

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32021L1226
Commission Delegated Directive (EU) 2021/1226 of 21 December 2020 amending, for the purposes of adapting to scientific and technical progress, Annex II to Directive 2002/49/EC of the European Parliament and of the Council as regards common noise assessment methods (Text with EEA relevance)
Directiva delegată (UE) 2021/1226 a Comisiei din 21 decembrie 2020 de modificare, în scopul adaptării la progresul științific și tehnic, a anexei II la Directiva 2002/49/CE a Parlamentului European și a Consiliului în ceea ce privește metodele comune de evaluare a zgomotului (Text cu relevanță pentru SEE)
Directiva delegată (UE) 2021/1226 a Comisiei din 21 decembrie 2020 de modificare, în scopul adaptării la progresul științific și tehnic, a anexei II la Directiva 2002/49/CE a Parlamentului European și a Consiliului în ceea ce privește metodele comune de evaluare a zgomotului (Text cu relevanță pentru SEE)
C/2020/9101
OJ L 269, 28.7.2021, p. 65–142
(BG, ES, CS, DA, DE, ET, EL, EN, FR, GA, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
28.7.2021 |
RO |
Jurnalul Oficial al Uniunii Europene |
L 269/65 |
DIRECTIVA DELEGATĂ (UE) 2021/1226 A COMISIEI
din 21 decembrie 2020
de modificare, în scopul adaptării la progresul științific și tehnic, a anexei II la Directiva 2002/49/CE a Parlamentului European și a Consiliului în ceea ce privește metodele comune de evaluare a zgomotului
(Text cu relevanță pentru SEE)
COMISIA EUROPEANĂ,
având în vedere Tratatul privind funcționarea Uniunii Europene,
având în vedere Directiva 2002/49/CE a Parlamentului European și a Consiliului din 25 iunie 2002 privind evaluarea și gestiunea zgomotului ambiental (1), în special articolul 12,
întrucât:
|
(1) |
Anexa II la Directiva 2002/49/CE stabilește metode comune de evaluare pentru statele membre, care trebuie utilizate pentru informațiile privind zgomotul ambiental și efectele acestuia asupra sănătății, în special pentru cartografierea acustică și adoptarea planurilor de acțiune bazate pe rezultatele cartografierii acustice. Această anexă trebuie adaptată la progresul tehnic și științific. |
|
(2) |
În perioada 2016-2020, Comisia a cooperat cu experți tehnici și științifici din statele membre pentru a evalua adaptările necesare ținând seama de progresele tehnice și științifice înregistrate în calculul zgomotului ambiental. Acest proces s-a desfășurat în strânsă consultare cu Grupul de experți în domeniul zgomotului, compus din reprezentanți ai statelor membre, ai Parlamentului European, ai părților interesate din industrie și ai autorităților publice din statele membre, ONG-uri, cetățeni și universitari. |
|
(3) |
Anexa la prezenta directivă delegată stabilește adaptările necesare ale metodelor comune de evaluare, care constau în clarificarea formulelor de calcul al propagării zgomotului, adaptarea tabelelor în funcție de cele mai recente cunoștințe și îmbunătățirea descrierii etapelor de calcul. Acestea se referă la calculul zgomotului generat de traficul rutier și de cel feroviar, al zgomotul industrial și al zgomotului produs de aeronave. Statele membre au obligația de a utiliza aceste metode începând cu 31 decembrie 2021, cel târziu. |
|
(4) |
Prin urmare, anexa II la Directiva 2002/49/CE ar trebui modificată în consecință. |
|
(5) |
Măsurile prevăzute în prezenta directivă sunt conforme cu avizul Grupului de experți în domeniul zgomotului, consultat la 12 octombrie 2020, |
ADOPTĂ PREZENTA DIRECTIVĂ:
Articolul 1
Anexa II la Directiva 2002/49/CE se modifică în conformitate cu anexa la prezenta directivă.
Articolul 2
(1) Statele membre asigură intrarea în vigoare a actelor cu putere de lege și a actelor administrative necesare pentru a se conforma prezentei directive, cel târziu până la 31 decembrie 2021. Statele membre comunică de îndată Comisiei textul acestor măsuri.
Atunci când statele membre adoptă măsurile respective, acestea conțin o trimitere la prezenta directivă sau sunt însoțite de o astfel de trimitere la data publicării lor oficiale. Statele membre stabilesc modalitatea de efectuare a acestei trimiteri.
(2) Statele membre comunică Comisiei textele principalelor dispoziții de drept intern pe care le adoptă în domeniul reglementat de prezenta directivă.
Articolul 3
Prezenta directivă intră în vigoare în ziua următoare datei publicării în Jurnalul Oficial al Uniunii Europene.
Articolul 4
Prezenta directivă se adresează statelor membre.
Adoptată la Bruxelles, 21 decembrie 2020.
