

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32017R0079
Commission Delegated Regulation (EU) 2017/79 of 12 September 2016 establishing detailed technical requirements and test procedures for the EC type-approval of motor vehicles with respect to their 112-based eCall in-vehicles systems, of 112-based eCall in-vehicle separate technical units and components and supplementing and amending Regulation (EU) 2015/758 of the European Parliament and of the Council with regard to the exemptions and applicable standards (Text with EEA relevance. )
Rozporządzenie delegowane Komisji (UE) 2017/79 z dnia 12 września 2016 r. ustanawiające szczegółowe wymogi techniczne i procedury badań w zakresie homologacji typu WE pojazdów silnikowych w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112, pokładowych oddzielnych zespołów technicznych i komponentów opartych na numerze 112 eCall oraz uzupełniające i zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2015/758 w odniesieniu do wyłączeń i mających zastosowanie norm (Tekst mający znaczenie dla EOG. )
Rozporządzenie delegowane Komisji (UE) 2017/79 z dnia 12 września 2016 r. ustanawiające szczegółowe wymogi techniczne i procedury badań w zakresie homologacji typu WE pojazdów silnikowych w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112, pokładowych oddzielnych zespołów technicznych i komponentów opartych na numerze 112 eCall oraz uzupełniające i zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2015/758 w odniesieniu do wyłączeń i mających zastosowanie norm (Tekst mający znaczenie dla EOG. )
C/2016/5709
OJ L 12, 17.1.2017, p. 44–85
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
17.1.2017 |
PL |
Dziennik Urzędowy Unii Europejskiej |
L 12/44 |
ROZPORZĄDZENIE DELEGOWANE KOMISJI (UE) 2017/79
z dnia 12 września 2016 r.
ustanawiające szczegółowe wymogi techniczne i procedury badań w zakresie homologacji typu WE pojazdów silnikowych w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112, pokładowych oddzielnych zespołów technicznych i komponentów opartych na numerze 112 eCall oraz uzupełniające i zmieniające rozporządzenie Parlamentu Europejskiego i Rady (UE) 2015/758 w odniesieniu do wyłączeń i mających zastosowanie norm
(Tekst mający znaczenie dla EOG)
KOMISJA EUROPEJSKA,
uwzględniając Traktat o funkcjonowaniu Unii Europejskiej,
uwzględniając rozporządzenie Parlamentu Europejskiego i Rady (UE) 2015/758 z dnia 29 kwietnia 2015 r. w sprawie wymagań dotyczących homologacji typu na potrzeby wdrożenia systemu pokładowego eCall opartego na numerze alarmowym 112 oraz zmiany dyrektywy 2007/46/WE (1), w szczególności jego art. 2 ust. 2, art. 5 ust. 8 i 9 oraz art. 6 ust. 12,
a także mając na uwadze, co następuje:
|
(1) |
Rozporządzenie (UE) 2015/758 wprowadza od dnia 31 marca 2018 r. ogólny obowiązek wyposażania nowych typów pojazdów kategorii M1 i N1 w systemy pokładowe eCall oparte na numerze 112. |
|
(2) |
Konieczne jest określenie szczegółowych wymogów technicznych i procedur badań dotyczących homologacji pojazdów silnikowych w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112. Procedury badań pozwalają również na badanie i homologację pokładowych oddzielnych zespołów technicznych i komponentów opartych na numerze 112, przeznaczonych do zamontowania w pojazdach silnikowych lub do połączenia z systemami pokładowymi eCall opartymi na numerze 112. |
|
(3) |
Badania powinny być prowadzone przez służby techniczne w ich roli przewidzianej w dyrektywie 2007/46/WE Parlamentu Europejskiego i Rady (2), która określa ogólne ramy homologacji typu WE pojazdów silnikowych oraz role i obowiązki wszystkich zainteresowanych podmiotów na różnych etapach procedury homologacji. |
|
(4) |
Badania i wymogi powinny być zaprojektowane w taki sposób, aby unikać powielania badań. Ponadto wymagana jest pewna elastyczność w odniesieniu do pojazdów specjalnego przeznaczenia, które powstają w wielu etapach zgodnie z dyrektywą 2007/46/WE, ponieważ są one zwolnione z wymogów dotyczących zderzenia czołowego i bocznego określonych w regulaminach EKG ONZ nr 94 i 95. W związku z tym homologacja przyznana na wcześniejszym etapie procedury pojazdowi podstawowemu w odniesieniu do systemu pokładowego eCall opartego na numerze 112 powinna nadal obowiązywać, chyba że system lub jego czujniki zostały zmodyfikowane po udzieleniu homologacji. |
|
(5) |
Istnieją przypadki, w których niektóre klasy pojazdów nie mogą z przyczyn technicznych być wyposażone w odpowiedni mechanizm inicjowania systemu eCall i powinny one zostać zwolnione z wymogów rozporządzenia (UE) 2015/758. Po dokonaniu oceny kosztów i korzyści przeprowadzonej przez Komisję i z uwzględnieniem odpowiednich aspektów technicznych i bezpieczeństwa określono te klasy pojazdów i ujęto je w wykazie w załączniku IX. |
|
(6) |
System pokładowy eCall oparty na numerze 112 powinien nadal działać po poważnym wypadku. Automatyczny system eCall jest najkorzystniejszy w przypadku poważnej kolizji, w której istnieje duże ryzyko, że osoby przebywające w pojeździe nie będą mogły wezwać pomocy inaczej niż przez system eCall. Należy zatem poddawać badaniom systemy pokładowe eCall oparte na numerze 112, oddzielne zespoły techniczne i komponenty, tak aby sprawdzić ich funkcjonalność po poddaniu ich obciążeniom statycznym podobnym do tych, jakie mogą wystąpić podczas poważnej kolizji pojazdu. |
|
(7) |
Funkcjonowanie pokładowego systemu eCall opartego na numerze 112 i jego automatyczne inicjowanie po wypadku powinno być również zapewnione na poziomie pojazdu. Należy zatem określić procedurę badania dla pełnego badania zderzeniowego, tak aby sprawdzić, czy pojazd jest skonstruowany w taki sposób, że system pokładowy eCall oparty na numerze 112 jest odporny na zderzenie czołowe i boczne w swoim pierwotnym położeniu i konfiguracji. |
|
(8) |
Podstawową funkcją systemu pokładowego eCall opartego na numerze 112 jest nie tylko powiadamianie publicznego punktu przyjmowania zgłoszeń o wypadkach (PSAP), ale również zapewnienie połączenia głosowego między osobami przebywającymi w pojeździe a operatorem PSAP. Sprzęt dźwiękowy systemu pokładowego eCall opartego na numerze 112 powinien zatem być poddany badaniom w ramach pełnego badania zderzeniowego, tak aby potwierdzić, że nie pojawiają się obniżenie głośności ani zakłócenia, które uniemożliwiałyby połączenia głosowe. |
|
(9) |
Jeżeli system pokładowy eCall oparty na numerze 112 jest homologowany do użytku w połączeniu z systemem usług stron trzecich („systemem TPS”), należy zapewnić, aby tylko jeden z tych systemów był aktywny w danym czasie oraz aby system pokładowy eCall oparty na numerze 112 uruchamiał się automatycznie, jeżeli system TPS nie działa. Producent pojazdów wyposażonych w system pokładowy eCall oparty na numerze 112 oraz w system TPS powinien wyjaśnić procedurę awaryjną wbudowaną w system TPS i opisać zasady przejścia pomiędzy systemem TPS a systemem pokładowym eCall opartym na numerze 112. |
|
(10) |
Aby zapewnić rzetelne i wiarygodne dane o lokalizacji, system pokładowy eCall oparty na numerze 112 powinien mieć możliwość korzystania z usług określania pozycji w systemach Galileo i EGNOS. |
|
(11) |
System pokładowy eCall oparty na numerze 112 powinien ostrzegać osoby przebywające w pojeździe, jeżeli system nie jest w stanie realizować połączeń alarmowych. Należy zatem określić procedurę weryfikacji samodiagnostyki systemu i jego zgodności z wymogami dotyczącymi wskazywania nieprawidłowości w działaniu. |
|
(12) |
Producenci powinni zapewnić, by systemy pokładowe eCall oparte na numerze 112 nie były identyfikowalne i nie były stale śledzone. W tym celu należy określić procedurę badania w celu sprawdzenia, czy system pokładowy eCall oparty na numerze 112 nie jest dostępny do komunikacji z PSAP przed zainicjowaniem zgłoszenia eCall. |
|
(13) |
Wszelkie dane przetworzone przez system pokładowy eCall oparty na numerze 112 muszą być odpowiednie, właściwe i proporcjonalne do celów, do których dane te są gromadzone i przetwarzane. W tym celu należy określić właściwe procedury, aby sprawdzić, czy dane w pamięci wewnętrznej systemu są automatycznie i nieprzerwanie usuwane oraz czy nie są przechowywane dłużej niż jest to konieczne na potrzeby obsługi zgłoszenia alarmowego. |
|
(14) |
Należy zaktualizować wersje obowiązujących norm, na których oparte są wymogi usługi eCall. |
|
(15) |
Producenci pojazdów powinni mieć wystarczająco dużo czasu na dostosowanie się do wymogów technicznych dotyczących homologacji systemów pokładowych eCall opartych na numerze 112. Państwa członkowskie powinny również dysponować wystarczającym czasem, aby wdrożyć na swoim terytorium infrastrukturę PSAP niezbędną do prawidłowego przyjmowania i obsługi zgłoszeń alarmowych. W związku z powyższym data rozpoczęcia stosowania niniejszego rozporządzenia powinna być taka sama jak data obowiązkowego stosowania systemów pokładowych eCall opartych na numerze 112 zgodnie z rozporządzeniem (UE) 2015/758, |
PRZYJMUJE NINIEJSZE ROZPORZĄDZENIE:
Artykuł 1
Przedmiot
Niniejsze rozporządzenie określa szczegółowe wymogi techniczne i procedury badań w zakresie homologacji typu WE pojazdów, o których mowa w art. 2 rozporządzenia (UE) 2015/758, w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112 oraz pokładowych oddzielnych zespołów technicznych i komponentów opartych na numerze 112.
Artykuł 2
Klasy pojazdów zwolnionych z wymogu montowania pokładowego systemu eCall opartego na numerze 112
Załącznik IX zawiera wykaz klas pojazdów, które ze względów technicznych nie mogą być wyposażone w odpowiedni mechanizm inicjowania systemu eCall, w związku z czym są zwolnione z wymogu montowania systemu pokładowego eCall opartego na numerze 112.
Artykuł 3
Homologacja wielostopniowa pojazdów specjalnego przeznaczenia
W przypadku wielostopniowej homologacji typu pojazdów specjalnego przeznaczenia zdefiniowanych w pkt 5.1 i 5.5 części A załącznika II do dyrektywy 2007/46/WE homologacja typu udzielona na poprzednim etapie w odniesieniu do montażu systemu pokładowego eCall opartego na numerze 112 w pojeździe podstawowym zachowuje ważność, pod warunkiem że system pokładowy eCall oparty na numerze 112 oraz odpowiednie czujniki nie zostały poddane modyfikacjom.
Artykuł 4
Definicje
Do celów niniejszego rozporządzenia stosuje się następujące definicje:
|
1) |
„typ pojazdu w odniesieniu do montażu systemu pokładowego eCall opartego na numerze 112” oznacza pojazdy silnikowe, które nie różnią się między sobą pod takimi zasadniczymi względami jak właściwości zamontowania w obrębie pojazdu oraz funkcjonalność i możliwości podstawowych urządzeń obsługujących pokładowe zgłoszenia alarmowe; |
|
2) |
„typ pokładowego oddzielnego zespołu technicznego eCall opartego na numerze 112” oznacza połączenia konkretnych urządzeń, które po ich zamontowaniu w pojeździe silnikowym nie różnią się między sobą pod takimi zasadniczymi względami jak właściwości, funkcjonalność i możliwości obsługi pokładowego zgłoszenia alarmowego; |
|
3) |
„typ komponentu systemu pokładowego eCall opartego na numerze 112” oznacza konkretne urządzenia, które po ich zamontowaniu w pokładowym oddzielnym zespole technicznym eCall opartym na numerze 112 lub w systemie pokładowym eCall opartym na numerze 112 nie różnią się między sobą pod takimi zasadniczymi względami jak właściwości, funkcjonalność i możliwości pełnienia roli w obsłudze pokładowego zgłoszenia alarmowego; |
|
4) |
„reprezentatywny układ części” oznacza wszystkie części wymagane w systemie pokładowym eCall opartym na numerze 112 do skutecznego wypełnienia pokładowego zgłoszenia alarmowego minimalnym zakresem danych i transmisji tego minimalnego zakresu danych, o którym mowa w normie EN 15722:2015 „Inteligentne systemy transportowe – e-bezpieczeństwo – Minimalny zakres danych systemu eCall”, w tym moduł sterujący, źródło zasilania, moduł łączności sieci bezprzewodowej, odbiornik globalnego systemu nawigacji satelitarnej, zewnętrzna antena globalnego systemu nawigacji satelitarnej oraz ich złącza i okablowanie; |
|
5) |
„moduł sterujący” oznacza komponent systemu pokładowego eCall zaprojektowany do zapewniania współdziałania wszystkich modułów, komponentów i funkcji systemu; |
|
6) |
„źródło zasilania” oznacza komponent zapewniający zasilanie systemu pokładowego eCall opartego na numerze 112, w tym ewentualne zapasowe źródło zasilania, który zasila system po badaniu, o którym mowa w pkt 2.3 załącznika I; |
|
7) |
„plik logu eCall” oznacza każdy rekord wygenerowany w momencie automatycznego lub ręcznego uruchomienia systemu „eCall”, który jest przechowywany w pamięci wewnętrznej systemu pokładowego eCall opartego na numerze 112 i składa się tylko z minimalnego zakresu danych; |
|
8) |
„globalny system nawigacji satelitarnej” („GNSS”) oznacza infrastrukturę konstelacji satelitów oraz sieci stacji naziemnych, która zapewnia użytkownikom dysponującym odpowiednim odbiornikiem dokładne informacje o czasie i geolokalizacji; |
|
9) |
„system wspomagający oparty na wyposażeniu satelitarnym” („SBAS”) oznacza regionalny system nawigacji satelitarnej służący monitorowaniu i korygowaniu sygnałów emitowanych przez istniejące globalne systemy nawigacji satelitarnej, zapewniający użytkownikom lepsze wyniki pod względem dokładności i integralności; |
|
10) |
„tryb zimnego rozruchu” oznacza stan odbiornika GNSS, w którym dane o położeniu, prędkości, czasie, almanachu i efemerydach nie są zapisane w odbiorniku, w związku z czym nawigacja musi być obliczona na podstawie pełnego wyszukiwania w przestrzeni; |
|
11) |
„aktualna lokalizacja” oznacza ostatnie znane położenie pojazdu określone w najpóźniejszym możliwym momencie przed wygenerowaniem minimalnego zakresu danych. |
Artykuł 5
Wymogi i procedury badań dotyczące homologacji typu WE pojazdów silnikowych w odniesieniu do montażu systemów pokładowych eCall opartych na numerze 112
1. Homologacja typu WE pojazdu w odniesieniu do montażu systemu pokładowego eCall opartego na numerze 112 jest uzależniona od pozytywnego wyniku pojazdu i jego systemu w badaniach określonych w załącznikach I–VIII oraz spełnienia przez pojazd i jego system odpowiednich wymogów określonych w tych załącznikach.
