|
13.11.2010 |
FR |
Journal officiel de l'Union européenne |
L 297/183 |
Seuls les textes originaux de la CEE-ONU ont un effet juridique dans le cadre du droit public international. Le statut et la date d'entrée en vigueur doivent être vérifiés dans la dernière version du document de statut TRANS/WP.29/343 de la CEE-ONU, disponible à l'adresse suivante:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Amendements au règlement no 13 de la Commission économique pour l'Europe des Nations unies (CEE-ONU) — Prescriptions uniformes relatives à l'homologation des véhicules des catégories M, N et O en ce qui concerne le freinage
Série 11 d'amendements
Amendements au règlement 13 publié au JO L 257 du 30 septembre 2010, p. 1.
Comprenant tout le texte valide jusqu'à:
|
|
Série 11 d'amendements — Date d'entrée en vigueur: 11 juillet 2008 |
|
|
Révision 6 — Amendement 1 — Corr 1 |
|
|
Révision 6 — Amendement 1 — Corr 2 |
|
|
Complément 1 à la série 11 d’amendements — Date d'entrée en vigueur: 22 juillet 2009 |
|
|
Complément 2 à la série 11 d’amendements — Date d'entrée en vigueur: 24 octobre 2009 |
|
|
Rectificatif 2 à la série 11 d'amendements — Date d'entrée en vigueur: 24 juin 2009 |
|
|
Complément 3 à la série 11 d’amendements — Date d'entrée en vigueur: 17 mars 2010 |
Table des matières — modifier comme suit
Le titre de l'annexe 16, modifier pour lire:
|
«Annexe 16 — |
Compatibilité entre les véhicules tracteurs et les remorques en ce qui concerne la communication des données définies dans la norme ISO 11992» |
Annexe 19, insérer les nouveaux appendices 7 et 8, ainsi conçu:
|
|
«Annexe 19 — Appendice 7 — Fiche technique de la fonction de contrôle de la stabilité du véhicule |
|
|
Annexe 19 — Appendice 8 — Procès-verbal d'essai de la fonction de contrôle de la stabilité du véhicule» |
Les appendices 7 et 8 deviennent les appendices 9 et 10.
Ajouter une nouvelle annexe 21
|
«Annexe 21 — |
Prescriptions particulières applicables aux véhicules équipés d’une fonction de contrôle de la stabilité du véhicule Annexe 21 — Appendice 1 — Simulation de la stabilité dynamique
|
Texte principal du règlement — modifier comme suit
Dans l’ensemble du texte du règlement no 13, remplacer le renvoi à «la norme ISO 11992:2003» par «la norme ISO 11992-2:2003 et son amendement ISO 11992-2:2003/Amd.1:2007».
Ajouter les nouveaux paragraphes 2.34 à 2.36, ainsi conçus:
|
“2.34. |
Par “fonction de contrôle de la stabilité du véhicule”, une fonction de contrôle électronique qui améliore la stabilité dynamique du véhicule.
|
|
2.35. |
Par “remorque considérée”, une remorque représentative du type de remorque à homologuer. |
|
2.36. |
Par “facteur d'amplification du frein (BF)”, le facteur d'amplification entre l'entrée et la sortie du frein.” |
Paragraphe 4.2 au lieu de « (actuellement 10)» lire « (actuellement 11)».
Ajouter le nouveau paragraphe 5.1.3.6.1, libellé comme suit:
|
«5.1.3.6.1. |
La prise en compte par le véhicule tracteur et par la remorque, selon le cas, des messages définis dans la norme ISO 11992-2:2003 et dans son Amd.1:2007 est décrite à l’annexe 16 du présent règlement.» |
Les paragraphes 5.1.3.6.1 et 5.1.3.6.2 (anciens) deviennent les paragraphes 5.1.3.6.2 et 5.1.3.6.3, respectivement.
Paragraphe 5.2.1.30.5, supprimer l’appel de note 12 de bas de page et la note correspondante.
Ajouter un nouveau paragraphe 5.2.1.32, ainsi conçu [ainsi conçu (y compris la note 12 de bas de page)]:
|
«5.2.1.32. |
Sous réserve des dispositions du paragraphe 12.4 du présent règlement, tous les véhicules des catégories M2, M3, N2 et N3 (1), n'ayant pas plus que 3 essieux, doivent être équipés de la fonction de contrôle de stabilité. Cette fonction doit comprendre la fonction antirenversement et la fonction de contrôle de la trajectoire et satisfaire aux prescriptions techniques de l’annexe 21. |
Paragraphe 5.2.2.17.1, modifier comme suit (avec suppression de la note):
|
«5.2.2.17.1. |
Les remorques équipées d’une fonction de contrôle de stabilité telle que définie au paragraphe 2.34 du présent règlement doivent, en cas de défaillance ou de défaut de ladite fonction, signaler cette défaillance ou ce défaut au moyen du signal d’avertissement jaune distinct, tel que défini au paragraphe 5.2.1.29.2 ci-dessus, par l’intermédiaire de la broche no 5 du raccord électrique ISO 7638:1997. Le signal d’avertissement doit être constant et rester allumé aussi longtemps que la défaillance ou le défaut persiste et que le contact est mis (position “marche”).» |
Paragraphe 5.2.2.22.1, supprimer l’appel de note 19 de bas de page et la note correspondante.
Paragraphe 5.2.2.22.2, l’appel de note et la note 20 deviennent l’appel de note et la note 19 et l’appel de note et la note 21 sont supprimés
Ajouter un nouveau paragraphe 5.2.2.23, ainsi conçu (y compris la note 20 de bas de page):
|
«5.2.2.23. |
Sous réserve des dispositions du paragraphe 12.4 du présent règlement, tous les véhicules des catégories O3 et O4 (2), n'ayant pas plus que 3 essieux et étant équipés d'une suspension pneumatique, doivent être équipés de la fonction de contrôle de stabilité. Cette fonction doit comprendre au moins la fonction antirenversement et satisfaire aux prescriptions techniques de l’annexe 21. |
Ajouter un nouveau paragraphe 12.1.6, ainsi conçu (y compris la note 21 de bas de page):
|
«12.1.6. |
À compter de la date officielle d’entrée en vigueur de la série 11 d’amendements, aucune partie contractante appliquant le présent règlement ne pourra refuser d’accorder une homologation de type en vertu du présent règlement tel qu’amendé par la série 11 d’amendements (3). |
Ajouter le nouveau paragraphe 12.1.7, ainsi conçu:
|
«12.1.7. |
Le complément 1 à la série 11 d’amendements au présent règlement entrera en application conformément aux dispositions du paragraphe 12.4.1.» |
Ajouter un nouveau paragraphe, libeller comme suit:
|
«12.1.8. |
À compter de la date officielle d'entrée en vigueur du complément 2 à la série 11 d'amendements au présent règlement, aucune partie contractante appliquant le présent règlement ne peut refuser d'accorder une homologation en vertu du présent règlement tel qu'amendé par le complément 2 à la série 11 d'amendements.» |
Ajouter le nouveau paragraphe 12.2.6, ainsi conçu:
|
«12.2.6. |
À l’expiration d’un délai de quarante-huit mois à compter de l’entrée en vigueur du complément 1 à la série 11 d’amendements au présent règlement, les parties contractantes n’accorderont d’homologation aux véhicules exemptés en vertu des paragraphes 5.2.1.32 et 5.2.2.23, y compris les notes de bas de page, que s’ils satisfont aux prescriptions du complément 1 à la série 11 d’amendements au présent règlement.» |
Ajouter un nouveau paragraphe, libeller comme suit:
|
«12.2.7. |
Passé un délai de quarante-huit mois à compter de la date d'entrée en vigueur du complément 2 à la série 11 d'amendements au présent règlement, les parties contractantes appliquant le présent règlement n'accordent d'homologation que si le type de véhicule à homologuer est conforme aux prescriptions du présent règlement tel qu'amendé par le complément 2 à la série 11 d'amendements.» |
Ajouter un nouveau paragraphe, libeller comme suit:
|
«12.3.2. |
Passé un délai de quatre-vingt-quatre mois à compter de la date d'entrée en vigueur du complément 2 à la série 11 d'amendements au présent règlement, les parties contractantes appliquant le présent règlement peuvent refuser la première immatriculation sur leur territoire (première mise en circulation) d'un véhicule ne satisfaisant pas aux prescriptions du complément 2 à la série 11 d'amendements au présent règlement.» |
Ajouter un nouveau paragraphe 12.4, ainsi conçu [y compris une note (*)]
«12.4. Dispositions obligatoires applicables aux véhicules équipés de la fonction de contrôle de stabilité du véhicule
|
12.4.1. |
Les prescriptions concernant l’équipement des véhicules des fonctions de contrôle de stabilité spécifiées aux paragraphes 5.2.1.32 et 5.2.2.23 du présent règlement, tel qu’amendé par la série 11 d’amendements, doivent être appliquées comme suit:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Les paragraphes 12.4 et 12.4.1 deviennent les paragraphes 12.5 et 12.5.1.
