ISSN 1977-0693
Journal officiel
de l'Union européenne
L 269

Édition de langue française
Législation
61e année
26 octobre 2018
|
ISSN 1977-0693 |
||
|
Journal officiel de l'Union européenne |
L 269 |
|
|
|
||
|
Édition de langue française |
Législation |
61e année |
|
Sommaire |
|
II Actes non législatifs |
page |
|
|
|
ACTES ADOPTÉS PAR DES INSTANCES CRÉÉES PAR DES ACCORDS INTERNATIONAUX |
|
|
|
* |
||
|
|
* |
||
|
|
* |
|
FR |
Les actes dont les titres sont imprimés en caractères maigres sont des actes de gestion courante pris dans le cadre de la politique agricole et ayant généralement une durée de validité limitée. Les actes dont les titres sont imprimés en caractères gras et précédés d'un astérisque sont tous les autres actes. |
II Actes non législatifs
ACTES ADOPTÉS PAR DES INSTANCES CRÉÉES PAR DES ACCORDS INTERNATIONAUX
|
26.10.2018 |
FR |
Journal officiel de l'Union européenne |
L 269/1 |
Seuls les textes originaux de la CEE (ONU) ont un effet légal en vertu du droit public international. Le statut et la date d'entrée en vigueur du présent règlement sont à vérifier dans la dernière version du document de statut TRANS/WP.29/343 de la CEE (ONU), disponible à l'adresse suivante:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Règlement no 139 de la Commission économique pour l'Europe des Nations unies (CEE-ONU) — Prescriptions uniformes relatives à l'homologation des voitures particulières en ce qui concerne le système d'assistance au freinage d'urgence [2018/1591]
Comprenant tout le texte valide jusqu'à:
Complément 1 à la version originale du règlement — Date d'entrée en vigueur: 29 décembre 2018
TABLE DES MATIÈRES
RÈGLEMENT
|
1. |
Domaine d'application |
|
2. |
Définitions |
|
3. |
Demande d'homologation |
|
4. |
Homologation |
|
5. |
Prescriptions générales |
|
6. |
Prescriptions fonctionnelles |
|
7. |
Prescriptions générales relatives aux essais |
|
8. |
Évaluation de la présence d'un système d'assistance au freinage d'urgence de catégorie A |
|
9. |
Évaluation de la présence d'un système d'assistance au freinage d'urgence de catégorie B |
|
10. |
Modifications du type de véhicule ou de son système d'assistance au freinage d'urgence et extension de l'homologation |
|
11. |
Conformité de la production |
|
12. |
Sanctions pour non-conformité de la production |
|
13. |
Arrêt définitif de la production |
|
14. |
Noms et adresses des services techniques chargés des essais d'homologation et des services administratifs |
ANNEXES
|
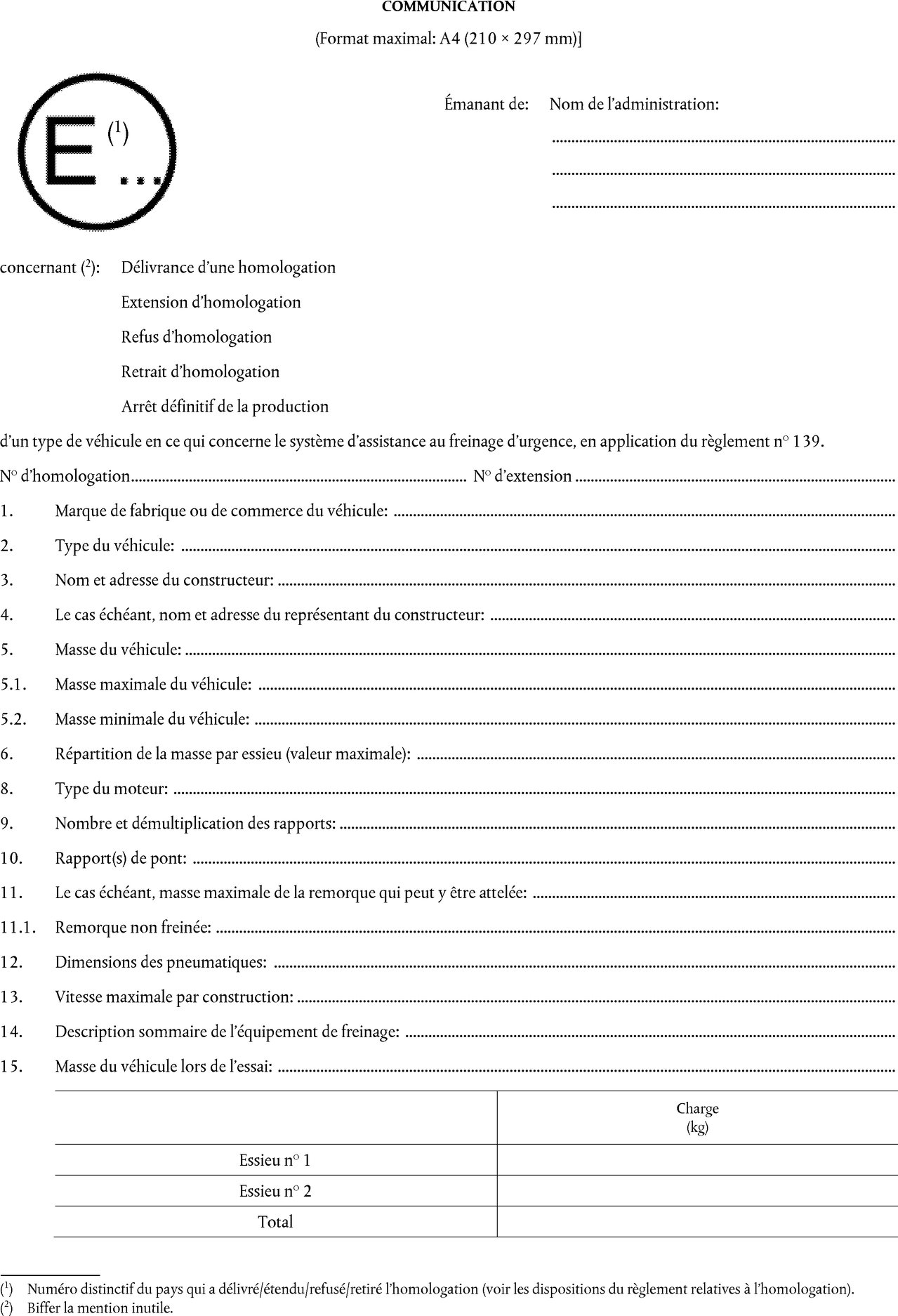
1. |
Communication |
|
2. |
Exemples de marques d'homologation |
|
3. |
Méthode de détermination de FABS et aABS |
|
4. |
Traitement des données pour le système d'assistance au freinage d'urgence (AFU) |
1. DOMAINE D'APPLICATION
1.1. Le présent règlement s'applique à l'homologation des véhicules des catégories M1 et N1 (1) en ce qui concerne le système d'assistance au freinage d'urgence.
1.2. Le domaine d'application du présent règlement ne couvre pas:
|
1.2.1. |
Les véhicules dont la vitesse par construction ne peut dépasser 25 km/h; |
|
1.2.2. |
Les véhicules aménagés pour être conduits par des invalides. |
2. DÉFINITIONS
Au sens du présent règlement, on entend:
|
2.1. |
Par «homologation du véhicule», l'homologation d'un type de véhicule en ce qui concerne le système d'assistance au freinage d'urgence. |
|
2.2. |
Par «type de véhicule», une catégorie de véhicules ne présentant pas entre eux de différences en ce qui concerne des éléments essentiels tels que:
|
|
2.3. |
Par «masse maximale», la masse maximale techniquement admissible déclarée par le constructeur (elle peut être supérieure à la «masse maximale autorisée», fixée par l'administration nationale). |
|
2.4. |
Par «répartition de la masse entre les essieux», la répartition de l'effet de la gravité sur la masse du véhicule et/ou son contenu entre les essieux. |
|
2.5. |
Par «charge par roue ou par essieu», la réaction (ou force) statique verticale de la surface de la route qui s'exerce dans la zone de contact sur la ou les roues de l'essieu. |
|
2.6. |
Par «système d'assistance au freinage d'urgence (AFU)», une fonction du système de freinage qui déduit d'une caractéristique de l'actionnement du système de freinage par le conducteur qu'il y a situation de freinage d'urgence et qui, dans ces conditions:
|
3. DEMANDE D'HOMOLOGATION
3.1. La demande d'homologation d'un type de véhicule en ce qui concerne le système d'assistance au freinage d'urgence doit être présentée par le constructeur du véhicule ou son représentant dûment accrédité.
3.2. Elle doit être accompagnée des documents mentionnés ci-après, en triple exemplaire, et des indications suivantes:
|
3.2.1. |
Description du type de véhicule en ce qui concerne les points mentionnés au paragraphe 2.2 ci-dessus. Les numéros et/ou les symboles caractérisant le type du véhicule et le type du moteur doivent être indiqués; |
|
3.2.2. |
Liste des éléments, dûment précisés, formant le système d'assistance au freinage d'urgence; |
|
3.2.3. |
Schéma de l'ensemble du système d'assistance au freinage d'urgence et indication de la position de ses éléments sur le véhicule; |
|
3.2.4. |
Dessins détaillés de chaque élément afin de faciliter son repérage et son identification. |
3.3. Un véhicule représentatif du type de véhicule à homologuer doit être présenté au service technique chargé des essais d'homologation.
4. HOMOLOGATION
4.1. Lorsque le type de véhicule présenté à l'homologation en application du présent règlement satisfait aux prescriptions des sections 5 et 6 ci-après, l'homologation pour ce type de véhicule doit être accordée.
4.2. Chaque type homologué reçoit un numéro d'homologation dont les deux premiers chiffres correspondent à la série d'amendements comprenant les principales modifications techniques les plus récentes apportées au règlement à la date de la délivrance de l'homologation. Une même Partie contractante ne peut attribuer ce même numéro à un autre type de véhicule en ce qui concerne le système d'assistance au freinage d'urgence.
4.3. L'homologation ou le refus d'homologation d'un type de véhicule en application du présent règlement doit être communiqué aux Parties contractantes à l'accord qui appliquent le présent règlement, au moyen d'une fiche conforme au modèle figurant à l'annexe 1 du présent règlement et d'un résumé des informations figurant dans les documents mentionnés aux paragraphes 3.2.1 à 3.2.4 ci-dessus, les dessins fournis par le demandeur de l'homologation étant au format maximal A4 (210 × 297 mm), ou pliés à ce format, et à une échelle appropriée.
4.4. Sur tout véhicule conforme à un type de véhicule homologué en application du présent règlement, il doit être apposé de manière visible, en un endroit facilement accessible et indiqué sur la fiche d'homologation, une marque d'homologation internationale composée:
|
4.4.1. |
D'un cercle à l'intérieur duquel est placée la lettre «E», suivie du numéro distinctif du pays qui a délivré l'homologation (3); |
|
4.4.2. |
Du numéro du présent règlement, suivi de la lettre «R», d'un tiret et du numéro d'homologation, placés à la droite du cercle prévu au paragraphe 4.4.1 ci-dessus. |
4.5. Si le véhicule est conforme à un type de véhicule homologué en application d'un autre ou de plusieurs autres règlements annexés à l'accord dans le même pays que celui qui a accordé l'homologation en application du présent règlement, le symbole prévu au paragraphe 4.4.1 ci-dessus n'a pas à être répété; dans ce cas, les numéros de règlement et d'homologation et les symboles additionnels de tous les règlements pour lesquels l'homologation est accordée dans le pays ayant délivré celle-ci en application du présent règlement doivent être rangés en colonnes verticales situées à droite du symbole prévu au paragraphe 4.4.1 ci-dessus.
4.6. La marque d'homologation doit être facilement lisible et indélébile.
4.7. La marque d'homologation doit être placée au voisinage de la plaque du constructeur, qui donne les caractéristiques du véhicule, ou sur cette plaque.
4.8. L'annexe 2 du présent règlement donne des exemples de schémas de marques d'homologation.
5. PRESCRIPTIONS GÉNÉRALES
5.1. Les véhicules doivent être équipés d'un système d'assistance au freinage d'urgence satisfaisant aux prescriptions fonctionnelles énoncées à la section 6 du présent règlement. La conformité avec ces prescriptions doit être prouvée par le respect des dispositions des sections 8 et 9 du présent règlement dans le cadre des prescriptions d'essai énoncées à la section 7 du présent règlement. En plus de respecter les prescriptions du présent règlement, tout véhicule doit aussi être équipé d'un système antiblocage des roues (ABS), conformément aux prescriptions techniques du règlement ONU no 13-H.
5.2. Le système d'assistance au freinage d'urgence doit être conçu, construit et monté de telle façon que, dans des conditions normales d'utilisation et en dépit des vibrations auxquelles il peut être soumis, le véhicule puisse satisfaire aux prescriptions du présent règlement.
5.3. En particulier, le système d'assistance au freinage d'urgence doit être conçu, construit et monté de façon à résister aux phénomènes de corrosion et de vieillissement auxquels il est exposé.
5.4. L'efficacité du système d'assistance au freinage d'urgence ne doit pas être altérée par des champs magnétiques ou électriques. Cette condition est remplie s'il est satisfait aux prescriptions techniques et aux dispositions transitoires du règlement no 10 en appliquant:
|
a) |
La série 03 d'amendements aux véhicules dépourvus de système de raccordement au système rechargeable de stockage de l'énergie (batteries de traction); |
|
b) |
La série 04 d'amendements aux véhicules équipés d'un système de raccordement au système rechargeable de stockage de l'énergie (batteries de traction). |
5.5. L'évaluation des aspects de sécurité d'un système d'assistance au freinage d'urgence doit faire partie de l'évaluation d'ensemble de la sécurité du système de freinage conformément aux prescriptions du règlement no 13-H, associées aux systèmes complexes de commande électronique. Cette prescription est réputée satisfaite sur présentation d'un certificat de conformité au règlement no 13-H incluant le système d'assistance au freinage d'urgence à homologuer.
5.6. Prescriptions relatives au contrôle technique périodique des systèmes d'assistance au freinage d'urgence
5.6.1. Il doit être possible lors d'un contrôle technique périodique de confirmer le bon état de fonctionnement par une observation visuelle des signaux d'avertissement présents après remise du contact.
5.6.2. Au moment de l'homologation de type, les moyens de protection mis en œuvre contre la simple modification non autorisée du fonctionnement des systèmes d'alarme doivent être décrits de façon confidentielle. À défaut, on considère qu'il est satisfait à cette prescription relative à la protection des systèmes lorsqu'il existe un autre moyen de vérifier leur fonctionnement correct.
6. PRESCRIPTIONS FONCTIONNELLES
6.1. Caractéristiques fonctionnelles générales pour les systèmes d'assistance au freinage d'urgence de catégorie A
Lorsqu'il a été déduit de l'application d'une force relativement élevée sur la pédale qu'il y a situation d'urgence, la force supplémentaire qu'il faut exercer sur la pédale pour que l'ABS effectue des cycles complets doit être moindre que celle qu'il faudrait appliquer si le système d'assistance au freinage d'urgence n'était pas activé.
La conformité avec cette prescription est démontrée si les dispositions des paragraphes 8.1 à 8.3 du présent règlement sont respectées.
6.2. Caractéristiques fonctionnelles générales des systèmes d'assistance au freinage d'urgence de catégorie B
Lorsqu'il a été déduit au moins de l'enfoncement très rapide de la pédale qu'il y a situation d'urgence, le système d'assistance au freinage d'urgence doit augmenter la pression de telle sorte que le taux de freinage soit le plus élevé possible et que l'ABS effectue des cycles complets.
La conformité avec cette prescription est démontrée si les dispositions des paragraphes 9.1 à 9.3 du présent règlement sont respectées.
