ISSN 1977-0685
Diario Oficial
de la Unión Europea
L 269

Edición en lengua española
Legislación
61.° año
26 de octubre de 2018
|
ISSN 1977-0685 |
||
|
Diario Oficial de la Unión Europea |
L 269 |
|
|
|
||
|
Edición en lengua española |
Legislación |
61.° año |
|
Sumario |
|
II Actos no legislativos |
Página |
|
|
|
ACTOS ADOPTADOS POR ÓRGANOS CREADOS MEDIANTE ACUERDOS INTERNACIONALES |
|
|
|
* |
||
|
|
* |
||
|
|
* |
|
ES |
Los actos cuyos títulos van impresos en caracteres finos son actos de gestión corriente, adoptados en el marco de la política agraria, y que tienen generalmente un período de validez limitado. Los actos cuyos títulos van impresos en caracteres gruesos y precedidos de un asterisco son todos los demás actos. |
II Actos no legislativos
ACTOS ADOPTADOS POR ÓRGANOS CREADOS MEDIANTE ACUERDOS INTERNACIONALES
|
26.10.2018 |
ES |
Diario Oficial de la Unión Europea |
L 269/1 |
Solo los textos originales de la CEPE surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben verificarse en la última versión del documento de la CEPE «TRANS/WP.29/343», que puede consultarse en:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Reglamento n.o 139 de la Comisión Económica para Europa de las Naciones Unidas (CEPE) Disposiciones uniformes sobre la homologación de los vehículos de turismo en lo relativo a los sistemas de asistencia en el frenado (BAS) [2018/1591]
Incorpora todo el texto válido hasta:
el suplemento 1 de la versión original del Reglamento. Fecha de entrada en vigor: 29 de diciembre de 2018
ÍNDICE
REGLAMENTO
|
1. |
Ámbito de aplicación |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Requisitos generales |
|
6. |
Requisitos funcionales |
|
7. |
Requisitos generales de ensayo |
|
8. |
Evaluación de la presencia de un BAS de categoría «A» |
|
9. |
Evaluación de la presencia de un BAS de categoría «B» |
|
10. |
Modificación de un tipo de vehículo o de un BAS y extensión de la homologación |
|
11. |
Conformidad de la producción |
|
12. |
Sanciones por no conformidad de la producción |
|
13. |
Cese definitivo de la producción |
|
14. |
Nombres y direcciones de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
ANEXOS
|
1. |
Comunicación |
|
2. |
Disposición de las marcas de homologación |
|
3. |
Método de determinación de FABS y aABS |
|
4. |
Tratamiento de datos para el BAS |
1. ÁMBITO DE APLICACIÓN
1.1. El presente Reglamento se aplica a la homologación de los vehículos de las categorías M1 y N1 (1) con respecto a su sistema de asistencia en el frenado.
1.2. El presente Reglamento no se aplica a:
|
1.2.1. |
los vehículos cuya velocidad por fabricación no supere los 25 km/h; |
|
1.2.2. |
los vehículos adaptados a los conductores con discapacidad. |
2. DEFINICIONES
A efectos del presente Reglamento, se entenderá por:
2.1. «Homologación de un vehículo»: homologación de un tipo de vehículo en lo relativo al frenado.
2.2. «Tipo de vehículo»: categoría de vehículos que no difieran entre sí en aspectos esenciales como:
|
2.2.1. |
el nombre comercial o la marca del fabricante; |
|
2.2.2. |
las características del vehículo que influyen significativamente en la eficacia del sistema de asistencia en el frenado (por ejemplo, diseño del sistema de frenado); |
|
2.2.3. |
el diseño del sistema de asistencia en el frenado. |
2.3. «Masa máxima»: la masa máxima técnicamente admisible declarada por el fabricante del vehículo (esta masa puede ser superior a la «masa máxima autorizada» por la administración nacional).
2.4. «Distribución de la masa entre los ejes»: distribución entre los ejes del efecto de la gravedad sobre la masa del vehículo y su contenido.
2.5. «Carga por rueda o eje»: la reacción (fuerza) vertical estática de la superficie de rodadura ejercida en la zona de contacto con la rueda o ruedas del eje.
2.6. «Sistema de asistencia en el frenado» (BAS): función del sistema de frenado que deduce una situación de frenado de emergencia a partir de una característica del intento de frenar del conductor y que, en tales condiciones:
|
a) |
ayuda al conductor a lograr el máximo coeficiente de frenado posible; o |
|
b) |
es suficiente para hacer que el ABS realice ciclos completos. |
2.6.1. «Sistema de asistencia en el frenado de categoría» A«»: dispositivo que detecta una situación de frenado de emergencia basándose principalmente en la fuerza (2) que el conductor aplica sobre el pedal del freno.
2.6.2. «Sistema de asistencia en el frenado de categoría» B«»: dispositivo que detecta una situación de frenado de emergencia a partir principalmente (2) de la velocidad a la que el conductor utiliza el pedal de freno.
3. SOLICITUD DE HOMOLOGACIÓN
3.1. La solicitud de homologación de un tipo de vehículo respecto al BAS será presentada por el fabricante del vehículo o por su representante debidamente acreditado.
3.2. Dicha solicitud deberá ir acompañada de los documentos que se mencionan a continuación, por triplicado, así como de los elementos siguientes:
|
3.2.1. |
una descripción del tipo de vehículo por lo que respecta a los elementos mencionados anteriormente en el punto 2.2 anterior. Deberán indicarse los números y símbolos que identifiquen el tipo de vehículo y el tipo de motor; |
|
3.2.2. |
una lista de los componentes, debidamente identificados, que conformen el BAS; |
|
3.2.3. |
un diagrama del BAS y una indicación de la ubicación de sus componentes en el vehículo; |
|
3.2.4. |
dibujos detallados de cada componente que permitan localizarlo e identificarlo fácilmente. |
3.3. Se entregará al servicio técnico encargado de la realización de los ensayos de homologación un vehículo representativo del tipo de vehículo que se desee homologar.
4. HOMOLOGACIÓN
4.1. Si el tipo de vehículo presentado para su homologación con arreglo al presente Reglamento satisface los requisitos que se exponen en los puntos 5 y 6, se concederá la homologación de dicho tipo de vehículo.
4.2. Se asignará un número de homologación a cada tipo de vehículo homologado; sus dos primeros dígitos indicarán la serie de modificaciones que incorporen los últimos cambios importantes de carácter técnico realizados en el Reglamento en el momento en que se expidió la homologación. Una misma Parte Contratante no podrá asignar el mismo número a otro tipo de vehículo con respecto al sistema de asistencia en el frenado.
4.3. Se comunicará la homologación o la denegación de la homologación de un tipo de vehículo con arreglo al presente Reglamento a las Partes Contratantes que apliquen el presente Reglamento mediante un formulario como el que figura en el anexo 1 del presente Reglamento y un resumen de la información incluida en los documentos a que se refieren los puntos 3.2.1 a 3.2.4 anteriores; el formato de los dibujos proporcionados por el solicitante de la homologación no será superior a A4 (210 × 297 mm), o bien se plegarán en dicho formato, y estarán a la escala adecuada.
4.4. En cada vehículo que se ajuste a un tipo de vehículo homologado con arreglo al presente Reglamento se colocará una marca de homologación internacional, de manera bien visible y en un lugar fácilmente accesible especificado en el formulario de homologación; la marca consistirá en los elementos siguientes:
|
4.4.1. |
la letra «E» dentro de un círculo, seguida del número distintivo del país que haya concedido la homologación (3), y |
|
4.4.2. |
el número del presente Reglamento seguido de la letra «R», un guion y el número de homologación a la derecha del círculo mencionado en el punto 4.4.1 anterior. |
4.5. Si el vehículo es conforme a un tipo de vehículo homologado de acuerdo con uno o varios Reglamentos anejos al Acuerdo en el país que ha concedido la homologación con arreglo al presente Reglamento, no será necesario repetir el símbolo prescrito en el punto 4.4.1; en ese caso, el Reglamento, los números de homologación y los símbolos adicionales de todos los Reglamentos según los cuales se ha concedido la homologación en el país que la concedió de conformidad con el presente Reglamento se colocarán en columnas verticales a la derecha del símbolo exigido en el punto 4.4.1.
4.6. La marca de homologación será claramente legible e indeleble.
4.7. La marca de homologación se colocará en la placa de características del vehículo o junto a ella.
4.8. En el anexo 2 del presente Reglamento figuran algunos ejemplos de disposición de las marcas de homologación.
5. REQUISITOS GENERALES
5.1. Los vehículos equipados estarán equipados con un sistema de asistencia en el frenado que cumpla los requisitos funcionales especificados en el punto 6 del presente Reglamento. El cumplimiento de estos requisitos se demostrará cumpliendo las disposiciones de los puntos 8 o 9 del presente Reglamento con arreglo a los requisitos de ensayo especificados en el punto 7 del presente Reglamento. Además de los requisitos del presente Reglamento, los vehículos también estarán equipados con un ABS con arreglo a los requisitos técnicos del Reglamento n.o 13-H de las Naciones Unidas.
5.2. El BAS deberá ser diseñado, fabricado e instalado de forma que, en condiciones normales de utilización y a pesar de las vibraciones a las que pudiera estar sometido, el vehículo se ajuste a las disposiciones del presente Reglamento.
5.3. En particular, el BAS deberá ser diseñado, fabricado e instalado de forma que sea capaz de resistir los fenómenos de corrosión y de envejecimiento a los que estará expuesto.
5.4. La eficacia del BAS no deberá verse mermada a causa de interferencias producidas por campos magnéticos y eléctricos. Este particular deberá demostrarse mediante el cumplimiento de los requisitos técnicos y de lo establecido en las disposiciones transitorias del Reglamento n.o 10, aplicando:
|
a) |
la serie 03 de enmiendas, en el caso de vehículos sin sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción); |
|
b) |
la serie 04 de enmiendas, en el caso de vehículos con sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción). |
5.5. La evaluación de los aspectos relativos a la seguridad de los BAS se incluirá en la evaluación general de la seguridad del sistema de frenado, tal como se especifica en los requisitos del Reglamento n.o 13-H asociados con los sistemas electrónicos complejos de control. Se considera que se cumple esta condición con la presentación de un certificado con arreglo al Reglamento n.o 13-H que incluya el BAS que deba homologarse.
5.6. Disposiciones relativas a la inspección técnica periódica de los sistemas electrónicos de asistencia en el frenado
5.6.1. Será posible confirmar el correcto estado de funcionamiento en una inspección técnica periódica mediante la observación visual de las señales de advertencia después de dar el contacto.
5.6.2. En el momento de la homologación de tipo, se describirán a título confidencial los medios implementados para proteger contra una modificación simple no autorizada del funcionamiento de las señales de aviso. Como alternativa, este requisito de protección se cumplirá cuando se disponga de un medio secundario que permita comprobar que el estado de funcionamiento es el correcto.
6. REQUISITOS FUNCIONALES
6.1. Características generales de funcionamiento de los BAS de categoría «A».
Si se detecta una fuerza relativamente elevada sobre el pedal como consecuencia de una situación de emergencia, la fuerza adicional sobre el pedal necesaria para hacer que el ABS realice ciclos completos se reducirá en comparación con la fuerza sobre el pedal necesaria si el BAS no se activa.
La conformidad con este requisito quedará demostrada si se cumple lo dispuesto en los puntos 8.1 a 8.3 del presente Reglamento.
6.2. Características generales de funcionamiento de los BAS de categoría «B».
Si se detecta una situación de emergencia a consecuencia, por lo menos, de accionar muy rápidamente el pedal, el BAS incrementará la presión para proporcionar el máximo coeficiente de frenado posible o para provocar que el ABS realice ciclos completos.
La conformidad con este requisito quedará demostrada si se cumple lo dispuesto en los puntos 9.1 a 9.3 del presente Reglamento.
7. REQUISITOS GENERALES DE ENSAYO
7.1. Variables
Al realizar los ensayos descritos en el presente Reglamento, se medirán las variables siguientes:
|
7.1.1. |
la fuerza ejercida sobre el pedal del freno, Fp; |
|
7.1.2. |
la velocidad del vehículo, vx; |
|
7.1.3. |
la desaceleración del vehículo, ax; |
|
7.1.4. |
la temperatura de los frenos, Td; |
|
7.1.5. |
la presión de los frenos, P, si procede; |
|
7.1.6. |
la velocidad del pedal de freno, vp, medida en el centro del patín del pedal o en un lugar del mecanismo del pedal con un desplazamiento proporcional al desplazamiento desde el centro del patín del pedal, permitiendo un calibrado simple de la medición. |
7.2. Equipo de medición
7.2.1. Las variables enumeradas en el punto 7.1 anterior se medirán mediante los captores adecuados. En la norma ISO 15037-1:2006 se describen la exactitud, los rangos de funcionamiento, las técnicas de filtrado, el tratamiento de datos y otros requisitos.
7.2.2. La exactitud de las mediciones de la fuerza ejercida sobre el pedal y la temperatura de los discos serán las indicadas a continuación:
|
Sistema de rango variable |
Rango de funcionamiento típico de los captores |
Errores de registro máximos recomendados |
|
Fuerza ejercida sobre el pedal |
0 a 2 000 N |
± 10 N |
|
Temperatura de los frenos |
0 – 1 000 °C |
± 5 °C |
|
Presión de los frenos (*1) |
0 – 20 MPa (*1) |
± 100 kPa (*1) |
7.2.3. El anexo 4 del presente Reglamento contiene información más detallada sobre el tratamiento digital y analógico de los datos relativos a los procedimientos de ensayo del BAS. Se requiere una frecuencia de muestreo para la adquisición de datos de 500 Hz como mínimo.
7.2.4. Podrán permitirse métodos de medición distintos de los mencionados en el punto 7.2.3, siempre que se demuestre que tienen un nivel de precisión al menos equivalente.
7.3. Condiciones del ensayo
7.3.1. Condiciones de ensayo relativas a la carga del vehículo: El vehículo deberá encontrarse descargado. Podrá haber, además del conductor, una segunda persona sentada en el asiento delantero, encargada de tomar nota de los resultados de los ensayos.
7.3.2. Los ensayos de frenado se efectuarán sobre una superficie seca que permita una buena adherencia.
7.4. Método de ensayo
7.4.1. Los ensayos descritos en los puntos 8 y 9 de la presente sección se realizarán a partir de una velocidad de ensayo de 100 ± 2 km/h. Se conducirá el vehículo a la velocidad de ensayo en línea recta.
7.4.2. La temperatura media de los frenos de servicio en el eje más caliente del vehículo, medida dentro de los forros del freno o en el recorrido de frenado del disco o tambor, estará situada entre 65 y 100 °C antes de cualquier accionamiento del freno.
7.4.3. A efectos de los ensayos, el tiempo de referencia, t0, se define como el instante en el que la fuerza ejercida sobre el pedal del freno alcance los 20 N.
Nota: En los vehículos provistos de un BAS asistido por una fuente de energía, la fuerza aplicada sobre el pedal depende necesariamente del nivel de energía existente en el dispositivo de almacenamiento de energía. Por tanto, al principio del ensayo se asegurará un nivel de energía suficiente.
8. EVALUACIÓN DE LA PRESENCIA DE UN BAS DE CATEGORÍA «A»
Los BAS de categoría «A» se ajustarán a los requisitos de ensayo establecidos en los puntos 8.1 y 8.2.
8.1. Ensayo 1: ensayo de referencia para determinar FABS y aABS
8.1.1. Los valores de referencia FABS y aABS se determinarán de acuerdo con el procedimiento descrito en el apéndice 3 del presente anexo.
