02015R0068 — RO — 09.06.2018 — 002.001
Acest document are doar scop informativ și nu produce efecte juridice. Instituțiile Uniunii nu își asumă răspunderea pentru conținutul său. Versiunile autentice ale actelor relevante, inclusiv preambulul acestora, sunt cele publicate în Jurnalul Oficial al Uniunii Europene și disponibile pe site-ul EUR-Lex. Aceste texte oficiale pot fi consultate accesând linkurile integrate în prezentul document.
|
►B
|
REGULAMENTUL DELEGAT (UE) 2015/68 AL COMISIEI
din 15 octombrie 2014
de completare a Regulamentului (UE) nr. 167/2013 al Parlamentului European și al Consiliului în ceea ce privește cerințele referitoare la sistemul de frânare al vehiculelor pentru omologarea vehiculelor agricole și forestiere
(Text cu relevanță pentru SEE)
(JO L 017 23.1.2015, p. 1)
|
Astfel cum a fost modificat prin:
▼B
REGULAMENTUL DELEGAT (UE) 2015/68 AL COMISIEI
din 15 octombrie 2014
de completare a Regulamentului (UE) nr. 167/2013 al Parlamentului European și al Consiliului în ceea ce privește cerințele referitoare la sistemul de frânare al vehiculelor pentru omologarea vehiculelor agricole și forestiere
(Text cu relevanță pentru SEE)
CAPITOLUL I
OBIECT, DOMENIU DE APLICARE ȘI DEFINIȚII
Articolul 1
Obiect
Prezentul regulament stabilește cerințele tehnice detaliate și procedurile de încercare referitoare la siguranța în funcționare cu privire la performanța de frânare pentru omologarea și supravegherea pieței vehiculelor agricole și forestiere și ale sistemelor, componentelor și unităților tehnice separate destinate acestor vehicule în conformitate cu Regulamentul (UE) nr. 167/2013.
Articolul 2
Definiții
▼M1
În sensul prezentului regulament, se aplică definițiile de la articolul 2 și din anexele XII și XXXIII la Regulamentul delegat (UE) 2015/208 al Comisiei (
1
). De asemenea, se aplică următoarele definiții:
▼B
1. „sistem de frânare” înseamnă ansamblul de componente care are ca funcție reducerea progresivă a vitezei unui vehicul în mers sau oprirea acestuia sau menținerea în staționare în cazul în care vehiculul este deja oprit; sistemul constă în dispozitivul de comandă, transmisia și frâna;
2. „sistem de frânare de serviciu” înseamnă sistemul de frânare care permite conducătorului auto să controleze mișcarea vehiculului și să îl oprească în siguranță, rapid și eficient, pentru toată gama de viteze și de sarcini în care vehiculul este autorizat să funcționeze, pe orice pantă descendentă sau ascendentă;
3. „frânare graduală” înseamnă frânarea care, în modul normal de funcționare a echipamentului, în timpul fie al cuplării, fie al decuplării frânelor, îndeplinește următoarele condiții:
(a) conducătorul poate, în orice moment, să mărească sau să reducă forța de frânare prin acționarea dispozitivului de comandă;
(b) forța de frânare acționează în aceeași direcție ca cea a acțiunii asupra dispozitivului de comandă (funcționare uniformă);
(c) este posibilă realizarea cu ușurință a unor reglări suficient de precise ale forței de frânare;
4. „dispozitiv de comandă” înseamnă dispozitivul acționat direct de către conducător pentru a furniza transmisiei energia necesară pentru frânare sau pentru a controla frânarea. Această energie poate fi energia musculară a conducătorului sau o altă sursă de energie controlată de conducător sau, după caz, energia cinetică a vehiculului remorcat sau o combinație între aceste diferite forme de energie;
▼M1
5. „transmisie” înseamnă ansamblul de componente cuprinse între dispozitivul de comandă și frână, cu excepția circuitelor de comandă, conductelor de alimentare și conductelor suplimentare între tractoare și vehiculele tractate, și care le unește în mod funcțional prin mijloace mecanice, hidraulice, pneumatice sau electrice sau prin utilizarea unei combinații a acestor mijloace; în cazul în care puterea de frânare provine de la sau este asistată de o sursă de energie independentă de conducător, rezerva de energie din sistem face și ea parte din transmisie;
▼B
6. „transmisia comenzilor” înseamnă ansamblul de componente ale transmisiei care comandă funcționarea frânelor și rezerva (rezervele) necesară (necesare) de energie;
7. „transmisia de energie” reprezintă ansamblul de componente care furnizează frânelor energia necesară pentru funcționarea acestora;
8. „frâna cu fricțiune” înseamnă o frână la care forțele sunt generate de frecarea dintre două piese ale vehiculului aflate în mișcare relativă una față de cealaltă;
9. „frână cu fluid” înseamnă o frână la care forțele sunt generate de acțiunea unui fluid situat între două părți ale vehiculului care se mișcă relativ una față de cealaltă; fluidul este un lichid în cazul unei „frâne hidraulice”, respectiv aer în cazul unei „frâne pneumatice”;
10. „frâna de motor” înseamnă o frână la care forțele sunt generate de o creștere artificială a acțiunii de frânare a motorului transmisă roților;
11. „sistem de frânare de parcare” înseamnă un sistem care permite ca vehiculul să rămână staționar pe o pantă sau pe o rampă ascendentă sau descendentă chiar și în absența conducătorului;
12. „frânare continuă” înseamnă frânarea unor vehicule care formează un ansamblu de vehicule, obținută cu ajutorul unei instalații având următoarele caracteristici:
(a) un singur dispozitiv de comandă pe care conducătorul îl acționează progresiv, dintr-o singură mișcare, din scaunul său;
(b) energia utilizată pentru frânarea vehiculelor care constituie ansamblul de vehicule este furnizată de aceeași sursă;
(c) instalația de frânare asigură frânarea simultană sau corespunzător decalată a fiecărui vehicul care formează ansamblul de vehicule, indiferent de poziția lor relativă;
13. „frânarea semicontinuă” înseamnă frânarea unui ansamblu de vehicule printr-o instalație care are următoarele caracteristici:
(a) conține un singur dispozitiv de comandă pe care conducătorul îl acționează progresiv, dintr-o singură mișcare, din scaunul său;
(b) energia utilizată pentru frânarea vehiculelor care constituie ansamblul de vehicule este furnizată de două surse diferite;
(c) instalația de frânare asigură frânarea simultană sau corespunzător decalată a fiecărui vehicul care formează ansamblul de vehicule, indiferent de poziția lor relativă;
14. „frânarea automată” înseamnă frânarea vehiculului remorcat sau a vehiculelor remorcate care survine automat în cazul separării oricăruia dintre vehiculele care constituie ansamblul de vehicule, inclusiv acea separare care survine în urma ruperii cuplajului, fără afectarea eficacității frânării celorlalte componente ale ansamblului;
15. „frânarea inerțială” înseamnă frânarea realizată prin utilizarea forțelor care sunt generate când vehiculul remorcat se apropie de tractor;
16. „transmisie nedecuplabilă” înseamnă transmisia la care presiunea, forța sau cuplul sunt transmise în mod continuu la orice moment în timpul deplasării vehiculului în sistemul de tracțiune între motor și roți, precum și în sistemul de frânare între dispozitivul de comandă a frânei și roți;
▼M1 —————
▼B
18. „sarcina pe roată” înseamnă forța statică verticală exercitată de suprafața solului în zona de contact asupra roții;
19. „sarcina pe axă” înseamnă suma forțelor statice verticale exercitate de suprafața solului în zona de contact asupra roților axei;
20. „sarcina staționară maximă pe roată” înseamnă sarcina staționară pe roată obținută în situația în care vehiculul se află la masa maximă tehnic admisă în stare încărcată;
21. „sarcina staționară maximă pe axă” înseamnă sarcina staționară pe axă obținută în situația în care vehiculul se află la masa maximă tehnic admisă în stare încărcată;
22. „vehicul remorcat” înseamnă o remorcă, astfel cum este definită la articolul 3 alineatul (9) din Regulamentul (UE) nr. 167/2013, sau un echipament remorcat interschimbabil, astfel cum este definit la articolul 3 alineatul (10) din regulamentul menționat mai sus;
23. „vehicul remorcat cu o bară de tracțiune” înseamnă un vehicul remorcat din categoria R sau S cu cel puțin două axe, din care cel puțin una este o axă directoare, echipată cu un dispozitiv de remorcare care se poate mișca pe verticală în raport cu vehiculul remorcat și care nu îi transmite tractorului o sarcină verticală semnificativă.
24. „remorcă cu o axă centrală” înseamnă un vehicul remorcat din categoria R sau S la care o axă sau mai multe axe sunt situate aproape de centrul de greutate al vehiculului atunci când acesta este încărcat uniform, astfel încât doar o sarcină verticală statică redusă, care nu depășește 10 % din sarcina corespunzătoare masei maxime a vehiculului remorcat, sau o sarcină de 1 000 daN, luând-se în considerare cea mai mică dintre aceste două valori, este transmisă tractorului;
25. „vehicul remorcat cu bară de tracțiune rigidă” înseamnă un vehicul remorcat din categoria R sau S cu o axă sau un grup de axe echipat cu o bară de tracțiune care transmite tractorului o sarcină statică semnificativă datorită construcției acesteia și care nu corespunde definiției unui vehicul remorcat cu o axă centrală; sistemul de cuplare care trebuie folosit pentru un ansamblu de vehicule nu constă într-un pivot de cuplare și o șa de cuplare; este tolerată o lejeră mișcare verticală a barei de tracțiune rigide; o bară de tracțiune articulată reglabilă hidraulic este considerată a fi o bară de tracțiune rigidă;
26. „sistem de frânare de anduranță” înseamnă un sistem de frânare suplimentar având capacitatea de a produce și a menține un efect de frânare pe o perioadă lungă de timp, fără o reducere semnificativă a performanței, inclusiv dispozitivul de comandă, care poate fi constituit dintr-un singur dispozitiv sau dintr-o combinație de mai multe dispozitive, fiecare dintre acestea putând fi dotat cu propria comandă;
27. „sistem de frânare cu comandă electronică” (denumit în continuare „EBS”) înseamnă un sistem de frânare la care comanda este generată și prelucrată sub forma unor semnale electrice de comandă a transmisiei și a dispozitivelor care generează forțele de acționare produse din energie acumulată sau generată;
28. „frânare cu comandă automată” înseamnă o funcție în cadrul unui sistem complex de comandă electronică în care acționarea sistemului (sistemelor) de frânare sau a frânelor anumitor axe este efectuată cu scopul de a provoca decelerarea vehiculului, cu sau fără intervenția directă a conducătorului, acțiune rezultată în urma evaluării automate a informațiilor comunicate de sistemele de bord ale vehiculului.
29. „frânare selectivă” înseamnă o funcție din cadrul unui sistem complex de comandă electronică în care acționarea fiecărei frâne este efectuată în mod automat și la care decelerarea vehiculului are o importanță secundară în raport cu modificarea comportamentului vehiculului.
30. „circuit electric de comandă” înseamnă o conexiune electrică între două vehicule, care asigură funcția de comandă a sistemului de frânare unui vehicul remorcat dintr-un ansamblu; acesta include cablajul electric și racordurile, precum și piesele necesare pentru comunicarea datelor și sursa de energie electrică pentru transmisia comenzilor vehiculului remorcat;
31. „camera de comprimare a arcului” înseamnă camera în care are efectiv loc variația de presiune care produce comprimarea arcului;
32. „propulsie hidrostatică” înseamnă un tip de propulsie a unui vehicul care folosește o transmisie hidrostatică, cu circuit închis sau deschis, în care circulă un fluid care are rolul de a transporta energia între una sau mai multe pompe hidraulice și unul sau mai multe motoare hidraulice;
33. „sistem complex de comandă electronică a vehiculelor” înseamnă un sistem de comandă electronică care face obiectul unei ierarhii a comenzilor în care o funcție comandată poate acorda prioritatea de executare unei funcții de comandă electronică de nivel superior sau unei funcții executate de un sistem de comandă electronică de nivel superior;
34. „sistem antiblocare” înseamnă o componentă a unui sistem de frânare de serviciu care reglează în mod automat gradul de alunecare în sensul de rotație a roții, la una sau mai multe roți ale vehiculului, în timpul frânării;
35. „roată controlată direct” înseamnă o roată a cărei forță de frânare este modulată pe baza datelor furnizate cel puțin de senzorul propriu;
36. „racord hidraulic de tipul cu o singură conductă” înseamnă racordul frânelor între tractor și vehiculul remorcat care constă într-o singură conductă cu lichid hidraulic;
▼M1
37. „sursă de energie” înseamnă un dispozitiv care furnizează energia necesară pentru acționarea frânelor, fie în mod direct, fie în mod indirect, printr-un dispozitiv de stocare a energiei;
38. „dispozitiv de stocare a energiei” înseamnă un dispozitiv care stochează energia furnizată de sursa de energie pentru a acționa sau a elibera frânele.
▼B
CAPITOLUL II
CERINȚE CARE SE APLICĂ DISPOZITIVELOR DE FRÂNARE ȘI DISPOZITIVELOR DE CUPLARE A FRÂNELOR REMORCILOR
Articolul 3
Cerințele de montaj și cerințele demonstrative privind performanța frânării
(1) Producătorii echipează vehiculele agricole și forestiere cu sisteme, componente și unități tehnice separate care influențează performanța lor de frânare, proiectate, construite și asamblate astfel încât să se garanteze că vehiculul, în condiții normale de utilizare și întreținut în conformitate cu prescripțiile producătorului, respectă cerințele tehnice și procedurile de încercare stabilite la articolele 4-17.
(2) Producătorii trebuie să demonstreze autorității de omologare, prin încercări demonstrative fizice, că vehiculele agricole și forestiere puse la dispoziție pe piață, înmatriculate sau puse în circulație în Uniune, sunt în conformitate cu cerințele tehnice detaliate și cu procedurile de încercare stabilite la articolele 4-17.
(3) Producătorii asigură conformitatea pieselor de schimb puse la dispoziție pe piață sau puse în exploatare pe teritoriul Uniunii cu cerințele tehnice detaliate și procedurile de încercare stabilite în prezentul regulament.
(4) Ca alternativă la respectarea cerințelor prezentului regulament, producătorul poate prezenta în dosarul informativ raportul de încercare al unei componente sau documentația relevantă care demonstrează îndeplinirea de către un sistem sau un vehicul a cerințelor Regulamentului CEE-ONU nr. 13, astfel cum este precizat în anexa X.
(5) Ca alternativă la respectarea cerințelor prezentului regulament, producătorul poate prezenta în dosarul informativ documentația relevantă care demonstrează îndeplinirea de către sistemele antiblocare ale vehiculelor remorcate, dacă sunt prezente, a cerințelor de la alineatul 5 din anexa 19 la Regulamentul CEE-ONU nr. 13, astfel cum este precizat în anexa X.
(6) În actul de punere în aplicare adoptat în conformitate cu articolul 68 din Regulamentul (UE) nr. 167/2013 se va face trimitere la componentele și sistemele menționate la alineatele 4. și 5.
Articolul 4
Cerințe aplicabile construcției și montării dispozitivelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci
Procedurile de încercare și cerințele aplicabile construcției și montajului dispozitivelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa I.
Articolul 5
Cerințe aplicabile încercărilor și performanței sistemelor de frânare și a dispozitivelor de cuplare ale sistemelor de frânare pentru remorci și ale vehiculelor echipate cu acestea
Procedurile de încercare și cerințele în materie de performanță aplicabile sistemelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci și vehiculelor echipate cu acestea sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa II.
Articolul 6
Cerințe aplicabile la măsurarea timpului de răspuns
Procedurile de încercare și cerințele aplicabile dispozitivelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci la măsurarea timpului de răspuns sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa III.
Articolul 7
Cerințe aplicabile surselor de energie și dispozitivelor de stocare a energiei ale sistemelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci, precum și vehiculelor echipate cu acestea
Procedurile de încercare și cerințele în materie de performanță aplicabile surselor de energie și dispozitivelor de stocare a energiei ale sistemelor de frânare și dispozitivelor de cuplare ale sistemelor de frânare pentru remorci, precum și vehiculelor echipate cu acestea sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa IV.
Articolul 8
Cerințe aplicabile frânelor cu arc și vehiculelor echipate cu acestea
Procedurile de încercare și cerințele în materie de performanță aplicabile frânelor cu arc și vehiculelor echipate cu acestea sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa V.
Articolul 9
Cerințe aplicabile sistemelor de frânare de parcare echipate cu un dispozitiv de blocare mecanică a cilindrilor de frână
Cerințele în materie de performanță aplicabile sistemelor de frânare de parcare echipate cu un dispozitiv de blocare mecanică a cilindrilor de frână sunt verificate în conformitate cu dispozițiile din anexa VI.
Articolul 10
Cerințele privind încercările alternative asupra vehiculelor pentru care încercarea de tip I, de tip II sau de tip III nu este obligatorie
(1) Condițiile în care încercarea de tip I, de tip II sau de tip III nu este obligatorie pentru anumite tipuri de vehicule sunt stabilite în anexa VII.
(2) Procedurile de încercare și cerințele în materie de performanță aplicabile vehiculelor pentru care încercarea de tip I, de tip II sau de tip III nu este obligatorie în conformitate cu alineatul 1 sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa VII.
Articolul 11
Cerințe aplicabile încercării sistemelor de frânare inerțiale, a dispozitivelor de frânare inerțiale și a dispozitivelor de cuplare ale sistemelor de frânare inerțiale ale remorcilor, precum și vehiculelor echipate cu acestea în ceea ce privește frânarea
Procedurile de încercare și cerințele în materie de performanță aplicabile încercării sistemelor de frânare inerțiale, a dispozitivelor de frânare inerțiale și a dispozitivelor de cuplare ale sistemelor de frânare inerțiale ale remorcilor, precum și încercării vehiculelor echipate cu acestea în ceea ce privește frânarea sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa VIII.
Articolul 12
Cerințe aplicabile vehiculelor cu propulsie hidrostatică și dispozitivelor de frânare și sistemelor de frânare ale acestora
Procedurile de încercare și cerințele aplicabile vehiculelor cu propulsie hidrostatică și dispozitivelor de frânare și sistemelor de frânare ale acestora sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa IX.
Articolul 13
Cerințe aplicabile aspectelor legate de siguranța sistemelor complexe de comandă electronică ale vehiculelor
Procedurile de încercare și cerințele aplicabile aspectelor legate de siguranța sistemelor complexe de comandă electronică ale vehiculelor sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa X.
Articolul 14
Cerințe și proceduri de încercare aplicabile sistemelor antiblocare și vehiculelor echipate cu acestea
Procedurile de încercare și cerințele aplicabile sistemelor antiblocare și vehiculelor echipate cu acestea sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa XI.
Articolul 15
Cerințe aplicabile EBS ale vehiculelor cu sisteme de frânare cu aer comprimat sau ale vehiculelor cu comunicarea datelor realizată prin intermediul contactelor 6 și 7 ale prizei ISO 7638, precum și vehiculelor echipate cu astfel de EBS
Procedurile de încercare și cerințele aplicabile EBS ale vehiculelor cu sisteme de frânare cu aer comprimat sau ale vehiculelor cu comunicarea datelor realizată prin intermediul contactelor 6 și 7 ale prizei ISO 7638, precum și vehiculelor echipate cu astfel de EBS sunt efectuate, respectiv verificate în conformitate cu dispozițiile din anexa XII.
▼M2
Articolul 16
Cerințe aplicabile racordurilor hidraulice de tipul cu conductă unică și vehiculelor echipate cu acestea
(1) Cerințele în materie de performanță aplicabile racordurilor hidraulice de tipul cu o singură conductă ale dispozitivelor de frânare și ale dispozitivelor de cuplare ale sistemelor de frânare instalate pe remorci, precum și tractoarelor echipate cu racorduri hidraulice de tipul cu o singură conductă sunt stabilite în anexa XIII. Cerințele respective se aplică până la 31 decembrie 2024.
(2) Producătorii nu instalează racorduri hidraulice de tipul cu o singură conductă după 31 decembrie 2024.
▼B
CAPITOLUL III
OBLIGAȚIILE STATELOR MEMBRE
Articolul 17
Omologarea de tip a vehiculelor, componentelor și unităților tehnice separate
În conformitate cu articolul 6 alineatul (2) din Regulamentul (UE) nr. 167/2013, începând cu 1 ianuarie 2016, autoritățile de omologare nu refuză, din motive legate de siguranța funcțională privind performanța de frânare, acordarea omologării UE de tip tipurilor de vehicule agricole și forestiere care îndeplinesc cerințele prezentului Regulament.
▼M2 —————
▼B
Începând de la 1 ianuarie 2018, autoritățile naționale interzic, în cazul vehiculelor noi care nu sunt în conformitate cu Regulamentul (UE) nr. 167/2013 și cu dispozițiile prezentului regulament referitoare la siguranța în funcționare în ceea ce privește performanța de frânare, punerea la dispoziție pe piață, înmatricularea sau punerea în circulație a unor astfel de vehicule.
▼M2
Începând de la 1 ianuarie 2025, autoritățile naționale interzic punerea la dispoziție pe piață, înmatricularea sau punerea în exploatare a noilor tractoarele echipate cu racorduri hidraulice de tipul cu o singură conductă.
▼B
Articolul 18
Omologarea de tip a vehiculelor, componentelor și unităților tehnice separate
Autoritățile naționale nu refuză acordarea omologării naționale de tip unui tip de vehicul, sistem, componentă sau unitate tehnică separată din motive legate de siguranța în funcționare în ceea ce privește performanța de frânare, în cazul în care vehiculul, sistemul, componenta sau unitatea tehnică separată este în conformitate cu cerințele prevăzute în prezentul regulament, cu excepția cerințelor aplicabile racordurilor hidraulice de tipul cu o singură conductă.
CAPITOLUL IV
DISPOZIȚIE FINALĂ
Articolul 19
Intrare în vigoare și aplicare
Prezentul regulament intră în vigoare în a douăzecea zi de la data publicării în Jurnalul Oficial al Uniunii Europene.
Se aplică de la 1 ianuarie 2016.
Prezentul regulament este obligatoriu în toate elementele sale și se aplică direct în toate statele membre.
LISTA ANEXELOR
|
Număr anexă
|
Titlu anexă
|
|
I
|
Cerințe cu privire la construirea și montarea dispozitivelor de frânare și a mecanismelor de cuplare ale sistemului de frânare al remorcii
|
|
II
|
Cerințe aplicabile încercărilor și performanței sistemelor de frânare și dispozitivelor de cuplare a sistemului de frânare al remorcilor și ale vehiculelor echipate cu acestea
|
|
III
|
Cerințe cu privire la măsurarea timpului de răspuns
|
|
IV
|
Cerințe aplicabile surselor de energie și dispozitivelor de stocare a energiei ale sistemelor de frânare și ale mecanismelor de cuplare a sistemului de frânare al remorcilor, precum și vehiculelor echipate cu acestea
|
|
V
|
Cerințe aplicabile frânelor cu arc și vehiculelor echipate cu astfel de frâne
|
|
VI
|
Cerințe aplicabile sistemelor de frânare de parcare echipate cu un dispozitiv de blocare mecanică a cilindrilor de frână
|
|
VII
|
Cerințe alternative privind încercările pentru vehiculele pentru care au fost efectuate încercări echivalente încercărilor de tip I, de tip II sau de tip III
|
|
VIII
|
Cerințe aplicabile pentru încercarea sistemelor de frânare inerțiale, a dispozitivelor de frânare și a mecanismelor de cuplare a sistemului de frânare ale remorcii, precum și a vehiculelor echipate cu acestea în ceea ce privește frânarea
|
|
IX
|
Cerințe aplicabile vehiculelor cu propulsie hidrostatică și dispozitivelor de frânare și sistemelor de frânare ale acestora
|
|
X
|
Cerințe aplicabile aspectelor legate de siguranța sistemelor complexe de control electronic ale vehiculelor
|
|
XI
|
Cerințe și proceduri de încercare aplicabile sistemelor antiblocare, precum și vehiculelor echipate cu sistemele respective
|
|
XII
|
Cerințe aplicabile EBS ale vehiculelor cu sisteme de frânare cu aer comprimat sau ale vehiculelor cu comunicarea de date prin intermediul contactelor 6 și 7 ale prizei ISO 7638, precum și vehiculelor echipate cu astfel de EBS
|
|
XIII
|
Cerințe aplicabile racordurilor hidraulice de tipul cu conductă unică și vehiculelor echipate cu acestea
|
ANEXA I
Cerințe cu privire la construirea și montarea dispozitivelor de frânare și a mecanismelor de cuplare a sistemului de frânare al remorcii
1.
Definiții
În sensul prezentei anexe:
1.1. „comanda forței de cuplare” înseamnă un sistem sau o funcție de echilibrare automată a coeficientului de frânare al tractorului și al vehiculului remorcat;
1.2. „valoarea nominală necesară” înseamnă o caracteristică a comenzii forței de cuplare care stabilește un raport între semnalul la racordul de cuplare și coeficientul de frânare și care poate fi demonstrată în momentul omologării de tip, în limitele benzilor de compatibilitate specificate în apendicele 1 din anexa II.
▼M1 —————
▼B
2.
Cerințe de construcție și montaj
2.1. Generalități
Viteza maximă prin construcție este considerat, în prezenta anexă, să fie în direcția înainte de deplasare a vehiculului, cu excepția cazurilor în care se menționează în mod explicit.
▼M1
2.1.1. Componente și piese de frânare
|
2.1.1.1.
|
Componentele și piesele de frânare sunt proiectate, construite și montate astfel încât vehiculul aflat în condiții normale de utilizare, în pofida vibrațiilor la care acesta poate fi supus, să fie în conformitate cu cerințele din prezenta anexă.
|
|
2.1.1.2.
|
În special, componentele și piesele de frânare sunt proiectate, construite și montate astfel încât să poată rezista la fenomenele de corodare și de îmbătrânire la care sunt expuse.
|
▼B
|
2.1.1.3.
|
Garniturile de frână nu trebuie să conțină azbest.
|
▼M1
|
2.1.1.4.
|
Nu este permisă instalarea niciunei supape reglabile care ar permite modificarea performanței sistemului de frânare de către utilizatorul vehiculului într-un mod în care, în circulație, acesta să nu mai facă obiectul cerințelor prezentului regulament. O supapă reglabilă care poate fi acționată de producător exclusiv prin folosirea unor scule speciale sau utilizarea unui sigiliu care să împiedice modificările neautorizate este permisă cu condiția ca utilizatorul vehiculului să nu poată regla supapa respectivă sau ca orice reglare efectuată de un utilizator să fie ușor de identificat de autoritățile de control.
|
▼B
|
2.1.1.5.
|
Un vehicul remorcat este echipat cu un dispozitiv automat de detectare a sarcinii, cu excepția următoarelor cazuri:
▼M1
2.1.1.5.1. În cazul în care vehiculele din categoria Ra având o viteză maximă prin construcție de cel mult 30 km/h și vehiculele din categoria Sa nu pot fi echipate cu un dispozitiv automat de detectare a sarcinii, acestea pot fi echipate cu un dispozitiv care are cel puțin trei reglaje fine pentru controlul forțelor de frânare.
2.1.1.5.2. În cazul special în care un vehicul remorcat din categoria Ra cu o viteză maximă prin construcție care nu depășește 30 km/h și vehiculele din categoria Sa permit prin construcție realizarea a doar două condiții exacte de încărcare, „descărcat” și „încărcat”, vehiculul poate avea doar două reglări fine pentru controlul forțelor de frânare.
2.1.1.5.3. Vehicule din categoria S care nu conțin nicio altă sarcină, cu excepția unei sarcini utile de materiale consumabile de maximum 10% din suma maselor tehnic admise per axă.
▼B
|
2.1.2. Funcțiile sistemului de frânare
Sistemul de frânare îndeplinește următoarele funcții:
2.1.2.1. Sistemul de frânare de serviciu
Trebuie să fie posibilă graduarea sistemului de frânare de serviciu. Conducătorul poate să efectueze această acțiune de frânare din poziția de conducere, fără să își ridice mâinile de pe dispozitivul de comandă a direcției.
2.1.2.2. Sistemul de frânare de siguranță
Sistemul de frânare de siguranță permite oprirea vehiculului pe o distanță rezonabilă, în cazul defectării sistemului de frânare de serviciu. La tractoare, este posibilă graduarea acestei acțiuni de frânare. Conducătorul efectuează această acțiune de frânare din scaunul său, ținând cel puțin o mână pe dispozitivul de comandă a direcției. În sensul acestor dispoziții, se presupune că, la un moment dat, nu poate să apară mai mult de o singură defecțiune a sistemului de frânare de serviciu.
▼M1
2.1.2.3. Sistemul de frânare de staționare
Sistemul de frânare de staționare permite ca vehiculul să rămână staționar pe o pantă sau pe o rampă chiar și în absența conducătorului, elementele active ale sistemului de frânare fiind menținute în poziție doar printr-un dispozitiv mecanic. Conducătorul trebuie să poată obține această acțiune de frânare din scaunul său, sub rezerva cerințelor de la punctul 2.2.2.10. în cazul unui vehicul remorcat.
Sistemul de frânare de serviciu (cu aer comprimat sau hidraulic) al vehiculului remorcat și sistemul de frânare de staționare al tractorului pot fi operate simultan, în cazul în care conducătorul poate asigura, în orice moment, că acțiunea sistemului de frânare de staționare al ansamblului de vehicule, obținută numai prin acțiunea mecanică a sistemului de frânare de staționare al tractorului, este suficientă.
▼B
|
2.1.3.
|
Cerințele relevante din apendicele 1 al anexei II se aplică vehiculelor și sistemelor de frânare ale acestora.
|
|
2.1.4.
|
Conexiunile, în ceea ce privește sistemele de frânare cu aer comprimat, între tractoare și vehicule remorcate
|
2.1.4.1.
|
Conexiunile sistemelor de frânare cu aer comprimat între tractoare și vehiculele remorcate trebuie să fie realizate în conformitate cu următoarele puncte: 2.1.4.1.1, 2.1.4.1.2 sau 2.1.4.1.3.
2.1.4.1.1. un circuit pneumatic de alimentare și un circuit pneumatic de comandă;
2.1.4.1.2. un circuit pneumatic de alimentare, un circuit pneumatic de comandă și un circuit electric de comandă;
2.1.4.1.3. un circuit pneumatic de alimentare și un circuit electric de comandă. Până la adoptarea unor standarde tehnice uniforme de compatibilitate și siguranță, legăturile între tractoare și remorci prevăzute în dispozițiile de la prezentul punct nu sunt permise.
|
|
|
2.1.5.
|
Legăturile între tractoare și vehicule remorcate cu sisteme de frânare hidraulice 2.1.5.1. Tipul conexiunilor
|
2.1.5.1.1
|
Circuitul de comandă hidraulic: acesta este circuitul de racordare care cuprinde racordul de tip tată de pe tractor și racordul de tip mamă de pe vehiculul remorcat. Racordurile trebuie să fie conforme cu ISO 5676:1983
|
|
2.1.5.1.2.
|
Circuitul hidraulic suplimentar: acesta este circuitul de racordare care cuprinde racordul de tip tată de pe tractor și racordul de tip mamă de pe vehiculul remorcat. Racordurile trebuie să fie conforme cu ISO 16028:2006, mărimea 10.
|
|
2.1.5.1.3.
|
►M1
————— ◄ Racordul prevăzut de standardul ISO 7638:2003 poate fi utilizat pentru aplicații cu 5 sau 7 contacte, după caz.
Poziționarea racordurilor astfel cum este specificat la punctele 2.1.5.1.1 și 2.1.5.1.2 trebuie să fie realizată pe tractor astfel cum este ilustrat în figura 1.