2. Jeżeli pojazd silnikowy jest wyposażony w typ pokładowego oddzielnego zespołu technicznego eCall opartego na numerze 112, który uzyskał homologację zgodnie z art. 7, pojazd i jego system muszą uzyskać pozytywny wynik w badaniach określonych w załącznikach II, III i V oraz spełniać wszystkie odpowiednie wymogi określone w tych załącznikach.
3. Jeżeli system pokładowy eCall oparty na numerze 112 w pojeździe silnikowym składa się z jednego lub większej liczby komponentów, które uzyskały homologację zgodnie z art. 6, pojazd i jego system muszą uzyskać pozytywny wynik w badaniach określonych w załącznikach I–VIII oraz spełniać wszystkie odpowiednie wymogi określone w tych załącznikach. Ocena zgodności systemu z tymi wymogami może jednak częściowo opierać się na wynikach badań, o których mowa w art. 6 ust. 3.
Artykuł 6
Wymogi i procedury badań dotyczące homologacji typu WE komponentów systemów pokładowych eCall opartych na numerze 112
1. Homologacja typu WE komponentu systemu pokładowego eCall opartego na numerze 112 jest uzależniona od pozytywnego wyniku komponentu w badaniach określonych w załączniku I oraz spełnienia przez komponent odpowiednich wymogów określonych w tym załączniku.
2. Do celów ust. 1 po poddaniu poszczególnych części badaniu, o którym mowa w pkt 2.3 załącznika I, stosuje się tylko procedurę weryfikacji komponentów określoną w pkt 2.8 tego załącznika.
3. Na wniosek producenta komponent może być dodatkowo poddany przez służbę techniczną badaniu na zgodność z wymogami określonymi w załącznikach IV, VI i VII, które mają znaczenie dla funkcjonalności komponentu. Zgodność z tymi wymogami wskazuje się w świadectwie homologacji typu wydanym zgodnie z art. 3 ust. 3 rozporządzenia wykonawczego Komisji (UE) 2017/78 (3).
Artykuł 7
Wymogi i procedury badań dotyczące homologacji typu WE pokładowych oddzielnych zespołów technicznych eCall opartych na numerze 112
1. Homologacja typu WE pokładowego oddzielnego zespołu technicznego eCall opartego na numerze 112 jest uzależniona od pozytywnego wyniku oddzielnego zespołu technicznego w badaniach określonych w załącznikach I, IV, VI, VII i VIII oraz spełnienia przez oddzielny zespół techniczny odpowiednich wymogów określonych w tych załącznikach.
2. Jeżeli pokładowy oddzielny zespół techniczny eCall oparty na numerze 112 składa się z jednego lub większej liczby komponentów, które uzyskały homologację zgodnie z art. 6, oddzielny zespół techniczny musi uzyskać pozytywny wynik w badaniach określonych w załącznikach I, IV, VI, VII i VIII oraz spełniać wszystkie odpowiednie wymogi określone w tych załącznikach. Ocena zgodności oddzielnego zespołu technicznego z tymi wymogami może jednak częściowo opierać się na wynikach badania, o którym mowa w art. 6 ust. 3.
Artykuł 8
Obowiązki państw członkowskich
Państwa członkowskie odmawiają udzielenia homologacji typu WE nowym typom pojazdów silnikowych, które nie spełniają wymogów określonych w niniejszym rozporządzeniu.
Artykuł 9
Zmiany w rozporządzeniu (UE) 2015/758
Art. 5 ust. 8 akapit drugi rozporządzenia (UE) 2015/758 otrzymuje brzmienie:
„Wymagania techniczne i badania, o których mowa w akapicie pierwszym, są oparte na wymaganiach określonych w ust. 2–7 oraz na dostępnych normach odnoszących się do eCall, stosownie do przypadku, w tym:
|
a) |
EN 16072:2015 »Inteligentne systemy transportowe – e-bezpieczeństwo – Wymagania operacyjne dla ogólnoeuropejskiego systemu eCall«; |
|
b) |
EN 16062:2015 »Inteligentne systemy transportowe – e-bezpieczeństwo – Wymagania wysokiego poziomu dla aplikacji (HLAR) eCall«; |
|
c) |
EN 16454:2015 »Inteligentne systemy transportowe – e-bezpieczeństwo – Kompleksowe badanie zgodności eCall«; |
|
d) |
EN 15722:2015 »Inteligentne systemy transportowe – e-bezpieczeństwo – Minimalny zakres danych systemu eCall«; |
|
e) |
EN 16102:2011 »Inteligentne systemy transportowe – eCall – Wymagania eksploatacyjne dotyczące usługi dostarczanej przez stronę trzecią«; |
|
f) |
wszelkich dodatkowych normach europejskich odnoszących się do systemu eCall przyjętych zgodnie z procedurami określonymi w rozporządzeniu Parlamentu Europejskiego i Rady (UE) nr 1025/2012 (*1) lub regulaminów Europejskiej Komisji Gospodarczej Organizacji Narodów Zjednoczonych (regulaminy EKG ONZ) dotyczących systemów eCall, do których Unia przystąpiła. |
Artykuł 10
Wejście w życie i stosowanie
Niniejsze rozporządzenie wchodzi w życie dwudziestego dnia po jego opublikowaniu w Dzienniku Urzędowym Unii Europejskiej.
Niniejsze rozporządzenie stosuje się od dnia 31 marca 2018 r.
Niniejsze rozporządzenie wiąże w całości i jest bezpośrednio stosowane we wszystkich państwach członkowskich.
Sporządzono w Brukseli dnia 12 września 2016 r.
W imieniu Komisji
Jean-Claude JUNCKER
Przewodniczący
(1) Dz.U. L 123 z 19.5.2015, s. 77.
(2) Dyrektywa 2007/46/WE Parlamentu Europejskiego i Rady z dnia 5 września 2007 r. ustanawiająca ramy dla homologacji pojazdów silnikowych i ich przyczep oraz układów, części i oddzielnych zespołów technicznych przeznaczonych do tych pojazdów (dyrektywa ramowa) (Dz.U. L 263 z 9.10.2007, s. 1).
(3) Rozporządzenie wykonawcze Komisji (UE) 2017/78 z dnia 15 lipca 2016 r. określające przepisy administracyjne dotyczące homologacji typu WE pojazdów silnikowych w odniesieniu do ich systemów pokładowych eCall opartych na numerze 112 oraz jednolite warunki wykonania rozporządzenia Parlamentu Europejskiego i Rady (UE) 2015/758 w odniesieniu do ochrony prywatności i danych użytkowników tych systemów (zob. s. 26 niniejszego Dziennika Urzędowego).
SPIS TREŚCI
| ZAŁĄCZNIK I – Wymagania techniczne i procedury badania odporności systemów pokładowych eCall na poważne zderzenia (badanie opóźnienia w przypadku poważnego zderzenia) | 51 |
| ZAŁĄCZNIK II – Pełna ocena badań zderzeniowych | 58 |
| ZAŁĄCZNIK III – Odporność urządzeń dźwiękowych na zderzenia | 60 |
| ZAŁĄCZNIK IV – Współistnienie systemu pokładowego eCall opartego na usługach stron trzecich (TPS) i systemu pokładowego eCall opartego na numerze 112 | 65 |
| ZAŁĄCZNIK V – Mechanizm automatycznego inicjowania | 67 |
| ZAŁĄCZNIK VI – Wymagania techniczne dotyczące zgodności systemów pokładowych eCall z usługami pozycjonowania w systemach Galileo i EGNOS | 68 |
| ZAŁĄCZNIK VII – Samodiagnostyka pokładowa | 80 |
| ZAŁĄCZNIK VIII – Wymagania techniczne i procedury badania w odniesieniu do prywatności i ochrony danych | 82 |
| ZAŁĄCZNIK IX – Klasy pojazdów, o których mowa w art. 2 | 86 |
ZAŁĄCZNIK I
Wymagania techniczne i procedury badania odporności systemów pokładowych eCall na poważne zderzenia (badanie opóźnienia w przypadku poważnego zderzenia)
1. Wymagania
1.1. Wymagania dotyczące osiągów
1.1.1. Badanie opóźnienia w przypadku poważnego zderzenia przeprowadzane zgodnie z pkt 2 na systemach pokładowych eCall, pokładowych oddzielnych zespołach technicznych eCall i komponentach eCall uznaje się za zadowalające, jeżeli zostanie wykazane, iż następujące wymagania zostały spełnione po zdarzeniu opóźnienia/przyspieszenia.
1.1.2. Emisja i kodowanie MSD: system eCall lub reprezentatywny układ są w stanie skutecznie przekazać MSD do punktu kontrolnego PSAP.
1.1.3. Określenie czasu zdarzenia: system eCall lub reprezentatywny układ są w stanie określić aktualny znacznik czasu dla zdarzenia eCall.
1.1.4. Określanie położenia: system eCall lub reprezentatywny układ są w stanie dokładnie określić aktualną lokalizację pojazdu.
1.1.5. Łączność z siecią telefonii ruchomej: system eCall lub reprezentatywny układ są w stanie połączyć się z siecią telefonii ruchomej i przekazać dane za jej pośrednictwem.
2. Procedura badania
2.1. Cel procedury badania opóźnienia w przypadku poważnego zderzenia
Celem tego badania jest sprawdzenie funkcjonalności systemu eCall opartego na numerze 112 po poddaniu go obciążeniom statycznym, jakie mogą wystąpić podczas poważnej kolizji pojazdu.
2.2. Następujące badania przeprowadza się na reprezentatywnym układzie części (bez nadwozia pojazdu).
2.2.1. Reprezentatywny układ obejmuje wszystkie części wymagane przez system eCall do skutecznego wypełnienia i przekazania MSD w zgłoszeniu eCall.
2.2.2. Obejmuje to moduł sterujący oraz źródło zasilania, a także wszelkie inne części wymagane do przeprowadzenia badania eCall.
2.2.3. Obejmuje to zewnętrzną antenę łączności ruchomej.
2.2.4. Wiązkę przewodów można odwzorować samymi odpowiednimi złączami (podłączonymi do badanych komponentów) oraz długością przewodu. O długości wiązki przewodów i jej ostatecznym umocowaniu może zadecydować producent w porozumieniu ze służbą techniczną, o której mowa w art. 3 pkt 31 dyrektywy 2007/46/WE, tak aby były reprezentatywne dla innych konfiguracji instalacji systemu eCall.
2.3. Procedura opóźnienia/przyspieszenia
2.3.1. Zastosowanie mają następujące warunki:
|
a) |
badanie przeprowadza się w temperaturze otoczenia 20 ± 10 oC; |
|
b) |
na początku badania ładuje się zasilacz do poziomu pozwalającego na przeprowadzenie późniejszych badań weryfikacyjnych. |
2.3.2. Badane części podłącza się do urządzeń badawczych za pomocą specjalnych uchwytów mocujących przeznaczonych do zamocowania ich w pojeździe. Jeżeli specjalne uchwyty mocujące zasilacz są celowo zaprojektowane tak, aby zwolnić źródło zasilania w momencie uderzenia, nie uwzględnia się ich w badaniu. Służba techniczna sprawdza, czy tego typu zwolnienie w przypadku zaistnienia poważnego zderzenia w rzeczywistych warunkach nie pogorszy funkcjonalności systemu (np. nie spowoduje odłączenia od źródła zasilania).
2.3.3. Jeżeli stosowane są dodatkowe wsporniki lub elementy jako część urządzenia opóźniającego/przyspieszającego, muszą one zapewniać wystarczająco sztywne połączenie z urządzeniem opóźniającym/przyspieszającym, aby nie wpływały na wynik badania.
2.3.4. System eCall opóźnia się lub przyspiesza zgodnie z korytarzem impulsu określonym w tabeli oraz na wykresie. Przyspieszenie/opóźnienie mierzy się w sztywnej części urządzenia opóźniającego/przyspieszającego oraz filtruje przez filtr CFC-60.
2.3.5. Impuls probierczy musi się mieścić w zakresie wartości minimalnych i maksymalnych określonych w tabeli. Maksymalna zmiana prędkości ΔV wynosi 70 km/h [+ 0/-2 km/h]. Jeżeli jednak badanie, za zgodą producenta, przeprowadzono przy wyższym poziomie przyspieszenia lub opóźnienia, wyższa wartość ΔV lub dłuższy okres trwania badania uznaje się za zadowalające.
2.3.6. Części, o których mowa pkt 2.2, bada się w najmniej korzystnej konfiguracji. Ich pozycja i orientacja na wózku odpowiadają zaleceniom producenta dotyczącym montażu oraz są wskazane w świadectwie homologacji typu wydanym na podstawie rozporządzenia wykonawczego Komisji (UE) 2017/78.
2.3.7. Opis impulsu probierczego
Wykres
Minimalna i maksymalna krzywa impulsu probierczego (korytarz impulsu)

Tabela
Wartości przyspieszenia/opóźnienia dla minimalnej i maksymalnej krzywej impulsu probierczego
|
Punkt |
Czas (m/s) |
Przyspieszenie/opóźnienie (g) |
|
A |
10 |
0 |
|
B |
34 |
65 |
|
C |
38 |
65 |
|
D |
46 |
0 |
|
E |
0 |
16 |
|
F |
25 |
77 |
|
G |
47 |
77 |
|
H |
60 |
0 |
2.4. Procedura weryfikacji
2.4.1. Należy sprawdzić, czy żadne złącza przewodów nie zostały odłączone w trakcie zdarzenia.
2.4.2. Wymagania dotyczące osiągów weryfikuje się, wykonując zgłoszenie testowe z wykorzystaniem źródła zasilania poddanego badaniu opóźnienia w przypadku poważnego zderzenia.