7. PRESCRIPTIONS GÉNÉRALES RELATIVES AUX ESSAIS
7.1. Variables
Lors des essais décrits dans le présent règlement, les variables suivantes doivent être mesurées:
|
7.1.1. |
Force exercée sur la pédale, Fp; |
|
7.1.2. |
Vitesse du véhicule, vx; |
|
7.1.3. |
Décélération du véhicule, ax; |
|
7.1.4. |
Température des freins, Td; |
|
7.1.5. |
Pression des freins, P, s'il y a lieu; |
|
7.1.6. |
Vitesse de la pédale de frein, vp, mesurée au centre du patin de la pédale ou en un point du pédalier où la course est proportionnelle à ce qu'elle est au centre du patin de la pédale, ce qui permet un étalonnage simple de la mesure. |
7.2. Matériel de mesure
7.2.1. Les variables énumérées au paragraphe 7.1 doivent être mesurées à l'aide de capteurs appropriés. La précision des mesures, les plages de fonctionnement, les techniques de filtrage, le traitement des données et d'autres prescriptions sont décrits dans la norme ISO 15037-1: 2006.
7.2.2. La force exercée sur la pédale et la température du disque doivent être mesurées avec la précision suivante:
|
Système à plage variable |
Plage de fonctionnement type des capteurs |
Erreurs d'enregistrement maximales préconisées |
|
Force exercée sur la pédale |
0 à 2 000 N |
± 10 N |
|
Température des freins |
0 à 1 000 °C |
± 5 °C |
|
Pression des freins (*1) |
0 à 20 MPa (*1) |
± 100 kPa (*1) |
7.2.3. Les traitements analogique et numérique des données utilisés dans les procédures d'essai applicables aux systèmes d'assistance au freinage d'urgence sont détaillés dans l'annexe 4 du présent règlement. La fréquence d'échantillonnage pour l'acquisition des données doit être supérieure ou égale à 500 Hz.
7.2.4. Des méthodes de mesure autres que celles visées au paragraphe 7.2.3 peuvent être admises, à condition qu'elles permettent un degré de précision au moins équivalent.
7.3. Conditions d'essai
7.3.1. Conditions d'essai relatives au chargement du véhicule: le véhicule doit être à vide. Outre le conducteur, il peut y avoir, sur le siège avant, une deuxième personne chargée de noter les résultats des essais.
7.3.2. Les essais de freinage doivent être exécutés sur une surface sèche offrant une bonne adhérence.
7.4. Méthode d'essai
7.4.1. Les essais décrits aux sections 8 et 9 du présent règlement doivent être réalisés à partir d'une vitesse d'essai de 100 ± 2 km/h. Le véhicule doit être conduit à la vitesse d'essai en ligne droite.
7.4.2. La température moyenne des freins de service sur l'essieu le plus chaud du véhicule, mesurée à l'intérieur des garnitures de freins ou sur la piste de freinage du disque ou du tambour, est située entre 65 °C et 100 °C avant tout freinage.
7.4.3. Pour les essais, l'instant de référence t0 est défini comme l'instant où la force exercée sur la pédale de frein atteint 20 N.
Note: Pour les véhicules équipés d'un système de freinage assisté par une source d'énergie, la force qu'il faut exercer sur la pédale dépend du niveau d'énergie qui existe dans le dispositif de stockage de l'énergie. C'est pourquoi on doit vérifier que ce niveau est suffisamment élevé au début de l'essai.
8. ÉVALUATION DE LA PRÉSENCE D'UN SYSTÈME D'ASSISTANCE AU FREINAGE D'URGENCE DE CATÉGORIE A
Un système d'assistance au freinage d'urgence de catégorie A doit satisfaire aux prescriptions d'essai énoncées dans les paragraphes 8.1 et 8.2.
8.1. Essai 1: Essai de référence visant à déterminer FABS et aABS
8.1.1. Les valeurs de référence FABS et aABS doivent être déterminées conformément à la procédure décrite dans l'annexe 3 du présent règlement.
8.2. Essai 2: Activation du système d'assistance au freinage d'urgence
8.2.1. Lorsqu'une situation de freinage d'urgence a été détectée, les systèmes sensibles à la force exercée sur la pédale doivent accroître fortement le rapport entre:
|
a) |
La pression dans le circuit de freinage et la force exercée sur la pédale de frein, lorsque cela est autorisé par le paragraphe 8.2.5; ou |
|
b) |
La décélération du véhicule et la force exercée sur la pédale de frein. |
8.2.2. Les prescriptions d'efficacité applicables à un système d'assistance au freinage d'urgence de catégorie A sont respectées si l'on peut définir une caractéristique de freinage spécifique permettant de diminuer de 40 % à 80 % la force à exercer sur la pédale de frein pour (FABS – FT) par rapport à (FABS, extrapolée – FT).
8.2.3. FT et aT désignent la force de seuil et la décélération de seuil indiquées sur la figure 1. Leurs valeurs sont fournies au service technique au moment de la présentation de la demande d'homologation de type. La valeur d'aT doit être comprise entre 3,5 m/s2 et 5,0 m/s2.
Figure 1a
Caractéristique de la force à exercer sur la pédale pour obtenir la décélération maximale avec un système d'assistance au freinage d'urgence de catégorie A

Décélération, a
FABS, extrapolée
FABS, max
FABS
FABS, min
Force exercée sur la pédale de frein, F
FT
aT
aABS
Entre 3,5 et 5,0 m/s2
8.2.4. On trace une droite reliant l'origine au point de coordonnées FT, aT (voir la figure 1a). On définit FABS, extrapolée comme la valeur «F» (force exercée sur la pédale) au point d'intersection entre cette droite et la droite horizontale définie par a = aABS:

8.2.5. Le constructeur peut aussi opter, dans le cas de véhicules de la catégorie N1 ou de véhicules de la catégorie M1 dérivés des premiers, qui ont une masse maximale brute supérieure à 2 500 kg, pour la solution suivante: les valeurs FT, FABS, min, FABS, max et FABS, extrapolée de la force exercée sur la pédale peuvent être calculées à partir de la réponse de la pression dans le circuit de freinage et non pas à partir de la décélération du véhicule. Les mesures doivent être effectuées lorsque la pression exercée sur la pédale de frein augmente.
8.2.5.1. La pression à laquelle le cycle de l'ABS commence doit être déterminée en effectuant cinq essais à partir de 100 ± 2 km/h, au cours desquels la pression exercée sur la pédale est augmentée jusqu'à ce que l'ABS soit activé. Les cinq valeurs ainsi obtenues, mesurées au niveau des roues avant, doivent être enregistrées; la moyenne de ces cinq valeurs est PABS.
8.2.5.2. La pression de seuil PT doit être fixée par le constructeur et correspondre à une décélération comprise entre 2,5 m/s2 et 4,5 m/s2.
8.2.5.3. La figure 1b doit être établie conformément au paragraphe 8.2.4 mais en utilisant les mesures de la pression dans le circuit de freinage pour définir les paramètres énoncés au paragraphe 8.2.5 du présent règlement où:

Figure 1b
Caractéristique de la force à exercer sur la pédale pour obtenir la décélération maximale avec un système d'assistance au freinage d'urgence de catégorie A

Pression dans le circuit de freinage, P
Seuil de modification de la force
FABS, extrapolée
FABS, max
FABS
FABS, min
Force exercée sur la pédale du frein, F
FT
PT
PABS
8.3. Évaluation des données
La présence d'un système d'assistance au freinage d'urgence de catégorie A est démontrée si
FABS,min ≤ FABS ≤ FABS,max
où:
FABS,max – FT ≤ (FABS,extrapolée – FT) · 0,6
et
FABS,min – FT ≥ (FABS, extrapolée – FT) · 0,2
9. ÉVALUATION DE LA PRÉSENCE D'UN SYSTÈME D'ASSISTANCE AU FREINAGE D'URGENCE DE CATÉGORIE B
Un système d'assistance au freinage d'urgence de catégorie B doit satisfaire aux prescriptions d'essai énoncées dans les paragraphes 9.1 et 9.2 du présent règlement.
9.1. Essai 1: Essai de référence visant à déterminer FABS et aABS
9.1.1. Les valeurs de référence FABS et aABS doivent être déterminées conformément à la procédure décrite dans l'annexe 3 du présent règlement.
9.2. Essai 2: Activation du système d'assistance au freinage d'urgence
Le véhicule doit être conduit en ligne droite à la vitesse d'essai indiquée au paragraphe 7.4 du présent règlement. Le conducteur doit actionner la pédale de frein rapidement, conformément à la figure 2, en simulant un freinage d'urgence de telle sorte que le système d'assistance soit activé et que le système antiblocage des roues (ABS) effectue des cycles complets.
Pour activer le système d'assistance au freinage d'urgence, la pédale de frein doit être actionnée conformément aux spécifications du constructeur automobile. Celui-ci doit notifier au service technique, au moment de la présentation de la demande d'homologation de type, la valeur d'entrée requise pour la pédale de frein. Il doit être démontré à la satisfaction du service technique que le système d'assistance au freinage d'urgence est activé dans les conditions définies par le fabricant conformément aux paragraphes 16.1.1 ou 16.1.2 de l'annexe 1.
Après t = t0 + 0,8 s et jusqu'à ce que le véhicule ait ralenti pour atteindre la vitesse de 15 km/h, la force exercée sur la pédale de frein doit être maintenue dans une plage comprise entre FABS, upper (= 0,7 FABS) et FABS, lower (= 0,5 FABS).
On considère également que les prescriptions sont respectées si, après t = t0 + 0,8 s, la force exercée sur la pédale devient inférieure à FABS, lower, pourvu que les prescriptions du paragraphe 9.3 soient respectées.
9.3. Évaluation des données
La présence d'un système d'assistance au freinage d'urgence de catégorie B est démontrée si une décélération moyenne (aBAS) d'au moins 0,85 · aABS est maintenue pendant la période s'écoulant entre t = t0 + 0,8 s et l'instant où la vitesse du véhicule est réduite à 15 km/h.
Figure 2
Essai 2 d'un système d'assistance au freinage d'urgence de catégorie B

Phase d’évaluation du systèm e AFU (se terminantà la vitesse de 15 km/h)
Force initiale exercée sur la pédale
Force exercée sur la pédale du frein
Force exercée sur la pédale du frein, F
FABS, lower
FABS, upper
t0
Phase de freinage panique
t0 + 0,8 s
temps
décélération
aAFU
aABS
Décélération, ax
10. MODIFICATIONS DU TYPE DE VÉHICULE OU DE SON SYSTÈME 'ASSISTANCE AU FREINAGE D'URGENCE ET EXTENSION DE L'HOMOLOGATION
10.1. Toute modification du type de véhicule ou de son système d'assistance au freinage d'urgence doit être portée à la connaissance du service administratif qui a accordé l'homologation de type du véhicule.
Ce service peut alors:
|
a) |
Décider, en consultation avec le fabricant, qu'il convient d'accorder une nouvelle homologation de type; ou |
|
b) |
Appliquer la procédure prévue au paragraphe 10.1.1 (révision) et, le cas échéant, la procédure prévue au paragraphe 10.1.2 (extension). |
10.1.1. Révision
Lorsque des renseignements consignés dans le dossier d'information ont changé et que le service administratif considère que les modifications apportées ne risquent pas d'avoir des conséquences défavorables notables, et qu'en tout cas les pédales de commande continuent de satisfaire aux prescriptions, la modification doit être considérée comme une «révision».
En pareil cas, le service administratif publie de nouveau, si besoin est, les pages révisées du dossier d'information, en faisant clairement apparaître sur chacune des pages révisées la nature de la modification et la date de republication. Une version récapitulative et actualisée du dossier d'information, accompagnée d'une description détaillée de la modification, est réputée satisfaire à cette exigence.
10.1.2. Extension
La modification doit être considérée comme une «extension» si, outre les modifications apportées aux renseignements consignés dans le dossier d'information:
|
a) |
D'autres contrôles ou essais sont nécessaires; ou |
|
b) |
Une information figurant sur la fiche de communication (à l'exception des pièces jointes) a été modifiée; ou |
|
c) |
L'homologation est demandée après l'entrée en vigueur d'une série ultérieure d'amendements. |
10.2. La confirmation ou le refus de l'homologation, avec indication de la modification concernée, doit être notifié selon la procédure indiquée au paragraphe 4.3 aux Parties contractantes à l'accord appliquant le présent règlement. En outre, la liste des pièces constituant le dossier d'homologation et des procès-verbaux d'essai, annexée à la fiche de communication de l'annexe 1, doit être modifiée en conséquence de manière que soit indiquée la date de la révision ou de l'extension la plus récente.
10.3. L'autorité compétente qui délivre l'extension de l'homologation attribue un numéro de série à chaque fiche de communication établie pour une telle extension.
11. CONFORMITÉ DE LA PRODUCTION
La procédure de contrôle de la conformité de la production doit suivre celle énoncée dans l'appendice 2 de l'accord (E/ECE/324-E/ECE/TRANS/505/Rev.2), les prescriptions étant les suivantes:
11.1. Tout véhicule homologué en application du présent règlement doit être construit de manière conforme au type de véhicule homologué, en satisfaisant aux exigences des sections 5 et 6 ci-dessus.
11.2. L'autorité qui a accordé l'homologation de type peut à tout moment vérifier les méthodes de contrôle de la conformité utilisées dans chaque unité de production. La fréquence normale de ces vérifications est d'une tous les deux ans.
12. SANCTIONS POUR NON-CONFORMITÉ DE LA PRODUCTION
12.1. L'homologation délivrée pour un type de véhicule en application du présent règlement peut être retirée si les conditions énoncées au paragraphe 11.1 ci-dessus ne sont pas respectées.
12.2. Si une Partie contractante à l'accord appliquant le présent règlement retire une homologation qu'elle a précédemment accordée, elle doit en informer aussitôt les autres Parties contractantes appliquant le présent règlement, au moyen d'une copie de la fiche de communication conforme au modèle de l'annexe 1 du présent règlement.
13. ARRÊT DÉFINITIF DE LA PRODUCTION
Si le détenteur d'une homologation cesse définitivement la fabrication d'un type de véhicule homologué conformément au présent règlement, il doit en informer l'autorité qui a délivré l'homologation qui, à son tour, avise les autres Parties contractantes à l'accord appliquant le présent règlement au moyen de copies de la fiche de communication conforme au modèle de l'annexe 1 du présent règlement.
14. NOMS ET ADRESSES DES SERVICES TECHNIQUES CHARGÉS DES ESSAIS D'HOMOLOGATION ET DES SERVICES ADMINISTRATIFS
Les Parties contractantes à l'accord appliquant le présent règlement communiquent au Secrétariat de l'Organisation des Nations unies les noms et adresses des services techniques chargés des essais d'homologation et ceux des services administratifs qui délivrent l'homologation et auxquels doivent être envoyées les fiches d'homologation, d'extension, de refus ou de retrait d'homologation émises dans les autres pays.
(1) Les catégories de véhicules M1 et N1 sont définies dans la Résolution d'ensemble sur la construction des véhicules (R.E.3) (ECE/TRANS/WP.29/78/Rev.4, par. 2) — www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Selon le constructeur du véhicule.
(3) Les numéros distinctifs des Parties contractantes à l'accord de 1958 figurent à l'annexe 3 de la Résolution d'ensemble sur la construction des véhicules (R.E.3) (ECE/TRANS/WP.29/78/Rev.4) — www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(*1) Comme indiqué au paragraphe 8.2.5.
ANNEXE 2
EXEMPLES DE MARQUES D'HOMOLOGATION
MODÈLE A
(Voir par. 4.4 du présent règlement)

La marque d'homologation ci-dessus, apposée sur un véhicule, indique que le type de ce véhicule a été homologué en Belgique (E 6), en ce qui concerne le dispositif d'assistance au freinage d'urgence, en application du règlement no 139. Les deux premiers chiffres du numéro d'homologation indiquent que l'homologation a été délivrée conformément aux prescriptions du règlement no 139 sous sa forme originale.