Pentru Comisie
Președintele
Ursula VON DER LEYEN
ANEXĂ
Anexa II la Directiva 2002/49/CE se modifică după cum urmează:
|
1. |
În secțiunea 2.1.1, al doilea paragraf se înlocuiește cu următorul text: „Calculul zgomotului produs de traficul rutier și de cel feroviar și calculul zgomotului industrial se efectuează în benzi de o octavă, cu excepția calculului puterii acustice a sursei zgomotului din traficul feroviar, pentru care se utilizează benzi de o treime de octavă. Pentru zgomotul produs de traficul rutier și de cel feroviar și pentru zgomotul industrial, pe baza acestor rezultate din benzile de o octavă, nivelul mediu de zgomot pe termen lung ponderat pe curba A pentru zi, seară și noapte, definit în anexa I și menționat la articolul 5 din Directiva 2002/49/CE, se calculează utilizând metoda descrisă în secțiunile 2.1.2, 2.2, 2.3, 2.4 și 2.5. Pentru drumurile și traficul feroviar din aglomerări, nivelul mediu de zgomot pe termen lung ponderat pe curba A este determinat de contribuția segmentelor rutiere și feroviare din aglomerări, inclusiv a drumurilor principale și a căilor ferate principale.” |
|
2. |
Secțiunea 2.2.1 se modifică după cum urmează:
|
|
3. |
Tabelul 2.3.b se modifică după cum urmează:
|
|
4. |
Secțiunea 2.3.2 se modifică după cum urmează:
|
|
5. |
În secțiunea 2.3.3, paragraful de sub titlul „Corecția pentru radiația structurală (poduri și viaducte)” se înlocuiește cu următorul text: „ În cazul în care tronsonul este situat pe un pod, este necesar să se ia în considerare zgomotul suplimentar generat de vibrația podului ca urmare a excitației cauzate de prezența trenului. Zgomotul produs de pod este modelat ca o sursă suplimentară, a cărei putere acustică per vehicul este dată de ecuația:
unde LH, bridge ,i este funcția de transfer a podului. Zgomotul produs de pod LW,0, bridge ,i constă numai în sunetul radiat de pod. Zgomotul de rulare produs de un vehicul pe pod se calculează utilizând ecuațiile (2.3.8)-(2.3.10) și alegând funcția de transfer a liniei care corespunde sistemului de linii ce se găsește pe pod. Barierele de la capetele podului nu se iau, în general, în considerare.” |
|
6. |
Secțiunea 2.4.1 se modifică după cum urmează:
|
|
7. |
În secțiunea 2.5.1, al șaptelea paragraf se înlocuiește cu următorul text: „Obiectele înclinate cu mai mult de 15° față de verticală nu sunt considerate a fi reflectoare, dar sunt luate în considerare în toate celelalte aspecte ale propagării, cum ar fi efectele solului și difracția.” |
|
8. |
Secțiunea 2.5.5 se modifică după cum urmează:
|
|
9. |
Secțiunea 2.5.6 se modifică după cum urmează:
|








|
10. |
Secțiunea 2.7.5 „Zgomotul aeronavei și performanța” se înlocuiește cu următorul text: „2.7.5. Zgomotul și performanțele aeronavelor Baza de date ANP prezentată în apendicele I cuprinde coeficienții de performanță ai aeronavelor și motoarelor, profilurile de plecare și de apropiere, precum și relațiile NPD pentru o parte substanțială a aeronavelor civile care operează pe aeroporturile Uniunii Europene. Datele care nu sunt în prezent indicate pentru unele tipuri sau variante de aeronave pot fi reprezentate cel mai bine de datele indicate pentru aeronave care sunt, în mod normal, similare. Aceste date au fost obținute pentru a calcula contururile de zgomot pentru o flotă și un mix de trafic medii sau reprezentative pentru un aeroport. Este posibil ca acestea să nu fie adecvate pentru a previziona nivelurile absolute de zgomot ale unui anumit model de aeronavă și nu sunt potrivite pentru a compara performanțele și caracteristicile acustice ale unor tipuri sau modele specifice de aeronave sau ale unor flote specifice de aeronave. Pentru a stabili care sunt cele mai zgomotoase tipuri sau modele de aeronave sau care este cea mai zgomotoasă flotă specifică de aeronave, trebuie consultate certificatele de zgomot. Baza de date ANP include unul sau mai multe profiluri implicite de decolare și de aterizare pentru fiecare tip de aeronavă menționat. Trebuie examinată aplicabilitatea acestor profiluri pentru aeroportul în cauză și trebuie determinate fie profilurile cu puncte fixe, fie etapele procedurale care reprezintă cel mai bine operațiunile de zbor de pe aeroportul respectiv.” |
|
11. |
În secțiunea 2.7.11, titlul celui de al doilea paragraf de sub titlul „Dispersia traiectoriei” se înlocuiește cu următorul titlu: „ ”. |
|
12. |
În secțiunea 2.7.12, după al șaselea paragraf și înainte de al șaptelea și ultimul paragraf, se inserează următorul paragraf: „Sursa de zgomot a unei aeronave trebuie introdusă la o înălțime minimă de 1,0 m (3,3 ft) deasupra nivelului aerodromului sau deasupra nivelului de elevație al pistei, după caz.” |
|
13. |
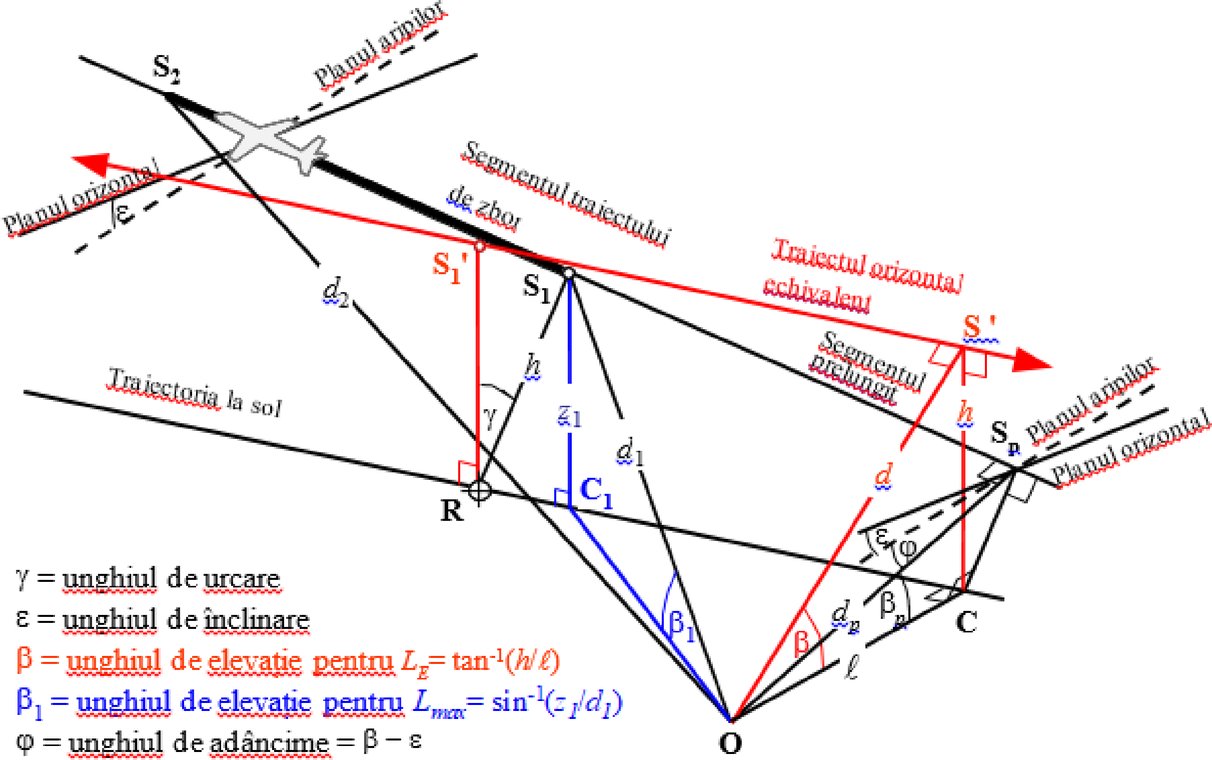
Secțiunea 2.7.13 „Construcția segmentelor de traiectorie de zbor” se înlocuiește cu următorul text: „2.7.13. Construcția segmentelor traiectului de zbor Fiecare traiect de zbor trebuie să fie definit de un set de coordonate ale segmentelor (noduri) și de parametrii de zbor. Punctul de început constă în determinarea coordonatelor segmentelor traiectoriei la sol. Profilul de zbor este apoi calculat, ținând seama că, pentru un set dat de etape procedurale, profilul depinde de traiectoria la sol; de exemplu, la aceeași tracțiune și viteză, rata de urcare a aeronavei este mai mică în viraje, decât în zbor drept. Se efectuează apoi o subsegmentare pentru aeronava aflată pe pistă (decolare sau rularea la sol după aterizare) și pentru aeronava aflată în apropierea pistei (urcarea inițială sau apropierea finală). Segmentele aeriene cu viteze semnificativ diferite în punctul de început față de punctul final trebuie subsegmentate. Se determină coordonatele bidimensionale ale segmentelor traiectoriei la sol (*) și se introduc în profilul de zbor bidimensional pentru a obține segmentele tridimensionale ale traiectului de zbor. În sfârșit, se înlătură orice puncte ale traiectului de zbor care sunt prea apropiate. Profilul de zbor Parametrii care descriu fiecare segment al profilului de zbor la începutul (sufixul 1) și la sfârșitul (sufixul 2) segmentului sunt:
Pentru a construi un profil de zbor pe baza unui set de etape procedurale (sinteza traiectului de zbor), segmentele se construiesc în succesiune, astfel încât să fie îndeplinite condițiile necesare la punctele finale. Parametrii punctului final al fiecărui segment devin parametrii punctului de început al segmentului următor. În orice calcul al segmentelor, parametrii de început sunt cunoscuți; condițiile necesare la final sunt specificate de etapa procedurală. Etapele în sine sunt definite fie de valorile implicite ANP, fie de utilizator (de exemplu, din manualele de zbor ale aeronavelor). Condițiile finale sunt de obicei înălțimea și viteza; sarcina construirii profilului constă în determinarea distanței parcurse pe traiectorie pentru îndeplinirea acestor condiții. Parametrii nedefiniți se determină cu ajutorul calculelor performanței de zbor descrise în apendicele B. Dacă traiectoria la sol este dreaptă, punctele profilului și parametrii de zbor asociați pot fi determinați independent de traiectoria la sol (unghiul de înclinare este întotdeauna zero). Traiectoriile la sol sunt însă rareori drepte; de obicei, includ viraje și, pentru a obține cele mai bune rezultate, acestea trebuie avute în vedere la determinarea profilului de zbor bidimensional, divizând, dacă este necesar, segmentele profilului la nodurile traiectoriei la sol, pentru a introduce modificările unghiului de înclinare. De regulă, lungimea segmentului următor este necunoscută la început și se calculează provizoriu, presupunând că unghiul de înclinare nu se schimbă. Dacă se constată apoi că segmentul provizoriu cuprinde unul sau mai multe noduri ale traiectoriei la sol, primul fiind la s, și anume la s1 < s < s2 , segmentul este trunchiat la s și se calculează parametrii în acest nod prin interpolare (a se vedea mai jos). Aceștia devin parametrii punctului final al segmentului curent și parametrii punctului de început al unui nou segment, care are în continuare aceleași condiții finale-țintă. Dacă nu intervine niciun nod al traiectoriei la sol, segmentul provizoriu este confirmat. Dacă efectele virajelor asupra profilului de zbor nu sunt luate în considerare, se adoptă soluția segmentului unic al zborului drept, dar se păstrează pentru utilizare ulterioară informațiile privind unghiul de înclinare. Indiferent dacă efectele virajelor sunt sau nu modelate integral, fiecare traiect de zbor tridimensional este generat prin fuziunea profilului său de zbor bidimensional cu traiectoria sa la sol bidimensională. Rezultatul este o succesiune de seturi de coordonate (x,y,z), fiecare fiind un nod al traiectoriei la sol segmentate, un nod a profilului de zbor sau ambele, punctele profilului fiind însoțite de valorile corespunzătoare ale înălțimii z, vitezei la sol V, unghiului de înclinare ε și puterii motoarelor P. Pentru un punct al traiectoriei (x,y) care se află între punctele finale ale unui segment al profilului de zbor, parametrii de zbor sunt interpolați după cum urmează:
unde:
A se reține că se presupune că z și ε variază liniar cu distanța, iar V și P variază liniar cu timpul (și anume, accelerația e constantă (**)). La punerea în corespondență a segmentelor profilului de zbor cu datele radar (analiza traiectului de zbor) toate distanțele, înălțimile, vitezele și unghiurile de înclinare de la punctele finale sunt luate direct din date; numai setările de putere trebuie calculate utilizând ecuațiile de performanță. Deoarece coordonatele traiectoriei la sol și ale profilului de zbor pot fi, de asemenea, puse în corespondență în mod adecvat, acest procedeu este, de obicei, destul de simplu. Rularea la sol pentru decolare La decolare, deoarece o aeronavă accelerează între punctul de deblocare a frânelor (denumit, alternativ, începerea rulării SOR) și punctul de ridicare de la sol, viteza se schimbă considerabil pe o distanță de 1 500-2 500 m, de la zero la aproximativ 80-100 m/s. Rularea pentru decolare este, în consecință, împărțită în segmente cu lungimi variabile; pe fiecare dintre acestea, viteza aeronavei variază cu o creștere specifică ΔV de cel mult 10 m/s (aproximativ 20 kt). Pentru scopul urmărit, este indicat să se presupună că accelerația e constantă, deși, în realitate, aceasta variază în timpul rulării pentru decolare. În acest caz, pentru faza de decolare, V1 este viteza inițială, V2 este viteza de decolare, nTO este numărul de segmente pentru decolare și sTO este distanța echivalentă de decolare. Pentru distanța echivalentă de decolare sTO (a se vedea apendicele B), viteza inițială V1 și viteza de decolare VTO , numărul nTO de segmente pentru rularea la sol este:
și deci variația vitezei de-a lungul segmentului este:
iar timpul Δt pe fiecare segment este (accelerația se consideră constantă):
Lungimea sTO,k a segmentului k (1 ≤ k ≤ nTO) al rulării pentru decolare este:
Exemplu: Pentru o distanță de decolare sTO = 1 600 m, V1 = 0 m/s și V2 = 75 m/s, nTO = 8 segmente cu lungimi cuprinse între 25 și 375 de metri (a se vedea figura 2.7.g):
În mod similar vitezei, tracțiunea aeronavei variază pe fiecare segment cu o creștere constantă ΔP, calculată cu ecuația:
unde PTO și P init desemnează tracțiunea aeronavei la punctul de ridicare de la sol și, respectiv, tracțiunea aeronavei la începutul rulării pentru decolare. Se utilizează această creștere constantă a tracțiunii (în locul ecuației pătratice 2.7.6) din motive de consecvență cu relația liniară dintre tracțiune și viteză în cazul aeronavelor cu motor cu reacție. Notă importantă: Ecuațiile și exemplul de mai sus presupun că viteza inițială a aeronavei la începutul fazei de decolare este zero. Acest lucru corespunde situației comune în care aeronava începe să ruleze și accelerează după punctul de deblocare a frânelor. Cu toate acestea, există și situații în care aeronava începe să accelereze de la viteza de rulare, fără a se opri la pragul pistei. În acest caz de viteză inițială Vinit diferită zero, trebuie utilizate următoarele ecuații „generalizate” în locul ecuațiilor 2.7.8, 2.7.9, 2.7.10 și 2.7.11.