2.4.3. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
system eCall otrzymuje (rzeczywiste lub symulowane) sygnały GNSS w stopniu reprezentatywnym dla warunków na wolnym powietrzu; |
|
b) |
system eCall był zasilany wystarczająco długo, aby osiągnąć ustaloną lokalizację GNSS; |
|
c) |
jedna z procedur połączenia określonych w pkt 2.7, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
d) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
e) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
f) |
w stosowanych przypadkach system TPS zostanie dezaktywowany lub automatycznie przełączy się na system oparty na numerze 112. |
2.4.4. Należy wykonać zgłoszenie testowe (tryb „push”) poprzez zainicjowanie zgodnie z instrukcjami producenta.
2.4.5. Należy sprawdzić każdy z następujących elementów:
|
a) |
Należy sprawdzić, czy punkt kontrolny PSAP otrzymał MSD. Weryfikuje się to za pomocą rekordu punktu kontrolnego PSAP potwierdzającego, że MSD wyemitowany z systemu eCall w wyniku zainicjowania został odebrany i pomyślnie dekodowany. Jeżeli dekodowanie MSD nie powiodło się w wersji z redundancją MSD rv0, lecz nastąpiło pomyślnie w wyższej wersji z redundancją lub w stabilnym trybie modulatora, jak określono w ETSI/TS 126 267, jest to dopuszczalne. |
|
b) |
Należy sprawdzić, czy MSD zawierał aktualny znacznik czasu. Weryfikuje się to za pomocą rekordu testowego potwierdzającego, że znacznik czasu zawarty w MSD otrzymanym przez punkt kontrolny PSAP nie odbiega od dokładnego zarejestrowanego czasu inicjacji o więcej niż 60 sekund. Transmisja może zostać powtórzona, jeżeli system eCall nie osiągnął ustalonej lokalizacji GNSS przed badaniem. |
|
c) |
Należy sprawdzić, czy MSD zawierał dokładne dane o aktualnej lokalizacji. Weryfikuje się to zgodnie z procedurą badania lokalizacji pojazdu, jak określono w pkt 2.5, za pomocą rekordu testowego potwierdzającego, że różnica między lokalizacją IVS a lokalizacją rzeczywistą, d_IVS, wynosi mniej niż 150 metrów, a bit ufności przekazany do punktu kontrolnego PSAP wskazuje, że „lokalizacja jest wiarygodna”. |
2.4.6. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.5. Procedura badania pozycjonowania
2.5.1. Należy zweryfikować funkcjonalność komponentów GNSS poprzez porównanie informacji o lokalizacji odbieranych i wysyłanych przez system.
2.5.2. „Lokalizacja IVS” (φIVS, λIVS) to: lokalizacja zawarta w MSD przekazanym do punktu kontrolnego PSAP w warunkach, w których antena GNSS znajduje się na wolnym powietrzu (rzeczywistych lub symulowanych).
2.5.3. „Lokalizacja rzeczywista” (φtrue, λtrue) to:
|
a) |
faktyczna lokalizacja anteny GNSS (znana lokalizacja lub określona w inny sposób niż poprzez system eCall) przy zastosowaniu rzeczywistych sygnałów GNSS; lub |
|
b) |
lokalizacja symulowana przy zastosowaniu symulowanych sygnałów GNSS. |
2.5.4. Różnicę między lokalizacją IVS a lokalizacją rzeczywistą, dIVS, należy obliczyć się, stosując następujące równania:
|
|
Δφ = φIVS – φtrue |
|
|
Δλ = λIVS – λtrue |
|
|
|

|
|
|

gdzie:
Δφ: Różnica w szerokości geograficznej (w radianach)
Δλ: Różnica w długości geograficznej (w radianach)
Uwaga: ; 1 mas = 4,8481368 · 10– 9 rad
; 1 mas = 4,8481368 · 10– 9 rad
φm : Średnia szerokość geograficzna (w jednostce odpowiedniej dla obliczenia cosinusa)
R: Promień Ziemi (średni) = 6 371 009 metrów
2.5.5. Procedura badania pozycjonowania może zostać powtórzona, jeżeli system eCall nie osiągnął ustalonej lokalizacji GNSS przed badaniem.
2.6. Procedura badania anteny
2.6.1. Jeżeli w procedurze połączenia zastosowanej przy zgłoszeniu testowym nie wykorzystano bezprzewodowej transmisji danych, należy zweryfikować funkcjonalność anteny sieci telefonii ruchomej, sprawdzając stan nastrojenia anteny po nastąpieniu zdarzenia opóźniającego zgodnie z poniższą procedurą.
2.6.2. Należy zmierzyć współczynnik fali stojącej,, zewnętrznej anteny sieci telefonii ruchomej po nastąpieniu zdarzenia opóźniającego przy częstotliwości w obrębie określonego pasma częstotliwości anteny.
2.6.2.1. Pomiar należy wykonać za pomocą miernika mocy, analizatora antenowego lub miernika fali w jak najmniejszej odległości od punktu zasilania anteny.
2.6.2.2. Jeżeli stosuje się miernik mocy, oblicza się za pomocą następującego równania:

gdzie:
Pf : Obliczona moc wyjściowa
Pr : Obliczona moc zwrotna/odbita
2.6.3. Należy sprawdzić, czy odpowiada specyfikacjom zalecanym przez producenta dla nowych anten.
2.7. Procedury połączenia
2.7.1. Procedura w przypadku symulowanej sieci telefonii ruchomej
2.7.1.1. Należy zapewnić bezprzewodowe wykonanie zgłoszenia TS12 wyemitowanego przez system oparty na numerze 112 za pośrednictwem niepublicznej (tj. symulowanej) sieci telefonii ruchomej i skierowanie do dedykowanego punktu kontrolnego PSAP.
2.7.1.2. Funkcję dedykowanego punktu kontrolnego PSAP podczas procedur badania pełni symulator PSAP pod kontrolą służby technicznej, zgodny z obowiązującymi normami EN oraz certyfikowany zgodnie z EN 16454. Jest on wyposażony w interfejs dźwiękowy, aby umożliwić badania połączenia głosowego.
2.7.1.3. W stosownych przypadkach należy zapewnić wykonanie zgłoszenia TS11 wyemitowanego przez system TPS bezprzewodowo za pośrednictwem niepublicznej (tj. symulowanej) sieci telefonii ruchomej i skierowanie do punktu kontrolnego TPSP.
2.7.1.4. Punkt kontrolny TPSP jest dedykowanym symulatorem punktu przyjmowania zgłoszeń TPSP pozostającym pod kontrolą służby technicznej lub faktycznym punktem przyjmowania zgłoszeń TPSP (wymagane jest uzyskanie pozwolenia od TPSP).
2.7.1.5. Dla tej procedury zalecany jest zasięg sieci telefonii ruchomej wynoszący co najmniej – 99 dBm lub równoważny.
2.7.2. Procedura w przypadku publicznej sieci telefonii ruchomej
2.7.2.1. Należy zapewnić wyemitowanie zgłoszenia TS11 pod długi numer przez system oparty na numerze 112 (zamiast zgłoszenia TS12), jego bezprzewodowe wykonanie za pośrednictwem sieci telefonii ruchomej i skierowanie do dedykowanego punktu kontrolnego PSAP.
2.7.2.2. Funkcję dedykowanego punktu kontrolnego PSAP podczas procedur badania pełni symulator PSAP pod kontrolą służby technicznej, zgodny z obowiązującymi normami EN oraz certyfikowany zgodnie z EN 16454. Jest on wyposażony w interfejs dźwiękowy, aby umożliwić badania połączenia głosowego.
2.7.2.3. W stosownych przypadkach należy zapewnić wykonanie zgłoszenia TS11 wyemitowanego przez system TPS bezprzewodowo za pośrednictwem publicznej sieci telefonii ruchomej i skierowanie do punktu kontrolnego TPSP.
2.7.2.4. Punkt kontrolny TPSP jest dedykowanym symulatorem punktu przyjmowania zgłoszeń TPSP pozostającym pod kontrolą służby technicznej lub faktycznym punktem przyjmowania zgłoszeń TPSP (wymagane jest uzyskanie pozwolenia od TPSP).
2.7.2.5. Dla tej procedury zalecany jest zasięg sieci telefonii ruchomej wynoszący co najmniej – 99 dBm lub równoważny.
2.7.3. Procedura w przypadku transmisji przewodowej
2.7.3.1. Należy zapewnić wykonanie zgłoszenia TS12 wyemitowanego przez system oparty na numerze 112 wyłącznie za pośrednictwem połączenia przewodowego (z pominięciem jakiejkolwiek anteny sieci telefonii ruchomej) i skierowanie do dedykowanego punktu kontrolnego PSAP.
2.7.3.2. Funkcję dedykowanego punktu kontrolnego PSAP podczas procedur badania pełni symulator PSAP pod kontrolą służby technicznej, zgodny z obowiązującymi normami EN oraz certyfikowany zgodnie z EN 16454. Jest on wyposażony w interfejs dźwiękowy, aby umożliwić badania połączenia głosowego.
2.7.3.3. W stosownych przypadkach należy zapewnić wykonanie zgłoszenia TS11 wyemitowanego przez system TPS za pośrednictwem połączenia przewodowego (z pominięciem jakiejkolwiek anteny sieci telefonii ruchomej) i skierowanie do dedykowanego punktu kontrolnego TPSP.
2.7.3.4. Punkt kontrolny TPSP jest dedykowanym symulatorem punktu przyjmowania zgłoszeń TPSP pozostającym pod kontrolą służby technicznej lub faktycznym punktem przyjmowania zgłoszeń TPSP (wymagane jest uzyskanie pozwolenia od TPSP).
2.8. Procedura weryfikacji komponentów
2.8.1. Procedury te mają zastosowanie do celów homologacji typu komponentu systemu pokładowego eCall opartego na numerze 112 zgodnie z art. 5 niniejszego rozporządzenia.
2.8.1.1. Procedury te mają zastosowanie po tym, jak poszczególne części zostaną poddane badaniu opóźnienia zgodnie z pkt 2.3 niniejszego załącznika.
2.8.2. Moduł sterujący, w tym jego złącza i wiązka przewodów, jak określono w pkt 2.2.4 niniejszego załącznika.
2.8.2.1. Należy sprawdzić, czy żadne złącza przewodów nie zostały odłączone w trakcie zdarzenia.
2.8.2.2. Wymagania dotyczące osiągów weryfikuje się, wykonując zgłoszenie testowe.
2.8.2.3. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
system eCall otrzymuje (rzeczywiste lub symulowane) sygnały GNSS w stopniu reprezentatywnym dla warunków na wolnym powietrzu; |
|
b) |
system eCall był zasilany wystarczająco długo, aby osiągnąć ustaloną lokalizację GNSS; |
|
c) |
jedna z procedur połączenia określonych w pkt 2.7, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
d) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
e) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
f) |
w stosowanych przypadkach system TPS zostanie dezaktywowany lub automatycznie przełączy się na system oparty na numerze 112. |
2.8.2.4. Należy wykonać zgłoszenie testowe (tryb „push”) poprzez zainicjowanie zgodnie z instrukcjami producenta.
2.8.2.5. Należy sprawdzić każdy z następujących elementów:
|
a) |
Należy sprawdzić, czy punkt kontrolny PSAP otrzymał MSD. Weryfikuje się to za pomocą rekordu punktu kontrolnego PSAP potwierdzającego, że MSD wyemitowany z systemu eCall w wyniku zainicjowania został odebrany i pomyślnie dekodowany. Jeżeli dekodowanie MSD nie powiodło się w wersji z redundancją MSD rv0, lecz nastąpiło pomyślnie w wyższej wersji z redundancją lub w stabilnym trybie modulatora, jak określono w ETSI/TS 126 267, jest to dopuszczalne. |
|
b) |
Należy sprawdzić, czy MSD zawierał aktualny znacznik czasu. Weryfikuje się to za pomocą rekordu testowego potwierdzającego, że znacznik czasu zawarty w MSD otrzymanym przez punkt kontrolny PSAP nie odbiega od dokładnego zarejestrowanego czasu inicjacji o więcej niż 60 sekund. Transmisja może zostać powtórzona, jeżeli system eCall nie osiągnął ustalonej lokalizacji GNSS przed badaniem. |
|
c) |
Należy sprawdzić, czy MSD zawierał dokładne dane o aktualnej lokalizacji. Weryfikuje się to zgodnie z procedurą badania lokalizacji pojazdu, jak określono w pkt 2.5, za pomocą rekordu testowego potwierdzającego, że różnica między lokalizacją IVS a lokalizacją rzeczywistą, dIVS, wynosi mniej niż 150 metrów, a bit ufności przekazany do punktu kontrolnego PSAP wskazuje, że „lokalizacja jest wiarygodna”. |
2.8.2.6. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.8.3. Antena sieci telefonii ruchomej, w tym jej złącza i wiązka przewodów, jak określono w pkt 2.2.4 niniejszego załącznika.
2.8.3.1. Należy sprawdzić, czy żadne złącza przewodów nie zostały odłączone w trakcie zdarzenia.
2.8.3.2. Należy zmierzyć współczynnik fali stojącej, VSWR, zewnętrznej anteny sieci telefonii ruchomej po nastąpieniu zdarzenia opóźniającego przy częstotliwości w obrębie określonego pasma częstotliwości anteny.
2.8.3.3. Pomiar należy wykonać za pomocą miernika mocy, analizatora antenowego lub miernika fali w jak najmniejszej odległości od punktu zasilania anteny.
2.8.3.4. Jeżeli stosuje się miernik mocy, VSWR oblicza się za pomocą następującego równania:
gdzie:
Pf : Obliczona moc wyjściowa
Pr : Obliczona moc zwrotna/odbita
2.8.3.5. Należy sprawdzić, czy VSWR odpowiada specyfikacjom zaleconym przez producenta dla nowych anten.
2.8.4. Zasilacz (jeżeli nie jest częścią modułu sterującego), w tym jego złącza i wiązka przewodów, jak określono w pkt 2.2.4 niniejszego załącznika.
2.8.4.1. Należy sprawdzić, czy żadne złącza przewodów nie zostały odłączone w trakcie zdarzenia.
2.8.4.2. Należy zmierzyć, czy napięcie odpowiada specyfikacji producenta.
ZAŁĄCZNIK II
Pełna ocena badań zderzeniowych
1. Wymagania
1.1. Wymagania dotyczące osiągów
1.1.1. Pełna ocena badań zderzeniowych pojazdów z zainstalowanymi systemami pokładowymi eCall, przeprowadzona zgodnie z punktem 2, jest uznawana za satysfakcjonującą, jeżeli zostanie wykazane, iż następujące wymagania zostały spełnione po zderzeniu.
1.1.2. Automatyczne inicjowanie: System eCall automatycznie zainicjuje zgłoszenie eCall po nastąpieniu zderzenia odpowiednio zgodnie z regulaminem nr 94 EKG ONZ (załącznik 3) oraz z regulaminem EKG ONZ nr 95 (załącznik 4).
