ANEXO V
VERIFICAÇÃO DOS DADOS DO MOTOR
1. Introdução
O método de ensaio do motor descrito no presente anexo produzirá os dados de entrada relativos aos motores para a ferramenta de simulação.
2. Definições
Para efeitos do presente anexo, são aplicáveis as definições do Regulamento n.o 49, rev. 06, da UNECE, bem como:
|
(1) |
«família de motores CO2», um grupo de motores, determinado pelo fabricante, conforme definido no ponto 1 do apêndice 3; |
|
(2) |
«motor precursor CO2», um motor selecionado de uma família de motores CO2, conforme especificado no apêndice 3; |
|
(3) |
«NCV», o poder calorífico inferior de um combustível como especificado no ponto 3.2; |
|
(4) |
«emissões mássicas específicas», as emissões mássicas totais divididas pelo funcionamento total do motor durante um período definido, expressas em g/kWh; |
|
(5) |
«consumo específico de combustível», o consumo de combustível total dividido pelo funcionamento total do motor durante um período definido, expresso em g/kWh; |
|
(6) |
«FCMC», ciclo de mapeamento do consumo de combustível; |
|
(7) |
«plena carga», o binário/potência do motor fornecida a uma determinada velocidade, quando o motor funciona em procura máxima do operador. |
Não são aplicáveis as definições dos pontos 3.1.5 e 3.1.6. do anexo 4 do Regulamento n.o 49, rev.06, da UNECE.
3. Requisitos gerais
As instalações do laboratório de calibração devem cumprir os requisitos da norma ISO/TS 16949, da série ISO 9000 ou da norma ISO/CEI 17025. Todo o equipamento de medição de referência dos laboratórios usado para calibragem e/ou verificação tem de respeitar as normas nacionais ou internacionais.
Os motores são agrupados em famílias de motores CO2, definidas em conformidade com o apêndice 3. O ponto 4.1 explica quais os ensaios a realizar para efeitos de certificação de cada família de motores CO2.
3.1 Condições de ensaio
Todos os ensaios realizados para efeitos de certificação de uma família de motores CO2, definida de acordo com o apêndice 3 do presente anexo, têm de ser realizados com o mesmo motor físico e sem quaisquer mudanças na configuração do dinamómetro e do sistema do motor, além das exceções previstas no ponto 4.2 e no apêndice 3.
3.1.1 Condições dos ensaios laboratoriais
Os ensaios devem ser realizados em condições ambientes que respeitem os seguintes requisitos ao longo de todo o processo de ensaio:
|
(1) |
O parâmetro fa que descreve as condições de ensaio laboratoriais, determinado em conformidade com o ponto 6.1 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, deve cumprir os seguintes limites: 0,96 ≤ fa ≤ 1,04. |
|
(2) |
A temperatura absoluta (Ta) do ar de admissão do motor, expressa em Kelvin, determinada em conformidade com o ponto 6.1 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, deve cumprir os seguintes limites: 283 K ≤ Ta ≤ 303 K. |
|
(3) |
A pressão atmosférica, expressa em kPa, determinada em conformidade com o ponto 6.1 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, deve cumprir os seguintes limites: 90 kPa ≤ ps ≤ 102 kPa. |
Se os ensaios forem efetuados em células de ensaio capazes de simular condições barométricas diferentes das existentes na atmosfera do local de ensaio em causa, o valor fa aplicável deve ser determinado com os valores de pressão atmosférica simulados pelo sistema de condicionamento. Utiliza-se o mesmo valor de referência da pressão atmosférica simulada para o ar de admissão, o escape e todos os outros sistemas relevantes do motor. O valor real da pressão atmosférica simulada para o ar de admissão, o escape do motor e todos os outros sistemas relevantes do motor deve situar-se dentro dos limites especificados no subponto 3.
Caso a pressão ambiental da atmosfera no local de ensaio em causa exceda o limite máximo de 102 kPa, poderão continuar a ser realizados ensaios em conformidade com o presente anexo. Nesse caso, os ensaios devem ser realizados com a pressão de ar ambiente específica existente na atmosfera.
Quando a célula de ensaio tiver a capacidade de controlar a temperatura, a pressão e/ou a humidade do ar de admissão do motor, de forma independente das condições atmosféricas, devem ser utilizados os mesmos parâmetros para todos ensaios realizados para efeitos de certificação de uma família de motores CO2 específica, definidos em conformidade com o apêndice 3 do presente anexo.
3.1.2 Instalação do motor
O motor de ensaio deve ser instalado de acordo com os pontos 6.3 a 6.6 do anexo 4 do Regulamento n.o 49 Rev.06, da UNECE.
Se os dispositivos auxiliares/equipamento necessários para o funcionamento do sistema do motor não estiverem instalados como exigido, em conformidade com o ponto 6.3 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, todos os valores medidos do binário do motor são corrigidos em função da potência necessária para acionar estes componentes para efeitos do presente anexo, em conformidade com o ponto 6.3 do anexo 4 do Regulamento n.o 49 Rev.06, da UNECE.
O consumo de potência dos componentes do motor seguintes, que resultam no binário do motor necessário para acionar esses componentes, deve ser determinado em conformidade com o apêndice 5 do presente anexo:
|
(1) |
ventoinha |
|
(2) |
dispositivos auxiliares/equipamentos elétricos necessários para operar o sistema do motor |
3.1.3 Emissões do cárter
No caso de um cárter fechado, o fabricante deve garantir que o sistema de ventilação do motor não permite a emissão de gases do cárter para a atmosfera. Se o cárter for de tipo aberto, as emissões devem ser medidas e adicionadas às emissões de escape, segundo o disposto no ponto 6.10 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE.
3.1.4 Arrefecimento do ar de admissão nos motores sobrealimentados
Durante todos os ensaios, o sistema de arrefecimento do ar de sobrealimentação utilizado no banco de ensaio deve ser operado em condições que sejam representativas da sua aplicação no veículo nas condições ambientes de referência. As condições ambientes de referência correspondem a 293 K para a temperatura do ar e 101,3 kPa para a pressão.
Para realizar os ensaios em conformidade com o presente regulamento, o arrefecimento do ar de sobrealimentação no laboratório deve cumprir o disposto no ponto 6.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
3.1.5 Sistema de arrefecimento do motor
|
(1) |
Durante todos os ensaios, o sistema de arrefecimento do motor utilizado no banco de ensaio deve ser operado em condições que sejam representativas da sua aplicação no veículo nas condições ambientes de referência. As condições ambientes de referência correspondem a 293 K para a temperatura do ar e 101,3 kPa para a pressão. |
|
(2) |
O sistema de arrefecimento do motor deve estar equipado com termostatos de acordo com as especificações do fabricante para instalação no veículo. Se for instalado um termostato não operacional ou não for utilizado nenhum termostato, é aplicável o subponto 3. A regulação do sistema de arrefecimento deve ser efetuada em conformidade com o subponto 4. |
|
(3) |
Se não for utilizado nenhum termostato ou o termostato não estiver operacional, o sistema no banco de ensaio deve refletir o comportamento do termostato em todas as condições de ensaio. A regulação do sistema de arrefecimento deve ser efetuada em conformidade com o subponto 4. |
|
(4) |
O caudal do fluido de arrefecimento do motor (ou, em alternativa, o diferencial de pressão no lado do motor do permutador de calor) e a temperatura do fluido de arrefecimento do motor devem ser definidos num valor que seja representativo da sua aplicação no veículo nas condições ambientes de referência, com o motor a funcionar à velocidade nominal e de plena carga e o termostato do motor em posição totalmente aberta. Esta regulação define a temperatura de referência do fluido de arrefecimento. Em todos os ensaios realizados para efeitos de certificação de um motor específico de uma família de motores CO2, o cenário adotado para o sistema de arrefecimento deve manter-se invariável, tanto no lado do motor como no lado do banco de ensaio do sistema de arrefecimento. A temperatura do meio de arrefecimento do lado de banco de ensaio deve ser mantida razoavelmente constante pelas boas práticas de engenharia. O meio de arrefecimento no lado do banco de ensaio do permutador de calor não deve exceder a temperatura nominal de abertura do termostato a jusante do permutador de calor. |
|
(5) |
Em todos os ensaios realizados para efeitos de certificação de um motor específico de uma família de motores CO2, a temperatura do fluido de arrefecimento do motor deve ser mantida entre o valor nominal da temperatura de abertura do termostato declarada pelo fabricante e a temperatura de referência do fluido de arrefecimento em conformidade com o subponto 4, logo que o fluido de arrefecimento do motor atinja a temperatura de abertura do termostato declarada após o arranque do motor a frio. |
|
(6) |
Para o ensaio com arranque do motor a frio do WHTC, realizado em conformidade com o ponto 4.3.3, as condições iniciais específicas são mencionadas nos pontos 7.6.1 e 7.6.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Em caso de simulação do comportamento do termostato de acordo com o subponto 3, não deve haver fluxo do fluido de arrefecimento no permutador de calor enquanto o fluido de arrefecimento do motor não atingir a temperatura nominal de abertura do termostato declarada, após o arranque do motor a frio. |
3.2 Combustíveis
O respetivo combustível de referência dos sistemas do motor objeto de ensaio deve ser selecionado entre os tipos de combustível que figuram no quadro 1. As propriedades dos combustíveis de referência enumerados no quadro 1 devem ser as especificadas no anexo IX do Regulamento (UE) n.o 582/2011 da Comissão.
A fim de assegurar a utilização do mesmo combustível em todos ensaios realizados para efeitos de certificação de uma família de motores CO2 específica, não pode ocorrer nenhum enchimento do depósito nem mudança para outro depósito de alimentação do sistema do motor. A título excecional, pode ser autorizado esse enchimento ou mudança se puder ser garantido que o novo combustível tem exatamente as mesmas propriedades que o combustível utilizado anteriormente (mesmo lote de produção).
O NCV do combustível utilizado deve ser determinado através de duas medições separadas, em conformidade com as normas respetivas, para cada tipo de combustível definido no quadro 1. As duas medições separadas devem ser efetuadas por dois laboratórios diferentes, independentes do fabricante que se candidata à certificação. O laboratório que efetua as medições tem de cumprir os requisitos da norma ISO/IEC 17025. A entidade homologadora deve certificar-se de que a amostra de combustível utilizada para determinar o NCV é retirada do lote de combustível utilizado para todos os ensaios.
Se os dois valores distintos do NCV registarem uma diferença superior a 440 Joule por grama de combustível, os valores determinados devem ser considerados nulos e a medição deve ser repetida.
O valor médio dos dois valores distintos do NCV, que não registem uma diferença superior a 440 Joule por grama de combustível, deve ser documentado em MJ/kg e arredondado para a terceira casa decimal, em conformidade com a norma ASTM E 29-06.
No que se refere aos combustíveis gasosos, as normas de determinação do NCV, em conformidade com o quadro 1, contêm o cálculo do valor calorífico com base na composição do combustível. A composição do combustível gasoso necessária para determinar o NCV é obtida a partir da análise do lote do combustível gasoso de referência utilizado nos ensaios de certificação. Para obter a composição do combustível gasoso utilizado para determinar o NCV, deve ser efetuada uma única análise por um laboratório independente do fabricante que requer a certificação. Para os combustíveis gasosos, o NCV deve ser determinado com base nessa análise única e não no valor médio de duas medições distintas.
Quadro 1
Combustíveis de referência para os ensaios
|
Tipo de combustível/tipo de motor |
Tipo de combustível de referência |
Norma utilizada para determinar o NCV |
|
Gasóleo/Ignição por compressão |
B7 |
pelo menos, ASTM D240 ou DIN 59100-1 (ASTM D4809 recomendada) |
|
Etanol/Ignição por compressão |
ED95 |
pelo menos, ASTM D240 ou DIN 59100-1 (ASTM D4809 recomendada) |
|
Gasolina/Ignição comandada |
E10 |
pelo menos, ASTM D240 ou DIN 59100-1 (ASTM D4809 recomendada) |
|
Etanol/Ignição Comandada |
E85 |
pelo menos, ASTM D240 ou DIN 59100-1 (ASTM D4809 recomendada) |
|
GPL/Ignição Comandada |
GPL — Combustível B |
ASTM 3588 ou DIN 51612 |
|
Gás natural/Ignição Comandada |
G25 |
ISO 6976 ou ASTM 3588 |
3.3 Lubrificantes
Os óleos lubrificantes utilizados em todos os ensaios realizados em conformidade com o presente anexo devem estar disponíveis no mercado, aprovados sem restrições pelo fabricante para condições operacionais normais, como definido no ponto 4.2 do anexo 8 do Regulamento n.o 49, rev. 06, da UNECE. Os lubrificantes cuja utilização esteja restrita a certas condições operacionais especiais do sistema do motor ou cuja substituição tenha de ser feita num período invulgarmente curto não podem ser utilizados para efeitos de ensaio em conformidade com o presente anexo. Os óleos disponíveis no mercado não podem ser objeto de nenhuma alteração ou aditivos.
Todos os ensaios realizados para efeitos de certificação das propriedades relacionadas com as emissões de CO2 e o consumo de combustível de uma família de motores de CO2 específica têm de ser efetuados com o mesmo tipo de óleo lubrificante.
3.4 Sistema de medição do caudal de combustível
O sistema de medição do caudal de combustível deve captar todos os caudais consumidos por todo o sistema do motor. Devem ser incluídos no sinal do caudal de combustível de todos os ensaios realizados os caudais de combustível adicionais que não alimentem diretamente o processo de combustão nos cilindros do motor. Os injetores de combustível adicionais (por exemplo, dispositivos de arranque a frio) não necessários para o funcionamento do sistema do motor devem ser desligados da linha de alimentação de combustível durante todos os ensaios realizados.
3.5 Especificações do equipamento de medição
O equipamento de medição tem de cumprir os requisitos do ponto 9 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Não obstante os requisitos definidos no ponto 9 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, os sistemas de medição que constam do quadro 2 devem cumprir os limites definidos nesse quadro.
Quadro 2
Requisitos dos sistemas de medição
|
|
Linearidade |
|
||||
|
Sistema de medição |
Ordenada na origem | xmin × (a1 – 1) + a0 | |
Declive a1 |
Erro-padrão da estimativa SEE |
Coeficiente de determinação r2 |
Exatidão (1) |
Tempo de subida (2) |
|
Velocidade do motor |
≤ 0,2 % calibragem máx. (3) |
0,999 – 1,001 |
≤ 0,1 % calibragem máx. (3) |
≥ 0,9985 |
0,2 % da leitura ou 0,1 % da calibragem máxima (3) da velocidade, consoante o que for maior |
≤ 1 s |
|
Binário do motor |
≤ 0,5 % calibragem máx. (3) |
0,995 – 1,00, |
≤ 0,5 % calibragem máx. (3) |
≥ 0,995 |
0,6 % da leitura ou 0,3 % da calibragem máxima (3) do binário, consoante o que for maior |
≤ 1 s |
|
Caudal mássico do combustível para combustíveis líquidos |
≤ 0,5 % calibragem máx. (3) |
0,995 – 1,00, |
≤ 0,5 % calibragem máx. (3) |
≥ 0,995 |
0,6 % da leitura ou 0,3 % da calibragem máxima (3) do caudal, consoante o que for maior |
≤ 2 s |
|
Caudal mássico do combustível para combustíveis gasosos |
≤ 1 % calibragem máx. (3) |
0,99 – 1,01 |
≤ 1 % calibragem máx. (3) |
≥ 0,995 |
1 % da leitura ou 0,5 % da calibragem máxima (3) do caudal, consoante o que for maior |
≤ 2 s |
|
Sistema elétrico |
≤ 1 % calibragem máx. (3) |
0,98 – 1,2 |
≤ 2 % calibragem máx. (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
|
Corrente |
≤ 1 % calibragem máx. (3) |
0,98 – 1,2 |
≤ 2 % calibragem máx. (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
|
Tensão |
≤ 1 % calibragem máx. (3) |
0,98 – 1,2 |
≤ 2 % calibragem máx. (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
O valor «xmin», utilizado para calcular a ordenada de origem no quadro 2, deve ser 0,9 vezes o valor mínimo previsto durante todos os ensaios para o respetivo sistema de medição.
A taxa de sinalização dos sistemas de medição enumerados no quadro 2, exceto para o sistema de medição do caudal mássico do combustível, deve ser, pelo menos, de 5 Hz (≥ 10 Hz recomendado). A taxa de sinalização do sistema de medição do caudal mássico do combustível deve ser de, pelo menos, 2 Hz.
Todos os dados de medição devem ser registados com uma taxa de amostragem de, pelo menos, 5 Hz (≥ 10 Hz recomendado).
3.5.1 Verificação do equipamento de medição
Deve ser efetuada uma verificação dos requisitos exigidos definidos no quadro 2 para cada sistema de medição. Têm de ser introduzidos no sistema de medição, pelo menos, 10 valores de referência entre xmin e o valor da calibragem máxima definido em conformidade com o ponto 3.5, devendo a resposta do sistema de medição ser registada como valor medido.
Para a verificação da linearidade, os valores medidos devem ser comparados com os valores de referência utilizando uma regressão linear segundo o método dos mínimos quadrados, em conformidade com o ponto A.3.2 do apêndice 3 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
4. Procedimento de ensaio
Todos os dados de medição devem ser determinados em conformidade com o anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, salvo indicação em contrário no presente anexo.
4.1 Descrição geral dos ensaios a realizar
O quadro 3 descreve os principais aspetos dos ensaios a realizar para efeitos de certificação de uma família de motores CO2 específica, como definido em conformidade com o apêndice 3.
