

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 42018X0798
Regulation No 51 of the Economic Commission for Europe of the United Nations (UNECE) — Uniform provisions concerning the approval of motor vehicles having at least four wheels with regard to their sound emissions [2018/798]
Regulamentul nr. 51 al Comisiei Economice pentru Europa a Organizației Națiunilor Unite (CEE-ONU) – Prevederi uniforme privind omologarea vehiculelor motorizate care au cel puțin patru roți în privința emisiilor lor sonore [2018/798]
Regulamentul nr. 51 al Comisiei Economice pentru Europa a Organizației Națiunilor Unite (CEE-ONU) – Prevederi uniforme privind omologarea vehiculelor motorizate care au cel puțin patru roți în privința emisiilor lor sonore [2018/798]
OJ L 138, 4.6.2018, p. 1–69
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
4.6.2018 |
RO |
Jurnalul Oficial al Uniunii Europene |
L 138/1 |
Numai textele originale CEE-ONU au efect juridic în temeiul dreptului public internațional. Situația și data intrării în vigoare a prezentului regulament se verifică în ultima versiune a documentului privind situația documentului CEE-ONU TRANS/WP.29/343, disponibil la următoarea adresă:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamentul nr. 51 al Comisiei Economice pentru Europa a Organizației Națiunilor Unite (CEE-ONU) – Prevederi uniforme privind omologarea vehiculelor motorizate care au cel puțin patru roți în privința emisiilor lor sonore [2018/798]
Include toate textele valabile până la:
Suplimentul 2 la seria 03 de amendamente – Data intrării în vigoare: 10 februarie 2018
CUPRINS
REGULAMENT
|
1. |
Domeniul de aplicare |
|
2. |
Definiții |
|
3. |
Cererea de omologare |
|
4. |
Marcaje |
|
5. |
Omologare |
|
6. |
Specificații |
|
7. |
Modificarea și extinderea omologării unui tip de vehicul |
|
8. |
Conformitatea producției |
|
9. |
Sancțiuni în cazul neconformității producției |
|
10. |
Încetarea definitivă a producției |
|
11. |
Dispoziții tranzitorii |
|
12. |
Denumirile și adresele serviciilor tehnice responsabile cu efectuarea încercărilor de omologare și ale autorităților de omologare de tip |
Anexe
|
1 |
Fișă de comunicare |
|
Apendicele 1 – |
Addendum la fișa de comunicare nr. … |
|
Apendicele 2 – |
Document cu informații tehnice |
|
2 |
Dispuneri ale mărcii de omologare |
|
3 |
Metode și instrumente pentru măsurarea sunetului emis de autovehicule |
|
Apendice |
|
|
4 |
Amortizoare de zgomot la evacuare care conțin materiale fibroase insonorizante |
|
Apendice |
|
|
5 |
Zgomotul provocat de aerul comprimat |
|
Apendice |
|
|
6 |
Verificări ale conformității producției |
|
7 |
Metoda de măsurare pentru evaluarea conformității cu dispozițiile suplimentare cu privire la emisiile sonore |
|
Apendicele 1 – |
Declarație de conformitate cu dispozițiile suplimentare cu privire la emisiile sonore |
|
Apendicele 2 |
|
1. DOMENIUL DE APLICARE
Prezentul regulament conține dispoziții privind emisiile sonore ale autovehiculelor și se aplică vehiculelor din categoriile M și N (1).
Specificațiile din prezentul regulament sunt menite să reproducă nivelurile sonore emise de vehicule în condiții de condus normal în trafic urban.
2. DEFINIȚII
În sensul prezentului regulament:
2.1. „Omologarea unui vehicul” însemnă omologarea unui tip de vehicul în ceea ce privește sunetul.
2.2. „Tip de vehicul” înseamnă o categorie de autovehicule care nu diferă în aspecte esențiale precum:
|
2.2.1. |
în cazul vehiculelor supuse încercărilor în conformitate cu dispozițiile de la punctul 3.1.2.1 din anexa 3:
|
|
2.2.2. |
în cazul vehiculelor supuse încercărilor în conformitate cu dispozițiile de la punctul 3.1.2.2 din anexa 3:
|
2.3. Totuși, dacă diferențele de la punctul 2.2.2 prevăd condiții vizate diferite, astfel cum sunt prezentate la punctul 3.1.2.2 din anexa 3, aceste diferențe sunt considerate o schimbare a tipului.
2.4. „Masa vehiculului în stare de funcționare (mro)” înseamnă:
|
(a) |
în cazul autovehiculelor: masa vehiculului, cu rezervorul (rezervoarele) de combustibil umplut(e) la cel puțin 90 % din capacitate, inclusiv masa conducătorului auto, a combustibilului și a lichidelor, dotat cu echipamentul standard în conformitate cu specificațiile producătorului și, dacă sunt prezente, masa caroseriei, a cabinei conducătorului auto, a dispozitivului de cuplare și a roții (roților) de rezervă, precum și a sculelor; |
|
(b) |
în cazul remorcilor: masa vehiculului, inclusiv a combustibilului și a lichidelor, dotat cu echipamentele standard în conformitate cu specificațiile producătorului și, dacă sunt prezente, masa caroseriei, a cuplajului (cuplajelor) suplimentar(e), a roții (roților) de rezervă, precum și cea a sculelor. |
2.5. „Masa maximă tehnic admisibilă a vehiculului încărcat (M)” înseamnă masa maximă în stare încărcată atribuită unui vehicul pe baza caracteristicilor sale constructive și a performanțelor sale de proiectare; masa maximă tehnic admisibilă a remorcii sau a semiremorcii încărcate include masa statică transferată vehiculului tractor la cuplare.
2.6. „Lungimea vehiculului” înseamnă o dimensiune măsurată în conformitate cu standardul ISO 612-1978, termenul nr. 6.1. În afară de dispozițiile din standardul menționat, la măsurarea lungimii structurale a unui vehicul, nu se iau în considerare următoarele elemente:
|
(a) |
dispozitivele de ștergere și de spălare a parbrizului; |
|
(b) |
plăcuțele de înmatriculare față și spate; |
|
(c) |
sigiliile de vamă și dispozitivele de protejare a acestora; |
|
(d) |
dispozitivele de fixare a prelatei, precum și dispozitivele de protejare a acestora; |
|
(e) |
echipamentele de iluminat; |
|
(f) |
oglinzile retrovizoare; |
|
(g) |
dispozitivele de supraveghere a spațiului din spate; |
|
(h) |
galeriile de admisie a aerului; |
|
(i) |
tampoanele pentru elementele de caroserie demontabile; |
|
(j) |
scările de acces; |
|
(k) |
apărătorile din cauciuc; |
|
(l) |
platformele elevatoare, rampele de acces și echipamentul similar în stare de funcționare, nedepășind 200 mm, cu condiția ca acestea să nu determine o creștere a capacității de încărcare a vehiculului; |
|
(m) |
dispozitivele de cuplare pentru autovehicule. |
2.7 „Lățimea vehiculului” înseamnă o dimensiune măsurată în conformitate cu standardul ISO 612-1978, termenul nr. 6.2. În afară de dispozițiile din standardul menționat, la măsurarea lățimii structurale a unui vehicul, nu se iau în considerare următoarele elemente:
|
(a) |
sigiliile de vamă și dispozitivele de protejare a acestora; |
|
(b) |
dispozitivele de fixare a prelatei, precum și dispozitivele de protejare a acestora; |
|
(c) |
martorii de indicare a defectării pneurilor; |
|
(d) |
elementele flexibile proeminente ale unui sistem de protecție antiîmproșcare; |
|
(e) |
echipamentele de iluminat. |
2.8. „Puterea nominală netă maximă (Pn)” înseamnă puterea motorului exprimată în kW și măsurată prin metoda prevăzută în Regulamentul nr. 85.
2.8.1. „Puterea totală a motorului” înseamnă suma puterilor generate de toate sursele de propulsie disponibile.
2.9. „Turația nominală a motorului (S)” înseamnă acea turație a motorului, declarată în min– 1 (rpm), la care motorul dezvoltă puterea nominală netă maximă, în conformitate cu Regulamentul nr. 85 sau, în cazul în care puterea nominală netă maximă este atinsă la mai multe turații ale motorului, cea mai mare dintre aceste turații.
2.10. „Indicele raportului putere/masă (RPM)” înseamnă o cantitate numerică (a se vedea punctul 3.1.2.1.1 din anexa 3) fără dimensiune utilizată pentru calcularea accelerației.
2.11. „Punct de referință” înseamnă unul dintre următoarele puncte:
|
2.11.1. |
în cazul vehiculelor din categoriile M1, N1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat < 3 500 kg:
|
|
2.11.2. |
în cazul vehiculelor din categoriile M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat > 3 500 kg, M3, N2, N3:
|
2.12. „Motor” înseamnă sursa de putere fără accesorii detașabile.
Sursa de putere include, în acest context, toate sursele de putere de tracțiune, de exemplu, sursele de putere electrică sau hidraulică utilizate separat sau în combinație cu alte surse de putere.
2.13. „Accelerația-țintă” înseamnă accelerația obținută cu clapeta de accelerație în poziție intermediară în traficul urban, rezultată din calcule statistice.
2.14. „Accelerația de referință” înseamnă accelerația necesară în timpul încercării la accelerare pe pista de încercare.
2.15. „Factorul de ponderare a raportului de transmisie k” înseamnă o valoare numerică adimensională utilizată pentru a combina rezultatele încercărilor obținute cu două raporturi de transmisie pentru încercarea la accelerare și încercarea la viteză constantă.
2.16. „Factorul de putere parțială kP” înseamnă o valoare numerică adimensională utilizată pentru combinarea ponderată a rezultatelor încercării la accelerare și a rezultatelor încercării la viteză constantă a vehiculelor.
2.17. „Preaccelerare” înseamnă aplicarea dispozitivului de comandă a accelerației înainte de linia AA′ în scopul obținerii unei accelerații stabile între liniile AA′ și BB′, după cum se indică în figura 1 din apendicele la anexa 3.
2.18. Treapta de viteză (2)
2.18.1. „Raporturi de transmisie”
2.18.1.1. „Raport de transmisie al cutiei de viteze” înseamnă raportul dintre turația arborelui motorului și turația arborelui de ieșire al cutiei de viteze.
2.18.1.2. „Raport de transmisie final” înseamnă raportul (raporturile) dintre turația arborelui de ieșire al cutiei de viteze și turația roților motoare.
2.18.1.3. „Raport de transmisie total” înseamnă raportul dintre viteza vehiculului și turația motorului în timpul trecerii vehiculului pe pista de încercare.
2.18.1.4. „Raportul de transmisie” utilizat în contextul încercării vehiculelor în conformitate cu punctul 3.1.2.1 din anexa 3 și cu anexa 7 este raportul de transmisie total, astfel cum este definit la punctul 2.18.1.3 de mai sus.
2.18.2. „Raport de transmisie blocat” înseamnă controlul transmisiei astfel încât nicio treaptă de viteză să nu se poată schimba în timpul unei încercări.
2.18.3. „Treaptă de viteză” înseamnă, în contextul prezentului regulament, un raport de transmisie individual selectabil fie de către conducătorul auto, fie de către un dispozitiv extern.
2.18.4. Pentru vehiculele supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 și cu anexa 7, „treapta de vitezăi” și „treapta de vitezăi + 1” se definesc ca o secvență de două trepte de viteză, unde treapta de vitezăi furnizează o accelerație cu o toleranță de 5 % conform punctului 3.1.2.1.4.1 litera (a) din anexa 3 sau o accelerație mai mare decât accelerația de referință, iar treapta de vitezăi + 1 o accelerație mai mică decât accelerația de referință conform punctului 3.1.2.1.4.1 litera (b) sau litera (c) din anexa 3.
2.19. „Amortizor de zgomot” înseamnă un set complet de componente necesare pentru limitarea sunetului generat de motor, de alimentarea și de evacuarea acestuia (colectorul/colectoarele de evacuare, catalizatorul/catalizatoarele și dispozitivul/dispozitivele de posttratare a emisiilor nu sunt considerate parte a amortizorului de zgomot, ci părți ale motorului).
2.20. „Familie de modele de amortizoare de zgomot la evacuare sau de componente ale amortizorului de zgomot la evacuare” înseamnă un grup de amortizoare de zgomot sau de componente ale acestora în cadrul căruia toate caracteristicile de mai jos sunt aceleași:
|
(a) |
prezența fluxului net de gaze de evacuare prin materiale fibroase absorbante, atunci când acestea intră în contact cu aceste materiale; |
|
(b) |
tipul de materiale fibroase; |
|
(c) |
specificațiile materialului liant, dacă este cazul; |
|
(d) |
dimensiunile medii ale fibrelor; |
|
(e) |
densitatea minimă a materialului ambalat în vrac, în kg/m3; |
|
(f) |
suprafața maximă de contact între fluxul de gaz și materialul absorbant. |
2.21. „Amortizor de zgomot de evacuare de diferite tipuri” înseamnă amortizoare de zgomot care diferă în mod semnificativ în ceea ce privește cel puțin una dintre următoarele caracteristici:
|
(a) |
denumirile comerciale sau mărcile comerciale ale componentelor acestora; |
|
(b) |
caracteristicile materialelor care intră în componentele acestora, cu excepția materialelor de acoperire a acestor componente; |
|
(c) |
forma sau dimensiunile componentelor acestora; |
|
(d) |
principiile de funcționare ale cel puțin uneia dintre componentele acestora; |
|
(e) |
montajul componentelor acestora; |
|
(f) |
numărul amortizoarelor de zgomot de evacuare sau al componentelor acestora. |
2.22. „Amortizor de zgomot de schimb” înseamnă orice piesă a sistemului de amortizare a zgomotului sau a componentelor acestuia destinată utilizării pe un vehicul, alta decât tipul de piesă instalat pe vehiculul respectiv în momentul prezentării acestuia pentru omologarea de tip în conformitate cu prezentul regulament.
2.23. „Punctul R” înseamnă punctul R, astfel cum este definit la punctul 2.4 din anexa 1 la Rezoluția Consolidată privind Construcția Vehiculelor (R.E.3).
2.24. Tabelul simbolurilor
|
Simbol |
Unitate |
Anexă |
Punct |
Explicație |
|
mro |
kg |
Anexa 3 |
2.2.1 |
masa în stare de funcționare; valoare care trebuie raportată și folosită pentru calcule cu o precizie de 10 kg |
|
mt |
kg |
Anexa 3 |
2.2.1 |
masa de încercare a vehiculului; valoare care trebuie raportată și folosită pentru calcule cu o precizie de 10 kg |
|
mtarget |
kg |
Anexa 3 |
2.2.1 |
masa de încercare țintă a vehiculului |
|
mxload |
kg |
Anexa 3 |
2.2.1 |
sarcină suplimentară |
|
mfa load unladen |
kg |
Anexa 3 |
2.2.1 |
sarcina pe axa față în stare neîncărcată |
|
mra load unladen |
kg |
Anexa 3 |
2.2.1 |
sarcina pe axa spate în stare neîncărcată |
|
munladen |
kg |
Anexa 3 |
2.2.1 |
masa vehiculului în stare neîncărcată |
|
mac ra max |
kg |
Anexa 3 |
2.2.1 |
masa maximă tehnic admisibilă a vehiculului încărcat permisă pentru axa spate declarată de producător |
|
md |
kg |
Anexa 3 |
2.2.1 |
masa conducătorului auto |
|
mchassis M2M3 |
kg |
Anexa 3 |
2.2.1 |
masa vehiculului incomplet (M2 sau M3) |
|
mxload M2M3 |
kg |
Anexa 3 |
2.2.1 |
sarcina suplimentară care trebuie adăugată la vehiculul incomplet (M2 sau M3) pentru ca acesta să atingă masa vehiculului în stare de funcționare aleasă de producător |
|
mfa load laden |
kg |
Anexa 3 |
2.2.7.2 |
sarcină pe axa față în stare încărcată |
|
mra load laden |
kg |
Anexa 3 |
2.2.7.2 |
sarcină pe axa spate în stare încărcată |
|
AA′ |
— |
Anexa 3 |
3.1.1 |
linie perpendiculară pe direcția de deplasare a vehiculului, care indică începutul zonei de înregistrare a nivelului de presiune sonoră în timpul încercării |
|
BB′ |
— |
Anexa 3 |
3.1.1 |
linie perpendiculară pe direcția de deplasare a vehiculului, care indică sfârșitul zonei de înregistrare a nivelului de presiune sonoră în timpul încercării |
|
CC′ |
— |
Anexa 3 |
3.1.1 |
linia de deplasare a vehiculului pe suprafața de încercare definită în ISO 10844 |
|
PP′ |
— |
Anexa 3 |
3.1.1 |
linie perpendiculară pe direcția de deplasare a vehiculului care indică amplasarea microfoanelor |
|
vtest |
km/oră |
Anexa 3 |
3.1.2.1 |
viteza de încercare a vehiculului |
|
RPM |
— |
Anexa 3 |
3.1.2.1.1 |
raportul putere/masă care trebuie utilizat la calcule; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Pn |
kW |
Anexa 3 |
3.1.2.1.1 |
puterea netă nominală totală a motorului |
|
l |
m |
Anexa 3 |
3.1.2.1.2 |
lungimea de referință; valoare care trebuie raportată și folosită pentru calcule cu o precizie de 0,01 m (1 cm) |
|
lveh |
m |
Anexa 3 |
3.1.2.1.2 |
lungimea vehiculului; valoare care trebuie raportată și folosită pentru calcule cu o precizie de 0,01 m (1 cm) |
|
vAA′ |
km/oră |
Anexa 3 |
3.1.2.1.2 |
viteza vehiculului atunci când punctul de referință trece de linia AA′ (a se vedea la punctul 5.1 definiția punctului de referință); valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
vBB′ |
km/oră |
Anexa 3 |
3.1.2.1.2 |
viteza vehiculului atunci când punctul de referință trece de linia BB′ (a se vedea la punctul 5.1 definiția punctului de referință); valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
vPP′ |
km/oră |
Anexa 3 |
3.1.2.1.2 |
viteza vehiculului atunci când punctul de referință trece de linia PP′ (a se vedea la punctul 5.1 definiția punctului de referință); valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
awot test |
m/s2 |
Anexa 3 |
3.1.2.1.2.1 |
accelerația cu clapeta de accelerație complet deschisă de la AA′ la BB′; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
awot test,i |
m/s2 |
Anexa 3 |
3.1.2.1.2.1 |
accelerația cu clapeta de accelerație complet deschisă atinsă la un anumit raport de transmisie i; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
lpa |
m |
Anexa 3 |
3.1.2.1.2.1 |
punctul în care se apasă pedala de accelerație înaintea liniei AA′; valoare care trebuie raportată în metri întregi |
|
awot test, PP-BB |
m/s2 |
Anexa 3 |
3.1.2.1.2.2 |
accelerația cu clapeta de accelerație complet deschisă de la PP′ la BB′; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
aurban |
m/s2 |
Anexa 3 |
3.1.2.1.2.3 |
accelerația-țintă reprezentând accelerația în trafic urban; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
awot ref |
m/s2 |
Anexa 3 |
3.1.2.1.2.4 |
accelerația de referință pentru încercarea cu clapeta de accelerație complet deschisă; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
kP |
— |
Anexa 3 |
3.1.2.1.3 |
factorul de putere parțială; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
awot i |
m/s2 |
Anexa 3 |
3.1.2.1.4.1 |
accelerația cu clapeta de accelerație complet deschisă la raportul de transmisie i; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
awot (i + 1) |
m/s2 |
Anexa 3 |
3.1.2.1.4.1 |
accelerația cu clapeta de accelerație complet deschisă la raportul de transmisie (i + 1); valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
raportul de transmisie i |
— |
Anexa 3 |
3.1.2.1.4.1 |
primul dintre cele două raporturi de transmisie care trebuie utilizate la încercarea vehiculului |
|
raportul de transmisie i + 1 |
— |
Anexa 3 |
3.1.2.1.4.1 |
al doilea dintre cele două raporturi de transmisie, la o turație a motorului mai mică decât cea pentru raportul de transmisie i |
|
k |
— |
Anexa 3 |
3.1.2.1.4.1 |
factorul de ponderare a raportului de transmisie; valoare care trebuie raportată și folosită pentru calcule cu o precizie de două zecimale |
|
nBB′ |
1/min |
Anexa 3 |
3.1.2.2 |
viteza de rotație a motorului vehiculului atunci când punctul de referință trece de linia BB′; valoare care trebuie raportată și folosită pentru calcule cu o precizie de 10 min– 1 |
|
S |
1/min |
Anexa 3 |
3.1.2.2 |
viteza nominală de rotație a motorului în rotații pe minut, sinonimă cu viteza de rotație a motorului la putere maximă |
|
ntarget BB′ |
1/min |
Anexa 3 |
3.1.2.2.1.1(a) |
viteza-țintă de rotație a motorului vehiculului atunci când punctul de referință trebuie să treacă de linia BB′ (a se vedea la punctul 2.11.2 definiția punctului de referință); |
|
vtarget BB′ |
km/oră |
Anexa 3 |
3.1.2.2.1.1(a) |
viteza-țintă a vehiculului atunci când este necesar ca punctul de referință să treacă de linia BB′ (a se vedea la punctul 2.11.2 definiția punctului de referință); |
|
vBB′ gear I |
km/oră |
Anexa 3 |
3.1.2.2.1.1(b) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
vBB′ gear i, i = 1,2 |
km/oră |
Anexa 3 |
3.1.2.2.1.1(c) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
treapta de vitezăx |
— |
Anexa 3 |
3.1.2.2.1.1(d) |
primul dintre cele două raporturi de transmisie utilizate pentru încercarea vehiculului M2 cu masă maximă autorizată de peste 3 500 kg, M3, N2 și N3 atunci când sunt îndeplinite anumite condiții de încercare |
|
treapta de vitezăy |
— |
Anexa 3 |
3.1.2.2.1.1(d) |
al doilea dintre cele două raporturi de transmisie utilizate pentru încercarea vehiculului M2 cu masă maximă autorizată de peste 3 500 kg, M3, N2 și N3 atunci când sunt îndeplinite anumite condiții de încercare |
|
vBB′x |
km/oră |
Anexa 3 |
3.1.2.2.1.1(d) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
vBB′y |
km/oră |
Anexa 3 |
3.1.2.2.1.1(d) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
vBB′1 |
km/oră |
Anexa 3 |
3.1.2.2.1.2(b) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
vBB′2 |
km/oră |
Anexa 3 |
3.1.2.2.1.2(b) |
viteza-țintă a vehiculului atunci când sunt îndeplinite anumite condiții |
|
nBB′i, i = 1,2 |
1/min |
Anexa 3 |
3.1.2.2.1.2(d) |
viteza de rotație a motorului atunci când punctul de referință trece de linia BB′ și când sunt îndeplinite anumite condiții |
|
Lcrs i |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul de presiune acustică a vehiculului la viteza de încercare constantă pentru treapta de viteză i; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lcrs (i + 1) |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul de presiune acustică a vehiculului la viteza de încercare constantă pentru treapta de viteză (i + 1); valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lcrs rep |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul raportat de presiune acustică a vehiculului la viteză de încercare constantă; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lwot i |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul de presiune acustică a vehiculului cu clapeta de accelerație complet deschisă pentru treapta de viteză i; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lwot (i + 1) |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul de presiune acustică a vehiculului cu clapeta de accelerație complet deschisă pentru treapta de viteză (i + 1); valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lwot rep |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul raportat de presiune acustică a vehiculului cu clapeta de accelerație complet deschisă; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lurban |
dB(A) |
Anexa 3 |
3.1.3.1 |
nivelul raportat de presiune acustică a vehiculului reprezentând funcționarea în trafic urban; valoare care trebuie raportată și rotunjită la cel mai apropiat număr întreg |
|
awot_ASEP |
m/s2 |
Anexa 7 |
2.3 |
accelerația maximă cerută cu clapeta de accelerație complet deschisă |
|
κ |
— |
Anexa 7 |
2.3 |
raporturile de transmisie care trebuie supuse încercării conform dispozițiilor suplimentare privind emisiile sonore (ASEP) |
|
nBB_ASEP |
1/min |
Anexa 7 |
2.3 |
turația maximă de încercare a motorului; valoare care trebuie raportată și folosită la calcule cu o precizie de 10 min– 1 |
|
vAA′_ASEP |
km/oră |
Anexa 7 |
2.3 |
viteza-țintă a vehiculului pentru punctul de încercare P1 menționat în metoda de evaluare în conformitate cu punctul 2.4 |
|
vBB′_ASEP |
km/oră |
Anexa 7 |
2.3 |
viteza-țintă a vehiculului pentru punctul de încercare P4 menționat în metoda de evaluare în conformitate cu punctul 2.4 |
|
Pj |
— |
Anexa 7 |
2.4 |
punctul (punctele) de încercare conform ASEP |
|
j |
— |
Anexa 7 |
2.4 |
indicele pentru punctele de încercare conform ASEP |
|
vBB_j |
km/oră |
Anexa 7 |
2.4 |
viteza de încercare a vehiculului la linia BB′ pentru un anumit punct de încercare ASEP |
|
awot,test, κj |
m/s2 |
Anexa 7 |
2.5 |
accelerația cu clapeta de accelerație complet deschisă atinsă cu treapta de viteză κ și la punctul de încercare j |
|
Lwot,κj |
dB(A) |
Anexa 7 |
2.5 |
nivelul de presiune acustică măsurat cu treapta de viteză κ și la punctul de încercare j; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
nBB,κj |
1/min |
Anexa 7 |
2.5 |
turația de încercare a motorului vehiculului la linia BB′ cu treapta de viteză κ și la punctul de încercare j |
|
vAA,κj |
km/oră |
Anexa 7 |
2.5 |
viteza de încercare a vehiculului la linia AA′ cu treapta de viteză κ și la punctul de încercare j; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
vBB,κj |
km/oră |
Anexa 7 |
2.5 |
viteza de încercare a vehiculului la linia BB′ cu treapta de viteză κ și la punctul de încercare j; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
vPP,κj |
km/oră |
Anexa 7 |
2.5 |
viteza de încercare a vehiculului la linia PP′ cu treapta de viteză κ și la punctul de încercare j; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lanchor |
dB(A) |
Anexa 7 |
3.1 |
nivelul raportat de presiune acustică a vehiculului la raportul de transmisie i din anexa 3; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
nanchor,κ |
1/min |
Anexa 7 |
3.1 |
turația raportată a motorului vehiculului la raportul de transmisie i din anexa 3 |
|
vanchor,κ |
km/oră |
Anexa 7 |
3.1 |
viteza de încercare raportată a vehiculului la raportul de transmisie i din anexa 3; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lκj |
dB(A) |
Anexa 7 |
3.5 |
nivelul de presiune acustică măsurat cu treapta de viteză κ și la punctul de încercare j; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
kP_ASEP |
— |
Anexa 7 |
4.2.1 |
factorul de putere parțială determinat pentru principiul Lurban din ASEP |
|
Lwot_ASEP |
dB(A) |
Anexa 7 |
4.2.1 |
nivelul de presiune acustică a vehiculului măsurat pentru principiul Lurban din ASEP; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lurban_measured_ASEP |
dB(A) |
Anexa 7 |
4.2.1 |
rezultat intermediar la calcularea ΔLurban_ASEP; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lurban_normalized |
dB(A) |
Anexa 7 |
4.2.1 |
rezultat intermediar la calcularea ΔLurban_ASEP; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
Lref |
dB(A) |
Anexa 7 |
5.3 |
nivelul de presiune acustică de referință pentru evaluarea sunetului de referință; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
|
nref_κ |
1/min |
Anexa 7 |
5.3 |
turația de referință a motorului pentru evaluarea sunetului de referință |
|
vref |
km/oră |
Anexa 7 |
5.3 |
viteza de încercare de referință a vehiculului pentru evaluarea sunetului de referință |
|
nBB′_ref |
1/min |
Anexa 7 |
5.3 |
turația de încercare de referință a motorului pentru evaluarea sunetului de referință |
|
vBB′_ref |
km/oră |
Anexa 7 |
5.3 |
viteza de încercare de referință a vehiculului pentru evaluarea sunetului de referință* |
|
Lurban_ASEP |
dB(A) |
Anexa 7 |
6.2 |
nivelul estimat de presiune acustică determinat pentru principiul Lurban din ASEP; valoare care trebuie raportată și folosită pentru calcule cu o precizie de o zecimală |
2.25. Moduri
2.25.1. „Mod” înseamnă o condiție distinctă care poate fi selectată de conducătorul auto și care afectează emisia sonoră a vehiculului.
