ISSN 1977-0774
Jornal Oficial
da União Europeia
L 42

Edição em língua portuguesa
Legislação
59.° ano
18 de fevereiro de 2016
|
ISSN 1977-0774 |
||
|
Jornal Oficial da União Europeia |
L 42 |
|
|
|
||
|
Edição em língua portuguesa |
Legislação |
59.° ano |
|
Índice |
|
II Atos não legislativos |
Página |
|
|
|
ATOS ADOTADOS POR INSTÂNCIAS CRIADAS POR ACORDOS INTERNACIONAIS |
|
|
|
* |
|
PT |
Os actos cujos títulos são impressos em tipo fino são actos de gestão corrente adoptados no âmbito da política agrícola e que têm, em geral, um período de validade limitado. Os actos cujos títulos são impressos em tipo negro e precedidos de um asterisco são todos os restantes. |
II Atos não legislativos
ATOS ADOTADOS POR INSTÂNCIAS CRIADAS POR ACORDOS INTERNACIONAIS
|
18.2.2016 |
PT |
Jornal Oficial da União Europeia |
L 42/1 |
Só os textos originais da UNECE fazem fé ao abrigo do direito internacional público. O estatuto e a data de entrada em vigor do presente regulamento devem ser verificados na versão mais recente do documento UNECE comprovativo do seu estatuto, TRANS/WP.29/343, disponível no seguinte endereço:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamento n.o 13 da Comissão Económica das Nações Unidas para a Europa (UNECE) — Prescrições uniformes relativas à homologação dos veículos das categorias M, N e O no que diz respeito à travagem [2016/194]
Integra todo o texto válido até:
Suplemento 13 à série 11 de alterações — Data de entrada em vigor: 8 de outubro de 2015
ÍNDICE
REGULAMENTO
|
1. |
Âmbito de aplicação |
|
2. |
Definições |
|
3. |
Pedido de homologação |
|
4. |
Homologação |
|
5. |
Especificações |
|
6. |
Ensaios |
|
7. |
Modificação do modelo de veículo ou do seu sistema de travagem e extensão da homologação |
|
8. |
Conformidade da produção |
|
9. |
Sanções pela não conformidade da produção |
|
10. |
Cessação definitiva da produção |
|
11. |
Designações e endereços dos serviços técnicos responsáveis pela realização dos ensaios de homologação e das entidades homologadoras |
|
12. |
Disposições transitórias |
ANEXOS
|
1 |
Equipamento, dispositivos, métodos e condições de travagem não abrangidos pelo presente regulamento |
|
2 |
Comunicação |
|
Apêndice 1 — |
Lista de dados do veículo para efeitos de homologação nos termos do Regulamento n.o 90 |
|
Apêndice 2 — |
Certificado de homologação referente ao equipamento de travagem do veículo |
|
3 |
Disposições das marcas de homologação |
|
4 |
Ensaios de travagem e desempenho dos sistemas de travagem |
|
Apêndice — |
Procedimento para monitorizar o estado de carga da bateria |
|
5 |
Disposições adicionais aplicáveis a determinados veículos conforme especificado no acordo ADR |
|
6 |
Método de medição do tempo de resposta em veículos equipados com sistemas de travagem a ar comprimido |
|
Apêndice — |
Exemplos de simulador |
|
7 |
Disposições relativas às fontes de energia e aos dispositivos de armazenamento de energia (acumuladores de energia) |
|
8 |
Disposições relativas a condições específicas aplicáveis aos sistemas de travagem de molas |
|
9 |
Disposições relativas aos sistemas de travagem de estacionamento equipados com um dispositivo de bloqueio mecânico dos cilindros dos travões (travões de segurança) |
|
10 |
Repartição da travagem pelos eixos dos veículos e requisitos de compatibilidade entre veículos tratores e reboques |
|
11 |
Casos em que não são necessários ensaios de tipo I e/ou de tipo II (ou de tipo II-A) ou de tipo III |
|
Apêndice 1 |
|
|
Apêndice 2 — |
Procedimentos alternativos para ensaios de tipo I e de tipo III dos travões de reboques |
|
Apêndice 3 — |
Modelo de relatório de ensaio prescrito no ponto 3.9 do apêndice 2 do presente anexo |
|
Apêndice 4 — |
Modelo de relatório de ensaio para um dispositivo alternativo de regulação automática dos travões, prescrito no ponto 3.7.3 do apêndice 2 do presente anexo |
|
Apêndice 5 — |
Ficha de informações sobre os eixos e os travões de reboques no que respeita ao procedimento alternativo para os ensaios de tipo I e de tipo III |
|
12 |
Condições que regem os ensaios dos veículos equipados com sistemas de travagem por inércia |
|
Apêndice 1 |
|
|
Apêndice 2 — |
Relatório de ensaio sobre o dispositivo de comando do sistema de travagem por inércia |
|
Apêndice 3 — |
Relatório de ensaio do travão |
|
Apêndice 4 — |
Relatório de ensaio relativo à compatibilidade entre o dispositivo de comando do travão por inércia, a transmissão e os travões no reboque |
|
13 |
Requisitos aplicáveis aos ensaios de veículos equipados com sistema antibloqueio |
|
Apêndice 1 — |
Símbolos e definições |
|
Apêndice 2 — |
Utilização da aderência |
|
Apêndice 3 — |
Desempenho em pisos com aderências diferentes |
|
Apêndice 4 — |
Método de seleção dos pisos de baixa aderência |
|
14 |
Condições de ensaio para reboques equipados com sistemas de travagem elétricos |
|
Apêndice — |
Compatibilidade da razão de travagem do reboque e da desaceleração média totalmente desenvolvida do conjunto trator/reboque (com o reboque com carga e sem carga) |
|
15 |
Método de ensaio de guarnições de travões com dinamómetro de inércia |
|
16 |
Compatibilidade entre veículos tratores e reboques no que respeita à comunicação de dados segundo a norma ISO 11992 |
|
17 |
Procedimento de ensaio para avaliar a compatibilidade funcional dos veículos equipados com linhas de comando elétricas |
|
18 |
Requisitos especiais a aplicar aos aspetos de segurança dos sistemas complexos de comando eletrónico de veículos |
|
19 |
Ensaios de desempenho dos componentes dos sistemas de travagem |
|
Apêndice 1 — |
Modelo de relatório de verificação das câmaras dos travões de diafragma |
|
Apêndice 2 — |
Modelo para o registo dos resultados de ensaio das câmaras dos travões de diafragma |
|
Apêndice 3 — |
Modelo de relatório de verificação dos travões de mola |
|
Apêndice 4 — |
Modelo para o registo dos resultados de ensaio dos travões de mola |
|
Apêndice 5 — |
Ficha de informações do sistema de travagem antibloqueio dos reboques |
|
Apêndice 6 — |
Relatório de ensaio do sistema de travagem antibloqueio dos reboques |
|
Apêndice 7 — |
Ficha de informações da função de estabilidade do veículo (reboque) |
|
Apêndice 8 — |
Relatório de ensaio da função de estabilidade do veículo (reboque) |
|
Apêndice 9 — |
Símbolos e definições |
|
Apêndice 10 — |
Modelo de documentação para ensaios de campo, conforme prescrito no ponto 4.4.2.9 do presente anexo |
|
Apêndice 11 — |
Ficha de informações da função de estabilidade do veículo (veículo a motor) |
|
Apêndice 12 — |
Relatório de ensaio da função de estabilidade do veículo (veículo a motor) |
|
20 |
Procedimento alternativo para a homologação de modelos de reboques |
|
Apêndice 1 — |
Método de cálculo da altura do centro de gravidade |
|
Apêndice 2 — |
Gráfico de verificação para efeitos do ponto 3.2.1.5 — Semirreboques |
|
Apêndice 3 — |
Gráfico de verificação para efeitos do ponto 3.2.1.6 — Reboques de eixo central |
|
Apêndice 4 — |
Gráfico de verificação para efeitos do ponto 3.2.1.7 — Reboques completos |
|
Apêndice 5 — |
Símbolos e definições |
|
21 |
Requisitos especiais para veículos equipados com uma função de estabilidade do veículo |
|
Apêndice 1 — |
Utilização da simulação da estabilidade dinâmica |
|
Apêndice 2 — |
Instrumento de simulação da estabilidade dinâmica e sua validação |
|
Apêndice 3 — |
Relatório de ensaio da função de estabilidade do veículo por simulação |
|
22 |
Requisitos para a interface elétrica/eletrónica do travão de um conector automatizado |
1. ÂMBITO DE APLICAÇÃO
1.1. O presente regulamento é aplicável aos veículos das categorias M2, M3, N e O (1) no que respeita à travagem (2).
1.2. O presente regulamento não abrange:
|
1.2.1. |
Os veículos com uma velocidade de projeto não superior a 25 km/h; |
|
1.2.2. |
Os reboques que não podem ser atrelados a veículos a motor com uma velocidade de projeto superior a 25 km/h; |
|
1.2.3. |
Os veículos adaptados para condutores inválidos; |
1.3. Sem prejuízo das disposições aplicáveis do presente regulamento, o equipamento, os dispositivos, os métodos e as condições enumerados no anexo 1 não são abrangidos pelo presente regulamento.
2. DEFINIÇÕES
Para efeitos do presente regulamento, entende-se por:
|
2.1. |
«Homologação de um veículo», a homologação de um modelo de veículo no que diz respeito à travagem; |
|
2.2. |
«Modelo de veículo», uma categoria de veículos que não apresentam entre si diferenças essenciais, nomeadamente, quanto aos aspetos seguintes:
|
|
2.3. |
«Sistema de travagem», o conjunto das peças que têm por função diminuir ou anular progressivamente a velocidade de um veículo em andamento, imobilizá-lo ou mantê-lo imobilizado, se já estiver parado; estas funções estão especificadas no ponto 5.1.2. O sistema é constituído pelo comando, pela transmissão e pelo travão propriamente dito; |
|
2.4. |
«Comando», a peça diretamente acionada pelo condutor (ou, no caso de determinados reboques, por um ajudante daquele) com vista a fornecer à transmissão a energia necessária para travar ou para a controlar. Essa energia pode ser a energia muscular do condutor ou energia proveniente de outra fonte controlada pelo condutor ou, se for caso disso, a energia cinética de um reboque ou ainda uma combinação destas várias formas de energia;
|
|
2.5. |
«Transmissão», o conjunto dos elementos situados entre o comando e o travão e que os liga de forma funcional. A transmissão pode ser mecânica, hidráulica, pneumática, elétrica ou mista. Quando a força de travagem for assegurada ou assistida por uma fonte de energia independente do condutor, a reserva de energia contida no sistema faz igualmente parte da transmissão. A transmissão está dividida em duas funções independentes: a transmissão do comando e a transmissão da energia. Sempre que utilizado isoladamente no presente regulamento, o termo «transmissão» designa tanto a «transmissão do comando» como a «transmissão da energia». As linhas e as condutas de comando e de alimentação entre os veículos tratores e os reboques não são consideradas elementos da transmissão.
|
|
2.6. |
«Travão», o órgão onde se desenvolvem as forças que se opõem ao movimento do veículo. O travão pode ser do tipo de atrito (quando as forças são geradas pelo atrito entre duas peças do veículo em movimento relativo), elétrico (quando as forças são geradas pela ação eletromagnética entre duas peças do veículo em movimento relativo, mas que não estão em contacto uma com a outra), por fluido (quando as forças são geradas pela ação de um fluido situado entre duas peças do veículo em movimento relativo), ou motor (quando as forças são provenientes de um aumento artificial da ação de travagem do motor transmitida às rodas); |
|
2.7. |
«Sistemas de travagem de tipos diferentes», sistemas que podem diferir entre si em relação aos seguintes aspetos essenciais:
|
|
2.8. |
«Componente de um sistema de travagem», qualquer uma das peças separadas que, quando montadas, formam, em conjunto, o sistema de travagem; |
|
2.9. |
«Travagem contínua», a travagem de um conjunto de veículos por meio de uma instalação com as seguintes características:
|
|
2.10. |
«Travagem semicontínua», a travagem de um conjunto de veículos por meio de uma instalação com as seguintes características:
|
|
2.11. |
«Travagem automática», a travagem do reboque ou dos reboques que ocorre automaticamente no caso de uma separação de elementos do conjunto de veículos atrelados, incluindo a rutura da ligação, sem que seja anulada a eficácia da travagem do resto do conjunto; |
|
2.12. |
«Travagem por inércia», a travagem realizada utilizando as forças geradas pela aproximação do reboque ao veículo trator; |
|
2.13. |
«Travagem regulável», uma travagem durante a qual, no interior da gama de funcionamento normal do equipamento e quando os travões são acionados (ver ponto 2.4.1 anterior);
|
|
2.14. |
«Travagem coordenada», um meio que pode ser utilizado quando duas ou mais fontes de travagem são acionadas a partir de um só comando, em que pode ser dada prioridade a uma fonte atenuando a ou as outras fontes, de modo a obrigar a um aumento do movimento do comando antes que comecem a funcionar. |
|
2.15. |
«Sistema auxiliar de travagem», um sistema de travagem adicional capaz de exercer e manter um efeito de travagem durante um período de tempo prolongado, sem redução significativa do desempenho. A expressão «sistema auxiliar de travagem» abrange todo o sistema, incluindo o dispositivo de comando.
|
|
2.16. |
«Veículo carregado», salvo indicação em contrário, o veículo carregado de modo a atingir a sua «massa máxima»; |
|
2.17. |
«Massa máxima», a massa máxima tecnicamente admissível declarada pelo fabricante do veículo (pode ser superior à «massa máxima admissível» definida pela administração nacional); |
|
2.18. |
«Distribuição da massa pelos eixos», a repartição, entre os eixos, do efeito que a gravidade exerce na massa e/ou no conteúdo do veículo; |
|
2.19. |
«Carga por roda/eixo», a reação (ou força) estática vertical do piso da estrada que se exerce na zona de contacto sobre a(s) roda(s) do eixo; |
|
2.20. |
«Carga estática máxima por roda/eixo», a carga estática por roda ou por eixo quando o veículo se encontra carregado; |
|
2.21. |
«Travagem regenerativa elétrica», um sistema de travagem que, durante a desaceleração, permite converter a energia cinética do veículo em energia elétrica.
|
|
2.22. |
«Sistema de travagem hidráulico com acumulação de energia», um sistema de travagem cuja energia de funcionamento é fornecida por um fluido hidráulico sob pressão, armazenado em um ou mais acumuladores alimentados por um ou mais compressores, cada um equipado com um dispositivo que permita limitar a pressão a um valor máximo. Esse valor deve ser especificado pelo fabricante; |
|
2.23. |
«Bloqueio simultâneo das rodas dianteiras e traseiras», a situação na qual o intervalo de tempo entre a primeira ocorrência de bloqueio da última (segunda) roda no eixo traseiro e a primeira ocorrência de bloqueio na última (segunda) roda no eixo dianteiro é inferior a 0,1 segundos; |
|
2.24. |
«linha de comando elétrica», a ligação elétrica entre dois veículos que transmite a função de comando de travagem ao veículo rebocado que faz parte de um conjunto de veículos. Engloba os cabos elétricos e o conector, incluindo todos os elementos necessários à comunicação de dados e a alimentação de energia elétrica para a transmissão do comando no reboque. |
|
2.25. |
«Comunicação de dados», a transferência de dados digitais segundo as regras de um protocolo. |
|
2.26. |
«Ligação ponto-a-ponto», uma topologia de uma rede de comunicação apenas com duas unidades. Cada unidade dispõe de uma resistência terminal integrada para a linha de comunicação. |
|
2.27. |
«Comando da força de engate», um sistema ou função para equilibrar automaticamente a razão de travagem do veículo trator e do reboque. |
|
2.28. |
«Valor nominal», definições do desempenho de referência da travagem, para dar um valor à função de transferência do sistema de travagem, comparando os valores de saída e de entrada, para os veículos considerados isoladamente e quando usados em conjunto.
|
|
2.29. |
«Travagem comandada automaticamente», uma função de um sistema complexo de comando eletrónico em que o acionamento do(s) sistema(s) de travagem ou dos travões de certos eixos é feito para gerar um abrandamento do veículo, com ou sem intervenção direta do condutor, resultante da avaliação automática da informação fornecida pelos sistemas de bordo do veículo. |
|
2.30. |
«Travagem seletiva», uma função de um sistema complexo de comando eletrónico em que o acionamento dos travões de cada roda individual é feito automaticamente, sendo o abrandamento do veículo secundária relativamente à modificação do seu comportamento dinâmico. |
|
2.31. |
«Forças de travagem de referência», as forças de travagem de um eixo produzidas na circunferência do pneu num frenómetro de rolos relativas à pressão no atuador do travão e declaradas aquando da homologação. |
|
2.32. |
«Sinal de travagem»: sinal lógico que indica o acionamento dos travões, conforme indicado no ponto 5.2.1.30. |
|
2.33. |
«Sinal de travagem de emergência»: sinal lógico que indica a travagem de emergência, conforme especificado no ponto 5.2.1.31. |
|
2.34. |
«Função de estabilidade do veículo», uma função de comando eletrónico de um veículo que melhora a estabilidade dinâmica do mesmo.
|
|
2.35. |
«Reboque considerado», um reboque representativo do modelo de reboque que se pretende homologar. |
|
2.36. |
O «fator de travagem (BF)» é a razão de amplificação entre a entrada e a saída do travão. |
|
2.37. |
«Código de identificação», código que identifica os discos ou tambores dos travões abrangidos pela homologação do sistema de travagem do veículo nos termos do presente regulamento. Contém, pelo menos, a marca ou a designação comercial do fabricante e um número de identificação. |
|
2.38. |
«Grupo de eixos», os eixos múltiplos, em que a distância entre um eixo e o seu eixo adjacente é igual ou inferior a 2,0 m. Quando a distância entre um eixo e o seu eixo adjacente for superior a 2,0 m, cada eixo individual deve ser considerado como um grupo de eixos independentes. |
|
2.39. |
«Natureza do veículo», uma expressão que descreve um veículo — trator para semirreboques, camião, autocarro, semirreboque, reboque completo, reboque de eixo central. |
|
2.40. |
«Interface elétrica/eletrónica do travão», a parte de uma conexão elétrica/eletrónica separável entre o veículo trator e o veículo rebocado e que é de utilização exclusiva do sistema de travagem. |
|
2.41. |
«Conector automatizado», um sistema pelo qual a conexão elétrica e a conexão pneumática entre o veículo trator e o veículo rebocado são feitas automaticamente, sem a intervenção direta de um operador humano. |
3. PEDIDO DE HOMOLOGAÇÃO
3.1. O pedido de homologação de um modelo de veículo no que diz respeito ao sistema de travagem deve ser apresentado pelo fabricante do veículo ou pelo seu representante devidamente acreditado.
3.2. Deve ser acompanhado pelos documentos em triplicado e pelos elementos a seguir indicados:
|
3.2.1. |
Descrição do modelo de veículo no que diz respeito aos aspetos enumerados no ponto 2.2 anterior. Os números e/ou os símbolos que identifiquem o modelo do veículo e, no caso dos veículos a motor, o tipo de motor devem ser indicados; |
|
3.2.2. |
Lista dos elementos, devidamente identificados, que constituem o sistema de travagem; |
|
3.2.3. |
Diagrama do sistema de travagem montado e indicação da posição dos respetivos elementos no veículo; |
|
3.2.4. |
Desenhos detalhados de cada elemento que permitam a sua fácil localização e identificação. |
3.3. Deve ser apresentado ao serviço técnico responsável pela realização dos ensaios de homologação um veículo representativo do modelo a homologar.
3.4. A entidade homologadora deve verificar a existência de disposições satisfatórias para garantir o controlo eficaz da conformidade da produção antes de conceder a homologação.
4. HOMOLOGAÇÃO
4.1. Se o modelo de veículo apresentado para homologação nos termos do presente regulamento cumprir o disposto nos pontos 5 e 6 seguintes, é concedida a homologação ao modelo de veículo em causa.
4.2. A cada modelo homologado deve ser atribuído um número de homologação, cujos dois primeiros algarismos (atualmente, 11) correspondem à série de alterações que incorpora as principais e mais recentes alterações técnicas ao regulamento na data de emissão da homologação. A mesma parte contratante não pode atribuir o mesmo número ao mesmo modelo de veículo equipado com outro tipo de sistema de travagem, nem a outro modelo de veículo.
4.3. A homologação ou a recusa da homologação de um modelo de veículo nos termos do presente regulamento deve ser notificada às partes no Acordo que apliquem o presente regulamento, por meio de um formulário conforme ao modelo constante do anexo 2 do presente regulamento e de um resumo das informações contidas nos documentos mencionados nos pontos 3.2.1 a 3.2.4 anteriores, devendo os desenhos fornecidos pelo requerente ser de formato máximo A4 (210 × 297 mm) ou dobrados neste formato e a uma escala adequada.
4.4. Nos veículos conformes aos modelos homologados nos termos do presente regulamento, deve ser afixada de maneira visível, num local facilmente acessível e indicado no formulário de homologação, uma marca de homologação internacional composta por:
|
4.4.1. |
Um círculo envolvendo a letra «E», seguida do número distintivo do país que concedeu a homologação (3); e |
|
4.4.2. |
O número do presente regulamento, seguido da letra «R», de um travessão e do número de homologação, colocados à direita do círculo previsto no ponto 4.4.1 anterior. |
4.5. Todavia, se um veículo das categorias M2 ou M3 for homologado nos termos das disposições do anexo 4, ponto 1.8, do presente regulamento, o número do regulamento deve ser seguido da letra M.
4.6. Se o veículo for conforme a um modelo homologado em aplicação de um outro ou de vários outros regulamentos anexos ao acordo no mesmo país que concedeu a homologação em aplicação do presente regulamento, o símbolo previsto no ponto 4.4.1 não tem de ser repetido; Neste caso, os números de regulamento e de homologação e os símbolos adicionais de todos os regulamentos nos termos dos quais a homologação foi concedida no país que a emitiu em aplicação do presente regulamento devem ser dispostos em colunas verticais, situadas à direita do símbolo previsto no ponto 4.4.1 anterior.
4.7. A marca de homologação deve ser claramente legível e indelével.
4.8. A marca de homologação deve ser aposta na chapa de identificação do veículo ou na sua proximidade.
4.9. O anexo 3 do presente regulamento contém exemplos de disposições de marcas de homologação.
5. ESPECIFICAÇÕES
5.1. Generalidades
5.1.1. Sistema de travagem
5.1.1.1. O sistema de travagem deve ser concebido, construído e montado de tal forma que, em condições normais de utilização e apesar das vibrações a que possa ser sujeito, o veículo cumpra o prescrito no presente regulamento.
5.1.1.2. O sistema de travagem deve, nomeadamente, ser concebido, construído e montado de forma a resistir aos fenómenos de corrosão e de envelhecimento a que está exposto.
5.1.1.3. As guarnições dos travões não devem conter amianto.
5.1.1.4. A eficácia dos sistemas de travagem, incluindo a linha de comando elétrica, não deve ser negativamente afetada por campos magnéticos ou elétricos. Tal deve ser demonstrado mediante o cumprimento dos requisitos técnicos e pelo respeito das disposições transitórias do Regulamento n.o 10, aplicando:
|
a) |
a série 03 de alterações, no caso de veículos sem sistema de acoplamento para carregar o sistema recarregável de armazenamento de energia (baterias de tração). |
|
b) |
a série 04 de alterações, no caso de veículos com sistema de acoplamento para carregar o sistema recarregável de armazenamento de energia (baterias de tração). |
5.1.1.5. Um sinal de deteção de avaria pode interromper momentaneamente (< 10 ms) o sinal de solicitação da transmissão do comando, sob condição de o desempenho da travagem não ser reduzido.
5.1.2. Funções do sistema de travagem
O sistema de travagem definido no ponto 2.3 do presente regulamento deve cumprir as seguintes funções:
|
5.1.2.1. |
Sistema de travagem de serviço O sistema de travagem de serviço deve permitir controlar o movimento do veículo e imobilizá-lo de uma forma segura, rápida e eficaz, quaisquer que sejam as condições de velocidade e de carga e o declive, ascendente ou descendente, em que o veículo se encontre. Deve ser possível graduar esta ação de travagem. O condutor deve poder executar esta ação de travagem a partir do seu lugar de condução, sem retirar as mãos do comando da direção. |
|
5.1.2.2. |
Sistema de travagem de emergência O sistema de travagem de emergência deve permitir imobilizar o veículo numa distância razoável, no caso de avaria do sistema de travagem de serviço. Deve ser possível graduar esta ação de travagem. O condutor deve conseguir executar esta ação de travagem do seu lugar de condução, mantendo pelo menos uma mão no comando da direção. Para efeitos das presentes prescrições, presume-se que não pode haver mais de uma avaria simultaneamente no sistema de travagem de serviço. |
|
5.1.2.3. |
Sistema de travagem de estacionamento O sistema de travagem de estacionamento deve permitir manter o veículo imobilizado num declive ascendente ou descendente, mesmo na ausência do condutor, mantendo-se os elementos ativos na posição de imobilizados por meio de um dispositivo de ação puramente mecânica. O condutor deve poder obter esta travagem do seu lugar de condução, sem prejuízo, no caso de um reboque, do disposto no ponto 5.2.2.10 do presente regulamento. O travão pneumático do reboque e o sistema de travagem de estacionamento do veículo trator podem ser acionados simultaneamente, desde que o condutor possa, a qualquer momento, verificar que o desempenho do travão de estacionamento do conjunto de veículos, obtido por ação puramente mecânica do sistema de travagem de estacionamento, é suficiente. |
5.1.3. Ligações entre veículos a motor e reboques nos sistemas de travagem a ar comprimido
5.1.3.1. As ligações dos sistemas de travagem a ar comprimido entre veículos a motor e reboques devem ser conformes ao prescrito nos pontos 5.1.3.1.1, 5.1.3.1.2 ou 5.1.3.1.3:
|
5.1.3.1.1. |
Uma conduta de alimentação pneumática e uma linha de comando pneumática; |
|
5.1.3.1.2. |
Uma conduta de alimentação pneumática, uma linha de comando pneumática e uma linha de comando elétrica; |
|
5.1.3.1.3. |
Uma conduta de alimentação pneumática e uma linha de comando elétrica; esta opção depende da nota de rodapé (4). |
5.1.3.2. A linha de comando elétrica do veículo a motor deve dar informações sobre se a linha de comando elétrica pode cumprir os requisitos do ponto 5.2.1.18.2 sem a assistência da linha de comando pneumática. Deve também informar se está equipada de acordo com o ponto 5.1.3.1.2, com duas linhas de comando ou, de acordo com o ponto 5.1.3.1.3, com apenas uma linha de comando elétrica.
5.1.3.3. Um veículo a motor equipado de acordo com o ponto 5.1.3.1.3 deve reconhecer que o engate de um reboque equipado de acordo com o ponto 5.1.3.1.1 não é compatível. Quando esses veículos estiverem eletricamente ligados através da linha de comando elétrica do veículo trator, o condutor deve ser avisado pelo sinal de aviso ótico vermelho definido no ponto 5.2.1.29.1.1 e, quando o sistema for posto sob tensão, os travões do veículo trator devem ser automaticamente acionados. Este acionamento do travão deve proporcionar, pelo menos, o desempenho da travagem de estacionamento exigido no ponto 2.3.1 do anexo 4 do presente regulamento.
5.1.3.4. No caso de um veículo a motor equipado com uma conduta e uma linha de comando na aceção do ponto 5.1.3.1.2, quando ligadas eletricamente a um reboque igualmente equipado com duas linhas de comando, devem cumprir-se as seguintes disposições:
|
5.1.3.4.1. |
Ambos os sinais devem estar presentes na cabeça de engate e o reboque deve utilizar o sinal de comando elétrico, a menos que se considere que este sinal está avariado. Neste caso o reboque deve passar automaticamente para a linha de comando pneumática; |
|
5.1.3.4.2. |
Cada veículo deve estar conforme às disposições relevantes do anexo 10 do presente regulamento tanto no que se refere à linha de comando elétrica como à linha de comando pneumática; e |
|
5.1.3.4.3. |
Quando o sinal de comando elétrico exceder o equivalente de 100 kPa durante mais de 1 segundo, o reboque deve verificar a presença de um sinal pneumático; Na ausência de um sinal pneumático, o condutor deve receber um aviso do reboque através do sinal de aviso amarelo distinto definido no ponto 5.2.1.29.2 seguinte. |
5.1.3.5. Um reboque pode estar equipado conforme referido no ponto 5.1.3.1.3 desde que apenas possa funcionar em conjunto com um veículo a motor equipado de uma linha de comando elétrica que satisfaça os requisitos do ponto 5.2.1.18.2. Em todos os outros casos, o reboque, quando ligado eletricamente, deve acionar automaticamente os travões ou permanecer travado. O condutor deve ser alertado pelo sinal de aviso amarelo distinto definido no ponto 5.2.1.29.2.
|
a) |
a linha de comando elétrica deve estar conforme à norma ISO 11992-1 e11992-2:2003, incluindo a sua alteração 1:2007, ser do tipo ponto-a-ponto e utilizar:
|
|
b) |
devem utilizar-se os contactos de transmissão de dados do conector ISO 7638 para transferir a informação exclusivamente para funções de travagem (incluindo ABS) e de rolamento (direção, pneus e suspensão) conforme definido na norma ISO 11992-2:2003, incluindo a sua alteração 1:2007. As funções de travagem têm prioridade e devem ser mantidas nos modos normal e de avaria. A transmissão de informações sobre os órgãos de rolamento não deve atrasar as funções de travagem; |
|
c) |
a alimentação de energia, proporcionada pelo conector ISO 7638, deve ser exclusivamente utilizada para as funções de travagem e de rolamento e para a transferência das informações relativas ao reboque não transmitidas pela linha de comando elétrica. No entanto, devem aplicar-se em todos os casos as disposições do ponto 5.2.2.18 do presente regulamento. Devem utilizar-se outros meios para fornecer energia a todas as outras funções. |
5.1.3.6.1. O suporte das mensagens definidas na norma ISO 11992-2:2003, incluindo a Alt. 1:2007, é especificado no anexo 16 do presente regulamento em relação ao veículo trator e ao reboque, consoante o caso.
5.1.3.6.2. A compatibilidade funcional entre tratores e reboques equipados com linhas de comando elétricas conforme definido anteriormente deve ser avaliada aquando da homologação, verificando-se se são cumpridas as disposições pertinentes da norma ISO 11992:2003, incluindo a norma ISO 11992-2:2003 e a respetiva Alt.1:2007, partes 1 e 2. O anexo 17 do presente regulamento apresenta um exemplo de ensaios que podem realizar-se para se proceder a esta avaliação.
5.1.3.6.3. Quando um veículo a motor estiver equipado com uma linha de comando elétrica e ligado eletricamente a um reboque também equipado com uma linha de comando elétrica, qualquer avaria persistente (> 40 ms) na linha de comando elétrica do veículo a motor deve ser detetada e assinalada ao condutor pelo sinal de aviso amarelo referido no ponto 5.2.1.29.1.2 quando esses veículos estiverem ligados através da linha de comando elétrica.
5.1.3.7. Se o acionamento do sistema de travagem de estacionamento do veículo a motor acionar igualmente o sistema de travagem do reboque, tal como autorizado no ponto 5.1.2.3, devem cumprir-se ainda os seguintes requisitos adicionais:
|
5.1.3.7.1. |
Quando o veículo a motor estiver equipado de acordo com o ponto 5.1.3.1.1, o acionamento do sistema de travagem de estacionamento do veículo a motor deve acionar o sistema de travagem do reboque através da linha de comando pneumática. |
|
5.1.3.7.2. |
Quando o veículo a motor estiver equipado de acordo com o ponto 5.1.3.1.2, o acionamento do sistema de travagem de estacionamento do veículo a motor deve acionar o sistema de travagem do reboque tal como prescrito no ponto 5.1.3.7.1. Além disso, o acionamento do sistema de travagem de estacionamento pode também acionar o sistema de travagem do reboque através da linha de comando elétrica. |
|
5.1.3.7.3. |
Quando o veículo a motor estiver equipado de acordo com o ponto 5.1.3.1.3 ou, caso cumpra os requisitos do ponto 5.2.1.18.2 sem a assistência da linha de comando pneumática, de acordo com o ponto 5.1.3.1.2, o acionamento do sistema de travagem de estacionamento do veículo a motor deve acionar o sistema de travagem do reboque através da linha de comando elétrica. Quando a energia elétrica para o equipamento de travagem do veículo a motor for desligada, a travagem do reboque deve ser efetuada por evacuação da conduta de alimentação (alem disso, a linha de comando pneumática pode permanecer sob pressão); a conduta de alimentação só pode permanecer evacuada até ser restabelecida a energia elétrica no equipamento de travagem do veículo a motor e, simultaneamente, seja restabelecida a travagem do reboque através da linha de comando elétrica. |
5.1.3.8. Não são admitidos dispositivos de corte que não sejam acionados automaticamente.
5.1.3.9. No caso de conjuntos de tratores e semirreboques, as tubagens flexíveis e os cabos devem fazer parte do veículo a motor. Em todos os outros casos, as tubagens flexíveis e os cabos devem fazer parte do reboque.
No caso de um conector automatizado, este requisito relativo à repartição das tubagens flexíveis e dos cabos não é aplicável.
5.1.4. Disposições relativas à inspeção técnica periódica dos sistemas de travagem
5.1.4.1. Deve ser possível avaliar o desgaste dos componentes do travão de serviço sujeitos a desgaste; por exemplo, guarnições de atrito e tambores ou discos (no caso dos tambores ou discos, a avaliação do desgaste não tem de ser necessariamente efetuada aquando da inspeção técnica periódica). O método que permite realizar esta operação encontra-se definido nos pontos 5.2.1.11.2 e 5.2.2.8.2 do presente regulamento.
5.1.4.2. Para a determinação das forças de travagem utilizadas em cada eixo do veículo equipado com um sistema de travagem a ar comprimido, são necessárias tomadas para controlo da pressão de ar:
|
5.1.4.2.1. |
Em cada circuito independente do sistema de travagem, numa posição de fácil acesso e tão próxima quanto possível do cilindro do travão que se encontrar na situação mais desfavorável em termos do tempo de resposta descrito no anexo 6. |
|
5.1.4.2.2. |
Num sistema de travagem que comporte um dispositivo de modulação da pressão conforme referido no ponto 7.2 do anexo 10, na conduta de pressão a montante e a jusante deste dispositivo na posição acessível mais próxima possível. Se este dispositivo tiver comando pneumático, é necessária uma tomada suplementar para simular a posição «em carga». Se esse dispositivo não existir, deve estar montada uma única tomada para controlo da pressão, equivalente ao conector a jusante mencionado anteriormente. Estas tomadas devem estar localizadas de modo a serem facilmente acessíveis a partir do solo ou do interior do veículo. |
|
5.1.4.2.3. |
Numa posição de fácil acesso e tão próxima quanto possível do dispositivo de armazenamento de energia mais desfavoravelmente colocado na aceção do ponto 2.4 da secção A do anexo 7. |
|
5.1.4.2.4. |
Em cada circuito independente do sistema de travagem, de modo a possibilitar a verificação da pressão de entrada e de saída de toda a conduta de transmissão. |
|
5.1.4.2.5. |
As tomadas para controlo da pressão devem cumprir a cláusula 4 da norma ISO 3583:1984. |
5.1.4.3. O acesso às tomadas para controlo da pressão exigidas não deve ser obstruído por modificações nem pela montagem de acessórios ou pela carroçaria do veículo.
5.1.4.4. Deve ser possível gerar forças máximas de travagem em condições estáticas, sobre um dinamómetro de rolos ou um frenómetro de rolos.
5.1.4.5. Dados relativos aos sistemas de travagem:
|
5.1.4.5.1. |
Os dados do sistema de travagem a ar comprimido para o ensaio funcional e de eficiência devem estar afixados no veículo, numa posição visível e de forma indelével, ou disponibilizados de outra forma (por exemplo, num manual, num registo eletrónico de dados). |
|
5.1.4.5.2. |
Relativamente aos veículos equipados com sistemas de travagem a ar comprimido, são necessários, no mínimo, os seguintes dados: Dados das características pneumáticas:
|
||||||||||||||||||||||||||||||||||||||||||||||||||
5.1.4.6. Forças de travagem de referência
5.1.4.6.1. Para os veículos com travões a ar comprimido definem-se as forças de travagem de referência utilizando um frenómetro de rolos.
5.1.4.6.2. As forças de travagem de referência devem ser determinadas para pressões no atuador do travão compreendidas entre 100 kPa e a pressão produzida em condições de tipo 0 para cada eixo. O requerente da homologação do modelo deve indicar as forças de travagem de referência para uma gama de pressões no atuador do travão a partir de 100 kPa. Estes dados devem ser disponibilizados pelo fabricante do veículo, em conformidade com o ponto 5.1.4.5.1 anterior.
5.1.4.6.3. As forças de travagem de referência declaradas devem ser tais que o veículo seja capaz de produzir uma razão de travagem equivalente à definida no anexo 4 do presente regulamento para o veículo relevante (50 % no caso dos veículos das categorias M2, M3, N2, N3, O3 e O4 exceto semirreboques, e 45 % no caso de semirreboques), sempre que a força de travagem medida nos rolos, para cada eixo e independentemente da carga, não seja inferior à força de travagem de referência para uma dada pressão no atuador do travão na gama de pressões de funcionamento declarada (9).
5.1.4.7. Deve ser possível verificar, de uma maneira frequente e simples, o estado de bom funcionamento dos sistemas eletrónicos complexos que comandam a travagem. Se for necessária informação especial, esta deve ser fornecida gratuitamente.
5.1.4.7.1. Quando o estado operacional for indicado ao condutor por sinais de aviso, tal como especificado no presente regulamento, deve ser possível aquando da inspeção técnica periódica confirmar o estado de bom funcionamento por meio de observação visual dos sinais de aviso na sequência da ativação do contacto.
5.1.4.7.2. No momento da homologação, os meios empregues para assegurar a proteção contra uma alteração simples não autorizada do funcionamento dos meios de verificação escolhidos pelo fabricante (p. ex. sinais de aviso) devem ser descritos de maneira confidencial.
Em alternativa, esse requisito de proteção considera-se cumprido se estiver disponível um meio secundário para verificar o estado de bom funcionamento.
5.1.5. Os requisitos do anexo 18 devem ser aplicados aos aspetos de segurança de todos os sistemas complexos de comando eletrónico do veículo que assegurem, ou façam parte, da transmissão do comando da função de travagem, incluindo os que utilizam o(s) sistema(s) de travagem para a travagem comandada automaticamente ou para a travagem seletiva.
Porém, os sistemas ou funções que usam o sistema de travagem como meio para atingir um objetivo de nível mais elevado só estão sujeitos às disposições do anexo 18 caso tenham um efeito direto no sistema de travagem. Se estiverem montados, esses sistemas não devem ser desativados durante o ensaio de homologação do sistema de travagem.
5.2. Características dos sistemas de travagem
5.2.1. Veículos das categorias M2, M3 e N
5.2.1.1. O conjunto dos sistemas de travagem que equipam o veículo deve cumprir os requisitos exigidos para os sistemas de travagem de serviço, de emergência e de estacionamento.
5.2.1.2. Os sistemas que asseguram as travagens de serviço, de emergência e de estacionamento podem ter componentes comuns, desde que obedeçam às seguintes condições:
|
5.2.1.2.1. |
Deve haver pelo menos dois comandos independentes um do outro e facilmente acessíveis ao condutor a partir da sua posição normal de condução. Para todas as categorias de veículos, exceto para as categorias M2 e M3, cada comando de travão (com exclusão do comando do sistema auxiliar de travagem) deve ser concebido de modo a regressar à posição de desativado quando a ativação cessa. Este requisito não se aplica ao comando do travão de estacionamento (ou a essa parte de um comando combinado) quando este é bloqueado mecanicamente na posição de ativado; |
|
5.2.1.2.2. |
O comando do sistema de travagem de serviço deve ser independente do comando do sistema de travagem de estacionamento; |
|
5.2.1.2.3. |
Se os sistemas de travagem de serviço e de travagem de emergência tiverem o mesmo comando, a eficácia da ligação entre esse comando e os diferentes componentes dos sistemas de transmissão não deve ser suscetível de diminuir após um certo período de utilização; |
|
5.2.1.2.4. |
Se os sistemas de travagem de serviço e de emergência tiverem o mesmo comando, o sistema de travagem de estacionamento deve ser concebido de forma a poder ser acionado quando o veículo estiver em movimento. Este requisito não se aplica se o sistema de travagem de serviço do veículo puder ser acionado, ainda que parcialmente, por meio de um comando auxiliar; |
|
5.2.1.2.5. |
Sem prejuízo dos requisitos do ponto 5.1.2.3 do presente regulamento, o sistema de travagem de serviço e o sistema de travagem de estacionamento podem utilizar componentes comuns na(s) respetiva(s) transmissão(ões), desde que, em caso de avaria de qualquer parte da(s) transmissão(ões), se garanta o cumprimento dos requisitos aplicáveis à travagem de emergência; |
|
5.2.1.2.6. |
Em caso de rutura de qualquer outro componente para além dos travões (na aceção do ponto 2.6 do presente regulamento) ou dos componentes referidos no ponto 5.2.1.2.8 a seguir ou de qualquer outra avaria no sistema de travagem de serviço (mau funcionamento, esgotamento parcial ou total de uma reserva de energia), o sistema de travagem de emergência, ou a parte do sistema de travagem de serviço não afetada pela avaria, deve permitir imobilizar o veículo nas condições exigidas para a travagem de emergência; |
|
5.2.1.2.7. |
Em particular, quando o comando e a transmissão do sistema de travagem de emergência forem os mesmos que os do sistema de travagem de serviço:
|
|
5.2.1.2.8. |
Determinadas peças, como o pedal e o seu suporte, o cilindro principal e o(s) seu(s) êmbolo(s) (sistemas hidráulicos), o distribuidor (sistemas hidráulicos e/ou pneumáticos), a ligação entre o pedal e o cilindro principal ou o distribuidor, os cilindros dos travões e os seus êmbolos (sistemas hidráulicos e/ou pneumáticos) e os conjuntos alavancas-cames dos travões, não são consideradas como peças eventualmente sujeitas à rutura, sob condição de terem dimensões calculadas com uma margem ampla, serem facilmente acessíveis para manutenção e apresentarem características de segurança, pelo menos, iguais às requeridas para outros componentes essenciais do veículo (mecanismo de direção, por exemplo). Se a avaria de uma única dessas peças tornar impossível a travagem do veículo com grau de eficácia pelo menos igual ao exigido para o sistema de travagem de emergência, a peça em questão deve ser metálica ou de um material com características equivalentes e não deve sofrer deformações sensíveis durante o funcionamento normal dos sistemas de travagem. |
5.2.1.3. Quando existirem comandos distintos para o sistema de travagem de serviço e o sistema de travagem de emergência, o acionamento simultâneo dos dois comandos não deve tornar ao mesmo tempo inoperantes o sistema de travagem de serviço e o sistema de travagem de emergência, tanto quando os dois sistemas de travagem estiverem em bom estado de funcionamento como quando um deles avarie.
5.2.1.4. O sistema de travagem de serviço, combinado, ou não, com o sistema de travagem de emergência, deve ser de molde a que, em caso de avaria de um componente da sua transmissão, possa continuar a travar um número suficiente de rodas por atuação do comando do travão de serviço; a seleção dessas rodas deve permitir que o desempenho residual do sistema de travagem de serviço cumpra os requisitos estabelecidos no ponto 2.4 do anexo 4 do presente regulamento.
5.2.1.4.1. Contudo, as disposições anteriores não devem aplicar-se a veículos tratores para semirreboques, quando a transmissão do sistema de travagem de serviço do semirreboque for independente da do sistema de travagem de serviço do veículo trator;
5.2.1.4.2. A avaria de um componente de um sistema de transmissão hidráulica deve ser assinalada ao condutor por um dispositivo que inclua um sinal de aviso vermelho, tal como definido no ponto 5.2.1.29.1.1. Em alternativa, pode permitir-se que este dispositivo se acenda quando o fluido do reservatório estiver abaixo de um determinado nível, especificado pelo fabricante.
5.2.1.5. Quando se recorrer a uma energia que não seja a energia muscular do condutor, a fonte de energia (bomba hidráulica, compressor de ar, etc.) pode ser única, mas o modo de acionamento do dispositivo que constitui essa fonte deve dar a máxima garantia de segurança.
5.2.1.5.1. Em caso de avaria numa parte qualquer da transmissão de um sistema de travagem, a alimentação da parte não afetada pela avaria deve continuar a ser assegurada, se tal for necessário para imobilizar o veículo com o grau de eficácia prescrito para a travagem residual e/ou de emergência. Esta condição deve ser cumprida por meio de dispositivos facilmente acionáveis com o veículo parado ou por um dispositivo de funcionamento automático.
5.2.1.5.2. Além disso, os dispositivos de armazenamento situados a jusante do circuito desse dispositivo devem ser tais que, em caso de avaria na alimentação de energia, após quatro manobras a fim de curso do comando do travão de serviço, nas condições prescritas no ponto 1.2 do anexo 7 do presente regulamento, seja ainda possível imobilizar o veículo à quinta manobra, com o grau de eficácia prescrito para a travagem de emergência.
5.2.1.5.3. Não obstante, no caso de sistemas de travagem hidráulicos com acumulação de energia, estas disposições podem ser consideradas cumpridas se tiver sido cumprido o disposto no ponto 1.2.2 da parte C do anexo 7 do presente regulamento.
5.2.1.6. As prescrições dos pontos 5.2.1.2, 5.2.1.4 e 5.2.1.5 do presente regulamento devem ser cumpridas sem recurso a qualquer tipo de dispositivo automático cuja ineficácia possa passar despercebida pelo facto de algumas das suas peças, que normalmente se encontram na posição de repouso, só entrarem em ação em caso de avaria do sistema de travagem.
5.2.1.7. O sistema de travagem de serviço deve atuar sobre todas as rodas do veículo e repartir a sua ação de forma adequada pelos eixos.
5.2.1.7.1. No caso de veículos com mais de dois eixos, e por forma a evitar o bloqueio das rodas ou a vitrificação das guarnições dos travões, a força de travagem em certos eixos pode ser reduzida automaticamente para zero ao transportar uma carga muito pequena, desde que o veículo satisfaça todos os requisitos de desempenho prescritos no anexo 4 do presente regulamento.
5.2.1.7.2. No caso de veículos da categoria N1 equipados com sistema de travagem regenerativa elétrica da categoria B, o contributo de outras fontes de travagem pode ser regulado de forma que só o sistema de travagem regenerativa elétrica seja aplicado, desde que ambas as condições seguintes se verifiquem:
|
5.2.1.7.2.1. |
As variações intrínsecas do binário de saída do sistema de travagem regenerativa elétrica (por exemplo, na sequência de variações no estado de carga elétrica das baterias de tração) são automaticamente compensadas por variações apropriadas na relação de coordenação, desde que os requisitos (10) de um dos anexos seguintes do presente regulamento sejam cumpridos:
|
|
5.2.1.7.2.2. |
Sempre que necessário, a fim de assegurar que a razão de travagem (10) continua a corresponder à solicitação de travagem do condutor, tendo em conta a aderência pneu/estrada existente, a travagem deve atuar automaticamente em todas as rodas do veículo. |
5.2.1.8. A ação do sistema de travagem de serviço deve ser repartida pelas rodas do mesmo eixo, simetricamente em relação ao plano longitudinal médio do veículo. A compensação e as funções, como o antibloqueio, suscetíveis de implicar exceções a esta repartição simétrica devem ser declaradas.
5.2.1.8.1. A compensação pela transmissão elétrica do comando de uma deterioração ou de um defeito do sistema de travagem deve ser indicada ao condutor por meio do sinal de aviso amarelo mencionado no ponto 5.2.1.29.1.2. Este requisito aplica-se, qualquer que seja o estado de carga do veículo, quando a compensação ultrapasse os seguintes limites:
|
5.2.1.8.1.1. |
Uma diferença entre as pressões de travagem nas extremidades de qualquer eixo:
|
|
5.2.1.8.1.2. |
Um valor de compensação individual sobre qualquer eixo:
|
5.2.1.8.2. A compensação acima definida só é autorizada se o acionamento inicial dos travões intervier com o veículo a circular a mais de 10 km/h.
5.2.1.9. As anomalias da transmissão elétrica do comando não devem ter como efeito acionar os travões contra a vontade do condutor.
5.2.1.10. Os sistemas de travagem de serviço, de emergência e de estacionamento devem atuar sobre superfícies de travagem ligadas às rodas por meio de componentes com resistência adequada.
Se o binário de travagem para um determinado eixo, ou eixos, for assegurado tanto por um sistema de travagem de atrito como por um sistema de travagem regenerativa elétrica da categoria B, a desativação deste último é permitida, desde que a fonte de travagem de atrito permaneça permanentemente ligada e seja capaz de proporcionar a compensação referida no ponto 5.2.1.7.2.1 anterior.
Contudo, no caso de fenómenos de desativação transitórios e de curta duração, é admissível uma compensação incompleta, desde que esta atinja, pelo menos, 75 % do seu valor final no intervalo de um segundo.
Não obstante, em todos os casos, a fonte de travagem de atrito em funcionamento permanente deve garantir que tanto o sistema de travagem de serviço como o sistema de travagem de emergência continuem a funcionar com o grau de eficácia exigido.
A desativação das superfícies de travagem do sistema de travagem de estacionamento deve ser permitida apenas no caso de a desativação ser comandada exclusivamente pelo condutor, a partir do seu lugar de condução, por um sistema incapaz de ser acionado por uma fuga.
5.2.1.11. O desgaste dos travões deve poder ser facilmente compensado por um sistema de regulação manual ou automática. Além disso, o comando e os elementos da transmissão e dos travões devem possuir uma reserva de curso e, se necessário, meios de compensação adequados para, em caso de aquecimento dos travões ou de um certo grau de desgaste das guarnições dos travões, garantir a eficácia da travagem sem necessidade de uma regulação imediata.
5.2.1.11.1. No que respeita aos travões de serviço, a regulação do desgaste deve ser automática. Todavia, a montagem de dispositivos de regulação automática dos travões é opcional para veículos todo-o-terreno das categorias N2 e N3 e para os travões traseiros dos veículos da categoria N1. Os travões equipados com dispositivos de regulação automática devem, após aquecimento seguido de arrefecimento, ser capazes de rolar livremente, na aceção do ponto 1.5.4 do anexo 4, na sequência do ensaio de tipo I também definido nesse anexo.
5.2.1.11.2. Verificação do desgaste dos componentes de atrito do travão de serviço
5.2.1.11.2.1. Deve ser possível avaliar facilmente este desgaste das guarnições do travão de serviço a partir do exterior ou da parte inferior do veículo, sem a remoção das rodas, através de orifícios de inspeção adequados, ou por outros meios. Esta verificação deve poder ser efetuada utilizando ferramentas normais de oficina ou equipamento comum de inspeção de veículos.
Em alternativa, é admissível utilizar-se um dispositivo sensor por roda (as rodas duplas são consideradas como uma só roda) que avise o condutor, no seu lugar de condução, quando for necessário substituir as guarnições. No caso de um aviso ótico, pode ser utilizado o sinal de aviso amarelo especificado no ponto 5.2.1.29.1.2 seguinte.
5.2.1.11.2.2. A avaliação do estado de desgaste das superfícies de atrito dos discos ou tambores do travão só pode ser efetuada por medição direta do componente em causa ou inspeção de qualquer indicador de desgaste dos discos ou tambores do travão, o que pode exigir uma desmontagem mais ou menos significativa. Por conseguinte, aquando da homologação, o fabricante do veículo deve definir o seguinte:
|
a) |
o método para avaliar o desgaste das superfícies de atrito dos tambores e discos, incluindo o nível de desmontagem exigido e as ferramentas e o processo necessários para o fazer; |
|
b) |
informações que definam o limite máximo de desgaste aceitável, a partir do qual se torna necessário substituir a peça. |
Estas informações devem ser disponibilizadas gratuitamente, por exemplo num manual ou num registo eletrónico de dados.
5.2.1.12. Nos sistemas de travagem com transmissão hidráulica, os orifícios de enchimento dos reservatórios de fluido devem ser facilmente acessíveis; além disso, os recipientes com o fluido de reserva devem ser concebidos e construídos por forma a que o respetivo nível possa ser facilmente verificado sem necessidade de os abrir. Se esta última condição não for preenchida, o sinal de aviso vermelho referido no ponto 5.2.1.29.1.1 deve chamar a atenção do condutor para qualquer redução no nível da reserva de fluido suscetível de causar uma avaria no sistema de travagem. O tipo de fluido a utilizar nos sistemas de travagem por transmissão hidráulica deve ser indicado pelo símbolo que consta da figura 1 ou 2 da norma ISO 9128:2006. O símbolo deve ser indelével e aposto num local visível à distância de 100 mm dos orifícios de enchimento dos reservatórios de fluido; o fabricante pode fornecer indicações complementares.
5.2.1.13. Dispositivo de aviso
5.2.1.13.1. Os veículos equipados com um travão de serviço acionado a partir de um reservatório de energia devem, caso não seja possível obter o desempenho prescrito para a travagem de emergência por meio deste sistema de travagem sem recurso à energia acumulada, ser equipados, para além do manómetro eventual, com um dispositivo de aviso que produza um sinal ótico ou acústico quando a energia acumulada, numa parte qualquer do sistema, baixar para um valor ao qual, sem realimentação do reservatório e independentemente do estado de carga do veículo, seja ainda possível, após quatro manobras a fim de curso do comando do travão de serviço, obter, à quinta manobra, o desempenho prescrito para a travagem de emergência (sem avaria da transmissão do travão de serviço e com os travões regulados com a menor folga possível). Este dispositivo de aviso deve estar ligado direta e permanentemente ao circuito. Com o motor a funcionar nas condições normais de utilização e sem nenhuma avaria a afetar o sistema de travagem, como acontece durante os ensaios de homologação do modelo em questão, o dispositivo de aviso não deve emitir nenhum sinal senão durante o tempo necessário para recarregar o(s) reservatório(s) de energia, após a colocação do motor em marcha. O sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 deve ser utilizado como o sinal de aviso ótico.
5.2.1.13.1.1. Contudo, no caso de veículos considerados como satisfazendo os requisitos do ponto 5.2.1.5.1 do presente regulamento unicamente pelo facto de cumprirem os do ponto 1.2.2 da parte C do anexo 7, o dispositivo de aviso, para além do sinal ótico, deve também consistir num sinal acústico. Não é necessário que estes dispositivos funcionem simultaneamente, desde que cada um deles esteja conforme aos requisitos acima e que o sinal acústico não seja acionado antes do sinal ótico. O sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 deve ser utilizado como o sinal de aviso ótico.
5.2.1.13.1.2. Esse dispositivo acústico pode ser tornado inoperativo quando o travão de mão for aplicado e/ou, à escolha do fabricante, quando, em caso de transmissão automática, o seletor estiver na posição «estacionamento».
5.2.1.14. Sem prejuízo dos requisitos do ponto 5.1.2.3 do presente regulamento, quando a intervenção de uma fonte auxiliar de energia for indispensável para o funcionamento de um sistema de travagem, a reserva de energia deve garantir, em caso de imobilização do motor ou de avaria do meio de acionamento da fonte de energia, um desempenho da travagem suficiente para permitir a imobilização do veículo nas condições prescritas. Por outro lado, se o esforço muscular do condutor sobre o sistema de travagem de estacionamento for reforçado por um dispositivo de assistência, o acionamento do sistema de travagem de estacionamento deve ser garantido em caso de avaria do dispositivo de assistência, recorrendo, se necessário, a uma reserva de energia independente da que normalmente alimenta este dispositivo. Esta reserva de energia pode ser a destinada ao sistema de travagem de serviço.
5.2.1.15. No caso de veículos a motor autorizados a atrelar um reboque equipado com um travão comandado pelo condutor do veículo trator, o sistema de travagem de serviço do veículo trator deve estar equipado com um dispositivo construído de modo a que, em caso de avaria do sistema de travagem do reboque ou de interrupção da alimentação de ar (ou de outro tipo de ligação adotada) entre o veículo trator e o reboque, seja ainda possível travar o veículo trator com a eficácia prescrita para a travagem de emergência; requer-se, assim, nomeadamente, que este dispositivo se situe no veículo trator.
5.2.1.16. A alimentação energética do equipamento auxiliar pneumático/hidráulico deve processar-se de modo que, durante o funcionamento deste, seja possível garantir as desacelerações previstas e que, mesmo em caso de avaria da fonte de energia, o funcionamento do equipamento auxiliar não possa ter por efeito uma redução das reservas de energia que alimentam os sistemas de travagem a um nível inferior ao indicado no ponto 5.2.1.13 anterior.
5.2.1.17. Se o reboque for das categorias O3 ou O4, o sistema de travagem de serviço deve ser de tipo contínuo ou semicontínuo.
5.2.1.18. No caso dos veículos autorizados a rebocar um reboque das categorias O3 ou O4, os seus sistemas de travagem devem cumprir as seguintes condições:
|
5.2.1.18.1. |
Quando o sistema de travagem de emergência do veículo trator for acionado, deve ser igualmente garantida uma ação de travagem graduada do reboque; |
|
5.2.1.18.2. |
No caso de avaria do sistema de travagem de serviço do veículo trator, quando esse sistema consistir em, pelo menos, duas partes independentes, a(s) parte(s) não afetada(s) pela avaria deve(m) ser capaz(es) de acionar, parcial ou totalmente, os travões do reboque; Deve ser possível graduar esta ação de travagem. Se esta operação for realizada por intermédio de uma válvula que se encontre normalmente na posição de repouso, esta válvula só poderá ser utilizada na condição de o seu funcionamento poder ser facilmente controlado pelo condutor, quer do interior da cabina, quer do exterior do veículo, sem utilização de ferramentas; |
|
5.2.1.18.3. |
Em caso de avaria (por exemplo rutura ou fuga) numa das condutas de ligação pneumática, de interrupção ou de deficiência da linha de comando elétrica, deve ser possível ao condutor acionar, total ou parcialmente, os travões do reboque, seja por meio do comando da travagem de serviço ou do comando da travagem de emergência, seja por meio do comando da travagem de estacionamento, a não ser que a avaria provoque automaticamente a travagem do reboque com o desempenho prescrito no ponto 3.3 do anexo 4 do presente regulamento. |
|
5.2.1.18.4. |
Considera-se que a travagem automática referida no ponto 5.2.1.18.3 anterior é satisfatória quando preencher as seguintes condições:
|
|
5.2.1.18.5. |
Em caso de avaria numa das linhas de comando que ligam dois veículos equipados em conformidade com o ponto 5.1.3.1.2, a linha de comando não afetada pela avaria deve assegurar automaticamente o desempenho da travagem prescrito para o reboque no ponto 3.1 do anexo 4. |
5.2.1.19. No caso de um veículo a motor equipado para puxar um reboque com um sistema de travagem elétrico, de acordo com o ponto 1.1 do anexo 14 do presente regulamento, devem ser cumpridos os seguintes requisitos:
|
5.2.1.19.1. |
A alimentação elétrica (gerador e bateria) do veículo a motor deve ter capacidade suficiente para fornecer a corrente destinada a um sistema de travagem elétrico. Com o motor à velocidade de marcha lenta sem carga recomendada pelo fabricante e todos os dispositivos elétricos por ele fornecidos como equipamento de série do veículo sob tensão, a tensão nas linhas elétricas não deve, com base no consumo máximo do sistema de travagem elétrico (15 A), descer abaixo do valor de 9,6 V, medido no ponto de ligação. As linhas elétricas não devem poder entrar em curto-circuito, mesmo em caso de sobrecarga; |
|
5.2.1.19.2. |
No caso de avaria no sistema de travagem de serviço do veículo trator, quando esse sistema consistir em, pelo menos, duas partes independentes, a(s) parte(s) não afetada(s) pela avaria deve(m) ser capaz(es) de acionar, parcial ou totalmente, os travões do reboque; |
|
5.2.1.19.3. |
A utilização do interruptor e do circuito da luz de travagem para comandar o sistema de travagem elétrico só é admissível se a linha de comando estiver ligada em paralelo com a luz de travagem e o interruptor e o circuito existentes forem capazes de suportar a carga adicional. |
5.2.1.20. Quando um sistema de travagem de serviço pneumático contiver duas ou várias secções independentes, qualquer fuga entre essas secções ao nível do comando ou a jusante deste deve ser continuamente ventilada para a atmosfera.
5.2.1.21. No caso de um veículo a motor autorizado a rebocar um reboque das categorias O3 ou O4, o sistema de travagem de serviço do reboque apenas pode ser acionado juntamente com o sistema de travagem de serviço, de emergência ou de estacionamento do veículo trator. Todavia, autoriza-se a aplicação automática apenas dos travões do reboque quando o veículo trator acionar automaticamente os travões do reboque exclusivamente para efeitos de estabilização do veículo.
5.2.1.22. Os veículos a motor das categorias M2, M3, N2 e N3 com um máximo de quatro eixos devem estar equipados com sistemas antibloqueio da categoria 1 conformes aos requisitos do anexo 13 do presente regulamento.
5.2.1.23. Os veículos a motor autorizados a rebocar um reboque equipado com um sistema antibloqueio devem estar igualmente equipados com uma ou ambas as seguintes características, para a transmissão elétrica do comando:
|
a) |
um conector elétrico especial, em conformidade com a norma ISO 7638:2003 (11); |
|
b) |
um conector automatizado que satisfaça os requisitos especificados no anexo 22. |
5.2.1.24. Requisitos adicionais para os veículos das categorias M2, N1 e da categoria N2 < 5 toneladas equipados com um sistema de travagem regenerativa elétrica da categoria A:
|
5.2.1.24.1. |
A travagem regenerativa elétrica só deve ser acionada pelo comando do acelerador e/ou pela posição de ponto morto do seletor de velocidades dos veículos da categoria N1. |
|
5.2.1.24.2. |
Além disso, para os veículos das categorias M2 e N2 (< 5 toneladas), o comando da travagem regenerativa elétrica pode ser um interruptor ou uma alavanca à parte. |
|
5.2.1.24.3. |
Os requisitos dos pontos 5.2.1.25.6 e 5.2.1.25.7 aplicam-se igualmente a sistemas de travagem regenerativa da categoria A. |
5.2.1.25. Requisitos adicionais para os veículos das categorias M2, N1 e da categoria N2 < 5 toneladas equipados com um sistema de travagem regenerativa elétrica da categoria B:
|
5.2.1.25.1. |
Não deve ser possível desligar parcial ou totalmente uma parte do sistema de travagem de serviço, exceto por meios automáticos. Esta prescrição não deve ser interpretada como uma derrogação aos requisitos do ponto 5.2.1.10. |
|
5.2.1.25.2. |
O sistema de travagem de serviço deve comportar um só dispositivo de comando; |
|
5.2.1.25.3. |
Para os veículos equipados com sistema de travagem regenerativa elétrica de ambas as categorias, devem aplicar-se todas as disposições pertinentes, exceto as do ponto 5.2.1.24.1. Neste caso, a travagem regenerativa elétrica pode ser acionada pelo comando do acelerador e/ou pela posição de ponto morto do seletor de velocidades dos veículos da categoria N1. Além disso, o acionamento do comando da travagem de serviço não deve reduzir o efeito de travagem referido anteriormente gerado quando de deixa de acionar o comando do acelerador. |
|
5.2.1.25.4. |
O funcionamento do sistema de travagem de serviço não deve ser perturbado pela colocação do ou dos motores em ponto morto ou pela relação de velocidade utilizada; |
|
5.2.1.25.5. |
Se o funcionamento do componente elétrico da travagem se basear numa relação estabelecida entre a informação proveniente do comando do travão de serviço e a força de travagem sobre as respetivas rodas, uma eventual avaria desta relação que leve à modificação da repartição da travagem entre os eixos (anexos 10 ou 13, conforme o caso) deve ser assinalada ao condutor por um sinal de aviso ótico que se acenda, o mais tardar, no momento em que o comando for acionado e que permaneça aceso enquanto a deficiência existir e o interruptor de comando do veículo (chave) estiver ligado (na posição «ON»). |
|
5.2.1.25.6. |
O funcionamento da travagem regenerativa elétrica não deve ser perturbado por campos magnéticos ou elétricos. |
|
5.2.1.25.7. |
Para os veículos equipados com dispositivo antibloqueio, este último deve comandar o sistema de travagem regenerativa elétrica. |
5.2.1.26. Outros requisitos especiais adicionais aplicáveis à transmissão elétrica do sistema de travagem de estacionamento
5.2.1.26.1. Em caso de avaria da transmissão elétrica, deve ser evitado qualquer acionamento involuntário do sistema de travagem de estacionamento;
5.2.1.26.2. Em caso de avaria elétrica, devem ser respeitados, conforme especificado, os seguintes requisitos:
|
5.2.1.26.2.1. |
Veículos das categorias M2, M3 N2 e N3: Em caso de avaria elétrica no comando ou de rutura nos cabos da transmissão elétrica do comando exterior às unidades de controlo eletrónico, excluindo a alimentação de energia, deve continuar a ser possível acionar o sistema de travagem de estacionamento a partir do banco do condutor e, assim, manter o veículo carregado imobilizado num declive ascendente ou descendente de 8 %. Em alternativa, nesse caso, é permitido o acionamento do travão de estacionamento quando o veículo estiver imobilizado, desde que se alcance o desempenho acima referido e que, uma vez acionado, o travão de estacionamento permaneça funcional independentemente do estado do comutador de ignição (arranque). Nesta alternativa, o travão de estacionamento deve desativar-se automaticamente assim que o condutor recomeçar a pôr o veículo em movimento. Deve também ser possível desativar o sistema de travagem de estacionamento, se necessário recorrendo ao uso de ferramentas e/ou de um dispositivo auxiliar transportado ou montado no veículo. |
|
5.2.1.26.2.2. |
Veículos da categoria N1: Em caso de avaria elétrica no comando ou de rutura nos cabos da transmissão elétrica do comando entre o comando e a UCE a ele diretamente ligada, excluindo a alimentação de energia, deve continuar a ser possível acionar o sistema de travagem de estacionamento a partir do banco do condutor e, assim, manter o veículo carregado imobilizado num declive ascendente ou descendente de 8 %. Em alternativa, nesse caso, é permitido o acionamento do travão de estacionamento quando o veículo estiver imobilizado, desde que se alcance o desempenho acima referido e que, uma vez acionado, o travão de estacionamento permaneça funcional independentemente do estado do comutador de ignição (arranque). Nesta alternativa, o travão de estacionamento deve desativar-se automaticamente assim que o condutor recomeçar a pôr o veículo em movimento. O motor/a transmissão manual ou a transmissão automática (posição de estacionamento) podem ser utilizados para assegurar, ou ajudar a assegurar, o desempenho acima referido. |
|
5.2.1.26.2.3. |
Uma rutura na cablagem da transmissão elétrica ou qualquer avaria elétrica no comando do sistema de travagem de estacionamento deve ser assinalada ao condutor por meio do sinal de aviso amarelo definido no ponto 5.2.1.29.1.2. Quando a origem for uma rutura na cablagem da transmissão elétrica do comando do sistema de travagem de estacionamento, este sinal de aviso amarelo deve acender-se assim que ocorrer a rutura. Além disso, este tipo de avaria elétrica no comando ou rutura na cablagem externa à(s) unidades de controlo eletrónico, excluindo a alimentação de energia, deve ser assinalado ao condutor pelo acionamento intermitente do sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 enquanto o comutador de ignição (arranque) estiver na posição de contacto (marcha), durante um período não inferior a 10 segundos, e o comando estiver na posição de marcha (ativado). Contudo, se o sistema de travagem de estacionamento detetar um aperto correto do travão de estacionamento, o sinal de aviso vermelho intermitente pode ser suprimido, devendo utilizar-se um sinal de aviso vermelho não intermitente para indicar que o travão de estacionamento está ativado. Quando o acionamento do travão de estacionamento for normalmente indicado por um sinal de aviso vermelho distinto, em conformidade com todos os requisitos do ponto 5.2.1.29.3, este sinal deve ser usado para cumprir o requisito acima referido relativo a um sinal vermelho. |
5.2.1.26.3. O equipamento auxiliar pode ser alimentado com energia proveniente da transmissão elétrica do sistema de travagem de estacionamento, desde que a energia disponível seja suficiente para acionar o sistema de travagem de estacionamento e alimentar ainda todos os outros sistemas do veículo consumidores de energia elétrica, sem que ocorram avarias. Além disso, quando esta reserva de energia for também utilizada pelo sistema de travagem de serviço, é aplicável o disposto no ponto 5.2.1.27.7.
5.2.1.26.4. Se o comutador de ignição/arranque que comanda a alimentação elétrica do equipamento de travagem tiver sido desligado e/ou a chave de ignição retirada, deve ser ainda possível acionar o sistema de travagem de estacionamento, mas impossível destravar.
5.2.1.27. Requisitos especiais adicionais aplicáveis aos sistemas de travagem de serviço com transmissão elétrica do comando
5.2.1.27.1. Com o travão de estacionamento desativado, o sistema de travagem de serviço deve ser capaz de produzir uma força de travagem estática total equivalente, no mínimo, à requerida no ensaio de tipo 0 prescrito, mesmo que o comutador de ignição/arranque tenha sido desligado e/ou que a chave de ignição tenha sido retirada. No caso de veículos a motor autorizados a rebocar reboques das categorias O3 ou O4, esses veículos devem fornecer um sinal de comando completo ao sistema de travagem de serviço do reboque. Pressupõe-se que haja energia em quantidade suficiente na transmissão de energia ao sistema de travagem de serviço.
5.2.1.27.2. Em caso de uma única avaria momentânea (< 40 ms) na transmissão elétrica do comando (sinal não transmitido ou erro de dados, por exemplo), excetuando-se o fornecimento de energia, o desempenho da travagem de serviço não deve ser afetado de modo percetível.
5.2.1.27.3. O condutor deve ser alertado para a existência de uma avaria na transmissão elétrica do comando (12), excluindo a sua reserva de energia, que afete a função e o desempenho dos sistemas abrangidos pelo disposto no presente regulamento através do sinal de aviso de cor vermelha ou amarela especificado nos pontos 5.2.1.29.1.1 e 5.2.1.29.1.2, respetivamente, consoante o caso. Se o desempenho previsto para a travagem de serviço deixar de poder ser assegurado (sinal de aviso vermelho), as avarias devidas a uma interrupção da alimentação elétrica (em consequência de rutura ou de desconexão, por exemplo) devem ser assinaladas ao condutor logo que se produzam, e o desempenho da travagem residual previsto deve ser atingido por meio do comando da travagem de serviço, em conformidade com o ponto 2.4 anexo 4 do presente regulamento. Estes requisitos não devem ser interpretados como uma derrogação aos requisitos em matéria de travagem de emergência.
5.2.1.27.4. Um veículo a motor, ligado eletricamente a um reboque por uma linha de comando elétrica, deve alertar de forma clara o condutor sempre que o reboque fornecer a informação de avaria indicando que a energia armazenada em qualquer parte do sistema de travagem de serviço do reboque baixou para um nível inferior ao de alerta, conforme definido no ponto 5.2.2.16 seguinte. Um aviso semelhante deve também ser feito quando uma avaria persistente (> 40 ms) na transmissão elétrica do comando do reboque, exceto a sua reserva de energia, impedir o desempenho prescrito do sistema de travagem de serviço do reboque, conforme definido no ponto 5.2.2.15.2.1 seguinte. Deve-se utilizar, neste caso, o sinal de aviso vermelho referido no ponto 5.2.1.29.2.1.
5.2.1.27.5. Se a fonte de energia da transmissão elétrica do comando acusar uma deficiência em relação ao valor nominal do nível de energia, deve ser garantida toda a gama de comando do sistema de travagem de serviço depois de se acionar 20 vezes consecutivas, a fundo, o comando da travagem de serviço. Durante o ensaio, o comando de travagem deve ser acionado a fundo durante 20 segundos e, em seguida, desativado durante 5 segundos de cada vez. Pressupõe-se que, durante o ensaio acima indicado, haja energia em quantidade suficiente na transmissão para permitir um acionamento, a fundo, do sistema de travagem de serviço. O presente requisito não deve ser interpretado como uma derrogação ao disposto no anexo 7.
5.2.1.27.6. Se a tensão da bateria descer abaixo de um valor fixado pelo fabricante, a partir do qual o desempenho prescrito para a travagem de serviço não possa continuar a ser assegurado e/ou nenhum de, pelo menos, dois circuitos de travagem de serviço independentes possa atingir o desempenho de travagem de emergência ou residual prescrito, o sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 deve ser ativado. Uma vez o sinal de aviso aceso, deve ser possível acionar o comando da travagem de serviço e obter, pelo menos, o desempenho residual referido no ponto 2.4 do anexo 4 do presente regulamento. Pressupõe-se que haja energia em quantidade suficiente na transmissão de energia ao sistema de travagem de serviço. Este requisito não deve ser interpretado como uma derrogação ao disposto em matéria de travagem de emergência.
5.2.1.27.7. Se o equipamento auxiliar for alimentado com energia da mesma reserva que a transmissão elétrica do comando, deve assegurar-se que, com o motor a funcionar a uma velocidade não superior a 80 % da velocidade a que se obtém a potência máxima, o fornecimento de energia é suficiente para atingir os valores de desaceleração prescritos, quer através de qualquer fonte de alimentação de energia capaz de evitar o esgotamento desta reserva, quando todos os equipamentos auxiliares estiverem em funcionamento, quer através de um corte automático de partes do equipamento auxiliar pré-selecionadas, a uma tensão acima do nível crítico referido no ponto 5.2.1.27.6 do presente regulamento, de modo a impedir uma descarga suplementar desta reserva. A conformidade pode ser demonstrada por cálculo ou por meio de um ensaio prático. Em relação aos veículos autorizados a rebocar um reboque das categorias O3 ou O4, o consumo de energia do reboque deve ser tido em conta à razão de 400 W. O presente ponto não é aplicável aos veículos em que os valores de desaceleração prescritos possam ser atingidos sem a utilização de energia elétrica.
5.2.1.27.8. Se o equipamento auxiliar for alimentado a energia pela transmissão elétrica do comando, devem ser cumpridos os seguintes requisitos:
5.2.1.27.8.1. Em caso de avaria da fonte de energia com o veículo em movimento, a energia contida no reservatório deve ser suficiente para acionar os travões quando o comando é acionado.
5.2.1.27.8.2. Em caso de avaria da fonte de energia com o veículo imobilizado e o sistema de travagem de estacionamento ativado, a energia contida no reservatório deve ser suficiente para acender as luzes, mesmo quando os travões são acionados.
5.2.1.27.9. Em caso de avaria na transmissão elétrica do comando do sistema de travagem de serviço de um veículo trator equipado com uma linha de comando elétrica de acordo com os pontos 5.1.3.1.2 ou 5.1.3.1.3, deve continuar a ser possível acionar a fundo os travões do reboque.
5.2.1.27.10. Em caso de avaria na transmissão elétrica do comando de um reboque, ligado eletricamente apenas através de uma linha de comando elétrica, de acordo com o ponto 5.1.3.1.3, deve ser assegurada a travagem do reboque em conformidade com o ponto 5.2.1.18.4.1. Deve ser este o caso sempre que o reboque emita o sinal de «pedido de travagem pela conduta de alimentação» através do componente de comunicação de dados da linha de comando elétrica ou em caso da ausência persistente desta comunicação de dados. O presente ponto não é aplicável aos veículos a motor que não possam funcionar com os reboques ligados apenas através de uma linha de comando elétrica, conforme descrito no ponto 5.1.3.5.
5.2.1.28. Requisitos especiais aplicáveis ao comando da força de engate
5.2.1.28.1. O comando da força de engate só é autorizado no veículo trator.
5.2.1.28.2. A ação do comando da força de engate deve ser a de reduzir a diferença entre as razões de travagem dinâmicas do veículo trator e do veículo rebocado. Aquando da homologação dever-se-á controlar o funcionamento do comando da força de engate. O método deste controlo deve ser acordado entre o fabricante do veículo e o serviço técnico, devendo o método de avaliação e os resultados ser apensos ao relatório de homologação.
5.2.1.28.2.1. O comando da força de engate pode comandar a razão de travagem TM/PM e/ou os valores de solicitação do travão para o reboque. No caso de um veículo trator equipado com duas linhas de comando em conformidade com o ponto 5.1.3.1.2 anterior, ambos os sinais devem estar sujeitos a regulações de comando semelhantes.
5.2.1.28.2.2. O comando da força de engate não deve impedir que sejam aplicadas as máximas pressões de travagem possíveis.
5.2.1.28.3. O veículo deve cumprir os requisitos de compatibilidade do anexo 10 para a condição de carregado, mas, para alcançar os objetivos referidos no ponto 5.2.1.28.2, o veículo pode derrogar a estes requisitos quando o comando da força de engate estiver em funcionamento.
5.2.1.28.4. Uma avaria no comando da força de engate deve ser detetada e assinalada ao condutor por um sinal de aviso amarelo, tal como o definido no ponto 5.2.1.29.1.2. Em caso de avaria, devem ser cumpridos os requisitos aplicáveis do anexo 10.
5.2.1.28.5. A compensação pelo sistema de comando da força de engate deve ser indicada pelo sinal de aviso amarelo definido no ponto 5.2.1.29.1.2 se esta compensação exceder 150 kPa em relação ao valor nominal da solicitação definido no ponto 2.28.3 até um limite, em pm, de 650 kPa (ou da solicitação digital equivalente). Acima do nível de 650 kPa, deve-se emitir o aviso se a compensação fizer com que o ponto de funcionamento fique fora da faixa de compatibilidade com a condição de veículo carregado, conforme definido no anexo 10 para o veículo a motor.
Diagrama 1
Veículos tratores de reboques (exceto semirreboques)