|
|
2.1.5.2.
|
Cu motorul pornit și cu sistemul de frânare de parcare al tractorului complet acționat:
2.1.5.2.1. în circuitul suplimentar, presiunea este de 0+100 kPa și/sau
2.1.5.2.2. în circuitul de comandă este generată o presiune cuprinsă între 11 500 kPa și 15 000 kPa.
|
|
2.1.5.3.
|
Cu motorul pornit și cu sistemul de frânare de parcare al tractorului complet decuplat, în circuitul suplimentar se înregistrează o presiune cuprinsă între valorile prevăzute la punctul 2.2.1.18.3.
|
|
2.1.5.4.
|
Cu motorul pornit și fără a acționa comanda frânei de pe tractor (situație în circulație sau în repaus), presiunea generată la racordul de cuplare al circuitului de comandă este cea prevăzută la punctul 2.2.1.18.2.
|
|
2.1.5.5.
|
Cu motorul pornit și cu dispozitivul de comandă al frânei de serviciu de pe tractor complet acționat, în circuitul de comandă este generată o presiune cuprinsă între 11 500 kPa și 15 000 kPa. Pentru a genera presiunea din circuitul de comandă în timpul acționării frânei de serviciu, tractorul trebuie să îndeplinească cerința de la punctul 3.6 din anexa III.
|
|
|
2.1.6.
|
Furtunurile și cablurile care fac legătura dintre tractoare și vehiculele remorcate fac parte din vehiculul remorcat.
|
|
2.1.7.
|
Nu sunt permise dispozitive de închidere care nu sunt acționate automat.
|
|
2.1.8.
|
Racorduri de încercare a presiunii
|
2.1.8.1.
|
În scopul determinării forțelor de frânare pe fiecare axă a vehiculului dezvoltate în timpul acționării unui sistem de frânare cu aer comprimat, trebuie montate racorduri de încercare a presiunii aerului:
2.1.8.1.1. pe fiecare circuit independent al sistemului de frânare, în poziția cea mai accesibilă față de cilindrul de frână aflat în poziția cea mai defavorabilă din punctul de vedere al timpului de reacție prevăzut în anexa III;
▼M1
2.1.8.1.2. Într-un sistem de frânare care include un dispozitiv de modulare a presiunii aerului din transmisia hidraulică, astfel cum este precizat la punctul 6.2. din apendicele I la anexa II, situate în circuitul de presiune în aval și în amonte de acest dispozitiv, în cea mai apropiată poziție accesibilă. Dacă acest dispozitiv este controlat pneumatic, este necesar un racord de încercare suplimentar pentru simularea condițiilor existente în cazul unui vehicul încărcat. Dacă nu există un astfel de dispozitiv, se montează un singur racord de încercare a presiunii, echivalent racordului din aval menționat la punctul 2.1.5.1 din prezenta anexă. Aceste racorduri de încercare se amplasează în poziții cât mai accesibile de la sol sau din interiorul vehiculului;
▼B
2.1.8.1.3. în poziția cea mai accesibilă față de dispozitivul de stocare a energiei aflat în poziția cea mai defavorabilă în sensul punctului 2.4 din secțiunea A a anexei IV.
2.1.8.1.4. pe fiecare circuit independent al sistemului de frânare, astfel încât să fie posibilă verificarea presiunii de intrare și ieșire ale circuitului complet de transmisie;
2.1.8.1.5. racordurile de încercare a presiunii sunt conforme cu clauza 4 din standardul ISO 3583:1984.
|
|
2.2. Cerințele sistemelor de frânare
2.2.1. Vehicule din categoriile T și C
|
2.2.1.1.
|
Setul sistemelor de frânare cu care este echipat un vehicul satisface cerințele stabilite pentru sistemele de frânare de serviciu, de siguranță și de parcare.
În scopul asistării conducătorului auto la frânare (pentru a permite frânarea diferențială în circulație), sistemul de frânare de serviciu al tractorului poate fi compus din două circuite de frânare independente, fiecare fiind conectat la o pedală de frână separată situată în dreapta sau în stânga.
▼M1
Pentru tractoarele din categoria Tb: în cazul în care funcția de frânare diferențială este activată, nu trebuie să fie posibilă deplasarea la viteze mai mari de 40 km/h; la viteze de peste 40 km/h, funcția de frânare diferențială trebuie dezactivată. Aceste două operațiuni se asigură prin mijloace automate.
▼B
În cazul în care modul diferențial este activat, acționarea sistemului de frânare al vehiculului remorcat nu este necesară dacă viteza este mai mică sau egală cu 12 km/h.
În cazul tractoarelor la care pedalele separate pot fi conectate manual, conducătorul trebuie să poată verifica cu ușurință, de la locul său de conducere, dacă aceste pedale sunt conectate sau nu.
|
|
2.2.1.2.
|
Echipamentele care asigură frânarea de serviciu, de siguranță și de parcare pot avea componente comune, cu condiția ca ele să îndeplinească următoarele condiții:
2.2.1.2.1. Trebuie să existe cel puțin două dispozitive de comandă, fiecare corespunzând unui sistem diferit de frânare, independente unul față de celălalt și ușor accesibile conducătorului din poziția sa normală de condus. Pentru toate categoriile de vehicule, fiecare dispozitiv de comandă a frânei (excluzând dispozitivul de comandă a sistemului de frânare de anduranță) este proiectat astfel încât să revină în poziția total decuplat când este eliberat. Această cerință nu se aplică în cazul dispozitivului de comandă a frânei de parcare (sau acelei părți dintr-un dispozitiv de comandă combinat) atunci când acesta este blocat mecanic în poziția cuplat sau este utilizat pentru frânarea de siguranță sau în ambele cazuri.
2.2.1.2.2. Dispozitivul de comandă a sistemului de frânare de serviciu este independent de cel al sistemului de frânare de parcare.
2.2.1.2.3. În cazul în care sistemele de frânare de siguranță și de serviciu au același dispozitiv de control, eficacitatea legăturii dintre acesta și alte componente ale sistemului de acționare nu se deteriorează după o anumită perioadă de folosire.
2.2.1.2.4. În cazul în care sistemele de frânare de siguranță și de serviciu au același dispozitiv de comandă, sistemul de frânare de parcare este proiectat astfel încât să poată fi acționat atunci când vehiculul se află în mișcare. Această cerință nu se aplică atunci când sistemul de frânare de serviciu poate fi acționat, chiar și parțial, prin intermediul unei comenzi auxiliare.
2.2.1.2.5. În cazul unei defecțiuni a oricărei componente, alta decât frânele sau componentele menționate la punctul 2.2.1.2.7, sau în cazul oricărei alte defecțiuni a sistemului de frânare de serviciu (defecțiune, epuizarea parțială sau totală a unei rezerve de energie), sistemul de frânare de siguranță sau acea parte a sistemului de frânare de serviciu care nu a fost afectată, poate opri vehiculul, în condițiile prevăzute pentru frânarea de siguranță.
2.2.1.2.6. În mod special, atunci când sistemul de frânare de siguranță și cel de serviciu au un dispozitiv de comandă și un sistem de transmisie comun:
▼M1
2.2.1.2.6.1 în cazul în care sistemul de frânare de serviciu este acționat de forța musculară a conducătorului asistată de o sursă de energie sau de una sau mai multe rezerve de energie, performanța frânării de siguranță trebuie să poată fi asigurată, în cazul unei defecțiuni a unei surse de energie auxiliare, de forța musculară a conducătorului și de rezervele de energie neafectate de defecțiune, dacă acestea există, forța aplicată dispozitivului de control nedepășind limita maximă prevăzută.
▼B
2.2.1.2.6.2. În cazul în care transmisia și forța frânării de serviciu depind exclusiv de utilizarea, controlată de către conducător, a unei rezerve de energie, există cel puțin două rezerve de energie complet independente, fiecare fiind prevăzută cu transmisie proprie, de asemenea, independentă; fiecare poate să acționeze asupra frânelor de la doar două sau mai multe roți selectate în așa fel încât să poată asigura singure gradul prescris de frânare de siguranță, fără punerea în pericol a stabilității vehiculului în timpul frânării; în plus, fiecare dintre aceste rezerve de energie este prevăzută cu un dispozitiv de avertizare. Cel puțin unul dintre rezervoarele de aer ale fiecărui circuit de frânare secundar trebuie să conțină un dispozitiv de evacuare și golire, amplasat într-o poziție adecvată și ușor accesibilă.
2.2.1.2.6.3. În cazul în care transmisia și forța frânării de serviciu depind exclusiv de folosirea unei rezerve de energie, o singură rezervă de energie pentru transmisie este considerată suficientă, cu condiția ca frânarea de siguranță să fie asigurată de forța musculară a conducătorului care acționează dispozitivul de comandă a frânei de serviciu și cu respectarea cerințelor de la punctul 2.2.1.5.
2.2.1.2.7. Anumite piese, cum ar fi pedala și suportul său, pompa centrală de frână și pistonul (pistoanele) acesteia (la sistemele hidraulice), robinetul distribuitor (la sistemele hidraulice sau pneumatice), legătura dintre pedală și pompa centrală de frână sau robinetul distribuitor, cilindrii de frână și pistoanele lor (la sistemele hidraulice sau pneumatice), și ansamblurile pârghie-camă ale frânelor, nu sunt considerate ca putând fi avariate în cazul în care sunt de dimensiuni mari, sunt ușor accesibile pentru reparații și prezintă caracteristici de siguranță cel puțin egale cu cele prevăzute pentru alte componente esențiale (cum ar fi sistemul de direcție) ale vehiculului. În cazul în care defectarea oricărei astfel de piese ar face imposibilă frânarea vehiculului cu o performanță cel puțin egală cu cea prevăzută pentru sistemul de frânare de siguranță, acea piesă se realizează din metal sau dintr-un material cu caracteristici asemănătoare și nu este supusă deformării în funcționarea normală a sistemelor de frânare.
|
|
2.2.1.3.
|
Dacă există dispozitive de control separate pentru sistemele de frânare de serviciu și de siguranță, acționarea simultană a dispozitivelor de control nu trebuie să ducă la inoperabilitatea ambelor sisteme de frânare, de serviciu și de siguranță, nici atunci când ambele sisteme de frânare sunt în stare bună de funcționare, nici atunci când unul dintre ele nu funcționează.
|
|
2.2.1.4.
|
Atunci când se utilizează o altă energie decât forța musculară a conducătorului, nu este nevoie să existe mai mult de o astfel de sursă de energie (pompă hidraulică, compresor de aer etc.), dar mijloacele prin care este acționat dispozitivul care constituie sursa respectivă trebuie să fie cât mai sigure posibil.
|
2.2.1.4.1.
|
În cazul defectării oricărei părți a mecanismului de transmisie a sistemului de frânare a vehiculului constituit din două circuite de frânare de serviciu care îndeplinesc cerințele de la punctul 2.2.1.25, alimentarea părții neafectate de defecțiune continuă să fie asigurată, acolo unde este necesar, în scopul opririi vehiculului cu un grad de eficacitate prevăzut pentru frânarea reziduală și/sau de siguranță. Această condiție este satisfăcută cu ajutorul unor mijloace automate.
|
|
2.2.1.4.2.
|
În plus, dispozitivele de stocare situate în aval de acest dispozitiv sunt proiectate astfel încât, în cazul unei întreruperi a furnizării de energie, după patru acționări complete ale dispozitivului de comandă a sistemului de frânare de serviciu, conform condițiilor de încercare prevăzute la punctul 1.2 din secțiunea A sau la punctul 1.2 din secțiunea B sau la punctul 1.2 din secțiunea C din anexa IV, în funcție de tipul sistemului de frânare, să fie încă posibilă oprirea vehiculului la a cincea acționare cu un grad de eficacitate prevăzut pentru frânarea de siguranță.
|
|
2.2.1.4.3.
|
În cazul sistemelor de frânare hidraulice cu energie stocată, cerințele de la punctele 2.2.1.4.1 și 2.2.1.4.2 sunt considerate ca fiind îndeplinite dacă sunt respectate cerințele de la punctul 1.2.2 din partea C a anexei IV la prezentul regulament.
|
|
2.2.1.4.4.
|
În cazul unui sistem de frânare de serviciu compus dintr-un singur circuit de frânare de serviciu trebuie ca, în cazul defectării sau nedisponibilității sursei de energie, să fie posibilă oprirea vehiculului cu ajutorul comenzii sistemului de frânare de serviciu, cu un grad de eficacitate prescris pentru frânarea secundară.
|
|
|
2.2.1.5.
|
Cerințele de la punctele 2.2.1.2, 2.2.1.4 și 2.2.1.25 sunt îndeplinite fără folosirea unui dispozitiv automat a cărui ineficacitate ar putea trece neobservată ca urmare a faptului că piesele care sunt în mod normal în poziție de repaus nu sunt activate decât în cazul defectării sistemului de frânare.
|
|
2.2.1.6.
|
La vehiculele cu o viteză maximă prin construcție de cel mult 30 km/h, sistemul de frânare de serviciu trebuie să acționeze asupra tuturor roților de pe cel puțin o axă. În toate celelalte cazuri, sistemul de frânare de serviciu acționează asupra tuturor roților vehiculului. Cu toate acestea, în cazul vehiculelor cu o axă frânată și o cuplare automată a forței motoare la toate celelalte axe în timpul frânării, toate roțile trebuie să fie frânate.
Pentru vehiculele din categoria C, această condiție este considerată a fi îndeplinită în cazul în care toate rolele șenilelor vehiculului sunt frânate. Pentru vehiculele din categoria C cu o viteză prin construcție mai mică de 30 km/h, această condiție se consideră a fi îndeplinită dacă cel puțin o rolă de șenilă de pe fiecare latură a vehiculului este frânată.
Pentru vehiculele echipate cu scaun tip șa și ghidon, frânarea de serviciu poate acționa fie pe axa față, fie pe axa spate, cu condiția ca cerințele de performanță prevăzute la punctul 2 din anexa II la prezentul regulament să fie îndeplinite.
În cazul tractoarelor articulate din categoria Ta, în cazul în care o axă este frânată și diferențialul este montat între frâna de serviciu și roți, toate roțile axei respective trebuie să fie frânate atunci când activarea sistemului de frânare de serviciu blochează automat diferențialul pe axa respectivă.
▼M1
2.2.1.6.1. Performanța conductelor hidraulice și a ansamblurilor de furtunuri în cazul vehiculelor cu o axă frânată și o cuplare automată a forței motoare pe toate axele în timpul frânării
Conductele hidraulice ale transmisiei hidraulice trebuie să poată suporta o presiune cel puțin egală cu de patru ori presiunea maximă normală de serviciu (T) specificată de către producător. Ansamblurile de furtunuri trebuie să fie conforme cu standardele ISO 1402:2009, 6605:2002 și 7751: 1997+A1:2011.
▼B
|
|
2.2.1.7.
|
În cazul în care sistemul de frânare de serviciu acționează asupra tuturor roților sau rolelor șenilelor vehiculului, acțiunea trebuie să fie corespunzător distribuită între axe.
►M1
————— ◄
|
2.2.1.7.1.
|
În cazul vehiculelor cu mai mult de două axe, pentru a se evita blocarea roților sau uzarea garniturilor de frână, forța de frânare a anumitor axe poate fi redusă automat la zero atunci când încărcătura transportată este mult redusă, cu condiția ca vehiculul să îndeplinească cerințele de performanță prevăzute în anexa II.
|
|
|
2.2.1.8.
|
Acțiunea sistemului de frânare de serviciu se distribuie simetric între roțile sau rolele șenilelor aceleiași axe, în raport cu planul median longitudinal al vehiculului.
|
|
2.2.1.9.
|
Sistemele de frânare de serviciu și de parcare trebuie să acționeze asupra suprafețelor de frânare permanent conectate la roți prin componente de o rezistență adecvată. Nu este posibilă deconectarea unei suprafețe de frânare de pe roți; cu toate acestea, orice astfel de deconectare este permisă în cazul sistemului de frânare de parcare, cu condiția ca acesta să fie manevrat exclusiv de către conducător, din scaunul său, printr-un sistem care să nu poată fi activat ca urmare a unei scurgeri. Atunci când mai mult de o axă face obiectul frânării în cazul vehiculelor din categoriile T și C cu o viteză maximă prin construcție de cel mult 60 km/h, o axă poate fi decuplată, cu condiția ca activarea sistemului de frânare de serviciu să recupleze automat acestă axă și ca, în cazul unei defecțiuni a alimentării cu energie sau al unei defecțiuni la transmisia comenzii dispozitivului de comandă pentru recuplare, să fie asigurată posibilitatea recuplării automate.
|
|
2.2.1.10.
|
►M1
Este posibilă compensarea uzurii frânelor de serviciu prin intermediul unui sistem de reglare manuală sau automată. ◄ Pentru vehiculele din categoriile Tb și Cb, uzura frânelor de serviciu este compensată cu ajutorul unui sistem de reglare automată. În plus, dispozitivul de comandă și componentele transmisiei și ale frânelor au o cursă de rezervă și, dacă este necesar, mijloace corespunzătoare de compensare astfel încât, atunci când frânele se supraîncălzesc sau când garniturile de frână ating un anumit grad de uzură, performanța frânării să fie asigurată fără a fi necesară reglarea imediată.
Nu este necesar ca vehiculele din categoriile Ta și Ca să fie echipate cu un sistem de reglare automată destinat compensării uzurii frânelor. Cu toate acestea, în cazul în care unele vehicule din aceste categorii sunt echipate cu un sistem care permite compensarea uzurii frânelor printr-un dispozitiv de reglare automată, sistemul respectiv îndeplinește aceleași cerințe ca cele corespunzătoare categoriilor Tb și Cb.
|
2.2.1.10.1.
|
►M1
După o încălzire a acestora urmată de o răcire, dispozitivele de reglare automată, în cazul în care sunt instalate, au capacitatea de a asigura rularea liberă, astfel cum este prevăzut la punctul 2.3.4. din anexa II în urma încercării de tip I menționate la punctul 2.3. din anexa respectivă. ◄
Trebuie să fie posibilă verificarea acestei stări de uzură a garniturilor de frână de serviciu, din exterior sau de sub vehicul, utilizând exclusiv sculele sau dispozitivele cu care este echipat în mod normal vehiculul; de exemplu, prin asigurarea unor orificii de inspecție adecvate sau prin alte mijloace. Sunt acceptate, de asemenea, dispozitive acustice sau optice situate în apropierea scaunului conducătorului care să-l atenționeze pe acesta atunci când este necesară înlocuirea garniturilor.
|
|
2.2.1.10.2.
|
Cerințele de la punctele 2.2.1.10 și 2.2.1.10.1 nu se aplică frânelor imersate în ulei, care sunt proiectate să funcționeze pe întreaga durată de viață a vehiculului fără a fi întreținute.
|
|
|
2.2.1.11.
|
În cazul sistemelor de frânare hidraulică:
2.2.1.11.1. Orificiile de umplere a rezervoarelor cu lichid trebuie să fie ușor accesibile; în plus, rezervoarele cu lichid de rezervă sunt fabricate astfel încât nivelul lichidului de rezervă să poată fi verificat fără să fie deschise rezervoarele. În cazul în care ultima condiție nu este îndeplinită, indicatorul de avertizare de culoare roșie menționat la punctul 2.2.1.29.1.1 atrage atenția conducătorului asupra oricărei scăderi a nivelului rezervei de lichid care ar putea cauza defectarea sistemului de frânare.
▼M1
În cazul sistemelor de frânare hidraulice, în care tipul de lichid utilizat pentru transmisiile hidraulice este același ca lichidul utilizat în alte dispozitive ale vehiculului și se află într-un rezervor comun este, de asemenea, permisă detectarea nivelului corect de lichid cu un dispozitiv care necesită deschiderea containerului.
2.2.1.11.2. O defecțiune a transmisiei hidraulice care nu permite obținerea performanței prescrise a sistemului de frânare de serviciu este semnalată conducătorului printr-un dispozitiv care include un semnal de avertizare, astfel cum este precizat la punctul 2.2.1.29.1.1. În mod alternativ, este permisă aprinderea acestui semnal atunci când lichidul din rezervor scade sub un anumit nivel specificat de producător.
▼M1
În cazul sistemelor de frânare hidraulice, în care tipul de lichid utilizat pentru transmisiile hidraulice este același ca lichidul utilizat în alte dispozitive ale vehiculului și se află într-un rezervor comun este, de asemenea, permisă detectarea unei scăderi de presiune în transmisia hidraulică până la o anumită valoare conform specificațiilor producătorului.
2.2.1.11.3. Tipul de lichid folosit în acționarea hidraulică a sistemelor de frânare este indicat de simbolul prezentat în figura 1 sau 2 din standardul ISO 9128:2006.
►M1
Simbolul trebuie să fie plasat la cel mult 100 mm de orificiile de umplere ale rezervoarelor de lichid, în conformitate cu cerințele stabilite în temeiul articolului 24 din Regulamentul delegat (UE) 2015/208. ◄ Producătorul poate oferi informații suplimentare. Această cerință se aplică numai vehiculelor care au o alimentare separată pentru lichidul sistemului de frânare.
|
|
2.2.1.12.
|
Dispozitive de avertizare
|
2.2.1.12.1.
|
Orice vehicul prevăzut cu un sistem de frânare de serviciu acționat de un rezervor de energie, în cazul în care performanța prevăzută a frânării de siguranță nu poate fi atinsă prin sistemul de frânare fără a se folosi energia înmagazinată, este prevăzut, pe lângă un eventual manometru, cu un dispozitiv de alarmă care emite un semnal optic sau acustic atunci când energia înmagazinată în oricare parte a sistemului scade la o valoare la care, fără a reîncărca rezervorul și indiferent de condițiile de încărcare a vehiculului, este posibilă acționarea dispozitivului de comandă a sistemului de frânare de serviciu a cincea oară după patru acționări complete și obținerea performanței prevăzute a frânei de siguranță (transmisia frânei de serviciu funcționând normal, iar frânele fiind reglate cât mai precis posibil). Dispozitivul de alarmă este conectat permanent și direct la circuit. Atunci când motorul funcționează în condiții normale și când nu există defecte în sistemul de frânare, avertizorul nu emite niciun semnal, cu excepția perioadei de încărcare a rezervorului (rezervoarelor) de energie după pornirea motorului.
|
2.2.1.12.1.1.
|
Cu toate acestea, în cazul vehiculelor considerate a fi în conformitate cu cerințele punctului 2.2.1.4.1 numai în virtutea îndeplinirii cerințelor punctului 1.2.2 din secțiunea C a anexei IV, avertizorul prezintă și un semnal acustic pe lângă cel optic. Nu este obligatoriu ca aceste avertizoare să acționeze simultan, cu condiția ca fiecare dintre ele să îndeplinească cerințele de mai sus și ca semnalul acustic să nu acționeze înaintea celui optic.
|
|
|
2.2.1.12.2.
|
Acest avertizor acustic poate fi oprit atunci când este acționat sistemul de frânare de parcare sau, la alegerea producătorului, atunci când selectorul este în poziția „parcare” în cazul transmisiei automate sau în ambele cazuri.
|
|
▼M1
|
2.2.1.13.
|
Tractoarele din categoria Tb cu o viteză maximă prin construcție mai mare de 60 km/h Fără a aduce atingere dispozițiilor punctului 2.1.2.3, atunci când folosirea unei surse auxiliare de energie este esențială pentru funcționarea sistemului de frânare, rezerva de energie este suficientă încât să garanteze faptul că, dacă se oprește motorul, sau în cazul unei defecțiuni în producerea energiei, performanța frânării continuă să fie suficientă pentru a opri vehiculul în condițiile prevăzute. Pe lângă acestea, dacă forța musculară aplicată de conducător sistemului de frânare de staționare este asistată de un alt dispozitiv, acționarea sistemului de frânare de staționare este asigurată, în cazul unei defecțiuni la nivelul acelui dispozitiv, dacă este necesar, prin folosirea unei rezerve de energie independentă de cea furnizată de dispozitivul respectiv. Această rezervă de energie poate fi cea destinată sistemului de frânare de serviciu.
|
▼B
|
2.2.1.14.
|
În cazul unui tractor la care este autorizată cuplarea unui vehicul remorcat echipat cu o frână comandată de conducătorul tractorului, sistemul de frânare de serviciu al tractorului trebuie să fie echipat cu un dispozitiv proiectat astfel încât, dacă sistemul de frânare al vehiculului remorcat se defectează sau dacă circuitul de alimentare (sau orice alt tip de conectare care poate fi adoptat) dintre tractor și vehiculul remorcat se rupe, să fie în continuare posibilă frânarea tractorului cu performanța prevăzută pentru sistemul de frânare de siguranță; în consecință, se prevede, în special, ca acest dispozitiv să fie montat în sistemul de frânare de serviciu al tractorului, asigurându-se că tractorul poate fi în continuare frânat cu ajutorul sistemului de frânare de serviciu cu o performanță prevăzută pentru sistemul de frânare de siguranță.
|
|
2.2.1.15.
|
Echipamentul auxiliar pneumatic sau hidraulic este alimentat automat cu energie astfel încât, în timpul funcționării sale, valorile prevăzute ale eficacității sale să poată fi atinse și, chiar și în situația unei avarii a sursei de energie, funcționarea echipamentului auxiliar să nu producă o scădere a rezervelor de energie care alimentează sistemele de frânare sub nivelul indicat la punctul 2.2.1.12.
|
|
2.2.1.16.
|
Un tractor autorizat să tracteze un vehicul din categoria R2, R3, R4 sau S2 trebuie să îndeplinească următoarele condiții:
2.2.1.16.1. În cazul în care se acționează sistemul de frânare de serviciu al tractorului, se acționează, de asemenea, treptat, frânele vehiculului remorcat (a se vedea de asemenea punctul 2.2.1.18.4).
2.2.1.16.2. Atunci când se acționează sistemul de frânare de siguranță al tractorului, se realizează și o acțiune de frânare a vehiculului remorcat; În cazul tractoarelor din categoriile Tb și Cb, această acțiune de frânare este treptată.
2.2.1.16.3. Dacă sistemul de frânare de serviciu al tractorului se defectează și în cazul în care acest sistem este alcătuit din cel puțin două secțiuni independente, secțiunea sau secțiunile neafectate de această defecțiune trebuie să poată acționa, parțial sau integral, frânele vehiculului remorcat. Această cerință nu se aplică în cazul în care cele două secțiuni independente cuprind o secțiune care frânează roțile din stânga și o secțiune care frânează roțile din dreapta, o astfel de proiectare având drept scop frânarea diferențială la efectuarea virajelor pe teren. În cazul în care, în această din urmă situație, sistemul de frânare de serviciu al tractorului nu funcționează, sistemul de frânare de siguranță trebuie să poată acționa complet sau parțial frânele vehiculului remorcat. Dacă această operațiune este efectuată cu ajutorul unei supape care se află în mod normal în repaus, aceasta poate fi încorporată doar dacă funcționarea ei corectă poate fi verificată ușor de către conducător, din interiorul sau din exteriorul vehiculului, fără folosirea unor unelte.
|
|
2.2.1.17.
|
Cerințe suplimentare în cazul tractoarelor autorizate să tracteze vehicule remorcate cu sisteme de frânare cu aer comprimat.
|
2.2.1.17.1.
|
În cazul unei defecțiuni (de exemplu, ruptură) la una dintre conductele de alimentare cu aer sau al întreruperii sau defectării circuitului electric de comandă, este totuși posibilă acționarea parțială sau integrală de către conducător a frânelor vehiculului remorcat, fie prin dispozitivul de comandă a sistemului de frânare de serviciu, fie prin dispozitivul de comandă a sistemului de frânare de siguranță, fie prin dispozitivul de comandă a sistemului de frânare de parcare, dacă ruptura sau scurgerea nu produce automat frânarea vehiculului remorcat cu performanța prevăzută la punctul 3.2.3 din anexa II.
|
|
2.2.1.17.2.
|
Se consideră că frânarea automată de la punctul 2.2.1.17.1 are loc atunci când sunt îndeplinite următoarele condiții:
2.2.1.17.2.1. Atunci când dispozitivul de comandă a frânei, desemnat dintre dispozitivele menționate la punctul 2.2.1.17.1, este acționat complet, presiunea din conducta de alimentare scade la 150 kPa în următoarele două secunde; în plus, atunci când dispozitivul de comandă a frânei este eliberat, circuitul de alimentare se presurizează din nou.
2.2.1.17.2.2. Atunci când conducta de alimentare se golește cu cel puțin 100 kPa pe secundă, frâna automată a vehiculului remorcat intră în funcțiune înainte ca presiunea din conducta de alimentare să scadă la 200 kPa.
|
▼M1
|
2.2.1.17.3.
|
În cazul defectării unuia dintre circuitele de comandă care conectează două vehicule echipate în conformitate cu punctul 2.1.4.1.2. din prezenta anexă, circuitul de comandă neafectat asigură în mod automat forța de frânare prevăzută pentru vehiculul remorcat la punctul 3.2.1. din anexa II.
|
▼B
|
2.2.1.17.4.
|
În cazul sistemului de frânare de serviciu pneumatic compus din două sau mai multe secțiuni independente, orice scurgere între aceste secțiuni la dispozitivul de comandă sau în aval de acesta trebuie eliberată în mod continuu în atmosferă.
|
|
|
2.2.1.18.
|
Cerințe suplimentare în cazul tractoarelor autorizate să remorcheze vehicule cu sisteme de frânare hidraulică.
|
2.2.1.18.1.
|
Presiunea furnizată la ambele racordurilor de cuplare când motorul este oprit trebuie să fie întotdeauna 0 kPa.
|
|
2.2.1.18.2.
|
Presiunea la racordul de cuplare al circuitului de comandă când motorul este pornit și nu se aplică nicio forță prin dispozitivul de comandă a frânei trebuie să fie 0+200 kPa.
|
|
2.2.1.18.3.
|
Atunci când motorul este pornit, trebuie să fie posibilă generarea, la racordul de cuplare al circuitului suplimentar, a unei presiuni de cel puțin 1 500 kPa și de cel mult 3 500 kPa.
|
|
2.2.1.18.4.
|
Ca o derogare de la aplicarea cerinței de la punctul 2.2.1.16.1, o acțiune progresivă de frânare a vehiculului remorcat este necesară numai dacă sistemul de frânare de serviciu al tractorului este activat atunci când motorul este pornit.
|
|
2.2.1.18.5.
|
În cazul unei defecțiuni (de exemplu, ruptură sau scurgere) în circuitul suplimentar, trebuie să fie totuși posibilă acționarea parțială sau integrală de către conducător a frânelor vehiculului remorcat, fie prin dispozitivul de comandă a sistemului de frânare de serviciu, fie prin dispozitivul de comandă a sistemului de frânare de parcare, dacă ruptura sau scurgerea respectivă nu produce automat frânarea vehiculului remorcat cu performanța prevăzută la punctul 3.2.3 din anexa II.
|
▼M1
|
2.2.1.18.6.
|
În cazul unei avarii (de exemplu, ruptură sau scurgere) a circuitului de comandă, presiunea în circuitul suplimentar scade până la 1 000 kPa în două secunde de la acționarea completă a dispozitivului de comandă a frânei de siguranță. În plus, la eliberarea dispozitivului de comandă a frânei de siguranță, circuitul suplimentar este presurizat din nou (a se vedea, de asemenea, punctul 2.2.2.15.2.).
|
▼B
|
2.2.1.18.7.
|
Presiunea din circuitul suplimentar scade de la valoarea sa maximă la 0+300 kPa într-o secundă de la acționarea completă a dispozitivului de comandă a sistemului de frânare de parcare.
Pentru a verifica timpul de evacuare, circuitul suplimentar al simulatorului vehiculului remorcat, prevăzut la punctul 3.6.2.1 din anexa III, este conectat la circuitul suplimentar al tractorului.
Acumulatorii simulatorului sunt apoi încărcați la valoarea maximă generată de tractor, motorul acestuia fiind pornit, iar dispozitivul de purjare (punctul 1.1 din apendicele 2 al anexei III) fiind complet închis.
|
|
2.2.1.18.8.
|
Pentru a putea conecta și deconecta circuitele de legătură hidraulice inclusiv când motorul este pornit și sistemul de frânare de parcare este acționat, un dispozitiv adecvat poate fi montat pe tractor.
Acest dispozitiv trebuie proiectat și construit astfel încât presiunea în circuitele de legătură să fie readusă imediat în poziția de repaus în momentul în care dispozitivul de control (de exemplu, butonul) este eliberat (de exemplu, supapa revine automat în poziția normală de funcționare).
|
|
2.2.1.18.9.
|
►M1
Tractoarele care remorchează vehicule din categoria R sau S care pot respecta doar cerințele privind performanțele de frânare ale sistemului de frânare de serviciu, ale sistemului de frânare de staționare sau ale sistemului de frânare automată cu ajutorul energiei stocate într-un dispozitiv de stocare a energiei hidraulice trebuie să fie echipate cu un conector ISO 7638:2003 pentru a putea indica nivelul scăzut de energie stocată de pe vehiculul remorcat, primită de acesta din urmă, astfel cum se prevede la punctul 2.2.2.15.1.1., prin semnalul de avertizare separat transmis prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003 menționate la punctul 2.2.1.29.2.2. (a se vedea, de asemenea, punctul 2.2.2.15.1.). ◄ Racordul prevăzut de standardul ISO 7638:2003 poate fi utilizat pentru aplicații cu 5 sau 7 contacte, după caz.
|
|
|
2.2.1.19.
|
În cazul unui tractor autorizat să remorcheze un vehicul din categoria R3, R4 sau S2, sistemul de frânare de serviciu al vehiculului remorcat poate fi acționat doar împreună cu sistemul de frânare de serviciu, de siguranță sau de parcare al tractorului. Cu toate acestea, aplicarea automată numai a frânelor vehiculului remorcat este permisă atunci când acționarea frânelor vehiculului remorcat este declanșată automat de către tractor în scopul exclusiv al stabilizării vehiculului.
|
2.2.1.19.1.
|
Prin derogare de la punctul 2.2.1.19, în vederea îmbunătățirii comportamentului vehiculului în circulație prin modificarea forței de cuplare dintre tractor și vehiculul remorcat, este permis ca frânele vehiculului remorcat să fie aplicate în mod automat pentru o perioadă de cel mult 5 secunde fără operarea sistemului de frânare de serviciu, de siguranță sau de parcare al tractorului.
|
|
|
2.2.1.20.
|
▼M1
În cazul în care cerințele de la punctul 3.1.3.4 din anexa II pot fi îndeplinite numai prin respectarea condițiilor specificate la punctul 3.1.3.4.1.1. din anexa II, atunci:
▼B
2.2.1.20.1. în cazul unui sistem de frânare cu aer comprimat, trebuie transmisă o presiune de cel puțin 650 kPa în circuitul de comandă (sau valoarea digitală echivalentă a cererii) atunci când un singur dispozitiv de comandă este acționat în totalitate și acesta acționează inclusiv sistemul de frânare de parcare al tractorului. Acest fapt trebuie, de asemenea, să fie asigurat atunci când comutatorul de contact/pornire a fost decuplat și/sau cheia a fost scoasă din contact;
2.2.1.20.2. în cazul unui sistem de frânare hidraulic, atunci când un dispozitiv de comandă unic este acționat integral, în circuitul suplimentar trebuie generată o presiune de 0+100 kPa.
|
|
2.2.1.21.
|
Sisteme de frânare antiblocare pentru tractoarele din categoria Tb
|
2.2.1.21.1.
|
Tractoarele din categoria Tb cu o viteză maximă prin construcție mai mare de 60 km/h trebuie să fie echipate cu sisteme antiblocare de categoria 1 în conformitate cu cerințele din anexa XI.
|
▼M2 —————
▼B
|
|
2.2.1.22.
|
Tractoarele autorizate să tracteze un vehicul echipat cu un sistem antiblocare se echipează, de asemenea, cu o priză electrică specială, conformă cu standardul ISO 7638:2003, pentru sistemul electric de comandă. Racordul prevăzut de standardul ISO 7638:2003 poate fi utilizat pentru aplicații cu 5 sau 7 contacte, după caz.
|
▼M2
|
2.2.1.23.
|
Tractoarele dotate cu sisteme de frânare antiblocare, altele decât cele menționate la punctul 2.2.1.21.1, respectă cerințele din anexa XI.
|
▼B
|
2.2.1.24.
|
Cerințele prevăzute în anexa X se aplică tuturor aspectelor legate de siguranța sistemelor de comandă electronică a vehiculelor, care furnizează sau fac parte din transmisia comenzilor funcției de frânare, inclusiv cele care utilizează sistemul (sistemele) de frânare pentru frânarea automată sau frânarea selectivă.
|
|
2.2.1.25.
|
În cazul tractoarelor din categoria Tb cu o viteză maximă prin construcție mai mare de 60 km/h, sistemul de frânare de serviciu este de așa natură încât, indiferent dacă este combinat cu sistemul de frânare de siguranță, în cazul unei defecțiuni a unei componente a transmisiei sale, să asigure frânarea unui număr suficient de roți atunci când este acționat dispozitivul de comandă a frânei de serviciu; roțile respective sunt selectate astfel încât performanța reziduală a sistemului de frânare de serviciu să îndeplinească cerințele stabilite la punctul 3.1.4 din anexa II.
Componenta sau componentele neafectate de defecțiune permit acționarea parțială sau totală a frânelor vehiculului remorcat.
▼M1 —————
▼B
|
|
2.2.1.26.
|
Cerințe suplimentare speciale privind transmisia electrică a sistemului de frânare de parcare 2.2.1.26.1. Tractoare cu o viteză maximă prin construcție mai mare de 60 km/h
|
2.2.1.26.1.1.
|
În cazul unei defecțiuni a transmisiei electrice, este eliminată orice posibilitate de acționare accidentală a sistemului de frânare de parcare.
|
▼M1
|
2.2.1.26.1.2.
|
În cazul unei defecțiuni a transmisiei electrice a dispozitivului de comandă sau al întreruperii unui circuit al transmisiei electrice din afara unității (unităților) electronice de control, cu excepția sursei de energie, rămâne posibilă acționarea sistemului de frânare de staționare de la postul conducătorului și, prin urmare, vehiculul încărcat poate fi menținut în poziție staționară pe o pantă cu înclinația de 8 %, ascendentă sau descendentă.
|
▼B
2.2.1.26.2. Tractoare cu o viteză maximă prin construcție mai mică sau egală cu 60 km/h
|
2.2.1.26.2.1.
|
În cazul unei defecțiuni electrice a comenzii sau a unei ruperi a cablajului transmisiei electrice a comenzii din afara unității (unităților) de comandă, cu excepția sursei de energie,
2.2.1.26.2.1.1. orice acționare accidentală a sistemului de frânare de parcare a vehiculului la o viteză mai mare de 10 km/h trebuie să fie împiedicată;
2.2.1.26.2.1.2. trebuie să fie în continuare posibilă aplicarea sistemului de frânare de parcare de la scaunul conducătorului și, în acest mod, trebuie ca vehiculul să poată staționa încărcat pe o pantă de 8 %, ascendentă sau descendentă.
|
▼M1
|
2.2.1.26.3.
|
Ca o soluție alternativă la cerințele privind performanța sistemului de frânare de staționare în conformitate cu punctele 2.2.1.26.1.2 și 2.2.1.26.2.1.2, alternativele prevăzute la punctele 2.2.1.26.3.1 și 2.2.1.26.3.2 sunt, de asemenea, permise.
2.2.1.26.3.1 o acționare automată a sistemului de frânare de staționare este permisă atunci când vehiculul este staționat, cu condiția să fie obținute rezultatele menționate la punctele 2.2.1.26.1.2 și 2.2.1.26.2.1.2 și, odată acționată, frâna de staționare să rămână cuplată independent de starea comutatorului de contact (pornire). În această situație alternativă, sistemul de frânare de staționare este eliberat automat imediat ce conducătorul auto începe să pună din nou în mișcare vehiculul.
2.2.1.26.3.2 acționarea sistemului de frânare de staționare de pe scaunul conducătorului cu un dispozitiv de comandă auxiliar și, în acest mod, trebuie ca vehiculul să poată staționa încărcat pe o pantă de 8 %, ascendentă sau descendentă. În acest caz, cerințele de la punctul 2.2.1.26.7 trebuie, de asemenea, îndeplinite.
|
▼B
|
2.2.1.26.4.
|
De asemenea, decuplarea sistemului de frânare de parcare este posibilă prin utilizarea unor unelte și/sau a unui dispozitiv auxiliar aflat în dotarea vehiculului.
|
|
2.2.1.26.5.
|
O rupere a cablajului transmisiei electrice sau o defecțiune electrică la dispozitivul de comandă a sistemului de frânare de parcare se semnalează conducătorului prin intermediul indicatorului de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2. Atunci când este cauzat de o rupere a cablajului transmisiei electrice a comenzii sistemului de frânare de parcare, acest semnal de avertizare de culoare galbenă se aprinde instantaneu imediat ce are loc ruperea sau, în cazul tractoarelor cu o viteză maximă prin construcție care nu depășește 60 km/h, cel târziu la acționarea comenzii de frânare corespunzătoare. În plus, o astfel de defecțiune electrică a dispozitivului de comandă sau o rupere a cablajului din exteriorul unității (unităților) electronice de control, cu excepția sursei de energie, este semnalată conducătorului prin lumina intermitentă a indicatorului de avertizare menționat la punctul 2.2.1.29.1.1, atât timp cât comutatorul de contact se află în poziția „pornit” și încă cel puțin 10 secunde după întreruperea contactului (poziția „oprit”), precum și atâta vreme cât dispozitivul de comandă se află simultan în poziția activat.
Cu toate acestea, dacă sistemul de frânare de parcare detectează cuplarea corectă a sistemului de frânare de parcare, lumina intermitentă a indicatorului de avertizare poate fi întreruptă, iar semnalul luminos permanent rămâne aprins pentru a indica cuplarea sistemului de frânare de parcare.
▼M1
Atunci când acționarea sistemului de frânare de staționare este indicată în mod normal de un semnal de avertizare separat, în conformitate cu toate cerințele de la punctul 2.2.1.29.4, acest semnal se utilizează astfel încât să satisfacă cerința privind semnalul cu lumină roșie stabilit la primul și al doilea alineat de la prezentul punct.
▼B
|
|
2.2.1.26.6.
|
Echipamentele auxiliare pot fi alimentate cu energie electrică prin intermediul transmisiei electrice a sistemului de frânare de parcare, cu condiția ca energia disponibilă să fie suficientă pentru a permite acționarea sistemului de frânare de parcare și să alimenteze în plus toți ceilalți consumatori electrici ai vehiculului, în absența oricărei defecțiuni. În plus, în cazul în care sursa de energie este utilizată, de asemenea, de sistemul de frânare de serviciu, se aplică cerințele de la punctul 4.1.7 din anexa XII.
|
|
2.2.1.26.7.
|
După ce comutatorul de contact/pornire care controlează energia electrică pentru echipamentul de frânare este decuplat și/sau cheia este îndepărtată, trebuie să fie în continuare posibilă acționarea sistemului de frânare de parcare, în timp ce decuplarea acestuia trebuie împiedicată.
Eliberarea sistemului de frânare de parcare este permisă în cazul în care comanda trebuie deblocată mecanic pentru a permite eliberarea sistemului de frânare de parcare.
|
|
|
2.2.1.27.
|
Cerințele din anexa XII se aplică vehiculelor cu EBS sau vehiculelor cu „comunicarea datelor” prin intermediul contactelor 6 și 7 ale prizei ISO 7638:2003.
|
|
2.2.1.28.
|
Cerințe speciale privind controlul forței de cuplare
|
2.2.1.28.1.
|
Controlul forței de cuplare este permis numai la tractor.
|
|
2.2.1.28.2.
|
Controlul forței de cuplare reduce diferența între forțele frânării dinamice ale tractoarelor și ale vehiculelor remorcate. Controlul forței de cuplare se verifică în momentul omologării de tip. Metoda de verificare se stabilește de comun acord între producătorul vehiculului și serviciul tehnic, iar metoda de evaluare și rezultatele se anexează la raportul de omologare de tip.
|
2.2.1.28.2.1.
|
Controlul forței de cuplare poate influența coeficientul de frânare TM/FM (punctul 2 din apendicele 1 la anexa II) și/sau valoarea (valorile) cererii de frânare pentru vehiculul remorcat. În cazul unui tractor echipat cu două circuite de comandă, în conformitate cu punctul 2.1.4.1.2 din prezenta anexă, capacitatea de control a ambelor semnale se reglează în mod similar.
|
|
2.2.1.28.2.2.
|
Sistemul de control al forței de cuplare nu împiedică aplicarea presiunii (presiunilor) maxime de frânare.
|
|
|
2.2.1.28.3.
|
Vehiculul îndeplinește cerințele de compatibilitate în stare încărcată din apendicele 1 al anexei II, dar, pentru a îndeplini prevederile de la punctul 2.2.1.28.2, vehiculul se poate abate de la aceste cerințe atunci când sistemul de control al forței de cuplare este activ.
|
|
2.2.1.28.4.
|
O defecțiune a comenzii forței de cuplare se detectează și se semnalează conducătorului prin intermediul unui indicator de avertizare de culoare galbenă, similar celui menționat la punctul 2.2.1.29.1.2. În cazul unei defecțiuni, sunt îndeplinite cerințele relevante din apendicele 1 al anexei II.
|
|
2.2.1.28.5.
|
În cazul în care compensarea prin sistemul de control al forței de cuplare depășește cu 150 kPa (pneumatic) și, respectiv, 2 600 kPa (hidraulic) valoarea nominală necesară, până la o limită, în pm, de 650 kPa (sau valoarea numerică echivalentă necesară) și, respectiv, 11 500 kPa (hidraulic), acest fapt se semnalează prin intermediul indicatorului de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2. Peste nivelul de 650 kPa și, respectiv, 11 500 kPa (hidraulic), indicatorul se aprinde în cazul în care compensarea conduce la deplasarea punctului de operare în exteriorul intervalului de compatibilitate în stare încărcată, astfel cum se specifică în apendicele 1 al anexei II, pentru tractoare.
|
|
2.2.1.28.6.
|
Un sistem de control al forței de cuplare controlează doar forțele de cuplare generate de sistemul de frânare de serviciu al tractorului și, respectiv, al vehiculului remorcat. Forțele de cuplare rezultate în urma utilizării sistemelor de frânare de anduranță nu sunt compensate nici de către sistemul de frânare de serviciu al tractorului, nici de către cel al vehiculului remorcat. Se consideră că sistemele de frânare de anduranță nu fac parte din sistemele de frânare de serviciu.
|
|
|
2.2.1.29.
|
Defectarea frânei și indicatorul de avertizare privind defecțiunea Cerințele privind semnalele de avertizare optice, a căror funcție este de a indica conducătorului anumite deficiențe sau defecțiuni din cadrul echipamentului de frânare al tractorului sau al vehiculului remorcat, sunt stabilite la punctele 2.2.1.29.1-2.2.1.29.6.3. Funcția acestor semnale este în mod exclusiv indicarea deficiențelor sau defecțiunilor echipamentului de frânare. Cu toate acestea, semnalul de avertizare optică descris la punctul 2.2.1.29.6 poate fi folosit, de asemenea, pentru semnalarea deficiențelor sau defecțiunilor mecanismului de rulare.
|
2.2.1.29.1.
|
Tractoarele trebuie să poată semnaliza optic erorile și defecțiunile sistemului de frânare, după cum urmează:
▼M1
2.2.1.29.1.1. Un indicator de avertizare de culoare roșie, în conformitate cu cerințele stabilite în anexa XXVI la Regulamentul delegat (UE) nr. 1322/2014, care indică defecțiuni ale echipamentului de frânare al vehiculului, astfel cum este precizat la alte puncte ale prezentei anexe și în anexele V, VII, IX și XIII, care împiedică atingerea performanței prescrise a sistemului de frânare de serviciu sau funcționarea cel puțin a unuia dintre două circuite independente de frânare de serviciu.
2.2.1.29.1.2. După caz, un semnal de avertizare de culoare galbenă, în conformitate cu cerințele stabilite la articolul 29 din Regulamentul delegat (UE) nr. 1322/2014, care indică o defecțiune detectată electric la echipamentul de frânare al vehiculului, neindicată de semnalul de avertizarea menționat la punctul 2.2.1.29.1.1.
▼B
|
|
2.2.1.29.2.
|
►M1
Tractoarele echipate cu un circuit electric de comandă și/sau autorizate să tracteze un vehicul echipat cu transmisie electrică a comenzii, trebuie să aibă capacitatea de a emite un semnal de avertizare separat, în conformitate cu cerințele stabilite la articolul 29 din Regulamentul delegat (UE) nr. 1322/2014, pentru indicarea unei defecțiuni a transmisiei electrice a comenzii sistemului de frânare al vehiculului remorcat. ◄ Indicatorul este activat de vehiculul remorcat prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003, iar semnalul transmis de vehiculul remorcat se afișează la bordul tractorului, în toate cazurile, fără nicio întârziere sau modificare semnificativă. Acest indicator de avertizare nu se aprinde atunci când se cuplează un vehicul remorcat fără circuit electric de comandă și/sau transmisie electrică a comenzii sau când nu este cuplat niciun vehicul remorcat. Această funcție este automată.
|
2.2.1.29.2.1.
|
În cazul în care un tractor echipat cu circuit electric de comandă este conectat electric la un vehicul remorcat dotat cu circuit electric de comandă, indicatorul de avertizare menționat la punctul 2.2.1.29.1.1 este utilizat și pentru a indica anumite defecțiuni specifice ale mecanismului de frânare al vehiculului remorcat, de fiecare dată când vehiculul remorcat furnizează informații corespunzătoare în acest sens prin intermediul componentei de transmisie de date a circuitului electric de comandă. Acest indicator există în plus față de indicatorul de avertizare menționat la punctul 2.2.1.29.2.
►M1
Ca o opțiune alternativă, în locul utilizării indicatorului de avertizare specificat la punctul 2.2.1.29.1.1 din prezenta anexă și a semnalului de avertizare suplimentar menționat la prezentul punct, un semnal de avertizare de culoare roșie separat, în conformitate cu cerințele stabilite în temeiul articolului 29 din Regulamentul delegat (UE) nr. 1322/2014, poate fi prevăzut pe tractor, pentru a semnala o astfel de defecțiune depistată la mecanismul de frânare al vehiculului remorcat. ◄
|
|
2.2.1.29.2.2.
|
Pentru a putea indica nivelul scăzut de energie stocată pe vehiculul remorcat, în conformitate cu punctele 2.2.2.15.1.1 și 2.2.2.15.2, tractoarele echipate cu o priză conformă cu standardul ISO 7638:2003 trebuie să afișeze conducătorului indicatorul separat de avertizare de culoare galbenă menționat la punctul 2.2.1.29.2 în cazul în care semnalul este transmis la tractor și pe vehiculul remorcat prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003.
|
|
|
2.2.1.29.3.
|
Cu excepția cazurilor în care este stabilit altfel:
2.2.1.29.3.1. o eroare sau o defecțiune specificată este semnalată conducătorului auto cu ajutorul semnalului (semnalelor) de avertizare menționat(e) anterior, cel târziu la acționarea dispozitivului de comandă a sistemului de frânare corespunzătoare;
2.2.1.29.3.2. indicatorul (indicatoarele) de avertizare rămâne (rămân) aprins(e) pe întreaga durată a avariei sau defecțiunii, în cazul în care comutatorul de contact se află în poziția „pornit”;
2.2.1.29.3.3. semnalul de avertizare este constant (lumina nu este intermitentă).
|
|
2.2.1.29.4.
|
Semnalele de avertizare sunt vizibile inclusiv pe timp de zi; starea corespunzătoare a lămpii este ușor de verificat de către conducător din scaunul său; defectarea unei componente a dispozitivelor de avertizare nu duce la scăderea eficacității sistemului de frânare respectiv.
|
|
2.2.1.29.5.
|
Semnalul (semnalele) de avertizare menționat(e) mai sus se aprinde (aprind) atunci când echipamentul electric al vehiculului (și sistemul de frânare) este (sunt) alimentat(e). Atunci când vehiculul staționează, sistemul de frânare verifică faptul că niciuna dintre avariile sau defecțiunile menționate nu este prezentă înainte de stingerea semnalelor. Avariile sau defecțiunile specificate, care ar trebui să activeze semnalul de avertizare menționat mai sus, dar care nu sunt detectate în condiții de staționare, sunt memorate după detectare și afișate la pornire și de fiecare dată când comutatorul de demarare este în poziția pornit, atâta timp cât defecțiunea persistă.
|
|
2.2.1.29.6.
|
Erorile sau defecțiunile nespecificate sau alte informații privind frânele sau mecanismele de rulare ale tractorului pot fi semnalate prin intermediul indicatorului de avertizare menționat la punctul 2.2.1.29.1.2, cu condiția îndeplinirii următoarelor condiții:
2.2.1.29.6.1. vehiculul staționează;
2.2.1.29.6.2. după prima alimentare a sistemului de frânare și după ce semnalul indică acest lucru, urmând procedurile detaliate la punctul 2.2.1.29.5, nu au fost identificate deficiențe (sau defecțiuni) specificate, precum și
2.2.1.29.6.3. deficiențele nespecificate sau alte informații sunt indicate doar prin aprinderea intermitentă a semnalului de avertizare. Semnalul de avertizare este însă întrerupt în momentul în care vehiculul depășește prima dată viteza de 10 km/h.
|
|
|
2.2.1.30.
|
Defecțiunile sistemelor electrice de transmisie a comenzii nu conduc la acționarea frânelor contrar intențiilor conducătorului.
|
|
2.2.1.31.
|
Tractoarele echipate cu transmisie hidraulică trebuie să fie conforme cu toate cerințele relevante din prezenta anexă sau din anexa IX.
|
2.2.2. Vehicule din categoriile R și S
|
2.2.2.1.
|
►M1
Vehicule din categoriile R1a, S1a nu trebuie să fie prevăzute cu un sistem de frânare de serviciu. Vehiculele din categoriile R1b și S1b, a căror sumă a maselor tehnic admise per axă nu depășește 750 kg, nu trebuie să fie prevăzute cu un sistem de frânare de serviciu. ◄ Cu toate acestea, în cazul în care vehiculele din aceste categorii sunt prevăzute cu un sistem de frânare de serviciu, acestea trebuie să îndeplinească aceleași cerințe ca cele corespunzătoare categoriei R2 sau S2, după caz.
|
|
2.2.2.2.
|
►M1
Vehiculele din categoriile R1b și S1b, a căror sumă a maselor tehnic admise per axă depășește 750 kg, și R2 trebuie să fie prevăzute cu un sistem de frânare de serviciu de tip continuu sau semicontinuu sau de tip inerțial. ◄ Cu toate acestea, în cazul în care vehiculele din aceste categorii au un sistem de frânare de serviciu de tip continuu sau semicontinuu, acestea trebuie să îndeplinească aceleași cerințe cu cele din categoria R3.
|
|
2.2.2.3.
|
În cazul în care un vehicul remorcat aparține categoriei R3, R4 sau S2, sistemul de frânare de serviciu trebuie să fie de tipul continuu sau semicontinuu.
|
2.2.2.3.1.
|
Prin derogare de la cerința de la punctul 2.2.2.3, un sistem de frânare inerțială poate fi montat în următoarele condiții pe vehicule din categoriile R3a și S2a cu o masă maximă care nu depășește 8 000 kg:
2.2.2.3.1.1 viteza prin construcție este de maximum 30 km/h atunci când frânele nu acționează asupra tuturor roților;
2.2.2.3.1.2 viteza prin construcție este de maximum 40 km/h atunci când frânele acționează asupra tuturor roților;
▼M1 —————
▼B
|
|
|
2.2.2.4.
|
Sistemul de frânare de serviciu:
2.2.2.4.1. acționează cel puțin asupra a două roți ale fiecărei axă în cazul vehiculului remorcat din categoriile Rb și Sb;
2.2.2.4.2. acțiunea este distribuită corespunzător între axe;
2.2.2.4.3. conține, în cel puțin unul dintre rezervoarele de aer, dacă acestea există, un dispozitiv de evacuare și golire, amplasat într-o poziție adecvată și ușor accesibilă.
|
|
2.2.2.5.
|
Acțiunea sistemului de frânare de serviciu se distribuie simetric între roțile sau rolele șenilelor aceleiași axe, în raport cu planul median longitudinal al vehiculului remorcat.
|
2.2.2.5.1.
|
Cu toate acestea, în cazul unui vehicul cu sarcini sensibil diferite pe roți în stânga și în dreapta vehiculului, acțiunea sistemului de frânare se poate abate în consecință de la modul de distribuție simetrică a forței de frânare.
|
|
|
2.2.2.6.
|
Defecțiunile sistemelor electrice de transmisie a comenzii nu conduc la acționarea frânelor contrar intențiilor conducătorului.
|
|
2.2.2.7.
|
Suprafețele de frânare necesare pentru obținerea eficacității prevăzute sunt în contact continuu cu roțile, fie în mod rigid, fie prin componente rezistente.
|
|
2.2.2.8.
|
Uzura frânelor trebuie să poată fi ușor compensată printr-un sistem de reglare manuală sau automată. În afară de aceasta, dispozitivul de comandă și componentele transmisiei și frânelor trebuie să dispună de o rezervă de cursă și, dacă este necesar, de mijloace de compensare adecvate astfel încât, atunci când frâna se încălzește sau când garniturile au atins un anumit grad de uzură, performanța frânării să fie asigurată fără să fie necesară reglarea imediată.
|
2.2.2.8.1.
|
Reglarea pentru compensarea uzurii este automată pentru frânele de serviciu. Totuși, montarea dispozitivelor de reglare automată este opțională pentru vehiculele din categoriile R1, R2, R3a, S1 și S2a. După o încălzire urmată de o răcire, frânele echipate cu dispozitive de reglare automată au capacitatea de a asigura o rulare liberă, astfel cum este precizat la punctul 2.5.6 din anexa II, în urma încercării de tip I sau III, după caz, descrise în anexa menționată mai sus.
|
2.2.2.8.1.1.
|
În cazul vehiculelor remorcate din categoriile:
— R3b, R4b, S2b a căror sumă a maselor tehnic admise per axă nu depășește 10 000 kg,
cerințele de performanță de la punctul 2.2.2.8.1 sunt considerate a fi îndeplinite dacă se respectă cerințele de la punctul 2.5.6 din anexa II. Până la definirea unor proceduri uniforme de încercare prin care se evaluează corect funcția dispozitivului de reglare automată a frânelor, cerința privind rularea liberă este considerată a fi îndeplinită atunci când se observă o rulare liberă în timpul tuturor încercărilor de frânare prevăzute pentru remorca în cauză.
|
|
2.2.2.8.1.2.
|
În cazul vehiculelor remorcate din categoriile R3b, R4b, S2b a căror sumă a maselor tehnic admise per axă depășește 10 000 kg, cerințele de performanță de la punctul 2.2.2.8.1 sunt considerate a fi îndeplinite dacă se respectă cerințele de la punctul 2.5.6 din anexa II.
|
|
|
|
2.2.2.9.
|
Sistemul de frânare este construit astfel încât vehiculul remorcat să fie oprit automat în cazul unei decuplări care are loc în timp ce vehiculul remorcat este în mișcare.
|
2.2.2.9.1.
|
Vehiculele din categoriile R1 și S1 care nu au un sistem de frânare trebuie să fie echipate, pe lângă dispozitivul de cuplare principal, cu un dispozitiv de cuplare secundar (lanț, cablu etc.) care, în cazul separării cuplajului principal, să aibă capacitatea de a împiedica bara de tracțiune să atingă solul și de a păstra într-o oarecare măsură direcția vehiculului remorcat.
|
|
2.2.2.9.2.
|
Vehiculele din categoriile R1, R2, R3a, S1 și S2a echipate cu un sistem de frânare inerțial trebuie dotate cu un dispozitiv (lanț, cablu etc.) care, în cazul separării dispozitivului de cuplare, să poată acționa frânele vehiculului remorcat.
|
|
2.2.2.9.3.
|
Astfel cum este specificat la punctele 2.1.5.1.1 și 2.1.5.1.2, la vehiculele remorcate care au un sistem de frânare hidraulic, circuitele de legătură se decuplează, pe tractor sau pe vehiculul remorcat, cu o scurgere nesemnificativă în timpul separării cuplajului. Forța de decuplare a unui circuit de legătură unic nu trebuie să depășească valorile specificate în ISO 5675:2008. Abătându-se de la valorile prevăzute la punctul 4.2.4 din standardul menționat mai sus, forța de decuplare pentru ambele circuite nu depășește 2 500 N.
|
|
|
2.2.2.10.
|
La toate vehiculele remorcate care trebuie să fie prevăzute cu un sistem de frânare de serviciu, frâna de parcare este asigurată chiar și când vehiculul remorcat este separat de tractor. Trebuie să fie posibil ca o persoană aflată pe sol să poată acționa sistemul de frânare de parcare.
|
|
2.2.2.11.
|
În cazul în care vehiculul remorcat este prevăzut cu un dispozitiv care întrerupe acționarea sistemului de frânare, altul decât sistemul de frânare de parcare, dispozitivul respectiv este proiectat și construit astfel încât să fie readus imediat în poziția de repaus, odată cu reluarea alimentării vehiculului remorcat cu aer comprimat sau cu ulei hidraulic sau cu energie electrică.
|
|
2.2.2.12.
|
Pe fiecare vehicul remorcat echipat cu un sistem de frânare hidraulic, sistemul de frânare trebuie să fie proiectat astfel încât, atunci când circuitul suplimentar se deconectează, sistemul de frânare de parcare sau de serviciu să fie aplicat automat.
|
|
2.2.2.13.
|
Vehiculele din categoriile R3, S4 și S2 satisfac condițiile specificate la punctul 2.2.1.17.2.2 pentru sistemele de frânare cu aer comprimat, respectiv la punctul 2.2.2.15.3 pentru sistemele de frânare hidraulice.
|
|
2.2.2.14.
|
Atunci când echipamentul auxiliar este alimentat cu energie din sistemul de frânare de serviciu, sistemul de frânare de serviciu trebuie protejat pentru a se asigura că presiunea din dispozitivul (dispozitivele) de stocare a(le) sistemului de frânare de serviciu este menținută la un nivel egal cu cel puțin 80 % din presiunea necesară a circuitului de comandă sau din valoarea digitală echivalentă a cererii, astfel cum este precizat la punctele 2.2.3.2 și, respectiv, 2.2.3.3 din anexa II.
|
|
2.2.2.15.
|
În plus față de cele menționate mai sus, vehiculele remorcate cu sisteme de frânare hidraulică trebuie să respecte următoarele cerințe:
2.2.2.15.1. În cazul în care un vehicul remorcat respectă cerințele sistemului de frânare de serviciu și/sau ale sistemului de frânare de parcare și/sau ale frânării automate numai cu ajutorul energiei stocate într-un dispozitiv de stocare a energiei hidraulice, vehiculul remorcat acționează automat frânele sau rămâne frânat atunci când nu este conectat electric (cheia de contact a tractorului este în poziția „pornit”) cu sursa de energie disponibilă la priza conformă cu ISO 7638:2003 (a se vedea, de asemenea, punctul 2.2.1.18.9). Racordul prevăzut de standardul ISO 7638:2003 poate fi utilizat pentru aplicații cu 5 sau 7 contacte, după caz.
2.2.2.15.1.1.
►M1
Atunci când presiunea din dispozitivele de stocare a energiei hidraulice scade sub o anumită presiune, declarată de producător în documentul informativ, sub care performanța (performanțele) la frânare prevăzută (prevăzute) nu este (sunt) asigurată (asigurate), această presiune joasă este indicată conducătorului prin intermediul semnalului de avertizare separat specificat la punctul 2.2.1.29.2.2. prin contactul 5 al prizei electrice conforme cu standardul ISO 7638:2003. ◄
▼M2 —————
▼M2
2.2.2.15.1.1.1. Această presiune joasă din dispozitivele hidraulice de stocare a energiei nu trebuie să depășească 11 500 kPa în sistemele care utilizează dispozitive de stocare a energiei proiectate pentru o presiune de funcționare maximă de 15 000 kPa.
2.2.2.15.1.1.2. Pentru obținerea eficacității de frânare prescrise, această presiune joasă din dispozitivele hidraulice de stocare a energiei poate să depășească 11 500 kPa în sistemele care utilizează dispozitive de stocare a energiei care operează la o presiune de funcționare maximă mai mare de 15 000 kPa.
▼B
2.2.2.15.2. Dacă presiunea din circuitul suplimentar scade la 1 200 kPa, frâna automată a vehiculului remorcat intră în acțiune (a se vedea, de asemenea, punctul 2.2.1.18.6).
2.2.2.15.3. Pe vehiculul remorcat poate fi instalat un dispozitiv pentru a debloca temporar frânele în cazul în care nu este disponibil un tractor adecvat. Circuitul suplimentar se conectează la dispozitivul respectiv în scopul acestei acțiuni temporare. În momentul în care circuitul suplimentar este deconectat de la acest dispozitiv, frânele trebuie să revină automat la starea aplicată.
|
|
2.2.2.16.
|
Vehiculele remorcate cu o viteză maximă prin construcție mai mare de 60 km/h din categoriile R3b, R4b și S2b sunt echipate cu un sistem antiblocare în conformitate cu anexa XI. De asemenea, în cazul în care masa maximă admisă a vehiculului remorcat depășește 10 t, este permis numai un sistem antiblocare din categoria A.
|
|
2.2.2.17.
|
Dacă autovehiculele remorcate nemenționate la punctul 2.2.2.16 sunt prevăzute cu sisteme antiblocare, acestea sunt în conformitate cu cerințele anexei XI.
|
|
2.2.2.18.
|
Vehiculele remorcate echipate cu un circuit electric de comandă și vehiculele remorcate din categoria R3b sau R4b echipate cu un sistem antiblocare trebuie să fie dotate cu o priză electrică specială pentru sistemul de frânare și sistemul antiblocare sau doar pentru unul dintre aceste două sisteme, în conformitate cu ISO 7638:2003. Secțiunile transversale ale conductorului specificate în ISO 7638:2003 pentru remorcă pot fi reduse dacă remorca este echipată cu o siguranță proprie. Calibrul acestei siguranțe împiedică, în conductori, trecerea oricărui curent electric cu o intensitate mai mare decât cea normală. Această derogare nu se aplică remorcilor echipate pentru a tracta o altă remorcă. Semnalele de avertizare corespunzătoare defecțiunilor detectate la remorcă prevăzute de prezentul regulament se activează prin priza susmenționată. Cerințele care se aplică vehiculelor remorcate în ceea ce privește transmiterea avertizărilor privind defecțiunile sunt cele prevăzute pentru tractoare la punctele 2.2.1.29.3, 2.2.1.29.4, 2.2.1.29.5 și 2.2.1.29.6, după caz.
►M1
Aceste vehicule sunt inscripționate în mod permanent, în conformitate cu cerințele stabilite în temeiul articolului 24 din Regulamentul delegat (UE) 2015/208, pentru a indica funcționalitatea sistemului de frânare atunci când priza conformă cu ISO 7638:2003 este conectată și deconectată. ◄ Marcajul se poziționează astfel încât să fie vizibil atunci când se realizează conectările pneumatică și electrică.
|
2.2.2.18.1.
|
Este permisă conectarea sistemului de frânare la o sursă de alimentare suplimentară celei disponibile prin intermediul prizei conforme cu ISO 7638:2003 de mai sus. Cu toate acestea, atunci când este disponibilă o sursă de curent electric suplimentară, se aplică următoarele dispoziții:
2.2.2.18.1.1. În toate cazurile, sursa de energie conformă cu ISO 7638:2003 este sursa principală de energie a sistemului de frânare, indiferent dacă este conectată o sursă de alimentare suplimentară. Sursa suplimentară are rolul de sistem de rezervă în cazul defectării sursei de alimentare conforme cu ISO 7638:2003;
2.2.2.18.1.2. aceasta nu perturbă funcționarea sistemului de frânare în modurile normal și de avarie;
2.2.2.18.1.3. în cazul unei defecțiuni a sursei de alimentare conforme cu ISO 7638:2003, energia consumată de sistemul de frânare nu depășește capacitatea maximă a sursei suplimentare.
2.2.2.18.1.4. vehiculul remorcat nu este prevăzut cu inscripții sau etichete care să indice că acesta este echipat cu o sursă de energie suplimentară;
2.2.2.18.1.5 nu este permisă dotarea vehiculului remorcat cu un dispozitiv de avertizare care semnalizează defecțiunile la sistemul de frânare al vehiculului remorcat atunci când sistemul de frânare este alimentat de sursa suplimentară;
2.2.2.18.1.6. atunci când există o sursă de alimentare suplimentară, este posibilă verificarea funcționării sistemului de frânare de la această sursă;
2.2.2.18.1.7. în cazul unei întreruperi a alimentării cu energie electrică de la priza conformă cu ISO 7638:2003, cerințele privind semnalizarea defecțiunii de la punctul 4.2.3. din anexa XII și de la punctul 4.1. din anexa XI se aplică indiferent dacă sistemul de frânare este alimentat sau nu de la sursa suplimentară.
|
|
|
2.2.2.19.
|
În plus față de cerințele de la punctele 2.2.1.17.2.2 și 2.2.1.19, frânele vehiculului remorcat pot fi, de asemenea, acționate automat de către sistemul de frânare al vehiculului remorcat, după evaluarea informațiilor provenite de la aparatele de bord.
|
3.
Încercări
Încercările de frânare la care trebuie supuse vehiculele care fac obiectul omologării, precum și performanța de frânare necesară sunt descrise în anexa II.
ANEXA II
Cerințe aplicabile încercărilor și performanței sistemelor de frânare și dispozitivelor de cuplare a sistemului de frânare al remorcilor și ale vehiculelor echipate cu acestea
1.
Definiții
În sensul prezentei anexe:
1.1. „grup de axe” înseamnă axe multiple atunci când distanța între una dintre axe și axa sa adiacentă este mai mică sau egală cu 2,0 m. În cazul în care distanța între una dintre axe și axa sa adiacentă este mai mare de 2,0 m, fiecare axă individuală este considerată drept un grup independent de axe.
▼M1
1.2. „curba de utilizare a aderenței” înseamnă curba caracteristică a raportului dintre forța de frânare fără rezistență la rulare și reacția normală a suprafeței drumului pe o anumită axă frânată în funcție de coeficientul de frânare al vehiculului.
▼B
2.
Încercări de frânare
2.1. Generalități
Viteza maximă prin construcție este considerată, în prezenta anexă, a fi în direcția înainte de deplasare a vehiculului, cu excepția cazurilor în care se menționează în mod explicit altfel.
|
2.1.1.
|
Performanța prevăzută pentru sistemele de frânare se bazează pe spațiul de frânare și pe decelerația medie rezultată a vehiculului sau numai pe una dintre aceste două valori. Performanța unui sistem de frânare se determină prin măsurarea spațiului de oprire în raport cu viteza inițială și prin măsurarea decelerației medii rezultate a vehiculului în timpul încercării sau numai una dintre aceste două valori. Atât distanța de oprire, cât și decelerația medie rezultată (sau doar una dintre aceste valori) sunt prescrise și măsurate în urma încercării care trebuie efectuată.
|
|
2.1.2.
|
Spațiul de frânare este distanța acoperită de vehicul din momentul în care conducătorul auto începe acționarea dispozitivului de comandă a sistemului de frânare și până când vehiculul se oprește; viteza inițială a vehiculului (v1) este viteza din momentul în care conducătorul începe acționarea dispozitivului de comandă al sistemului de frânare. Viteza inițială nu este mai mică de 98 % din viteza prevăzută pentru încercarea în cauză. Decelerația medie rezultată dm se calculează, în raport cu distanța dată de variația vitezei de la vb la ve, folosind formula următoare:

unde:
|
v1
|
=
|
viteza inițială a vehiculului, calculată astfel cum este precizat la primul paragraf
|
|
vb
|
=
|
viteza vehiculului la 0,8 v1, măsurată în km/h
|
|
ve
|
=
|
viteza vehiculului la 0,1 v1, măsurată în km/h
|
|
sb
|
=
|
distanța parcursă în intervalul v1 — vb, în metri
|
|
se
|
=
|
distanța parcursă în intervalul v1 — ve, în metri
|
Viteza și distanța sunt determinate folosind instrumente care au o precizie de ± 1 % la viteza prevăzută pentru încercare. dm poate fi determinată prin alte metode decât măsurarea vitezei și distanței; în acest caz, precizia valorii dm trebuie să se încadreze în intervalul ± 3 %.
|
|
2.1.3.
|
Pentru omologarea de tip a oricărui vehicul, performanța de frânare trebuie să fie măsurată în timpul încercărilor pe drum efectuate în următoarele condiții:
2.1.3.1. Vehiculul trebuie să îndeplinească condițiile referitoare la masă prevăzute pentru fiecare tip de încercare, care trebuie specificate în raportul de încercare;
2.1.3.2. Încercarea se efectuează la vitezele prevăzute pentru fiecare tip de încercare. Dacă viteza maximă prin construcție a vehiculului este inferioară vitezei prevăzute pentru o încercare, încercarea se efectuează la viteza maximă a vehiculului.
2.1.3.3. În timpul încercărilor, forța aplicată dispozitivului de comandă a sistemului de frânare în scopul obținerii performanței prevăzute nu depășește 600 N în cazul dispozitivelor acționate cu piciorul sau 400 N în cazul dispozitivelor acționate cu mâna.
2.1.3.4. Drumul trebuie să aibă o suprafață cu aderență bună, cu excepția situațiilor în care este prevăzut altfel.
2.1.3.5. Încercările se efectuează în condiții în care intensitatea vântului este suficient de mică pentru a nu influența rezultatele.
2.1.3.6. La începerea încercărilor, pneurile sunt reci și la presiunea prevăzută pentru sarcina suportată efectiv de roți atunci când vehiculul este în staționare.
2.1.3.7. Performanța prevăzută este obținută fără devierea vehiculului de la traiectoria sa, fără vibrații anormale și fără blocarea roților. Blocarea roților este permisă în cazurile în care aceasta este menționată în mod specific.
|
|
2.1.4.
|
Comportamentul vehiculului în timpul frânării
|
2.1.4.1.
|
În încercările de frânare, în special în cele efectuate la viteză mare, se verifică comportamentul general al vehiculului la frânare.
|
|
2.1.4.2.
|
Comportamentul vehiculului la frânarea pe un drum cu aderență redusă.
▼M1
Comportamentul la frânare al vehiculelor din categoriile Tb, R2b, R3b, R4b și S2b pe un drum cu aderență redusă îndeplinește condițiile menționate în apendicele 1 din prezenta anexă sau, în cazul în care vehiculul este echipat cu ABS, condițiile din anexa XI.
▼B
|
|
2.2. Încercare la frânare de tip 0 (încercare obișnuită de performanță cu frânele la rece)
2.2.1. Generalități
|
2.2.1.1.
|
Frânele trebuie să fie reci. O frână este considerată ca fiind rece dacă este îndeplinită una dintre condițiile următoare:
2.2.1.1.1. Temperatura măsurată pe disc sau la exteriorul tamburului este mai mică de 100 °C.
2.2.1.1.2. În cazul frânelor complet încorporate, inclusiv al frânelor imersate în ulei, temperatura măsurată la exteriorul carterului este mai mică de 50 °C.
2.2.1.1.3. Frânele nu au fost utilizate timp de o oră înaintea încercării.
|
|
2.2.1.2.
|
În timpul încercării de frânare, o axă fără frână, în cazul în care poate fi debreiat, nu trebuie să fie cuplat cu o axă frânată. Cu toate acestea, în cazul tractoarelor cu o axă frânată și o cuplare automată a forței motoare la toate celelalte axe în timpul frânării, toate roțile trebuie să fie frânate.
|
|
2.2.1.3.
|
Încercarea este efectuată în următoarele condiții:
2.2.1.3.1. Vehiculul se încarcă la masa maximă tehnic admisă precizată de producător, iar o axă nefrânată al acestuia este încărcat la masa sa maximă tehnic admisă. Roțile axei frânate sunt echipate cu cauciucurile cu cel mai mare diametru precizat de producător pentru tipul respectiv de vehicul în cazul în care acesta este încărcat la masa maximă tehnic admisă. Pentru vehiculele cu sistem de frânare pe toate roțile, axa din față este încărcată la masa maximă tehnic admisă.
2.2.1.3.2. Încercarea este repetată pentru un vehicul neîncărcat; în cazul tractoarelor, acest fapt înseamnă că la bordul tractorului se află doar conducătorul și, după caz, o persoană responsabilă cu monitorizarea rezultatelor încercării.
2.2.1.3.3. Limitele prevăzute pentru performanța minimă, atât pentru încercările cu vehiculul neîncărcat, cât și cu vehiculul încărcat, sunt cele menționate mai jos pentru fiecare categorie de vehicul, vehiculul satisface atât distanța de oprire prevăzută cât și decelerația medie rezultată prevăzută pentru respectiva categorie de vehicul, dar măsurarea ambilor parametri poate să nu fie absolut necesară.
2.2.1.3.4. Drumul trebuie să fie plat.
|
2.2.2. Încercare de tip 0 pentru vehicule din categoriile T și C
|
2.2.2.1.
|
Încercarea se efectuează la viteza maximă prin construcție a vehiculului, cu motorul decuplat. Această viteză poate face obiectul unei anumite marje de toleranță. Cu toate acestea, în orice caz, performanța minimă prescrisă este atinsă. Distanța maximă de oprire prescrisă (prin formula de calcul a distanței de oprire) se calculează efectiv prin intermediul vitezei reale de încercare.
|
▼M1
|
2.2.2.2.
|
Pentru verificarea conformității cu dispozițiile punctului 2.2.1.2.4 din anexa I, se efectuează o încercare de tip 0 cu motorul decuplat, la o viteză inițială de 30 km/h.
La acționarea comenzii sistemului de frânare de staționare, decelerația medie completă și decelerația imediat înaintea opririi vehiculului nu trebuie să fie mai mici de 1,5 m/s2. Aceeași cerință se aplică în cazul comenzii auxiliare menționate la punctul 2.2.1.2.4 din anexa I.
Încercarea se efectuează cu vehiculul încărcat. Forța exercitată asupra dispozitivului de comandă a frânării nu depășește valorile specificate.
|
▼B
|
2.2.2.3.
|
În cazul vehiculelor echipate cu ghidon și scaun tip șa sau cu volan și banchetă sau scaune cu cupe amplasate pe unul sau mai multe rânduri, și care sunt, de asemenea, echipate cu o transmisie nedecuplabilă, în măsura în care acest fapt poate fi demonstrat de producător în momentul încercării sistemului de frânare, vehiculul este supus încercării de tip 0 cu motorul cuplat.
|
2.2.3. Încercarea de tip 0 pentru vehicule din categoriile R și S:
|
2.2.3.1.
|
Performanța frânării vehiculului remorcat poate fi calculată fie cu ajutorul coeficientului de frânare al ansamblului tractor — vehicul remorcat și al forței axiale măsurate la dispozitivul de cuplare, fie, în anumite cazuri, cu ajutorul coeficientului de frânare al ansamblului tractor — vehicul remorcat, atunci când numai vehiculul remorcat este frânat. Motorul tractorului este decuplat în timpul încercării de frânare.
|
|
2.2.3.2.
|
În cazul în care vehiculul remorcat este prevăzut cu un sistem de frânare cu aer comprimat, presiunea în circuitul de alimentare nu depășește 700 kPa, iar presiunea în circuitul de comandă nu depășește următoarele valori în timpul încercării de frânare, în funcție de caracteristicile instalației:
2.2.3.2.1 650 kPa în circuitul pneumatic de comandă;
2.2.3.2.2 O valoare a semnalului digital în circuitul electric de comandă corespunzătoare presiunii de 650 kPa (astfel cum este definit în ISO 11992:2003, inclusiv în ISO 11992-2:2003 și în amendamentul acestuia Amd. 1:2007).
|
|
2.2.3.3.
|
În cazul în care vehiculul remorcat este echipat cu un sistem de frânare hidraulică:
2.2.3.3.1 Performanța minimă de frânare prescrisă este atinsă la o presiune care nu depășește 11 500 kPa la racordul de cuplare al circuitului de comandă.
2.2.3.3.2 Presiunea maximă transmisă la racordul de cuplare al circuitului de comandă nu depășește 15 000 kPa.
|
|
2.2.3.4.
|
Cu excepția cazurilor precizate la punctele 2.2.3.5 și 2.2.3.6, pentru a determina coeficientul de frânare al vehiculului remorcat este necesară măsurarea coeficientului de frânare al ansamblului tractor — vehicul remorcat și forța axială în dispozitivul de cuplare. Tractorul îndeplinește cerințele stabilite în apendicele 1 cu privire la relația dintre raportul TM/FM și presiunea pm,
unde:
|
TM
|
=
|
suma forțelor de frânare la circumferința tuturor roților tractoarelor
|
|
FM
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților tractoarelor
|
|
PM
|
=
|
presiunea la racordul de cuplare al circuitului de comandă
|
Factorul de frânare al vehiculului remorcat se calculează după următoarea formulă:
zR = zR + M + D/FR
unde:
|
zR
|
=
|
coeficientul de frânare al vehiculului remorcat,
|
|
zR + M
|
=
|
coeficientul de frânare al ansamblului tractor — vehicul remorcat,
|
|
D
|
=
|
forța axială la dispozitivul de cuplare (forța de tracțiune D > 0; forța de compresie D < 0)
|
|
FR
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților vehiculului remorcat
|
|
|
2.2.3.5.
|
În cazul în care un vehicul remorcat are un sistem de frânare continuu sau semicontinuu la care presiunea în cilindrii de frână nu variază în timpul frânării în pofida transferului sarcinii dinamice între axe, doar vehiculul remorcat poate fi frânat. Factorul de frânare zR al vehiculului remorcat se calculează cu următoarea formulă:

unde:
|
R
|
=
|
valoarea rezistenței la rulare:
— 0,02 în cazul vehiculelor cu viteza maximă prin construcție de cel mult 40 km/h
— 0,01 în cazul vehiculelor cu viteza maximă prin construcție de peste 40 km/h
|
|
FM
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților tractoarelor
|
|
FR
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților vehiculului remorcat
|
|
|
2.2.3.6.
|
Ca o soluție alternativă, evaluarea coeficientului de frânare a vehiculului remorcat se poate face prin frânarea doar a vehiculului remorcat. În acest caz, presiunea folosită este egală cu cea măsurată în cilindrii de frână la frânarea ansamblului.
|
2.3. Încercare de tip I (încercarea de pierdere de performanță)
Acest tip de încercare se efectuează în conformitate cu cerințele de la punctul 2.3.1 sau 2.3.2, după caz.
2.3.1. Cu frânări repetate
Tractoarele din categoriile T și C sunt supuse încercării de tip I cu frânări repetate.
|
2.3.1.1.
|
Sistemul de frânare de serviciu al tractoarelor care fac obiectul prezentului regulament este supus încercării prin acționarea și eliberarea frânelor în mod succesiv de un anumit număr de ori. Vehiculul este încărcat la capacitate maximă și supus încercării în conformitate cu condițiile precizate în tabelul următor:
|
Categoria de vehicule
|
Condiții
|
|
v1 [km/h]
|
v2 [km/h]
|
Δt [sec]
|
n
|
|
T, C
|
80 % vmax
|
½ v1
|
60
|
20
|
unde
|
v1
|
=
|
viteza la începutul frânării
|
|
v2
|
=
|
viteza la sfârșitul frânării
|
|
vmax
|
=
|
viteza maximă prin construcție a vehiculului
|
|
n
|
=
|
număr de aplicări ale frânei
|
|
Δt
|
=
|
durata ciclului de frânare (timpul scurs între inițierea unei acționări a frânei și inițierea următoarei acționări).
|
|
2.3.1.1.1.
|
În cazul tractoarelor cu o viteză maximă prin construcție de cel mult 40 km/h, ca opțiune alternativă la condițiile de încercare indicate în tabelul de la punctul 2.3.1.1, pot fi aplicate condițiile din tabelul următor:
|
Categoria de vehicule
|
Condiții
|
|
v1 [km/h]
|
v2 [km/h]
|
Δt [sec]
|
n
|
|
T, C
|
80 % vmax
|
0,05 v1
|
60
|
18
|
|
|
|
2.3.1.2.
|
În cazul în care caracteristicile vehiculului nu permit respectarea perioadei de timp prevăzute pentru Δt, durata poate fi mărită; în toate cazurile, pe lângă perioada de timp necesară pentru frânare și accelerare, este permisă o perioadă de 10 secunde la fiecare ciclu pentru stabilizarea vitezei v1.
|
|
2.3.1.3.
|
În aceste încercări, forța aplicată dispozitivului de comandă este reglată astfel încât să se atingă o decelerație medie rezultată de 3 m/s2 la prima acționare a frânelor. Aceasta forță rămâne constantă pe tot parcursul acționării repetate a frânelor.
|
|
2.3.1.4.
|
În timpul acționării frânelor, se folosește în permanență cea mai mare treaptă de viteză (cu excepția supramultiplicatorului etc.).
►M1
Ca alternativă, se permite, de asemenea, efectuarea încercării cu motorul decuplat, după caz, în timpul acționării frânei. ◄
|
|
2.3.1.5.
|
Pentru mărirea vitezei după frânare, cutia de viteze se folosește astfel încât să se obțină viteza v1 în cel mai scurt timp posibil (accelerația maximă permisă de motor și de cutia de viteze).
|
|
2.3.1.6.
|
În cazul vehiculelor echipate cu dispozitive de reglare automată a frânelor, frânele se reglează înainte de încercarea de tip I de mai sus, în conformitate cu următoarea procedură, după caz:
2.3.1.6.1. În cazul vehiculelor echipate cu frâne pneumatice, reglarea frânelor trebuie să permită funcționarea dispozitivului de reglare automată a frânelor. În acest scop, cursa elementului de acționare se reglează la:
so ≥ 1,1 × sre-adjust
(limita superioară nu depășește valoarea recomandată de producător)
unde:
|
S re-adjust
|
este cursa de reajustare specificată de producătorul dispozitivului de reglare automată a frânei, însemnând cursa la care începe reajustarea cursei de deplasare a frânei, la o presiune a elementului de acționare egală cu 15 % din presiunea de funcționare a frânei, dar nu mai puțin de 100 kPa.
Dacă, în urma unui acord cu serviciul tehnic, măsurarea cursei elementului de acționare nu este necesară, valoarea inițială se stabilește de comun acord cu serviciul tehnic.
Pe baza condiției de mai sus, frâna se acționează succesiv de 50 de ori, cu o presiune a elementului de acționare egală cu 30 % din presiunea de funcționare a frânei, dar nu mai puțin de 200 kPa. După aceasta, frâna se acționează o singură dată, cu o presiune a elementului de acționare de minimum 650 kPa.
|
2.3.1.6.2. În cazul vehiculelor echipate cu frâne hidraulice cu disc, nu sunt necesare cerințe privind reglarea.
2.3.1.6.3. În cazul vehiculelor echipate cu frâne hidraulice cu tambur, reglarea frânelor este realizată în conformitate cu recomandările producătorului.
|
2.3.2. Cu frânare continuă
▼M1
|
2.3.2.1.
|
Sistemul de frânare de serviciu al vehiculelor din categoriile R1, R2, S1, R3a, R4a și S2a; și al vehiculelor din categoriile R3b și S2b, a căror sumă a maselor tehnic admise per axă nu depășește 10 000 kg, trebuie supuse încercării astfel încât, cu vehiculul încărcat, energia de intrare transmisă frânelor să fie echivalentă cu cea înregistrată, în același interval de timp, când vehiculul încărcat supus încercării este condus cu o viteză constantă de 40 km/h pe o pantă descendentă cu înclinația de 7 % pe o distanță de 1,7 km.
În mod alternativ, această cerință se consideră a fi îndeplinită pentru vehiculele din categoriile R3a, R4a, S2a și pentru vehiculele din categoriile R3b și S2b a căror sumă a maselor tehnic admise per axă nu depășește 10 000 kg, atunci când aceste vehicule au trecut cu succes încercarea de tip III în conformitate cu punctul 2.5.
|
▼B
|
2.3.2.2.
|
Încercarea trebuie efectuată pe un drum orizontal, vehiculul remorcat fiind tractat de un vehicul agricol; în timpul încercării, forța aplicată dispozitivului de comandă este reglată astfel încât să mențină constantă rezistența vehiculului remorcat (7 % din sarcina maximă staționară pe axă a vehiculului remorcat). În cazul în care forța disponibilă pentru remorcare este insuficientă, încercarea poate fi efectuată la o viteză mai mică dar pe o distanță mai mare, conform tabelului următor:
|
Viteza (km/h)
|
Distanța (în m)
|
|
40
|
1 700
|
|
30
|
1 950
|
|
20
|
2 500
|
|
15
|
3 100
|
|
|
2.3.2.3.
|
În cazul vehiculelor remorcate echipate cu dispozitive de reglare automată a frânelor, frânele se reglează înainte de încercarea de tip I prevăzută mai sus, în conformitate cu procedura de la punctul 2.5.4.
|
2.3.3. Performanța la cald
|
2.3.3.1.
|
La sfârșitul încercării de tip I (încercarea descrisă la punctul 2.3.1 sau încercarea descrisă la punctul 2.3.2), performanța la cald a sistemului de frânare de serviciu este măsurată în aceleași condiții (și în special la o forță constantă de comandă care nu depășește forța medie folosită), la fel ca pentru încercarea de tip 0 cu motorul decuplat (condițiile de temperatură pot fi diferite).
|
|
2.3.3.2.
|
În cazul tractoarelor, această performanță la cald nu este mai mică de 80 % din cea prevăzută pentru categoria în cauză și nici mai mică de 60 % din cea înregistrată la încercarea de tip 0 cu motorul decuplat.
|
|
2.3.3.3.
|
În cazul vehiculelor remorcate, forța de frânare la circumferința roților, pentru frânele încălzite, atunci când acestea sunt supuse încercării la 40 km/h, nu este mai mică de 36 % din forța corespunzătoare sarcinii staționare maxime pe roată dacă viteza maximă vmax a vehiculelor remorcate este mai mare de 30 km/h sau de 26 % dacă vmax ≤ 30 km/h, nici mai mică de 60 % din valoarea înregistrată la încercarea de tip 0 la aceeași viteză.
|
2.3.4. Încercarea de rulare liberă
În cazul tractoarelor echipate cu dispozitive de reglare automată a frânelor, după efectuarea încercărilor specificate la punctul 2.3.3, se permite răcirea frânelor la o temperatură tipică a frânelor reci (adică de maximum 100 °C) și se verifică dacă vehiculul are capacitatea să ruleze liber prin îndeplinirea uneia dintre următoarele condiții:
2.3.4.1. Roțile rulează liber (de exemplu, pot fi rotite cu mâna);
▼M1
2.3.4.2. Se constată că, atunci când vehiculul este condus la o viteză constantă v = 60 km/h sau la viteza maximă prin construcție a vehiculului tractat, în funcție de care viteză este mai mică, cu frânele neacționate, temperaturile asimptotice ale tamburului/discului nu depășesc 80 °C, iar momentele frânării reziduale sunt considerate acceptabile.
▼B
2.4. Încercarea de tip II (încercarea comportamentului la coborâre)
Pe lângă încercarea de tip I, tractoarele din categoriile Tb și Cb cu o masă maximă admisă care depășește 12 t sunt supuse, de asemenea, încercării de tip II.
|
2.4.1.
|
Tractorul încărcat este supus încercării în condiții în care energia aplicată este echivalentă cu cea înregistrată pe aceeași perioadă de timp la un tractor încărcat, condus cu o viteză medie de 30 km/h pe o pantă descendentă cu o înclinație de 6 % și pe o distanță de 6 km, într-o treaptă de viteză corespunzătoare și cu sistemul de frânare de anduranță cuplat, în cazul în care vehiculul este prevăzut cu un astfel de sistem. Treapta de viteză este aleasă astfel încât să nu permită motorului să depășească valoarea maximă a turației (min– 1) menționată de producător.
|
|
2.4.2.
|
Pentru vehiculele la care energia este absorbită doar prin acțiunea de frânare a motorului se permite o toleranță de ± 5 km/h a vitezei medii și se folosește o treaptă de viteză care să stabilizeze viteza la valoarea cea mai apropiată de 30 km/h pe o pantă cu o înclinație de 6 %. Dacă performanța acțiunii de frânare exclusive a motorului se determină prin măsurarea decelerației, aceasta este suficientă dacă decelerația medie este de cel puțin 0,5 m/s2.
|
|
2.4.3.
|
La sfârșitul încercării, performanța la cald a sistemului de frânare de serviciu se măsoară în aceleași condiții ca pentru încercarea de tip 0 cu motorul decuplat (condițiile de temperatură pot fi diferite). Această performanță la cald corespunde unei distanțe de oprire care nu depășește valorile următoare și o decelerație medie rezultată cel puțin egală cu valorile următoare, folosind o forță de acționare a dispozitivului de control care nu depășește 60 daN:
|
0,15 v + (1,33 v2/115)
|
(al doilea termen corespunzând unei decelerații medii rezultate dm = 3,3 m/s2);
|
|
2.5. Încercarea de tip III (încercare de pierdere de performanță a frânelor) pentru vehicule încărcate din categoriile:
|
2.5.1.
|
R3b, R4b, S2b a căror sumă a maselor tehnic admise per axă nu depășește 10 000 kg
sau, alternativ, din categoriile
|
|
2.5.2.
|
R3a, R4a, S2a, atunci când aceste vehicule nu au fost supuse încercărilor în conformitate cu punctul 2.3.2.
|
▼M1
|
2.5.3.
|
R3b și S2b a căror sumă a maselor tehnic admise per axă nu depășește 10 000 kg.
|
▼B
|
2.5.4.
|
Încercarea pe pistă
|
2.5.4.1.
|
Înainte de încercarea de tip III de mai jos, frânele se reglează în conformitate cu următoarele proceduri, după caz:
2.5.4.1.1 În cazul vehiculelor remorcate echipate cu frâne pneumatice, reglarea frânelor trebuie să permită funcționarea dispozitivului de reglare automată a frânelor. În acest scop, cursa elementului de acționare se reglează la:
so ≥ 1,1 × sre-adjust
(limita superioară nu depășește valoarea recomandată de producător)
unde:
|
sre-adjust
|
este cursa de reajustare specificată de producătorul dispozitivului de reglare automată a frânei, adică cursa la care începe reajustarea cursei de deplasare a frânei, la o presiune a elementului de acționare de 100 kPa.
|
Dacă, în urma unui acord cu serviciul tehnic, măsurarea cursei elementului de acționare nu este necesară, valoarea inițială se stabilește de comun acord cu serviciul tehnic.
Pe baza condiției de mai sus, frâna se acționează succesiv de 50 de ori, cu o presiune a elementului de acționare de 200 kPa. După aceasta, frâna se acționează o singură dată, cu o presiune a elementului de acționare de minimum 650 kPa.
2.5.4.1.2. În cazul vehiculelor remorcate echipate cu frâne hidraulice cu disc, nu sunt considerate necesare cerințele privind reglările.
2.5.4.1.3 În cazul vehiculelor remorcate echipate cu frâne hidraulice cu tambur, reglarea frânelor are loc în conformitate cu recomandările producătorului.
|
|
2.5.4.2.
|
Condițiile pentru încercarea pe pistă sunt următoarele:
|
Număr de frânări
|
20
|
|
Durata ciclului de frânare
|
60 s
|
|
Viteza inițială la începutul frânării
|
60 km/h
|
|
Acționări ale frânei
|
În aceste încercări, forța aplicată dispozitivului de comandă este reglată astfel încât să se atingă o decelerație medie rezultată de 3 m/s2 în raport cu masa vehiculului remorcat PR la prima acționare a frânelor. Această forță rămâne constantă pe întreg parcursul acționării repetate a frânelor.
|
Coeficientul de frânare al vehiculului remorcat se calculează în conformitate cu punctul 2.2.3.5:

Viteza la sfârșitul frânării:

unde:
|
zR
|
=
|
coeficientul de frânare al vehiculului remorcat,
|
|
zR + M
|
=
|
coeficientul de frânare al ansamblului (tractor și vehicul remorcat),
|
|
R
|
=
|
valoarea rezistenței la rulare = 0,01
|
|
FM
|
=
|
reacțiunea statică normală totală dintre suprafața drumului și roțile tractorului (N)
|
|
FR
|
=
|
reacțiunea statică normală totală dintre suprafața drumului și roțile vehiculului remorcat (N),
|
|
F1
|
=
|
reacțiunea statică normală a părții masei vehiculului remorcat suportate de axa (axele) nefrânată(e) (N),
|
|
F2
|
=
|
reacțiunea statică normală a părții masei vehiculului remorcat suportate de axa (axele) frânată (frânate) (N),
|
|
v1
|
=
|
viteza inițială (km/h),
|
|
v2
|
=
|
viteza finală (km/h).
|
|
|
|
2.5.5.
|
Performanța la cald La sfârșitul încercării descrise la punctul 2.5.4, performanța la cald a sistemului de frânare de serviciu trebuie să fie măsurată în aceleași condiții ca cele existente la încercarea de tip 0, cu excepția următorilor parametri: temperatura și viteza inițială (egală cu 60 km/h în acest caz). În aceste condiții, forța de frânare la cald la circumferința roților nu este mai mică de 40 % din sarcina maximă staționară a roții și nu este mai mică de 60 % din cea înregistrată la încercarea de tip 0 la aceeași viteză.
|
|
2.5.6.
|
Încercarea de rulare liberă După efectuarea încercărilor descrise la punctul 2.5.5, se permite răcirea frânelor la o temperatură tipică a frânelor reci (adică de maximum 100 °C) și se verifică dacă vehiculul remorcat are capacitatea să ruleze liber, prin îndeplinirea uneia dintre următoarele condiții:
2.5.6.1. Roțile rulează liber (de exemplu, pot fi rotite cu mâna);
2.5.6.2. Se constată că, atunci când vehiculul remorcat este condus la o viteză constantă v = 60 km/h cu frânele neacționate, temperaturile asimptotice ale tamburului/discului nu depășesc 80 °C, iar momentele frânării reziduale sunt considerate acceptabile.
|
3.
Performanțele sistemelor de frânare
3.1. Vehicule din categoriile T și C
3.1.1. Sisteme de frânare de serviciu
|
3.1.1.1.
|
În condiții de tip 0, sistemul de frânare de serviciu este supus încercării în condițiile ilustrate în următorul tabel:
|
|
vmax ≤ 30 km/h
|
vmax > 30 km/h
|
|
v
|
= vmax
|
= vmax
|
|
s (metri)
|
≤ 0,15 v + v2/92
|
≤ 0,15 v + v2/130
|
|
dm
|
≥ 3,55 m/s2
|
≥ 5 m/s2
|
|
Comandă acționată cu piciorul (F)
|
≤ 600 N
|
≤ 600 N
|
|
Comandă acționată cu piciorul (F)
|
≤ 400 N
|
≤ 400 N
|
unde:
|
vmax
|
=
|
viteza maximă prin construcție a vehiculului
|
|
v
|
=
|
viteza de încercare prescrisă
|
|
dm
|
=
|
decelerația medie rezultată
|
|
F
|
=
|
forța aplicată dispozitivului de comandă
|
|
|
3.1.1.2.
|
►M1
În cazul unui tractor autorizat să tracteze un vehicul fără frâne din categoria R sau S, performanța combinată minimă prevăzută, conform cerințelor de la punctul 3.1.1.2.1, se atinge cu vehiculul remorcat fără frâne cuplat la tractor și cu vehiculul remorcat fără frâne încărcat la masa maximă declarată de producătorul tractorului. ◄
Performanța ansamblului se verifică prin calcule care fac referire la performanța maximă de frânare efectiv atinsă exclusiv de tractor în timpul încercării de tip 0 cu motorul decuplat, în situațiile cu tractorul încărcat și neîncărcat (opțional, și pentru o situație cu un tractor încărcat parțial, definită de către producătorul tractorului), folosind următoarea formulă (nu sunt necesare încercări practice cu un vehicul remorcat cuplat și fără frâne):

unde:
|
dM + R
|
=
|
decelerația medie rezultată a tractorului, calculată la cuplarea cu o remorcă nefrânată, în m/s2,
|
|
dM
|
=
|
decelerația medie rezultată maximă exclusiv a tractorului, obținută în timpul încercării de tip 0 cu motorul decuplat, în m/s2,
|
|
PM
|
=
|
masa tractorului (după caz, inclusiv orice balast și/sau încărcătură de susținere)
|
|
PM_laden
|
=
|
masa tractorului încărcat,
|
|
PM_par_laden
|
=
|
masa tractorului încărcat parțial,
|
|
PM_unladen
|
=
|
masa tractorului neîncărcat,
|
|
PR
|
=
|
o parte din sarcina maximă pe axa (axele) unui vehicul remorcat fără frână de serviciu care poate fi cuplat (astfel cum este declarată de către producătorul tractorului)
|
▼M1
|
PM+R
|
=
|
masa ansamblului (masa „PM” + masa declarată PR a vehiculului remorcat nefrânat).
|
▼B
3.1.1.2.1. Performanța minimă necesară a ansamblului
Performanța minimă necesară a ansamblului este de cel puțin 4,5 m/s2 în cazul tractoarelor cu vmax > 30 km/h și de cel puțin 3,2 m/s2 în cazul tractoarelor cu vmax ≤ 30 km/h pentru condițiile încărcat și neîncărcat. La latitudinea producătorului de tractoare, serviciul tehnic poate efectua încă o încercare de tip 0 pentru o masă a tractorului încărcat parțial declarată de producător, în scopul de a stabili masa maximă autorizată a vehiculului remorcat nefrânat care îndeplinește cerințele minime de performanță pentru un astfel de „ansamblu de mase”.
Valorile măsurate „dm” pentru condițiile de încărcare susmenționate și valorile corespunzătoare „dM + R” calculate sunt înregistrate în raportul de încercare.
Valoarea maximă declarată pentru masa vehiculului remorcat nefrânat nu trebuie să depășească 3 500 kg.
|
3.1.2. Sistemul de frânare de siguranță
Dispozitivul de comandă care acționează sistemul de frânare de siguranță, chiar dacă este folosit și pentru alte funcții de frânare, trebuie să asigure o distanță de oprire care să nu depășească următoarele valori și o decelerație medie rezultată cel puțin egală cu următoarele valori:
|
Tractoare cu vmax ≤ 30 km/h:
|
0,15 v + (v2/39)
|
|
(al doilea termen corespunde unei decelerații medii dm = 1,5 m/s2)
|
|
Tractoare cu vmax > 30 km/h:
|
0,15 v + (v2/57)
|
|
(al doilea termen corespunde unei decelerații medii dm = 2,2 m/s2)
|
Performanța prescrisă este obținută prin aplicarea la dispozitivul de comandă a unei forțe care nu depășește 600 N în cazul unui dispozitiv de comandă acționat cu piciorul sau 400 N în cazul unui dispozitiv acționat cu mâna. Dispozitivul de comandă trebuie să fie situat astfel încât să poată fi acționat ușor și rapid de către conducător.
3.1.3. Sistemul de frânare de parcare
|
3.1.3.1.
|
Chiar dacă este combinat cu unul dintre celelalte dispozitive de frânare, sistemul de frânare de parcare este capabil să mențină un tractor încărcat în staționare pe o pantă sau o rampă ascendentă sau descendentă cu o înclinație de 18 %. Această cerință trebuie să fie îndeplinită chiar și în perioada de răcire. Perioada de răcire este considerată terminată atunci când frânele ajung la o temperatură mai mare cu 10 °C decât temperatura ambiantă.
|
|
3.1.3.2.
|
În cazul vehiculelor din categoria T4.3, chiar dacă sistemul de frânare de parcare este combinat cu unul dintre celelalte dispozitive de frânare, el este capabil să mențină un tractor încărcat în staționare pe o pantă sau o rampă ascendentă sau descendentă cu o înclinație de 40 %. Această cerință trebuie să fie îndeplinită chiar și în perioada de răcire. Perioada de răcire este considerată terminată atunci când frânele ajung la o temperatură mai mare cu 10 °C decât temperatura ambiantă.
|
|
3.1.3.3.
|
Încercarea privind performanța sistemului de frânare de parcare la cald și la rece Pentru a verifica dacă frâna de parcare poate menține în staționare un tractor încărcat pe o pantă sau o rampă ascendentă sau descendentă conform cerințelor de la punctele 3.1.3.1 și 3.1.3.2, măsurătorile sunt efectuate în următoarele condiții:
— se încălzesc frânele la o temperatură ≥ 100 °C (măsurată la suprafața de frecare a discului sau la suprafața exterioară a tamburului);
— se efectuează încercarea statică la cald a sistemului de frânare de parcare la o temperatură ≥ 100 °C;
— se efectuează încercarea statică la rece a sistemului de frânare de parcare la o temperatură ≤ temperatura ambiantă + 10 °C;
▼M1
— În timpul perioadei de răcire, sistemul de frânare de staționare nu poate fi reglat manual.
▼B
În cazul frânelor imersate în ulei, metoda folosită pentru efectuarea acestei verificări trebuie stabilită de comun acord de către producător și serviciul tehnic. Metoda de evaluare și rezultatele trebuie anexate la raportul de omologare de tip.
▼M1
Încercare statică la cald a sistemului de frânare de staționare poate fi omisă în cazul în care sistemul de frânare de staționare acționează doar asupra suprafețelor de frânare care nu sunt folosite în timpul frânării de serviciu.
▼B
|
|
3.1.3.4.
|
La tractoarele autorizate să fie cuplate la vehicule remorcate, sistemul de frânare de parcare al tractorului trebuie să poată menține ansamblul de vehicule, având masa maximă tehnic admisă specificată de producătorul tractorului, în staționare pe o pantă de 12 %, ascendentă sau descendentă.
▼M1
În cazul în care această cerință nu poate fi îndeplinită din cauza limitărilor fizice (de exemplu, aderență disponibilă limitată a pneului/a căii de rulare pentru ca tractorul să genereze forțe de frânare suficiente sau în cazul în care performanțele pur mecanice ale sistemului de frânare de staționare al tractorului prevăzute la punctul 3.1.3.1 nu sunt suficiente pentru a menține ansamblul de vehicule staționar), ea este considerată îndeplinită dacă este respectată cerința alternativă stabilită la punctul 3.1.3.4.1 din prezenta anexă în conjuncție cu punctul 2.2.1.20 din anexa I.
|
3.1.3.4.1.
|
Cerința de la punctul 3.1.3.4 se consideră a fi îndeplinită atunci când condițiile prevăzute la punctul 3.1.3.4.1.1 sunt îndeplinite în cazul unui vehicul remorcat cu frâna de serviciu sau atunci când condițiile prevăzute la punctul 3.1.3.4.1.2 sunt îndeplinite în cazul unui vehicul remorcat nefrânat sau frânat prin inerție.
3.1.3.4.1.1. Chiar dacă motorul tractorului nu este pornit, ansamblul, având masa maximă admisă, trebuie să rămână staționar pe panta cu înclinația prescrisă atunci când activarea unui singur dispozitiv de către conducător, de pe scaunul său, a acționat sistemul de frânare de staționare al tractorului și sistemul de frânare de serviciu al vehiculului remorcat sau doar sistemul de frânare de staționare al tractorului.
3.1.3.4.1.2. Sistemul de frânare de staționare al tractorului poate menține în staționare tractorul cuplat la un vehicul remorcat nefrânat sau frânat prin inerție cu o masă egală cu cea mai mare „masă a ansamblului PM+R” menționată în raportul de încercare. Această masă se determină după cum urmează:
(a) în cazul unui vehicul remorcat nefrânat: PM+R = masa ansamblului (masa „PM” + masa declarată PR a vehiculului remorcat nefrânat) în conformitate cu punctul 3.1.1.2;
(b) în cazul unui vehicul remorcat frânat prin inerție: PM+R = masa ansamblului (masa „PM” + masa declarată PR a vehiculului remorcat frânat prin inerție, astfel cum se specifică de către producător).
PM = masa tractorului (după caz, inclusiv orice balast sau încărcătură de susținere sau ambele).
|
▼B
|
|
3.1.3.5.
|
Este acceptat un sistem de frânare de parcare care trebuie să fie acționat de mai multe ori înainte de a atinge performanța prevăzută.
|
3.1.4. Performanța reziduală a sistemului de frânare de serviciu după o defecțiune a mecanismului de transmisie
|
3.1.4.1.
|
În cazul categoriei de tractoare Tb având viteza maximă prin construcție mai mare de 60 km/h, performanța reziduală a sistemului de frânare de serviciu, în cazul unei defecțiuni la una dintre piesele mecanismului său de transmisie, corespunde unei distanțe de oprire care nu depășește valorile următoare și o decelerație medie rezultată cel puțin egală cu valorile următoare, atunci când forța de comandă nu depășește 70 daN, această forță fiind verificată prin încercarea de tip 0 cu motorul decuplat, începând de la următoarele viteze inițiale ale categoriei vehiculului respectiv:
|
v (km/h)
|
distanța de oprire a în stare ÎNCĂRCATĂ (m)
|
dm (m/s2)
|
distanța de oprire în stare NEÎNCĂRCATĂ (m)
|
dm (m/s2)
|
|
40
|

|
1,3
|

|
1,3
|
Această dispoziție nu se interpretează ca modificând dispozițiile referitoare la frânarea de siguranță.
|
|
3.1.4.2.
|
Verificarea eficacității reziduale a sistemului de frânare se efectuează prin simularea condițiilor reale de avarie a sistemului de frânare de serviciu.
|
3.2. Vehicule din categoriile R și S
3.2.1. Sistemul de frânare de serviciu
3.2.1.1. Cerință privind încercările vehiculelor din categoria R1 sau S1
În cazul în care vehiculele remorcate din categoria R1 sau S1 sunt prevăzute cu un sistem de frânare de serviciu, performanța sistemului satisface cerințele prevăzute pentru categoria de vehicule R2 sau S2.
3.2.1.2. Dispoziții privind încercările vehiculelor din categoria R2
În cazul în care sistemul de frânare de serviciu este de tip continuu sau semicontinuu, suma forțelor exercitate la circumferința roților frânate este egală cu cel puțin X % din sarcina maximă staționară pe roată.
|
X
|
=
|
50 în cazul vehiculelor cu o viteză maximă prin construcție de peste 30 km/h
|
|
X
|
=
|
35 în cazul vehiculelor cu o viteză maximă mai mică sau egală cu 30 km/h
|
În cazul în care vehiculul remorcat este prevăzut cu un sistem de frânare cu aer comprimat, presiunea în circuitul de comandă nu depășește 650 kPa (și/sau o valoare corespunzătoare a semnalului digital, astfel cum este definit în ISO 11992:2003, inclusiv în ISO 11992-2:2003 și în amendamentul său Amd.1:2007, în circuitul electric de comandă), iar presiunea în circuitul de alimentare nu depășește 700 kPa în timpul încercării frânei.
În cazul în care vehiculul remorcat este prevăzut cu un sistem de frânare cu aer comprimat, presiunea în circuitul de comandă nu depășește 11 500 kPa, iar presiunea în circuitul suplimentar este cuprinsă între 1 500 kPa și 1 800 kPa în timpul încercării frânei.
Viteza de încercare este egală cu 60 km/h sau viteza maximă prin construcție a vehiculului remorcat, reținându-se valoarea cea mai scăzută.
Dacă sistemul de frânare este de tip inerțial, acesta respectă condițiile din anexa VIII.
3.2.1.3. Cerință privind încercările vehiculelor din categoria R3, R4 sau S2
Suma forțelor exercitate la circumferința roților frânate este egală cu cel puțin X % din sarcina maximă staționară pe roată.
|
X
|
=
|
50 în cazul vehiculelor remorcate din categoriile R3, R4 și S2 cu o viteză maximă prin construcție de peste 30 km/h
|
|
X
|
=
|
35 în cazul vehiculelor remorcate din categoriile R3a, R4a și S2a cu o viteză maximă prin construcție de cel mult 30 km/h
|
În cazul în care vehiculul remorcat este prevăzut cu un sistem de frânare cu aer comprimat, presiunea în circuitul de comandă nu depășește 650 kPa, iar presiunea în circuitul de alimentare nu depășește 700 kPa în timpul încercării frânei.
▼M1
Viteza de încercare este egală cu 60 km/h sau viteza maximă prin construcție a vehiculului remorcat, reținându-se valoarea cea mai scăzută.
▼B
În cazul în care vehiculul remorcat este prevăzut cu un sistem de frânare cu aer comprimat, presiunea în circuitul de comandă nu depășește 11 500 kPa, iar presiunea în circuitul suplimentar este cuprinsă între 1 500 kPa și 1 800 kPa în timpul încercării frânei.
|
3.2.1.4.
|
În cadrul unui grup de axe, este permisă blocarea roților unei axe în timpul procedurii de încercare de tip 0. Această cerință nu este interpretată ca o abatere de la cerințele de la punctul 6.3.1 din anexa XI referitoare la blocarea roților controlate direct.
|
3.2.2. Sistemul de frânare de parcare
|
3.2.2.1.
|
Sistemul de frânare de parcare cu care este prevăzut vehiculul remorcat este capabil să mențină în staționare vehiculul remorcat încărcat, atunci când acesta este separat de tractor, pe o rampă sau o pantă ascendentă sau descendentă cu o înclinație de18 %.
|
|
3.2.2.2.
|
Cerințele prevăzute la punctul 3.2.2.1 sunt îndeplinite inclusiv în timpul perioadei de răcire. Perioada de răcire este considerată terminată atunci când frânele ajung la o temperatură mai mare cu 10 °C decât temperatura ambiantă.
|
|
3.2.2.3.
|
Încercarea privind performanța sistemului de frânare de parcare la cald și la rece Cerința de încercare specificată la punctul 3.1.3.3 se aplică în mod corespunzător.
|
▼M1
3.2.3. Sistemul de frânare automată
Performanța frânării automate, în cazul unei defecțiuni menționate la punctele 2.2.1.17.1 și 2.2.1.18.5 din anexa I, la încercarea vehiculului încărcat la o viteză de 40 km/h sau de 0,8 vmax (luându-se în calcul cea mai mică dintre aceste două valori) nu este mai mică de 13,5 % din sarcina maximă staționară a roții. Este permisă blocarea roților la niveluri de performanță de peste 13,5 %.
▼B
3.3. Timpul de reacție pentru vehiculele din categoriile T, C, R și S
|
3.3.1.
|
Atunci când un vehicul este prevăzut cu un sistem de frânare de serviciu care este dependent total sau parțial de o sursă de energie, alta decât efortul muscular al conducătorului, sunt satisfăcute următoarele condiții:
3.3.1.1. În cazul unei manevre de urgență, timpul scurs între momentul în care dispozitivul începe să fie activat și momentul în care forța de frânare asupra axei situată în poziția cea mai defavorabilă atinge nivelul corespunzător eficacității prevăzute nu depășește 0,6 secunde.
3.3.1.2. În cazul vehiculelor prevăzute cu sisteme de frânare cu aer comprimat sau al vehiculelor remorcate cu sisteme de frânare hidraulice, dispozițiile de la punctul 3.3.1 sunt considerate ca fiind îndeplinite în cazul în care vehiculul se conformează dispozițiilor din anexa III.
3.3.1.3. În cazul tractoarelor prevăzute cu sisteme de frânare hidraulică, dispozițiile de la punctul 3.3.1 sunt considerate ca fiind îndeplinite în cazul în care, în cazul unei manevre de urgență, decelerația vehiculului sau presiunea la cilindrul de frână aflat în situația cea mai puțin favorabilă atinge un nivel corespunzător performanței prevăzute în cel mult 0,6 secunde.
3.3.1.4. În cazul tractoarelor la care una dintre axe este frânată și toate celelalte axe sunt angajate automat în mișcare în timpul frânării, cerința de la punctul 3.3.1 este considerată a fi îndeplinită dacă tractorul respectă atât distanța de oprire prescrisă, cât și decelerația medie rezultată prescrisă pentru categoria corespunzătoare de vehicule, în conformitate cu cerințele de la punctul 3.1.1.1, însă în acest caz este necesară măsurarea efectivă a ambilor parametri de mai sus.
|
Apendicele 1
Distribuirea frânării între axele vehiculelor și cerințe privind compatibilitatea dintre tractoare și vehiculul remorcat
1.
Cerințe generale
1.1. Vehicule din categoriile T, C, R și S
|
1.1.1.
|
Vehiculele din categoriile Ta, Ca, R2a, R3a, R4a și S2a cu o viteză maximă prin construcție mai mare de 30 km/h îndeplinesc următoarele cerințe din prezentul apendice:
1.1.1.1. Cerințele de compatibilitate asociate cu figurile 2 și 3, după caz; dacă se utilizează un dispozitiv special, acesta funcționează automat. În cazul remorcilor cu control electronic al distribuției forței de frânare, cerințele prezentului apendice se aplică numai dacă remorca este conectată electric la tractor prin priza conformă cu ISO 7638:2003.
1.1.1.2. în cazul unei defecțiuni a comenzii dispozitivului special, performanța de frânare specificată la punctul 5 este îndeplinită pentru vehiculul în cauză.
1.1.1.3. cerințele referitoare la marcare prevăzute la punctul 6.
|
|
1.1.2.
|
Vehiculele din categoriile Tb, R2b, R3b, R4b și S2b îndeplinesc cerințele relevante din prezentul apendice. Dacă se utilizează un dispozitiv special, acesta funcționează automat.
|
|
1.1.3.
|
▼M1
Cu toate acestea, vehiculele din categoriile menționate la punctul 1.1.1. și la punctul 1.1.2. echipate cu un sistem antiblocare din categoria 1 sau 2 (tractoare) și din categoria A sau B (vehicule remorcate) care îndeplinesc cerințele relevante din anexa XI trebuie să îndeplinească, de asemenea, toate cerințele relevante din prezenta anexă, cu următoarele excepții sau condiții:
▼B
1.1.3.1. nu este necesară conformitatea cu cerințele privind utilizarea aderenței asociate diagramei 1;
1.1.3.2. în cazul tractoarelor și vehiculelor remorcate, conformitatea cu cerințele de compatibilitate în stare neîncărcată asociate cu diagramele 2 și 3, după caz, nu este necesară. Cu toate acestea, indiferent de starea de încărcare, o forță de frânare trebuie generată la o presiune cuprinsă între 20 kPa și 100 kPa (pentru sistemele de frânare pneumatice), respectiv între 350 și 1 800 kPa (pentru sistemele de frânare hidraulice) sau la valoarea semnalului digital echivalent la racordul de cuplare al circuitului (circuitelor) de comandă;
1.1.3.3. în cazul vehiculelor echipate cu un dispozitiv special care comandă automat distribuția frânării între axe sau reglează automat forța de frânare în funcție de sarcina pe axă (axe), se aplică cerințele de la punctele 5 și 6.
|
|
1.1.4.
|
Dacă vehiculul este echipat cu un sistem de frânare de anduranță, forța de încetinire nu se ia în considerare atunci când se determină conformitatea vehiculului cu dispozițiile prezentului apendice.
|
▼M1
|
1.1.5.
|
Cerințele din prezentul apendice se aplică echipamentului de frânare dotat cu pneurile cu cel mai mare diametru precizat de producător pentru tipul respectiv de vehicul.
|
|
1.1.6.
|
Conformitatea cu utilizarea aderenței și cu cerințele de compatibilitate asociate cu figurile 1, 2 și 3 din prezentul apendice se demonstrează prin calcul.
|
▼B
|
1.2.
|
Cerințele referitoare la diagramele menționate la punctele 3.1.6.1, 4.1 și 4.2 sunt valabile în cazul vehiculelor cu un circuit pneumatic și electric de comandă în conformitate cu punctul 2.1.4 din anexa I sau cu un circuit hidraulic de comandă în conformitate cu punctul 2.1.5 din anexa I. În toate cazurile, valoarea de referință (abscisa diagramelor) va fi valoarea presiunii transmise sau, respectiv, semnalul electric în circuitul de comandă:
1.2.1. În cazul vehiculelor echipate în conformitate cu punctul 2.1.4.1.1 din anexa I, această valoare va fi presiunea pneumatică efectivă din circuitul de comandă (pm);
1.2.2. În cazul vehiculelor echipate în conformitate cu punctul 2.1.4.1.2 sau cu punctul 2.1.4.1.3 din anexa I, această valoare va fi presiunea corespunzătoare valorii semnalului digital transmis prin circuitul electric de comandă, în conformitate cu ISO 11992:2003, inclusiv cu ISO 11992-2:2003 și cu amendamentul său Amd. 1:2007.
Vehiculele echipate în conformitate cu punctul 2.1.4.1.2 din anexa I (având atât circuite pneumatice, cât și circuite electrice de comandă) satisfac cerințele diagramelor corespunzătoare ambelor circuite de comandă. Totuși, nu sunt necesare curbe identice ale caracteristicii de frânare pentru ambele circuite de comandă.
1.2.3. În cazul vehiculelor echipate în conformitate cu punctul 2.1.5.1 din anexa I, această valoare este presiunea hidraulică efectivă din circuitul de comandă (pm);
|
|
1.3.
|
Validarea generării forței de frânare.
|
1.3.1.
|
În momentul omologării de tip, se verifică dacă generarea forței de frânare pe o axă al fiecărui grup independent de axe are loc în următorul interval de presiuni:
1.3.1.1. Vehicule încărcate:
Cel puțin o axă începe să dezvolte o forță de frânare atunci când presiunea la racordul de cuplare se situează în intervalul 20-100 kPa (la sistemele de frânare pneumatice), respectiv 350-1 800 kPa (la sistemele de frânare hidraulice) sau când se înregistrează valoarea semnalului digital echivalent.
Cel puțin o axă din fiecare grup de axe începe să dezvolte o forță de frânare atunci când presiunea la racordul de cuplare este de maximum 120 kPa (la sistemele de frânare pneumatice), respectiv de 2 100 kPa (la sistemele de frânare hidraulice) sau când presiunea are valoarea semnalului digital echivalent.
1.3.1.2. Vehicule neîncărcate:
Cel puțin o axă începe să dezvolte o forță de frânare atunci când presiunea la racordul de cuplare se situează în intervalul 20-100 kPa (la sistemele de frânare pneumatice), respectiv 350-1 800 kPa (la sistemele de frânare hidraulice) sau se înregistrează valoarea semnalului digital echivalent.
1.3.1.3. Cu roata (roțile) axei (axelor) ridicată (ridicate) și liberă (libere), se aplică o forță de frânare progresivă și se măsoară presiunea la racordul de cuplare atunci când roata (roțile) nu mai poate (pot) fi rotită (rotite) cu mâna. În cazul tractoarelor din categoria C, poate fi utilizată o procedură alternativă pentru validarea generării forței de frânare (de exemplu, prin înlăturarea șenilelor). Această condiție determină începutul forței de frânare.
|
|
2.
Simboluri
|
i
|
=
|
indice de axă (i = 1, axă față; i = 2, a doua axă etc.)
|
|
ER
|
=
|
distanța dintre punctul de cuplare și centrul axei vehiculului cu bară de tracțiune rigide și a vehiculului remorcat cu axă centrală
|
|
fi
|
=
|
Ti/Ni, aderența utilizată a axei i
|
|
Fi
|
=
|
reacțiunea normală a suprafeței drumului asupra axei i în condiții statice
|
|
FM
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților tractorului
|
|
g
|
=
|
accelerația gravitațională: g = 9,81 m/s2
|
|
h
|
=
|
înălțimea centrului de greutate specificată de producător și aprobată de serviciile tehnice care efectuează încercarea de omologare;
|
|
J
|
=
|
decelerația vehiculului
|
|
k
|
=
|
coeficient teoretic al aderenței dintre pneu și drum
|
|
Ni
|
=
|
reacțiunea normală a suprafeței drumului asupra axei i la frânare
|
|
pm
|
=
|
presiunea la racordul de cuplare al circuitului de comandă
|
|
FR
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților vehiculului remorcat
|
|
FRmax
|
=
|
valoarea FR corespunzătoare masei maxime a vehiculului remorcat
|
|
Ti
|
=
|
forța exercitată de frâne asupra axei i în condiții normale de frânare pe drum
|
|
TM
|
=
|
suma forțelor de frânare la circumferința tuturor roților tractoarelor
|
|
TR
|
=
|
suma forțelor de frânare Ti la circumferința tuturor roților vehiculului remorcat
|
|
z
|
=
|
coeficientul de frânare al vehiculului = J/g
|
▼M1
3.
Cerințe pentru tractoarele din categoria T
3.1. Tractoare cu două axe
3.1.1. Pentru valori ale dreptei k între 0,2 și 0,8:

Dispozițiile prevăzute la prezentul punct nu afectează cerințele anexei II privind performanța frânelor. Cu toate acestea, dacă în urma încercărilor efectuate în conformitate cu dispozițiile de la prezentul punct se înregistrează niveluri de performanță a frânării peste cele prevăzute în anexa II, dispozițiile referitoare la curbele de aderență utilizate se aplică în zonele din diagrama 1 definite de dreptele k = 0,8 și z = 0,8.
3.1.2. Pentru toți coeficienții de frânare cuprinși între 0,15 și 0,30:
3.1.2.1. Curbele de aderență pentru fiecare axă sunt situate între două linii paralele la dreapta coeficientului de aderență ideal dată de ecuația k = z + -0,08, astfel cum este indicat în diagrama 1, iar curba de aderență pentru axa spate, pentru coeficienți de frânare z > 0,3, respectă relația:

3.1.3. Pentru tractoarele autorizate să remorcheze vehicule din categoriile R3b, R4b și S2b echipate cu sisteme de frânare cu aer comprimat:
3.1.3.1. Atunci când este supusă încercării cu sursa de energie și cu circuitul de alimentare deconectate, cu rezervorul având o capacitate de 0,5 litri conectat la circuitul pneumatic de comandă și cu sistemul aflat la presiuni de cuplare și decuplare, presiunea la acționarea completă a dispozitivului de comandă a sistemului de frânare de serviciu este cuprinsă între 650 și 850 kPa la racordurile de cuplare ale circuitului de alimentare și ale circuitului pneumatic de comandă, indiferent de masa totală a vehiculului.
3.1.3.2. În cazul vehiculelor echipate cu un circuit electric de comandă, o acționare completă a dispozitivului de comandă a sistemului de frânare produce o valoare a semnalului digital corespunzând unei presiuni situate între 650 și 850 kPa (a se vedea ISO 11992:2003, inclusiv conform ISO 11992-2:2003 și amendamentului acestuia Amd. 1:2007).
3.1.3.3. Aceste valori trebuie să poată fi verificate la tractor atunci când acesta este decuplat de vehiculul remorcat. Zonele de compatibilitate din diagramele de la punctele 3.1.6., 4.1. și 4.2 nu trebuie să depășească limita de 750 kPa și/sau valoarea semnalului digital corespunzător (a se vedea ISO 11992: 2003, inclusiv ISO 11992-2:2003 și amendamentul său Amd. 1:2007).
3.1.3.4. Trebuie să se garanteze că la racordul de cuplare al circuitului de alimentare presiunea este de cel puțin 700 kPa atunci când sistemul este la presiunea de cuplare. Această presiune trebuie să poată fi verificată fără acționarea sistemului de frânare de serviciu.
3.1.4. În cazul tractoarelor autorizate să remorcheze vehicule din categoriile R3b, R4b și S2b echipate cu sisteme de frânare hidraulice:
3.1.4.1. Atunci când sunt supuse încercării cu sursa de energie la ralanti și la 2/3 din turația maximă a motorului, un circuit de comandă al simulatorului vehiculului remorcat (punctul 3.6. din anexa III) conectat la circuitul de comandă hidraulic. La acționarea integrală a dispozitivului de comandă a frânării, presiunea trebuie să fie cuprinsă între 11 500 și 15 000 kPa în circuitul de comandă hidraulic, respectiv între 1 500 și 3 500 kPa în circuitul suplimentar, indiferent de starea de încărcare a vehiculului.
3.1.4.2. Aceste presiuni trebuie să poată fi verificate la tractor atunci când acesta este decuplat de vehiculul remorcat. Zonele de compatibilitate din diagramele de la punctele 3.1.6., 4.1. și 4.2 nu trebuie să depășească limita de 13 300 kPa.
3.1.5. Verificarea cerințelor de la punctele 3.1.1 și 3.1.2.
3.1.5.1. Pentru verificarea condițiilor de la punctele 3.1.1 și 3.1.2, producătorul furnizează curbele de aderență pentru axele față și spate, calculate cu formulele următoare:

Curbele sunt trasate pentru ambele stări de încărcare de mai jos:
3.1.5.1.1. neîncărcat, fără a se depăși masa minimă declarată de producător în fișa de informații;
3.1.5.1.2. încărcat; dacă există o dispoziție privind mai multe posibilități de distribuție a sarcinii, se ia în considerare acea distribuție în care sarcina cea mai mare se află pe axa față.
3.1.5.2. Cerințe speciale în cazul tractoarelor atunci când toate axele sunt conectate în permanență rigid (100 % rata de blocare) prin tracțiunea integrală sau sunt conectate în timpul frânării prin tracțiunea integrală (100 % rata de blocare)
3.1.5.2.1. Verificarea matematică prevăzută la punctul 3.1.5.1 nu este necesară.
3.1.5.3. Tractoare cu tracțiune integrală permanentă, altele decât cele menționate la punctul 3.1.5.2.
3.1.5.3.1. Dacă verificarea matematică prevăzută la punctul 3.1.5.1. nu este posibilă în cazul vehiculelor cu tracțiune integrală permanentă sau în situația în care tracțiunea integrală este cuplată în timpul frânării, producătorul poate utiliza o încercare de blocare în succesiune a roților pentru a verifica dacă blocarea roților din față are loc fie simultan, fie înainte de blocarea roților din spate.
3.1.5.4. Cu toate acestea, pentru tractoarele care cuplează automat tracțiunea integrală când frânarea începe la o viteză de peste 20 km/h, dar care nu cuplează automat tracțiunea integrală când sistemul de frânare de serviciu este acționat la viteze care nu depășesc 20 km/h, nu este necesară demonstrarea conformității cu cerințele de la punctul 3.1.5.1. în situația în care tracțiunea integrală nu este cuplată în timpul frânării.
3.1.5.5. Procedură de verificare a condițiilor prevăzute la punctul 3.1.5.3.
3.1.5.5.1. Încercarea de blocare în succesiune a roților se efectuează cu vehiculul încărcat și cu vehiculul neîncărcat pe suprafețe de drum cu un nivel de aderență astfel încât blocarea roților pe prima axă să aibă loc la coeficienți de frânare cuprinși între 0,55 și 0,8 de la viteza inițială de încercare specificată la punctul 3.1.5.5.2.
3.1.5.5.2. Viteza de încercare:
0,9 vmax, dar nu mai mare de 60 km/h.
3.1.5.5.3. Forța aplicată asupra pedalei poate depăși forțele de acționare permise în conformitate cu punctul 3.1.1 din anexa II.
3.1.5.5.4. Pedala se apasă cu o forță progresivă, astfel încât a doua roată a vehiculului să se blocheze într-un interval cuprins între 0,5 și 1 s după începerea acționării pedalei, până la blocarea ambelor roți ale unui ax (în timpul încercării se pot bloca și alte roți, ca de exemplu în cazul blocării simultane).
3.1.5.5.4.1. Dacă, în timpul încercării cu vehiculul încărcat, nu este posibil să se ajungă la blocarea celei de-a doua roți într-un interval de 1 s, această încercare poate fi omisă cu condiția ca blocarea roților în condițiile indicate la punctul 3.1.5.5.4 să poate fi demonstrată în timpul încercării cu vehiculul neîncărcat.
În cazul în care, în timpul încercării cu vehiculul neîncărcat, nu este posibil să se ajungă la blocarea celei de-a doua roți într-un interval de 1 s, se efectuează o a treia încercare, decisivă, pe o cale de rulare cu un coeficient de aderență de maximum 0,3 la viteza de încercare de 0,8 vmax km/h, dar fără a depăși 60 km/h.
3.1.5.5.4.2. În scopul încercărilor în conformitate cu punctul 3.1.5.5, o blocare simultană a roților față și spate se referă la condițiile în care intervalul de timp dintre prima blocare a ultimei roți (cea de-a doua) de pe axa spate și prima blocare a ultimei roți (cea de-a doua) de pe axa față nu depășește 0,3 secunde.
3.1.6. Tractoare autorizate să tracteze vehicule remorcate
3.1.6.1. Raportul admisibil dintre coeficientul de frânare TM/FM și presiunea pm trebuie să fie situat în zonele indicate în diagrama 2 pentru toate presiunile cuprinse între 20 și 750 kPa (în cazul sistemului de frânare cu aer comprimat), respectiv între 350 și 13 300 kPa (în cazul sistemului de frânare hidraulic).
3.2. Tractoare cu mai mult de două axe
Dispozițiile punctului 3.1 se aplică vehiculelor cu mai mult de două axe. Dispozițiile de la punctul 3.1.2. privind ordinea de blocare a roților sunt considerate îndeplinite dacă, în cazul coeficienților de frânare cuprinși între 0,15 și 0,30, coeficientul de aderență al cel puțin uneia dintre axele față este mai mare decât cel al cel puțin uneia dintre axele spate.
▼B
4.
Cerințe pentru vehiculele remorcate
|
4.1.
|
Pentru vehiculele remorcate cu bară de tracțiune, echipate cu sisteme de frânare cu aer comprimat și hidraulice:
4.1.1. Pentru vehiculele remorcate cu bară rigidă și cu două axe se aplică următoarele cerințe:
4.1.1.1. Pentru valori ale k cuprinse între 0,2 și 0,8:
z ≥ 0,1 + 0,85 (k – 0,2)
Dispozițiile punctului 3.1.1 nu afectează cerințele din anexa II privind performanța frânării. Cu toate acestea, în cazul în care, în încercările realizate conform dispozițiilor de la punctul 3.1.1, performanțele frânării obținute sunt superioare celor prescrise în anexa II, atunci dispozițiile privind curbele de utilizare a aderenței necesare se aplică în interiorul zonelor delimitate de dreptele k = 0,8 și z = 0,8 din diagrama 1 din prezenta anexă.
4.1.1.2. Pentru toate condițiile de încărcare ale vehiculului, curba de utilizare a aderenței a axei spate nu este situată deasupra curbei de utilizare a aderenței corespunzătoare axei față, pentru toți coeficienții de frânare situați între 0,15 și 0,30. Această condiție este, de asemenea, considerată satisfăcută dacă, pentru coeficienți de frânare cuprinși între 0,15 și 0,30, sunt îndeplinite următoarele două condiții:
4.1.1.2.1. curbele de utilizare a aderenței pentru fiecare axă sunt situate între două linii paralele cu linia de utilizare ideală a aderenței dată de ecuațiile k = z + 0,08 și k = z – 0,08, astfel cum este indicat în diagrama 1
și
4.1.1.2.2. curba de utilizare a aderenței pentru axa spate, în cazul unor coeficienți de frânare z ≥ 0,3, respectă relația z ≥ 0,3 + 0,74 (k – 0,38).
4.1.1.3. Procedura de verificare a condițiilor de la punctele 4.1.1.1 și 4.1.1.2 este aceeași cu cea prevăzută la punctul 3.1.5.
4.1.2. În cazul vehiculelor remorcate cu bară de tracțiune rigidă cu mai mult de două axe, se aplică cerințele de la punctul 4.1.1. Cerințele de la punctul 4.1.1 privind ordinea de blocare a roților sunt considerate îndeplinite dacă, în cazul coeficienților de frânare cuprinși între 0,15 și 0,30, coeficientul de aderență al cel puțin unuia dintre axele față este mai mare decât cel al cel puțin unuia dintre axele spate.
4.1.3. Raportul admis dintre coeficientul de frânare TR/FR și presiunea pm se situează în zonele indicate în diagrama 3, pentru toate presiunile situate între 20 și 750 kPa (sistem pneumatic), respectiv între 350 și 13 300 kPa (sistem hidraulic), pentru stările încărcat și neîncărcat.
|
|
4.2.
|
Pentru vehiculele remorcate echipate cu bară de tracțiune rigidă și vehiculele remorcate cu axă centrală, dotate cu sisteme de frânare cu aer comprimat și hidraulice:
4.2.1. Raportul admis între coeficientul de frânare TR/FR și presiunea pm se situează în cele două zone obținute din diagrama 3 prin înmulțirea scării verticale cu 0,95. Această cerință trebuie să fie îndeplinită la toate presiunile cuprinse între 20 și 750 kPa (pneumatic), respectiv între 350 și 13 300 kPa (hidraulic), pentru stările încărcat și neîncărcat.
|
|
4.3.
|
Pentru vehiculele remorcate cu bară de tracțiune cu sistem de frânare inerțială
|
4.3.1.
|
Cerințele prevăzute la punctul 4.1.1 se aplică, de asemenea, pentru vehiculele remorcate cu bară de tracțiune cu sistem de frânare inerțială.
|
|
4.3.2.
|
Pentru vehiculele remorcate cu bară de tracțiune cu sistem de frânare inerțială și cu mai mult de două axe, se aplică cerințele prevăzute la punctul 4.1.2 din prezentul apendice.
|
|
4.3.3.
|
La calculul destinat verificării conformității cu dispozițiile punctului 4.1.1.3, influența forței admise a barei de tracțiune D* (punctul 10.3.1 din anexa VIII) poate fi ignorată.
|
|
5.
Condiții care trebuie îndeplinite în cazul unei defecțiuni a sistemului de distribuție a frânării
În cazul în care cerințele prezentului apendice sunt îndeplinite prin utilizarea unui dispozitiv special (de exemplu, controlat mecanic de suspensia vehiculului), este posibilă, în eventualitatea unei defecțiuni a comenzii sale, oprirea vehiculului în condițiile specificate pentru frânarea de siguranță la tractoare; la tractoarele autorizate să remorcheze un vehicul prevăzut cu sisteme de frânare cu aer comprimat sau hidraulice, este posibilă atingerea unei presiuni la racordul de cuplare al circuitului de comandă care să se încadreze în limitele specificate la punctele 3.1.3 și 3.1.4. În cazul defecțiunii comenzii dispozitivului la vehicule remorcate, trebuie să se obțină o performanță a sistemului de frânare de serviciu egală cu cel puțin 30 % din cea prevăzută pentru vehiculul respectiv.
6.
Marcaje
|
6.1.
|
▼M1
Vehiculele care îndeplinesc cerințele prezentului apendice prin utilizarea unui dispozitiv controlat mecanic de suspensia vehiculului sunt marcate în conformitate cu dispozițiile stabilite în temeiul articolului 24 din Regulamentul delegat (UE) 2015/208, iar marcajele conțin datele adecvate pentru a indica cursa utilă a dispozitivului între pozițiile corespunzătoare stărilor neîncărcat, respectiv încărcat, ale vehiculului, precum și alte informații care să permită verificarea reglării dispozitivului.
▼B
|
6.1.1.
|
Când un dispozitiv cu senzori de sarcină ai frânei este controlat prin intermediul suspensiei vehiculului cu ajutorul oricăror alte mijloace, pe vehicul sunt marcate informații despre modul de verificare a reglării dispozitivului.
|
|
|
6.2.
|
În cazul în care cerințele prezentului apendice sunt îndeplinite prin utilizarea unui dispozitiv care variază presiunea aerului sau presiunea hidraulică în transmisia frânei, vehiculul este marcat pentru a indica sarcinile pe axe la sol, presiunile nominale de ieșire ale dispozitivului și o presiune de intrare cel puțin egală cu 80 % din presiunea maximă de intrare proiectată, conform specificațiilor producătorului vehiculului, pentru următoarele stări de încărcare:
6.2.1. Încărcarea maximă tehnic admisă pentru axa (axele) care controlează dispozitivul;
6.2.2. Sarcina (sarcinile) pe axă corespunzătoare masei vehiculului neîncărcat în stare de funcționare, astfel cum este precizat în raportul de încercare pentru omologarea sistemului de frânare;
6.2.3. Sarcina (sarcinile) pe axă specificată (specificate) de producător pentru a permite verificarea reglării dispozitivului în timpul funcționării, în cazul în care aceasta (acestea) este (sunt) diferită (diferite) de sarcina (sarcinile) specificată (specificate) la punctele 6.2.1-6.2.2.
|
|
6.3.
|
Marcajele menționate la punctele 6.1 și 6.2 se aplică într-o poziție vizibilă și nu pot fi șterse.
►M1
Un exemplu de marcaj pentru un dispozitiv controlat mecanic la un vehicul prevăzut cu sistem de frânare cu aer comprimat sau hidraulic este oferit în conformitate cu cerințele stabilite în temeiul articolului 5 din Regulamentul de punere în aplicare (UE) 2015/504 al Comisiei (
2
). ◄
|
|
6.4.
|
Sistemele electronice de distribuire a forței de frânare care nu pot îndeplini cerințele de la punctele 6.1, 6.2 și 6.3 sunt echipate cu un dispozitiv de autodiagnosticare a funcțiilor care influențează distribuirea forței de frânare. În plus, atunci când vehiculul este staționat, este posibilă efectuarea verificărilor prevăzute la punctul 1.3.1, prin reproducerea condițiilor de presiune nominală necesară asociată cu începerea frânării atât în starea încărcat, cât și în starea neîncărcat.
|
7.
Încercarea vehiculului
În timpul încercării pentru omologarea de tip, serviciul tehnic verifică conformitatea cu cerințele prevăzute în prezentul apendice și efectuează orice alte încercări considerate necesare în acest scop. Raportul privind eventualele încercări suplimentare se anexează la raportul de omologare de tip.
Diagrama 1
Tractoare din categoria Tb și vehicule remorcate cu bară de tracțiune din categoriile R3b, R4b și S2b
(a se vedea punctele 3.1.2.1 și 4.1.1.2)

