Vain alkuperäiset UNECE:n tekstit ovat kansainvälisen julkisoikeuden mukaan sitovia. Tämän säännön asema ja voimaantulopäivä on hyvä tarkastaa UNECE:n asiakirjan TRANS/WP.29/343 viimeisimmästä versiosta. Asiakirja saatavana osoitteessa
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Yhdistyneiden kansakuntien Euroopan talouskomission (UN/ECE) sääntö nro 140 – Yhdenmukaiset vaatimukset, jotka koskevat henkilöautojen hyväksyntää elektronisten ajonvakautusjärjestelmien (ESC) osalta [2018/1592]
Sisältää kaiken voimassa olevan tekstin seuraaviin asti:
Täydennys 2 säännön alkuperäiseen versioon – voimaantulopäivä: 29. joulukuuta 2018
SISÄLLYSLUETTELO
SÄÄNTÖ
|
1. |
Soveltamisala |
|
2. |
Määritelmät |
|
3. |
Hyväksynnän hakeminen |
|
4. |
Hyväksyntä |
|
5. |
Yleiset vaatimukset |
|
6. |
Toiminnalliset vaatimukset |
|
7. |
Suoritusvaatimukset |
|
8. |
Testausolosuhteet |
|
9. |
Testausmenetelmä |
|
10. |
Ajoneuvotyypin tai elektronisen ajonvakautusjärjestelmän muuttaminen ja hyväksynnän laajentaminen |
|
11. |
Tuotannon vaatimustenmukaisuus |
|
12. |
Seuraamukset vaatimustenmukaisuudesta poikkeavasta tuotannosta |
|
13. |
Tuotannon lopettaminen |
|
14. |
Hyväksyntätesteistä vastaavien tutkimuslaitosten ja tyyppihyväksyntäviranomaisten nimet ja osoitteet |
LIITTEET
|
1 |
Ilmoitus |
|
2 |
Hyväksyntämerkit |
|
3 |
Dynaamisen ajovakauden simuloinnin käyttö |
|
4 |
Dynaamisen ajovakauden simulointityökalu ja sen validointi |
|
5 |
Ajoneuvon ajonvakautustoiminnon simulointityökalun testausseloste |
1. SOVELTAMISALA
1.1 Tätä sääntöä sovelletaan luokkien M1 ja N1 (1) ajoneuvojen hyväksyntään niiden elektronisen ajonvakautusjärjestelmän osalta.
1.2 Tätä sääntöä ei sovelleta
|
1.2.1 |
ajoneuvoihin, joiden rakenteellinen nopeus on enintään 25 km/h |
|
1.2.2 |
vammaisille kuljettajille tarkoitettuihin ajoneuvoihin. |
2. MÄÄRITELMÄT
Tässä säännössä sovelletaan seuraavia määritelmiä:
|
2.1 |
’Ajoneuvon hyväksynnällä’ tarkoitetaan ajoneuvotyypin hyväksyntää elektronisen ajonvakautusjärjestelmän osalta. |
|
2.2 |
’Ajoneuvotyypillä’ tarkoitetaan sellaisia ajoneuvoja, jotka eivät eroa toisistaan seuraavien olennaisten ominaisuuksien osalta:
|
|
2.3 |
’Suurimmalla massalla’ tarkoitetaan ajoneuvon valmistajan ilmoittamaa, ajoneuvon suurinta teknisesti sallittua massaa (tämä massa voi olla suurempi kuin kansallisten viranomaisten vahvistama suurin sallittu massa). |
|
2.4 |
’Massan jakautumisella akseleille’ tarkoitetaan painovoiman aiheuttamien ajoneuvon massaan ja/tai sisältöön kohdistuvien vaikutusten jakautumista akselien kesken. |
|
2.5 |
’Pyörä- tai akselikuormituksella’ tarkoitetaan akselin pyörän tai pyörien ja niiden kanssa kosketuksissa olevan tienpinnan välistä pystysuoraa staattista voimaa. |
|
2.6 |
’Ackermannin ohjauskulmalla’ tarkoitetaan kulmaa, jonka tangentti on akseliväli jaettuna kääntösäteellä erittäin pienellä nopeudella. |
|
2.7 |
’Elektronisella ajonvakautusjärjestelmällä’ tai ’ESC-järjestelmällä’ tarkoitetaan järjestelmää, jolla on kaikki seuraavat ominaisuudet:
|
|
2.8 |
’Sivuttaiskiihtyvyydellä’ tarkoitetaan kiihtyvyysvektorin komponenttia ajoneuvon kohdassa, joka on kohtisuorassa ajoneuvon x-akselia (pituusakseli) kohtaan ja yhdensuuntainen tienpinnan kanssa. |
|
2.9 |
’Yliohjautumisella’ tarkoitetaan tilaa, jossa ajoneuvon kiertymisnopeus on suurempi kuin ajoneuvon kyseisellä nopeudella Ackermannin ohjauskulman tuloksena syntyvä kiertymisnopeus. |
|
2.10 |
’Sivuluisulla tai sivuluisukulmalla’ tarkoitetaan ajoneuvon painopisteen sivuttaissuuntaisen nopeuden ja pitkittäissuuntaisen nopeuden välisen suhteen arkustangenttia. |
|
2.11 |
’Aliohjautumisella’ tarkoitetaan tilaa, jossa ajoneuvon kiertymisnopeus on pienempi kuin ajoneuvon kyseisellä nopeudella Ackermannin ohjauskulman tuloksena syntyvä kiertymisnopeus. |
|
2.12 |
’Kiertymisnopeudella’ tarkoitetaan ajoneuvon kulkusuunnan kulman muutossuhdetta mitattuna kiertoliikkeenä ajoneuvon painopisteen läpi kulkevan pystyakselin ympäri asteissa sekuntia kohti. |
|
2.13 |
’Jarrutuskitkakertoimen huippuarvolla’ tarkoitetaan renkaan ja tienpinnan välisen kitkan määrää vierivän renkaan enimmäishidastuvuuden perusteella. |
|
2.14 |
’Yhteisellä alueella’ tarkoitetaan aluetta, jolla voidaan näyttää useampi kuin yksi ilmaisin, osoitin, tunnistussymboli tai muu viesti, mutta ei samanaikaisesti. |
|
2.15 |
’Staattisella vakaustekijällä’ tarkoitetaan ajoneuvon puolta raideväliä jaettuna ajoneuvon painopisteen korkeudella. Se voidaan ilmaista myös yhtälöllä SSF = T/2H, jossa T = raideväli (jos ajoneuvossa on enemmän kuin yksi raideväli, käytetään raidevälien keskiarvoa, paripyöräakselien osalta raidevälin laskennassa käytetään ulompia renkaita) ja H = ajoneuvon painopisteen korkeus. |
3. HYVÄKSYNNÄN HAKEMINEN
3.1 Hakemuksen ajoneuvotyypin hyväksymiseksi elektronisen ajonvakautusjärjestelmän osalta tekee ajoneuvon valmistaja tai tämän asianmukaisesti valtuutettu edustaja.
3.2 Hyväksyntähakemukseen on liitettävä seuraavat asiakirjat kolmena kappaleena sekä seuraavat tiedot:
|
3.2.1 |
kuvaus ajoneuvotyypistä kohdassa 2.2 mainittujen ominaisuuksien osalta. Ajoneuvotyypin ilmaisevat numerot ja/tai merkit sekä moottorin tyyppi on ilmoitettava. |
|
3.2.2 |
luettelo elektronisen ajonvakautusjärjestelmän muodostavista komponenteista asianmukaisine tunnistetietoineen |
|
3.2.3 |
kaavio kootusta elektronisesta ajonvakautusjärjestelmästä ja tiedot sen komponenttien sijainnista ajoneuvossa |
|
3.2.4 |
yksityiskohtaiset kuvat kaikista komponenteista, jotta ne voidaan paikantaa ja tunnistaa helposti. |
3.3 Hyväksyntätesteistä vastaavalle tutkimuslaitokselle on toimitettava hyväksyttäväksi esitettävää ajoneuvotyyppiä edustava ajoneuvo.