Amendements À L'annexe 2
Annexe 2, ajouter les nouveaux paragraphes 14.14 et 14.14.1, ainsi conçus:
|
«14.14. |
Le véhicule est équipé de la fonction de contrôle de la stabilité du véhicule: |
Oui/Non (2) |
|
Si oui: … |
|
|
|
La fonction de contrôle de la stabilité du véhicule a fait l’objet des essais prévus par les dispositions de l’annexe 21 et satisfait à ces dispositions: |
Oui/Non (2) |
|
|
La fonction de contrôle de la stabilité du véhicule est un équipement en option: |
Oui/Non (2) |
|
|
La fonction de contrôle de la stabilité du véhicule comprend la fonction de contrôle de la trajectoire: |
Oui/Non (2) |
|
|
La fonction de contrôle de la stabilité du véhicule comprend la fonction antirenversement: |
Oui/Non (2) |
|
|
14.14.1. |
Si un rapport d’essai a été établi conformément à l’annexe 19, indique le numéro de ce rapport: …» |
|
Amendements à l'annexe 10
Annexe 10, paragraphe 1.3.1, note 2 de bas de page, modifier comme suit:
|
«(2) |
Dans le cas d’essieux multiples, si l’écartement entre un essieu et l’essieu adjacent est supérieur à 2 m, chaque essieu doit être considéré comme un groupe d’essieux indépendant.» |
Amendements à l'annexe 11
Annexe 11
Paragraphe 2, modifier comme suit:
|
«2. |
Le terme «identique», tel qu'il est utilisé aux paragraphes 1.1, 1.2 et 1.3 ci-dessus, signifie identique du point de vue des caractéristiques géométriques, mécaniques et des matériaux des éléments du véhicule visés à ces paragraphes. Dans le cas des remorques, on considère que les dispositions des paragraphes 1.1 et 1.2 ci-dessus sont respectées si les identificateurs mentionnés au paragraphe 3.7 de l'appendice 2 de la présente annexe pour l'essieu et le frein de la remorque considérée figurent dans un procès-verbal concernant un essieu/frein de référence. Par “essieu/frein de référence”, on entend un essieu/frein pour lequel il existe un procès-verbal d'essai conforme au paragraphe 3.9 de l'appendice 2 de la présente annexe.» |
Annexe 11 — Appendice 1
Tableau I, modifier comme suit (y compris la note 1):
|
|
«Essieux du véhicule |
Essieux de référence |
||||
|
Masse statique (P) (5) |
Effort de freinage nécessaire aux roues |
Vitesse |
Masse d'essai (Pe) (5) |
Effort de freinage développé aux roues |
Vitesse |
|
|
kg |
N |
km/h |
kg |
N |
km/h |
|
|
Essieu 1 |
|
|
|
|
|
|
|
Essieu 2 |
|
|
|
|
|
|
|
Essieu 3 |
|
|
|
|
|
|
|
Essieu 4 |
|
|
|
|
|
|
Tableau III, troisième rangée, modifier comme suit (et supprimer la note 2):
|
|
«ESSIEU DE RÉFÉRENCE … (copie jointe) |
|
|
PROCÈS-VERBAL NO … |
|
|
Date … |
|
|
Type-I |
Type-III |
|
Effort de freinage par essieu (N) (voir le paragraphe 4.2.1 de l'appendice 2) |
|
|
|
Essieu 1 |
T1 = … % Fe |
T1 = … % Fe |
|
Essieu 2 |
T2 = … % Fe |
T2 = … % Fe |
|
Essieu 3 |
T3 = … % Fe |
T3 = … % Fe |
|
… |
… |
…» |
Annexe 11 — Appendice 2
Insérer un nouveau paragraphe, libeller comme suit:
|
«1.2.2. |
Les essais qui sont exécutés conformément au présent appendice avant la publication du complément 2 à la série 11 d'amendements au présent règlement et qui, complétés par d'éventuelles données fournies par le constructeur du véhicule ou le fabricant de l'essieu/du frein, donnent suffisamment d'informations pour satisfaire aux prescriptions du complément 2 à la série 11 d'amendements peuvent être utilisés pour un nouveau procès-verbal ou l'extension d'un procès-verbal d'essai existant sans qu'il soit nécessaire de mener des essais réels.» |
Paragraphe 2, modifier comme suit:
«2. SYMBOLES ET DÉFINITIONS
2.1. Symboles
|
P |
= |
partie de la masse du véhicule supportée par l'essieu en conditions statiques |
|
F |
= |
réaction normale du sol sur l'essieu en conditions statiques = P · g |
|
FR |
= |
réaction normale du sol sur toutes les roues d'une remorque en conditions statiques |
|
Fe |
= |
charge sur l'essieu d'essai |
|
Pe |
= |
Fe / g |
|
g |
= |
accélération de la pesanteur: g = 9,81 m/s2 |
|
C |
= |
couple d'actionnement |
|
C0 |
= |
couple d'actionnement minimal utile (voir la définition au paragraphe 2.2.2) |
|
C0,dec |
= |
couple d'actionnement minimal utile déclaré |
|
Cmax |
= |
couple d'actionnement maximal déclaré |
|
R |
= |
rayon de roulement (dynamique) du pneu |
|
T |
= |
force de freinage à l'interface entre le pneu et la route |
|
TA |
= |
force de freinage totale de la remorque à l'interface entre le pneu et la route |
|
M |
= |
couple de freinage = T · R |
|
z |
= |
taux de freinage = T / F ou M /(R · F) |
|
s |
= |
course du récepteur (course utile + course à vide) |
|
sp |
= |
voir annexe 19, appendice 9 |
|
ThA |
= |
voir annexe 19, appendice 9 |
|
l |
= |
longueur du levier |
|
r |
= |
rayon intérieur des tambours de frein ou rayon effectif des disques de frein |
|
p |
= |
pression d'actionnement des freins |
Note: Les symboles ayant le suffixe “e” désignent des paramètres intervenant dans l'essai de freinage de référence et peuvent être associés à d'autres paramètres s'il y a lieu.
2.2. Définitions
2.2.1. Masse d'un disque ou d'un tambour
|
2.2.1.1. |
La “masse déclarée” est la masse déclarée par le fabricant qui est représentative de l'identificateur de frein (voir le paragraphe 3.7.2.2 du présent appendice). |
|
2.2.1.2. |
La “masse d'essai nominale” est la masse spécifiée par le fabricant pour le disque ou le tambour soumis par le service technique à l'essai approprié. |
|
2.2.1.3. |
La “masse d'essai réelle” est la masse mesurée par le service technique avant l'essai. |
2.2.2. “Couple d'actionnement minimal utile”
|
2.2.2.1. |
Le couple d'actionnement minimal utile “C0 ” est le couple d'actionnement nécessaire pour produire un couple de freinage mesurable. Il peut être déterminé par extrapolation des mesures dans une plage n'excédant pas 15 % du taux de freinage ou par d'autres méthodes équivalentes (voir par exemple, le paragraphe 1.3.1.1 de l'annexe 10). |
|
2.2.2.2. |
Le couple d'actionnement minimal utile déclaré “C0,dec ” est le couple d'actionnement minimal utile déclaré par le fabricant, qui est représentatif du frein (voir le paragraphe 3.7.2.2.1 du présent appendice) et nécessaire pour élaborer le diagramme 2 de l'annexe 19. |
|
2.2.2.3. |
Le couple d'actionnement minimal utile “C0,e ” est déterminé par la procédure définie au paragraphe 2.2.2.1 ci-dessus et mesuré par le service technique à la fin de l'essai. |
2.2.3. “Diamètre extérieur du disque”
|
2.2.3.1. |
Le “diamètre extérieur déclaré” est la valeur du diamètre extérieur d'un disque déclarée par le fabricant et qui est représentative de ce diamètre (voir le paragraphe 3.7.2.2.1 du présent appendice). |
|
2.2.3.2. |
Le “diamètre extérieur nominal” est le diamètre extérieur spécifié par le fabricant pour le disque soumis par le service technique à l'essai approprié. |
|
2.2.3.3. |
Le “diamètre extérieur réel” est le diamètre extérieur mesuré par le service technique avant l'essai. |
2.2.4. La “longueur effective de l'axe de came” est la distance entre l'axe de la came en S et l'axe du levier de commande.»
Paragraphe 3.4, modifier comme suit:
«3.4. Conditions de l'essai (généralités)»
Supprimer les paragraphes 3.7 à 3.7.3.
Insérer les nouveaux paragraphes 3.7 à 3.9.4, libeller comme suit:
«3.7. Identification
3.7.1. L'essieu doit comporter en un endroit visible au minimum les informations d'identification ci-après, regroupées selon un ordre quelconque et inscrites de façon lisible et indélébile:
|
(a) |
Le fabricant et/ou la marque de l'essieu; |
|
(b) |
L'identificateur d'essieu (voir le paragraphe 3.7.2.1 du présent appendice); |
|
(c) |
L'identificateur de frein (voir le paragraphe 3.7.2.2 du présent appendice); |
|
(d) |
L'identificateur Fe (voir le paragraphe 3.7.2.3 du présent appendice); |
|
(e) |
La partie de base du numéro du procès-verbal d'essai (voir le paragraphe 3.9 du présent appendice). |
Exemple:
|
|
|
|
|
|
|
|
|
|
3.7.1.1. Un dispositif de réglage automatique de frein non intégré doit comporter en un endroit visible au minimum les informations d'identification ci-après, regroupées et inscrites de façon lisible et indélébile:
|
(a) |
Le fabricant et/ou la marque; |
|
(b) |
Le type; |
|
(c) |
La version. |
3.7.1.2. La marque et le type de chaque garniture de frein doivent être visibles lorsque celle-ci est montée sur la mâchoire/plaquette et doivent être inscrits de façon lisible et indélébile.
3.7.2 Identificateurs
3.7.2.1 Identificateur d'essieu
L'identificateur d'essieu sert à ranger l'essieu dans une catégorie sur la base de la force de freinage/du couple indiqués par le fabricant.
Il s'agit d'un nombre alphanumérique formé des quatre caractères «ID1-» suivis d'un maximum de 20 caractères.
3.7.2.2 Identificateur de frein
L'identificateur de frein est un nombre alphanumérique formé des quatre caractères «ID2-» suivis d'un maximum de 20 caractères.