MODÈLE B
(Voir par. 4.5 du présent règlement)

La marque d'homologation ci-dessus, apposée sur un véhicule, indique que le type de ce véhicule a été homologué en Belgique (E 6), en application des règlements nos 139 et 24 (1). (Dans le cas de ce dernier règlement, la valeur corrigée du coefficient d'absorption est 1,30 m– 1.) Les numéros d'homologation signifient qu'aux dates de délivrance des homologations respectives le règlement no 139 existait sous sa forme originale et que le règlement no 24 comprenait la série 02 d'amendements.
(1) Ce numéro n'est donné qu'à titre d'exemple.
ANNEXE 3
MÉTHODE DE DÉTERMINATION DE FABS ET aABS
1.1. La force exercée sur la pédale de frein FABS est, pour un véhicule donné, la force minimale à exercer sur la pédale de frein pour obtenir la décélération maximale indiquant que l'ABS effectue des cycles complets; aABS est, pour un véhicule donné, la valeur de décélération pendant la décélération ABS telle que définie au paragraphe 1.8.
1.2. La pédale de frein doit être actionnée lentement (sans activation du système d'assistance au freinage d'urgence s'il s'agit d'un système de la catégorie B) pour obtenir une augmentation constante de la décélération jusqu'à ce que l'ABS effectue des cycles complets (figure ci-après).
1.3. La décélération totale doit être obtenue dans un délai de 2,0 ± 0,5 s. La courbe de décélération, enregistrée par rapport au temps, doit s'inscrire dans une plage de ± 0,5 s autour de l'axe qui, dans l'exemple de la figure ci-après, a pour origine l'instant t0 et coupe la droite d'ordonnée aABS à l'instant t0 + 2 s. Une fois atteinte la décélération totale, la pédale de frein doit être actionnée de manière que l'ABS continue à effectuer des cycles complets. L'instant d'activation totale de l'ABS est défini comme l'instant où la force exercée sur la pédale atteint la valeur FABS. La mesure doit se situer dans la plage de variation de l'augmentation de la décélération (voir figure ci-après).
Plage de décélération pour la détermination de FABS et aABS

Plage de variation de l’augmentation de la décélération
Plage où le système ABS effectue des cycles complets
Décélération a
aABS
temps [s]
délai
2 ± 0,5 s
1s
t0
1.4. Cinq essais satisfaisant aux prescriptions du paragraphe 1.3 doivent être réalisés. Pour chacun de ces essais valables, la décélération du véhicule doit être représentée en fonction de la valeur enregistrée pour la force exercée sur la pédale de frein. Seules les données enregistrées pour des vitesses supérieures à 15 km/h doivent être prises en compte pour les calculs décrits dans les paragraphes suivants.
1.5. Aux fins de la détermination de FABS et de aABS, on doit employer, pour mesurer la décélération du véhicule ainsi que la force exercée sur la pédale, un filtre passe-bas dont la fréquence de coupure est de 2 Hz.
1.6. Les cinq courbes de «décélération en fonction de la force exercée sur la pédale de frein» sont utilisées pour calculer la valeur moyenne de décélération suivant un pas de 1 N. La courbe obtenue est celle de la décélération moyenne en fonction de la force exercée sur la pédale de frein, appelée «courbe maF» dans la présente annexe.
1.7. La valeur maximale de la décélération du véhicule, appelée «amax», est déterminée à partir de la «courbe maF».
1.8. On effectue la moyenne de toutes les valeurs de la «courbe maF» qui sont supérieures à 90 % de cette valeur de décélération de «amax». La valeur «a» obtenue est la décélération «aABS» visée dans la présente annexe.
1.9. La force minimale FABS qu'il suffit d'exercer sur la pédale pour obtenir la décélération aABS est définie comme la valeur de F correspondant à a = aABS sur la courbe maF.
ANNEXE 4
TRAITEMENT DES DONNÉES POUR LE SYSTÈME D'ASSISTANCE AU FREINAGE D'URGENCE (AFU)
(Voir par. 7.2.3 du présent règlement)
1. TRAITEMENT DE DONNÉES ANALOGIQUES
La largeur de bande de la totalité du système capteurs/enregistrement ne doit pas être inférieure à 30 Hz.
On doit utiliser, pour le filtrage à appliquer au signal, des filtres passe-bas d'ordre égal ou supérieur à 4. La largeur de la bande passante (fréquences comprises entre 0 Hz et la fréquence f0 à – 3 dB) ne doit pas être inférieure à 30 Hz. Les erreurs d'amplitude doivent être inférieures à ± 0,5 % dans l'intervalle de fréquences compris entre 0 Hz et 30 Hz. Tous les signaux analogiques doivent être traités au moyen de filtres présentant des caractéristiques de phase suffisamment similaires pour que les différences de retard dues au filtrage restent dans les limites de précision requises pour les mesures de temps.
Note: Le filtrage analogique d'un signal contenant différentes fréquences peut générer des décalages de phase. Il est donc préférable d'utiliser la méthode de traitement des données décrite au paragraphe 2 ci-après.
2. TRAITEMENT DE DONNÉES NUMÉRIQUES
2.1. Considérations générales
Numériser des signaux analogiques nécessite de tenir compte de la baisse d'amplitude due au filtrage et de déterminer la fréquence d'échantillonnage de manière à éviter les repliements de phase, les déphasages et les retards dus au filtrage. D'autres aspects à prendre en compte sont l'amplification du signal avant échantillonnage, afin de réduire les erreurs de numérisation, la définition du nombre de bits par échantillon et du nombre d'échantillons par cycle, le choix des amplificateurs d'échantillonnage-blocage et la fréquence d'échantillonnage. En outre, pour obtenir un filtrage numérique sans déphasage, il convient de déterminer judicieusement les bandes passantes et les bandes de rejet ainsi que le taux d'atténuation et le niveau d'ondulation autorisé pour chacune d'elles, et de corriger les déphasages dus au filtrage. Tous ces facteurs doivent être pris en compte pour obtenir une précision relative d'ensemble de ± 0,5 % pour l'acquisition des données.
2.2. Repliements de phase
Pour éviter les repliements de phase, qui sont impossibles à corriger, il faut faire subir aux signaux analogiques un filtrage approprié avant l'échantillonnage et la numérisation. L'ordre des filtres utilisés et leur bande passante doivent être choisis en fonction de la planéité requise dans l'intervalle de fréquences considéré et de la fréquence d'échantillonnage utilisée.
Les caractéristiques minimales de filtrage et la fréquence d'échantillonnage doivent respecter les prescriptions suivantes:
|
a) |
Dans l'intervalle de fréquences considéré (c'est-à-dire entre 0 Hz et fmax = 30 Hz), l'atténuation est inférieure à la résolution du système d'acquisition des données; et |
|
b) |
À la fréquence égale à la moitié de la fréquence d'échantillonnage (c'est-à-dire la fréquence de Nyquist ou «de repliement»), les amplitudes des différentes composantes fréquentielles du signal et du bruit sont réduites à une valeur inférieure à la résolution du système. |
Pour une résolution de 0,05 %, l'atténuation du filtre doit être inférieure à 0,05 % dans la gamme de fréquences comprise entre 0 Hz et 30 Hz et doit être supérieure à 99,95 % à toutes les fréquences supérieures à la moitié de la fréquence d'échantillonnage.
Note: L'atténuation d'un filtre de Butterworth est donnée par:
 et
et 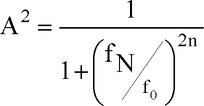
Où:
|
|
n est l'ordre du filtre; |
|
|
fmax est l'intervalle de fréquences considéré (30 Hz); |
|
|
f0 est la fréquence de coupure du filtre; |
|
|
fN est la fréquence de Nyquist ou «de repliement». |
Pour un filtre de quatrième ordre
|
|
pour A = 0,9995: f0 = 2,37 · fmax |
|
|
pour A = 0,0005: fS = 2 · (6,69 · f0), où fS est la fréquence d'échantillonnage (2 · fN). |
2.3. Élimination des déphasages et des retards
Il faut éviter de filtrer excessivement le signal analogique, et tous les filtres doivent présenter des caractéristiques de phases suffisamment similaires pour que les différences de retard restent dans les limites de précision requises pour les mesures de temps. Les déphasages sont particulièrement grands lorsque l'on multiplie les variables mesurées pour obtenir de nouvelles variables car, si les amplitudes sont multipliées, les déphasages et les retards associés s'additionnent. On diminue les déphasages et les retards en augmentant f0. Si l'on connaît les équations décrivant les filtres de pré-échantillonnage, il est commode de supprimer les déphasages et retards qu'ils génèrent en utilisant des algorithmes simples dans le domaine fréquentiel.
Note: Le décalage de phase Φ d'un filtre de Butterworth peut être donné par l'approximation suivante dans l'intervalle de fréquences où l'amplitude reste plate:
|
|
Φ = 81 · (f/f0) degrés pour un filtre de second ordre |
|
|
Φ = 150 · (f/f0) degrés pour un filtre de quatrième ordre |
|
|
Φ = 294 · (f/f0) degrés pour un filtre de huitième ordre |
Le retard pour tous les ordres de filtre est le suivant: t = (Φ/360) · (1/f0).
2.4. Échantillonnage et numérisation des données
À 30 Hz, la variation d'amplitude du signal peut atteindre 18 % par milliseconde. Pour limiter à 0,1 % les erreurs dynamiques dues à une modification du signal analogique d'entrée, il faut que la fenêtre d'échantillonnage ou de numérisation soit inférieure à 32 μs. Toutes les paires ou tous les ensembles d'échantillons de données à comparer doivent être acquis simultanément ou sur une période de temps suffisamment courte.
2.5. Prescriptions applicables au système
Le système de données doit avoir une résolution d'au moins 12 bits (± 0,05 %) et une précision de 2 lb (± 0,1 %). L'ordre des filtres antirepliement doit être égal ou supérieur à 4 et l'intervalle des fréquences à prendre en considération fmax doit être compris entre 0 Hz et 30 Hz.
Pour un filtre de quatrième ordre, la fréquence passe-bande f0 (fréquences comprises entre 0 Hz et f0) doit être supérieure à 2,37 · fmax si les erreurs de phase sont corrigées ultérieurement dans le traitement numérique des données et supérieure à 5 · fmax dans le cas contraire. Pour un filtre de quatrième ordre, la fréquence d'échantillonnage des données fS doit être supérieure à 13,4 · f0.
|
26.10.2018 |
FR |
Journal officiel de l'Union européenne |
L 269/17 |
Seuls les textes originaux de la CEE (ONU) ont un effet légal en vertu du droit public international. Le statut et la date d'entrée en vigueur du présent règlement sont à vérifier dans la dernière version du document de statut TRANS/WP.29/343 de la CEE (ONU), disponible à l'adresse suivante:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Règlement no 140 de la Commission économique pour l'Europe des Nations unies (CEE-ONU) — Prescriptions uniformes relatives à l'homologation des voitures particulières en ce qui concerne les systèmes de contrôle électronique de la stabilité (ESC) [2018/1592]
Comprenant tout le texte valide jusqu'à:
Complément 2 à la version originale du règlement — Date d'entrée en vigueur: 29 décembre 2018
TABLE DES MATIÈRES
RÈGLEMENT
|
1. |
Domaine d'application |
|
2. |
Définitions |
|
3. |
Demande d'homologation |
|
4. |
Homologation |
|
5. |
Prescriptions générales |
|
6. |
Prescriptions fonctionnelles |
|
7. |
Prescriptions d'efficacité |
|
8. |
Conditions d'essai |
|
9. |
Procédure d'essai |
|
10. |
Modification du type de véhicule ou du système ESC et extension de l'homologation |
|
11. |
Conformité de la production |
|
12. |
Sanctions pour non-conformité de la production |
|
13. |
Arrêt définitif de la production |
|
14. |
Noms et adresses des services techniques chargés des essais d'homologation et des services administratifs |
ANNEXES
|
1. |
Communication |
|
2. |
Exemples de marques d'homologation |
|
3. |
Simulation de la stabilité dynamique |
|
4. |
Outil de simulation de la stabilité dynamique et validation de l'outil |
|
5. |
Procès-verbal de l'essai par simulation de la fonction de contrôle électronique de la stabilité du véhicule |
1. DOMAINE D'APPLICATION
1.1. Le présent règlement s'applique à l'homologation des véhicules des catégories M1 et N1 (1) en ce qui concerne le système de contrôle électronique de la stabilité.
1.2. Le domaine d'application du présent règlement ne comprend pas:
|
1.2.1. |
Les véhicules dont la vitesse par construction ne peut dépasser 25 km/h; |
|
1.2.2. |
Les véhicules aménagés pour être conduits par des invalides. |
2. DÉFINITIONS
Au sens du présent règlement, on entend par:
|
2.1. |
«Homologation d'un véhicule», l'homologation d'un type de véhicule en ce qui concerne le contrôle électronique de la stabilité. |
|
2.2. |
«Type de véhicule», une catégorie de véhicules ne présentant pas entre eux de différences en ce qui concerne des éléments essentiels, tels que:
|
|
2.3. |
«Masse maximale», la masse maximale techniquement admissible déclarée par le constructeur (cette masse peut être supérieure à la «masse maximale autorisée» fixée par l'administration nationale). |
|
2.4. |
«Répartition de la masse entre les essieux», la répartition de l'effet de la gravité sur la masse du véhicule et/ou son contenu entre les essieux. |
|
2.5. |
«Charge roue/essieu», la réaction (ou force) statique verticale de la surface de la route qui s'exerce dans la zone de contact sur la ou les roues de l'essieu. |
|
2.6. |
«Angle d'Ackermann», l'angle dont la tangente est le quotient de l'empattement par le rayon de braquage à très petite vitesse. |
|
2.7. |
«Système de contrôle électronique de la stabilité (ESC)», un système qui présente l'ensemble des caractéristiques suivantes:
|
|
2.8. |
«Accélération latérale», la composante vectorielle de l'accélération d'un point du véhicule perpendiculairement à l'axe x (longitudinal) du véhicule et parallèlement au plan de la route. |
|
2.9. |
«Survirage», une situation dans laquelle la vitesse angulaire de lacet du véhicule est supérieure à ce qu'elle devrait être à la vitesse donnée du véhicule compte tenu de l'effet de l'angle d'Ackermann. |
|
2.10. |
«Angle de dérive», l'arc tangent de la vitesse latérale du centre de gravité du véhicule divisée par la vitesse longitudinale du même point. |
|
2.11. |
«Sous-virage», une situation dans laquelle la vitesse angulaire de lacet du véhicule est inférieure à ce qu'elle devrait être à la vitesse donnée du véhicule compte tenu de l'effet de l'angle d'Ackermann. |
|
2.12. |
«Vitesse angulaire de lacet», la vitesse de changement de cap du véhicule, mesurée en degrés/secondes de rotation autour d'un axe vertical passant par le centre de gravité du véhicule. |
|
2.13. |
«Coefficient maximal de freinage (CMF)», une mesure du frottement pneumatique/route fondée sur la décélération maximale obtenue avec une roue en rotation. |
|
2.14. |
«Espace d'affichage commun», une zone où plusieurs témoins, indicateurs, symboles d'identification ou autres messages peuvent s'afficher, mais non simultanément. |
|
2.15. |
«Facteur de stabilité statique», le quotient de la moitié de la voie d'un véhicule par la hauteur de son centre de gravité, ou encore SSF = T/2H, T étant la largeur de la voie (sur les véhicules à plusieurs essieux, moyenne de leurs largeurs, et sur les essieux à roues jumelées, écartement entre les roues extérieures) et H la hauteur du centre de gravité du véhicule. |
3. DEMANDE D'HOMOLOGATION
3.1. La demande d'homologation d'un type de véhicule en ce qui concerne le système de contrôle électronique de la stabilité doit être présentée par le constructeur du véhicule ou son représentant dûment accrédité.
3.2. Elle doit être accompagnée des documents mentionnés ci-après, en triple exemplaire, et des indications suivantes:
|
3.2.1. |
Description du type de véhicule en ce qui concerne les points mentionnés au paragraphe 2.2 ci-dessus. Les numéros et/ou les symboles caractérisant le type du véhicule et le type de moteur doivent être indiqués; |
|
3.2.2. |
Liste des éléments, dûment identifiés, formant le système de contrôle de la stabilité; |
|
3.2.3. |
Schéma de l'ensemble du système de contrôle électronique de la stabilité et indication de la position de ses éléments sur le véhicule; |
|
3.2.4. |
Dessins détaillés des divers éléments permettant de les localiser et de les identifier facilement. |
3.3. Un véhicule représentatif du type de véhicule à homologuer doit être présenté au service technique chargé des essais d'homologation.
