ISSN 1977-0782
Jurnalul Oficial
al Uniunii Europene
L 269

Ediţia în limba română
Legislaţie
Anul 61
26 octombrie 2018
|
ISSN 1977-0782 |
||
|
Jurnalul Oficial al Uniunii Europene |
L 269 |
|
|
|
||
|
Ediţia în limba română |
Legislaţie |
Anul 61 |
|
Cuprins |
|
II Acte fără caracter legislativ |
Pagina |
|
|
|
ACTE ADOPTATE DE ORGANISME CREATE PRIN ACORDURI INTERNAŢIONALE |
|
|
|
* |
||
|
|
* |
||
|
|
* |
|
RO |
Actele ale căror titluri sunt tipărite cu caractere drepte sunt acte de gestionare curentă adoptate în cadrul politicii agricole şi care au, în general, o perioadă de valabilitate limitată. Titlurile celorlalte acte sunt tipărite cu caractere aldine şi sunt precedate de un asterisc. |
II Acte fără caracter legislativ
ACTE ADOPTATE DE ORGANISME CREATE PRIN ACORDURI INTERNAŢIONALE
|
26.10.2018 |
RO |
Jurnalul Oficial al Uniunii Europene |
L 269/1 |
Numai textele originale CEE-ONU au efect juridic în temeiul dreptului public internațional. Situația și data intrării în vigoare ale prezentului regulament ar trebui verificate în cea mai recentă versiune a documentului de situație al CEE-ONU TRANS/WP.29/343, disponibil la următoarea adresă:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamentul nr. 139 al Comisiei Economice pentru Europa a Organizației Națiunilor Unite (CEE-ONU) – Dispoziții uniforme privind omologarea autoturismelor în ceea ce privește sistemele de frânare asistată (BAS) [2018/1591]
Include toate textele valabile până la:
Suplimentul 1 la versiunea originală a regulamentului – Data intrării în vigoare: 29 decembrie 2018
CUPRINS
REGULAMENT
|
1. |
Domeniul de aplicare |
|
2. |
Definiții |
|
3. |
Cerere de omologare |
|
4. |
Omologare |
|
5. |
Cerințe generale |
|
6. |
Cerințe funcționale |
|
7. |
Cerințe generale pentru încercare |
|
8. |
Evaluarea prezenței unui BAS de categoria „A” |
|
9. |
Evaluarea prezenței unui BAS de categoria „B” |
|
10. |
Modificarea tipului de vehicul sau a sistemului BAS și extinderea omologării |
|
11. |
Conformitatea producției |
|
12. |
Sancțiuni în caz de neconformitate a producției |
|
13. |
Încetarea definitivă a producției |
|
14. |
Denumirile și adresele serviciilor tehnice responsabile cu încercările de omologare, precum și ale autorităților de omologare de tip |
ANEXE
|
1. |
Fișă de informații |
|
2. |
Exemple de mărci de omologare |
|
3. |
Metodă de determinare a FABS și aABS |
|
4. |
Prelucrarea datelor pentru BAS |
1. DOMENIU DE APLICARE
1.1. Prezentul regulament se aplică la omologarea vehiculelor din categoriile M1 și N1 (1) în ceea ce privește sistemul de frânare asistată al acestora.
1.2. Prezentul regulament nu se aplică:
|
1.2.1. |
Vehiculelor cu o viteză maximă prin construcție de 25 km/h; |
|
1.2.2. |
Vehiculelor echipate pentru conducători auto cu dizabilități. |
2. DEFINIȚII
În sensul prezentului regulament,
|
2.1. |
„Omologarea unui vehicul” înseamnă omologarea unui tip de vehicul în ceea ce privește sistemul de frânare asistată. |
|
2.2. |
„Tip de vehicul” înseamnă o categorie de vehicule care nu prezintă diferențe esențiale în ceea ce privește:
|
|
2.3. |
„Masă maximă” înseamnă masa declarată de către producătorul vehiculului ca fiind admisibilă din punct de vedere tehnic (această masă poate fi mai mare decât „masa maximă admisibilă” stabilită de către administrația națională). |
|
2.4. |
„Distribuția masei pe axe” înseamnă distribuția efectului gravitației asupra masei vehiculului și/sau a încărcăturii acestuia pe axe. |
|
2.5. |
„Sarcina pe roată/axă” înseamnă reacția (forța) statică verticală a suprafeței căii de rulare în zona de contact cu roata/roțile axei. |
|
2.6. |
„Sistem de frânare asistată (BAS – Brake Assist System)” înseamnă o funcție a sistemului de frânare care identifică o situație de frânare de urgență dintr-o caracteristică a acțiunii de frânare a conducătorului și, în aceste condiții:
|
3. CERERE DE OMOLOGARE
3.1. Cererea de omologare a unui vehicul cu privire la sistemul de frânare asistată al acestuia se înaintează de către producătorul vehiculului sau de către reprezentantul autorizat al acestuia.
3.2. Cererea trebuie însoțită de documentele menționate mai jos, în triplu exemplar, precum și de următoarele informații:
|
3.2.1. |
O descriere a tipului de vehicul cu privire la aspectele menționate la punctul 2.2 de mai sus. Se specifică numerele și/sau simbolurile care identifică tipul de motor și tipul de vehicul; |
|
3.2.2. |
O listă a componentelor, identificate corespunzător, care formează sistemul de asistare la frânare; |
|
3.2.3. |
O schemă a sistemului de asistare la frânare asamblat și o indicație a poziției componentelor acestuia pe vehicul; |
|
3.2.4. |
Desene detaliate ale fiecărei componente, pentru a permite localizarea și identificarea cu ușurință a acesteia. |
3.3. Este prezentat serviciului tehnic care efectuează încercările de omologare un vehicul reprezentativ pentru tipul de vehicul care urmează să fie omologat.
4. OMOLOGARE
4.1. În cazul în care tipul de vehicul prezentat pentru omologare în temeiul prezentului regulament îndeplinește cerințele de la punctele 5 și 6 de mai jos, se acordă omologarea respectivului tip de vehicul.
4.2. Fiecărui tip de vehicul omologat i se alocă un număr de omologare, primele două cifre ale acestuia indicând seria amendamentelor care încorporează cele mai recente modificări tehnice majore aduse regulamentului în momentul emiterii omologării. Aceeași parte contractantă nu poate aloca acest număr altui tip de vehicul de vehicul pentru sistemul de frânare asistată.
4.3. Avizul de omologare sau de refuz al omologării unui tip de vehicul în conformitate cu prezentul regulament se comunică părților contractante la acord care aplică prezentul regulament, prin intermediul unei fișe de informații conforme cu modelul din anexa 1 la prezentul regulament și al unui rezumat al informațiilor conținute în documentele menționate la punctele 3.2.1-3.2.4 de mai sus, iar desenele furnizate de către solicitant pentru omologare sunt într-un format maxim A4 (210 × 297 mm) sau împăturite în acest format și sunt furnizate la o scară corespunzătoare.
4.4. Pe fiecare vehicul conform cu un tip de vehicul omologat în conformitate cu prezentul regulament se aplică, în mod vizibil și într-un loc ușor accesibil specificat în formularul de omologare, o marcă de omologare internațională care constă în:
|
4.4.1. |
Un cerc, în interiorul căruia se află litera „E”, urmată de numărul distinctiv al țării care a acordat omologarea (3); și |
|
4.4.2. |
Numărul prezentului regulament, urmat de litera „R”, o liniuță și numărul de omologare, în dreapta cercului menționat la punctul 4.4.1 de mai sus. |
4.5. În cazul în care vehiculul corespunde unui tip de vehicul omologat în temeiul unuia sau mai multor regulamente anexate la acord în țara care a acordat omologarea în temeiul prezentului regulament, simbolul prevăzut la punctul 4.4.1 de mai sus nu trebuie repetat; în acest caz, numărul regulamentului și numerele de omologare și simbolurile suplimentare ale tuturor regulamentelor în temeiul cărora a fost acordată omologarea în țara care a acordat omologarea în temeiul prezentului regulament trebuie plasate în coloane verticale la dreapta simbolului prevăzut la punctul 4.4.1 de mai sus.
4.6. Marca de omologare trebuie să fie clar lizibilă și de neșters.
4.7. Marca de omologare se amplasează lângă plăcuța producătorului sau pe aceasta.
4.8. Anexa 2 la prezentul regulament oferă exemple de dispunere a mărcilor de omologare.
5. CERINȚE GENERALE
5.1. Vehiculele trebuie echipate cu un sistem de asistență la frânare care îndeplinește cerințele funcționale specificate la paragraful 6 din prezentul regulament. Conformitatea cu aceste cerințe trebuie să fie demonstrată prin îndeplinirea dispozițiilor de la punctele 8 și 9 din prezentul regulament în condițiile de încercare specificate la punctul 7 din prezentul regulament. În plus față de cerințele din prezentul regulament, vehiculele trebuie, de asemenea, să fie echipate cu ABS în conformitate cu cerințele tehnice din Regulamentul ONU nr. 13-H.
5.2. BAS este proiectat, construit și montat în așa fel încât vehiculul, în condiții normale de utilizare și în pofida vibrațiilor la care poate fi supus, să fie în conformitate cu cerințele din prezentul regulament.
5.3. În special, BAS este proiectat, construit și montat în așa fel încât să reziste la fenomenele de coroziune și de uzură la care este expus.
5.4. Eficacitatea BAS nu trebuie să fie afectată de interferențele produse de câmpuri magnetice sau electrice. Aceasta se demonstrează prin îndeplinirea cerințelor tehnice și prin respectarea dispozițiilor tranzitorii din Regulamentul nr. 10, aplicând:
|
(a) |
seria 03 de amendamente pentru vehiculele fără un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune); |
|
(b) |
seria 04 de amendamente pentru vehiculele cu un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune). |
5.5. Evaluarea aspectelor legate de siguranță ale BAS trebuie inclusă în evaluarea globală a siguranței sistemului de frânare conform cerințelor din Regulamentul nr. 13-H legate de sistemele complexe de control electronic. Această cerință se consideră îndeplinită la prezentarea, în conformitate cu Regulamentul nr. 13-H, a unui certificat care include BAS-ul supus omologării.
5.6. Dispoziții privind inspecția periodică a sistemelor de frânare asistată.
5.6.1. Trebuie să fie posibilă, în cadrul unei inspecții tehnice periodice, confirmarea stării corecte de funcționare prin observarea vizuală a unor semnale de avertizare după comutarea cheii de contact în poziția „pornit”.
5.6.2. În cadrul omologării de tip, mijloacele puse în aplicare pentru protecția împotriva unei modificări simple neautorizate a funcționării semnalelor de avertizare sunt prezentate cu respectarea cerințelor de confidențialitate. În mod alternativ, această cerință în materie de protecție este îndeplinită atunci când este disponibilă o metodă secundară de verificare a stării de funcționare.
6. CERINȚE FUNCȚIONALE
6.1. Caracteristicile generale de performanță ale sistemelor BAS de categoria „A”
Atunci când este detectată o situație de urgență din cauza unei forțe relativ ridicate aplicată pe pedala de frână, forța suplimentară asupra pedalei necesară pentru a declanșa un ciclu complet al sistemului ABS trebuie să fie mai mică decât forța asupra pedalei necesară cu sistemul BAS neactivat.
Conformitatea cu această cerință este demonstrată dacă dispozițiile de la punctele 8.1-8.3 din prezentul regulament sunt satisfăcute.
6.2. Caracteristicile generale de performanță ale sistemelor BAS de categoria „B”
Atunci când este detectată o situație de urgență, cel puțin printr-o apăsare foarte rapidă a pedalei, sistemul BAS ridică presiunea pentru a furniza coeficientul de frânare disponibil maxim sau pentru a declanșa un ciclu complet de funcționare a sistemului ABS.
Conformitatea cu această cerință este demonstrată dacă dispozițiile de la punctele 9.1-9.3 din prezentul regulament sunt satisfăcute.
7. CERINȚE GENERALE PENTRU ÎNCERCARE
7.1. Variabile
În timpul efectuării încercărilor descrise în prezentul regulament, se măsoară următoarele variabile:
|
7.1.1. |
Forța asupra pedalei de frână, Fp; |
|
7.1.2. |
Viteza vehiculului, vx; |
|
7.1.3. |
Decelerația vehiculului, ax; |
|
7.1.4. |
Temperatura frânei, Td; |
|
7.1.5. |
Presiunea de frânare, P, după caz; |
|
7.1.6. |
Cursa pedalei de frână, vp, măsurată în centrul plăcii pedalei sau într-un punct de pe mecanismul pedalei unde deplasarea este proporțională cu deplasarea în centrul plăcii pedalei, permițând etalonarea simplă a măsurătorii. |
7.2. Aparatura de măsură
7.2.1. Variabilele enumerate la punctul 7.1 se măsoară cu ajutorul unor traductoare corespunzătoare. Precizia, intervalele de operare, tehnicile de filtrare, prelucrarea datelor și alte cerințe sunt descrise în standardul ISO 15037-1: 2006.
7.2.2. Măsurarea forței asupra pedalei și a temperaturii se efectuează cu precizia următoare:
|
Sistemul cu interval variabil |
Domeniul de măsurare caracteristic al traductorilor |
Erori maxime de măsurare recomandate |
|
Forța asupra pedalei |
0-2 000 N |
± 10 N |
|
Temperatura frânei |
0-1 000 °C |
± 5 °C |
|
Presiunea de frânare (*1) |
0-20 MPa (*1) |
± 100 kPa (*1) |
7.2.3. Detaliile privind prelucrarea datelor analogice și digitale ale procedurii de încercare BAS sunt descrise în anexa 4 la prezentul regulament. Frecvența de eșantionare pentru achiziționarea datelor trebuie să fie de cel puțin 500 Hz.
7.2.4. Metode de măsurare alternative celor descrise la punctul 7.2.3 pot fi admise, cu condiția ca acestea să demonstreze cel puțin un nivel de precizie echivalent.
7.3. Condiții de încercare
7.3.1. Condiții de încercare privind încărcarea vehiculului: Vehiculul trebuie să fie neîncărcat. În afara conducătorului, pe scaunul din față al vehiculului se poate afla o a doua persoană care are sarcina de a nota rezultatele încercărilor.
7.3.2. Încercările frânelor se efectuează pe o suprafață uscată, cu aderență ridicată.
7.4. Metoda de încercare
7.4.1. Încercările, astfel cum sunt descrise la punctele 8 și 9 din prezenta secțiune, sunt efectuate la o viteză de încercare de 100 ± 2 km/h. Vehiculul trebuie condus, la viteza de încercare, în linie dreaptă.
7.4.2. Temperatura medie a frânelor de serviciu de pe cea mai fierbinte axă a vehiculului, măsurată pe partea interioară a garniturilor de frână sau pe calea de frânare a discului sau a tamburului, trebuie să fie între 65 și 100 °C înainte de orice aplicare a frânei.
7.4.3. Pentru încercări, timpul de referință t0, este definit ca fiind momentul în care forța de apăsare a pedalei de frână atinge 20 N.
Notă: În cazul vehiculelor dotate cu un sistem de frânare asistat de o sursă de energie, forța necesară aplicată la acționarea pedalei depinde de nivelul de energie existent în dispozitivul de stocare a energiei. Prin urmare, la începutul încercării, se asigură un nivel de energie suficient de ridicat.
8. EVALUAREA PREZENȚEI UNUI BAS DE CATEGORIA „A”
Un sistem BAS de categoria „A” trebuie să satisfacă cerințele de încercare prezentate la punctele 8.1 și 8.2.
8.1. Încercarea 1: Încercarea de referință pentru a stabili FABS și aABS.
8.1.1. Valorile de referință FABS și aABS se determină în conformitate cu procedura descrisă în anexa 3 la prezentul regulament.
8.2. Încercarea 2: Pentru activarea BAS
8.2.1. După ce a fost detectată o situație de frânare de urgență, sistemele sensibile la forța aplicată asupra pedalei produc o creștere semnificativă a raportului dintre:
|
(a) |
presiunea din circuitul de frână și forța asupra pedalei de frână, atunci când acest lucru este admisibil conform punctului 8.2.5; sau |
|
(b) |
decelerația vehiculului și forța de apăsare a pedalei de frână. |
8.2.2. Cerințele de performanță pentru un sistem BAS de categoria „A” se consideră satisfăcute dacă se poate defini o caracteristică specifică acționării frânei care prezintă o scădere cuprinsă între 40 % și 80 % a forței necesare asupra pedalei de frână pentru (FABS – FT) în comparație cu (FABS extrapolat – FT).
