 in S1
|
1.3.1
|
Zbiralniki, s katerimi so opremljena vlečena vozila, morajo biti izdelani tako, da raven podtlaka na točkah uporabe po preskusu s štirikratnim polnim aktiviranjem delovnega zavornega sistema vlečenega vozila ne pade pod raven, enakovredno polovici vrednosti, ki je bila izmerjena pri prvi uporabi zavor.
|
|
1.3.2
|
Preskuse je treba izvajati skladno z naslednjimi zahtevami:
1.3.2.1 Začetno raven energije v zbiralnikih določi proizvajalec. Začetna raven energije mora zagotoviti predpisani zavorni učinek delovne zavore.
►M1
Začetna raven energije mora biti navedena v opisni mapi. ◄
1.3.2.2 Zbiralniki se ne smejo napajati; poleg tega morajo biti zbiralniki za pomožno opremo odklopljeni.
|
2.
Zmogljivost virov energije
2.1 Splošno
|
2.1.1
|
Vir energije mora omogočati, da se z atmosferskega tlaka okolice v zbiralnikih v treh minutah vzpostavi začetna raven, ki je določena v točki 1.2.2.1. Pri vozilu, na katero je dovoljeno priključiti vlečeno vozilo, čas za doseganje te ravni pod pogoji, določenimi v točki 2.2, ne sme presegati šest minut.
|
2.2 Merilni pogoji
|
2.2.1
|
Vrtilna frekvenca vira podtlaka mora biti:
2.2.1.1 vrtilna frekvenca motorja vozila v mirovanju z menjalnikom v nevtralnem položaju in motorjem v prostem teku, če je vir podtlaka motor vozila;
2.2.1.2 vrtilna frekvenca, dosežena pri delovanju motorja s 65 % vrtilne frekvence, ki ustreza njegovi največji moči, če je vir podtlaka črpalka, in
2.2.1.3 vrtilna frekvenca, dosežena pri delovanju motorja s 65 % največje vrtilne frekvence, ki jo dopušča regulator, če je vir podtlaka črpalka in je motor opremljen z regulatorjem.
|
|
2.2.2
|
Če je predvideno, da se na vozilo priključi vlečeno vozilo, ki ima vakuumski delovni zavorni sistem, se za vlečeno vozilo uporabi naprava za shranjevanje energije s prostornino V v litrih, ki se izračuna z naslednjo formulo:
V = 15 R
pri čemer je R največja dovoljena masa v tonah na oseh vlečenega vozila.
|
C. HIDRAVLIČNI ZAVORNI SISTEMI S SHRANJENO ENERGIJO
1.
Prostornina naprav za shranjevanje energije
1.1 Splošno
|
1.1.1
|
Vozila, pri katerih zavorni sistem za delovanje potrebuje shranjeno energijo, ki jo zagotavlja hidravlična tekočina pod tlakom, morajo biti opremljena z napravami za shranjevanje energije z zmogljivostjo, ki izpolnjuje zahteve iz točk 1.2 in 1.3.
▼M1
Naprave za shranjevanje energije, ki se uporabljajo kot naprave za dušenje pulziranja v hidravličnih zavornih sistemih, pri katerih se predpisani zavorni učinek delovne zavore doseže z virom energije, se ne štejejo za naprave za akumulacijo energije v smislu te priloge.
▼B
|
|
1.1.2
|
Ni pa nujno, da imajo zavorni sistemi, ki lahko v primeru pomanjkanja zaloge energije z uporabo upravljalnega elementa delovnega zavornega sistema dosežejo vsaj takšen zavorni učinek, kot je predpisan za pomožni zavorni sistem, naprave za shranjevanje energije s predpisano zmogljivostjo.
|
|
1.1.3
|
Pri preverjanju skladnosti z zahtevami iz točk 1.2.1, 1.2.2 in 2.1 morajo biti zavore nastavljene čim tesneje.
|
1.2 Vozila kategorij T in C
|
1.2.1
|
Vozila, ki so opremljena s hidravličnim zavornim sistemom s shranjeno energijo, morajo izpolnjevati naslednje zahteve:
1.2.1.1 Po osemkratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema mora biti pri deveti uporabi še vedno mogoče doseči učinek, ki je predpisan za pomožni zavorni sistem.
1.2.1.2 Preskuse je treba izvajati skladno z naslednjimi zahtevami:
1.2.1.2.1 Preskus se začne pri tlaku, ki ga lahko določi proizvajalec, vendar ni večji od vklopnega tlaka.
1.2.1.2.2 Naprave za shranjevanje energije se ne smejo napajati; poleg tega morajo biti naprave za shranjevanje energije za pomožno opremo odklopljene.
|
|
1.2.2
|
Za traktorje, opremljene s hidravličnim zavornim sistemom s shranjeno energijo, ki ne izpolnjujejo zahtev iz točke 2.2.1.4.1 Priloge I, se šteje, da so skladni s to točko, če so izpolnjene naslednje zahteve:
1.2.2.1 Po vsaki posamezni okvari v prenosnem sistemu mora biti po osemkratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema pri deveti uporabi še vedno mogoče doseči vsaj učinek, ki je predpisan za pomožni zavorni sistem ali, kjer se učinek, predpisan za pomožni zavorni sistem, ki zahteva uporabo shranjene energije, doseže z ločenim upravljalnim elementom, mora biti po osemkratnem polnem aktiviranju pri deveti uporabi še vedno mogoče doseči preostali učinek, ki je predpisan v odstavku 3.1.4 Priloge II k tej uredbi.
1.2.2.2 Preskuse je treba izvajati skladno z naslednjimi zahtevami:
1.2.2.2.1 Ko je vir energije v mirovanju ali deluje z vrtilno frekvenco, ki ustreza vrtilni frekvenci prostega teka motorja, se lahko sproži kakršna koli okvara prenosnega sistema. Preden se sproži takšna okvara, morajo biti naprave za shranjevanje energije pod tlakom, ki ga lahko določi proizvajalec, vendar ne sme presegati vklopnega tlaka.
1.2.2.2.2 Pomožna oprema in njene naprave za shranjevanje energije, če obstajajo, morajo biti odklopljene.
|
1.3 Vozila kategorij R in S
|
1.3.1
|
Če so vlečena vozila opremljena z napravami za shranjevanje energije (zbiralniki energije), morajo te naprave biti izdelane tako, da po osemkratnem polnem aktiviranju delovnega zavornega sistema traktorja raven energije, ki se dovaja delom delovnega mehanizma, ki jo uporabljajo, ne pade pod polovico vrednosti, dosežene pri prvi uporabi zavor, ne da bi se pri tem aktiviral samodejni ali parkirni zavorni sistem vlečenega vozila.
|
|
1.3.2
|
Med preskusom morajo biti izpolnjene naslednje zahteve:
1.3.2.1 na začetku preskusa mora biti tlak v napravah za shranjevanje energije 15 000 kPa;
▼M2
1.3.2.1.1 pri sistemih z napravami za shranjevanje energije, ki se za izpolnjevanje zahtev glede predpisanega zavornega učinka polnijo na največji delovni tlak, ki presega 15 000 kPa, mora biti tlak v napravah za shranjevanje energije na začetku preskusa najvišji tlak, ki ga določi proizvajalec;
1.3.2.2 dodatni vod mora biti zaprt; poleg tega morajo biti naprave za shranjevanje energije za pomožno opremo odklopljene;
1.3.2.3 med preskusom se naprave za shranjevanje energije ne smejo napajati;
1.3.2.4 Za vsako uporabo zavore mora biti tlak v hidravličnem krmilnem vodu 13 300 kPa.
|
2.
Zmogljivost hidravličnih virov energije
Viri energije morajo izpolnjevati zahteve iz naslednjih točk:
2.1 Vozila kategorij T in C
2.1.1 Simboli
2.1.1.1 „p1“ je največji delovni tlak (izklopni tlak) v napravah za shranjevanje energije, ki ga določi proizvajalec.
2.1.1.2 „p2“ je tlak po štirikratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema, z začetkom pri tlaku p1, brez napajanja naprav za shranjevanje energije.
2.1.1.3 „t“ je čas, ki je potreben, da tlak naraste s p2 na p1 v napravah za shranjevanje energije brez uporabe upravljalnega elementa delovnega zavornega sistema.
2.1.2 Merilni pogoji
|
2.1.2.1
|
Med preskusom za določanje časa t je napajalna hitrost vira energije tista, ki se doseže, ko motor deluje z vrtilno frekvenco, ki ustreza njegovi največji moči, ali z vrtilno frekvenco, ki jo dopušča regulator.
|
|
2.1.2.2
|
Med preskusom za določanje časa t se naprave za shranjevanje energije za pomožno opremo ne smejo odklopiti, razen če je to samodejno.
|
▼M1
2.1.3 Razlaga rezultatov
Čas t ne sme preseči 30 s pri traktorjih, na katere ni dovoljeno priključiti vlečenega vozila.
▼B
2.2 Traktorji, ki so opremljeni s hidravličnim krmilnim vodom za vlečena vozila
|
2.2.1
|
Za določitev napajalne hitrosti vira energije se na vlečno glavo hidravličnega dodatnega voda traktorja priključi simulator vlečenega vozila z dodatnim vodom, predpisan v odstavku 3.6.2.1 Priloge III k tej uredbi.
|
|
2.2.2
|
Preskus je treba opraviti pod naslednjimi pogoji:
2.2.2.1 Preskus se izvaja pri temperaturi okolice med 15 °C in 30 °C.
2.2.2.2 Pred preskusom se pri nedelujočem motorju na vlečno glavo dodatnega voda priključi simulator vlečenega vozila z dodatnim vodom.
2.2.2.3 Med preskusom mora biti vrtilna frekvenca motorja traktorja 25 % nad vrtilno frekvenco prostega teka.
2.2.2.4 Med preskusom mora biti upravljalni element parkirne zavore traktorja popolnoma popuščen.
|
|
2.2.3
|
Pri delujočem motorju in popolnoma zaprti odzračevalni napravi čas, ki poteče, ko tlak v preskusni odprtini blizu ženske spojke, ki ustreza standardu ISO 16028:2006, naraste s 300 kPa na 1 500 kPa, ne sme presegati 2,5 sekunde.
|
2.3 Vozila kategorij R in S
Če vlečeno vozilo uporablja napravo za shranjevanje energije kot pomoč za delovni zavorni sistem in se takšna naprava za shranjevanje energije polni s tlakom v krmilnem vodu med uporabo delovnega zavornega sistema in/ali z virom energije, vgrajenim v vlečeno vozilo, morajo biti izpolnjene naslednje zahteve:
|
2.3.1
|
Vir energije se mora napajati s simulatorjem traktorja v skladu z Dodatkom 2 Priloge III prek električnega priključka, ki ustreza standardu ISO 7638:2003.
|
|
2.3.2
|
Simboli
2.3.2.1 „pR1“ je največji delovni tlak (izklopni tlak) v napravi za shranjevanje energije, ki ga določi proizvajalec.
2.3.2.2 „pR2“ je tlak po štirikratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema traktorja.
2.3.2.3 „tR“ je čas, ki je potreben, da tlak naraste s pR2 na pR1 v napravi za shranjevanje energije brez uporabe upravljalnega elementa delovnega zavornega sistema traktorja.
|
|
2.3.3
|
Merilni pogoji Med preskusom za določanje časa tR morajo biti izpolnjene naslednje zahteve:
2.3.3.1 Tlak v napravi za shranjevanje energije ob začetku preskusa mora biti tlak „pR1“.
2.3.3.2 Delovni zavorni sistem se mora štirikrat aktivirati z krmilnim vodom simulatorja traktorja.
2.3.3.3 Za vsako uporabo zavore mora biti tlak v krmilnem vodu 13 300 kPa.
2.3.3.4 Naprave za shranjevanje energije za pomožno opremo se ne smejo odklopiti, razen če je to samodejno.
2.3.3.5 Ventil, ki napaja napravo za shranjevanje energije s tlakom krmilnega voda, mora biti med preskusom zaprt.
|
|
2.3.4
|
Razlaga rezultatov Čas tR ne sme presegati 4 minut.
|
3.
Značilnosti opozorilnih naprav
Z motorjem v mirovanju in z začetnim tlakom, ki ga lahko določi proizvajalec in ki ne presega vklopnega tlaka, se opozorilna naprava po dvakratnem polnem aktiviranju upravljalnega elementa delovnega zavornega sistema ne sme sprožiti.
PRILOGA V
Zahteve za vzmetne zavore in vozila, opremljena z njimi
1.
Zahteve za izdelavo, vgradnjo in preglede
1.1 Opredelitve pojmov
V tej prilogi:
1.1.1 „vzmetni zavorni sistemi“ pomeni zavorne sisteme, v katerih energijo, potrebno za zaviranje, zagotavlja ena ali več vzmeti, ki delujejo kot naprava za shranjevanje energije;
1.1.2 „tlak“ pomeni podtlak, če se stiskanje vzmeti izvaja z vakuumsko napravo.
2.
Splošne zahteve
Največja konstrukcijsko določena hitrost v tej prilogi velja za vožnjo vozila v smeri naprej, razen če je izrecno navedeno drugače.
|
2.1
|
Vzmetni zavorni sistem se ne sme uporabljati kot delovni zavorni sistem, razen pod pogojem iz točke 2.2. V primeru okvare dela prenosnega sistema delovnega zavornega sistema pa se lahko za doseganje preostalega učinka iz točke 3.1.4 Priloge II uporabi vzmetni zavorni sistem, če voznik lahko zavira stopnjevano.
|
2.1.1
|
Vzmetne zavore se lahko uporabijo kot pomožni zavorni sistem ne glede na največjo konstrukcijsko določeno hitrost vozila pod pogojem, da voznik lahko zavira stopnjevano in da so izpolnjene zahteve glede učinka iz Priloge II.
Izjemoma morajo biti pri vozilih, katerih največja konstrukcijsko določena hitrost ne presega 30 km/h in ki kot pomožni zavorni sistem uporabljajo vzmetne zavore z upravljalnim elementom tipa VKLOP/IZKLOP (npr. gumb ali stikalo), ki ne omogoča stopnjevanega zaviranja, izpolnjene naslednje zahteve:
2.1.1.1 Vozniku mora biti omogočeno aktiviranje upravljalnega elementa vzmetnih zavor z njegovega sedeža, pri čemer lahko vsaj z eno roko še vedno drži volan.
2.1.1.2 Dosežen mora biti zavorni učinek, predpisan v Prilogi II k tej uredbi.
2.1.1.3 Predpisani učinek je treba doseči brez blokiranja koles, brez odmika vozila s poti in brez neobičajnega tresenja.
|
|
2.1.2
|
Vakuumske vzmetne zavore se ne smejo uporabljati za vlečena vozila.
Energijo, ki je potrebna za stiskanje vzmeti, s čimer se popusti zavora, zagotavlja in uravnava upravljalni element, ki ga aktivira voznik.
|
|
|
2.2.
|
Pri vozilih, katerih največja konstrukcijsko določena hitrost ne presega 30 km/h, se lahko vzmetni zavorni sistem uporablja kot delovni zavorni sistem pod pogojem, da voznik lahko zavira stopnjevano.
Če se vzmetni zavorni sistem uporablja kot delovni zavorni sistem, morajo biti izpolnjene naslednje dodatne zahteve:
▼M1
2.2.1 zahteve glede odzivnega časa iz oddelka 6 Priloge III;
▼B
2.2.2 s čim tesneje nastavljenimi vzmetnimi zavorami mora biti mogoče aktivirati:
2.2.2.1 zavoro 10-krat v minuti, ko motor deluje z vrtilno frekvenco prostega teka (aktiviranja zavore morajo biti v tem času enakomerno porazdeljena);
2.2.2.2 delovni zavorni sistem šestkrat, z začetkom pri tlaku, ki ni večji od vklopnega tlaka vira energije. Med tem preskusom se naprave za shranjevanje energije ne smejo napajati. Poleg tega morajo biti naprave za shranjevanje energije za pomožno opremo odklopljene.
2.2.3 Vzmetne zavore morajo biti zasnovane tako, da se ne kvarijo zaradi utrujenosti. Proizvajalec mora zato tehnični službi predložiti ustrezna poročila o preskusih vzdržljivosti.
|
|
2.3
|
Majhno nihanje katere koli mejne vrednosti tlaka, ki lahko nastane v napajalnem vodu vzmetne kompresijske komore, ne sme povzročiti večjega nihanja v zavorni sili.
|
|
2.4
|
Za traktorje, opremljene z vzmetnimi zavorami, veljajo naslednje zahteve:
2.4.1 Napajalni vod vzmetne kompresijske komore mora imeti lastno zalogo energije ali se mora napajati vsaj iz dveh neodvisnih zalog energije. Pnevmatski napajalni vod ali hidravlični dodatni vod vlečenega vozila se lahko odcepi od tega napajalnega voda, če padec tlaka v navedenih vodih ne more povzročiti aktiviranja sprožil vzmetnih zavor.
2.4.2 Pomožna oprema lahko črpa energijo iz napajalnega voda za sprožila vzmetnih zavor samo, če njeno delovanje tudi v primeru okvar vira energije ne povzroči upada zaloge energije za sprožila vzmetnih zavor pod raven, s katere je mogoča vsaj ena popustitev sprožil vzmetnih zavor.
2.4.3 Pri ponovnem polnjenju zavornega sistema, potem ko je tlak padel na vrednost 0, vzmetne zavore ne smejo popustiti ne glede na položaj upravljalnega elementa, dokler tlak v delovnem zavornem sistemu ne naraste dovolj, da je zagotovljen vsaj predpisani učinek pomožnega zaviranja pri obremenjenem vozilu, pri čemer se uporablja upravljalni element delovnega zavornega sistema.
2.4.4 Ko so vzmetne zavore aktivirane, se ne smejo popustiti, razen če je v delovnem zavornem sistemu zadosten tlak, ki zagotavlja vsaj predpisani preostali zavorni učinek obremenjenega vozila iz točke 3.1.4 Priloge II z uporabo upravljalnega elementa delovne zavore.
|
|
2.5
|
Pri traktorjih mora biti sistem zasnovan tako, da je mogoče zavore aktivirati in popustiti vsaj trikrat, če je začetni tlak v vzmetni kompresijski komori enak največjemu konstrukcijsko določenemu tlaku. Pri vlečenih vozilih s pnevmatskimi zavornimi sistemi mora biti po odklopu vlečenega vozila mogoče zavore popustiti vsaj trikrat, pri čemer mora biti tlak v napajalnem vodu pred odklopom 750 kPa. Vendar mora biti pred preverjanjem zavora v sili popuščena. Ti pogoji morajo biti izpolnjeni, kadar so zavore nastavljene čim tesneje. Poleg tega mora biti mogoče aktivirati in popustiti parkirno zavoro, kot je določeno v točki 2.2.2.10 Priloge I, ko je priklopnik priključen na traktor.
|
|
2.6
|
Pri traktorjih tlak v vzmetni kompresijski komori, pri katerem začnejo vzmeti aktivirati zavore, ki so nastavljene čim tesneje, ne sme biti večji od 80 % najmanjše vrednosti normalno razpoložljivega tlaka.
|
|
2.7
|
Pri vlečenih vozilih s pnevmatskimi zavornimi sistemi tlak v vzmetni kompresijski komori, pri katerem začnejo vzmeti aktivirati zavore, ne sme biti večji od tlaka, ki nastane po štirikratnem polnem aktiviranju delovnega zavornega sistema v skladu s točko 1.3 dela A Priloge IV. Začetni tlak je 700 kPa.
|
|
2.8
|
Pri vlečenih vozilih s hidravličnimi zavornimi sistemi, ki ne uporabljajo shranjene energije za vzpostavitev tlaka v vzmetni kompresijski komori, tlak, pri katerem začnejo vzmeti aktivirati zavore, ne sme biti večji od 1 200 kPa.
|
|
2.9
|
Pri vlečenih vozilih s hidravličnimi zavornimi sistemi, ki uporabljajo shranjeno energijo za vzpostavitev tlaka v vzmetni kompresijski komori, tlak v vzmetni kompresijski komori, pri katerem začnejo vzmeti aktivirati zavore, ne sme biti večji od tlaka, ki nastane po štirikratnem polnem aktiviranju delovnega zavornega sistema v skladu s točko 1.3 dela C Priloge IV. Začetni tlak je 12 000 kPa. Poleg tega tlak v dodatnem vodu, pri katerem začnejo vzmeti aktivirati zavore, ne sme biti večji od 1 200 kPa.
|
|
2.10
|
Ko tlak v vodu, ki dovaja energijo v vzmetno kompresijsko komoro – razen vodov pomožne naprave za popuščanje zavor, ki uporablja tekočino pod tlakom – pade na vrednost, pri kateri se deli zavor začnejo premikati, se mora aktivirati optična ali zvočna opozorilna naprava. Če je ta zahteva izpolnjena, lahko opozorilna naprava vključuje opozorilni signal iz točke 2.2.1.29.1.1 Priloge I. Ta določba ne velja za vlečena vozila.
|
|
2.11
|
Če je traktor, ki lahko vleče vozilo kategorij R in S s povezanim ali polpovezanim zavornim sistemom, opremljen z vzmetnim zavornim sistemom, mora samodejno aktiviranje omenjenega sistema povzročiti aktiviranje zavor vlečenega vozila.
|
|
2.12
|
Vlečena vozila, ki uporabljajo zaloge energije pnevmatskega delovnega zavornega sistema za izpolnjevanje zahtev za samodejno zavoro iz točke 3.2.3 Priloge II, morajo izpolnjevati tudi eno od naslednjih zahtev, ko je vlečeno vozilo odklopljeno s traktorja in je upravljalni element parkirne zavore vlečenega vozila v popuščenem položaju (vzmetne zavore niso aktivirane):
2.12.1 ko se zaloge energije delovnega zavornega sistema zmanjšajo na tlak, ki ni nižji od 280 kPa, se mora za polno aktiviranje vzmetnih zavor tlak v kompresijski komori vzmetne zavore zmanjšati na 0 kPa. Ta zahteva se preverja s stalnim tlakom zaloge energije delovnega zavornega sistema 280 kPa;
2.12.2 zmanjšanje tlaka v zalogi energije delovnega zavornega sistema povzroči ustrezno zmanjšanje tlaka v vzmetni kompresijski komori.
|
3.
Pomožni sistem za popuščanje
|
3.1
|
Vzmetni zavorni sistem mora biti zasnovan tako, da je v primeru okvare navedenega sistema še vedno mogoče popustiti zavore. To se lahko doseže z uporabo pomožne naprave za popuščanje (pnevmatske, hidravlične, mehanske itd.).
Pomožne naprave za popuščanje, ki za popuščanje uporabljajo zalogo energije, morajo energijo črpati iz zaloge energije, ki je neodvisna od zaloge energije, ki se običajno uporablja za vzmetni zavorni sistem. Stisnjeni zrak ali hidravlična tekočina v taki pomožni napravi za popuščanje lahko deluje na isto površino bata v vzmetni kompresijski komori, ki se uporablja za običajni vzmetni zavorni sistem, če pomožna naprava za popuščanje uporablja ločen vod. Povezava tega voda z običajnim vodom, ki povezuje upravljalni element s sprožili vzmetne zavore, mora biti pri vsakem sprožilu vzmetne zavore tik pred odprtino vzmetne kompresijske komore, če ni vgrajena v ohišje sprožila. Ta povezava mora vsebovati napravo, ki preprečuje vpliv enega voda na drugega. Zahteve iz točke 2.2.1.5 Priloge I veljajo tudi za to napravo.
|
3.1.1
|
Za namene zahteve iz točke 3.1 se sestavni deli prenosnega sistema zavornega sistema ne štejejo za izpostavljene okvaram, če se v skladu s točko 2.2.1.2.7 Priloge I ne obravnavajo kot izpostavljeni okvaram, pod pogojem, da so izdelani iz kovine ali iz materiala s podobnimi lastnostmi in da pri običajnem zaviranju niso nagnjeni k znatnim deformacijam.
|
|
|
3.2
|
Če je za delovanje pomožne naprave iz točke 3.1 potrebno orodje ali ključ, ga je treba imeti v vozilu.
|
|
3.3
|
Če pomožni sistem za popuščanje uporablja zalogo energije za popuščanje vzmetnih zavor, veljata naslednji dodatni zahtevi:
3.3.1 Če se za upravljanje pomožnega sistema za popuščanje vzmetnih zavor uporablja isti upravljalni element kot za upravljanje pomožne ali parkirne zavore, v vseh primerih veljajo zahteve iz točke 2.4.
3.3.2 Če je upravljalni element pomožnega sistema za popuščanje vzmetnih zavor ločen od upravljalnega elementa pomožne ali parkirne zavore, za oba sistema upravljanja veljajo zahteve iz točke 2.3. Zahteve iz točke 2.4.4 pa ne veljajo za pomožni sistem za popuščanje vzmetnih zavor. Poleg tega mora biti upravljalni element pomožnega sistema za popuščanje nameščen tako, da vozniku preprečuje uporabo z njegovega sedeža.
|
|
3.4
|
Če se v pomožnem sistemu za popuščanje uporablja stisnjeni zrak, bi se moral sistem aktivirati z ločenim upravljalnim elementom, ki ni povezan z upravljalnim elementom vzmetnih zavor.
|
PRILOGA VI
Zahteve za parkirne zavore, opremljene z napravo za mehansko blokiranje zavornih valjev
1.
Opredelitve pojmov
V tej prilogi:
1.1 „naprava za mehansko blokiranje zavornih valjev“ pomeni napravo, ki zagotavlja zaviranje s parkirno zavoro tako, da mehansko blokira batnico zavornega bata. Mehansko blokiranje nastopi, ko se iz blokirne komore spusti stisnjena tekočina, pri čemer je naprava za mehansko blokiranje zasnovana tako, da se lahko popusti, ko je blokirna komora znova pod tlakom.
2.
Zahteve
|
2.1
|
Naprava za mehansko blokiranje zavornih valjev mora biti zasnovana tako, da se lahko popusti, ko se v blokirni komori znova vzpostavi tlak.
|
|
2.2
|
Ko se tlak v blokirni komori približa ravni, ki ustreza napravi za mehansko blokiranje zavornih valjev, se mora aktivirati optični ali zvočni opozorilni sistem. Ta določba ne velja za vlečena vozila. Pri vlečenih vozilih tlak, ki ustreza napravi za mehansko blokiranje zavornih valjev, ne sme presegati 4 kPa. Učinek parkirne zavore mora biti mogoče doseči kljub kakršni koli posamezni okvari delovnega zavornega sistema vlečenega vozila. Poleg tega mora biti po odklopu vlečenega vozila mogoče zavore popustiti vsaj trikrat, pri čemer mora biti tlak v napajalnem vodu pred odklopom 650 kPa. Ti pogoji morajo biti izpolnjeni, kadar so zavore nastavljene čim tesneje. Poleg tega mora biti mogoče aktivirati in popustiti parkirno zavoro, kot je določeno v točki 2.2.2.10 Priloge I, ko je vlečeno vozilo priključeno na traktor.
|
|
2.3
|
Pri sprožilih zavor z vgrajeno napravo za mehansko blokiranje zavornih valjev mora biti mogoče sprožilo zavore aktivirati z eno od dveh zalog energije.
|
|
2.4
|
Blokirani zavorni valj se lahko popusti le, če je zagotovljeno, da bo zavorna naprava po taki popustitvi lahko spet aktivirana.
|
|
2.5
|
Za primere okvare vira energije, ki napaja blokirno komoro, je predpisana pomožna naprava za popuščanje (npr. mehanska ali pnevmatska), ki uporablja npr. zrak v eni od pnevmatik vozila.
|
|
2.6
|
Upravljalni element mora biti zasnovan tako, da pri aktiviranju zaporedoma izvaja naslednje postopke: aktivira zavore, tako da se zagotovi stopnja učinkovitosti, ki je potrebna za parkirno zaviranje, blokira zavore v tem položaju in nato izniči silo za aktiviranje zavore.
|
PRILOGA VII
▼M1
Alternativne preskusne zahteve za vozila, za katera so bili izvedeni preskusi, enakovredni preskusom tipa I, tipa II ali tipa III
1.
Opredelitev pojmov
V tej prilogi:
1.1 „zadevno vlečeno vozilo“ pomeni vlečeno vozilo, ki predstavlja tip vlečenega vozila, za katerega se zahteva homologacija;
1.2 „enak“ pomeni dele, ki imajo enake geometrijske in mehanske značilnosti ter materiale, uporabljene za sestavne dele vozil;
1.3 „referenčna os“ pomeni os, za katero obstaja poročilo o preskusu;
1.4 „referenčna zavora“ pomeni zavoro, za katero obstaja poročilo o preskusu;
1.5 „nazivna preskusna masa“ pomeni maso koluta ali bobna, ki jo proizvajalec navede za kolut oziroma boben, na katerem tehnična služba izvede ustrezen preskus;
1.6 „dejanska preskusna masa“ pomeni maso, ki jo tehnična služba izmeri pred preskusom;
1.7 „prag vhodnega navora zavore“ pomeni vhodni navor, ki je potreben za merljivi zavorni navor;
1.8 „določen prag vhodnega navora zavore“ pomeni prag vhodnega navora zavore, ki ga določi proizvajalec in je reprezentativen za zavoro;
1.9 „določen zunanji premer koluta“ pomeni zunanji premer koluta, ki ga določi proizvajalec in je reprezentativen zunanji premer za kolut;
1.10 „nazivni zunanji premer“ pomeni zunanji premer, ki ga proizvajalec določi za kolut, na katerem tehnična služba izvede ustrezen preskus;
1.11 „dejanski zunanji premer“ pomeni zunanji premer koluta, ki ga tehnična služba izmeri pred preskusom;
1.12 „dejanska dolžina odmične gredi“ pomeni razdaljo od središčnice S-odmikača do središčnice sprožilnega vzvoda;
1.13 „faktor zaviranja“ pomeni razmerje ojačanja zavore med vhodno in izhodno vrednostjo.
2.
Splošne zahteve
Preskusov tipa I in/ali tipa II ali tipa III iz Priloge II ni treba izvajati za vozila in njegove sisteme v postopku homologacije v naslednjih primerih:
2.1 Zadevno vozilo je traktor ali vlečeno vozilo, ki je glede pnevmatik, zavorne energije, ki jo porabi posamezna os, ter namestitve pnevmatik in sklopa zavor v zvezi z zaviranjem enako traktorju ali vlečenemu vozilu, ki:
2.1.1 je opravilo preskus tipa I in/ali tipa II ali tipa III ter
2.1.2 je bilo homologirano, kar zadeva porabljeno energijo pri zaviranju, za maso na os, ki ni manjša od mase zadevnega vozila.
2.2 Zadevno vozilo je traktor ali vlečeno vozilo, katerega osi so glede pnevmatik, zavorne energije, ki jo porabi posamezna os, ter namestitve pnevmatik in sklopa zavor v zvezi z zaviranjem enake osem, ki so vsaka posebej opravile preskus tipa I in/ali tipa II ali tipa III za mase na os, ki niso manjše kot pri zadevnem vozilu, pod pogojem, da zavorna energija, ki jo porabi posamezna os, ne presega energije, ki jo posamezna os porabi med referenčnim preskusom ali preskusi, ki se izvajajo na posamezni osi.
2.3 Zadevno vozilo je traktor, opremljen s trajnostnim zavornim sistemom, ki ni motorna zavora in je enak trajnostnemu zavornemu sistemu, ki je že bil preskušen pod naslednjimi pogoji:
2.3.1 trajnostni zavorni sistem mora pri preskusu, ki se je izvajal na vsaj 6-odstotnem naklonu (preskus tipa II), sam stabilizirati vozilo z največjo maso, ki v času preskusa ni bila manjša od največje mase vozila v postopku homologacije;
2.3.2 pri zgornjim preskusu je treba preveriti, ali je rotacijska hitrost vrtljivih delov trajnostnega zavornega sistema, ko vozilo v postopku homologacije doseže cestno hitrost 30 km/h, takšna, da zavorni navor ni manjši od zavornega navora, ki ustreza preskusu iz točke 2.3.1.
2.4 Zadevno vozilo je vlečeno vozilo, ki je opremljeno s pnevmatskimi zavorami z S-odmikačem ali kolutnimi zavorami, ki izpolnjujejo zahteve glede preverjanja iz Dodatka 1, in sicer v zvezi z nadzorom značilnosti v primerjavi z značilnostmi iz poročila za referenčno os, kot je prikazano v poročilu o preskusu. Ob predložitvi enakovrednih podatkov so lahko poleg pnevmatskih zavor z S-odmikačem ali kolutnih zavor homologirani tudi drugi tipi zavor.
▼B
3.
Posebne zahteve za vlečena vozila
Pri vlečenih vozilih se šteje, da so te zahteve izpolnjene v zvezi s točkama 2.1 in 2.2, če poročilo za referenčno os/zavoro vsebuje identifikacijske oznake iz točke 3.7 Dodatka 1 za os ali zavoro zadevnega vlečenega vozila.
▼M1
4.
Certifikat o homologaciji
Če veljajo navedene zahteve, mora certifikat o homologaciji vključevati naslednje podatke:
4.1 v primeru iz točke 2.1 te priloge je treba navesti homologacijsko številko vozila, na katerem je bil izveden referenčni preskus tipa I in/ali tipa II ali tipa III;
4.2 v primerih iz točke 2.2 te priloge je treba izpolniti preglednico I v predlogi iz Priloge V k Izvedbeni uredbi (EU) 2015/504;
4.3 v primerih iz točke 2.3 te priloge je treba izpolniti preglednico II v predlogi iz Priloge V k Izvedbeni uredbi (EU) 2015/504;
4.4 če se uporablja točka 2.4, je treba izpolniti preglednico III v predlogi iz Priloge V k Izvedbeni uredbi (EU) 2015/504.
▼B
5.
Dokumentacija
Če se vlagatelj vloge za homologacijo v državi članici sklicuje na homologacijo, podeljeno v drugi državi članici, mora predložiti dokumentacijo v zvezi s tisto homologacijo.
Dodatek 1
Alternativni postopki za preskuse tipa I ali tipa III za zavore vlečenih vozil
1.
Splošno
|
1.1
|
V skladu s točko 2.4 se v postopku homologacije vozila preskusi tipa I ali tipa III lahko opustijo, če sestavni deli zavornega sistema izpolnjujejo zahteve iz tega dodatka in če predvideni zavorni učinek izpolnjuje zahteve iz te uredbe za ustrezno kategorijo vozil.
|
|
1.2
|
Šteje se, da preskusi, ki se izvajajo v skladu postopki, določenimi v tem dodatku, izpolnjujejo zgornje zahteve.
|
|
1.3
|
Preskusi, opravljeni v skladu s točko 3.6, in rezultati v poročilu o preskusu so sprejemljiv dokaz skladnosti z zahtevami iz točke 2.2.2.8.1 Priloge I.
|
|
1.4
|
Nastavljanje zavor pred preskusom tipa III mora biti izvedeno v skladu z naslednjimi postopki, kot je ustrezno:
1.4.1 Pnevmatske zavore vlečenih vozil morajo biti nastavljene tako, da omogočajo delovanje naprave za samodejno nastavljanje zavor. V ta namen mora biti gib sprožila nastavljen na:
s0 > 1,1 · spon-nast
(zgornja mejna vrednost ne sme presegati vrednosti, ki jo priporoča proizvajalec),
pri čemer je:
|
spon-nast
|
gib za ponovno nastavitev v skladu s specifikacijo proizvajalca naprave za samodejno nastavljanje zavor, tj. gib, pri katerem se sproži ponovna nastavitev voznega profila zavore s tlakom v sprožilu, ki znaša 100 kPa.
|
Če po dogovoru s tehnično službo merjenje giba sprožila ni izvedljivo, se je treba o začetni nastavitvi dogovoriti s tehnično službo.
V skladu z zgornjim pogojem je treba zavoro aktivirati 50-krat zapored s tlakom v sprožilu 200 kPa. Temu sledi enkratno zaviranje s tlakom v sprožilu vsaj 650 kPa.
1.4.2 Pri hidravličnih kolutnih zavorah vlečenega vozila se zahteve glede nastavljanja ne štejejo za potrebne.
1.4.3 Pri hidravličnih bobnastih zavorah vlečenega vozila mora nastavitev zavor določiti proizvajalec.
|
|
1.5
|
Pri vlečenih vozilih, ki so opremljena z napravami za samodejno nastavljanje zavor, morajo biti zavore pred spodnjim preskusom tipa I nastavljene v skladu s postopkom iz točke 1.4.
|
▼M1
2.
Simboli, ki se uporabljajo v tej prilogi, so pojasnjeni v naslednji tabeli:
|
P
|
=
|
del mase vozila, ki jo nosi os pri statičnih pogojih
|
|
F
|
=
|
normalna reakcija površine cestišča na os pri statičnih pogojih = P·g
|
|
FR
|
=
|
skupna normalna statična reakcija površine cestišča na vsa kolesa vlečenega vozila
|
|
Fe
|
=
|
preskusna osna obremenitev
|
|
g
|
=
|
gravitacijski pospešek: g = 9,81 m/s2
|
|
C0
|
=
|
prag vhodnega navora zavore. Ta navor se lahko določi z ekstrapolacijo meritev v območju, ki ne presega 15 odstotkov stopnje zaviranja, ali z drugimi enakovrednimi metodami.
|
|
C0,dec
|
=
|
določen prag vhodnega navora zavore
|
|
Cmax
|
=
|
največji vhodni navor zavore
|
|
R
|
=
|
dinamični kotalni polmer pnevmatike. Za vozila kategorij Ra in Sa se lahko namesto dinamičnega kotalnega polmera pnevmatike uporabi statični obremenjeni polmer, kot ga je navedel proizvajalec pnevmatike.
|
|
T
|
=
|
zavorna sila na dotikališču pnevmatike s cesto
|
|
TR
|
=
|
skupna zavorna sila na dotikališču pnevmatike vlečenega vozila s cesto
|
|
z
|
=
|
stopnja zaviranja = T/F ali M/(R F)
|
|
s
|
=
|
gib sprožila (vsota delovnega in praznega giba)
|
|
sp
|
=
|
učinkoviti gib (gib, pri katerem izhodna sila bata zavornega valja znaša 90 % povprečne sile bata ThA)