8.2. Ensayo 2: activación del BAS
8.2.1. Cuando se haya detectado una situación de frenado de emergencia, los sistemas sensibles a la fuerza ejercida sobre el pedal mostrarán un incremento significativo de la relación entre:
|
a) |
la presión en el circuito de frenado y la fuerza ejercida sobre el pedal del freno, en aquellos casos en que lo permitan las disposiciones del punto 8.2.5; o |
|
b) |
la desaceleración del vehículo y la fuerza ejercida sobre el pedal del freno. |
8.2.2. Los requisitos de eficacia de los BAS de categoría «A» se cumplen si se puede determinar una característica específica de frenado en la que la fuerza ejercida sobre el pedal del freno requerida experimente un descenso de entre el 40 % y el 80 % para (FABS – FT) en comparación con (FABS extrapolada – FT).
8.2.3. FT y aT son, respectivamente, la fuerza de umbral y la desaceleración de umbral, tal como muestra la figura 1. Los valores de FT y aT se suministrarán al servicio técnico al presentar la solicitud de homologación de tipo. El valor de aT se situará entre 3,5 m/s2 y 5,0 m/s2.
Figura 1a
Característica de la fuerza ejercida sobre el pedal necesaria para alcanzar una desaceleración máxima con un BAS de categoría «A»

Desaceleración, a
FABS, extrapolada
FABS, , máx
FABS
FABS, mín
Fuerza ejercida sobre el pedal del freno, F
FT
aT
aABS
Entre 3,5 y 5,0 m/s2
8.2.4. Se marcará una línea recta que, desde el origen, pase por el punto FT, aT (como muestra la figura 1a). El valor «F» de la fuerza ejercida sobre el pedal del freno, en el punto de intersección entre esta línea y una línea horizontal expresada como a = aABS, se definirá como FABS, extrapolada:
8.2.5. Como alternativa, en el caso de los vehículos de categoría N1 (o de los de categoría M1 derivados de los anteriores), y una masa bruta del vehículo GVM > 2 500 kg, el fabricante puede optar por calcular los valores FT, FABS,mín, FABS,máx y FABS,extrapolada relativos a la fuerza ejercida sobre el pedal del freno a partir de la característica de la respuesta de la presión en el circuito de frenado, en vez de a partir de la desaceleración del vehículo. Las mediciones se efectuarán cuando la fuerza ejercida sobre el pedal del freno esté en aumento.
8.2.5.1. La presión a la que se iniciará la realización de ciclos del ABS se hallará mediante cinco ensayos a partir de 100 ± 2 km/h en los que se accionará el pedal del freno hasta que se active el ABS; las cinco presiones a las que esto ocurra, determinadas a partir de la presión en las ruedas delanteras, se registrarán y el valor medio obtenido se designará como PABS.
8.2.5.2. La presión de umbral PT será especificada por el fabricante y corresponderá a una desaceleración situada entre 2,5 y 4,5 m/s2.
8.2.5.3. La figura 1b se determinará de acuerdo con las disposiciones del punto 8.2.4, pero utilizando las mediciones de la presión en el circuito de frenado para definir los parámetros enumerados en el punto 8.2.5 del presente Reglamento, siendo:

Figura 1b
Característica de la fuerza ejercida sobre el pedal necesaria para alcanzar una desaceleración máxima con un BAS de categoría «A»

Umbral de cambiode la fuerza
Presión en el circuito de frenado, P
FABS, extrapolada
FABS, máx
FABS
FABS, mín
Fuerza ejercida sobre el pedal del freno, F
FT
PT
PABS
8.3. Evaluación de los datos
La presencia de un BAS de categoría «A» queda probada si
FABS,mín ≤ FABS ≤ FABS,máx
siendo:
FABS,máx – FT ≤ (FABS,extrapolada – FT) · 0,6
y
FABS,mín – FT ≥ (FABS,extrapolada – FT) · 0,2
9. EVALUACIÓN DE LA PRESENCIA DE UN BAS DE CATEGORÍA «B»
Los BAS de categoría «B» se ajustarán a los requisitos de ensayo establecidos en los puntos 9.1 y 9.2 de la presente sección.
9.1. Ensayo 1: ensayo de referencia para determinar FABS y aABS
9.1.1. Los valores de referencia FABS y aABS se determinarán de acuerdo con el procedimiento descrito en el apéndice 3 del presente anexo.
9.2. Ensayo 2: activación del BAS
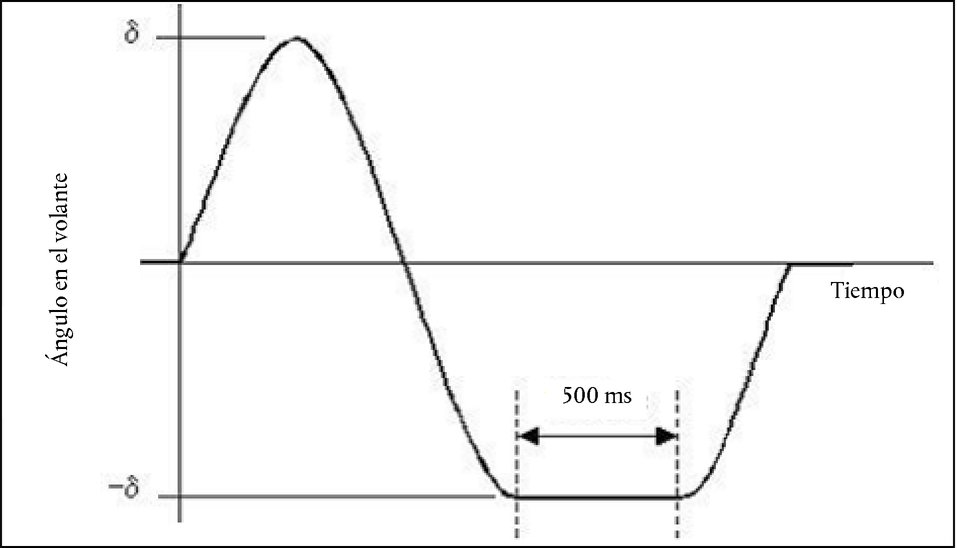
Se conducirá el vehículo a la velocidad de ensayo en línea recta a la velocidad de ensayo especificada en el punto 7.4 del presente Reglamento. El conductor accionará rápidamente el pedal del freno de conformidad con la figura 2, simulando una situación de frenado de emergencia a fin de que el BAS se active y el ABS ejecute ciclos completos.
Para activar el BAS se accionará el pedal del freno siguiendo las instrucciones del fabricante del vehículo. Este notificará al servicio técnico los valores de entrada requeridos para el pedal del freno al presentar la solicitud de homologación de tipo. Se demostrará a satisfacción del servicio técnico que el BAS se activa en las condiciones especificadas por el fabricante conforme a lo dispuesto en el punto 16.1.1 o 16.1.2 del anexo 1.
Después de t = t0 + 0,8 s y hasta que la velocidad del vehículo se haya reducido a 15 km/h, se mantendrá la fuerza sobre el pedal del freno en un intervalo situado entre FABS, superior y FABS, inferior, siendo FABS, superior = 0,7 FABS y FABS, inferior = 0,5 FABS.
También se considerarán cumplidos los requisitos si, después de t = t0 + 0,8 s, la fuerza sobre el pedal se sitúa por debajo de FABS, inferior, a condición de que se cumpla el requisito del punto 9.3.
9.3. Evaluación de los datos
La presencia de un BAS de categoría «B» quedará probada si se mantiene una desaceleración media (aBAS) de al menos 0,85 · aABS desde el instante en que t = t0 + 0,8 s hasta el instante en que la velocidad del vehículo se haya reducido a 15 km/h.
Figura 2
Ejemplo de ensayo 2 de un BAS de categoría «B»

Fase de evaluación del BAS (termina a velocidad de 15 km/h)
Fuerza ejerci-da sobre el pe-dal del freno, F
Fuerza inicial sobre el pedal
FABS, inferior
FABS, superior
t0
Fase de accionamientodel pedal con pánico
t0 + 0,8 segundos
tiempo
Desaceleración
aBAS
aABS
Desaceleración, ax
Fuerza ejercida sobre el pedal del freno
10. MODIFICACIÓN DE UN TIPO DE BAS Y EXTENSIÓN DE LA HOMOLOGACIÓN
10.1. Toda modificación de un tipo de vehículo existente deberá notificarse a la autoridad de homologación de tipo que lo homologó.
Entonces, dicha autoridad podrá:
|
a) |
decidir, en consulta con el fabricante, que debe concederse una nueva homologación de tipo; o bien |
|
b) |
aplicar el procedimiento previsto en el punto 10.1.1 (revisión) y, si procede, el procedimiento previsto en el punto 10.1.2 (extensión). |
10.1.1. Revisión
Cuando hayan cambiado los datos registrados en las fichas de características y la autoridad de homologación de tipo considere improbable que las modificaciones realizadas tengan consecuencias negativas apreciables y que, en cualquier caso, los mandos que se accionan con el pie siguen cumpliendo los requisitos correspondientes, la modificación será considerada una «revisión».
En estos casos, la autoridad de homologación de tipo deberá expedir las páginas revisadas de las fichas de características, según proceda, señalando claramente en cada página revisada qué tipo de cambio se ha producido y en qué fecha tuvo lugar la nueva expedición. Se considerará cumplido este requisito mediante una copia consolidada y actualizada de las fichas de características que lleve adjunta una descripción detallada de los cambios.
10.1.2. Extensión
La modificación se considerará una «extensión» si, además de la modificación de los datos registrados en las fichas de características:
|
a) |
deben realizarse nuevas inspecciones o nuevos ensayos; o |
|
b) |
ha cambiado cualquier información del documento de comunicación (a excepción de sus documentos adjuntos); o |
|
c) |
se pide la homologación conforme a una serie posterior de enmiendas después de su entrada en vigor. |
10.2. La confirmación o denegación de la homologación se comunicará a las Partes Contratantes del Acuerdo que apliquen el presente Reglamento mediante el procedimiento indicado en el punto 4.3, especificándose las modificaciones. Por otra parte, el índice de las fichas de características y de los informes de ensayo, que se adjunta al documento de comunicación del anexo 1, se modificará en consecuencia para mostrar la fecha de la revisión o extensión más reciente.
10.3. La autoridad competente que expida la extensión de la homologación asignará un número de serie a cada formulario de comunicación cumplimentado para dicha extensión.
11. CONFORMIDAD DE LA PRODUCCIÓN
Los procedimientos de conformidad de la producción se ajustarán a los expuestos en el apéndice 2 del Acuerdo (E/ECE/324-E/ECE/TRANS/505/Rev. 2), más los requisitos siguientes:
11.1. Un vehículo homologado con arreglo al presente Reglamento será fabricado de conformidad con el tipo homologado cumpliendo los requisitos expuestos en los puntos 5 y 6 anteriores.
11.2. La autoridad que haya concedido la homologación de tipo podrá verificar en cualquier momento los métodos de control de la conformidad aplicados en cada planta de producción. La frecuencia normal de esas verificaciones será una vez cada dos años.
12. SANCIONES POR NO CONFORMIDAD DE LA PRODUCCIÓN
12.1. Se podrá retirar la homologación concedida a un tipo de vehículo con arreglo al presente Reglamento si no se cumplen los requisitos exigidos en el punto 11.1 siguiente.
12.2. Si una Parte Contratante en el Acuerdo que aplique el presente Reglamento retira una homologación que concedió anteriormente, lo notificará inmediatamente a las demás Partes Contratantes que apliquen el presente Reglamento mediante una copia del formulario de comunicación que se ajuste al modelo que figura en el anexo 1 del presente Reglamento.
13. CESE DEFINITIVO DE LA PRODUCCIÓN
Si el titular de una homologación cesa por completo de fabricar un tipo de vehículo homologado con arreglo al presente Reglamento, deberá informar de ello a la autoridad que concedió la homologación. Una vez recibida esta comunicación, dicha autoridad informará a las demás Partes Contratantes en el Acuerdo que apliquen el presente Reglamento mediante copias de un formulario de comunicación que se ajusten al modelo que figura en el anexo 1 del presente Reglamento.
14. NOMBRES Y DIRECCIONES DE LOS SERVICIOS TÉCNICOS RESPONSABLES DE LA REALIZACIÓN DE LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes Contratantes del Acuerdo que apliquen el presente Reglamento enviarán a la Secretaría de las Naciones Unidas los nombres y direcciones de los servicios técnicos responsables de la realización de los ensayos de homologación y de las autoridades de homologación de tipo que conceden la homologación y a los que deben enviarse los formularios que certifican la homologación, extensión, denegación o retirada de la homologación expedidos en otros países.
(1) Las categorías de vehículo M1 y N1 figuran definidas en la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.4, para. 2 -www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Según declaración del fabricante del vehículo.
(3) Los números distintivos de las Partes Contratantes del Acuerdo de 1958 figuran en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 4, anexo 3-www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(*1) Aplicable según se especifica en el punto 8.2.5.
ANEXO 2
DISPOSICIÓN DE LAS MARCAS DE HOMOLOGACIÓN
MODELO A
(Véase el punto 4.4 del presente Reglamento)
Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión ha sido homologado en Bélgica (E 6) en lo relativo al sistema de asistencia en el frenado con arreglo al Reglamento n.o 139. Los dos primeros dígitos del número de homologación indican que esta se concedió de acuerdo con los requisitos del Reglamento n.o 139 en su forma original.
MODELO B
(Véase el punto 4.5 del presente Reglamento)

Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo ha sido homologado en Bélgica (E 6) con arreglo a los Reglamentos n.os 139 y 24 (1). (En el caso de este último Reglamento el coeficiente de absorción corregido es 1,30 m–1). Los números de homologación indican que, cuando se concedieron las homologaciones respectivas, la versión existente del Reglamento n.o 139 era la original y el Reglamento n.o 24 incluía la serie 02 de enmiendas.
(1) Este número se da a título de ejemplo.
ANEXO 3
MÉTODO DE DETERMINACIÓN DE FABS Y aABS
1.1. La fuerza ejercida sobre el pedal FABS es la fuerza mínima que ha de aplicarse sobre el pedal en un vehículo determinado a fin de alcanzar la máxima desaceleración que indica que el ABS realiza ciclos completos. aABS designa la desaceleración de un vehículo determinado durante la desaceleración ABS, según se define en el punto 1.8 siguiente.
1.2. El pedal del freno se accionará lentamente (sin activar el BAS en el caso de los sistemas de categoría B) de forma que la desaceleración aumente constantemente hasta que el ABS realice ciclos completos (véase la figura).
1.3. La desaceleración plena se alcanzará en un intervalo de tiempo de 2,0 ± 0,5 s. La curva de desaceleración registrada en relación con el tiempo se situará en un intervalo de ± 0,5 s en torno de la línea central del intervalo de la curva de desaceleración. El ejemplo de la figura se origina en el tiempo t0 y corta la línea aABS en 2 s. Una vez que se haya alcanzado la plena desaceleración, se accionará el pedal del freno de forma que el ABS siga efectuando ciclos completos. El tiempo de activación plena del ABS se define como el instante en el que se alcanza la fuerza sobre el pedal FABS. La medición se realizará en el intervalo correspondiente a la variación del incremento de la desaceleración (véase la figura abajo).