O ciclo de mapeamento do consumo de combustível em conformidade com o ponto 4.3.5 e o registo da curva de motorização em conformidade com o ponto 4.3.2 devem ser omitidos para todos os outros motores, exceto o motor precursor CO2 da família de motores CO2.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, deve-se também realizar o ciclo de mapeamento do consumo de combustível em conformidade com o ponto 4.3.5 e o registo da curva de motorização em conformidade com o ponto 4.3.2 para esse motor específico.
Quadro 3
Descrição geral dos ensaios a realizar
|
Ensaio |
Referência ao ponto |
Exigido para o motor precursor CO2 |
Exigido para os outros motores da mesma família de motores CO2 |
|
Curva do motor de plena carga |
4.3.1 |
sim |
sim |
|
Curva de motorização |
4.3.2 |
sim |
não |
|
Ensaio WHTC |
4.3.3 |
sim |
sim |
|
Ensaio WHSC |
4.3.4 |
sim |
sim |
|
Ciclo de mapeamento do consumo de combustível |
4.3.5 |
sim |
não |
4.2 Alterações autorizadas no sistema do motor
A alteração do valor de referência do controlador de velocidade do motor em marcha lenta sem carga para um valor inferior na unidade de controlo eletrónico do motor será permitida para todos os ensaios em que ocorra uma operação em marcha lenta sem carga, de modo a evitar interferências entre este controlador e o dispositivo de controlo do banco de ensaio.
4.3 Ensaios
4.3.1 Curva do motor de plena carga
A curva de plena carga do motor deve ser registada em conformidade com os pontos 7.4.1 a 7.4.5 do anexo 4 do Regulamento n.o 49 Rev.06, da UNECE.
4.3.2 Curva de motorização
O registo da curva de motorização em conformidade com o presente número deve ser omitido para todos os outros motores, exceto o motor precursor CO2 da família de motores CO2 definida em conformidade com o apêndice 3. Em conformidade com o ponto 6.1.3, a curva de motorização registada para o motor precursor CO2 da família de motores CO2 também será aplicável a todos os outros motores que pertencem à mesma família de motores CO2.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, deve-se também realizar o registo da curva de motorização para esse motor específico.
A curva de motorização deve ser registada em conformidade com a opção b) do ponto 7.4.7 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Este ensaio deve determinar o binário negativo necessário para acionar o motor entre a velocidade mínima e máxima de mapeamento com uma solicitação mínima do operador.
O ensaio deve ser efetuado imediatamente após o mapeamento da curva de plena carga em conformidade com o ponto 4.3.1. A pedido do fabricante, a curva de motorização pode ser registada separadamente. Nesse caso, deve ser registada a temperatura do óleo do motor obtida no final do ensaio da curva de plena carga, efetuado em conformidade com o ponto 4.3.1, e o fabricante deve demonstrar à entidade homologadora que a temperatura do óleo do motor no ponto inicial da curva de motorização coincide com a temperatura acima mencionada com uma tolerância de ± 2 K.
No início do ensaio da curva de motorização, o motor deve ser operado com uma solicitação mínima do operador, à velocidade máxima de mapeamento, como definido no ponto 7.4.3 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Logo que o valor do binário motor estabilize a ± 5 % dos seus valores médios durante, pelo menos, 10 segundos, deve ser dado início ao registo dos dados e a velocidade do motor deve ser reduzida, a uma taxa média de 8 ± 1 min– 1/s, da velocidade máxima para a velocidade mínima de mapeamento, como definido no ponto 7.4.3 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
4.3.3 Ensaio WHTC
O ensaio WHTC deve ser realizado em conformidade com o anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Os resultados ponderados dos ensaios de emissões devem cumprir os limites aplicáveis definidos no Regulamento (CE) n.o 595/2009.
A curva do motor de plena carga registada em conformidade com o ponto 4.3.1 deve ser utilizada para a desnormalização do ciclo de referência e todos os cálculos de valores de referência efetuados em conformidade com os pontos 7.4.6, 7.4.7 e 7.4.8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
4.3.3.1 Sinais de medição e registo dos dados
Para além das disposições definidas no anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, deve ser registado o caudal mássico efetivo do combustível consumido pelo motor em conformidade com o ponto 3.4.
4.3.4 Ensaio WHSC
O ensaio WHSC deve ser realizado em conformidade com o anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Os resultados dos ensaios de emissões devem cumprir os limites aplicáveis definidos no Regulamento (CE) n.o 595/2009.
A curva do motor de plena carga registada em conformidade com o ponto 4.3.1 deve ser utilizada para a desnormalização do ciclo de referência e todos os cálculos de valores de referência efetuados em conformidade com os pontos 7.4.6, 7.4.7 e 7.4.8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
4.3.4.1 Sinais de medição e registo dos dados
Para além das disposições definidas no anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, deve ser registado o caudal mássico efetivo do combustível consumido pelo motor em conformidade com o ponto 3.4.
4.3.5 Ciclo de mapeamento do consumo de combustível (FCMC)
O ciclo de mapeamento do consumo de combustível (FCMC) em conformidade com o presente número deve ser omitido para todos os outros motores, exceto o motor precursor CO2 da família de motores CO2. Os dados sobre o mapeamento do combustível registados para o motor precursor CO2 da família de motores CO2 também são aplicáveis a todos os outros motores da mesma família de motores CO2.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, deve-se também realizar o ciclo de mapeamento do consumo de combustível para esse motor específico.
O mapa do combustível do motor deve ser medido numa série de pontos de operação do motor em estado estacionário, como definido no ponto 4.3.5.2. A métrica deste mapa inclui o consumo de combustível em g/h, de acordo com a velocidade do motor em min– 1, e o binário do motor em Nm.
4.3.5.1 Tratamento das interrupções durante o FCMC
Caso ocorra um episódio de regeneração pós-tratamento durante o FCMC, para motores equipados com sistemas de pós-tratamento dos gases de escape, que sejam regenerados numa base periódica,como definido no ponto 6.6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, todas as medições efetuadas nesse modo de velocidade do motor são consideradas nulas. O episódio de regeneração deve terminar e apenas posteriormente deve ser continuado o procedimento, como descrito no ponto 4.3.5.1.1.
Se ocorrer uma interrupção, anomalia ou erro inesperado durante o FCMC, todas as medições realizadas nesse modo de velocidade do motor são consideradas nulas, devendo o fabricante escolher uma das seguintes opções para poder prosseguir:
|
(1) |
o procedimento será continuado como descrito no ponto 4.3.5.1.1 |
|
(2) |
todo o FCMC será repetido em conformidade com o ponto 4.3.5.4 e 4.3.5.5 |
4.3.5.1.1 Disposições para prosseguir o FCMC
O motor deve ser acionado e aquecido em conformidade com o ponto 7.4.1 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Depois de aquecido, deve ser pré-condicionado operando o motor no modo 9 durante 20 minutos, como definido no quadro 1 do ponto 7.2.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
A curva do motor de plena carga registada em conformidade com o ponto 4.3.1 deve ser utilizada para a desnormalização dos valores de referência do modo 9 efetuados em conformidade com os pontos 7.4.6, 7.4.7 e 7.4.8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Imediatamente após a conclusão do pré-condicionamento, os valores de referência da velocidade do motor e do binário devem ser mudados linearmente, num lapso de 20 a 46 segundos, para o valor-alvo de regulação mais elevado do binário, no valor-alvo de regulação imediatamente superior da velocidade de referência do motor, em relação ao valor-alvo de regulação da velocidade de referência do motor específico em que ocorreu a interrupção do FCMC. Se o valor-alvo de regulação for alcançado em menos de 46 segundos, o tempo restante, até perfazer os 46 segundos, deve ser utilizado para efeitos de estabilização.
Para estabilização, o funcionamento do motor deve prosseguir a partir desse ponto, em conformidade com a sequência de ensaio especificada no ponto 4.3.5.5, sem registar os valores de medição.
Quando é alcançado o valor-alvo de regulação mais elevado do binário de referência, no valor-alvo de regulação da velocidade de referência do motor específico em que a interrupção ocorreu, o registo dos valores de medição deve ser prosseguido a partir desse ponto em conformidade com a sequência de ensaio indicada no ponto 4.3.5.5.
4.3.5.2 Quadro dos valores-alvo de regulação
O quadro dos valores-alvo de regulação é fixada de forma normalizada e consiste em 10 valores-alvo de regulação da velocidade do motor e 11 valores-alvo de regulação do binário. A conversão da regulação normalizada para os valores-alvo efetivos de regulação da velocidade do motor e do binário, para cada motor ensaiado, deve basear-se na curva de plena carga do motor precursor CO2 da família de motores CO2, como definido no apêndice 3 do presente anexo, e ser registada em conformidade com o ponto 4.3.1.
4.3.5.2.1 Definição dos valores-alvo de regulação da velocidade do motor
Os 10 valores-alvo de regulação da velocidade do motor são definidos por 4 valores-alvo de regulação básicos da velocidade de referência do motor e 6 valores-alvo adicionais.
As velocidades do motor nidle, nlo, npref, n95h and nhi devem ser determinadas a partir da curva do motor de plena carga, do motor precursor CO2 da família de motores CO2, como definido no apêndice 3 do presente anexo, e registadas em conformidade com o ponto 4.3.1, aplicando as definições das velocidades características do motor em conformidade com o ponto 7.4.6 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
A velocidade do motor n57 deve ser determinada de acordo com a seguinte equação:
n57 = 0,565 × (0,45 × nlo + 0,45 × npref + 0,1 × nhi – nidle) × 2,0327 + nidle
Os 4 valores-alvo de regulação básicos da velocidade de referência do motor devem ser definidos do seguinte modo:
|
(1) |
Velocidade do motor básica 1: nidle |
|
(2) |
Velocidade do motor básica 2: nA = n57 – 0,05 × (n95h – nidle) |
|
(3) |
Velocidade do motor básica 3: nB = n57 + 0,08 × (n95h – nidle) |
|
(4) |
Velocidade do motor básica 4: n95h |
As distâncias potenciais entre os valores-alvo de regulação da velocidade devem ser determinadas de acordo com as seguintes equações:
|
(1) |
dnidleA_44 = (nA – nidle) / 4 |
|
(2) |
dnB95h_44 = (n95h – nB) / 4 |
|
(3) |
dnidleA_35 = (nA – nidle) / 3 |
|
(4) |
dnB95h_35 = (n95h – nB) / 5 |
|
(5) |
dnidleA_53 = (nA – nidle) / 5 |
|
(6) |
dnB95h_53 = (n95h – nB) / 3 |
Os valores absolutos dos desvios potenciais entre as duas secções devem ser determinados de acordo com as seguintes equações:
|
(1) |
dn44 = ABS(dnidleA_44 – dnB95h_44) |
|
(2) |
dn35 = ABS(dnidleA_35 – dnB95h_35) |
|
(3) |
dn53 = ABS(dnidleA_53 – dnB95h_53) |
Os 6 valores-alvo adicionais de regulação da velocidade de referência do motor devem ser determinados com base no menor dos três valores dn44, dn35 e dn53 em conformidade com as seguintes disposições:
|
(1) |
Se dn44 for o mais pequeno dos três valores, as 6 velocidades adicionais de referência do motor devem ser determinadas dividindo cada um dos dois intervalos, um de nidle a nA e o outro de nB a n95h, em 4 secções equidistantes. |
|
(2) |
Se dn35 for o mais pequeno dos três valores, as 6 velocidades adicionais de referência do motor devem ser determinadas dividindo o intervalo de nidle a nA em 3 secções equidistantes e o intervalo de nB a n95h em 5 secções equidistantes. |
|
(3) |
Se dn53 for o mais pequeno dos três valores, as 6 velocidades adicionais de referência do motor devem ser determinadas dividindo o intervalo de nidle a nA em 5 secções equidistantes e o intervalo de nB a n95h em 3 secções equidistantes. |
A figura 1 ilustra claramente a definição dos valores-alvo de regulação da velocidade de referência do motor de acordo com o subponto 1 acima.
Figura 1
Definição dos valores-alvo de regulação da velocidade

4.3.5.2.2 Definição dos valores-alvo de regulação do binário
Os 11 valores-alvo de regulação do binário são definidos a partir de 2 valores-alvo de regulação do binário básicos e 9 valores-alvo adicionais. Os 2 valores-alvo de regulação básicos do binário são definidos a partir do binário zero e da carga máxima do motor precursor CO2, como determinado em conformidade com o ponto 4.3.1. (binário máximo global Tmax_overall). Os 9 valores-alvo adicionais são determinados dividindo a distância entre o binário zero e o binário máximo, Tmax_overall, em 10 secções equidistantes.
Todos os valores-alvo de regulação do binário, num valor-alvo de regulação da velocidade de referência do motor específico, que excedam o valor-limite definido pelo valor do binário de plena carga, nesse valor-alvo específico de regulação da velocidade de referência do motor, menos 5 % de Tmax_overall, devem ser substituídos pelo valor do binário de plena carga nesse valor-alvo de regulação da velocidade de referência do motor específico. A figura 2 ilustra claramente a definição dos valores-alvo de regulação do binário.
Figura 2
Definição dos valores-alvo de regulação do binário

4.3.5.3 Sinais de medição e registo dos dados
Devem ser registados os seguintes dados de medição:
|
(1) |
velocidade do motor |
|
(2) |
binário do motor corrigido em conformidade com o ponto 3.1.2 |
|
(3) |
caudal mássico do combustível consumido por todo o sistema do motor em conformidade com o ponto 3.4 |
|
(4) |
Poluentes gasosos, como definido no Regulamento n.o 49, rev. 06, da UNECE. As partículas poluentes e as emissões de amoníaco não precisam de ser monitorizadas durante os ensaios do FCMC. |
A medição dos poluentes gasosos deve ser efetuada de acordo com os pontos 7.5.1, 7.5.2, 7.5.3, 7.5.5, 7.7.4, 7.8.1, 7.8.2, 7.8.4 e 7.8.5 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Para efeitos do disposto no ponto 7.8.4 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, o termo «ciclo de ensaios» refere-se à sequência completa, desde o pré-condicionamento em conformidade com o ponto 4.3.5.4 até ao fim da sequência de ensaio como previsto no ponto 4.3.5.5.
4.3.5.4 Pré-condicionamento do sistema do motor
O sistema de diluição, quando aplicável, e o motor devem ser acionados e aquecidos em conformidade com o ponto 7.4.1 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Depois de aquecidos, o motor e o sistema de amostragem devem ser pré-condicionados, operando o motor no modo 9 durante 20 minutos, como definido no quadro 1 do ponto 7.2.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, e operando simultaneamente o sistema de diluição.
A curva do motor de plena carga do motor precursor CO2 da família de motores CO2 e registada em conformidade com o ponto 4.3.1 deve ser utilizada para a desnormalização dos valores de referência do modo 9 em conformidade com os pontos 7.4.6, 7.4.7 e 7.4.8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Imediatamente após a conclusão do pré-condicionamento, os valores-alvo da velocidade do motor e do binário do motor devem ser mudados linearmente, num lapso de 20 a 46 segundos, de modo a coincidir com o primeiro valor-alvo de regulação da sequência de ensaio de acordo com o ponto 4.3.5.5. Se o primeiro valor-alvo de regulação for alcançado em menos de 46 segundos, o tempo restante, até perfazer os 46 segundos, deve ser utilizado para efeitos de estabilização.
4.3.5.5 Sequência do ensaio
A sequência de ensaio é composta por valores-alvo de regulação em estado estacionário, com valores de velocidade e do binário do motor definidos em cada valor-alvo de regulação em conformidade com o ponto 4.3.5.2 e rampas definidas para a deslocação de um valor-alvo de regulação para outro.
O valor-alvo de regulação mais elevado do binário, em cada velocidade de referência do motor, deve ser operado com solicitação máxima do operador.
O primeiro valor-alvo de regulação é definido no mais elevado valor-alvo de regulação da velocidade de referência do motor e mais elevado valor-alvo de regulação do binário.
Devem seguir-se os seguintes passos para cobrir todos os valores-alvo de regulação:
|
(1) |
O motor deve ser operado durante 95 ± 3 segundos, em cada valor-alvo de regulação. Os primeiros 55 ± 1 segundos em cada valor-alvo de regulação são considerados enquanto período de estabilização. Durante o seguinte período de 30 ± 1 segundos a velocidade do motor, valor médio será controlado da seguinte forma:
Os valores registados em conformidade com o ponto 4.3.5.3 devem ser armazenados como valor médio do período de 30 ± 1 segundos. O tempo remanescente do período de 10 ± 1 segundos pode ser utilizado para pós-tratamento e armazenamento de dados, se necessário. Durante este tempo, o valor-alvo de regulação do motor deve ser mantido. |
|
(2) |
Após concluir as medições num valor-alvo de regulação, o valor de referência da velocidade do motor deve ser mantido constante com uma tolerância de ± 20 min– 1 em relação ao valor-alvo de regulação da velocidade de referência do motor, e o valor de referência do binário deve ser reduzido linearmente em 20 ± 1 segundos até coincidir com o valor-alvo de regulação do binário de referência imediatamente inferior. De seguida, a medição deve ser efetuada de acordo com o subponto 1. |
|
(3) |
Após medição do valor-alvo de regulação do binário zero no subponto 1, a velocidade do motor visada deve ser reduzida linearmente até ao valor-alvo de regulação da velocidade de referência do motor imediatamente inferior e, simultaneamente, o binário de referência deve ser aumentado linearmente até coincidir com o valor-alvo de regulação mais elevado do binário de referência, no valor-base de regulação da velocidade de referência do motor imediatamente inferior, num lapso de 20 a 46 segundos. Se o valor-alvo de regulação seguinte for alcançado em menos de 46 segundos, o tempo restante, até perfazer os 46 segundos, deve ser utilizado para efeitos de estabilização. A medição deve ser realizada iniciando o procedimento de estabilização de acordo com o subponto 1 e, de seguida, os valores-alvo de regulação do binário de referência devem ser ajustados de acordo com o subponto 2. |
A figura 3 ilustra os três passos a respeitar em cada valor-alvo de medição para a realização do ensaio em conformidade com o subponto 1 mais acima.
