ISSN 1977-0650
Euroopa Liidu
Teataja
L 269

Eestikeelne väljaanne
Õigusaktid
61. aastakäik
26. oktoober 2018
|
ISSN 1977-0650 |
||
|
Euroopa Liidu Teataja |
L 269 |
|
|
|
||
|
Eestikeelne väljaanne |
Õigusaktid |
61. aastakäik |
|
Sisukord |
|
II Muud kui seadusandlikud aktid |
Lehekülg |
|
|
|
RAHVUSVAHELISTE LEPINGUTEGA LOODUD ORGANITE VASTU VÕETUD AKTID |
|
|
|
* |
||
|
|
* |
||
|
|
* |
|
ET |
Aktid, mille peakiri on trükitud harilikus trükikirjas, käsitlevad põllumajandusküsimuste igapäevast korraldust ning nende kehtivusaeg on üldjuhul piiratud. Kõigi ülejäänud aktide pealkirjad on trükitud poolpaksus kirjas ja nende ette on märgitud tärn. |
II Muud kui seadusandlikud aktid
RAHVUSVAHELISTE LEPINGUTEGA LOODUD ORGANITE VASTU VÕETUD AKTID
|
26.10.2018 |
ET |
Euroopa Liidu Teataja |
L 269/1 |
Rahvusvahelise avaliku õiguse alusel on õiguslik toime ainult ÜRO Euroopa Majanduskomisjoni originaaltekstidel. Käesoleva eeskirja staatust ja jõustumise kuupäeva tuleb kontrollida ÜRO Euroopa Majanduskomisjoni eeskirjade staatust käsitleva dokumendi TRANS/WP.29/343 viimasest versioonist, mis on kättesaadav Internetis aadressil
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Ühinenud Rahvaste Organisatsiooni Euroopa Majanduskomisjoni (UNECE) eeskiri nr 139: ühtsed sätted, milles käsitletakse sõiduautode tüübikinnitust seoses piduriassistendiga (BAS) [2018/1591]
Sisaldab kogu kehtivat teksti kuni:
Eeskirja algversiooni 1. täiendus – jõustumiskuupäev: 29. detsember 2018
SISUKORD
EESKIRI
|
1. |
Kohaldamisala |
|
2. |
Mõisted |
|
3. |
Tüübikinnituse taotlemine |
|
4. |
Tüübikinnitus |
|
5. |
Üldnõuded |
|
6. |
Talitlusnõuded |
|
7. |
Üldised katsenõuded |
|
8. |
A-kategooria piduriassistendi olemasolu hindamine |
|
9. |
B-kategooria piduriassistendi olemasolu hindamine |
|
10. |
Sõidukitüübi või piduriassistendi muutmine ja tüübikinnituse laiendamine |
|
11. |
Tootmise nõuetele vastavus |
|
12. |
Karistused tootmise nõuetele mittevastavuse korral |
|
13. |
Tootmise lõpetamine |
|
14. |
Tüübikinnituskatsete eest vastutavate tehniliste teenistuste ja tüübikinnitusasutuste nimed ja aadressid |
LISAD
|
1. |
Teatis |
|
2. |
Tüübikinnitusmärkide kujundus |
|
3. |
FABS ja aABS kindlaksmääramise meetod |
|
4. |
Andmete töötlemine piduriassistendi jaoks |
1. KOHALDAMISALA
1.1. Käesolevat eeskirja kohaldatakse M1- ja N1-kategooria (1) sõidukite tüübikinnituse suhtes seoses piduriassistendiga.
1.2. Käesolev eeskiri ei hõlma:
|
1.2.1. |
sõidukeid, mille tootjakiirus on kuni 25 km/h; |
|
1.2.2. |
invaliididest sõidukijuhtidele kohandatud sõidukeid. |
2. MÕISTED
Käesolevas eeskirjas kasutatakse järgmisi mõisteid.
2.1. „Sõiduki tüübikinnitus“– sõiduki tüübikinnitus seoses piduriassistendiga.
2.2. „Sõidukitüüp“– sõidukikategooria, millesse kuuluvad sõidukid ei erine järgmiste oluliste tunnuste poolest:
|
2.2.1. |
tootja kaubanimi või kaubamärk; |
|
2.2.2. |
sõiduki omadused, mis oluliselt mõjutavad piduriassistendi toimimist (nt pidurisüsteemi konstruktsioon); |
|
2.2.3. |
piduriassistendi konstruktsioon. |
2.3. „Täismass“– sõiduki tootja määratud maksimaalne tehniliselt lubatav mass (võib olla riikliku ametiasutuse määratud registrimassist suurem).
2.4. „Massi jaotumine telgede vahel“– sõiduki ja/või selle sisu massile mõjuva raskusjõu jaotumine telgede vahel.
2.5. „Ratta-/teljekoormus“– vertikaalne staatiline reaktsioon (jõud) teekattele telje ratta/rataste kokkupuute pinnal.
2.6. „Piduriassistent (BAS)“– pidurisüsteemi funktsioon, mis tulenevalt juhi pidurdamise näitajatest teeb kindlaks hädapidurduse ja sellises olukorras:
|
a) |
abistab juhti maksimaalse pidurduse saavutamisel või |
|
b) |
on piisav rataste blokeerumist vältiva süsteemi täistsükli rakendamiseks. |
2.6.1. „A-kategooria piduriassistent“– süsteem, mis teeb hädapidurduse kindlaks peamiselt (2) selle järgi, millise jõuga juht vajutab piduripedaalile;
2.6.2. „B-kategooria piduriassistent“– süsteem, mis teeb hädapidurduse kindlaks peamiselt (2) selle järgi, millise kiirusega juht vajutab piduripedaalile.
3. TÜÜBIKINNITUSE TAOTLEMINE
3.1. Sõiduki tüübikinnituse taotluse seoses piduriassistendiga esitab sõiduki tootja või tema nõuetekohaselt volitatud esindaja.
3.2. Taotlusele lisatakse allpool nimetatud dokumendid kolmes eksemplaris ning järgmised üksikasjad:
|
3.2.1. |
sõidukitüübi kirjeldus koos punktis 2.2 nimetatud andmetega; esitatakse mootori- ja sõidukitüübi identimiseks vajalikud numbrid ja/või tähised; |
|
3.2.2. |
piduriassistendi süsteemi kuuluvate ja nõuetekohaselt identifitseeritud osade loetelu; |
|
3.2.3. |
kokkupandud piduriassistendi joonis, millel on näidatud süsteemi osade asukoht sõidukil; |
|
3.2.4. |
iga osa detailne joonis, et seda oleks lihtne paigaldada ja identifitseerida. |
3.3. Tüübikinnituskatsete eest vastutavale tehnilisele teenistusele esitatakse kinnitatavat tüüpi sõiduk.
4. TÜÜBIKINNITUS
4.1. Kui käesoleva eeskirja kohaselt tüübikinnituse saamiseks esitatud sõidukitüüp vastab punktide 5 ja 6 nõuetele, antakse sellele sõidukitüübile tüübikinnitus.
4.2. Igale tüübikinnituse saanud tüübile antakse tüübikinnitusnumber; selle kaks esimest numbrit näitavad tüübikinnituse andmise ajaks käesolevasse eeskirja viimati tehtud peamiste tehniliste muudatuste seeriat. Sama kokkuleppeosaline ei või seoses piduriassistendiga anda sama numbrit teisele sõidukitüübile.
4.3. Teatis sõidukile käesoleva eeskirja kohase tüübikinnituse andmise või andmata jätmise kohta esitatakse käesolevat eeskirja kohaldavatele kokkuleppeosalistele käesoleva eeskirja 1. lisas esitatud näidisele vastaval vormil koos kokkuvõttega punktides 3.2.1–3.2.4 osutatud dokumentides sisalduvast teabest, kusjuures tüübikinnituse taotleja esitatavate jooniste suurim formaat on A4 (210 × 297 mm) või need on kokku voldituna sellises formaadis ning asjakohases mõõtkavas.
4.4. Igale käesoleva eeskirja kohaselt tüübikinnituse saanud tüübile vastavale sõidukile tuleb kinnitada tüübikinnituse vormil kindlaksmääratud hästi märgatavasse ja kergesti juurdepääsetavasse kohta rahvusvaheline tüübikinnitusmärk, millel on:
|
4.4.1. |
ringjoonega ümbritsetud E-täht, millele järgneb tüübikinnituse andnud riigi eraldusnumber, (3) ja |
|
4.4.2. |
käesoleva eeskirja number, millele järgneb R-täht, mõttekriips ja punktis 4.4.1 ettenähtud ringist paremale jääv tüübikinnitusnumber. |
4.5. Kui sõiduk vastab käesoleva eeskirja kohaselt tüübikinnituse andnud riigis ühe või mitme teise kokkuleppele lisatud eeskirja kohaselt tüübikinnituse saanud sõidukitüübile, ei pea punktiga 4.4.1 ette nähtud sümbolit kordama; sellisel juhul märgitakse punktis 4.4.1 kirjeldatud sümbolist paremale tulpadesse nende eeskirjade numbrid, mille kohaselt on käesoleva eeskirja alusel tüübikinnituse andnud riigis tüübikinnitus antud, ning vastavad tüübikinnitusnumbrid ja täiendavad sümbolid.
4.6. Tüübikinnitusmärk peab olema selgesti loetav ja kustumatu.
4.7. Tüübikinnitusmärk tuleb kinnitada sõiduki andmesildi lähedale või selle peale.
4.8. Näited tüübikinnitusmärgi kujunduse kohta on esitatud käesoleva eeskirja 2. lisas.
5. ÜLDNÕUDED
5.1. Sõidukid peavad olema varustatud piduriassistendiga, mis vastab käesoleva eeskirja punktis 6 esitatud talitlusnõuetele. Vastavust nendele nõuetele tuleb tõendada käesoleva eeskirja punkti 8 või 9 sätete järgimisega käesoleva eeskirja punktis 7 esitatud katsetingimuste juures. Peale käesolevas eeskirjas sätestatud nõuete täitmise peavad piduriassistendiga sõidukid olema varustatud ka eeskirja nr 13-H tehniliste nõuete kohase rataste blokeerumist vältiva süsteemiga.
5.2. Piduriassistent peab olema projekteeritud, ehitatud ja paigaldatud nii, et sõiduk vastaks tavapärasel kasutamisel käesoleva eeskirja nõuetele, olenemata võimalikust vibratsioonist.
5.3. Piduriassistent peab eelkõige olema projekteeritud, ehitatud ja paigaldatud nii, et see oleks korrosiooni- ja vananemiskindel.
5.4. Magnet- või elektriväljad ei tohi piduriassistendi töö tulemuslikkust häirida. Seda tõendatakse eeskirja nr 10 tehniliste nõuete täitmise ja üleminekusätete järgimisega, kohaldades:
|
a) |
03-seeria muudatusi sõidukite suhtes, millel puudub ühendussüsteem laetava energiasalvestussüsteemi (veoakude) laadimiseks; |
|
b) |
04-seeria muudatusi sõidukite suhtes, millel on olemas ühendussüsteem laetava energiasalvestussüsteemi (veoakude) laadimiseks. |
5.5. Piduriassistendi ohutusaspektide hindamine moodustab osa pidurisüsteemi üldisest ohutushindamisest vastavalt eeskirja nr 13-H nõuetele, mis käsitlevad kompleksseid elektroonilisi juhtsüsteeme. Hindamisnõue loetakse täidetuks eeskirja nr 13-H kohase tunnistuse esitamisel, kui tunnistus käsitleb muu hulgas tüübikinnituse saamiseks esitatud piduriassistenti.
5.6. Piduriassistentide korralise tehnoülevaatuse suhtes kohaldatavad sätted
5.6.1. Korralisel tehnoülevaatusel peab olema võimalik kinnitada nõuetekohast käitusolekut hoiatussignaalide vaatluse teel pärast sisselülitamist.
5.6.2. Tüübikinnituse andmise ajal tuleb konfidentsiaalselt kirjeldada meetmeid, mis on võetud hoiatussignaalide toimimisse lihtsate lubamatute muudatuste tegemise vastu. Alternatiivina on see nõue täidetud, kui nõuetekohase käitusoleku kontrollimiseks on saadaval teisesed kontrollivahendid.
6. TALITLUSNÕUDED
6.1. A-kategooria piduriassistentide üldised toimivusomadused
Kui suhteliselt tugeva pedaalile mõjuva jõu tõttu on tuvastatud hädaolukord, läheb tänu piduriassistendile rataste blokeerumist vältiva süsteemi täistsükli saavutamiseks vaja vähem pedaalile mõjuvat jõudu, kui läheks tarvis ilma piduriassistendi töötamiseta.
Sellele nõudele vastavust näitab käesoleva eeskirja punktide 8.1–8.3 sätete järgimine.
6.2. B-kategooria piduriassistentide üldised toimivusomadused
Kui hädaolukord on tuvastatud, vähemasti väga kiire pedaalile vajutamise tõttu, suurendab piduriassistent survet, mis toob kaasa maksimaalse võimaliku pidurduse või rataste blokeerumist vältiva süsteemi täistsükli.
See nõue loetakse täidetuks, kui on täidetud käesoleva eeskirja punktid 9.1–9.3.
7. ÜLDISED KATSENÕUDED
7.1. Muutujad
Käesolevas eeskirjas ette nähtud katsete käigus mõõdetakse järgmisi muutujaid:
|
7.1.1. |
piduripedaalile mõjuv jõud Fp; |
|
7.1.2. |
sõiduki kiirus vx; |
|
7.1.3. |
sõiduki aeglustus ax; |
|
7.1.4. |
piduri temperatuur Td; |
|
7.1.5. |
pidurirõhk P (vajaduse korral); |
|
7.1.6. |
piduripedaali kiirus vp, mida mõõdetakse piduripedaalipinna keskel või pedaalimehhanismi selles kohas, kus nihe on proportsionaalne nihkega piduripedaalipinna keskkohas, võimaldades mõõtmist lihtsalt kalibreerida. |
7.2. Mõõteseadmed
7.2.1. Punktis 7.1 loetletud muutujaid mõõdetakse sobivate andurite abil. Täpsuse, mõõtepiirkonna, filtreerimismeetodite, andmetöötluse ja muude aspektidega seotud nõudeid on kirjeldatud standardis ISO 15037-1: 2006.
7.2.2. Pedaalile mõjuva jõu ja ketta temperatuuri mõõtmiste täpsus on järgmine:
|
Muutuja |
Andurite tüüpilised mõõtepiirkonnad |
Soovitatav maksimaalne registreerimisviga |
|
Pedaalile mõjuv jõud |
0–2 000 N |
± 10 N |
|
Piduri temperatuur |
0–1 000 °C |
± 5 °C |
|
Pidurirõhk (*1) |
0–20 MPa (*1) |
± 100 kPa (*1) |
7.2.3. Lisateave piduriassistendi katsemenetluse käigus saadud andmete analoog- või digitaaltöötlemise kohta on esitatud käesoleva eeskirja 4. lisas. Andmete kogumiseks vajalik diskreetimissagedus on vähemalt 500 Hz.
7.2.4. Lisaks punktis 7.2.3 osutatud meetoditele on lubatud kasutada ka muid mõõtmismeetodeid, tingimusel et need annavad vähemalt samaväärse täpsusega tulemusi.
7.3. Katsetingimused
7.3.1. Katsesõiduki koormus: sõiduk peab olema koormamata. Peale juhi võib esiistmel olla veel üks isik, kes vastutab katsetulemuste ülesmärkimise eest.
7.3.2. Pidurduskatsed tehakse tasasel pinnal, mis võimaldab head haarduvust.
7.4. Katsemeetod
7.4.1. Käesoleva jaotise punktides 8 ja 9 kirjeldatud katsed tehakse katsekiirusel 100 ± 2 km/h. Sõidukiga sõidetakse katsekiirusel otsesuunas.
7.4.2. Sõidupidurite keskmine temperatuur sõiduki kõige kuumemal teljel mõõdetuna piduri hõõrdkatete siseküljel või piduriketta või -trumli pidurdustee pinnal peab enne igasugust piduri rakendamist olema 65–100 °C.
7.4.3. Katsete puhul määratletakse võrdlusaeg t0 kui hetk, mil piduripedaalile mõjuv jõud saavutab 20 N taseme.
Märkus: sõidukite puhul, mis on varustatud energiaallika abil töötava pidurisüsteemiga, sõltub vajalik rakendatav pedaalijõud energia tasemest energiasalvestusseadmes. Seetõttu tagatakse katse alguses piisav energiatase.
8. A-KATEGOORIA PIDURIASSISTENDI OLEMASOLU HINDAMINE
A-kategooria piduriassistent peab vastama punktides 8.1 ja 8.2 esitatud katsenõuetele.
