

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32021L1226
Commission Delegated Directive (EU) 2021/1226 of 21 December 2020 amending, for the purposes of adapting to scientific and technical progress, Annex II to Directive 2002/49/EC of the European Parliament and of the Council as regards common noise assessment methods (Text with EEA relevance)
Komisijas Deleģētā direktīva (ES) 2021/1226 (2020. gada 21. decembris), ar ko, pielāgojot zinātnes un tehnikas attīstībai, Eiropas Parlamenta un Padomes Direktīvas 2002/49/EK II pielikumu groza attiecībā uz kopīgām trokšņa novērtēšanas metodēm (Dokuments attiecas uz EEZ)
Komisijas Deleģētā direktīva (ES) 2021/1226 (2020. gada 21. decembris), ar ko, pielāgojot zinātnes un tehnikas attīstībai, Eiropas Parlamenta un Padomes Direktīvas 2002/49/EK II pielikumu groza attiecībā uz kopīgām trokšņa novērtēšanas metodēm (Dokuments attiecas uz EEZ)
C/2020/9101
OJ L 269, 28.7.2021, p. 65–142
(BG, ES, CS, DA, DE, ET, EL, EN, FR, GA, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
28.7.2021 |
LV |
Eiropas Savienības Oficiālais Vēstnesis |
L 269/65 |
KOMISIJAS DELEĢĒTĀ DIREKTĪVA (ES) 2021/1226
(2020. gada 21. decembris),
ar ko, pielāgojot zinātnes un tehnikas attīstībai, Eiropas Parlamenta un Padomes Direktīvas 2002/49/EK II pielikumu groza attiecībā uz kopīgām trokšņa novērtēšanas metodēm
(Dokuments attiecas uz EEZ)
EIROPAS KOMISIJA,
ņemot vērā Līgumu par Eiropas Savienības darbību,
ņemot vērā Eiropas Parlamenta un Padomes Direktīvu 2002/49/EK (2002. gada 25. jūnijs) par vides trokšņa novērtēšanu un pārvaldību (1) un jo īpaši tās 12. pantu,
tā kā:
|
(1) |
Direktīvas 2002/49/EK II pielikumā ir noteiktas dalībvalstīm kopīgas novērtēšanas metodes, kas jāizmanto informācijas iegūšanai par vides troksni un tā ietekmi uz veselību, jo īpaši trokšņa kartēšanai un rīcības plānu pieņemšanai, pamatojoties uz trokšņa kartēšanas rezultātiem. Šis pielikums ir jāpielāgo zinātnes un tehnikas attīstībai. |
|
(2) |
No 2016. līdz 2020. gadam Komisija sadarbojās ar dalībvalstu tehniskajiem un zinātniskajiem ekspertiem, lai novērtētu, kādi pielāgojumi vajadzīgi, ņemot vērā tehniskos un zinātniskos sasniegumus vides trokšņa aprēķināšanā. Šis process tika veikts, rūpīgi apspriežoties ar Trokšņa ekspertu grupu, kurā darbojās dalībvalstu pārstāvji, Eiropas Parlamenta pārstāvji, nozares ieinteresētās personas, dalībvalstu publiskā sektora iestādes, NVO, iedzīvotāji un akadēmiskās aprindas. |
|
(3) |
Šīs deleģētās direktīvas pielikumā ir noteikti nepieciešamie kopīgo novērtēšanas metožu pielāgojumi, kas ietver precizētas trokšņa izplatīšanās aprēķināšanas formulas, jaunākajām zināšanām pielāgotas tabulas un aprēķinu posmu apraksta uzlabojumus. Tas ietekmē autoceļu trokšņa, dzelzceļu trokšņa, rūpnieciskā trokšņa un gaisa kuģu trokšņa aprēķinus. Dalībvalstīm šīs metodes jāizmanto vēlākais no 2021. gada 31. decembra. |
|
(4) |
Tāpēc būtu attiecīgi jāgroza Direktīvas 2002/49/EK II pielikums. |
|
(5) |
Šajā direktīvā paredzētie pasākumi ir saskaņā ar Trokšņa ekspertu grupas atzinumu, ar kuru notika apspriešanās 2020. gada 12. oktobrī, |
IR PIEŅĒMUSI ŠO DIREKTĪVU.
1. pants
Direktīvas 2002/49/EK II pielikumu groza saskaņā ar šīs direktīvas pielikumu.
2. pants
1. Dalībvalstīs stājas spēkā normatīvie un administratīvie akti, kas vajadzīgi, lai izpildītu šīs direktīvas prasības vēlākais līdz 2021. gada 31. decembrim. Dalībvalstis nekavējoties dara Komisijai zināmu minēto noteikumu tekstu.
Kad dalībvalstis pieņem minētos noteikumus, tajos ietver atsauci uz šo direktīvu vai arī šādu atsauci pievieno to oficiālajai publikācijai. Dalībvalstis nosaka, kā izdarāma šāda atsauce.
2. Dalībvalstis dara Komisijai zināmus to tiesību aktu galvenos noteikumus, ko tās pieņem jomā, uz kuru attiecas šī direktīva.
3. pants
Šī direktīva stājas spēkā nākamajā dienā pēc tās publicēšanas Eiropas Savienības Oficiālajā Vēstnesī.
4. pants
Šī direktīva ir adresēta dalībvalstīm.
Briselē, 2020. gada 21. decembrī
Komisijas vārdā –
priekšsēdētāja
Ursula VON DER LEYEN
PIELIKUMS
direktīvas II pielikumu groza šādi:
|
1) |
pielikuma 2.1.1. sadaļas otro daļu aizstāj ar šādu: “Ceļu satiksmes, sliežu ceļu satiksmes un rūpniecisko troksni aprēķina oktāvu joslās, izņemot sliežu ceļu satiksmes trokšņa avotu skaņas jaudu, kur tiek izmantotas trešdaļoktāvu joslas. Pamatojoties uz šiem oktāvu joslu rezultātiem, ceļu satiksmes, sliežu ceļu satiksmes un rūpnieciskā trokšņa A-izsvarotais ilgtermiņa vidējais skaņas līmenis dienas, vakara un nakts periodā, kā definēts Direktīvas 2002/49/EK I pielikumā un minēts 5. pantā, tiek aprēķināts, izmantojot 2.1.2., 2.2., 2.3., 2.4. un 2.5. sadaļā aprakstīto metodi. Aglomerācijās ceļu satiksmes un sliežu ceļu satiksmes A-izsvaroto ilgtermiņa vidējo skaņas līmeni nosaka pēc tajās esošo ceļu un sliežu ceļu segmentu, tostarp galveno autoceļu un galveno dzelzceļa līniju, devuma.”; |
