ISSN 1977-0766
Dziennik Urzędowy
Unii Europejskiej
L 269

Wydanie polskie
Legislacja
Rocznik 61
26 października 2018
|
ISSN 1977-0766 |
||
|
Dziennik Urzędowy Unii Europejskiej |
L 269 |
|
|
|
||
|
Wydanie polskie |
Legislacja |
Rocznik 61 |
|
Spis treści |
|
II Akty o charakterze nieustawodawczym |
Strona |
|
|
|
AKTY PRZYJĘTE PRZEZ ORGANY UTWORZONE NA MOCY UMÓW MIĘDZYNARODOWYCH |
|
|
|
* |
||
|
|
* |
||
|
|
* |
|
PL |
Akty, których tytuły wydrukowano zwykłą czcionką, odnoszą się do bieżącego zarządzania sprawami rolnictwa i generalnie zachowują ważność przez określony czas. Tytuły wszystkich innych aktów poprzedza gwiazdka, a drukuje się je czcionką pogrubioną. |
II Akty o charakterze nieustawodawczym
AKTY PRZYJĘTE PRZEZ ORGANY UTWORZONE NA MOCY UMÓW MIĘDZYNARODOWYCH
|
26.10.2018 |
PL |
Dziennik Urzędowy Unii Europejskiej |
L 269/1 |
Jedynie oryginalne teksty EKG ONZ mają skutek prawny w świetle międzynarodowego prawa publicznego. Status i datę wejścia w życie niniejszego regulaminu należy sprawdzać w najnowszej wersji dokumentu EKG ONZ dotyczącego statusu TRANS/WP.29/343, dostępnej pod adresem
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamin nr 139 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) – Jednolite przepisy dotyczące homologacji samochodów osobowych w zakresie układów wspomagania hamowania w sytuacjach awaryjnych (BAS) [2018/1591]
Obejmujący wszystkie obowiązujące teksty, w tym:
Suplement nr 1 do pierwotnej wersji regulaminu – data wejścia w życie: 29 grudnia 2018 r.
SPIS TREŚCI
REGULAMIN
|
1. |
Zakres |
|
2. |
Definicje |
|
3. |
Wystąpienie o homologację |
|
4. |
Homologacja |
|
5. |
Wymogi ogólne |
|
6. |
Wymogi funkcjonalne |
|
7. |
Ogólne wymogi badawcze |
|
8. |
Ocena obecności BAS kategorii A |
|
9. |
Ocena obecności BAS kategorii B |
|
10. |
Zmiana typu pojazdu lub BAS oraz rozszerzenie homologacji |
|
11. |
Zgodność produkcji |
|
12. |
Sankcje z tytułu niezgodności produkcji |
|
13. |
Ostateczne zaniechanie produkcji |
|
14. |
Nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz nazwy i adresy organów udzielających homologacji typu |
ZAŁĄCZNIKI
|
1. |
Zawiadomienie |
|
2. |
Układy znaków homologacji |
|
3. |
Metoda wyznaczania FABS i aABS |
|
4. |
Przetwarzanie danych na potrzeby BAS |
1. ZAKRES
1.1. Niniejszy regulamin stosuje się do homologacji pojazdów kategorii M1 i N1 (1) w zakresie układów wspomagania hamowania w sytuacjach awaryjnych.
1.2. Niniejszy regulamin nie dotyczy:
|
1.2.1. |
Pojazdów o prędkości konstrukcyjnej nieprzekraczającej 25 km/h; |
|
1.2.2. |
Pojazdów z wyposażeniem dla kierowców niepełnosprawnych. |
2. DEFINICJE
Do celów niniejszego regulaminu:
|
2.1. |
„Homologacja pojazdu” oznacza homologację typu pojazdu w zakresie układów wspomagania hamowania w sytuacjach awaryjnych. |
|
2.2. |
„Typ pojazdu” oznacza kategorię pojazdów nieróżniących się pod tak zasadniczymi względami, jak:
|
|
2.3. |
„Masa maksymalna” oznacza technicznie dopuszczalną masę maksymalną określoną przez producenta pojazdu (masa ta może być większa niż „dopuszczalna masa całkowita” ustalona przez organ administracji krajowej). |
|
2.4. |
„Rozkład masy pomiędzy osie” oznacza rozkład działania siły ciężkości na masę pojazdu lub jej podział między osie. |
|
2.5. |
„Obciążenie koła/osi” oznacza pionową statyczną reakcję (siłę) wywieraną przez nawierzchnię drogi w miejscu styczności z kołem/kołami osi. |
|
2.6. |
„Układ wspomagania hamowania w sytuacjach awaryjnych (BAS)” oznacza funkcję układu hamulcowego, która wykrywa sytuację hamowania awaryjnego na podstawie charakterystyki działania kierowcy na hamulec i w takich warunkach:
|
3. WYSTĄPIENIE O HOMOLOGACJĘ
3.1. O udzielenie homologacji typu pojazdu w zakresie BAS występuje producent pojazdu lub jego należycie upoważniony przedstawiciel.
3.2. Do wniosku należy dołączyć trzy egzemplarze każdego z niżej wymienionych dokumentów oraz następujące dane:
|
3.2.1. |
opis typu pojazdu w odniesieniu do właściwości określonych w pkt 2.2 powyżej. Należy podać numery lub symbole identyfikujące typ pojazdu oraz typ silnika; |
|
3.2.2. |
wykaz odpowiednio oznaczonych części składowych stanowiących układ BAS; |
|
3.2.3. |
schemat zmontowanego układu BAS ze wskazaniem rozmieszczenia jego części składowych w pojeździe; |
|
3.2.4. |
szczegółowe rysunki każdej części składowej, umożliwiające łatwe określenie jej położenia i identyfikację. |
3.3. Reprezentatywny egzemplarz typu pojazdu zgłoszonego do homologacji należy dostarczyć placówce technicznej przeprowadzającej badania homologacyjne.
4. HOMOLOGACJA
4.1. Jeżeli typ pojazdu przedstawiony do homologacji w zakresie objętym niniejszym regulaminem spełnia wymagania określone w pkt 5 i 6 poniżej, należy udzielić homologacji tego typu pojazdu.
4.2. Każdemu homologowanemu typowi nadaje się numer homologacji. Dwie pierwsze jego cyfry wskazują serię poprawek obejmujących najnowsze główne zmiany techniczne wprowadzone do regulaminu, obowiązujące w chwili udzielania homologacji. Ta sama Umawiająca się Strona nie może przydzielić tego samego numeru innemu typowi pojazdu w zakresie układów wspomagania hamowania w sytuacjach awaryjnych.
4.3. Zawiadomienie o udzieleniu lub odmowie homologacji typu pojazdu na podstawie niniejszego regulaminu należy przesłać Umawiającym się Stronom Porozumienia stosującym niniejszy regulamin, wykorzystując w tym celu formularz zgodny z wzorem zamieszczonym w załączniku 1 do niniejszego regulaminu oraz streszczenie informacji zawartych w dokumentach, o których mowa w pkt 3.2.1–3.2.4 powyżej, przy czym rysunki dostarczone przez występującego o homologację nie mogą być w formacie większym niż A4 (210 × 297 mm) lub muszą być złożone do tego formatu, i muszą być sporządzone w odpowiedniej skali.
4.4. Na każdym pojeździe zgodnym z typem pojazdu homologowanym na podstawie niniejszego regulaminu, w widocznym i łatwo dostępnym miejscu określonym w formularzu homologacji, umieszcza się międzynarodowy znak homologacji zawierający:
|
4.4.1. |
okrąg otaczający literę „E”, po której następuje numer identyfikujący państwo udzielające homologacji (3) oraz |
|
4.4.2. |
numer niniejszego regulaminu, literę „R”, myślnik i numer homologacji umieszczone z prawej strony okręgu opisanego w pkt 4.4.1 powyżej. |
4.5. Jeżeli pojazd jest zgodny z typem pojazdu homologowanym zgodnie z jednym lub większą liczbą regulaminów stanowiących załączniki do Porozumienia w państwie, które udzieliło homologacji na podstawie niniejszego regulaminu, symbol podany w pkt 4.4.1 powyżej nie musi być powtarzany. W takim przypadku numery regulaminu i homologacji oraz dodatkowe symbole wszystkich regulaminów, zgodnie z którymi udzielono homologacji w państwie, które udzieliło homologacji na podstawie niniejszego regulaminu, należy umieścić w kolumnach po prawej stronie symbolu opisanego w pkt 4.4.1 powyżej.
4.6. Znak homologacji musi być czytelny i nieusuwalny.
4.7. Znak homologacji umieszcza się na tabliczce znamionowej pojazdu lub w jej pobliżu.
4.8. Przykładowe układy znaków homologacji przedstawiono w załączniku 2 do niniejszego regulaminu.
5. WYMOGI OGÓLNE
5.1. Pojazdy muszą być wyposażone w układ wspomagania hamowania w sytuacjach awaryjnych spełniający wymogi funkcjonalne określone w pkt 6 niniejszego regulaminu. Powyższe wymogi uznaje się za spełnione, jeżeli spełniono przepisy pkt 8 lub 9 niniejszego regulaminu zgodnie z wymogami badawczymi określonymi w pkt 7 niniejszego regulaminu. Oprócz zgodności z wymogami niniejszego regulaminu pojazdy muszą również posiadać ABS zgodnie z wymaganiami technicznymi regulaminu ONZ nr 13-H.
5.2. BAS musi być zaprojektowany, wykonany i zamontowany w taki sposób, aby pojazd w normalnych warunkach użytkowania, pomimo możliwości narażenia na drgania, spełniał wymogi niniejszego regulaminu.
5.3. W szczególności BAS musi być zaprojektowany, wykonany i zamontowany w taki sposób, aby był odporny na grożące mu zjawiska korozji i starzenia się.
5.4. Pola magnetyczne lub elektryczne nie mogą zmniejszać skuteczności BAS. Należy to wykazać przez spełnienie wymagań technicznych i z poszanowaniem przepisów przejściowych regulaminu nr 10, przez stosowanie:
|
a) |
serii poprawek 03 w odniesieniu do pojazdów bez układu sprzęgającego do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych); |
|
b) |
serii poprawek 04 w odniesieniu do pojazdów z układem sprzęgającym do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych). |
5.5. Ocenę aspektów bezpieczeństwa BAS należy ująć w ogólnej ocenie bezpieczeństwa układu hamulcowego zgodnie z wymogami regulaminu nr 13-H związanymi ze złożonymi układami sterowania elektronicznego. Warunek ten uznaje się za spełniony po przedstawieniu świadectwa zgodności z regulaminem nr 13-H obejmującego BAS, który ma zostać homologowany.
5.6. Przepisy dotyczące okresowej kontroli technicznej elektronicznych układów wspomagania hamowania w sytuacjach awaryjnych
5.6.1. W trakcie okresowych przeglądów technicznych musi istnieć możliwość potwierdzenia prawidłowego działania za pomocą obserwacji wzrokowych sygnałów ostrzegawczych po włączeniu zasilania.
5.6.2. Na potrzeby homologacji typu należy w sposób poufny ujawnić, jakie środki zastosowano, aby uniemożliwić osobom niepowołanym łatwą modyfikację sygnałów ostrzegawczych. Niniejszy wymóg dotyczący zabezpieczeń uważa się za spełniony, jeżeli istnieje dodatkowa metoda umożliwiająca sprawdzenie prawidłowego działania układu.
6. WYMOGI FUNKCJONALNE
6.1. Ogólna charakterystyka działania układów BAS kategorii A
W przypadku wykrycia sytuacji awaryjnej na podstawie stosunkowo dużej siły nacisku na pedał hamulca dodatkowa siła potrzebna do uruchomienia pracy układu ABS w pełnym cyklu musi być mniejsza niż siła, jaka jest potrzebna przy wyłączonym systemie BAS.
Powyższy wymóg uznaje się za spełniony, jeżeli spełniono przepisy pkt 8.1–8.3 niniejszego regulaminu.
6.2. Ogólna charakterystyka działania układów BAS kategorii B
W przypadku wykrycia sytuacji awaryjnej, co najmniej na podstawie bardzo szybkiego naciśnięcia pedału hamulca, układ BAS musi zwiększyć ciśnienie, aby osiągnąć maksymalny osiągalny wskaźnik hamowania lub spowodować pracę układu ABS w pełnym cyklu.
Powyższy wymóg uznaje się za spełniony, jeżeli spełniono przepisy pkt 9.1–9.3 niniejszego regulaminu.
7. OGÓLNE WYMOGI BADAWCZE
7.1. Zmienne
Podczas wykonywania badań określonych w niniejszym regulaminie mierzy się następujące zmienne:
|
7.1.1. |
Siła nacisku na pedał hamulca Fp |
|
7.1.2. |
Prędkość pojazdu, vx; |
|
7.1.3. |
Opóźnienie pojazdu, ax; |
|
7.1.4. |
Temperatura hamulca, Td; |
|
7.1.5. |
Ciśnienie w układzie hamulcowym, P, w stosownych przypadkach; |
|
7.1.6. |
Prędkość nacisku na pedał hamulca, vp, mierzona w środku płaskiej części pedału hamulca lub w takim miejscu w mechanizmie pedału, w którym przemieszczenie jest proporcjonalne do przemieszczenia środka płaskiej części pedału hamulca, co umożliwia łatwą kalibrację pomiaru. |
7.2. Urządzenia pomiarowe
7.2.1. Zmienne wymienione w pkt 7.1 powyżej należy mierzyć z wykorzystaniem odpowiednich przetworników. Dokładność, zakresy działania, techniki filtrowania, przetwarzanie danych oraz inne wymagania zostały opisane w normie ISO 15037-1: 2006.
7.2.2. Dokładność pomiarów siły nacisku na pedał oraz temperatury tarczy hamulcowej musi być następująca:
|
Układ ze zmiennym zakresem |
Typowy zakres działania przetworników |
Zalecane maksymalne błędy zapisu |
|
Siła nacisku na pedał |
0–2 000 N |
± 10 N |
|
Temperatura hamulców |
0–1 000 °C |
± 5 °C |
|
Ciśnienie w układzie hamulcowym (*1) |
0–20 MPa (*1) |
± 100 kPa (*1) |
7.2.3. Szczegółowe informacje na temat analogowego i cyfrowego przetwarzania danych z badań BAS zostały przedstawione w załączniku 4 do niniejszego regulaminu. Wymagana częstotliwość pobierania próbek na potrzeby gromadzenia danych wynosi 500 Hz.
7.2.4. Dopuszcza się stosowanie innych metod pomiarowych niż te określone w pkt 7.2.3, pod warunkiem że zapewniają one co najmniej równoważny poziom dokładności.
7.3. Warunki badania
7.3.1. Obciążenie badanego pojazdu: pojazd musi być nieobciążony. Oprócz kierowcy w pojeździe może przebywać druga osoba zajmująca przednie siedzenie, odpowiedzialna za zapisywanie wyników badań.
7.3.2. Badania hamowania wykonuje się na suchej nawierzchni o dobrej przyczepności.
7.4. Metoda badania
7.4.1. Badania opisane w pkt 8 i 9 niniejszej części wykonuje się przy początkowej prędkości badawczej wynoszącej 100 ± 2 km/h. Pojazd prowadzi się z prędkością badawczą po linii prostej.
7.4.2. Przed każdym uruchomieniem hamulca średnia temperatura hamulców roboczych na najgorętszej osi pojazdu, mierzona wewnątrz okładzin hamulca lub na powierzchni hamowania tarczy lub bębna, musi wynosić od 65 °C do 100 °C.
7.4.3. Na potrzeby badań czas odniesienia, t0, oznacza chwilę, w której siła nacisku na pedał hamulca osiąga wartość 20 N.
Uwaga: W przypadku pojazdów wyposażonych w układ hamulcowy wspomagany przez źródło energii, siła nacisku na pedał hamulca zależy od poziomu energii w urządzeniu magazynującym energię. W związku z tym na początku badania należy zapewnić wystarczający poziom energii.
8. OCENA OBECNOŚCI BAS KATEGORII A
BAS kategorii A musi spełniać wymogi badawcze określone w pkt 8.1 i 8.2.
8.1. Badanie 1: badanie referencyjne w celu wyznaczenia FABS i aABS.
8.1.1. Wartości referencyjne FABS i aABS wyznacza się zgodnie z procedurą opisaną w załączniku 3 do niniejszego regulaminu.