|
|
ThA
|
=
|
povprečna sila bata (povprečna sila bata se določi tako, da se integrirajo vrednosti med 1/3 in 2/3 skupnega giba Smax)
|
|
r
|
=
|
notranji polmer zavornih bobnov ali učinkoviti polmer zavornih kolutov
|
|
p
|
=
|
tlak aktiviranja zavor
|
Opomba: simboli s pripono „e“ se nanašajo na parametre, povezane z referenčnim preskusom zavor, in se lahko po potrebi dodajo drugim simbolom.
▼B
3.
Preskusne metode
3.1 Preskusi na progi za preskušanje
|
3.1.1
|
Preskusi zavornega učinka naj se po možnosti izvajajo samo na posamezni osi.
|
|
3.1.2
|
▼M1
Rezultati preskusov na skupini osi se lahko uporabijo v skladu s točko 2.1 te priloge, če med preskusi z vlečenjem in preskusi s segretimi zavorami vsaka os prispeva enako količino energije za zaviranje.
▼B
|
3.1.2.1
|
To je zagotovljeno, če je za vse osi enako naslednje: geometrija zavor, obloge, montaža koles, pnevmatike, aktiviranje sprožil in porazdelitev tlaka v njih.
|
|
3.1.2.2
|
Rezultat, zabeležen za skupino osi, je povprečna vrednost za število osi, kot da bi bila uporabljena samo ena os.
|
|
|
3.1.3
|
Osi naj bi bile po možnosti obremenjene z največjo statično obremenitvijo osi, čeprav to ni nujno, če se med preskusi upošteva razlika v kotalnem uporu zaradi različne obremenitve preskusnih osi.
|
|
3.1.4
|
Pri skupini vozil, ki se uporabljajo za preskuse, je treba upoštevati učinek povečanega kotalnega upora.
|
|
3.1.5
|
Za začetno hitrost se mora uporabiti predpisana hitrost. Končna hitrost se izračuna po naslednji formuli:
Pri preskusu tipa III pa se uporabi korekcijska formula za hitrost v skladu s točko 2.5.4.2 Priloge II,
pri čemer je:
|
v1
|
=
|
začetna hitrost (km/h);
|
|
v2
|
=
|
končna hitrost (km/h);
|
|
Po
|
=
|
masa traktorja (kg) pri preskusnih pogojih;
|
|
P1
|
=
|
del mase vlečenega vozila, ki ga nosijo nezavirane osi (kg);
|
|
P2
|
=
|
del mase vlečenega vozila, ki ga nosijo zavirane osi (kg).
|
|
3.2 Preskusi na vztrajnostnem dinamometru
|
3.2.1
|
Preskusna naprava mora imeti rotacijsko vztrajnost, ki simulira tisti del linearne vztrajnosti mase vozila, ki deluje na eno kolo in ki je potreben za preskuse učinka hladnih in segretih zavor ter se lahko upravlja pri nespremenjeni hitrosti za preskus, opisan v točkah 3.5.2 in 3.5.3.
|
|
3.2.2
|
Preskus se izvaja za celo kolo, vključno s pnevmatiko, nameščeno na premični del zavore, kot pri vozilu. Vztrajnostna masa je lahko povezana z zavoro bodisi neposredno ali prek pnevmatik in koles.
|
3.2.2.1
|
Z odstopanjem od točke 3.2.2 je preskus mogoče izvesti tudi brez pnevmatike pod pogojem, da hlajenje ni dovoljeno. Zaradi odsesavanja strupenih ali škodljivih plinov iz preskusne komore pa je dovoljeno omejeno kroženje zraka.
|
|
|
3.2.3
|
Pod pogoji iz točke 3.2.2 se lahko med ogrevalnimi krogi uporabi hlajenje z zrakom pri hitrosti in smeri pretoka zraka, ki simulirata dejanske pogoje, pri čemer je hitrost pretoka zraka
vzrak = 0,33 v
pri čemer je:
|
v
|
=
|
preskusna hitrost vozila ob začetku zaviranja.
|
Temperatura hladilnega zraka mora biti enaka temperaturi okolice.
|
|
3.2.4
|
Če se med preskusom kotalni upor pnevmatik ne izravna samodejno, se zavorni navor spremeni tako, da se odšteje navor, ki je enakovreden koeficientu kotalnega upora 0,02 (pri vozilih kategorij Ra in Sa) ali 0,01 (pri vozilih kategorij Rb in Sb).
Lahko se tudi uporabi najbolj neugoden koeficient kotalnega upora 0,01, da se pokrijejo vse kategorije vozil, za katere je morda treba opraviti preskus tipa I, kot je določeno v poročilu o preskusu.
|
3.3 Preskusi na dinamometru s preskusnimi valji
|
3.3.1
|
Os mora biti, če je to mogoče, obremenjena z največjo statično maso na osi, čeprav to ni nujno, če se med preskusi upošteva razlika v kotalnem uporu zaradi različne mase na preskusni osi.
|
|
3.3.2
|
Hlajenje z zrakom pri hitrosti in smeri pretoka zraka, ki simulirata dejanske pogoje, se lahko uporabi med ogrevalnimi krogi, pri čemer je hitrost pretoka zraka
vzrak = 0,33 v
pri čemer je:
|
v
|
=
|
preskusna hitrost vozila ob začetku zaviranja.
|
Temperatura hladilnega zraka mora biti enaka temperaturi okolice.
|
|
3.3.3
|
Zavorni čas mora trajati 1 sekundo po najdaljšem času naraščanja zavorne sile 0,6 s.
|
3.4 Preskusni pogoji (splošno)
|
3.4.1
|
Preskušane zavore morajo biti opremljene z merilniki za naslednje meritve:
3.4.1.1 zvezno zapisovanje za določitev zavornega navora ali sile na obodu pnevmatike;
3.4.1.2 zvezno zapisovanje zračnega tlaka v sprožilu zavore;
3.4.1.3 hitrost vozila med preskusom;
3.4.1.4 začetna temperatura na zunanji strani zavornega bobna ali zavornega koluta;
3.4.1.5 gib sprožila zavore med preskusi tipa 0 in tipa I ali tipa III.
|
3.5 Preskusni postopki
3.5.1 Dodatni preskus učinka hladne zavore
Priprava zavore mora biti v skladu s točko 3.5.1.1.
3.5.1.1 Postopek utekanja
|
3.5.1.1.1
|
V primeru bobnastih zavor je treba preskus začeti z novimi zavornimi oblogami in novimi bobni, zavorne obloge pa je treba obdelati tako, da se doseže najboljši možni začetni stik med oblogami in bobni.
|
|
3.5.1.1.2
|
V primeru kolutnih zavor je treba preskuse začeti z novimi zavornimi ploščicami in novimi koluti, o obdelavi materiala zavornih ploščic pa odloča proizvajalec zavor.
|
|
3.5.1.1.3
|
Dvajsetkrat je treba zavreti pri začetni hitrosti 60 km/h, pri čemer je pritisk na zavore teoretično enak 0,3 TR/preskusna masa. Začetna temperatura na dotikališču obloge in bobna ali zavorne ploščice in koluta ne sme biti višja od 100 °C pred vsako uporabo zavor.
|
|
3.5.1.1.4
|
Tridesetkrat je treba zavreti s 60 km/h na 30 km/h, pri čemer je pritisk na zavore enak 0,3 TR/preskusna masa, časovni interval med uporabami zavor pa je 60 s. Če se uporabi preskus na progi za preskušanje ali preskus na preskusnih valjih, je treba uporabiti zavorno energijo, ki je enakovredna navedeni zavorni energiji. Začetna temperatura na dotikališču obloge in bobna ali zavorne ploščice in koluta pri prvem zaviranju ne sme biti višja od 100 °C.
|
|
3.5.1.1.5
|
Po 30 uporabah zavor, kot je določeno v točki 3.5.1.1.4, in po časovnem intervalu 120 s je treba petkrat zavreti s 60 km/h na 30 km/h, pri čemer mora biti pritisk na zavore enak 0,3 TR/preskusna masa, časovni interval med uporabami zavor pa je 120 s4.
|
|
3.5.1.1.6
|
Dvajsetkrat je treba zavreti pri začetni hitrosti 60 km/h, pri čemer je pritisk na zavore enak 0,3 TR/preskusna masa. Začetna temperatura na dotikališču obloge in bobna ali zavorne ploščice in koluta ne sme biti višja od 150 °C pred vsako uporabo zavor.
|
|
3.5.1.1.7
|
Preveriti je treba učinek na naslednji način:
3.5.1.1.7.1 Izračunati je treba vhodni navor, da se določijo vrednosti teoretičnega učinka, enake 0,2, 0,35 in 0,5 + 0,05 TR/preskusna masa.
3.5.1.1.7.2 Ko je določena vrednost vhodnega navora za vsako zavorno razmerje, mora ta vrednost ostati nespremenjena pri vsakem naslednjem zaviranju (npr. nespremenjen tlak).
3.5.1.1.7.3 Zavore je treba uporabiti z vsakim vhodnim navorom, določenim v točki 3.5.1.1.7.1, pri začetni hitrosti 60 km/h. Začetna temperatura na dotikališču obloge in bobna ali zavorne ploščice in koluta ne sme biti višja od 100 °C pred vsako uporabo zavor.
|
|
3.5.1.1.8
|
Ponoviti je treba postopke iz točk 3.5.1.1.6 in 3.5.1.1.7.3, pri čemer točka 3.5.1.1.6 ni obvezna, dokler se rezultati petih zaporednih nemonotonih meritev pri nespremenljivi vhodni vrednosti 0,5 TR/(preskusna masa) ne stabilizirajo znotraj odstopanja – 10 % največje vrednosti.
|
|
3.5.1.2
|
Prav tako je dovoljeno izvesti oba preskusa pojemanja zavornega učinka, tj. tipa I in tipa III, in sicer enega za drugim.
|
|
3.5.1.3
|
S tem preskusom, ki se izvaja pri začetni hitrosti 40 km/h za preskus tipa I in 60 km/h za preskus tipa III, se ocenjuje zavorni učinek pri zaviranju s segretimi zavorami ob koncu preskusov tipa I in tipa III. Preskuse pojemanja zavornega učinka tipa I in/ali tipa III je treba opraviti takoj po preskusu zavornega učinka pri zaviranju s hladnimi zavorami.
|
|
3.5.1.4
|
Zavore se uporabijo trikrat pri enakem tlaku (p) in pri začetni hitrosti 30 km/h oziroma 40 km/h (pri preskusu tipa I, kot je določeno v poročilu o preskusu) ali 60 km/h (pri preskusu tipa III) s približno enako začetno temperaturo zavor, ki ne presega 100 °C in je izmerjena na zunanji površini bobnov ali kolutov. Pri vseh uporabah zavor mora biti pri tlaku v sprožilu zavore dosežen zavorni navor ali sila, enakovredna zavornemu razmerju (z) vsaj 50 %. Tlak v sprožilu zavore ne sme presegati 650 kPa (pnevmatski sistem) ali 11 500 kPa (hidravlični sistem) in vhodni navor zavore (C) ne sme presegati največjega dovoljenega vhodnega navora zavore (Cmax). Povprečje treh rezultatov se vzame kot zavorni učinek pri zaviranju s hladnimi zavorami.
|
3.5.2 Preskus pojemanja zavornega učinka (preskus tipa I)
|
3.5.2.1
|
Ta preskus se izvaja pri hitrosti 40 km/h z začetno temperaturo zavor, ki ne presega 100 °C in je izmerjena na zunanji površini bobna ali zavornega koluta.
|
|
3.5.2.2
|
Zavorno razmerje se ohranja pri 7 %, enako tudi kotalni upor (glej točko 3.2.4).
|
|
3.5.2.3
|
Preskus se opravi v 2 minutah in 33 sekundah ali na razdalji 1,7 km pri hitrosti vozila 40 km/h. Pri vlečenih vozilih z vmax ≤ 30 km/h ali če preskusne hitrosti ni mogoče doseči, se lahko trajanje preskusa podaljša v skladu s točko 2.3.2.2 Priloge II.
|
|
3.5.2.4
|
Največ 60 sekund po koncu preskusa tipa I se v skladu s točko 2.3.3 Priloge II pri začetni hitrosti 40 km/h izvede preskus učinka segretih zavor. Tlak v sprožilu zavore mora biti enak tlaku, ki se uporablja pri preskusu tipa 0.
|
3.5.3 Preskus pojemanja zavornega učinka (preskus tipa III)
3.5.3.1 Preskusne metode za ponavljajoče se zaviranje
3.5.3.1.1 Preskusi na progi za preskušanje (glej točko 2.5 Priloge II)
3.5.3.1.2 Preskusi na vztrajnostnem dinamometru
Pri preskusu na preskusni napravi iz točke 3.2 so pogoji lahko enaki kot pri preskusu na cesti iz točke 2.5.4 Priloge II, pri čemer je:

3.5.3.1.3 Preskus na dinamometru s preskusnimi valji
Za preskus na preskusni napravi iz točke 3.3 veljajo naslednji pogoji:
|
število zaviranj
|
20
|
|
trajanje zaviranja
|
60 s (zavorni čas 25 sekund in čas za ponovno vzpostavitev hitrosti 35 sekund)
|
|
preskusna hitrost
|
30 km/h
|
|
zavorno razmerje
|
0,06
|
|
kotalni upor
|
0,01
|
|
3.5.3.2
|
Največ 60 sekund po koncu preskusa tipa III se v skladu s točko 2.5.5 Priloge II izvede preskus učinka segretih zavor. Tlak v sprožilu zavore mora biti enak tlaku, ki se uporablja pri preskusu tipa 0.
|
3.6 Zahteve glede učinka za naprave za samodejno nastavljanje zavor
|
3.6.1
|
Naslednje zahteve veljajo za napravo za samodejno nastavljanje zavor, ki je nameščena na zavori in katere učinek se preverja v skladu z določbami tega dodatka.
Ob koncu preskusov iz točke 3.5.2.4 (preskus tipa I) ali 3.5.3.2 (preskus tipa III) se preverijo zahteve iz točke 3.6.3.
|
|
3.6.2
|
Naslednje zahteve veljajo za alternativno napravo za samodejno nastavljanje zavor, ki je nameščena na zavori, za katero že obstaja poročilo o preskusu.
3.6.2.1 Zavorni učinek
Po segrevanju zavor, ki se izvede v skladu s postopki iz točke 3.5.2 (preskus tipa I) ali 3.5.3 (preskus tipa III), kot je ustrezno, se uporabi ena od naslednjih določb:
(a) zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema mora znašati najmanj 80 % predpisanega učinka preskusa tipa 0 ali
(b) zavoro je treba uporabiti pri tlaku v sprožilu zavore, ki je takšen, kot se uporablja med preskusom tipa 0; pri tem tlaku je treba izmeriti skupni gib sprožila (sA), ki mora biti ≤ 0,9 sp vrednosti zavornega valja.
|
sp
|
=
|
učinkoviti gib pomeni gib, pri katerem izhodna sila bata zavornega valja znaša 90 % povprečne sile bata (ThA) – glej točko 2.
|
|
3.6.2.2
|
Ob koncu preskusov iz točke 3.6.2.1 se preverijo zahteve iz točke 3.6.3.
|
|
|
3.6.3
|
Preskus prostega teka Po opravljenih preskusih iz točke 3.6.1 ali 3.6.2, kot je ustrezno, se morajo zavore ohladiti do temperature, ki ustreza temperaturi hladnih zavor (tj. ≤ 100 °C), pri čemer je treba preveriti, ali vlečeno vozilo/kolesa omogočajo prosti tek z izpolnjevanjem enega od naslednjih pogojev:
3.6.3.1 kolesa se prosto obračajo (tj. jih je mogoče vrteti ročno);
3.6.3.2 potrjeno je, da se lahko preostali zavorni navor šteje za sprejemljivega, če asimptotična temperatura ne presega povečanja temperature bobna/koluta za 80 °C, kadar vozilo vozi z nespremenjeno hitrostjo v = 60 km/h in s popuščenimi zavorami.
|
▼M1
3.7 Identifikacija
3.7.1 Na osi morajo biti na vidnem mestu berljivo in neizbrisno skupaj in v katerem koli vrstnem redu navedeni vsaj naslednji identifikacijski podatki:
3.7.1.1 proizvajalec osi in/ali znamka;
3.7.1.2 identifikacijska oznaka osi;
3.7.1.3 identifikacijska oznaka zavore;
3.7.1.4 identifikacijska oznaka Fe;
3.7.1.5 osnovni del številke poročila o preskusu;
proizvajalec osi in/ali znamka ABC
ID1-XXXXXX
ID2-YYYYYY
ID3-11111
ID4-ZZZZZZZ
3.7.2 Na nevgrajeni napravi za samodejno nastavljanje zavor morajo biti na vidnem mestu berljivo in neizbrisno skupaj navedeni vsaj naslednji identifikacijski podatki:
3.7.2.1 proizvajalec in znamka ali eden od njiju, kot je ustrezno;
3.7.3 Znamka in tip vsake zavorne obloge ali ploščice morata biti berljiva in neizbrisna, ko je obloga ali ploščica vgrajena na zavorno čeljust ali podporno ploščo.
3.7.4 Identifikacijske oznake
3.7.4.1 Identifikacijska oznaka osi
Identifikacijska oznaka osi razvršča os glede zavorne sile/navorne zmogljivosti, kot jih navaja proizvajalec osi.
Identifikacijska oznaka osi je alfanumerični niz, sestavljen iz štirih znakov „ID1-“, ki jim sledi največ 20 znakov.
3.7.4.2 Identifikacijska oznaka zavore
Identifikacijska oznaka zavore je alfanumerični niz, sestavljen iz štirih znakov „ID2-“, ki jim sledi največ 20 znakov.
Zavora z enako identifikacijsko oznako je zavora, ki se ne razlikuje glede na naslednja merila:
(b) osnovni material za okvir kolutne zavore, nosilec zavor, zavorni kolut in zavorni boben;
(c) mere s pripono „e“ skladno s poročilom o preskusu;
(d) osnovno metodo, ki se uporablja v zavori za ustvarjanje zavorne sile;
(e) pri kolutnih zavorah način vgradnje tornega obroča: pritrjeno ali plavajoče;
(g) različne značilnosti zavor glede na zahteve iz Priloge VII, ki niso zajete v točki 3.7.4.2.1 tega dodatka.
3.7.4.2.1 Razlike, ki so dovoljene v okviru iste identifikacijske oznake zavore
Ista identifikacijska oznaka zavore lahko vključuje različne značilnosti zavore glede na naslednja merila:
(a) povečanje najvišjega določenega vhodnega navora zavore Cmax;
(b) odstopanje navedene mase zavornega koluta in zavornega bobna mdec: ±20 odstotkov;
(c) način pritrditve zavornih oblog/zavornih ploščic na zavorno čeljust/podporno ploščo;
(d) pri kolutnih zavorah povečanje največje zmogljivosti giba zavore;
(e) učinkovita dolžina odmične gredi;
(f) določen prag navora C0,dec;
(g) ±5 mm od določenega zunanjega premera koluta;
(h) tip hlajenja koluta (prezračevan ali neprezračevan);
(i) pesto (z vgrajenim pestom ali brez njega);
(j) kolut z vgrajenim bobnom – z delovanjem ali brez delovanja parkirne zavore;
(k) geometrijsko razmerje med tornimi površinami kolutov in nosilcem koluta;
(m) različice materiala (razen sprememb osnovnega materiala iz točke 3.7.4.2), za katere proizvajalec potrdi, da taka sprememba materiala ne spreminja učinka v zvezi z zahtevanimi preskusi;
(n) podporna plošča in čeljusti.
3.7.4.3 Identifikacijska oznaka Fe
Identifikacijska oznaka Fe navaja preskusno osno obremenitev. Je alfanumerični niz, sestavljen iz štirih znakov „ID3-“, ki jim sledi vrednost Fe v daN, brez identifikacijske oznake enote „daN“.
3.7.4.4 Identifikacijska oznaka poročila o preskusu
Identifikacijska oznaka poročila o preskusu je alfanumerični niz, sestavljen iz štirih znakov „ID4-“, ki jim sledi osnovni del številke poročila o preskusu.
3.7.5 Naprava za samodejno nastavljanje zavor (vgrajena in nevgrajena)
3.7.5.1 Tipi naprave za samodejno nastavljanje zavor
Isti tip naprave za samodejno nastavljanje zavor se ne razlikuje glede na naslednja merila:
(a) trup: osnovni material;
(b) najvišji dovoljeni moment zavorne gredi;
(c) način izvajanja nastavitve.
3.7.5.2 Različice naprave za samodejno nastavljanje zavor glede na obnašanje pri nastavljanju
Šteje se, da so naprave za samodejno nastavljanje zavor v okviru tipa, ki vplivajo na zračnost zavore, različice naprave.
3.8 Preskusna merila
Če je za spremenjeno os ali zavoro v okviru omejitev iz opisnega lista potrebno novo poročilo o preskusu ali razširitev poročila o preskusu, se uporabijo naslednja merila, da se določi, ali je potrebno nadaljnje preskušanje ob upoštevanju najbolj neugodnih postavitev, o katerih se dogovori s tehnično službo.
|
Okrajšave, ki se uporabljajo v naslednji tabeli:
|
|
CT (celotni preskus)
|
Preskus:
3.5.1: Dodaten preskus učinka pri hladnih zavorah
3.5.2: Preskus pojemanja zavornega učinka (preskus tipa I) (1)
3.5.3: Preskus pojemanja zavornega učinka (preskus tipa III) (1)
|
|
FT (preskus pojemanja zavornega učinka)
|
Preskus:
3.5.1 Dodaten preskus učinka pri hladnih zavorah
3.5.2 Preskus pojemanja zavornega učinka (preskus tipa I) (1)
3.5.3 Preskus pojemanja zavornega učinka (preskus tipa III) (1)
|
|
(*1) Če je primerno.
|
|
Razlike v skladu s točko 3.7.4.2.1
|
Preskusna merila
|
|
(a) Povečanje najvišjega določenega vhodnega navora zavore Cmax
|
Sprememba, dovoljena brez dodatnega preskušanja.
|
|
(b) Odstopanje navedene mase zavornega koluta in zavornega bobna mdec: ± 20 odstotkov
|
CT: preskusi se najlažja različica; če nazivna preskusna masa za novo različico odstopa za manj kot 5 odstotkov od prej preskušene različice z večjo nazivno vrednostjo, preskus lažje različice ni potreben.
Dejanska preskusna masa preskusnega vzorca lahko odstopa ±od nazivne preskusne mase za 5 odstotkov.
|
|
(c) Način pritrditve zavornih oblog/zavornih ploščic na zavorno čeljust/podporno ploščo
|
Najbolj neugoden primer, ki ga določi proizvajalec in s katerim se strinjajo tehnične službe, ki izvajajo preskus.
|
|
(d) Pri kolutnih zavorah povečanje največje zmogljivosti giba zavore
|
Sprememba, dovoljena brez dodatnega preskušanja.
|
|
(e) Učinkovita dolžina odmične gredi
|
Šteje se, da je najbolj neugoden primer najmanjša torzijska togost odmične gredi in se preveri bodisi s:
(i) FT; ali
(ii) spremembo, dovoljena brez dodatnega preskušanja, če se z izračunom lahko prikaže vpliv na gib in zavorno silo. V tem primeru morajo biti v poročilu o preskusu navedene naslednje ekstrapolirane vrednosti: se, Ce, Te, Te/Fe.
|
|
(f) Določen prag navora C0,dec
|
Preveriti je treba, ali zavorni učinek ostaja znotraj območij na diagramu 1.
|
|
(g) ±5 mm od določenega zunanjega premera koluta
|
Šteje se, da je najbolj neugoden primer najmanjši premer.
Dejanski zunanji premer preskusnega vzorca lahko odstopa± od nazivnega zunanjega premera, ki ga določi proizvajalec osi, za 1 mm.
|
|
(h) Tip hlajenja koluta (prezračevan ali neprezračevan)
|
Vsak tip se preskusi.
|
|
(i) Pesto (z vgrajenim pestom ali brez njega)
|
Vsak tip se preskusi.
|
|
(j) Kolut z vgrajenim bobnom – z delovanjem ali brez delovanja parkirne zavore
|
Za to značilnost preskušanje ni potrebno.
|
|
(k) Geometrijsko razmerje med tornimi površinami kolutov in nosilcem koluta
|
Za to značilnost preskušanje ni potrebno.
|
|
(l) Tip zavorne obloge
|
Vsak tip zavorne obloge.
|
|
(m) Različice materiala (razen sprememb osnovnega materiala iz točke 3.7.4.2), za katere proizvajalec potrdi, da taka sprememba materiala ne spreminja učinka v zvezi z zahtevanimi preskusi
|
Za ta pogoj preskušanje ni potrebno.
|
|
(n) Podporna plošča in čeljusti
|
Preskusni pogoji najbolj neugodnega primera (1):
podporna plošča: najmanjša debelina
čeljust: najlažja zavorna čeljust
|
|
(*1) Preskus ni potreben, če proizvajalec lahko dokaže, da sprememba ne vpliva na togost.
|
|
3.8.1
|
Če naprava za samodejno nastavljanje zavor odstopa od preskušene naprave v skladu s točkama 3.7.5.1 in 3.7.5.2, je potreben dodatni preskus v skladu s točko 3.6.2.
|
▼B
3.9 Rezultati preskusov
|
3.9.1
|
Rezultati preskusov, izvedenih v skladu s točkama 3.5 in 3.6.1, se vpišejo na obrazec za rezultate preskusov.
|
|
3.9.2
|
Če ima zavora alternativno napravo za nastavljanje zavor, se rezultati preskusov, izvedenih v skladu s točko 3.6.2, vpišejo na obrazec za rezultate preskusov.
|
|
3.9.3
|
Opisni list Opisni list, ki ga zagotovi proizvajalec osi ali vozila, mora biti del poročila o preskusu.
Če pride v poštev, se v opisnem listu navedejo različice opreme zavore ali osi glede na bistvena merila.
|
4.
Preverjanje
4.1 Preverjanje sestavnih delov
Zavorna specifikacija vozila, ki je v postopku homologacije, mora izpolnjevati zahteve iz točk 3.7, 3.8 in 3.9.
4.2 Preverjanje porabljene energije pri zaviranju
|
4.2.1
|
Zavorne sile (T) za vsako zadevno zavoro (za enak tlak pm v krmilnem vodu), ki so potrebne za nastanek uporne sile, določene za pogoje preskusa tipa I in tipa III, ne smejo presegati vrednosti Te, kot je navedeno v poročilu o preskusu, ki so bile določene kot osnova za preskus referenčne zavore.
|
4.3 Preverjanje zavornega učinka pri zaviranju s segretimi zavorami
|
4.3.1
|
Zavorna sila (T) za vsako zadevno zavoro za določen tlak (p) v sprožilih in za tlak v krmilnem vodu (pm), ki se uporablja med preskusom tipa 0 zadevnega vlečenega vozila, se določi na naslednji način:
4.3.1.1 Predvideni gib sprožila (s) zadevne zavore se izračuna na naslednji način:

Ta vrednost ne sme presegati sp.
4.3.1.2 Izmeri se povprečna sila bata (ThA) sprožila, ki je nameščeno na zadevno zavoro, pri tlaku iz točke 4.3.1.
4.3.1.3 Vhodni navor zavore (C) se nato izračuna na naslednji način:

C ne sme presegati Cmax.
4.3.1.4 Predvideni zavorni učinek zadevne zavore se izračuna na naslednji način:

R ne sme biti manjši od 0,8 Re.
|
|
4.3.2
|
Predvideni zavorni učinek zadevnega vlečenega vozila se izračuna na naslednji način:

|
|
4.3.3
|
Zavorni učinek pri zaviranju s segretimi zavorami se s preskusi tipa I ali tipa III določi v skladu s točkami od 4.3.1.1 do 4.3.1.4. Iz tega izhajajoče vrednosti, določene v točki 4.3.2, morajo izpolnjevati zahteve iz te uredbe za zadevno vlečeno vozilo. Vrednost, ki se uporablja za vrednost, zabeleženo pri preskusu tipa 0, kot je predpisano v točki 2.3.3 ali 2.5.5 Priloge II, je vrednost, zabeležena pri preskusu tipa 0 zadevnega vlečenega vozila.

|
PRILOGA VIII
Zahteve za preskušanje vztrajnostnih zavornih sistemov, zavornih naprav, zavornih spojk priklopnikov in vozil, opremljenih z njimi, glede zaviranja
1.
Splošne določbe
|
1.1
|
Vztrajnostni zavorni sistem vlečenega vozila je sestavljen iz naletne naprave, prenosnega sistema in zavore.
|
|
1.2
|
Naletna naprava je sklop sestavnih delov, ki so del vlečne naprave (vlečne glave).
|
|
1.3
|
Prenosni sistem je sklop sestavnih delov, ki so med zadnjim delom vlečne glave in prvim delom zavore.
|
|
1.4
|
Zavorni sistemi, pri katerih traktor prenese nakopičeno energijo (npr. električno, pnevmatsko ali hidravlično energijo) na vlečeno vozilo in se energija uravnava samo s silo na vlečni sklopki, se ne štejejo za vztrajnostne zavorne sisteme v smislu te uredbe.
|
|
1.5
|
Preskusi
|
1.5.1
|
Določitev bistvenih značilnosti zavore.
|
|
1.5.2
|
Določitev bistvenih značilnosti naletne naprave in preverjanje skladnosti naletne naprave z določbami te uredbe.
|
|
1.5.3
|
Preverjanje na vozilu:
1.5.3.1 združljivost naletne naprave in zavore ter
|
|
2.
Simboli
2.1 Uporabljene enote
2.1.3 gravitacijski pospešek: g = 9,81 m/s2;
2.1.4 navori in momenti: Nm;
2.1.7 dolžine: enote, določene za vsak primer posebej.
2.2 Simboli, ki veljajo za vse tipe zavor (glej sliko 1 v Dodatku 1)
|
2.2.1
|
GA : „največja tehnično dovoljena masa“ vlečenega vozila, kot jo navede proizvajalec;
|
|
2.2.2
|
G′A : „največja masa“ vlečenega vozila, ki jo lahko zavre naletna naprava, kot jo navede proizvajalec;
|
|
2.2.3
|
GB :
„največja masa“ vlečenega vozila, ki jo lahko zavrejo vse zavore vlečenega vozila skupaj
GB = n · GBo;
|
|
2.2.4
|
GBo : delež največje dovoljene mase vlečenega vozila, ki ga lahko zavre ena zavora, kot ga navede proizvajalec;
|
|
2.2.5
|
B* : potrebna zavorna sila;
|
|
2.2.6
|
B : potrebna zavorna sila ob upoštevanju kotalnega upora;
|
|
2.2.7
|
D* : dovoljena sila na vlečni sklopki;
|
|
2.2.8
|
D : sila na vlečni sklopki;
|
|
2.2.9
|
P′ : izhodna sila naletne naprave;
|
|
2.2.10
|
K : dodatna sila v naletni napravi, po dogovoru definirana kot sila D, ki ustreza presečišču z osjo abscis ekstrapolirane krivulje P′ v odvisnosti od D, izmerjena na polovici giba naletne naprave (glej sliki 2 in 3 v Dodatku 1);
|
|
2.2.11
|
KA : prag sile na naletni napravi, tj. največja sila na vlečno glavo, ki lahko deluje kratek čas, ne da bi ustvarila izhodno silo na naletni napravi. Običajno je KA opredeljen kot sila, ki se izmeri, ko začne sila potiskati nazaj vlečno glavo s hitrostjo od 10 do 15 mm/s pri odklopljenem prenosnem sistemu naletne naprave;
|
|
2.2.12
|
D1 : največja sila, ki deluje na vlečno glavo, ko jo potiska nazaj s hitrostjo s mm/s + 10 % pri odklopljenem prenosnem sistemu;
|
|
2.2.13
|
D2 : največja sila, ki deluje na vlečno glavo, ko jo vleče naprej s hitrostjo s mm/s + 10 % iz njene najbolj stisnjene lege pri odklopljenem prenosnem sistemu;
|
|
2.2.14
|
ηHo : učinkovitost naletne naprave;
|
|
2.2.15
|
ηH1 : učinkovitost prenosnega sistema;
|
|
2.2.16
|
ηH : skupna učinkovitost naletne naprave in prenosnega sistema ηH = ηHo · ηH1;
|
|
2.2.17
|
s : gib naletne naprave v milimetrih;
|
▼M1
|
2.2.18
|
s' : učinkoviti (uporabni) gib naletne naprave v milimetrih, določen v skladu s točko 10.4;
|
▼B
|
2.2.19
|
s″ : prosti gib glavnega valja, izmerjen v milimetrih na vlečni glavi;
|
|
2.2.19.1
|
sHz : gib glavnega valja v milimetrih v skladu s sliko 8 v Dodatku 1;
|
|
2.2.19.2
|
s′Hz : prosti gib glavnega valja v milimetrih na batnici v skladu s sliko 8 v Dodatku 1;
|
|
2.2.20
|
so : izguba giba, tj. gib vlečne glave v milimetrih, ko ta zaniha s točke 300 mm nad do 300 mm pod vodoravno ravnino, pri čemer prenosni sistem miruje;
|
|
2.2.21
|
2sB : gib naleganja zavornih čeljusti (gib do naleganja zavornih čeljusti na zavorni boben) v milimetrih, izmerjen na premeru, ki je vzporeden z zadevno napravo, pri čemer zavore med preskusom niso nastavljene;
|
|
2.2.22
|
2s
B
* :
najmanjši gib naleganja sredine zavornih čeljusti (najmanjši gib do naleganja zavornih čeljusti na zavorni boben) v milimetrih za kolesne zavore z bobnastimi zavorami
 ; ;
pri čemer je 2r premer zavornega bobna v milimetrih (glej sliko 4 v Dodatku 1).

Za kolesne zavore s kolutnimi zavorami s hidravličnim prenosnim sistemom:
pri čemer je:
|
V60
|
=
|
absorpcija prostornine tekočine ene kolesne zavore pri tlaku, ki ustreza zavorni sili 1,2 B* = 0,6 · GBo in največjemu polmeru pnevmatike;
in
|
|
2rA
|
=
|
zunanji premer zavornega koluta (V60 v cm3, FRZ v cm2 in rA v mm).
|
|
▼M1
|
2.2.23
|
M* : zavorni navor, kot ga je določil proizvajalec. Ta zavorni navor mora doseči vsaj predpisano zavorno silo B*;
|
▼B
|
2.2.23.1
|
MT : preskusni zavorni navor, če ni nameščen varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.1);
|
▼M1
|
2.2.24
|
R : dinamični kotalni polmer pnevmatike. Za vozila kategorij Ra in Sa se lahko namesto dinamičnega kotalnega polmera pnevmatike uporabi statični obremenjeni polmer, kot ga je navedel proizvajalec pnevmatike;
|
▼B
|
2.2.25
|
n : število zavor;
|
|
2.2.26
|
Mr : največji zavorni navor, ki nastane z največjim dovoljenim gibom sr ali največjo dovoljeno prostornino tekočine Vr, ko se vlečeno vozilo premika nazaj (vključno s kotalnim uporom = 0,01 · g · GBo);
|
|
2.2.27
|
sr : največji dovoljeni gib zavorne ročice, ko se vlečeno vozilo premika nazaj;
|
|
2.2.28
|
Vr : največja dovoljena prostornina tekočine, ki jo absorbira eno zavirano kolo, ko se vlečeno vozilo premika nazaj.
|
2.3 Simboli, ki veljajo za zavorne sisteme z mehanskim prenosnim sistemom (glej sliko 5 v Dodatku 1)
|
2.3.1
|
iHo : redukcijsko razmerje med gibom vlečne glave in gibom ročice na izhodni strani naletne naprave;
|
|
2.3.2
|
iH1 : redukcijsko razmerje med gibom ročice na izhodni strani naletne naprave in gibom zavorne ročice (prestavno razmerje prenosnega sistema);
|
|
2.3.3
|
iH :
redukcijsko razmerje med gibom vlečne glave in gibom zavorne ročice
iH = iHo · iH1
|
|
2.3.4
|
ig : redukcijsko razmerje med gibom zavorne ročice in gibom naleganja (do naleganja na zavorni boben) sredine zavorne čeljusti (glej sliko 4 v Dodatku 1);
|
|
2.3.5
|
P : sila na zavorni ročici; (glej sliko 4 v Dodatku 1);
|
|
2.3.6
|
Po : povratna sila zavore, ko se vlečeno vozilo premika naprej, tj., na grafu M = f(P), vrednost sile P v presečišču ekstrapolacije te funkcije z absciso (glej sliko 6 v Dodatku 1);
|
|
2.3.6.1
|
Por : povratna sila zavore, ko se vlečeno vozilo premika nazaj (glej sliko 6 v Dodatku 1);
|
|
2.3.7
|
P* : sila na zavorni ročici za ustvarjanje zavorne sile B*;
|
|
2.3.8
|
PT : preskusna sila v skladu s točko 6.2.1;
|
|
2.3.9
|
ρ : značilna vrednost zavore, ko se vlečeno vozilo premika naprej, kot določa formula:
M = ρ (P – Po)
|
|
2.3.9.1
|
ρr :
značilna vrednost zavore, ko se vlečeno vozilo premika nazaj, kot določa formula:
Mr = ρr (Pr – Por)
|
|
2.3.10
|
scf : gib zadnjega kabla ali droga na kompenzatorju, ko zavore delujejo v smeri naprej (
3
);
|
|
2.3.11
|
scr : gib zadnjega kabla ali droga na kompenzatorju, ko zavore delujejo v smeri nazaj (3) ;
|
|
2.3.12
|
scd :
diferenčni gib na kompenzatorju, ko samo ena zavora deluje v smeri naprej, druga pa v smeri nazaj (3) ;
pri čemer je: scd = scr – scf (glej sliko 5A v Dodatku 1).
|
2.4 Simboli, ki veljajo za zavorne sisteme s hidravličnim prenosnim sistemom (glej sliko 8 v Dodatku 1)
|
2.4.1
|
ih : redukcijsko razmerje med gibom vlečne glave in gibom bata v glavnem valju;
|
|
2.4.2
|
i′g : redukcijsko razmerje med gibom točke potiska valja in gibom naleganja (do naleganja na zavorni boben) sredine zavorne čeljusti;
|
|
2.4.3
|
FRZ : površina bata enega kolesnega valja pri bobnastih zavorah; pri kolutnih zavorah je to skupna površina batov sedla kolutne zavore na eni strani koluta;
|
|
2.4.4
|
FHZ : površina bata v glavnem valju;
|
|
2.4.5
|
p : hidravlični tlak v zavornem valju;
|
|
2.4.6
|
po : povratni tlak v zavornem valju, ko se vlečeno vozilo premika naprej; tj., na grafu M = f(p), vrednost tlaka p v presečišču ekstrapolacije te funkcije z absciso (glej sliko 7 v Dodatku 1);
|
|
2.4.6.1
|
por : povratni tlak zavore, ko se vlečeno vozilo premika nazaj (glej sliko 7 v Dodatku 1);
|
|
2.4.7
|
p* : hidravlični tlak v zavornem valju za ustvarjanje zavorne sile B*;
|
|
2.4.8
|
pT : preskusni tlak v skladu s točko 6.2.1;
|
|
2.4.9
|
r′ : značilna vrednost zavore, ko se vlečeno vozilo premika naprej, kot določa formula:
M = r′ (p – po)
|
|
2.4.9.1
|
r′r :
značilna vrednost zavore, ko se vlečeno vozilo premika nazaj, kot določa formula:
Mr = r′r (pr – por)
|
2.5 Simboli v zvezi z zahtevami glede zaviranja za varovalne mehanizme proti preobremenitvi
|
2.5.1
|
Dop : sila delovanja na vhodni strani naletne naprave, pri kateri se aktivira varovalni mehanizem proti preobremenitvi;
|
|
2.5.2
|
Mop : zavorni navor, pri katerem se aktivira varovalni mehanizem proti preobremenitvi (kot ga je določil proizvajalec);
|
|
2.5.3
|
MTop : najmanjši preskusni zavorni navor, če je nameščen varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.2.2);
|
|
2.5.4
|
Pop_min : sila, ki deluje na zavoro in pri kateri se aktivira varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.2.1);
|
|
2.5.5
|
Pop_max : največja sila (ko je vlečna glava potisnjena v svojo skrajno lego), s katero varovalni mehanizem proti preobremenitvi deluje na zavoro (v skladu s točko 6.2.2.3);
|
|
2.5.6
|
pop_min : tlak, ki deluje na zavoro in pri katerem se aktivira varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.2.1);
|
|
2.5.7
|
pop_max : največji hidravlični tlak (ko je vlečna glava potisnjena v svojo skrajno lego), s katerim varovalni mehanizem proti preobremenitvi deluje na sprožilo zavore (v skladu s točko 6.2.2.3);
|
|
2.5.8
|
PTop : najmanjša preskusna zavorna sila, če je nameščen varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.2.2);
|
|
2.5.9
|
pTop : najmanjši preskusni zavorni tlak, če je nameščen varovalni mehanizem proti preobremenitvi (v skladu s točko 6.2.2.2).
|
2.6 Tipi razredov vozil glede vztrajnostnih zavornih sistemov
2.6.1 Razred vozil A
Razred vozil A pomeni vozila kategorij R1, R2 in S1.
2.6.2 Razred vozil B
Razred vozil B pomeni vozila kategorij R3 in S2 z maso nad 3 500 kg in do največ 8 000 kg.
2.6.3 Razred vozil C
Razred vozil C1 pomeni vozila kategorij R in S z največjo konstrukcijsko določeno hitrostjo 30 km/h.
Razred vozil C2 pomeni vozila kategorij R in S z največjo konstrukcijsko določeno hitrostjo 40 km/h.
Razred vozil C3 pomeni vozila kategorij R in S z največjo konstrukcijsko določeno hitrostjo nad 40 km/h.
3.
Splošne zahteve
|
3.1
|
Prenos sile z vlečne glave na zavore vlečenega vozila mora potekati prek vzvodja ali ene ali več tekočin. Del prenosa se lahko zagotovi z vrvnim potegom (bovdenskim potegom). Ta del mora biti čim krajši. Drogovi in kabli za upravljanje se ne smejo dotikati okvirja vlečenega vozila ali drugih površin, ki lahko vplivajo na aktiviranje ali popuščanje zavore.
|
|
3.2
|
Vsi sorniki na zglobih morajo biti ustrezno zaščiteni. Poleg tega morajo biti ti zglobi samomazalni ali nameščeni tako, da jih je enostavno mazati.
|
|
3.3
|
Vztrajnostne zavorne naprave morajo biti nameščene tako, da se v primeru, ko se vlečna glava premika v največjem gibu, noben del prenosnega sistema ne uklešči, trajno deformira ali zlomi. To je treba preveriti z odklopom konca prenosnega sistema od zavorne ročice.
|
|
3.4
|
Vztrajnostni zavorni sistem mora omogočati, da se vlečeno vozilo premika vzvratno s traktorjem, ne da bi povzročilo uporno silo, ki presega 0,08 g · GA. Naprave, ki se uporabljajo v ta namen, morajo delovati samodejno in se samodejno sprostiti, ko se vlečeno vozilo premakne naprej.
|
|
3.5
|
Kakršna koli posebna naprava, vgrajena za namen točke 3.4, mora biti takšna, da ne vpliva negativno na učinkovitost parkirne zavore pri zadrževanju vozila na naklonu.
|
|
3.6
|
Vztrajnostni zavorni sistemi lahko imajo vgrajene varovalne mehanizme proti preobremenitvi. Ti se ne smejo aktivirati pri sili, manjši od Dop = 1,2 · D* (če so nameščeni pri naletni napravi), ali pri sili, manjši od Pop = 1,2 · P*, ali pri tlaku, manjšem od pop = 1,2 · p* (če so nameščeni pri zavori), če sila P* ali tlak p* ustreza zavorni sili B* = 0,5 · g · GBo (v primeru vozil razredov C2 in C3) in B* = 0,35 · g · GBo (v primeru vozil razreda C1).
|
4.
Zahteve za naletne naprave
|
4.1
|
Drsni elementi naletne naprave morajo biti dovolj dolgi, da omogočajo celotni gib, tudi ko je priključeno vlečeno vozilo.
|
|
4.2
|
Drsni elementi morajo biti zaščiteni z mehom ali podobno enakovredno napravo. Elementi morajo biti namazani ali narejeni iz samomazalnih materialov. Drsne površine morajo biti iz materialov, ki ne tvorijo elektrokemičnih elementov, in mehansko prilagojene tako, da ne more priti do ukleščenja drsnih elementov.
|
|
4.3
|
Prag sile (KA) naletne naprave ne sme biti manjši od 0,02 g · G′A in ne večji od 0,04 g · G′A. V primeru vozil razredov C1 in C2 pa je prag sile (KA) naletne naprave lahko v območju od 0,01 g · G′A do 0,04 g · G′A.
|
|
4.4
|
Največja sila priključitve D1 ne sme presegati 0,10 g · G′A pri vlečenih vozilih s togim vlečnim ojesom in vlečenih vozilih s centralno osjo ter 0,067 g · G′A pri večosnih vlečenih vozilih z vlečnimi ojesi.
|
|
4.5
|
Največja vlečna sila D2 ne sme biti manjša od 0,1 g · G′A in ne večja od 0,5 g · G′A.
V primeru vozil razreda B je dovoljeno tudi stanje D2 ≥ 1 750 N + 0,05 g · G′A, če je D2 ≤ 0,5 g · G′A.
|
5.
Preskusi in meritve, ki se izvajajo na naletnih napravah
|
5.1
|
Pri naletnih napravah, predloženih tehnični službi, ki izvaja preskuse, je treba preveriti skladnost z zahtevami iz točk 3 in 4.
|
|
5.2
|
Pri vseh tipih zavor se izmeri:
5.2.1 gib s in učinkoviti gib s′;
5.2.4 sila priključitve D1;
|
|
5.3
|
Pri vztrajnostnih zavornih sistemih z mehanskim prenosnim sistemom se določi naslednje:
5.3.1 redukcijsko razmerje iHo, ki se izmeri na polovici giba naletne naprave;
5.3.2 izhodna sila P′ naletne naprave kot funkcija sile D na vlečno oje; iz grafične predstavitve rezultatov teh meritev se določita dodatna sila K in učinkovitost

(glej sliko 2 v Dodatku 1).
|
|
5.4
|
Pri vztrajnostnih zavornih sistemih s hidravličnim prenosnim sistemom se določi naslednje:
5.4.1 redukcijsko razmerje ih, ki se izmeri na polovici giba naletne naprave;
5.4.2 izhodni tlak p glavnega valja kot funkcija sile D na vlečnem ojesu in površine FHZ bata glavnega valja, kot ga je določil proizvajalec; iz grafične predstavitve rezultatov teh meritev se določita dodatna sila K in učinkovitost

(glej sliko 3 v Dodatku 1);
5.4.3 prosti gib glavnega valja s″ iz točke 2.2.19;
5.4.4 površina FHZ bata glavnega valja;
5.4.5 gib sHz glavnega valja (v milimetrih);
5.4.6 prosti gib s″Hz glavnega valja (v milimetrih).
|
▼M1
|
5.5
|
Pri vztrajnostnih zavornih sistemih na večosnih vlečenih vozilih z vlečnimi ojesi se izmeri izguba giba so iz točke 10.4.1.
|
▼B
6.
Zahteve za zavore
|
6.1
|
Poleg zavor, ki jih je treba preveriti, mora proizvajalec tehnični službi, ki izvaja preskuse, predložiti risbe zavor, na katerih so prikazani tip, mere in material bistvenih sestavnih delov ter znamka in tip zavornih oblog. Pri hidravličnih zavorah mora biti iz teh risb razvidna tudi površina FRZ zavornih valjev. Proizvajalec mora določiti tudi zavorni navor M* in maso GBo iz točke 2.2.4.
|
|
6.2
|
Pogoji preskušanja
|
6.2.1
|
Če vztrajnostni zavorni sistem ni opremljen z varovalnim mehanizmom proti preobremenitvi in s tem mehanizmom tudi v prihodnosti ne bo opremljen, je treba kolesno zavoro preskusiti z naslednjimi preskusnimi silami ali tlaki:
PT = 1,8 P* ali pT = 1,8 p* in MT = 1,8 M*, kot je ustrezno.
|
|
6.2.2
|
Če je vztrajnostni zavorni sistem opremljen z varovalnim mehanizmom proti preobremenitvi ali bo s tem mehanizmom opremljen v prihodnosti, je treba kolesno zavoro preskusiti z naslednjimi preskusnimi silami ali tlaki:
6.2.2.1 Proizvajalec mora določiti najmanjše projektirane vrednosti za varovalni mehanizem proti preobremenitvi, ki ne smejo biti manjše od
Pop = 1,2 P* ali pop = 1,2 p*
6.2.2.2 Razponi najmanjše preskusne sile PTop ali najmanjšega preskusnega tlaka pTop in najmanjšega preskusnega navora MTop so:
PTop = 1,1 do 1,2 P* ali pTop = 1,1 do 1,2 p*
in
MTop = 1,1 do 1,2 M*
6.2.2.3 Proizvajalec mora določiti največjo vrednost (Pop_max ali pop_max) za varovalni mehanizem proti preobremenitvi, ki ne sme presegati PT oziroma pT.
|
|
7.
Preskusi in meritve, ki se izvajajo na zavorah
|
7.1
|
Pri zavorah in sestavnih delih, predloženih tehnični službi, ki izvaja preskuse, je treba preveriti skladnost z zahtevami iz točke 6.
|
|
7.2
|
Določiti je treba naslednje:
7.2.1 najmanjši gib naleganja zavornih čeljusti (najmanjši gib do naleganja zavornih čeljusti na zavorni boben), tj. 2sB*;
7.2.2 gib naleganja sredine zavornih čeljusti (gib do naleganja zavornih čeljusti na zavorni boben), tj. 2sB (ki mora biti večji kot 2sB*).
|
|
7.3
|
Pri mehanskih zavorah se določi naslednje:
7.3.1 redukcijsko razmerje ig (glej sliko 4 v Dodatku 1);
7.3.2 sila P* za zavorni navor M*;
7.3.3 navor M* kot funkcija sile P*, ki deluje na zavorno ročico pri sistemih z mehanskim prenosnim sistemom.
Hitrost vrtenja zavornih površin mora ustrezati začetni hitrosti vozila 30 km/h v primeru vozila razreda C1, 40 km/h v primeru vozila razreda C2 in 60 km/h v primeru vozila razreda C3, ko se vlečeno vozilo premika naprej, in 6 km/h, ko se vlečeno vozilo premika nazaj. Na podlagi grafične predstavitve rezultatov teh meritev se določi naslednje (glej sliko 6 v Dodatku 1):
7.3.3.1 povratna sila zavore Po in značilna vrednost ρ, ko se priklopnik premika naprej;
7.3.3.2 povratna sila zavore Por in značilna vrednost ρr, ko se vlečeno vozilo premika nazaj;
7.3.3.3 največji zavorni navor Mr do največjega dovoljenega giba sr, ko se vlečeno vozilo premika nazaj (glej sliko 6 v Dodatku 1);
7.3.3.4 največji dovoljeni gib pri zavorni ročici, ko se vlečeno vozilo premika nazaj (glej sliko 6 v Dodatku 1).
|
|
7.4
|
Pri hidravličnih zavorah se določi naslednje:
7.4.1 redukcijsko razmerje ig′ (glej sliko 8 v Dodatku 1);
7.4.2 tlak p* za zavorni navor M*;
7.4.3 navor M* kot funkcija tlaka p*, ki deluje na zavorni valj pri sistemih s hidravličnim prenosnim sistemom.
Hitrost vrtenja zavornih površin mora ustrezati začetni hitrosti vozila 30 km/h v primeru vozila razreda C1, 40 km/h v primeru vozila razreda C2 in 60 km/h v primeru vozila razreda C3, ko se vlečeno vozilo premika naprej, in 6 km/h, ko se vlečeno vozilo premika nazaj. Na podlagi grafične predstavitve rezultatov teh meritev se določi naslednje (glej sliko 7 v Dodatku 1):
7.4.3.1 povratni tlak po in značilna vrednost ρ′, ko se vlečeno vozilo premika naprej;
7.4.3.2 povratni tlak por in značilna vrednost r′r, ko se vlečeno vozilo premika nazaj;
7.4.3.3 največji zavorni navor Mr do največje dovoljene prostornine tekočine Vr, ko se vlečeno vozilo premika nazaj (glej sliko 7 v Dodatku 1);
7.4.3.4 največja dovoljena prostornina tekočine Vr, ki jo absorbira eno zavirano kolo, ko se vlečeno vozilo premika nazaj (glej sliko 7 v Dodatku 1).
7.4.4 površina FRZ bata zavornega valja.
|
|
7.5
|
Alternativni postopek za preskus tipa I
|
7.5.1
|
Preskusa tipa I v skladu s točko 2.3 Priloge II ni treba izvesti na vozilu, predloženem v homologacijo, če se sestavni deli zavornega sistema preskusijo na vztrajnostni preskuševalni napravi za skladnost s predpisi iz točk 2.3.2 in 2.3.3 Priloge II.
|
|
7.5.2
|
Alternativni postopek za preskus tipa I je treba izvesti v skladu z določbami iz točke 3.5.2 Dodatka 1 k Prilogi VII (po analogiji se uporablja tudi za kolutne zavore).
|
|
8.
Simulirana razlika v sili parkirne zavore na naklonu
8.1 Način izračuna
|
8.1.1
|
Točke vrtenja v kompenzatorju morajo biti v ravni črti, ko je parkirna zavora v položaju mirovanja.