1.1.3. Wskazanie statusu zgłoszenia: System eCall informuje osoby znajdujące się w pojeździe o obecnym statusie zgłoszenia eCall (wskaźnik statusu) za pośrednictwem sygnału wzrokowego lub dźwiękowego.
1.1.4. Emisja i kodowanie MSD: System eCall jest w stanie skutecznie przekazać MSD do punktu kontrolnego PSAP za pośrednictwem sieci telefonii ruchomej.
1.1.5. Określanie danych dotyczących konkretnego pojazdu: System eCall jest w stanie dokładnie wypełnić obowiązkowe pola dotyczące danych konkretnego pojazdu w MSD.
1.1.6. Określanie położenia: System eCall jest w stanie dokładnie określić aktualną lokalizację pojazdu.
2. Procedura badania
2.1. Cel procedury pełnego badania zderzeniowego
Celem tego badania jest sprawdzenie funkcji automatycznego inicjowania i funkcjonalności systemu pokładowego eCall opartego na numerze 112 w pojazdach poddanych zderzeniu czołowemu lub zderzeniu bocznemu.
2.2. Następujące badania przeprowadza się na pojeździe z zainstalowanym systemem pokładowym eCall.
2.3. Procedura badania zderzeniowego
2.3.1. Badania zderzeniowe należy przeprowadzić zgodnie z badaniami zdefiniowanymi odpowiednio w załączniku 3 do regulaminu nr 94 EKG ONZ w odniesieniu do zderzeń czołowych oraz w załączniku 4 do regulaminu EKG ONZ nr 95 w odniesieniu do zderzeń bocznych.
2.3.2. Stosuje się warunki badania zdefiniowane w regulaminie nr 94 EKG ONZ lub w regulaminie nr 95.
2.3.3. Przed wykonaniem badania zderzeniowego należy upewnić się, że:
|
a) |
pokładowe źródło zasilania, jeżeli zostało zainstalowane na potrzeby badania, ładuje się na początku badania zgodnie ze specyfikacjami podanymi przez producenta, co pozwala na przeprowadzenie późniejszych badań weryfikacyjnych; |
|
b) |
automatyczny system eCall jest włączony i uzbrojony oraz że zapłon lub główny wyłącznik pojazdu jest włączony; |
|
c) |
jedna z procedur połączenia określonych w pkt 2.7, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
d) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
e) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
f) |
w stosowanych przypadkach system TPS zostanie dezaktywowany lub automatycznie przełączy się na system oparty na numerze 112. |
2.4. Procedura weryfikacji
2.4.1. Wymagania dotyczące osiągów weryfikuje się, wykonując zgłoszenie testowe z pojazdu po nastąpieniu zderzenia, stosując system pokładowy eCall oparty na numerze 112: automatycznie zainicjowane zgłoszenie eCall po badaniu zderzeniowym.
2.4.2. Należy wykonać zgłoszenie testowe (tryb „push”) poprzez zastosowanie automatycznego inicjowania.
2.4.3. Należy sprawdzić każdy z następujących elementów w co najmniej jednym ze zgłoszeń testowych:
|
a) |
Należy sprawdzić, czy zgłoszenie eCall zostało zainicjowane automatycznie w momencie pełnego zderzenia. Weryfikuje się to za pomocą rekordu punktu kontrolnego PSAP, który potwierdza, że otrzymał sygnał inicjujący zgłoszenie eCall po nastąpieniu zderzenia oraz że wskaźnik kontrolny MSD został przełączony na opcję „automatycznie zainicjowane zgłoszenie eCall”. |
|
b) |
Należy sprawdzić, czy wskaźnik statusu zgłoszenia eCall wskazał sekwencję zgłoszenia eCall w następstwie automatycznego lub ręcznego zainicjowania. Weryfikuje się to za pomocą rekordu, który potwierdza, że sekwencja oznaczenia została przeprowadzona na wszystkich kanałach sensorycznych określonych w dokumentacji producenta (wzrokowych lub dźwiękowych). |
|
c) |
Należy sprawdzić, czy punkt kontrolny PSAP otrzymał MSD. Weryfikuje się to za pomocą rekordu punktu kontrolnego PSAP, który potwierdza, że MSD wyemitowany z pojazdu w wyniku automatycznego lub ręcznego inicjowania został odebrany i pomyślnie dekodowany. Jeżeli dekodowanie MSD nie powiodło się w wersji z redundancją MSD rv0, lecz nastąpiło pomyślnie w wyższej wersji z redundancją lub w stabilnym trybie modulatora, jak określono w ETSI/TS 126 267, jest to dopuszczalne. |
|
d) |
Należy zweryfikować, czy MSD zawierał dokładne dane o konkretnym pojeździe. Weryfikuje się to za pomocą rekordu punktu kontrolnego PSAP potwierdzającego, że informacje zawarte w polach dotyczących typu pojazdu, numeru identyfikacyjnego pojazdu (VIN) oraz rodzaju napędu pojazdu nie odbiegają od informacji określonych we wniosku o homologację typu. |
|
e) |
Należy sprawdzić, czy MSD zawierał dokładne dane o aktualnej lokalizacji. Weryfikuje się to zgodnie z procedurą badania lokalizacji pojazdu, jak określono w pkt 2.5 załącznika I do niniejszego rozporządzenia za pomocą rekordu testowego potwierdzającego, że różnica między lokalizacją IVS a lokalizacją rzeczywistą, d_IVS, wynosi mniej niż 150 metrów, a bit ufności przekazany do punktu kontrolnego PSAP wskazuje, że „lokalizacja jest wiarygodna”. Jeżeli w miejscu badań zderzeniowych nie są dostępne sygnały GNSS, można przetransportować pojazd do odpowiedniej lokalizacji przed wykonaniem zgłoszenia testowego. |
2.4.4. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.4.5. Jeżeli nie można było wykonać automatycznego zgłoszenia testowego ze względu na czynniki zewnętrzne niezależne od pojazdu, dopuszczalna jest weryfikacja automatycznego inicjowania po badaniu za pomocą wewnętrznej funkcji rekordu systemu pokładowego. W rejestrze możliwe jest przechowywanie otrzymanych sygnałów wyzwalających w pamięci trwałej. Inżynier prowadzący badania musi mieć dostęp do danych przechowywanych w systemie pokładowym oraz zweryfikować, czy nie zarejestrowano żadnych automatycznych sygnałów wyzwalających przed nastąpieniem zderzenia oraz czy zarejestrowano automatyczny sygnał wyzwalający po nastąpieniu zderzenia.
2.4.6. Jeżeli podjęto próbę zgłoszenia testowego z pojazdem podłączonym do zewnętrznego zasilania (w przypadkach, w których badanie zderzeniowe przeprowadzono z niezainstalowanym standardowym zasilaniem pojazdu), należy zweryfikować, czy pokładowa instalacja elektryczna zasilająca system pokładowy eCall pozostała nienaruszona. Weryfikuje się to za pomocą rekordu inżyniera prowadzącego badanie potwierdzającego pomyślne sprawdzenie integralności pokładowej instalacji elektrycznej, w tym testowego pokładowego źródła zasilania (kontrola wzrokowa pod kątem uszkodzenia mechanicznego wspornika montażowego źródła zasilania albo jego konstrukcji) oraz połączeń za pośrednictwem jego terminali.
2.5. Procedura badania pozycjonowania
Zastosowanie ma procedura badania pozycjonowania określona w pkt 2.5 załącznika I do niniejszego rozporządzenia.
2.6. Procedura badania anteny
2.6.1. Jeżeli w procedurze połączenia zastosowanej przy zgłoszeniu testowym nie wykorzystano bezprzewodowej transmisji danych (pkt 2.7.3 załącznika I do niniejszego rozporządzenia), należy zweryfikować funkcjonalność anteny sieci telefonii ruchomej, sprawdzając stan nastrojenia anteny po badaniu pełnego zderzenia zgodnie z procedurą określoną w pkt 2.6 załącznika I do niniejszego rozporządzenia. Ponadto należy zweryfikować, czy nie nastąpiło żadne przerwanie lub zwarcie przewodu zasilającego anteny, sprawdzając rezystancję między punktami końcowymi przewodu oraz między przewodem a uziemieniem pojazdu.
2.7. Procedury połączenia
Zastosowanie mają procedury połączenia określone w pkt 2.7 załącznika I do niniejszego rozporządzenia.
ZAŁĄCZNIK III
Odporność urządzeń dźwiękowych na zderzenia
1. Wymagania
1.1. Wymagania dotyczące osiągów
1.1.1. Ocena odporności urządzeń dźwiękowych systemu eCall na zderzenia w pojazdach z zainstalowanymi systemami pokładowymi eCall, przeprowadzona zgodnie z punktem 2, jest uznawana za satysfakcjonującą, jeżeli zostanie wykazane po zderzeniu, iż następujące wymagania zostały spełnione zarówno w odniesieniu do badania zderzenia czołowego, jak i do badania zderzenia bocznego, w zależności od sytuacji.
1.1.2. Ponowne podłączanie urządzeń dźwiękowych: System eCall ponownie podłącza głośniki i mikrofony po tym, jak zostały rozłączone w trakcie eCall na potrzeby transmisji MSD.
1.1.3. Połączenie głosowe: System eCall umożliwia połączenie głosowe w trybie głośnomówiącym (kierunek wysyłania i odbioru), które jest wystarczająco zrozumiałe dla osób znajdujących się w pojeździe i operatora.
2. Procedura badania
2.1. Cel procedury badania odporności urządzeń dźwiękowych na zderzenia
Badanie to ma zweryfikować, czy głośniki i mikrofony zostały pomyślnie podłączone po ich rozłączeniu na czas transmisji MSD, oraz czy urządzenia dźwiękowe nadal działają po poddaniu pojazdu badaniu zderzenia czołowego lub zderzenia bocznego.
2.2. Zgodnie z regulaminem nr 94 EKG ONZ (załącznik 3 w odniesieniu do zderzenia czołowego) lub z regulaminem EKG ONZ nr 95 (załącznik 4 w odniesieniu do zderzenia bocznego) przeprowadza się następujące badanie sprawdzające na pojeździe z zainstalowanym systemem pokładowym eCall, który to pojazd uległ pełnemu zderzeniu, jak określono w pkt 1.1.1 powyżej.
2.3. Ogólny opis procedury badania
2.3.1. Funkcjonalność urządzeń dźwiękowych weryfikuje się, wykonując zgłoszenie testowe po badaniu zderzeniowym oraz z wykorzystaniem kanału połączenia głosowego pomiędzy pojazdem a punktem kontrolnym PSAP.
2.3.2. Dwóch inżynierów prowadzących badanie znajdujących się odpowiednio w pojeździe (tester w punkcie generacji sygnału) oraz w punkcie kontrolnym PSAP (tester w punkcie odbioru sygnału) po kolei przekazuje (odczytuje i wysłuchuje) uprzednio określone, fonetycznie zrównoważone zdania wypowiadane oddzielnie przez jedną osobę.
2.3.3. Testerzy mają za zadanie ocenić, czy zrozumieli znaczenie przekazu w kierunku wysyłania i odbioru.
2.4. Umiejscowienie testerów
2.4.1. Badanie należy przeprowadzić w cichym otoczeniu, gdzie szum tła nie przekracza poziomu 50 dB(A) oraz do którego nie dochodzą żadne inne dźwięki mogące w inny sposób zakłócić przebieg badań.
2.4.2. Tester w punkcie generacji sygnału siedzi w takiej pozycji, w której głowa znajduje się w położeniu zbliżonym do normalnej pozycji siedzącej na fotelu kierowcy pojazdu, który uległ zderzeniu. Tester korzysta z pokładowych urządzeń dźwiękowych, nie zmieniając ich ułożenia.
2.4.3. Tester w punkcie odbioru sygnału znajduje się w takiej odległości od pojazdu, aby zrozumienie mowy o normalnym natężeniu głosu jednego testera było niemożliwe bez użycia przez drugiego testera urządzeń pomocniczych.
2.5. Konfiguracja badania
2.5.1. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
jedna z procedur połączenia określonych w pkt 2.7 załącznika I do niniejszego rozporządzenia, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
b) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
c) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; |
|
d) |
w stosowanych przypadkach system TPS zostanie dezaktywowany lub automatycznie przełączy się na system oparty na numerze 112; oraz |
|
e) |
zapłon lub główny wyłącznik pojazdu jest włączony. |
2.5.2. Jeżeli możliwe jest dostosowanie ustawień głośności, należy ustawić najwyższy poziom głośności dla kierunku wysyłania i odbioru w punkcie generacji sygnału (ang. near-end) i w punkcie odbioru sygnału (ang. far-end). Można obniżać poziom głośności w punkcie odbioru sygnału w trakcie badania, jeżeli wpływa to na zrozumiałość wypowiedzi.
2.5.3. Jeżeli jest to możliwe, przy połączeniu nie należy korzystać z żadnych sieci telefonii ruchomej, które wpływają na działanie urządzeń głośnomówiących (tj. echo, automatyczna regulacja wzmocnienia, redukcja hałasu itp.). W przypadku sieci symulowanych należy w miarę możliwości wyłączyć DTX, zastosować kodek Full Rate (dla standardu GSM) oraz najwyższą przepływność wynoszącą 12,2 kbit/s (w przypadku kodeków AMR).
2.6. Zgłoszenie testowe
2.6.1. Należy wykonać zgłoszenie testowe (tryb „push”) poprzez ręczne zainicjowanie za pomocą pokładowego panelu HMI oraz poczekać, aż głośniki oraz mikrofony zostaną ponownie połączone na potrzeby połączenia głosowego po zakończonej transmisji MSD.
2.6.2. Wymiana wiadomości testowych
2.6.2.1. Kierunek odbioru
2.6.2.1.1. Tester w punkcie odbioru sygnału wybiera i odczytuje jedną parę zdań z listy w dodatku. Tester odczytuje zdania z normalnym natężeniem głosu właściwym dla rozmów telefonicznych.
2.6.2.1.2. Tester w punkcie generacji sygnału ocenia, czy transmisja głosowa w kierunku odbioru była zrozumiała: badanie w kierunku odbioru ma wynik pozytywny, jeżeli tester w punkcie generacji sygnału, pozostając w swojej wyjściowej pozycji siedzącej, był w stanie bez większego wysiłku zrozumieć cały przekaz.
2.6.2.1.3. Jeżeli jest to wymagane do celów oceny, tester w punkcie generacji sygnału może poprosić testera w punkcie odbioru sygnału o przekazanie dodatkowych par zdań.
2.6.2.2. Kierunek wysyłania
2.6.2.2.1. Pozostając w wyjściowej pozycji siedzącej, tester w punkcie generacji sygnału wybiera i odczytuje jedną parę zdań z listy w dodatku. Tester odczytuje zdania z normalnym natężeniem głosu właściwym dla rozmów telefonicznych.