4. HOMOLOGATION
4.1. Lorsque le type du véhicule présenté à l'homologation en application du présent règlement satisfait aux prescriptions des paragraphes 5, 6 et 7 ci-après, l'homologation pour ce type de véhicule doit être accordée.
4.2. Chaque type homologué reçoit un numéro d'homologation dont les deux premiers chiffres correspondent à la série d'amendements comprenant les principales modifications techniques les plus récentes apportées au règlement à la date de la délivrance de l'homologation. Une Partie contractante ne peut attribuer ce numéro au même type de véhicule équipé d'un autre type de système de contrôle électronique de la stabilité, ni à un autre type de véhicule.
4.3. L'homologation ou le refus d'homologation d'un type de véhicule, en application du présent règlement, doit être communiqué aux Parties à l'accord appliquant le présent règlement au moyen d'une fiche conforme au modèle figurant à l'annexe 1 du présent règlement et d'un résumé des informations figurant dans les documents mentionnés aux paragraphes 3.2.1 à 3.2.4 ci-dessus, les dessins fournis par le demandeur de l'homologation étant au format maximal A4 (210 × 297 mm), ou pliés à ce format, et à une échelle appropriée.
4.4. Sur tout véhicule conforme à un type de véhicule homologué en application du présent règlement, il doit être apposé de manière visible, en un endroit facilement accessible et indiqué sur la fiche d'homologation, une marque internationale d'homologation composée:
|
4.4.1. |
D'un cercle à l'intérieur duquel est placée la lettre «E» suivie du numéro distinctif du pays qui a accordé l'homologation (3), et |
|
4.4.2. |
Du numéro du présent règlement, suivi de la lettre «R», d'un tiret et du numéro d'homologation, placés à la droite du cercle prévu au paragraphe 4.4.1 ci-dessus. |
4.5. Si le véhicule est conforme à un type de véhicule homologué en application d'un ou de plusieurs autres règlements joints en annexe à l'accord, dans le pays même qui a accordé l'homologation en application du présent règlement, il n'est pas nécessaire de répéter le symbole prescrit au paragraphe 4.4.1; en pareil cas, les numéros de règlement et d'homologation et les symboles additionnels pour tous les règlements pour lesquels l'homologation a été accordée dans le pays qui a accordé l'homologation en application du présent règlement doivent être inscrits l'un au-dessous de l'autre à droite du symbole prescrit au paragraphe 4.4.1.
4.6. La marque d'homologation doit être nettement lisible et indélébile.
4.7. La marque d'homologation doit être placée sur la plaque signalétique du véhicule apposée par le constructeur ou à proximité.
4.8. On trouvera à l'annexe 1 du présent règlement des exemples de marques d'homologation.
5. PRESCRIPTIONS GÉNÉRALES
5.1. Les véhicules doivent être équipés d'un système de contrôle électronique de la stabilité (ESC) satisfaisant aux prescriptions fonctionnelles énoncées au paragraphe 6 et aux prescriptions d'efficacité énoncées au paragraphe 7, dans le cadre des procédures d'essai décrites au paragraphe 9 et dans les conditions d'essai spécifiées au paragraphe 8 du présent règlement.
5.1.1. Indépendamment de ce qui est dit au paragraphe 5.1, les véhicules des catégories M1 et N1 dont la masse en état de marche est supérieure à 1 735 kg peuvent être équipés d'une fonction de contrôle de la stabilité comportant une fonction antirenversement et une fonction de contrôle de la trajectoire et satisfaisant aux prescriptions techniques et aux dispositions transitoires de l'annexe 21 du règlement no 13. Ces véhicules ne sont pas tenus de satisfaire aux prescriptions fonctionnelles énoncées au paragraphe 6 et aux prescriptions d'efficacité énoncées au paragraphe 7, dans le cadre des procédures d'essai décrites au paragraphe 9 et dans les conditions d'essai définies au paragraphe 8 du présent règlement.
5.2. Le système de contrôle électronique de la stabilité doit être conçu, construit et monté de telle façon que, dans des conditions normales d'utilisation et en dépit des vibrations auxquelles il peut être soumis, le véhicule puisse satisfaire aux prescriptions du présent règlement.
5.3. En particulier, le système de contrôle électronique de la stabilité doit être conçu, construit et monté de façon à résister aux phénomènes de corrosion et de vieillissement auxquels il est exposé.
5.4. L'efficacité du système ne doit pas être diminuée par des champs magnétiques ou électriques. La démonstration doit en être faite lorsqu'il est satisfait aux prescriptions techniques et aux dispositions transitoires du règlement no 10 en appliquant:
|
a) |
la série 03 d'amendements dans le cas des véhicules non dotés d'un système de raccordement pour la recharge du SRSE (batteries de traction); |
|
b) |
la série 04 d'amendements dans le cas des véhicules dotés d'un système de raccordement pour la recharge du SRSE (batteries de traction). |
5.5. L'évaluation des aspects de sécurité d'un système de contrôle électronique de la stabilité en ce qui concerne son effet direct sur le système de freinage doit faire partie de l'évaluation d'ensemble de la sécurité dudit système de freinage conformément aux prescriptions du règlement no 13-H relatives aux systèmes complexes de commande électronique. Cette prescription est réputée satisfaite sur présentation d'un certificat de conformité au règlement no 13-H incluant le système de contrôle électronique de la stabilité à homologuer.
5.6. Prescriptions relatives au contrôle technique périodique des systèmes de contrôle électronique de la stabilité
5.6.1. Il doit être possible lors d'un contrôle technique périodique de confirmer le bon état de fonctionnement par une observation visuelle des signaux d'avertissement présents à la mise du contact.
5.6.2. Au moment de l'homologation de type, les moyens de protection mis en œuvre contre toute modification non autorisée du fonctionnement des signaux d'avertissement doivent être décrits de façon confidentielle. On considère qu'il est satisfait à cette prescription relative à la protection lorsqu'il existe un autre moyen de vérifier leur bon état de fonctionnement.
6. PRESCRIPTIONS FONCTIONNELLES
Chaque véhicule présenté à l'homologation en application du présent règlement doit être équipé d'un système de contrôle électronique de stabilité qui:
6.1. Soit capable d'appliquer un couple de freinage individuellement à chacune des quatre roues (4) et qui utilise un algorithme de commande à cette fin;
6.2. Fonctionne sur toute la plage de vitesses du véhicule pendant toutes les phases de la conduite, y compris l'accélération, la marche en roue libre et la décélération (y compris le freinage), sauf:
|
6.2.1. |
Lorsque le conducteur a désactivé l'ESC; |
|
6.2.2. |
Lorsque la vitesse du véhicule est inférieure à 20 km/h; |
|
6.2.3. |
Pendant l'exécution de l'autodiagnostic et des contrôles de plausibilité initiaux au démarrage, ce qui ne doit pas prendre plus de deux (2) minutes lorsque le véhicule est utilisé dans les conditions énoncées au paragraphe 9.10.2; |
|
6.2.4. |
Lorsque le véhicule est conduit en marche arrière; |
6.3. Reste capable de fonctionner même si le système antiblocage des roues ou le système antipatinage est aussi en fonction.
7. PRESCRIPTIONS D'EFFICACITÉ
Lors de chaque essai effectué dans les conditions prescrites au paragraphe 8 et conformément à la procédure prescrite au paragraphe 9.9, le véhicule, système ESC activé, doit satisfaire aux critères de stabilité directionnelle définis aux paragraphes 7.1 et 7.2, ainsi qu'au critère de réactivité du paragraphe 7.3 lors de chacun de ces essais effectués avec un angle de braquage programmé (5) de 5 A ou plus (mais dans les limites des prescriptions du paragraphe 9.9.4), A étant l'angle de braquage du volant calculé conformément au paragraphe 9.6.1.
Si un véhicule a été physiquement soumis aux essais prescrits au paragraphe 8, on peut démontrer que des versions ou variantes de ce même type de véhicule satisfont aux prescriptions en s'appuyant sur une simulation informatique qui respecte les conditions d'essai stipulées au paragraphe 8 et la procédure d'essai décrite au paragraphe 9.9. L'utilisation du simulateur est décrite à l'annexe 4 du présent règlement.
7.1. La vitesse angulaire de lacet mesurée 1 seconde après la fin de la manœuvre Sinus avec palier (temps T0 + 1 à la figure 1) ne doit pas dépasser 35 % de la première valeur de pointe de la vitesse angulaire enregistrée après le changement de sens de l'angle de braquage (entre la première et la deuxième valeur de point e) ( à la figure 1) au cours du même parcours d'essai.
à la figure 1) au cours du même parcours d'essai.
Figure 1
Informations de position du volant et de vitesse angulaire de lacet utilisées pour l'évaluation de la stabilité latérale
 Texte de l'image
Texte de l'image
7.2. La vitesse angulaire de lacet mesurée 1,75 seconde après la fin de la manœuvre Sinus avec palier ne doit pas dépasser 20 % de la première valeur de pointe de la vitesse angulaire enregistrée après le changement de sens de l'angle de braquage (entre la première et la deuxième point e) au cours du même parcours d'essai.
7.3. Le déplacement latéral du centre de gravité du véhicule par rapport à la trajectoire rectiligne initiale doit être d'au moins 1,83 m pour les véhicules ayant une MTC inférieure ou égale à 3 500 kg, et 1,52 m pour les véhicules ayant une masse maximale supérieure à 3 500 kg, cette valeur étant calculée 1,07 seconde après le début de la manœuvre de braquage (DMB). La définition du début de la manœuvre de braquage (DMB) est donnée au paragraphe 9.11.6.
7.3.1. Le calcul du déplacement latéral est effectué par double intégration par rapport au temps de la mesure de l'accélération latérale au centre de gravité du véhicule, conformément à la formule suivante:

Une autre méthode de mesure peut être autorisée pour les essais destinés à l'homologation de type, à condition qu'elle offre un degré de précision au moins équivalent à celui de la méthode par double intégration.
7.3.2. Le temps t = 0 pour l'opération d'intégration est l'instant de l'action sur la commande, appelé début de la manœuvre de braquage (DMB). La définition du début de la manœuvre de braquage (DMB) est donnée au paragraphe 9.11.6.
7.4. Détection d'un défaut de fonctionnement du ESC
Le véhicule doit être équipé d'un témoin qui prévienne le conducteur de l'apparition de tout défaut de fonctionnement qui affecte la génération ou la transmission des signaux de commande ou de réponse dans le système de contrôle de stabilité du véhicule.
7.4.1. Ce témoin:
|
7.4.1.1. |
Doit satisfaire aux prescriptions techniques pertinentes du règlement no 121; |
|
7.4.1.2. |
Sauf autres dispositions énoncées au paragraphe 7.4.1.3, doit s'allumer lorsqu'il existe un défaut de fonctionnement et doit demeurer allumé de manière continue, dans les conditions définies au paragraphe 7.4, aussi longtemps que le défaut subsiste, tant que le contact est mis; |
|
7.4.1.3. |
Sauf autres dispositions énoncées au paragraphe 7.4.2, doit s'allumer pour le contrôle du fonctionnement de la lampe soit lorsque la commande de contact est mise sur la position «Marche» sans que le moteur tourne, soit quand elle est sur une position intermédiaire entre «Marche» et «Démarrage» prévue par le constructeur comme position de contrôle; |
|
7.4.1.4. |
Doit s'éteindre au cycle de mise du contact suivant, une fois le défaut corrigé conformément aux dispositions du paragraphe 9.10.4; |
|
7.4.1.5. |
Doit pouvoir aussi servir à indiquer un défaut de fonctionnement d'un système ou d'une fonction connexe, comme l'antipatinage, le système de stabilisation de la remorque, le contrôle des freins en virage ou d'autres fonctions semblables qui font appel à la commande des gaz et/ou au dispositif de régulation du couple roue par roue pour actionner des éléments qu'elles partagent avec le ESC. |
7.4.2. Il n'est pas nécessaire que le témoin de défaut de fonctionnement de l'ESC s'allume lorsqu'un système antidémarrage lié à la transmission est en fonction.
7.4.3. Les prescriptions du paragraphe 7.4.1.3 ne s'appliquent pas aux témoins figurant dans un espace d'affichage commun.
7.4.4. Le constructeur peut utiliser le témoin de défaillance du ESC en mode clignotant pour indiquer l'intervention du ESC ou de systèmes connexes (énumérés au paragraphe 7.4.1.5), ou pour indiquer l'intervention du ESC sur l'angle de braquage d'une ou plusieurs roues afin d'assurer la stabilité du véhicule.
7.5. Commande de désactivation de l'ESC et commandes d'autres systèmes
Le constructeur peut prévoir une commande de désactivation de l'ESC, qui doit s'allumer lorsque les projecteurs du véhicule sont allumés et a pour fonction de mettre le système ESC dans un mode dans lequel il ne satisfait plus aux prescriptions d'efficacité des paragraphes 7, 7.1, 7.2 et 7.3. Le constructeur peut aussi prévoir des commandes pour d'autres systèmes qui ont une fonction auxiliaire par rapport à celle de l'ESC. Les commandes de l'un ou l'autre type qui mettent le système ESC dans un mode qui ne lui permet plus de satisfaire aux prescriptions d'efficacité des paragraphes 7, 7.1, 7.2 et 7.3 sont autorisées à condition que le système satisfasse aux prescriptions des paragraphes 7.5.1, 7.5.2 et 7.5.3.
7.5.1. Le système ESC du véhicule doit toujours revenir, par défaut, dans le mode initialement prévu par le constructeur, qui satisfait aux prescriptions des paragraphes 6 et 7, au début de tout nouveau cycle de mise du contact, quel que soit le mode précédemment sélectionné par le conducteur. Cependant, il ne doit pas nécessairement revenir dans un mode satisfaisant aux prescriptions des paragraphes 7 à 7.3 au début de chaque nouveau cycle de mise du contact si:
|
7.5.1.1. |
Le véhicule est en mode quatre roues motrices, ce qui a pour effet d'accoupler l'essieu avant (moteur) et l'essieu arrière et de créer une démultiplication supplémentaire entre le moteur et les roues du véhicule d'au moins 1,6, choisie par le conducteur pour conduire sur des rapports courts en tout terrain; |
|
7.5.1.2. |
Le véhicule est en mode quatre roues motrices choisi par le conducteur pour conduire sur des rapports longs, sur le sable, la boue ou la neige, ce qui a pour effet d'accoupler l'essieu avant (moteur) et l'essieu arrière, à condition que dans ce mode le véhicule satisfasse aux prescriptions de stabilité des paragraphes 7.1 et 7.2 dans les conditions d'essai définies au paragraphe 8. Cependant, si le système ESC comprend plus d'un mode satisfaisant aux prescriptions des paragraphes 7.1 et 7.2 dans la configuration de conduite choisie pour le cycle de mise du contact précédent, l'ESC doit revenir, par défaut, dans le mode initialement prévu par le constructeur pour cette configuration de conduite au début de chaque nouveau cycle de mise du contact. |
7.5.2. Une commande ayant pour seule et unique fonction de mettre le système ESC dans un mode où il ne satisfait plus aux prescriptions d'efficacité des paragraphes 7, 7.1, 7.2 et 7.3 doit satisfaire aux prescriptions techniques pertinentes du règlement no 121.
7.5.3. Une commande pour système ESC ayant pour fonction de mettre le système dans différents modes, dont l'un au moins ne satisfait plus aux prescriptions d'efficacité des paragraphes 7, 7.1, 7.2 et 7.3, doit satisfaire aux prescriptions techniques pertinentes du règlement no 121.