Lahko se uporabijo tudi drugi sistemi, če zagotavljajo enako napetost v obeh zadnjih kablih, tudi v primeru razlik v gibu med zadnjima kabloma.
|
|
8.1.2
|
S podrobnimi risbami je treba dokazati, da je zgibanje kompenzatorja zadostno in da zagotavlja enako napetost za oba zadnja kabla. Kompenzator mora biti dovolj širok, da omogoča diferenčni gib od leve proti desni. Čeljusti vilic morajo biti dovolj globoke glede na svojo širino, tako da ne preprečujejo zgibanja, ko je kompenzator v položaju pod kotom.
Diferenčni gib na kompenzatorju (scd) se določi na naslednji način:

pri čemer je:
|
Sc' = S′/iH
|
(gib na kompenzatorju – delovanje v smeri naprej) in Sc′ = 2 · SB/ig;
|
|
Scr = Sr/iH
|
(gib na kompenzatorju – delovanje v smeri nazaj).
|
|
▼M1
9.
Poročila o preskusih
Vlogam za homologacijo vlečenih vozil, opremljenih z vztrajnostnimi zavornimi sistemi, je treba priložiti poročila o preskusih naletne naprave in zavor ter poročilo o preskusu združljivosti naletne naprave, prenosnega sistema in zavor vlečenega vozila, pri čemer morajo ta poročila vsebovati vsaj podatke iz člena 9 Izvedbene uredbe (EU) 2015/504.
▼B
10.
Združljivost naletne naprave in zavor vozila
|
10.1
|
Ob upoštevanju značilnosti naletne naprave, ki so navedene v poročilu o preskusu, značilnosti zavor, ki so navedene v poročilu o preskusu, in značilnosti vlečenega vozila iz poročila o preskusu je treba na vozilu preveriti, ali vztrajnostni zavorni sistem vlečenega vozila izpolnjuje predpisane zahteve.
|
|
10.2
|
Splošna preverjanja za vse tipe zavor
|
10.2.1
|
Vse dele prenosnega sistema, ki niso bili preverjeni istočasno kot naletna naprava ali zavore, je treba preveriti na vozilu. Rezultati preverjanja se vpišejo v poročilo o preskusu (npr. iH1 in ηH1).
|
|
10.2.2
|
Masa
|
10.2.2.1
|
Največja masa GA vlečenega vozila ne sme presegati največje mase G′A, ki je dovoljena za naletno napravo.
|
|
10.2.2.2
|
Največja masa GA vlečenega vozila ne sme presegati največje mase GB, ki jo lahko zavrejo vse zavore vlečenega vozila skupaj.
|
|
|
10.2.3
|
Sile
|
10.2.3.1
|
Prag sile KA ne sme biti manjši od 0,02 g · GA in večji od 0,04 g · GA.
|
|
10.2.3.2
|
Največja sila priključitve D1 ne sme presegati 0,10 g · GA pri vlečenih vozilih s togim vlečnim ojesom in vlečenih vozilih s centralno osjo ter 0,067 g · GA pri večosnih vlečenih vozilih z vlečnim ojesom.
|
|
10.2.3.3
|
Največja vlečna sila D2 mora biti med 0,1 g · GA in 0,5 g · GA.
|
|
|
|
10.3
|
Preverjanje učinkovitosti zaviranja
|
10.3.1
|
Vsota zavornih sil, ki delujejo na obod koles vlečenega vozila, mora biti najmanj B* = 0,50 g · GA (v primeru vozil razredov C2 in C3) in B* = 0,35 · g · GA (v primeru vozil razreda C1), vključno s kotalnim uporom 0,01 g · GA: to ustreza zavorni sili B, ki je 0,49 g · GA (v primeru vozil razredov C2 in C3) in B* = 0,34 · g · GA (v primeru vozil razreda C1). V tem primeru je največja dovoljena sila na napravi za spajanje:
D* = 0,067 g · GA v primeru večosnih vlečenih vozilih z vlečnim ojesom;
in
D* = 0,10 g · GA v primeru vlečenih vozil s togim vlečnim ojesom in vlečenih vozil s centralno osjo.
▼M1
Za preverjanje upoštevanja teh pogojev se uporabita naslednji neenačbi:
|
10.3.1.1
|
pri vztrajnostnih zavornih sistemih z mehanskim prenosnim sistemom:

|
|
10.3.1.2
|
pri vztrajnostnih zavornih sistemih s hidravličnim prenosnim sistemom:

|
▼B
|
|
|
10.4
|
Preverjanje giba naletne naprave
|
10.4.1
|
Pri naletnih napravah za večosna vlečena vozila z vlečnim ojesom, pri katerih je vzvodje zavor odvisno od položaja vlečne naprave, mora biti gib naletne naprave s daljši od učinkovitega (uporabnega) giba naletne naprave s′, pri čemer je razlika vsaj enaka izgubi giba so. Izguba giba so ne sme presegati 10 odstotkov učinkovitega giba.
|
|
10.4.2
|
Učinkoviti (uporabni) gib naletne naprave s′ se za enoosna in večosna vlečena vozila določi na naslednji način:
10.4.2.1 če na vzvodje zavor vpliva kotni položaj vlečne naprave:
s′ = s – so
10.4.2.2 če ni izgube giba:
s′ = s
10.4.2.3 pri hidravličnih zavornih sistemih:
s′ = s – s″
|
|
10.4.3
|
Za preverjanje, ali je gib naletne naprave zadosten, se uporabita naslednji neenačbi:
10.4.3.1 pri vztrajnostnih zavornih sistemih z mehanskim prenosnim sistemom:

▼M1
10.4.3.2 pri vztrajnostnih zavornih sistemih s hidravličnim prenosnim sistemom:


|
▼M1
10.4.4 Ko se vlečeno vozilo premika nazaj, se uporabijo naslednje neenačbe:
10.4.4.1 pri vztrajnostnih zavornih sistemih z mehanskim prenosnim sistemom:
10.4.4.1.1

10.4.4.1.2

10.4.4.2 pri vztrajnostnih zavornih sistemih s hidravličnim prenosnim sistemom:
10.4.4.2.1

10.4.4.2.2

10.4.5 Preverjanja pri nameščenem varovalnem mehanizmu proti preobremenitvi v smislu točke 3.6
Uporabijo se naslednje neenačbe:
10.4.5.1 pri mehanskem varovalnem mehanizmu proti preobremenitvi na naletni napravi:
10.4.5.2 pri hidravličnem varovalnem mehanizmu proti preobremenitvi na naletni napravi:

10.4.5.3 če je varovalni mehanizem proti preobremenitvi nameščen na naletni napravi:
10.4.5.4 če je varovalni mehanizem proti preobremenitvi nameščen na zavori:

▼B
|
|
10.5
|
Dodatna preverjanja
|
10.5.1
|
Pri vztrajnostnih zavornih sistemih z mehanskim prenosnim sistemom je treba preveriti, ali je vzvodje, ki prenaša sile od naletne naprave do zavor, pravilno nameščeno.
|
|
10.5.2
|
Pri vztrajnostnih zavornih sistemih s hidravličnim prenosnim sistemom je treba preveriti, ali gib glavnega valja ni manjši od s/ih. Manjša vrednost ni dovoljena.
|
|
10.5.3
|
Splošno obnašanje vozila med zaviranjem se preveri med preskusom na cesti, ki se izvaja pri različnih cestnih hitrostih, z različnimi silami, potrebnimi za zaviranje, in različnimi presledki med pritiski na zavore. Lastno nedušeno nihanje ni dovoljeno.
|
|
11.
Splošne pripombe
Zgornje zahteve veljajo za najobičajnejše modele vztrajnostnih zavornih sistemov z mehanskim ali hidravličnim prenosnim sistemom, pri čemer je zlasti pomembno, da so vsa kolesa vlečenega vozila opremljena z istim tipom zavor in istim tipom pnevmatik. Za preverjanje manj običajnih modelov je treba zgornje zahteve prilagoditi okoliščinam posameznega primera.
Dodatek 1
Obrazložitvene slike
Slika 1
Simboli, veljavni za vse tipe zavor
(glej točko 2.2 te priloge)
Slika 2
Mehanski prenosni sistem
(glej točki 2.2.10 in 5.3.2 te priloge)


Slika 3
Hidravlični prenosni sistem
(glej točki 2.2.10 in 5.4.2 te priloge)


Slika 4
Preverjanja zavor
(glej točki 2.2.22 in 2.3.4 te priloge)

Slika 5
Zavorni sistem z mehanskim prenosnim sistemom
(glej točko 2.3 te priloge)

▼M1
Slika 5A
Zavorni sistem z mehanskim prenosnim sistemom
(glej točko 2.3 te priloge)

▼B
Slika 6
Mehanska zavora
(glej točko 2 te priloge)

Slika 7
Hidravlična zavora
(glej točko 2 te priloge)

Slika 8
Zavorni sistem s hidravličnim prenosnim sistemom
(glej točko 2 te priloge)

