

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32021R0646
Commission Implementing Regulation (EU) 2021/646 of 19 April 2021 laying down rules for the application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as regards uniform procedures and technical specifications for the type-approval of motor vehicles with regard to their emergency lane-keeping systems (ELKS) (Text with EEA relevance)
Rozporządzenie wykonawcze Komisji (UE) 2021/646 z dnia 19 kwietnia 2021 r. ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych w zakresie homologacji typu pojazdów silnikowych w odniesieniu do ich systemów awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) (Tekst mający znaczenie dla EOG)
Rozporządzenie wykonawcze Komisji (UE) 2021/646 z dnia 19 kwietnia 2021 r. ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych w zakresie homologacji typu pojazdów silnikowych w odniesieniu do ich systemów awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) (Tekst mający znaczenie dla EOG)
C/2021/2562
OJ L 133, 20.4.2021, p. 31–53
(BG, ES, CS, DA, DE, ET, EL, EN, FR, GA, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force: This act has been changed. Current consolidated version: 20/04/2021
In force: This act has been changed. Current consolidated version: 20/04/2021
|
20.4.2021 |
PL |
Dziennik Urzędowy Unii Europejskiej |
L 133/31 |
ROZPORZĄDZENIE WYKONAWCZE KOMISJI (UE) 2021/646
z dnia 19 kwietnia 2021 r.
ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych w zakresie homologacji typu pojazdów silnikowych w odniesieniu do ich systemów awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS)
(Tekst mający znaczenie dla EOG)
KOMISJA EUROPEJSKA,
uwzględniając Traktat o funkcjonowaniu Unii Europejskiej,
uwzględniając rozporządzenie Parlamentu Europejskiego i Rady (UE) 2019/2144 z dnia 27 listopada 2019 r. w sprawie wymogów dotyczących homologacji typu pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, w odniesieniu do ich ogólnego bezpieczeństwa oraz ochrony osób znajdujących się w pojeździe i niechronionych uczestników ruchu drogowego, zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 oraz uchylające rozporządzenia Parlamentu Europejskiego i Rady (WE) nr 78/2009, (WE) nr 79/2009 i (WE) nr 661/2009 oraz rozporządzenia Komisji (WE) nr 631/2009, (UE) nr 406/2010, (UE) nr 672/2010, (UE) nr 1003/2010, (UE) nr 1005/2010, (UE) nr 1008/2010, (UE) nr 1009/2010, (UE) nr 19/2011, (UE) nr 109/2011, (UE) nr 458/2011, (UE) nr 65/2012, (UE) nr 130/2012, (UE) nr 347/2012, (UE) nr 351/2012, (UE) nr 1230/2012 i (UE) 2015/166 (1), w szczególności jego art. 7 ust. 6 w związku z art. 7 ust. 3,
a także mając na uwadze, co następuje:
|
(1) |
W art. 7 ust. 3 rozporządzenia (UE) 2019/2144 określono wymóg, aby samochody osobowe i lekkie pojazdy użytkowe były wyposażone w systemy awaryjnego utrzymywania pojazdu na pasie ruchu. Konieczne jest ustanowienie przepisów dotyczących jednolitych procedur i specyfikacji technicznych w odniesieniu do homologacji typu pojazdów w zakresie systemów awaryjnego utrzymywania pojazdu na pasie ruchu. |
|
(2) |
Procedury homologacji typu określone w rozporządzeniu Parlamentu Europejskiego i Rady (UE) 2018/858 (2) mają zastosowanie do homologacji typu pojazdów silnikowych w odniesieniu do systemów awaryjnego utrzymywania pojazdu na pasie ruchu. Aby umożliwić spójne podejście do informacji, które mają być zawarte w dokumencie informacyjnym, o którym mowa w art. 24 ust. 1 lit. a) rozporządzenia (UE) 2018/858, w niniejszym rozporządzeniu należy doprecyzować informacje istotne dla systemu awaryjnego utrzymywania pojazdu na pasie ruchu. |
|
(3) |
Świadectwo homologacji typu UE, o którym mowa w art. 28 ust. 1 rozporządzenia (UE) 2018/858, wydawane dla systemów awaryjnego utrzymywania pojazdu na pasie ruchu, powinno się opierać na odpowiednim wzorze formularza określonym w załączniku III do rozporządzenia wykonawczego Komisji (UE) 2020/683 (3). Uzupełnienie do świadectwa homologacji typu powinno jednak zawierać informacje szczególne dla systemów awaryjnego utrzymywania pojazdu na pasie ruchu, jak określono w niniejszym rozporządzeniu, w związku z czym w niniejszym rozporządzeniu należy określić wzór formularza świadectwa homologacji typu wraz z towarzyszącym uzupełnieniem. |
|
(4) |
Zgodnie z uwagą 6 do tabeli w załączniku II do rozporządzenia (UE) 2019/2144 stosowanie wymogu obowiązkowego montażu systemu awaryjnego utrzymywania pojazdu na pasie ruchu odracza się o dwa lata w odniesieniu do pojazdów silnikowych wyposażonych we wspomagane hydraulicznie układy kierownicze. W tym okresie pojazdy takie powinny zostać wyposażone w system ostrzegania przed niezamierzoną zmianą pasa ruchu spełniający wymogi niniejszego rozporządzenia. |
|
(5) |
System awaryjnego utrzymywania pojazdu na pasie ruchu jest systemem wspomagającym kierowcę, który powinien ostrzegać kierowcę i korygować trajektorię tylko wtedy, gdy kierowca w sposób niezamierzony opuszcza pas ruchu. |
|
(6) |
Zgodnie z krajowymi przepisami dotyczącymi ruchu drogowego kierowcy mają prawo do przekraczania przerywanej linii, a obecne technologie mają szczególne trudności z oceną, czy przekraczanie przerywanej linii jest zamierzone. W celu uniknięcia niepotrzebnych interwencji ze strony systemu awaryjnego utrzymywania pojazdu na pasie ruchu, które mogą skłonić kierowcę do wyłączenia systemu, a tym samym do utraty potencjalnych korzyści w zakresie bezpieczeństwa, system awaryjnego utrzymywania pojazdu na pasie ruchu powinien mieć za zadanie jedynie ostrzeganie kierowcy a nie korygowanie trajektorii pojazdu podczas przekraczania linii przerywanej. |
|
(7) |
Obecnie istniejące technologie systemów awaryjnego utrzymywania pojazdu na pasie ruchu opierają się na wykrywaniu oznaczeń pasa ruchu, a skuteczność tych systemów nie może być zagwarantowana w przypadku braku takich oznaczeń. W związku z tym nie należy wymagać działania systemów awaryjnego utrzymywania pojazdu na pasie ruchu w przypadku braku oznaczeń pasa ruchu. |
|
(8) |
Ze względu na złożoność układów sterowania elektronicznego systemów awaryjnego utrzymywania pojazdu na pasie ruchu konieczne jest uzupełnienie badań przewidzianych w niniejszym rozporządzeniu o dokumentację przedstawiającą środki projektowe i walidacyjne wprowadzone przez producenta w celu zapewnienia bezpiecznego działania systemu awaryjnego utrzymywania pojazdu na pasie ruchu w różnych sytuacjach. W niniejszym rozporządzeniu określa się odpowiednią dokumentację, która ma być dostarczona przez producenta, oraz procedury jej oceny przez organy udzielające homologacji lub służby techniczne. |
|
(9) |
Ponieważ rozporządzenie (UE) 2019/2144 ma być stosowane od dnia 6 lipca 2022 r., niniejsze rozporządzenie należy także stosować od tej daty. |
|
(10) |
Środki przewidziane w niniejszym rozporządzeniu są zgodne z opinią Komitetu Technicznego ds. Pojazdów Silnikowych, |
PRZYJMUJE NINIEJSZE ROZPORZĄDZENIE:
Artykuł 1
Przepisy administracyjne i specyfikacje techniczne dotyczące homologacji typu pojazdów silnikowych w odniesieniu do systemu awaryjnego utrzymywania pojazdu na pasie ruchu
1. Dokument informacyjny przedłożony zgodnie z art. 24 ust. 1 lit. a) rozporządzenia (UE) 2018/858 wraz z wnioskiem o udzielenie homologacji typu pojazdu w odniesieniu do systemu awaryjnego utrzymywania pojazdu na pasie ruchu musi zawierać informacje istotne dla tego systemu, jak określono w załączniku I część 1.
2. Homologacja typu pojazdów silnikowych w odniesieniu do systemów awaryjnego utrzymywania pojazdu na pasie ruchu podlega specyfikacjom technicznym określonym w załączniku I część 2.