Diagrama 2
Unidades tratoras para semirreboques

5.2.1.28.6. Um sistema de comando da força de engate aplica-se apenas às forças de engate produzidas pelo sistema de travagem de serviço do veículo a motor e do reboque. As forças de engate resultantes do desempenho dos sistemas auxiliares de travagem não devem ser compensadas pelo sistema de travagem de serviço do veículo a motor nem do reboque. Considera-se que os sistemas auxiliares de travagem não fazem parte dos sistemas de travagem de serviço.
5.2.1.29. Avaria dos travões e sinal de aviso de anomalia
Os requisitos gerais aplicáveis aos sinais de aviso óticos cuja função é indicar ao condutor determinadas avarias específicas (ou anomalias) no equipamento de travagem do veículo a motor ou, se for o caso, do seu reboque, são estabelecidos nos pontos seguintes. À exceção do disposto no ponto 5.2.1.29.6 seguinte, esses sinais devem ser utilizados exclusivamente para os fins previstos no presente regulamento.
5.2.1.29.1. Os veículos a motor devem poder emitir sinais de aviso óticos em caso de avaria e de anomalia dos travões, como se segue:
|
5.2.1.29.1.1. |
Um sinal de aviso vermelho, indicando avarias no equipamento de travagem do veículo definidas noutros pontos do presente regulamento que impedem a travagem de serviço de atingir o desempenho prescrito e/ou que afetam o funcionamento de, pelo menos, um dos dois circuitos independentes da travagem de serviço; |
|
5.2.1.29.1.2. |
Se aplicável, um sinal de aviso amarelo indicando uma anomalia detetada eletricamente no equipamento de travagem do veículo que não seja indicada pelo sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 anterior. |
5.2.1.29.2. Os veículos a motor equipados com uma linha de comando elétrica e/ou autorizados a rebocar reboques equipados com uma transmissão elétrica do comando devem poder apresentar um sinal de aviso amarelo separado para indicar uma anomalia na transmissão elétrica do comando do equipamento de travagem do reboque. O sinal deve ser acionado a partir do reboque através do pino 5 do conector elétrico conforme à norma ISO 7638:2003 (13), devendo sempre o sinal transmitido pelo reboque ser mostrado sem atraso ou modificação significativos no veículo trator. Este sinal de aviso não deve acender-se quando o veículo estiver ligado a um reboque que não tenha uma linha de comando elétrica e/ou uma transmissão elétrica do comando ou quando não estiver ligado a nenhum reboque. Esta função deve ser automática.
5.2.1.29.2.1. No caso de um veículo a motor equipado com uma linha de comando elétrica, quando ligado eletricamente a um reboque equipado com uma linha de comando elétrica, o sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 anterior deve ser igualmente utilizado para indicar determinadas avarias específicas no equipamento de travagem do reboque, sempre que o reboque facultar a informação correspondente de avaria através do componente de comunicação de dados da linha de comando elétrica. Esta indicação deverá ser complementar à do sinal de aviso amarelo definido no ponto 5.2.1.29.2 anterior. Em alternativa, em vez de se utilizar o sinal de aviso vermelho definido no ponto 5.2.1.29.1.1 e o sinal de aviso amarelo referido anteriormente, o veículo trator pode dispor de um sinal de aviso vermelho separado para indicar avaria no equipamento de travagem do reboque.
5.2.1.29.3. Os sinais de aviso devem ser visíveis, mesmo em pleno dia; o bom estado de funcionamento dos sinais deve poder ser facilmente verificado pelo condutor a partir do seu lugar de condução; a avaria de um dos componentes dos dispositivos de aviso não deve afetar o desempenho do sistema de travagem.
5.2.1.29.4. Exceto indicação em contrário:
|
5.2.1.29.4.1. |
Qualquer avaria ou anomalia deve ser assinalada ao condutor por meio do(s) sinal(is) de aviso supramencionado(s), o mais tardar, no momento em que for acionado o comando do travão em causa; |
|
5.2.1.29.4.2. |
O(s) sinal(is) de aviso deve(m) permanecer aceso(s) enquanto a avaria/anomalia persistir e o comutador de ignição («arranque») estiver na posição de contacto («marcha»); e |
|
5.2.1.29.4.3. |
O sinal de aviso deve ser constante (não intermitente). |
5.2.1.29.5. O(s) sinal(is) de aviso supramencionado(s) deve(m) acender-se quando o equipamento elétrico do veículo (e o sistema de travagem) são colocados sob tensão. Com o veículo imobilizado, o sistema de travagem deve verificar se, antes da extinção dos sinais, não está presente alguma das avarias ou anomalias especificadas. As avarias ou as anomalias especificadas que devem ativar os sinais de aviso supramencionados, mas que não são detetadas em condições estáticas, devem ser registadas no momento da sua deteção e poder ser visualizadas no momento do arranque e sempre que o comutador de ignição («arranque») estiver na posição de contacto («marcha») e enquanto a avaria ou a anomalia persistir.
5.2.1.29.6. As avarias (ou as anomalias) não especificadas, ou outras informações relativas aos travões e/ou aos órgãos de rolamento do veículo a motor, podem ser indicadas pelo sinal de aviso amarelo referido no ponto 5.2.1.29.1.2 anterior, desde que estejam reunidas todas as seguintes condições:
|
5.2.1.29.6.1. |
O veículo se encontre imobilizado; |
|
5.2.1.29.6.2. |
Após o equipamento de travagem ter sido colocado sob tensão e o sinal ter indicado que, em conformidade com os procedimentos definidos no ponto 5.2.1.29.5 anterior, não foram identificadas avarias (ou anomalias) específicas; e |
|
5.2.1.29.6.3. |
As avarias não especificadas, ou outras informações, são indicadas apenas pela intermitência do sinal de aviso. Todavia, o sinal de aviso deve apagar-se assim que o veículo ultrapasse os 10 km/h. |
5.2.1.30. Geração de um sinal de travagem que acenda as luzes de travagem
5.2.1.30.1. O acionamento do sistema de travagem de serviço pelo condutor deve gerar um sinal que será utilizado para acender as luzes de travagem.
5.2.1.30.2. Requisitos aplicáveis aos veículos que utilizam sinalização eletrónica para comandar o acionamento inicial do sistema de travagem de serviço e que estão equipados com travões auxiliares e/ou sistema de travagem regenerativa da categoria A:
|
Desaceleração pelo sistema auxiliar de travagem e/ou pelo sistema de travagem regenerativa |
|
|
≤ 1,3 m/s2 |
> 1,3 m/s2 |
|
Pode gerar o sinal |
Deve gerar o sinal |
5.2.1.30.3. No caso de veículos equipados com um sistema de travagem de uma especificação diferente da definida no ponto 5.2.1.30.2 anterior, o funcionamento do sistema auxiliar de travagem e/ou do sistema de travagem regenerativa da categoria A pode produzir o sinal independentemente da desaceleração produzida.
5.2.1.30.4. Não deve ser gerado o sinal quando o abrandamento se produzir pelo efeito natural de travagem apenas do motor.
5.2.1.30.5. A ativação do sistema de travagem de serviço através da «travagem comandada automaticamente» deve gerar o sinal supramencionado. No entanto, quando o abrandamento gerado for inferior a 0,7 m/s2, o sinal pode ser suprimido (14).
5.2.1.30.6. A ativação de parte do sistema de travagem de serviço por «travagem seletiva» não deve gerar o sinal mencionado acima (15).
5.2.1.30.7. No caso de veículos equipados com uma linha de comando elétrica, o sinal deve ser gerado pelo veículo a motor quando for recebida do reboque a mensagem «acender luzes de travagem» através da linha de comando elétrica.
5.2.1.31. Quando um veículo estiver equipado com meios para indicar a travagem de emergência, a ativação e a desativação do sinal de travagem de emergência devem apenas ser geradas pela aplicação do sistema de travagem de serviço quando estiverem preenchidas as seguintes condições: (16)
|
5.2.1.31.1. |
O sinal não deve ser ativado quando a desaceleração do veículo for inferior aos valores definidos no quadro seguinte, mas pode ser gerado com uma desaceleração igual ou superior a esses valores, sendo o valor concreto definido pelo fabricante do veículo:
O sinal deve ser desativado em todos os veículos, o mais tardar, quando a desaceleração tiver baixado para menos de 2,5 m/s2. |
|
5.2.1.31.2. |
Podem ser também utilizadas as seguintes condições:
O sinal deve ser desativado quando o sistema antibloqueio deixar de efetuar ciclos completos. |
5.2.1.32. Sem prejuízo do disposto no ponto 12.3 do presente regulamento, todos os veículos das categorias seguintes devem estar equipados com uma função de estabilidade do veículo:
|
a) |
M2, M3, N2 (17); |
|
b) |
N3 (17) que não tenham mais de três eixos; |
|
c) |
N3 (17) com quatro eixos, com uma massa máxima não superior a 25 t e com um código de diâmetro máximo da roda não superior a 19,5. |
A função de estabilidade do veículo deve incluir um controlo da capotagem e um controlo da direção e cumprir os requisitos técnicos do anexo 21 do presente regulamento.
5.2.1.33. Os veículos da categoria N1 que não tenham mais do que 3 eixos podem ser equipados com uma função de estabilidade do veículo. Se presente, esta deve incluir um controlo da capotagem e um controlo da direção e cumprir os requisitos técnicos do anexo 21 do presente regulamento.
5.2.2. Veículos da categoria O
5.2.2.1. Os reboques da categoria O1 não precisam de estar equipados com um sistema de travagem de serviço; contudo, se um reboque desta categoria estiver equipado com um sistema de travagem de serviço, deve respeitar os mesmos requisitos que um reboque da categoria O2.
5.2.2.2. Os reboques da categoria O2 devem estar equipados com um sistema de travagem de serviço de tipo contínuo, semicontínuo ou por inércia. Este último tipo só deve é admitido em reboques de eixo central. Todavia, são admitidos sistemas de travagem elétricos conformes aos requisitos do anexo 14 do presente regulamento.
5.2.2.3. Os reboques das categorias O3 e O4 devem estar equipados com um sistema de travagem de serviço de tipo contínuo ou semicontínuo.
5.2.2.4. O sistema de travagem de serviço:
|
5.2.2.4.1. |
Deve atuar sobre todas as rodas do veículo; |
|
5.2.2.4.2. |
Deve distribuir a sua ação adequadamente pelos eixos; |
|
5.2.2.4.3. |
Deve conter, pelo menos num dos reservatórios de ar, um dispositivo de drenagem e de evacuação colocados em posição adequada e de fácil acesso. |
5.2.2.5. A ação do sistema de travagem de serviço deve ser repartida pelas rodas do mesmo eixo, simetricamente em relação ao plano longitudinal médio do veículo. A compensação e as funções, como o antibloqueio, suscetíveis de implicar exceções a esta repartição simétrica devem ser declaradas.
5.2.2.5.1. A compensação pela transmissão elétrica do comando de uma deterioração ou de uma anomalia do sistema de travagem deve ser indicada ao condutor por meio do sinal de aviso ótico separado de cor amarela mencionado no ponto 5.2.1.29.2. Este requisito aplica-se, qualquer que seja o estado de carga do veículo, quando a compensação ultrapasse os seguintes limites:
|
5.2.2.5.1.1. |
Uma diferença entre as pressões de travagem nas extremidades de qualquer eixo:
|
|
5.2.2.5.1.2. |
Um valor de compensação individual sobre qualquer eixo:
|
5.2.2.5.2. A compensação acima definida só é autorizada se o acionamento inicial dos travões intervier com o veículo a circular a mais de 10 km/h.
5.2.2.6. As anomalias da transmissão elétrica do comando não devem ter como efeito acionar os travões contra a vontade do condutor.
5.2.2.7. As superfícies de travagem necessárias para atingir o grau de eficácia prescrito devem estar em ligação permanente com as rodas, de forma rígida ou por intermédio de componentes insuscetíveis de avaria.
5.2.2.8. O desgaste dos travões deve poder ser facilmente compensado por um sistema de regulação manual ou automática. Além disso, o comando e os elementos da transmissão e dos travões devem possuir uma reserva de curso e, se necessário, meios de compensação adequados para, em caso de aquecimento dos travões ou de um certo grau de desgaste das guarnições dos travões, garantir a eficácia da travagem sem necessidade de uma regulação imediata.
5.2.2.8.1. No que respeita aos travões de serviço, a regulação do desgaste deve ser automática. Todavia, a montagem de dispositivos de regulação automática é opcional para veículos das categorias O1 e O2. Os travões equipados com dispositivos de regulação automática devem, após aquecimento seguido de arrefecimento, ser capazes de rolar livremente, na aceção do ponto 1.7.3 do anexo 4, na sequência dos ensaios de tipo I ou de tipo III também definidos nesse anexo, consoante o caso.
5.2.2.8.1.1. No caso de reboques da categoria O4, os requisitos de desempenho do ponto 5.2.2.8.1 anterior devem ser considerados preenchidos se forem cumpridos os requisitos do ponto 1.7.3 do anexo 4.
5.2.2.8.1.2. No caso de reboques das categorias O2 e O3, os requisitos de desempenho do ponto 5.2.2.8.1 anterior devem ser considerados preenchidos se forem cumpridos os requisitos do ponto 1.7.3 (18) do anexo 4.
5.2.2.8.2. Verificação do desgaste dos componentes de atrito do travão de serviço
5.2.2.8.2.1. Deve ser possível avaliar facilmente este desgaste das guarnições do travão de serviço a partir do exterior ou da parte inferior do veículo, sem a remoção das rodas, através de orifícios de inspeção adequados, ou por outros meios. Esta verificação deve poder ser efetuada utilizando ferramentas normais de oficina ou equipamento comum de inspeção de veículos.
Em alternativa, é admissível instalar-se no reboque um dispositivo que informe quando é necessário substituir as guarnições ou um dispositivo sensor por roda (as rodas duplas são consideradas como uma só roda), que avisará o condutor na sua posição de condução da necessidade de substituir as guarnições. No caso de um sinal de aviso ótico, pode usar-se o sinal de aviso amarelo mencionado no ponto 5.2.1.29.2 anterior, desde que o sinal cumpra os requisitos do ponto 5.2.1.29.6.
5.2.2.8.2.2. A avaliação do estado de desgaste das superfícies de atrito dos discos ou tambores do travão só pode ser efetuada por medição direta do componente em causa ou inspeção de qualquer indicador de desgaste dos discos ou tambores do travão, o que pode exigir uma desmontagem mais ou menos significativa. Por conseguinte, aquando da homologação, o fabricante do veículo deve definir o seguinte:
|
a) |
o método para avaliar o desgaste das superfícies de atrito dos tambores e dos discos, incluindo o nível de desmontagem exigido e as ferramentas e o processo necessários para o fazer; |
|
b) |
informações que definam o limite máximo de desgaste aceitável, a partir do qual se torna necessário substituir a peça. |
Estas informações devem ser disponibilizadas gratuitamente, por exemplo num manual ou num registo eletrónico de dados.
5.2.2.9. Os sistemas de travagem devem ser concebidos de forma a que a imobilização do reboque seja assegurada automaticamente em caso de separação do engate em andamento.
5.2.2.10. Em qualquer reboque que deva estar equipado com um sistema de travagem de serviço, a travagem de estacionamento deve igualmente ser assegurada quando o reboque estiver separado do veículo trator. O dispositivo de travagem de estacionamento deve poder ser acionado por uma pessoa de pé no solo; todavia, no caso de um reboque utilizado para o transporte de passageiros, este travão deve poder ser acionado do interior do reboque.
5.2.2.11. Se o reboque estiver equipado com um dispositivo que permita neutralizar o mecanismo de acionamento a ar comprimido de um sistema de travagem que não seja o sistema de travagem de estacionamento, o sistema mencionado em primeiro lugar deve ser concebido e construído de tal forma que seja obrigatoriamente levado à posição «de repouso» pelo menos quando o reboque for novamente alimentado com ar comprimido.
5.2.2.12. Os reboques das categorias O3 e O4 devem preencher as condições referidas no ponto 5.2.1.18.4.2. É necessária uma tomada para controlo da pressão, facilmente acessível, a jusante da cabeça de engate da linha de comando.
5.2.2.12.1. No caso de reboques equipados com uma linha de comando elétrica e ligados eletricamente a um veículo trator com uma linha de comando elétrica, pode suprimir-se a ação de travagem automática referida no ponto 5.2.1.18.4.2, desde que a pressão nos reservatórios de ar comprimido do reboque seja suficiente para assegurar o desempenho da travagem referido no ponto 3.3 do anexo 4 do presente regulamento.
5.2.2.13. Os reboques da categoria O3 devem estar equipados com um sistema de travagem antibloqueio, em conformidade com os requisitos do anexo 13 do presente regulamento. Os reboques da categoria O4 devem estar equipados com um sistema de travagem antibloqueio, em conformidade com os requisitos aplicáveis à categoria A constantes do anexo 13 do presente regulamento.
5.2.2.14. Se o equipamento auxiliar for alimentado com energia do sistema de travagem de serviço, este sistema deve estar protegido, a fim de garantir que a soma das forças de travagem exercidas na periferia das rodas é de, pelo menos, 80 % do valor prescrito para o reboque relevante, conforme definido no ponto 3.1.2.1 do anexo 4 do presente regulamento. Este requisito deve ser respeitado em ambas as condições de funcionamento seguintes:
|
|
Durante o funcionamento do equipamento auxiliar; e |
|
|
Em caso de rutura ou fuga do equipamento auxiliar, a menos que tal rutura ou fuga afetem o sinal de comando referido no ponto 6 do anexo 10 do presente regulamento, devendo neste caso aplicar-se os requisitos de desempenho constantes desse ponto. |
5.2.2.14.1. Considera-se que as disposições acima referidas são cumpridas quando a pressão nos dispositivos de armazenamento de energia do travão de serviço se mantiver a uma pressão de, pelo menos, 80 % da pressão de solicitação da linha de comando ou do valor digital de solicitação equivalente, tal como referido no ponto 3.1.2.2 do anexo 4 do presente regulamento.
5.2.2.15. Requisitos especiais adicionais aplicáveis aos sistemas de travagem de serviço com transmissão elétrica do comando
5.2.2.15.1. Em caso de uma única avaria momentânea (< 40 ms) na transmissão elétrica do comando (sinal não transmitido ou erro de dados, por exemplo), excetuando-se o fornecimento de energia, o desempenho da travagem de serviço não deve ser afetado de modo percetível.
5.2.2.15.2. Em caso de avaria na transmissão elétrica do comando (19) (por exemplo, rutura, desconexão), deve ser mantido um desempenho da travagem de, pelo menos, 30 % do desempenho prescrito para o sistema de travagem de serviço do reboque em questão. Quanto aos reboques unicamente ligados por uma linha de comando elétrica, em conformidade com o ponto 5.1.3.1.3, e que respeitem o referido no ponto 5.2.1.18.4.2 com o desempenho prescrito no ponto 3.3 do anexo 4 do presente regulamento, basta respeitar o disposto no ponto 5.2.1.27.10 quando deixar de poder ser garantido um desempenho da travagem de, pelo menos, 30 % do desempenho prescrito para o sistema de travagem de serviço do reboque, quer emitindo o sinal de «pedido de travagem pela conduta de alimentação» através do componente de comunicação de dados da linha de comando elétrica quer pela ausência persistente desta comunicação de dados.
5.2.2.15.2.1. Uma avaria na transmissão elétrica do comando do reboque que afete a função e o desempenho de sistemas abrangidos pelo presente regulamento e as avarias da alimentação de energia disponível a partir do conector ISO 7638:2003 (20) devem ser indicadas ao condutor pelo sinal de aviso separado definido no ponto 5.2.1.29.2 através do pino 5 do conector elétrico conforme à norma ISO 7638:2003. (20) Além disso, os reboques equipados com uma linha de comando elétrica, quando ligados eletricamente a um veículo trator equipado com uma linha de comando elétrica, devem informar da avaria para ativação do sinal de aviso vermelho referido no ponto 5.2.1.29.2.1 através do componente de comunicação de dados da linha de comando elétrica, quando o desempenho prescrito para a travagem de serviço do reboque já não puder ser assegurado.
5.2.2.16. Quando a energia armazenada numa parte do sistema de travagem de serviço de um reboque equipado com uma linha de comando elétrica e ligado eletricamente a um veículo trator equipado com uma linha de comando eletrónico baixar para o valor determinado em conformidade com o ponto 5.2.2.16.1 seguinte, o condutor do veículo trator deve ser avisado. O aviso deve ser emitido por ativação do sinal vermelho referido no ponto 5.2.1.29.2.1 e o reboque deve facultar a informação de avaria através do componente de comunicação de dados da linha de comando elétrica. O sinal de aviso amarelo separado referido no ponto 5.2.1.29.2 deve ser igualmente ativado através do pino 5 do conector elétrico conforme à norma ISO 7638:2003 (21), a fim de prevenir o condutor de que o nível da reserva de energia do reboque está baixo.
5.2.2.16.1. O valor de energia baixo referido no ponto 5.2.2.16 anterior deve ser o valor ao qual, sem recarregar o reservatório de energia e independentemente da condição de carga do reboque, não é possível acionar o comando da travagem de serviço uma quinta vez, após quatro acionamentos a fundo, e obter, pelo menos, 50 % do desempenho prescrito do sistema de travagem de serviço do reboque em questão.
5.2.2.17. Os reboques equipados com uma linha de comando elétrica e os reboques das categorias O3 e O4 equipados com um sistema antibloqueio devem estar equipados com um ou ambos dos seguintes componentes, para a transmissão elétrica do comando:
|
a) |
um conector elétrico especial para o sistema de travagem e/ou para o sistema antibloqueio, em conformidade com a norma ISO 7638:2003 (21) (22); |
|
b) |
um conector automatizado que satisfaça os requisitos especificados no anexo 22. |
Os sinais de aviso de avaria exigidos ao reboque no presente regulamento devem ser ativados através dos conectores atrás referidos. Os requisitos a aplicar aos reboques no que diz respeito à transmissão dos sinais de aviso de avaria são os prescritos para os veículos a motor, conforme o caso, nos pontos 5.2.1.29.4, 5.2.1.29.5 e 5.2.1.29.6 do presente regulamento.
Os reboques equipados com um conector ISO 7638:2003 tal como atrás definido devem ser marcados de forma indelével, a fim de indicar a funcionalidade do sistema de travagem quando o conector ISO 7638:2003 for ligado e desligado (23).
A marcação deve ser colocada de forma a ser visível quando se estabelecerem as conexões das interfaces pneumáticas e elétricas.
5.2.2.17.1. Os reboques equipados com uma função de estabilidade do veículo, tal como definida no ponto 2.34 do presente regulamento, devem, em caso de avaria ou anomalia na função de estabilidade do reboque, indicar a avaria ou a anomalia através do sinal de aviso amarelo separado referido no ponto 5.2.1.29.2 anterior, utilizando o pino 5 do conector ISO 7638:2003.
O sinal de aviso deve ser constante e permanecer aceso enquanto a avaria ou a anomalia persistirem e o comutador de ignição (arranque) estiver em posição de contacto (marcha).
5.2.2.17.2. É permitido ligar o sistema de travagem a uma alimentação elétrica para além da fornecida pelo conector ISO 7638:2003. No entanto, quando estiver disponível uma alimentação elétrica suplementar, são aplicáveis as seguintes disposições:
|
a) |
em todos os casos, a alimentação elétrica fornecida pelo conector ISO 7638:2003 é a fonte de energia primária do sistema de travagem, independentemente da existência de qualquer alimentação elétrica suplementar. A alimentação suplementar destina-se a servir de reserva em caso de avaria da alimentação de energia fornecida pelo conector ISO 7638:2003; |
|
b) |
não deve ter consequências negativas para o funcionamento do sistema de travagem em condições normais e de avaria; |
|
c) |
em caso de avaria da alimentação fornecida pelo conector ISO 7638:2003, a energia consumida pelo sistema de travagem não deve ultrapassar a potência máxima disponível da alimentação suplementar; |
|
d) |
o reboque não deve ter nenhuma marcação nem rótulo que indique que o reboque está equipado com uma alimentação elétrica suplementar; |
|
e) |
não é permitido um dispositivo de aviso de avaria no reboque para ser ativado em caso de avaria no sistema de travagem do reboque quando este funcionar com a alimentação suplementar; |
|
f) |
quando estiver disponível uma alimentação elétrica suplementar, deve ser possível verificar o funcionamento do sistema de travagem com esta fonte de alimentação; |
|
g) |
em caso de avaria na alimentação elétrica do conector ISO 7638:2003, devem ser respeitados os requisitos dos pontos 5.2.2.15.2.1 e 4.1 do anexo 13 no que diz respeito ao aviso de avaria, independentemente de o sistema de travagem estar ou não a funcionar com a alimentação elétrica suplementar. |
5.2.2.18. Sempre que a energia elétrica fornecida pelo conector ISO 7638:2003 for utilizada para as funções definidas no ponto 5.1.3.6 anterior, o sistema de travagem deve ter prioridade e estar protegido contra sobrecargas externas. Esta proteção deve ser uma função do sistema de travagem.
5.2.2.19. Em caso de avaria numa das linhas de comando que ligam dois veículos equipados de acordo com o ponto 5.1.3.1.2, o reboque deve utilizar a linha de comando não afetada pela avaria para assegurar, automaticamente, o desempenho de travagem prescrito para o reboque no ponto 3.1 do anexo 4.
5.2.2.20. Se a tensão de alimentação do reboque descer abaixo de um valor fixado pelo fabricante, a partir do qual o desempenho prescrito para a travagem de serviço deixa de poder ser garantido, o sinal de aviso amarelo referido no ponto 5.2.1.29.2 deve ser ativado através do pino 5 do conector ISO 7638:2003 (24). Além disso, os reboques equipados com uma linha de controlo elétrico, quando ligados eletricamente a um veículo trator equipado com uma linha de comando elétrica, devem transmitir a informação da avaria para ativação do sinal de aviso vermelho referido no ponto 5.2.1.29.2.1 através do componente de comunicação de dados da linha de comando elétrica.
5.2.2.21. Para além dos requisitos enunciados nos pontos 5.2.1.18.4.2 e 5.2.1.21 anteriores, os travões do reboque podem igualmente ser acionados automaticamente se essa ação for iniciada pelo próprio sistema de travagem do reboque no seguimento da avaliação de informação gerada a bordo.
5.2.2.22. Ativação do sistema de travagem de serviço.
5.2.2.22.1. No caso dos reboques equipados com uma linha de comando elétrica, o reboque deve transmitir a mensagem «acender luzes de travagem» através da linha de comando elétrica quando for ativado o sistema de travagem do reboque durante a «travagem comandada automaticamente» iniciada pelo reboque. No entanto, quando o abrandamento gerado for inferior a 0,7 m/s2, o sinal pode ser suprimido (25).
5.2.2.22.2. No caso dos reboques equipados com uma linha de comando elétrica, o reboque não deve transmitir a mensagem «acender luzes de travagem» através da linha de comando elétrica durante a «travagem seletiva» iniciada pelo reboque (26).
5.2.2.23. Sem prejuízo do disposto no ponto 12.3 do presente regulamento, todos os veículos das categorias O3, e O4 (27) que não tenham mais de 3 eixos e estejam equipados com suspensão pneumática devem estar equipados com uma função de estabilidade do veículo. Esta deve incluir, pelo menos, um controlo da capotagem e cumprir os requisitos técnicos do anexo 21 do presente regulamento.
6. ENSAIOS
Os ensaios de travagem a que devem ser sujeitos os veículos apresentados para homologação, assim como o desempenho exigido para a travagem, são descritos no anexo 4 do presente regulamento.
7. MODIFICAÇÃO DO MODELO DE VEÍCULO OU DO SEU SISTEMA DE TRAVAGEM E EXTENSÃO DA HOMOLOGAÇÃO
7.1. Qualquer modificação de um modelo de veículo ou do seu equipamento de travagem no que diz respeito às características referidas no anexo 2 do presente regulamento deve ser notificada à entidade homologadora que homologou o modelo de veículo. Essa entidade pode então:
7.1.1. Considerar que as modificações introduzidas não são suscetíveis de ter efeitos adversos apreciáveis e que, em qualquer caso, o veículo ainda cumpre os requisitos; ou
|
7.1.2. |
Exigir um novo relatório de ensaio ao serviço técnico responsável pela realização dos ensaios. |
|
7.2. |
A confirmação ou a recusa da homologação, com especificação das alterações introduzidas, deve ser comunicada às partes signatárias do acordo que apliquem o presente regulamento, mediante o procedimento indicado no ponto 4.3 anterior. |
7.3. A entidade homologadora responsável pela extensão da homologação deve atribuir um número de série a cada formulário de comunicação elaborado para essa extensão e informar desse facto as restantes partes contratantes no Acordo de 1958 através de um formulário de comunicação conforme ao modelo apresentado no anexo 2 do presente regulamento.
8. CONFORMIDADE DA PRODUÇÃO
8.1. Os veículos homologados nos termos do presente regulamento devem ser fabricados em conformidade com o modelo homologado, mediante o cumprimento dos requisitos estabelecidos no ponto 5 anterior.
8.2. Para verificar o cumprimento do disposto no ponto 8.1 anterior, devem ser efetuados controlos adequados da produção.
8.3. O titular da homologação deve em especial:
|
8.3.1. |
Assegurar a existência de procedimentos para um controlo eficaz da qualidade dos produtos; |
|
8.3.2. |
Ter acesso ao equipamento de controlo necessário para verificar a conformidade com cada modelo homologado; |
|
8.3.3. |
Assegurar que os dados dos resultados dos ensaios sejam registados e que os documentos anexos fiquem disponíveis durante um período a determinar em consonância com a entidade homologadora; |
|
8.3.4. |
Analisar os resultados de cada tipo de ensaio para verificar e garantir a estabilidade das características do produto, tendo em conta as variações inerentes a uma produção industrial; |
|
8.3.5. |
Assegurar que, para cada tipo de produto, são efetuados os ensaios, ou alguns deles, prescritos no presente regulamento; |
|
8.3.6. |
Assegurar que quaisquer amostras ou provetes que indiquem não conformidade com o tipo de ensaio considerado deem lugar a outra amostragem e a outro ensaio. Devem ser tomadas todas as medidas necessárias para restabelecer a conformidade da produção correspondente. |
8.4. A entidade homologadora que tiver concedido a homologação pode verificar, em qualquer momento, os métodos de controlo da conformidade aplicados em cada unidade de produção.
8.4.1. Em cada inspeção, os cadernos dos ensaios e os registos da fiscalização da produção devem ser apresentados ao inspetor.
8.4.2. O inspetor pode selecionar aleatoriamente amostras a serem ensaiadas no laboratório do fabricante. O número mínimo de amostras pode ser determinado em função dos resultados dos controlos efetuados pelo próprio fabricante.
8.4.3. Se o nível da qualidade se afigurar insatisfatório ou se se afigurar necessário verificar a validade dos ensaios efetuados em aplicação do ponto 8.4.2 anterior, o inspetor pode selecionar amostras a serem enviadas ao serviço técnico que realizou os ensaios de homologação.
8.4.4. A entidade homologadora pode efetuar qualquer ensaio prescrito no presente regulamento.
8.4.5. A frequência normal das inspeções pela entidade homologadora é bienal. Se forem registados resultados insatisfatórios durante uma destas visitas, a entidade homologadora deve assegurar que são tomadas todas as medidas necessárias para restabelecer a conformidade da produção tão rapidamente quanto possível.
9. SANÇÕES PELA NÃO CONFORMIDADE DA PRODUÇÃO
9.1. A homologação concedida a um modelo de veículo nos termos do presente regulamento pode ser revogada se os requisitos enunciados no ponto 8.1 anterior não forem cumpridos.
9.2. Se uma parte contratante no acordo que aplique o presente regulamento revogar uma homologação que tiver previamente concedido, deve desse facto notificar as outras partes contratantes que apliquem o presente regulamento, por meio de uma cópia do formulário de comunicação conforme ao modelo que consta do anexo 2 do presente regulamento.
10. CESSAÇÃO DEFINITIVA DA PRODUÇÃO
Se o titular da homologação deixar definitivamente de fabricar um modelo de veículo homologado nos termos do presente regulamento, deve informar desse facto a entidade que concedeu a homologação. Após receber a comunicação correspondente, essa entidade deve do facto informar as outras partes contratantes no Acordo que apliquem o presente regulamento por meio de um formulário de comunicação conforme ao modelo constante do anexo 2 do presente regulamento.
11. DESIGNAÇÕES E ENDEREÇOS DOS SERVIÇOS TÉCNICOS RESPONSÁVEIS PELA REALIZAÇÃO DOS ENSAIOS DE HOMOLOGAÇÃO E DAS ENTIDADES HOMOLOGADORAS
As partes contratantes no acordo que apliquem o presente regulamento comunicam ao secretariado da Organização das Nações Unidas as designações e os endereços dos serviços técnicos responsáveis pela realização dos ensaios de homologação e das entidades homologadoras que concedem essas homologações e às quais devem ser enviados os formulários de homologação, extensão, recusa ou revogação da homologação emitidos por outros países.
12. DISPOSIÇÕES TRANSITÓRIAS
12.1. A contar da data oficial de entrada em vigor da série 11 de alterações (11 de julho de 2008), nenhuma parte contratante que aplique o presente regulamento deve recusar conceder ou recusar aceitar um pedido de homologação ao abrigo do presente regulamento, com a redação que lhe foi dada pela série 11 de alterações.
12.2. As partes contratantes que apliquem o presente regulamento só devem conceder homologações se o modelo de veículo a homologar cumprir os requisitos do presente regulamento, com a redação que lhe foi dada pela série 11 de alterações.
Não obstante os requisitos acima referidos, a conformidade com os requisitos do Suplemento 7 à série 11 de alterações não é exigida para todas as novas homologações anteriores a 28 de outubro de 2014.
12.3. A partir das datas de aplicação indicadas no quadro seguinte no que diz respeito à série 11 de alterações ao presente regulamento, as partes contratantes que apliquem o presente regulamento não são obrigadas a aceitar um modelo de veículo homologado ao abrigo da série 10 de alterações ao presente regulamento.
|
Categoria do veículo |
Data de aplicação (a partir da data de entrada em vigor da série 11 de alterações, 11 de julho de 2008) |
|
|
Veículos não isentos de requisitos de controlo da estabilidade nos termos dos pontos 5.2.1.32 e 5.2.2.23, incluindo as notas de rodapé |
M2 |
84 meses (11 de julho de 2015) |
|
M3 (classe III) |
36 meses (11 de julho de 2011) |
|
|
M3 < 16 toneladas (transmissão pneumática) |
48 meses (11 de julho de 2012) |
|
|
M3 (classe II e B) (transmissão hidráulica) |
84 meses (11 de julho de 2015) |
|
|
M3 (classe III) (transmissão hidráulica) |
84 meses (11 de julho de 2015) |
|
|
M3 (classe III) (transmissão pneumática do comando e transmissão de energia hidráulica) |
96 meses (11 de julho de 2016) |
|
|
M3 (classe II) (transmissão pneumática do comando e transmissão de energia hidráulica) |
96 meses (11 de julho de 2016) |
|
|
M3 (outros) |
48 meses (11 de julho de 2012) |
|
|
N2 (transmissão hidráulica) |
84 meses (11 de julho de 2015) |
|
|
N2 (transmissão pneumática do comando e transmissão de energia hidráulica) |
96 meses (11 de julho de 2016) |
|
|
N2 (outros) |
72 meses (11 de julho de 2014) |
|
|
N3 (tratores de 2 eixos para semirreboques) |
36 meses (11 de julho de 2011) |
|
|
N3 [tratores de 2 eixos para semirreboques com transmissão pneumática do comando (ABS)] |
60 meses (11 de julho de 2013) |
|
|
N3 [3 eixos com transmissão elétrica do comando (EBS)] |
60 meses (11 de julho de 2013) |
|
|
N3 [2 e 3 eixos com transmissão pneumática do comando (ABS)] |
72 meses (11 de julho de 2014) |
|
|
N3 (outros) |
48 meses (11 de julho de 2013) |
|
|
O3 (carga combinada dos eixos entre 3,5 e 7,5 toneladas) |
72 meses (11 de julho de 2014) |
|
|
O3 (outros) |
60 meses (11 de julho de 2013) |
|
|
O4 |
36 meses (11 de julho de 2011) |
|
|
Veículos das categorias M, N e O, isentos de requisitos de controlo da estabilidade (pelos pontos 5.2.1.32 e 5.2.2.23, incluindo as notas de rodapé), mas não isentos dos demais requisitos da série 11 de alterações |
24 de outubro de 2016 |
|
12.4. Não obstante o disposto no ponto 12.3, até 24 de outubro de 2016, nenhuma parte contratante que aplique o presente regulamento pode recusar a homologação de um modelo de veículo que não cumpra os requisitos do Suplemento 2 à série 11 de alterações ao presente regulamento.
12.5. As partes contratantes que apliquem o presente regulamento não podem recusar a concessão de extensões a homologações de modelos existentes que tiverem sido concedidas com base no requisito vigente na data da homologação original.
12.6. Sem prejuízo das disposições transitórias anteriores, as partes contratantes para as quais a aplicação do presente regulamento produza efeitos após a data de entrada em vigor da série mais recente de alterações não são obrigadas a aceitar homologações que tiverem sido concedidas em conformidade com qualquer das séries precedentes de alterações ao presente regulamento.
12.7. Transcorridos 24 meses a partir da data de entrada em vigor do Suplemento 12 à série 11 de alterações, as partes contratantes que apliquem o presente regulamento só devem conceder homologações se o modelo de veículo a homologar cumprir os requisitos do presente regulamento com a redação dada pelo Suplemento 12 à série 11 de alterações.
(1) Tal como definido na Resolução consolidada sobre a construção de veículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.3, ponto 2 — www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Em conformidade com as datas de aplicação indicadas no ponto 12 do presente regulamento, os requisitos de travagem para veículos da categoria M1 são os contidos unicamente no Regulamento n.o 13-H. Para os veículos da categoria N1, as partes contratantes que forem signatárias tanto do Regulamento n.o 13-H como do presente regulamento devem reconhecer as homologações concedidas ao abrigo de qualquer um destes dois regulamentos como igualmente válidas.
(3) Os números distintivos das partes contratantes no Acordo de 1958 são reproduzidos no anexo 3 da Resolução consolidada sobre a construção de veículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 3 www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Até serem adotadas normas técnicas uniformes que assegurem compatibilidade e segurança, não devem ser admitidas ligações entre veículos a motor e reboques conformes ao ponto 5.1.3.1.3.
(5) Não aplicável aos reboques.
(6) Não aplicável aos veículos equipados com sistemas de travagem de comando eletrónico.
(7) Quando diferente da pressão mínima de conjunção.
(8) Apenas aplicável aos reboques.
(9) Para efeitos da inspeção técnica periódica, os valores mínimos da razão de travagem definidos para o veículo completo podem necessitar de regulação a fim de respeitar requisitos nacionais ou internacionais aplicáveis aos veículos em circulação.
(10) A entidade homologadora responsável pela concessão de homologação tem o direito de verificar o sistema de travagem de serviço com procedimentos de teste adicionais do veículo.
(11) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(12) Enquanto não forem adotados métodos de ensaio uniformes, o fabricante deve fornecer ao serviço técnico uma análise das avarias potenciais da transmissão do comando e dos respetivos efeitos. As informações comunicadas serão objeto de exame e acordo entre o serviço técnico e o fabricante do veículo.
(13) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(14) Aquando da homologação, o cumprimento deste requisito deve ser confirmado pelo fabricante do veículo.
(15) Durante uma «travagem seletiva», a função pode ser alterada para «travagem comandada automaticamente».
(16) Aquando da homologação, o cumprimento deste requisito deve ser confirmado pelo fabricante do veículo.
(17) Estão excluídos deste requisito os veículos todo-o-terreno, os veículos para fins especiais (por exemplo, equipamentos móveis com quadros não normalizados — p. ex., gruas móveis –, veículos de propulsão hidrostática em que o sistema de propulsão hidráulica é igualmente utilizado para as funções de travagem e auxiliares, veículos N2 que tenham todas as seguintes características: uma massa total entre 3,5 e 7,5 toneladas, um quadro de estrutura baixa não normalizado, mais do que 2 eixos e transmissão hidráulica), vos veículos da classe I, classe A e os veículos articulados das categorias M2 e M3, os tratores N2 para semirreboque com uma massa bruta total (MBT) entre 3.5 e 7,5 toneladas.
(18) Até serem aprovadas disposições técnicas uniformes que avaliem corretamente a função do dispositivo de regulação automática dos travões, considera-se cumprido o requisito de velocidade livre quando esta se observar durante todos os ensaios de travões prescritos para o reboque pertinente.
(19) Enquanto não forem adotados métodos de ensaio uniformes, o fabricante deve fornecer ao serviço técnico uma análise das avarias potenciais da transmissão do comando e dos respetivos efeitos. As informações comunicadas serão objeto de exame e acordo entre o serviço técnico e o fabricante do veículo.
(20) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(21) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(22) As secções dos condutores definidas na norma ISO 7638:2003 para o reboque podem ser reduzidas se o reboque estiver equipado com o seu próprio fusível independente. O fusível deve impedir a passagem de corrente de intensidade superior à intensidade nominal dos condutores. Esta derrogação não é aplicável a reboques equipados para rebocar outro reboque.
(23) No caso de um reboque equipado com um conector ISO 7638 e conector automatizado, a marcação deve indicar que o conector ISO 7638 não deve estar ligado quando estiver a ser utilizado um conector automatizado.
(24) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(25) Aquando da homologação, o cumprimento deste requisito deve ser confirmado pelo fabricante do veículo.
(26) Durante uma «travagem seletiva», a função pode ser alterada para «travagem comandada automaticamente».
(27) Os reboques para transporte de cargas excecionais e os reboques com zonas para passageiros de pé estarão excluídos deste requisito.
ANEXO 1
EQUIPAMENTO, DISPOSITIVOS, MÉTODOS E CONDIÇÕES DE TRAVAGEM NÃO ABRANGIDOS PELO PRESENTE REGULAMENTO
|
1. |
Método para a medição dos tempos de reação («resposta») em travões diferentes dos travões a ar comprimido. |
ANEXO 2
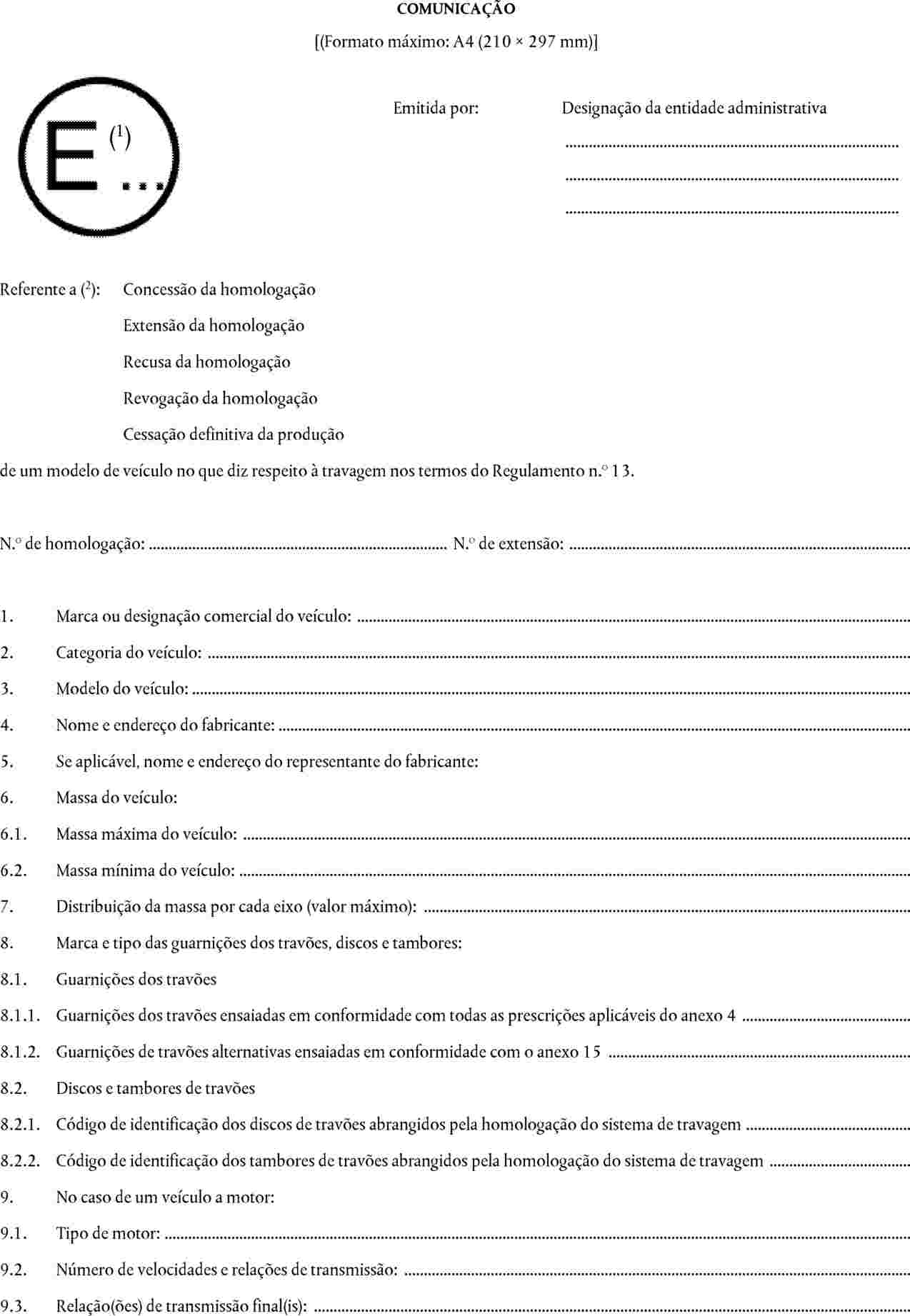
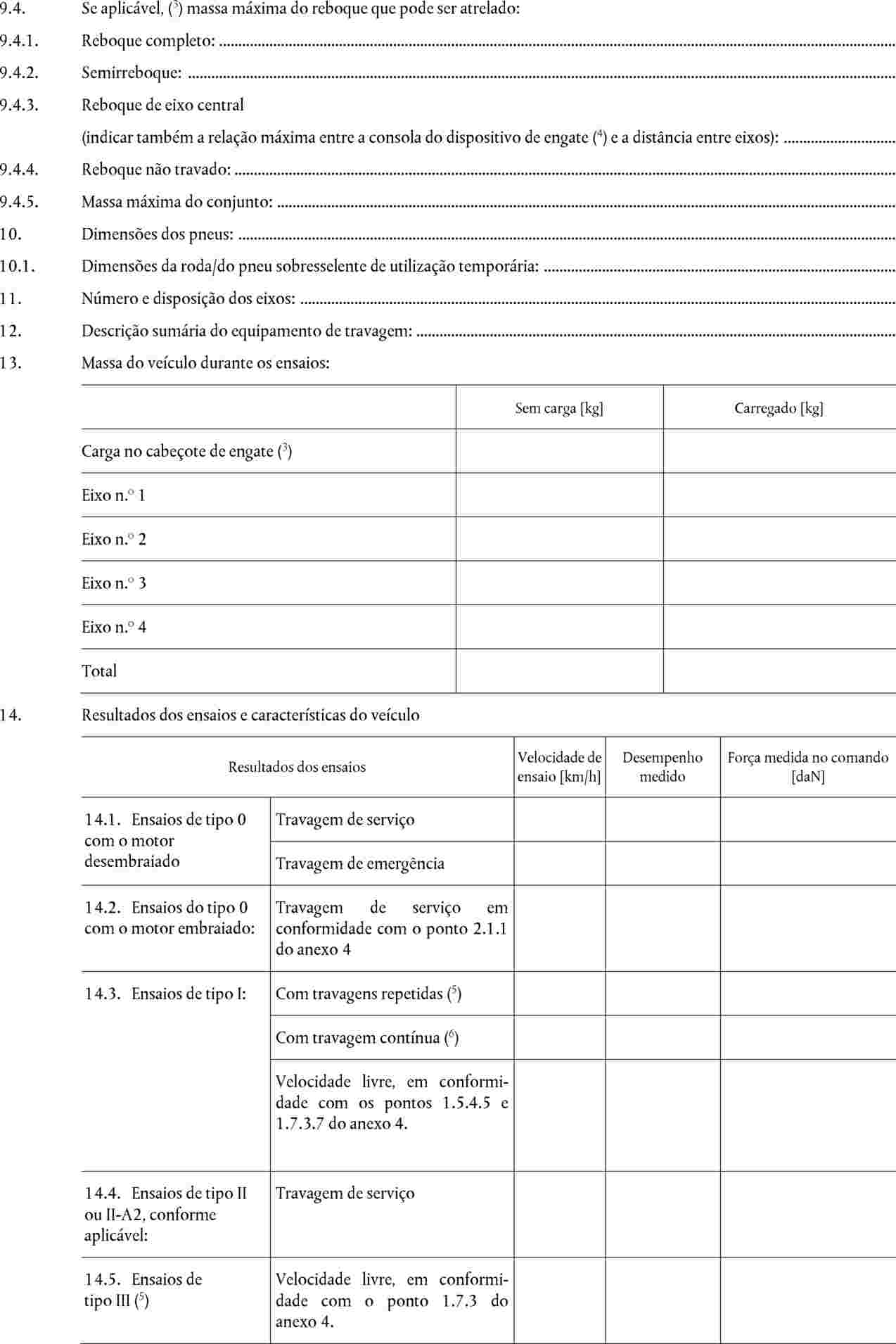
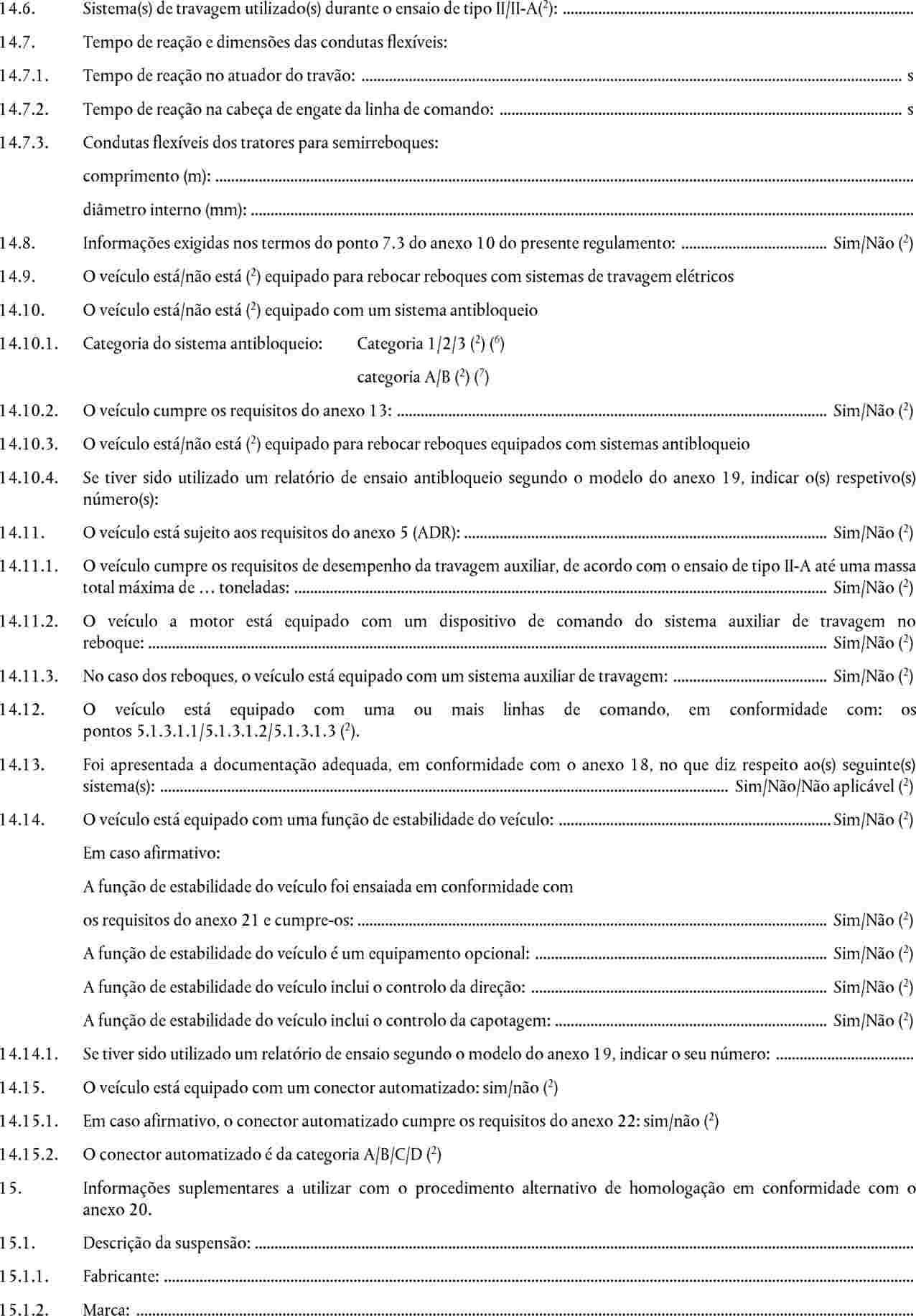

Apêndice 1 (1)
Lista de dados do veículo para efeitos de homologação nos termos do Regulamento n.o 90
1. Descrição do modelo de veículo:…
1.1. Marca ou designação comercial do veículo, se disponível:…
1.2. Categoria do veículo …
1.3. Modelo de veículo em conformidade com a homologação nos termos do Regulamento n.o 13 …
1.4. Modelos ou designações comerciais dos veículos que constituem o modelo de veículo, se disponíveis: …
1.5. Nome e endereço do fabricante: …
2. Marca e tipo das guarnições dos travões, discos e tambores:
2.1. Guarnições dos travões
2.1.1. Guarnições dos travões ensaiadas em conformidade com todas as prescrições aplicáveis do anexo 4 …
2.1.2. Guarnições de travões alternativas ensaiadas em conformidade com o anexo 15 …
2.2. Discos e tambores de travões
2.2.1. Código de identificação dos discos de travões abrangidos pela homologação do sistema de travagem …
2.2.2. Código de identificação dos tambores de travões abrangidos pela homologação do sistema de travagem …
3. Massa mínima do veículo …
3.1. Distribuição da massa por cada eixo (valor máximo): …
4. Massa máxima do veículo: …
4.1. Distribuição da massa por cada eixo (valor máximo): …
5. Velocidade máxima do veículo: …
6. Dimensões dos pneus e das rodas …
7. Configuração do circuito dos travões (por exemplo, repartição dianteira/traseira ou em diagonal): …
8. Declaração de qual dos sistemas constitui o sistema de travagem de emergência: …
9. Especificações das válvulas dos travões (se aplicável): …
9.1. Especificações de regulação da válvula sensora de carga: …
9.2. Regulação da válvula de pressão …
10. Distribuição prevista das forças de travagem …
11. Especificação do travão …
11.1. Tipo de travão de disco [por exemplo, número de êmbolos e diâmetro(s) respetivo(s), disco ventilado ou maciço] …
11.2. Tipo de travão de tambor (por exemplo: duo-servo, com indicação do calibre dos êmbolos e das dimensões do tambor) …
11.3. No caso de sistemas de travagem a ar comprimido, indicar, por exemplo, o tipo e as dimensões das câmaras, das alavancas, etc. …
12. Tipo e calibre do cilindro principal …
13. Tipo e calibre do servodispositivo …
(1) A pedido do(s) requerente(s) de uma homologação ao abrigo do Regulamento n.o 90, a entidade homologadora deve fornecer a informação tal como contida no apêndice 1 do presente anexo. No entanto, essa informação não deve ser fornecida para outros fins além dos de homologação ao abrigo do Regulamento n.o 90.
Apêndice 2
Certificado de homologação referente ao equipamento de travagem do veículo
1. Generalidades
Os elementos suplementares a seguir indicados devem ser registados aquando da homologação do reboque mediante utilização do procedimento alternativo definido no anexo 20 do presente regulamento.
2. Relatórios de ensaio em conformidade com o anexo 19
|
2.1. |
Câmaras de travões de diafragma: |
Relatório n.o … |
|
2.2. |
Travões de mola: |
Relatório n.o … |
|
2.3. |
Características de desempenho dos travões do reboque a frio: |
Relatório n.o… |
|
2.4. |
Sistema de travagem antibloqueio: |
Relatório n.o… |
3. Verificações do desempenho
|
3.1. |
O reboque cumpre os requisitos dos pontos 3.1.2 e 1.2.7 do anexo 4 (desempenho da travagem de serviço a frio) |
Sim/Não (1) |
|
3.2. |
O reboque cumpre os requisitos do ponto 3.2 do anexo 4 (desempenho da travagem de estacionamento a frio) |
Sim/Não (1) |
|
3.3. |
O reboque cumpre os requisitos do ponto 3.3 do anexo 4 (desempenho da travagem de emergência/automática) |
Sim/Não (1) |
|
3.4. |
O reboque cumpre os requisitos do ponto 6 do anexo 10 (desempenho da travagem em caso de avaria no sistema de repartição da travagem) |
Sim/Não (1) |
|
3.5. |
O reboque cumpre os requisitos do ponto 5.2.2.14.1 do presente regulamento (desempenho da travagem em caso de fuga do equipamento auxiliar) |
Sim/Não (1) |
|
3.6. |
O reboque cumpre os requisitos do anexo 13 (travagem antibloqueio) |
Sim/Não (1) |
(1) Riscar o que não é aplicável.
ANEXO 3
DISPOSIÇÕES DAS MARCAS DE HOMOLOGAÇÃO
MODELO A
(Ver ponto 4.4 do presente regulamento)
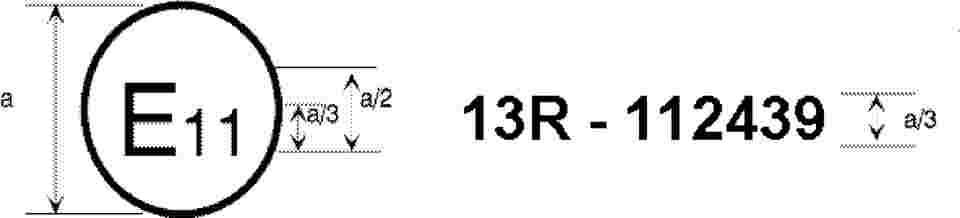
A marca de homologação acima representada, afixada num veículo, indica que o modelo de veículo em causa foi homologado, no que se refere à travagem, no Reino Unido (E11) nos termos do Regulamento n.o 13, com o número de homologação 112439. Este número indica que a homologação foi concedida em conformidade com os requisitos do Regulamento n.o 13 alterado pela série 11 de alterações. Em relação aos veículos das categorias M2 e M3, esta marca significa que esse modelo de veículo foi submetido ao ensaio de tipo II.
MODELO B
(Ver ponto 4.5 do presente regulamento)
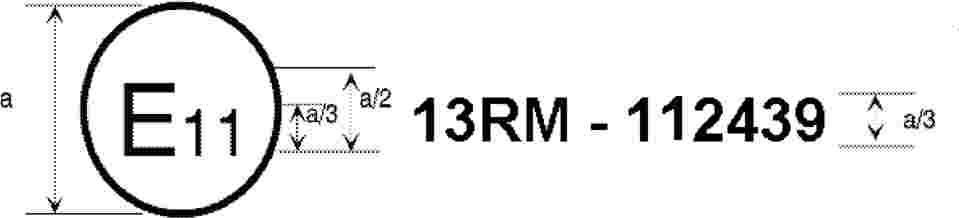
A marca de homologação acima representada, afixada num veículo, indica que o modelo de veículo em causa foi homologado, no que se refere à travagem, no Reino Unido (E11) nos termos do Regulamento n.o 13. Em relação aos veículos das categorias M2 e M3, esta marca significa que o modelo de veículo foi submetido ao ensaio de tipo II-A.
MODELO C
(Ver ponto 4.6 do presente regulamento)
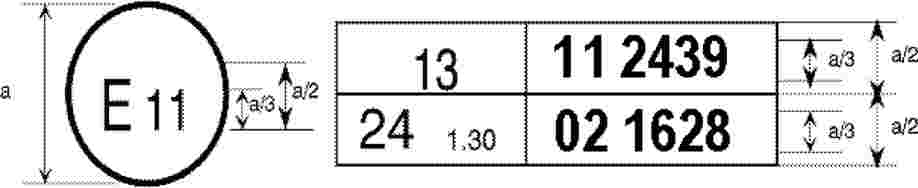
A marca de homologação acima representada, afixada num veículo, indica que o modelo de veículo em causa foi homologado no Reino Unido (E 11) nos termos dos Regulamentos n.o 13 e n.o 24 (1). (No caso deste último regulamento, o valor corrigido do coeficiente de absorção é de 1,30 m– 1)
(1) Este número é indicado apenas a título de exemplo.
ANEXO 4
ENSAIOS DE TRAVAGEM E DESEMPENHO DOS SISTEMAS DE TRAVAGEM
1. ENSAIOS DE TRAVAGEM
1.1. Generalidades
1.1.1. O desempenho prescrito para os sistemas de travagem baseia-se na distância de imobilização e/ou na desaceleração média totalmente desenvolvida. O desempenho de um sistema de travagem é determinado medindo a distância de imobilização relativamente à velocidade inicial do veículo e/ou medindo a desaceleração média totalmente desenvolvida durante o ensaio.
1.1.2. A distância de imobilização é a distância percorrida pelo veículo desde o momento em que o condutor começa a acionar o comando do sistema de travagem até ao momento em que o veículo se imobiliza; a velocidade inicial é a velocidade no momento em que o condutor começa a acionar o comando do sistema de travagem; a velocidade inicial não deve ser inferior a 98 % da velocidade prescrita para o ensaio em questão.
A desaceleração média totalmente desenvolvida (dm) é dada pela desaceleração média em função da distância no intervalo vb-ve, calculada através da seguinte fórmula:

em que:
|
vo |
= |
velocidade inicial do veículo em km/h, |
|
vb |
= |
velocidade do veículo a 0,8 vo em km/h, |
|
ve |
= |
velocidade do veículo a 0,1 vo em km/h, |
|
sb |
= |
distância percorrida entre vo e vb em metros, |
|
se |
= |
distância percorrida entre vo e ve em metros. |
A velocidade e a distância devem ser calculadas com instrumentos que permitam uma exatidão de ± 1 % à velocidade de ensaio especificada. A desaceleração média totalmente desenvolvida pode ser determinada por métodos que não envolvam a medição de velocidade e distância; neste caso, a exatidão da desaceleração média totalmente desenvolvida deve ser de ± 3 %.
1.2. Para a homologação de um veículo, o desempenho da travagem mede-se durante os ensaios em estrada, efetuados nas seguintes condições:
|
1.2.1. |
A condição do veículo, no que respeita à massa, deve estar em conformidade com as prescrições estabelecidas para cada tipo de ensaio e deve ser especificada no relatório de ensaio; |
|
1.2.2. |
O ensaio deve ser realizado às velocidades prescritas para cada tipo de ensaio; se a velocidade máxima de projeto de um veículo for inferior à prescrita para um ensaio, este deve ser efetuado à velocidade máxima do veículo; |
|
1.2.3. |
Durante os ensaios, a força exercida no comando do sistema de travagem para obter o desempenho prescrito não deve exceder a força máxima estabelecida para a categoria do veículo em ensaio; |
|
1.2.4. |
Sem prejuízo de disposições em contrário constantes dos anexos, o piso da estrada deve ter boas condições de aderência; |
|
1.2.5. |
Os ensaios devem ser efetuados na ausência de vento suscetível de influenciar os resultados; |
|
1.2.6. |
No início dos ensaios, os pneus devem estar frios e à pressão prescrita para a carga efetivamente suportada pelas rodas com o veículo imobilizado; |
|
1.2.7. |
O desempenho prescrito deve ser obtido sem bloqueio das rodas, sem que o veículo se desvie da sua trajetória e sem vibrações anormais (1). |
|
1.2.8. |
No caso de veículos movidos total ou parcialmente por um ou mais motores elétricos permanentemente ligados às rodas, todos os ensaios devem ser efetuados com o(s) motor(es) ligado(s); |
|
1.2.9. |
No caso dos veículos referidos no ponto 1.2.8, equipados com um sistema de travagem regenerativa elétrica da categoria A, os ensaios de comportamento descritos no ponto 1.4.3.1 do presente anexo devem ser efetuados numa pista com baixo coeficiente de aderência (tal como definido no ponto 5.2.2 do anexo 13). No entanto, a velocidade máxima de ensaio não deve ultrapassar a velocidade máxima de ensaio prescrita no ponto 5.3.1 do anexo 13 para um piso de baixa aderência e a categoria do veículo em questão.
|
|
1.2.10. |
Durante os ensaios especificados nos pontos 1.2.9 e 1.2.9.1 anteriores, não é permitido o bloqueio das rodas. Admite-se, porém, uma correção da direção, se o ângulo de rotação do comando da direção for inferior a 120° durante os dois primeiros segundos e não superior a 240° no total. |
|
1.2.11. |
No caso de veículos equipados com travões de serviço acionados eletricamente por baterias de tração (ou por baterias auxiliares) alimentadas apenas pela energia de um sistema de carga externo e independente, essas baterias não devem, durante os ensaios de desempenho de travagem, estar, em média, a mais de 5 % acima do estado de carga em que deve ser ativado o aviso de avaria dos travões previsto no ponto 5.2.1.27.6. Se este sinal de aviso for ativado, as baterias podem receber mais alguma carga durante os ensaios, para que possam ser mantidas no estado de carga requerido. |
1.3. Comportamento do veículo durante a travagem
1.3.1. Durante os ensaios de travagem, nomeadamente os efetuados a alta velocidade, deve verificar-se o comportamento geral do veículo durante a travagem.
1.3.2. Comportamento do veículo durante a travagem numa estrada com aderência reduzida. O comportamento dos veículos das categorias M2, M3, N1, N2, N3, O2, O3 e O4 numa estrada com aderência reduzida deve cumprir os requisitos aplicáveis do anexo 10 e/ou do anexo 13 do presente regulamento.
1.3.2.1. No caso de um sistema de travagem conforme ao ponto 5.2.1.7.2 em que a travagem num determinado eixo ou eixos seja assegurada por mais de uma fonte de binário de travagem e qualquer fonte individual possa variar no que respeita às outras, o veículo deve cumprir os requisitos do anexo 10 ou, em alternativa, do anexo 13 em todas as relações admitidas pela sua estratégia de comando (2).
1.4. Ensaio de tipo 0 (ensaio normal de desempenho com os travões frios)
1.4.1. Generalidades
1.4.1.1. Os travões devem estar frios; considera-se que os travões estão frios quando a sua temperatura, medida no disco ou no exterior do tambor, for inferior a 100 °C.
1.4.1.2. O ensaio deve ser efetuado nas seguintes condições:
|
1.4.1.2.1. |
O veículo deve estar carregado, sendo a repartição da sua massa entre os eixos a declarada pelo fabricante; se forem previstas várias repartições da carga pelos eixos, a distribuição da massa máxima pelos eixos deve ser tal que a carga sobre cada eixo seja proporcional à carga máxima admissível para cada eixo. No caso dos tratores para semirreboques, a carga pode ser reposicionada aproximadamente a meia distância entre a posição do cabeçote de engate resultante das condições de carga acima referidas e a linha média do(s) eixo(s) traseiro(s); |
|
1.4.1.2.2. |
Cada ensaio deve ser repetido com o veículo sem carga. No caso de um veículo a motor, pode haver no banco da frente, para além do condutor, uma segunda pessoa encarregada de anotar os resultados do ensaio. No caso de um trator para semirreboques, os ensaios sem carga são efetuados com o veículo na condição de base, incluindo uma massa que represente o prato de engate. Deve também incluir uma massa que represente uma roda sobresselente, se esta estiver incluída na especificação de série do veículo. No caso de um veículo apresentado sob a forma de quadro-cabina nu, pode ser adicionada uma carga suplementar para simular a massa da carroçaria, sem exceder a massa mínima declarada pelo fabricante no anexo 2 do presente regulamento; No caso de um veículo equipado com um sistema de travagem regenerativa elétrica, os requisitos dependem da categoria desse sistema: Categoria A: Qualquer comando distinto de travagem regenerativa elétrica que seja fornecido não deve ser utilizado nos ensaios de tipo 0. Categoria B: O contributo do sistema de travagem regenerativa elétrica para a força de travagem gerada não deve ser superior ao nível mínimo garantido pela conceção do sistema. Considera-se que este requisito é cumprido se as baterias estiverem numa das seguintes condições de estado de carga, sendo este estado de carga (3) determinado pelo método previsto no apêndice do presente anexo:
|
|
1.4.1.2.3. |
Os limites prescritos para o desempenho mínimo, quer nos ensaios com o veículo sem carga, quer nos ensaios com o veículo carregado, devem ser os indicados a seguir para cada categoria de veículos; o veículo deve cumprir tanto a distância de imobilização como a desaceleração média totalmente desenvolvida prescritas para a categoria de veículo em questão, muito embora possa ser desnecessário medir de facto ambos os parâmetros. |
|
1.4.1.2.4. |
A estrada deve ser horizontal. |
1.4.2. Ensaio de tipo 0 com o motor desembraiado
O ensaio deve ser efetuado à velocidade prescrita para a categoria a que o veículo pertence, sendo admitida uma certa margem de tolerância para os números prescritos a este respeito. Deve atingir-se o desempenho mínimo prescrito para cada categoria.
1.4.3. Ensaio de tipo 0 com o motor embraiado
1.4.3.1. Devem ser igualmente efetuados ensaios a diferentes velocidades, sendo a mais baixa igual a 30 % da velocidade máxima do veículo e a mais elevada igual a 80 % dessa velocidade. No caso de veículos equipados com um limitador de velocidade, a velocidade deste limitador deve ser tomada como a velocidade máxima do veículo. Devem ser medidos os valores máximos de desempenho prático, e o comportamento do veículo deve ser indicado no relatório do ensaio. Os tratores para semirreboques, carregados artificialmente para simular os efeitos de um semirreboque carregado, não devem ser ensaiados a mais de 80 km/h.
1.4.3.2. Devem efetuar-se ensaios suplementares com o motor embraiado a partir da velocidade prescrita para a categoria a que o veículo pertence. Deve atingir-se o desempenho mínimo prescrito para cada categoria. As unidades tratoras para semirreboques, carregadas artificialmente para simular os efeitos de um semirreboque carregado, não devem ser ensaiadas a mais de 80 km/h.
1.4.4. Ensaio do tipo 0 para veículos da categoria O equipados com travões a ar comprimido
1.4.4.1. O desempenho da travagem do reboque pode ser calculado, quer a partir da razão de travagem do veículo trator mais o reboque e do impulso medido no engate, quer, em determinados casos, a partir da razão de travagem do veículo trator mais o reboque, estando apenas este travado. O motor do veículo trator deve ser desembraiado durante o ensaio de travagem.
Quando apenas o reboque estiver travado, para tomar em consideração a massa adicional sujeita a abrandamento, toma-se como desempenho a desaceleração média totalmente desenvolvida.
1.4.4.2. Com exceção dos casos previstos nos pontos 1.4.4.3 e 1.4.4.4 do presente anexo, é necessário, para determinar a razão de travagem do reboque, medir a razão de travagem do veículo trator mais o reboque e o impulso sobre o engate. O veículo trator tem de cumprir os requisitos estabelecidos no anexo 10 do presente regulamento no que se refere à relação entre o quociente TM/PM e a pressão pm. A razão de travagem do reboque é calculada de acordo com a seguinte fórmula:

em que:
|
zR |
= |
razão de travagem do reboque, |
|
zR+M |
= |
razão de travagem do veículo trator mais o reboque, |
|
D |
= |
impulso sobre o engate, (força de tração: + D), (força de compressão: – D), |
|
PR |
= |
reação estática normal total entre o piso da estrada e as rodas do reboque (anexo 10). |
1.4.4.3. Se um reboque estiver equipado com um sistema de travagem contínua ou semicontínua em que a pressão nos atuadores dos travões não varia durante a travagem apesar da transferência dinâmica de carga entre eixos e no caso de semirreboques, só o reboque pode ser travado. A razão de travagem do reboque é calculada de acordo com a seguinte fórmula:

em que:
|
R |
= |
valor da resistência ao rolamento = 0,01 |
|
PM |
= |
reação estática normal total entre o piso da estrada e as rodas dos veículos tratores dos reboques (anexo 10) |
1.4.4.4. Em alternativa, a razão de travagem do reboque pode também ser avaliada exclusivamente a partir da travagem do reboque. Neste caso, a pressão utilizada deve ser a mesma que a medida nos atuadores dos travões durante a travagem do conjunto.
1.5. Ensaio de tipo I (ensaio de perda de desempenho)
1.5.1. Com travagens repetidas
1.5.1.1. Os sistemas de travagem de serviço de todos os veículos a motor devem ser ensaiados ativando e desativando sucessivamente os travões com o veículo carregado, nas condições indicadas no quadro seguinte:
|
Categoria de veículos |
Condições |
|||
|
v1 [km/h] |
v2 [km/h] |
Δt [sec] |
n |
|
|
M2 |
80 por cento vmax < 100 |
1/2 v1 |
55 |
15 |
|
N1 |
80 por cento vmax < 120 |
1/2 v1 |
55 |
15 |
|
M3, N2, N3 |
80 por cento vmax < 60 |
1/2 v1 |
60 |
20 |
em que:
|
v1 |
= |
velocidade inicial, no início da travagem, |
|
v2 |
= |
velocidade no fim da travagem |
|
vmax |
= |
velocidade máxima do veículo, |
|
n |
= |
número de acionamentos dos travões |
|
Δt |
= |
duração de um ciclo de travagem: tempo decorrido entre o início de um acionamento dos travões e o início do seguinte. |
1.5.1.2. Se as características do veículo não permitirem respeitar a duração prescrita para Δt, esta pode ser aumentada; de qualquer modo, para além do tempo necessário para travar e acelerar o veículo, deve permitir-se um período de 10 segundos em cada ciclo para estabilizar a velocidade v1.
1.5.1.3. Nestes ensaios, a força exercida no comando deve ser regulada de modo a atingir, no primeiro acionamento dos travões, a desaceleração média totalmente desenvolvida de 3 m/s2; esta força deve permanecer constante em todos os acionamentos dos travões sucessivos.
1.5.1.4. Durante os acionamentos dos travões, o motor deve estar embraiado na relação de velocidade mais elevada (excluindo a sobremultiplicação, etc.).
1.5.1.5. Para readquirir velocidade após uma travagem, deve usar-se a caixa de velocidades de modo a atingir a velocidade v1 no menor tempo possível (aceleração máxima permitida pelo motor e pela caixa de velocidades).
1.5.1.6. No caso dos veículos que não disponham de autonomia suficiente para executar os ciclos de aquecimento dos travões, devem efetuar-se os ensaios atingindo a velocidade prescrita antes do primeiro acionamento dos travões, acelerando depois ao máximo das possibilidades para recuperar velocidade e, em seguida, travando sucessivamente à velocidade atingida no final de cada ciclo, conforme especificado para a categoria de veículos correspondente no ponto 1.5.1.1 anterior.
1.5.1.7. No caso de veículos equipados com dispositivos de regulação automática dos travões, antes do ensaio de tipo I atrás referido, os travões devem ser regulados de acordo com os procedimentos a seguir indicados, consoante o caso:
|
1.5.1.7.1. |
No caso de veículos equipados com travões pneumáticos, a regulação dos travões deve fazer-se de modo a permitir o funcionamento do dispositivo de regulação automática dos travões. Para o efeito, o curso do atuador deve ser regulado para: so ≥ 1,1 × srerregulação (o limite superior não deve ultrapassar um valor recomendado pelo fabricante) em que: srerregulação é o curso da rerregulação de acordo com a especificação do fabricante do dispositivo de regulação automática dos travões, ou seja, o curso a partir do qual começa a existir uma rerregulação da folga das guarnições dos travões com uma pressão no atuador de 15 % da pressão de funcionamento do sistema de travagem, mas não inferior a 100 kPa. Quando, por acordo com o serviço técnico, for impraticável medir o curso do atuador, a regulação inicial deve ser fixada de acordo com o serviço técnico. A partir da condição atrás referida, o travão deve ser acionado 50 vezes de seguida com uma pressão no atuador de 30 % da pressão de funcionamento do sistema de travagem, mas não inferior a 200 kPa. Deve, em seguida, acionar-se o travão uma só vez com uma pressão no atuador ≥ 650 kPa. |
|
1.5.1.7.2. |
No caso dos veículos equipados com travões de disco hidráulicos, não se considera necessário fixar requisitos de regulação. |
|
1.5.1.7.3. |
No caso dos veículos equipados com travões de tambor hidráulicos, a regulação dos travões deve ser conforme às especificações do fabricante. |
1.5.1.8. Nos veículos equipados com um sistema de travagem regenerativa elétrica da categoria B, o estado das baterias do veículo no início do ensaio deve ser de molde a que o contributo do sistema de travagem regenerativa elétrica para a força de travagem não ultrapasse o nível mínimo garantido pela conceção do sistema.
Considera-se que este requisito é cumprido se as baterias estiverem numa das condições de estado de carga enumeradas no ponto 1.4.1.2.2 anterior.
1.5.2. Com travagem contínua
1.5.2.1. Os travões de serviço das categorias O2 e O3 (nos casos em que os reboques da categoria O3 não tenham sido aprovados, em alternativa, no ensaio de tipo III, em conformidade com o ponto 1.7 do presente anexo) devem ser ensaiados de modo a que, estando o veículo carregado, a entrada de energia nos travões seja equivalente à registada durante o mesmo período num veículo carregado conduzido a uma velocidade estabilizada de 40 km/h num declive descendente com 7 % de inclinação e numa distância de 1,7 km.
1.5.2.2. O ensaio pode ser efetuado numa estrada horizontal, sendo o reboque atrelado a um veículo trator; durante o ensaio, a força aplicada no comando deve ser regulada de modo a manter constante a resistência do reboque (7 % da carga estática máxima total por eixo do reboque). Se a potência disponível para a tração for insuficiente, o ensaio pode ser efetuado a uma velocidade inferior mas numa distância maior, de acordo com o seguinte quadro:
|
Velocidade [km/h] |
Distância [metros] |
|
40 |
1 700 |
|
30 |
1 950 |
|
20 |
2 500 |
|
15 |
3 100 |
1.5.2.3. No caso dos reboques equipados com dispositivos de regulação automática dos travões, a regulação dos travões deve ser fixada, antes do ensaio de tipo I prescrito anteriormente, de acordo com o procedimento referido no ponto 1.7.1.1 do presente anexo.
1.5.3. Desempenho a quente
1.5.3.1. No fim do ensaio de tipo I (ensaio descrito nos pontos 1.5.1 ou 1.5.2 do presente anexo), o desempenho a quente do sistema de travagem de serviço deve ser medido nas mesmas condições (e em especial a uma força constante sobre o comando não superior à força média efetivamente utilizada) do ensaio de tipo 0 com o motor desembraiado (mas podendo as condições de temperatura ser diferentes).
1.5.3.1.1. Nos veículos a motor, este desempenho a quente não deve ser inferior a 80 % do prescrito para a categoria em questão, nem inferior a 60 % do valor registado no ensaio de tipo 0 com o motor desembraiado.
1.5.3.1.2. Nos veículos equipados com um sistema de travagem regenerativa elétrica da categoria A, durante os acionamentos dos travões a relação de velocidade mais elevada deve manter-se permanentemente engatada e o comando da travagem regenerativa elétrica separado, se existir, não deve ser utilizado.
1.5.3.1.3. No caso dos veículos equipados com um sistema de travagem regenerativa elétrica da categoria B, tendo sido efetuados os ciclos de aquecimento previstos no ponto 1.5.1.6 do presente anexo, o ensaio de desempenho a quente deve ser realizado à velocidade máxima que o veículo pode atingir no final dos ciclos de aquecimento dos travões, a não ser que possa ser atingida a velocidade especificada no ponto 1.4.2 do presente anexo.
Para efeitos de comparação, repete-se o ensaio de tipo 0 com os travões frios a partir da mesma velocidade e com um contributo do sistema de travagem regenerativa elétrica similar, assegurado por um estado de carga da bateria adequado, semelhante ao do ensaio de desempenho a quente.
É permitido o recondicionamento das guarnições antes da realização do ensaio para comparar os resultados deste segundo ensaio de desempenho de tipo 0 a frio com os alcançados no ensaio a quente, em função dos critérios referidos nos pontos 1.5.3.1.1 e 1.5.3.2 do presente anexo.
Os ensaios podem ser realizados sem uma componente de travagem regenerativa. Neste caso, o requisito relativo ao estado de carga das baterias não é aplicável.
1.5.3.1.4. Todavia, no caso dos reboques, a força de travagem a quente na periferia das rodas, quando o ensaio for feito a 40 km/h, não deve ser inferior a 36 % da carga estática máxima por roda, nem a 60 % do valor registado no ensaio de tipo 0 à mesma velocidade.
1.5.3.2. No caso de um veículo a motor que cumpre o requisito dos 60 % especificado no ponto 1.5.3.1.1 anterior, mas que não pode cumprir o requisito dos 80 % mencionado nesse mesmo ponto, pode efetuar-se mais um ensaio de desempenho a quente, aplicando uma força sobre o comando que não exceda a especificada no ponto 2 do presente anexo para a categoria relevante de veículos. Os resultados dos dois ensaios devem ser indicados no relatório.
1.5.4. Ensaio de velocidade livre
No caso dos veículos a motor equipados com dispositivos de regulação automática dos travões, após a conclusão dos ensaios referidos no ponto 1.5.3 anterior deve deixar-se que os travões arrefeçam até uma temperatura correspondente à de travões frios (ou seja, ≤ 100 °C) e verificar-se se o veículo é capaz de rolar livremente e preencher uma das seguintes condições:
|
a) |
as rodas rodam livremente (ou seja, podem ser rodadas manualmente); |
|
b) |
quando o veículo é conduzido a uma velocidade constante de v = 60 km/h sem acionamento dos travões, as temperaturas assimptóticas nos tambores ou nos discos não aumentam mais de 80 °C, sendo os binários de travagem residual considerados admissíveis. |
1.6. Ensaio de tipo II (ensaio de comportamento em declive descendente)
1.6.1. Os veículos a motor carregados devem ser ensaiados de modo a que a entrada de energia seja equivalente à registada, no mesmo período, num veículo carregado conduzido a uma velocidade média de 30 km/h num declive descendente com 6 % de inclinação e numa distância de 6 km, estando na relação de transmissão conveniente e utilizando o sistema auxiliar de travagem, se ele existir no veículo. A relação de transmissão utilizada deve ser tal que a velocidade do motor (min– 1) não ultrapasse o valor máximo prescrito pelo fabricante.
1.6.2. Para os veículos em que a energia é absorvida unicamente pela ação de travagem do motor, deve ser admitida uma tolerância de ± 5 km/h na velocidade média, devendo utilizar-se a relação de transmissão que permita obter uma velocidade estabilizada de valor o mais próximo possível de 30 km/h num declive descendente com 6 % de inclinação. Se o desempenho da ação de travagem obtida apenas pelo motor for determinado por uma medição da desaceleração, bastará que a desaceleração média medida seja de, pelo menos, 0,5 m/s2.
1.6.3. No fim do ensaio, deve medir-se o desempenho a quente do sistema de travagem de serviço nas mesmas condições de ensaio que as do ensaio de tipo 0, com o motor desembraiado (as condições de temperatura podem ser diferentes). Este desempenho a quente deve dar uma distância de imobilização que não exceda os valores a seguir indicados e uma desaceleração média totalmente desenvolvida que não seja inferior aos valores a seguir indicados, exercendo uma força sobre o comando não superior a 70 daN:
Categoria M3 0,15 v + (1,33 v2/130) (o segundo termo corresponde a uma desaceleração média totalmente desenvolvida dm = 3,75 m/s2);
Categoria N3 0,15 v + (1,33 v2/115) (o segundo termo corresponde a uma desaceleração média totalmente desenvolvida dm = 3,3 m/s2).
1.6.4. Os veículos citados nos pontos 1.8.1.1, 1.8.1.2 e 1.8.1.3 devem ser submetidos ao ensaio de tipo II-A descrito no ponto 1.8 e não ao ensaio de tipo II.
1.7. Ensaio de tipo III (ensaio de perda de desempenho exigido para veículos carregados da categoria O4 ou, em alternativa, da categoria O3).
1.7.1. Ensaio em pista
1.7.1.1. Antes do ensaio de tipo III, a regulação dos travões deve ser efetuada de acordo com os seguintes procedimentos, conforme o caso:
|
1.7.1.1.1. |
No caso dos reboques equipados com travões pneumáticos, a regulação dos travões deve fazer-se de modo a permitir o funcionamento do dispositivo de regulação automática dos travões. Para o efeito, o curso do atuador deve ser regulado de modo a que s0 ≥1,1 × srerregulação (o limite superior não deve exceder um valor recomendado pelo fabricante): em que:
Quando, por acordo com o serviço técnico, for impraticável medir o curso do atuador, a regulação inicial deve ser fixada de acordo com o serviço técnico. A partir da condição atrás referida, o travão deve ser acionado 50 vezes de seguida com uma pressão no atuador de 200 kPa. Deve, em seguida, acionar-se o travão uma só vez com uma pressão no atuador ≥ 650 kPa. |
|
1.7.1.1.2. |
No caso dos reboques equipados com travões de disco hidráulicos, não se considera necessário fixar requisitos de regulação. |
|
1.7.1.1.3. |
No caso dos reboques equipados com travões de tambor hidráulicos, a regulação dos travões deve ser conforme às especificações do fabricante. |
1.7.1.2. As condições de realização do ensaio em estrada devem ser as seguintes:
|
Número de acionamentos dos travões |
20 |
|
Duração de um ciclo de travagem |
60 s |
|
Velocidade inicial no início da travagem |
60 km/h |
|
Acionamentos dos travões |
Nestes ensaios, a força exercida no comando deve ser regulada de modo a atingir, no primeiro acionamento dos travões, a desaceleração média totalmente desenvolvida de 3 m/s2 em relação à massa PR do reboque; esta força deve permanecer constante em todos os acionamentos dos travões sucessivos. |
A razão de travagem de um reboque é calculada de acordo com a fórmula dada no ponto 1.4.4.3 do presente anexo:
![]()
A velocidade no final da travagem (ponto 3.1.5 do apêndice 2 do anexo 11):

em que:
|
zR |
= |
razão de travagem do reboque, |
|
zR+M |
= |
razão de travagem do conjunto de veículos (veículo a motor e reboque) |
|
R |
= |
valor da resistência ao rolamento = 0,01 |
|
PM |
= |
reação estática normal total entre o piso da estrada e as rodas do veículo trator (kg) |
|
PR |
= |
reação estática normal total entre o piso da estrada e as rodas do reboque (kg) |
|
P1 |
= |
parte da massa do reboque suportada pelo(s) eixo(s) não travado(s) (kg), |
|
P2 |
= |
parte da massa do reboque suportada pelo(s) eixo(s) travado(s) (kg) |
|
v1 |
= |
velocidade inicial (km/h) |
|
v2 |
= |
velocidade final (km/h) |
1.7.2. Desempenho a quente
No final do ensaio nas condições descritas no ponto 1.7.1, mede-se o desempenho a quente do sistema de travagem de serviço nas mesmas condições que para o ensaio de tipo 0, mas com condições de temperatura diferentes e com uma velocidade inicial de 60 km/h. A força de travagem a quente na periferia das rodas não poderá ser inferior a 40 % da carga estática máxima por roda, nem inferior a 60 % do valor registado no ensaio de tipo 0 à mesma velocidade.
1.7.3. Ensaio de velocidade livre
Após a conclusão dos ensaios referidos no ponto 1.7.2 anterior, deve deixar-se que os travões arrefeçam até uma temperatura correspondente à de travões frios (ou seja, ≤ 100 °C) e verificar-se se o reboque é capaz de rolar livremente preenchendo uma das seguintes condições:
|
a) |
As rodas rodam livremente (ou seja, podem ser rodadas manualmente); |
|
b) |
Quando o reboque é conduzido a uma velocidade constante de v = 60 km/h sem acionamento dos travões, as temperaturas assimptóticas nos tambores ou nos discos não aumentam mais de 80 °C, sendo os binários de travagem residual considerados admissíveis. |
1.8. Ensaio de tipo II-A (desempenho da travagem auxiliar)
1.8.1. Os veículos das categorias a seguir indicadas devem ser submetidos ao ensaio de tipo II-A:
|
1.8.1.1. |
Veículos da categoria M3, pertencentes às classes II, III ou B, conforme definido na Resolução Consolidada sobre a Construção de Veículos (R.E.3). |
|
1.8.1.2. |
Veículos da categoria N3 que estão autorizados a rebocar um reboque da categoria O4. Se a massa máxima exceder 26 toneladas, a massa de ensaio está limitada a 26 toneladas ou, no caso de a massa sem carga exceder 26 toneladas, esta massa deve ser tida em conta por meio de cálculos. |
|
1.8.1.3. |
Certos veículos sujeitos ao ADR (ver anexo 5). |
1.8.2. Condições de ensaio e requisitos de desempenho
1.8.2.1. O desempenho do sistema auxiliar de travagem deve ser ensaiado com a massa máxima do veículo ou do conjunto de veículos.
1.8.2.2. Os veículos carregados devem ser ensaiados de modo a que a entrada de energia seja equivalente à registada, no mesmo período, num veículo carregado conduzido a uma velocidade média de 30 km/h num declive descendente com 7 % de inclinação e numa distância de 6 km. Durante o ensaio, os sistemas de travagem de serviço, de emergência e de estacionamento não devem ser acionados. A relação de transmissão utilizada deve ser tal que a velocidade do motor não ultrapasse o valor máximo prescrito pelo fabricante. Pode ser utilizado um sistema auxiliar de travagem integrado, desde que esteja convenientemente regulado de modo a que o sistema de travagem de serviço não seja acionado; para isso, verifica-se a temperatura dos respetivos travões, que devem permanecer frios, conforme definido no ponto 1.4.1.1 do presente anexo.
1.8.2.3. Para os veículos em que a energia é absorvida unicamente pela ação de travagem do motor, deve ser admitida uma tolerância de ±5 km/h na velocidade média, devendo utilizar-se a relação de transmissão que permita obter uma velocidade estabilizada de valor o mais próximo possível de 30 km/h num declive descendente com 7 % de inclinação. Se o desempenho da ação de travagem obtida apenas pelo motor for determinado por uma medição da desaceleração, bastará que a desaceleração média medida seja de, pelo menos, 0,6m/s2.
2. DESEMPENHO DOS SISTEMAS DE TRAVAGEM DOS VEÍCULOS DAS CATEGORIAS M2, M3 E N
2.1. Sistema de travagem de serviço
2.1.1. Os travões de serviço dos veículos das categorias M2, M3 e N devem ser ensaiados nas condições indicadas no quadro seguinte:
|
|
Categoria |
M2 |
M3 |
N1 |
N2 |
N3 |
|
Tipo de ensaio |
0-I |
0-I-II ou II-A |
0-I |
0-I |
0-I-II |
|
|
Ensaio de tipo 0 com o motor desembraiado |
v |
60 km/h |
60 km/h |
80 km/h |
60 km/h |
60 km/h |
|
s ≤ |
|
|||||
|
dm ≥ |
5,0 m/s2 |
|||||
|
Ensaio de tipo 0 com o motor embraiado |
v = 0,80 vmax mas não superior a |
100 km/h |
90 km/h |
120 km/h |
100 km/h |
90 km/h |
|
s ≤ |
|
|||||
|
dm ≥ |
4,0 m/s2 |
|||||
|
|
F ≤ |
70 daN |
||||
em que:
|
v |
= |
velocidade de ensaio prescrita, em km/h |
|
s |
= |
distância de imobilização, em metros |
|
dm |
= |
desaceleração média totalmente desenvolvida, em m/s2 |
|
F |
= |
força exercida sobre o pedal de comando, em daN |
|
vmax |
= |
velocidade máxima do veículo, em km/h |
2.1.2. No caso dos veículos a motor autorizados a rebocar um reboque não travado, o desempenho da travagem mínimo previsto para a categoria de veículos a motor em questão (no ensaio de tipo 0 com o motor desembraiado) deve ser alcançado com um reboque não travado, carregado com a massa máxima declarada pelo fabricante do veículo a motor, atrelado ao veículo a motor.
Verifica-se o desempenho de travagem do conjunto através do cálculo do desempenho de travagem máximo atingido efetivamente pelo veículo a motor sem reboque (carregado), num ensaio de tipo 0 com o motor desembraiado utilizando a fórmula seguinte (não são exigidos ensaios práticos com um reboque não travado atrelado ao veículo):
em que:
|
dM+R |
= |
valor calculado para a desaceleração média totalmente desenvolvida do veículo a motor com um reboque não travado atrelado, em m/s2 |
|
dM |
= |
valor máximo da desaceleração média totalmente desenvolvida unicamente pelo veículo, alcançada durante o ensaio de tipo 0 com o motor desembraiado, em m/s2 |
|
PM |
= |
massa do veículo a motor (carregado) |
|
PR |
= |
massa máxima de um reboque não travado que, de acordo com a declaração do fabricante do veículo a motor, pode ser rebocado. |
2.2. Sistema de travagem de emergência
2.2.1. O sistema de travagem de emergência, mesmo que o comando que o acione seja também utilizado para outras funções de travagem, deve oferecer uma distância de imobilização que não exceda os valores a seguir indicados e uma desaceleração média totalmente desenvolvida que não seja inferior aos valores a seguir indicados:
Categorias M2, M3 0,15 v + (2v2/130) (o segundo termo corresponde a uma desaceleração média totalmente desenvolvida de dm = 2,5 m/s2)
Categoria N 0,15 v + (2v2/115) (o segundo termo corresponde a uma desaceleração média totalmente desenvolvida de dm = 2,2 m/s2)
2.2.2. Se o comando for manual, o desempenho prescrito deve ser obtido aplicando ao comando uma força não superior a 60 daN, devendo o comando ser colocado de forma a poder ser fácil e rapidamente acionado pelo condutor.
2.2.3. Se o comando for acionado por pedal, o desempenho prescrito deve ser obtido aplicando ao comando uma força não superior a 70 daN, devendo o comando ser colocado de forma a poder ser fácil e rapidamente acionado pelo condutor.
2.2.4. O desempenho do sistema de travagem de emergência deve ser verificado pelo ensaio de tipo 0 com o motor desembraiado e a partir das seguintes velocidades iniciais:
|
M2: 60 km/h |
M3: 60 km/h |
|
|
N1: 70 km/h |
N2: 50 km/h |
N3: 40 km/h |
2.2.5. O ensaio da eficácia da travagem de emergência é efetuado através da simulação das condições reais de avaria no sistema de travagem de serviço.
2.2.6. Para os veículos equipados com sistemas de travagem regenerativa elétrica, o desempenho de travagem deve, além disso, ser verificado nas duas condições de avaria seguintes:
|
2.2.6.1. |
Avaria total do componente elétrico da travagem de serviço. |
|
2.2.6.2. |
No caso em que a avaria leva o componente elétrico a produzir a força máxima de travagem. |
2.3. Sistema de travagem de estacionamento
2.3.1. O sistema de travagem de estacionamento, mesmo quando combinado com um dos outros sistemas de travagem, deve poder manter imobilizado o veículo carregado num declive ascendente ou descendente com 18 % de inclinação.
2.3.2. Nos veículos aos quais é autorizado atrelar um reboque, o sistema de travagem de estacionamento do veículo trator deve poder manter o conjunto de veículos imobilizado num declive ascendente ou descendente com 12 % de inclinação.
2.3.3. Se o comando for manual, a força exercida sobre ele não deve exceder 60 daN.
2.3.4. Se o comando for de pedal, a força exercida sobre ele não deve exceder 70 daN.
2.3.5. É admissível que o sistema de travagem de estacionamento tenha de ser acionado várias vezes para atingir o desempenho prescrito.
2.3.6. Para verificar a conformidade ao prescrito no ponto 5.2.1.2.4 do presente regulamento, deve executar-se um ensaio de tipo 0 com o motor desembraiado à velocidade inicial de 30 km/h. A desaceleração média totalmente desenvolvida obtida pelo acionamento do dispositivo de comando do sistema de travagem de estacionamento e a desaceleração registada imediatamente antes da imobilização do veículo não devem ser inferiores a 1,5 m/s2. O ensaio deve ser executado com o veículo carregado.
A força exercida no dispositivo de comando da travagem não deve exceder os valores prescritos.
2.4. Travagem residual após avaria da transmissão
2.4.1. Em caso de avaria de uma parte da sua transmissão, o desempenho residual do sistema de travagem de serviço deve oferecer uma distância de imobilização que não exceda os valores a seguir indicados e uma desaceleração média totalmente desenvolvida que não seja inferior aos valores a seguir indicados, não sendo a força exercida no comando superior a 70 daN aquando do ensaio de tipo 0, com o motor desembraiado, a partir das seguintes velocidades iniciais para a categoria de veículo relevante:
Distância de imobilização (m) e desaceleração média totalmente desenvolvida (dm) [m/s2]
|
Categoria do veículo |
v [km/h] |
Distância de imobilização CARREGADO [m] |
dm [m/s2] |
Distância de imobilização SEM CARGA [m] |
dm [m/s2] |
|
M2 |
60 |
0,15v + (100/30) · (v2/130) |
1.5 |
0,15v + (100/25) · (v2/130) |
1.3 |
|
M3 |
60 |
0,15v + (100/30) · (v2/130) |
1.5 |
0,15v + (100/30) · (v2/130) |
1.5 |
|
N1 |
70 |
0,15v + (100/30) · (v2/115) |
1.3 |
0,15v + (100/25) · (v2/115) |
1.1 |
|
N2 |
50 |
0,15v + (100/30) · (v2/115) |
1.3 |
0,15v + (100/25) · (v2/115) |
1.1 |
|
N3 |
40 |
0,15v + (100/30) · (v2/115) |
1.3 |
0,15v + (100/30) · (v2/115) |
1.3 |
2.4.2. O ensaio da eficácia da travagem residual é efetuado através da simulação das condições reais de avaria no sistema de travagem de serviço.
3. DESEMPENHO DOS SISTEMAS DE TRAVAGEM DOS VEÍCULOS DA CATEGORIA O
3.1. Sistema de travagem de serviço
3.1.1. Disposição relativa aos ensaios dos veículos da categoria O1:
Nos casos em que a presença de um sistema de travagem de serviço for obrigatória, o seu desempenho deve obedecer aos requisitos estabelecidos para os veículos das categorias O2 e O3.
3.1.2. Disposições relativas aos ensaios dos veículos das categorias O2 e O3:
|
3.1.2.1. |
Se o sistema de travagem de serviço for do tipo contínuo ou semicontínuo, a soma das forças exercidas na periferia das rodas travadas deve ser pelo menos igual a x % da carga estática máxima por roda, tendo x os seguintes valores:
|
|
3.1.2.2. |
Se o reboque estiver equipado com um sistema de travagem a ar comprimido, a pressão na conduta de alimentação não deve exceder 700 kPa durante o ensaio de travagem e o valor do sinal na linha de comando não deve exceder os valores a seguir indicados, consoante a instalação:
A velocidade de ensaio deve ser de 60 km/h. Para comparação com o resultado obtido no ensaio de tipo I, deverá efetuar-se um ensaio suplementar a 40 km/h com o reboque carregado. |
|
3.1.2.3. |
Se o sistema de travagem for do tipo por inércia, deve cumprir os requisitos do anexo 12 do presente regulamento. |
|
3.1.2.4. |
Os veículos devem ainda ser submetidos a um ensaio de tipo I ou, em alternativa, a um ensaio de tipo III no caso dos reboques da categoria O3. |
|
3.1.2.5. |
No ensaio de tipo I ou de tipo III de um semirreboque, a massa travada pelo(s) eixo(s) deste último deve corresponder à carga máxima sobre os eixos (sem contar com a carga no cabeçote de engate). |
3.1.3. Disposições relativas aos ensaios dos veículos da categoria O4:
|
3.1.3.1. |
Se o sistema de travagem de serviço for do tipo contínuo ou semicontínuo, a soma das forças exercidas na periferia das rodas travadas deve ser pelo menos igual a x % da carga estática máxima por roda, tendo x os seguintes valores:
|
|
3.1.3.2. |
Se o reboque estiver equipado com um sistema de travagem a ar comprimido, a pressão na linha de comando não deve exceder 650 kPa e a pressão na conduta de alimentação não deve exceder 700 kPa durante o ensaio de travagem. A velocidade de ensaio é de 60 km/h. |
|
3.1.3.3. |
Os veículos devem ainda ser submetidos a um ensaio de tipo III. |
|
3.1.3.4. |
No ensaio de tipo III de um semirreboque, a massa travada pelo(s) eixo(s) deste último deve corresponder à carga máxima sobre os eixos. |
3.2. Sistema de travagem de estacionamento
3.2.1. O sistema de travagem de estacionamento com o qual o reboque está equipado deve poder manter o reboque carregado imobilizado, quando separado do veículo trator, num declive ascendente ou descendente com 18 % de inclinação. A força exercida no dispositivo de comando não deve exceder 60 daN.
3.3. Sistema de travagem automática
3.3.1. Aquando do ensaio do veículo carregado a partir de uma velocidade de 40 km/h, o desempenho da travagem automática em caso de avaria, conforme descrito no ponto 5.2.1.18.3 do presente regulamento, não deve ser inferior a 13,5 % da carga estática máxima por roda. Admite-se o bloqueio das rodas a níveis de desempenho superiores a 13,5 %.
4. TEMPO DE RESPOSTA
4.1. Nos veículos equipados com um sistema de travagem de serviço que dependa total ou parcialmente de uma fonte de energia que não seja a do esforço muscular do condutor, devem ser preenchidos os seguintes requisitos:
|
4.1.1. |
Numa manobra de emergência, o tempo que decorre entre o momento em que o comando começa a ser acionado e o momento em que a força de travagem sobre o eixo situado em posição mais desfavorável atinge o valor correspondente ao desempenho prescrito não deve ser superior a 0,6 segundos; |
|
4.1.2. |
No que diz respeito aos veículos equipados com sistemas de travagem a ar comprimido, consideram-se respeitados os requisitos do ponto 4.1.1 anterior se o veículo cumprir o disposto no anexo 6 do presente regulamento. |
|
4.1.3. |
No caso de veículos equipados com sistemas de travagem hidráulicos, consideram-se cumpridos os requisitos do ponto 4.1.1 anterior se, durante uma manobra de emergência, a desaceleração do veículo ou a pressão ao nível do cilindro de travão mais desfavorecido atingir, em 0,6 s, um nível correspondente ao desempenho prescrito. |
(1) O bloqueio das rodas é autorizado caso seja especificamente referido.
(2) O fabricante deve fornecer ao serviço técnico a família de curvas de travagem admitida pela estratégia de comando automático utilizada. Essas curvas podem ser verificadas pelo serviço técnico.
(3) Com o acordo do serviço técnico, a avaliação do estado de carga não é exigida para os veículos que possuam a bordo uma fonte de energia para carregar as baterias de tração, bem como os meios para regular o respetivo estado de carga.
Apêndice
Procedimento para monitorização do estado de carga da bateria
Este procedimento é aplicável às baterias dos veículos utilizadas para tração e travagem regenerativa.
O procedimento exige a utilização de um contador de watt-hora bidirecional para corrente contínua ou um contador de amperes-hora bidirecional para corrente contínua.
1. PROCEDIMENTO
1.1. Se as baterias forem novas ou tiverem estado armazenadas durante um longo período, devem ser submetidas a ciclos conforme recomendação do fabricante. Após a conclusão dos ciclos, deve seguir-se um período de impregnação mínimo de 8 horas à temperatura ambiente.
1.2. As baterias devem ser carregadas completamente em conformidade com o procedimento de carga recomendado pelo fabricante.
1.3. Quando da realização dos ensaios de travagem referidos nos pontos 1.2.11, 1.4.1.2.2, 1.5.1.6, e 1.5.3.1.3 do anexo 4, deve devem registar-se os watts-hora consumidos pelos motores de tração e fornecidos pelo sistema de travagem regenerativa como o total acumulado, que deverá ser utilizado em seguida para determinar o estado de carga existente no início ou no fim de um determinado ensaio.
1.4. A fim de reproduzir um determinado nível de estado de carga das baterias, para efeitos de ensaios comparativos como os do ponto 1.5.3.1.3 do anexo 4, as baterias devem ser recarregadas até esse nível ou carregadas acima desse nível e, em seguida, descarregadas, com uma potência aproximadamente constante, até ser alcançado o estado de carga exigido. Em alternativa, para os veículos equipados apenas com tração elétrica alimentada por baterias, o estado de carga pode ser ajustado fazendo funcionar o veículo. Os ensaios realizados com uma bateria parcialmente carregada devem começar o mais rapidamente possível após ter sido alcançado o estado de carga desejado.
ANEXO 5
DISPOSIÇÕES ADICIONAIS APLICÁVEIS A DETERMINADOS VEÍCULOS CONFORME ESPECIFICADO NO ACORDO ADR
1. ÂMBITO DE APLICAÇÃO
O presente anexo aplica-se a certos veículos abrangidos pelo disposto no ponto 9.2.3 do anexo B do Acordo Europeu relativo ao Transporte Internacional de Mercadorias Perigosas por Estrada (ADR).
2. REQUISITOS
2.1. Disposições gerais
Os veículos a motor e os reboques destinados ao transporte de mercadorias perigosas devem cumprir todos os requisitos técnicos pertinentes do presente regulamento. Devem também, quando aplicável, cumprir as disposições técnicas a seguir indicadas.
2.2. Sistema de travagem antibloqueio dos reboques
2.2.1. Os reboques da categoria O4 devem estar equipados com sistemas antibloqueio da categoria A, tal como definido no anexo 13 do presente regulamento.
2.3. Sistema auxiliar de travagem
2.3.1. Os veículos a motor com uma massa máxima superior a 16 toneladas, ou autorizados a rebocar reboques da categoria O4, devem estar equipados com um sistema auxiliar de travagem, em conformidade com o ponto 2.15 do presente regulamento, que obedeça aos seguintes requisitos:
|
2.3.1.1. |
As configurações do comando da travagem auxiliar devem ser de um tipo descrito nos pontos 2.15.2.1 a 2.15.2.3 do presente regulamento. |
|
2.3.1.2. |
Em caso de avaria elétrica no sistema antibloqueio, devem desligar-se automaticamente os sistemas auxiliares de travagem, integrados ou combinados. |
|
2.3.1.3. |
A eficácia do sistema auxiliar de travagem deve ser comandada pelo sistema de travagem antibloqueio de modo que os eixos travados pelo sistema auxiliar de travagem não possam ficar bloqueados por esse sistema a velocidades superiores a 15 km/h. Contudo, este requisito não é aplicável à parte do sistema de travagem constituída pelo travão natural do motor. |
|
2.3.1.4. |
A eficácia do sistema auxiliar de travagem deve incluir vários níveis, incluindo um nível baixo adaptado à condição do veículo sem carga. Quando o sistema auxiliar de travagem de um veículo a motor for constituído pelo seu motor, deve considerar-se que as diferentes relações de transmissão asseguram os diferentes níveis de eficácia. |
|
2.3.1.5. |
O desempenho do sistema auxiliar de travagem deve ser de modo a cumprir os requisitos do ponto 1.8 do anexo 4 do presente regulamento (ensaio de tipo II-A), com uma massa do veículo carregado, incluindo a massa em carga do veículo a motor mais a massa máxima rebocada autorizada, sem, porém, ultrapassar um total de 44 toneladas. |
2.3.2. Se um reboque estiver equipado com um sistema auxiliar de travagem, deve cumprir os requisitos dos pontos 2.3.1.1 a 2.3.1.4 anteriores, conforme o caso.
2.4. Requisitos de travagem para veículos EX/III das categorias O1 e O2
2.4.1. Sem prejuízo do disposto no ponto 5.2.2.9 do presente regulamento, os veículos EX/III, tal como definidos no Regulamento n.o 105, das categorias O1 e O2, independentemente da sua massa, devem estar equipados com um sistema de travagem que trave automaticamente o reboque até à imobilização, caso o dispositivo de engate se desengate enquanto o reboque está em movimento.
ANEXO 6
MÉTODO DE MEDIÇÃO DO TEMPO DE RESPOSTA EM VEÍCULOS EQUIPADOS COM SISTEMAS DE TRAVAGEM A AR COMPRIMIDO
1. GENERALIDADES
1.1. Os tempos de resposta do sistema de travagem de serviço devem ser determinados com o veículo imobilizado, sendo a pressão medida na entrada do cilindro do travão situado na posição mais desfavorável. GNo caso de veículos equipados com sistemas de travagem combinados, ar comprimido/hidráulicos, a pressão pode ser medida à entrada da unidade pneumática situada na posição menos favorável. No que respeita aos veículos que disponham de válvulas sensoras de carga, estes dispositivos devem ser regulados na posição «em carga».
1.2. Durante o ensaio, o curso dos cilindros dos travões dos diferentes eixos deve ser o exigido para os travões regulados com a menor folga possível.
1.3. Os tempos de resposta determinados em conformidade com as disposições do presente anexo devem ser arredondados ao décimo de segundo mais próximo. Se o algarismo das centésimas for igual ou superior a cinco, o tempo de resposta deve ser arredondado para a casa decimal imediatamente superior.
2. VEÍCULOS A MOTOR
2.1. No início de cada ensaio, a pressão no dispositivo de armazenamento de energia deve ser igual à pressão a que o regulador restabeleça a alimentação do sistema. Em sistemas desprovidos de regulador (por exemplo, os compressores de pressão limitada), a pressão no dispositivo de armazenamento de energia no início de cada ensaio deve ser igual a 90 % da pressão especificada pelo fabricante e definida no ponto 1.2.2.1 da parte A do anexo 7 do presente regulamento, utilizada nos ensaios prescritos no presente anexo.
2.2. Os tempos de resposta em função do tempo de acionamento (tf) devem ser obtidos por uma sucessão de acionamentos a fundo, começando com o tempo de acionamento mais curto possível e aumentando para um tempo de cerca de 0,4 segundos. Os valores medidos devem ser traçados num gráfico.
2.3. O tempo de resposta a ter em consideração para efeitos do ensaio é o correspondente a um tempo de acionamento de 0,2 segundos. Este tempo de resposta pode ser obtido, por interpolação, a partir do gráfico.
2.4. Por um tempo de acionamento de 0,2 segundos, o tempo que decorre entre o início do acionamento do comando do sistema de travagem até ao momento em que a pressão no cilindro do travão atinge 75 % do seu valor assimptótico não deve exceder 0,6 segundos.
2.5. No caso dos veículos a motor equipados com uma linha de comando pneumática para reboques, para além dos requisitos do ponto 1.1 do presente anexo, deve medir-se o tempo de resposta na extremidade de um tubo com 2,5 m de comprimento e um diâmetro interno de 13 mm, que deve estar ligado à cabeça de engate da linha de comando do sistema de travagem de serviço. Durante este ensaio, deve ser ligado à cabeça de engate da conduta de alimentação um volume de 385 cm3 ± 5 cm3 (considerado equivalente ao volume de um tubo com 2,5 m de comprimento e um diâmetro interno de 13 mm a uma pressão de 650 kPa).
Os tratores dos semirreboques devem estar equipados com condutas flexíveis para assegurar a ligação aos semirreboques. As cabeças de engate estarão, pois, na extremidade dessas condutas flexíveis. O comprimento e o diâmetro interno das condutas devem ser indicados no ponto 14.7.3 do formulário cujo modelo consta do anexo 2 do presente regulamento.
No caso de um conector automatizado, deve proceder-se à medição incluindo o uso de um tubo com 2,5 m de comprimento e um volume de 385 cm3 ± 5 cm3 acima descrito, considerando a interface do conector como cabeças de engate.
2.6. O tempo que decorre entre o início do acionamento do pedal do travão até ao momento em que:
|
a) |
a pressão medida na cabeça de engate da linha de comando pneumática, |
|
(b) |
o valor digital da solicitação na linha de comando elétrica medido em conformidade com a norma ISO 11992:2003, incluindo ISO 11992-2:2003 e respetiva Alt.1:2007, |
atinge x % do seu valor assimptótico, ou seja, final, não deve exceder os tempos apresentados no quadro seguinte:
|
x [por cento] |
t [s] |
|
10 75 |
0,2 0,4 |
2.7. No caso dos veículos a motor autorizados a rebocar reboques das categorias O3 ou O4 equipados com sistemas de travagem a ar comprimido, para além dos requisitos acima referidos, deve proceder-se à verificação das prescrições constantes do ponto 5.2.1.18.4.1 do presente regulamento, através da realização do seguinte ensaio:
|
a) |
medição da pressão na extremidade de um tubo de 2,5 m de comprimento e 13 mm de diâmetro interno ligado à cabeça de engate da conduta de alimentação; |
|
b) |
simulação de uma avaria da linha de comando na cabeça de engate; |
|
c) |
acionamento do dispositivo de comando da travagem de serviço durante 0,2 segundos, tal como descrito no ponto 2.3 anterior. |
3. REBOQUES
3.1. Os tempos de resposta do reboque devem ser medidos sem o veículo a motor. Para substituir o veículo a motor, é necessário utilizar um simulador ao qual estão ligados as cabeças de engate da conduta de alimentação, a linha de comando pneumática e/ou o conector da linha de comando elétrica.
3.2. A pressão na conduta de alimentação deve ser de 650 kPa.
3.3. O simulador das linhas de comando pneumáticas deve ter as seguintes características:
|
3.3.1. |
Deve dispor de um reservatório de 30 litros cheio a uma pressão de 650 kPa antes de cada ensaio, que não deve ser recarregado durante os ensaios. O simulador deve incluir, à saída do dispositivo de comando de travagem, um orifício com um diâmetro de 4,0 a 4,3 mm. O volume do tubo, medido a partir do orifício até à cabeça de engate, inclusive, deve ser de 385 ± 5 cm3 (considerado equivalente ao volume de um tubo com 2,5 m de comprimento e um diâmetro interno de 13 mm, a uma pressão de 650 kPa). As pressões na linha de comando referidas no ponto 3.3.3 do presente anexo devem ser medidas imediatamente a jusante do orifício. |
|
3.3.2. |
O comando do sistema de travagem deve ser concebido de modo que o seu desempenho não seja influenciado pela pessoa que efetua o ensaio. |
|
3.3.3. |
O simulador deve ser regulado, por exemplo pela escolha do orifício em conformidade com o ponto 3.3.1 do presente anexo, de modo que, se estiver ligado a um reservatório de 385 cm3 ± 5 cm3, o tempo que a pressão leva a passar de 65 a 490 kPa (10 % e 75 %, respetivamente, da pressão nominal de 650 kPa) seja de 0,2 ± 0,01 segundos. Se o reservatório acima mencionado for substituído por um reservatório de 1 155 cm3 ± 15 cm3, o tempo que a pressão leva a passar de 65 a 490 kPa sem regulação suplementar deve ser de 0,38 ± 0,02 segundos. Entre estes dois valores de pressão, a pressão deve aumentar de um modo aproximadamente linear. Estes reservatórios devem ser ligados à cabeça de engate sem a utilização de condutas flexíveis. O diâmetro interno da ligação entre os reservatórios e a cabeça de engate não deve ser inferior a 10 mm. A regulação deve ser efetuada por meio de uma disposição da cabeça de engate que seja representativa do tipo instalado no reboque que se pretende homologar. |
|
3.3.4. |
Os diagramas no apêndice do presente anexo dão um exemplo de regulação e de utilização corretas do simulador. |
3.4. O simulador destinado a verificar a resposta aos sinais transmitidos através da linha de comando elétrica deve ter as seguintes características:
|
3.4.1. |
O simulador deve gerar um sinal de solicitação digital na linha de comando elétrica, em conformidade com a norma ISO 11992-2:2003 e respetiva alt. 1:2007, e facultar a informação adequada ao reboque através dos pinos 6 e 7 do conector ISO 7638:2003. Para efeitos de medição do tempo de resposta, o simulador pode, a pedido do fabricante, transmitir ao reboque a informação de que não existe qualquer linha de comando pneumática e de que o sinal de solicitação da linha de comando elétrica é gerado a partir de dois circuitos independentes (ver pontos 6.4.2.2.24 e 6.4.2.2.25 da norma ISO 11992-2:2003 e respetiva alt. 1:2007). |
|
3.4.2. |
O comando do sistema de travagem deve ser concebido de modo que o seu desempenho não seja influenciado pela pessoa que efetua o ensaio. |
|
3.4.3. |
Para efeitos de medição do tempo de resposta, o sinal gerado pelo simulador elétrico deve ser equivalente a um aumento linear da pressão pneumática de 0,0 para 650 kPa, em 0,2 ± 0,01 segundos. |
|
3.4.4. |
Os diagramas no apêndice do presente anexo dão um exemplo de regulação e de utilização corretas do simulador. |
3.5. Requisitos de desempenho
3.5.1. Para reboques com uma linha de comando pneumática, o tempo que decorre entre o momento em que a pressão produzida na linha de comando pelo simulador atinge 65 kPa e o momento em que a pressão no atuador do travão do reboque atinge 75 % do seu valor assimptótico não deve exceder 0,4 segundos.
3.5.1.1. Os reboques equipados com uma linha de comando pneumática e uma transmissão elétrica do comando devem ser submetidos a ensaio com a energia elétrica fornecida ao reboque através do conector ISO 7638:2003 (cinco ou sete pinos).
3.5.2. Para os reboques com uma linha de comando elétrica, o tempo que decorre entre o momento em que o sinal gerado pelo simulador excede o equivalente a 65 kPa e o momento em que a pressão no atuador do travão do reboque atinge 75 % do seu valor assimptótico não deve exceder 0,4 segundos.
3.5.3. No caso dos reboques equipados com uma linha de comando pneumática e uma linha de comando elétrica, a medição do tempo de resposta de cada linha de comando é determinada de forma independente, de acordo com o procedimento relevante atrás definido.
Apêndice
Exemplos de simulador
(ver ponto 3 do anexo 6)
1. Configuração do simulador

2. Ensaio do reboque

|
A |
= |
Ligação de alimentação com válvula de corte |
|
C1 |
= |
Comutador de pressão no simulador, regulado para 65 kPa e 490 kPa |
|
C2 |
= |
Comutador de pressão a ligar ao atuador do travão do reboque, regulado para 75 % da pressão assimptótica no atuador do travão CF |
|
CF |
= |
Cilindro do travão |
|
L |
= |
Linha do orifício O até à sua cabeça de engate TC, inclusive, com um volume interno de 385 ± 5 cm3 a uma pressão de 650 kPa |
|
M |
= |
Manómetro |
|
O |
= |
Orifício com um diâmetro não inferior a 4 mm e não superior a 4,3 mm |
|
PP |
= |
Tomada para controlo da pressão |
|
R1 |
= |
Reservatório de 30 litros com válvula de purga |
|
R2 |
= |
Reservatório de calibração de 385 ± 5 cm3, incluindo a respetiva cabeça de engate TC |
|
R3 |
= |
Reservatório de calibração de 1 155 ± 15 cm3, incluindo a respetiva cabeça de engate TC |
|
RA |
= |
Válvula de corte |
|
TA |
= |
Cabeça de engate, conduta de alimentação |
|
V |
= |
Dispositivo de comando do sistema de travagem |
|
TC |
= |
Cabeça de engate, linha de comando |
|
VRU |
= |
Válvula-relé de emergência |
3. Exemplo de simulador para linhas de comando elétricas

|
ECL |
= |
linha de comando elétrica conforme à norma ISO 7638 |
|
SIMU |
= |
Simulador do Byte 3,4 de EBS 11 em conformidade com a norma ISO 11992-2:2003, incluindo a Alt.1:2007, com sinais de saída no início, 65 kPa e 650 kPa |
|
A |
= |
Ligação de alimentação com válvula de corte |
|
C2 |
= |
Comutador de pressão a ligar ao atuador do travão do reboque, regulado para 75 % da pressão assimptótica no atuador do travão CF |
|
CF |
= |
Cilindro do travão |
|
M |
= |
Manómetro |
|
PP |
= |
Tomada para controlo da pressão |
|
TA |
= |
Cabeça de engate, conduta de alimentação |
|
VRU |
= |
Válvula-relé de emergência |
ANEXO 7
DISPOSIÇÕES RELATIVAS ÀS FONTES DE ENERGIA E AOS DISPOSITIVOS DE ARMAZENAMENTO DE ENERGIA (ACUMULADORES DE ENERGIA)
A. SISTEMAS DE TRAVAGEM A AR COMPRIMIDO
1. CAPACIDADE DOS DISPOSITIVOS DE ARMAZENAMENTO DE ENERGIA (RESERVATÓRIOS DE ENERGIA)
1.1. Generalidades
1.1.1. Os veículos em que o funcionamento do sistema de travagem exigir a utilização de ar comprimido devem estar equipados com dispositivos de armazenamento de energia (reservatórios de energia) com uma capacidade que cumpra os requisitos dos pontos 1.2 e 1.3 do presente anexo (parte A).
1.1.2. Deve ser possível identificar facilmente os reservatórios dos diferentes circuitos.
1.1.3. Todavia, os dispositivos de armazenamento de energia não terão de ter uma capacidade determinada se o sistema de travagem permitir, na ausência de uma reserva de energia, alcançar um desempenho da travagem pelo menos igual ao prescrito para o sistema de travagem de emergência.
1.1.4. Para verificar a conformidade com os requisitos dos pontos 1.2 e 1.3 do presente anexo, os travões devem estar regulados com a menor folga possível.
1.2. Veículos a motor
1.2.1. Os dispositivos de armazenamento de energia (reservatórios de energia) dos veículos a motor devem ser concebidos para que, após oito acionamentos a fim de curso do comando do sistema de travagem de serviço, a pressão residual nos dispositivos de armazenamento de energia não seja inferior à pressão necessária para assegurar o desempenho especificado para a travagem de emergência.
1.2.2. Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
1.2.2.1. |
O nível inicial de energia no(s) dispositivos de armazenamento de energia deve ser igual ao valor declarado pelo fabricante (1). Esse nível deve permitir assegurar o desempenho prescrito para o sistema de travagem de serviço; |
|
1.2.2.2. |
O(s) dispositivo(s) de armazenamento de energia não devem ser alimentados; além disso, os dispositivos de armazenamento de energia para equipamento auxiliar devem ser isolados. |
|
1.2.2.3. |
Nos veículos a motor aos quais é permitido atrelar reboques e equipados com uma linha de comando pneumática, a conduta de alimentação deve ser bloqueada e um reservatório de ar comprimido, com uma capacidade de 0,5 litros, deve ser diretamente ligado à cabeça de engate da linha de comando pneumática. Antes da cada operação de travagem, a pressão neste reservatório de ar comprimido deve ser completamente eliminada. Após o ensaio referido no ponto 1.2.1 anterior, o nível de energia que alimenta a linha de comando pneumática não deve descer abaixo de um nível equivalente a metade do valor obtido no primeiro acionamento dos travões. |
1.3. Reboques
1.3.1. Os dispositivos de armazenamento de energia (reservatórios de energia) com os quais os reboques estão equipados devem ser de modo que, após oito acionamentos a fim de curso do sistema de travagem de serviço do veículo trator, o nível de energia fornecido aos órgãos utilizadores da energia não desça abaixo de um nível equivalente a metade do valor obtido no primeiro acionamento dos travões e sem acionar o sistema de travagem automático nem o sistema de travagem de estacionamento do reboque.
1.3.2. Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
1.3.2.1. |
A pressão nos dispositivos de armazenamento de energia no início de cada ensaio deve ser de 850 kPa; |
|
1.3.2.2. |
A conduta de alimentação deve ser bloqueada; além disso, os dispositivos de armazenamento de energia para equipamento auxiliar devem ser isolados. |
|
1.3.2.3. |
Os dispositivos de armazenamento de energia não devem ser reabastecidos durante o ensaio; |
|
1.3.2.4. |
A cada acionamento dos travões, a pressão na linha de comando pneumática deve ser de 750 kPa; |
|
1.3.2.5. |
A cada acionamento dos travões, o valor digital da solicitação na linha de comando elétrica deve corresponder a uma pressão de 750 kPa. |
2. CAPACIDADE DAS FONTES DE ENERGIA
2.1. Generalidades
Os compressores devem cumprir os requisitos enunciados nos parágrafos seguintes.
2.2. Definições
2.2.1. «p1» é a pressão correspondente a 65 % da pressão p2 definida no ponto 2.2.2 a seguir;
2.2.2. «p2» é o valor declarado pelo fabricante e mencionado no ponto 1.2.2.1 anterior;
2.2.3. «t1» é o tempo necessário para que a pressão relativa suba do valor 0 ao valor p1, e «t2» é o tempo necessário para que a pressão relativa suba do valor 0 ao valor p2.
2.3. Condições de medição
2.3.1. Em todos os casos, velocidade do compressor deve ser a obtida quando o motor trabalha a uma velocidade correspondente à sua potência máxima ou à velocidade permitida pelo regulador.
2.3.2. Durante os ensaios para determinar o tempo t1 e o tempo t2, os dispositivos de armazenamento de energia do equipamento auxiliar devem estar isolados.
2.3.3. Quando estiver previsto atrelar um reboque a um veículo a motor, o reboque deve ser representado por um dispositivo de armazenamento de energia cuja pressão relativa máxima p (expressa em kPa/100) é a que pode ser fornecida pelo circuito de alimentação do veículo trator e cujo volume V, expresso em litros, é dado pela fórmula p × V = 20 R (sendo R a massa máxima admissível, expressa em toneladas, nos eixos do reboque).
2.4. Interpretação dos resultados
2.4.1. O tempo t1 registado para o dispositivo de armazenamento de energia mais desfavorecido não deve exceder:
|
2.4.1.1. |
3 minutos, no caso de veículos aos quais não é permitido atrelar reboques; ou |
|
2.4.1.2. |
6 minutos, no caso de veículos aos quais é permitido atrelar reboques. |
2.4.2. O tempo t2 registado para o dispositivo de armazenamento de energia mais desfavorecido não deve exceder:
|
2.4.2.1. |
6 minutos, no caso de veículos aos quais não é permitido atrelar reboques; ou |
|
2.4.2.2. |
9 minutos, no caso de veículos aos quais é permitido atrelar reboques. |
2.5. Ensaio complementar
2.5.1. Se o veículo a motor estiver equipado com um ou mais dispositivos de armazenamento de energia para o equipamento auxiliar com uma capacidade total superior a 20 % da capacidade total dos dispositivos de armazenamento de energia de travagem, deve realizar-se um ensaio complementar durante qual não deve ocorrer qualquer irregularidade no funcionamento das válvulas que controlam o enchimento dos dispositivos de armazenamento de energia do equipamento auxiliar.
2.5.2. Deve verificar-se, durante o ensaio referido, que o tempo t3 necessário para aumentar a pressão de 0 para p2 no dispositivo de armazenamento de energia de travagem mais desfavorecido é inferior a:
|
2.5.2.1. |
oito minutos, no caso de veículos aos quais não é permitido atrelar reboques; ou |
|
2.5.2.2. |
onze minutos, no caso de veículos aos quais é permitido atrelar reboques. |
2.5.3. O ensaio deve ser efetuado nas condições especificadas nos pontos 2.3.1 e 2.3.3 anteriores.
2.6. Veículos tratores
2.6.1. Os veículos a motor aos quais é permitido atrelar reboques devem também respeitar os requisitos acima mencionados aplicáveis aos veículos aos quais não é permitido atrelar reboques. Neste caso, os ensaios dos pontos 2.4.1 e 2.4.2 (e 2.5.2) do presente anexo devem ser realizados sem o dispositivo de armazenamento de energia mencionado no ponto 2.3.3 anterior.
B. SISTEMAS DE TRAVAGEM A VÁCUO
1. CAPACIDADE DOS DISPOSITIVOS DE ARMAZENAMENTO DE ENERGIA (RESERVATÓRIOS DE ENERGIA)
1.1. Generalidades
1.1.1. Os veículos em que o funcionamento do sistema de travagem exigir a utilização de vácuo devem estar equipados com dispositivos de armazenamento de energia (reservatórios de energia) com uma capacidade que cumpra os requisitos dos pontos 1.2 e 1.3 do presente anexo (parte B).
1.1.2. Todavia, os dispositivos de armazenamento de energia não terão de ter uma capacidade determinada se o sistema de travagem permitir, na ausência de uma reserva de energia, alcançar um desempenho da travagem pelo menos igual ao prescrito para o sistema de travagem de emergência.
1.1.3. Para verificar a conformidade com os requisitos dos pontos 1.2 e 1.3 do presente anexo, os travões devem estar regulados com a menor folga possível.
1.2. Veículos a motor
1.2.1. Os dispositivos de armazenamento de energia (reservatórios de energia) dos veículos a motor devem permitir alcançar o desempenho prescrito para o sistema de travagem de emergência:
|
1.2.1.1. |
Após oito acionamentos a fim de curso do comando do sistema de travagem de serviço, quando a fonte de energia for uma bomba de vácuo; e |
|
1.2.1.2. |
Após quatro acionamentos a fim de curso do comando do travão de serviço, quando a fonte de energia for o motor. |
1.2.2. Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
1.2.2.1. |
O nível inicial de energia no(s) dispositivos de armazenamento de energia deve ser igual ao valor declarado pelo fabricante (2). Esse valor deve permitir assegurar o desempenho prescrito do sistema de travagem de serviço e deve corresponder a um vácuo que não seja superior a 90 % do vácuo máximo fornecido pela fonte de energia; |
|
1.2.2.2. |
O(s) dispositivo(s) de armazenamento de energia não devem ser alimentados; além disso, o(s) dispositivo(s) de armazenamento de energia para equipamento auxiliar devem ser isolados. |
|
1.2.2.3. |
No caso de um veículo a motor autorizado a atrelar um reboque, deve cortar–se a conduta de alimentação e ligar–se à linha de comando um dispositivo de armazenamento de energia com uma capacidade de 0,5 litros. Após o ensaio mencionado no ponto 1.2.1 anterior, o nível de vácuo na linha de comando não deve ser inferior a um nível equivalente a metade do valor obtido aquando do primeiro acionamento dos travões. |
1.3. Reboques (apenas das categorias O1 e O2)
1.3.1. Os dispositivos de armazenamento de energia (reservatórios de energia) que equipam os reboques devem ser tais que o nível de vácuo fornecido aos pontos de uso não seja inferior a metade do valor obtido durante o primeiro acionamento dos travões após a realização de um ensaio com quatro acionamentos a fim de curso do sistema de travagem de serviço do reboque.
1.3.2. Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
1.3.2.1. |
O nível inicial de energia no(s) dispositivo(s) de armazenamento de energia deve ser o especificado pelo fabricante (3). Esse nível deve permitir assegurar o desempenho prescrito para o sistema de travagem de serviço; |
|
1.3.2.2. |
O(s) dispositivo(s) de armazenamento de energia não devem ser alimentados; além disso, os dispositivos de armazenamento de energia para equipamento auxiliar devem ser isolados. |
2. CAPACIDADE DAS FONTES DE ENERGIA
2.1. Generalidades
2.1.1. Partindo da pressão atmosférica ambiente, a fonte de energia deve ser capaz de alcançar, nos dispositivos de armazenamento de energia, em 3 minutos, o nível inicial especificado no ponto 1.2.2.1 anterior. No caso dos veículos a motor aos quais é permitido atrelar um reboque, o tempo necessário para atingir esse nível nas condições indicadas no ponto 2.2 a seguir não deve ser superior a 6 minutos.
2.2. Condições de medição
2.2.1. A velocidade da fonte de vácuo deve ser:
|
2.2.1.1. |
Se a fonte de vácuo for o motor do veículo, a velocidade do motor obtida com o veículo parado, a caixa de velocidades em ponto morto e o motor a rodar em marcha lenta sem carga; |
|
2.2.1.2. |
Se a fonte de vácuo for uma bomba de vácuo, a velocidade obtida com o motor a rodar a 65 % da velocidade correspondente à sua potência máxima; e |
|
2.2.1.3. |
Se a fonte de vácuo for uma bomba de vácuo e o motor estiver equipado com um regulador, a velocidade obtida com o motor a rodar a 65 % da velocidade máxima permitida pelo regulador. |
2.2.2. Se estiver previsto atrelar ao veículo a motor um reboque cujo sistema de travagem de serviço funcione com vácuo, o reboque deve ser representado por um dispositivo de armazenamento de energia com uma capacidade V, expressa em litros, determinada pela fórmula V = 15 R, sendo R a massa máxima admissível sobre os eixos do reboque, expressa em toneladas.
C. SISTEMAS DE TRAVAGEM HIDRÁULICOS COM RESERVA DE ENERGIA
1. CAPACIDADE DOS DISPOSITIVOS DE ARMAZENAMENTO DE ENERGIA (ACUMULADORES DE ENERGIA)
1.1. Generalidades
1.1.1. Os veículos nos quais o funcionamento do sistema de travagem exija a utilização de uma reserva de energia fornecida por um fluido hidráulico sob pressão devem estar equipados com dispositivos de armazenamento de energia (acumuladores de energia) com uma capacidade suficiente para cumprir os requisitos do ponto 1.2 do presente anexo (parte C).
1.1.2. Todavia, os dispositivos de armazenamento de energia não terão de ter a capacidade prescrita, se o sistema de travagem permitir, na ausência de qualquer reserva de energia, alcançar com o comando do sistema de travagem de serviço um desempenho de travagem pelo menos igual ao prescrito para o sistema de travagem de emergência.
1.1.3. Para verificar a conformidade com os requisitos dos pontos 1.2.1, 1.2.2 e 2.1 do presente anexo, os travões devem estar regulados com a menor folga possível e, relativamente ao ponto 1.2.1, o intervalo entre os acionamentos a fim de curso deve ser de modo a permitir um intervalo mínimo de 60 segundos entre cada acionamento.
1.2. Veículos a motor
1.2.1. Os veículos a motor equipados com um sistema de travagem hidráulico com acumulação de energia devem cumprir os seguintes requisitos:
|
1.2.1.1. |
Após oito acionamentos a fim de curso do comando do sistema de travagem de serviço, deve ser ainda possível alcançar, ao nono acionamento, o desempenho prescrito para o sistema de travagem de emergência. |
|
1.2.1.2. |
Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
1.2.2. Considera-se que os veículos a motor equipados com um sistema de travagem hidráulico e reserva de energia que não cumpram os requisitos do ponto 5.2.1.5.1 do presente regulamento satisfazem esses requisitos se se respeitarem as seguintes condições:
|
1.2.2.1. |
Após uma avaria da transmissão, deve ser ainda possível, após oito acionamentos a fim de curso do comando do sistema de travagem de serviço, alcançar, aquando do nono acionamento, pelo menos o desempenho prescrito para o sistema de travagem de emergência ou, se o desempenho da travagem de emergência que depende da utilização da reserva de energia for alcançado por um comando separado, deve ainda ser possível, após oito acionamentos a fim de curso, alcançar, aquando do nono acionamento, o desempenho residual previsto no ponto 5.2.1.4 do presente regulamento. |
|
1.2.2.2. |
Os ensaios devem ser efetuados em conformidade com os seguintes requisitos:
|
2. CAPACIDADE DAS FONTES DE ENERGIA DE FLUIDO HIDRÁULICO
2.1. As fontes de energia devem cumprir os requisitos que figuram nos pontos a seguir.
2.1.1. Definições
2.1.1.1. «p1» representa a pressão máxima de funcionamento do sistema (pressão de disjunção) nos dispositivos de armazenamento de energia indicada pelo fabricante.
2.1.1.2. «p2» representa a pressão após quatro acionamentos a fim de curso com o comando do sistema de travagem de serviço, partindo de p1, sem alimentação dos dispositivos de armazenamento de energia.
2.1.1.3. «t» representa o tempo necessário para que a pressão nos dispositivos de armazenamento de energia suba de p2 para p1 sem acionamento do comando do sistema de travagem de serviço.
2.1.2. Condições de medição
2.1.2.1. Durante o ensaio realizado para determinar o tempo t, o caudal de alimentação da fonte de energia deve ser o que se obtiver com o motor a trabalhar à velocidade correspondente à sua potência máxima ou à velocidade permitida pelo regulador de sobrerregime.
2.1.2.2. Durante o ensaio destinado a determinar o tempo t, o(s) dispositivo(s) de armazenamento de energia do equipamento auxiliar só deve(m) ser isolado(s) de forma automática.
2.1.3. Interpretação dos resultados
2.1.3.1. Em todos os veículos, com exclusão dos das categorias M3, N2 e N3, o tempo t não deve exceder 20 segundos.
2.1.3.2. No caso dos veículos das categorias M3, N2 e N3, o tempo t não deve exceder 30 segundos.
3. CARACTERÍSTICAS DOS DISPOSITIVOS DE AVISO
Com o motor parado e partindo de uma pressão que pode ser indicada pelo fabricante mas que não deve exceder a pressão de conjunção, o dispositivo de aviso não deve ser desencadeado após dois acionamentos a fim de curso do comando do sistema de travagem de serviço.
(1) O nível inicial de energia deve ser indicado no documento de homologação.
(2) O nível inicial de energia deve ser indicado no documento de homologação.
(3) O nível inicial de energia deve ser indicado no documento de homologação.
ANEXO 8
DISPOSIÇÕES RELATIVAS A CONDIÇÕES ESPECÍFICAS APLICÁVEIS AOS SISTEMAS DE TRAVAGEM DE MOLAS
1. DEFINIÇÃO
1.1. «Sistemas de travagem de molas» são sistemas de travagem nos quais a energia necessária para a travagem é fornecida por uma ou mais molas que funcionam como um dispositivo de armazenamento de energia (acumulador de energia).
1.1.1. A energia necessária para comprimir a mola a fim de soltar o travão é fornecida e comandada pelo «comando» acionado pelo condutor (ver a definição no ponto 2.4 do presente regulamento).
1.2. «Câmara de compressão da mola» é a câmara em que se produz de facto a variação de pressão que induz a compressão da mola.
1.3. Se a compressão das molas for obtida por meio de um dispositivo de vácuo, «pressão» significará pressão negativa em todo o presente anexo.
2. GENERALIDADES
2.1. Um sistema de travagem de molas não deve ser utilizado como um sistema de travagem de serviço. Todavia, em caso de avaria de uma parte da transmissão do sistema de travagem de serviço, pode utilizar-se um sistema de travagem de molas para alcançar o desempenho residual prescrito no ponto 5.2.1.4 do presente regulamento, desde que o condutor possa graduar essa ação. No caso dos veículos a motor, com exceção de tratores para semirreboques que cumpram os requisitos definidos no ponto 5.2.1.4.1 do presente regulamento, o sistema de travagem de molas não deve ser a única fonte de travagem residual. Os sistemas de travagem de molas a vácuo não devem ser utilizados em reboques.
2.2. Uma ligeira variação dos limites de pressão que se possa produzir no circuito de alimentação da câmara de compressão da mola não deve provocar uma variação significativa da força de travagem.
2.3. Aplicam-se os seguintes requisitos aos veículos a motor equipados com travões de mola:
|
2.3.1. |
O circuito de alimentação da câmara de compressão da mola deve incluir a sua própria reserva de energia ou ser alimentado por, pelo menos, duas reservas de energia independentes. A conduta de alimentação do reboque pode ser derivada desse circuito, desde que uma queda de pressão na conduta de alimentação do reboque não provoque o acionamento dos travões de mola. |
|
2.3.2. |
O equipamento auxiliar só pode obter a sua energia da conduta de alimentação dos dispositivos de acionamento dos travões de mola se o seu funcionamento, mesmo em caso de danos na fonte de energia, não fizer com que a reserva de energia desses dispositivos desça abaixo do nível ao qual é possível que se soltem. |
|
2.3.3. |
Em todo o caso, durante a recarga do sistema de travagem a partir da pressão zero, os travões de mola devem estar aplicados a fundo, independentemente da posição do dispositivo de comando, até que a pressão no sistema de travagem de serviço seja suficiente para garantir pelo menos o desempenho prescrito para a travagem de emergência com o veículo carregado, utilizando o comando do sistema de travagem de serviço. |
|
2.3.4. |
Uma vez aplicados, os travões de mola não se devem desativar, salvo se a pressão no sistema de travagem de serviço for suficiente para garantir pelo menos o desempenho residual de travagem prescrito com o veículo carregado por aplicação do comando do sistema de travagem de serviço. |
2.4. No caso dos veículos a motor, o sistema deve ser concebido de maneira a permitir acionar e desativar os travões pelo menos três vezes, se a pressão inicial na câmara de compressão da mola for igual à pressão máxima prevista. No caso dos reboques, deve ser possível desativar os travões do reboque desatrelado pelo menos três vezes, sendo a pressão na conduta de alimentação de 750 kPa antes do desengate do reboque. Contudo, antes da verificação deve desativar-se o travão de emergência. Estas condições devem ser cumpridas quando os travões estiverem regulados com a menor folga possível. Além disso, deve ser possível acionar e desativar o sistema de travagem de estacionamento, conforme definido no ponto 5.2.2.10 do presente regulamento, quando o reboque estiver atrelado ao veículo trator.
2.5. No caso dos veículos a motor, a pressão na câmara de compressão da mola a partir da qual estas começam a acionar os travões, regulados com a menor folga possível, não deve ser superior a 80 % do nível mínimo da pressão normal disponível.
No caso dos reboques, a pressão na câmara de compressão da mola a partir da qual as molas começam a acionar os travões não deve ser maior do que a obtida após quatro acionamentos a fim de curso do sistema de travagem de serviço, em conformidade com o ponto 1.3 da parte A do anexo 7 do presente regulamento. A pressão inicial é fixada em 700 kPa.
2.6. Quando a pressão na conduta de alimentação de energia da câmara de compressão da mola — com exclusão das condutas de um dispositivo auxiliar de desativação que utilize um fluido sob pressão — baixar ao nível a partir do qual os componentes dos travões são postos em movimento, deve entrar em ação um dispositivo de aviso ótico ou acústico. Desde que este requisito seja cumprido, o dispositivo de aviso pode incluir o sinal de aviso vermelho indicado no ponto 5.2.1.29.1.1 do presente regulamento. Esta disposição não se aplica aos reboques.
2.7. Se um veículo a motor autorizado a rebocar um reboque com um sistema de travagem contínua ou semicontínua estiver equipado com um sistema de travagem de molas, o acionamento automático do referido sistema deve levar ao acionamento dos travões do reboque.
2.8. Os reboques que utilizam as reservas de energia do sistema de travagem de serviço para cumprirem os requisitos relativos ao travão automático, como definidos no ponto 3.3 do anexo 4, devem igualmente preencher um dos seguintes requisitos quando o reboque deixa de estar atrelado ao veículo trator e o comando do travão de estacionamento do reboque está na posição destravada (travões de mola não acionados):
|
a) |
quando as reservas de energia do sistema de travagem de serviço se reduzem a uma pressão não inferior a 280 kPa, a pressão na câmara de compressão das molas deve reduzir-se a 0 kPa para acionar totalmente os travões de mola. Este requisito deve ser verificado com uma reserva de energia do sistema de travagem de serviço a uma pressão constante de 280 kPa; |
|
b) |
uma redução da pressão na reserva de energia do sistema de travagem de serviço leva à correspondente redução da pressão na câmara de compressão da mola. |
3. SISTEMA AUXILIAR DE DESATIVAÇÃO DOS TRAVÕES
3.1. O sistema de travagem de molas deve ser concebido de modo a que, em caso de avaria, seja possível desbloquear os travões. Esta condição pode ser cumprida por meio de um dispositivo auxiliar de desativação (pneumático, mecânico, etc.).
Os dispositivos auxiliares de desativação que utilizem uma reserva de energia para a desativação devem retirar essa energia de uma reserva independente da que é normalmente utilizada para o sistema de travagem de molas. O fluido pneumático ou hidráulico num dispositivo auxiliar de desativação deste tipo pode atuar sobre a mesma superfície de êmbolo na câmara de compressão da mola que a utilizada para o sistema de travagem de molas normal, na condição de o dispositivo auxiliar utilizar uma conduta separada. A junção entre esta conduta e a conduta normal que assegura a ligação entre o dispositivo de comando e os dispositivos de acionamento dos travões de mola deve fazer-se, ao nível de cada dispositivo de acionamento, imediatamente antes da entrada da câmara de compressão da mola, se esta não estiver integrada no corpo do atuador. Essa junção deve incluir um dispositivo que impeça qualquer interação entre as duas condutas. Os requisitos do ponto 5.2.1.6 do presente regulamento aplicam-se igualmente a este dispositivo.
3.1.1. Para efeitos do ponto 3.1 anterior, não se deve considerar que os componentes da transmissão do sistema de travagem estão sujeitos a avaria se, na aceção do ponto 5.2.1.2.7 do presente regulamento, não forem considerados peças sujeitas a rutura e desde que sejam peças metálicas, ou de um material com características equivalentes, que não sofram deformações significativas durante o funcionamento normal do sistema de travagem.
3.2. Se o acionamento do dispositivo auxiliar referido no ponto 3.1 anterior exigir a utilização de uma ferramenta ou chave, estas devem encontrar-se a bordo do veículo.
3.3. Quando um sistema auxiliar de desativação dos travões utilizar a reserva de energia para desativar os travões de mola, devem aplicar-se os seguintes requisitos suplementares:
|
3.3.1. |
Quando o comando do sistema auxiliar de desativação dos travões de mola for o mesmo que o utilizado para o sistema de travagem de emergência/estacionamento, devem aplicar-se, em todos os casos, os requisitos definidos no ponto 2.3 anterior. |
|
3.3.2. |
Quando o comando do sistema auxiliar de desativação dos travões de mola estiver separado do comando do sistema de travagem de emergência/estacionamento, devem aplicar-se os requisitos definidos no ponto 2.3 anterior a ambos os sistemas de comando. No entanto, os requisitos do ponto 2.3.4 anterior não devem aplicar-se ao sistema auxiliar de desativação dos travões de mola. O comando auxiliar de desativação deve ainda estar colocado de forma a impedir que o condutor o possa acionar na posição normal de condução. |
3.4. Se se utilizar ar comprimido no sistema auxiliar de desativação dos travões, o sistema deve ser ativado por um comando separado, não ligado ao comando dos travões de mola.
ANEXO 9
DISPOSIÇÕES RELATIVAS AOS SISTEMAS DE TRAVAGEM DE ESTACIONAMENTO EQUIPADOS COM UM DISPOSITIVO DE BLOQUEIO MECÂNICO DOS CILINDROS DOS TRAVÕES (TRAVÕES DE SEGURANÇA)
1. DEFINIÇÃO
«Dispositivo de bloqueio mecânico dos cilindros dos travões» é um dispositivo que assegura o funcionamento do sistema de travagem de estacionamento bloqueando mecanicamente a haste do êmbolo do travão. Obtém-se o bloqueio mecânico esvaziando o fluido comprimido contido na câmara de bloqueio; é concebido de tal forma que para se desbloquear deve restabelecer-se a pressão na câmara de bloqueio.
2. REQUISITOS ESPECIAIS
2.1. Quando a pressão na câmara de bloqueio se aproximar do nível em que ocorre o bloqueio mecânico, deve entrar em funcionamento um sinal de aviso ótico ou acústico. Desde que este requisito seja cumprido, o dispositivo de aviso pode incluir o sinal de aviso vermelho indicado no ponto 5.2.1.29.1.1 do presente regulamento. Esta disposição não é aplicável aos reboques.
Neste caso, a pressão correspondente ao bloqueio mecânico não deve ultrapassar 400 kPa. Deve ser possível alcançar o desempenho da travagem de estacionamento após uma só avaria no sistema de travagem de serviço do reboque. Deve ainda ser possível desativar os travões do reboque desatrelado pelo menos três vezes, sendo a pressão na conduta de alimentação de 650 kPa antes do desengate do reboque. Estas condições devem ser cumpridas quando os travões estiverem regulados com a menor folga possível. Deve também ser possível acionar e desativar o sistema de travagem de estacionamento, conforme definido no ponto 5.2.2.10 do presente regulamento, quando o reboque estiver atrelado ao veículo trator.
2.2. Nos cilindros equipados com um dispositivo de bloqueio mecânico, o movimento do êmbolo do travão deve ser assegurado por meio de energia proveniente de um dos dois dispositivos de armazenamento de energia independentes.
2.3. Não deve ser possível desativar o cilindro do travão bloqueado, a menos que esteja garantido que, após essa desativação, o travão pode ser acionado outra vez.
2.4. Em caso de avaria na fonte de energia que alimenta a câmara de bloqueio, deve estar disponível um dispositivo auxiliar de desativação do travão (por exemplo, mecânico ou pneumático que pode utilizar o ar contido num dos pneus do veículo).
2.5. O comando deve ser concebido de modo que, quando acionado, realize as seguintes operações pela ordem indicada: aciona os travões para obter o nível de eficiência exigido para a travagem de estacionamento, bloqueia os travões nessa posição e, em seguida, anula a força de acionamento dos travões.
ANEXO 10
REPARTIÇÃO DA TRAVAGEM PELOS EIXOS DOS VEÍCULOS E REQUISITOS DE COMPATIBILIDADE ENTRE VEÍCULOS TRATORES E REBOQUES
1. REQUISITOS GERAIS
1.1. Os veículos das categorias M2, M3, N, O2, O3 e O4 devem cumprir todos os requisitos do presente anexo. Se for utilizado um dispositivo especial, este deve funcionar automaticamente (1).
Contudo, os veículos das categorias acima mencionadas que estiverem equipados com um sistema de travagem antibloqueio e cumprirem os requisitos aplicáveis do anexo 13 devem cumprir todos os requisitos aplicáveis do presente anexo, ressalvadas as seguintes exceções.
|
a) |
não é exigido o cumprimento dos requisitos de utilização da aderência associados aos diagramas 1-A, 1-B ou 1-C, conforme o caso. |
|
b) |
no caso de veículos tratores e reboques equipados com um sistema de travagem a ar comprimido, não é exigido o cumprimento dos requisitos de compatibilidade sem carga associados aos diagramas 2, 3 ou 4, conforme o caso. Contudo, em todas as condições de carga, deve desenvolver-se uma razão de travagem a uma pressão compreendida entre 20 kPa e 100 kPa ou a um valor digital da solicitação equivalente na cabeça de engate das linhas de comando. |
1.1.1. Quando o veículo estiver equipado com um sistema auxiliar de travagem, a força de retardamento não deve ser tida em consideração quando se determinar o desempenho do veículo no que diz respeito às disposições do presente anexo.
1.2. Os requisitos respeitantes aos diagramas referidos nos pontos 3.1.5, 3.1.6, 4.1., 5.1 e 5.2 do presente anexo são válidos tanto para veículos com uma linha de comando pneumática de acordo com o ponto 5.1.3.1.1 do presente regulamento como para veículos com uma linha de comando elétrica de acordo com o ponto 5.1.3.1.3 do presente regulamento. Em ambos os casos, o valor de referência (abcissa dos diagramas) será o valor da pressão transmitida na linha de comando:
|
a) |
para veículos equipados de acordo com o ponto 5.1.3.1.1 do presente regulamento, esta será a pressão pneumática real na linha de comando (pm); |
|
b) |
para veículos equipados de acordo com o ponto 5.1.3.1.3 do presente regulamento, esta será a pressão correspondente ao valor digital da solicitação transmitido na linha de comando elétrica, de acordo com a norma ISO 11992:2003 e respetiva Alt. 1:2007. |
Os veículos equipados de acordo com o ponto 5.1.3.1.2 do presente regulamento (com linha de comando pneumática e linha de comando elétrica) devem cumprir os requisitos dos diagramas relacionados com ambas. Contudo, não é necessário que ambas as linhas de comando tenham curvas características de travagem idênticas.
1.3. Validação do desenvolvimento da força de travagem
1.3.1. Aquando da homologação, deve verificar-se se o desenvolvimento da travagem num eixo de cada grupo de eixos independentes se encontra dentro das seguintes amplitudes de pressão:
|
a) |
veículos carregados:
|
|
b) |
veículos sem carga: Quando a pressão na cabeça de engate se situar entre 20 e 100 kPa, pelo menos um eixo deve começar a desenvolver uma força de travagem. |
1.4. No caso dos veículos da categoria O equipados com sistemas de travagem pneumática, quando se utilizar o procedimento de homologação alternativo definido no anexo 20, devem fazer-se os cálculos exigidos no presente anexo com as características de desempenho obtidas nos relatórios de verificação relevantes constantes do anexo 19 e determinar-se a altura do centro de gravidade pelo método definido no apêndice 1 do anexo 20.
2. SÍMBOLOS
|
i |
= |
índice do eixo (i = 1, eixo dianteiro; i = 2, segundo eixo; etc.) |
|
Pi |
= |
reação normal do piso da estrada sobre o eixo i, em condições estáticas |
|
Ni |
= |
reação normal do piso da estrada sobre o eixo i durante a travagem |
|
Ti |
= |
força exercida pelos travões sobre o eixo i em condições normais de travagem em estrada |
|
fi |
= |
Ti/Ni, aderência utilizada pelo eixo i (2) |
|
J |
= |
desaceleração do veículo |
|
g |
= |
aceleração devida à gravidade: g = 9,81 m/s2 |
|
z |
= |
razão de travagem do veículo = J/g (3) |
|
P |
= |
massa do veículo |
|
h |
= |
altura acima do solo do centro de gravidade, indicada pelo fabricante e aceite pelos serviços técnicos que efetuam o ensaio de homologação |
|
E |
= |
distância entre eixos |
|
k |
= |
coeficiente teórico de aderência entre o pneu e a estrada |
|
Kc |
= |
fator de correção: semirreboque em carga |
|
Kv |
= |
fator de correção: semirreboque sem carga |
|
TM |
= |
soma das forças de travagem na periferia de todas as rodas dos veículos tratores dos reboques |
|
PM |
= |
reação estática normal total do piso sobre as rodas dos veículos tratores dos reboques (4) |
|
pm |
= |
pressão medida na cabeça de engate da linha de comando |
|
TR |
= |
soma das forças de travagem na periferia de todas as rodas do reboque |
|
PR |
= |
reação estática normal total do piso sobre todas as rodas do reboque (4) |
|
PRmax |
= |
valor de PR relativo à massa máxima do reboque |
|
ER |
= |
distância entre o cabeçote de engate e o centro do ou dos eixos do semirreboque |
|
hR |
= |
altura acima do solo do centro de gravidade do semirreboque indicada pelo fabricante e aceite pelos serviços técnicos que efetuam o ensaio de homologação |
3. REQUISITOS PARA VEÍCULOS A MOTOR
3.1. Veículos com dois eixos
3.1.1. Para os valores de k compreendidos entre 0,2 e 0,8, todas as categorias de veículos devem satisfazer a relação: (5)
z ≥ 0,10 + 0,85 (k – 0,20)
3.1.2. Em todas as condições de carga do veículo, a curva de aderência utilizada pelo eixo traseiro não deve estar situada acima da do eixo dianteiro:
|
3.1.2.1. |
Para todas as razões de travagem compreendidas entre 0,15 e 0,80, no caso de veículos da categoria N1 com uma relação de carga em carga/sem carga sobre o eixo traseiro não superior a 1,5 ou com uma massa máxima inferior a 2 toneladas, na gama de valores de z compreendidos entre 0,3 e 0,45, autoriza-se uma inversão das curvas de aderência, desde que a curva de aderência do eixo traseiro não exceda em mais de 0,05 a linha definida pela fórmula k = z (linha de aderência ideal no diagrama 1A do presente anexo). |
|
3.1.2.2. |
Para todas as razões de travagem compreendidas entre 0,15 e 0,50, no caso de outros veículos da categoria N1, esta condição considera-se cumprida se, para razões de travagem compreendidas entre 0,15 e 0,30, as curvas de aderência para cada eixo se situarem entre duas linhas paralelas à linha de aderência ideal dada pela equação k = z + 0,08, conforme apresentado no diagrama 1C do presente anexo, no qual a curva de aderência para o eixo traseiro pode atravessar a linha k = z ± 0,08, e se a razão de travagem se situar entre 0,30 e 0,50, com uma relação z ≥ k – 0,08 e entre 0,50 e 0,61, com uma relação z ≥ 0,5 k + 0,21. |
|
3.1.2.3. |
Para todas as razões de travagem compreendidas entre 0,15 e 0,30, se se tratar de veículos de outras categorias, considera-se esta condição igualmente cumprida se, para razões de travagem compreendidas entre 0,15 e 0,30, as curvas de aderência para cada eixo se situarem entre duas linhas paralelas à linha de aderência ideal dada pela equação k = z ± 0,08, conforme apresentado no diagrama 1B do presente anexo, e a curva de aderência para o eixo traseiro para razões de travagem superiores ou iguais a 0,3 cumprir a relação: z ≥ 0,3 + 0,74 (k – 0,38). |
3.1.3. No caso de um veículo a motor autorizado a rebocar reboques das categorias O3 ou O4 equipados com sistemas de travagem a ar comprimido.
3.1.3.1. Quando for ensaiado com a fonte de energia cortada, a conduta de alimentação isolada, um reservatório de 0,5 litros ligado à linha de comando pneumática e com o sistema às pressões de corte (conjunção e disjunção), a pressão, durante o acionamento a fim de curso do comando de travagem deve situar-se entre 650 e 850 kPa nas cabeças de engate da conduta de alimentação e da linha de comando pneumática, seja qual for o estado de carga do veículo.
3.1.3.2. Para veículos equipados com uma linha de comando elétrica, um acionamento a fim de curso do comando do sistema de travagem de serviço deve dar um valor digital da solicitação correspondente a uma pressão compreendida entre 650 e 850 kPa (ver ISO 11992:2003, incluindo ISO 11992-2:2003 e respetiva Alt.1:2007).
3.1.3.3. Estes valores devem poder ser comprovados no veículo a motor desacoplado do reboque. As faixas de compatibilidade constantes dos diagramas apresentados nos pontos 3.1.5, 3.1.6, 4.1, 5.1 e 5.2 do presente anexo não devem ser alargadas além de 750 kPa e/ou do valor digital da solicitação correspondente (ver ISO 11992:2003 incluindo ISO 11992-2:2003 e respetiva Alt.1:2007).
3.1.3.4. Deve assegurar-se que, quando o sistema estiver à pressão de conjunção, a pressão na cabeça de engate da conduta de alimentação é de, pelo menos, 700 kPa. Esta pressão deve ser comprovada sem acionamento dos travões de serviço.
3.1.4. Verificação dos requisitos dos pontos 3.1.1 e 3.1.2 anteriores.
3.1.4.1. Para verificar a conformidade ao prescrito nos pontos 3.1.1 e 3.1.2 do presente anexo, o fabricante deve fornecer as curvas de aderência relativas ao eixo dianteiro e ao eixo traseiro, calculadas de acordo com as seguintes fórmulas:


As curvas devem ser determinadas para ambas as condições de carga seguintes:
|
3.1.4.1.1. |
Sem carga, em ordem de marcha, com o condutor a bordo; no caso de um veículo apresentado sob a forma de quadro-cabina, pode ser adicionada uma carga suplementar para simular a massa da carroçaria, sem exceder a massa mínima declarada pelo fabricante no anexo 2 do presente regulamento; |
|
3.1.4.1.2. |
Com carga; se se previrem várias possibilidades de repartição da carga, deve tomar-se em consideração aquela em que o eixo dianteiro for o mais carregado. |
3.1.4.2. Se, no caso de veículos com tração integral (permanente), não for possível proceder à verificação matemática nos termos do ponto 3.1.4.1, o fabricante pode verificar, mediante um ensaio à ordem de bloqueio das rodas, se, para todas as razões de travagem compreendidas entre 0,15 e 0,8, o bloqueio das rodas dianteiras ocorre antes do bloqueio das rodas traseiras ou simultaneamente.
3.1.4.3. Procedimento para verificar os requisitos do ponto 3.1.4.2 anterior.
3.1.4.3.1. O ensaio à ordem de bloqueio das rodas deve realizar-se num piso com um coeficiente de aderência não superior a 0,3 e noutro com cerca de 0,8 (piso seco) a partir das velocidades de ensaio iniciais definidas no ponto 3.1.4.3.2.
3.1.4.3.2. Velocidades de ensaio:
|
|
60 km/h, mas não excedendo 0,8 vmax nas desacelerações em pisos com baixo coeficiente de atrito; |
|
|
80 km/h, mas não excedendo vmax nas desacelerações em pisos com elevado coeficiente de atrito; |
3.1.4.3.3. A força exercida sobre o pedal pode ser superior às forças de acionamento admissíveis nos termos do ponto 2.1.1 do anexo 4.
3.1.4.3.4. A força exercida sobre o pedal é aumentada de modo que a segunda roda do veículo se bloqueie entre 0,5 e 1 segundos após o início do acionamento do travão, até que se bloqueiem ambas as rodas de um eixo (podem também ficar bloqueadas outras rodas durante o ensaio, por exemplo no caso do bloqueio simultâneo).
3.1.4.4. Os ensaios prescritos no ponto 3.1.4.2 anterior devem realizar-se duas vezes em cada piso. Se um dos ensaios der um resultado desfavorável, deve realizar-se um terceiro ensaio, que será determinante.
3.1.4.5. Para os veículos elétricos equipados com um sistema de travagem regenerativa elétrica da categoria B, e quando a capacidade de travagem regenerativa elétrica é influenciada pelo estado de carga elétrica, as curvas devem ser traçadas tendo em conta a componente de travagem regenerativa elétrica nas condições mínimas e máximas da força de travagem produzida. Este requisito não se aplica se o veículo estiver equipado com um dispositivo antibloqueio que comande as rodas ligadas à travagem regenerativa elétrica, aplicando-se, neste caso, os requisitos do anexo 13.
3.1.5. Veículos tratores exceto tratores de semirreboques
3.1.5.1. No caso de um veículo a motor autorizado a rebocar reboques das categorias O3 ou O4 equipados com um sistema de travagem a ar comprimido, a relação admissível entre a razão de travagem TM/PM e a pressão pm deve situar-se dentro das zonas indicadas no diagrama 2 do presente anexo para todas as pressões entre 20 e 750 kPa.
3.1.6. Tratores de semirreboques
3.1.6.1. Tratores de semirreboque sem carga. Considera-se como um conjunto sem carga um trator em ordem de marcha, com o condutor a bordo, atrelado a um semirreboque sem carga. A carga dinâmica do semirreboque sobre o trator deve ser representada por uma massa estática Ps, colocada sobre o prato de engate, igual a 15 % da massa máxima deste último. Entre as condições de «trator com semirreboque sem carga» e de «trator isolado», as forças de travagem devem ser reguladas pelo dispositivo de forma contínua; devem verificar-se as forças de travagem relativas ao «trator isolado».
3.1.6.2. Tratores de semirreboque em carga. Considera-se como um conjunto em carga um trator em ordem de marcha, com o condutor a bordo, atrelado a um semirreboque em carga. A carga dinâmica do semirreboque sobre o trator deve ser representada por uma massa estática Ps, colocada sobre o prato de engate, igual a:
Ps = Pso (1 + 0,45z)
em que:
|
Pso |
representa a diferença entre a massa máxima do veículo trator em carga e a sua massa sem carga. |
Toma-se para h o valor:

em que:
|
ho |
é a altura do centro de gravidade do trator, |
|
hs |
é a altura do plano de apoio do semirreboque sobre o engate; |
|
Po |
é a massa sem carga do trator isolado. |
e:
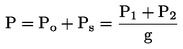
3.1.6.3. No caso de veículos equipados com um sistema de travagem a ar comprimido, a relação admissível entre a razão de travagem TM/PM e a pressão pm deve situar-se nas zonas indicadas no diagrama 3 do presente anexo para todas as pressões compreendidas entre 20 e 750 kPa.
3.2. Veículos com mais de dois eixos
Os requisitos do ponto 3.1 do presente anexo devem aplicar-se a veículos com mais de dois eixos. Devem considerar-se cumpridos os requisitos do ponto 3.1.2 do presente anexo se, no que respeita à ordem de bloqueio das rodas e para razões de travagem compreendidas entre 0,15 e 0,30, a aderência utilizada por, pelo menos, um dos eixos dianteiros for superior à de, pelo menos, um dos eixos traseiros.
4. REQUISITOS APLICÁVEIS A SEMIRREBOQUES
4.1. Para semirreboques equipados com sistemas de travagem a ar comprimido:
|
4.1.1. |
A relação admissível entre a razão de travagem TR/PR e a pressão pm deve situar-se entre duas zonas dadas pelos diagramas 4A e 4B para todas as pressões compreendidas entre 20 e 750 kPa, tanto em carga como sem carga. Este requisito deve ser cumprido em todas as condições de carga admissíveis para os eixos do semirreboque. |
|
4.1.2. |
Não é necessário respeitar as disposições do ponto 4.1.1 se um semirreboque com um fator Kc inferior a 0,95 cumprir, no mínimo, o desempenho da travagem especificado no ponto 3.1.2.1. ou no ponto 3.1.3.1, consoante o caso, do anexo 4 do presente regulamento. |
5. REQUISITOS PARA REBOQUES COMPLETOS E REBOQUES DE EIXOS CENTRAIS
5.1. Para reboques completos equipados com sistema de travagem a ar comprimido:
|
5.1.1. |
Para reboques completos com dois eixos, aplicam-se os seguintes requisitos:
|
|
5.1.2. |
Para reboques completos com mais de dois eixos, devem aplicar-se os requisitos do ponto 5.1.1 do presente anexo. Devem considerar-se cumpridos os requisitos do ponto 5.1.1 do presente anexo se, no que respeita à ordem de bloqueio das rodas e para razões de travagem compreendidas entre 0,15 e 0,30, a aderência utilizada por, pelo menos, um dos eixos dianteiros for superior à de, pelo menos, um dos eixos traseiros. |
|
5.1.3. |
A relação admissível entre a razão de travagem TR/PR e a pressão pm deve situar-se entre as zonas dadas pelo diagrama 2 do presente anexo para todas as pressões compreendidas entre 20 e 750 kPa, tanto em carga como sem carga. |
5.2. Para os reboques de eixos centrais equipados com sistemas de travagem a ar comprimido:
|
5.2.1. |
A relação admissível entre a razão de travagem TR/PR e a pressão pm deve situar-se entre duas zonas dadas pelo diagrama 2 do presente anexo, multiplicando a escala vertical por 0,95. Este requisito deve ser cumprido em todas as pressões compreendidas entre 20 e 750 kPa, tanto em carga como sem carga. |
|
5.2.2. |
Se os requisitos do ponto 3.1.2.1 do anexo 4 do presente regulamento não puderem ser cumpridos por falta de aderência, o reboque de eixo central deve, nesse caso, estar equipado com um sistema antibloqueio conforme ao anexo 13 do presente regulamento. |
6. REQUISITOS A CUMPRIR NA EVENTUALIDADE DE AVARIA DO SISTEMA DE REPARTIÇÃO DA TRAVAGEM
Quando os requisitos do presente anexo forem cumpridos por meio de um dispositivo especial (por exemplo, comandado mecanicamente pela suspensão do veículo) ou se o veículo estiver equipado com um tal dispositivo, deve ser possível, em caso de avaria do seu comando, imobilizar o veículo nas condições previstas para a travagem de emergência, se se tratar de veículos a motor; no que diz respeito aos veículos a motor autorizados a rebocar um reboque equipado com sistemas de travagem a ar comprimido, deve ser possível atingir na cabeça de engate da linha de comando uma pressão compreendida na gama prescrita no ponto 3.1.3 do presente anexo. Na eventualidade de avaria no comando do dispositivo em reboques, deve alcançar-se um desempenho da travagem de serviço de, pelo menos, 30 % do prescrito para o veículo em questão.
7. MARCAÇÕES
7.1. Os veículos que cumprirem os requisitos do presente anexo por meio de um dispositivo comandado mecanicamente pela suspensão do veículo, ou se o veículo estiver equipado com um tal dispositivo, devem ostentar marcas que indiquem o curso útil do dispositivo entre as posições correspondentes, respetivamente, à condição sem carga e à condição em carga do veículo, bem como toda a informação suplementar que permita controlar a regulação do dispositivo.
7.1.1. Quando um sensor de carga do travão for comandado, através da suspensão do veículo, por qualquer outro meio, o veículo deve ostentar uma marca com informação que permita controlar a regulação do dispositivo.
7.2. Quando os requisitos do presente anexo forem cumpridos por meio de um dispositivo que gradue a pressão de ar na transmissão dos travões, o veículo deve ostentar marcas que indiquem as cargas por eixo no solo, as pressões nominais de saída do dispositivo e uma pressão de entrada que deve ser igual ou superior a 80 % da pressão máxima de entrada prevista, especificada pelo fabricante do veículo, para as seguintes condições de carga:
|
7.2.1. |
Carga máxima por eixo tecnicamente admissível nos eixos que comandam o dispositivo; |
|
7.2.2. |
Carga por eixo correspondente à massa do veículo sem carga em ordem de marcha, tal como indicado no ponto 13 do anexo 2 do presente regulamento; |
|
7.2.3. |
Carga por eixo correspondente aproximadamente a um veículo em ordem de marcha com a carroçaria prevista, quando a carga por eixo mencionada no ponto 7.2.2 do presente anexo se referir a um veículo no estado de quadro-cabina; |
|
7.2.4. |
Carga por eixo especificada pelo fabricante que permite controlar a regulação do dispositivo em serviço, se esta carga for diferente das cargas especificadas nos pontos 7.2.1 a 7.2.3 do presente anexo. |
7.3. O ponto 14.8 do anexo 2 do presente regulamento deve incluir informações que permitam assegurar a conformidade com os requisitos dos pontos 7.1 e 7.2 do presente anexo.
7.4. As marcas referidas nos pontos 7.1 e 7.2 do presente anexo devem estar afixadas de forma bem visível e indelével. O diagrama 5 do presente anexo dá um exemplo de marcas para um dispositivo comandado mecanicamente, num veículo equipado com sistema de travagem a ar comprimido.
7.5. Os sistemas de repartição da força de travagem comandados eletronicamente que não puderem cumprir os requisitos dos pontos 7.1, 7.2, 7.3 e 7.4 anteriores devem estar equipados com um dispositivo de controlo automático das funções que influenciam a repartição da força de travagem. Além disso, quando o veículo estiver imobilizado, deve ser possível efetuar as verificações definidas no ponto 1.3.1 anterior, mediante a produção da pressão nominal de solicitação associada ao início da travagem tanto com carga como sem carga.
8. ENSAIOS DO VEÍCULO
Aquando da homologação do modelo de veículo, o serviço técnico deve verificar a conformidade com os requisitos constantes do presente anexo e proceder a todos os ensaios considerados necessários para o efeito. Os resultados de eventuais ensaios suplementares devem ser apensos ao relatório de homologação.
Diagrama 1A
Determinados veículos da categoria N1
(ver ponto 3.1.2.1 do presente anexo)

Diagrama 1B
Veículos com exceção dos veículos da categoria N1 e reboques completos
(ver pontos 3.1.2.3 e 5.1.1.2 do presente anexo)

|
Nota: |
O limite inferior k = z – 0,08 não é aplicável à aderência do eixo traseiro. |
Diagrama 1C
Veículos da categoria N1 (com determinadas exceções após 1 de outubro de 1990)
(ver ponto 3.1.2.2 do presente anexo)

|
Nota: |
O limite inferior k = z – 0,08 não é aplicável à aderência do eixo traseiro. |
Diagrama 2
Veículos tratores e reboques (exceto tratores de semirreboques e semirreboques)
(ver ponto 3.1.5.1 do presente anexo)

|
Nota: |
As relações estipuladas pelo presente diagrama devem aplicar-se progressivamente às condições intermédias de carga, entre as condições sem carga e em carga, e ser alcançadas por meios automáticos. |
Diagrama 3
Tratores de semirreboques
(ver ponto 3.1.6.3 do presente anexo)
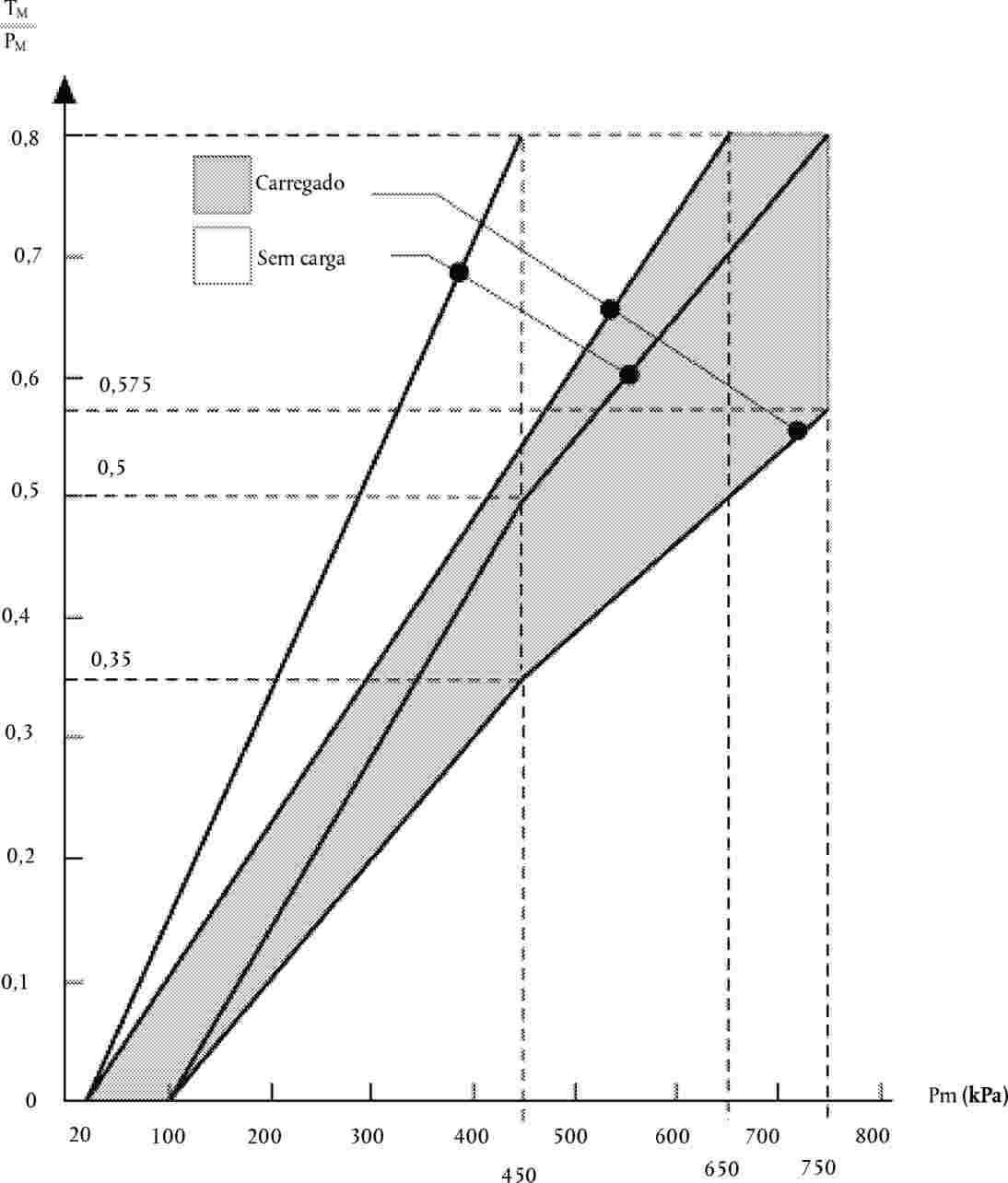
|
Nota: |
As relações estipuladas pelo presente diagrama devem aplicar-se progressivamente às condições intermédias de carga, entre as condições sem carga e em carga, e ser alcançadas por meios automáticos. |
Diagrama 4A
Semirreboques
(ver ponto 4 do presente anexo)
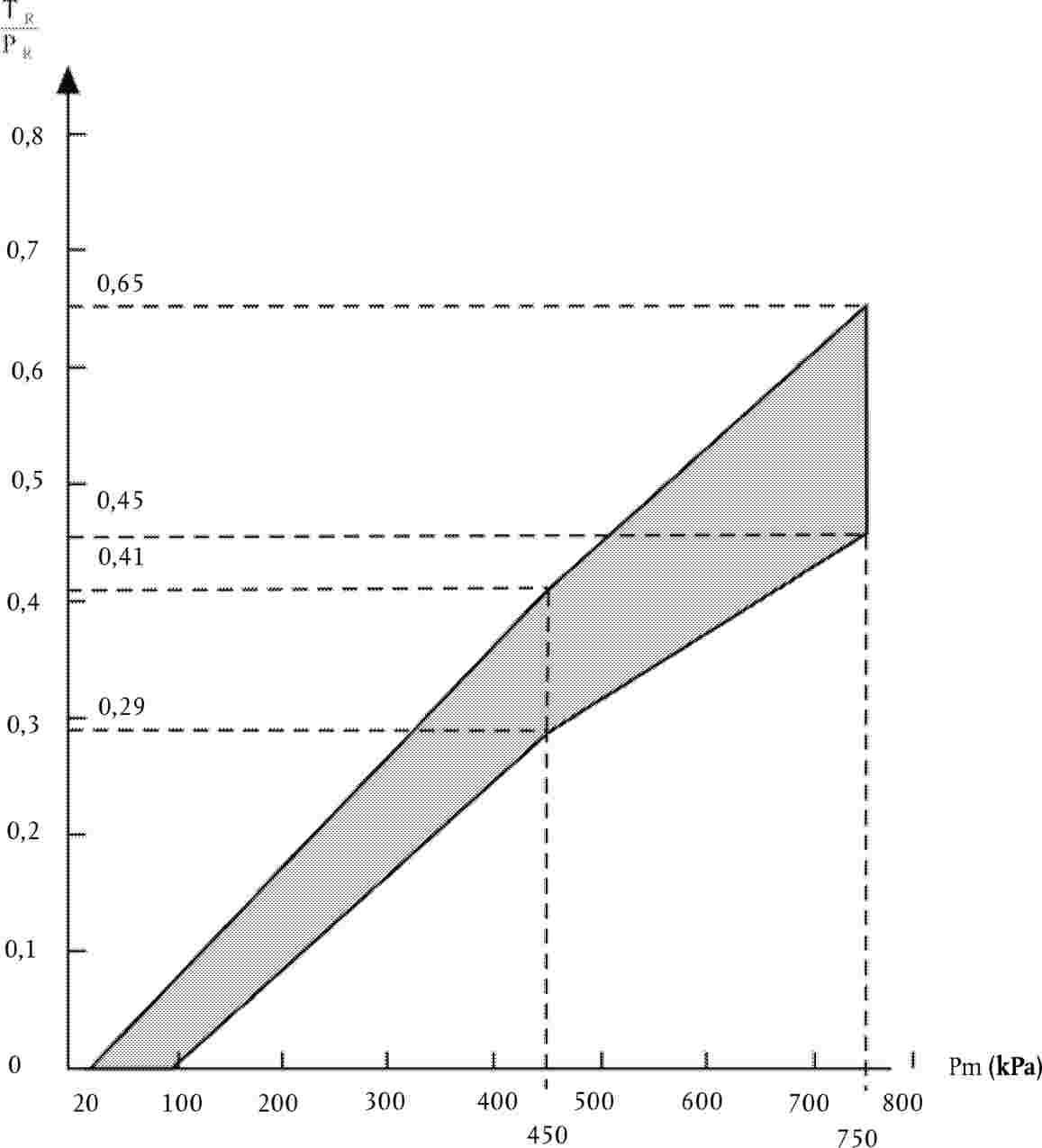
|
Nota: |
A relação entre a razão de travagem TR/PR e a pressão na linha de comando nas condições em carga e sem carga determina-se do seguinte modo: Obtêm-se os fatores Kc (em carga) e Kv (sem carga) por referência ao diagrama 4B. Para determinar as zonas correspondentes às condições em carga e sem carga, multiplicam-se os valores das ordenadas dos limites superior e inferior da zona sombreada no diagrama 4A, respetivamente, pelos fatores Kc e Kv. |
Diagrama 4B
(ver ponto 4 e diagrama 4A do presente anexo)

NOTA EXPLICATIVA SOBRE A UTILIZAÇÃO DO DIAGRAMA 4B
|
1. |
Fórmula através da qual se deduziu o diagrama 4B:
|
|
2. |
Descrição do método de utilização com exemplo prático
|
Diagrama 5
Sensor de carga do travão
(ver ponto 7.4 do presente anexo)
|
Dados de comando |
Carregamento do veículo |
Carga no eixo n.o 2 no solo [daN] |
Pressão de entrada [kPa] |
Pressão nominal de saída [kPa] |
|
|
Carregado |
10 000 |
600 |
600 |
|
Sem carga |
1 500 |
600 |
240 |
(1) No caso de reboques com uma distribuição da força de travagem controlada eletronicamente, os requisitos do presente anexo aplicam-se apenas quando o reboque estiver eletricamente ligado ao veículo trator pelo conector ISO 7638:2003.
(2) «Curvas de aderência» de um veículo são as curvas que revelam, em condições de carga especificadas, a aderência utilizada por cada eixo i em função da razão de travagem do veículo.
(3) No caso dos semirreboques, z é a força de travagem dividida pela carga estática no ou nos eixos do semirreboque.
(4) Tal como referido no ponto 1.4.4.3 do anexo 4 do presente regulamento.
(5) O disposto nos pontos 3.1.1 ou 5.1.1 não afeta os requisitos do anexo 4 do presente regulamento relativos ao desempenho da travagem. Todavia, se, em ensaios realizados nos termos dos pontos 3.1.1 ou 5.1.1, os valores respeitantes ao desempenho de travagem forem mais elevados que os prescritos no anexo 4, devem aplicar-se as disposições relativas às curvas de aderência no interior da zona dos diagramas 1A, 1B e 1C do presente anexo definida pelas linhas retas k = 0,8 e z = 0,8.
(6) O disposto nos pontos 3.1.1 ou 5.1.1 não afeta os requisitos do anexo 4 do presente regulamento relativos ao desempenho da travagem. Todavia, se, em ensaios realizados nos termos dos pontos 3.1.1 ou 5.1.1, os valores respeitantes ao desempenho de travagem forem mais elevados que os prescritos no anexo 4, devem aplicar-se as disposições relativas às curvas de aderência no interior da zona dos diagramas 1A, 1B e 1C do presente anexo definida pelas linhas retas k = 0,8 e z = 0,8.
ANEXO 11
CASOS EM QUE NÃO SÃO NECESSÁRIOS ENSAIOS DE TIPO I E/OU DE TIPO II (OU DE TIPO II-A) OU DE TIPO III
1. Não é necessário efetuar ensaios de tipo I e/ou de tipo II (ou tipo II-A) ou de tipo III num veículo apresentado para homologação nos seguintes casos:
|
1.1. |
O veículo em questão é um veículo a motor ou um reboque que, no que respeita aos pneus, à energia de travagem absorvida por eixo e ao modo de instalação dos pneus e montagem dos travões, é idêntico, em relação à travagem, a um veículo a motor ou a um reboque que:
|
|
1.2. |
O veículo em questão é um veículo a motor ou um reboque cujos eixos, no que respeita aos pneus, à energia de travagem absorvida por eixo e ao modo de instalação de pneus e montagem dos travões, são idênticos, em relação à travagem, aos eixos que passaram isoladamente ensaios do tipo I e/ou do tipo II (ou do tipo II-A) ou do tipo III para massas por eixo não inferiores à do veículo em questão, desde que a energia de travagem absorvida por eixo não exceda a energia absorvida por eixo nos ensaios de referência realizados num eixo. |
|
1.3. |
O veículo em questão está equipado com um sistema auxiliar de travagem, com exceção do travão do motor, idêntico a um sistema auxiliar de travagem já ensaiado nas seguintes condições:
|
|
1.4. |
O veículo em questão é um reboque equipado com travões pneumáticos de cames em S ou travões de disco (1) que satisfaz os requisitos de verificação do apêndice 2 do presente anexo no que respeita ao controlo de características relativamente às características indicadas num relatório de ensaio do eixo de referência, conforme apresentado no apêndice 3 do presente anexo. |
2. O termo «idêntico», tal como utilizado nos pontos 1.1, 1.2 e 1.3 anteriores, refere-se às características geométricas e mecânicas e aos materiais utilizados nos componentes do veículo referido nesses pontos.
No caso dos reboques, consideram-se cumpridos estes requisitos, no que respeita aos pontos 1.1 e 1.2 anteriores, se os identificadores referidos no ponto 3.7 do apêndice 2 do presente anexo em relação ao eixo/travão do reboque considerado constarem de um relatório sobre um eixo/travão de referência.
Um «eixo/travão de referência» é um eixo/travão sobre o qual existe um relatório de ensaio mencionado no ponto 3.9 do apêndice 2 do presente anexo.
3. Quando se aplicarem os requisitos acima mencionados, a comunicação referente à homologação (anexo 2 do presente regulamento) deve incluir os seguintes elementos:
|
3.1. |
No caso referido no ponto 1.1, deve indicar-se o número de homologação do veículo submetido ao ensaio de referência de tipo I e/ou de tipo II (ou de tipo II-A) ou de tipo III. |
|
3.2. |
No caso referido no ponto 1.2, deve preencher-se o quadro I do apêndice 1 do presente anexo; |
|
3.3. |
No caso referido no ponto 1.3, deve preencher-se o quadro II do apêndice 1 do presente anexo. |
|
3.4. |
Se for aplicável o ponto 1.4, deve preencher-se o quadro III do apêndice 1 do presente anexo. |
4. Se o requerente da homologação num país Parte no Acordo que aplica o presente regulamento se referir a uma homologação concedida noutro país Parte no Acordo que aplica o presente regulamento, o requerente deve apresentar a documentação relativa a essa homologação.
(1) Podem ser homologados travões com conceções diferentes mediante apresentação de informação equivalente.
Apêndice 1
Quadro I
|
|
Eixos do veículo |
Eixos de referência |
||||
|
Massa estática (P) (1) |
Força de travagem necessária nas rodas |
Velocidade |
Massa de ensaio (Pe) (1) |
Força de travagem desenvolvida nas rodas |
Velocidade |
|
|
kg |
N |
Km/h |
kg |
N |
km/h |
|
|
Eixo 1 Eixo 2 Eixo 3 Eixo 4 |
|
|
|
|
|
|
Quadro II
|
|
Massa total do veículo apresentado para homologação …kg |
|
|
Força de travagem necessária nas rodas …N |
|
|
Binário de retardamento necessário no veio principal do sistema auxiliar de travagem …Nm |
|
|
Binário de retardamento obtido no veio principal do sistema auxiliar de travagem (de acordo com o diagrama) …Nm |
Quadro III
|
Eixo de referência …Relatório n.o …Data … (cópia anexa) |
||||
|
|
Tipo I |
Tipo III |
||
|
Força de travagem por eixo (N) (ver o ponto 4.2.1 do apêndice 2) |
||||
|
Eixo 1 |
T1 = …% Fe |
T1 = …% Fe |
||
|
Eixo 2 |
T2 = …% Fe |
T2 = …% Fe |
||
|
Eixo 3 |
T3 = …% Fe |
T3 = …% Fe |
||
|
Curso previsto do atuador do travão (mm) (ver ponto 4.3.1.1 do apêndice 2) |
||||
|
Eixo 1 |
S1 = … |
s1 = … |
||
|
Eixo 2 |
S2 = … |
s2 = … |
||
|
Eixo 3 |
S3 = … |
s3 = … |
||
|
Impulso médio (N) (ver ponto 4.3.1.2 do apêndice 2) |
||||
|
Eixo 1 |
ThA1 = … |
ThA1 = … |
||
|
Eixo 2 |
ThA2 = … |
ThA2 = … |
||
|
Eixo 3 |
ThA3 = … |
ThA3 = … |
||
|
Desempenho da travagem (N) (ver ponto 4.3.1.4 do apêndice 2) |
||||
|
Eixo 1 |
T1 = … |
T1 = … |
||
|
Eixo 2 |
T2 = … |
T2 = … |
||
|
Eixo 3 |
T3 = … |
T3 = … |
||
|
|
Resultado do ensaio de tipo 0 a que foi submetido o reboque considerado (E) |
Tipo I a quente (previsto) |
Tipo III a quente (previsto) |
|
|
Desempenho da travagem do veículo (ver ponto 4.3.2 do apêndice 2) |
||||
|
Requisitos da travagem a quente (ver pontos 1.5.3, 1.6.3 e 1.7.2 do anexo 4) |
|
≥ 0,36 e ≥ 0,60 E |
≥ 0,40 e ≥ 0,60 E |
|
(1) Ver ponto 2.1 do apêndice 2 do presente anexo.
Apêndice 2
Procedimentos alternativos para ensaios do tipo I e do tipo III para travões de reboques
1. GENERALIDADES
1.1. Em conformidade com o ponto 1.4 do presente anexo, não é necessário realizar os ensaios de tipo I ou de tipo III aquando da homologação do veículo, se os elementos do sistema de travagem cumprirem os requisitos do presente apêndice e se o desempenho da travagem resultante cumprir os requisitos do presente regulamento para a categoria de veículos adequada.
1.2. Considera-se que os ensaios realizados em conformidade com os métodos descritos no presente apêndice satisfazem os requisitos acima indicados.
1.2.1. Considera-se que os ensaios realizados em conformidade com o ponto 3.5.1 do presente apêndice, incluindo o Suplemento 7 à série 09 de alterações, que tiverem dado resultados positivos, cumprem o disposto no ponto 3.5.1 do presente apêndice, com a sua última redação. Se se recorrer a este procedimento alternativo, o relatório de ensaio deve remeter para o relatório de ensaio original, cujos resultados são retomados no novo relatório atualizado. Todavia, há que realizar novos ensaios em conformidade com os requisitos da versão alterada mais recente do presente regulamento.
1.2.2. Os ensaios realizados em conformidade com o presente apêndice, antes da publicação do suplemento 2 à série 11 de alterações ao presente regulamento, que, em conjunto com eventuais dados fornecidos pelo fabricante de veículos/eixos/travões, proporcionem informações suficientes para cumprir os requisitos do suplemento 2 à série 11 de alterações podem ser utilizados num novo relatório ou na extensão de um relatório de ensaio existente sem necessidade de realizar ensaios reais.
1.3. Os ensaios realizados em conformidade com o ponto 3.6 do presente apêndice e os resultados apresentados na secção 2 do apêndice 3 ou do apêndice 4 do presente anexo devem ser admissíveis como meio de prova do cumprimento dos requisitos constantes do ponto 5.2.2.8.1 do presente regulamento.
1.4. Antes do ensaio de tipo III, a regulação dos travões deve ser efetuada de acordo com os seguintes procedimentos, conforme o caso:
|
1.4.1. |
No caso de reboques equipados com travões pneumáticos, a regulação dos travões deve fazer-se de modo a permitir o funcionamento do dispositivo de regulação automática dos travões. Para o efeito, o curso do atuador deve ser regulado para: s0 ≥1,1 · srerregulação (o limite superior não deve ultrapassar um valor recomendado pelo fabricante) em que: srerregulação é o curso de rerregulação de acordo com a especificação do fabricante do dispositivo de regulação automática dos travões, ou seja, o curso a partir do qual começa a existir uma rerregulação da folga das guarnições dos travões com uma pressão no atuador de 100 kPa. Quando, por acordo com o serviço técnico, for impraticável medir o curso do atuador, a regulação inicial deve ser fixada de acordo com o serviço técnico. A partir da condição atrás referida, o travão deve ser acionado 50 vezes de seguida com uma pressão no atuador de 200 kPa. Deve, em seguida, acionar-se o travão uma só vez, sendo a pressão no atuador ≥ 650 kPa. |
|
1.4.2. |
No caso de reboques equipados com travões de disco hidráulicos, não se considera necessário fixar requisitos de regulação. |
|
1.4.3. |
No caso de reboques equipados com travões de tambor hidráulicos, a regulação dos travões deve ser conforme às especificações do fabricante. |
1.5. No caso de reboques equipados com dispositivos de regulação automática dos travões, a regulação dos travões deve ser fixada, antes do ensaio do tipo I referido infra, de acordo com o procedimento referido no ponto 1.4 anterior.
2. SÍMBOLOS E DEFINIÇÕES
2.1. Símbolos
|
P |
= |
parte da massa do veículo suportada pelos eixos em condições estáticas |
|
F |
= |
reação normal do piso sobre o eixo em condições estáticas = P · g |
|
FR |
= |
reação estática normal total do piso sobre todas as rodas do reboque |
|
Fe |
= |
carga sobre o eixo de ensaio |
|
Pe |
= |
Fe / g |
|
g |
= |
aceleração devida à gravidade: g = 9,81 m/s2 |
|
C |
= |
binário de acionamento dos travões |
|
CO |
= |
binário-limiar de acionamento dos travões, ver definição no ponto 2.2.2. |
|
C0,dec |
= |
binário-limiar declarado de acionamento dos travões |
|
Cmax |
= |
binário máximo de acionamento dos travões |
|
R |
= |
raio de rolamento (dinâmico) do pneu |
|
T |
= |
força de travagem na interface pneu/piso |
|
TR |
= |
força de travagem total na interface pneu/piso do reboque |
|
M |
= |
binário de travagem = T · R |
|
z |
= |
razão de travagem = T/F ou M/(R · F) |
|
s |
= |
curso do atuador (curso útil + curso em vazio) |
|
sp |
= |
ver anexo 19, apêndice 9 |
|
ThA |
= |
ver anexo 19, apêndice 9 |
|
l |
= |
comprimento da alavanca |
|
r |
= |
raio interno dos tambores dos travões ou raio efetivo dos discos dos travões |
|
p |
= |
pressão de acionamento do travão |
Nota: os símbolos com o sufixo «e» designam os parâmetros associados ao ensaio do travão de referência e este sufixo pode ser acrescentado a outros símbolos, se adequado.
2.2. Definições
2.2.1. Massa de um disco ou travão
2.2.1.1. A «massa declarada» é a massa declarada pelo fabricante e é uma massa representativa para o identificador do travão (ver ponto 3.7.2.2 do presente apêndice).
2.2.1.2. A «massa de ensaio nominal» é a massa que o fabricante especifica para o disco ou o tambor com o qual o serviço técnico realiza o ensaio pertinente.
2.2.1.3. A «massa de ensaio real» é a massa medida pelo serviço técnico antes do ensaio.
2.2.2. «Binário-limiar de acionamento dos travões»:
|
2.2.2.1. |
O binário-limiar de acionamento dos travões «C0» é o binário de acionamento necessário para produzir um binário de travagem mensurável. Pode determinar-se este binário por extrapolação de medições dentro de limites não superiores a 15 % da razão de travagem ou por outros métodos equivalentes (por exemplo, ponto 1.3.1.1 do anexo 10). |
|
2.2.2.2. |
O binário limiar de acionamento dos travões «C0,dec» é o binário-limiar de acionamento dos travões declarado pelo fabricante, é um binário-limiar de acionamento dos travões representativo para os travões (ver ponto 3.7.2.2.1 do presente apêndice) e é necessário para elaborar o diagrama 2 do anexo 19 — parte 1. |
|
2.2.2.3. |
Determina-se o binário-limiar de acionamento dos travões «C0,e» pelo procedimento definido no ponto 2.2.2.1 anterior, medido pelo serviço técnico no final do ensaio. |
2.2.3. «Diâmetro externo de um disco»:
|
2.2.3.1. |
O «diâmetro externo declarado» é o diâmetro externo de um disco declarado pelo fabricante e é um diâmetro externo representativo para o disco (ver ponto 3.7.2.2.1 do presente apêndice). |
|
2.2.3.2. |
O «diâmetro externo nominal» é o diâmetro externo que o fabricante especifica para o disco com o qual o serviço técnico realiza o ensaio pertinente. |
|
2.2.3.3. |
O «diâmetro externo real» é o diâmetro externo medido pelo serviço técnico antes do ensaio. |
2.2.4. O «comprimento efetivo da árvore de cames» é a distância entre a linha central da came em S e a linha central da alavanca de comando.

3. MÉTODOS DE ENSAIO
3.1. Ensaios em pista
3.1.1. Os ensaios de desempenho da travagem devem de preferência ser efetuados num único eixo.
3.1.2. Os resultados dos ensaios num grupo de eixos podem ser utilizados em conformidade com o ponto 1.1 do presente anexo, desde que cada eixo forneça a mesma energia de travagem durante os ensaios de arrastamento e de eficiência a quente.
3.1.2.1. Esta condição é cumprida se as seguintes características forem idênticas para cada eixo: geometria do travão, guarnições do travão, montagem das rodas, pneus, acionamento e repartição da pressão nos atuadores.
3.1.2.2. O resultado documentado para um grupo de eixos será a média para o número de eixos, como se se tratasse de um único eixo.
3.1.3. Os eixos devem, de preferência, estar carregados com a carga estática máxima por eixo, embora esta condição não seja imperativa, se se tiver em conta, durante os ensaios, a diferença de resistência ao rolamento provocada pela diferença de carga nos eixos ensaiados.
3.1.4. Deve ter-se em conta o efeito do aumento de resistência ao rolamento resultante da utilização de um conjunto de veículos para efetuar os ensaios.
3.1.5. A velocidade inicial do ensaio deve ser a prescrita. A velocidade final deve ser calculada pela seguinte fórmula:

em que:
|
v1 |
= |
velocidade inicial (km/h) |
|
v2 |
= |
velocidade final (km/h) |
|
Po |
= |
massa do veículo trator (kg) nas condições de ensaio, |
|
P1 |
= |
parte da massa do reboque suportada pelos eixos sem aplicação de travões (kg), |
|
P2 |
= |
parte da massa do reboque suportada pelo(s) eixo(s) travado(s) (kg). |
3.2. Ensaios com um dinamómetro de inércia
3.2.1. A máquina de ensaio deve ter uma inércia rotativa que simule a parte da inércia linear da massa do veículo que atua numa roda, necessária para os ensaios de desempenho a frio e de desempenho a quente, e deve poder funcionar a uma velocidade constante, para as necessidades do ensaio descrito nos pontos 3.5.2 e 3.5.3 do presente apêndice.
3.2.2. O ensaio deve ser efetuado com uma roda completa, incluindo o pneu, montada na parte móvel do travão como o seria no veículo. A massa de inércia pode ser ligada ao travão ou diretamente ou por intermédio dos pneus e das rodas.
3.2.3. Pode recorrer-se ao arrefecimento por ar a uma velocidade e num sentido de escoamento que simulem as condições reais durante os ensaios de aquecimento, devendo a velocidade do caudal de ar ser de
var = 0,33 v
em que:
|
v |
= |
velocidade de ensaio do veículo no início da travagem. |
A temperatura do ar de arrefecimento deve ser a temperatura ambiente.
3.2.4. Quando a resistência ao rolamento do pneu não for compensada automaticamente durante o ensaio, o binário aplicado ao travão deve ser modificado por subtração de um binário equivalente a um coeficiente de resistência ao rolamento de 0,01.
3.3. Ensaios em dinamómetro de rolos
3.3.1. O eixo deve ser carregado, de preferência, com a sua carga estática máxima, se bem que isso não seja indispensável se se tomar em consideração, durante os ensaios, a diferença de resistência ao rolamento provocada por uma massa diferente no eixo submetido ao ensaio.
3.3.2. Pode recorrer-se ao arrefecimento por ar a uma velocidade e num sentido de escoamento que simulem as condições reais durante os ensaios de aquecimento, devendo a velocidade do caudal de ar ser de
var = 0,33 v
em que:
|
v |
= |
velocidade de ensaio do veículo no início da travagem. |
A temperatura do ar de arrefecimento deve ser a temperatura ambiente.
3.3.3. O tempo de travagem deve ter uma duração de 1 segundo após um tempo de resposta máximo de 0,6 segundos.
3.4. Condições de ensaio (generalidades)
3.4.1. Os travões submetidos a ensaio devem estar equipados com instrumentos para que possam fazer-se as seguintes medições:
|
3.4.1.1. |
Um registo contínuo que permita determinar o binário ou a força de travagem na periferia do pneu. |
|
3.4.1.2. |
Um registo contínuo da pressão de ar no atuador do travão. |
|
3.4.1.3. |
A velocidade do veículo durante o ensaio. |
|
3.4.1.4. |
A temperatura inicial na face externa do tambor ou do disco do travão. |
|
3.4.1.5. |
O curso do atuador do travão utilizado durante os ensaios do tipo 0 e de tipo I ou de tipo III. |
3.5. Procedimentos de ensaio
3.5.1. Ensaio adicional de desempenho a frio
Deve preparar-se o travão em conformidade com o ponto 4.4.2 do anexo 19 — parte 1 do presente regulamento.
No caso de a verificação do fator de travagem BF e do binário-limiar do travão ter sido realizada de acordo com o ponto 4.4.3 do anexo 19 — parte 1 do presente regulamento, a rodagem no procedimento de ensaio adicional de desempenho a frio deve ser idêntica ao procedimento utilizado para a verificação de acordo com o ponto 4.4.3 do anexo 19 — parte 1.
Podem realizar-se os ensaios de desempenho a frio após a verificação do fator de travagem BF, em conformidade com o ponto 4 do anexo 19 — parte 1 do presente regulamento.
Podem também realizar-se sequencialmente os dois ensaios de perda de desempenho, tipo I e tipo III.
Em conformidade com o ponto 4.4.2.6 do anexo 19 — parte 1, podem acionar-se os travões entre cada ensaio de perda de desempenho e entre os ensaios de verificação e de desempenho a frio. A quantidade de acionamentos deve ser declarada pelo fabricante dos travões.
3.5.1.1. Este ensaio é efetuado a uma velocidade inicial de 40 km/h, no caso do ensaio de tipo I, e de 60 km/h, no caso do ensaio de tipo III, para avaliar o desempenho da travagem a quente no final dos ensaios de tipo I e de tipo III. Os ensaios de perda de desempenho de tipo I e/ou de tipo III têm de ser feitos imediatamente após este ensaio de desempenho a frio.
3.5.1.2. O travão deve ser acionado três vezes à mesma pressão (p) e a uma velocidade inicial equivalente a 40 km/h (no caso do ensaio de tipo I) ou a 60 km/h (no caso do ensaio de tipo III), a uma temperatura inicial de travagem, medida na face externa dos tambores ou dos discos, que seja mais ou menos igual e não superior a 100 °C. Os travões são acionados à pressão no atuador do travão necessária para produzir um binário ou uma força de travagem equivalente a uma razão de travagem (z) de, pelo menos, 50 %. A pressão no atuador do travão não deve exceder 650 kPa e o binário de acionamento dos travões (C) não deve exceder o binário máximo admissível de acionamento dos travões (Cmax). A média dos três resultados dará o desempenho a frio.
3.5.2. Ensaio de perda de desempenho (ensaio do tipo I)
3.5.2.1. Este ensaio é efetuado a uma velocidade equivalente a 40 km/h e a uma temperatura inicial de travagem não superior a 100 °C, medida na face externa do tambor ou do disco do travão.
3.5.2.2. Mantém-se uma razão de travagem a 7 %, incluindo a resistência ao rolamento (ver ponto 3.2.4 do presente apêndice).
3.5.2.3. O ensaio é realizado durante 2 minutos e 33 segundos ou durante 1,7 km a uma velocidade do veículo de 40 km/h. Se não se puder alcançar a velocidade de ensaio, a duração do ensaio pode ser aumentada em conformidade com o ponto 1.5.2.2 do anexo 4 do presente regulamento.
3.5.2.4. No máximo 60 segundos após o fim do ensaio do tipo I, efetua-se um ensaio de desempenho a quente em conformidade com o ponto 1.5.3 do anexo 4 do presente regulamento, a uma velocidade inicial equivalente a 40 km/h. A pressão no atuador do travão deve ser a utilizada durante o ensaio do tipo 0.
3.5.3. Ensaio de perda de desempenho (ensaio de tipo III)
3.5.3.1. Métodos de ensaio para travagens repetidas
|
3.5.3.1.1. |
Ensaios em pista (ver o ponto 1.7 do anexo 4) |
|
3.5.3.1.2. |
Ensaio com um dinamómetro de inércia As condições de realização dos ensaios em banco de ensaio previstos no ponto 3.2 do Apêndice 2 do anexo 11 podem ser idênticas às definidas para o ensaio em estrada previsto no ponto 1.7.1 do anexo 4 do presente regulamento, com: 
|
|
3.5.3.1.3. |
Ensaio em dinamómetro de rolos As condições de realização dos ensaios em banco de ensaio previstos no ponto 3.3 do apêndice 2 do anexo 11 devem ser as seguintes:
|
3.5.3.2. No máximo 60 segundos após o fim do ensaio de tipo III, efetua-se um ensaio de desempenho a quente em conformidade com o ponto 1.7.2 do anexo 4 do presente regulamento. A pressão no atuador do travão deve ser a utilizada durante o ensaio de tipo 0.
3.6. Requisitos de desempenho para dispositivos de regulação automática dos travões
3.6.1. Os requisitos a seguir indicados devem aplicar-se a um dispositivo de regulação automática dos travões que esteja instalado num travão, cujo desempenho é verificado de acordo com as disposições do presente apêndice.
Após a conclusão dos ensaios indicados nos pontos 3.5.2.4 (ensaio de tipo I) ou 3.5.3.2 (ensaio de tipo III) anteriores, devem verificar-se os requisitos do ponto 3.6.3 seguinte.
3.6.2. Os requisitos a seguir indicados devem aplicar-se a um dispositivo alternativo de regulação automática dos travões instalado num travão para o qual já exista um relatório de ensaio conforme ao disposto no apêndice 3.
3.6.2.1. Desempenho dos travões
Após aquecimento dos travões executado em conformidade com os procedimentos descritos nos pontos 3.5.2 (ensaio de tipo I) ou 3.5.3 (ensaio de tipo III), consoante o caso, deve aplicar-se uma das seguintes disposições:
|
a) |
o desempenho a quente do sistema de travagem de serviço deve ser ≥ 80 % do desempenho prescrito para o ensaio de tipo 0; ou |
|
b) |
o travão deve ser acionado com uma pressão no atuador igual à utilizada durante o ensaio de tipo 0; a esta pressão, deve medir-se o curso total do atuador (sA), que deve ser ≤ 0,9 sp da câmara do travão. |
sp = O curso efetivo significa o curso no qual o esforço exercido é 90 % do impulso médio (ThA) — ver ponto 2 do anexo 11 — apêndice 2 do presente regulamento.
3.6.2.2. Após a conclusão dos ensaios indicados no ponto 3.6.2.1 anterior, devem verificar-se os requisitos do ponto 3.6.3.
3.6.3. Ensaio de velocidade livre
Após a conclusão dos ensaios referidos nos pontos 3.6.1 ou 3.6.2 anteriores, conforme aplicável, deve deixar-se que os travões arrefeçam até uma temperatura correspondente à de travões frios (ou seja, ≤ 100 °C) e verificar-se se o reboque/as rodas é/são capaz(es) de rolar livremente e preencher uma das seguintes condições:
|
a) |
as rodas rodam livremente (ou seja, podem ser rodadas manualmente); |
|
b) |
se se determinar que, a uma velocidade constante equivalente a v = 60 km/h sem a aplicação dos travões, a temperatura assimptótica nos tambores ou nos discos não aumenta mais de 80 °C, este momento de travagem residual é considerado aceitável. |
3.7. Identificação
3.7.1. O eixo deve apresentar, num local visível, pelo menos as informações de identificação a seguir mencionadas, agrupadas sem qualquer ordem de prioridade, de forma legível e indelével:
|
a) |
marca e/ou fabricante do eixo; |
|
b) |
identificador do eixo (ver ponto 3.7.2.1 do presente apêndice); |
|
c) |
identificador do travão (ver ponto 3.7.2.2 do presente apêndice); |
|
d) |
identificador Fe do eixo (ver ponto 3.7.2.3 do presente apêndice); |
|
e) |
a parte de base do número do relatório de ensaio (ver ponto 3.9 do presente apêndice). |
Exemplo:
|
|
Fabricante do eixo e/ou marca ABC |
|
|
ID1-XXXXXX |
|
|
ID2-YYYYYY |
|
|
ID3-11200 |
|
|
ID4-ZZZZZZZ |
3.7.1.1. Um dispositivo de regulação automática dos travões não integrado deve apresentar, num local visível, pelo menos as seguintes informações de identificação agrupadas, de forma legível e indelével:
|
a) |
Fabricante e/ou marca; |
|
b) |
Tipo; |
|
c) |
Versão. |
3.7.1.2. A marca e o tipo de cada guarnição do travão deve ser visível quando a guarnição/pastilha estiver montada nas maxilas/placa de suporte do travão de forma legível e indelével.
3.7.2. Identificadores
3.7.2.1. Identificador do eixo
O identificador do eixo permite classificar um eixo em termos da sua força de travagem/capacidade de binário, conforme especificado pelo fabricante do eixo.
O identificador do eixo consiste num número alfanumérico constituído por quatro caracteres «ID1-» seguidos de, no máximo, 20 caracteres.
3.7.2.2. Identificador do travão
O identificador do travão consiste num número alfanumérico constituído por quatro caracteres «ID2-» seguidos de, no máximo, 20 caracteres.
Os travões com o mesmo identificador partilham os seguintes critérios:
|
a) |
tipo de travão [por exemplo, tambor (came em S, calço, etc.) ou travão de disco (fixo, flutuante, simples ou duplo, etc.)]; |
|
b) |
material de base (por exemplo, ferroso ou não ferroso) no que se refere ao alojamento da pinça, à braçadeira do travão, ao disco do travão e ao tambor do travão; |
|
c) |
dimensões com o sufixo «e» de acordo com as figuras 2A e 2B do apêndice 5 do presente anexo; |
|
d) |
o método de base utilizado no travão para produzir a força de travagem; |
|
e) |
no caso dos travões de disco, o método de montagem do anel de atrito: fixo ou flutuante; |
|
f) |
fator de travagem BF; |
|
g) |
diferentes características do travão relativas aos requisitos do anexo 11 e não abrangidas pelo ponto 3.7.2.2.1. |
3.7.2.2.1. Diferenças admissíveis no mesmo identificador do travão
O mesmo identificador do travão pode incluir diferentes características relativamente aos seguintes critérios:
|
a) |
aumento no binário máximo declarado de acionamento do travão Cmax; |
|
b) |
desvio entre a massa declarada do disco do travão e do tambor do travão mdec: ± 20 %; |
|
c) |
modo de fixação das guarnições/pastilhas nas maxilas/placas de suporte do travão; |
|
d) |
no caso dos travões de disco, aumento da capacidade de curso máximo do travão; |
|
e) |
comprimento efetivo da árvore de cames; |
|
f) |
binário-limiar declarado C0,dec; |
|
g) |
± 5 mm do diâmetro externo declarado do disco; |
|
h) |
tipo de arrefecimento do disco (ventilado/não ventilado); |
|
i) |
cubo (integrado ou não); |
|
j) |
disco com tambor integrado — com ou sem função de travagem de estacionamento; |
|
k) |
relação geométrica entre as superfícies de atrito do disco e a montagem do disco; |
|
l) |
tipo de guarnição do travão; |
|
m) |
variações dos materiais (excluindo as alterações no material de base, ver ponto 3.7.2.2 anterior) que, segundo o fabricante, não alteram o desempenho no que respeita aos ensaios exigidos; |
|
n) |
placa de suporte e maxilas. |
3.7.2.3. Identificador Fe
O identificador Fe indica a carga por eixo de ensaio. O identificador consiste num número alfanumérico constituído por quatro caracteres «ID3-» seguidos do valor de Fe em daN, mas sem o identificador de unidade «daN».
3.7.2.4. Identificador do relatório de ensaio
O identificador do relatório de ensaio consiste num número alfanumérico constituído por quatro caracteres «ID4-» seguidos da parte de base do número do relatório de ensaio.
3.7.3. Dispositivo de regulação automática dos travões (integrado e não integrado)
3.7.3.1. Tipo do dispositivo de regulação automática dos travões
Os dispositivos de regulação automática dos travões do mesmo tipo partilham os seguintes critérios:
|
a) |
carroçaria: material de base (por exemplo, ferroso ou não ferroso, ferro fundido ou aço forjado); |
|
b) |
momento máximo admissível do eixo do travão; |
|
c) |
princípio de funcionamento da regulação, por exemplo, dependente do curso, dependente da força ou eletrónico/mecânico. |
3.7.3.2. Versões do dispositivo de regulação automática dos travões, no que diz respeito ao comportamento da regulação
Dentro de um determinado tipo de dispositivos de regulação automática dos travões, os que têm impacto na folga das guarnições dos travões são considerados versões diferentes.
3.8. Critérios de ensaio
Os ensaios devem demonstrar a conformidade com os requisitos estabelecidos no apêndice 2 do presente anexo.
Caso seja necessário um novo relatório de ensaio, ou uma extensão do mesmo, para um eixo/travão modificado, dentro dos limites definidos no ponto 3.7.2.2.1 anterior, utilizam-se os critérios a seguir apresentados para determinar a necessidade de proceder a mais ensaios, atendendo às configurações mais desfavoráveis acordadas com o serviço técnico.
|
As abreviaturas apresentadas a seguir são utilizadas no quadro abaixo: |
|||||||||
|
CT (ensaio completo) |
Ensaio conforme ao anexo 11, apêndice 2:
Ensaio conforme ao anexo 19:
|
||||||||
|
FT (ensaio de perda de desempenho) |
Ensaio conforme ao anexo 11, apêndice 2:
|
||||||||
|
Diferenças em conformidade com o ponto 3.7.2.2.1 anterior |
Critérios de ensaio |
||||||
|
Alteração permitida sem ensaios suplementares |
||||||
|
CT: Deve ser ensaiada a variante mais leve. Se a massa de ensaio nominal para uma nova variante apresentar um desvio inferior a 5 % em relação a uma variante ensaiada anteriormente com um valor nominal superior, pode dispensar-se o ensaio da variante menor. A massa de ensaio real da amostra de ensaio pode variar ± 5 % em relação à massa de ensaio nominal. |
||||||
|
O pior caso indicado pelo fabricante e aceite pelos serviços técnicos que efetuam o ensaio |
||||||
|
Alteração permitida sem ensaios suplementares |
||||||
|
Considera-se que o pior caso corresponde ao valor mínimo de rigidez à torção da árvore de cames, devendo proceder-se à sua verificação por:
|
||||||
|
Deve verificar-se se o desempenho do travão se mantém dentro dos limites indicados no diagrama 2 do anexo 19 — Parte 1. |
||||||
|
Considera-se que o pior caso é o diâmetro menor O diâmetro externo real da amostra de ensaio pode variar ± 1 mm em relação ao diâmetro externo nominal especificado pelo fabricante do eixo. |
||||||
|
Cada tipo deve ser objeto de ensaio. |
||||||
|
Cada tipo deve ser objeto de ensaio. |
||||||
|
Esta característica não exige a realização de ensaios. |
||||||
|
Esta característica não exige a realização de ensaios. |
||||||
|
Cada tipo de guarnição do travão deve ser objeto de ensaio |
||||||
|
Esta condição não exige a realização de ensaios. |
||||||
|
Condições de ensaio para o pior caso (2):
|
3.8.1. Se um dispositivo de regulação automática dos travões diferir de um ensaiado de acordo com os pontos 3.7.3.1 e 3.7.3.2, é necessário um novo ensaio em conformidade com o ponto 3.6.2 do presente apêndice.
3.9. Relatório de ensaio
3.9.1. Número do relatório de ensaio
O número do relatório de ensaio é constituído por duas partes: uma parte de base e um sufixo que identifica o nível da questão a tratar no relatório de ensaio.
A parte de base, constituída, no máximo, por 20 caracteres, e o sufixo devem estar claramente separados entre si, por exemplo por um ponto ou barra.
A parte de base do número do relatório de ensaio deve apenas abranger travões com o mesmo identificador do travão e o mesmo fator de travagem (de acordo com o ponto 4 do anexo 19 — Parte 1, do presente regulamento).
3.9.2. Código de ensaio
Para além do número do relatório de ensaio, um «código de ensaio» constituído por, no máximo, oito caracteres (p. ex., ABC123) deve indicar os resultados de ensaios aplicáveis aos identificadores e à amostra de ensaio, conforme descrito pormenorizadamente no ponto 3.7 anterior.
3.9.3. Resultados dos ensaios
3.9.3.1. O resultado dos ensaios efetuados em conformidade com os pontos 3.5 e 3.6.1 do presente apêndice deve ser apresentado numa ficha, cujo modelo figura no apêndice 3 do presente anexo.
3.9.3.2. No caso de um travão equipado com um dispositivo alternativo de regulação dos travões, os resultados dos ensaios efetuados em conformidade com o ponto 3.6.2 do presente apêndice devem ser apresentados numa ficha, cujo modelo figura no apêndice 4 do presente anexo.
3.9.4. Ficha de informações
Deve fazer parte do relatório de ensaio uma ficha de informações, fornecida pelo fabricante do eixo ou do veículo, contendo, no mínimo, as informações definidas no apêndice 5 do presente anexo.
A ficha de informações deve indicar, se for o caso, as diversas variantes do travão/eixo em relação aos critérios essenciais enumerados no ponto 3.7.2.2.1 anterior.
4. VERIFICAÇÃO
4.1. Verificação dos componentes
A especificação dos travões do veículo objeto de homologação deve cumprir os requisitos estabelecidos nos pontos 3.7 e 3.8 anteriores.
4.2. Verificação da energia de travagem absorvida
4.2.1. As forças de travagem (T) de cada travão considerado (para a mesma pressão pm na linha de comando) necessárias para produzir a força de arrastamento especificada para as condições de realização dos ensaios dos tipos I e III não devem exceder os valores Te indicados nos pontos 2.3.1 e 2.3.2 do apêndice 3 do anexo 11, utilizados como base para o ensaio do travão de referência.
4.3. Verificação do desempenho a quente
4.3.1. A força de travagem (T) para cada travão considerado, para uma dada pressão (p) nos atuadores e para uma pressão na linha de comando (pm) utilizadas durante o ensaio do tipo 0 do reboque considerado, deve ser determinada do seguinte modo:
|
4.3.1.1. |
Calcula-se o curso previsto do(s) atuador(es) do travão em causa do seguinte modo: 
Este valor não deve exceder sp, quando o valor sp tiver sido verificado e apresentado em conformidade com o procedimento definido no ponto 2 do anexo 19 — Parte 1 do presente regulamento e puder apenas ser aplicado dentro da gama de pressões registada no ponto 3.3.1 do relatório de ensaio definido no apêndice 1 do anexo 19. |
|
4.3.1.2. |
Mede-se o impulso médio (ThA) do atuador montado no travão considerado à pressão especificada no ponto 4.3.1 anterior. |
|
4.3.1.3. |
O binário de acionamento do travão (C) é, então, calculado do seguinte modo: C = ThA · l C não deve exceder Cmax |
|
4.3.1.4. |
O desempenho da travagem previsto para o travão em causa é dado pela seguinte fórmula: 
R não pode ser inferior a 0,8 Re |
4.3.2. O desempenho da travagem previsto para o reboque considerado é dado pela fórmula:

4.3.3. Os desempenhos a quente após os ensaios dos tipos I ou III devem ser determinados em conformidade com os pontos 4.3.1.1 a 4.3.1.4 anteriores. Os valores calculados correspondentes, determinados em conformidade com o ponto 4.3.2 anterior, devem cumprir os requisitos do presente regulamento aplicáveis ao reboque considerado. O valor utilizado para:
«o número registado no ensaio do tipo 0, tal como prescrito nos pontos 1.5.3 ou 1.7.2 do anexo 4»
deve ser o número registado no ensaio do tipo 0 do reboque considerado.
(1) Se aplicável.
(2) Não são necessários ensaios, se o fabricante demonstrar que a alteração não afeta a rigidez.
Apêndice 3
Modelo de relatório de ensaio prescrito no ponto 3.9 do apêndice 2 do presente anexo
|
Relatório de ensaio |
N.o … |
|
Parte de base: |
ID4- … |
|
Sufixo: |
… |
1. Generalidades …
1.1. Fabricante do eixo (nome e endereço): …
1.1.1. Marca do fabricante do eixo: …
1.2. Fabricante do travão (nome e endereço): …
1.2.1. Identificador do travão ID2-: …
1.2.2. dispositivo de regulação automática dos travões: integrado/não integrado (1)
1.3. Ficha de informações do fabricante: …
2. Registo dos resultados do ensaio
Os dados que se seguem têm de ser registados para cada ensaio:
2.1. Código de ensaio (ver ponto 3.9.2 do apêndice 2 do presente anexo): …
2.2. Amostra de ensaio: (identificação específica da variante ensaiada relativa à ficha de informações do fabricante. Ver também ponto 3.9.2 do apêndice 2 do presente anexo)
2.2.1. Eixo
2.2.1.1. Identificador do eixo: ID1-…
2.2.1.2. Identificação do eixo ensaiado: …
2.2.1.3. Carga por eixo de ensaio (identificador Fe): ID3- …daN
2.2.2. Travão
2.2.2.1. Identificador do travão: ID2-…
2.2.2.2. Identificação do travão ensaiado: …
2.2.2.3. Capacidade máxima de curso do travão: (2)…
2.2.2.4. Comprimento efetivo da árvore de cames: (3) …
2.2.2.5. Variação do material segundo o ponto 3.8, alínea m), do apêndice 2 do presente anexo: …
2.2.2.6. Tambor/disco do travão (1)
2.2.2.6.1. Massa de ensaio efetiva do disco/tambor: (1) …
2.2.2.6.2. Diâmetro externo nominal do disco: (4) …
2.2.2.6.3. Tipo de arrefecimento do disco ventilado/não ventilado (5)
2.2.2.6.4. Com ou sem cubo integrado (5)
2.2.2.6.5. Disco com tambor integrado — com ou sem função de travagem de estacionamento (4) (5)
2.2.2.6.6. Relação geométrica entre as superfícies de atrito do disco e a fixação do disco: …
2.2.2.6.7. Material de base: …
2.2.2.7. Guarnição ou pastilha do travão (5)
2.2.2.7.1. Fabricante: …
2.2.2.7.2. Marca: …
2.2.2.7.3. Tipo: …
2.2.2.7.4. Método de fixação das guarnições/pastilhas nas maxilas/placas de suporte do travão: (5) …
2.2.2.7.5. Espessura da placa de suporte, peso das maxilas ou outras informações descritivas (ficha de informações do fabricante): (5) …
2.2.2.7.6. Material de base das maxilas/placa de suporte do travão (5): …
2.2.3. Dispositivo de regulação automática dos travões (não aplicável no caso do dispositivo integrado de regulação automática dos travões) (5)
2.2.3.1. Fabricante (nome e endereço): …
2.2.3.2. Marca: …
2.2.3.3. Tipo: …
2.2.3.4. Versão: …
2.2.4. Rodas (dimensões, ver figuras 1A e 1B no apêndice 5 do presente anexo)
2.2.4.1. Raio de rolamento de referência do pneu (Re) à carga por eixo de ensaio (Fe): …
2.2.4.2. Dados da roda montada durante o ensaio:
|
Dimensão do pneu |
Dimensão da jante |
Xe (mm) |
De (mm) |
Ee (mm) |
Ge (mm) |
|
|
|
|
|
|
|
2.2.5. Comprimento da alavanca le: …
2.2.6. Atuador do travão
2.2.6.1. Fabricante: …
2.2.6.2. Marca: …
2.2.6.3. Tipo: …
2.2.6.4. Número de identificação (ensaio): …
2.3. Resultados do ensaio (corrigidos em função da resistência ao rolamento de 0,01 · Fe)
2.3.1. No caso dos veículos das categorias O2 e O3 em que o reboque O3 tenha sido sujeito ao ensaio de tipo I:
|
Tipo de ensaio: |
0 |
I |
|
|
Anexo 11, apêndice 2, ponto: |
3.5.1.2. |
3.5.2.2./3. |
3.5.2.4. |
|
Velocidade de ensaio …km/h |
40 |
40 |
40 |
|
Pressão no atuador do travão pe …kPa |
|
— |
|
|
Tempo de travagem …min |
— |
2,55 |
— |
|
Força de travagem desenvolvida Te …daN |
|
|
|
|
Eficiência de travagem Te/Fe …- |
|
|
|
|
Curso do atuador se …mm |
|
— |
|
|
Binário de acionamento do travão Ce …Nm |
|
— |
|
|
Binário-limiar de acionamento do travão C0,e …Nm |
|
|
|
2.3.2. No caso dos veículos das categorias O3 e O4 em que o reboque O3 tenha sido sujeito ao ensaio de tipo III:
|
Tipo de ensaio: |
0 |
III |
|
|
Anexo 11, apêndice 2, ponto: |
3.5.1.2. |
3.5.3.1. |
3.5.3.2. |
|
Velocidade de ensaio inicial …km/h |
60 |
|
60 |
|
Velocidade de ensaio final …km/h |
|
|
|
|
Pressão no atuador do travão pe …kPa |
|
— |
|
|
Número de acionamentos dos travões …- |
— |
20 |
— |
|
Duração do ciclo de travagem …s |
— |
60 |
— |
|
Força de travagem desenvolvida Te …daN |
|
|
|
|
Eficiência de travagem Te/Fe …- |
|
|
|
|
Curso do atuador se …mm |
|
— |
|
|
Binário de acionamento do travão Ce …Nm |
|
— |
|
|
Binário-limiar de acionamento do travão C0,e …Nm |
|
— |
|
2.3.3. Este ponto só deve ser preenchido quando o travão tiver sido submetido ao procedimento de ensaio descrito no ponto 4 do anexo 19 — Parte 1 do presente regulamento para verificar as características de desempenho a frio do travão utilizando o fator de travagem (BF).
2.3.3.1. Fator de travagem BF:
2.3.3.2. Binário-limiar declarado C0,dec …Nm
2.3.4. Desempenho do dispositivo de regulação automática dos travões (caso exista)
2.3.4.1. Velocidade livre de acordo com o ponto 3.6.3 do anexo 11, apêndice 2: sim / não (6)
3. Gama de aplicações
A gama de aplicações especifica as variantes de eixo/travão abrangidas pelo presente relatório de ensaio, mostrando quais as variáveis abrangidas pelos diferentes códigos de ensaio.
4. Este ensaio foi realizado e os resultados são apresentados em conformidade com o apêndice 2 do anexo 11 e, se for o caso, com o ponto 4 do anexo 19 — Parte 1 do Regulamento n.o 13, com a última redação que lhe foi dada pela série … de alterações.
No final do ensaio indicado no ponto 3.6 do anexo 11, apêndice 2, (7) considerou-se que os requisitos do ponto 5.2.2.8.1 do Regulamento n.o 13 foram/não foram respeitados. (7)
Serviço técnico (8) que realizou o ensaio
Assinatura: …Data: …
5. Entidade homologadora (8)
Assinatura: …Data: …
(1) Riscar o que não é aplicável.
(2) Aplicável apenas a travões de disco.
(3) Aplicável apenas a travões de tambor.
(4) Aplicável apenas a travões de disco.
(5) Riscar o que não é aplicável.
(6) Riscar o que não é aplicável.
(7) A preencher apenas quando estiver instalado um dispositivo de regulação automática de desgaste do travão.
(8) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 4
Modelo de relatório de ensaio para um dispositivo alternativo de regulação automática dos travões, prescrito no ponto 3.7.3 do apêndice 2 do presente anexo
Relatório de ensaio N.o …
1. Identificação
1.1. Eixo:
Marca: …
Tipo: …
Modelo: …
Carga por eixo de ensaio (identificador Fe): ID3- …daN
Anexo 11, apêndice 3, relatório de ensaio n.o …
1.2. Travão:
Marca: …
Tipo: …
Modelo: …
Guarnição do travão: …
Marca/Tipo: …
1.3. Acionamento:
Fabricante: …
Tipo (cilindro/diafragma) (1)…
Modelo: …
Comprimento da alavanca (l): …mm
1.4. Dispositivo de regulação automática dos travões:
Fabricante (nome e endereço): …
Marca: …
Tipo: …
Versão: …
2. Registo dos resultados dos ensaios
2.1. Desempenho do dispositivo de regulação automática dos travões
2.1.1. Desempenho a quente dos sistemas de travagem de serviço determinado em conformidade com o ensaio definido no ponto 3.6.2.1, alínea a), do anexo 11, apêndice 2: …por cento
ou
Curso do atuador sA determinado em conformidade com o ensaio definido no ponto 3.6.2.1, alínea b) do anexo 11, apêndice 2: . …mm
2.1.2. Velocidade livre em conformidade com o ponto 3.6.3 do anexo 11, apêndice 2: sim / não (2)
3. Designação do serviço técnico/entidade homologadora (2) que realizou o ensaio:
4. Data do ensaio:
5. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 11, apêndice 2, ponto 3.6.2 do Regulamento n.o 13, com a redação que lhe foi dada pela série …de alterações.
6. No final de ensaio indicado no ponto 5 anterior, considerou-se que os requisitos do ponto 5.2.2.8.1 do Regulamento n.o 13 foram/não foram respeitados (2)
7. Serviço técnico (3) que realizou o ensaio
Assinatura: …Data: …
8. Entidade homologadora (3)
Assinatura: …Data: …
(1) Riscar o que não é aplicável.
(2) Riscar o que não é aplicável.
(3) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 5
Ficha de informações sobre o eixo e o travão do reboque no que respeita ao procedimento alternativo respeitante ao tipo I e ao tipo III
1. Generalidades
1.1. Nome e endereço do fabricante do eixo ou do veículo: …
2. Dados sobre o eixo
2.1. Fabricante (nome e endereço): …
2.2. Tipo/variante: …
2.3. Identificador do eixo: ID1-…
2.4. Carga por eixo de ensaio (Fe): …daN
2.5. Dados sobre a roda e o travão de acordo com as figuras 1A e 1B seguintes …
Figura 1A

Figura 1B

3. Travão
3.1. Informações gerais
3.1.1. Marca:…
3.1.2. Fabricante (nome e endereço): …
3.1.3. Tipo de travão (p. ex., tambor/disco): …
3.1.3.1. Variante (p. ex., came em S, calço simples, etc.): …
3.1.4. Identificador do travão: ID2-…
3.1.5. Dados sobre o travão de acordo com as figuras 2A e 2B seguintes: …
Figura 2A
Figura 2B

|
xe (mm) |
ae (mm) |
he (mm) |
ce (mm) |
de (mm) |
ee (mm) |
α0e |
α1e |
be (mm) |
re (mm) |
Ae (cm2) |
S1e (mm) |
S2e (mm) |
S3e (mm) |
3.2. Dados sobre o travão de tambor
3.2.1. Dispositivo de regulação dos travões (externo/integrado): …
3.2.2. Aumento no binário máximo declarado de acionamento do travão Cmax: …Nm
3.2.3. Eficiência mecânica: η = …
3.2.4. Binário-limiar declarado de acionamento dos travões C0,dec: …Nm
3.2.5. Comprimento efetivo da árvore de cames: …mm
3.3. Tambor do travão
3.3.1. Diâmetro máximo da superfície de atrito (limite de desgaste): …mm
3.3.2. Material de base: …
3.3.3. Massa declarada: …kg
3.3.4. Massa nominal: …kg
3.4. Guarnição do travão
3.4.1. Nome e endereço do fabricante: …
3.4.2. Marca: …
3.4.3. Tipo: …
3.4.4. Identificação (identificação de tipo na guarnição): …
3.4.5. Espessura mínima (limite de desgaste): …mm
3.4.6. Método de fixação do material de atrito à maxila do travão: …
3.4.6.1. Pior caso de fixação (caso existam vários): …
3.5. Dados sobre o travão de disco
3.5.1. Tipo de ligação ao eixo (axial, radial, integrada, etc.): …
3.5.2. Dispositivo de regulação dos travões (externo/integrado): …
3.5.3. Curso máximo de acionamento: …mm
3.5.4. Força aplicada máxima declarada ThAmax: …daN
3.5.4.1. Cmax = ThAmax · le: …Nm
3.5.5. Raio de atrito: re = …mm
3.5.6. Comprimento da alavanca: le = …mm
3.5.7. Razão de entrada/saída (le/ee): i = …
3.5.8. Eficiência mecânica: η = …
3.5.9. Binário-limiar declarado de acionamento do travão ThA0,dec: …N
3.5.9.1. C0,dec = ThA0,dec · le: …Nm
3.5.10. Espessura mínima do rotor (limite de desgaste): …mm
3.6. Dados sobre o disco do travão: …
3.6.1. Descrição do tipo de disco: …
3.6.2. Ligação/fixação ao cubo: …
3.6.3. Ventilação (sim/não): …
3.6.4. Massa declarada: …kg
3.6.5. Massa nominal: …kg
3.6.6. Diâmetro externo declarado: …mm
3.6.7. Diâmetro externo mínimo: …mm
3.6.8. Diâmetro interno do anel de atrito: …mm
3.6.9. Largura do canal de ventilação (se aplicável): …mm
3.6.10. Material de base: …
3.7. Dados sobre a pastilha do travão: …
3.7.1. Nome e endereço do fabricante: …
3.7.2. Marca: …
3.7.3. Tipo: …
3.7.4. Identificação (identificação de tipo na placa de suporte da pastilha): …
3.7.5. Espessura mínima (limite de desgaste): …mm
3.7.6. Método de fixação do material de atrito à placa de suporte da pastilha: …
3.7.6.1. Pior caso de fixação (caso existam vários) …:
ANEXO 12
CONDIÇÕES QUE REGEM OS ENSAIOS DOS VEÍCULOS EQUIPADOS COM SISTEMAS DE TRAVAGEM POR INÉRCIA
1. DISPOSIÇÕES GERAIS
1.1. O sistema de travagem por inércia de um reboque é constituído pelo dispositivo de comando, a transmissão e os travões das rodas, a seguir designados por «travões».
1.2. O dispositivo de comando é o conjunto dos componentes que são parte integrante do dispositivo de tração (cabeça de engate).
1.3. A transmissão é o conjunto dos componentes compreendidos entre a saída da cabeça de engate e a entrada do travão.
1.4. O «travão» é constituído pelo órgão onde se desenvolvem as forças que se opõem ao movimento do veículo. A entrada do travão pode ser a alavanca que aciona a came do travão ou componentes semelhantes (sistema de travagem por inércia com transmissão mecânica), ou o cilindro do travão (sistema de travagem por inércia com transmissão hidráulica).
1.5. Os sistemas de travagem nos quais a energia acumulada (por exemplo, energia elétrica, pneumática ou hidráulica) é transmitida ao reboque pelo veículo trator e só é controlada pelo impulso sobre o engate não são considerados sistemas de travagem por inércia na aceção do presente regulamento.
1.6. Ensaios
1.6.1. Determinação dos componentes essenciais do travão.
1.6.2. Determinação dos componentes essenciais do dispositivo de comando e verificação da sua conformidade com as disposições do presente regulamento.
1.6.3. Verificação no veículo:
|
a) |
da compatibilidade entre o dispositivo de comando e o travão; e |
|
b) |
da transmissão. |
2. SÍMBOLOS E DEFINIÇÕES
2.1. Unidades utilizadas
2.1.1. Massa: kg;
2.1.2. Força: N;
2.1.3. Aceleração devida à gravidade: g = 9,81 m/s2
2.1.4. Binários e momentos: Nm;
2.1.5. Superfícies: cm2;
2.1.6. Pressões: kPa;
2.1.7. Comprimentos: unidade definida em cada caso.
2.2. Símbolos válidos para todos os tipos de travões (ver figura 1 do apêndice 1 do presente anexo)
2.2.1. GA : «massa máxima» tecnicamente admissível do reboque declarada pelo fabricante;
2.2.2. G′A : «massa máxima» do reboque capaz de ser travada pelo dispositivo de comando declarada pelo fabricante;
2.2.3. GB : «massa máxima» do reboque capaz de ser travada pelo funcionamento conjunto de todos os travões do reboque
GB = n · GBo
2.2.4. GBo : fração da «massa máxima» admissível do reboque capaz de ser travada por um travão, declarada pelo fabricante;
2.2.5. B*: força de travagem necessária;
2.2.6. B: força de travagem necessária, tendo em conta a resistência ao rolamento;
2.2.7. D*: impulso admissível sobre o engate;
2.2.8. D: impulso sobre o engate;
2.2.9. P′: força na extremidade do dispositivo de comando;
2.2.10. K: força suplementar do dispositivo de comando, convencionalmente designada por força D, correspondente ao ponto de intersecção com o eixo das abcissas da curva extrapolada que exprime P′ em função de D, medida com o dispositivo a meio curso (ver figuras 2 e 3 do apêndice 1 do presente anexo);
2.2.11. KA : limiar de solicitação do dispositivo de comando, ou seja, o impulso máximo na cabeça de engate cuja ação, durante um curto intervalo de tempo, não produz nenhuma força na extremidade do dispositivo de comando. O símbolo KA aplica-se convencionalmente à força medida quando a cabeça de engate começa a ser empurrada a uma velocidade de 10 a 15 mm/s, estando desligada a transmissão do dispositivo de comando;
2.2.12. D1 : a força máxima aplicada à cabeça de engate quando está a ser empurrada a uma velocidade de s mm/s + 10 %, estando desligada a transmissão;
2.2.13. D2 : a força máxima aplicada à cabeça de engate quando está a ser puxada a uma velocidade de s mm/s + 10 % para fora da posição de compressão máxima, estando desligada a transmissão;
2.2.14. ηHo : eficiência do dispositivo de comando de inércia;
2.2.15. ηH1 : eficiência do sistema de transmissão;
2.2.16. ηH : eficiência global do dispositivo de comando e da transmissão ηH = ηHo · ηH1;
2.2.17. S: curso do comando, em milímetros;
2.2.18. s′: curso efetivo (útil) do comando, em milímetros, determinado em conformidade com o ponto 9.4 do presente anexo;
2.2.19. s″: curso de reserva do cilindro principal, medido em milímetros na cabeça de engate;
2.2.19.1. sHz : curso do cilindro principal, em milímetros, de acordo com a figura 8 do apêndice 1 do presente anexo;
2.2.19.2. s″Hz : curso livre do cilindro principal, em milímetros, na haste do êmbolo, de acordo com a figura 8;
2.2.20. so : perda de curso, ou seja, curso, em milímetros, da cabeça de engate quando esta é acionada de modo a passar de 300 mm acima para 300 mm abaixo da horizontal, permanecendo a transmissão imobilizada;
2.2.21. 2sB : curso de aperto das maxilas dos travões (curso das maxilas quando da aplicação dos travões), em milímetros, medido no diâmetro situado paralelamente ao dispositivo de aperto e sem regulação dos travões durante o ensaio;
2.2.22. 2sB*: curso mínimo de aperto das maxilas dos travões no centro destas (curso mínimo das maxilas quando do acionamento dos travões), expresso em milímetros, no caso dos travões das rodas equipados com travões de tambor
sendo 2r o diâmetro do tambor do travão, em milímetros (ver apêndice 1, figura 4, do presente anexo).
No caso dos travões das rodas equipados com travões de disco com transmissão hidráulica
em que:
V60 = volume de fluido absorvido pelo travão de uma roda, a uma pressão correspondente a uma força de travagem de 1,2 B* = 0,6 · GBo e um raio de pneu máximo
e
2rA = diâmetro exterior do disco do travão.
(V60 em cm3, FRZ em cm2 e rA em mm)
2.2.23. M*: binário de travagem especificado pelo fabricante no ponto 5 do apêndice 3. Este binário de travagem deve produzir, pelo menos, a força de travagem B* prescrita;
2.2.23.1. MT : binário de travagem de ensaio no caso de não estar montado nenhum protetor contra sobrecargas (de acordo com o ponto 6.2.1);
2.2.24. R: raio de rolamento dinâmico do pneu (m);
2.2.25. N: número de travões.
2.2.26. Mr : binário de travagem máximo resultante do curso máximo admissível sr ou do volume de fluido máximo admissível Vr, quando o reboque faz marcha-atrás (incluindo resistência ao rolamento = 0,01 · g · GBo);
2.2.27. sr : curso máximo admissível na alavanca de comando do travão quando o reboque faz marcha-atrás;
2.2.28. Vr : volume de fluido máximo admissível absorvido por uma roda em travagem quando o reboque faz marcha-atrás.
2.3. Símbolos válidos para sistemas de travagem com transmissão mecânica (ver figura 5 do apêndice 1 do presente anexo);
2.3.1. iHo : relação de desmultiplicação entre o curso da cabeça de engate e o curso da alavanca na extremidade do dispositivo de comando;
2.3.2. iH1 : relação de desmultiplicação entre o curso da alavanca na extremidade do dispositivo de comando e o curso da alavanca dos travões (desmultiplicação da transmissão);
2.3.3. iH : relação de desmultiplicação entre o curso da cabeça de engate e o curso da alavanca dos travões
iH = iHo · iH1
2.3.4. ig : relação de desmultiplicação entre o curso da alavanca dos travões e o curso de aperto no centro da maxila (curso de aplicação dos travões) (ver figura 4 do apêndice 1 do presente anexo);
2.3.5. P: força aplicada à alavanca de comando do travão (ver figura 4 do apêndice 1 do presente anexo);
2.3.6. Po : força residual do travão quando o reboque avança; ou seja, no gráfico M = f(P), o valor da força P no ponto de intersecção do prolongamento desta função com o eixo das abcissas (ver figura 6 do apêndice 1 do presente anexo);
2.3.6.1. Por : força residual do travão quando o reboque faz marcha-atrás (ver figura 6 do apêndice 1 do presente anexo);
2.3.7. P*: força aplicada à alavanca de comando do travão para produzir a força de travagem B*;
2.3.8. PT : força de ensaio de acordo com o ponto 6.2.1;
2.3.9. ρ: característica do travão quando o reboque avança, definida por:
M = ρ (P – Po)
2.3.9.1. ρr : característica do travão quando o reboque faz marcha-atrás, definida por:
Mr = ρr (Pr – Pou)
2.3.10. scf : curso do cabo ou veio da retaguarda a nível do compensador quando os travões funcionam na deslocação para a frente (1);
2.3.11. scr : curso do cabo ou veio da retaguarda a nível do compensador quando os travões funcionam na deslocação em marcha-atrás (1)
2.3.12. scd : curso diferencial no compensador quando apenas um travão funciona para a frente e o outro para trás (1)
em que: scd = scr – scf (ver figura 5A do apêndice 1)
2.4. Símbolos válidos para sistemas de travagem com transmissão hidráulica (ver figura 8 do apêndice 1 do presente anexo)
2.4.1. ih : relação de desmultiplicação entre o curso da cabeça de engate e o curso do êmbolo do cilindro principal;
2.4.2. i′g : relação de desmultiplicação entre o curso do ponto de ataque do cilindro e o curso de aperto no centro da maxila;
2.4.3. FRZ : superfície do êmbolo do cilindro de uma roda no caso dos travões de tambor; no caso dos travões de disco, somatório da superfície dos êmbolos da pinça de uma das faces do disco.
2.4.4. FHZ : superfície do êmbolo do cilindro principal;
2.4.5. P: pressão hidráulica no cilindro de travão;
2.4.6. po : pressão residual no cilindro de travão quando o reboque avança; ou seja, no gráfico M = f(p), o valor da pressão p no ponto de interseção do prolongamento desta função com o eixo das abcissas (ver figura 7 do apêndice 1 do presente anexo);
2.4.6.1. por : pressão residual do travão quando o reboque faz marcha-atrás, (ver figura 7 do apêndice 1 do presente anexo);
2.4.7. p*: pressão hidráulica no cilindro do travão para produzir a força de travagem B*;
2.4.8. pT : pressão de ensaio de acordo com o ponto 6.2.1;
2.4.9. ρ′: característica do travão quando o reboque avança, definida por:
M = ρ′ (p – po)
2.4.9.1. ρ′r : característica do travão quando o reboque faz marcha-atrás, definida por:
Mr = ρ′r (pr – por)
2.5. Símbolos relativos aos requisitos de travagem respeitantes aos protetores contra sobrecargas
2.5.1. Dop : força aplicada na entrada do dispositivo de comando que ativa o protetor contra sobrecargas;
2.5.2. Mop : binário de travagem que ativa o protetor contra sobrecargas (tal como declarado pelo fabricante);
2.5.3. MTop : binário mínimo de travagem de ensaio caso esteja montado um protetor contra sobrecargas (de acordo com o ponto 6.2.2.2);
2.5.4. Pop_min: força aplicada ao travão que ativa o protetor contra sobrecargas (de acordo com o ponto 6.2.2.1);
2.5.5. Pop_max: força máxima (quando a cabeça de engate é completamente empurrada) aplicada no travão pelo protetor contra sobrecargas (de acordo com o ponto 6.2.2.3);
2.5.6. pop_min: pressão aplicada ao travão que ativa o protetor contra sobrecargas (de acordo com o ponto 6.2.2.1);
2.5.7. pop_max: pressão hidráulica máxima (quando a cabeça de engate é completamente empurrada) aplicada pelo protetor contra sobrecargas no atuador do travão (em conformidade com o ponto 6.2.2.3);
2.5.8. PTop : força mínima de travagem de ensaio caso esteja montado um protetor contra sobrecargas (de acordo com o ponto 6.2.2.2);
2.5.9. PTop : pressão mínima de travagem de ensaio caso esteja montado um protetor contra sobrecargas (de acordo com o ponto 6.2.2.2);
3. REQUISITOS GERAIS
3.1. A transmissão dos esforços da cabeça de engate aos travões do reboque deve realizar-se quer por mecanismo articulado, quer por um ou vários fluidos. Pode, todavia, utilizar-se um cabo com bainha (cabo do tipo Bowden) para assegurar parte da transmissão; esta parte deve ser tão curta quanto possível. Os cabos e as bielas de comando não devem entrar em contacto com o quadro do reboque ou com outras superfícies que possam afetar a ativação ou a desativação do travão.
3.2. Todos os parafusos colocados nas articulações devem estar suficientemente protegidos. Por outro lado, estas articulações devem ser autolubrificadas ou facilmente acessíveis para lubrificação.
3.3. Os dispositivos de travagem por inércia devem ser dispostos de tal modo que, em caso de utilização do curso máximo da cabeça de engate, nenhuma parte da transmissão emperre, sofra uma deformação permanente ou se frature. A verificação deve ser efetuada após o desengate da parte da transmissão das alavancas de comando do travão.
3.4. O sistema de travagem por inércia deve permitir fazer recuar o reboque por meio do veículo trator sem impor uma força de arrastamento contínua que exceda 0,08 g · GA. Os dispositivos utilizados para esse fim devem atuar automaticamente e devem desengatar-se automaticamente quando o reboque se mover para a frente.
3.5. Qualquer dispositivo especial incorporado para as necessidades do ponto 3.4 do presente anexo deve ser de natureza a não afetar o desempenho do estacionamento num declive.
3.6. Os sistemas de travagem por inércia podem incluir protetores contra sobrecargas. Não devem ser ativados por aplicação de uma força inferior a Dop = 1,2 · D* (quando montados no dispositivo de comando) ou de uma força inferior a Pop = 1,2 · P* ou uma pressão inferior a pop = 1.2 · p* (quando montados no travão da roda), correspondendo a força P* ou a pressão p* a uma força de travagem de B* = 0,5 · g · GBo.
4. REQUISITOS PARA OS DISPOSITIVOS DE COMANDO
4.1. As partes deslizantes do dispositivo de comando devem ser suficientemente compridas para que o curso possa ser completamente utilizado, mesmo com o reboque engatado.
4.2. As partes deslizantes devem ser protegidas por um fole ou qualquer outro dispositivo equivalente. Devem ser lubrificadas ou constituídas por materiais autolubrificantes. As superfícies de atrito devem ser de um material tal que não se forme uma pilha galvânica, nem haja incompatibilidade mecânica suscetível de provocar um emperramento ou uma soldadura das partes deslizantes.
4.3. A tensão limiar (KA) do dispositivo de comando deve ser inferior a 0,02 g · G′A e não superior a 0,04 g · G′A.
4.4. A força de inserção máxima D1 não pode exceder 0,10 g · G′A em reboques com barra de tração rígida nem 0,067 g · G′A em reboques de vários eixos com barra de tração articulada.
4.5. A força de tração máxima D2 não deve ser inferior a 0,1 g · G′A nem superior a 0,5 g · G′A.
5. ENSAIOS E MEDIÇÕES A EFETUAR NOS DISPOSITIVOS DE COMANDO
5.1. Os dispositivos de comando apresentados ao serviço técnico encarregado dos ensaios devem ser verificados em conformidade com os requisitos dos pontos 3 e 4 do presente anexo.
5.2. Em todos os tipos de travões devem medir-se:
|
5.2.1. |
O curso s e o curso útil s′; |
|
5.2.2. |
A força suplementar K; |
|
5.2.3. |
O limiar de solicitação KA; |
|
5.2.4. |
A força de inserção D1: |
|
5.2.5. |
A força de tração D2. |
5.3. Nos sistemas de travagem por inércia com transmissão mecânica, devem determinar-se:
|
5.3.1. |
A relação de desmultiplicação iHo, medida no ponto médio do curso do comando; |
|
5.3.2. |
A força P′ na extremidade do dispositivo de comando em função do impulso D sobre a barra de tração. A força suplementar K e a eficiência são derivadas da curva representativa resultante destas medições (ver figura 2 do apêndice 1 do presente anexo). |
5.4. Nos sistemas de travagem por inércia com transmissão hidráulica, devem determinar-se:
|
5.4.1. |
A relação de desmultiplicação ih, medida no ponto médio do curso do comando; |
|
5.4.2. |
A pressão p à saída do cilindro principal em função do impulso D sobre a barra de tração e da superfície FHZ do êmbolo do cilindro principal, a indicar pelo fabricante. A força suplementar K e a eficiência são derivadas da curva representativa resultante destas medições 
(ver figura 3 do apêndice 1 do presente anexo); |
|
5.4.3. |
O curso livre do cilindro principal s″, tal como referido no ponto 2.2.19 do presente anexo; |
|
5.4.4. |
Superfície FHZ do êmbolo do cilindro principal. |
|
5.4.5. |
O curso sHz do cilindro principal (em milímetros). |
|
5.4.6. |
O curso livre s″Hz do cilindro principal (em milímetros). |
5.5. Nos sistemas de travagem por inércia dos reboques de vários eixos com barra de tração articulada, deve medir-se a perda de curso mencionada no ponto 10.4.1 do presente anexo.
6. REQUISITOS PARA OS TRAVÕES
6.1. Para além dos travões a verificar, o fabricante deve apresentar ao serviço técnico encarregado dos ensaios os desenhos dos travões, com indicação do tipo, das dimensões e do material dos componentes essenciais e da marca e tipo das guarnições dos travões. No caso dos travões hidráulicos, estes desenhos devem apresentar a superfície FRZ dos cilindros dos travões. O fabricante deve indicar também o binário de travagem M* e a massa GBo definida no ponto 2.2.4 do presente anexo.
6.2. Condições de ensaio
6.2.1. Quando um protetor contra sobrecargas não estiver montado nem se preveja a sua montagem no sistema de travagem por inércia, o travão da roda deve ser ensaiado com as forças ou pressões de ensaio seguintes:
PT = 1,8 P* ou pT = 1,8 p* e MT = 1,8 M* tal como apropriado.
6.2.2. Quando um protetor contra sobrecargas estiver montado ou se preveja a sua montagem no sistema de travagem por inércia, o travão da roda deve ser ensaiado com as forças ou pressões de ensaio seguintes:
|
6.2.2.1. |
Os valores de projeto mínimos para um protetor contra sobrecargas devem ser especificados pelo fabricante e não devem ser inferiores a: Pop = 1,2 P* ou pop = 1,2 p* |
|
6.2.2.2. |
Os limites de força mínima de ensaio PTop ou pressão mínima de ensaio pTop e do binário mínimo de ensaio MTop são:
|
|
6.2.2.3. |
Os valores máximos (Pop_max ou pop_max) para o protetor contra sobrecargas devem ser indicados pelo fabricante e não devem ser superiores a, respetivamente, PT ou pT. |
7. ENSAIOS E MEDIÇÕES A EFETUAR NOS TRAVÕES
7.1. Os travões e componentes apresentados ao serviço técnico responsável pela realização dos ensaios devem ser ensaiados a fim de verificar a conformidade com os requisitos do ponto 6 do presente anexo.
7.2. Devem ser determinados os seguintes aspetos:
|
7.2.1. |
O curso mínimo de aperto das maxilas (curso mínimo das maxilas quando da aplicação dos travões), 2sB*; |
|
7.2.2. |
O curso de aperto no centro da maxila (curso das maxilas quando da aplicação dos travões) 2sB (que deve ser superior a 2sB*); |
7.3. Nos travões mecânicos, deve determinar-se:
|
7.3.1. |
A relação de desmultiplicação ig (ver figura 4 do apêndice 1 do presente anexo); |
|
7.3.2. |
A força P* do binário de travagem M*; |
|
7.3.3. |
O binário M* em função da força P* aplicada à alavanca de comando em sistemas de transmissão mecânica. A velocidade de rotação das superfícies de travagem deve corresponder a uma velocidade inicial do veículo de 60 km/h quando o reboque avança e de 6 km/h quando o reboque faz marcha-atrás. Deduz-se da curva obtida a partir destas medições (ver figura 6 do apêndice 1 do presente anexo):
|
7.4. Nos travões hidráulicos, deve determinar-se:
|
7.4.1. |
A relação de desmultiplicação i′g (ver figura 8 do apêndice 1 do presente anexo) |
|
7.4.2. |
A pressão p* do binário de travagem M* |
|
7.4.3. |
O binário M* em função da pressão p* aplicada ao cilindro do travão em sistemas de transmissão hidráulica. A velocidade de rotação das superfícies de travagem deve corresponder a uma velocidade inicial do veículo de 60 km/h quando o reboque avança e de 6 km/h quando o reboque faz marcha-atrás. Deduz-se da curva obtida a partir destas medições (ver figura 7 do apêndice 1 do presente anexo):
|
|
7.4.4. |
Superfície FRZ do êmbolo do cilindro do travão. |
7.5. Procedimento alternativo para o ensaio de tipo I
7.5.1. O ensaio de tipo I em conformidade com o ponto 1.5 do anexo 4 não deve ser efetuado em veículos apresentados para homologação, se os componentes do sistema de travagem forem ensaiados num banco de ensaio de inércia para verificar se cumprem as prescrições dos pontos 1.5.2 e 1.5.3 do anexo 4.
7.5.2. O procedimento alternativo para o ensaio de tipo I deve ser efetuado em conformidade com o disposto no anexo 11, apêndice 2, ponto 3.5.2 (por analogia, também aplicável aos travões de disco).
8. DIFERENCIAL DE FORÇA NO TRAVÃO DE ESTACIONAMENTO EM GRADIENTE SIMULADO
8.1. Método de cálculo
8.1.1. Os pontos de articulação do compensador devem estar alinhados com o travão de estacionamento na posição de repouso.

Podem ser utilizadas soluções alternativas, se proporcionarem tensão idêntica em ambos os cabos da retaguarda, mesmo quando existirem diferenças de curso entre estes cabos.
8.1.2. Devem fornecer-se desenhos pormenorizados para demonstrar que a articulação do compensador é suficiente para garantir a aplicação da mesma tensão a cada um dos cabos da retaguarda. O compensador deve ter uma distância suficiente em largura, a fim de facilitar o curso do diferencial da esquerda para a direita. As maxilas devem também ter uma profundidade suficiente em relação à sua largura, a fim de garantir que não impedem a articulação quando o compensador forma um ângulo.
O curso diferencial no compensador (scd) deve ser derivado de:
scd ≥ 1,2 · (Scr – Sc′)
em que:
|
|
Sc′ = S′/iH (curso a nível do compensador — funcionamento em deslocação para a frente) e Sc′ = 2 · SB/ig |
|
|
Scr = Sr/iH (curso a nível do compensador — funcionamento em marcha-atrás) |
9. RELATÓRIOS DOS ENSAIOS
Os pedidos de homologação de reboques equipados com sistemas de travagem por inércia devem ser acompanhados dos relatórios de ensaio referentes ao dispositivo de comando e aos travões e do relatório de ensaio sobre a compatibilidade do dispositivo de comando de inércia, do dispositivo de transmissão e dos travões do reboque, que devem incluir, pelo menos, as indicações constantes dos apêndices 2, 3 e 4 do presente anexo.
10. COMPATIBILIDADE ENTRE O DISPOSITIVO DE COMANDO E OS TRAVÕES DE UM VEÍCULO
10.1. Quando se procede à verificação do veículo devem ter-se em conta as características do dispositivo de comando (apêndice 2), as características dos travões (apêndice 3) e as características do reboque referidas no ponto 4 do apêndice 4 do presente anexo, a fim de se determinar se o sistema de travagem por inércia do reboque cumpre os requisitos prescritos.
10.2. Verificações gerais para todos os tipos de travões
10.2.1. Devem ser verificados no veículo todos os componentes da transmissão que não tiverem sido verificados ao mesmo tempo que o dispositivo de comando ou os travões. Os resultados da verificação devem ser inscritos no apêndice 4 do presente anexo (por exemplo, iH1 e ηH1).
10.2.2. Massa
10.2.2.1. A massa máxima GA do reboque não deve ultrapassar a massa máxima G′A para a qual o dispositivo de comando é autorizado.
10.2.2.2. A massa máxima GA do reboque não deve ultrapassar a massa máxima GB que pode ser imobilizada pela ação comum de todos os travões do reboque.
10.2.3. Forças
10.2.3.1. O limiar de solicitação KA não deve ser inferior a 0,02 g · GA nem superior a 0,04 g · GA.
10.2.3.2. A força de inserção máxima D1 não pode exceder 0,10 g · GA em reboques com barra de tração rígida nem 0,067 g · G′A em reboques de vários eixos com barra de tração articulada.
10.2.3.3. A força de tração máxima D2 deve situar-se entre 0,1 g · GA e 0,5 g · GA.
10.3. Controlo da eficiência da travagem
10.3.1. A soma das forças de travagem exercidas na circunferência das rodas do reboque não deve ser inferior a B* = 0,50 g · GA, incluindo uma resistência ao rolamento de 0,01 g · GA: tal corresponde a uma força de travagem B de 0,49 g · GA. Neste caso, o impulso máximo admissível sobre o engate deve ser:
|
|
D* = 0,067 g · GA para os reboques de vários eixos com barra de tração articulada; e |
|
|
D* = 0,10 g · GA para os reboques com barra de tração rígida. |
Para verificar se estas condições são cumpridas, devem aplicar-se as seguintes desigualdades:
|
10.3.1.1. |
Em sistemas de travagem por inércia com transmissão mecânica: 
|
|
10.3.1.2. |
Em sistemas de travagem por inércia com transmissão hidráulica: 
|
10.4. Verificação do curso do comando
10.4.1. Em dispositivos de comando dos reboques de vários eixos com barra de tração articulada em que o mecanismo articulado dos travões depende da posição do dispositivo de tração, o curso do comando s deve ser maior do que o curso útil do comando s′, sendo a diferença pelo menos equivalente à perda de curso so. A perda de curso de so não deve exceder 10 por cento do curso útil s′.
10.4.2. Deve determinar-se o curso útil do comando s′ para reboques com um único eixo e com vários eixos do seguinte modo:
|
10.4.2.1. |
Se o mecanismo articulado dos travões for influenciado pela posição angular do dispositivo de tração, então: s′ = s – s0 |
|
10.4.2.2. |
Se não houver nenhuma perda de curso, então: s′ = s |
|
10.4.2.3. |
Em sistemas de travagem com transmissão hidráulica: s′ = s – s |
10.4.3. Devem aplicar-se as seguintes desigualdades para verificar se o curso do comando é adequado:
10.4.3.1. Em sistemas de travagem por inércia com transmissão mecânica:

10.4.3.2. Em sistemas de travagem por inércia com transmissão hidráulica:

10.5. Verificações complementares
10.5.1. Nos sistemas de travagem por inércia com transmissão mecânica, deve verificar-se se o mecanismo articulado que assegura a transmissão das forças do dispositivo de comando está corretamente montado.
10.5.2. Nos sistemas de travagem por inércia com transmissão hidráulica, deve verificar-se se o curso do cilindro principal não é inferior a s/ih. Não é autorizado um valor inferior.
10.5.3. O comportamento geral do veículo durante a travagem deve ser objeto de um ensaio em estrada a várias velocidades, variando-se o esforço de travagem e o número de vezes que se aciona o travão. Não são admitidas oscilações espontâneas não amortecidas.
11. OBSERVAÇÕES GERAIS
Os requisitos acima indicados aplicam-se às formas mais correntes dos sistemas de travagem por inércia com transmissão mecânica ou com transmissão hidráulica, nos quais, designadamente, todas as rodas do reboque estão equipadas com o mesmo tipo de travão e o mesmo tipo de pneu. Para verificar as formas menos habituais, os requisitos acima indicados devem ser adaptados às circunstâncias do caso concreto.
(1) Os pontos 2.3.10, 2.3.11 e 2.3.12 são aplicáveis apenas ao método de cálculo do curso diferencial do travão de estacionamento.
Apêndice 1
Figura 1
Símbolos válidos para todos os tipos de travões
(ver ponto 2.2 do presente anexo)

Figura 2
Transmissão mecânica
(Ver pontos 2.2.10 e 5.3.2 do presente anexo)

![]()
Figura 3
Transmissão hidráulica
(Ver pontos 2.2.10 e 5.4.2 do presente anexo)

Figura 4
Verificações dos travões
(Ver pontos 2.2.22 e 2.3.4 do presente anexo)
Figura 5
Sistema de travagem com transmissão mecânica
(Ver ponto 2.3 do presente anexo)

Figura 5A
Sistema de travagem com transmissão mecânica
(Ver ponto 2.3 do presente anexo)

Figura 6
Travão mecânico
(Ver ponto 2 do presente anexo)
Figura 7
Travão hidráulico
(Ver ponto 2 do presente anexo)

Figura 8
Sistema de travagem com transmissão hidráulica
(Ver ponto 2 do presente anexo)

Apêndice 2
Relatório de ensaio sobre o dispositivo de comando do sistema de travagem por inércia
1. Fabricante …
2. Marca …
3. Tipo …
4. Características de reboques cujo dispositivo de comando é previsto pelo fabricante:
|
4.1. |
Massa G′A = …kg |
|
4.2. |
Força vertical estática admissível no cabeçote do dispositivo de tração …N |
|
4.3. |
Reboque com barra de tração rígida ou reboque de vários eixos com barra de tração articulada (1) |
5. Breve descrição
(Lista dos planos e desenhos cotados anexos)
6. Diagrama com o princípio do comando
7. Curso s = …mm
8. Relação de desmultiplicação do dispositivo de comando:
|
8.1. |
Com dispositivo de transmissão mecânica (1) iHo = de …até … (2) |
|
8.2. |
Com dispositivo de transmissão hidráulica (1) ih = de …até … (2) FHZ = …cm2 curso do cilindro principal sHz …mm curso livre do cilindro principal s″Hz …mm |
9. Resultados dos ensaios: …
9.1. Eficiência
Com dispositivo de transmissão mecânica (1) ηH = …
Com dispositivo de transmissão hidráulica (1) ηH = …
9.2. Força suplementar K = …N
9.3. Força de compressão máxima D1 = …N
9.4. Força de tração máxima D2 = …N
9.5. Limiar de solicitação KA = …N
9.6. Perda de curso e curso livre: …
quando a posição do dispositivo de tração tem um efeito s0 (1) = …mm
com um dispositivo de transmissão hidráulica s″ (1) = s″Hz × ih = …mm
9.7. Curso útil do comando s′ = …mm
9.8. Protetor contra sobrecargas conforme ao ponto 3.6 do presente anexo: existe/não existe (3) …
9.8.1. Se o protetor contra sobrecargas estiver montado antes da alavanca de transmissão do dispositivo de comando …
9.8.1.1. Limiar de solicitação do protetor contra sobrecargas …Dop = N
9.8.1.2. Se o protetor contra sobrecargas for mecânico (3), força máxima que o dispositivo de comando de inércia pode desenvolver
P′max/iHo = Pop_max = …N
9.8.1.3. Se o protetor contra sobrecargas for hidráulico (3) a pressão que o dispositivo de comando de inércia pode desenvolver
p′max/ih = pop_max = …N/cm2
9.8.2. Se o protetor contra sobrecargas estiver montado depois da alavanca de transmissão do dispositivo de comando …
9.8.2.1. Limiar de solicitação do protetor contra sobrecargas em que este é mecânico (3) …
Dop · iHo = …N
Se o protetor contra sobrecargas for hidráulico (3)
Dop · ih = …N
9.8.2.2. Se o protetor contra sobrecargas for mecânico (3), a força máxima que o dispositivo de comando de inércia pode desenvolver
P′max = Pop_max = …N
9.8.2.3. Se o protetor contra sobrecargas for hidráulico (3), a pressão que o dispositivo de comando de inércia pode desenvolver
p′max = pop_max = …N/cm2
10. O dispositivo de comando acima descrito cumpre/não cumpre (3) os requisitos dos pontos 3, 4 e 5 do presente anexo.
Assinatura: …Data: …
11. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 12 do Regulamento n.o 13 da UNECE, com a última redação que lhe foi dada pela série …de alterações.
Serviço técnico (4) que realizou o ensaio
Assinatura: …Data: …
12. Entidade homologadora (4)
Assinatura: …Data: …
(1) Riscar o que não é aplicável.
(2) Indicar os comprimentos cuja razão serviu para determinar iHo ou ih.
(3) Riscar o que não é aplicável.
(4) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 3
Relatório de ensaio do travão
1. Fabricante …
2. Marca …
3. Tipo …
4. «Massa máxima» admissível por roda GBo = …kg
5. Binário de travagem M* (especificado pelo fabricante de acordo com o ponto 2.2.23 do presente anexo) = …Nm
6. Raio de rolamento dinâmico do pneu
Rmin = …m; Rmax = …m
7. Breve descrição
(Lista dos planos e desenhos cotados)
8. Diagrama com o princípio da travagem
9. Resultado do ensaio:
|
|
Travão mecânico (1) |
|
Travão hidráulico (1) |
|
9.1. |
Relação de desmultiplicação |
9.1.A. |
Relação de desmultiplicação |
|
ig = … (2) |
i′g = … (2) |
||
|
9.2. |
Curso de aperto |
9.2.A. |
Curso de aperto |
|
sB = …mm |
sB = …m |
||
|
9.3. |
Aperto prescrito |
9.3.A. |
Aperto prescrito |
|
(curso de aperto prescrito) sB* = …mm |
(curso de aperto prescrito) sB* = …mm |
||
|
9.4. |
Força residual |
9.4.A. |
Pressão residual |
|
Po = …N |
po= …N/cm2 |
||
|
9.5. |
Coeficiente (característica) |
9.5.A. |
Coeficiente (característica) |
|
ρ = …m |
ρ′ = …m |
||
|
9.6 |
Protetor contra sobrecargas conforme ao ponto 3.6 do presente anexo: existe/não existe (1) |
9.6.A. |
Protetor contra sobrecargas conforme ao ponto 3.6 do presente anexo: existe/não existe (1) |
|
9.6.1. |
Binário de travagem que ativa o protetor contra sobrecargas |
9.6.1.A. |
Binário de travagem que ativa o protetor contra sobrecargas |
|
Mop= …Nm |
Mop= …Nm |
||
|
9.7. |
Força para M* |
9.7.A. |
Pressão para M* |
|
P* = …N |
p* = …N/cm2 |
||
|
9.8. |
|
9.8.A. |
Superfície do cilindro da roda FRZ = …cm2 |
|
9.9. |
|
9.9.A. |
Absorção volúmica de fluido (para travões de disco) V60 = …m3 |
9.10. Desempenho do travão de serviço quando o reboque faz marcha-atrás (ver figuras 6 e 7 do apêndice 1 do presente anexo)
9.10.1. Binário de travagem máximo fig 6 Mr = …Nm
9.10.1.A. Binário de travagem máximo fig 7 Mr = …Nm
9.10.2. Curso máximo admissível sr = …mm
9.10.2.A. Volume de fluido máximo admissível absorvido Vr = …cm3
9.11. Outras características do travão quando o reboque faz marcha-atrás (ver figuras 6 e 7 do apêndice 1 do presente anexo)
9.11.1. Força residual do travão Pou = …N
9.11.1.A. Pressão residual do travão pou = …N/cm2
9.11.2. Característica do travão ρr = …m
9.11.2.A. Característica do travão ρ′r = …m
9.12. Ensaios em conformidade com o ponto 7.5 do presente anexo (se aplicável) (corrigidos de modo a ter em conta uma resistência ao rolamento de 0,01 · g · GBo)
9.12.1. Ensaio de travagem do tipo 0
Velocidade de ensaio = …km/h
Razão de travagem = …%
Força de comando = …N
9.12.2. Ensaio de travagem de tipo I
Velocidade de ensaio = …km/h
Razão de travagem contínua = …%
Tempo de travagem = …minutos
Desempenho a quente = …%
(expresso enquanto percentagem do resultado do ensaio do tipo 0 referido no ponto 9.12.1)
Força de comando = …N
10. O travão acima indicado está/não está (3) conforme aos requisitos dos pontos 3 e 6 das condições de ensaio dos veículos equipados com sistemas de travagem por inércia descritos no presente anexo.
O travão pode/não pode (3) ser utilizado num sistema de travagem por inércia sem protetor contra sobrecargas.
Data: …
Assinatura: …
11. Este ensaio foi realizado e os resultados apresentados em conformidade com as disposições pertinentes do anexo 12 do Regulamento n.o 13 da UNECE, com a última redação que lhe foi dada pela série …de alterações.
Serviço técnico (4) que realizou o ensaio
Data: …
Assinatura: …
12. Entidade homologadora (5)
Data: …
Assinatura: …
(1) Riscar o que não é aplicável.
(2) Indicar os comprimentos que serviram para determinar ig ou i′g.
(3) Riscar o que não é aplicável.
(4) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
(5) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 4
Relatório de ensaio de compatibilidade do dispositivo de comando do travão por inércia, do dispositivo de transmissão e dos travões do reboque
1. Dispositivo de comando descrito no relatório de ensaio anexo (ver apêndice 2 do presente anexo)
Relação de desmultiplicação escolhida:
iHo (1) = … (2) ou ih (1) = … (2)
(deve encontrar-se dentro dos limites definidos nos pontos 8.1 ou 8.2 do apêndice 2 do presente anexo)
2. Travões descritos no relatório de ensaio anexo (ver apêndice 3 do presente anexo)
3. Dispositivos de transmissão do reboque
3.1. Breve descrição com o diagrama que mostra o princípio
3.2. Relação de desmultiplicação e eficiência do dispositivo de transmissão mecânica do reboque
ηH1 (1) = …
4. Reboque
4.1. Fabricante …
4.2. Marca …
4.3. Tipo …
4.4. Tipo de barra de tração: reboque com barra de tração rígida ou reboque de vários eixos com barra de tração articulada (1)
4.5. Número de travões, n = …
4.6. massa máxima tecnicamente admissível GA = …kg
4.7. Raio de rolamento dinâmico do pneu, R = …m
4.8. Impulso admissível sobre o engate
D* = 0,10 g GA (1) = …N
ou
D* = 0,067 g GA (1) = …N
4.9. Força de travagem exigida B* = 0,50 g GA = …N
4.10. Força de travagem B = 0,49 g GA = …N
5. Compatibilidade — Resultados dos ensaios …
5.1. Limiar de solicitação 100 · KA /(g · GA) = …
(deve situar-se entre 2 e 4)
5.2. Força de compressão máxima 100 · D1/(g · GA) = …
(não deve ser superior a 10 no caso dos reboques com barra de tração rígida, nem a 6,7 no caso dos reboques de vários eixos com barra de tração articulada)
5.3. Força de tração máxima 100 · D2/(g · GA) = …
(deve situar-se entre 10 e 50)
5.4. Massa máxima tecnicamente admissível para o dispositivo do comando de inércia
G′A = …kg
(não deve ser inferior a GA)
5.5. Massa máxima tecnicamente admissível para todos os travões do reboque
GB = n · GBo = …kg
(não deve ser inferior a GA)
5.6. Binário de travagem dos travões …
n · M* /(B · R) = …
(não deve ser inferior a 1,0)
5.6.1. Um protetor contra sobrecargas na aceção do ponto 3.6 do presente anexo está/não está (3) instalado no dispositivo de comando de inércia /nos travões (3)
5.6.1.1. se o protetor contra sobrecargas do dispositivo de comando de inércia for mecânico (3)
n · P* /(iH1 · ηH1 · p′max)= …
(não deve ser inferior a 1,2)
5.6.1.2. se o protetor contra sobrecargas do dispositivo de comando de inércia for hidráulico (3)
p* / p′max = …
(não deve ser inferior a 1,2)
5.6.1.3. Se o protetor contra sobrecargas estiver montado no dispositivo de comando de inércia:
limiar de solicitação Dop/D* = …
(não deve ser inferior a 1,2)
5.6.1.4. Se o protetor contra sobrecargas estiver montado no travão:
binário-limiar n × Mop/(B · R) = …
(não deve ser inferior a 1,2)
5.7. Sistema de travagem por inércia com dispositivo de transmissão mecânica (3)
5.7.1. iH = iHo · iH1 = …
5.7.2. ηH = ηHo · ηH1 = …

(não deve ser superior a: iH)

(não deve ser inferior a: iH)
5.7.5. Razão s′/iH = …quando o reboque faz marcha-atrás (deve ser igual ou inferior a: sr)
5.7.6. Binário de travagem quando o reboque faz marcha-atrás, incluindo resistência ao rolamento
0,08 · g·GA·R = …Nm
(não deve ser superior a: n · Mr)
5.8. Sistema de travagem por inércia com dispositivo de transmissão hidráulica (4)
5.8.1. ih/FHZ = …

(deve ser igual ou inferior a: ih/FHZ)