8.2.3. FT și aT sunt forța limită și decelerația limită, conform figurii 1. Valorile FT și aT sunt furnizate serviciului tehnic în momentul prezentării cererii de omologare de tip. Valoarea aT este cuprinsă între 3,5 m/s2 și 5,0 m/s2.
Figura 1a
Caracteristica forței de apăsare a pedalei necesară pentru a obține decelerația maximă cu un sistem BAS de categoria „A”

Între 3,5 și 5,0 m/s2
Decelerația, a
FABS, extrapolat
FABS, max
FABS
FABS, min
Forța pe pedala de frână, F
FT
aT
aABS
8.2.4. Se trasează o linie dreaptă din punctul inițial până în punctul FT, aT (după cum se ilustrează în figura 1a). Valoarea forței de apăsare asupra pedalei de frână „F”, în punctul de intersecție a acestei drepte cu o dreaptă orizontală definită de a = aABS, se definește ca fiind FABS, extrapolat:

8.2.5. Ca alternativă, care poate fi selectată de către producător, în cazul vehiculelor de categoria N1 sau M1 derivate din acele vehicule N1 cu o masă brută a vehiculului GVM > 2 500 kg, valorile forței de apăsare a pedalei pentru FT, FABS,min, FABS,max și FABS,extrapolat pot fi derivate pornind de la caracteristica răspunsului presiunii în conducta de frână, în loc de caracteristica de decelerație a vehiculului. Aceasta se măsoară pe măsură ce forța de apăsare a pedalei de frână crește.
8.2.5.1. Presiunea la care este inițiat ciclul sistemului ABS este stabilită prin efectuarea a cinci încercări la viteza de 100 ± 2 km/h, în care pedala de frână este apăsată până la nivelul care activează funcționarea ABS, iar cele cinci presiuni la care se petrece acest lucru, astfel cum sunt determinate din înregistrările presiunii pe roata frontală, se înregistrează, valoarea medie obținută fiind PABS.
8.2.5.2. Presiunea limită PT este declarată de către producător și trebuie să corespundă unei decelerări situate între 2,5-4,5 m/s2.
8.2.5.3. Figura 1b este construită în maniera stabilită la punctul 8.2.4, însă utilizând măsurătorile presiunii din circuit pentru a defini parametrii stabiliți la punctul 8.2.5 al prezentului regulament, unde:

Figura 1b
Caracteristica forței de apăsare a pedalei necesară pentru a obține decelerația maximă cu un sistem BAS de categoria „A”

Presiunea de frânare, P
FABS, extrapolat
FABS, max
FABS
FABS, min
Forța pe pedala de frână, F
FT
PT
PABS
Pragul de modificare a forței
8.3. Evaluarea datelor
Prezența unui sistem BAS de categoria „A” este demonstrată dacă
FABS,min ≤ FABS ≤ FABS,max
unde:
FABS,max – FT ≤ (FABS,extrapolat – FT) · 0,6
și
FABS,min – FT ≥ (FABS,extrapolat – FT) · 0,2
9. EVALUAREA PREZENȚEI UNUI BAS DE CATEGORIA „B”
Un sistem BAS de categoria „B” trebuie să satisfacă cerințele de încercare prezentate la punctele 9.1 și 9.2 din prezenta secțiune.
9.1. Încercarea 1: Încercarea de referință pentru a determina FABS și aABS.
9.1.1. Valorile de referință FABS și aABS se determină în conformitate cu procedura descrisă în anexa 3 la prezentul regulament.
9.2. Încercarea 2: Pentru activarea BAS
Vehiculul este condus în linie dreaptă la viteza de încercare specificată la punctul 7.4 din prezentul regulament. Conducătorul auto apasă pedala de frână rapid conform figurii 2, simulând frânarea de urgență, astfel încât sistemul BAS să fie activat, iar ciclul ABS să fie complet declanșat.
Pentru a activa BAS, pedala de frână este aplicată în modul specificat de producătorul vehiculului. Producătorul înștiințează serviciul tehnic cu privire la forța necesară asupra pedalei de frână în momentul prezentării cererii de omologare de tip. Trebuie să se demonstreze în mod convingător serviciului tehnic faptul că sistemul BAS este activat în condițiile specificate de producător, conform punctului 16.1.1 sau 16.1.2 din anexa 1.
După t = t0 + 0,8 s și până când viteza vehiculului scade până la 15 km/h, forța exersată pe pedala de frână trebuie să fie menținută într-un interval cuprins între FABS, superior și FABS, inferior, unde FABS, superior este 0,7 FABS și FABS, inferior este 0,5 FABS.
Cerințele sunt considerate, de asemenea, ca fiind îndeplinite dacă, după t = t0 + 0,8 s, forța asupra pedalei scade sub FABS, inferior, cu condiția ca cerința de la punctul 9.3 să fie îndeplinită.
9.3. Evaluarea datelor
Prezența sistemului BAS de categoria „B” este demonstrată dacă o decelerație medie (aBAS) de minimum 0,85 · aABS se menține de la momentul t = t0 + 0,8 s până la momentul în care viteza vehiculului este redusă la 15 km/h.
Figura 2
Exemplu de încercare 2 a sistemului BAS de categoria „B”

Faza evaluării BAS- (ia sfârșit la viteza de 15 km/h)
Faza apăsării panicatea pedalei
Forța la pedală inițială
Forța pe pedala de frână F
FABS, inferior
FABS, superior
t0
t0 + 0,8 secunde
timp
Decelerația
aBAS
aABS
Decelerația, ax
Forța pe pedala de frână
10. MODIFICAREA TIPULUI DE VEHICUL SAU A SISTEMULUI BAS ȘI EXTINDEREA OMOLOGĂRII
10.1. Orice modificare a unui tip de vehicul existent trebuie adusă la cunoștința autorității de omologare de tip care a acordat omologarea de tip vehiculului respectiv.
În acest caz, autoritatea poate:
|
(a) |
să decidă, cu consultarea producătorului, acordarea unei noi omologări de tip; sau |
|
(b) |
să aplice procedura prevăzută la punctul 10.1.1 (revizuire) sau, dacă este cazul, procedura prevăzută la punctul 10.1.2 (extindere). |
10.1.1. Revizuire
Atunci când datele înregistrate în fișa de informații s-au schimbat și autoritatea de omologare consideră că este puțin probabil ca modificările făcute să aibă efecte adverse semnificative și că, în orice caz, comanda prin pedală a sistemului de frânare respectă în continuare cerințele, modificarea este considerată „revizuire”.
Într-un astfel de caz, autoritatea de omologare emite paginile revizuite în consecință din fișa de informații, marcând fiecare pagină revizuită pentru a indica în mod clar natura modificării și data noii emiteri a omologării. Această cerință se consideră îndeplinită și de o versiune consolidată, actualizată a fișei de informații, însoțită de o descriere detaliată a modificării.
10.1.2. Extindere
Modificarea este considerată „extindere” în cazul în care, pe lângă modificarea datelor din fișa de informații,
|
(a) |
sunt necesare noi inspecții sau încercări; sau |
|
(b) |
au fost schimbate una sau mai multe informații din fișa de informații (cu excepția informațiilor din documentele anexate la fișa în cauză); sau |
|
(c) |
este necesară aprobarea unei serii ulterioare de amendamente după intrarea în vigoare a modificării actuale. |
10.2. Confirmarea sau refuzul omologării, cu precizarea modificării, se comunică prin procedura specificată la punctul 4.3 de mai sus părților contractante la acordul care aplică prezentul regulament. În plus, cuprinsul fișei de informații și al rapoartelor de încercare, anexate la fișa de informații din anexa I, se modifică în consecință, pentru a indica data celei mai recente revizuiri sau extinderi.
10.3. Autoritatea competentă care acordă extinderea omologării trebuie să aloce un număr de serie fiecărei fișe de informații redactate în scopul unei astfel de extinderi.
11. CONFORMITATEA PRODUCȚIEI
Procedurile de conformitate a producției sunt conforme cu procedurile stabilite în apendicele 2 la acord (E/ECE/324-E/ECE/TRANS/505/Rev.2), cu respectarea următoarelor cerințe:
11.1. Un vehicul omologat în temeiul prezentului regulament trebuie să fie fabricat astfel încât să fie conform cu tipul omologat îndeplinind cerințele de la punctele 5 și 6 de mai sus.
11.2. Autoritatea care a acordat omologarea de tip poate verifica în orice moment metodele de control al conformității aplicate în fiecare unitate de producție. Frecvența normală a acestor verificări este de o dată la doi ani.
12. SANCȚIUNI ÎN CAZ DE NECONFORMITATE A PRODUCȚIEI
12.1. Omologarea acordată cu privire la tipul de vehicul în temeiul prezentului regulament poate fi retrasă în cazul în care condițiile stabilite la punctul 11.1 de mai sus nu sunt respectate.
12.2. În cazul în care o parte contractantă la acord care aplică prezentul regulament retrage o omologare acordată anterior, aceasta informează în cel mai scurt timp celelalte părți contractante care aplică prezentul regulament prin intermediul unei copii a fișei de informații conforme cu modelul indicat în anexa 1 la prezentul regulament.
13. ÎNCETAREA DEFINITIVĂ A PRODUCȚIEI
În cazul în care titularul unei omologări încetează complet fabricarea unui tip de vehicul omologat în conformitate cu prezentul regulament, acesta trebuie să informeze autoritatea care a acordat omologarea. La primirea acestei comunicări, autoritatea informează celelalte părți contractante la acord care aplică prezentul regulament prin intermediul unor copii ale fișei de informații conforme cu modelul indicat în anexa 1 la prezentul regulament.
14. DENUMIRILE ȘI ADRESELE SERVICIILOR TEHNICE RESPONSABILE CU EFECTUAREA ÎNCERCĂRILOR DE OMOLOGARE, PRECUM ȘI ALE AUTORITĂȚILOR DE OMOLOGARE DE TIP
Părțile contractante la acord care aplică prezentul regulament comunică Secretariatului Organizației Națiunilor Unite denumirile și adresele serviciilor tehnice responsabile cu efectuarea încercărilor de omologare și ale autorităților de omologare de tip care acordă omologarea și la care trebuie trimise formularele care certifică omologarea sau extinderea, refuzul sau retragerea omologării, emise în alte țări.
(1) Categoriile de vehicule M1 și N1 sunt definite în Rezoluția consolidată privind construcția vehiculelor (Consolidated Resolution on the Construction of Vehicles –R.E.3) documentul ECE/TRANS/WP.29/78/Rev.4, punctul 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Astfel cum este declarată de producătorul vehiculului.
(3) Numerele distinctive ale părților contractante la Acordul din 1958 sunt reproduse în anexa 3 la Rezoluția consolidată privind construcția vehiculelor (R.E.3), documentulECE/TRANS/WP.29/78/Rev. 4, anexa 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(*1) În conformitate cu specificațiile de la punctul 8.2.5.
ANEXA 2
EXEMPLE DE MĂRCI DE OMOLOGARE
MODELUL A
(A se vedea punctul 4.4 din prezentul regulament)

Marca de omologare de mai sus, fixată pe un vehicul, arată că tipul de vehicul în cauză a fost omologat în Belgia (E 6) pentru sistemul de frânare asistată, în temeiul Regulamentului nr. 139. Primele două cifre ale acesteia indică faptul că omologarea a fost acordată în conformitate cu cerințele din Regulamentul nr. 139, în forma sa originală.
MODELUL B
(A se vedea punctul 4.5 din prezentul regulament)
Marca de omologare de mai sus aplicată pe un vehicul indică faptul că tipul de vehicul în cauză a fost omologat în Belgia (E 6), în temeiul Regulamentelor nr. 139 și 24 (1). (În cazul celui de-al doilea regulament, valoarea corectată a coeficientului de absorbție este 1,30 m-1.) Numerele de omologare indică faptul că, la datele la care au fost acordate respectivele omologări, Regulamentul nr. 139 era în forma sa inițială, iar Regulamentul nr. 24 includea seria 02 de amendamente.
(1) Acest număr este folosit doar cu titlu de exemplu.
ANEXA 3
METODĂ DE DETERMINARE A FABS ȘI A AABS
1.1. Forța FABS exercitată asupra pedalei de frână este, pentru un vehicul dat, forța minimă ce trebuie să fie aplicată pentru a atinge o decelerație maximă care să indice că sistemul ABS execută cicluri complete. aABS este, pentru un vehicul dat, valoarea decelerației în timpul decelerării ABS, astfel cum este definită la punctul 1.8 de mai jos.
1.2. Pedala de frână trebuie să fie acționată în mod lent (fără activarea BAS în cazul sistemelor de categoria B), pentru a obține o creștere constantă a decelerației până când sistemul ABS execută cicluri complete (figură).
1.3. Decelerația totală trebuie să fie atinsă într-un termen de 2,0 ± 0,5 s. Curba de decelerație, înregistrată în funcție de timp, trebuie să se înscrie într-un interval de ± 0,5 s în jurul axei centrale a coridorului curbei de decelerație. Exemplul din figură își are originea la momentul t0 și intersectează linia aABS la 2 secunde. Odată ce a fost atinsă decelerația totală, pedala de frână trebuie să fie acționată în așa fel încât sistemul ABS să continue să execute cicluri complete. Momentul de activare totală a sistemului ABS este definit ca fiind momentul în care se atinge forța de apăsare a pedalei FABS. Măsurătorile se vor face în coridorul prevăzut pentru variația creșterii decelerației (a se vedea figura).
Coridorul de decelerație pentru determinarea FABS și a aABS

Coridor pentru variația creșterii decelerației
decelerație a
aABS
timp[s]
interval de timp
2 ± 0,5 s
1s
t0
Coridor pentru ciclul ABS complet
1.4. Trebuie efectuate cinci încercări corespunzătoare cerințelor de la punctul 1.3. Pentru fiecare dintre aceste încercări valabile, decelerația vehiculului trebuie să fie reprezentată în funcție de valoarea înregistrată pentru forța exercitată asupra pedalei de frână. Pentru calculele descrise la punctele următoare se iau în considerare numai datele înregistrate pentru viteze mai mari de 15 km/h.
1.5. Pentru a determina aABS și FABS, se aplică un filtru trece-jos de 2 Hz pentru decelerația vehiculului și se apasă pedala.
1.6. Media celor cinci curbe individuale de „decelerație în funcție de forța exercitată asupra pedalei de frână” se determină calculând decelerația medie a celor cinci curbe individuale „decelerația în funcție de forța exercitată asupra pedalei de frână” în incremente de 1 N ale forței pe pedala de frână. Rezultatul este valoarea decelerației medii în raport cu curba forței exercitate asupra pedalei de frână, care va fi numită în continuare în prezenta anexă „curba maF”.
1.7. Valoarea maximă a decelerației vehiculului se determină pornind de la „curba maF” și este desemnată prin „amax”.
1.8. Se face media tuturor valorilor „curbei maF” care depășesc 90 % din această valoare a decelerației „amax”. Valoarea „a” obținută este decelerația „aABS” menționată în prezentul regulament.
1.9. Forța minimă suficientă aplicată pedalei (FABS) pentru a obține decelerația aABS este definită ca fiind valoarea F corespunzătoare valorii a = aABS pe curba maF.
ANEXA 4
PRELUCRAREA DATELOR PENTRU BAS
(A se vedea punctul 7.2.3 din prezentul regulament)
1. PRELUCRAREA DATELOR ANALOGICE
Lățimea de bandă a întregului sistem captor/înregistrare nu trebuie să fie mai mică de 30 Hz.
Pentru a executa filtrarea necesară a semnalelor se folosesc filtre trece-jos de ordinul patru sau mai mare. Lățimea benzii de trecere (cu frecvențe cuprinse între 0 Hz și frecvența fo la – 3 dB) nu trebuie să fie mai mică de 30 Hz. Erorile de amplitudine trebuie să fie mai mici de ± 0,5 % într-un interval de frecvențe situat între 0 și 30 de Hz. Prelucrarea tuturor semnalelor analogice se face cu ajutorul unor filtre care să prezinte caracteristici de fază suficient de similare pentru ca diferențele de întârzieri datorate filtrării să rămână în limitele de precizie cerute pentru măsurătorile de timp.