3. W przypadku gdy pojazdy silnikowe ze wspomaganym hydraulicznie układem kierowniczym są wyposażone zamiast systemów awaryjnego utrzymywania pojazdu na pasie ruchu w systemy ostrzegania przed niezamierzoną zmianą pasa ruchu zgodnie z definicją w art. 3 pkt 9 rozporządzenia (UE) 2019/2144, takie systemy ostrzegania przed niezamierzoną zmianą pasa ruchu muszą być zgodne z odpowiednimi specyfikacjami technicznymi określonymi w załączniku I część 2.
4. Świadectwo homologacji typu UE dla typu pojazdu w odniesieniu do systemu awaryjnego utrzymywania pojazdu na pasie ruchu, o którym mowa w art. 28 ust. 1 rozporządzenia (UE) 2018/858, sporządza się zgodnie z załącznikiem I część 3.
Artykuł 2
Audyt bezpieczeństwa
Procedury weryfikacji przez organy udzielające homologacji lub służby techniczne aspektów bezpieczeństwa układów sterowania elektronicznego systemami awaryjnego utrzymywania pojazdu na pasie ruchu oraz procedury oceny dokumentacji technicznej dostarczonej przez producentów określono w załączniku II.
Artykuł 3
Wejście w życie i rozpoczęcie stosowania
Niniejsze rozporządzenie wchodzi w życie dwudziestego dnia po jego opublikowaniu w Dzienniku Urzędowym Unii Europejskiej.
Niniejsze rozporządzenie stosuje się od dnia 6 lipca 2022 r.
Niniejsze rozporządzenie wiąże w całości i jest bezpośrednio stosowane we wszystkich państwach członkowskich.
Sporządzono w Brukseli dnia 19 kwietnia 2021 r.
W imieniu Komisji
Ursula VON DER LEYEN
Przewodnicząca
(1) Dz.U. L 325 z 16.12.2019, s. 1.
(2) Rozporządzenie Parlamentu Europejskiego i Rady (UE) 2018/858 z dnia 30 maja 2018 r. w sprawie homologacji i nadzoru rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów, zmieniające rozporządzenie (WE) nr 715/2007 i (WE) nr 595/2009 oraz uchylające dyrektywę 2007/46/WE (Dz.U. L 151 z 14.6.2018, s. 1).
(3) Rozporządzenie wykonawcze Komisji (UE) 2020/683 z dnia 15 kwietnia 2020 r. w sprawie wykonania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2018/858 w odniesieniu do wymogów administracyjnych dotyczących homologacji i nadzoru rynku pojazdów silnikowych i ich przyczep oraz układów, komponentów i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów (Dz.U. L 163 z 26.5.2020, s. 1).
ZAŁĄCZNIK I
CZĘŚĆ 1
Dokument informacyjny dotyczący homologacji typu UE pojazdów w odniesieniu do systemu awaryjnego utrzymywania pojazdu na pasie ruchu
WZÓR
Dokument informacyjny nr … do celów homologacji typu UE typu pojazdu w odniesieniu do systemu awaryjnego utrzymywania pojazdu na pasie ruchu.
Poniższe informacje należy dostarczyć w trzech egzemplarzach wraz ze spisem treści. Wszystkie rysunki lub ilustracje muszą być w formacie A4 lub złożone do formatu A4, w odpowiedniej skali i o dostatecznym stopniu szczegółowości. Fotografie, jeśli zostały załączone, muszą być dostatecznie szczegółowe.
Jeżeli systemy, o których mowa w niniejszym dokumencie informacyjnym, są sterowane przez układy elektroniczne, należy dostarczyć informacje dotyczące ich działania.
0. INFORMACJE OGÓLNE
|
0.1. |
Marka (nazwa handlowa producenta): |
|
0.2. |
Typ: |
|
0.2.1. |
Nazwa(-y) handlowa(-e) (o ile występuje(-ą)): |
|
0.3. |
Oznaczenia identyfikacji typu, jeżeli występują na pojeździe/komponencie/oddzielnym zespole technicznym: |
|
0.3.1. |
Umiejscowienie tego oznakowania: |
|
0.4. |
Kategoria pojazdu: |
|
0.5. |
Nazwa przedsiębiorstwa i adres producenta: |
|
0.8. |
Nazwy i adresy zakładów montażowych: |
|
0.9. |
Nazwa i adres przedstawiciela producenta (w stosownych przypadkach): |
1. OGÓLNE CECHY KONSTRUKCYJNE
|
1.1. |
Fotografie lub rysunki reprezentatywnego pojazdu/komponentu/oddzielnego zespołu technicznego: |
|
1.8. |
Kierunek ruchu drogowego lewostronny/prawostronny |
2. MASY I WYMIARY
(w kg i mm) (w razie potrzeby należy odwołać się do rysunku)
|
2.6. |
Masa w stanie gotowym do jazdy
|
4. UKŁAD NAPĘDOWY
|
4.5. |
Skrzynia biegów |
|
4.5.1. |
Rodzaj: Ręcznie sterowana/automatyczna/przekładnia CVT (bezstopniowa)/stały napęd/zautomatyzowana/inna/piasta |
|
4.7. |
Maksymalna prędkość konstrukcyjna pojazdu (w km/h): |
|
6.6.1. |
Zespół (zespoły) opona/koło |
|
6.6.1.1. |
Osie |
|
6.6.1.1.1. |
Oś 1:
|
|
6.6.1.1.2. |
Oś 2:
itp. |
|
6.6.1.2. |
Koło zapasowe, jeżeli występuje: |
|
7.4. |
System awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) |
|
7.4.1. |
Opis techniczny lub rysunek techniczny systemu: |
|
7.4.2. |
Środki ręcznej dezaktywacji ELKS: |
|
7.4.3. |
Opis automatycznej dezaktywacji (jeżeli zainstalowano): |
|
7.4.4. |
Opis automatycznego zatrzymania działania (jeżeli zainstalowano): |
|
7.5. |
System ostrzegania przed niezamierzoną zmianą pasa ruchu (LDWS) |
|
7.5.1 |
Zakres prędkości, w którym działa LDWS: |
|
7.5.2. |
Opis techniczny i rysunek techniczny LDWS: |
|
7.6. |
Korekcyjna funkcja sterowania kierunkowego (CDCF) |
|
7.6.1 |
Zakres prędkości, w którym działa CDCF: |
|
7.6.2. |
Opis techniczny i rysunek systemu (w szczególności jeżeli system wykorzystuje układ kierowniczy lub hamulcowy): |
Objaśnienie:
Niniejszy dokument informacyjny zawiera informacje istotne dla systemu awaryjnego utrzymywania pojazdu na pasie ruchu i należy go wypełniać zgodnie ze wzorem określonym w załączniku I do rozporządzenia wykonawczego Komisji (UE) 2020/683.