8.2. Badanie 2: uruchomienie BAS
8.2.1. W momencie wykrycia sytuacji wymagającej gwałtownego hamowania układy reagujące na siłę nacisku na pedał muszą wykazać znaczący wzrost stosunku:
|
a) |
ciśnienia w przewodzie hamulcowym do siły nacisku na pedał hamulca, jeżeli dopuszcza to pkt 8.2.5; lub |
|
b) |
opóźnienia pojazdu do siły nacisku na pedał hamulca. |
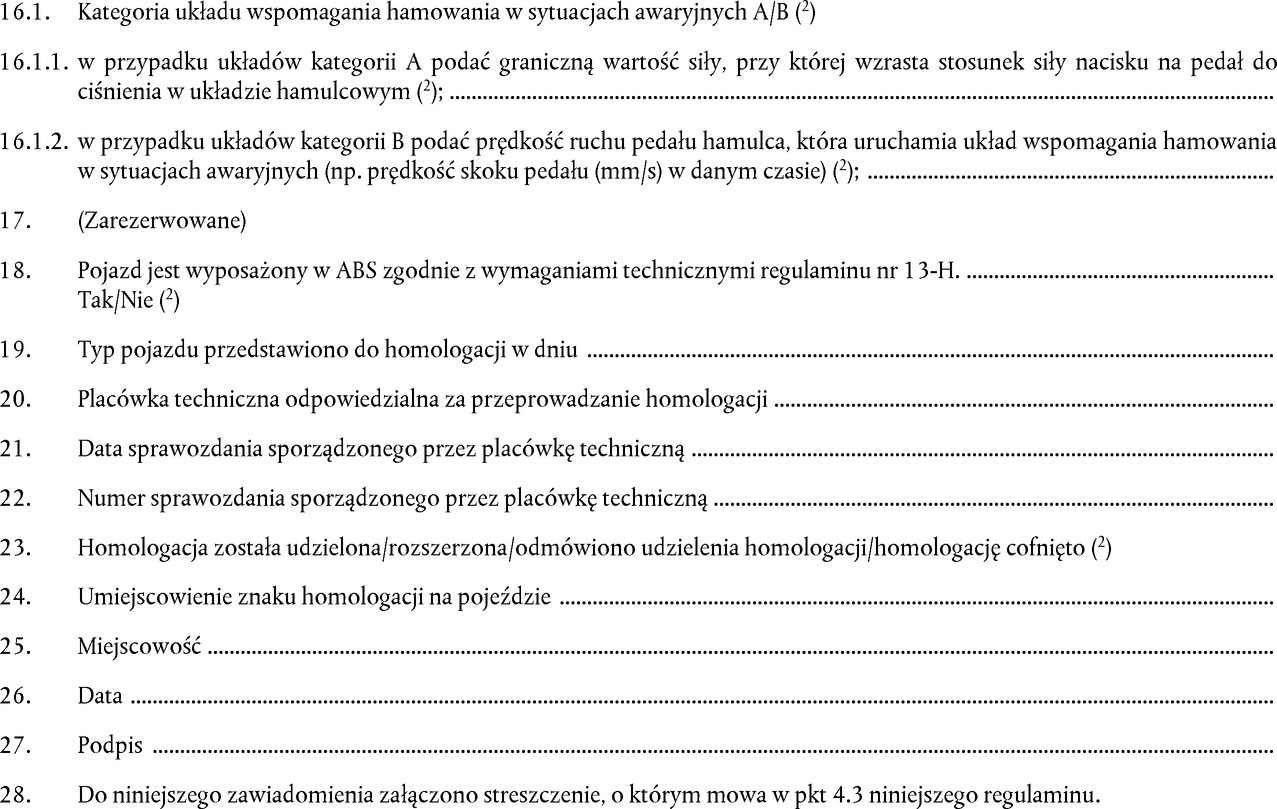
8.2.2. Wymogi eksploatacyjne dla BAS kategorii A są spełnione, jeśli można określić taki sposób nacisku hamulca, który powoduje zmniejszenie wymaganej siły nacisku na pedał hamulca dla (FABS - FT) o 40–80 % w porównaniu z (FABS extrapolated - FT).
8.2.3. FT i aT oznaczają odpowiednio siłę progową i opóźnienie progowe, jak pokazano na rys. 1. Wartości FT i aT należy przekazać placówce technicznej przy składaniu wniosku o udzielenie homologacji typu. Wartość aT musi wynosić od 3,5 m/s2 do 5,0 m/s2.
Rysunek 1a
Charakterystyka siły nacisku na pedał wymagana do osiągnięcia maksymalnego opóźnienia w przypadku BAS kategorii A
Opóźnienie, a
FABS, extrapolated
FABS, max
FABS
FABS, min
Siła nacisku na pedał hamulca, F
FT
aT
aABS
Między 3,5 i 5,0 m/s2
8.2.4. Z punktu przecięcia osi układu współrzędnych należy poprowadzić linię prostą przechodzącą przez punkt FT, aT (jak pokazano na rys. 1a). Wartość siły nacisku na pedał hamulca „F” w punkcie przecięcia tej prostej z prostą poziomą wyznaczoną na podstawie wzoru a = aABS to FABS, extrapolated:

8.2.5. Jako alternatywne rozwiązanie, które może wybrać producent w przypadku pojazdów kategorii N1 lub M1 wywodzących się z tych pojazdów N1 o dopuszczalnej masie całkowitej DMC > 2 500 kg, wartości liczbowe siły nacisku na pedał dla FT, FABS,min, FABS,max i FABS,extrapolated można uzyskać na podstawie charakterystyki zmian ciśnienia w układzie hamulcowym zamiast na podstawie charakterystyki opóźnienia pojazdu. Wartości te mierzy się przy wzroście siły nacisku na pedał hamulca.
8.2.5.1. Ciśnienie, przy którym uruchamia się układ ABS, wyznacza się za pomocą pięciu badań przy prędkości początkowej 100 ± 2 km/h, podczas których pedał hamulca jest dociskany w stopniu powodującym zadziałanie układu ABS, i rejestruje się pięć wartości ciśnienia uruchomienia ABS na podstawie ciśnienia hamulcowego zarejestrowanego w kołach przednich, a następnie oblicza się średnią wartość tego ciśnienia PABS.
8.2.5.2. Ciśnienie progowe PT musi zostać podane przez producenta i odpowiadać opóźnieniu w przedziale 2,5–4,5 m/s2.
8.2.5.3. Wykres na rys. 1b należy sporządzić w sposób określony w pkt 8.2.4, ale stosując pomiary ciśnienia w przewodzie hamulcowym w celu wyznaczenia parametrów, o których mowa w pkt 8.2.5 niniejszego regulaminu, gdzie:

Rysunek 1b
Charakterystyka siły nacisku na pedał wymagana do osiągnięcia maksymalnego opóźnienia w przypadku BAS kategorii A

Ciśnienie w przewodzie, P
FABS, extrapolated
FABS, max
FABS
FABS, min
Siła nacisku na pedał hamulca, F
FT
PT
PABS
Próg zmiany siły
8.3. Ocena danych
Obecność BAS kategorii A zostaje potwierdzona, jeżeli
FABS,min ≤ FABS ≤ FABS,max
gdzie:
FABS,max – FT ≤ (FABS,extrapolated – FT) · 0,6
oraz
FABS,min – FT ≥ (FABS,extrapolated – FT) · 0,2
9. OCENA OBECNOŚCI BAS KATEGORII B
BAS kategorii B musi spełniać wymogi badawcze określone w pkt 9.1 i 9.2 niniejszej części.
9.1. Badanie 1: badanie referencyjne w celu wyznaczenia FABS i aABS.
9.1.1. Wartości referencyjne FABS i aABS wyznacza się zgodnie z procedurą opisaną w załączniku 3 do niniejszego regulaminu.
9.2. Badanie 2: Uruchomienie BAS
Pojazd należy prowadzić wzdłuż linii prostej z prędkością badawczą określoną w pkt 7.4 niniejszego regulaminu. Kierowca szybko naciska pedał hamulca zgodnie z rys. 2, symulując hamowanie awaryjne, tak, aby uruchomić BAS i zapewnić pracę ABS w pełnym cyklu.
W celu uruchomienia BAS pedał hamulca należy nacisnąć w sposób określony przez producenta pojazdu. W chwili wystąpienia o homologację typu producent przekazuje placówce technicznej informację o wymaganym nacisku na pedał hamulca. Należy wykazać w sposób spełniający oczekiwania placówki technicznej, że BAS uruchamia się w warunkach określonych przez producenta zgodnie z pkt 16.1.1 lub 16.1.2 załącznika 1.
Po upływie t = t0 + 0,8 s i do chwili, w której pojazd zwolni do prędkości 15 km/h, należy utrzymywać siłę nacisku na pedał hamulca w zakresie między FABS, upper i FABS, lower, gdzie FABS, upper wynosi 0,7 FABS, a FABS, lower wynosi 0,5 FABS.
Wymagania te uznaje się za spełnione także w przypadku, gdy po upływie t = t0 + 0,8 s siła nacisku na pedał spadnie poniżej FABS, lower, o ile spełniony jest wymóg określony w pkt 9.3.
9.3. Ocena danych
Obecność BAS kategorii B zostaje potwierdzona, jeżeli utrzymane jest średnie opóźnienie (aBAS) wynoszące co najmniej 0,85 · aABS od chwili t = t0 + 0,8 s do chwili, gdy prędkość pojazdu spada do 15 km/h.
Rysunek 2
Przykład badania 2 dla układu BAS kategorii B

Siła nacisku na pedał hamulca F
Faza badania BAS (koniec przy prędkości 15 km/h)
Początkowa siła nacisku na pedał
FABS, lower
FABS, upper
t0
Faza gwałtownego nacisku na pedał
t0 + 0,8 s
Czas
Opóźnienie
aBAS
aABS
Opóźnienie, ax
Siła nacisku na pedał hamulca
10. ZMIANA TYPU POJAZDU LUB BAS ORAZ ROZSZERZENIE HOMOLOGACJI
10.1. O każdej zmianie istniejącego typu pojazdu należy powiadomić organ udzielający homologacji typu, który udzielił homologacji typu pojazdu.
Organ ten:
|
a) |
postanawia, w porozumieniu z producentem, że należy udzielić nowej homologacji typu; lub |
|
b) |
stosuje procedurę przedstawioną w pkt 10.1.1 (Zmiana) oraz, w stosownych przypadkach, procedurę przedstawioną w pkt 10.1.2 (Rozszerzenie). |
10.1.1. Zmiana
W przypadku gdy szczegółowe dane zarejestrowane w dokumentach informacyjnych uległy zmianie, a organ udzielający homologacji typu uznaje za mało prawdopodobne, aby wprowadzone modyfikacje miały istotne negatywne skutki, i uznaje, że w każdym razie nożne urządzenia sterujące nadal spełniają wymagania, modyfikację oznacza się jako „zmianę”.
W takim przypadku organ udzielający homologacji typu wydaje w razie potrzeby zmienione strony dokumentów informacyjnych, oznaczając każdą zmienioną stronę w sposób jasno wskazujący charakter modyfikacji i datę ponownego wydania. Uznaje się, że wymóg ten spełnia ujednolicona, zaktualizowana wersja dokumentów informacyjnych, której towarzyszy szczegółowy opis modyfikacji.
10.1.2. Rozszerzenie
Zmianę oznacza się jako „rozszerzenie”, jeżeli, oprócz zmiany szczegółowych danych zarejestrowanych w folderze informacyjnym,
|
a) |
wymagane są dalsze kontrole lub badania; lub |
|
b) |
uległy zmianie jakiekolwiek informacje w dokumencie zawiadomienia (z wyjątkiem jego załączników); lub |
|
c) |
wystąpiono o homologację zgodnie z późniejszą serią poprawek po jej wejściu w życie. |
10.2. Umawiające się Strony Porozumienia stosujące niniejszy regulamin zostają powiadomione o potwierdzeniu lub odmowie udzielenia homologacji, z wyszczególnieniem zmiany, zgodnie z procedurą określoną w pkt 4.3 powyżej. Ponadto należy odpowiednio zmienić spis treści dokumentów informacyjnych i sprawozdań z badań dołączony do dokumentu zawiadomienia w załączniku 1 w celu wskazania daty ostatniej zmiany lub rozszerzenia.
10.3. Właściwy organ udzielający rozszerzenia homologacji nadaje numer seryjny każdemu formularzowi zawiadomienia przygotowanemu w związku z takim rozszerzeniem.
11. ZGODNOŚĆ PRODUKCJI
Procedury zgodności produkcji muszą być zgodne z procedurami określonymi w dodatku 2 do Porozumienia (E/ECE/324-E/ECE/TRANS/505/Rev.2) i następującymi wymogami:
11.1. Pojazd homologowany zgodnie z niniejszym regulaminem musi być produkowany w sposób zapewniający jego zgodność z typem homologowanym poprzez spełnienie wymogów określonych w pkt 5 i 6 powyżej.
11.2. Organ, który udzielił homologacji typu, może w dowolnym czasie zweryfikować metody kontroli zgodności stosowane w każdym zakładzie produkcyjnym. Weryfikację taką przeprowadza się zazwyczaj co dwa lata.
12. SANKCJE Z TYTUŁU NIEZGODNOŚCI PRODUKCJI
12.1. Homologacja udzielona w odniesieniu do typu pojazdu zgodnie z niniejszym regulaminem może zostać cofnięta w razie niespełnienia wymogów określonych w pkt 11.1 powyżej.
12.2. Jeżeli Umawiająca się Strona Porozumienia stosująca niniejszy regulamin postanowi o cofnięciu uprzednio przez siebie udzielonej homologacji, niezwłocznie powiadamia o tym fakcie pozostałe Umawiające się Strony stosujące niniejszy regulamin, na formularzu zawiadomienia zgodnym ze wzorem przedstawionym w załączniku 1 do niniejszego regulaminu.
13. OSTATECZNE ZANIECHANIE PRODUKCJI
Jeżeli posiadacz homologacji ostatecznie zaniecha produkcji typu pojazdu homologowanego zgodnie z niniejszym regulaminem, informuje o tym organ, który udzielił homologacji. Po otrzymaniu stosownego zawiadomienia organ ten powiadamia o tym pozostałe Umawiające się Strony Porozumienia stosujące niniejszy regulamin za pomocą egzemplarzy formularza zawiadomienia zgodnego ze wzorem przedstawionym w załączniku 1 do niniejszego regulaminu.
14. NAZWY I ADRESY PLACÓWEK TECHNICZNYCH PRZEPROWADZAJĄCYCH BADANIA HOMOLOGACYJNE ORAZ NAZWY I ADRESY ORGANÓW UDZIELAJĄCYCH HOMOLOGACJI TYPU
Umawiające się Strony Porozumienia stosujące niniejszy regulamin przekazują sekretariatowi Organizacji Narodów Zjednoczonych nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz organów udzielających homologacji typu, którym należy przesyłać wydane w innych państwach formularze poświadczające udzielenie, rozszerzenie, odmowę udzielenia lub cofnięcie homologacji.
(1) Kategorie pojazdów M1 i N1 zdefiniowano w ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev.4, pkt 2 www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Zgodnie z deklaracją producenta pojazdu.
(3) Numery identyfikujące Umawiające się Strony Porozumienia z 1958 r. podano w załączniku 3 do ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, załącznik 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(*1) Stosuje się zgodnie z pkt 8.2.5.
ZAŁĄCZNIK 2
UKŁADY ZNAKÓW HOMOLOGACJI
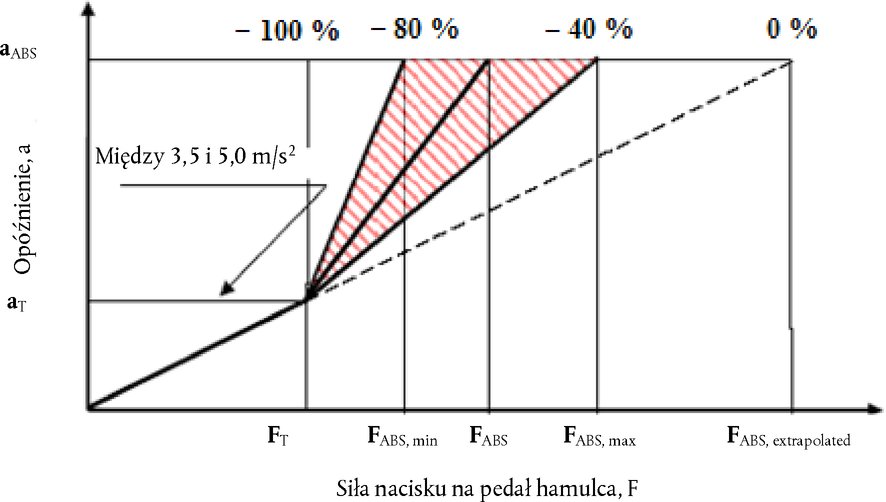
WZÓR A
(zob. pkt 4.4 niniejszego regulaminu)

Powyższy znak homologacji umieszczony na pojeździe oznacza, że odnośny typ pojazdu uzyskał homologację w Belgii (E 6) w zakresie układu wspomagania hamowania w sytuacjach awaryjnych zgodnie z regulaminem nr 139. Dwie pierwsze cyfry numeru homologacji wskazują, że homologacji udzielono zgodnie z wymogami regulaminu nr 139 w jego pierwotnej wersji.
WZÓR B
(zob. pkt 4.5 niniejszego regulaminu)

Powyższy znak homologacji umieszczony na pojeździe wskazuje, że odnośny typ pojazdu uzyskał homologację w Belgii (E 6) na podstawie regulaminów nr 139 i 24 (1). (W przypadku regulaminu nr 24 skorygowany współczynnik pochłaniania wynosi 1,30 m-1). Numery homologacji oznaczają, że w chwili udzielenia odpowiednich homologacji regulamin nr 139 obowiązywał w wersji pierwotnej, a regulamin nr 24 zawierał serię poprawek 02.
(1) Ten numer podano jedynie jako przykład.
ZAŁĄCZNIK 3
METODA WYZNACZANIA FABS I AABS
1.1. Siła nacisku na pedał hamulca FABS stanowi minimalną siłę, jaka musi być przyłożona w przypadku danego pojazdu, aby osiągnąć maksymalne opóźnienie, które wskazuje na pracę ABS w pełnym cyklu. Zgodnie z definicją zawartą w pkt 1.8 aABS oznacza opóźnienie danego pojazdu podczas zmniejszania prędkości z układem ABS.
1.2. Pedał hamulca należy naciskać powoli (bez uruchamiania BAS w przypadku układów kategorii B), powodując stały wzrost opóźnienia do momentu osiągnięcia pracy ABS w pełnym cyklu (rysunek).