4. HYVÄKSYNTÄ
4.1 Jos tämän säännön mukaisesti hyväksyttäväksi jätetty ajoneuvotyyppi täyttää kohtien 5, 6 ja 7 vaatimukset, ajoneuvotyyppi on hyväksyttävä.
4.2 Kaikille hyväksytyille ajoneuvotyypeille annetaan hyväksyntänumero, jonka kahdesta ensimmäisestä numerosta käy ilmi muutossarja, joka sisältää ne sääntöön tehdyt merkittävät tekniset muutokset, jotka ovat hyväksynnän myöntämishetkellä viimeisimmät. Sama sopimuspuoli ei saa antaa elektronisen ajonvakautusjärjestelmän osalta samaa numeroa toiselle ajoneuvotyypille.
4.3 Tähän sääntöön perustuvasta ajoneuvotyypin hyväksynnän myöntämisestä tai epäämisestä on ilmoitettava tätä sääntöä soveltaville sopimuspuolille tämän säännön liitteessä 1 esitetyn mallin mukaisella lomakkeella ja esittämällä yhteenveto kohdissa 3.2.1–3.2.4 tarkoitettujen asiakirjojen sisältämistä tiedoista. Hakijan hyväksyntää varten toimittamien piirrosten on oltava enintään A4-kokoiset (210 × 297 mm) taikka tähän kokoon taitetut ja mittakaavaltaan sopivat.
4.4 Kaikkiin tämän säännön mukaisesti hyväksytyn ajoneuvotyypin mukaisiin ajoneuvoihin on kiinnitettävä näkyvästi hyväksyntälomakkeessa määriteltyyn helppopääsyiseen paikkaan kansainvälinen hyväksyntämerkki, joka koostuu seuraavista osista:
|
4.4.1 |
E-kirjain ja hyväksynnän myöntäneen maan tunnusnumero (3), jotka ovat ympyrän sisällä |
|
4.4.2 |
kohdassa 4.4.1 tarkoitetun ympyrän oikealla puolella sijaitseva tämän säännön numero, jota seuraa R-kirjain, viiva ja tyyppihyväksyntänumero. |
4.5 Kohdassa 4.4.1 määriteltyä tunnusta ei tarvitse toistaa, jos ajoneuvo vastaa ajoneuvotyyppiä, joka on hyväksytty yhden tai useamman sopimukseen sisältyvän muun säännön perusteella maassa, joka on myöntänyt hyväksynnän tämän säännön perusteella. Tällaisessa tapauksessa kaikkien niiden sääntöjen numerot, hyväksyntänumerot ja lisätunnukset, joiden perusteella hyväksyntä on myönnetty hyväksynnän tämän säännön mukaisesti myöntäneessä maassa, on merkittävä pystysarakkeisiin kohdassa 4.4.1 määritellyn tunnuksen oikealle puolelle.
4.6 Hyväksyntämerkin on oltava selvästi luettavissa ja pysyvä.
4.7 Hyväksyntämerkki on sijoitettava ajoneuvon tyyppikilpeen tai lähelle sitä.
4.8 Tämän säännön liitteessä 1 annetaan esimerkkejä hyväksyntämerkeistä.
5. YLEISET VAATIMUKSET
5.1 Ajoneuvot on varustettava elektronisella ajonvakautusjärjestelmällä (ESC-järjestelmällä), joka täyttää tämän säännön kohdan 6 toiminnalliset vaatimukset ja kohdan 7 suoritusvaatimukset kohdan 8 mukaisissa testausolosuhteissa, kun käytetään kohdassa 9 määriteltyjä testausmenettelyjä.
5.1.1 Vaihtoehtona kohdan 5.1 vaatimuksille voidaan luokkien M1 ja N1 ajoneuvot, joiden massa ajokunnossa on suurempi kuin 1 735 kg, varustaa ajoneuvon vakautustoiminteella, joka käsittää kaatumisen hallinnan ja suuntaohjauksen ja täyttää säännön nro 13 liitteessä 21 asetetut tekniset vaatimukset. Näiden ajoneuvojen ei tarvitse täyttää tämän säännön kohdan 6 toiminnallisia vaatimuksia ja kohdan 7 suoritusvaatimuksia kohdan 8 mukaisissa testausolosuhteissa, kun käytetään kohdassa 9 määriteltyjä testausmenettelyjä.
5.2 ESC-järjestelmä on suunniteltava, rakennettava ja asennettava siten, että ajoneuvo siihen mahdollisesti tavanomaisessa käytössä kohdistuvasta tärinästä huolimatta täyttää tavanomaisessa käytössä tämän säännön vaatimukset.
5.3 ESC-järjestelmä on erityisesti suunniteltava, rakennettava ja asennettava siten, että se kestää syöpymistä ja vanhenemista aiheuttavia olosuhteita.
5.4 Magneetti- tai sähkökentät eivät saa haitallisesti vaikuttaa ESC-järjestelmän tehoon. Tämä on osoitettava näyttämällä toteen, että järjestelmä täyttää säännön nro 10 tekniset vaatimukset säännön siirtymämääräysten mukaisesti siten, että
|
a) |
ajoneuvoihin, joissa ei ole ladattavan energiavarastojärjestelmän (ajoakkujen) lataamisessa käytettävää kytkentäjärjestelmää, sovelletaan muutossarjaa 03 ja |
|
b) |
ajoneuvoihin, joissa on ladattavan energiavarastojärjestelmän (ajoakkujen) lataamisessa käytettävä kytkentäjärjestelmä, sovelletaan muutossarjaa 04. |
5.5 ESC-järjestelmän turvallisuusnäkökohtien arviointi sen jarrutusjärjestelmään kohdistamien suorien vaikutusten osalta on sisällytettävä jarrujärjestelmän yleiseen turvallisuusarviointiin, joka tehdään säännössä nro 13-H olevien kompleksisiin elektronisiin ajoneuvonhallintajärjestelmiin liittyvien vaatimusten mukaisesti. Vaatimuksen täyttyminen voidaan osoittaa esittämällä säännön nro 13-H mukainen todistus, joka sisältää hyväksyttäväksi toimitetun ESC-järjestelmän.
5.6 ESC-järjestelmien teknistä määräaikaistarkastusta koskevat vaatimukset
5.6.1 Teknisessä määräaikaistarkastuksessa on voitava varmistaa oikea toimintatila tarkastamalla varoitukset visuaalisesti, kun virta kytketään päälle.
5.6.2 Tyyppihyväksynnän yhteydessä on esiteltävä luottamuksellisena pidettävä menettely, jolla varoitussignaalien toiminta suojataan yksinkertaiselta luvattomalta muuttamiselta. Suojavaatimus täyttyy myös silloin, kun asianmukaisen toimintatilan tarkastamiseen on käytössä varamenettely.
6. TOIMINNALLISET VAATIMUKSET
Jokainen tämän säännön mukaisesti hyväksyttäväksi toimittu ajoneuvo on varustettava elektronisella ajonvakautusjärjestelmällä (ESC-järjestelmällä), joka
6.1 kykenee tuottamaan jarrutusmomentin erikseen kaikkiin neljään pyörään (4) ja jossa on ohjausalgoritmi, joka hyödyntää tätä ominaisuutta.