8.1. Katse 1: võrdluskatse FABS ja aABS kindlaksmääramiseks
8.1.1. Kontrollväärtused FABS ja aABS määratakse kindlaks käesoleva eeskirja 3. lisas kirjeldatud korra kohaselt.
8.2. Katse 2: piduriassistendi aktiveerimine
8.2.1. Kui on tuvastatud hädapidurdus, suureneb pedaalile mõjuva jõu suhtes tundlikes süsteemides märkimisväärselt suhe:
|
a) |
piduritorustiku rõhu ja piduripedaalile mõjuva jõu vahel, kui see on lubatud punktiga 8.2.5, või |
|
b) |
sõiduki aeglustuse ja piduripedaalile mõjuva jõu vahel. |
8.2.2. A-kategooria piduriassistendi toimivusnõuded on täidetud, kui pidurdusomaduste mõõtmisel ilmneb, et pedaalile mõjuv nõutav jõud (FABS – FT) on võrreldes näitajaga (FABS extrapolated – FT) vähenenud 40–80 %.
8.2.3. Väärtused FT ja aT on vastavalt lävijõud ja läviaeglustus, nagu näidatud joonisel 1. FT ja aT väärtused edastatakse tehnilisele teenistusele tüübikinnitustaotluse esitamise ajal. aT väärtus peab olema 3,5–5,0 m/s2.
Joonis 1a
Pedaalile mõjuva jõu näitaja, mis on vajalik selleks, et saavutada A-kategooria piduriassistendiga maksimaalne aeglustus

Aeglustus, a
FABS, extrapolated
FABS, max
FABS
FABS, min
Piduripedaalile rakendatav jõud, F
FT
aT
aABS
3,5 kuni 5,0 m/s2
8.2.4. Algpunktist tõmmatakse sirgjoon läbi punkti aT ja punkti FT ristumiskoha (nagu näidatud joonisel 1a). Piduripedaalile mõjuva jõu F väärtus kõnealuse sirgjoone ja horisontaalse joone a = aABS ristumispunktis on määratletud kui FABS, extrapolated:

8.2.5. Teise võimalusena, mille kasuks võib tootja otsustada kogumassiga üle 2 500 kg N1-kategooria sõidukite või nendel N1-kategooria sõidukitel põhinevate M1-kategooria sõidukite puhul, võib pedaalile mõjuva jõu näitajad FT, FABS,min, FABS,max ja FABS,extrapolated tuletada piduritorustiku rõhumuutuste alusel, mitte sõiduki aeglustuse alusel. Seda mõõdetakse pidurile mõjuva jõu kasvades.
8.2.5.1. Rõhk, mille juures rataste blokeerumist vältiv süsteem käivitub, määratakse kindlaks viie katse tegemisega kiirusel 100 ± 2 km/h, mille ajal piduripedaali vajutatakse kuni rataste blokeerumist vältiva süsteemi käivitumiseni, ning need viis rõhku, mille juures esiratta rõhumeerik näitab selle süsteemi käivitumist, registreeritakse ja leitakse keskväärtus PABS.
8.2.5.2. Lävirõhu PT määrab kindlaks tootja ja see peab vastama aeglustusele vahemikus 2,5–4,5 m/s2.
8.2.5.3. Joonis 1b koostatakse punktis 8.2.4 ette nähtud viisil, kuid piduritorustiku rõhu mõõtmistulemusi kasutatakse selleks, et määrata kindlaks käesoleva osa punktis 8.2.5 sätestatud parameetrid, kus:

Joonis 1b
Pedaalile mõjuva jõu näitaja, mis on vajalik selleks, et saavutada A-kategooria piduriassistendiga maksimaalne aeglustus

Piduritorustiku rõhk, P
FABS, extrapolated
FABS, max
FABS
FABS, min
Piduripedaalile rakendatav jõud, F
FT
PT
PABS
Jõu muutuse lävi
8.3. Andmete hindamine
A-kategooria piduriassistendi olemasolu on tõendatud, kui:
FABS,min ≤ FABS ≤ FABS,max
kus:
FABS,max – FT ≤ (FABS,extrapolated – FT) · 0,6
ning
FABS,min – FT ≥ (FABS,extrapolated – FT) · 0,2
9. B-KATEGOORIA PIDURIASSISTENDI OLEMASOLU HINDAMINE
B-kategooria piduriassistent peab vastama käesoleva jao punktides 9.1 ja 9.2 esitatud katsenõuetele.
9.1. Katse 1: võrdluskatse FABS ja aABS kindlaksmääramiseks
9.1.1. Kontrollväärtused FABS ja aABS määratakse kindlaks käesoleva eeskirja 3. lisas kirjeldatud korra kohaselt.
9.2. Katse 2: piduriassistendi aktiveerimine
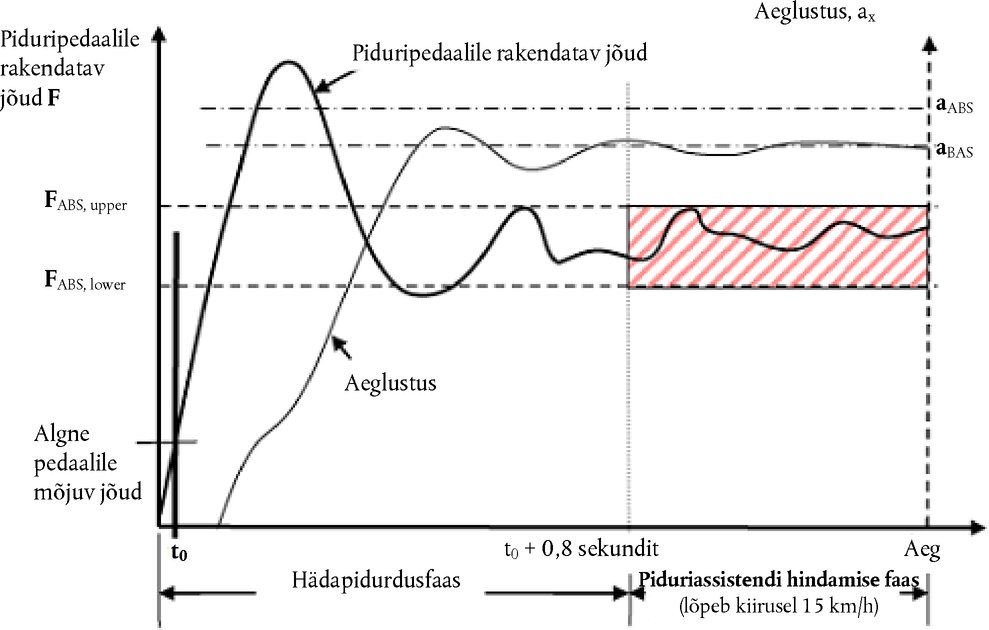
Sõidukiga sõidetakse sirgjooneliselt käesoleva eeskirja punktis 7.4 ette nähtud katsekiirusel. Juht vajutab kiiresti piduripedaalile, nagu on näidatud joonisel 2, simuleerides hädapidurdust, selleks et aktiveerida piduriassistent ja tagada rataste blokeerumist vältiva süsteemi täistsükkel.
Piduriassistendi aktiveerimiseks vajutatakse piduripedaali nii, nagu sõiduki tootja on ette näinud. Tootja teatab tehnilisele teenistusele vajalikust piduripedaalile mõjuvast sisendjõust tüübikinnituse taotluse esitamise ajal. Tehnilisele teenistusele tuleb nõuetekohaselt tõendada, et piduriassistent aktiveerub tootja täpsustatud tingimustel kooskõlas 1. lisa punktidega 16.1.1 või 16.1.2.
Kui t = t0 + 0,8 s ja seni, kuni sõiduk on aeglustanud kiiruseni 15 km/h, peab piduripedaalile mõjuv jõud püsima FABS, upper ja FABS, lower väärtuste vahel, kui FABS, upper on 0,7 FABS ja FABS, lower on 0,5 FABS.
Nõuded loetakse samuti täidetuks juhul, kui pärast t = t0 + 0,8 s jääb piduripedaalile mõjuv jõud alla taseme FABS, lower, tingimusel et punktis 9.3 esitatud nõue on täidetud.
9.3. Andmete hindamine
B-kategooria piduriassistendi olemasolu on tõendatud, kui ajast t = t0 + 0,8 s kuni ajani, mil sõiduki kiirus on vähenenud kiiruseni 15 km/h, säilitatakse keskmine aeglustus (aBAS) vähemalt 0,85 · aABS.
Joonis 2
B-kategooria piduriassistendi 2. katse näide
Algne pedaalile mõjuv jõud
Piduripedaalile rakendatav jõud F
FABS, lower
FABS, upper
t0
Hädapidurdusfaas
Piduriassistendi hindamise faas (lõpeb kiirusel 15 km/h)
t0 + 0,8 sekundit
Aeg
Aeglustus
aBAS
aABS
Aeglustus, ax
Piduripedaalile rakendatav jõud
10. SÕIDUKITÜÜBI VÕI PIDURIASSISTENDI MUUTMINE JA TÜÜBIKINNITUSE LAIENDAMINE
10.1. Olemasoleva sõidukitüübi mis tahes muutmisest antakse teada tüübikinnitusasutusele, kes andis sõidukitüübile tüübikinnituse.
Sellisel juhul tüübikinnitusasutus:
|
a) |
otsustab pärast tootjaga konsulteerimist, et tuleb anda uus tüübikinnitus, või |
|
b) |
rakendab punktis 10.1.1 „Läbivaatus“ esitatud menetlust või vajaduse korral punktis 10.1.2 „Laiendus“ esitatud menetlust. |
10.1.1. Läbivaatus
Juhul kui teabedokumentides sisalduvaid andmeid on muudetud ning tüübikinnitusasutus leiab, et tõenäoliselt ei avalda tehtud muudatused märgatavat ebasoovitavat mõju ning et pedaalid vastavad igal juhul endiselt nõuetele, nimetatakse muudatust „läbivaatuseks“.
Sel juhul väljastab tüübikinnitusasutus vajaduse korral teabedokumentide parandatud leheküljed, märkides igale parandatud leheküljele selgelt muudatuse laadi ja uuesti väljastamise kuupäeva. See nõue loetakse täidetuks teabedokumentide konsolideeritud ja ajakohastatud versiooniga, millele on lisatud muudatuse üksikasjalik kirjeldus.
10.1.2. Laiendus
Muudatust nimetatakse „laienduseks“, kui lisaks teabedokumentides sisalduvate andmete muutmisele:
|
a) |
nõutakse täiendavaid inspekteerimisi või katseid või |
|
b) |
teatises (v.a selle lisades) sisalduv teave on muutunud või |
|
c) |
pärast hilisema muudatuste seeria jõustumist nõutakse niisuguse hilisema seeria kohast tüübikinnitust. |
10.2. Teatis tüübikinnituse andmise või andmata jätmise kohta koos muudatuse kirjeldusega edastatakse käesolevat eeskirja kohaldavatele kokkuleppeosalistele punktis 4.3 sätestatud korras. Lisaks sellele muudetakse 1. lisa teatisele lisatud teabedokumentide ja katsearuannete sisukorda, nii et oleks näha kõige viimase läbivaatuse või laienduse kuupäev.
10.3. Tüübikinnituse laienduse andnud pädev asutus määrab igale laienduse kohta koostatud teatisevormile seerianumbri.
11. TOOTMISE NÕUETELE VASTAVUS
Tootmise nõuetele vastavuse kontrollimenetlused peavad olema kooskõlas kokkuleppe 2. liite (E/ECE/324-E/ECE/TRANS/505/Rev.2) sätetega, vastates järgmistele nõuetele:
11.1. Käesoleva eeskirja alusel tüübikinnituse saanud sõiduk peab olema toodetud nii, et see vastab tüübikinnituse saanud tüübile, täites punktides 5 ja 6 sätestatud nõuded.
11.2. Tüübikinnituse andnud asutus võib igal ajal kontrollida tootmisrajatistes rakendatavaid vastavuskontrolli meetodeid. Nende kontrollide tavaline sagedus on kord iga kahe aasta järel.
12. KARISTUSED TOOTMISE NÕUETELE MITTEVASTAVUSE KORRAL
12.1. Sõidukitüübile käesoleva eeskirja kohaselt antud tüübikinnituse võib tühistada, kui punktis 11.1 sätestatud nõuded ei ole täidetud.
12.2. Kui käesolevat eeskirja kohaldav kokkuleppeosaline tühistab tema poolt varem antud tüübikinnituse, teatab ta sellest kohe teistele käesolevat eeskirja kohaldavatele kokkuleppeosalistele, kasutades käesoleva eeskirja 1. lisas esitatud näidisele vastavat teatise vormi.
13. TOOTMISE LÕPETAMINE
Kui tüübikinnituse omanik lõpetab täielikult käesoleva eeskirja kohaselt tüübikinnituse saanud sõiduki tootmise, teavitab ta sellest tüübikinnituse andnud asutust. Asjaomase teatise saamisel teatab kõnealune asutus sellest teistele käesolevat eeskirja kohaldavatele kokkuleppeosalistele teatisega, mille vorm vastab käesoleva eeskirja 1. lisas esitatud näidisele.
14. TÜÜBIKINNITUSKATSETE EEST VASTUTAVATE TEHNILISTE TEENISTUSTE NING TÜÜBIKINNITUSASUTUSTE NIMED JA AADRESSID
Käesolevat eeskirja kohaldavad kokkuleppeosalised edastavad Ühinenud Rahvaste Organisatsiooni sekretariaadile tüübikinnituskatsete eest vastutavate tehniliste teenistuste nimed ja aadressid ning nende tüübikinnitusasutuste nimed ja aadressid, kes annavad tüübikinnitusi ja kellele tuleb saata vormikohased teatised teistes riikides välja antud tüübikinnituste, nende laiendamise, nende andmata jätmise või tühistamise kohta.
(1) M1- ja N1-kategooria sõidukid on määratletud sõidukite ehitust käsitlevas konsolideeritud resolutsioonis (R.E.3) (dokument ECE/TRANS/WP.29/78/Rev.4, jaotis 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Vastavalt sõidukitootja deklaratsioonile.
(3) 1958. aasta kokkuleppe osalisriikide tunnusnumbrid on esitatud sõidukite ehitust käsitleva konsolideeritud resolutsiooni (R.E.3) 3. lisas (ECE/TRANS/WP.29/78/Rev. 4, 3. lisa) – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(*1) Kohaldatakse vastavalt punktile 8.2.5.
2. LISA
TÜÜBIKINNITUSMÄRKIDE KUJUNDUS
NÄIDIS A
(Vt käesoleva eeskirja punkt 4.4)

Kui sõidukile on kinnitatud eespool kujutatud tüübikinnitusmärk, näitab see, et asjaomasele sõidukitüübile on seoses piduriassistendiga antud tüübikinnitus Belgias (E 6) eeskirja nr 139 kohaselt. Tüübikinnitusnumbri kaks esimest kohta näitavad, et tüübikinnitus on antud vastavalt eeskirja nr 139 algversiooni nõuetele.
NÄIDIS B
(Vt käesoleva eeskirja punkt 4.5)

Kui sõidukile on kinnitatud eespool kujutatud tüübikinnitusmärk, näitab see, et asjaomasele sõidukitüübile on antud tüübikinnitus Belgias (E 6) eeskirjade nr 139 ja 24 kohaselt (1). (Viimase eeskirja puhul on korrigeeritud neeldumistegur 1,30 m– 1). Tüübikinnitusnumbrid näitavad, et asjaomaste tüübikinnituste andmise kuupäevadel oli eeskiri nr 139 oma algsel kujul ja eeskiri nr 24 hõlmas 02-seeria muudatusi.
(1) Number on esitatud näitena.
3. LISA
FABS JA aABS KINDLAKSMÄÄRAMISE MEETOD
1.1. Piduripedaalile mõjuv jõud FABS on minimaalne jõud, mida tuleb vastava sõiduki puhul pidurile rakendada, et saavutada maksimaalne aeglustamine, mis osutab sellele, et rataste blokeerumist vältiv süsteem töötab täistsüklis. aABS on vastava sõiduki aeglustus rataste blokeerumist vältiva süsteemiga aeglustuse ajal, nagu on määratletud punktis 1.8.
1.2. Piduripedaali vajutatakse aeglaselt (B-kategooria süsteemide puhul ilma piduriassistenti aktiveerimata) ja suurendades aegamisi aeglustust seni, kuni rataste blokeerumist vältiv süsteem töötab täistsüklis (joonis).
1.3. Täisaeglustuseni tuleb jõuda 2,0 ± 0,5 sekundi jooksul Ajas registreeritud aeglustuse kõver peab jääma ± 0,5 s vahemikku aeglustuskõvera vahemiku keskjoone ümber. Joonisel esitatud näite puhul on alguspunktiks aja t0 lõikumine joonega aABS 2 sekundi juures. Pärast täisaeglustuse saavutamist jätkatakse piduripedaalile vajutamist, nii et rataste blokeerumist vältiv süsteem töötab täistsüklis. Rataste blokeerumist vältiva süsteemi täieliku aktiveerimise aeg on määratluse kohaselt aeg, mil saavutatakse pedaalile mõjuv jõud FABS. Mõõtmine tehakse aeglustuse kasvu varieerumisvahemikus (vt joonist allpool).