CZĘŚĆ 2
Specyfikacje techniczne
|
1. |
Definicje
Do celów załączników zastosowanie mają następujące definicje: |
|
1.1. |
„typ pojazdu w odniesieniu do jego systemu awaryjnego utrzymywania pojazdu na pasie ruchu” oznacza kategorię pojazdów, które nie różnią się między sobą w takich istotnych aspektach jak:
|
|
1.2. |
„korekcyjna funkcja sterowania kierunkowego (CDCF)” oznacza funkcję sterowniczą w ramach elektronicznego układu sterowania, w ramach której przez ograniczony czas mogą następować zmiany kąta skrętu co najmniej jednego koła lub hamowania poszczególnych kół na skutek automatycznej oceny sygnałów pochodzących z pojazdu, fakultatywnie uzupełnionych danymi dostarczonymi ze źródeł zewnętrznych w celu skorygowania niezamierzonej zmiany pasa ruchu, np. w celu uniknięcia przekroczenia oznaczenia pasa ruchu, opuszczenia drogi; |
|
1.3. |
„przedmiotowy pojazd” oznacza pojazd poddawany badaniom; |
|
1.4. |
„odległość od oznaczenia pasa ruchu (DTLM)” oznacza pozostałą odległość boczną (prostopadłą do oznaczenia pasa ruchu) między wewnętrzną stroną oznaczenia pasa ruchu a najbardziej zewnętrzną krawędzią opony, zanim przedmiotowy pojazd przekroczy wewnętrzną stronę oznaczenia pasa ruchu; |
|
1.5. |
„droga płaska” oznacza drogę o nachyleniu mniejszym niż 1 % w kierunku wzdłużnym a w kierunku poprzecznym, mniejszym niż 2 % dla połowy szerokości pasa ruchu po obu stronach linii środkowej i mniejszym niż 3 % dla zewnętrznej połowy pasa ruchu; |
|
1.6. |
„droga sucha” oznacza drogę o nominalnej szczytowej wartości współczynnika tarcia wynoszącej 0,9; |
|
1.7. |
„układ” oznacza układ sterowania elektronicznego i złożone układy sterowania elektronicznego, które zapewniają lub tworzą część przełożenia sterowania systemu awaryjnego utrzymywania pojazdu na pasie ruchu, w tym połączenia transmisyjne do lub z innych układów pojazdu, które mają wpływ na system awaryjnego utrzymywania pojazdu na pasie ruchu; |
|
1.8. |
„jednostki” oznaczają najmniejsze jednostki podziału elementów układu, jakie są uwzględniane, ponieważ takie kombinacje elementów traktowane są jako samodzielne całości do celów identyfikacji, analizy lub wymiany; |
|
1.9. |
„połączenia transmisyjne” oznaczają wszelkie urządzenia elektryczne, mechaniczne, pneumatyczne lub hydrauliczne wykorzystywane do wzajemnego połączenia rozłożonych przestrzennie jednostek w celu transmisji sygnałów, danych operacyjnych lub zasilania w energię; |
|
1.10. |
„układ sterowania elektronicznego” oznacza połączenie jednostek zaprojektowanych do współtworzenia funkcji sterowania pojazdem poprzez elektroniczne przetwarzanie danych; |
|
1.11. |
„złożony układ sterowania elektronicznego pojazdu” oznacza układ sterowania elektronicznego, w którym funkcja sterowana przez układ elektroniczny lub kierowcę może być zneutralizowana przez układ/funkcję sterowania elektronicznego wyższego poziomu, stając się tym samym częścią złożonego układu, jak również wszelkie elementy nadrzędne systemu, w tym połączenia transmisyjne do i z systemów/funkcji nadrzędnych nieobjętych zakresem niniejszego rozporządzenia; |
|
1.12. |
„strategia sterowania” oznacza strategię mającą zapewnić sprawne i bezpieczne działanie funkcji układu sterowania elektronicznego w odpowiedzi na określony zbiór warunków otoczenia lub warunków eksploatacyjnych (np. stan nawierzchni drogi, natężenie ruchu i obecność innych użytkowników drogi, niesprzyjające warunki pogodowe itp.), która może obejmować automatyczną dezaktywację danej funkcji lub czasowe ograniczenia działania (np. ograniczenie maksymalnej prędkości operacyjnej itp.); |
|
1.13. |
„koncepcja bezpieczeństwa” oznacza opis środków wbudowanych w układ, na przykład w jednostki elektroniczne, których celem jest utrzymanie integralności systemu i zapewnienie jego bezpiecznego działania w warunkach bezawaryjnych i w przypadku wystąpienia awarii, nawet w przypadku wystąpienia awarii elektrycznej. Koncepcja bezpieczeństwa może obejmować możliwość alternatywnego przełączenia na tryb pracy częściowej lub nawet przełączenia na system rezerwowy obsługujący zasadnicze funkcje pojazdu. |
|
2. |
Wymogi ogólne |
|
2.1. |
System awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) obejmuje system ostrzegania przed niezamierzoną zmianą pasa ruchu (LDWS) oraz korekcyjną funkcję sterowania kierunkowego (CDCF). |
|
2.1.1. |
LDWS musi spełniać wymogi określone w pkt 3.1–3.4 i 3.5. |
|
2.1.2. |
CDCF musi spełniać wymogi określone w pkt 3.1–3.4 i 3.6. |
|
2.2. |
Ostrzeżenia i interwencje ELKS dotyczące niezamierzonej zmiany pasa ruchu
Z zastrzeżeniem określonych poniżej wymogów szczegółowych system należy zaprojektować tak, aby zminimalizować ostrzeżenia i interwencje dotyczące manewrów zamierzonych przez kierowcę. |
|
3. |
Wymogi szczegółowe |
|
3.1. |
Ostrzeżenie o awarii ELKS
Zapewnia się sygnał ostrzegający, jeżeli wystąpiła awaria ELKS uniemożliwiająca spełnienie wymagań niniejszego rozporządzenia. |
|
3.1.1. |
Sygnał ostrzegający o awarii musi być ciągłym wzrokowym sygnałem ostrzegającym. |
|
3.1.1.1. |
Między poszczególnymi samokontrolami dokonywanymi przez ELKS nie mogą występować znaczące odstępy czasowe (zintegrowana funkcja, która w sposób ciągły sprawdza awarie systemu, przynajmniej w czasie, gdy system jest włączony) oraz nie może występować opóźnienie w wyświetleniu sygnału ostrzegającego w przypadku wystąpienia awarii wykrywalnej w sposób elektryczny. |
|
3.1.1.2. |
Po wykryciu jakiejkolwiek awarii nieelektrycznej (np. nieprawidłowego ustawienia czujnika), uruchamia się sygnał ostrzegający zdefiniowany w pkt 3.1.1. |
|
3.1.2. |
Jeżeli pojazd jest wyposażony w urządzenie do dezaktywacji ELKS, należy ostrzec, gdy system jest zdezaktywowany zgodnie z pkt 3.2. Musi to być stały wzrokowy sygnał ostrzegający. Określony w pkt 3.1.1 sygnał ostrzegający o awarii może być wykorzystany w tym celu. |
|
3.2. |
Dezaktywacja ELKS |
|
3.2.1. |
Dezaktywacja ręczna
Jeżeli pojazd jest wyposażony w środki umożliwiające ręczną dezaktywację funkcji ELKS, częściowo lub całkowicie, wówczas zastosowanie mają odpowiednio następujące warunki: |
|
3.2.1.1. |
Pełna funkcja ELKS musi być automatycznie i w pełni przywrócona przy każdym uruchomieniu głównego wyłącznika pojazdu. |
|
3.2.1.2. |
Ręczna dezaktywacja pełnego ELKS nie może być możliwa przy mniej niż dwóch zamierzonych czynnościach, np. naciśnięciu i przytrzymywaniu przycisku lub wybraniu i potwierdzeniu w menu. Musi istnieć możliwość łatwego wstrzymania akustycznych sygnałów ostrzegających LDWS, ale takie działanie nie może jednocześnie dezaktywować LDWS ani CDCF. |
|
3.2.1.3. |
Zdolność do ręcznej dezaktywacji należy badać zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 3. |
|
3.2.2. |
Dezaktywacja automatyczna
Jeżeli pojazd jest wyposażony w urządzenie do automatycznej dezaktywacji funkcji ELKS, częściowo lub całkowicie, na przykład w sytuacjach takich jak jazda terenowa, doczepienie przyczepy do pojazdu lub dezaktywacja elektronicznej kontroli stateczności (ESC), zastosowanie mają odpowiednio następujące warunki: |
|
3.2.2.1. |
W ramach audytu bezpieczeństwa producent pojazdu dostarcza wykaz sytuacji i odpowiadających im kryteriów, w których funkcja ELKS jest automatycznie dezaktywowana; wykaz ten załącza się do sprawozdania z badań. |
|
3.2.2.2. |
Funkcja ELKS jest automatycznie i w pełni włączana ponownie, gdy tylko warunki, które doprowadziły do automatycznej dezaktywacji przestają występować. |