6.2 on toiminnassa ajoneuvon koko nopeusalueella kaikissa ajamisen vaiheissa, mukaan luettuina kiihdyttäminen, rullaaminen ja hidastaminen (myös jarruttaminen) mutta lukuun ottamatta seuraavia tilanteita:
|
6.2.1 |
kun kuljettaja on kytkenyt ESC-järjestelmän pois päältä |
|
6.2.2 |
kun ajoneuvon nopeus on alle 20 km/h |
|
6.2.3 |
kun järjestelmä suorittaa käynnistyksen jälkeistä itsetestausta ja virheellisten arvojen tarkastusta, joka ei saa kestää yli kahta minuuttia ajettaessa kohdan 9.10.2 mukaisissa olosuhteissa |
|
6.2.4 |
kun ajoneuvoa peruutetaan |
6.3 kykenee toimimaan silloinkin, kun myös lukkiutumaton jarrujärjestelmä tai luistonestojärjestelmä on kytketty päälle.
7. SUORITUSVAATIMUKSET
Suoritettaessa kutakin testiä kohdan 8 mukaisissa testausolosuhteissa käyttäen kohdan 9.9 testausmenettelyä on ajoneuvon ESC-järjestelmä päälle kytkettynä täytettävä kohtien 7.1 ja 7.2 suuntavakauskriteerit sekä kohdan 7.3 käsiteltävyyskriteerit kunkin testin aikana, kun ohjauspyörä (5) on käännettynä kulmaan 5A tai suurempaan kulmaan, kuitenkin kohdan 9.9.4 rajoitusten mukaisesti (A on kohdassa 9.6.1 laskettu ohjauspyörän kulma).
Kun ajoneuvo on testattu fyysisesti kohdan 8 mukaisesti, saman ajoneuvotyypin eri versioiden tai varianttien vaatimustenmukaisuus voidaan osoittaa tietokonesimuloinnilla, jossa noudatetaan kohdan 8 testausolosuhteita ja kohdan 9.9 testausmenettelyä. Simulaattorin käyttö määritellään tämän säännön liitteessä 4.
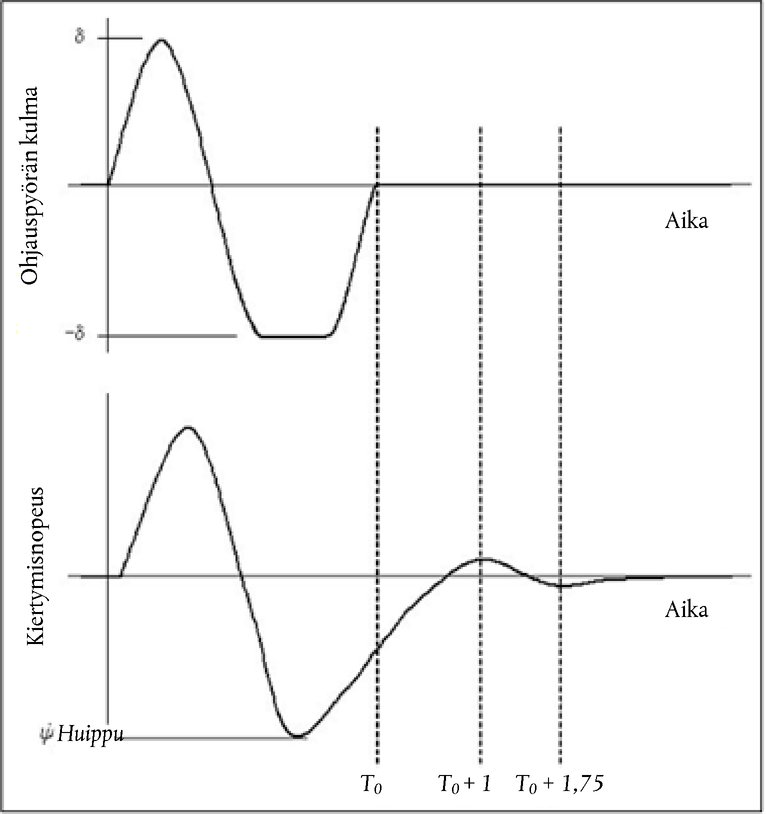
7.1 Kiertymisnopeus mitattuna 1 sekunti ”sinikäyrä tasavaiheella” -ohjaussyötteen (Sine with Dwell) valmistumisen jälkeen (aika T0 + 1 kuvassa 1) saa olla enintään 35 prosenttia ensimmäisestä kiertymisnopeuden huippuarvosta, joka on mitattu ohjauspyörän kulman vaihdettua etumerkkiä (ensimmäisen ja toisen huipun välissä) ( kuvassa 1) saman testiajon aikana.
kuvassa 1) saman testiajon aikana.
Kuva 1
Ohjauspyörän asento ja sivuttaisvakauden arviointiin käytettävä kiertymisnopeus
 Teksti kuva
Teksti kuva
7.2 Kiertymisnopeus mitattuna 1,75 sekuntia ”sinikäyrä tasavaiheella” -ohjaussyötteen valmistumisen jälkeen saa olla enintään 20 prosenttia ensimmäisestä kiertonopeuden huippuarvosta, joka on mitattu ohjauspyörän kulman vaihdettua etumerkkiä (ensimmäisen ja toisen huipun välissä) saman testiajon aikana.
7.3 Ajoneuvon painopisteen sivuttaissiirtymän verrattuna sen alkuperäiseen suoraan kulkulinjaan on oltava vähintään 1,83 m ajoneuvoilla, joiden suurin sallittu kokonaismassa on enintään 3 500 kg, ja 1,52 m ajoneuvoilla, joiden suurin sallittu kokonaismassa on suurempi kuin 3 500 kg, laskettuna 1,07 sekuntia ohjausliikkeen alkamisesta (BOS, Beginning of Steer). BOS määritellään kohdassa 9.11.6.
7.3.1 Sivuttaissiirtymä lasketaan muodostamalla kaksoisintegraali ajan suhteen ajoneuvon painopisteen mitatusta sivuttaiskiihtyvyydestä seuraavan kaavan mukaisesti:

Tyyppihyväksyntätestaukseen voidaan sallia vaihtoehtoinen mittausmenetelmä, mikäli sillä saavutetaan ainakin vastaava tarkkuus kuin kaksoisintegroimalla.
7.3.2 Integraalissa aika t = 0 tarkoittaa ohjausliikkeen aloitusaikaa (Beginning of Steer, BOS). BOS määritellään kohdassa 9.11.6.
7.4 ESC-järjestelmän toimintahäiriön havaitseminen
Ajoneuvossa on oltava merkkivalo, joka varoittaa kuljettajaa kaikista sellaisista toimintahäiriöistä, jotka vaikuttavat ajoneuvon elektronisen ajonvakautusjärjestelmän ohjaus- tai vastesignaalien generointiin tai siirtämiseen.
7.4.1 ESC-järjestelmän toimintahäiriön merkkivalon
|
7.4.1.1 |
on oltava säännön nro 121 asiaankuuluvien vaatimusten mukainen |
|
7.4.1.2 |
on sytyttävä toimintahäiriön aikana ja pysyttävä valaistuna kohdassa 7.4 määritettyjen olosuhteiden vallitessa niin pitkään kuin toimintahäiriö esiintyy aina, kun virtalukko on kytkettynä päälle, lukuun ottamatta kohdassa 7.4.1.3 tarkoitettuja tilanteita |
|
7.4.1.3 |
on sytyttävä lampuntarkastusta varten joko silloin, kun virtalukko kytketään päällä-asentoon moottorin ollessa sammutettuna tai kun virtalukko on valmistajan tarkastusasennoksi määrittämässä asennossa asentojen ”päällä” (ON) ja ”käynnistys” (START) välissä, lukuun ottamatta kohdassa 7.4.2 tarkoitettuja tilanteita |
|
7.4.1.4 |
on sammuttava toimintahäiriön korjaantumisen jälkeisessä sytytyssyklissä kohdan 9.10.4 mukaisesti |
|
7.4.1.5 |
käyttötarkoituksiin voi myös sisältyä ESC-järjestelmään liittyvien järjestelmien/toimintojen toimintahäiriöiden ilmaisu. Tällaisia järjestelmiä ovat luistonestojärjestelmä, perävaunun vakautusjärjestelmä, kaarrejarrutuksen hallintajärjestelmä sekä muut vastaavat toiminnot, joiden toiminta perustuu kaasuttimen ja/tai yksittäisten jarrumomenttien ohjaukseen ja joilla on yhteisiä komponentteja ESC-järjestelmän kanssa. |