(deve ser igual ou superior a: ig/FHZ)
5.8.4. s/ih = …
(deve ser igual ou inferior ao curso do atuador do cilindro principal, conforme definido no ponto 8.2 do apêndice 2 do presente anexo)
5.8.5. Razão s′/FHZ = …quando o reboque faz marcha-atrás (deve ser igual ou inferior a: vr)
5.8.6. Binário de travagem quando o reboque faz marcha-atrás, incluindo resistência ao rolamento
0,08 · g·GA· R = …Nm
(não deve ser superior a: n · Mr)
6. Curso diferencial a nível do compensador do travão de estacionamento
6.1.1. Curso máximo admissível do compensador (para a frente) scf = …mm
6.1.2. Curso máximo admissível do compensador (para trás) scr = …mm
6.1.3. Curso máximo admissível diferencial do compensador scd = …mm
7. O sistema de travagem por inércia acima descrito cumpre/não cumpre (4) os requisitos dos pontos 3 a 10 do presente anexo.
Assinatura …Data …
8. Este ensaio foi realizado e os resultados apresentados em conformidade com as disposições pertinentes do anexo 12 do Regulamento n.o 13 da UNECE, com a última redação que lhe foi dada pela série …de alterações.
Serviço técnico que realizou o ensaio
Assinatura …Data …
(1) Riscar o que não é aplicável.
(2) Indicar os comprimentos que serviram para determinar iHo ou ih.
(3) Riscar o que não é aplicável.
(4) Riscar o que não é aplicável.
ANEXO 13
REQUISITOS APLICÁVEIS AOS ENSAIOS DE VEÍCULOS EQUIPADOS COM SISTEMA ANTIBLOQUEIO
1. GENERALIDADES
1.1. O presente anexo define o desempenho de travagem exigido aos veículos rodoviários equipados com um ou mais sistemas antibloqueio.
1.2. Os sistemas antibloqueio atualmente conhecidos compreendem um ou mais sensores, controladores e moduladores. Qualquer dispositivo de outra conceção que possa ser utilizado no futuro ou qualquer outro sistema que integre uma função de travagem antibloqueio devem ser considerados como sistemas de travagem antibloqueio na aceção do presente anexo e do anexo 10 do presente regulamento, se o seu desempenho for igual ao prescrito pelo presente anexo.
2. DEFINIÇÕES
2.1. Por «sistema de travagem antibloqueio», entende-se um elemento de um sistema de travagem de serviço que regula automaticamente o grau de deslizamento, no sentido de rotação da(s) roda(s), numa ou em várias rodas do veículo, durante a travagem.
2.2. Por «sensor», entende-se um componente concebido para detetar e transmitir ao controlador as condições de rotação da(s) roda(s) ou as condições dinâmicas do veículo.
2.3. Por «controlador», entende-se o componente concebido para avaliar as informações fornecidas pelo(s) sensor(es) e transmitir um sinal ao modulador.
2.4. Por «modulador», entende-se o componente concebido para variar a(s) força(s) de travagem em função da ordem recebida do controlador.
2.5. Por «roda diretamente controlada», entende-se uma roda cuja força de travagem é modulada a partir das informações fornecidas, pelo menos, pelo seu próprio sensor (1).
2.6. Por «roda indiretamente controlada», entende-se uma roda cuja força de travagem é modulada a partir de informações provenientes do(s) sensor(es) de outra(s) roda(s). (1)
2.7. Por «execução de ciclos completos», entende-se a modulação repetida da força de travagem pelo sistema antibloqueio para evitar o bloqueio das rodas diretamente controladas. Os acionamentos dos travões que comportem uma única modulação durante a imobilização não são considerados como correspondendo à presente definição.
No caso de reboques com sistemas de travagem pneumática, a execução de ciclos completos pelo sistema de travagem antibloqueio é apenas assegurada quando a pressão disponível em qualquer atuador do travão de uma roda diretamente controlada é mais de 100 kPa acima da pressão máxima de execução de ciclos num determinado ensaio. A pressão de alimentação disponível não pode subir acima de 800 kPa.
3. CATEGORIAS DE SISTEMAS ANTIBLOQUEIO
3.1. Considera-se que um veículo a motor está equipado com um sistema antibloqueio na aceção do ponto 1 do anexo 10 do presente regulamento se estiver montado um dos seguintes sistemas:
|
3.1.1. |
Sistema antibloqueio da categoria 1 Um veículo equipado com um sistema antibloqueio da categoria 1 deve cumprir todos os requisitos aplicáveis do presente anexo. |
|
3.1.2. |
Sistema antibloqueio da categoria 2 Um veículo equipado com um sistema antibloqueio da categoria 2 deve cumprir todos os requisitos aplicáveis do presente anexo, com exceção dos do ponto 5.3.5. |
|
3.1.3. |
Sistema antibloqueio da categoria 3 Um veículo equipado com um sistema antibloqueio de categoria 3 deve cumprir todos os requisitos aplicáveis do presente anexo, com exceção dos dos pontos 5.3.4 e 5.3.5. Nesses veículos, cada eixo (ou grupo de eixos) que não esteja equipado com pelo menos uma roda diretamente controlada deve cumprir as condições de utilização da aderência e respeitar a ordem de bloqueio das rodas descrita no anexo 10 do presente regulamento no que diz respeito, respetivamente, à razão de travagem e à carga. Pode verificar-se o cumprimento destes requisitos através da realização de ensaios em pisos de elevada ou baixa aderência (cerca de 0,8 e 0,3, no máximo), modulando a força exercida no comando da travagem de serviço. |
3.2. Considera-se que um reboque está equipado com um sistema antibloqueio na aceção do ponto 1 do anexo 10 do presente regulamento se pelo menos duas rodas situadas em lados opostos do veículo forem diretamente comandadas e todas as outras rodas forem direta ou indiretamente comandadas pelo sistema antibloqueio. No caso dos reboques completos, pelo menos duas rodas de um eixo dianteiro e duas rodas de um eixo traseiro são diretamente comandadas (e cada um desses eixos tem pelo menos um modulador independente), enquanto todas as outras rodas são direta ou indiretamente comandadas. Além disso, os reboques equipados com um sistema antibloqueio devem cumprir uma das seguintes condições:
|
3.2.1. |
Sistema antibloqueio da categoria A Os reboques equipados com um sistema antibloqueio da categoria A devem cumprir todos os requisitos aplicáveis do presente anexo. |
|
3.2.2. |
Sistema antibloqueio da categoria B Os reboques equipados com um sistema antibloqueio da categoria B devem cumprir todos os requisitos aplicáveis do presente anexo, com exceção do ponto 6.3.2. |
4. REQUISITOS GERAIS
4.1. As avarias na transmissão elétrica do comando do sistema de travagem antibloqueio (2) que afetem o sistema no que respeita ao cumprimento dos requisitos de funcionamento e desempenho previstos no presente anexo, devem ser assinaladas ao condutor por um sinal de aviso ótico específico. O sinal de aviso amarelo, definido no ponto 5.2.1.29.1.2 do presente regulamento, deve ser utilizado para este efeito.
4.1.1. As anomalias dos sensores que não puderem ser detetadas em condições estáticas devem ser detetadas, o mais tardar, quando a velocidade dos veículos ultrapassar os 10 km/h (3). Todavia, para impedir uma indicação errónea de avaria quando um sensor não estiver a gerar dados sobre a velocidade, devido à não rotação de uma roda, a verificação pode ser adiada, devendo porém ser detetada, o mais tardar, quando a velocidade do veículo ultrapassar 15 km/h.
4.1.2. Quando o sistema de travagem antibloqueio for colocado sob tensão com o veículo imobilizado, a(s) eletroválvula(s) do modulador pneumático deve(m) efetuar, pelo menos, um ciclo completo.
4.2. Os veículos a motor equipados com um sistema antibloqueio e autorizados a rebocar reboques equipados com este sistema devem estar equipados com um sinal de aviso ótico específico do sistema antibloqueio do reboque que satisfaça os requisitos do ponto 4.1 do presente anexo. Os sinais de aviso amarelos específicos, definidos no ponto 5.2.1.29.2 do presente regulamento, devem ser utilizados para este efeito e ativados através do pino 5 do conector elétrico ISO 7638:2003 (4).
4.3. Em caso de avaria, tal como definida no ponto 4.1 anterior, aplicam-se os seguintes requisitos:
|
|
Veículos a motor: O desempenho residual da travagem deve ser o prescrito para o veículo em questão em caso de avaria de uma parte da transmissão do sistema de travagem de serviço, tal como definido no ponto 5.2.1.4 do presente regulamento. Este requisito não deve ser interpretado como uma modificação dos requisitos relativos à travagem de emergência. |
|
|
Reboques: O desempenho residual da travagem deve ser o definido no ponto 5.2.2.15.2 do presente regulamento. |
4.4. As interferências produzidas por campos magnéticos ou elétricos não devem perturbar o funcionamento do sistema antibloqueio. Esta condição será cumprida se se respeitar o Regulamento N.o 10, tal como prescrito pelo ponto 5.1.1.4 do presente regulamento.
4.5. Com exceção dos veículos a motor todo-o-terreno das categorias N2 e N3, não poderão existir nos veículos dispositivos manuais que sirvam para desativar ou modificar o modo de comando (5) do sistema de travagem antibloqueio; se o dispositivo estiver montado em veículos das categorias N2 ou N3, devem ser cumpridas as seguintes condições:
|
4.5.1. |
Depois de o sistema antibloqueio ter sido desativado ou de o modo de comando ter sido modificado por meio do dispositivo referido no ponto 4.5 anterior, o veículo a motor deve cumprir todos os requisitos aplicáveis do anexo 10 do presente regulamento; |
|
4.5.2. |
Deve existir um sinal de aviso ótico que assinale ao condutor que o sistema antibloqueio foi desativado ou o modo de comando modificado; o sinal amarelo de aviso de avaria do sistema antibloqueio, definido no ponto 5.2.1.29.1.2 do presente regulamento, pode ser utilizado para este efeito. O sinal de aviso pode ser constante ou intermitente; |
|
4.5.3. |
Quando o dispositivo de ignição (arranque) for de novo levado à posição de contacto (marcha), o sistema antibloqueio deve ser reativado ou voltar ao modo «estrada»;automaticamente; |
|
4.5.4. |
O manual de instruções do veículo fornecido pelo fabricante deve alertar o condutor para as consequências da desativação ou da modificação do modo de comando manuais do sistema antibloqueio; |
|
4.5.5. |
O dispositivo previsto no ponto 4.5 anterior pode desativar ou modificar o modo de comando do sistema antibloqueio do reboque em conjunção com o veículo trator. Não é autorizada a existência de um dispositivo separado para o reboque. |
4.6. Os veículos equipados com um sistema auxiliar de travagem integrado devem também estar equipados com um sistema de travagem antibloqueio que acione, pelo menos, os travões de serviço do eixo comandado pelo sistema auxiliar de travagem e o próprio sistema auxiliar de travagem, devendo cumprir os requisitos aplicáveis do presente anexo.
5. DISPOSIÇÕES ESPECIAIS RELATIVAS AOS VEÍCULOS A MOTOR
5.1. Consumo de energia
Os veículos a motor equipados com sistemas antibloqueio devem manter o seu desempenho quando o dispositivo de comando da travagem de serviço for acionado a fundo durante períodos longos. A conformidade com o presente requisito verifica-se efetuando os seguintes ensaios:
5.1.1. Procedimento de ensaio
5.1.1.1. O nível inicial de energia no(s) dispositivos de armazenamento de energia deve ser igual ao valor declarado pelo fabricante. Esse valor deve, no mínimo, permitir assegurar o desempenho requerido para a travagem de serviço com o veículo em carga.
Os dispositivos de armazenamento de energia para equipamento pneumático auxiliar devem estar isolados.
5.1.1.2. A partir de uma velocidade inicial não inferior a 50 km/h e sobre um piso com coeficiente de aderência inferior ou igual a 0,3 (6), os travões do veículo carregado devem ser acionados a fundo durante uma duração t, durante a qual deve ter-se em conta a energia consumida pelas rodas indiretamente comandadas, devendo todas as rodas diretamente comandadas permanecer sob o comando do sistema antibloqueio.
5.1.1.3. Deve em seguida parar-se o motor do veículo ou a alimentação dos dispositivos de armazenamento de energia para a transmissão.
5.1.1.4. O dispositivo de comando da travagem de serviço é então acionado quatro vezes sucessivas a fundo, com o veículo imobilizado.
5.1.1.5. Quando o dispositivo de comando for acionado pela quinta vez, o veículo deve poder ser travado com pelo menos o desempenho prescrito para a travagem de emergência do veículo carregado.
5.1.1.6. Durante os ensaios, no caso de um veículo a motor autorizado a puxar um reboque equipado com um sistema de travagem a ar comprimido, a conduta de alimentação deve ser bloqueada e um dispositivo de armazenamento de energia com uma capacidade de 0,5 litros deve ser ligado à linha de comando pneumática — se montada — (em conformidade com o ponto 1.2.2.3 da parte A do anexo 7 do presente regulamento). Aquando da quinta aplicação dos travões referida no ponto 5.1.1.5 anterior, o nível de energia fornecido à linha de comando pneumática não deve ser inferior a metade do nível obtido aquando de uma aplicação a fundo a partir do nível de energia inicial.
5.1.2. Requisitos adicionais
5.1.2.1. O coeficiente de aderência do piso da estrada deve ser medido com o veículo em ensaio e segundo o método descrito no ponto 1.1 do apêndice 2 do presente anexo.
5.1.2.2. O ensaio de travagem deve ser efetuado com o motor desembraiado a rodar em marcha lenta e com o veículo em carga.
5.1.2.3. O tempo de travagem «t» deve ser determinado pela fórmula:
 (but not less than 15 seconds)
(but not less than 15 seconds)
sendo «t» expresso em segundos e vmax representando a velocidade máxima de projeto do veículo em km/h, com um limite máximo de 160 km/h.
5.1.2.4. Se não for possível obter a duração «t» em uma única operação de travagem, pode repetir-se a operação, sendo o número total de operações autorizado limitado a quatro.
5.1.2.5. Se o ensaio for efetuado em várias operações, não deve haver reabastecimento de energia entre as operações.
A partir da segunda operação, o consumo de energia correspondente ao acionamento inicial dos travões pode ser tido em conta, eliminando-se um dos quatro acionamentos dos travões a fundo previstos no ponto 5.1.1.4 (e pontos 5.1.1.5, 5.1.1.6 e 5.1.2.6) do presente anexo, em cada uma das segunda, terceira e quarta operações utilizadas no ensaio, prescritas no ponto 5.1.1 do presente anexo, consoante o caso.
5.1.2.6. Considera-se cumprido o requisito de desempenho previsto no ponto 5.1.1.5 do presente anexo se, no final do quarto acionamento com o veículo imobilizado, o nível de energia no(s) acumulador(es) for igual, ou superior, ao necessário para atingir o desempenho de travagem de emergência previsto para um veículo carregado.
5.2. Utilização da aderência
5.2.1. A utilização da aderência pelo sistema antibloqueio tem em conta o acréscimo efetivo da distância de travagem em relação ao seu valor mínimo teórico. O sistema antibloqueio é considerado satisfatório se a condição ε ≥ 0,75 for cumprida, sendo que ε representa a aderência utilizada, definida no apêndice 2, ponto 1.2, do presente anexo.
5.2.2. A utilização da aderência ε deve ser medida em pisos com um coeficiente de aderência igual ou inferior a 0,3 (7), e de, aproximadamente, 0,8 (com piso seco), a partir de uma velocidade inicial de 50 km/h. A fim de eliminar os efeitos das diferenças de temperatura dos travões, recomenda-se a determinação do valor de zAL antes do de k.
5.2.3. O procedimento de ensaio para determinar o coeficiente de aderência (k) e o modo de cálculo da aderência utilizada (ε) são os referidos no presente anexo, apêndice 2.
5.2.4. A utilização da aderência pelo sistema antibloqueio deve ser verificada em veículos completos equipados com sistemas antibloqueio das categorias 1 ou 2. Para os veículos equipados com um sistema antibloqueio da categoria 3, apenas os eixos com pelo menos uma roda diretamente comandada devem cumprir este requisito.
5.2.5. A condição ε ≥ 0,75 deve ser verificada com o veículo carregado e sem carga (8).
O ensaio com carga sobre uma superfície de forte aderência é dispensável se a força prescrita exercida sobre o comando não permitir obter um ciclo completo do sistema antibloqueio.
No ensaio sem carga, se a força máxima prescrita não for suficiente para desencadear um ciclo completo do sistema, a força aplicada no comando poderá ir até 100 daN (9). Se uma força de 100 daN for insuficiente para desencadear um ciclo completo do sistema, não é necessário efetuar este ensaio. No caso dos sistemas de travagem a ar comprimido, a pressão do ar durante este ensaio não pode exceder a pressão de disjunção.
5.3. Verificações complementares
As verificações suplementares a seguir enumeradas devem ser efetuadas com o motor desembraiado e o veículo em carga e, em seguida, sem carga:
5.3.1. As rodas diretamente comandadas por um sistema antibloqueio não devem bloquear-se quando for aplicada repentinamente a força máxima (9) no dispositivo de comando, nos pisos definidos no ponto 5.2.2 do presente anexo, a uma velocidade inicial de 40 km/h e a uma velocidade inicial mais elevada, conforme indicado no quadro seguinte (10) (11)
|
|
Categoria do veículo |
Velocidade máxima de ensaio |
|
Piso de elevada aderência |
Todas as categorias exceto N2, N3 em carga |
0,8 vmax ≤ 120 km/h |
|
N2, N3 em carga |
0,8 vmax ≤ 80 km/h |
|
|
Piso de baixa aderência |
N1 |
0,8 vmax ≤ 120 km/h |
|
M2, M3, N2 exceto tratores de semirreboques |
0,8 vmax ≤ 80 km/h |
|
|
N3 e N2 tratores de semirreboques |
0,8 vmax ≤ 70 km/h |
5.3.2. Quando um eixo passar de um piso de elevada aderência (kH) para um piso de baixa aderência (kL), em que kH ≥ 0,5 e kH/kL ≥ 2 (12), com a força máxima (9) aplicada no dispositivo de comando, as rodas comandadas diretamente não devem bloquear-se. A velocidade e o momento de aplicação dos travões devem ser calculados de modo que, com o sistema de travagem antibloqueio a efetuar um ciclo completo no piso de elevada aderência, a passagem de um piso para o outro ocorra às velocidades mais baixa e mais elevada previstas no ponto 5.3.1 do presente anexo. (11)
5.3.3. Quando o veículo passar de um piso de baixa aderência (kL) para um piso de elevada aderência (kH), em que kH ≥ 0,5 e kH/kL ≥ 2, (12) com a força máxima (9) aplicada no dispositivo de comando, a desaceleração do veículo deve aumentar, num intervalo de tempo razoável, para o valor elevado apropriado, e o veículo não deve desviar-se da sua trajetória inicial. A velocidade e o momento de acionamento dos travões devem ser calculados de forma que, com o sistema antibloqueio a efetuar um ciclo completo no piso de baixa aderência, a passagem de um piso para o outro ocorra a aproximadamente 50 km/h.
5.3.4. No caso dos veículos equipados com sistemas antibloqueio das categorias 1 ou 2, quando as rodas direitas e esquerdas do veículo estiverem situadas em pisos de coeficientes de aderência diferentes (kH e kL), em que kH ≥ 0,5 e kH/kL ≥ 2 (13), e o veículo se deslocar à velocidade de 50 km/h, as rodas diretamente comandadas não devem bloquear-se quando for aplicada repentinamente a força máxima (14) no dispositivo de comando.
5.3.5. Além disso, os veículos carregados equipados com sistemas antibloqueio da categoria 1 devem, nas condições do ponto 5.3.4 do presente anexo, respeitar a razão de travagem prescrita no apêndice 3 do mesmo.
5.3.6. Todavia, são admitidos breves períodos de bloqueio das rodas nos ensaios previstos nos pontos 5.3.1, 5.3.2, 5.3.3, 5.3.4 e 5.3.5 do presente anexo. Além disso, admitem-se bloqueios das rodas a velocidades do veículo inferiores a 15 km/h; de igual modo, admite-se o bloqueio das rodas indiretamente comandadas, seja qual for a velocidade, embora não devam ser afetadas a estabilidade nem a dirigibilidade do veículo.
5.3.7. Durante os ensaios previstos nos pontos 5.3.4 e 5.3.5 do presente anexo, admite-se uma correção da direção, desde que a rotação angular do comando de direção seja inferior a 120°, nos dois primeiros segundos, e não exceda 240° no total. Além disso, no início dos ensaios, o plano longitudinal médio do veículo deve passar pela linha de separação dos dois pisos (elevada e baixa aderência) e durante a sua realização nenhuma parte dos pneus (exteriores) deve atravessar essa linha.
6. DISPOSIÇÕES ESPECIAIS APLICÁVEIS AOS REBOQUES
6.1. Consumo de energia
Os reboques equipados com sistemas antibloqueio devem ser concebidos de tal modo que, mesmo após o dispositivo de comando da travagem de serviço ter sido mantido a fim de curso durante um certo tempo, haja energia suficiente para imobilizar o veículo numa distância razoável.
6.1.1. O cumprimento do requisito acima mencionado deve ser verificado pelo procedimento descrito a seguir, estando o veículo sem carga, numa estrada horizontal e retilínea de piso com bom coeficiente de aderência (15), com os travões regulados no limite e o corretor de travagem ligado à carga (se existir) mantido na posição «carga» durante o ensaio.
6.1.2. No caso dos sistemas de travagem a ar comprimido, o nível inicial de energia nos dispositivos de armazenamento de energia para a transmissão deve corresponder à pressão de 800 kPa na cabeça de engate da conduta de alimentação do reboque.
6.1.3. Com uma velocidade inicial do veículo de pelo menos 30 km/h, os travões devem ser acionados a fundo durante t = 15 s, devendo todas as rodas permanecer simultaneamente sob o comando do sistema antibloqueio. Durante este ensaio, deve estar cortada a alimentação dos dispositivos de armazenamento de energia para a transmissão.
Se a duração t = 15 s não puder ser atingida numa só operação de travagem, poderá proceder-se a novas operações de travagem. Durante essas operações, o ou os reservatórios de energia para a transmissão não devem ser realimentados de energia e, a partir da segunda operação, será necessário ter em conta o consumo suplementar de energia no enchimento dos atuadores, por exemplo através do método a seguir descrito.
No início da primeira operação de travagem, a pressão nos reservatórios deve ser a prevista no ponto 6.1.2 do presente anexo. No início da ou das operações seguintes, a pressão nos reservatórios depois do acionamento dos travões não deve ser inferior à pressão nos reservatórios no final da operação precedente.
Durante essa ou essas operações subsequentes, o único instante a ter em conta é o momento a partir do qual a pressão nos reservatórios iguala a pressão no final da operação anterior.
6.1.4. No final da travagem, com o veículo imobilizado, deve acionar-se quatro vezes a fundo o dispositivo de comando da travagem de serviço. Durante o quinto acionamento, a pressão no circuito em funcionamento deve ser suficiente para transmitir à periferia das rodas uma força total de travagem igual ou superior a 22,5 % da carga estática máxima por roda, sem que isso desencadeie o acionamento automático de qualquer sistema de travagem independente do sistema antibloqueio.
6.2. Utilização da aderência
6.2.1. Os sistemas de travagem equipados com um sistema antibloqueio devem ser considerados aceitáveis se for cumprida a condição ε ≥ 0,75, em que ε representa a aderência utilizada, tal como definida no ponto 2 do apêndice 2 ao presente anexo. A conformidade desta condição deve ser verificada com o veículo sem carga, numa estrada horizontal e retilínea de piso com bom coeficiente de aderência. (16) (17)
6.2.2. A fim de eliminar os efeitos das diferenças de temperatura dos travões, recomenda-se a determinação do valor de zRAL antes do de kR.
6.3. Verificações complementares
6.3.1. A velocidades superiores a 15 km/h, as rodas diretamente comandadas por um sistema antibloqueio não devem bloquear-se quando for aplicada repentinamente a força máxima (18) no dispositivo de comando do veículo trator. A conformidade desta prescrição deve ser verificada nas condições previstas no ponto 6.2 do presente anexo, sendo o ensaio efetuado às velocidades iniciais de 40 km/h e 80 km/h.
6.3.2. As disposições deste ponto só são aplicáveis aos reboques equipados com sistemas antibloqueio da categoria A. Quando as rodas dos lados direito e esquerdo estiverem situadas em pisos nos quais as razões de travagem (zRALH e zRALL) máximas sejam diferentes, em que
 and
and 
o veículo se deslocar à velocidade de 50 km/h, as rodas diretamente comandadas não devem bloquear-se quando for aplicada repentinamente a força máxima (18) no dispositivo de comando do veículo trator. O valor da razão zRALH/zRALL poderá ser determinado pelo procedimento referido no ponto 2 do apêndice 2 do presente anexo ou através do cálculo direto da razão zRALH/zRALL. Cumprida esta condição, a razão de travagem do veículo sem carga deve ser a prevista no apêndice 3 do presente anexo. (17)
6.3.3. Quando a velocidade do veículo for igual ou superior a 15 km/h, as rodas diretamente comandadas só poderão ficar bloqueadas durante períodos curtos, ao passo que a velocidades inferiores a 15 km/h se admite qualquer bloqueio. As rodas indiretamente comandadas podem bloquear-se a qualquer velocidade, mas a estabilidade nunca deve ser afetada.
(1) Os sistemas antibloqueio de seleção alta são considerados como tendo rodas controladas direta e indiretamente. Nos sistemas de baixa seleção, todas as rodas que possuam sensor são consideradas como diretamente controladas.
(2) Enquanto não forem adotados procedimentos de ensaio uniformes, o fabricante deve fornecer ao serviço técnico uma análise das potenciais avarias da transmissão do comando e dos respetivos efeitos. As informações comunicadas serão objeto de exame e acordo entre o serviço técnico e o fabricante do veículo.
(3) O sinal de aviso pode acender-se de novo durante a imobilização do veículo, desde que se apague antes de a velocidade deste atingir 10 km/h ou 15 km/h, consoante o caso, na ausência de qualquer disfunção.
(4) Se necessário, pode utilizar se um conector ISO 7638:2003 para aplicações com cinco ou sete pinos.
(5) Pressupõe-se que os dispositivos que modificam o modo de comando do sistema antibloqueio não são abrangidos pelo ponto 4.5 do presente anexo se, no modo de comando modificado, forem cumpridos todos os requisitos aplicáveis à categoria de sistema antibloqueio com que o veículo está equipado. Todavia, neste caso, deve ser cumprido o disposto nos pontos 4.5.2, 4.5.3 e 4.5.4 do presente anexo.
(6) Enquanto estes pisos de ensaio não estiverem geralmente disponíveis, fica à discrição do serviço técnico utilizar pneus no limite de desgaste autorizado e valores mais elevados para o coeficiente de aderência (até 0,4). O valor real assim obtido, bem como os tipos de pneus e de piso devem ser registados no relatório.
(7) Enquanto estes pisos de ensaio não estiverem geralmente disponíveis, fica à discrição do serviço técnico utilizar pneus no limite de desgaste autorizado e valores mais elevados para o coeficiente de aderência (até 0,4). O valor real assim obtido, bem como os tipos de pneus e de piso devem ser registados no relatório.
(8) Até à adoção de um procedimento de ensaio uniforme, os ensaios exigidos pelo presente número podem ter de ser repetidos no caso dos veículos equipados com sistemas de travagem regenerativa elétrica, a fim de determinar o efeito dos diferentes valores de distribuição da travagem fornecidos pelas funções automáticas do veículo.
(9) «Força máxima» é a força máxima estabelecida no anexo 4 do presente regulamento para a categoria de veículo; pode ser mais elevada se o funcionamento do sistema antibloqueio o exigir.
(10) O disposto neste ponto é aplicável a partir de 13 de março de 1992 (Decisão do Grupo de Trabalho sobre a Construção de Veículos, TRANS/SC.1/WP.29/341, ponto 23).
(11) O objetivo destes ensaios é verificar se as rodas não bloqueiam e se o veículo permanece estável. É, pois, inútil bloquear completamente as rodas e imobilizar o veículo sobre o piso de baixo coeficiente de aderência.
(12) kH e kL são medidos conforme indicado no apêndice 2 do presente anexo.
(13) kH e kL são medidos conforme indicado no apêndice 2 do presente anexo.
(14) «Força máxima» é a força máxima estabelecida no anexo 4 do presente regulamento para a categoria de veículo; pode ser mais elevada se o funcionamento do sistema antibloqueio o exigir.
(15) Se o coeficiente de aderência da pista de ensaios for demasiado elevado, não permitindo que o sistema de travagem antibloqueio efetue ciclos completos, o ensaio pode ser efetuado num piso de coeficiente de aderência mais baixo.
(16) Se o coeficiente de aderência da pista de ensaios for demasiado elevado, não permitindo que o sistema de travagem antibloqueio efetue ciclos completos, o ensaio pode ser efetuado num piso de coeficiente de aderência mais baixo.
(17) No caso dos reboques equipados com um sensor de carga do travão, a pressão do dispositivo poderá ser aumentada para assegurar a realização de ciclos completos.
(18) «Força máxima» é a força máxima estabelecida no anexo 4 do presente regulamento para a categoria de veículo; pode ser mais elevada se o funcionamento do sistema antibloqueio o exigir.
Apêndice 1
Símbolos e definições
|
Símbolos |
Definições |
|
E |
Distância entre eixos |
|
ER |
Distância entre o cabeçote de engate e o centro do ou dos eixos do semirreboque (ou distância entre o ponto de engate da barra de tração e o centro do ou dos eixos do reboque de eixo central) |
|
ε |
Aderência utilizada pelo veículo: quociente entre a razão de travagem máxima obtida com o sistema antibloqueio ativado (zAL) e o coeficiente de aderência (k) |
|
εi |
Valor de ε medido no eixo i (no caso dos veículos a motor com um sistema antibloqueio da categoria 3) |
|
εH |
Valor de ε num piso de elevada aderência |
|
εL |
Valor de ε num piso de baixa aderência |
|
F |
Força [N] |
|
FbR |
Força de travagem do reboque com o sistema de travagem antibloqueio inoperante |
|
FbRmax |
Valor máximo de FbR |
|
FbRmaxi |
Valor de FbRmax quando só o eixo i do reboque está travado |
|
FbRAL |
Força de travagem do reboque com o sistema de travagem antibloqueio ativado |
|
FCnd |
Reação normal total do piso sobre os eixos não motores não travados do conjunto de veículos, em condições estáticas |
|
FCd |
Reação normal total do piso sobre os eixos motores não travados do conjunto de veículos, em condições estáticas |
|
Fdyn |
Reação normal do piso da estrada, em condições dinâmicas, com o sistema antibloqueio ativado |
|
Fidyn |
Fdyn sobre o eixo i no caso de veículos a motor ou de reboques completos |
|
Fi |
Reação normal do piso da estrada sobre o eixo i, em condições estáticas |
|
FM |
Reação estática normal total do piso sobre todas as rodas do veículo (trator) a motor |
|
FMnd (1) |
Reação estática normal total do piso da estrada sobre os eixos não motores e não travados do veículo a motor |
|
FMd (1) |
Reação estática normal total do piso da estrada sobre os eixos motores e não travados do veículo a motor |
|
FR |
Reação estática normal total do piso sobre todas as rodas do reboque |
|
FRdyn |
Reação dinâmica normal total do piso sobre os eixos do semirreboque ou do reboque de eixo central |
|
FWM (1) |
0,01 FMnd + 0,015 FMd |
|
g |
Aceleração devida à gravidade (9,81 m/s2) |
|
h |
Altura do centro de gravidade, declarada pelo fabricante e confirmada pelo serviço técnico que realiza o ensaio de homologação |
|
hD |
Altura da barra de tração (ponto de articulação no reboque) |
|
hK |
Altura do prato de engate (cabeçote de engate) |
|
hR |
Altura do centro de gravidade do reboque |
|
k |
Coeficiente de aderência entre o pneu e o piso |
|
kf |
Coeficiente k de um eixo dianteiro |
|
kH |
Valor de k determinado num piso de elevada aderência |
|
kl |
Valor de k determinado no eixo i de um veículo equipado com sistema antibloqueio da categoria 3 |
|
kL |
Valor de k determinado num piso de baixa aderência |
|
klock |
Valor da aderência correspondente a um deslizamento de 100 % |
|
kM |
Coeficiente k do veículo a motor |
|
kpeak |
Valor máximo da curva de «aderência em função do deslizamento» |
|
kr |
Coeficiente k de um eixo traseiro |
|
kR |
Coeficiente k do reboque |
|
P |
Massa do veículo [kg] |
|
R |
Relação entre kpeak e klock |
|
t |
Intervalo de tempo [s] |
|
tm |
Valor médio de t |
|
tmin |
Valor mínimo de t |
|
z |
Razão de travagem |
|
zAL |
Razão de travagem z do veículo com o sistema antibloqueio ativado |
|
zC |
Razão de travagem z do conjunto de veículos, quando apenas o reboque for travado e o sistema antibloqueio estiver inoperante |
|
zCAL |
Razão de travagem z do conjunto de veículos, quando apenas o reboque for travado e o sistema antibloqueio estiver ativado |
|
zCmax |
Valor máximo de zC |
|
zCmaxi |
Valor máximo de zC quando só o eixo i do reboque está travado |
|
zm |
Razão de travagem média |
|
zmax |
Valor máximo de z |
|
zMALS |
Valor de zAL com o veículo a motor num piso de superfície irregular |
|
zR |
Razão de travagem z do reboque com o sistema antibloqueio inoperante |
|
zRAL |
Zal do reboque obtida por travagem de todos os eixos, com o veículo trator não travado e o motor desembraiado |
|
zRALH |
zRAL num piso com elevado coeficiente de aderência |
|
zRALL |
zRAL num piso com baixo coeficiente de aderência |
|
zRALS |
zRAL num piso de superfície irregular |
|
zRH |
zR num piso com elevado coeficiente de aderência |
|
zRL |
zR num piso com baixo coeficiente de aderência |
|
zRHmax |
Valor máximo de zRH |
|
zRLmax |
Valor máximo de zRL |
|
zRmax |
Valor máximo de zR |
(1) FMnd e FMd no caso de veículos a motor de dois eixos: estes símbolos podem ser simplificados, substituindo-os pelos símbolos Fi correspondentes.
Apêndice 2
Utilização da aderência
1. MÉTODO DE MEDIÇÃO PARA OS VEÍCULOS A MOTOR
1.1. Determinação do coeficiente de aderência (k)
1.1.1. O coeficiente de aderência (k) é definido como o quociente entre as forças de travagem máximas num eixo, sem bloqueio das rodas, e a carga dinâmica correspondente no mesmo eixo.
1.1.2. Os travões devem ser aplicados num único eixo do veículo em ensaio, a uma velocidade inicial de 50 km/h. Para se obter o desempenho máximo, as forças de travagem devem ser repartidas pelas rodas desse eixo. O sistema de travagem antibloqueio deve ser desativado ou ficar inoperante entre as velocidades de 40 km/h e 20 km/h.
1.1.3. Efetuam-se vários ensaios com pressões crescentes no sistema, para determinar a razão de travagem máxima do veículo (zmax). Durante cada ensaio, a força aplicada sobre o pedal deve ser mantida constante e a razão de travagem é determinada em função do tempo (t) necessário para passar de 40 km/h para 20 km/h, através da fórmula:

zmax é o valor máximo de z; t é expresso em segundos.
1.1.3.1. Admite-se a ocorrência de bloqueio das rodas a velocidades inferiores a 20 km/h.
1.1.3.2. Partindo do valor mínimo de t medido, designado tmin, selecionam-se três valores de t compreendidos entre tmin e 1,05 tmin e calcula-se a sua média aritmética (tm), calculando-se, em seguida:

Se for demonstrado que, por razões práticas, não é possível obter os três valores acima referidos, pode utilizar-se o tempo mínimo, tmin. Contudo, os requisitos do ponto 1.3 devem continuar a aplicar-se.
1.1.4. As forças de travagem devem ser calculadas a partir da razão de travagem medida e da resistência ao rolamento dos eixos não travados, que é igual a 0,015 vezes a carga estática no eixo, se este for motor, e a 0,010 vezes a carga estática no eixo, se este não for motor.
1.1.5. A carga dinâmica sobre o eixo é dada pelas fórmulas constantes do anexo 10 do presente regulamento.
1.1.6. O valor de k deve ser arredondado à terceira casa decimal.
1.1.7. Repetir, em seguida, o ensaio descrito nos pontos 1.1.1 a 1.1.6 anteriores nos outros eixos (no que respeita a exceções, ver pontos 1.4 e 1.5 seguintes).
1.1.8. Por exemplo, no caso de um veículo a motor com dois eixos e tração à retaguarda, com o eixo dianteiro (1) a ser travado, o valor do coeficiente de aderência k é dado pela fórmula:

1.1.9. Determina-se o valor do coeficiente correspondente ao eixo dianteiro (kf) e o valor do coeficiente correspondente ao eixo traseiro (kr).
1.2. Determinação da aderência utilizada (ε)
1.2.1. A aderência utilizada (ε) é definida como o quociente entre a razão de travagem máxima com o sistema antibloqueio em funcionamento (zAL) e o coeficiente de aderência (kM), ou seja:

1.2.2. A partir de uma velocidade inicial do veículo de 55 km/h, a razão de travagem máxima (zAL) deve ser medida quando o sistema antibloqueio efetua um ciclo completo e com base no valor médio de três ensaios, conforme indica o ponto 1.1.3 do presente apêndice, utilizando o tempo necessário para reduzir a velocidade de 45 para 15 km/h, segundo a fórmula seguinte:
1.2.3. O coeficiente de aderência kM é determinado por ponderação com base nas cargas dinâmicas por eixo.
em que:

1.2.4. O valor de ε deve ser arredondado à segunda casa decimal.
1.2.5. No caso de veículos equipados com sistema de travagem antibloqueio das categorias 1 ou 2, o valor de zAL é determinado para o veículo travado no seu conjunto e com o sistema de travagem antibloqueio a funcionar, enquanto a aderência utilizada (ε) é novamente dada pela fórmula do ponto 1.2.1 do presente apêndice.
1.2.6. No caso de veículos equipados com sistema de travagem antibloqueio da categoria 3, o valor de zAL é determinado em cada eixo que tenha, pelo menos, uma roda diretamente controlada. Por exemplo: para um veículo de dois eixos com sistema de travagem antibloqueio que atue apenas no eixo traseiro (2), a aderência utilizada (ε) é obtida pela seguinte fórmula:

Este cálculo deve ser efetuado para cada eixo que tenha, pelo menos, uma roda diretamente controlada.
1.3. Se ε >1,00, devem repetir-se as medições necessárias à determinação dos coeficientes de aderência. Admite-se uma tolerância de 10 %.
1.4. No caso dos veículos a motor com três eixos, na determinação do valor k do veículo não é necessário ter em consideração quaisquer eixos que estejam fixados por meio de componentes da suspensão e que, por conseguinte, reajam à transferência de peso durante a travagem ou transmissão (1).
1.5. No caso de veículos das categorias N2 e N3 cuja distância entre eixos seja inferior a 3,80 m e para os quais h/E ≥ 0,25, não será necessário determinar o coeficiente de aderência do eixo traseiro.
1.5.1. A aderência utilizada (ε) é definida como o quociente entre a razão de travagem máxima com o sistema antibloqueio em funcionamento (zAL) e o coeficiente de aderência (kf), ou seja:

2. MÉTODO DE MEDIÇÃO PARA OS REBOQUES
2.1. Generalidades
2.1.1. O coeficiente de aderência (k) é definido como o quociente entre as forças de travagem máximas num eixo, sem bloqueio das rodas, e a carga dinâmica correspondente no mesmo eixo.
2.1.2. Os travões devem ser aplicados num único eixo do reboque em ensaio, a uma velocidade inicial de 50 km/h. Para se obter o desempenho máximo, as forças de travagem devem ser repartidas pelas rodas desse eixo. O sistema de travagem antibloqueio deve ser desativado ou ficar inoperante entre as velocidades de 40 km/h e 20 km/h.
2.1.3. Devem efetuar-se vários ensaios com pressões crescentes no sistema, para determinar a razão de travagem máxima do conjunto de veículos (zCmax) apenas com o reboque a ser travado. A razão de travagem é determinada em função do tempo (t) necessário para passar de 40 km/h para 20 km/h, através da fórmula:

2.1.3.1. Admite-se a ocorrência de bloqueio das rodas a velocidades inferiores a 20 km/h.
2.1.3.2. Partindo do valor mínimo de t medido, designado tmin, selecionam-se três valores de t compreendidos entre tmin e 1,05 tmin e calcula-se a sua média aritmética (tm), calculando-se, em seguida:

Se for demonstrado que, por razões práticas, não é possível obter os três valores acima referidos, pode utilizar-se o tempo mínimo, tmin.
2.1.4. A aderência utilizada (ε) deve ser calculada através da fórmula:

O valor de k tem de ser determinado de acordo com o ponto 2.2.3 do presente apêndice para reboques completos ou com o ponto 2.3.1 para semirreboques.
2.1.5. Se ε >1,00, devem repetir-se as medições necessárias à determinação dos coeficientes de aderência. Admite-se uma tolerância de 10 %.
2.1.6. Determina-se a razão de travagem máxima (zRAL) com o sistema de travagem antibloqueio a executar ciclos completos e o veículo trator não travado, tendo por base o valor médio de três ensaios, conforme descrito no ponto 2.1.3 do presente apêndice.
2.2. Reboques completos
2.2.1. Procede-se à determinação de k para os eixos dianteiros e traseiros (com o sistema antibloqueio desativado ou inoperante entre 40 km/h e 20 km/h).
Para um eixo dianteiro i:
FbRmaxi = zCmaxi(FM + FR) – 0,01 FCnd – 0,015 FCd

Para um eixo traseiro i:
FbRmaxi = zCmaxi · (FM + FR) – 0,01 FCnd – 0,015 FCd

2.2.2. Os valores de kf e kr devem ser arredondados à terceira casa decimal.
![]()
2.2.3. O coeficiente de aderência kR é determinado proporcionalmente em função das cargas dinâmicas por eixo.

2.2.4. Medição de zRAL (com o sistema antibloqueio operativo)
![]()
O valor de zRAL deve ser determinado num piso com elevado coeficiente de aderência e, no caso de veículos equipados com um sistema antibloqueio da categoria A, também deve ser determinado num piso com baixo coeficiente de aderência.
2.3. Semirreboques e reboques de eixos centrais
2.3.1. Deve proceder-se à medição de k (com o sistema antibloqueio desativado ou inoperante entre 40 km/h e 20 km/h) depois de terem sido retiradas todas as rodas, com exceção das de um dos eixos.
FbRmax = zCmax(FM + FR) – FWM
![]()
![]()
2.3.2. Deve proceder-se à medição de zRAL (com o sistema antibloqueio operativo) com todas as rodas montadas.
FbRAL = zCAL · (FM + FR) – FWM
![]()
![]()
O valor de zRAL deve ser determinado num piso com elevado coeficiente de aderência e, no caso de veículos equipados com um sistema antibloqueio da categoria A, também deve ser determinado num piso com baixo coeficiente de aderência.
(1) Enquanto não for adotado um método de ensaio uniforme, os veículos com mais de três eixos e os veículos especiais serão objeto de uma concertação com o serviço técnico.
Apêndice 3
Desempenho em pisos com aderências diferentes
1. VEÍCULOS A MOTOR
1.1. A razão de travagem referida no ponto 5.3.5 do presente anexo pode ser calculada a partir do coeficiente de aderência determinado para cada um dos dois pisos sobre os quais se efetua o ensaio. Esses dois pisos devem cumprir as condições prescritas no ponto 5.3.4 do presente anexo.
1.2. O coeficiente de aderência dos pisos de elevada e baixa aderência (kH e kL, respetivamente) são determinados em conformidade com as disposições do apêndice 2, ponto 1.1, do presente anexo.
1.3. A razão de travagem (zMALS) de veículos a motor com carga deve ser tal que:
 e zMALS ≥ kL
e zMALS ≥ kL
2. REBOQUES
2.1. A razão de travagem referida no ponto 6.3.2 do presente anexo pode ser calculada a partir das razões de travagem zRALH e zRALL medidas em cada um dos dois pisos sobre os quais decorrem os ensaios, com o sistema antibloqueio operativo. Esses dois pisos devem cumprir as condições prescritas no ponto 6.3.2 do presente anexo.
2.2. A razão de travagem zRALS deve ser:

e

Se εH >0,95, usar εH = 0,95
Apêndice 4
Método de seleção de pisos de baixa aderência
1. Devem ser fornecidos ao serviço técnico elementos suficientes sobre o coeficiente de aderência do piso selecionado, a que é feita referência no ponto 5.1.1.2 do presente anexo.
1.1. Entre os elementos a fornecer, deve figurar uma curva do coeficiente de aderência em função do deslizamento (de 0 a 100 %) para uma velocidade próxima de 40 km/h (1).
1.1.1. O valor máximo da curva é designado como kpeak e o valor correspondente a um deslizamento de 100 % como klock.
1.1.2. A razão R é determinada como o quociente entre kpeak e klock.

1.1.3. O valor de R deve ser arredondado à primeira casa decimal.
1.1.4. O piso a utilizar deve ser caracterizado por uma relação de R compreendida entre 1,0 e 2,0 (2).
2. Antes dos ensaios, o serviço técnico deve certificar-se de que o piso selecionado preenche os requisitos aplicáveis. Devem ainda ser-lhe comunicadas as seguintes informações:
|
a) |
o método utilizado na determinação de R, |
|
b) |
o modelo de veículo (veículo a motor, reboque, etc.), |
|
c) |
dados sobre os pneus e as cargas por eixo (devem ser ensaiados várias cargas e vários pneus e os resultados obtidos devem ser comunicados ao serviço técnico, que decidirá se podem ser considerados representativos para o veículo a homologar). |
2.1. O valor de R deve ser inscrito no relatório de ensaio.
Para verificar a constância do valor de R, o piso deve ser objeto de uma aferição, pelo menos, anual com um veículo representativo.
(1) Enquanto não for estabelecido um procedimento de ensaio uniforme para a determinação da curva de aderência de veículos com uma massa máxima superior a 3,5 toneladas, pode recorrer-se à curva traçada para automóveis de passageiros. Neste caso, para esses veículos, a razão entre kpeak e klock deve ser estabelecida utilizando-se um valor de kpeak conforme definido no apêndice 2 do presente anexo. Mediante o acordo do serviço técnico, o coeficiente de aderência referido neste ponto poderá ser determinado por outro método, desde que seja demonstrada a equivalência dos valores kpeak e klock
(2) Enquanto estes pisos de ensaio não estiverem geralmente disponíveis, é aceitável um valor de R até 2,5, mediante aprovação do serviço técnico.
ANEXO 14
CONDIÇÕES DE ENSAIO PARA REBOQUES EQUIPADOS COM SISTEMAS DE TRAVAGEM ELÉTRICOS
1. GENERALIDADES
1.1. Para efeitos das disposições que se seguem, os sistemas de travagem elétricos são sistemas de travagem de serviço que consistem num dispositivo de comando, um dispositivo de transmissão eletromecânica e travões de atrito. O dispositivo de comando elétrico que regula a tensão para o reboque deve encontrar-se a bordo deste último.
1.2. A energia elétrica requerida pelo sistema de travagem elétrico deve ser fornecida ao reboque pelo veículo trator.
1.3. Os sistemas de travagem elétricos devem ser comandados pelo acionamento do sistema de travagem de serviço do veículo trator.
1.4. A tensão nominal deve ser de 12 V.
1.5. O consumo máximo de corrente não deve exceder 15 A.
1.6. A ligação elétrica entre o sistema de travagem elétrico e o veículo trator deve ser assegurada por meio de uma ficha e de uma tomada especiais correspondentes a… (1), que não devem ser compatíveis com as tomadas do equipamento de iluminação do veículo. A ficha e o cabo respetivo devem estar situados no reboque.
2. CONDIÇÕES RELATIVAS AO REBOQUE
2.1. Se estiver instalada no reboque uma bateria alimentada pela unidade de alimentação de energia do veículo trator, a sua linha de alimentação deve ser desligada durante a travagem de serviço do reboque.
2.2. Para os reboques cuja massa sem carga seja inferior a 75 % da sua massa máxima, a força de travagem deve ser regulada automaticamente em função do estado de carga do reboque.
2.3. Os sistemas de travagem elétricos devem ser tais que, mesmo que a tensão nas linhas de ligação se reduza a um valor de 7 V, seja ainda assegurado um efeito de travagem de 20 % (da soma) das cargas estáticas máximas por eixo.
2.4. Se o reboque tiver mais de um eixo e um dispositivo de atrelagem regulável na vertical, os dispositivos de comando para a regulação da força de travagem que reagem à inclinação no sentido de marcha (pêndulo, sistema mola-massa, comutador por inércia líquida) devem ser fixados ao quadro. No caso dos reboques com um único eixo e dos reboques com eixos afastados entre si menos de 1 metro, esses dispositivos de comando devem estar equipados com um mecanismo que indique a posição horizontal (nível de álcool, por exemplo) e devem dispor de uma regulação manual que permita alinhar o mecanismo com o sentido de marcha do veículo no plano horizontal.
2.5. O relé para o acionamento da corrente de travagem em conformidade com o ponto 5.2.1.19.2 do presente regulamento, que está ligado à linha de acionamento, deve estar situado no reboque.
2.6. Deve haver uma tomada isolante para a ficha.
2.7. Deve haver um avisador ao nível do dispositivo de comando, que se acenda aquando de qualquer acionamento do travão, para indicar o bom funcionamento do sistema de travagem elétrico do reboque.
3. DESEMPENHO
3.1. Os sistemas de travagem elétricos devem reagir a uma desaceleração do conjunto trator/reboque não superior a 0,4 m/s2.
3.2. O efeito de travagem pode começar com uma força de travagem inicial que não exceda 10 % (da soma) das cargas estáticas máximas por eixo, nem 13 % (da soma) das cargas estáticas por eixo do reboque sem carga.
3.3. As forças de travagem também podem ser aumentadas por patamares. A níveis de forças de travagem mais elevados do que os que se referem no ponto 3.2 do presente anexo, esses patamares não devem exceder 6 % (da soma) das cargas estáticas máximas por eixo, nem 8 % (da soma) das cargas estáticas por eixo do reboque sem carga.
Todavia, no caso dos reboques com um único eixo cuja massa máxima não exceda 1,5 toneladas, o primeiro patamar não deve exceder 7 % (da soma) das cargas estáticas máximas por eixo do reboque. Admite-se um aumento de 1 % desse valor para os patamares seguintes (exemplo: primeiro patamar 7 %, segundo 8 %, terceiro 9 %, etc.; os patamares suplementares não devem exceder 10 %). Para efeitos destas disposições, um reboque de dois eixos cuja distância entre eixos seja inferior a 1 metro é considerado como um reboque de eixo único.
3.4. A força de travagem prescrita para o reboque de pelo menos 50 % do somatório das cargas máximas por eixo deve ser atingida — com a massa máxima — no caso de uma desaceleração média totalmente desenvolvida do conjunto trator/reboque que não exceda 5,9 m/s2, no que respeita aos reboques com um único eixo, ou 5,6 m/s2, no que respeita aos reboques com vários eixos. Os reboques de eixos afastados de menos de 1 metro são igualmente considerados como reboques de eixo único na aceção da presente disposição. Além disso, devem ser respeitados os limites definidos no apêndice do presente anexo. Se a força de travagem for regulada por patamares, estes devem estar situados na gama indicada no apêndice do presente anexo.
3.5. O ensaio deve ser efetuado a uma velocidade inicial de 60 km/h.
3.6. A travagem automática do reboque deve ser assegurada em conformidade com as condições do ponto 5.2.2.9 do presente regulamento. Se esta ação de travagem automática exigir energia elétrica, deve ser garantida durante pelo menos 15 minutos uma força de travagem do reboque de pelo menos 25 % da carga máxima total por eixo para que se cumpram as condições acima mencionadas.
(1) Em estudo. Até se determinarem as características dessa ligação especial, o tipo a utilizar será indicado pela autoridade nacional responsável pela homologação.
Apêndice
Compatibilidade da razão de travagem do reboque e da desaceleração média totalmente desenvolvida do conjunto trator/reboque (com o reboque em carga e sem carga)

Notas:
|
1. |
Os limites indicados neste diagrama referem-se aos reboques em carga e sem carga. Quando a massa do reboque sem carga exceder 75 % da sua massa máxima, os limites só devem aplicar-se à posição «em carga». |
|
2. |
Os limites indicados no diagrama não afetam as disposições do presente anexo relativas aos desempenhos mínimos de travagem requeridos. Contudo, se os desempenhos de travagem obtidos durante o ensaio — em conformidade com as disposições indicadas no ponto 3.4 do presente anexo — forem superiores aos exigidos, esses desempenhos não devem exceder os limites indicados no diagrama.
|
ANEXO 15
MÉTODO DE ENSAIO DE GUARNIÇÕES DE TRAVÕES COM DINAMÓMETRO DE INÉRCIA
1. GENERALIDADES
1.1. O procedimento descrito no presente anexo pode ser aplicado em caso de modificação do modelo de veículo resultante da montagem de guarnições de travões de outro tipo em veículos que tenham sido homologados nos termos do presente regulamento.
1.2. Os tipos de guarnições de travões de substituição devem ser controlados por comparação do seu desempenho com o obtido com as guarnições de travões com que o veículo estava equipado no momento da homologação e que estavam conformes aos elementos identificados na ficha de informações correspondente, cujo modelo figura no anexo 2 do presente regulamento.
1.3. Se assim entender, o serviço técnico responsável pela realização dos ensaios de homologação pode exigir que a comparação do desempenho das guarnições de travões seja feita em conformidade com as disposições pertinentes do anexo 4 do presente regulamento.
1.4. O pedido de homologação por efeitos de comparação é apresentado pelo fabricante do veículo ou pelo seu representante devidamente acreditado.
1.5. No contexto do presente anexo, «veículo» é o modelo de veículo homologado em conformidade com o presente regulamento e em relação ao qual se pede que a comparação seja considerada satisfatória.
2. EQUIPAMENTO DE ENSAIO
2.1. O dinamómetro a utilizar deve ter as seguintes características:
|
2.1.1. |
Deve ser capaz de produzir a inércia exigida no ponto 3.1 do presente anexo e ter a capacidade necessária para preencher os requisitos enunciados nos pontos 1.5, 1.6 e 1.7 do anexo 4 do presente regulamento no que se refere aos ensaios de tipo I, de tipo II e de tipo III; |
|
2.1.2. |
Os travões montados devem ser idênticos aos do modelo de veículo inicial; |
|
2.1.3. |
Em caso de arrefecimento a ar, este deve obedecer ao ponto 3.4 do presente anexo; |
|
2.1.4. |
A aparelhagem utilizada no ensaio deve poder fornecer pelo menos os seguintes dados:
|
3. CONDIÇÕES DE ENSAIO
3.1. O dinamómetro deve ser regulado de forma a reproduzir o mais fielmente possível, com uma tolerância de ± 5 %, a inércia de rotação correspondente à parte da inércia total do veículo que é travada pelas rodas correspondentes, obtida pela seguinte fórmula:
I = MR2
em que:
|
I |
= |
inércia de rotação [kg × m2], |
|
R |
= |
raio de rolamento dinâmico do pneu [m]; |
|
M |
= |
a parte da massa máxima do veículo travada pelas rodas consideradas. No caso de um dinamómetro de uma saída, e tratando-se de veículos das categorias M2, M3 e N, esta parte deve ser calculada a partir da repartição teórica da travagem quando a desaceleração corresponder ao valor aplicável indicado no ponto 2.1 do anexo 4 do presente regulamento; no caso de veículos da categoria O (reboques), o valor de M corresponderá à carga no solo para a roda considerada quando o veículo estiver imobilizado e carregado com a sua massa máxima. |
3.2. A velocidade de rotação inicial do dinamómetro de inércia deve corresponder à velocidade linear do veículo tal como prescrita no anexo 4 do presente regulamento e basear-se no raio de rolamento dinâmico do pneu.
3.3. As guarnições de travões devem estar rodadas a, pelo menos, 80 % e não devem exceder a temperatura de 180 °C durante o processo de rodagem de desgaste ou, em alternativa, a pedido do fabricante do veículo, devem ser rodadas em conformidade com as suas recomendações.
3.4. Pode ser utilizado ar de arrefecimento, sendo o sentido da corrente que varre o travão perpendicular ao eixo de rotação deste. A velocidade do ar de arrefecimento sobre o travão deve ser:
var = 0,33 v
em que:
|
v |
= |
velocidade de ensaio do veículo no início da travagem. |
A temperatura do ar de arrefecimento deve ser a temperatura ambiente.
4. PROCEDIMENTO DE ENSAIO
4.1. Submetem-se ao ensaio de comparação cinco jogos de amostras da guarnição dos travões. Comparam-se com cinco jogos de guarnições conformes aos elementos de origem identificados na ficha de informações relativa à primeira homologação do modelo de veículo em questão.
4.2. A equivalência das guarnições de travões é verificada comparando os resultados obtidos por meio dos procedimentos de ensaio descritos no presente anexo, em conformidade com as condições seguintes:
4.3. Ensaio de desempenho a frio do tipo 0
4.3.1. Aciona-se o travão três vezes a uma temperatura inicial inferior a 100 °C, medida em conformidade com o ponto 2.1.4.4 do presente anexo.
4.3.2. No caso das guarnições de travões destinadas a veículos das categorias M2, M3 e N, os acionamentos dos travões devem ser efetuados a uma velocidade de rotação inicial equivalente à indicada no ponto 2.1 do anexo 4 do presente regulamento, para obter um binário médio equivalente à desaceleração prescrita nesse ponto. Além disso, devem igualmente ser efetuados ensaios a diferentes velocidades de rotação, sendo a mais baixa equivalente a 30 % da velocidade máxima do veículo e a mais elevada a 80 % da mesma.
4.3.3. No caso das guarnições de travões destinadas aos veículos da categoria O, os acionamentos dos travões devem ser efetuados a uma velocidade de rotação inicial equivalente a 60 km/h e de modo a obter um binário médio equivalente ao prescrito no ponto 3.1 do anexo 4 do presente regulamento. Deve ser efetuado um ensaio suplementar de desempenho a frio a uma velocidade inicial de rotação equivalente a 40 km/h, para comparação com os resultados do ensaio de tipo I, conforme previsto no ponto 3.1.2.2 do anexo 4 do presente regulamento.
4.3.4. Para os mesmos valores de entrada, o binário médio de travagem registado, durante os ensaios de desempenho a frio supramencionados, com as guarnições ensaiadas para efeitos de comparação deve situar-se dentro dos limites de ensaio (± 15 %) do binário médio de travagem registado com as guarnições de travões conformes ao componente identificado no pedido de homologação do modelo de veículo em questão.
4.4. Ensaio de tipo I (ensaio de perda de desempenho)
4.4.1. Com travagens repetidas
4.4.1.1. As guarnições de travões de veículos das categorias M2, M3 e N devem ser ensaiadas em conformidade com o procedimento indicado no ponto 1.5.1 do anexo 4 do presente regulamento.
4.4.2. Com travagem contínua
4.4.2.1. As guarnições de travões para reboques (categoria O) devem ser ensaiadas em conformidade com o ponto 1.5.2 do anexo 4 do presente regulamento.
4.4.3. Desempenho a quente
4.4.3.1. Terminados os ensaios exigidos nos pontos 4.4.1 e 4.4.2 do presente anexo, deve executar-se o ensaio de desempenho da travagem a quente, prescrito no ponto 1.5.3 do anexo 4 do presente regulamento.
4.4.3.2. Para os mesmos valores de entrada, o binário médio de travagem registado durante os ensaios de desempenho a quente supramencionados com as guarnições ensaiadas para efeitos de comparação deve situar-se dentro dos limites de ensaio (± 15 %) do binário médio de travagem registado com as guarnições de travões conformes ao componente identificado no pedido de homologação do modelo de veículo em questão.
4.5. Ensaio de tipo II (ensaio de comportamento em declive descendente):
4.5.1. Este ensaio apenas é exigido se, no modelo de veículo em questão, forem utilizados os travões de atrito para o ensaio de tipo II.
4.5.2. As guarnições de travões dos veículos a motor da categoria M3 (com exceção dos que, em conformidade com o ponto 1.6.4 do anexo 4 do presente regulamento, devem ser objeto de um ensaio de tipo II-A) e da categoria N3, e os reboques da categoria O4 devem ser ensaiados em conformidade com o procedimento estabelecido no ponto 1.6.1 do anexo 4 do presente regulamento.
4.5.3. Desempenho a quente
4.5.3.1. Terminados os ensaios exigidos no ponto 4.5.1 do presente anexo, deve executar-se o ensaio de desempenho da travagem a quente, prescrito no ponto 1.6.3 do anexo 4 do presente regulamento.
4.5.3.2. Para os mesmos valores de entrada, o binário médio de travagem registado durante os ensaios de desempenho a quente supramencionados com as guarnições ensaiadas para efeitos de comparação deve situar-se dentro dos limites de ensaio (± 15 %) do binário médio de travagem registado com as guarnições de travões conformes ao componente identificado no pedido de homologação do modelo de veículo em questão.
4.6. Ensaio de tipo III (ensaio de perda de desempenho)
4.6.1. Ensaio com travagens repetidas
4.6.1.1. As guarnições de travões para reboques da categoria O4 devem ser ensaiadas em conformidade com o procedimento indicado nos pontos 1.7.1 e 1.7.2 do anexo 4 do presente regulamento.
4.6.2. Desempenho a quente
4.6.2.1. Terminados os ensaios exigidos nos pontos 4.6.1 e 4.6.2 do presente anexo, deve executar-se o ensaio de desempenho da travagem a quente, prescrito no ponto 1.7.2 do anexo 4 do presente regulamento.
4.6.2.2. Para os mesmos valores de entrada, o binário médio de travagem registado durante os ensaios a quente acima referidos de desempenho das guarnições, para efeitos de comparação, deve situar-se dentro dos limites de ensaio (± 15 %) do binário médio de travagem registado com as guarnições de travões conformes ao elemento identificado no pedido de homologação do modelo de veículo em questão.
5. INSPEÇÃO DAS GUARNIÇÕES DE TRAVÕES
5.1. As guarnições de travões devem ser inspecionadas visualmente no final dos ensaios acima referidos, para verificar se o seu estado permite continuar a utilizá-las normalmente.
ANEXO 16
COMPATIBILIDADE ENTRE VEÍCULOS TRATORES E REBOQUES NO QUE RESPEITA À COMUNICAÇÃO DE DADOS SEGUNDO A NORMA ISO 11992
1. GENERALIDADES
1.1. Os requisitos do presente anexo aplicam-se apenas aos veículos tratores e aos reboques equipados com uma linha de comando elétrica, tal como definida no ponto 2.24 do presente regulamento.
1.2. O conector ISO 7638 fornece alimentação elétrica ao sistema de travagem ou ao sistema de travagem antibloqueio do reboque. No caso de veículos equipados com linha de comando elétrica, conforme definida no ponto 2.24 do presente regulamento, este conector serve também de interface para a comunicação de dados através dos pinos 6 e 7 — ver ponto 5.1.3.6 do presente regulamento.
1.3. O presente anexo define os requisitos aplicáveis ao veículo trator e ao reboque no que respeita ao apoio às mensagens definidas na norma ISO 11992-2:2003, incluindo a Alt.1:2007.
2. OS PARÂMETROS DEFINIDOS NA NORMA ISO 11992-2:2003, INCLUINDO A ALT.1:2007, TRANSMITIDOS PELA LINHA DE COMANDO ELÉTRICA, DEVEM SER SUPORTADOS DO SEGUINTE MODO:
|
2.1. |
As funções e mensagens associadas a seguir indicadas, tal como definidas no presente regulamento, devem ser suportadas pelo veículo trator ou pelo reboque, consoante o caso:
|
|
2.2. |
Quando o reboque transmite as mensagens a seguir indicadas, o veículo trator deve emitir um aviso destinado ao condutor:
|
|
2.3. |
As mensagens a seguir indicadas, definidas na norma ISO 11992-2:2003, incluindo a Alt.1:2007, devem ser suportadas pelo veículo trator ou pelo reboque:
|
|
2.4. |
As mensagens a seguir indicadas devem ser suportadas pelo veículo trator ou reboque, consoante o caso, quando o veículo estiver equipado com uma função associada a este parâmetro:
|
|
2.5. |
O suporte a todas as outras mensagens, na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é opcional para o veículo trator e para o reboque. |
(1) O VDC (Comando dinâmico do veículo), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definido no presente regulamento por «função de estabilidade do veículo» — ver ponto 2.34 do presente regulamento.
(2) O VDC (Comando dinâmico do veículo), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definido no presente regulamento por «função de estabilidade do veículo» — ver ponto 2.34 do presente regulamento.
(3) O VDC (Comando dinâmico do veículo), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definido no presente regulamento por «função de estabilidade do veículo» — ver ponto 2.34 do presente regulamento.
(4) A ROP (Proteção em Caso de Capotagem), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definida no presente regulamento por «controlo da capotagem» — ver ponto 2.34.2.2 do presente regulamento.
(5) O YC (Controlo de Guinadas), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definido no presente regulamento como «controlo da direção» — ver ponto 2.34.2.1 do presente regulamento.
(6) A ROP (Proteção em Caso de Capotagem), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definida no presente regulamento por «controlo da capotagem» — ver ponto 2.34.2.2 do presente regulamento.
(7) O YC (Controlo de Guinadas), na aceção da norma ISO 11992-2:2003, incluindo a Alt.1:2007, é definido no presente regulamento como «controlo da direção» — ver ponto 2.34.2.1 do presente regulamento.
ANEXO 17
PROCEDIMENTO DE ENSAIO PARA AVALIAR A COMPATIBILIDADE FUNCIONAL DOS VEÍCULOS EQUIPADOS COM LINHAS DE COMANDO ELÉTRICAS
1. GENERALIDADES
1.1. O presente anexo define um procedimento que pode ser utilizado para verificar se os veículos tratores e os veículos rebocados equipados com uma linha de comando elétrica respeitam os requisitos de desempenho referidos no ponto 5.1.3.6.1 do presente regulamento. Se assim o entender, o serviço técnico pode utilizar procedimentos alternativos, caso possa estabelecer-se um nível equivalente de integridade da verificação.
1.2. No presente anexo, devem entender-se as referências à norma ISO 7638 como a norma ISO 7638-1:2003 para as instalações de 24V e a norma ISO 7638-2:2003 para as instalações de 12V.
2. FICHA DE INFORMAÇÕES
2.1. O fabricante do veículo ou o fornecedor do sistema deve fornecer ao serviço técnico uma ficha de informações que contenha pelo menos os seguintes elementos:
|
2.1.1. |
Um esquema do sistema de travagem do veículo; |
|
2.1.2. |
Provas de que a interface, incluindo a camada física, a camada de ligação de dados e a camada de aplicação, bem como a posição respetiva das mensagens encaminhadas e dos parâmetros, cumpre a norma ISO 11992; |
|
2.1.3. |
Uma lista das mensagens encaminhadas e dos parâmetros; e |
|
2.1.4. |
A especificação do veículo a motor no que diz respeito ao número de circuitos de comando que transmitem sinais às linhas de comando pneumáticas e/ou elétricas. |
3. VEÍCULOS TRATORES
3.1. Simulador de reboque ISO 11992
O simulador deve:
|
3.1.1. |
Possuir um conector ISO 7638:2003 (7 pinos) para ligar ao veículo submetido a ensaio. Os pinos 6 e 7 do conector devem ser utilizados para transmitir e receber mensagens conformes à norma ISO 11992:2003 e respetiva Alt-1:2007; |
|
3.1.2. |
Poder receber todas as mensagens transmitidas pelo veículo a motor a homologar e transmitir todas as mensagens provenientes do reboque em conformidade com a norma ISO 11992-2:2003 e respetiva Alt-1:2007; |
|
3.1.3. |
Proporcionar uma leitura direta ou indireta de mensagens e apresentar os parâmetros do campo de dados na ordem cronológica correta; e |
|
3.1.4. |
Incluir um dispositivo para medir o tempo de resposta da cabeça de engate em conformidade com o ponto 2.6 do anexo 6 do presente regulamento. |
3.2. Procedimento de verificação
3.2.1. Confirmar que a ficha de informações do fabricante ou do fornecedor demonstra o cumprimento das disposições da norma ISO 11992 no que respeita à camada física, à camada de ligação de dados e à camada de aplicação.
3.2.2. Verificar os seguintes elementos, com o simulador ligado ao veículo a motor através da interface ISO 7638 e estando a ser transmitidas todas as mensagens pertinentes do reboque para a interface:
3.2.2.1. Sinalização da linha de comando:
3.2.2.1.1. Deve verificar-se a especificação do veículo corresponde aos parâmetros definidos na EBS 12 (byte 3) da norma ISO 11992-2:2003, procedendo-se do seguinte modo:
|
Sinalização de linha de comando |
EBS 12 (byte 3) |
|
|
Bits 1 — 2 |
Bits 5 — 6 |
|
|
Solicitação de travagem de serviço gerada por um circuito elétrico |
00b |
|
|
Solicitação de travagem de serviço gerada por dois circuitos elétricos |
01b |
|
|
Veículo não equipado com uma linha de comando pneumática (1) |
|
00b |
|
Veículo equipado com uma linha de comando pneumática |
|
01b |
3.2.2.2. Solicitação de travagem de serviço/de emergência:
3.2.2.2.1 Devem verificar-se os parâmetros definidos na EBS 11 da norma ISO 11992-2:2003 do seguinte modo:
|
Condição de ensaio |
Referência bytes |
Valor do sinal da linha de comando elétrica |
|
Pedal do travão de serviço e comando do travão de emergência não acionados |
3 — 4 |
0 |
|
Pedal do travão de serviço aplicado a fundo |
3 — 4 |
33280d a 43520d (650 a 850 kPa) |
|
Travão de emergência acionado a fundo (2) |
3 — 4 |
33280d a 43520d (650 a 850 kPa) |
3.2.2.3. Aviso de avaria:
|
3.2.2.3.1. |
Simular uma avaria permanente na linha de comunicação que utiliza o pino 6 do conector ISO 7638 e verificar se se acende o sinal de aviso amarelo indicado no ponto 5.2.1.29.1.2 do presente regulamento. |
|
3.2.2.3.2. |
Simular uma avaria permanente na linha de comunicação que utiliza o pino 7 do conector ISO 7638 e verificar se se acende o sinal de aviso amarelo indicado no ponto 5.2.1.29.1.2 do presente regulamento. |
|
3.2.2.3.3. |
Simular uma mensagem EBS 22 (byte 2 e bits 3-4) do tipo 01b e verificar se se acende o sinal de aviso vermelho indicado no ponto 5.2.1.29.1.1 do presente regulamento. |
3.2.2.4. Pedido de travagem pela conduta de alimentação:
No caso de veículos a motor que podem funcionar com os reboques ligados unicamente através de uma linha de comando elétrica:
Apenas se liga a linha de comando elétrica.
Simular uma mensagem EBS 22 (byte 4 e bits 3-4) do tipo 01b e verificar se, quando o travão de serviço, o travão de emergência ou o travão de estacionamento são acionados a fundo, a pressão na conduta de alimentação baixa para 150 kPa nos dois segundos que se seguem.
Simular uma ausência contínua de comunicação de dados e verificar se, quando o travão de serviço, o travão de emergência ou o travão de estacionamento são acionados a fundo, a pressão na conduta de alimentação baixa para 150 kPa nos dois segundos seguintes.
3.2.2.5. Tempo de resposta:
3.2.2.5.1. Verificar se, na ausência de avarias, são respeitados os requisitos de resposta da linha de comando definidos no ponto 2.6 do anexo 6 do presente regulamento.
3.2.2.6. Iluminação das luzes de travagem
Simular uma mensagem EBS22 byte 4 bits 5 a 6 do tipo 00 e verificar se as luzes de travagem não se acendem.
Simular uma mensagem EBS22 byte 4 bits 5 a 6 do tipo 01 e verificar se as luzes de travagem se acendem.
3.2.2.7. Intervenção da função de estabilidade do reboque
Simular uma mensagem EBS21 byte 2 bits 1 a 2 do tipo 00 e verificar se não se acende o avisador do condutor, tal como definido no ponto 2.1.6 do anexo 21.
Simular uma mensagem EBS21 byte 2 bits 1 a 2 do tipo 01 e verificar se se acende o avisador do condutor, tal como definido no ponto 2.1.6 do anexo 21.
3.2.3. Verificações complementares
3.2.3.1. Se assim o entender, o serviço técnico pode repetir os procedimentos de verificação acima definidos com as funções independentes da travagem relevantes para a interface em estados diferentes ou desligados.
3.2.3.2. O ponto 2.4.1 do anexo 16 define mensagens suplementares que devem ser suportadas pelo veículo trator em circunstâncias específicas. Podem efetuar-se verificações suplementares para controlar o estado das mensagens suportadas, a fim de garantir o cumprimento dos requisitos constantes do ponto 5.1.3.6.2 do regulamento.
4. REBOQUES
4.1. Simulador de veículo trator ISO 11992
O simulador deve:
|
4.1.1. |
possuir um conector ISO 7638:2003 (7 pinos) para ligar ao veículo submetido a ensaio. Os pinos 6 e 7 do conector devem ser utilizados para transmitir e receber mensagens conformes à norma ISO 11992:2003 e respetiva Alt-1:2007; |
|
4.1.2. |
possuir um dispositivo indicador de avaria e uma alimentação elétrica para o reboque; |
|
4.1.3. |
poder receber todas as mensagens transmitidas pelo reboque a homologar e transmitir todas as mensagens provenientes do veículo a motor em conformidade com a norma ISO 11992-2:2003 e respetiva Alt-1:2007. |
|
4.1.4. |
proporcionar uma leitura direta ou indireta de mensagens e apresentar os parâmetros do campo de dados na ordem cronológica correta; e |
|
4.1.5. |
incluir um dispositivo para medir o tempo de resposta do sistema de travagem em conformidade com o ponto 3.5.2 do anexo 6 do presente regulamento. |
4.2. Procedimento de verificação
4.2.1. Confirmar que a ficha de informações do fabricante ou do fornecedor demonstra o cumprimento das disposições da norma ISO 11992:2003 e respetiva Alt.1:2007 no que respeita à camada física, à camada de ligação de dados e à camada de aplicação.
4.2.2. Verificar os seguintes elementos, com o simulador ligado ao reboque através da interface ISO 7638 e estando a ser transmitidas todas as mensagens pertinentes do veículo trator para a interface:
4.2.2.1. Função do sistema de travagem de serviço:
4.2.2.1.1. Deve verificar-se a resposta do reboque aos parâmetros definidos na EBS 11 da norma ISO 11992-2:2003 e respetiva Alt 1:2007 do seguinte modo:
A pressão na conduta de alimentação no início de cada ensaio deve ser ≥ 700 kPa e o veículo deve estar em carga (o estado de carga pode ser simulado para efeitos desta verificação).
4.2.2.1.1.1. No caso dos reboques equipados com linhas de comando pneumática e elétrica:
|
|
ambas as linhas de comando devem estar ligadas; |
|
|
ambas as linhas de comando devem transmitir sinais em simultâneo; |
|
|
o simulador deve transmitir uma mensagem byte 3, bits 5-6; |
|
|
ESB 12 do tipo 01b, para indicar ao reboque que deve ser ligada uma linha de comando pneumática. |
Parâmetros a verificar:
|
Mensagem transmitida pelo simulador |
Pressão nas câmaras dos travões |
|
|
Bytes |
Valor digital da solicitação |
|
|
3 — 4 |
0 |
0 kPa |
|
3 — 4 |
33280d (650 kPa) |
Tal como definido nos cálculos de travagem do fabricante do veículo |
4.2.2.1.1.2. Nos reboques equipados com linhas de comando pneumática e elétrica ou apenas com uma linha de comando elétrica:
Apenas deve ligar-se a linha de comando elétrica
O simulador deve transmitir as seguintes mensagens:
EBS 12 (byte 3 e bits 5-6) do tipo 00b, para indicar ao reboque que não está disponível uma linha de comando pneumática, e EBS 12 (byte 3 e bits 1-2) do tipo 01b, para indicar ao reboque que o sinal de linha de comando elétrica está a ser gerado pelos dois circuitos elétricos.
Parâmetros a verificar:
|
Mensagem transmitida pelo simulador |
Pressão nas câmaras dos travões |
|
|
Bytes |
Valor digital da solicitação |
|
|
3 — 4 |
0 |
0 kPa |
|
3 — 4 |
33280d (650 kPa) |
Tal como definido nos cálculos de travagem do fabricante do veículo |
4.2.2.1.2. No caso de reboques equipados apenas com uma linha de comando elétrica, a resposta a mensagens definidas na EBS 12 da norma ISO 11992-2:2003 deve ser verificada do seguinte modo:
|
|
A pressão na conduta de alimentação pneumática no início de cada ensaio deve ser ≥ 700 kPa. |
|
|
A linha de comando elétrica deve estar ligada ao simulador. |
O simulador deve transmitir as seguintes mensagens:
|
|
EBS 12 (byte 3 e bites 5-6) do tipo 01b, para indicar ao reboque que está disponível uma linha de comando pneumática. |
|
|
EBS 11 (bytes 3-4) do tipo 0 (nenhuma solicitação de travagem de serviço) |
Deve ser verificada a resposta às seguintes mensagens:
|
EBS 12 (byte 3 e bits 1-2) |
Pressão nas câmaras dos travões ou reação do reboque |
|
01b |
0 kPa (travão de serviço não acionado) |
|
00b |
O reboque é automaticamente travado para demonstrar que a combinação não é compatível. Deve também ser transmitido um sinal através do pino 5 do conector ISO 7638:2003 (sinal de aviso amarelo). |
4.2.2.1.3. No caso de reboques ligados apenas com uma linha de comando elétrica, a resposta do reboque a uma avaria na transmissão elétrica do comando do reboque que resulte numa redução do desempenho da travagem a pelo menos 30 % do valor prescrito deve ser verificada pelo seguinte procedimento:
|
|
A pressão na conduta de alimentação pneumática no início de cada ensaio deve ser ≥700 kPa. |
|
|
A linha de comando elétrica deve estar ligada ao simulador. |
|
|
EBS 12 (byte 3 e bits 5-6) do tipo 00b, para indicar ao reboque que não está disponível uma linha de comando pneumática. |
|
|
EBS 12 (byte 3 e bits 1-2) do tipo 01b, para indicar ao reboque que o sinal de linha de comando elétrica está a ser gerado por dois circuitos independentes. |
Devem verificar-se os seguintes aspetos:
|
Condição de ensaio |
Resposta do sistema de travagem |
|
Sistema de travagem do reboque em bom estado de funcionamento |
Verificar se o sistema de travagem está a comunicar com o simulador e que a mensagem EBS 22 (byte 4 e bites 3-4) é do tipo 00b. |
|
Introduzir uma avaria na transmissão elétrica do comando do sistema de travagem do reboque que impeça que se mantenha pelo menos 30 % do desempenho da travagem prescrito |
Verificar se a mensagem EBS 22 (byte 4 e bits 3-4) é do tipo 01b ou A comunicação de dados ao simulador foram cortadas |
4.2.2.2. Aviso de avaria
4.2.2.2.1. Verificar se a mensagem ou sinal de aviso adequada é transmitida nas seguintes condições:
|
4.2.2.2.1.1. |
Quando uma avaria permanente na transmissão elétrica do comando do sistema de travagem do reboque impedir o desempenho da travagem de serviço, simular essa avaria e verificar se a EBS 22 (byte 2 e bits 3-4) transmitida pelo reboque é do tipo 01b. Deve também ser transmitido um sinal através do pino 5 do conector ISO 7638 (sinal de aviso amarelo). |
|
4.2.2.2.1.2. |
Reduzir a tensão nos pinos 1 e 2 do conector ISO 7638 até um valor inferior ao fixado pelo fabricante que impeça o desempenho do sistema de travagem de serviço e verificar se a EBS 22 (byte 2 e bits 3-4) transmitida pelo reboque é do tipo 01b. Deve também ser transmitido um sinal através do pino 5 do conector ISO 7638 (sinal de aviso amarelo). |
|
4.2.2.2.1.3. |
Verificar a conformidade com o disposto no ponto 5.2.2.16 do presente regulamento, isolando a conduta de alimentação. Reduzir a pressão no sistema de armazenamento de pressão do reboque para o valor fixado pelo fabricante. Verificar se a EBS 22 (byte 2 e bits 3-4) transmitida pelo reboque é do tipo 01b e se a EBS 23 (byte 1 e bites 7-8) é do tipo 00. Deve também ser transmitido um sinal através do pino 5 do conector ISO 7638 (sinal de aviso amarelo). |
|
4.2.2.2.1.4. |
Quando a parte elétrica do equipamento de travagem é colocada sob tensão pela primeira vez, verificar se a EBS 22 (byte 2 e bits 3-4) transmitida pelo reboque é do tipo 01b. Depois de o sistema de travagem verificar que não existe qualquer avaria que exija identificação pelo sinal de aviso vermelho, a mensagem acima indicada deve ser do tipo 00b. |
4.2.2.3. Verificação do tempo de resposta
4.2.2.3.1. Verificar se, na ausência de avarias, são respeitados os requisitos de resposta do sistema de travagem definidos no ponto 3.5.2 do anexo 6 do presente regulamento.
4.2.2.4. Travagem comandada automaticamente
No caso de um reboque incluir uma função cujo funcionamento dê origem a uma intervenção de travagem comandada automaticamente, devem verificar-se os seguintes aspetos:
Se não se produzir uma intervenção de travagem comandada automaticamente, verificar se a mensagem EBS 22 byte 4 bits 5 a 6 é do tipo 00.
Simular uma intervenção de travagem comandada automaticamente e, quando a desaceleração resultante for ≥0,7 m/seg2, verificar se a mensagem EBS 22 (byte 4 e bits 5-6) é do tipo 01.
4.2.2.5. Função de estabilidade do veículo
No caso de um reboque equipado com uma função de estabilidade do veículo, deve proceder-se ao controlo dos seguintes aspetos:
Quando a função de estabilidade do veículo estiver inativa, verificar se a mensagem EBS 21 (byte 2 e bits 1-2) é do tipo 00.
Simular uma intervenção da função de controlo da estabilidade do veículo conforme indicado no ponto 2.2.4 do anexo 21 e verificar se a mensagem EBS 21 byte 2 bits 1 a 2 é do tipo 01.
4.2.2.6. Suporte à linha de comando elétrica
Se o sistema de travagem do reboque não suportar a travagem por intermédio da linha de comando elétrica, verificar se a mensagem EBS 22 byte 4 bits 7 a 8 é do tipo 00.
Se o sistema de travagem do reboque apoiar a linha de comando elétrica, verificar se a mensagem EBS 22 byte 4 bits 7 a 8 é do tipo 01.
4.2.3. Verificações complementares
4.2.3.1. Se assim o entender, o serviço técnico pode repetir os procedimentos de verificação acima definidos com as mensagens de não travagem pertinentes para a interface em estados diferentes ou desligados.
Quando se repetem as medições do tempo de resposta do sistema de travagem, podem ocorrer variações no valor registado devido à reação dos pneus do veículo. Os requisitos prescritos para o tempo de resposta devem ser sempre cumpridos.
4.2.3.2. O ponto 2.4.2 do anexo 16 define mensagens suplementares que devem ser suportadas pelo reboque em circunstâncias específicas. Podem efetuar-se verificações suplementares para controlar o estado das mensagens suportadas, a fim de garantir o cumprimento dos requisitos constantes do ponto 5.1.3.6.2 do regulamento.
(1) Esta especificação do veículo está proibida pela nota de rodapé 4 do ponto 5.1.3.1.3 do presente regulamento.
(2) Opcional em veículos tratores com linhas de comando elétricas e pneumática quando a linha de comando pneumática cumprir os requisitos aplicáveis da travagem de emergência.
ANEXO 18
REQUISITOS ESPECIAIS A APLICAR AOS ASPETOS DE SEGURANÇA DOS SISTEMAS COMPLEXOS DE COMANDO ELETRÓNICO DE VEÍCULOS
1. GENERALIDADES
O presente anexo enuncia os requisitos especiais para a documentação, a estratégia de deteção e verificação de anomalias no tocante aos aspetos de segurança dos sistemas complexos de comando eletrónico de veículos (ponto 2.3) no que se refere ao presente regulamento.
O presente anexo pode também servir de referência a disposições especiais constantes do presente regulamento relativas a funções associadas à segurança comandadas por sistemas eletrónicos.
O presente anexo não especifica os critérios de desempenho para o «sistema», mas contempla a metodologia aplicada no processo de conceção e a informação que deve obrigatoriamente ser transmitida ao serviço técnico para efeitos de homologação.
Esta informação demonstra que o «sistema» cumpre, tanto em condições normais como de avaria, todos os requisitos de desempenho especificados noutras partes do presente regulamento.
2. DEFINIÇÕES
Para efeitos do presente anexo, entende-se por:
|
2.1. |
«Conceito de segurança», uma descrição das medidas incorporadas no sistema, por exemplo, nas unidades eletrónicas, por forma a controlar a integridade do sistema e, deste modo, assegurar um bom funcionamento mesmo em caso de avaria elétrica. A possibilidade de retorno a um funcionamento parcial ou mesmo de se recorrer a um sistema de reserva para funções vitais do veículo pode estar contemplada neste conceito de segurança. |
|
2.2. |
«Sistema de comando eletrónico», uma combinação de unidades, concebidas para cooperar na execução da função de comando do referido veículo mediante o processamento eletrónico de dados. Tais sistemas, frequentemente comandados por software, são construídos a partir de componentes funcionais discretos, tais como sensores, unidades de controlo eletrónico de comando e atuadores, sendo conectados por ligações de transmissão. Podem incluir elementos mecânicos, eletropneumáticos ou eletro-hidráulicos. O «sistema», a que se faz referência no presente anexo, é aquele que é objeto do pedido de homologação. |
|
2.3. |
«Sistemas complexos de comando eletrónico de veículos», sistemas de comando eletrónico que estão sujeitos a uma hierarquia de comando, na qual uma função comandada pode ser suplantada por uma função/sistema de comando eletrónico de nível superior. Uma função que é suplantada torna-se parte integrante do sistema complexo. |
|
2.4. |
«Comando de nível superior», sistemas/funções que utilizam dispositivos adicionais de processamento e/ou de deteção para modificar o comportamento do veículo ao determinarem variações nas funções normais do sistema de comando do veículo. Deste modo, os sistemas complexos podem mudar automaticamente os seus objetivos segundo uma ordem de prioridade que depende das circunstâncias detetadas. |
|
2.5. |
«Unidades», as mais pequenas divisões de componentes do sistema em consideração no presente anexo, uma vez que estas combinações de componentes serão tratadas como entidades únicas para efeitos de identificação, análise ou substituição. |
|
2.6. |
«Ligações de transmissão», os meios utilizados para interconectar as diferentes unidades para efeitos de transmissão de sinais e de dados operacionais ou de alimentação de energia. Este equipamento é geralmente elétrico, mas pode, em certa medida, ser ótico, pneumático, hidráulico ou mecânico. |
|
2.7. |
«Alcance do comando», uma variável de resultado que define o raio até onde o sistema é suscetível de exercer controlo. |
|
2.8. |
«Limite de funcionamento», os limites físicos exteriores no âmbito dos quais o sistema tem capacidade para assegurar a função de comando. |
3. DOCUMENTAÇÃO
3.1. Requisitos
O fabricante deve fornecer um dossiê que documente a conceção de base do «sistema» e os meios pelos quais este está ligado a outros sistemas do veículo ou pelos quais controla diretamente variáveis de resultado.
As funções do «sistema» e o conceito de segurança, tal como definidos pelo fabricante, devem ser explicados.
A documentação deve ser concisa, sem deixar de demonstrar que a conceção e o desenvolvimento beneficiaram do conhecimento especializado proveniente de todos os domínios do sistema envolvidos.
Para efeitos de inspeção técnica periódica, a documentação deve indicar o modo como se pode verificar o estado de funcionamento do «sistema».
3.1.1. A documentação deve ser disponibilizada em duas partes:
|
a) |
O dossiê oficial de homologação, com os documentos enumerados no ponto 3 (à exceção dos documentos indicados no ponto 3.4.4 abaixo), que deve ser fornecido ao serviço técnico aquando da apresentação do pedido de homologação. Estes dados constituirão a referência de base para o processo de verificação enunciado no ponto 4 do presente anexo. |
|
b) |
O material adicional e os dados de análise referidos no ponto 3.4.4 abaixo devem ficar na posse do fabricante, sendo, porém, facultados para inspeção aquando da homologação. |
3.2. Descrição das funções do «sistema»
Deve ser apresentada uma descrição que explique, de forma simples, as funções de comando do «sistema» e os métodos empregues para atingir os objetivos, acompanhada de uma declaração sobre os mecanismos pelos quais é exercido o controlo.
3.2.1. Deve ser fornecida uma lista de todas as variáveis, com a definição do respetivo alcance de operação.
3.2.2. Deve ser fornecida uma lista de todas as variáveis de resultado controladas pelo «sistema», com indicação, em cada caso, se o controlo é direto ou se é exercido através de outro sistema do veículo. Deve ser definido o alcance do controlo (ponto 2.7) exercido em relação a cada uma dessas variáveis.
3.2.3. Os limites que demarcam as fronteiras para o funcionamento (ponto 2.8 anterior) devem ser indicados, se tal for pertinente para o desempenho do sistema.
3.3. Descrição e esquema do sistema
3.3.1. Inventário de componentes
Deve ser fornecida uma lista que confira todas as unidades do «sistema» e mencione os demais sistemas do veículo necessários para realizar a função de comando em questão.
Deve ser fornecido um esquema que mostre essas unidades em combinação, que dê precisões sobre a distribuição dos elementos do equipamento e mostre com clareza as interconexões entre esses mesmos elementos.
3.3.2. Funções das unidades
Deve ser definida a função de cada unidade do «sistema» e indicados os sinais que ligam cada unidade às outras unidades e aos demais sistemas do veículo. Esta informação pode ser fornecida por meio de um diagrama de blocos com legendas, ou por uma descrição sustentada num diagrama desse tipo.
3.3.3. Interconexões
As interconexões no interior do «sistema» devem ser indicadas por meio de um diagrama de circuito para as ligações de transmissão elétricas, por um diagrama de fibra ótica para as ligações óticas, por um diagrama de rede para o equipamento de transmissão pneumático ou hidráulico e por um diagrama simplificado para as ligações mecânicas.
3.3.4. Fluxograma de sinais e prioridades
Tem de haver uma correspondência clara entre estas ligações de transmissão e os sinais veiculados entre as unidades.
As prioridades dos sinais são indicadas em canais de dados multiplexados, sempre que a prioridade possa ter uma incidência no desempenho ou na segurança no que ao presente regulamento diz respeito.
3.3.5. Identificação das unidades
Cada unidade deve ser identificável com clareza e sem ambiguidade (p. ex. por meio de uma marcação para o hardware e uma marcação ou um sinal informático para o conteúdo de software), de molde a estabelecer correspondência entre o hardware e a documentação.
Quando houver funções combinadas dentro de uma mesma unidade ou mesmo dentro de um mesmo computador, mas que sejam mostradas em blocos múltiplos no diagrama de blocos para maior clareza e facilidade de explicação, utiliza-se uma única marcação de identificação do hardware.
Com a utilização desta identificação, o fabricante declara que o equipamento fornecido é conforme ao documento correspondente.
3.3.5.1. A marca de identificação define a versão do hardware e do software, e, sempre que a versão deste mudar de molde a alterar a função da unidade com relação ao presente regulamento, essa marca de identificação deve também ser mudada.
3.4. Conceito de segurança do fabricante
3.4.1. O fabricante deve fornecer uma declaração na qual afirme que a estratégia escolhida para realizar os objetivos do «sistema» não comprometerá, em condições de ausência de avarias, o funcionamento seguro dos sistemas abrangidos pelas disposições do presente regulamento.
3.4.2. Com respeito ao software utilizado no «sistema», deve ser dada uma explicação da respetiva arquitetura e identificados os métodos e ferramentas de conceção. O fabricante deve estar preparado para, se lhe for pedido, demonstrar, com base em comprovativos, como esses elementos determinaram a realização da lógica do sistema durante a conceção e o processo de desenvolvimento.
3.4.3. O fabricante deve fornecer aos serviços técnicos uma explicação das prescrições de conceção incorporadas no «sistema», por forma a assegurar um bom funcionamento em condições de avaria. Exemplos de prescrições de conceção em caso de avaria do «sistema»:
|
a) |
retorno ao modo de funcionamento com recurso a um sistema parcial; |
|
b) |
passagem para um sistema de reserva distinto; |
|
c) |
supressão da função de nível superior. |
Em caso de avaria, o condutor deve ser avisado, por exemplo, por meio de sinal de aviso ou afixação de uma mensagem. Quando o sistema não for desativado pelo condutor, por exemplo rodando a ignição da posição de contacto («marcha») para a posição «off», ou desligando essa função específica se houver um interruptor especial para o efeito, o sinal de alarme deve permanecer ativo enquanto persistir a avaria.
3.4.3.1. Se a opção escolhida selecionar um modo de funcionamento de desempenho parcial em determinadas condições de avaria, então estas condições devem ser especificadas e definidos os limites de eficácia que delas resultam.
3.4.3.2. Se a opção escolhida selecionar um meio secundário (de reserva) para realizar o objetivo do sistema de comando do veículo, devem ser explicados os princípios do mecanismo de comutação, a lógica e o nível de redundância, assim como qualquer dispositivo integrado de verificação, bem como definidos os limites de eficácia que daí resultam para esse meio secundário (reserva).
3.4.3.3. Se a opção escolhida selecionar a supressão da função de nível superior, todos os sinais de controlo de saída relacionados com esta função serão inibidos, de forma a que se limitem as perturbações transitórias.
3.4.4. A documentação deve ser acompanhada de uma análise que demonstre, em termos globais, o modo como o sistema se comportará na ocorrência de qualquer uma das anomalias especificadas que tenham incidência no desempenho ou na segurança do comando do veículo.
Para o efeito, pode-se tomar como base a Failure Mode and Effect Analysis (FMEA — Análise dos Modos de Anomalia, Efeitos e sua Criticidade) e a Fault Tree Analysis (FTA — Análise da Árvore de Anomalias), ou qualquer outro processo adaptado às condições de segurança do sistema.
As abordagens analíticas escolhidas devem ser definidas e mantidas pelo fabricante e disponibilizadas para inspeção pelo serviço técnico aquando da homologação.
3.4.4.1. A documentação deve enumerar os parâmetros que são monitorizados e definir, em relação a cada condição de avaria do tipo definido no ponto 3.4.4 anterior, o sinal de aviso que deve ser dado ao condutor e/ou ao pessoal do serviço/inspeção técnica.
4. VERIFICAÇÕES E ENSAIOS
4.1. A utilização funcional do «sistema», tal como descrita nos documentos requeridos no ponto 3 anterior, deve ser ensaiada como segue:
4.1.1. Verificação da função do «sistema»
Para definir os níveis de funcionamento normais, deve ser conduzida a verificação do desempenho do sistema do veículo sob condições de ausência de anomalias em confronto com as especificações básicas de referência do fabricante, a menos que seja sujeito a um ensaio de desempenho especificado no âmbito do procedimento de homologação previsto por este ou outro regulamento.
4.1.2. Verificação do conceito de segurança do ponto 3.4 anterior
A reação do «sistema» deve, ao critério da entidade homologadora, ser verificada em condições de avaria em qualquer uma das unidades, aplicando os sinais de saída correspondentes às unidades elétricas ou elementos mecânicos no intuito de simular os efeitos das avarias internas da unidade.
4.1.2.1. Os resultados da verificação devem corresponder ao resumo documentado da análise de avarias, a um tal nível de efeito global que permita confirmar que o conceito de segurança e a execução são os adequados.
ANEXO 19
ENSAIOS DE DESEMPENHO DOS COMPONENTES DOS SISTEMAS DE TRAVAGEM
PARTE 1
Ensaio de desempenho dos componentes de travagem do reboque
1. GENERALIDADES
1.1. A parte 1 define os procedimentos de ensaio aplicáveis na definição do desempenho dos seguintes elementos:
|
1.1.1. |
Câmaras de travões de diafragma (ver ponto 2). |
|
1.1.2. |
Travões de mola (ver ponto 3). |
|
1.1.3. |
Travões de reboque — características de desempenho a frio (ver ponto 4). |
|
1.1.4. |
Sistemas de travagem antibloqueio (ver ponto 5) Nota: Os procedimentos de ensaio para determinar a perda de desempenho dos travões dos reboques e dos dispositivos de regulação automática do desgaste dos travões encontram-se definidos no anexo 11 do presente regulamento. |
|
1.1.5. |
Função de estabilidade do veículo (ver ponto 6). |
1.2. Os relatórios dos ensaios acima mencionados podem ser utilizados juntamente com os procedimentos definidos no anexo 20 do presente regulamento ou aquando da avaliação de um reboque que está a ser submetido aos requisitos reais de desempenho definidos para esse reboque.
2. CARACTERÍSTICAS DE DESEMPENHO DAS CÂMARAS DE TRAVÕES DE DIAFRAGMA
2.1. Generalidades
2.1.1. O presente ponto define o procedimento que permite determinar as características de impulso/curso/pressão para as câmaras de travões de diafragma que são utilizadas em sistemas de travagem a ar comprimido (1) para gerar as forças necessárias aos travões com acionamento mecânico.
Para efeitos deste procedimento de verificação, considera-se que a parte de travão de serviço de um dispositivo combinado de acionamento dos travões de mola é uma câmara de travões de diafragma.
2.1.2. As características de desempenho pelo fabricante devem ser utilizadas em todos os cálculos referentes aos requisitos de compatibilidade dos travões mencionados no anexo 10, aos requisitos de desempenho da travagem de serviço a frio do tipo 0 mencionados no anexo 20 e à determinação do curso do atuador disponível no que respeita à verificação do desempenho a quente mencionado no anexo 11.
2.2. Procedimento de ensaio
2.2.1. A posição zero da câmara do travão deve ser considerada como a posição sem pressão.
2.2.2. Com aumentos da pressão nominal ≤100 kPa, através de uma gama de pressões entre 100 e ≥800 kPa, deve monitorizar-se o impulso correspondente produzido em toda a gama do curso disponível para uma velocidade de deslocação ≤10 mm/s ou um aumento do curso de ≤10 mm, ao mesmo tempo que se impede que a pressão aplicada varie mais do que ± 5 kPa.
2.2.3. Para cada aumento da pressão, o impulso médio correspondente (ThA) e o curso efetivo (sp) serão determinados em conformidade com o apêndice 9 do presente anexo.
2.3. Verificação
2.3.1. Em relação ao apêndice 1, pontos 3.1, 3.2, 3.3 e 3.4, do presente anexo, devem ser ensaiadas no mínimo seis amostras e elaborado um relatório de verificação, desde que sejam respeitados os requisitos dos pontos 2.3.2, 2.3.3 e 2.3.4 abaixo.
2.3.2. Quanto à verificação do impulso médio (ThA) — f(p), deve elaborar-se um gráfico que defina a variação aceitável do desempenho segundo o modelo apresentado no diagrama 1, que se baseia na relação, declarada pelos fabricantes, entre esforço e pressão. O fabricante deve também definir a categoria do reboque em que pode ser usada a câmara do travão, bem como a faixa de tolerância correspondente aplicada.
2.3.3 Deve verificar-se se a pressão (p15) necessária para gerar um curso da biela de 15 mm a partir da posição zero, com uma tolerância de ± 10 kPa, com um dos seguintes procedimentos de ensaio:
|
2.3.3.1 |
Utilizando a função declarada do impulso (ThA) — f(p), deve calcular-se a pressão-limiar da câmara do travão (p15), quando ThA = 0. Deve, então, verificar-se se, quando esta pressão-limiar é aplicada, se produz um curso da biela conforme definido no ponto 2.3.3 anterior. |
|
2.3.3.2. |
O fabricante deve declarar a pressão-limiar da câmara do travão (p15), devendo verificar-se se, ao aplicar esta pressão, se produz o curso da biela conforme definido no ponto 2.3.3 anterior. |
2.3.4. Relativamente à verificação do curso efetivo (sp) — f(p), o valor medido não deve ser inferior em mais de –4 % às características sp na gama de pressões declarada pelo fabricante. Este valor deve ser registado e especificado no ponto 3.3.1 do apêndice 1 do presente anexo. Fora desta gama de pressões, a tolerância pode exceder –4 %.
Diagrama 1