PRILOGA IX
Zahteve za vozila s hidrostatičnim pogonom ter njihove zavorne naprave in zavorne sisteme
1.
Opredelitve pojmov
V tej prilogi:
1.1 „hidrostatični zavorni sistem“ pomeni zavorni sistem (kot delovni in/ali pomožni zavorni sistem), ki uporablja samo zavorno moč hidrostatičnega pogona;
1.2 „kombinirani hidrostatični zavorni sistem“ pomeni zavorni sistem, ki uporablja hidrostatični in torni zavorni učinek, pri čemer se večina zavornih sil ustvari s hidrostatičnim pogonom. Najmanjši predpisani delež torne zavore v zavornem učinku je naveden v točki 6.3.1.1;
1.3 „kombinirani torni zavorni sistem“ pomeni zavorni sistem, ki uporablja torni in hidrostatični zavorni učinek, pri čemer se večina zavornih sil ustvari s tornimi zavorami. Najmanjši predpisani delež torne zavore v zavornem učinku je naveden v točki 6.3.1.2;
1.4 „torni zavorni sistem“ pomeni zavorni sistem, pri katerem se zavorne sile ustvarjajo samo s tornimi zavorami brez uporabe zavornega učinka hidrostatičnega zavornega sistema;
1.5 „stopnjevano hidrostatično zaviranje“ pomeni hidrostatično zaviranje, ki omogoča vozniku, da s postopnim delovanjem na upravljalni element v vsakem trenutku poveča ali zmanjša hitrost vozila;
1.6 „upravljalni element“ pomeni napravo, kot je ročica ali stopalka, ki se uporablja za spreminjanje hitrosti vozila;
1.7 „upravljalni element delovne zavore“ pomeni upravljalni element, s katerim se doseže predpisani zavorni učinek delovne zavore;
1.8 „naprava za počasno premikanje“ pomeni napravo, ki vpliva na hitrost vozila neodvisno od upravljanja hidrostatičnega pogona.
2.
Področje uporabe
Ta priloga se uporablja za vozila z največjo konstrukcijsko določeno hitrostjo do 40 km/h, opremljena s hidrostatičnim pogonom, ki ga ni mogoče izklopiti med vožnjo in za katerega proizvajalec vozila navaja, da deluje kot zavorni sistem ali zavorna naprava, ki je lahko:
2.1 delovni zavorni sistem in pomožni zavorni sistem ali eden od teh dveh sistemov.
Delovni zavorni sistem je lahko eden od spodaj navedenih zavornih sistemov pod pogojem, da je zagotovljen zavorni učinek delovne zavore iz točke 6.3.1:
2.1.1 „hidrostatični zavorni sistem“,
2.1.2 „kombinirani hidrostatični zavorni sistem“,
2.1.3 „kombinirani torni zavorni sistem“,
2.1.4 „torni zavorni sistem“;
ali
2.2 del zavornih sistemov iz točke 2.1.
3.
Vozila za posebne namene
Nekatera vozila za posebne namene uporabe so opremljena s hidrostatičnim pogonom, ki se uporablja tako za upočasnjevanje kot tudi za pogon vozila. Ta tip pogona se torej lahko šteje za zavorni sistem, ki lahko deluje samostojno ali v kombinaciji s torno zavoro.
4.
Razvrstitev vozil
|
4.1
|
Razred I : vozila, katerih največja konstrukcijsko določena hitrost ne presega 12 km/h.
|
|
4.2
|
Razred II : vozila, katerih največja konstrukcijsko določena hitrost je večja od 12 km/h in ne presega 30 km/h.
|
|
4.3
|
Razred III : vozila, katerih največja konstrukcijsko določena hitrost je večja od 30 km/h in ne presega 40 km/h.
|
5.
Zahteve
5.1 Splošno
|
5.1.1
|
Upravljalni element pogona mora biti zasnovan tako, da med vožnjo po cesti ne more priti do nenamerne vzvratne vožnje.
|
|
5.1.2
|
Za omogočitev vleke vozila je potrebna naprava, s katero se prekine povezava med motorjem in pogonskimi kolesi.
Upravljanje te naprave iz položaja za vožnjo med vožnjo po cesti mora biti onemogočeno.
Če je za upravljanje te naprave potrebno orodje, mora biti vozilo opremljeno z njim.
|
5.2 Konstrukcijske zahteve za zavorne sisteme
5.2.1 Delovni zavorni sistem
|
5.2.1.1
|
Omogočeno mora biti stopnjevano zaviranje z delovnim zavornim sistemom. Vozniku mora biti omogočeno takšno zaviranje z njegovega sedeža, pri čemer mora vsaj z eno roko ohraniti nadzor nad krmilno napravo na traktorju.
|
|
5.2.1.2
|
Učinek delovnega zavornega sistema, zahtevan z uredbo, se doseže z aktiviranjem enega upravljalnega elementa.
|
5.2.1.2.1
|
Šteje se, da je ta zahteva izpolnjena tudi, če voznik prestavi nogo s pogonske stopalke na stopalko zavore ali če je na začetku zaporedja zaviranja upravljalni element pogona popuščen ali premaknjen v nevtralni položaj z roko ali nogo.
|
|
5.2.1.2.2
|
Upravljalni element delovnega zavornega sistema mora biti zasnovan tako, da se po popustitvi samodejno vrne v začetni položaj.
To ne velja za hidrostatični del zavornega sistema, če se s popustitvijo upravljalnega elementa hidrostatičnega pogona ustvari zavorni učinek.
|
|
|
5.2.1.3
|
V nasprotju s točko 5.2.1.1 je mogoče pri vozilih razreda I in razreda II pri zaviranju z delovnim zavornim sistemom za ustavitev vozila na naklonu v primeru preostale hitrosti lezenja uporabiti tudi drug zavorni sistem (pomožni zavorni sistem ali parkirno zavoro).
|
5.2.2 Pomožni zavorni sistem
|
5.2.2.1
|
V zvezi s pomožnim zavornim sistemom morajo biti izpolnjene ustrezne zahteve iz točke 2.1.2.2 Priloge I.
|
▼M1 —————
▼B
5.2.3 Parkirna zavora
V zvezi s parkirno zavoro morajo biti izpolnjene zahteve iz točke 2.1.2.3 Priloge I.
▼M1
|
5.2.3.1
|
Če s hidrostatičnim pogonom ni mogoče ustaviti vozila na naklonu, je dovoljeno vozilo, ki se premika s preostalo hitrostjo lezenja, ustaviti s parkirno zavoro. V ta namen mora biti parkirna zavora zasnovana tako, da jo je mogoče aktivirati med vožnjo.
|
▼B
5.3 Značilnosti zavornih sistemov
|
5.3.1
|
Sklop zavornih sistemov, s katerimi je opremljeno vozilo, mora izpolnjevati zahteve, ki so predpisane za delovne, pomožne in parkirne zavorne sisteme.
|
|
5.3.2
|
V primeru okvare katerega koli sestavnega dela razen zavor ali sestavnih delov iz točke 2.2.1.2.7 Priloge I ali v primeru katerih koli drugih okvar delovnega zavornega sistema se mora z uporabo pomožnega zavornega sistema ali tistega dela delovnega zavornega sistema, na katerega okvara ne vpliva, vozilo ustaviti v pogojih, predpisanih za pomožno zaviranje, zlasti če imata pomožni zavorni sistem in delovni zavorni sistem skupni upravljalni element in skupni prenosni sistem; na primer, če je zavorni učinek odvisen od pravilnega delovanja prenosa moči, tj. pretvornika, hidravličnih črpalk, tlačnih cevi, hidravličnih motorjev ali primerljivih sestavnih delov.
|
|
5.3.3
|
Sistemi, ki omogočajo delovanje delovne, pomožne in parkirne zavore, lahko imajo skupne sestavne dele, če so izpolnjeni pogoji iz točke 2.2.1.2 Priloge I.
|
▼M1
|
5.3.4
|
Porazdelitev zavorne sile delovnega zavornega sistema je zasnovana tako, da med zaviranjem ne prihaja do znatnega momenta okrog navpične osi vozila, če ni dosežena mejna vrednost oprijema med pnevmatikami in cesto na homogenih površinah cestišča.
|
▼B
|
5.3.5
|
Porazdelitev zavorne sile delovnega zavornega sistema mora biti zasnovana tako, da je med zaviranjem z delovnim zavornim sistemom na površinah z različnimi tornimi koeficienti μ 0,2/0,8 mogoče doseči minimalni pojemek, ki znaša najmanj 55 % povprečnega polnega pojemka dm delovnega zavornega sistema, ki je predpisan za zadevni razred vozil (glej točko 6.3). To je mogoče dokazati z izračuni; v tem primeru se kotalni upor ne upošteva.
|
|
5.3.6
|
Z odstopanjem od točke 5.3.2 mora v primeru okvare krmilne naprave črpalke hidrostatičnega pogona biti mogoče ustaviti vozilo z učinkom, predpisanim za pomožni zavorni sistem. V primeru takšne okvare se lahko aktivira tudi dodatna naprava, ki se vedno lahko preprosto upravlja iz položaja za vožnjo (na primer naprava, ki vpliva na vrtilno frekvenco motorja, vključno s stikalom za izklop motorja).
|
|
5.3.7
|
V primeru naprave za počasno premikanje ali druge primerljive naprave, ki jo je mogoče aktivirati med vožnjo, je treba zagotoviti, da so vse predpisane zahteve iz te priloge (zlasti glede zavornega učinka) izpolnjene tudi, ko je aktiviran ta tip naprave.
|
|
5.3.8
|
Opozorilni signali in opozorilne naprave Izpolnjene morajo biti ustrezne zahteve iz točke 2.2.1.29 in točke 2.2.1.12 Priloge I.
|
|
5.3.9
|
Naprave za shranjevanje energije (zbiralniki energije) v vozilih na motorni pogon morajo biti zasnovane tako, da po osmih polnih aktiviranjih upravljalnega elementa delovnega zavornega sistema preostali tlak v napravah za shranjevanje energije ni nižji od tlaka, ki je potreben za navedeni zavorni učinek pomožne zavore.
|
|
5.3.10
|
Pnevmatski/hidravlični pomožni opremi je treba energijo dovajati tako, da se lahko med delovanjem dosežejo predpisane vrednosti pojemka in da celo v primeru okvare vira energije delovanje pomožne opreme ne more povzročiti, da bi zaloge energije, ki napajajo zavorne sisteme, padle pod raven iz točke 2.2.1.12 Priloge I.
|
|
5.3.11
|
Obraba zavor Izpolnjene morajo biti ustrezne zahteve iz točke 2.2.1.10 Priloge I.
|
|
5.3.12
|
Za traktorje, opremljene s kompleksnimi elektronskimi krmilnimi sistemi vozila v skladu s Prilogo X, se uporabljajo zahteve iz navedene priloge, pri čemer magnetna ali električna polja ne smejo negativno vplivati na delovanje sistema.
►M1
Ta pogoj je izpolnjen v primeru skladnosti s tehničnimi zahtevami, določenimi v skladu z ustreznimi določbami člena 19 Delegirane uredbe (EU) 2015/208. ◄
|
|
5.3.13
|
Če lahko traktor s hidrostatičnim pogonom vleče vozilo kategorije R2, R3, R4 ali S2, mora izpolnjevati ustrezne zahteve iz točk 2.1.4, 2.1.5, 2.2.1.16, 2.2.1.17 in 2.2.1.18 Priloge I.
|
|
5.3.14
|
Odzivni čas Če je traktor opremljen z delovnim zavornim sistemom, ki je povsem ali delno odvisen od vira energije, ki ni fizična energija voznika, morajo biti za nehidrostatični del delovnega zavornega sistema izpolnjene zahteve iz točke 3.3 Priloge II.
|
6.
Preskusi zaviranja
6.1 Splošno
|
6.1.1
|
Izpolnjene morajo biti ustrezne zahteve iz točke 2.1 Priloge II.
|
|
6.1.2
|
Med preskusom zavor se oceni voznost (npr. nagnjenost k dviganju zadnje osi zaradi zaviranja z delovnimi zavorami).
|
6.1.2.1
|
Pri vozilih razreda III dvig ni dovoljen.
|
|
6.1.2.2
|
►M1
Pri vozilih razreda I in razreda II je dvig osi dovoljen pri pojemku, ki presega 4,5 m/s2. Vendar pa se mora ohraniti vozna stabilnost. ◄
Tukaj je treba upoštevati tudi zavorni učinek hidrostatičnega pogona.
|
|
6.2 Preskus tipa 0
6.2.1 Splošno
|
6.2.1.1
|
Zavora mora biti hladna. Šteje se, da je zavora hladna, če so izpolnjeni pogoji iz točke 2.2.1.1 Priloge II.
|
|
6.2.1.2
|
Preskus mora biti opravljen pri pogojih iz točke 2.2.1.3 Priloge II.
|
|
6.2.1.3
|
Cesta mora biti ravna.
|
|
6.2.2
|
V primeru ročno upravljanega upravljalnega elementa pogona (vozila razreda I in razreda II) se učinkovitost delovne zavore oceni tako, da se ročica za pogon premakne v nevtralni položaj tik pred upravljanjem delovne zavore, s čimer se prepreči zaviranje proti moči hidrostatičnega sistema.
►M1
V primeru vozil razreda III je to zaporedje samodejno, saj se uporabi samo upravljalni element delovne zavore. ◄
|
|
6.2.3
|
Delovni zavorni sistem Predpisane mejne vrednosti za najmanjši učinek, tako za preskuse z neobremenjenim vozilom kot tudi za preskuse z obremenjenim vozilom, so za vsak razred vozil določene v točki 6.3.
Delovni zavorni sistem mora izpolnjevati zahteve iz točke 6.3.1.
Če se uporablja kot delovni zavorni sistem,
|
6.2.3.1
|
mora kombinirani hidrostatični zavorni sistem izpolnjevati tudi zahteve v zvezi z najmanjšim zavornim deležem tornih zavor iz točke 6.3.1;
|
|
6.2.3.2
|
mora kombinirani torni zavorni sistem izpolnjevati tudi zahteve v zvezi z najmanjšim zavornim deležem tornih zavor iz točke 6.3.1.
|
Določi se tudi učinek torne zavore. Pri tem tipu preskusa se zaradi ocenjevanja torne zavore in kotalnega upora nevtralizira učinek hidrostatičnega prenosa moči.
Če iz tehničnih razlogov ni mogoče odklopiti hidrostatične zavore, se lahko delež torne zavore določi na drug način, na primer:
|
6.2.3.3
|
opravijo se zaporedni preskusi zavor:
|
6.2.3.3.1
|
s kombiniranim hidrostatičnim zavornim sistemom z vklopljenimi tornimi zavorami;
|
|
6.2.3.3.2
|
s kombiniranim hidrostatičnim zavornim sistemom z izklopljenimi tornimi zavorami (samo „hidrostatično zaviranje“).
|
Uporabi se ta formula:
zF = zHy + F – zHy + R
|
zF
|
:
|
povprečni polni pojemek tornega zavornega sistema, vključno s kotalnim uporom;
|
|
zHy
|
:
|
povprečni polni pojemek, povezan samo z zavornim učinkom hidrostatičnega zavornega sistema, vključno s kotalnim uporom;
|
|
zHy + F
|
:
|
povprečni polni pojemek kombiniranega hidrostatičnega zavornega sistema;
|
|
|
|
6.2.4
|
Pomožni zavorni sistem
|
6.2.4.1
|
Preskus učinkovitosti pomožnega zavornega sistema se izvede s simuliranjem pogojev pri dejanski okvari delovnega zavornega sistema ali s preskušanjem pomožnega zavornega sistema, ki je neodvisen od delovnega zavornega sistema.
|
|
6.2.4.2
|
Sistem se preskusi z ustreznim upravljalnim elementom.
Predpisani učinek se doseže tako, da se na upravljalni element deluje s silo, ki ne presega 600 N v primeru nožnega upravljalnega elementa ali 400 N v primeru ročnega upravljalnega elementa. Upravljalni element se namesti tako, da ga lahko voznik uporabi preprosto in hitro.
|
|
6.2.4.3
|
Predpisane mejne vrednosti za najmanjši učinek, tako za preskuse z neobremenjenim vozilom kot tudi za preskuse z obremenjenim vozilom, so za vsak razred vozil določene v točki 6.3.2.
|
|
6.3 Preskusi učinkovitosti delovnega in pomožnega zavornega sistema (tip 0)
|
|
Obremenjeno in neobremenjeno vozilo
|
|
Razred I
|
Razred II
|
Razred III
|
|
|
(v v km/h; s v m; dm v m/s2)
|
v
|
12
|
30
|
40
|
|
6.0.1
|
delovni zavorni sistem
|
s
|
0,15v + v2/78
|
0,15v + v2/92
|
0,15v + v2/130
|
|
dm
|
3,0
|
3,55
|
5,0
|
|
6.0.1.1
|
najmanjši zavorni delež tornih zavor v kombiniranem hidrostatičnem zavornem sistemu
|
s
|
0,15v + v2/26
|
0,15v + v2/40
|
0,15v + v2/40
|
|
dm
|
1,0
|
1,5
|
1,5
|
|
6.0.1.2
|
najmanjši zavorni delež tornih zavor v kombiniranem tornem zavornem sistemu
|
s
|
0,15v + v2/52
|
0,15v + v2/52
|
0,15v + v2/78
|
|
dm
|
2,0
|
2,0
|
3,0
|
|
6.0.2
|
pomožni zavorni sistem
|
s
|
0,15v + v2/40
|
0,15v + v2/40
|
0,15v + v2/57
|
|
dm
|
1,5
|
1,5
|
2,2
|
6.4 Preskus zavor tipa I (pojemanje)
|
6.4.1
|
Delovne zavore se preskusijo tako, da je pri obremenjenem vozilu zavorna energija enaka energiji, ki je bila zabeležena v istem časovnem obdobju pri obremenjenem vozilu, ki vozi s stalno hitrostjo 40 km/h na razdalji 1,7 km po 7-odstotnem naklonu navzdol.
|
|
6.4.2
|
Preskus se lahko izvede tudi na ravni cesti, pri čemer traktor vleče traktor; med preskusom mora biti sila, ki deluje na upravljalni element, prilagojena tako, da se vzdržuje nespremenljiv upor vlečenega vozila (7 odstotkov največje skupne statične obremenitve osi preskušanega traktorja). Če moč, zagotovljena za vleko, ni zadostna, se preskus lahko opravi pri nižji hitrosti, vendar na večji razdalji, kot je prikazano v preglednici spodaj:
|
Hitrost [km/h]
|
Razdalja [metri]
|
|
40
|
1 700
|
|
30
|
1 950
|
|
20
|
2 500
|
|
15
|
3 100
|
|
|
6.4.3
|
Namesto postopka s povezanim zaviranjem iz točk 6.4.1 in 6.4.2 se lahko uporabi tudi preskusni postopek s ponavljajočim se zaviranjem iz točke 2.3.1 Priloge II.
|
|
6.4.4
|
Zavorni učinek pri zaviranju s segretimi zavorami Ob koncu preskusa tipa I je treba zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema izmeriti pod enakimi pogoji (in še zlasti pri uporabi nespremenjene sile za upravljanje, ki ni večja kot dejansko uporabljena povprečna sila) kot za preskus tipa 0 (temperaturni pogoji so lahko različni).
|
6.4.4.1
|
Zavorni učinek pri zaviranju s segretimi zavorami delovnega zavornega sistema ne sme biti pod mejnimi vrednostmi v tabeli iz točke 6.4.4.2.
|
|
6.4.4.2
|
Najmanjši predpisani zavorni učinek pri zaviranju s segretimi zavorami (preskus tipa I)
|
Delovni zavorni sistem
|
Zavorni učinek pri zaviranju s segretimi zavorami v % predpisane vrednosti
|
Zavorni učinek pri zaviranju s segretimi zavorami v % vrednosti, zabeležene med preskusom tipa 0
|
|
hidrostatični zavorni sistem
|
90
|
90
|
|
kombinirani hidrostatični zavorni sistem
|
90
|
80
|
|
kombinirani torni zavorni sistem
|
80
|
60
|
|
▼M1
|
|
torni zavorni sistem
|
80
|
60
|
|
▼B
|
|
|
|
6.4.5
|
Preskus tipa I se lahko izpusti, če sta izpolnjena naslednja dva pogoja:
6.4.5.1 Najmanj 60 % vsote zavornih sil med preskusom tipa 0 delovnega zavornega sistema (glej točko 6.2.3) se ustvari z zaviranjem s hidrostatičnim pogonom.
6.4.5.2 Proizvajalec lahko dokaže, da je v primeru stalnega delovanja preprečeno pregrevanje zavor.
|
6.5 Parkirna zavora
|
6.5.1
|
V zvezi s parkirno zavoro morajo biti izpolnjene zahteve iz točke 3.1.3 Priloge II.
|
|
6.5.2
|
Za preverjanje skladnosti z zahtevo iz točke 2.2.1.2.4 Priloge I se izvede preskus tipa 0 z obremenjenim vozilom pri začetni preskusni hitrosti v ≥ 0,8 vmax. Povprečni polni pojemek ob uporabi upravljalnega elementa parkirne zavore in pojemek, tik preden se vozilo ustavi, ne smeta biti manjša od 1,5 m/s2. Sila, ki deluje na upravljalni element zavore, ne sme presegati določenih vrednosti.
V primeru ročno upravljanega upravljalnega elementa pogona (vozila razreda I in razreda II) se učinkovitost parkirne zavore med vožnjo oceni tako, da se upravljalni element pogona premakne v nevtralni položaj tik pred upravljanjem parkirne zavore, s čimer se prepreči zaviranje proti moči hidrostatičnega sistema.
►M1
V primeru vozil razreda III je to zaporedje samodejno, saj se uporabi samo upravljalni element parkirne zavore. ◄
|
PRILOGA X
Zahteve za varnostne vidike kompleksnih elektronskih krmilnih sistemov vozil
1.
Splošno
V tej prilogi so določene zahteve za homologacijsko preskušanje, strategijo ob napaki in preverjanje v zvezi z varnostnimi vidiki kompleksnih elektronskih krmilnih sistemov vozil, povezanih z zaviranjem kmetijskih in gozdarskih vozil.
2.
Zahteve
Vsi kompleksni elektronski krmilni sistemi vozil morajo biti skladni z določbami Priloge 18 k Pravilniku št. 13 UN/ECE, kot je navedeno v naslednji tabeli:
|
Št. pravilnika UN/ECE
|
Področje
|
Spremembe
|
Sklic na UL
|
|
13
|
homologacija vozil kategorij M, N in O v zvezi z zaviranjem
|
Dodatek 5 k spremembam 10
spremembe 11
|
UL L 257, 30.9.2010, str. 1.
UL L 297, 13.11.2010, str. 183.
|
PRILOGA XI
Zahteve in preskusni postopki za protiblokirne zavorne sisteme in vozila, opremljena z njimi
1.
Opredelitve pojmov
V tej prilogi:
1.1 „vgrajeni trajnostni zavorni sistem“ pomeni trajnostni zavorni sistem, katerega upravljalni element je vgrajen v upravljalni element delovnega zavornega sistema tako, da se trajnostni in delovni zavorni sistem uporabljata hkrati ali ustrezno stopnjevano z upravljanjem kombiniranega upravljalnega elementa;
1.2 „tipalo“ pomeni sestavni del, ki prepoznava podatke o stanju vrtenja koles ali dinamičnem stanju vozila in jih pošilja regulatorju;
1.3 „regulator“ pomeni sestavni del, zasnovan za ocenjevanje podatkov, ki jih prejme od tipal, in za pošiljanje signala modulatorju;
1.4 „modulator“ pomeni sestavni del, zasnovan za spreminjanje zavornih sil skladno s signalom, ki ga prejme od regulatorja;
1.5 „posredno upravljano kolo“ pomeni kolo, katerega zavorna sila se spreminja skladno s podatki, ki jih pošljejo tipala drugih koles;
1.6 „maksimalno uravnavanje zavorne sile“ pomeni, da protiblokirni sistem vedno znova spreminja zavorno silo, da se prepreči blokada neposredno upravljanih koles; ne vključuje zaviranj, pri katerih se sprememba zgodi samo enkrat med ustavitvijo;
1.7. „polna sila“ pomeni največjo silo, določeno v preskusih zaviranja in učinka zavornih sistemov v skladu s to uredbo.
V zvezi z neposredno in posredno upravljanimi kolesi se šteje, da protiblokirni sistemi z možnostjo „select-high“ vključujejo neposredno in posredno upravljana kolesa, pri sistemih z možnostjo „select-low“ pa se šteje, da so vsa kolesa s tipali neposredno upravljana kolesa.
2.
Splošno
|
2.1
|
V tej prilogi je določen potrebni zavorni učinek za kmetijska vozila, opremljena s protiblokirnimi zavornimi sistemi.
Največja konstrukcijsko določena hitrost, za katero so namenjene te zahteve, v tej uredbi velja za vožnjo vozila v smeri naprej, razen če je izrecno navedeno drugače.
|
|
2.2
|
Protiblokirni zavorni sistemi, ki se trenutno uporabljajo, vključujejo tipala, regulatorje in modulatorje. Vse drugače zasnovane naprave, ki bodo uvedene v prihodnosti, ali primeri, ko je protiblokirna zavorna funkcija vgrajena v drug sistem, se štejejo za protiblokirne zavorne sisteme v smislu te priloge, če je njihov učinek enak učinku, ki je predpisan v tej prilogi.
|
|
2.3
|
Odstopanja od predpisanih preskusnih postopkov so dovoljena, če zaradi premajhne največje konstrukcijsko določene hitrosti traktorja ni mogoče izpolniti pogojev preskušanja. V tem primeru je treba dokazati enakovrednost predpisanih učinkov, pri čemer se poročilu o homologaciji priložijo rezultati in metoda ocene.
|
3.
Tipi protiblokirnih zavornih sistemov
|
3.1
|
Šteje se, da je traktor opremljen s protiblokirnim zavornim sistemom, če je vgrajen eden od naslednjih sistemov:
3.1.1 protiblokirni zavorni sistem kategorije 1:
vozilo, opremljeno s protiblokirnim zavornim sistemom kategorije 1, mora izpolnjevati vse ustrezne zahteve iz te priloge;
3.1.2 protiblokirni zavorni sistem kategorije 2:
vozilo, opremljeno s protiblokirnim zavornim sistemom kategorije 2, mora izpolnjevati vse ustrezne zahteve iz te priloge, razen tistih iz točke 5.3.5;
3.1.3 protiblokirni zavorni sistem kategorije 3:
vozilo, opremljeno s protiblokirnim zavornim sistemom kategorije 3, mora izpolnjevati vse ustrezne zahteve iz te priloge, razen tistih iz točk 5.3.4 in 5.3.5. Pri takšnih vozilih mora vsaka posamezna os (ali tandem os), ki nima vsaj enega neposredno upravljanega kolesa, izpolnjevati pogoje izkoristka oprijema in zaporedja blokiranja koles iz Dodatka 1 k Prilogi II v zvezi z zavornim razmerjem in obremenitvijo. Navedene zahteve se lahko preverijo na površinah cestišča z visokim in nizkim koeficientom oprijema (največ približno 0,8 in 0,3), in sicer s spreminjanjem sile za upravljanje delovnih zavor.
|
|
3.2
|
za vlečeno vozilo se šteje, da je opremljeno s protiblokirnim zavornim sistemom, če sta neposredno upravljani vsaj dve kolesi na nasprotnih straneh vozila in če vsa druga kolesa neposredno ali posredno upravlja protiblokirni zavorni sistem. Pri vlečenih vozilih z vlečnim ojesom se neposredno upravljajo vsaj dve kolesi na sprednji osi in dve kolesi na zadnji osi, pri čemer ima vsaka od teh osi vsaj en neodvisni modulator, vsa druga kolesa pa so neposredno ali posredno upravljana. Poleg tega mora vlečeno vozilo, opremljeno s protiblokirnim zavornim sistemom, izpolnjevati enega od naslednjih pogojev:
3.2.1 protiblokirni zavorni sistem kategorije A:
vlečeno vozilo, opremljeno s protiblokirnim zavornim sistemom kategorije A, mora izpolnjevati vse ustrezne zahteve iz te priloge;
3.2.2 protiblokirni zavorni sistem kategorije B:
vlečeno vozilo, opremljeno s protiblokirnim zavornim sistemom kategorije B, mora izpolnjevati vse ustrezne zahteve iz te priloge razen zahtev iz točke 6.3.2.
|
4.
Splošne zahteve
|
4.1
|
Poseben optični opozorilni signal mora voznika obvestiti o okvarah v električnem prenosu upravljanja protiblokirnega zavornega sistema, ki vplivajo na sistem v zvezi z zahtevami glede delovanja in učinka v tej prilogi. V ta namen se uporabi rumeni opozorilni signal iz točke 2.2.1.29.1.2 Priloge I.
Dokler se ne sprejmejo enotni preskusni postopki, mora proizvajalec tehnični službi predložiti analizo možnih okvar prenosa upravljanja in vpliva teh okvar na delovanje. O teh informacijah se dogovorita tehnična služba in proizvajalec vozila.
|
4.1.1
|
Nepravilnosti v delovanju tipala, ki jih ni mogoče zaznati v statičnih pogojih, je treba zaznati najpozneje takrat, ko vozilo preseže hitrost 10 km/h. Da pa se prepreči napačen prikaz napake, ko tipalo zato, ker se kolo ne vrti, ne ustvarja podatkov o hitrosti vozila, se preverjanje lahko zapozni, vendar mora biti zaznano najpozneje takrat, ko vozilo preseže hitrost 15 km/h. Ko vozilo miruje, lahko opozorilni signal spet zasveti, če se izklopi, preden vozilo doseže hitrost 10 km/h ali 15 km/h, kot je ustrezno, če v sistemu ni okvare.
|
|
4.1.2
|
Ko je protiblokirni zavorni sistem pod napetostjo pri mirujočem vozilu, morajo električno regulirani pnevmatski modulatorji preklopiti vsaj enkrat.
|
|
|
4.2
|
Traktorji, opremljeni s protiblokirnim zavornim sistemom, ki lahko vlečejo vlečeno vozilo, opremljeno s takšnim sistemom, morajo biti opremljena z ločenim optičnim opozorilnim signalom za protiblokirni zavorni sistem vlečenega vozila, ki izpolnjuje zahteve iz točke 4.1. V ta namen se uporabijo ločeni opozorilni signali iz točke 2.2.1.29.2 Priloge I, ki se aktivirajo prek pola 5 električnega priključka v skladu s standardom ISO 7638:2003. Priključek iz standarda ISO 7638:2003 se lahko uporabi s 5 poli ali 7 poli, kot je ustrezno.
|
4.2.1
|
Opozorilni signal ne sme zasvetiti, ko je na traktor priklopljeno vlečeno vozilo brez protiblokirnega zavornega sistema ali ko nanj ni priklopljeno nobeno vlečeno vozilo. Ta funkcija mora biti samodejna.
|
|
|
4.3
|
V primeru okvare, kot je opisano v točki 4.1, veljajo naslednje zahteve:
Traktorji: v primeru okvare dela prenosnega sistema delovnega zavornega sistema mora preostali zavorni učinek znašati 1,3 m/s2. Ta zahteva ne pomeni odstopanja od zahtev v zvezi s pomožnim zaviranjem.
Vlečena vozila: preostali zavorni učinek mora znašati vsaj 30 odstotkov predpisanega učinka za delovni zavorni sistem zadevnega traktorja.
|
|
4.4
|
Magnetna ali električna polja ne smejo negativno vplivati na delovanje sistema.
►M1
Ta zahteva je izpolnjena v primeru skladnosti s tehničnimi zahtevami iz člena 19 Delegirane uredbe (EU) 2015/208. ◄
|
|
4.5
|
V sistemu ne sme biti ročne naprave za odklop ali spremembo načina upravljanja protiblokirnega zavornega sistema, razen pri traktorjih kategorije T ali C. Če je naprava vgrajena v traktorje kategorije T ali C, morajo biti izpolnjeni naslednji pogoji:
4.5.1 Optični opozorilni signal mora opozoriti voznika, da je protiblokirni zavorni sistem izklopljen ali da je spremenjen način delovanja; v ta namen se lahko uporabi opozorilni signal za okvaro protiblokirnega zavornega sistema iz točke 2.2.1.29.1.2 Priloge I.
Opozorilni signal je neprekinjen ali utripajoč.
4.5.2 Protiblokirni zavorni sistem se mora samodejno vklopiti/vrniti v način vožnje po cesti, ko je naprava za vžig (zagon) znova vklopljena ali ko hitrost vozila preseže 30 km/h.
4.5.3 Priročnik za uporabo vozila, ki ga zagotovi proizvajalec, mora vsebovati opozorila o posledicah ročnega izklapljanja ali spreminjanja načina delovanja protiblokirnega zavornega sistema.
4.5.4 Naprava iz točke 4.5 lahko skupaj s traktorjem izklopi/spremeni način upravljanja protiblokirnega zavornega sistema vlečenega vozila. Ločena naprava samo za vlečeno vozilo ni dovoljena.
4.5.5 Točka 4.5 ne velja za naprave, ki spreminjajo način upravljanja protiblokirnega zavornega sistema, če spremenjeni način upravljanja izpolnjuje vse zahteve za kategorijo protiblokirnega zavornega sistema, s katerim je opremljeno vozilo. Vendar morajo biti v tem primeru izpolnjene zahteve iz točk 4.5.1, 4.5.2 in 4.5.3.
|
|
4.6
|
Pri vozilih, opremljenih s protiblokirnim zavornim sistemom in vgrajenim trajnostnim zavornim sistemom, mora protiblokirni zavorni sistem delovati vsaj na delovne zavore krmiljene osi trajnostnega zavornega sistema in na sam trajnostni zavorni sistem ter mora izpolnjevati ustrezne zahteve iz te priloge.
|
|
4.7
|
Pri vlečenih vozilih s pnevmatskim zavornim sistemom je maksimalno uravnavanje zavorne sile protiblokirnega zavornega sistema zagotovljeno samo, če je razpoložljiv tlak katerega koli sprožila zavore neposredno upravljanega kolesa več kot 100 kPa nad največjim tlakom med delovanjem v celotnem preskusu. Razpoložljiv dovodni tlak se ne sme povečati nad 800 kPa.
Pri vlečenih vozilih s hidravličnimi zavornimi sistemi je maksimalno uravnavanje zavorne sile protiblokirnega zavornega sistema zagotovljeno samo, če je razpoložljiv tlak katerega koli sprožila zavore neposredno upravljanega kolesa več kot 1 750 kPa nad največjim tlakom med delovanjem v celotnem preskusu. Razpoložljiva raven energije, zagotovljena za protiblokirni zavorni sistem, se ne sme povečati nad 14 200 kPa.
|
5.
Posebne določbe v zvezi s traktorji
5.1 Poraba energije
Traktorji, opremljeni s protiblokirnimi zavornimi sistemi, morajo obdržati svojo učinkovitost tudi, ko se upravljalni element delovne zavore daljši čas polno uporablja. Skladnost z zahtevo se preverja s postopki iz točk 5.1.1, 5.2.3, 5.2.4, 5.2.5, 5.3, 6.1.1, 6.1.3, 6.1.4 in 6.3:
5.1.1 Preskusni postopek
|
5.1.1.1
|
Začetno raven energije v napravah za shranjevanje energije določi proizvajalec. Ta raven mora biti vsaj takšna, da zagotavlja učinkovitost, predpisano za zaviranje z delovno zavoro, ko je vozilo obremenjeno. Naprave za shranjevanje energije za pnevmatsko pomožno opremo morajo biti odklopljene.
|
|
5.1.1.2
|
Od začetne hitrosti najmanj 50 km/h (ali vmax, kar je manj) se na cestišču s koeficientom oprijema 0,3 ali manj za čas t polno uporabijo zavore obremenjenega vozila, pri čemer se v tem času upošteva energija, ki jo porabijo posredno upravljana kolesa, vsa neposredno upravljana kolesa pa upravlja protiblokirni zavorni sistem.
Dokler takšne preskusne površine niso povsod na voljo, se po presoji tehnične službe lahko uporabijo do konca obrabljene pnevmatike in večje vrednosti do 0,4. Zabeležijo se dobljena dejanska vrednost, tip pnevmatik in tip površine.
|
|
5.1.1.3
|
Motor vozila se nato ustavi ali pa se prekine dovod do naprav za shranjevanje energije.
|
|
5.1.1.4
|
Upravljalni element delovne zavore je nato treba štirikrat zapored polno aktivirati pri mirujočem vozilu.
|
|
5.1.1.5
|
Ko se upravljalni element uporabi petič, mora biti mogoče zavreti vozilo vsaj s takim učinkom, kot je predpisan za pomožno zaviranje obremenjenega vozila.
|
|
5.1.1.6
|
Med preskusi se pri vozilu, ki lahko vleče vozilo, opremljeno s pnevmatskim zavornim sistemom, napajalni vod blokira in na krmilni vod se priklopi naprava za shranjevanje energije s prostornino 0,5 litra (v skladu s točko 1.2.2.3 Priloge IV, oddelek A). Pri petem pritisku na zavore, kot je predvideno v točki 5.1.1.5 te priloge, raven energije, ki se dovaja krmilnemu vodu, ne sme pasti pod polovico vrednosti, ki je dosežena pri polni uporabi zavore, ko je na voljo še začetna raven energije.
|
5.1.2 Dodatne zahteve
|
5.1.2.1
|
Koeficient oprijema površine cestišča se za zadevno vozilo izmeri z metodo, ki je opisana v točki 1.1 Dodatka 2.
|
|
5.1.2.2
|
Preskus zaviranja se izvaja z odklopljenim motorjem v prostem teku in pri obremenjenem vozilu.
|
|
5.1.2.3
|
Čas zaviranja t znaša 15 sekund.
|
|
5.1.2.4
|
Če se čas t ne doseže v eni fazi zaviranja, so skupaj dovoljene največ štiri faze.
|
|
5.1.2.5
|
Če se preskus izvaja v več fazah, se med fazami preskusa ne sme dovajati nove energije. Od druge faze se lahko upošteva poraba energije, ki ustreza začetnemu pritisku na zavore, in sicer tako, da se en pritisk na zavoro s polnim gibom odšteje od štirih pritiskov s polnim gibom, predpisanih v točkah 5.1.1.4, 5.1.1.5, 5.1.1.6 in 5.1.2.6 za vsako drugo, tretjo in četrto fazo, ki se uporabljajo v preskusnem postopku, predpisanem v točki 5.1.1, kot je ustrezno.
|
|
5.1.2.6
|
Šteje se, da je učinek, predpisan v točki 5.1.1.5, dosežen, če je na koncu četrtega pritiska na upravljalni element zavore, ko vozilo miruje, raven energije v napravah za shranjevanje energije na ravni, ki je potrebna za zaviranje s pomožno zavoro, ko je vozilo obremenjeno, ali nad njo.
|
5.2 Izkoristek oprijema
|
5.2.1
|
Izkoristek oprijema protiblokirnega zavornega sistema upošteva dejansko povečanje zavorne razdalje, ki presega teoretični minimum. Šteje se, da je protiblokirni zavorni sistem zadovoljiv, ko je izpolnjen pogoj
ε ≥ 0,75
pri čemer ε predstavlja izkoriščeni oprijem, kot je opisano v točki 1.2 Dodatka 2.
|
|
5.2.2
|
Izkoristek oprijema (ε) se meri na površinah cestišč s koeficientom oprijema 0,3 ali manj in približno 0,8 (na suhi cesti) pri začetni hitrosti 50 km/h ali vmax, kar je manj. Da se odpravijo učinki razlik v temperaturi zavor, je priporočljivo, da se vrednost zAL (glej Dodatek 1) določi pred vrednostjo k.
Dokler takšne preskusne površine niso povsod na voljo, se po presoji tehnične službe lahko uporabijo do konca obrabljene pnevmatike in večje vrednosti do 0,4. Zabeležijo se dobljena dejanska vrednost, tip pnevmatik in tip površine.
|
|
5.2.3
|
Preskusni postopek za določanje koeficienta oprijema (k) in formule za izračun izkoristka oprijema (ε) so določeni v Dodatku 2.
|
|
5.2.4
|
Izkoristek oprijema protiblokirnega zavornega sistema se pri vozilih, opremljenih s protiblokirnimi zavornimi sistemi kategorij 1 ali 2, preveri na celotnih vozilih. Pri vozilih, opremljenih s protiblokirnimi zavornimi sistemi kategorije 3, morajo to zahtevo izpolnjevati samo osi z vsaj enim neposredno upravljanim kolesom.
|
|
5.2.5
|
Pogoj ε ≥ 0,75 se preverja pri obremenjenem in neobremenjenem vozilu. Preskus obremenjenega vozila na cestišču z visoko oprijemljivostjo se lahko izpusti, če predpisana sila, ki deluje na upravljalni element, ne povzroči maksimalnega uravnavanja zavorne sile protiblokirnega zavornega sistema. Pri preskusu neobremenjenega vozila se sila za upravljanje lahko poveča na 1 000 N, če sistem ob uporabi polne sile ne uravnava zavorne sile. Lahko se uporabi sila, ki je večja od polne sile, če je potrebna za aktiviranje protiblokirnega zavornega sistema. Če 1 000 N ne zadošča za uravnavanje zavorne sile s sistemom, se lahko ta preskus opusti. Pri tem preskusu se pri pnevmatskih zavornih sistemih zračni tlak ne sme povečati nad odklopni tlak.
|
5.3 Dodatna preverjanja
Naslednja dodatna preverjanja je treba izvesti na obremenjenem in neobremenjenem vozilu z odklopljenim motorjem:
5.3.1 Kolesa, ki jih neposredno upravlja protiblokirni zavorni sistem, ne smejo blokirati, če se na upravljalni element nenadoma deluje s polno silo, na površinah cestišč iz točke 5.2.2, pri začetni hitrosti 40 km/h in pri visoki začetni hitrosti, kot je navedeno v spodnji tabeli:
|
Stanje
|
Največja preskusna hitrost
|
|
cestišče z velikim oprijemom
|
0,8 vmax ≤ 80 km/h
|
|
cestišče z majhnim oprijemom
|
0,8 vmax ≤ 70 km/h
|
5.3.2 Ko os preide s površine z velikim oprijemom (kH) na površino z majhnim oprijemom (kL), pri čemer je kH ≥ 0,5 in kH/kL ≥ 2, in se na upravljalni element deluje s polno silo, neposredno upravljana kolesa ne smejo blokirati. Hitrost vožnje in trenutek uporabe zavor je treba izračunati tako, da poteka prehod z ene površine na drugo pri visoki in nizki hitrosti, ko protiblokirni zavorni sistem maksimalno uravnava zavorno silo na cestišču z velikim oprijemom, pod pogoji iz točke 5.3.1.
5.3.3 Ko vozilo preide s površine z majhnim oprijemom (kL) na površino z velikim oprijemom (kH), pri čemer je kH ≥ 0,5 in kH/kL ≥ 2, in se deluje na upravljalni element s polno silo, mora pojemek vozila narasti na ustrezno visoko vrednost v razumnem času in vozilo ne sme skreniti iz začetne smeri. Hitrost vožnje in trenutek uporabe zavor je treba izračunati tako, da se prehod z ene površine na drugo izvede pri hitrosti približno 50 km/h ali 0,8 vmax, kar je manj, ko protiblokirni zavorni sistem maksimalno uravnava zavorno silo na cestišču z majhnim oprijemom.
5.3.4 Pri vozilih, opremljenih s protiblokirnimi zavornimi sistemi kategorij 1 in 2, ko so desna in leva kolesa vozila na površinah z različnima koeficientoma oprijema (kH in kL), pri čemer je kH ≥ 0,5 in kH/kL ≥ 2, neposredno upravljana kolesa ne smejo blokirati, če se na upravljalni element nenadoma deluje s polno silo pri hitrosti 50 km/h ali 0,8 vmax, kar je manj.
5.3.5 Poleg tega morajo obremenjena vozila, opremljena s protiblokirnimi zavornimi sistemi kategorije 1, pod pogoji iz točke 5.3.4 izpolnjevati zahteve glede zavornega razmerja, predpisane v Dodatku 3.
5.3.6 Pri preskusih iz točk 5.3.1, 5.3.2, 5.3.3, 5.3.4 in 5.3.5, pa so dovoljena kratkotrajna blokiranja koles. Poleg tega je blokiranje koles dovoljeno, ko je hitrost vozila manjša od 15 km/h; prav tako je dovoljeno blokiranje posredno upravljanih koles pri kateri koli hitrosti, če to ne vpliva na stabilnost in vodljivost.
5.3.7 Med preskusi iz točk 5.3.4 in 5.3.5 so dovoljeni popravki krmiljenja, če je zasuk volana v prvih dveh sekundah največ 120° in skupno največ 240°. Poleg tega mora vzdolžna srednja ravnina vozila na začetku teh preskusov potekati nad mejo med površinama z velikim in majhnim oprijemom in noben del (zunanjih) pnevmatik med temi preskusi ne sme prekoračiti te meje.
5.3.8 Upoštevajo se naslednje opombe:
5.3.8.1 Koeficienta kH in kL se izmerita v skladu z Dodatkom 2 k tej prilogi.
5.3.8.2 Namen preskusov iz točk 5.3.1, 5.3.2, 5.3.3 in 5.3.4 je preveriti, da neposredno upravljana kolesa ne blokirajo in da vozilo ostane stabilno. Pri teh preskusih se lahko uporabi sila, ki je večja od polne sile, če je potrebna za aktiviranje protiblokirnega zavornega sistema.
5.3.8.3 V zvezi s točkama 5.3.1 in 5.3.2 zato vozila na površini z majhnim oprijemom ni treba povsem ustavljati.
6.
Posebne določbe v zvezi z vlečenimi vozili
6.1 Poraba energije
Vlečena vozila, opremljena s protiblokirnimi zavornimi sistemi, morajo biti zasnovana tako, da tudi potem, ko se že nekaj časa polno pritiska na upravljalni element delovne zavore, vozilo ohrani še dovolj energije, da se ustavi na primerni razdalji.
|
6.1.1
|
Skladnost z zgornjo zahtevo se preverja s spodaj določenim postopkom, ko je vozilo neobremenjeno, na ravni in vodoravni cesti, ki ima površino z dobrim koeficientom oprijema, in z zavorami, nastavljenimi čim tesneje, ter z regulatorjem zavorne sile glede na obremenitev osi (če je vgrajen) v obremenjenem položaju ves čas preskusa.
Če je koeficient oprijema na progi za preskušanje previsok, kar preprečuje, da bi protiblokirni zavorni sistem začel uravnavati zavorno silo, se preskus lahko izvede na površini z nižjim koeficientom oprijema.
|
|
6.1.2
|
Pri pnevmatskih zavornih sistemih mora biti začetna raven energije v napravah za shranjevanje energije enaka tlaku 800 kPa na vlečni glavi napajalnega voda vlečenega vozila.
|
|
6.1.3
|
Pri začetni hitrosti vozila najmanj 30 km/h se polno zavira v času t = 15 s, v katerem se upošteva energija, ki jo porabijo posredno upravljana kolesa, vsa neposredno upravljana kolesa pa upravlja protiblokirni zavorni sistem. Med tem preskusom mora biti dovod do naprav za shranjevanje energije prekinjen. Če se čas t = 15 s ne doseže v eni fazi zaviranja, so dovoljene dodatne faze. Med temi fazami se v naprave za shranjevanje energije ne sme dovajati nove energije in od druge faze naprej se upošteva dodatna poraba energije za polnjenje sprožil, npr. z naslednjim preskusnim postopkom. Tlak v zbiralnikih na začetku prve faze mora ustrezati tlaku iz točke 6.1.2. Na začetku faz, ki sledijo, tlak v zbiralnikih po uporabi zavor ne sme biti manjši od tlaka v zbiralnikih na koncu predhodne faze. Pri fazah, ki sledijo, se upošteva samo čas od trenutka, ko je tlak v zbiralnikih enak tlaku na koncu predhodne faze.
|
|
6.1.4
|
Na koncu zaviranja se pri mirujočem vozilu štirikrat polno aktivira upravljalni element delovne zavore. Ob petem pritisku na upravljalni element zavore mora biti tlak v delovnih vodih dovolj velik, da zagotavlja skupno zavorno silo na obodu koles, ki znaša vsaj 22,5 % največje statične obremenitve koles in ki samodejno ne sproža zavornih sistemov, ki jih ne upravlja protiblokirni zavorni sistem.
|
6.2 Izkoristek oprijema
|
6.2.1
|
Šteje se, da so vlečena vozila, opremljena s protiblokirnim zavornim sistemom, sprejemljiva, če je izpolnjen pogoj ε ≥ 0,75, pri čemer ε predstavlja izkoriščeni oprijem, kot je določeno v točki 2 Dodatka 2. Izpolnjenost tega pogoja se preverja, ko je vozilo neobremenjeno, ter na ravni in vodoravni cesti, ki ima površino z dobrim koeficientom oprijema.
Če je koeficient oprijema na progi za preskušanje previsok, kar preprečuje, da bi protiblokirni zavorni sistem začel uravnavati zavorno silo, se preskus lahko izvede na površini z nižjim koeficientom oprijema.
Pri priklopnikih, opremljenih z regulatorjem zavorne sile glede na obremenitev osi, se tlak lahko poveča, da se zagotovi maksimalno uravnavanje zavorne sile.
|
|
6.2.2
|
Da se odpravijo učinki razlik v temperaturi zavor, je priporočljivo, da se vrednost zRAL določi pred vrednostjo kR.
|
6.3 Dodatna preverjanja
|
6.3.1
|
Pri hitrostih nad 15 km/h kolesa, ki jih neposredno upravlja protiblokirni zavorni sistem, ne smejo blokirati, če se na upravljalni element zavor traktorja nenadoma deluje s polno silo. To se preverja pod pogoji iz točke 6.2 ter pri začetnih hitrostih 40 km/h in 60 km/h.
|
|
6.3.2
|
Določbe te točke veljajo samo za vlečena vozila, opremljena s protiblokirnim zavornim sistemom kategorije A. Ko so desna in leva kolesa na površinah, ki povzročajo različna največja zavorna razmerja (zRALH in zRALL), pri čemer je