7.4.2 ESC-järjestelmän toimintahäiriön merkkivalon ei tarvitse syttyä, kun käynnistyksen turvalukitus on kytkeytyneenä.
7.4.3 Kohdan 7.4.1.3 vaatimus ei koske yhteisellä alueella näytettäviä merkkivaloja.
7.4.4 Valmistaja voi käyttää ESC-järjestelmän toimintahäiriön varoitusvaloa vilkkuvassa tilassa ilmaisemaan ESC-järjestelmän ja/tai (kohdassa 7.4.1.5 mainittujen) ESC-järjestelmään liittyvien järjestelmien toimintaa taikka ESC-järjestelmän ajoneuvon vakauttamiseksi suorittamaa yhden tai useamman pyörän ohjauskulman korjausta.
7.5 ESC-järjestelmän sammutuskytkin ja muut järjestelmän hallintalaitteet
Valmistaja voi halutessaan sisällyttää järjestelmään ESC-järjestelmän sammutuskytkimen, jonka on oltava valaistuna ajoneuvon ajovalojen ollessa päällä ja jonka tarkoituksena on asettaa ESC-järjestelmä toimintatilaan, jossa se ei enää täytä kohtien 7, 7.1, 7.2 ja 7.3 suoritusvaatimuksia. Valmistajat voivat tarjota hallintalaitteita myös sellaisia muita järjestelmiä varten, joilla on vaikutusta ESC-järjestelmän toimintaan. Tällaiset hallintalaitteet, jotka asettavat ESC-järjestelmän tilaan, jossa se ei enää täytä kohtien 7, 7.1, 7.2 ja 7.3 suoritusvaatimuksia, ovat sallittuja, mikäli järjestelmä täyttää myös kohtien 7.5.1, 7.5.2 ja 7.5.3 vaatimukset.
7.5.1 Ajoneuvon ESC-järjestelmän on jokaisella ajoneuvon käynnistyskerralla aina palattava valmistajan alkuperäiseen oletustilaan, joka täyttää kohtien 6 ja 7 vaatimukset, huolimatta siitä, minkä käyttötilan kuljettaja on aikaisemmin valinnut. Ajoneuvon ESC-järjestelmän ei kuitenkaan tarvitse palata kohtien 7–7.3 vaatimukset täyttävään tilaan jokaisella ajoneuvon käynnistyskerralla, jos
|
7.5.1.1 |
ajoneuvo on kuljettajan hidasta maastoajoa varten valitsemassa nelivetotilassa, joka kytkee etu- ja taka-akselien vetopyörästöt yhteen ja tuottaa moottorin pyörimisnopeuden ja ajoneuvon nopeuden välille hidastuksen, jonka suuruus on vähintään 1,6, tai |
|
7.5.1.2 |
ajoneuvo on kuljettajan valitsemassa nelivetotilassa, joka on suunniteltu suuremmilla nopeuksilla ajamiseen lumisilla tai hiekkaisilla teillä tai sorateillä ja joka kytkee etu- ja taka-akselien vetopyörästöt yhteen, edellyttäen että ajoneuvo täyttää tämä tila valittuna kohtien 7.1 ja 7.2 vakausvaatimukset kohdassa 8 määritetyissä testausolosuhteissa. Jos järjestelmässä on kuitenkin useampi kuin yksi ESC-tila, joka täyttää kohtien 7.1 ja 7.2 vaatimukset edellistä käynnistyssykliä varten valitulla voimansiirtotilalla, ESC-järjestelmän on palattava valmistajan kyseiselle voimansiirtotilalle määrittelemään alkuperäiseen oletustilaan jokaisella uudelleenkäynnistyskerralla. |
7.5.2 Hallintalaitteen, jonka ainoa tarkoitus on asettaa ESC-järjestelmä tilaan, jossa se ei enää täytä kohtien 7, 7.1, 7.2 ja 7.3 suoritusvaatimuksia, on täytettävä säännön nro 121 asiaankuuluvat vaatimukset.
7.5.3 ESC-järjestelmän hallintalaitteen, jonka tarkoitus on asettaa ESC-järjestelmä erilaisiin toimintatiloihin, joista ainakaan yksi ei enää täytä kohtien 7, 7.1, 7.2 ja 7.3 suoritusvaatimuksia, on täytettävä säännön nro 121 asiaankuuluvat vaatimukset.
Vaihtoehtoisesti siinä tapauksessa, että ESC-järjestelmän toimintatilaa ohjataan monitoimihallintalaitteella, kuljettajan näytön on selkeästi ilmaistava kuljettajalle kyseisen toimintatilan valintakohta käyttäen säännössä nro 121 määriteltyä elektronisen ajonvakautusjärjestelmän ”pois päältä” -symbolia (OFF).
7.5.4 Hallintalaitetta, jolla ohjataan muuta järjestelmää, jonka rinnakkaisvaikutuksena ESC-järjestelmä kytkeytyy tilaan, jossa se ei enää täytä kohtien 7, 7.1, 7.2 ja 7.3 suoritusvaatimuksia, ei tarvitse merkitä kohdassa 7.5.2 tarkoitetulla ESC-järjestelmän poiskytkettyä tilaa ilmaisevalla symbolilla.
7.6 Merkkivalo ”ESC-järjestelmä pois päältä” (ESC Off)
Mikäli valmistaja sisällyttää järjestelmään hallintalaitteen, jolla ESC-järjestelmä kytketään pois päältä tai sen toimintaa rajoitetaan kohdan 7.5 mukaisesti, kohtien 7.6.1–7.6.4 merkkivaloa koskevien vaatimuksien on täytyttävä kuljettajan varoittamiseksi ESC-järjestelmän toimimattomuudesta tai rajoitetusta toiminnasta. Tämä vaatimus ei koske kohdassa 7.5.1.2 mainittua kuljettajan valitsemaa toimintatilaa.
7.6.1 Ajoneuvon valmistajan on sisällytettävä järjestelmään merkkivalo, joka ilmoittaa ajoneuvon olevan sellaisessa tilassa, jossa se ei täytä kohtien 7, 7.1, 7.2 ja 7.3 vaatimuksia, mikäli järjestelmässä on tällainen toimintatila.
7.6.2 Merkkivalon ”ESC-järjestelmä pois päältä”
|
7.6.2.1 |
on oltava säännön nro 121 asiaankuuluvien vaatimusten mukainen |
|
7.6.2.2 |
on pysyttävä valaistuna niin pitkään kuin ESC-järjestelmä on tilassa, jossa se ei täytä kohtien 7, 7.1, 7.2 ja 7.3 vaatimuksia |
|
7.6.2.3 |
on sytyttävä lampuntarkastusta varten joko silloin, kun virtalukko kytketään asentoon ”päällä” moottorin ollessa sammutettuna tai kun virtalukko on valmistajan tarkastusasennoksi määrittämässä asennossa asentojen ”päällä” (ON) ja ”käynnistys” (START) välissä, lukuun ottamatta kohdissa 7.6.3 ja 7.6.4 tarkoitettuja tilanteita |
|
7.6.2.4 |
on sammuttava sen jälkeen, kun ESC-järjestelmä on palautunut valmistajan alkuperäiseen oletustilaan. |
7.6.3 ”ESC-järjestelmä pois päältä” -merkkivalon ei tarvitse syttyä, kun käynnistyksen turvalukitus on kytkeytyneenä.