Aeglustusvahemik FABS ja aABS kindlaksmääramiseks

Aeglustus a
aABS
aeg [s]
Ajavahemik
2 ± 0,5 s
1s
t0
Aeglustamiskasvu varieerumisvahemik
ABSi täistsükli vahemik
1.4. Tehakse viis punktis 1.3 sätestatud nõuetele vastavat katset. Iga sellise katse puhul esitatakse sõiduki aeglustus pedaalile mõjuva registreeritud jõu funktsioonina. Järgmistes punktides kirjeldatud arvutuste puhul võetakse arvesse üksnes andmeid, mis on registreeritud suuremal kiirusel kui 15 km/h.
1.5. FABS ja aABS kindlaksmääramiseks kasutatakse 2 Hz madalpääsfiltrit nii aeglustuse kui ka pedaalile mõjuva jõu puhul.
1.6. Viis aeglustuse ja piduripedaalile mõjuva jõu suhet väljendavat kõverat keskmistatakse, arvutades viie osutatud kõvera keskmise aeglustuse välja pedaalile mõjuvat jõudu järk-järgult 1 N võrra suurendades. Tulemuseks on keskmine aeglustuse ja piduripedaalile mõjuva jõu suhet väljendav kõver, mida käesolevas lisas nimetatakse maF-kõveraks.
1.7. Sõiduki aeglustuse maksimaalne väärtus määratakse maF-kõvera põhjal ja selle väärtuse tähis on amax.
1.8. Kõik maF-kõvera väärtused, mis on suuremad kui 90 % amax väärtusest, keskmistatakse. Saadud a väärtus on käesolevas eeskirjas nimetatud aeglustus aABS.
1.9. Minimaalne piduripedaalile mõjuv jõudu (FABS), millest piisab aeglustuse aABS saavutamiseks, on määratluse kohaselt F väärtus, mis vastab maF-kõveral väärtusele a = aABS.
4. LISA
ANDMETE TÖÖTLEMINE PIDURIASSISTENDI JAOKS
(Vt käesoleva eeskirja punkt 7.2.3)
1. ANALOOGANDMETE TÖÖTLEMINE
Terve andurite/salvestussüsteemi ribalaius kokku ei tohi olla alla 30 Hz.
Vajalikuks signaalide filtreerimiseks kasutatakse vähemalt neljanda järgu madalpääsfiltreid. Pääsuriba laius (alates 0 Hz kuni sageduseni fo – 3 dB juures) ei tohi olla väiksem kui 30 Hz. Amplituudi vead peavad vastavas sagedusvahemikus, mis jääb 0–30 Hz piiresse, olema alla ± 0,5 %. Kõiki analoogsignaale töödeldakse filtritega, millel on piisavalt sarnased faasiomadused, tagamaks, et filtreerimisel tekkivad erinevused ajanihetes jääksid aja mõõtmisel nõutava täpsuse piiresse.
Märkus: erineva sagedusega signaalide analoogfiltreerimisel võib esineda faasinihkeid. Seepärast tuleb eelistada käesoleva lisa punktis 2 kirjeldatud andmetöötlusmeetodit.
2. DIGITAALANDMETE TÖÖTLEMINE
2.1. Üldkaalutlused
Analoogsignaale ette valmistades tuleb võtta arvesse filtri amplituudi sumbumist ja diskreetimissagedust, et vältida esitusvigu ning filtreerida faasi- ja ajanihkeid. Diskreetimisel ja digiteerimisel tuleb muu hulgas arvesse võtta diskreetimisele eelnevat signaalide võimendamist digiteerimisvigade minimeerimiseks, bittide arvu diskreedi kohta, diskreetide arvu tsüklis, diskreet- ja hoidevõimendeid ja diskreetide ajalist sammu. Täiendaval faasita digitaalfiltreerimisel võetakse arvesse ribapääs- ja ribatõkkefiltreid ning sumbumist ja pulseerumist mõlema puhul; samuti filtri faasinihete korrigeerimist. Kõiki neid tegureid võetakse arvesse, selleks et saavutada üldise andmekogumise suhteline täpsus ± 0,5 %.
2.2. Diskreetimishäired
Selleks, et vältida parandamatuid diskreetimishäireid, tuleb analoogsignaalid enne diskreetimist ja digiteerimist nõuetekohaselt filtreerida. Kasutatavate filtrite järk ja nende pääsuriba laius valitakse vastavalt asjaomase sagedusvahemiku nõutavale pinnatasasusele ja diskreetimissagedusele.
Minimaalsed filtriomadused ja diskreetimissagedus peavad olema sellised, et:
|
a) |
asjakohases sagedusvahemikus 0 Hz kuni fmax = 30 Hz on sumbumine väiksem kui andmekogumissüsteemi resolutsioon ning |
|
b) |
diskreetimissageduse poole peal (st Nyquisti piirnorm või piirsagedus) vähendatakse kõikide signaalide ja müra sageduslike komponentide ulatust. |
0,05 % resolutsiooni puhul on filtri sumbumine sagedusvahemikus 0–30 Hz alla 0,05 %; sumbumine on suurem kui 99,95 % kõigi sageduste puhul, mis on suuremad kui pool diskreetimissagedusest.
Märkus: Butterworthi filtri puhul väljendab sumbuvust järgmine valem:
 ning
ning 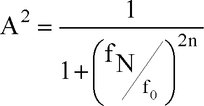
kus:
|
|
n on filtri järk; |
|
|
fmax on asjakohane sagedusvahemik (30 Hz); |
|
|
f0 on filtri piirsagedus; |
|
|
fN on Nyquisti piirnorm või piirsagedus. |
Neljanda järgu filtri puhul:
|
|
kui A = 0,9995: fo = 2,37 · fmax |
|
|
kui A = 0,0005: fS = 2 · (6,69 · fo), kus fS on diskreetimissagedus = 2 · fN. |
2.3. Filtri faasinihked ja ajanihked silumisfiltri puhul
Ülemäärast analoogfiltreerimist tuleb vältida ning kõikidel filtritel peab olema piisavalt faasikarakteristikuid, mis tagavad, et ajanihke erinevused jäävad aja mõõtmisel nõutava täpsuse piiresse. Faasinihked on eriti olulised siis, kui mõõdetud muutujad koondatakse uute muutujate loomiseks. Seda seetõttu, et amplituudide korrutamisel lisandub faasinihkeid ja nendega seotud ajanihkeid. Faasinihkeid ja ajanihkeid saab vähendada fo suurendamisega. Kui diskreetimisele eelnevaid filtreid kirjeldavad valemid on teada, on mõistlik kõrvaldada nende faasinihked ja ajanihked lihtsate algoritmide kasutamisega sageduspiirkondades.
Märkus: kui sagedusalas jäävad filtri amplituudikarakteristikud lamedaks, on võimalik Butterworthi filtri faasinihke Φ jaoks leida ligikaudne väärtus
|
|
Φ = 81 · (f/f0) kraadi teise järgu puhul; |
|
|
Φ = 150 · (f/f0) kraadi neljanda järgu puhul; |
|
|
Φ = 294 · (f/f0) kraadi kaheksanda järgu puhul. |
Ajanihe kõikide filtrijärkude puhul on: t = (Φ/360) · (1/f0)
2.4. Andmete diskreetimine ja digiteerimine
30 Hz juures muutub signaaliamplituud kuni 18 % millisekundis. Selleks et vähendada muutuvate analoogsisendite põhjustatud dünaamiliste vigade mahtu 0,1 %-ni, on diskreetimise või digitaliseerimise aeg väiksem kui 32 μs. Kõik võrreldavad andmediskreetide paarid või komplektid võetakse üheaegselt või piisavalt lühikese aja jooksul.
2.5. Süsteemile esitatavad nõuded
Andmesüsteemi resolutsioon on 12 bitti (± 0,05 %) või enam ning täpsus ± 0,1 % (2 LSB). Anti-aliasing-filtrite järk on neljas või kõrgem ning asjakohane andmetega hõlmatud vahemik fmax on 0–30 Hz.
Neljanda järgu filtrite puhul on pääsuriba sagedus f0 (alates 0 Hz kuni sageduseni f0) suurem kui 2,37 · fmax, kui faasivigu kohandatakse seejärel digitaalse andmetöötluse käigus, ja muudel juhtudel suurem kui 5 · fmax. Neljanda järgu filtrite puhul on diskreetimissagedus fs suurem kui 13,4 · f0.
|
26.10.2018 |
ET |
Euroopa Liidu Teataja |
L 269/17 |
Rahvusvahelise avaliku õiguse alusel on õiguslik toime ainult ÜRO Euroopa Majanduskomisjoni originaaltekstidel. Käesoleva eeskirja staatust ja jõustumise kuupäeva tuleb kontrollida ÜRO Euroopa Majanduskomisjoni staatusdokumendi TRANS/WP.29/343 viimasest versioonist, mis on kättesaadav internetis aadressil
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Ühinenud Rahvaste Organisatsiooni Euroopa Majanduskomisjoni (UNECE) eeskiri nr 140: ühtsed sätted, milles käsitletakse sõiduautode tüübikinnitust seoses sõidustabilisaatoritega (ESC) [2018/1592]
Sisaldab kogu kehtivat teksti kuni:
Eeskirja algversiooni 2. täiendus – jõustumiskuupäev: 29. detsember 2018
SISUKORD
EESKIRI
|
1. |
Kohaldamisala |
|
2. |
Mõisted |
|
3. |
Tüübikinnituse taotlemine |
|
4. |
Tüübikinnitus |
|
5. |
Üldnõuded |
|
6. |
Talitlusnõuded |
|
7. |
Toimivusnõuded |
|
8. |
Katsetingimused |
|
9. |
Katsemenetlus |
|
10. |
Sõidukitüübi või sõidustabilisaatori muutmine ja tüübikinnituse laiendamine |
|
11. |
Tootmise nõuetele vastavus |
|
12. |
Karistused tootmise nõuetele mittevastavuse korral |
|
13. |
Tootmise lõpetamine |
|
14. |
Tüübikinnituskatsete eest vastutavate tehniliste teenistuste ja tüübikinnitusasutuste nimed ja aadressid |
LISAD
|
1. |
Teatis |
|
2. |
Tüübikinnitusmärkide kujundus |
|
3. |
Dünaamilise stabiilsuse simulatsiooni kasutamine |
|
4. |
Dünaamilise stabiilsuse simulatsioonivahend ja selle valideerimine |
|
5. |
Sõiduki stabiilsusfunktsiooni simulatsioonivahendi katsearuanne |
1. KOHALDAMISALA
1.1. Käesolevat eeskirja kohaldatakse M1- ja N1-kategooria (1) sõidukite suhtes seoses nende sõidustabilisaatoriga.
1.2. Käesolev eeskiri ei hõlma:
|
1.2.1. |
Sõidukeid, mille tootjakiirus on kuni 25 km/h; |
|
1.2.2. |
Invaliididest sõidukijuhtidele kohandatud sõidukeid. |
2. MÕISTED
Käesolevas eeskirjas kasutatakse järgmisi mõisteid.
2.1. „Sõiduki tüübikinnitus“– sõiduki tüübikinnitus seoses sõidustabilisaatoriga.
2.2. „Sõidukitüüp“– sõidukikategooria, millesse kuuluvad sõidukid ei erine järgmiste oluliste tunnuste poolest:
|
2.2.1. |
tootja kaubanimi või kaubamärk; |
|
2.2.2. |
sõiduki omadused, mis oluliselt mõjutavad sõidustabilisaatori toimimist (nt täismass, raskuskeskme asukoht, rattavahe, teljevahe, rehvide mõõtmed ja pidurisüsteemi ehitus); |
|
2.2.3. |
sõidustabilisaatori ülesehitus. |
2.3. „Täismass“– sõiduki tootja määratud maksimaalne tehniliselt lubatav mass (võib olla riikliku ametiasutuse määratud registrimassist suurem).
2.4. „Massi jaotumine telgede vahel“– sõiduki ja/või selle sisu massile mõjuva raskusjõu jaotumine telgede vahel.
2.5. „Ratta-/teljekoormus“– vertikaalne staatiline reaktsioon (jõud) teekattele telje ratta/rataste kokkupuute pinnal.
2.6. „Ackermani pöördenurk“– nurk, mille tangens vastab teljevahe ja väga väikese kiiruse juures tekkiva pöörderaadiuse jagatisele.
2.7. „Sõidustabilisaator (ESC)“– süsteem, millel on järgmised tunnused:
|
2.7.1. |
see parandab sõiduki suunastabiilsust, vähemalt reguleerides automaatselt igal teljel asuva vasaku ja parema ratta pidurdusmomente, (2) et tekiks korrigeeriv lengerdus, tuginedes sõiduki tegeliku käitumise hindamisele võrreldes juhi soovitava sõiduki käitumisega; |
|
2.7.2. |
seda juhib arvuti, mis kasutab sõiduki ülejuhitavuse või alajuhitavuse piiramiseks tagasisidestatud süsteemi, tuginedes sõiduki tegeliku käitumise hindamisele võrreldes juhi soovitava sõiduki käitumisega; |
|
2.7.3. |
see võimaldab vahetult kindlaks määrata sõiduki lengerdusmäära ja hinnata selle külglibisemist või külglibisemise tuletist aja järgi; |
|
2.7.4. |
see võimaldab jälgida juhi manöövreid ning |
|
2.7.5. |
sellel on olemas algoritm, millega teha kindlaks jõumomendi muutmise vajadus, ja seade, mis võimaldab jõumomenti vajaduse korral muuta, et aidata juhil säilitada kontroll sõiduki üle. |
2.8. „Külgkiirendus“– sõiduki teatava punkti pikiteljega (x-teljega) risti asetseva ja teepinnaga paralleelse kiirendusvektori komponent.
2.9. „Ülejuhitavus“– olukord, mille puhul sõiduki tegelik lengerdusmäär on suurem kui Ackermani pöördenurgast tulenev lengerdusmäär sama sõidukiiruse juures.
2.10. „Külglibisemine või külglibisemisnurk“– külgkiiruse ja sõiduki raskuskeskme pikisuunalise kiiruse suhtarvu arkustangens.
2.11. „Alajuhitavus“– olukord, mille puhul sõiduki tegelik lengerdusmäär on väiksem kui Ackermani pöördenurgast tulenev lengerdusmäär sama sõidukiiruse juures.
2.12. „Lengerdusmäär“– sõiduki suunanurga muutuse määr, mida mõõdetakse kraadides sõiduki raskuskeset läbiva vertikaaltelje ümber pöörlemise sekundi kohta.
2.13. „Suurim pidurdustegur“– näitaja, mis kajastab rehvi käitumist pinnahõõrdumise suhtes veereva rehvi suurima aeglustamise põhjal.
2.14. „Ühisala“– ala, millel võib olla kuvatud enam kui üks märgulamp, näidik, tunnusmärk või mõni muu sõnum, aga mitte samaaegselt.
2.15. „Staatilise stabiilsuse tegur“– sõiduki poole rattavahe ja raskuskeskme kõrguse jagatis; seda väljendatakse ka valemiga SSF = T/2H, kus: T on rattavahe (enama kui ühe rööpmelaiusega sõidukite puhul kasutatakse nende keskmist; topeltratastega telgede puhul arvutatakse rattavahe väliste rataste järgi) ja H on sõiduki raskuskeskme kõrgus.
3. TÜÜBIKINNITUSE TAOTLEMINE
3.1. Sõiduki tüübikinnituse taotluse seoses sõidustabilisaatoriga esitab sõiduki tootja või tema nõuetekohaselt volitatud esindaja.
3.2. Taotlusele lisatakse allpool nimetatud dokumendid kolmes eksemplaris ning järgmised üksikasjad:
|
3.2.1. |
sõidukitüübi kirjeldus koos punktis 2.2 nimetatud andmetega; esitatakse mootori- ja sõidukitüübi identimiseks vajalikud numbrid ja/või tähised; |
|
3.2.2. |
sõidustabilisaatori kuuluvate ja nõuetekohaselt identifitseeritud osade loetelu; |
|
3.2.3. |
kokkupandud sõidustabilisaatori joonis, millel on näidatud süsteemi osade asukoht sõidukil; |
|
3.2.4. |
iga osa detailne joonis, et seda oleks lihtne paigaldada ja identifitseerida. |
3.3. Tüübikinnituskatsete eest vastutavale tehnilisele teenistusele esitatakse tüübikinnituse saamiseks esitatud tüübi näidissõiduk.
4. TÜÜBIKINNITUS
4.1. Kui käesoleva eeskirja kohaselt tüübikinnituse saamiseks esitatud sõiduk vastab punktide 5, 6 ja 7 nõuetele, antakse sellele sõidukitüübile tüübikinnitus.
4.2. Igale tüübikinnituse saanud tüübile antakse tüübikinnitusnumber; selle kaks esimest numbrit näitavad tüübikinnituse andmise ajaks käesolevasse eeskirja viimati tehtud peamiste tehniliste muudatuste seeriat. Sama kokkuleppeosaline ei või seoses sõidustabilisaatoriga anda sama numbrit teisele sõidukitüübile.