Figura 3
Passos a respeitar em cada valor-alvo de medição

A figura 4 apresenta claramente a sequência de valores-alvo de medição em estado estacionário que devem ser respeitados para realizar o ensaio.
Figura 4
Sequência de valores-alvo de medição em estado estacionário

4.3.5.6 Avaliação dos dados de monitorização das emissões
Os poluentes gasosos, como definido no ponto 4.3.5.3, devem ser monitorizados durante o FCMC. As definições das velocidades características do motor em conformidade com o ponto 7.4.6 do anexo 4 do Reg. n.o 49, rev.06, da UNECE, são aplicáveis.
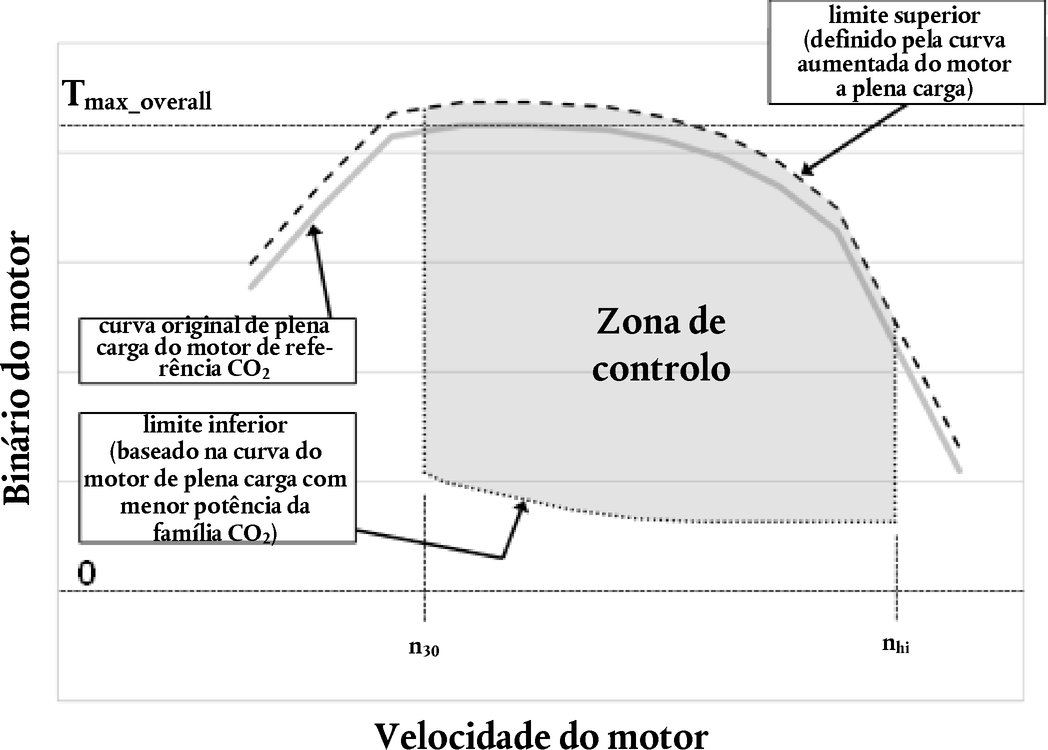
4.3.5.6.1 Definição da zona de controlo
A zona de controlo para a monitorização das emissões durante o FCMC deve ser determinada em conformidade com os pontos 4.3.5.6.1.1 e 4.3.5.6.1.2.
4.3.5.6.1.1 Gama de velocidades do motor adotada para a zona de controlo
|
(1) |
A gama de velocidades do motor adotada para a zona de controlo deve ser definida com base na curva de plena carga do motor precursor CO2 da família de motores CO2, como definido de acordo com o apêndice 3 do presente anexo, e registada em conformidade com o ponto 4.3.1. |
|
(2) |
A zona de controlo deve incluir todas as velocidades do motor iguais ou superiores ao 30.o percentil cumulativo da distribuição da velocidade, determinado a partir de todas as velocidades do motor, incluindo a velocidade de marcha lenta sem carga, ordenadas por ordem crescente, durante o ciclo de ensaios WHTC com arranque a quente, efetuadas em conformidade com o ponto 4.3.3 (n30) para a curva do motor de plena carga a que se refere o subponto 1. |
|
(3) |
A zona de controlo deve incluir todas as velocidades do motor inferiores ou iguais a nhi determinadas a partir da curva do motor de plena carga a que se refere o subponto 1. |
4.3.5.6.1.2 Gamas de binário do motor e de potência adotadas para a zona de controlo
|
(1) |
O limite inferior da gama do binário do motor adotada para a zona de controlo deve ser definido com base na curva de plena carga do motor com a notação mais baixa de todos os motores da família de motores CO2, registados em conformidade com o ponto 4.3.1. |
|
(2) |
A zona de controlo deve incluir todos os pontos de carga do motor com um valor de binário superior ou igual a 30 % do valor máximo do binário determinado a partir da curva do motor de plena carga, como referido no subponto 1. |
|
(3) |
Não obstante as disposições do subponto 2, os pontos da velocidade e do binário inferiores a 30 % do valor da potência máxima, determinado a partir da curva do motor de plena carga, como referido no subponto 1, devem ser excluídos da zona de controlo. |
|
(4) |
Não obstante as disposições dos subpontos 2 e 3, o limite superior adotado para a zona de controlo deve basear-se na curva de plena carga do motor precursor CO2 da família de motores CO2, como definido de acordo com o apêndice 3 do presente anexo, e registado em conformidade com o ponto 4.3.1. O valor do binário para cada velocidade do motor, determinado a partir da curva de plena carga do motor precursor CO2, deve ser aumentado em 5 % do binário máximo global, Tmax_overall, definido em conformidade com o ponto 4.3.5.2.2. A curva de plena carga do motor precursor CO2 aumentada será utilizada como limite superior da zona de controlo. |
A figura 5 mostra através de exemplos a definição da velocidade do motor, do binário e da variação da potência adotados para a zona de controlo.
Figura 5
Definição exemplificativa das gamas de velocidade, do binário e da potência do motor para a zona de controlo
4.3.5.6.2 Definição das células do quadro
A zona de controlo definida em conformidade com o ponto 4.3.5.6.1 deve ser dividida num certo número de células para monitorização das emissões durante o FCMC.
O quadro deve conter 9 células para os motores com velocidade nominal inferior a 3 000 min– 1 e 12 células para motores com velocidade nominal superior ou igual a 3 000 min– 1. Os quadros são definidos de acordo com as seguintes disposições:
|
(1) |
Os limites exteriores do quadro devem ser ajustados de acordo com a zona de controlo definida em conformidade com o ponto 4.3.5.6.1. |
|
(2) |
2 linhas verticais espaçadas a igual distância entre as velocidades do motor n30 e 1,1 vezes n95h para 9 células, ou 3 linhas verticais espaçadas a igual distância entre as velocidades do motor n30 e 1,1 vezes n95h para 12 células. |
|
(3) |
2 linhas espaçadas a igual distância do binário do motor (ou seja, 1/3), em cada linha vertical da velocidade do motor definida pelos subpontos 1 e 2 |
Todos os valores de velocidade do motor em min– 1 e todos os valores do binário em newton-metros que definem os limites das células o quadro devem ser arredondados para duas casas decimais, em conformidade com a norma ASTM E 29-06.
A figura 6 mostra através de exemplos a definição de células do quadro para a zona de controlo, com 9 células.
Figura 6
Definição exemplificativa das células do quadro para a zona de controlo, com 9 células

4.3.5.6.3 Cálculo das emissões mássicas específicas
As emissões mássicas específicas dos poluentes gasosos devem ser determinadas sob a forma de valor médio, para cada célula definida em conformidade com o ponto 4.3.5.6.2. O valor médio a utilizar para cada célula deve ser determinado enquanto média aritmética das emissões mássicas específicas de todos os pontos de velocidade e do binário do motor medidos durante o FCMC, situados na mesma célula do quadro.
As emissões mássicas específicas da velocidade e do binário do motor medidos durante o FCMC devem ser determinadas como valor médio no período de 30 ± 1 segundos de medição, como definido em conformidade com o subponto 1 do ponto 4.3.5.5.
Se um ponto da velocidade e do binário do motor se encontra diretamente sobre uma linha que separa diferentes células, esse ponto tem de ser tido em conta para os valores médios de todas as células adjacentes do quadro.
O cálculo das emissões mássicas totais de cada poluente gasoso, para cada ponto da velocidade e do binário do motor, medido durante o FCMC, mFCMC,i em gramas, durante o período de 30 ± 1 segundos de medição, como definido no subponto 1 do ponto 4.3.5.5, deve ser realizado em conformidade com o ponto 8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
O trabalho real do motor para cada ponto da velocidade e do binário do motor medido durante o FCMC, WFCMC, i em kWh, durante o período de 30 ± 1 segundos de medição, como definido no subponto 1 do ponto 4.3.5.5, deve ser determinado a partir dos valores da velocidade e do binário do motor registados em conformidade com o ponto 4.3.5.3.
As emissões mássicas específicas de poluentes gasosos eFCMC,i em g/kWh, para cada ponto de velocidade e do binário do motor medido durante o FCMC deve ser determinado através da seguinte equação:
eFCMC,i = mFCMC,i / WFCMC,i
4.3.5.7 Validade dos dados
4.3.5.7.1 Requisitos para as estatísticas de validação do FCMC
Uma análise de regressão linear dos valores reais da velocidade do motor (nact), do binário do motor (Mact) e da potência do motor (Pact) sobre os respetivos valores de referência (nref, Mref, Pref) para o FCMC. Os valores reais para nact, Mact e Pact devem ser determinada a partir dos valores registados em conformidade com o ponto 4.3.5.3.
As rampas que permitem passar de um valor-alvo para outro devem ser excluídas desta análise de regressão.
Para minimizar a influência do intervalo de tempo entre os valores reais e de referência do ciclo, a sequência completa dos sinais reais de velocidade e do binário do motor pode ser avançada ou atrasada em relação à sequência dos sinais de referência. Se os sinais reais forem desviados, tanto a velocidade como o binário devem ser desviados na mesma quantidade no mesmo sentido.
Deve utilizar-se o método dos mínimos quadrados para a análise de regressão em conformidade com os pontos A.3.1 e A.3.2 do apêndice 3 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, e a equação mais adequada terá a forma definida no ponto 7.8.7 do anexo 4 desse regulamento. Recomenda-se que esta análise seja realizada a 1 Hertz.
Para efeitos desta análise de regressão só são permitidas omissões de pontos onde indicado no quadro 4 (Omissões de pontos permitidas na análise de regressão) do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE, antes de calcular a regressão. Além disso, todos os valores do binário e da potência do motor nos pontos com solicitação máxima do operador devem ser omitidos para efeitos unicamente da presente análise de regressão. No entanto, os pontos omitidos para efeitos da análise de regressão não devem ser omitidos de nenhum outro cálculo em conformidade com o presente anexo. A omissão de pontos pode aplicar-se à totalidade ou a qualquer parte do ciclo.
Para os dados serem considerados válidos, devem ser respeitados os critérios do quadro 3 (Tolerâncias da linha de regressão para o WHSC) do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
4.3.5.7.2 Requisitos de monitorização das emissões
Os dados obtidos a partir dos ensaios FCMC são válidos se as emissões mássicas específicas dos poluentes gasosos regulamentados, determinados para cada célula do quadro, de acordo com o ponto 4.3.5.6.3, satisfizerem os limites aplicáveis aos poluentes gasosos definidos no ponto 5.2.2 do anexo 10 do Regulamento n.o 49, rev. 06, da UNECE. Nos casos em que o número de pontos da velocidade e do binário do motor na mesma célula do quadro for inferior a 3, o presente número não é aplicável a essa célula.
5. Pós-tratamento dos dados de medição
Todos os cálculos definidos no presente número devem ser efetuados especificamente para cada motor da mesma família de motores CO2.
5.1 Cálculo do trabalho do motor
O trabalho total do motor durante um ciclo ou um período definido deve ser determinado a partir dos valores da potência do motor registados em conformidade com os pontos 3.1.2, 6.3.5. e 7.4.8. do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
O trabalho do motor durante um ciclo completo ou cada subciclo WHTC será determinado integrando os valores registados de potência do motor de acordo com a seguinte fórmula:

em que:
|
Wact, i |
= |
trabalho total do motor durante o período de t0 a t1 |
|
t0 |
= |
hora no início do período |
|
t1 |
= |
hora no final do período |
|
n |
= |
número de valores registados durante o período de t0 to t1 |
|
Pk [0 … n] |
= |
valores da potência do motor registados ao longo do período de t0 to t1 por ordem cronológica, em que k vai de 0 em t0 a n em t1 |
|
h |
= |
amplitude do intervalo entre dois valores adjacentes registados, definida por |

5.2 Cálculo do consumo de combustível integrado
Os valores negativos registados para o consumo de combustível devem ser utilizados diretamente e não devem ser reduzidos a zero para os cálculos do valor integrado.
A massa total de combustível consumido pelo motor durante um ciclo completo ou cada subciclo WHTC será determinada integrando os valores registados do caudal mássico de combustível de acordo com a seguinte fórmula:

em que:
|
Σ FCmeas, i |
= |
massa total de combustível consumido pelo motor durante o período de t0 a t1 |
|
t0 |
= |
hora no início do período |
|
t1 |
= |
hora no final do período |
|
n |
= |
número de valores registados durante o período de t0 to t1 |
|
mffuel,k [0 … n] |
= |
valores do caudal mássico de combustível registados durante o período de t0 a t1 por ordem cronológica, em que k vai de 0 em t0 a n em t1 |
|
h |
= |
amplitude do intervalo entre dois valores adjacentes registados, definida por |

5.3 Cálculo dos valores do consumo específico de combustível
Os fatores de correção e compensação, que têm de ser fornecidos como dados de entrada para a ferramenta de simulação, são calculados pela ferramenta de pré-tratamento do motor, com base os valores medidos do consumo específico de combustível do motor, determinados em conformidade com os pontos 5.3.1 e 5.3.2.
5.3.1 Valores do consumo específico de combustível para o fator de correção WHTC
O consumo específico de combustível para o fator de correção WHTC deve ser calculado a partir dos valores reais medidos durante os ensaios WHTC com arranque a quente, registados em conformidade com o ponto 4.3.3, do seguinte modo:
|
|
SFCmeas, Urban = Σ FCmeas, WHTC-Urban / Wact, WHTC-Urban |
|
|
SFCmeas, Rural = Σ FCmeas, WHTC- Rural / Wact, WHTC- Rural |
|
|
SFCmeas, MW = Σ FCmeas, WHTC-MW / Wact, WHTC-M |
em que:
|
SFCmeas, i |
= |
Consumo específico de combustível durante o subciclo WHTC i [g/kWh] |
|
Σ FCmeas, i |
= |
Massa total de combustível consumido pelo motor durante o subciclo WHTC i [g], determinada em conformidade com o ponto 5.2. |
|
Wact, i |
= |
Trabalho total do motor durante o subciclo WHTC i [kWh] determinado em conformidade com o ponto 5.1. |
Os 3 diferentes subciclos do WHTC — urbano, rural e em autoestrada — são definidos do seguinte modo:
|
(1) |
urbano: do início do ciclo até ≤ 900 segundos depois do início do ciclo |
|
(2) |
rural: desde > 900 segundos do início do ciclo até ≤ 1 380 segundos depois do início do ciclo |
|
(3) |
autoestrada (MW): desde > 1 380 segundos do início do ciclo até ao final do ciclo |
5.3.2 Valores do consumo específico de combustível para o fator de compensação das emissões a frio e a quente
Os valores do consumo específico de combustível necessários para o fator de compensação das emissões a frio e a quente devem ser calculados a partir dos valores reais medidos tanto para o ensaio com arranque a quente WHTC como com arranque a frio, e ser registados em conformidade com o ponto 4.3.3. O cálculo deve ser efetuado para ambos os ensaios WHTC, separadamente, do seguinte modo:
|
|
SFCmeas, hot = Σ FCmeas, hot / Wact, hot |
|
|
SFCmeas, cold = Σ FCmeas, cold / Wact, cold |
em que:
|
SFCmeas, j |
= |
Consumo específico de combustível [g/kWh] |
|
Σ FCmeas, j |
= |
Consumo total de combustível durante o WHTC [g] determinado em conformidade com o ponto 5.2 do presente anexo |
|
Wact, j |
= |
Trabalho total do motor durante o WHTC [kWh] determinado em conformidade com o ponto 5.1. deste anexo |
5.3.3 Valores do consumo específico de combustível durante o WHSC
O consumo específico de combustível durante o WHSC será calculado a partir dos valores reais medidos para o WHSC, registados em conformidade com o ponto 4.3.4, do seguinte modo:
SFCWHSC = (Σ FCWHSC) / (WWHSC)
em que:
|
SFCWHSC |
= |
Consumo específico de combustível durante o WHSC [g/kWh] |
|
Σ FCWHSC |
= |
Consumo total de combustível durante o WHSC [g] determinado em conformidade com o ponto 5.2 do presente anexo |
|
WWHSC |
= |
Trabalho total do motor durante o WHSC [kWh] determinado em conformidade com o ponto 5.1. deste anexo |
5.3.3.1 Valores corrigidos do consumo específico de combustível durante o WHSC
O consumo específico de combustível calculado durante o WHSC, SFCWHSC, determinado em conformidade com o ponto 5.3.3, deve ser ajustado para um valor corrigido, SFCWHSC,corr, a fim de ter em conta a diferença entre o NCV do combustível utilizado durante o ensaio e o NCV para a respetiva tecnologia do motor em matéria de combustível de acordo com a seguinte equação:

em que:
|
SFCWHSC,corr |
= |
Consumo específico de combustível corrigido durante o WHSC [g/kWh] |
|
SFCWHSC |
= |
Consumo específico de combustível durante o WHSC [g/kWh] |
|
NCVmeas |
= |
NCV do combustível utilizado durante os ensaios determinado em conformidade com o ponto 3.2 [MJ/kg] |
|
NCVstd |
= |
NCV padrão em conformidade com o quadro 4 [MJ/kg] |
Quadro 4
Poder calorífico inferior dos tipos de combustível
|
Tipo de combustível/tipo de motor |
Tipo de combustível de referência |
Norma NCV [MJ/kg] |
|
Gasóleo/Ignição por compressão |
B7 |
42.7 |
|
Etanol/Ignição por compressão |
ED95 |
25.7 |
|
Gasolina/Ignição comandada |
E10 |
41.5 |
|
Etanol/Ignição Comandada |
E85 |
29.1 |
|
GPL/Ignição Comandada |
GPL — Combustível B |
46.0 |
|
Gás natural/Ignição Comandada |
G25 |
45.1 |
5.3.3.2 Disposições especiais para o combustível de referência B7
Nos casos em que seja utilizado o combustível de referência de tipo B7 (Gasóleo/Ignição por Compressão) em conformidade com o ponto 3.2 durante o ensaio, a correção de normalização em conformidade com o ponto 5.3.3.1 não deve ser efetuada e o valor corrigido, SFCWHSC,corr, deve ser fixado de acordo com o valor não corrigido SFCWHSC.