Notă: Limita inferioară k = z – 0,08 nu se aplică la utilizarea aderenței axei spate
Diagrama 2
▼M1
Raportul admisibil dintre coeficientul de frânare TM/FM și presiunea pm la racordul de cuplare pentru tractoare din categoriile T și C cu sisteme de frânare cu aer comprimat sau hidraulice
▼B

Diagrama 3
Raportul admisibil dintre coeficientul de frânare TM/FR și presiunea pm la racordul de cuplare pentru vehicule remorcate din categoriile S2, R3 și R4 cu sisteme de frânare cu aer comprimat sau hidraulice

ANEXA III
Cerințe cu privire la măsurarea timpului de răspuns
1.
Cerințe generale
|
1.1.
|
Timpul de răspuns pentru sistemele de frânare de serviciu se determină cu vehiculul staționar, presiunea fiind măsurată la deschiderea frânei care se află în poziția cea mai defavorabilă. La vehiculele echipate cu senzori de sarcină ai frânei, acestea se reglează în poziția „încărcat”.
|
|
1.2.
|
În timpul încercărilor, cursa cilindrilor de frână ai axelor este cea corespunzătoare frânelor reglate cel mai strâns.
|
|
1.3.
|
Timpii de răspuns obținuți în conformitate cu punctele 2.2, 2.3, 2.4, 2.6, 3.3, 3.4, 3.5, 3.6.5, 4.1, 4.5.1, 4.5.2, 4.5.3, 5.3.6, 6.2 sunt rotunjiți la cea mai apropiată zecime de secundă. În cazul în care cifra sutimilor este mai mare sau egală cu 5, atunci timpul de reacție se rotunjește prin adaos la zecimala imediat următoare.
|
|
1.4.
|
Diagramele din apendicele 1 și 2 prezintă exemple ale configurației corecte a simulatoarelor adecvate pentru reglare și utilizare.
|
2.
Tractoarele echipate cu sisteme de frânare cu aer comprimat
|
2.1.
|
La începutul fiecărei încercări, presiunea din dispozitivul de stocare a energiei este egală cu presiunea la care regulatorul restabilește alimentarea sistemului. La sistemele care nu sunt echipate cu regulator (de exemplu, compresoarele cu presiune limitată), presiunea din dispozitivul de stocare a energiei, la începutul fiecărei încercări, este egală cu 90 % din presiunea declarată de producător și precizată la punctul 1.2.2.1 din partea A a anexei IV, folosită pentru încercările prescrise în prezenta anexă.
|
|
2.2.
|
Timpii de răspuns în raport cu timpul de acționare (tf) se obțin dintr-o serie de acționări complete, începând de la un timp de acționare cât mai scurt posibil care este mărit apoi până la un timp de aproximativ 0,4 secunde. Valorile obținute se introduc într-o diagramă.
|
|
2.3.
|
Timpul de răspuns utilizat în scopurile încercării este cel corespunzător unui timp de acționare de 0,2 secunde. Acest timp de răspuns poate fi obținut din diagramă prin interpolare.
|
|
2.4.
|
În cazul unui timp de acționare de 0,2 secunde, timpul care se scurge între începutul acționării dispozitivului de comandă a sistemului de frânare și momentul în care presiunea din cilindrul de frână atinge 75 % din valoarea sa asimptotică nu trebuie să depășească 0,6 secunde.
|
|
2.5.
|
În cazul tractoarelor prevăzute cu un circuit de comandă pneumatic pentru vehicule remorcate, în mod suplimentar față de cerințele de la punctul 1.1, timpul de răspuns se măsoară la capătul unei conducte de 2,5 m lungime, cu un diametru interior de 13 mm, care se branșează la racordul de cuplare al circuitului de comandă al sistemului de frânare de serviciu. În timpul încercării, un volum de 385 ± 5 cm3 (considerat echivalent cu volumul unei conducte de 2,5 m lungime cu un diametru interior de 13 mm și la o presiune de 650 kPa) se conectează la racordul de cuplare al circuitului de alimentare. Lungimea și diametrul interior ale conductelor sunt indicate la punctul 2.4 din raportul de încercare.
|
|
2.6.
|
Timpul care se scurge de la începutul acționării pedalei de comandă și până în momentul când:
2.6.1. Presiunea măsurată la racordul de cuplare al circuitului pneumatic de comandă;
2.6.2. Valoarea semnalului digital în circuitul electric de comandă, măsurată conform ISO 11992: 2003, inclusiv conform ISO 11992-2:2003 și amendamentului său 1:2007, atinge x % din valoarea ei asimptotică, respectiv finală, și nu depășește valorile enumerate în tabelul de mai jos:
|
x [procente]
|
t [s]
|
|
10
75
|
0,2
0,4
|
|
|
2.7.
|
În mod suplimentar față de cerințele de la punctul 2.6, în cazul tractoarelor autorizate să remorcheze vehicule din categoria R3 sau R4 echipate cu sisteme de frânare cu aer comprimat, respectarea dispozițiilor de la punctul 2.2.1.17.2.1 din anexa I se verifică prin efectuarea următoarelor încercări:
2.7.1. măsurarea presiunii la extremitatea unei conducte de 2,5 m lungime cu un diametru interior de 13 mm, care se branșează la racordul de cuplare al circuitului de alimentare;
2.7.2. simularea unei defecțiuni a circuitului de comandă la racordul de cuplare;
2.7.3. acționarea dispozitivului de comandă a sistemului de frânare de serviciu în 0,2 secunde, astfel cum este precizat la punctul 2.3.
|
3.
Tractoare echipate cu sisteme de frânare hidraulice
|
3.1.
|
Încercarea privind timpul de răspuns trebuie efectuată la o temperatură ambiantă cuprinsă între 15 °C și 30 °C.
|
|
3.2.
|
La începutul fiecărei încercări, presiunea din dispozitivul de stocare a energiei este egală cu presiunea la care regulatorul restabilește alimentarea sistemului. La sistemele care nu sunt echipate cu regulator (de exemplu, pompe hidraulice cu presiune limitată), presiunea din dispozitivul de stocare a energiei, la începutul fiecărei încercări, este egală cu 90 % din presiunea declarată de producător și precizată la punctul 1.2.1.2 din partea C a anexei IV, folosită pentru încercările prescrise în prezenta anexă.
|
|
3.3.
|
Timpii de răspuns în raport cu timpul de acționare (tf) se obțin dintr-o serie de acționări complete, începând de la un timp de acționare cât mai scurt posibil care este mărit apoi până la un timp de aproximativ 0,4 secunde. Valorile obținute se introduc într-o diagramă.
În cazul unui sistem de frânare de serviciu care este activat fără folosirea energiei sau doar cu un aport limitat de energie, se aplică o forță de comandă care asigură cel puțin performanța prescrisă a sistemului de frânare.
|
|
3.4.
|
Timpul de răspuns utilizat în scopurile încercării este cel corespunzător unui timp de acționare de 0,2 secunde. Acest timp de răspuns poate fi obținut din grafic prin interpolare.
|
|
3.5.
|
În cazul unui timp de acționare de 0,2 secunde, timpul care se scurge între începutul acționării dispozitivului de comandă a sistemului de frânare și momentul în care presiunea din cilindrul de frână atinge 75 % din valorile sale maxime nu depășește 0,6 secunde.
În cazul unui sistem de frânare de serviciu complet asistat în care presiunea în elementul de acționare al frânei atinge o presiune maximă temporară care apoi scade la valoarea presiunii stabilizate medii, această presiune stabilizată medie ar trebui luată în considerare la calculul valorii de 75 %.
|
|
3.6.
|
Tractoare echipate cu un circuit de comandă hidraulic pentru vehiculele remorcate
|
3.6.1.
|
În plus față de cerințele de la punctul 1.1, timpul de răspuns se măsoară cu un simulator de vehicul remorcat (a se vedea punctul 1 din apendicele 2) care se conectează la racordurile de cuplare ale circuitului de comandă hidraulic și ale circuitului suplimentar al tractorului.
|
|
3.6.2.
|
Simulatorul de vehicul remorcat are următoarele componente și caracteristici:
3.6.2.1. Circuit suplimentar al simulatorului de vehicul remorcat
|
3.6.2.1.1.
|
Circuit suplimentar cu un racord de tip mamă conform cu ISO 16028:2006, având un orificiu cu diametrul de 0,6+ 0.2mm pentru a limita debitul acestuia în timpul încercării
|
|
3.6.2.1.2.
|
Acumulator cu piston (sau un dispozitiv echivalent) care prezintă următoarele caracteristici și respectă condițiile de încercare de mai jos:
▼M1 —————
▼B
3.6.2.1.2.2 Presiune inițială de preîncărcare egală cu 1 000 ± 100 kPa pentru un volum dislocuit de 0 cm3;
3.6.2.1.2.3 Presiune maximă de 1 500 kPa pentru un volum dislocuit de 500± 5 cm3.
|
|
3.6.2.1.3.
|
Acumulatorul cu piston (sau un dispozitiv echivalent) este conectat la circuitul suplimentar prin intermediul unei racord cu un diametru interior de 12,5 mm, care constă într-o conductă flexibilă (în conformitate cu EN853:2007) de 1,0 m lungime.
|
|
3.6.2.1.4.
|
Un orificiu de încercare trebuie prevăzut cât mai aproape posibil de racordul de tip mamă conform cu ISO 16028:2006.
|
|
3.6.2.1.5
|
Pentru a putea purja simulatorul înaintea încercării și după aceasta, trebuie prevăzut un dispozitiv de purjare.
|
3.6.2.2. Circuit de comandă al simulatorului de vehicul remorcat
|
3.6.2.2.1
|
Circuit de comandă cu racord de tip mamă conform cu ISO 5676:1983
|
|
3.6.2.2.2
|
Dispozitiv de stocare a energiei cu piston (sau un dispozitiv echivalent) care prezintă următoarele caracteristici și respectă condițiile de încercare de mai jos:
3.6.2.2.2.1 Presiune inițială de preîncărcare egală cu 500± 100 kPa pentru un volum dislocuit de 0 cm3;
3.6.2.2.2.2 Presiune de încercare intermediară de 2 200 ± 200 kPa pentru un volum dislocuit de 100± 3 cm3.
3.6.2.2.2.3 Presiune finală de 11 500 ± 200 kPa pentru un volum dislocuit de 140± 5 cm3.
|
|
3.6.2.2.3
|
Dispozitivul de stocare a energiei cu piston (sau un dispozitiv echivalent) este conectat la circuitul de comandă prin intermediul unei racord cu un diametru interior de 10 mm, care constă într-o conductă flexibilă (conformă cu EN853:2007) de 3,0 m lungime și o conductă rigidă de 4,5 m lungime.
|
|
3.6.2.2.4
|
Orificiile de încercare trebuie să fie prevăzute cât mai aproape posibil de dispozitivul de stocare a energiei cu piston (sau de un dispozitiv echivalent) și de racordul de tip mamă conform cu ISO 5676:1983.
|
|
3.6.2.2.5
|
Pentru a putea purja aerul din conductele de racordare înaintea încercării, trebuie prevăzut un dispozitiv de purjare.
|
|
|
3.6.3.
|
Încercarea este efectuată în următoarele condiții:
3.6.3.1. conductele de conectare sunt purjate de aer înainte de încercare;
3.6.3.2. turația motorului tractorului este cu 25 % mai mare decât turația la ralanti;
3.6.3.3. dispozitivul de purjare al circuitului suplimentar al simulatorului de vehicul remorcat este complet deschis.
|
|
3.6.4.
|
În ceea ce privește măsurarea timpului de răspuns în conformitate cu punctele 3.3 și 3.4, forța asupra pedalei de frână are o valoare care permite să se obțină o presiune de cel puțin 11 500 kPa la racordul de cuplare al circuitului de comandă atunci când motorul se află la o turație cu 25 % mai mare decât turația la ralanti.
|
|
3.6.5.
|
În cazul unui timp de acționare de 0,2 secunde, timpul care se scurge între începutul acționării dispozitivului de comandă a sistemului de frânare și momentul în care presiunea măsurată la orificiul de încercare din apropierea dispozitivului de stocare a energiei cu piston (sau a dispozitivului echivalent) atinge 75 % din valoarea sa maximă în conformitate cu punctul 3.5 nu trebuie să depășească 0,6 secunde.
Cu toate acestea, valoarea maximă se referă în acest caz la presiunea măsurată la orificiul de încercare, nu la presiunea de frânare, așa cum este cazul la punctul 3.5.
|
|
4.
Vehicule remorcate echipate cu sisteme de frânare cu aer comprimat
|
4.1.
|
Timpii de răspuns ai vehiculului remorcat se măsoară fără tractor. Pentru a înlocui tractorul este necesar să se asigure un simulator la care să fie conectate racordurile de cuplare ale circuitului de comandă și circuitului pneumatic de comandă și/sau priza circuitului electric de comandă.
|
|
4.2.
|
Presiunea în conducta de alimentare este de 650 kPa.
|
|
4.3.
|
Simulatorul pentru circuitele pneumatice de comandă are următoarele caracteristici:
4.3.1. Are un rezervor cu o capacitate de 30 litri, care este încărcat până la o presiune de 650 kPa înaintea fiecărei încercări și care nu se reîncarcă în timpul fiecărei încercări. La ieșirea dispozitivului de comandă a frânei, simulatorul are un orificiu cu un diametru cuprins între 4,0 și 4,3 mm inclusiv. Volumul conductei măsurat de la orificiu până la racordul de cuplare, inclusiv, este de 385 ± 5 cm3 (considerat echivalentul volumului unei conducte de 2,5 m lungime cu un diametru interior de 13 mm și având o presiune de 650 kPa). Presiunile în circuitul de comandă menționat la punctul 4.3.3 se măsoară imediat în aval de orificiu.
4.3.2. Dispozitivul de comandă a sistemului de frânare este proiectat astfel încât performanța sa la utilizare să nu fie afectată de persoana care efectuează încercarea.
4.3.3. Simulatorul se reglează, de exemplu, prin alegerea unui orificiu în conformitate cu punctul 4.3.1, astfel încât, dacă la acesta se cuplează un rezervor de 385 ± 5 cm3, timpul necesar pentru ca presiunea să crească de la 65 la 490 kPa (10 și, respectiv, 75 % din presiunea nominală de 650 kPa), să fie de 0,2 ± 0,01 secunde. În cazul în care rezervorul de mai sus este înlocuit cu un rezervor de 1 155 ± 15 cm3, timpul necesar pentru ca presiunea să crească de la 65 la 490 kPa, fără altă reglare ulterioară, este de 0,38 ± 0,02 secunde. Între aceste două valori ale presiunii, presiunea crește într-un mod aproximativ liniar. Aceste rezervoare se cuplează la racordul de cuplare fără a se utiliza conducte flexibile și au un diametru interior de cel puțin 10 mm.
4.3.4. Diagramele din apendicele 1 prezintă un exemplu de configurație corectă a simulatorului pentru reglare și utilizare.
|
|
4.4.
|
Simulatorul de verificare a reacției la semnalele transmise prin circuitul electric de comandă are următoarele caracteristici:
4.4.1. Simulatorul produce în circuitul electric de comandă un semnal digital de cerere, în conformitate cu ISO 11992-2:2003 și cu amendamentul său 1:2007 și transmite informațiile corespunzătoare vehiculului remorcat prin contactele 6 și 7 ale prizei conforme cu ISO 7638:2003. În scopul măsurării timpului de răspuns, simulatorul poate transmite vehiculului remorcat, la solicitarea producătorului, informații privind lipsa unui circuit pneumatic de comandă și privind faptul că semnalul de cerere din circuitul electric de comandă este generat de două circuite independente (a se vedea punctele 6.4.2.2.24 și 6.4.2.2.25 din ISO 11992-2:2003 și din amendamentul său 1:2007).
4.4.2. Comanda sistemului de frânare este proiectată în așa fel încât performanța sa la utilizare să nu fie afectată de persoana care efectuează încercarea.
4.4.3. În scopul măsurării timpului de răspuns, semnalul produs de simulatorul electric este echivalent cu o creștere a presiunii pneumatice liniare de la 0,0 la 650 kPa în 0,2 ± 0,01 secunde.
|
|
4.5.
|
Cerințe de performanță
|
4.5.1.
|
În cazul vehiculelor remorcate cu circuit pneumatic de comandă, intervalul de timp dintre momentul în care presiunea produsă de simulator în circuitul de comandă atinge 65 kPa și momentul în care presiunea din elementul de acționare al frânei vehiculului remorcat atinge 75 % din valoarea sa asimptotică nu trebuie să depășească 0,4 secunde.
|
4.5.1.1.
|
Vehiculele remorcate echipate cu un circuit pneumatic de comandă și transmisie electrică a comenzii trebuie supuse încercării asigurând alimentarea lor cu energie electrică prin priza conformă cu ISO 7638:2003 (5 sau 7 contacte).
|
|
|
4.5.2.
|
În cazul vehiculelor remorcate cu circuit electric de comandă, timpul care se scurge între momentul în care semnalul produs de simulator depășește echivalentul a 65 kPa și momentul în care presiunea din elementul de acționare a frânei vehiculului remorcat atinge 75 % din valoarea sa asimptotică nu trebuie să depășească 0,4 secunde.
|
|
4.5.3.
|
În cazul vehiculelor remorcate echipate cu un circuit pneumatic și un circuit electric de comandă, timpul de răspuns se măsoară independent pentru fiecare circuit de comandă, în conformitate cu procedura corespunzătoare descrisă la punctele 4.5.1.1 și 4.5.2.
|
|
5.
Vehicule remorcate echipate cu sisteme de frânare hidraulice
|
5.1.
|
Încercările trebuie efectuate la o temperatură ambiantă cuprinsă între 15 °C și 30 °C.
|
|
5.2.
|
Timpii de răspuns ai vehiculului remorcat se măsoară fără tractor. Pentru a simula tractorul, este necesar să se prevadă un simulator de tractor la care să fie conectate racordurile de cuplare ale circuitului de comandă și ale circuitului suplimentar. În cazul în care vehiculul remorcat este echipat cu o priză electrică, astfel cum este precizat la punctul 2.1.5.1.3 din anexa I, această priză trebuie să fie conectată inclusiv la simulatorul de tractor (a se vedea punctul 2 din apendicele 2).
|
|
5.3.
|
Simulatorul de tractor are următoarele caracteristici:
5.3.1. Simulatorul de tractor trebuie să fie echipat cu tipurile de conexiuni specificate la punctele 2.1.5.1.1 și 2.1.5.1.3 din anexa I cu privire la tractor.
5.3.2. În cazul în care simulatorul de tractor este activat (de exemplu, de un întrerupător electric):
5.3.2.1. la racordul de cuplare al circuitului de comandă trebuie să fie generată o presiune de 11 500 + 500 kPa,
5.3.2.2. la racordul de cuplare al circuitului suplimentar trebuie să existe o presiune de 1 500 + 300 kPa.
5.3.3. În cazul în care circuitul de comandă al vehiculului remorcat nu este conectat, simulatorul de tractor trebuie să poată genera la racordul de cuplare al circuitului de comandă o presiune de 11 500 kPa într-un interval de 0,2 secunde de la activarea circuitului (de exemplu, de un întrerupător electric).
5.3.4. Lichidul hidraulic utilizat în simulatorul de tractor are o viscozitate de 60± 3 mm2/s la o temperatură de 40± 3 °C (de exemplu, lichidul hidraulic conform cu SAE 10W30). În timpul încercării pe simulatorul de tractor, temperatura lichidului hidraulic nu trebuie să depășească 45 °C.
5.3.5. În cazul în care vehiculul remorcat este echipat cu dispozitive de stocare a energiei hidraulice pentru a satisface cerințele privind sistemul de frânare de serviciu, dispozitivele de stocare a energiei se încarcă înainte de măsurarea timpilor de răspuns, la o presiune precizată de producător în raportul de încercare, astfel încât să fie atinsă performanța minimă prescrisă a sistemului de frânare de serviciu.
5.3.6. În cazul în care simulatorul de tractor este conectat la circuitul de comandă al simulatorului de vehicul remorcat (astfel cum este specificat la punctul 3.6.2), simulatorul de tractor se etalonează astfel încât timpul scurs de la activarea simulatorului de tractor până în momentul în care presiunea în dispozitivul de stocare a energiei cu piston (sau în dispozitivul echivalent) al circuitului de comandă al simulatorului de vehicul remorcat atinge valoarea de 11 500 kPa să fie egal cu 0,6+ 0,1 secunde. Pentru a atinge această performanță, debitul simulatorului de tractor trebuie reglat (de exemplu, cu un regulator de debit). Conductele de conectare ale circuitului de comandă al simulatorului de vehicul remorcat sunt purjate de aer înaintea acestei etalonări.
5.3.7. Dispozitivul de comandă al simulatorului de tractor este proiectat astfel încât performanța sa să nu fie afectată de persoana care efectuează încercarea.
|
|
5.4.
|
Cerințe de performanță
|
5.4.1.
|
În cazul în care simulatorul de tractor etalonat (a se vedea punctul 5.3.6) este conectat la vehiculul remorcat, timpul scurs între momentul în care simulatorul de tractor este activat (de exemplu, de un întrerupător electric) și momentul în care presiunea din cel mai defavorabil dispozitiv de acționare a frânei atinge 75 % din valoarea sa maximă nu trebuie să depășească 0,6 secunde.
În cazul unui sistem de frânare de serviciu, atunci când presiunea în dispozitivul de acționare a frânei atinge o valoare temporară maximă a presiunii care scade apoi la valoarea presiunii medii stabilizate, aceasta din urmă se ia în considerare pentru calculul valorii de 75 %.
|
|
6.
Tractoare echipate cu un sistem de frânare de serviciu cu frâne cu arc
|
6.1.
|
Măsurarea timpului de răspuns trebuie să fie efectuată cu frânele cu arc reglate cât mai precis posibil. Presiunea inițială din camera de comprimare a arcului, corespunzătoare acestei cerințe de încercare, trebuie specificată de producător.
|
|
6.2.
|
Timpul care se scurge de la activarea dispozitivului de comandă a frânei de serviciu (frânele complet eliberate) până la momentul în care presiunea în camera de compresie a arcului cilindrului de frână cel mai defavorabil atinge o presiune corespunzătoare unei valori egale cu 75 % din performanța de frânare prescrisă nu trebuie să depășească 0,6 secunde.
|
Apendicele 1
Exemple de simulatoare pneumatice
1. Reglarea simulatorului

2. Încercarea asupra remorcii
|
A
|
=
|
racord de alimentare cu supapă de închidere
|
|
C1
|
=
|
comutator de presiune al simulatorului, reglat la 65 kPa și la 490 kPa
|
|
C2
|
=
|
comutator de presiune pentru racordarea la elementul de acționare al frânei vehiculului remorcat, care urmează să funcționeze la 75 % din presiunea asimptotică în elementul de acționare al frânei CF
|
|
L
|
=
|
conducta de la orificiul O până la (și inclusiv) racordul său de cuplare TC, având un volum interior de 385 ± 5 cm3 la o presiune de 650 kPa
|
|
O
|
=
|
orificiu cu un diametru minim de 4 mm și maxim de 4,3 mm
|
|
PP
|
=
|
racord de încercare a presiunii
|
|
R1
|
=
|
rezervor de aer de 30 litri cu supapă de golire
|
|
R2
|
=
|
rezervor de etalonare, având, inclusiv racordul său de cuplare TC, un volum de 385 ± 5 cm3
|
|
R3
|
=
|
rezervor de etalonare, având, inclusiv racordul său de cuplare TC, un volum de 1 155 ± 15 cm3
|
|
TA
|
=
|
racord de cuplare, circuit de alimentare
|
|
V
|
=
|
dispozitiv de comandă a sistemului de frânare
|
|
TC
|
=
|
racord de cuplare, circuit de comandă
|
|
VRU
|
=
|
supapă-releu de urgență
|
3. Exemplu de simulator pentru circuitele electrice de comandă
|
ECL
|
=
|
Circuit electric de comandă conform cu ISO 7638:2003
|
|
SIMU
|
=
|
Simulator al octetului 3,4 al EBS 11, conform cu ISO 11992:2003, cu semnale de ieșire la pornire de 65 kPa și 650 kPa
|
|
A
|
=
|
Racord de alimentare cu supapă de închidere
|
|
C 2
|
=
|
Comutatorul de presiune care trebuie conectat la elementul de acționare a frânei vehiculului remorcat și care intră în funcțiune la o presiune egală cu 75 % din presiunea asimptotică în elementul de acționare al frânei CF
|
|
PP
|
=
|
Racord de încercare a presiunii
|
|
TA
|
=
|
Racord de cuplare, conducta de alimentare
|
|
VRU
|
=
|
Supapă-releu de urgență
|
Apendicele 2
Exemple de simulatoare hidraulice
1. Simulator de vehicul remorcat
1.1. Circuit suplimentar al simulatorului de vehicul remorcat

|
TA
|
=
|
racord de cuplare, circuit suplimentar (racord de tip mamă conform cu ISO 16028: 2006)
|
|
M
|
=
|
orificiu pentru încercarea la presiune
|
|
PT
|
=
|
traductor de presiune
|
|
P 1
|
=
|
conductă flexibilă în conformitate cu EN853:2007, cu un diametru interior de 12,5 mm
|
▼M1
|
A
|
=
|
acumulator hidraulic (presiune de preîncărcare: 1 000 kPa)
|
▼B
|
V
|
=
|
dispozitiv de purjare
|
|
P 2
|
=
|
conductă flexibilă cu diametrul interior de 10 mm
|
|
T
|
=
|
retur la rezervorul tractorului
|
1.2. Circuit de comandă al simulatorului de vehicul remorcat

|
TA
|
=
|
racord de cuplare, circuit de comandă (racord de tip mamă conform cu ISO 5676:1983)
|
|
M
|
=
|
orificiu pentru manometru sau pentru traductorul de presiune
|
|
FP
|
=
|
conductă flexibilă în conformitate cu EN853:2007, cu un diametru interior de 10 mm
|
|
RP
|
=
|
conductă rigidă cu diametrul interior de 10 mm
|
|
PT
|
=
|
traductor de presiune
|
|
C
|
=
|
cilindru (cilindri) (*)
|

2. Simulator de tractor

|
PT
|
=
|
traductoare de presiune
|
|
CLRV
|
=
|
supapă de siguranță a circuitului de comandă
|
|
SLRV
|
=
|
supapă de siguranță a circuitului suplimentar
|
|
SV
|
=
|
electrovalvă cu 3 căi
|
|
MV
|
=
|
supapă de modulare proporțională
|
|
TA
|
=
|
racord de cuplare, circuit suplimentar (racord de tip tată conform cu ISO 16028:2006)
|
|
TC
|
=
|
racord de cuplare, circuit suplimentar (racord de tip tată conform cu ISO 5676:1983)
|
|
EC
|
=
|
conexiune electrică (racord de tip mamă conform cu ISO 7638:2003)
|
ANEXA IV
Cerințe aplicabile surselor de energie și dispozitivelor de stocare a energiei ale sistemelor de frânare și ale mecanismelor de cuplare a sistemului de frânare al remorcilor, precum și vehiculelor echipate cu acestea
1.
Definiții
În sensul prezentei anexe:
1.1. „sistem de frânare hidraulică sau pneumatică cu energie stocată” înseamnă un sistem de frânare în care energia este furnizată de un lichid hidraulic sau de aerul sub presiune, înmagazinat în unul sau mai multe dispozitive de stocare a energiei alimentat de una sau mai multe pompe de presiune sau de un compresor (compresoare), fiecare dintre acestea fiind prevăzut cu un dispozitiv de limitare a presiunii la o valoare maximă (precizată de producător).
A. SISTEME DE FRÂNARE CU AER COMPRIMAT
1.
Capacitatea dispozitivelor de stocare a energiei (rezervoare de energie)
1.1. Cerințe generale
|
1.1.1.
|
Vehiculele la care funcționarea sistemului de frânare depinde de utilizarea aerului comprimat sunt prevăzute cu rezervoare a căror capacitate îndeplinește cerințele stabilite la punctele 1.2 și 1.3.
|
|
1.1.2.
|
Cu toate acestea, nu este obligatoriu ca rezervoarele să fie de o anumită capacitate în cazul în care sistemul de frânare este de așa natură încât, în absența oricărei rezerve de energie, este posibil să se obțină, cu dispozitivul de comandă a sistemului de frânare de serviciu, o performanță a frânării cel puțin egală cu cea prevăzută pentru sistemul de frânare de siguranță.
|
|
1.1.3.
|
Pentru verificarea conformității cu cerințele stabilite la punctele 1.2 și 1.3, frânele sunt reglate cât mai precis posibil.
|
1.2. Vehicule din categoria T
|
1.2.1.
|
Rezervoarele frânelor cu aer comprimat ale vehiculelor se construiesc astfel încât, după opt acționări cu curse complete ale dispozitivului de comandă a sistemului de frânare de serviciu, presiunea rămasă în rezervorul de aer comprimat să nu fie mai mică decât presiunea necesară pentru a obține performanța de frânare de siguranță specificată.
|
|
1.2.2.
|
În cursul încercării trebuie să fie îndeplinite următoarele condiții:
1.2.2.1. Presiunea inițială în rezervoare trebuie să fie cea indicată de către producător. Nivelul presiunii trebuie să permită atingerea eficacității prevăzute pentru sistemul de frânare de serviciu.
►M1
Presiunea inițială trebuie să fie specificată în dosarul informativ. ◄
1.2.2.2. Rezervorul sau rezervoarele nu trebuie să fie realimentate; de asemenea, rezervorul sau rezervoarele auxiliare trebuie să fie izolate.
1.2.2.3. În cazul vehiculelor autorizate să tracteze un vehicul, circuitul de alimentare este blocat, iar la circuitul de comandă se cuplează un rezervor cu o capacitate de 0,5 litri. Presiunea din rezervor este epuizată înaintea fiecărei acționări a frânelor. După efectuarea încercării prevăzute la punctul 1.2.1, presiunea din circuitul de comandă nu trebuie să fie mai mică decât jumătate din presiunea obținută la prima acționare a frânei.
|
1.3. Vehicule din categoriile R și S
|
1.3.1.
|
Rezervoarele montate pe vehiculele remorcate sunt de așa natură încât, după opt acționări cu curse complete ale sistemului de frânare de serviciu al tractorului, presiunea furnizată către piesele care o utilizează să nu scadă sub un nivel echivalent cu o jumătate din valoarea obținută la prima acționare a frânei și fără a acționa nici sistemul de frânare automată, nici sistemul de frânare de parcare al vehiculului remorcat.
|
|
1.3.2.
|
În cursul încercării sunt îndeplinite următoarele condiții:
1.3.2.1. Presiunea din rezervoare la începutul încercării este de 850 kPa.
1.3.2.2. Circuitul de comandă este deconectat; în plus, rezervoarele auxiliare sunt izolate.
1.3.2.3. Rezervorul nu se reumple în cursul încercării.
1.3.2.4. La fiecare acționare a frânei, presiunea din circuitul de comandă este de 750 kPa.
1.3.2.5. La fiecare acționare a frânei, mărimea semnalului digital din circuitul electric de comandă corespunde unei presiuni pneumatice de 750 kPa.
|
2.
Capacitatea surselor de energie
2.1. Dispoziții generale
Compresoarele îndeplinesc condițiile de mai jos:
2.2. Simboluri specifice pentru această secțiune
2.2.1. p1 presiunea corespunzătoare unei valori egale cu 65 % din presiunea p2 prevăzută la punctul 2.2.2.
2.2.2. p2 reprezintă valoarea specificată de către producător și prevăzută la punctul 1.2.2.1.
2.2.3. t1 reprezintă timpul necesar pentru ca presiunea relativă să crească de la 0 la p1; t2 reprezintă timpul necesar pentru ca presiunea relativă să crească de la 0 la p2.
2.3. Condiții de măsurare
|
2.3.1.
|
În toate cazurile, turația compresorului este cea obținută atunci când motorul funcționează la turația corespunzătoare puterii sale maxime sau la turația permisă de către regulator.
|
|
2.3.2.
|
Rezervoarele auxiliare sunt izolate în cursul încercărilor pentru determinarea timpilor t1 și t2.
|
|
2.3.3.
|
La vehiculele destinate tractării de vehicule, vehiculul remorcat este reprezentat de un rezervor a cărui presiune maximă relativă p (exprimată în kPa/100) este cea care poate fi furnizată prin circuitul de alimentare al tractorului și al cărui volum V (exprimat în litri) se calculează cu formula p × V = 20 R (R fiind masa maximă admisă, exprimată în tone, pe axele vehiculului remorcat).
|
2.4. Interpretarea rezultatelor
|
2.4.1.
|
Timpul t1 pentru dispozitivul de stocare a energiei cel mai defavorizat nu trebuie să depășească:
2.4.1.1. trei minute, în cazul vehiculelor care nu sunt autorizate să tracteze un vehicul remorcat;
2.4.1.2. șase minute, în cazul vehiculelor care sunt autorizate să tracteze un vehicul remorcat.
|
|
2.4.2.
|
Timpul t2 pentru rezervorul cel mai defavorizat nu trebuie să depășească:
2.4.2.1. șase minute, în cazul vehiculelor care nu sunt autorizate să tracteze un vehicul remorcat;
2.4.2.2. nouă minute, în cazul vehiculelor care sunt autorizate să tracteze un vehicul remorcat.
|
2.5. Încercare suplimentară
|
2.5.1.
|
Atunci când vehiculul este echipat cu un rezervor sau cu rezervoare auxiliare cu o capacitate totală care depășește 20 % din capacitatea totală a rezervoarelor de frânare, se efectuează o încercare suplimentară în cursul căreia nu se efectuează nicio intervenție legată de funcționarea supapelor care reglează umplerea rezervorului (rezervoarelor) auxiliar(e). În cursul acestei încercări se verifică faptul că timpul t3 necesar pentru a obține o creștere a presiunii de la 0 la p2 în rezervoarele de frânare este mai mic de:
2.5.1.1. opt minute, în cazul vehiculelor care nu sunt autorizate să tracteze un vehicul remorcat
2.5.1.2. unsprezece minute, în cazul vehiculelor care sunt autorizate să tracteze un vehicul remorcat.
|
|
2.5.2.
|
Încercarea se efectuează în condițiile prevăzute la punctele 2.3.1 și 2.3.3.
|
2.6. Tractoare
|
2.6.1.
|
Vehiculele care sunt autorizate să tracteze un vehicul remorcat îndeplinesc, de asemenea, cerințele menționate mai sus cu privire la vehiculele care nu au o astfel de autorizație. În acest caz, încercările de la punctele 2.4.1, 2.4.2 și 2.5.1 se efectuează fără rezervorul menționat la punctul 2.3.3.
|
3.
Racorduri de încercare a presiunii
|
3.1.
|
Racordul de încercare a presiunii se montează în poziția cea mai accesibilă pentru rezervorul cel mai defavorizat în sensul punctului 2.4.
|
|
3.2.
|
Racordurile de încercare a presiunii sunt în conformitate cu clauza 4 din standardul ISO 3583-1984.
|
B. SISTEME DE FRÂNARE CU VID
1.
Capacitatea dispozitivelor de stocare a energiei (rezervoare de energie)
1.1. Generalități
|
1.1.1.
|
Vehiculele la care funcționarea sistemului de frânare necesită utilizarea depresiunii (vidului) sunt echipate cu rezervoare a căror capacitate îndeplinește cerințele stabilite la punctele 1.2 și 1.3.
|
|
1.1.2.
|
Cu toate acestea, nu este obligatoriu ca rezervoarele să aibă o capacitate predefinită în cazul în care sistemul de frânare este de așa natură încât, în absența oricărei rezerve de energie, să fie posibilă obținerea unei performanțe de frânare cel puțin egale cu cea prevăzută pentru sistemul de frânare de siguranță.
|
|
1.1.3.
|
Pentru verificarea conformității cu cerințele prevăzute la punctele 1.2 și 1.3, frânele trebuie să fie reglate cât mai precis posibil.
|
1.2. Vehicule din categoriile T și C
|
1.2.1.
|
Rezervoarele vehiculelor agricole trebuie să fie de așa natură încât să fie în continuare posibilă obținerea performanței prevăzute pentru sistemele de frânare de siguranță:
1.2.1.1. după opt acționări cu curse complete ale dispozitivului de comandă a sistemului de frânare de serviciu când sursa de energie este o pompă de vid și
1.2.1.2. după patru acționări cu curse complete ale dispozitivului de comandă a sistemului de frânare de serviciu când sursa de energie este motorul.
|
|
1.2.2.
|
Încercarea se efectuează cu respectarea următoarelor condiții:
1.2.2.1. Nivelul inițial de energie din rezervor (rezervoare) este cel specificat de către producător. Acesta trebuie să fie de așa natură încât să permită obținerea performanței prevăzute a sistemului de frânare de serviciu și să corespundă unei depresiuni care nu depășește 90 % din depresiunea maximă creată de sursa de energie.
►M1
Nivelul inițial de energie trebuie să fie specificat în dosarul informativ. ◄
1.2.2.2. Rezervorul (rezervoarele) nu este (sunt) alimentat(e); în plus, rezervorul (rezervoarele) auxiliare este (sunt) izolate.
1.2.2.3. În cazul vehiculelor agricole autorizate să tracteze un vehicul remorcat, circuitul de alimentare este deconectat, iar la circuitul de comandă se cuplează un rezervor cu o capacitate de 0,5 litri. După efectuarea încercării prevăzute la punctul 1.2.1, nivelul de vid din circuitul de comandă nu trebuie să scadă sub un nivel echivalent cu jumătate din valoarea presiunii obținute la prima acționare a frânei.
|
1.3. Vehicule din categoriile R1, R2 și S1
|
1.3.1.
|
Rezervorul (rezervoarele) instalat(e) pe vehiculele remorcate este (sunt) de așa natură încât nivelul de vid furnizat componentelor utilizatoare să nu scadă sub jumătate din nivelul echivalent cu valoarea obținută la prima acționare a frânei după efectuarea unei încercări care cuprinde patru acționări cu cursă completă ale sistemului de frânare de serviciu al vehiculului remorcat.
|
|
1.3.2.
|
Încercarea se efectuează cu respectarea următoarelor condiții:
1.3.2.1. Nivelul inițial de energie din rezervor (rezervoare) este cel specificat de către producător. Acesta trebuie să fie de așa natură încât să permită atingerea performanței prescrise pentru sistemul de frânare de serviciu.
►M1
Nivelul inițial de energie trebuie să fie specificat în dosarul informativ. ◄
1.3.2.2. Rezervorul (rezervoarele) nu este (sunt) alimentat(e); în plus, rezervorul (rezervoarele) auxiliare este (sunt) izolate.
|
2.
Capacitatea surselor de energie
2.1. Generalități
|
2.1.1.
|
Pornind de la presiunea atmosferică ambiantă, sursa de energie este capabilă să atingă în rezervor (rezervoare), în trei minute, nivelul inițial specificat la punctul 1.2.2.1. În cazul unui vehicul autorizat să tracteze un vehicul remorcat, timpul necesar pentru a atinge acest nivel, în condițiile specificate la punctul 2.2, nu trebuie să depășească șase minute.
|
2.2. Condiții de măsurare
|
2.2.1.
|
Turația sursei de vid este:
2.2.1.1. în cazul în care sursa de vid este motorul vehiculului, turația motorului obținută cu vehiculul staționar, cu schimbătorul de viteze în poziția neutră și cu motorul funcționând la ralanti;
2.2.1.2. în cazul în care sursa de vid este o pompă, turația obținută cu motorul în funcțiune la 65 % din turația care corespunde puterii maxime și
2.2.1.3. în cazul în care sursa de vid este o pompă și motorul este echipat cu un regulator, turația obținută cu motorul funcționând la 65 % din turația maximă permisă de regulator.
|
|
2.2.2.
|
În cazul în care se intenționează cuplarea la vehicul a unui vehicul remorcat al cărui sistem de frânare de serviciu este acționat de o sursă de vid, vehiculul remorcat este reprezentat de un dispozitiv de stocare a energiei cu un volum V, exprimat în litri, calculat cu formula următoare:
V = 15 R
unde R reprezintă masa maximă permisă, exprimată în tone metrice, pe axele vehiculului remorcat.
|
C. SISTEME DE FRÂNARE HIDRAULICE CU REZERVĂ DE ENERGIE
1.
Capacitatea dispozitivelor de stocare a energiei
1.1. Generalități
|
1.1.1.
|
Vehiculele la care funcționarea sistemului de frânare necesită utilizarea unei rezerve de energie asigurată de un lichid hidraulic sub presiune sunt prevăzute cu dispozitive de stocare a energiei (acumulatori de energie) cu o capacitate conformă cu cerințele stabilite la punctele 1.2 și 1.3.
▼M1
Dispozitivele de stocare a energiei utilizate ca amortizoare de pulsații la sisteme de frânare hidraulice, în cazul în care performanța de frânare prescrisă este realizată de o sursă de energie nu sunt considerate dispozitive de acumulare de energie în sensul prezentei anexe.
▼B
|
|
1.1.2.
|
Cu toate acestea, nu este obligatoriu ca rezervoarele să aibă o capacitate anume în cazul în care sistemul de frânare este de așa natură încât, în absența oricărei rezerve de energie, să fie posibilă, cu folosirea dispozitivului de comandă a sistemului de frânare de serviciu, obținerea unei performanțe a frânării cel puțin egale cu cea prevăzută pentru sistemul de frânare de siguranță.
|
|
1.1.3.
|
Pentru verificarea conformității cu cerințele stabilite la punctele 1.2.1, 1.2.2 și 2.1, frânele trebuie să fie reglate cât mai precis posibil.
|
1.2. Vehicule din categoriile T și C
|
1.2.1.
|
Vehiculele echipate cu un sistem de frânare hidraulic cu energie de rezervă trebuie să îndeplinească următoarele cerințe:
1.2.1.1. După opt acționări cu cursă completă ale dispozitivului de comandă a sistemului de frânare de serviciu, este încă posibilă obținerea, la a noua acționare, a performanței prevăzute pentru sistemul de frânare de siguranță.
1.2.1.2. Încercarea se efectuează cu respectarea următoarelor condiții:
1.2.1.2.1. Încercarea începe la o presiune care poate fi specificată de producător, însă această presiune nu depășește presiunea de cuplare:
1.2.1.2.2. Dispozitivele de stocare a energiei nu trebuie alimentate; în plus, orice dispozitive de stocare a energiei auxiliare trebuie să fie izolate.
|
|
1.2.2.
|
Tractoarele echipate cu un sistem de frânare hidraulic cu rezervă de energie care nu pot îndeplini condițiile de la punctul 2.2.1.4.1 din anexa I sunt considerate ca fiind în conformitate cu cerințele de la punctul respectiv dacă respectă următoarele condiții:
1.2.2.1. După orice defecțiune a transmisiei, trebuie să fie încă posibil ca, după opt acționări cu cursă completă ale dispozitivului de comandă a sistemului de frânare de serviciu, la a noua acționare să se atingă cel puțin performanța prevăzută pentru sistemul de frânare de siguranță sau, în cazul în performanța prescrisă pentru sistemul de frânare de siguranță care necesită utilizarea rezervei de energiei se obține printr-un dispozitiv de comandă separat, trebuie ca, după opt acționări cu cursă completă, să se mai poată obține, la a noua acționare, performanța reziduală prevăzută la punctul 3.1.4 din anexa II la prezentul regulament.
1.2.2.2. Încercarea se efectuează cu respectarea următoarelor condiții:
1.2.2.2.1. cu sursa de energie staționară sau funcționând la o turație corespunzătoare turației la ralanti a motorului, se poate provoca o defecțiune a transmisiei. Înaintea provocării defecțiunii, dispozitivele de stocare a energiei sunt la o presiune care poate fi specificată de către producător, dar care nu depășește presiunea de cuplare.
1.2.2.2.2. Echipamentul auxiliar și dispozitivele aferente de stocare a energiei, dacă există, sunt izolate.
|
1.3. Vehicule din categoriile R și S
|
1.3.1.
|
Dacă vehiculele remorcate sunt echipate cu dispozitive de stocare a energiei (rezervoare de energie), acestea trebuie să fie de așa natură încât, după opt acționări cu cursă completă ale sistemului de frânare de serviciu al tractorului, nivelul de energie furnizat către piesele care utilizează energia să nu scadă sub un nivel echivalent cu jumătate din valoarea obținută la prima acționare a frânei și fără a acționa sistemul de frânare automată sau sistemul de frânare de parcare al vehiculului remorcat.
|
|
1.3.2.
|
În cursul încercării sunt îndeplinite următoarele condiții:
1.3.2.1. Presiunea din dispozitivele de stocare a energiei la începutul încercării este de 15 000 kPa;
▼M2
1.3.2.1.1. În cazul sistemelor care utilizează dispozitive de stocare a energiei care, pentru a îndeplini cerințele privind eficacitatea frânării, operează la o presiune de funcționare maximă mai mare de 15 000 kPa, presiunea din dispozitivele de stocare a energiei la începutul încercării este presiunea maximă prevăzută de producător.
1.3.2.2. Circuitul suplimentar este deconectat; în plus, dispozitivul (dispozitivele) auxiliar(e) de stocare a energiei este (sunt) izolat(e);
1.3.2.3. Dispozitivul (dispozitivele) de stocare a energiei nu se realimentează în cursul încercării.
1.3.2.4. La fiecare acționare a frânei, presiunea din circuitul de comandă hidraulic este de 13 300 kPa.
|
2.
Capacitatea surselor de energie hidraulică
Sursele de energie îndeplinesc condițiile stabilite la punctele următoare:
2.1. Vehicule din categoriile T și C
2.1.1 Simboluri
2.1.1.1. „p1” reprezintă presiunea maximă de funcționare a sistemului (presiunea la decuplare) în dispozitivele de stocare a energiei specificate de către producător.
2.1.1.2. „p2” reprezintă presiunea după patru acționări cu cursă completă ale dispozitivului de comandă a sistemului de frânare de serviciu, începând de la p1, fără a alimenta dispozitivele de stocare a energiei.
2.1.1.3. „t” reprezintă timpul necesar pentru ca presiunea să crească de la p2 la p1 în dispozitivele de stocare a energiei, fără acționarea dispozitivului de comandă a sistemului de frânare de serviciu.
2.1.2. Condiții de măsurare
|
2.1.2.1.
|
În cursul încercării de determinare a timpului t, turația de alimentare a sursei de energie este cea obținută atunci când motorul funcționează la turația corespunzătoare puterii sale maxime sau la turația permisă de regulator.
|
|
2.1.2.2.
|
În cursul încercării de determinare a timpului t, dispozitivele de stocare a energiei auxiliare nu se izolează altfel decât în mod automat.
|
▼M1
2.1.3. Interpretarea rezultatelor
Timpul t nu trebuie să depășească 30 s, în cazul tractoarelor la care nu este autorizată cuplarea unui vehicul remorcat.
▼B
2.2. Tractoare echipate cu un circuit de comandă hidraulic pentru vehiculele remorcate
|
2.2.1.
|
Pentru a determina debitul furnizat de sursa de energie, circuitul suplimentar al simulatorului de vehicul remorcat prevăzut la punctul 3.6.2.1 din anexa III la prezentul regulament se conectează la racordul de cuplare al circuitului suplimentar hidraulic al tractorului.
|
|
2.2.2.
|
Încercarea este efectuată în următoarele condiții:
2.2.2.1. Încercarea trebuie efectuată la o temperatură ambiantă cuprinsă între 15 °C și 30 °C.
2.2.2.2. Circuitul suplimentar al simulatorului de vehicul remorcat trebuie conectat la racordul de cuplare al circuitului suplimentar înainte de încercare, motorul fiind oprit.
2.2.2.3. Turația motorului tractorului în timpul încercării este cu 25 % mai mare decât turația la ralanti.
2.2.2.4. Comanda frânei de parcare a tractorului este eliberată complet în timpul încercării.
|
|
2.2.3.
|
Motorul fiind pornit și dispozitivul de purjare fiind complet închis, intervalul de timp necesar pentru ca presiunea la orificiul de încercare situat în apropierea racordului de tip mamă conform cu ISO 16028:2006 să crească de la 300 kPa la 1 500 kPa nu trebuie să depășească 2,5 secunde.
|
2.3. Vehicule din categoriile R și S
În cazul în care un vehicul utilizează, pentru asistarea sistemului de frânare de serviciu, un dispozitiv de stocare a energiei care este reîncărcat prin presiunea circuitului de comandă în timpul acționării frânei de serviciu și/sau printr-o sursă de energie instalată pe vehiculul remorcat, trebuie respectate următoarele cerințe:
|
2.3.1.
|
Sursa de energie este alimentată de simulatorul de tractor, în conformitate cu dispozițiile de la apendicele 2 al anexei III, prin priza electrică conformă cu ISO 7638:2003.
|
|
2.3.2.
|
Simboluri
2.3.2.1. „pR1” reprezintă presiunea maximă de funcționare a sistemului (presiunea la decuplare) în dispozitivul de stocare a energiei specificat de către producător.
2.3.2.2. „pR2” reprezintă presiunea după patru acționări cu cursă completă ale dispozitivului de comandă a sistemului de frânare de serviciu al tractorului.
2.3.2.3. „tR” reprezintă timpul necesar pentru ca presiunea să crească de la pR2 la pR1 în dispozitivul de stocare a energiei, fără acționarea dispozitivului de comandă a sistemului de frânare de serviciu al tractorului.
|
|
2.3.3.
|
Condiții de măsurare În cursul încercării de determinare a timpului tR, trebuie îndeplinite următoarele cerințe:
2.3.3.1. Presiunea din dispozitivul de stocare a energiei la începutul încercării este presiunea „pR1”.
2.3.3.2. Sistemul de frânare de serviciu trebuie să fie acționat de patru ori prin circuitul de comandă al simulatorului de tractor.
2.3.3.3. La fiecare acționare a frânei, presiunea din circuitul de comandă trebuie să fie egală cu 13 300 kPa.
2.3.3.4. Dispozitivele de stocare a energiei auxiliare nu se izolează altfel decât automat.
2.3.3.5. Supapa care permite alimentarea dispozitivului de stocare prin presiunea circuitului de comandă trebuie să fie închisă în timpul încercării.
|
|
2.3.4.
|
Interpretarea rezultatelor Timpul tR nu depășește 4 minute.
|
3.
Caracteristicile dispozitivelor de alarmă
Cu motorul oprit și începând de la o presiune ce poate fi specificată de către producător, dar care nu depășește presiunea de cuplare, dispozitivul de alarmă nu trebuie să se declanșeze după două acționări cu cursă completă ale dispozitivului de comandă a sistemului de frânare de serviciu.
ANEXA V
Cerințe aplicabile frânelor cu arc și vehiculelor echipate cu astfel de frâne
1.
Cerințe de construcție, montaj și control
1.1. Definiții
În sensul prezentei anexe:
1.1.1. „sisteme de frânare cu arc” înseamnă sisteme de frânare la care energia necesară pentru frânare este furnizată de unul sau mai multe arcuri care acționează ca un dispozitiv de stocare a energiei;
1.1.2. „presiune” înseamnă presiune negativă în cazul în care comprimarea arcurilor se obține prin intermediul unui dispozitiv de vid.
2.
Cerințe generale
În sensul prezentei anexe, viteza maximă prin construcție este considerată a fi în sensul spre înainte al vehiculului, dacă nu se specifică altfel în mod explicit.
|
2.1.
|
Un sistem de frânare cu arc nu trebuie utilizat ca sistem de frânare de serviciu, cu excepția situației precizate la punctul 2.2. Cu toate acestea, în eventualitatea unei defecțiuni a unei componente a transmisiei sistemului de frânare de serviciu, se poate utiliza un sistem de frânare cu arc pentru a obține performanța reziduală prevăzută la punctul 3.1.4 din anexa II, în cazul în care conducătorul poate acționa gradual sistemul de frânare.
|
2.1.1.
|
Frânele cu arc pot fi utilizate drept sistem de frânare de siguranță numai în cazul în care conducătorul poate acționa gradual sistemul de frânare, iar cerințele de performanță din anexa II sunt respectate.
În mod excepțional, în cazul vehiculelor cu o viteză maximă prin construcție de cel mult 30 km/h care utilizează frâne cu arc a căror comandă este de tip ÎNCHIS/DESCHIS (de exemplu, un buton sau un întrerupător) și care nu permit conducătorului să acționeze gradual sistemul de frânare, ca sistem de frânare de siguranță, trebuie îndeplinite următoarele cerințe:
2.1.1.1. Conducătorul trebuie să fie în măsură să acționeze comanda frânelor cu arc de pe scaunul conducătorului auto, având în același timp cel puțin o mână pe volan sau ghidon.
2.1.1.2. Performanța de frânare prescrisă în anexa II la prezentul regulament este respectată.
2.1.1.3. Performanța prevăzută este obținută fără devierea vehiculului de la traiectoria sa, fără vibrații anormale și fără blocarea roților.
|
|
2.1.2.
|
La vehiculele remorcate nu se utilizează frâne cu arc cu dispozitiv cu vid.
Energia necesară pentru a comprima arcul în vederea decuplării frânei este furnizată și controlată de dispozitivul de comandă acționat de către conducător.
|
|
|
2.2.
|
La vehiculele cu o viteză maximă prin construcție de cel mult 30 km/h, un sistem de frânare cu arc poate fi utilizat ca sistem de frânare de serviciu numai în cazul în care conducătorul auto poate acționa gradual sistemul de frânare al acestuia.
În cazul unui sistem de frânare cu arc utilizat ca un sistem de frânare de serviciu, trebuie îndeplinite următoarele cerințe suplimentare:
▼M1
2.2.1 cerințele privind timpul de răspuns, astfel cum se prevede la punctul 6 din anexa III;
▼B
2.2.2. cu frânele cu arc reglate cât mai precis posibil, trebuie să se poată acționa:
2.2.2.1. frâna de 10 ori într-un minut, cu motorul la turația de ralanti (acționările frânei fiind distribuite uniform în acest interval);
2.2.2.2. sistemul de frânare de serviciu de 6 ori, pornind de la o presiune care nu depășește presiunea de cuplare a sursei de energie. În cursul acestei încercări, dispozitivele de stocare a energie nu sunt alimentate. În plus, orice dispozitiv de stocare a energiei pentru echipamente auxiliare trebuie să fie izolat.
2.2.3. Frânele cu arc trebuie să fie proiectate în așa fel încât să nu facă obiectul unor defecțiuni la oboseală. De aceea, producătorul pune la dispoziția serviciului tehnic rapoartele de încercare de anduranță corespunzătoare.
|
|
2.3.
|
O mică variație a limitelor presiunii, care poate apărea în circuitul de alimentare al camerei de comprimare a arcului, nu determină o variație puternică a forței de frânare.
|
|
2.4.
|
Tractoarele echipate cu frâne cu arc îndeplinesc următoarele condiții:
2.4.1. Circuitul de alimentare a camerei de comprimare a arcului include o rezervă proprie de energie sau este alimentat de la cel puțin două rezerve de energie independente. Circuitul de alimentare pneumatic sau circuitul suplimentar hidraulic al vehiculului remorcat poate să se ramifice de la acest circuit de alimentare cu condiția ca o cădere de presiune în circuitele susmenționate să nu poată activa dispozitivul de comandă a frânelor cu arc.
2.4.2. Echipamentul auxiliar poate să obțină energia necesară din circuitul de alimentare a frânei cu arc numai dacă funcționarea acestuia, chiar în cazul unei defecțiuni a sursei de energie, nu determină scăderea rezervei de energie pentru frânele cu arc la un nivel la care nu mai este posibilă decuplarea acestora.
2.4.3. În orice caz, în cursul reîncărcării sistemului de frânare de la presiunea zero, frânele cu arc rămân aplicate la maximum, indiferent de poziția dispozitivului de comandă, până când presiunea din sistemul de frânare de serviciu este suficientă pentru a asigura cel puțin performanța prevăzută a frânării de siguranță pentru vehiculul încărcat, utilizând dispozitivul de comandă a frânei de serviciu.
2.4.4. Odată acționate, frânele cu arc nu se decuplează dacă presiunea în sistemul de frânare de serviciu nu este suficient de ridicată pentru a asigura cel puțin performanța reziduală de frânare prevăzută pentru vehiculul încărcat, astfel cum este precizat la punctul 3.1.4 din anexa II, prin acționarea dispozitivului de comandă a frânei de serviciu.
|
|
2.5.
|
În cazul tractoarelor, sistemul trebuie să fie proiectat astfel încât să fie posibilă cuplarea și decuplarea frânelor de cel puțin trei ori dacă presiunea inițială din camera de comprimare a arcului este egală cu presiunea maximă prevăzută prin construcție. În cazul vehiculelor remorcate cu sisteme de frânare cu aer comprimat, este posibilă decuplarea frânelor de cel puțin trei ori după ce vehiculul remorcat a fost decuplat, presiunea în conducta de alimentare fiind de 750 kPa înainte de decuplare. Totuși, înainte de verificare, frâna de urgență se decuplează. Aceste condiții sunt satisfăcute atunci când frânele sunt reglate cât mai precis posibil. În plus, trebuie să fie posibilă cuplarea și decuplarea frânei de parcare, așa cum este specificat la punctul 2.2.2.10 din anexa I, atunci când remorca este cuplată la tractor.
|
|
2.6.
|
În cazul tractoarelor, presiunea din camera de comprimare a arcurilor la care arcurile încep să acționeze frânele, acestea din urmă fiind reglate cât mai precis posibil, nu trebuie să fie mai mare de 80 % din nivelul minim al presiunii normale disponibile.
|
|
2.7.
|
În cazul vehiculelor remorcate cu sisteme de frânare cu aer comprimat, presiunea din camera de comprimare a arcurilor la care arcurile încep să acționeze frânele nu trebuie să fie mai mare decât cea obținută după patru acționări cu cursă completă ale sistemului de frânare de serviciu, în conformitate cu punctul 1.3 din partea A a anexei IV. Presiunea inițială este fixată la 700 kPa.
|
|
2.8.
|
În cazul vehiculelor remorcate cu sisteme de frânare hidraulice care nu utilizează energie stocată pentru presurizarea camerei de comprimare a arcurilor, presiunea la care arcurile încep să acționeze frânele nu trebuie să fie mai mare de 1 200 kPa.
|
|
2.9.
|
În cazul vehiculelor remorcate cu sisteme de frânare hidraulice care utilizează energia stocată pentru presurizarea camerei de comprimare a arcurilor, presiunea din camera de comprimare a arcurilor la care arcurile încep să acționeze frânele nu trebuie să fie mai mare decât cea obținută după patru acționări cu cursă completă ale sistemului de frânare de serviciu, în conformitate cu punctul 1.3 din partea C a anexei IV. Presiunea inițială este fixată la 12 000 kPa. În plus, presiunea din circuitul suplimentar la care arcurile încep să acționeze frânele nu trebuie să fie mai mare de 1 200 kPa.
|
|
2.10.
|
Când presiunea în circuitul de alimentare a camerei de compresie — exclusiv circuitele unui dispozitiv auxiliar de decuplare a frânelor utilizând un fluid sub presiune — scade până la nivelul la care componentele frânei se pun în mișcare, se activează un avertizor optic sau sonor. Dacă această condiție este îndeplinită, dispozitivul de avertizare poate consta în indicatorul de avertizare menționat la punctul 2.2.1.29.1.1 din anexa I. Prezenta dispoziție nu se aplică pentru vehiculele remorcate.
|
|
2.11.
|
Atunci când un tractor autorizat să tracteze un vehicul din categoriile R și S cu frânare continuă sau semicontinuă este dotat cu un sistem de frânare cu arc, acționarea automată a acestui sistem de frânare trebuie să cauzeze aplicarea frânelor vehiculului remorcat.
|
|
2.12.
|
Vehiculele remorcate care utilizează rezervele de energie ale sistemului de frânare de serviciu cu aer comprimat pentru a îndeplini cerințele privind frânarea automată, astfel cum este stabilit la punctul 3.2.3 din anexa II, trebuie să îndeplinească, de asemenea, una dintre următoarele cerințe atunci când vehiculul remorcat este decuplat de tractor, iar dispozitivul de comandă a sistemului de frânare de parcare a vehiculului remorcat este în poziție liberă (frânele cu arcuri nu sunt acționate):
2.12.1. în cazul în care rezervele de energie ale sistemului de frânare de serviciu scad la o presiune de cel puțin 280 kPa, presiunea în camera de comprimare a frânei cu arc se reduce la 0 kPa pentru a aplica complet frânele cu arc. Această cerință este considerată respectată dacă presiunea în rezerva de energie a sistemului de frânare de serviciu este menținută la un nivel constant de 280 kPa;
2.12.2. o scădere a presiunii din rezerva de energie a sistemului de frânare de serviciu duce la o reducere corespunzătoare a presiunii în camera de comprimare a arcurilor.
|
3.
Sistemul auxiliar de decuplare a frânelor
|
3.1.
|
Un sistem de frânare cu arc este proiectat astfel încât, în eventualitatea unei defecțiuni în acest sistem, decuplarea frânelor să fie totuși posibilă. Acest lucru se poate realiza prin folosirea unui dispozitiv auxiliar de decuplare a frânelor (pneumatic, hidraulic, mecanic etc.).
Dispozitivele auxiliare de decuplare a frânelor care folosesc o rezervă de energie pentru decuplare obțin această energie dintr-o sursă independentă de cea folosită în mod normal pentru sistemul de frânare cu arc. Lichidul pneumatic sau hidraulic dintr-un astfel de dispozitiv auxiliar de decuplare a frânelor poate acționa asupra aceleiași suprafețe a pistonului din camera de comprimare a arcurilor care este folosită pentru sistemul normal de frânare cu arcuri, cu condiția ca dispozitivul auxiliar de decuplare a frânelor să folosească un circuit separat. Racordul dintre acest circuit și cel normal, care conectează dispozitivul de comandă cu elementul de acționare a frânelor cu arc, este situat, pentru fiecare element de acționare a frânei, imediat înainte de orificiul camerei de comprimare a arcurilor, în cazul în care nu este parte integrantă a elementului de acționare. Acest racord include un dispozitiv care să prevină interacțiunea unui circuit cu celălalt. Dispozițiile prevăzute la punctul 2.2.1.5 din anexa I se aplică inclusiv acestui dispozitiv.
|
3.1.1.
|
În sensul cerințelor prevăzute la punctul 3.1, componentele transmisiei sistemului de frânare nu sunt considerate ca susceptibile de a se defecta dacă, în conformitate cu punctul 2.2.1.2.7 din anexa I, acestea nu sunt considerate ca fiind susceptibile să se rupă, cu condiția de a fi confecționate din metal sau dintr-un material cu caracteristici similare și de a nu suferi deformări importante la o frânare normală.
|
|
|
3.2.
|
Dacă funcționarea dispozitivului auxiliar prevăzut la punctul 3.1 necesită folosirea unei unelte sau a unei chei, unealta sau cheia respectivă se păstrează la bordul vehiculului.
|
|
3.3.
|
Atunci când un sistem auxiliar de decuplare a frânelor utilizează energie stocată pentru a decupla frânele cu arc, se aplică următoarele cerințe suplimentare:
3.3.1. În cazul în care dispozitivul de comandă a sistemului auxiliar de decuplare a frânelor cu arc este același cu cel utilizat pentru sistemul de frânare de siguranță sau de parcare, cerințele stabilite la punctul 2.4 se aplică în toate cazurile.
3.3.2. În cazul în care dispozitivul de comandă a sistemului auxiliar de decuplare a frânelor cu arc este separat de dispozitivul de comandă a sistemului de frânare de siguranță sau de parcare, cerințele stabilite la punctul 2.3 se aplică ambelor sisteme de comandă. Cu toate acestea, cerințele stabilite la punctul 2.4.4 de mai sus nu se aplică sistemului auxiliar de decuplare a frânelor cu arc. În plus, dispozitivul de comandă a sistemului auxiliar de decuplare se amplasează astfel încât să fie protejat împotriva acționării de către conducător atunci când se află în poziția normală de conducere.
|
|
3.4.
|
Dacă sistemul auxiliar de decuplare funcționează cu aer comprimat, sistemul trebuie să fie activat de un dispozitiv de comandă separat, neconectat la dispozitivul de comandă a sistemului de frânare cu arc.
|
ANEXA VI
Cerințe aplicabile sistemelor de frânare de parcare echipate cu un dispozitiv de blocare mecanică a cilindrilor de frână
1.
Definiții
În sensul prezentei anexe:
1.1. „dispozitiv de blocare mecanică a cilindrilor de frână” înseamnă un dispozitiv care asigură funcționarea sistemului de frânare de parcare prin intermediul blocării mecanice a tijei pistonului de frână. Blocarea mecanică se obține prin evacuarea lichidului comprimat din camera de blocare; dispozitivul de blocare mecanică este proiectat astfel încât să poată fi deblocat atunci când presiunea din camera de blocare este restabilită.
2.
Cerințe
|
2.1.
|
Dispozitivul de blocare mecanică a cilindrilor de frână este conceput în așa fel încât să poată fi deblocat când camera de blocare este presurizată din nou.
|
|
2.2.
|
Când presiunea din camera de blocare se apropie de nivelul corespunzător dispozitivului de blocare mecanică a cilindrilor de frână, se declanșează un sistem de avertizare optic sau sonor. Această dispoziție nu se aplică vehiculelor remorcate. În cazul vehiculelor remorcate, presiunea corespunzătoare dispozitivului de blocare mecanică a cilindrilor de frână nu depășește 4 kPa. Obținerea performanței sistemului de frânare de parcare este posibilă după orice defectare a sistemului de frânare de serviciu al vehiculului remorcat. În plus, este posibilă decuplarea frânelor de cel puțin trei ori după ce vehiculul remorcat a fost decuplat, presiunea în conducta de alimentare fiind de 650 kPa înainte de decuplare. Aceste condiții sunt satisfăcute atunci când frânele sunt reglate cât mai precis posibil. De asemenea, trebuie să fie posibilă cuplarea și decuplarea sistemului de frânare de parcare, astfel cum este specificat la punctul 2.2.2.10 din anexa I, atunci când vehiculul remorcat este cuplat la tractor.
|
|
2.3.
|
În cazul cilindrilor de frână prevăzuți cu un dispozitiv de blocare mecanică a cilindrilor de frână, elementul de acționare a frânei poate fi activat de oricare dintre cele două rezerve de energie.
|
|
2.4.
|
Cilindrul frânei blocate nu poate fi deblocat decât dacă se asigură posibilitatea acționării din nou a frânei după această deblocare.
|
|
2.5.
|
În eventualitatea unei defecțiuni la sursa de alimentare cu energie a camerei de blocare, trebuie să existe un sistem auxiliar de deblocare (de exemplu, mecanic sau pneumatic), care folosește, de exemplu, aerul din unul dintre pneurile vehiculului.
|
|
2.6.
|
Dispozitivul de comandă trebuie să fie astfel încât, odată acționat, să efectueze, în ordine, operațiunile următoare: să cupleze frânele astfel încât să se ajungă la gradul de performanță prevăzut pentru frânarea de parcare, să blocheze frânele în acea poziție și apoi să anuleze forța de cuplare a frânelor.
|
ANEXA VII
▼M1
Cerințe alternative privind încercările pentru vehiculele pentru care au fost efectuate încercări echivalente încercărilor de tip I, de tip II sau de tip III
1.
Definiții
În sensul prezentei anexe:
1.1. „vehicul remorcat luat în considerare” înseamnă un vehicul remorcat reprezentativ pentru tipul de vehicul remorcat care face obiectul procedurii de omologare de tip;
1.2. „identice” înseamnă piesele cu caracteristici geometrice și mecanice identice, precum și materialele utilizate pentru fabricarea componentelor vehiculelor;
1.3. „axă de referință” înseamnă o axă pentru care există un raport de încercare;
1.4. „frână de referință” înseamnă o frână pentru care există un raport de încercare;
1.5. „masa nominală de încercare” este masa unui disc sau a unui tambur pe care producătorul o specifică pentru discul sau tamburul respectiv supus încercării corespunzătoare de către serviciul tehnic;
1.6. „masa efectivă de încercare” este masa măsurată de serviciul tehnic înainte de încercare;
1.7. „pragul cuplului aplicat frânei” este cuplul aplicat necesar pentru producerea unui cuplu de frânare măsurabil;
1.8. „pragul cuplului aplicat frânei declarat” înseamnă pragul cuplului aplicat frânei declarat de producător și care este reprezentativ pentru frână;
1.9. „diametrul exterior declarat” este diametrul exterior al unui disc, declarat de producător, care este un diametru exterior reprezentativ pentru disc;
1.10. „diametrul exterior nominal” este diametrul exterior pe care producătorul îl specifică pentru discul supus încercării corespunzătoare de către serviciul tehnic;
1.11. „diametrul exterior efectiv” este diametrul exterior măsurat de serviciul tehnic înainte de încercare;
1.12. „lungimea efectivă a axei cu came” este distanța de la linia centrală a camei în formă de S la linia centrală a levierului de comandă;
1.13. „factor de frânare” este raportul dintre amplificarea de intrare și de ieșire a frânei.
2.
Cerințe generale
În următoarele cazuri, nu este necesară efectuarea încercărilor de tip I și/sau de tip II sau de tip III, prevăzute în anexa II, asupra unui vehicul și asupra sistemelor acestuia pentru care a fost solicitată omologarea:
2.1. Atunci când vehiculul respectiv este un tractor sau un vehicul remorcat care, din punctul de vedere al pneurilor, al energiei de frânare absorbite de fiecare axă și al modului de montare al pneurilor și frânelor, este identic, în privința frânării, cu un tractor sau un vehicul remorcat care:
2.1.1. a trecut cu succes o încercare de tip I și/sau de tip II sau de tip III; și
2.1.2. a fost omologat, cu privire la energia de frânare absorbită, pentru o masă pe axă care nu este inferioară celei a vehiculului în cauză.
2.2. Atunci când vehiculul luat în considerare este un tractor sau un vehicul remorcat a cărui axă sau ale cărui axe sunt, în privința pneurilor, energiei de frânare absorbite de fiecare axă și modului de montare a anvelopelor și frânelor, identice, din punctul de vedere al sistemului de frânare, cu o axă sau mai multe axe care au trecut cu succes, în mod individual, încercările de tip I și/sau de tip II sau de tip III pentru mase pe axă cel puțin egale cu cele ale vehiculului în cauză, cu condiția ca energia de frânare absorbită de fiecare axă să nu depășească energia absorbită per ax în timpul încercării sau încercărilor de referință efectuate separat pe acea axă.
2.3. Atunci când vehiculul în cauză este echipat cu un sistem de frânare de anduranță, altul decât frâna de motor, identic cu un sistem de frânare de anduranță care a fost deja supus încercării în următoarele condiții:
2.3.1. Într-o încercare efectuată pe o pantă cu o înclinație de cel puțin 6 % (încercare de tip II), sistemul de frânare de anduranță a stabilizat singur un vehicul cu o masă maximă în momentul efectuării încercării cel puțin egală cu masa maximă a vehiculului care face obiectul omologării;
2.3.2. În cadrul încercării de mai sus se verifică dacă viteza de rotație a părților rotative ale sistemului de frânare de anduranță, atunci când vehiculul se deplasează cu o viteză de 30 km/h, este astfel încât cuplul de încetinire să fie cel puțin egal cu cel din timpul încercării menționate la punctul 2.3.1.
2.4. Atunci când vehiculul respectiv este un vehicul remorcat, prevăzut cu frâne cu aer comprimat cu camă în formă de S sau cu frâne cu disc, care îndeplinesc condițiile de verificare din apendicele 1 privind controlul caracteristicilor față de cele menționate în raportul unei axe de referință, astfel cum este indicat în raportul de încercare. Alte modele de frână, diferite de frânele cu aer comprimat cu camă în formă de S sau de frânele cu disc, pot fi omologate pe baza prezentării unor informații echivalente.
▼B
3.
Cerințe specifice pentru vehiculele remorcate
În cazul vehiculelor remorcate, aceste cerințe sunt considerate ca fiind îndeplinite în ceea ce privește punctele 2.1 și 2.2 dacă identificatorii menționați la punctul 3.7 din apendicele 1 pentru axa sau frâna vehiculului remorcat supus încercării sunt incluși într-un raport privind o axă/o frână de referință.
▼M1
4.
Certificatul de omologare
La aplicarea cerințelor de mai sus, certificatul de omologare de tip trebuie să includă următoarele elemente:
4.1. În cazul de la punctul 2.1 din prezenta anexă, trebuie precizat numărul de omologare al vehiculului care a făcut obiectul încercării de referință de tip I și/sau de tip II sau de tip III.
4.2. În cazurile de la punctul 2.2 din prezenta anexă, trebuie completat tabelul I conform modelului stabilit în anexa V la Regulamentul de punere în aplicare (UE) 2015/504.
4.3. În cazurile de la punctul 2.3 din prezenta anexă, trebuie completat tabelul II conform modelului stabilit în anexa V la Regulamentul de punere în aplicare (UE) 2015/504.
4.4. Dacă se aplică punctul 2.4 din prezenta anexă, trebuie completat tabelul III conform modelului stabilit în anexa V la Regulamentul de punere în aplicare (UE) 2015/504.
▼B
5.
Documentație
În cazul în care solicitantul unei omologări de tip într-un stat membru face trimitere la o omologare de tip acordată într-un alt stat membru, el trebuie să depună documentația referitoare la acea omologare de tip acordată.
Apendicele 1
Proceduri alternative pentru încercările de tip I sau de tip III pentru frânele vehiculelor remorcate
1.
Generalități
|
1.1.
|
În conformitate cu punctul 2.4, nu este necesar să se realizeze încercările de tip I sau de tip III la omologarea de tip a vehiculului în cazul în care componentele sistemului de frânare îndeplinesc condițiile din prezentul apendice, iar performanța calculată corespunzătoare a frânării este conformă cu dispozițiile prezentului regulament pentru categoria respectivă de vehicule.
|
|
1.2.
|
Încercările realizate conform metodelor descrise în prezentul apendice sunt considerate a fi conforme cu condițiile de mai sus.
|
|
1.3.
|
Încercările efectuate în conformitate cu punctul 3.6 și rezultatele din raportul de încercare trebuie să fie acceptate ca mijloc de a dovedi conformitatea cu cerințele stabilite la punctul 2.2.2.8.1 din anexa I.
|
|
1.4.
|
Reglarea frânei (frânelor) se efectuează înainte de efectuarea încercării de tip III de mai jos, în conformitate cu următoarea procedură, după caz:
1.4.1. În cazul frânei (frânelor) pneumatice a(le) vehiculului remorcat, reglarea frânelor trebuie să fie astfel încât să permită funcționarea dispozitivului de reglare automată a frânelor. În acest scop, cursa elementului de acționare se reglează la:
s0 > 1,1 · sre-adjust
(limita superioară nu depășește o valoare recomandată de producător),
unde:
|
sre-adjust
|
este cursa de reajustare specificată de producătorul dispozitivului de reglare automată a frânei, adică cursa la care începe reajustarea ansamblului de garnituri de frână pentru o presiune a elementului de acționare egală cu 100 kPa.
|
Dacă, în urma unui acord cu serviciul tehnic, se decide că măsurarea cursei elementului de acționare nu este necesară, valoarea inițială se stabilește de comun acord cu serviciul tehnic.
Pe baza condiției de mai sus, frâna se acționează succesiv de 50 de ori, la o presiune a elementului de acționare de 200 kPa. După aceasta, frâna se acționează o singură dată, la o presiune a elementului de acționare de minimum 650 kPa.
1.4.2. În cazul frânelor hidraulice cu disc ale vehiculelor remorcate, nu sunt considerate necesare cerințele privind reglarea.
1.4.3. În cazul frânelor hidraulice cu tambur ale remorcilor, reglarea acestora are loc în conformitate cu recomandările producătorului.
|
|
1.5.
|
În cazul vehiculelor remorcate echipate cu dispozitive de reglare automată a frânelor, frânele se reglează înainte de încercarea de tip I de mai jos, în conformitate cu procedura de la punctul 1.4.
|
▼M1
2.
Simbolurile utilizate în prezenta anexă sunt explicate în tabelul următor:
|
P
|
=
|
parte a masei vehiculului susținută de axă în condiții statice
|
|
F
|
=
|
reacțiunea normală a suprafeței drumului asupra axei în condiții statice = P·g
|
|
FR
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților vehiculului remorcat
|
|
Fe
|
=
|
sarcina de încercare pe axă
|
|
g
|
=
|
accelerația gravitațională: g = 9,81 m/s2
|
|
C
|
=
|
cuplul aplicat frânei
|
|
C0
|
=
|
pragul minim al cuplului aplicat frânei. Acest cuplu poate fi determinat prin extrapolarea măsurătorilor într-un interval care să nu depășească o rată de frânare de 15 % sau prin alte metode echivalente
|
|
C0,dec
|
=
|
pragul declarat al cuplului aplicat frânei
|
|
Cmax
|
=
|
cuplul maxim aplicat frânei
|
|
R
|
=
|
raza dinamică de rulare a pneului. Ca alternativă, în cazul vehiculelor din categoriile Ra și Sa, raza încărcată static, astfel cum este specificat de către producător, poate fi utilizată în locul razei de rulare dinamice a pneului
|
|
T
|
=
|
forța de frânare la zona de contact dintre pneu și suprafața drumului
|
|
TR
|
=
|
forța de frânare totală la zona de contact dintre pneu și suprafața drumului
|
|
M
|
=
|
cuplul de frânare = T·R
|
|
z
|
=
|
raportul de frânare = T/F sau M/(RF)
|
|
s
|
=
|
cursa dispozitivului de acționare (cursa utilă + cursa în gol)
|
|
sp
|
=
|
cursa efectivă (cursa la care forța de împingere este egală cu 90 % din forța de împingere medie ThA)
|
|
ThA
|
=
|
forța de împingere medie (forța de împingere medie este determinată prin integrarea valorilor cuprinse între 1/3 și 2/3 din cursa totală smax)
|
|
r
|
=
|
raza interioară a tamburelor de frână sau raza efectivă a discurilor de frână
|
|
p
|
=
|
presiunea de acționare a frânei
|
Notă:
Simbolurile cu sufixul „e” au legătură cu parametrii asociați încercării frânei de referință, sufixul putând fi adăugat și altor simboluri, după caz.
▼B
3.
Metode de încercare
3.1. Încercări pe pistă
|
3.1.1.
|
Încercările de performanță a frânei trebuie efectuate, de preferință, pe o singură axă.
|
|
3.1.2.
|
▼M1
Rezultatele încercărilor asupra unui ansamblu de axe pot fi folosite în conformitate cu punctul 2.1 din prezenta anexă, cu condiția ca fiecare axă să producă aceeași energie de frânare în timpul încercărilor de eficacitate normală și la cald.
▼B
|
3.1.2.1.
|
Acest rezultat este obținut dacă următoarele caracteristici sunt identice pentru fiecare axă: geometria sistemului de frânare, garniturile, montajul roților, pneurile, acționarea și repartiția presiunii în elementele de acționare.
|
|
3.1.2.2.
|
Rezultatul înregistrat pentru un ansamblu de axe este valoarea medie pentru axele respective, ca și când s-ar fi utilizat o singură axă.
|
|
|
3.1.3.
|
Este preferabil ca axa (axele) să fie încărcată (încărcate) cu sarcina statică maximă pe axă, deși aceasta nu este o condiție obligatorie în cazul în care se ține cont, în timpul încercărilor, de diferența de rezistență la rulare cauzată de diferența de sarcină pe axă (axele) supusă(e) încercării.
|
|
3.1.4.
|
Se ia în considerare efectul creșterii rezistenței la rulare generată de utilizarea, în cadrul încercărilor, a unui ansamblu de vehicule.
|
|
3.1.5.
|
Viteza inițială în timpul încercării este cea prescrisă. Viteza finală se calculează cu formula următoare:

Cu toate acestea, în cazul încercării de tip III, se aplică formula de corecție a vitezei în conformitate cu punctul 2.5.4.2 din anexa II.
unde:
|
v1
|
=
|
viteza inițială (km/h),
|
|
v2
|
=
|
viteza finală (km/h),
|
|
Po
|
=
|
masa tractorului (kg) în condițiile de încercare,
|
|
P1
|
=
|
partea din masa vehiculului remorcat susținută de axa (axele) nefrânată(e) (kg),
|
|
P2
|
=
|
partea din masa vehiculului remorcat susținută de axa (axele) frânată(e) (kg).
|
|
3.2. Încercări cu dinamometru inerțial
|
3.2.1.
|
Echipamentul de încercare are o inerție de rotație care simulează acea parte a inerției liniare a masei vehiculului care acționează asupra unei roți și care este necesară pentru încercările de performanță la rece și la cald; echipamentul poate să funcționeze la o turație constantă în scopul încercării descrise la punctele 3.5.2 și 3.5.3.
|
|
3.2.2.
|
Încercarea se efectuează cu o roată completă, cu pneu, montată pe partea mobilă a frânei așa cum ar fi montată pe vehicul. Masa inerțială poate fi conectată la frână fie direct, fie prin pneuri și roți.
|
3.2.2.1.
|
Prin derogare de la punctul 3.2.2, încercarea poate fi realizată, de asemenea, fără pneu, cu condiția ca răcirea să nu fie permisă. Cu toate acestea, pentru a aspira în exterior gazele toxice sau nocive din camera de încercare, este permisă o circulație limitată a aerului.
|
|
|
3.2.3.
|
În condițiile specificate la punctul 3.2.2, în cursul rulărilor de încălzire se poate utiliza răcirea cu aer la o anumită viteză și dintr-o direcție care simulează condițiile reale, viteza fluxului de aer fiind
vair = 0,33 v
unde:
|
v
|
=
|
viteza de încercare a vehiculului la începerea frânării.
|
Temperatura aerului de răcire este temperatura ambiantă.
|
|
3.2.4.
|
În cazul în care rezistența la rulare a pneului nu este compensată automat în timpul încercării, cuplul aplicat frânei este modificat prin scăderea unui cuplu echivalent cu un coeficient de rezistență la rulare de 0,02 (în cazul vehiculelor din categoriile Ra și Sa) și, respectiv, 0,01 (în cazul vehiculelor din categoriile Rb și Sb).
Ca o opțiune alternativă, poate fi utilizat coeficientul de rezistență la rulare de 0,01, corespunzător situației celei mai defavorabile, pentru a cuprinde toate categoriile de vehicule care pot fi supuse încercării de tip I, astfel cum se stabilește în raportul de încercare.
|
3.3. Încercări dinamometrice pe standul cu rulouri
|
3.3.1.
|
Este preferabil ca axa să fie încărcat cu sarcina statică maximă pe axă, deși aceasta nu este o condiție obligatorie în cazul în care se ține cont, în timpul încercărilor, de diferența de rezistență la rulare cauzată de diferența de sarcină pe axă supusă încercării.
|
|
3.3.2.
|
Se poate utiliza, în fazele de încălzire, o răcire cu aer având un debit și o direcție reprezentative pentru condițiile reale, viteza debitului de aer fiind
vair = 0,33 v
unde:
|
v
|
=
|
viteza de încercare a vehiculului la începerea frânării.
|
Temperatura aerului de răcire este temperatura ambiantă.
|
|
3.3.3.
|
Timpul de frânare are o durată de o secundă, după un timp de răspuns maxim de 0,6 secunde.
|
3.4. Condiții de încercare (generalități)
|
3.4.1.
|
Pe frânele supuse încercării se montează o aparatură care permite realizarea măsurătorilor următoare:
3.4.1.1. O înregistrare continuă care să permită determinarea cuplului de frânare sau forței de frânare pe circumferința pneului;
3.4.1.2. O înregistrare continuă a presiunii aerului în elementul de acționare;
3.4.1.3. Viteza vehiculului în timpul încercării;
3.4.1.4. Temperatura inițială la exteriorul tamburului sau discului de frână;
3.4.1.5. Cursa dispozitivului de acționare în timpul încercărilor de tip 0 și de tip I sau III.
|
3.5. Proceduri de încercare
3.5.1. Încercare suplimentară de performanță la rece
Pregătirea frânei are loc în conformitate cu punctul 3.5.1.1.
3.5.1.1. Procedura de rodare
|
3.5.1.1.1.
|
În cazul frânelor cu tambur, încercările încep cu garnituri și tambur(e) de frână noi, iar garniturile de frână se șlefuiesc pentru a se obține o suprafață de contact inițială cât mai bună între garnituri și tambur(e).
|
|
3.5.1.1.2.
|
În cazul frânelor cu disc, încercarea începe cu folosirea unor plăcuțe și a unui (unor) disc (discuri) de frână noi, iar șlefuirea materialului plăcuțelor rămâne la alegerea producătorului.
|
|
3.5.1.1.3.
|
Se acționează frâna de 20 de ori, de la o viteză inițială de 60 km/h, cu o forță asupra frânei egală cu 0,3TR/masa de încercare. Temperatura inițială la suprafața de contact dintre garnitură și tambur sau dintre plăcuțe și disc nu trebuie să depășească 100 °C înaintea fiecărei aplicări a frânei.
|
|
3.5.1.1.4.
|
Frâna se acționează de 30 ori de la 60 km/h la 30 km/h, cu o forță asupra frânelor egală cu 0,3 TR/masa de încercare și la un interval de 60 s între fiecare acționare. În cazul utilizării metodelor de încercare pe pistă sau pe standul cu rulouri, se folosesc niveluri de energie echivalente cu cele specificate. Temperatura inițială la suprafața de contact dintre garnitură și tambur sau dintre plăcuțe și disc nu trebuie să depășească 100 °C la prima acționare a frânei.
|
|
3.5.1.1.5.
|
După cele 30 de acționări precizate la punctul 3.5.1.1.4 și după un interval de 120 s, frâna se acționează de 5 ori de la 60 km/h la 30 km/h, cu o forță asupra frânei egală cu 0,3 TR/masa de încercare și la un interval de 120 s între fiecare acționare.
|
|
3.5.1.1.6.
|
Se acționează frâna de 20 de ori, de la o viteză inițială de 60 km/h, cu o forță asupra frânei egală cu 0,3TR/masa de încercare. Temperatura inițială la suprafața de contact dintre garnitură și tambur sau dintre plăcuțe și disc nu trebuie să depășească 150 °C înaintea fiecărei aplicări a frânei.
|
|
3.5.1.1.7.
|
Se efectuează o verificare a performanței după cum urmează:
3.5.1.1.7.1. Se calculează cuplul de intrare necesar pentru producerea unor valori teoretice de performanță echivalente cu 0,2, 0,35 și 0,5 + 0,05 TR/masa de încercare.
3.5.1.1.7.2. După determinarea valorii cuplului de intrare pentru fiecare coeficient de frânare, această valoare rămâne constantă la fiecare dintre următoarele acționări ale frânei (de exemplu, presiune constantă).
3.5.1.1.7.3. Se efectuează o frânare de la o viteză inițială de 60 km/h pentru fiecare dintre cuplurile de intrare specificate la punctul 3.5.1.1.7.1. Temperatura inițială la suprafața de contact dintre garnitură și tambur sau dintre plăcuțe și disc nu trebuie să depășească 100 °C înainte de fiecare acționare a frânei.
|
|
3.5.1.1.8.
|
Se repetă procedura stabilită la punctele 3.5.1.1.6 și 3.5.1.1.7.3, punctul 3.5.1.1.6 fiind opțional, până când performanța obținută după cinci măsurători consecutive nemonotone la valoarea de intrare constantă de 0,5 TR/(masa de încercare) se stabilizează, cu o toleranță de -10 % din valoarea maximă.
|
|
3.5.1.2.
|
Se permite, de asemenea, efectuarea succesivă a celor două încercări de pierdere a eficacității de tip I și III.
|
|
3.5.1.3.
|
Această încercare se realizează la o viteză inițială de 40 km/h pentru încercarea de tip-I și de 60 km/h pentru încercarea de tip III, pentru a evalua performanța frânării la cald la sfârșitul încercărilor de tip I și III. Încercarea de pierdere de performanță de tip I și/sau tip III se efectuează imediat după această încercare de performanță la rece.
|
|
3.5.1.4.
|
Se efectuează trei acționări ale frânei la aceeași presiune (p) și la o viteză inițială de 30 km/h și, respectiv, 40 km/h (pentru încercarea de tip I, astfel cum se precizează în raportul de încercare) sau de 60 km/h (pentru încercarea de tip-III), cu o temperatură inițială a frânelor aproximativ egală și care nu depășește 100 °C, măsurată pe suprafața exterioară a tamburelor sau discurilor. Acționările au loc la presiunea necesară elementului de acționare a frânei pentru a furniza un cuplu de frânare sau o forță de frânare echivalentă unui coeficient de frânare (z) de cel puțin 50 %. Presiunea la elementul de acționare nu depășește 650 kPa (pneumatic) sau 11 500 kPa (hidraulic), iar cuplul de acționare a frânei (C) nu depășește cuplul maxim de acționare a frânei admis (Cmax). Media celor trei rezultate obținute constituie valoarea performanței la rece.
|
3.5.2. Încercarea de pierdere de performanță (încercare de tip I)
|
3.5.2.1.
|
Această încercare se efectuează la o viteză de 40 km/h și o temperatură inițială a frânelor ce nu depășește 100 °C, măsurată pe suprafața exterioară a tamburului sau discului de frânare.
|
|
3.5.2.2.
|
Coeficientul de frânare este menținut la valoarea de 7 %, incluzând rezistența la rulare (a se vedea punctul 3.2.4).
|
|
3.5.2.3.
|
Durata încercării este de două minute și 33 secunde sau corespunzătoare unei distanțe de 1,7 km parcurse la viteza de 40 km/h. În cazul vehiculelor remorcate cu vmax ≤ 30 km/h, dacă viteza de încercare nu poate fi atinsă, durata încercării poate fi prelungită în conformitate cu punctul 2.3.2.2 din anexa II.
|
|
3.5.2.4.
|
Cel târziu 60 de secunde după încercarea de tip I, se efectuează un test de performanță la cald în conformitate cu punctul 2.3.3 din anexa II, la o viteză inițială de 40 km/h. Presiunea elementului de acționare este cea utilizată în încercarea de tip 0.
|
3.5.3. Încercarea de pierdere de performanță (încercare de tip III)
3.5.3.1. Metode de încercare pentru frânarea repetată.
3.5.3.1.1. Încercări pe pistă (a se vedea punctul 2.5 din anexa II)
3.5.3.1.2. Încercarea cu dinamometrul inerțial
Pentru încercarea pe bancul de încercare descrisă la punctul 3.2, condițiile pot fi aceleași ca pentru încercarea pe drum prevăzută la punctul 2.5.4 din anexa II cu:

3.5.3.1.3. Încercarea dinamometrică pe stand cu rulouri
Pentru încercarea dinamometrică pe stand prevăzută la punctul 3.3, condițiile sunt următoarele:
|
Număr de aplicări ale frânei
|
20
|
|
Durata ciclului de frânare
|
(timpul de frânare 25 s și timpul de revenire 35 s) 60 s
|
|
Viteza de încercare
|
30 km/h
|
|
Coeficientul de frânare
|
0,06
|
|
Rezistența la rulare
|
0,01
|
|
3.5.3.2.
|
Cel târziu 60 secunde după sfârșitul încercării de tip III se realizează o încercare a performanței la cald în conformitate cu punctul 2.5.5 din anexa II. Presiunea elementului de acționare este cea utilizată în încercarea de tip 0.
|
3.6. Cerințe de performanță pentru dispozitivele de reglare automată a frânelor
|
3.6.1.
|
Următoarele cerințe se aplică unui dispozitiv de reglare automată a frânelor care se montează pe o frână, iar performanța acestuia se verifică în conformitate cu dispozițiile prezentului apendice.
După finalizarea încercărilor descrise la punctul 3.5.2.4 (încercare de tip I) sau 3.5.3.2 (încercare de tip III), sunt verificate cerințele prevăzute la punctul 3.6.3.
|
|
3.6.2.
|
Următoarele cerințe se aplică unui dispozitiv de reglare automată a frânelor instalat pe o frână pentru care există deja un raport de încercare.
3.6.2.1. Performanța de frânare
După încălzirea frânei (frânelor) efectuată în conformitate cu procedurile descrise la punctul 3.5.2 (încercare de tip-I) sau 3.5.3 (încercare de tip-III), după caz, se aplică una dintre următoarele dispoziții:
(a) performanța la cald a sistemului de frânare de serviciu este de minimum 80 % din performanța prevăzută pentru tipul-0; sau
(b) frâna se aplică cu o presiune a elementului de acționare a frânei egală cu cea utilizată în timpul încercării de tip 0; la această presiune, se măsoară cursa totală a elementului de acționare (sA), iar valoarea acesteia trebuie să fie ≤ 0,9 sp a camerei frânei.
|
sp
|
=
|
cursa efectivă (cursa la care forța de apăsare este egală cu 90 % din forța de apăsare medie (ThA) — a se vedea punctul 2.
|
|
3.6.2.2.
|
La încheierea încercărilor prevăzute la punctul 3.6.2.1, se verifică cerințele prevăzute la punctul 3.6.3.
|
|
|
3.6.3.
|
Încercarea de rulare liberă După efectuarea încercărilor specificate la punctul 3.6.1 sau 3.6.2, se permite răcirea frânelor la o temperatură tipică a frânelor reci (adică de maximum 100 °C) și se verifică dacă vehiculul remorcat/roata (roțile) are (au) capacitatea să ruleze liber, prin îndeplinirea uneia dintre următoarele condiții:
3.6.3.1. Roțile rulează liber (adică pot fi rotite cu mâna);
3.6.3.2. Dacă la o viteză constantă de v = 60 km/h cu frâna (frânele) neacționată (neacționate), temperatura asimptotică a tamburului/discului nu crește cu mai mult de 80 °C, atunci momentul frânării reziduale este considerat acceptabil.
|
▼M1
3.7. Identificare
3.7.1. Pe axă trebuie prevăzute, într-un loc vizibil, cel puțin următoarele date de identificare grupate, în orice ordine, într-un mod lizibil și indelebil:
3.7.1.1. Producătorul și/sau marca axei;
3.7.1.2. Identificatorul axei;
3.7.1.3. Identificatorul frânei
3.7.1.4. Identificatorul Fe;
3.7.1.5. Partea de bază a numărului raportului de încercare;
3.7.1.6. Exemplu de identificator:
Producătorul axei și/sau marca ABC
ID1-XXXXXX
ID2-YYYYYY
ID3-11111
ID4-ZZZZZZZ
3.7.2. Un dispozitiv neintegrat de reglare automată a frânei trebuie să poarte într-un loc vizibil cel puțin următoarele date de identificare grupate, într-un mod lizibil și indelebil:
3.7.2.1. Producătorul și marca sau unul dintre cele două, după caz
3.7.3. Marca și tipul fiecărei garnituri sau plăcuțe de frână trebuie să fie vizibile când garnitura sau plăcuța este montată pe sabotul de frână sau pe discul mandrinei, într-un mod lizibil și de neșters.
3.7.4.1. Identificatorul axei
Identificatorul axei clasifică o axă în funcție de forța de frânare/capacitatea de a dezvolta un cuplu declarată de producătorul axei.
Identificatorul axei este un număr alfanumeric alcătuit din cele patru caractere „ID1-” urmate de maxim 20 de caractere.
3.7.4.2. Identificatorul frânei
Identificatorul frânei este un număr alfanumeric alcătuit din cele patru caractere „ID2-” urmate de maxim 20 de caractere.
O frână cu același identificator este o frână care nu diferă în ceea ce privește următoarele criterii:
(b) materialul de bază în ceea ce privește corpul etrierului, suportul frânei, discul de frână și tamburul de frână;
(c) dimensiunile cu sufixul „e” în conformitate cu raportul de încercare;
(d) metoda de bază folosită în sistemul frânei pentru a genera forța de frânare;
(e) în cazul discurilor de frână, metoda de montare a inelului de frecare: fix sau mobil;
(f) factorul de frânare BF;
(g) caracteristici diferite ale frânei în sensul cerințelor anexei VII care nu sunt reglementate la punctul 3.7.4.2.1 din prezentul apendice.
3.7.4.2.1. Diferențe admise în cadrul aceluiași identificator al frânei
Același identificator al frânei poate include diferite caracteristici ale frânei în ceea ce privește următoarele criterii:
(a) creșterea cuplului maxim declarat aplicat frânei Cmax;
(b) abaterea discului de frână declarat și masa mdec a tamburului de frână: ±20 %;
(c) metoda de fixare a garniturii/plăcuței pe sabotul de frână/discul mandrinei;
(d) în cazul discurilor de frână, creșterea capacității maxime de cursă a frânei;
(e) lungimea efectivă a axei cu came;
(f) pragul cuplului declarat C0dec;
(g) ±5 mm față de diametrul exterior declarat al discului;
(h) tipul de răcire a discului (ventilat/neventilat);
(i) butuc (cu sau fără butuc integrat);
(j) disc cu tambur integrat — cu sau fără funcție de frână de staționare;
(k) raportul geometric dintre suprafețele de frecare ale discului și suportul discului;
(l) tipul garniturii de frână;
(m) variații de material (cu excepția modificărilor materialului de bază menționate la punctul 3.7.4.2) pentru care producătorul confirmă că astfel de variații de material nu modifică performanța în ceea ce privește încercările necesare;
(n) discul mandrinei și saboți.
3.7.4.3. Identificatorul Fe
Identificatorul Fe indică sarcina de încercare pe axă. Este un număr alfanumeric alcătuit din cele patru caractere „ID3-” urmate de valoarea Fe în daN, fără identificatorul unității „daN”.
3.7.4.4. Identificatorul raportului de încercare
Identificatorul raportului de încercare este un număr alfanumeric alcătuit din cele patru caractere „ID4-” urmate de partea de bază a numărului raportului de încercare.
3.7.5. Dispozitiv de reglare automată a frânei (integrat și neintegrat)
3.7.5.1. Tipuri de dispozitive de reglare automată a frânei
Același tip de dispozitiv de reglare automată a frânei nu diferă în ceea ce privește următoarele criterii:
(a) corpul: material de bază;
(b) momentul maxim admis al arborelui de frână;
(c) principiul de funcționare a reglării.
3.7.5.2. Versiunile dispozitivului de reglare automată a frânei în ceea ce privește comportamentul de reglare
Dispozitivele de reglare automată a frânei din cadrul unui tip care influențează jocul de rulare a frânei sunt considerate a fi versiuni diferite.
3.8. Criterii de încercare
În cazul în care se solicită un nou raport de încercare sau completarea unui raport de încercare pentru un ax sau o frână modificată în limitele specificate în fișa de informații, se folosesc următoarele criterii pentru a stabili necesitatea efectuării unor încercări suplimentare luând în considerare configurațiile pentru cazul cel mai nefavorabil convenite cu serviciul tehnic.
|
Abrevieri folosite în tabelul următor:
|
|
CT (încercare completă)
|
Încercare:
3.5.1.: Încercare suplimentară de eficacitate la rece
3.5.2.: Încercarea de pierdere de eficacitate (încercare de tip I) (1)
3.5.3.: Încercarea de pierdere de eficacitate (încercare de tip III) (1)
|
|
FT (încercare de pierdere de eficacitate)
|
Încercare:
3.5.1. Încercare suplimentară de eficacitate la rece
3.5.2. Încercarea de pierdere de eficacitate (încercare de tip I) (1)
3.5.3. Încercarea de pierdere de eficacitate (încercare de tip III) (1)
|
|
(*1) Dacă este cazul
|
|
Diferențe în conformitate cu punctul 3.7.4.2.1
|
Criterii de încercare
|
|
(a) Creșterea cuplului maxim declarat aplicat frânei Cmax
|
Modificare permisă fără efectuarea unei încercări suplimentare
|
|
(b) Abaterea discului de frână declarat și masa mdec a tamburului de frână: ± 20 %
|
CT: Încercarea este efectuată asupra celei mai ușoare variante; dacă masa nominală de încercare pentru o nouă variantă variază cu mai puțin de 5 % față de o variantă supusă încercării anterior, având o valoare nominală mai mare, atunci încercarea versiunii mai ușoare poate fi omisă.
Masa efectivă de încercare a eșantionului de încercare poate varia cu 5± față de masa nominală de încercare.
|
|
(c) Metoda de fixare a garniturii/plăcuței pe sabotul de frână/discul mandrinei
|
Cazul cel mai nefavorabil specificat de către producător și agreat de serviciile tehnice care efectuează încercarea.
|
|
(d) În cazul frânelor cu disc, creșterea capacității maxime a cursei frânei
|
Modificare permisă fără efectuarea unei încercări suplimentare
|
|
(e) Lungimea efectivă a axei cu came
|
Cazul cel mai nefavorabil se consideră a fi cea mai joasă rigiditate la torsiune a axei cu came și se verifică prin:
(i) FT; sau
(ii) modificare permisă fără efectuarea unei încercări suplimentare, dacă se poate calcula influența asupra cursei și asupra forței de frânare. În acest caz, raportul de încercare include următoarele valori extrapolate: se, Ce, Te, Te/Fe.
|
|
(f) Pragul cuplului declarat C0dec
|
Se verifică dacă performanța de frânare se menține în intervalele din diagrama 1
|
|
(g) ±5 mm față de diametrul exterior declarat al discului
|
Cazul cel mai nefavorabil se consideră a fi cel mai mic diametru
Diametrul exterior efectiv al eșantionului de încercare poate varia cu ±1 mm față de diametrul exterior nominal specificat de producătorul axei.
|
|
(h) Tipul de răcire a discului (ventilat/neventilat)
|
Fiecare tip trebuie supus încercării
|
|
(i) Butuc (cu sau fără butuc integrat)
|
Fiecare tip trebuie supus încercării
|
|
(j) Disc cu tambur integrat — cu sau fără funcție de frână de staționare
|
Pentru această funcție, încercarea nu este necesară
|
|
(k) Raportul geometric dintre suprafețele de frecare ale discului și suportul discului
|
Pentru această funcție, încercarea nu este necesară
|
|
(l) Tipul garniturii de frână
|
Fiecare tip de garnitură de frână.
|
|
(m) Variații de material (cu excepția modificărilor materialului de bază menționate la punctul 3.7.4.2) pentru care producătorul confirmă că astfel de variații de material nu modifică performanța în ceea ce privește încercările necesare
|
Pentru această condiție, încercarea nu este necesară
|
|
(n) Discul mandrinei și saboți
|
Condiții de încercare pentru cazul cel mai nefavorabil (1):
Discul mandrinei: grosime minimă
Sabot: cel mai ușor sabot de frână
|
|
(*1) Nu sunt necesare încercări dacă producătorul poate demonstra faptul că o modificare nu afectează rigiditatea.
|
|
3.8.1.
|
În cazul în care un dispozitiv de reglare automată a frânei diferă față de un dispozitiv deja supus încercării în conformitate cu punctele 3.7.5.1 și 3.7.5.2, este necesară efectuarea unei încercări suplimentare în conformitate cu punctul 3.6.2.
|
▼B
3.9. Rezultatele încercărilor
|
3.9.1.
|
Rezultatele încercărilor efectuate în conformitate cu punctele 3.5 și 3.6.1 sunt înscrise în fișa rezultatelor încercărilor.
|
|
3.9.2.
|
În cazul unei frâne echipate cu un dispozitiv alternativ de reglare a frânei, rezultatele încercărilor realizate în conformitate cu punctul 3.6.2 sunt precizate în fișa rezultatelor încercărilor.
|
|
3.9.3.
|
Fișa de informații O fișă de informații, furnizată de producătorul axei sau al vehiculului, trebuie să facă parte din raportul de încercare.
În fișa de informații sunt identificate, dacă este cazul, diferitele variante de frâne sau axe în conformitate cu criteriile esențiale ale acestora.
|
4.
Verificarea
4.1. Verificarea componentelor
Specificația frânei vehiculului care urmează a fi supus omologării de tip este în conformitate cu cerințele stabilite la punctele 3.7, 3.8 și 3.9.
4.2. Verificarea forțelor de frânare absorbite
|
4.2.1.
|
Forțele de frânare (T) pentru fiecare frână supusă încercării (pentru aceeași presiune a circuitului de comandă pm) necesare pentru a produce forța de rezistență specificată pentru condițiile încercărilor de tip I și III nu depășește valorile Te indicate în raportul de încercare, care au fost folosite ca bază pentru încercarea frânei de referință.
|
4.3. Verificarea performanței la cald
|
4.3.1.
|
Forța de frânare (T) pentru fiecare frână supusă încercării pentru o presiune (p) specificată a elementului de acționare și pentru o presiune a circuitului de comandă (pm) folosite în timpul încercării de tip 0 a vehiculului remorcat respectiv se determină după cum urmează:
4.3.1.1. Cursa calculată (s) a elementului de acționare a frânei supuse încercării se calculează după cum urmează:

Această valoare nu depășește sp.
4.3.1.2. Se măsoară forța de tracțiune medie (ThA) a elementului de acționare corespunzător frânei supuse încercării la presiunea specificată la punctul 4.3.1.
4.3.1.3. Cuplul aplicat frânei (C) este calculat apoi după cum urmează:

C nu depășește Cmax.
4.3.1.4. Performanța de frânare calculată pentru frâna supusă încercării este calculată cu formula:

R are o valoare cel puțin egală cu 0,8 Re.
|
|
4.3.2.
|
Performanța de frânare calculată pentru frâna supusă încercării este calculată cu formula:

|
|
4.3.3.
|
Performanțele la cald după încercarea de tip I sau de tip III se determină în conformitate cu punctele 4.3.1.1-4.3.1.4. Valorile calculate conform punctului 4.3.2 îndeplinesc cerințele prezentului regulament pentru vehiculul remorcat respectiv. Valoarea utilizată ca mărime înregistrată la încercarea de tip 0, conform dispozițiilor de la punctul 2.3.3 sau 2.5.5 din anexa II, este valoarea care a fost înregistrată la încercarea de tip 0 a vehiculului remorcat în cauză.

|
ANEXA VIII
Cerințe aplicabile pentru încercarea sistemelor de frânare inerțiale, a dispozitivelor de frânare, a dispozitivelor de cuplare a sistemului de frânare al remorcii și a vehiculelor echipate cu acestea în ceea ce privește frânarea
1.
Dispoziții generale
|
1.1.
|
Sistemul cu frânare inerțială al unui vehicul remorcat cuprinde dispozitivul de comandă, transmisia și frâna.
|
|
1.2.
|
Dispozitivul de comandă reprezintă ansamblul de componente care cuprinde dispozitivul de tracțiune (racordul de cuplare).
|
|
1.3.
|
Transmisia reprezintă ansamblul de componente situate între ieșirea racordului de cuplare și intrarea frânei.
|
|
1.4.
|
Sistemele de frânare în care energia acumulată (de exemplu, electrică, pneumatică sau hidraulică) este transmisă vehiculului remorcat de către tractor și este comandată doar de forța de tracțiune din cuplaj nu sunt considerate sisteme cu frânare inerțială în sensul prezentului regulament.
|
|
1.5.
|
Încercări
|
1.5.1.
|
Determinarea caracteristicilor principale ale frânei.
|
|
1.5.2.
|
Determinarea caracteristicilor principale ale dispozitivului de comandă și verificarea conformității acestuia cu dispozițiile din prezentul regulament.
|
|
1.5.3.
|
Verificarea pe vehicul:
1.5.3.1 a compatibilității dispozitivului de comandă și a frânei și
|
|
2.
Simboluri
2.1. Unități folosite
2.1.3. Accelerația gravitațională g = 9,81 m/s2
2.1.4. Cupluri și momente: Nm;
2.1.7. Lungimi: unitate specificată în fiecare caz.
2.2. Simboluri valabile pentru toate tipurile de frâne (a se vedea figura 1 din apendicele 1)
|
2.2.1.
|
GA : „masa maximă” a vehiculului remorcat tehnic admisă și declarată de producător;
|
|
2.2.2.
|
GA : „masa totală” a vehiculului remorcat care, în conformitate cu declarația producătorului, poate fi frânată de dispozitivul de comandă;
|
|
2.2.3.
|
GB :
„masa totală” a vehiculului remorcat care poate fi frânată prin acțiunea comună a tuturor frânelor vehiculului remorcat
GB = n · GBo;
|
|
2.2.4.
|
GBo : fracțiune din masa totală autorizată a vehiculului remorcat care, în conformitate cu declarația producătorului, poate fi frânată de o singură frână;
|
|
2.2.5.
|
B* : forța de frânare necesară;
|
|
2.2.6.
|
B : forța de frânare necesară ținând seama de rezistența la rulare;
|
|
2.2.7.
|
D* : forța admisibilă în cuplaj;
|
|
2.2.8.
|
D : forța efectivă în cuplaj;
|
|
2.2.9.
|
P' : forța de ieșire la dispozitivul de comandă;
|
|
2.2.10.
|
K : forța suplimentară a dispozitivului de comandă, definită prin convenție ca forța D corespunzătoare punctului de intersecție cu axa absciselor curbei extrapolate reprezentând P′ în funcție de D, măsurată cu dispozitivul de comandă în poziția corespunzătoare cursei medii a elementului de acționare (a se vedea figurile 2 și 3 din apendicele 1);
|
|
2.2.11.
|
KA : forța limită a dispozitivului de comandă — aceasta este forța maximă la racordul de cuplare care poate fi aplicată pe o perioadă scurtă de timp fără a produce o forță de răspuns la ieșirea dispozitivului de comandă. În mod convențional, simbolul KA se aplică forței măsurate când racordul de cuplare începe să fie forțat înapoi cu o viteză de 10-15 mm/s, transmisia dispozitivului de comandă fiind decuplată;
|
|
2.2.12.
|
D1 : forța maximă aplicată la racordul de cuplare când acesta este forțat înapoi cu o viteză de s mm/s ± 10 %, transmisia fiind decuplată;
|
|
2.2.13.
|
D2 : forța maximă aplicată la racordul de cuplare când acesta este tras înainte cu o viteză de s mm/s ± 10 %, din poziția de compresie maximă, transmisia fiind decuplată;
|
|
2.2.14.
|
ηHo : randamentul dispozitivului de comandă inerțial;
|
|
2.2.15.
|
ηH1 : randamentul sistemului de transmisie;
|
|
2.2.16.
|
ηH : randamentul total al dispozitivului de comandă și al transmisiei ηH = ηHo.ηH1;
|
|
2.2.17.
|
s : cursa dispozitivului de comandă în milimetri;
|
▼M1
|
2.2.18.
|
s’ : cursa de lucru (utilă) a dispozitivului de comandă (exprimată în milimetri), determinată în conformitate cu punctul 10.4;
|
▼B
|
2.2.19.
|
s″ : cursa de rezervă a cilindrului principal, măsurată în milimetri la racordul de cuplare;
|
|
2.2.19.1
|
sHz : cursa cilindrului principal, măsurată în milimetri, în conformitate cu figura 8 din apendicele 1;
|
|
2.2.19.2
|
s″Hz : cursa de rezervă a cilindrului principal, măsurată în milimetri la tija pistonului, în conformitate cu figura 8 din apendicele 1;
|
|
2.2.20.
|
so : pierderea de cursă, și anume distanța, măsurată în milimetri, pe care o parcurge racordul de cuplare când este acționat astfel încât să se deplaseze dintr-un punct aflat la 300 mm deasupra planului orizontal într-un punct aflat la 300 mm sub același plan, transmisia rămânând imobilă;
|
|
2.2.21.
|
2sB : deplasarea sabotului de frână (cursa sabotului frânei), exprimată în milimetri, măsurată pe diametrul paralel cu mecanismul de acționare și fără ca frânele să fie reglate în timpul încercării;
|
|
2.2.22.
|
2s
B
* :
deplasarea minimă a centrului saboților de frână (cursa minimă a sabotului de frână) pentru roțile cu frâne cu tambur, exprimată în milimetri
 ; ;
2r este diametrul tamburului frânei exprimat în milimetri (a se vedea figura 4 din apendicele 1)