2.3.5. Os resultados do ensaio devem ser registados num formulário cujo modelo é apresentado no apêndice 2 do presente anexo, devendo ser apensos ao relatório de verificação, descrito no ponto 2.4 abaixo.
2.4. Relatório de verificação
2.4.1. As características de desempenho declaradas pelo fabricante, verificadas pelos resultados do ensaio registados em conformidade com o ponto 2.3.2 anterior, devem ser registadas num formulário cujo modelo é apresentado no apêndice 1 do presente anexo.
3. CARACTERÍSTICAS DE DESEMPENHO DOS TRAVÕES DE MOLA
3.1. Generalidades
3.1.1. O presente ponto define o procedimento que permite determinar as características de impulso/curso/pressão para os travões de mola (2) que são utilizados em sistemas de travagem a ar comprimido para gerar as forças que o acionamento mecânico exige aos travões.
Para efeitos deste procedimento de verificação, considera-se que a parte do travão de mola de um dispositivo combinado de acionamento dos travões de mola é um travão de mola.
3.1.2. As características de desempenho declaradas pelo fabricante devem ser utilizadas em todos os cálculos referentes aos requisitos de desempenho da travagem de estacionamento mencionados no anexo 20.
3.2. Procedimento de ensaio
3.2.1. A posição zero da câmara do travão de mola deve ser considerada como a posição sob pressão total.
3.2.2. Com aumentos do curso nominal de ≤10 mm, deve monitorizar-se o impulso correspondente produzido em toda a gama do curso disponível à pressão zero.
3.2.3. A pressão deve, então, ser gradualmente aumentada até que o curso esteja a 10 mm da posição zero, e esta pressão, definida como a pressão de desativação, deve ser registada.
3.2.4. A pressão deve, então, ser aumentada até 850 kPa ou até à pressão máxima de funcionamento declarada pelo fabricante, se esta for menor.
3.3. Verificação:
3.3.1. Em relação ao apêndice 3, pontos 2.1, 3.1, 3.2 e 3.3, do presente anexo devem ser ensaiadas no mínimo seis amostras e elaborado um relatório de verificação, desde que sejam respeitadas as seguintes condições:
|
3.3.1.1. |
Numa gama de curso compreendida entre 10 mm e 2/3 do curso máximo, nenhum resultado, medido em conformidade com o ponto 3.2.2 anterior, se deve desviar mais de 6 % das características declaradas. |
|
3.3.1.2. |
Nenhum resultado, medido em conformidade com o ponto 3.2.3 anterior, deve exceder o valor declarado. |
|
3.3.1.3. |
Cada travão de mola deve continuar a funcionar corretamente após a conclusão do ensaio em conformidade com o ponto 3.2.4 anterior |
3.3.2. Os resultados do ensaio devem ser registados num formulário cujo modelo é apresentado no apêndice 4 do presente anexo, devendo ser apensos ao relatório de verificação, descrito no ponto 3.4 abaixo.
3.4. Relatório de verificação
3.4.1. As características de desempenho declaradas pelo fabricante, verificadas pelos resultados do ensaio registados em conformidade com o ponto 3.3.2 anterior, devem ser registadas num formulário cujo modelo é apresentado no apêndice 3 do presente anexo.
4. CARACTERÍSTICAS DE DESEMPENHO A FRIO DOS TRAVÕES DE REBOQUES
4.1. Generalidades
4.1.1. Este procedimento abrange o ensaio das características de desempenho «a frio» dos travões pneumáticos de cames em S ou travões de disco (3) instalados em reboques.
4.1.2. As características de desempenho declaradas pelo fabricante devem ser utilizadas para todos os cálculos referentes aos requisitos de compatibilidade de travagem do anexo 10 e aos requisitos do anexo 20 respeitantes ao desempenho da travagem de serviço a frio e da travagem de estacionamento (tipo 0).
4.2. Fator de travagem e binário-limiar do travão
4.2.1. Deve preparar-se o travão em conformidade com o ponto 4.4.2 do presente anexo.
4.2.2. Determina-se o fator de travagem usando a seguinte fórmula:

que deve ser verificado para cada um dos materiais da guarnição ou da pastilha indicados no ponto 4.3.1.3 abaixo.
4.2.3. O binário-limiar do travão deve ser expresso de maneira a permanecer válido para as variações do acionamento do travão e é designado pelo símbolo Co.
4.2.4. Os valores de BF devem permanecer válidos nas variações dos seguintes parâmetros:
|
4.2.4.1. |
Massa por travão até à definida no ponto 4.3.1.5. |
|
4.2.4.2. |
Dimensões e características dos componentes externos utilizados para acionar o travão. |
|
4.2.4.3. |
Dimensões das rodas/pneus. |
4.3. Ficha de informações
4.3.1. O fabricante do travão deve fornecer ao serviço técnico pelo menos as seguintes informações:
|
4.3.1.1 |
Uma descrição do tipo, modelo, dimensão, etc. do travão. |
|
4.3.1.2 |
Pormenores da geometria do travão |
|
4.3.1.3. |
A marca e o tipo de guarnição(ões) ou de pastilha(s) do travão. |
|
4.3.1.4. |
Material do tambor ou disco do travão |
|
4.3.1.5. |
Massa máxima tecnicamente admissível para o travão |
4.3.2. Informações suplementares
4.3.2.1. Dimensão das rodas e dos pneus a utilizar no ensaio
4.3.2.2. O factor de travagem declarado BF
4.3.2.3. O binário-limiar declarado C0,dec
4.4. Procedimento de ensaio
4.4.1. Preparação
4.4.1.1. Deve elaborar-se um gráfico que defina a variação de desempenho aceitável, segundo o modelo apresentado no diagrama 2, utilizando o fator de travagem declarado pelo fabricante.
4.4.1.2. Deve calibrar-se o desempenho do dispositivo utilizado para acionar o travão com uma exatidão de 1 %.
4.4.1.3. Deve determinar-se o raio dinâmico do pneu à carga de ensaio conforme prescrito para o método de ensaio.
4.4.2. Procedimento de rodagem (de desgaste)
4.4.2.1. No caso de travões de tambor, os ensaios devem começar com guarnições de travões e tambores novos, as guarnições devem ser maquinadas para proporcionar o melhor contacto inicial possível entre as guarnições e os tambores.
4.4.2.2. No caso dos travões de disco, os ensaios devem começar com pastilhas e discos novos, ficando ao critério do fabricante de travões a maquinagem do material das pastilhas.
4.4.2.3. Travar 20 vezes a partir de uma velocidade inicial de 60 km/h, exercendo sobre o travão uma força teoricamente equivalente a 0,3 TR/massa de ensaio. A temperatura inicial na interface guarnição/tambor ou pastilha/disco não deve ultrapassar 100 °C antes de cada acionamento dos travões.
4.4.2.4. Efetuar 30 acionamentos dos travões passando de uma velocidade de 60 km/h a 30 km/h e exercendo sobre o travão uma força equivalente a 0,3 TR/massa de ensaio, a intervalos de 60 s (4). A temperatura inicial da interface guarnição/tambor ou pastilha/disco no primeiro acionamento dos travões não deve ultrapassar 100 °C.
4.4.2.5. Depois de efetuados acionamentos dos travões referidos no ponto 4.4.2.4 anterior e após um intervalo de 120 s, proceder a cinco acionamentos dos travões de 60 km/h para 30 km/h e exercendo sobre o travão uma força equivalente a 0,3 TR/massa de ensaio, a intervalos de 120 s (4)
4.4.2.6. Travar 20 vezes a partir de uma velocidade inicial de 60 km/h, exercendo sobre o travão uma força equivalente a 0,3 TR/massa de ensaio. A temperatura inicial na interface guarnição/tambor ou pastilha/disco não deve ultrapassar 150°C antes de cada acionamento dos travões.
4.4.2.7. Proceder a uma verificação do desempenho do seguinte modo:
|
4.4.2.7.1. |
Calcular o binário de entrada de modo a obter valores teóricos de desempenho equivalentes a 0,2, 0,35 e 0,5 + 0,05 TR/massa de ensaio. |
|
4.4.2.7.2. |
Uma vez determinado o valor do binário de entrada para cada razão de travagem, esse valor deve permanecer constante em todos os acionamentos dos travões seguintes (por exemplo, pressão constante). |
|
4.4.2.7.3. |
Efetuar um acionamento dos travões com todos os binários de entrada determinados no ponto 4.4.2.7.1 a partir de uma velocidade inicial de 60 km/h. A temperatura inicial na interface guarnição/tambor ou pastilha/disco não deve ultrapassar 100 °C antes de cada acionamento dos travões. |
4.4.2.8. Repetir os procedimentos indicados nos pontos 4.4.2.6 e 4.4.2.7.3, sendo o ponto 4.4.2.6 opcional, até o desempenho de cinco medições não monotónicas consecutivas a um valor de entrada constante de 0,5 TR/massa de ensaio ter estabilizado com uma tolerância de menos 10 % do valor máximo.
4.4.2.9. Se o fabricante puder demonstrar, através de resultados dos ensaios de campo, que o fator de travagem após esta rodagem é diferente do fator de travagem obtido em estrada, é admissível um condicionamento suplementar.
A temperatura máxima de travagem, medida na interface guarnição/tambor ou pastilha/disco, durante esta rodagem suplementar, não deve exceder 500 °C no caso de travões de tambor e 700 °C no caso de travões de disco.
Este ensaio de campo deve ser um ensaio de resistência efetuado com o mesmo tipo e modelo de travão que o registado no relatório de ensaio do apêndice 3 do anexo 11. Os resultados de pelo menos três ensaios conformes ao disposto no ponto 4.4.3.4 seguinte, realizados nas condições de ensaio em carga do tipo 0 no ensaio de campo, devem constituir a base para determinar se é admissível um condicionamento suplementar. Os ensaios de travagem devem ser documentados conforme prescrito no apêndice 8 do presente anexo.
Os dados de todos os condicionamentos suplementares devem ser registados e apensos ao fator BF previsto no anexo 11, apêndice 3, ponto 2.3.1, especificando nomeadamente os seguintes parâmetros de ensaio:
|
a) |
pressão no atuador do travão, binário de acionamento do travão ou binário de travagem; |
|
b) |
velocidade no início e no fim do acionamento dos travões; |
|
c) |
tempo, em caso de velocidade constante; |
|
d) |
temperatura no início e no fim do acionamento dos travões ou da duração do ciclo de travagem. |
4.4.2.10. Caso este procedimento seja realizado num dinamómetro de inércia ou num dinamómetro de rolos, pode utilizar-se ar de arrefecimento sem restrições.
4.4.3. Ensaio de verificação
4.4.3.1. A temperatura medida na interface guarnição/tambor ou pastilha/disco não deve exceder 100 °C no início de cada acionamento dos travões.
4.4.3.2. Deve determinar-se o binário-limiar do travão a partir do valor medido do binário de entrada por referência a um dispositivo de entrada calibrado.
4.4.3.3. A velocidade inicial para todas as travagens é de 60 + 2 km/h.
4.4.3.4. Travar pelo menos seis vezes consecutivas, exercendo sobre o travão uma força a partir de 0,15 até 0,55 TR/(massa de ensaio) e aumentando progressivamente a pressão, travando em seguida seis vezes com as mesmas pressões, mas em sentido descendente.
4.4.3.5. Para cada acionamento dos travões mencionado no ponto 4.4.3.4 anterior, calcula-se a razão de travagem, corrigida a fim de ter em conta a resistência ao rolamento, que deve ser traçada no gráfico indicado no ponto 4.4.1.1 do presente anexo.
4.5. Métodos de ensaio
4.5.1. Ensaio em pista
4.5.1.1. O ensaio de desempenho da travagem deve ser efetuado num único eixo.
4.5.1.2. Os ensaios devem ser realizados numa pista horizontal e retilínea de piso com uma boa aderência quando não houver vento suscetível de afetar os resultados.
4.5.1.3. O reboque deve ser carregado (com a maior exatidão possível) com a massa máxima tecnicamente admissível para cada travão, podendo, todavia, ser adicionada, se necessário, uma massa suplementar para assegurar que existe uma massa suficiente sobre o eixo em ensaio para alcançar uma razão de travagem de 0,55 TR/(massa máxima tecnicamente admissível por travão) sem bloqueio da roda.
4.5.1.4. O raio de rolamento dinâmico do pneu pode ser verificado a baixa velocidade, <10 km/h, mediante a medição da distância percorrida em função das rotações da roda, sendo 10 o número mínimo de rotações necessárias para determinar o raio de rolamento dinâmico.
4.5.1.5. A resistência do conjunto de veículos ao rolamento deve ser determinada através da medição do tempo necessário para que a velocidade do veículo passe de 55 para 45 km/h, bem como da distância percorrida, quando o ensaio se realizar na mesma direção que o ensaio de verificação e com o motor desembraiado e qualquer sistema auxiliar de travagem igualmente desembraiado.
4.5.1.6. Apenas os travões do eixo em ensaio devem ser acionados e alcançar uma pressão de entrada no dispositivo do binário de entrada do travão de 90 ± 3 % (após um período máximo de aumento da pressão de 0,7 s) do seu valor assimptótico. O ensaio deve ser realizado com o motor desembraiado e qualquer sistema auxiliar de travagem desembraiado.
4.5.1.7. Os travões devem ser corretamente regulados no início do ensaio.
4.5.1.8. O binário de acionamento para efeitos do cálculo do binário-limiar do travão deve ser determinado mediante a elevação da roda e do acionamento gradual do travão enquanto a roda é rodada manualmente até se detetar resistência.
4.5.1.9. Deve determinar-se a velocidade final v2 em conformidade com o anexo 11, apêndice 2, ponto 3.1.5.
4.5.1.10. O desempenho da travagem do eixo em ensaio deve ser determinado mediante o cálculo da desaceleração a partir da medição direta de velocidade e da distância entre 0,8 v1 e v2, em que v2 não deve ser inferior a 0,1 v1. Considera-se que este valor é equivalente à desaceleração média totalmente desenvolvida conforme definido no anexo 4 do presente regulamento.
4.5.2. Ensaio com um dinamómetro de inércia
4.5.2.1. O ensaio deve ser efetuado num único travão.
4.5.2.2. A máquina de ensaio deve poder gerar a inércia exigida pelo ponto 4.5.2.5 do presente anexo.
4.5.2.3. A máquina de ensaio deve ser calibrada com uma exatidão de 2 % para a velocidade e o binário de travagem.
4.5.2.4. A aparelhagem utilizada no ensaio deve poder fornecer pelo menos os seguintes dados:
|
4.5.2.4.1. |
Um registo contínuo da pressão ou da força de acionamento dos travões; |
|
4.5.2.4.2. |
Um registo contínuo do binário de travagem; |
|
4.5.2.4.3. |
Um registo contínuo da temperatura medida na interface guarnição/tambor ou pastilha/disco. |
|
4.5.2.4.4. |
Velocidade durante o ensaio. |
4.5.2.5. A inércia (IT) do dinamómetro deve ser regulada de forma a reproduzir o mais fielmente possível, com uma tolerância de ± 5 %, incluindo o atrito interno do dinamómetro, a parte da inércia linear do veículo que atua sobre uma roda, necessária a um desempenho de 0,55 TR/(massa máxima tecnicamente admissível), de acordo com a seguinte fórmula:
IT = Pd × R2
em que:
|
IT |
= |
inércia de rotação efetiva (kgm (2)); |
|
R |
= |
raio de rolamento do pneu definido pela fórmula 0,485 D, |
|
D |
= |
d + 2H (5) |
|
d |
= |
valor convencional do diâmetro da jante (mm), |
|
H |
= |
altura da secção nominal (mm) = S1 × 0,01 Ra |
|
S1 |
= |
largura da secção (mm), |
|
Ra |
= |
relação de aspeto nominal, |
|
Pd |
= |
massa máxima tecnicamente admissível/travão na aceção do ponto 4.3.1.5 anterior. |
4.5.2.6. Pode utilizar-se ar de arrefecimento à temperatura ambiente, soprando a uma velocidade não superior a 0,33 v perpendicularmente ao eixo de rotação do travão.
4.5.2.7. O travão deve ser corretamente regulado no início do ensaio.
4.5.2.8. O binário de entrada para efeitos de cálculo do binário-limiar do travão deve ser determinado pelo acionamento gradual do travão até se observar o início da produção do binário de travagem.
4.5.2.9. Deve determinar-se o desempenho da travagem aplicando a seguinte fórmula ao binário de travagem medido:

em que:
|
Mt |
= |
binário médio de travagem (Nm) — com base na distância, |
|
g |
= |
desaceleração devida à gravidade (m/s2). |
Deve calcular-se o binário médio de travagem (Mt) a partir da desaceleração determinada pela medição direta da velocidade e da distância entre 0,8 v1 e 0,1 v1. Considera-se que este valor é equivalente à desaceleração média totalmente desenvolvida conforme definido no anexo 4 do presente regulamento.
4.5.3. Ensaio em dinamómetro de rolos
4.5.3.1. O ensaio deve ser realizado num único eixo com um ou dois travões.
4.5.3.2. A máquina de ensaio deve dispor de sistema calibrado que permita simular a massa necessária para que o travão seja ensaiado.
4.5.3.3. A máquina de ensaio deve estar calibrada, em termos de velocidade e binário de travagem, com uma exatidão de 2 % tendo em conta as características de atrito interno. O raio de rolamento dinâmico do pneu (R) deve ser determinado pela medição da velocidade de rotação do dinamómetro de rolos e das rodas não travadas do eixo ensaiado a uma velocidade equivalente a 60 km/h e calculada pela fórmula

em que:
|
RR |
= |
raio do dinamómetro de rolos |
|
nD |
= |
velocidade (de rotação) do dinamómetro de rolos |
|
nw |
= |
velocidade de rotação das rodas não travadas do eixo |
4.5.3.4. Pode utilizar-se ar de arrefecimento à temperatura ambiente, soprando a uma velocidade não superior a 0,33 v sobre o travão.
4.5.3.5. Os travões devem ser corretamente regulados no início do ensaio.
4.5.3.6. O binário de entrada para efeitos do cálculo do binário-limiar do travão deve ser determinado pelo acionamento gradual dos travões até ao início do binário de travagem.
4.5.3.7. Deve determinar-se o desempenho da travagem através da medição da força de travagem na periferia do pneu calculado em função da razão de travagem, tendo em conta a resistência ao rolamento. A resistência ao rolamento do eixo em carga é determinada pela medição da força na periferia do pneu a uma velocidade de 60 km/h.
O binário médio de travagem (Mt) deve basear-se nos valores medidos entre o momento em que a pressão/força de acionamento alcança o seu valor assimptótico a partir do início do aumento da pressão no binário de entrada e o momento em que a energia absorvida atinge o valor W60 definido no ponto 4.5.3.8.
4.5.3.8. Para determinar a razão de travagem, deve ser tida em conta uma energia absorvida W60 equivalente à energia cinética da massa correspondente para o travão em ensaio quando travado a partir de 60 km/h até à imobilização.
em que:

4.5.3.8.1. Se a velocidade de ensaio v não puder ser mantida a 60 ± 2 km/h durante a medição da razão de travagem, em conformidade com o ponto 4.5.3.8 anterior, deve determinar-se a razão de travagem a partir da medição direta da força de travagem FB e/ou do binário de travagem Mt, de modo que a medição destes parâmetros não seja afetada pelas forças dinâmicas da massa de inércia da máquina de ensaio do dinamómetro de rolos.
4.6. Relatório de verificação
4.6.1. As características de desempenho declaradas pelo fabricante, verificadas pelos resultados do ensaio registados em conformidade com o ponto 4.4.3 anterior, devem ser inscritas num formulário cujo modelo é apresentado no apêndice 3 do anexo 11.
Diagrama 2

5. SISTEMAS DE TRAVAGEM ANTIBLOQUEIO (ABS)
5.1. Generalidades
5.1.1. Este ponto define o procedimento para determinar o desempenho de um sistema de travagem antibloqueio de um reboque.
5.1.2. Considera-se que os ensaios realizados em reboques da categoria O4 abrangem os requisitos relativos a reboques da categoria O3.
5.2. Ficha de informações
5.2.1. O fabricante do ABS deve fornecer ao serviço técnico uma ficha de informações dos sistemas que exigem a verificação do desempenho. Essa ficha deve conter pelo menos as informações indicadas no apêndice 5 do presente anexo.
5.3. Definição dos veículos de ensaio
5.3.1. Com base nas informações fornecidas na ficha de informações, em especial as aplicações de reboques definidas no apêndice 5, ponto 2.1, o serviço técnico deve levar a cabo ensaios em reboques representativos que tenham no máximo três eixos e estejam equipados com o respetivo sistema de travagem/configuração antibloqueio. Além disso, ao selecionar os reboques a avaliar, devem também ter-se em conta os parâmetros enumerados nos pontos seguintes.
5.3.1.1. Tipo de suspensão: o método para avaliar o desempenho do sistema de travagem antibloqueio em função do tipo de suspensão é selecionado do seguinte modo:
|
|
Semirreboques: dentro de cada grupo de suspensões (por exemplo, suspensão mecânica), procede-se à avaliação de um reboque representativo. |
|
|
Reboques completos: procede-se à avaliação de um reboque representativo equipado com qualquer tipo de suspensão. |
5.3.1.2. Distância entre eixos: distância entre eixos: no caso dos semirreboques, a distância entre eixos não deve constituir um fator limitativo, mas no caso dos reboques completos, deve avaliar-se a distância entre eixos mais curta.
5.3.1.3. Tipo de travão: a homologação deve limitar-se aos travões de cames em S ou aos travões de disco, embora possam tornar-se necessários ensaios comparativos caso fiquem disponíveis outros tipos de travões.
5.3.1.4. Dispositivo sensor de carga: a utilização da aderência deve ser determinada com a válvula sensora de carga nas posições «em carga» e «sem carga». Devem aplicar-se, em todos os casos, os requisitos do anexo 13, ponto 2.7, do presente regulamento.
5.3.1.5. Acionamento dos travões: devem registar-se os diferenciais verificados no acionamento dos travões, que serão avaliados durante os ensaios de determinação da utilização da aderência. Os resultados obtidos nos ensaios de um determinado reboque podem ser extrapolados para outros reboques do mesmo tipo.
5.3.2. Para cada tipo de reboque submetido a ensaio, deve ser fornecida documentação que comprove a compatibilidade dos travões, conforme definido no anexo 10 do presente regulamento (diagramas 2 e 4) a fim de demonstrar a conformidade.
5.3.3. Para efeitos de homologação, deve considerar-se que os semirreboques e os reboques de eixo central constituem um mesmo modelo de veículo.
5.4. Programa de ensaio
5.4.1. Os ensaios seguintes devem ser realizados pelo serviço técnico nos veículos definidos no ponto 5.3 do presente anexo para cada configuração de ABS tomando em consideração a lista de aplicações indicada no apêndice 5, ponto 2.1, do presente anexo. Contudo, a referência ao caso mais desfavorável poderá dispensar a realização de determinados ensaios. Caso se opte pelo ensaio do caso mais desfavorável, é necessário mencionar o facto no relatório do ensaio.
5.4.1.1. Utilização da aderência — Os ensaios devem ser realizados de acordo com o procedimento definido no anexo 13, ponto 6.2, do presente regulamento para cada configuração de ABS e tipo de reboque, tal como definido na ficha de informações do fabricante (ver apêndice 5, ponto 2.1, do presente anexo).
5.4.1.2. Consumo de energia
5.4.1.2.1. Carga por eixo — Os reboques a testar devem ser carregados de forma que a carga por eixo seja de 2 500 kg + 200 kg ou de 35 % + 200 kg da carga estática admissível por eixo, se esta for menor.
5.4.1.2.2. Deve garantir-se que a «execução de ciclos completos» do sistema de travagem antibloqueio se pode alcançar durante os ensaios dinâmicos indicados no anexo 13, ponto 6.1.3, do presente regulamento.
5.4.1.2.3. Ensaio do consumo de energia — deve proceder-se ao ensaio de cada configuração de ABS de acordo com o procedimento descrito no anexo 13, ponto 6.1, do presente regulamento.
5.4.1.2.4. Para verificar a conformidade dos reboques submetidos a homologação com os requisitos aplicáveis no que respeita ao consumo de energia do sistema antibloqueio (ver anexo 13, ponto 6.1), devem realizar-se os seguintes controlos:
|
5.4.1.2.4.1. |
Antes de dar início ao ensaio do consumo de energia (ponto 5.4.1.2.3 anterior), no caso de travões sem regulação integrada do seu desgaste, os travões devem ser regulados para um estado em que a relação (Rl) entre o curso do veio do dispositivo de compressão da câmara do travão (sT) e o comprimento da alavanca do travão (lT) é de 0,2. Esta relação deve ser determinada para uma pressão na câmara do travão de 650 kPa. Exemplo:
No caso de travões com regulação automática integrada do seu desgaste, os travões devem ser regulados para a folga normal das guarnições especificada pelo fabricante. A regulação dos travões acima definida deve ser efetuada com os travões frios (< 100 °C). |
|
5.4.1.2.4.2. |
Com a válvula sensora de carga regulada na posição «em carga» e o nível inicial de energia regulado de acordo com o ponto 6.1.2 do anexo 13 do presente regulamento, devem isolar-se os dispositivos de armazenamento de energia de todas as realimentações de ar. Acionam-se os travões com uma pressão de comando de 650 kPa na cabeça de engate e soltam-se em seguida. Efetuam-se mais travagens até que a pressão nas câmaras dos travões iguale a obtida uma vez concluídos os ensaios previstos no anexo 13, pontos 6.1.3 e 6.1.4, do presente regulamento. Deve registar-se o número de acionamentos dos travões equivalentes (ner). O número equivalente de acionamentos dos travões em condições estáticas (ne) deve ser registado no relatório de ensaio. Em que ne = 1,2 · ner e é arredondado ao número inteiro mais próximo. |
5.4.1.3. Ensaio num piso de atrito desigual — Se um determinado sistema de travagem antibloqueio pertencer à categoria A, todas as configurações desse ABS devem cumprir os requisitos de desempenho especificados no anexo 13, ponto 6.3.2, do presente regulamento.
5.4.1.4. Desempenho a alta e a baixa velocidades
5.4.1.4.1. Com o reboque nas mesmas condições que para a avaliação da utilização da aderência, deve proceder-se à verificação do desempenho a alta e a baixa velocidades de acordo com o anexo 13, ponto 6.3.1, do presente regulamento.
5.4.1.4.2. Se existir uma tolerância entre o número de dentes do excitador e a circunferência do pneu, deve proceder-se a verificações funcionais nos extremos do intervalo de tolerância, em conformidade com o ponto 6.3 do anexo 13 do presente regulamento. Para o efeito, podem utilizar-se pneus de tamanhos diferentes ou fabricar excitadores especiais, que permitam simular frequências extremas.
5.4.1.5. Verificações complementares
Deve igualmente proceder-se às verificações suplementares a seguir descritas, com o veículo trator destravado e o reboque sem carga.
5.4.1.5.1. Quando um eixo ou grupo de eixos passar de um piso de elevada aderência (kH) para um piso de baixa aderência (kH), em que kH ≥0,5 e kH / kL ≥2, com uma pressão de comando de 650 kPa na cabeça de engate, as rodas comandadas diretamente não devem bloquear-se. A velocidade e o momento de acionamento dos travões do reboque devem ser calculados de forma que, com o sistema de travagem antibloqueio a efetuar um ciclo completo no piso de elevada aderência, a passagem de um piso para o outro ocorra a aproximadamente 80 km/h e 40 km/h.
5.4.1.5.2. Quando o reboque passar de um piso de baixa aderência (kL) para um piso de elevada aderência (kH), em que kH ≥0,5 e kH / kL ≥2, com uma pressão de comando de 650 kPa na cabeça de engate, a pressão nas câmaras dos travões deve aumentar, num intervalo de tempo razoável, para um valor elevado adequado e o reboque não deve desviar-se da sua trajetória inicial. A velocidade e o momento da travagem devem ser calculados de forma que, com o sistema de travagem antibloqueio a efetuar um ciclo completo no piso de baixa aderência, a passagem de um piso para o outro ocorra a aproximadamente 50 km/h.
5.4.1.6. A documentação relativa aos controladores deve ser disponibilizada conforme exigido no ponto 5.1.5 do regulamento e no anexo 13, ponto 4.1, do presente regulamento, incluindo a nota de rodapé 12.
5.5. Relatório de homologação
5.5.1. Deve elaborar-se um relatório de homologação, cujo teor é definido no apêndice 6 do presente anexo.
6. FUNÇÃO DE ESTABILIDADE DO VEÍCULO
6.1. Generalidades
6.1.1. O presente ponto define um método de ensaio para determinar as características dinâmicas de um veículo equipado com uma função de estabilidade do veículo constituída por pelo menos uma das seguintes funções:
|
a) |
controlo da direção; |
|
b) |
controlo da capotagem. |
6.2. Ficha de informações
6.2.1. O fabricante do sistema ou do veículo deve fornecer ao serviço técnico uma ficha de informações sobre as funções de controlo cujo desempenho deve ser verificado. Essa ficha deve conter pelo menos as informações indicadas no apêndice 7 do presente anexo.
6.3. Definição de veículos de ensaio
6.3.1. Com base nas funções de controlo da estabilidade e respetivas aplicações definidas na ficha de informações do fabricante, o serviço técnico deve efetuar a verificação do desempenho. Esta verificação pode incluir uma ou mais manobras dinâmicas, na aceção do anexo 21, ponto 2.2.3, do presente Regulamento, em reboques equipados com, no máximo, três eixos e que sejam representativos das aplicações definidas no ponto 2.1 da ficha de informações do fabricante.
6.3.1.1. Ao selecionar os reboques a avaliar, devem ter-se em conta também os seguintes aspetos:
|
a) |
tipo de suspensão: tipo de suspensão: para cada grupo de suspensões, p. ex., pneumática compensada, deve ser avaliado um reboque com essa especificação; |
|
b) |
distância entre eixos: a distância entre eixos não deve constituir um fator limitativo; |
|
c) |
tipo de travão: a homologação deve limitar-se aos reboques com travões de cames em S ou travões de disco, embora possam tornar-se necessários ensaios comparativos caso fiquem disponíveis outros tipos de travões; |
|
d) |
sistema de travagem: o sistema de travagem dos reboques a avaliar deve cumprir todos os requisitos aplicáveis do presente Regulamento. |
6.4. Programa de ensaio
6.4.1. Para avaliar a função de estabilidade do veículo, os ensaios utilizados devem ser acordados entre o fabricante do sistema/veículo e o serviço técnico e incluir condições, adequadas à função a avaliar, que resultariam, sem a intervenção da função de controlo da estabilidade, na perda do controlo da direção do veículo ou em capotagem. As manobras dinâmicas, as condições de ensaio e os resultados devem constar do relatório do ensaio.
6.5. Veículo trator
6.5.1. O veículo trator utilizado para avaliar o desempenho da função de estabilidade do veículo (reboque) deve dispor das ligações pneumáticas e elétricas necessárias e, se o veículo trator estiver equipado com uma função de estabilidade do veículo na aceção do ponto 2.34 do presente Regulamento, esta função deve estar desativada.
6.6. Relatório de ensaio
6.6.1. Deve elaborar-se um relatório de ensaio cujo conteúdo deve ser, no mínimo, o indicado no apêndice 8 do presente anexo.
PARTE 2
Ensaio de desempenho dos componentes de travagem do veículo a motor
1. GENERALIDADES
A parte 2 define os procedimentos de ensaio aplicáveis na definição do desempenho dos seguintes elementos:
1.1. Função de estabilidade do veículo.
1.1.1. Generalidades
1.1.1.1. O presente ponto define o procedimento destinado a determinar as características dinâmicas de um veículo equipado com uma função de estabilidade tal como definida no ponto 5.2.1.32 do presente regulamento.
1.1.2. Ficha de informações
1.1.2.1. O fabricante do sistema deve fornecer ao serviço técnico uma ficha de informações sobre as funções de controlo da estabilidade do veículo para o qual se requer a verificação do desempenho. Essa ficha deve conter pelo menos as informações indicadas no apêndice 11 do presente anexo e ser apensa ao relatório de ensaio.
1.1.3. Definição de veículos de ensaio
1.1.3.1. Com base nas funções de controlo da estabilidade e respetivas aplicações, definidas na ficha de informações do fabricante do sistema, o serviço técnico deve efetuar a verificação do desempenho tendo em conta o veículo. Esta verificação pode incluir uma ou mais manobras dinâmicas, na aceção do anexo 21, ponto 2.1.3, do presente Regulamento, em veículos a motor representativos das aplicações definidas no ponto 2.1 da ficha de informações fornecida pelo fabricante do sistema.
1.1.3.2. Ao selecionar os veículos a motor a avaliar, devem ter-se em conta também os seguintes aspetos:
|
a) |
sistema de travagem: o sistema de travagem dos veículos de ensaio a avaliar deve cumprir todos os requisitos aplicáveis do presente Regulamento; |
|
b) |
veículos das categorias M2, M3 N2 e N3; |
|
c) |
natureza do veículo; |
|
d) |
configurações de ABS (por exemplo, 4 × 2, 6 × 2, etc.): cada configuração deve ser avaliada; |
|
e) |
lado da circulação (pela direita ou pela esquerda) não constitui um fator limitativo — avaliação desnecessária; |
|
f) |
eixo direcional dianteiro único: não constitui um fator limitativo — avaliação desnecessária [ver alíneas g) e h)]; |
|
g) |
eixos direcionais suplementares (por exemplo, direção forçada, autodireção): a avaliar; |
|
h) |
desmultiplicação da direção: a avaliar — a programação de fim de série ou os sistemas de autoaprendizagem não constituem fatores limitativos; |
|
i) |
eixos motores: devem ser tidos em conta no que respeita ao uso (perda) do sinal dos sensores de velocidade das rodas para determinar a velocidade do veículo; |
|
j) |
eixos eleváveis: deve avaliar-se a deteção/controlo dos eixos eleváveis e o estado de elevação; |
|
k) |
gestão do motor: deve ser avaliada a compatibilidade da comunicação; |
|
l) |
tipo de caixa de velocidades (por exemplo, manual, manual automatizada, semiautomática ou automática): a avaliar; |
|
m) |
opções relativas à unidade de tração (por exemplo, um retardador): a avaliar; |
|
n) |
tipo de diferencial (por exemplo, normal ou autobloqueante): a avaliar; |
|
o) |
bloqueios do diferencial (selecionados pelo condutor): a avaliar; |
|
p) |
tipo de sistema de travagem (por exemplo, hidropneumático, pneumático): a avaliar; |
|
q) |
tipo de travão [disco, tambor (calço simples, calço duplo, came em S)]: não constitui um fator limitativo; se, no entanto, ficarem disponíveis outros tipos de travões, pode ser necessário proceder a ensaios comparativos; |
|
r) |
configurações de travagem antibloqueio: a avaliar; |
|
s) |
distância entre eixos: a avaliar; Se, por ocasião do ensaio, não estiverem disponíveis veículos cuja distância entre os eixos cumpra os valores mínimos e máximos especificados na ficha de informações, a verificação da distâncias entre eixos mínima e máxima pode ser efetuada utilizando os dados do ensaio do fabricante do sistema relativos a veículos reais, admitindo-se uma tolerância de 20 % relativamente à distância entre eixos efetiva dos veículos ensaiados pelo serviço técnico; |
|
t) |
tipo de roda (simples ou dupla): a incluir na ficha de informações do fabricante do sistema; |
|
u) |
tipo de pneu (por exemplo, a estrutura, a categoria de utilização, dimensão): a incluir na ficha de informações do fabricante do sistema; |
|
v) |
largura da via: não constitui um fator limitativo — abrangida pelas variações da avaliação do centro de gravidade; |
|
w) |
tipo de suspensão (por exemplo, pneumática, mecânica, borracha): a avaliar; |
|
x) |
altura do centro de gravidade: a avaliar; se, por ocasião do ensaio, não estiverem disponíveis veículos cujo centro de gravidade tenha uma altura máxima conforme à especificada na ficha de informações, a verificação da altura máxima do centro de gravidade pode ser efetuada utilizando os dados do ensaio do fabricante do sistema relativos a veículos reais, admitindo-se uma tolerância de 20 % relativa à altura máxima do centro de gravidade efetiva dos veículos ensaiados pelo serviço técnico; |
|
(y) |
posição do sensor de aceleração lateral: é necessário avaliar o gabarito de instalação especificado pelo fabricante do sistema; |
|
z) |
posição do sensor de velocidade angular de guinada: é necessário avaliar o gabarito de instalação especificado pelo fabricante do sistema. |
1.1.4. Programa de ensaio
1.1.4.1. Para avaliar a função de estabilidade do veículo, os ensaios utilizados devem ser acordados entre o fabricante do sistema e o serviço técnico e incluir condições, adequadas à função a avaliar, que resultariam, sem a intervenção da função de controlo da estabilidade, na perda do controlo da direção do veículo ou em capotagem. As manobras dinâmicas, as condições de ensaio e os resultados devem constar do relatório do ensaio.
A avaliação deve incluir o seguinte, conforme adequado:
|
1.1.4.1.1. |
Eixos direcionais suplementares Avaliar a influência de uma comparação dos resultados com o eixo no decurso normal do seu modo de direção com deficiência e com a orientação de modo que esta se torne um determinado eixo, a menos que se trate de um parâmetro de programação de fim de série. |
|
1.1.4.1.2. |
Desmultiplicação da direção É necessário realizar ensaios para determinar a eficácia de qualquer programação de fim de série ou autoaprendizagem utilizando vários veículos com desmultiplicações de direção diferentes, ou restringe-se a homologação às desmultiplicações efetivamente testadas. |
|
1.1.4.1.3. |
Eixos eleváveis É necessário realizar ensaios com o eixo elevável nas posições alta e baixa, avaliando-se a posição de deteção e a transferência do sinal a fim de comprovar que a variação da distância entre eixos foi reconhecida. |
|
1.1.4.1.4. |
Gestão do motor: É necessário demonstrar que o controlo do motor, ou de qualquer outra fonte de energia motriz, é independente da intervenção do condutor. |
|
1.1.4.1.5. |
Opções relativas à unidade de tração É necessário demonstrar as incidências das eventuais opções, por exemplo, que a gestão de um eventual dispositivo retardador é independente do condutor. |
|
1.1.4.1.6. |
Tipo de diferencial/bloqueio(s) do diferencial Efeito de bloqueio automático ou bloqueio selecionado pelo condutor, por exemplo, função mantida, reduzida ou desligada. |
|
1.1.4.1.7. |
Configurações de travagem antibloqueio É necessário ensaiar cada uma das configurações de travagem antibloqueio em pelo menos um veículo. Se a função de estabilidade do veículo estiver hospedada em sistemas diferentes (por exemplo, ABS ou EBS), os ensaios devem ser realizados em veículos com os diferentes sistemas hospedeiros. |
|
1.1.4.1.8. |
Tipo de suspensão Os veículos devem ser selecionados em função do tipo de suspensão (por exemplo, pneumática, mecânica, borracha) de cada eixo ou grupo de eixos. |
|
1.1.4.1.9. |
Altura do centro de gravidade Os ensaios devem ser realizados em veículos que admitam a regulação da altura do centro de gravidade, a fim de demonstrar que o controlo da capotagem se adapta a alterações na altura do centro de gravidade. |
|
1.1.4.1.10. |
Posição do sensor de aceleração lateral É necessário avaliar as incidências de instalar o sensor de aceleração lateral em diferentes posições no mesmo veículo, a fim de confirmar o gabarito de instalação especificado pelo fabricante do sistema. |
|
1.1.4.1.11. |
Posição do sensor de velocidade angular de guinada é necessário avaliar as incidências de instalar o sensor da velocidade angular de guinada em diferentes posições no mesmo veículo, a fim de confirmar o gabarito de instalação especificado pelo fabricante do sistema. |
|
1.1.4.1.12. |
Carga É necessário ensaiar os veículos carregados e sem carga/parcialmente carregados a fim de demonstrar que a função de estabilidade do veículo se adapta a diferentes condições de carga. No caso de tratores para semirreboques, os ensaios devem ser realizados do seguinte modo:
|
1.1.4.2. Avaliação de autocarros
Em alternativa, a avaliação de autocarros pode ser efetuada mediante a utilização de camiões com o mesmo tipo de sistema de travagem. No entanto, é necessário incluir pelo menos um autocarro no ensaio e no relatório subsequente.
1.1.5. Relatório de ensaio
1.1.5.1. Deve elaborar-se um relatório de ensaio cujo teor deve ser, no mínimo, o indicado no apêndice 12 do presente anexo.
(1) Podem ser homologadas câmaras de travões com conceções diferentes mediante apresentação de informação equivalente.
(2) Podem ser homologados travões de mola com conceções diferentes mediante apresentação de informação equivalente.
(3) Podem ser homologados travões com conceções diferentes mediante apresentação de informação equivalente.
(4) Caso se utilize o método de ensaio de pista ou os métodos de ensaio em dinamómetro de rolos, deve usar-se uma absorção de energia equivalente à especificada.
(5) Diâmetro exterior do pneu, tal como definido no Regulamento n.o 54.
Apêndice 1
Modelo de relatório de verificação das câmaras dos travões de diafragma
Relatório n.o …
1. Identificação …
1.1. Fabricante (nome e endereço): …
…
1.2. Marca: … (1)
1.3. Tipo: … (1)
1.4. Número da peça: … (1)
2. Condições de funcionamento:
2.1. Pressão máxima de funcionamento:
3. Características de desempenho declaradas pelo fabricante:
3.1. Curso máximo (smax) a uma pressão de 650 kPa … (2)
3.2. Impulso médio (ThA) — f(p) … (2)
3.3. Curso efetivo (sp) — f (p) … (2)
3.3.1. Gama de pressões acima da qual o curso efetivo é válido: (ver ponto 2.3.4 do anexo 19 — parte 1).
3.4. Pressão necessária para produzir um curso do veio do dispositivo de compressão de 15 mm (p15) com base em ThA — f(p) ou no valor declarado2. (2) (3)
4. Âmbito de aplicação
A câmara do travão pode ser utilizada em reboques das categorias O3 e O4 sim/não
A câmara do travão pode ser utilizada apenas em reboques da categoria O3 sim/não
5. Designação do serviço técnico/entidade homologadora que realizou o ensaio:
6. Data do ensaio: …
7. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 19 do Regulamento n.o 13, com a redação que lhe foi dada pela série …de alterações.
Serviço técnico (4) que realizou o ensaio
Assinatura: …Data: …
8. Entidade homologadora (5)
Assinatura: …Data: …
9. Documentação do ensaio:
Apêndice 2, …, …
(1) A marcar na câmara do travão, mas, para inclusão no relatório de ensaio, apenas se exige o número da peça precursora, não sendo necessário indicar as variantes dos modelos.
(2) Deve alterar-se a identificação quando se fizerem alterações que influenciem as características de desempenho, pontos 3.1, 3.2 e 3.3 do presente apêndice.
(3) Para efeitos da aplicação das características definidas no presente relatório no que diz respeito ao anexo 10, partir-se-á do princípio de que a relação entre p15 e a função ThA – f(p) declarada a uma pressão de 100 kPa é linear.
(4) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
(5) A elaborar para cada uma das seis amostras ensaiadas.
Apêndice 2
Modelo para o registo de resultados de ensaio das câmaras dos travões de diafragma
Relatório n.o…
|
1. |
Registo dos resultados de ensaio (1) para o número de peça … |
|
Pressão (2) p — (kPa) |
Impulso médio ThA — (N) |
Curso efetivo sp — (mm) |
|
|
|
|
(1) A elaborar para cada uma das seis amostras ensaiadas.
(2) A pressão «p» corresponde aos valores reais de pressão utilizados no ensaio, conforme definido no ponto 2.2.2 do presente anexo.
Apêndice 3
Modelo de relatório de verificação dos travões de mola
Relatório n.o …
1. Identificação: …
1.1. Fabricante (nome e endereço): …
…
1.2. Marca: … (1)
1.3. Tipo: … (1)
1.4. Número da peça: … (1)
2. Condições de funcionamento:
2.1. Pressão máxima de funcionamento:
3. Características de desempenho declaradas pelo fabricante:
3.1. Curso máximo (smax) … (2)
3.2. Impulso da mola (Ths) — f (s) … (2)
3.3. Pressão de desativação (com um curso de 10 mm) … (2)
4. Data do ensaio: …
5. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 19 do Regulamento n.o 13, com a redação que lhe foi dada pela série …de alterações.
Serviço técnico (3) que realizou o ensaio
Assinatura: …Data: …
6. Entidade homologadora (3)
Assinatura: …Data: …
7. Documentação do ensaio:
Apêndice 4, …, …
(1) A marcar no travão de mola, mas, para inclusão no relatório de ensaio, apenas se exige o número da peça precursora, não sendo necessário indicar as variantes de modelos.
(2) Deve alterar-se a identificação quando se fizerem alterações que influenciem as características de desempenho, pontos 3.1, 3.2 e 3.3 do presente apêndice.
(3) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 4
Modelo para o registo dos resultados de ensaio dos travões de mola
Relatório n.o…
|
1. |
Registo dos resultados de ensaio (1) para o número de peça: … |
|
Curso (2) S — (mm) |
Impulso Ths- (N) |
|
|
|
Pressão de desativação (com um curso de 10 mm) …kPa
(1) A elaborar para cada uma das seis amostras ensaiadas.
(2) O curso «s» corresponde aos valores reais de curso utilizados no ensaio, conforme definido no ponto 3.2.2 do presente anexo.
Apêndice 5
Ficha de informações do sistema de travagem antibloqueio de reboques
1. Generalidades
1.1. Nome do fabricante
1.2. Designação do sistema
1.3. Variantes do sistema
1.4. Configurações do sistema (por exemplo, 2S/1M, 2S/2M, etc.)
1.5. Princípios básicos do sistema e/ou breve descrição do seu funcionamento
2. Aplicações
2.1. Lista dos tipos de reboque e das configurações de ABS objeto do pedido de homologação
2.2. Diagramas esquemáticos das configurações do sistema instaladas nos reboques indicados no ponto 2.1 anterior atendendo aos seguintes parâmetros:
|
|
Localização dos sensores |
|
|
Localização dos moduladores |
|
|
Eixos eleváveis |
|
|
Eixos direcionais |
|
|
Tubagens: tipo, diâmetro interno e comprimento |
2.3. Relação entre a circunferência do pneu e a resolução do excitador, com indicação das tolerâncias.
2.4. Tolerância admitida na circunferência dos pneus entre dois eixos equipados com o mesmo excitador.
2.5. Âmbito de aplicação no que diz respeito ao tipo de suspensão:
Suspensão pneumática: qualquer tipo de suspensão pneumática compensada com «braço de suspensão»
Outras suspensões: a definir pelo fabricante, modelo e tipo (compensadas/não compensadas).
2.6. Recomendações referentes a eventuais diferenciais do binário de entrada do travão em função da configuração do ABS e do grupo de eixos do reboque.
2.7. Informações suplementares (se for caso disso) incluídas no pedido de homologação do sistema de travagem antibloqueio.
3. Descrição dos componentes
3.1. Sensores
Função
Identificação (por exemplo, números das peças)
3.2. Controladores
Descrição geral e função
Identificação (por exemplo, números das peças)
Aspetos de segurança dos controladores
Características suplementares (por exemplo, comando do retardador, configuração automática, parâmetros variáveis, diagnóstico de anomalias)
3.3. Moduladores
Descrição geral e função
Identificação (por exemplo, números das peças)
Restrições (por exemplo, volume máximo controlável)
3.4. Equipamento elétrico
Diagramas do circuito
Métodos de alimentação
Sequência(s) da luz de aviso
3.5. Circuitos pneumáticos
Esquemas de travagem correspondentes às configurações de ABS utilizadas nos tipos de reboque indicados no ponto 2.1 anterior
Limitações aplicáveis ao diâmetro e ao comprimento das tubagens que influenciem o desempenho do sistema (por exemplo, entre o modulador e a câmara dos travões)
3.6. Compatibilidade eletromagnética
3.6.1. Documentação demonstrativa do cumprimento do disposto no anexo 13, ponto 4.4, do presente regulamento.
Apêndice 6
Relatório de ensaio do sistema de travagem antibloqueio de reboques
Relatório de ensaio n.o: …
1. Identificação
1.1. Fabricante do sistema de travagem antibloqueio (nome e endereço)
1.2. Designação/modelo do sistema
2. Sistemas e instalações homologados
2.1. Configurações de ABS homologadas (por exemplo, 2S/1M, 2S/2M, etc.):
2.2. Gama de aplicações (tipo de reboque e número de eixos):
2.3. Métodos de alimentação: ISO 7638, ISO 1185, etc.
2.4. Identificação dos sensores, controladores e moduladores homologados:
2.5. Consumo de energia — número equivalente de acionamentos dos travões em condições estáticas.
2.6. Características suplementares, por exemplo, comando do retardador, configuração dos eixos eleváveis, etc.
3. Dados e resultados dos ensaios
3.1. Dados relativos ao veículo submetido a ensaio:
3.2. Dados sobre os pisos utilizados no ensaio:
3.3. Resultados dos ensaios:
3.3.1. Utilização da aderência:
3.3.2. Consumo de energia:
3.3.3. Ensaio num piso de atrito desigual:
3.3.4. Desempenho a baixa velocidade:
3.3.5. Desempenho a alta velocidade:
3.3.6. Verificações suplementares:
3.3.6.1. Passagem de um piso de elevada aderência para um piso de baixa aderência:
3.3.6.2. Passagem de um piso de baixa aderência para um piso de elevada aderência:
3.3.7. Simulação do modo de avaria:
3.3.8. Verificações funcionais das ligações elétricas facultativas:
3.3.9. Compatibilidade eletromagnética
4. Limites de instalação
4.1. Relação entre a circunferência do pneu e a resolução do excitador:
4.2. Tolerância admitida na circunferência dos pneus entre dois eixos equipados com o mesmo excitador.
4.3. Tipo de suspensão:
4.4. Diferenciais do binário de entrada do travão no grupo de eixos do reboque:
4.5. Distância entre eixos do reboque completo:
4.6. Tipo de travão:
4.7. Diâmetros e comprimentos das tubagens:
4.8. Utilização do dispositivo sensor de carga:
4.9. Sequência da luz de aviso:
4.10. Configurações do sistema e aplicações conformes aos requisitos aplicáveis à categoria A.
4.11. Outras recomendações/restrições (referentes, por exemplo, à localização dos sensores, dos moduladores, dos eixos eleváveis ou dos eixos direcionais):
5. Data do ensaio:
Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 19 do Regulamento n.o 13, com a redação que lhe foi dada pela série …de alterações.
Serviço técnico (1) que realizou o ensaio
Assinatura: . …Data: …
6. Entidade homologadora (1)
Assinatura: …Data: …
Anexo: Ficha de informações fornecida pelo fabricante
(1) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 7
Ficha de informações da função de estabilidade do veículo (reboque)
1. Generalidades
1.1. Nome do fabricante
1.2. Designação do sistema
1.3. Variantes do sistema
1.4. Funções de controlo (da direção/da capotagem/ambas), incluindo uma explicação da função de base e/ou da filosofia do controlo
1.5. Configurações do sistema (se for caso disso)
1.6. Identificação do sistema
2. Aplicações
2.1. Lista dos tipos de reboque e das configurações objeto do pedido de homologação
2.2. Diagramas esquemáticos das respetivas configurações instaladas nos reboques indicados no ponto 2.1 anterior atendendo aos seguintes parâmetros:
|
a) |
Eixos eleváveis; |
|
b) |
Eixos direcionais; |
|
c) |
Configurações de travagem antibloqueio. |
2.3. Âmbito de aplicação no que diz respeito ao tipo de suspensão:
a) Suspensão pneumática: qualquer tipo de suspensão pneumática compensada com «braço de suspensão»;
b) Outras suspensões: identificadas individualmente pelo fabricante, modelo e tipo (compensadas/não compensadas).
2.4. Informações suplementares (se aplicável) relativas à aplicação da função de controlo da direção e/ou da capotagem
3. Descrição dos componentes
3.1. Sensores externos ao controlador
|
a) |
Função; |
|
b) |
Restrições quanto à localização dos sensores; |
|
c) |
Identificação, por exemplo, números das peças. |
3.2. Controladores
|
a) |
Descrição geral e função; |
|
b) |
Identificação, por exemplo, números das peças; |
|
c) |
Restrições quanto à localização dos controladores; |
|
d) |
Características suplementares. |
3.3. Moduladores
|
a) |
Descrição geral e função; |
|
b) |
Identificação; |
|
c) |
Restrições. |
3.4. Equipamento elétrico
|
a) |
Diagramas dos circuitos; |
|
b) |
Métodos de alimentação. |
3.5. Circuitos pneumáticos
Esquema do sistema, incluindo as configurações de travagem antibloqueio associadas aos tipos de reboque definidos no ponto 6.2.1 do presente anexo.
3.6 Aspetos de segurança do sistema eletrónico, em conformidade com o anexo 18 do presente regulamento.
3.7. Compatibilidade eletromagnética
3.7.1. Documentação demonstrativa do cumprimento do disposto no Regulamento N.o 10, tal como prescrito pelo ponto 5.1.1.4 do presente regulamento.
Apêndice 8
Relatório de ensaio da função de estabilidade do veículo (reboque)
Relatório de ensaio n.o: …
1. Identificação
1.1. Fabricante da função de estabilidade do veículo (nome e endereço)
1.2. Designação/modelo do sistema
1.3. Função de controlo
2. Sistemas e instalações homologados:
2.1. Configurações da travagem antibloqueio (se aplicável)
2.2. Âmbito de aplicação (tipos de reboque e número de eixos)
2.3. Identificação do sistema
2.4. Caraterísticas suplementares
3. Dados e resultados dos ensaios
3.1. Dados relativos ao veículo de ensaio (incluindo as especificações e a funcionalidade do veículo trator)
3.2. Dados sobre os pisos utilizados no ensaio
3.3. Informações suplementares
3.4. Ensaios demonstrativos/simulações utilizados para efeitos da avaliação do controlo da direção e da capotagem, consoante o caso.
3.5. Resultados dos ensaios
3.6. Avaliação em conformidade com o anexo 18 do presente Regulamento
4. Limites de instalação
4.1. Tipo de suspensão
4.2. Tipo de travão
4.3. Localização dos componentes no reboque
4.4. Configurações de travagem antibloqueio
4.5. Outras recomendações/restrições (por exemplo, eixos eleváveis, eixos direcionais, etc.).
5. Peças de fixação
6. Data do ensaio:
7. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 19 do Regulamento ONU n.o 13, com a redação que lhe foi dada pela série … de alterações.
Serviço técnico (1) que realizou o ensaio
Assinatura: …Data: …
8. Entidade homologadora (1)
Assinatura: …Data: …
(1) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
Apêndice 9
Símbolos e definições
|
Símbolo |
Definição |
|
BF |
Fator de travagem (relação de amplificação entre o binário de entrada e o binário de saída) |
|
CO |
Binário limiar de acionamento (binário mínimo necessário para produzir um binário de travagem mensurável) |
|
D |
Diâmetro exterior do pneu (diâmetro global de um pneu novo insuflado) |
|
d |
Um número convencional que designa o diâmetro nominal da jante e que corresponde ao diâmetro da jante expresso em polegadas ou mm |
|
FB |
Força de travagem |
|
H |
Altura nominal da secção do pneu (a distância igual a metade da diferença entre o diâmetro exterior do pneu e o diâmetro nominal da jante) |
|
I |
Inércia de rotação |
|
lT |
Comprimento da alavanca do travão do reboque de referência |
|
Mt |
binário médio de travagem |
|
ne |
Número equivalente de acionamentos do travão em condições estáticas para efeitos de homologação |
|
ner |
Número equivalente de aplicações do travão em condições estáticas obtidas durante o ensaio |
|
nD |
Velocidade de rotação do dinamómetro de rolos |
|
nW |
Velocidade de rotação das rodas não travadas do eixo |
|
Pd |
Massa máxima tecnicamente admissível para o travão |
|
p |
Pressão |
|
P15 |
A pressão na câmara do travão necessária para gerar um curso da biela de 15 mm a contar da posição zero. |
|
R |
Raio de rolamento dinâmico do pneu (calculado utilizando 0,485D) |
|
Ra |
Relação nominal altura/largura do pneu (100 vezes o número obtido dividindo o número que expressa a altura nominal da secção do pneu, em mm, pelo número que expressa a largura nominal da secção, em mm) |
|
Rl |
Razão de sT / lT |
|
RR |
Raio do dinamómetro de rolos |
|
S1 |
Largura da secção do pneu (distância linear entre os lados exteriores das paredes laterais de um pneu insuflado, excluindo as saliências provenientes das marcações de identificação. |
|
s |
Curso do atuador (curso útil + curso em vazio) |
|
smax |
Curso total do atuador |
|
sp |
Curso efetivo (o curso no qual o impulso exercido é de 90 % do impulso médio (ThA) |
|
sT |
Curso do veio do dispositivo de compressão da câmara do travão do reboque de referência, expresso em mm |
|
ThA |
Impulso médio (o impulso médio é determinado pela integração dos valores entre um terço e dois terços do curso total smax) |
|
THS |
Impulso da mola do travão de mola |
|
TR |
Soma das forças de travagem na periferia de todas as rodas do reboque ou do semirreboque |
|
V |
Velocidade linear do dinamómetro de rolos |
|
v1 |
Velocidade inicial no início da travagem |
|
v2 |
Velocidade no fim da travagem |
|
W60 |
Energia absorvida, equivalente à energia cinética da massa correspondente para o travão em ensaio quando travado a partir de 60 km/h até à imobilização |
|
Z |
Razão de travagem do veículo |
Apêndice 10
Modelo de documentação para ensaios de campo, conforme prescrito no ponto 4.4.2.9 do presente anexo
1. Identificação
1.1. Travão:
Fabricante …
Marca …
Tipo …
Modelo …
Travão de tambor ou travão de disco (1)
Dados que permitem identificar o elemento ensaiado …
Binário de acionamento dos travões tecnicamente admissível Cmax …
Dispositivo de regulação automática dos travões: integrado/não integrado (1)
1.2. Tambor do travão ou disco do travão:
Diâmetro interno do tambor ou diâmetro externo do disco …
Raio efetivo (2)…
Espessura …
Massa …
Material …
Dados que permitem identificar o elemento ensaiado …
1.3. Guarnição ou pastilha do travão:
Fabricante …
Tipo …
Identificação …
Largura …
Espessura …
Superfície …
Método de fixação …
Dados que permitem identificar o elemento ensaiado …
1.4. Atuador:
Fabricante …
Marca …
Dimensão …
Tipo …
Dados que permitem identificar o elemento ensaiado …
1.5. Dispositivo de regulação automática dos travões: (3)
Fabricante …
Marca …
Tipo …
Versão …
Dados que permitem identificar o elemento ensaiado …
1.6. Dados relativos ao veículo de ensaio:
|
|
Veículo trator:
|
|
|
Reboque
|
|
|
Duplos/simples (4)
|
2. Dados e resultados dos ensaios
2.1. Ensaio de campo:
Descrição geral que abrange: distância percorrida, duração e localização
2.2. Ensaio de travagem:
2.2.1. Informações sobre a pista de ensaio …
2.2.2. Procedimento de ensaio …
2.3. Resultados dos ensaios:
|
|
Fator de travagem
|
|
|
Diagramas |
(1) Riscar o que não é aplicável.
(2) Aplicável apenas a travões de disco.
(3) Não aplicável no caso do dispositivo integrado de regulação automática dos travões.
(4) Strike out what does not apply.
Apêndice 11
Ficha de informações sobre a função de estabilidade do veículo (a motor)
1. Generalidades
1.1. Nome do fabricante
1.2. Sistema
1.3. Variantes do sistema
1.4. Opções de sistemas
1.4.1. Funções de controlo (da direção/da capotagem/ambas), incluindo uma explicação da função de base e/ou da filosofia do controlo
1.5. Configurações do sistema (se for caso disso)
1.6. Identificação do sistema, incluindo software nível identificador
2. Aplicações
2.1. Lista dos veículos a motor através da descrição e configuração que estão abrangidas pela ficha de informações
2.2. Diagramas esquemáticos das respetivas configurações instaladas nos veículos a motor indicados no ponto 2.1 anterior atendendo aos seguintes parâmetros:
|
a) |
Eixos eleváveis |
|
b) |
Eixos direcionais |
|
c) |
Configurações de travagem antibloqueio |
2.3. Âmbito de aplicação no que diz respeito à suspensão:
|
a) |
Pneumática |
|
b) |
Mecânica |
|
c) |
Borracha |
|
d) |
Mista |
|
e) |
Barras estabilizadoras |
2.4. Informações suplementares (se aplicável) relativas à aplicação da função de controlo da direção e/ou da capotagem, nomeadamente:
|
a) |
Distância entre eixos, via, altura do centro de gravidade |
|
b) |
Tipo de roda (simples ou dupla) e tipo de pneus (por exemplo, estrutura, categoria de utilização, dimensão) |
|
c) |
Tipo de caixa de velocidades (por exemplo, manual, manual automatizada, semiautomática ou automática): |
|
d) |
Opções relativas à unidade de tração (por exemplo, retardador): |
|
e) |
Tipo de diferencial/bloqueio(s) do diferencial (por exemplo, normal ou autobloqueante, automático ou selecionado pelo condutor) |
|
f) |
Gestão do motor ou de qualquer outra fonte de energia motriz |
|
g) |
Tipo de travão |
3. Descrição dos componentes:
3.1. Sensores externos ao controlador
|
a) |
Função |
|
b) |
Restrições quanto à localização dos sensores |
|
c) |
Identificação (por exemplo, números das peças) |
3.2. Controladores
|
a) |
Descrição geral e função |
|
b) |
Funcionalidade de sensores internos (se aplicável) |
|
c) |
Identificação do hardware (por exemplo, números das peças) |
|
d) |
Identificação do software |
|
e) |
Restrições quanto à localização dos controladores |
|
f) |
Caraterísticas suplementares |
3.3. Moduladores
|
a) |
Descrição geral e função |
|
b) |
Identificação do hardware (por exemplo, números das peças) |
|
c) |
Identificação do software (se aplicável) |
|
d) |
Restrições |
3.4. Equipamento elétrico
|
a) |
Diagramas dos circuitos |
|
b) |
Métodos de alimentação |
3.5. Circuitos pneumáticos
Esquema do sistema, incluindo as configurações de travagem antibloqueio associadas aos modelos de veículos a motor definidos no ponto 2.1 do presente apêndice
3.6. Aspetos de segurança do sistema eletrónico, em conformidade com o anexo 18 do presente regulamento.
3.7. Compatibilidade eletromagnética
3.7.1. Documentação demonstrativa do cumprimento do disposto no Regulamento n.o 10, tal como prescrito pelo ponto 5.1.1.4 do presente regulamento.
Apêndice 12
Relatório de ensaio sobre a função de estabilidade do veículo (a motor)
Número do relatório de ensaio: …
1. Identificação:
1.1. Fabricante da função de estabilidade do veículo (nome e endereço)
1.2. Requerente (se distinto do fabricante)
1.3. Sistemas
1.3.1. Variantes do sistema
1.3.2. Opções de sistemas
1.3.2.1. Funções de controlo
2. Sistemas e instalações:
2.1. Configurações de travagem antibloqueio
2.2. Aplicações em veículos
2.2.1. Categoria do veículo (por exemplo, N2, N3, etc.)
2.2.2. Natureza do veículo
2.2.3. Configurações do veículo (por exemplo, 4 × 2, 6 × 2, etc.):
2.2.4. Programação de fim de série
2.3. Identificação do sistema
2.4. Descrição funcional
2.4.1. Controlo da direção
2.4.2. Controlo da capotagem
2.4.3. Funcionamento a velocidade baixa
2.4.4. Modo de todo o terreno
2.4.5. Opções relativas à unidade de tração
2.5. Componentes
2.6. Deteção e funcionalidade do reboque
2.7. Aviso de intervenção
2.8. Aviso de avaria
2.9. Iluminação das luzes de travagem
3. Variáveis do veículo avaliadas:
3.1. Generalidades
3.2. Tipo de sistema de travagem
3.3. Tipo de travão
3.4. Centro de gravidade
3.5. Gestão do motor ou de qualquer outra fonte de energia motriz
3.6. Tipo de caixa de velocidades:
3.7. Configurações da instalação
3.8. Eixos eleváveis
3.9. Efeitos das variações de carga
3.9.1. Controlo da capotagem
3.9.2. Controlo da direção
3.10. Desmultiplicação da direção
3.11. Direção ou eixos direcionais suplementares
3.12. Suspensão
3.13. Largura da via
3.14. Sensores de aceleração lateral e de velocidade angular de guinada
3.15. Distância entre eixos
3.16. Tipo de roda, tipo de pneu, medida do pneu
4. Limites de instalação
4.1. Tipo de suspensão
4.2. Tipo de travão
4.3. Localização dos componentes
4.3.1. Posição dos sensores de aceleração lateral e de velocidade angular de guinada
4.4. Configurações do sistema de travagem antibloqueio
4.5. Eixos direcionais suplementares
4.6. Outras recomendações e restrições
4.6.1. Tipo de sistema de travagem
4.6.2. Gestão do motor ou de qualquer outra fonte de energia motriz
4.6.3. Eixos eleváveis
5. Dados e resultados dos ensaios:
5.1. Dados relativos ao veículo de ensaio (incluindo as especificações e a funcionalidade de qualquer reboque utilizado no ensaio)
5.2. Dados sobre os pisos utilizados no ensaio
5.2.1. Piso de elevada aderência
5.2.2. Piso de baixa aderência
5.3. Medição e aquisição de dados
5.4. Condições e procedimentos de ensaio
5.4.1. Ensaios do veículo
5.4.1.1. Controlo da direção
5.4.1.2. Controlo da capotagem
5.5. Informações suplementares
5.6. Resultados dos ensaios
5.6.1. Ensaios do veículo
5.6.1.1. Controlo da direção
5.6.1.2. Controlo da capotagem
5.7. Avaliação em conformidade com o anexo 18 do presente Regulamento
5.8. Conformidade com o Regulamento n.o 10
6. Anexos: (1)
7. Data do ensaio:
8. Este ensaio foi realizado e os resultados apresentados em conformidade com o anexo 19, parte 2, do Regulamento n.o 13 da UNECE, com a redação que lhe foi dada pela série …de alterações.
Serviço técnico (2) que realizou o ensaio
Assinatura: …Data: …
9. Entidade homologadora (2)
Assinatura: …Data: …
(1) É necessário anexar dados de ensaios efetuados pelo fornecedor do sistema que justifiquem a autorização da tolerância, nos termos do anexo 19, parte 2, pontos 1.1.3.2 s) e 1.1.3.2 x)
(2) A assinar por pessoas diferentes, ainda que o serviço técnico e a entidade homologadora sejam uma só entidade, ou, em alternativa, que a entidade homologadora emita uma autorização distinta com o relatório.
ANEXO 20
PROCEDIMENTO ALTERNATIVO PARA A HOMOLOGAÇÃO DE REBOQUES
1. GENERALIDADES
1.1. O presente anexo define um procedimento alternativo para a homologação de reboques, com base em informações constantes de relatórios de ensaio elaborados em conformidade com os anexos 11 e 19.
1.2. Após a conclusão dos procedimentos de verificação descritos nos pontos 3, 4, 5, 6, 7 e 8 do presente anexo, o serviço técnico/entidade homologadora devem emitir um certificado de homologação da ONU conforme ao modelo constante do anexo 2, apêndice 1, do presente regulamento.
1.3. Para efeitos dos cálculos apresentados no presente anexo, deve determinar-se a altura do centro de gravidade em conformidade com o método descrito no apêndice 1 do presente anexo.
2. PEDIDO DE HOMOLOGAÇÃO
2.1. O pedido de homologação da ONU de um tipo de reboque no que respeita ao equipamento de travagem deve ser apresentado pelo fabricante do reboque. Para que o reboque possa ser homologado, é necessário que o seu fabricante forneça ao serviço técnico no mínimo o seguinte:
|
2.1.1. |
Uma cópia do certificado de homologação da ONU ou da UE e a ficha de informações de um reboque, a seguir referido como «reboque de referência» no qual se deve basear a comparação do desempenho da travagem de serviço. Este reboque deve ter sido submetido aos ensaios estabelecidos no anexo 4 do presente regulamento para o reboque adequado ou estabelecidos na diretiva equivalente da UE. Um reboque que tiver sido homologado de acordo com o procedimento alternativo definido no presente anexo não deve ser utilizado como reboque de referência. |
|
2.1.2. |
Cópias dos relatórios de ensaio nos termos do anexo 11 e do anexo 19. |
|
2.1.3 |
Um dossiê contendo as informações de verificação pertinentes, incluindo, quando adequado, os cálculos dos seguintes elementos:
|
|
2.1.4. |
Um reboque, representativo do tipo de reboque a homologar, a seguir referido como o «reboque considerado». |
2.2. O fabricante do «reboque de referência» deve ser o fabricante do «reboque considerado».
3. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DA TRAVAGEM DE SERVIÇO A FRIO DO TIPO 0.
3.1. Para demonstrar que é cumprido o desempenho da travagem de serviço a frio do tipo 0, deve verificar-se, por cálculo, que o «reboque considerado» dispõe de uma força de travagem (TR) suficiente para alcançar o desempenho da travagem de serviço prescrito e que existe uma aderência suficiente em piso seco (pressupondo-se um coeficiente de aderência de 0,8) para se utilizar esta força de travagem.
3.2. Verificação
3.2.1. Considera-se que o reboque considerado cumpre os requisitos do anexo 4, pontos 1.2.7, 3.1.2 e 3.1.3 (requisito de desempenho a frio e obtenção deste desempenho sem bloqueio das rodas, sem desvio da trajetória e sem vibração anormal) se cumprir os critérios de verificação descritos nos pontos a seguir, tanto nas condições de carregado como sem carga:
|
3.2.1.1. |
A distância entre eixos do reboque considerado não deve ser inferior a 0,8 vezes a distância entre eixos do reboque de referência. |
|
3.2.1.2. |
Qualquer diferença no binário de entrada do travão entre dois eixos de um grupo de eixos de um «reboque considerado» deve ser a mesma que no «reboque de referência». |
|
3.2.1.3. |
O número e a disposição de eixos, ou seja, a elevação, a direção, etc. do «reboque considerado» devem ser os mesmos que os do reboque de referência. |
|
3.2.1.4. |
A repartição da carga estática por eixo do reboque considerado não deve diferir em mais de 10 % da do reboque de referência. |
|
3.2.1.5. |
No caso dos semirreboques, deve desenhar-se um gráfico, em conformidade com o apêndice 2, e, a partir deste gráfico, verificar-se se:
|
|
3.2.1.6. |
No caso dos reboques de eixo central, deve desenhar-se um gráfico, em conformidade com o apêndice 3, e, a partir deste gráfico, verificar-se se:
|
|
3.2.1.7. |
No caso dos reboques completos, deve desenhar-se um gráfico, em conformidade com o apêndice 4, e, a partir deste gráfico, verificar-se se:
|
4. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DO TRAVÃO DE ESTACIONAMENTO
4.1. Generalidades
4.1.1. Este procedimento constitui uma alternativa aos ensaios físicos em reboques num declive e assegura que os reboques equipados com mecanismos de estacionamento acionados por travões de mola podem cumprir os requisitos em termos de desempenho do travão de estacionamento. Este procedimento não deve ser aplicado a reboques equipados com mecanismos de estacionamento acionados por meios diferentes dos de travões de mola. Esses reboques devem ser submetidos ao ensaio físico prescrito no anexo 4.
4.1.2. O desempenho da travagem de estacionamento prescrito deve ser demonstrado por cálculo, utilizando as fórmulas contidas nos pontos 4.2 e 4.3 abaixo.
4.2. Desempenho de estacionamento
4.2.1. A força de travagem de estacionamento na periferia dos pneus de eixos travados pelo mecanismo de estacionamento acionado por travão de mola deve ser calculada utilizando a seguinte fórmula:
Tpi = ( Ths × l – Co ) × n × BF / Rs
4.2.2. A reação normal do piso sobre os eixos de um reboque imobilizado perante um declive ascendente ou descendente com uma inclinação de 18 % deve ser calculada utilizando as seguintes fórmulas:
|
4.2.2.1. |
No caso de reboques completos:
|
|
4.2.2.2. |
No caso de reboques de eixo central:
|
|
4.2.2.3. |
No caso de semirreboques:
|
4.3. Verificação
4.3.1. O desempenho do travão de estacionamento do reboque deve ser verificado utilizando as seguintes fórmulas:

e:

5. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DA TRAVAGEM DE EMERGÊNCIA/AUTOMÁTICA
5.1. Generalidades
5.1.1. Para demonstrar o cumprimento dos requisitos do desempenho da travagem automática, pode estabelecer-se uma comparação entre a pressão na câmara necessária para alcançar o desempenho especificado e a pressão assimptótica na câmara após a desativação da conduta de alimentação, conforme descrito no ponto 5.2.1 abaixo, ou então verificar-se se a força de travagem proporcionada pelos eixos equipados com travões de mola é suficiente para alcançar o desempenho especificado, conforme definido no ponto 5.2.2.
5.2. Verificação
5.2.1. Considera-se que os requisitos do anexo 4, ponto 3.3, são cumpridos por um reboque considerado se a pressão assimptótica na câmara (pc), após a desativação da conduta de alimentação, for superior à pressão na câmara (pc) necessária para alcançar um desempenho de 13,5 % da carga máxima suportada pelas rodas imobilizadas. A pressão na conduta de alimentação deve ser estabilizada a 700 kPa antes da desativação.
5.2.2. Considera-se que um reboque considerado, equipado com travões de mola, cumpre os requisitos do anexo 4, ponto 3.3, se:
ΣTpi ≥ 0,135 ( PR )( g )
em que:
Tpi é calculada em conformidade com o ponto 4.2.1 anterior.
6. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DA TRAVAGEM EM CASO DE AVARIA DO SISTEMA DE REPARTIÇÃO DA TRAVAGEM
6.1. Generalidades
6.1.1. Para demonstrar o cumprimento dos requisitos do desempenho da travagem em caso de avaria no sistema de repartição da travagem, estabelece-se uma comparação entre a pressão na câmara necessária para alcançar o desempenho especificado e a pressão disponível na câmara quando surge uma avaria no sistema de repartição da travagem.
6.2. Verificação
6.2.1. Considera-se que o reboque considerado cumpre os requisitos do anexo 10, apêndice, ponto 6, se a pressão definida no ponto 6.2.1.1 for superior ou igual à pressão definida no ponto 6.2.1.2 abaixo, em carga e sem carga.
6.2.1.1. Pressão na câmara (pc) do reboque considerado, quando pm = 650 kPa, pressão na conduta de alimentação = 700 kPa e avaria no sistema de repartição da travagem.
6.2.1.2. Pressão na câmara (pc) para alcançar uma razão de travagem de 30 % do desempenho da travagem de serviço prescrito para o reboque considerado.
7. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DA TRAVAGEM ANTIBLOQUEIO
7.1. Generalidades
7.1.1. Podem dispensar-se os ensaios a um reboque em conformidade com o anexo 13 do presente regulamento aquando da sua homologação se o sistema de travagem antibloqueio (ABS) satisfizer os requisitos do anexo 19 do presente regulamento.
7.2. Verificação
7.2.1. Verificação dos componentes e da instalação
Deve verificar-se se o ABS instalado no reboque apresentado para homologação satisfaz todos os critérios seguintes:
|
Ponto |
Critérios |
|||
|
7.2.1.1. |
|
Não se admitem alterações |
||
|
Não se admitem alterações |
|||
|
Não se admitem alterações |
|||
|
7.2.1.2. |
Diâmetros e comprimentos das condutas |
|
||
|
|
|||
|
Diâmetro interno mínimo |
Pode ser aumentado |
|||
|
Comprimento total máximo |
Pode ser reduzido |
|||
|
|
|||
|
Diâmetro interno |
Não se admitem alterações |
|||
|
Comprimento total máximo |
Pode ser reduzido |
|||
|
7.2.1.3. |
Sequência do sinal de aviso |
Não se admitem alterações |
||
|
7.2.1.4. |
Diferenciais do binário de entrada do travão num grupo de eixos |
Só são autorizados os diferenciais que tenham sido aprovados |
||
|
7.2.1.5. |
Em relação a outras limitações, consultar o ponto 4 do relatório de ensaio, conforme descrito no anexo 19, apêndice 6, do presente regulamento |
A instalação deve manter-se dentro da gama de limitações enunciadas — não se admitem desvios. |
||
7.3. Verificação da capacidade do reservatório
7.3.1. Dado que, nos reboques, são utilizados múltiplos sistemas de travagem e equipamentos auxiliares, não é possível construir um quadro com as capacidades recomendadas dos reservatórios. Para verificar se está instalada a capacidade de armazenamento adequada, pode proceder-se aos ensaios de acordo com o anexo 13, ponto 6.1, do presente regulamento ou recorrendo ao seguinte procedimento:
|
7.3.1.1. |
No caso de travões sem regulação integrada do seu desgaste, os travões do reboque considerado devem ser regulados para um estado em que a relação (R 1 ) entre o curso do veio do dispositivo de compressão da câmara do travão (sT) e o comprimento da alavanca do travão (l T) seja de 0,2. Exemplo:
|
|
7.3.1.2. |
No caso de travões com regulação automática integrada do seu desgaste, os travões devem ser regulados para a folga normal de funcionamento. |
|
7.3.1.3. |
A regulação dos travões acima definida deve ser efetuada com os travões frios (≤100 °C). |
|
7.3.1.4. |
Com os travões regulados de acordo com o procedimento relevante acima indicado, com os dispositivos sensores de carga regulados para o estado em carga e com o nível inicial de energia regulado de acordo com anexo 19, parte 1, ponto 5.4.1.2.4.2, do presente regulamento, os dispositivos de armazenamento de energia devem estar isolados da sua alimentação. Aplicam-se os travões exercendo uma pressão de comando de 650 kPa na cabeça de engate e, em seguida, soltando-os completamente. Os travões devem ser acionados mais vezes até se atingir o número ne determinado a partir do ensaio realizado em conformidade com o anexo 19, ponto 5.4.1.2.4.2, do presente regulamento e indicado no ponto 2.5 do relatório de homologação do sistema de travagem antibloqueio. Durante esta aplicação, a pressão no circuito em funcionamento deve ser suficiente para transmitir à periferia das rodas uma força total de travagem igual ou superior a 22,5 % da carga estática máxima por roda, sem que isso desencadeie a aplicação automática de qualquer sistema de travagem independente do sistema antibloqueio. |
7.4. Os reboques com mais de 3 eixos podem utilizar o relatório de ensaio ABS previsto no anexo 19, desde que sejam preenchidas as seguintes condições:
|
7.4.1. |
Independentemente do tipo de reboque, pelo menos um terço dos eixos de um grupo de eixos deve ter todas as rodas controladas diretamente, sendo as rodas dos demais eixos controladas indiretamente (1). |
|
7.4.2. |
Utilização da aderência: considera-se que foi atingida a utilização da aderência mínima especificada no anexo 13, ponto 6.2, do presente regulamento se estiverem preenchidas as seguintes condições:
|
|
7.4.3. |
Consumo de energia: o número de acionamentos dos travões em condições estáticas equivalentes definidos no ponto 2.5 do relatório de ensaio pode ser utilizado em conjugação com o procedimento de verificação do ponto 7.3 do presente anexo. Em alternativa pode ser utilizado o procedimento de ensaio previsto no anexo 13, ponto 6.1, do presente regulamento; |
|
7.4.4. |
Desempenho a baixa velocidade: não são exigidas verificações adicionais; |
|
7.4.5. |
Desempenho a alta velocidade: não são exigidas verificações adicionais; |
|
7.4.6. |
Desempenho da categoria A: consideram-se cumpridos os requisitos relativos ao piso de atrito desigual especificados no anexo 13, ponto 6.3.2, do presente regulamento, se o número de rodas sujeitas a controlo direita/esquerda independente for igual ou superior ao número de rodas controladas através do controlo do eixo «Selecionar posição baixa»; |
|
7.4.7. |
Desempenho do piso de transição de piso: não são exigidas verificações adicionais; |
|
7.4.8. |
Restrições em matéria de instalação: são aplicáveis as seguintes restrições em todos os casos:
|
8. PROCEDIMENTO ALTERNATIVO PARA DEMONSTRAR O DESEMPENHO DE UM REBOQUE EQUIPADO COM UMA FUNÇÃO DE ESTABILIDADE DO VEÍCULO.
8.1. Pode prescindir-se da avaliação de um reboque em conformidade com o anexo 21, ponto 2, do presente regulamento aquando da homologação, desde que a função de estabilidade do veículo cumpra os requisitos aplicáveis do anexo 19 do presente regulamento.
8.2. Verificação
8.2.1. Verificação dos componentes e da instalação
É necessário verificar se as especificações do sistema de travagem instalado no reboque a homologar, no qual é integrada a função de controlo da estabilidade, cumprem os seguintes critérios:
|
Condição |
Critérios |
|||
|
8.2.1.1. |
|
Não se admitem alterações |
||
|
Não se admitem alterações |
|||
|
Não se admitem alterações |
|||
|
8.2.1.2. |
Tipos de reboques, tal como definidos no relatório de ensaio |
Não se admitem alterações |
||
|
8.2.1.3. |
Configurações da instalação, tal como definidas no relatório do ensaio |
Não se admitem alterações |
||
|
8.2.1.4. |
Em relação a outras restrições, consultar o ponto 4 do relatório de ensaio, conforme descrito no anexo 19, apêndice 8, do presente regulamento |
Não se admitem alterações |
||
9. VERIFICAÇÕES FUNCIONAIS E DAS INSTALAÇÕES
9.1. O serviço técnico/a entidade homologadora deve proceder a verificações funcionais e das instalações que abranjam os seguintes pontos:
9.1.1. Função antibloqueio
9.1.1.1. Trata-se apenas de proceder a uma verificação do sistema de travagem antibloqueio em condições dinâmicas. Para garantir que o sistema efetua ciclos completos, pode ser necessário regular o dispositivo sensor de carga ou utilizar um piso de baixa aderência. Se o sistema antibloqueio não obtiver a homologação em conformidade com o anexo 19, o reboque deve ser ensaiado em conformidade com o anexo 13 e cumprir os requisitos aplicáveis constantes desse anexo.
9.1.2. Medição do tempo de resposta
9.1.2.1. O serviço técnico deve verificar se o reboque considerado cumpre os requisitos do anexo 6.
9.1.3. Consumo de energia em condições estáticas
9.1.3.1. O serviço técnico deve verificar se o reboque considerado cumpre os requisitos do anexo 7 e do anexo 8, conforme aplicável.
9.1.4. Função de travagem de serviço
9.1.4.1. O serviço técnico deve verificar se não há vibrações anormais durante a travagem.
9.1.5. Função de travagem de estacionamento
9.1.5.1. O serviço técnico deve acionar e soltar o travão de estacionamento para assegurar um funcionamento correto.
9.1.6. Função de travagem de emergência/automática
9.1.6.1. O serviço técnico deve verificar se o reboque considerado cumpre os requisitos do ponto 5.2.1.18.4.2 do presente regulamento.
9.1.7. Verificação da identificação do veículo e dos componentes
9.1.7.1. O serviço técnico deve verificar o reboque considerado em função dos dados constantes do certificado de homologação.
9.1.8. Função de estabilidade do veículo
9.1.8.1. Por razões de ordem prática, a verificação da função de estabilidade do veículo deve limitar-se a uma verificação da instalação tal como definida no ponto 8.2 anterior e da existência da sequência correta dos sinais de aviso, a fim de garantir a inexistência de avarias.
9.1.9. Verificações complementares
9.1.9.1. O serviço técnico pode, se necessário, solicitar a realização de verificações suplementares.
(1) Se, ao dividir-se o número de eixos de um grupo de eixos por três, o resultado for inferior a um, é necessário que pelo menos um eixo seja diretamente controlado. Se, ao dividir-se o número de eixos de um grupo de eixos por três, o resultado não for um número inteiro, é necessário controlar diretamente mais um eixo para além do número de eixos indicado pelo valor desse número inteiro
Apêndice 1
Método de cálculo da altura do centro de gravidade
Pode calcular-se a altura do centro de gravidade do veículo completo (em carga e sem carga) do seguinte modo:
|
h1 |
= |
altura do centro de gravidade dos eixos (incluindo pneus, molas, etc.) = R · 1,1 |
|
h2 |
= |
altura do centro de gravidade do quadro (carregado) = (h6 + h8) · 0,5 |
|
h3 |
= |
altura do centro de gravidade da carga útil e da carroçaria (carregado) = (h7 · 0,3) + h6 |
|
h4 |
= |
altura do centro de gravidade do quadro (sem carga) = h2 + s |
|
h5 |
= |
altura do centro de gravidade da carga útil e da carroçaria (sem carga) = (h7 · 0,5) + h6 + s |
em que:
|
h6 |
= |
altura do quadro, topo |
|
h7 |
= |
dimensões da carroçaria, internas |
|
h8 |
= |
altura do quadro, base |
|
P |
= |
massa total do reboque |
|
PR |
= |
massa total sobre todas as rodas de um semirreboque ou reboque de eixo central |
|
R |
= |
raio do pneu |
|
s |
= |
contração da mola entre o estado carregado e o estado sem carga |
|
W1 |
= |
massa do conjunto de eixos (incluindo pneus, molas, etc.) = P · 0,1 |
|
W2 |
= |
massa do quadro = (Punl - W1) · 0,8 |
|
W3 |
= |
massa da carga útil e da carroçaria |
|
W4 |
= |
massa da carroçaria = (Punl - W1) · 0,2 |
|
Carregado: |
Sem carga: |
|
|
|
Notas:
|
1) |
Para reboques do tipo caixa aberta, deve utilizar-se uma altura máxima de 4 m. |
|
2) |
Para reboques cuja altura exata do centro de gravidade da carga útil se desconheça, essa altura deve ser estabelecida como sendo 0,3 vezes superior às dimensões internas da carroçaria. |
|
3) |
Para reboques com suspensão pneumática, partir-se-á do princípio de que s = zero. |
|
4) |
Para semirreboques e reboques de eixo central, substituir P por PR sempre que necessário. |
Apêndice 2
Gráfico de verificação para efeitos do ponto 3.2.1.5 — Semirreboques

|
1) |
= |
TRmax, em que pm = 650 kPa e a pressão na conduta de alimentação = 700 kPa. |
|
2) |
= |
FRdyn · 0,8 = TRL |
|
3) |
= |
0,45 · FR = TRpr |
em que:
![]()
sendo o valor de zc calculado com a seguinte fórmula:

Notas:
|
1) |
Nesta fórmula, o valor 7 000 representa a massa de um veículo trator sem reboque atrelado. |
|
2) |
Para efeitos destes cálculos, os eixos muito próximos (um afastamento entre eixos inferior a 2 metros) podem ser considerados como um só eixo. |
Apêndice 3
Gráfico de verificação para efeitos do ponto 3.2.1.6 — Reboques de eixo central

|
1) |
= |
TRmax, em que pm = 650 kPa e a pressão na conduta de alimentação = 700 kPa. |
|
2) |
= |
FRdyn · 0,8 = TRL |
|
3) |
= |
0,5 · FR = TRpr |
em que:
![]()
sendo o valor de zc calculado com a seguinte fórmula:

Notas:
|
1) |
Nesta fórmula, o valor 7 000 representa a massa de um veículo trator sem reboque atrelado. |
|
2) |
Para efeitos destes cálculos, os eixos muito próximos (um afastamento entre eixos inferior a 2 metros) podem ser considerados como um só eixo. |
Apêndice 4
Gráfico de verificação para efeitos do ponto 3.2.1.7 — Reboques completos

|
1) |
= |
TRmax, em que pm = 650 kPa e a pressão na conduta de alimentação = 700 kPa. |
|
2) |
= |
0,5 · FR = TRpr |
|
3) |
= |
TRprf = TRf, em que pm = x |
|
4) |
= |
Ffdyn · 0,8 = TRLf |
|
5) |
= |
TRprr = TRr, em que pm = x |
|
6) |
= |
Frdyn · 0,8 = TRLr |
em que:

e

sendo o valor de zc calculado com a seguinte fórmula:

Notas:
|
1) |
Nesta fórmula, o valor 7 000 representa a massa de um veículo trator sem reboque atrelado. |
|
2) |
Para efeitos destes cálculos, os eixos muito próximos (um afastamento entre eixos inferior a dois metros) podem ser considerados como um só eixo. |
Apêndice 5
Símbolos e definições
|
Símbolos |
Definições |
||||||||||||
|
ADi |
Tpi em que Tpi ≤ 0,8 NFDi para eixos dianteiros, ou 0,8 NFDi em quepi > 0,8 NFDi para eixos dianteiros |
||||||||||||
|
BDi |
Tpiem que Tpi ≤ 0,8 NFDi para eixos traseiros, ou 0,8 NRDi when Tpi > 0,8 NRDi para eixos traseiros |
||||||||||||
|
AUiAUi |
Tpiem que Tpi ≤ 0,8 NFUi para eixos dianteiros, ou 0,8 NFUi em que Tpi > 0,8 NFUi para eixos dianteiros |
||||||||||||
|
BUi |
Tpiem que Tpi ≤ 0,8 NRUi para eixos traseiros, ou 0,8 NRUi em que Tpi > 0,8 NRUi para eixos traseiros |
||||||||||||
|
BF |
fator de travagem |
||||||||||||
|
CO |
binário limiar útil na árvore de cames (binário mínimo a aplicar na árvore de cames para produzir um binário de travagem mensurável) |
||||||||||||
|
E |
distância entre eixos |
||||||||||||
|
EL |
distância entre a(s) perna(s) de apoio do engate e o centro dos eixos de um reboque de eixo central ou de um semirreboque |
||||||||||||
|
ER |
distância entre o cabeçote de engate e o centro do ou dos eixos do semirreboque |
||||||||||||
|
F |
força (N) |
||||||||||||
|
Ff |
reação estática normal total do piso nos eixos dianteiros |
||||||||||||
|
Ffdyn |
reação dinâmica normal total do piso nos eixos dianteiros |
||||||||||||
|
Fr |
reação estática normal total do piso nos eixos traseiros |
||||||||||||
|
FRdyn |
reação dinâmica normal total do piso nos eixos traseiros |
||||||||||||
|
FR |
reação estática normal total do piso sobre todas as rodas do reboque ou do semirreboque |
||||||||||||
|
FRdyn |
reação dinâmica normal total do piso sobre todas as rodas do reboque ou do semirreboque |
||||||||||||
|
g |
aceleração devida à gravidade (9,81 m/s2) |
||||||||||||
|
h |
altura do centro de gravidade acima do solo |
||||||||||||
|
hK |
altura do prato de engate (cabeçote de engate) |
||||||||||||
|
hr |
altura do centro de gravidade do reboque |
||||||||||||
|
i |
índice do eixo |
||||||||||||
|
iF |
número de eixos dianteiros |
||||||||||||
|
iR |
número de eixos traseiros |
||||||||||||
|
l |
comprimento da alavanca |
||||||||||||
|
n |
número de atuadores dos travões de mola por eixo |
||||||||||||
|
NFD |
reação normal total do piso sobre os eixos dianteiros perante um declive descendente com uma inclinação de 18 % |
||||||||||||
|
NFDi |
reação normal total do piso sobre o eixo dianteiro i perante um declive descendente com uma inclinação de 18 % |
||||||||||||
|
NFU |
reação normal total do piso sobre os eixos dianteiros perante um declive ascendente com uma inclinação de 18 % |
||||||||||||
|
NFUi |
reação normal total do piso sobre o eixo dianteiro i perante um declive ascendente com uma inclinação de 18 % |
||||||||||||
|
NRD |
reação normal total do piso sobre os eixos traseiros perante um declive descendente com uma inclinação de 18 % |
||||||||||||
|
NRDi |
reação normal total do piso sobre o eixo traseiro i perante um declive descendente com uma inclinação de 18 % |
||||||||||||
|
NRU |
reação normal total do piso sobre os eixos traseiros perante um declive ascendente com uma inclinação de 18 % |
||||||||||||
|
NRUi |
reação normal total do piso sobre o eixo traseiro i perante um declive ascendente com uma inclinação de 18 % |
||||||||||||
|
pm |
pressão medida na cabeça de engate da linha de comando |
||||||||||||
|
pc |
pressão nas câmaras dos travões |
||||||||||||
|
P |
massa do veículo |
||||||||||||
|
Ps |
massa do prato de engate para uma massa de reboque P, em condições estáticas |
||||||||||||
|
PR |
reação estática normal total do piso sobre as rodas do reboque ou do semirreboque |
||||||||||||
|
PRF |
reação estática normal total do piso nos eixos dianteiros em solo horizontal |
||||||||||||
|
PRR |
reação estática normal total do piso nos eixos traseiros a nível do solo |
||||||||||||
|
Rs |
raio do pneu carregado, em condições estáticas, calculado com a seguinte fórmula: Rs = em que:
|
||||||||||||
|
Tpi |
força de travagem na periferia de todas as rodas do eixo i fornecida pelos travões de mola |
||||||||||||
|
Ths |
Impulso da mola do travão de mola |
||||||||||||
|
TR |
soma das forças de travagem na periferia de todas as rodas do reboque ou do semirreboque |
||||||||||||
|
TRf |
soma das forças de travagem na periferia de todas as rodas dos eixos dianteiros |
||||||||||||
|
TRr |
soma das forças de travagem na periferia de todas as rodas dos eixos traseiros |
||||||||||||
|
TRmax |
soma das forças de travagem máximas disponíveis na periferia de todas as rodas do reboque ou do semirreboque |
||||||||||||
|
TRL |
soma das forças de travagem na periferia de todas as rodas do reboque ou do semirreboque à qual se atinge o limite de aderência |
||||||||||||
|
TRLf |
soma das forças de travagem na periferia de todas as rodas dos eixos dianteiros à qual se atinge o limite de aderência |
||||||||||||
|
TRLr |
soma das forças de travagem na periferia de todas as rodas dos eixos traseiros à qual se atinge o limite de aderência. |
||||||||||||
|
TRpr |
soma das forças de travagem na periferia de todas as rodas do reboque ou do semirreboque necessária para atingir o desempenho prescrito |
||||||||||||
|
TRprf |
soma das forças de travagem na periferia de todas as rodas dos eixos dianteiros necessária para atingir o desempenho prescrito |
||||||||||||
|
TRprr |
soma das forças de travagem na periferia de todas as rodas dos eixos traseiros necessária para atingir o desempenho prescrito |
||||||||||||
|
zC |
razão de travagem do conjunto de veículos, apenas com o reboque a ser travado |
||||||||||||
|
cos P |
cosseno do ângulo entre uma inclinação de 18 % e o plano horizontal = 0,98418 |
||||||||||||
|
tan P |
tangente do ângulo entre uma inclinação de 18 % e o plano horizontal = 0,18 |
ANEXO 21
REQUISITOS ESPECIAIS PARA VEÍCULOS EQUIPADOS COM UMA FUNÇÃO DE ESTABILIDADE DO VEÍCULO
1. GENERALIDADES
1.1. O presente anexo define os requisitos especiais aplicáveis a veículos equipados com uma função de estabilidade do veículo, em conformidade com os pontos 5.2.1.32, 5.2.1.33 e 5.2.2.23 do presente regulamento.
1.2. Para cumprir os requisitos do presente anexo, os «Outros veículos», nos termos dos pontos 2.1.3 e 2.2.3 seguintes, não diferem entre si pelo menos nos seguintes aspetos essenciais:
|
1.2.1. |
Natureza do veículo; |
|
1.2.2. |
No caso dos veículos a motor, a configuração dos eixos (por exemplo, 4 × 2, 6 × 2, 6 × 4); |
|
1.2.3. |
No caso dos reboques, o número e a disposição dos eixos; |
|
1.2.4. |
A desmultiplicação da direção do eixo dianteiro no caso de veículos a motor, se a função de estabilidade do veículo não a incluir enquanto elemento de programação de fim de série ou característica de autoaprendizagem; |
|
1.2.5. |
Eixos direcionais suplementares, no caso dos veículos a motor, e eixos direcionais, no caso dos reboques; |
|
1.2.6. |
Eixos eleváveis; |
2. REQUISITOS
2.1. Veículos a motor
2.1.1. Quando um veículo estiver equipado com uma função de estabilidade, na aceção do ponto 2.4 do presente regulamento, deve aplicar-se o seguinte:
|
|
No caso de controlo da direção, a função deve poder comandar, automática e individualmente, a velocidade das rodas esquerda e direita de cada eixo, ou um eixo de cada grupo de eixos por travagem seletiva com base na avaliação do comportamento efetivo do veículo, em comparação com a determinação do comportamento do veículo solicitado pelo condutor (1). |
|
|
No caso do controlo da capotagem, a função deve poder comandar automaticamente a velocidade das rodas em, pelo menos, duas rodas de cada eixo ou grupo de eixos por travagem seletiva ou travagem comandada automaticamente com base na avaliação do comportamento efetivo do veículo suscetível de provocar a capotagem (1) |
|
|
Em ambos os casos, a função não é necessária:
|
2.1.2. Para realizar a funcionalidade acima definida, uma função de estabilidade do veículo deve incluir, para além da travagem seletiva e/ou da travagem comandada automaticamente, pelo menos os seguintes aspetos:
|
a) |
a capacidade de controlar a potência do motor; |
|
b) |
no caso de controlo da direção: a determinação do comportamento efetivo do veículo a partir de valores da velocidade angular de guinada, da aceleração lateral, da velocidade de rotação das rodas, bem como das ações de controlo do condutor em relação aos sistemas de travagem e de direção e ao motor. Apenas deve ser utilizada a informação gerada a bordo. Se esses valores não forem medidos diretamente, devem ser mostradas ao serviço técnico, aquando da homologação, as provas da correlação adequada com valores diretamente medidos em todas as condições de condução (p. ex., condução em túneis); |
|
c) |
no caso de controlo da capotagem: a determinação do comportamento efetivo do veículo a partir de valores da força vertical sobre os pneus (ou, pelo menos, a aceleração lateral e a velocidade das rodas), bem como das ações de controlo do condutor em relação ao sistema de travagem e ao motor. Apenas deve ser utilizada a informação gerada a bordo. Se esses valores não forem medidos diretamente, devem ser mostradas ao serviço técnico, aquando da homologação, as provas da correlação adequada com valores diretamente medidos em todas as condições de condução (p. ex., condução em túneis); |
|
d) |
no caso de um veículo trator equipado de acordo com o ponto 5.1.3.1 do presente regulamento: a capacidade de aplicar os travões de serviço do reboque através das respetivas linhas de comando independentemente do condutor. |
2.1.3. A função de estabilidade do veículo deve ser demonstrada ao serviço técnico através de manobras dinâmicas num só veículo, cuja função de estabilidade seja a mesma que a do modelo de veículo a homologar. Pode proceder-se a uma comparação dos resultados obtidos, numa dada condição de carga, com a função de estabilidade do veículo ativada e desativada. Em alternativa à realização de manobras dinâmicas em outros veículos e outras condições de carga, equipados com o mesmo sistema de estabilidade, podem ser apresentados resultados de ensaios reais obtidos com esse veículo ou simulações informáticas.
Em alternativa, pode recorrer-se a um relatório de ensaio em conformidade com o anexo 19, parte 2, ponto 1.1.
A utilização do simulador é definida no apêndice 1 do presente anexo.
As especificações e a validação do simulador são definidas no apêndice 2 do presente anexo.
Enquanto não forem adotados procedimentos de ensaio uniformes, o método para realizar esta demonstração deve ser acordado entre o fabricante do veículo e o serviço técnico, devendo incluir as condições críticas de controlo da direção e da capotagem, conforme adequado à função de estabilidade do veículo instalada no mesmo, e anexando ao relatório de homologação o método de demonstração e os resultados obtidos. Estes ensaios podem ser realizados sem ser no momento da homologação.
Para demonstrar a função de estabilidade do veículo, pode utilizar-se qualquer uma das seguintes manobras dinâmicas (2):
|
Controlo da direção |
Controlo da capotagem |
|
Ensaio com redução progressiva do ângulo de viragem do volante |
Ensaio em trajetória circular em estado estacionário |
|
Ensaio com variação brusca do ângulo de viragem do volante |
Pião em marcha-atrás |
|
Ensaio com variação sinusoidal do ângulo de viragem do volante com patamar |
|
|
Pião em marcha-atrás |
|
|
m- mudança de via em pavimento com faixas longitudinais de aderência desigual |
|
|
Dupla mudança de via |
|
|
Ensaio de trajetória em gancho |
|
|
Ensaio com variação do ângulo de viragem do volante em seno assimétrico |
|
Para demonstrar a repetibilidade, o veículo será submetido a uma segunda demonstração com base nas manobras selecionadas.
2.1.4. As intervenções da função de estabilidade do veículo devem ser assinaladas ao condutor por um sinal de aviso ótico que preencha os requisitos técnicos pertinentes do Regulamento n.o 121. Esta indicação deve permanecer ativa enquanto a função de estabilidade do veículo se encontrar em modo de intervenção. O sinal de aviso indicado no ponto 5.2.1.29.1.2 do presente regulamento não deve ser utilizado para este fim.
Podem também ser indicadas ao condutor através deste sinal de aviso ótico intermitente as intervenções de sistemas relacionados com a função de estabilidade do veículo (incluindo o controlo da tração, a assistência à estabilidade do reboque, o controlo de travagem em curva e outras funções análogas que utilizem o comando do acelerador e/ou do binário individual para acionar e partilhar componentes comuns com a função de estabilidade do veículo).
As intervenções da função de estabilidade do veículo utilizadas nos processos de aprendizagem para determinar as características de funcionamento do veículo não devem produzir este tipo de sinal.
O sinal deve ser visível pelo condutor, mesmo de dia, de modo que o condutor possa facilmente verificar o bom estado do sinal a partir do seu lugar de condução.
2.1.5. Qualquer avaria ou anomalia na função de estabilidade do veículo deve ser detetada e assinalada ao condutor por meio de um sinal de aviso ótico que preencha os requisitos técnicos pertinentes do Regulamento n.o 121.
O sinal de aviso indicado no ponto 5.2.1.29.1.2 do presente regulamento não deve ser utilizado para este fim.
O sinal de aviso deve ser constante e permanecer aceso enquanto a avaria ou a anomalia persistirem e o comutador de ignição (arranque) estiver na posição de contacto (marcha).
2.1.6. No caso de um veículo a motor equipado com uma linha de comando elétrica e ligado eletricamente a um reboque equipado com uma linha de comando elétrica, o condutor deve ser avisado por um sinal de aviso ótico que preencha os requisitos técnicos pertinentes do Regulamento n.o 121, sempre que o reboque emita a informação «VDC ativa» através da via de comunicação de dados da linha de comando elétrica. O sinal ótico definido no ponto 2.1.4 anterior pode ser utilizado para este fim.
2.2. Reboques
2.2.1. Quando um reboque estiver equipado com uma função de estabilidade, na aceção do ponto 2.34 do presente regulamento, deve aplicar-se o seguinte:
|
|
No caso de controlo da direção, a função deve poder comandar, automática e individualmente, a velocidade das rodas esquerda e direita de cada eixo, ou um eixo de cada grupo de eixos por travagem seletiva com base na avaliação do comportamento efetivo do reboque, em comparação com a determinação do comportamento relativo do veículo trator (3) |
|
|
No caso do controlo da capotagem, a função deve poder comandar automaticamente a velocidade das rodas em, pelo menos, duas rodas de cada eixo ou grupo de eixos por travagem seletiva ou travagem comandada automaticamente com base na avaliação do comportamento efetivo do reboque suscetível de provocar a capotagem (4) |
2.2.2. Para realizar a funcionalidade acima definida, uma função de estabilidade do veículo deve incluir, para além da travagem comandada automaticamente e, quando adequado, da travagem seletiva, pelo menos os seguintes aspetos:
A determinação do comportamento efetivo do reboque a partir de valores da força vertical sobre os pneus ou, pelo menos, uma aceleração lateral e a velocidade das rodas. Apenas deve ser utilizada a informação gerada a bordo. Se esses valores não forem medidos diretamente, devem ser comunicadas ao serviço técnico, aquando da homologação, as provas da correlação adequada com valores diretamente medidos em todas as condições de condução (p. ex., condução em túneis).
2.2.3. A função de estabilidade do veículo deve ser demonstrada ao serviço técnico através de manobras dinâmicas num só veículo, cuja função de estabilidade seja a mesma que a do modelo de veículo a homologar. Pode proceder-se a uma comparação dos resultados obtidos, numa dada condição de carga, com a função de estabilidade do veículo ativada e desativada. Em alternativa à realização de manobras dinâmicas em outros veículos e outras condições de carga, equipados com o mesmo sistema de estabilidade, podem ser apresentados resultados de ensaios reais obtidos com esse veículo ou simulações informáticas.
Em alternativa, pode recorrer-se a um relatório de ensaio em conformidade com o anexo 19, parte 1, ponto 6.
A utilização do simulador é definida no apêndice 1 do presente anexo.
As especificações e a validação do simulador são definidas no apêndice 2 do presente anexo.
Enquanto não forem adotados procedimentos de ensaio uniformes, o método para realizar esta demonstração deve ser acordado entre o fabricante do reboque e o serviço técnico, devendo incluir as condições críticas de controlo da direção e da capotagem, conforme adequado à função de estabilidade do veículo instalada no mesmo, e anexando ao relatório de homologação o método de demonstração e os resultados obtidos. Estes ensaios podem ser realizados sem ser no momento da homologação.
Para demonstrar a função de estabilidade do veículo, pode utilizar-se qualquer uma das seguintes manobras dinâmicas (5)
|
Controlo da direção |
Controlo da capotagem |
|
Ensaio com redução progressiva do ângulo de viragem do volante |
Ensaio em trajetória circular em estado estacionário |
|
Ensaio com variação brusca do ângulo de viragem do volante |
Pião em marcha-atrás |
|
Ensaio com variação sinusoidal do ângulo de viragem do volante com patamar |
|
|
Pião em marcha-atrás |
|
|
m- mudança de via em pavimento com faixas longitudinais de aderência desigual |
|
|
Dupla mudança de via |
|
|
Ensaio de trajetória em gancho |
|
|
Ensaio com variação do ângulo de viragem do volante em seno assimétrico |
|
Para demonstrar a repetibilidade, o veículo será submetido a uma segunda demonstração com base nas manobras selecionadas.
2.2.4. Os reboques equipados com uma linha de comando elétrica, quando ligados eletricamente a um veículo trator de uma linha de comando elétrica, devem fornecer a informação «VDC ativa» através da via de comunicação de dados da linha de comando elétrica, quando a função de estabilidade do veículo se encontrar em modo de intervenção. As intervenções da função de estabilidade do veículo utilizadas nos processos de aprendizagem para determinar as características de funcionamento do reboque não devem produzir este tipo de informação.
2.2.5. Para maximizar o desempenho dos reboques que utilizem o comando de «baixa seletividade», esses reboques são autorizados a passar ao modo de comando «alta seletividade» durante uma intervenção da «função de estabilidade do veículo».
(1) É permitida uma interação suplementar com outros sistemas ou componentes do veículo. Se estes sistemas ou elementos estiverem sujeitos a regulamentos especiais, essa interação deve cumprir os requisitos desses regulamentos, por exemplo, a interação com o sistema de direção deve respeitar os requisitos estabelecidos no Regulamento n.o 79 relativos à direção corretiva.
(2) Caso o recurso a qualquer uma das manobras acima definidas não resulte na perda do controlo da direção do veículo ou da capotagem, consoante o caso, pode recorrer-se a uma manobra alternativa, com o acordo do serviço técnico.
(3) É permitida uma interação suplementar com outros sistemas ou componentes do veículo. Se estes sistemas ou elementos estiverem sujeitos a regulamentos especiais, essa interação deve cumprir os requisitos desses regulamentos, por exemplo, a interação com o sistema de direção deve respeitar os requisitos estabelecidos no Regulamento n.o 79 relativos à direção corretiva.
(4) É permitida uma interação suplementar com outros sistemas ou componentes do veículo. Se estes sistemas ou elementos estiverem sujeitos a regulamentos especiais, essa interação deve cumprir os requisitos desses regulamentos, por exemplo, a interação com o sistema de direção deve respeitar os requisitos estabelecidos no Regulamento n.o 79 relativos à direção corretiva.
(5) Caso o recurso a qualquer uma das manobras acima definidas não resulte na perda do controlo da direção do veículo ou da capotagem, consoante o caso, pode recorrer-se a uma manobra alternativa, com o acordo do serviço técnico.
Apêndice 1
Utilização da simulação da estabilidade dinâmica
A eficácia da função de controlo da estabilidade da direção e/ou da capotagem dos veículos a motor e reboques das categorias M, N e O pode ser determinada por simulação em computador.
1. UTILIZAÇÃO DA SIMULAÇÃO
1.1. A função de estabilidade do veículo deve ser demonstrada pelo fabricante do veículo à entidade homologadora ou ao serviço técnico pelas mesmas manobras dinâmicas que para a demonstração prática referida nos pontos 2.1.3 ou 2.2.3 do presente anexo.
1.2. A simulação deve ser um meio que permita demonstrar o desempenho da estabilidade do veículo com a função de estabilidade do veículo ativada ou desativada e com o veículo carregado e sem carga.
1.3. As simulações devem ser feitas com um instrumento de modelização e de simulação validado. O instrumento de simulação só deve ser utilizado quando cada parâmetro pertinente do veículo a homologar, tal como enumeradas no ponto 1.1 do apêndice 2 do presente anexo, estiver incluído no instrumento de simulação e quando o valor de cada parâmetro cair no respetivo alcance validado. A verificação dever ser feita com recurso às mesmas manobras que estão descritas no ponto 1.1 do presente apêndice do presente anexo.
O método através do qual o instrumento de simulação é validado é apresentado no presente anexo, apêndice 2.
1.3.1. Os fabricantes de veículos que utilizem um instrumento de simulação validado, mas não diretamente por eles, para uma homologação de um modelo de veículo devem, no mínimo proceder a um ensaio de confirmação.
Este ensaio de confirmação deve ser realizado em conjunção com um serviço técnico e deve consistir numa comparação entre um ensaio real de veículo e uma simulação que utilize uma das manobras definidas no ponto 1.1 do presente apêndice.
O ensaio de confirmação deve ser repetido no caso de qualquer alteração do instrumento de simulação (1).
Os resultados do ensaio de confirmação devem ser anexados à documentação de homologação.
1.4. A disponibilidade do software do instrumento de simulação, a versão de software utilizado, devem ser mantidas durante um período não inferior a 10 anos a contar da data da homologação do veículo.
(1) A necessidade de um ensaio de confirmação deve ser discutida entre o fabricante do veículo, o serviço técnico e a entidade homologadora.
Apêndice 2
Instrumento de simulação da estabilidade dinâmica e sua validação
1. ESPECIFICAÇÃO DO INSTRUMENTO DE SIMULAÇÃO
1.1. O instrumento de simulação deve ter em conta os principais fatores que influenciam os movimentos direcional e de rolamento do veículo.
1.1.1. O instrumento de simulação deve ter em conta os seguintes parâmetros do veículo, conforme aplicável (1):
|
a) |
categoria do veículo; |
|
b) |
natureza do veículo; |
|
c) |
tipo de caixa de velocidades (por exemplo, manual, manual automatizada, semiautomática ou automática); |
|
d) |
tipo de diferencial (por exemplo, normal ou autobloqueante); |
|
e) |
bloqueios do diferencial (selecionados pelo condutor); |
|
f) |
tipo de sistema de travagem (por exemplo, hidropneumático, pneumático); |
|
g) |
tipo de travão [p. ex. disco, tambor (calço simples, calço duplo, came em S)]; |
|
h) |
tipo de pneu (p. ex. estrutura, categoria de utilização, dimensão); |
|
i) |
tipo de suspensão (p. ex. pneumática, mecânica, borracha). |
1.1.2. O modelo de simulação deve incluir pelo menos os seguintes parâmetros, conforme aplicável (1)
|
a) |
configurações dos veículos (p. ex. 4 × 2, 6 × 2, etc., com identificação da funcionalidade (p. ex. em roda livre, eleváveis, direcionais) e a posição do eixo); |
|
b) |
eixos direcionais (princípio de funcionamento); |
|
c) |
desmultiplicação da direção; |
|
d) |
eixo(s) motor(es) (efeito sobre sensores de velocidade das rodas e a velocidade do veículo); |
|
e) |
eixo(s) elevável/(eis) (deteção/controlo de efeitos das alterações na distância entre eixos quando levantada); |
|
f) |
gestão do motor (comunicação, controlo e resposta); |
|
g) |
características da caixa de velocidades; |
|
h) |
opções de unidade de tração (p. ex. retardador, travagem regenerativa, sistema de propulsão auxiliar); |
|
i) |
características dos travões; |
|
j) |
configuração de travagem antibloqueio; |
|
k) |
distância entre eixos; |
|
l) |
largura da via; |
|
m) |
altura do centro de gravidade; |
|
n) |
posição do sensor de aceleração lateral; |
|
o) |
posição do sensor de velocidade angular de guinada; |
|
p) |
carga. |
1.1.3. Deve ser fornecida ao serviço técnico que procede à validação uma ficha de informações que abranja pelo menos os elementos previstos nos pontos 1.1.1 e 1.1.2 anteriores.
1.2. A função de estabilidade do veículo deve ser acrescentada ao modelo de simulação por meio de:
|
a) |
um subsistema (modelo de software) do instrumento de simulação como software no circuito, ou |
|
b) |
uma unidade de controlo eletrónico numa configuração do tipo hardware no circuito. |
1.3. No caso de um reboque, a simulação deve ser efetuada com o reboque atrelado a um veículo trator representativo.
1.4. Estado de carga do veículo
1.4.1. O instrumento de simulação deve poder ter em conta o estado de carga (em carga e sem carga).
1.4.2. O instrumento de simulação deve satisfazer os seguintes critérios:
|
a) |
uma carga fixa; |
|
b) |
uma dada massa; |
|
c) |
distribuição de uma dada massa; e |
|
d) |
uma dada altura do centro de gravidade. |
2. VALIDAÇÃO DO INSTRUMENTO DE SIMULAÇÃO
2.1. A validade do instrumento de modelização e simulação aplicado deve ser verificada por meio de comparações com os ensaios do veículo em condições reais. Os ensaios utilizados para a validação devem ser os que, na ausência de ações de comando, resultariam na perda do controlo da direção (subviragem e sobreviragem) e/ou do controlo da capotagem, consoante a funcionalidade adequada da função de controlo da estabilidade instalada num veículo.
Durante os ensaios, devem ser registadas ou calculadas as seguintes variáveis de movimento, em conformidade com a norma ISO 15037, parte 1:2006 ou parte 2:2002, consoante o caso:
|
a) |
velocidade angular de guinada; |
|
b) |
aceleração lateral; |
|
c) |
carga por roda ou descolagem da roda; |
|
d) |
velocidade de avanço; |
|
e) |
intervenção do condutor. |
2.2. O objetivo é mostrar que o comportamento simulado do veículo e o funcionamento da função de estabilidade do veículo é comparável à observada nos ensaios reais com o veículo.
A capacidade do instrumento de simulação para ser utilizado com parâmetros que não foram validados por um ensaio real com o veículo deve ser mostrada realizando simulações com diferentes valores de parâmetros. Os resultados destas simulações devem ser verificados sejam lógicos e similares em comparação com os resultados de ensaios reais com o veículo.
2.3. Deve-se considerar que um simulador está validado quando os dados produzidos são comparáveis aos resultados produzidos num ensaio prático pelos mesmos veículos durante as manobras selecionadas a partir das descritas nos pontos 2.1.3 ou 2.2.3 do presente anexo, consoante o caso.
O instrumento de simulação só deve ser utilizado no que respeita aos elementos para que tenha sido feito o cotejo entre ensaios reais com o veículo e os resultados do instrumento de simulação. As comparações devem ser feitas nos estados em carga e sem carga, por forma a mostrar os diferentes estados de carga a que pode ser adaptado e para confirmar os parâmetros extremos a simular, por exemplo:
|
a) |
veículo com a distância entre eixos mais curta e centro de gravidade mais alto; |
|
b) |
veículo com a distância entre eixos mais longa e centro de gravidade mais alto. |
No caso do ensaio em trajetória circular em estado estacionário, a comparação far-se-á com o declive de subviragem.
No caso de uma manobra dinâmica, a comparação deve ser feita com base na relação entre a ativação da função de estabilidade do veículo e a sequência de operações realizadas na simulação e no ensaio real do veículo.
2.4. Na simulação, as eventuais diferenças entre os parâmetros físicos da configuração do veículo simulado e do veículo de referência devem ser alinhadas em conformidade.
2.5. Deve ser elaborado um relatório do ensaio de simulação, cujo modelo consta do presente anexo, apêndice 3, devendo um exemplar desse relatório ser anexado ao relatório de homologação do veículo.
2.5.1. A validação do instrumento de simulação levada a cabo em conformidade com os apêndices 2 e 3 do presente anexo, antes da data de entrada em vigor do suplemento 10 à série 11 de alterações do presente regulamento, pode continuar a ser utilizada para uma nova homologação da função de estabilidade do veículo ou para a extensão de uma homologação existente da mesma função, desde que os requisitos técnicos aplicáveis estejam preenchidos e seja cumprido o âmbito de aplicação.
(1) Os parâmetros não incluídos restringem a utilização do instrumento de simulação.
Apêndice 3
Relatório de ensaio da função de estabilidade do veículo por simulação
Número do relatório de ensaio: …
1. Identificação
1.1. Nome e endereço do fabricante do instrumento de simulação
1.2. Identificação do instrumento de simulação: designação/modelo/número (hardware e software)
2. Instrumento de simulação
2.1. Método de simulação (descrição geral tendo em conta os requisitos do ponto 1.1 do apêndice 2 do presente anexo)
2.2. Hardware/software no circuito (ver n.o 1.2 do apêndice 2 do presente anexo)
2.3. Condições de carga do veículo (ver ponto 1.4 do apêndice 2 do presente anexo)
2.4. Validação (ver ponto 2 do apêndice 2 do presente anexo)
2.5. Variáveis de movimento (ver ponto 2.1 do apêndice 2 do presente anexo)
3. Âmbito de aplicação:
3.1. Categoria do veículo:
3.2. Natureza do veículo:
3.3. Configuração do veículo:
3.4. Eixos direcionais:
3.5 Desmultiplicação da direção:
3.6. Eixos motores:
3.7. Eixos eleváveis:
3.8. Gestão do motor:
3.9. Tipo de caixa de velocidades:
3.10. Opções relativas à unidade de tração:
3.11. Tipo de diferencial:
3.12. Bloqueio(s) dos diferenciais:
3.13. Tipo de sistema de travagem:
3.14. Tipo de travão:
3.15. Características dos travões:
3.16. Configurações de travagem antibloqueio:
3.17. Distância entre eixos:
3.18. Tipo de pneu:
3.19. Largura da via:
3.20. Tipo de suspensão:
3.21. Altura do centro de gravidade:
3.22. Posição do sensor de aceleração lateral:
3.23. Posição do sensor de velocidade angular de guinada:
3.24. Carga:
3.25. Fatores restritivos:
3.26. Manobras para as quais o instrumento de simulação foi validado:
4. Ensaios de verificação do veículo
4.1. Descrição dos veículos, incluindo o veículo trator, caso se trate do ensaio de reboques:
4.1.1. Identificação do(s) veículo(s): marca/modelo/NIV
4.1.1.1. Acessórios fixos não normalizados:
4.1.2. Descrição do veículo, nomeadamente a configuração dos eixos/suspensão/rodas, motor e transmissão, sistemas de travagem e conteúdo da função de estabilidade do veículo (controlo da direção/capotagem) sistema de direção, com designação/modelo/número de identificação:
4.1.3. Dados do veículo utilizados na simulação (explícitos)
4.2. Descrição dos ensaios, incluindo localizações, estado do piso/superfície da área de ensaio, temperatura e datas:
4.3. Resultados com carga e sem carga, com a função de estabilidade do veículo ativada e desativada, incluindo as variáveis de movimento referidas no ponto 2.1 do apêndice 2 do presente anexo, consoante o caso:
5. Resultados da simulação
5.1. Os parâmetros e os valores do veículo utilizados na simulação que não são recolhidos a partir do veículo de ensaio real (implícitos):
5.2. Resultados em carga e sem carga, com a função de estabilidade do veículo ativada e desativada para cada ensaio realizado de acordo com o ponto 4.2 do presente apêndice, incluindo as variáveis de movimento referidas no ponto 2.1 do apêndice 2 do presente anexo, consoante o caso:
6. Declarações finais
O comportamento simulado do veículo e o funcionamento da função de estabilidade do veículo é comparável à observada nos ensaios reais com o veículo.
Sim/Não
7. Fatores restritivos
8. Este ensaio foi realizado e os resultados apresentados em conformidade com o apêndice 2 do anexo 21 do Regulamento n.o 13, com a última redação que lhe foi dada pela série … de alterações.
Serviço técnico que realizou o ensaio (1)
Assinatura: …Data: …
Entidade homologadora (1)
(1) A assinar por pessoas distintas, se os serviços técnicos e a entidade homologadora forem a mesma organização
ANEXO 22
REQUISITOS PARA A INTERFACE ELÉTRICA/ELETRÓNICA DO TRAVÃO DE UM CONECTOR AUTOMATIZADO
1. GENERALIDADES
O presente anexo define os requisitos aplicáveis às instalações em que a conexão e a desconexão da interface elétrica/eletrónica do travão entre o veículo trator e o reboque são feitas por meio de um conector automatizado.
O presente anexo também considera os veículos equipados com um conector ISO 7638 e com um conector automatizado.
2. CATEGORIAS DE CONECTORES AUTOMATIZADOS
Os conectores automatizados classificam-se em diferentes categorias (1):
|
Categoria A |
: |
Os conectores automatizados para conjuntos trator/semirreboque devem satisfazer os requisitos do apêndice 2 do presente anexo. Todos os conectores automatizados no âmbito desta categoria são compatíveis entre si. |
|
Categoria B |
: |
Os conectores automatizados para conjuntos trator/semirreboque que não satisfazem os requisitos do apêndice 2 do presente anexo. Não são compatíveis com a categoria A. As interfaces da categoria B não são necessariamente compatíveis com todos os tipos de interfaces no âmbito desta categoria. |
|
Categoria C |
: |
Os conectores automatizados para conjuntos que não de trator/semirreboque devem satisfazer os requisitos do apêndice 3 do presente anexo (2). Todos os conectores automatizados no âmbito desta categoria são compatíveis entre si. |
|
Categoria D |
: |
Os conectores automatizados para conjuntos que não de trator/semirreboque que não satisfazerem os requisitos do apêndice 3. Não são compatíveis com a categoria C. As interfaces da categoria D não são necessariamente compatíveis com todos os tipos de interfaces no âmbito desta categoria. |
3. REQUISITOS
A interface elétrica/eletrónica do travão do conector automatizado deve atingir os mesmos requisitos funcionais que foram especificados para o conector ISO 7638 ao longo do presente regulamento e dos seus anexos.
3.1. Os contactos (pinos e olhais) para a interface elétrica/eletrónica do travão devem ter as mesmas características elétricas e funcionalidade que os contactos ISO 7638.
3.1.1. Devem-se utilizar os contactos de transmissão de dados da interface elétrica/eletrónica do travão para transferir a informação exclusivamente para funções de travagem (incluindo ABS) e de rolamento (direção, pneus e suspensão) conforme definido na norma ISO 11992-2:2003, incluindo a sua alteração 1:2007. As funções de travagem têm prioridade e devem ser mantidas nos modos normal e de avaria. A transmissão de informações sobre os órgãos de rolamento não deve atrasar as funções de travagem.
3.1.2. A alimentação de energia, proporcionada pela interface elétrica/eletrónica do travão, deve ser exclusivamente utilizada para as funções de travagem e de rolamento e para a transferência das informações relativas ao reboque não transmitidas pela linha de comando elétrica. No entanto, devem aplicar-se em todos os casos as disposições do ponto 5.2.2.18 do presente regulamento. Devem utilizar-se outros meios para fornecer energia a todas as outras funções.
3.2. No caso de conjuntos de semirreboques equipados com um conector automatizado, o comprimento máximo do cabo para a comunicação de dados de travagem deve ser:
|
a) |
trator: 21 m; |
|
b) |
semirreboque: 19 m; |
em ordem de marcha.
Em todos os outros casos, aplicam-se as condições dos pontos 5.1.3.6 e 5.1.3.8 do presente regulamento no que respeita ao comprimento máximo dos cabos.
3.3. Os veículos equipados com um conector conforme à norma ISO 7638 e com um conector automatizado devem ser construídos de tal modo que só haja uma via possível para o funcionamento da transmissão elétrica do comando ou para a transmissão de informações em conformidade com a norma ISO 11992-2:2003, incluindo a alteração 1:2007. Ver exemplos no apêndice 1 do presente anexo.
No caso de seleção automática de via, será dada prioridade ao conector automatizado.
3.4. Os reboques equipados com um conector automatizado devem estar equipados com um sistema de travagem de molas em conformidade com o anexo 8 do presente regulamento.
3.5. O fabricante que requeira a homologação deve apresentar uma ficha de informações que descreva a funcionalidade e as eventuais restrições à utilização do conector automatizado e qualquer equipamento associado, inclusive a indicação da categoria de acordo com o ponto 2 do presente anexo.
No caso de conectores automatizados das categorias B e D, os meios para identificar o respetivo tipo devem também ser descritos para garantir a identificação de compatibilidade.
3.6. O manual de instruções do veículo fornecido pelo fabricante deve alertar o condutor para as consequências da não verificação da compatibilidade do conector automatizado entre o veículo trator e o reboque. Devem também ser fornecidas informações sobre o funcionamento em modo misto, se aplicável.
A fim de permitir que o condutor verifique a compatibilidade, os veículos equipados com um conector automatizado devem ter uma marcação com indicação da categoria em conformidade com o ponto 2 do presente anexo. Para as categorias B e D, deve também ser indicado o tipo de conector automatizado. Esta marcação deve ser indelével e visível para o condutor, estando no solo e de pé.
(1) Novas categorias de engates podem ser acrescentadas mais tarde para soluções técnicas novas/inovadoras, quando forem definidas e acordadas interfaces normalizadas.
(2) Até ser definida e acordada uma norma, entende-se que nenhum conector automatizado pertence à categoria C.
Apêndice 1
Exemplos da configuração de uma conexão automatizada entre veículos
Conexão automatizada e veículos equipados com conexão manual: requisitos de barramento de dados.
Esquemas de ligações elétricas mostram encaminhamento de sinais dos pinos 6 e 7, de acordo com a norma ISO 7638.
LEGENDA
ELÉTRICAS
|
E1 |
Nó ISO 11992-2 no veículo trator, p. ex. UCE ABS/EBS |
|
E2 |
Tomada ISO 7638 do veículo trator |
|
E3 |
Ficha ISO 7638 do veículo trator para o conector automatizado |
|
E4 |
Parte do conector automatizado correspondente ao veículo trator |
|
E5 |
Ficha ISO 7638 do reboque para o conector automatizado |
|
E6 |
Tomada ISO 7638 do reboque |
|
E7 |
Parte do conector automatizado correspondente ao reboque |
|
E8 |
Cabo em espiral ISO 7638 |
|
E9 |
Tomada de estacionamento ISO 7638 |
|
E10 |
Nó ISO 11992-2 no reboque, p. ex. UCE ABS/EBS |
|
I |
Cabo de E1 a E2 |
|
II |
Cabo de E10 a E6 |
|
III |
Cabo de E5 a E7 |
|
IV |
Cabo de E3 a E4 |
PNEUMÁTICAS
|
P1 |
Válvula de controlo do reboque montada no veículo trator |
|
P2 |
Peça T |
|
P3 |
Cabeça de engate pneumática no veículo trator (comando e alimentação) |
|
P4 |
Parte do conector automatizado correspondente ao veículo trator |
|
P5 |
Cabeça de engate pneumática no reboque (comando e alimentação) |
|
P6 |
Válvula pneumática para selar o terminal não utilizado (válvula de duplo controlo) (comando e alimentação) |
|
P7 |
Parte do conector automatizado correspondente ao reboque |
|
P8 |
Tubo pneumático em espiral (comando e alimentação) |
|
P9 |
Tomada de estacionamento pneumática (comando e alimentação) |
EXEMPLOS DE VEÍCULO TRATOR E SEMIRREBOQUE
I. Conexão automatizada e veículos equipados com conexão manual
Modo de conexão automatizada
Figura A
Conexão ponto a ponto da UCE do veículo trator (E1) e da UCE do reboque (E10) via ACV. Modo de conexão automatizada: sem cabos em espiral conectados, conexões entre E1 e E10 quando E4 e E7 estiverem conectados (ou seja, quando o prato de engate estiver atrelado)
Modo de conexão manual
Figura B
Conexão ponto a ponto da UCE do veículo trator (E1) e da UCE do reboque (E10) via cabo em espiral. Modo manual: cabos em espiral conectados, conexões entre E3 e E4 quando E5 e E7 não estiverem a ser utilizados

II. Apenas uma parte do conjunto de veículos está equipada com uma conexão automatizada
Modo manual A (só o veículo trator equipado com conexão automatizada)
Figura C
Conexão ponto a ponto da UCE do veículo trator (E1) e da UCE do reboque (E10) quando o prato de engate estiver fechado. Cabos em espiral conectados, linha de E3 a E4 não está a ser utilizada

Modo manual B (apenas o semirreboque está equipado com conexão automatizada)
Figura D
Conexão ponto a ponto da UCE do trator (E1) e da UCE do reboque ECU (E10). Cabos em espiral conectados, linha de E5 a E7 não está a ser utilizada

Modo de conexão automatizada
Figura E
Conexão pneumática entre o veículo trator e o reboque através da ACV. Modo de conexão automatizada: sem cabos em espiral conectados, conexão entre o trator e o reboque quando P4 e P7 estiverem conectados (ou seja, quando o prato de engate estiver atrelado)

Modo manual A (só o veículo trator equipado com conexão automatizada)
Figura F
Conexão pneumática do trator com o reboque via cabo em espiral. Tubos em espiral conectados, linha P2 a P5

Modo manual B (apenas o semirreboque está equipado com conexão automatizada)
Figura G
Conexão pneumática do trator com o reboque via cabo em espiral. Tubos em espiral conectados, linha P1 a P5

Apêndice 2
Os engates da classe A devem ser conformes às disposições pertinentes da norma ISO 13044-2:2013 para assegurar a compatibilidade entre os sistemas de travagem do trator e os do semirreboque.
Apêndice 3
(Reservado)
A definir posteriormente.