2.26. Accelerație stabilă
2.26.1. „Accelerația stabilă” aplicabilă atunci când trebuie calculată accelerația este dată atunci când raportul de accelerație dintre awot_testPP-BB și awot test este mai mic sau egal cu 1,2.
2.26.2. „Accelerație instabilă” înseamnă o abatere de la accelerația stabilă în timpul accelerării.
2.26.2.1. Accelerația instabilă poate apărea și la începutul accelerării de la viteze reduse, atunci când grupul motopropulsor reacționează prin trepidații și smucituri la comanda de accelerare.
3. CEREREA DE OMOLOGARE
3.1. Cererea de omologare a unui tip de vehicul în privința sunetului se depune de către producător sau de către reprezentantul său legal autorizat.
3.2. Aceasta va fi însoțită de documentele menționate mai jos și de următoarele informații în trei exemplare:
|
3.2.1. |
o descriere a tipului de vehicul cu privire la aspectele menționate la punctul 2.2 de mai sus. Trebuie specificate numerele și/sau simbolurile de identificare a tipului de motor și a tipului de vehicul; |
|
3.2.2. |
o listă a componentelor, identificate corespunzător, care constituie sistemul de amortizare a sunetului; |
|
3.2.3. |
o schiță a sistemului asamblat de amortizare a sunetului și indicarea poziției acestuia pe vehicul; |
|
3.2.4. |
desene detaliate ale fiecărei componente pentru a permite localizarea și identificarea ei cu ușurință și specificarea materialelor utilizate; |
|
3.2.5. |
un document cu informații tehnice cuprinzând informațiile specificate în apendicele 2 la anexa 1. |
3.3. În cazul punctului 2.2.2, serviciul tehnic care desfășoară încercările de omologare va selecta un vehicul unic reprezentativ pentru tipul în cauză, de acord cu producătorul vehiculului, cu cea mai mică masă în stare de funcționare, cu cea mai scurtă lungime și în conformitate cu specificația menționată la punctul 3.1.2.2 din anexa 3.
3.4. La solicitarea serviciului tehnic care efectuează încercările, producătorul vehiculului depune, suplimentar, un eșantion pentru sistemul de amortizare a sunetului și un motor cu cel puțin aceeași capacitate cilindrică și putere nominală netă maximă ca cele ale vehiculului pentru care se solicită omologarea de tip.
3.5. Autoritatea de omologare de tip verifică dacă există condiții satisfăcătoare pentru asigurarea controlului efectiv al conformității producției înainte de acordarea omologării de tip.
4. MARCAJE
4.1. Componentele sistemului de amortizare a sunetului, exclusiv armătura de fixare și conductele, trebuie să aibă marcate:
|
4.1.1. |
denumirea comercială sau marca producătorului sistemului de amortizare a sunetului și a componentelor acestuia, precum și |
|
4.1.2. |
descrierea comercială a producătorului. |
4.2. Aceste marcaje vor fi lizibile și de neșters după asamblare.
4.3. O componentă poate fi marcată cu mai multe numere de omologare dacă a fost omologată drept componentă a mai multor sisteme de schimb de amortizare a zgomotului.
5. OMOLOGARE
5.1. Omologarea de tip se acordă doar dacă tipul de vehicul îndeplinește cerințele de la punctele 6 și 7 de mai jos.
5.2. Fiecărui tip omologat i se atribuie un număr de omologare. Primele două cifre (în prezent 03, care corespunde seriei de amendamente 03) indică seria de amendamente care include cele mai recente modificări tehnice majore aduse regulamentului în momentul emiterii omologării. Aceeași parte contractantă nu atribuie același număr altui tip de vehicul.
5.3. Omologarea, extinderea, refuzul sau retragerea omologării sau încetarea definitivă a producției unui tip de vehicul în temeiul prezentului regulament se comunică părților la acord care aplică prezentul regulament prin intermediul unei fișe conforme cu modelul din anexa 1 la prezentul regulament.
5.4. Pe fiecare vehicul conform cu un tip de vehicul omologat în conformitate cu prezentul regulament se aplică, în mod vizibil și într-un loc ușor accesibil specificat în formularul de omologare, o marcă de omologare internațională care constă în:
|
5.4.1. |
un cerc în interiorul căruia se află litera „E” urmată de numărul distinctiv al țării care a acordat omologarea (3); |
|
5.4.2. |
numărul prezentului regulament, urmat de litera „R”, o linie de separare și numărul de omologare în partea dreaptă a cercului specificat la punctul 5.4.1. |
5.5. În cazul în care vehiculul este conform tipului de vehicul omologat în temeiul unuia sau mai multor regulamente anexate la acord, în țara care a acordat omologarea în conformitate cu prezentul regulament, simbolul specificat la punctul 5.4.1 nu trebuie repetat; în acest caz, regulamentul și numerele de omologare și simbolurile suplimentare ale tuturor regulamentelor în temeiul cărora a fost acordată omologarea în țara care a acordat omologarea în conformitate cu prezentul regulament sunt amplasate în coloane verticale în partea dreaptă a simbolului prevăzut la punctul 5.4.1.
5.6. Marca de omologare trebuie să fie clar lizibilă și de neșters.
5.7. Marca de omologare se amplasează pe plăcuța cu date a vehiculului fixată de producător sau în apropierea acesteia.
5.8. Anexa 2 la prezentul regulament oferă exemple de dispuneri ale mărcii de omologare.
6. SPECIFICAȚII
6.1. Specificații generale
6.1.1. Vehiculul, motorul și sistemul de amortizare a sunetului trebuie să fie proiectate, construite și asamblate astfel încât să permită vehiculului să îndeplinească cerințele prezentului regulament, în condiții normale de utilizare, indiferent de vibrațiile la care poate fi supus.
6.1.2. Sistemul de amortizare a sunetului trebuie să fie proiectat, construit și asamblat astfel încât să prezinte rezistență rezonabilă la fenomenele de coroziune la care este expus în condițiile normale de utilizare a vehiculului, inclusiv la diferențele climatice regionale.
6.2. Specificații privind nivelurile sonore
6.2.1. Metode de măsurare
6.2.1.1. Sunetul pe care îl emite tipul de vehicul prezentat spre omologare se măsoară prin metodele descrise în anexa 3 la prezentul regulament pentru vehiculul în mișcare și pentru vehiculul în regim staționar (4); în cazul unui vehicul al cărui motor cu ardere internă nu poate funcționa atunci când vehiculul este staționar, sunetul emis se măsoară numai în mișcare. în cazul unui vehicul electric hibrid din categoria M1 al cărui motor cu ardere internă nu poate funcționa atunci când vehiculul este staționar, sunetul emis se măsoară în conformitate cu dispozițiile de la punctul 4 din anexa 3.
Vehiculele cu o masă maximă tehnic admisibilă a vehiculului încărcat care depășește 2 800 kg trebuie supuse unei încercări suplimentare pentru măsurarea zgomotului produs de aerul comprimat cu vehiculul în staționare conform specificațiilor din anexa 5, dacă echipamentul de frânare corespunzător face parte din vehicul.
6.2.1.2. Valorile măsurate în conformitate cu prevederile articolului 6.2.1.1 de mai sus se introduc în raportul de încercare și într-un certificat care respectă modelul din anexa 1.
6.2.2. Limitele nivelului sonor
Nivelul sonor măsurat în conformitate cu dispozițiile de la punctul 3.1 din anexa 3 la prezentul regulament, rotunjit matematic la cea mai apropiată valoare întreagă, nu trebuie să depășească următoarele limite:
|
Categoria de vehicule |
Vehicule utilizate pentru transportul de pasageri |
Valori-limită [dB(a)] |
||
|
Etapa 1 |
Etapa 2 |
Etapa 3 |
||
|
M1 |
RPM ≤ 120 |
72 |
70 |
68 |
|
120 < RPM ≤ 160 |
73 |
71 |
69 |
|
|
RPM > 160 |
75 |
73 |
71 |
|
|
RPM > 200, nr. de scaune ≤ 4, înălțimea punctului R < 450 mm de la sol |
75 |
74 |
72 |
|
|
M2 |
M ≤ 2,5 t |
72 |
70 |
69 |
|
2,5 t < M ≤ 3,5 t |
74 |
72 |
71 |
|
|
M > 3,5 t; Pn ≤ 135 kW |
75 |
73 |
72 |
|
|
M > 3,5 t; Pn > 135 kW |
75 |
74 |
72 |
|
|
M3 |
Pn ≤ 150 kW |
76 |
74 |
73 |
|
150 kW < Pn ≤ 250 kW |
78 |
77 |
76 |
|
|
Pn > 250 kW |
80 |
78 |
77 |
|
|
Categoria de vehicule |
Vehicule utilizate pentru transportul de mărfuri |
Etapa 1 |
Etapa 2 |
Etapa 3 |
|
N1 |
M ≤ 2,5 t |
72 |
71 |
69 |
|
M > 2,5 t |
74 |
73 |
71 |
|
|
N2 |
Pn ≤ 135 kW |
77 |
75 |
74 |
|
Pn > 135 kW |
78 |
76 |
75 |
|
|
N3 |
Pn ≤ 150 kW |
79 |
77 |
76 |
|
150 kW < Pn ≤ 250 kW |
81 |
79 |
77 |
|
|
Pn > 250 kW |
82 |
81 |
79 |
|
6.2.2.1. Pentru vehicule de categoria M1 derivate din tipul de vehicule N1 și având o masă maximă tehnic admisibilă a vehiculului încărcat care depășește 2,5 tone și o înălțime a punctului R de peste 850 mm de la sol, se aplică limitele pentru tipurile de vehicule de categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat care depășește 2,5 tone.
6.2.2.2. Pentru tipurile de vehicule destinate utilizării pe drumuri neamenajate (5), valorile-limită cresc cu 2 dB (A) pentru vehicule de categoria M3 și N3 și cu 1 dB(A) pentru orice alte categorii de vehicule.
Pentru tipurile de vehicule din categoria M1, valorile-limită mai mari pentru vehiculele de teren sunt valabile numai dacă masa maximă tehnic admisibilă a vehiculului încărcat este > 2 tone.
6.2.2.3. Valorile-limită cresc cu 2 dB(A) pentru vehiculele accesibile scaunelor rulante din categoria M1 construite sau modificate în mod specific pentru a permite uneia sau mai multor persoane așezate în scaunele lor rulante să călătorească cu ele, precum și pentru vehiculele blindate, astfel cum sunt definite la punctul 2.5.2 din R.E.3.
6.2.2.4. Pentru tipurile de vehicule din categoria M3 cu motoare care funcționează numai cu benzină, valoarea-limită aplicabilă se mărește cu 2 dB (A).
6.2.2.5. Pentru tipurile de vehicule din categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat mai mică sau egală cu 2,5 tone, o capacitate a motorului de maximum 660 cc și un raport putere/masă (RPM) calculat utilizând masa maximă tehnic admisibilă a vehiculului încărcat de maximum 35 și o distanță orizontală „d” între axa față și punctul R al scaunului conducătorului auto de maximum 1 100 mm, se aplică limitele pentru tipurile de vehicule de categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat care depășește 2,5 tone.
6.2.3. Dispoziții suplimentare cu privire la emisiile sonore
Dispozițiile suplimentare cu privire la emisiile sonore (ASEP) se aplică numai vehiculelor din categoriile M1 și N1 echipate cu motoare cu ardere internă.
Se consideră că vehiculele îndeplinesc cerințele din anexa 7 dacă producătorul vehiculului furnizează autorității de omologare de tip documente tehnice care demonstrează că diferența între turația maximă și minimă ale vehiculelor la BB′ pentru orice condiții de încercare din domeniul de control ASEP definit la punctul 3.3 din anexa 7 la prezentul regulament (inclusiv condițiile din anexa 3) nu depășește 0,15 × S. Prezentul articol este destinat în special transmisiilor neblocabile cu raporturi de transmisie variabile (CVT).
Vehiculele sunt scutite de ASEP dacă este îndeplinită una dintre următoarele condiții:
|
(a) |
pentru vehiculele din categoria N1, dacă capacitatea motorului nu depășește 660 cc, iar raportul putere/masă RPM calculat utilizând masă maximă tehnic admisibilă a vehiculului încărcat nu depășește 35; |
|
(b) |
pentru vehiculele din categoria N1, dacă sarcina utilă este de cel puțin 850 kg, iar raportul putere/masă calculat utilizând masă maximă tehnic admisibilă a vehiculului încărcat nu depășește 40; |
|
(c) |
pentru vehiculele din categoria N1 sau M1 derivate din N1, dacă masă maximă tehnic admisibilă a vehiculului încărcat este mai mare de 2,5 tone, înălțimea punctului R este mai mare de 850 mm de la sol și raportul putere/masă calculat utilizând masă maximă tehnic admisibilă a vehiculului încărcat nu depășește 40. |
Emisiile sonore ale vehiculului în condiții tipice de conducere pe drum, care sunt diferite de cele în care a fost efectuată încercarea de omologare de tip prevăzută în anexa 3 și în anexa 7, nu diferă în mod semnificativ de rezultatul încercării.
6.2.3.1. Producătorul vehiculului nu modifică, adaptează sau introduce în mod intenționat niciun fel de dispozitive sau proceduri mecanice, electrice, termice sau de altă natură exclusiv în scopul îndeplinirii cerințelor privind emisiile sonore prevăzute în prezentul regulament dacă aceste dispozitive sau proceduri nu sunt operaționale în timpul funcționării tipice pe drum.
6.2.3.2. Vehiculul trebuie să îndeplinească cerințele din anexa 7 la prezentul regulament.
6.2.3.3. În cererea de omologare de tip, producătorul trebuie să prezinte o declarație, întocmită în conformitate cu apendicele 1 la anexa 7, în care menționează că tipul de vehicul care urmează a fi omologat respectă cerințele de la punctul 6.2.3 din prezentul regulament.
6.3. Specificații privind sisteme de evacuare care conțin materiale fibroase
6.3.1. Se aplică cerințele din anexa 4.
7. MODIFICAREA ȘI EXTINDEREA OMOLOGĂRII UNUI TIP DE VEHICUL
7.1. Orice modificare a tipului omologat trebuie adusă la cunoștința autorității de omologare de tip care a acordat omologarea de tip. Autoritatea de omologare de tip poate:
|
7.1.1. |
să considere că este puțin probabil ca modificările făcute să aibă un efect nefavorabil considerabil și că, în orice caz, vehiculul încă respectă cerințele; sau |
|
7.1.2. |
să solicite un nou raport de încercare serviciului tehnic responsabil cu efectuarea încercărilor. |
7.2. Confirmarea sau refuzul omologării, cu precizarea modificărilor efectuate, va fi comunicată, prin aplicarea procedurii specificate la punctul 5.3, părților la acord care aplică prezentul regulament.
7.3. Autoritatea de omologare de tip care acordă extinderea omologării atribuie un număr de serie pentru respectiva extindere și informează ulterior celelalte părți la Acordul din 1958 care aplică prezentul regulament prin intermediul unei fișe de comunicare conforme cu modelul din anexa 1 la prezentul regulament.
8. CONFORMITATEA PRODUCȚIEI
8.1 Procedurile privind conformitatea producției trebuie să fie conforme cu cele stabilite în apendicele 2 la acord (E/ECE/324-E/ECE/TRANS/505/Rev.2), cu următoarele cerințe:
|
8.1.1. |
vehiculele omologate în temeiul prezentului regulament sunt construite astfel încât să corespundă tipului omologat prin îndeplinirea condițiilor prevăzute la punctul 6 de mai sus; |
|
8.1.2. |
trebuie îndeplinite cerințele minime privind procedurile de control al conformității producției din anexa 6 la prezentul regulament. |
8.2. Autoritatea care a acordat omologarea de tip poate verifica în orice moment metodele de control al conformității aplicate în fiecare unitate de producție. Frecvența normală a acestor modificări este de o dată la doi ani.
9. SANCȚIUNI ÎN CAZUL NECONFORMITĂȚII PRODUCȚIEI
9.1. Omologarea acordată în ceea ce privește un tip de vehicul în temeiul prezentului regulament poate fi retrasă dacă cerințele enunțate mai sus nu sunt respectate.
9.2. În cazul în care o parte la acord care aplică prezentul regulament retrage o omologare acordată anterior, ea notifică acest lucru imediat celorlalte părți contractante care aplică prezentul regulament prin intermediul unei fișe de comunicare conforme cu modelul din anexa 1 la prezentul regulament.
10. ÎNCETAREA DEFINITIVĂ A PRODUCȚIEI
10.1. În cazul în care titularul unei omologări încetează complet fabricarea unui tip de vehicul omologat în conformitate cu prezentul regulament, acesta informează autoritatea care a acordat omologarea în legătură cu acest lucru. La primirea notificării în cauză, autoritatea respectivă informează cu privire la aceasta celelalte părți contractante la Acordul din 1958 care aplică prezentul regulament, prin intermediul unei fișe de comunicare conforme cu modelul din anexa 1 la prezentul regulament.
11. DISPOZIȚII TRANZITORII
11.1. Începând cu data oficială a intrării în vigoare a seriei 03 de amendamente la prezentul regulament, nicio parte contractantă care aplică prezentul regulament nu poate refuza acordarea omologării în temeiul prezentului regulament astfel cum a fost modificat prin seria 03 de amendamente.
11.2. Dispoziții tranzitorii pentru etapa 1 (a se vedea punctul 6.2.2 de mai sus)
11.2.1. Începând cu 1 iulie 2016, părțile contractante care aplică prezentul regulament acordă omologări de tip numai dacă tipul de vehicul care urmează a fi omologat îndeplinește cerințele pentru etapa 1 din prezentul regulament (a se vedea punctul 6.2.2 de mai sus) astfel cum au fost modificate prin seria 03 de amendamente.
Începând de la data oficială a intrării în vigoare a seriei 03 de amendamente, părțile contractante care aplică prezentul regulament acordă omologări de tip tipului de vehicul care îndeplinește cerințele pentru etapa 2 și etapa 3 din prezentul regulament astfel cum a fost modificat prin seria 03 de amendamente.
11.2.2. Părțile contractante care aplică prezentul regulament nu pot să refuze acordarea de extinderi ale omologărilor de tip pentru tipurile existente care au fost omologate în conformitate cu seria 02 de amendamente la prezentul regulament.
11.2.3. Până la 30 iunie 2022, nicio parte contractantă care aplică prezentul regulament nu poate să refuze acordarea unei omologări naționale sau regionale de tip unui vehicul omologat de tip în temeiul seriei 02 de amendamente la prezentul regulament.
11.2.4. Începând cu 1 iulie 2022, părțile contractante care aplică prezentul regulament nu mai sunt obligate să accepte, în scopul omologării naționale sau regionale de tip, niciun tip de vehicul omologat în temeiul seriei precedente de amendamente la prezentul regulament.
11.2.5. Chiar și după data intrării în vigoare a seriei 03 de amendamente la prezentul regulament, părțile contractante care aplică prezentul regulament pot continua, în scopul omologării naționale sau regionale de tip, să acorde omologări de tip sau extinderi ale omologărilor de tip în temeiul seriei precedente de amendamente la prezentul regulament.
11.3. Dispoziții tranzitorii pentru etapa 2 (a se vedea punctul 6.2.2 de mai sus)
11.3.1. Începând cu 1 iulie 2020 pentru alte tipuri de vehicule decât N2 și începând cu 1 iulie 2022 pentru tipurile de vehicule din categoria N2, părțile contractante care aplică prezentul regulament acordă omologări de tip numai dacă tipul de vehicul care urmează a fi omologat îndeplinește cerințele pentru etapa 2 din prezentul regulament (a se vedea punctul 6.2.2 de mai sus) astfel cum au fost modificate prin seria 03 de amendamente.
În plus, începând de la data oficială a intrării în vigoare a seriei 03 de amendamente, părțile contractante care aplică prezentul regulament acordă omologări de tip tipului de vehicul care îndeplinește cerințele pentru etapa 3 din prezentul regulament astfel cum a fost modificat prin seria 03 de amendamente.
11.3.2. Părțile contractante care aplică prezentul regulament nu pot să refuze acordarea de extinderi ale omologărilor de tip pentru tipurile existente care au fost omologate în conformitate cu etapa 1 (a se vedea punctul 6.2.2 de mai sus) sau cu seria 02 de amendamente la prezentul regulament.
11.3.3. Până la 30 iunie 2022 pentru alte tipuri de vehicule decât N2 și până la 30 iunie 2023 pentru tipurile de vehicule din categoria N2, nicio parte contractantă care aplică prezentul regulament nu poate să refuze acordarea unei omologări naționale sau regionale de tip unui tip de vehicul omologat în temeiul etapei 1 (a se vedea punctul 6.2.2 de mai sus) sau seriei 02 de amendamente la prezentul regulament.
11.3.4. Începând cu 1 iulie 2022 pentru alte tipuri de vehicule decât N2 și începând cu 1 iulie 2023 pentru tipurile de vehicule din categoria N2, părțile contractante care aplică prezentul regulament nu mai sunt obligate să accepte, în scopul omologării naționale sau regionale de tip, niciun tip de vehicul omologat în temeiul etapei 1 (a se vedea punctul 6.2.2.1 de mai sus) sau seriei precedente de amendamente la prezentul regulament.
11.3.5. Chiar și după data intrării în vigoare a seriei 03 de amendamente la prezentul regulament, părțile contractante care aplică prezentul regulament pot continua, în scopul omologării naționale sau regionale de tip, să acorde omologări de tip sau extinderi ale omologărilor de tip în temeiul etapei 1 (a se vedea punctul 6.2.2 de mai sus) sau seriei precedente de amendamente la prezentul regulament.
11.4. Dispoziții tranzitorii pentru etapa 3 (a se vedea punctul 6.2.2 de mai sus)
11.4.1. Începând cu 1 iulie 2024 pentru alte tipuri de vehicule decât N2, N3 și M3 și începând cu 1 iulie 2026 pentru tipurile de vehicule din categoria N2, N3 și M3, părțile contractante care aplică prezentul regulament acordă omologări de tip numai dacă tipul de vehicul care urmează a fi omologat îndeplinește cerințele pentru etapa 3 din prezentul regulament (a se vedea punctul 6.2.2 de mai sus) astfel cum au fost modificate prin seria 03 de amendamente.
11.4.2. Părțile contractante care aplică prezentul regulament nu pot să refuze acordarea de extinderi ale omologărilor de tip pentru tipurile existente care au fost omologate în temeiul etapei 2 în conformitate cu punctul 6.2.2 de mai sus.
11.4.3. Până la 30 iunie 2026 pentru alte tipuri de vehicule decât N2, N3 și M3 și până la 30 iunie 2027 pentru tipurile de vehicule din categoriile N2, N3 și M3, nicio parte contractantă care aplică prezentul regulament nu poate să refuze acordarea unei omologări naționale sau regionale de tip unui tip de vehicul omologat în temeiul etapei 2 în conformitate cu punctul 6.2.2 de mai sus.
11.4.4. Începând cu 1 iulie 2026 pentru alte tipuri de vehicule decât N2, N3 și M3 și începând cu 1 iulie 2027 pentru tipurile de vehicule din categoriile N2, N3 și M3, părțile contractante care aplică prezentul regulament nu mai sunt obligate să accepte, în scopul omologării naționale sau regionale de tip, niciun tip de vehicul omologat în temeiul etapei 2 în conformitate cu punctul 6.2.2 de mai sus.
11.4.5. Chiar și după data intrării în vigoare a seriei 03 de amendamente la prezentul regulament, părțile contractante care aplică prezentul regulament pot continua, în scopul omologării naționale sau regionale de tip, să acorde omologări de tip sau extinderi ale omologărilor de tip în temeiul etapei 1 sau etapei 2 (a se vedea punctul 6.2.2 de mai sus) sau al seriei precedente de amendamente la prezentul regulament.
11.5. Sub rezerva dispozițiilor tranzitorii de mai sus, părțile contractante pentru care prezentul regulament intră în vigoare după data intrării în vigoare a celei mai recente serii de amendamente nu sunt obligate să accepte omologări care au fost acordate în conformitate cu oricare dintre seriile precedente de amendamente aduse prezentului regulament.
11.6. Până la 30 iunie 2019, vehiculele cu propulsie hibridă de serie care au un motor cu ardere internă fără cuplaj mecanic la grupul motopropulsor sunt scutite de îndeplinirea cerințelor de la punctul 6.2.3 de mai sus.