Pentru frâne cu disc cu transmisie hidraulică:
Unde:
|
V60
|
=
|
volumul de lichid absorbit de frâna unei roți la o presiune corespunzătoare unei forțe de frânare de 1,2 B* = 0,6 · GBo și la raza maximă a pneului;
și
|
|
2rA
|
=
|
diametrul exterior al discului frânei (V60 în cm3, FRZ în cm2 și rA în mm).
|
|
▼M1
|
2.2.23.
|
M* : cuplul de frânare specificat de către producător. Acest cuplu de frânare produce cel puțin forța de frânare prescrisă B*;
|
▼B
|
2.2.23.1
|
MT : cuplul de frânare de încercare atunci când nu este prevăzut un limitator de suprasarcină (conform punctului 6.2.1);
|
▼M1
|
2.2.24.
|
R : Raza dinamică de rulare a pneului. Ca alternativă, în cazul vehiculelor din categoriile Ra și Sa, raza încărcată static, astfel cum se specifică de către producător, poate fi utilizată în locul razei de rulare dinamice a pneului;
|
▼B
|
2.2.25.
|
n : numărul frânelor;
|
|
2.2.26.
|
Mr : cuplul maxim de frânare rezultat din cursa maximă permisă sr sau din volumul de fluid maxim permis Vr atunci când vehiculul remorcat se deplasează înapoi (inclusiv rezistența la rulare = 0,01·g·GBo);
|
|
2.2.27.
|
sr : cursa maximă permisă la pârghia de comandă a frânei atunci când vehiculul remorcat se deplasează înapoi;
|
|
2.2.28.
|
Vr : volumul maxim permis de lichid absorbit de o roată supusă frânării atunci când vehiculul remorcat se deplasează înapoi.
|
2.3. Simboluri pentru sisteme de frânare cu transmisie mecanică (a se vedea figura 5 din apendicele 1)
|
2.3.1.
|
iHo : raportul de demultiplicare între cursa racordului de cuplare și cursa pârghiei la ieșirea dispozitivului de comandă;
|
|
2.3.2.
|
iH1 : raportul de demultiplicare dintre cursa pârghiei la ieșirea dispozitivului de comandă și cursa pârghiei frânei (demultiplicarea transmisiei);
|
|
2.3.3.
|
iH :
raportul de demultiplicare între cursa racordului de cuplare și cursa pârghiei frânei
iH = iHo.iH1
|
|
2.3.4.
|
ig : raportul de demultiplicare dintre cursa pârghiei frânei și deplasarea centrului sabotului de frână (cursa sabotului de frână) (a se vedea figura 4 din apendicele 1);
|
|
2.3.5.
|
P : forța aplicată la pârghia de comandă a frânei; (a se vedea figura 4 din apendicele 1);
|
|
2.3.6.
|
Po : forța de revenire a frânei atunci când vehiculul remorcat se deplasează înainte, adică, în diagrama M = f(P), valoarea forței P la punctul de intersecție al extensiei acestei funcții cu abscisa (a se vedea figura 6 din apendicele 1);
|
|
2.3.6.1
|
Por : forța de revenire a frânei atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 6 din apendicele 1);
|
|
2.3.7.
|
P* : forța aplicată la pârghia de comandă a frânei pentru a produce forța de frânare B*;
|
|
2.3.8.
|
PT : forța de încercare, în conformitate cu punctul 6.2.1;
|
|
2.3.9.
|
ρ : caracteristica frânei când vehiculul remorcat se deplasează înainte, definită prin:
M = ρ (P — Po)
|
|
2.3.9.1
|
ρr :
caracteristica frânei când vehiculul remorcat se deplasează înapoi, definită prin:
Mr = ρr (Pr – Por)
|
|
2.3.10.
|
scf : cursa cablului sau a tijei spate la compensator atunci când frânele operează în direcția înainte (
3
);
|
|
2.3.11.
|
scr : cursa cablului sau a tijei spate la compensator atunci frânele când operează în direcția înapoi; (3) ;
|
|
2.3.12.
|
scd :
cursa diferențială la compensator atunci când doar o frână operează în direcția înainte, iar cealaltă în direcția înapoi (3) ;
Unde: scd = scr – scf (a se vedea figura 5A din apendicele 1);
|
2.4. Simboluri pentru sisteme de frânare cu transmisie hidraulică (a se vedea figura 8 din apendicele 1)
|
2.4.1.
|
ih : raportul de demultiplicare dintre cursa racordului de cuplare și cursa pistonului în cilindrul principal;
|
|
2.4.2.
|
i′g : raportul de demultiplicare dintre cursa punctului de acționare a cilindrului (cursa de acționare) și deplasarea centrului sabotului de frână;
|
|
2.4.3.
|
FRZ : suprafața pistonului unui cilindru de frână, pentru frânele cu tambur; pentru frânele cu disc, suma suprafeței pistoanelor etrierului pe o parte a discului;
|
|
2.4.4.
|
FHZ : suprafața pistonului cilindrului principal;
|
|
2.4.5.
|
p : presiunea hidraulică din cilindrul de frână;
|
|
2.4.6.
|
po : presiunea de revenire în cilindrul de frână atunci când vehiculul remorcat se deplasează înainte, adică, în diagrama M = f(p), valoarea presiunii p în punctul de intersecție al prelungirii acestei funcții cu abscisa (a se vedea figura 7 din apendicele 1)
|
|
2.4.6.1
|
por : presiunea de revenire a frânei atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 7 din apendicele 1);
|
|
2.4.7.
|
p* : presiunea hidraulică în cilindrul de frână necesară pentru producerea forței de frânare B*;
|
|
2.4.8.
|
pT : presiunea de încercare, în conformitate cu punctul 6.2.1;
|
|
2.4.9.
|
r′ : caracteristica frânei când vehiculul remorcat se deplasează înainte, definită prin:
M = r′ (p – po)
|
|
2.4.9.1
|
r′r :
caracteristica frânei când vehiculul remorcat se deplasează înapoi, definită prin:
Mr = r′r (pr – por)
|
2.5. Simboluri privind cerințele de frânare referitoare la limitatoarele de suprasarcină
|
2.5.1.
|
Dop : forța aplicată la intrarea dispozitivului de comandă, la care limitatorul de suprasarcină este activat
|
|
2.5.2.
|
Mop : cuplul de frânare la care limitatorul de suprasarcină este activat (declarat de către producător)
|
|
2.5.3.
|
MTop : cuplul minim al frânării de încercare când este prevăzut un limitator de suprasarcină (în conformitate cu punctul 6.2.2.2).
|
|
2.5.4.
|
Pop_min : forța aplicată frânei la care se activează limitatorul de suprasarcină (în conformitate cu punctul 6.2.2.1).
|
|
2.5.5.
|
Pop_max : forța maximă (atunci când racordul de cuplare este împins complet în poziția inițială) aplicată frânei de către limitatorul de suprasarcină (în conformitate cu punctul 6.2.2.3).
|
|
2.5.6.
|
pop_min : presiunea aplicată frânei la care se activează limitatorul de suprasarcină (în conformitate cu punctul 6.2.2.1).
|
|
2.5.7.
|
pop_max : presiunea hidraulică maximă (atunci când racordul de cuplare este împins complet în poziția inițială) aplicată dispozitivului de acționare a frânei de către limitatorul de suprasarcină (în conformitate cu punctul 6.2.2.3).
|
|
2.5.8.
|
PTop : forța minimă a frânării de încercare în cazul în care este prevăzut un limitator de suprasarcină (în conformitate cu punctul 6.2.2.2).
|
|
2.5.9.
|
pTop : presiunea minimă a frânării de încercare în cazul în care este prevăzut un limitator de suprasarcină (în conformitate cu punctul 6.2.2.2).
|
2.6. Tipuri de clase de vehicule în ceea ce privește sistemele de frânare inerțiale
2.6.1. Clasa de vehicule A
Clasa de vehicule A înseamnă vehicule din categoriile R1, R2 și S1
2.6.2. Clasa de vehicule B
Clasa de vehicule B înseamnă vehiculele cu o masă mai mare de 3 500 kg, dar care nu depășește 8 000 kg, din categoriile R3 și S2
2.6.3. Clasa de vehicule C
Clasa de vehicule C1 înseamnă vehiculele din categoriile R și S cu viteza maximă prin construcție de cel mult 30 km/h
Clasa de vehicule C2 înseamnă vehiculele din categoriile R și S cu viteza maximă prin construcție de cel mult 40 km/h
Clasa de vehicule C3 înseamnă vehiculele din categoriile R și S cu viteza maximă prin construcție mai mare de 40 km/h
3.
Cerințe generale
|
3.1.
|
Transmiterea puterii de frânare de la racordul de cuplare la frânele vehiculului remorcat se efectuează fie prin tija de legătură, fie prin intermediul unuia sau mai multor fluide. Cu toate acestea, se poate folosi un cablu blindat (tip Bowden) pentru asigurarea unei porțiuni a transmisiei. Această porțiune este cât mai scurtă posibil. Cablurile și tijele de control nu intră în contact cu cadrul vehiculului remorcat sau cu alte suprafețe care pot afecta acționarea sau eliberarea frânei.
|
|
3.2.
|
Toate șuruburile de la articulații trebuie să fie protejate în mod adecvat. De asemenea, aceste legături sunt fie cu ungere automată, fie ușor accesibile pentru ungere.
|
|
3.3.
|
Sistemele de frânare inerțial se instalează astfel încât, în caz de utilizare a cursei maxime a racordului de cuplare, nici una dintre părțile transmisiei să nu se blocheze, să nu sufere o deformare permanentă și să nu se defecteze. Verificarea acestui fapt se face prin decuplarea extremității transmisiei de la pârghiile de comandă ale frânei.
|
|
3.4.
|
Sistemul de frânare inerțial permite vehiculului remorcat să se deplaseze înapoi împreună cu tractorul fără a impune o forță permanentă de rezistență mai mare de 0,08 g · GA. Dispozitivele utilizate în acest scop se declanșează automat și se dezactivează automat când vehiculul remorcat se deplasează în direcția înainte.
|
|
3.5.
|
Orice dispozitiv special încorporat, în sensul punctului 3.4, este realizat astfel încât performanța frânei de parcare pe o rampă să nu fie afectată în mod negativ.
|
|
3.6.
|
Sistemele de frânare inerțiale pot fi prevăzute cu limitatoare de suprasarcină. Acestea nu se activează la o forță mai mică decât Dop = 1,2×D* (când sunt instalate pe dispozitivul de comandă) sau la o forță mai mică decât Pop = 1,2×P* sau la o presiune mai mică de pop = 1,2×p* (când sunt instalate pe frână), unde forța P* sau presiunea p* corespunde unei forțe de frânare de B* = 0,5 · g · GBo (în cazul vehiculelor din clasele C2 și C3) și de B* = 0,35 · g · GBo (în cazul vehiculelor din clasa C1).
|
4.
Dispoziții pentru dispozitivele de comandă
|
4.1.
|
Părțile culisante ale dispozitivului de comandă sunt suficient de lungi pentru a permite cursei să fie utilizată integral, inclusiv în cazul în care vehiculul remorcat este cuplat.
|
|
4.2.
|
Părțile culisante sunt protejate de o mască sau de un alt dispozitiv echivalent. Acestea trebuie unse sau realizate din materiale cu autoungere. Suprafețele de frecare se realizează dintr-un astfel de material încât să nu existe cuplu electrochimic și nici o incompatibilitate mecanică care ar putea provoca o blocare sau o gripare a părților culisante.
|
|
4.3.
|
Forța limită (KA) a dispozitivului de comandă se situează între 0,02 g · G′A și 0,04 g · G′A.. Cu toate acestea, în cazul vehiculelor din clasele C1 și C2, forța limită (KA) a dispozitivului de comandă se poate situa între 0,01 g · G'A și 0,04 g · G'A.
|
|
4.4.
|
Forța maximă de împingere D1 nu trebuie să depășească 0,10 g · G′A la vehiculele remorcate cu bare de tracțiune rigide și la vehiculele remorcate cu axa centrală și 0,067 g · G′A la vehiculele remorcate cu mai multe axe și bare de tracțiune.
|
|
4.5.
|
Forța maximă de tracțiune D2 se situează între 0,1 g · G′A și 0,5 g · G′A.
În cazul vehiculelor din clasa B, se permite și condiția D2 ≥ 1 750 N + 0,05 g · G′A atât timp cât D2 ≤ 0,5 g · G′A.
|
5.
Verificări și măsurători care trebuie efectuate asupra dispozitivelor de comandă
|
5.1.
|
Dispozitivele de comandă prezentate serviciului tehnic care efectuează încercările sunt verificate în ceea ce privește conformitatea cu dispozițiile de la punctele 3 și 4.
|
|
5.2.
|
Pentru toate tipurile de frâne sunt măsurate următoarele:
5.2.1. cursa s și cursa efectivă s';
5.2.2. forța suplimentară K;
5.2.4. forța de împingere D1;
5.2.5. forța de tracțiune D2.
|
|
5.3.
|
Pentru sistemele de frânare inerțiale cu tracțiune mecanică, se determină următoarele:
5.3.1. raportul de demultiplicare iHo, măsurat la mijlocul cursei dispozitivului de comandă;
5.3.2. forța de ieșire P′ a dispozitivului de comandă, în funcție de forța de tracțiune D din bara de tracțiune; forța suplimentară K și randamentul sunt derivate din curba reprezentativă obținută prin aceste măsurători.

(a se vedea figura 2 din apendicele 1).
|
|
5.4.
|
Pentru frânele inerțiale cu transmisie hidraulică, se determină următoarele:
5.4.1. raportul de demultiplicare iHo, măsurat la mijlocul cursei dispozitivului de comandă;
5.4.2. presiunea p la ieșirea cilindrului principal în funcție de forța de tracțiune D din bara de tracțiune și de suprafața FHZ a pistonului cilindrului principal, specificată de producător. forța suplimentară K și randamentul sunt derivate din curba reprezentativă obținută prin aceste măsurători.

(a se vedea figura 3 din apendicele 1);
5.4.3. cursa de rezervă a cilindrului principal s″, menționată la punctul 2.2.19;
5.4.4. suprafața FHZ a pistonului din cilindrul principal;
5.4.5. cursa sHz a cilindrului principal (în milimetri);
5.4.6. cursa de rezervă s″Hz a cilindrului principal (în milimetri).
|
▼M1
|
5.5.
|
În cazul sistemului de frânare inerțială al vehiculelor tractate cu mai multe axe cu bară de tracțiune, se măsoară pierderea de cursă menționată în raportul la punctul 10.4.1.
|
▼B
6.
Cerințe pentru frâne
|
6.1.
|
Producătorul pune la dispoziția serviciului tehnic care efectuează încercările, pe lângă frânele care urmează să fie supuse încercării, schițe ale acestora care indică tipul, dimensiunea și materialul părților principale, precum și marca și tipul garniturilor. Aceste schițe indică suprafața FRZ a cilindrilor de frână, în cazul frânelor hidraulice. Producătorul indică, de asemenea, cuplul de frânare M* și masa GBo menționate la punctul 2.2.4.
|
|
6.2.
|
Condiții de încercare
|
6.2.1.
|
În cazul în care sistemul de frânare inerțială nu este nici dotat, nici proiectat pentru a fi dotat cu un limitator de suprasarcină, frâna roții se încearcă la următoarele forțe sau presiuni de încercare:
PT = 1,8 P* sau pT = 1,8 p* și MT = 1,8 M* după caz.
|
|
6.2.2.
|
În cazul în care sistemul de frânare inerțial este dotat sau este proiectat pentru a fi dotat cu un limitator de suprasarcină, frâna de la roată se încearcă la următoarele forțe sau presiuni de încercare:
6.2.2.1 Valorile minime prin construcție ale unui limitator de suprasarcină se specifică de către producător și nu sunt mai mici de:
Pop = 1,2 P* sau pop = 1,2 p*
6.2.2.2 Intervalele în care se încadrează forța minimă de încercare PTop sau presiunea minimă de încercare pTop și cuplul minim de încercare MTop sunt:
PTop = 1,1 – 1,2 P* sau pTop = 1,1 — 1,2 p*
și
MTop = 1,1 – 1,2 M*.
6.2.2.3 Valorile maxime (Pop_max sau pop_max) pentru limitatorul de suprasarcină se specifică de către producător și nu depășesc PT, respectiv pT.
|
|
7.
Verificări și măsurători de efectuat asupra frânelor
|
7.1.
|
Frânele și piesele prezentate serviciului tehnic care efectuează încercările sunt verificate privind conformitatea cu dispozițiile de la punctul 6.
|
|
7.2.
|
Se determină următoarele:
7.2.1. Cursa minimă de strângere a sabotului (deplasarea minimă a centrului sabotului), 2sB*;
7.2.2. Cursa de strângere a sabotului (deplasarea centrului sabotului) 2sB (care trebuie să fie mai mare decât 2sB*);
|
|
7.3.
|
În cazul frânelor acționate mecanic, se determină următoarele:
7.3.1. raportul de demultiplicare ig (a se vedea figura 4 din apendicele 1);
7.3.2. forța P* pentru cuplul de frânare M*;
7.3.3. cuplul M* ca funcție de forța P* aplicată pârghiei de comandă a sistemelor cu transmisie mecanică.
Viteza de rotație a suprafețelor de frânare corespunde unei viteze inițiale a vehiculului de 30 km/h în cazul vehiculelor din clasa C1, de 40 km/h în cazul vehiculelor din clasa C2, de 60 km/h în cazul vehiculelor din clasa C3, atunci când vehiculul remorcat se deplasează înainte și de 6 km/h atunci când vehiculul remorcat se deplasează înapoi. Din curba obținută pe baza acestor măsurători se deduc următoarele mărimi (a se vedea figura 6 din apendicele 1):
7.3.3.1 forța de revenire a frânei Po și caracteristica ρ' atunci când remorca se deplasează înainte;
7.3.3.2 forța de revenire a frânei Por și caracteristica ρ′r atunci când vehiculul remorcat se deplasează înapoi;
7.3.3.3 cuplul maxim de frânare Mr până la cursa maximă admisă sr atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 6 din apendicele 1);
7.3.3.4 cursa maximă admisibilă a pârghiei de comandă a frânei atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 6 din apendicele 1).
|
|
7.4.
|
În cazul frânelor acționate hidraulic, se determină următoarele mărimi:
7.4.1. raportul de demultiplicare ig′ (a se vedea figura 8 din apendicele 1)
7.4.2. presiunea p* pentru cuplul de frânare M*;
7.4.3. cuplul M* ca funcție de presiunea p* aplicată asupra cilindrului de frână al sistemelor de transmisie hidraulică.
Viteza de rotație a suprafețelor de frânare corespunde unei viteze inițiale a vehiculului de 30 km/h în cazul vehiculelor din clasa C1, de 40 km/h în cazul vehiculelor din clasa C2, de 60 km/h în cazul vehiculelor din clasa C3, atunci când vehiculul remorcat se deplasează înainte și de 6 km/h atunci când vehiculul remorcat se deplasează înapoi. Din curba obținută pe baza acestor măsurători se deduc următoarele (a se vedea figura 7 din apendicele 1):
7.4.3.1 presiunea de revenire po a frânei și caracteristica ρ′ atunci când vehiculul remorcat se deplasează înainte;
7.4.3.2 presiunea de revenire por și caracteristica ρ′r atunci când vehiculul remorcat se deplasează înapoi;
7.4.3.3 cuplul maxim de frânare Mr până la volumul de fluid maxim admisibil Vr atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 7 din apendicele 1);
7.4.3.4 volumul de fluid maxim admisibil Vr absorbit de o roată supusă frânării atunci când vehiculul remorcat se deplasează înapoi (a se vedea figura 7 din apendicele 1).
7.4.4. suprafața FRZ a pistonului din cilindrul de frână;
|
|
7.5.
|
Procedură alternativă pentru încercarea de tip I
|
7.5.1.
|
Încercarea de tip I prevăzută la punctul 2.3 din anexa II nu trebuie să fie efectuată pe un vehicul prezentat spre omologare de tip dacă părțile componente ale sistemului de frânare sunt încercate pe un stand de încercare inerțial, pentru a se verifica îndeplinirea criteriilor de la punctele 2.3.2 și 2.3.3 din anexa II.
|
|
7.5.2.
|
Procedura alternativă pentru încercarea de tip I se desfășoară în conformitate cu dispozițiile prevăzute la punctul 3.5.2 din apendicele 1 la anexa VII. (aplicabile, prin analogie, și în cazul frânelor cu discuri).
|
|
8.
Diferențialul forțelor exercitate de sistemul de frânare de parcare pe o pantă simulată
8.1. Metoda de calcul
|
8.1.1.
|
Punctele de pivotare ale compensatorului sunt aliniate atunci când frâna de parcare este în poziție de repaus.

Se pot utiliza dispuneri alternative în cazul în care se asigură o tensiune egală în ambele cabluri din spate, chiar și atunci când există diferențe în ceea ce privește deplasările între cablurile din spate.
|
|
8.1.2.
|
Trebuie prezentate schițe detaliate pentru a se demonstra că articulația compensatorului este suficientă pentru a asigura că se aplică o tensiune egală în fiecare dintre cablurile din spate. Compensatorul trebuie să fie suficient de lat pentru a facilita cursele diferențiale de la stânga la dreapta. Brațele dispozitivului de strângere trebuie, de asemenea, să fie suficient de adânci în raport cu lățimea lor pentru a se asigura că acestea nu împiedică articularea când compensatorul nu este paralel cu axele.
Cursa diferențială la nivelul compensatorului (scd) se determină cu formula:

Unde:
|
Sc' = S'/iH
|
(cursa la nivelul compensatorului — deplasare înainte) și Sc' = 2 · SB/ig
|
|
Scr = Sr/iH
|
(cursa la nivelul compensatorului — deplasare înapoi)
|
|
▼M1
9.
Rapoarte de încercare
Cererile pentru omologarea vehiculelor tractate prevăzute cu sisteme de frânare inerțială sunt însoțite de rapoartele de încercare ale dispozitivului de comandă și ale frânelor, precum și de raportul de încercare a compatibilității între dispozitivul de comandă inerțial, transmisie și frânele vehiculului tractat; aceste rapoarte cuprind cel puțin informațiile specificate la articolul 9 din Regulamentul de punere în aplicare (UE) 2015/504.
▼B
10.
Compatibilitatea între dispozitivul de comandă și frânele unui vehicul
|
10.1.
|
Se efectuează o verificare pe vehicul pentru a stabili, în funcție de caracteristicile dispozitivului de comandă, care sunt menționate în raportul de încercare, de caracteristicile frânelor menționate în raportul de încercare și de caracteristicile vehiculului remorcat, menționate în raportul de încercare, dacă sistemul de frânare inerțial corespunde cerințelor specificate.
|
|
10.2.
|
Verificări generale pentru toate tipurile de frâne
|
10.2.1.
|
Acele componente ale transmisiei care nu au fost verificate în același timp cu dispozitivul de comandă sau cu frânele se verifică pe vehicul. Rezultatele verificării se introduc în raportul de încercare (de exemplu, iH1 și ηH1).
|
|
10.2.2.
|
Masa
|
10.2.2.1
|
Masa maximă GA a vehiculului remorcat nu trebuie să depășească masa maximă G′A pentru care este autorizat dispozitivul de comandă.
|
|
10.2.2.2
|
Masa maximă GA a vehiculului remorcat nu trebuie să depășească masa maximă GB care poate fi frânată prin acționarea în comun a tuturor frânelor remorcii.
|
|
|
10.2.3.
|
Forțele
|
10.2.3.1
|
Forța limită KA nu trebuie să fie mai mică de 0,02 g · GA și nici mai mare de 0,04 g · GA.
|
|
10.2.3.2
|
Forța maximă de împingere D1 nu trebuie să depășească 0,10 g · GA la vehiculele remorcate cu bară de tracțiune rigidă și la vehiculele tractate cu axă centrală, respectiv 0,067 g · GA la vehiculele remorcate cu mai multe axe.
|
|
10.2.3.3
|
Forța maximă de tracțiune D2 se situează între 0,1 g · GA și 0,5 g · GA.
|
|
|
|
10.3.
|
Verificarea performanței frânării
|
10.3.1.
|
Suma forțelor de frânare exercitate pe circumferința roților vehiculului remorcat nu trebuie să fie mai mică de B* = 0,50 g · GA (în cazul vehiculelor din clasele C2 și C3) și B* = 0,35 · g · GA (în cazul vehiculelor din clasa C1), inclusiv o rezistență la rulare de 0,01 g · GA: aceasta corespunde unei forțe de frânare B de 0,49 g · GA (în cazul vehiculelor din clasele C2 și C3) și B* = 0,34 · g · GA (în cazul vehiculelor din clasa C1). În acest caz, forța maximă de tracțiune admisă asupra sistemului de cuplare este:
D* = 0,067 g · GA în cazul vehiculelor remorcate cu mai multe axe cu bară de tracțiune;
și
D* = 0,10 g · GA în cazul vehiculelor remorcate cu bară de tracțiune rigidă și al vehiculelor cu axă centrală;
▼M1
Pentru a verifica dacă aceste condiții sunt îndeplinite, se aplică următoarele inegalități:
|
10.3.1.1.
|
în cazul sistemelor de frânare inerțială cu transmisie mecanică:

|
|
10.3.1.2.
|
În cazul sistemelor de frânare inerțială cu transmisie hidraulică:

|
▼B
|
|
|
10.4.
|
Verificarea cursei dispozitivului de comandă
|
10.4.1.
|
În cazul dispozitivelor de comandă pentru vehicule remorcate cu mai multe axe cu bară de tracțiune al căror sistem de tije de frânare este dependent de poziția dispozitivului de tracțiune, cursa dispozitivului de comandă s este mai mare decât cursa efectivă (utilă) a dispozitivului de comandă s′, diferența fiind cel puțin echivalentă cu pierderea de cursă so. Pierderea de cursă so nu trebuie să depășească 10 % din cursa efectivă s′.
|
|
10.4.2.
|
Cursa efectivă (utilă) a dispozitivului de comandă s′ pentru vehiculele remorcate cu unul sau mai multe axe se determină după cum urmează:
10.4.2.1 în cazul în care tijele sistemului de frânare sunt influențate de poziția unghiulară a dispozitivului de tracțiune, atunci:
s′ = s – so;
10.4.2.2. dacă nu există pierdere de cursă, atunci:
s′ = s;
10.4.2.3. În sistemele de frânare hidraulică:
s′ = s – s″
|
|
10.4.3.
|
Următoarele inegalități se aplică pentru a se verifica dacă cursa dispozitivului de comandă este adecvată;
10.4.3.1. în cazul sistemelor de frânare inerțială cu transmisie mecanică:
▼M1
10.4.3.2. în cazul sistemelor de frânare inerțială cu transmisie hidraulică:


|
▼M1
10.4.4. Atunci când vehiculul remorcat se deplasează înapoi, se aplică următoarele inegalități:
10.4.4.1. în cazul sistemelor de frânare inerțială cu transmisie mecanică:
10.4.4.1.1.

10.4.4.1.2.

10.4.4.2. În cazul sistemelor de frânare inerțială cu transmisie hidraulică:
10.4.4.2.1.

10.4.4.2.2.

10.4.5. Verificări în cazul în care este montat un limitator de suprasarcină, în sensul punctului 3.6
Se aplică următoarele inegalități:
10.4.5.1. dacă limitatorul de suprasarcină montat pe dispozitivul de comandă inerțial este mecanic:

10.4.5.2. dacă limitatorul de suprasarcină montat pe dispozitivul de comandă inerțial este hidraulic:

10.4.5.3. dacă limitatorul de suprasarcină este montat pe dispozitivul de comandă inerțial:
10.4.5.4. dacă limitatorul de suprasarcină este montat pe frână:

▼B
|
|
10.5.
|
Verificări suplimentare
|
10.5.1.
|
În cazul sistemelor de frânare inerțială cu transmisie mecanică, se efectuează verificarea corectitudinii montării sistemului de tije prin care forțele sunt transmise de la dispozitivul de comandă la frâne.
|
|
10.5.2.
|
În cazul sistemelor de frânare inerțială cu transmisie hidraulică, se efectuează o verificare pentru a determina dacă cursa sistemului de acționare a cilindrului principal atinge nivelul minim de s/ih. Nu se admite o valoare inferioară.
|
|
10.5.3.
|
Comportamentul general al vehiculului la frânare face obiectul unei încercări pe drum a sistemului de frânare, la diferite viteze, la diferite eforturi de frânare și la frecvențe diferite de acționare a frânelor. Nu se admit oscilații autoinduse neamortizate.
|
|
11.
Observații generale
Dispozițiile de mai sus se aplică celor mai uzuale sisteme de frânare inerțială cu transmisie mecanică sau hidraulică, în special în cazul în care toate roțile vehiculelor remorcate sunt echipate cu același tip de frâne și cu același tip de pneuri. La verificarea unor construcții mai puțin uzuale, dispozițiile de mai sus se adaptează la particularitățile fiecărui caz în parte.
Apendicele 1
Scheme explicative
Figura 1
Simboluri valabile pentru toate tipurile de frâne
(a se vedea punctul 2.2 din prezenta anexă)

Figura 2
Transmisie mecanică
(a se vedea punctele 2.2.10 și 5.3.2 din prezenta anexă)

Figura 3
Transmisie hidraulică
(a se vedea punctele 2.2.10 și 5.4.2 din prezenta anexă)


Figura 4
Verificarea frânelor
(a se vedea punctele 2.2.22 și 2.3.4 din prezenta anexă)

Figura 5
Sistem de frânare cu transmisie mecanică
(a se vedea punctul 2.3 din prezenta anexă)

▼M1
Figura 5A
Sistemul de frânare cu transmisie mecanică
(a se vedea punctul 2.3 din prezenta anexă)

▼B
Figura 6
Frână mecanică
(a se vedea punctul 2 din prezenta anexă)

Figura 7
Frână hidraulică
(a se vedea punctul 2 din prezenta anexă)

Figura 8
Sistem de frânare cu transmisie hidraulică
(a se vedea punctul 2 din prezenta anexă)