În acest caz, pentru faza de decolare, V1 este viteza inițială Vinit , V2 este viteza de decolare VTO , n este numărul de segmente pentru decolare nTO , s este distanța echivalentă de decolare sTO și sk este lungimea sTO,k a segmentului k (1[Symbol]k[Symbol]n). Rularea la sol la aterizare Deși rularea la sol la aterizare este, în esență, o inversare a rulării la sol pentru decolare, trebuie să se țină seama, în special, de:
Spre deosebire de distanța de rulare pentru decolare, care se obține cu ajutorul parametrilor de performanță ai aeronavei, distanța de oprire sstop (și anume, distanța de la punctul de contact cu pista la punctul în care aeronava părăsește pista) nu este pur specifică aeronavei. Deși poate fi estimată o distanță minimă de oprire ținând seama de masa și de performanța aeronavei (și de tracțiunea inversă disponibilă), distanța de oprire reală depinde și de amplasarea pistelor, de situația traficului și de reglementările specifice aeroportului privind utilizarea tracțiunii inverse. Aplicarea tracțiunii inverse nu este o procedură standard – aceasta se utilizează numai dacă decelerația necesară nu poate fi obținută folosind frânele roților. (Tracțiunea inversă poate fi deosebit de perturbatoare, deoarece în urma modificării rapide a puterii motorului de la ralanti la setările inverse se produce brusc un zgomot intens.) Majoritatea pistelor sunt însă utilizate atât pentru plecări, cât și pentru aterizări, astfel încât tracțiunea inversă are un efect foarte mic asupra contururilor de zgomot, întrucât energia acustică totală în vecinătatea pistei este dominată de zgomotul produs de operațiunile de decolare. Contribuțiile tracțiunii inverse la contururi pot fi semnificative numai atunci când pista este utilizată exclusiv pentru operațiuni de aterizare. Fizic, zgomotul produs de tracțiunea inversă este un proces foarte complex, dar deoarece are o importanță destul de mică pentru contururile de zgomot ambiental, acesta poate fi modelat simplist, modificarea rapidă a puterii motorului fiind luată în considerare printr-o segmentare adecvată. Este clar că modelarea rulării la sol după aterizare nu este atât de simplă ca în cazul rulării pentru decolare. Următoarele ipoteze pentru modelarea simplificată sunt recomandate pentru utilizare generală, atunci când nu sunt disponibile informații detaliate (a se vedea figura 2.7.h.1).
Aeronava trece pragul de aterizare (care are coordonata s = 0 pe traiectoria la sol de apropiere) la o altitudine de 50 de picioare și continuă apoi pe panta de coborâre până când atinge pista. Pentru o pantă de coborâre de 3°, punctul de contact cu pista este situat la 291 m de pragul de aterizare (după cum se arată în figura 2.7.h.1). Aeronava este apoi decelerată pe distanța de oprire sstop – valorile specifice ale aeronavei pe această distanță figurează în baza de date ANP – de la viteza de apropiere finală Vfinal până la 15 m/s. Din cauza modificărilor rapide ale vitezei pe acest segment, acesta trebuie subsegmentat la fel ca pentru rularea la sol pentru decolare (sau pentru segmentele aeriene cu modificări rapide ale vitezei), utilizând ecuațiile generalizate 2.7.13 (deoarece viteza de rulare nu este 0). Puterea motoarelor se modifică de la puterea de apropiere finală la punctul de contact cu pista la puterea de tracțiune inversă Prev pe o distanță de 0,1•sstop , apoi scade la 10 % din puterea maximă disponibilă pe restul de 90 % din distanța de oprire. Până la sfârșitul pistei (la s = -s RWY), viteza aeronavei rămâne constantă. Curbele NPD pentru tracțiunea inversă nu sunt în prezent incluse în baza de date ANP și, prin urmare, este necesar să se apeleze la curbele convenționale pentru modelarea acestui efect. De obicei, puterea tracțiunii inverse Prev este de aproximativ 20 % din puterea totală și este recomandată atunci când nu sunt disponibile informații operaționale. Cu toate acestea, la o setare de putere dată, tracțiunea inversă tinde să genereze un zgomot considerabil mai mare decât tracțiunea directă, astfel încât pentru nivelul obținut din NPD al evenimentului se aplică o creștere ΔL, care progresează de la zero la valoarea ΔLrev (5dB este valoarea recomandată provizoriu (***)) de a lungul a 0,1•sstop și apoi scade liniar la zero pe restul distanței de oprire. Segmentarea segmentului de urcare inițială și a segmentului de apropiere finală Geometria segment-receptor se schimbă rapid de a lungul segmentelor aeriene de urcare inițială și de apropiere finală, în special în ceea ce privește pozițiile observatorului din dreptul traiectului de zbor, unde unghiul de elevație (unghiul beta) se schimbă, de asemenea, rapid, pe măsură ce aeronava urcă sau coboară de a lungul acestor segmente inițiale/finale. Comparațiile cu calculele segmentelor foarte mici arată că utilizarea unui singur segment aerian de urcare sau de apropiere sau a unui număr limitat de segmente aeriene de urcare sau de apropiere sub o anumită înălțime (față de pistă) conduce la o aproximare nesatisfăcătoare a zgomotului în dreptul traiectului de zbor pentru metricile integrate. Acest lucru se datorează aplicării unei singure ajustări a atenuării laterale pentru fiecare segment, care corespunde unei singure valori specifice segmentului pentru unghiul de elevație, în timp ce modificarea rapidă a acestui parametru determină variații semnificative ale efectului de atenuare laterală de-a lungul fiecărui segment. Acuratețea calculului este îmbunătățită prin subsegmentarea segmentului aerian de urcare inițială și a segmentului aerian de apropiere finală. Numărul de subsegmente și lungimea fiecăruia dintre acestea determină «granularitatea» modificării atenuării laterale care va fi luată în considerare. Observând expresia atenuării laterale totale pentru aeronavele cu motoare montate pe fuzelaj, se poate demonstra că, pentru o modificare limitată a atenuării laterale de 1,5 dB per subsegment, segmentele aeriene de urcare și de apropiere situate sub înălțimea de 1 289,6 m (4 231 ft) deasupra pistei ar trebui subsegmentate conform următorului set de valori ale înălțimii:
Pentru fiecare segment original situat sub 1 289,6 m (4 231 ft), înălțimile de mai sus sunt aplicate identificând în setul de mai sus înălțimea cea mai apropiată de înălțimea originală a punctului final (pentru un segment de urcare) sau de înălțimea originală a punctului de început (pentru un segment de apropiere). Înălțimile reale zi ale subsegmentelor vor fi apoi calculate cu ecuația:
unde:
Exemplu pentru un segment de urcare inițială: Dacă înălțimea punctului final al segmentului original este ze = 304,8 m, atunci din setul de valori ale înălțimii rezultă că 214,9 m < ze < 334,9 m, înălțimea din set cea mai apropiată de ze fiind z’7 = 334,9 m. Înălțimile punctelor finale ale subsegmentelor sunt apoi calculate cu ecuația:
(se observă că, în acest caz, k = 1, deoarece este vorba de un segment de urcare inițială). Prin urmare, z1 = 17,2 m, z2 = 37,8 m etc. Segmentarea segmentelor aeriene În ceea ce privește segmentele aeriene, dacă viteza se modifică semnificativ de a lungul unui segment, acesta este subdivizat ca în cazul rulării la sol, și anume,
unde V1 și V2 sunt vitezele la începutul și, respectiv, la finalul segmentului. Parametrii corespunzători ai subsegmentului sunt calculați la fel ca în cazul rulării la sol pentru decolare, utilizând ecuațiile 2.7.9-2.7.11. Traiectoria la sol O traiectorie la sol, indiferent dacă este o traiectorie principală sau o subtraiectorie dispersată, este definită de o serie de coordonate (x,y) în planul terestru (obținute, de exemplu, din informațiile radar) sau de o succesiune de comenzi vectoriale care descriu segmente drepte și arce de cerc (viraje cu raza r și schimbarea capului-compas Δξ definite). Pentru modelarea segmentării, un arc este reprezentat printr-o succesiune de segmente drepte care corespund subarcurilor. Deși acestea nu apar explicit în segmentele traiectoriei la sol, înclinarea aeronavei în cursul virajelor influențează definiția lor. Apendicele B4 explică modul de calcul al unghiurilor de înclinare în cursul unui viraj constant, dar desigur că acestea nu sunt în realitate aplicate sau anulate instantaneu. Modul de gestionare a tranziției de la zborul drept la viraj sau de la un viraj la un viraj secvențial imediat nu este precizat. De regulă, detaliile lăsate la latitudinea utilizatorului (a se vedea secțiunea 2.7.11) au un efect potențial neglijabil asupra contururilor finale; este necesar, în principal, să se evite discontinuitățile bruște la finalul virajelor, iar acest lucru poate fi realizat cu ușurință, de exemplu, prin inserarea unor segmente scurte de tranziție, pe care unghiul de înclinare variază liniar cu distanța. Numai în cazul special în care este posibil ca un anumit viraj să aibă un efect dominant asupra contururilor finale ar fi necesar să se modeleze mai realist dinamica tranziției, pentru a face legătura dintre tipurile de aeronave și unghiul de înclinare și a adopta ratele de rulare adecvate. În cazul de față, este suficient să se precizeze că subarcurile finale Δξtrans din orice viraj sunt dictate de cerințele de modificare a unghiului de înclinare. Restul arcului cu o schimbare a capului-compas de Δξ – 2·Δξtrans grade este divizat în nsub subarce conform ecuației:
unde int(x) este o funcție care redă partea întreagă a lui x. Apoi schimbarea capului-compas Δξ sub dată de fiecare subarc se calculează cu ecuația:
unde nsub trebuie să fie suficient de mare pentru a asigura că Δξ sub ≤ 10 grade. Segmentarea unui arc (cu excepția subsegmentelor terminale ale tranziției) este ilustrată în figura 2.7.h.2 (****).
După ce segmentele traiectoriei la sol au fost stabilite în planul x-y, peste acestea se plasează segmentele profilului de zbor (din planul s-z), pentru a obține segmentele tridimensionale (x, y, z) ale traiectoriei. Traiectoria la sol ar trebui să se întindă întotdeauna de la pistă până dincolo de spațiul acoperit de rețeaua de calcul. Acest lucru poate fi realizat adăugând, dacă este necesar, un segment drept cu lungimea adecvată după ultimul segment al traiectoriei la sol. Lungimea totală a profilului de zbor, după fuziunea cu traiectoria la sol, trebuie, de asemenea, să se întindă de la pistă până dincolo de spațiul acoperit de rețeaua de calcul. Acest lucru poate fi realizat adăugând, dacă este necesar, un punct suplimentar de profil:
Ajustări ale segmentării segmentelor aeriene După obținerea segmentelor tridimensionale ale traiectului de zbor conform procedurii descrise în secțiunea 2.7.13, pot fi necesare ajustări ale segmentării, pentru a îndepărta punctele prea apropiate ale traiectului de zbor. Atunci când există puncte adiacente care se situează la 10 metri sau mai puțin unul de celălalt, iar vitezele și tracțiunile asociate sunt aceleași, unul dintre puncte ar trebui eliminat. (*) În acest scop, lungimea totală a traiectoriei la sol trebuie să depășească întotdeauna lungimea profilului de zbor. Acest lucru poate fi realizat adăugând, dacă este necesar, segmente drepte cu o lungime adecvată după ultimul segment al traiectoriei la sol." (**) Chiar dacă setările de putere ale motorului rămân constante de-a lungul unui segment, forța de propulsie și accelerația pot suferi modificări ca urmare a variației densității aerului cu înălțimea. Din perspectiva modelării zgomotului, aceste modificări sunt însă, în mod normal, neglijabile." (***) Această valoare a fost recomandată în ediția anterioară a ECAC Doc 29, dar este în continuare considerată provizorie, până la obținerea mai multor date experimentale coroborante." (****) Definită în acest mod simplu, lungimea totală a traiectului segmentat este ușor mai mică decât cea a traiectului circular. Cu toate acestea, eroarea rezultată a conturului este neglijabilă dacă creșterile unghiulare sunt mai mici de 30°.”" |




|
14. |
Secțiunea 2.7.16 „Determinarea nivelurilor evenimentului cu ajutorul datelor NPD” se înlocuiește cu următorul text: „2.7.16. Determinarea nivelurilor evenimentului cu ajutorul datelor NPD Sursa principală a datelor referitoare la zgomotul aeronavelor este baza de date internațională privind zgomotul și performanțele aeronavelor (Aircraft Noise and Performance – ANP). Aceasta prezintă Lmax și LE sub formă tabelară, ca funcții de distanța de propagare d pentru tipuri și variante specifice de aeronave, configurații de zbor (apropiere, plecare, poziția flapsurilor) și setări de putere P. Aceste valori sunt valabile pentru un zbor constant la vitezele de referință specifice Vref de a lungul unui traiect de zbor drept, teoretic infinit (*). Modul în care sunt specificate valorile variabilelor independente P și d este descris ulterior. La o singură căutare cu valorile de intrare P și d, valorile de ieșire necesare sunt nivelurile de bază Lmax(P,d) și/sau LE ∞(P,d) (aplicabile pentru un traiect de zbor infinit). Cu excepția cazului în care valorile sunt tabelate exact pentru P și/sau d, este necesar, în general, să se estimeze nivelul (nivelurile) necesar(e) de zgomot al (ale) evenimentului prin interpolare. Se utilizează o interpolare liniară între setările de putere tabelate și o interpolare logaritmică între distanțele tabelate (a se vedea figura 2.7.i).