11.7. Până la 30 iunie 2019, părțile contractante care aplică prezentul regulament pot continua să acorde omologări utilizând poligoane de încercare care respectă specificațiile prevăzute de seria precedentă de amendamente la prezentul regulament, ca alternativă la punctul 2.1 din anexa 3 la prezentul regulament.
11.8. Până la 30 iunie 2022 pentru tipurile de vehicule din categoria N1 sau pentru tipurile de vehicule din categoria M1 derivate din N1, se aplică limitele prevăzute la punctul 6.2.2 pentru tipurile de vehicule din categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat de peste 2,5 tone, dacă sunt îndeplinite toate specificațiile următoare:
|
(a) |
să aibă o masă maximă tehnic admisibilă a vehiculului încărcat mai mică sau egală cu 2,5 tone; |
|
(b) |
înălțimea punctului R să fie mai mare sau egală cu 800 mm de la sol; |
|
(c) |
capacitatea motorului să depășească 660 cc, dar să fie mai mică de 1 495 cc; |
|
(d) |
centrul de greutate al motorului să fie situat între 300 mm și 1 500 mm în spatele axei față; |
|
(e) |
să aibă o axă motoare pe spate. |
12. DENUMIRILE ȘI ADRESELE SERVICIILOR TEHNICE RESPONSABILE CU EFECTUAREA ÎNCERCĂRILOR DE OMOLOGARE ȘI ALE AUTORITĂȚILOR DE OMOLOGARE DE TIP
Părțile contractante la Acordul din 1958 care aplică prezentul regulament trebuie să comunice Secretariatului Națiunilor Unite denumirile și adresele serviciilor tehnice responsabile pentru efectuarea încercărilor de omologare și ale autorităților de omologare de tip care acordă omologarea și către care se trimit formularele care atestă omologarea, extinderea, refuzul sau retragerea omologării eliberate în alte țări.
(1) În conformitate cu Rezoluția consolidată privind construcția vehiculelor (R.E.3), document ECE/TRANS/WP.29/78/Rev.3, par. 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Ceea ce se înțelege în mod obișnuit prin „treaptă de viteză inferioară” și „treaptă de viteză superioară” nu se aplică raporturilor de transmisie. De exemplu, cea mai mică treaptă de viteză pentru mers înainte, treapta întâi, are cel mai mare raport de transmisie dintre toate treptele de viteză pentru mers înainte. În vreme ce transmisiile manuale au trepte de viteză individuale date, multe transmisii care nu sunt manuale pot avea mai multe raporturi de transmisie angajate de unitatea de comandă a transmisiei.
(3) Numerele distinctive ale părților contractante la Acordul din 1958 sunt reproduse în anexa 3 la Rezoluția consolidată privind construcția vehiculelor (R.E.3), documentul ECE/TRANS/WP.29/78/Rev. 3, anexa 3 - www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Se efectuează o încercare asupra vehiculului staționar pentru a dobândi o valoare de referință pentru serviciile administrative, care utilizează această metodă pentru a verifica vehiculele în uz.
(5) În conformitate cu Rezoluția consolidată privind construcția vehiculelor (R.E.3), document ECE/TRANS/WP.29/78/Rev.3, par. 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
ANEXA 1
 Textul imaginii
Textul imaginii
 Textul imaginii
Textul imaginii
Apendicele 1
Addendum la fișa de comunicare nr. …
1. Informații suplimentare
1.1. Motor
1.1.1. Producătorul motorului: …
1.1.2. Codul motorului înscris de producător: …
1.1.3 Putere nominală maximă … kW la … min– 1 sau puterea nominală continuă maximă (motor electric) … kW
1.1.4. Compresor (compresoare), marca și tipul: …
1.1.5. Filtru de aer, marca și tipul: …
1.1.6. Amortizor (amortizoare) de zgomot la admisie, marca și tipul: …
1.1.7. Amortizor (amortizoare) de zgomot la evacuare, marca și tipul: …
1.1.8. Catalizator (catalizatoare), marca și tipul: …
1.1.9. Filtru (filtre) de particule, marca și tipul: …
1.2. Transmisia
1.2.1. Tipul (mecanică, hidraulică, electrică etc.): …
1.3. Piese care nu țin de motor menite să reducă zgomotul: …
2. Rezultatele încercărilor
2.1. Nivelul sonor al vehiculului în mișcare: … dB(A)
2.2. Nivelul sonor al vehiculului în regim staționar: … dB(A) la … min– 1
2.2.1. Nivelul sonor al aerului comprimat, frâna de serviciu: … dB(A)
2.2.2. Nivelul sonor al aerului comprimat, frâna de staționare: … dB(A)
2.2.3. Nivelul sonor al aerului comprimat în timpul acționării regulatorului de presiune: … dB(A)
2.3. Date pentru facilitarea încercării de conformitate în funcțiune a vehiculelor hibride, în cazul în care motorul cu ardere internă nu poate funcționa când vehiculul este staționar
2.3.1. Treapta (treptele) de viteză sau poziția selectorului treptelor de viteză aleasă pentru încercare:
2.3.2. Poziția comutatorului de funcționare în timpul măsurătorii Lwot(i), (dacă acesta este montat)
2.3.3. Lungimea de preaccelerare lPA (punctul la care este apăsată pedala de accelerație înainte de linia AA′, în metri)
2.3.4. Nivelul presiunii acustice Lwot(i) … dB(A)
3. Observații: …
…
Apendicele 2
Document cu informații tehnice
0. Generalități
0.1. Marca (denumirea comercială a producătorului): …
0.2. Modalități de identificare a tipului, dacă acesta este marcat pe vehicul (1): …
0.2.1. Amplasarea marcajului: …
0.3. Categoria vehiculului (2): …
0.4. Denumirea societății și adresa producătorului: …
0.5. Numele și adresa reprezentantului producătorului (dacă există): …
0.6. Numele și adresa (adresele) fabricii (fabricilor) de asamblare: …
1. Caracteristici constructive generale ale vehiculului
1.1. Fotografii și/sau desene ale unui vehicul reprezentativ: …
1.2. Numărul de axe și roți (3): …
1.2.1. Axe motoare (număr, poziție, interconectare): …
1.3. Amplasarea și dispunerea motorului: …
2. Mase și dimensiuni (4) (în kg, respectiv în mm) (a se vedea schița, dacă este cazul): …
2.1. Gama dimensiunilor vehiculului (generale): …
2.1.1. Pentru șasiu fără caroserie: …
2.1.1.1. Lungime: …
2.1.1.2. Lățime: …
2.1.2. Pentru șasiu cu caroserie …
2.1.2.1. Lungime: …
2.1.2.2. Lățime: …
2.2. Masa în stare de funcționare (5)
|
(a) |
Minimă și maximă pentru fiecare variantă: … |
|
(b) |
Masa fiecărei versiuni (trebuie furnizat un tabel): … |
2.3. Masa maximă tehnic admisibilă a vehiculului încărcat declarată de producător (6) (7):
3. Motorul (8)
3.1. Producătorul motorului: …
3.1.1. Codul motorului înscris de producător (astfel cum este marcat pe motor sau alte mijloace de identificare): …
3.2. Motor cu ardere internă
3.2.1. Informații specifice privind motorul
3.2.1.1. Principiul de funcționare: aprindere prin scânteie/aprindere prin compresie, în patru timpi/în doi timpi/cu cilindri rotativi (9)
3.2.1.2. Numărul și dispunerea cilindrilor: …
3.2.1.2.1. Ordinea de aprindere: …
3.2.1.3. Cilindreea (10): … cm3
3.2.1.4. Putere nominală maximă: … kW at … min– 1 (valoare declarată de producător)
3.2.2. Alimentarea cu combustibil
3.2.2.1. Prin injecție cu combustibil (numai în cazul aprinderii prin compresie): da/nu (9)
3.2.2.1.1. Principiul de funcționare: injecție directă/anticameră/cameră de turbulență (9)
3.2.2.1.2. Regulator
3.2.2.1.2.1. Tipul: …
3.2.2.1.2.2. Turația la care începe punctul de întrerupere a alimentării în sarcină: … min– 1
3.2.2.2. Prin injecție cu combustibil (numai în cazul aprinderii prin scânteie): da/nu (9)
3.2.2.2.1. Principiul de funcționare: injecție [simplă/multipunct (2)] în galeria de admisie/injecție directă/alta (a se preciza) (9)
3.2.3. Sistemul de admisie
3.2.3.1. Filtrul de aer, schițe sau
3.2.3.1.1. Marca (mărcile): …
3.2.3.1.2. Tipul (tipurile): …
3.2.3.2. Amortizor de zgomot la admisie, schițe:
3.2.3.2.1. Marca (mărcile): …
3.2.3.2.2. Tipul (tipurile): …
3.2.4. Sistemul de evacuare
3.2.4.1. Descrierea și/sau schița sistemului de evacuare: …
3.2.4.2. Conductă (conducte) de evacuare cu amortizor (amortizoare) de zgomot: …
Tipul, marcajul amortizorului (amortizoarelor) de zgomot la evacuare: …
Pentru zgomotul exterior, după caz: sisteme de reducere a zgomotului în compartimentul motor și pe motor: …
3.2.4.3. Amplasarea orificiului de evacuare: …
3.2.4.4. Amortizor de zgomot la evacuare care conține materiale fibroase: …
3.2.5. Convertizorul catalitic: da/nu (9)
3.2.5.1. Numărul de convertizoare catalitice și de elemente (a se furniza mai jos informații pentru fiecare unitate separată): …
3.3. Motorul electric
3.3.1. Tip (bobinaj, excitație): …
3.3.1.1. Puterea maximă pe oră: … kW
3.3.1.2. Tensiunea de funcționare: … V
3.4. Combinații de motoare: …
3.4.1. Vehicul electric hibrid: da/nu (9)
3.4.2. Categoria vehiculului electric hibrid: permite încărcarea în afara vehiculului/nu permite încărcarea în afara vehiculului (9):
3.4.3. Comutatorul modului de funcționare: cu/fără (9)
3.4.3.1. Moduri selectabile
3.4.3.1.1. Pur electric: da/nu (9)
3.4.3.1.2. Mod de funcționare exclusiv cu combustibil: da/nu (9)
3.4.3.1.3. Moduri hibride: da/nu (9) (în caz afirmativ, scurtă descriere):
3.4.4. Motor electric (se descrie separat fiecare tip de motor electric)
3.4.4.1. Marca: …
3.4.4.2. Tipul: …
3.4.4.3. Putere nominală maximă … kW
4. Transmisia (11)
4.1. Tipul (mecanică, hidraulică, electrică etc.): …
4.2. Raporturi de transmisie
|
Treapta de viteză |
Raporturile cutiei de viteze (raporturi dintre turația motorului și turația arborelui de ieșire) |
Raportul (raporturile) finale ale axelor (raportul dintre turația arborelui de ieșire din cutia de viteze și turația roților motoare) |
Raporturi de transmisie totale |
|
Maxim pentru CTV (12) |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
… |
|
|
|
|
Minim pentru CTV |
|
|
|
|
Marșarier |
|
|
|
4.3. Viteza maximă prin construcție a vehiculului (în km/h) (13): …
5. Suspensia
5.1. Pneuri și roți
5.1.1. Combinație (combinații) pneu/roată
|
(a) |
pentru pneuri, a se indica denumirea, indicele capacității de încărcare, simbolul categoriei de viteză; |
|
(b) |
pentru roți, a se indic dimensiunea (dimensiunile) și deportul (deporturile) jantei (jantelor). |
5.1.2. Limitele superioară și inferioară ale razelor de rulare
5.1.2.1. Axa 1: …
5.1.2.2. Axa 2: …
5.1.2.3. Axa 3: …
5.1.2.4. Axa 4: …
etc.
6. Caroserie
6.1. Tipul de caroserie: …
6.2. Materiale utilizate și metode de construcție: …
7. Diverse
7.1. Detalii ale oricăror piese care nu țin de motor menite să reducă zgomotul (dacă nu au fost menționate la alte puncte): …
Semnătura: …
Funcția în cadrul societății: …
Data: …
(1) Dacă mijloacele de identificare a tipului conțin informații care nu sunt relevante pentru descrierea tipurilor de vehicule la care se referă certificatul de omologare de tip, acestea trebuie specificate în documentație prin simbolul: „?” (de exemplu ABC??123??).
(2) În conformitate cu Rezoluția consolidată privind construcția vehiculelor (R.E.3), document ECE/TRANS/WP.29/78/Rev.3, punctul 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(3) Doar în scopul definirii „vehiculelor de teren”.
(4) Standardul ISO 612: 1978 – Vehicule rutiere – Dimensiunile autovehiculelor și ale vehiculelor tractate – termeni și definiții.
|
(a) |
În cazul unui model cu o cabină normală și în cazul altuia cu o cabină cu cușetă, trebuie declarate ambele mase și ambele dimensiuni. |
|
(b) |
Echipamentele opționale care afectează dimensiunile vehiculului trebuie specificate. |
(5) Masa conducătorului auto este considerată a fi 75 de kg. Sistemele care conțin lichide (cu excepția celor destinate apelor uzate care trebuie să rămână goale) sunt umplute la 90 % din capacitatea specificată de producător. Nu este necesară furnizarea informațiilor menționate la punctul 2.2 litera (b) pentru categoriile de vehicule N2, N3, M2 și M3.
(6) Pentru vehiculele cuplate cu o remorcă sau o semiremorcă, care exercită o presiune verticală semnificativă asupra dispozitivului de cuplare sau asupra atelajului, această valoare, împărțită la accelerația gravitațională standard, este inclusă în masa maximă tehnic admisibilă. A se completa aici valorile superioare și inferioare pentru fiecare variantă.
(7) A se completa aici valorile superioare și inferioare pentru fiecare variantă.
(8) În cazul unui vehicul care poate funcționa fie cu benzină, motorină etc, fie în combinație cu alt combustibil, aceste rubrici se completează de câte ori este necesar. În cazul motoarelor și sistemelor neconvenționale, producătorul trebuie să furnizeze informații echivalente celor menționate aici.
(9) A se șterge mențiunea care nu se aplică.
(10) Această valoare se calculează (π = 3,1416) și se rotunjește la cel mai apropiat cm3.
(11) Detaliile specificate trebuie prezentate pentru oricare variantă propusă.
(12) Transmisie cu variație continuă (CVT): transmisie cu raporturi de transmisie variabile.
(13) Pentru remorci, viteza maximă permisă de producător.
ANEXA 2
DISPUNERI ALE MĂRCII DE OMOLOGARE
Modelul A
(a se vedea punctul 5.4 din prezentul regulament)

Marca de omologare de mai sus, aplicată pe un vehicul, arată că tipul de vehicul în cauză a fost omologat, cu privire la emisia de zgomot, în Țările de Jos (E4) conform Regulamentului nr. 51 cu nr. de omologare 032439.
Primele două cifre ale numărului de omologare indică faptul că Regulamentul nr. 51 includea deja seria 03 de modificări atunci când a fost acordată omologarea.
Modelul B
(a se vedea punctul 5.5 din prezentul regulament)

Marca de omologare de mai sus, aplicată pe un vehicul, arată că tipul de vehicul în cauză a fost omologat în Țările de Jos (E4) conform Regulamentului nr. 51 și nr. 33 (1). Numerele de omologare indică faptul că la data când au fost acordate respectivele omologări, Regulamentul nr. 51 includea deja seria 03 de modificări în timp ce Regulamentul nr. 33 se afla în forma lui originală.
(1) Ultimul număr este dat doar ca exemplu.
ANEXA 3
METODE ȘI INSTRUMENTE PENTRU MĂSURAREA SUNETULUI EMIS DE AUTOVEHICULE
1. Instrumente de măsurare
1.1. Măsurători acustice
Aparatura utilizată pentru măsurarea nivelului sonor trebuie să fie un sonometru de precizie sau un sistem de măsurare echivalent care îndeplinește cerințele pentru clasa 1 de instrumente (inclusiv ecranul de protecție împotriva vântului recomandat de producător, dacă este cazul). Aceste cerințe sunt descrise în „IEC 61672-1:2002: Sonometre de precizie”, ediția a doua, a Comisiei internaționale pentru Electrotehnică (IEC).
Măsurătorile se efectuează utilizând răspunsul „rapid” al instrumentului de măsurare acustică și curba „A” de ponderare descrisă de asemenea în „IEC 61672-1:2002”. Atunci când se utilizează un sistem care presupune o monitorizare periodică a nivelului de presiune sonoră ponderat A, citirile trebuie făcute la intervale de timp de maximum 30 ms.
Instrumentele trebuie întreținute și etalonate conform instrucțiunilor producătorului.
1.2. Etalonarea întregului sistem de măsurare acustică pentru o serie de măsurători
La începutul și la sfârșitul fiecărei sesiuni de măsurare, sistemul de măsurare trebuie să fie verificat în ansamblu cu ajutorul unui aparat de etalonare acustică care să îndeplinească cerințele pentru aparate de etalonare acustică din cel puțin clasa de precizie 1 în conformitate cu IEC 60942:2003. Fără alte reglări, diferența dintre valorile obținute pentru două verificări consecutive trebuie să fie mai mică sau egală cu 0,5 dB(A).
Dacă este depășită această valoare, rezultatele măsurătorilor obținute după verificarea anterioară satisfăcătoare se elimină.
1.3. Conformitatea cu cerințele
Conformitatea instrumentarului pentru măsurări acustice se verifică prin existența unui certificat de conformitate valabil. Aceste certificate sunt considerate valabile dacă certificarea de conformitate cu standardele a fost realizată în ultimele 12 luni, pentru dispozitivul de etalonare sonoră, și în ultimele 24 luni pentru sistemul instrumentar. Toate încercările de conformitate se efectuează de un laborator autorizat să efectueze etalonări, cu respectarea etapelor indicate în standardele specifice.
1.4. Instrumente pentru măsurarea vitezei
Turația motorului se măsoară cu instrumente având o precizie ± 2 % sau mai bună la regimul de turații ale motorului prescris pentru măsurătorile efectuate.
Viteza pe drum a vehiculului se măsoară cu instrumente având precizia de cel puțin ± 0,5 km/h, atunci când se utilizează dispozitive de măsurare continuă.
Dacă pentru încercare se utilizează măsurători independente ale vitezei, aceste instrumente trebuie să respecte limitele de precizie din specificații, de cel puțin ± 0,2 km/h.
1.5. Instrumente de măsură meteorologice
Instrumentele de măsură meteorologice utilizate pentru monitorizarea condițiilor meteorologice în timpul testului trebuie să includă următoarele dispozitive având cel puțin precizia specificată:
|
(a) |
dispozitiv de măsurare a temperaturii, ±1 °C; |
|
(b) |
dispozitiv de măsurare a vitezei vântului, ±1,0 m/s; |
|
(c) |
dispozitiv de măsurare a presiunii barometrice, ± 5 hPa; |
|
(d) |
dispozitiv de măsurare a umidității relative, ± 5 %. |
2. Condiții de măsurare
2.1. Poligonul de încercare și condițiile ambiante
Suprafața pistei de încercare și dimensiunile poligonului de încercare sunt conforme cu standardul ISO 10844:2014.
Suprafața poligonului trebuie să fie liberă de zăpadă afânată, iarbă înaltă, bucăți de pământ sau cenușă. Nu trebuie să existe niciun obstacol care să poată afecta câmpul sonor în vecinătatea microfonului și a sursei sonore. Observatorul care efectuează măsurătorile trebuie să se poziționeze astfel încât să nu afecteze citirile instrumentului de măsurare.
Măsurătorile nu se fac în condiții de vreme nefavorabile. Trebuie să se asigure faptul că rezultatele nu sunt afectate de rafale de vânt.
Instrumentele de măsură meteorologice trebuie poziționate în imediata apropiere a zonei de încercare, la o înălțime de 1,2 m ± 0,02 m. Măsurătorile trebuie făcute atunci când temperatura aerului ambient se află în intervalul 5 °C-40 °C.
Nu se efectuează încercări dacă, la măsurarea sunetului, viteza vântului, inclusiv rafalele, la înălțimea microfonului depășește 5 m/s.
Se înregistrează o valoare reprezentativă de temperatură, viteză și direcție a vântului, umiditate relativă și presiune barometrică în timpul intervalului de măsurare a sunetului.
Orice nivel maxim al sunetului care pare a nu fi legat de caracteristicile nivelului general de sunet al vehiculului va fi ignorat în preluarea citirilor.
Zgomotul de fond se măsoară pe o durată de 10 secunde imediat înainte și imediat după o serie de încercări ale vehiculului. Măsurătorile trebuie efectuate cu aceleași microfoane și cu aceleași amplasamente ale microfoanelor utilizate în timpul încercării. Se înregistrează nivelul maxim al presiunii acustice ponderat în funcție de curba A.
Zgomotul de fond (inclusiv orice zgomot cauzat de vânt) trebuie să fie cu cel puțin 10 dB(A) sub nivelul de presiune acustică ponderat A produs de vehicul în timpul încercării. Dacă diferența dintre zgomotul ambiental și sunetul măsurat este între 10 și 15 dB(A), pentru calculul rezultatelor încercării, citirile sonometrului trebuie corectate în mod corespunzător, conform tabelului de mai jos:
|
Diferența dintre zgomotul ambiant si sunetul măsurat dB(A) |
10 |
11 |
12 |
13 |
14 |
15 |
|
Corecție dB(A) |
0,5 |
0,4 |
0,3 |
0,2 |
0,1 |
0,0 |
2.2. Vehiculul
2.2.1. Vehiculul trebuie să fie reprezentativ pentru vehiculele care urmează să fie introduse pe piață, conform specificațiilor producătorului în acord cu serviciul tehnic, pentru a respecta cerințele prezentului regulament.
Măsurătorile se efectuează fără remorcă, cu excepția vehiculelor care nu sunt separabile. La solicitarea producătorului, se pot efectua măsurători pe vehicule cu axă (axe) liftabilă (liftabile) în poziție ridicată.
Măsurătorile se efectuează pe vehicule cu masa de încercare mt specificată în tabelul următor.
Masa-țintă mtarget se utilizează pentru a reprezenta masa la care ar trebui încercate vehiculele din categoriile N2 și N3. Masa efectivă de încercare a vehiculului poate fi mai mică din cauza unor limitări ale vehiculului sau ale sarcinii pe axă.
|
Categoria de vehicule |
Masa de încercare a vehiculului |
|
M1 |
mt = mro +/– 5 % |
|
N1 |
mt = mro +/– 5 % |
|
N2, N3 |
mtarget = 50 [kg/kW] × Pn [kW] Sarcina suplimentară mxload necesară pentru a atinge masa-țină pentru vehicul mtarget se plasează deasupra axei (axelor) din spate. Suma dintre sarcina suplimentară și sarcina pe axa spate în stare neîncărcată, mra load unladen, trebuie să fie de maximum 75 % din masa maximă tehnic admisibilă a vehiculului încărcat pentru axa spate, mac ra max. Masa-țintă trebuie realizată cu o toleranță de ± 5 %. Dacă centrul de greutate al sarcinii suplimentare nu poate fi aliniat cu centrul axei spate, masa de încercare mt a vehiculului nu trebuie să depășească suma dintre sarcina pe axa față în stare neîncărcată, mfa load unladen, și cea de pe axa spate în stare neîncărcată, mra load unladen, plus sarcina suplimentară mxload și masa conducătorului auto md. Masa de încercare pentru vehiculele cu mai mult de două axe trebuie să fie aceeași cu masa pentru un vehicul cu două axe. Dacă masa unui vehicul cu mai mult de două axe în stare neîncărcată, munladen, este mai mare decât masa de încercare pentru vehiculul cu două axe, atunci vehiculul respectiv trebuie să fie încercat fără sarcina suplimentară. Dacă masa unui vehicul cu două axe, munladen, este mai mare decât masa-țintă, atunci vehiculul respectiv trebuie să fie încercat fără sarcina suplimentară. |
|
M2, M3 |
mt = mro Masa în stare de funcționare trebuie realizată cu o toleranță de ± 10 %. |
|
Incomplet M2, M3 |
Dacă încercările se efectuează cu un vehicul incomplet care nu are caroserie, mtarget = 50 [kg/kW] × Pn [kW] se calculează în condițiile de mai sus (a se vedea categoria N2, N3) sau mt = mchassisM2M3 + mxloadM2M3 = mro Masa în stare de funcționare trebuie realizată cu o toleranță de ± 10 %. |
2.2.2. La cererea solicitantului, vehiculul din categoria M2, M3, N2 sau N3 se consideră reprezentativ pentru tipul de vehicule complete din care face parte dacă încercările sunt efectuate cu un vehicul incomplet care nu are caroserie. La încercarea unui vehicul incomplet, acesta este echipat cu toate materialele de izolare fonică, panourile și componentele și sistemele de reducere a zgomotului relevante, conform proiectării producătorului, cu excepția unei părți a caroseriei care se montează într-o etapă ulterioară.
În cazul montării unui rezervor de combustibil suplimentar sau al repoziționării rezervorului de combustibil inițial, nu este necesară efectuarea de noi încercări, cu condiția ca alte părți sau structuri ale vehiculului care afectează în mod evident emisiile sonore să nu fi fost modificate.
Pneurile utilizate la încercare trebuie să fie reprezentative pentru vehicul, se aleg de către producătorul vehiculului și sunt înregistrate în addendumul la fișa de comunicare (apendicele 1 la anexa 1). Acestea corespund uneia dintre dimensiunile de pneuri desemnate drept echipament original al vehiculului. Pneul este sau urmează să fie comercializat pe piață în același timp cu vehiculul (1). Pneurile trebuie umflate la presiunea recomandată de producătorul vehiculului pentru masa de încercare a acestuia. Pneurile trebuie să aibă o adâncime a profilului suprafeței de rulare de cel puțin 1,6 mm.
2.2.3. Înainte de începerea măsurătorilor, se aduce motorul în condițiile normale de operare.
2.2.4. Dacă vehiculul este echipat cu mai mult de două roți motoare, el trebuie încercat pentru regimul de tracțiune destinat utilizării în condiții normale pe drum.
2.2.5. Dacă vehiculul este echipat cu ventilator (ventilatoare) cu mecanism de comandă automat, nu se intervine în acest sistem pe parcursul măsurătorilor.
2.2.6. Dacă vehiculul este echipat cu un sistem de evacuare care conține materiale fibroase, sistemul de evacuare trebuie pregătit înaintea încercării în conformitate cu anexa 4.