Les freins qui ont le même identificateur partagent les caractéristiques suivantes:
|
a) |
Le type [par exemple, frein à tambour (came en S, coin, etc.) ou frein à disque (étrier fixe, étrier flottant, disque unique ou double disque, etc.)]; |
|
b) |
Le matériau de base (métal ferreux ou non ferreux par exemple) présent dans le porte-étriers, le support de garniture, le disque de frein ou le tambour de frein; |
|
c) |
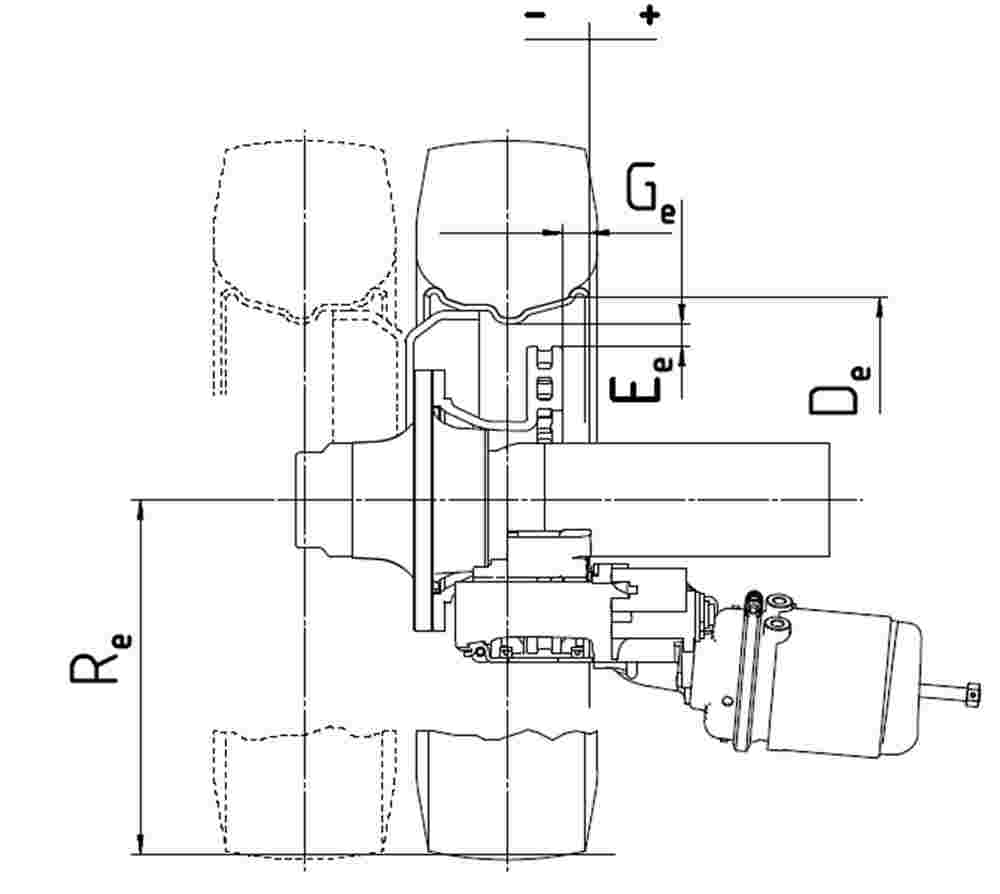
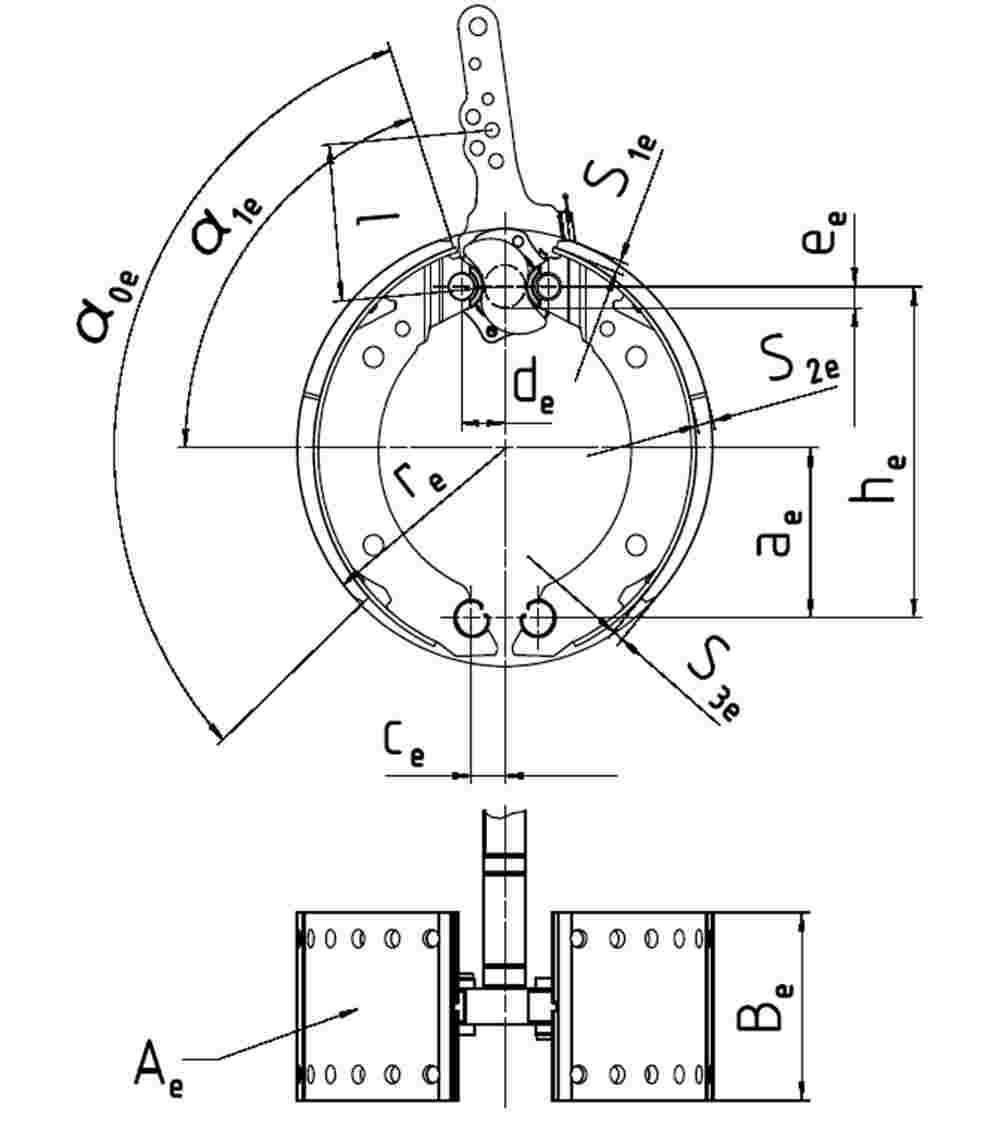
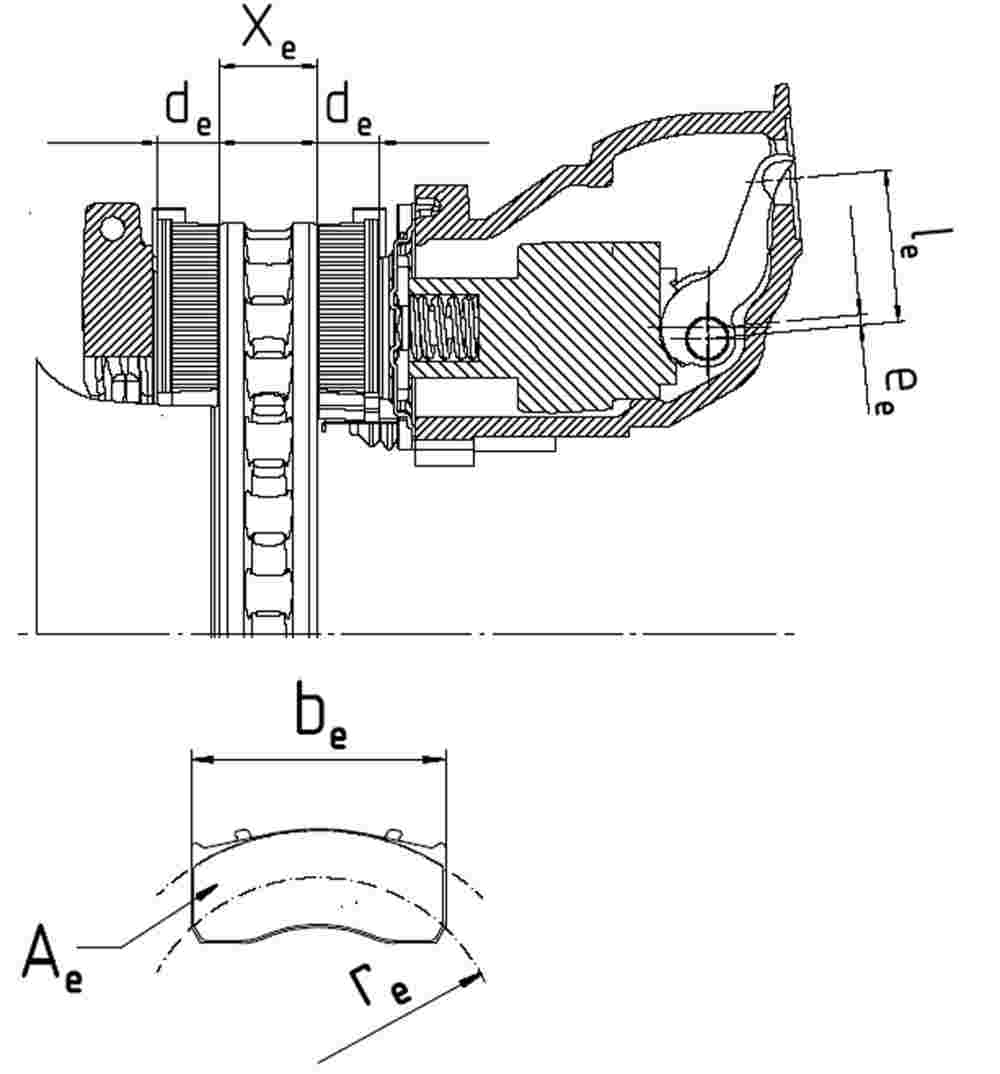
Les dimensions comportant le suffixe «e» sur les figures 2A et 2B de l'appendice 5 de la présente annexe; |
|
d) |
La méthode de base utilisée pour générer la force de freinage; |
|
e) |
Dans le cas de freins à disque, la méthode de montage (fixe ou flottante) de l'étrier; |
|
f) |
Le facteur d'amplification du frein BF; |
|
g) |
Les différentes caractéristiques du frein relatives aux prescriptions de l'annexe 11 et non mentionnées au paragraphe 3.7.2.2.1. |
3.7.2.2.1. Différences autorisées entre freins ayant le même identificateur
Les freins ayant le même identificateur peuvent différer en ce qui concerne les caractéristiques suivantes:
|
a) |
Le couple d'actionnement maximal déclaré Cmax (valeur supérieure); |
|
b) |
La masse déclarée du disque de frein ou du tambour de frein mdec: ± 20 %; |
|
c) |
Le mode de fixation de la garniture sur la mâchoire/la plaquette; |
|
d) |
Dans le cas de freins à disque, la course maximale du frein (valeur supérieure); |
|
e) |
La longueur effective de l'axe de came; |
|
f) |
Le couple d'actionnement minimal utile déclaré C0,dec; |
|
g) |
Le diamètre extérieur déclaré du disque (±5 mm); |
|
h) |
Le type de refroidissement du disque (ventilé/non ventilé); |
|
i) |
Le moyeu (intégré ou non); |
|
j) |
L'intégration du frein de stationnement au disque ou au tambour; |
|
k) |
La relation géométrique entre les surfaces de friction du disque et les éléments de montage du disque; |
|
l) |
Le type de garniture de frein; |
|
m) |
Les matériaux (à l'exclusion du matériau de base, voir le paragraphe 3.7.2.2) à propos desquels le fabricant confirme que les différences ne modifient pas les performances relevées dans les essais requis; |
|
n) |
La plaquette ou la mâchoire de frein. |
3.7.2.3. Identificateur Fe
L'identificateur Fe désigne la charge sur l'essieu d'essai. Il s'agit d'un nombre alphanumérique formé des quatre caractères «ID3-» suivis de la valeur de Fe exprimée en daN mais sans l'identificateur d'unité «daN».
3.7.2.4. Identificateur du procès-verbal d'essai
L'identificateur du procès-verbal d'essai est un numéro alphanumérique formé des quatre caractères «ID4-» suivis de la partie de base du numéro du procès-verbal d'essai.