1.3. Osiągnięcie pełnego opóźnienia musi nastąpić w czasie 2,0 ± 0,5 s. Krzywa opóźnienia, rejestrowana w funkcji czasu, musi się zawierać w korytarzu ± 0,5 s leżącym po obu stronach środkowej linii korytarza krzywej opóźnienia. W przykładzie na rysunku początkiem układu współrzędnych jest wartość czasu t0, przecinająca linię aABS w punkcie 2 sekund. Po osiągnięciu pełnego opóźnienia pedał hamulca jest obsługiwany w taki sposób, aby ABS nadal działał w pełnym cyklu. Moment pełnego uruchomienia układu ABS jest definiowany jako moment osiągnięcia siły nacisku na pedał FABS. Pomiar musi się zawierać w korytarzu dopuszczalnych odchyłek dla wzrostu opóźnienia (zob. rysunek).
Korytarz krzywej opóźnienia do wyznaczania FABS i aABS

Korytarz dopuszczalnych odchyłek wzrostu wartości opóźnienia
Opóźnienie a
aABS
Czas [s]
Przedział czasu
2 ± 0,5s
1s
t0
Korytarz pracy ABS w pełnym cyklu
1.4. Wykonuje się pięć badań spełniających wymogi określone w pkt 1.3. W przypadku każdego z tych ważnych badań opóźnienie pojazdu musi zostać przedstawione na wykresie jako funkcja zarejestrowanej siły nacisku na pedał hamulca. Do obliczeń opisanych w kolejnych punktach wykorzystuje się tylko dane zarejestrowane przy prędkościach powyżej 15 km/h.
1.5. Do wyznaczenia aABS i FABS należy użyć filtru dolnoprzepustowego o częstotliwości odcięcia 2 Hz w odniesieniu do opóźnienia pojazdu, należy również zastosować siłę nacisku na pedał hamulca.
1.6. Należy wyznaczyć średnią z pięciu poszczególnych krzywych „opóźnienia w funkcji siły nacisku na pedał hamulca”, obliczając średnie opóźnienie dla pięciu krzywych „opóźnienia w funkcji siły nacisku na pedał hamulca” co 1 N przyrostu siły nacisku na pedał hamulca. Wynik stanowi średnią krzywą opóźnienia w funkcji siły nacisku na pedał, która w niniejszym załączniku będzie określana jako „krzywa maF”.
1.7. Na podstawie „krzywej maF” wyznaczana jest maksymalna wartość opóźnienia pojazdu, określana jako „amax”.
1.8. Wszystkie wartości „krzywej maF” powyżej 90 % wartości opóźnienia „amax” są uśredniane. Uzyskana w ten sposób wartość „a” stanowi opóźnienie „aABS”, o którym mowa w niniejszym regulaminie.
1.9. Minimalna siła nacisku na pedał (FABS), wystarczająca do osiągnięcia opóźnienia aABS definiowana jest jako wartość F odpowiadająca a = ABS na krzywej maF.
ZAŁĄCZNIK 4
PRZETWARZANIE DANYCH NA POTRZEBY BAS
(zob. pkt 7.2.3 niniejszego regulaminu)
1. ANALOGOWE PRZETWARZANIE DANYCH
Szerokość pasma wykorzystywanego w całym połączonym układzie przetwarzająco-rejestrującym nie może być mniejsza niż 30 Hz.
W celu niezbędnego przefiltrowania sygnałów stosuje się filtry dolnoprzepustowe czwartego lub wyższego rzędu. Szerokość pasma przepustowego (od 0 Hz do częstotliwości fo przy -3 dB) nie może być mniejsza niż 30 Hz. Błędy amplitudy nie mogą przekraczać ± 0,5 % dla odnośnego zakresu częstotliwości 0–30 Hz. Wszystkie sygnały analogowe są przetwarzane z wykorzystaniem filtrów o dostatecznie podobnej charakterystyce fazowej, aby różnice opóźnień związane z filtrowaniem mieściły się w granicach wymaganej dokładności pomiaru czasu.
Uwaga: Podczas analogowego filtrowania sygnałów o różnej strukturze częstotliwościowej może dojść do przesunięć fazowych. Z tego względu korzystniejsza jest metoda przetwarzania danych określona w pkt 2 niniejszego załącznika.
2. CYFROWE PRZETWARZANIE DANYCH
2.1. Czynniki ogólne
Przygotowanie sygnałów analogowych obejmuje uwzględnienie tłumienia amplitudy oraz częstotliwości próbkowania w celu uniknięcia błędów aliasingu, opóźnień fazy filtra oraz opóźnień czasowych. Czynniki mające wpływ na proces próbkowania i cyfryzacji obejmują wzmocnienie sygnałów przed próbkowaniem w celu ograniczenia do minimum błędów cyfryzacji, liczbę bitów na jedno próbkowanie, liczbę próbkowań na jeden cykl, wzmacniacze próbkująco-pamiętające oraz rozłożenie próbkowań w czasie. W przypadku dodatkowej filtracji cyfrowej bez przesunięcia fazowego czynniki obejmują wybór pasm przepustowych i tłumieniowych oraz tłumienie i dopuszczalne zakłócenia w każdym z nich; a także korektę opóźnień fazowych filtra. Należy uwzględnić każdy z tych czynników, aby uzyskać względną ogólną dokładność gromadzenia danych rzędu ± 0,5 %.
2.2. Błędy aliasingu
Aby uniknąć niemożliwych do skorygowania błędów aliasingu, przed próbkowaniem i cyfryzacją sygnały analogowe muszą zostać odpowiednio przefiltrowane. Rząd wykorzystywanych filtrów oraz ich pasmo przepustowe należy wybierać zarówno według wymaganej płaskości w odpowiednim zakresie częstotliwości, jak i częstotliwości próbkowania.
Minimalna charakterystyka filtra oraz częstotliwość próbkowania muszą być takie, aby
|
a) |
w ramach odpowiedniego zakresu częstotliwości 0 Hz do fmax = 30 Hz, tłumienie było mniejsze niż rozdzielczość systemu gromadzenia danych; oraz |
|
b) |
w połowie częstotliwości próbkowania (tj. częstotliwości Nyquista lub częstotliwości zawinięcia) wielkości wszystkich elementów składowych częstotliwości sygnału oraz zakłócenia były obniżone do poziomu niższego niż rozdzielczość systemu. |
W przypadku rozdzielczości 0,05 % tłumienie filtra musi wynosić poniżej 0,05 % w zakresie częstotliwości 0–30 Hz, a we wszystkich częstotliwościach powyżej połowy częstotliwości próbkowania musi być większe niż 99,95 %.
Uwaga: W przypadku filtra Butterwortha tłumienie wyznacza się za pomocą wzorów:
 oraz
oraz 
gdzie:
|
|
n oznacza rząd filtra; |
|
|
fmax oznacza odpowiedni zakres częstotliwości (30 Hz); |
|
|
fo oznacza częstotliwość odcięcia; |
|
|
fN oznacza częstotliwość Nyquista lub częstotliwość zawinięcia. |
W przypadku filtra czwartego rzędu
|
|
dla A = 0,9995: fo = 2,37 · fmax |
|
|
dla A = 0,0005: fS, = 2 · (6,69 · fo), gdzie fS oznacza częstotliwość próbkowania = 2 · fN. |
2.3. Przesunięcia fazowe filtra oraz opóźnienia czasowe dla filtracji antyaliasingowej
Należy unikać nadmiernej filtracji analogowej, a wszystkie filtry muszą posiadać wystarczająco podobną charakterystykę fazową, aby różnice opóźnień mieściły się w granicach wymaganej dokładności pomiaru czasu. Przesunięcia fazowe są szczególnie istotne w przypadku zwielokrotniania liczby mierzonych zmiennych w celu utworzenia nowych zmiennych, ponieważ przy zwielokrotnianiu amplitud zwiększają się przesunięcia fazowe i związane z nimi opóźnienia czasowe. Przesunięcia fazowe i opóźnienia czasowe zmniejsza się poprzez zwiększenie fo. Jeżeli znane są równania opisujące filtry przed pobraniem próbek, możliwe jest wyeliminowanie ich przesunięć fazowych i opóźnień czasowych za pomocą zwykłych algorytmów stosowanych w zakresie częstotliwości.
Uwaga: W zakresie częstotliwości, w którym charakterystyka amplitudy filtra pozostaje płaska, przesunięcie fazowe Φ filtra Butterwortha można określić w przybliżeniu jako
|
|
Φ = 81 · (f/f0) stopni dla drugiego rzędu |
|
|
Φ = 150 · (f/f0) stopni dla czwartego rzędu |
|
|
Φ = 294 · (f/f0) dla ósmego rzędu |
Opóźnienie czasowe dla wszystkich rzędów filtrów wynosi: t = (Φ/360) · (1/f0)
2.4. Pobieranie próbek danych i ich cyfryzacja
Przy 30 Hz amplituda sygnału zmienia się maksymalnie o 18 % na milisekundę. Aby ograniczyć poziom błędów dynamicznych spowodowanych zmianą analogowych sygnałów wejściowych do 0,1 %, czas próbkowania lub cyfryzacji musi wynosić mniej niż 32 μs. Wszystkie pary lub zbiory próbek danych do porównania muszą być pobierane jednocześnie lub w wystarczająco krótkim odstępie czasu.
2.5. Wymagania dla układu
Układ obróbki danych musi mieć rozdzielczość 12 bitów (± 0,05 %) lub większą i dokładność 2 lb (± 0,1 %). Filtry antyaliasingowe muszą być czwartego lub wyższego rzędu, a odpowiedni zakres danych fmax musi wynosić 0–30 Hz.
W przypadku filtrów czwartego rzędu częstotliwość pasma przepustowego fo (od 0 Hz do częstotliwości fo) musi być większa niż 2,37 · fmax, jeżeli błędy fazowe są następnie korygowane podczas przetwarzania danych cyfrowych, i większa niż 5 · fmax w pozostałych przypadkach. W przypadku filtrów czwartego rzędu częstotliwość próbkowania danych fs musi być większa niż 13,4 · fo.
|
26.10.2018 |
PL |
Dziennik Urzędowy Unii Europejskiej |
L 269/17 |
Jedynie oryginalne teksty EKG ONZ mają skutek prawny w świetle międzynarodowego prawa publicznego. Status i datę wejścia w życie niniejszego regulaminu należy sprawdzać w najnowszej wersji dokumentu EKG ONZ dotyczącego statusu TRANS/WP.29/343, dostępnej pod adresem
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamin nr 140 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) – Jednolite przepisy dotyczące homologacji pojazdów w zakresie układów elektronicznej kontroli stateczności (ESC) [2018/1592]
Obejmujący wszystkie obowiązujące teksty, w tym:
Suplement nr 2 do pierwotnej wersji regulaminu – data wejścia w życie: 29 grudnia 2018 r.
SPIS TREŚCI
REGULAMIN
|
1. |
Zakres |
|
2. |
Definicje |
|
3. |
Wystąpienie o homologację |
|
4. |
Homologacja |
|
5. |
Wymogi ogólne |
|
6. |
Wymogi funkcjonalne |
|
7. |
Wymogi dotyczące osiągów |
|
8. |
Warunki badania |
|
9. |
Procedura badania |
|
10. |
Zmiana typu pojazdu lub układu ESC i rozszerzenie homologacji |
|
11. |
Zgodność produkcji |
|
12. |
Sankcje z tytułu niezgodności produkcji |
|
13. |
Ostateczne zaniechanie produkcji |
|
14. |
Nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz nazwy i adresy organów udzielających homologacji typu |
ZAŁĄCZNIKI
|
1. |
Zawiadomienie |
|
2. |
Układy znaków homologacji |
|
3. |
Zastosowanie symulacji stateczności dynamicznej |
|
4. |
Narzędzie do symulacji stateczności dynamicznej i jego walidacja |
|
5. |
Sprawozdanie z badania narzędzia do symulacji funkcji stateczności pojazdu |
1. ZAKRES
1.1. Niniejszy regulamin stosuje się do homologacji pojazdów kategorii M1 i N1 (1) w zakresie układu elektronicznej kontroli stateczności.
1.2. Niniejszy regulamin nie dotyczy:
|
1.2.1. |
Pojazdów o prędkości konstrukcyjnej nieprzekraczającej 25 km/h; |
|
1.2.2. |
Pojazdów z wyposażeniem dla kierowców niepełnosprawnych. |
2. DEFINICJE
Do celów niniejszego regulaminu:
|
2.1. |
„Homologacja pojazdu” oznacza homologację typu pojazdu w zakresie elektronicznej kontroli stateczności. |
|
2.2. |
„Typ pojazdu” oznacza kategorię pojazdów, które nie różnią się między sobą pod względem następujących istotnych właściwości:
|
|
2.3. |
„Masa maksymalna” oznacza technicznie dopuszczalną masę maksymalną określoną przez producenta pojazdu (masa ta może być większa niż „dopuszczalna masa całkowita” ustalona przez organ administracji krajowej). |
|
2.4. |
„Rozkład masy pomiędzy osie” oznacza rozkład działania siły ciężkości na masę pojazdu lub jej podział między osie. |
|
2.5. |
„Obciążenie koła/osi” oznacza pionową statyczną reakcję (siłę) wywieraną przez nawierzchnię drogi w miejscu styczności z kołem/kołami osi. |
|
2.6. |
„Kąt skrętu Ackermana” oznacza kąt, którego tangens to stosunek rozstawu osi do promienia skrętu przy bardzo małej prędkości pojazdu. |
|
2.7. |
„Układ elektronicznej kontroli stateczności (ESC)” to układ, który posiada wszystkie poniższe właściwości:
|
|
2.8. |
„Przyśpieszenie poprzeczne” oznacza składową wektora przyśpieszenia punktu pojazdu prostopadłą do osi x pojazdu (wzdłużnej) i równoległą do płaszczyzny drogi. |
|
2.9. |
„Nadsterowność” oznacza stan, w którym rzeczywista prędkość kątowa odchylania pojazdu jest większa niż prędkość kątowa odchylania wynikająca dla danej prędkości pojazdu z kąta skrętu Ackermana. |
|
2.10. |
„Uślizg boczny” lub „kąt uślizgu bocznego” oznacza arcus tangens stosunku prędkości poprzecznej do prędkości wzdłużnej środka ciężkości pojazdu. |
|
2.11. |
„Podsterowność” oznacza stan, w którym rzeczywista prędkość kątowa odchylania pojazdu jest mniejsza niż prędkość kątowa odchylania wynikająca dla danej prędkości pojazdu z kąta skrętu Ackermana. |
|
2.12. |
„Prędkość kątowa odchylania” oznacza prędkość zmiany kąta odchylenia pojazdu, wyrażoną w stopniach na sekundę, w odniesieniu do obrotu wokół osi pionowej przechodzącej przez środek ciężkości pojazdu. |
|
2.13. |
„Szczytowa wartość współczynnika tarcia (PBC)” oznacza miarę tarcia pomiędzy oponą a nawierzchnią drogi przy maksymalnym opóźnieniu toczącej się opony. |
|
2.14. |
„Powierzchnia wspólna” oznacza powierzchnię, na której może być wyświetlana więcej niż jedna lampka kontrolna, wskaźnik, symbol identyfikacyjny lub inny komunikat, ale nie jednocześnie. |
|
2.15. |
„Współczynnik stateczności statycznej” oznacza stosunek połowy rozstawu kół pojazdu do wysokości środka ciężkości pojazdu i wyraża się wzorem SSF = T/2H, gdzie: T oznacza rozstaw kół (dla pojazdów o kilku różnych rozstawach kół stosuje się wartość średnią; dla osi o kołach bliźniaczych do obliczenia T bierze się koła zewnętrzne), a H oznacza wysokość środka ciężkości pojazdu. |
3. WYSTĄPIENIE O HOMOLOGACJĘ
3.1. O udzielenie homologacji typu pojazdu w zakresie ESC występuje producent pojazdu lub jego należycie upoważniony przedstawiciel.
3.2. Do wniosku należy dołączyć trzy egzemplarze każdego z niżej wymienionych dokumentów oraz następujące dane:
|
3.2.1. |
Opis typu pojazdu w odniesieniu do właściwości określonych w pkt 2.2 powyżej. Należy podać numery lub symbole identyfikujące typ pojazdu oraz typ silnika; |
|
3.2.2. |
Wykaz odpowiednio oznaczonych części składowych stanowiących układ ESC; |
|
3.2.3. |
Schemat kompletnego układu ESC ze wskazaniem rozmieszczenia jego części składowych w pojeździe; |
|
3.2.4. |
Szczegółowe rysunki każdej części składowej, umożliwiające łatwe określenie jej położenia i identyfikację. |
3.3. Reprezentatywny egzemplarz typu pojazdu zgłoszonego do homologacji należy dostarczyć placówce technicznej przeprowadzającej badania homologacyjne.
4. HOMOLOGACJA
4.1. Jeżeli typ pojazdu przedstawiony do homologacji na podstawie niniejszego regulaminu spełnia wymogi określone w pkt 5, 6 i 7 poniżej, należy udzielić homologacji tego typu pojazdu.
4.2. Każdemu homologowanemu typowi nadaje się numer homologacji. Dwie pierwsze jego cyfry wskazują serię poprawek obejmujących najnowsze główne zmiany techniczne wprowadzone do regulaminu, obowiązujące w chwili udzielania homologacji. Ta sama Umawiająca się Strona nie może przydzielić tego samego numeru innemu typowi pojazdu w zakresie elektronicznej kontroli stateczności.