2.2.7. Procedură de calcul pentru a determina sarcina suplimentară numai pentru vehicule din categoriile N2 și N3
2.2.7.1. Calcularea sarcinii suplimentare
Masa-țintă mtarget (per kW de putere nominală) pentru vehicule cu două axe din categoriile N2 și N3 este specificată în tabelul de la punctul 2.2.1 de mai sus.
|
mtarget = 50 [kg/kW] × Pn [kW] |
(1) |
Pentru a obține masa-țintă dorită mtarget pentru vehiculul supus încercării, vehiculul neîncărcat, care include masa conducătorului auto md, trebui încărcat cu o masă suplimentară mxload, care se amplasează deasupra axei spate, conform formulei (8):
|
mtarget = munladen + md + mxload |
(2) |
Masa-țintă mtarget trebuie realizată cu o toleranță de ± 5 %.
Masa vehiculului de încercare în stare neîncărcată, munladen, se calculează prin măsurarea pe o balanță a sarcinii pe axa față cu vehiculul neîncărcat, mfa load unladen, și a sarcinii pe axa spate cu vehiculul neîncărcat, mra load unladen, conform formulei (3):
|
munladen = mfa load unladen + mra load unladen |
(3) |
Utilizând formulele (2) și (3), se calculează sarcina suplimentară mxload, conform formulelor (4) și (5):
|
mxload = mtarget – (md + munladen) |
(4) |
|
mxload = mtarget – (md + mfa load unladen + mra load unladen) |
(5) |
Suma dintre sarcina suplimentară mxload și sarcina pe axa spate cu vehiculul neîncărcat mra load unladen trebuie să fie de maximum 75 % din masa maximă tehnic admisibilă a vehiculului încărcat pentru axa spate, mac ra max, conform formulei (6):
|
0,75 mac ra max ≥ mxload + mra load unladen |
(6) |
mxload este limitată conform formulei (7):
|
mxload ≤ 0,75 mac ra max – mra load unladen |
(7) |
Dacă sarcina suplimentară mxload calculată cu formula (5) îndeplinește condițiile din formula (7), atunci sarcina suplimentară este egală cu cea calculată cu formula (5). Masa de încercare mt a vehiculului este cea calculată cu formula (8):
|
mt = mxload + md + mfa load unladen + mra load unladen |
(8) |
În acest caz, masa de încercare a vehiculului este egală cu masa-țintă
|
mt = mtarget |
(9) |
Dacă sarcina suplimentară mxload calculată cu formula (5) nu îndeplinește condițiile din formula (7), ci pe cele din formula (10)
|
mxload > 0,75 mac ra max – mra load unladen |
(10) |
atunci sarcina suplimentară mxload este cea dată de formula (11):
|
mxload = 0,75 mac ra max – mra load unladen |
(11) |
iar masa de încercare mt a vehiculului este cea dată de formula (12):
|
mt = 0,75 mac ra max + md + mfa load unladen |
(12) |
În acest caz, masa de încercare a vehiculului este mai mică decât masa-țintă
|
mt < mtarget |
(13) |
2.2.7.2. Considerații privind sarcina dacă aceasta nu poate fi aliniată cu centrul axei spate
Dacă centrul de greutate al sarcinii suplimentare mxload nu poate fi aliniat cu centrul axei spate, masa de încercare mt a vehiculului nu trebuie să depășească suma dintre sarcina pe axa față cu vehiculul neîncărcat, mfa load unladen, și cea de pe axa spate cu vehiculul neîncărcat, mra load unladen, plus sarcina suplimentară mxloadși masa conducătorului auto md.
Aceasta înseamnă că, dacă sarcinile efective pe axa față și pe axa spate se măsoară pe o balanță atunci când sarcina suplimentară mxload este amplasată pe vehicul și este aliniată cu centrul axei spate, masa de încercare a vehiculului minus masa conducătorului auto este dată de formula (14):
|
mt – md = mfa load laden + mra load laden |
(14) |
unde:
|
mfa load laden = mfa load unladen |
(15) |
Dacă centrul de greutate al sarcinii suplimentare nu poate fi aliniat cu centrul axei spate, formula (14) continuă să fie îndeplinită, dar
|
mfa load laden > mfa load unladen |
(16) |
din cauză că sarcina suplimentară și-a distribuit parțial masa pe axa față. În cast caz, nu este permis să se adauge masă suplimentară pe axa spate pentru a compensa masa mutată pe axa față.
2.2.7.3. Masa de încercare pentru vehiculele cu mai mult de două axe
Dacă se supune încercării un vehicul cu mai mult de două axe, masa de încercare a vehiculului trebuie să fie aceeași cu masa de încercare a vehiculului cu două axe.
Dacă masa unui vehicul neîncărcat cu mai mult de două axe este mai mare decât masa de încercare pentru vehiculul cu două axe, atunci vehiculul respectiv trebuie să fie încercat fără sarcina suplimentară.
3. Metode de încercare
3.1. Măsurarea intensității sunetului vehiculelor în mișcare
3.1.1. Condiții generale de încercare
Pe pista de încercare se marchează două linii, AA′ și BB′, paralele cu linia PP′ și situate la 10 ± 0,05 m în fața liniei PP′ și, respectiv, la 10 m ± 0,05 m în spatele acesteia.
Se efectuează cel puțin patru măsurători pe fiecare latură a vehiculului și pentru fiecare treaptă de viteză. Se pot face măsurători preliminare în vederea ajustării, dar acestea nu vor fi luate în considerare.
Microfonul trebuie amplasat la o distanță de 7,5 m ± 0,05 m de linia de referință CC′ a pistei și la 1,2 m ± 0,02 m deasupra solului.
Axa de referință pentru condiții de câmp deschis (a se vedea IEC 61672-1:2002) trebuie să fie orizontală și perpendiculară pe traiectoria CC′ a vehiculului.
3.1.2. Condiții specifice de încercare a vehiculelor
3.1.2.1. Vehicule din categoriile M1, N1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat ≤ 3 500 kg:
Direcția liniei mediane a vehiculului trebuie să urmărească linia CC′ cât mai aproape posibil pe parcursul întregii încercări, din momentul apropierii de linia AA′ până ce spatele vehiculului trece de linia BB′. Dacă vehiculul este echipat cu o transmisie cu mai mult de două roți motoare, acesta se supune încercării în regimul de tracțiune destinat utilizării normale pe drum.
Dacă vehiculul este dotat cu transmisie manuală auxiliară sau cu axă cu raporturi multiple, se utilizează raportul folosit la circulația normală în oraș. În nicio situație nu se utilizează raporturile de transmisie pentru mișcări lente, parcare sau frânare.
Masa de încercare a vehiculului trebuie să se conformeze tabelului de la articolul 2.2.1.
Viteza de încercare vtest este de 50 km/h ± 1 km/h. Această viteză trebuie să fie atinsă atunci când punctul de referință ajunge la linia PP′.
Dacă viteza de încercare este modificată conform punctului 3.1.2.1.4.1 litera (e) din anexa 3 la prezentul regulament, trebuie utilizată viteza de încercare modificată atât pentru încercarea la accelerare, cât și pentru încercarea la viteză constantă.
3.1.2.1.1. Raportul putere/masă (RPM)
RPM se definește după cum urmează:
RPM = (Pn/mro) * 1 000 kg/kW, unde Pn se măsoară în kW, iar mro se măsoară în kg, conform punctului 2.2.1 din prezenta anexă.
Dacă, în condițiile de încercare specificate la punctul 3.1.2.1 din anexa 3 la prezentul regulament, sunt în funcțiune mai multe surse de putere de propulsie, puterea netă totală a motorului Pn este suma aritmetică a puterii motoarelor de propulsie paralele ale vehiculului. Motoarele de propulsie paralele aplicabile sunt acele surse de putere care propulsează înainte vehiculul în condițiile de încercare specificate la punctul 3.1.2.1 din anexa 3 la prezentul regulament. Puterea specificată a motoarele fără combustie este puterea declarată de producător.
RPM, adimensional, se utilizează în calculul accelerației.
3.1.2.1.2. Calculul accelerației
Calculele accelerației se aplică numai vehiculelor M1, N1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat ≤ 3 500 kg.
Toate accelerațiile se calculează utilizând viteze diferite ale vehiculului pe pista de încercare (2). Formulele prezentate se utilizează la calculul mărimilor awot i, awot i + 1 și awot test. Viteza la AA′ sau la PP′ se definește ca viteza vehiculului în momentul în care punctul de referință traversează linia AA′ (vAA′) sau PP′ (vPP′). Viteza la BB′ se definește ca viteza în momentul în care spatele vehiculului trece de linia BB′ (vBB′). Metoda utilizată pentru determinarea accelerației trebuie specificată în raportul de încercare.
Ținând seama de definiția punctului de referință al vehiculului, pentru lungimea vehiculului (lveh) din formula de mai jos sunt luate în considerare valori diferite. Dacă punctul de referință este în fața vehiculului, atunci l = lveh, dacă este situat la mijloc: l =  lveh, iar dacă este situat în spate: l = 0.
lveh, iar dacă este situat în spate: l = 0.
La alegerea producătorului vehiculului vehiculele cu motorul în față pot utiliza l = 5 m, iar vehiculele cu motorul în mijloc pot utiliza l = 2,5 m.
3.1.2.1.2.1. Procedura de calcul pentru vehiculele cu transmisie manuală, transmisie automată, transmisie adaptivă și transmisie cu variație continuă (CTV) supuse încercării cu raportul de transmisie blocat:
awot test = ((vBB′/3,6)2 – (vAA′/3,6)2) / (2 * (20 + l))
awot test utilizată la selecția treptei de viteză este media celor patru awot test, i obținute în timpul fiecărui parcurs de măsurare valabil.
Se poate utiliza preaccelerarea. Punctul în care se apasă pedala de accelerație înaintea liniei AA′ trebuie precizat în addendumul la fișa de comunicare (apendicele 1 la anexa 1).
3.1.2.1.2.2. Procedura de calcul pentru vehiculele cu transmisie automată, transmisie adaptivă și transmisie cu variație continuă (CTV) supuse încercării cu raportul de transmisie neblocat:
awot test utilizată la selecția treptei de viteză este media celor patru awot test, i obținute în timpul fiecărui parcurs de măsurare valabil.
Dacă dispozitivele sau măsurile descrise la punctul 3.1.2.1.4.2 pot fi utilizate pentru a controla funcționarea transmisiei în vederea îndeplinirii cerințelor de încercare, se calculează awot test utilizând ecuația:
awot test = ((vBB′/3,6)2 – (vAA′/3,6)2)/(2 * (20 + l))
Se poate utiliza preaccelerarea.
Dacă nu se utilizează niciunul dintre dispozitivele sau măsurile descrise la punctul 3.1.2.1.4.2, awot test se calculează utilizând ecuația:
awot_testPP-BB = ((vBB′/3,6)2 – (vPP′/3,6)2)/(2 * (10 + l))
Nu se utilizează preaccelerarea.
Pedala de accelerație se apasă în momentul în care punctul de referință al vehiculului ajunge la linia AA′.
3.1.2.1.2.3. Accelerația-țintă
Accelerația-țintă aurban definește accelerația tipică în traficul urban și derivă din investigații statistice. Această funcție depinde de RPM al vehiculului.
Accelerația-țintă aurban se definește astfel:
aurban = 0,63 * log10 (RPM) – 0,09
3.1.2.1.2.4. Accelerația de referință
Accelerația de referință awot ref definește accelerația necesară în timpul încercării la accelerare pe pista de încercare. Este o funcție care depinde de raportul putere/masă al vehiculului. Această funcție este diferită pentru categorii specifice de vehicule.
Accelerația de referință awot ref este definită astfel:
|
awot ref = 1,59 * log10 (RPM) – 1,41 |
pentru RPM ≥ 25 |
|
awot ref = a urban = 0,63 * log10 (RPM) – 0,09 |
pentru RPM < 25 |
3.1.2.1.3. Factorul parțial de putere kP
Factorul parțial de putere kP (a se vedea punctul 3.1.3.1) se utilizează pentru combinația ponderată a rezultatelor încercării la accelerare și a încercării la viteză constantă pentru vehicule din categoriile M1 și N1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat < 3 500 kg.
Dacă încercarea nu se efectuează într-o singură treaptă de viteză, se utilizează awot ref în loc de awot test (a se vedea punctul 3.1.3.1).
3.1.2.1.4. Selectarea raportului de transmisie
Selectarea raporturilor de transmisie pentru încercare depinde de potențialul specific de accelerare al acestora awot la debit maxim de combustibil, conform accelerației de referință awot ref necesare pentru încercarea la accelerare cu debit de combustibil maxim.
Dacă vehiculul permite tipuri diferite de transmisie, cum ar fi selectarea manuală sau automată a treptelor de viteză, și/sau are diferite programe software sau moduri de operare (de exemplu, sportiv, de iarnă, adaptiv) care duc la obținerea unor accelerații valabile, producătorul vehiculului trebuie să dovedească în mod satisfăcător pentru serviciul tehnic că vehiculul este supus încercării într-un mod care permite atingerea unei accelerații cât mai apropiate posibil de awot ref.
Transmisia vehiculului, treapta de viteză sau raportul de transmisie pot fi comandate prin măsuri electronice sau mecanice pentru a se evita activarea funcției „kick-down”.
Figurile 3a-3f din apendicele la prezenta anexă prezintă criteriile de selectare a treptelor de viteză și criteriile de încercare pentru categoriile M1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat de cel mult 3 500 kg și pentru N1, sub formă de diagramă, ca ajutor la efectuarea încercărilor.
3.1.2.1.4.1. Vehicule echipate cu transmisie manuală, automată, adaptivă sau continuu variabilă (TCV) supuse încercării cu raportul de transmisie blocat.
Sunt posibile următoarele condiții de selectare a raportului de transmisie:
|
(a) |
Dacă un anumit raport de transmisie generează o accelerație într-o bandă de toleranță de ± 5 la sută din accelerația de referință awot ref, nu mai mare de 2,0 m/s2, încercarea se efectuează cu acel raport de transmisie. |
|
(b) |
Dacă niciunul dintre raporturile de transmisie nu permite atingerea accelerației prescrise, se alege un raport de transmisie i, care conduce la o accelerație mai mare, și un raport de transmisie i + 1, care conduce la o accelerație mai mică decât accelerația de referință. Dacă valoarea accelerației în raportul de transmisie i nu depășește 2,0 m/s2, pentru încercare se utilizează ambele raporturi de transmisie. Factorul de ponderare în raport cu accelerația de referință awot ref se calculează astfel: k = (awot ref – awot (i + 1))/(awot (i) – awot (i + 1)) |
|
(c) |
Dacă valoarea accelerației în raportul de transmisie i depășește 2,0 m/s2, se utilizează primul raport de transmisie care conduce la o accelerație mai mică de 2,0 m/s2, cu condiția ca treapta de viteză i + 1 să nu conducă la o accelerație mai mică decât aurban. În acest caz se utilizează două trepte, i și i + 1, inclusiv treapta i cu accelerația mai mare de 2,0 m/s2. În alte situații, nu se utilizează nicio altă treaptă de viteză. Pentru calculul factorului parțial de putere kP, în locul awot ref se utilizează accelerația awot test obținută în timpul încercării. |
|
(d) |
Dacă vehiculul are o transmisie cu o singură selecție pentru raportul de transmisie, încercarea la accelerare se efectuează cu selecția respectivă a treptei de viteză. Accelerația atinsă este utilizată apoi la calculul factorului de putere parțială kP în loc de awot ref. |
|
(e) |
Dacă pentru un raport de transmisie se depășește turația nominală a motorului înainte ca vehiculul să treacă de BB′, se utilizează treapta de viteză imediat superioară. Dacă treapta de viteză superioară conduce la o accelerație sub valoarea aurban, viteza de încercare a vehiculului vtest se reduce cu 2,5 km/h, iar selectarea raportului de transmisie se efectuează conform opțiunilor specificate la prezentul punct. Viteza vehiculului nu poate fi redusă în niciun caz la mai puțin de 40 km/h. În acest caz, este permis un raport de transmisie chiar dacă awot test nu depășește aurban. |
În cazul unui vehicul care trebuie să îndeplinească cerințele ASEP în conformitate cu punctul 6.2.3, în vederea încercării prevăzute în anexa 7, se utilizează la încercare treapta de viteză i și se raportează valorile (Lwot i, nwot,BB i vwot,BB i).
3.1.2.1.4.2. Vehicule cu transmisie automată, transmisie adaptivă sau transmisie continuu variabilă (TCV) se supun încercării cu raporturile de transmisie neblocate:
Se utilizează poziția selectorului treptelor de viteză corespunzătoare funcționării complet automate.
Valoarea accelerației awot test se calculează conform definiției de la punctul 3.1.2.1.2.2.
Încercarea poate include apoi o schimbare a treptei de viteză într-o treaptă inferioară și o accelerație mai mare. Nu este permisă schimbarea treptei de viteză într-o treaptă superioară și o accelerație mai mică. Se recomandă evitarea schimbării într-un raport de transmisie care nu se utilizează în traficul urban.
Din aceste motive, este permis să se instaleze și utilizeze dispozitive electronice sau mecanice, inclusiv poziții alternative ale selectorului treptelor de viteză, pentru a preveni trecerea la un raport de transmisie care în mod obișnuit nu este utilizat la încercarea în trafic urban.
Accelerația obținută awot test trebuie să fie mai mare sau egală cu aurban.
Dacă este posibil, producătorul va lua măsuri pentru a evita o valoare a accelerației awot test mai mare de 2,0 m/s2.
Accelerația atinsă awot test se utilizează apoi pentru calculul factorului de putere parțială kp (a se vedea punctul 3.1.2.1.3) în locul awot ref.
3.1.2.1.5. Încercarea la accelerare
Producătorul definește poziția punctului de referință în fața linei AA′ unde are loc apăsarea maximă a pedalei de accelerație. Pedala de accelerație trebuie să fie complet apăsată (cât mai rapid posibil) atunci când punctul de referință al vehiculului ajunge la punctul definit. Pedala de accelerație trebuie menținută apăsată până ce spatele vehiculului ajunge la linia BB′. Pedala de accelerație se eliberează apoi cât mai rapid posibil. Punctul în care se apasă complet pedala de accelerație trebuie raportat în addendumul la fișa de comunicare (apendicele 1 la anexa 1). Serviciul tehnic trebuie să aibă posibilitatea de a efectua încercări prealabile.
În cazul vehiculelor articulate care constau în două unități inseparabile considerate un singur vehicul, semiremorca nu se ia în considerare la stabilirea momentului traversării liniei BB′.
3.1.2.1.6. Încercarea la viteză constantă
Încercarea la viteză constantă se efectuează cu aceeași (aceleași) treaptă (trepte) de viteză specificată (specificate) pentru încercarea la accelerare și la o viteză constantă de 50 km/h cu o toleranță de ± 1 km/h între AA′ și BB′. Pe parcursul încercării la viteză constantă, pedala de accelerație se poziționează în așa fel încât viteza între AA′ și BB′ să fie constantă, conform specificațiilor. Dacă treapta de viteză este blocată pentru încercarea la accelerare, aceeași treaptă de viteză trebuie blocată pentru încercarea la viteză constantă.
Încercarea la viteză constantă nu este necesară pentru vehicule cu RPM < 25.
3.1.2.2. Vehicule din categoriile M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat > 3 500 kg, M3, N2, N3:
Direcția liniei mediane a vehiculului trebuie să urmărească linia CC′ cât mai aproape posibil pe parcursul întregii încercări, din momentul apropierii de linia AA′ până ce spatele vehiculului trece de linia BB′. Încercarea se efectuează fără remorcă sau semiremorcă. Dacă o remorcă nu este ușor separabilă de vehiculul de tracțiune, remorca se ignoră atunci când are loc trecerea liniei BB′. Dacă vehiculul încorporează echipamente precum un amestecător de beton, un compresor etc., aceste echipamente nu trebuie să funcționeze în timpul încercării. Masa de încercare a vehiculului trebuie să fie conform tabelului de la punctul 2.2.1 din anexa 3 la prezentul regulament.
Valorile nBB′ și vBB′ utilizate la determinarea treptei de viteză și a vitezei vehiculului trebuie să fie media celor patru valori nBB′, j și vBB′, j măsurate la fiecare încercare valabilă.
Valoarea nBB′ trebuie raportată cu o precizie de 10 de rotații pe minut. Valoarea nBB′ raportată se utilizează la toate calculele ulterioare.
Valoarea vBB′ trebuie raportată cu o precizie de o zecimală (xx,x). Valoarea vBB′ raportată se utilizează la toate calculele ulterioare.
Condiții-țintă pentru categoriile M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat > 3 500 kg, N2:
Atunci când punctul de referință trece de linia BB′, turația motorului nBB′ trebuie să fie cuprinsă între 70 și 74 % din turația S, la care motorul dezvoltă puterea nominală netă maximă, iar viteza vehiculului trebuie să fie de 35 km/h ± 5 km/h. Între liniile AA′ și BB′, trebuie asigurată o stare de accelerare stabilă.
Condiții-țintă pentru categoriile M3, N3:
Atunci când punctul de referință trece de linia BB′, turația motorului nBB′ trebuie să fie între 85 și 89 % din turația S, la care motorul dezvoltă puterea nominală netă maximă, iar viteza vehiculului trebuie să fie de 35 km/h ± 5 km/h. Între liniile AA′ și BB′, trebuie asigurată o stare de accelerare stabilă.
3.1.2.2.1. Selectarea raportului de transmisie
Este responsabilitatea producătorului să determine modul corect de încercare în care sunt realizate condițiile prescrise.
Transmisia vehiculului, treapta de viteză sau raportul de transmisie trebuie alese astfel încât să îndeplinească condițiile-țintă în conformitate cu punctul 3.1.2.2.1.1 sau 3.1.2.2.1.2 din anexa 3 la prezentul regulament. Transmisia vehiculului, treapta de viteză sau raportul de transmisie pot fi comandate prin măsuri electronice sau mecanice care să excludă funcția „kick-down”.
Figurile 4a-4d din apendicele la prezenta anexă prezintă criteriile de selectare a treptelor de viteză și criteriile de încercare pentru categoriile M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat de peste 3 500 kg, N2, M3 și N3, sub formă de diagramă, ca ajutor la efectuarea încercărilor.
3.1.2.2.1.1. Vehiculele cu transmisie manuală, transmisie automată, transmisie adaptivă și transmisie cu variație continuă (CTV) supuse încercării cu raportul de transmisie blocat
Se asigură condiții de accelerare stabile. Alegerea treptei de viteză depinde de condițiile-țintă.
Sunt posibile următoarele condiții pentru îndeplinirea condițiilor-țintă de la punctul 3.1.2.2 din anexa 3 la prezentul regulament:
|
(a) |
Dacă o treaptă de viteză îndeplinește condițiile-țintă atât pentru viteza de rotație a motorului ntarget BB′, cât și pentru viteza vehiculului vtarget BB′, încercarea se efectuează în acea treaptă de viteză. |
|
(b) |
Dacă mai multe trepte de viteză îndeplinesc condițiile-țintă atât pentru viteza de rotație a motorului ntarget BB′, cât și pentru viteza vehiculului vtarget BB′, încercarea se efectuează în treapta de viteză i care conduce la viteza vBB′ gear i cea mai apropiată de 35 km/h. |
|
(c) |
Dacă două trepte de viteză îndeplinesc condițiile-țintă atât pentru viteza de rotație a motorului ntarget BB′, cât și pentru viteza vehiculului vtarget BB′ și îndeplinesc, de asemenea, și următoarea condiție: (vtarget BB′ – vBB′ gear i) = (vBB′ gear i + 1 – vtarget BB′) atunci ambele trepte de viteză trebuie luate în considerare pentru calcularea în continuare a Lurban. |
|
(d) |
Dacă o treaptă de viteză îndeplinește condiția-țintă atât pentru viteza de rotație a motorului ntarget BB′, cât și pentru viteza vehiculului vtarget BB′, se utilizează două trepte de viteză, treaptax și treaptay. Condițiile-țintă în ceea ce privește viteza vehiculului pentru cele două trepte de viteză sunt următoarele:
Ambele trepte de viteză, treaptax și treaptay, trebuie să îndeplinească condiția de viteză-țintă de rotație a motorului ntarget BB′. Ambele trepte de viteză se utilizează pentru calcularea în continuare a Lurban. Dacă numai una dintre treptele de viteză îndeplinește condiția de viteză-țintă de rotație a motorului ntarget BB′, încercarea se efectuează cu treapta de viteză respectivă. Aceasta este treapta de viteză care se utilizează pentru calcularea în continuare a Lurban. |
|
(e) |
Dacă niciuna dintre cele două trepte de viteză nu îndeplinește condiția de viteză-țintă de rotație a motorului ntarget BB′ de la condiția (d), atunci se alege cerința (f). |
|
(f) |
Dacă nicio treaptă de viteză nu îndeplinește condiția de viteză-țintă de rotație a motorului, se alege treapta de viteză care îndeplinește condiția de viteză-țintă a vehiculului vtarget BB′ și care se apropie cel mai mult de viteza-țintă de rotație a motorului ntarget BB′, dar nu depășește ntarget BB′, vBB′ gear i = vtarget BB′ nBB′ gear i ≤ ntarget BB′ Se asigură o stare de accelerație stabilă. Dacă o anumită treaptă de viteză nu poate asigura o accelerație stabilă, treapta de viteză respectivă nu este luată în considerare. În toate condițiile, turația nominală a motorului nu trebuie să fie depășită atât timp cât punctul de referință al vehiculului se află în zona de măsurare. Dacă turația nominală a motorului este depășită în interiorul zonei de măsurare, treapta de viteză respectivă nu este luată în considerare. |
3.1.2.2.1.2. Vehiculele cu transmisie automată, transmisie adaptivă și transmisie continuu variabilă supuse încercării cu raportul de transmisie neblocat
Se utilizează poziția selectorului treptelor de viteză corespunzătoare funcționării complet automate.
Încercarea poate include apoi o schimbare a treptei de viteză într-o treaptă inferioară și o accelerație mai mare. Nu este permisă schimbarea treptei de viteză într-o treaptă superioară și o accelerație mai mică. În orice caz, se recomandă evitarea schimbării treptei de viteză la un raport de transmisie care în mod obișnuit nu este utilizat în condițiile specificate de trafic urban definite de producător.
Din aceste motive, este permis să se instaleze și utilizeze dispozitive electronice sau mecanice, inclusiv poziții alternative ale selectorului treptelor de viteză, pentru a preveni trecerea la un raport de transmisie care nu este utilizat în mod obișnuit în condițiile de încercare specificate definite de producător pentru trafic urban.