|
3.2.3. |
Stały wzrokowy sygnał ostrzegający informuje kierowcę o tym, że funkcja ELKS została dezaktywowana. Do tego celu można zastosować sygnał ostrzegający o awarii, o którym mowa w pkt 3.1.1 powyżej. |
|
3.3. |
Automatyczne zatrzymanie działania |
|
3.3.1. |
W przypadku manewrów zamierzonych przez kierowcę
W ramach audytu bezpieczeństwa producent dostarcza pakiet dokumentacji, który umożliwia dostęp do podstawowego projektu i połączeń logicznych układu na potrzeby wykrywania prawdopodobnych manewrów zamierzonych przez kierowcę oraz automatycznego zatrzymania działania ELKS. Pakiet ten musi zawierać wykaz wykrytych parametrów oraz podstawowy opis metody zastosowanej do podjęcia decyzji o wstrzymaniu działania układu, w tym, w miarę możliwości, wartości dopuszczalnych. Zarówno w przypadku CDCF, jak i LDWS służba techniczna ocenia pakiet dokumentacji w celu wykazania, że niezamierzone manewry kierowcy w granicach pasa ruchu zachowują parametry badania utrzymywania na pasie ruchu (w szczególności prędkość poprzeczna opuszczenia pasa ruchu), nie skutkują automatycznym zatrzymaniem działania systemu. |
|
3.3.2. |
Automatyczne zatrzymanie działania ELKS jest również dozwolone w sytuacjach, gdy inne funkcje wspomagania kierowcy lub automatycznego kierowania (tj. funkcja automatycznie kontrolowanego kierowania, funkcja kierowania w sytuacjach awaryjnych lub automatyczne utrzymanie pasa ruchu) kontrolują ruch poprzeczny pojazdu lub inne funkcje związane z bezpieczeństwem (tzn. posiadające zdolność do zmiany dynamicznego zachowania pojazdu, takie jak AEBS, ESC itp.). Sytuacje takie są zgłaszane przez producenta w ramach audytu bezpieczeństwa. |
|
3.4. |
Przepisy dotyczące okresowych badań zdatności do ruchu drogowego |
|
3.4.1. |
Do celów okresowych badań zdatności do ruchu drogowego pojazdów musi istnieć możliwość weryfikacji następujących cech ELKS:
|
|
3.4.2. |
Podczas homologacji typu należy w sposób poufny określić, w ramach audytu bezpieczeństwa w załączniku II, wybrane przez producenta środki zabezpieczające przed prostą, nieupoważnioną ingerencją w działanie sygnału ostrzegającego o awarii. Ten wymóg dotyczący zabezpieczeń uznaje się za spełniony, jeżeli istnieje dodatkowa metoda umożliwiająca sprawdzenie, czy system ELKS jest dostępny. |
|
3.5. |
Wymogi w zakresie LDWS |
|
3.5.1. |
Przedział prędkości
LDWS działa co najmniej w zakresie prędkości pojazdu od 65 km/h do 130 km/h (lub do maksymalnej prędkości pojazdu, jeżeli jest ona niższa niż 130 km/h) i w każdych warunkach obciążenia pojazdu, chyba że system został ręcznie zdezaktywowany zgodnie z pkt 3.2. |
|
3.5.2. |
Ostrzeganie przed niezamierzoną zmianą pasa ruchu
Gdy LDWS jest włączony i eksploatowany w przewidzianym zakresie prędkości, musi on być w stanie ostrzec kierowcę najpóźniej, jeżeli pojazd przekroczy widoczne oznaczenie pasa ruchu, na którym się porusza, o wartość DTLM większą niż -0,3 m:
Uznaje się, że wymagane wartości parametrów nie mogą być w pełni osiągnięte w warunkach innych niż te wymienione powyżej. System nie może jednak znacząco zmieniać strategii kontroli w tych odmiennych warunkach. Zdolność ostrzegania przed niezamierzoną zmianą pasa ruchu bada się zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 4. |
|
3.5.3. |
Sygnał ostrzegający LDWS |
|
3.5.3.1. |
Ostrzeżenie o niezamierzonej zmianie pasa ruchu, o którym mowa w pkt 3.5.2, musi być zauważalne dla kierowcy oraz mieć postać:
Ostrzeżenie, o którym mowa powyżej, może zostać wstrzymane, jeżeli kierowca podejmie działania wskazujące na to, że zamierza zmienić pas ruchu. |
|
3.5.3.1.1. |
Jeżeli do ostrzegania o niezamierzonej zmianie pasa ruchu stosuje się sygnał wzrokowy, można wykorzystać sygnał ostrzegający o awarii wskazany w pkt 3.1.1 powyżej w trybie migania. |
|
3.5.3.1.2. |
W przypadku wystąpienia interwencji CDCF w celu utrzymania pojazdu na pasie ruchu uznaje się ją za wyczuwalny sygnał ostrzegający zgodnie z pkt 3.5.3.1. |
|
3.5.3.2. |
Wzrokowy sygnał ostrzegający LDWS uruchamia się po włączeniu zasilania głównym wyłącznikiem pojazdu. Wymóg ten nie ma zastosowania do sygnałów ostrzegających wyświetlanych na powierzchni wspólnej. |
|
3.5.3.3. |
Wzrokowe sygnały ostrzegające LDWS muszą być widoczne również w świetle dziennym; kierowca musi być w stanie prawidłowo ocenić stan sygnałów z siedzenia kierowcy. |
|
3.5.3.4. |
Badanie wzrokowego sygnału ostrzegającego należy przeprowadzać zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 4. |
|
3.6. |
Wymogi eksploatacyjne CDCF |
|
3.6.1. |
Przedział prędkości
CDCF musi działać co najmniej w zakresie prędkości od 70 km/h do 130 km/h (lub do maksymalnej prędkości pojazdu, jeżeli jest ona niższa niż 130 km/h) i w każdych warunkach obciążenia pojazdu, chyba że system został zdezaktywowany zgodnie z pkt 3.2. Jednakże w przypadku gdy pojazd zmniejsza prędkość z prędkości powyżej 70 km/h do prędkości poniżej 70 km/h, system musi działać przynajmniej do chwili, gdy prędkość pojazdu zmniejszy się poniżej 65 km/h. |
|
3.6.2. |
Utrzymywanie na pasie ruchu
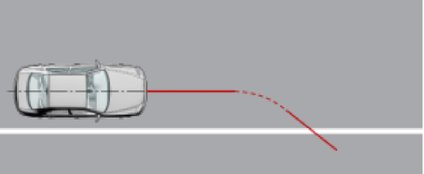
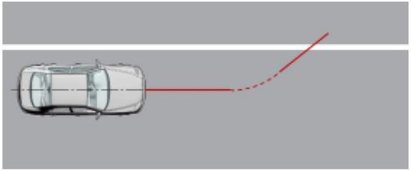
W przypadku braku warunków prowadzących do dezaktywacji lub zatrzymania działania CDCF musi być w stanie zapobiec niezamierzonej zmianie pasa ruchu poprzez przekroczenie widocznych oznaczeń pasa ruchu w scenariuszach przedstawionych w poniższej tabeli o wartość DTLM większą niż -0,3 m:
Uznaje się, że wartości parametrów wymagane dla scenariuszy w niniejszej tabeli nie mogą być w pełni osiągnięte w warunkach innych niż te wymienione powyżej. System nie może jednak znacząco zmieniać strategii kontroli w tych odmiennych warunkach. Wykazuje się to zgodnie z audytem bezpieczeństwa. Zdolność do utrzymywania na pasie ruchu należy badać zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 5. |
|
3.6.3. |
Neutralizacja sterowania |
|
3.6.3.1. |
Siła sterowania niezbędna do neutralizacji sterowania kierunkowego zapewnianego przez układ nie może przekraczać 50 N. Znaczna utrata wspomagania sterowaniem po neutralizacji nie może nastąpić w gwałtowny sposób. |
|
3.6.3.2. |
W przypadku systemów CDCF, które nie oddziałują na sam układ kierowniczy (np. CDCF typu hamowania różnicowego), kąt skrętu nie może przekraczać 25 stopni. |
|
3.6.3.3. |
Siłę sterowania niezbędna do neutralizacji sterowania bada się zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 5. |
|
3.6.4. |
Sygnał ostrzegający CDCF |
|
3.6.4.1. |
Każdą interwencję CDCF należy natychmiast sygnalizować kierowcy za pomocą wzrokowego sygnału ostrzegającego wyświetlanego przez co najmniej 1 sekundę lub przez cały czas trwania interwencji, w zależności od tego, który z tych okresów jest dłuższy. Sygnałem wzrokowym może być migający sygnał ostrzegający o awarii określony w pkt 3.1.1. |
|
3.6.4.1.1. |
W przypadku interwencji trwającej dłużej niż 10 sekund, do czasu zakończenia interwencji musi być wysyłany dźwiękowy sygnał ostrzegający, chyba że nastąpi działanie kierowcy wskazujące na zamiar opuszczenia pasa ruchu. |
|
3.6.4.1.2. |
W przypadku co najmniej dwóch interwencji w ruchomym przedziale czasu wynoszącym 180 sekund i wobec braku siły wywieranej na układ kierowniczy przez kierowcę w czasie tej interwencji układ musi zapewnić dźwiękowy sygnał ostrzegający podczas drugiej i każdej kolejnej interwencji w ruchomym przedziale czasu wynoszącym 180 sekund. Począwszy od trzeciej interwencji (i w czasie kolejnych interwencji) dźwiękowy sygnał ostrzegający trwa co najmniej 10 sekund dłużej niż poprzedni sygnał ostrzegający. |