Notă: Filtrajul analogic al unui semnal conținând diferite frecvențe poate genera decalaje de fază. Prin urmare, se preferă o metodă de prelucrare a datelor astfel cum este descrisă la punctul 2 din prezenta anexă.
2. PRELUCRAREA DIGITALĂ A DATELOR
2.1. Considerații generale
Prelucrarea semnalelor analogice include luarea în considerare a atenuării amplitudinii produsă de filtru și a frecvenței de eșantionare pentru a evita erorile de repliere a eșantioanelor, defazajele și întârzierile datorate filtrării. Eșantionarea și digitalizarea semnalelor implică amplificarea semnalelor înainte de eșantionare în vederea minimizării erorilor de digitalizare; numărul de biți per eșantion; numărul de eșantionări pe ciclu; amplificatoare de tip eșantionare și blocare (sample and hold) și eșalonarea în timp a eșantioanelor. Pentru o filtrare digitală suplimentară fără defazare trebuie să se aleagă benzi de trecere și benzi de oprire cu atenuările și variațiile admisibile pentru fiecare dintre acestea și să se corecteze defazările cauzate de filtru. Toți acești factori trebuie luați în considerare pentru a obține o precizie relativă globală de ± 0,5 % la colectarea datelor.
2.2. Erori de repliere
Pentru a evita erorile de repliere, care sunt imposibil de corectat, semnalele analogice trebuie filtrate în mod adecvat înainte de eșantionare și digitalizare. Ordinul filtrelor utilizate și banda lor de trecere trebuie să fie alese în funcție atât de caracterul constant al amplitudinii filtrului necesar în intervalul de frecvențe relevant, cât și de frecvența de eșantionare utilizată.
Caracteristicile minime de filtrare și frecvența de eșantionare trebuie să respecte următoarele specificații:
|
(a) |
în intervalul de frecvență luat în considerare de la 0 până la fmax = 30 Hz, atenuarea este inferioară rezoluției sistemului de colectare a datelor; și |
|
(b) |
la o frecvență egală cu jumătate din frecvența de eșantionare (adică frecvența lui Nyquist sau de „pliere”) amplitudinile diferitelor componente de frecvență ale semnalului și ale zgomotului sunt reduse la o valoare inferioară rezoluției sistemului. |
Pentru o rezoluție de 0,05 %, atenuarea filtrului trebuie să fie mai mică de 0,05 % în intervalul de frecvențe cuprins între 0 și 30 Hz și trebuie să fie mai mare de 99,95 % pentru toate frecvențele superioare unei jumătăți din frecvența de eșantionare.
Notă: Atenuarea unui filtru Butterworth este dată de:
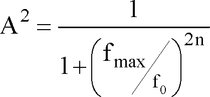 și
și 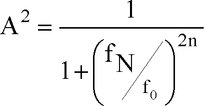
unde:
|
|
n este ordinul filtrului; |
|
|
fmax este intervalul de frecvență relevant (30 Hz); |
|
|
fo este frecvența de întrerupere a filtrului; |
|
|
fN este frecvența lui Nyquist sau de „pliere”. |
Pentru un filtru de ordinul patru
|
|
pentru A = 0,9995: fo = 2,37 · fmax |
|
|
pentru A = 0,0005: fS = 2 · (6,69 · fo), unde fS este frecvența de eșantionare = 2 · fN. |
2.3. Decalaje de fază și întârzieri pentru o filtrare antirepliere
Filtrarea excesivă a semnalelor analogice trebuie să fie evitată și toate filtrele trebuie să prezinte caracteristici de fază suficient de similare pentru ca diferențele între timpii de întârziere să rămână în limitele de precizie necesare pentru măsurarea timpului. Decalajele de fază sunt deosebit de mari atunci când se multiplică variabilele măsurate pentru a obține noi variabile, deoarece, dacă amplitudinile sunt multiplicate, decalajele de fază și întârzierile asociate acestora se acumulează. Decalajele de fază și timpii de întârziere sunt reduse prin creșterea fo. Dacă sunt cunoscute ecuațiile care descriu filtrele de preeșantionare, este ușor să fie eliminate decalajele de fază și timpii de întârziere prin utilizarea unor algoritmi simpli în domeniul frecvențelor.
Notă: În intervalul de frecvențe în care caracteristicile amplitudinii filtrului rămân constante, defazajul Φ al unui filtru Butterworth poate fi aproximat astfel:
|
|
Φ = 81 · (f/f0) grade pentru un filtru de ordinul doi |
|
|
Φ = 150 · (f/f0) grade pentru un filtru de ordinul patru |
|
|
Φ = 294 · (f/f0) grade pentru un filtru de ordinul opt |
Timpul de întârziere în cazul tuturor ordinelor de filtre este următorul: t = (Φ/360) · (1/f0)
2.4. Eșantionarea și digitalizarea datelor
La 30 Hz, variația amplitudinii semnalului poate ajunge la 18 % pe milisecundă. Pentru ca erorile dinamice cauzate de variația semnalelor analogice de intrare să fie limitate la 0,1 %, timpul de eșantionare sau de digitalizare trebuie să fie mai mic de 32 μs. Toate perechile sau toate seturile de eșantioane de date care urmează a fi comparate trebuie înregistrate simultan sau într-un interval de timp suficient de scurt.
2.5. Cerințe privind sistemul
Sistemul de date are o rezoluție de cel puțin 12 biți (± 0,05 %) și o precizie de ± 0,1 % (2 lb). Ordinul filtrelor antirepliere trebuie să fie de cel puțin 4 și intervalul de frecvențe fmax pertinent trebuie să fie cuprins între 0 Hz și 30 Hz.
Pentru un filtru de ordinul patru, frecvența benzii de trecere fo (de la 0 Hz la frecvența fo) este mai mare decât 2,37 · fmax în cazul în care erorile de fază se corectează ulterior în cursul prelucrării digitale a datelor și mai mare decât 5 · fmax în caz contrar. În cazul filtrelor de ordinul patru, frecvența fs de eșantionare a datelor trebuie să fie mai mare decât 13,4 · fo.
|
26.10.2018 |
RO |
Jurnalul Oficial al Uniunii Europene |
L 269/17 |
Numai textele originale CEE-ONU au efect juridic în temeiul dreptului public internațional. Situația și data intrării în vigoare ale prezentului regulament ar trebui verificate în cea mai recentă versiune a documentului de situație al CEE-ONU TRANS/WP.29/343, disponibil la următoarea adresă:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamentul nr. 140 al Comisiei Economice pentru Europa a Organizației Națiunilor Unite (CEE-ONU) – Dispoziții uniforme privind omologarea autoturismelor în ceea ce privește sistemul de control electronic al stabilității (ESC) [2018/1592]
Include toate textele valabile până la:
Suplimentul 2 la versiunea originală a regulamentului – Data intrării în vigoare: 29 decembrie 2018
CUPRINS
REGULAMENT
|
1. |
Domeniul de aplicare |
|
2. |
Definiții |
|
3. |
Cererea de omologare |
|
4. |
Omologare |
|
5. |
Cerințe generale |
|
6. |
Cerințe funcționale |
|
7. |
Cerințe de performanță |
|
8. |
Condiții de încercare |
|
9. |
Procedura de încercare |
|
10. |
Modificarea tipului de vehicul sau a sistemului ESC și extinderea omologării |
|
11. |
Conformitatea producției |
|
12. |
Sancțiuni în caz de neconformitate a producției |
|
13. |
Încetarea definitivă a producției |
|
14. |
Denumirile și adresele serviciilor tehnice responsabile pentru efectuarea încercărilor de omologare și ale autorităților de omologare de tip |
ANEXE
|
1. |
Fișă de informații |
|
2. |
Exemple de mărci de omologare |
|
3. |
Utilizarea simulării stabilității dinamice |
|
4. |
Instrumentul de simulare a stabilității dinamice și validarea acestuia |
|
5. |
Raport de încercare a instrumentului de simulare a funcției de stabilitate a vehiculului |
1. DOMENIUL DE APLICARE
1.1. Prezentul regulament se aplică vehiculelor din categoriile M1 și N1 (1) în ceea ce privește sistemul lor de control electronic al stabilității.
1.2. Prezentul regulament nu se aplică:
|
1.2.1. |
Vehiculelor cu o viteză maximă prin construcție de 25 km/h; |
|
1.2.2. |
Vehiculelor echipate pentru conducătorii auto cu dizabilități. |
2. DEFINIȚII
În sensul prezentului regulament:
|
2.1. |
„Omologarea unui vehicul” înseamnă omologarea unui tip de vehicul în ceea ce privește sistemul electronic de control al stabilității. |
|
2.2. |
„Tip de vehicul” înseamnă o categorie de vehicule care nu prezintă diferențe esențiale în ceea ce privește:
|
|
2.3. |
„Masă maximă” înseamnă masa declarată de către producătorul vehiculului ca fiind admisibilă din punct de vedere tehnic (această masă poate fi mai mare decât „masa maximă admisibilă” stabilită de către administrația națională). |
|
2.4. |
„Distribuția masei pe axe” înseamnă distribuția efectului gravitației asupra masei vehiculului și/sau a încărcăturii acestuia pe axe. |
|
2.5. |
„Sarcina pe roată/axă” înseamnă reacțiunea (forța) statică verticală a suprafeței căii de rulare în zona de contact cu roata/roțile unei axe. |
|
2.6. |
„Unghiul Ackermann de bracare” înseamnă unghiul a cărui tangentă este ampatamentul împărțit la raza de girație la viteză foarte mică. |
|
2.7. |
„Sistem de control electronic al stabilității (ESC – Electronic Stability Control System)” înseamnă un sistem care prezintă toate caracteristicile următoare:
|
|
2.8. |
„Accelerație laterală” înseamnă componenta vectorului accelerație într-un punct din vehicul perpendiculară pe axa x a vehiculului (longitudinală) și paralelă cu planul căii de rulare. |
|
2.9. |
„Supravirare” înseamnă o situație în care viteza de girație a vehiculului este mai mare decât viteza de girație care ar avea loc la viteza vehiculului corespunzătoare unghiului Ackermann de bracare. |
|
2.10. |
„Derapajul sau unghiul de derapaj” reprezintă arctangenta raportului dintre viteza laterală și viteza longitudinală a centrului de greutate al vehiculului. |
|
2.11. |
„Subvirare” reprezintă o stare în care viteza de girație a vehiculului este mai mică decât viteza de girație care ar avea loc la viteza vehiculului corespunzătoare unghiului Ackermann de bracare. |
|
2.12. |
„Viteză de girație” reprezintă viteza de modificare a unghiului traiectoriei vehiculului măsurată în grade/secundă de rotație în jurul unei axe verticale care trece prin centrul de greutate al vehiculului. |
|
2.13. |
„Coeficientul maxim de frânare (PBC – Peak braking coefficient)”: reprezintă măsura frecării dintre pneu și suprafața căii de rulare calculată pe baza decelerației maxime a unui pneu în rulare. |
|
2.14. |
„Spațiu comun” reprezintă o zonă în care pot fi afișate mai multe lămpi de control, indicatoare, simboluri de identificare sau alte mesaje, însă nu simultan. |
|
2.15. |
„Factor de stabilitate statică (SSF – Static stability factor)” înseamnă 1/2 din ecartamentul vehiculului împărțit la înălțimea centrului său de greutate, exprimată și sub forma SSF = T/2H, unde: T = ecartamentul (pentru vehicule cu mai multe ecartamente se utilizează media acestora; pentru axe cu roți duble, la calculul „T”, se utilizează roțile exterioare), iar H = înălțimea centrului de greutate al vehiculului. |
3. CEREREA DE OMOLOGARE
3.1. Cererea de omologare a unui vehicul cu privire la sistemul ESC se înaintează de către producătorul vehiculului sau de către reprezentantul autorizat al acestuia.
3.2. Cererea trebuie însoțită de documentele menționate mai jos, în triplu exemplar, precum și de următoarele informații:
|
3.2.1. |
O descriere a tipului de vehicul cu privire la aspectele menționate la punctul 2.2 de mai sus. Se specifică numerele și/sau simbolurile care identifică tipul de motor și tipul de vehicul; |
|
3.2.2. |
O listă a componentelor, identificate corespunzător, care formează sistemul ESC; |
|
3.2.3. |
O schemă a sistemului ESC asamblat și o indicație a poziției componentelor acestuia pe vehicul; |
|
3.2.4. |
Desene detaliate ale fiecărei componente, pentru a permite localizarea și identificarea cu ușurință a acesteia. |
3.3. Este prezentat serviciului tehnic care efectuează încercările de omologare un vehicul reprezentativ pentru tipul de vehicul care urmează să fie omologat.
4. OMOLOGARE
4.1. Dacă tipul de vehicul trimis spre omologare în temeiul prezentului regulament îndeplinește cerințele menționate la punctele 5, 6 și 7 de mai jos, omologarea tipului respectiv de vehicul este acordată.
4.2. Fiecărui tip de vehicul omologat i se alocă un număr de omologare, primele două cifre ale acestuia indicând seria modificărilor care încorporează cele mai recente modificări tehnice majore aduse regulamentului la momentul emiterii omologării. Aceeași parte contractantă nu poate aloca același număr unui alt tip de vehicul cu privire la sistemul de control electronic al stabilității.
4.3. Avizul de omologare sau de refuz al omologării unui tip de vehicul în conformitate cu prezentul regulament se comunică părților contractante la acord care aplică prezentul regulament, prin intermediul unei fișe de informații conforme cu modelul din anexa 1 la prezentul regulament și al unui rezumat al informațiilor conținute în documentele menționate la punctele 3.2.1-3.2.4 de mai sus, iar desenele furnizate de către solicitant pentru omologare sunt într-un format maxim A4 (210 × 297 mm) sau împăturite în acest format și sunt furnizate la o scară corespunzătoare.
4.4. Pe fiecare vehicul conform cu un tip de vehicul omologat în conformitate cu prezentul regulament se aplică, în mod vizibil și într-un loc ușor accesibil specificat în formularul de omologare, o marcă de omologare internațională care constă în:
|
4.4.1. |
Un cerc, în interiorul căruia se află litera „E”, urmată de numărul distinctiv al țării care a acordat omologarea (3), și în |
|
4.4.2. |
Numărul prezentului regulament, urmat de litera „R”, o liniuță și numărul de omologare, în dreapta cercului menționat la punctul 4.4.1 de mai sus. |
4.5. În cazul în care vehiculul corespunde unui tip de vehicul omologat în temeiul unuia sau mai multor regulamente anexate la acord, în țara care a acordat omologarea în temeiul prezentului regulament, simbolul prevăzut la punctul 4.4.1 de mai sus nu trebuie repetat; în acest caz, regulamentul, numerele de omologare și simbolurile suplimentare ale tuturor regulamentelor în temeiul cărora se acordă omologarea în țara care a acordat omologarea în temeiul prezentului regulament trebuie dispuse în coloane verticale, situate la dreapta simbolului prevăzut la punctul 4.4.1 de mai sus.
4.6. Marca de omologare trebuie să fie clar lizibilă și de neșters.
4.7. Marca de omologare se amplasează pe plăcuța cu datele vehiculului sau în apropierea acesteia.
4.8. Anexa 1 la prezentul regulament oferă exemple de dispunere a mărcilor de omologare.
5. CERINȚE GENERALE
5.1. Vehiculele trebuie echipate cu un sistem ESC care trebuie să satisfacă cerințele funcționale specificate la punctul 6 și cerințele privind performanța de la punctul 7 în cadrul procedurilor de încercare specificate la punctul 9 și în condițiile de încercare specificate la punctul 8 din prezentul regulament.
5.1.1. Ca o alternativă la cerințele de la punctul 5.1, vehiculele din categoriile M1 și N1 cu o masă în stare de funcționare mai mare de 1 735 kg pot fi dotate cu o funcție de stabilitate a vehiculului care include controlul împotriva răsturnării și controlul direcției și care satisface cerințele tehnice din anexa 21 la Regulamentul nr. 13. Aceste vehicule nu trebuie să satisfacă cerințele funcționale specificate la punctul 6 și cerințele privind performanța de la punctul 7 în cadrul procedurilor de încercare specificate la punctul 9 și în condițiile de încercare specificate la punctul 8 din prezentul regulament.