Intervalo de desaceleración para la determinación de FABS y aABS
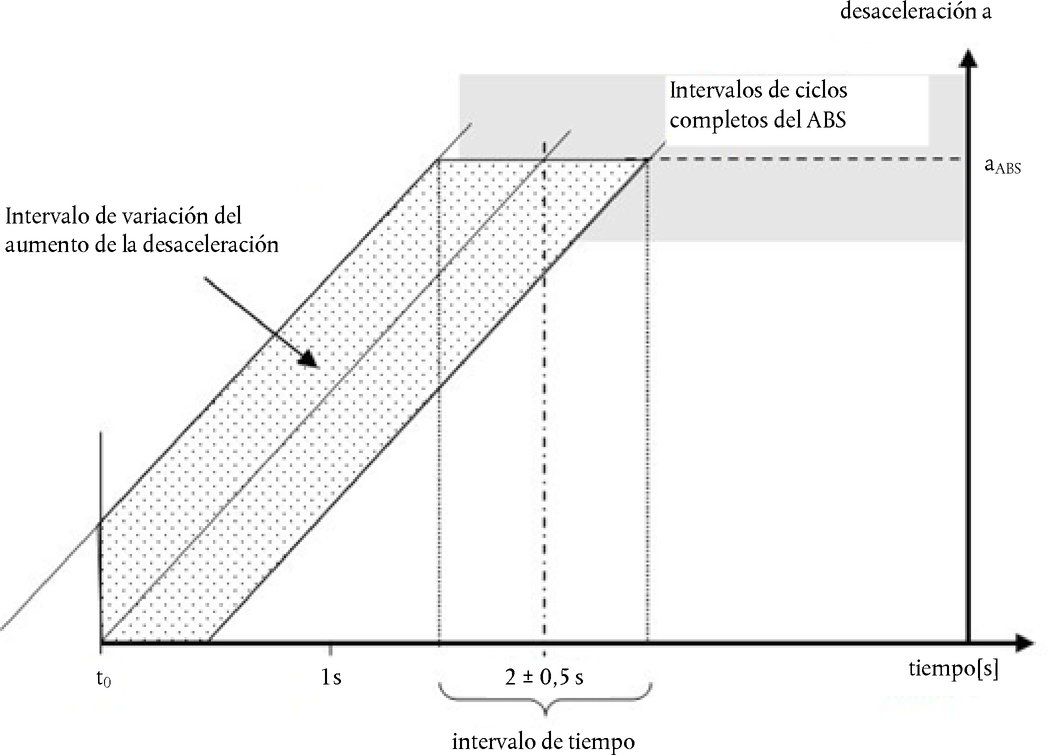
Intervalo de variación del aumento de la desaceleración
desaceleración a
aABS
tiempo[s]
intervalo de tiempo
2 ± 0,5 s
1s
t0
Intervalos de ciclos completos del ABS
1.4. Se llevarán a cabo cinco ensayos conforme a los requisitos del punto 1.3. En cada uno de estos ensayos válidos, la desaceleración del vehículo se representará gráficamente como una función de la fuerza registrada sobre el pedal del freno. Para realizar los cálculos descritos en los párrafos siguientes, solo se tendrán en cuenta los datos registrados a velocidades superiores a los 15 km/h.
1.5. A fin de determinar aABS y FABS se aplicará un filtro de paso bajo de 2 Hz para la desaceleración del vehículo y para la fuerza ejercida sobre el pedal.
1.6. La desaceleración media se calculará a partir de los valores de las cinco curvas de «desaceleración en función de la fuerza sobre el pedal del freno» con incrementos de 1 N en la fuerza aplicada sobre el pedal. La curva así obtenida representará la desaceleración media en función de la fuerza aplicada sobre el pedal del freno, designada en el presente anexo como «curva maF».
1.7. El valor máximo de desaceleración del vehículo se determinará a partir de la «curva maF» y se denominará «amáx».
1.8. Se promediarán todos los valores de la «curva maF» por encima del 90 % de este valor de desaceleración «amáx». Este valor de «a» representará la desaceleración «aABS» mencionada en el presente Reglamento.
1.9. La fuerza mínima aplicada sobre el pedal (FABS) suficiente para alcanzar la desaceleración aABS se definirá como el valor F correspondiente a a = aABS en la curva maF.
ANEXO 4
TRATAMIENTO DE DATOS PARA EL BAS
(véase el punto 7.2.3 del presente Reglamento)
1. TRATAMIENTO ANALÓGICO DE LOS DATOS
El ancho de banda de todo el sistema combinado de captores/registrador no será inferior a 30 Hz.
Para poder llevar a cabo el filtrado de señales necesario, se utilizarán filtros de paso bajo de orden superior o igual a 4. El ancho de la banda pasante (de 0 Hz a la frecuencia fo a – 3 dB) no será inferior a 30 Hz. Los errores de amplitud serán inferiores a un ± 0,5 % en la gama de frecuencias pertinente entre 0 Hz y 30 Hz. Todas las señales analógicas se tratarán con filtros cuyas características de fase sean suficientemente parecidas para garantizar que las diferencias en los retardos debidas al filtrado no excedan los límites de exactitud requeridos para la medición del tiempo.
Nota: durante el filtrado analógico de señales con componentes de frecuencias diferentes se pueden producir desplazamientos de fase. Por lo tanto, es preferible utilizar un método de tratamiento de los datos como el descrito en el punto 2 del presente anexo.
2. TRATAMIENTO DIGITAL DE LOS DATOS
2.1. Consideraciones generales
Al preparar las señales analógicas debe prestarse atención a la atenuación de la amplitud del filtro y a la frecuencia de muestreo para evitar errores de solape, así como desfases y retardos debidos al filtrado. El muestreo y digitalización suponen definir los parámetros siguientes: la amplificación de las señales previa al muestreo a fin de reducir al mínimo los errores de digitalización; el número de bits por muestra; el número de muestras por ciclo; los amplificadores de muestreo y mantenimiento de señal; y el espaciamiento temporal de las muestras. Entre los parámetros para un filtrado digital complementario sin fases se encuentra la selección de bandas pasantes y bandas recortadas y la atenuación y la ondulación admisible de cada una de ellas; así como la corrección de los retardos debidos al filtrado. Se tendrá en cuenta cada uno de estos factores a fin de lograr una exactitud global relativa de ± 0,5 % en la adquisición de los datos.
2.2. Errores de solape
Con objeto de evitar errores de solape imposibles de corregir, las señales analógicas se filtrarán de forma adecuada antes del muestreo y la digitalización. El orden de los filtros utilizados, así como su banda pasante, se elegirán en función tanto de la planitud requerida en la gama de frecuencias pertinente como de la frecuencia de muestreo.
Las características mínimas del filtro y la frecuencia de muestro cumplirán los siguientes requisitos:
|
a) |
en la gama de frecuencias pertinente de 0 Hz a fmáx = 30 Hz, la atenuación será inferior a la resolución del sistema de adquisición de datos; y |
|
b) |
a una frecuencia igual a la mitad de la frecuencia de muestreo (es decir, la frecuencia Nyquist o frecuencia de «doblado») se reducirán las magnitudes de todos los componentes de frecuencia de la señal y el ruido hasta valores inferiores a los de la resolución del sistema. |
Para una resolución de 0,05 %, la atenuación del filtro será inferior al 0,05 % en la gama de frecuencias entre 0 y 30 Hz, y superior al 99,95 % en todas las frecuencias superiores a la mitad de la frecuencia de muestreo.
Nota: la atenuación para un filtro Butterworth se determina por las siguientes fórmulas:
 y
y 
siendo:
|
|
n representa el orden del filtro; |
|
|
fmáx representa la gama de frecuencias pertinente (30 Hz); |
|
|
fo representa la frecuencia de corte del filtro; |
|
|
fN representa la frecuencia de Nyquist o frecuencia de «doblado». |
Con respecto a un filtro de cuarto orden
|
|
Para A = 0,9995: fo = 2,37 · fmáx |
|
|
Para A = 0,0005: fS = 2 · (6,69 · fo), siendo fS la frecuencia de muestreo = 2 · fN. |
2.3. Desfases del filtro y retardos para un filtrado antisolapes
Se evitará el filtrado analógico excesivo y todos los filtros presentarán características de fase suficientemente similares como para asegurar que las diferencias en los retardos no excedan los límites de exactitud requeridos para la medición del tiempo. Los desfases son especialmente significativos si se multiplican entre sí las variables medidas para formar nuevas variables, ya que, al multiplicar las amplitudes, aumentan también los desfases y los retardos asociados. Los desfases y los retardos se reducen al aumentar el valor de fo. Siempre que se conozcan las ecuaciones que describen los filtros de premuestreo sean conocidas, resulta práctico suprimir los desfases y retardos de las mismas aplicando algoritmos simples en el dominio frecuencial.
Nota: En la gama de frecuencias en las que las características de amplitud del filtro permanecen planas, el desfase Φ de un filtro Butterworth se puede estimar mediante la aproximación siguiente:
|
|
Φ = 81 · (f/f0) grados para un filtro de segundo orden |
|
|
Φ = 150 · (f/f0) grados para un filtro de cuarto orden |
|
|
Φ = 294 · (f/f0) grados para un filtro de octavo orden |
El retardo para todos los filtros, independientemente de su orden será: t = (Φ/360) · (1/f0)
2.4. Muestreo y digitalización de los datos
A 30 Hz, la amplitud de la señal puede sufrir variaciones de, como máximo, un 18 % por ms. Para reducir hasta un 0,1 % los errores dinámicos debidos a los cambios en las señales analógicas de entrada, el tiempo de muestreo o de digitalización será inferior a 32 μs. Todos los pares o conjuntos de muestras de datos que vayan a compararse se tomarán simultáneamente o en un período de tiempo suficientemente corto.
2.5. Requisitos del sistema
El sistema de datos tendrá una resolución de 12 bits (± 0,05 %) como mínimo, y una exactitud de ± 0,1 % (2 lb). Los filtros antisolape serán de cuarto orden o superior y el intervalo de datos pertinente fmáx estará comprendido entre 0 y 30 Hz.
Para los filtros de cuarto orden, la frecuencia de la banda pasante fo (entre 0 Hz y la frecuencia fo) será superior a 2,37 · fmáx si posteriormente se ajustan los errores de fase durante el tratamiento digital de los datos; en caso contrario, será superior a 5 · fmáx. La frecuencia de muestreo de los datos fs para los filtros de cuarto orden será superior a 13,4 · fo.
|
26.10.2018 |
ES |
Diario Oficial de la Unión Europea |
L 269/17 |
Solo los textos originales de la CEPE surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben consultarse en la última versión del documento de situación de la CEPE TRANS/WP.29/343, disponible en:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Reglamento n.o 140 de la Comisión Económica para Europa de las Naciones Unidas (CEPE). Disposiciones uniformes sobre la homologación de los vehículos de turismo en lo relativo a los sistemas de control electrónico de la estabilidad (ESC) [2018/1592]
Incorpora todo el texto válido hasta:
el suplemento 2 de la versión original del Reglamento. Fecha de entrada en vigor: 29 de diciembre de 2018
ÍNDICE
REGLAMENTO
|
1. |
Ámbito de aplicación |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Requisitos generales |
|
6. |
Requisitos funcionales |
|
7. |
Requisitos de eficacia |
|
8. |
Condiciones del ensayo |
|
9. |
Procedimiento de ensayo |
|
10. |
Modificación del tipo de vehículo o del sistema ESC y extensión de la homologación |
|
11. |
Conformidad de la producción |
|
12. |
Sanciones por no conformidad de la producción |
|
13. |
Cese definitivo de la producción |
|
14. |
Nombres y direcciones de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
ANEXOS
|
1. |
Comunicación |
|
2. |
Disposición de las marcas de homologación |
|
3. |
Utilización de la simulación de la estabilidad dinámica |
|
4. |
Herramienta de simulación de la estabilidad dinámica y validación de la misma |
|
5. |
Acta de ensayo de la herramienta de simulación de la función de control de la estabilidad del vehículo |
1. ÁMBITO DE APLICACIÓN
1.1. El presente Reglamento se aplica a la homologación de los vehículos de las categorías M1 y N1 (1) con respecto a su sistema de control electrónico de la estabilidad.
1.2. El presente Reglamento no se aplica a:
|
1.2.1. |
los vehículos cuya velocidad por fabricación no supere los 25 km/h; |
|
1.2.2. |
los vehículos adaptados a los conductores con discapacidad. |
2. DEFINICIONES
A efectos del presente Reglamento, se entenderá por:
2.1. «Homologación de un vehículo»: homologación de un tipo de vehículo en lo relativo al sistema de control electrónico de la estabilidad.
2.2. «Tipo de vehículo»: categoría de vehículos que no difieran entre sí en aspectos esenciales como:
|
2.2.1. |
el nombre comercial o la marca del fabricante; |
|
2.2.2. |
las características del vehículo que influyen significativamente en la eficacia del sistema de control electrónico de la estabilidad (por ejemplo, masa máxima, posición del centro de gravedad, anchura de vía, distancia entre los ejes, dimensión de los neumáticos y diseño del sistema de frenado); |
|
2.2.3. |
el diseño del sistema de control electrónico de la estabilidad. |
2.3. «Masa máxima»: la masa máxima técnicamente admisible declarada por el fabricante del vehículo (esta masa puede ser superior a la «masa máxima autorizada» por la administración nacional).
2.4. «Distribución de la masa entre los ejes»: distribución entre los ejes del efecto de la gravedad sobre la masa del vehículo y su contenido.
2.5. «Carga por rueda o eje»: la reacción (fuerza) vertical estática de la superficie de rodadura ejercida en la zona de contacto con la rueda o ruedas del eje.
2.6. «Ángulo de dirección de Ackermann»: ángulo cuya tangente es la distancia entre los ejes dividida por el radio del giro a muy baja velocidad.
2.7. «Sistema de control electrónico de la estabilidad (ESC)»: sistema que dispone de todos los atributos siguientes:
|
2.7.1. |
Mejora la estabilidad direccional del vehículo mediante, al menos, la capacidad de controlar automáticamente los pares de frenado de las ruedas izquierda y derecha de cada eje (2) para inducir un momento de deriva corrector a partir de la evaluación del comportamiento real del vehículo en comparación con una determinación del comportamiento del vehículo solicitada por el conductor. |
|
2.7.2. |
Está controlado por un módulo informático que utiliza un algoritmo de bucle cerrado para limitar el sobrevirado y el subvirado del vehículo a partir de la evaluación del comportamiento real del mismo en comparación con una determinación del comportamiento del vehículo solicitada por el conductor. |
|
2.7.3. |
Dispone de un medio para determinar directamente la velocidad angular de guiñada del vehículo y estimar su deriva o la derivada de esta con respecto al tiempo. |
|
2.7.4. |
Posee un medio para controlar las señales dadas a la dirección por el conductor. |
|
2.7.5. |
Cuenta con un algoritmo para determinar la necesidad de modificar el par de propulsión y un medio de hacerlo, en caso necesario, a fin de ayudar al conductor a mantener el control del vehículo. |
2.8. «Aceleración transversal»: componente del vector de aceleración de un punto del vehículo perpendicular al eje (longitudinal) x del vehículo y paralelo al plano de la carretera.
2.9. «Sobrevirado»: condición en la que la velocidad angular de guiñada del vehículo es mayor que la que se produciría a la velocidad del vehículo como resultado del ángulo de dirección de Ackermann.
2.10. «Deriva o ángulo de deriva»: arco tangente del cociente de la velocidad transversal con respecto a la velocidad longitudinal del centro de gravedad del vehículo.
2.11. «Subvirado»: condición en la que la velocidad angular de guiñada del vehículo es menor que la que se produciría a la velocidad del vehículo como resultado del ángulo de dirección de Ackermann.
2.12. «Velocidad angular de guiñada»: velocidad del cambio del rumbo del vehículo medida en grados/segundos de rotación en torno a un eje vertical que atraviese el centro de gravedad del vehículo.