Sunt posibile următoarele condiții pentru îndeplinirea condițiilor-țintă de la punctul 3.1.2.2 din anexa 3 la prezentul regulament:
|
(a) |
Dacă alegerea unei poziții a selectorului treptelor de viteză îndeplinește condițiile-țintă atât pentru viteza de rotație a motorului ntarget BB′, cât și pentru viteza vehiculului vtarget BB′, încercarea se efectuează cu selectorul treptelor de viteză în poziția respectivă. |
|
(b) |
Dacă alegerea unei poziții a selectorului treptelor de viteză îndeplinește condițiile-țintă pentru viteza de rotație a motorului ntarget BB′, dar nu și pentru viteza vehiculului vtarget BB′, modificați condiția-țintă pentru viteza vehiculului la două viteze-țintă ale vehiculului după cum urmează:
Efectuați două încercări, una cu vBB′1 și una cu vBB′2. Ambele condiții de încercare se utilizează pentru calcularea în continuare a Lurban. |
|
(c) |
Dacă, în condiția (b), nu poate fi îndeplinită viteza-țintă de rotație a motorului ntarget BB′, se alege condiția (d). |
|
(d) |
Dacă alegerea unei poziții a selectorului treptelor de viteză nu poate îndeplini condițiile-țintă pentru viteza de rotație a motorului ntarget BB′, dar poate îndeplini condițiile-țintă pentru viteza vehiculului vtarget BB′, modificați condiția-țintă pentru viteza vehiculului la două viteze-țintă ale vehiculului după cum urmează:
Se efectuează două încercări, una cu vBB′1 și una cu vBB′2. Se utilizează încercarea la care nBB′ este cea mai apropiată de viteza-țintă de rotație a motorului ntarget BB′, dar nu depășește ntarget BB′. nBB′ i ≤ ntarget BB′ pentru i = 1, 2 Dacă vehiculul nu poate îndeplini condiția: nBB′ i ≤ ntarget BB′ pentru i = 1, 2 trebuie utilizată condiția (e). |
|
(e) |
Dacă alegerea unei poziții a selectorului treptelor de viteză nu poate îndeplini condițiile-țintă pentru viteza de rotație a motorului ntarget BB′ și condițiile-țintă pentru viteza vehiculului vtarget BB′, modificați condiția-țintă pentru viteza vehiculului după cum urmează: vBB′ = vtarget BB′ + 5 km/h Se efectuează încercarea cu viteza vehiculului vBB′ respectivă, unde nBB′ este valoarea cea mai apropiată de viteza-țintă de rotație a motorului ntarget BB′. Schimbarea într-o treaptă superioară de viteză și o accelerație mai mică sunt permise după ce vehiculul trece de linia PP′. |
|
(f) |
Dacă vehiculul este echipat cu o transmisie ce oferă o singură selecție a treptei de viteză (D) care limitează turația motorului în timpul încercării, vehiculul se supune încercării utilizând numai viteza-țintă vtarget BB′. |
3.1.2.2.1.3. Grup motopropulsor care nu are disponibil un regim de turație al motorului cu ardere
Vehiculele cu grup motopropulsor pentru care nu este disponibil regimul de turație al motorului cu ardere trebuie să îndeplinească numai condiția-țintă privind viteza vehiculului vtarget BB′.
Sunt posibile următoarele condiții pentru îndeplinirea condiției-țintă privind vtarget BB′ de la punctul 3.1.2.2 din anexa 3 la prezentul regulament.
|
(a) |
Dacă nu este disponibil regimul de turație al motorului, este necesar să fie îndeplinită numai condiția privind viteza-țintă a vehiculului vtarget BB′. |
|
(b) |
Dacă nu este disponibil regimul de turație al motorului, iar condiția privind viteza-țintă a vehiculului vtarget BB′ nu poate fi îndeplinită, trebuie îndeplinite următoarele două condiții de încercare:
Ambele condiții de încercare se utilizează pentru calcularea în continuare a Lurban. |
|
(c) |
Dacă nu este disponibil regimul de turație al motorului, iar viteza-țintă a vehiculului vtarget BB′ și vBB′1 definită drept 25 km/h ≤ vBB′1 ≤ 35 km/h nu poate fi îndeplinită, este necesar să se efectueze o singură încercare cu vBB′2, unde vBB′2 este definită drept 35 km/h ≤ vBB′2 ≤ 45 km/h |
Condiția de încercare pentru vBB′2 se ia în considerare pentru calcularea în continuare a Lurban.
3.1.2.2.2. Încercarea la accelerare
Când punctul de referință al vehiculului ajunge la linia AA′, se apasă la maximum pedala de accelerație (fără a efectua trecerea automată într-o treaptă de viteză inferioară celei utilizate în mod normal în circulația urbană) și se menține complet apăsată până când punctul de referință ajunge la BB′ + 5 m. Comanda accelerației poate fi apoi eliberată la cererea producătorului.
În cazul vehiculelor articulate care constau în două unități inseparabile considerate un singur vehicul, semiremorca nu se ia în considerare la stabilirea momentului traversării liniei BB′.
3.1.3. Interpretarea rezultatelor
Pentru vehiculele din categoriile M1 și M2 cu masa maximă autorizată de cel mult 3 500 kg și din categoria N1, nivelul maxim de presiune acustică ponderat A indicat la fiecare trecere a vehiculului printre cele două linii AA′ și BB′ se rotunjește la prima zecimală semnificativă (de exemplu, XX,X).
Pentru vehiculele din categoria M2 cu masa maximă autorizată de peste 3 500 kg și din categoriile M3, N2 și N3, nivelul maxim de presiune acustică ponderat A indicat la fiecare trecere a punctului de referință al vehiculului printre cele două linii AA′ și BB′ + 5 m se rotunjește la prima zecimală semnificativă (de exemplu, XX,X).
Dacă se înregistrează un maxim sonor situat în mod evident în afara caracteristicii generale a nivelului de presiune acustică, măsurătoarea nu se ia în considerare. Se efectuează cel puțin patru măsurători pentru fiecare condiție de încercare, pe fiecare latură a vehiculului și pentru fiecare raport de transmisie. Măsurătorile pe partea dreaptă și pe partea stângă se pot face simultan sau succesiv. La calculul rezultatului final pentru latura respectivă a vehiculului, se utilizează rezultatele primelor patru măsurători consecutive valabile, cu o precizie de 2 dB(A), permițând anularea rezultatelor nevalide (a se vedea punctul 2.1). Se calculează media rezultatelor pentru fiecare latură, iar acestea se rotunjesc la prima zecimală. Toate calculele ulterioare pentru a obține Lurban se efectuează separat pentru latura stângă și pentru latura dreaptă a vehiculului. Valoarea finală care trebuie raportată ca rezultat al încercării, rotunjită la cel mai apropiat număr întreg, este valoarea cea mai mare dintre cele aferente celor două laturi.
Măsurătorile de viteză la AA′, BB′ și PP′ se înregistrează și se utilizează în calcule rotunjite la prima zecimală după virgulă.
Accelerația calculată awot test se înregistrează cu a doua zecimală după virgulă.
3.1.3.1. Vehicule din categoriile M1, N1 și M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat ≤ 3 500 kg:
Valorile calculate pentru încercarea la accelerare și încercarea la viteză constantă sunt date de:
|
|
Lwot rep = Lwot (i + 1) + k * (Lwot(i) – Lwot (i + 1)) |
|
|
Lcrs rep = Lcrs(i + 1) + k * (Lcrs (i) – Lcrs (i + 1)) |
unde k = (awot ref – awot (i + 1))/(awot (i) – awot (i + 1))
În cazul încercării utilizând un singur raport de transmisie, rezultatele sunt valorile măsurate la fiecare încercare.
Rezultatul final se calculează combinând Lwot rep și Lcrs rep. Ecuația este:
Lurban = Lwot rep – kP * (Lwot rep – Lcrs rep)
Factorul de ponderare kP indică factorul de putere parțială pentru circulația urbană. În cazuri diferite de încercarea într-o singură treaptă de viteză, kP se calculează astfel:
kP = 1 – (aurban/awot ref)
Dacă pentru încercare s-a specificat o singură treaptă de viteză, kP este dat de formula:
kP = 1 – (aurban/awot test)
În situațiile în care awot test este mai mic decât aurban:
kP = 0
3.1.3.2. Vehicule din categoriile M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat > 3 500 kg, M3, N2, N3:
Când se utilizează rezultatul unei singure condiții de încercare, rezultatul final Lurban este egal cu rezultatul intermediar.
Când se utilizează rezultatul a două condiții de încercare, se calculează media aritmetică a rezultatelor intermediare pentru fiecare latură ale celor două condiții. Rezultatul final Lurban este valoarea mai mare dintre cele două medii calculate.
3.2. Măsurarea intensității sunetului emis de vehicule staționare
3.2.1. Nivelul sonor în vecinătatea vehiculelor
Rezultatele măsurătorilor se introduc în addendumul la fișa de comunicare (apendicele 1 la anexa 1).
3.2.2. Măsurători acustice
Se utilizează pentru măsurători un dispozitiv de precizie de măsurare al nivelului de sunet conform definiției de la punctul 1.1 din prezenta anexă.
3.2.3. Poligonul de încercare – condiții locale (a se vedea figura 2 din apendicele la anexa 3)
3.2.3.1. În apropierea microfonului, nu trebuie să existe niciun obstacol susceptibil să influențeze câmpul acustic și nicio persoană între microfon și sursa de sunet. Observatorul aparatului de măsură trebuie să fie plasat astfel încât să nu influențeze valorile indicate de aparat.
3.2.4. Zgomotul perturbator și interferența vântului
Valorile indicate de instrumentele de măsură produse de zgomotul ambiant și de vânt trebuie să fie cu cel puțin 10 dB(A) sub nivelul sonor care trebuie măsurat. Pe microfon se poate fixa un paravânt adecvat, cu condiția să se țină seama de efectul său asupra sensibilității microfonului (a se vedea punctul 1.1 din prezenta anexă).
3.2.5. Metoda de măsurare
3.2.5.1. Natura și numărul măsurătorilor
În tipul perioadei de funcționare la care se face referire la punctul 3.2.5.3.2.1, se măsoară nivelul sonor maxim exprimat în decibeli ponderați A [dB(A)].
În fiecare punct de măsurare se efectuează cel puțin trei măsurători.
3.2.5.2. Poziționarea și pregătirea vehiculului
Vehiculul trebuie poziționat în partea centrală a poligonului de încercare, cu selectorul treptelor de viteză în poziție neutră și ambreiajul cuplat. Dacă prin construcție vehiculul nu permite acest lucru, vehiculul se încearcă în conformitate cu prescripțiile producătorului pentru încercarea motorului în regim staționar. Înaintea fiecărei serii de măsurători, motorul trebuie adus la condițiile de funcționare normală, conform specificațiilor producătorului.
Dacă vehiculul este echipat cu ventilator (ventilatoare) cu mecanism de comandă automat, nu se intervine în acest sistem pe parcursul măsurătorilor nivelului sonor.
Capota motorului sau acoperișul compartimentului motor, dacă este cazul, trebuie să fie închise.
3.2.5.3. Măsurarea zgomotului în aproprierea evacuării
(a se vedea figura 2 din anexa 3)
3.2.5.3.1. Pozițiile microfonului
3.2.5.3.1.1. Microfonul trebuie amplasat la o distanță de 0,5 m ± 0,01 m față de punctul de referință al conductei de evacuare definit în figura 2 și la un unghi de 45° (± 5°) față de planul vertical care conține axa de curgere la extremitatea conductei. Microfonul trebuie amplasat la înălțimea punctului de referință, dar la cel puțin 0,2 m de la suprafața solului. Axa de referință a microfonului trebuie să se afle într-un plan paralel cu suprafața solului și trebuie îndreptată spre punctul de referință de la orificiul de evacuare.
Dacă sunt posibile două poziții ale microfonului, se utilizează amplasamentul cel mai îndepărtat lateral față de linia mediană longitudinală a vehiculului.
Dacă axa de curgere a conductei de evacuare este la 90° față de linia mediană longitudinală a vehiculului, microfonul se amplasează în punctul cel mai îndepărtat de motor.
3.2.5.3.1.2. Pentru vehiculele al căror sistem de evacuare are orificii de evacuare dispuse la distanțe de peste 0,3 m unul față de celălalt, se efectuează câte o măsurătoare pentru fiecare orificiu de evacuare. Se înregistrează nivelul cel mai ridicat.
3.2.5.3.1.3. În cazul unei evacuări cu două sau mai multe orificii plasate la mai puțin de 0,3 m depărtare unul de celălalt și care sunt conectate la același amortizor de zgomot, poziția microfonului este determinată de orificiul de evacuare cel mai apropiat de marginea extremă a vehiculului sau, dacă un asemenea orificiu nu există, de orificiul situat cel mai sus în raport cu solul.
3.2.5.3.1.4. Pentru vehiculele cu sistem de evacuare vertical (de exemplu, vehicule utilitare), microfonul trebuie amplasat la înălțimea orificiului de evacuare. Axa sa trebuie să fie verticală și orientată în sus. Microfonul trebuie amplasat la o distanță de 0,5 m ± 0,01 m față de punctul de referință al conductei de evacuare, dar niciodată la mai puțin de 0,2 m de latura vehiculului cea mai apropiată de sistemul de evacuare.
3.2.5.3.1.5. Pentru orificiile sistemului de evacuare amplasate sub caroseria vehiculului, microfonul trebuie amplasat la minimum 0,2 m de latura cea mai apropiată a vehiculului, în punctul cel mai apropiat, dar situat la cel puțin 0,5 m de punctul de referință al conductei de evacuare, la o înălțime de 0,2 m deasupra solului, dar nu pe axa fluxului de evacuare. Este permis ca cerința privind unghiurile de la punctul 3.2.5.3.1.1 să nu fie îndeplinită în unele cazuri.
3.2.5.3.1.6. În figurile 3a-3d din apendicele la anexa 3, sunt furnizate exemple de amplasare a microfonului, în funcție de poziția conductei de evacuare.
3.2.5.3.2. Condițiile de funcționare a motorului
3.2.5.3.2.1. Turația-țintă a motorului
Turația-țintă a motorului se definește ca fiind:
|
(a) |
75 % din turația nominală S a motorului pentru vehicule cu turația nominală a motorului ≤ 5 000 min– 1; |
|
(b) |
3 750 min– 1 pentru vehicule cu turația nominală a motorului mai mare de 5 000 min– 1 și mai mică de 7 500 min– 1; |
|
(c) |
50 % din turația nominală S a motorului pentru vehicule cu turația nominală a motorului ≥ 7 500 min– 1. |
Dacă vehiculul nu poate atinge turația motorului specificată mai sus, turația-țintă va fi cu 5 % sub turația maximă posibilă a motorului pentru încercarea în regim staționar respectivă.
3.2.5.3.2.2. Procedura de încercare
Se crește progresiv turația motorului de la ralanti la turația-țintă, fără a depăși o marjă de toleranță de ± 3 % din turația-țintă a motorului, și se menține constantă. Apoi se deschide rapid clapeta de accelerație, iar turația motorului se readuce la ralanti. Se măsoară nivelul de presiune acustică într-o perioadă de funcționare compusă dintr-un interval de o secundă în care turația motorului este menținută constantă și din întreaga durată de decelerare. Se reține ca rezultat al încercării valoarea maximă a nivelului sonor înregistrată în cursul acestei perioade de funcționare, rotunjită matematic la prima zecimală.
3.2.5.3.2.3. Validarea încercării
Măsurătoarea se consideră valabilă dacă turația de încercare a motorului nu diferă de turația-țintă a motorului cu mai mult de ± 3 % timp de cel puțin 1 secundă.
3.2.6. Rezultate
Se efectuează cel puțin trei măsurători pentru fiecare poziție de încercare. Se înregistrează nivelul maxim de presiune acustică ponderat A indicat în timpul fiecăreia dintre cele trei măsurători. La calculul rezultatului final pentru poziția de măsurare dată, se utilizează rezultatele primelor trei măsurători consecutive valabile, cu o precizie de 2 dB(A), permițând anularea rezultatelor nevalide (a se vedea punctul 2.1, cu excepția specificațiilor privind poligonul de încercare). Nivelul sonor maxim pentru toate pozițiile de măsurare și pentru cele trei rezultate ale măsurării constituie rezultatul final.
4. Sunetul produs de un vehicul hibrid din categoriile M1 aflat în mișcare, în cazul în care motorul cu ardere internă nu poate funcționa atunci când vehiculul este staționar (date raportate pentru a facilita încercarea vehiculului în funcționare)
4.1. Pentru a facilita încercarea de conformitate în funcționare a vehiculelor hibride – în cazul în care un motor cu ardere internă nu poate funcționa atunci când vehiculul este staționar –, următoarele informații referitoare la măsurătorile nivelului presiunii acustice efectuate în conformitate cu punctul 3.1 din anexa 3 pentru autovehiculele în mișcare sunt denumite date de referință pentru conformitatea în funcțiune:
|
(a) |
treapta (i) sau, pentru vehiculele supuse încercării cu raporturile de transmisie neblocate, poziția selectorului treptelor de viteză aleasă pentru încercare; |
|
(b) |
poziția comutatorului de funcționare în timpul măsurătorii nivelului presiunii acustice Lwot (i) (dacă este montat comutatorul); |
|
(c) |
lungimea de preaccelerare lPA în m; |
|
(d) |
viteza medie a vehiculului în km/h la începutul perioadei de accelerare cu clapeta de accelerație deschisă la maximum pentru încercările în treapta (i) de viteză și |
|
(e) |
nivelul presiunii acustice Lwot (i), exprimat în dB(A), din încercarea cu clapeta de accelerație deschisă la maximum în treapta (i) de viteză, definit ca valoarea maximă dintre cele două valori obținute prin calcularea mediei rezultatelor măsurătorilor individuale în fiecare poziție a microfonului. |
4.2. Datele de referință pentru conformitatea în funcționare se consemnează în certificatul de omologare de tip, astfel cum se precizează la punctul 2.3 din addendumul la fișa de comunicare (apendicele 1 la anexa 1).
(1) Întrucât contribuția pneurilor la emisia sonoră totală este semnificativă, trebuie să se țină seama de dispozițiile de reglementare existente cu privire la emisiile sonore pneu/drum. La cererea producătorului, pneurile de tracțiune, pneurile de zăpadă și pneurile cu destinație specială, astfel cum sunt definite la punctul 2 din Regulamentul nr. 117, nu se utilizează la măsurătorile pentru omologarea de tip și conformitatea producției, în conformitate cu Regulamentul nr. 117.
(2) A se vedea figura 1 din apendicele la anexa 3.
Apendice
Figura 1
Poziții de măsurare pentru vehicule în mișcare
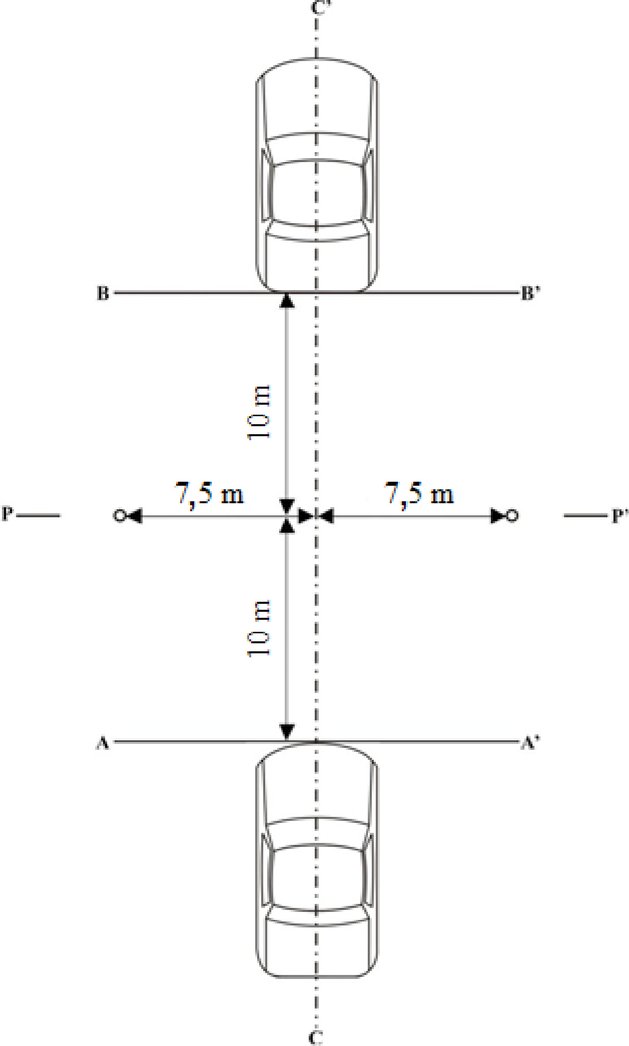
Figura 2
Punctul de referință pentru măsurarea sunetului emis de vehicule staționare
|
|
Legendă:
|
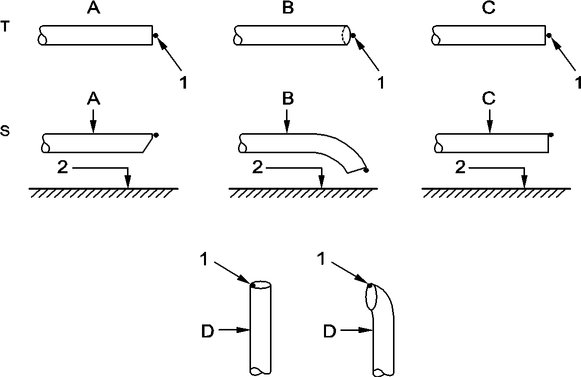
|
Figura 3a |
Figura 3b |
|
|
|
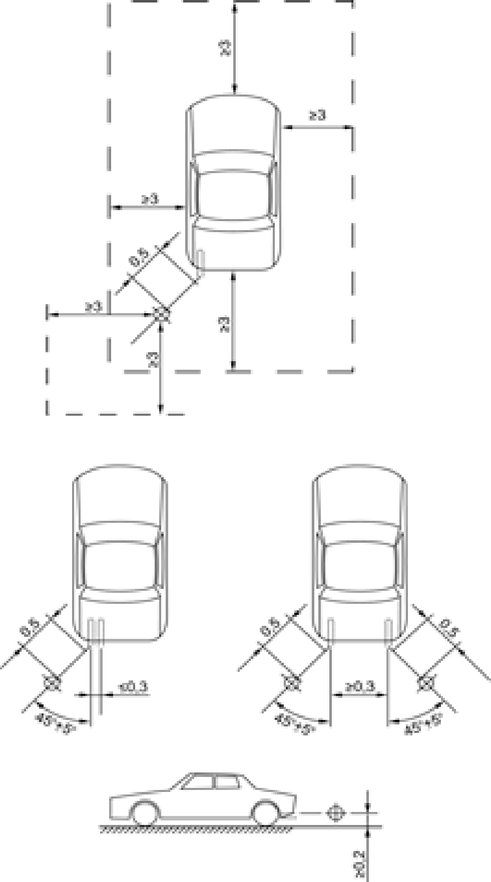
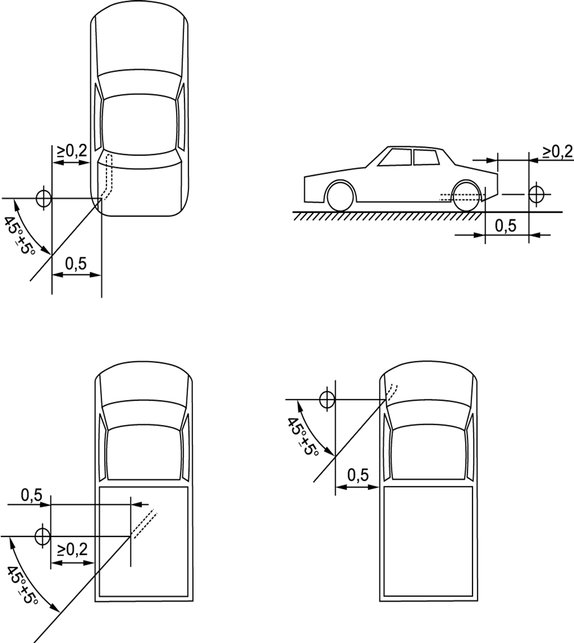
|
Figura 3c |
Figura 3d |
|
|
|
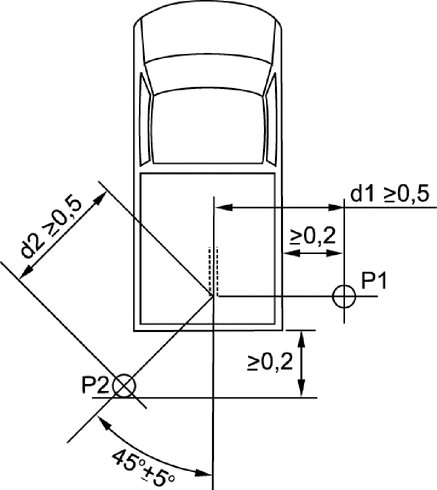

Figura 3a
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 la prezentul regulament – Calcularea Lurban

Calculul factorului de ponderare k pt. încercarea cu 2 trepte de viteză (3.1.2.1.4.1)
Raport de transmisie neblocat (3.1.2.1.4.2), fig. 3e
Se alege metoda de încercare (3.1.2.1.4)
Se determină RPM pt vehiculul de încercare (3.1.2.1.1)
Se calculează Lurban (3.1.3.1)
Se calculează Lwot rep și Lcrs rep (3.1.3.1)
Se calculează kP (3.1.3.1)
Se determină accelerația-țintă aurban (3.1.2.1.2.3) și accelerația de referință awot ref (3.1.2.1.2.4)
Încercare la viteză constantă (3.1.2.1.6)
Încercare la accelerare (3.1.2.1.5)
Raport de transmisie blocat (3.1.2.1.4.1), fig. 3b, 3c și 3d
Figura 3b
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 la prezentul regulament – Selectarea treptelor de viteză cu raportul de transmisie blocat
PARTEA 1
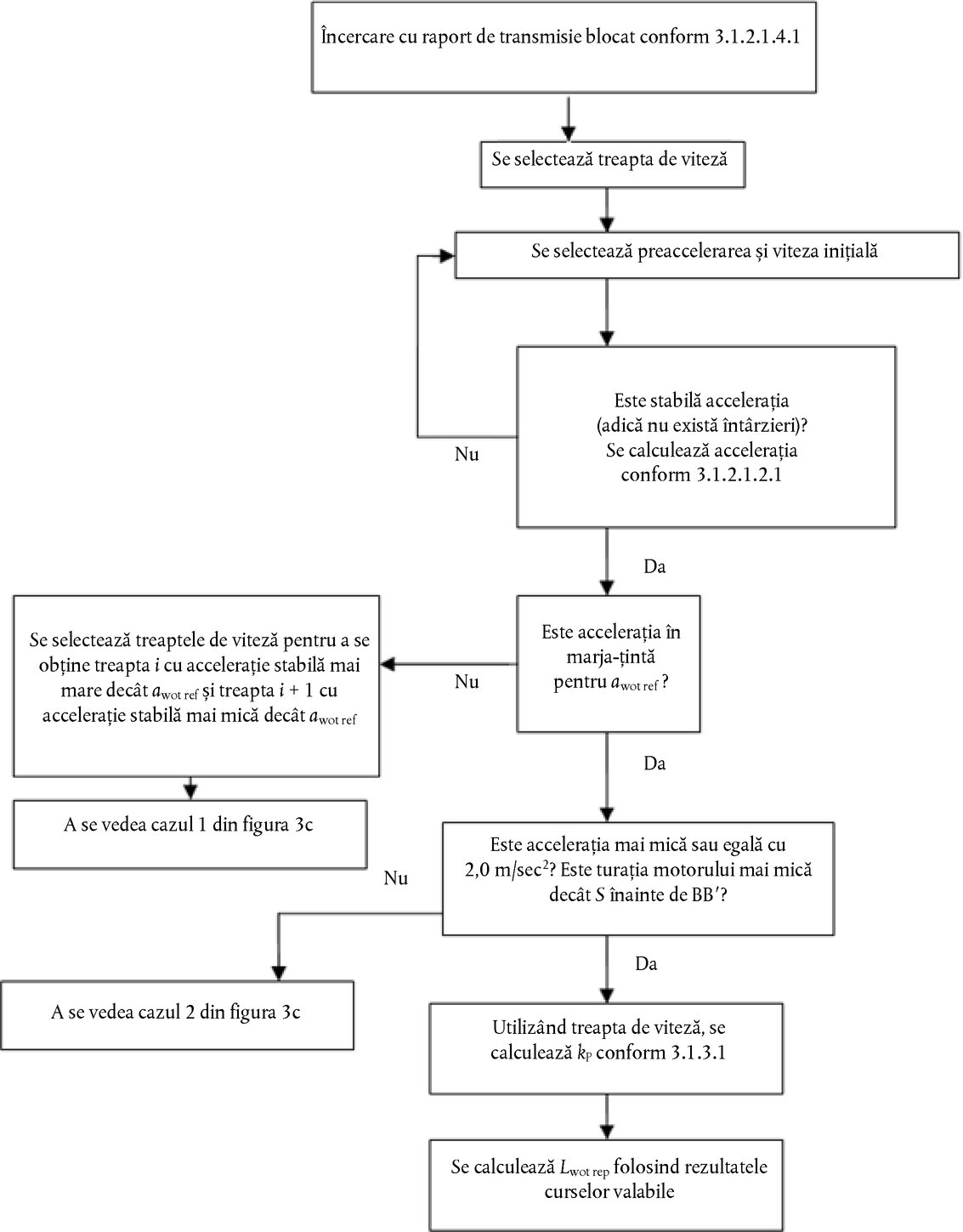
Se calculează Lwot rep folosind rezultatele curselor valabile
Încercare cu raport de transmisie blocat conform 3.1.2.1.4.1
A se vedea cazul 2 din figura 3c
Se selectează treaptele de viteză pentru a se obține treapta i cu accelerație stabilă mai mare decât awot ref și treapta i + 1 cu accelerație stabilă mai mică decât awot ref
Este stabilă accelerația (adică nu există întârzieri)?