5.2. Sistemul ESC este proiectat, construit și montat în așa fel încât să permită, în condiții normale de utilizare și în pofida vibrațiilor la care poate fi supus, conformitatea vehiculului cu cerințele din prezentul regulament.
5.3. În special, sistemul ESC este proiectat, construit și montat în așa fel încât să reziste la fenomenele de coroziune și de uzură la care este expus.
5.4. Eficiența ESC nu trebuie să fie afectată de interferențele produse de câmpuri magnetice sau electrice. Acest lucru se demonstrează prin îndeplinirea cerințelor tehnice și prin respectarea dispozițiilor tranzitorii ale Regulamentului nr. 10, aplicând:
|
(a) |
seria 03 de amendamente pentru vehiculele fără un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune); |
|
(b) |
seria 04 de amendamente pentru vehiculele cu un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune). |
5.5. Evaluarea aspectelor legate de siguranță ale sistemului ESC, în raport cu efectul direct al acestuia asupra sistemului de frânare, trebuie inclusă în evaluarea globală a siguranței sistemului de frânare conform cerințelor din Regulamentul nr. 13-H legate de sistemele complexe de control electronic. Această cerință se consideră îndeplinită la prezentarea, în conformitate cu Regulamentul nr. 13-H, a unui certificat care include sistemul ESC supus omologării.
5.6. Dispoziții privind inspecția periodică a sistemelor ESC
5.6.1. Trebuie să fie posibilă, în cadrul unei inspecții tehnice periodice, confirmarea stării corecte de funcționare prin observarea vizuală a unor semnale de avertizare după comutarea cheii de contact în poziția „pornit”.
5.6.2. În cadrul omologării de tip, mijloacele puse în aplicare pentru protecția împotriva unei modificări simple neautorizate a funcționării semnalelor de avertizare sunt prezentate cu respectarea cerințelor de confidențialitate. În mod alternativ, această cerință în materie de protecție este îndeplinită atunci când este disponibilă o metodă secundară de verificare a stării operaționale.
6. CERINȚE FUNCȚIONALE
Fiecare vehicul prezentat în vederea omologării în temeiul prezentului regulament trebuie să fie echipat cu un sistem de control electronic al stabilității (ESC) care:
6.1. Este capabil să aplice cupluri de frânare în mod individual asupra tuturor cele patru roți (4) și este prevăzut cu un algoritm de control care îi permite să utilizeze această funcție;
6.2. Este funcțional pe întregul domeniu de viteze al vehiculului, în timpul tuturor fazelor deplasării, inclusiv în accelerare, în rulare inerțială și în decelerare (inclusiv în frânare), exceptând:
|
6.2.1. |
perioadele în care conducătorul auto a dezactivat ESC; |
|
6.2.2. |
perioadele când viteza vehiculului este mai mică de 20 km/h; |
|
6.2.3. |
perioada dintre pornirea inițială și finalizarea procedurilor de autodiagnosticare și de verificare a plauzibilității, această perioadă nedepășind două minute când vehiculul este condus în condițiile de la punctul 9.10.2; |
|
6.2.4. |
perioadele când vehiculul este condus în marșarier. |
6.3. Poate fi în continuare activat chiar dacă sistemul de frânare cu antiblocare sau sistemul de control al tracțiunii este, de asemenea, activat.
7. CERINȚE DE PERFORMANȚĂ
În cursul fiecărei încercări efectuate în condițiile de încercare de la punctul 8 și ale procedurii de încercare de la punctul 9.9, vehiculul cu sistemul ESC cuplat trebuie să satisfacă criteriile de stabilitate direcțională prevăzute la punctele 7.1 și 7.2, precum și criteriul privind capacitatea de reacție prevăzut la punctul 7.3, toate aceste încercări fiind efectuate cu un unghi comandat al volanului (5) de 5A sau mai mare, însă limitat conform punctului 9.9.4, unde A este unghiul volanului calculat conform punctului 9.6.1.
În cazul în care un vehicul a fost încercat fizic în conformitate cu punctul 8, conformitatea versiunilor sau variantelor aceluiași tip de vehicul poate fi demonstrată cu ajutorul unei simulări computerizate, care respectă condițiile de încercare de la punctul 8 și procedura de încercare de la punctul 9.9. Utilizarea simulatorului este definită în anexa 4 la prezentul regulament.
7.1. Viteza de girație măsurată la 1 secundă după finalizarea semnalului de intrare de comandă a direcției de tip sinus cu palier de temporizare (timpul T0 + 1 în figura 1) nu trebuie să depășească 35 % din prima valoare maximă a vitezei de girație înregistrate după schimbarea de semn a unghiului volanului (între primul și cel de al doilea maxim) ( în figura 1) pe parcursul efectuării aceleiași încercări.
în figura 1) pe parcursul efectuării aceleiași încercări.
Figura 1
Poziția volanului și informații privind viteza de girație utilizate pentru a evalua stabilitatea laterală
 Textul imaginii
Textul imaginii
7.2. Viteza de girație măsurată la 1,75 secunde după finalizarea semnalului de intrare de comandă a direcției de tip sinus cu palier de temporizare nu trebuie să depășească 20 % din prima valoare maximă a vitezei de girație înregistrate după schimbarea de semn a unghiului volanului (între primul și al doilea maxim) pe durata efectuării aceleiași încercări.
7.3. Deplasarea laterală a centrului de greutate al vehiculului în raport cu traiectoria rectilinie inițială a acestuia trebuie să fie de cel puțin 1,83 m pentru vehiculele cu o masă brută (GVM) de maximum 3 500 kg, și de 1,52 m pentru vehiculele cu masa maximă mai mare de 3 500 kg când este calculată la 1,07 secunde după începutul virării (BOS –- Beginning of Steer). BOS este definit la punctul 9.11.6.
7.3.1. Calculul deplasării laterale se efectuează utilizând integrarea dublă în raport cu timpul de măsurare al accelerației laterale în centrul de greutate al vehiculului, cu formula:

O metodă alternativă de măsurare poate fi permisă pentru încercarea de omologare de tip a vehiculului, cu condiția ca aceasta să prezinte un nivel de precizie cel puțin echivalent cu cel al metodei integrării duble.
7.3.2. Timpul t = 0 pentru operația de integrare este momentul inițierii virării, cunoscut sub denumirea de începutul virării (BOS). BOS este definit la punctul 9.11.6.
7.4. Detectarea defectării sistemului ESC
Vehiculul este echipat cu un martor de bord care avertizează conducătorul auto la apariția oricărei defecțiuni care afectează generarea sau transmisia semnalelor de comandă sau de răspuns în cadrul sistemului electronic de control al stabilității vehiculului.
7.4.1. Lampa martor de semnalizare a defectării ESC:
|
7.4.1.1. |
îndeplinește cerințele tehnice aplicabile specificate în Regulamentul nr. 121; |
|
7.4.1.2. |
cu excepția cazului menționat la punctul 7.4.1.3, lampa martor de semnalizare a defectării ESC se aprinde atunci când există o defecțiune și rămâne aprinsă în mod continuu în condițiile specificate la punctul 7.4 atât timp cât există defecțiunea, ori de câte ori cheia de contact este în poziția „pornit”; |
|
7.4.1.3. |
cu excepția cazului menționat la punctul 7.4.2, fiecare lampă martor privind defectarea ESC este activată pentru a verifica funcționarea lămpii fie atunci când cheia de contact este în poziția „pornit” fără ca motorul să fi demarat, fie atunci când cheia de contact este într-o poziție între „pornit” și „contact demaror” care este desemnată de către producător ca poziție de verificare; |
|
7.4.1.4. |
se stinge la următorul ciclu de aprindere după ce se rectifică defecțiunea, în conformitate cu punctul 9.10.4; |
|
7.4.1.5. |
poate fi utilizată, de asemenea, pentru a indica defectarea sistemelor/funcțiilor asociate, inclusiv controlul tracțiunii, asistarea stabilității remorcii, controlul frânării în viraje și alte funcții asemănătoare care utilizează accelerația și/sau controlul individual al accelerației pentru a opera și distribui componente comune cu ESC. |
7.4.2. Lampa martor de semnalizare a defectării ESC nu trebuie neapărat să fie activată atunci când un sistem de blocare a demarorului este în funcțiune.
7.4.3. Cerința de la punctul 7.4.1.3 nu se aplică lămpilor martor montate într-un spațiu comun.
7.4.4. Producătorul poate utiliza lampa martor de semnalizare a defectării ESC în modul de iluminare intermitentă pentru a indica intervențiile ESC și/sau intervențiile sistemelor legate de ESC (astfel cum sunt enumerate la punctul 7.4.1.5), precum și intervenția ESC asupra unghiului de bracaj al unei roți sau al mai multor roți în scopul stabilizării vehiculului.
7.5. Dezactivarea ESC și alte comenzi ale sistemului
Producătorul poate include o comandă „Dezactivare ESC” (ESC Off), care va fi iluminată atunci când sunt activate farurile vehiculului și care are scopul de a cupla sistemul ESC într-un mod în care nu mai satisface cerințele de performanță de la punctele 7, 7.1, 7.2 și 7.3. Producătorii pot asigura, de asemenea, comenzi pentru alte sisteme care au un efect auxiliar asupra funcționării ESC. Sunt permise comenzile de orice tip care plasează sistemul ESC într-un mod în care acesta nu mai poate satisface cerințele de performanță de la punctele 7, 7.1, 7.2 și 7.3, cu condiția ca sistemul să satisfacă cerințele de la punctele 7.5.1, 7.5.2 și 7.5.3.
7.5.1. Sistemul ESC al vehiculului revine întotdeauna la modul prevăzut inițial de producător, mod care satisface cerințele de la punctele 6 și 7 la începutul fiecărui nou ciclu de demarare, indiferent de modul selectat anterior de conducătorul auto. Cu toate acestea, sistemul ESC al vehiculului nu trebuie să revină la un mod care satisface cerințele de la punctele 7-7.3 la începutul fiecărui nou ciclu de demarare, dacă:
|
7.5.1.1. |
vehiculul este configurat pentru tracțiunea integrală care are efectul de blocare a roților dințate ale mecanismului de acționare a axelor față și spate împreună și de a asigura o reducere suplimentară a raportului între turația motorului și viteza de deplasare de minimum 1,6, selectată de conducătorul auto pentru deplasarea cu viteză redusă pe teren accidentat; sau |
|
7.5.1.2. |
vehiculul este configurat pentru tracțiunea integrală, selectată de conducătorul auto pentru funcționarea la viteze ridicate pe șosele cu zăpadă, nisip sau noroi și care are efectul de a bloca roțile dințate ale mecanismului de acționare a axelor față și spate împreună, cu condiția ca în acest mod vehiculul să satisfacă cerințele privind performanța de stabilitate de la punctele 7.1 și 7.2 în condițiile de încercare specificate la punctul 8. Cu toate acestea, dacă sistemul are mai multe moduri ESC care satisfac cerințele de la punctele 7.1 și 7.2 din cadrul configurației transmisiei selectate pentru ciclul de demarare anterior, ESC revine la modul ESC prevăzut inițial de producător, pentru acea configurație a transmisiei de la începutul fiecărui nou ciclu de demarare. |
7.5.2. O comandă al cărei singur scop este plasarea sistemului ESC într-un mod în care nu mai satisface cerințele de performanță de la punctele 7, 7.1, 7.2 și 7.3 trebuie să îndeplinească cerințele tehnice relevante din Regulamentul nr. 121.
7.5.3. O comandă pentru un sistem ESC, al cărei singur scop este de a plasa sistemul ESC în moduri diferite, dintre care cel puțin unul nu mai satisface cerințele de performanță de la punctele 7, 7.1, 7.2 și 7.3, trebuie să îndeplinească cerințele tehnice relevante din Regulamentul nr. 121.
În mod alternativ, în cazul în care modul sistemului ESC este controlat de o comandă multifuncțională, afișajul conducătorului auto îi indică în mod clar acestuia poziția comenzii pentru acest mod, utilizând simbolul „dezactivat” (off) pentru sistemul ESC, astfel cum este definit în Regulamentul nr. 121.
7.5.4. O comandă pentru un alt sistem care are efectul auxiliar de a plasa sistemul ESC într-un mod în care acesta nu mai satisface cerințele de performanță de la punctele 7, 7.1, 7.2 și 7.3 nu trebuie să fie identificată prin simbolul „ESC dezactivat” (ESC Off) de la punctul 7.5.2.
7.6. Lampa martor „ESC dezactivat”
În cazul în care producătorul alege să instaleze o comandă pentru a dezactiva sau reduce performanța sistemului ESC conform punctului 7.5, cerințele privind lampa martor de la punctele 7.6.1-7.6.4 trebuie să fie satisfăcute pentru a alerta conducătorul auto privind starea dezactivată sau redusă a funcționalității sistemului ESC. Această cerință nu se aplică modului selectat de conducătorul auto la care se face referire la punctul 7.5.1.2.
7.6.1. Producătorul vehiculului furnizează o lampă martor care indică faptul că vehiculul a fost plasat într-un mod care face imposibilă satisfacerea cerințelor de la punctele 7, 7.1, 7.2 și 7.3, dacă un asemenea mod este disponibil.
7.6.2. Lampa martor „ESC dezactivat”:
|
7.6.2.1. |
trebuie să îndeplinească cerințele tehnice aplicabile specificate în Regulamentul nr. 121. |
|
7.6.2.2. |
rămâne aprinsă în mod continuu atâta timp cât ESC este plasat într-un mod care face imposibilă satisfacerea cerințelor de la punctele 7, 7.1, 7.2 și 7.3; |
|
7.6.2.3. |
cu excepția cazurilor menționate la punctele 7.6.3 și 7.6.4, fiecare lampă martor „ESC dezactivat” este activată pentru a verifica funcționarea lămpii, fie atunci când cheia de contact este în poziția „pornit” fără ca motorul să fie demarat, fie atunci când sistemul de blocare a contactului se află într-o poziție între „pornit” și „contact demaror”, care este creată de producător drept poziție de verificare; |
|
7.6.2.4. |
se stinge după ce sistemul ESC revine la modul inițial, implicit, al producătorului. |
7.6.3. Lampa martor „ESC dezactivat” nu trebuie să fie activată atunci când un sistem de blocare a demarorului este în funcțiune.
7.6.4. Cerința de la punctul 7.6.2.3 din prezenta secțiune nu se aplică lămpilor de control montate într-un spațiu comun.
7.6.5. Producătorul poate utiliza lampa martor „ESC dezactivat” pentru a indica un nivel de funcționare a ESC altul decât modul prevăzut inițial de producător, chiar dacă vehiculul ar satisface cerințele de la punctele 7., 7.1, 7.2 și 7.3 din prezenta secțiune la acel nivel al funcției ESC.
7.7. Documentația tehnică a sistemului ESC
Ca o confirmare a faptului că vehiculul este echipat cu un sistem ESC care corespunde definiției unui „sistem ESC” conform punctului 2.7. din prezentul regulament, dosarul cu documentația include documentația producătorului vehiculului, astfel cum se specifică la punctele 7.7.1-7.7.4 de mai jos.
7.7.1. Diagrama sistemului care identifică toate componentele hardware ale sistemului ESC. Diagrama identifică acele componente care sunt utilizate pentru a genera cupluri de frânare la fiecare roată, pentru a determina viteza de girație a vehiculului, derapajul estimat sau o derivată a derapajului și acționările direcției de către conducătorul auto.
7.7.2. O scurtă explicație scrisă, suficientă pentru a descrie caracteristicile operaționale de bază ale sistemului ESC. Această explicație trebuie să cuprindă o descriere succintă a capacității sistemului de a aplica cupluri de frânare la fiecare roată și modul în care sistemul schimbă cuplul de propulsie în timpul activării sistemului ESC și va specifica faptul că viteza de girație a vehiculului este determinată direct chiar și în condițiile în care nu sunt disponibile informații privind viteza roții. Explicația trebuie să indice, de asemenea, domeniul de viteză al vehiculului și fazele de deplasare (accelerare, decelerare, rulare inerțială, în timpul activării ABS sau a controlului tracțiunii) în care poate fi activat sistemul ESC.