2.13. «Coeficiente de frenado máximo (PBC)»: medida de la fricción entre el neumático y la carretera basada en la desaceleración máxima de un neumático en rotación.
2.14. «Espacio común»: zona en la que puede mostrarse más de un testigo, indicador, símbolo de identificación u otro mensaje, pero no simultáneamente.
2.15. «Factor de estabilidad estática» (SSF): la mitad de la anchura de vía de un vehículo dividida por la altura de su centro de gravedad, también expresado como SSF = T/2H, donde: T = anchura de vía (en el caso de vehículos con más de una achura de vía, se utilizará la media; cuando se trate de ruedas gemelas, se emplearán las ruedas exteriores al calcular «T») y H = altura del centro de gravedad del vehículo.
3. SOLICITUD DE HOMOLOGACIÓN
3.1. La solicitud de homologación de un tipo de vehículo por lo que respecta al ESC deberá presentarla el fabricante del vehículo o su representante debidamente acreditado.
3.2. Dicha solicitud deberá ir acompañada de los documentos que se mencionan a continuación, por triplicado, así como de los elementos siguientes:
|
3.2.1. |
una descripción del tipo de vehículo por lo que respecta a los elementos mencionados anteriormente en el punto 2.2 anterior. Deberán indicarse los números y símbolos que identifiquen el tipo de vehículo y el tipo de motor. |
|
3.2.2. |
una lista de los componentes, debidamente identificados, que conforman el sistema ESC; |
|
3.2.3. |
un diagrama del sistema ESC y una indicación de la ubicación de sus componentes en el vehículo; |
|
3.2.4. |
dibujos detallados de cada componente que permitan localizarlo e identificarlo fácilmente. |
3.3. Se entregará al servicio técnico encargado de la realización de los ensayos de homologación un vehículo representativo del tipo de vehículo que se desee homologar.
4. HOMOLOGACIÓN
4.1. Si el tipo de vehículo presentado para su homologación con arreglo al presente Reglamento satisface los requisitos que se exponen en los puntos 5, 6 y 7 siguientes, se concederá la homologación de dicho tipo de vehículo.
4.2. Se asignará un número de homologación a cada tipo de vehículo homologado; sus dos primeros dígitos indicarán la serie de modificaciones que incorporen los últimos cambios importantes de carácter técnico realizados en el Reglamento en el momento en que se expidió la homologación. Una misma Parte Contratante no podrá asignar el mismo número a otro tipo de vehículo con respecto al control electrónico de la estabilidad.
4.3. Se comunicará la homologación o la denegación de la homologación de un tipo de vehículo con arreglo al presente Reglamento a las Partes Contratantes que apliquen el presente Reglamento mediante un formulario como el que figura en el anexo 1 del presente Reglamento y un resumen de la información incluida en los documentos a que se refieren los puntos 3.2.1 a 3.2.4 anteriores; el formato de los dibujos proporcionados por el solicitante de la homologación no será superior a A4 (210 × 297 mm), o bien se plegarán en dicho formato, y estarán a la escala adecuada.
4.4. En cada vehículo que se ajuste a un tipo de vehículo homologado con arreglo al presente Reglamento se colocará una marca de homologación internacional, de manera bien visible y en un lugar fácilmente accesible especificado en el formulario de homologación; la marca consistirá en los elementos siguientes:
|
4.4.1. |
la letra «E» dentro de un círculo, seguida del número distintivo del país que haya concedido la homologación (3), y |
|
4.4.2. |
el número del presente Reglamento seguido de la letra «R», un guion y el número de homologación a la derecha del círculo mencionado en el punto 4.4.1 anterior. |
4.5. Si el vehículo es conforme a un tipo de vehículo homologado de acuerdo con uno o varios Reglamentos anejos al Acuerdo en el país que ha concedido la homologación con arreglo al presente Reglamento, no será necesario repetir el símbolo prescrito en el punto 4.4.1; en ese caso, el Reglamento, los números de homologación y los símbolos adicionales de todos los Reglamentos según los cuales se ha concedido la homologación en el país que la concedió de conformidad con el presente Reglamento se colocarán en columnas verticales a la derecha del símbolo exigido en el punto 4.4.1.
4.6. La marca de homologación será claramente legible e indeleble.
4.7. La marca de homologación se colocará en la placa de características del vehículo o junto a ella.
4.8. En el anexo 1 del presente Reglamento figuran algunos ejemplos de disposición de las marcas de homologación.
5. REQUISITOS GENERALES
5.1. Los vehículos estarán equipados con un sistema ESC que cumpla los requisitos funcionales y de eficacia establecidos respectivamente en los puntos 6 y 7 durante los procedimientos de ensayo y en las condiciones de ensayo de los puntos 9 y 8, respectivamente, del presente Reglamento.
5.1.1. Como alternativa a los requisitos del punto 5.1, los vehículos de las categorías M1 y N1 con una masa en orden de marcha superior a 1 735 kg podrán estar equipados con una función de estabilidad del vehículo que incluya un control antivuelco y un control direccional y que cumpla los requisitos técnicos y las disposiciones transitorias del Reglamento n.o 13, anexo 21. No será necesario que dichos vehículos cumplan los requisitos funcionales y de eficacia establecidos respectivamente en los puntos 6 y 7 durante los procedimientos de ensayo y en las condiciones de ensayo de los puntos 9 y 8, respectivamente, del presente Reglamento.
5.2. El ESC deberá ser diseñado, fabricado e instalado de forma que, en condiciones normales de utilización y a pesar de las vibraciones a las que pudiera estar sometido, el vehículo se ajuste a las disposiciones del presente Reglamento.
5.3. En particular, el ESC deberá ser diseñado, fabricado e instalado de forma que sea capaz de resistir los fenómenos de corrosión y de envejecimiento a los que estará expuesto.
5.4. La eficacia del ESC no deberá verse mermada a causa de interferencias producidas por campos magnéticos y eléctricos. Este particular deberá demostrarse mediante el cumplimiento de los requisitos técnicos y de lo establecido en las disposiciones transitorias del Reglamento n.o 10, aplicando:
|
a) |
la serie 03 de enmiendas, en el caso de vehículos sin sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción); |
|
b) |
la serie 04 de enmiendas, en el caso de vehículos con sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción). |
5.5. La evaluación de los aspectos relativos a la seguridad de los ESC en cuanto a su efecto directo en el sistema de frenado se incluirá en la evaluación general de la seguridad del sistema de frenado, tal como se especifica en los requisitos del Reglamento n.o 13-H asociados con los sistemas electrónicos complejos de control. Se considera que se cumple esta condición con la presentación de un certificado con arreglo al Reglamento n.o 13-H que incluya el sistema ESC que deba homologarse.
5.6. Disposiciones relativas a la inspección técnica periódica de los sistemas ESC
5.6.1. Será posible confirmar el correcto estado de funcionamiento en una inspección técnica periódica mediante la observación visual de las señales de advertencia después de dar el contacto.
5.6.2. En el momento de la homologación de tipo, se describirán a título confidencial los medios implementados para proteger contra una modificación simple no autorizada del funcionamiento de las señales de aviso. Como alternativa, este requisito de protección se cumplirá cuando se disponga de un medio secundario que permita comprobar que el estado de funcionamiento es el correcto.
6. REQUISITOS FUNCIONALES
Todo vehículo presentado a homologación con arreglo al presente Reglamento estará equipado con un sistema de control electrónico de la estabilidad (ESC) que:
6.1. Sea capaz de aplicar pares de frenado por separado a cada una de las cuatro ruedas (4) y disponga de un algoritmo de control que utilice esta capacidad.
6.2. Funcione en toda la gama de velocidades del vehículo, durante todas las fases de la conducción, incluida la aceleración, la marcha con los gases cortados, y la desaceleración (incluido el frenado), excepto:
|
6.2.1. |
cuando el conductor haya desactivado el ESC; |
|
6.2.2. |
cuando la velocidad del vehículo sea inferior a 20 km/h; |
|
6.2.3. |
mientras se realicen las comprobaciones de autodiagnóstico y de plausibilidad, cuya duración no superará los 2 minutos en las condiciones del punto 9.10.2; |
|
6.2.4. |
cuando el vehículo se conduzca marcha atrás. |
6.3. Siga siendo capaz de activarse incluso cuando el sistema antibloqueo del frenado o el control de la tracción también estén activados.
7. REQUISITOS DE EFICACIA
Durante cada ensayo realizado en las condiciones del punto 8 y con el procedimiento del punto 9.9, el vehículo con el sistema ESC activado cumplirá los criterios de estabilidad direccional de los puntos 7.1 y 7.2 y el criterio de capacidad de respuesta del punto 7.3 durante cada uno de dichos ensayos efectuados con un ángulo en el volante programado (5) de 5A como mínimo, pero limitado con arreglo al punto 9.9.4, donde A es el ángulo en el volante calculado en el punto 9.6.1.
En aquellos casos en que un vehículo haya sido sometido a ensayo físicamente conforme al punto 8, se podrá demostrar la conformidad de versiones o variantes del mismo tipo de vehículo mediante una simulación informática que cumpla las condiciones y el procedimiento de ensayo de los puntos 8 y 9.9 respectivamente. En el anexo 4 del presente anexo se regula la utilización del simulador.
7.1. La velocidad angular de guiñada medida 1 s después de completada la maniobra del impulso de dirección de seno con pausa (tiempo T0 + 1 en la figura 1) no superará el 35 % del primer valor de cresta de la velocidad angular de guiñada registrado después de que el ángulo en el volante cambie de signo (entre la primera y la segunda cresta) ( en la figura 1) durante la misma ejecución del ensayo.
en la figura 1) durante la misma ejecución del ensayo.
Figura 1
Información de la posición del volante y de la velocidad de guiñada para evaluar la estabilidad transversal
 Texto de la imagen
Texto de la imagen
7.2. La velocidad angular de guiñada medida 1,75 s después de completada la maniobra del impulso de dirección de seno con pausa no superará el 20 % del primer valor de cresta de la velocidad angular de guiñada registrado después de que el ángulo en el volante cambie de signo (entre la primera y la segunda cresta) durante la misma ejecución del ensayo.
7.3. El desplazamiento transversal del centro de gravedad del vehículo con respecto a su trayectoria recta inicial, calculado 1,07 s tras el inicio del giro (BOS), será de 1,83 m como mínimo para los vehículos con una GVM máxima de 3 500 kg, y de 1,52 m para los vehículos con una masa máxima superior a 3 500 kg. El inicio del giro (BOS) se define en el punto 9.11.6.
7.3.1. El desplazamiento transversal se calculará mediante doble integración con respecto al tiempo de la medición de la aceleración transversal en el centro de gravedad del vehículo, según se expresa en la fórmula siguiente:

Podrá permitirse otro método de medición para los ensayos de homologación de tipo, siempre que se demuestre que tiene una precisión equivalente al método de doble integración.
7.3.2. El tiempo t = 0 para la operación de integración es el instante en que se inicia el giro (BOS). El inicio del giro (BOS) se define en el punto 9.11.6.
7.4. Detección de funcionamiento defectuoso del ESC
El vehículo contará con un indicador que advierta al conductor de cualquier funcionamiento defectuoso que afecte a la generación o transmisión de las señales de control o de respuesta en el sistema de control electrónico de la estabilidad del vehículo.
7.4.1. El indicador de funcionamiento defectuoso del ESC:
|
7.4.1.1. |
cumplirá los requisitos técnicos pertinentes del Reglamento n.o 121. |
|
7.4.1.2. |
No obstante lo dispuesto en el punto 7.4.1.3, el indicador de funcionamiento defectuoso del ESC se iluminará cuando se produzca un funcionamiento defectuoso y permanecerá encendido de forma continua en las condiciones del punto 7.4 mientras exista el funcionamiento defectuoso y el interruptor de contacto se encuentre en la posición de «marcha». |
|
7.4.1.3. |
No obstante lo dispuesto en el punto 7.4.2, cada indicador del funcionamiento defectuoso del ESC se activará para la comprobación del funcionamiento de la lámpara cuando el interruptor de contacto se encuentre en la posición de «marcha» sin que el motor funcione o en una posición intermedia entre «marcha» y «arranque» designada por el fabricante como posición de comprobación. |
|
7.4.1.4. |
El indicador se apagará al siguiente ciclo de encendido una vez corregido el funcionamiento defectuoso conforme a lo dispuesto en el punto 9.10.4. |
|
7.4.1.5. |
El indicador también podrá utilizarse para indicar el funcionamiento defectuoso de funciones o sistemas relacionados, incluido el control de la tracción, el asistente de estabilización del remolque (trailer stability assist), el control de los frenos en curva (corner brake control) y otras funciones similares que utilicen el control de los gases o del par y que compartan componentes con el ESC. |
7.4.2. No será necesario que el indicador de funcionamiento defectuoso del ESC se active cuando funcione un dispositivo de bloqueo del arranque (starter interlock).
7.4.3. El requisito del punto 7.4.1.3 no se aplica a los indicadores que figuran en un espacio común.
7.4.4. El fabricante podrá utilizar el indicador de funcionamiento defectuoso del ESC en modo intermitente para indicar las intervenciones de los sistemas ESC y/o de sistemas relacionados con el ESC (enumerados en el punto 7.4.1.5), o la intervención del ESC en el ángulo de giro de una o varias ruedas a efectos de la estabilidad del vehículo.
7.5. Desconexión del ESC y otros sistemas de control
El fabricante podrá incluir un mando de desconexión del ESC, que se iluminará cuando se activen los faros del coche, cuya finalidad consiste en poner al sistema del ESC en un modo en que ya no cumpla los requisitos de eficacia de los puntos 7, 7.1, 7.2 y 7.3. Los fabricantes también podrán proporcionar mandos para otros sistemas que ejerzan un efecto auxiliar en el funcionamiento del ESC. Se permiten los mandos de cualquier tipo que pongan al sistema del ESC en un modo en que ya no cumpla los requisitos de eficacia de los puntos 7, 7.1, 7.2 y 7.3, siempre que el sistema también cumpla los requisitos de los puntos 7.5.1, 7.5.2 y 7.5.3.
7.5.1. Al iniciar cada nuevo ciclo de encendido, el sistema ESC del vehículo siempre volverá al modo por defecto original del fabricante que cumpla los requisitos de los puntos 6 y 7, independientemente del modo seleccionado previamente por el conductor. No obstante, no será necesario que el sistema del ESC del vehículo vuelva a un modo que cumpla los requisitos de los puntos 7 a 7.3 al inicio de cada nuevo ciclo de encendido si:
|
7.5.1.1. |
el vehículo está en una configuración de tracción a las cuatro ruedas que tenga por efecto acoplar los engranajes transmisores de los ejes delantero y trasero y proporcionar una reducción de transmisión suplementaria entre el régimen del motor y la velocidad del vehículo de 1,6 como mínimo, seleccionada por el conductor para la conducción campo a través con relaciones cortas; o |
|
7.5.1.2. |
el vehículo está en una configuración de tracción a las cuatro ruedas seleccionada por el conductor y concebida para funcionar a relaciones más largas sobre calzadas con nieve, arena o fango y que tenga por efecto acoplar los engranajes transmisores de los ejes delantero y trasero, siempre que en este modo el vehículo cumpla los requisitos de estabilidad de los puntos 7.1 y 7.2 en las condiciones de ensayo del punto 8. No obstante, si el sistema dispone de más de un modo ESC que cumple los requisitos de los puntos 7.1 y 7.2 en la configuración de conducción seleccionada para el ciclo de encendido anterior, el ESC volverá al modo por defecto original del fabricante para dicha configuración de conducción al inicio de cada ciclo de encendido. |
7.5.2. Los mandos cuya finalidad consista solo en poner el sistema del ESC en un modo en que ya no cumpla los requisitos de eficacia de los puntos 7, 7.1, 7.2 y 7.3 cumplirán los requisitos técnicos pertinentes del Reglamento n.o 121.