2.6.2.2.2. Tester w punkcie odbioru sygnału ocenia, czy transmisja głosowa w kierunku odbioru była zrozumiała: Badanie w kierunku wysyłania ma wynik pozytywny, jeżeli tester w punkcie odbioru sygnału był w stanie bez większego wysiłku zrozumieć cały przekaz.
2.6.2.2.3. Jeżeli jest to wymagane do celów oceny, tester w punkcie odbioru sygnału może poprosić testera w punkcie generacji sygnału o przekazanie dodatkowych par zdań.
2.6.3. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.6.4. Jeżeli spełnienie wymagań jest niemożliwe z powodu uszkodzeń spowodowanych przez punkt kontrolny PSAP lub medium transmisyjne, można powtórzyć zgłoszenie testowe w miarę potrzeb w dostosowanej konfiguracji testowej.
2.7. Procedury połączenia
2.7.1. Zastosowanie mają procedury połączenia określone w pkt 2.7 załącznika I do niniejszego rozporządzenia.
Dodatek
Zdania testowe
1. Przy wymianie zdań testowych w kierunku wysyłania i odbioru stosuje się poniższe pary zdań testowych określone w zaleceniu P.501 Międzynarodowej Unii Telekomunikacyjnej, Biura Specyfikacji Telekomunikacyjnych, załącznik B.
2. Z poniższej listy wybiera się pary zdań testowych w języku najczęściej używanym przez testerów. W przypadku gdy testerzy nie znają żadnego z dostępnych języków, stosuje się alternatywne zdania, najlepiej fonetycznie zrównoważone, w znanym im języku.
3. Pary zdań testowych
3.1. Język niderlandzki
|
a) |
Dit product kent nauwelijks concurrentie. Hij kende zijn grens niet. |
|
b) |
Ik zal iets over mijn carrière vertellen. Zijn auto was alweer kapot. |
|
c) |
Zij kunnen de besluiten nehmen. De meeste mensen hadden het wel door. |
|
d) |
Ik zou liever gaan lopen. Willem gaat telkens naar buiten. |
3.2. Język angielski
|
a) |
These days a chicken leg is a rare dish. The hogs were fed with chopped corn and garbage. |
|
b) |
Rice is often served in round bowls. A large size in stockings is hard to sell. |
|
c) |
The juice of lemons makes fine punch. Four hours of steady work faced us. |
|
d) |
The birch canoe slid on smooth planks. Glue the sheet to the dark blue background. |
3.3. Język fiński
|
a) |
Ole ääneti tai sano sellaista, joka on parempaa kuin vaikeneminen. Suuret sydämet ovat kuin valtameret, ne eivät koskaan jäädy. |
|
b) |
Jos olet vasara, lyö kovaa. Jos olet naula, pidä pääsi pystyssä. Onni tulee eläen, ei ostaen. |
|
c) |
Rakkaus ei omista mitään, eikä kukaan voi sitä omistaa. Naisen mieli on puhtaampi, hän vaihtaa sitä useammin. |
|
d) |
Sydämellä on syynsä, joita järki ei tunne. On opittava kärsimään voidakseen elää. |
3.4. Język francuski
|
a) |
On entend les gazouillis d'un oiseau dans le jardin. La barque du pêcheur a été emportée par une tempête. |
|
b) |
Le client s'attend à ce que vous fassiez une réduction. Chaque fois que je me lève ma plaie me tire. |
|
c) |
Vous avez du plaisir à jouer avec ceux qui ont un bon caractère. Le chevrier a corné pour rassembler ses moutons. |
|
d) |
Ma mère et moi faisons de courtes promenades. La poupée fait la joie de cette très jeune fille. |
3.5. Język niemiecki
|
a) |
Zarter Blumenduft erfüllt den Saal. Wisch den Tisch doch später ab. |
|
b) |
Sekunden entscheiden über Leben. Flieder lockt nicht nur die Bienen. |
|
c) |
Gegen Dummheit ist kein Kraut gewachsen. Alles wurde wieder abgesagt. |
|
d) |
Überquere die Strasse vorsichtig. Die drei Männer sind begeistert. |
3.6. Język włoski
|
a) |
Non bisogna credere che sia vero tutto quello che dice la gente. Tu non conosci ancora gli uomini, non conosci il mondo. Dopo tanto tempo non ricordo più dove ho messo quella bella foto, ma se aspetti un po' la cerco e te la prendo. |
|
b) |
Questo tormento durerà ancora qualche ora. Forse un giorno poi tutto finirà e tu potrai tornare a casa nella tua terra. Lucio era certo che sarebbe diventato una persona importante, un uomo politico o magari un ministro. Aveva a cuore il bene della società. |
|
c) |
Non bisogna credere che sia vero tutto quello che dice la gente tu non conosci ancora gli uomini, non conosci il mondo. Dopo tanto tempo non ricordo più dove ho messo quella bella foto ma se aspetti un po' la cerco e te la prendo. |
|
d) |
Questo tormento durerà ancora qualche ora. Forse un giorno poi tutto finirà e tu potrai tornare a casa nella tua terra. Lucio era certo che sarebbe diventato una persona importante, un uomo politico o magari un ministro, aveva a cuore il bene della società. |
3.7. Język polski
|
a) |
Pielęgniarki były cierpliwe. Przebiegał szybko przez ulicę. |
|
b) |
Ona była jego sekretarką od lat. Dzieci często płaczą, kiedy są głodne. |
|
c) |
On był czarującą osobą. Lato wreszcie nadeszło. |
|
d) |
Większość dróg było niezmiernie zatłoczonych. Mamy bardzo entuzjastyczny zespół. |
3.8. Język hiszpański
|
a) |
No arroje basura a la calle. Ellos quieren dos manzanas rojas. |
|
b) |
No cocinaban tan bien. Mi afeitadora afeita al ras. |
|
c) |
Ve y siéntate en la cama. El libro trata sobre trampas. |
|
d) |
El trapeador se puso amarillo. El fuego consumió el papel. |
ZAŁĄCZNIK IV
Współistnienie systemu pokładowego eCall opartego na usługach stron trzecich (TPS) i systemu pokładowego eCall opartego na numerze 112
1. Wymagania
1.1. Następujące wymagania mają zastosowanie do systemów pokładowych eCall opartych na numerze 112, pokładowych oddzielnych zespołów technicznych i (opcjonalnie) komponentów używanych w połączeniu z systemem pokładowym eCall TPS.
1.2. Wymagania dotyczące osiągów
1.2.1. System oparty na numerze 112 musi być zdezaktywowany tak długo, jak długo system TPS jest aktywny i działa.
1.2.2. System oparty na numerze 112 musi uruchamiać się automatycznie, w przypadku gdy system TPS jest uruchomiony, ale nie działa.
1.3. Wymagania dotyczące dokumentacji
1.3.1. Producent dostarcza służbie technicznej objaśnienie zasad konstrukcji wbudowanej w system TPS w celu zapewnienia automatycznego uruchomienia się systemu opartego na numerze 112 („procedura awaryjna”), w przypadku gdy system TPS nie działa. Dokumentacja ta ma zawierać opis zasad przejścia między systemami.
1.3.2. Dokumentację należy poprzeć analizą, w której w ogólny sposób przedstawia się warunki błędów sprzętu lub oprogramowania skutkujące niezdolnością systemu TPS do wykonania prawidłowego połączenia, oraz opisuje się zachowanie systemu TPS w przypadku wystąpienia takich błędów.
Analiza może się opierać na analizie przyczyn i skutków błędów (ang. Failure Mode and Effect Analysis, FMEA), analizie drzewa błędów (ang. Fault Tree Analysis, FTA) lub dowolnym podobnym procesie uzgodnionym między służbą techniczną a producentem.
Wybrane podejście lub podejścia analityczne ustala i utrzymuje producent oraz udostępnia je do kontroli prowadzonej przez służbę techniczną w momencie homologacji typu.
2. Procedura badania
2.1. Cel procedury badania współistnienia TPS
Celem tej procedury badania jest sprawdzenie w odniesieniu do systemów pokładowych eCall, które należy stosować w połączeniu z pokładowym systemem TPS eCall, czy tylko jeden system jest aktywny w danym momencie oraz czy system oparty na numerze 112 uruchamia się automatycznie, w przypadku gdy system TPS nie działa.
2.2. Następujące badania przeprowadza się albo na pojeździe z zainstalowanym systemem pokładowym eCall, albo na reprezentatywnym układzie części.
2.3. Dezaktywację systemu opartego na numerze 112 podczas działania systemu TPS sprawdza się za pomocą ręcznie uruchomionego zgłoszenia testowego.
2.3.1. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
jedna z procedur połączenia określonych w pkt 2.7 załącznika I do niniejszego rozporządzenia, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
b) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
c) |
dostępny jest punkt kontrolny TPSP umożliwiający odebranie zgłoszenia wyemitowanego przez system TPS; |
|
d) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
e) |
że zapłon lub główny wyłącznik pojazdu jest włączony. |
2.3.2. Należy wykonać zgłoszenie testowe, stosując ręczne uruchomienie systemu TPS (tryb „push”).
2.3.3. Należy sprawdzić:
|
a) |
czy nawiązano połączenie z punktem kontrolnym TPSP za pomocą rekordu punktu kontrolnego TPSP, który potwierdza, że otrzymał sygnał inicjujący zgłoszenie, lub za pomocą udanego połączenia głosowego z punktem kontrolnym TPSP; oraz |
|
b) |
czy podjęto próbę nawiązania połączenia lub nawiązano połączenie z punktem kontrolnym PSAP za pomocą rekordu punktu kontrolnego PSAP, który potwierdza, że nie otrzymał sygnału inicjującego zgłoszenie eCall. |
2.3.4. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.3.5. Jeżeli podczas badania dojdzie do nieudanej próby zgłoszenia za pomocą systemu TPS, procedurę badania można powtórzyć.
2.4. W przypadku gdy system TPS nie działa, procedurę awaryjną sprawdza się za pomocą ręcznie uruchomionego zgłoszenia testowego do dedykowanego punktu kontrolnego PSAP.
2.4.1. Należy wprowadzić zmiany do systemu TPS, aby zasymulować awarię wybraną według uznania organu udzielającego homologacji typu, skutkującą uruchomieniem procedury awaryjnej na podstawie dokumentacji dostarczonej przez producenta.
2.4.2. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
jedna z procedur połączenia określonych w pkt 2.7 załącznika I do niniejszego rozporządzenia, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
b) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
c) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
d) |
że zapłon lub główny wyłącznik pojazdu jest włączony. |
2.4.3. Należy wykonać zgłoszenie testowe, stosując ręczne uruchomienie systemu TPS (tryb „push”).
2.4.4. Należy sprawdzić, czy wykonano zgłoszenie eCall przez system oparty na numerze 112, za pomocą rekordu punktu kontrolnego PSAP, który potwierdza, że otrzymał sygnał inicjujący zgłoszenie eCall.
2.4.5. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
2.5. Procedury połączenia
Zastosowanie mają procedury połączenia określone w pkt 2.7 załącznika I do niniejszego rozporządzenia.
ZAŁĄCZNIK V
Mechanizm automatycznego inicjowania
1. Wymagania
1.1. Następujące wymagania mają zastosowanie do pojazdów z zainstalowanymi systemami pokładowymi eCall.
1.2. Wymagania dotyczące dokumentacji
1.2.1. Producent wydaje oświadczenie, w którym potwierdza, że strategia wybrana do automatycznego inicjowania systemu eCall gwarantuje jego uruchomienie także w innych konfiguracjach wypadków lub w mniej poważnych wypadkach niż zderzenia symulowane w mających zastosowanie badaniach pełnego zderzenia, o których mowa w regulaminach nr 94 i 95 EKG ONZ.
1.2.2. Producent wybiera typologię i ciężkość zderzeń i wykazuje, że znacząco różnią się one od badań pełnego zderzenia.
1.2.3. Producent dostarcza organowi udzielającemu homologacji typu objaśnienia i techniczną dokumentację zawierającą ogólne uzasadnienie.
1.2.3.1. Dokumentacja ta potwierdza w sposób zadowalający dla organu udzielającego homologacji typu, że uruchomienie dodatkowych systemów przytrzymujących oraz stopień ciężkości wybrany według uznania producenta również powodują automatyczne zgłoszenie eCall, co należy uznać za satysfakcjonujące.
1.2.3.2. Dokumentacja ta potwierdza w sposób zadowalający dla organu udzielającego homologacji typu strategię służącą zapobieganiu nieuzasadnionym zgłoszeniom eCall w przypadku zderzeń o stopniu ciężkości, który nie jest uznawany za poważny wypadek. Ponadto należy przeprowadzić analizę przyczyn błędów, która wykaże, że żadne błędy sprzętu lub oprogramowania nie skutkują automatycznym uruchomieniem systemu eCall.
1.2.3.3. Odpowiednimi środkami do wykazania tego związku będą: rysunki przedstawiające specyfikację sterownika poduszek powietrznych, uwagi do danych dotyczących specyfikacji, rysunki dotyczące czułości, odpowiednie schematy obwodów lub podobne dokumenty uznane za równoważne przez organ udzielający homologacji typu.
1.2.3.4. Rozszerzony komplet dokumentacji pozostaje ściśle poufny. Może go przechowywać organ udzielający homologacji lub, według uznania tego urzędu, producent. W przypadku gdy komplet dokumentacji przechowuje producent, po dokonaniu jego przeglądu i zatwierdzenia organ udzielający homologacji opatruje go identyfikatorem i datą. Jest on udostępniany do wglądu organowi udzielającemu homologacji w czasie homologacji lub w dowolnym terminie w okresie ważności homologacji.
ZAŁĄCZNIK VI
Wymagania techniczne dotyczące zgodności systemów pokładowych eCall z usługami pozycjonowania w systemach Galileo i EGNOS
1. Wymagania
1.1. Wymagania dotyczące zgodności
1.1.1. „Zgodność z systemem Galileo” obejmuje: odbiór i przetwarzanie sygnałów z powszechnie dostępnej usługi Galileo oraz wykorzystanie ich do obliczenia końcowego położenia.
1.1.2. „Zgodność z systemem EGNOS” obejmuje: odbiór korekt z powszechnie dostępnej usługi EGNOS oraz zastosowanie ich do sygnałów GNSS, w szczególności GPS.
1.1.3. Zgodność systemów pokładowych eCall z usługami pozycjonowania w systemach Galileo i EGNOS powinna pokrywać się z możliwościami w zakresie pozycjonowania, o których mowa w pkt 1.2, oraz powinna zostać wykazana przez przeprowadzenie metod badania, o których mowa w pkt 2.