4.3. Zawiadomienie o udzieleniu lub odmowie homologacji typu pojazdu na podstawie niniejszego regulaminu należy przesłać Umawiającym się Stronom Porozumienia stosującym niniejszy regulamin, wykorzystując w tym celu formularz zgodny z wzorem zamieszczonym w załączniku 1 do niniejszego regulaminu oraz streszczenie informacji zawartych w dokumentach, o których mowa w pkt 3.2.1–3.2.4 powyżej, przy czym rysunki dostarczone przez występującego o homologację nie mogą być w formacie większym niż A4 (210 × 297 mm) lub muszą być złożone do tego formatu, i muszą być sporządzone w odpowiedniej skali.
4.4. Na każdym pojeździe zgodnym z typem pojazdu homologowanym na podstawie niniejszego regulaminu, w widocznym i łatwo dostępnym miejscu określonym w formularzu homologacji, umieszcza się międzynarodowy znak homologacji zawierający:
|
4.4.1. |
Okrąg otaczający literę „E”, po której następuje numer identyfikujący państwo udzielające homologacji (3) oraz |
|
4.4.2. |
Numer niniejszego regulaminu, literę „R”, myślnik i numer homologacji umieszczone z prawej strony okręgu opisanego w pkt 4.4.1 powyżej. |
4.5. Jeżeli pojazd jest zgodny z typem pojazdu homologowanym zgodnie z jednym lub większą liczbą regulaminów stanowiących załączniki do Porozumienia w państwie, które udzieliło homologacji na podstawie niniejszego regulaminu, symbol podany w pkt 4.4.1 powyżej nie musi być powtarzany. W takim przypadku numery regulaminu i homologacji oraz dodatkowe symbole wszystkich regulaminów, zgodnie z którymi udzielono homologacji w państwie, które udzieliło homologacji na podstawie niniejszego regulaminu, należy umieścić w kolumnach po prawej stronie symbolu opisanego w pkt 4.4.1 powyżej.
4.6. Znak homologacji musi być czytelny i nieusuwalny.
4.7. Znak homologacji umieszcza się na tabliczce znamionowej pojazdu lub w jej pobliżu.
4.8. Przykładowe układy znaków homologacji przedstawiono w załączniku 1 do niniejszego regulaminu.
5. WYMOGI OGÓLNE
5.1. Pojazdy muszą być wyposażone w układ ESC spełniający wymogi funkcjonalne określone w pkt 6 i wymagania eksploatacyjne określone w pkt 7 przy zachowaniu procedur badawczych określonych w pkt 9 i w warunkach badań określonych w pkt 8 niniejszego regulaminu.
5.1.1. Pojazdy kategorii M1 i N1 o masie w stanie gotowym do jazdy większej niż 1 735 kg nie muszą spełniać wymogów pkt 5.1 powyżej, jeżeli są wyposażone w funkcję stateczności pojazdu, która zabezpiecza przed wywróceniem pojazdu i zapewnia sterowanie kierunkowe, oraz spełnia wymogi techniczne i przepisy przejściowe załącznika 21 do regulaminu nr 13. Pojazdy te nie muszą spełniać wymogów funkcjonalnych określonych w pkt 6 i wymogów eksploatacyjnych określonych w pkt 7 przy zachowaniu procedur badawczych określonych w pkt 9 i w warunkach badań określonych w pkt 8 niniejszego regulaminu.
5.2. Układ ECS musi być zaprojektowany, wykonany i zamontowany w taki sposób, aby pojazd w normalnych warunkach użytkowania, pomimo możliwości narażenia na drgania, spełniał wymogi niniejszego regulaminu.
5.3. W szczególności układ ECS musi być zaprojektowany, wykonany i zamontowany w taki sposób, aby był odporny na grożące mu zjawiska korozji i starzenia się.
5.4. Pola magnetyczne lub elektryczne nie mogą wywierać negatywnego wpływu na skuteczność układu ECS. Należy to wykazać przez spełnienie wymagań technicznych i z poszanowaniem przepisów przejściowych regulaminu nr 10, przez stosowanie:
|
a) |
serii poprawek 03 w odniesieniu do pojazdów bez układu sprzęgającego do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych); |
|
b) |
serii poprawek 04 w odniesieniu do pojazdów z układem sprzęgającym do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych). |
5.5. Ocenę aspektów bezpieczeństwa ESC, w zakresie jego bezpośredniego wpływu na układ hamulcowy, należy ująć w ogólnej ocenie bezpieczeństwa układu hamulcowego zgodnie z wymogami regulaminu nr 13-H związanymi ze złożonymi układami sterowania elektronicznego. Warunek ten uznaje się za spełniony po przedstawieniu świadectwa zgodności z regulaminem nr 13-H obejmującego układ ESC, który ma zostać homologowany.
5.6. Przepisy dotyczące okresowej kontroli technicznej układów ESC
5.6.1. W trakcie okresowych przeglądów technicznych musi istnieć możliwość potwierdzenia prawidłowego działania za pomocą obserwacji wzrokowych sygnałów ostrzegawczych po włączeniu zasilania.
5.6.2. Na potrzeby homologacji typu należy w sposób poufny ujawnić, jakie środki zastosowano, aby uniemożliwić osobom niepowołanym łatwą modyfikację sygnałów ostrzegawczych. Niniejszy wymóg dotyczący zabezpieczeń uważa się za spełniony, jeżeli istnieje dodatkowa metoda umożliwiająca sprawdzenie prawidłowego działania układu.
6. WYMOGI FUNKCJONALNE
Każdy pojazd zgłoszony do homologacji na podstawie niniejszego regulaminu musi być wyposażony w układ elektronicznej kontroli stateczności (ESC), który:
6.1. zapewnia możliwość przyłożenia momentu hamowania do każdego z czterech kół z osobna (4) i dysponuje algorytmem sterującym, który wykorzystuje tę możliwość;
6.2. działa w całym zakresie prędkości pojazdu i w każdej fazie jazdy, włącznie z przyśpieszaniem, poruszaniem się ruchem bezwładnym i opóźnianiem (w tym hamowaniem), z wyjątkiem następujących sytuacji:
|
6.2.1. |
kiedy kierowca wyłączył układ ESC; |
|
6.2.2. |
gdy prędkość pojazdu wynosi poniżej 20 km/h; |
|
6.2.3. |
podczas wykonywania samobadania układu i kontroli sensowności danych po uruchomieniu, przy czym czas ten nie może przekraczać dwóch minut w warunkach jazdy określonych w pkt 9.10.2; |
|
6.2.4. |
gdy pojazd jest prowadzony na biegu wstecznym; |
6.3. pozostaje w gotowości do działania także w czasie działania układu hamulcowego przeciwblokującego lub układu kontroli trakcji.
7. WYMOGI DOTYCZĄCE OSIĄGÓW
W odniesieniu do badań prowadzonych w warunkach określonych w pkt 8 i zgodnie z procedurą badawczą z pkt 9.9 pojazd z włączonym układem ESC musi spełniać kryteria stateczności kierunkowej z pkt 7.1 i 7.2 oraz kryterium czasu odpowiedzi z pkt 7.3 w czasie każdego z ww. badań przy zadanym kącie skrętu kierownicy (5) wynoszącym co najmniej 5 A, lecz nie więcej niż kąt określony w pkt 9.9.4, gdzie A oznacza kąt skrętu kierownicy obliczony w pkt 9.6.1.
Jeżeli dany pojazd został poddany badaniom fizycznym zgodnie z pkt 8, to zgodność innych wersji lub wariantów tego samego typu pojazdu można wykazać za pomocą symulacji komputerowej uwzględniającej warunki badawcze określone w pkt 8 i przebieg badania określony w pkt 9.9. Zastosowanie symulatora stanowi przedmiot załącznika 4 do niniejszego regulaminu.
7.1. Prędkość kątowa odchylania zmierzona po upływie 1 sekundy od manewru sinusowego z przytrzymaniem kąta skrętu (czas T0 + 1 na rys. 1) nie może przekroczyć 35 % pierwszej wartości szczytowej prędkości kątowej odchylania zmierzonej po zmianie znaku kąta skrętu kierownicy (tj. położonej między pierwszym a drugim pikiem) ( na rys. 1) podczas tej samej próby.
na rys. 1) podczas tej samej próby.
Rysunek 1
Dane dotyczące kąta skrętu kierownicy i prędkości kątowej odchylania do oceny stateczności bocznej pojazdu
 Tekst z obrazka
Tekst z obrazka
7.2. Prędkość kątowa odchylania zmierzona po upływie 1,75 sekundy od manewru sinusowego z przytrzymaniem kąta skrętu nie może przekroczyć 20 % pierwszej wartości szczytowej prędkości kątowej odchylania zmierzonej po zmianie znaku kąta skrętu kierownicy (tj. położonej między pierwszym a drugim pikiem) podczas tej samej próby.
7.3. Przesunięcie poprzeczne środka ciężkości pojazdu w stosunku do początkowego prostoliniowego toru jazdy musi wynosić co najmniej 1,83 m dla pojazdów o DMC do 3 500 kg oraz 1,52 m dla pojazdów o masie maksymalnej powyżej 3 500 kg, przy czym wartość tę oblicza się dla czasu 1,07 sekundy od rozpoczęcia kierowania (BOS). BOS określono w pkt 9.11.6.
7.3.1. Przesunięcie poprzeczne oblicza się metodą całkowania podwójnego z czasu pomiaru przyśpieszenia poprzecznego środka ciężkości pojazdu zgodnie z następującym wzorem:

Na potrzeby badań homologacyjnych typu można zastosować inną metodę pomiaru, o ile wykazuje co najmniej równoważny poziom dokładności w porównaniu do całkowania podwójnego.
7.3.2. Czas t = 0 do całkowania to chwila uruchomienia układu kierowniczego, zdefiniowana jako „rozpoczęcia kierowania (BOS)”. BOS określono w pkt 9.11.6.
7.4. Wykrywanie nieprawidłowego działania układu ESC
Pojazd musi być wyposażony we wskaźnik kontrolny ostrzegający kierowcę o wystąpieniu nieprawidłowego działania mającego wpływ na wytwarzanie lub przekazywanie sygnałów sterujących lub sygnałów odpowiedzi w układzie elektronicznej kontroli stateczności pojazdu.
7.4.1. Wskaźnik kontrolny nieprawidłowego działania układu ESC:
|
7.4.1.1. |
musi spełniać odpowiednie wymogi techniczne określone w regulaminie nr 121; |
|
7.4.1.2. |
z zastrzeżeniem przepisów pkt 7.4.1.3 wskaźnik kontrolny nieprawidłowego działania układu ESC musi się włączać w przypadku wystąpienia nieprawidłowego działania układu i musi pozostać włączony przez cały czas trwania nieprawidłowego działania w warunkach określonych w pkt 7.4, kiedy wyłącznik zapłonu znajduje się w pozycji włączonej („On”) lub do jazdy („Run”); |
|
7.4.1.3. |
z zastrzeżeniem przepisów pkt 7.4.2 wszystkie wskaźniki kontrolne nieprawidłowego działania układu ESC muszą się włączać w funkcji sprawdzania żarówki, kiedy wyłącznik zapłonu znajduje się w pozycji włączonej (do jazdy) i silnik nie pracuje, albo kiedy wyłącznik zapłonu znajduje się w przewidzianej przez producenta pozycji przejściowej do sprawdzania wskaźników kontrolnych, znajdującej się pomiędzy pozycją włączoną (do jazdy) a pozycją rozruchu silnika; |
|
7.4.1.4. |
po usunięciu niesprawności sygnał kontrolny musi się wyłączyć po wyłączeniu i ponownym włączeniu zapłonu, zgodnie z pkt 9.10.4; |
|
7.4.1.5. |
może być wykorzystywany do sygnalizowania nieprawidłowego działania innych układów lub funkcji związanych z ESC, w tym kontroli trakcji, układu wspomagającego stateczność przyczepy, układu sterowania hamowaniem w zakręcie i innych podobnych funkcji, które do swojego działania wykorzystują sterowanie przepustnicą lub momentem hamowania na poszczególnych kołach i mają wspólne elementy z układem ESC. |
7.4.2. Wskaźnik kontrolny nieprawidłowego działania układu ESC nie musi się włączać w czasie działania blokady rozrusznika.
7.4.3. Wymogu określonego w pkt 7.4.1.3 nie stosuje się do wskaźników kontrolnych wyświetlanych na powierzchni wspólnej.
7.4.4. Producent może zastosować wskaźnik kontrolny nieprawidłowego działania układu ESC w trybie migania w celu sygnalizowania interwencji ESC lub układów powiązanych z ESC (wyszczególnionych w pkt 7.4.1.5), interwencji ESC w zakresie kąta skrętu przynajmniej jednego koła dla zapewnienia stateczności pojazdu.
7.5. Urządzenie sterujące do wyłączania układu ESC i urządzenia sterujące innych układów
Producent może wyposażyć pojazd w urządzenie sterujące do wyłączania układu ESC („ESC OFF”), które musi być podświetlone, gdy włączone są reflektory pojazdu i którego celem jest przełączanie układu ESC w tryb, w którym układ ten nie spełnia wymogów eksploatacyjnych określonych w pkt 7, 7.1, 7.2 i 7.3. Producent może również wyposażyć pojazd w urządzenia sterujące do obsługi innych układów, które działają pomocniczo na pracę układu ESC. Urządzenia sterujące obu rodzajów, które przełączają układ ESC na tryb niespełniający wymogów eksploatacyjnych określonych w pkt 7, 7.1, 7.2 i 7.3, są dozwolone, pod warunkiem że układ spełnia jednocześnie wymogi pkt 7.5.1, 7.5.2 i 7.5.3.
7.5.1. Przy każdym wyłączeniu i ponownym włączeniu zapłonu układ ESC pojazdu musi wracać do przewidzianego przez producenta trybu domyślnego, który spełnia wymogi pkt 6 i 7, niezależnie od trybu pracy wybranego wcześniej przez kierowcę. Układ ESC nie musi jednak powracać do trybu spełniającego wymogi pkt 7–7.3 przy każdym wyłączeniu i ponownym włączeniu zapłonu, jeżeli spełnione są następujące warunki:
|
7.5.1.1. |
kierowca włączył konfigurację układu napędowego do jazdy terenowej z małymi prędkościami, w której włączony jest napęd na cztery koła z blokadą mechanizmu różnicowego na przedniej i tylnej osi i dodatkową redukcją prędkości obrotowej silnika do prędkości pojazdu o wartości co najmniej 1,6; lub |
|
7.5.1.2. |
kierowca włączył konfigurację z napędem na cztery koła przeznaczoną do jazdy z większymi prędkościami na drogach ośnieżonych, zapiaszczonych lub gruntowych, w której włączona jest blokada mechanizmu różnicowego na przedniej i tylnej osi, pod warunkiem że w takim trybie pojazd spełnia wymogi eksploatacyjne dotyczące stateczności określone w pkt 7.1 i 7.2 w warunkach badawczych z pkt 8. Jeżeli jednak układ ma kilka trybów pracy ESC, które spełniają wymogi pkt 7.1 i 7.2 dla konfiguracji układu napędowego wybranej przed ostatnim wyłączeniem zapłonu, to układ ESC musi powrócić do przewidzianego przez producenta trybu domyślnego ESC dla danej konfiguracji napędu przy każdym wyłączeniu i ponownym włączeniu zapłonu. |
7.5.2. Urządzenie sterujące przeznaczone tylko do przełączania układu ESC w tryb, w którym układ ten nie spełnia wymogów eksploatacyjnych określonych w pkt 7, 7.1, 7.2 i 7.3, musi spełniać odpowiednie wymagania techniczne określone w regulaminie nr 121.
7.5.3. Urządzenie sterujące przeznaczone do wyboru różnych trybów pracy układu ESC, z których co najmniej jeden nie spełnia wymogów eksploatacyjnych określonych w pkt 7, 7.1, 7.2 i 7.3, musi spełniać odpowiednie wymogi techniczne określone w regulaminie nr 121.
Jeżeli tryb pracy układu ESC wybiera się za pomocą wielofunkcyjnego urządzenia sterującego, to na wyświetlaczu dla kierowcy musi się pojawić czytelna informacja identyfikująca to położenie urządzenia sterującego, które odpowiada powyższemu trybowi, wyrażona za pomocą symbolu „off” dla układu elektronicznej kontroli stateczności, jak określono w regulaminie nr 121.
7.5.4. Urządzenie sterujące innego układu, którego działanie może przełączać układ ESC na tryb, który nie spełnia wymogów eksploatacyjnych określonych w pkt 7, 7.1, 7.2 i 7.3, nie musi być oznaczone symbolem „ESC Off” określonym w pkt 7.5.2.
7.6. Wskaźnik kontrolny wyłączenia układu ESC („ESC Off”)
Jeżeli producent wyposaży pojazd w urządzenie sterujące do wyłączania lub zmniejszania skuteczności układu ESC zgodnie z pkt 7.5, to muszą być spełnione wymogi pkt 7.6.1–7.6.4 dotyczące wskaźnika kontrolnego, który ma informować kierowcę o wyłączeniu lub ograniczeniu działania układu ESC. Wymogu tego nie stosuje się do wybranego przez kierowcę trybu, o którym mowa w pkt 7.5.1.2.
7.6.1. Producent musi wyposażyć pojazd we wskaźnik kontrolny sygnalizujący, że został włączony tryb pracy, w którym pojazd nie może spełnić wymogów pkt 7, 7.1, 7.2 i 7.3, jeżeli istnieje możliwość włączenia takiego trybu.