|
3.6.4.2. |
Wymogi określone w pkt 3.6.4.1.1 i 3.6.4.1.2 bada się zgodnie z odpowiednimi badaniami pojazdu określonymi w pkt 5. |
|
4. |
Wymogi badań dotyczących LDWS |
|
4.1. |
Przepisy ogólne
Pojazdy wyposażone w LDWS muszą spełniać odpowiednie wymogi dotyczące badań zawarte w niniejszym punkcie. |
|
4.2. |
Warunki badania
Badania przeprowadza się:
Według uznania producenta i za zgodą służby technicznej badania mogą być przeprowadzane w warunkach odbiegających od warunków opisanych powyżej (np. w niższych temperaturach otoczenia). |
|
4.2.1. |
Oznaczenia pasa ruchu
Ciągłe i przerywane oznaczenia pasa ruchu na drodze używanej do badań muszą być zgodne z jednym z oznaczeń opisanych w załączniku 3 (Określenie widocznego oznaczenia pasa ruchu) do regulaminu ONZ nr 130. Oznaczenia muszą być w dobrym stanie i być wykonane z materiału spełniającego normę dotyczącą widocznych oznaczeń pasa ruchu. Rozplanowanie oznaczenia pasa ruchu zastosowane w badaniach należy podać w sprawozdaniu z badań. Na potrzeby badań w niniejszym punkcie szerokość pasa ruchu (mierzona pomiędzy oznaczeniami) musi wynosić co najmniej 3,5 m. Producent pojazdu musi wykazać przy pomocy dokumentacji zgodność ze wszystkimi innymi oznaczeniami pasa ruchu wskazanymi w załączniku 3 (Określenie widocznego oznaczenia pasa ruchu) do regulaminu ONZ nr 130. Wszelką tego rodzaju dokumentację należy załączyć do sprawozdania z badań. |
|
4.2.2. |
Warunki dotyczące przedmiotowego pojazdu |
|
4.2.2.1. |
Masa próbna
Przedmiotowy pojazd bada się w warunkach obciążenia uzgodnionych między producentem a służbą techniczną. Po rozpoczęciu procedury badawczej nie można dokonywać zmian obciążenia. Producent pojazdu musi wykazać przy pomocy dokumentacji, że układ działa prawidłowo przy dowolnym obciążeniu. |
|
4.2.2.2. |
Przedmiotowy pojazd należy badać przy zalecanym przez producenta pojazdu ciśnieniu opon. |
|
4.2.2.3. |
W przypadku gdy LDWS jest wyposażony w opcję umożliwiającą określenie progu ostrzegającego przez użytkownika, badania określone w pkt 4.3 przeprowadza się przy progu ostrzegania ustawionym na maksymalny poziom wykrywania niezamierzonej zmiany pasa ruchu. Po rozpoczęciu procedury badań nie można wprowadzać żadnych dodatkowych zmian. |
|
4.2.2.4. |
Przygotowanie pojazdu przed badaniem
Na żądanie producenta pojazd może przejechać maksymalną odległość 100 km składającą się z odcinków dróg na obszarach miejskich i wiejskich z rożnym wyposażeniem komunikacyjnym i drogowym w celu kalibracji systemu czujników. |
|
4.3. |
Procedury badania |
|
4.3.1. |
Badanie sprawdzające skuteczność wzrokowego sygnału ostrzegającego
Należy przeprowadzić kontrolę nieruchomego pojazdu w celu sprawdzenia, czy wzrokowe sygnały ostrzegające spełniają wymagania określone w pkt 3.5.3.2. |
|
4.3.2. |
Badanie ostrzegania przed niezamierzoną zmianą pasa ruchu |
|
4.3.2.1. |
Pojazd należy prowadzić z prędkością 70 km/h +/-3 km/h po środkowej części pasa służącego do badań w sposób płynny, tak aby położenie pojazdu było stabilne.
Utrzymując przewidzianą prędkość, należy delikatnie zmieniać kierunek ruchu pojazdu w lewo lub w prawo przy prędkości poprzecznej opuszczenia pasa ruchu wynoszącej między 0,1 a 0,5 m/s, tak aby pojazd przekroczył oznaczenie pasa ruchu. Badanie należy powtórzyć przy różnej wartości tempa zmiany w zakresie między 0,1 a 0,5 m/s. Należy powtórzyć przedstawione powyżej badania, zmieniając kierunek jazdy na przeciwny. |
|
4.3.2.2. |
Wymogi dotyczące badań są spełnione, jeżeli LDWS zapewnia wskazania ostrzegające przed niezamierzoną zmianą pasa ruchu, o których mowa w pkt 3.5.3.1 powyżej, najpóźniej w momencie, gdy wartość DLTM wynosi -0,3 m. |
|
4.3.2.3. |
Producent pojazdu musi ponadto wykazać w sposób zadowalający służbę techniczną, że spełniono wymogi dla całego zakresu prędkości i zakresu prędkości poprzecznej opuszczenia pasa ruchu. Można tego dokonać na podstawie odpowiedniej dokumentacji dołączonej do sprawozdania z badań. |
|
4.3.3. |
Badanie ręcznej dezaktywacji |
|
4.3.3.1. |
Jeżeli pojazd jest wyposażony w środki ręcznej dezaktywacji ELKS (LDWS), należy przełączyć główny wyłącznik pojazdu do pozycji „PowerON” i dezaktywować ELKS (LDWS). Należy uruchomić sygnał ostrzegający określony w pkt 3.2.3.
Ustawić główny wyłącznik w pozycji „Power OFF”. Należy ustawić główny wyłącznik pojazdu w pozycji „Power ON” i sprawdzić, czy uruchomiony wcześniej sygnał ostrzegający nie uruchomił się ponownie, co oznaczałoby, że ELKS (LDWS) został przywrócony zgodnie z opisem przedstawionym w pkt 3.2.1.1. |
|
5. |
Wymogi dotyczące badań CDCF |
|
5.1. |
Przepisy ogólne
Pojazdy wyposażone w CDCF muszą spełniać odpowiednie wymogi dotyczące badań zawarte w niniejszym punkcie. |
|
5.2. |
Warunki badania
Badania przeprowadza się:
Według uznania producenta i za zgodą służby technicznej badania mogą być przeprowadzane w warunkach odbiegających od warunków opisanych powyżej (np. w niższych temperaturach otoczenia). |
|
5.2.1. |
Oznaczenia pasa ruchu
Oznaczenie pasa ruchu na drodze wykorzystanej do badań musi być zgodne z tym, o którym mowa w załączniku 3 (Określenie widocznego oznaczenia pasa ruchu) do regulaminu ONZ nr 130. Oznaczenia muszą być w dobrym stanie i być wykonane z materiału spełniającego normę dotyczącą widocznych oznaczeń pasa ruchu. Oznaczenia pasa ruchu zastosowane w badaniach należy podać w sprawozdaniu z badań. Do celów badań w tym punkcie oznaczenie pasa ruchu linią ciągłą musi znajdować się w minimalnej odległości 3,5 m od wszelkich innych oznaczeń pasa ruchu. Producent pojazdu musi wykazać przy pomocy dokumentacji zgodność ze wszystkimi innymi ciągłymi oznaczeniami pasa ruchu wskazanymi w załączniku 3 (Określenie widocznego oznaczenia pasa ruchu) do regulaminu ONZ nr 130. Wszelką tego rodzaju dokumentację należy załączyć do sprawozdania z badań. |
|
5.2.2. |
Warunki dotyczące przedmiotowego pojazdu |
|
5.2.2.1. |
Masa próbna
Przedmiotowy pojazd bada się w warunkach obciążenia uzgodnionych między producentem a służbą techniczną. Po rozpoczęciu procedury badawczej nie można dokonywać zmian obciążenia. Producent pojazdu musi wykazać przy pomocy dokumentacji, że układ działa prawidłowo przy dowolnym obciążeniu. |
|
5.2.2.2. |
Przedmiotowy pojazd należy badać przy zalecanym przez producenta pojazdu ciśnieniu opon. |
|
5.2.2.3. |
W przypadku gdy CDCF jest wyposażony w opcję umożliwiającą określenie progu czasowego przez użytkownika, badanie określone w pkt 5.3.3 przeprowadza się przy progu czasowym ustawionym na najpóźniejszy czas interwencji systemu. Po rozpoczęciu procedury badań nie można wprowadzać żadnych dodatkowych zmian. |
|
5.2.2.4. |
Przygotowanie pojazdu przed badaniem
Na żądanie producenta pojazd może przejechać maksymalną odległość 100 km składającą się z odcinków dróg na obszarach miejskich i wiejskich z rożnym wyposażeniem komunikacyjnym i drogowym w celu kalibracji systemu czujników. |
|
5.3. |
Procedury badań |
|
5.3.1. |
Badanie sygnałów ostrzegających |
|
5.3.1.1. |
Przedmiotowy pojazd należy prowadzić z włączoną CDCF na drodze z ciągłymi oznaczeniami pasa ruchu przynajmniej po jednej stronie pasa ruchu.