1.1.4. Procedury badania, o których mowa w pkt 2.2, mogą być przeprowadzane albo na jednostce eCall, z uwzględnieniem zdolności późniejszego przetwarzania, albo bezpośrednio na odbiorniku GNSS będącym częścią systemu eCall.
1.2. Wymagania dotyczące osiągów
1.2.1. Odbiornik GNSS jest w stanie wygenerować nawigację w formacie protokołu NMEA-0183 (komunikat RMC, GGA, VTG, GSA i GSV). Opis konfiguracji eCall do celów generowania komunikatów NMEA-0183 znajduje się w instrukcji obsługi.
1.2.2. Odbiornik GNSS, będąc częścią systemu eCall, jest w stanie odbierać i przetwarzać indywidualne sygnały GNSS w paśmie L1/E1 z co najmniej dwóch globalnych systemów nawigacji satelitarnej, w tym Galileo i GPS.
1.2.3. Odbiornik GNSS, będąc częścią systemu eCall, jest w stanie odbierać i przetwarzać połączone sygnały GNSS w paśmie L1/E1 z co najmniej dwóch globalnych systemów nawigacji satelitarnej, w tym Galileo i GPS; oraz SBAS.
1.2.4. Odbiornik GNSS, będąc częścią systemu eCall, jest w stanie udzielić informacji dotyczących pozycjonowania w układzie współrzędnych WGS-84.
1.2.5. Błąd położenia horyzontalnego nie może przekroczyć:
|
— |
w warunkach na wolnym powietrzu: 15 metrów przy poziomie ufności 0,95 z trójwymiarowym rozmyciem dokładności (PDOP) w zakresie od 2,0 do 2,5, |
|
— |
w warunkach tzw. kanionu miejskiego: 40 metrów przy poziomie ufności 0,95 z trójwymiarowym rozmyciem dokładności (PDOP) w zakresie od 3,5 do 4,0. |
1.2.6. Należy określić wymagania dotyczące dokładności:
|
— |
przy prędkości w zakresie od 0 do [140] km/h, |
|
— |
przy przyspieszeniu liniowym w zakresie od 0 do [2] G. |
1.2.7. Czas od zimnego rozruchu do odnalezienia przez odbiornik bieżącego położenia nie może przekroczyć:
|
— |
60 sekund w przypadku poziomu sygnału do minus 130 dBm, |
|
— |
300 sekund w przypadku poziomu sygnału do minus 140 dBm. |
1.2.8. Czas ponownego wychwycenia sygnału GNSS po zablokowaniu trwającym 60 sekund przy poziomie sygnału do 130 dBm nie może przekroczyć 20 sekund od przywrócenia widoczności satelitów nawigacyjnych.
1.2.9. Czułość danych wejściowych do odbiornika jest następująca:
|
— |
wykrywanie sygnałów GNSS („zimny rozruch”) nie przekracza 3 600 sekund przy poziomie sygnału danych systemu eCall na wejściu antenowym wynoszącym minus 144 dBm, |
|
— |
obliczenia śledzenia i nawigacji sygnałów GNSS są dostępne przez co najmniej 600 sekund przy poziomie sygnału danych systemu eCall na wejściu antenowym wynoszącym minus 155 dBm, |
|
— |
ponowne wychwycenie sygnałów GNSS oraz obliczenie nawigacji jest możliwe i nie przekracza 60 sekund przy poziomie sygnału danych systemu eCall na wejściu antenowym wynoszącym minus 150 dBm. |
1.2.10. Odbiornik GNSS jest w stanie pozyskiwać ustaloną lokalizację co najmniej co sekundę.
2. Metody badania
2.1. Warunki badania
2.1.1. Przedmiotem badania jest system eCall, który obejmuje odbiornik GNSS i antenę GNSS wraz z określeniem charakterystyk i cech nawigacyjnych testowanego systemu.
2.1.2. Liczba próbnych zestawów testowych eCall wynosi co najmniej 3 sztuki, które mogą być badane równolegle.
2.1.3. System eCall jest udostępniany na potrzeby badania razem z zainstalowaną kartą SIM, instrukcją obsługi oraz oprogramowaniem (na nośnikach elektronicznych).
2.1.4. Załączone dokumenty muszą zawierać następujące informacje:
|
— |
numer seryjny urządzenia, |
|
— |
wersję sprzętu, |
|
— |
wersję oprogramowania, |
|
— |
numer identyfikacyjny dostawcy urządzenia, |
|
— |
odpowiednią dokumentację techniczną do przeprowadzenia badań. |
2.1.5. Badania przeprowadza się w normalnych warunkach klimatycznych zgodnie z normą ISO 16750-1:2006:
|
— |
temperatura powietrza 23 (± 5) °C, |
|
— |
względna wilgotność powietrza: od 25 % do 75 %. |
2.1.6. Badania systemu eCall w odniesieniu do jego odbiornika GNSS przeprowadza się z wykorzystaniem urządzeń testowych i pomocniczych określonych w tabeli 1.
Tabela 1
Wykaz zalecanych instrumentów pomiaru oraz urządzeń badawczych i pomocniczych
|
Nazwa urządzenia |
Wymagana charakterystyka techniczna urządzenia badawczego |
|||||||
|
Zakres skali |
Dokładność skali |
|||||||
|
Symulator globalnego systemu nawigacji satelitarnej generujący sygnały Galileo i GPS |
Liczba symulowanych sygnałów: co najmniej 12 |
Średniokwadratowe odchylenie losowego komponentu dokładności pseudoodległości od satelitów Galileo i GPS nie większa niż:
|
||||||
|
Cyfrowy stoper |
Maksymalny zakres wskazań: 9 h 59 min 59,99 s |
Dzienne wahania przy 25 (± 5)°С nie większe niż 1,0 sekundy. Nieciągłość czasu – 0,01 sekundy. |
||||||
|
Wektorowy analizator sieci |
Zakres częstotliwości: 300 kHz .. 4 000 kHz Zakres dynamiczny: (minus 85 .. 40) dB |
Dokładność F = ±1·10-6 kHz Dokładność D = (0,1 .. 0,5) dB |
||||||
|
Wzmacniacz niskoszumowy |
Zakres częstotliwości: 1 200 .. 1 700 MHz Współczynnik głośności: nie wyższy niż 2,0 dB Współczynnik wzmocnienia wzmacniacza: 24 dB |
|
||||||
|
Tłumik 1 |
Zakres dynamiczny: (0 .. 11) dB |
Dokładność ± 0,5 dB |
||||||
|
Tłumik 2 |
Zakres dynamiczny: (0 .. 110) dB |
Dokładność ± 0,5 dB |
||||||
|
Źródło zasilania |
Zakres ustawień napięcia prądu stałego: od 0,1 do 30 V |
Dokładność V = ±3 % |
||||||
|
Natężenie prądu napięcia wyjściowego: co najmniej 3 ampery |
Dokładność A = ±1 % |
|||||||
|
Uwaga: Dopuszcza się stosowanie innych podobnego rodzaju urządzeń zapewniających określenie charakterystyki z wymaganą dokładnością. |
||||||||
2.1.7. Jeżeli nie określono inaczej, symulacja sygnału GNSS przebiega zgodnie z wzorcem „na wolnym powietrzu” określonym na wykresie 1.
Wykres 1
Definicja „wolnego powietrza”
|
Strefa |
Przewyższenie (stopnie) |
Zakres azymutu (stopnie) |
|
A |
0–5 |
0–360 |
|
Otoczenie |
Obszar poza strefą A |
|

2.1.8. Miejsce na wolnym powietrzu – tłumienie:
|
|
0 dB |
|
A |
– 100 dB albo sygnał jest wyłączony |
2.2. Procedury badania
2.2.1. Badanie dotyczące generowania komunikatów NMEA-0183
2.2.1.1. Należy ustanowić połączenia zgodnie z wykresem 2.
Wykres 2
Schemat stanowiska badawczego
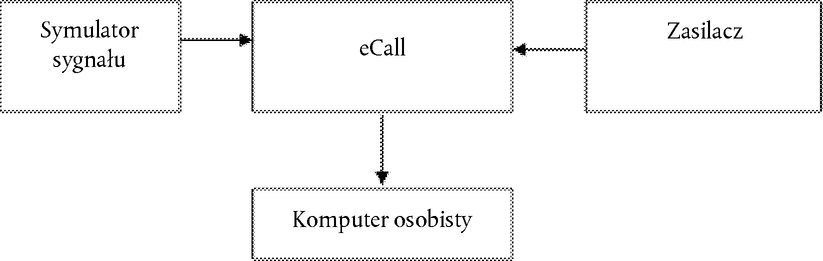
2.2.1.2. Należy przygotować i włączyć system eCall. Za pomocą instrukcji obsługi i oprogramowania producenta skonfigurować odbiornik GNSS tak, aby odbierał sygnały z Galileo, GPS oraz SBAS. Skonfigurować odbiornik GNSS tak, aby generował komunikaty NMEA-0183 (komunikaty RMC, GGA, VTG, GSA i GSV).
2.2.1.3. Należy skonfigurować symulator zgodnie z instrukcją obsługi symulatora. Zainicjować skrypt symulatora według parametrów określonych w tabeli 2 dla sygnałów Galileo, GPS oraz SBAS.
Tabela 2
Główne parametry skryptu symulacji dla scenariusza statycznego
|
Symulowany parametr |
Wartość |
||||||
|
Czas trwania badania (hh:mm:ss) |
01:00:00 |
||||||
|
Częstotliwość wyjściowa |
1 Hz |
||||||
|
Lokalizacja zgłoszenia eCall |
Dowolny określony punkt na lądzie między szerokością geograficzną 80 °N a 80 °S w układzie współrzędnych WGS-84 |
||||||
|
Troposfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Jonosfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Wartość PDOP w badanym odstępie czasu |
2,0 ≤ PDOP ≤ 2,5 |
||||||
|
Symulowane sygnały |
|
||||||
|
Moc sygnału: |
|
||||||
|
minus 135 dBm, |
||||||
|
minus 138,5 dBm. |
||||||
|
Liczba symulowanych satelitów: |
|
2.2.1.4. Za pomocą odpowiedniego interfejsu szeregowego należy ustanowić połączenie między systemem eCall a komputerem osobistym. Należy skontrolować możliwość odbierania informacji dotyczących nawigacji za pośrednictwem protokołu NMEA-0183. Wartość w polu 6 w komunikatach GGA ustawia się na „2”.
2.2.1.5. Wyniki badania uznaje się za pozytywne, jeżeli informacje dotyczące nawigacji przekazywane za pośrednictwem protokołu NMEA-0183 są odbierane we zestawach testowych eCall.
2.2.1.6. Można połączyć badanie dotyczące generowania komunikatów NMEA-0183 z oceną dokładności pozycjonowania w niezależnym trybie statycznym.
2.2.2. Ocena dokładności pozycjonowania w niezależnym trybie statycznym.
2.2.2.1. Należy ustanowić połączenia zgodnie z wykresem 2.
2.2.2.2. Należy przygotować i włączyć system eCall. Za pomocą oprogramowania producenta należy upewnić się, że odbiornik GNSS jest skonfigurowany tak, aby mógł odbierać połączone sygnały Galileo, GPS i SBAS. Skonfigurować odbiornik GNSS w taki sposób, aby generował komunikaty zgodnie z protokołem NMEA-0183 (komunikaty GGA, RMC, VTG, GSA i GSV).
2.2.2.3. Należy skonfigurować symulator zgodnie z instrukcją obsługi. Należy rozpocząć symulację skryptu połączonych sygnałów Galileo, GPS oraz SBAS według parametrów określonych w tabeli 2.
2.2.2.4. Należy skonfigurować rejestrowanie komunikatów NMEA-0183 po otrzymaniu nawigacji. Do czasu aż skrypt symulacji będzie kompletny, komunikaty NMEA-0183 są generowane przez odbiornik GNSS do pliku.
2.2.2.5. Po otrzymaniu nawigacji należy skonfigurować rejestrowanie komunikatów NMEA-0183 wysyłanych przez odbiornik GNSS do pliku do czasu zakończenia skryptu symulacji.
2.2.2.6. Należy wyodrębnić współrzędne: szerokość geograficzną (B) i długość geograficzną (L) zawarte w komunikatach GGA (RMC).
2.2.2.7. Należy obliczyć niedokładność systematyczną wyznaczania współrzędnych w niezmiennych odstępach na podstawie wzorów (1), (2), na przykład dla współrzędnej szerokości geograficznej (B):
|
(1) |
ΔB(j) = B(j) – B truej, |
|
(2) |
|

|
— |
Btruej oznacza faktyczną wartość współrzędnej B w czasie j, w sekundach kątowych. |
|
— |
B(j) oznacza wartość współrzędnej B w czasie j określoną przez odbiornik GNSS, w sekundach kątowych. |
|
— |
N oznacza liczbę komunikatów GGA (RMC) odebranych podczas badania odbiornika GNSS. |
2.2.2.8. Podobnie należy obliczyć niedokładność systematyczną współrzędnej L (długości geograficznej).
2.2.2.9. Należy obliczyć wartość odchylenia standardowego na podstawie wzoru (3) dla współrzędnej B:
|
(3) |
|
2.2.2.10. Podobnie należy obliczyć wartość odchylenia standardowego dla współrzędnej L (długości geograficznej).
2.2.2.11. Należy przekształcić obliczone współrzędne i wartości odchylenia standardowego wyznaczonych szerokości i długości geograficznej z sekund kątowych na metry na podstawie wzorów (4) i (5).
2.2.2.12. Dla szerokości geograficznej:
|
(4-1) |
|
|
(4-2) |
|


2.2.2.13. Dla długości geograficznej:
|
(5-1) |
|
|
(5-2) |
|


— a– duża półoś elipsoidy, w metrach;
— e– pierwszy mimośród, [0–1];
— φ– określona wartość szerokości geograficznej, w radianach.
2.2.2.14. Należy obliczyć błąd położenia horyzontalnego na podstawie wzoru (6):
|
(6) |
|

2.2.2.15. Należy powtórzyć procedury badania zgodnie z pkt 2.2.2.3–2.2.2.14 dla sygnałów GNSS Galileo z zastosowaniem parametrów symulacji określonych w tabeli 2.
2.2.2.16. Należy powtórzyć procedury badania zgodnie z pkt 2.2.2.3–2.2.2.14 wyłącznie dla sygnałów GPS GNSS z zastosowaniem parametrów symulacji określonych w tabeli 2.
2.2.2.17. Należy powtórzyć procedury badania zgodnie z pkt 2.2.2.3–2.2.2.16 z dla wszystkich zestawów testowych eCall udostępnionych na potrzeby badania.