Lorsque le mode du système ESC est choisi au moyen d'une commande multifonction, l'écran d'affichage doit clairement indiquer au conducteur la position de la commande correspondant au mode désactivé, au moyen du symbole «OFF» défini dans le règlement no 121.
7.5.4. Une commande pour un autre système ayant pour effet annexe de mettre le système ESC dans un mode dans lequel il ne satisfait plus aux prescriptions d'efficacité des paragraphes 7, 7.1, 7.2 et 7.3 ne doit pas obligatoirement porter le symbole de mise hors fonction de l'ESC défini au paragraphe 7.5.2.
7.6. Témoin de désactivation de l'ESC
Si le constructeur décide d'installer une commande permettant de désactiver l'ESC ou d'en réduire l'efficacité, comme indiqué au paragraphe 7.5, les prescriptions applicables aux témoins qui sont énoncées aux paragraphes 7.6.1 à 7.6.4 doivent être remplies afin que le conducteur soit informé de la désactivation ou de la réduction de l'efficacité de l'ESC. Cette prescription n'est cependant pas applicable lorsque le mode dans lequel se trouve l'ESC a été choisi par le conducteur, comme c'est le cas au paragraphe 7.5.1.2.
7.6.1. Le constructeur doit prévoir un témoin indiquant que le véhicule a été mis dans un mode qui ne lui permet pas de satisfaire aux prescriptions des paragraphes 7, 7.1, 7.2 et 7.3, si un tel mode existe.
7.6.2. Le témoin de désactivation de l'ESC:
|
7.6.2.1. |
Doit satisfaire aux prescriptions techniques pertinentes du règlement no 121; |
|
7.6.2.2. |
Doit rester allumé de manière continue aussi longtemps que l'ESC est dans un mode où il ne peut satisfaire aux prescriptions des paragraphes 7, 7.1, 7.2 et 7.3; |
|
7.6.2.3. |
Sauf autres dispositions énoncées aux paragraphes 7.6.3 et 7.6.4, tout témoin de désactivation de l'ESC doit s'allumer pour le contrôle du fonctionnement de la lampe soit lorsque la commande de contact est mise sur la position «Marche» sans que le moteur tourne, soit quand elle est sur une position intermédiaire entre «Marche» et «Démarrage» prévue par le constructeur comme position de contrôle; |
|
7.6.2.4. |
Doit s'éteindre une fois que l'ESC est revenu, par défaut, dans le mode initialement prévu par le constructeur. |
7.6.3. Il n'est pas nécessaire que le témoin de désactivation de l'ESC s'allume lorsqu'un système de verrouillage du démarrage lié à la transmission est en fonction.
7.6.4. La prescription du paragraphe 7.6.2.3 de la présente section ne s'applique pas aux témoins figurant dans un même espace d'affichage.
7.6.5. Le constructeur peut utiliser le témoin de désactivation de l'ESC pour indiquer que le système fonctionne dans un mode autre que le mode par défaut initialement prévu, même si le véhicule continue de satisfaire aux prescriptions des paragraphes 7, 7.1, 7.2 et 7.3 de la présente section dans le premier mode.
7.7. Documentation technique relative au système ESC
Le dossier de documentation doit, à titre de preuve que le véhicule est équipé d'un système ESC qui satisfait à la définition du «système ESC» donnée au paragraphe 2.7 du présent règlement, comprendre la documentation constructeur prescrite aux paragraphes 7.7.1 à 7.7.4 ci-dessous.
7.7.1. Schéma de principe des composants matériels du système ESC. Le schéma doit indiquer les composants utilisés pour produire le couple de freinage sur chaque roue et pour déterminer la vitesse de lacet du véhicule, l'angle de dérive ou la dérivée de celle-ci et les signaux de direction émis par le conducteur.
7.7.2. Description succincte des caractéristiques fonctionnelles de base du système. Celle-ci doit donner des informations succinctes sur la capacité du système à appliquer des couples de freinage à chaque roue et sur la manière dont il agit sur le couple moteur lors de l'activation du système ESC, et montrer que la vitesse angulaire de lacet est déterminée directement, même dans le cas où aucune donnée sur la vitesse des roues n'est disponible. Cette description doit aussi indiquer la plage de vitesses du véhicule et les phases de conduite (accélération, décélération, marche en prise gaz coupés et phases actives de l'ABS ou de l'antipatinage) dans lesquelles le système ESC peut entrer en action.
7.7.3. Diagramme logique. Ce diagramme complète la description donnée au paragraphe 7.7.2.
7.7.4. Informations sur les mesures de correction du sous-virage. Description succincte des données d'entrée pertinentes fournies à l'ordinateur pour gérer les composants matériels du système ESC et de la manière dont elles sont utilisées pour limiter le sous-virage.
8. CONDITIONS D'ESSAI
8.1. Conditions ambiantes
8.1.1. La température ambiante doit être comprise entre 0 et 45 °C.
8.1.2. La vitesse maximale du vent ne doit pas dépasser 10 m/s pour les véhicules dont la SSF est supérieure à 1,25 et 5 m/s pour les véhicules dont la SSF est inférieure ou égale à cette valeur.
8.2. Revêtement d'essai
8.2.1. Les essais doivent être effectués sur un revêtement dur, uniforme et sec, dépourvu d'ondulations et d'irrégularités telles que déclivités et crevasses.
8.2.2. Le revêtement d'essai permet d'obtenir un coefficient maximal de freinage nominal (6) de 0,9, sauf indication contraire, lors d'un essai effectué:
|
8.2.2.1. |
Soit avec le pneumatique d'essai de référence normalisé E1136 de l'American Society for Testing and Materials (ASTM), conformément à la méthode ASTM E1337-90, à une vitesse de 40 mph; |
|
8.2.2.2. |
Soit par la méthode de détermination du coefficient d'adhérence (k), décrite à l'appendice 2 de l'annexe 6 du règlement no 13-H. |
8.2.3. Le revêtement d'essai doit avoir une pente régulière ne dépassant pas 1 %.
8.3. Préparation du véhicule
8.3.1. Le système de contrôle électronique de la stabilité doit être activé pour tous les essais.
8.3.2. Masse du véhicule. Le véhicule doit être chargé de telle sorte que le réservoir de carburant soit rempli au moins à 90 % de sa contenance, que le poids à l'intérieur de l'habitacle soit de 168 kg, y compris le conducteur, et que le poids du matériel d'essai représente environ 59 kg (appareil de braquage, système de collecte des données et alimentation électrique de l'appareil de braquage), du lest pouvant être utilisé pour compenser les éventuelles insuffisances. Au besoin, le lest est posé sur le plancher derrière le siège du passager avant, ou encore devant celui-ci. Le lest doit être calé de telle façon qu'il ne se déplace pas pendant l'essai.
8.3.3. Pneumatiques. Les pneumatiques sont gonflés à la (aux) pression(s) à froid recommandée(s) par le constructeur, par exemple telle(s) qu'elle(s) figure(nt) sur la fiche signalétique du véhicule ou sur l'étiquette prévue à cet effet. Les pneumatiques peuvent être munis d'une chambre à air pour éviter le détalonnage.
8.3.4. Béquilles antirenversement. Des béquilles antirenversement peuvent être utilisées lors des essais si l'on estime qu'elles sont nécessaires pour la sécurité des conducteurs. Dans ce cas, les dispositions ci-dessous s'appliquent pour les véhicules ayant un facteur de stabilité statique (SSF) ≤ 1,25:
|
8.3.4.1. |
Les véhicules dont la masse en ordre de marche est inférieure à 1 588 kg doivent être équipés de béquilles «légères», c'est-à-dire dont la masse maximum est de 27 kg et le moment d'inertie maximum en roulis de 27 kg · m2; |
|
8.3.4.2. |
Les véhicules dont la masse en ordre de marche est comprise entre 1 588 kg et 2 722 kg doivent être équipés de béquilles «normales», c'est-à-dire ayant une masse maximum de 32 kg et un moment d'inertie maximum en roulis de 35,9 kg · m2; |
|
8.3.4.3. |
Les véhicules ayant une masse en ordre de marche égale ou supérieure à 2 722 kg doivent être équipés de béquilles «renforcées», dont la masse maximum est de 39 kg et le moment d'inertie maximum en roulis, de 40,7 kg · m2. |
8.3.5. Appareil de braquage. Un appareil de braquage programmé pour faire effectuer au véhicule les manœuvres prescrites est utilisé pour les paragraphes 9.5.2, 9.5.3, 9.6 et 9.9. Il doit être capable de produire des couples de braquage compris entre 40 et 60 Nm, à une vitesse angulaire du volant pouvant atteindre jusqu'à 1 200 degrés par seconde.
9. PROCÉDURE D'ESSAI
9.1. Gonfler les pneumatiques du véhicule à la (aux) pression(s) à froid recommandée(s) par le constructeur, telle(s) qu'elle(s) figure(nt) sur la fiche signalétique du véhicule ou sur l'étiquette prévue à cet effet, par exemple.
9.2. Vérification du fonctionnement de la lampe témoin. Le véhicule étant à l'arrêt et la commande de contact étant sur la position «Verrouillé» ou «Arrêt», mettre la commande de contact sur la position «Marche» ou, selon le cas, la position spéciale de contrôle des lampes. Le témoin de défaut de fonctionnement de l'ESC doit s'allumer pour vérification du fonctionnement de la lampe, comme prescrit au paragraphe 7.4.1.3, et, si le véhicule en est équipé, le témoin de désactivation de l'ESC doit aussi s'allumer pour vérification du fonctionnement de la lampe, comme prescrit au paragraphe 7.6.2.3. La vérification du fonctionnement de la lampe du témoin n'est pas requise pour un témoin figurant dans un espace d'affichage commun, comme indiqué aux paragraphes 7.4.3 et 7.6.4.
9.3. Contrôle de la commande de désactivation de l'ESC. Sur les véhicules équipés d'une telle commande, le véhicule étant à l'arrêt et le contact étant coupé mettre le contact. Actionner la commande de désactivation de l'ESC et vérifier que le témoin correspondant s'allume, comme prescrit au paragraphe 7.6.2. Couper le contact. Remettre le contact de désactivation de l'ESC et vérifier que le témoin s'est éteint, ce qui indique que le système ESC a été réactivé comme prescrit au paragraphe 7.5.1.
9.4. Conditionnement des freins
Conditionner les freins en procédant de la manière décrite aux paragraphes 9.4.1 à 9.4.4.
9.4.1. Exécuter 10 arrêts à partir d'une vitesse de 56 km/h, avec une décélération moyenne d'environ 0,5 g.
9.4.2. Immédiatement après la série d'arrêts à partir de 56 km/h, exécuter trois arrêts supplémentaires à partir de 72 km/h, avec une décélération plus élevée.
9.4.3. Lors de l'exécution des arrêts décrits au paragraphe 9.4.2, une force suffisante doit être appliquée à la pédale de frein pour actionner le système antiblocage des roues (ABS) sur la plus grande partie de chaque manœuvre de freinage.
9.4.4. Après l'exécution du dernier arrêt prescrit au paragraphe 9.4.2, le véhicule doit être conduit à une vitesse de 72 km/h pendant cinq (5) minutes de façon à refroidir les freins.
9.5. Conditionnement des pneumatiques
Conditionner les pneumatiques en appliquant la procédure décrite aux paragraphes 9.5.1 à 9.5.3 en vue de faire disparaître l'agent de démoulage et de porter les pneumatiques à leur température de fonctionnement immédiatement avant l'exécution des parcours prescrits aux paragraphes 9.6 et 9.9.
9.5.1. Conduire le véhicule d'essai en suivant un cercle de 30 mètres de diamètre à une vitesse produisant une accélération latérale d'environ 0,5 à 0,6 g, sur trois tours dans le sens des aiguilles d'une montre, puis trois tours en sens contraire.
9.5.2. En appliquant à la commande de direction un signal sinusoïdal de 1 Hz, avec un angle de braquage de pointe au volant correspondant à une accélération latérale de 0,5 à 0,6 g et à une vitesse de 56 km/h, on fait accomplir au véhicule quatre parcours comprenant chacun 10 cycles sinusoïdaux de braquage.
9.5.3. L'amplitude de braquage du volant lors du cycle final du dernier parcours doit être deux fois celle des autres cycles. Le délai maximal admis entre deux parcours circulaires ou deux parcours avec cycles sinusoïdaux est de cinq (5) minutes.
9.6. Manœuvre avec un angle de braquage croissant progressivement
Le véhicule doit effectuer deux séries de parcours avec un angle de braquage croissant progressivement, à une vitesse constante de 80 ± 2 km/h et avec un signal de braquage croissant de 13,5 degrés par seconde jusqu'à ce qu'une accélération latérale d'environ 0,5 g soit obtenue. Chaque série d'essais est reproduite trois fois. Une série est effectuée avec braquage dans le sens contraire des aiguilles d'une montre, et l'autre avec braquage dans le sens des aiguilles d'une montre. Le délai maximal admis entre deux parcours est de cinq (5) minutes.
9.6.1. À partir des essais de braquage à un angle croissant progressivement, on détermine la quantité «A». «A» est l'angle de braquage du volant, en degrés, qui produit une accélération latérale en régime stabilisé (corrigée par les méthodes décrites au paragraphe 9.11.3) de 0,3 g pour le véhicule d'essai. Par régression linéaire, on calcule «A», arrondi au dixième de degré le plus proche, à partir des résultats des six essais de braquage à un angle croissant progressivement. On détermine la moyenne des six valeurs absolues de «A», arrondie au dixième de degré le plus proche, pour obtenir le résultat final «A», qui est utilisé comme indiqué ci-après.
9.7. Après avoir déterminé la valeur «A», il convient d'exécuter la procédure de conditionnement des pneumatiques décrite au paragraphe 9.5, sans remplacer les pneumatiques, immédiatement avant l'exécution de l'essai Sinus avec palier décrit au paragraphe 9.9. La première série de manœuvres Sinus avec palier doit commencer au plus tard deux heures après l'achèvement des essais de braquage à un angle croissant progressivement prescrits au paragraphe 9.6.
9.8. Vérifier que le système ESC est activé en contrôlant que le témoin de défaut de fonctionnement de l'ESC et le témoin de désactivation de l'ESC s'il existe ne sont pas allumés.
9.9. Essai de manœuvre avec impulsion Sinus avec palier pour contrôler l'intervention de correction du survirage et la réactivité
Le véhicule est soumis à deux séries de parcours dans les conditions suivantes: un signal de direction en forme d'onde sinusoïdale de 0,7 Hz et un temps de latence de 500 ms débutant à la deuxième pointe d'amplitude, comme indiqué à la figure 2 (essai de manœuvre Sinus avec palier). Pour la première série, le volant est braqué dans le sens contraire des aiguilles d'une montre pendant la première demi-période; pour la seconde, il est braqué dans le sens des aiguilles d'une montre pendant la première demi-période également. On effectue un arrêt de refroidissement du véhicule pendant une durée de quatre-vingt-dix (90) secondes à cinq (5) minutes entre deux parcours.
Figure 2
Impulsion Sinus avec palier
 Texte de l'image
Texte de l'image
9.9.1. Au début de la manœuvre de direction, le véhicule se déplace sur le rapport supérieur, gaz coupés, à une vitesse de 80 ± 2 km/h.
9.9.2. L'amplitude de braquage pour le premier parcours de chaque série est de 1,5 A, A étant l'angle de braquage du volant déterminé conformément au paragraphe 9.6.1.
9.9.3. Dans chaque série de parcours, l'amplitude de braquage est accrue d'un parcours à l'autre de 0,5 A, sous réserve que pour aucun parcours l'amplitude de braquage ne soit supérieure à celle prescrite pour le parcours final au paragraphe 9.9.4.
9.9.4. L'amplitude de braquage lors du parcours final de chaque série doit être égale à la plus grande des deux valeurs suivantes: 6,5 A ou 270°, à la condition que la valeur calculée de 6,5 A ne dépasse pas 300°. Si un accroissement quelconque de 0,5 A, jusqu'à 6,5 A, donne une valeur de plus de 300°, l'amplitude de braquage pour le parcours final doit être de 300°.