7.6.4 Kohdan 7.6.2.3 vaatimus ei koske yhteisellä alueella näytettäviä merkkivaloja.
7.6.5 Valmistaja voi käyttää merkkivaloa ”ESC-järjestelmä pois päältä” ilmaisemaan järjestelmän muuta kuin valmistajan alkuperäistä oletustilaa vastaavaa toimintatasoa, vaikka ajoneuvo täyttäisikin kyseisessä tilassa kohtien 7, 7.1, 7.2 ja 7.3 vaatimukset.
7.7 ESC-järjestelmän tekninen dokumentaatio
Dokumentaatioon on sisällyttävä kohdissa 7.7.1–7.7.4 eritelty valmistajan dokumentaatio vahvistuksena sille, että ajoneuvo on varustettu ESC-järjestelmällä, joka täyttää tämän säännön kohdassa 2.7 annetun ”ESC-järjestelmän” määritelmän. Valmistajan dokumentaation on sisällettävä seuraavat tiedot:
7.7.1 Kaikki ESC-järjestelmän laitteet erittelevä järjestelmäkaavio. Kaaviossa on nimettävä kaikki komponentit, joilla tuotetaan jarrumomenttia kuhunkin pyörään sekä määritettävä ajoneuvon kiertymisnopeus, arvioitu sivuluisu tai sivuluisun derivaatta ja kuljettajan ohjausliikkeet.
7.7.2 Lyhyt kirjallinen selitys, jossa annetaan riittävä kuvaus ESC-järjestelmän toiminnan perusperiaatteista. Tämän selityksen on sisällettävä pääpiirteittäinen kuvaus järjestelmän kyvystä tuottaa jarrumomenttia kuhunkin pyörään ja siitä, miten ESC-järjestelmä toimiessaan muuttaa moottorin vääntömomenttia, ja osoitettava, että ajoneuvon kiertymisnopeus määritetään suoraan sellaisissakin olosuhteissa, joissa pyörännopeustietoja ei ole käytettävissä. Selityksestä on myös käytävä ilmi ajoneuvon nopeusalue ja ajon vaiheet (kiihdyttäminen, hidastaminen, rullaaminen, ABS-järjestelmän tai luistoneston kytkeminen päälle), joiden aikana ESC-järjestelmä voi kytkeytyä päälle.
7.7.3 Logiikkakaavio. Tämä kaavio täydentää kohdan 7.7.2 mukaista selitystä.
7.7.4 Tiedot aliohjautuvuudesta. Pääpiirteittäinen kuvaus ESC-järjestelmää ohjaavan tietokoneen saamista syötteistä ja siitä, miten niitä käytetään vähentämään ajoneuvon aliohjautumista.
8. TESTAUSOLOSUHTEET
8.1 Ympäristöolosuhteet
8.1.1 Ympäristön lämpötila 0–45 °C.
8.1.2 Tuulennopeus enintään 10 m/s ajoneuvoilla, joiden staattinen vakaustekijä SSF > 1,25, ja 5 m/s ajoneuvoilla, joiden SSF ≤ 1,25.
8.2 Testausalueen pinta
8.2.1 Testit suoritetaan kuivalla ja yhtenäisellä kiinteäpinnoitteisella alustalla. Epätasainen ja aaltoileva alusta, jossa on esim. kuoppia ja suuria halkeamia, ei sovellu testaamiseen.
8.2.2 Testausalueen pinnoitteen kitkakertoimen nimellisen (6) huippuarvon (PBC) on oltava 0,9, ellei toisin ilmoitettu, mitattuna joko
|
8.2.2.1 |
ASTM:n (American Society for Testing and Materials) E1136-vakiovertailutestausrenkaalla ASTM-menetelmän E1337-90 mukaisesti nopeudessa 64 km/h (40 mph) tai |
|
8.2.2.2 |
säännön nro 13-H liitteen 6 lisäyksessä 2 määritetyllä k-testillä. |
8.2.3 Testausalustan kaltevuudeltaan on oltava tasainen vaakasuoran ja 1 prosentin kaltevuuden välillä.
8.3 Ajoneuvon testauskunto
8.3.1 ESC-järjestelmä pidetään käytössä koko testauksen ajan.
8.3.2 Ajoneuvon massa: Ajoneuvoon, jonka polttoainetankki on täytetty vähintään 90 prosenttiin tilavuudestaan, lastataan yhteensä 168 kg:n sisäkuorma, joka koostuu testikuljettajasta, n. 59 kg:sta testauslaitteita (automaattinen ohjauslaite, tiedonkeruujärjestelmä ja ohjauslaitteen voimanlähde) sekä tarvittavasta määrästä painolastia korvaamaan kuljettajan ja testauslaitteiden lisäksi mahdollisesti puuttuva paino. Mikäli painolastia tarvitaan, se sijoitetaan ajoneuvon lattialle kuljettajan istuimen taakse tai tarvittaessa etuosan matkustajan istuimen jalkatilaan. Kaikki painolasti on kiinnitettävä siten, että se ei voi irrota testaamisen aikana.
8.3.3 Renkaat: Renkaat täytetään ajoneuvon valmistajan suosittelemaan kylmäpaineeseen esim. ajoneuvon kilvessä tai rengaspainemerkissä ilmoitetun mukaan. Tarvittaessa voidaan asentaa putket estämään renkaiden irtoaminen vanteilta.
8.3.4 Tukipyörät: Testaamisessa voidaan käyttää tukipyöriä, mikäli sen katsotaan olevan tarpeen testikuljettajan turvallisuuden kannalta. Tässä tapauksessa seuraava koskee ajoneuvoja, joiden staattinen vakaustekijä SSF ≤ 1,25:
|
8.3.4.1 |
Ajoneuvot, joiden massa ajokunnossa on alle 1 588 kg, varustetaan kevytrakenteisilla tukipyörillä. Kevytrakenteisten tukipyörien massa on enintään 27 kg ja kallistuksen hitausmomentti enintään 27 kg · m2. |
|
8.3.4.2 |
Ajoneuvot, joiden massa ajokunnossa on 1 588–2 722 kg, varustetaan normaalirakenteisilla tukipyörillä. Normaalirakenteisten tukipyörien massa on enintään 32 kg ja kallistuksen hitausmomentti enintään 35,9 kg · m2. |
|
8.3.4.3 |
Ajoneuvot, joiden massa ajokunnossa on suurempi kuin 2 722 kg, varustetaan raskailla tukipyörillä. Raskaiden tukipyörien massa on enintään 39 kg ja kallistuksen hitausmomentti enintään 40,7 kg · m2. |
8.3.5 Automaattinen ohjauslaite: Kohtien 9.5.2, 9.5.3, 9.6 ja 9.9 menettelyissä käytetään ohjausrobottia, joka on ohjelmoitu suorittamaan vaaditut ohjausliikkeet. Ohjauslaitteen on kyettävä tuottamaan 40–60 Nm:n ohjausmomentti. Ohjauslaitteen on kyettävä tuottamaan kyseinen momentti ohjauspyörän kääntönopeuksilla arvoon 1 200 astetta sekunnissa saakka.
9. TESTAUSMENETTELYT
9.1 Renkaat täytetään valmistajan suosittelemaan kylmäpaineeseen, joka on ilmoitettu esim. ajoneuvon kilvessä tai rengaspainemerkissä.
9.2 Merkkivalon lampun tarkastus: Ajoneuvon ollessa paikallaan ja virtalukon ollessa asennossa lukittu (LOCK) tai pois päältä (OFF) kytketään virtalukko päällä-asentoon tai mahdolliseen merkkivalojen testausasentoon. ESC-järjestelmän toimintahäiriön merkkivalon on sytyttävä lampun toiminnan tarkastamiseksi kohdan 7.4.1.3 mukaisesti. Jos ajoneuvossa on ”ESC-järjestelmä pois päältä” -merkkivalo, myös sen on sytyttävä lampun toiminnan tarkastamiseksi kohdan 7.6.2.3 mukaisesti. Merkkivalon lampun tarkastusta ei vaadita kohdissa 7.4.3 ja 7.6.4 tarkoitettujen yhteisellä alueella näytettävien merkkivalojen tapauksessa.