4.3. Teatis sõidukile käesoleva eeskirja kohase tüübikinnituse andmise või andmata jätmise kohta esitatakse käesolevat eeskirja kohaldavatele kokkuleppeosalistele käesoleva eeskirja 1. lisas esitatud näidisele vastaval vormil koos kokkuvõttega punktides 3.2.1–3.2.4 osutatud dokumentides sisalduvast teabest, kusjuures tüübikinnituse taotleja esitatavate jooniste suurim formaat on A4 (210 × 297 mm) või need on kokku voldituna sellises formaadis ning asjakohases mõõtkavas.
4.4. Igale käesoleva eeskirja kohaselt tüübikinnituse saanud tüübile vastavale sõidukile tuleb kinnitada tüübikinnituse vormil kindlaksmääratud hästi märgatavasse ja kergesti juurdepääsetavasse kohta rahvusvaheline tüübikinnitusmärk, millel on:
|
4.4.1. |
ringjoonega ümbritsetud E-täht, millele järgneb tüübikinnituse andnud riigi eraldusnumber, (3) ja |
|
4.4.2. |
käesoleva eeskirja number, millele järgneb R-täht, mõttekriips ja punktis 4.4.1 ettenähtud ringist paremale jääv tüübikinnitusnumber. |
4.5. Kui sõiduk vastab sõidukitüübile, mis on käesolevale eeskirjale vastava tüübikinnituse andnud riigis saanud tüübikinnituse ühe või mitme asjaomasele kokkuleppele lisatud muu eeskirja alusel, ei ole punktis 4.4.1 sätestatud tähist vaja korrata; sellisel juhul paigutatakse eeskirja ja tüübikinnituse numbrid ning täiendavad sümbolid kõigi eeskirjade kohta, mille alusel on antud tüübikinnitus riigis, mis on andnud tüübikinnituse käesoleva eeskirja alusel, tulpadena punktis 4.4.1 ettenähtud sümbolist paremale.
4.6. Tüübikinnitusmärk peab olema selgesti loetav ja kustumatu.
4.7. Tüübikinnitusmärk tuleb kinnitada sõiduki andmesildi lähedale või selle peale.
4.8. Tüübikinnitusmärkide kujunduse näidised on esitatud käesoleva eeskirja 1. lisas.
5. ÜLDNÕUDED
5.1. Sõidukid peavad olema varustatud sõidustabilisaatoriga, mis vastab käesoleva eeskirja punktis 6 esitatud talitlusnõuetele ning punktis 7 esitatud toimivusnõuetele punktis 9 kirjeldatud katsemenetluste ja punktis 8 esitatud katsetingimuste kohaselt.
5.1.1. Alternatiivina punktis 5.1 sätestatud nõudele võib M1- ja N1-kategooria sõidukeil, mille mass on töökorras olekus üle 1 735 kg, olla sõiduki stabiilsusfunktsioon, mis hõlmab ümberminekukontrolli ja suunakontrolli ning vastab eeskirja nr 13 21. lisas sätestatud tehnilistele nõuetele ja üleminekusätetele. Sellised sõidukid ei pea vastama käesoleva eeskirja punktis 6 esitatud talitlusnõuetele ning punktis 7 esitatud toimivusnõuetele punktis 9 kirjeldatud katsemenetluste ja punktis 8 esitatud katsetingimuste kohaselt.
5.2. Sõidustabilisaator peab olema projekteeritud, ehitatud ja paigaldatud nii, et sõiduk vastaks tavapärasel kasutamisel käesoleva eeskirja nõuetele, olenemata võimalikust vibratsioonist.
5.3. Sõidustabilisaator peab eelkõige olema projekteeritud, ehitatud ja paigaldatud nii, et see oleks korrosiooni- ja vananemiskindel.
5.4. Magnet- või elektriväljad ei tohi sõidustabilisaatori töö tõhusust häirida. Seda tõendatakse eeskirja nr 10 tehniliste nõuete täitmise ja üleminekusätete järgimisega, kohaldades:
|
a) |
03-seeria muudatusi sõidukite suhtes, millel puudub ühendussüsteem laetava energiasalvestussüsteemi (veoakude) laadimiseks; |
|
b) |
04-seeria muudatusi sõidukite suhtes, millel on olemas ühendussüsteem laetava energiasalvestussüsteemi (veoakude) laadimiseks. |
5.5. Sõidustabilisaatori otsesest mõjust pidurisüsteemile tulenevate ohutusaspektide hindamine moodustab osa sõidustabilisaatori üldisest ohutushindamisest vastavalt eeskirja nr 13-H nõuetele, mis käsitlevad kompleksseid elektroonilisi juhtsüsteeme. Hindamisnõue loetakse täidetuks eeskirja nr 13-H kohase tunnistuse esitamisel, kui tunnistus käsitleb muu hulgas tüübikinnituse saamiseks esitatud sõidustabilisaatorit.
5.6. Sõidustabilisaatorite korralise tehnoülevaatuse suhtes kohaldatavad sätted
5.6.1. Korralisel tehnoülevaatusel peab olema võimalik kinnitada nõuetekohast käitusolekut hoiatussignaalide vaatluse teel pärast sisselülitamist.
5.6.2. Tüübikinnituse andmise ajal tuleb konfidentsiaalselt kirjeldada meetmeid, mis on võetud hoiatussignaalide toimimisse lihtsate lubamatute muudatuste tegemise vastu. Alternatiivina on see nõue täidetud, kui nõuetekohase käitusoleku kontrollimiseks on saadaval teisesed kontrollivahendid.
6. TALITLUSNÕUDED
Iga sõiduk, mis on esitatud tüübikinnituse saamiseks käesoleva eeskirja kohaselt, peab olema varustatud sõidustabilisaatoriga, mis:
6.1. suudab rakendada pidurdusmomenti kõigil neljal rattal eraldi (4) ja millel on kõnealust võimet rakendav juhtimisalgoritm;
6.2. töötab sõiduki kõigi kiiruste juures kõigi sõidufaaside, sealhulgas kiirenduse, vabakäigu ja aeglustuse (sh pidurduse) ajal, välja arvatud järgmistel juhtudel:
|
6.2.1. |
kui juht on sõidustabilisaatori välja lülitanud; |
|
6.2.2. |
kui sõiduki kiirus on väiksem kui 20 km/h; |
|
6.2.3. |
pärast esialgset käivituskontrolli süsteemis ja usaldusväärsuse kontrolli, mis ei tohi kesta üle kahe minuti, kui sõidukiga sõidetakse punktis 9.10.2 osutatud tingimustes; |
|
6.2.4. |
sõiduki tagurdamisel; |
6.3. on suuteline käivituma isegi juhul, kui samal ajal on töös mitteblokeeruv pidurisüsteem või veojõu kontrollsüsteem.
7. TOIMIVUSNÕUDED
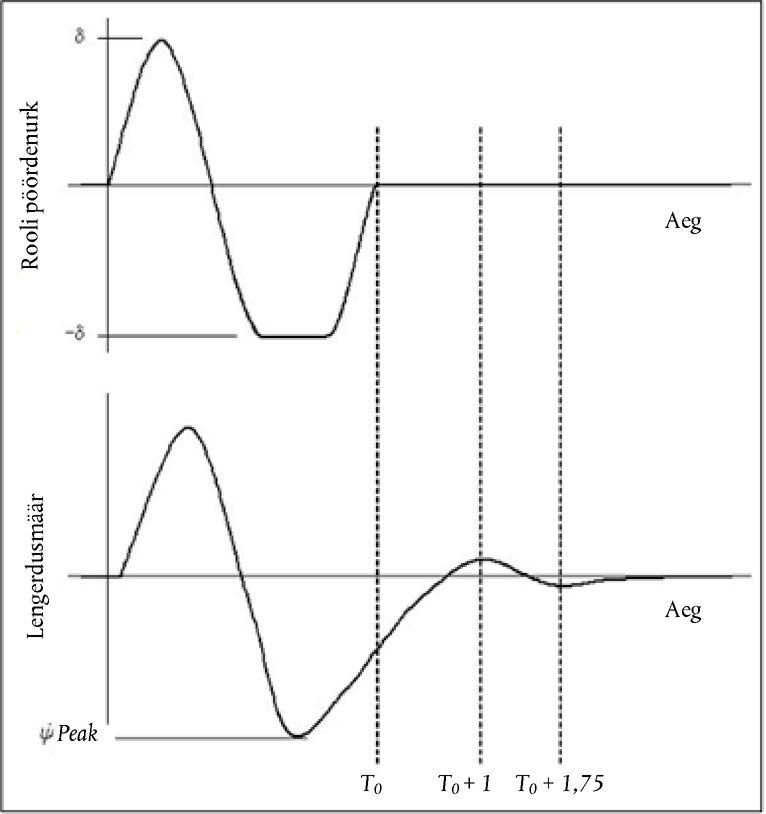
Punktis 8 kirjeldatud katsetingimustel ja punktis 9.9 sätestatud korra kohaselt tehtavate katsete ajal vastab sõidustabilisaatoriga sõiduk punktides 7.1 ja 7.2 esitatud nõuetele seoses suunastabiilsusega ning punktis 7.3 sätestatud reageerivuskriteeriumile iga katse korral, mille ajal on rooli (5) pöördenurk vähemalt 5A, kuid piiratud vastavalt punktile 9.9.4, kus A on punkti 9.6.1 kohaselt arvutatud rooli pöördenurk.
Kui sõidukiga on tehtud füüsilised katsed kooskõlas punktiga 8, võib asjaomase sõidukitüübi variantide vastavust nõuetele tõendada arvutisimulatsiooni abil, mis vastab punktis 8 sätestatud katsetingimustele ja punktis 9.9 esitatud katsemenetlusele. Simulaatori kasutamise kord on sätestatud käesoleva eeskirja 4. lisas.
7.1. Üks sekund pärast rooliseadme viivitusega sinusoidaalse manöövri lõpetamist (aeg T0 + 1 joonisel 1) mõõdetud lengerdusmäär ei tohi olla suurem kui 35 % lengerdusmäära esimesest maksimumväärtusest, mis on registreeritud sama katse ajal pärast rooli pöördenurga märgi muutumist (esimese ja teise maksimumväärtuse vahel; ( joonisel 1).
joonisel 1).
Joonis 1
Rooli asend ja lengerduskiiruse andmed, mida kasutatakse külgsuunalise stabiilsuse hindamiseks
 Tekst pildi
Tekst pildi
7.2. 1,75 sekundit pärast rooliseadme viivitusega sinusoidaalse manöövri lõpetamist mõõdetud lengerdusmäär ei tohi olla suurem kui 20 % lengerdusmäära esimesest maksimumväärtusest, mis on registreeritud sama katse ajal pärast rooli pöördenurga märgi muutumist (esimese ja teise maksimumväärtuse vahel).
7.3. Sõiduki raskuskeskme külgnihe selle algse otsesuunas liikumistee suhtes peab sõidukite puhul, mille täismass on 3 500 kg või vähem, olema vähemalt 1,83 m, ja sõidukite puhul, mille täismass on suurem kui 3 500 kg, vähemalt 1,52 m, arvutatuna 1,07 sekundit pärast roolimise algust. Roolimise algus on määratletud punktis 9.11.6.
7.3.1. Külgnihke arvutamisel kasutatakse kahekordset integraali külgkiirenduse mõõtmise aja suhtes sõiduki raskuskeskmes, nagu on väljendatud järgmises valemis:

Tüübikinnituskatsete puhul võib lubada kasutada alternatiivset mõõtemeetodit, tingimusel et see tagab vähemalt samaväärse täpsusastme nagu kahekordse integraali meetod.
7.3.2. Integraalitehtes on aeg t = 0 roolikeeramise alustamise hetk ehk roolimise algus. Roolimise algus on määratletud punktis 9.11.6.
7.4. Sõidustabilisaatori rikke tuvastamine
Sõiduk peab olema varustatud märgulambiga, mille abil antakse juhile teada igasugusest rikkest, mis mõjutab juhtimis- või reageerimissignaalide tekkimist või edasiandmist sõiduki sõidustabilisaatoris.
7.4.1. Sõidustabilisaatori rikke märgulamp:
|
7.4.1.1. |
peab vastama eeskirja nr 121 asjakohastele tehnilistele nõuetele; |
|
7.4.1.2. |
peab süttima rikke esinemisel ja põlema punktis 7.4 osutatud tingimustel kogu rikke püsimise aja ja kuni süütelüliti on sisselülitatud asendis, välja arvatud punktis 7.4.1.3 kirjeldatud juhul; |
|
7.4.1.3. |
peab süttima iga kord lambi toimimise kontrollimiseks kas siis, kui süütelüliti on sisselülitatud asendis, aga mootor ei tööta, või kui süütelüliti on sisselülitatud asendi ja käivitusasendi vahepealses asendis, mille tootja on määranud kontrollasendiks, välja arvatud punktis 7.4.2 kirjeldatud juhul; |
|
7.4.1.4. |
peab kustuma järgmise süütetsükli ajal pärast seda, kui rike on kooskõlas punktiga 9.10.4 kõrvaldatud; |
|
7.4.1.5. |
võib olla kasutatav ka seotud süsteemide/funktsioonide, sealhulgas veojõu kontrollsüsteemi, haagise stabiilsusfunktsiooni, kurvis pidurdamise kontrollfunktsiooni ja muude selliste funktsioonide riketest teadaandmiseks, milles kasutatakse koostalitluseks sõidustabilisaatoriga ja ühiste komponentide jagamiseks drosselit ja/või üksikute rataste pidurdusmomentide reguleerimist. |
7.4.2. Sõidustabilisaatori märgulamp ei pea süttima, kui käiviti on blokeeritud.
7.4.3. Punkti 7.4.1.3 nõuet ei kohaldata ühisalal kuvatavate märgulampide suhtes.
7.4.4. Tootja võib ette näha, et sõidustabilisaatori rikke märgulambi vilkumine tähistab sõidustabilisaatori ja/või sellega seotud süsteemide (mis on loetletud punktis 7.4.1.5) käivitumist, nimelt sõidustabilisaatori rakendumist ühe või mitme ratta pöördenurga suhtes sõiduki stabiilsuse tagamiseks.
7.5. Sõidustabilisaatori väljalülitatud oleku juhtseadis ja muud juhtseadised
Tootja võib paigaldada sõidustabilisaatori väljalülitatud oleku juhtseadise, mille puhul märgulamp süttib sõiduki esilaternate süttimisel ning mis on ette nähtud sõidustabilisaatori lülitamiseks režiimi, milles see ei täida enam punktides 7, 7.1, 7.2 ja 7.3 sätestatudtoimivusnõudeid. Samuti võib tootja paigaldada juhtseadised muude süsteemide jaoks, mis oma muude funktsioonide hulgas mõjutavad sõidustabilisaatori talitlust. Mõlemat liiki juhtseadised, mis lülitavad sõidustabilisaatori režiimi, milles see ei pruugi enam täita punktides 7, 7.1, 7.2 ja 7.3 sätestatud toimivusnõudeid, on lubatud tingimusel, et süsteem vastab ka punktides 7.5.1, 7.5.2 ja 7.5.3 esitatud nõuetele.
7.5.1. Sõiduki sõidustabilisaator lülitub iga uue süütetsükli alguses alati tagasi tootja valitud algsele vaikerežiimile, mis vastab punktide 6 ja 7 nõuetele, olenemata sellest, millise režiimi on juht eelnevalt valinud. Sõiduki sõidustabilisaator ei pea siiski iga uue süütetsükli alguses punktide 7–7.3 nõuetele vastavale režiimile tagasi lülituma järgmistel juhtudel:
|
7.5.1.1. |
sõidukil kasutatakse neljarattavedu, mille mõjul lukustub ülekanne samaaegselt esi- ja tagateljel ning peaülekanne vähendab mootori pöörlemissagedust võrreldes sõiduki kiirusega vähemalt 1,6 korda ning mille juht valib aeglasel kiirusel maastikusõiduks; või |
|
7.5.1.2. |
sõidukil kasutatakse juhi valikul neljarattavedu, mis on ette nähtud sõitmiseks suurtel kiirustel lumistel, liivastel või pinnasteedel ning mille mõjul lukustub ülekanne samaaegselt esi- ja tagateljel, tingimusel et selles režiimis vastab sõiduki stabiilsus punktides 7.1 ja 7.2 esitatud toimivusnõuetele punktis 8 sätestatud katsetingimustel. Kui aga süsteemil on rohkem kui üks sõidustabilisaatori režiim, mis eelmise süütetsükli jaoks valitud ülekandekonfiguratsioonil vastab punktides 7.1 ja 7.2 esitatud nõuetele, lülitub sõidustabilisaator selle konfiguratsiooni puhul iga uue süütetsükli alguses siiski tagasi tootja algsesse vaikerežiimi. |
7.5.2. Juhtseadis, mille ainus otstarve on lülitada sõidustabilisaator režiimi, milles see ei vasta enam punktides 7, 7.1, 7.2 ja 7.3 esitatud toimivusnõuetele, peab vastama eeskirja nr 121 asjakohastele tehnilistele nõuetele.
7.5.3. Sõidustabilisaatori juhtseadis, mille otstarve on lülitada sõidustabilisaator eri režiimidesse, millest vähemalt ühe puhul ei vasta süsteem enam punktides 7, 7.1, 7.2 ja 7.3 esitatud toimivusnõuetele, peab vastama eeskirja nr 121 asjakohastele tehnilistele nõuetele.