9.9.5. Après l'exécution des deux séries de parcours d'essai, le traitement ultérieur des données de vitesse angulaire de lacet et d'accélération latérale s'effectue comme prescrit au paragraphe 9.11.
9.10. Détection d'un défaut de fonctionnement de l'ESC
9.10.1. Simuler un ou plusieurs défauts de fonctionnement de l'ESC en déconnectant l'alimentation de l'un quelconque des composants ESC ou en interrompant la liaison électrique entre des composants ESC (l'alimentation du véhicule étant coupée). Lors de la simulation d'un défaut de fonctionnement de l'ESC, les liaisons électriques du (des) témoin(s) et/ou de la (des) commande(s) facultative(s) du système ESC ne doivent pas être déconnectées.
9.10.2. Le véhicule étant à l'arrêt et le contact étant coupé, mettre le contact et mettre en marche le moteur. Démarrer en marche avant et lancer le véhicule jusqu'à atteindre une vitesse de 48 ± 8 km/h. Au plus tard trente (30) secondes après le démarrage du moteur et dans les deux (2) minutes qui suivent à ladite vitesse, effectuer au moins un léger virage à gauche et un léger virage à droite sans perte de stabilité directionnelle et en freinant une fois. Vérifier que le témoin de défaut de fonctionnement de l'ESC s'allume conformément aux prescriptions du paragraphe 7.4 à la fin de ces manœuvres.
9.10.3. Arrêter le véhicule et couper le contact. Au bout de cinq (5) minutes, mettre le contact du véhicule et mettre en marche le moteur. Vérifier que le témoin de défaut de fonctionnement de l'ESC s'allume de nouveau et reste allumé aussi longtemps que le moteur tourne ou que le défaut n'a pas été corrigé.
9.10.4. Couper le contact. Rétablir le fonctionnement normal du système ESC, mettre le contact et mettre en marche le moteur. Recommencer les manœuvres décrites au paragraphe 9.10.2 et vérifier que le témoin s'éteint une fois qu'elles sont terminées ou immédiatement après.
9.11. Traitement des données après l'essai — Calcul des résultats
Le traitement des données de mesure de vitesse angulaire de lacet et de déplacement latéral ainsi que les calculs ultérieurs doivent être effectués selon les méthodes définies aux paragraphes 9.11.1 à 9.11.8.
9.11.1. Les données brutes sur l'angle de braquage du volant doivent être filtrées avec un filtre de Butterworth sans déphasage à 12 pôles et à une fréquence de coupure de 10 Hz. Les données filtrées sont ensuite recalées au zéro pour éliminer le décalage dû au capteur, sur la base de données statiques enregistrées avant l'essai.
9.11.2. Les données brutes sur la vitesse angulaire de lacet doivent être filtrées avec un filtre Butterworth sans déphasage à 12 pôles et à une fréquence de coupure de 6 Hz. Les données filtrées sont ensuite recalées au zéro pour éliminer le décalage dû au capteur, sur la base de données statiques enregistrées avant l'essai.
9.11.3. Les données brutes sur l'accélération latérale doivent être filtrées avec un filtre de Butterworth sans déphasage à 12 pôles et à une fréquence de coupure de 6 Hz. Les données filtrées sont ensuite recalées au zéro pour éliminer le décalage dû au capteur, sur la base de données statiques enregistrées avant l'essai. Pour déterminer les données d'accélération latérale au centre de gravité du véhicule, on déduit les effets causés par le roulis de la carrosserie du véhicule et on corrige les données en fonction de la position du capteur par transformation des coordonnées. Pour la collecte des données, l'accéléromètre latéral doit être situé le plus près possible des centres de gravité longitudinal et transversal du véhicule.
9.11.4. Pour déterminer la vitesse angulaire du volant, on dérive les valeurs filtrées d'angle de braquage du volant. Les données de vitesse angulaire du volant sont ensuite filtrées avec un filtre à moyenne glissante mobile de 0,1 seconde.
9.11.5. Les voies des données d'accélération latérale, de vitesse angulaire de lacet et d'angle de braquage du volant sont recalées au zéro par application d'une «plage de recalage au zéro» selon les méthodes décrites aux paragraphes 9.11.5.1 et 9.11.5.2.
9.11.5.1. Sur la base des données de vitesse angulaire du volant calculées par les méthodes décrites au paragraphe 9.11.4, on détermine l'instant où cette vitesse dépasse 75 degrés par seconde. À partir de ce point, la vitesse angulaire du volant doit demeurer supérieure à 75 degrés par seconde pendant au moins 200 ms. Si cette seconde condition n'est pas remplie, on détermine l'instant suivant où la vitesse angulaire du volant dépasse 75 degrés par seconde et on applique le contrôle de validité de 200 ms. Ce processus itératif est poursuivi jusqu'à ce que les deux conditions soient remplies.
9.11.5.2. La «plage de recalage au zéro» est définie comme la période de temps de 1,0 seconde précédant l'instant où la vitesse angulaire du volant dépasse 75 degrés par seconde (donc, l'instant où la vitesse angulaire du volant dépasse 75 degrés par seconde définit la fin de la «plage de recalage au zéro»).
9.11.6. Le début de la manœuvre de braquage (DMB) est défini comme étant le premier instant où les données d'angle de braquage du volant filtrées et recalées au zéro atteignent – 5° (lorsque l'action initiale sur la direction se fait dans le sens contraire des aiguilles d'une montre) ou + 5° (lorsque l'action initiale se fait dans le sens des aiguilles d'une montre) après un temps définissant la fin de la «plage de recalage au zéro». La valeur de temps à l'instant DMB est calculée par interpolation.
9.11.7. La fin de la manœuvre de braquage (FMB) est définie comme étant l'instant où l'angle de braquage du volant revient à zéro à la fin de la manœuvre Sinus avec palier. La valeur de temps à l'instant du braquage zéro est calculée par interpolation.
9.11.8. La deuxième valeur de pointe de la vitesse angulaire de lacet est définie comme étant la première valeur de pointe produite par l'inversion du sens de rotation du volant. Les vitesses angulaires de lacet à 1,0 et 1,75 seconde après la fin du braquage sont calculées par interpolation.
9.11.9. On détermine la vitesse latérale par intégration des données d'accélération latérale corrigées, filtrées et recalées au zéro. La vitesse latérale zéro est fixée à l'instant DMB. On détermine le déplacement latéral par intégration de la vitesse latérale recalée au zéro. Le déplacement latéral zéro est fixé à l'instant DMB. Le déplacement latéral à 1,07 seconde à partir de l'instant DMB est déterminé par interpolation.
10. MODIFICATION DU TYPE DE VÉHICULE OU DU SYSTÈME ESC ET EXTENSION DE L'HOMOLOGATION
10.1. Toute modification d'un type de véhicule existant doit être portée à la connaissance du service administratif qui a accordé l'homologation de type du véhicule.
Ce service peut alors:
|
a) |
décider, en concertation avec le constructeur, qu'il convient d'accorder une nouvelle homologation de type; ou |
|
b) |
appliquer la procédure prévue au paragraphe 10.1.1 (Révision) et, au besoin, la procédure prévue au paragraphe 10.1.2 (Extension). |
10.1.1. Révision
Lorsque des renseignements consignés dans le dossier d'information ont changé et que le service administratif considère que les modifications apportées ne risquent pas d'avoir de conséquences négatives notables, et qu'en tout état de cause les pédales de commande continuent de satisfaire aux prescriptions, l'ensemble des modifications est considéré comme une «révision».
En pareil cas, le service administratif publie les pages révisées du dossier d'information, en faisant clairement apparaître sur chacune d'elles la nature des modifications et la date de la nouvelle publication. Une version actualisée du dossier d'information, accompagnée d'une description détaillée des modifications, est censée satisfaire à cette exigence.
10.1.2. Extension
L'ensemble des modifications est considéré comme une «extension» si, outre les modifications apportées aux renseignements consignés dans le dossier d'information:
|
a) |
d'autres contrôles ou essais sont nécessaires; ou |
|
b) |
une quelconque information figurant sur la fiche de communication (à l'exception des pièces jointes) a été modifiée; ou |
|
c) |
l'homologation en vertu d'une série d'amendements ultérieure est demandée après son entrée en vigueur. |
10.2. La confirmation ou le refus de l'homologation, avec l'indication des modifications, est notifié(e) aux Parties à l'accord appliquant le présent règlement par la procédure décrite au paragraphe 4.3 ci-dessus. En outre, la liste des pièces constituant le dossier d'homologation et des procès-verbaux d'essai, annexée à la fiche de communication de l'annexe 1, doit être modifiée en conséquence de manière que soit indiquée la date de la révision ou de l'extension la plus récente.
10.3. L'autorité compétente délivrant l'extension d'homologation attribue un numéro de série à chaque fiche de communication établie aux fins d'une extension.
11. CONFORMITÉ DE LA PRODUCTION
Les procédures de contrôle de la conformité de la production doivent être conformes à celles énoncées dans l'appendice 2 de l'accord (E/ECE/324-E/ECE/TRANS/505/Rev.2), les prescriptions applicables étant les suivantes:
|
11.1. |
Tout véhicule homologué en application du présent règlement doit être construit de manière conforme au type de véhicule homologué, en satisfaisant aux prescriptions des paragraphes 5, 6 et 7 ci-dessus; |
|
11.2. |
L'autorité d'homologation de type peut à tout moment vérifier les méthodes de contrôle de la conformité utilisées dans chaque atelier de production. La fréquence normale de ces vérifications est d'une tous les deux ans. |
12. SANCTIONS POUR NON-CONFORMITÉ DE LA PRODUCTION
12.1. L'homologation délivrée pour un type de véhicule en application du présent règlement peut être retirée si les conditions énoncées au paragraphe 8.1 ci-dessus ne sont pas respectées.
12.2. Si une Partie contractante à l'accord appliquant le présent règlement retire une homologation qu'elle a précédemment accordée, elle doit en informer aussitôt les autres Parties contractantes appliquant le présent règlement, au moyen d'un exemplaire de la fiche de communication conforme au modèle de l'annexe 1 du présent règlement.
13. ARRÊT DÉFINITIF DE LA PRODUCTION
Si le détenteur d'une homologation cesse définitivement la fabrication d'un type de véhicule homologué conformément au présent règlement, il doit en informer l'autorité qui a délivré l'homologation, laquelle à son tour avise les autres Parties à l'accord appliquant le présent règlement au moyen de copies d'une fiche de communication conforme au modèle de l'annexe 5 du présent règlement.
14. NOMS ET ADRESSES DES SERVICES TECHNIQUES CHARGÉS DES ESSAIS D'HOMOLOGATION ET DES SERVICES ADMINISTRATIFS
Les Parties à l'accord appliquant le présent règlement doivent communiquer au Secrétariat de l'Organisation des Nations unies les noms et adresses des services techniques chargés des essais d'homologation et ceux des services administratifs qui délivrent l'homologation et auxquels doivent être envoyées les fiches d'homologation, d'extension, de refus ou de retrait d'homologation émises dans les autres pays.
(1) Les catégories de véhicules M1 et N1 sont définies dans la résolution d'ensemble sur la construction des véhicules (R.E.3) (ECE/TRANS/WP.29/78/Rev.4, par. 2) www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Un groupe d'essieux est assimilé à un essieu simple et des roues jumelées sont assimilées à une roue simple.
(3) La liste des numéros distinctifs des parties contractantes à l'accord de 1958 est reproduite à l'annexe 3 de la résolution d'ensemble sur la construction des véhicules (R.E.3) (document ECE/TRANS/WP.29/78/Rev.4, annexe 3, téléchargeable à l'adresse électronique suivante: www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html).
(4) Un groupe d'essieux est assimilé à un essieu simple et des roues jumelées sont assimilées à une roue simple.
(5) Dans le présent règlement, il est supposé que la direction du véhicule est commandée par un volant. Les véhicules sur lesquels d'autres types de commande de direction sont utilisés peuvent également être homologués conformément au présent règlement à condition que le constructeur soit en mesure de démontrer au service technique que l'on peut satisfaire aux prescriptions d'efficacité énoncées dans le règlement en donnant à la commande de direction des impulsions équivalentes à celles prescrites au paragraphe 7 du règlement.
(6) Par valeur «nominale», on entend la valeur théorique visée.
ANNEXE 2
EXEMPLES DE MARQUES D'HOMOLOGATION
MODÈLE A
(Voir le paragraphe 4.4 du présent règlement)
La marque d'homologation ci-dessus, apposée sur un véhicule, indique que le type de véhicule visé a été homologué en Belgique (E6) en ce qui concerne le système de contrôle de stabilité, en application du règlement no 140. Les deux premiers chiffres du numéro d'homologation indiquent que l'homologation a été délivrée conformément aux prescriptions du règlement no 140 sous sa forme originale.
MODÈLE B
(Voir le paragraphe 4.5 du présent règlement)

La marque d'homologation ci-dessus, apposée sur un véhicule, indique que le type de véhicule visé a été homologué en Belgique (E6), en application des règlements nos 140 et 24 (1). (Dans le cas de ce dernier règlement, la valeur corrigée du coefficient d'absorption est 1,30 m– 1.) Les numéros d'homologation indiquent qu'aux dates de délivrance des homologations respectives, le règlement no 140 existait sous sa forme originale et le règlement no 24 comprenait la série 02 d'amendements.
(1) Ce numéro n'est donné qu'à titre d'exemple.
ANNEXE 3
SIMULATION DE LA STABILITÉ DYNAMIQUE
L'efficacité du système de contrôle électronique de la stabilité peut être déterminée par simulation informatique.
1. UTILISATION DE LA SIMULATION
1.1. Le constructeur du véhicule doit apporter à l'autorité d'homologation de type ou au service technique la preuve de l'efficacité de la fonction de contrôle électronique de la stabilité du véhicule en simulant les manœuvres dynamiques décrites au paragraphe 9.9 du présent règlement.
1.2. La simulation doit être un moyen permettant d'établir le degré de stabilité du véhicule compte tenu:
|
a) |
de la vitesse angulaire de lacet mesurée une (1) seconde après la fin de la manœuvre de l'impulsion Sinus avec palier (temps T0 + 1); |
|
b) |
de la vitesse angulaire de lacet mesurée 1,75 seconde après la fin de la manœuvre de l'impulsion Sinus avec palier; |
|
c) |
du déplacement latéral du centre de gravité du véhicule par rapport à sa trajectoire rectiligne initiale. |
1.3. La simulation doit être effectuée en utilisant un outil de modélisation et de simulation validé et en appliquant les manœuvres dynamiques décrites au paragraphe 9.9 du présent règlement, dans les conditions d'essai prescrites au paragraphe 8 du présent règlement.
La méthode utilisée pour valider l'outil de simulation est décrite à l'annexe 4 du présent règlement.
ANNEXE 4
OUTIL DE SIMULATION DE LA STABILITÉ DYNAMIQUE ET VALIDATION DE L'OUTIL
1. CARACTÉRISTIQUES DE L'OUTIL DE SIMULATION
1.1. La méthode de simulation doit tenir compte des principaux facteurs qui influent sur la trajectoire et le risque de renversement. Un modèle type peut inclure les paramètres suivants sous une forme explicite ou implicite:
|
a) |
essieu/roue; |
|
b) |
suspension; |
|
c) |
pneumatique; |
|
d) |
châssis/carrosserie; |
|
e) |
chaîne de traction/transmission, s'il y a lieu; |
|
f) |
système de freinage; |
|
g) |
charge utile. |
1.2. La fonction de contrôle de la stabilité du véhicule doit être ajoutée au modèle de simulation au moyen:
|
a) |
d'un sous-système (modèle logiciel) de l'outil de simulation; |
|
b) |
d'une boîte de commande électronique dans une configuration de type matériel incorporé (HIL — Hardware-in-the-loop). |
2. VALIDATION DE L'OUTIL DE SIMULATION
2.1. Il convient de vérifier la validité de l'outil de modélisation et de simulation utilisé en procédant à des comparaisons avec des essais effectués sur un véhicule dans des conditions réelles. Les essais à prendre en compte pour la validation doivent être les manœuvres dynamiques décrites au paragraphe 9.9 du présent règlement.