7.7.3. Diagrama logică. Această diagramă însoțește explicația prevăzută la punctul 7.7.2.
7.7.4. Informații privind subvirarea. O descriere succintă a datelor de intrare pertinente în calculatorul care controlează echipamentele hardware ale sistemului ESC și modul în care acestea sunt utilizate pentru a limita subvirarea vehiculului.
8. CONDIȚII DE ÎNCERCARE
8.1. Condiții ambiante
8.1.1. Temperatura ambiantă este cuprinsă între 0 °C și 45 °C.
8.1.2. Viteza maximă a vântului nu trebuie să depășească 10 m/s pentru vehiculele cu factor static de stabilitate (SSF) > 1,25, respectiv 5 m/s pentru vehiculele cu SSF ≤ 1,25.
8.2. Suprafața pistei de încercare
8.2.1. Încercările sunt efectuate pe o suprafață uscată, uniformă, solid pavată. Suprafețele cu neregularități și ondulații, precum înclinațiile și crăpăturile de mari dimensiuni sunt necorespunzătoare.
8.2.2. Suprafața căii de rulare pentru încercare are, dacă nu se specifică altfel, un coeficient de frânare maxim (CFM) nominal (6) de 0,9, determinat folosind unul din procedeele de mai jos:
|
8.2.2.1. |
pneul standard E1136 de referință pentru încercare al Societății Americane pentru Încercări și Materiale (American Society for Testing and Materials – ASTM), în conformitate cu Metoda E1337-90 a ASTM, la o viteză de 40 mile/oră; sau |
|
8.2.2.2. |
metoda încercării k specificată în apendicele 2 din anexa 6 la Regulamentul nr. 13-H. |
8.2.3. Suprafața de încercare are o pantă constantă cuprinsă între 0 și 1 %.
8.3. Condiții privind vehiculul
8.3.1. Sistemul ESC este activat pentru toate încercările.
8.3.2. Masa vehiculului. Vehiculul este încărcat cu rezervorul de combustibil umplut până la minimum 90 % din capacitatea acestuia și o sarcină interioară totală de 168 kg formată din conducătorul auto care participă la încercare, aproximativ 59 kg de echipamente de încercare (mașina automată de comandă a direcției, sistemul de achiziție a datelor și sursa de alimentare cu curent electric pentru mașina automată de comandă a direcției) și balast, dacă este cazul, pentru a compensa greutatea insuficientă a conducătorului auto care efectuează încercarea și a echipamentelor de încercare. În cazurile în care este necesar, balastul este amplasat pe podea, în spatele scaunului din față pentru pasageri sau, dacă este necesar, în zona pentru picioare a pasagerului din față. Întreaga cantitate de balast se fixează astfel încât să fie împiedicată deplasarea acestuia în timpul încercării.
8.3.3. Pneuri. Pneurile sunt umflate la presiunea (presiunile) de umflare la rece recomandată (recomandate) de producătorul vehiculului, de exemplu, în modul specificat pe placheta vehiculului sau pe eticheta presiunii de umflare a pneului. Se pot monta tuburi pentru a împiedica deteriorarea talonului pneului.
8.3.4. Console de reazem. Consolele de reazem pot fi utilizate pentru încercare, dacă se consideră că este necesar pentru siguranța conducătorilor auto de încercare. În acest caz, se aplică dispozițiile de mai jos pentru vehiculele cu un factor de stabilitate statică (SSF – Static Stability Factor) ≤ 1,25:
|
8.3.4.1. |
vehiculele cu o masă în stare de funcționare mai mică de 1 588 kg sunt echipate cu console de reazem „ușoare”. consolele de reazem ușoare sunt proiectate astfel încât să aibă o masă maximă de 27 kg și un moment de inerție de rotație maxim de 27 kg · m2; |
|
8.3.4.2. |
vehiculele cu o masă în stare de funcționare cuprinsă între 1 588 kg și 2 722 kg sunt echipate cu console de reazem „standard”; consolele de reazem standard sunt proiectate astfel încât să aibă o masă maximă de 32 kg și un moment de inerție de rotație maxim de 35,9 kg · m2; |
|
8.3.4.3. |
vehiculele cu o masă în stare de funcționare mai mare sau egală cu 2 722 kg sunt echipate cu console de reazem „grele”. consolele de reazem grele sunt proiectate astfel încât să aibă o masă maximă de 39 kg și un moment de inerție de rotație maxim de 40,7 kg · m2; |
8.3.5. Dispozitivul automat de comandă a direcției. Pentru punctele 9.5.2, 9.5.3, 9.6 și 9.9, se utilizează un robot pentru comanda direcției programat pentru a executa modelul de direcție solicitat. Dispozitivul de comandă a direcției trebuie să poată furniza cupluri de direcție cuprinse între 40 și 60 Nm. Dispozitivul de comandă a direcției trebuie să poată aplica aceste cupluri la viteze de rotație ale volanului de până la 1 200 grade pe secundă.
9. PROCEDURI DE ÎNCERCARE
9.1. Se umflă pneurile vehiculului conform presiunii (presiunilor) de umflare la rece recomandate de producătorul vehiculului, de exemplu în modul specificat pe placheta vehiculului sau pe eticheta privind presiunea de umflare a pneului.
9.2. Verificarea becului electric al lămpii martor. În timp ce vehiculul este staționat și cheia de contact este în poziția „blocat” sau „staționare”, se cuplează comutatorul de contact în poziția „pornit” sau, după caz, în poziția corespunzătoare pentru verificarea lămpii. Aprinderea lămpii martor de semnalizare a defectării ESC are rolul de a verifica funcționarea lămpii, astfel cum se specifică la punctul 7.4.1.3 și, dacă există, aprinderea lămpii martor „ESC dezactivat” are, de asemenea, rolul de verificare a funcționării lămpii, astfel cum se specifică la punctul 7.6.2.3. Verificarea becului lămpii martor nu este necesară pentru lampa martor montată într-un spațiu comun, astfel cum se specifică la punctele 7.4.3 și 7.6.4.
9.3. Verificarea comenzii „ESC dezactivat”. Pentru vehiculele echipate cu o comandă „ESC dezactivat”, în timp ce vehiculul este staționat iar cheia de contact este în poziția „blocat” sau „staționare”, se comută contactul în poziția „pornit”. Se activează comanda „ESC dezactivat” și se verifică dacă este aprinsă lampa martor „ESC dezactivat”, în modul specificat la punctul 7.6.2. Se pune cheia de contact în poziția „blocat” sau „staționare”. Din nou, se întoarce cheia în contact în poziția „pornit” și se veridică dacă lampa martor „ESC dezactivat” s-a stins, indicând faptul că sistemul ESC a fost restaurat, astfel cum se specifică la punctul 7.5.1.
9.4. Condiționarea frânelor
Se condiționează frânele vehiculului în modul descris la punctele 9.4.1-9.4.4.
9.4.1. Se efectuează zece opriri de la o viteză de 56 km/h, cu o decelerație medie de aproximativ 0,5 g.
9.4.2. Imediat după seria de zece opriri de la viteza de 56 km/h, se efectuează trei opriri suplimentare de la viteza de 72 km/h, cu o decelerație mai ridicată.
9.4.3. În momentul executării opririlor de la punctul 9.4.2, se aplică o forță suficientă asupra pedalei de frână pentru a activa funcționarea sistemului de antiblocare a roților vehiculului (ABS) în cea mai mare parte a duratei fiecărei manevre de frânare.
9.4.4. După efectuarea ultimei frânări de la punctul 9.4.2, vehiculul este condus la o viteză de 72 km/h timp de cinci minute, pentru răcirea frânelor.
9.5. Condiționarea pneurilor
Pneurile se condiționează utilizând procedura de la punctele 9.5.1-9.5.3 pentru eliminarea luciului matriței și pentru obținerea temperaturii de operare imediat înainte de începerea curselor de încercare de la punctele 9.6 și 9.9.
9.5.1. Vehiculul de încercare este condus în cerc, cercul având diametrul de 30 de metri, cu o viteză care produce o accelerație centrifugă de aproximativ 0,5-0,6 g, trei ture în sensul acelor de ceasornic, urmate de trei ture în sens invers acelor de ceasornic.
9.5.2. Aplicând la comanda direcției un semnal sinusoidal cu frecvența de 1 Hz, cu un unghi de bracaj maxim al volanului corespunzător unei accelerații centrifuge maxime de 0,5-0,6 g și unei viteze a vehiculului de 56 km/h, vehiculul este condus patru ture, la fiecare tură efectuându-se 10 cicluri sinusoidale de bracaj.
9.5.3. Amplitudinea unghiului de bracaj al volanului la ciclul final al ultimei ture trebuie să fie de două ori mai mare decât amplitudinea respectivă în celelalte cicluri. Intervalul de timp maxim admis între două ture sau două cicluri este de cinci minute.
9.6. Procedura virării progresive lente
Vehiculul este supus la două serii de curse pentru încercarea virării progresive lente utilizând o viteză constantă a vehiculului de 80 ± 2 km/h și un model de viraj cu un increment de 13,5 grade pe secundă până la obținerea unei accelerații centrifuge de aproximativ 0,5 g. Fiecare serie de încercări se repetă de trei ori. O serie utilizează virarea în sens invers acelor de ceasornic, iar cealaltă serie utilizează virarea în sensul acelor de ceasornic. Durata maximă de timp permisă între cursele de încercare este de cinci minute.
9.6.1. În urma încercărilor virării progresive lente, este determinată mărimea „A”. „A” este unghiul volanului, în grade, care produce o accelerație centrifugă constantă (rectificată utilizând metodele specificate la punctul 9.11.3) de 0,3 g pentru vehiculul de încercare. Utilizând regresia liniară, A se calculează, rotunjit la o zecime de grad, pentru fiecare dintre cele șase încercări de virare progresivă lentă. Se determină media celor șase valori absolute ale mărimii A, după care media este rotunjită la 0,1 grade pentru a rezulta mărimea finală A utilizată mai jos.
9.7. După ce a fost stabilită cantitatea A, fără a înlocui pneurile, procedura de pregătire a pneurilor descrisă la punctul 9.5 se efectuează din nou, imediat înainte de a efectua încercarea sinus cu palier de temporizare stabilită la punctul 9.9. Inițierea primei serii de încercări sinus cu palier de temporizare se efectuează la două ore după încheierea încercărilor virării progresive lente de la punctul 9.6.
9.8. Se controlează activarea sistemului ESC, verificând dacă lămpile martor de semnalizare a defectării ESC, respectiv pentru „ESC dezactivat” (dacă există) rămân stinse.
9.9. Încercarea cu impuls sinus cu palier de temporizare a intervenției cu supravirare și a capacității de reacție.
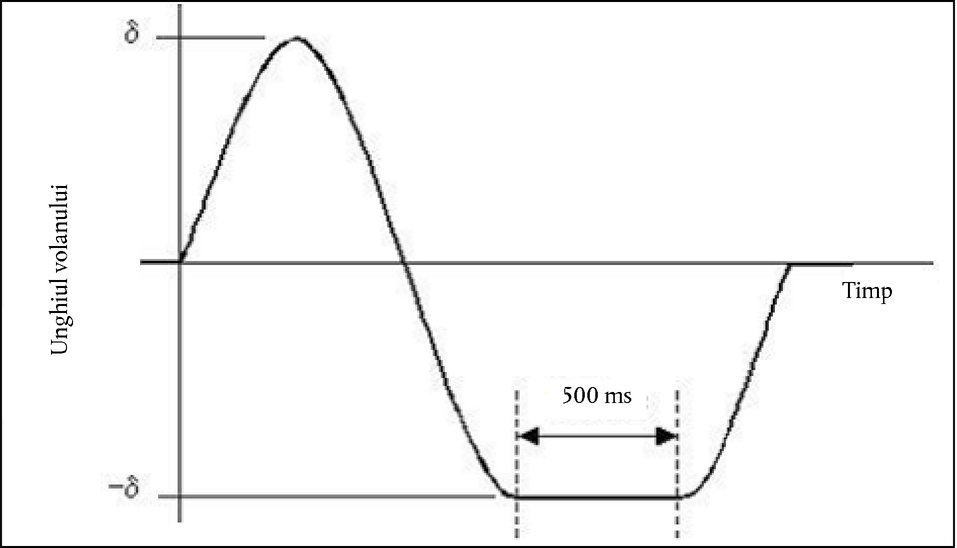
Vehiculul este supus la două serii de curse de încercare utilizând un model de viraj cu impuls sinusoidal, având frecvența 0,7 Hz și o temporizare de 500 ms începând de la al doilea maxim al sinusoidei, în modul ilustrat în figura 2 (încercările sinus cu palier de temporizare). O serie utilizează virajul în sensul invers acelor de ceasornic pentru prima jumătate de ciclu, iar a doua serie utilizează virajul în sensul acelor de ceasornic pentru prima jumătate de ciclu. Este permisă răcirea vehiculului între fiecare cursă de încercare pentru o perioadă cuprinsă între 1,5 și 5 minute, vehiculul fiind staționat.
Figura 2
Sinus cu palier de temporizare
 Textul imaginii
Textul imaginii
9.9.1. Mișcarea de virare este inițiată în timp ce vehiculul rulează inerțial, cu cutia de viteze cuplată într-o treaptă superioară, la viteza de 80 ± 2 km/h.
9.9.2. Amplitudinea comenzii direcției pentru cursa inițială a fiecărei serii este de 1,5 A, unde A este unghiul volanului, determinat la punctul 9.6.1.
9.9.3. În cadrul fiecărei serii de curse de încercare, amplitudinea comenzii de direcție crește de la o cursă la alta, cu incremente de 0,5 A, cu condiția ca nicio cursă să nu aibă o amplitudine a comenzii de direcție mai mare decât cea a cursei finale specificată la punctul 9.9.4.
9.9.4. Amplitudinea comenzii de direcție a cursei finale din cadrul fiecărei serii este mai mare de 6,5 A sau de 270 de grade, cu condiția ca amplitudinea calculată de 6,5 A să fie mai mică sau egală cu 300 de grade. Dacă orice creștere de 0,5 A, până la 6,5 A, este mai mare de 300 de grade, amplitudinea comenzii de direcție a cursei finale va fi de 300 de grade.
9.9.5. După finalizarea celor două serii de curse de încercare, se efectuează postprocesarea datelor privind viteza de girație și accelerația centrifugă, după cum se specifică la punctul 9.11.
9.10. Detectarea defectării sistemului ESC
9.10.1. Se simulează una sau mai multe defecțiuni ale sistemului ESC, deconectând sursa de alimentare a oricărei componente ESC sau decuplând conexiunile electrice dintre componentele ESC (în timp ce alimentarea vehiculului este întreruptă). În momentul simulării unei defecțiuni ESC, conexiunile electrice pentru lampa (lămpile) martor și/sau comanda (comenzile) opționale a(le) sistemului ESC nu este (sunt) decuplată (decuplate).
9.10.2. În timp ce vehiculul este inițial staționat, iar cheia de contact este în poziția „blocat” sau „staționare”, se pune contactul în poziția „pornit” și se pornește motorul. Se conduce vehiculul în direcția de mers înainte pentru a obține o viteză de deplasare de 48 ± 8 km/h. La cel târziu 30 de secunde după ce a fost pornit motorul și în următoarele două minute de deplasare cu această viteză, se efectuează cel puțin o manevră de virare lină spre stânga și una spre dreapta, fără a pierde stabilitatea direcțională și se efectuează o aplicare a frânei. Se verifică dacă indicatorul de defecțiune al ESC se aprinde în conformitate cu punctul 7.4 până la finalul acestor manevre.
9.10.3. Se oprește vehiculul și se pune cheia de contact în poziția „blocat” sau „staționare”. După o perioadă de cinci minute, se pune cheia de contact în poziția „pornit” și se pornește motorul. Se verifică dacă indicatorul de defecțiune al ESC se aprinde din nou pentru a semnala o defecțiune și rămâne aprins atât timp cât motorul funcționează sau până când este rectificată eroarea.