7.5.3. Los mandos de un sistema del ESC cuya finalidad consista en poner el sistema del ESC en distintos modos, de los cuales uno, como mínimo, pueda dejar de cumplir los requisitos de eficacia de los puntos 7, 7.1, 7.2 y 7.3, cumplirán los requisitos técnicos pertinentes del Reglamento n.o 121.
Como alternativa, en el caso en que el modo del sistema ESC esté controlado por un mando multifuncional, el dispositivo de visualización del conductor le indicará a este claramente la posición del mando correspondiente a este modo mediante el símbolo de desconexión («off») del sistema de control electrónico de la estabilidad definido en el Reglamento n.o 121.
7.5.4. No será necesario identificar mediante el símbolo de desconexión del ESC del punto 7.5.2 los mandos de otros sistemas que ejerzan el efecto secundario de poner al sistema ESC en un modo en el que ya no cumpla los requisitos de eficacia de los puntos 7, 7.1, 7.2 y 7.3.
7.6. Indicador de desconexión del ESC
Si el fabricante decide instalar un mando para desactivar o reducir la eficacia del sistema ESC conforme al punto 7.5, se cumplirá lo dispuesto en los puntos 7.6.1 a 7.6.4 a fin de advertir al conductor de la desactivación o reducción de la eficacia de dicho sistema. Este requisito no se aplicará en el caso del modo seleccionado por el conductor mencionado en el punto 7.5.1.2.
7.6.1. El fabricante del vehículo proporcionará un indicador de que se ha puesto el vehículo en un modo que lo incapacita para cumplir los requisitos de los puntos 7, 7.1, 7.2 y 7.3, en caso de existir dicho modo.
7.6.2. El indicador de desconexión del ESC:
|
7.6.2.1. |
cumplirá los requisitos técnicos pertinentes del Reglamento n.o 121. |
|
7.6.2.2. |
permanecerá iluminado continuamente mientras el ESC se halle en un modo que le impida cumplir los requisitos de los puntos 7, 7.1, 7.2 y 7.3; |
|
7.6.2.3. |
no obstante lo dispuesto en los puntos 7.6.3 y 7.6.4, cada indicador del desconexión del ESC se activará para la comprobación del funcionamiento de la lámpara cuando el interruptor de contacto se encuentre en la posición de «marcha» sin que el motor funcione o en una posición intermedia entre «marcha» y «arranque» designada por el fabricante como posición de comprobación; |
|
7.6.2.4. |
se apagará una vez que el sistema del ESC haya vuelto al modo por defecto original del fabricante. |
7.6.3. No será necesario que el indicador de desconexión del ESC se active cuando funcione un dispositivo de bloqueo del arranque (starter interlock).
7.6.4. El requisito del punto 7.6.2.3 de la presente sección no se aplica a los indicadores que figuran en un espacio común.
7.6.5. El fabricante podrá utilizar el indicador de desconexión del ESC para indicar un nivel de función distinto del modo por defecto original del fabricante, incluso en aquellos casos en que el vehículo cumpliría los requisitos de los puntos 7, 7.1, 7.2. y 7.3 de esta sección a dicho nivel de función del ESC.
7.7. Documentación técnica del sistema ESC
La documentación incluirá la documentación del fabricante del vehículo especificada en los puntos 7.7.1 a 7.7.4 siguientes, como confirmación de que el vehículo está equipado con un sistema ESC que responde a la definición de «sistema ESC» del punto 2.7 del presente Reglamento.
7.7.1. Diagrama en el que se identifique el hardware del sistema ESC. El diagrama identificará los componentes que se utilicen para generar pares de frenado en cada rueda, determinar la velocidad angular de guiñada del vehículo, la deriva o la derivada de esta y las señales dadas a la dirección por el conductor.
7.7.2. Explicación breve que baste para describir las principales características básicas de funcionamiento del sistema ESC. Esta explicación incluirá la descripción sucinta de la capacidad del sistema de aplicar pares de frenado a cada rueda y cómo el sistema modifica el par de propulsión durante la activación del sistema ESC, y mostrará que la velocidad angular de guiñada se determina directamente, incluso en las condiciones en las que no se dispone de información sobre la velocidad de las ruedas. La explicación también especificará la gama de velocidades del vehículo y las fases de la conducción (aceleración, desaceleración, marcha con los gases cortados, durante la activación del ABS o el control de la tracción) en las que el sistema ESC puede activarse.
7.7.3. Diagrama lógico. Dicho diagrama apoya la explicación proporcionada con arreglo al punto 7.7.2.
7.7.4. Información sobre el subvirado. Consiste en una descripción sucinta de los datos de entrada pertinentes suministrados al ordenador que controla el hardware del sistema ESC y cómo se utilizan para limitar el subvirado del vehículo.
8. CONDICIONES DEL ENSAYO
8.1. Condiciones ambientales
8.1.1. La temperatura ambiente se situará entre 0 °C y 45 °C.
8.1.2. La velocidad máxima del viento no superará los 10 m/s, en el caso de los vehículos con un SSF > 1,25, ni los 5 m/s en el caso de los vehículos con un SSF ≤ 1,25.
8.2. Superficie de carretera de ensayo
8.2.1. Los ensayos se realizarán en una superficie seca, uniforme y sólidamente pavimentada. No serán adecuadas las superficies con irregularidades y ondulaciones, como declives y grandes grietas.
8.2.2. La superficie de carretera de ensayo tendrá un coeficiente de frenado máximo (PBC) nominal (6) del 0,9, salvo que se especifique lo contrario, que se medirá de una de las siguientes formas:
|
8.2.2.1. |
el neumático de ensayo de referencia normalizado E1136 de la American Society for Testing and Materials (ASTM) conforme al método E1337-90 de la ASTM, a una velocidad de 40 mph; o |
|
8.2.2.2. |
el método de ensayo de «k» especificado en el apéndice 2 del anexo 6 del Reglamento n.o 13-H. |
8.2.3. La superficie de ensayo tendrá una pendiente constante no superior al 1 %.
8.3. Condiciones del vehículo
8.3.1. El sistema del ESC estará activado para todos los ensayos.
8.3.2. Masa del vehículo. El vehículo se cargará con el depósito de combustible lleno hasta un 90 % de su capacidad, como mínimo, una carga total interior de 168 kg incluido el conductor, 59 kg aproximadamente de equipos de ensayo (máquina de giro automatizado y su fuente de alimentación, sistema de adquisición de datos) y con el lastre necesario para compensar la insuficiencia de peso del conductor o de los equipos de ensayo. En aquellos casos en que sea necesario, el lastre se colocará en el suelo del vehículo, detrás del asiento delantero del pasajero o, en caso de necesidad, en el espacio para los pies del pasajero delantero. Se asegurará todo el lastre de forma que no pueda desplazarse durante el ensayo.
8.3.3. Neumáticos. Los neumáticos se inflarán a la presión o presiones de inflado en frío recomendadas por el fabricante, por ejemplo las especificadas en la placa o en la etiqueta de presión de inflado de los neumáticos del vehículo. Podrán instalarse cámaras de aire para evitar que se salgan los talones.
8.3.4. Patas antivuelco (outriggers). Para los ensayos podrán utilizarse patas antivuelco en caso de que se considere necesario para la seguridad del conductor. En tal caso, se aplicará lo siguiente en el caso de los vehículos con un SSF ≤ 1,25:
|
8.3.4.1. |
Los vehículos con una masa en orden de marcha inferior a 1 588 kg estarán equipados con patas antivuelco «ligeras». Estas estarán diseñadas con una masa máxima de 27 kg y un momento máximo de inercia en balanceo de 27 kg · m2. |
|
8.3.4.2. |
Los vehículos con una masa en orden de marcha situada entre 1 588 kg y 2 722 kg estarán equipados con patas antivuelco «normales». Estas estarán diseñadas con una masa máxima de 32 kg y un momento máximo de inercia en balanceo de 35,9 kg · m2. |
|
8.3.4.3. |
Los vehículos con una masa en orden de marcha igual o superior a 2 722 kg estarán equipados con patas antivuelco «pesadas». Estas estarán diseñadas con una masa máxima de 39 kg y un momento máximo de inercia en balanceo de 40,7 kg · m2. |
8.3.5. Máquina de giro automatizado. En los puntos 9.5.2, 9.5.3, 9.6 y 9.9 se utilizará un robot de girado para ejecutar el patrón de giros requerido. La máquina será capaz de proporcionar pares de giro situados entre 40 y 60 Nm. También será capaz de aplicar estos pares funcionando con velocidades del volante de hasta 1 200 grados por segundo.
9. PROCEDIMIENTOS DE ENSAYO
9.1. Los neumáticos del vehículo se inflarán a la presión o presiones de inflado en frío recomendadas por el fabricante, por ejemplo las especificadas en la placa o en la etiqueta de presión de inflado de los neumáticos del vehículo.
9.2. Comprobación de la lámpara del indicador. Con el vehículo parado y el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado), póngase este en posición «On» (marcha) o, en su caso, la posición pertinente para la comprobación de la lámpara. El indicador de funcionamiento defectuoso del ESC se iluminará para comprobar el funcionamiento de la lámpara, conforme al punto 7.4.1.3; si el vehículo cuenta con un indicador de desconexión del ESC, también se iluminará para comprobar su funcionamiento conforme al punto 7.6.2.3. La comprobación de la lámpara de los indicadores no será necesaria en el caso de que el indicador figure en un espacio común, conforme a los puntos 7.4.3 y 7.6.4.
9.3. Comprobación del mando de desconexión del ESC. En el caso de vehículos equipados con un mando de desconexión del ESC, con el vehículo parado y el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado), póngase este último en posición «On» (marcha). Actívese el mando de desconexión del ESC y compruébese que el testigo de desconexión de este esté encendido con arreglo al punto 7.6.2. Póngase el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado). Póngase de nuevo el interruptor de contacto en la posición «On» (marcha) y compruébese que el indicador de desconexión del ESC se haya apagado, lo que indica que se ha vuelto a conectar el sistema ESC con arreglo al punto 7.5.1.
9.4. Acondicionamiento de los frenos
Acondiciónense los frenos del vehículo conforme a los puntos 9.4.1 a 9.4.4.
9.4.1. Se realizarán 10 paradas a partir de una velocidad de 56 km/h, con una desaceleración media de aproximadamente 0,5 g.
9.4.2. Inmediatamente después de esta serie de paradas, se efectuarán 3 paradas más a partir de 72 km/h con una desaceleración mayor.
9.4.3. Al ejecutar las paradas del punto 9.4.2, se aplicará sobre el pedal del freno una fuerza suficiente para hacer funcionar el sistema antibloqueo del frenado (ABS) del vehículo durante la mayor parte de cada maniobra de frenado.
9.4.4. Tras la última parada del punto 9.4.2, se conducirá el vehículo a 72 km/h durante 5 minutos para enfriar los frenos.
9.5. Acondicionamiento de los neumáticos
Acondiciónense los neumáticos mediante el procedimiento de los puntos 9.5.1 a 9.5.3 para eliminar el agente de desmoldeo y alcanzar la temperatura de funcionamiento inmediatamente antes del inicio de las ejecuciones de los ensayos de los puntos 9.6 y 9.9.
9.5.1. El vehículo de ensayo se conducirá siguiendo un círculo de 30 m de diámetro a una velocidad que produzca una aceleración transversal de aproximadamente 0,5 a 0,6 g durante tres vueltas en el sentido de las agujas del reloj, seguidas de otras 3 vueltas en sentido contrario.
9.5.2. Aplicando un modelo de giros sinusoidal a una frecuencia de 1 Hz, una amplitud máxima de ángulo en el volante correspondiente a una aceleración transversal máxima de 0,5 a 0,6 g y una velocidad del vehículo de 56 km/h, el vehículo efectuará 4 recorridos realizando 10 ciclos de giros sinusoidales en cada recorrido.
9.5.3. La amplitud de giro del volante correspondiente al ciclo final del último recorrido será el doble que la de los demás ciclos. El máximo tiempo permitido entre cada vuelta o recorrido será de 5 minutos.
9.6. Procedimiento de aumento lento del giro
Se someterá el vehículo a dos series de ejecuciones del ensayo de aumento lento del giro a una velocidad constante del vehículo de 80 ± 2 km/h y a un modelo de giro que aumente 13,5 grados por segundo hasta obtener una aceleración transversal de aproximadamente 0,5 g. Cada serie del ensayo se repetirá tres veces. Una serie utilizará giros en el sentido contrario a las agujas del reloj y la otra, en el sentido de las agujas del reloj. El máximo tiempo permitido entre cada ejecución del ensayo será de 5 minutos.
9.6.1. El valor de «A» se determinará a partir de los ensayos de aumento lento del giro. «A» es el ángulo giro del volante en grados que produce una aceleración transversal estable (corregida con los métodos especificados en el punto 9.11.3) de 0,3 g en el caso del vehículo de ensayo. Mediante una regresión lineal, A se calcula, a la décima de grado más cercana, a partir de cada uno de los seis ensayos de aumento lento del giro. Se promedia el valor absoluto de los seis valores de A calculados y se redondea a la décima de grado más cercana a fin de obtener el valor final de A, que se utiliza más adelante.
9.7. Una vez determinado el valor de A, sin sustituir los neumáticos, se acondicionarán de nuevo los neumáticos, conforme al procedimiento del punto 9.5, inmediatamente antes de efectuar el ensayo de seno con pausa del punto 9.9. La primera serie del ensayo de seno con pausa se iniciará, como máximo, dos horas después de finalizados los ensayos de aumento lento del giro del punto 9.6.
9.8. Compruébese que el sistema ESC está conectado cerciorándose de que los testigos de funcionamiento defectuoso o de desconexión del ESC (en su caso) no están iluminados.
9.9. Ensayo de seno con pausa de la intervención por sobrevirado y capacidad de respuesta
Se someterá el vehículo a dos series de ejecuciones del ensayo utilizando un modelo de giro de una onda senoidal a una frecuencia de 0,7 Hz con un retardo de 500 ms que se inicia en la segunda cresta de amplitud, según se muestra en la figura 2 (ensayos de seno con pausa). Durante la primera mitad del ciclo, una serie utilizará giros en el sentido contrario a las agujas del reloj y la otra, en el sentido de las agujas del reloj. Se permitirá que el vehículo se enfríe entre cada ejecución del ensayo durante un período de 1,5 a 5 minutos, con el vehículo parado.
Figura 2
Seno con pausa
 Texto de la imagen
Texto de la imagen
9.9.1. El movimiento de giro se iniciará con el vehículo con los gases cortados a una marcha alta a 80 ± 2 km/h.
9.9.2. La amplitud de giro de la primera ejecución de cada serie será de 1,5 A, siendo «A» el ángulo en el volante determinado en el punto 9.6.1.
9.9.3. En cada serie de ejecuciones del ensayo, la amplitud de giro aumentará 0,5 A de una ejecución a otra, a condición de que en ninguna ejecución se alcance una amplitud de giro superior a la prevista para la ejecución final en el punto 9.9.4.
9.9.4. La amplitud de giro de la ejecución final de cada serie será el mayor de los dos valores siguientes, a saber, 6,5 A o 270 grados, a condición de el valor calculado de 6,5 A sea inferior o igual a 300 grados. Si un aumento de 0,5 A, hasta 6,5 A, fuera mayor que 300 grados, la amplitud de giro de la ejecución final será de 300 grados.