7.6.2. Wskaźnik kontrolny wyłączenia układu ESC („ESC Off”):
|
7.6.2.1. |
musi spełniać odpowiednie wymogi techniczne określone w regulaminie nr 121; |
|
7.6.2.2. |
musi pozostawać włączony przez cały czas, kiedy układ ESC znajduje się w trybie, który uniemożliwia spełnienie wymogów pkt 7, 7.1, 7.2 i 7.3; |
|
7.6.2.3. |
z zastrzeżeniem przepisów pkt 7.6.3 i 7.6.4 wszystkie wskaźniki kontrolne wyłączenia układu ESC muszą się włączać w funkcji sprawdzania żarówki, kiedy wyłącznik zapłonu znajduje się w pozycji włączonej (do jazdy) i silnik nie pracuje, albo kiedy wyłącznik zapłonu znajduje się w przewidzianej przez producenta pozycji przejściowej do sprawdzania wskaźników kontrolnych, znajdującej się pomiędzy pozycją włączoną (do jazdy) a pozycją rozruchu silnika; |
|
7.6.2.4. |
musi się wyłączyć, gdy układ ESC powróci do przewidzianego przez producenta trybu domyślnego. |
7.6.3. Wskaźnik kontrolny wyłączenia układu ESC nie musi się włączać w czasie działania blokady rozrusznika.
7.6.4. Wymogu określonego w pkt 7.6.2.3 niniejszej części nie stosuje się do wskaźników kontrolnych wyświetlanych na powierzchni wspólnej.
7.6.5. Producent może zastosować wskaźnik kontrolny wyłączenia układu „ESC Off” do sygnalizowania poziomu działania ESC innego niż tryb domyślny przewidziany przez producenta, nawet jeżeli przy takim poziomie działania układu ESC pojazd spełniałby wymogi pkt 7, 7.1, 7.2 i 7.3 niniejszej części.
7.7. Dokumentacja techniczna układu ESC
Pakiet dokumentacji stanowiący potwierdzenie, że pojazd jest wyposażony w układ ESC zgodny z definicją „układu ESC” określoną w pkt 2.7 niniejszego regulaminu, musi zawierać dokumentację producenta pojazdu określoną w pkt 7.7.1–7.7.4 poniżej.
7.7.1. Schemat układu z oznaczeniem wszystkich jednostek sprzętowych układu ESC. Na schemacie muszą być oznaczone elementy, które są wykorzystywane do wytwarzania momentów hamowania na każdym kole, wyznaczania prędkości kątowej odchylania pojazdu, określania szacunkowego uślizgu bocznego lub pochodnej uślizgu bocznego oraz oceny danych wejściowych układu kierowniczego pochodzących od kierowcy.
7.7.2. Krótki opis wyjaśniający podstawowe właściwości działania układu ESC. Opis ten musi wyjaśniać ogólną zasadę, która umożliwia układowi sterowanie momentem hamowania na każdym kole, oraz sposób, w jaki układ modyfikuje moment napędowy podczas uruchomienia układu ESC, a także wykazać, że układ bezpośrednio wyznacza prędkość kątową odchylania pojazdu nawet w warunkach, w których nie są dostępne żadne informacje dotyczące prędkości obrotowej kół. Opis musi również określać zakres prędkości i fazy ruchu pojazdu (przyśpieszanie, opóźnianie, ruch bezwładny, ruch podczas działania układu ABS lub kontroli trakcji), dla których możliwe jest działanie układu ESC.
7.7.3. Schemat logiczny. Schemat ten stanowi uzupełnienie opisu wymaganego na podstawie pkt 7.7.2.
7.7.4. Dane dotyczące podsterowności. Ogólny opis odpowiednich danych wejściowych do komputera sterującego sprzętem układu ESC oraz sposobu ich wykorzystania do ograniczania podsterowności pojazdu.
8. WARUNKI BADANIA
8.1. Warunki otoczenia
8.1.1. Temperatura otoczenia musi wynosić od 0°C do 45 °C.
8.1.2. Prędkość maksymalna wiatru nie może być większa niż 10 m/s dla pojazdów o SSF > 1,25 oraz 5 m/s dla pojazdów o SSF ≤ 1,25.
8.2. Testowa nawierzchnia drogi
8.2.1. Badania wykonuje się na suchej, litej i jednorodnej nawierzchni. Nawierzchnie wykazujące uszkodzenia i nierówności, na przykład obniżenia i duże pęknięcia, są nieodpowiednie.
8.2.2. Testowa nawierzchnia drogi ma nominalną (6) szczytową wartość współczynnika tarcia (PBC) wynoszącą 0,9, o ile nie określono inaczej, przy pomiarze za pomocą:
|
8.2.2.1. |
procedury ASTM E1337-90 z użyciem wzorcowej opony testowej E1136 Amerykańskiego Towarzystwa ds. Badań i Materiałów (ASTM), przy prędkości 40 mph; lub |
|
8.2.2.2. |
metody wyznaczania współczynnika przyczepności k określonej w dodatku 2 do załącznika 6 do regulaminu nr 13-H. |
8.2.3. Nawierzchnia badawcza musi mieć równomierne nachylenie od 0 do 1 %.
8.3. Warunki dotyczące pojazdu.
8.3.1. Układ ESC musi być włączony we wszystkich badaniach.
8.3.2. Masa Pojazdu. Pojazd obciąża się poprzez napełnienie zbiornika paliwa do co najmniej 90 % jego pojemności i umieszczenie wewnątrz pojazdu całkowitego obciążenia równego 168 kg, na które składa się kierowca, około 59 kg aparatury badawczej (zautomatyzowany robot kierujący, układ zbierania danych, zasilanie zautomatyzowanego robota kierującego) oraz odpowiedni balast do uzyskania wymaganego obciążenia, jeżeli masa kierowcy i aparatury jest za mała. Balast umieszcza się na podłodze pojazdu za przednim siedzeniem pasażera lub w razie konieczności na podłodze przed przednim siedzeniem pasażera. Cały balast zabezpiecza się przed przemieszczaniem się w czasie badań.
8.3.3. Opony. Opony należy napompować do wartości ciśnienia zalecanych dla zimnych opon przez producenta, podanych na przykład na tabliczce pojazdu lub na naklejce z wartościami ciśnienia w ogumieniu. Można zastosować dętki, aby zapobiec wypadnięciu opony ze stopki obręczy.
8.3.4. Wysięgniki. Można zastosować wysięgniki boczne, jeżeli jest to konieczne ze względów bezpieczeństwa kierowcy. W takim przypadku do pojazdów o współczynniku stateczności statycznej (SSF) ≤ 1,25 stosuje się następujące wymogi:
|
8.3.4.1. |
Pojazdy o masie poniżej 1 588 kg w stanie gotowym do jazdy wyposaża się w „lekkie” wysięgniki. Lekkie wysięgniki mają masę maksymalną 27 kg i są zaprojektowane na maksymalny moment bezwładności równy 27 kg · m2. |
|
8.3.4.2. |
Pojazdy o masie 1 588–2 722 kg w stanie gotowym do jazdy wyposaża się w „standardowe” wysięgniki. Wysięgniki standardowe mają masę maksymalną 32 kg i są zaprojektowane na maksymalny moment bezwładności równy 35,9 kg · m2. |
|
8.3.4.3. |
Pojazdy o masie równej lub większej niż 2 722 kg w stanie gotowym do jazdy wyposaża się w „ciężkie” wysięgniki. Ciężkie wysięgniki mają masę maksymalną 39 kg i są zaprojektowane na maksymalny moment bezwładności równy 40,7 kg · m2. |
8.3.5. Zautomatyzowany robot kierujący. Do celów pkt 9.5.2, 9.5.3, 9.6 i 9.9 używa się robota sterującego, zaprogramowanego do wykonania wymaganego manewru układu kierowniczego. Robot sterujący musi umożliwiać wytworzenie momentu obrotowego kierownicy o wartości od 40 do 60 Nm, wykonując ruchy kierownicy z szybkością do 1 200 na sekundę.
9. PROCEDURY BADAŃ
9.1. Opony pompuje się do wartości ciśnienia zalecanych dla zimnych opon przez producenta, podanych na przykład na tabliczce pojazdu lub na naklejce z wartościami ciśnienia w ogumieniu.
9.2. Kontrola żarówek wskaźników kontrolnych. Przy pojeździe nieruchomym i wyłączniku zapłonu w pozycji zablokowanej („Lock”) lub wyłączonej („Off”), przestawić wyłącznik zapłonu do pozycji włączonej (do jazdy) lub w odpowiednie położenie przewidziane do kontroli działania żarówek. Wskaźnik kontrolny nieprawidłowego działania układu ESC musi się zaświecić w funkcji sprawdzania żarówki, jak określono w pkt 7.4.1.3, oraz wskaźnik kontrolny wyłączenia układu „ESC Off”, jeżeli występuje, musi również się zaświecić w funkcji sprawdzania żarówki, jak określono w pkt 7.6.2.3. Kontrola żarówek wskaźników kontrolnych nie jest wymagana w przypadku wskaźników kontrolnych wyświetlanych na powierzchni wspólnej, zgodnie z pkt 7.4.3 i 7.6.4.
9.3. Kontrola działania „urządzenia sterującego do wyłączania układ ESC”. Dla pojazdów wyposażonych w urządzenie sterujące do wyłączania układu ESC, przy pojeździe nieruchomym i wyłączniku zapłonu w pozycji zablokowanej lub wyłączonej, przestawić wyłącznik zapłonu do pozycji włączonej (do jazdy). Uruchomić urządzenie sterujące do wyłączania ESC („ESC Off”) i sprawdzić, czy zapala się wskaźnik kontrolny „ESC Off” określony w pkt 7.6.2. Przestawić wyłącznik zapłonu do pozycji zablokowanej lub wyłączonej. Ponownie przestawić wyłącznik zapłonu do pozycji włączonej (do jazdy) i sprawdzić, czy zgasł wskaźnik kontrolny „ESC Off”, co oznacza powrót układu ESC do trybu domyślnego zgodnie z pkt 7.5.1.
9.4. Kondycjonowanie hamulców
Wykonać kondycjonowanie hamulców pojazdu zgodnie z metodą opisaną w pkt 9.4.1–9.4.4.
9.4.1. Zatrzymać pojazd dziesięć razy z prędkości 56 km/h, przy średnim opóźnieniu o wartości około 0,5 g.
9.4.2. Bezpośrednio po wykonaniu serii dziesięciu zatrzymań z 56 km/h wykonać trzy dodatkowe zatrzymania pojazdu z prędkości 72 km/h przy większym opóźnieniu.
9.4.3. Podczas zatrzymywania pojazdu zgodnie z pkt 9.4.2 do pedału hamulca należy przyłożyć siłę na tyle dużą, aby spowodować uruchomienie układu hamulcowego przeciwblokującego pojazdu (ABS) przez większą część każdego hamowania.
9.4.4. Po wykonaniu ostatniego zatrzymania z pkt 9.4.2 pojazd prowadzić z prędkością 72 km/h przez pięć minut w celu ochłodzenia hamulców.
9.5. Kondycjonowanie opon
Wykonać kondycjonowanie opon za pomocą metody określonej w pkt 9.5.1–9.5.3 w celu usunięcia ewentualnego połysku powierzchni opony i osiągnięcia odpowiedniej temperatury pracy bezpośrednio przed rozpoczęciem badań określonych w pkt 9.6 i 9.9.
9.5.1. Badany pojazd wykonuje trzy okrążenia zgodnie z ruchem wskazówek zegara i trzy okrążenia przeciwnie do ruchu wskazówek zegara, poruszając się po okręgu o średnicy około 30 metrów z prędkością, która wytwarza przyśpieszenie poprzeczne o wartości około 0,5–0,6 g.
9.5.2. Stosując sinusoidalny sygnał z kierownicy o częstotliwości 1 Hz, przy szczytowej amplitudzie kąta skrętu kierownicy odpowiadającej szczytowej wartości przyśpieszenia poprzecznego wynoszącej 0,5–0,6 g i przy prędkości pojazdu wynoszącej 56 km/h wykonuje się cztery przebiegi pojazdu, przy czym na każdy przebieg przypada 10 cykli kierowania sinusoidalnego.
9.5.3. Amplituda kąta skrętu kierownicy w czasie ostatniego cyklu ostatniego przebiegu musi być dwa razy większa niż dla pozostałych cykli. Przerwy pomiędzy kolejnymi okrążeniami i przebiegami nie mogą być dłuższe niż pięć minut.
9.6. Procedura powoli wzrastającego kąta skrętu kierownicy
Pojazd poddaje się dwóm seriom badania powoli wzrastającego kąta skrętu kierownicy przy stałej prędkości pojazdu wynoszącej 80 ± 2 km/h i kącie skrętu kierownicy wzrastającym o 13,5° na sekundę do chwili osiągnięcia przyśpieszenia poprzecznego o wartości około 0,5 g. W każdej serii wykonuje się trzy powtórzenia. W jednej serii kierownicę skręca się przeciwnie do ruchu wskazówek zegara, a w drugiej zgodnie z ruchem wskazówek zegara. Przerwy między powtórzeniami nie mogą być dłuższe niż pięć minut.
9.6.1. Na podstawie badań powoli wzrastającego kąta skrętu wyznacza się wielkość „A”. „A” oznacza kąt skrętu kierownicy w stopniach, który dla badanego pojazdu wytwarza stałe przyśpieszenie poprzeczne (skorygowane zgodnie z metodą z pkt 9.11.3) wynoszące 0,3 g. Metodą regresji liniowej oblicza się wielkość „A” z dokładnością do 0,1 z każdego z sześciu przebiegów badania powoli wzrastającego kąta skrętu. Następnie oblicza się średnią z wartości bezwzględnych sześciu obliczonych wielkości „A” i zaokrągla do jednego miejsca po przecinku, uzyskując końcową wielkość „A” stosowaną poniżej.
9.7. Po wyznaczeniu wielkości „A”, bez wymiany opon, procedurę kondycjonowania opon opisaną w pkt 9.5 wykonuje się ponownie bezpośrednio przed wykonaniem badania z użyciem manewru sinusowego z przytrzymaniem kąta skrętu opisanego w pkt 9.9. Pierwszą serię badania z użyciem manewru sinusowego z przytrzymaniem kąta skrętu należy rozpocząć w ciągu dwóch godzin od zakończenia prób z powoli wzrastającym kątem skrętu z pkt 9.6.
9.8. Należy sprawdzić, czy układ ESC jest włączony. W tym celu sprawdza się, czy nie świeci się wskaźnik kontrolny nieprawidłowego działania układu ESC lub wskaźnik kontrolny wyłączenia ESC („ESC Off”), jeżeli występuje.
9.9. Badanie z użyciem manewru sinusowego z przytrzymaniem kąta skrętu do oceny przeciwdziałania nadsterowności i zdolności odpowiedzi układu
Pojazd poddaje się dwóm seriom badania z użyciem manewru sinusowego z przytrzymaniem kąta skrętu, w którym sygnał z koła kierownicy ma przebieg fali sinusoidalnej z częstotliwością 0,7 Hz i opóźnieniem wynoszącym 500 ms po drugim piku zgodnie z rys. 2 (badania z użyciem manewru sinusowego z przytrzymaniem kąta skrętu). W jednej serii pierwszą połowę cyklu wykonuje się, skręcając kierownicę przeciwnie do ruchu wskazówek zegara, a w drugiej serii – zgodnie z ruchem wskazówek zegara. Pomiędzy poszczególnymi próbami pojazd pozostawia się w spoczynku na czas od 1,5 minuty do 5 minut.
Rysunek 2
Manewr sinusowy z przytrzymaniem kąta skrętu kierownicy
 Tekst z obrazka
Tekst z obrazka
9.9.1. Skręcanie kierownicy rozpoczyna się przy pojeździe poruszającym się ruchem bezwładnym na najwyższym biegu z prędkością 80 ± 2 km/h.
9.9.2. Amplituda skrętu kierownicy dla pierwszej próby każdej serii wynosi 1,5 A, gdzie A oznacza kąt skrętu kierownicy określony zgodnie z pkt 9.6.1.
9.9.3. W każdej serii amplituda skrętu kierownicy musi wzrastać o 0,5 A z każdą kolejną próbą, pod warunkiem że w żadnej próbie amplituda ta nie przekroczy wartości dla ostatniej próby określonej w pkt 9.9.4.
9.9.4. Amplituda skrętu kierownicy dla ostatniej próby w każdej serii musi wynosić 6,5 A lub 270 °, w zależności od tego, która wartość jest większa, pod warunkiem że obliczona wartość 6,5 A nie przekracza 300 °. Jeżeli przyrost amplitudy o 0,5 A do wartości 6,5 A spowoduje przekroczenie wartości 300 °, to amplituda skrętu kierownicy dla ostatniej próby musi wynosić 300°.
9.9.5. Po wykonaniu dwóch serii prób badawczych dane dotyczące prędkości kątowej odchylania i przyśpieszenia poprzecznego przetwarza się zgodnie z pkt 9.11.
9.10. Wykrywanie nieprawidłowego działania układu ESC
9.10.1. Wykonać symulację jednego lub wielu przypadków nieprawidłowego działania w układzie ESC poprzez odłączenie zasilania dowolnej części ESC lub rozłączenie połączenia elektrycznego między częściami układu ESC (przy wyłączonym silniku pojazdu). Do celów symulacji nieprawidłowego działania ESC nie należy rozłączać połączeń elektrycznych wskaźników kontrolnych układu ani opcjonalnych urządzeń sterujących układu ESC.
9.10.2. Zaczynając od pojazdu nieruchomego przy wyłączniku zapłonu w pozycji zablokowanej („Lock”) lub wyłączonej („Off”), przestawić wyłącznik zapłonu na pozycję do rozruchu i uruchomić silnik. Pojazd rozpędzić do uzyskania prędkości 48 ± 8 km/h. Nie później niż w ciągu 30 sekund od uruchomienia silnika i przed upływem dwóch minut od osiągnięcia ww. prędkości wykonać co najmniej jeden łagodny manewr skrętu w lewo i jeden w prawo bez utraty stateczności kierunkowej oraz jedno hamowanie. Sprawdzić, czy wskaźnik nieprawidłowego działania układu ESC zapala się zgodnie z pkt 7.4 przed zakończeniem powyższych manewrów.