5.4 Fator de correção dos motores equipados com sistemas de pós-tratamento dos gases de escape, que são regenerados numa base periódica
No que se refere aos motores equipados com sistemas de pós-tratamento dos gases de escape, que são regenerados numa base periódica, como definido em conformidade com o ponto 6.6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, o consumo de combustível deve ser ajustado através de um fator de correção para ter em conta os eventos de regeneração.
Esse fator de correção, CFRegPer, deve ser determinado em conformidade com o ponto 6.6.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Para os motores equipados com sistemas de pós-tratamento dos gases de escape com regeneração contínua, como definido em conformidade com o ponto 6.6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, nenhum fator de correção deve ser determinado e o valor do fator CFRegPer deve ser fixado em 1.
A curva do motor de plena carga registada em conformidade com o ponto 4.3.1 deve ser utilizada para a desnormalização do ciclo de referência WHTC e todos os cálculos de valores de referência efetuados em conformidade com os pontos 7.4.6, 7.4.7 e 7.4.8 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
Para além das disposições definidas no anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, o caudal mássico efetivo do combustível consumido pelo motor em conformidade com o ponto 3.4 deve ser registado para cada ensaio WHTC com arranque a quente, efetuado em conformidade com o ponto 6.6.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE.
O consumo específico de combustível para cada ensaio WHTC com arranque a quente deve ser calculado através da seguinte equação:
SFCmeas, m = (Σ FCmeas, m) / (Wact, m)
em que:
|
SFCmeas, m |
= |
Consumo específico de combustível [g/kWh] |
|
Σ FCmeas,m |
= |
Consumo total de combustível durante o WHTC [g] determinado em conformidade com o ponto 5.2 do presente anexo |
|
Wact, m |
= |
Trabalho total do motor durante o WHTC [kWh] determinado em conformidade com o ponto 5.1. deste anexo |
|
m |
= |
Índice que define cada ensaio WHTC com arranque a quente |
Os valores do consumo específico de combustível de cada ensaio WHTC são ponderados através da seguinte equação:

em que:
|
n |
= |
o número de ensaios WHTC com arranque a quente sem regeneração |
|
nr |
= |
o número de ensaios WHTC com arranque a quente com regeneração (o número mínimo é um ensaio) |
|
SFCavg |
= |
o consumo específico médio de combustível de todos os ensaios WHTC com arranque a quente sem regeneração [g/kWh] |
|
SFCavg,r |
= |
o consumo específico médio de combustível de todos os ensaios WHTC com arranque a quente com regeneração [g/kWh] |
O fator de correção, CFRegPer, deve ser calculado através da seguinte equação:

6. Aplicação da ferramenta de pré-tratamento do motor
A ferramenta de pré-tratamento do motor será executada para cada motor da mesma família de motores CO2 utilizando os dados de entrada definidos no ponto 6.1.
Os dados de saída da ferramenta de pré-tratamento do motor são o resultado final do procedimento de ensaio do motor e devem ser documentados.
6.1 Dados de entrada da ferramenta de pré-tratamento do motor
Os seguintes dados de entrada são gerados pelos procedimentos de ensaio especificados no presente anexo e servirão de dados de entrada para a ferramenta de pré-tratamento do motor.
6.1.1 Curva de plena carga do motor precursor CO2
Os dados de entrada correspondem à curva de plena carga do motor precursor CO2 da família de motores CO2, como definido em conformidade com o apêndice 3 do presente anexo, e são registados em conformidade com o ponto 4.3.1.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, a curva de plena carga desse motor específico, registada em conformidade com o ponto 4.3.1, deve ser utilizada como dado de entrada.
Os dados de entrada devem ser fornecidos sob a forma de valores separados por vírgulas, utilizando como caráter de separação o caráter Unicode «COMMA» (U + 002C) («,»). A primeira linha do ficheiro deve ser usada como cabeçalho e não pode conter quaisquer dados registados. Os dados registados devem começar na segunda linha do ficheiro.
A primeira coluna do ficheiro deve indicar a velocidade do motor em min– 1 arredondados para 2 casas decimais, em conformidade com a norma ASTM E 29-06. A segunda coluna deve corresponder ao binário do motor em Nm arredondados para 2 casas decimais, em conformidade com a norma ASTM E 29-06.
6.1.2 Curva de plena carga
Os dados de entrada são a carga do motor de plena carga, registada em conformidade com o ponto 4.3.1.
Os dados de entrada devem ser fornecidos sob a forma de valores separados por vírgulas, utilizando como caráter de separação o caráter Unicode «COMMA» (U + 002C) («,»). A primeira linha do ficheiro deve ser usada como cabeçalho e não pode conter quaisquer dados registados. Os dados registados devem começar na segunda linha do ficheiro.
A primeira coluna do ficheiro deve indicar a velocidade do motor em min– 1 arredondada para 2 casas decimais, em conformidade com a norma ASTM E 29-06. A segunda coluna deve corresponder ao binário do motor em Nm arredondados para 2 casas decimais, em conformidade com a norma ASTM E 29-06.
6.1.3 Curva de motorização do motor precursor CO2
Os dados de entrada correspondem à curva de motorização do motor precursor CO2 da família de motores CO2, como definido em conformidade com o apêndice 3 do presente anexo, e são registados em conformidade com o ponto 4.3.2.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, a curva de motorização desse motor específico, registada em conformidade com o ponto 4.3.2, deve ser utilizada como dado de entrada.
Os dados de entrada devem ser fornecidos sob a forma de valores separados por vírgulas, utilizando como caráter de separação o caráter Unicode «COMMA» (U + 002C) («,»). A primeira linha do ficheiro deve ser usada como cabeçalho e não pode conter quaisquer dados registados. Os dados registados devem começar na segunda linha do ficheiro.
A primeira coluna do ficheiro deve indicar a velocidade do motor em min– 1 arredondada para 2 casas decimais, em conformidade com a norma ASTM E 29-06. A segunda coluna deve corresponder ao binário do motor em Nm, arredondada para 2 casas decimais, em conformidade com a norma ASTM E 29-06.
6.1.4 Mapa do consumo de combustível da família de motores CO2
Os dados de entrada correspondem aos valores da velocidade do motor, do binário e do caudal mássico do combustível, determinados para o motor precursor CO2 da família de motores CO2, como definido em conformidade com o apêndice 3 do presente anexo, e são registados em conformidade com o ponto 4.3.5.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, os valores da velocidade do motor, do binário e do caudal mássico do combustível determinados para esse motor específico, registados em conformidade com o ponto 4.3.5, devem ser utilizados como dado de entrada.
Os dados de entrada devem apenas consistir dos valores de medição médios da velocidade do motor, do binário e do caudal mássico do combustível, durante o período de medição de 30 ± 1 segundos, determinado de acordo com o subponto 1 do ponto 4.3.5.5.
Os dados de entrada devem ser fornecidos sob a forma de valores separados por vírgulas, utilizando como caráter de separação o caráter Unicode «COMMA» (U + 002C) («,»). A primeira linha do ficheiro deve ser usada como cabeçalho e não pode conter quaisquer dados registados. Os dados registados devem começar na segunda linha do ficheiro.
A primeira coluna do ficheiro deve indicar a velocidade do motor em min– 1 arredondados para 2 casas decimais, em conformidade com a norma ASTM E 29-06. A segunda coluna deve corresponder ao binário do motor em Nm arredondados para 2 casas decimais, em conformidade com a norma ASTM E 29-06. A terceira coluna deve indicar o caudal mássico do combustível em g/h, arredondado para 2 casas decimais, em conformidade com a norma ASTM E 29-06.
6.1.5 Valores do consumo específico de combustível para o fator de correção WHTC
Os dados de entrada correspondem aos três valores do consumo específico de combustível obtidos durante os diferentes subciclos WHTC — urbano, rural e em autoestrada — em g/kWh, determinados em conformidade com o ponto 5.3.1.
Os valores devem ser arredondados para a segunda casa decimal em conformidade com a norma ASTM E 29-06.
6.1.6 Valores do consumo específico de combustível para o fator de compensação das emissões a frio e a quente
Os dados de entrada devem corresponder aos dois valores relativos ao consumo específico de combustível durante os ensaios WHTC a quente e a frio, em g/kWh, determinados em conformidade com o ponto 5.3.2.
Os valores devem ser arredondados para a segunda casa decimal em conformidade com a norma ASTM E 29-06.
6.1.7 Fator de correção dos motores equipados com sistemas de pós-tratamento dos gases de escape, que são regenerados numa base periódica
Os dados de entrada devem ser o fator de correção CFRegPer determinado em conformidade com o ponto 5.4.
Para motores equipados com sistemas de pós-tratamento dos gases de escape com regeneração contínua, como definido em conformidade com o ponto 6.6.1 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, este fator deve ser fixado em 1, em conformidade com o ponto 5.4.
Os valores devem ser arredondados para a segunda casa decimal em conformidade com a norma ASTM E 29-06.
6.1.8 NCV do combustível de ensaio
Os dados de entrada devem ser o NCV do combustível de ensaio em MJ/kg, determinado em conformidade com o ponto 3.2.
Os valores devem ser arredondados para a terceira casa decimal em conformidade com a norma ASTM E 29-06.
6.1.9 Tipo de combustível de ensaio
Os dados de entrada devem ser o tipo do combustível de ensaio selecionado em conformidade com o ponto 3.2.
6.1.10 Velocidade do motor em marcha lenta sem carga do motor precursor CO2
Os dados de entrada devem corresponder à velocidade em marcha lenta sem carga, nidle, em min– 1, do motor precursor CO2 da família de motores CO2, como definido de acordo com o apêndice 3 do presente anexo, e conforme declarado pelo fabricante no pedido de certificação, na ficha de informação fornecida em conformidade com o modelo constante do apêndice 2.
Sempre que, mediante pedido do fabricante, as disposições definidas no artigo 15.o, n.o 5, do presente regulamento sejam aplicadas, a velocidade em marcha lenta sem carga desse motor específico deve ser utilizada como dado de entrada.
Os valores devem ser arredondados para o número inteiro mais próximo em conformidade com a norma ASTM E 29-06.
6.1.11 Velocidade do motor em marcha lenta sem carga
Os dados de entrada devem corresponder à velocidade em marcha lenta sem carga do motor, nidle, em min– 1, tal como declarado pelo fabricante no pedido de certificação, na ficha de informação fornecida em conformidade com o modelo constante do apêndice 2 do presente anexo.
Os valores devem ser arredondados para o número inteiro mais próximo em conformidade com a norma ASTM E 29-06.
6.1.12 Cilindrada do motor
Os dados de entrada devem corresponder à cilindrada em ccm do motor, tal como declarado pelo fabricante no pedido de certificação, na ficha de informação fornecida em conformidade com o modelo constante do apêndice 2 do presente anexo.
Os valores devem ser arredondados para o número inteiro mais próximo em conformidade com a norma ASTM E 29-06.
6.1.13 Velocidade nominal do motor
Os dados de entrada devem corresponder à velocidade nominal do motor em min– 1, conforme declarado pelo fabricante no pedido de certificação, no ponto 3.2.1.8. do documento de informação fornecido em conformidade com o apêndice 2 do presente anexo.
Os valores devem ser arredondados para o número inteiro mais próximo em conformidade com a norma ASTM E 29-06.
6.1.14 Potência nominal do motor
Os dados de entrada devem corresponder à potência nominal do motor em kW, conforme declarado pelo fabricante no pedido de certificação, no ponto 3.2.1.8. do documento de informação fornecido em conformidade com o apêndice 2 do presente anexo.
Os valores devem ser arredondados para o número inteiro mais próximo em conformidade com a norma ASTM E 29-06.
6.1.15 Manufacturer
Os dados de entrada devem corresponder ao nome do fabricante do motor sob a forma de sequência de carateres em codificação ISO 8859-1.
6.1.16 Model
Os dados de entrada devem corresponder ao modelo do motor sob a forma de sequência de carateres em codificação ISO 8859-1.
6.1.17 ID do relatório técnico
Os dados de entrada devem ser um identificador único do relatório técnico elaborado para a homologação do motor específico. Esse identificador deve ser apresentado sob a forma de carateres da codificação ISO 8859-1.
(1) «Exatidão», o desvio entre a leitura do analisador e o valor de referência, estabelecido em conformidade com uma norma nacional ou internacional.
(2) «Tempo de subida», o intervalo de tempo decorrido entre 10 % e 90 % da resposta da leitura final do analisador (t90 – t10).
(3) Os valores da «calibragem máxima» devem ser 1,1 vezes o valor máximo previsto durante todos os ensaios para o respetivo sistema de medição.
Apêndice 1
MODELO DE CERTIFICADO RELATIVO A UM COMPONENTE, UNIDADE TÉCNICA OU SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO ÀS EMISSÕES DE CO2 E ÀS PROPRIEDADES DO CONSUMO DE COMBUSTÍVEL DE UMA FAMÍLIA DE MOTORES
|
Carimbo da administração
|
Comunicação relativa a:
|
de um certificado relativo às emissões de CO2 e às propriedades do consumo de combustível de uma família de motores, em conformidade com o Regulamento(UE) 2017/2400 da Comissão.
Regulamento (UE) 2017/2400 da Comissão com a última redação que lhe foi dada pelo …
Número de certificação:
Valor da dispersão:
Razão da extensão:
SECÇÃO I
0.1. Marca (designação comercial do fabricante):
0.2. Modelo:
0.3. Meios de identificação do tipo
0.3.1. Localização da marca de certificação:
0.3.2. Método de aposição da marca de certificação:
0.5. Nome e endereço do fabricante:
0.6. Nome(s) e endereço(s) da(s) instalação(ões) de montagem:
0.7. Nome e endereço do representante do fabricante (se aplicável)
SECÇÃO II
1. Informações suplementares (se aplicável): ver adenda
2. Entidade homologadora responsável pela realização dos ensaios:
3. Data do relatório de ensaio:
4. Número do relatório:
5. Eventuais observações: ver adenda
6. Local:
7. Data:
8. Assinatura:
Anexos:
Dossiê de homologação. Relatório de ensaio.
Apêndice 2
Ficha de informações do motor
Notas respeitantes ao preenchimento dos quadros
As letras A, B, C, D e E, correspondentes aos membros da família de motores CO2, devem ser substituídas pelos nomes efetivos dos motores dessa família CO2.
Sempre que, para uma determinada característica do motor, se aplicar o mesmo valor/descrição a todos os motores de uma mesma família CO2, devem unificar-se as células A a E.
Se a família de motores CO2 for constituída por mais de 5 membros, podem adicionar-se mais colunas.
O «Apêndice à ficha de informações» deve ser copiado e preenchido separadamente para cada motor da mesma família CO2.
