ISSN 1977-0677
doi:10.3000/19770677.L_2012.254.eng
Official Journal
of the European Union
L 254

English edition
Legislation
Volume 55
20 September 2012
|
ISSN 1977-0677 doi:10.3000/19770677.L_2012.254.eng |
||
|
Official Journal of the European Union |
L 254 |
|
|
|
||
|
English edition |
Legislation |
Volume 55 |
|
Contents |
|
II Non-legislative acts |
page |
|
|
|
ACTS ADOPTED BY BODIES CREATED BY INTERNATIONAL AGREEMENTS |
|
|
|
* |
||
|
|
* |
|
EN |
Acts whose titles are printed in light type are those relating to day-to-day management of agricultural matters, and are generally valid for a limited period. The titles of all other Acts are printed in bold type and preceded by an asterisk. |
II Non-legislative acts
ACTS ADOPTED BY BODIES CREATED BY INTERNATIONAL AGREEMENTS
|
20.9.2012 |
EN |
Official Journal of the European Union |
L 254/1 |
Only the original UN/ECE texts have legal effect under international public law. The status and date of entry into force of this Regulation should be checked in the latest version of the UN/ECE status document TRANS/WP.29/343, available at:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulation No 10 of the Economic Commission for Europe of the United Nations (UN/ECE) — Uniform provisions concerning the approval of vehicles with regard to electromagnetic compatibility
Incorporating all valid text up to:
04 series of amendments — Date of entry into force: 28 October 2011
Corrigendum 1 to the Revision 4 — Date of entry into force: 28 October 2011
Supplement 1 to the 04 series of amendments — Date of entry into force: 26 July 2012
CONTENTS
|
1. |
Scope |
|
2. |
Definitions |
|
3. |
Application for approval |
|
4. |
Approval |
|
5. |
Markings |
|
6. |
Specification in configurations other than ‘RESS charging mode coupled to the power grid’ |
|
7. |
Additional specifications in the configuration ‘RESS charging mode coupled to the power grid’ |
|
8. |
Amendment or extension of a vehicle type-approval following electrical/electronic sub assembly (ESA) addition or substitution |
|
9. |
Conformity of production |
|
10. |
Penalties for non-conformity of production |
|
11. |
Production definitively discontinued |
|
12. |
Modification and extension of type-approval of a vehicle or ESA |
|
13. |
Transitional provisions |
|
14. |
Names and addresses of Technical Services conducting approval tests, and of Type Approval Authorities |
APPENDICES
|
1 |
List of standards referred to in this Regulation |
|
2 |
Vehicle broadband reference limits |
|
3 |
Vehicle broadband reference limits |
|
4 |
Vehicle narrowband reference limits |
|
5 |
Vehicle narrowband reference limits |
|
6 |
Electrical/electronic sub-assembly |
|
7 |
Electrical/electronic sub-assembly |
ANNEXES
|
1 |
Examples of approval marks |
|
2A |
Information document for type-approval of a vehicle with respect to electromagnetic compatibility |
|
2B |
Information document for type-approval of an electric/electronic sub-assembly with respect to electromagnetic compatibility |
|
3A |
Communication concerning the approval or extension or refusal or withdrawal of approval or production definitely discontinued of a type of vehicle/component/separate technical unit with regard to Regulation No 10 |
|
3B |
Communication concerning the approval or extension or refusal or withdrawal of approval or production definitely discontinued of a type of electrical/electronic sub-assembly with regard to Regulation No 10 |
|
4 |
Method of measurement of radiated broadband electromagnetic emissions from vehicles |
|
5 |
Method of measurement of radiated narrowband electromagnetic emissions from vehicles |
|
6 |
Method of testing for immunity of vehicles to electromagnetic radiation |
|
7 |
Method of measurement of radiated broadband electromagnetic emissions from electrical/electronic sub-assemblies |
|
8 |
Method of measurement of radiated narrowband electromagnetic emissions from electrical/electronic sub-assemblies |
|
9 |
Method(s) of testing for immunity of electrical/electronic sub-assemblies to electromagnetic radiation |
|
10 |
Method(s) of testing for immunity to and emission of transients of electrical/electronic sub-assemblies |
|
11 |
Method(s) of testing for emission of harmonics generated on AC power lines from vehicle |
|
12 |
Method(s) of testing for emission of voltage changes, voltage fluctuations and flicker on AC power lines from vehicle |
|
13 |
Method(s) of testing for emission of radiofrequency conducted disturbances on AC or DC power lines from vehicle |
|
14 |
Method(s) of testing for emission of radiofrequency conducted disturbances on network and telecommunication access from vehicle |
|
15 |
Method(s) of testing for immunity of vehicles to electrical fast transient/ burst disturbances conducted along AC and DC power lines |