9.3 ESC-järjestelmän sammutuskytkimen tarkastus: Mikäli ajoneuvo on varustettu ESC-järjestelmän sammutuskytkimellä (ESC OFF), suoritetaan tarkastus seuraavasti: Kytketään virtalukko päällä-asentoon (ON), kun ajoneuvo on paikallaan ja virtalukko asennossa lukittu (LOCK) tai pois päältä (OFF). Kytketään ESC-järjestelmän sammutuskytkin päälle ja varmistetaan, että merkkivalo ”ESC-järjestelmä pois päältä” syttyy kohdan 7.6.2 mukaisesti. Kytketään virtalukko lukittuun tai pois päältä -asentoon. Kytketään virtalukko takaisin päällä-asentoon ja varmistetaan, että merkkivalo ”ESC-järjestelmä pois päältä” on sammunut, mikä ilmaisee ESC-järjestelmän palautuneen toimintaan kohdan 7.5.1 mukaisesti.
9.4 Jarrujen valmistelu
Valmistellaan ajoneuvon jarrut kohdissa 9.4.1–9.4.4 kuvaillulla tavalla.
9.4.1 Tehdään kymmenen pysähdystä nopeudesta 56 km/h niin, että keskimääräinen hidastuvuus on noin 0,5 g.
9.4.2 Välittömästi nopeudesta 56 km/h toteutetun kymmenen pysähdyksen sarjan jälkeen tehdään kolme lisäpysähdystä nopeudesta 72 m/h suuremmalla hidastuvuudella.
9.4.3 Kohdassa 9.4.2 tarkoitettuja pysähdyksiä suoritettaessa jarrupoljinta painetaan voimalla, joka on riittävä ajoneuvon lukkiutumattoman jarrujärjestelmän (ABS) kytkeytymiseksi päälle suurimmassa osassa jokaista jarrutustapahtumaa.
9.4.4 Kohdan 9.4.2 mukaisen viimeisen pysähtymisen jälkeen ajoneuvo kiihdytetään nopeuteen 72 km/h viideksi minuutiksi jarrujen jäähdyttämiseksi.
9.5 Renkaiden valmistelu
Valmistellaan renkaat kohtien 9.5.1–9.5.3 mukaisesti uutuudenkiillon poistamiseksi ja renkaiden lämmittämiseksi toimintalämpöönsä välittömästi ennen kohtien 9.6 ja 9.9 mukaisten testiajojen suorittamista.
9.5.1 Ajetaan testattavaa ajoneuvoa ympyrää, jonka halkaisija on 30 metriä, nopeudella, joka tuottaa noin 0,5–0,6 g:n sivuttaiskiihtyvyyden, ensin kolme kierrosta myötäpäivään, sitten kolme kierrosta vastapäivään.
9.5.2 Ajetaan ajoneuvoa neljä ajokertaa noudattaen 1 hertsin siniaaltomaista ohjauskuviota siten, että ohjauspyörän kulman huippuamplitudi vastaa 0,5–0,6 g:n huippusivuttaiskiihtyvyyttä ja ajoneuvon nopeus on 56 km/h, ja tehdään kullakin ajokerralla 10 siniaaltomaista ohjausliikettä.
9.5.3 Ohjauspyörän kulman amplitudin on viimeisen ajokerran viimeisessä ohjausliikkeessä oltava kaksinkertainen verrattuna muihin ohjausliikkeisiin. Suurin sallittu aikaväli jokaisen kierroksen ja ajokerran välillä on viisi minuuttia.
9.6 Hitaasti kasvavan ohjausliikkeen testausmenettely
Ajetaan ajoneuvoa kaksi hitaasti kasvavan ohjausliikkeen testiajosarjaa vakionopeudella 80 ± 2 km/h ja ohjausliikkeellä, joka kasvaa 13,5 astetta sekunnissa, kunnes saavutetaan noin 0,5 g:n sivuttaiskiihtyvyys. Toistetaan jokainen testisarja kolme kertaa. Yhdessä sarjassa ohjataan vastapäivään ja toisessa sarjassa myötäpäivään. Suurin sallittu aikaväli jokaisen testiajon välillä on viisi minuuttia.
9.6.1 Määritetään hitaasti kasvavan ohjausliikkeen testeistä arvo A. Arvo A on asteina ilmaistu ohjauspyörän kulma, joka tuottaa testiajoneuvolle tasaisen 0,3 g:n sivuttaiskiihtyvyyden (korjattuna kohdassa 9.11.3 määritetyillä menetelmillä). Arvo A lasketaan lineaarisen regression avulla lähimmän 0,1 asteen tarkkuudella jokaisesta kuudesta hitaasti kasvavan ohjausliikkeen testistä. Muodostetaan jäljempänä käytettävä A:n lopullinen arvo laskemalla keskiarvo kuuden lasketun A:n arvon absoluuttisista arvoista ja pyöristämällä se lähimpään 0,1 asteeseen.
9.7 Arvon A määrittämisen jälkeen suoritetaan kohdassa 9.5 kuvailtu renkaiden valmistelu renkaita vaihtamatta välittömästi ennen kohdassa 9.9 tarkoitetun ”sinikäyrä tasavaiheella” -testin suorittamista. Ensimmäinen ”sinikäyrä tasavaiheella” -testisarja on aloitettava kahden tunnin kuluessa kohdan 9.6 mukaisten hitaasti kasvavan ohjausliikkeen testien valmistumisesta.
9.8 Tarkastetaan, että ESC-järjestelmä on käytössä varmistamalla, että merkkivalot ”ESC-järjestelmän toimintahäiriö” ja ”ESC-järjestelmä pois päältä” (jos sellainen sisältyy järjestelmään) eivät pala.
9.9 Yliohjauksen korjauksen ja käsiteltävyyden ”sinikäyrä tasavaiheella” -testi
Ajetaan ajoneuvoa kaksi testiajosarjaa noudattaen 0,7 hertsin taajuista siniaaltomaista ohjauskuviota, jossa on toisesta amplitudihuipusta alkava 500 ms:n tasainen vaihe kuvan 2 mukaisesti (sinikäyrä tasavaiheella -testit). Yhdessä sarjassa ohjataan vastapäivään syklin ensimmäisellä puolikkaalla ja toisessa sarjassa myötäpäivään syklin ensimmäisellä puolikkaalla. Annetaan ajoneuvon jäähtyä paikoillaan jokaisen testiajon välissä 1,5–5 minuutin ajan.
Kuva 2
Sinikäyrä tasavaiheella
 Teksti kuva
Teksti kuva
9.9.1 Ohjausliike aloitetaan ajoneuvon rullatessa suurella vaihteella nopeudella 80 ± 2 km/h.
9.9.2 Kunkin sarjan ensimmäisen testiajon ohjausamplitudina käytetään arvoa 1,5 A, jolloin A on kohdan 9.6.1 mukaisesti määritetty ohjauspyörän kulma.
9.9.3 Kussakin testiajosarjassa kasvatetaan ohjausamplitudia joka ajokerralla arvolla 0,5 A siten, että ajokerran ohjausamplitudi ei kasva suuremmaksi kuin kohdassa 9.9.4 viimeiselle ajokerralle määritetty amplitudi.
9.9.4 Kunkin sarjan viimeisen ajokerran ohjausamplitudi on suurempi arvoista 6,5 A ja 270 astetta, edellyttäen että laskettu arvo 6,5 A on pienempi tai yhtä suuri kuin 300 astetta. Jos mikä tahansa 0,5 A:n lisäys arvoon 6,5 A saakka tuottaa arvon, joka on suurempi kuin 300 astetta, viimeisen ajokerran ohjausamplitudina käytetään arvoa 300 astetta.