|
2) |
pielikuma 2.2.1. sadaļu groza šādi:
|
|
3) |
pielikuma 2.3.b tabulu groza šādi:
|
|
4) |
pielikuma 2.3.2. sadaļu groza šādi:
|
|
5) |
pielikuma 2.3.3. sadaļā daļu aiz virsraksta “Korekcija par strukturālo starojumu (tilti un viadukti)” aizstāj ar šādu: “ Gadījumā, kad sliežu ceļa posms atrodas uz tilta, ir jāņem vērā papildu troksnis, ko rada tilta vibrācija, kuru ierosina vilciena atrašanās uz tilta. Tilta troksni modelē kā papildu avotu, kura skaņas jaudu katram riteklim iegūst ar
kur LH, bridge ,i ir tilta pārneses funkcija. Tilta troksnis LW,0, bridge ,i ir tikai troksnis, ko izstaro tilta konstrukcija. Uz tilta esoša ritekļa radīto rites troksni aprēķina, izmantojot 2.3.8. līdz 2.3.10. formulu un izvēloties sliežu pārneses funkciju, kas atbilst uz tilta esošajai sliežu ceļa sistēmai. Barjeras tilta malās parasti neņem vērā.”; |
|
6) |
pielikuma 2.4.1. sadaļu groza šādi:
|
|
7) |
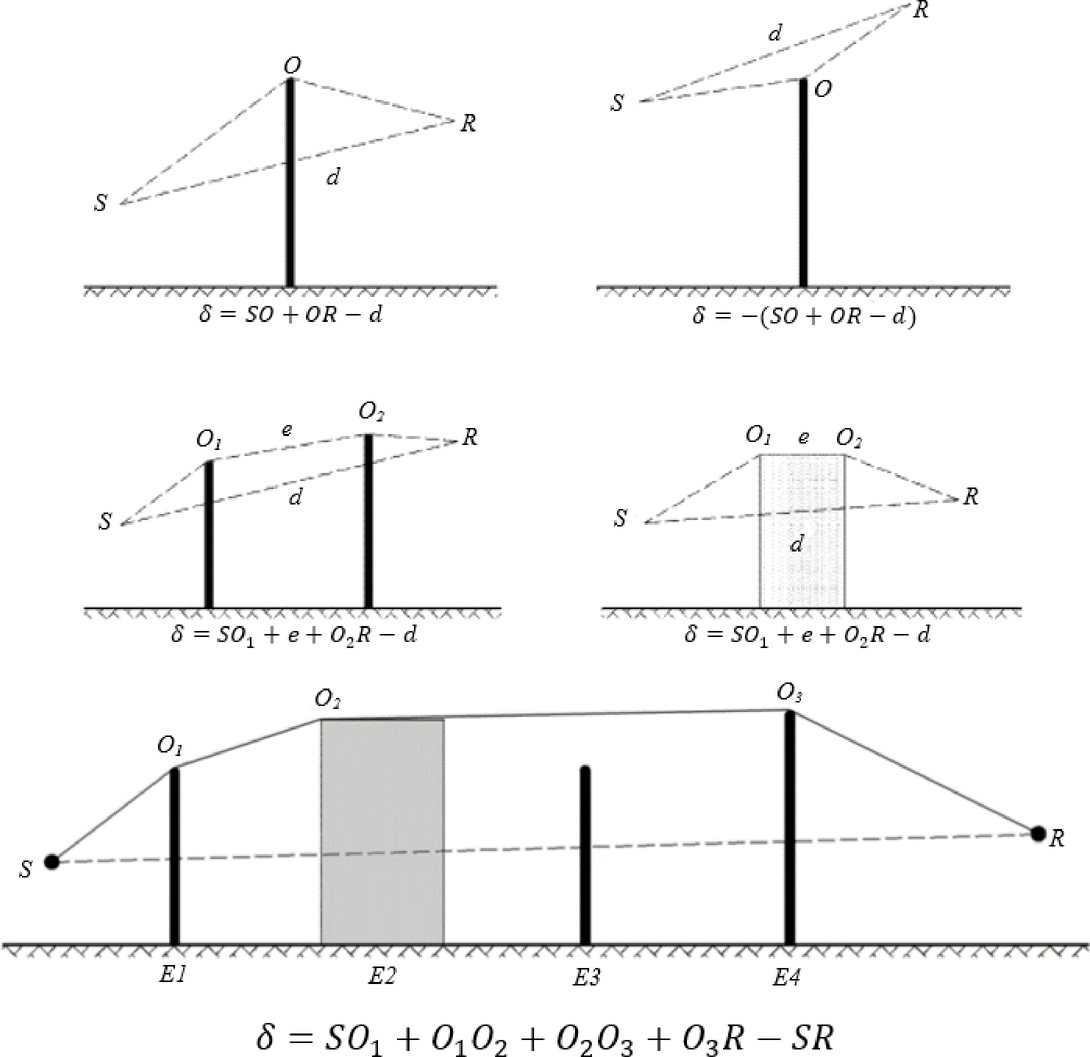
pielikuma 2.5.1. sadaļā septīto daļu aizstāj ar šādu: “Objektus, kuru slīpums attiecībā pret vertikāli pārsniedz 15°, neuzskata par atstarotājiem, bet tos ņem vērā visos citos izplatīšanās aspektos, tādos kā zemes virsmas efekts un difrakcija.”; |
|
8) |
pielikuma 2.5.5. sadaļu groza šādi:
|
|
9) |
pielikuma 2.5.6. sadaļu groza šādi:
|







|
10) |
pielikuma 2.7.5. sadaļu “Gaisa kuģu trokšņa un lidtehniskie raksturojumi” aizstāj ar šādu: “2.7.5. Gaisa kuģu trokšņa un lidtehniskie raksturojumi I papildinājumā iekļautajā ANP datubāzē ir ietverti gaisa kuģu un dzinēju darbības koeficienti, izlidošanas un pieejas profili, kā arī NPD sakarības ievērojamai daļai civilo gaisa kuģu, kas veic lidojumus no Eiropas Savienības lidostām. Ja dati par kādu gaisa kuģa tipu vai modifikāciju datubāzē nav iekļauti, tad tos vislabāk atspoguļo dati par citiem, parasti līdzīgiem gaisa kuģiem, kas ir iekļauti datubāzē. Šie dati tika iegūti, lai aprēķinātu trokšņa kontūras vidēja vai reprezentatīva gaisa kuģu parka un satiksmes kombinācijai lidostā. Var nebūt piemēroti prognozēt atsevišķa gaisa kuģa modeļa absolūtos trokšņa līmeņus, un nav piemēroti salīdzināt konkrētu gaisa kuģu tipu, modeļu vai konkrēta gaisa kuģu parka trokšņa rādītājus un raksturlielumus. Tā vietā, lai noteiktu, kuri gaisa kuģu tipi, modeļi vai konkrēta gaisa kuģu flote ir trokšņainākie, izmanto trokšņa līmeņa sertifikātus. ANP datubāzē ir ietverts viens vai vairāki noklusējuma pacelšanās un nolaišanās profili katram uzskaitītajam gaisa kuģa tipam. Pārbauda šo profilu piemērojamību attiecīgajai lidostai un nosaka vai nu fiksēto punktu profilus, vai procedūras posmus, kas vislabāk raksturo lidojumu darbības šajā lidostā.”; |
|
11) |
pielikuma 2.7.11. sadaļā otrās daļas nosaukumu zem virsraksta “Ceļa līniju izkliede” aizstāj ar šādu: “”; |
|
12) |
pielikuma 2.7.12. sadaļā aiz sestās apakšdaļas un pirms septītās un pēdējās apakšdaļas iekļauj šādu apakšdaļu: “Gaisa kuģa trokšņa avots būtu jāievada attiecīgi vismaz 1,0 m (3,3 pēdu) augstumā virs lidlauka līmeņa vai attiecīgi virs skrejceļa reljefa pacēluma līmeņa.”; |
|
13) |
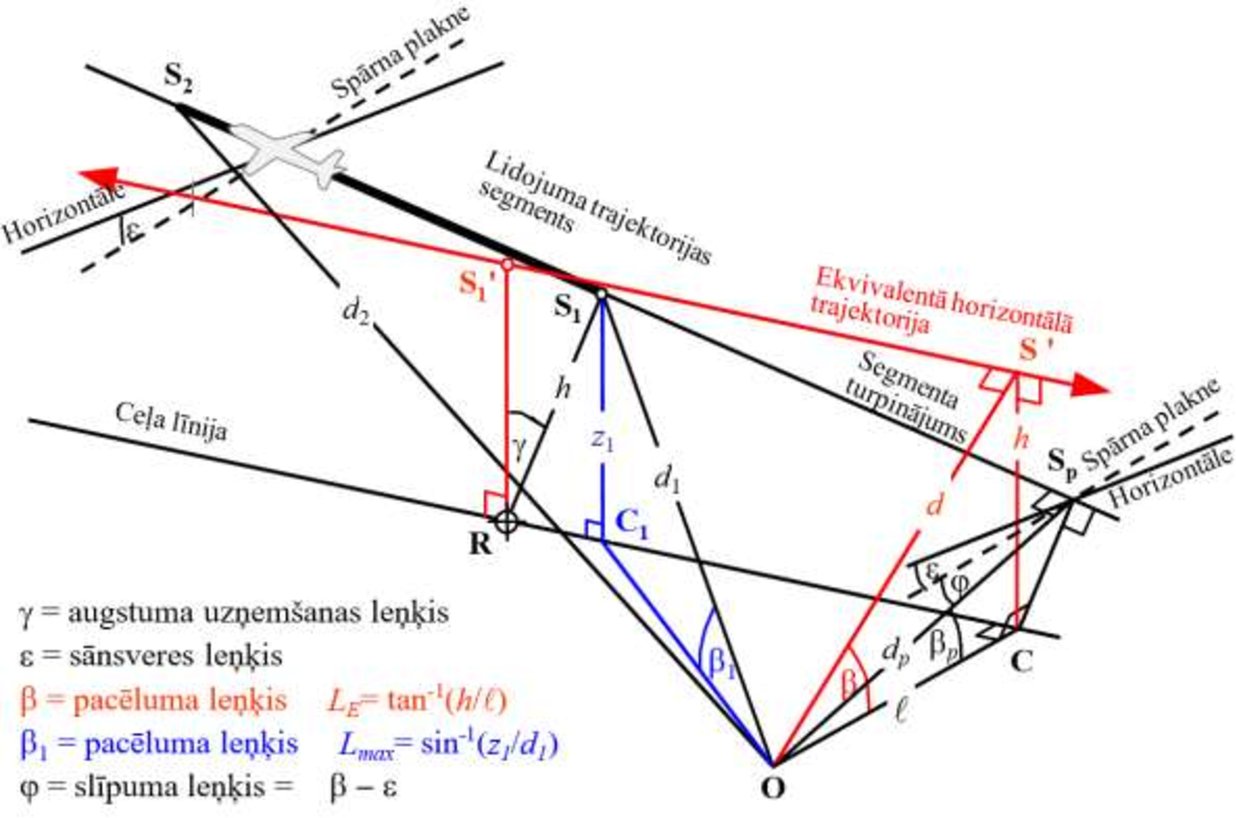
pielikuma 2.7.13. sadaļu “Lidojuma trajektorijas segmentu konstruēšana” aizstāj ar šādu: “2.7.13. Lidojuma trajektorijas segmentu konstruēšana Katra lidojuma trajektorija ir jādefinē ar segmentu koordinātu (mezglpunktu) kopu un lidojuma parametriem. Pirmais uzdevums ir noteikt ceļa līnijas segmentu koordinātas. Pēc tam aprēķina lidojuma profilu, ievērojot, ka katram dotajam procedūras etapu kopumam profils ir atkarīgs no ceļa līnijas; piem., pie tādas pašas vilces un ātruma gaisa kuģa augstuma uzņemšanas ātrums (kāpšanas spēja) pagriezienos ir mazāks nekā taisnā lidojumā. Pēc tam veic iedalīšanu apakšsegmentos gaisa kuģim uz skrejceļa (pacelšanās ieskrējiens vai nosēšanās izskrējiens) un gaisa kuģim, kas atrodas skrejceļa tuvumā (sākotnējā augstuma uzņemšana vai pieejas beigu posms). Tad gaisa segmenti ar ievērojami atšķirīgu ātrumu to sākuma un beigu punktos būtu jāiedala apakšsegmentos. Ceļa līnijas (*)segmentu divdimensiju koordinātas nosaka un apvieno ar divdimensiju lidojuma profilu, lai izveidotu trīsdimensiju lidojuma trajektorijas segmentus. Visbeidzot, izņem visus tos lidojuma trajektorijas punktus, kas atrodas pārāk tuvu cits citam. Lidojuma profils Parametri, ar ko apraksta katru lidojuma profila segmentu tā sākumā (indekss 1) un beigās (indekss 2), ir šādi:
Lai konstruētu lidojuma profilu no procedūras etapu virknes (lidojuma trajektorijas sintēze), segmentus konstruē secīgi, lai beigu punktos sasniegtu vēlamos apstākļus. Katra segmenta beigu punkta parametri kļūst par nākamā segmenta sākuma punkta parametriem. Aprēķinot jebkuru segmentu, šie parametri ir zināmi jau sākumā, jo nepieciešamos apstākļus beigu punktā nosaka procedūras etaps. Procedūras etapus nosaka vai nu ANP dati (kas sniegti pēc noklusējuma), vai lietotājs (piem., pēc gaisa kuģa lidojumu rokasgrāmatas). Beigu apstākļi parasti ir augstums un ātrums; konstruējot profilu, uzdevums ir noteikt ceļa garumu, kas nolidots, lai šādus apstākļus sasniegtu. Nedefinētos parametrus nosaka, izmantojot lidtehnisko parametru aprēķinus, kas aprakstīti B papildinājumā. Ja ceļa līnija ir taisna, tad profila punktus un saistītos lidojuma parametrus var noteikt neatkarīgi no ceļa līnijas (sānsveres leņķis allaž ir nulle). Tomēr ceļa līnijas tikai retos gadījumos ir taisnas: parasti tās ietver pagriezienus, kas – lai sasniegtu vislabākos rezultātus – ir jāņem vērā, kad tiek noteikts divdimensionālais lidojuma profils; vajadzības gadījumā profila segmenti ir jāsadala pie ceļa līnijas mezglpunktiem, lai ņemtu vērā sānsveres leņķa izmaiņas. Parasti sākumā nākamā segmenta garums nav zināms; to aprēķina provizoriski, pieņemot, ka sānsveres leņķis nemainās. Ja konstatē, ka provizoriskais segments stiepjas pāri vienam vai vairākiem ceļa līnijas mezglpunktiem, no kuriem pirmais atrodas pie s, proti, s1 < s < s2 , tad segmentu atšķeļ pie s, bet parametrus aprēķina ar interpolācijas paņēmienu (sk. turpmāk). Tie kļūst par pašreizējā segmenta beigu punkta parametriem un jaunā segmenta sākuma punkta – kuram vēl aizvien saglabājas tie paši sasniedzamie beigu apstākļi – parametriem. Ja nav neviena iestarpināta ceļa līnijas mezglpunkta, tad provizorisko segmentu uzskata par apstiprinātu. Ja pagriezienu ietekme uz lidojuma profilu ir ignorējama, tad izmanto variantu “taisns lidojums ar vienu segmentu”, lai gan informāciju par sānsveres leņķi patur tālākai izmantošanai. Neatkarīgi no tā, vai pagrieziena ietekme ir pilnībā modelēta, katru trīsdimensionālo lidojuma trajektoriju konstruē, apvienojot divdimensionālo lidojuma profilu ar divdimensionālo ceļa līniju. Rezultātā iegūst virkni ar koordinātu kopām (x, y, z), no kurām katra ir vai nu segmentētās ceļa līnijas mezglpunkts, vai lidojuma profila mezglpunkts, vai abi, un profila punktus papildina ar attiecīgajām augstuma z, ātruma attiecībā pret zemi V, sānsveres leņķa ε un dzinēja jaudas P vērtībām. Ceļa līnijas punktam (x, y), kas atrodas starp lidojuma profila segmenta beigu punktiem, lidojuma parametrus interpolē šādi:
kur
Jāievēro: tiek pieņemts, ka z un ε lineāri mainās atkarībā no attāluma, bet pieņemts, ka V un P lineāri mainās atkarībā no laika (proti, konstants paātrinājums (**)). Kad lidojuma profila segmentus salāgo ar radara datiem (lidojuma trajektorijas analīze), visus beigu punktu attālumus, augstumus, ātrumus un sānsveres leņķus nosaka tieši pēc šiem datiem; jāaprēķina ir tikai jaudas režīma parametri, izmantojot lidtehnisko raksturojumu vienādojumus. Parasti tas nav sarežģīti, jo ceļa līnijas un lidojuma profila koordinātas var pienācīgi salāgot. Pacelšanās ieskrējiens Gaisa kuģim paceļoties, kad tā gaita paātrinās segmentā no bremžu atlaišanas punkta (cits nosaukums: ieskrējiena sākums (SOR)) līdz atraušanās punktam, ātrums 1 500–2 500 m lielā distancē krasi mainās: no nulles līdz aptuveni 80–100 m/s. Tādējādi pacelšanās ieskrējiens tiek sadalīts dažāda garuma segmentos, kuros gaisa kuģa ātrums mainās par specifisku palielinājumu ΔV, kas nav lielāks par 10 m/s (aptuveni 20 mezgli). Lai gan paātrinājuma faktiskā vērtība pacelšanās ieskrējiena laikā mainās, šim mērķim ir pilnīgi pietiekami uzskatīt, ka paātrinājums ir konstants. Šādā gadījumā pacelšanās posmā V1 ir sākotnējais ātrums, V2 ir pacelšanās ātrums, nTO ir pacelšanās segmentu skaits un sTO ir ekvivalentā pacelšanās distance. Pie ekvivalentās pacelšanās distances sTO (sk. B papildinājumu), pacelšanās ātruma V1 un pacelšanās ātruma VTO ieskrējiena segmentu skaits nTO ir
un līdz ar to ātruma izmaiņas segmentā ir
un laiks Δt katrā segmentā ir (pieņemot, ka paātrinājums ir konstants)
Ieskrējiena segmenta k (1 ≤ k ≤ nTO) garums sTO,k ir:
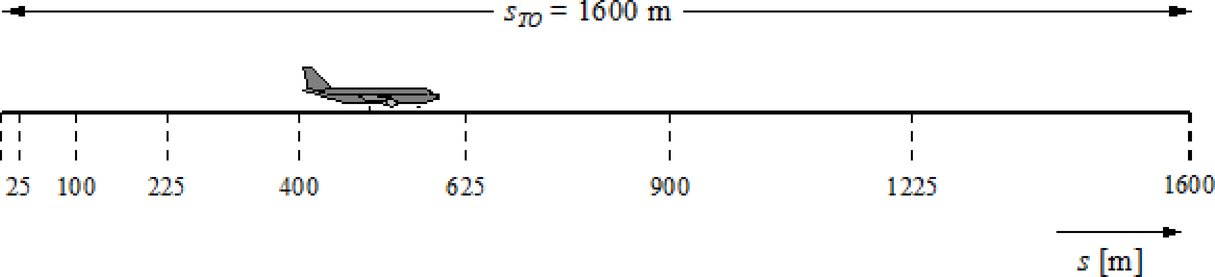
Piemērs. Ja pacelšanās distance sTO = 1 600 m, V1 = 0 m/s un V2 = 75 m/s, tad nTO = 8 segmenti, kuru garums ir no 25 līdz 375 m (sk. 2.7.g attēlu).