Se calculează accelerația conform 3.1.2.1.2.1
Este accelerația în marja-țintă pentru awot ref ?
Se selectează preaccelerarea și viteza inițială
Este accelerația mai mică sau egală cu 2,0 m/sec2? Este turația motorului mai mică decât S înainte de BB′?
A se vedea cazul 1 din figura 3c
Da
Se selectează treapta de viteză
Da
Da
Nu
Nu
Nu
Utilizând treapta de viteză, se calculează kP conform 3.1.3.1
Figura 3c
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 la prezentul regulament – Selectarea treptelor de viteză cu raportul de transmisie blocat
PARTEA 2
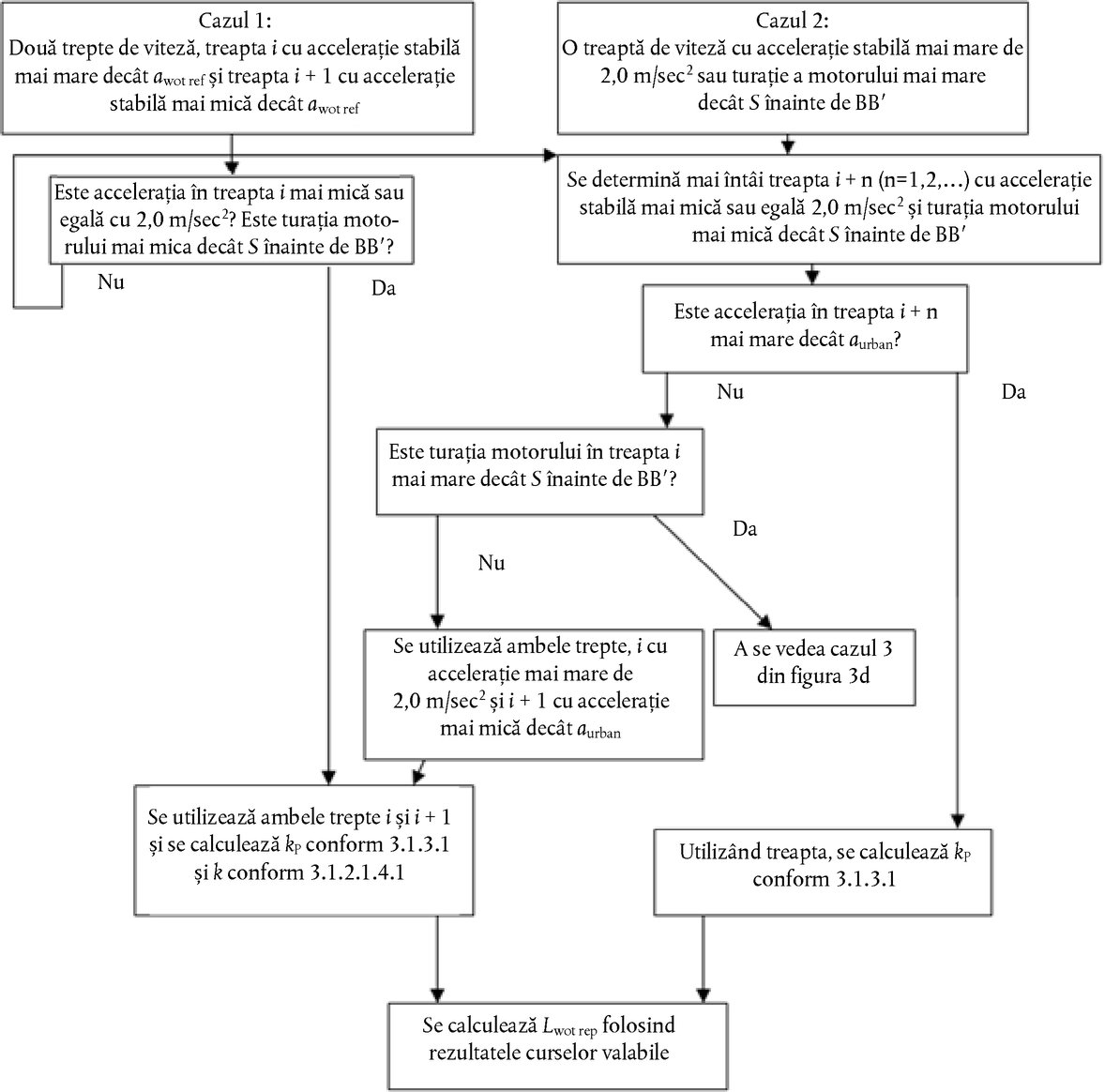
Se utilizează ambele trepte i și i + 1 și se calculează kP conform 3.1.3.1 și k conform 3.1.2.1.4.1
Cazul 2: O treaptă de viteză cu accelerație stabilă mai mare de 2,0 m/sec2 sau turație a motorului mai mare decât S înainte de BB′
Este accelerația în treapta i + n mai mare decât aurban?
Se determină mai întâi treapta i + n (n=1,2,…) cu accelerație stabilă mai mică sau egală 2,0 m/sec2 și turația motorului mai mică decât S înainte de BB′
Este accelerația în treapta i mai mică sau egală cu 2,0 m/sec2? Este turația moto-rului mai mica decât S înainte de BB′?
Se calculează Lwot rep folosind rezultatele curselor valabile
Utilizând treapta, se calculează kP conform 3.1.3.1
A se vedea cazul 3 din figura 3d
Este turația motorului în treapta i mai mare decât S înainte de BB′?
Da
Da
Nu
Nu
Da
Nu
Se utilizează ambele trepte, i cu accelerație mai mare de 2,0 m/sec2 și i + 1 cu accelerație mai mică decât aurban
Cazul 1: Două trepte de viteză, treapta i cu accelerație stabilă mai mare decât awot ref și treapta i + 1 cu accelerație stabilă mai mică decât awot ref
Figura 3d
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 la prezentul regulament – Selectarea treptelor de viteză cu raportul de transmisie blocat
PARTEA 3
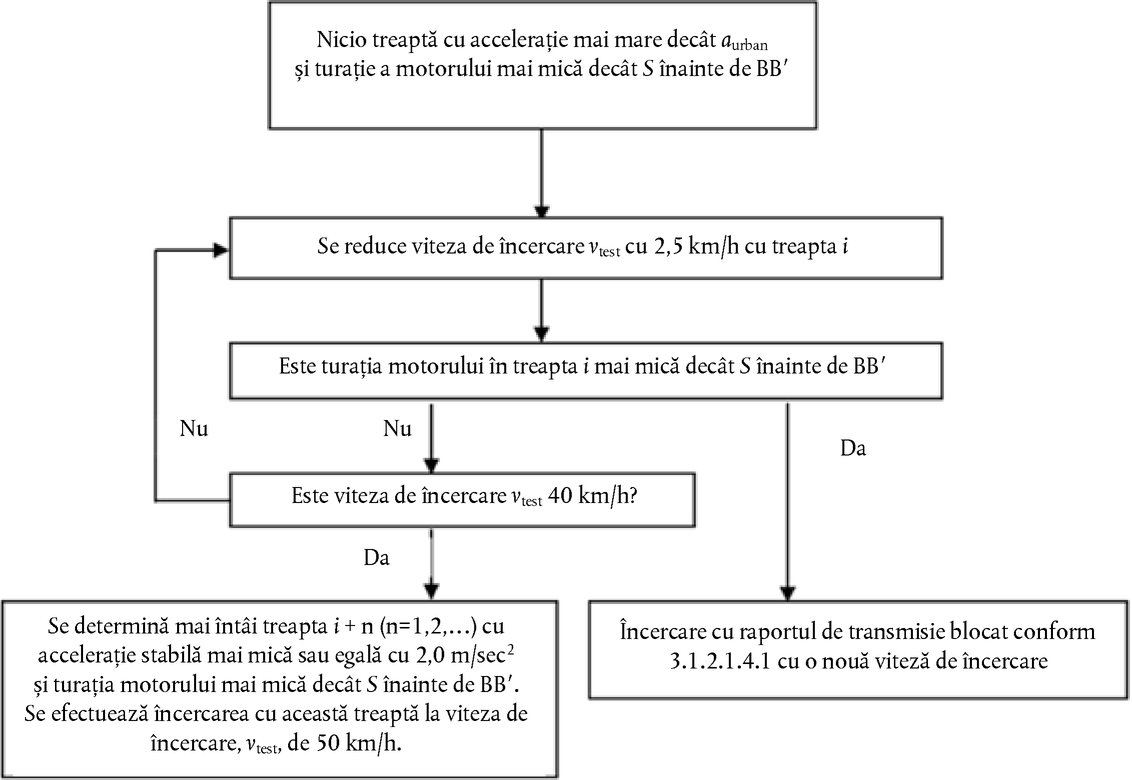
Încercare cu raportul de transmisie blocat conform 3.1.2.1.4.1 cu o nouă viteză de încercare
Nu
Nu
Da
Da
Este viteza de încercare vtest 40 km/h?
Este turația motorului în treapta i mai mică decât S înainte de BB′
Se reduce viteza de încercare vtest cu 2,5 km/h cu treapta i
Nicio treaptă cu accelerație mai mare decât aurban și turație a motorului mai mică decât S înainte de BB′
Se determină mai întâi treapta i + n (n=1,2,…) cu accelerație stabilă mai mică sau egală cu 2,0 m/sec2 și turația motorului mai mică decât S înainte de BB′. Se efectuează încercarea cu această treaptă la viteza de încercare, vtest, de 50 km/h.
Figura 3e
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.1 din anexa 3 la prezentul regulament – Selectarea treptelor de viteză cu raportul de transmisie neblocat
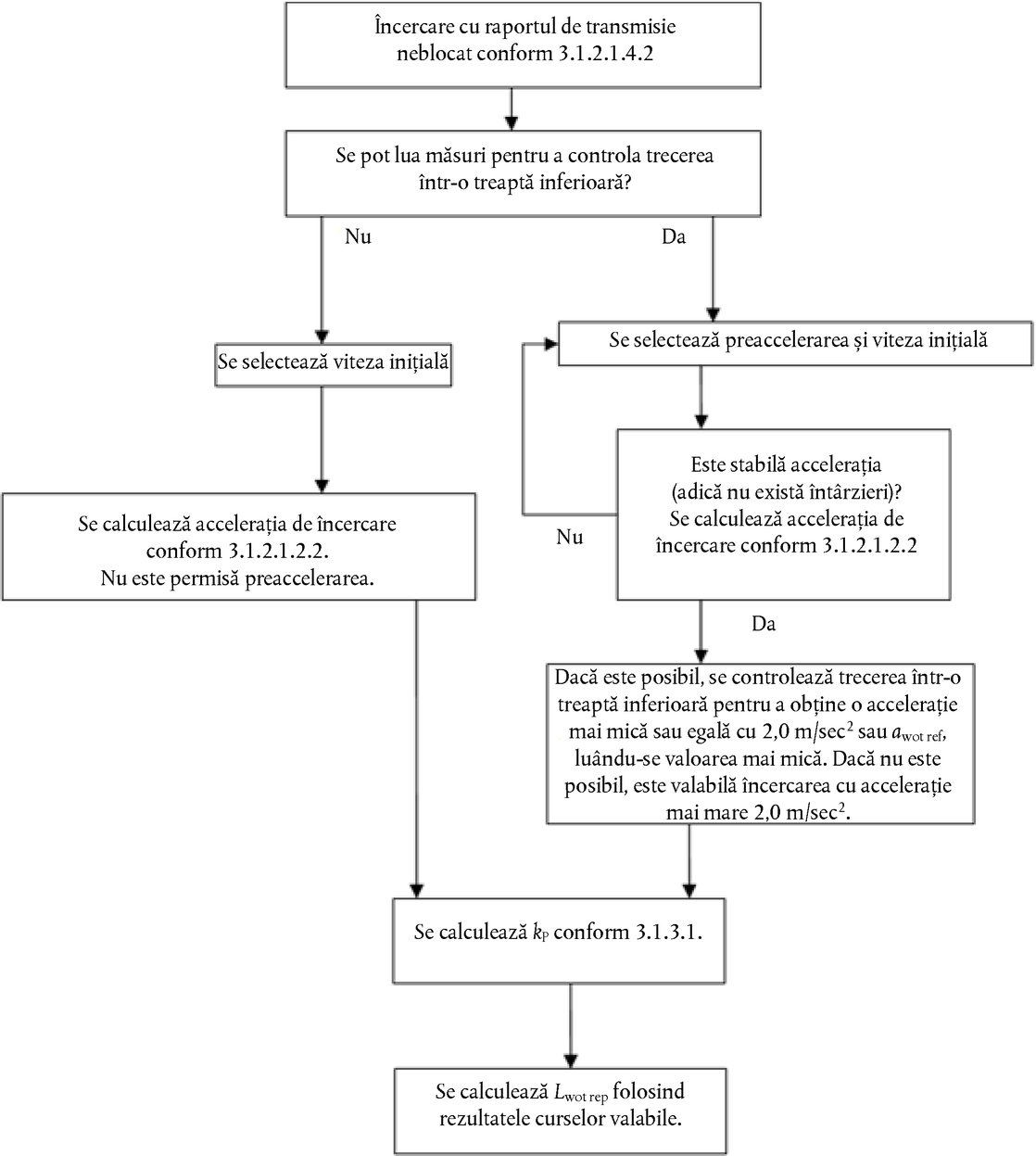
Se calculează Lwot rep folosind rezultatele curselor valabile.
Se calculează kP conform 3.1.3.1.
Dacă este posibil, se controlează trecerea într-o treaptă inferioară pentru a obține o accelerație mai mică sau egală cu 2,0 m/sec2 sau awot ref, luându-se valoarea mai mică. Dacă nu este posibil, este valabilă încercarea cu accelerație mai mare 2,0 m/sec2.
Se selectează viteza inițială
Se calculează accelerația de încercare conform 3.1.2.1.2.2. Nu este permisă preaccelerarea.
Este stabilă accelerația (adică nu există întârzieri)?
Se calculează accelerația de încercare conform 3.1.2.1.2.2
Se selectează preaccelerarea și viteza inițială
Da
Nu
Da
Nu
Se pot lua măsuri pentru a controla trecerea într-o treaptă inferioară?
Încercare cu raportul de transmisie neblocat conform 3.1.2.1.4.2
Figura 4a*
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.2 din anexa 3 la prezentul regulament – Încercare cu raportul de transmisie neblocat
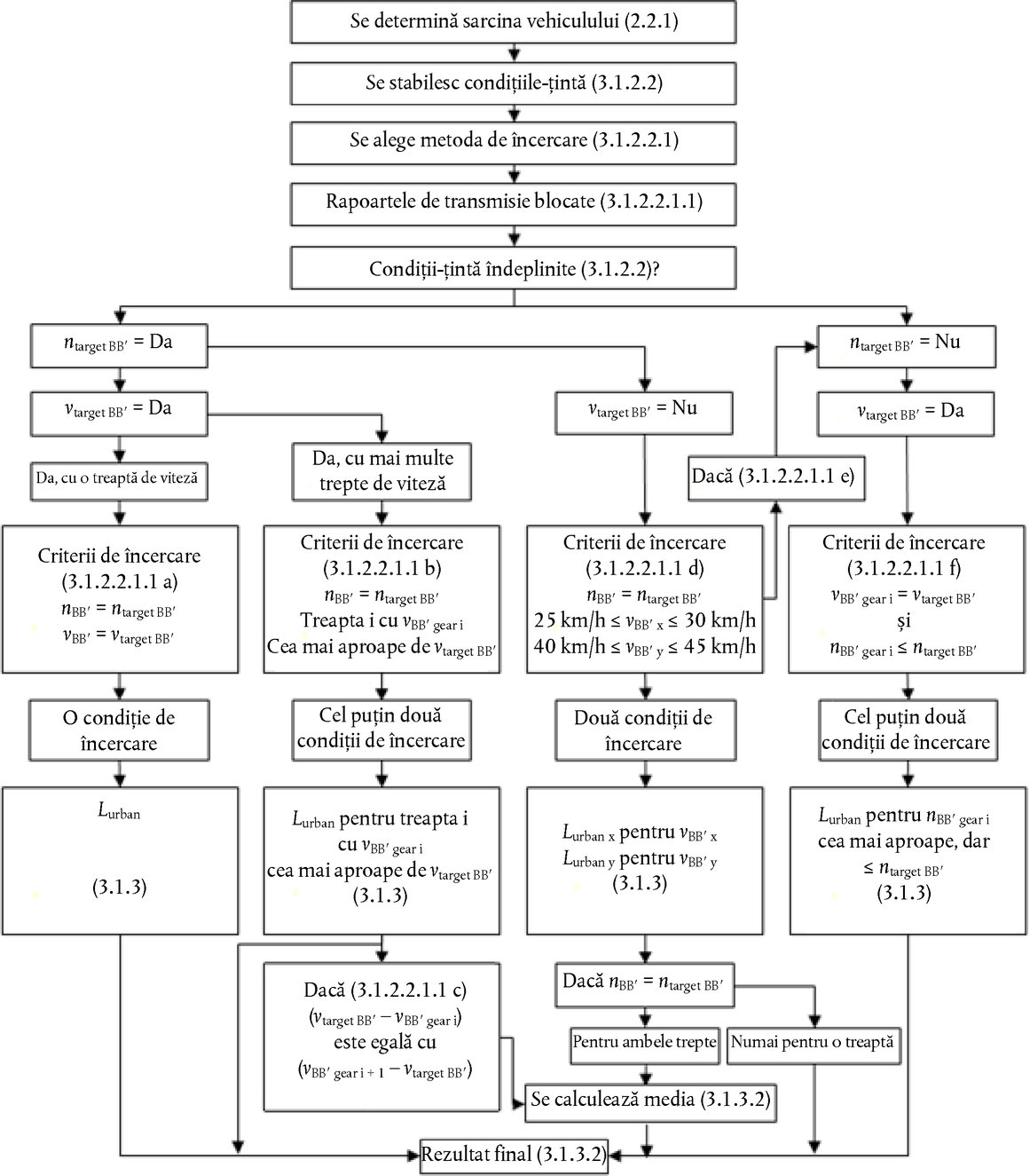
Rezultat final (3.1.3.2)
Pentru ambele trepte
Numai pentru o treaptă
Lurban pentru treapta i cu vBB′ gear i cea mai aproape de vtarget BB′
(3.1.3)
Cel puțin două condiții de încercare
Cel puțin două condiții de încercare
Criterii de încercare (3.1.2.2.1.1 b)
nBB′ = ntarget BB′
Treapta i cu vBB′ gear i
Cea mai aproape de vtarget BB′
Dacă (3.1.2.2.1.1 e)
Da, cu o treaptă de viteză
Dacă nBB′ = ntarget BB′
Dacă (3.1.2.2.1.1 c) (vtarget BB′ – vBB′ gear i) este egală cu (vBB′ gear i + 1 – vtarget BB′)
Lurban pentru nBB′ gear i cea mai aproape, dar ≤ ntarget BB′
(3.1.3)
Lurban
(3.1.3)
Criterii de încercare (3.1.2.2.1.1 a)
nBB′ = ntarget BB′
vBB′ = vtarget BB′
Da, cu mai multe trepte de viteză
vtarget BB′ = Da
vtarget BB′ = Nu
Se determină sarcina vehiculului (2.2.1)
Condiții-țintă îndeplinite (3.1.2.2)?
Rapoartele de transmisie blocate (3.1.2.2.1.1)
Se alege metoda de încercare (3.1.2.2.1)
Se stabilesc condițiile-țintă (3.1.2.2)
Se calculează media (3.1.3.2)
Două condiții de încercare
O condiție de încercare
Lurban x pentru vBB′ x
Lurban y pentru vBB′ y
(3.1.3)
Criterii de încercare (3.1.2.2.1.1 f)
vBB′ gear i = vtarget BB′
și
nBB′ gear i ≤ ntarget BB′
Criterii de încercare (3.1.2.2.1.1 d)
nBB′ = ntarget BB′
25 km/h ≤ vBB′ x ≤ 30 km/h
40 km/h ≤ vBB′ y ≤ 45 km/h
ntarget BB′ = Nu
vtarget BB′ = Da
ntarget BB′ = Da
Figura 4b*
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.2 din anexa 3 la prezentul regulament – Încercare cu raportul de transmisie neblocat
PARTEA 1

Criterii de încercare (3.1.2.2.1.2 e)
vBB′ = vtarget BB′ + 5 km/h
nBB′ cea mai aproape de ntarget BB′
Rezultat final (3.1.3.2)
Se calculează media (3.1.3.2)
Dacă (3.1.2.2.1.2 c)
Lurban pentru nBB′ cea mai aproape de ntarget BB′
(3.1.3)
Lurban pentru nBB′ i cea mai aproape, dar ≤ ntarget BB′ pentru i=1,2
(3.1.3)
Două condiții de încercare
Două condiții de încercare
O condiție de încercare
O condiție de încercare
Criterii de încercare (3.1.2.2.1.2 d)
25 km/h ≤ vBB′ 1 ≤ 30 km/h
40 km/h ≤ vBB′ 2 ≤ 45 km/h
nBB′ i ≤ ntarget BB′
Criterii de încercare (3.1.2.2.1.2 b)
nBB′ = ntarget BB′
25 km/h ≤ vBB′ 1 ≤ 35 km/h
35 km/h ≤ vBB′ 2 ≤ 45 km/h
Dacă nBB′ i > ntarget BB′
vtarget BB′ = Nu
Condiții-țintă îndeplinite (3.1.2.2)?