9.9.5 Kahden testiajosarjan valmistumisen jälkeen tehdään kiertymisnopeuden ja sivuttaiskiihtyvyyden tietojen jälkiprosessointi kohdan 9.11 mukaisesti.
9.10 ESC-järjestelmän toimintahäiriön havaitseminen
9.10.1 Simuloidaan yksi tai useampi ESC-järjestelmän toimintahäiriö irrottamalla virtalähde mistä tahansa ESC-järjestelmän komponentista tai irrottamalla mikä tahansa sähköliitäntä ESC-järjestelmän komponenttien väliltä (ajoneuvon virran ollessa katkaistuna). ESC-järjestelmän toimintahäiriötä simuloitaessa ei saa irrottaa merkkivalojen ja/tai valinnaisten ESC-järjestelmän hallintalaitteiden sähköliitäntöjä.
9.10.2 Kun ajoneuvo on paikoillaan ja virtalukko lukitussa (LOCK) tai poissa päältä -asennossa (OFF), kytketään virtalukko käynnistysasentoon (START) ja käynnistetään moottori. Ajetaan ajoneuvoa eteenpäin, kunnes saavutetaan nopeus 48 + 8 km/h. Viimeistään 30 sekunnin kuluttua moottorin käynnistämisestä ja seuraavien kahden minuutin aikana suoritetaan tällä nopeudella ainakin yksi tasainen kaarros vasempaan ja yksi tasainen kaarros oikeaan menettämättä suuntavakavuutta ja tehdään yksi jarrutus. Varmistetaan, että ESC-järjestelmän toimintahäiriön merkkivalo syttyy kohdan 7.4 mukaisesti näiden ajoliikkeiden päättymiseen mennessä.
9.10.3 Pysäytetään ajoneuvo ja asetetaan virtalukko lukittuun tai pois päältä -asentoon. Viiden minuutin kuluttua asetetaan ajoneuvon virtalukko käynnistysasentoon ja käynnistetään moottori. Varmistetaan, että ESC-järjestelmän toimintahäiriön merkkivalo syttyy jälleen ilmaisten toimintahäiriötä ja että se palaa niin kauan kuin moottori on käynnissä tai kunnes vika on korjattu.
9.10.4 Asetetaan virtalukko lukittuun tai pois päältä -asentoon. Palautetaan ESC-järjestelmä normaaliin toimintakuntoon, asetetaan virtalukko käynnistysasentoon ja käynnistetään moottori. Tehdään uudestaan kohdassa 9.10.2 kuvaillut ajoliikkeet ja varmistetaan, että merkkivalo on sammunut mainitun ajan kuluessa tai välittömästi sen jälkeen.
9.11 Tietojen jälkiprosessointi – suoritusarvojen laskenta
Kiertymisnopeuden ja sivuttaissiirtymän mittaukset ja laskelmat prosessoidaan kohdissa 9.11.1–9.11.8 määritetyillä menetelmillä.
9.11.1 Ohjauspyöräkulman käsittelemätön raakadata suodatetaan käyttäen 12-napaista vaiheetonta Butterworth-suodatinta 10 hertsin katkaisutaajuudella. Suodatettu data keskitetään sen jälkeen nollaan mittausantureiden asentopoikkeamien poistamiseksi staattisten, ennen testejä mitattujen arvojen avulla.
9.11.2 Kiertymisnopeuden käsittelemätön raakadata suodatetaan käyttäen 12-napaista vaiheetonta Butterworth-suodatinta 6 hertsin katkaisutaajuudella. Suodatettu data keskitetään sen jälkeen nollaan mittausantureiden asentopoikkeamien poistamiseksi staattisten, ennen testejä mitattujen arvojen avulla.
9.11.3 Sivuttaiskiihtyvyyden käsittelemätön raakadata suodatetaan käyttäen 12-napaista vaiheetonta Butterworth-suodatinta 6 hertsin katkaisutaajuudella. Suodatettu data keskitetään sen jälkeen nollaan mittausantureiden asentopoikkeamien poistamiseksi staattisten, ennen testejä mitattujen arvojen avulla. Sivuttaiskiihtyvyysdata ajoneuvon painopisteessä määritetään poistamalla ajoneuvon korin kallistelun aiheuttamat vaikutukset sekä korjaamalla mittausanturien sijainti koordinaattimuunnoksen avulla. Sivuttaiskiihtyvyysmittari sijoitetaan tiedonkeruuta varten sekä pitkittäis- että poikittaisakselin suhteen niin lähelle ajoneuvon painopistettä kuin mahdollista.
9.11.4 Ohjauspyörän kääntönopeus määritetään derivoimalla suodatettu ohjauspyörän kulmatieto. Ohjauspyörän kääntönopeustieto suodatetaan sen jälkeen 0,1 sekunnin liukuvan keskiarvon suodattimella.
9.11.5 Sivuttaiskiihtyvyyden, kiertymisnopeuden ja ohjauspyörän kulman tietokanavat keskitetään nollaan erikseen määriteltyä ”nolla-aluetta” käyttämällä. Nolla-alueen määrittämiseen käytettävät menetelmät määritellään kohdissa 9.11.5.1 ja 9.11.5.2.
9.11.5.1 Määritetään ensimmäinen ajankohta, jossa ohjauspyörän kääntönopeus ylittää 75 astetta sekunnissa, käyttäen kohdassa 9.11.4 kuvailtujen menetelmien mukaisesti laskettua ohjauspyörän kääntönopeustietoa. Tästä kohdasta eteenpäin ohjauspyörän kääntönopeuden on pysyttävä suurempana kuin 75 astetta sekunnissa vähintään 200 ms:n ajan. Jos jälkimmäinen ehto ei täyty, määritetään seuraava ajankohta, jossa ohjauspyörän kääntönopeus ylittää 75 astetta sekunnissa, ja tarkastetaan 200 ms:n ehdon täyttyminen. Tätä iteraatioprosessia jatketaan, kunnes molemmat ehdot lopulta täyttyvät.
9.11.5.2 ”Nolla-alue” on 1,0 sekunnin ajanjakso ennen ajankohtaa, jossa ohjauspyörän kääntönopeus ylittää 75 astetta sekunnissa (eli hetki, jolloin ohjauspyörän kääntönopeus ylittää 75 astetta sekunnissa, määrittää ”nolla-alueen” lopun).
9.11.6 Ohjausliikkeen alkamiskohta (Beginning of Steer, BOS) on ensimmäinen ajankohta, jossa suodatettu ja nollaan keskitetty ohjauspyörän kulmatieto saavuttaa arvon – 5 astetta (kun ensimmäinen ohjausliike suoritetaan vastapäivään) tai arvon + 5 astetta (kun ensimmäinen ohjausliike suoritetaan myötäpäivään) ”nolla-alueen” lopun määrittävän ajankohdan jälkeen. Ohjausliikkeen alkamiskohdan aika-arvo määritetään interpoloimalla.
9.11.7 Ohjausliikkeen lopetuskohta (COS, Completion of Steer) on aika, jolloin ohjauspyörän kulma palaa nollaan ”sinikäyrä tasavaiheella” -ohjausliikkeen jälkeen. Aika-arvo ohjauspyörän kulman saavuttaessa nollan määritetään interpoloimalla.
9.11.8 Toinen kiertymisnopeuden huippuarvo on ensimmäinen paikallinen kiertymisnopeuden huippuarvo, joka saavutetaan sen jälkeen, kun ohjauspyörää aletaan kääntää vastakkaiseen suuntaan. Kiertymisnopeudet 1,0 ja 1,75 sekuntia ohjausliikkeen lopetuskohdan jälkeen määritetään interpoloimalla.