3.7.3 Dispositif de réglage automatique de frein (intégré ou non intégré)
3.7.3.1 Types de dispositif de réglage automatique de frein
Les dispositifs de réglage automatique de frein de même type ne diffèrent pas en ce qui concerne les caractéristiques suivantes:
|
a) |
Le matériau de base (par exemple, ferreux ou non ferreux, en fonte ou en acier forgé); |
|
b) |
Le moment maximal admissible sur l'arbre de frein; |
|
c) |
Le mode de réglage (par exemple en fonction de la course (déplacement), en fonction de la force ou réglage de type électronique/mécanique). |
3.7.3.2. Versions de dispositif de réglage automatique de frein
On distingue différentes versions au sein d'un même type de dispositif de réglage automatique de frein lorsque le jeu des garnitures au frein est différent.
3.8. Critères d'essai
L'essai doit permettre de vérifier que toutes les prescriptions énoncées dans l'appendice 2 de la présente annexe sont respectées.
Dans le cas où il faut un nouveau procès-verbal d'essai ou une extension de procès-verbal d'essai pour un essieu/un frein modifié dans le cadre des limites spécifiées au paragraphe 3.7.2.2.1, les critères suivants sont utilisés pour déterminer s'il est nécessaire de procéder à de nouveaux essais compte tenu des configurations les plus défavorables convenues avec le service technique.
|
Les abréviations suivantes sont utilisées dans le tableau ci-après: |
|||||||||
|
CT (essai complet) |
Essai conforme à l'appendice 2 de l'annexe 11:
Essai conforme à l'annexe 19:
|
||||||||
|
FT (essai de perte d'efficacité à chaud) |
Essai conforme à l'appendice 2 de l'annexe 11:
|
||||||||
|
Différences autorisées conformément au paragraphe 3.7.2.2.1 |
Critères d'essai |
||||||
|
Différence autorisée sans essai supplémentaire |
||||||
|
CT: La moindre différence doit donner lieu à un essai. Si la masse d'essai nominale pour une nouvelle variante diffère de moins de 5 % par rapport à la variante précédemment mise à l'essai tout en lui restant supérieure, il n'est pas obligatoire de soumettre à l'essai la variante la plus légère. La masse d'essai réelle de l'échantillon d'essai peut différer de± 5 % par rapport à la masse d'essai nominale. |
||||||
|
Cas le plus défavorable spécifié par le fabricant et convenu par le service technique exécutant l'essai |
||||||
|
Différence autorisée sans essai supplémentaire |
||||||
|
On considère que le cas le plus défavorable correspond à la valeur la plus petite de la résistance à la torsion de l'axe de came et qu'il faut alors:
|
||||||
|
Il faut vérifier que l'efficacité de freinage s'inscrit dans les limites du diagramme 2 de l'appendice 19. |
||||||
|
On considère que le plus petit diamètre correspond au cas le plus défavorable. Le diamètre extérieur réel de l'échantillon d'essai peut varier de ± 1 mm par rapport au diamètre extérieur nominal spécifié par le fabricant de l'essieu. |
||||||
|
Chaque type doit faire l'objet d'un essai. |
||||||
|
Chaque type doit faire l'objet d'un essai. |
||||||
|
L'essai n'est pas requis pour cette caractéristique. |
||||||
|
L'essai n'est pas requis pour cette caractéristique. |
||||||
|
L'essai est requis pour chaque type de garniture. |
||||||
|
L'essai n'est pas requis pour cette caractéristique. |
||||||
|
Conditions d'essai correspondant au cas le plus défavorable (7): Plaquette: épaisseur minimale; Mâchoire: mâchoire de frein la plus légère. |
|
3.8.1. |
Si un dispositif de réglage automatique des freins ne donne pas les mêmes résultats qu'un autre dispositif soumis à l'essai conformément aux paragraphes 3.7.3.1 et 3.7.3.2, un essai supplémentaire conforme au paragraphe 3.6.2 du présent appendice est nécessaire. |
3.9. Procès-verbal d'essai
3.9.1. Numéro du procès-verbal d'essai
Le numéro du procès-verbal d'essai comprend deux parties: une partie de base et un suffixe identifiant le niveau de la question à traiter dans le procès-verbal d'essai.
La partie de base (qui comprend au maximum 20 caractères) et le suffixe doivent être séparés clairement, par un point ou une barre oblique par exemple.
La partie de base du numéro du procès-verbal d'essai ne concerne que les freins qui ont le même identificateur de frein et le même facteur d'amplification du frein (conformément au paragraphe 4 de l'annexe 19 du présent règlement).
3.9.2. Code d'essai
Associé au numéro du procès-verbal d'essai, un «code d'essai» comprenant jusqu'à huit caractères (ABC123 par exemple) doit indiquer les résultats d'essai applicables aux identificateurs et à l'échantillon d'essai, tels que décrits au paragraphe 3.7 ci-dessus.
3.9.3. Résultats d'essai
|
3.9.3.1. |
Les résultats des essais exécutés conformément aux paragraphes 3.5 et 3.6.1 du présent appendice doivent être consignés sur un formulaire dont le modèle est donné à l'appendice 3 à la présente annexe. |
|
3.9.3.2. |
Dans le cas d'un frein équipé d'un dispositif de réglage automatique, les résultats des essais exécutés conformément au paragraphe 3.6.2 du présent appendice doivent être consignés sur un formulaire dont le modèle est donné à l'appendice 4 à la présente annexe. |
3.9.4. Document d'information
Le procès-verbal d'essai doit comprendre un document d'information fourni par le fabricant de l'essieu ou le constructeur du véhicule et dans lequel figurent au minimum les informations définies à l'appendice 5 de la présente annexe.
Ce document doit recenser, s'il y a lieu, les différentes variantes de frein/d'essieu pour ce qui est des principaux critères énumérés au paragraphe 3.7.2.2.1 ci-dessus.»
Paragraphe 4.1, modifier comme suit:
«4.1. Contrôle des éléments intéressant le freinage
Les caractéristiques des freins du véhicule soumis à l'homologation de type doivent être conformes aux prescriptions énoncées aux paragraphes 3.7 et 3.8 ci-dessus.»
Paragraphes 4.1.1 à 4.1.7, à supprimer.
Paragraphe 4.3.1.4, modifier la formule comme suit:
Paragraphe 4.3.2, modifier la formule comme suit:

Annexe 11 – Appendice 3
Modifier comme suit (et supprimer les figures 1A, 1B, 2A et 2B):
«APPENDICE 3
Modèle de formule du procès-verbal d'essai mentionné au paragraphe 3.9 de l'appendice 2 à la présente annexe
PROCÈS-VERBAL D'ESSAI No …
|
|
Partie de base: ID4- … |
|
|
Suffixe: … |
1. GENERALITES
|
1.1. |
Fabricant de l'essieu (nom et adresse): … |
|
1.1.1. |
Marque du fabricant de l'essieu: … |
|
1.2. |
Fabricant de frein (nom et adresse): … |
|
1.2.1. |
Identificateur de frein: ID2-… |
|
1.2.2. |
Dispositif de réglage automatique de freins: intégré/non intégré (8) |
|
1.3. |
Document d'information du fabricant: … |
2. DONNEES ENREGISTREES LORS DE L'ESSAI
Les informations suivantes doivent être relevées pour chaque essai:
|
2.1. |
Code d'essai (voir le paragraphe 3.9.2 de l'appendice 2 de la présente annexe): … |
|
2.2. |
Échantillon d'essai: (identification précise de la variante mise à l'essai concernant le document d'information du fabricant. Voir également le paragraphe 3.9.2 de l'appendice 2 de la présente annexe) |
|
2.2.1. |
Essieu |
|
2.2.1.1. |
Identificateur d'essieu: ID1-… |
|
2.2.1.2. |
Identification de l'essieu soumis à l'essai: … |
|
2.2.1.3. |
Charge sur l'essieu d'essai (identificateur Fe): ID3-… daN |
|
2.2.2. |
Frein |
|
2.2.2.1. |
Identificateur de frein: ID2-… |
|
2.2.2.2. |
Identification du frein soumis à l'essai: … |
|
2.2.2.3. |
Course maximale du frein (9): … |
|
2.2.2.4. |
Longueur effective de l'axe de came (10): … |
|
2.2.2.5. |
Différences de matériau selon l'alinéa m du paragraphe 3.8 de l'appendice 2 de la présente annexe: … |
|
2.2.2.6. |
Tambour de frein/disque de frein (8) |
|
2.2.2.6.1. |
Masse d'essai réelle du disque du tambour (8): … |
|
2.2.2.6.2. |
Diamètre extérieur nominal du disque (9): … |
|
2.2.2.6.3. |
Type de refroidissement du disque (ventilé/non ventilé) (8) |
|
2.2.2.6.4. |
Avec/sans moyeu intégré (8) |
|
2.2.2.6.5. |
Disque à tambour intégré — avec/sans frein de stationnement (8), (9) |
|
2.2.2.6.6. |
Relation géométrique entre les surfaces de friction du disque et les éléments de montage du disque: … |
|
2.2.2.6.7. |
Matériau de base: … |
|
2.2.2.7. |
Garniture (8) |
|
2.2.2.7.1. |
Fabricant: … |
|
2.2.2.7.2. |
Marque: … |
|
2.2.2.7.3. |
Type: … |
|
2.2.2.7.4. |
Mode de fixation de la garniture sur la mâchoire/plaquette (8): … |
|
2.2.2.7.5. |
Épaisseur de la plaquette, poids de la mâchoire ou autres informations à caractère descriptif (document d'information du fabricant) (8) |
|
2.2.2.7.6. |
Matériau de base constituant la mâchoire/la plaquette (8): … |
|
2.2.3. |
Dispositif de réglage automatique de frein (sans objet dans le cas d'un dispositif de réglage automatique intégré) (8) |
|
2.2.3.1. |
Fabricant (nom et adresse): … |
|
2.2.3.2. |
Marque: … |
|
2.2.3.3. |
Type: … |
|
2.2.3.4. |
Version: … |
|
2.2.4. |
Roue(s) (pour les dimensions, voir les figures 1A et 1B de l'appendice 5 de la présente annexe) |
|
2.2.4.1. |
Rayon de roulement de référence du pneumatique (Re) au niveau de la charge sur l'essieu d'essai (Fe): … |
|
2.2.4.2. |
Données sur la roue montée pour l'essai:
|
|
2.2.5. |
Longueur du levier le: … |
|
2.2.6. |
Récepteur de frein |
|
2.2.6.1. |
Fabricant: … |
|
2.2.6.2. |
Marque: … |
|
2.2.6.3. |
Type: … |
|
2.2.6.4. |
Numéro d'identification (d'essai): … |
|
2.3. |
Résultats d'essai (corrigés pour tenir compte d'une résistance du roulement égale à 0,01 · Fe) |
|
2.3.1. |
Pour les véhicules des catégories O2 et O3
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.2 |
Pour les véhicules de la catégorie O4
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.3. |
Cette rubrique ne doit être remplie que lorsqu'on a soumis le frein à la méthode d'essai définie au paragraphe 4 de l'annexe 19 du présent règlement pour contrôler ses caractéristiques d'efficacité à froid au moyen du facteur d'amplification du frein (BF). |
|
2.3.3.1. |
Facteur d'amplification du frein BF: |
|
2.3.3.2. |
Couple d'actionnement minimal utile déclaré C0,dec Nm |
|
2.3.4. |
Fonctionnement du dispositif de réglage automatique (s'il y a lieu) |
|
2.3.4.1. |
Roulement libre au sens du paragraphe 3.6.3 de l'appendice 2 de l'annexe 11: oui/non (8) |
3. DOMAINE D'APPLICATION
Le domaine d'application spécifie les variantes d'essieu/de frein couvertes par le présent procès-verbal d'essai en précisant les variables auxquelles se rapportent les différents codes d'essai.