in

neposredno upravljana kolesa ne smejo blokirati, če se na upravljalni element zavor traktorja nenadoma deluje s silo pri hitrosti 50 km/h. Razmerje zRALH/zRALL se lahko določi s postopkom iz točke 2 Dodatka 2 ali z izračunom razmerja zRALH/zRALL. Pod tem pogojem mora neobremenjeno vozilo doseči predpisano zavorno razmerje iz Dodatka 3.
Pri vlečenem vozilu, opremljenem z regulatorjem zavorne sile glede na obremenitev osi, se tlak lahko poveča, da se zagotovi maksimalno uravnavanje zavorne sile.
|
|
6.3.3
|
Pri hitrostih vozila najmanj 15 km/h so za neposredno upravljana kolesa dovoljena kratkotrajna blokiranja, pri hitrostih pod 15 km/h pa je dovoljeno kakršno koli blokiranje. Posredno upravljana kolesa lahko blokirajo pri vsaki hitrosti. V nobenem primeru pa to ne sme vplivati na stabilnost.
|
Dodatek 1
Simboli
V dodatkih 2, 3 in 4 se uporabljajo naslednji simboli:
|
Simbol
|
Opombe
|
|
E
|
medosna razdalja
|
|
ER
|
razdalja med priklopno točko in središčem osi vlečenega vozila s togim vlečnim ojesom (ali razdalja med priklopno točko in središčem osi vlečenega vozila s centralno osjo)
|
|
ε
|
oprijem, ki ga izkorišča vozilo: kvocient največjega zavornega razmerja z delujočim protiblokirnim zavornim sistemom (zAL) in koeficienta oprijema (k)
|
|
εi
|
vrednost ε, izmerjena na osi i (pri traktorju s protiblokirnim zavornim sistemom kategorije 3)
|
|
εΗ
|
vrednost ε na površini z velikim tornim koeficientom
|
|
εL
|
vrednost ε na površini z majhnim tornim koeficientom
|
|
F
|
sila (N)
|
|
FbR
|
zavorna sila vlečenega vozila z nedelujočim protiblokirnim zavornim sistemom
|
|
FbRmax
|
največja vrednost FbR
|
|
FbRmaxi
|
vrednost FbRmax, pri kateri se zavira samo os i vlečenega vozila
|
|
FbRAL
|
zavorna sila vlečenega vozila z delujočim protiblokirnim zavornim sistemom
|
|
FCnd
|
skupna normalna reakcija površine cestišča na nezavirane in negnane osi skupine vozil pri statičnih pogojih
|
|
FCd
|
skupna normalna reakcija površine cestišča na nezavirane in gnane osi skupine vozil pri statičnih pogojih
|
|
Fdyn
|
normalna reakcija ceste pri dinamičnih pogojih z delujočim protiblokirnim zavornim sistemom
|
|
Fidyn
|
Fdyn na os i pri traktorjih ali vlečenem vozilu z vlečnim ojesom
|
|
Fi
|
normalna reakcija površine cestišča na os i pri statičnih pogojih
|
|
FM
|
skupna normalna statična reakcija površine cestišča na vsa kolesa traktorja
|
|
FMnd F (1)
|
skupna normalna statična reakcija površine cestišča na nezavirane in negnane osi traktorja
|
|
FMd
|
skupna normalna statična reakcija površine cestišča na nezavirane in gnane osi vozila na motorni pogon
|
|
FR
|
skupna normalna statična reakcija površine cestišča na vsa kolesa vlečenega vozila
|
|
FRdyn
|
skupna normalna dinamična reakcija površine cestišča na osi vlečenega vozila s togim vlečnim ojesom ali vlečenega vozila s centralno osjo
|
|
FwM
|
0,01 FMnd + 0,015 FMd
|
|
g
|
gravitacijski pospešek (9,81 m/s2)
|
|
h
|
višina težišča, ki jo določi proizvajalec in potrdi tehnična služba, ki izvaja homologacijski preskus
|
|
hD
|
višina vlečnega ojesa (vrtljivi zglob na vlečenem vozilu)
|
|
hK
|
višina sedlaste sklopke (kraljevi čep)
|
|
hR
|
višina težišča vlečenega vozila
|
|
k
|
koeficient oprijema med pnevmatiko in cestiščem
|
|
kf
|
faktor k ene sprednje osi
|
|
kH
|
vrednost k, določena na površini z velikim tornim koeficientom
|
|
ki
|
vrednost k, določena na osi i za vozilo s protiblokirnim zavornim sistemom kategorije 3
|
|
kL
|
vrednost k, določena na površini z majhnim tornim koeficientom
|
|
klock
|
vrednost oprijema pri 100-odstotnem zdrsu
|
|
kM
|
faktor k traktorja
|
|
kpeak
|
največja vrednost krivulje „oprijem v primerjavi z zdrsom“
|
|
kr
|
faktor k ene zadnje osi
|
|
kR
|
faktor k vlečenega vozila
|
|
P
|
masa vozila (kg)
|
|
R
|
razmerje med kpeak in klock
|
|
t
|
časovni interval (s)
|
|
tm
|
povprečna vrednost t
|
|
tmin
|
najmanjša vrednost t
|
|
z
|
zavorno razmerje (m/s2)
|
|
zAL
|
zavorno razmerje z vozila z delujočim protiblokirnim zavornim sistemom
|
|
zC
|
zavorno razmerje z skupine vozil, če je zavirano samo vlečeno vozilo brez delujočega protiblokirnega zavornega sistema
|
|
zCAL
|
zavorno razmerje z skupine vozil, če je zavirano samo vlečeno vozilo z delujočim protiblokirnim zavornim sistemom
|
|
zCmax
|
največja vrednost zC
|
|
zCmaxi
|
največja vrednost zC, pri kateri se zavira samo os i vlečenega vozila
|
|
zm
|
povprečno zavorno razmerje
|
|
zmax
|
največja vrednost z
|
|
zMALS
|
zAL traktorja na „deljeni površini“
|
|
zR
|
zavorno razmerje z vlečenega vozila z nedelujočim protiblokirnim zavornim sistemom
|
|
zRAL
|
zAL vlečenega vozila pri zaviranju vseh osi, če je traktor nezaviran in motor odklopljen
|
|
zRALH
|
zRAL na površini z velikim koeficientom oprijema
|
|
zRALL
|
zRAL na površini z majhnim koeficientom oprijema
|
|
zRALS
|
zRAL na deljeni površini
|
|
zRH
|
zR na površini z velikim koeficientom oprijema
|
|
zRL
|
zR na površini z majhnim koeficientom oprijema
|
|
zRHmax
|
največja vrednost zRH
|
|
zRLmax
|
največja vrednost zRL
|
|
zRmax
|
največja vrednost zR
|
|
(1) FMnd in FMd za dvoosna vozila na motorni pogon: ta simbola se lahko poenostavita v ustrezne simbole Fi.
|
Dodatek 2
Izkoristek oprijema
1.
Način merjenja za traktorje
1.1 Določitev koeficienta oprijema (k)
|
1.1.1
|
Koeficient oprijema (k) se določi kot kvocient največjih zavornih sil brez blokiranja koles in ustrezne dinamične obremenitve na zavirani osi.
|
|
1.1.2
|
Zavore se uporabijo samo na eni osi preskušanega vozila pri začetni hitrosti 50 km/h. Zavorne sile morajo biti tako porazdeljene med kolesa osi, da se doseže največji zavorni učinek. Protiblokirni zavorni sistem je v območju hitrosti med 40 km/h in 20 km/h izklopljen ali ne deluje.
|
|
1.1.3
|
Za določitev največjega zavornega razmerja vozila (zmax) se opravi več preskusov ob stopnjevanju tlaka v vodih. Med vsakim preskusom se vzdržuje nespremenljiva vhodna sila in zavorno razmerje se določi glede na čas (t), potreben za zmanjšanje hitrosti s 40 km/h na 20 km/h, z uporabo naslednje formule:

zmax je največja vrednost z v m/s2,
t je v sekundah.
|
1.1.3.1
|
Blokiranje koles lahko nastopi pri hitrosti pod 20 km/h.
|
|
1.1.3.2
|
Začne se z najmanjšo izmerjeno vrednostjo t, imenovano tmin, nato se izberejo tri vrednosti t med tmin in 1,05 tmin ter se izračuna njihova aritmetična srednja vrednost tm, nato se izračuna

Če se izkaže, da zgoraj določenih treh vrednosti iz praktičnih razlogov ni mogoče doseči, se lahko uporabi najmanjši čas tmin. Zahteve iz točke 1.3 pa še vedno veljajo.
|
|
|
1.1.4
|
Zavorne sile se izračunajo iz izmerjenega zavornega razmerja in kotalnega upora nezaviranih osi, ki je enak 0,015 in 0,010 statične obremenitve osi za gnano oziroma negnano os.
|
|
1.1.5
|
Dinamična obremenitev osi se izračuna iz zavornega razmerja, statične obremenitve osi, medosne razdalje in višine težišča.
|
|
1.1.6
|
Vrednost k se zaokroži na tri decimalna mesta.
|
|
1.1.7
|
Nato se preskus ponovi za druge osi, kot je določeno v točkah od 1.1.1 do 1.1.6 (glede izjem glej točki 1.4 in 1.5).
|
|
1.1.8
|
Pri dvoosnem vozilu s pogonom na zadnja kolesa in z zavirano sprednjo osjo se na primer koeficient oprijema (k) izračuna tako:

|
|
1.1.9
|
En koeficient se določi za sprednjo os kf in en za zadnjo os kr.
|
1.2 Določitev izkoriščenega oprijema (ε)
|
1.2.1
|
Izkoriščeni oprijem (ε) se določi kot kvocient največjega zavornega razmerja z delujočim protiblokirnim zavornim sistemom (zAL) in koeficienta oprijema kM, tj.

|
|
1.2.2
|
Od začetne hitrosti vozila 55 km/h ali vmax, kar je manj, se izmeri največja vrednost zavornega razmerja (zAL) z maksimalnim uravnavanjem zavorne sile protiblokirnega zavornega sistema. Vrednost za zAL temelji na povprečni vrednosti treh preskusov, kot je opisano v točki 1.1.3, pri čemer se uporabi čas, ki je potreben, da se hitrost zmanjša s 45 km/h na 15 km/h, v skladu z naslednjo formulo:

|
|
1.2.3
|
Koeficient oprijema kM se določi s ponderiranjem dinamičnih obremenitev osi:

pri čemer je:


|
|
1.2.4
|
Vrednost ε se zaokroži na dve decimalni mesti.
|
|
1.2.5
|
Pri vozilu, ki je opremljeno s protiblokirnim zavornim sistemom kategorije 1 ali 2, vrednost zAL temelji na celotnem vozilu, ko protiblokirni zavorni sistem deluje, izkoriščeni oprijem (ε) pa se določi s formulo iz točke 1.2.1.
|
|
1.2.6
|
Pri vozilu, ki je opremljeno s protiblokirnim zavornim sistemom kategorije 3, se vrednost zAL izmeri na vsaki osi, ki ima vsaj eno neposredno upravljano kolo.
Primer: pri dvoosnih vozilih s protiblokirnim zavornim sistemom, ki deluje samo na zadnjo os (2), se izkoriščeni oprijem (ε) izračuna na naslednji način:
Ta izračun se naredi za vsako os, ki ima vsaj eno neposredno upravljano kolo.
|
|
1.3
|
Če je ε > 1,00, se meritve koeficientov oprijema ponovijo. Dopustna je razlika do 10 %.
|
|
1.4
|
Pri traktorjih, opremljenih s tremi osmi, se osi, ki so povezane s sestavnimi deli vzmetenja, zaradi česar se odzivajo na prenos teže pri zaviranju, ali s prenosom moči, lahko zanemarijo pri določanju vrednosti k za vozilo.
Dokler ni sklenjen dogovor o enotnem preskusnem postopku, je pri vozilih z več kot tremi osmi in pri vozilih za posebne namene nujen posvet s tehnično službo.
|
|
1.5
|
Pri traktorjih z medosno razdaljo, krajšo od 3,80 m, in s h/E > 0,25 ni treba določiti koeficienta oprijema za zadnjo os.
|
1.5.1
|
V tem primeru se izkoriščeni oprijem (ε) določi kot kvocient največjega zavornega razmerja z delujočim protiblokirnim zavornim sistemom (zAL) in koeficienta oprijema (kf), tj.

|
|
2.
Način merjenja za vlečena vozila
2.1 Splošno
|
2.1.1
|
Koeficient oprijema (k) se določi kot kvocient največjih zavornih sil brez blokiranja koles in ustrezne dinamične obremenitve na zavirani osi.
|
|
2.1.2
|
Zavore se uporabijo samo na eni osi preskušanega vlečenega vozila pri začetni hitrosti 50 km/h. Zavorne sile morajo biti tako porazdeljene med kolesa osi, da se doseže največji zavorni učinek. Protiblokirni zavorni sistem je v območju hitrosti med 40 km/h in 20 km/h izklopljen ali ne deluje.
|
|
2.1.3
|
Za določitev največjega zavornega razmerja skupine vozil (zCmax), pri čemer se zavira samo vlečeno vozilo, se opravi več preskusov ob stopnjevanju tlaka v vodih. Med vsakim preskusom se vzdržuje nespremenljiva vhodna sila in zavorno razmerje se določi glede na čas (t), potreben za zmanjšanje hitrosti s 40 km/h na 20 km/h, z uporabo naslednje formule:

|
2.1.3.1
|
Blokiranje koles lahko nastopi pri hitrosti pod 20 km/h.
|
|
2.1.3.2
|
Začne se z najmanjšo izmerjeno vrednostjo t, imenovano tmin, nato se izberejo tri vrednosti t med tmin in 1,05 tmin ter se izračuna njihova aritmetična srednja vrednost tm.
Nato se izračuna:

Če se izkaže, da zgoraj določenih treh vrednosti iz praktičnih razlogov ni mogoče doseči, se lahko uporabi najmanjši čas tmin.
|
|
|
2.1.4
|
Izkoriščeni oprijem (ε) se izračuna s formulo:

Vrednost k se določi skladno s točko 2.2.3 za vlečena vozila z vlečnim ojesom ali s točko 2.3.1 za vlečena vozila s togim vlečnim ojesom oziroma vlečena vozila s centralno osjo.
|
|
2.1.5
|
Če je ε > 1,00, se meritve koeficientov oprijema ponovijo. Dopustna je razlika do 10 %.
|
|
2.1.6
|
Največje zavorno razmerje (zRAL) se izmeri z maksimalnim uravnavanjem zavorne sile protiblokirnega zavornega sistema in pri nezaviranem traktorju, pri čemer temelji na povprečni vrednosti treh preskusov, kot je določeno v točki 2.1.3.
|
2.2 Vlečena vozila z vlečnim ojesom
|
2.2.1
|
Meritev vrednosti k (ko je protiblokirni zavorni sistem v območju hitrosti med 40 km/h in 20 km/h izklopljen ali ne deluje) se izvede za sprednje in zadnje osi.
Za eno sprednjo os i:


Za eno zadnjo os i:



|
|
2.2.2
|
Vrednosti kf in kr se zaokrožita na tri decimalna mesta.
|
|
2.2.3
|
Koeficient oprijema kR se določi sorazmerno z dinamičnimi obremenitvami osi.

|
|
2.2.4
|
Meritev vrednosti zRAL (z delujočim protiblokirnim zavornim sistemom)

zRAL se določi na površini z velikim koeficientom oprijema in za vozila s protiblokirnim zavornim sistemom kategorije A tudi na površini z majhnim koeficientom oprijema.
|
2.3 Vlečena vozila s togim vlečnim ojesom in vlečena vozila s centralno osjo
|
2.3.1
|
Meritev vrednosti k (ko je protiblokirni zavorni sistem v območju hitrosti med 40 km/h in 20 km/h izklopljen ali ne deluje) se izvede, ko so kolesa nameščena samo na eno os, z drugih osi pa se kolesa odstranijo.



|
|
2.3.2
|
Meritev vrednosti zRAL (z delujočim protiblokirnim zavornim sistemom) se izvede, ko so nameščena vsa kolesa.



zRAL se določi na površini z velikim koeficientom oprijema in za vozila s protiblokirnim zavornim sistemom kategorije A tudi na površini z majhnim koeficientom oprijema.
|
Dodatek 3
Učinek na površinah z različnim oprijemom
1.
Traktorji
▼M1
|
1.1
|
Predpisana stopnja zaviranja, omenjena v točki 5.3.5 te priloge, se izračuna glede na izmerjeni koeficient oprijema na dveh površinah, na katerih se izvaja preskus.
Ti dve površini morata izpolnjevati pogoje iz točke 5.3.4 te priloge.
|
▼B
|
1.2
|
Koeficient oprijema (kH in kL) površin z velikim in majhnim koeficientom oprijema se določi skladno z določbami točke 1.1 Priloge 2.
|
|
1.3
|
Zavorno razmerje (zMALS) za obremenjene traktorje je:

in

|
2.
Vlečena vozila
|
2.1
|
Zavorno razmerje, omenjeno v točki 6.3.2 te priloge, se izračuna glede na izmerjeni zavorni razmerji zRALH in zRALL na dveh površinah, na katerih se izvajajo preskusi z delujočim protiblokirnim zavornim sistemom. Ti dve površini morata izpolnjevati pogoje, predpisane v točki 6.3.2 te priloge.
|
|
2.2
|
Zavorno razmerje zRALS je:

in

Če je εΗ > 0,95, se uporablja εΗ = 0,95
|
Dodatek 4
Način izbire površine z majhnim koeficientom oprijema
|
1.
|
Podrobnosti o koeficientu oprijema izbrane površine, kot je določeno v točki 5.1.1.2 te priloge, se predložijo tehnični službi.
|
1.1
|
Ti podatki morajo vključevati krivuljo koeficienta oprijema v primerjavi z zdrsom (od 0-odstotnega do 100-odstotnega zdrsa) za hitrost približno 40 km/h.
Dokler ni sprejet enoten preskusni postopek za določanje krivulje oprijema za vozila z največjo maso nad 3,5 tone, se lahko uporablja krivulja za osebne avtomobile. Pri vozilih z največjo maso nad 3,5 tone se razmerje med kpeak in klock določi z uporabo vrednosti kpeak, kot je opredeljeno v Dodatku 2. Z dovoljenjem tehnične službe se lahko koeficient oprijema, opisan v tej točki, določi tudi drugače, če se dokaže enakovrednost vrednosti kpeak in klock.
|
1.1.1
|
Vrednost kpeak je največja vrednost krivulje, vrednost klock pa je vrednost pri 100-odstotnem zdrsu.
|
|
1.1.2
|
Razmerje R se določi kot kvocient vrednosti kpeak in klock.