As notas explicativas podem ser consultadas no final do presente apêndice.
|
|
|
Motor precursor CO2 |
Membros da família de motores CO2 |
||||
|
A |
B |
C |
D |
E |
|||
|
0. |
Generalidades |
||||||
|
0.l. |
Marca (designação comercial do fabricante) |
|
|||||
|
0.2. |
Type |
|
|||||
|
0.2.1. |
Designação(ões) comercial(ais) (se for caso disso) |
|
|
|
|
|
|
|
0.5. |
Nome e endereço do fabricante |
|
|||||
|
0.8. |
Nome(s) e endereço(s) da(s) instalação(ões) de montagem |
|
|
|
|
|
|
|
0.9. |
Nome e endereço do representante do fabricante (se aplicável) |
|
|||||
PARTE 1
Características essenciais do motor (precursor) e dos tipos de motor da mesma família
|
|
|
Motor precursor ou tipo de motor |
Membros da família de motores CO2 |
|||||||
|
A |
B |
C |
D |
E |
||||||
|
3.2. |
Motor de combustão interna |
|
|
|
|
|
|
|||
|
3.2.1. |
Informação específica do motor |
|
|
|
|
|
|
|||
|
3.2.1.1. |
Princípio de funcionamento: ignição comandada/ignição por compressão (1) Ciclo: quatro tempos/dois tempos/rotativo (1) |
|
||||||||
|
3.2.1.2. |
Número e disposição dos cilindros |
|
|
|
|
|
|
|||
|
3.2.1.2.1. |
Diâmetro (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.2. |
Curso (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.3. |
Ordem de inflamação |
|
|
|
|
|
|
|||
|
3.2.1.3. |
Cilindrada (4) cm3 |
|
|
|
|
|
|
|||
|
3.2.1.4. |
Taxa de compressão volumétrica (5) |
|
|
|
|
|
|
|||
|
3.2.1.5. |
Desenhos da câmara de combustão, face superior do êmbolo e, no caso de motores de ignição comandada, segmentos |
|
|
|
|
|
|
|||
|
3.2.1.6. |
Velocidade normal de marcha lenta sem carga (5) min– 1 |
|
|
|
|
|
|
|||
|
3.2.1.6.1. |
Velocidade elevada de marcha lenta sem carga (5) min– 1 |
|
|
|
|
|
|
|||
|
3.2.1.7. |
Teor de monóxido de carbono em volume nos gases de escape com o motor em marcha lenta sem carga (5): % conforme indicado pelo fabricante (motores de ignição comandada apenas) |
|
|
|
|
|
|
|||
|
3.2.1.8. |
Potência útil máxima (6) … kW at … min– 1 (valor declarado pelo fabricante) |
|
|
|
|
|
|
|||
|
3.2.1.9. |
Velocidade máxima admissível do motor, conforme prescrito pelo fabricante (min– 1) |
|
|
|
|
|
|
|||
|
3.2.1.10. |
Binário útil máximo (6) (Nm) at (min– 1) (valor declarado pelo fabricante) |
|
|
|
|
|
|
|||
|
3.2.1.11. |
Referências do dossiê de documentação do fabricante exigido nos pontos 3.1, 3.2 e 3.3 do Regulamento n.o 49, Rev. 06, da UNECE que dá à entidade homologadora a possibilidade de avaliar as estratégias de controlo das emissões e os sistemas a bordo no motor, a fim de assegurar o funcionamento correto das medidas de controlo dos NOx |
|
|
|
|
|
|
|||
|
3.2.2. |
Combustível |
|
|
|
|
|
|
|||
|
3.2.2.2. |
Veículos pesados a diesel/gasolina/GPL/GN-H/GN-L/GN-HL/etanol (ED95)/etanol (E85)1 |
|
|
|
|
|
|
|||
|
3.2.2.2.1. |
Combustíveis compatíveis com a utilização pelo motor declarada pelo fabricante, em conformidade com o ponto 4.6.2 do do Regulamento n.o 49, Rev. 06, da UNECE (se aplicável) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.4. |
Alimentação de combustível |
|
|
|
|
|
|
|||
|
3.2.4.2. |
Por injeção de combustível (ignição por compressão apenas): Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.1. |
Descrição do sistema |
|
|
|
|
|
|
|||
|
3.2.4.2.2. |
Princípio de funcionamento: injeção direta/pré-câmara/câmara de turbulência (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.3. |
Bomba de injeção |
|
|
|
|
|
|
|||
|
3.2.4.2.3.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.3. |
Débito máximo de combustível (1) (5) … mm3 /curso ou ciclo à velocidade do motor de … min– 1 ou, alternativamente, um diagrama característico (Se a pressão puder ser controlada, indicar o débito de combustível e a pressão característicos em relação à velocidade do motor) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.4. |
Regulação estática da injeção (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.5. |
Curva do avanço da injeção (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.6. |
Procedimento de calibração: banco de ensaio/motor (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4. |
Regulador |
|
|
|
|
|
|
|||
|
3.2.4.2.4.1. |
Type |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2. |
Ponto de corte |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.1. |
Velocidade de início de corte em carga (min– 1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.2. |
Velocidade máxima sem carga (min– 1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.3. |
Velocidade de marcha lenta sem carga (min– 1) |
|
|
|
|
|
|
|||
|
3.2.4.2.5. |
Tubagem de injeção |
|
|
|
|
|
|
|||
|
3.2.4.2.5.1. |
Comprimento (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.2. |
Diâmetro interno (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.3. |
Rampa comum, marca e tipo |
|
|
|
|
|
|
|||
|
3.2.4.2.6. |
Injetor(es) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.6.3. |
Pressão de abertura (5): |
kPa ou diagrama característico (5) |
|
|
|
|
|
|
||
|
3.2.4.2.7. |
Sistema de arranque a frio |
|
|
|
|
|
|
|||
|
3.2.4.2.7.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.7.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.7.3. |
Descrição |
|
|
|
|
|
|
|||
|
3.2.4.2.8. |
Sistema auxiliar de arranque |
|
|
|
|
|
|
|||
|
3.2.4.2.8.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.8.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.8.3. |
Descrição do sistema |
|
|
|
|
|
|
|||
|
3.2.4.2.9. |
Injeção controlada eletronicamente: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3. |
Descrição do sistema (no caso de sistemas que não sejam de injeção contínua, indicar pormenores equivalentes) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.1. |
Marca e tipo da unidade de controlo (ECU) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.2. |
Marca e tipo do regulador de combustível |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.3. |
Marca e tipo do sensor do fluxo de ar |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.4. |
Marca e tipo do distribuidor de combustível |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.5. |
Marca e tipo do alojamento da borboleta do acelerador |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.6. |
Marca e tipo do sensor da temperatura da água |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.7. |
Marca e tipo do sensor da temperatura do ar |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.8. |
Marca e tipo do sensor da pressão do ar |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.9. |
Número(s) de calibração do software |
|
|
|
|
|
|
|||
|
3.2.4.3. |
Por injeção de combustível (ignição comandada apenas): Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.4.3.1. |
Princípio de funcionamento: coletor de admissão (ponto único/multiponto/injeção direta (1)/outro especificar) |
|
|
|
|
|
|
|||
|
3.2.4.3.2. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.4.3.3. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.4.3.4. |
Descrição do sistema (no caso de sistemas que não sejam de injeção contínua, indicar pormenores equivalentes) |
|
|
|
|
|
|
|||
|
3.2.4.3.4.1. |
Marca e tipo da unidade de controlo (ECU) |
|
|
|
|
|
|
|||
|
3.2.4.3.4.2. |
Marca e tipo do regulador de combustível |
|
|
|
|
|
|
|||
|
3.2.4.3.4.3. |
Marca e tipo do sensor do fluxo de ar |
|
|
|
|
|
|
|||
|
3.2.4.3.4.4. |
Marca e tipo do distribuidor de combustível |
|
|
|
|
|
|
|||
|
3.2.4.3.4.5. |
Marca e tipo do regulador de pressão |
|
|
|
|
|
|
|||
|
3.2.4.3.4.6. |
Marca e tipo do microcomutador |
|
|
|
|
|
|
|||
|
3.2.4.3.4.7. |
Marca e tipo do parafuso de ajustamento da marcha lenta sem carga |
|
|
|
|
|
|
|||
|
3.2.4.3.4.8. |
Marca e tipo do alojamento da borboleta do acelerador |
|
|
|
|
|
|
|||
|
3.2.4.3.4.9. |
Marca e tipo do sensor da temperatura da água |
|
|
|
|
|
|
|||
|
3.2.4.3.4.10. |
Marca e tipo do sensor da temperatura do ar |
|
|
|
|
|
|
|||
|
3.2.4.3.4.11. |
Marca e tipo do sensor da pressão do ar |
|
|
|
|
|
|
|||
|
3.2.4.3.4.12. |
Número(s) de calibração do software |
|
|
|
|
|
|
|||
|
3.2.4.3.5. |
Injetores: pressão de abertura (5) (kPa) ou diagrama característico (5) |
|
|
|
|
|
|
|||
|
3.2.4.3.5.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.4.3.5.2. |
Type |
|
|
|
|
|
|
|||
|
3.2.4.3.6. |
Regulação da injeção |
|
|
|
|
|
|
|||
|
3.2.4.3.7. |
Sistema de arranque a frio |
|
|
|
|
|
|
|||
|
3.2.4.3.7.1. |
Princípio(s) de funcionamento |
|
|
|
|
|
|
|||
|
3.2.4.3.7.2. |
Limites/regulações de funcionamento (1) (5) |
|
|
|
|
|
|
|||
|
3.2.4.4. |
Bomba de alimentação |
|
|
|
|
|
|
|||
|
3.2.4.4.1. |
Pressão (5) (kPa) ou diagrama característico (5) |
|
|
|
|
|
|
|||
|
3.2.5. |
Sistema elétrico |
|
|
|
|
|
|
|||
|
3.2.5.1. |
Tensão nominal (V), terra positiva/negativa (1) |
|
|
|
|
|
|
|||
|
3.2.5.2. |
Gerador |
|
|
|
|
|
|
|||
|
3.2.5.2.1. |
Type |
|
|
|
|
|
|
|||
|
3.2.5.2.2. |
Saída nominal (VA) |
|
|
|
|
|
|
|||
|
3.2.6. |
Sistema de ignição (unicamente motores de ignição comandada) |
|
|
|
|
|
|
|||
|
3.2.6.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.6.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.6.3. |
Princípio de funcionamento |
|
|
|
|
|
|
|||
|
3.2.6.4. |
Curva de avanço da ignição ou traçado do avanço (5) |
|
|
|
|
|
|
|||
|
3.2.6.5. |
Regulação da ignição estática (5) (graus antes do TDC) |
|
|
|
|
|
|
|||
|
3.2.6.6. |
Velas de ignição |
|
|
|
|
|
|
|||
|
3.2.6.6.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.6.6.2. |
Type |
|
|
|
|
|
|
|||
|
3.2.6.6.3. |
Regulação da folga (mm) |
|
|
|
|
|
|
|||
|
3.2.6.7. |
Bobinas(a) de ignição |
|
|
|
|
|
|
|||
|
3.2.6.7.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.6.7.2. |
Type |
|
|
|
|
|
|
|||
|
3.2.7. |
Sistema de arrefecimento: líquido/ar (1) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.7.2. |
Líquido |
|
|
|
|
|
|
|||
|
3.2.7.2.1. |
Natureza do líquido |
|
|
|
|
|
|
|||
|
3.2.7.2.2. |
Bomba(s) de circulação: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.7.2.3. |
Características |
|
|
|
|
|
|
|||
|
3.2.7.2.3.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.7.2.3.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.7.2.4. |
Relação de transmissão |
|
|
|
|
|
|
|||
|
3.2.7.3. |
Ar |
|
|
|
|
|
|
|||
|
3.2.7.3.1. |
Ventoinha: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.7.3.2. |
Características |
|
|
|
|
|
|
|||
|
3.2.7.3.2.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.7.3.2.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.7.3.3. |
Relação de transmissão |
|
|
|
|
|
|
|||
|
3.2.8. |
Sistema de admissão |
|
|
|
|
|
|
|||
|
3.2.8.1. |
Sobrealimentador: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.8.1.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.8.1.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.8.1.3. |
Descrição do sistema (p.ex., pressão máxima de sobrealimentação … kPa, válvula de descarga, se aplicável) |
|
|
|
|
|
|
|||
|
3.2.8.2. |
Permutador de calor: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.8.2.1. |
Modelo: ar-ar/ar-água (1) |
|
|
|
|
|
|
|||
|
3.2.8.3. |
Depressão na admissão à velocidade nominal do motor e a 100 % de carga (unicamente motores de ignição por compressão) |
|
|
|
|
|
|
|||
|
3.2.8.3.1. |
Mínima admissível (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.3.2. |
Máxima admissível (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.4. |
Descrição e desenhos das tubagens de admissão e respetivos acessórios (câmara de admissão, dispositivo de aquecimento, entradas de ar adicionais, etc.) |
|
|
|
|
|
|
|||
|
3.2.8.4.1. |
Descrição do coletor de admissão (incluir desenhos e/ou fotografias) |
|
|
|
|
|
|
|||
|
3.2.9. |
Sistema de escape |
|
|
|
|
|
|
|||
|
3.2.9.1. |
Descrição e/ou desenhos do coletor de escape |
|
|
|
|
|
|
|||
|
3.2.9.2. |
Descrição e/ou desenho do sistema de escape |
|
|
|
|
|
|
|||
|
3.2.9.2.1. |
Descrição e/ou desenho dos componentes do sistema de escape que fazem parte do sistema do motor |
|
|
|
|
|
|
|||
|
3.2.9.3. |
Contrapressão de escape máxima admissível à velocidade nominal do motor e a 100 % de carga (unicamente motores de ignição por compressão)(kPa) (7) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.9.7. |
Volume do sistema de escape (dm3) |
|
|
|
|
|
|
|||
|
3.2.9.7.1. |
Volume aceitável do sistema de escape (dm3) |
|
|
|
|
|
|
|||
|
3.2.10. |
Secções transversais mínimas e geometria das janelas de admissão |
|
|
|
|
|
|
|||
|
3.2.11. |
Regulação das válvulas ou dados equivalentes |
|||||||||
|
3.2.11.1. |
Elevação máxima das válvulas, ângulos de abertura e de fecho ou pormenores de regulação de sistemas alternativos de distribuição, em relação aos pontos mortos. Para um sistema de regulação variável, regulação mínima e máxima |
|
|
|
|
|
|
|||
|
3.2.11.2. |
Gama de referência e/ou de regulação (7) |
|
|
|
|
|
|
|||
|
3.2.12. |
Medidas tomadas contra a poluição atmosférica |
|||||||||
|
|
||||||||||
|
3.2.12.1.1. |
Dispositivo para reciclar os gases do cárter: Sim/Não (1) Em caso afirmativo, descrição e desenhos Em caso negativo, é exigido o cumprimento dos requisitos do ponto 6.10 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE |
|
|
|
|
|
|
|||
|
3.2.12.2. |
Dispositivos de controlo da poluição adicionais (se existirem e se não forem abrangidos por outra rubrica) |
|
|
|
|
|
|
|||
|
3.2.12.2.1. |
Catalisador: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.1. |
Número de catalisadores e elementos (fornecer as informações seguintes para cada unidade separadamente) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.2. |
Dimensões, forma e volume do(s) catalisador(s) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.3. |
Tipo de ação catalítica |
|
|
|
|
|
|
|||
|
3.2.12.2.1.4. |
Carga total de metais preciosos |
|
|
|
|
|
|
|||
|
3.2.12.2.1.5. |
Concentração relativa |
|
|
|
|
|
|
|||
|
3.2.12.2.1.6. |
Substrato (estrutura e material) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.7. |
Densidade das células |
|
|
|
|
|
|
|||
|
3.2.12.2.1.8. |
Tipo de alojamento do(s) catalisador(es) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.9. |
Localização do(s) catalisador(es) (local e distância de referência na linha de escape) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.10. |
Blindagem térmica: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11. |
Sistemas/método de regeneração de sistemas de pós-tratamento dos gases de escape, descrição |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.1.11.5. |
Gama de temperaturas de funcionamento normal (K) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.6. |
Reagentes consumíveis: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.7. |
Tipo e concentração do reagente necessário para a ação catalítica |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.8. |
Gama de temperaturas de funcionamento normais do reagente K |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.9. |
Norma internacional |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.10. |
Frequência de reabastecimento de reagente: contínuo/manutenção (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.12. |
Marca do catalisador |
|
|
|
|
|
|
|||
|
3.2.12.2.1.13. |
Número de identificação da peça |
|
|
|
|
|
|
|||
|
3.2.12.2.2. |
Sensor de oxigénio: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.2.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.12.2.2.2. |
Localização |
|
|
|
|
|
|
|||
|
3.2.12.2.2.3. |
Gama de controlo |
|
|
|
|
|
|
|||
|
3.2.12.2.2.4. |
Type |
|
|
|
|
|
|
|||
|
3.2.12.2.2.5. |
Número de identificação da peça |
|
|
|
|
|
|
|||
|
3.2.12.2.3. |
Injeção de ar: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.3.1. |
Tipo (ar pulsado, bomba de ar, etc.) |
|
|
|
|
|
|
|||
|
3.2.12.2.4. |
Recirculação dos gases de escape (EGR): Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.4.1. |
Características (marca, tipo, caudal, etc.) |
|
|
|
|
|
|
|||
|
3.2.12.2.6. |
Coletor de partículas (PT): Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.1. |
Dimensões, forma e capacidade do coletor de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.2. |
Conceção do coletor de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.3. |
Localização (distância de referência na linha de escape) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.4. |
Método ou sistema de regeneração, descrição e/ou desenho |
|
|
|
|
|
|
|||
|
3.2.12.2.6.5. |
Marca do coletor de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.6. |
Número de identificação da peça |
|
|
|
|
|
|
|||
|
3.2.12.2.6.7. |
Gamas de temperatura (K) e de pressão (kPa) normais de funcionamento |
|
|
|
|
|
|
|||
|
3.2.12.2.6.8. |
No caso de regeneração periódica |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.6.8.1.1. |
Número de ciclos de ensaios WHTC sem regeneração (n) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
3.2.12.2.6.8.2.1. |
Número de ciclos de ensaios WHTC com regeneração (nR) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9. |