Dacă Pi și Pi+ 1 sunt valori ale puterii motoarelor pentru care nivelul de zgomot este tabelat în funcție de distanță, nivelul de zgomot L(P) la o distanță dată, pentru puterea intermediară P dintre Pi și Pi+ 1 este dat de ecuația:
Dacă, la orice setare de putere, di și di+ 1 sunt distanțe pentru care sunt tabelate datele privind zgomotul, nivelul zgomotului L(d) pentru distanța intermediară d dintre di și di+ 1 este dat de ecuația:
Utilizând ecuațiile (2.7.19) și (2.7.20) se poate obține un nivel de zgomot L(P,d) pentru orice setare de putere P și orice distanță d din domeniul acoperit de baza de date NPD. În cazul distanțelor d din afara domeniului acoperit de baza de date NPD, ecuația 2.7.20 se utilizează pentru a extrapola pornind de la ultimele două valori, și anume, spre interior, de la L(d1) și L(d2) sau, spre exterior, de la L(dI-1) și L(dI), unde I este numărul total de puncte NPD de pe curbă. Prin urmare, spre interior:
spre exterior:
Deoarece la distanțe d scurte nivelurile de zgomot cresc foarte rapid cu scăderea distanței de propagare, se recomandă să se impună o limită inferioară de 30 m pentru distanța d, și anume d = max (d, 30 m). Ajustarea datelor standard NPD ca urmare a impedanței Datele NPD din baza de date ANP sunt standardizate pentru condițiile atmosferice de referință (temperatura de 25 °C și presiunea de 101,325 kPa). Înainte de aplicarea metodei de interpolare/extrapolare descrise anterior, se aplică o ajustare a acestor date standard NPD ca urmare a impedanței acustice. Impedanța acustică se referă la propagarea undelor sonore într-un mediu acustic și este definită ca fiind un produs al densității aerului și al vitezei sunetului. Pentru o intensitate a sunetului dată (putere per unitate de suprafață), percepută la o distanță specifică de sursă, presiunea acustică asociată (utilizată pentru a defini metricile SEL și LAmax) depinde de impedanța acustică a aerului la locul de măsurare. Este o funcție de temperatură și de presiunea atmosferică (și, indirect, de altitudine). Prin urmare, este necesar să se ajusteze datele standard NPD din baza de date ANP pentru a ține seama de condițiile reale de temperatură și presiune la punctul receptor, care sunt, în general, diferite de condițiile standardizate ale datelor ANP. Ajustarea care trebuie aplicată nivelurilor standard NPD ca urmare a impedanței este exprimată după cum urmează:
unde:
Impedanța ρ·c este calculată după cum urmează:
Ajustarea ca urmare a impedanței acustice este, de obicei, mai mică de câteva zecimi de decibel. Ar trebui să se observe, în special, că, în condițiile atmosferice standard (p0 = 101,325 kPa și T0 = 15,0 °C), ajustarea ca urmare a impedanței este mai mică de 0,1 dB (0,074 dB). Cu toate acestea, atunci când există o variație semnificativă a temperaturii și a presiunii atmosferice față de condițiile atmosferice de referință ale datelor NPD, ajustarea poate fi mai substanțială. (*) Deși noțiunea de traiect de zbor cu lungimea infinită este importantă pentru definirea nivelului de expunere la sunetul unui eveniment LE, aceasta are mai puțină relevanță în cazul nivelului maxim al evenimentului Lmax, care este legat de zgomotul emis de aeronavă atunci când se află într-o poziție specifică în sau în vecinătatea celui mai apropiat punct de apropiere față de observator. În scopul modelării, parametrul reprezentat de distanța NPD se consideră a fi distanța minimă dintre observator și segment.”" |




|
15. |
În secțiunea 2.7.18 „Parametrii segmentului traiectoriei de zbor”, paragraful de sub titlul „Puterea segmentului P” se înlocuiește cu următorul text: „Puterea P a unui segment Datele NPD tabelate descriu zgomotul unei aeronave în zbor drept, constant, pe un traiect de zbor infinit, cu alte cuvinte, la o putere P constantă a motoarelor. Metodologia recomandată împarte traiectele reale de zbor, de a lungul cărora viteza și direcția variază, într-un număr de segmente finite, fiecare dintre acestea fiind apoi considerat ca făcând parte dintr-un traiect de zbor uniform, infinit, pentru care sunt valabile datele NPD. Metodologia prevede însă modificări ale puterii de a lungul unui segment; se consideră că aceasta se modifică pătratic cu distanța, de la P1 la începutul segmentului, la P2 la sfârșitul segmentului. Prin urmare, este necesar să se definească pentru segment o valoare P echivalentă, constantă. Se consideră că aceasta este valoarea în punctul de pe segment care este cel mai apropiat de observator. Dacă observatorul se situează în dreptul segmentului (figura 2.7.k), puterea se obține prin interpolare între valorile finale conform ecuației 2.7.8, și anume,
Dacă observatorul se situează în spatele sau în fața segmentului, puterea este cea de la cel mai apropiat punct final, P1 sau P2 .” |
|
16. |
Secțiunea 2.7.19 se modifică după cum urmează:
|

 ;
; 






|
17. |
Secțiunea 2.8 se înlocuiește cu următorul text: „2.8. Expunerea la zgomot Determinarea suprafeței expuse la zgomot Evaluarea suprafeței expuse la zgomot se bazează pe puncte de evaluare a zgomotului situate la 4 m ± 0,2 deasupra solului, care corespund punctelor receptoare definite în secțiunile 2.5, 2.6 și 2.7 și se calculează pe o rețea pentru surse individuale. Se atribuie un nivel de zgomot punctelor rețelei situate în interiorul clădirilor, considerând că cele mai apropiate puncte de recepție a zgomotului situate în afara clădirilor sunt cele mai silențioase; zgomotul produs de aeronave face excepție, deoarece în acest caz calculul se efectuează fără a lua în considerare prezența clădirilor și se utilizează direct punctul recepție a zgomotului care se situează într-o clădire. În funcție de rezoluția rețelei, se atribuie fiecărui punct de calcul din rețea o