9.10.3. Zatrzymać pojazd i przestawić wyłącznik zapłonu w pozycję wyłączoną („Off”) lub zablokowaną („Lock”). Po upływie pięciu minut ponownie przestawić wyłącznik zapłonu w pozycję do rozruchu („Start”) i uruchomić silnik. Sprawdzić, czy wskaźnik nieprawidłowego działania układu ESC zapala się ponownie, sygnalizując nieprawidłowe działanie, i pozostaje włączony do chwili wyłączenia silnika lub usunięcia awarii.
9.10.4. Przestawić wyłącznik zapłonu w pozycję wyłączoną („Off”) lub zablokowaną („Lock”). Przywrócić układ ESC do normalnego działania, przestawić wyłącznik zapłonu w pozycję do rozruchu („Start”) i uruchomić silnik. Ponownie wykonać manewr opisany w pkt 9.10.2 i sprawdzić, czy wskaźnik kontrolny wyłącza się w tym czasie lub zaraz po zakończeniu manewru.
9.11. Przetwarzanie danych – obliczenia do oceny skuteczności działania układu
Pomiary i obliczenia dotyczące prędkości kątowej odchylania i przesunięcia poprzecznego przetwarza się za pomocą metod określonych w pkt 9.11.1–9.11.8.
9.11.1. Dane pierwotne dotyczące kąta skrętu kierownicy filtruje się za pomocą 12-biegunowego filtru Butterwortha bez przesunięcia fazowego o częstotliwości odcięcia 10 Hz. Przefiltrowane dane koryguje się następnie w celu kompensacji błędu czujnika, wykorzystując statyczne dane sprzed badania.
9.11.2. Dane pierwotne dotyczące prędkości kątowej odchylania filtruje się za pomocą 12-biegunowego filtru Butterwortha bez przesunięcia fazowego o częstotliwości odcięcia 6 Hz. Przefiltrowane dane koryguje się następnie w celu kompensacji błędu czujnika, wykorzystując statyczne dane sprzed badania.
9.11.3. Dane pierwotne dotyczące przyśpieszenia poprzecznego filtruje się za pomocą 12-biegunowego filtru Butterwortha bez przesunięcia fazowego o częstotliwości odcięcia 6 Hz. Przefiltrowane dane koryguje się następnie w celu kompensacji błędu czujnika, wykorzystując statyczne dane sprzed badania. Przyśpieszenie poprzeczne środka ciężkości pojazdu wyznacza się z uwzględnieniem kompensacji przechyłu nadwozia i korekty ze względu na położenie czujnika za pomocą transformacji współrzędnych. Do celów zbierania danych przyśpieszeniomierz mierzący przyśpieszenie poprzeczne umieszcza się jak najbliżej wzdłużnych i poprzecznych środków ciężkości pojazdu.
9.11.4. Prędkość ruchu kierownicy wyznacza się poprzez różniczkowanie przefiltrowanych danych dotyczących kąta skrętu kierownicy. Dane dotyczące prędkości ruchu kierownicy filtruje się następnie za pomocą filtru ze średnią kroczącą co 0,1 sekundy.
9.11.5. Dla kanałów danych przyśpieszenia poprzecznego, prędkości kątowej odchylania i kąta skrętu kierownicy ustawia się zero za pomocą „zakresu zerowania” określonego za pomocą metod z pkt 9.11.5.1 i 9.11.5.2.
9.11.5.1. Wykorzystując dane prędkości ruchu kierownicy obliczone zgodnie z pkt 9.11.4, wyznacza się pierwszą chwilę, dla której prędkość ruchu kierownicy przekracza 75 stopni na sekundę. Od tej chwili prędkość ruchu kierownicy musi być większa niż 75 stopni na sekundę przez co najmniej 200 ms. Jeżeli powyższy drugi warunek nie jest spełniony, to wyznacza się kolejną chwilę, dla której prędkość ruchu kierownicy przekracza 75 stopni na sekundę i ponownie sprawdza, czy prędkość ta utrzymuje się przez 200 ms. Proces ten powtarza się aż do spełnienia obu warunków.
9.11.5.2. „Zakres zerowania” to przedział czasu równy 1,0 sekundzie poprzedzający chwilę, w której prędkość ruchu kierownicy przekracza 75 stopni na sekundę (czyli chwila, w której prędkość ruchu kierownicy przekracza 75 stopni na sekundę wyznacza koniec „zakresu zerowania”).
9.11.6. Rozpoczęcie kierowania (BOS) oznacza pierwszą chwilę następującą po zakończeniu czasu „zakresu sterowania”, w której kąt skrętu kierownicy (dla danych przefiltrowanych i zerowanych) osiąga – 5° (przy początku kierowania przeciwnie do ruchu wskazówek zegara) lub + 5° (przy początku kierowania zgodnie z ruchem wskazówek zegara). Wartość czasu w punkcie BOS jest interpolowana.
9.11.7. Zakończenie kierowania (COS) oznacza chwilę, w której kąt skrętu kierownicy powraca do wartości zero po zakończeniu manewru sinusowego z przytrzymaniem kąta skrętu kierownicy. Wartość czasu w punkcie zerowego kąta skrętu kierownicy jest interpolowana.
9.11.8. Druga szczytowa wartość prędkości kątowej odchylania oznacza pierwszą szczytową wartość prędkości kątowej po skręceniu kierownicy w stronę przeciwną. Wartości prędkości kątowej dla czasu 1,0 i 1,75 s po zakończeniu kierowania wyznacza się przez interpolację.
9.11.9. Wyznaczyć prędkość poprzeczną metodą całkowania skorygowanych, przefiltrowanych i zerowanych danych dotyczących przyśpieszenia poprzecznego. Ustawić zero dla prędkości poprzecznej w punkcie BOS. Wyznaczyć przesunięcie poprzeczne metodą całkowania wyzerowanej prędkości poprzecznej. Ustawić zero dla przesunięcia poprzecznego w punkcie BOS. Pomiar przesunięcia poprzecznego wykonuje się 1,07 sekundy po punkcie BOS i wyznacza przez interpolację.
10. ZMIANA TYPU POJAZDU LUB UKŁADU ESC I ROZSZERZENIE HOMOLOGACJI
10.1. O każdej zmianie istniejącego typu pojazdu należy powiadomić organ udzielający homologacji typu, który udzielił homologacji typu pojazdu.
Organ ten:
|
a) |
postanawia, w porozumieniu z producentem, że należy udzielić nowej homologacji typu; lub |
|
b) |
stosuje procedurę przedstawioną w pkt 10.1.1 (Zmiana) oraz, w stosownych przypadkach, procedurę przedstawioną w pkt 10.1.2 (Rozszerzenie). |
10.1.1. Zmiana
W przypadku gdy szczegółowe dane zarejestrowane w dokumentach informacyjnych uległy zmianie, a organ udzielający homologacji typu uznaje za mało prawdopodobne, aby wprowadzone modyfikacje miały istotne negatywne skutki, i uznaje, że w każdym razie sterowanie nożne nadal spełnia wymagania, modyfikację oznacza się jako „zmianę”.
W takim przypadku organ udzielający homologacji typu wydaje w razie potrzeby zmienione strony dokumentów informacyjnych, oznaczając każdą zmienioną stronę w sposób jasno wskazujący charakter modyfikacji i datę ponownego wydania. Uznaje się, ze wymóg ten spełnia ujednolicona, zaktualizowana wersja dokumentów informacyjnych, której towarzyszy szczegółowy opis modyfikacji.
10.1.2. Rozszerzenie
Modyfikację oznacza się jako „rozszerzenie”, jeżeli, oprócz zmiany szczegółowych danych zarejestrowanych w dokumentach informacyjnych:
|
a) |
wymagane są dalsze inspekcje lub badania; lub |
|
b) |
uległa zmianie dowolna informacja w dokumencie zawiadomienia (z wyjątkiem jego załączników); lub |
|
c) |
wystąpiono o homologację zgodnie z późniejszą serią poprawek po jej wejściu w życie. |
10.2. Umawiające się Strony Porozumienia stosujące niniejszy regulamin zostają powiadomione o potwierdzeniu lub odmowie udzielenia homologacji, z wyszczególnieniem zmian, zgodnie z procedurą określoną w pkt 4.3 powyżej. Ponadto należy odpowiednio zmienić spis treści dokumentów informacyjnych i sprawozdań z badań dołączony do dokumentu zawiadomienia w załączniku 1 w celu wskazania daty ostatniej zmiany lub rozszerzenia.
10.3. Właściwy organ udzielający rozszerzenia homologacji nadaje numer seryjny każdemu formularzowi zawiadomienia przygotowanemu w związku z takim rozszerzeniem.
11. ZGODNOŚĆ PRODUKCJI
Procedury zgodności produkcji muszą być zgodne z procedurami określonymi w dodatku 2 do Porozumienia (E/ECE/324-E/ECE/TRANS/505/Rev.2) i następującymi wymogami:
|
11.1. |
Pojazd homologowany zgodnie z niniejszym regulaminem musi być produkowany w sposób zapewniający jego zgodność z typem homologowanym poprzez spełnienie wymogów określonych w pkt 5, 6 i 7 powyżej. |
|
11.2. |
Organ, który udzielił homologacji typu, może w dowolnym czasie zweryfikować metody kontroli zgodności stosowane w każdym zakładzie produkcyjnym. Weryfikację taką przeprowadza się zazwyczaj co dwa lata. |
12. SANKCJE Z TYTUŁU NIEZGODNOŚCI PRODUKCJI
12.1. Homologacja udzielona w odniesieniu do typu pojazdu zgodnie z niniejszym regulaminem może zostać cofnięta w razie niespełnienia wymogów określonych w pkt 8.1 powyżej.
12.2. Jeżeli Umawiająca się Strona Porozumienia stosująca niniejszy regulamin postanowi o cofnięciu uprzednio przez siebie udzielonej homologacji, niezwłocznie powiadamia o tym fakcie pozostałe Umawiające się Strony stosujące niniejszy regulamin, na formularzu zawiadomienia zgodnym ze wzorem przedstawionym w załączniku 1 do niniejszego regulaminu.
13. OSTATECZNE ZANIECHANIE PRODUKCJI
Jeżeli posiadacz homologacji ostatecznie zaniecha produkcji typu pojazdu homologowanego zgodnie z niniejszym regulaminem, informuje o tym organ, który udzielił homologacji. Po otrzymaniu stosownego zawiadomienia organ ten powiadamia o tym pozostałe Umawiające się Strony Porozumienia stosujące niniejszy regulamin na formularzu zawiadomienia zgodnym ze wzorem przedstawionym w załączniku 5 do niniejszego regulaminu.
14. NAZWY I ADRESY PLACÓWEK TECHNICZNYCH PRZEPROWADZAJĄCYCH BADANIA HOMOLOGACYJNE ORAZ NAZWY I ADRESY ORGANÓW UDZIELAJĄCYCH HOMOLOGACJI TYPU
Umawiające się Strony Porozumienia stosujące niniejszy regulamin przekazują sekretariatowi Organizacji Narodów Zjednoczonych nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz organów udzielających homologacji typu, którym należy przesyłać wydane w innych państwach formularze poświadczające udzielenie, rozszerzenie, odmowę udzielenia lub cofnięcie homologacji.
(1) Kategorie M1 i N1 zdefiniowano w ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, pkt 2. - www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Zespół osi uznaje się za oś pojedynczą a koła bliźniacze uznaje się za jedno koło.
(3) Numery identyfikujące Umawiające się Strony Porozumienia z 1958 r. podano w załączniku 3 do ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, załącznik 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Zespół osi uznaje się za oś pojedynczą a koła bliźniacze uznaje się za jedno koło;
(5) Tekst niniejszego regulaminu zakłada sterowanie układem kierowniczym pojazdu za pomocą koła kierownicy. Pojazdy z innym typem urządzenia sterującego układem kierowniczym mogą być homologowane zgodnie z niniejszym załącznikiem, jeżeli producent może wykazać placówce technicznej, że wymogi dotyczące skuteczności określone w niniejszym regulaminie mogą być spełnione przy użyciu sygnałów wejściowych układu kierowniczego równoważnych w stosunku do sygnałów określonych w pkt 7 niniejszego regulaminu.
(6) Przez wartość nominalną rozumie się teoretyczną wartość docelową.
ZAŁĄCZNIK 2
UKŁADY ZNAKÓW HOMOLOGACJI
WZÓR A
(zob. pkt 4.4 niniejszego regulaminu)
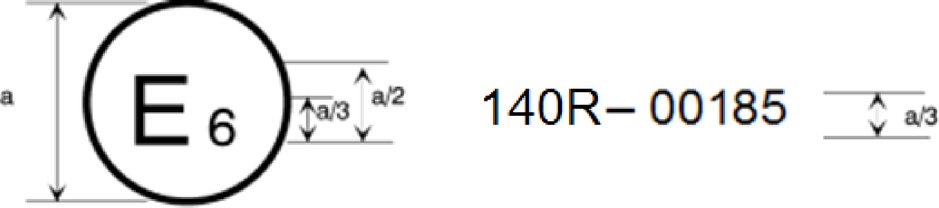
Powyższy znak homologacji umieszczony na pojeździe wskazuje, że odnośny typ pojazdu uzyskał homologację w Belgii (E 6) w zakresie elektronicznej kontroli stateczności na podstawie regulaminu nr 140. Dwie pierwsze cyfry numeru homologacji wskazują, że homologacji udzielono zgodnie z wymogami regulaminu nr 140 w jego pierwotnej wersji.
WZÓR B
(zob. pkt 4.5 niniejszego regulaminu)

Powyższy znak homologacji umieszczony na pojeździe wskazuje, że odnośny typ pojazdu uzyskał homologację w Belgii (E 6) na podstawie regulaminów nr 140 i nr 24 (1). (W przypadku regulaminu nr 24 skorygowany współczynnik pochłaniania wynosi 1,30 m-1). Numery homologacji oznaczają, że w chwili udzielenia odpowiednich homologacji regulamin nr 140 pozostawał w wersji pierwotnej, a regulamin nr 24 był zmieniony serią poprawek 02.
(1) Ten numer podano jedynie jako przykład.
ZAŁĄCZNIK 3
ZASTOSOWANIE SYMULACJI STATECZNOŚCI DYNAMICZNEJ
Skuteczność układu elektronicznej kontroli stateczności można określić w drodze symulacji komputerowej.
1. WYKORZYSTANIE SYMULACJI
1.1. Producent pojazdu musi wykazać działanie funkcji stabilności pojazdu przed organem udzielającym homologacji typu lub placówką techniczną poprzez symulację manewrów dynamicznych opisanych w pkt 9.9 niniejszego regulaminu.
1.2. Symulacja jest środkiem, w ramach którego można wykazać stateczność pojazdu poprzez:
|
a) |
prędkość kątową odchylania po upływie jednej sekundy od zakończenia manewru sinusowego z przytrzymaniem kąta skrętu (czas T0 + 1); |
|
b) |
prędkość kątową odchylania po upływie 1,75 sekundy od manewru sinusowego z przytrzymaniem kąta skrętu kierownicy; |
|
c) |
przesunięcie poprzeczne środka ciężkości pojazdu w stosunku do pierwotnego toru prostoliniowego. |
1.3. Symulację wykonuje się za pomocą zatwierdzonego narzędzia do modelowania i badań symulacyjnych, z zastosowaniem manewrów dynamicznych określonych w pkt 9.9 niniejszego regulaminu w warunkach badawczych określonych w pkt 8 niniejszego regulaminu.
Metodę dokonywania walidacji narzędzia do symulacji podano w załączniku 4 do niniejszego regulaminu.
ZAŁĄCZNIK 4
NARZĘDZIE DO SYMULACJI STATECZNOŚCI DYNAMICZNEJ I JEGO WALIDACJA
1. SPECYFIKACJA NARZĘDZIA DO SYMULACJI
1.1. W metodzie symulacji należy uwzględnić główne czynniki wpływające na ruch kierunkowy i przechylanie się pojazdu. Typowy model może obejmować następujące parametry pojazdu, w postaci bezpośredniej lub pośredniej:
|
a) |
oś/koło; |
|
b) |
zawieszenie; |
|
c) |
opona; |
|
d) |
podwozie/nadwozie; |
|
e) |
układ napędowy/przeniesienie napędu, jeśli dotyczy; |
|
f) |
układ hamulcowy; |
|
g) |
ładowność użyteczna. |
1.2. Funkcję stateczności pojazdu dodaje się do modelu symulacyjnego za pomocą:
|
a) |
podsystemu (modelu oprogramowania) narzędzia do symulacji; lub |
|
b) |
elektronicznej jednostki sterującej w konfiguracji ze sprzętowym sprzężeniem zwrotnym (HIL). |
2. WALIDACJA NARZĘDZIA DO SYMULACJI
2.1. Ważność stosowanego narzędzia do modelowania i symulacji sprawdza się za pomocą porównania z praktycznymi badaniami pojazdu. W badaniach walidacyjnych stosuje się manewry dynamiczne określone w pkt 9.9 niniejszego regulaminu.