Outros sistemas: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9.1. |
Descrição e funcionamento |
|
|
|
|
|
|
|||
|
3.2.12.2.7. |
Sistema de diagnóstico a bordo (OBD) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.1. |
Número de famílias de motores OBD dentro da família de motores |
|
||||||||
|
3.2.12.2.7.0.2. |
Lista de famílias de motores OBD (se for o caso) |
Família de motores OBD 1: … |
||||||||
|
Família de motores OBD 2: … |
||||||||||
|
etc. … |
||||||||||
|
3.2.12.2.7.0.3. |
Número da família de motores OBD a que pertence o motor precursor/motor membro |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.4. |
Referências do fabricante da documentação OBD, como exigido na alínea c), do ponto 3.1.4 e no ponto 3.3.4 do Regulamento n.o 49, Rev. 06, da UNECE, e especificado no seu anexo 9-A, para efeitos de homologação do sistema OBD |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.5. |
Se for o caso, referência do fabricante da documentação para instalar num veículo um sistema de motor equipado com um sistema OBD |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.2. |
Lista e finalidade de todos os componentes controlados pelo sistema (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3. |
Descrição escrita (princípios gerais de funcionamento) de |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1. |
Motores de ignição comandada (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.1. |
Monitorização do catalisador (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.2. |
Deteção de falhas de ignição (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.3. |
Monitorização do sensor de oxigénio (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.4. |
Outros componentes monitorizados pelo sistema OBD |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2. |
Motores de ignição por compressão (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.1. |
Monitorização do catalisador (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.2. |
Monitorização do coletor de partículas (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.3. |
Monitorização do sistema eletrónico de alimentação de combustível (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.4. |
Monitorização do sistema DeNOx (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.5. |
Outros componentes monitorizados pelo sistema OBD (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.4. |
Critérios de acionamento do IA (número fixo de ciclos de condução ou método estatístico) (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.5. |
Lista de todos códigos de saída OBD e formatos utilizados (com uma explicação de cada um deles) (8) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.6.5. |
Protocolo-padrão de comunicação do OBD (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7. |
Referência do fabricante da informação relativa ao OBD, como exigido na alínea d), do ponto 3.1.4 e no ponto 3.3.4 do Regulamento n.o 49, Rev. 06, da UNECE, para efeitos de cumprimento das disposições relativas ao acesso ao OBD do veículo, ou |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7.1. |
Em alternativa à referência do fabricante prevista no ponto 3.2.12.2.7.7, a referência do anexo ao presente anexo, contendo o quadro a seguir apresentado, depois de preenchido de acordo com o exemplo dado: Componente – Código de anomalia – Estratégia de monitorização – Critérios para a deteção de anomalias – Critérios de ativação do IA – Parâmetros secundários – Pré-condicionamento – Ensaio de demonstração Catalisador SCR - P20EE – Sinais dos sensores NOx 1 e 2 – Diferença entre os sinais dos sensores 1 e 2 – 2.o ciclo – Velocidade do motor, carga do motor, temperatura do catalisador, atividade do reagente, caudal mássico dos gases de escape – Um ciclo de ensaios OBD (WHTC, parte a quente) – Ciclo de ensaios OBD (WHTC, parte a quente) |
|
|
|
|
|
|
|||
|
3.2.12.2.8. |
Outro sistema (descrição e funcionamento) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.1. |
Sistemas para garantir o correto funcionamento das medidas de controlo dos NOx |
|
|
|
|
|
|
|||
|
3.2.12.2.8.2. |
Motor com desativação permanente da persuasão do condutor, para ser utilizado pelos serviços de salvamento ou nos veículos projetados e fabricados para utilização pelas forças armadas, proteção civil, serviços de incêndio e forças responsáveis pela manutenção da ordem pública: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.3. |
Número de famílias de motores OBD da família de motores considerada ao assegurar o correto funcionamento das medidas de controlo dos NOx |
|
||||||||
|
3.2.12.2.8.4. |
Lista de famílias de motores OBD (se for o caso) |
Família de motores OBD 1: … Família de motores OBD 2: … etc. … |
||||||||
|
3.2.12.2.8.5. |
Número da família de motores OBD a que pertence o motor precursor/motor membro |
|
|
|
|
|
|
|||
|
3.2.12.2.8.6. |
Concentração mínima do ingrediente ativo presente no reagente que não aciona o sistema de aviso (CDmin) (% vol.) |
|
||||||||
|
3.2.12.2.8.7. |
Se for o caso, referência da documentação do fabricante relativa à montagem, no veículo, dos sistemas que garantem o correto funcionamento das medidas de controlo dos NOx |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.17. |
Informação específica relativa a motores a gás para veículos pesados (em caso de sistemas com outra configuração, fornecer uma informação equivalente) |
|
|
|
|
|
|
|||
|
3.2.17.1. |
Combustível: GPL/GN-H/GN-L/GN-HL (1) |
|
|
|
|
|
|
|||
|
3.2.17.2. |
Regulador(es) de pressão ou vaporizador(es)/regulador(es) de pressão (1) |
|
|
|
|
|
|
|||
|
3.2.17.2.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.2.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.2.3. |
Número dos estádios de redução de pressão |
|
|
|
|
|
|
|||
|
3.2.17.2.4. |
Pressão no estádio final mínimo (kPa) – máximo. (kPa) |
|
|
|
|
|
|
|||
|
3.2.17.2.5. |
Número de pontos de regulação principais |
|
|
|
|
|
|
|||
|
3.2.17.2.6. |
Número de pontos de regulação da marcha lenta sem carga |
|
|
|
|
|
|
|||
|
3.2.17.2.7. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.3. |
Sistema de alimentação de combustível: unidade de mistura/injeção de gás/injeção de líquido/injeção direta (1) |
|
|
|
|
|
|
|||
|
3.2.17.3.1. |
Regulação da riqueza da mistura |
|
|
|
|
|
|
|||
|
3.2.17.3.2. |
Descrição do sistema e/ou diagrama e desenhos |
|
|
|
|
|
|
|||
|
3.2.17.3.3. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.4. |
Unidade misturadora |
|
|
|
|
|
|
|||
|
3.2.17.4.1. |
Número |
|
|
|
|
|
|
|||
|
3.2.17.4.2. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.4.3. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.4.4. |
Localização |
|
|
|
|
|
|
|||
|
3.2.17.4.5. |
Possibilidades de regulação |
|
|
|
|
|
|
|||
|
3.2.17.4.6. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.5. |
Injeção no coletor de admissão |
|
|
|
|
|
|
|||
|
3.2.17.5.1. |
Injeção: ponto único/multiponto (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.2. |
Injeção: contínua/temporizada simultaneamente/temporizada sequencialmente (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.3. |
Equipamento de injeção |
|
|
|
|
|
|
|||
|
3.2.17.5.3.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.3.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.3.3. |
Possibilidades de regulação |
|
|
|
|
|
|
|||
|
3.2.17.5.3.4. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.5.4. |
Bomba de alimentação (se aplicável) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.3. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.5.5. |
Injetor(es) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.5.5.3. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.6. |
Injeção direta |
|
|
|
|
|
|
|||
|
3.2.17.6.1. |
Bomba de injeção/regulador de pressão (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.3. |
Regulação da injeção |
|
|
|
|
|
|
|||
|
3.2.17.6.1.4. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.6.2. |
Injetor(es) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.3. |
Pressão de abertura ou diagrama característico (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.4. |
Número de homologação |
|
|
|
|
|
|
|||
|
3.2.17.7. |
Unidade de controlo eletrónico (ECU) |
|
|
|
|
|
|
|||
|
3.2.17.7.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.2.17.7.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.2.17.7.3. |
Possibilidades de regulação |
|
|
|
|
|
|
|||
|
3.2.17.7.4. |
Número(s) de calibração do software |
|
|
|
|
|
|
|||
|
3.2.17.8. |
Equipamentos específicos para o GN |
|
|
|
|
|
|
|||
|
3.2.17.8.1. |
Variante 1 (apenas no caso de homologações de motores para várias composições específicas de combustível) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.1. |
Característica autoadaptável? Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.2. |
Calibração para uma composição específica de gás GN-H/GN-L/ GN-HL1 Transformação para uma composição específica de gás GN-Ht/ GN-Lt/GN-HLt 1 |
|
|
|
|
|
|
|||
|
3.2.17.8.1.1. |
metano (CH4) … básica (%mol) etano (C2H6) … básica (%mol) propano (C3H8) … básica (%mol) butano (C4H10) … básica (%mol) C5/C5+: … básica (%mol) oxigénio (O2) … básica (%mol) inerte (N2, He etc) … básica (%mol) |
mín (%mol) mín (%mol) mín (%mol) mín (%mol) mín (%mol) mín (%mol) mín (%mol) |
máx (%mol) máx (%mol) máx (%mol) máx (%mol) máx (%mol) máx (%mol) máx (%mol) |
|||||||
|
3.5.5. |
Consumo específico de combustível e fatores de correção |
|
|
|
|
|
|
|||
|
3.5.5.1. |
Consumo específico de combustível durante os ensaios WHSC «SFCWHSC», em conformidade com o ponto 5.3.3 g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.2. |
Consumo específico de combustível durante o WHSC «SFCWHSC», em conformidade com o ponto 5.3.3.1:... g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.3. |
Fator de correção da parte urbana do WHTC (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.5.5.4. |
Fator de correção da parte rural do WHTC (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.5.5.5. |
Fator de correção da parte em autoestrada do WHTC (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.5.5.6. |
Fator de equilíbrio das emissões a quente e a frio (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.5.5.7. |
Fator de correção dos motores equipados com sistemas de pós-tratamento dos gases de escape que são regenerados numa base periódica CFRegPer (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.5.5.8. |
Fator de correção do NCV padrão (a partir dos dados de saída da ferramenta de pré-tratamento do motor) |
|
|
|
|
|
|
|||
|
3.6. |
Temperaturas admitidas pelo fabricante |
|
|
|
|
|
|
|||
|
3.6.1. |
Sistema de arrefecimento |
|
|
|
|
|
|
|||
|
3.6.1.1. |
Arrefecimento por líquido: temperatura máxima à saída (K) |
|
|
|
|
|
|
|||
|
3.6.1.2. |
Arrefecimento por ar |
|
|
|
|
|
|
|||
|
3.6.1.2.1. |
Ponto de referência |
|
|
|
|
|
|
|||
|
3.6.1.2.2. |
Temperatura máxima no ponto de referência (K) |
|
|
|
|
|
|
|||
|
3.6.2. |
Temperatura máxima à saída do permutador de calor (K) |
|
|
|
|
|
|
|||
|
3.6.3. |
Temperatura máxima do escape no(s) ponto(s) do(s) tubo(s) de escape adjacente(s) à(s) flange(s) exterior(es) do(s) coletor(es) de escape ou da(s) turbina(s) de sobrealimentação (K) |
|
|
|
|
|
|
|||
|
3.6.4. |
Temperatura do combustível mínima (K) – máxima (K) À entrada da bomba de injeção, no que diz respeito aos motores diesel, e no estádio final do regulador de pressão para os motores a gás |
|
|
|
|
|
|
|||
|
3.6.5. |
Temperatura do lubrificante Mínima (K) – Máxima (K) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.8. |
Sistema de lubrificação |
|
|
|
|
|
|
|||
|
3.8.1. |
Descrição do sistema |
|
|
|
|
|
|
|||
|
3.8.1.1. |
Posição do reservatório do lubrificante |
|
|
|
|
|
|
|||
|
3.8.1.2. |
Sistema de alimentação (por bomba/injeção na admissão/mistura com combustível, etc.) (1) |
|
|
|
|
|
|
|||
|
3.8.2. |
Bomba de lubrificação |
|
|
|
|
|
|
|||
|
3.8.2.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.8.2.2. |
Tipo(s) |
|
|
|
|
|
|
|||
|
3.8.3. |
Mistura com combustível |
|
|
|
|
|
|
|||
|
3.8.3.1. |
Percentagem |
|
|
|
|
|
|
|||
|
3.8.4. |
Arrefecedor por óleo: Sim/Não (1) |
|
|
|
|
|
|
|||
|
3.8.4.1. |
Desenho(s) |
|
|
|
|
|
|
|||
|
3.8.4.1.1. |
Marca(s) |
|
|
|
|
|
|
|||
|
3.8.4.1.2. |
Tipo(s) |
|
|
|
|
|
|
|||
Notas:
|
(1) |
Riscar o que não interessa (há casos em que nada precisa de ser suprimido, quando for aplicável mais de uma entrada). |
|
(3) |
Este valor deve ser arredondado para o décimo de milímetro mais próximo. |
|
(4) |
Este valor deve ser calculado e arredondado para o cm3 mais próximo. |
|
(5) |
Especificar a tolerância. |
|
(6) |
Determinação em conformidade com os requisitos do Regulamento n.o 85. |
|
(7) |
Indicar aqui os valores mais altos e mais baixos para cada variante. |
|
(8) |
A documentar caso se trate de uma só família de motores OBD e se ainda não estiver indicado na documentação referida no ponto 3.2.12.2.7.0.4 da parte 1 do presente apêndice. |
Apêndice à ficha de informações
Informação sobre as condições de ensaio
1. Velas de ignição
1.1. Marca
1.2. Type
1.3. Regulação da folga
2. Bobina de ignição
2.1. Marca
2.2. Type
3. Lubrificante utilizado
3.1. Marca
3.2. Tipo (indicar a percentagem de óleo na mistura se o lubrificante e o combustível forem misturados)
3.3. Especificações do lubrificante
4. Combustível de ensaio utilizado
4.1. Tipo de combustível (em conformidade com o ponto 6.1.9 do anexo V do Regulamento (UE) 2017/2400 da Comissão)
4.2. Número de identificação único (número do lote de fabrico) do combustível utilizado
4.3. Poder calorífico inferior (NCV) (em conformidade com o ponto 6.1.8 do anexo V do Regulamento (UE) 2017/2400 da Comissão)
5. Equipamentos acionados pelo motor
5.1. A potência absorvida pelos dispositivos auxiliares/equipamento apenas precisa de ser determinada,
|
a) |
Se os dispositivos auxiliares/equipamento exigidos não estiverem montados no motor e/ou |
|
b) |
Se os dispositivos auxiliares/equipamento não exigidos estiverem montados no motor. |
|
Nota: |
Os requisitos aplicáveis ao equipamento acionado pelo motor são diferentes para o ensaio das emissões e para o ensaio da potência. |
5.2. Enumeração e pormenores identificadores
5.3. Potência absorvida a velocidades do motor específicas para o ensaio das emissões
Quadro 1
Potência absorvida a velocidades do motor específicas para o ensaio das emissões
|
Equipamento |
|
||||
|
|
Marcha lenta |
Velocidade baixa |
Velocidade alta |
Velocidade preferida (2) |
n95h |
|
Pa Dispositivos auxiliares/equipamento exigidos de acordo com o apêndice 6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE |
|
|
|
|
|
|
Pb Dispositivos auxiliares/equipamento não exigidos de acordo com o apêndice 6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE |
|
|
|
|
|
5.4. Constante da ventoinha determinada em conformidade com o apêndice 5 do presente anexo (se aplicável)
5.4.1. Cavg-fan (se aplicável)
5.4.2. Cind-fan (se aplicável)
Quadro 2
Valor da constante da ventoinha Cind-fan para diferentes velocidades do motor
|
Valor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
Velocidade do motor |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
velocidade do motor [min– 1] |
|
|
|
|
|
|
|
|
|
|
|
constante da ventoinha Cind-fan,i |
|
|
|
|
|
|
|
|
|
|
6. Desempenho do motor (declarado pelo fabricante)
6.1. Velocidades de ensaio do motor para o ensaio das emissões de acordo com o anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE (1)
|
Velocidade baixa (nlo) |
… min– 1 |
|
Velocidade alta (nhi) |
… min– 1 |
|
Velocidade em marcha lenta sem carga |
… min– 1 |
|
Velocidade preferencial |
… min– 1 |
|
n95h |
… min– 1 |
6.2. Valores declarados para o ensaio de potência de acordo com o Regulamento n.o 85
|
6.2.1. |
Velocidade em marcha lenta sem carga |
… min– 1 |
|
6.2.2. |
Velocidade à potência máxima |
… min– 1 |
|
6.2.3. |
Potência máxima |
… kW |
|
6.2.4. |
Velocidade ao binário máximo |
… min– 1 |
|
6.2.5. |
Binário máximo |
… Nm |
(1) Especificar a tolerância; devem ter uma aproximação de ± 3 % em relação aos valores declarados pelo fabricante.
Apêndice 3
Família de motores CO2
1. Parâmetros que definem a família de motores CO2
A família de motores CO2, tal como determinada pelo fabricante, deve respeitar os critérios de pertença definidos em conformidade com o ponto 5.2.3 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE. Uma família de motores CO2 pode ser constituída por um único motor.
Além destes critérios de pertença, a família de motores CO2, tal como determinado pelo fabricante, deve respeitar os critérios enumerados nos pontos 1.1 a 1.9 do presente apêndice.
Além dos parâmetros mais abaixo, o fabricante pode aplicar critérios adicionais que permitam definir famílias de menor dimensão. Esses parâmetros não são necessariamente parâmetros com influência no nível de consumo de combustível.