Pendant les essais, les variables de mouvement ci-après, selon le cas, doivent être enregistrées ou calculées conformément à la norme ISO 15037 — Partie 1:2006: Conditions générales pour voitures particulières ou Partie 2:2002: Conditions générales pour véhicules lourds et autobus (selon la catégorie du véhicule):
|
a) |
angle de braquage (δΗ); |
|
b) |
vitesse longitudinale (vX); |
|
c) |
angle de dérive (β) ou vitesse latérale (vY); (facultatif); |
|
d) |
accélération longitudinale (aX); (facultatif); |
|
e) |
accélération latérale (aY); |
|
f) |
vitesse de lacet (dψ/dt); |
|
g) |
vitesse de roulis (dφ/dt); |
|
h) |
vitesse de tangage (dθ/dt); |
|
i) |
angle de roulis (φ); |
|
j) |
angle de tangage (θ). |
2.2. L'objectif est de montrer que la simulation du comportement du véhicule et du fonctionnement de la fonction de contrôle de la stabilité est comparable à ce que l'on observe lors d'essais en conditions réelles.
2.3. Le simulateur est réputé validé lorsque les résultats qu'il produit sont comparables aux résultats des essais en conditions réelles consistant à faire exécuter à un type de véhicule donné les manœuvres décrites au paragraphe 9.9 du présent règlement. La comparaison doit être effectuée au moyen de la relation entre l'activation de la fonction de stabilité du véhicule et la séquence des opérations exécutées par cette fonction, dans la simulation d'une part et lors de l'essai en conditions réelles d'autre part.
2.4. Lors de la simulation, les paramètres physiques de la configuration du véhicule simulé doivent être alignés sur ceux de la configuration du véhicule de référence.
2.5. Un procès-verbal d'essai par simulation doit être établi conformément au modèle figurant à l'annexe 5 du présent règlement et une copie de ce document doit être annexée au procès-verbal de l'homologation de type.
ANNEXE 5
PROCÈS-VERBAL DE L'ESSAI PAR SIMULATION DE LA FONCTION DE CONTRÔLE ÉLECTRONIQUE DE LA STABILITÉ DU VÉHICULE
Procès-verbal d'essai no: …
1. IDENTIFICATION
1.1. Fabricant de l'outil de simulation (nom et adresse): …
1.2. Désignation/modèle/numéro (matériel et logiciel): …
2. DOMAINE D'APPLICATION
2.1. Type de véhicule: …
2.2. Configurations du véhicule: …
3. DONNÉES SUR LE VÉHICULE D'ESSAI
3.1. Description du ou des véhicules: …
3.1.1. Identification du ou des véhicules: marque/modèle/VIN (numéro d'identification): …
3.1.2. Description du véhicule, notamment suspension et roues, moteur et transmission, système(s) de freinage et système de direction, avec désignation/modèle/numéro d'identification: …
3.1.3. Données sur le véhicule utilisé dans la simulation (explicites): …
3.2. Emplacement(s), état du revêtement de la route/de l'aire d'essai, température et date(s): …
3.3. Résultats avec la fonction de la stabilité du véhicule activée et désactivée, y compris les variables de mouvement mentionnées au paragraphe 2.1 de l'annexe 4, selon le cas: …
4. RÉSULTATS DE LA SIMULATION
4.1. Paramètres du véhicule et valeurs utilisées lors de la simulation qui ne sont pas obtenues à partir du véhicule d'essai réel (implicites): …
4.2. Stabilité de lacet et déplacement latéral conformément aux paragraphes 7.1 à 7.3 du présent règlement: …
5. Cet essai a été exécuté et ses résultats ont été consignés conformément aux dispositions de l'annexe 4 du règlement no 140.
Service technique ayant effectué l'essai (1): …
Signature: …
Date: …
Autorité d'homologation (1) …
Signature: …
Date: …
(1) Doit être signé par des personnes différentes si le service technique et l'autorité d'homologation de type sont une seule et même entité.
|
26.10.2018 |
FR |
Journal officiel de l'Union européenne |
L 269/36 |
Seuls les textes originaux de la CEE (ONU) ont un effet légal en vertu du droit public international. Le statut et la date d'entrée en vigueur du présent règlement sont à vérifier dans la dernière version du document de statut TRANS/WP.29/343 de la CEE (ONU), disponible à l'adresse suivante:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Règlement no 141 de la Commission économique pour l'Europe des Nations unies (CEE-ONU) — Prescriptions uniformes relatives à l'homologation des véhicules en ce qui concerne leur système de surveillance de la pression [2018/1593]
Date d'entrée en vigueur: 22 janvier 2017
TABLE DES MATIÈRES
RÈGLEMENT
|
1. |
Champ d'application |
|
2. |
Définitions |
|
3. |
Demande d'homologation |
|
4. |
Homologation |
|
5. |
Spécifications et essais |
|
6. |
Renseignements supplémentaires |
|
7. |
Modifications et extension de l'homologation d'un type de véhicule |
|
8. |
Conformité de la production |
|
9. |
Sanctions pour non-conformité de la production |
|
10. |
Arrêt définitif de la production |
|
11. |
Noms et adresses des services techniques chargés des essais d'homologation et de l'autorité d'homologation de type |
ANNEXES
|
1. |
Communication |
|
2. |
Exemples de marques d'homologation |
|
3. |
Essais des systèmes de surveillance de la pression des pneus |
1. CHAMP D'APPLICATION
Le présent règlement s'applique à l'homologation des véhicules des catégories M1 dont la masse maximale est de 3 500 kg et N1 (1) équipés d'un système de surveillance de la pression des pneumatiques, à l'exception des véhicules qui ont un essieu à roues jumelées.
2. DÉFINITIONS
Au sens du présent règlement, on entend par:
|
2.1. |
«Homologation d'un véhicule», l'homologation d'un type de véhicule en ce qui concerne son système de surveillance de la pression des pneumatiques. |
|
2.2. |
«Type de véhicule», les véhicules ne présentant pas entre eux de différences en ce qui concerne des éléments essentiels, tels que:
|
|
2.3. |
«Roue», une roue complète composée d'une jante et d'un voile de roue; |
|
2.4. |
«Pneumatique», un pneumatique constitué d'une enveloppe souple renforcée qui contient, ou qui forme avec la roue sur laquelle elle est montée, une chambre fermée continue, de forme sensiblement toroïdale, renfermant un gaz (généralement de l'air) ou un gaz et un liquide, qui est normalement conçu pour être utilisé à une pression supérieure à la pression atmosphérique; |
|
2.5. |
«Masse maximale», la valeur maximale du véhicule déclarée techniquement admissible par le constructeur (elle peut être supérieure à la «masse maximale admissible» fixée par l'administration nationale); |
|
2.6. |
«Charge maximale par essieu», la valeur maximale, telle qu'elle est déclarée par le constructeur, de la force verticale totale s'exerçant entre les surfaces de contact des pneus ou les chenilles d'un essieu et le sol et résultant de la partie de la masse du véhicule que supporte cet essieu; cette charge peut être supérieure à la «charge par essieu autorisée» fixée par l'administration nationale. La somme des charges par essieu peut être supérieure à la valeur correspondant à la masse totale du véhicule; |
|
2.7. |
«Système de surveillance de la pression des pneumatiques (TPMS)», un système monté sur un véhicule, capable d'évaluer la pression de gonflage des pneumatiques ou la variation de cette pression dans le temps et de transmettre les renseignements correspondants à l'usager pendant que le véhicule roule; |
|
2.8. |
«Pression de gonflage à froid du pneumatique», la pression du pneumatique à température ambiante en l'absence de toute montée en pression due à l'utilisation du pneumatique; |
|
2.9. |
«Pression de gonflage à froid recommandée (Prec)», la pression recommandée par le constructeur du véhicule pour chacun des pneumatiques, pour les conditions de service prévues (par exemple, vitesse et charge) du véhicule donné, tel que défini sur la plaque-étiquette et/ou dans le manuel d'utilisation; |
|
2.10. |
«Pression d'utilisation (Pwarm)», la pression de gonflage de chacun des pneumatiques, supérieure à la pression à froid (Prec) du fait des effets de la température lors de l'utilisation du véhicule; |
|
2.11. |
«Pression d'essai (Ptest)», la pression réelle choisie pour chacun des pneumatiques après dégonflage lors de la procédure d'essai. |
3. DEMANDE D'HOMOLOGATION
3.1. La demande d'homologation d'un type de véhicule en ce qui concerne son système de surveillance de la pression des pneumatiques est présentée par le constructeur du véhicule ou son représentant dûment accrédité.
3.2. Il est joint à la demande une description en trois exemplaires du type de véhicule comportant les renseignements indiqués à l'annexe 1 du présent règlement.
3.3. Un véhicule représentatif du type de véhicule à homologuer est présenté à l'autorité d'homologation de type ou au service technique chargé des essais d'homologation.
3.4. L'autorité d'homologation de type doit vérifier l'existence de dispositions satisfaisantes pour assurer un contrôle efficace de la conformité de production avant que ne soit accordée l'homologation du type.
4. HOMOLOGATION
4.1. Si le véhicule présenté à l'homologation en application du présent règlement satisfait aux prescriptions du paragraphe 5 ci-après, l'homologation pour ce type de véhicule est accordée.
4.2. Un numéro d'homologation est attribué à chaque type homologué, dont les deux premiers chiffres (actuellement 00, ce qui correspond à la version initiale du règlement) indiquent la série d'amendements englobant les plus récentes modifications techniques majeures apportées au règlement à la date de la délivrance de l'homologation. Une même Partie contractante ne peut pas attribuer ce numéro à un autre type de véhicule.
4.3. L'homologation ou l'extension ou le refus d'homologation d'un type de véhicule en application du présent règlement est communiqué aux Parties à l'accord appliquant le présent règlement, au moyen d'une fiche conforme au modèle visé à l'annexe 1 du présent règlement.
4.4. Sur tout véhicule conforme à un type de véhicule homologué en application du présent règlement, il est apposé de manière visible, en un endroit facilement accessible et indiqué sur la fiche d'homologation, une marque d'homologation internationale composée:
|
4.4.1. |
D'un cercle à l'intérieur duquel est placée la lettre «E», suivie du numéro distinctif du pays qui a accordé l'homologation (2); |
|
4.4.2. |
Du numéro du présent règlement, suivi de la lettre «R», d'un tiret et du numéro d'homologation, placé à la droite du marquage prévu au paragraphe 4.4.1. |
4.5. Si le véhicule est conforme à un type de véhicule homologué, en application d'un ou de plusieurs autres règlements joints en annexe à l'accord, dans le pays même qui a accordé l'homologation en application du présent règlement, il n'est pas nécessaire de répéter le symbole prescrit au paragraphe 4.4.1; en pareil cas, les numéros de règlement et d'homologation et les symboles additionnels pour tous les règlements pour lesquels l'homologation a été accordée dans le pays qui a accordé l'homologation en application du présent règlement sont inscrits l'un au-dessous de l'autre, à droite du symbole prescrit au paragraphe 4.4.1.
4.6. La marque d'homologation doit être nettement lisible et indélébile.
4.7. La marque d'homologation est placée sur la plaque signalétique du véhicule apposée par le constructeur ou à proximité de celle-ci.
4.8. L'annexe 2 du présent règlement donne des exemples de marques d'homologation.
5. SPÉCIFICATIONS ET ESSAIS
5.1. Généralités
5.1.1. Tout véhicule des catégories M1 dont la masse est inférieure ou égale à 3 500 kg et N1, dans les deux cas avec tous les essieux équipés de pneumatiques en montage simple et équipés d'un système de surveillance de la pression des pneumatiques répondant à la définition donnée au paragraphe 2.7, doit satisfaire aux prescriptions fonctionnelles énoncées aux paragraphes 5.1.2 à 5.5.5 du présent règlement sur tous les types de routes rencontrés sur le territoire des Parties contractantes.
5.1.2. L'efficacité du système de surveillance de la pression des pneumatiques monté sur un véhicule ne doit pas être altérée par des champs magnétiques ou électriques. Cette condition est remplie s'il est satisfait aux prescriptions techniques et aux dispositions transitoires du règlement no 10 en appliquant:
|
a) |
La série 03 d'amendements aux véhicules dépourvus de système de raccordement pour la recharge du système rechargeable de stockage de l'énergie (batteries de traction); |
|
b) |
La série 04 d'amendements aux véhicules équipés d'un système de raccordement pour la recharge du système rechargeable de stockage de l'énergie (batteries de traction). |
5.1.3. Le système doit fonctionner dès la vitesse de 40 km/h, voire moins, jusqu'à la vitesse maximale par construction du véhicule.
5.1.4. Le véhicule doit satisfaire aux essais (crevaison, défaut d'étanchéité et défaut de fonctionnement) comme prescrit à l'annexe 3.
5.2. Mesure de la pression des pneumatiques en vue de déceler une perte de pression liée à un incident
5.2.1. Le système de surveillance de la pression des pneumatiques doit allumer le témoin d'avertissement décrit au paragraphe 5.5 dix minutes de temps de conduite cumulé au plus après que la pression d'utilisation mesurée dans l'un des pneumatiques du véhicule a diminué de 20 % ou atteint une pression minimale de 150 kPa, la valeur retenue étant la plus élevée des deux.
5.3. Détection d'un niveau de pression des pneumatiques sensiblement inférieur à la pression recommandée pour assurer une efficacité optimale, y compris en termes de consommation de carburant et de sécurité
5.3.1. Le système de surveillance de la pression des pneumatiques doit allumer le témoin d'avertissement décrit au paragraphe 5.5 dans les soixante minutes de temps de conduite cumulé après une baisse de pression d'utilisation de 20 % dans au moins un des quatre pneumatiques du véhicule, ou lorsqu'il atteint une pression minimale de 150 kPa, la valeur retenue étant la plus élevée des deux.
5.4. Détection des défauts de fonctionnement
5.4.1. Le système de surveillance de la pression des pneumatiques doit allumer le témoin d'avertissement décrit au paragraphe 5.5 dix minutes au plus après l'apparition d'un défaut de fonctionnement affectant l'émission ou la transmission des signaux de commande ou de réaction dans le système de surveillance de la pression des pneumatiques du véhicule.
5.5. Témoin d'avertissement
5.5.1. L'avertissement doit être donné au moyen d'un témoin optique conforme au règlement no 121.
5.5.2. Le témoin d'avertissement doit s'allumer lorsque le contact d'allumage est mis (vérification du bon fonctionnement du voyant). Cette prescription ne s'applique pas aux témoins figurant dans un espace d'affichage commun.
5.5.3. Le témoin d'avertissement doit être visible même de jour; son bon état doit pouvoir être contrôlé aisément par le conducteur depuis son siège.
5.5.4. Le même témoin peut servir à indiquer un défaut de fonctionnement ou un sous-gonflage. Si le témoin d'avertissement décrit au paragraphe 5.5.1 sert à indiquer à la fois un sous-gonflage et un défaut de fonctionnement du système de surveillance de la pression des pneumatiques, il doit clignoter pour signaler un défaut de fonctionnement du système, le contact d'allumage étant mis. Puis il doit rapidement rester allumé en continu aussi longtemps que le défaut de fonctionnement persiste et que le contact d'allumage est mis. La séquence clignotement et allumage en continu doit se répéter chaque fois que le contact d'allumage est remis jusqu'à ce que le défaut de fonctionnement ait été réparé.
5.5.5. Le témoin d'avertissement décrit dans le paragraphe 5.5.1 peut être employé en mode clignotant pour fournir des renseignements sur la réinitialisation du système de surveillance de la pression des pneumatiques conformément au manuel d'utilisation.