W badaniach walidacyjnych odpowiednio rejestruje się lub oblicza następujące zmienne opisujące ruch, zgodnie z normą ISO 15037 część 1:2006: Warunki ogólne dla samochodów osobowych lub część 2:2002: Warunki ogólne dla pojazdów ciężkich i autobusów (w zależności od kategorii pojazdu):
|
a) |
kąt skrętu kierownicy (δΗ); |
|
b) |
prędkość pojazdu (vX); |
|
c) |
kąt uślizgu bocznego (β) lub prędkość poprzeczna (vY) – (nieobowiązkowo); |
|
d) |
przyspieszenie podłużne (aX) – (nieobowiązkowo); |
|
e) |
przyspieszenie poprzeczne (aY); |
|
f) |
prędkość kątowa odchylania (dψ/dt); |
|
g) |
prędkość kątowa przechylania (dφ/dt); |
|
h) |
prędkość kątowa pochylania (dθ/dt); |
|
i) |
kąt przechylenia (φ); |
|
j) |
kąt pochylenia (θ). |
2.2. Celem jest wykazanie, że symulowane zachowanie pojazdu i działanie funkcji stateczności pojazdu są porównywalne z zachowaniem pojazdu i działaniem funkcji zaobserwowanymi podczas badań praktycznych.
2.3. Symulator uzyskuje pozytywną walidację, jeżeli wyniki symulacji są porównywalne z wynikami badań praktycznych dla danego typu pojazdu dla manewrów dynamicznych określonych w pkt 9.9 niniejszego regulaminu. Porównanie wykonuje się na podstawie zależności między uruchomieniem i sekwencją funkcji stateczności pojazdu w procesie symulacji i w praktycznym badaniu pojazdu.
2.4. Jeżeli pojazd referencyjny różni się od pojazdu symulacyjnego pod względem pewnych parametrów fizycznych, to parametry te należy odpowiednio dostosować w symulacji.
2.5. Należy sporządzić sprawozdanie z badania symulatora zgodnie ze wzorem określonym w załączniku 5 do niniejszego regulaminu i załączyć jego kopię do sprawozdania z homologacji pojazdu.
ZAŁĄCZNIK 5
SPRAWOZDANIE Z BADANIA NARZĘDZIA DO SYMULACJI FUNKCJI STATECZNOŚCI POJAZDU
Numer sprawozdania z badania: …
1. DANE IDENTYFIKACYJNE
1.1. Nazwa i adres producenta narzędzia do symulacji: …
1.2. Oznaczenie narzędzia do symulacji: nazwa/model/numer (sprzęt i oprogramowanie) …
2. ZAKRES STOSOWANIA
2.1. Typ pojazdu: …
2.2. Konfiguracje pojazdu: …
3. SPRAWDZAJĄCE BADANIE POJAZDU
3.1. Opis pojazdu(-ów) …
3.1.1. Identyfikacja pojazdu(-ów) marka/model/VIN …
3.1.2. Opis pojazdu, w tym dane dotyczące zawieszenia/kół, silnika, układu przenoszenia napędu, układu(-ów) hamulcowego (-ych), układu kierowniczego, z podaniem nazwy/modelu/numeru: …
3.1.3. Dane dotyczące pojazdu wykorzystane podczas symulacji (bezpośrednio): …
3.2. Opis miejsc(-a) badania, nawierzchni drogi/powierzchni badawczej, temperatury i dat(-y) badania: …
3.3. Wyniki przy włączonej i wyłączonej funkcji stateczności pojazdu, w tym zmienne opisujące ruch, o których mowa w pkt 2.1 załącznika 4, stosownie do przypadku: …
4. WYNIKI SYMULACJI
4.1. Parametry pojazdu i wartości wykorzystane do symulacji, które nie pochodzą z pojazdu faktycznie użytego w badaniach (pośrednie): …
4.2. Prędkość kątowa odchylania i przesunięcie poprzeczne zgodnie z pkt 7.1–7.3 niniejszego regulaminu: …
5. Badanie wykonano i wyniki umieszczono w sprawozdaniu zgodnie z załącznikiem 4 do regulaminu nr 140.
Placówka techniczna prowadząca badanie (1) …
Podpis: …
Data: …
Organ udzielający homologacji typu (1) …
Podpis: …
Data: …
(1) Jeśli placówka techniczna i organ udzielający homologacji typu są tym samym organem, wymagane są podpisy różnych osób.
|
26.10.2018 |
PL |
Dziennik Urzędowy Unii Europejskiej |
L 269/36 |
Jedynie oryginalne teksty EKG ONZ mają skutek prawny w świetle międzynarodowego prawa publicznego. Status i datę wejścia w życie niniejszego regulaminu należy sprawdzać w najnowszej wersji dokumentu EKG ONZ dotyczącego statusu TRANS/WP.29/343, dostępnej pod adresem
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulamin nr 141 Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (EKG ONZ) – Jednolite przepisy dotyczące homologacji pojazdów w odniesieniu do ich systemów monitorowania ciśnienia w oponach (TPMS) [2018/1593]
Data wejścia w życie: 22 stycznia 2017 r.
SPIS TREŚCI
REGULAMIN
|
1. |
Zakres |
|
2. |
Definicje |
|
3. |
Wystąpienie o homologację |
|
4. |
Homologacja |
|
5. |
Specyfikacje i badania |
|
6. |
Informacje dodatkowe |
|
7. |
Zmiany i rozszerzenie homologacji typu pojazdu |
|
8. |
Zgodność produkcji |
|
9. |
Sankcje z tytułu niezgodności produkcji |
|
10. |
Ostateczne zaniechanie produkcji |
|
11. |
Nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz nazwy i adresy organów udzielających homologacji typu |
ZAŁĄCZNIKI
|
1. |
Zawiadomienie |
|
2. |
Układy znaków homologacji |
|
3. |
Wymogi w zakresie badania systemów monitorowania ciśnienia w oponach (TPMS). |
1. ZAKRES
Niniejszy regulamin stosuje się do homologacji pojazdów kategorii M1 o masie maksymalnej do 3 500 kg oraz N1 (1) wyposażonych w system monitorowania ciśnienia w oponach, z wyjątkiem pojazdów wyposażonych w koła bliźniacze na osi.
2. DEFINICJE
Do celów niniejszego regulaminu:
|
2.1. |
„Homologacja pojazdu” oznacza homologację typu pojazdu w odniesieniu do systemu monitorowania ciśnienia w oponach. |
|
2.2. |
„Typ pojazdu” oznacza pojazdy, które nie różnią się znacząco pod względem takich podstawowych cech, jak:
|
|
2.3. |
„Koło” oznacza kompletne koło składające się z obręczy i tarczy koła. |
|
2.4. |
„Opona” oznacza oponę pneumatyczną, będącą wzmocnionym elastycznym przekrojem, który jest dostarczany z ciągłą, na ogół toroidalną, zamkniętą komorą zawierającą gaz (zazwyczaj powietrze) lub gaz i ciecz lub który wraz z kołem, na którym jest zamontowany, tworzy taką komorę; komora ta jest zwykle przeznaczona do stosowania przy ciśnieniu wyższym niż ciśnienie atmosferyczne. |
|
2.5. |
„Masa maksymalna” oznacza wartość maksymalną dla pojazdu określoną przez producenta jako technicznie dopuszczalna (masa ta może być wyższa niż „maksymalna dopuszczalna masa” określona przez władze krajowe). |
|
2.6. |
„Maksymalny nacisk na oś” oznacza wskazaną przez producenta wartość maksymalną całkowitej siły pionowej między powierzchniami styku opon lub rozstawu jednej osi a podłożem, która pochodzi od części masy pojazdu, która jest przenoszona na tej osi; nacisk ten może być większy niż „dopuszczalny nacisk na oś” określony przez władze krajowe. Suma wartości nacisków na osie może być większa niż wartość odpowiadająca całkowitej masie pojazdu. |
|
2.7. |
„System monitorowania ciśnienia w oponach (TPMS)” oznacza zamontowany w pojeździe system realizujący funkcję pomiaru ciśnienia napompowania opon lub zmian tego ciśnienia napompowania w czasie i przekazujący odpowiednie informacje użytkownikowi w trakcie pracy pojazdu. |
|
2.8. |
„Ciśnienie napompowania opony zimnej” oznacza ciśnienie w oponie w temperaturze otoczenia, bez jakiegokolwiek wzrostu ciśnienia spowodowanego używaniem opony. |
|
2.9. |
„Zalecane ciśnienie napompowania opony zimnej (P rec )” oznacza ciśnienie zalecane przez producenta pojazdu dla każdego położenia opony, dla przewidzianych warunków pracy (np. prędkości i obciążenia) danego pojazdu, określone w informacji o pojeździe lub w instrukcji obsługi pojazdu. |
|
2.10. |
„Ciśnienie robocze (P warm )” oznacza ciśnienie napompowania dla każdego położenia opony podwyższone w stosunku do ciśnienia w oponie zimnej (Prec) wskutek wpływu temperatury w trakcie używania pojazdu. |
|
2.11. |
„Ciśnienie badania (P test )” oznacza rzeczywiste ciśnienie wybranej opony (wybranych opon) dla każdego położenia opony po spuszczeniu powietrza w trakcie przebiegu badania. |
3. WYSTĄPIENIE O HOMOLOGACJĘ
3.1. O udzielenie homologacji typu pojazdu w zakresie systemu monitorowania ciśnienia w oponach występuje producent pojazdu lub jego należycie upoważniony przedstawiciel.
3.2. Do wniosku należy dołączyć, w trzech egzemplarzach, opis typu pojazdu obejmujący elementy określone w załączniku 1 do niniejszego regulaminu.
3.3. Pojazd reprezentatywny dla typu homologowanego pojazdu musi zostać przedstawiony organowi udzielającemu homologacji typu lub placówce technicznej odpowiedzialnej za przeprowadzanie badań homologacyjnych.
3.4. Przed udzieleniem homologacji typu istnienie zadowalających rozwiązań zapewniających skuteczną kontrolę zgodności produkcji podlega weryfikacji przez organ udzielający homologacji typu.
4. HOMOLOGACJA
4.1. Jeżeli pojazd przedstawiony do homologacji na podstawie niniejszego regulaminu spełnia wszystkie wymogi pkt 5 poniżej, należy udzielić homologacji tego typu pojazdu.
4.2. Każdemu homologowanemu typowi nadaje się numer homologacji. Dwie pierwsze jego cyfry (obecnie 00 odpowiadające pierwotnej wersji regulaminu) oznaczają serię poprawek obejmujących najnowsze główne zmiany techniczne wprowadzone do regulaminu, obowiązujące w chwili udzielania homologacji. Ta sama Umawiająca się Strona nie może przydzielić tego samego numeru innemu typowi pojazdu.
4.3. Zawiadomienie o udzieleniu, przedłużeniu lub odmowie udzielenia homologacji typu pojazdu na mocy niniejszego regulaminu zostaje przekazane Umawiającym się Stronom Porozumienia stosującym niniejszy regulamin w postaci formularza zgodnego ze wzorem przedstawionym w załączniku 1 do niniejszego regulaminu.
4.4. Na każdym pojeździe zgodnym z typem pojazdu homologowanym na mocy niniejszego regulaminu, w widocznym i łatwo dostępnym miejscu określonym w formularzu homologacji, umieszcza się międzynarodowy znak homologacji zawierający:
|
4.4.1. |
okrąg otaczający literę „E”, po której następuje numer wyróżniający państwo udzielające homologacji (2); |
|
4.4.2. |
numer niniejszego regulaminu, po którym następuje litera „R”, myślnik oraz numer homologacji po prawej stronie oznaczeń określonych w pkt 4.4.1. |
4.5. Jeżeli pojazd jest zgodny z typem pojazdu homologowanym zgodnie z jednym lub większą liczbą regulaminów stanowiących załączniki do Porozumienia w państwie, które udzieliło homologacji na podstawie niniejszego regulaminu, symbol podany w pkt 4.4.1 nie musi być powtarzany. W takim przypadku numery regulaminów i homologacji oraz dodatkowe symbole dla wszystkich regulaminów, zgodnie z którymi udzielono homologacji w danym państwie, należy umieścić w kolumnach po prawej stronie symbolu opisanego w pkt 4.4.1.
4.6. Znak homologacji musi być czytelny i nieusuwalny.
4.7. Znak homologacji umieszcza się na tabliczce znamionowej pojazdu zamontowanej przez producenta lub w jej pobliżu.
4.8. Przykładowe znaki homologacji przedstawiono w załączniku 2 do niniejszego regulaminu.
5. SPECYFIKACJE I BADANIA
5.1. Uwagi ogólne
5.1.1. Wszystkie pojazdy kategorii M1 do 3 500 kg i N1, w obu przypadkach wyposażone w pojedyncze opony i wyposażone w system monitorowania ciśnienia w oponach zgodny z definicją w pkt 2.7, muszą spełniać wymogi w zakresie skuteczności zawarte w pkt 5.1.2–5.5.5 niniejszego regulaminu w różnych warunkach drogowych i środowiskowych występujących na terytorium Umawiających się Stron.
5.1.2. Pola magnetyczne lub elektryczne nie mogą wywierać negatywnego wpływu na skuteczność systemu monitorowania ciśnienia w oponach. Należy to wykazać przez spełnienie wymagań technicznych i z poszanowaniem przepisów przejściowych regulaminu nr 10, przez stosowanie:
|
a) |
serii poprawek 03 w odniesieniu do pojazdów bez układu sprzęgającego do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych); |
|
b) |
serii poprawek 04 w odniesieniu do pojazdów z układem sprzęgającym do ładowania układu magazynowania energii elektrycznej wielokrotnego ładowania (akumulatorów trakcyjnych); |
5.1.3. System działa w zakresie prędkości od 40 km/h lub mniejszej do maksymalnej prędkości konstrukcyjnej pojazdu.
5.1.4. Pojazd musi przejść badania (przebicie, spadek ciśnienia i nieprawidłowe działanie) określone w załączniku 3.
5.2. Wykrywanie ciśnienia w oponie w związku ze spadkiem ciśnienia wywołanym zdarzeniem
5.2.1. TPMS powoduje zapalenie się sygnału ostrzegawczego opisanego w pkt 5.5 nie później niż dziesięć minut łącznego czasu jazdy po tym, jak ciśnienie robocze w jednej z opon pojazdu obniży się o dwadzieścia procent lub będzie miało wartość minimalnego ciśnienia 150 kPa, zależnie od tego, która z tych wartości jest wyższa.
5.3. Wykrywanie poziomu ciśnienia w oponie znacznie poniżej ciśnienia zalecanego dla optymalnego funkcjonowania, z uwzględnieniem kwestii zużycia paliwa i bezpieczeństwa
5.3.1. TPMS powoduje zapalenie się sygnału ostrzegawczego opisanego w pkt 5.5 nie później niż sześćdziesiąt minut łącznego czasu jazdy po tym, jak ciśnienie robocze w jednej z opon pojazdu, a w co najwyżej czterech oponach, obniży się o dwadzieścia procent lub będzie miało wartość minimalnego ciśnienia 150 kPa, zależnie od tego, która z tych wartości jest wyższa.
5.4. Wykrywanie nieprawidłowości
5.4.1. TPMS powoduje zapalenie się sygnału ostrzegawczego opisanego w pkt 5.5 nie później niż 10 minut po wystąpieniu nieprawidłowego działania, które ma wpływ na wywoływanie lub przekazywanie sygnałów sterujących lub reagujących w systemie monitorowania ciśnienia w oponach pojazdu.
5.5. Sygnał ostrzegawczy.
5.5.1. Ostrzeżenie jest przekazywane za pomocą optycznego sygnału ostrzegawczego zgodnego z regulaminem nr 121.
5.5.2. Sygnał ostrzegawczy uruchamia się w momencie przełączenia wyłącznika zapłonu do pozycji włączonej („On”) lub do jazdy („Run”) (kontrola działania żarówki). Ten wymóg nie ma zastosowania do kontrolek znajdujących się we wspólnej przestrzeni.
5.5.3. Sygnał ostrzegawczy musi być widoczny nawet w świetle dziennym; właściwy stan sygnału musi być łatwy do zweryfikowania przez kierowcę z siedzenia kierowcy.
5.5.4. Wskazanie nieprawidłowego działania może być tym samym sygnałem ostrzegawczym, co sygnał ostrzegający o zbyt niskim ciśnieniu. Jeżeli sygnał ostrzegawczy opisany w pkt 5.5.1 jest używany do wskazania zarówno zbyt niskiego ciśnienia, jak i nieprawidłowego działania TPMS, zastosowanie mają następujące zasady: jeżeli wyłącznik zapłonu znajduje się w pozycji włączonej (do jazdy), zapalenie się sygnału ostrzegawczego wskazuje na nieprawidłowe działanie systemu. Po krótkim czasie sygnał ostrzegawczy pozostaje na stałe zapalony przez cały czas trwania awarii i dopóki wyłącznik zapłonu znajduje się w pozycji włączonej (do jazdy). Sygnał migający i stały jest powtarzany za każdym razem po przełączeniu wyłącznika zapłonu do pozycji włączonej (do jazdy), dopóki błędne działanie nie zostanie usunięte.
5.5.5. Tryb migania kontrolki ostrzegawczej opisanej w pkt 5.5.1 może informować o statusie ponownego uruchomienia systemu monitorowania ciśnienia w oponach, zgodnie z instrukcją obsługi pojazdu.