Līdzīgi kā mainās ātrums, arī gaisa kuģa vilce katrā segmentā mainās ar konstantu palielinājumu ΔP, ko aprēķina kā
kur attiecīgi PTO un P init apzīmē gaisa kuģa vilci atraušanās punktā un gaisa kuģa vilci pacelšanās ieskrējiena sākumā. Šādu konstanto vilces palielinājumu (nevis bikvadrātvienādojumu 2.7.6) izmanto tāpēc, lai būtu saskanība ar lineāro sakarību starp vilci un ātrumu reaktīvo gaisa kuģu gadījumā. Svarīga piezīme. Iepriekš norādītajos vienādojumos un piemērā netieši pieņem, ka gaisa kuģa sākotnējais ātrums pacelšanās posma sākumā ir nulle. Tas atbilst parastajai situācijai, kad gaisa kuģis sāk ieskrieties un paātrināties no bremžu atlaišanas punkta. Tomēr ir arī situācijas, kad gaisa kuģis var sākt paātrināties no manevrēšanas ātruma, neapstājoties pie skrejceļa sliekšņa. Ja sākotnējais ātrums Vinit nav nulle, 2.7.8., 2.7.9., 2.7.10. un 2.7.11. vienādojuma vietā būtu jāizmanto šādi “vispārīgi” vienādojumi.
Šādā gadījumā pacelšanās posmā V1 ir sākotnējais ātrums Vinit , V2 ir pacelšanās ātrums VTO , n ir pacelšanās segmentu skaits nTO , s ir ekvivalentā pacelšanās distance sTO un sk ir segmenta k (1 [Symbol] k [Symbol] n) garums sTO,k . Nosēšanās izskrējiens Lai gan nosēšanās izskrējiens pēc būtības ir apgriezta pacelšanās ieskrējiena operācija, īpaša uzmanība jāpievērš
Pretstatā pacelšanās ieskrējiena distancei, ko atvedina no gaisa kuģa lidtehniskajiem parametriem, apstāšanās distance sstop (proti, distance no zemskares punkta līdz punktam, kur gaisa kuģis atbrīvo skrejceļu) nav atkarīga tikai no gaisa kuģa. Lai gan minimālo apstāšanās distanci var aplēst pēc gaisa kuģa masas un lidtehniskajiem parametriem (un pieejamās reversās vilces), faktiskā apstāšanās distance ir atkarīga arī no manevrēšanas ceļu atrašanās vietas, no satiksmes situācijas un no konkrētās lidostas noteikumiem par reversās vilces izmantošanu. Reversās vilces izmantošana nav standarta procedūra – to izmanto tikai tad, ja nepieciešamo palēninājumu nav iespējams sasniegt ar riteņu bremzēm. (Reversā vilce var būt sevišķi traucējoša, jo dzinēja straujā pāreja no tukšgaitas režīma reversajā režīmā rada piepešu un lielu troksni.) Tomēr vairumu skrejceļu izmanto tiklab pacelšanās, kā nosēšanās vajadzībām, tāpēc reversajai vilcei ir ļoti maza ietekme uz trokšņa kontūrām, jo skrejceļa tuvumā kopējā skaņas enerģijā dominē troksnis no pacelšanās operācijām. Reversās vilces ietekme uz trokšņa kontūrām var būt būtiska tikai tad, ja skrejceļu izmanto tikai nosēšanās operācijām. No fizikālā viedokļa reversās vilces troksnis ir ļoti sarežģīts process, tomēr tā ietekme uz gaisa trokšņa kontūrām ir samērā nenozīmīga, tāpēc tā modelēšana var būt vienkāršota, proti, dzinēja jaudas straujās izmaiņas atveido ar pienācīgu segmentāciju. Nav šaubu, ka nosēšanās izskrējiena trokšņa modelēšana ir sarežģītāka nekā pacelšanās ieskrējiena trokšņa modelēšana. Gadījumos, kad detalizēta informācija nav pieejama, modelēšanā ieteicams izmantot šādus vienkāršotus pieņēmumus (sk. 2.7.h.1. attēlu).