Lurban 1 pentru vBB′ 1
Lurban 2 pentru vBB′ 2
(3.1.3)
Lurban
(3.1.3)
Criterii de încercare (3.1.2.2.1.2 a)
nBB′ = ntarget BB′
vBB′ = vtarget BB′
vtarget BB′ = Nu
vtarget BB′ = Da
ntarget BB′ = Nu
vtarget BB′ = Da
ntarget BB′ = Da
Se determină sarcina vehiculului (2.2.1)
Rapoartele de transmisie neblocate (3.1.2.2.1.2)
Se alege metoda de încercare (3.1.2.2.1)
Se stabilesc condițiile-țintă (3.1.2.2)
Figura 4c*
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.2 din anexa 3 la prezentul regulament – Încercare cu raportul de transmisie neblocat
PARTEA 2

Lurban
(3.1.3)
vtarget BB′ = limitată de selecția treptei D
Rezultat final (3.1.3.2)
O condiție de încercare
Criterii de încercare (3.1.2.2.1.2 f) vBB′ = vtarget BB′
Figura 4d*
Diagramă pentru vehicule supuse încercării în conformitate cu punctul 3.1.2.2 din anexa 3 la prezentul regulament – Încercare în care turația motorului cu ardere nu este disponibilă
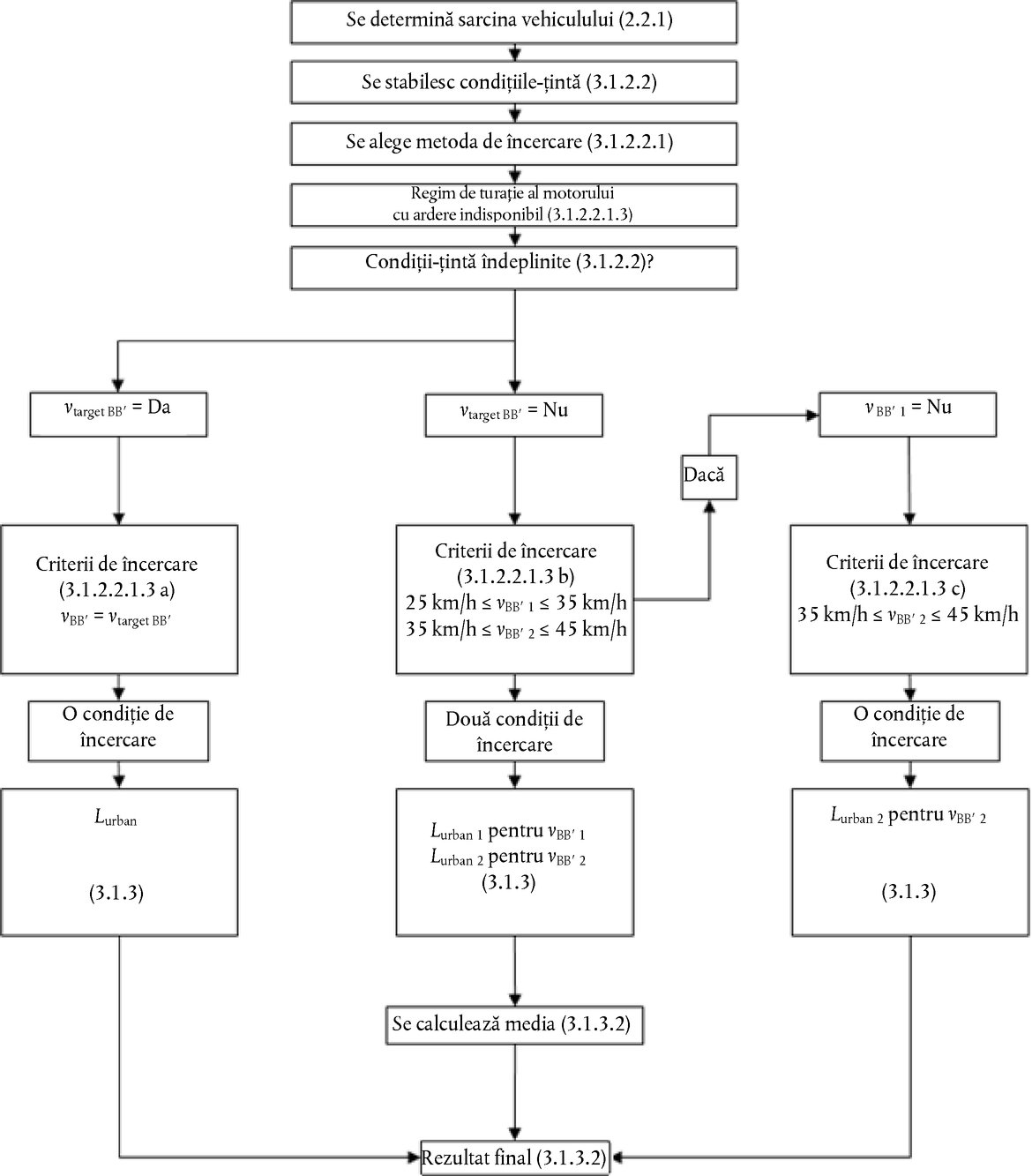
Rezultat final (3.1.3.2)
Se calculează media (3.1.3.2)
Dacă
Regim de turație al motorului cu ardere indisponibil (3.1.2.2.1.3)
Lurban
(3.1.3)
Lurban 2 pentru vBB′ 2
(3.1.3)
Criterii de încercare (3.1.2.2.1.3 c)
35 km/h ≤ vBB′ 2 ≤ 45 km/h
Criterii de încercare (3.1.2.2.1.3 b)
25 km/h ≤ vBB′ 1 ≤ 35 km/h
35 km/h ≤ vBB′ 2 ≤ 45 km/h
Criterii de încercare (3.1.2.2.1.3 a)
vBB′ = vtarget BB′
vtarget BB′ = Nu
Condiții-țintă îndeplinite (3.1.2.2)?
Se stabilesc condițiile-țintă (3.1.2.2)
Se determină sarcina vehiculului (2.2.1)
Se alege metoda de încercare (3.1.2.2.1)
vtarget BB′ = Da
v BB′ 1 = Nu
Lurban 1 pentru vBB′ 1
Lurban 2 pentru vBB′ 2
(3.1.3)
O condiție de încercare
Două condiții de încercare
O condiție de încercare
Notă:
|
* |
A se mări intervalul de viteze-țintă ale vehiculului vtarget BB′ pentru vehiculele din categoria M2 cu o masă maximă tehnic admisibilă a vehiculului încărcat > 3 500 kg și pentru vehiculele din categoriile N2, M3 și N3.
Viteza-țintă a vehiculului vtarget BB′ se definește drepttarget BB′ = 35 km/h ± 5 km/h, ceea ce conduce la un interval pentru viteza vBB′, atunci când punctul de referință trece de linia BB′, între 30 km/h și 40 km/h. Dacă viteza-țintă a vehiculului vtarget BB′ este modificată în două viteze-țintă ale vehiculului, una mai mare și una mai mică, aceasta înseamnă următoarele: viteza-țintă mai mică a vehiculului se definește drept viteza-țintă a vehiculului vtarget BB′ redusă cu 5 km/h (vtarget BB′ – 5 km/h), ceea ce conduce la un interval pentru viteza vBB′ 1, atunci când punctul de referință trece de linia BB′, între 25 km/h și 35 km/h. 25 km/h ≤ vBB′1 ≤ 35 km/h. Viteza-țintă mai mare a vehiculului se definește drept viteza-țintă a vehiculului vtarget BB′ mărită cu 5 km/h (vtarget BB′ + 5 km/h), ceea ce conduce la un interval pentru viteza vBB′ 2, atunci când punctul de referință trece de linia BB′, între 35 km/h și 45 km/h. 35 km/h ≤ vBB′2 ≤ 45 km/h. |
ANEXA 4
AMORTIZOARE DE ZGOMOT LA EVACUARE CARE CONȚIN MATERIALE FIBROASE INSONORIZANTE
1. Generalități
Materialele fibroase insonorizante pot fi utilizate în sistemele de amortizare a zgomotului sau în componentele acestora numai dacă:
|
(a) |
gazul de evacuare nu vine în contact cu materialele fibroase sau dacă |
|
(b) |
sistemul de amortizare a zgomotului sau componentele acestuia aparțin unei familii, prin proiectoare, de sisteme de amortizare a zgomotului sau de componente pentru care s-a demonstrat, în cursul unei proceduri de omologare de tip în conformitate cu cerințele prezentului regulament pentru un alt tip de vehicul, că nu sunt supuse deteriorării. |
În cazul în care niciuna dintre aceste condiții nu este îndeplinită, întregul sistem de amortizare a zgomotului sau componentele acestuia trebuie supus(e) condiționării convenționale utilizând una dintre cele trei instalații și proceduri descrise mai jos.
1.1. Funcționarea rutieră continuă pe o distanță de 10 000 km
1.1.1. 50 ± 20 % din această operație trebuie să aibă loc în circulația urbană, restul operației fiind efectuat pe distanțe lungi și la viteză mare; funcționarea continuă pe drum poate fi înlocuită cu un program de încercări corespunzător în poligonul de încercare.
1.1.2. Cele două regimuri de viteză trebuie alternate cel puțin de două ori.
1.1.3. Programul complet de încercare trebuie să includă un număr minim de 10 pauze cu o durată de cel puțin trei ore pentru a reproduce efectele de răcire și de condensare care pot avea loc.
1.2. Condiționare pe standul de încercare
1.2.1. Utilizând piese standard și cu respectarea instrucțiunilor producătorului, sistemul de amortizare a zgomotului sau componentele acestuia se montează pe vehiculul menționat la punctul 3.3 din prezentul regulament sau pe motorul menționat la punctul 3.4 din prezentul regulament. În primul caz, vehiculul trebuie instalat pe un stand de încercare cu rulouri. În al doilea caz, motorul trebuie cuplat la un stand dinamometric.
1.2.2. Încercarea trebuie efectuată în șase perioade a câte șase ore cu o pauză de cel puțin 12 ore între fiecare perioadă pentru a reproduce efectele de răcire și de condensare care pot avea loc.
1.2.3. În timpul fiecărei perioade de șase ore, motorul funcționează în următoarele condiții:
|
(a) |
cinci minute la ralanti; |
|
(b) |
o secvență de o oră la 1/4 din sarcină și 3/4 din turația nominală maximă (S); |
|
(c) |
o secvență de o oră la 1/2 din sarcină și 3/4 din turația nominală maximă (S); |
|
(d) |
o secvență de 10 minute la sarcină integrală și la 3/4 din turația nominală maximă (S); |
|
(e) |
o secvență de 15 minute la 1/2 din sarcină și la turația nominală maximă (S); |
|
(f) |
o secvență de 30 de minute la 1/4 din sarcină și la turația nominală maximă (S). |
Fiecare perioadă cuprinde două serii de secvențe succesive ale celor șase condiții menționate mai sus, în ordinea indicată de la (a) la (f).
1.2.4. În timpul încercării, sistemul de amortizare a zgomotului sau componentele acestuia nu trebuie răcite cu curent de aer forțat prin simularea fluxului normal de aer din jurul vehiculului. Cu toate acestea, la cererea producătorului, sistemul de amortizare a zgomotului sau componentele acestuia pot fi răcite pentru a nu se depăși temperatura înregistrată a gazelor la intrarea în amortizor atunci când vehiculul rulează cu viteza maximă.
1.3. Condiționarea prin pulsație
1.3.1. Sistemul de amortizare a zgomotului sau componentele acestuia trebuie montate pe vehiculul menționat la punctul 3.3 din prezentul regulament sau pe motorul menționat la punctul 3.4 din prezentul regulament. În primul caz, vehiculul trebuie instalat pe un stand de încercare cu rulouri.
În al doilea caz, motorul trebuie montat pe standul dinamometric. Aparatura de încercare, a cărei schemă detaliată este prezentată în figura 1 din apendicele la prezenta anexă, trebuie instalată la ieșirea sistemului de amortizare a zgomotului. Se admite orice altă aparatură care oferă rezultate echivalente.
1.3.2. Aparatura de încercare trebuie reglată astfel încât fluxul de gaze de evacuare să fie întrerupt și restabilit alternativ prin supapa cu acțiune rapidă pe parcursul a 2 500 de cicluri.
1.3.3. Supapa trebuie să se deschidă atunci când contrapresiunea gazelor de evacuare, măsurată la cel puțin 100 mm în aval de flanșa de admisie, ajunge la o valoare cuprinsă între 35 și 40 kPa. Supapa se închide când această presiune nu diferă cu mai mult de 10 % din valoarea sa stabilizată cu supapa deschisă.
1.3.4. Releul de temporizare se reglează pentru durata evacuării gazelor rezultată din dispozițiile de la punctul 1.3.3 de mai sus.
1.3.5. Turația motorului este egală cu 75 % din turația nominală (S) la care motorul dezvoltă puterea nominală netă maximă.
1.3.6. Puterea indicată de dinamometru reprezintă 50 % din puterea cu clapeta de accelerație deschisă la maximum, măsurată la 75 % din turația nominală a motorului (S).
1.3.7. În timpul încercării, toate orificiile de purjare sunt închise.
1.3.8. Încercarea completă trebuie finalizată în 48 de ore.
Dacă este necesar, se va respecta o perioadă de răcire după fiecare interval de o oră.
Apendice
Figura 1
Aparatura de încercare pentru condiționarea prin pulsație
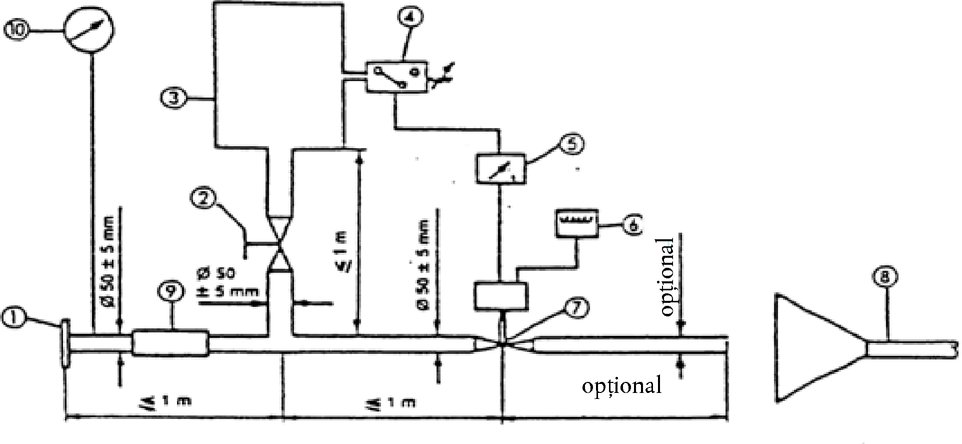 Textul imaginii
Textul imaginii
|
1. |
Flanșă de admisie sau manșon pentru conectarea la ieșirea sistemului de evacuare supus încercării. |
|
2. |
Supapă de reglare cu acționare manuală. |
|
3. |
Rezervor de compensare cu o capacitate maximă de 40 l și un timp de umplere de cel puțin o secundă. |
|
4. |
Comutator de presiune cu domeniul de funcționare între 0,05 și 2,5 bar. |
|
5. |
Releu de temporizare. |
|
6. |
Cronometru pulsații. |
|
7. |
Supapă cu acțiune rapidă, de tipul unei supape de frânare la evacuare cu diametrul de 60 mm, acționată de un cilindru pneumatic care dezvoltă o forță de 120 N la 4 bar. Timpul de răspuns, la deschidere și la închidere, nu trebuie să depășească 0,5 s. |
|
8. |
Evacuarea gazelor. |
|
9. |
Conductă flexibilă. |
|
10. |
Manometru. |
ANEXA 5
ZGOMOTUL PROVOCAT DE AERUL COMPRIMAT
1. Metoda de măsurare
Măsurătoarea se efectuează la pozițiile 2 și 6 ale microfonului, în conformitate cu figura 1, cu vehiculul staționar. Cel mai înalt nivel sonor ponderat A se înregistrează în timpul aerisirii regulatorului de presiune și în timpul ventilării după utilizarea frânelor de serviciu și de staționare.
Zgomotul provocat de ventilarea regulatorului de presiune se măsoară cu motorul la turația de ralanti. Zgomotul de ventilare se înregistrează în timpul acționării frânelor de serviciu și de staționare; înainte de fiecare măsurătoare, unitatea de aer comprimat trebuie adusă la cel mai înalt nivel de presiune de funcționare admisibil, iar motorul trebuie oprit.
2. Evaluarea rezultatelor
Pentru fiecare poziție a microfonului, se efectuează două măsurători. Pentru a compensa abaterile echipamentului de măsură, rezultatul înregistrării efectuate de sonometru se reduce cu 1 dB (A), iar valoarea rezultantă este considerată rezultatul măsurării. Rezultatele sunt considerate valide dacă, pentru o poziție dată a microfonului, diferența dintre rezultatele măsurătorilor nu depășește 2 dB(A). Cea mai mare valoare măsurată este reținută ca rezultat. Dacă această valoare depășește nivelul sonor maxim admis cu 1 dB(A), trebuie efectuate alte două măsurători la poziția respectivă a microfonului.
În acest caz, trei dintre cele patru rezultate ale măsurătorilor obținute la această poziție trebuie să respecte nivelul sonor maxim admis.
3. Valoarea-limită
Nivelul sonor nu trebuie să depășească limita de 72 dB(A).
Apendice
Figura 1
Pozițiile microfonului pentru măsurarea zgomotului provocat de aerul comprimat
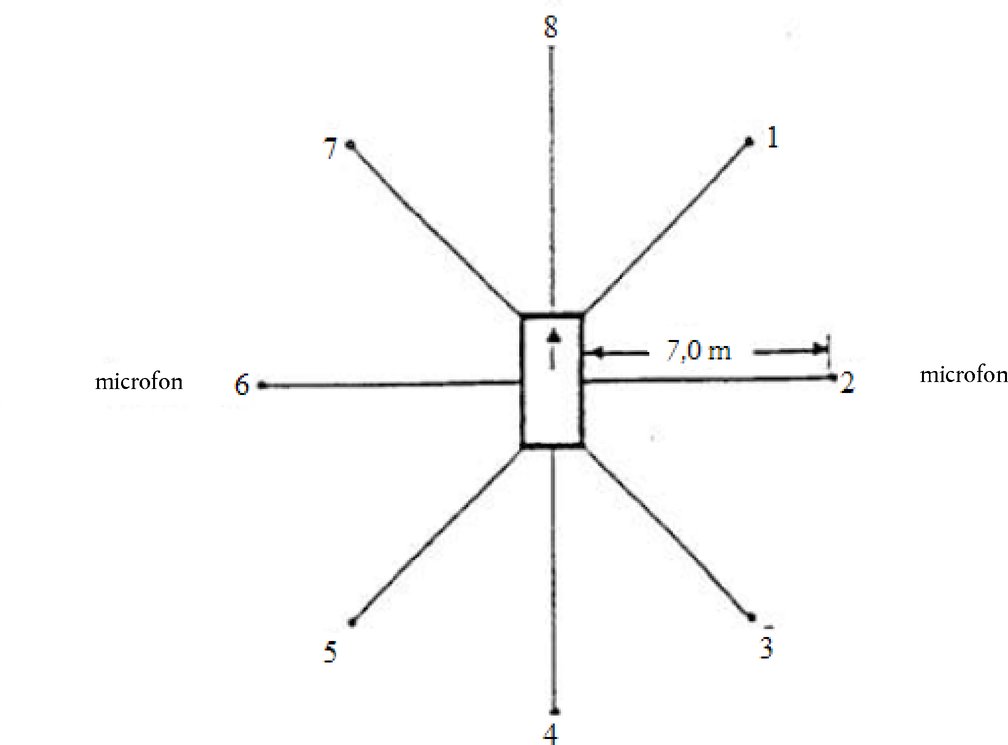 Textul imaginii
Textul imaginii
Măsurătoarea se face cu vehiculul staționar, în conformitate cu figura 1, folosind două poziții ale microfonului la o distanță de 7 m de marginea vehiculului și la o înălține de 1,2 m distanță față de sol.
ANEXA 6
VERIFICĂRI ALE CONFORMITĂȚII PRODUCȚIEI
1. Generalități
Aceste cerințe corespund încercării care trebuie efectuată pentru verificarea conformității producției, în conformitate cu punctul 8 din prezentul regulament.
2. Procedura de încercare
Poligonul de încercare și instrumentele de măsură sunt cele descrise în anexa 3.
2.1. Vehiculul (vehiculele) încercat(e) trebuie supus(e) încercării de măsurare a zgomotului vehiculului în mișcare, astfel cum se descrie la punctul 3.1 din anexa 3.
2.2. Zgomotul provocat de aerul comprimat
Vehiculele cu o masă care depășește 2 800 kg echipate cu sisteme de aer comprimat trebuie să fie supuse unei încercări suplimentare pentru măsurarea zgomotului provocat de aerul comprimat, conform descrierii de la punctul 1 din anexa 5.
2.3. Dispoziții suplimentare în materie de emisii sonore (ASEP)
Producătorul vehiculului trebuie să evalueze conformitatea cu dispozițiile ASEP printr-o evaluare corespunzătoare (de exemplu, verificări parțiale, dar nu doar acestea) sau poate efectua încercarea descrisă în anexa 7.
3. Eșantionarea și evaluarea rezultatelor
Se alege un vehicul și acesta se supune încercărilor descrise la punctul 2. Dacă nivelul sonor al vehiculului încercat nu depășește cu mai mult de 1 dB(A) valoarea-limită prevăzută în anexa 3 și, după caz, la punctul 3 din anexa 5, tipul de vehicul este considerat conform cu cerințele prezentului regulament.
Dacă unul din rezultatele încercării nu satisface cerințele de conformitate a producției din prezenta anexă și de la punctul 8 din regulament, se încearcă două vehicule suplimentare de același tip în conformitate cu punctul 2 de mai sus.
Dacă rezultatele încercării pentru al doilea și al treilea vehicul satisfac cerințele de conformitate a producției din prezenta anexă și de la punctul 8 din regulament, se consideră că vehiculul satisface cerințele de conformitate a producției.
Dacă unul din rezultatele încercării efectuate asupra celui de-al doilea sau al treilea vehicul nu satisface cerințele de conformitate a producției din prezenta anexă și de la punctul 8 din regulament, se consideră că tipul de vehicul nu satisface cerințele prezentului regulament, producătorul trebuind să ia măsurile necesare pentru restabilirea conformității.
ANEXA 7
METODA DE MĂSURARE PENTRU EVALUAREA CONFORMITĂȚII CU DISPOZIȚIILE SUPLIMENTARE CU PRIVIRE LA EMISIILE SONORE
Aplicabilă numai vehiculelor menționate la punctul 6.2.3 din prezentul regulament.
1. Generalități (a se vedea diagrama din figura 1 din apendicele 2)
Prezenta anexă descrie o metodă de măsurare pentru evaluarea conformității vehiculului cu dispozițiile suplimentare privind emisiile sonore (ASEP) în conformitate cu dispozițiile de la punctul 6.2.3 din prezentul regulament.
La depunerea cererii de omologare de tip, nu este obligatorie efectuarea unor încercări propriu-zise. Producătorul semnează declarația de conformitate specificată în apendicele 1. Autoritatea de omologare poate solicita informații suplimentare privind declarația de conformitate și poate efectua încercările prezentate mai jos.
Procedura prevăzută în prezenta anexă necesită efectuarea unei încercări în conformitate cu anexa 3.
Dacă, în cursul omologării de tip, se efectuează încercările în conformitate cu anexa 7, toate încercările realizate conform anexei 3 sau conform anexei 7 trebuie efectuate pe aceeași pistă de încercare și în condiții meteorologice similare (1).
Dacă încercările conform anexei 7 se efectuează după acordarea omologării de tip, de exemplu în timpul verificării conformității producției sau pentru verificarea conformității în funcționare, încercările în mișcare specificate în anexa 3 trebuie efectuate cu același mod, treaptă (trepte) de viteză/raport (raporturi) de transmisie, factor de ponderare a raportului de transmisie k și factor parțial de putere kP care au fost determinate în timpul procesului de omologare de tip.
2. Metodă de măsurare (a se vedea diagrama din figura 3 din apendicele 2)
2.1. Instrumente de măsurare și condiții pentru efectuarea măsurătorilor
Dacă nu se specifică altfel, instrumentele de măsurare, condițiile pentru efectuarea măsurătorilor și starea vehiculului sunt echivalente cu cele specificate la punctele 1 și 2 din anexa 3.
Dacă vehiculul dispune de moduri de funcționare diferite care afectează emisiile sonore, toate modurile de funcționare trebuie să respecte cerințele specificate în prezenta anexă. În cazul în care producătorul a efectuat încercări pentru a demonstra autorității de omologare conformitatea cu cerințele de mai sus, modurile de funcționare utilizate la efectuarea încercărilor se consemnează în raportul de încercare.
2.2. Metoda de încercare
Dacă nu se specifică altfel, se utilizează condițiile și procedurile prevăzute în anexa 3. În sensul prezentei anexe, se măsoară și se evaluează o încercare pentru fiecare tip de condiții de încercare.
2.3. Domeniul de control
Cerințele ASEP se aplică pentru fiecare raport de transmisie κ care conduce la rezultate ale încercării în domeniul de control definit mai jos.
|
Viteza vehiculului VAA_ASEP: |
vAA ≥ 20 km/h |
|
Accelerația vehiculului aWOT_ASEP: |
aWOT ≤ 5,0 m/s2 |
|
Turația motorului nBB_ASEP |
nBB ≤ 2,0 * RPM– 0,222 * S sau nBB ≤ 0,9 * S, fiind reținută cea mai mică valoare |
|
Viteza vehiculului VBB_ASEP: |
|
Dacă vehiculul, în configurația cu cea mai mică treaptă de viteză admisibilă, nu atinge turația maximă a motorului nBB_ASEP la o viteză mai mică de 70 km/h, măriți viteza vehiculului în treapta de viteză respectivă până la turația maximă a motorului nBB_ASEP, dar fără a depăși 80 km/h.
Pentru orice altă treaptă de viteză, viteza maximă a vehiculului este de 70 km/h.
Pentru vehiculele supuse încercării cu transmisia neblocată, viteza maximă a vehiculului este de 80 km/h.
|
Trepte de viteză |
κ ≤ treapta de viteză i determinată în anexa 3 |
Condiții privind transmisia:
|
Selecția treptei de viteză conform anexei 3 |
Selecția treptei de viteză conform anexei 7 |
|
Blocată |
Treapta de vitezăi, treapta de vitezăi – 1, … |
|
Neblocată |
Neblocată |
2.4. Condiții-țintă
Emisiile sonore trebuie măsurate pentru fiecare raport de transmisie valabil în patru puncte de încercare, după cum se specifică mai jos. Pentru toate punctele de încercare, trebuie să fie îndeplinite condițiile-limită prevăzute la punctul 2.3.
Raportul de transmisie este valabil dacă toate cele patru puncte și punctul fix îndeplinesc specificațiile de la punctul 2.3 de mai sus. Orice raport de transmisie pentru care nu sunt îndeplinite aceste criterii este considerat nevalabil și nu se analizează în continuare.
Pentru definiția primului punct de încercare P1, se utilizează o viteză inițială a vehiculului vAA,κ1 de 20 km/h ≤ vAA,κ1 < 20 km/h + 3 km/h.
Pentru P1, dacă nu poate fi obținută o accelerație stabilă conform punctului 2.26.2.1 din secțiunea de definiții a prezentului regulament, viteza vAA,κ1 se mărește în incremente de 5 km/h până la obținerea unei accelerații stabile.