|
|
1.1.3
|
Vrednost R se zaokroži na eno decimalno mesto.
|
|
1.1.4
|
Površina, ki se uporabi, mora imeti razmerje R med 1,0 in 2.0.
Dokler takšne preskusne površine niso povsod na voljo, je po dogovoru s tehnično službo sprejemljivo razmerje R do 2,5.
|
|
|
|
2.
|
Pred preskusi mora tehnična služba zagotoviti, da izbrana površina izpolnjuje navedene zahteve, zato jo je treba obvestiti o preskusni metodi za določitev vrednosti R, tipu vozila (traktor itd.), obremenitvah osi in pnevmatikah (preskusiti je treba različne obremenitve in različne pnevmatike ter rezultate predložiti tehnični službi, ki se odloči, ali so reprezentativni za vozilo v postopku homologacije).
|
2.1
|
Vrednost R se navede v poročilu o preskusu.
Umerjanje površine se izvaja vsaj enkrat letno z reprezentativnim vozilom in s tem se preverja nespremenljivost vrednosti R.
|
|
PRILOGA XII
Zahteve za sisteme EBS vozil s pnevmatskimi zavornimi sistemi ali vozil s podatkovno komunikacijo prek polov 6 in 7 priključka iz standarda ISO 7638:2003 in za vozila, opremljena s takšnimi sistemi EBS
1.
Opredelitve pojmov
V tej prilogi:
1.1 „od točke do točke“ pomeni topologijo komunikacijskega omrežja s samo dvema enotama. Vsaka enota ima vgrajen zaključni upor za komunikacijski vod;
1.2 „zavorni signal“ pomeni logični signal, ki opozori na aktiviranje zavore.
2.
Splošne zahteve
|
2.1
|
Električni krmilni vod mora biti skladen s standardoma ISO 11992-1 in 11992-2:2003, vključno s spremembami 1:2007, in mora biti tipa „od točke do točke“ ter uporabljati priključek s sedmimi poli v skladu s standardom ISO 7638-1 ali 7638-2:2003. Podatkovni kontakti priključka iz standarda ISO 7638 se morajo uporabljati za prenos informacij izključno za zavorne funkcije (vključno z ABS) in funkcije voznega mehanizma (krmiljenje, pnevmatike in vzmetenje), kot je določeno v standardu ISO 11992-2:2003, vključno s spremembami 1:2007. Zavorne funkcije imajo prednost ter se morajo ohraniti v običajnem stanju in stanju okvare. Prenos informacij o voznem mehanizmu ne sme zakasniti zavornih funkcij. Oskrba z energijo, ki jo zagotavlja priključek iz standarda ISO 7638:2003, se mora uporabljati izključno za zavorne funkcije in funkcije voznega mehanizma ter funkcijo, potrebno za prenos informacij v zvezi z vlečenim vozilom, ki se ne prenašajo prek električnega krmilnega voda. V vseh primerih veljajo določbe točke 5.2.1. Vse druge funkcije je treba oskrbovati z energijo iz drugih virov.
|
|
2.2
|
Podpora sporočil, opredeljenih v standardu ISO 11992-2:2003, vključno s spremembami 1:2007, je za traktor in vlečeno vozilo, kot je ustrezno, določena v Dodatku 1 k tej prilogi.
|
|
2.3
|
Funkcionalna združljivost traktorjev in vlečenih vozil, opremljenih z električnimi krmilnimi vodi, se oceni v času homologacije s preverjanjem, ali so izpolnjene ustrezne določbe standarda ISO 11992:2003, vključno z deloma 1 in 2 standarda ISO 11992-2:2003 ter njegovih sprememb 1:2007. V Dodatku 2 k tej prilogi je naveden primer preskusov, ki se lahko uporabijo za izvedbo te ocene.
|
|
2.4
|
Če je traktor opremljen z električnim krmilnim vodom in je električno povezan z vlečenim vozilom, ki je opremljeno z električnim krmilnim vodom, mora biti v traktorju zaznana trajajoča okvara (> 40 ms) v električnem krmilnem vodu, na katero mora biti voznik opozorjen z rumenim opozorilnim signalom iz točke 2.2.1.29.1.2 Priloge I, če so takšna vozila povezana z električnim krmilnim vodom.
|
3.
Posebne zahteve za povezave med traktorji in vlečenimi vozili za pnevmatske zavorne sisteme
|
3.1
|
►M1
Električni krmilni vod traktorja mora zagotoviti informacije o tem, ali lahko električni krmilni vod izpolni zahteve iz točke 2.2.1.16.3 Priloge I brez pomoči pnevmatskega krmilnega voda. ◄ Zagotoviti mora tudi informacije o tem, ali je opremljen z dvema krmilnima vodoma v skladu s točko 2.1.4.1.2 Priloge I ali samo z električnim krmilnim vodom v skladu s točko 2.1.4.1.3 Priloge I.
|
|
3.2
|
Traktor, opremljen v skladu s točko 2.1.4.1.3 Priloge I, mora prepoznati, da naprava za spajanje vlečenega vozila, opremljenega v skladu s točko 2.1.4.1.1 Priloge I, ni združljiva. Ko so takšna vozila električno povezana prek električnega krmilnega voda traktorja, mora voznika na to opozoriti rdeči optični opozorilni signal iz točke 2.2.1.29.1.1 Priloge I, ko pa se sistemu dovaja energija, se morajo zavore na traktorju samodejno aktivirati. To aktiviranje zavor mora zagotoviti vsaj predpisani učinek parkirne zavore, ki je določen v točki 3.1.3.1 oziroma 3.1.3.2 Priloge II.
|
|
3.3
|
V primeru traktorja, ki je opremljen z dvema krmilnima vodoma, kot je opisano v točki 2.1.4.1.2 Priloge I, in je električno povezan z vlečenim vozilom, ki je prav tako opremljeno z dvema krmilnima vodoma, morajo biti izpolnjeni vsi naslednji pogoji:
3.3.1 oba signala morata biti na vlečni glavi, pri čemer mora vlečeno vozilo uporabiti električni upravljalni signal, razen če se šteje, da je signal odpovedal. V tem primeru vlečeno vozilo samodejno preklopi na pnevmatski upravljalni vod;
3.3.2 vsako vozilo mora biti v skladu z ustreznimi določbami Dodatka 1 k Prilogi II glede električnih in pnevmatskih krmilnih vodov;
▼M1
3.3.3 če električni krmilni signal preseže ekvivalent 100 kPa za več kot 1 sekundo, mora vlečeno vozilo preveriti, ali je pnevmatski signal na voljo; če pnevmatskega signala ni, mora vlečeno vozilo voznika opozoriti z ločenim rumenim opozorilnim signalom iz točke 2.2.1.29.2 Priloge I.
▼B
|
|
3.4
|
►M1
Vlečeno vozilo je lahko opremljeno v skladu z opisom iz točke 2.1.4.1.3 Priloge I, če ga je mogoče upravljati samo skupaj s traktorjem z električnim krmilnim vodom, ki izpolnjuje zahteve iz točke 2.2.1.16.3 Priloge I. ◄ V vseh drugih primerih mora vlečeno vozilo, če je električno povezano, samodejno aktivirati zavore ali zagotoviti, da zavore ostanejo aktivirane. Voznika mora opozoriti ločen rumeni opozorilni signal iz točke 2.2.1.29.2 Priloge I.
|
|
3.5
|
Če delovanje parkirne zavore na traktorju pomeni tudi delovanje zavornega sistema na vlečenem vozilu, kot je dovoljeno v točki 2.1.2.3 Priloge I, morajo biti izpolnjene naslednje dodatne zahteve:
3.5.1 Če je traktor opremljen v skladu s točko 2.1.4.1.1 Priloge I, se mora z aktiviranjem parkirne zavore traktorja aktivirati zavorni sistem na vlečenem vozilu prek pnevmatskega krmilnega voda.
3.5.2 Če je traktor opremljen v skladu s točko 2.1.4.1.2 Priloge I, se mora z aktiviranjem parkirne zavore traktorja aktivirati zavorni sistem na vlečenem vozilu tako, kot je predpisano v točki 3.5.1. Poleg tega se lahko z aktiviranjem parkirne zavore aktivira tudi zavorni sistem na vlečenem vozilu prek električnega krmilnega voda.
3.5.3
►M1
Če je traktor opremljen v skladu s točko 2.1.4.1.3 Priloge I ali če izpolnjuje zahteve iz točke 2.2.1.16.3 Priloge I brez pomoči pnevmatskega krmilnega voda iz točke 2.1.4.1.2 Priloge I, se mora z aktiviranjem parkirne zavore traktorja aktivirati zavorni sistem na vlečenem vozilu prek električnega krmilnega voda. ◄ Če je električna energija za zavorno opremo traktorja izklopljena, se mora zaviranje vlečenega vozila izvesti z izpraznitvijo napajalnega voda (poleg tega lahko pnevmatski krmilni vod ostane pod tlakom); napajalni vod lahko ostane prazen samo do ponovne zagotovitve električne energije za zavorno opremo traktorja in sočasne ponovne zagotovitve zaviranja vlečenega vozila prek električnega krmilnega voda.
|
4.
Posebne dodatne zahteve za delovne zavorne sisteme z električnim prenosom upravljanja
4.1 Traktorji
|
4.1.1
|
Ko je parkirna zavora popuščena, mora biti delovni zavorni sistem sposoben ustvariti skupno statično zavorno silo, ki je vsaj enakovredna sili, ki jo zahteva predpisani preskus tipa 0, tudi če je stikalo za vžig/zagon izklopljeno in/ali ključ odstranjen. Traktorji, ki lahko vlečejo vozila kategorije R3b ali R4b, morajo zagotoviti popoln upravljalni signal za delovni zavorni sistem vlečenega vozila. Upoštevati je treba, da je v prenosu energije delovnega zavornega sistema na voljo zadostna energija.
|
|
4.1.2
|
Posamezna začasna okvara (< 40 ms) električnega prenosa upravljanja (npr. neuspešen prenos signala ali podatkovna napaka), razen oskrbe z energijo, ne sme znatno vplivati na zavorni učinek delovne zavore.
|
|
4.1.3
|
Na okvaro v električnem prenosu upravljanja, brez njegove zaloge energije, ki vpliva na delovanje in učinkovitost sistemov, obravnavanih v tej uredbi, mora voznika opozoriti rdeči ali rumeni opozorilni signal iz točke 2.2.1.29.1.1 oziroma 2.2.1.29.1.2 Priloge I, kot je ustrezno.
►M1
Ko predpisanega zavornega učinka delovne zavore ni več mogoče doseči (rdeči opozorilni signal), mora biti voznik opozorjen na okvare zaradi izgube električne povezave (npr. pretrganje, prekinitev) čim prej po njihovem nastanku, pri čemer se mora v skladu s točko 3.1.4 Priloge II z upravljanjem upravljalnega elementa delovne zavore doseči predpisani preostali zavorni učinek. ◄
Proizvajalec mora tehnični službi predložiti analizo možnih okvar prenosa upravljanja in njihovega vpliva. O teh informacijah se dogovorita tehnična služba in proizvajalec vozila.
Te zahteve ne pomenijo odstopanja od zahtev v zvezi s pomožnim zaviranjem.
|
|
4.1.4
|
Traktor, ki je električno povezan z vlečenim vozilom prek električnega upravljalnega voda, mora voznika jasno opozoriti, če vlečeno vozilo pošlje informacije o okvari, povezani s padcem zaloge energije v katerem koli delu delovnega zavornega sistema na vlečenem vozilu pod opozorilno raven, kot je določeno v točki 5.2.4. Podobno opozorilo mora biti zagotovljeno tudi, kadar trajajoča okvara (> 40 ms) v električnem prenosu upravljanja vlečenega vozila, brez njegove zaloge energije, prepreči doseganje predpisanega zavornega učinka delovne zavore vlečenega vozila, kot je določeno v točki 4.2.3. V ta namen se uporabi opozorilni signal iz točke 2.2.1.29.2.1 Priloge I.
|
|
4.1.5
|
V primeru okvare vira energije električnega prenosa upravljanja se po dvajsetih zaporednih polnih aktiviranjih upravljalnega elementa delovne zavore zagotovi polno območje upravljanja delovnega zavornega sistema, z začetkom pri nazivni vrednosti ravni energije. Med preskusom se upravljalni element za zaviranje polno aktivira za 20 sekund, po vsakem aktiviranju pa se popusti za 5 sekund. Upoštevati je treba, da je med zgornjim preskusom v prenosu energije na voljo zadostna energija, da se zagotovi polno aktiviranje delovnega zavornega sistema. Ta zahteva ne pomeni odstopanja od zahtev iz Priloge IV.
|
|
4.1.6
|
Ko napetost akumulatorja pade pod vrednost, ki jo določi proizvajalec in pri kateri ni več mogoče zagotoviti predpisanega učinka delovne zavore in/ali ki preprečuje vsaj dvema neodvisnima tokokrogoma delovne zavore doseganje predpisanega pomožnega ali preostalega zavornega učinka, se mora aktivirati opozorilni signal iz točke 2.2.1.29.1.1 Priloge I. Ko je opozorilni signal aktiviran, mora biti mogoče aktivirati upravljalni element delovne zavore in v primeru traktorja z največjo konstrukcijsko določeno hitrostjo nad 60 km/h doseči vsaj takšen učinek, kot je predpisan za preostalo in pomožno zaviranje, ali v primeru traktorja z največjo konstrukcijsko določeno hitrostjo, ki ne presega 60 km/h, takšen učinek, kot je predpisan za pomožno zaviranje. Upoštevati je treba, da je v prenosu energije delovnega zavornega sistema na voljo zadostna energija. Ta zahteva ne pomeni odstopanja od zahteve v zvezi s pomožnim zaviranjem.
|
|
4.1.7
|
Če se pomožna oprema oskrbuje z energijo iz iste zaloge kot električni prenos upravljanja, je treba zagotoviti, da je pri največ 80 % največje moči motorja oskrba z energijo zadostna, da izpolni predpisane vrednosti pojemka z zagotavljanjem oskrbe z energijo, s katero je mogoče preprečiti porabo te zaloge, kadar deluje vsa pomožna oprema, ali s samodejnim izklopom vnaprej izbranih delov pomožne opreme pri napetosti nad kritično ravnjo iz točke 4.1.6, tako da je nadaljnja poraba te zaloge preprečena. Skladnost je mogoče dokazati z izračunom ali praktičnim preskusom. Pri vozilih, ki lahko vlečejo vozilo kategorije R3b ali R4b, je treba upoštevati porabo energije vlečenega vozila z obremenitvijo 400 W. Ta točka ne velja za vozila, pri katerih je mogoče predpisane vrednosti pojemka doseči brez uporabe električne energije.
|
|
4.1.8
|
Če se pomožna oprema oskrbuje z energijo iz električnega prenosa upravljanja, morajo biti izpolnjene naslednje zahteve.
|
4.1.8.1
|
V primeru okvare vira energije med vožnjo mora biti v zbiralniku dovolj energije za aktiviranje zavor, ko se uporabi upravljalni element.
|
|
4.1.8.2
|
V primeru okvare vira energije, ko vozilo miruje in je aktivirana parkirna zavora, mora biti v zbiralniku dovolj energije za aktiviranje luči, tudi če so aktivirane zavore.
|
|
|
4.1.9
|
V primeru okvare električnega prenosa upravljanja delovnega zavornega sistema traktorja, opremljenega z električnim krmilnim vodom v skladu s točko 2.1.4.1.2 ali 2.1.4.1.3 Priloge I, mora biti še naprej zagotovljeno polno aktiviranje zavor vlečenega vozila.
|
|
4.1.10
|
►M1
V primeru okvare električnega prenosa upravljanja vlečenega vozila, električno povezanega samo prek električnega krmilnega voda v skladu s točko 2.1.4.1.3 Priloge I, mora biti zagotovljeno zaviranje vlečenega vozila v skladu s točko 2.2.1.17.2.1 Priloge I. ◄ To mora biti izpolnjeno vedno, kadar vlečeno vozilo zagotavlja signal za „zahtevo za zaviranje prek napajalnega voda“ prek dela električnega krmilnega voda za podatkovno komunikacijo, ali v primeru neprekinjene odsotnosti te podatkovne komunikacije. Ta točka se ne uporablja za traktorje, ki jih ni mogoče upravljati z vlečenimi vozili, povezanimi samo prek električnega upravljalnega voda, kot je opisano v točki 3.4.
|
4.2 Priklopniki
|
4.2.1
|
Posamezna začasna okvara (< 40 ms) električnega prenosa upravljanja (npr. neuspešen prenos signala ali podatkovna napaka), razen oskrbe z energijo, ne sme znatno vplivati na zavorni učinek delovne zavore.
|
|
4.2.2
|
V primeru okvare električnega prenosa upravljanja (npr. pretrganje, prekinitev) se mora ohraniti vsaj 30 % predpisanega učinka za delovni zavorni sistem zadevnega vlečenega vozila.
Dokler se ne sprejmejo enotni preskusni postopki, mora proizvajalec tehnični službi predložiti analizo možnih okvar prenosa upravljanja in vpliva teh okvar na delovanje. O teh informacijah se dogovorita tehnična služba in proizvajalec vozila.
▼M1
Za vlečena vozila, ki so v skladu s točko 2.1.4.1.3 Priloge I električno povezana samo prek električnega krmilnega voda in ki z učinkom, predpisanim v točki 3.2.3 Priloge II, izpolnjujejo zahteve iz točke 2.2.1.17.2.2 Priloge I, zadošča sklicevanje na določbe točke 4.1.10 te priloge, kadar zavornega učinka, enakega vsaj 30 odstotkom predpisanega učinka za delovni zavorni sistem vlečenega vozila, ni več mogoče zagotoviti, in sicer s signalom za „zahtevo za zaviranje prek napajalnega voda“ prek dela električnega krmilnega voda za podatkovno komunikacijo ali z neprekinjeno odsotnostjo te podatkovne komunikacije.
▼B
|
|
4.2.3
|
Okvara električnega prenosa upravljanja vlečenega vozila, ki vpliva na delovanje in učinkovitost sistemov iz te uredbe, in okvare oskrbe z energijo prek priključka iz standarda ISO 7638:2003 morajo biti vozniku prikazane z ločenim opozorilnim signalom iz točke 2.2.1.29.2 Priloge I prek pola 5 električnega priključka, ki ustreza standardu ISO 7638:2003. Poleg tega morajo vlečena vozila, ki so opremljena z električnim krmilnim vodom, prek katerega so električno povezana s traktorjem, zagotoviti informacije o okvari za aktiviranje opozorilnega signala iz točke 2.2.1.29.2.1 Priloge I prek dela električnega krmilnega voda za podatkovno komunikacijo, ko predpisanega učinka delovne zavore vlečenega vozila ni več mogoče zagotoviti.
V primeru kakršne koli okvare oskrbe z energijo prek priključka iz standarda ISO 7638:2003 pa zadostuje prikaz rumenega opozorilnega signala prek pola 5 električnega priključka, ki ustreza standardu ISO 7638:2003, pod pogojem, da je še vedno na voljo polna zavorna sila.
|
5.
Dodatne zahteve
5.1 Traktorji
5.1.1 Proizvajanje zavornega signala za osvetlitev zavornih svetilk
|
5.1.1.1
|
Ko voznik aktivira delovni zavorni sistem, se mora proizvesti signal za osvetlitev zavornih svetilk.
|
|
5.1.1.2
|
Zahteve za vozila, pri katerih se z elektronskim signaliziranjem upravlja začetno aktiviranje delovnega zavornega sistema in ki so opremljena s trajnostnim zavornim sistemom:
|
Pojemek s trajnostnim zavornim sistemom
|
|
≤ 1,3 m/s2
|
> 1,3 m/s2
|
|
lahko proizvede signal
|
mora proizvesti signal
|
|
|
5.1.1.3
|
Pri vozilih, opremljenih z zavornim sistemom, katerega specifikacija se razlikuje od specifikacije iz točke 5.1.1.2, lahko delovanje trajnostnega zavornega sistema proizvede signal ne glede na ustvarjen pojemek.
|
|
5.1.1.4
|
Signal ne sme biti proizveden, če pojemek povzroči naravni zavorni učinek samega motorja.
|
|
5.1.1.5
|
Pri aktiviranju delovnega zavornega sistema, ki ga sproži samodejno krmiljeno zaviranje, se mora proizvesti zgoraj omenjeni signal. Pri pojemku, ki je manjši od 0,7 m/s2, pa se signal lahko prekine.
V času homologacije skladnost s to zahtevo potrdi proizvajalec vozila.
|
|
5.1.1.6
|
Pri aktiviranju dela delovnega zavornega sistema, ki ga sproži selektivno zaviranje, ne sme biti proizveden zgoraj omenjeni signal.
Med selektivnim zaviranjem se lahko funkcija spremeni v samodejno krmiljeno zaviranje.
|
|
5.1.1.7
|
Pri vozilih, opremljenih z električnim krmilnim vodom, mora traktor proizvesti signal, ko prek električnega krmilnega voda od vlečenega vozila prejme sporočilo „osvetlitev zavornih svetilk“.
|
5.2 Vlečena vozila
|
5.2.1
|
Če se energija, ki jo dovaja priključek iz standarda ISO 7638:2003, uporablja za funkcije iz točke 2.1, mora zavorni sistem imeti prednost in biti zaščiten pred preobremenitvijo, ki ne izhaja iz zavornega sistema. Ta zaščita mora biti funkcija zavornega sistema.
|
|
5.2.2
|
V primeru okvare enega od krmilnih vodov, ki povezujejo dve vozili, opremljeni v skladu s točko 2.1.4.1.2 Priloge I, mora vlečeno vozilo uporabiti upravljalni vod, na katerega okvara ni vplivala, da se samodejno zagotovi zavorni učinek, ki je za vlečeno vozilo predpisan v točki 3.2.1 Priloge II.
|
|
5.2.3
|
Ko napajalna napetost v vlečenem vozilu pade pod vrednost, ki jo je navedel proizvajalec in pri kateri predpisanega učinka delovne zavore ni več mogoče zagotoviti, se mora prek pola 5 priključka iz standarda ISO 7638:2003 aktivirati ločeni rumeni opozorilni signal iz točke 2.2.1.29.2 Priloge I. Poleg tega morajo vlečena vozila, ki so opremljena z električnim krmilnim vodom, prek katerega so električno povezana s traktorjem, prek dela električnega krmilnega voda za podatkovno komunikacijo zagotoviti informacije o okvari za aktiviranje opozorilnega signala iz točke 2.2.1.29.2.1 Priloge I.
|
|
5.2.4
|
Ko shranjena energija v katerem koli delu delovnega zavornega sistema vlečenega vozila, ki je opremljeno z električnim krmilnim vodom, prek katerega je električno povezano s traktorjem, pade na vrednost, ki je določena v skladu s točko 5.2.4.1, mora biti voznik traktorja o tem obveščen z opozorilom. Opozorilo se zagotovi z aktiviranjem rdečega signala iz točke 2.2.1.29.2.1 Priloge I, pri čemer mora vlečeno vozilo prek dela električnega krmilnega voda za podatkovno komunikacijo zagotoviti informacije o okvari. Prek pola 5 električnega priključka v skladu s standardom ISO 7638:2003 se mora aktivirati tudi ločeni rumeni opozorilni signal iz točke 2.2.1.29.2 Priloge I, da se voznika obvesti o nizki ravni energije v vlečenem vozilu.
|
5.2.4.1
|
Nizka raven energije iz točke 5.2.4 mora biti takšna, da brez ponovnega polnjenja zbiralnika energije in ne glede na obremenjenost vlečenega vozila upravljalnega elementa delovne zavore po štirih polnih aktiviranjih ni mogoče uporabiti petič in pri tem doseči vsaj 50 odstotkov predpisanega učinka delovnega zavornega sistema zadevnega vlečenega vozila.
|
|
|
5.2.5
|
Aktiviranje delovnega zavornega sistema
|
5.2.5.1
|
Pri vlečenih vozilih, ki so opremljena z električnim krmilnim vodom, mora vlečeno vozilo prek električnega krmilnega voda poslati sporočilo „osvetlitev zavornih svetilk“, ko se zavorni sistem vlečenega vozila aktivira med „samodejno krmiljenim zaviranjem“, ki ga sproži vlečeno vozilo. Pri pojemku, ki je manjši od 0,7 m/s2, pa se signal lahko prekine.
V času homologacije skladnost s to zahtevo potrdi proizvajalec vozila.
|
|
5.2.5.2
|
Pri vlečenih vozilih, ki so opremljena z električnim krmilnim vodom, vlečeno vozilo prek električnega krmilnega voda ne pošlje sporočila „osvetlitev zavornih svetilk“ med selektivnim zaviranjem, ki ga sproži vlečeno vozilo.
Med selektivnim zaviranjem se lahko funkcija spremeni v samodejno krmiljeno zaviranje.
|
|
6.
Prekinitev samodejnega zaviranja
Pri vlečenih vozilih, ki so opremljena z električnim krmilnim vodom, prek katerega so električno povezana s traktorjem, se lahko samodejno zaviranje iz točke 2.2.1.17.2.2 Priloge I prekine, dokler je tlak v zbiralnikih stisnjenega zraka vlečenega vozila zadosten za zagotovitev zavornega učinka iz točke 3.2.3 Priloge II.
Dodatek 1
Združljivost traktorjev in vlečenih vozil v zvezi s podatkovno komunikacijo po standardu ISO 11992:2003
1. Splošno
|
1.1
|
Zahteve iz tega dodatka veljajo samo za traktorje in vlečena vozila, ki so opremljeni z električnim krmilnim vodom.
|
|
1.2
|
Priključek iz standarda ISO 7638:2003 zagotavlja energijo za zavorni sistem ali protiblokirni zavorni sistem vlečenega vozila. Pri vozilih, ki so opremljena z električnim krmilnim vodom, ta priključek prek polov 6 in 7 zagotavlja tudi vmesnik za podatkovno komunikacijo, kot je opisano v točki 2.1 te priloge.
|
|
1.3
|
V tem dodatku so določene zahteve, ki veljajo za traktorje in vlečena vozila v zvezi s podporo za sporočila, opredeljena v standardu ISO 11992-2:2003, vključno s spremembami 1:2007.
|
|
2.
|
Parametri, opredeljeni v standardu ISO 11992-2:2003, vključno s spremembami 1:2007, ki se prenašajo prek električnega krmilnega voda, so podprti na naslednji način:
2.1 Naslednje funkcije in z njimi povezana sporočila so funkcije in sporočila, ki so določena v tej uredbi in ki jih podpira traktor ali vlečeno vozilo, kot je ustrezno:
2.1.1 Sporočila, ki jih traktor pošlje vlečenemu vozilu:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
Sklic v tej uredbi
|
|
vrednost zahteve za delovno/pomožno zaviranje
|
EBS11,
zloga 3–4
|
Dodatek 1 k Prilogi II, točka 3.1.3.2
|
|
vrednost zahteve za zaviranje dveh električnih vodov
|
EBS12,
zlog 3, bita 1–2
|
Priloga XII, točka 3.1
|
|
pnevmatski upravljalni vod
|
EBS12,
zlog 3, bita 5–6
|
Priloga XII, točka 3.1
|
2.1.2 Sporočila, ki jih vlečeno vozilo pošlje traktorju:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
Sklic v tej uredbi
|
|
električno napajanje vozila zadostno/nezadostno
|
EBS22, zlog 2,
bita 1–2
|
Priloga XII, točka 5.2.3
|
|
zahteva za opozorilni signal
|
EBS22, zlog 2,
bita 3–4
|
Priloga XII, točke 4.2.3, 5.2.4 in 5.2.3
|
|
zahteva za zaviranje prek napajalnega voda
|
EBS22, zlog 4,
bita 3–4
|
Priloga XII, točka 4.2.2
|
|
zahteva za zavorne svetilke
|
EBS22, zlog 4,
bita 5–6
|
Priloga XII, točka 5.2.5.1
|
|
pnevmatsko napajanje vozila zadostno/nezadostno
|
EBS23, zlog 1,
bita 7–8
|
Priloga XII, točka 5.2.4
|
2.2 Ko vlečeno vozilo pošlje naslednje sporočilo, mora traktor opozoriti voznika:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
Potrebno je opozarjanje voznika
|
|
zahteva za opozorilni signal
|
EBS22, zlog 2,
bita 3–4
|
točka 2.2.1.29.2.1 Priloge I
|
2.3 Traktor ali vlečeno vozilo mora podpirati naslednja sporočila, opredeljena v standardu ISO 11992-2:2003, vključno s spremembami 1:2007:
2.3.1 Sporočila, ki jih traktor pošlje vlečenemu vozilu:
trenutno ni opredeljeno nobeno sporočilo.
2.3.2 Sporočila, ki jih vlečeno vozilo pošlje traktorju:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
|
delovna zavora vozila aktivna/pasivna
|
EBS22, zlog 1, bita 5–6
|
|
zaviranje, podprto prek električnega krmilnega voda
|
EBS22, zlog 4, bita 7–8
|
|
kazalo geometrijskih podatkov
|
EBS24, zlog 1
|
|
vsebina kazala geometrijskih podatkov
|
EBS24, zlog 2
|
2.4 Traktor ali vlečeno vozilo mora podpirati naslednja sporočila, če je v vozilo vgrajena funkcija, povezana z navedenim parametrom:
2.4.1 Sporočila, ki jih traktor pošlje vlečenemu vozilu:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
|
tip vozila
|
EBS11, zlog 2, bita 3–4
|
|
ENS (elektronski nadzor stabilnosti) aktiven/pasiven
|
EBS11, zlog 2, bita 5–6
|
|
vrednost zahtev za zaviranje za sprednjo ali levo stran vozila
|
EBS11, zlog 7
|
|
vrednost zahtev za zaviranje za zadnjo ali desno stran vozila
|
EBS11, zlog 8
|
|
varnostni sistem proti prevrnitvi omogočen/onemogočen
|
EBS12, zlog 1, bita 3–4
|
|
sistem krmiljenja nihanja omogočen/onemogočen
|
EBS12, zlog 1, bita 5–6
|
|
omogoči/onemogoči varnostni sistem proti prevrnitvi vlečenega vozila
|
EBS12, zlog 2, bita 1–2
|
|
omogoči/onemogoči sistem krmiljenja nihanja vlečenega vozila
|
EBS12, zlog 2, bita 3–4
|
|
zahteva za pomoč pri vleki
|
RGE11, zlog 1, bita 7–8
|
|
dvižna os 1 – zahteva za položaj
|
RGE11, zlog 2, bita 1–2
|
|
dvižna os 2 – zahteva za položaj
|
RGE11, zlog 2, bita 3–4
|
|
zahteva za blokiranje krmiljene osi
|
RGE11, zlog 2, bita 5–6
|
|
sekunde
|
TD11, zlog 1
|
|
minute
|
TD11, zlog 2
|
|
ure
|
TD11, zlog 3
|
|
meseci
|
TD11, zlog 4
|
|
dan
|
TD11, zlog 5
|
|
leto
|
TD11, zlog 6
|
|
lokalna minutna izravnava
|
TD11, zlog 7
|
|
lokalna urna izravnava
|
TD11, zlog 8
|
2.4.2 Sporočila, ki jih vlečeno vozilo pošlje traktorju:
|
Funkcija/parameter
|
Sklic na
ISO 11992-2:2003
|
|
podpora stranske ali osne porazdelitve zavorne sile
|
EBS21, zlog 2, bita 3–4
|
|
hitrost vozila na kolesih
|
EBS21, bita 3–4
|
|
bočni pospešek
|
EBS21, zlog 8
|
|
ABS vozila aktiven/pasiven
|
EBS22, zlog 1, bita 1–2
|
|
zahteva za oranžni opozorilni signal
|
EBS22, zlog 2, bita 5–6
|
|
tip vozila
|
EBS22, zlog 3, bita 5–6
|
|
pomoč pri približevanju tovorni klančini
|
EBS22, zlog 4, bita 1–2
|
|
vsote osne obremenitve
|
EBS22, bita 5–6
|
|
tlak v pnevmatikah zadosten/nezadosten
|
EBS23, zlog 1, bita 1–2
|
|
zavorna obloga zadostna/nezadostna
|
EBS23, zlog 1, bita 3–4
|
|
stanje temperature zavor
|
EBS23, zlog 1, bita 5–6
|
|
identifikacija pnevmatike/kolesa (tlak)
|
EBS23, zlog 2
|
|
identifikacija pnevmatike/kolesa (obloga)
|
EBS23, zlog 3
|
|
identifikacija pnevmatike/kolesa (temperatura)
|
EBS23, zlog 4
|
|
tlak v pnevmatikah (dejanski tlak v pnevmatikah)
|
EBS23, zlog 5
|
|
zavorna obloga
|
EBS23, zlog 6
|
|
temperatura zavor
|
EBS23, zlog 7
|
|
tlak v zavornem valju, prva os, levo kolo
|
EBS25, zlog 1
|
|
tlak v zavornem valju, prva os, desno kolo
|
EBS25, zlog 2
|
|
tlak v zavornem valju, druga os, levo kolo
|
EBS25, zlog 3
|
|
tlak v zavornem valju, druga os, desno kolo
|
EBS25, zlog 4
|
|
tlak v zavornem valju, tretja os, levo kolo
|
EBS25, zlog 5
|
|
tlak v zavornem valju, tretja os, desno kolo
|
EBS25, zlog 6
|
|
varnostni sistem proti prevrnitvi omogočen/onemogočen
|
EBS25, zlog 7, bita 1–2
|
|
sistem krmiljenja nihanja omogočen/onemogočen
|
EBS25, zlog 7, bita 3–4
|
|
pomoč pri vleki
|
RGE21, zlog 1, bita 5–6
|
|
položaj dvižne osi 1
|
RGE21, zlog 2, bita 1–2
|
|
položaj dvižne osi 2
|
RGE21, zlog 2, bita 3–4
|
|
blokiranje krmiljene osi
|
RGE21, zlog 2, bita 5–6
|
|
identifikacija pnevmatike/kolesa
|
RGE23, zlog 1
|
|
temperatura pnevmatike
|
RGE23, zloga 2–3
|
|
zaznavanje puščanja zraka (pnevmatika)
|
RGE23, zloga 4–5
|
|
zaznavanje praga tlaka v pnevmatikah
|
RGE23, zlog 6, bita 1–3
|
2.5 Podpora vseh drugih sporočil, opredeljenih v standardu ISO 11992-2:2003, vključno s spremembami 1:2007, za traktor in vlečeno vozilo ni obvezna.
|
Dodatek 2
Preskusni postopek za oceno funkcionalne združljivosti vozil, opremljenih z električnimi krmilnimi vodi
1.
Splošno
|
1.1
|
V tem dodatku je določen postopek, ki ga tehnična služba lahko uporabi za preverjanje traktorjev in vlečenih vozil, opremljenih z električnim krmilnim vodom, v zvezi z zahtevami glede delovanja in učinka iz točke 2.2 Priloge XII.
|
|
1.2
|
Sklicevanja na standard ISO 7638 v tem dodatku veljajo za standard ISO 7638-1:2003 za 24-voltne sisteme in standard ISO 7638-2:2003 za 12-voltne sisteme.
|
2.
Traktorji
2.1 Simulator vlečenega vozila iz standarda ISO 11992:2003
Simulator mora:
2.1.1 imeti priključek, ki izpolnjuje zahteve iz standarda ISO 7638:2003 (s sedmimi poli), za priključitev na preskušano vozilo. Pola 6 in 7 priključka se uporabljata za pošiljanje in prejemanje sporočil v skladu s standardom ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007;
2.1.2 biti sposoben prejeti vsa sporočila, ki jih pošlje motorno vozilo v postopku homologacije, in poslati vsa sporočila vlečenega vozila, ki so opredeljena v standardu ISO 11992-2:2003 in njegovih spremembah 1:2007;
2.1.3 omogočati neposredno ali posredno odčitavanje sporočil, pri čemer so parametri v podatkovnem polju prikazani v pravilnem vrstnem redu glede na čas, in
2.1.4 vključevati napravo za merjenje odzivnega časa vlečne glave v skladu s točko 2.6 Priloge III.
2.2 Postopek preverjanja
|
2.2.1
|
Potrditi je treba, da opisni list proizvajalca/dobavitelja dokazuje skladnost z določbami standarda ISO 11992:2003 v zvezi s fizičnim slojem, slojem podatkovne povezave in aplikacijskim slojem.
|
|
2.2.2
|
Ko je simulator priključen na motorno vozilo prek vmesnika iz standarda ISO 7638:2003 in se pošiljajo vsa sporočila vlečenega vozila, pomembna za vmesnik, je treba preveriti naslednje:
|
2.2.2.1
|
Signaliziranje upravljalnega voda:
2.2.2.1.1 parametre, opredeljene v zlogu 3 EBS 12 iz standarda ISO 11992-2:2003 in njegovih sprememb 1:2007, je treba preveriti glede na specifikacijo vozila na naslednji način:
|
Signaliziranje upravljalnega voda
|
EBS 12, zlog 3
|
|
bita 1–2
|
bita 5–6
|
|
zahteva za delovno zaviranje, ki jo ustvari električni vod
|
00b
|
|
|
zahteva za delovno zaviranje, ki jo ustvarita dva električna voda
|
01b
|
|
|
vozilo ni opremljeno s pnevmatskim krmilnim vodom (1)
|
|
00b
|
|
vozilo je opremljeno s pnevmatskim krmilnim vodom
|
|
01b
|
|
(1) Ta specifikacija vozila je prepovedana v skladu s točko 2.1.4.1.3. Priloge I.
|
|
|
2.2.2.2
|
Zahteva za delovno/pomožno zaviranje:
2.2.2.2.1 parametre, opredeljene v EBS 11 iz standarda ISO 11992-2:2003 in njegovih sprememb 1:2007, je treba preveriti na naslednji način:
|
Preskusni pogoj
|
Zlog
|
Vrednost signala električnega upravljalnega voda
|
|
popuščena stopalka delovne zavore in upravljalni element pomožne zavore
|
3–4
|
0
|
|
polno aktivirana stopalka delovne zavore
|
3–4
|
33 280 d do 43 520 d (650 do 850 kPa)
|
|
polna uporaba pomožne zavore (1)
|
3–4
|
33 280 d do 43 520 d (650 do 850 kPa)
|
|
(1) Dodatna oprema na traktorjih z električnimi in pnevmatskimi krmilnimi vodi, kadar pnevmatski krmilni vod izpolnjuje ustrezne zahteve za pomožno zaviranje.
|
|
|
2.2.2.3
|
Opozarjanje na okvaro:
2.2.2.3.1 simulirati je treba trajno okvaro komunikacijskega voda prek pola 6 priključka iz standarda ISO 7638 in preveriti, ali se prikazuje rumeni opozorilni signal iz točke 2.2.1.29.1.2 Priloge I;
2.2.2.3.2 simulirati je treba trajno okvaro komunikacijskega voda prek pola 7 priključka iz standarda ISO 7638 in preveriti, ali se prikazuje rumeni opozorilni signal iz točke 2.2.1.29.1.2 Priloge I;
2.2.2.3.3 simulirati je treba sporočilo EBS 22, zlog 2 z bitoma 3 – 4, nastavljeno na 01b, in preveriti, ali se prikazuje opozorilni signal iz točke 2.2.1.29.1.1 Priloge I.
|
|
2.2.2.4
|
Zahteva za zaviranje prek napajalnega voda:
za vozila na motorni pogon, ki se lahko upravljajo z vlečenimi vozili, priključenimi samo prek električnega upravljalnega voda:
priključen je samo električni upravljalni vod.
Simulirati je treba sporočilo EBS 22, zlog 4 z bitoma 3 – 4, nastavljeno na 01b, in preveriti, ali pri polnem aktiviranju delovne zavore, pomožne zavore ali parkirne zavore tlak v napajalnem vodu v naslednjih dveh sekundah pade na 150 kPa.
Simulirati je treba trajno odsotnost podatkovne povezave in preveriti, ali pri polnem aktiviranju delovne zavore, pomožne zavore ali parkirne zavore tlak v napajalnem vodu v naslednjih dveh sekundah pade na 150 kPa.
|
|
2.2.2.5
|
Odzivni čas:
2.2.2.5.1 Preveriti je treba, ali so brez napak izpolnjene zahteve glede odzivnosti krmilnega voda iz točke 2.6 Priloge III.
|
|
2.2.2.6
|
Osvetlitev zavornih svetilk Simulirati je treba sporočilo EBS 22, zlog 4 z bitoma 5–6, nastavljeno na 00, da se preveri, ali zavorne svetilke ne svetijo.
Simulirati je treba sporočilo EBS 22, zlog 4 z bitoma 5–6, nastavljeno na 01, da se preveri, ali zavorne svetilke svetijo.
|
|
|
2.2.3
|
Dodatna preverjanja
|
2.2.3.1
|
Po presoji tehnične službe se lahko postopki preverjanja, določeni v točkah 2.2.1 in 2.2.2, ponovijo za nezavorne funkcije, pomembne za vmesnik v različnih stanjih ali izklopljen vmesnik.
|
|
2.2.3.2
|
V točki 2.4.1 Dodatka 1 so opredeljena dodatna sporočila, ki jih mora v posebnih okoliščinah podpirati traktor. Izvedejo se lahko dodatna preverjanja, da se preveri stanje podprtih sporočil in zagotovi, da so izpolnjene zahteve iz točke 2.3.
|
|
3.
Vlečena vozila
3.1 Simulator traktorja iz standarda ISO 11992:2003
Simulator mora:
3.1.1 imeti priključek, ki izpolnjuje zahteve iz standarda ISO 7638:2003 (s sedmimi poli), za priključitev na preskušano vozilo. Pola 6 in 7 priključka se uporabljata za pošiljanje in prejemanje sporočil v skladu s standardom ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007;
3.1.2 opozarjati na okvaro in oskrbovati vlečeno vozilo z električno energijo;
3.1.3 biti sposoben prejeti vsa sporočila, ki jih pošlje vlečeno vozilo v postopku homologacije, in poslati vsa sporočila motornega vozila, ki so opredeljena v standardu ISO 11992-2:2003 in njegovih spremembah 1:2007;
3.1.4 omogočati neposredno ali posredno odčitavanje sporočil, pri čemer so parametri v podatkovnem polju prikazani v pravilnem vrstnem redu glede na čas, in
3.1.5 vključevati napravo za merjenje odzivnega časa zavornega sistema v skladu s točko 4.5.2 Priloge III.
3.2 Postopek preverjanja
|
3.2.1
|
Potrditi je treba, da opisni list proizvajalca ali dobavitelja dokazuje skladnost z določbami standarda ISO 11992:2003, vključno s standardom ISO 11992-2:2003 in njegovimi spremembami 1:2007, v zvezi s fizičnim slojem, slojem podatkovne povezave in aplikacijskim slojem.
|
|
3.2.2
|
Ko je simulator priključen na vlečeno vozilo prek vmesnika iz standarda ISO 7638:2003 in se pošiljajo vsa sporočila traktorja, pomembna za vmesnik, je treba preveriti naslednje:
|
3.2.2.1
|
Delovanje sistema delovne zavore:
|
3.2.2.1.1
|
Odziv vlečenega vozila na parametre, opredeljene v EBS 11 iz standarda ISO 11992-2:2003 in njegovih sprememb 1:2007, je treba preveriti na naslednji način:
tlak v napajalnem vodu na začetku vsakega preskusa mora biti > 700 kPa, vozilo pa mora biti obremenjeno (za to preverjanje je lahko obremenjenost simulirana).
|
3.2.2.1.1.1
|
Za vlečena vozila, opremljena s pnevmatskim in električnim krmilnim vodom:
priključena morata biti oba upravljalna voda;
oba krmilna voda morata hkrati poslati signale;
simulator mora poslati zlog 3, bita 5–6, sporočila;
sporočilo EBS 12, nastavljeno na 01b, sporoči vlečenemu vozilu, da je treba priključiti pnevmatski upravljalni vod.
Parametri, ki jih je treba preveriti:
|
Sporočilo, ki ga pošlje simulator
|
Tlak v zavornih valjih
|
|
Zlog
|
Digitalna vrednost
|
|
3–4
|
0
|
0 kPa
|
|
3–4
|
33 280 d
(650 kPa)
|
kot je opredeljeno v izračunu proizvajalca vozila za zavore
|
|
|
3.2.2.1.1.2
|
Vlečena vozila, opremljena s pnevmatskim in električnim krmilnim vodom ali samo z električnim krmilnim vodom:
Priključen mora biti samo električni krmilni vod.
Simulator mora poslati naslednja sporočila:
zlog 3, bita 5–6, EBS 12, nastavljen na 00b, da se sporoči vlečenemu vozilu, da pnevmatski krmilni vod ni na voljo, in zlog 3, bita 1–2, EBS 12, nastavljen na 01b, da se sporoči vlečenemu vozilu, da signal električnega krmilnega voda ustvarjata dva električna voda.
Parametri, ki jih je treba preveriti:
|
Sporočilo, ki ga pošlje simulator
|
Tlak v zavornih valjih
|
|
Zlog
|
Digitalna vrednost
|
|
3–4
|
0
|
0 kPa
|
|
3–4
|
33 280 d
(650 kPa)
|
kot je opredeljeno v izračunu proizvajalca vozila za zavore
|
|
|
|
3.2.2.1.2
|
Za vlečena vozila, opremljena samo z električnim krmilnim vodom, je treba odziv na sporočila, opredeljena v EBS 12 iz standarda ISO 11992-2:2003 in njegovih sprememb 1:2007, preveriti na naslednji način:
Tlak v pnevmatskem napajalnem vodu mora biti na začetku vsakega preskusa ≥ 700 kPa.
Električni krmilni vod mora biti priključen na simulator.
Simulator mora poslati naslednja sporočila:
Zlog 3, bita 5–6, EBS 12, nastavljen na 01b, da se sporoči vlečenemu vozilu, da je pnevmatski krmilni vod na voljo.
Zloga 3–4 EBS 11 morata biti nastavljena na 0 (ni zahteve za delovno zaviranje).
Preveriti je treba odziv na naslednja sporočila:
|
EBS 12, zlog 3, bita 1–2
|
Tlak v zavornih valjih ali odziv vlečenega vozila
|
|
01b
|
0 kPa (popuščena delovna zavora)
|
|
00b
|
vlečeno vozilo se samodejno zavira, da se dokaže nezdružljivost kombinacije; signal mora biti poslan tudi prek pola 5 priključka v skladu s standardom ISO 7638:2003 (rumeno opozorilo)
|
|
|
3.2.2.1.3
|
Pri vlečenih vozilih, ki so priključena samo z električnim krmilnim vodom, je treba preveriti odziv vlečenega vozila na okvaro njegovega električnega prenosa upravljanja, zaradi katere se zavorni učinek zmanjša na vsaj 30 % predpisane vrednosti, pri čemer je treba upoštevati naslednji postopek:
Tlak v pnevmatskem napajalnem vodu mora biti na začetku vsakega preskusa ≥ 700 kPa.
Električni krmilni vod mora biti priključen na simulator.
Zlog 3, bita 5–6, EBS 12, nastavljen na 00b, da se sporoči vlečenemu vozilu, da pnevmatski krmilni vod ni na voljo.
Zlog 3, bita 1–2, EBS 12, nastavljen na 01b, da se sporoči vlečenemu vozilu, da signal električnega krmilnega voda ustvarjata dva neodvisna voda.
Preveriti je treba naslednje:
|
Preskusni pogoj
|
Odziv zavornega sistema
|
|
brez napak zavornega sistema vlečenega vozila
|
preveriti je treba, ali zavorni sistem komunicira s simulatorjem in ali je zlog 4, bita 3–4, EBS 22 nastavljen na 00b
|
|
povzročiti je treba okvaro električnega prenosa upravljanja v zavornem sistemu vlečenega vozila, ki preprečuje ohranjanje vsaj 30 % predpisanega zavornega učinka
|
preveriti je treba, ali je zlog 4, bita 3–4, EBS 22 nastavljen na 01b
ali
podatkovna komunikacija s simulatorjem je prekinjena
|
|
|
|
3.2.2.2
|
Opozarjanje na okvaro
|
3.2.2.2.1
|
Preveriti je treba, ali je ustrezno opozorilno sporočilo ali signal prenesen pod naslednjimi pogoji:
3.2.2.2.1.1 Če trajna okvara električnega prenosa upravljanja v zavornem sistemu vlečenega vozila preprečuje, da bi bil dosežen učinek delovne zavore, je treba takšno okvaro simulirati in preveriti, ali je zlog 2, bita 3–4, EBS 22, ki ga pošlje vlečeno vozilo, nastavljen na 01b. Signal mora biti poslan tudi prek pola 5 priključka v skladu s standardom ISO 7638 (rumeno opozorilo).
3.2.2.2.1.2 Zmanjšati je treba napetost na polih 1 in 2 priključka v skladu s standardom ISO 7638 pod vrednost, ki jo določi proizvajalec, zaradi česar ni mogoče doseči učinka delovnega zavornega sistema, in preveriti, ali je zlog 2, bita 3–4, EBS 22, ki ga pošlje vlečeno vozilo, nastavljen na 01b. Signal mora biti poslan tudi prek pola 5 priključka v skladu s standardom ISO 7638 (rumeno opozorilo).
3.2.2.2.1.3 Preveriti je treba skladnost z določbami točke 5.2.4 te priloge tako, da se izolira napajalni vod. Zmanjšati je treba tlak v sistemu vlečenega vozila za shranjevanje tlaka na vrednost, ki jo določi proizvajalec. Preveriti je treba, ali je zlog 2, bita 3–4, EBS 22, ki ga pošlje vlečeno vozilo, nastavljen na 01b, in ali je zlog 1, bita 7–8, EBS 23 nastavljen na 00. Signal mora biti poslan tudi prek pola 5 priključka v skladu s standardom ISO 7638 (rumeno opozorilo).
3.2.2.2.1.4 Ko je električni del zavorne opreme prvič priklopljen na električno energijo, je treba preveriti, ali je zlog 2, bita 3–4, EBS 22, ki ga pošlje vlečeno vozilo, nastavljen na 01b.
►M1
Potem ko zavorni sistem preveri, da ni okvar, zaradi katerih bi bila potrebna identifikacija z rdečim opozorilnim signalom, se sporočilo iz te točke nastavi na 00b. ◄
|
|
|
3.2.2.3
|
Preverjanje odzivnega časa
|
3.2.2.3.1
|
Preveriti je treba, ali so brez napak izpolnjene zahteve glede odzivnega časa zavornega sistema iz točke 4.5.2 Priloge III.
|
|
|
3.2.2.4
|
Samodejno krmiljeno zaviranje Če ima vlečeno vozilo funkcijo, katere delovanje povzroči samodejno krmiljeno zaviranje, je treba preveriti naslednje:
Če se zaviranje ne krmili samodejno, je treba preveriti, ali je sporočilo EBS 22, zlog 4, bita 5–6 nastavljeno na 00.
Simulirati je treba samodejno krmiljeno zaviranje in ko je pojemek ≥ 0,7 m/s2, je treba preveriti, ali je sporočilo EBS 22, zlog 4, bita 5–6 nastavljeno na 01.
|
|
3.2.2.5
|
Funkcija stabilnosti vozila Če je vlečeno vozilo opremljeno s funkcijo stabilnosti vozila, je treba preveriti naslednje:
Ko je funkcija stabilnosti vozila neaktivna, je treba preveriti, ali je sporočilo EBS 21, zlog 2, bita 1–2 nastavljeno na 00.
|
|
3.2.2.6
|
Podpora električnega upravljalnega voda Če zavorni sistem vlečenega vozila ne podpira zaviranja prek električnega upravljalnega voda, je treba preveriti, ali je sporočilo EBS 22, zlog 4, bita 7–8 nastavljeno na 00.
Če zavorni sistem vlečenega vozila podpira električni upravljalni vod, je treba preveriti, ali je sporočilo EBS 22, zlog 4, bita 7–8 nastavljeno na 01.
|
|
|
3.2.3
|
Dodatna preverjanja
|
3.2.3.1
|
Po presoji tehnične službe se lahko postopki preverjanja, določeni v točkah 3.2.1 in 3.2.2, ponovijo za sporočila, ki niso povezana z zaviranjem in ki so pomembna za vmesnik v različnih stanjih ali izklopljen vmesnik.
Kadar se ponovijo meritve odzivnega časa zavornega sistema, so lahko zaradi odziva pnevmatik vozila zabeležene različne vrednosti. V vseh primerih morajo biti izpolnjene predpisane zahteve glede odzivnega časa.
|
|
3.2.3.2
|
V točki 2.4.2 Dodatka 1 so opredeljena dodatna sporočila, ki jih mora v posebnih okoliščinah podpirati vlečeno vozilo. Izvedejo se lahko dodatna preverjanja, da se preveri stanje podprtih sporočil in zagotovi, da so izpolnjene zahteve iz točke 2.3 te priloge.
|
|
PRILOGA XIII
Zahteve za enovodne hidravlične povezave in vozila, opremljena z njimi
1.
Splošno
|
1.1
|
▼M2
Enovodna hidravlična povezava se lahko vgradi v traktor, ki je opremljen z eno od naslednjih povezav:
(a) katera koli vrsta povezave iz točke 2.1.4 Priloge I;
(b) katera koli vrsta povezave iz točk 2.1.5.1.1, 2.1.5.1.2 in 2.1.5.1.3 Priloge I. V tem primeru je lahko moški priključek enovodne hidravlične povezave moški priključek iz točke 2.1.5.1.1 Priloge I, da se prepreči podvajanje priključkov, pod pogojem, da so tlaki, ki nastajajo na tem priključku, v skladu s točkami 1.1.1, 1.1.2 in 1.1.3.
▼M2
1.1.1 V primeru, da sta krmilni in dodatni vod vlečenega vozila povezana, mora biti ustvarjeni tlak pm v skladu z diagramom 2 iz Dodatka 1 k Prilogi II.
1.1.2 V primeru, da je priključeno vlečeno vozilo z enovodno hidravlično povezavo, mora biti ustvarjeni tlak pm v skladu s točko 2 ali 3 te priloge.
1.1.3 Zaznavanje priključenih vodov iz točk 1.1.1 in 1.1.2 mora biti avtomatsko.
|
▼M1 —————
▼B
|
1.3
|
Delovni zavorni sistem traktorja mora biti opremljen z napravo, ki je zasnovana tako, da je v primeru okvare zavornega sistema vlečenega vozila ali prekinitve krmilnega voda med traktorjem in vlečenim vozilom še vedno mogoče zavreti traktor tako učinkovito, kot je predpisano za pomožni zavorni sistem v tej uredbi.
|
2.
Enovodne hidravlične povezave med traktorji in vlečenimi vozili, ki so opremljena s hidravličnimi zavornimi sistemi, morajo izpolnjevati naslednje zahteve:
|
2.1
|
Tip povezave: hidravlični krmilni vod z moškim priključkom na traktorju in ženskim priključkom na vlečenem vozilu. Priključki morajo biti skladni s standardom ISO 5676:1983.
|
|
2.2
|
Pri delujočem motorju in polno aktiviranem upravljalnem elementu delovnega zavornega sistema traktorja se mora v krmilnem vodu ustvariti tlak med 10 000 kPa in 15 000 kPa.
|
|
2.3
|
Ko motor deluje in ni aktiviran noben upravljalni element zavor na traktorju (vožnja ali stanje pripravljenosti), se mora do vlečne glave krmilnega voda dovajati tlak 0+ 200 kPa.
|
|
2.4
|
Zahteve glede odzivnega časa iz Priloge III ne veljajo za ta tip povezave.
|
|
2.5
|
Zahteve glede združljivosti v skladu z Dodatkom 1 k Prilogi II ne veljajo za ta tip povezave.
|
▼M1
3.
Alternativne zahteve
Kot alternativa zahtevam iz oddelkov 1 in 2 mora enovodna hidravlična povezava, vgrajena v traktorje, izpolnjevati vse zahteve iz tega oddelka ter določbe točke 2.1.
▼B
|
3.1
|
Hidravlični tokokrog mora biti opremljen z razbremenilnim ventilom, ki preprečuje dvig hidravličnega tlaka nad 15 000 kPa.
|
|
3.2
|
Če ni aktiviran noben upravljalni element zavor (vključno s parkirno zavoro) na traktorju, mora pri kateri koli vrtilni frekvenci motorja med nizkim prostim tekom in nazivno vrtilno frekvenco biti tlak na vlečni glavi med 1 000 in 1 500 kPa.
|
|
3.3
|
Pri postopnem aktiviranju delovnih zavor traktorja se mora tlak na vlečni glavi postopoma večati, tako da doseže največjo navedeno vrednost med 12 000 in 14 000 kPa. Zahteva mora biti izpolnjena pri kateri koli vrtilni frekvenci motorja, kot je opisano v točki 3.2.
|
|
3.4
|
Dovoljeno razmerje med zavornim razmerjem TM/FM in tlakom na vlečni glavi pm mora biti pod črto AAA na sliki 1. Zahteva mora biti izpolnjena pri neobremenjenem vozilu.
|
|
3.5
|
Odzivni čas pri vlečni glavi, izmerjen s priključitvijo simulatorja vlečenega vozila (kot je opisano v točki 3.10) na traktor, ne sme biti daljši od 0,6 sekunde. Odzivni čas se izmeri pri vlečni glavi. Meriti se začne v trenutku aktiviranja stopalke, konča pa, ko tlak doseže vrednost 7 500 kPa. Med preskusom je vrtilna frekvenca motorja nastavljena na 2/3 nazivne vrtilne frekvence. Temperatura okolice in vozila mora biti stabilizirani med 10 °C in 30 °C. Čas aktiviranja stopalke, potreben, da se doseže tlak 10 000 kPa na vlečni glavi, ne sme biti krajši od 0,2 sekunde.
|
|
3.6
|
V primeru okvare dela zavornega sistema vlečenega vozila, ki je na strani traktorja, se mora v 1 sekundi izvesti padec tlaka na 0 kPa (merjeno na vlečni glavi), da se aktivirajo zavore vlečenega vozila. Ista določba velja v primeru izklopa ali nizke učinkovitosti vira energije.
|
|
3.7
|
V primeru okvare delovnih zavor traktorja mora biti upravljavec zmožen zmanjšati tlak na vlečni glavi na 0 kPa. Ta zahteva je lahko izpolnjena s pomožnim ročnim upravljalnim elementom.
|
|
3.8
|
Traktor mora biti opremljen z opozorilnim signalom iz točke 2.2.1.29.1.1 Priloge I; aktivirati se mora, če tlak v zavornem sistemu vlečenega vozila pade pod 1 000 (+ 0 – 200) kPa.
|
▼M1
|
3.9
|
Zavorni ventil in vir energije morata biti označena v skladu z zahtevami iz člena 24 Delegirane uredbe (EU) 2015/208.
|
▼B
|
3.10
|
Simulator vlečenega vozila: Naprava, ki simulira zavorni sistem vlečenega vozila, mora vključevati hidravlični tokokrog, opremljen z eno žensko spojko v skladu s standardom ISO 5676-1983 in dvema enakima napravama za shranjevanje hidravlične energije, ki sta opremljeni z vzmetnimi elementi in ki izpolnjujeta zahteve, prikazane na sliki 2. Simulator mora biti izdelan v skladu z določbami, prikazanimi na sliki 3.
Slika 1
Odvisnost med zavornim razmerjem TM/FM in tlakom na vlečni glavi pm
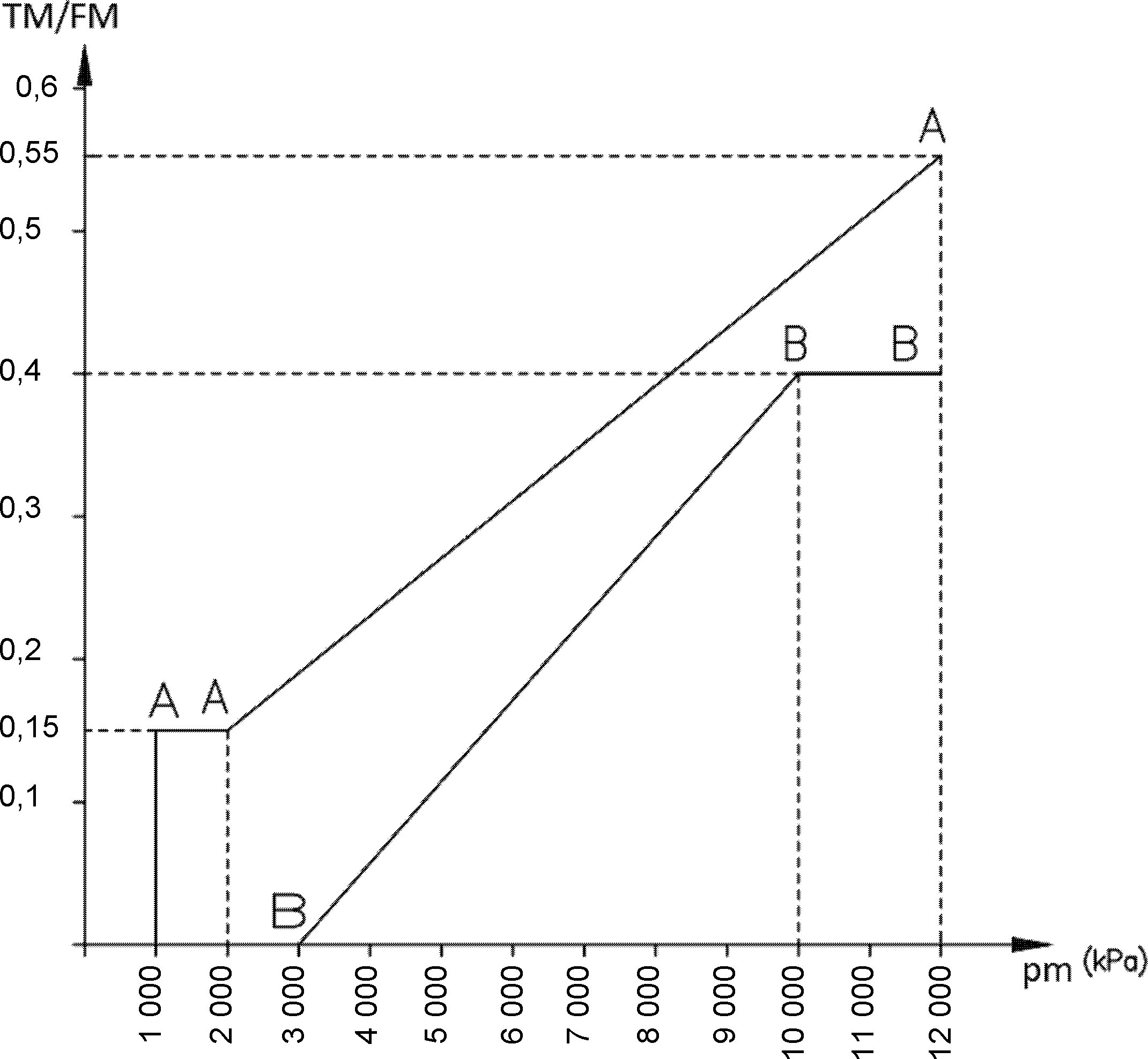
|
Pm
|
=
|
stabiliziran hidravlični tlak na vlečni glavi (kPa)
|
|
TM
|
=
|
vsota zavornih sil na obodu vseh koles traktorjev
|
|
FM
|
=
|
skupna normalna statična reakcija površine cestišča na kolesa traktorjev
|
Slika 2
Karakteristika simulatorja vlečenega vozila glede na njegovo največjo dovoljeno maso