9.9.5. Una vez finalizadas las dos series de ejecuciones del ensayo, los datos sobre la velocidad angular de guiñada y la aceleración transversal se tratarán conforme a lo dispuesto en el punto 9.11.
9.10. Detección de funcionamiento defectuoso del ESC
9.10.1. Simúlense uno o varios casos de funcionamiento defectuoso desconectando la fuente de alimentación de cualquier componente del ESC o cualquier conexión eléctrica entre los componentes del ESC (con la alimentación del vehículo cortada). Al simular un caso de funcionamiento defectuoso del ESC, no se desconectarán las conexiones eléctricas de los indicadores y/o los mandos opcionales del sistema ESC.
9.10.2. Con el vehículo inicialmente parado y el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado), poner este último en posición «Start» (arranque) y poner en marcha el motor. Conducir el vehículo hacia delante hasta alcanzar una velocidad de 48 ± 8 km/h. 30 s, como máximo, tras haber arrancado el motor y en los dos minutos siguientes a dicha velocidad, realícese al menos un giro ligero a la derecha y otro giro ligero a la izquierda, sin perder la estabilidad direccional, y una frenada. Compruébese que el indicador de funcionamiento defectuoso del ESP se ilumina conforme a lo dispuesto en el punto 7.4 al término de estas maniobras.
9.10.3. Párese el vehículo y póngase el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado). Cinco minutos después, póngase el interruptor de contacto del vehículo en la posición «Start» (arranque) y póngase en marcha el motor. Compruébese que el indicador de funcionamiento defectuoso del ESP vuelve a iluminarse para señalar el funcionamiento defectuoso y que permanece iluminado mientras gire el motor o se corrija el funcionamiento defectuoso.
9.10.4. Póngase el interruptor de contacto en la posición «Lock» (bloqueado) u «Off» (apagado). Restablézcase el funcionamiento normal del sistema ESC, póngase el interruptor de contacto en la posición «Start» (arranque) y póngase en marcha el motor. Ejecútese de nuevo la maniobra descrita en el punto 9.10.2 y compruébese que el indicador se haya apagado durante ese período de tiempo o inmediatamente después.
9.11. Tratamiento ulterior de los datos: cálculos de los resultados
Las mediciones y los cálculos de la velocidad angular de guiñada y del desplazamiento transversal se tratarán mediante las técnicas especificadas en los puntos 9.11.1 a 9.11.8.
9.11.1. Los datos brutos sobre el ángulo en el volante se filtrarán con un filtro Butterworth sin fases («phaseless») de 12 polos y una frecuencia de corte de 10 Hz. A continuación, se ponen a cero los datos filtrados para eliminar la desviación («offset») de los detectores mediante datos estáticos registrados antes del ensayo.
9.11.2. Los datos brutos sobre la velocidad angular de guiñada se filtrarán con un filtro Butterworth sin fases («phaseless») de 12 polos y una frecuencia de corte de 6 Hz. A continuación, se ponen a cero los datos filtrados para eliminar la desviación («offset») de los detectores mediante datos estáticos registrados antes del ensayo.
9.11.3. Los datos brutos sobre la aceleración transversal se filtrarán con un filtro Butterworth sin fases («phaseless») de 12 polos y una frecuencia de corte de 6 Hz. A continuación, se ponen a cero los datos filtrados para eliminar la desviación («offset») de los detectores mediante datos estáticos registrados antes del ensayo. Los datos sobre la aceleración transversal en el centro de gravedad del vehículo se determinarán eliminando los efectos provocados por el balanceo de la carrocería del vehículo y corrigiendo la colocación de los detectores mediante la transformación de las coordenadas. En el caso de la recogida de datos, el acelerómetro transversal se situará lo más próximo posible de los centros de gravedad longitudinal y transversal del vehículo.
9.11.4. Para determinar la velocidad de giro del volante, se derivarán los datos filtrados sobre el ángulo en el volante. A continuación, los datos sobre la velocidad de giro del volante se filtrarán con un filtro de media móvil de 0,1 s.
9.11.5. Se pondrán a cero los canales de los datos de la aceleración transversal, la velocidad angular de guiñada y del ángulo en el volante mediante una «gama de puesta a cero» definida. En los puntos 9.11.5.1 y 9.11.5.2 se definen los métodos utilizados para determinar la gama de puesta a cero.
9.11.5.1. Se identificará el primer instante en el que la velocidad angular del volante supera los 75 grados/s utilizando los datos sobre dicha velocidad calculados mediante los métodos descritos en el punto 9.11.4. A partir de dicho punto, la velocidad angular del volante seguirá siendo superior a 75 grados/s durante al menos 200 ms. Si no se cumple la segunda condición, se identificará el siguiente instante en que la velocidad angular del volante supere los 75 grados/s y se aplicará el control de validez de 200 ms. Este proceso iterativo continuará hasta que finalmente se cumplan ambas condiciones.
9.11.5.2. Se define la «gama de puesta a cero» como el período de tiempo de 1,0 s previo al instante en que la velocidad angular del volante supere los 75 grados/s (es decir, el instante en que la velocidad angular del volante supere los 75 grados/s señala el fin de la «gama de puesta a cero»).
9.11.6. Se entiende por «inicio del giro» (BOS) el primer instante en que los datos filtrados y puestos a cero sobre el ángulo en el volante alcanzan -5 grados (cuando la señal de dirección inicial va en sentido contrario a las agujas del reloj) o +5 grados (cuando la señal de dirección inicial va en el sentido de las agujas del reloj) después de un tiempo que marque el fin de la «gama de puesta a cero». Se interpolará el valor del tiempo en el BOS.
9.11.7. Se entiende por «fin del giro» (COS) el instante en que el ángulo en el volante vuelve a cero al término de la maniobra de giro de seno con pausa. Se interpolará el valor del tiempo en el instante del giro del volante de cero grados.
9.11.8. Se entiende por «segunda velocidad máxima de guiñada» la primera velocidad máxima de guiñada producida por la inversión del sentido de rotación del volante. Se interpolarán las velocidades de guiñada a 1,0 y 1,75 s después del COS.
9.11.9. Determínese la velocidad transversal integrando los datos de aceleración transversal corregidos, filtrados y puestos a cero. La velocidad transversal cero, en el punto de BOS. Determínese el desplazamiento transversal integrando la velocidad transversal puesta a cero. El desplazamiento transversal cero, en el punto de BOS. El desplazamiento transversal se medirá a 1,07 s después del instante de BOS y se determinará por interpolación.
10. MODIFICACIÓN DEL TIPO DE VEHÍCULO O DEL SISTEMA ESC Y EXTENSIÓN DE LA HOMOLOGACIÓN
10.1. Toda modificación de un tipo de vehículo existente deberá notificarse a la autoridad de homologación de tipo que lo homologó.
Entonces, dicha autoridad podrá:
|
a) |
decidir, en consulta con el fabricante, que debe concederse una nueva homologación de tipo; o |
|
b) |
aplicar el procedimiento previsto en el punto 10.1.1 (revisión) y, si procede, el procedimiento previsto en el punto 10.1.2 (extensión). |
10.1.1. Revisión
Cuando hayan cambiado los datos registrados en las fichas de características y la autoridad de homologación de tipo considere improbable que las modificaciones realizadas tengan consecuencias negativas apreciables y que, en cualquier caso, los mandos que se accionan con el pie siguen cumpliendo los requisitos correspondientes, la modificación será considerada una «revisión».
En estos casos, la autoridad de homologación de tipo deberá expedir las páginas revisadas de las fichas de características, según proceda, señalando claramente en cada página revisada qué tipo de cambio se ha producido y en qué fecha tuvo lugar la nueva expedición. Se considerará cumplido este requisito mediante una copia consolidada y actualizada de las fichas de características que lleve adjunta una descripción detallada de los cambios.
10.1.2. Extensión
La modificación se considerará una «extensión» si, además de la modificación de los datos registrados en las fichas de características:
|
a) |
deben realizarse nuevas inspecciones o nuevos ensayos; o |
|
b) |
ha cambiado cualquier información del documento de comunicación (a excepción de sus documentos adjuntos); o |
|
c) |
se pide la homologación conforme a una serie posterior de enmiendas después de su entrada en vigor. |
10.2. La confirmación o denegación de la homologación se comunicará a las Partes Contratantes del Acuerdo que apliquen el presente Reglamento mediante el procedimiento indicado en el punto 4.3, especificándose las modificaciones. Por otra parte, el índice de las fichas de características y de los informes de ensayo, que se adjunta al documento de comunicación del anexo 1, se modificará en consecuencia para mostrar la fecha de la revisión o extensión más reciente.
10.3. La autoridad competente que expida la extensión de la homologación asignará un número de serie a cada formulario de comunicación cumplimentado para dicha extensión.
11. CONFORMIDAD DE LA PRODUCCIÓN
Los procedimientos de conformidad de la producción se ajustarán a los expuestos en el apéndice 2 del Acuerdo (E/ECE/324-E/ECE/TRANS/505/Rev. 2), más los requisitos siguientes:
|
11.1. |
Un vehículo homologado con arreglo al presente Reglamento será fabricado de conformidad con el tipo homologado cumpliendo los requisitos expuestos en los puntos 5, 6 y 7 anteriores. |
|
11.2. |
La autoridad de homologación de tipo que haya expedido la homologación de tipo podrá verificar en cualquier momento los métodos de control de la conformidad aplicados en cada planta de producción. La frecuencia normal de esas verificaciones será una vez cada dos años. |
12. SANCIONES POR NO CONFORMIDAD DE LA PRODUCCIÓN
12.1. Se podrá retirar la homologación concedida a un tipo de vehículo con arreglo al presente Reglamento si no se cumplen los requisitos exigidos en el punto 8.1 anterior.
12.2. Si una Parte Contratante en el Acuerdo que aplique el presente Reglamento retira una homologación que concedió anteriormente, lo notificará inmediatamente a las demás Partes Contratantes que apliquen el presente Reglamento mediante una copia del formulario de comunicación que se ajuste al modelo que figura en el anexo 1 del presente Reglamento.
13. CESE DEFINITIVO DE LA PRODUCCIÓN
Si el titular de una homologación cesa por completo de fabricar un tipo de vehículo homologado con arreglo al presente Reglamento, deberá informar de ello a la autoridad que concedió la homologación. Una vez recibida esta comunicación, dicha autoridad informará a las demás Partes Contratantes en el Acuerdo que apliquen el presente Reglamento mediante copias de un formulario de comunicación que se ajusten al modelo que figura en el anexo 5 del presente Reglamento.
14. NOMBRES Y DIRECCIONES DE LOS SERVICIOS TÉCNICOS RESPONSABLES DE LA REALIZACIÓN DE LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes Contratantes del Acuerdo que apliquen el presente Reglamento enviarán a la Secretaría de las Naciones Unidas los nombres y direcciones de los servicios técnicos responsables de la realización de los ensayos de homologación y de las autoridades de homologación de tipo que conceden la homologación y a los que deben enviarse los formularios que certifican la homologación, extensión, denegación o retirada de la homologación expedidos en otros países.
(1) Las categorías de vehículo M1 y N1 figuran definidas en la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 4, para. 2.-www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Un grupo de ejes se tratará como si fuera un único eje y las ruedas gemelas de tratarán como si fueran ruedas independientes.
(3) Los números distintivos de las Partes Contratantes del Acuerdo de 1958 figuran en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev. 4, anexo 3-www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Un grupo de ejes se tratará como si fuera un único eje y las ruedas gemelas de tratarán como si fueran ruedas independientes.
(5) En el texto del presente Reglamento se supone que la dirección del vehículo está controlada mediante un volante. Los vehículos que utilicen otros tipos de control de la dirección también podrán homologarse conforme a lo dispuesto en este anexo siempre que el fabricante pueda demostrar al servicio técnico que los requisitos de eficacia del presente Reglamento pueden cumplirse mediante señales a la dirección equivalentes a las establecidas en el punto 7 del mismo.
(6) Se entiende por valor «nominal» el valor diana teórico.
ANEXO 2
DISPOSICIÓN DE LAS MARCAS DE HOMOLOGACIÓN
MODELO A
(Véase el punto 4.4 del presente Reglamento)

Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión ha sido homologado en Bélgica (E 6) en lo relativo al control de la estabilidad con arreglo al Reglamento n.o 140. Los dos primeros dígitos del número de homologación indican que esta se concedió de acuerdo con los requisitos del Reglamento n.o 140 en su forma original.
MODELO B
(Véase el punto 4.5 del presente Reglamento)

Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo ha sido homologado en Bélgica (E 6) con arreglo a los Reglamentos n.os 140 y 24 (1). (En el caso de este último Reglamento el coeficiente de absorción corregido es 1,30 m-1). Los números de homologación indican que, cuando se concedieron las homologaciones respectivas, la versión existente del Reglamento n.o 140 era la original y el Reglamento n.o 24 incluía la serie 02 de enmiendas.
(1) Este número se da a título de ejemplo.
ANEXO 3
UTILIZACIÓN DE LA SIMULACIÓN DE LA ESTABILIDAD DINÁMICA
La eficacia del ESC podrá determinarse mediante una simulación informática.
1. UTILIZACIÓN DE LA SIMULACIÓN
1.1. El fabricante del vehículo demostrará a la autoridad de homologación de tipo o al servicio técnico la función de control de la estabilidad del vehículo simulando las maniobras dinámicas del punto 9.9 del presente Reglamento.
1.2. La simulación constituirá un medio que permitirá demostrar el grado de estabilidad del vehículo teniendo en cuenta:
|
a) |
la velocidad angular de guiñada 1 s después de completada la maniobra del impulso de dirección de seno con pausa (tiempo T0 + 1); |
|
b) |
la velocidad angular de guiñada 1,75 s después de completada la maniobra del impulso de dirección de seno con pausa; |
|
c) |
el desplazamiento transversal del centro de gravedad del vehículo con respecto a su trayectoria recta inicial. |
1.3. La simulación se realizará con una herramienta validada de modelización y simulación y utilizando las maniobras dinámicas del punto 9.9 del presente Reglamento en las condiciones de ensayo del punto 8 del mismo.
En el anexo 4 del presente anexo se describe el método de validación de la herramienta de simulación.
ANEXO 4
HERRAMIENTA DE SIMULACIÓN DE LA ESTABILIDAD DINÁMICA Y VALIDACIÓN DE LA MISMA
1. ESPECIFICACIONES DE LA HERRAMIENTA DE SIMULACIÓN
1.1. El método de simulación tendrá en cuenta los principales factores que influyen en la trayectoria y en el balanceo del vehículo. Un modelo tipo podrá incluir los siguientes parámetros del vehículo de forma explícita o implícita:
|
a) |
eje/rueda |
|
b) |
suspensión |
|
c) |
neumático |
|
d) |
chasis/carrocería del vehículo |
|
e) |
cadena de tracción/transmisión, si procede |
|
f) |
sistema de frenos |
|
g) |
carga útil. |
1.2. La función de control de la estabilidad del vehículo se añadirá al modelo de simulación mediante:
|
a) |
un subsistema (modelo software, «software model») de la herramienta de simulación o |
|
b) |
una caja de control electrónico en una configuración de hardware en bucle («hardware-in-the-loop») |
2. VALIDACIÓN DE LA HERRAMIENTA DE SIMULACIÓN
2.1. La validez de la herramienta de modelización y simulación se comprobará mediante comparaciones con ensayos prácticos en vehículos. Los ensayos utilizados para la validación consistirán en las maniobras dinámicas contempladas en el punto 9.9 del presente Reglamento.