9.10.4. Se pune cheia de contact în poziția „blocat” sau „staționare”. Se restabilește funcționarea normală a sistemului ESC, se pune cheia de contact în poziția „pornit” și se pornește motorul. Se efectuează încă o dată manevra descrisă la punctul 9.10.2 și se verifică dacă lampa martor s-a stins în acest timp sau imediat după.
9.11. Prelucrarea ulterioară a datelor – calculul indicatorilor de performanță
Viteza de girație, precum și calculele și măsurătorile pentru deplasarea laterală se prelucrează utilizând metodele specificate la punctele 9.11.1-9.11.8.
9.11.1. Datele brute ale unghiului volanului se filtrează utilizând un filtru fără fază Butterworth cu 12 poli și o frecvență de deconectare de 10 Hz. Datele filtrate sunt ulterior readuse la zero pentru a îndepărta eroarea senzorului provocată de date statice anterioare încercării.
9.11.2. Datele brute privind viteza de girație se filtrează utilizând un filtru fără fază Butterworth cu 12 poli și o frecvență de deconectare de 6 Hz. Datele filtrate sunt ulterior readuse la zero pentru a îndepărta eroarea senzorului provocată de date statice anterioare încercării.
9.11.3. Datele brute privind accelerația centrifugă se filtrează utilizând un filtru fără fază Butterworth cu 12 poli și o frecvență de deconectare de 6 Hz. Datele filtrate sunt ulterior readuse la zero pentru a îndepărta eroarea senzorului provocată de date statice anterioare încercării. Datele privind accelerația centrifugă în centrul de greutate al vehiculului se determină eliminând efectele cauzate de balansul caroseriei vehiculului și prin corectarea poziției senzorului cu ajutorul unei transformări de coordonate. Pentru colectarea datelor, accelerometrul lateral este amplasat cât mai aproape posibil de poziția centrelor de greutate longitudinale și laterale ale vehiculului.
9.11.4. Viteza volanului este determinată prin derivarea în raport cu timpul a datelor filtrate ale unghiului volanului. Ulterior, datele privind viteza volanului sunt filtrate cu ajutorul unui filtru cu medie mobilă de 0,1 secunde.
9.11.5. Canalele de date privind accelerația centrifugă, viteza de girație și unghiul volanului sunt readuse la zero utilizând un „interval de readucere la zero” prestabilit. Metodele utilizate pentru a stabili intervalul de readucere la zero sunt definite la punctele 9.11.5.1 și 9.11.5.2.
9.11.5.1. Utilizând datele privind viteza unghiulară a volanului calculate prin metodele descrise la punctul 9.11.4, se identifică primul moment în care viteza volanului depășește 75 grade/sec. Din acest moment, viteza unghiulară a volanului trebuie să rămână mai mare de 75 grade/sec. timp de cel puțin 200 ms. Dacă a doua condiție nu este îndeplinită, este identificat următorul moment în care viteza unghiulară a volanului depășește 75 grade/sec și se verifică din nou condiția intervalului de 200 ms. Acest proces iterativ continuă până când ambele condiții sunt în cele din urmă satisfăcute.
9.11.5.2. „Intervalul de readucere la zero” este definit ca fiind perioada de timp de 1,0 secundă dinainte de momentul în care viteza volanului depășește 75 grade/sec. (adică, momentul în care viteza volanului depășește 75 grade/sec. definește finalul „intervalului de readucere la zero”).
9.11.6. Începutul virării (BOS) este definit ca fiind primul moment în care datele privind unghiul volanului filtrate și readuse la zero ating – 5 grade (atunci când acțiunea inițială asupra direcției are loc în sens invers acelor de ceasornic) sau + 5 grade (atunci când acțiunea inițială asupra direcției are loc în sensul acelor de ceasornic) după o perioadă care definește finalul „intervalului de readucere la zero”. Valoarea pentru timp la BOS se interpolează.
9.11.7. Finalizarea virării (COS – Completion of Steer) este definită ca fiind perioada de timp în care unghiul volanului revine la zero la finalizarea manevrei de virare cu impuls sinus cu palier de temporizare. Valoarea pentru timp la unghiul de zero grade al volanului se interpolează.
9.11.8. A doua viteză de girație maximă este definită ca fiind prima viteză de girație maximă locală produsă de inversarea cursei volanului. Vitezele de girație la 1,0 și 1,75 secunde după COS se determină prin interpolare.
9.11.9. Se stabilește viteza laterală prin integrarea datelor privind accelerația centrifugă corectate, filtrate și readuse la zero. Viteza laterală la momentul BOS se fixează la zero. Se stabilește deplasarea laterală prin integrarea vitezei laterale readusă la zero. Deplasarea laterală la momentul BOS se fixează la zero. Măsurarea deplasării laterale se efectuează la 1,07 secunde după momentul BOS și se determină prin interpolare.
10. MODIFICAREA TIPULUI DE VEHICUL SAU A SISTEMULUI ESC ȘI EXTINDEREA OMOLOGĂRII
10.1. Orice modificare a unui tip de vehicul existent trebuie adusă la cunoștința autorității de omologare de tip care a acordat omologarea de tip pentru vehiculul respectiv.
În acest caz, autoritatea poate:
|
(a) |
să decidă, cu consultarea producătorului, acordarea unei noi omologări de tip sau |
|
(b) |
să aplice procedura prevăzută la punctul 10.1.1. (revizuire) și, dacă este cazul, să aplice procedura prevăzută la punctul 10.1.2. (extindere). |
10.1.1. Revizuire
Atunci când datele înregistrate în fișa de informare s-au schimbat, iar autoritatea de omologare consideră că este puțin probabil ca modificările efectuate să aibă efecte adverse semnificative și că, în orice caz, comanda prin pedală a sistemului de frânare respectă în continuare cerințele, modificarea este considerată „revizuire”.
Într-un astfel de caz, autoritatea de omologare emite paginile revizuite în consecință din fișa de informare, marcând fiecare pagină revizuită pentru a indica în mod clar natura modificării și data noii emiteri. Această cerință se consideră îndeplinită și de o versiune consolidată, actualizată a fișei de informare, însoțită de o descriere detaliată a modificării.
10.1.2. Extindere
Modificarea este considerată „extindere” în cazul în care, pe lângă modificarea datelor din fișa de informare,
|
(a) |
sunt necesare noi inspecții sau încercări sau |
|
(b) |
în cazul în care au fost schimbate una sau mai multe informații din fișa de informații (cu excepția informațiilor din documentele anexate la fișa în cauză) sau |
|
(c) |
dacă este necesară aprobarea unei serii ulterioare de amendamente după intrarea în vigoare a modificării actuale. |
10.2. Confirmarea sau refuzul omologării, cu precizarea modificării, se comunică prin procedura specificată la punctul 4.3 de mai sus părților contractante la acordul care aplică prezentul regulament. În plus, cuprinsul fișei de informații și al rapoartelor de încercare, anexate la fișa de informații din anexa I, se modifică în consecință, pentru a indica data celei mai recente revizuiri sau extinderi.
10.3. Autoritatea competentă care acordă extinderea omologării trebuie să aloce un număr de serie fiecărei fișe de informații redactate în scopul unei astfel de extinderi.”
11. CONFORMITATEA PRODUCȚIEI
Procedurile de conformitate a producției sunt conforme cu procedurile stabilite în apendicele 2 la acord (E/ECE/324-E/ECE/TRANS/505/Rev.2), cu respectarea următoarelor cerințe:
|
11.1. |
Un vehicul omologat în temeiul prezentului regulament trebuie să fie fabricat astfel încât să fie conform cu tipul omologat prin îndeplinirea cerințelor de la punctele 5, 6 și 7 de mai sus. |
|
11.2. |
Autoritatea de omologare de tip care a acordat omologarea de tip poate să verifice în orice moment metodele de control al conformității aplicate în fiecare unitate de producție. Frecvența normală a acestor verificări este de o dată la doi ani. |
12. SANCȚIUNI ÎN CAZ DE NECONFORMITATE A PRODUCȚIEI
12.1. Omologarea acordată cu privire la tipul de vehicul în temeiul prezentului regulament poate fi retrasă în cazul în care condițiile stabilite la punctul 8.1 de mai sus nu sunt respectate.
12.2. În cazul în care o parte contractantă la acord care aplică prezentul regulament retrage o omologare acordată anterior, aceasta informează în cel mai scurt timp celelalte părți contractante care aplică prezentul regulament prin intermediul unei copii a fișei de informații conforme cu modelul indicat în anexa 1 la prezentul regulament.
13. ÎNCETAREA DEFINITIVĂ A PRODUCȚIEI
În cazul în care titularul omologării încetează definitiv să producă un tip de vehicul în conformitate cu prezentul regulament, trebuie să informeze autoritatea care a acordat omologarea. La primirea acestei comunicări, autoritatea informează celelalte părți contractante la acord care aplică prezentul regulament prin intermediul unor copii ale formularului conforme cu modelul indicat în anexa 5 la prezentul regulament.
14. DENUMIRILE ȘI ADRESELE SERVICIILOR TEHNICE RESPONSABILE CU EFECTUAREA ÎNCERCĂRILOR DE OMOLOGARE, PRECUM ȘI ALE AUTORITĂȚILOR DE OMOLOGARE DE TIP
Părțile contractante la acord care aplică prezentul regulament comunică Secretariatului Organizației Națiunilor Unite denumirile și adresele serviciilor tehnice responsabile cu efectuarea încercărilor de omologare și ale autorităților de omologare de tip care acordă omologarea și la care trebuie trimise fișele care certifică omologarea sau extinderea, refuzul sau retragerea omologării, emise în alte țări.
(1) Categoriile M1 și N1 de vehicule sunt definite în Rezoluția consolidată privind construcția vehiculelor (R.E.3), document ECE/TRANS/WP.29/78/Rev. 4 punctul 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Un grup de axe este tratat ca o singură axă, iar roțile duble sunt tratate ca o singură roată.
(3) Numerele distinctive ale părților contractante la Acordul din 1958 care sunt reproduse în anexa 3 la Rezoluția consolidată privind construcția vehiculelor (R.E.3), documentul ECE/TRANS/WP.29/78/Rev. 4, anexa 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Un grup de axe este tratat ca o singură axă, iar roțile duble sunt tratate ca o singură roată.
(5) Textul din prezentul regulament pornește de la premisa că direcția vehiculului este controlată prin intermediul unui volan. Vehiculele care utilizează alte tipuri de comenzi ale direcției pot fi omologate, de asemenea, conform prezentei anexe, cu condiția ca producătorul să poată demonstra serviciului tehnic că cerințele privind performanța din prezentul regulament pot fi satisfăcute utilizând acționări ale direcției echivalente cu cele prevăzute la punctul 7 din prezentul regulament.
(6) Valoarea „nominală” se înțelege ca fiind valoarea teoretică țintă.
ANEXA 2
EXEMPLE DE MĂRCI DE OMOLOGARE
MODELUL A
(A se vedea punctul 4.4 din prezentul regulament)

Marca de omologare de mai sus, fixată pe un vehicul, arată că tipul de vehicul în cauză a fost omologat în Belgia (E 6) pentru sistemul de control electronic al stabilității, în temeiul Regulamentului nr. 140. Primele două cifre ale acesteia indică faptul că omologarea a fost acordată în conformitate cu cerințele Regulamentului nr. 140, în forma sa originală.
MODELUL B
(A se vedea punctul 4.5 din prezentul regulament)

Marca de omologare de mai sus aplicată pe un vehicul indică faptul că tipul de vehicul în cauză a fost omologat în Belgia (E 6), în temeiul Regulamentelor nr. 140 și 24 (1). (În cazul celui de al doilea regulament, valoarea corectată a coeficientului de absorbție este egală cu 1,30 m-1.) Numerele de omologare indică faptul că, la datele la care au fost acordate respectivele omologări, Regulamentul nr. 140 era în forma sa inițială, iar Regulamentul nr. 24 includea seria 02 de modificări.
(1) Acest număr este folosit doar cu titlu de exemplu.
ANEXA 3
UTILIZAREA SIMULĂRII STABILITĂȚII DINAMICE
Eficacitatea sistemului de control electronic al stabilității se poate determina prin simulare pe calculator.
1. UTILIZAREA SIMULĂRII
1.1. Funcția de stabilitate a vehiculului trebuie demonstrată de către producătorul vehiculului autorității de omologare de tip sau serviciului tehnic prin simularea manevrelor dinamice prevăzute la punctul 9.9 din prezentul regulament.
1.2. Simularea reprezintă un mijloc prin care se demonstrează eficacitatea stabilității vehiculului cu:
|
(a) |
viteza de girație, la o secundă după finalizarea semnalului de intrare de comandă cu impuls sinus cu palier de temporizare (timpul T0 + 1); |
|
(b) |
viteza de girație, la 1,75 secunde după finalizarea semnalului de intrare de comandă cu impuls sinus cu palier de temporizare; |
|
(c) |
deplasarea laterală a centrului de greutate al vehiculului în raport cu traiectoria rectilinie inițială a acestuia. |
1.3. Simularea se efectuează prin intermediul unui instrument validat de modelare și simulare și utilizând manevrele dinamice de la punctul 9.9 din prezentul regulament, în condițiile de încercare de la punctul 8 din prezentul regulament.
Metoda prin care se validează instrumentul de simulare este prevăzută în anexa 4 la prezentul regulament.
ANEXA 4
INSTRUMENTUL DE SIMULARE A STABILITĂȚII DINAMICE ȘI VALIDAREA ACESTUIA
1. SPECIFICAȚIA INSTRUMENTULUI DE SIMULARE
1.1. Metoda de simulare ia în considerare principalii factori care influențează traiectoria și balansul vehiculului. Un model tipic poate cuprinde, într-o formă explicită sau implicită, următorii parametrii ai vehiculului:
|
(a) |
axa/roata; |
|
(b) |
suspensia; |
|
(c) |
pneul; |
|
(d) |
șasiul/caroseria vehiculului; |
|
(e) |
grupul propulsor/transmisia, dacă este cazul; |
|
(f) |
sistemul de frânare; |
|
(g) |
sarcina utilă. |
1.2. Funcția de stabilitate a vehiculului este adăugată modelului de simulare prin intermediul:
|
(a) |
unui subsistem (model de software) al instrumentului de simulare; sau |
|
(b) |
cutiei electronice de comandă din cadrul unei configurații de tip hardware-in-the-loop (hardware în buclă). |
2. VALIDAREA INSTRUMENTULUI DE SIMULARE
2.1. Validitatea instrumentului de modelare și simulare se verifică prin comparații cu încercări practice ale vehiculului. Încercările utilizate pentru validare sunt manevrele dinamice de la punctul 9.9 din prezentul regulament.
În timpul încercărilor, următoarele variabile de mișcare, după caz, se consemnează sau se calculează în conformitate cu ISO 15037 partea 1:2006: condiții generale pentru autoturisme sau Partea 2:2002: condiții generale pentru vehicule grele și autobuze (în funcție de categoria de vehicul):
|
(a) |
unghiul volanului (δΗ); |
|
(b) |
viteza longitudinală (vX); |
|
(c) |
unghiul de alunecare laterală (β) sau viteza laterală (vY) – (opțional); |
|
(d) |
accelerația longitudinală (aX) – (opțional); |
|
(e) |
accelerația laterală (aY); |
|
(f) |
viteza de girație (dψ/dt); |
|
(g) |
viteza de balans (dφ/dt); |
|
(h) |
viteza de tangaj (dθ/dt); |
|
(i) |
unghiul de balans (φ); |
|
(j) |
unghiul de tangaj (θ). |
2.2. Obiectivul este demonstrarea posibilității de a compara comportamentul simulat al vehiculului și operarea simulată a funcției de stabilitate a vehiculului cu cele observate în încercările practice efectuate asupra vehiculelor.
2.3. Se consideră că simulatorul este validat atunci când rezultatele sale sunt comparabile cu rezultatele încercărilor practice obținute pe un anumit tip de vehicul în timpul manevrelor dinamice de la punctul 9.9 din prezentul regulament. Comparația se realizează pe baza relației dintre activarea și secvența funcției de stabilitate a vehiculului obținute în urma simulării, respectiv în urma încercărilor practice ale vehiculului.