Warunki badania i prędkość próbna przedmiotowego pojazdu muszą się mieścić w zasięgu działania układu. Podczas badania należy odnotowywać czas trwania interwencji CDCF oraz wzrokowych i dźwiękowych sygnałów ostrzegających. W przypadku, o którym mowa w pkt 3.6.4.1.1 przedmiotowy pojazd należy prowadzić w taki sposób, aby podjąć próbę opuszczenia pasa ruchu i spowodować utrzymanie interwencji CDCF przez okres ponad 10 sekund. Jeżeli takiego badania nie można właściwie przeprowadzić, np. ze względu na ograniczenia urządzeń badawczych, za zgodą organu udzielającego homologacji typu wymóg ten można spełnić przy użyciu dokumentacji. Wymogi dotyczące badań są spełnione, jeżeli ostrzeżenie dźwiękowe ma miejsce nie później niż 10 sekund po rozpoczęciu interwencji. W przypadku, o którym mowa w pkt 3.6.4.1.2, przedmiotowy pojazd należy prowadzić w taki sposób, aby podjąć próbę opuszczenia pasa ruchu i spowodować co najmniej trzy interwencje układu w ruchomym przedziale czasu wynoszącym 180 sekund. Wymogi badania są spełnione, jeżeli spełnione są wszystkie następujące warunki:
|
|
5.3.1.2. |
Ponadto producent musi wykazać w sposób zadowalający służbę techniczną, że dla całego zakresu działania CDCF spełniono wymogi określone w pkt 3.6.4.1.1 i 3.6.4.1.2. Można tego dokonać na podstawie odpowiedniej dokumentacji dołączonej do sprawozdania z badań. |
|
5.3.2. |
Badanie neutralizacji sterowania |
|
5.3.2.1. |
Przedmiotowy pojazd należy prowadzić z włączoną CDCF po drodze z ciągłymi oznaczeniami pasa ruchu po każdej stronie pasa ruchu.
Warunki badania i prędkość próbna przedmiotowego pojazdu muszą się mieścić w zasięgu działania układu. Pojazd należy prowadzić w taki sposób, aby podjąć próbę opuszczenia pasa ruchu i spowodować interwencję CDCF. Podczas interwencji kierowca stosuje siłę sterowania w celu neutralizacji interwencji. Należy odnotować siłę i kąt skrętu zastosowane przez kierowcę w stosunku do kierownicy w celu neutralizacji interwencji. Wymogi badań zostają spełnione, gdy:
|
|
5.3.2.2. |
Ponadto producent musi wykazać w sposób zadowalający służbę techniczną, że dla całego zakresu działania CDCF spełniono wymogi określone w pkt 3.6.4. Można tego dokonać na podstawie odpowiedniej dokumentacji dołączonej do sprawozdania z badań. |
|
5.3.3. |
Badanie utrzymywania na pasie ruchu |
|
5.3.3.1. |
CDCF bada się dla scenariuszy badań nr 1 i 2 opisanych w pkt 3.6.2. |
|
5.3.3.1.1. |
Badania dla wszystkich scenariuszy przeprowadza się przy prędkościach poprzecznych wynoszących 0,2 m/s i 0,5 m/s. |
|
5.3.3.1.2. |
Należy pokonać tor badawczy, który składa się z początkowego odcinka prostego równoległego do badanego ciągłego oznaczenia pasa ruchu, po którym następuje łuk o stałym promieniu w celu zastosowania znanej prędkości poprzecznej i odchylenia do przedmiotowego pojazdu, po którym następuje odcinek prosty, na którym nie przykłada się do kierownicy żadnej siły (np. poprzez zdjęcie dłoni z kierownicy).
|

|
5.3.3.1.3. |
Prędkość przedmiotowego pojazdu podczas badania aż do punktu, w którym następuje interwencja systemu wynosi 72 km/h ± 1 km/h.
Łuk o stałym promieniu pokonywany w celu zastosowania wymaganej prędkości bocznej musi mieć promień co najmniej 1 200 m. Wymaganą prędkość poprzeczną należy osiągnąć z tolerancją ± 0,05 m/s. Producent pojazdu dostarcza informacje opisujące promień łuku, który ma być pokonany, oraz miejsce, w którym znajduje się koniec zamkniętego toru lub należy zakończyć sterowanie prędkością, tak aby zapewnić swobodną jazdę, by nie zakłócać automatycznego zatrzymania działania zgodnie z pkt 3.3.1. |
|
5.3.3.2. |
Wymogi dotyczące badań są spełnione, jeżeli przedmiotowy pojazd nie przekracza oznaczenia pasa ruchu o wielkość DTLM wynoszącą więcej niż -0,3 m. |
|
5.3.3.3. |
Producent pojazdu musi ponadto wykazać w sposób zadowalający służbę techniczną, że spełniono wymogi dla całego zakresu prędkości i zakresu prędkości poprzecznej opuszczenia pasa ruchu. Można tego dokonać na podstawie odpowiedniej dokumentacji dołączonej do sprawozdania z badań. |
CZĘŚĆ 3
ŚWIADECTWO HOMOLOGACJI TYPU UE (UKŁAD POJAZDU)
Zawiadomienie dotyczące udzielenia/rozszerzenia/odmowy/cofnięcia (4) homologacji typu pojazdu w odniesieniu do jego systemu awaryjnego utrzymywania pojazdu na pasie ruchu zgodnie z wymogami określonymi w rozporządzeniu wykonawczym Komisji (UE) 2021/646 (5), ostatnio zmienionym rozporządzeniem (UE) 2021/646
Numer świadectwa homologacji typu UE:
Powód rozszerzenia/odmowy/cofnięcia (1):
SEKCJA I
|
0.1. |
Marka (nazwa handlowa producenta): |
|
0.2. |
Typ: |
|
0.2.1. |
Nazwa(-y) handlowa(-e) (o ile występuje(-ą)): |
|
0.3. |
Sposób identyfikacji typu, jeżeli oznaczono na pojeździe: |
|
0.3.1. |
Umiejscowienie tego oznakowania: |
|
0.4. |
Kategoria pojazdu: |
|
0.5. |
Nazwa i adres producenta: |
|
0.8. |
Nazwy i adresy zakładów montażowych: |
|
0.9. |
Nazwa i adres przedstawiciela producenta (w stosownych przypadkach): |
SEKCJA II
|
1. |
Informacje dodatkowe (jeżeli dotyczy): zob. uzupełnienie. |
|
2. |
Służba techniczna odpowiedzialna za przeprowadzenie badań: |
|
3. |
Data sprawozdania z badań: |
|
4. |
Numer sprawozdania z badań: |
|
5. |
Ewentualne uwagi: zob. uzupełnienie. |
|
6. |
Miejscowość: |
|
7. |
Data: |
|
8. |
Podpis: |
(1) Dyrektywa Parlamentu Europejskiego i Rady 2014/45/UE z dnia 3 kwietnia 2014 r. w sprawie okresowych badań zdatności do ruchu drogowego pojazdów silnikowych i ich przyczep oraz uchylająca dyrektywę 2009/40/WE (Dz.U. L 127 z 29.4.2014, s. 51).
(2) Rozporządzenie wykonawcze Komisji (UE) 2019/621 z dnia 17 kwietnia 2019 r. w sprawie informacji technicznych niezbędnych do badania zdatności do ruchu drogowego elementów podlegających badaniu, w sprawie stosowania zalecanych metod badań oraz ustanawiające szczegółowe przepisy dotyczące formatu danych i procedur dostępu do odpowiednich informacji technicznych (Dz.U. L 108 z 23.4.2019, s. 5).
(3) Dz.U. L 178 z 18.6.2014, s. 29.
(4) Niepotrzebne skreślić.
(5) Rozporządzenie wykonawcze Komisji (UE) 2021/646 z dnia 19 kwietnia 2021 r. ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych w zakresie homologacji typu pojazdów silnikowych w odniesieniu do ich systemów awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) (Dz.U. L 133 z 20.4.2021, s. 31).