4. L'essai a été exécuté et ses résultats ont été consignés conformément à l'appendice 2 de l'annexe 11 et, s'il y a lieu, au paragraphe 4 de l'annexe 19 au règlement no 13 tel qu'amendé le plus récemment par la série … d'amendements.
À la fin de l'essai défini au paragraphe 3.6 de l'appendice 2 de l'annexe 11 (11), il a été estimé que les conditions énoncées au paragraphe 5.2.2.8.1 du règlement no 13 étaient remplies/n'étaient pas remplies (8).
SERVICE TECHNIQUE (12) AYANT PROCÉDÉ À L'ESSAI
Signature: …Date: …
5. AUTORITÉ D'HOMOLOGATION (12)
Signature: …Date: …
Annexe 11 — Appendice 4,
paragraphe 1.1, remplacer l'expression «Charge techniquement admissible sur l'essieu (Pe)» par «Charge sur l'essieu d'essai (identificateur Fe): ID3-»
Ajouter un nouvel Appendice 5 à l'Annexe 11, libeller comme suit:
«APPENDICE 5
Document d'information sur l'essieu et le frein de remorque pour les variantes d'homologation de type I et de type III
1. INFORMATIONS GÉNÉRALES
|
1.1. |
Nom et adresse du fabricant de l'essieu ou du constructeur du véhicule: … |
2. DONNÉES SUR L'ESSIEU
|
2.1. |
Fabricant (nom et adresse): … |
|
2.2. |
Type/variante: … |
|
2.3. |
Identificateur d'essieu: ID1-… |
|
2.4. |
Charge sur l'essieu d'essai (Fe): …daN |
|
2.5. |
Données sur la roue et le frein telles qu'indiquées sur les figures 1A et 1B ci-dessous Figure 1A
Figure 1B
|
3. FREIN
|
3.1. |
Informations générales |
|
3.1.1. |
Marque: … |
|
3.1.2. |
Fabricant (nom et adresse): … |
|
3.1.3. |
Type de frein (par exemple à disque ou à tambour): … |
|
3.1.3.1. |
Variante (par exemple à came en S, à coin unique, etc.): … |
|
3.1.4. |
Identificateur de frein: ID2-… |
|
3.1.5. |
Données sur le frein telles qu'indiquées sur les figures 2a et 2b ci-après: Figure 2A
Figure 2B
|
|
3.2. |
Données sur le tambour de frein |
|
3.2.1. |
Dispositif de réglage automatique de frein (externe/intégré): … |
|
3.2.2. |
Couple d'actionnement maximal déclaré Cmax: … Nm |
|
3.2.3. |
Efficacité mécanique: η = … |
|
3.2.4. |
Couple d'actionnement minimal utile déclaré C0,dec: …Nm |
|
3.2.5. |
Longueur effective de l'axe de came: … mm |
|
3.3. |
Tambour de frein |
|
3.3.1. |
Diamètre maximal de la surface de friction (limite d'usure): … mm |
|
3.3.2. |
Matériau de base: … |
|
3.3.3. |
Masse déclarée: … kg |
|
3.3.4. |
Masse nominale: … kg |
|
3.4. |
Garniture de frein (d'une machoire de frein) |
|
3.4.1. |
Nom et adresse du fabricant: … |
|
3.4.2. |
Marque: … |
|
3.4.3. |
Type: … |
|
3.4.4. |
Identification (identification de type sur la garniture): … |
|
3.4.5. |
Épaisseur minimale (limite d'usure): … mm |
|
3.4.6. |
Mode de fixation du matériau de friction sur la mâchoire de frein: … |
|
3.4.6.1. |
Mode de fixation dans le cas le plus défavorable (s’il y en a plusieurs): … |
|
3.5. |
Données sur le frein à disque |
|
3.5.1. |
Type de connexion sur l'essieu (axial, radial, intégré, etc.): … |
|
3.5.2. |
Dispositif de réglage de frein (externe/intégré): … |
|
3.5.3. |
Course maximale du cylindre de frein: … mm |
|
3.5.4. |
Force de commande maximale déclarée ThAmax: … daN |
|
3.5.4.1. |
Cmax = ThAmax · le: … Nm |
|
3.5.5. |
Rayon de friction: re = … mm |
|
3.5.6. |
Longueur du levier: le = … mm |
|
3.5.7. |
Rapport entrée/sortie (le/ee): i = … |
|
3.5.8. |
Efficacité mécanique: η = … |
|
3.5.9. |
Force d'actionnement minimale utile déclarée ThA0,dec: … N |
|
3.5.9.1. |
C0,dec = ThA0,dec · le: … Nm |
|
3.5.10. |
Épaisseur minimale du disque (limite d'usure): … mm |
|
3.6. |
Données sur le disque de frein |
|
3.6.1. |
Description du type de disque: … |
|
3.6.2. |
Fixation au moyeu: … |
|
3.6.3. |
Ventilation (oui/non): … |
|
3.6.4. |
Masse déclarée: … kg |
|
3.6.5. |
Masse nominale: … kg |
|
3.6.6. |
Diamètre extérieur déclaré: … mm |
|
3.6.7. |
Diamètre extérieur minimal: … mm |
|
3.6.8. |
Diamètre intérieur de l'anneau de friction: …mm |
|
3.6.9. |
Largeur du canal de ventilation (s’il y a lieu): …mm |
|
3.6.10. |
Matériau de base: … |
|
3.7. |
Données sur la garniture de frein (d'une plaquette de frein) |
|
3.7.1. |
Nom et adresse du fabricant: … |
|
3.7.2. |
Marque: … |
|
3.7.3. |
Type: … |
|
3.7.4. |
Identification (identification de type sur la plaquette): … |
|
3.7.5. |
Épaisseur minimale (limite d'usure): … mm |
|
3.7.6. |
Mode de fixation du matériau de friction sur la plaquette de frein: … |
|
3.7.6.1. |
Mode de fixation dans le cas le plus défavorable (s’il y en a plusieurs): …» |
Amendements à l'Annexe 13
Annexe 13, paragraphe 4.3, modifier comme suit:
|
«4.3. |
En cas de défaillance telle que définie au paragraphe 4.1 ci-dessus, les prescriptions suivantes s'appliquent:
|
Amendements à l'Annexe 16
Annexe 16, modifier pour lire:
«ANNEXE 16
Compatibilité entre les véhicules tracteurs et les remorquesen ce qui concerne la communication des données définiesdans la norme iso 11992
1. GÉNÉRALITÉS
|
1.1. |
Les prescriptions de la présente annexe ne s’appliquent qu’aux véhicules tracteurs et aux remorques équipés d’une ligne de commande électrique, telle qu’elle est définie au paragraphe 2.24 du présent règlement. |
|
1.2. |
Le raccord ISO 7638 assure l’alimentation en énergie électrique du système de freinage ou du système de freinage antiblocage de la remorque. Dans le cas de véhicules équipés d’une ligne de commande électrique, telle qu’elle est définie au paragraphe 2.24 du présent règlement, ce raccord sert aussi d’interface de communication des données par l’intermédiaire des broches nos 6 et 7 (voir le paragraphe 5.1.3.6 du présent règlement). |
|
1.3. |
Dans la présente annexe sont énoncées les prescriptions applicables au véhicule tracteur et à la remorque, qui concernent la prise en compte des messages définis dans la norme ISO 11992-2:2003 et dans son amendement ISO 119922:2003/Amd.1:2007. |
2. Les paramètres définis dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, qui sont transmis par la ligne de commande électrique, doivent être pris en compte comme suit:
|
2.1. |
Les fonctions et les messages associés suivants, tels qu’ils sont définis dans le présent règlement, doivent être respectivement assurés et pris en compte par le véhicule tracteur ou par la remorque, selon le cas:
|
|
2.2. |
Lorsque la remorque émet les messages suivants, le véhicule tracteur doit émettre un signal d’avertissement à destination du conducteur:
|
|
2.3. |
Les messages suivants, tels qu’ils sont définis dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, doivent être pris en compte par le véhicule tracteur ou par la remorque:
|
|
2.4. |
Les messages suivants doivent être pris en compte par le véhicule tracteur ou par la remorque, selon le cas, lorsque le véhicule est équipé d’un dispositif associé au paramètre en question:
|
|
2.5. |
La prise en compte par le véhicule tracteur et par la remorque de tous les autres messages définis dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Am.1:2007 est facultative.» |
Amendements à l'Annexe 17
Annexe 17,
Ajouter les nouveaux paragraphes 3.2.2.6 et 3.2.2.7, libellés comme suit:
«3.2.2.6. Allumage des feux-stop
Simuler un message EBS22 (octet 4), les bits 5-6 étant mis sur 00, et vérifier que les feux-stop ne sont pas allumés.
Simuler un message EBS22 (octet 4), les bits 5-6 étant mis sur 01, et vérifier que les feux-stop sont allumés.
3.2.2.7. Actionnement du dispositif de stabilité directionnelle de la remorque
Simuler un message EBS21 (octet 2), les bits 1-2 étant mis sur 00, et vérifier que le témoin d’avertissement du conducteur défini au paragraphe 2.1.6 de l’annexe 21 n’est pas allumé.
Simuler un message EBS21 (octet 2), les bits 1-2 étant mis sur 01, et vérifier que le témoin d’avertissement du conducteur défini au paragraphe 2.1.6 de l’annexe 21 est allumé.»