|
16 |
Method(s) of testing for immunity of vehicles to surges conducted along AC and DC power lines |
1. SCOPE
This Regulation applies to:
|
1.1. |
Vehicles of categories L, M, N and O (1) with regard to electromagnetic compatibility. |
|
1.2. |
Components and separate technical units intended to be fitted in these vehicles with the limitation given in paragraph 3.2.1 with regard to electromagnetic compatibility. |
|
1.3. |
It covers:
|
2. DEFINITIONS
For the purposes of this Regulation:
|
2.1. |
‘Electromagnetic compatibility’ means the ability of a vehicle or component(s) or separate technical unit(s) to function satisfactorily in its electromagnetic environment without introducing intolerable electromagnetic disturbances to anything in that environment. |
|
2.2. |
‘Electromagnetic disturbance’ means any electromagnetic phenomenon which may degrade the performance of a vehicle or component(s) or separate technical unit(s), or of any other device, unit of equipment or system operated in vicinity of a vehicle. An electromagnetic disturbance may be electromagnetic noise, an unwanted signal or a change in the propagation medium itself. |
|
2.3. |
‘Electromagnetic immunity’ means the ability of a vehicle or component(s) or separate technical unit(s) to operate without degradation of performance in the presence of (specified) electromagnetic disturbances which includes wanted radio frequency signals from radio transmitters or radiated in-band emissions of industrial-scientific-medical (ISM) apparatus, internal or external to the vehicle. |
|
2.4. |
‘Electromagnetic environment’ means the totality of electromagnetic phenomena existing at a given location. |
|
2.5. |
‘Broadband emission’ means an emission, which has a bandwidth greater than that of a particular measuring apparatus or receiver (International Special Committee on Radio Interference (CISPR) 25, second edition 2002 and Corrigendum 2004). |
|
2.6. |
‘Narrowband emission’ means an emission which has a bandwidth less than that of a particular measuring apparatus or receiver (CISPR 25, second edition 2002 and Corrigendum 2004). |
|
2.7. |
‘Electrical/electronic system’ means (an) electrical and/or electronic device(s) or set(s) of devices together with any associated electrical connections which form part of a vehicle but which are not intended to be type-approved separately from the vehicle. Both RESS and Coupling system for charging the RESS are considered electrical/electronic systems. |
|
2.8. |
‘Electrical/electronic sub-assembly’ (ESA) means an electrical and/or electronic device or set(s) of devices intended to be part of a vehicle, together with any associated electrical connections and wiring, which performs one or more specialised functions. An ESA may be approved at the request of a manufacturer or his authorised representative as either a ‘component’ or a ‘separate technical unit (STU)’. |
|
2.9. |
‘Vehicle type’ in relation to electromagnetic compatibility includes all vehicles, which do not differ essentially in such respects as:
|
|
2.10. |
An ‘ESA type’ in relation to electromagnetic compatibility means ESAs, which do not differ in such essential respects as:
|
|
2.11. |
‘Vehicle wiring harness’ means supply voltage, bus system (e.g. CAN), signal or active antenna cables, which are installed by the vehicle manufacturer. |
|
2.12. |
‘Immunity related functions’ are:
|
|
2.13. |
‘RESS’ means the rechargeable energy storage system that provides electric energy for electric propulsion of the vehicle. |
|
2.14. |
‘Coupling system for charging the RESS’ means the electrical circuit installed in the vehicle used for charging the RESS. |
3. APPLICATION FOR APPROVAL
3.1. Approval of a vehicle type
|
3.1.1. |
The application for approval of a vehicle type, with regard to its electromagnetic compatibility, shall be submitted by the vehicle manufacturer. |
|
3.1.2. |
A model of information document is shown in Annex 2A. |
|
3.1.3. |
The vehicle manufacturer shall draw up a schedule describing all relevant vehicle electrical/electronic systems or ESAs, body styles, variations in body material, general wiring arrangements, engine variations, left-hand/right-hand drive versions and wheelbase versions. Relevant vehicle electrical/electronic systems or ESAs are those which may emit significant broadband or narrowband radiation and/or those which are involved in immunity related functions of the vehicle (see paragraph 2.12) and those which provide coupling systems for charging the RESS. |
|
3.1.4. |