Uzupełnienie
do świadectwa homologacji typu UE nr …
1.
Informacje dodatkowe
1.1.
Opis układu
1.2.
Środki ręcznej dezaktywacji ELKS
1.3.
Opis automatycznej dezaktywacji (jeżeli zainstalowano):
1.4.
Opis automatycznego zatrzymania działania (jeżeli zainstalowano):
1.5.
System ostrzegania przed niezamierzoną zmianą pasa ruchu (LDWS)
1.5.1
Zakres prędkości, w którym działa LDWS
1.5.2.
Opis techniczny lub rysunek techniczny LDWS
1.6.
Korekcyjna funkcja sterowania kierunkowego (CDCF)
1.6.1
Zakres prędkości CDCF
1.6.2.
Opis układu (w szczególności jeżeli układ wykorzystuje układ kierowniczy lub hamujący)
ZAŁĄCZNIK II
AUDYT BEZPIECZEŃSTWA
|
1. |
Przepisy ogólne |
|
1.1. |
W niniejszym załączniku określa się wymogi specjalne dotyczące dokumentacji, strategii postępowania w przypadku uszkodzenia oraz weryfikacji w odniesieniu do aspektów bezpieczeństwa złożonych układów elektronicznego sterowania pojazdów systemu awaryjnego utrzymywania pojazdu na pasie ruchu. |
|
1.1.1. |
Układy elektronicznego sterowania sterowane są zazwyczaj za pomocą oprogramowania i są zbudowane z oddzielnych komponentów funkcyjnych, takich jak czujniki, elektroniczne moduły sterujące i urządzenia uruchamiające, oraz połączone za pomocą połączeń transmisyjnych. W skład takich układów mogą wchodzić elementy mechaniczne, elektropneumatyczne lub elektrohydrauliczne. |
|
1.2. |
Niniejszy załącznik nie określa kryteriów eksploatacyjnych dla „układu” objętego niniejszym rozporządzeniem, natomiast obejmuje metodologię stosowaną w procesie projektowania oraz informacje, które należy udostępnić służbie technicznej do celów homologacji typu. |
|
1.3. |
Dane te wykazują, że „układ” spełnia, w warunkach bezawaryjnych i w przypadku wystąpienia awarii, wszystkie odpowiednie wymagania dotyczące osiągów określone w części 2 załącznika I, oraz że zaprojektowano go w taki sposób, aby jego działanie nie stwarzało krytycznego ryzyka dla bezpieczeństwa. |
|
2. |
Dokumentacja |
|
2.1. |
Wymogi
Producent przedkłada pakiet dokumentacji zapewniający dostęp do danych na temat podstawowej budowy „układu” oraz sposobu, w jaki jest on połączony z innymi układami pojazdu lub w jaki bezpośrednio steruje zmiennymi wyjściowymi. Należy objaśnić funkcje „układu”, w tym strategie sterowania, i koncepcję bezpieczeństwa określone przez producenta. Dokumentacja musi być zwięzła, ale jednocześnie musi przestawiać dowody na to, że przy projektowaniu i opracowaniu „układu” wykorzystano wiedzę fachową dotyczącą wszystkich jego obszarów. Do celów okresowych badań zdatności do ruchu drogowego w dokumentacji należy opisać, jak można sprawdzić aktualny status operacyjny „układu”. Służba techniczna musi ocenić pakiet dokumentacji, aby wykazać, że „układ”:
|
|
2.1.1. |
Dokumentacja dostępna jest w dwóch częściach:
|
|
2.2. |
Należy przedstawić opis zawierający proste objaśnienie wszystkich funkcji, z uwzględnieniem strategii sterowania „układu” oraz metod używanych do osiągnięcia tych celów, w tym określenie mechanizmów, za pomocą których realizowane jest sterowanie.
Należy określić każdą funkcję, którą można zneutralizować, oraz podać dalszy opis zmienionego uzasadnienia działania funkcji. |
|
2.2.1. |
Należy dostarczyć wykaz wszystkich zmiennych wejściowych i zmiennych z czujników oraz określić zakres roboczy tych zmiennych wraz z opisem tego, w jaki sposób każda zmienna wpływa na zachowanie systemu. |
|
2.2.2. |
Należy przedstawić wykaz wszystkich zmiennych wyjściowych sterowanych przez „układ” oraz w każdym przypadku określić, czy sterowanie odbywa się bezpośrednio, czy poprzez inny układ pojazdu. Należy określić zakres, w którym „układ” może sprawować kontrolę nad każdą zmienną wyjściową. |
|
2.2.3. |
W stosownych przypadkach należy określić limity wyznaczające granice funkcjonalnego działania (tj. zewnętrzne granice fizyczne, w których „układ” jest w stanie utrzymać kontrolę), jeżeli ma to znaczenie dla działania „układu”. |
|
2.3. |
Rozplanowanie i schematy „układu”. |
|
2.3.1. |
Spis komponentów
Należy przedstawić zestawienie wszystkich jednostek „układu” wraz z określeniem innych układów pojazdu, które są niezbędne do realizacji danej funkcji sterowania. Należy dostarczyć ogólny schemat kombinacji wspomnianych jednostek, pokazujący w sposób czytelny rozplanowanie urządzeń oraz ich wzajemne połączenia. |
|
2.3.2. |
Funkcje jednostek
Należy określić funkcję każdej jednostki „układu” oraz sygnały łączące daną jednostkę z innymi jednostkami lub innymi układami pojazdu. Można do tego celu wykorzystać opisany schemat blokowy, inny rodzaj schematu lub opis z takim schematem pomocniczym. |
|
2.3.3. |
Wzajemne połączenia w „układzie” należy przedstawić za pomocą schematu zasadniczego elektrycznych połączeń transmisyjnych, schematu instalacji rurowej w przypadku pneumatycznych lub hydraulicznych urządzeń transmisyjnych oraz uproszczonego rozplanowania schematycznego połączeń mechanicznych. Należy również przedstawić połączenia transmisyjne prowadzące z i do innych układów. |
|
2.3.4. |
Połączenia transmisyjne muszą ściśle odpowiadać sygnałom przekazywanym pomiędzy jednostkami. Należy określić pierwszeństwo sygnałów na wielowarstwowych ścieżkach danych, jeżeli takie pierwszeństwo może mieć znaczenie dla działania lub bezpieczeństwa. |
|
2.3.5. |
Identyfikacja jednostek
Musi być możliwa wyraźna i jednoznaczna identyfikacja każdej jednostki (np. za pomocą oznaczeń na sprzęcie oraz oznaczeń lub danych wyjściowych w przypadku zawartości oprogramowania), w celu przyporządkowania odpowiadającego jej sprzętu i dokumentacji. Jeżeli w ramach jednej jednostki lub w jednym komputerze połączono kilka funkcji, które na schemacie blokowym przedstawione są w oddzielnych blokach, aby schemat był przejrzysty i łatwo zrozumiały, stosuje się pojedyncze oznaczenie identyfikacyjne sprzętu. Poprzez zastosowanie wspomnianego oznaczenia identyfikacyjnego producent potwierdza, że dostarczone wyposażenie jest zgodne z odpowiednim dokumentem. |
|
2.3.5.1. |
Identyfikacja określa wersję sprzętową i wersję oprogramowania; jeżeli wersja oprogramowania ulegnie zmianie w sposób zmieniający funkcję jednostki w zakresie objętym niniejszym rozporządzeniem, to należy również zmienić identyfikację. |
|
2.4. |
Koncepcja bezpieczeństwa producenta |
|
2.4.1. |
Producent składa oświadczenie potwierdzające, że w warunkach bezawaryjnych strategia obrana w celu wypełnienia zadań „układu” nie będzie miała negatywnego wpływu na bezpieczne działanie pojazdu. |
|
2.4.2. |
W odniesieniu do oprogramowania zastosowanego w „układzie” należy objaśnić ogólną architekturę oprogramowania i określić zastosowane metody i narzędzia projektowe. Producent musi być w stanie udowodnić sposoby użyte do określenia realizacji logiki układu podczas procesu projektowania i opracowywania. |
|
2.4.3. |
Producent przedstawia służbie technicznej objaśnienia dotyczące zabezpieczeń projektowych wbudowanych w „układ” i mających na celu zapewnienie bezpiecznego działania w warunkach awarii. Przykładowe rozwiązania projektowe na wypadek awarii w „układzie” obejmują na przykład:
W przypadku wystąpienia awarii kierowca otrzymuje ostrzeżenie na przykład w postaci sygnału ostrzegającego lub komunikatu na wyświetlaczu. Jeżeli kierowca nie zdezaktywuje układu, na przykład poprzez wyłączenie zapłonu lub wyłączenie danej funkcji za pomocą przewidzianego do tego celu specjalnego przełącznika, jeżeli taki występuje, to ostrzeżenie pozostaje widoczne przez cały czas trwania awarii. |
|
2.4.3.1. |
Jeżeli wybrana forma zabezpieczenia powoduje przełączenie na tryb pracy częściowej w pewnych warunkach awarii, to należy określić te warunki oraz wynikające z nich limity skuteczności. |
|
2.4.3.2. |
Jeżeli wybrana forma zabezpieczenia powoduje przełączenie na drugi (rezerwowy) sposób realizacji zadań układu sterowania pojazdu, to należy objaśnić reguły mechanizmu przełączania, logikę i stopień nadmiarowości oraz ewentualne wbudowane rezerwowe funkcje sprawdzające, a także określić wynikające z powyższego limity skuteczności układu rezerwowego. |
|
2.4.3.3. |
Jeżeli wybrane rozwiązanie powoduje usunięcie funkcji sterowania elektronicznego wyższego poziomu, wówczas wszystkie odpowiednie wyjściowe sygnały sterowania związane z tą funkcją zostają wstrzymane w sposób pozwalający na zminimalizowanie zakłóceń przejściowych. |
|
2.4.4. |
Dokumentację należy poprzeć analizą przedstawiającą ogólnie zachowanie układu w przypadku wystąpienia dowolnego z tych zagrożeń lub uszkodzeń, które mają wpływ na działanie lub bezpieczeństwo sterowania pojazdu.