Ajouter le nouveau paragraphe 3.2.3.2, ainsi conçu:
|
«3.2.3.2. |
Dans le paragraphe 2.4.1 de l’annexe 16 sont définis des messages supplémentaires qui doivent, dans des conditions précises, être pris en compte par le véhicule tracteur. Des contrôles supplémentaires peuvent être effectués pour vérifier que l’état des messages pris en compte est tel que les prescriptions du paragraphe 5.1.3.6.2 du présent règlement sont remplies.» |
Ajouter les nouveaux paragraphes 4.2.2.4 à 4.2.2.6, libellés comme suit:
«4.2.2.4. Freinage commandé automatiquement
Dans le cas où la remorque est équipée d’un dispositif de freinage commandé automatiquement, on procédera aux vérifications suivantes:
Si aucun freinage commandé automatiquement n’a lieu, vérifier que dans le message EBS22 (octet 4) les bits 5-6 sont mis sur 00.
Simuler un freinage commandé automatiquement et, lorsque la décélération est supérieure ou égale à 0,7 m/sec2, vérifier que dans le message EBS22 (octet 4) les bits 5-6 sont mis sur 01.
4.2.2.5. Dispositif de stabilité directionnelle
Dans le cas où la remorque est équipée d’un dispositif de stabilité directionnelle, on procédera aux vérifications suivantes:
|
|
Si le dispositif de stabilité directionnelle est désactivé, vérifier que dans le message EBS21 (octet 2) les bits 1-2 sont mis sur 00. |
|
|
Simuler l’actionnement du dispositif de stabilité directionnelle, comme indiqué au paragraphe 2.2.4 de l’annexe 21, et vérifier que dans le message EBS21 (octet 2) les bits 1-2 sont mis sur 01. |
4.2.2.6. Prise en charge de la ligne de commande électrique
Si le système de freinage de la remorque n’assure pas le freinage par l’intermédiaire de la ligne de commande électrique, vérifier que dans le message EBS22 (octet 4) les bits 7-8 sont mis sur 00.
Si le système de freinage de la remorque assure le freinage par l’intermédiaire de la ligne de commande électrique, vérifier que dans le message EBS22 (octet 4) les bits 7-8 sont mis sur 01.»
Ajouter le nouveau paragraphe 4.2.3.2, ainsi conçu:
|
«4.2.3.2. |
Dans le paragraphe 2.4.2 de l’annexe 16 sont définis des messages supplémentaires qui doivent, dans des conditions précises, être pris en compte par la remorque. Des contrôles supplémentaires peuvent être effectués pour vérifier que l’état des messages pris en compte est tel que les prescriptions du paragraphe 5.1.3.6.2 du présent règlement sont remplies.» |
Amendements à l'Annexe 19
Annexe 19,
Ajouter un nouveau paragraphe 1.1.5, ainsi conçu:
|
«1.1.5. |
Fonction de contrôle de la stabilité du véhicule (voir paragraphe 6).» |
Paragraphe 2.2.3, au lieu de «l'appendice 7» lire «l'appendice 9».
Paragraphe 4.2.2, modifier comme suit:
|
«4.2.2. |
Le facteur d'amplification du frein est donné par la formule suivante:
et doit être contrôlé pour chacune des garnitures de mâchoire ou de plaquette visées au paragraphe 4.3.1.3.» |
Paragraphe 4.3.2.3, modifier comme suit:
|
«4.3.2.3. |
Couple-seuil d'actionnement déclaré C0,dec» |
Ajouter les nouveaux paragraphes 6 à 6.6.1, ainsi conçus:
«6. Fonction de contrôle de la stabilité du véhicule
6.1. Généralités
|
6.1.1. |
La présente section définit une méthode d’essai visant à déterminer les caractéristiques dynamiques d’un véhicule équipé d’une fonction de contrôle de la stabilité comprenant au moins l’une des fonctions suivantes:
|
6.2. Fiche technique
|
6.2.1. |
Le fabricant du système du véhicule doit fournir au service technique une fiche technique sur la ou les fonctions de contrôle dont l’efficacité doit être vérifiée. Elle doit contenir au moins les renseignements définis à l’appendice 7 de la présente annexe. |
6.3. Définition du ou des véhicules d’essai
|
6.3.1. |
Compte tenu de la ou des fonctions de contrôle de stabilité et de leur application définies dans la fiche technique du fabricant, le service technique effectue des essais de vérification d’efficacité. Ils peuvent comprendre une ou plusieurs des manœuvres dynamiques définies au paragraphe 2.2.3 de l’annexe 21 du présent règlement effectuées sur une ou plusieurs remorques ayant jusqu’à trois essieux, représentatives de la ou des applications définies au paragraphe 2.1 de la fiche technique du fabricant. |
|
6.3.1.1. |
Lors du choix de la ou des remorques pour évaluation, il doit aussi être tenu compte des éléments suivants:
|
6.4. Programme d’essai
|
6.4.1. |
Les essais visant à évaluer la fonction de contrôle de la stabilité du véhicule doivent être convenus entre le fabricant du système/du véhicule et le service technique et être effectués dans des conditions appropriées à la fonction évaluée, qui entraîneraient, faute d’une intervention de la fonction de contrôle de la stabilité, une perte de contrôle directionnel ou un renversement. Les manœuvres dynamiques, les conditions d’essai et les résultats des essais doivent être consignés dans le procès-verbal d’essai. |
6.5. Véhicule tracteur
|
6.5.1. |
Le véhicule tracteur utilisé pour évaluer l’efficacité de la fonction de contrôle de la stabilité de la remorque doit être équipé des liaisons pneumatiques et électriques nécessaires. Si le véhicule tracteur est équipé d’une fonction de contrôle de stabilité telle qu’elle est définie au paragraphe 2.34 du présent règlement, cette fonction doit être désactivée. |
6.6. Procès-verbal d’essai
|
6.6.1. |
Un procès-verbal d’essai doit être établi, où doivent figurer au moins les renseignements indiqués à l’appendice 8 de la présente annexe.» |
Ajouter un nouvel appendice 7 à l’annexe 19, ainsi conçu:
«APPENDICE 7
Fiche technique de la fonction de contrôle de la stabilité du véhicule
1. GÉNÉRALITÉS
|
1.1. |
Nom du fabricant |
|
1.2. |
Nom du système |
|
1.3. |
Variantes du système |
|
1.4. |
Fonctions de contrôle (fonction de contrôle de la trajectoire/fonction antirenversement/les deux fonctions) y compris explication de la fonction de base et/ou du principe du système |
|
1.5. |
Configurations du système (s’il y a lieu) |
|
1.6. |
Identification du système |
2. APPLICATIONS
|
2.1. |
Liste des types de remorque et des configurations présentés à l’homologation |
|
2.2. |
Diagrammes schématiques des configurations installées sur les remorques, selon le paragraphe 2.1 et compte tenu des éléments suivants:
|
|
2.3. |
Champ d’application en fonction du type de suspension:
|
|
2.4. |
Renseignements complémentaires (le cas échéant) relatifs à l’application de la (des) fonction(s) de contrôle de la trajectoire et/ou antirenversement |
3. DESCRIPTION DES ÉLÉMENTS
3.1. Capteurs extérieurs au calculateur
|
a) |
Fonction; |
|
b) |
Restrictions applicables à l’emplacement des capteurs; |
|
c) |
Identification [par exemple numéro(s) de pièce]. |
3.2. Calculateur(s)
|
a) |
Description générale et fonction; |
|
b) |
Identification (par exemple numéro(s) de pièce); |
|
c) |
Restrictions applicables à l’emplacement du ou des calculateurs; |
|
d) |
Caractéristiques supplémentaires. |
3.3. Modulateurs
|
a) |
Description générale et fonction; |
|
b) |
Identification; |
|
c) |
Restrictions. |
3.4. Équipement électrique
|
a) |
Diagramme(s) du circuit; |
|
b) |
Méthodes d’alimentation. |
3.5. Circuits pneumatiques
Schémas du système comprenant les configurations d’ABS associées aux types de remorque définis au paragraphe 6.2.1 de la présente annexe
3.6. Éléments du système électronique concernant la sécurité conformément à l’annexe 18 du présent règlement
3.7. Compatibilité électromagnétique
|
3.7.1. |
Documents établissant le respect des dispositions du règlement no 10, y compris la série 02 d’amendements.» |
Ajouter un nouvel appendice 8 à l’annexe 19, ainsi conçu:
«APPENDICE 8
Procès-verbal d’essai de la fonction de contrôle de la stabilité du véhicule
PROCÈS-VERBAL No: …
1. IDENTIFICATION
|
1.1. |
Fabricant de la fonction de contrôle de la stabilité du véhicule (nom et adresse): … |
|
1.2. |
Nom du système et modèle: … |
|
1.3. |
Fonctions de contrôle: … |
2. SYSTÈME(S) ET INSTALLATION(S) HOMOLOGUÉ(S):
|
2.1. |
Configurations de systèmes de freinage antiblocage (s’il y a lieu): … |
|
2.2. |
Champ d’application (type(s) de remorque et nombre d’essieux): … |
|
2.3. |
Identification du système: … |
|
2.4. |
Caractéristiques supplémentaires: … |
3. DONNÉES ET RÉSULTATS D’ESSAIS
|
3.1. |
Données relatives aux véhicules d’essai (y compris les caractéristiques et les fonctionnalités du véhicule tracteur): … |
|
3.2. |
Renseignements sur le revêtement d’essai: … |
|
3.3. |
Renseignements complémentaires: … |
|
3.4. |
Essais démonstratifs/simulations effectués pour évaluer la fonction de contrôle de la trajectoire et/ou la fonction antirenversement: … |
|
3.5. |
Résultats des essais: … |
|
3.6. |
Évaluation conformément à l’annexe 18 du présent règlement: … |
4. LIMITES D’INSTALLATION
|
4.1. |
Type de suspension: … |
|
4.2. |
Type de frein: … |
|
4.3. |
Emplacement des composants sur la remorque: … |
|
4.4. |
Configurations du système de freinage antiblocage des freins: … |
|
4.5. |
Autres recommandations/restrictions (par exemple, essieux relevables, essieux directeurs, etc.): … |
5. PIÈCES JOINTES: …
6. DATE DE L’ESSAI: …
7. Cet essai a été effectué et ses résultats ont été consignés conformément à l’annexe 19 du règlement CEE no 13 tel que modifié pour la dernière fois par la série … d’amendements.
SERVICE TECHNIQUE (19) AYANT EFFECTUÉ L’ESSAI
Signature: …Date: …
8. AUTORITÉ D’HOMOLOGATION (19)
Signature: …Date: …
Les appendices 7 et 8 deviennent les appendices 9 et 10.