— diagram A B C za največje dovoljene mase do 14 ton
— diagram A D E za največje dovoljene mase nad 14 ton
Opomba: dovoljeno odstopanje ± 2 %
Slika 3
Načrt simulatorja vlečenega vozila
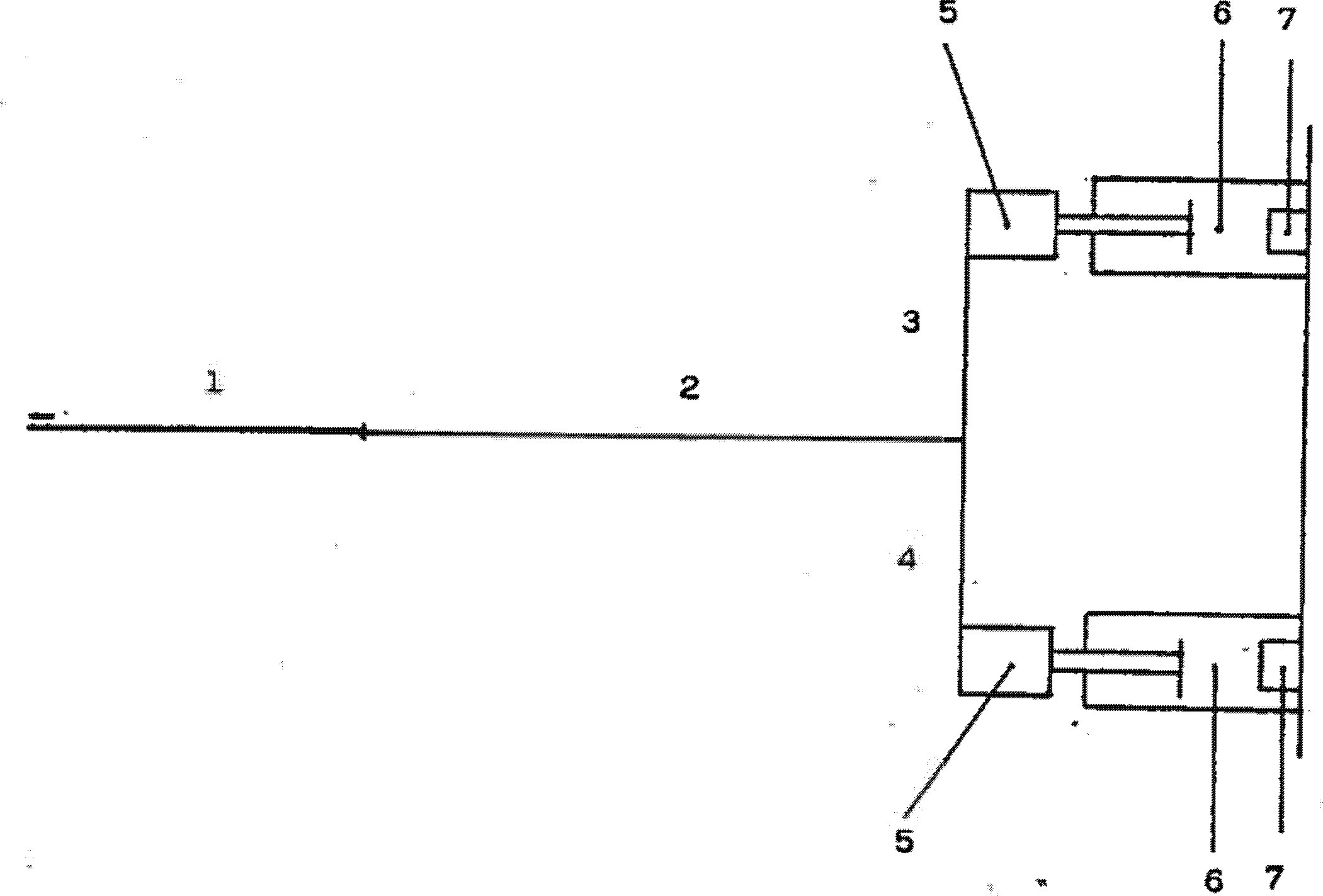
|
1
|
=
|
cev dolžine 2 000 mm z eno žensko spojko v skladu s standardom ISO 5676-1983;
|
|
2
|
=
|
cev z notranjim premerom 8 mm in dolžine 4 000 mm;
|
|
3
|
=
|
cev z notranjim premerom 8 mm in dolžine 1 000 mm;
|
|
4
|
=
|
cev z notranjim premerom 8 mm in dolžine 1 000 mm;
|
|
5
|
=
|
elementa za simulacijo zavornih batov;
|
|
6
|
=
|
vzmetno nastavljiva elementa, ki delujeta na celotnem gibu bata;
|
|
7
|
=
|
vzmetno nastavljiva elementa, ki delujeta samo na koncu giba bata.
|
|