Teise võimalusena, juhul kui sõidustabilisaatori režiimi reguleeritakse mitmeotstarbelise juhtseadise abil, tuleb režiimi juhtseadise asend kuvada näidikupaneelil juhi jaoks selgel ja arusaadaval viisil, kasutades sõidustabilisaatori väljalülitatud oleku tähist vastavalt eeskirjale nr 121.
7.5.4. Mõne muu süsteemi juhtseadist, mis oma muude funktsioonide hulgas lülitab sõidustabilisaatori sellisesse režiimi, milles see ei vasta punktides 7, 7.1, 7.2 ja 7.3 esitatud toimivusnõuetele, ei ole vaja punktis 7.5.2 osutatud sõidustabilisaatori väljalülitatud oleku tähisega märgistada.
7.6. Sõidustabilisaatori väljalülitatud oleku märgulamp
Kui tootja valikul paigaldatakse juhtseadis, millega lülitatakse punkti 7.5 kohaselt sõidustabilisaator välja või vähendatakse selle toimivust, peavad olema täidetud punktides 7.6.1–7.6.4 esitatud märgulampi käsitlevad nõuded, et pöörata juhi tähelepanu sõidustabilisaatori takistatud või vähendatud toimimisele. Seda nõuet ei kohaldata punktis 7.5.1.2 osutatud juhul, kui juht on valinud vastava režiimi.
7.6.1. Sõiduki tootja paigaldab märgulambi, millega antakse märku sellest, et sõidustabilisaator on sellises režiimis, mis ei võimalda sõidukil vastata punktides 7, 7.1, 7.2 ja 7.3 esitatud nõuetele, kui selline režiim on ette nähtud.
7.6.2. Sõidustabilisaatori väljalülitatud oleku märgulamp:
|
7.6.2.1. |
vastab eeskirja nr 121 asjakohastele tehnilistele nõuetele; |
|
7.6.2.2. |
põleb nii kaua, kuni sõidustabilisaator püsib režiimis, milles see ei vasta punktides 7, 7.1, 7.2 ja 7.3 esitatud nõuetele; |
|
7.6.2.3. |
süttib iga kord lambi toimimise kontrollimiseks kas siis, kui süütelüliti on sisselülitatud asendis, aga mootor ei tööta, või kui süütelüliti on sisselülitatud asendi ja käivitusasendi vahepealses asendis, mille tootja on määranud kontrollasendiks, välja arvatud punktides 7.6.3 ja 7.6.4 esitatud juhtudel; |
|
7.6.2.4. |
kustub, kui sõidustabilisaator lülitatakse tagasi tootja määratud algsele vaikerežiimile. |
7.6.3. Sõidustabilisaatori väljalülitatud oleku märgulamp ei pea süttima, kui käiviti on blokeeritud.
7.6.4. Käesoleva jaotise punktis 7.6.2.3 esitatud nõuet ei kohaldata ühisalal kuvatavate märgulampide suhtes.
7.6.5. Tootja võib kasutada sõidustabilisaatori väljalülitatud oleku märgulampi, et märkida sõidustabilisaatori funktsiooni, mis erineb tootja algsest vaikerežiimist, isegi kui sõiduk vastaks asjaomase sõidustabilisaatori funktsiooni juures käesoleva jaotise punktidele 7, 7.1, 7.2 ja 7.3.
7.7. Sõidustabilisaatori tehniline dokumentatsioon
Dokumentatsioon peab sisaldama sõiduki tootja esitatavaid dokumente vastavalt punktidele 7.7.1–7.7.4, mille abil kinnitatakse, et sõiduk on varustatud sõidustabilisaatoriga, mis vastab käesoleva eeskirja punktis 2.7 esitatud sõidustabilisaatori mõistele.
7.7.1. Sõidustabilisaatori riistvara kirjeldav süsteemiskeem. Skeemil näidatakse kõigi rataste pidurdusmomendi tekitamiseks kasutatavad osad, samuti sõiduki lengerdusmäär, hinnanguline külglibisemine või külglibisemise tuletis ning juhi manöövrid.
7.7.2. Sõidustabilisaatori peamiste tööomaduste lühikirjeldus. Selles dokumendis kirjeldatakse üldjoontes süsteemi võimet pidurdada iga ratast eraldi ning viisi, kuidas süsteem muudab sisselülitatud olekus jõumomente, samuti tõendatakse, et sõiduki lengerdusmäära on võimalik otseselt kindlaks määrata ka siis, kui teave ratta kiiruse kohta ei ole kättesaadav. Samuti loetletakse kirjelduses sõiduki kiiruse piirmäärad ja sõidufaasid (kiirendus, aeglustus, vabajooks, sõidufaas mitteblokeeruva pidurisüsteemi või veojõu kontrollsüsteemi rakendamise ajal), mille puhul saab sõidustabilisaatori käivitada.
7.7.3. Loogikaskeem. Sellega toetatakse punkti 7.7.2 kohaselt esitatud kirjeldust.
7.7.4. Teave alajuhitavuse kohta. Üldine kirjeldus arvutile edastatavate sõidustabilisaatori riistvara juhtivate asjakohaste signaalide kohta ning nende rakendamise kohta sõiduki alajuhitavuse vähendamisel.
8. KATSETINGIMUSED
8.1. Keskkonnatingimused
8.1.1. Keskkonnatemperatuur on 0–45 °C.
8.1.2. Maksimaalne tuulekiirus võib sõidukite puhul, mille staatilise stabiilsuse tegur on suurem kui 1,25, olla 10 m/s ning sõidukite puhul, mille staatilise stabiilsuse tegur on 1,25 või vähem, 5 m/s.
8.2. Katseraja pind
8.2.1. Katsed tehakse kuival, ühtlasel ja kõvapinnalisel teel. Katseteks ei sobi ebatasasustega ja lainetava kattega, näiteks lohkude ja suurte pragudega teepinnad.
8.2.2. Kui ei ole sätestatud teisiti, on katses kasutatava teepinna suurima pidurdusteguri nimiväärtus (6) 0,9, mida mõõdetakse kas:
|
8.2.2.1. |
USA Materjalide Katsetamise Ühingu (American Society for Testing and Materials, ASTM) standardi E1136 kohase võrdlusrehviga ASTMi meetodi E1337-90 kohaselt kiirusel 40 miili tunnis või |
|
8.2.2.2. |
eeskirja nr 13-H 6. lisa 2. liites kirjeldatud haardeteguri (k) katsemeetodi kohaselt. |
8.2.3. Katsepinna kalle jääb tasapinna ja 1 % vahele.
8.3. Sõiduki seisukord
8.3.1. Sõidustabilisaator peab olema kõigi katsete ajal sisse lülitatud.
8.3.2. Sõiduki mass. Sõiduk on koormatud, kusjuures kütusepaak on vähemalt 90 % ulatuses täidetud ning sisekoormuse kogumass on 168 kg, mis sisaldab katsesõidu juhi massi, katseseadmete (automaatrooliseade, andmekogumissüsteem ja roolimisseadme toiteallikas) massi ulatuses ligikaudu 59 kg ning lisaraskuse massi, mis on vajalik juhul, kui katsesõidu juhtide ja katseseadmete mass ei ole piisavalt suur. Kui lisaraskus on nõutav, asetatakse see kaassõitja istme taha põrandale või vajaduse korral kaassõitja istme jalaruumi. Lisaraskus kinnitatakse nii, et see ei liiguks katsete ajal paigast.
8.3.3. Rehvid. Rehvid pumbatakse sõidukitootja soovitatud külma rõhuni, mis on täpsustatud näiteks sõiduki andmekleebisel või rehvirõhu sildil. Rehvirandi lahtitulemise vältimiseks võib paigaldada lohvid.
8.3.4. Tugiseadmed. Tugiseadmeid võib katsetel kasutada, kui see on juhi ohutuse huvides vajalik. Sel juhul kohaldatakse sõidukitele, mille staatilise stabiilsuse tegur on 1,25 või väiksem, järgmisi sätteid:
|
8.3.4.1. |
sõidukid, mille mass on sõidukorras alla 1 588 kg, varustatakse kergete tugiseadmetega. Kergete tugiseadmete projektijärgne maksimaalne mass on 27 kg ja pöörlemise maksimaalne inertsmoment 27 kg · m2; |
|
8.3.4.2. |
sõidukid, mille mass on sõidukorras 1 588–2 722 kg, varustatakse standardsete tugiseadmetega. Standardsete tugiseadmete projektijärgne maksimaalne mass on 32 kg ja pöörlemise maksimaalne inertsmoment 35,9 kg · m2; |
|
8.3.4.3. |
sõidukid, mille mass on sõidukorras 2 722 kg või rohkem, varustatakse raskete tugiseadmetega. Raskete tugiseadmete projektijärgne maksimaalne mass on 39 kg ja pöörlemise maksimaalne inertsmoment 40,7 kg · m2. |
8.3.5. Automaatrooliseade. Punktides 9.5.2, 9.5.3, 9.6 ja 9.9 kirjeldatud toiminguteks kasutatakse automaatrooli, mis on programmeeritud nõutavale roolimismudelile. Automaatrooliseade suudab tekitada roolimismomenti vahemikus 40–60 Nm. Automaatrooliseade suudab kõnealuseid momente rakendada rooliratta nurkkiirusel kuni 1 200 °/s.
9. KATSEMENETLUSED
9.1. Sõiduki rehvid pumbatakse sõidukitootja soovitatud külma rõhuni, mis on täpsustatud näiteks sõiduki andmekleebisel või rehvirõhu sildil.
9.2. Märgulambi kontroll. Kui sõiduk seisab paigal ja süütelüliti on lukustatud või väljalülitatud asendis, keeratakse süütelüliti sisselülitatud asendisse või vajaduse korral asjaomasesse lambikontrolli võimaldavasse asendisse. Sõidustabilisaatori märgulamp peab süttima lambi toimimise kontrollimiseks, nagu on täpsustatud punktis 7.4.1.3, ja kui sõiduk on varustatud sõidustabilisaatori väljalülitatud oleku märgulambiga, peab süttima ka see lambi toimimise kontrollimiseks, nagu on täpsustatud punktis 7.6.2.3. Märgulambi kontroll ei ole nõutav ühisalal kuvatava märgulambi korral, nagu on täpsustatud punktides 7.4.3 ja 7.6.4.
9.3. Sõidustabilisaatori väljalülitatud oleku juhtseadise kontroll. Sõidustabilisaatori väljalülitatud oleku juhtseadisega varustatud sõidukite puhul, kui sõiduk seisab paigal ja süütelüliti on lukustatud või väljalülitatud asendis, pööratakse süütelüliti sisselülitatud asendisse. Sõidustabilisaatori väljalülitatud oleku juhtseadis käivitatakse ning seejärel kontrollitakse, et sõidustabilisaatori väljalülitatud oleku märgulamp on süttinud, nagu on täpsustatud punktis 7.6.2. Süütelüliti pööratakse lukustatud või väljalülitatud asendisse. Süütelüliti pööratakse uuesti sisselülitatud asendisse ning seejärel kontrollitakse, et sõidustabilisaatori väljalülitatud oleku märgulamp on kustunud, mis näitab, et sõidustabilisaator on lähtestatud, nagu on sätestatud punktis 7.5.1.
9.4. Pidurite konditsioneerimine
Sõiduki pidurid konditsioneeritakse punktides 9.4.1–9.4.4 kirjeldatud viisil.
9.4.1. Kiiruselt 56 km/h tehakse kümme peatumist, mille puhul keskmine aeglustus on ligikaudu 0,5 g.
9.4.2. Vahetult pärast kümmet peatumist kiiruselt 56 km/h tehakse kolm lisapeatumist kiiruselt 72 km/h suurema aeglustuse juures.
9.4.3. Punktis 9.4.2 kirjeldatud peatumisi tehes rakendatakse piduripedaalile piisavalt jõudu, et sõiduki mitteblokeeruv pidurisüsteem käivituks enamiku pidurduste korral.
9.4.4. Pärast punktis 9.4.2 kirjeldatud viimase peatumise lõppu sõidetakse sõidukiga viis minutit kiirusel 72 km/h, et pidureid jahutada.
9.5. Rehvide konditsioneerimine
Rehvid konditsioneeritakse punktides 9.5.1–9.5.3 kirjeldatud menetluse kohaselt, et kulutada maha valuvormi jäänused ja saavutada töötemperatuur vahetult enne punktides 9.6 ja 9.9 kirjeldatud katsesõitude alustamist.
9.5.1. Katsesõidukiga sõidetakse mööda 30 m läbimõõduga ringjoont kolm ringi päripäeva ja kolm ringi vastupäeva kiirusega, mille juures tekib külgkiirendus ligikaudu 0,5–0,6 g.
9.5.2. Kasutades rooliseadme sinusoidaalse manöövri mudelit sagedusel 1 Hz, rooli pöördenurga maksimaalset amplituudi, mis vastab maksimaalsele külgkiirendusele 0,5–0,6 g, tehakse sõidukiga kiirusel 56 km/h neli sõitu, millest igaühe ajal tehakse kümme rooliseadme sinusoidaalse manöövri tsüklit.
9.5.3. Rooli pöördenurga amplituud viimase sõidu lõpptsükli ajal peab olema kaks korda suurem kui teiste tsüklite ajal. Ringide ja sõitude vahele võib jääda kõige rohkem viis minutit.
9.6. Aeglaselt suureneva nurkkiirusega roolimise katse menetlus
Sõidukiga tehakse kaks aeglaselt suureneva nurkkiirusega roolimise katse seeriat sõiduki püsikiirusel 80 ± 2 km/h ja kasutades roolimismudelit, mille puhul nurkkiirust suurendatakse 13,5 °/s, kuni saavutatakse külgkiirendus ligikaudu 0,5 g. Iga katseseeriat korratakse kolm korda. Ühe katseseeria puhul sõidetakse vastupäeva ja teise puhul päripäeva. Katsesõitude vahele võib jääda kõige rohkem viis minutit.
9.6.1. Aeglaselt suureneva nurkkiirusega roolimise katsete põhjal määratakse kindlaks väärtus A. A on rooli pöördenurk kraadides, millega tekitatakse katsesõidukil püsiseisundis külgkiirendus 0,3 g (korrigeeritud punktis 9.11.3 täpsustatud meetodite abil). A arvutatakse lineaarse regressiooni meetodit kasutades 0,1-kraadise täpsusega kuue aeglaselt suureneva nurkkiirusega roolimise katse tulemuste põhjal. Lõppväärtuse A saamiseks arvutatakse kuue A väärtuse absoluutväärtuse keskmine, mis ümardatakse lähima kümnendkohani.
9.7. Pärast A kindlaksmääramist ja ilma rehve vahetamata konditsioneeritakse rehvid punktis 9.5 kirjeldatud menetluse kohaselt uuesti vahetult enne punktis 9.9 kirjeldatud viivitusega sinusoidaalse manöövri katse tegemist. Esimest viivitusega sinusoidaalse manöövri katsete seeriat alustatakse kahe tunni jooksul pärast punktis 9.6 kirjeldatud aeglaselt suureneva nurkkiirusega roolimise katse lõppu.
9.8. Kontrollitakse sõidustabilisaatori toimimist, veendudes, et sõidustabilisaatori rikke märgulamp ja sõidustabilisaatori väljalülitatud oleku märgulamp (kui need on paigaldatud) ei põle.
9.9. Ülejuhitavuse korral sekkumise ja reageerimise viivitusega sinusoidaalse manöövri katse
Sõidukiga tehakse kaks katseseeriat, kasutades roolimismudelit siinuslaine sagedusel 0,7 Hz 500 ms viivitusega, mis algab teisel maksimumamplituudil, nagu on näidatud joonisel 2 (viivitusega sinusoidaalse manöövri katsed). Ühe katseseeria ajal kasutatakse esimeses tsüklipooles vastupäeva roolimist ja teise seeria ajal kasutatakse esimeses tsüklipooles päripäeva roolimist. Sõidukil lastakse iga katsesõidu järel paigal seistes 1,5–5 minutit jahtuda.
Joonis 2
Viivitusega sinusoidaalne manööver
 Tekst pildi
Tekst pildi
9.9.1. Roolimist alustatakse, kui sõiduk liigub (gaasipedaal vabastatud) kõrgel käigul kiirusel 80 ± 2 km/h.
9.9.2. Iga seeria esimesel sõidukorral on roolimisamplituud 1,5 A, kus A on punkti 9.6.1 kohaselt kindlaks määratud rooli pöördenurk.
9.9.3. Igas katsesõitude seerias suurendatakse roolimisamplituudi iga sõiduga 0,5 A, tingimusel et ühegi sellise katsesõidu tulemusel tekkiv roolimisamplituud ei ole suurem kui punktis 9.9.4 osutatud viimase katsesõidu roolimisamplituud.
9.9.4. Iga seeria viimasel sõidukorral on roolimisamplituud suurem kui 6,5 A või 270 kraadi, tingimusel et arvutatud väärtus 6,5 A on 300 kraadi või väiksem. Kui väärtuse 0,5 A astmeline kasv (kuni 6,5 A) ületab 300 kraadi, peab viimase katsesõidu roolimisamplituud olema 300 kraadi.