Durante los ensayos, las siguientes variables del movimiento, según el caso, se registrarán o calcularán conforme a la norma ISO 15037 parte 1:2006: Condiciones generales para vehículos automóviles, o parte 2:2002: Condiciones generales para vehículos pesados y autobuses (según la categoría del vehículo):
|
a) |
ángulo en el volante (δΗ); |
|
b) |
velocidad longitudinal (vX); |
|
c) |
ángulo de deriva (β) o velocidad transversal (vY) – (facultativo); |
|
d) |
aceleración longitudinal (aX) – (facultativo); |
|
e) |
aceleración transversal (aY); |
|
f) |
velocidad de guiñada (dψ/dt); |
|
g) |
velocidad de balanceo (dφ/dt); |
|
h) |
velocidad de cabeceo (dθ/dt); |
|
i) |
ángulo de balanceo (φ); |
|
j) |
ángulo de cabeceo (θ). |
2.2. El objetivo consiste en mostrar que la simulación del comportamiento del vehículo y del funcionamiento de la función de control de la estabilidad del vehículo es comparable con lo que se observa en los ensayos prácticos en vehículos.
2.3. Se considerará validado el simulador cuando sus resultados sean comparables a los de los ensayos prácticos producidos por un determinado tipo de vehículo durante las maniobras dinámicas del punto 9.9 del presente Reglamento. La comparación se realizará mediante la relación de la activación y la secuencia de la función de control de la estabilidad del vehículo en la simulación y en el ensayo práctico en vehículo.
2.4. Los parámetros físicos que difieran entre la configuración del vehículo de referencia y la del vehículo simulado se modificarán en consecuencia en la simulación.
2.5. Se elaborará un informe del ensayo por simulación confirme al modelo del anexo 5 del presente Reglamento, y se adjuntará una copia del mismo al acta de homologación del vehículo.
ANEXO 5
ACTA DE ENSAYO DE LA HERRAMIENTA DE SIMULACIÓN DE LA FUNCIÓN DE CONTROL DE LA ESTABILIDAD DEL VEHÍCULO
Número del acta: …
1. IDENTIFICACIÓN
1.1. Nombre y dirección del fabricante de la herramienta de simulación …
1.2. Identificación de la herramienta de simulación: nombre/modelo/número (hardware y software) …
2. ÁMBITO DE APLICACIÓN
2.1. Tipo de vehículo: …
2.2. Configuraciones del vehículo: …
3. ENSAYO DE VERIFICACIÓN EN VEHÍCULO
3.1. Descripción del vehículo o vehículos: …
3.1.1. Identificación del vehículo o vehículos: marca/modelo/VIN …
3.1.2. Descripción del vehículo, incluidos la suspensión/las ruedas, el motor y los órganos de transmisión, los sistemas de frenado, el sistema de dirección, con nombre/modelo/número de identificación: …
3.1.3. Datos del vehículo o vehículos utilizados en la simulación (explícitos): …
3.2. Descripción de los lugares, las condiciones de la superficie de la carretera/superficie de la zona de ensayos, temperatura y fecha o fechas: …
3.3. Resultados con la función de control de la estabilidad del vehículo encendida y apagada, incluidas las variables del movimiento mencionadas en el anexo 4, punto 2.1, según proceda: …
4. RESULTADOS DE LA SIMULACIÓN
4.1. Parámetros del vehículo o vehículos y valores utilizados en la simulación no tomados del ensayo efectivo del vehículo (implícitos) …
4.2. Estabilidad ante la guiñada y desplazamiento transversal conforme a los puntos 7.1 a 7.3 del presente Reglamento: …
5. Este ensayo ha sido efectuado y sus resultados consignados con arreglo a lo prescrito en el anexo 4 del Reglamento n.o 140.
Servicio técnico que efectúa el ensayo (1) …
Firma: …
Fecha: …
Autoridad de homologación (1) …
Firma: …
Fecha: …
(1) Debe estar firmado por distintas personas si el servicio técnico y la autoridad de homologación de tipo son la misma entidad.
|
26.10.2018 |
ES |
Diario Oficial de la Unión Europea |
L 269/36 |
Solo los textos originales de la CEPE surten efectos jurídicos con arreglo al Derecho internacional público. La situación y la fecha de entrada en vigor del presente Reglamento deben consultarse en la última versión del documento de situación de la CEPE TRANS/WP.29/343, disponible en:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Reglamento n.o 141 de la Comisión Económica para Europa (CEPE) de las Naciones Unidas. Prescripciones uniformes relativas a la homologación de vehículos en lo que concierne a sus sistemas de control de la presión de los neumáticos (TPMS) [2018/1593]
Fecha de entrada en vigor: 22 de enero de 2017
ÍNDICE
REGLAMENTO
|
1. |
Ámbito de aplicación |
|
2. |
Definiciones |
|
3. |
Solicitud de homologación |
|
4. |
Homologación |
|
5. |
Especificaciones y ensayos |
|
6. |
Información adicional |
|
7. |
Modificación y extensión de la homologación del tipo de vehículo |
|
8. |
Conformidad de la producción |
|
9. |
Sanciones por no conformidad de la producción |
|
10. |
Cese definitivo de la producción |
|
11. |
Nombre y dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo |
ANEXOS
|
1. |
Comunicación |
|
2. |
Ejemplos de marcas de homologación |
|
3. |
Requisitos de ensayo para los sistemas de control de la presión de los neumáticos (TPMS) |
1. ÁMBITO DE APLICACIÓN
El presente Reglamento se aplica a la homologación de los vehículos de la categoría M1 hasta una masa máxima de 3 500 kg y de los vehículos de la categoría N1 (1) que estén equipados con un sistema de control de la presión de los neumáticos, excepto para los vehículos con ruedas gemelas en un eje.
2. DEFINICIONES
A los efectos del presente Reglamento, se entenderá por:
|
2.1. |
«homologación de un vehículo», la homologación de un tipo de vehículo con respecto a su sistema de control de la presión de los neumáticos; |
|
2.2. |
«tipo de vehículo», vehículos que no difieren significativamente entre sí en aspectos esenciales como:
|
|
2.3. |
«rueda», una rueda completa, compuesta de una llanta y un disco de rueda; |
|
2.4. |
«neumático», una cubierta flexible reforzada que tiene, o forma junto con la rueda en la que va montada, una cámara continua, esencialmente toroidal y cerrada, que contiene gas (generalmente aire) o gas y líquido, y normalmente está destinada a ser usada a una presión superior a la presión atmosférica; |
|
2.5. |
«masa máxima», el valor máximo del vehículo declarado por el fabricante como técnicamente admisible (dicha masa puede ser superior a la «masa admisible máxima» establecida por la administración nacional); |
|
2.6. |
«carga máxima por eje», el valor máximo indicado por el fabricante de la fuerza vertical total entre las superficies de contacto de los neumáticos o las orugas de un eje y el suelo, y derivada de la parte de la masa del vehículo que soporta ese eje; esta carga puede ser superior a la «carga por eje autorizada» establecida por la administración nacional; la suma de las cargas por eje puede ser superior al valor correspondiente a la masa total del vehículo; |
|
2.7. |
«sistema de control de la presión de los neumáticos (TPMS)», sistema instalado en un vehículo capaz de evaluar la presión de inflado de los neumáticos o la variación de esta a lo largo del tiempo y transmitir la información correspondiente al usuario mientras el vehículo está en marcha; |
|
2.8. |
«presión de inflado en frío», la presión del neumático a temperatura ambiente, sin ningún otro aumento de presión debido al uso del neumático; |
|
2.9. |
«presión de inflado en frío recomendada (P rec )», la presión recomendada para cada posición de neumático por el fabricante del vehículo, conforme a las condiciones de uso previstas (por ejemplo, velocidad y carga) del vehículo dado, según lo definido en la placa identificadora del vehículo o en su manual de instrucciones; |
|
2.10. |
«presión de funcionamiento (P warm )», la presión de inflado para cada posición de neumático, elevada a partir de la presión en frío (Prec) por los efectos de la temperatura durante el uso del vehículo; |
|
2.11. |
«presión de prueba (P test )», la presión real del neumático o los neumáticos seleccionados para cada posición de neumático tras el desinflado durante el procedimiento de prueba. |
3. SOLICITUD DE HOMOLOGACIÓN
3.1. La solicitud de homologación de un tipo de vehículo en lo que respecta a su sistema de control de la presión de los neumáticos será presentada por el fabricante del vehículo o su representante debidamente autorizado.
3.2. Irá acompañada, por triplicado, de una descripción del tipo de vehículo por lo que se refiere a los puntos especificados en el anexo 1 del presente Reglamento.
3.3. Se facilitará a la autoridad de homologación de tipo o al servicio técnico responsable de llevar a cabo los ensayos de homologación un vehículo representativo del tipo cuya homologación se solicite.
3.4. La autoridad de homologación de tipo deberá verificar la existencia de disposiciones adecuadas para garantizar un control eficaz de la conformidad de la producción antes de conceder la homologación.
4. HOMOLOGACIÓN
4.1. Si el vehículo presentado para su homologación con arreglo al presente Reglamento cumple todas las prescripciones establecidas en el apartado 5, se concederá la homologación de dicho tipo de vehículo.
4.2. Se asignará un número de homologación a cada tipo de vehículo homologado. Sus dos primeros dígitos (actualmente 00 para el Reglamento en su forma original) indicarán la serie de enmiendas que incorporen los últimos cambios importantes de carácter técnico realizados en el Reglamento en el momento en que se emita la homologación. La misma Parte contratante no asignará el mismo número a otro tipo de vehículo.
4.3. La concesión, extensión o denegación de la homologación de un vehículo con arreglo al presente Reglamento se comunicará a las Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante un formulario que se ajustará al modelo que figura en el anexo 1 del presente Reglamento.
4.4. En todo vehículo que se ajuste al tipo homologado con arreglo al presente Reglamento se colocará en un lugar visible y de fácil acceso, que se especificará en el formulario de homologación, una marca internacional de homologación compuesta por:
|
4.4.1. |
un círculo en cuyo interior figurará la letra «E» seguida del número distintivo del país que haya concedido la homologación (2); |
|
4.4.2. |
el número del presente Reglamento, seguido de la letra «R», de un guion y del número de homologación, colocados a la derecha de los marcados previstos en el apartado 4.4.1. |
4.5. Si el vehículo es conforme con un tipo de vehículo homologado de acuerdo con uno o varios Reglamentos anejos al Acuerdo en el país que haya concedido la homologación con arreglo al presente Reglamento, no será necesario repetir el símbolo prescrito en el apartado 4.4.1; en tal caso, el Reglamento, los números de homologación y los símbolos adicionales de todos los Reglamentos según los cuales se haya concedido la homologación en el país que la haya concedido de conformidad con el presente Reglamento se colocarán en columnas verticales a la derecha del símbolo prescrito en el apartado 4.4.1.
4.6. La marca de homologación será claramente legible e indeleble.
4.7. La marca de homologación se pondrá en la placa de datos del vehículo colocada por el fabricante o cerca de esta.
4.8. En el anexo 2 del presente Reglamento figuran algunos ejemplos de marcas de homologación.
5. ESPECIFICACIONES Y ENSAYOS
5.1. Generalidades
5.1.1. Todo vehículo de la categoría M1 hasta 3 500 kg y de la categoría N1, en ambos casos con neumáticos individuales en todos los ejes y equipados con un sistema de control de la presión de los neumáticos que se ajuste a la definición del apartado 2.7, deberá cumplir los requisitos de rendimiento de los puntos 5.1.2 a 5.5.5 del presente Reglamento en una amplia gama de condiciones de carretera y ambientales dentro del territorio de las Partes contratantes.
5.1.2. La eficacia del sistema de control de la presión de los neumáticos instalado en un vehículo no deberá verse afectada por campos magnéticos o eléctricos. Este particular deberá demostrarse por cumplimiento de los requisitos técnicos y observación de las disposiciones transitorias del Reglamento n.o 10, aplicando:
|
a) |
la serie 03 de modificaciones, en el caso de vehículos sin sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción); |
|
b) |
la serie 04 de modificaciones, en el caso de vehículos con un sistema de acoplamiento para cargar el sistema de almacenamiento de energía recargable (baterías de tracción). |
5.1.3. El sistema deberá funcionar desde una velocidad igual o inferior a 40 km/h hasta la velocidad máxima del vehículo según el fabricante.
5.1.4. El vehículo deberá superar los ensayos (perforación, difusión y avería) como se detalla en el anexo 3.
5.2. Detección de la presión de los neumáticos en lo que concierne a la pérdida de presión relacionada con un incidente
5.2.1. El TPMS deberá iluminar la señal de advertencia descrita en el apartado 5.5 transcurridos no más de diez minutos de tiempo de conducción acumulado desde que la presión de servicio en uno de los neumáticos del vehículo se haya reducido en un 20 % o sea como mínimo de 150 kPa, según cual sea el valor más alto.
5.3. Detección respecto a un nivel de presión de los neumáticos muy por debajo de la presión recomendada para un rendimiento óptimo, incluidos el consumo de combustible y la seguridad
5.3.1. El TPMS deberá iluminar la señal de advertencia descrita en el apartado 5.5 transcurridos no más de sesenta minutos de tiempo de conducción acumulado desde que la presión de servicio en alguno de los neumáticos del vehículo, hasta un total de cuatro neumáticos, se haya reducido en un 20 % o sea como mínimo de 150 kPa, según cual sea el valor más alto.
5.4. Detección de una avería
5.4.1. El TPMS deberá iluminar la señal de advertencia descrita en el apartado 5.5 no más de diez minutos después de producirse una avería que afecte a la generación o transmisión de señales de control o respuesta en el sistema de control de la presión de los neumáticos del vehículo.
5.5. Indicación de aviso
5.5.1. La indicación de advertencia deberá consistir en una señal de advertencia óptica que se ajuste al Reglamento n.o 121.
5.5.2. La señal de advertencia se activará cuando el interruptor de contacto (arranque) esté en la posición de encendido (funcionamiento) (verificación de las lámparas). Este requisito no se aplica a los testigos mostrados en un espacio común.
5.5.3. La señal de advertencia deberá ser visible incluso de día; el conductor deberá poder verificar fácilmente desde su asiento el estado correcto de la señal.
5.5.4. La indicación de avería puede ser la misma señal de advertencia utilizada para indicar un inflado insuficiente. Si la señal de advertencia descrita en el apartado 5.5.1 se utiliza para indicar tanto un inflado insuficiente como una avería del TPMS, será de aplicación lo siguiente: Cuando el interruptor de contacto (arranque) esté en la posición de encendido (funcionamiento), la señal de advertencia parpadeará para indicar una avería. Tras un breve período, la señal de advertencia permanecerá iluminada continuamente mientras persista la avería y el interruptor de contacto (arranque) esté en la posición de encendido (funcionamiento). La secuencia de parpadeo e iluminación se repetirá cada vez que el interruptor de contacto (arranque) esté en posición de encendido (funcionamiento), hasta que la avería haya sido corregida.
5.5.5. El testigo de advertencia que se describe en el apartado 5.5.1 puede utilizarse en modo intermitente para proporcionar información sobre la situación de reajuste del sistema de control de la presión de los neumáticos de acuerdo con el manual de instrucciones del vehículo.
6. INFORMACIÓN ADICIONAL
6.1. El manual de instrucciones, en su caso, del vehículo contendrá por lo menos la siguiente información:
|
6.1.1. |
Una declaración de que el vehículo está equipado con ese sistema (e información sobre la manera de reajustarlo, si esta función está incluida en el sistema). |
|
6.1.2. |
Una imagen del testigo descrito en el apartado 5.5.1 (y una imagen del testigo de avería, si se utiliza un testigo específico para esta función). |
|
6.1.3. |
Información adicional acerca del significado de que se ilumine el testigo de advertencia de baja presión en los neumáticos y una descripción de las medidas correctoras que deben adoptarse si esto sucede. |
6.2. Si no se facilita con el vehículo un manual de instrucciones, la información requerida en el apartado 6.1 figurará en un lugar destacado del vehículo.