1.1. Dados geométricos relevantes para a combustão
1.1.1. Deslocação por cilindro
1.1.2. Número de cilindros
1.1.3. Dados do diâmetro e do curso
1.1.4. Geometria e taxa de compressão da câmara de combustão
1.1.5. Diâmetro das válvulas e geometria do porto
1.1.6. Injetores de combustível (conceção e localização)
1.1.7. Desenho da cabeça dos cilindros
1.1.8. Desenho dos pistões e anéis do pistão
1.2. Componentes relevantes de gestão do ar
1.2.1. Tipo de equipamento de sobrealimentação (válvula de descarga, sistema de regulação variável, duas fases, outro) e características termodinâmicas
1.2.2. Conceção do arrefecimento do ar de sobrealimentação
1.2.3. Conceção da regulação das válvulas (fixa, parcialmente fixa, flexível)
1.2.4. Conceção da EGR (sem/com arrefecimento, pressão alta/baixa, controlo da EGR)
1.3. Sistema de injeção
1.4. Conceção da propulsão dos dispositivos auxiliares/do equipamento (mecânica, elétrica, etc.)
1.5. Recuperação de calor residual (sim/não; conceção e sistema)
1.6. Sistema de pós-tratamento
1.6.1. Características do sistema de dosagem do reagente (tipo de reagente e dosagem)
1.6.2. Catalisador e filtro de partículas diesel (disposição, material e revestimento)
1.6.3. Características do sistema de dosagem dos hidrocarbonetos (desenho e conceção da dosagem)
1.7. Curva de plena carga
1.7.1. Os valores do binário em cada velocidade do motor da curva de plena carga do motor precursor CO2, determinados em conformidade com o ponto 4.3.1, devem ser iguais ou superiores ao de todos os outros motores dentro da mesma família de motores CO2, à mesma velocidade do motor, para toda a gama de velocidades do motor registada.
1.7.2. Os valores do binário em cada velocidade do motor da curva de plena carga do motor com a menor potência de todos os motores da mesma família de motores CO2, determinados em conformidade com o ponto 4.3.1, devem ser iguais ou inferiores ao de todos os outros motores dentro da mesma família de motores CO2, à mesma velocidade do motor, para toda a gama de velocidades do motor registada.
1.8. Velocidades características de ensaio do motor
1.8.1. A velocidade do motor em marcha lenta sem carga, nidle, do motor precursor CO2, como declarada pelo fabricante na ficha de informações do pedido de certificação em conformidade com o apêndice 2 do presente anexo, deve ser igual ou inferior à velocidade de todos os outros motores da mesma família de motores CO2.
1.8.2. A velocidade de rotação do motor n95h de todos os outros motores que não o motor precursor CO2 dentro da mesma família de motores CO2, determinada a partir da curva do motor de plena carga registada em conformidade com o ponto 4.3.1, aplicando as definições das velocidades características do motor em conformidade com o ponto 7.4.6 do anexo 4 do Regulamento n.o 49, Rev. 06, da UNECE, não se deve desviar da velocidade de rotação do motor n95h do motor precursor CO2 em mais de ± 3 %.
1.8.3. A velocidade do motor n57 de todos os outros motores que não o motor precursor CO2 da mesma família de motores CO2, determinada a partir da curva do motor de plena carga registada em conformidade com o ponto 4.3.1, aplicando as definições em conformidade com o ponto 4.3.5.2.1, não deve apresentar um desvio em relação à velocidade do motor n57 do motor precursor CO2 superior a ± 3 %.
1.9. Número mínimo de pontos no mapa do consumo de combustível
1.9.1. Todos os motores da mesma família de motores CO2 devem ter um número mínimo de 54 pontos de mapeamento do mapa de consumo de combustível do motor situados abaixo da respetiva curva do motor de plena carga, como determinado em conformidade com o ponto 4.3.1.
2. Escolha do motor precursor CO2
O motor precursor CO2 da família de motores CO2 deve ser selecionado em conformidade com os seguintes critérios:
2.1. Maior potência de todos os motores da mesma família de motores CO2.
Apêndice 4
Conformidade das emissões de CO2 e propriedades relativas ao consumo de combustível
1. Disposições gerais
1.1 A conformidade das emissões de CO2 e das propriedades relativas ao consumo de combustível deve ser verificada com base nos dados contidos nos certificados estabelecidos no apêndice 1 do presente anexo, e com base na descrição na ficha de informações prevista no apêndice 2 do presente anexo.
1.2 Se a homologação do motor tiver sido objeto de uma ou mais extensões, devem efetuar-se os ensaios com os motores descritos no dossiê de homologação relativo à extensão em causa.
1.3 Todos os motores submetidos a ensaio devem ser selecionados da produção em série que satisfaça os critérios de seleção de acordo com o ponto 3 do presente apêndice.
1.4 Os ensaios podem ser efetuados com os combustíveis comerciais aplicáveis. Todavia, a pedido do fabricante, podem ser utilizados os combustíveis de referência especificados no ponto 3.2.
1.5 Se os ensaios realizados para fins de conformidade das emissões de CO2 e das propriedades relativas ao consumo de combustível de motores a gás (gás natural, GPL) utilizarem combustíveis comerciais, o fabricante deve demonstrar à entidade homologadora que a composição do combustível gasoso é determinada de forma apropriada para definir o NCV em conformidade com o ponto 4 do presente apêndice, aplicando as boas práticas de engenharia.
2. Número de motores e famílias de motores CO2 a ensaiar
2.1 No âmbito de aplicação do presente regulamento, a base de cálculo do número de famílias de motores CO2 e o número de motores dentro dessas famílias CO2 que devem ser ensaiados anualmente, para verificar a conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível, deve ser 0,05 % de todos os motores produzidos no ano de produção anterior. O valor resultante de 0,05 % dos motores relevantes deve ser arredondado para o número inteiro mais próximo. Este resultado terá a designação nCOP,base.
2.2 Não obstante o disposto no ponto 2.1, será utilizado um número mínimo de 30 para deduzir o valor nCOP,base.
2.3 O valor resultante nCOP,base, determinado em conformidade com os pontos 2.1 e 2.2 do presente apêndice, deve ser dividido por 10 e o resultado deve ser arredondado para o número inteiro mais próximo, a fim de determinar o número de famílias de motores CO2 que devem ser ensaiadas anualmente, nCOP,fam, para verificar a conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível.
2.4 No caso de um fabricante ter menos famílias de motores CO2 do que o valor nCOP,fam, determinado em conformidade com o ponto 2.3, o número de famílias CO2 a ensaiar, nCOP,fam, será definido com base no número total de famílias CO2 do fabricante.
3. Seleção de famílias de motores CO2 a ensaiar
De todas as famílias de motores CO2 a ensaiar, como determinado em conformidade com o ponto 2 do presente apêndice, as duas primeiras famílias CO2 são aquelas que tiverem os maiores volumes de produção.
As restantes famílias de motores CO2 a ensaiar devem ser selecionadas aleatoriamente, entre todas as famílias de motores CO2 existentes, e acordadas entre o fabricante e a entidade homologadora.
4. Ensaios a realizar
O número mínimo de motores que são submetidos a ensaio para cada família de motores CO2, nCOP,min, deve ser determinado dividindo nCOP,base por nCOP,fam, ambos os valores estabelecidos em conformidade com o ponto 2. Se o valor resultante para nCOP,min for inferior a 4 deve ser fixado em 4.
Para cada família de motores CO2 determinada em conformidade com o ponto 3 do presente apêndice, deve ser ensaiado um número mínimo de motores nCOP,min, a fim de tomar uma decisão de aprovação, em conformidade com o ponto 9 do presente apêndice.
O número de ensaios a realizar numa mesma família de motores CO2 deve ser fixado aleatoriamente para os diferentes motores dessa família CO2 e acordado entre o fabricante e a entidade homologadora.
A conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível deve ser verificada ensaiando os motores através do ciclo WHSC em conformidade com o ponto 4.3.4.
São aplicáveis todas as condições-limite conforme especificado no presente anexo para os ensaios de certificação, excetuando:
|
(1) |
As condições de ensaio laboratoriais em conformidade com o ponto 3.1.1 do presente anexo. As condições em conformidade com o ponto 3.1.1 são recomendadas. mas não devem ser obrigatórias. Podem ocorrer desvios em determinadas condições ambientes no local de ensaio, que devem ser minimizadas aplicando as boas práticas de engenharia. |
|
(2) |
No caso de ser utilizado combustível de referência do tipo B7 (gasóleo/ignição por compressão) em conformidade com o ponto 3.2 do presente anexo, a determinação do NCV, em conformidade com o ponto 3.2 do presente anexo, não é exigida. |
|
(3) |
No caso de ser utilizado combustível comercial ou um combustível de referência que não o B7 (gasóleo/ignição por compressão), o NCV do combustível deve ser determinado de acordo com as normas aplicáveis, definidas no quadro 1 do presente anexo. Com exceção de motores a gás, as medições de NCV são efetuadas apenas por um laboratório independente do fabricante do motor em vez de dois, tal como exigido em conformidade com o ponto 3.2 do presente anexo. O NCV dos combustíveis gasosos de referência (G25, GPL combustível B) deve ser calculado de acordo com as normas aplicáveis do quadro 1 do presente anexo, a partir da análise de combustível apresentada pelo fornecedor do combustível gasoso de referência. |
|
(4) |
O óleo lubrificante deve ser o óleo utilizado durante o fabrico do motor e não deve ser mudado para testar a conformidade das propriedades das emissões de CO2 e do consumo de combustível. |
5. Rodagem de motores recém-fabricados
5.1 Os ensaios devem ser efetuados com motores recém-fabricados selecionados da produção em série que tenham uma rodagem máxima de 15 horas antes de iniciar o ensaio de verificação da conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível em conformidade com o ponto 4 do presente apêndice.
5.2 A pedido do fabricante, os ensaios podem ser efetuados com veículos que já tenham uma rodagem até 125 horas. Nesse caso, o procedimento de rodagem deve ser conduzido pelo fabricante, que não pode fazer quaisquer regulações nesses motores.
5.3 Se o fabricante pedir para conduzir um procedimento de rodagem em conformidade com o ponto 5.2 deste apêndice, tal pode ser realizado:
|
a) |
em todos os motores a ensaiar |
|
b) |
nos motores recém-fabricados, determinando um coeficiente de evolução do seguinte modo:
|
5.4 Se as disposições definidas na alínea b) do ponto 5.3 do presente apêndice forem aplicadas, os motores subsequentes selecionados para ensaiar a conformidade das propriedades das emissões de CO2 e do consumo de combustível não são sujeitos ao procedimento de rodagem, mas o seu consumo específico de combustível durante o WHSC determinado no motor novo com uma rodagem máxima de 15 horas, em conformidade com o ponto 5.1 do presente apêndice, deve ser multiplicado pelo coeficiente de evolução.
5.5 No caso descrito no ponto 5.4 do presente apêndice, os valores do consumo específico de combustível a considerar durante o WHSC devem ser os seguintes:
|
a) |
para o motor utilizado para a determinação do coeficiente de evolução em conformidade com o ponto 5.3, alínea b), do presente apêndice, o valor a partir do segundo ensaio |
|
b) |
para os outros motores, os valores determinados no motor novo com uma rodagem máxima de 15 horas, em conformidade com o ponto 5.1 do presente apêndice, multiplicado pelo coeficiente de evolução, determinado em conformidade com a alínea b) (C) do ponto 5.3 do presente apêndice |
5.6. Em vez de utilizar um procedimento de rodagem em conformidade com os pontos 5.2 a 5.5 do presente apêndice, pode ser utilizado a pedido do fabricante um coeficiente de evolução genérico de 0,99. Nesse caso, o consumo específico de combustível durante o WHSC determinado no motor novo com uma rodagem máxima de 15 horas, em conformidade com o ponto 5.1 do presente apêndice, deve ser multiplicado pelo coeficiente de evolução genérico de 0,99.
5.7 Se o coeficiente de evolução em conformidade com a alínea b) do ponto 5.3 do presente apêndice for determinado utilizando o motor precursor de uma família de motores de acordo com os pontos 5.2.3 e 5.2.4 do anexo 4 do Regulamento n.o 49, Rev.06, da UNECE, pode ser aplicado a todos os membros de qualquer família CO2 que pertença à mesma família de motores de acordo com o ponto 5.2.3 do anexo 4 do referido regulamento.
6. Valor-alvo para avaliação da conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível
O valor-alvo para avaliar a conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível corresponde ao consumo específico de combustível corrigido durante o WHSC, SFCWHSC,corr, em g/kWh, determinado em conformidade com o ponto 5.3.3 e documentado na ficha de informações no quadro dos certificados estabelecidos no apêndice 2 do presente anexo para o motor específico ensaiado.
7. Valor real para avaliação da conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível
7.1 O consumo específico de combustível durante o WHSC, SFCWHSC, deve ser determinado em conformidade com o ponto 5.3.3 do presente anexo, a partir dos ensaios efetuados em conformidade com o ponto 4 do presente apêndice. A pedido do fabricante, o valor do consumo específico de combustível determinado deve ser alterado, aplicando as disposições definidas nos pontos 5.3 a 5.6 do presente apêndice.
7.2 Se for utilizado combustível comercial durante os ensaios em conformidade com o ponto 1.4 do presente apêndice, o consumo específico de combustível durante o WHSC, SFCWHSC, determinado em conformidade com o ponto 7.1 do presente apêndice, deve ser ajustado para um valor corrigido, SFCWHSC,corr, em conformidade com o ponto 5.3.3.1 do presente anexo.
7.3 Se for utilizado combustível de referência durante os ensaios em conformidade com o ponto 1.4 do presente apêndice, aplicam-se as disposições especiais definidas no ponto 5.3.3.2 do presente anexo ao valor determinado em conformidade com o ponto 7.1 do presente apêndice.
7.4 A emissão de poluentes gasosos medida durante o WHSC efetuado em conformidade com o ponto 4 devem ser ajustadas, aplicando os fatores de deterioração apropriados (DF) para o motor em causa, conforme registado na adenda ao certificado de homologação CE concedido em conformidade com o Regulamento (UE) n.o 582/2011 da Comissão.
8. Limite de conformidade de um único ensaio
Para os motores a gasóleo, os valores-limite para a avaliação da conformidade de um único motor ensaiado devem corresponder ao valor-alvo determinado em conformidade com o ponto 6, mais 3 %.
Para os motores a gás, os valores-limite para a avaliação da conformidade de um único motor ensaiado devem corresponder ao valor-alvo determinado em conformidade com o ponto 6, mais 4 %.
9. Avaliação da conformidade das propriedades certificadas das emissões de CO2 e do consumo de combustível
9.1 Os resultados do ensaio de emissões durante o WHSC, determinado em conformidade com o ponto 7.4 do presente apêndice devem cumprir os limites aplicáveis aos valores definidos no anexo I do Regulamento (CE) n.o 595/2009 para todos os poluentes, com exceção do amoníaco gasoso; caso contrário, o ensaio é considerado nulo para a avaliação da conformidade das propriedades relacionadas com as emissões de CO2 e consumo de combustível certificadas.
9.2 Qualquer ensaio único efetuado num motor em conformidade com o ponto 4 do presente apêndice deve ser considerado não conforme se o valor real em conformidade com o ponto 7 do presente apêndice for mais elevado do que os valores-limite definidos em conformidade com o ponto 8 do presente apêndice.
9.3 No que se refere à dimensão da amostra de motores ensaiados numa família CO2 em conformidade com o ponto 4 do presente apêndice, deve ser aplicar-se uma estatística do ensaio quantificando o número cumulativo de ensaios não conformes de acordo com o ponto 9.2 do presente apêndice no n-ésimo ensaio.
|
a) |
Se o número cumulativo de ensaios não conformes no n-ésimo ensaio determinado em conformidade com o ponto 9.3 do presente apêndice for inferior ou igual ao número correspondente à decisão de aprovação da dimensão da amostra fornecido no quadro 4 do apêndice 3 do Regulamento n.o 49, Rev. 06, da UNECE, será tomada uma decisão de rejeição. |
|
b) |
Se o número cumulativo de ensaios não conformes no n-ésimo ensaio determinado em conformidade com o ponto 9.3 do presente apêndice for superior ou igual ao número correspondente à decisão de aprovação da dimensão da amostra fornecido no quadro 4 do apêndice 3 do Regulamento n.o 49, Rev. 06, da UNECE, será tomada uma decisão de rejeição. |
|
c) |
Caso contrário, proceder-se-á ao ensaio de mais um motor, de acordo com o ponto 4 do presente apêndice, e aplicar-se-á o método de cálculo em conformidade com o ponto 9.3 do presente anexo à amostra, acrescido de uma unidade. |
9.4 Se for não for tomada uma decisão de aprovação nem de rejeição, o fabricante pode optar em qualquer momento por interromper os ensaios. Nesse caso, será registada uma decisão de rejeição.