suprafață corespunzătoare. De exemplu, într-o rețea de 10 m × 10 m, fiecare punct de evaluare reprezintă o suprafață de 100 demetri pătrați, care este expusă nivelului calculat de zgomot. Atribuirea de puncte de evaluare a zgomotului pentru clădirile care nu cuprind locuințe Evaluarea expunerii la zgomot a clădirilor care nu cuprind locuințe, cum ar fi școlile și spitalele, se bazează pe puncte de evaluare a zgomotului situate la 4 ± 0,2 m deasupra solului, care corespund punctelor receptoare definite în secțiunile 2.5, 2.6 și 2.7. Pentru evaluarea clădirilor care nu cuprind locuințe și sunt expuse la zgomotul produs de aeronave, fiecare clădire este asociată celui mai zgomotos punct de recepție a zgomotului situat în clădire sau, dacă acesta nu există, situat pe rețeaua care înconjoară clădirea. Pentru evaluarea clădirilor care nu cuprind locuințe și sunt expuse la surse de zgomot aflate pe sol, punctele receptoare sunt plasate la aproximativ 0,1 m înaintea fațadelor clădirilor. Reflexiile pe fațadele respective nu se includ în calcul. Clădirea este apoi asociată celui mai zgomotos punct receptor de pe fațadele sale. Determinarea locuințelor expuse la zgomot și a persoanelor care trăiesc în locuințe expuse la zgomot Pentru evaluarea expunerii la zgomot a locuințelor și a expunerii persoanelor care trăiesc în locuințe, se iau în considerare numai clădirile rezidențiale. Locuințele sau persoanele nu se atribuie clădirilor nerezidențiale, cum ar fi cele utilizate exclusiv ca școli, spitale, clădiri de birouri sau fabrici. Locuințele și persoanele care trăiesc în locuințe sunt atribuite clădirilor rezidențiale pe baza celor mai recente date oficiale (în funcție de reglementările relevante ale statului membru). Numărul de locuințe din clădirile rezidențiale și de persoane care trăiesc în aceste locuințe reprezintă parametri intermediari importanți pentru estimarea expunerii la zgomot. Din păcate, datele privind acești parametri nu sunt întotdeauna disponibile. Mai jos se precizează modul în care pot fi obținuți acești parametri din datele disponibile. Simbolurile utilizate în continuare sunt: BA = suprafața bazei clădirii DFS = suprafața locuibilă DUFS = suprafața locuibilă a unității locative H= = înălțimea clădirii FSI = suprafața locuibilă per persoană care trăiește în locuințe Dw = numărul de locuințe Inh = numărul de persoane care trăiesc în locuințe NF = numărul de etaje V = volumul clădirilor rezidențiale Pentru calcularea numărului de locuințe și de persoane care trăiesc în locuințe, se utilizează fie procedura descrisă la cazul 1, fie procedura descrisă la cazul 2, în funcție de disponibilitatea datelor. Cazul 1: datele privind numărul de locuințe și de persoane care trăiesc în locuințe sunt disponibile 1A: Numărul de persoane care trăiesc în locuințe este cunoscut sau a fost estimat pe baza numărului de unități locative. În acest caz, numărul de persoane care trăiesc în locuințele dintr-o clădire reprezintă suma numerelor persoanelor care trăiesc în toate unitățile locative din clădire:
1B: Numărul de locuințe sau de persoane care trăiesc în locuințe este cunoscut numai pentru entitățile mai mari decât o clădire, de exemplu, pentru zone de recensământ, grupuri de clădiri, cartiere sau chiar o întreagă municipalitate. În acest caz, numărul de locuințe dintr-o clădire și numărul de persoane care trăiesc în locuințele respective se estimează pe baza volumului clădirii:
Indicele „total” se referă la entitatea luată în considerare. Volumul clădirii este produsul dintre suprafața bazei clădirii și înălțimea acesteia:
Dacă înălțimea clădirii nu este cunoscută, aceasta se estimează pe baza numărului de etaje NFbuilding , presupunând că înălțimea medie a unui etaj este de 3 m:
Dacă nici numărul de etaje nu este cunoscut, se utilizează o valoare implicită pentru numărul de etaje, care este reprezentativă pentru cartier sau sector. Volumul total al clădirilor rezidențiale din entitatea luată în considerare Vtotal se calculează ca sumă a volumelor tuturor clădirilor rezidențiale din entitate: (2.8.5)
Cazul 2: nu sunt disponibile date privind numărul de persoane care trăiesc în locuințe În acest caz, numărul de persoane care trăiesc în locuințe se estimează pe baza suprafeței locuibile medii per persoană care trăiește în locuințe, FSI. Dacă acest parametru nu este cunoscut, se utilizează o valoare implicită. 2 A: Suprafața locuibilă este cunoscută pe baza unităților locative. În acest caz, numărul de persoane care trăiesc în fiecare unitate locativă este estimat după cum urmează:
Numărul total de persoane care trăiesc în locuințele din clădire poate fi apoi estimat ca în cazul 1A. 2 B: Suprafața locuibilă este cunoscută pentru întreaga clădire, respectiv se cunoaște suma suprafețelor locuibile ale tuturor unităților locative din clădire. În acest caz, numărul de persoane care trăiesc în locuințe este estimat după cum urmează:
2C: Suprafața locuibilă este cunoscută numai pentru entitățile mai mari decât o clădire, de exemplu, pentru zone de recensământ, grupuri de clădiri, cartiere sau chiar o întreagă municipalitate. În acest caz, numărul de persoane care trăiesc în locuințele dintr-o clădire se estimează pe baza volumului clădirii, astfel cum se arată în Cazul 1B, numărul total de persoane care trăiesc în locuințe fiind estimat după cum urmează:
2D: Suprafața locuibilă nu este cunoscută. În acest caz, numărul de persoane care trăiesc în locuințele dintr-o clădire se estimează astfel cum se arată în Cazul 2B, suprafața locuibilă fiind estimată după cum urmează: (2.8.9)