Gaisa kuģis šķērso nosēšanās slieksni (kura koordināta s = 0 gar pieejas ceļa līniju) 50 pēdu augstumā un pēc tam turpina nolaisties pa glisādi, līdz tas pieskaras zemei uz skrejceļa. Ja glisāde ir 3°, zemskares punkts ir 291 m aiz nosēšanās sliekšņa (kā parādīts 2.7.h.1 attēlā). Tad gaisa kuģis apstāšanās distancē sstop – tās ir gaisa kuģim specifiskas vērtības, kas atrodamas ANP datubāzē, – samazina ātrumu no pieejas beigu posma ātruma Vfinal līdz 15 m/s. Tā kā šajā segmentā notiek ļoti straujas ātruma izmaiņas, tas būtu sīkāk jāiedala apakšsegmentos tāpat kā pacelšanās ieskrējiens (vai gaisa segmenti ar straujām ātruma izmaiņām), izmantojot vispārinātos vienādojumus 2.7.13 (jo manevrēšanas ātrums nav nulle). Dzinēja jauda mainās: no pieejas beigu posma jaudas zemskares punktā līdz reversās vilces jaudas režīmam Prev distancē 0,1•sstop , tad atlikušajos 90 % no apstāšanās distances tā samazinās līdz 10 % no maksimālās pieejamās jaudas. Līdz pat skrejceļa beigām (pie s = -s RWY) gaisa kuģa ātrums ir konstants. Pašlaik ANP datubāzē nav iekļautas reversās vilces NPD līknes, tāpēc šī efekta modelēšanā ir jāizmanto tradicionālās līknes. Parasti reversās vilces jauda Prev ir aptuveni 20 % no pilnas jaudas režīma; ja nav pieejama ekspluatācijas informācija, ieteicams izmantot šo vērtību. Tomēr dotajā jaudas režīmā reversā vilce parasti rada daudz lielāku troksni nekā turpgaitas vilce, tāpēc no NPD atvedinātajam trokšņa notikuma līmenim ir jāpiemēro palielinājums ΔL, ar ko attiecīgo vērtību sākumā palielina no nulles līdz vērtībai ΔLrev (provizoriski ieteicamais lielums ir 5 dB (***)) distancē 0,1•sstop un tad lineāri samazina līdz nullei atlikušajā apstāšanās distancē. Sākotnējās augstuma uzņemšanas un pieejas beigu posma segmentu segmentācija Sākotnējās augstuma uzņemšanas un pieejas beigu posma gaisa segmentu laikā segmenta–uztvērēja ģeometriskie parametri strauji mainās, jo īpaši attiecībā uz tādām novērotāju atrašanās vietām, kas atrodas sāņus no lidojuma trajektorijas, kur pacēluma leņķis (beta leņķis) arī strauji mainās, gaisa kuģim uzņemot vai samazinot augstumu šajos sākotnējos/beigu segmentos. Salīdzinājumi ar aprēķinu rezultātiem par ļoti maziem segmentiem liecina: ja izmanto integrētus parametrus, tad trokšņa aproksimācija no viena (vai ierobežota skaita) augstuma uzņemšanas vai pieejas gaisa segmenta(-iem) zem noteikta augstuma (attiecībā pret skrejceļu) blakus lidojuma ceļa līnijai ir vāja. Tas ir tādēļ, ka katram segmentam tiek piemērota viena laterālā vājinājuma korekcija, kas atbilst vienai segmentam specifiskai pacēluma leņķa vērtībai, savukārt šā parametra straujās izmaiņas rada ievērojamas laterālā vājinājuma efekta izmaiņas katrā segmentā. Aprēķinu precizitāti uzlabo, sadalot apakšsegmentos sākotnējās augstuma uzņemšanas un pieejas pēdējā posma gaisa segmentus. Apakšsegmentu skaits un katra apakšsegmenta garums nosaka laterālā vājinājuma izmaiņu “granularitāti”, kas tiks ņemta vērā. Ievērojot kopējā laterālā vājinājuma izteiksmi gaisa kuģiem ar fizelāžā uzstādītiem dzinējiem, var pierādīt: ja ierobežo laterālā vājinājuma variācijas 1,5 dB diapazonā uz apakšsegmentu, tad augstuma uzņemšanas un pieejas gaisa segmenti, kas atrodas zemāk par 1 289,6 m (4 231 pēda) virs skrejceļa, būtu jāsadala apakšsegmentos, pamatojoties uz šādu augstuma vērtību kopu:
Katram sākotnējam segmentam zemāk par 1 289,6 m (4 231 pēdu) iepriekš minētos augstumus īsteno, nosakot, kurš augstums iepriekš minētajā kopā ir vistuvākais sākotnējā beigu punkta augstumam (augstuma uzņemšanas segmentam) vai sākuma punkta augstumam (pieejas segmentam). Pēc tam aprēķina faktiskos apakšsegmentu augstumus zi, izmantojot formulu:
kur:
Sākotnējās augstuma uzņemšanas segmenta piemērs Ja sākotnējā segmenta beigu punkta augstums ir ze = 304,8 m, tad no augstuma vērtību kopas redzams, ka 214,9 m < ze < 334,9 m un ka tuvākais augstums no kopas līdz ze ir z′7 = 334,9 m. Apakšsegmenta beigu punkta augstumus aprēķina šādi:
(ņemot vērā, ka šajā gadījumā k = 1, jo tas ir sākotnējās augstuma uzņemšanas segments) Tādējādi z1 būtu 17,2 m, z2 būtu 37,8 m utt. Gaisa segmentu segmentācija Ja kādā gaisa segmentā ātrums būtiski mainās, segments jāsadala sīkāk tāpat kā ieskrējiena gadījumā, proti,
kur V1 un V2 ir attiecīgi segmenta sākuma un beigu ātrumi. Attiecīgos apakšsegmentu parametrus aprēķina līdzīgi kā pacelšanās ieskrējienam, izmantojot vienādojumus 2.7.9–2.7.11. Ceļa līnija Ceļa līniju (vai tā būtu maģistrālā ceļa līnija, vai izkliedēta pakārtotā līnija) definē vai nu ar (x,y) koordinātu sēriju zemes plaknē (piem., no radara informācijas), vai ar vektorēšanas komandu secību, ar ko apraksta taisnos segmentus un riņķa līnijas lokus (pagriezieni ar dotu rādiusu r un kursa maiņu Δξ). Modelēšanā ar segmentācijas metodi loku atveido ar taisnu nogriežņu virkni, kas atbilst loka daļām. Lai gan gaisa kuģa sānsvere pagriezienā tieši neparādās ceļa līnijas segmentos, tā ietekmē segmentu parametrus. B4 papildinājumā izskaidrots, kā aprēķināt sānsveres leņķus stabilā pagriezienā, lai gan faktiski, protams, šos leņķus nevar momentāni ne piemērot, ne atsaukt. Tas, kā izpildīt pāreju no taisna lidojuma uz pagriezienu vai no viena pagrieziena uz sekojošu nākamo pagriezienu, nav noteikts. Parasti faktoriem, kas ir lietotāja ziņā (sk. 2.7.11. sadaļu), ir niecīga ietekme uz galīgajām kontūrām; galvenā prasība ir izvairīties no krasas nesalāgotības pagrieziena galos, un to var panākt, piemēram, iestarpinot īsus pārejas segmentus, kuros sānsveres leņķis mainās lineāri atkarībā no attāluma. Tikai tādā īpašā gadījumā, kad konkrētajam pagriezienam var būt noteicoša ietekme uz galīgajām kontūrām, būs nepieciešams pārejas dinamiku modelēt tuvāk reālajiem apstākļiem, proti, sasaistīt sānsveres leņķi ar konkrētu gaisa kuģa tipu un pieņemt pienācīgas sānsveres leņķa leņķiskā ātruma vērtības. Šajā sakarā ir pietiekami pieminēt, ka visos pagriezienos nepieciešamās sānsveres leņķa izmaiņas nosaka loka galos esošās daļas Δξtrans. Atlikusī loka daļa ar kursa maiņu par Δξ – 2·Δξtrans grādiem tiek sadalīta nsub loka daļās saskaņā ar vienādojumu:
kur int(x) ir funkcija, kas ļauj iegūt veselo daļu no x. Tad katras loka daļas kursa maiņu Δξ sub aprēķina kā:
kur nsub jābūt pietiekami lielam, lai nodrošinātu, ka Δξ sub ≤ 10 grādiem. Loka sadalīšana segmentos (izņemot pārejas noslēdzošos apakšsegmentus) ir redzama 2.7.h.2. attēlā ( (****)).