9.9.5. Kahe katsesõiduseeria lõpetamisel tehakse lengerdusmäära ja külgkiirenduse andmete järeltöötlemine, nagu täpsustatud punktis 9.11.
9.10. Sõidustabilisaatori rikke avastamine
9.10.1. Ühendades lahti ükskõik millise sõidustabilisaatori osa toiteallika või sõidustabilisaatori osade vahelise elektriühenduse (kui sõidukil on mootor välja lülitatud), simuleeritakse üht või mitut sõidustabilisaatori riket. Sõidustabilisaatori rikke simuleerimisel ei ühendata lahti elektriühendusi märgulambi/märgulampide ja/või valikvarustusena paigaldatavate sõidustabilisaatori juhtseadise(te) vahel.
9.10.2. Esialgu seisab sõiduk paigal ja süütelüliti on lukustatud või väljalülitatud asendis; seejärel lülitatakse süütelüliti käivitusasendisse ja mootor käivitatakse. Sõidukiga sõidetakse otsesuunas, kuni saavutatakse kiirus 48 ± 8 km/h. Hiljemalt 30 sekundit pärast mootori käivitamist pööratakse järgmise kahe minuti jooksul osutatud kiirusel ilma suunastabiilsust kaotamata sujuvalt vähemalt ühe korra vasakule ja ühe korra paremale ning pidurdatakse ühe korra. Manöövrite lõpuks peab süttima sõidustabilisaatori rikke märgulamp kooskõlas punktiga 7.4.
9.10.3. Sõiduk peatatakse, süütelüliti lülitatakse väljalülitatud või lukustatud asendisse. Pärast viie minuti möödumist lülitatakse sõiduki süütelukk käivitusasendisse ja mootor käivitatakse. Seejärel peab sõidustabilisaatori rikke märgulamp rikkest teadaandmiseks uuesti süttima ning põlema niikaua, kuni mootor töötab või kuni rike on kõrvaldatud.
9.10.4. Süütelüliti lülitatakse väljalülitatud või lukustatud asendisse. Sõidustabilisaatori tavapärane režiim taastatakse, süütelüliti lülitatakse käivitusasendisse ja mootor käivitatakse. Punktis 9.10.2 kirjeldatud manöövrit korratakse ja veendutakse, et märgulamp kustub osutatud aja jooksul või vahetult pärast seda.
9.11. Andmete järeltöötlemine – toimivusnäitajate arvutamine
Lengerdusmäära ja külgnihet mõõdetakse ja arvutatakse punktides 9.11.1–9.11.8 kirjeldatud meetodite abil.
9.11.1. Rooli pöördenurga toorandmed filtreeritakse 12-pooluselise faasita Butterworthi filtriga ja piirsagedusel 10 Hz. Seejärel filtreeritud andmed nullitakse, et kõrvaldada katse-eelseid staatilisi andmeid kasutades anduri hälve.
9.11.2. Lengerdusmäära toorandmed filtreeritakse 12-pooluselise faasita Butterworthi filtriga ja piirsagedusel 6 Hz. Seejärel filtreeritud andmed nullitakse, et kõrvaldada katse-eelseid staatilisi andmeid kasutades anduri hälve.
9.11.3. Külgkiirenduse toorandmed filtreeritakse 12-pooluselise faasita Butterworthi filtriga ja piirsagedusel 6 Hz. Seejärel filtreeritud andmed nullitakse, et kõrvaldada katse-eelseid staatilisi andmeid kasutades anduri hälve. Külgkiirenduse näitajad sõiduki raskuskeskmes määratakse kindlaks, kõrvaldades sõidukikere veeremise mõjud ja korrigeerides andurite paigutust koordinaatide teisendamise teel. Andmete kogumiseks paigutatakse külgkiirendusmõõtur võimalikult lähedale sõiduki pikisuunalisele ja külgsuunalisele raskuskeskmele.
9.11.4. Rooli nurkkiirus määratakse kindlaks rooli pöördenurga filtreeritud andmete liigendamise teel. Seejärel filtreeritakse rooli nurkkiiruse andmed liikuva 0,1-sekundilise libiseva keskväärtuse filtri abil.
9.11.5. Külgkiirenduse, lengerdusmäära ja rooli pöördenurga andmete kanalid nullitakse, kasutades kindlaksmääratud nullimisvahemikku. Nullimisvahemiku kindlaksmääramisel kasutatavad meetodid on sätestatud punktides 9.11.5.1 ja 9.11.5.2.
9.11.5.1. Kasutades punktis 9.11.4 kirjeldatud meetodite abil kindlaks määratud rooli nurkkiiruse näitajaid, selgitatakse välja hetk, millal rooli nurkkiirus ületab esmakordselt 75 °/s. Sellest punktist alates peab rooli nurkkiirus olema vähemalt 75 ms jooksul suurem kui 200 °/s. Kui viimane tingimus ei ole täidetud, selgitatakse välja järgmine hetk, millal rooli nurkkiirus ületab 75 °/s, ning seejärel kontrollitakse, kas 200 ms nõue on täidetud. Sellist toimingut korratakse nii kaua, kuni mõlemad tingimused on täidetud.
9.11.5.2. Nullimisvahemik on 1,0-sekundiline ajaperiood enne hetke, millal rooli nurkkiirus ületab 75 °/s (st hetk, kui rooli nurkkiirus ületab 75 °/s, on nullimisvahemiku lõpp-punkt).
9.11.6. Roolimise algus on hetk, millal rooli pöördenurga filtreeritud ja nullitud näitaja jõuab pärast nullimisvahemiku lõpp-punkti esmakordselt – 5 kraadini (kui rooliseadme manööver oli algselt vastupäeva) või + 5 kraadini (kui rooliseadme manööver oli algselt päripäeva). Roolimise alguse ajaline väärtus interpoleeritakse.
9.11.7. Roolimise lõpp on hetk, millal rooliratas jõuab viivitusega sinusoidaalse manöövri lõpus tagasi nullpunkti. Ajaline väärtus rooli pöördenurga 0° juures interpoleeritakse.
9.11.8. Lengerdusmäära teine maksimumväärtus on lengerdusmäära esimene maksimaalne kohtväärtus, mille tekitab rooliratta vastassuunas pööramine. Lengerdusmäärad 1,0 ja 1,75 sekundit pärast roolimise lõppu määratakse kindlaks interpoleerimise teel.
9.11.9. Külgsuunaline kiirus määratakse kindlaks külgkiirenduse korrigeeritud, filtreeritud ja nullitud andmed integreerides. Külgsuunaline kiirus roolimise algushetkel nullitakse. Nullitud külgsuunalise kiiruse integreerimisega selgitatakse välja külgnihe. Külgnihe roolimise alguspunktis nullitakse. Külgnihet mõõdetakse 1,07 sekundit pärast roolimise alguspunkti ja see määratakse kindlaks interpoleerimise teel.
10. SÕIDUKITÜÜBI VÕI SÕIDUSTABILISAATORI MUUTMINE JA TÜÜBIKINNITUSE LAIENDAMINE
10.1. Sõidukitüübi mis tahes muutmisest antakse teada tüübikinnitusasutusele, kes andis sõidukitüübile tüübikinnituse.
Sellisel juhul tüübikinnitusasutus:
|
a) |
otsustab pärast tootjaga konsulteerimist, et tuleb anda uus tüübikinnitus, või |
|
b) |
rakendab punktis 10.1.1 „Läbivaatus“ esitatud menetlust või vajaduse korral punktis 10.1.2 „Laiendus“ esitatud menetlust. |
10.1.1. Läbivaatus
Juhul kui teabedokumentides sisalduvaid andmeid on muudetud ning tüübikinnitusasutus leiab, et tõenäoliselt ei avalda tehtud muudatused märgatavat ebasoovitavat mõju ning et pedaalid vastavad igal juhul endiselt nõuetele, nimetatakse muudatust „läbivaatuseks“.
Sel juhul väljastab tüübikinnitusasutus vajaduse korral teabedokumentide parandatud leheküljed, märkides igale parandatud leheküljele selgelt muudatuse laadi ja uuesti väljastamise kuupäeva. See nõue loetakse täidetuks, kui on olemas teabedokumentide konsolideeritud ja ajakohastatud versioon koos muudatuse üksikasjaliku kirjeldusega.
10.1.2. Laiendus
Muudatust nimetatakse „laienduseks“, kui lisaks teabedokumentides sisalduvate andmete muutmisele:
|
a) |
nõutakse täiendavaid kontrolle või katseid või |
|
b) |
teatises (v.a selle lisades) sisalduv teave on muutunud või |
|
c) |
pärast hilisema muudatuste seeria jõustumist taotletakse niisuguse hilisema seeria kohast tüübikinnitust. |
10.2. Teatis tüübikinnituse andmise või andmata jätmise kohta koos muudatuse kirjeldusega edastatakse käesolevat eeskirja kohaldavatele kokkuleppeosalistele punktis 4.3 sätestatud korras. Lisaks sellele muudetakse 1. lisa teatisele lisatud teabedokumentide ja katsearuannete sisukorda, nii et oleks näha kõige viimase läbivaatuse või laienduse kuupäev.
10.3. Tüübikinnituse laienduse andnud pädev asutus määrab igale laienduse kohta koostatud teatisevormile seerianumbri.
11. TOOTMISE NÕUETELE VASTAVUS
Tootmise nõuetele vastavuse järelevalvemenetlus peab olema kooskõlas kokkuleppe (E/ECE/324-E/ECE/TRANS/505/Rev.2) 2. liitega ja vastama järgmistele nõuetele.
|
11.1. |
Käesoleva eeskirja alusel tüübikinnituse saanud sõiduk peab olema toodetud nii, et see vastab tüübikinnituse saanud tüübile, täites punktis 5, 6 ja 7 sätestatud nõuded. |
|
11.2. |
Tüübikinnituse andnud tüübikinnitusasutus võib igal ajal kontrollida igas tootmisüksuses tootmise vastavuse kontrollimiseks kasutatavaid meetodeid. Nende kontrollide tavaline sagedus on kord iga kahe aasta järel. |
12. KARISTUSED TOOTMISE NÕUETELE MITTEVASTAVUSE KORRAL
12.1. Sõidukitüübile käesoleva eeskirja kohaselt antud tüübikinnituse võib tühistada, kui punktis 8.1 sätestatud nõuded ei ole täidetud.
12.2. Kui käesolevat eeskirja kohaldav kokkuleppeosaline tühistab tema poolt varem antud tüübikinnituse, teatab ta sellest kohe teistele käesolevat eeskirja kohaldavatele kokkuleppeosalistele, kasutades käesoleva eeskirja 1. lisas esitatud näidisele vastavat teatise vormi.
13. TOOTMISE LÕPETAMINE
Kui tüübikinnituse omanik lõpetab käesoleva eeskirja kohase tüübikinnituse saanud sõidukitüübi tootmise, teavitab ta sellest tüübikinnituse andnud asutust. Asjaomase teatise saamisel teatab kõnealune asutus sellest teistele käesolevat eeskirja kohaldavatele kokkuleppeosalistele teatisega, mille vorm vastab käesoleva eeskirja 5. lisas esitatud näidisele.
14. TÜÜBIKINNITUSKATSETE EEST VASTUTAVATE TEHNILISTE TEENISTUSTE NING TÜÜBIKINNITUSASUTUSTE NIMED JA AADRESSID
Käesolevat eeskirja kohaldavad kokkuleppeosalised edastavad Ühinenud Rahvaste Organisatsiooni sekretariaadile tüübikinnituskatsete eest vastutavate tehniliste teenistuste nimed ja aadressid ning nende tüübikinnitusasutuste nimed ja aadressid, kes annavad tüübikinnitusi ja kellele tuleb saata vormikohased teatised teistes riikides välja antud tüübikinnituste, nende laiendamise, nende andmata jätmise või tühistamise kohta.
(1) M1- ja N1-kategooria sõidukid on määratletud sõidukite ehitust käsitlevas konsolideeritud resolutsioonis (R.E.3) (dokument ECE/TRANS/WP.29/78/Rev.4, punkt 2, www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Teljerühmi käsitatakse üksikteljena ja topeltrattaid üksikrattana.
(3) 1958. aasta kokkuleppe osalisriikide tunnusnumbrid on esitatud sõidukite ehitust käsitleva konsolideeritud resolutsiooni (R.E.3) 3. lisas (ECE/TRANS/WP.29/78/Rev. 4, 3. lisa), www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Teljerühmi käsitatakse üksikteljena ja topeltrattaid üksikrattana.
(5) Käesoleva eeskirja tekstis eeldatakse, et sõidukit juhitakse rooli abil. Muud tüüpi juhtseadistega sõidukitele võib käesoleva lisa alusel samuti tüübikinnituse anda, kui tootja suudab tehnilisele teenistusele tõendada, et käesolevas eeskirjas esitatud toimivusnõudeid on võimalik täita käesoleva eeskirja punkti 7 kohaselt ette nähtud rooliseadme manöövrite asemel samaväärseid manöövreid kasutades.
(6) Nimiväärtuse all mõistetakse teoreetilist sihtväärtust.
2. LISA
TÜÜBIKINNITUSMÄRKIDE KUJUNDUS
NÄIDIS A
(Vt käesoleva eeskirja punkt 4.4)

Kui sõidukile on kinnitatud eespool kujutatud tüübikinnitusmärk, näitab see, et asjaomasele sõidukitüübile on seoses sõidustabilisaatoriga antud tüübikinnitus Belgias (E 6) eeskirja nr 140 kohaselt. Tüübikinnitusnumbri kaks esimest kohta näitavad, et tüübikinnitus on antud vastavalt eeskirja nr 140 algversiooni nõuetele.
NÄIDIS B
(Vt käesoleva eeskirja punkt 4.5)

Kui sõidukile on kinnitatud eespool kujutatud tüübikinnitusmärk, näitab see, et asjaomasele sõidukitüübile on antud tüübikinnitus Belgias (E 6) eeskirjade nr 140 ja 24 kohaselt (1). (Viimase eeskirja puhul on korrigeeritud neeldumistegur 1,30 m-1). Tüübikinnitusnumbrid näitavad, et asjaomaste tüübikinnituste andmise kuupäevadel oli eeskiri nr 140 oma algsel kujul ja eeskiri nr 24 hõlmas 02-seeria muudatusi.
(1) See number on esitatud näitena.
3. LISA
DÜNAAMILISE STABIILSUSE SIMULATSIOONI KASUTAMINE
Sõidustabilisaatori tõhususe võib kindlaks määrata arvutisimulatsiooni abil.
1. SIMULATSIOONI KASUTAMINE
1.1. Sõiduki tootja tõendab sõiduki stabiilsusfunktsiooni toimivust tüübikinnitusasutusele või tehnilisele teenistusele käesoleva eeskirja punktis 9.9 kirjeldatud dünaamilisi manöövreid simuleerides.
1.2. Simulatsiooni abil tõendatakse sõiduki stabiilsustõhusust järgmiselt:
|
a) |
lengerdusmääraga üks sekund pärast rooliseadme viivitusega sinusoidaalse manöövri lõpetamist (aeg T0 + 1); |
|
b) |
lengerdusmääraga 1,75 sekundit pärast rooliseadme viivitusega sinusoidaalse manöövri lõpetamist; |
|
c) |
sõiduki raskuskeskme külgnihkega selle algse otsesuunas liikumistee suhtes. |
1.3. Simulatsioon korraldatakse valideeritud modelleerimis- ja simulatsioonivahendiga, kasutades käesoleva eeskirja punktis 9.9 kirjeldatud dünaamilisi manöövreid käesoleva eeskirja punktis 8 sätestatud katsetingimustel.
Simulatsioonivahendi valideerimise meetod esitatakse käesoleva eeskirja 4. lisas.
4. LISA
DÜNAAMILISE STABIILSUSE SIMULATSIOONIVAHEND JA SELLE VALIDEERIMINE
1. SIMULATSIOONIVAHENDI SPETSIFIKATSIOON
1.1. Simulatsioonimeetodi puhul võetakse arvesse peamisi sõiduki liikumissuunda ja veeremist mõjutavaid tegureid. Tüüpmudel võib kas otsesel või kaudsel viisil hõlmata sõiduki järgmisi parameetreid:
|
a) |
telg/ratas; |
|
b) |
vedrustus; |
|
c) |
rehv; |
|
d) |
šassii / sõiduki kere; |
|
e) |
jõuülekanne (vajaduse korral); |
|
f) |
pidurisüsteem; |
|
g) |
nimikoormus. |
1.2. Sõiduki stabiilsusfunktsioon lisatakse simulatsioonimudelile järgmiste vahendite abil:
|
a) |
simulatsioonivahendi alamsüsteem (tarkvaramudel) või |
|
b) |
elektrooniline juhtplokk riistvaralise juhtimiskontuuriga konfiguratsioonis. |
2. SIMULATSIOONIVAHENDI VALIDEERIMINE
2.1. Rakendatava modelleerimis- ja simulatsioonivahendi kehtivust kinnitatakse sõiduki praktiliste katsetega võrdlemise abil. Valideerimise otstarbel tehtavad katsed on käesoleva eeskirja punktis 9.9 kirjeldatud dünaamilised manöövrid.