ANEXA IX
Cerințe aplicabile vehiculelor cu propulsie hidrostatică și dispozitivelor și sistemelor de frânare ale acestora
1.
Definiții
În sensul prezentei anexe:
1.1. „sistem de frânare hidrostatică” înseamnă un sistem de frânare (fie ca sistem de frânare de serviciu și/sau ca sistem de frânare de siguranță) care utilizează numai puterea de frânare a propulsiei hidrostatice;
1.2. „sistem de frânare hidrostatică combinat” înseamnă un sistem de frânare care utilizează atât efectul de frânare hidrostatică, cât și cel de frânare prin fricțiune, însă în cadrul căruia forțele de frânare sunt generate în mare parte de propulsia hidrostatică. Proporția minimă prescrisă a frânei cu fricțiune în efectul de frânare este precizată la punctul 6.3.1.1;
1.3. „sistem de frânare cu fricțiune combinat” înseamnă un sistem de frânare care utilizează atât efectul de frânare hidrostatică, cât și cel de frânare prin fricțiune, însă în cadrul căruia forțele de frânare sunt generate în mare parte de frânele cu fricțiune. Proporția minimă prescrisă a frânei cu fricțiune pe efectul de frânare este precizată la punctul 6.3.1.2;
1.4. „sistem de frânare cu fricțiune” înseamnă un sistem de frânare în care forțele de frânare sunt generate numai de frânele cu fricțiune fără a se ține seama de efectul de frânare al sistemului de frânare hidrostatică;
1.5. „frânare hidrostatică treptată” înseamnă frânarea hidrostatică prin care conducătorul auto poate mări sau reduce viteza vehiculului în orice moment printr-o acționare progresivă a dispozitivului său de comandă.
1.6. „dispozitiv de comandă a propulsiei hidrostatice” înseamnă un dispozitiv, cum ar fi o pârghie sau o pedală, utilizat pentru a varia viteza vehiculului.
1.7. „dispozitiv de comandă a frânei de serviciu” înseamnă dispozitivul de comandă prin a cărui activare se obține performanța frânării de serviciu prescrise;
1.8. „dispozitiv Inch” înseamnă dispozitivul care afectează viteza vehiculului independent de dispozitivul de comandă hidrostatic.
2.
Domeniul de aplicare
Prezenta anexă se aplică vehiculelor cu viteză maximă prin construcție de până la 40 km/h, care sunt echipate cu o propulsie hidrostatică care nu poate fi dezactivată în timpul circulației și care este declarată de către producătorul vehiculului ca acționând ca un sistem de frânare sau ca un dispozitiv de frânare care pot fi:
2.1. un sistem de frânare de serviciu și un sistem de frânare de siguranță sau unul dintre aceste două sisteme.
Un sistem de frânare de serviciu poate fi unul dintre sistemele de frânare menționate mai jos, cu condiția să fie atinsă performanța frânării de serviciu specificată la punctul 6.3.1:
2.1.1. Sistem de frânare hidrostatică,
2.1.2. Sistem de frânare hidrostatică combinat,
2.1.3. Sistem de frânare cu fricțiune combinat,
2.1.4. Sistem de frânare cu fricțiune
sau
2.2. o parte din sistemele de frânare menționate la punctul 2.1.
3.
Vehicule cu destinație specială
Pentru lucrările cu destinație specială, unele vehicule sunt echipate cu o propulsie hidrostatică utilizată atât pentru a încetini, cât și pentru a propulsa vehiculul. Acest tip de propulsie poate fi, așadar, recunoscut ca fiind un sistem de frânare, singur sau în combinație cu o frână cu fricțiune.
4.
Clasificarea vehiculelor
|
4.1.
|
Clasa I : vehicule cu viteza maximă prin construcție ≤ 12 km/h.
|
|
4.2.
|
Clasa II : vehicule cu viteza maximă prin construcție > 12 km/h și ≤ 30 km/h
|
|
4.3.
|
Clasa III : vehicule cu viteza maximă prin construcție > 30 km/h și ≤ 40 km/h
|
5.
Cerințe
5.1. Generalități
|
5.1.1.
|
Dispozitivul de comandă a propulsiei trebuie construit în așa fel încât să se prevină inversarea accidentală în timpul deplasării pe drum.
|
|
5.1.2.
|
Pentru a facilita reechilibrarea vehiculului, este necesar un dispozitiv pentru a debloca legătura dintre motor și roțile de tracțiune.
Trebuie să fie imposibilă acționarea acestui dispozitiv din poziția de conducere în timpul deplasării pe drum.
În cazul în care este necesar un instrument pentru a acționa acest dispozitiv, acesta trebuie să se afle în vehicul.
|
5.2. Cerințe de proiectare pentru sistemele de frânare.
5.2.1. Sistemul de frânare de serviciu
|
5.2.1.1.
|
Este posibil să se aplice acțiunea progresivă de frânare a sistemului de frânare de serviciu. Conducătorul trebuie să poată acționa frâna de pe scaunul său, păstrând controlul dispozitivului de direcție al tractorului cu cel puțin o mână.
|
|
5.2.1.2
|
Performanța sistemului de frânare de serviciu impusă în temeiul Regulamentului se obține prin acționarea unui singur dispozitiv de comandă.
|
5.2.1.2.1.
|
Această cerință se consideră a fi îndeplinită când piciorul este mutat de pe pedala de accelerație pe pedala de frână sau atunci când, la începutul secvenței de frânare, dispozitivul de comandă a propulsiei este decuplat sau comutat în poziție neutră cu mâna sau cu piciorul.
|
|
5.2.1.2.2.
|
Dispozitivul de comandă a sistemului de frânare de serviciu trebuie să fie conceput astfel încât să revină automat la poziția inițială atunci când este decuplat.
Aceasta nu se aplică secțiunii hidrostatice a sistemului de frânare atunci când decuplarea comenzii de acționare hidraulică creează efectul de frânare.
|
|
|
5.2.1.3.
|
Contrar dispozițiilor de la punctul 5.2.1.1, la vehiculele din clasa I și clasa II, atunci când se frânează cu sistemul de frânare de serviciu, se poate utiliza un alt sistem de frânare (de exemplu, sistemul de frânare de siguranță sau de parcare) pentru a imobiliza vehiculul pe o pantă în cazul unei viteze reziduale de fluaj.
|
5.2.2. Sistemul de frânare de siguranță
|
5.2.2.1
|
În ceea ce privește sistemul de frânare de siguranță, trebuie îndeplinite cerințele relevante de la punctul 2.1.2.2 din anexa I.
|
▼M1 —————
▼B
5.2.3. Sistemul de frânare de parcare
În ceea ce privește sistemul de frânare de parcare, trebuie îndeplinite cerințele relevante de la punctul 2.1.2.3 din anexa I.
▼M1
|
5.2.3.1.
|
Dacă, în cazul unui vehicul cu propulsie hidrostatică, acesta nu poate fi imobilizat în pantă, se permite să se opereze sistemul de frânare de staționare pentru oprirea vehiculului din viteza reziduală de fluaj în regim de staționare. În acest scop, sistemul de frânare de staționare trebuie să fie proiectat astfel încât să poată fi acționat în timpul condusului.
|
▼B
5.3. Caracteristicile sistemelor de frânare
|
5.3.1.
|
Setul sistemelor de frânare cu care este echipat un vehicul satisface cerințele stabilite pentru sistemele de frânare de serviciu, de siguranță și de parcare.
|
|
5.3.2.
|
În cazul defectării oricărei componente, alta decât frânele sau componentele menționate la punctul 2.2.1.2.7 din anexa I sau a oricărei alte defecțiuni a sistemului de frânare de serviciu, sistemul de frânare de siguranță sau acea parte a sistemului de frânare de serviciu care nu este afectată de această defecțiune trebuie să poată opri vehiculul în condițiile prescrise pentru frâna de siguranță, în special, atunci când sistemul de frânare de siguranță și cel de serviciu au o comandă comună și o transmisie comună; de exemplu, atunci când efectul de frânare este dependent de funcționarea corespunzătoare a instalației de transmisie a puterii, adică de conversie, pompele hidraulice, motoarele hidraulice, țevile sub presiune sau componentele comparabile.
|
|
5.3.3.
|
Dispozitivele care realizează frânarea de serviciu, de siguranță și de parcare pot avea componente comune, cu condiția ca acestea să îndeplinească condițiile menționate la punctul 2.2.1.2 din anexa I.
|
▼M1
|
5.3.4.
|
Distribuția forței de frânare a sistemului de frânare de serviciu trebuie să fie proiectată în așa fel încât în timpul frânării să nu existe un moment important în jurul axei verticale a vehiculului dacă nu este atinsă limita de aderență dintre pneuri și drum pe suprafețe ale drumului omogene.
|
▼B
|
5.3.5.
|
Distribuția forței de frânare a sistemului de frânare de serviciu trebuie să fie proiectată astfel încât în timpul frânării cu sistemul de frânare de serviciu pe suprafețe cu coeficienți diferiți de frecare μ 0,2/0,8, să se poate atinge o decelerație minimă care reprezintă cel puțin 55 % din decelerația medie în regim dm a sistemului de frânare de serviciu prevăzută pentru clasa de vehicule respectivă (a se vedea punctul 6.3). Acest lucru poate fi demonstrat prin calcule; în acest caz, rezistența la rulare nu trebuie luată în considerare.
|
|
5.3.6.
|
Prin derogare de la punctul 5.3.2, în cazul unei defecțiuni a dispozitivului de comandă al pompei care acționează propulsia hidrostatică, trebuie să fie posibilă oprirea vehiculului cu performanța prevăzută pentru sistemul de frânare de siguranță. Cu toate acestea, în această condiție de defecțiune, se poate recurge la un dispozitiv suplimentar care să poată fi ușor acționat în orice moment din poziția conducătorului auto (de exemplu, un dispozitiv care acționează asupra turației motorului, inclusiv comanda de oprire a motorului).
|
|
5.3.7.
|
În cazul unui „dispozitiv Inch”, sau al altor dispozitive similare care pot fi utilizate în timpul conducerii, trebuie să se ia măsuri pentru a se asigura că toate cerințele prevăzute în prezenta anexă (în special performanța de frânare) sunt încă respectate atunci când acest tip de dispozitiv este activat.
|
|
5.3.8.
|
Semnalele de avertizare și dispozitivele de avertizare Trebuie îndeplinite cerințele relevante de la punctele 2.2.1.29 și 2.2.1.12 din anexa I.
|
|
5.3.9.
|
Dispozitivele de stocare a energiei (rezervoarele de energie) ale autovehiculelor sunt de așa natură încât, după opt acționări cu curse complete ale dispozitivului de comandă a sistemului de frânare de serviciu, presiunea rămasă în dispozitivul (dispozitivele) de stocare a energiei să nu fie mai mică decât presiunea necesară pentru a obține performanța de frânare de siguranță specificată.
|
|
5.3.10.
|
Echipamentul auxiliar hidraulic/pneumatic este alimentat cu energie astfel încât, în timpul funcționării, valorile sale prevăzute ale decelerației să poată fi atinse și, chiar și în situația unei avarii a sursei de energie, funcționarea echipamentului auxiliar să nu producă o scădere a rezervelor de energie care alimentează sistemele de frânare sub nivelul indicat la punctul 2.2.1.12 din anexa I.
|
|
5.3.11.
|
Uzura frânelor Trebuie îndeplinite cerințele relevante de la punctul 2.2.1.10 din anexa I.
|
|
5.3.12.
|
În cazul unui tractor echipat cu sisteme complexe de comandă electronică a vehiculelor în conformitate cu anexa X, se aplică cerințele din anexa menționată, iar funcționarea sistemului nu trebuie perturbată de interferențele produse de câmpuri magnetice sau electrice.
►M1
Aceasta se demonstrează prin conformitatea cu cerințele tehnice stabilite în conformitate cu dispozițiile relevante ale articolului 19 din Regulamentul delegat (UE) 2015/208. ◄
|
|
5.3.13.
|
Dacă un tractor cu propulsie hidrostatică este autorizat să tracteze un vehicul din categoriile R2, R3, R4 sau S2, el trebuie să îndeplinească cerințele relevante de la punctele 2.1.4, 2.1.5, 2.2.1.16, 2.2.1.17 și 2.2.1.18 din anexa I.
|
|
5.3.14.
|
Timpul de răspuns Atunci când un vehicul este prevăzut cu un sistem de frânare de serviciu care este dependent total sau parțial de o sursă de energie, alta decât efortul muscular al conducătorului, trebuie îndeplinite condițiile de la punctul 3.3 din anexa II în ceea ce privește părțile care nu sunt hidrostatice ale sistemului de frânare de serviciu.
|
6.
Încercări de frânare
6.1. Generalități
|
6.1.1.
|
Trebuie îndeplinite cerințele relevante de la punctul 2.1 din anexa II.
|
|
6.1.2.
|
În timpul încercării de frânare, se evaluează manevrabilitatea (de exemplu, tendința osiei spate de a se ridica în urma acțiunii de frânare a frânelor de serviciu).
|
6.1.2.1.
|
Nu este permisă ridicarea la vehiculele din clasa III.
|
|
6.1.2.2.
|
►M1
Ridicarea unei axe este permisă pentru vehiculele din clasele I și II la o decelerație mai mare de 4,5 m/s2. Cu toate acestea, trebuie să se mențină stabilitatea de conducere. ◄
În acest caz, trebuie luat în considerare și efectul de frânare al propulsiei hidrostatice.
|
|
6.2. Încercare de tip 0
6.2.1. Generalități
|
6.2.1.1
|
Frânele trebuie să fie reci. Se consideră că o frână este rece dacă sunt îndeplinite condițiile specificate la punctul 2.2.1.1 din anexa II.
|
|
6.2.1.2.
|
Încercarea se efectuează în condițiile specificate la punctul 2.2.1.3 din anexa II.
|
|
6.2.1.3.
|
Drumul este orizontal.
|
|
6.2.2.
|
În caz de acționare manuală a dispozitivului de comandă (vehicule din clasa I și clasa II), performanța frânei de serviciu trebuie să fie evaluată prin mutarea pârghiei de acționare în poziție neutră chiar înainte de acționarea frânei de serviciu pentru a se asigura că nu se frânează împotriva sistemului hidrostatic.
►M1
În cazul vehiculelor din clasa III, această secvență este automată, utilizându-se numai dispozitivul frânei de serviciu. ◄
|
|
6.2.3.
|
Sistemul de frânare de serviciu Limitele prescrise pentru performanța minimă, pentru ambele încercări, cea cu vehiculul încărcat și cea cu vehiculul descărcat, sunt cele prezentate la punctul 6.3 de mai jos pentru fiecare categorie de vehicul;
Sistemul de frânare de serviciu trebuie să îndeplinească cerințele de la punctul 6.3.1.
Atunci când este utilizat ca sistem de frânare de serviciu,
|
6.2.3.1
|
un sistem combinat de frânare hidrostatică trebuie să îndeplinească și cerințele cu privire la partea de frânare minimă a frânei (frânelor) cu fricțiune, astfel cum se specifică la punctul 6.3.1.
|
|
6.2.3.2
|
un sistem combinat de frânare cu fricțiune trebuie să îndeplinească și cerințele cu privire la partea de frânare minimă a frânei (frânelor) cu fricțiune, astfel cum se specifică la punctul 6.3.1.
|
Trebuie determinată și performanța frânei cu fricțiune. La aceste tipuri de încercări, efectul de transmisie hidrostatică trebuie să fie neutralizat pentru a se evalua frâna cu fricțiune și rezistența la rulare.
În cazul în care frânarea hidrostatică nu poate fi decuplată din motive tehnice, proporția de frânare cu fricțiune poate fi determinată prin alte metode, de exemplu:
|
6.2.3.3.
|
Se efectuează încercări succesive de frânare
|
6.2.3.3.1.
|
cu sistemul combinat de frânare hidrostatică cu frâna (frânele) cu fricțiune conectată (conectate)
|
|
6.2.3.3.2.
|
cu sistemul combinat de frânare hidrostatică cu frâna (frânele) cu fricțiune deconectată (deconectate) (doar „frânare hidrostatică”)
|
Apoi se utilizează această formulă:
zF = zHy+F – zHy + R
|
zF
|
:
|
Decelerația medie completă a sistemului de frânare cu fricțiune, inclusiv rezistența la rulare
|
|
zHy
|
:
|
Decelerația medie completă referitoare doar la efectul de frânare al sistemului de frânare hidrostatică, inclusiv rezistența la rulare
|
|
zHy+F
|
:
|
Decelerația medie completă a sistemului combinat de frânare hidrostatică.
|
|
R
|
:
|
Rezistența la rulare = 0,02
|
|
|
|
6.2.4.
|
Sistemul de frânare de siguranță
|
6.2.4.1.
|
Încercarea performanței sistemului de frânare de siguranță se realizează fie prin simularea condițiilor unei avarii reale a sistemului de frânare de serviciu, fie prin efectuarea respectivei încercări cu un sistem de frânare care să fie independent de sistemul de frânare de serviciu.
|
|
6.2.4.2.
|
Sistemul trebuie încercat cu dispozitiv de comandă adecvat.
Performanța prevăzută este obținută prin aplicarea asupra dispozitivului de comandă a unei forțe care nu depășește 600 N pe un picior sau 400 N pe un dispozitiv de comandă acționat manual. Dispozitivul de comandă trebuie să fie situat astfel încât să poată fi manevrat ușor și rapid de către conducătorul auto.
|
|
6.2.4.3.
|
Limitele prescrise pentru performanța minimă, pentru ambele încercări, cea cu vehiculul încărcat și cea cu vehiculul descărcat, sunt cele prezentate la punctul 6.3.2 de mai jos pentru fiecare categorie de vehicul.
|
|
6.3. Încercări de performanță ale sistemului de frânare de serviciu și de siguranță (de tip 0)
|
|
Încărcat & descărcat
|
|
Clasa I
|
Clasa II
|
Clasa III
|
|
|
(v in km/h; s în m; dm în m/s2)
|
v
|
≤ 12
|
≤ 30
|
≤ 40
|
|
6.3.1.
|
Sistemul de frânare de serviciu
|
s
|
≤ 0,15v + v2/78
|
≤ 0,15v + v2/92
|
≤ 0,15v + v2/130
|
|
dm
|
≥ 3,0
|
≥ 3,55
|
≥ 5,0
|
|
6.3.1.1.
|
Porțiunea minimă de frânare a frânei (frânelor) cu fricțiune în cadrul unui sistem combinat de frânare hidrostatică
|
s
|
≤ 0,15v + v2/26
|
≤ 0,15v + v2/40
|
≤ 0,15v + v2/40
|
|
dm
|
≥ 1,0
|
≥ 1,5
|
≥ 1,5
|
|
6.3.1.2.
|
Porțiunea minimă de frânare a frânei (frânelor) cu fricțiune în cadrul unui sistem combinat de frânare cu fricțiune
|
s
|
≤ 0,15v + v2/52
|
≤ 0,15v + v2/52
|
≤ 0,15v + v2/78
|
|
dm
|
≥ 2,0
|
≥ 2,0
|
≥ 3,0
|
|
6.3.2.
|
Sistemul de frânare de siguranță
|
s
|
≤ 0,15v + v2/40
|
≤ 0,15v + v2/40
|
≤ 0,15v + v2/57
|
|
dm
|
≥ 1,5
|
≥ 1,5
|
≥ 2,2
|
6.4. Încercarea de tip I (încercarea de pierdere a performanței)
|
6.4.1.
|
Frânele de serviciu sunt supuse încercării astfel încât, cu vehiculul încărcat, energia consumată la frânare să fie egală cu cea înregistrată în aceeași perioadă de timp cu vehiculul încărcat, condus cu viteză constantă de 40 km/h pe o pantă descendentă cu înclinație de 7 %, pe o distanță de 1,7 km.
|
|
6.4.2.
|
În mod alternativ, încercarea poate fi efectuată pe o suprafață plană, vehiculul fiind remorcat de un tractor; în timpul încercării, forța aplicată dispozitivului de comandă este reglată astfel încât să mențină constantă rezistența vehiculului remorcat (7 % din sarcina maximă staționară pe axa vehiculului remorcat). În cazul în care forța disponibilă pentru remorcare este insuficientă, încercarea poate fi efectuată la o viteză mai mică, dar pe o distanță mai mare, conform tabelului următor:
|
Viteză [km/h]
|
Distanța [metri]
|
|
40
|
1 700
|
|
30
|
1 950
|
|
20
|
2 500
|
|
15
|
3 100
|
|
|
6.4.3.
|
Ca alternativă la procedura cu frânare continuă descrisă la punctele 6.4.1 și 6.4.2, se poate utiliza procedura de încercare descrisă la punctul 2.3.1 din anexa II cu frânare repetată.
|
|
6.4.4.
|
Performanța la cald La sfârșitul încercării de tip I, performanța la cald a sistemului de frânare de serviciu este măsurată în aceleași condiții (și în special la o forță constantă de comandă care nu depășește forța medie folosită) la fel ca în cazul încercării de tip 0 (condițiile de temperatură pot fi diferite).
|
6.4.4.1.
|
Performanța frânării la cald a sistemului de frânare de serviciu nu trebuie să fie mai mică decât limitele indicate în tabelul de la punctul 6.4.4.2.
|
|
6.4.4.2.
|
Performanța la cald minimă prescrisă (încercarea de tip I)
|
Sistemul de frânare de serviciu
|
Performanța la cald ca % din valoarea prescrisă
|
Performanța la cald ca % din valoarea înregistrată în încercarea de tip 0
|
|
Sistem de frânare hidrostatică
|
90
|
90
|
|
Sistem de frânare hidrostatică combinat
|
90
|
80
|
|
Sistem de frânare cu fricțiune combinat
|
80
|
60
|
|
▼M1
|
|
Sistem de frânare cu fricțiune
|
80
|
60
|
|
▼B
|
|
|
|
6.4.5.
|
Încercarea de tip I poate fi omisă cu condiția să fie îndeplinite următoarele două condiții:
6.4.5.1 Cel puțin 60 % din suma forțelor de frânare în timpul încercării de tip 0 a frânei de serviciu (a se vedea punctul 6.2.3) sunt produse de frânarea cu propulsia hidrostatică.
6.4.5.2 Producătorul poate dovedi că supraîncălzirea frânelor în cazul funcționării permanente este împiedicată.
|
6.5. Sistemul de frânare de parcare
|
6.5.1.
|
În ceea ce privește sistemul de frânare de parcare, trebuie îndeplinite cerințele relevante de la punctul 3.1.3 din anexa II.
|
|
6.5.2.
|
Pentru verificarea conformității cu dispozițiile de la punctul 2.2.1.2.4 al anexei I, se efectuează o încercare de tip 0 cu vehiculul încărcat, la o viteză inițială de încercare de v ≥ 0,8 vmax. Decelerația medie completă rezultată la acționarea comenzii sistemului de frânare de parcare și decelerația imediat înaintea opririi vehiculului nu sunt mai mici de 1,5 m/s2. Forța exercitată asupra dispozitivului de comandă a frânării nu trebuie să depășească valorile specificate.
În caz de acționare manuală a dispozitivului de comandă (vehicule din clasa I și clasa II), performanța sistemului de frânare de parcare în mișcare trebuie să fie evaluată prin mutarea pârghiei de acționare în poziție neutră chiar înainte de acționarea frânei de parcare pentru a se asigura că nu se frânează împotriva sistemului hidrostatic.
►M1
În cazul vehiculelor din clasa III, această secvență este automată, utilizându-se numai dispozitivul frânei de staționare. ◄
|
ANEXA X
Cerințe aplicabile aspectelor legate de siguranța sistemelor complexe de comandă electronică a vehiculelor
1.
Generalități
Prezenta anexă stabilește cerințele pentru încercări în vederea omologării de tip, a strategiei și verificării în caz de defecțiune cu privire la aspectele legate de siguranța sistemelor complexe de comandă electronică a vehiculelor legate de sistemul de frânare al vehiculelor agricole și forestiere.
2.
Cerințe
Toate sistemele complexe de comandă electronică a vehiculelor respectă dispozițiile din anexa 18 la Regulamentul CEE-ONU nr. 13, astfel cum este menționat în tabelul următor:
|
Regulamentul CEE-ONU nr.
|
Obiect
|
Seria de amendamente
|
Trimitere JO
|
|
13
|
Omologarea vehiculelor din categoriile M, N și O/ în ceea ce privește frânarea
|
Suplimentul 5 la seria de amendamente 10
Seria 11 de amendamente
|
JO L 257, 30.9.2010, p. 1
JO L 297, 13.11.2010, p. 183
|
ANEXA XI
Procedurile de încercare și cerințele aplicabile sistemelor antiblocare, precum și vehiculelor echipate cu dispozitivele respective
1.
Definiții
În sensul prezentei anexe:
1.1. „sistem de frânare de anduranță integrat” înseamnă un sistem de frânare de anduranță al cărui dispozitiv de comandă este integrat în cel al sistemului de frânare de serviciu, astfel încât sistemul de frânare de anduranță și cel al frânei de serviciu sunt acționate simultan sau decalate corespunzător, prin intermediul unui dispozitiv de comandă comun;
1.2. „senzor” înseamnă elementul destinat recunoașterii și transmiterii către dispozitivul de control a condițiilor de rotație a roții (roților) sau a condițiilor dinamice ale vehiculului.
1.3. „dispozitiv de control” înseamnă elementul destinat evaluării datelor transmise de senzori și transmiterii unui semnal către modulator.
1.4. „modulator” înseamnă elementul destinat modulării forțelor de frânare în funcție de semnalul primit de la dispozitivul de control.
1.5. „roată controlată indirect” înseamnă o roată a cărei forță de frânare este modulată pe baza datelor furnizate de senzorul (senzorii) unei (unor) alte roți;
1.6. „executare de cicluri complete” înseamnă că sistemul antiblocare modulează în mod repetat forța de frânare pentru a împiedica blocarea roților controlate direct și exclude acționările frânei în care modularea are loc o singură dată în timpul opririi;
1.7. „forța maximă” înseamnă forța maximă stabilită în încercări de frânare și performanța sistemelor de frânare în conformitate cu prezentul regulament.
În sensul roților controlate direct și indirect, sistemele antiblocare cu grad ridicat de selectivitate sunt considerate a acționa atât asupra roților controlate direct, cât și asupra roților controlate indirect; în cazul sistemelor cu grad scăzut de selectivitate, toate roțile supuse unui senzor sunt considerate ca fiind controlate direct.
2.
Generalități
|
2.1.
|
Prezenta anexă definește performanța de frânare necesară la vehiculele agricole prevăzute cu sisteme antiblocare.
Prin viteza maximă prin construcție pentru care sunt stipulate astfel de cerințe se înțelege, în prezenta anexă, viteza care este în direcția înainte de deplasare a vehiculului, cu excepția cazurilor în care se menționează altfel în mod explicit.
|
|
2.2.
|
Sistemele antiblocare cunoscute în prezent pot avea unul sau mai mulți senzori, unul sau mai multe puncte de control și unul sau mai multe modulatoare. Orice dispozitiv de concepție diferită care poate fi utilizat în viitor sau orice alt sistem care integrează o funcție antiblocare pe roți este considerat sistem antiblocare pentru roți în sensul prezentei anexe, dacă acesta asigură o eficacitate egală cu cea prevăzută în prezenta anexă.
|
|
2.3.
|
Abaterile de la procedurile de încercare prescrise sunt permise în cazul în care condițiile de încercare nu pot fi respectate din cauza unei viteze maxime prin construcție a tractorului care este prea redusă. În acest caz, trebuie să fie demonstrată echivalența performanțele prescrise, iar metoda de evaluare și rezultatele se anexează la raportul de omologare de tip.
|
3.
Tipuri de sisteme antiblocare
|
3.1.
|
Un tractor este considerat a fi echipat cu un sistem antiblocare dacă este prevăzut cu unul dintre dispozitivele următoare:
3.1.1. Sistem antiblocare din categoria 1:
Un vehicul prevăzut cu un sistem antiblocare din categoria 1 îndeplinește toate dispozițiile corespunzătoare din prezenta anexă.
3.1.2. Sistem antiblocare din categoria 2:
Un vehicul prevăzut cu un sistem antiblocare din categoria 2 îndeplinește toate dispozițiile corespunzătoare din prezenta anexă, cu excepția celor de la punctul 5.3.5.
3.1.3. Sistem antiblocare din categoria 3:
Un vehicul prevăzut cu un sistem antiblocare din categoria 3 îndeplinește toate dispozițiile corespunzătoare din prezenta anexă, cu excepția celor de la punctele 5.3.4 și 5.3.5. La astfel de vehicule, orice axă individuală (sau punte) care nu include cel puțin o roată controlată direct trebuie să îndeplinească condițiile de utilizare a aderenței și succesiunile de blocare descrise în apendicele 1 la anexa II privind coeficientul de frânare și, respectiv, sarcina. Aceste dispoziții pot fi verificate pe căi de rulare cu coeficient înalt sau redus de aderență (aproximativ 0,8, respectiv 0,3 drept valori maxime) prin modularea forței exercitate asupra comenzii frânei de serviciu.
|
|
3.2.
|
Se consideră că un vehicul remorcat este prevăzut cu un sistem antiblocare atunci când cel puțin două roți situate pe laturi opuse ale vehiculului sunt controlate direct, iar toate celelalte roți sunt controlate fie direct, fie indirect de către sistemul de frânare cu antiblocare. În cazul vehiculelor remorcate cu bară de tracțiune, cel puțin două roți de la o axă din față și două roți de la o axă din spate sunt controlate în mod direct, fiecare dintre aceste două axe având cel puțin un modulator independent, iar celelalte roți fiind controlate fie direct, fie indirect. De asemenea, un vehicul remorcat prevăzut cu sistem antiblocare respectă una dintre următoarele condiții:
3.2.1. Sistem antiblocare din categoria A:
Un vehicul remorcat prevăzut cu un sistem antiblocare din categoria A îndeplinește toate dispozițiile corespunzătoare din prezenta anexă.
3.2.2. Sistem antiblocare din categoria B:
Un vehicul remorcat prevăzut cu un sistem antiblocare din categoria B îndeplinește toate dispozițiile corespunzătoare din prezenta anexă, cu excepția punctului 6.3.2.
|
4.
Cerințe generale
|
4.1.
|
Defecțiunile la transmisia electrică a comenzii sistemului de frânare antiblocare care afectează sistemul cu privire la cerințele funcționale și de performanță prevăzute în prezenta anexă, sunt semnalate conducătorului auto printr-un semnal optic de avertizare specific. În acest scop se utilizează semnalul de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2 din anexa I.
Atât timp cât procedurile de încercare nu au fost definite, producătorul furnizează serviciului tehnic o analiză a eventualelor defecțiuni care pot interveni în cadrul transmisiei comenzilor și a efectelor acestora. Aceste informații constituie subiectul unei discuții și al unui acord între serviciul tehnic și producătorul vehiculului.
|
4.1.1.
|
Anomaliile senzorului, care nu pot fi detectate în condiții statice, se detectează cel târziu în momentul în care viteza de deplasare a vehiculului depășește 10 km/h. Totuși, pentru a preveni indicarea eronată a unei defecțiuni atunci când un senzor nu transmite informații privind viteza ca urmare o roată nu este în mișcare de rotație, verificarea poate fi amânată, dar cel târziu până în momentul în care viteza vehiculului depășește 15 km/h. Semnalul de avertizare se poate aprinde din nou atunci când vehiculul staționează, cu condiția ca acesta să se stingă înainte ca viteza vehiculului să atingă 10 km/h sau 15 km/h, după caz, dacă nu există nicio defecțiune.
|
|
4.1.2.
|
Atunci când sistemul antiblocare este alimentat cu vehiculul staționat, supapa (supapele) pneumatică (pneumatice), comandată (comandate) electric, a (ale) modulatorului este (sunt) acționată (acționate) cel puțin o dată.
|
|
|
4.2.
|
Tractoarele echipate cu un sistem antiblocare și autorizate să tracteze un vehicul remorcat prevăzut cu un astfel de sistem trebuie prevăzute cu un martor optic separat pentru sistemul antiblocare al vehiculului remorcat, conform dispozițiilor de la punctul 4.1. În acest scop se utilizează indicatoarele de avertizare separate menționate la punctul 2.2.1.29.2 din anexa I, activate prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003. Priza prevăzută de standardul ISO 7638:2003 poate fi utilizată pentru aplicații cu 5 sau 7 contacte, după caz.
|
4.2.1.
|
Acest avertizor nu se aprinde în cazul în care vehiculul remorcat nu dispune de sistem antiblocare sau în cazul în care nu este cuplat niciun vehicul remorcat. Această funcție este automată.
|
|
|
4.3.
|
În cazul unei defecțiuni conform descrierii de la punctul 4.1, se aplică următoarele cerințe:
Tractoare: În cazul unei defecțiuni a unei componente a transmisiei sistemului de frânare de serviciu, performanța de frânare reziduală trebuie să fie de 1,3 m/s2. Această dispoziție nu se interpretează ca modificând dispozițiile referitoare la frânarea de siguranță.
Vehiculele remorcate: Performanța de frânare reziduală trebuie să fie de cel puțin 30 la sută din performanța prevăzută pentru sistemul de frânare de serviciu al vehiculului remorcat relevant.
|
|
4.4.
|
Acțiunea sistemului nu trebuie perturbată de interferențele produse de câmpuri magnetice sau electrice.
►M1
Această cerință se demonstrează prin conformitatea cu cerințele tehnice stabilite la articolul 19 din Regulamentul delegat (UE) 2015/208. ◄
|
|
4.5.
|
Nu se furnizează un dispozitiv manual care să deconecteze sau să schimbe modul de comandă al sistemului antiblocare, cu excepția tractoarelor din categoria T sau C. Atunci când tractoarele din categoriile T sau C sunt prevăzute cu un astfel de dispozitiv, sunt îndeplinite condițiile următoare:
4.5.1. un semnal optic anunță conducătorul că sistemul antiblocare a fost deconectat sau că modul de comandă a fost modificat; în acest scop se utilizează semnalul de avertizare menționat la punctul 2.2.1.29.1.2 din anexa I.
Semnalul de avertizare poate fi permanent sau intermitent;
4.5.2. Sistemul antiblocare este reconectat sau repornit automat în momentul în care se repornește motorul sau când viteza vehiculului depășește 30km/h.
4.5.3. Manualul de utilizare al vehiculului furnizat de producător trebuie să prevină conducătorul cu privire la consecințele deconectării manuale a sistemului antiblocare sau a schimbării modului de control al acestuia;
4.5.4. Dispozitivul menționat la punctul 4.5 poate, împreună cu tractorul, să deconecteze sau să schimbe modul de comandă al sistemului antiblocare al vehiculului remorcat. Nu se admite un dispozitiv separat numai pentru vehiculul remorcat.
4.5.5. Dispozitivele care modifică mijlocul de control al sistemului antiblocare nu fac obiectul punctului 4.5 dacă în modul de control modificat sunt îndeplinite toate cerințele aplicabile categoriei sistemului antiblocare cu care este echipat un vehicul. În orice caz, în această situație, sunt respectate punctele 4.5.1, 4.5.2 și 4.5.3.
|
|
4.6.
|
În cazul vehiculelor echipate cu un sistem de frânare cu antiblocare și cu un sistem integrat de frânare de anduranță, sistemul de frânare cu antiblocare acționează cel puțin frânele de serviciu de pe axa controlată de sistemul de frânare de anduranță, precum și sistemul de frânare de anduranță propriu-zis, și trebuie să îndeplinească dispozițiile corespunzătoare ale prezentei anexe.
|
|
4.7.
|
În cazul vehiculelor remorcate cu sisteme de frânare pneumatice, executarea ciclurilor complete de către sistemul de frânare cu antiblocare este asigurată numai atunci când presiunea disponibilă în oricare dintre dispozitivele de acționare a frânei ale unei roți controlate direct depășește cu peste 100 kPa presiunea maximă de executare a ciclurilor pe parcursul unei anumite încercări. Presiunea de alimentare disponibilă nu trebuie să crească peste 800 kPa.
În cazul vehiculelor remorcate cu sisteme de frânare hidraulice, executarea ciclurilor complete de către sistemul de frânare cu antiblocare este asigurată numai atunci când presiunea disponibilă în oricare dintre dispozitivele de acționare a frânei ale unei roți controlate direct depășește cu peste 1 750 kPa presiunea maximă de executare a ciclurilor pe parcursul unei anumite încercări. Nivelul de energie disponibilă furnizată de sistemul antiblocare nu trebuie să crească peste 14 200 kPa.
|
5.
Dispoziții speciale privind tractoarele
5.1. Consum energetic
Tractoarele echipate cu sisteme antiblocare își mențin performanțele chiar și atunci când dispozitivul de comandă a frânei de serviciu este acționat până la capătul cursei pe o perioadă lungă de timp. Conformitatea cu această cerință trebuie verificată prin procedura la care se face referire la punctele 5.1.1, 5.2.3, 5.2.4, 5.2.5, 5.3, 6.1.1, 6.1.3, 6.1.4, 6.3:
5.1.1. Procedura de încercare
|
5.1.1.1.
|
Nivelul inițial al energiei din dispozitivele de stocare a energiei este cel specificat de producător. Acest nivel are cel puțin o valoare care să asigure performanța prevăzută pentru frânarea de serviciu cu vehiculul încărcat. Dispozitivele de stocare a energiei pentru echipamentul pneumatic auxiliar trebuie izolate.
|
|
5.1.1.2.
|
De la o viteză inițială de cel puțin 50 km/h (sau vmax, luându-se în calcul valoarea cea mai mică dintre cele două) pe o cale de rulare cu un coeficient de aderență de 0,3 sau mai mic, frânele unui vehicul încărcat se aplică complet, pe o durată t, în timpul căreia se ia în calcul energia consumată de roțile controlate indirect; roțile controlate direct trebuie să rămână în permanență sub controlul sistemului antiblocare în acest interval.
Până când aceste suprafețe de încercare vor deveni accesibile pe scară largă, serviciul tehnic poate folosi, la discreția sa, pneuri aflate la limita uzurii autorizate și valori mai mari ale coeficientului de aderență, de până la 0,4. Se înregistrează valoarea efectivă obținută, precum și tipul pneurilor și al suprafețelor.
|
|
5.1.1.3.
|
După aceasta, se oprește motorul vehiculului sau se întrerupe alimentarea cu energie.
|
|
5.1.1.4.
|
Dispozitivul de comandă a frânei de serviciu este acționat apoi complet, de patru ori succesiv vehiculul fiind staționat.
|
|
5.1.1.5.
|
La a cincea acționare a dispozitivului de comandă, vehiculul poate fi frânat cel puțin cu performanța prescrisă pentru frânarea de siguranță a vehiculului încărcat.
|
|
5.1.1.6.
|
În timpul încercărilor, în cazul unui autovehicul autorizat să tracteze un vehicul echipat cu un sistem de frânare cu aer comprimat, circuitul de alimentare se blochează, iar o rezervă de energie cu o capacitate de 0,5 litri se conectează la circuitul de comandă (în conformitate cu punctul 1.2.2.3 din partea A a anexei IV). La a cincea acționare conform punctului 5.1.1.5 din prezenta anexă, nivelul de energie furnizat circuitului de comandă nu trebuie să fie mai mic de jumătate din nivelul de energie obținut printr-o acționare completă începând de la nivelul inițial de energie.
|
5.1.2. Cerințe suplimentare
|
5.1.2.1.
|
Coeficientul de aderență al căii de rulare este măsurat pentru vehiculul în cauză conform metodei descrise la punctul 1.1 de la apendicele 2.
|
|
5.1.2.2.
|
Încercarea de frânare se efectuează cu motorul decuplat, la ralanti, și cu vehiculul încărcat.
|
|
5.1.2.3.
|
Timpul de frânare t trebuie să fie de 15 secunde.
|
|
5.1.2.4.
|
Dacă timpul t nu poate fi acoperit într-o singură etapă de frânare, operațiunea poate fi repetată de maximum patru ori.
|
|
5.1.2.5.
|
Dacă încercarea se efectuează în mai multe etape, nu se realizează nicio alimentare cu energie între etapele încercării. Începând cu a doua etapă, poate fi luat în considerare consumul de energie corespunzător primei acționări a frânei, prin scăderea unei acționări complete a frânei din cele patru acționări prevăzute la punctele 5.1.1.4, 5.1.1.5, 5.1.1.6 și 5.1.2.6, pentru fiecare dintre a doua, a treia și a patra etapă folosite în încercarea prevăzută la punctul 5.1.1, după caz.
|
|
5.1.2.6
|
Performanța prescrisă la punctul 5.1.1.5 este considerată satisfăcătoare dacă, la sfârșitul celei de a patra acționări, cu vehiculul staționat, nivelul de energie din rezervoare este cel puțin egal cu cel necesar pentru atingerea performanței de frânare de siguranță cu vehiculul încărcat.
|
5.2. Utilizarea aderenței
|
5.2.1.
|
Utilizarea aderenței de către un sistem antiblocare ia în considerare creșterea efectivă a distanței de frânare față de valoarea minimă teoretică a acesteia. Sistemul antiblocare este considerat ca fiind satisfăcător atunci când este îndeplinită condiția
ε ≥ 0,75
unde ε reprezintă aderența utilizată, conform definiției de la punctul 1.2 din apendicele 2.
|
|
5.2.2.
|
Utilizarea aderenței (ε) se măsoară pe suprafețe de drum cu un coeficient de aderență de 0,3 sau mai mic și, respectiv, de aproximativ 0,8 (drum uscat), la o viteză inițială de 50 km/h sau vmax, luându-se în calcul cea mai mică dintre aceste două valori. Pentru a elimina efectele temperaturilor de frânare diferite, se recomandă ca zAL (a se vedea apendicele 1) să fie stabilit înainte de determinarea coeficientului k.
Până când aceste suprafețe de încercare vor deveni accesibile pe scară largă, serviciul tehnic poate folosi, la discreția sa, pneuri aflate la limita uzurii autorizate și valori mai mari ale coeficientului de aderență, de până la 0,4. Se menționează valoarea efectivă obținută, tipul pneurilor și al suprafețelor.
|
|
5.2.3.
|
Procedura de încercare care urmărește determinarea coeficientului de aderență (k) și formulele pentru calculul aderenței utilizate (ε) sunt cele stabilite în apendicele 2.
|
|
5.2.4.
|
Utilizarea aderenței de către sistemul antiblocare se verifică la vehiculele complexe prevăzute cu sisteme antiblocare din categoria 1 sau 2. În cazul vehiculelor prevăzute cu sisteme antiblocare din categoria 3, numai axa (axele) cu cel puțin o roată controlată direct îndeplinește (îndeplinesc) această condiție.
|
|
5.2.5.
|
Condiția ε ≥0,75 se verifică cu vehiculul încărcat și cu vehiculul neîncărcat. În prima situație, încercarea pe o suprafață cu grad ridicat de aderență poate fi omisă dacă forța specificată asupra dispozitivului de comandă nu permite atingerea unui ciclu complet al sistemului antiblocare. Pentru încercarea cu vehiculul neîncărcat, forța asupra comenzii poate fi mărită până la 1 000 N dacă ciclul nu este terminat în condițiile unei valori maxime a forței specificate. O forță mai mare decât valoarea forței maxime poate fi utilizată dacă aceasta este necesară pentru activarea sistemului antiblocare. Dacă forța de 1 000 N nu permite efectuarea unui ciclu complet, această încercare poate fi omisă. Pentru sistemele de frânare pe bază de aer comprimat, presiunea aerului nu poate depăși presiunea de decuplare pentru această încercare.
|
5.3. Verificări suplimentare
Verificările suplimentare următoare se efectuează cu motorul decuplat, cu vehiculul încărcat sau neîncărcat:
5.3.1. Roțile controlate direct de un sistem antiblocare nu se blochează în momentul în care forța maximă este aplicată brusc asupra dispozitivului de comandă, pe căile de rulare specificate la punctul 5.2.2 din prezenta anexă, la o viteză inițială de 40 km/h și la viteză inițială ridicată, conform tabelului de mai jos:
|
Stare
|
Viteza maximă de încercare
|
|
Suprafață cu grad ridicat de aderență
|
0,8 vmax ≤ 80 km/h
|
|
Suprafață cu grad scăzut de aderență
|
0,8 vmax ≤ 70 km/h
|
5.3.2. Când o axă trece de la o suprafață cu grad ridicat de aderență (kH) la o suprafață cu grad scăzut de aderență (kL) unde kH ≥ 0,5 și kH/kL ≥ 2, iar dispozitivul de comandă este acționat cu forța maximă, roțile controlate direct nu trebuie să se blocheze. Viteza de rulare și momentul frânării sunt calculate astfel încât, cu sistemul antiblocare efectuând un ciclu complet pe o suprafață cu grad ridicat de aderență, trecerea de la o suprafață la alta să se facă la viteză mare și la viteză mică în condițiile specificate la punctul 5.3.1 de mai sus.
5.3.3. Când un vehicul trece de la o suprafață cu grad redus de aderență (kL) la o suprafață cu grad ridicat de aderență (kH) unde kH ≥ 0,5 și kH/kL ≥ 2, iar dispozitivul de comandă este acționat cu forță maximă, decelerația vehiculului trebuie să atingă valoarea ridicată adecvată într-un interval de timp rezonabil, iar vehiculul nu trebuie să devieze de la traiectoria inițială. Viteza de rulare și momentul frânării se calculează astfel încât, cu sistemul antiblocare efectuând un ciclu complet pe o suprafață cu grad redus de aderență, trecerea de la o suprafață la alta să aibă loc la o viteză de aproximativ 50 km/h sau la 0,8 vmax, luându-se în calcul cea mai mică dintre aceste două valori.
5.3.4. În cazul vehiculelor echipate cu sisteme antiblocare din categoriile 1 și 2, când roțile din partea dreaptă și din partea stângă a vehiculului sunt situate pe suprafețe cu coeficienți diferiți de aderență (kH și kL), unde kH ≥ 0,5 și kH/kL ≥ 2, roțile controlate direct nu trebuie să se blocheze în momentul în care forța maximă este aplicată brusc asupra dispozitivului de comandă, la o viteză de 50 km/h sau de 0,8 vmax, luându-se în calcul cea mai mică dintre aceste două valori.
5.3.5. De asemenea, vehiculele încărcate dotate cu un sistem antiblocare din categoria 1 respectă, în conformitate cu condițiile de la punctul 5.3.4 de mai sus, factorul de frânare prevăzut în apendicele 3.
5.3.6. Cu toate acestea, pentru încercările prevăzute la punctele 5.3.1, 5.3.2, 5.3.3, 5.3.4 și 5.3.5, se admit secvențe scurte de blocare a roților. De asemenea, blocarea roților este permisă în cazul în care viteza vehiculului este mai mică de 15 km/h; în mod similar, blocarea roților controlate indirect este permisă la orice viteză cu condiția ca stabilitatea și manevrabilitatea vehiculului să nu fie afectate.
5.3.7. În timpul încercărilor prevăzute la punctele 5.3.4 și 5.3.5, corectarea direcției este permisă cu condiția ca rotația angulară a comenzii direcției să fie mai mică de 120° în timpul primelor doua secunde și să nu depășească 240° în total. De asemenea, la începutul încercărilor, planul median longitudinal al vehiculului trebuie să treacă prin linia de separare dintre suprafața cu coeficient redus și cea cu coeficient ridicat de aderență, iar în timpul încercărilor nici o parte a pneurilor (exterioare) nu trebuie să treacă peste această limită.
5.3.8. Se ține seama de următoarele:
5.3.8.1. kH și kL se măsoară conform specificațiilor din apendicele 2 la prezenta anexă.
5.3.8.2. Scopul încercărilor de la următoarele puncte 5.3.1, 5.3.2, 5.3.3 și 5.3.4 este de a verifica dacă roțile controlate direct nu se blochează și dacă vehiculul rămâne stabil. În cadrul acestor încercări, se poate utiliza o forță mai mare decât valoarea forței maxime dacă aceasta este necesară pentru activarea sistemului antiblocare.
5.3.8.3. În ceea ce privește punctele 5.3.1 și 5.3.2, în consecință, nu este necesară efectuarea unor opriri complete ale vehiculului pe o suprafață cu grad redus de aderență.
6.
Dispoziții speciale privind vehiculele remorcate
6.1. Consum energetic
Vehiculele remorcate prevăzute cu sisteme antiblocare sunt concepute astfel încât, chiar dacă dispozitivul de comandă al frânei de serviciu a fost acționat până la capătul cursei pentru un anumit timp, în vehicul rămâne suficientă energie pentru oprirea vehiculului în limitele unei distanțe rezonabile.
|
6.1.1.
|
Respectarea dispoziției de mai sus se verifică prin metoda descrisă mai jos, cu vehiculul neîncărcat pe un drum rectiliniu și orizontal, cu o suprafață cu un coeficient bun de aderență, având frânele reglate cât mai strâns posibil și senzorul de sarcină al frânei (dacă este montat) menținut în poziția „încărcat” pe tot parcursul încercării.
Dacă coeficientul de aderență din încercare este prea mare și împiedică sistemul antiblocare să-și efectueze ciclul, atunci încercarea poate fi realizată pe o suprafață cu un coeficient de aderență mai mic.
|
|
6.1.2.
|
În cazul sistemelor de frânare cu aer comprimat, nivelul de energie inițial din dispozitivele de stocare a energiei corespunde unei presiuni de 800 kPa la racordul de cuplare al circuitului de alimentare al vehiculului remorcat.
|
|
6.1.3.
|
Când viteza inițială a unui vehicul este de cel puțin 30 km/h, frânele se aplică complet pentru un timp t = 15 s, în timpul căruia se ia în calcul energia consumată de roțile controlate indirect, toate roțile controlate direct rămânând sub controlul sistemului antiblocare. În timpul acestei încercări, alimentarea cu energie a dispozitivelor de stocare este întreruptă. În cazul în care timpul t = 15 s nu poate fi obținut într-o singură etapă de frânare, operațiunea poate fi repetată. În timpul acestor etape nu se permite nicio alimentare cu energie a dispozitivelor de stocare și, din a doua etapă, se ia în calcul consumul suplimentar de energie necesar umplerii sistemului de acționare, aplicându-se de exemplu procedura de încercare următoare. Presiunea din rezervoare la începutul primei etape este cea specificată la punctul 6.1.2. La începutul etapelor următoare, presiunea din rezervoare după aplicarea frânelor nu este inferioară celei constatate la sfârșitul etapei precedente. În etapa (etapele) următoare, singurul interval de timp care trebuie luat în calcul este cel înregistrat din momentul în care presiunea din rezervor (rezervoare) este egală cu cea de la sfârșitul etapei precedente.
|
|
6.1.4.
|
La sfârșitul frânării, vehiculul fiind staționat, dispozitivul de comandă al frânei de serviciu se acționează până la capătul cursei de patru ori la rând. La cea de-a cincea acționare, presiunea din circuitele aflate în funcționare este suficientă pentru a oferi o forță totală de frânare la periferia roților cel puțin egală cu 22,5 % din forța corespunzătoare sarcinii maxime pe roți când vehiculul staționează, fără să provoace acționarea automată a unui sistem de frânare independent de sistemul antiblocare.
|
6.2. Utilizarea aderenței
|
6.2.1.
|
Vehiculele remorcate prevăzute cu un sistem antiblocare sunt considerate ca fiind acceptabile atunci când este îndeplinită condiția ε ≥ 0,75, unde ε reprezintă aderența utilizată, conform definiției de la punctul 2 din apendicele 2. Această condiție este verificată cu vehiculul neîncărcat, pe un drum rectiliniu și orizontal, având un coeficient de aderență bun.
Dacă coeficientul de aderență din încercare este prea mare și împiedică sistemul antiblocare să-și efectueze ciclul, atunci încercarea poate fi realizată pe o suprafață cu un coeficient de aderență mai mic.
În cazul remorcilor prevăzute cu senzor de sarcină la frânare, presiunea poate fi mărită pentru asigurarea unui ciclu complet.
|
|
6.2.2.
|
Pentru a elimina efectele temperaturilor de frânare diferite, se recomandă ca zRAL să fie stabilit înainte de determinarea coeficientului kR.
|
6.3. Verificări suplimentare
|
6.3.1.
|
La o viteză care depășește 15 km/h, roțile controlate direct de sistemul antiblocare nu se blochează atunci când forța maximă este aplicată brusc asupra dispozitivului de comandă al tractorului. Această dispoziție se verifică conform condițiilor prevăzute la punctul 6.2, la viteze inițiale de 40 km/h și 60 km/h.
|
|
6.3.2.
|
Dispozițiile prezentului punct se aplică numai vehiculelor remorcate prevăzute cu un sistem antiblocare din categoria A. Când roțile din partea dreaptă și din partea stângă se află pe suprafețe ce produc coeficienți maximi de frânare diferiți (zRALH și zRALL), unde:

și
roțile controlate direct nu trebuie să se blocheze la aplicarea bruscă a forței maxime asupra dispozitivului de comandă al tractorului la o viteză de 50 km/h. Raportul zRALH/zRALL poate fi verificat prin procedura de la punctul 2 din apendicele 2 sau calculând raportul zRALH/zRALL. Această condiție fiind îndeplinită, coeficientul de frânare al vehiculului neîncărcat este cel prevăzut în apendicele 3.
În cazul vehiculelor remorcate prevăzute cu frâne cu senzor de sarcină, presiunea dispozitivului poate fi mărită pentru asigurarea unui ciclu complet.
|
|
6.3.3.
|
Dacă vehiculul rulează la o viteză ≥ 15 km/h, roțile controlate direct se pot bloca pentru perioade scurte, însă la viteze < 15 km/h orice blocare este permisă. Roțile controlate indirect se pot bloca la orice viteză. În toate cazurile, stabilitatea nu trebuie să fie afectată.
|
Apendicele 1
Simboluri
Simbolurile următoare sunt folosite în apendicele 2, 3 și 4:
|
Simbol
|
Note
|
|
E
|
ampatamentul
|
|
ER
|
distanța dintre punctul de cuplare și centrul axei (axelor) vehiculului remorcat cu bară de tracțiune rigidă [sau distanța dintre punctul de cuplare și centrul axei (axelor) vehiculului remorcat cu axă mediană]
|
|
ε
|
aderența utilizată de vehicul: raportul dintre factorul de frânare maxim obținut cu sistemul antiblocare cuplat (zAL) și coeficientul de aderență (k)
|
|
εi
|
valoarea ε măsurată pe axa i (în cazul unui tractor cu un sistem antiblocare din categoria 3)
|
|
εΗ
|
valoarea ε pe o suprafață cu aderență ridicată
|
|
εL
|
valoarea ε pe o suprafață cu aderență scăzută
|
|
F
|
forța [N]
|
|
FbR
|
forța de frânare a vehiculului remorcat cu sistemul antiblocare necuplat
|
|
FbRmax
|
valoarea maximă a FbR
|
|
FbRmaxi
|
valoarea lui FbRmax atunci când numai axa i al vehiculului remorcat este frânat
|
|
FbRAL
|
forța de frânare a vehiculului remorcat cu sistemul antiblocare cuplat
|
|
FCnd
|
reacțiunea normală totală a suprafeței drumului asupra axelor nefrânate și nemotoare ale ansamblului de vehicule în condiții statice
|
|
FCd
|
reacțiunea normală totală a suprafeței drumului față de axele nefrânate și motoare ale ansamblului de vehicule în condiții statice
|
|
Fdyn
|
reacțiunea normală a suprafeței drumului în condiții dinamice și cu sistemul antiblocare cuplat
|
|
Fidyn
|
Fdyn pe axa i în cazul tractoarelor sau al vehiculelor remorcate cu bară de tracțiune
|
|
Fi
|
reacțiunea normală a suprafeței drumului față de axa i în condiții statice
|
|
FM
|
reacțiunea statică normală totală a suprafeței drumului asupra tuturor roților tractorului
|
|
FMnd (1)
|
reacția statică normală totală a suprafeței drumului asupra axelor nefrânate și nemotoare ale unui tractor
|
|
FMd
|
reacțiunea statică normală totală a suprafeței drumului asupra axelor nefrânate și motoare ale unui autovehicul
|
|
FR
|
reacțiunea statică normală totală a suprafeței drumului asupra tuturor roților vehiculului remorcat
|
|
FRdyn
|
reacțiunea dinamică normală totală a suprafeței drumului asupra axei (axelor) vehiculului remorcat cu bară de tracțiune rigidă sau al vehiculului remorcat cu axă centrală
|
|
FwM
|
0,01 FMnd + 0,015 FMd
|
|
g
|
accelerația gravitațională g = 9,81 m/s2
|
|
h
|
înălțimea centrului de greutate specificată de producător și validată de serviciul tehnic care efectuează încercarea de omologare
|
|
hD
|
înălțimea barei de tracțiune (punctul de articulare pe vehiculul remorcat)
|
|
hK
|
înălțimea șeii de cuplare (a pivotului de cuplare)
|
|
hR
|
înălțimea centrului de greutate al vehiculului remorcat
|
|
k
|
coeficientul de aderență dintre pneu și calea de rulare
|
|
kf
|
valoarea lui k pentru o axă din față
|
|
kH
|
valoarea lui k determinată pentru o suprafață cu grad ridicat de fricțiune
|
|
ki
|
valoarea lui k determinată pentru axa i al unui vehicul dotat cu sistem antiblocare de categoria 3
|
|
kL
|
valoarea lui k determinată pentru o suprafață cu grad scăzut de fricțiune
|
|
klock
|
valoarea aderenței pentru o alunecare de 100 %
|
|
kM
|
valoarea lui k pentru tractor
|
|
kpeak
|
valoarea maximă a curbei „de aderență în funcție de alunecare”
|
|
kr
|
valoarea lui k pentru o axă din spate
|
|
kR
|
valoarea lui k pentru vehiculul remorcat
|
|
P
|
masa vehiculului individual [kg]
|
|
R
|
raportul kpeak – klock
|
|
t
|
durata [în secunde]
|
|
tm
|
valoarea medie a lui t
|
|
tmin
|
valoarea minimă a lui t
|
|
z
|
coeficientul de frânare [m/s2]
|
|
zAL
|
coeficientul de frânare z al vehiculului cu sistemul antiblocare cuplat
|
|
zC
|
coeficientul de frânare z al ansamblului de vehicule, numai cu vehiculul remorcat frânat și sistemul antiblocare necuplat
|
|
zCAL
|
coeficientul de frânare z al ansamblului de vehicule, numai cu vehiculul remorcat frânat și sistemul antiblocare cuplat
|
|
zCmax
|
valoarea maximă a lui zC
|
|
zCmaxi
|
valoarea maximă a lui zC atunci când numai axa i al vehiculului remorcat este frânat
|
|
zm
|
coeficientul de frânare mediu
|
|
zmax
|
valoarea maximă a lui z
|
|
zMALS
|
zAL a tractorului pe o cale de rulare cu coeficienți de aderență diferiți
|
|
zR
|
coeficientul de frânare z al vehiculului remorcat cu sistemul antiblocare decuplat
|
|
zRAL
|
zAL al vehiculului remorcat obținut prin frânarea tuturor axelor, cu tractorul nefrânat și motorul acestuia oprit
|
|
zRALH
|
valoarea lui zRAL pe o suprafață cu coeficient ridicat de aderență
|
|
zRALL
|
valoarea lui zRAL pe o suprafață cu coeficient scăzut de aderență
|
|
zRALS
|
zRAL pe o suprafață cu coeficienți de aderență diferiți
|
|
zRH
|
zRAL pe o suprafață cu coeficient ridicat de aderență
|
|
zRL
|
zRAL pe o suprafață cu coeficient scăzut de aderență
|
|
zRHmax
|
valoarea maximă a lui zRH
|
|
zRLmax
|
valoarea maximă a lui zRL
|
|
zRmax
|
valoarea maximă a lui zR
|
|
(1) FMnd și FMd în cazul vehiculelor motoare cu două axe. Aceste simboluri pot fi simplificate prin utilizarea simbolurilor corespunzătoare Fi.
|
Apendicele 2
Utilizarea aderenței
1.
Metodă de măsurare pentru tractoare
1.1. Determinarea coeficientului de aderență (k)
|
1.1.1.
|
Coeficientul de aderență (k) se determină ca fiind produsul dintre forța maximă de frânare fără blocarea roților și sarcina dinamică respectivă pe axa frânată.
|
|
1.1.2.
|
Frânele se aplică numai pe una dintre axele vehiculului supus încercării, la o viteză inițială de 50 km/h. Forțele de frânare se distribuie între roțile axei astfel încât să se obțină o performanță maximă. Sistemul antiblocare este deconectat sau nefuncțional între vitezele de 40 km/h și 20 km/h.
|
|
1.1.3.
|
Pentru a determina rata maximă de frânare a vehiculului (zmax) se efectuează mai multe încercări cu creșterea treptată a presiunii în circuit. Pe parcursul fiecărei încercări se menține o forță constantă de acționare, iar coeficientul de frânare se determină în funcție de timpul (t) necesar pentru a reduce viteza de la 40 km/h la 20 km/h, cu formula următoare:

zmax este valoarea maximă a lui z in m/s2,
t este exprimat în secunde.
|
1.1.3.1.
|
Se admite blocarea roților la o viteză mai mică de 20 km/h.
|
|
1.1.3.2.
|
Începând cu valoarea minimă măsurată a lui t, denumită tmin, se aleg trei valori ale lui t cuprinse între tmin și 1,05 tmin și se calculează media lor aritmetică tm, apoi se calculează

În cazul în care se demonstrează că, din motive practice, cele trei valori determinate mai sus nu pot fi obținute, atunci se poate utiliza timpul minim tmin. Cu toate acestea, dispozițiile de la punctul 1.3 se aplică în continuare.
|
|
|
1.1.4.
|
Forțele de frânare se calculează pe baza coeficientului de frânare măsurat și a rezistenței la rulare a axei (axelor) nefrânat(e), care este egală cu de 0,015 ori sarcina statică pe o axă pentru o axă motor și de 0,010 ori sarcina statică pe o axă pentru o axă nemotor.
|
|
1.1.5.
|
Sarcina dinamică pe axă se calculează pornind de la coeficientul de frânare, sarcina statică pe axă, ampatament și înălțimea centrului de greutate.
|
|
1.1.6.
|
Valoarea lui k se rotunjește la a treia zecimală.
|
|
1.1.7.
|
Încercarea se repetă apoi pentru celelalte axe, conform indicațiilor de la punctul 1.1.1-1.1.6 (pentru excepții, a se vedea punctele 1.4 și 1.5).
|
|
1.1.8.
|
De exemplu, în cazul unui vehicul cu două axe și tracțiune pe spate, atunci când axa față este frânat, coeficientul de aderență (k) se calculează cu formula:

|
|
1.1.9.
|
Se determină un coeficient kf pentru axa față și un coeficient kr pentru axa spate.
|
1.2. Determinarea coeficientului de aderență (ε) utilizat
|
1.2.1.
|
Coeficientul de aderență (ε) se definește ca fiind raportul dintre coeficientul maxim de frânare în condiții de cuplare a sistemului antiblocare (zAL) și coeficientul de aderență (kM), adică:

|
|
1.2.2.
|
De la o viteză inițială a vehiculului egală cu 55 km/h sau cu vmax, luându-se în calcul cea mai mică dintre aceste două valori, valoarea maximă a coeficientului de frânare (zAL) se măsoară cu efectuarea unui ciclu complet al sistemului antiblocare. Această valoare zAL este media a trei încercări, conform specificațiilor de la punctul 1.1.3, folosind timpul necesar pentru a reduce viteza de la 45 km/h la 15 km/h, conform formulei următoare:

|
|
1.2.3.
|
Coeficientul de aderență kM se obține prin ponderare, pe baza sarcinilor dinamice pe axe:
Unde:


|
|
1.2.4.
|
Valoarea lui ε se rotunjește la a doua zecimală.
|
|
1.2.5.
|
În cazul unui vehicul prevăzut cu un sistem antiblocare din categoria 1 sau 2, valoarea lui zAL corespunde vehiculului complet, cu sistemul antiblocare cuplat, aderența utilizată (ε) fiind calculată cu aceeași formulă ca la punctul 1.2.1.
|
|
1.2.6.
|
În cazul unui vehicul prevăzut cu un sistem antiblocare din categoria 3, valoarea lui zAL se măsoară pe fiecare axă care are cel puțin o roată controlată direct.
Exemplu: pentru un vehicul cu două axe cu sistem antiblocare care acționează numai asupra axei spate (2), aderența utilizată (ε) este calculată cu formula:

Acest calcul se efectuează pentru fiecare axă care are cel puțin o roată controlată direct.
|
|
1.3.
|
Dacă ε > 1,00 măsurătorile pentru determinarea coeficientului de aderență se repetă. Se admite o toleranță de 10 %.
|
|
1.4.
|
În cazul tractoarelor echipate cu trei axe, orice axe care sunt interconectate prin oricare dintre componentele suspensiei și, astfel, reacționează la transferul de masă la frânare sau în timpul transmisiei pot fi luate în considerare la stabilirea coeficientul k al vehiculului.
Până când se va conveni asupra unei proceduri uniforme de încercare, vehiculele cu mai mult de trei axe și vehiculele speciale fac obiectul unei consultări cu serviciul tehnic.
|
|
1.5.
|
Pentru vehiculele cu ampatamentul mai mic de 3,80 m și cu h/E > 0,25, nu se ia în calcul coeficientul de aderență a axei spate.
|
1.5.1.
|
Coeficientul de aderență (ε) se definește ca fiind raportul dintre coeficientul maxim de frânare în condiții de cuplare a sistemului antiblocare (zAL) și coeficientul de aderență (kf), adică:

|
|
2.
Metoda de măsurare pentru vehiculele remorcate
2.1. Generalități
|
2.1.1.
|
Coeficientul de aderență (k) se determină ca fiind produsul dintre forța maximă de frânare fără blocarea roților și sarcina dinamică respectivă pe axa frânată.
|
|
2.1.2.
|
Frânele se aplică numai pe una dintre axele vehiculului remorcat supus încercării, la o viteză inițială de 50km/h. Forțele de frânare se distribuie între roțile axei astfel încât să se obțină o performanță maximă. Sistemul antiblocare este decuplat sau nefuncțional între 40 km/h și 20 km/h.
|
|
2.1.3.
|
Se efectuează mai multe încercări cu mărirea treptată a presiunii din circuit pentru a determina coeficientul maxim de frânare al ansamblului de vehicule (zCmax) acționând numai frânele vehiculului remorcat. Pe parcursul fiecărei încercări se menține o forță constantă de acționare, iar coeficientul de frânare se determină în funcție de timpul (t) necesar pentru a reduce viteza de la 40 km/h la 20 km/h, cu formula următoare:

|
2.1.3.1
|
Se admite blocarea roților la o viteză mai mică de 20 km/h.
|
|
2.1.3.2
|
Începând de la valoarea minimă măsurată a lui t, denumită tmin, se aleg trei valori ale lui t cuprinse între tmin și 1,05 tmin și se calculează media lor aritmetică tm,
apoi se determină:

În cazul în care se demonstrează că, din motive practice, cele trei valori determinate mai sus nu pot fi obținute, atunci se poate utiliza timpul minim tmin.
|
|
|
2.1.4.
|
Coeficientul de aderență (ε) se calculează cu formula:

Valoarea lui k se determină conform punctului 2.2.3 pentru vehicule remorcate cu bară de tracțiune sau conform punctului 2.3.1 pentru vehicule remorcate cu bară de tracțiune rigidă și vehiculele remorcate cu axă central.
|
|
2.1.5.
|
Dacă ε > 1,00 măsurătorile pentru determinarea coeficientului de aderență se repetă. Se acceptă o abatere de 10 %.
|
|
2.1.6.
|
Rata maximă de frânare (zRAL) se măsoară cu sistemul antiblocare executând cicluri complete și cu tractorul nefrânat și se bazează pe valoarea medie a celor trei încercări, conform punctului 2.1.3.
|
2.2. Vehicule remorcate cu bară de tracțiune
|
2.2.1.
|
Măsurarea lui k (cu sistemul antiblocare decuplat sau nefuncțional între 40 km/h și 20 km/h) se face atât pentru axa față cât și pentru axa spate.
Pentru o axă față i:


Pentru o axă spate i:


|
|
2.2.2.
|
Valorile lui kf și kr se rotunjesc la a treia zecimală.
|
|
2.2.3.
|
Coeficientul de aderență kR se calculează prin ponderare, pe baza sarcinilor dinamice pe osie.

|
|
2.2.4.
|
Măsurarea lui zRAL (cu sistemul antiblocare cuplat)

zRAL se determină pe o suprafață cu un coeficient de aderență ridicat, iar pentru vehiculele cu un sistem antiblocare din categoria A, acesta se determină și pe o suprafață cu un coeficient de aderență redus.
|
2.3. Vehiculele remorcate cu bară de tracțiune rigidă și vehiculele remorcate cu axă centrală
|
2.3.1.
|
Măsurarea lui k (cu sistemul antiblocare decuplat sau nefuncțional între 40 km/h și 20 km/h) se efectuează cu roți montate pe o singură axă, roțile celeilalte (celorlalte) axe fiind înlăturate.



|
|
2.3.2.
|
Măsurarea lui zRAL (cu sistemul antiblocare cuplat) se efectuează pe un vehicul la care sunt montate toate roțile.



zRAL se determină pe o suprafață cu un coeficient de aderență ridicat, iar pentru vehiculele cu un sistem antiblocare din categoria A, acesta se determină și pe o suprafață cu un coeficient de aderență redus.
|
Apendicele 3
Performanța pe suprafețe cu coeficienți de aderență diferiți
1.
Tractoare
▼M1
|
1.1.
|
Rata de frânare specificată, prevăzută la punctul 5.3.5 din prezenta anexă, poate fi calculată în funcție de coeficientul de aderență al celor două suprafețe pe care se efectuează încercarea.
Aceste două suprafețe îndeplinesc condițiile prevăzute la punctul 5.3.4 din prezenta anexă.
|
▼B
|
1.2.
|
Coeficienții de aderență (kH și kL) ai suprafețelor cu aderență ridicată și redusă se determină în conformitate cu dispozițiile de la punctul 1.1 din apendicele 2.
|
|
1.3.
|
Rata de frânare (zMALS) a tractoarelor încărcate este:
și

|
2.
Vehicule remorcate
|
2.1.
|
Coeficientul de frânare prevăzut la punctul 6.3.2 din prezenta anexă se poate calcula în funcție de ratele de frânare zRALH și zRALL măsurate pe cele două suprafețe pe care se efectuează încercările cu sistemul antiblocare cuplat. Aceste două suprafețe îndeplinesc condițiile prevăzute la punctul 6.3.2 din prezenta anexă.
|
|
2.2.
|
Rata de frânare zRALS se calculează cu formula următoare:

și

dacă εΗ > 0,95 se folosește εΗ = 0,95.
|
Apendicele 4
Metoda de selecție a suprafeței cu aderență redusă
|
1.
|
Detaliile legate de coeficientul de aderență al suprafeței alese, conform punctului 5.1.1.2 din prezenta anexă, sunt puse la dispoziția serviciului tehnic.
|
1.1.
|
Aceste date trebuie să includă o curbă a coeficientului de aderență în funcție de coeficientul de alunecare (între 0 % și 100 %) la o viteză de aproximativ 40 km/h.
Până când se va stabili o procedură uniformă de încercare pentru calculul curbei de aderență în cazul vehiculelor cu o masă maximă de peste 3,5 tone, se poate utiliza curba stabilită pentru autoturisme. În acest caz, pentru vehiculele cu o masă maximă ce depășește 3,5 tone se calculează raportul kpeak – klock folosind valoarea kpeak definită în apendicele 2. Cu acordul serviciului tehnic, coeficientul de aderență descris la prezentul punct poate fi determinat printr-o metodă diferită dacă se demonstrează echivalența valorilor kpeak și klock.
|
1.1.1.
|
Valoarea maximă a curbei este reprezentată de simbolul kpeak, iar valoarea la o alunecare de 100 % este reprezentată de simbolul klock.
|
|
1.1.2.
|
Raportul R se definește ca fiind raportul dintre kpeak și klock