6. RENSEIGNEMENTS SUPPLÉMENTAIRES
6.1. S'il existe un manuel d'utilisation du véhicule, celui-ci doit contenir au moins les renseignements suivants:
|
6.1.1. |
L'indication que le véhicule est équipé d'un tel système (et des renseignements sur la façon de le réinitialiser, si cette possibilité existe); |
|
6.1.2. |
Une image du symbole du témoin décrit dans le paragraphe 5.5.1 (et une image du symbole du témoin de défaut de fonctionnement, si un témoin spécial est employé pour ce faire); |
|
6.1.3. |
Des renseignements supplémentaires sur la signification de l'allumage du témoin d'avertissement de faible pression des pneumatiques et une description des mesures correctives à prendre lorsque cela se produit. |
6.2. Si un manuel d'utilisation n'est pas fourni avec le véhicule, les renseignements prescrits au paragraphe 6.1 ci-dessus doivent figurer sur le véhicule en un endroit bien visible.
7. MODIFICATIONS ET EXTENSION DE L'HOMOLOGATION D'UN TYPE DE VÉHICULE
7.1. Toute modification du type de véhicule tel qu'il est défini au paragraphe 2.2 doit être portée à la connaissance de l'autorité d'homologation de type. Celle-ci peut alors:
|
7.1.1. |
Soit considérer que les modifications apportées n'influencent pas défavorablement les conditions d'octroi de l'homologation et accorder une extension de l'homologation; |
|
7.1.2. |
Soit considérer que les modifications apportées ont une influence sur les conditions d'octroi de l'homologation et exiger de nouveaux essais ou des vérifications complémentaires avant d'accorder l'extension de l'homologation. |
7.2. La confirmation ou le refus de l'extension, avec l'indication des modifications, doit être notifié aux Parties contractantes à l'accord appliquant le présent règlement selon la procédure indiquée au paragraphe 4.3.
7.3. L'autorité d'homologation de type communique l'extension aux autres Parties contractantes au moyen de la fiche de communication reproduite à l'annexe 1 au présent règlement. Elle attribue, pour chaque extension, un numéro d'ordre, dénommé numéro d'extension.
8. CONFORMITÉ DE LA PRODUCTION
8.1. Les procédures de contrôle de conformité de la production doivent satisfaire aux dispositions formulées à l'appendice 2 de l'accord (E/ECE/324-E/ECE/TRANS/505/Rev.2), ainsi qu'aux conditions suivantes:
8.2. L'autorité qui a délivré l'homologation de type peut à tout moment vérifier la conformité de la production dans chaque installation de production. La fréquence normale de ces vérifications est d'au moins une fois par an.
9. SANCTIONS POUR NON-CONFORMITÉ DE LA PRODUCTION
9.1. L'homologation délivrée pour un type de véhicule en application du présent règlement peut être retirée si les conditions énoncées au paragraphe 8 ci-dessus ne sont pas respectées.
9.2. Si une Partie à l'accord appliquant le présent règlement retire une homologation qu'elle a précédemment accordée, elle doit en informer aussitôt les autres Parties contractantes appliquant le présent règlement, au moyen d'une copie de la fiche d'homologation portant à la fin, en gros caractères, la mention signée et datée: «HOMOLOGATION RETIRÉE».
10. ARRÊT DÉFINITIF DE LA PRODUCTION
Si le détenteur d'une homologation cesse définitivement la production d'un type de véhicule homologué conformément au présent règlement, il en informe l'autorité qui a délivré l'homologation qui, à son tour, avise les autres Parties à l'accord appliquant le présent règlement au moyen d'une copie de la fiche d'homologation portant à la fin, en gros caractères, la mention signée et datée «PRODUCTION ARRÊTÉE».
11. NOMS ET ADRESSES DES SERVICES TECHNIQUES CHARGÉS DES ESSAIS D'HOMOLOGATION ET DE L'AUTORITÉ D'HOMOLOGATION DE TYPE
Les Parties à l'accord appliquant le présent règlement communiquent au Secrétariat de l'Organisation des Nations unies les noms et adresses des services techniques chargés des essais d'homologation et ceux de l'autorité qui délivre l'homologation de type et à laquelle doivent être envoyées les fiches d'homologation ou d'extension et de refus ou de retrait d'homologation émises dans les autres pays.
(1) Selon les définitions de la Résolution d'ensemble sur la construction des véhicules (R.E.3.), document ECE/TRANS/WP.29/78/Rev.6, par. 2 — www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Les numéros distinctifs des Parties contractantes à l'accord de 1958 sont reproduits dans l'annexe 3 de la Résolution d'ensemble sur la construction des véhicules (R.E.3), document ECE/TRANS/WP.29/78/Rev.6, annexe 3 — www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
ANNEXE 2
EXEMPLES DE MARQUES D'HOMOLOGATION
(Voir le paragraphe 4.4 du présent règlement)

La marque d'homologation ci-dessus, apposée sur un véhicule, indique que le type de ce véhicule a été homologué aux Pays-Bas (E 4), en ce qui concerne le système de surveillance de la pression des pneumatiques, en application du règlement no 141 et sous le numéro d'homologation 002439. Ce numéro indique que l'homologation a été accordée conformément aux prescriptions du règlement no 141 dans sa version originale.
ANNEXE 3
ESSAIS DES SYSTÈMES DE SURVEILLANCE DE LA PRESSION DES PNEUMATIQUES
1. CONDITIONS D'ESSAI
1.1. Température ambiante
La température ambiante doit être comprise entre 0 et 40 °C.
1.2. Revêtement routier d'essai
Le revêtement routier de la chaussée doit présenter de bonnes conditions d'adhérence. Lors de l'essai, il doit être sec.
1.3. Les essais sont effectués dans un environnement exempt d'interférences dues à des ondes radioélectriques.
1.4. Préparation du véhicule
1.4.1. Masse d'essai
Le véhicule peut être soumis à l'essai dans un état de charge quelconque, la répartition de la masse sur les essieux étant celle déclarée par le constructeur automobile, sans que soit dépassée la masse maximale admissible pour chacun d'eux.
Toutefois, lorsqu'il n'est pas possible d'initialiser ou de réinitialiser le système, le véhicule doit être à vide. Outre le conducteur, il peut y avoir, sur le siège avant, une deuxième personne chargée de noter les résultats des essais. L'état de charge du véhicule ne doit pas être modifié pendant l'essai.
1.4.2. Vitesse du véhicule
Le système de surveillance de la pression des pneumatiques du véhicule doit être étalonné et éprouvé:
|
a) |
Dans une plage de vitesses comprises entre 40 et 120 km/h ou à la vitesse maximale par construction du véhicule si celle-ci est inférieure à 120 km/h pour l'essai de crevaison permettant de vérifier les prescriptions du paragraphe 5.2 du présent règlement; et |
|
b) |
Dans une plage de vitesses comprises entre 40 et 100 km/h pour l'essai de défaut d'étanchéité permettant de vérifier le respect des prescriptions du paragraphe 5.3 du présent règlement et l'essai de défaut de fonctionnement permettant de vérifier le respect des prescriptions du paragraphe 5.4 dudit règlement. |
L'essai doit porter sur l'intégralité de la plage de vitesses.
Sur les véhicules équipés d'un régulateur de vitesse, le régulateur de vitesse ne doit pas être enclenché pendant l'essai.
1.4.3. Placement des jantes
Les jantes du véhicule peuvent être placées n'importe où, sauf instructions contraires du constructeur.
1.4.4. Stationnement
Lorsque le véhicule est stationné, ses pneumatiques doivent être protégés du rayonnement direct du soleil. L'emplacement doit être abrité de tout vent susceptible d'affecter les résultats.
1.4.5. Actionnement de la pédale de frein
Il n'est pas tenu compte du temps de conduite au cours duquel le frein est actionné alors que le véhicule roule.
1.4.6. Pneumatiques
Le véhicule est soumis à l'essai, les pneumatiques étant montés conformément aux recommandations du constructeur. Toutefois, on peut utiliser le pneumatique de secours pour vérifier que le système de surveillance de la pression des pneumatiques ne présente pas de défaut de fonctionnement.
1.5. Précision du matériel de mesure de pression
La précision du matériel de mesure de pression lors des essais faisant l'objet de la présente annexe doit être de ± 3kPa.
2. MODE OPÉRATOIRE
L'essai est réalisé à une vitesse d'essai dans la plage indiquée au paragraphe 1.4.2 de la présente annexe, au moins une fois pour le cas prévu au paragraphe 2.6.1 de ladite annexe («essai de crevaison»), et au moins une fois pour chaque cas prévu au paragraphe 2.6.2 de ladite annexe («essai de défaut d'étanchéité»).
2.1. Avant de gonfler les pneumatiques du véhicule, immobiliser le véhicule en extérieur à température ambiante pendant au moins une heure, moteur coupé, en le protégeant du rayonnement direct du soleil, du vent ou d'autres facteurs de réchauffement ou de refroidissement. Gonfler les pneumatiques du véhicule à la pression à froid recommandée par le constructeur du véhicule (Prec), conformément aux recommandations de celui-ci en matière de vitesse, de charge et de position des pneumatiques. Toutes les mesures de pression doivent être faites avec le même matériel de mesure.
2.2. Le véhicule étant à l'arrêt, contact coupé, mettre le contact. Le système de surveillance de la pression des pneumatiques procède à un contrôle du fonctionnement de la lampe du témoin de sous-gonflage des pneumatiques, comme indiqué au paragraphe 5.5.2 du présent règlement. Cette dernière prescription ne s'applique pas aux témoins figurant dans un espace d'affichage commun.
2.3. Le cas échéant, initialiser ou réinitialiser le système de surveillance de la pression des pneumatiques conformément aux recommandations du constructeur du véhicule.
2.4. Phase d'apprentissage
2.4.1. Conduire le véhicule pendant un minimum de vingt minutes, dans la plage de vitesses définie au paragraphe 1.4.2 de la présente annexe et à une vitesse moyenne de 80 ± 10 km/h. Il est autorisé de sortir de cette plage de vitesses pendant un temps cumulé maximum de deux minutes au cours de la phase d'apprentissage.
2.4.2. Au choix du service technique, lorsque l'essai de conduite est exécuté sur une piste (circulaire/ovale), les virages se prenant donc toujours dans le même sens, l'essai de conduite visé au paragraphe 2.4.1 ci-dessus devrait être scindé en deux parties égales (± 2 minutes), à raison d'une partie dans chaque sens.
2.4.3. Dans les cinq minutes qui suivent l'achèvement de la phase d'apprentissage, mesurer la pression réelle à chaud du ou des pneumatiques à dégonfler. Cette valeur, Pwarm, sera utilisée pour les opérations suivantes.
2.5. Phase de dégonflage
2.5.1. Mode opératoire pour l'essai de crevaison permettant de vérifier les prescriptions du paragraphe 5.2 du présent règlement
Dans les cinq minutes qui suivent la mesure de la pression à chaud décrite au paragraphe 2.4.3, dégonfler un des pneumatiques du véhicule jusqu'à atteindre un niveau de pression Ptest correspondant à Pwarm – 20 % ou à la pression minimale de 150 kPa, la valeur retenue étant la plus élevée des deux. À la suite d'une période de stabilisation comprise entre deux et cinq minutes, vérifier le niveau de pression Ptest et l'ajuster si nécessaire.
2.5.2. Mode opératoire de l'essai de défaut d'étanchéité permettant de vérifier le respect des prescriptions du paragraphe 5.3 du présent règlement
Dans les cinq minutes qui suivent la mesure de la pression à chaud décrite au paragraphe 2.4.3, dégonfler les quatre pneumatiques jusqu'à atteindre le niveau de pression Ptest correspondant à Pwarm – 20 %, avec un dégonflage supplémentaire de 7 Kpa. À la suite d'une période de stabilisation comprise entre deux et cinq minutes, vérifier le niveau de pression Ptest et l'ajuster si nécessaire.
2.6. Phase de détection d'un sous-gonflage
2.6.1. Mode opératoire de l'essai de crevaison permettant de vérifier le respect des prescriptions du paragraphe 5.2 du présent règlement
2.6.1.1. Conduire le véhicule sur une portion du parcours d'essai (pas nécessairement en continu). Au total, le temps de conduite cumulé ne doit pas dépasser soit dix minutes, soit le temps que met le témoin de sous-gonflage des pneumatiques à s'allumer, la valeur retenue étant la plus basse des deux.
2.6.2. Mode opératoire de l'essai de défaut d'étanchéité permettant de vérifier les prescriptions du paragraphe 5.3 du présent règlement.
2.6.2.1. Conduire le véhicule sur une portion du parcours d'essai. Après vingt minutes au moins et quarante minutes au plus, immobiliser complètement le véhicule, le moteur étant coupé et la clef de contact étant retirée depuis une minute au moins et trois minutes au plus. Reprendre l'essai. Au total, le temps de conduite cumulé ne doit pas dépasser soit soixante minutes dans les conditions définies au paragraphe 1.4.2 ci-dessus, soit le temps que met le témoin de sous-gonflage des pneumatiques à s'allumer, la valeur retenue étant la plus basse des deux.
2.6.3. Si le témoin de sous-gonflage des pneumatiques ne s'est pas allumé, mettre fin à l'essai.
2.7. Si le témoin de sous-gonflage des pneumatiques s'est allumé au cours de l'essai décrit au paragraphe 2.6 ci-dessus, couper le contact. Cinq minutes plus tard, remettre le contact du véhicule. Le témoin doit s'allumer et rester allumé aussi longtemps que le contact est mis.
2.8. Gonfler tous les pneumatiques du véhicule à la pression de gonflage à froid recommandée par le constructeur du véhicule. Réinitialiser le système conformément aux instructions de celui-ci. S'assurer que le témoin s'est bien éteint. S'il y a lieu, conduire le véhicule jusqu'à l'extinction du témoin. Si le témoin ne s'éteint pas, mettre fin à l'essai.
2.9. Répétition de la phase de dégonflage
L'essai peut être répété, avec la même charge ou une charge différente, selon les modes opératoires décrits aux paragraphes 2.1 à 2.8 ci-dessus, le ou les pneumatiques du véhicule concernés étant sous-gonflés, conformément aux dispositions du paragraphe 5.2 ou 5.3 du présent règlement, selon qu'il convient.
3. DÉTECTION DES DÉFAUTS DE FONCTIONNEMENT DU SYSTÈME DE SURVEILLANCE DE LA PRESSION DES PNEUMATIQUES
3.1. Simuler un défaut de fonctionnement du système de surveillance de la pression des pneumatiques, par exemple, en déconnectant l'alimentation d'un des composants du système, en interrompant la connexion électrique entre les composants eux-mêmes ou en montant sur le véhicule un pneumatique ou une roue incompatible avec le système. Lors de la simulation d'un défaut de fonctionnement du système de surveillance de la pression des pneumatiques, les connexions électriques des témoins ne doivent pas être interrompues.
3.2. Conduire le véhicule pendant un temps cumulé de dix minutes au plus (pas nécessairement en continu) sur une portion du parcours d'essai.
3.3. Au total, le temps de conduite cumulé visé au paragraphe 3.2 ne doit pas dépasser soit dix minutes, soit le temps que met le témoin de défaut de fonctionnement du système de surveillance de la pression des pneumatiques à s'allumer, la valeur retenue étant la plus basse des deux.
3.4. Si le témoin de défaut de fonctionnement du système de surveillance de la pression des pneumatiques ne s'est pas allumé au cours de l'essai décrit au paragraphe 5.4 du présent règlement, mettre fin à l'essai.
3.5. Si le témoin de défaut de fonctionnement du système de surveillance de la pression des pneumatiques est allumé ou s'allume au cours de l'essai décrit aux paragraphes 3.1 à 3.3 ci-dessus, couper le contact. Cinq minutes plus tard, remettre le contact du véhicule. Le témoin doit de nouveau signaler un défaut de fonctionnement et rester allumé aussi longtemps que le contact est mis.
3.6. Ramener le système de surveillance de la pression des pneumatiques à son mode de fonctionnement normal. S'il y a lieu, conduire le véhicule jusqu'à l'extinction du témoin d'avertissement. Si celui-ci ne s'éteint pas, mettre fin à l'essai.
3.7. L'essai peut être répété selon les modes opératoires décrits aux paragraphes 3.1 à 3.6 ci-dessus, chaque essai se limitant à la simulation d'un seul défaut de fonctionnement.