2.2.2.18. Należy określić średnie wartości zgodnie ze wzorem (6) uzyskane dla wszystkich zestawów testowych eCall.
2.2.2.19. Wyniki badań uważa się za satysfakcjonujące, jeżeli błędy położenia horyzontalnego określone wzorem (6) uzyskane dla wszystkich zestawów testowych eCall nie przekraczają 15 metrów w warunkach na wolnym powietrzu przy poziomie ufności wynoszącym 0,95 dla wszystkich skryptów symulacji.
2.2.3. Ocena dokładności pozycjonowania w niezależnym trybie dynamicznym.
2.2.3.1. Należy powtórzyć procedury badania opisane w pkt 2.2.2, z pominięciem pkt 2.2.2.15–2.2.2.16, z zastosowaniem skryptu symulacji dla manewrowania określonego w tabeli 3.
Tabela 3
Główne parametry skryptu symulacji dla manewrowania
|
Symulowany parametr |
Wartość |
||||||
|
Czas trwania badania (hh:mm:ss) |
01:00:00 |
||||||
|
Częstotliwość wyjściowa |
1 Hz |
||||||
|
Lokalizacja zgłoszenia eCall |
Dowolny określony punkt na lądzie między szerokością geograficzną 80 °N a 80 °S w układzie współrzędnych WGS-84 |
||||||
|
Model ruchu: |
Manewrowanie |
||||||
|
140 |
||||||
|
500 |
||||||
|
0,2 |
||||||
|
Troposfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Jonosfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Wartość PDOP w badanym odstępie czasu |
2,0 ≤ PDOP ≤ 2,5 |
||||||
|
Symulowane sygnały |
Połączone sygnały Galileo/GPS/SBAS |
||||||
|
Moc sygnału: |
|
||||||
|
minus 135 dBm, |
||||||
|
minus 138,5 dBm. |
||||||
|
Liczba symulowanych satelitów: |
|
2.2.3.2. Należy określić średnie wartości zgodnie ze wzorem (6) uzyskane dla wszystkich zestawów testowych eCall.
2.2.3.3. Wyniki badań uważa się za satysfakcjonujące, jeżeli błędy położenia horyzontalnego uzyskane dla wszystkich zestawów testowych eCall nie przekraczają 15 metrów w warunkach na wolnym powietrzu przy poziomie ufności wynoszącym 0,95.
2.2.4. Ruch na obszarach cienia, na obszarach przerywanego odbioru sygnałów nawigacyjnych i w kanionach miejskich.
2.2.4.1. Należy powtórzyć procedury badania opisane w pkt 2.2.3 w odniesieniu do symulacji skryptu dla ruchu na obszarach cienia i na obszarach przerywanego odbioru sygnałów nawigacyjnych (opisanego w tabeli 4) ze wzorem sygnału dla kanionów miejskich, który opisano na wykresie 3.
Tabela 4
Główne parametry ruchu na obszarach cienia i na obszarach przerywanego odbioru sygnałów nawigacyjnych
|
Symulowany parametr |
Wartość |
||||||
|
Czas trwania badania (hh:mm:ss) |
01:00:00 |
||||||
|
Częstotliwość wyjściowa |
1 Hz |
||||||
|
Lokalizacja zgłoszenia eCall |
Dowolny określony punkt na lądzie między szerokością geograficzną 80 °N a 80 °S w układzie współrzędnych WGS-84 |
||||||
|
Model ruchu: |
Manewrowanie |
||||||
|
140 |
||||||
|
500 |
||||||
|
0,2 |
||||||
|
Widoczność satelity: |
|
||||||
|
300 |
||||||
|
600 |
||||||
|
Troposfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Jonosfera: |
Standardowy model uprzednio zdefiniowany przez symulator GNSS |
||||||
|
Wartość PDOP w badanym odstępie czasu |
3,5 ≤ PDOP ≤ 4,0 |
||||||
|
Symulowane sygnały |
Połączone sygnały Galileo/GPS/SBAS |
||||||
|
Moc sygnału: |
|
||||||
|
minus 135 dBm, |
||||||
|
minus 138,5 dBm. |
||||||
|
Liczba symulowanych satelitów: |
|
Wykres 3
Definicja kanionu miejskiego
|
Strefa |
Przewyższenie (stopnie) |
Zakres azymutu (stopnie) |
|
A |
0–5 |
0–360 |
|
B |
5–30 |
210–330 |
|
C |
5–30 |
30–150 |
|
Otoczenie |
Obszar poza strefami A, B, C |
|

2.2.4.2. Obszar kanionu miejskiego – tłumienie:
|
|
0 dB |
|
B |
– 40 dB |
|
C |
– 40 dB |
|
A |
– 100 dB albo sygnał jest wyłączony |
2.2.4.3. Wyniki badań uważa się za satysfakcjonujące, jeżeli błędy położenia horyzontalnego uzyskane dla wszystkich zestawów testowych eCall nie przekraczają 40 metrów w warunkach kanionu miejskiego przy poziomie ufności wynoszącym 0,95.
2.2.5. Czas od zimnego rozruchu do odnalezienia przez odbiornik bieżącego położenia.
2.2.5.1. Należy przygotować i włączyć system eCall. Za pomocą oprogramowania producenta upewnić się, że moduł GNSS jest skonfigurowany tak, aby mógł odbierać sygnały Galileo i GPS.
2.2.5.2. Należy usunąć wszystkie dane o położeniu, prędkości, czasie, almanachu i efemerydach z odbiornika GNSS.
2.2.5.3. Należy skonfigurować symulator zgodnie z instrukcją obsługi symulatora. Zainicjować skrypt symulatora według parametrów określonych w tabeli 2 dla sygnałów Galileo i GPS przy poziomie sygnału wynoszącym minus 130 dBm.
2.2.5.4. Za pomocą stopera należy zmierzyć odstęp czasu pomiędzy rozpoczęciem symulacji sygnału a pierwszym wynikiem nawigacji.
2.2.5.5. Należy przeprowadzić procedury badania określone w punktach 2.2.5.2–2.2.5.4 co najmniej 10 razy.
2.2.5.6. Należy obliczyć średni czas do odnalezienia przez odbiornik bieżącego położenia w trybie zimnego rozruchu na podstawie pomiarów dla wszystkich zestawów testowych eCall dostarczonych na potrzeby badania.
2.2.5.7. Wynik badania uznaje się za pozytywny, jeżeli średni czas do odnalezienia przez odbiornik bieżącego położenia obliczony w sposób opisany w punkcie 2.2.5.6 nie przekracza 60 sekund w przypadku poziomu sygnału do minus 130 dBm w odniesieniu do wszystkich symulowanych sygnałów.
2.2.5.8. Należy powtórzyć procedurę badania zgodnie z punktami 2.2.5.1–2.2.5.5 przy poziomie sygnału wynoszącym minus 140 dBm.
2.2.5.9. Wynik badania przeprowadzonego zgodnie z pkt 2.2.5.8 uznaje się za pozytywny, jeżeli średni czas do odnalezienia przez odbiornik bieżącego położenia obliczony w sposób opisany w punkcie 2.2.5.6 nie przekracza 300 sekund w przypadku poziomu sygnału do minus 140 dBm w odniesieniu do wszystkich symulowanych sygnałów.
2.2.6. Badanie ponownego wychwycenia sygnałów śledzenia po blokadzie trwającej 60 sekund.
2.2.6.1. Należy przygotować i włączyć system eCall zgodnie z instrukcją stosowania. Za pomocą oprogramowania producenta upewnić się, że odbiornik GNSS jest skonfigurowany tak, aby mógł odbierać sygnały Galileo i GPS.
2.2.6.2. Należy skonfigurować symulator zgodnie z instrukcją obsługi symulatora. Zainicjować skrypt symulatora według parametrów określonych w tabeli 2 dla sygnałów Galileo i GPS przy poziomie sygnału wynoszącym minus 130 dBm.
2.2.6.3. Należy odczekać 15 minut i upewnić się, że odbiornik GNSS obliczył położenie systemu eCall.
2.2.6.4. Należy odłączyć kabel anteny GNSS od systemu eCall i ponownie go podłączyć po upływie 60 sekund. Za pomocą stopera zmierzyć odstęp czasu pomiędzy momentem podłączenia kabla a przywróceniem śledzenia satelitów i obliczania nawigacji.
2.2.6.5. Należy powtórzyć procedurę badania zgodnie z punktem 2.2.6.4 co najmniej 10 razy.
2.2.6.6. Należy obliczyć średni czas ponownego wychwycenia sygnałów śledzenia satelitów przez system eCall w odniesieniu do wszystkich wykonanych pomiarów i wszystkich zestawów testowych eCall dostarczonych na potrzeby badania.
2.2.6.7. Wynik badania uznaje się za pozytywny, jeżeli przeciętne wartości czasu ponownego wychwycenia sygnału po blokadzie wynoszącej 60 sekund, zmierzone w sposób opisany w punkcie 2.2.6.6, nie przekraczają 20 sekund.
2.2.7. Badanie czułości odbiornika GNSS w trybie zimnego rozruchu, w trybie śledzenia i w scenariuszu ponownego wychwycenia sygnałów.
2.2.7.1. Należy włączyć wektorowy analizator sieci. Należy skalibrować wektorowy analizator sieci zgodnie z jego instrukcją stosowania.
2.2.7.2. Należy skonfigurować schemat zgodnie z wykresem 4.
Wykres 4
Schemat kalibracji ścieżki

2.2.7.3. Należy ustawić zerową tłumienność ścieżki sygnału w tłumikach. Zmierzyć częstotliwość odpowiedzi dla danej ścieżki sygnału w paśmie E1/L1 odpowiednio dla systemu Galileo/GPS. Zarejestrować średni współczynnik transmisji ścieżki w [dB] w tym paśmie częstotliwości.
2.2.7.4. Należy zmontować obwód pokazany na wykresie 5.
Wykres 5
Układ na potrzeby oceny czułości modułu GNSS

2.2.7.5. Należy przygotować i włączyć system eCall zgodnie z instrukcją stosowania. Za pomocą oprogramowania producenta upewnić się, że odbiornik GNSS jest skonfigurowany tak, aby mógł odbierać sygnały Galileo i GPS. Wyczyścić pamięć RAM odbiornika GNSS w taki sposób, aby odbiornik GNSS systemu eCall przeszedł w tryb „zimnego” rozruchu. Sprawdzić, czy informacje dotyczące położenia, prędkości i czasu zostały zresetowane.
2.2.7.6. Należy przygotować symulator sygnałów GNSS zgodnie z jego instrukcją stosowania. Zainicjować skrypt symulacji sygnałów Galileo i GPS zgodnie z parametrami podanymi w tabeli 2. Ustawić poziom mocy wyjściowej symulatora na minus 144 dBm.
2.2.7.7. Za pomocą stopera należy zmierzyć odstęp czasu pomiędzy rozpoczęciem symulacji sygnału a pierwszym wynikiem nawigacji.
2.2.7.8. Należy ustawić tłumienność ścieżki sygnału w tłumikach tak, aby sygnał na wejściu antenowym systemu eCall był równy minus 155 dBm.
2.2.7.9. Za pomocą stopera należy sprawdzić, czy system eCall nadal zapewnia nawigację przez co najmniej 600 sekund.
2.2.7.10. Należy ustawić tłumienność ścieżki sygnału w tłumikach tak, aby sygnał na wejściu antenowym systemu eCall był równy minus 150 dBm.
2.2.7.11. Należy odłączyć kabel anteny GNSS od systemu eCall i ponownie go podłączyć po upływie 20 sekund.
2.2.7.12. Za pomocą stopera zmierzyć odstęp czasu pomiędzy momentem podłączenia kabla a przywróceniem śledzenia satelitów i obliczania nawigacji.
2.2.7.13. Wynik badania uznaje się za pozytywny, jeżeli:
|
— |
czas do odnalezienia przez odbiornik bieżącego położenia w trybie „zimnego” rozruchu, zmierzony zgodnie z pkt 2.2.7.7, nie przekracza 3 600 sekund przy poziomie sygnału na wejściu antenowym systemu eCall wynoszącym minus 144 dBm w przypadku wszystkich zestawów testowych eCall, |
|
— |
nawigacja GNSS, zmierzona zgodnie z pkt 2.2.7.9, jest dostępna przez co najmniej 600 sekund przy poziomie sygnału na wejściu antenowym systemu eCall wynoszącym minus 155 dBm w przypadku wszystkich zestawów testowych eCall, |
|
— |
oraz ponowne wychwycenie sygnałów GNSS oraz obliczenie nawigacji przy poziomie sygnału na wejściu antenowym systemu eCall wynoszącym minus 150 dBm jest możliwe i odstęp czasu zmierzony zgodnie z pkt 2.2.7.12 nie przekracza 60 sekund w przypadku wszystkich zestawów testowych eCall. |
ZAŁĄCZNIK VII
Samodiagnostyka pokładowa
1. Wymagania
1.1. Następujące wymagania mają zastosowanie do pojazdów z zainstalowanym systemem pokładowym eCall, do oddzielnych zespołów technicznych i (opcjonalnie) do komponentów.
1.2. Wymagania dotyczące osiągów
1.2.1. System eCall przeprowadza samodiagnostykę przy każdym włączeniu zasilania systemu.
1.2.2. Funkcja samodiagnostyki monitoruje co najmniej elementy techniczne wymienione w tabeli.
1.2.3. Jeżeli funkcja samodiagnostyki wykryje błąd, powinno się pojawić ostrzeżenie w formie wizualnej (lampka kontrolna) albo w formie komunikatu ostrzegawczego na wspólnym obszarze wyświetlania.
1.2.3.1. Pozostaje ono aktywne, dopóki występuje błąd.
1.2.3.2. Może ono zostać czasowo anulowane, ale należy je powtarzać, ilekroć włączany jest zapłon lub główny wyłącznik pojazdu.
1.3. Wymagania dotyczące dokumentacji
1.3.1. Producent dostarcza organom udzielającym homologacji typu dokumentację, zgodnie z tabelą, która powinna zawierać w odniesieniu do każdego elementu zasadę techniczną stosowaną w celu ich monitorowania.