Amendements à l'Annexe 20
Annexe 20,
paragraphe 2.1.3, modifier comme suit:
|
«2.1.3. |
Un dossier technique contenant les résultats de contrôle pertinents, y compris les calculs pour, s’il y a lieu, les éléments suivants:
|
Ajouter les nouveaux paragraphes 8 à 8.2.1.4, ainsi conçus:
8. Variantes pour la démonstration de l’efficacité de la fonction de contrôle de la stabilité du véhicule installée sur une remorque.
8.1. Il peut ne pas être procédé à l’évaluation d’une remorque selon le paragraphe 2 de l’annexe 21 du présent règlement, lors de l’homologation du type de la remorque, si la fonction de contrôle de la stabilité du véhicule satisfait aux prescriptions pertinentes de l’annexe 19 du présent règlement.
8.2. Contrôle
8.2.1. Contrôle des éléments et de l’installation
Les caractéristiques du système de freinage monté sur la remorque devant faire l’objet d’une homologation, de type dans lequel la fonction de contrôle de la stabilité est intégrée, doivent être contrôlées selon chacun des critères suivants:
|
|
Condition |
Critères |
||
|
8.2.1.1. |
|
Aucun changement n’est admis |
||
|
Aucun changement n’est admis |
|||
|
Aucun changement n’est admis |
|||
|
8.2.1.2. |
Types de remorque tels qu’ils sont définis dans le procès-verbal d’essai |
Aucun changement n’est admis |
||
|
8.2.1.3. |
Configurations d’installation telles qu’elles sont définies dans le procès-verbal d’essai |
Aucun changement n’est admis |
||
|
8.2.1.4. |
Pour les autres restrictions, voir le paragraphe 4 du modèle de procès-verbal d’essai figurant à l’appendice 8 de l’annexe 19 du présent règlement |
Aucun changement n’est admis» |
Les paragraphes 8 à 8.1.7.1 deviennent les paragraphes 9 à 9.1.7.1.
Les paragraphes 8.1.8 et 8.1.8.1 deviennent les paragraphes 9.1.9 et 9.1.9.1.
Ajouter les nouveaux paragraphes 9.1.8 et 9.1.8.1, ainsi conçus:
«9.1.8. Fonction de contrôle de la stabilité du véhicule
|
9.1.8.1. |
Pour des raisons pratiques, le contrôle de la fonction de contrôle de la stabilité du véhicule consiste uniquement à vérifier que cette fonction est installée conformément au paragraphe 8.2 ci-dessus et que le témoin d’avertissement émet la suite de signaux voulus indiquant que la fonction ne présente aucune défaillance.» |
Ajouter une nouvelle annexe 21, ainsi conçue (y compris ses appendices 1 à 3):
ANNEXE 21
Prescriptions particulières applicables aux véhicules équipés d’une fonction de contrôle de la stabilité du véhicule
1. GÉNÉRALITÉS
La présente annexe énonce les prescriptions particulières qui s’appliquent aux véhicules équipés d’une fonction de contrôle de la stabilité du véhicule, conformément aux paragraphes 5.2.1.32 et 5.2.2.23 du présent règlement.
2. PRESCRIPTIONS
2.1. Véhicules à moteur
|
2.1.1. |
Lorsqu’un véhicule est équipé d’une fonction de contrôle de la stabilité du véhicule telle qu’elle est définie au paragraphe 2.34 du présent règlement, les dispositions suivantes s’appliquent:
|
|
2.1.2. |
Pour réaliser les fonctionnalités définies ci-dessus, toute fonction de contrôle de stabilité doit comprendre, outre le freinage sélectif et/ou le freinage à commande automatique, au moins les éléments suivants:
|
|
2.1.3. |
La preuve de l’efficacité de la fonction de contrôle de la stabilité du véhicule doit être apportée au service technique par des manœuvres dynamiques effectuées sur un même véhicule. Cette preuve peut être apportée en comparant, pour un même état de charge, les résultats obtenus selon que la fonction de contrôle de stabilité est activée ou désactivée. Au lieu d’effectuer des manœuvres dynamiques sur d’autres véhicules équipés du même système de contrôle de stabilité et dans d’autres conditions de charge, il est possible de soumettre les résultats d’essais réels effectués sur un véhicule ou de simulations informatiques. Les modalités d’utilisation d’un simulateur sont définies à l’appendice 1 de la présente annexe. Les caractéristiques et la procédure de validation du simulateur sont définies à l’appendice 2 de la présente annexe. En attendant que des méthodes uniformes d’essai aient été convenues, la méthode utilisée pour effectuer cette démonstration doit être définie d’un commun accord par le constructeur du véhicule et le service technique et doit comprendre les conditions indispensables pour vérifier l’efficacité de la fonction de contrôle de la trajectoire et/ou de la fonction antirenversement faisant partie de la fonction de contrôle de stabilité installée sur le véhicule. La méthode utilisée et les résultats obtenus doivent être annexés au procès-verbal de l’homologation de type. Les essais peuvent être effectués à un autre moment que lors de l’homologation de type. Pour démontrer l’efficacité de la fonction de contrôle de la stabilité du véhicule, l’une des manœuvres dynamiques suivantes doit être effectuée (22):
Pour démontrer la répétabilité, on soumet le véhicule à une deuxième démonstration en effectuant la ou les manœuvres retenues. |
|
2.1.4. |
Toute intervention de la fonction de contrôle de la stabilité du véhicule doit être indiquée au conducteur par un signal d’avertissement optique distinct. L’avertissement doit durer aussi longtemps que dure l’intervention de la fonction de contrôle de stabilité. Les signaux d’avertissement visés au paragraphe 5.2.1.29 du présent règlement ne doivent pas être utilisés à cette fin. Les interventions de la fonction de contrôle de la stabilité du véhicule utilisées dans tout processus d’apprentissage visant à déterminer les caractéristiques opérationnelles du véhicule ne doivent pas produire l’avertissement susmentionné. Le voyant doit être visible par le conducteur, même de jour; son bon état doit pouvoir être contrôlé aisément par le conducteur depuis son siège. |
|
2.1.5. |
Toute défaillance de la fonction de contrôle de stabilité doit être détectée et signalée au conducteur au moyen du signal d’avertissement optique jaune visé au paragraphe 5.2.1.29.1.2 du présent règlement. Le signal d’avertissement doit être constant et doit rester allumé aussi longtemps que le défaut ou la défaillance persiste et que le contact est mis (position “marche”). |
|
2.1.6. |
Sur les véhicules à moteur équipés d’une ligne de commande électrique et électriquement reliés à une remorque au moyen d’une ligne de commande électrique, le conducteur doit être averti au moyen d’un signal d’avertissement optique distinct chaque fois que la remorque envoie le message “Fonction de contrôle de la trajectoire activée” par l’intermédiaire de la voie communication de données sur la ligne de commande électrique. Le signal optique défini au paragraphe 2.1.4 ci-dessus peut être utilisé à cette fin. |
2.2. Remorques
|
2.2.1. |
Lorsqu’une remorque est équipée d’une fonction de contrôle de la stabilité du véhicule telle qu’elle est définie au paragraphe 2.34 du présent règlement, les dispositions suivantes s’appliquent:
|
|
2.2.2. |
Pour réaliser les fonctionnalités définies ci-dessus, toute fonction de contrôle de la stabilité du véhicule doit comprendre, outre le freinage à commande automatique et, le cas échéant, le freinage sélectif, au moins les éléments suivants:
|
|
2.2.3. |
La preuve de l’efficacité de la fonction de contrôle de la stabilité du véhicule doit être apportée au service technique par des manœuvres dynamiques effectuées sur un même véhicule. Cette preuve peut être apportée en comparant, pour un même état de charge, les résultats obtenus avec la fonction de contrôle de la stabilité activée et les résultats obtenus avec la fonction désactivée. Au lieu d’effectuer des manœuvres dynamiques sur d’autres véhicules équipés du même système de contrôle de stabilité et dans d’autres conditions de charge, le constructeur peut soumettre les résultats d’essais réels effectués sur un véhicule ou de simulations informatiques. Les modalités d’utilisation d’un simulateur sont définies à l’appendice 1 de la présente annexe. Les caractéristiques et la procédure de validation du simulateur sont définies à l’appendice 2 de la présente annexe. En attendant que des méthodes uniformes d’essai aient été convenues, la méthode utilisée pour effectuer cette démonstration doit être définie d’un commun accord par le constructeur du véhicule et le service technique et doit comprendre les conditions indispensables pour vérifier l’efficacité de la fonction de contrôle de la trajectoire et/ou de la fonction antirenversement faisant partie de la fonction de contrôle de la stabilité installée sur la remorque. La méthode utilisée et les résultats obtenus doivent être annexés au procès-verbal de l’homologation de type. Les essais peuvent être effectués à un autre moment que lors de l’homologation de type. Pour démontrer l’efficacité de la fonction de contrôle de la stabilité du véhicule, l’une des manœuvres dynamiques suivantes doit être effectuée (22):
Pour démontrer la répétabilité, on soumettra le véhicule à une deuxième démonstration en effectuant la ou les manœuvres retenues. |
|
2.2.4. |
Toute remorque équipée d’une ligne de commande électrique et électriquement reliée à un véhicule tracteur au moyen d’une ligne de commande électrique doit envoyer le message “Fonction de contrôle de la trajectoire activée” par l’intermédiaire de la voie de communication de données sur la ligne de commande électrique lorsque la fonction de contrôle de la stabilité est activée. Les interventions de la fonction de contrôle de la stabilité du véhicule utilisée dans tout processus d’apprentissage visant à déterminer les caractéristiques opérationnelles de la remorque ne doivent pas entraîner l’envoi du message susmentionné. |
|
2.2.5. |
Pour maximiser les performances des remorques qui utilisent la commande à “basse sélectivité”, ces remorques sont autorisées à basculer sur le mode “haute sélectivité” lorsque la “fonction de contrôle de la stabilité du véhicule” est activée. |
APPENDICE 1
Simulation De La Stabilité Dynamique
L’efficacité de la fonction de contrôle de la stabilité (fonction de contrôle de la trajectoire et/ou fonction antirenversement) des véhicules à moteur et des remorques des catégories M, N et O peut être déterminée par simulation informatique.