Producent ustala i utrzymuje wybraną przez siebie metodę lub metody analityczne i udostępnia je do wglądu służbom technicznym podczas udzielania homologacji typu. Służba techniczna dokonuje oceny stosowania podejścia lub podejść analitycznych. Taka ocena obejmuje:
Ocena obejmuje wyrywkowe kontrole wybranych zagrożeń i usterek mające na celu ustalenie, czy argumenty na poparcie koncepcji bezpieczeństwa są zrozumiałe i logiczne, a plany walidacji są odpowiednie i kompletne. Służba techniczna może przeprowadzić badania lub wymagać ich przeprowadzenia zgodnie z pkt 3 w celu weryfikacji koncepcji bezpieczeństwa. |
|
2.4.4.1. |
Wspomniana dokumentacja zawiera wykaz monitorowanych parametrów oraz określa, dla każdego warunku awarii należącego do typu, o którym mowa w pkt 2.4.4, sygnał ostrzegający otrzymywany przez kierowcę lub przez personel serwisowy/wykonujący badanie techniczne. |
|
2.4.4.2. |
We wspomnianej dokumentacji należy opisać wprowadzone środki zapewniające, aby „układ” nie wpływał negatywnie na bezpieczne użytkowanie pojazdu, gdy na działanie „układu” oddziałują warunki środowiskowe, np. klimat, temperatura, wnikanie pyłu, wnikanie wody lub oblodzenie. |
|
3. |
Weryfikacja i badanie |
|
3.1. |
Funkcjonalne działanie „układu”, jak określono w dokumentach wymaganych na podstawie pkt 2, sprawdza się w następujący sposób: |
|
3.1.1. |
Weryfikacja funkcji „układu”
Służba techniczna sprawdza „układ” w warunkach bezawaryjnych, badając szereg funkcji wybranych spośród tych opisanych przez producenta zgodnie z pkt 2.2. Dla skomplikowanych układów elektronicznych badania te muszą obejmować scenariusze, w których neutralizuje się zadeklarowaną funkcję. |
|
3.1.1.1. |
Wyniki weryfikacji muszą odpowiadać opisowi, w tym strategiom kontroli, przedstawionym przez producenta w pkt 2.2. |
|
3.1.2. |
Weryfikacja koncepcji bezpieczeństwa, o której mowa w pkt 2.4
Należy sprawdzić reakcję „układu” pod wpływem wystąpienia uszkodzenia w dowolnej indywidualnej jednostce, poprzez przyłożenie odpowiednich sygnałów wyjściowych do jednostek elektrycznych lub elementów mechanicznych w celu symulacji skutków awarii wewnętrznych w obrębie jednostki. Służba techniczna przeprowadza taką kontrolę względem co najmniej jednej jednostki, ale nie sprawdza reakcji „układu” na różne, jednoczesne uszkodzenia pojedynczych jednostek. Służba techniczna sprawdza, czy badania te obejmują aspekty, które mogą mieć wpływ na możliwość sterowania pojazdem i informacje dla użytkownika (aspekty HMI). |
|
4. |
Sprawozdawczość służby technicznej
Sprawozdania służby technicznej z oceny należy sporządzić w taki sposób, aby umożliwić identyfikowalność, np. nadając kody wersjom kontrolowanych dokumentów i wymieniając je w rejestrach służby technicznej. Przykład możliwego układu formularza oceny przekazanego przez służbę techniczną organowi udzielającemu homologacji typu podano w dodatku. |
Dodatek
Wzór formularza oceny ELKS
Numer sprawozdania z badania:
|
1. |
Oznakowanie |
|
1.1. |
Marka pojazdu: |
|
1.2. |
Typ |
|
1.3. |
Oznaczenie identyfikacyjne typu, jeżeli jest umieszczone na pojeździe: |
|
1.4. |
Umiejscowienie tego oznakowania: |
|
1.5. |
Nazwa i adres producenta: |
|
1.6. |
Nazwa i adres przedstawiciela producenta (w stosownych przypadkach): |
|
1.7. |
Pakiet dokumentacji formalnej producenta:
Numer referencyjny dokumentacji: Data pierwotnego wydania: Data ostatniej aktualizacji: |
|
2. |
Opis badanego pojazdu lub pojazdów/układu lub układów |
|
2.1. |
Opis ogólny: |
|
2.2. |
Opis wszystkich funkcji sterowania „układu” i metod działania: |
|
2.3. |
Opis komponentów i schematów połączeń w obrębie „układu”: |
|
2.4. |
Opis ogólny: |
|
2.5. |
Opis wszystkich funkcji sterowania „układu” i metod działania: |
|
2.6. |
Opis komponentów i schematów połączeń w obrębie „układu”: |
|
3. |
Koncepcja bezpieczeństwa producenta |
|
3.1. |
Opis przepływu sygnału i danych operacyjnych oraz ich pierwszeństwo: |
|
3.2. |
Oświadczenie producenta:
Producent lub producenci … potwierdza lub potwierdzają, że w warunkach bezawaryjnych strategia obrana w celu wypełnienia zadań „układu” nie będzie miała negatywnego wpływu na bezpieczne używanie pojazdu. |
|
3.3. |
Ogólna architektura oprogramowania oraz zastosowane metody i narzędzia projektowania: |
|
3.4. |
Objaśnienia dotyczące zabezpieczeń projektowych wbudowanych w „układ” w warunkach awarii: |
|
3.5. |
Udokumentowane analizy zachowania „układu” w warunkach indywidualnego zagrożenia lub awarii: |
|
3.6. |
Opis środków stosowanych w odniesieniu do warunków środowiskowych: |
|
3.7. |
Przepisy dotyczące okresowego badania zdatności do ruchu drogowego „układu”: |
|
3.8. |
Wyniki badania weryfikacyjnego „układu”, o którym mowa w pkt 3.1.1 załącznika II do rozporządzenia wykonawczego Komisji (UE) 2021/646 (1). |
|
3.9. |
Wyniki badania weryfikacyjnego koncepcji bezpieczeństwa, o którym mowa w pkt 3.1.2 załącznika II do rozporządzenia wykonawczego (UE) 2021/646. |
|
3.10. |
Data badania: |
|
3.11. |
Badanie to wykonano i wyniki zapisano zgodnie rozporządzeniem wykonawczym (UE) 2021/646, ostatnio zmienionym rozporządzeniem (UE) 2021/646
Służba techniczna przeprowadzająca badanie Podpisano: … Data: … |
|
3.12. |
Uwagi: |
(1) Rozporządzenie wykonawcze Komisji (UE) 2021/646 z dnia 19 kwietnia 2021 r. ustanawiające zasady stosowania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2019/2144 w odniesieniu do jednolitych procedur i specyfikacji technicznych w zakresie homologacji typu pojazdów silnikowych w odniesieniu do ich systemów awaryjnego utrzymywania pojazdu na pasie ruchu (ELKS) (Dz.U. L 133 z 20.4.2021, s. 31).