Tabela
Wzór informacji do celów funkcji samodiagnostyki
|
Element |
Zasada techniczna stosowana do celów monitorowania |
|
Moduł sterujący systemu eCall jest w dobrym stanie technicznym (np. brak wewnętrznych błędów sprzętu, procesor/pamięć są gotowe do użycia, funkcja logiczna w oczekiwanym stanie domyślnym) |
|
|
Zewnętrzna antena sieci telefonii ruchomej jest podłączona |
|
|
Urządzenie komunikacyjne sieci telefonii ruchomej jest w dobrym stanie technicznym (brak wewnętrznych błędów sprzętu, czułość) |
|
|
Zewnętrzna antena GNSS jest podłączona |
|
|
Odbiornik GNSS jest w dobrym stanie technicznym (brak wewnętrznych błędów sprzętu, moc wyjściowa w oczekiwanym zakresie) |
|
|
Jednostka sterująca zderzenia jest podłączona |
|
|
Brak błędów z połączeniem (błędy w połączeniu z magistralą) w przypadku poszczególnych komponentów wymienionych w niniejszej tabeli |
|
|
Karta SIM jest włożona (ten element ma zastosowanie wyłącznie wówczas, gdy stosowana jest wymienna karta SIM) |
|
|
Źródło zasilania jest podłączone |
|
|
Źródło zasilania jest wystarczająco naładowane (próg według uznania producenta) |
|
2. Procedura badania
2.1. Weryfikacja funkcji samodiagnostyki
2.1.1. Następujące badanie przeprowadza się na pojeździe z systemem pokładowym eCall zainstalowanym zgodnie z art. 4, na oddzielnych zespołach technicznych zgodnie z art. 6 lub (opcjonalnie) na komponencie, który stanowi część całego systemu na potrzeby badania, zgodnie z art. 5.
2.1.2. Należy przeprowadzić symulację wadliwego funkcjonowania systemu eCall przez wywołanie błędu krytycznego w co najmniej jednym elemencie monitorowanym za pomocą funkcji samodiagnostyki zgodnie z dokumentacją techniczną dostarczoną przez producenta. Organ udzielający homologacji typu wybiera taki element lub takie elementy według własnego uznania.
2.1.3. Należy włączyć zasilanie systemu eCall (np. odpowiednio przełączając zapłon na „on” lub włączając główny wyłącznik pojazdu) oraz sprawdzić, czy chwilę później zaświeci się wskaźnik nieprawidłowego działania.
2.1.4. Należy wyłączyć zasilanie systemu eCall (np. odpowiednio przełączając zapłon na „off” lub wyłączając główny wyłącznik pojazdu) oraz przywrócić normalne działanie systemu.
2.1.5. Należy włączyć zasilanie systemu eCall i sprawdzić, czy wskaźnik nieprawidłowego działania nie świeci się lub zgaśnie wkrótce po początkowym zaświeceniu.
3. Modyfikacja typu systemu pokładowego eCall lub oddzielnego zespołu technicznego opartego na numerze 112
3.1. Jeżeli producent składa wniosek o przegląd lub rozszerzenie zakresu obecnej homologacji w celu uwzględnienia komponentów alternatywnej anteny GNSS, elektronicznej jednostki sterującej, anteny sieci telefonii ruchomej lub źródła zasilania, nie jest wymagane ponowne badanie komponentów systemu pokładowego eCall opartego na numerze 112 do celów wypełnienia wymagań niniejszego załącznika, pod warunkiem że takie homologowane komponenty charakteryzują się przynajmniej identyczną funkcjonalnością oraz że są rzeczywiście objęte niniejszym załącznikiem zgodnie z art. 5 ust. 3.
ZAŁĄCZNIK VIII
Wymagania techniczne i procedury badania w odniesieniu do prywatności i ochrony danych
CZĘŚĆ I
Procedura weryfikacji braku możliwości śledzenia systemu pokładowego eCall lub pokładowego oddzielnego zespołu technicznego eCall
1. Cel
1.1. Niniejsza procedura badania ma zapewnić, aby nie było możliwe śledzenie systemu pokładowego lub oddzielnego zespołu technicznego eCall opartego na numerze 112 oraz aby nie były one przedmiotem ciągłego śledzenia w normalnych warunkach pracy.
2. Wymagania
2.1. Niemożliwe jest połączenie systemu pokładowego eCall lub oddzielnego zespołu technicznego eCall opartego na numerze 112 z PSAP, gdy punkt kontrolny PSAP inicjuje połączenie.
2.2. Brak nawiązania połączenia można przypisać temu, że system pokładowy eCall oparty na numerze 112 nie został zarejestrowany w sieci.
3. Procedura badania
3.1. Następujące badania przeprowadza się na reprezentatywnym układzie części (bez nadwozia pojazdu).
3.2. Przedmiotowe badanie przeprowadza się po udanym połączeniu systemu pokładowego eCall z siecią oraz po rejestracji urządzenia w celu ułatwienia transmisji MSD.
3.2.1. Przed tym badaniem należy „usunąć” wstępne połączenie alarmowe i wyrejestrować je z sieci (np. rozłączając się), w przeciwnym razie punkt kontrolny PSAP będzie mógł nawiązać połączenie.
3.2.2. Przed przeprowadzeniem badania, należy upewnić się, że:
|
a) |
jedna z procedur połączenia określonych w pkt 2.7 załącznika I do niniejszego rozporządzenia, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
b) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
c) |
zapłon lub główny wyłącznik pojazdu jest włączony; |
|
d) |
ewentualny system TPS lub usług dodanych jest wyłączony. |
3.2.3. Należy pozostawić system pokładowy eCall oparty na numerze 112 z włączonym zasilaniem.
3.2.4. Należy podjąć próbę połączenia z systemem pokładowym eCall opartym na numerze 112 za pośrednictwem punktu kontrolnego PSAP.
4. Ocena
4.1. Uznaje się, że wymaganie zostało spełnione, jeżeli niemożliwe jest połączenie systemu pokładowego eCall opartego na numerze 112 z PSAP, gdy punkt kontrolny PSAP próbuje nawiązać połączenie.
4.2. Nawiązanie połączenia z systemem pokładowym eCall opartym na numerze 112, gdy punkt kontrolny PSAP inicjuje połączenie, stanowi nieprawidłowość.
CZĘŚĆ II
Procedura weryfikacji okresu, przez jaki plik logu eCall jest przechowywany przez system pokładowy eCall lub oddzielny zespół techniczny
1. Cel
1.1. Niniejsza procedura badania ma zapewnić, aby system pokładowy eCall nie przechowywał danych osobowych przetwarzanych zgodnie z rozporządzeniem (UE) 2015/758 dłużej, niż jest to konieczne do obsługi sytuacji wyjątkowej, oraz aby dane te zostały całkowicie usunięte, jak tylko przestaną być przydatne do tego celu.
1.2. Udowodnienie, że pliki logu eCall nie są przechowywane dłużej niż 13 godzin od momentu automatycznego zainicjowania połączenia eCall, służy wykazaniu, że dane są automatycznie usuwane.
2. Wymagania
2.1. W momencie kontroli system pokładowy eCall ani oddzielny zespół techniczny nie mogą zawierać w swojej pamięci żadnego rekordu dotyczącego zgłoszenia eCall po upływie 13 godzin od momentu zainicjowania zgłoszenia eCall.
3. Warunki badania
3.1. Służba techniczna musi uzyskać dostęp do tej części systemu, w której przechowywane są pliki logu eCall.
3.2. Następujące badanie przeprowadza się na reprezentatywnym układzie części.
4. Metoda badania
4.1. Należy przeprowadzić badania określone w pkt 2.7 załącznika I. Wymagają one wykonania zgłoszenia testowego w celu przeprowadzenia kontroli funkcjonalności.
4.2. Po upływie 13 godzin od wykonania zgłoszenia testowego tester służby technicznej uzyskuje dostęp do miejsca, w którym przechowywane są pliki logu eCall w systemie. Obejmuje to możliwość pobrania z systemu pokładowego wszelkich plików logu, aby tester mógł się z nimi zapoznać.
5. Ocena
5.1. Uznaje się, że wymaganie zostało spełnione, jeżeli w pamięci systemu pokładowego eCall nie znajdują się żadne pliki logu.
5.2. Obecność jakiegokolwiek pliku logu odnoszącego się do zgłoszenia eCall, które miało miejsce dawniej niż 13 godzin temu, stanowi nieprawidłowość.
CZĘŚĆ III
Procedura weryfikacji automatycznego oraz nieprzerwanego procesu usuwania danych z pamięci wewnętrznej systemu pokładowego eCall lub pokładowego oddzielnego zespołu technicznego eCall
1. Cel
1.1. Niniejsza procedura badania ma zapewnić, aby dane osobowe były wykorzystywane jedynie w celu obsługi sytuacji wyjątkowej oraz aby były automatycznie i nieprzerwanie usuwane z pamięci wewnętrznej systemu pokładowego eCall lub pokładowego oddzielnego zespołu technicznego eCall.
1.2. Należy to udowodnić, wykazując, że w pamięci wewnętrznej systemu pokładowego lub oddzielnego zespołu technicznego eCall opartego na numerze 112 zachowały się maksymalnie trzy ostatnie lokalizacje pojazdu.
2. Wymagania
2.1. W momencie kontroli system pokładowy ani pokładowy oddzielny zespół techniczny eCall nie może mieć zapisanych więcej niż trzy ostatnie lokalizacje pojazdu.
3. Warunki badania
3.1. Służba techniczna musi uzyskać dostęp do tej części systemu, w której przechowywane są dane o lokalizacji pojazdu w pamięci wewnętrznej systemu pokładowego.
3.2. Następujące badanie przeprowadza się na reprezentatywnym układzie części.
4. Metoda badania
4.1. Tester służby technicznej uzyskuje dostęp do miejsca, w którym przechowywane są dane o lokalizacji pojazdu w pamięci wewnętrznej systemu pokładowego. Obejmuje to możliwość pobrania z systemu pokładowego wszelkich zapisanych lokalizacji, aby tester mógł się z nimi zapoznać.
5. Ocena
5.1. Uznaje się, że wymóg został spełniony, jeżeli w pamięci systemu pokładowego eCall znajdują się maksymalnie trzy ostatnie lokalizacje.
5.2. Obecność więcej niż trzech lokalizacji stanowi nieprawidłowość.
CZĘŚĆ IV
Procedura weryfikacji, czy dane osobowe nie podlegają wymianie między systemem pokładowym eCall lub pokładowym oddzielnym zespołem technicznym eCall a systemami usług stron trzecich
1. Cel
1.1. Niniejsza procedura badania zapewnia takie zaprojektowanie systemu pokładowego lub pokładowego oddzielnego zespołu technicznego eCall opartego na numerze 112 i wszelkich dodatkowych funkcjonalności systemu zapewniających TPS eCall lub usługę dodaną, aby w żadnym momencie nie była możliwa wymiana danych osobowych między nimi.
2. Wymagania
2.1. Następujące wymagania mają zastosowanie do systemów pokładowych eCall lub pokładowych oddzielnych zespołów technicznych eCall używanych w połączeniu z funkcjonalnością TPS eCall systemu pokładowego.
2.2. Wymagania dotyczące osiągów
2.2.1. Nie zachodzi żadna wymiana danych osobowych między systemami pokładowymi eCall lub pokładowym oddzielnym zespołem technicznym opartymi na numerze 112 a ewentualną dodatkową funkcjonalnością systemu zapewniającą TPS eCall lub usługę dodaną.
2.2.2. Po wykonaniu zgłoszenia eCall za pomocą systemu pokładowego eCall lub pokładowego oddzielnego zespołu technicznego opartego na numerze 112 w pamięci systemu usług eCall dostarczanych przez stronę trzecią lub usług dodanych nie zachowuje się żaden log tego zgłoszenia eCall.
3. Procedura badania
3.1. Następujące badania przeprowadza się albo na pojeździe z zainstalowanym systemem pokładowym eCall, albo na reprezentatywnym układzie części.
3.2. Należy wyłączyć system TPS na czas trwania zgłoszenia testowego.
3.2.1. Przed wykonaniem zgłoszenia testowego należy upewnić się, że:
|
a) |
jedna z procedur połączenia określonych w pkt 2.7 załącznika I do niniejszego rozporządzenia, zgodnie z ustaleniami służby technicznej i producenta, będzie stosowana w odniesieniu do każdego zgłoszenia testowego; |
|
b) |
dostępny jest dedykowany punkt kontrolny PSAP umożliwiający odebranie zgłoszenia eCall wyemitowanego przez system oparty na numerze 112; |
|
c) |
nie można wykonać fałszywego zgłoszenia eCall do prawdziwego PSAP za pośrednictwem aktywnej sieci; oraz |
|
d) |
zapłon lub główny wyłącznik pojazdu jest włączony. |
3.2.2. Należy wykonać zgłoszenie testowe, stosując ręczne uruchomienie systemu (tryb „push”) przy wyłączonym systemie TPS.
3.2.3. Należy sprawdzić, czy nawiązano połączenie z punktem kontrolnym PSAP, za pomocą rekordu punktu kontrolnego PSAP, który potwierdza, że otrzymał sygnał inicjujący zgłoszenie, lub za pomocą udanego połączenia głosowego z punktem kontrolnym PSAP.
3.2.4. Należy zakończyć zgłoszenie testowe za pomocą odpowiedniej komendy punktu kontrolnego PSAP (np. „rozłącz się”).
3.2.5. Jeżeli próba zgłoszenia za pomocą systemu opartego na numerze 112 nie powiedzie się, można powtórzyć procedurę badania.
3.3. Brak pliku logu w systemie TPS należy zweryfikować poprzez dostęp do tej części systemu, w której przechowywane są pliki logu eCall.
3.3.1. Tester służby technicznej uzyskuje dostęp do miejsca, w którym przechowywane są pliki logu eCall w IVS. Obejmuje to możliwość pobrania z systemu pokładowego wszelkich plików logu, aby tester mógł się z nimi zapoznać.
3.3.2. Uznaje się, że wymaganie zostało spełnione, jeżeli w pamięci systemu pokładowego TPS nie znajdują się żadne pliki logu.
3.3.3. Obecność w systemie TPS jakiegokolwiek pliku logu odnoszącego się do zgłoszenia eCall, które wykonano przy użyciu systemu opartego na numerze 112, stanowi nieprawidłowość.
3.4. Procedury połączenia
Zastosowanie mają procedury połączenia określone w pkt 2.7 załącznika I do niniejszego rozporządzenia.
ZAŁĄCZNIK IX
Klasy pojazdów, o których mowa w art. 2
Pojazdy opancerzone kategorii M1 i N1, określone w części A pkt 5.2 załącznika II do dyrektywy 2007/46/WE, wyposażone w opancerzone szyby bezpieczeństwa klasy BR 7 zgodnie z klasyfikacją według normy europejskiej EN 1063:2000 (Badanie i klasyfikacja odporności na uderzenie pocisku) oraz w części samochodowe zgodne z normą europejską EN 1522:1999 (Okna, drzwi, żaluzje i zasłony -- Kuloodporność), w przypadku gdy pojazdy te ze względu na swoje specjalne przeznaczenie nie mogą spełniać wymagań określonych w rozporządzeniu (UE) 2015/758 i w niniejszym rozporządzeniu.