Factorul 0,8 este factorul de conversie suprafață brută → suprafață locuibilă. Dacă se cunoaște un alt factor care este reprezentativ pentru zonă, se utilizează acesta în schimb și se documentează clar. Dacă numărul de etaje al clădirii nu este cunoscut, acesta se estimează pe baza înălțimii clădirii Hbuilding , ceea ce conduce, de regulă, la un număr zecimal de etaje:
Dacă nu se cunosc nici înălțimea clădirii, nici numărul de etaje, se utilizează pentru numărul de etaje o valoare implicită, care este reprezentativă pentru cartier sau sector. Atribuirea de puncte de evaluare a zgomotului pentru locuințe și persoanele care trăiesc în locuințe Evaluarea expunerii la zgomot a locuințelor și a persoanelor care trăiesc în locuințe se bazează pe puncte de evaluare a zgomotului situate la 4 ± 0,2 m deasupra solului, care corespund punctelor receptoare definite în secțiunile 2.5, 2.6 și 2.7. Pentru calcularea numărului de locuințe și de persoane care trăiesc în locuințe și sunt expuse la zgomotul produs de aeronave, toate locuințele dintr-o clădire și persoanele care trăiesc în aceste locuințe sunt asociate celui mai zgomotos punct de recepție a zgomotului situat în clădire sau, dacă acesta nu există, situat pe rețeaua care înconjoară clădirea. Pentru calcularea numărului de locuințe și de persoane care trăiesc în locuințe și sunt expuse la surse de zgomot aflate pe sol, punctele receptoare sunt plasate la aproximativ 0,1 m înaintea fațadelor clădirilor rezidențiale. Reflexiile pe fațadele respective nu se includ în calcul. Pentru localizarea punctelor receptoare se utilizează fie procedura descrisă la cazul 1, fie procedura descrisă la cazul 2. Cazul 1: fațade împărțite în intervale regulate pe fiecare fațadă
Cazul 2: fațade împărțite la o distanță determinată de la începutului poligonului
Atribuirea locuințelor și a persoanelor care trăiesc în locuințe către punctele receptoare Dacă sunt disponibile informații privind amplasarea locuințelor pe amprenta la sol a clădirii, locuința respectivă și persoanele care trăiesc în aceasta sunt atribuite punctului receptor de la fațada cea mai expusă a locuinței. În această situație sunt, de exemplu, casele individuale, casele semi-individuale și casele înșiruite, blocurile de apartamente a căror divizare internă este cunoscută, clădirile la care mărimea suprafeței etajului indică existența unei singure locuințe pe etaj sau clădirile la care mărimea suprafeței și înălțimea indică existența unei singure locuințe în clădire. Dacă nu sunt disponibile informații privind amplasarea locuințelor pe amprenta la sol a clădirii, astfel cum s-a explicat mai sus, se utilizează una din următoarele două metode, după caz și în funcție de clădire, pentru a estima expunerea la zgomot a locuințelor din clădiri și a persoanelor din aceste locuințe.
(*) Valoarea mediană este valoarea care separă jumătatea superioară (50 %) a unui set de date de jumătatea inferioară (50 %)." (**) Jumătatea inferioară a setului de date poate fi asociată cu prezența fațadelor relativ calme. Dacă se știe în avans, de exemplu, pe baza amplasării clădirilor față de sursele dominante de zgomot, care sunt punctele receptoare cu cel mai ridicat/cel mai scăzut nivel de zgomot, nu este necesară calcularea zgomotului pentru jumătatea inferioară.”" |



|
18. |
Apendicele D se modifică după cum urmează:
|
|
19. |
Apendicele F se modifică după cum urmează:
|
|
20. |
Apendicele G se modifică după cum urmează:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21. |
Apendicele I se modifică după cum urmează:
|
(*) În acest scop, lungimea totală a traiectoriei la sol trebuie să depășească întotdeauna lungimea profilului de zbor. Acest lucru poate fi realizat adăugând, dacă este necesar, segmente drepte cu o lungime adecvată după ultimul segment al traiectoriei la sol.
(**) Chiar dacă setările de putere ale motorului rămân constante de-a lungul unui segment, forța de propulsie și accelerația pot suferi modificări ca urmare a variației densității aerului cu înălțimea. Din perspectiva modelării zgomotului, aceste modificări sunt însă, în mod normal, neglijabile.
(***) Această valoare a fost recomandată în ediția anterioară a ECAC Doc 29, dar este în continuare considerată provizorie, până la obținerea mai multor date experimentale coroborante.
(****) Definită în acest mod simplu, lungimea totală a traiectului segmentat este ușor mai mică decât cea a traiectului circular. Cu toate acestea, eroarea rezultată a conturului este neglijabilă dacă creșterile unghiulare sunt mai mici de 30°.”
(*) Deși noțiunea de traiect de zbor cu lungimea infinită este importantă pentru definirea nivelului de expunere la sunetul unui eveniment LE, aceasta are mai puțină relevanță în cazul nivelului maxim al evenimentului Lmax, care este legat de zgomotul emis de aeronavă atunci când se află într-o poziție specifică în sau în vecinătatea celui mai apropiat punct de apropiere față de observator. În scopul modelării, parametrul reprezentat de distanța NPD se consideră a fi distanța minimă dintre observator și segment.”
(*) Aceasta este cunoscută sub denumirea de corecția pentru durată, deoarece ține seama de efectele vitezei aeronavei asupra duratei evenimentului sonor, aplicând presupunerea simplă că, dacă niciun alt parametru nu se schimbă, durata și, prin urmare, energia acustică primită ca urmare a evenimentului este invers proporțională cu viteza sursei.”
(*) Valoarea mediană este valoarea care separă jumătatea superioară (50 %) a unui set de date de jumătatea inferioară (50 %).
(**) Jumătatea inferioară a setului de date poate fi asociată cu prezența fațadelor relativ calme. Dacă se știe în avans, de exemplu, pe baza amplasării clădirilor față de sursele dominante de zgomot, care sunt punctele receptoare cu cel mai ridicat/cel mai scăzut nivel de zgomot, nu este necesară calcularea zgomotului pentru jumătatea inferioară.””