2.4. Parametrii fizici care diferă în configurațiile vehiculului de referință în raport cu cele ale vehiculului simulat trebuie modificați în consecință în cadrul simulării.
2.5. Se întocmește un raport de încercare al simulatorului, al cărui model este prevăzut în anexa 5 la prezentul regulament, iar o copie a acestuia se anexează la raportul de omologare a vehiculului.
ANEXA 5
RAPORT DE ÎNCERCARE A INSTRUMENTULUI DE SIMULARE A FUNCȚIEI DE STABILITATE A VEHICULULUI
Numărul raportului de încercare: …
1. IDENTIFICARE
1.1. Denumirea și adresa producătorului instrumentului de simulare …
1.2. Identificarea instrumentului de simulare: denumire/model/număr (hardware și software) …
2. DOMENIUL DE APLICARE
2.1. Tipul vehiculului: …
2.2. Configurații ale vehiculului: …
3. VERIFICAREA VEHICULULUI DE ÎNCERCARE
3.1. Descrierea vehiculului (vehiculelor): …
3.1.1. Identificarea vehiculului (vehiculelor): marcă/model/VIN …
3.1.2. Descrierea vehiculului, inclusiv a suspensiei/roților, a motorului și a transmisiei, a sistemului (sistemelor) de frânare, a sistemului de direcție, cu identificarea denumirii/modelului/numărului acestuia: …
3.1.3. Datele privind vehiculul folosite în cadrul simulării (explicit): …
3.2. Descrierea locației (locațiilor), a condițiilor de suprafață ale drumului/zonei de încercare, indicarea temperaturii și a datei (datelor): …
3.3. Rezultatele cu funcția de stabilitate a vehiculului activată și dezactivată, inclusiv variabilele de mișcare menționate la punctul 2.1 din anexa 4, după caz: …
4. REZULTATELE SIMULĂRII
4.1. Parametrii vehiculului și valorile folosite în cadrul simulării care nu sunt preluate din încercarea reală a vehiculului (implicit): …
4.2. Stabilitatea girației și deplasarea laterală în conformitate cu punctele 7.1-7.3 din prezentul regulament: …
5. Această încercare a fost efectuată și rezultatele au fost consemnate în conformitate cu anexa 4 la Regulamentul nr. 140.
Serviciul tehnic care efectuează încercarea (1) …
Semnătura: …
Data: …
Autoritatea de omologare (1) …
Semnătura: …
Data: …
(1) Se semnează de către persoane diferite în cazul în care serviciul tehnic și autoritatea de omologare de tip coincid.
|
26.10.2018 |
RO |
Jurnalul Oficial al Uniunii Europene |
L 269/36 |
Numai textele originale CEE-ONU au efect juridic în temeiul dreptului public internațional. Situația și data intrării în vigoare ale prezentului regulament ar trebui verificate în ultima versiune a documentului de situație al CEE-ONU TRANS/WP.29/343, disponibil la următoarea adresă:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamentul nr. 141 al Comisiei Economice pentru Europa din cadrul Organizației Națiunilor Unite (CEE/ONU) – Dispoziții uniforme privind omologarea autovehiculelor cu privire la sistemele lor de monitorizare a presiunii în pneuri (TPMS) [2018/1593]
Data intrării în vigoare: 22 ianuarie 2017
CUPRINS
REGULAMENT
|
1. |
Domeniu de aplicare |
|
2. |
Definiții |
|
3. |
Cerere de omologare |
|
4. |
Omologare |
|
5. |
Specificații și încercări |
|
6. |
Informații suplimentare |
|
7. |
Modificarea și extinderea omologării de tip a vehiculului |
|
8. |
Conformitatea producției |
|
9. |
Sancțiuni pentru neconformitatea producției |
|
10. |
Încetarea definitivă a producției |
|
11. |
Denumirile și adresele serviciilor tehnice responsabile cu efectuarea încercărilor de omologare și ale autorităților de omologare de tip |
ANEXE
|
1. |
Fișă de informații |
|
2. |
Exemple de dispunere a mărcilor de omologare |
|
3. |
Încercări ale sistemelor de monitorizare a presiunii în pneuri (TPMS – Tyre Pressure Monitoring Systems) |
1. DOMENIU DE APLICARE
Prezentul regulament se aplică omologării vehiculelor din categoria M 1 cu o masă maximă de cel mult 3 500 kg și N 1 (1) atunci când sunt echipate cu un sistem de monitorizare a presiunii în pneuri, cu excepția vehiculelor echipate cu roți duble pe o axă.
2. DEFINIȚII
În sensul prezentului regulament:
|
2.1. |
„Omologarea unui vehicul” înseamnă omologarea unui tip de vehicul cu privire la sistemul său de monitorizare a presiunii în pneuri. |
|
2.2. |
„Tip de vehicul” înseamnă vehiculele care nu diferă în privința unor aspecte esențiale precum:
|
|
2.3. |
„Roată” înseamnă o roată completă, constând într-o jantă și un disc de roată; |
|
2.4. |
„Pneu” înseamnă o anvelopă pneumatică, constând într-o învelitoare din cauciuc ranforsat prevăzută cu sau care formează împreună cu roata pe care este montată o cameră închisă continuă, de formă practic toroidală, conținând un gaz (de obicei aer) sau un gaz amestecat cu lichid și care în mod normal este destinat utilizării la o presiune mai mare decât presiunea atmosferică; |
|
2.5. |
„Masa maximă” înseamnă masa maximă a vehiculului declarată de către producător ca fiind admisibilă din punct de vedere tehnic (această masă poate fi mai mare decât „masa maximă admisibilă” stabilită de către administrația națională). |
|
2.6. |
„Sarcina maximă pe axă” înseamnă valoarea maximă declarată de către producător a forței verticale totale între suprafețele de contact ale pneurilor sau între căile de rulare ale unei axe, pe de o parte, și sol, pe de altă parte, și care rezultă din partea de masă a vehiculului preluată de axa respectivă; această sarcină poate fi mai mare decât „sarcina autorizată pe axă” stabilită de către administrația națională. Suma sarcinilor pe axă poate fi mai mare decât valoarea corespunzătoare masei totale a vehiculului. |
|
2.7. |
„Sistem de monitorizare a presiunii în pneuri (TPMS – Tyre Pressure Monitoring System)” înseamnă un sistem cu care este echipat un vehicul, capabil să evalueze presiunea de umflare în pneuri sau variația presiunii în timp și să transmită informația corespunzătoare utilizatorului în timpul mersului; |
|
2.8. |
„Presiunea de umflare la rece a pneului” înseamnă presiunea în pneu la temperatura ambiantă, în lipsa oricărei creșteri de presiune cauzate de folosirea pneului; |
|
2.9. |
„Presiunea de umflare la rece recomandată (Prec)” înseamnă presiunea recomandată de producătorul vehiculului pentru fiecare poziție a pneului, în condițiile de funcționare prevăzute (de exemplu, viteză și sarcină) ale unui vehicul dat, astfel cum se indică pe plăcuța vehiculului și/sau în manualul proprietarului vehiculului; |
|
2.10. |
„Presiunea de operare (Pwarm)” înseamnă presiunea în pneuri pentru fiecare poziție a pneului care, din cauza încălzirii în timpul funcționării vehiculului, este mai mare decât presiunea la rece (Prec). |
|
2.11. |
„Presiunea de încercare (Ptest)” este presiunea reală a pneului (pneurilor) pentru fiecare poziție selectată a pneului după pierderile de presiune din cursul procedurii de încercare. |
3. CERERE DE OMOLOGARE
3.1. Cererea de omologare a unui tip de vehicul în ceea ce privește sistemul său de monitorizare a presiunii în pneuri este prezentată de către producătorul vehiculului sau de către reprezentantul autorizat al acestuia;
3.2. Cererea de omologare este însoțită de o descriere în triplu exemplar a tipului de vehicul cu privire la aspectele menționate în anexa 1 la prezentul regulament:
3.3. Un vehicul reprezentativ pentru tipul de vehicul care urmează a fi supus omologării este prezentat autorității de omologare de tip sau serviciului tehnic responsabil pentru efectuarea încercărilor de omologare.
3.4. Autoritatea de omologare de tip verifică dacă există condiții satisfăcătoare pentru asigurarea controlului efectiv al conformității producției înainte de acordarea omologării de tip.
4. OMOLOGARE
4.1. În cazul în care vehiculul supus omologării în temeiul prezentului regulament îndeplinește toate cerințele de la punctul 5 de mai jos, se acordă omologarea respectivului tip de vehicul.
4.2. Fiecărui tip omologat i se atribuie un număr de omologare. Primele două cifre ale acestuia (în prezent 00, corespunzătoare regulamentului în forma sa originală) indică seria de amendamente care cuprinde cele mai recente modificări tehnice majore la regulament în momentul eliberării omologării. Aceeași parte contractantă nu poate să atribuie același număr unui alt tip de vehicul.
4.3. Omologarea, extinderea sau refuzul omologării unui tip de vehicul în conformitate cu prezentul regulament se comunică părților contractante la acord care aplică prezentul regulament prin intermediul unei fișe de informații conforme cu modelul din anexa 1 la prezentul regulament.
4.4. Pe fiecare vehicul conform cu un tip de vehicul omologat în conformitate cu prezentul regulament se aplică, în mod vizibil și într-un loc ușor accesibil specificat în formularul de omologare, o marcă de omologare internațională care constă în:
|
4.4.1. |
un cerc în interiorul căruia este înscrisă litera „E”, urmată de numărul distinctiv al țării care a acordat omologarea (2); |
|
4.4.2. |
numărul prezentului regulament, urmat de litera „R”, o cratimă și numărul de omologare în dreapta cercului prevăzut la punctul 4.4.1. |
4.5. În cazul în care vehiculul corespunde unui tip de vehicul omologat, în temeiul unuia sau mai multor regulamente anexate la acord, în țara care a acordat omologarea în temeiul prezentului regulament, simbolul prevăzut la punctul 4.4.1 nu trebuie repetat; în acest caz, numărul regulamentului și numărul de omologare, precum și simbolurile suplimentare ale tuturor regulamentelor în temeiul cărora s-a acordat omologarea în țara care a acordat omologarea în temeiul prezentului regulament se introduc în coloane verticale la dreapta simbolului prevăzut la punctul 4.4.1.
4.6. Marca de omologare trebuie să fie perfect lizibilă și de neșters.
4.7. Marca de omologare se amplasează pe plăcuța cu date a vehiculului fixată de producător sau în apropierea acesteia.
4.8. În anexa 2 la prezentul regulament sunt oferite exemple de mărci de omologare.
5. SPECIFICAȚII ȘI ÎNCERCĂRI
5.1. Considerații generale
5.1.1. Orice vehicul din categoriile M1 cu masa de cel mult 3 500 kg și N1, în ambele cazuri cu toate axele echipate cu pneuri simple și echipate cu un sistem de monitorizare a presiunii în pneuri care corespunde definiției de la punctul 2.7, trebuie să îndeplinească cerințele de performanță prevăzute la punctele 5.1.2-5.5.5 din prezentul regulament pentru o gamă largă de condiții rutiere și de mediu întâlnite pe teritoriul părților contractante.
5.1.2. Eficiența sistemului de monitorizare a presiunii în pneuri montat pe un vehicul nu trebuie să fie afectată de interferențele produse de câmpuri magnetice sau electrice. Aceasta se demonstrează prin îndeplinirea cerințelor tehnice și respectarea dispozițiilor tranzitorii din Regulamentul nr. 10, aplicând:
|
(a) |
seria 03 de amendamente pentru vehiculele fără un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune); |
|
(b) |
seria 04 de amendamente pentru vehiculele cu un sistem de cuplare pentru încărcarea sistemului reîncărcabil de stocare a energiei (bateriile de tracțiune). |
5.1.3. Sistemul va funcționa de la o viteză de 40 km/h sau inferioară, până la viteza maximă prin construcție a vehiculului.
5.1.4. Vehiculul trebuie să satisfacă încercările (la perforare, de difuziune și de detectare a defecțiunilor) în conformitate cu anexa 3.
5.2. Detectarea pierderilor bruște de presiune în pneuri.
5.2.1. Sistemul TPMS va determina aprinderea lămpii indicatorului de avertizare descris la punctul 5.5 într-un interval de timp cumulat de cel mult 10 minute de rulare după ce presiunea de funcționare în unul din pneurile vehiculului fie s-a redus cu 20 %, fie a ajuns la presiunea minimă de 150 kPa, activarea având loc la cea mai mare dintre aceste două valori.
5.3. Detectarea unui nivel de presiune semnificativ mai scăzut decât presiunea recomandată pentru performanța optimă, ținând cont inclusiv de consumul de combustibil și de cerințele de siguranță.
5.3.1. Sistemul TPMS va determina aprinderea lămpii indicatorului de avertizare descris la punctul 5.5 într-un interval de timp cumulat de cel mult 60 minute de rulare după ce presiunea de funcționare în oricare dintre pneurile vehiculului, până la un total de patru, fie s-a redus cu 20 %, fie a ajuns la presiunea minimă de 150 kPa, activarea având loc la cea mai mare dintre aceste două valori.
5.4. Detectarea unei defecțiuni
5.4.1. Sistemul TPMS va determina aprinderea lămpii indicatorului de avertizare descris la punctul 5.5 în cel mult 10 minute de la apariția unei defecțiuni care afectează generarea sau transmiterea semnalelor de comandă sau de răspuns ale sistemului de monitorizare a presiunii în pneuri cu care este echipat vehiculul.
5.5. Semnalul de avertizare.
5.5.1. Avertizarea se realizează prin intermediul unui semnal optic care corespunde cerințelor din Regulamentul nr. 121.
5.5.2. Indicatorul de avertizare este activat atunci când cheia de contact este în poziția „pornit” (run) (lampă de control). Această cerință nu se aplică în cazul lămpilor-martor expuse într-un spațiu comun.
5.5.3. Indicatoarele de avertizare trebuie să fie vizibile inclusiv la lumina zilei; activarea corespunzătoare a semnalelor trebuie să fie ușor de verificat de către conducător din scaunul său.
5.5.4. Dispozitivul de semnalare a defecțiunilor poate fi același indicator de avertizare ca cel utilizat pentru indicarea presiunii reduse. Dacă indicatorul de avertizare descris la punctul 5.5.1 este utilizat pentru a semnaliza atât presiunea scăzută, cât și o defecțiune a sistemului TPMS, se aplică următoarele dispoziții: dacă cheia de contact este în poziția „pornit” (run), indicatorul de avertizare se aprinde intermitent pentru a indica o defecțiune. După un interval scurt de timp, indicatorul de avertizare trebuie să rămână luminat în mod continuu atât timp cât persistă defecțiunea și cheia de contact se află în poziția „pornit” (run). Secvența iluminare intermitentă – iluminare continuă se repetă de fiecare dată când cheia de contact se află în poziția „pornit” (run), până când defecțiunea este remediată.
5.5.5. Lampa-martor a indicatorului de avertizare descris la punctul 5.5.1 poate fi utilizată în modul cu iluminare intermitentă pentru a furniza informații despre starea resetată a sistemului de monitorizare a presiunii în pneuri, în conformitate cu manualul proprietarului vehiculului.
6. INFORMAȚII SUPLIMENTARE
6.1. Manualul proprietarului vehiculului, dacă există, trebuie să conțină cel puțin următoarele informații:
|
6.1.1. |
Indicarea faptului că vehiculul este echipat cu un astfel de sistem (și informații privind modul de resetare a sistemului, dacă sistemul existent include această funcție). |
|
6.1.2. |
O imagine a simbolului lămpii-martor descrise la punctul 5.5.1 (și o imagine a simbolului lămpii martor a defecțiunii, în cazul în care se utilizează o lampă martor specială pentru această funcție). |
|
6.1.3. |
Informații suplimentare privind semnificația aprinderii lămpii-martor de avertizare a scăderii presiunii în pneuri și o descriere a acțiunii corective care trebuie întreprinsă în acest caz. |
6.2. În cazul în care manualul proprietarului nu este livrat împreună cu vehiculul, informațiile prevăzute la punctul 6.1 vor fi afișate într-un loc vizibil pe vehicul.