6. INFORMACJE DODATKOWE
6.1. Ewentualna instrukcja obsługi pojazdu zawiera co najmniej następujące informacje:
|
6.1.1. |
Informację o tym, że pojazd jest wyposażony w taki system (oraz informację o tym, jak ponownie uruchomić system, jeżeli dany system posiada taką funkcję). |
|
6.1.2. |
Obraz symbolu kontrolki opisanej w pkt 5.5.1. (oraz obraz symbolu kontrolki nieprawidłowego działania, jeżeli dla tej funkcji zastosowano oddzielną kontrolkę). |
|
6.1.3. |
Dodatkową informację na temat znaczenia świecącej kontrolki ostrzegawczej niskiego ciśnienia w oponie oraz opis działań naprawczych, które należy podjąć, jeżeli taka sytuacja będzie miała miejsce. |
6.2. Jeżeli z pojazdem nie dostarczono instrukcji obsługi, informacje wymagane w pkt 6.1 powyżej należy umieścić w widocznym miejscu na pojeździe.
7. ZMIANY I ROZSZERZENIE HOMOLOGACJI TYPU POJAZDU
7.1. Każda zmiana typu pojazdu określonego w pkt 2.2 niniejszego regulaminu musi zostać zgłoszona organowi udzielającemu homologacji typu, który udzielił homologacji typu pojazdu. Organ udzielający homologacji typu może:
|
7.1.1. |
uznać, że dokonane zmiany nie mają negatywnego wpływu na warunki udzielenia homologacji i udzielić rozszerzenia homologacji; |
|
7.1.2. |
uznać, że dokonane zmiany mają wpływ na warunki udzielenia homologacji i zażądać dalszych badań lub dodatkowych kontroli przed udzieleniem rozszerzenia homologacji. |
7.2. Umawiające się Strony Porozumienia stosujące niniejszy regulamin zostają powiadomione o potwierdzeniu lub odmowie udzielenia homologacji, z wyszczególnieniem zmian, zgodnie z procedurą określoną w pkt 4.3 powyżej.
7.3. Organ udzielający homologacji typu powiadamia pozostałe Umawiające się Strony o rozszerzeniu homologacji przy użyciu formularza zawiadomienia przedstawionego w załączniku 1 do niniejszego regulaminu. Każdemu takiemu rozszerzeniu organ ten nadaje numer seryjny, zwany numerem rozszerzenia.
8. ZGODNOŚĆ PRODUKCJI
8.1. Procedury zgodności produkcji muszą być zgodne z procedurami określonymi w dodatku 2 do Porozumienia (E/ECE/324–E/ECE/TRANS/505/Rev.2) i następującymi wymogami:
8.2. Organ, który udzielił homologacji typu, może w dowolnym czasie dokonać weryfikacji zgodności produkcji w każdej jednostce produkcyjnej. Normalna częstotliwość takich weryfikacji wynosi co najmniej raz na rok.
9. SANKCJE Z TYTUŁU NIEZGODNOŚCI PRODUKCJI
9.1. Homologacja udzielona w odniesieniu do typu pojazdu zgodnie z niniejszym regulaminem może zostać cofnięta w razie niespełnienia wymogów określonych w pkt 8.
9.2. Jeżeli Umawiająca się Strona Porozumienia stosująca niniejszy regulamin cofnie uprzednio udzieloną homologację, niezwłocznie powiadamia o tym fakcie pozostałe Umawiające się Strony stosujące niniejszy regulamin, wykorzystując w tym celu kopię formularza homologacji z adnotacją na końcu napisaną dużymi literami oraz opatrzoną datą i podpisem, o treści: „HOMOLOGACJA COFNIĘTA”.
10. OSTATECZNE ZANIECHANIE PRODUKCJI
Jeżeli posiadacz homologacji ostatecznie zaniecha produkcji typu pojazdu homologowanego zgodnie z niniejszym regulaminem, informuje o tym organ, który udzielił homologacji. Po otrzymaniu stosownego powiadomienia wyżej wymieniony organ powiadamia o tym pozostałe Umawiające się Strony Porozumienia stosujące niniejszy regulamin za pomocą formularza homologacji zawierającego na końcu adnotację napisaną dużymi literami oraz opatrzoną datą i podpisem: „ZANIECHANIE PRODUKCJI”.
11. NAZWY I ADRESY PLACÓWEK TECHNICZNYCH ODPOWIEDZIALNYCH ZA PRZEPROWADZANIE BADAŃ HOMOLOGACYJNYCH ORAZ NAZWY I ADRESY ORGANÓW UDZIELAJĄCYCH HOMOLOGACJI TYPU
Umawiające się Strony Porozumienia stosujące niniejszy regulamin przekazują sekretariatowi Organizacji Narodów Zjednoczonych nazwy i adresy placówek technicznych odpowiedzialnych za przeprowadzanie badań homologacyjnych oraz organów udzielających homologacji typu, którym należy przesyłać wydane w innych państwach formularze poświadczające udzielenie, rozszerzenie, odmowę udzielenia lub cofnięcie homologacji.
(1) Zgodnie z definicją zawartą w ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev.6, pkt 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(2) Numery identyfikujące Umawiające się Strony Porozumienia z 1958 r. podano w załączniku 3 do ujednoliconej rezolucji w sprawie budowy pojazdów (R.E.3), dokument ECE/TRANS/WP.29/78/Rev.6, załącznik 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
ZAŁĄCZNIK 2
UKŁADY ZNAKÓW HOMOLOGACJI
(zob. pkt 4.4 niniejszego regulaminu)
Powyższy znak homologacji umieszczony na pojeździe oznacza, że dany typ pojazdu otrzymał, w odniesieniu do systemu monitorowania ciśnienia w oponach, homologację w Niderlandach (E 4) o numerze 002439, zgodnie z regulaminem nr 141. Numer homologacji wskazuje, że homologacji udzielono zgodnie z wymogami regulaminu nr 141 w jego pierwotnej wersji.
ZAŁĄCZNIK 3
BADANIE SYSTEMÓW MONITOROWANIA CIŚNIENIA W OPONACH (TPMS).
1. WARUNKI BADANIA
1.1. Temperatura otoczenia.
Temperatura otoczenia musi wynosić od 0 °C do 40 °C.
1.2. Testowa nawierzchnia drogi.
Droga musi mieć nawierzchnię zapewniającą dobrą przyczepność. W trakcie badania nawierzchnia drogi musi być sucha.
1.3. Badania prowadzi się w środowisku wolnym od zakłóceń radiowych.
1.4. Warunki pojazdu.
1.4.1. Masa badanego pojazdu.
Pojazd może być badany przy dowolnym obciążeniu, przy rozłożeniu masy pomiędzy osie określonym przez producenta pojazdu, bez przekraczania dopuszczalnej maksymalnej masy przypadającej na każdą z osi.
W przypadku gdy nie ma możliwości uruchomienia lub ponownego uruchomienia systemu, pojazd należy jednak rozładować. Oprócz kierowcy w pojeździe może przebywać druga osoba zajmująca przednie siedzenie, odpowiedzialna za zapisywanie wyników badań. Obciążenie nie może się zmieniać w trakcie badania.
1.4.2. Prędkość pojazdu.
TPMS jest kalibrowany i badany:
|
a) |
w zakresie prędkości od 40 km/h do 120 km/h lub maksymalnej prędkości konstrukcyjnej pojazdu, jeśli wynosi ona mniej niż 120 km/h, w przypadku badania odporności na przebicie w celu zweryfikowania wymogów pkt 5.2 niniejszego regulaminu; oraz |
|
b) |
w zakresie prędkości od 40 km/h do 100 km/h w przypadku badania spadku ciśnienia w celu zweryfikowania wymogów pkt 5.3 niniejszego regulaminu oraz w przypadku badania nieprawidłowego działania w celu zweryfikowania wymogów pkt 5.4 niniejszego regulaminu. |
W trakcie badania testuje się pełen zakres prędkości.
W pojazdach wyposażonych w regulator prędkości jazdy (tempomat) urządzenie pozostaje wyłączone w trakcie badania.
1.4.3. Położenie obręczy.
Obręcze mogą być umieszczone w dowolnym położeniu koła, zgodnie z odpowiednimi instrukcjami i ograniczeniami określonymi przez producenta pojazdu.
1.4.4. Pozycja postojowa.
W zaparkowanym pojeździe opony muszą być osłonięte przed bezpośrednim działaniem światła słonecznego. Miejsce postojowe musi być osłonięte od wiatru, który może mieć wpływ na wyniki badania.
1.4.5. Użycie pedału hamulca.
Czasu jazdy nie nalicza się w trakcie używania hamulca przy poruszaniu się pojazdu.
1.4.6. Opony.
Pojazd testuje się z oponami zamontowanymi w pojeździe zgodnie z zaleceniami producenta pojazdu. Do badania nieprawidłowego działania TPMS można jednak użyć opony zapasowej.
1.5. Dokładność urządzeń do pomiaru ciśnienia.
Dokładność urządzeń do pomiaru ciśnienia stosowanych w badaniach, o których mowa w niniejszym załączniku, musi wynosić co najmniej +/– 3kPa.
2. PROCEDURA BADANIA
Badanie wykonuje się przy prędkości w zakresie zgodnym z pkt 1.4.2 niniejszego załącznika, przynajmniej jeden raz dla badanego przypadku zgodnie z pkt 2.6.1 niniejszego załącznika („badanie odporności na przebicie”) oraz przynajmniej jeden raz dla badanego przypadku zgodnie z pkt 2.6.2 niniejszego załącznika („badanie spadku ciśnienia”).
2.1. Przed napompowaniem opon pojazdu należy ustawić pojazd na zewnątrz, w temperaturze otoczenia, z silnikiem wyłączonym, osłoniętym przed bezpośrednim działaniem światła słonecznego, niewystawionym na działanie wiatru i innych czynników grzejących lub chłodzących, przez co najmniej jedną godzinę. Opony pojazdu należy napompować zgodnie z zalecanym przez producenta pojazdu ciśnieniem napompowania opony zimnej (Prec), przestrzegając zaleceń producenta pojazdu dotyczących prędkości, obciążenia i położenia opon. Wszystkie pomiary ciśnienia prowadzone są z użyciem tych samych urządzeń.
2.2. Przy pojeździe nieruchomym i wyłączniku zapłonu w pozycji zablokowanej („Lock”) lub wyłączonej („Off”), przestawić wyłącznik zapłonu do pozycji włączonej („On”) lub do jazdy („Run”). System monitorowania ciśnienia w oponach przeprowadza test żarówki kontrolki niskiego ciśnienia, jak określono w pkt 5.5.2 niniejszego regulaminu. Ten ostatni wymóg nie ma zastosowania do kontrolek znajdujących się we wspólnej przestrzeni.
2.3. W stosownych przypadkach należy uruchomić lub ponownie uruchomić system monitorowania ciśnienia w oponach, zgodnie z zaleceniami producenta pojazdu.
2.4. Etap adaptacji.
2.4.1. Należy prowadzić pojazd przez co najmniej dwadzieścia minut, w zakresie prędkości określonym w pkt 1.4.2 niniejszego załącznika, przy średniej prędkości 80 km/h (± 10 km/h). Prędkość pojazdu może się znaleźć poza określonym zakresem łącznie przez maksymalnie dwie minuty całego etapu adaptacji.
2.4.2. Według uznania placówki technicznej, jeżeli badanie prowadzone jest na torze (okrągłym/owalnym), ze skrętami tylko w jednym kierunku, badanie opisane w pkt 2.4.1 powyżej powinno być równo podzielone (+/– 2 min.) na jazdę w obu kierunkach.
2.4.3. W ciągu pięciu minut po zakończeniu etapu adaptacji należy zmierzyć ciśnienie w oponie ciepłej, z której spuszczone zostanie powietrze. Ciśnienie w oponie ciepłej jest odnotowywane jako wartość Pwarm. Wartość ta używana jest w dalszych obliczeniach.
2.5. Etap spuszczania powietrza.
2.5.1. Przebieg badania odporności na przebicie w celu zweryfikowania wymogów pkt 5.2 niniejszego regulaminu.
Spuścić powietrze z jednej z opon pojazdu w ciągu pięciu minut od pomiaru ciśnienia w oponie ciepłej, jak opisano powyżej w pkt 2.4.3, do osiągnięcia wartości Ptest, tj. wartości Pwarm -20 % lub minimalnej wartości ciśnienia równej 150 kPa, zależnie od tego, która z tych wartości jest wyższa. Po stabilizacji, trwającej od dwóch do pięciu minut, ciśnienie Ptest sprawdza się ponownie i w razie konieczności koryguje.
2.5.2. Przebieg badania spadku ciśnienia w celu zweryfikowania wymogów pkt 5.3 niniejszego regulaminu
Spuścić powietrze ze wszystkich czterech opon pojazdu w ciągu pięciu minut od pomiaru ciśnienia w oponie ciepłej, jak opisano powyżej w pkt 2.4.3, do osiągnięcia wartości Ptest, tj. wartości Pwarm – 20 % z uwzględnieniem dodatkowego spuszczenia powietrza o wartości 7 kPa. Po stabilizacji, trwającej od dwóch do pięciu minut, ciśnienie Ptest sprawdza się ponownie i w razie konieczności koryguje.
2.6. Etap wykrywania niskiego ciśnienia w oponach.
2.6.1. Przebieg badania odporności na przebicie w celu zweryfikowania wymogów pkt 5.2 niniejszego regulaminu.
2.6.1.1. Prowadzić pojazd na dowolnym odcinku trasy testowej (nie musi być to jazda ciągła). Łączny czas jazdy musi wynosić 10 minut lub trwać do momentu zapalenia się kontrolki niskiego ciśnienia, zależnie od tego, co następuje wcześniej.
2.6.2. Przebieg badania spadku ciśnienia w celu zweryfikowania wymogów pkt 5.3 niniejszego regulaminu
2.6.2.1. Prowadzić pojazd na dowolnym odcinku trasy testowej. Po co najmniej 20 minutach, ale nie dłużej niż po 40 minutach, zatrzymać pojazd całkowicie, wyłączyć silnik, wyjąć kluczyk ze stacyjki, odczekać co najmniej 1 minutę, ale nie dłużej niż 3 minuty. Wznowić badanie. Łączny czas jazdy musi wynosić 60 minut w warunkach opisanych w pkt 1.4.2 powyżej lub trwać do momentu zapalenia się kontrolki niskiego ciśnienia, zależnie od tego, co następuje wcześniej.
2.6.3. Jeżeli kontrolka niskiego ciśnienia nie zapaliła się, badanie należy przerwać.
2.7. Jeżeli kontrolka niskiego ciśnienia zapaliła się w trakcie procedury opisanej w pkt 2.6 powyżej, należy przestawić wyłącznik zapłonu do pozycji wyłączonej lub zablokowanej. Po okresie pięciu minut przestawić ponownie wyłącznik zapłonu pojazdu do pozycji włączonej (do jazdy). Kontrolka musi się zapalić i palić się, dopóki wyłącznik zapłonu pozostaje w pozycji włączonej (do jazdy).
2.8. Napompować wszystkie opony pojazdu do zalecanego przez producenta ciśnienia napompowania opony zimnej. Uruchomić ponownie system, zgodnie z instrukcjami producenta pojazdu. Sprawdzić, czy kontrolka zgasła. Jeśli jest to niezbędne, prowadzić pojazd do czasu zgaśnięcia kontrolki. Jeżeli kontrolka nie zgaśnie, przerwać badanie.
2.9. Powtórzenie etapu spuszczania powietrza.
Badanie można powtórzyć, przy tym samym lub różnym obciążeniu, korzystając z odpowiednich procedur badania określonych w pkt 2.1–2.8 powyżej, gdy dana opona (dane opony) pojazdu jest (są) niewystarczająco napompowana (napompowane), zgodnie z przepisami w pkt 5.2 lub 5.3 niniejszego regulaminu, zależnie od tego, które przepisy mają zastosowanie.
3. WYKRYWANIE NIEPRAWIDŁOWEGO DZIAŁANIA TPMS
3.1. Należy przeprowadzić symulację nieprawidłowego działania TPMS, przykładowo odłączając źródło zasilania od dowolnego elementu TPMS, rozłączając połączenia elektryczne między elementami TPMS lub montując w pojeździe oponę lub koło niekompatybilne z TPMS. Przeprowadzając symulację nieprawidłowego działania TPMS, nie rozłącza się połączeń elektrycznych kontrolek.
3.2. Prowadzić pojazd przez łącznie najwyżej dziesięć minut (nie musi być to jazda ciągła) na dowolnym odcinku trasy testowej.
3.3. Łączny czas jazdy, o której mowa w pkt 3.2, musi wynosić dziesięć minut lub trwać do momentu zapalenia się kontrolki nieprawidłowego działania TPMS, zależnie od tego, co następuje wcześniej.
3.4. Jeżeli kontrolka nieprawidłowego działania TPMS nie zapaliła się zgodnie z wymogami w pkt 5.4 niniejszego regulaminu, należy przerwać badanie.
3.5. Jeżeli kontrolka nieprawidłowego działania TPMS zapali się w trakcie procedury opisanej w pkt 3.1–3.3 powyżej, należy przestawić wyłącznik zapłonu do pozycji włączonej lub zablokowanej. Po pięciu minutach przestawić ponownie wyłącznik zapłonu pojazdu do pozycji włączonej (do jazdy). Kontrolka nieprawidłowego działania TPMS musi sygnalizować ponownie nieprawidłowe działanie i palić się, dopóki wyłącznik zapłonu pozostaje w pozycji włączonej (do jazdy).
3.6. Przywrócić TPMS do normalnego działania. Jeżeli jest to konieczne, prowadzić pojazd do czasu zgaśnięcia sygnału ostrzegawczego. Jeżeli sygnał ostrzegawczy nie zgasł, należy przerwać badanie.
3.7. Badanie można powtórzyć, korzystając z procedur badania określonych w pkt 3.1–3.6 powyżej, przy czym każde takie badanie jest ograniczone do symulacji jednego przypadku nieprawidłowego działania.