Kad x-y plaknē ir noteikti ceļa līnijas segmenti, tiek uzklāti lidojuma profila segmenti (s–z plaknē), lai izveidotu trīsdimensiju (x, y, z) ceļa segmentus. Ceļa līnijai vienmēr būtu jāstiepjas no skrejceļa līdz līmenim, kas pārsniedz aprēķina koordinātu tīklu. Vajadzības gadījumā to var panākt, ceļa līnijas pēdējam segmentam pievienojot pienācīga garuma taisnu segmentu. Lidojuma profila kopgarumam, kad tas ir apvienots ar ceļa līniju, arī ir jāstiepjas no skrejceļa līdz līmenim, kas pārsniedz aprēķina koordinātu tīklu. Vajadzības gadījumā to var panākt, pievienojot papildu profila punktu:
Gaisa segmentu segmentācijas koriģēšana Pēc tam, kad saskaņā ar 2.7.13. sadaļā aprakstīto procedūru ir iegūti trīsdimensiju lidojuma trajektorijas segmenti, var būt nepieciešams segmentāciju koriģēt, lai izņemtu tos lidojuma trajektorijas punktus, kas atrodas pārāk tuvu cits citam. Ja blakusesošie punkti atrodas ne vairāk kā 10 m attālumā viens no otra, bet saistītās ātruma un vilces vērtības ir identiskas, viens no punktiem būtu jāizņem. (*) Tālab ceļa līnijas kopējam garumam būtu allaž jāpārsniedz lidojuma profila kopējais garums. Vajadzības gadījumā to var panākt, ceļa līnijas pēdējam segmentam pieskaitot pienācīga garuma taisnos segmentus." (**) Pat tad, ja dzinēja jaudas režīms segmenta garumā ir konstants, vilces spēks un paātrinājums var mainīties, atkarībā no augstuma mainoties gaisa blīvumam. Tomēr trokšņa modelēšanā šīs izmaiņas parasti ir maznozīmīgas." (***) Tas ieteikts ECAC dok. 29 iepriekšējā redakcijā, bet joprojām tiek uzskatīts par provizorisku, iekams nav iegūti apstiprinoši eksperimentālie dati." (****) Ja izmanto šādu vienkāršu definīciju, tad segmentētās trajektorijas kopējais garums ir nedaudz mazāks nekā riņķveida trajektorijai. Tomēr no tā izrietošā kontūras kļūda ir nenozīmīga, ja leņķa palielinājums ir zem 30°.”;" |



|
14) |
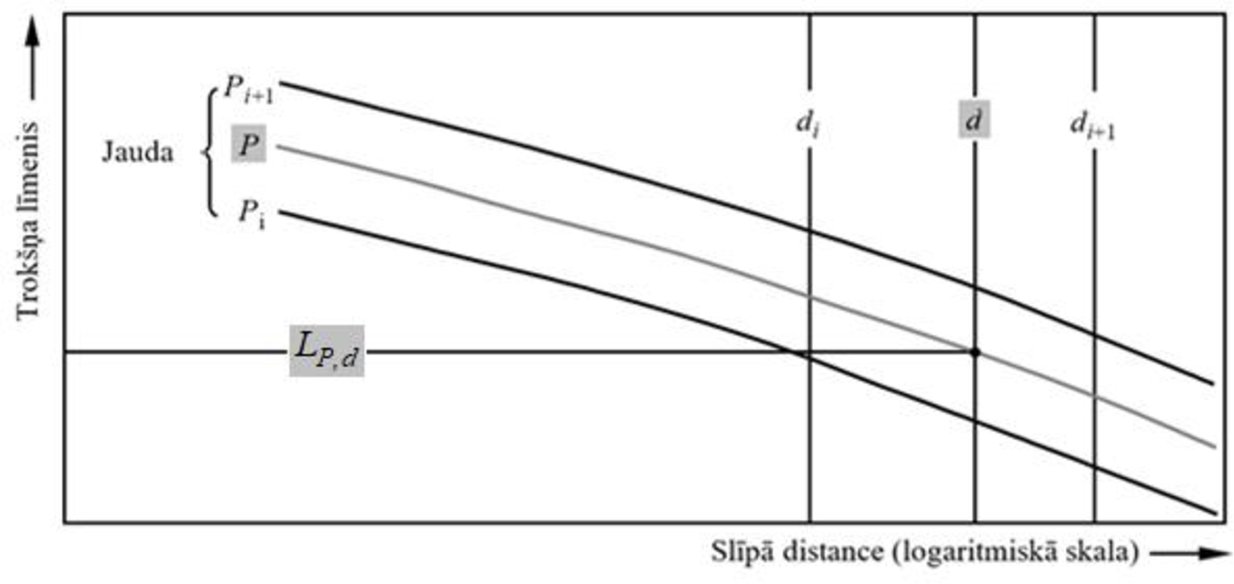
pielikuma 2.7.16. sadaļu “Trokšņa notikuma līmeņa noteikšana no NPD datiem” aizstāj ar šādu: “2.7.16. Trokšņa notikuma līmeņa noteikšana no NPD datiem Galvenais avots, kur atrodami gaisa kuģu trokšņa dati, ir starptautiskā Gaisa kuģu trokšņa un lidtehnisko parametru (ANP) datubāze. Tā satur tabulas, kur lielumi Lmax un LE norādīti kā funkcija no izplatīšanās attāluma konkrētiem gaisa kuģu tipiem, modifikācijām, lidojuma konfigurācijām (pieeja, izlidošana, aizplākšņu stāvoklis) un jaudas režīmiem P. Šīs vērtības attiecas uz stabilu lidojumu ar konkrētu references ātrumu Vref pa teorētiski bezgalīgu, taisnu lidojuma trajektoriju (*). Tas, kā nosaka neatkarīgo mainīgo P un d vērtības, ir aprakstīts tālāk. Skatoties datubāzē, ja ievadvērtības ir P un d, tad vajadzīgās izvadvērtības ir bāzes līmeņi Lmax(P,d) un/vai LE ∞(P,d) (attiecas uz bezgalīgu lidojuma trajektoriju). Izņemot notikumus, kad vērtības attiecībā uz lielumiem P un/vai d ir izskaitļotas precīzi, parasti vajadzīgais notikuma trokšņa līmenis būs jāaplēš ar interpolāciju. Starp tabulā esošajiem jaudas režīmiem izmanto lineāru interpolāciju, turpretī starp tabulā esošajiem attālumiem izmanto logaritmisko interpolāciju (sk. 2.7.i attēlu).
Ja Pi un Pi+ 1 ir dzinēja jaudas vērtības, kurām tabulā norādīts trokšņa līmenis atkarībā no attāluma, tad trokšņa līmeni L(P) dotajā attālumā jaudas starpvērtībai P (starp Pi un Pi+ 1) dod formula:
Ja jebkādā jaudas režīmā di un di+ 1 ir attālums, kam tabulā ir norādīti trokšņa dati, tad trokšņa līmeni L(d) attāluma starpvērtībai d (starp di un di+ 1) dod formula:
Izmantojot vienādojumus (2.7.19) un (2.7.20), trokšņa līmeni L(P,d) var iegūt jebkuram jaudas režīmam P un jebkuram attālumam d, ko aptver NPD datubāze. Ja NPD dati attālumus d neaptver, izmanto vienādojumu (2.7.20) ekstrapolācijai no divām pēdējām vērtībām, proti, iekšup no L(d1) un L(d2) vai ārup no L(dI-1) un L(dI), kur I ir NPD punktu kopējais skaits līknē. Tādējādi: Iekšup:
Ārup:
Tā kā īsos attālumos d, izplatīšanās attālumam samazinoties, trokšņa līmeņi pieaug ļoti strauji, ieteicams d noteikt zemāko robežu – 30 m –, proti, d = max(d, 30 m). Standartizēto NPD datu impedances korekcijas ANP datubāzē esošie NPD dati ir normalizēti atsauces atmosfēras apstākļiem (temperatūra 25°C un spiediens 101,325 kPa). Pirms izmantot aprakstīto interpolācijas/ekstrapolācijas metodi, šie standartizētie NPD dati ir jākoriģē, piemērojot akustisko impedanci. Akustiskā impedance ir saistīta ar skaņas viļņu izplatīšanos akustiskajā vidē, un to definē kā skaņas ātruma un gaisa blīvuma reizinājumu. Dotajai skaņas intensitātei (jauda uz virsmas vienību), ko uztver konkrētā attālumā no avota, saistītais skaņas spiediens (ko izmanto, lai definētu SEL un LAmax) ir atkarīgs no gaisa akustiskās impedances mērījumu veikšanas vietā. Tā ir funkcija no temperatūras, atmosfēras spiediena (un netieši no augstuma). Tāpēc ANP datubāzē esošie standartizētie NPD dati ir jākoriģē, lai ņemtu vērā faktiskos temperatūras un spiediena apstākļus uztveršanas punktā, kas parasti atšķiras no normalizētajiem apstākļiem attiecībā uz ANP datiem. Standartizētajiem NPD līmeņiem piemērojamo impedances korekciju izsaka šādi:
kur:
Impedanci ρ·c aprēķina šādi:
Akustiskās impedances korekcija parasti ir mazāka par dažām viena dB desmitdaļām. Īpaši jāievēro, ka standarta atmosfēras apstākļos (p0 = 101,325 kPa un T0 = 15,0 °C) impedances korekcija ir mazāka par 0,1 dB (0,074 dB). Tomēr, ja temperatūras un atmosfēras spiediena attiecība pret NPD datu references atmosfēras apstākļiem ir ar būtiskām variācijām, korekcija var būt nozīmīgāka. (*) Lai gan bezgalīgi garas lidojuma trajektorijas jēdziens ir nozīmīgs, lai varētu definēt notikuma skaņas ekspozīcijas līmeni LE , tas ir mazāk būtisks, ja runā par notikuma maksimālo līmeni Lmax , jo tas ir atkarīgs no gaisa kuģa emitētā trokšņa, kad tas atrodas noteiktā vietā novērotājam vistuvākajā pietuvošanās punktā vai tā tuvumā. Modelēšanā pieņem, ka NPD attāluma parametrs ir minimālais attālums starp novērotāju un segmentu.”;" |