A vehicle representative of the type to be approved shall be selected from this schedule by mutual agreement between the manufacturer and the Competent Authority. The choice of vehicle shall be based on the electrical/electronic systems offered by the manufacturer. One or more vehicles may be selected from this schedule if it is considered by mutual agreement between the manufacturer and the Competent Authority that different electrical/electronic systems are included which are likely to have a significant effect on the vehicle’s electromagnetic compatibility compared with the first representative vehicle. |
|
3.1.5. |
The choice of the vehicle(s) in conformity with paragraph 3.1.4 above shall be limited to vehicle/electrical/electronic system combinations intended for actual production. |
|
3.1.6. |
The manufacturer may supplement the application with a report on tests which have been carried out. Any such data provided may be used by the approval authority for the purpose of drawing up the communication form for type-approval. |
|
3.1.7. |
If the Technical Service responsible for the type-approval test carries out the test itself, then a vehicle representative of the type to be approved according to paragraph 3.1.4 shall be provided. |
|
3.1.8. |
For vehicles of categories M, N, and O the vehicle manufacturer must provide a statement of frequency bands, power levels, antenna positions and installation provisions for the installation of radio frequency transmitters (RF-transmitters), even if the vehicle is not equipped with an RF transmitter at time of type-approval. This should cover all mobile radio services normally used in vehicles. This information must be made publicly available following the type-approval. Vehicle manufacturers must provide evidence that vehicle performance is not adversely affected by such transmitter installations. |
|
3.1.9. |
Vehicle type-approval shall be applied for both RESS and Coupling system for charging the RESS as they are considered as electrical/electronic systems. |
3.2. ESA type-approval
|
3.2.1. |
Applicability of this Regulation to ESA:
|
|
3.2.2. |
The application for approval of a type of ESA with regard to its electromagnetic compatibility shall be submitted by the vehicle manufacturer or by the manufacturer of the ESA. |
|
3.2.3. |
A model of information document is shown in Annex 2B. |
|
3.2.4. |
The manufacturer may supplement the application with a report on tests which have been carried out. Any such data provided may be used by the approval authority for the purpose of drawing up the communication form for type-approval. |
|
3.2.5. |
If the Technical Service responsible for the type-approval test carries out the test itself, then a sample of the ESA system representative of the type to be approved shall be provided, if necessary, after discussion with the manufacturer on, e.g. possible variations in the layout, number of components, number of sensors. If the Technical Service deems it necessary, it may select a further sample. |
|
3.2.6. |
The sample(s) must be clearly and indelibly marked with the manufacturer’s trade name or mark and the type designation. |
|
3.2.7. |
Where applicable, any restrictions on use should be identified. Any such restrictions should be included in Annexes 2B and/or 3B. |
|
3.2.8. |
ESA which are brought to the market as spare parts need no type-approval if they are obviously marked as a spare part by an identification number and if they are identical and from the same manufacturer as the corresponding original equipment manufacturer (OEM) part for an already type-approved vehicle. |
|
3.2.9. |
Components sold as aftermarket equipment and intended for the installation in motor vehicles need no type-approval if they are not related to immunity related functions (see paragraph 2.12). In this case a declaration must be issued by the manufacturer that the ESA fulfils the requirements of this Regulation and in particular the limits defined in paragraphs 6.5, 6.6, 6.8 and 6.9. |
4. APPROVAL
4.1. Type-approval procedures
4.1.1. Type-approval of a vehicle
The following alternative procedures for vehicle type-approval may be used at the discretion of the vehicle manufacturer.
4.1.1.1. Approval of a vehicle installation
A vehicle installation may be type-approved directly by following the provisions laid down in paragraph 6 of this Regulation. If this procedure is chosen by a vehicle manufacturer, no separate testing of electrical/electronic systems or ESAs is required.
4.1.1.2. Approval of vehicle type by testing of individual ESAs
A vehicle manufacturer may obtain approval for the vehicle by demonstrating to the approval authority that all the relevant (see paragraph 3.1.3 of this Regulation) electrical/electronic systems or ESAs have been approved in accordance with this Regulation and have been installed in accordance with any conditions attached thereto.