7. MODIFICAREA ȘI EXTINDEREA OMOLOGĂRII DE TIP A VEHICULULUI
7.1. Orice modificare a tipului de vehicul, astfel cum este definită mai sus la punctul 2.2 din prezentul regulament, se comunică autorității de omologare de tip care a omologat tipul de vehicul. Autoritatea de omologare de tip poate:
|
7.1.1. |
să considere că modificările aduse nu au un efect negativ asupra condițiilor de acordare a omologării și să acorde o extindere a omologării; |
|
7.1.2. |
să considere că modificările aduse afectează condițiile acordării omologării și să solicite încercări sau verificări suplimentare înainte de a acorda o extindere a omologării. |
7.2. Confirmarea sau respingerea omologării, cu precizarea modificărilor, se comunică prin procedura specificată la punctul 4.3 de mai sus părților contractante ale acordului care aplică prezentul regulament.
7.3. Autoritatea de omologare de tip informează celelalte părți contractante cu privire la extindere prin intermediul fișei de informații din anexa 1 la prezentul regulament. Autoritatea atribuie fiecărei extinderi un număr de serie, care urmează să fie cunoscut sub numele de număr de extindere.
8. CONFORMITATEA PRODUCȚIEI
8.1. Procedurile privind conformitatea producției trebuie să fie conforme cu cele stabilite în apendicele 2 la acord (E/ECE/324–E/ECE/TRANS/505/Rev. 2), cu respectarea următoarelor cerințe:
8.2. Autoritatea care a acordat omologarea de tip poate verifica în orice moment metodele de control al conformității aplicate în fiecare unitate de producție. Frecvența normală a acestor verificări trebuie să fie de cel puțin o dată pe an.
9. SANCȚIUNI PENTRU NECONFORMITATEA PRODUCȚIEI
9.1. Omologarea acordată pentru un tip de vehicul în temeiul prezentului regulament poate fi retrasă în cazul în care nu sunt respectate cerințele de la punctul 8.
9.2. În cazul în care o parte contractantă la acord, care aplică prezentul regulament, retrage o omologare pe care a acordat-o anterior, aceasta informează de îndată celelalte părți contractante la acord care aplică prezentul regulament, prin intermediul unei copii a formularului de omologare care va purta la sfârșit, cu majuscule, mențiunea „OMOLOGARE RETRASĂ”, semnată și datată.
10. ÎNCETAREA DEFINITIVĂ A PRODUCȚIEI
În cazul în care titularul unei omologări încetează complet fabricarea unui tip de vehicul omologat în conformitate cu prezentul regulament, acesta trebuie să informeze autoritatea care a acordat omologarea în legătură cu acest lucru. La primirea comunicării corespunzătoare, autoritatea respectivă informează cu privire la aceasta celelalte părți contractante la acordul de punere în aplicare a prezentului regulament, prin intermediul unei copii a formularului de omologare care conține la final, cu litere mari, mențiunea semnată și datată „PRODUCȚIE OPRITĂ”.
11. DENUMIRILE ȘI ADRESELE SERVICIILOR TEHNICE RESPONSABILE CU EFECTUAREA ÎNCERCĂRILOR DE OMOLOGARE ȘI ALE AUTORITĂȚILOR DE OMOLOGARE DE TIP
Părțile contractante la acord care aplică prezentul regulament comunică Secretariatului Organizației Națiunilor Unite denumirile și adresele serviciilor tehnice responsabile cu efectuarea încercărilor de omologare și ale autorităților de omologare de tip care acordă omologarea și la care trebuie trimise formularele care certifică omologarea sau extinderea, refuzul sau retragerea omologării, emise în alte țări.
(1) Astfel cum sunt definite în Rezoluția consolidată privind construcția vehiculelor (R.E.3), documentul ECE/TRANS/WP.29/78/Rev.6, punctul 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Numerele de identificare a părților contractante la acordul din 1958 sunt prezentate în anexa 3 la Rezoluția consolidată privind construcția vehiculelor (R.E.3), documentul ECE/TRANS/WP.29/78/Rev.6, anexa 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
ANEXA 2
EXEMPLE DE DISPUNERE A MĂRCILOR DE OMOLOGARE
(A se vedea punctul 4.4 din prezentul regulament)
Marca de omologare de mai sus, aplicată pe un vehicul, indică faptul că, în ceea ce privește echiparea cu un sistem de monitorizare a presiunii în pneuri, tipul de vehicul în cauză a fost omologat în Țările de Jos (E 4) în temeiul Regulamentului nr. 141, sub numărul de omologare 002439. Numărul de omologare indică faptul că omologarea a fost acordată în conformitate cu cerințele Regulamentului nr. 141 în versiunea sa originală.
ANEXA 3
ÎNCERCĂRI ALE SISTEMELOR DE MONITORIZARE A PRESIUNII ÎN PNEURI (TPMS – TYRE PRESSURE MONITORING SYSTEMS)
1. CONDIȚII DE ÎNCERCARE
1.1. Temperatura ambiantă
Temperatura ambiantă va fi cuprinsă între 0 °C și 40 °C.
1.2. Suprafața pistei de încercare
Pista de încercare trebuie să aibă o suprafață cu o bună aderență. Suprafața pistei de încercare trebuie să fie uscată și netedă.
1.3. Încercările se realizează într-un mediu fără interferențe radio.
1.4. Condiții privind vehiculul.
1.4.1. Greutatea de încercare
Vehiculul poate fi încercat fără restricții privind încărcătura, însă respectând repartizarea masei pe axe prevăzută de către producătorul vehiculului, fără a depăși masa maximă admisibilă pentru fiecare axă.
Cu toate acestea, în cazul în care nu există nicio posibilitate de setare sau resetare a sistemului, vehiculul va fi neîncărcat. În afara conducătorului, pe scaunul din față al vehiculului se poate afla o a doua persoană care are sarcina de a nota rezultatele încercărilor. Starea de încărcare nu se modifică pe parcursul încercării.
1.4.2. Viteza vehiculului
TPMS se etalonează și este supus încercării:
|
(a) |
într-un regim de viteză între 40 km/h și 120 km/h sau la viteza maximă prin construcție a vehiculului, dacă aceasta este mai mică de 120 km/h pentru încercarea la perforare, în vederea verificării cerințelor prevăzute la punctul 5.2 din prezentul regulament; și |
|
(b) |
într-un regim de viteză între 40 km/h și 100 km/h pentru încercarea de difuziune în vederea verificării cerințelor prevăzute la punctul 5.3 din prezentul regulament și pentru încercarea de detectare a defecțiunilor în vederea verificării cerințelor prevăzute la punctul 5.4 din prezentul regulament. |
În timpul încercării va fi acoperit întregul interval de viteză.
În cazul vehiculelor echipate cu sistem de control al vitezei de croazieră, acesta nu va fi cuplat în timpul efectuării încercării.
1.4.3. Poziția jantei
Jantele vehiculului pot fi poziționate în orice poziție a roții, în conformitate cu instrucțiunile furnizate sau limitele impuse de producătorul vehiculului.
1.4.4. Locul staționării
Atunci când vehiculul este parcat, pneurile acestuia trebuie protejate de lumina solară directă. Locul staționării trebuie să fie ferit de vânt pentru a nu influența rezultatele încercărilor.
1.4.5. Aplicarea pedalei de frână
Timpul de rulare nu se cumulează pe durata aplicării frânei de serviciu, atunci când vehiculul se află în mișcare.
1.4.6. Pneuri
Vehiculul este supus încercării cu pneurile montate în conformitate cu recomandările producătorului vehiculului. Totuși, roata de rezervă poate fi utilizată pentru a verifica defecțiunile TPMS.
1.5. Precizia echipamentului de măsurare a presiunii
Echipamentul de măsurare a presiunii utilizat pentru încercările prevăzute în prezenta anexă are o precizie de cel puțin +/– 3 kPa.
2. PROCEDURA DE ÎNCERCARE
Încercarea se efectuează la o viteză cuprinsă în intervalul de încercare în conformitate cu punctul 1.4.2 din prezenta anexă, cel puțin o dată pentru situația de la punctul 2.6.1 din prezenta anexă („încercarea la perforare”) și cel puțin o dată pentru fiecare situație prevăzută la punctul 2.6.2 din prezenta anexă („încercarea de difuziune”).
2.1. Înainte de umflarea pneurilor vehiculului, se lasă vehiculul în staționare în aer liber timp de cel puțin o oră, la temperatura ambiantă, cu motorul ferit de lumină solară directă și de vânt sau de alți factori care determină încălzirea sau răcirea. Se umflă pneurile vehiculului la presiunea de umflare la rece recomandată de producătorul vehiculului (Prec) în conformitate cu recomandările acestuia cu privire la condițiile de viteză și de încărcare, precum și la pozițiile pneurilor. Toate măsurătorile presiunii se efectuează utilizând același echipament de încercare.
2.2. Cu vehiculul aflat în stare de staționare și cu cheia de contact în poziția „blocat” (lock) sau „oprit” (off), acesta din urmă se aduce în poziția „pornit” (on/run). Sistemul de monitorizare a presiunii în pneuri efectuează o verificare a funcției lămpii pentru lampa martor de presiune scăzută a pneurilor, astfel cum se prevede la punctul 5.5.2 din prezentul regulament. Această ultimă cerință nu se aplică în cazul lămpilor-martor expuse într-un spațiu comun.
2.3. După caz, se setează sau resetează sistemul de monitorizare a presiunii în pneuri în conformitate cu recomandările producătorului vehiculului.
2.4. Etapa colectării de informații.
2.4.1. Se rulează vehiculul timp de cel puțin 20 de minute în intervalul de viteze prevăzut la punctul 1.4.2 din prezenta anexă și cu viteza medie de 80 km/h (± 10 km/h). Este permisă devierea de la acest interval de viteză pentru un timp maxim cumulat de 2 minute pe durata etapei de colectare de informații.
2.4.2. Dacă încercarea de conducere se desfășoară pe o pistă (circulară/ovală) cu întoarceri într-o singură direcție, atunci încercarea de conducere de la punctul 2.4.1 se împarte în mod egal (+/–2 minute) în ambele direcții, la latitudinea serviciului tehnic.
2.4.3. Într-un interval de cinci minute de la încheierea etapei de colectare de informații, se măsoară presiunea la cald a pneului (pneurilor) care urmează să fie dezumflat(e). Presiunea la cald se consideră ca fiind valoarea Pwarm. Această valoare se utilizează pentru operațiile ulterioare.
2.5. Etapa de dezumflare.
2.5.1. Procedura de încercare la perforare în vederea verificării cerințelor prevăzute la punctul 5.2 din prezentul regulament.
Se dezumflă unul dintre pneurile vehiculului în următoarele cinci minute după măsurarea presiunii la cald, astfel cum se descrie la punctul 2.4.3, până când valoarea presiunii ajunge la Pwarm – 20 % sau la valoarea minimă de 150 kPa, oricare dintre acestea este mai mare, aceasta fiind Ptest. După o perioadă de stabilizare cuprinsă între 2 și 5 minute, presiunea Ptest se verifică din nou și se ajustează dacă este necesar.
2.5.2. Procedura de încercare de difuziune în vederea verificării cerințelor prevăzute la punctul 5.3 din prezentul regulament.
Se dezumflă toate cele patru pneuri în cel mult cinci minute de la măsurarea presiunii la cald, astfel cum este descris la punctul 2.4.3 de mai sus, până când pneurile dezumflate ajung la valoarea Pwarm – 20 %, după care se efectuează o dezumflare suplimentară de 7 kPa, aceasta fiind Ptest. După o perioadă de stabilizare cuprinsă între două și cinci minute, presiunea Ptest se verifică din nou și se ajustează dacă este necesar.
2.6. Etapa detectării presiunii scăzute în pneuri
2.6.1. Procedura de încercare la perforare în vederea verificării cerințelor prevăzute la punctul 5.2 din prezentul regulament.
2.6.1.1. Se rulează vehiculul pe orice porțiune a pistei de încercare (nu neapărat încontinuu). Timpul total cumulat de rulare trebuie să fie mai mic de 10 minute sau până în momentul în care se aprinde lampa-martor de semnalizare a scăderii presiunii în pneuri.
2.6.2. Procedura de încercare de difuziune în vederea verificării cerințelor prevăzute la punctul 5.3 din prezentul regulament.
2.6.2.1. Se rulează vehiculul pe orice porțiune a pistei de încercare. După cel puțin 20 de minute și cel mult 40 de minute, vehiculul trebuie adus în stare imobilă, cu motorul oprit, iar cheia este scoasă din contact timp de cel puțin un minut sau de cel mult trei minute. Se reia încercarea. Timpul de rulare total cumulat va fi timpul cel mai scurt dintre timpul de rulare de 60 de minute în condițiile stabilite la punctul 1.4.2 de mai sus și timpul scurs până la aprinderea lămpii-martor de semnalizare a scăderii presiunii în pneuri.
2.6.3. Dacă dispozitivul de semnalizare a scăderii presiunii în pneuri nu se aprinde, se întrerupe încercarea.
2.7. Dacă lampa-martor de semnalizare a scăderii presiunii în pneuri s-a aprins în timpul procedurii de la punctul 2.6, cheia de contact se aduce în poziția „oprit” („off”) sau „blocat” („lock”). După cinci minute, se readuce cheia de contact în poziția „pornit” („run”). Lampa-martor trebuie să se aprindă și să rămână astfel atât timp cât cheia de contact se află în poziția „pornit” („run”).
2.8. Se umflă toate pneurile vehiculului la presiunea de umflare la rece recomandată de producătorul vehiculului. Se resetează sistemul în conformitate cu recomandările producătorului vehiculului. Se stabilește dacă lampa-martor s-a stins. Dacă este cazul, se rulează vehiculul până când lampa-martor se stinge. Dacă lampa-martor nu se stinge, se întrerupe încercarea.
2.9. Repetarea etapei de dezumflare.
Încercarea poate fi repetată cu aceeași sarcină sau cu o sarcină diferită, utilizând procedurile de încercare corespunzătoare descrise la punctele 2.1-2.8 de mai sus, cu pneul (pneurile) corespunzător (corespunzătoare) insuficient umflat(e), în conformitate cu prevederile de la punctul 5.2 sau de la punctul 5.3 din prezentul regulament, în funcție de care dintre aceste două puncte este aplicabil.
3. DETECTAREA DEFECTĂRII SISTEMULUI TPMS
3.1. Se simulează o defecțiune a sistemului TPMS, de exemplu prin deconectarea sursei de alimentare a unei componente TPMS, prin întreruperea conexiunii electrice între componentele TPMS sau prin montarea pe vehicul a unu pneu sau a unei roți incompatibile cu sistemul TPMS. Atunci când se simulează o defecțiune a sistemului TPMS, conexiunile electrice pentru lămpile-martor nu trebuie să fie deconectate.
3.2. Se rulează vehiculul un timp cumulat de cel mult 10 minute (nu neapărat încontinuu) pe orice porțiune a pistei de încercare.
3.3. Timpul de rulare total cumulat, conform punctului 3.2, va fi timpul cel mai scurt dintre cele 10 minute și intervalul în care se aprinde lampa-martor de semnalizare a defectării sistemului TPMS.
3.4. Dacă dispozitivul de avertizare a defectării sistemului TPMS nu s-a aprins în conformitate cu punctul 5.4 din prezentul regulament, astfel cum este necesar, se întrerupe încercarea.
3.5. Dacă dispozitivul de avertizare a defectării sistemului TPMS se activează sau este iluminat în timpul procedurii descrise la punctele 3.1-3.3 de mai sus, se aduce cheia de contact în poziția „oprit” („off”) sau „blocat” („lock”). După cinci minute, se readuce cheia de contact în poziția „pornit” („run”). Dispozitivul de semnalare a defectării sistemului TPMS trebuie să indice din nou o defecțiune și să rămână aprins atât timp cât cheia de contact a vehiculului se află în poziția „pornit” („run”).
3.6. Se readuce sistemul TPMS la starea normală de funcționare. Dacă este necesar, se rulează vehiculul până când semnalul de avertizare se stinge. Dacă lampa de avertizare nu se stinge, se întrerupe încercarea.
3.7. Încercarea poate fi repetată utilizând procedurile de încercare descrise la punctele 3.1-3.6 de mai sus, fiecare încercare fiind limitată la simularea unei singure defecțiuni.