1. UTILISATION DE LA SIMULATION
|
1.1. |
Le constructeur du véhicule doit apporter à l’autorité d’homologation de type ou au service technique la preuve de l’efficacité de la fonction de contrôle de la stabilité du véhicule au moyen de la ou des mêmes manœuvres dynamiques que celles qui sont effectuées lors de la démonstration pratique décrite aux paragraphes 2.1.3 ou 2.2.3 de l’annexe 21. |
|
1.2. |
La simulation doit être un moyen qui permette d’établir le degré de stabilité du véhicule lorsque la fonction de contrôle de la stabilité est activée et lorsqu’elle est désactivée et lorsque le véhicule est en charge ou à vide. |
|
1.3. |
Les simulations doivent être effectuées au moyen d’un outil de modélisation et de simulation validé. La vérification doit être effectuée en utilisant la ou les mêmes manœuvres que celles visées au paragraphe 1.1 ci-dessus. La méthode utilisée pour valider l’outil de simulation est décrite à l’appendice 2 de l’annexe 21. |
APPENDICE 2
Outil de simulation de la stabilité dynamique et sa validation
1. CARACTÉRISTIQUES DE L’OUTIL DE SIMULATION
1.1. La méthode de simulation doit tenir compte des principaux facteurs qui influent sur la trajectoire et le risque de renversement. Un modèle type peut inclure les paramètres suivants sous une forme explicite ou implicite:
|
a) |
Essieu/roue; |
|
b) |
Suspension; |
|
c) |
Pneumatique; |
|
d) |
Châssis/carrosserie; |
|
e) |
Chaîne cinématique/transmission, s’il y a lieu; |
|
f) |
Système de freinage; |
|
g) |
Chargement. |
1.2. La fonction de contrôle de la stabilité du véhicule doit être ajoutée au modèle de simulation au moyen:
|
a) |
D’un sous-système (modèle logiciel) de l’outil de simulation; ou |
|
b) |
D'une boîte de commande électronique dans une configuration matériel dans la boucle (hardware-in-the-loop). |
1.3. Dans le cas d’une remorque, la simulation doit être effectuée avec la remorque attelée à un véhicule tracteur représentatif.
1.4. État de charge du véhicule
|
1.4.1. |
Le simulateur doit être capable de tenir compte de l’état de charge (véhicule en charge ou à vide). |
|
1.4.2. |
La charge doit être considérée comme une charge arrimée dont les propriétés (masse, répartition de la masse et hauteur maximale recommandée du centre de gravité) sont définies par le constructeur. |
2. VALIDATION DE L’OUTIL DE SIMULATION
|
2.1. |
On vérifie la validité de l’outil de modélisation et de simulation utilisé en effectuant des comparaisons avec le ou les essais effectués sur un véhicule dans des conditions réelles. Le ou les essais utilisés pour la validation doivent être ceux qui, en l’absence d’une intervention de la fonction de contrôle, entraîneraient un écart par rapport à la trajectoire désirée (sous-virage ou survirage) ou un renversement selon la fonctionnalité de la fonction de contrôle de la stabilité installée sur un véhicule représentatif. Pendant le ou les essais, les variables de mouvement ci-après, selon le cas, doivent être enregistrées ou calculées conformément à la norme ISO 15037 — Partie 1: 2005: Conditions générales pour voitures particulières ou Partie 2: 2002: Conditions générales pour véhicules lourds et autobus (selon la catégorie de véhicule):
|
|
2.2. |
L’objectif est de montrer que la simulation du comportement du véhicule et du fonctionnement de la fonction de contrôle de la stabilité est comparable à ce que l’on observe lors d’essais pratiques. |
|
2.3. |
Le simulateur est réputé être validé lorsque les résultats qu’il produit sont comparables aux résultats des essais pratiques consistant à faire exécuter à un type de véhicule donné une ou plusieurs des manœuvres définies aux paragraphes 2.1.3 ou 2.2.3 de l’annexe 21, selon le cas. Dans le cas de l’essai sur trajectoire circulaire en régime permanent, la comparaison est effectuée au moyen du gradient de sous-virage. Dans le cas d’une manœuvre dynamique, la comparaison est effectuée au moyen de la relation entre l’activation de la fonction stabilité du véhicule et la séquence des opérations effectuées par cette fonction, dans la simulation, d’une part, et lors de l’essai pratique, d’autre part. |
|
2.4. |
Lors de la simulation, les paramètres physiques de la configuration du véhicule simulé doivent être alignés sur ceux de la configuration du véhicule de référence. |
|
2.5. |
Un procès-verbal d’essai par simulation doit être établi conformément au modèle figurant à l’appendice 3 de la présente annexe et une copie de ce procès-verbal doit être annexée au procès-verbal de l’homologation de type. |
APPENDICE 3
Procès verbal de l’essai de la fonction de contrôlede la stabilité du véhicule par simulation
PROCÈS-VERBAL D’ESSAI No: …
1. IDENTIFICATION
|
1.1. |
Fabricant de l’outil de simulation (nom et adresse) |
|
1.2. |
Identification de l’outil de simulation: désignation/modèle/numéro (matériel et logiciel) |
2. DOMAINE D’APPLICATION
|
2.1. |
Type de véhicule: (par exemple camion, tracteur, autobus, semi-remorque, remorque à essieu médian, remorque complète) |
|
2.2. |
Configuration du véhicule: (par exemple, 4 × 2, 4 × 4, 6 × 2, 6 × 4, 6 × 6) |
|
2.3. |
Facteurs limitatifs (par exemple suspension mécanique seulement) |
|
2.4. |
Manœuvres pour lesquelles le simulateur a été validé: |
3. DONNÉES SUR LE(S) VÉHICULE(S) D’ESSAI ET LE OU LES ESSAIS
|
3.1. |
Description du ou des véhicules y compris le véhicule tracteur si l’essai porte sur une remorque: |
|
3.1.1. |
Identification du ou des véhicules: marque/modèle/VIN (numéro d’identification) |
|
3.1.1.1. |
Éléments spéciaux: |
|
3.1.2. |
Description du véhicule, notamment configuration des essieux/suspension/roues, moteur et transmission, système(s) de freinage et contenu de la fonction de contrôle de la stabilité du véhicule (fonction de contrôle de trajectoire/fonction antirenversement), système de direction, avec désignation/modèle/numéro d’identification: |
|
3.1.3. |
Données sur le véhicule utilisé dans la simulation (explicites): |
|
3.2. |
Description du ou des essais, notamment emplacement(s), état du revêtement de la route/de l’aire d’essai, température et date(s): |
|
3.3. |
Résultats en charge et à vide avec la fonction de contrôle de la stabilité du véhicule activée et désactivée, notamment les variables de mouvement mentionnées au paragraphe 2.1 de l’appendice 2 de l’annexe 21, selon le cas: |
4. RÉSULTATS DE LA SIMULATION
|
4.1. |
Paramètres du véhicule et valeurs utilisées lors de la simulation, qui ne sont pas obtenues à partir du véhicule d’essai réel (implicites): |
|
4.2. |
Résultats en charge et à vide avec la fonction de contrôle de la stabilité activée et désactivée pour chaque essai effectué conformément au paragraphe 3.2 du présent appendice, notamment les variables de mouvement mentionnées au paragraphe 2.1 de l’appendice 2 de l’annexe 21, selon le cas: |
5. Cet essai a été exécuté et ses résultats ont été consignés conformément à l’appendice 2 de l’annexe 21 du règlement CEE no 13 tel qu’amendé pour la dernière fois par la série … d’amendements.
Service technique ayant effectué l’essai (23): …
Signature: …Date: …
Autorité d’homologation (23): …
Signature: …Date: …
(1) Les véhicules tout-terrain, les véhicules spécialisés (par exemple, engin mobile utilisant un châssis de véhicule non-standardisé — par exemple, des grues —, les véhicules à propulsion hydrostatique sur lesquels le système hydraulique est aussi utilisé pour le freinage et des fonctions auxiliaires), les autobus de la classe I et classe A des catégories de véhicule M2 et M3, les autobus et autocars articulés, les tracteurs N2 pour semi-remorque avec une masse maximale de véhicule entre 3,5 et 7,5 tonnes, doivent être exclus de ces prescriptions.»
(2) Les remorques pour les transports de charges exceptionnelles et les remorques construits avec des emplacements pour les voyageurs debout, doivent être exclus de ces prescriptions.»
(3) Ce paragraphe ne doit pas empêcher le Danemark de maintenir obligatoires les systèmes électroniques de contrôle de stabilité des véhicules qui satisfont aux prescriptions du présent règlement.»
(4) Classe III telle qu’elle est définie dans le règlement CEE no 107.»
(5) Voir le paragraphe 2.1 de l'appendice 2 de la présente annexe.»
(6) S'il y a lieu.
(7) Aucun essai n'est requis si le fabricant peut prouver que la modification apportée n'a pas d'effet sur la rigidité.
(8) Rayer la mention inutile.
(9) Pour les freins à disque uniquement.
(10) Pour les freins à tambour uniquement.
(11) À remplir uniquement si un dispositif de rattrapage automatique d'usure est installé.
(12) Ces signatures doivent émaner de personnes différentes même lorsque le service technique et l'autorité d'homologation désignent une même entité; il est également possible de joindre au procès-verbal une autorisation émanant de l'autorité d'homologation.
(13) La commande dynamique du véhicule (VDC), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “dispositif de stabilisation du véhicule” (voir le paragraphe 2.34 du présent règlement).
(14) La commande dynamique du véhicule (VDC), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “dispositif de stabilisation du véhicule” (voir le paragraphe 2.34 du présent règlement).
(15) La protection contre le renversement (ROP), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “dispositif antirenversement de la remorque” (voir le paragraphe 2.32.2.2 du présent règlement).
(16) La commande de lacet (Yaw control), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “commande de direction” (voir le paragraphe 2.32.2.1 du présent règlement).
(17) La protection contre le renversement (ROP), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “dispositif antirenversement de la remorque” (voir le paragraphe 2.32.2.2 du présent règlement).
(18) La commande de lacet (Yaw control), telle qu’elle est définie dans la norme ISO 11992-2:2003 et dans son amendement ISO 11992-2:2003/Amd.1:2007, est nommée dans le présent règlement “commande de direction” (voir le paragraphe 2.32.2.1 du présent règlement).
(19) Doit être signé par des personnes différentes même lorsque le service technique et l’autorité d’homologation sont une seule entité, ou bien qu’une autorisation distincte de l’autorité d’homologation est délivrée avec le procès-verbal.
(20) Dans le cas d’essieux multiples, si l’écartement entre un essieu et l’essieu adjacent est supérieur à 2 m, chaque essieu doit être considéré comme un groupe d’essieux indépendant.
(21) Des interactions complémentaires avec d’autres systèmes ou composants installés sur le véhicule sont autorisées. Si ces systèmes ou composants sont régis par des règlements spéciaux, ces interactions doivent satisfaire aux prescriptions desdits règlements; par exemple, toute interaction avec le système de direction doit satisfaire aux prescriptions du règlement no 79 relatives à la direction corrective.
(22) Si la réalisation de l’une quelconque des manœuvres définies ci-après n’entraîne pas une perte de contrôle directionnel ou un renversement, selon le cas, une autre manœuvre peut être utilisée en accord avec le service technique.
(23) Doit être signé par des personnes différentes, même lorsque le service technique et l’autorité d’homologation sont une seule entité.