4.1.1.3. A manufacturer may obtain approval according to this Regulation if the vehicle has no equipment of the type, which is subject to immunity or emission tests. Such approvals do not require testing.
4.1.2. Type-approval of an ESA
Type-approval may be granted to an ESA to be fitted either to any vehicle type (component approval) or to a specific vehicle type or types requested by the ESA manufacturer (separate technical unit approval).
4.1.3. ESAs, which are intentional RF transmitters, which have not received type-approval in conjunction with a vehicle manufacturer, must be supplied with suitable installation guidelines.
4.2. Granting of type-approval
4.2.1. Vehicle
4.2.1.1. If the representative vehicle fulfils the requirements of paragraph 6 of this Regulation, type-approval shall be granted.
4.2.1.2. A model of communication form for type-approval is contained in Annex 3A.
4.2.2. ESA
4.2.2.1. If the representative ESA system(s) fulfil(s) the requirements of paragraph 6 of this Regulation, type-approval shall be granted.
4.2.2.2. A model of communication form for type-approval is contained in Annex 3B.
4.2.3. In order to draw up the communication forms referred to in paragraph 4.2.1.2 or 4.2.2.2 above, the Competent Authority of the Contracting Party granting the approval may use a report prepared or approved by a recognised laboratory or in accordance with the provisions of this Regulation.
4.3. Approval, or refusal of approval, of a type of vehicle or ESA in accordance with this Regulation shall be notified to the Parties to the Agreement applying this Regulation on a form conforming to the model in Annex 3A or 3B of this Regulation, accompanied by photographs and/or diagrams or drawings on an appropriate scale supplied by the applicant in a format not larger than A4 (210 × 297 mm) or folded to those dimensions.
5. MARKINGS
5.1. An approval number shall be assigned to each vehicle or ESA type-approved. The first two digits of this number shall indicate the series of amendments corresponding to the most recent essential technical amendments made to the Regulation at the date of approval. A Contracting Party may not assign the same approval number to another type of vehicle or ESA.
5.2. Presence of markings
5.2.1. Vehicle
An approval mark described in paragraph 5.3 below shall be affixed to every vehicle conforming to a type-approved under this Regulation.
5.2.2. Sub-assembly
An approval mark described in paragraph 5.3 below shall be affixed to every ESA conforming to a type-approved under this Regulation.
No marking is required for electrical/electronic systems built into vehicles which are approved as units.
5.3. An international approval mark must be affixed, in a conspicuous and easily accessible place specified on the approval communication form, on each vehicle conforming to the type-approved under this Regulation. This mark shall comprise:
5.3.1. A circle containing the letter ‘E’, followed by the distinguishing number of the country granting the approval (2).
5.3.2. The number of this Regulation, followed by the letter ‘R’, a dash and the approval number to the right of the circle specified in paragraph 5.3.1.
5.4. An example of the type-approval mark is shown in Annex 1 to this Regulation.
5.5. Markings on ESAs in conformity with paragraph 5.3 above need not be visible when the ESA is installed in the vehicle.
6. SPECIFICATIONS IN CONFIGURATIONS OTHER THAN ‘RESS CHARGING MODE COUPLED TO THE POWER GRID’
6.1. General specifications
6.1.1. A vehicle and its electrical/electronic system(s) or ESA(s) shall be so designed, constructed and fitted as to enable the vehicle, in normal conditions of use, to comply with the requirements of this Regulation.
|
6.1.1.1. |
A vehicle shall be tested for radiated emissions and for immunity to radiated disturbances. No tests for conducted emissions or immunity to conducted disturbances are required for vehicle type-approval. |
|
6.1.1.2. |
ESA(s) shall be tested for radiated and conducted emissions, for immunity to radiated and conducted disturbances. |
6.1.2. Before testing the Technical Service has to prepare a test plan in conjunction with the manufacturer, which contains at least mode of operation, stimulated function(s), monitored function(s), pass/fail criterion(criteria) and intended emissions.