|
15) |
pielikuma 2.7.18. sadaļā “Lidojuma trajektorijas segmenta parametri” daļu aiz virsraksta “Jaudas režīms P segmentā” aizstāj ar šādu: “Jaudas režīms P segmentā Tabulveida NPD dati apraksta gaisa kuģa troksni vienmērīgā, taisnā lidojumā pa bezgalīgu lidojuma trajektoriju, t. i., pie konstantas dzinēja jaudas P. Ieteicamā metodoloģija ir faktiskās lidojuma trajektorijas, kurās mainās ātrums un virziens, iedalīt galīgos segmentos; pieņem, ka katrs no šiem segmentiem ir viendabīga, bezgalīga lidojuma trajektorija, kurai ir derīgi NPD dati. Tomēr šī metodoloģija paredz jaudas režīma izmaiņas segmenta garumā; pieņem, ka jaudas režīms mainās kvadrātiski atkarībā no attāluma, un segmenta sākumā tas ir P1 , bet beigās – P2 . Tāpēc ir nepieciešams konkrētajam segmentam noteikt ekvivalento vienmērīgo vērtību P. Pieņem, ka šī ir vērtība novērotājam vistuvākajā segmenta punktā. Ja novērotājs atrodas blakus segmentam (2.7.k attēls), šo vērtību iegūst ar interpolāciju starp beigu punktu vērtībām, kā norādīts vienādojumā 2.7.8, proti:
Ja novērotājs atrodas pirms vai aiz segmenta, tā atbilst vērtībai tuvākajā beigu punktā, P1 vai P2 .”; |
|
16) |
pielikuma 2.7.19. sadaļu groza šādi:
|

 ;
; 




|
17) |
pielikuma 2.8. sadaļu aizstāj ar šādu: “2.8. Pakļautība trokšņa iedarbībai Trokšņa iedarbībai pakļautās zonas noteikšana Novērtējot trokšņa iedarbībai pakļauto zonu, pamatojas uz trokšņa novērtēšanas punktiem 4 m ± 0,2 augstumā virs zemes, kas atbilst 2.5., 2.6. un 2.7. punktā definētajiem uztvērēja punktiem, ko atsevišķiem avotiem aprēķina koordinātu tīklā. Koordinātu tīkla punktiem, kas atrodas ēkās, trokšņa līmeņa rezultātu piešķir, izmantojot klusākos tuvumā esošos trokšņa uztvērēju punktus ārpus ēkām, izņemot attiecībā uz gaisa kuģu radīto troksni, kad aprēķinu veic, neņemot vērā ēku esību, un šādā gadījumā tieši izmanto trokšņa uztvērēja punktu, kas atrodas ēkā. Atkarībā no koordinātu tīkla izšķirtspējas atbilstošo zonu piešķir katram aprēķina punktam koordinātu tīklā. Piemēram, 10 m x 10 m koordinātu tīklā katrs novērtēšanas punkts atbilst 100 kvadrātmetru lielam laukumam, kas ir pakļauts aprēķinātā trokšņa līmeņa iedarbībai. Trokšņa novērtēšanas punktu piešķiršana ēkām, kurās nav mājokļu Novērtējot trokšņa iedarbībai pakļautās ēkas, kurās nav mājokļu, piemēram, skolas un slimnīcas, pamatojas uz trokšņa novērtēšanas punktiem 4 m ± 0,2 augstumā virs zemes, kas atbilst 2.5., 2.6. un 2.7. punktā definētajiem uztvērēja punktiem. Lai novērtētu ēkas, kurās nav mājokļu un kuras ir pakļautas gaisa kuģu radītajam troksnim, katru ēku piesaista trokšņainākajam trokšņa uztvērēja punktam, kas atrodas pašā ēkā vai, ja tāda nav, to aptverošajā koordinātu tīklā. Lai novērtētu ēkas, kurās nav mājokļu un kuras ir pakļautas trokšņa avotiem uz zemes, uztvērēju punktus izvieto aptuveni 0,1 m no ēku fasādēm. Atstarojumus no aplūkojamās fasādes aprēķinā neiekļauj. Pēc tam ēku piesaista trokšņainākajam uztvērēja punktam uz tās fasādēm. Trokšņa iedarbībai pakļauto mājokļu un mājokļos dzīvojošo cilvēku noteikšana Lai novērtētu mājokļu pakļautību trokšņa iedarbībai un mājokļos dzīvojošo cilvēku pakļautību trokšņa iedarbībai, aplūko tikai dzīvojamās ēkas. Attiecībā uz nedzīvojamām ēkām, ko izmanto tikai un vienīgi skolu, slimnīcu, biroju vai rūpnīcu vajadzībām, pieņem, ka tajās nav ne mājokļu, ne cilvēku. Piesaistot mājokļus un mājokļos dzīvojošos cilvēkus dzīvojamajām ēkām, pamatojas uz jaunākajiem oficiālajiem datiem (atkarībā no attiecīgajiem dalībvalsts noteikumiem). Mājokļu skaits dzīvojamās ēkās un mājokļos dzīvojošo cilvēku skaits ir svarīgi starpposma parametri, lai novērtētu pakļautību trokšņa iedarbībai. Diemžēl attiecīgie dati ne vienmēr ir pieejami. Tālāk izklāstīts, kā šos parametrus atvedināt no pieejamākiem datiem. Izmantotie saīsinājumi: BA = ēkas pamata laukums DFS = dzīvojamā platība DUFS = dzīvojamās vienības platība H = ēkas augstums FSI = dzīvojamā platība uz vienu mājoklī dzīvojošu personu Dw = mājokļu skaits Inh = mājokļos dzīvojošo cilvēku skaits NF = stāvu skaits V = dzīvojamo ēku tilpums Lai aprēķinātu mājokļu skaitu un mājokļos dzīvojošo cilvēku skaitu, izmanto tālāk aprakstīto 1. vai 2. paņēmienu atkarībā no tā, kādi dati ir pieejami. 1. paņēmiens: dati par mājokļu skaitu un tajos dzīvojošo cilvēku skaitu ir pieejami 1A: Mājokļos dzīvojošo cilvēku skaits vai nu ir zināms, vai ir aplēsts, pamatojoties uz dzīvojamo vienību skaitu. Šajā gadījumā ēkas mājokļos dzīvojošo cilvēku skaits ir to cilvēku skaita summa, kuri dzīvo ēkas visās dzīvojamajās vienībās:
1B: Mājokļu skaits vai mājokļos dzīvojošo cilvēku skaits ir zināms tikai vienumiem, kas lielāki par ēku, piem., tautas skaitīšanas iecirkņiem, kvartāliem, rajoniem vai pat veselām pašvaldībām. Šādā gadījumā ēkas mājokļu skaitu un mājokļos dzīvojošo cilvēku skaitu aplēš, pamatojoties uz ēkas tilpumu:
Indekss “total” šeit nozīmē attiecīgo vienumu. Ēkas tilpums ir tās pamata laukuma reizinājums ar tās augstumu:
Ja ēkas augstums nav zināms, to aplēš, pamatojoties uz stāvu skaitu NFbuilding , pieņemot, ka viena stāva vidējais augstums ir 3 m:
Ja nav zināms arī stāvu skaits, aprēķinā izmanto rajonam vai apgabalam tipisku stāvu skaitu. Aplūkotajā vienumā ietilpstošo dzīvojamo ēku kopējo tilpumu Vtotal aprēķina kā visu attiecīgā vienuma dzīvojamo ēku tilpumu summu: (2.8.5)
2. paņēmiens: dati par mājokļos dzīvojošo cilvēku skaitu nav pieejami Šādā gadījumā mājokļos dzīvojošo cilvēku skaitu aplēš, vadoties no vidējās dzīvojamās platības uz vienu mājoklī dzīvojošu personu FSI. Ja šis parametrs nav zināms, izmanto standarta vērtību. 2A: Dzīvojamā platība ir zināma, vadoties no dzīvojamo vienību skaita. Šādā gadījumā katrā dzīvojamajā vienībā dzīvojošo cilvēku skaitu aplēš šādi:
Pēc tam ēkas mājokļos dzīvojošo cilvēku kopējo skaitu var aplēst kā 1A gadījumā. 2 B: Ir zināma visas ēkas dzīvojamā platība, t. i., ir zināma visu ēkas dzīvojamo vienību dzīvojamo platību summa. Šādā gadījumā mājokļos dzīvojošo cilvēku skaitu aplēš šādi:
2C: Ir zināma dzīvojamā platība tikai par ēku lielākiem vienumiem, piem., tautas skaitīšanas iecirkņiem, kvartāliem, rajoniem vai pat veselām pašvaldībām. Šādā gadījumā ēkas mājokļos dzīvojošo cilvēku skaitu aplēš, pamatojoties uz ēkas tilpumu, kā aprakstīts 1B paņēmienā, un mājokļos dzīvojošo cilvēku kopējo skaitu aplēš šādi:
2D: Dzīvojamā platība nav zināma. Šādā gadījumā ēkas mājokļos dzīvojošo cilvēku skaitu aplēš, kā aprakstīts 2B paņēmienā, un dzīvojamo platību aplēš šādi: (2.8.9)
Koeficientu 0,8 izmanto, lai kopējo platību pārrēķinātu dzīvojamā platībā. Ja ir zināms cits platībai reprezentatīvs koeficients, izmanto to un skaidri dokumentē. Ja ēkas stāvu skaits nav zināms, to aplēš, vadoties pēc ēkas augstuma Hbuilding ; parasti iznākums nav vesels skaitlis:
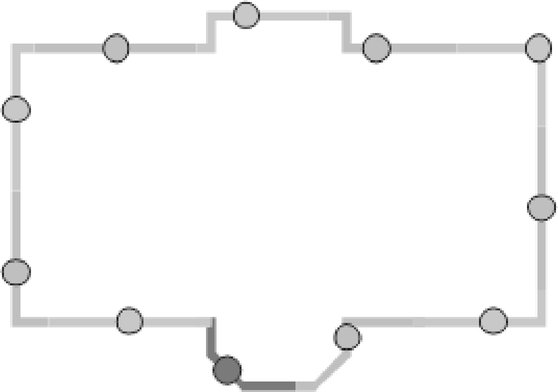
Ja nav zināms ne ēkas augstums, ne stāvu skaits, aprēķinā izmanto rajonam vai apgabalam reprezentatīvu stāvu skaitu. Trokšņa novērtēšanas punktu piešķiršana mājokļiem un mājokļos dzīvojošajiem cilvēkiem Novērtējot trokšņa iedarbībai pakļautos mājokļus un mājokļos dzīvojošos cilvēkus, pamatojas uz trokšņa novērtēšanas punktiem 4 m ± 0,2 augstumā virs zemes, kas atbilst 2.5., 2.6. un 2.7. punktā definētajiem uztvērēja punktiem. Lai saistībā ar gaisa kuģu radīto troksni aprēķinātu mājokļu skaitu un mājokļos dzīvojošo cilvēku skaitu, visus ēkas mājokļus un mājokļos dzīvojošos cilvēkus piesaista trokšņainākajam trokšņa uztvērēja punktam, kas atrodas pašā ēkā vai, ja tāda nav, to aptverošajā koordinātu tīklā. Lai saistībā ar trokšņa avotiem uz zemes aprēķinātu mājokļu skaitu un tajos dzīvojošo cilvēku skaitu, uztvērēju punktus izvieto aptuveni 0,1 m no dzīvojamo ēku fasādēm. Atstarojumus no aplūkojamās fasādes aprēķinā neiekļauj. Lai izvietotu uztvērēju punktus, izmanto vai nu šādu 1. paņēmiena, vai 2. paņēmiena procedūru. 1. paņēmiens: katru fasādi sadala regulāros nogriežņos
2. paņēmiens: fasādes sadala konkrētos garumos no daudzstūra sākuma
Mājokļu un tajos dzīvojošo cilvēku piesaistīšana uztveršanas punktiem Ja ir pieejama informācija par mājokļu atrašanās vietu ēku perimetros, attiecīgais mājoklis un cilvēki, kas tajā dzīvo, tiek piesaistīti uztveršanas punktam minētā mājokļa visvairāk iedarbībai pakļautajā fasādē. Piemēram, savrupmājām, dvīņu mājām un rindu mājām vai daudzdzīvokļu ēkām, ja ir zināms ēkas iekšējais dalījums, vai ēkām, kuru telpu platība norāda uz vienu mājokli katrā stāvā, vai ēkām, kuru telpu platība un augstums norāda uz vienu mājokli katrā ēkā. Ja nav pieejama informācija par mājokļu atrašanās vietu ēku perimetros, kā paskaidrots iepriekš, lai aplēstu ēkā esošo mājokļu un mājokļos dzīvojošo cilvēku pakļautību trokšņa iedarbībai, izmanto attiecīgi vienu no divām turpmāk minētajām metodēm.
(*) Vidējā vērtība ir vērtība, kas atdala datu kopas augstāko pusi (50 %) no zemākās puses (50 %)." (**) Datu kopas zemāko pusi drīkst asimilēt, ja ir relatīvi mierīgas fasādes. Ja, piemēram, pamatojoties uz ēku atrašanās vietu attiecībā pret dominējošajiem trokšņa avotiem, jau iepriekš ir zināms, kādas uztvērēju atrašanās vietas dos augstākos/zemākos trokšņa līmeņus, nav vajadzības aprēķināt troksni zemākajai pusei.”;" |




|
18) |
pielikuma D papildinājumu groza šādi:
|
|
19) |
pielikuma F papildinājumu groza šādi:
|
|
20) |
pielikuma G papildinājumu groza šādi:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21) |
pielikuma I papildinājumu groza šādi:
|
(*) Tālab ceļa līnijas kopējam garumam būtu allaž jāpārsniedz lidojuma profila kopējais garums. Vajadzības gadījumā to var panākt, ceļa līnijas pēdējam segmentam pieskaitot pienācīga garuma taisnos segmentus.
(**) Pat tad, ja dzinēja jaudas režīms segmenta garumā ir konstants, vilces spēks un paātrinājums var mainīties, atkarībā no augstuma mainoties gaisa blīvumam. Tomēr trokšņa modelēšanā šīs izmaiņas parasti ir maznozīmīgas.
(***) Tas ieteikts ECAC dok. 29 iepriekšējā redakcijā, bet joprojām tiek uzskatīts par provizorisku, iekams nav iegūti apstiprinoši eksperimentālie dati.
(****) Ja izmanto šādu vienkāršu definīciju, tad segmentētās trajektorijas kopējais garums ir nedaudz mazāks nekā riņķveida trajektorijai. Tomēr no tā izrietošā kontūras kļūda ir nenozīmīga, ja leņķa palielinājums ir zem 30°.”;
(*) Lai gan bezgalīgi garas lidojuma trajektorijas jēdziens ir nozīmīgs, lai varētu definēt notikuma skaņas ekspozīcijas līmeni LE , tas ir mazāk būtisks, ja runā par notikuma maksimālo līmeni Lmax , jo tas ir atkarīgs no gaisa kuģa emitētā trokšņa, kad tas atrodas noteiktā vietā novērotājam vistuvākajā pietuvošanās punktā vai tā tuvumā. Modelēšanā pieņem, ka NPD attāluma parametrs ir minimālais attālums starp novērotāju un segmentu.”;
(*) To uzskata par ilguma korekciju, jo tādējādi tiek ņemta vērā gaisa kuģa ātruma ietekme uz skaņas notikuma ilgumu, kas ir saskaņā ar šādu vienkāršu pieņēmumu: ja visi pārējie rādītāji ir vienādi, tad ilgums un līdz ar to arī no trokšņa notikuma uztvertā skaņas enerģija ir apgriezti proporcionāla trokšņa avota ātrumam.”;
(*) Vidējā vērtība ir vērtība, kas atdala datu kopas augstāko pusi (50 %) no zemākās puses (50 %).
(**) Datu kopas zemāko pusi drīkst asimilēt, ja ir relatīvi mierīgas fasādes. Ja, piemēram, pamatojoties uz ēku atrašanās vietu attiecībā pret dominējošajiem trokšņa avotiem, jau iepriekš ir zināms, kādas uztvērēju atrašanās vietas dos augstākos/zemākos trokšņa līmeņus, nav vajadzības aprēķināt troksni zemākajai pusei.”;”