Apêndice 5
Determinação do consumo de energia dos componentes dos motores
1. Ventoinha
O binário do motor devem ser medido com o motor em rotação com e sem ventoinha com base no seguinte procedimento:
|
i. |
Instalar a ventoinha de acordo com as instruções do produto antes do início do ensaio. |
|
ii. |
Fase de aquecimento: Aquecer o motor de acordo com a recomendação do fabricante e as boas práticas de engenharia (por exemplo, operando o motor no modo 9 durante 20 minutos, tal como definido no quadro 1 do ponto 7.2.2 do anexo 4 do Regulamento n.o 49, rev. 06, da UNECE). |
|
iii. |
Fase de estabilização: Concluído o aquecimento ou passo de aquecimento facultativo (v), o motor deve ser operado com solicitação mínima do operador («motoring»), à velocidade do motor npref durante 130 ± 2 segundos, com a ventoinha desligada (* nfan_disengage < 0,25 * nengine * rfan). Os 60 ± 1 primeiros segundos deste período são considerados um período de estabilização, durante o qual a velocidade do motor deve ser mantida a ± 5 min– 1 of npref. |
|
iv. |
Fase de medição: Durante o seguinte período de 60 ± 1 segundos, a velocidade real do motor deve ser mantida a ± 2 min– 1 de npref e a temperatura do refrigerante em ± 5 °C, ao passo que o binário de rotação do motor com a ventoinha desligada, a velocidade fan da ventoinha e a velocidade do motor devem ser registadas como valor médio desse período de 60 ± 1 segundos. O período restante de 10 ± 1 segundos será utilizado para pós-tratamento e armazenamento de dados, se necessário. |
|
v. |
Fase de aquecimento facultativo: Mediante pedido do fabricante e de acordo com as boas práticas de engenharia, o passo ii pode ser repetido (por exemplo, se a temperatura descer mais de 5 °C) |
|
vi. |
Fase de estabilização: Concluído o aquecimento facultativo, o motor deve ser operado com solicitação mínima do operador («motoring»), em velocidade do motor npref durante 130 ± 2 segundos, com a ventoinha desligada (* nfan_disengage < 0,9 * nengine * rfan). Os 60 ± 1 primeiros segundos deste período são considerados um período de estabilização, durante o qual a velocidade real do motor deve ser mantida a ± 5 min– 1 of npref. |
|
vii. |
Fase de medição: Durante o período seguinte de 60 ± 1 segundos, a velocidade real do motor deve ser mantida a ± 2 min– 1 de npref e a temperatura do refrigerante em ± 5 °C, ao passo que o binário de rotação do motor com a ventoinha desligada, a velocidade fan da ventoinha e a velocidade do motor devem ser registadas como valor médio desse período de 60 ± 1 segundos. O período restante de 10 ± 1 segundos será utilizado para pós-tratamento e armazenamento de dados, se necessário. |
|
viii. |
Os passos iii) a vii) devem ser repetidos a velocidades do motor n95h e nhi em vez de npref, com um aquecimento facultativo entre cada fase de estabilização, se necessário, para manter uma temperatura estável do líquido de arrefecimento (± 5 °C), de acordo com as boas práticas de engenharia. |
|
ix. |
Se o desvio-padrão de todos os Ci calculados segundo a equação abaixo a três velocidades npref, n95h e nhi for igual ou superior a 3 %, a medição deve ser efetuada para todas as velocidades do motor que definem o quadro do procedimento de mapeamento do combustível (FCMC) de acordo com o ponto 4.3.5.2.1. |
A constante efetiva da ventoinha deve ser calculada a partir dos dados de medição, de acordo com a seguinte equação:

em que:
|
Ci |
constante da ventoinha a uma determinada velocidade do motor |
|
MDfan_disengage |
binário do motor medido estando o motor em movimento com a ventoinha desligada (Nm) |
|
MDfan_engage |
binário do motor medido estando o motor em movimento com a ventoinha ligada (Nm) |
|
nfan_engage |
velocidade da ventoinha ligada (min– 1) |
|
nfan_disengage |
velocidade da ventoinha desligada (min– 1) |
|
rfan |
relação da ventoinha |
Se o desvio-padrão de todos os Ci calculados às três velocidades npref, n95h e nhi for inferior a 3 %, deve ser utilizado um valor médio Cavg-fan determinado durante essas três velocidades para a constante da ventoinha.
Se o desvio-padrão de todos os Ci calculados às três velocidades npref, n95h e nhi for igual ou superior a 3 %, devem ser utilizados valores individuais determinados para todas as velocidades do motor de acordo com o ponto ix) para a constante da ventoinha Cind-fan,i. O valor da constante da ventoinha da velocidade real Cind-fan,i deve ser determinado por interpolação linear entre os valores individuais Cind-fan,i da constante da ventoinha.
O binário do motor para acionar a ventoinha deve ser calculado de acordo com a seguinte equação:
Mfan = Cfan · nfan 2 · 10– 6
em que:
|
Mfan |
binário do motor para acionar a ventoinha (Nm) |
|
Cfan |
constante da ventoinha Cavg-fan ou Cind-fan,i, correspondente a nengine |
A energia mecânica absorvida pela ventoinha deve ser calculada a partir do binário do motor para acionar a ventoinha e a velocidade real do motor. A energia mecânica e o binário do motor devem ser tidos em conta em conformidade com o ponto 3.1.2.
2. Componentes elétricos/equipamento
A energia elétrica fornecida externamente aos componentes de motores elétricos deve ser medida. Este valor medido deve ser corrigido em relação à energia mecânica dividindo-o por um valor de eficiência genérico de 0,65. Esta energia mecânica e o binário do motor correspondente devem ser tidos em conta em conformidade com o ponto 3.1.2.
Apêndice 6
1. Marcas
No caso de ser certificado em conformidade com o presente anexo, o motor deve ostentar:
1.1 O nome e a marca comercial do fabricante
1.2 A marca e o tipo de indicação de identificação, tal como registado na informação referida nos pontos 0.1 e 0.2 do apêndice 2 do presente anexo
1.3 A marca de certificação, constituída por: um retângulo dentro do qual está colocada a letra «e» minúscula, seguida pelo número distintivo do Estado-Membro que concedeu o certificado:
|
|
1 para a Alemanha; |
|
|
2 para a França; |
|
|
3 para a Itália; |
|
|
4 para os Países Baixos; |
|
|
5 para a Suécia; |
|
|
6 para a Bélgica; |
|
|
7 para a Hungria; |
|
|
8 para a República Checa; |
|
|
9 para a Espanha; |
|
|
11 para o Reino Unido; |
|
|
12 para a Áustria; |
|
|
13 para o Luxemburgo; |
|
|
17 para a Finlândia; |
|
|
18 para a Dinamarca; |
|
|
19 para a Roménia, |
|
|
20 para a Polónia; |
|
|
21 para Portugal; |
|
|
23 para a Grécia; |
|
|
24 para a Irlanda; |
|
|
25 para a Croácia; |
|
|
26 para a Eslovénia; |
|
|
27 para a Eslováquia; |
|
|
29 para a Estónia; |
|
|
32 para a Letónia; |
|
|
34 para a Bulgária; |
|
|
36 para a Lituânia; |
|
|
49 para Chipre; |
|
|
50 para Malta |
1.4 A marca de certificação deve também incluir, junto ao retângulo, o «número de homologação de base», conforme especificado na secção 4 do número de homologação previsto no anexo VII da Diretiva 2007/46/CE, precedido do número sequencial de dois algarismos atribuído à mais recente alteração técnica do presente regulamento e por uma letra «E» indicando que a homologação foi concedida para um motor.
O número de ordem correspondente ao presente regulamento é 00.
1.4.1 Exemplo e dimensões da marca de certificação (marcação separada)
A marca de certificação acima aposta num motor indica que o modelo em causa foi certificado na Polónia (e20), nos termos do presente regulamento. Os dois primeiros algarismos (00) indicam o número de ordem atribuído à mais recente alteração técnica do presente regulamento. A letra seguinte indica que o certificado foi concedido para um motor (E). Os quatro últimos algarismos (0004) são os algarismos atribuídos pela entidade homologadora ao motor como número de homologação de base.
1.5 No caso de ser concedida a certificação nos termos do presente regulamento ao mesmo tempo que a homologação atribuída em conformidade com o Regulamento (UE) n.o 582/2011, os requisitos de marcação estabelecidos no ponto 1.4 podem seguir, separados por «/», os requisitos de marcação estabelecidos no apêndice 8 do anexo I do Regulamento (UE) n.o 582/2011
1.5.1 Exemplo da marca de certificação (marcação conjunta)
A marca de certificação acima aposta num motor indica que o modelo em causa foi certificado na Polónia (e20), nos termos do Regulamento (UE) 582/2011 (Regulamento (UE) n.o 133/2014). O «D» indica a Diesel/gasóleo, seguido de um «C» para a fase de emissão. Os dois algarismos seguintes (00) indicam o número sequencial atribuído à mais recente alteração técnica ao regulamento acima referido, seguidos de quatro algarismos (0004), que são os algarismos atribuídos pela entidade homologadora ao motor como número de homologação de base para o Regulamento (UE) n.o 582/2011. Após a barra oblíqua, os primeiros dois algarismos indicam o número sequencial atribuído à mais recente alteração técnica do presente regulamento, seguidos de uma letra «E» para o motor, seguido de quatro algarismos atribuídos pela entidade homologadora para efeitos de certificação em conformidade com o presente Regulamento («número de homologação de base» no presente regulamento).
1.6 A pedido do requerente da certificação e após acordo prévio com a entidade homologadora, podem ser utilizados outros tamanhos de fonte que não os indicados nos pontos 1.4.1 e 1.5.1. As outras dimensões devem também ser claramente legíveis.
1.7 As marcas, etiquetas, placas ou autocolantes devem durar a vida útil do motor e ser claramente legíveis e indeléveis. O fabricante deve garantir que as marcas, etiquetas, placas ou autocolantes não possam ser removidas sem serem destruídas.
2. Numeração
2.1 O número de certificação dos motores deve incluir o seguinte:
eX*YYY/YYYY*ZZZ/ZZZZ*E*0000*00
|
Secção 1 |
Secção 2 |
Secção 3 |
Letra adicional da secção 3 |
Secção 4 |
Secção 5 |
|
Indicação do país que emite a certificação |
Ato de certificação de CO2 (…/2017) |
Último ato de alteração (zzz/zzzz) |
E: motor |
Número de certificação de base 0000 |
Extensão 00 |
Apêndice 7
Parâmetros de entrada para a ferramenta de simulação
Introdução
O presente apêndice descreve a lista de parâmetros que devem ser fornecidos pelo fabricante dos componentes como dados de entrada para a ferramenta de simulação. O modelo XML aplicável e vários exemplos de dados estão disponíveis na plataforma de distribuição eletrónica específica.
O XML é gerado automaticamente pela ferramenta de pré-tratamento do motor.
Definições
(1)
(2)
«string» … sequência de carateres na codificação ISO8859-1
«token» … sequência de carateres na codificação ISO8859-1, sem espaços em branco à frente e atrás
«date» … data e hora UTC com o seguinte formato: YYYY-MM-DDTHH:MM:SSZ com os carateres fixos em itálico, p. ex., «2002-05-30T09:30:10Z»
«integer»… valor com um tipo de dados inteiro, sem zeros à frente, p. ex., «1800»
«double, X» … número fracionário contendo exatamente X dígitos a seguir ao sinal decimal («.») e sem zeros à frente, p. ex., «double, 2»: «2345.67»; para «double, 4»: «45.6780»
(3)
Conjunto de parâmetros de entrada
Quadro 1
Parâmetros de entrada «Veículo/Geral»
|
Parameter name |
Parameter ID |
Type |
Unit |
Descrição/referência |
|
Manufacturer |
P200 |
token |
[-] |
|
|
Model |
P201 |
token |
[-] |
|
|
TechnicalReportId |
P202 |
token |
[-] |
|
|
Date |
P203 |
dateTime |
[-] |
Data e hora de criação do valor da dispersão do componente |
|
AppVersion |
P204 |
token |
[-] |
Número da versão da ferramenta de pré-tratamento do motor |
|
Deslocação |
P061 |
int |
[cm3] |
|
|
IdlingSpeed |
P063 |
int |
[1/min] |
|
|
RatedSpeed |
P249 |
int |
[1/min] |
|
|
RatedPower |
P250 |
int |
[W] |
|
|
MaxEngineTorque |
P259 |
int |
[Nm] |
|
|
WHTCUrban |
P109 |
double, 4 |
[-] |
|
|
WHTCRural |
P110 |
double, 4 |
[-] |
|
|
WHTCMotorway |
P111 |
double, 4 |
[-] |
|
|
BFColdHot |
P159 |
double, 4 |
[-] |
|
|
CFRegPer |
P192 |
double, 4 |
[-] |
|
|
CFNCV |
P260 |
double, 4 |
[-] |
|
|
Fueltype |
P193 |
string |
[-] |
Valores admitidos: «Diesel CI», «Ethanol CI», «Petrol PI», «Ethanol PI», «LPG», «NG» |
Quadro 2
Parâmetros de entrada «Engine/FullloadCurve» para cada ponto do quadro na curva de plena carga
|
Parameter name |
Parameter ID |
Type |
Unit |
Descrição/referência |
|
EngineSpeed |
P068 |
double, 2 |
[1/min] |
|
|
MaxTorque |
P069 |
double, 2 |
[Nm] |
|
|
DragTorque |
P070 |
double, 2 |
[Nm] |
|
Quadro 3
Parâmetros de entrada «Engine/FuelMap» para cada ponto do quadro no mapa de combustível
|
Parameter name |
Parameter ID |
Type |
Unit |
Descrição/referência |
|
EngineSpeed |
P072 |
double, 2 |
[1/min] |
|
|
Binário |
P073 |
double, 2 |
[Nm] |
|
|
FuelConsumption |
P074 |
double, 2 |
[g/h] |
|
Apêndice 8
Passos da avaliação e equações importante da ferramenta de pré-tratamento do motor
O presente apêndice descreve os principais passos da avaliação e equações básicas subjacentes que são aplicadas pela ferramenta de pré-tratamento do motor. São realizados os seguintes passos durante a avaliação dos dados de entrada, pela ordem indicada:
1. Leitura de ficheiros de entrada e verificação automática dos dados de entrada
1.1 Verificação dos requisitos em matéria de dados de entrada, em conformidade com as definições do ponto 6.1 do presente anexo
1.2 Verificação dos requisitos dos dados FCMC registados de acordo com as definições do ponto 4.3.5.2 e subponto 1 do ponto 4.3.5.5 do presente anexo
2. Cálculo das velocidades características do motor a partir da curva de plena carga do motor precursor e do motor efetivo para certificação, em conformidade com as definições do ponto 4.3.5.2.1 do presente anexo
3. Tratamento do mapa do consumo de combustível (FC)
3.1 Os valores FC nidle são copiados para a velocidade do motor (nidle – 100 min– 1) no mapa
3.2 Os valores FC n95h são copiados para a velocidade do motor (n95h + 500 min– 1) no mapa
3.3 A extrapolação dos valores FC em todos os pontos de regulação da velocidade do motor para um valor de binário de (1,1 vezes Tmax_overall), através de regressão linear dos mínimos quadrados, com base nos 3 pontos FC medidos com os mais elevados valores de binário em cada ponto de regulação da velocidade do motor no mapa
3.4 Adição de FC = 0 para os valores interpolados do binário motor em todos os pontos de regulação da velocidade do motor no mapa
3.5 Adição de FC = 0 para o mínimo dos valores interpolados do binário motor do subponto (3.4) menos 100 Nm a todos os pontos de regulação da velocidade do motor no mapa
4. Simulação de FC e do trabalho do ciclo durante o WHTC e respetivas subpartes para certificação do motor efetivo
4.1 Os pontos de referência WHTC são desnormalizados, utilizando os dados de entrada da curva de plena carga na resolução inicialmente registada
4.2 Calcula-se o FC correspondente aos valores de referência desnormalizados WHTC da velocidade e do binário do motor do subponto 4.1
4.3 Calcula-se o FC com a inércia do motor a 0
4.4 Calcula-se o FC com a função normalizada PT1 (como na simulação do veículo principal) para a resposta ativa do binário do motor)
4.5 O FC correspondente a todos os pontos de rotação sem alimentação é ajustado no 0,
4.6 Para todos os pontos de não-rotação sem alimentação, o FC é calculado a partir do mapa FC segundo o método de interpolação Delaunay (como na simulação do veículo principal)
4.7 O trabalho do ciclo e o FC são calculados conforme as equações definidas nos pontos 5.1 e 5.2 do presente anexo
4.8 Os valores específicos simulados de FC são calculados de forma análoga aos das equações definidas nos pontos 5.3.1 e 5.3.2 do presente anexo relativamente aos valores medidos
5. Cálculo dos fatores de correção WHTC
5.1 Os valores medidos dos dados de entrada para a ferramenta de pré-tratamento e os valores simulados do ponto 4 deve ser utilizados em conformidade com as equações dos pontos 5.2 a 5.4
5.2 CFUrban = SFCmeas,Urban / SFCsimu,Urban
5.3 CFRural = SFCmeas,Rural / SFCsimu,Rural
5.4 CFMW = SFCmeas,MW / SFCsimu,MW
5.5 Nos casos em que o valor calculado para um fator de correção for inferior a 1, o fator de correção respetivo é fixado em 1
6. Cálculo do fator de compensação das emissões a quente e a frio
6.1 Este fator é calculado de acordo com a equação apresentada no ponto 6.2
6.2 BFcold-hot = 1 + 0,1 × (SFCmeas,cold – SFCmeas,hot) / SFCmeas,hot
6.3 Nos casos em que o valor calculado para este fator for inferior a 1, o fator é fixado em 1
7. Correção dos valores FC no mapa FC mapa para o NCV padrão
7.1 Esta correção é calculada de acordo com a equação apresentada no ponto 7.2
7.2 FCcorrected = FCmeasured,map × NCVmeas / NVCstd
7.3 FCmeasured,map é o valor FC no mapa dos dados de entrada FC tratados em conformidade com o ponto 3
7.4 NCVmeas e NVCstd devem ser definidos em conformidade com o ponto 5.3.3.1 do presente anexo
7.5 Nos casos em que seja utilizado o combustível de referência de tipo B7 (Diesel/CI) em conformidade com o ponto 3.2 do presente anexo durante o ensaio, a correção em conformidade com os pontos 7.1 a 7.4 não deve ser efetuada.
8. Conversão dos valores de plena carga e do binário motor do motor efetivo para certificação numa frequência de registo da velocidade do motor de 8 min– 1
8.1 A conversão é efetuada pela média aritmética em intervalos de ± 4 min– 1 do ponto de regulação dado para os dados de saída, com base nos dados de entrada da curva de plena carga na resolução inicialmente registada



































 [Nm]
[Nm] [-]
[-] [-]
[-] [-]
[-] [-]
[-] [-]
[-]