Pentru toate punctele, dacă nu se poate obține o accelerație stabilă conform punctului 2.26.1, accelerația awot_testPP-BB se calculează conform formulei date la punctul 3.1.2.1.2 din anexa 3.
În condiții de transmisie neblocată, dacă nBB_ASEP este depășită în timpul încercării, se iau în considerare următoarele măsuri, separat sau împreună:
|
— |
dispozițiile de la punctul 2.5.1; |
|
— |
mărirea vitezei în incremente de 5 km/h. |
Viteza de încercare pentru cea de-al patrulea punct de încercare P4 în orice treaptă de viteză se definește astfel:
|
— |
0,95 × nBB_ASEP ≤ nBB,κ4 ≤ nBB_ASEP sau |
|
— |
vBB_ASEP – 3 km/h ≤ VBB,κ4 ≤ VBB_ASEP cu VBB_ASEP, astfel cum s-a definit la punctul 2.3. |
Viteza de încercare pentru celelalte două puncte de încercare este definită prin următoarea formulă:
Punctul de încercare Pj: vBB,κj = vBB,κ1 + ((j – 1) / 3) * (vBB,κ4 – vBB,κ1) pentru j = 2 și 3, cu o toleranță de ± 3 km/h
unde:
|
vBB,κ1 |
= |
viteza vehiculului la linia BB′ a punctului de încercare P1 |
|
vBB,κ4 |
= |
viteza vehiculului la linia BB′ a punctului de încercare P4 |
2.5. Încercarea vehiculului
2.5.1. Direcția liniei mediane a vehiculului trebuie să urmărească linia CC′ cât mai aproape posibil pe parcursul întregii încercări, începând cu momentul apropierii punctului de referință conform definiției de la punctul 2.11 din partea principală a regulamentului de linia AA′ până ce spatele vehiculului trece de linia BB′.
La linia AA′, pedala de accelerație trebuie să fie apăsată complet. Pentru a obține o accelerație mai stabilă sau pentru a evita o schimbare într-o treaptă inferioară de viteză între linia AA′ și BB′, înainte de linia AA′ poate fi utilizată o preaccelerare, conform dispozițiilor de la punctele 3.1.2.1.2.1 și 3.1.2.1.2.2 din anexa 3. Pedala de accelerație trebuie menținută apăsată până ce spatele vehiculului ajunge la linia BB′.
În condiții de transmisie neblocată, încercarea poate să includă o schimbare a raportului de transmisie într-o treaptă inferioară și o accelerație mai mare. Nu este permisă schimbarea treptei de viteză într-o treaptă superioară și o accelerație mai mică.
Dacă este posibil, producătorul ia măsuri pentru a evita ca schimbarea treptei de viteză să ducă la o stare care nu este conformă cu condițiile-limită. Pentru aceasta, este permis să se instaleze și utilizeze dispozitive electronice sau mecanice, cum ar fi poziții alternative ale selectorului treptelor de viteză. Dacă nu pot fi prevăzute astfel de măsuri, trebuie furnizată explicația, iar justificarea acesteia trebuie inclusă în raportul tehnic.
2.5.2. Citirea măsurătorilor:
|
|
Pentru fiecare punct de încercare, se efectuează o singură cursă de încercare. |
|
|
Pentru fiecare cursă separată de încercare, se determină și se consemnează următorii parametri:
|
2.5.3. Accelerația calculată se determină în conformitate cu formula de la punctul 3.1.2.1.2 din anexa 3 și se înregistrează cu două zecimale după virgulă (awot,test,κj).
3. Metoda de analiză 1: Evaluarea pantei
3.1. Determinarea punctului fix
Punctul fix este același pentru fiecare raport de transmisie κ ce intră în domeniul de control conform punctului 2.3. Parametrii punctului fix se determină în urma încercării de accelerare din anexa 3 după cum urmează:
|
|
Lanchor este presiunea acustică mai mare a Lwot,(i) pentru partea stângă și dreaptă cu raportul de transmisie i; |
|
|
nanchor este media nBB, wot după 4 curse cu raportul de transmisie i conform anexei 3. |
3.2. Dreapta de regresie pentru fiecare raport de transmisie κ
Măsurările nivelului sonor se evaluează în funcție de turația motorului în conformitate cu punctul 3.2.1.
3.2.1. Calculul pantei dreptei de regresie pentru fiecare raport de transmisie κ
Dreapta de regresie liniară se calculează folosind punctul fix și patru măsurători suplimentare corelate cu rezultatele pentru turațiile motorului și nivelurile sonore raportate conform punctului 2.5.2 din prezenta anexă.
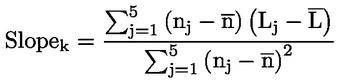 (în dB/1 000 min– 1)
(în dB/1 000 min– 1)
cu 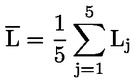 și
și  ;
;
unde nj = turația motorului măsurată la linia BB′
3.2.2. Dreapta de regresie pentru fiecare raport de transmisie κ
Panta slopeκ a unei anumite trepte de viteză pentru calculele ulterioare este rezultatul calculului de la punctul 3.2.1 rotunjit la prima zecimală, dar nu mai mare de 5 dB(A)/1 000 min– 1.
În condiții neblocate, dacă panta Slopeκ < 0, configurația aleasă a transmisiei nu este valabilă. În acest caz, se aplică evaluarea Lurban specificată la punctul 4.
3.3. Calculul creșterii nivelului sonor liniar preconizat pentru fiecare măsurare
Nivelul sonor LASEP,κj pentru punctul de măsurare j și treapta de viteză κ se calculează folosind turațiile motorului determinate pentru fiecare punct de măsurare, utilizând panta specificată la punctul 3.2 de mai sus, în punctul fix specific pentru fiecare raport de transmisie.
Pentru nBB_κ,j ≤ nanchor:
LASEP_κ,j = Lanchor + (Slopeκ – Y) * (nBB_κ,j – nanchor) / 1 000
Pentru nBB_κ,j > nanchor:
LASEP_κ,j = Lanchor + (Slopeκ + Y) * (nBB_κ,j – nanchor) / 1 000
unde Y = 1
3.4. Eșantioane suplimentare
La cererea autorității de omologare de tip, se efectuează două curse suplimentare în condiții-limită conforme cu punctul 2.3 din prezenta anexă.
3.5. Specificații
Se evaluează fiecare măsurare individuală a nivelului sonor.
Nivelul sonor din fiecare punct de măsurare specificat nu trebuie să depășească limitele indicate în continuare:
Lκj ≤ LASEP_κ.j + x
unde:
|
|
x = 3 dB(A) + valoarea-limită (2) – Lurban pentru un vehicul supus încercării în condiții de transmisie neblocată |
|
|
x = 2 dB(A) + valoarea-limită (2) – Lurban pentru vehicule supuse încercării în condiții de transmisie blocată |
Dacă nivelul sonor măsurat într-un punct depășește limita, se efectuează două măsurători suplimentare în același punct pentru a verifica gradul de incertitudine al măsurării. Vehiculul îndeplinește în continuare cerințele ASEP în cazul în care media celor trei măsurători valabile în acest punct specific corespunde specificației.
4. Metoda de analiză 2: Evaluarea Lurban
4.1. Generalități
Această procedură de evaluare, selectată de producătorul vehiculului, este o alternativă la procedura descrisă la punctul 3 din prezenta anexă și este aplicabilă tuturor tehnologiilor pentru vehicule. Este responsabilitatea producătorului vehiculului să determine maniera corectă de încercare. Dacă nu se prevede altfel, toate încercările și calculele sunt conforme specificațiilor din anexa 3 la prezentul regulament.
Metoda de măsurare este definită la punctul 2. Fiecare punct de încercare este evaluat individual.
4.2. Calcularea Δ Lurban_ASEP
4.2.1. Prelucrarea datelor
Din orice valoare Lwot_ASEP măsurată în conformitate cu prezenta anexă, Lurban_ASEP se calculează după cum urmează:
|
(a) |
se calculează awot_test_ASEP utilizând accelerația calculată la punctul 3.1.2.1.2.1 sau la punctul 3.1.2.1.2.2 din anexa 3 la prezentul regulament, după caz; |
|
(b) |
se determină viteza vehiculului (vBB_ASEP) la BB în timpul încercării Lwot_ASEP; |
|
(c) |
se calculează kP_ASEP după cum urmează: kP_ASEP = 1 – (aurban/awot_test_ASEP) Rezultatele încercărilor la care awot_test_ASEP este mai mic decât aurban nu sunt luate în considerare; |
|
(d) |
se calculează Lurban_measured_ASEP după cum urmează: Lurban_measured_ ASEP = Lwot_ASEP – kP_ASEP * (Lwot_ASEP – Lcrs rep) Pentru calcule suplimentare, se utilizează Lurban din anexa 3 la prezentul regulament, fără rotunjiri, inclusiv cifra după virgulă (xx,x); |
|
(e) |
se calculează Lurban_normalized pentru normalizarea vitezei de la vBB_ASEP la 50 km/h după cum urmează: Lurban_normalized = Lurban_measured_ASEP – (0,15 * (V_BB_ASEP – 50)) |
|
(f) |
se calculează abaterea ΔLurban_ASEP relativ la Lurban după cum urmează: ΔLurban_ASEP = Lurban_normalized – Lurban |
4.2.2. Specificații
conformitatea cu limitele:
Δ Lurban_ASEP trebuie să fie mai mică sau egală cu 3,0 dB(A) + valoarea-limită (3) – Lurban.
5. Evaluarea sunetului de referință (a se vedea diagrama din figura 2 din apendicele 2)
5.1. Generalități
Sunetul de referință se poate obține prin simulare sau măsurătoare directă. Rezultatul unei metode de evaluare trebuie să respecte specificațiile de la punctul 5.4.
5.1.1. Metoda de simulare (4)
Pentru simulare, sunetul de referință este evaluat într-un singur punct la un raport de transmisie individual dat, simulând un proces de accelerare presupunând o viteză de ieșire vBB′ egală cu 61 km/h. Conformitatea sunetului se calculează utilizând rezultatele pantei de la punctul 3.2.2.
Dacă rezultatele pantei de la punctul 3.2.2 nu sunt disponibile pentru treapta de viteză specificată la punctul 5.2, panta treptei de viteză care lipsește poate fi determinată în conformitate cu punctele 2.4, 3.1 și 3.2.
5.1.2. Metoda măsurării directe
Pentru măsurarea directă, sunetul de referință este evaluat într-o singură cursă într-un proces de accelerare care începe la linia AA′, după cum se specifică la punctul 2.5. Treapta de viteză este cea specificată la punctul 5.2 pentru vehicule supuse încercării în condiții de transmisie blocată sau cu selectorul treptelor de viteză în poziție pentru condiții de condus normal, conform specificațiilor producătorului pentru vehicule supuse încercării în condiții de transmisie neblocată.
Viteza de încercare țintă vAA este de 50 km/h ± 1 km/h, cu excepția cazului în care vBB depășește 61 km/h.
Dacă vBB depășește 61 km/h, viteza de încercare țintă vBB se stabilește la 61 km/h ± 1 km/h. Viteza inițială se ajustează astfel încât să se obțină viteza de încercare țintă.
5.2. Determinarea treptei de viteză α se face după cum urmează:
|
|
α = 3 pentru orice transmisie manuală și pentru o transmisie automată cu maximum 5 trepte de viteză supusă încercării în poziție blocată; |
|
|
α = 4 pentru o transmisie automată cu 6 sau mai multe trepte de viteză supusă încercării în poziție blocată. Dacă accelerația calculată între AA și BB + lungimea vehiculului în treapta 4 de viteză depășește 1,9 m/s2, se selectează prima treaptă de viteză mai mare α > 4 cu o accelerație mai mică sau egală cu 1,9 m/s2. |
Pentru vehicule supuse încercării în condiții de transmisie neblocată, raportul de transmisie pentru calcule suplimentare se determină din rezultatul încercării la accelerare din anexa 3, utilizând turația motorului raportată și viteza vehiculului la linia BB′.
5.3. Prelucrarea datelor pentru evaluarea simulării
5.3.1. Determinarea turației de referință a motorului nBB′_ref_α
Turația de referință a motorului, nBB′_ref_α, se calculează folosind raportul de transmise al treptei de viteză α la viteza de referință vBB′_ref = 61 km/h.
5.3.2. Calcularea Lref
Lref = Lanchor + Slope α * (nBB′_ref_α – nanchor) / 1 000
5.4. Specificații
Pentru vehicule din categoria M1, Lref trebuie să fie mai mic sau egal cu 76 dB(A).
Pentru vehiculele din categoria M1 echipate cu transmisie manuală cu mai mult de patru trepte de viteză pentru mers înainte și echipate cu un motor care dezvoltă o putere nominală netă maximă mai mare de 140 kW (conform Regulamentului nr. 85) și având un raport putere maximă/masă maximă mai mare de 75, Lref trebuie să fie mai mic sau egal cu 79 dB(A).
Pentru vehiculele din categoria M1 echipate cu transmisie automată cu mai mult de patru trepte de viteză pentru mers înainte și echipate cu un motor care dezvoltă o putere nominală netă maximă mai mare de 140 kW (conform Regulamentului nr. 85) și având un raport putere maximă/masă maximă mai mare de 75, Lref trebuie să fie mai mic sau egal cu 78 dB(A).
Pentru vehiculele din categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat mai mică de 2 000 kg, Lref trebuie să fie mai mic sau egal cu 78 dB(A).
Pentru vehiculele din categoria N1 cu o masă maximă tehnic admisibilă a vehiculului încărcat mai mare de 2 000 kg și mai mică de 3 500 kg, Lref trebuie să fie mai mic sau egal cu 79 dB(A).
Pentru vehiculele din categoriile M1 și N1 echipate cu un motor cu combustie internă cu aprindere prin compresie și injecție directă, nivelul sonor trebuie crescut cu 1 dB(A).
Pentru vehiculele din categoriile M1 și N1 destinate utilizării pe drumuri neamenajate și având o masă maximă tehnic admisibilă a vehiculului încărcat mai mare de 2 tone, nivelul sonor trebuie crescut cu 1 dB(A) dacă sunt echipate cu un motor care are o putere nominală netă maximă mai mică de 150 kW (conform Regulamentului nr. 85) sau cu 2 dB(A) dacă sunt echipate cu un motor care are o putere nominală netă maximă cel puțin egală cu 150 kW (conform Regulamentului nr. 85).
(1) Măsurătorile conform anexei 7 pentru un anumit tip de vehicul pot fi efectuate pe alte piste de încercare sau în condiții meteorologice diferite, fiecare în conformitate cu dispozițiile prezentului regulament, dacă rezultatele încercării Lwoti și Lcrsi pentru treapta de viteză i, reprezentând punctul fix, nu diferă cu mai mult de +/– 1,0 dB de rezultatele încercării din momentul în care s-au efectuat încercările conform anexei 3.
(2) După cum este cazul pentru tipul de vehicul omologat.
(3) După cum este cazul pentru tipul de vehicul omologat.
(4) Este posibil ca simularea să nu fie întotdeauna aplicabilă, întrucât rezultatul încercării din anexa 3 și pantele elaborate conform punctului 3 din anexa 7 s-ar putea să nu furnizeze date coerente pentru simulare. În acest caz, se recomandă să se efectueze măsurători directe.
Apendicele 1
Declarație de conformitate cu dispozițiile suplimentare cu privire la emisiile sonore
[Format maxim: A4 (210 × 297 mm)]
… (Denumirea producătorului) atestă că vehiculele de acest tip (tip cu privire la emisiile sale sonore conform Regulamentului UE nr. 51) sunt în conformitate cu cerințele de la punctul 6.2.3 din Regulamentul nr. 51.
… (Denumirea producătorului) face prezenta declarație cu bună-credință, după ce a procedat la o evaluare corespunzătoare a măsurătorilor emisiilor sonore ale vehiculelor.
Data: …
Numele reprezentantului autorizat: …
Semnătura reprezentantului autorizat: …
Apendicele 2
Figura 1
Diagramă pentru evaluarea conceptului ASEP în conformitate cu anexa 7
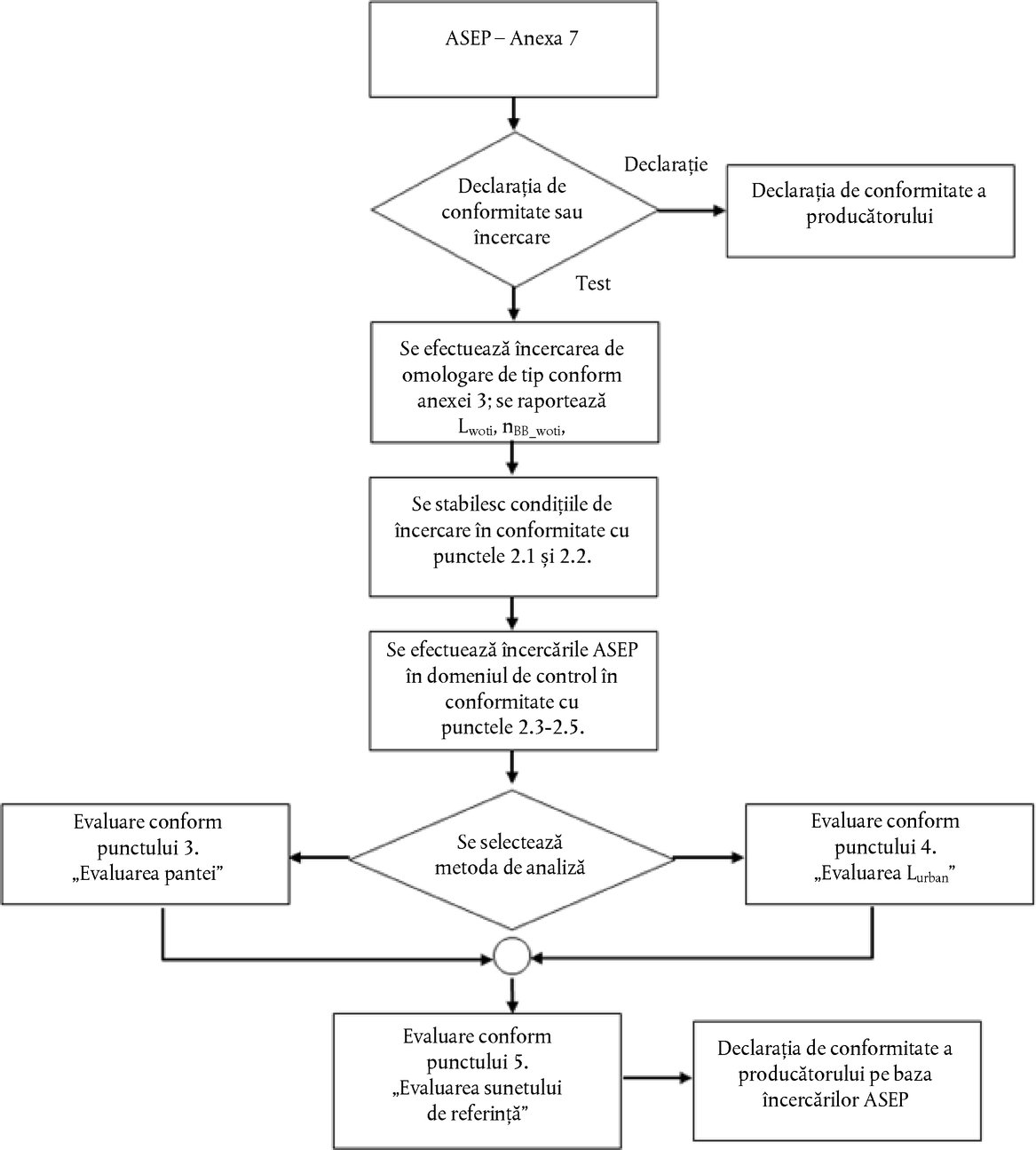
Declarația de conformitate a producătorului pe baza încercărilor ASEP
Evaluare conform punctului 5. „Evaluarea sunetului de referință”
Evaluare conform punctului 4. „Evaluarea Lurban”
Se selectează metoda de analiză
Evaluare conform punctului 3. „Evaluarea pantei”
Se efectuează încercările ASEP în domeniul de control în conformitate cu punctele 2.3-2.5.
Se stabilesc condițiile de încercare în conformitate cu punctele 2.1 și 2.2.
Se efectuează încercarea de omologare de tip conform anexei 3; se raportează Lwoti, nBB_woti,
Test
Declarația de conformitate a producătorului
Declarație
Declarația de conformitate sau încercare
ASEP – Anexa 7
Figura 2
Diagramă pentru evaluarea sunetului vehiculului în conformitate cu punctul 5 din anexa 7 „Evaluarea sunetului de referință”
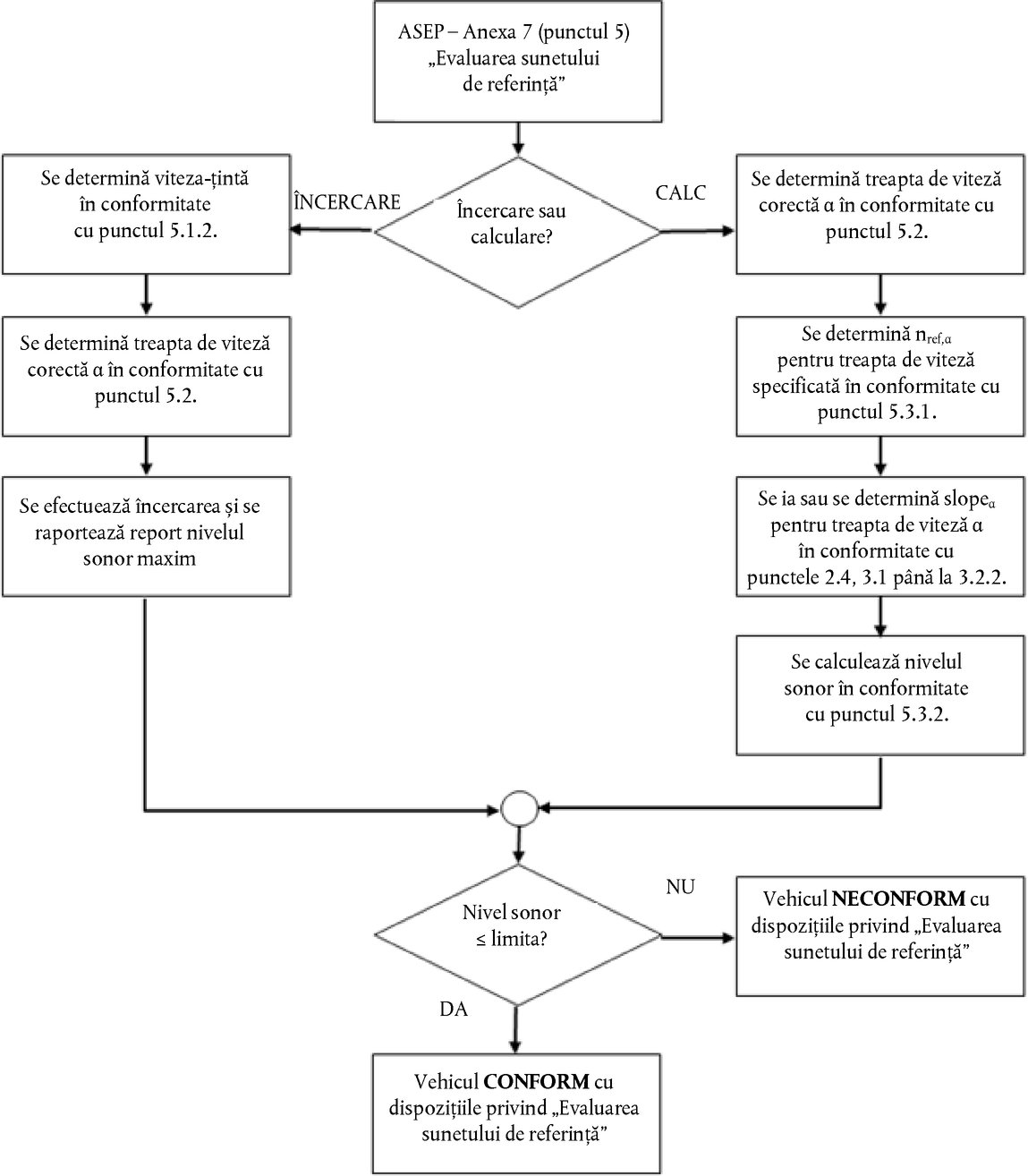
Se determină nref,α pentru treapta de viteză specificată în conformitate cu punctul 5.3.1.
ÎNCERCARE
Vehicul CONFORM cu dispozițiile privind „Evaluarea sunetului de referință”
Nivel sonor ≤ limita?
Se calculează nivelul sonor în conformitate cu punctul 5.3.2.
Se ia sau se determină slopeα pentru treapta de viteză α în conformitate cu punctele 2.4, 3.1 până la 3.2.2.
Se efectuează încercarea și se raportează report nivelul sonor maxim
Se determină treapta de viteză corectă α în conformitate cu punctul 5.2.
Se determină treapta de viteză corectă α în conformitate cu punctul 5.2.
Încercare sau calculare?
Se determină viteza-țintă în conformitate cu punctul 5.1.2.
DA
NU
CALC
Vehicul NECONFORM cu dispozițiile privind „Evaluarea sunetului de referință”
ASEP – Anexa 7 (punctul 5) „Evaluarea sunetului de referință”
Figura 3
Diagramă pentru determinarea punctelor de încercare individuale Pj în conformitate cu punctul 2 din anexa 7 „Metoda de măsurare”
Treaptă valabilă κ, se raportează datele pentru P1 - P4
Cea mai mică treaptă valabilă
Treapta de viteză κ ≤ i
awot ≤ 5 m/s2
Treaptă nevalabilă
awot ≤ 5 m/s2
Treaptă nevalabilă
awot ≤ 5 m/s2
Se selectează treapta de viteză cea mai mica (viteza întâi)
ASEP – Anexa 7 (punctul 2) Metodă de măsurare
Încercare P4
Țintă: 80 km/h sau nBB_ASEP
Încercare P4
Țintă: 70 km/h sau nBB_ASEP
Încercare P2 și P3 Țintă calculate utilizând măsurătoarea la P1 și P4
nBB ≤ nBB_ASEP sau vBB ≤ 80 km/h
DA
DA
DA
DA
DA
DA
NU
NU
NU
NU
NU
NU
Treceți la punctul 3 „Evaluarea pantei” sau la punctul 4 „Evaluarea Lurban”
Încercare P1
Țintă: VAA = 20 km/h (sau 25, 30, … km/h)
Se selectează treapta imediat superioară