Vastavalt vajadusele registreeritakse või arvutatakse katsete ajal välja järgmised liikumise muutujad kooskõlas standardi ISO 15037 osaga 1:2006: „Sõiduautode üldtingimused“ või osaga 2:2002: „Üldtingimused raskeveokitele ja bussidele“ (sõltuvalt sõiduki kategooriast):
|
a) |
rooli pöördenurk (δΗ); |
|
b) |
pikisuunaline kiirus (vX); |
|
c) |
külglibisemise nurk (β) või külgsuunaline kiirus (vY) — (valikuline); |
|
d) |
pikikiirendus (aX) — (valikuline); |
|
e) |
külgkiirendus (aY); |
|
f) |
lengerduskiirus (dψ/dt); |
|
g) |
veeremiskiirus (dφ/dt); |
|
h) |
nookumiskiirus (dθ/dt); |
|
i) |
veerenurk (φ); |
|
j) |
nookumisnurk (θ). |
2.2. Eesmärk on näidata, et sõiduki simuleeritud käitumine ja sõiduki stabiilsusfunktsiooni simuleeritud toimimine on võrreldavad sõidukiga korraldatud tegelikes katsetes täheldatuga.
2.3. Simulaator loetakse valideerituks, kui selle väljund on võrreldav katsetulemustega, mis on saadud asjaomase sõidukitüübi dünaamiliste manöövrite ajal vastavalt käesoleva eeskirja punktile 9.9. Võrdlemisel kasutatakse sõiduki stabiilsusfunktsiooni käivitamise ja järjestuse suhet simulatsioonis ja sõiduki praktilises katses.
2.4. Kui kontrollsõiduki ja simuleeritud sõiduki konfiguratsioonide füüsilised parameetrid on erinevad, tuleb neid simulatsioonis vastavalt muuta.
2.5. Koostatakse simulaatorikatse aruanne, mille näidis on esitatud käesoleva eeskirja 5. lisas ja mille koopia lisatakse sõiduki tüübikinnitusaruandele.
5. LISA
SÕIDUKI STABIILSUSFUNKTSIOONI SIMULATSIOONIVAHENDI KATSEARUANNE
Katsearuande nr: …
1. IDENTIFITSEERIMISANDMED
1.1. Simulatsioonivahendi tootja nimi ja aadress …
1.2. Simulatsioonivahendi tähistus: nimetus/mudel/number (riistvara ja tarkvara) …
2. RAKENDUSALA
2.1. Sõidukitüüp: …
2.2. Sõiduki konfiguratsioonid: …
3. KONTROLLKATSE SÕIDUKIGA
3.1. Sõiduki(te) kirjeldus: …
3.1.1. Sõiduki(te) identifitseerimisandmed: kaubamärk/mudel/tehasetähis …
3.1.2. Sõiduki kirjeldus, sh vedrustus/rattad, mootor ja jõuülekanne, pidurisüsteem(id), roolimehhanism, nende nimetus/mudel/number: …
3.1.3. Simulatsioonis kasutatud sõiduki andmed (teadaolevad andmed): …
3.2. Asukoha (asukohtade), tee-/katseala pinna tingimuste ja temperatuuri kirjeldus ning kuupäev(ad): …
3.3. Tulemused sõiduki sisselülitatud ja väljalülitatud stabiilsusfunktsiooni korral, sh vajaduse korral 4. lisa punktis 2.1 osutatud liikumismuutujad: …
4. SIMULATSIOONITULEMUSED
4.1. Sõiduki parameetrid ja simulatsioonis kasutatud väärtused, mis ei pärine tegelikult katsesõidukilt (kaudsed väärtused): …
4.2. Lengerdusstabiilsus ja külgnihe käesoleva eeskirja punktide 7.1–7.3 kohaselt: …
5. Katse on tehtud ja tulemused on aruandesse kantud kooskõlas eeskirja nr 140 4. lisaga.
Katse teinud tehniline teenistus (1) …
Allkiri: …
Kuupäev: …
Tüübikinnitusasutus (1) …
Allkiri: …
Kuupäev: …
(1) Kui tehniline teenistus ja tüübikinnitusasutus on üks ja sama organisatsioon, allkirjastavad aruande eri isikud.
|
26.10.2018 |
ET |
Euroopa Liidu Teataja |
L 269/36 |
Rahvusvahelise avaliku õiguse alusel on õiguslik toime ainult ÜRO Euroopa Majanduskomisjoni originaaltekstidel. Käesoleva eeskirja staatust ja jõustumise kuupäeva tuleb kontrollida ÜRO Euroopa Majanduskomisjoni staatusdokumendi TRANS/WP.29/343 viimasest versioonist, mis on kättesaadav internetis:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
ÜRO Euroopa Majanduskomisjoni (UN/ECE) eeskiri nr 141 – Mootorsõidukite tüübikinnituse ühtsed sätted seoses rehvirõhu jälgimise süsteemidega (TPMS) [2018/1593]
Jõustumiskuupäev: 22. jaanuar 2017
SISUKORD
EESKIRI
|
1. |
Kohaldamisala |
|
2. |
Mõisted |
|
3. |
Tüübikinnituse taotlemine |
|
4. |
Tüübikinnitus |
|
5. |
Spetsifikatsioonid ja katsed |
|
6. |
Lisateave |
|
7. |
Sõidukitüübi kinnituse muutmine ja laiendamine |
|
8. |
Toodangu nõuetekohasus |
|
9. |
Karistused toodangu nõuetele mittevastavuse korral |
|
10. |
Tootmise lõpetamine |
|
11. |
Tüübikinnituskatsete eest vastutavate tehniliste teenistuste ja tüübikinnitusasutuste nimed ja aadressid |
LISAD
|
1. |
Teabevahetus |
|
2. |
Tüübikinnitusmärkide kujundus |
|
3. |
Rehvirõhu jälgimise süsteemide katsetamise nõuded |
1. KOHALDAMISALA
Käesolevat eeskirja kohaldatakse kuni 3 500 kg täismassiga M1-kategooria sõidukite ja N1-kategooria (1) sõidukite suhtes, kui sellistel sõidukitel on rehvirõhu jälgimise süsteem, välja arvatud topeltratastega sõidukid.
2. MÕISTED
Käesolevas eeskirjas kasutatakse järgmisi mõisteid.
2.1. „sõiduki tüübikinnitus“– sõidukitüübi kinnitus seoses rehvirõhu jälgimise süsteemiga;
2.2. „sõidukitüüp“– sõidukid, mis ei erine üksteisest järgmiste oluliste omaduste poolest:
|
a) |
tootja kaubanimi või kaubamärk; |
|
b) |
sõiduki omadused, mis mõjutavad märkimisväärselt rehvirõhu jälgimise süsteemi tööd; |
|
c) |
rehvirõhu jälgimise süsteemi ehitus; |
2.3. „velg“– velje pöiast ja rattakilbist koosnev komplektne velg;
2.4. „rehv“– tugevdatud elastsest kestast koosnev õhkrehv, mis moodustab iseseisvalt või koos veljega, millele see on paigaldatud, katkematu toroidaalse suletud kambri, mis sisaldab gaasi (tavaliselt õhku) või gaasi ja vedelikku, mis tavaoludes on ette nähtud kasutamiseks atmosfäärirõhust kõrgemal rõhul;
2.5. „täismass“– tootja määratud sõiduki suurim tehniliselt lubatud mass (see võib olla suurem kui riikliku ametiasutuse sätestatud suurim lubatud täismass ehk registrimass);
2.6. „suurim teljekoormus“– tootja kindlaks määratud suurim vertikaaljõud, mis mõjub ühe telje rehvide või roomikute ja maa kontaktpinnale ja mille põhjustab asjaomasele teljele langev sõiduki osakoormus; see koormus võib olla riikliku ametiasutuse sätestatud lubatud teljekoormusest suurem. Teljekoormuste summa võib olla sõiduki kogumassile vastavast väärtusest suurem;
2.7. „rehvirõhu jälgimise süsteem (TPMS)“– sõidukile paigaldatud süsteem, mis on võimeline hindama rehvide rõhku või selle muutumist ajas ning edastama vastava teabe sõiduki käitamise ajal selle kasutajale;
2.8. „soojenemata rehvi rõhk“– rehvirõhk ümbritseva õhu temperatuuril ilma rehvi kasutamisest tingitud rõhu suurenemiseta;
2.9. „soovitatav soojenemata rehvi rõhk (P rec )“– sõiduki andmekleebisel ja/või kasutusjuhendis esitatud sõiduki tootja soovitatav rõhk iga rehvipositsiooni jaoks sõiduki ettenähtud töötingimustel (nt kiirusel ja koormusel);
2.10. „töörõhk (Pwarm)“– sõiduki kasutamisega kaasnevast temperatuuritõusust põhjustatud soojenemata rehvi rõhust (Prec) suurem rõhk iga rehvipositsiooni jaoks;
2.11. „katserõhk (P test )“– tegelik valitud rehvirõhk iga rehvipositsiooni jaoks pärast rehvide tühjendamist katse käigus.
3. TÜÜBIKINNITUSE TAOTLEMINE
3.1. Sõiduki tootja või tema volitatud esindaja esitab taotluse sõidukitüübi kinnitamiseks seoses selle rehvirõhu jälgimise süsteemiga.
3.2. Taotlusele lisatakse kolmes eksemplaris sõidukitüübi kirjeldus seoses käesoleva eeskirja 1. lisas osutatud varustusega.
3.3. Tüübikinnitusasutusele või tüübikinnituskatsete eest vastutavale tehnilisele teenistusele esitatakse tüübikinnituse saamiseks ettenähtud sõidukitüüpi esindav sõiduk.
3.4. Enne tüübikinnituse andmist veendub tüübikinnitusasutus piisavate meetmete olemasolus, millega tagatakse tootmise nõuetele vastavuse tulemuslik kontroll.
4. TÜÜBIKINNITUS
4.1. Kui käesoleva eeskirja kohaselt tüübikinnituse saamiseks esitatud sõiduk vastab punktis 5 sätestatud nõuetele, antakse sellele sõidukitüübile tüübikinnitus.
4.2. Igale tüübikinnituse saanud sõidukitüübile antakse tüübikinnitusnumber. Selle esimesed kaks numbrit (praegu 00, mis tähistavad eeskirja algversiooni) näitavad tüübikinnituse andmise ajaks käesolevasse eeskirja viimati tehtud olulisemate tehniliste muudatuste seeriat. Üks ja sama kokkuleppeosaline ei tohi anda sama numbrit teisele sõidukitüübile.
4.3. Teatis sõidukitüübile käesoleva eeskirja kohase tüübikinnituse andmise, tüübikinnituse laiendamise või tüübikinnituse andmisest keeldumise kohta esitatakse käesolevat eeskirja kohaldavatele kokkuleppeosalistele käesoleva eeskirja 1. lisas esitatud näidisele vastaval vormil.
4.4. Igale käesoleva eeskirja kohaselt tüübikinnituse saanud tüübile vastavale sõidukile tuleb kinnitada tüübikinnituse vormil kindlaksmääratud hästi märgatavasse ja kergesti juurdepääsetavasse kohta rahvusvaheline tüübikinnitusmärk, millel on:
|
4.4.1. |
ringjoonega ümbritsetud E-täht, millele järgneb tüübikinnituse andnud riigi tunnusnumber (2); |
|
4.4.2. |
punktis 4.4.1 ettenähtud ringist paremal käesoleva määruse number, millele järgneb R-täht, kriips ja tüübikinnitusnumber. |
4.5. Punktis 4.4.1 ettenähtud sümbolit ei ole tarvis korrata, kui sõiduk vastab sõidukitüübile, mis on kinnitatud ühe või mitme käesolevale kokkuleppele lisatud muu eeskirja alusel riigis, mis on sellele käesoleva eeskirja alusel andnud tüübikinnituse; sellisel juhul paigutatakse punktis 4.4.1 ettenähtud sümbolist paremale üksteise alla tulpa kõigi nende eeskirjade numbrid ja tüübikinnitusnumbrid ning lisasümbolid, mille kohaselt on antud tüübikinnitus riigis, mis on andnud tüübikinnituse käesoleva eeskirja kohaselt.
4.6. Tüübikinnitusmärk peab olema selgesti loetav ja kustumatu.
4.7. Tüübikinnitusmärk paigutatakse tootja kinnitatud sõiduki andmeplaadile või selle lähedusse.
4.8. Näited tüübikinnitusmärgi kujunduse kohta on esitatud käesoleva eeskirja 2. lisas.
5. SPETSIFIKATSIOONID JA KATSED
5.1. Üldteave
5.1.1. Nii M1-kategooria sõidukid massiga kuni 3 500 kg kui ka N1-kategooria sõidukid, kui neil on kõik teljed üksikasetuses rehvidega ja kui neile on paigaldatud punktis 2.7 määratletud rehvirõhu jälgimise süsteem, peavad vastama käesoleva eeskirja punktides 5.1.2–5.5.5 esitatud nõuetele mitmesugustes teeoludes ja keskkonnatingimustes, mida esineb kokkuleppeosaliste territooriumil.
5.1.2. Sõidukile paigaldatud rehvirõhu jälgimise süsteemi tööd ei tohi häirida magnet- ja elektriväljad. Seda tuleb tõendada, näidates järgmiselt, et süsteem vastab eeskirja nr 10 tehnilistele nõuetele ja üleminekusätetele:
|
a) |
03-seeria muudatusi kohaldatakse sõidukite suhtes, millel puudub laetava energiasalvestussüsteemi (veoakud) laadimiseks ettenähtud ühendussüsteem; |
|
b) |
04-seeria muudatusi kohaldatakse sõidukite suhtes, millel on laetava energiasalvestussüsteemi (veoakud) laadimiseks ettenähtud ühendussüsteem. |
5.1.3. Süsteem peab töötama kiiruste vahemikus alates 40 km/h või väiksemast kuni sõiduki valmistajakiiruseni.
5.1.4. Sõiduk peab läbima 3. lisas sätestatud katsed (torkeaugukatse, difusioonikatse ja tõrkekatse).
5.2. Rehvirõhu kindlakstegemine rõhukao juhtumi korral
5.2.1. Punktis 5.5. kirjeldatud rehvirõhu jälgimise süsteemi hoiatussignaal peab süttima hiljemalt kümne minuti jooksul pärast seda, kui sõiduki ühe rehvi töörõhku on vähendatud 20 % või kui rehvirõhk on saavutanud minimaalse rõhu 150 kPa, kui viimati osutatud väärtus on suurem.
5.3. Rehvirõhu kindlakstegemine, kui see rõhk on oluliselt väiksem kui optimaalseks tööks soovitatav rõhk, võttes sealhulgas arvesse kütusekulu ja ohutust.
5.3.1. Punktis 5.5 kirjeldatud rehvirõhu jälgimise süsteemi hoiatussignaal peab süttima hiljemalt kuuekümneminutise kogusõiduaja möödudes pärast seda, kui sõiduki neljast rehvist ühe rehvi töörõhku on vähendatud 20 % või kui rehvirõhk on saavutanud minimaalse rõhu 150 kPa, kui viimati osutatud väärtus on suurem.
5.4. Tõrke avastamine.
5.4.1. Punktis 5.5 kirjeldatud rehvirõhu jälgimise süsteemi hoiatussignaal peab süttima hiljemalt kümme minutit pärast sõiduki rehvirõhu jälgimise süsteemi kontroll- või vastussignaalide genereerimist või edastamist mõjutava tõrke tekkimist.
5.5. Hoiatusmärguanne.
5.5.1. Hoiatusmärguandena kasutatakse eeskirja nr 121 kohast optilist hoiatussignaali.
5.5.2. Hoiatussignaal aktiveeritakse, kui süüde on sisse lülitatud (lampide kontroll). Seda nõuet ei kohaldata ühisnäidikul nähtaval olevate märgulampide suhtes.
5.5.3. Hoiatussignaalid peavad olema nähtavad ka päevavalges; juht peab saama juhiistmelt signaalide rahuldavas nähtavuses hõlpsalt veenduda.
5.5.4. Tõrke märguandeks võib olla sama hoiatussignaal, mida kasutatakse alarõhust teavitamiseks. Kui punktis 5.5.1 kirjeldatud hoiatussignaali kasutatakse nii alarõhust kui ka rehvirõhu jälgimise süsteemi tõrkest teavitamiseks, kohaldatakse järgmist: kui süüde on sisse lülitatud, peab hoiatussignaal tõrkest teavitamiseks vilkuma. Lühikese aja möödudes peab hoiatussignaal jääma pidevalt põlema nii kauaks, kuni tõrget ei ole kõrvaldatud, aga süüde on sisse lülitatud. Kuni tõrke kõrvaldamiseni vahelduvad vilkumine ja põlemajäämine iga kord, kui süüde sisse lülitatakse.