7. MODIFICACIÓN Y EXTENSIÓN DE LA HOMOLOGACIÓN DEL TIPO DE VEHÍCULO
7.1. Toda modificación del tipo de vehículo con arreglo a la definición del punto 2.2 del presente Reglamento deberá notificarse a la autoridad de homologación de tipo que lo homologó. Esta podrá, a continuación:
|
7.1.1. |
considerar que las modificaciones realizadas no tienen un efecto adverso en las condiciones de concesión de la homologación y conceder una extensión de la homologación; |
|
7.1.2. |
considerar que las modificaciones realizadas afectan a las condiciones de concesión de la homologación y exigir nuevos ensayos o controles adicionales antes de conceder una extensión de la homologación. |
7.2. La confirmación o la denegación de la homologación se comunicarán a las Partes contratantes del Acuerdo que apliquen el presente Reglamento, especificando las modificaciones, mediante el procedimiento indicado en el punto 4.3.
7.3. La autoridad de homologación de tipo informará de la extensión a las demás Partes contratantes mediante el formulario de comunicación del anexo 1 del presente Reglamento. Asignará un número de serie a cada extensión, denominado número de extensión.
8. CONFORMIDAD DE LA PRODUCCIÓN
8.1. Los procedimientos relativos a la conformidad de la producción se ajustarán a los establecidos en el apéndice 2 del Acuerdo (E/ECE/324–E/ECE/TRANS/505/Rev.2) y a los requisitos siguientes:
8.2. La autoridad de homologación de tipo que haya concedido la homologación de tipo podrá verificar en cualquier momento la conformidad de la producción en cada instalación de producción. La frecuencia normal de estas verificaciones será una vez al año.
9. SANCIONES POR NO CONFORMIDAD DE LA PRODUCCIÓN
9.1. La homologación concedida con respecto a un tipo de vehículo con arreglo al presente Reglamento podrá retirarse si no se cumplen los requisitos establecidos en el apartado 8.
9.2. Si una Parte contratante del Acuerdo que aplica el presente Reglamento retira una homologación que haya concedido anteriormente, lo notificará inmediatamente a las demás Partes Contratantes que apliquen el presente Reglamento mediante una copia del formulario de homologación al final de la cual figurará en grandes caracteres la indicación firmada y fechada «HOMOLOGACIÓN RETIRADA».
10. CESE DEFINITIVO DE LA PRODUCCIÓN
Si el titular de una homologación cesa por completo de fabricar un tipo de vehículo homologado con arreglo al presente Reglamento, deberá informar de ello a la autoridad que concedió la homologación. Tras recibir la correspondiente comunicación, dicha autoridad deberá informar de ello a las demás Partes contratantes del Acuerdo que apliquen el presente Reglamento mediante una copia del formulario de homologación al final de la cual figurará en grandes caracteres la indicación firmada y fechada «CESE DE LA PRODUCCIÓN».
11. NOMBRES Y DIRECCIONES DE LOS SERVICIOS TÉCNICOS ENCARGADOS DE REALIZAR LOS ENSAYOS DE HOMOLOGACIÓN Y DE LAS AUTORIDADES DE HOMOLOGACIÓN DE TIPO
Las Partes contratantes del Acuerdo que apliquen el presente Reglamento deberán comunicar a la Secretaría de las Naciones Unidas el nombre y la dirección de los servicios técnicos encargados de realizar los ensayos de homologación y de las autoridades de homologación de tipo que concedan la homologación y a las cuales deban remitirse los formularios expedidos en otros países que certifiquen la concesión, extensión, denegación o retirada de la homologación.
(1) Con arreglo a la definición que figura en la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6, punto 2, www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html.
(2) Los números distintivos de las Partes contratantes del Acuerdo de 1958 figuran en el anexo 3 de la Resolución consolidada sobre la construcción de vehículos (R.E.3), documento ECE/TRANS/WP.29/78/Rev.6, anexo 3 (www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html).
ANEXO 2
EJEMPLOS DE MARCAS DE HOMOLOGACIÓN
(Véase el apartado 4.4 del presente Reglamento)

Esta marca de homologación colocada en un vehículo indica que el tipo de vehículo en cuestión, en lo que concierne a su equipamiento con un sistema de control de la presión de los neumáticos, ha sido homologado en los Países Bajos (E 4) con arreglo al Reglamento n.o 141, con el número de homologación 002439. El número de homologación indica que esta fue concedida de conformidad con los requisitos que establece el Reglamento n.o 141 en su forma original.
ANEXO 3
ENSAYOS PARA SISTEMAS DE CONTROL DE LA PRESIÓN DE LOS NEUMÁTICOS (TPMS)
1. CONDICIONES DE ENSAYO
1.1. Temperatura ambiente
La temperatura ambiente estará comprendida entre 0 °C y 40 °C.
1.2. Superficie de carretera de ensayo
La carretera deberá tener una superficie que presente buenas condiciones de adherencia. Dicha superficie deberá estar seca durante el ensayo.
1.3. Los ensayos se llevarán a cabo en un entorno libre de interferencias de ondas de radio.
1.4. Condiciones del vehículo
1.4.1. Pesos de ensayo
El vehículo podrá someterse a ensayo en cualquier condición de carga, siendo la distribución de la masa entre los ejes la declarada por el fabricante del vehículo, sin sobrepasar ninguna de las masas máximas admisibles en cada eje.
Sin embargo, en el caso de que no haya ninguna posibilidad de ajustar o reajustar el sistema, el vehículo estará vacío. Podrá haber, además del conductor, una segunda persona sentada en el asiento delantero, encargada de tomar nota de los resultados de los ensayos. La condición de carga no se modificará durante el ensayo.
1.4.2. Velocidad del vehículo
El TPMS se calibrará y someterá a ensayo:
|
a) |
en una gama de velocidades de 40 a 120 km/h o a la velocidad máxima del vehículo según el fabricante, si esta es inferior a 120 km/h, para el ensayo de perforación, a fin de comprobar los requisitos del apartado 5.2 del presente Reglamento, y |
|
b) |
en una gama de velocidades de 40 a 100 km/h para el ensayo de difusión, a fin de comprobar los requisitos del apartado 5.3 del presente Reglamento, y para el ensayo de avería, a fin de comprobar los requisitos del apartado 5.4 del presente Reglamento. |
Durante el ensayo quedará cubierta toda la gama de velocidades.
Cuando los vehículos estén equipados con control de crucero, este no estará en funcionamiento durante el ensayo.
1.4.3. Posición de las llantas
Las llantas del vehículo pueden colocarse en cualquier posición de rueda, de acuerdo con las instrucciones o limitaciones del fabricante del vehículo.
1.4.4. Vehículo inmovilizado
Cuando el vehículo esté estacionado, el sol no podrá incidir directamente sobre los neumáticos. El lugar estará protegido de vientos que puedan afectar a los resultados.
1.4.5. Accionamiento del pedal del freno
El tiempo de conducción no se acumulará durante el accionamiento de los frenos de servicio mientras que el vehículo esté en movimiento.
1.4.6. Neumáticos
El vehículo se probará con los neumáticos instalados en él según las recomendaciones del fabricante del vehículo. No obstante, el neumático de repuesto puede utilizarse para ensayar posibles averías del TPMS.
1.5. Exactitud del equipo de medida de la presión
El equipo de medida de la presión que deberá utilizarse para realizar los ensayos que figuran en el presente anexo deberá tener una exactitud de al menos ± 3 kPa.
2. PROCEDIMIENTO DE ENSAYO
El ensayo se llevará a cabo a una velocidad de ensayo comprendida en la gama indicada en el punto 1.4.2 del presente anexo, al menos una vez para la hipótesis de ensayo del punto 2.6.1 (ensayo de perforación) y al menos una vez para cada hipótesis de ensayo del punto 2.6.2 (ensayo de difusión).
2.1. Antes de inflar los neumáticos, el vehículo se dejará inmovilizado, en el exterior, a temperatura ambiente, con el motor apagado, protegido de la luz solar directa y durante al menos una hora no expuesto al viento u otras influencias que puedan calentarlo o enfriarlo. Los neumáticos del vehículo se inflarán a la presión de inflado en frío recomendada por el fabricante (Prec) para las condiciones de velocidad y de carga y las posiciones de los neumáticos. Todas las mediciones de la presión se llevarán a cabo utilizando el mismo equipo de ensayo.
2.2. Con el vehículo inmovilizado y el interruptor de contacto en posición de bloqueo o apagado, se activará el interruptor de contacto hacia la posición de encendido o funcionamiento. El sistema de control de la presión de los neumáticos realizará una comprobación del funcionamiento de la bombilla del testigo que indica una baja presión en los neumáticos según se describe en el apartado 5.5.2 del presente Reglamento. Este último requisito no se aplica a los testigos mostrados en un espacio común.
2.3. Si procede, se ajustará o reajustará el sistema de control de la presión de los neumáticos de acuerdo con las recomendaciones del fabricante del vehículo.
2.4. Fase de aprendizaje
2.4.1. Se conducirá el vehículo durante un mínimo de 20 minutos dentro de la gama de velocidades contemplada en el punto 1.4.2 del presente anexo, y con una velocidad media de 80 km/h (± 10 km/h). Se permitirá que el vehículo se salga de la gama de velocidades por un tiempo máximo acumulado de dos minutos durante la fase de aprendizaje.
2.4.2. A discreción del servicio técnico, cuando se realice en una pista (circular u ovalada) dando vueltas en una sola dirección, el ensayo de conducción que figura en el punto 2.4.1 debería dividirse a partes iguales (± 2 minutos) en ambas direcciones.
2.4.3. En los cinco minutos siguientes al término de la fase de aprendizaje, se medirá la presión en caliente del neumático o de los neumáticos que vayan a desinflarse. La presión en caliente se tomará como el valor Pwarm. Este valor se utilizará para operaciones futuras.
2.5. Fase de desinflado
2.5.1. Procedimiento para el ensayo de perforación a fin de verificar los requisitos del apartado 5.2 del presente Reglamento
En los cinco minutos siguientes a la medida de la presión en caliente conforme a lo descrito en el punto 2.4.3, se desinflará uno de los neumáticos del vehículo hasta una presión de Pwarm – 20 %, o hasta una presión mínima de 150 kPa, tomándose de estas dos opciones la que sea superior, y esta será Ptest. Tras un período de estabilización de entre dos y cinco minutos, se volverá a comprobar la presión Ptest y se ajustará si fuera necesario.
2.5.2. Procedimiento para el ensayo de difusión a fin de verificar los requisitos del apartado 5.3 del presente Reglamento
En los cinco minutos siguientes a la medición de la presión en caliente conforme a lo descrito en el punto 2.4.3, se desinflarán los cuatro neumáticos del vehículo hasta Pwarm – 20 %, y además otros 7 kPa, y esta será Ptest. Tras un período de estabilización de entre dos y cinco minutos, se volverá a comprobar la presión Ptest y se ajustará si fuera necesario.
2.6. Fase de detección de la baja presión de los neumáticos
2.6.1. Procedimiento para el ensayo de perforación a fin de verificar los requisitos del apartado 5.2 del presente Reglamento
2.6.1.1. Se conducirá el vehículo a lo largo de cualquier porción de la pista de ensayo (no necesariamente de manera continuada). La suma del tiempo de conducción acumulado total será de menos de 10 minutos o el tiempo en que se ilumine el testigo de baja presión de los neumáticos.
2.6.2. Procedimiento para el ensayo de difusión a fin de verificar los requisitos del apartado 5.3 del presente Reglamento
2.6.2.1. Se conducirá el vehículo a lo largo de cualquier porción de la pista de ensayo. Tras no menos de 20 minutos y no más de 40 minutos, se inmovilizará el vehículo, con el motor apagado y la llave de contacto sacada, durante no menos de 1 minuto ni más de 3 minutos. Se reanudará el ensayo. La suma del tiempo de conducción acumulado total será 60 minutos de conducción acumulada en las condiciones establecidas en el punto 1.4.2 o el tiempo en que el testigo de baja presión de los neumáticos esté iluminado, según cuál de estos períodos sea menor.
2.6.3. Si no se ilumina la señal de baja presión de los neumáticos, deberá interrumpirse el ensayo.
2.7. Si el testigo de baja presión de los neumáticos se ilumina durante el procedimiento descrito en el punto 2.6, deberá desactivarse el interruptor de contacto, situándolo en la posición de apagado o bloqueo. Al cabo de 5 minutos, se reactivará el interruptor de contacto del vehículo, situándolo en la posición de encendido (funcionamiento). El testigo deberá iluminarse y permanecer iluminado mientras el interruptor de contacto esté en la posición de encendido (funcionamiento).
2.8. Se inflarán todos los neumáticos del vehículo a la presión de inflado en frío recomendada por el fabricante del vehículo. Se reajustará el sistema de acuerdo con las instrucciones del fabricante del vehículo. Se determinará si el testigo se ha apagado. Si es necesario, se conducirá el vehículo hasta que se haya apagado el testigo. Si el testigo no se apaga, se interrumpirá el ensayo.
2.9. Repetición de la fase de desinflado
Podrá repetirse el ensayo, a las mismas o diferentes cargas, utilizando los procedimientos de ensayo pertinentes que figuran en los apartados 2.1 a 2.8, con el neumático o los neumáticos pertinentes en el vehículo insuficientemente inflados, con arreglo a lo dispuesto en los apartados 5.2 o 5.3 del presente Reglamento, según cuáles de estas disposiciones sean pertinentes.
3. DETECCIÓN DE AVERÍA DEL TPMS
3.1. Se simulará una avería del TPMS, por ejemplo desconectando la fuente de alimentación de cualquier componente del TPMS, alguna conexión eléctrica entre componentes del TPMS, o instalando en el vehículo un neumático o una rueda que sean incompatibles con el TPMS. Al simular una avería del TPMS, no se desconectarán las conexiones eléctricas de las bombillas de los testigos.
3.2. Se conducirá el vehículo durante períodos que sumen hasta 10 minutos de tiempo acumulado (no necesariamente de manera continua) a lo largo de cualquier porción de la pista de ensayo.
3.3. La suma del tiempo de conducción acumulado total mencionada en el punto 3.2 será de 10 minutos, o el tiempo en que se ilumine el testigo de avería del TPMS, tomándose de estas dos opciones la que sea menor.
3.4. Si el testigo de avería del TPMS no se ilumina de conformidad con el apartado 5.4 del presente Reglamento, como se exige, se interrumpirá el ensayo.
3.5. Si el testigo de avería del TPMS se ilumina durante el procedimiento descrito en los puntos 3.1 a 3.3, se desactivará el interruptor de contacto, situándolo en la posición de apagado o bloqueo. Al cabo de 5 minutos, se reactivará el interruptor de contacto del vehículo, situándolo en la posición de encendido (funcionamiento). El indicador de avería del TPMS señalará de nuevo una avería y permanecerá iluminado mientras el interruptor de contacto esté en la posición de encendido (funcionamiento).
3.6. Se restablecerá el TPMS a su funcionamiento normal. Si es necesario, se conducirá el vehículo hasta que se haya apagado la señal de advertencia. Si la luz de advertencia no se apaga, se interrumpirá el ensayo.
3.7. El ensayo puede repetirse utilizando los procedimientos de ensayo establecidos en los puntos 3.1 a 3.6, limitándose cada uno de esos ensayos a la simulación de una sola avería.