9.11.9 Määritetään sivuttaisnopeus integroimalla korjattu, suodatettu ja nollaan keskitetty sivuttaiskiihtyvyystieto. Asetetaan sivuttaisnopeus ohjausliikkeen alkamishetkellä (BOS) nollaksi. Määritetään sivuttaissiirtymä integroimalla nollaan keskitetty sivuttaisnopeus. Asetetaan sivuttaissiirtymä ohjausliikkeen alkamishetkellä nollaksi. Sivuttaissiirtymä mitataan 1,07 sekuntia ohjausliikkeen alkamishetken jälkeen ja määritetään interpoloimalla.
10. AJONEUVOTYYPIN TAI ELEKTRONISEN AJONVAKAUTUSJÄRJESTELMÄN MUUTTAMINEN JA HYVÄKSYNNÄN LAAJENTAMINEN
10.1 Hyväksyttyyn ajoneuvotyyppiin tehtävistä muutoksista on ilmoitettava tyyppihyväksyntäviranomaiselle, joka on hyväksynyt kyseisen ajoneuvotyypin.
Viranomainen voi tämän jälkeen
|
a) |
valmistajaa kuultuaan päättää, että on myönnettävä uusi tyyppihyväksyntä, tai |
|
b) |
soveltaa kohdassa 10.1.1 (Tarkistus) esitettyä menettelyä ja tapauksen mukaan kohdassa 10.1.2 (Laajennus) esitettyä menettelyä. |
10.1.1 Tarkistus
Jos ilmoituslomakkeisiin kirjatut tiedot ovat muuttuneet ja tyyppihyväksyntäviranomainen katsoo, ettei tehdyillä muutoksilla todennäköisesti ole merkittävää kielteistä vaikutusta ja että hallintapolkimet joka tapauksessa edelleen täyttävät vaatimukset, muutosta pidetään ”tarkistuksena”.
Tällaisessa tapauksessa tyyppihyväksyntäviranomaisen on tarvittaessa annettava uudelleen ilmoituslomakkeiden tarkistetut sivut ja osoitettava selvästi jokaisella tarkistetulla sivulla muutoksen luonne ja sivun uudelleenantamisen päivämäärä. Ilmoituslomakkeiden konsolidoidun, päivitetyn toisinnon, johon on liitetty yksityiskohtainen kuvaus muutoksista, katsotaan myös täyttävän tämän vaatimuksen.
10.1.2 Laajennus
Muutosta pidetään ”laajennuksena”, jos ilmoituslomakkeiden tietojen muutoksen lisäksi
|
a) |
tarvitaan uusia tarkastuksia tai testejä tai |
|
b) |
jokin ilmoituksen tieto (lukuun ottamatta sen liitteitä) on muuttunut tai |
|
c) |
pyydetään hyväksyntää myöhemmän muutossarjan mukaisesti sen voimaantulon jälkeen. |
10.2 Hyväksynnän vahvistaminen tai epääminen, jossa eritellään muutokset, annetaan kohdassa 4.3 täsmennetyllä menettelyllä tiedoksi tätä sääntöä soveltaville sopimuspuolille. Myös ilmoituslomakkeiden ja testausselosteiden hakemistoa, joka on liitetty ilmoitukseen, on vastaavasti muutettava niin, että siitä käy ilmi viimeisimmän tarkistuksen tai laajennuksen päivämäärä.
10.3 Hyväksynnän laajennuksen myöntävän toimivaltaisen viranomaisen on annettava sarjanumero kaikille kyseistä laajennusta koskeville ilmoituslomakkeille.
11. TUOTANNON VAATIMUSTENMUKAISUUS
Tuotannon vaatimustenmukaisuuden testausmenettelyjen on oltava sopimuksen lisäyksen 2 (E/ECE/324-E/ECE/TRANS/505/Rev.2) mukaisia ja täytettävä seuraavat vaatimukset:
|
11.1 |
Tämän säännön mukaisesti hyväksyttävä ajoneuvo on valmistettava siten, että se vastaa hyväksyttyä tyyppiä ja täyttää kohtien 5, 6 ja 7 vaatimukset. |
|
11.2 |
Tyyppihyväksynnän myöntänyt tyyppihyväksyntäviranomainen voi koska tahansa tarkastaa kussakin yksittäisessä tuotantolaitoksessa käytettävät vaatimustenmukaisuuden valvontamenettelyt. Tällaisia tarkastuksia tehdään tavallisesti kerran kahdessa vuodessa. |
12. SEURAAMUKSET VAATIMUSTENMUKAISUUDESTA POIKKEAVASTA TUOTANNOSTA
12.1 Tämän säännön mukaisesti ajoneuvotyypille myönnetty hyväksyntä voidaan peruuttaa, jos kohdassa 8.1 vahvistettuja vaatimuksia ei noudateta.
12.2 Jos tätä sääntöä soveltava sopimuspuoli peruuttaa aiemmin myöntämänsä hyväksynnän, sen on viipymättä ilmoitettava asiasta muille tätä sääntöä soveltaville sopimuspuolille tämän säännön liitteessä 1 esitetyn mallin mukaisella ilmoituslomakkeella.
13. TUOTANNON LOPETTAMINEN
Jos hyväksynnän haltija lopettaa kokonaan tämän säännön perusteella hyväksytyn ajoneuvotyypin valmistamisen, hyväksynnän haltijan on ilmoitettava asiasta hyväksynnän myöntäneelle viranomaiselle. Ilmoituksen saatuaan viranomaisen on ilmoitettava asiasta muille tätä sääntöä soveltaville sopimuspuolille tämän säännön liitteessä 5 esitetyn mallin mukaisella ilmoituslomakkeella.
14. HYVÄKSYNTÄTESTEISTÄ VASTAAVIEN TEKNISTEN TUTKIMUSLAITOSTEN SEKÄ TYYPPIHYVÄKSYNTÄVIRANOMAISTEN NIMET JA OSOITTEET
Tätä sääntöä soveltavien sopimuspuolten on ilmoitettava Yhdistyneiden kansakuntien sihteeristölle hyväksyntätestien suorittamisesta vastaavien tutkimuslaitosten sekä niiden tyyppihyväksyntäviranomaisten nimet ja osoitteet, jotka myöntävät hyväksynnät ja joille lomakkeet todistukseksi muissa maissa myönnetystä hyväksynnästä taikka hyväksynnän laajentamisesta, epäämisestä tai peruuttamisesta on toimitettava.
(1) Ajoneuvoluokat M1 ja N1 on määritelty ajoneuvojen rakennetta koskevassa konsolidoidussa päätöslauselmassa (R.E.3), asiakirja (ECE/TRANS/WP.29/78/Rev.4, kohta 2) – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(2) Akseliryhmää pidetään yhtenä akselina ja paripyöriä yhtenä pyöränä.
(3) Vuoden 1958 sopimuksen sopimuspuolten tunnusnumerot esitetään ajoneuvojen rakennetta koskevan konsolidoidun päätöslauselman (R.E.3) liitteessä 3, asiakirja ECE/TRANS/WP.29/78/Rev. 4, Annex 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(4) Akseliryhmää pidetään yhtenä akselina ja paripyöriä yhtenä pyöränä.
(5) Tässä säännössä oletetaan, että ajoneuvoa ohjataan ohjauspyörällä. Myös muunlaisia ohjausmenetelmiä käyttävät ajoneuvot voidaan hyväksyä tämän säännön perusteella, mikäli valmistaja kykenee osoittamaan tutkimuslaitokselle, että tämän säännön suoritusvaatimukset voidaan täyttää käyttäen tämän säännön kohdassa 7 määrättyjä ohjaussyötteitä vastaavia ohjaussyötteitä.
(6) ”Nimellisarvona” pidetään teoreettista tavoitearvoa.