5.5.5. Punktis 5.5.1 kirjeldatud hoiatussignaali märgulampi võib kasutada vilkuvas režiimis, et anda vastavalt sõiduki kasutusjuhendile teavet rehvirõhu jälgimise süsteemi lähtestamisoleku kohta.
6. LISATEAVE
6.1. Kui sõidukil on kasutusjuhend, peab selles leiduma vähemalt järgmine teave:
|
6.1.1. |
teave selle kohta, et sõiduk on varustatud sellise süsteemiga (samuti teave selle kohta, kuidas süsteemi lähtestada, kui sellel selline funktsioon olemas on); |
|
6.1.2. |
Punktis 5.5.1 kirjeldatud märgulambi tähise kujutis (ja tõrke märgulambi tähise kujutis, kui tõrke jaoks kasutatakse eraldi märgulampi); |
|
6.1.3. |
lisateave madala rehvirõhu hoiatuse märgulambi süttimise olulisuse kohta ning kirjeldus selle kohta, mida sellises olukorras ette võtma peab. |
6.2. Kui sõidukil puudub kasutusjuhend, tuleb punktis 6.1 nõutav teave paigutada sõidukis hästi märgatavasse kohta.
7. SÕIDUKI TÜÜBIKINNITUSE MUUTMINE JA LAIENDAMINE
7.1. Igast käesoleva eeskirja punktis 2.2 määratletud sõidukitüübi muudatusest teatatakse sõidukile tüübikinnituse andnud tüübikinnitusasutusele. Sellisel juhul võib tüübikinnitusasutus:
|
7.1.1. |
leida, et tehtud muudatused ei mõjuta negatiivselt tüübikinnituse andmise tingimusi, ja tüübikinnitust laiendada; |
|
7.1.2. |
leida, et tehtud muudatused mõjutavad tüübikinnituse andmise tingimusi, ja nõuda enne tüübikinnituse laiendamist täiendavaid katseid või lisakontrolli. |
7.2. Tüübikinnituse andmisest või sellest keeldumisest teatatakse koos muudatuste täpsustustega kõikidele käesolevat eeskirja kohaldavatele kokkuleppeosalistele punktis 4.3 täpsustatud korras.
7.3. Tüübikinnitusasutus teatab laiendamisest teistele kokkuleppeosalistele, kasutades selleks käesoleva eeskirja 1. lisas esitatud teatisevormi. Ta määrab igale laiendusele seerianumbri, mida nimetatakse laienduse numbriks.
8. TOODANGU NÕUETEKOHASUS
8.1. Toodete vastavust nõuetele tuleb kontrollida vastavalt kokkuleppe 2. liitele (E/ECE/324–E/ECE/TRANS/505/Rev.2) järgmistel tingimustel.
8.2. Tüübikinnituse andnud tüübikinnitusasutus võib igal ajal igas tootmisüksuses kontrollida toodangu vastavust. Neid kontrolle tehakse tavaliselt vähemalt üks kord aastas.
9. KARISTUSED TOODANGU NÕUETELE MITTEVASTAVUSE KORRAL
9.1. Sõidukitüübile käesoleva eeskirja kohaselt antud tüübikinnituse võib tühistada, kui punktis 8 sätestatud nõuded ei ole täidetud.
9.2. Kui käesolevat eeskirja kohaldav kokkuleppeosaline tühistab tüübikinnituse, mille ta varem on andnud, teatab ta sellest viivitamata teistele käesolevat eeskirja rakendavatele kokkuleppeosalistele, saates neile tüübikinnitusteate koopia, mille lõppu on lisatud suurtähtedega kirjutatud märkus „TÜÜBIKINNITUS TÜHISTATUD“ koos kuupäeva ning allkirjaga.
10. TOOTMISE LÕPETAMINE
Kui tüübikinnituse valdaja lõpetab täielikult käesoleva eeskirja kohaselt tüübikinnituse saanud sõiduki tootmise, teatab ta sellest tüübikinnituse andnud asutusele. Pärast asjaomase teatise saamist teatab asutus sellest teistele käesolevat eeskirja kohaldavatele kokkuleppeosalistele tüübikinnitusvormiga, mille lõppu on lisatud suurtähtedega kirjutatud märge „TOOTMINE LÕPETATUD“ koos kuupäeva ja allkirjaga.
11. TÜÜBIKINNITUSKATSETE EEST VASTUTAVATE TEHNILISTE TEENISTUSTE JA TÜÜBIKINNITUSASUTUSTE NIMED JA AADRESSID
Käesolevat eeskirja kohaldavad 1958. aasta kokkuleppe osalised edastavad ÜRO sekretariaadile tüübikinnituskatsete eest vastutavate tehniliste teenistuste ja nende tüübikinnitusasutuste nimed ja aadressid, kes annavad tüübikinnitusi ning kellele tuleb saata teistes riikides väljaantud tõendid tüübikinnituse andmise, laiendamise, andmisest keeldumise ja tühistamise kohta.
(1) Nagu on määratletud sõidukite ehitust käsitlevas konsolideeritud resolutsioonis (R.E.3.), dokument ECE/TRANS/WP.29/78/Rev.6, punkt 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) 1958. aasta kokkuleppe osaliste tunnusnumbrid on esitatud sõidukite tootmist käsitleva resolutsiooni (R.E.3), (dokument ECE/TRANS/WP.29/78/Rev.6; www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html) 3. lisas.
2. LISA
TÜÜBIKINNITUSMÄRKIDE KUJUNDUS
(Vt käesoleva eeskirja punkt 4.4)

Sõidukile kinnitatud eespool kujutatud tüübikinnitusmärk näitab, et asjaomane sõidukitüüp on saanud seoses sõiduki varustusse kuuluva rehvirõhu jälgimise süsteemiga tüübikinnituse Madalmaades (E 4) kooskõlas eeskirjaga nr 141 ja tüübikinnitusnumbri 002439 all. Tüübikinnitusnumber näitab, et tüübikinnitus on antud kooskõlas eeskirja nr 141 algversiooni nõuetega.
3. LISA
REHVIRÕHU JÄLGIMISE SÜSTEEMIDE KATSETAMISNÕUDED
1. KATSETINGIMUSED
1.1. Ümbritseva õhu temperatuur.
Ümbritseva õhu temperatuur peab olema vahemikus 0 °C–40 °C.
1.2. Katseraja pind
Katseraja pind peab tagama hea haarduvuse. Teekate peab katsetamise ajal olema kuiv.
1.3. Katsed tehakse keskkonnas, kus ei esine raadiolainetest tingitud häireid.
1.4. Sõiduki seisukord
1.4.1. Katsemass
Sõidukit võib katsetada igal koormusel, kusjuures massi jaotumine telgede vahel peab vastama sõiduki tootja määratule ning ühegi telje suurimat lubatud massi ei tohi ületada.
Kui süsteemi ei ole võimalik seadistada või lähtestada, tuleb sõiduk siiski tühjaks laadida. Peale juhi võib esiistmel olla veel üks isik, kes vastutab katsetulemuste ülesmärkimise eest. Koormamistingimusi ei tohi katse kestel muuta.
1.4.2. Sõidukiirus.
Rehvirõhu jälgimise süsteemi kalibreeritakse ja katsetatakse:
|
a) |
torkeaugu katse puhul käesoleva eeskirja punkti 5.2 nõuetele vastavuse kontrollimiseks kiiruste vahemikus 40–120 km/h või sõiduki valmistajakiirusel, kui see on väiksem kui 120 km/h, ning |
|
b) |
difusioonikatse puhul käesoleva eeskirja punkti 5.3 nõuetele vastavuse kontrollimiseks ja tõrkekatse puhul käesoleva eeskirja punkti 5.4 nõuetele vastavuse kontrollimiseks kiiruste vahemikus 40–100 km/h. |
Katse kestel tuleb kasutada kogu kiiruste vahemikku.
Kiirushoidikuga varustatud sõidukitel ei tohi kiirushoidik olla katsetamise ajal aktiveeritud.
1.4.3. Velgede positsioon.
Sõiduki veljed võivad paikneda ükskõik millises positsioonis kooskõlas sõidukitootja mis tahes sellekohaste suuniste ja piirangutega.
1.4.4. Seisva sõiduki asukoht
Kui sõiduk on pargitud, peavad selle rehvid olema kaitstud otsese päikesevalguse eest. Sõiduk peab asuma tulemusi mõjutada võiva tuule eest kaitstud kohas.
1.4.5. Piduripedaali kasutamine
Kogusõiduaja hulka ei arvestata sõidupiduri kasutamise kestust sõiduki liikumise ajal.
1.4.6. Rehvid
Sõiduki katsetamisel peavad rehvid olema paigaldatud sõiduki tootja soovituste kohaselt. Rehvirõhu jälgimise süsteemi tõrke katsetamisel võib kasutada ka varurehvi.
1.5. Rõhumõõteseadmete täpsus.
Käesolevas lisas kirjeldatud katsetes kasutatavate rõhumõõteseadmete täpsus peab olema vähemalt +/– 3 kPa.
2. KATSE KÄIK
Katse tehakse käesoleva lisa punkti 1.4.2 kohasesse kiiruste vahemikku jääval katsekiirusel vähemalt üks kord käesoleva lisa punkti 2.6.1 kohase katse (torkeaugu katse) puhul ja vähemalt üks kord iga käesoleva lisa punkti 2.6.2 kohase katse (difusioonikatse) puhul.
2.1. Paigalseisvat väljalülitatud mootoriga sõidukit hoitakse enne rehvide täispumpamist väljas ümbritseva õhu temperatuuril otsese päikesevalguse ja tuule ning muude kuumutavate või jahutavate mõjude eest kaitstuna vähemalt üks tund. Sõiduki rehvid pumbatakse täis sõiduki tootja soovitatava soojenemata rehvi rõhuni (Prec), järgides sõiduki tootja soovitusi kiiruse, koormamistingimuste ja rehvide paigutuse kohta. Kõik rõhumõõtmised tehakse samu katseseadmeid kasutades.
2.2. Paigalseisva ja lukustatud või väljalülitatud asendis süütelülitiga sõiduki süüde lülitatakse sisse. Rehvirõhu jälgimise süsteem teeb käesoleva eeskirja punktis 5.5.2 määratletud madala rehvirõhu märgulambi kontrolli. Viimast nõuet ei kohaldata ühisnäidikul nähtaval olevate märgulampide suhtes.
2.3. Vajaduse korral seadistatakse või lähtestatakse rehvirõhu jälgimise süsteem kooskõlas sõiduki tootja soovitustega.
2.4. Õppimisetapp
2.4.1. Sõidukiga sõidetakse vähemalt 20 minutit käesoleva lisa punkti 1.4.2 kohasesse kiirusvahemikku kuuluva kiirusega, nii et keskmine kiirus on 80 km/h (± 10 km/h). Õppimisetapi vältel võib väljapoole kõnealust kiirusvahemikku jääva kiirusega sõita kokku kuni kaks minutit.
2.4.2. Kui punktis 2.4.1 kirjeldatud sõidukatse tehakse ainult ühesuunalise kõverusega rajal (ringil/ovaalil), jagatakse sõidukatse aeg tehnilise teenistuse äranägemisel võrdselt (+/– 2 minutit) kahte suunda.
2.4.3. Viie minuti jooksul pärast õppimisetapi lõpetamist mõõdetakse sooja(de) tühjendatava(te) rehvi(de) rõhku. Sooja rehvi rõhku tähistatakse Pwarm. Seda rõhku kasutatakse järgnevates toimingutes.
2.5. Tühjendamisetapp
2.5.1. Torkeaugu katse käesoleva eeskirja punkti 5.2 nõuetele vastavuse kontrollimiseks.
Sõiduki ühe rehvi rõhku vähendatakse viie minuti jooksul pärast eespool punktis 2.4.3 kirjeldatud sooja rehvi rõhu mõõtmist kuni väärtuseni Pwarm – 20 % või kuni minimaalse rehvirõhuni 150 kPa, kui see rõhk on suurem, ning saadud rõhku tähistatakse Ptest. Kahe kuni viie minuti pikkuse stabiliseerumisperioodi möödudes kontrollitakse rõhku Ptest uuesti ja korrigeeritakse vajaduse korral.
2.5.2. Difusioonikatse käesoleva eeskirja punkti 5.3 nõuetele vastavuse kontrollimiseks.
Kõigi nelja rehvi rõhku vähendatakse viie minuti jooksul pärast eespool punktis 2.4.3 kirjeldatud sooja rehvi rõhu mõõtmist kuni väärtuseni Pwarm – 20 % ja lisaks veel 7 kPa ning saadud rõhku tähistatakse Ptest. Kahe kuni viie minuti pikkuse stabiliseerumisperioodi möödudes kontrollitakse rõhku Ptest uuesti ja korrigeeritakse vajaduse korral.
2.6. Madala rehvirõhu avastamise etapp.
2.6.1. Torkeaugu katse käesoleva eeskirja punkti 5.2 nõuetele vastavuse kontrollimiseks.
2.6.1.1. Sõidukiga sõidetakse mööda katseraja mis tahes lõiku (mitte tingimata katkematult). Kogusõiduaeg peab olema kümme minutit või madala rehvirõhu märgulambi süttimiseni kuluv aeg, kui viimane on lühem.
2.6.2. Difusioonikatse käesoleva eeskirja punkti 5.3 nõuetele vastavuse kontrollimiseks.
2.6.2.1. Sõidukiga sõidetakse mööda katseraja mis tahes lõiku. Minimaalselt 20 ja maksimaalselt 40 minuti möödudes peatatakse sõiduk täielikult, mootor lülitatakse välja ja süütevõti eemaldatakse minimaalselt üheks ja maksimaalselt kolmeks minutiks. Katset jätkatakse. Kogusõiduaeg peab eespool punktis 1.4.2 sätestatud tingimuste kohasel sõitmisel olema 60 minutit või madala rehvirõhu märgulambi süttimiseni kuluv aeg, kui viimane on lühem.
2.6.3. Kui madala rehvirõhu hoiatussignaal ei ole süttinud, katse lõpetatakse.
2.7. Kui eespool punktis 2.6 sätestatud katse käigus süttib madala rehvirõhu märgulamp, lülitatakse süüde välja. Viie minuti möödudes lülitatakse süüde uuesti sisse. Märgulamp peab süttima ja jääma põlema nii kauaks, kui süüde on sisse lülitatud.
2.8. Sõiduki kõik rehvid pumbatakse sõiduki tootja soovitatava soojenemata rehvi rõhuni täis. Süsteem lähtestatakse vastavalt sõiduki tootja suunistele. Kontrollitakse, kas märgulamp on kustunud. Vajaduse korral sõidetakse sõidukiga seni, kuni märgulamp kustub. Kui märgulamp ei kustu, katse lõpetatakse.
2.9. Tühjendamisetapi kordamine.
Katset võib korrata sõiduki asjakohas(t)e rehvi(de) alandatud rõhul samal või erineval koormusel, järgides punktides 2.1–2.8 kirjeldatud asjakohast katse käiku ning käesoleva eeskirja punkti 5.2 või 5.3 sätteid, olenevalt sellest, kumb on asjakohane.
3. REHVIRÕHU JÄLGIMISE SÜSTEEMI TÕRKE AVASTAMINE
3.1. Tekitatakse rehvirõhu jälgimise süsteemi tõrge, võttes mingi rehvirõhu jälgimise süsteemi komponendi toiteallikast lahti, katkestades rehvirõhu jälgimise süsteemi komponentide vahelise elektriühenduse või paigaldades sõidukile rehvi või velje, mis on rehvirõhu jälgimise süsteemiga kokkusobimatu. Rehvirõhu jälgimise süsteemi tõrke tekitamisel ei tohi lahti ühendada märgulampide elektriühendusi.
3.2. Sõidukiga sõidetakse kogusõiduajaga kuni kümme minutit (mitte tingimata katkematult) mööda katseraja mis tahes lõiku.
3.3. Punkti 3.2 kohane kogusõiduaeg peab olema kümme minutit või rehvirõhu jälgimise süsteemi tõrke märgulambi süttimiseni kuluv aeg, kui viimane on lühem.
3.4. Kui rehvirõhu jälgimise süsteemi tõrke märgulamp ei ole kooskõlas käesoleva eeskirja punkti 5.4 nõuetega süttinud, katse lõpetatakse.
3.5. Kui punktides 3.1–3.3 kirjeldatud katse käigus rehvirõhu jälgimise süsteemi tõrke märgulamp põleb või süttib, lülitatakse süüde välja. Viie minuti möödudes lülitatakse süüde uuesti sisse. Rehvirõhu jälgimise süsteemi tõrke märgulamp peab tõrkest uuesti märku andma ja jääma põlema nii kauaks, kuni süüde on sisse lülitatud.
3.6. Rehvirõhu jälgimise süsteemi tavapärase töörežiimi taastamine. Vajaduse korral sõidetakse sõidukiga seni, kuni hoiatussignaal kustub. Kui hoiatuslamp ei kustu, lõpetatakse katse.
3.7. Katset võib korrata punktides 3.1–3.6 kirjeldatud katse käigu kohaselt, kuid igas sellises katses tuleb piirduda üheainsa tõrke tekitamisega.