|
|
1.1.3.
|
Valoarea lui R se rotunjește la prima zecimală.
|
|
1.1.4.
|
Suprafața care urmează să fie folosită trebuie să aibă un raport R cuprins între 1,0 și 2,0.
Până când astfel de piste de încercare vor fi disponibile pe scară largă, o valoare a raportului R de cel mult 2,5 este considerată acceptabilă, sub rezerva acceptării de către serviciul tehnic.
|
|
|
|
2.
|
Înaintea încercărilor, serviciul tehnic se asigură că suprafața aleasă îndeplinește cerințele specificate. În special, acesta este informat cu privire la metoda de încercare utilizată pentru calculul valorii R, la tipul de vehicul (tractor etc.) la sarcina pe axă și la tipul de pneuri (trebuie încercate sarcini diferite și tipuri de pneuri diferite, iar rezultatele trebuie comunicate serviciului tehnic care decide dacă acestea sunt reprezentative pentru vehiculul supus omologării).
|
2.1.
|
Valoarea lui R se menționează în raportul încercărilor.
Suprafața pistei de încercare trebuie etalonată cel puțin o dată pe an cu un vehicul reprezentativ pentru a verifica dacă R este constant.
|
|
ANEXA XII
Cerințe aplicabile EBS ale vehiculelor cu sisteme de frânare cu aer comprimat sau ale vehiculelor cu comunicarea datelor realizată prin intermediul contactelor 6 și 7 ale prizei ISO 7638, precum și vehiculelor echipate cu astfel de EBS
1.
Definiții
În sensul prezentei anexe:
1.1. „legătură punct cu punct” înseamnă un tip de rețea de comunicații compusă doar din două unități. Fiecare unitate este dotată cu o rezistență de extremitate integrată pentru linia de comunicații;
1.2. „semnal de frânare” înseamnă semnalul logic care indică activarea frânelor.
2.
Cerințe generale
|
2.1.
|
Circuitul electric de comandă trebuie să fie conform cu ISO 11992-1 și 11992-2:2003, inclusiv cu Amd.1:2007 și să fie de tipul punct cu punct, utilizând priza cu șapte contacte prevăzută de ISO 7638-1 sau 7638-2:2003. Contactele pentru transmiterea de date ale prizei prevăzute de ISO 7638 se utilizează exclusiv pentru transferul informațiilor privind funcțiile de frânare (inclusiv ABS) și funcțiilor mecanismului de rulare (direcție, pneuri și suspensie), conform specificațiilor ISO 11992-2:2003, inclusiv Amd.1:2007. Funcțiile de frânare sunt prioritare și se mențin în modurile normal și de avarie. Transmiterea informațiilor privind mecanismul de rulare nu trebuie să întârzie funcțiile de frânare. Alimentarea cu energie electrică, asigurată de priza ISO 7638, este utilizată exclusiv pentru funcțiile de frânare și cele ale mecanismului de rulare, precum și pentru cele necesare transferului de date privind vehiculul remorcat netransmise prin circuitul electric de comandă. Cu toate acestea, dispozițiile de la punctul 5.2.1 se aplică în toate cazurile. Alimentarea cu energie electrică a tuturor celorlalte funcții utilizează alte mijloace.
|
|
2.2.
|
Luarea în considerare a mesajelor definite în ISO 11992-2: 2003, inclusiv în amendamentul Amd. 1:2007, este prevăzută în apendicele 1 la prezenta anexă, pentru tractor și pentru vehiculul remorcat, după caz.
|
|
2.3.
|
Compatibilitatea funcțională între tractoare și vehiculele remorcate echipate cu circuitele electrice de comandă descrise mai sus se evaluează în momentul omologării de tip, prin verificarea respectării dispozițiilor relevante prevăzute de ISO 11992:2003, inclusiv ISO 11992-2:2003 și Amd.1:2007 părțile 1 și 2. Apendicele 2 la prezenta anexă conține un exemplu de încercări prin care poate fi realizată această evaluare.
|
|
2.4.
|
Atunci când un tractor este echipat cu un circuit electric de comandă și este conectat electric la un vehicul remorcat echipat cu un circuit electric de comandă, o întrerupere continuă (> 40 ms) în circuitul electric de comandă este detectată la bordul tractorului și este semnalată conducătorului prin intermediul indicatorului de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2 din anexa I, atunci când aceste vehicule sunt conectate prin circuitul electric de comandă.
|
3.
Cerințe speciale pentru racordurile între tractor și vehiculele remorcate pentru sisteme de frânare cu aer comprimat
|
3.1.
|
►M1
Circuitul electric de comandă al tractorului indică dacă cerințele de la punctul 2.2.1.16.3 din anexa I pot fi îndeplinite de către circuitul electric de comandă, fără intervenția circuitului pneumatic de comandă. ◄ De asemenea, acesta indică dacă este echipat în conformitate cu punctul 2.1.4.1.2 din anexa I, cu două circuite de comandă sau, în conformitate cu punctul 2.1.4.1.3 din anexa I, cu un singur circuit electric de comandă.
|
|
3.2.
|
Un tractor echipat în conformitate cu punctul 2.1.4.1.3 din anexa I detectează dacă sistemul de cuplare al unui vehicul remorcat echipat în conformitate cu punctul 2.1.4.1.1 din anexa I nu este compatibil. Atunci când astfel de vehicule sunt conectate electric prin intermediul circuitului electric de comandă al tractorului, conducătorul este avertizat de indicatorul optic de avertizare de culoare roșie specificat la punctul 2.2.1.29.1.1 din anexa I, iar atunci când sistemul este alimentat cu energie, frânele de pe tractor se activează automat. Această activare a frânelor asigură cel puțin performanța prevăzută a frânei de staționare, conform cerinței de la punctele 3.1.3.1 și respectiv 3.1.3.2 din anexa II.
|
|
3.3.
|
În cazul în care un tractor echipat cu două circuite de comandă, conform definiției de la punctul 2.1.4.1.2 din anexa I, este conectat electric la un vehicul remorcat dotat, de asemenea, cu două circuite de comandă, sunt îndeplinite următoarele condiții:
3.3.1. ambele semnale sunt prezente la racordul de cuplare, iar vehiculul remorcat utilizează semnalul electric de comandă, cu excepția cazului în care se consideră că acesta s-a defectat. În acest caz, vehiculul remorcat trece automat la circuitul pneumatic de comandă;
3.3.2. fiecare vehicul îndeplinește dispozițiile relevante din apendicele 1 al anexei II în ceea ce privește circuitele de comandă, atât electrice, cât și pneumatice;
▼M1
3.3.3. atunci când semnalul electric de comandă depășește echivalentul a 100 kPa mai mult de 1 secundă, vehiculul remorcat verifică prezența unui semnal pneumatic; în absența unui semnal pneumatic, conducătorul este avertizat de vehiculul remorcat prin intermediul indicatorului de avertizare de culoare galbenă specificat la punctul 2.2.1.29.2 din anexa I.
▼B
|
|
3.4.
|
►M1
Un vehicul remorcat poate fi echipat conform descrierii de la punctul 2.1.4.1.3 din anexa I, cu condiția să poată fi operat numai împreună cu un tractor cu un circuit electric de comandă care îndeplinește cerințele de la punctul 2.2.1.16.3 din anexa I. ◄ În orice alt caz, vehiculul remorcat, atunci când este conectat electric, acționează automat frânele sau rămâne frânat. Conducătorul este avertizat prin intermediul indicatorului de avertizare de culoare galbenă menționat la punctul 2.2.1.29.2 din anexa I.
|
|
3.5.
|
Dacă acționarea sistemului de frânare de parcare al tractorului activează un sistem de frânare al vehiculului remorcat, astfel cum se permite la punctul 2.1.2.3 din anexa I, se îndeplinesc următoarele cerințe:
3.5.1. dacă tractorul este echipat în conformitate cu punctul 2.1.4.1.1 din anexa I, acționarea sistemului de frânare de parcare al tractorului activează un sistem de frânare al remorcii prin intermediul circuitului pneumatic de comandă;
3.5.2. dacă tractorul este echipat în conformitate cu punctul 2.1.4.1.2 din anexa I, acționarea sistemului de frânare de parcare al tractorului activează un sistem de frânare al vehiculului remorcat conform punctului 3.5.1. În plus, acționarea sistemului de frânare de parcare poate activa, de asemenea, un sistem de frânare al vehiculului remorcat prin intermediul circuitului electric de comandă;
3.5.3.
►M1
Dacă tractorul este echipat în conformitate cu punctul 2.1.4.1.3 din anexa I sau dacă satisface cerințele de la punctul 2.2.1.16.3 din anexa I fără a fi necesară intervenția circuitului pneumatic de comandă, punctul 2.1.4.1.2 din anexa I, acționarea sistemului de frânare de parcare al tractorului activează un sistem de frânare al vehiculului remorcat prin intermediul circuitului electric de comandă. ◄ Atunci când alimentarea cu energie electrică a mecanismului de frânare al tractorului este întreruptă, frânarea vehiculului remorcat are loc prin evacuarea circuitului de alimentare (în plus, circuitul pneumatic de comandă poate rămâne sub presiune); circuitul de alimentare poate rămâne evacuat numai până când alimentarea cu energie electrică a tractorului este reluată și, în același timp, este restabilită capacitatea de frânare a vehiculului remorcat prin intermediul circuitului electric de comandă.
|
4.
Cerințe suplimentare speciale privind sistemele de frânare de serviciu cu transmisie electrică a comenzii
4.1. Tractoare
|
4.1.1.
|
Atunci când sistemul de frânare de parcare este eliberat, sistemul de frânare de serviciu poate genera o forță statică totală de frânare cel puțin echivalentă cu cea necesară la încercarea prescrisă de tip 0, chiar și atunci când comutatorul de contact/pornire este decuplat și/sau cheia este scoasă din contact. Tractoarele autorizate să tracteze vehicule din categoria R3b sau R4b sunt dotate cu un semnal pentru comandă completă pentru sistemul de frânare de serviciu al vehiculului remorcat. Se subînțelege faptul că este disponibilă suficientă energie în cadrul transmisiei de energie a sistemului de frânare de serviciu.
|
|
4.1.2.
|
În cazul unei defecțiuni temporare unice (< 40 ms) în cadrul transmisiei electrice a comenzilor, cu excepția alimentării cu energie a acesteia (de exemplu, semnal netransmis sau eroare de date), performanța frânării de serviciu nu trebuie să fie afectată în mod perceptibil.
|
|
4.1.3.
|
O defecțiune a transmisiei electrice a comenzii, cu excepția rezervei sale de energie, care afectează funcționarea și performanța sistemelor menționate în prezentul regulament, este semnalată conducătorului prin intermediul indicatorului de avertizare de culoare roșie sau galbenă menționat la punctele 2.2.1.29.1.1, respectiv 2.2.1.29.1.2 din anexa I, după caz.
►M1
Atunci când performanța prescrisă a frânării de serviciu nu mai poate fi atinsă (indicator de avertizare de culoare roșie), defecțiunile provocate în urma pierderii continuității electrice (de exemplu, rupere, deconectare) se semnalează conducătorului în momentul în care apar, iar performanța de frânare reziduală prescrisă se obține prin acționarea dispozitivului de comandă a frânei de serviciu, în conformitate cu punctul 3.1.4 din anexa II. ◄
Producătorul furnizează serviciului tehnic o analiză a eventualelor defecțiuni care pot interveni în cadrul transmisiei comenzilor și a efectelor acestora. Aceste informații fac obiectul unor discuții și al unui acord între serviciul tehnic și producătorul vehiculului.
Aceste cerințe nu sunt interpretate ca o abatere de la cerințele privind frâna de siguranță.
|
|
4.1.4.
|
Un tractor conectat electric la un vehicul remorcat prin intermediul unui circuit electric de comandă avertizează în mod clar conducătorul atunci când vehiculul remorcat transmite mesajul de eroare conform căruia energia stocată în orice parte a sistemului de frânare de serviciu al vehiculului remorcat a scăzut sub nivelul de avertizare, în conformitate cu punctul 5.2.4. Un avertisment similar se transmite atunci când o defecțiune continuă (peste 40 ms) a transmisiei comenzii electrice a vehiculului remorcat, cu excepția sursei de curent electric a acestuia, previne atingerea performanței prescrise a frânei de serviciu, în conformitate cu punctul 4.2.3. În acest scop se utilizează semnalul de avertizare menționat la punctul 2.2.1.29.1.2 din anexa I.
|
|
4.1.5.
|
În cazul unei defectări a sursei de energie a transmisiei electrice a comenzilor, începând de la valoarea nominală a nivelului de energie, intervalul complet de comandă al sistemului de frânare de serviciu este garantat după douăzeci de acționări consecutive cu cursă completă ale dispozitivului de comandă a frânei de serviciu. În timpul încercării, dispozitivul de comandă a sistemului de frânare este acționat complet timp de 20 de secunde și eliberat timp de 5 secunde la fiecare acționare. Se subînțelege că, pe durata încercării, alimentarea cu energie electrică a sistemului de frânare de serviciu este suficientă pentru a permite acționarea completă a sistemului de frânare de serviciu. Această cerință nu este interpretată ca o abatere de la cerințele anexei IV.
|
|
4.1.6.
|
Atunci când tensiunea bateriei scade sub o valoare specificată de producător, la care performanța de frânare prescrisă nu mai poate fi garantată și/sau care împiedică cel puțin două circuite de frânare de serviciu independente să atingă, fiecare în parte, performanța prescrisă de frânare de urgență sau de frânare reziduală, se activează indicatorul de avertizare de culoare roșie menționat la punctul 2.2.1.29.1.1 din anexa I. După ce a fost activat semnalul de avertizare, se poate acționa dispozitivul de comandă a frânării de serviciu și se obțin cel puțin performanțele prescrise pentru frânarea reziduală și de siguranță în cazul tractoarelor cu viteza maximă prin construcție de peste 60 km/h sau performanța prescrisă pentru frânarea de siguranță în cazul tractoarelor cu viteza maximă prin construcție de cel mult 60 km/h. Se subînțelege faptul că este disponibilă suficientă energie în cadrul transmisiei de energie a sistemului de frânare de serviciu. Această cerință nu este interpretată ca o abatere de la cerințele privind sistemul de frânare de siguranță.
|
|
4.1.7.
|
Dacă echipamentele auxiliare sunt alimentate cu energie de la aceeași rezervă ca și transmisia electrică a comenzilor, trebuie să se asigure faptul că, în timp ce motorul este pornit la o turație de maximum 80 % din turația corespunzătoare puterii maxime, alimentarea cu energie este suficientă pentru a satisface valorile prescrise ale decelerației, fie prin asigurarea unei alimentări cu energie care este în măsură să împiedice descărcarea acestei rezerve atunci când funcționează toate echipamentele auxiliare, fie prin întreruperea automată a funcționării unor piese preselectate ale echipamentelor auxiliare aflate la o tensiune mai mare de nivelul critic menționat la punctul 4.1.6, astfel încât să fie împiedicată descărcarea ulterioară a acestei rezerve. Conformitatea poate fi demonstrată prin calcul sau cu ajutorul unei încercări practice. În cazul vehiculelor autorizate să tracteze un vehicul din categoria R3b sau R4b, consumul de energie al vehiculului remorcat trebuie să fie luat în considerare la o sarcină de 400 W. Acest punct nu se aplică vehiculelor la care valorile prescrise ale decelerației pot fi atinse fără utilizarea energiei electrice.
|
|
4.1.8.
|
Dacă echipamentul auxiliar este alimentat cu energie de la transmisia electrică a comenzii, sunt îndeplinite următoarele condiții.
|
4.1.8.1
|
În cazul unei defectări a sursei de energie în timp ce vehiculul este în mișcare, energia din rezervor trebuie să fie suficientă pentru a acționa frânele atunci când este acționat dispozitivul de comandă;
|
|
4.1.8.2
|
În cazul unei defectări în cadrul sursei de energie în timp ce vehiculul este staționat și sistemul de frânare de parcare este aplicat, energia din rezervor trebuie să fie suficientă pentru a aprinde luminile, chiar și atunci când frânele sunt aplicate.
|
|
|
4.1.9.
|
În cazul unei defecțiuni la transmisia electrică a comenzii sistemului de frânare de serviciu a unui tractor echipat cu un circuit electric de comandă, în conformitate cu punctul 2.1.4.1.2 sau 2.1.4.1.3 din anexa I, frânele vehiculului remorcat rămân cuplate la forța maximă.
|
|
4.1.10.
|
►M1
În cazul unei defecțiuni la transmisia comenzii electrice a unui vehicul remorcat conectat electric exclusiv prin intermediul unui circuit electric de comandă, în conformitate cu punctul 2.1.4.1.3 din anexa I, sistemul de frânare al vehiculului remorcat trebuie să fie asigurat în conformitate cu punctul 2.2.1.17.2.1 din anexa I. ◄ Acesta este cazul ori de câte ori vehiculul remorcat prevede semnalul „cerere de frânare de la circuitul de alimentare” prin intermediul modulului de transmisie de date al circuitului electric de comandă sau în cazul unei absențe continue a acestor date. Prezentul punct nu se aplică tractoarelor care nu pot fi operate cu vehicule remorcate conectate exclusiv prin intermediul unui circuit electric de comandă, în conformitate cu punctul 3.4.
|
4.2. Remorci
|
4.2.1.
|
În cazul unei defecțiuni temporare unice (< 40 ms) în cadrul transmisiei electrice a comenzilor, cu excepția alimentării cu energie a acesteia, (de exemplu, semnal netransmis sau eroare de date) performanța frânării de serviciu nu trebuie să fie afectată de o manieră perceptibilă.
|
|
4.2.2.
|
În cazul unei defecțiuni a transmisiei comenzii electrice (de exemplu, rupere, deconectare), performanța de frânare se menține la cel puțin 30 % din performanța prevăzută pentru sistemul de frânare de serviciu al vehiculului remorcat în cauză.
Atât timp cât nu sunt stabilite proceduri de încercare uniforme, producătorul furnizează serviciului tehnic o analiză a eventualelor defecțiuni ce pot interveni la nivelul calculatoarelor și a eventualelor efecte ale acestora. Aceste informații fac obiectul unor discuții și al unui acord între serviciul tehnic și producătorul vehiculului.
▼M1
În cazul vehiculelor remorcate conectate electric exclusiv prin intermediul unui circuit electric de comandă, în conformitate cu punctul 2.1.4.1.3 din anexa I, și care îndeplinesc cerințele de la punctul 2.2.1.17.2.2 din anexa I cu performanța prevăzută la punctul 3.2.3 din anexa II, este suficient să fie invocate dispozițiile punctului 4.1.10 din prezenta anexă atunci când nu mai poate fi asigurată o performanță de frânare de cel puțin 30 % din performanța prevăzută pentru sistemul de frânare de serviciu, fie prin transmiterea semnalului „cerere de frânare de la circuitul de alimentare” prin intermediul modulului de transmisie de date al circuitului electric de comandă, fie prin absența continuă a acestor date.
▼B
|
|
4.2.3.
|
O defecțiune a transmisiei electrice a comenzii vehiculului remorcat care afectează funcția și performanța sistemelor prevăzute de prezentul regulament, precum și întreruperile alimentării cu energie disponibile prin priza prevăzută de standardul ISO 7638:2003, sunt semnalate conducătorului de către indicatorul separat de avertizare menționat la punctul 2.2.1.29.2 din anexa I, fiind transmise prin contactul 5 al prizei electrice conforme cu standardul ISO 7638:2003. În plus, dacă performanța prescrisă a sistemului de frânare de serviciu nu mai poate fi asigurată, vehiculele remorcate echipate cu un circuit electric de comandă transmit, atunci când sunt conectate electric la un tractor dotat cu circuit electric de comandă, datele despre defecțiune care activează, prin intermediul modulului de transmisie de date al circuitului electric de comandă, indicatorul de avertizare de culoare roșie menționat la punctul 2.2.1.29.2.1 din anexa I.
Cu toate acestea, în cazul unei defecțiuni a alimentării cu energie electrică de la priza conformă cu ISO 7638:2003, indicația semnalului galben de avertizare prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003 este suficientă, cu condiția ca întreaga forță de frânare să fie încă disponibilă.
|
5.
Cerințe suplimentare
5.1. Tractoare
5.1.1. Generarea unui semnal de frânare pentru iluminarea lămpilor de stop
|
5.1.1.1
|
Activarea sistemului de frânare de serviciu de către conducător generează un semnal care este utilizat pentru a ilumina lămpile de stop.
|
|
5.1.1.2
|
Cerințe pentru vehicule care utilizează semnale electronice pentru a comanda prima acționare a sistemului de frânare de serviciu și echipate cu un sistem de frânare de anduranță:
|
Decelerație de către sistemul de frânare de anduranță
|
|
≤ 1,3 m/sec2
|
> 1,3 m/sec2
|
|
Semnalul poate fi generat
|
Semnalul este generat
|
|
|
5.1.1.3
|
În cazul vehiculelor echipate cu un sistem de frânare având specificații diferite față de cele prevăzute la punctul 5.1.1.2, acționarea sistemului de frânare de anduranță poate genera semnalul indiferent de nivelul decelerației produse.
|
|
5.1.1.4
|
Semnalul nu se generează atunci când decelerația este produsă ca urmare a efectului exclusiv al frânei de motor.
|
|
5.1.1.5
|
Activarea sistemului de frânare de serviciu prin frânarea comandată automat generează semnalul menționat mai sus. Cu toate acestea, atunci când decelerația generată este mai mică de 0,7 m/s2, semnalul poate fi întrerupt.
La momentul omologării de tip, conformitatea cu această cerință trebuie confirmată de producătorul vehiculului.
|
|
5.1.1.6
|
Activarea unei părți a sistemului de frânare de serviciu prin frânare selectivă nu generează semnalul menționat mai sus.
În timpul unui eveniment de frânare selectivă, funcția poate fi comutată la frânarea comandată automat.
|
|
5.1.1.7
|
În cazul vehiculelor echipate cu un circuit electric de comandă, semnalul se generează de către tractor atunci când primește de la vehiculul remorcat, prin intermediul circuitului electric de comandă, mesajul „iluminare lămpi de stop”.
|
5.2. Vehicule remorcate
|
5.2.1.
|
Atunci când energia furnizată de priza conformă cu ISO 7638:2003 este utilizată pentru alimentarea funcțiilor descrise la punctul 2.1, sistemul de frânare are prioritate și este protejat de o eventuală suprasarcină din exterior. Această protecție este o funcție a sistemului de frânare.
|
|
5.2.2.
|
În cazul defectării unuia dintre circuitele de comandă care fac legătura între două vehicule echipate în conformitate cu punctul 2.1.4.1.2 din anexa I, vehiculul remorcat utilizează circuitul de comandă neafectat pentru a asigura, în mod automat, performanța de frânare prevăzută la punctul 3.2.1 din anexa II.
|
|
5.2.3.
|
Atunci când tensiunea de alimentare a vehiculului remorcat scade sub o valoare specificată de producător, la care performanța de frânare prescrisă nu mai poate fi garantată, indicatorul separat de avertizare de culoare galbenă menționat la punctul 2.2.1.29.2 din anexa I se activează prin intermediul contactului 5 al prizei conforme cu ISO 7638:2003. În plus, atunci când sunt conectate electric la un tractor dotat cu circuit electric de comandă, vehiculele remorcate echipate cu un circuit electric de comandă transmit datele despre defecțiune care activează, prin intermediul modulului de transmisie de date al circuitului electric de comandă, indicatorul de avertizare de culoare roșie menționat la punctul 2.2.1.29.2.1 din anexa I.
|
|
5.2.4.
|
Atunci când energia stocată în orice parte a sistemului de frânare de serviciu al unui vehicul remorcat echipat cu un circuit electric de comandă și conectat electric la un tractor echipat cu un circuit electric de comandă scade la valoarea determinată în conformitate cu punctul 5.2.4.1 de mai jos, conducătorul tractorului este avertizat. Avertizarea are loc prin aprinderea indicatorului de culoare roșie menționat la punctul 2.2.1.29.2.1 din anexa I, iar vehiculul remorcat transmite datele despre defecțiune prin modulul de transmisie de date al circuitului electric de comandă. Indicatorul de avertizare separat de culoare galbenă specificat la punctul 2.2.1.29.2 din anexa I se activează tot prin intermediul contactului 5 al prizei electrice conforme cu standardul ISO 7638:2003, pentru a semnala conducătorului nivelul scăzut de energie al vehiculului remorcat.
|
5.2.4.1
|
Nivelul scăzut de energie menționat la punctul 5.2.4 este nivelul la care, fără reîncărcarea rezervorului de energie și indiferent de încărcarea vehiculului remorcat, nu este posibilă acționarea pentru a cincea oară a comenzii frânei de serviciu, după patru acționări complete ale acesteia, și nici obținerea a cel puțin 50 % din performanța prescrisă a sistemului de frânare de serviciu al vehiculului remorcat în cauză.
|
|
|
5.2.5.
|
Activarea sistemului de frânare de serviciu
|
5.2.5.1
|
În cazul vehiculelor remorcate echipate cu un circuit electric de comandă, mesajul „iluminare lămpi de stop” este transmis de către vehiculul remorcat prin intermediul circuitului electric de comandă, atunci când sistemul de frânare al vehiculului remorcat este activat în timpul „frânării cu comandă automată” inițiate de către vehiculul remorcat. Cu toate acestea, atunci când încetinirea generată este mai mică de 0,7 m/s2, semnalul poate fi întrerupt.
La momentul omologării de tip, conformitatea cu această cerință trebuie confirmată de producătorul vehiculului.
|
|
5.2.5.2
|
În cazul vehiculelor remorcate echipate cu un circuit electric de comandă, mesajul „iluminare lămpi de stop” nu se transmite de către vehiculul remorcat prin circuitul electric de comandă în timpul frânării selective inițiate de vehiculul remorcat.
În timpul unui eveniment de frânare selectivă, funcția poate fi comutată la frânarea comandată automat.
|
|
6.
Suprimarea frânării automate
În cazul vehiculelor remorcate echipate cu un circuit electric de comandă și conectate electric la un tractor echipat cu un circuit electric de comandă, acțiunea de frânare automată specificată la punctul 2.2.1.17.2.2 din anexa I poate fi întreruptă, atât timp cât presiunea din rezervoarele de aer comprimat ale vehiculului remorcat este suficientă pentru a asigura performanța de frânare specificată la punctul 3.2.3 din anexa II.
Apendicele 1
Compatibilitate între tractoare și vehiculele remorcate în ceea ce privește comunicațiile de date ISO 11992
1. Generalități
|
1.1.
|
Cerințele din prezentul apendice se aplică numai pentru tractoarele și vehiculele remorcate echipate cu un circuit electric de comandă.
|
|
1.2.
|
Conectorul prevăzut de ISO 7638 oferă o sursă de energie pentru sistemul de frânare sau sistemul antiblocare al vehiculului remorcat. În cazul vehiculelor echipate cu un circuit electric de comandă acest conector oferă, de asemenea, o interfață de comunicare de date prin contactele 6 și 7, astfel cum este prevăzut la punctul 2.1 din prezenta anexă.
|
|
1.3.
|
Prezentul apendice stabilește cerințele aplicabile tractorului și vehiculului remorcat în ceea ce privește suportul pentru mesaje definit în ISO 11992-2: 2003, inclusiv în Amendamentul 1:2007.
|
|
2.
|
Parametrii definiți în ISO 11992-2:2003, inclusiv în Amendamentul 1: 2007, care sunt transmiși prin circuitul electric de comandă trebuie să fie încadrați după cum urmează:
2.1. Următoarele funcții și mesaje asociate, astfel cum sunt definite în prezentul regulament, sunt luate în considerare de tractor sau de vehiculul remorcat, după caz:
2.1.1. Mesajele transmise de la tractor la vehiculul remorcat:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
Trimitere la prezentul regulament
|
|
Cerere de frânare de serviciu/frânare de siguranță
|
EBS11
Octet 3-4
|
Apendicele 1 la anexa II, punctul 3.1.3.2
|
|
Valoarea cererii de frânare în două circuite electrice
|
EBS12
Octet 3, Biți 1-2
|
Punctul 3.1 din anexa XII
|
|
Circuit pneumatic de comandă
|
EBS12
Octet 3, Biți 5-6
|
Punctul 3.1 din anexa XII
|
2.1.2. Mesajele transmise de la vehiculul remorcat la tractor:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
Trimitere la prezentul regulament
|
|
Alimentarea cu energie electrică a vehiculului: suficientă/insuficientă
|
EBS22 Octet 2
Bit 1-2
|
Punctul 5.2.3 din anexa XII
|
|
Cererea de semnal de avertizare
|
EBS22 Octet 2
Bit 3-4
|
Punctele 4.2.3, 5.2.4 și 5.2.3 din anexa XII
|
|
Cerere de frânare de la circuitul de alimentare
|
EBS22 Octet 4
Bit 3-4
|
Punctul 4.2.2 din anexa XII
|
|
Cerere de lămpi de stop
|
EBS22 Octet 4
Bit 5-6
|
Punctul 5.2.5.1 din anexa XII
|
|
Alimentarea pneumatică a vehiculului: suficientă/insuficientă
|
EBS23 Octet 1
Bit 7-8
|
Punctul 5.2.4 din anexa XII
|
2.2. Atunci când vehiculul remorcat transmite următoarele mesaje, tractorul trebuie să emită o avertizare către conducător:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
Obligația de avertizare a conducătorului auto
|
|
Cererea de semnal de avertizare
|
EBS22 Octet 2
Bit 3-4
|
Punctul 2.2.1.29.2.1 din anexa I
|
2.3. Următoarele mesaje definite în ISO 11992-2:2003, inclusiv în Amendamentul 1:2007, sunt luate în considerare de tractor sau de vehiculul remorcat:
2.3.1. Mesajele transmise de la tractor la vehiculul remorcat:
în prezent, nu există mesaje definite.
2.3.2. Mesajele transmise de la vehiculul remorcat la tractor:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
|
Frânarea de serviciu a vehiculului: activă/pasivă
|
EBS22 Octet 1, Biți 5-6
|
|
Frânarea asistată prin circuitul electric de control
|
EBS22 Octet 4, Biți 7-8
|
|
Indicele de date geometrice
|
EBS24 Octet 1
|
|
Conținutul indicelui de date geometrice
|
EBS24 Octet 2
|
2.4. Următoarele mesaje trebuie luate în considerare în mod corespunzător de tractor sau de vehiculul remorcat atunci când vehiculul este instalat cu o funcție asociată acelui parametru:
2.4.1. Mesajele transmise de la tractor la vehiculul remorcat:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
|
Tipul de vehicul
|
EBS11 Octet 2, Biți 3-4
|
|
VDC (Controlul dinamic al vehiculului) activ/pasiv
|
EBS11 Octet 2, Biți 5-6
|
|
Valoarea cererii de frânare pentru partea din față sau partea stângă a vehiculului
|
EBS11 Octet 7
|
|
Valoarea cererii de frânare pentru partea din spate sau partea dreaptă a vehiculului
|
EBS11 Octet 8
|
|
Sistemul ROP (Protecție în caz de răsturnare) activat/dezactivat
|
EBS12 Octet 1, Biți 3-4
|
|
Sistemul YC (Controlul girației) activat/dezactivat
|
EBS12 Octet 1, Biți 5-6
|
|
Sistemul ROP (Protecție în caz de răsturnare) al vehiculului remorcat activat/dezactivat
|
EBS12 Octet 2, Biți 1-2
|
|
Sistemul YC (Controlul girației) al vehiculului remorcat activat/dezactivat
|
EBS12 Octet 2, Biți 3-4
|
|
Cerere de ajutor la tractare
|
RGE11 Octet 1, Biți 7-8
|
|
Axă liftabilă 1 — cerere de poziție
|
RGE11 Octet 2, Biți 1-2
|
|
Axă liftabilă 2 — cerere de poziție
|
RGE11 Octet 2, Biți 3-4
|
|
Cerere de blocare a axei directoare
|
RGE11 Octet 2, Biți 5-6
|
|
Secunde
|
TD11 Octet 1
|
|
Minute
|
TD11 Octet 2
|
|
Ore
|
TD11 Octet 3
|
|
Luni
|
TD11 Octet 4
|
|
Ziua
|
TD11 Octet 5
|
|
Anul
|
TD11 Octet 6
|
|
Reglare minute locale
|
TD11 Octet 7
|
|
Reglare oră locală
|
TD11 Octet 8
|
2.4.2. Mesajele transmise de la vehiculul remorcat la tractor:
|
Funcție/Parametru
|
ISO 11992-2:2003
Trimitere
|
|
Susținerea distribuției forței de frânare laterale sau pe axă
|
EBS21 Octet 2, Biți 3-4
|
|
Viteza vehiculului bazată pe roată
|
EBS21 Octet 3-4
|
|
Accelerație laterală
|
EBS21 Octet 8
|
|
ABS vehicul activ/pasiv
|
EBS22 Octet 1, Biți 1-2
|
|
Cerere de semnal de avertizare de culoare galben aurie
|
EBS22 Octet 2, Biți 5-6
|
|
Tipul de vehicul
|
EBS22 Octet 3, Biți 5-6
|
|
Asistență privind metoda de încărcare a rampei
|
EBS22 Octet 4, Biți 1-2
|
|
Suma sarcinii pe axă
|
EBS22 Octet 5-6
|
|
Presiunea în pneuri suficientă/insuficientă
|
EBS23 Octet 1, Biți 1-2
|
|
Garnitura de frână suficientă/insuficientă
|
EBS23 Octet 1, Biți 3-4
|
|
Situația temperaturii frânelor
|
EBS23 Octet 1, Biți 5-6
|
|
Identificare pneu/roată (presiune)
|
EBS23 Octet 2
|
|
Identificare pneu/roată (garnitură)
|
EBS23 Octet 3
|
|
Identificare pneu/roată (temperatură)
|
EBS23 Octet 4
|
|
Presiunea în pneuri (presiunea efectivă în pneuri)
|
EBS23 Octet 5
|
|
Garnitura de frână
|
EBS23 Octet 6
|
|
Temperatura de frânare
|
EBS23 Octet 7
|
|
Presiunea din cilindrul de frână prima axă roata stângă
|
EBS25 Octet 1
|
|
Presiunea din cilindrul de frână prima axă roata dreaptă
|
EBS25 Octet 2
|
|
Presiunea din cilindrul de frână a doua axă roata stângă
|
EBS25 Octet 3
|
|
Presiunea din cilindrul de frână a doua axă roata dreaptă
|
EBS25 Octet 4
|
|
Presiunea din cilindrul de frână a treia axă roata stângă
|
EBS25 Octet 5
|
|
Presiunea din cilindrul de frână a treia axă roata dreaptă
|
EBS25 Octet 6
|
|
Sistemul ROP (Protecție în caz de răsturnare) activat/dezactivat
|
EBS25 Octet 7, Biți 1-2
|
|
Sistemul YC (Controlul girației) activat/dezactivat
|
EBS25 Octet 7, Biți 3-4
|
|
Ajutor la tractare
|
RGE21 Octet 1, Biți 5-6
|
|
Poziția axei liftabil 1
|
RGE21 Octet 2, Biți 1-2
|
|
Poziția axei liftabil 2
|
RGE21 Octet 2, Biți 3-4
|
|
Blocarea axei directoare
|
RGE21 Octet 2, Biți 5-6
|
|
Identificare pneu/roată
|
RGE23 Octet 1
|
|
Temperatura pneurilor
|
RGE23 Octet 2-3
|
|
Detectarea pierderilor de aer (pneu)
|
RGE23 Octet 4-5
|
|
Detectarea pragului de presiune în pneuri
|
RGE23 Octet 6, Biți 1-3
|
2.5. Luarea în considerare a tuturor celorlalte mesaje definite în cadrul ISO 11992-2:2003, inclusiv în Amendamentul 1:2007, este opțională pentru tractor și pentru vehiculul remorcat.
|
Apendicele 2
Procedura de încercare pentru evaluarea compatibilității funcționale a vehiculelor echipate cu circuite electrice de comandă
1.
Generalități
|
1.1.
|
Prezenta anexă stabilește o procedură prin care serviciul tehnic poate verifica îndeplinirea de către tractoare și vehiculele remorcate echipate cu un circuit electric de comandă a cerințelor funcționale și de performanță descrise la punctul 2.2 din anexa XII.
|
|
1.2.
|
Trimiterile la ISO 7638 din prezentul apendice se aplică standardului ISO 7638-1:2003 în ceea ce privește aplicațiile de 24 V, respectiv standardului ISO 7638-2:2003 în ceea ce privește aplicațiile de 12 V.
|
2.
Tractoare
2.1. Simulator de vehicul remorcat ISO 11992
Simulatorul:
2.1.1. este dotat cu o priză conformă cu ISO 7638:2003 (7 contacte), utilizat pentru conectarea la vehiculul supus încercării. Contactele 6 și 7 ale prizei se utilizează pentru transmiterea și primirea mesajelor prevăzute de ISO 11992:2003, inclusiv ISO 11992-2:2003 și Amd.1:2007.
2.1.2. are capacitatea să primească toate mesajele transmise de către autovehiculul prezentat spre omologare de tip, precum și să transmită toate mesajele provenite de la vehiculul remorcat, astfel cum sunt definite în standardul ISO 11992-2:2003 și în Amd.1:2007;
2.1.3. asigură o citire directă și indirectă a mesajelor, indicând parametrii din câmpul de date în ordinea corectă, în funcție de timp; și
2.1.4. include o funcție de măsurare a timpului de reacție la racordul de cuplare, în conformitate cu punctul 2.6 din anexa III.
2.2. Procedura de verificare
|
2.2.1.
|
Se confirmă că fișa de informații pusă la dispoziție de producător/furnizor demonstrează respectarea dispozițiilor ISO 11992 în ceea ce privește nivelul fizic, nivelul de legătură de date și nivelul de aplicație.
|
|
2.2.2.
|
Cu simulatorul conectat la autovehicul prin interfața ISO 7638 și în timpul transmiterii către interfață a mesajelor de la vehiculul remorcat, se verifică următoarele:
|
2.2.2.1.
|
Semnalele transmise prin circuitul de comandă:
2.2.2.1.1. Parametrii definiți în EBS 12 octetul 3 conform ISO 11992-2:2003 și Amd.1:2007 se compară cu specificațiile vehiculului, după cum urmează:
|
Semnale transmise prin circuitul de comandă
|
EBS 12 octetul 3
|
|
Biți 1-2
|
Biți 5-6
|
|
Cerere de frânare de serviciu generată de un circuit electric
|
00b
|
|
|
Cerere de frânare de serviciu generată de două circuite electrice
|
01b
|
|
|
Vehiculul nu este echipat cu circuit pneumatic de comandă (1)
|
|
00b
|
|
Vehiculul este echipat cu circuit pneumatic de comandă
|
|
01b
|
|
(1) Acest tip de specificație a vehiculului este interzisă în conformitate cu punctul 2.1.4.1.3. din anexa I.
|
|
|
2.2.2.2
|
Cerere de frânare de serviciu/frânare suplimentară:
2.2.2.2.1 Parametrii definiți în EBS 11 din ISO 11992-2:2003 și amendamentul acestuia Amd.1:2007 se verifică după cum urmează:
|
Condiții de încercare
|
Referință octet
|
Valoarea semnalului din circuitul electric de comandă
|
|
Pedala frânei de serviciu și comanda frânei de siguranță sunt neacționate
|
3 – 4
|
0
|
|
Pedala frânei de serviciu apăsată complet
|
3 – 4
|
33280d — 43520d (650 — 850 kPa)
|
|
Frâna de siguranță acționată complet (1)
|
3 – 4
|
33280d — 43520d (650 — 850 kPa)
|
|
(1) Opțional la tractoarele cu circuite electrice și pneumatice de control, dacă circuitul pneumatic de control îndeplinește dispozițiile relevante privind frânarea de siguranță.
|
|
|
2.2.2.3.
|
Indicatorul de avarie:
2.2.2.3.1. Se simulează o avarie permanentă la circuitul de comunicare către contactul 6 al prizei ISO 7638 și se verifică dacă s-a aprins indicatorul de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2 din prezenta anexă.
2.2.2.3.2. Se simulează o avarie permanentă la circuitul de comunicare către contactul 7 al prizei ISO 7638 și se verifică dacă s-a aprins indicatorul de avertizare de culoare galbenă menționat la punctul 2.2.1.29.1.2 din prezenta anexă.
2.2.2.3.3. Se simulează mesajul EBS 22, octetul 2 cu biții 3 - 4 setați la 01b, și se verifică dacă s-a aprins indicatorul de avertizare menționat la punctul 2.2.1.29.1.1 din anexa I.
|
|
2.2.2.4
|
Cerere de frânare de la circuitul de alimentare:
În cazul vehiculelor care pot fi operate exclusiv cu vehicule remorcate conectate prin intermediul unui circuit electric de comandă:
Se conectează numai circuitul electric de comandă.
Se simulează mesajul EBS 22, octetul 4 cu biții 3 - 4 setați la 01b și se verifică, atunci când frâna de serviciu, frâna de siguranță sau frâna de parcare sunt acționate complet, dacă presiunea din circuitul de alimentare scade la 150 kPa în următoarele două secunde.
Se simulează o lipsă continuă a transmisiei de date și se verifică, atunci când sistemul de frânare de serviciu, sistemul de frânare de siguranță sau sistemul de frânare de parcare este acționat complet, dacă presiunea din circuitul de alimentare scade la 150 kPa în următoarele două secunde.
|
|
2.2.2.5
|
Timpul de răspuns:
2.2.2.5.1. Se verifică, în absența erorilor, dacă sunt respectate cerințele privind reacția circuitului de comandă prevăzute la punctul 2.6 din anexa III.
|
|
2.2.2.6
|
Iluminarea lămpilor de stop Se simulează mesajul EBS 22 octet 4 biți 5-6 setat în poziția 00 și se verifică faptul că lămpile de stop nu sunt iluminate.
Se simulează mesajul EBS 22 octet 4 biți 5-6 setat în poziția 01 și se verifică faptul că lămpile de stop sunt iluminate.
|
|
|
2.2.3.
|
Verificări suplimentare
|
2.2.3.1
|
La discreția serviciului tehnic, procedurile de verificare descrise la punctele 2.2.1 și 2.2.2 se pot repeta atunci când funcțiile transmisibile către interfață, altele decât funcțiile de frânare, sunt deconectate sau în diferite stări.
|
|
2.2.3.2
|
Punctul 2.4.1 din apendicele 1 definește mesajele suplimentare care trebuie suportate de tractor în situații specifice. Se pot efectua încercări suplimentare pentru a verifica statutul mesajelor suportate în sensul garantării îndeplinirii cerințelor de la punctul 2.3.
|
|
3.
Vehicule remorcate
3.1. Simulator de tractor conform ISO 11992
Simulatorul:
3.1.1. este dotat cu un conector conform cu ISO 7638:2003 (7 contacte), utilizat pentru conectarea la vehiculul supus încercării. Contactele 6 și 7 ale prizei se utilizează pentru transmiterea și primirea mesajelor prevăzute de ISO 11992:2003, inclusiv ISO 11992-2:2003 și amendamentul acestuia Amd.1:2007;
3.1.2. este dotat cu un indicator de avertizare a defecțiunilor și o sursă de alimentare electrică pentru vehiculul remorcat;
3.1.3. are capacitatea să primească toate mesajele transmise de către vehiculul remorcat prezentat spre omologare de tip, precum și să transmită toate mesajele provenite de la autovehicul, astfel cum sunt definite în standardul ISO 11992-2:2003 și în amendamentul său Amd.1:2007.
3.1.4. asigură o citire directă și indirectă a mesajelor, indicând parametrii din câmpul de date în ordinea corectă, în funcție de timp și
3.1.5. include o funcție de măsurare a timpului de reacție al sistemului de frânare, în conformitate cu punctul 4.5.2 din anexa III.
3.2. Procedura de verificare
|
3.2.1.
|
Se confirmă că documentul informativ pus la dispoziție de producător/furnizor demonstrează respectarea dispozițiilor ISO 11992:2003, inclusiv ISO 11992-2:2003 și Amd.1:2007 în ceea ce privește nivelul fizic, nivelul de legătură de date și nivelul de aplicație.
|
|
3.2.2.
|
Cu simulatorul conectat la vehiculul remorcat prin interfața ISO 7638 și în timpul transmiterii către interfață a mesajelor de la tractor, se verifică următoarele:
|
3.2.2.1.
|
Funcția sistemului de frânare de serviciu:
|
3.2.2.1.1.
|
Răspunsul vehiculului remorcat la parametrii definiți în EBS 11 din ISO 11992-2:2003 și în amendamentul său Amd.1:2007 se verifică după cum urmează:
Presiunea din circuitul de alimentare la începutul fiecărei încercări este de > 700 kPa, iar vehiculul este încărcat (în scopurile acestei încercări, starea de încărcare poate fi simulată).
|
3.2.2.1.1.1.
|
În cazul vehiculelor remorcate echipate cu circuite de comandă pneumatice și electrice:
se conectează ambele circuite de comandă;
ambele circuite de comandă se semnalizează simultan;
simulatorul transmite mesajul octet 3, biții 5-6;
cu EBS 12 setat la 01b, pentru a transmite vehiculului remorcat că este necesară conectarea unui circuit pneumatic de comandă.
Parametrii care se verifică:
|
Mesaj transmis de către simulator
|
Presiunea la camera de frânare
|
|
Referință octet
|
Valoarea semnalului digital
|
|
3 — 4
|
0
|
0 kPa
|
|
3 — 4
|
33280d
(650 kPa)
|
Conform calculelor producătorului vehiculului privind frâna
|
|
|
3.2.2.1.1.2.
|
Vehiculele remorcate echipate cu circuite pneumatice și electrice de comandă sau numai cu un circuit electric de comandă:
Se conectează numai circuitul electric de comandă
Simulatorul transmite următoarele mesaje:
Octetul 3, biții 5-6 din EBS 12 setați la 00b pentru a transmite vehiculului remorcat că nu este disponibil un circuit pneumatic de comandă, și octetul 3, biții 1-2 din EBS 12 setați la 01b pentru a transmite vehiculului remorcat că semnalul circuitului electric de comandă este generat de două circuite electrice.
Parametrii care se verifică:
|
Mesaj transmis de către simulator
|
Presiunea la camera de frânare
|
|
Referință octet
|
Valoarea semnalului digital
|
|
3 — 4
|
0
|
0 kPa
|
|
3 — 4
|
33280d
(650 kPa)
|
Conform datelor producătorului vehiculului
|
|
|
|
3.2.2.1.2.
|
În cazul vehiculelor remorcate echipate numai cu un circuit electric de comandă, răspunsul la mesajele definite în EBS 12 din ISO 11992-2:2003 și Amd.1:2007 se verifică după cum urmează:
La începutul fiecărei încercări, presiunea în circuitul pneumatic de alimentare este > 700 kPa.
Circuitul electric de comandă se conectează la simulator.
Simulatorul transmite următoarele mesaje:
Octetul 3, biții 5-6 din EBS 12 setați la 01b pentru a transmite vehiculului remorcat că este disponibil un circuit pneumatic de comandă.
Biții 3-4 din EBS 11 se setează la 0 (nu există cerere de frânare de serviciu)
Se verifică răspunsul la următoarele mesaje:
|
EBS 12, octetul 3, biții 1-2
|
Presiunea în camerele de frânare sau răspunsul vehiculului remorcat
|
|
01b
|
0 kPa (frâna de serviciu eliberată)
|
|
00b
|
Vehiculul remorcat este frânat automat pentru a se arăta că respectiva combinație nu este compatibilă. De asemenea, se transmite un semnal prin contactul 5 al prizei ISO 7638:2003 (indicatorul de culoare galbenă).
|
|
|
3.2.2.1.3.
|
În cazul vehiculelor remorcate conectate numai prin intermediul unui circuit electric de comandă, răspunsul vehiculului remorcat la o avarie a transmisiei electrice a comenzii care conduce la reducerea performanței frânării la cel puțin 30 % din valoarea prescrisă se verifică prin următoarea procedură:
La începutul fiecărei încercări, presiunea în circuitul pneumatic de alimentare trebuie să fie ≥ 700 kPa.
Circuitul electric de comandă se conectează la simulator.
Octetul 3, biții 5-6 din EBS 12 setați la 00b pentru a transmite vehiculului remorcat că nu este disponibil un circuit pneumatic de comandă.
Octetul 3, biții 1-2 din EBS 12 setați la 01b pentru a transmite vehiculului remorcat că semnalul circuitului electric de comandă este generat de două circuite independente.
Se verifică următoarele:
|
Condiții de încercare
|
Răspunsul sistemului de frânare
|
|
Nu există erori în sistemul de frânare al vehiculului remorcat
|
Se verifică dacă sistemul de frânare comunică cu simulatorul și dacă octetul 4, biții 3-4 din EBS 22 sunt setați la 00b.
|
|
Se introduce o avarie în transmisia electrică a comenzii sistemului de frânare al vehiculului remorcat care împiedică menținerea a cel puțin 30 % din performanța de frânare.
|
Se verifică dacă octetul 4, biții 3-4 din EBS 22 sunt setați la 01b
sau
Comunicațiile de date către simulator au fost întrerupte
|
|
|
|
3.2.2.2
|
Indicatorul de avarie
|
3.2.2.2.1.
|
Se verifică dacă se transmite mesajul sau semnalul de avertizare corespunzător în următoarele condiții:
3.2.2.2.1.1. dacă o avarie permanentă în transmisia electrică a sistemului de frânare al vehiculului remorcat împiedică atingerea performanței frânării de serviciu, se simulează o astfel de avarie și se verifică dacă octetul 2, biții 3-4 din EBS 22 sunt setați la 01b. De asemenea, se transmite un semnal prin contactul 5 al prizei ISO 7638 (indicatorul de culoare galbenă).
3.2.2.2.1.2. Tensiunea din contactele 1 și 2 ale prizei ISO 7638 se reduce la o valoare inferioară celei specificate de producător, ceea ce împiedică atingerea performanței sistemului de frânare de serviciu, și se verifică dacă octetul 2, biții 3-4 din EBS 22 transmiși de vehiculul remorcat sunt setați la 01b. De asemenea, se transmite un semnal prin contactul 5 al prizei ISO 7638 (indicatorul de culoare galbenă).
3.2.2.2.1.3. Se verifică respectarea dispozițiilor punctului 5.2.4 din prezenta anexă prin izolarea circuitului de alimentare. Se reduce presiunea în sistemul de acumulare a presiunii al vehiculului remorcat la valoarea specificată de producător. Se verifică dacă octetul 2, biții 3-4 din EBS 22 transmiși de vehiculul remorcat sunt setați la 01b, și dacă octetul 1, biții 7-8 din EBS 23 sunt setați la 00. De asemenea, se transmite un semnal prin contactul 5 al prizei ISO 7638 (indicatorul de culoare galbenă).
3.2.2.2.1.4. Când partea electrică a sistemului de frânare este alimentată cu energie pentru prima dată, se verifică dacă octetul 2, biții 3-4 din EBS 22 transmiși către remorcă sunt setați la 01b.
►M1
După ce sistemul de frânare a verificat că nu există erori care necesită semnalizarea prin indicatorul de avertizare de culoare roșie, mesajul de la prezentul punct se setează la 00b. ◄
|
|
|
3.2.2.3
|
Verificarea timpului de răspuns
|
3.2.2.3.1.
|
Se verifică, în absența erorilor, dacă sunt respectate cerințele privind reacția sistemului de frânare prevăzute la punctul 4.5.2 din anexa III.
|
|
|
3.2.2.4
|
Frânare comandată automat În cazul în care vehiculul remorcat include o funcție a cărei operare rezultă într-o intervenție de frânare comandată automat, se vor verifica următoarele:
În cazul în care nu este generată nicio intervenție de frânare comandată automat, se verifică setarea mesajului EBS 22 octet 4 biți 5-6 în poziția 00.
Se simulează o intervenție de frânare comandată automat; atunci când decelerația rezultată este ≥ 0,7 m/sec2, se verifică setarea mesajului EBS 22 octet 4 biți 5-6 în poziția 01.
|
|
3.2.2.5
|
Funcția de stabilitate a vehiculului În cazul unui vehicul remorcat echipat cu o funcție de stabilitate a vehiculului, se efectuează următoarele verificări:
Când funcția de stabilitate a vehiculului este inactivă, se verifică setarea mesajului EBS 21 octet 2 biți 1-2 în poziția 00.
|
|
3.2.2.6
|
Suportul circuitului electric de comandă Atunci când sistemul de frânare al vehiculului remorcat nu suportă frânarea prin circuitul electric de comandă, se verifică setarea mesajului EBS 22 octet 4 biți 7-8 în poziția 00.
Atunci când sistemul de frânare al vehiculului remorcat suportă frânarea prin circuitul electric de comandă, se verifică setarea mesajului EBS 22 octet 4 biți 7-8 în poziția 01.
|
|
|
3.2.3.
|
Verificări suplimentare
|
3.2.3.1
|
La discreția serviciului tehnic, procedurile de verificare descrise la punctele 3.2.1 și 3.2.2 se pot repeta atunci când funcțiile transmisibile către interfață, altele decât funcțiile de frânare, sunt deconectate sau în diferite stări.
Atunci când măsurarea timpului de răspuns al sistemului de frânare se repetă, pot apărea diferențe între valorile înregistrate ca urmare a reacției pneurilor vehiculului. Indiferent de situație, cerințele privind timpul de reacție trebuie îndeplinite.
|
|
3.2.3.2
|
Punctul 2.4.2 din apendicele 1 definește mesajele suplimentare care trebuie luate în considerare de vehiculul remorcat în situații specifice. Se pot efectua încercări suplimentare pentru a verifica statutul mesajelor suportate în sensul garantării îndeplinirii cerințelor de la punctul 2.3 din prezenta anexă.
|
|
ANEXA XIII
Cerințe aplicabile racordurilor hidraulice de tipul cu o singură conductă și vehiculelor echipate cu acestea
1.
Generalități
|
1.1.
|
▼M2
Un racord hidraulic de tipul cu o singură conductă poate fi instalat pe tractoarele care sunt echipate cu una dintre următoarele conexiuni:
(a) oricare dintre tipurile de conexiuni menționate la punctul 2.1.4 din anexa I;
(b) oricare dintre tipurile de conexiuni menționate la punctele 2.1.5.1.1, 2.1.5.1.2 și 2.1.5.1.3 din anexa I. În acest caz, pentru a se evita duplicarea unui conector, racordul de tip tată al racordului hidraulic de tipul cu o singură conductă poate fi racordul de tip tată descris la punctul 2.1.5.1.1 din anexa I, cu condiția ca presiunile generate în racordul respectiv să respecte cerințele de la punctele 1.1.1, 1.1.2 și 1.1.3.
▼M2
1.1.1. În cazul în care sunt conectate o linie de control și o linie suplimentară ale vehiculului remorcat, presiunea pm generată este în conformitate cu diagrama 2 din apendicele 1 la anexa II.
1.1.2. În cazul în care este conectat un vehicul remorcat având un racord hidraulic de tipul cu o singură conductă, presiunea pm generată este în conformitate cu punctul 2 sau 3 din prezenta anexă.
1.1.3. Detectarea liniilor conectate menționate la punctele 1.1.1 și 1.1.2 se efectuează în mod automat.
|
▼M1 —————
▼B
|
1.3.
|
Sistemul de frânare de serviciu al tractorului trebuie să fie dotat cu un dispozitiv proiectat astfel încât, dacă sistemul de frânare al vehiculului remorcat sau circuitul de comandă dintre tractor și vehiculul remorcat se întrerupe, să fie în continuare posibilă frânarea tractorului cu performanța prevăzută pentru sistemul de frânare de siguranță din prezentul regulament.
|
2.
Racordurile hidraulice de tipul cu o singură conductă între tractor și vehiculele remorcate echipate cu sisteme de frânare hidraulice trebuie să îndeplinească următoarele cerințe:
|
2.1.
|
tip de racord: circuit de comandă hidraulic cu conectorul de tip tată pe tractor și conectorul de tip mamă pe vehiculul remorcat. Conectorii trebuie să fie conformi cu ISO 5676:1983
|
|
2.2.
|
Cu motorul în funcțiune și dispozitivul de comandă al sistemului de frânare de serviciu al tractorului acționat complet se generează o presiune între 10 000 kPa și 15 000 kPa în circuitul de comandă.
|
|
2.3.
|
Cu motorul în funcțiune și fără niciun dispozitiv de comandă al frânei de pe tractor acționat (condiție în circulație sau în staționare cu motorul pornit), presiunea la racordul de cuplare al circuitului de comandă trebuie să fie 0+200 kPa.
|
|
2.4.
|
Cerințele privind timpul de răspuns din anexa III nu se aplică acestui tip de conexiune.
|
|
2.5.
|
Cerințele de compatibilitate în conformitate cu apendicele 1 la anexa II nu se aplică acestui tip de conexiune.
|
▼M1
3.
Cerințe alternative
Ca alternativă la cerințele din secțiunile 1 și 2, racordul hidraulic de tipul cu o singură conductă instalată pe tractoare îndeplinește toate cerințele din prezenta secțiune, în plus față de dispozițiile de la punctul 1.2.
▼B
|
3.1.
|
Circuitul hidraulic trebuie prevăzut cu o supapă de reținere pentru a preveni presiunile hidraulice mai mari de 15 000 kPa.
|
|
3.2.
|
Fără niciun dispozitiv de comandă a frânei aplicat pe tractor (nici frâna de parcare), la orice număr de rotații pe minut (rpm) cuprins între turația inferioară la ralanti și turația nominală, presiunea la racordul de cuplare trebuie să fie cuprinsă între 1 000 și 1 500 kPa.
|
|
3.3.
|
Aplicându-se frâna de serviciu a tractorului treptat, presiunea la racordul de cuplare trebuie să crească progresiv și să atingă valoarea maximă specificată, care trebuie să fie cuprinsă între 12 000 și 14 000 kPa. Cerințele trebuie îndeplinite la orice turație a motorului, conform descrierii de la punctul 3.2.
|
|
3.4.
|
Valoarea relației admise între coeficientul de frânare TM/FM și presiunea la racordul de cuplare pm trebuie să fie sub dreapta AAA din figura 1. Cerința trebuie îndeplinită de vehiculul neîncărcat.
|
|
3.5.
|
Timpul de reacție la racordul de cuplare, măsurat conectând simulatorul de vehicul remorcat la tractor (conform descrierii de la punctul 3.10), nu trebuie să fie mai mare de 0,6 secunde. Timpul de reacție se măsoară la racordul de cuplare, începând din momentul acționării pedalei de comandă și până în momentul când presiunea atinge valoarea de 7 500 kPa. În timpul încercării, turația motorului se fixează la 2/3 din turația nominală. Temperatura ambiantă și temperatura vehiculului trebuie să fie stabilizate între 10 °C și 30 °C. Timpul de acționare a pedalei necesar pentru a ajunge la o presiune de 10 000 kPa la racordul de cuplare nu trebuie să fie mai mic de 0,2 secunde.
|
|
3.6.
|
În caz de defectare a părții sistemului de frânare al vehiculului remorcat amplasate pe partea laterală a tractorului, o cădere de presiune până la 0 kPa (măsurată la racordul de cuplare) trebuie să fie generată într-o secundă pentru a aplica frânele vehiculului remorcat. Aceeași dispoziție se aplică în cazul opririi sau al unei eficiențe scăzute a sursei de energie.
|
|
3.7.
|
În caz de defectare a frânelor de serviciu ale tractorului, operatorul trebuie să poată scădea presiunea la racordul de cuplare la 0 kPa. Această cerință poate fi realizată cu un dispozitiv de comandă manuală auxiliar.
|
|
3.8.
|
Tractorul trebuie echipat cu indicatorul de avertizare menționat la punctul 2.2.1.29.1.1 din anexa I; acesta se activează atunci când presiunea din sistemul de frânare al vehiculului remorcat scade sub 1 000 (+0 — 200) kPa.
|
▼M1
|
3.9.
|
Supapa de frânare și sursa de energie trebuie marcate în conformitate cu cerințele stabilite la articolul 24 din Regulamentul delegat (UE) 2015/208.
|
▼B
|
3.10.
|
Simulator de vehicul remorcat: dispozitivul care simulează sistemul de frânare al vehiculului remorcat trebuie să includă un circuit hidraulic prevăzut cu un cuplaj de tip mamă conform cu ISO 5676-1983 și două dispozitive identice de stocare a energiei hidraulice, prevăzute cu resorturi și care îndeplinesc cerințele specificate în figura 2. Simulatorul trebuie să fie fabricat în conformitate cu specificațiile din figura 3.
Figura 1
Relația dintre coeficientul de frânare TM/FM și presiunea la racordul de cuplare pm
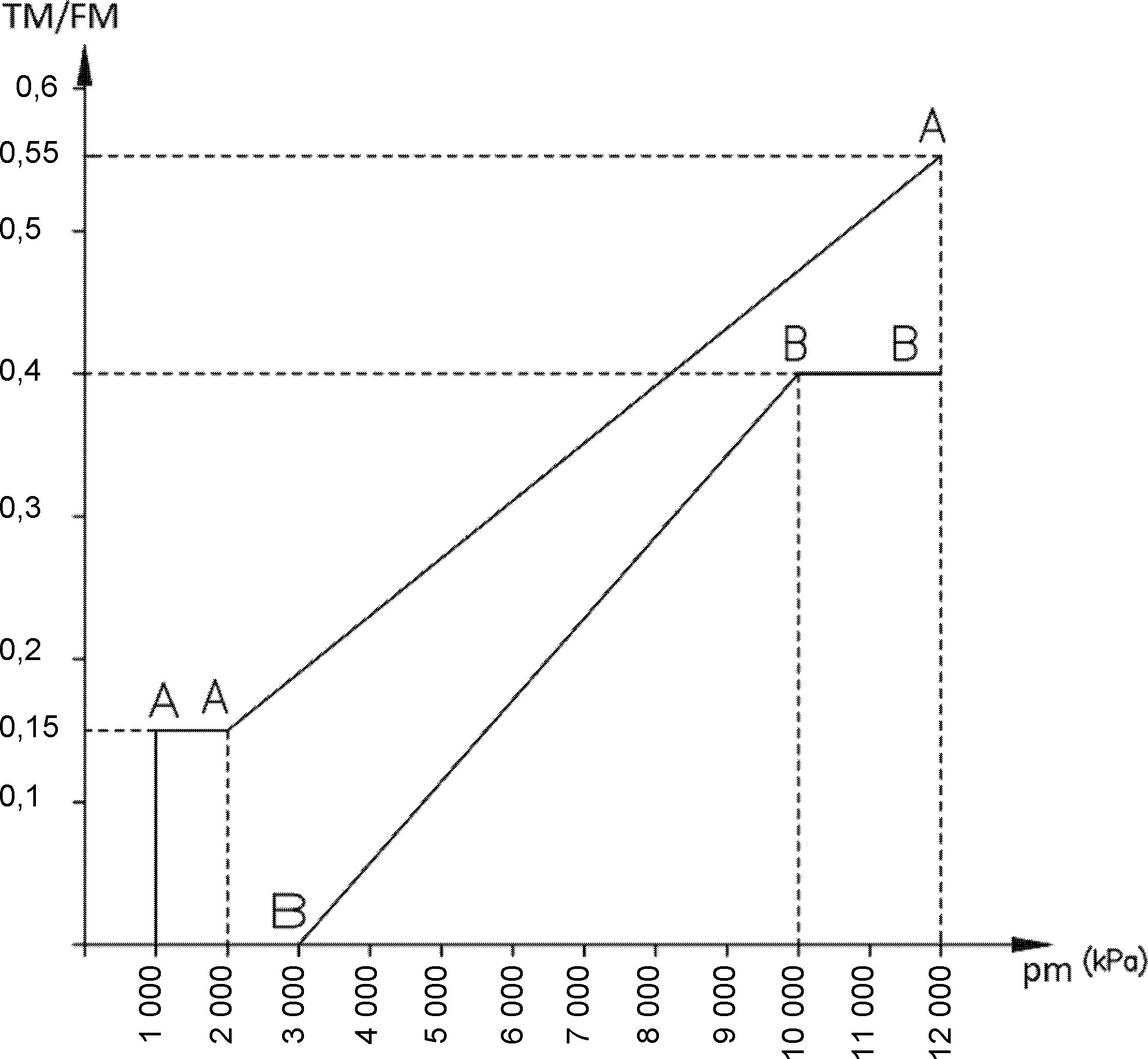
|
pm
|
=
|
presiunea hidraulică stabilizată la racordul de cuplare (kPa).
|
|
TM
|
=
|
suma forțelor de frânare pe circumferința tuturor roților tractorului.
|
|
FM
|
=
|
reacțiunea statică normală totală a suprafeței drumului asupra roților tractorului.
|
Figura 2
Caracteristici ale simulatorului de vehicul remorcat, în funcție de masa maximă admisă a acestuia

— diagrama A B C pentru masa maximă admisă de maxim 14 tone.
— diagrama A D E pentru masa maximă admisă mai mare de 14 tone
Notă: toleranță permisă ± 2 %
Figura 3
Dispunerea simulatorului de vehicul remorcat

|
1
|
=
|
furtun cu lungimea de 2 000 mm având un cuplaj de tip mamă conform cu ISO 5676-1983;
|
|
2
|
=
|
tub cu diametrul intern de 8 mm și lungimea de 4 000 mm;
|
|
3
|
=
|
tub cu diametrul intern de 8 mm și lungimea de 1 000 mm;
|
|
4
|
=
|
tub cu diametrul intern de 8 mm și lungimea de 1 000 mm;
|
|
5
|
=
|
elemente care simulează o frână cu piston;
|
|
6
|
=
|
elemente reglate cu resorturi care acționează asupra cursei totale a pistonului;
|
|
7
|
=
|
elemente reglate cu resorturi care acționează doar la sfârșitul cursei pistonului;
|
|