6.2. Specifications concerning broadband electromagnetic radiation from vehicles
6.2.1. Method of measurement
The electromagnetic radiation generated by the vehicle representative of its type shall be measured using the method described in Annex 4. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
6.2.2. Vehicle broadband type-approval limits
|
6.2.2.1. |
If measurements are made using the method described in Annex 4 using a vehicle-to-antenna spacing of 10,0 ± 0,2 m, the limits shall be 32 dB microvolts/m in the 30 to 75 MHz frequency band and 32 to 43 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 2. In the 400 to 1 000 MHz frequency band the limit remains constant at 43 dB microvolts/m. |
|
6.2.2.2. |
If measurements are made using the method described in Annex 4 using a vehicle-to-antenna spacing of 3,0 ± 0,05 m, the limits shall be 42 dB microvolts/m in the 30 to 75 MHz frequency band and 42 to 53 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 3. In the 400 to 1 000 MHz frequency band the limit remains constant at 53 dB microvolts/m. |
|
6.2.2.3. |
On the vehicle representative of its type, the measured values, expressed in dB microvolts/m shall be below the type-approval limits. |
6.3. Specifications concerning narrowband electromagnetic radiation from vehicles
6.3.1. Method of measurement
The electromagnetic radiation generated by the vehicle representative of its type shall be measured using the method described in Annex 5. These shall be defined by the vehicle manufacturer in accordance with the Technical Service.
6.3.2. Vehicle narrowband type-approval limits
|
6.3.2.1. |
If measurements are made using the method described in Annex 5 using a vehicle-to-antenna spacing of 10,0 ± 0,2 m, the limits shall be 22 dB microvolts/m in the 30 to 75 MHz frequency band and 22 to 33 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 4. In the 400 to 1 000 MHz frequency band the limit remains constant at 33 dB microvolts/m. |
|
6.3.2.2. |
If measurements are made using the method described in Annex 5 using a vehicle-to-antenna spacing of 3,0 ± 0,05 m, the limit shall be 32 dB microvolts/m in the 30 to 75 MHz frequency band and 32 to 43 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 5. In the 400 to 1 000 MHz frequency band the limit remains constant at 43 dB microvolts/m. |
|
6.3.2.3. |
On the vehicle representative of its type, the measured values, expressed in dB microvolts/m, shall be below the type-approval limit. |
|
6.3.2.4. |
Notwithstanding the limits defined in paragraphs 6.3.2.1, 6.3.2.2 and 6.3.2.3 of this Regulation, if, during the initial step described in paragraph 1.3 of Annex 5, the signal strength measured at the vehicle broadcast radio antenna is less than 20 dB microvolts over the frequency range 76 to 108 MHz measured with an average detector, then the vehicle shall be deemed to comply with the limits for narrowband emissions and no further testing will be required. |
6.4. Specifications concerning immunity of vehicles to electromagnetic radiation
6.4.1. Method of testing
The immunity to electromagnetic radiation of the vehicle representative of its type shall be tested by the method described in Annex 6.
6.4.2. Vehicle immunity type-approval limits
|
6.4.2.1. |
If tests are made using the method described in Annex 6, the field strength shall be 30 volts/m rms (root mean squared) in over 90 per cent of the 20 to 2 000 MHz frequency band and a minimum of 25 volts/m rms over the whole 20 to 2 000 MHz frequency band. |
|
6.4.2.2. |
The vehicle representative of its type shall be considered as complying with immunity requirements if, during the tests performed in accordance with Annex 6, there shall be no degradation of performance of ‘immunity related functions’, according to paragraph 2.1 of Annex 6. |
6.5. Specification concerning broadband electromagnetic interference generated by ESAs.
6.5.1. Method of measurement
The electromagnetic radiation generated by the ESA representative of its type shall be measured by the method described in Annex 7.
6.5.2. ESA broadband type-approval limits
|
6.5.2.1. |
If measurements are made using the method described in Annex 7, the limits shall be 62 to 52 dB microvolts/m in the 30 to 75 MHz frequency band, this limit decreasing logarithmically with frequencies above 30 MHz, and 52 to 63 dB microvolts/m in the 75 to 400 MHz band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 6. In the 400 to 1 000 MHz frequency band the limit remains constant at 63 dB microvolts/m. |
|
6.5.2.2. |
On the ESA representative of its type, the measured values, expressed in dB microvolts/m, shall be below the type-approval limits. |
6.6. Specifications concerning narrowband electromagnetic interference generated by ESAs.
6.6.1. Method of measurement
The electromagnetic radiation generated by the ESA representative of its type shall be measured by the method described in Annex 8.
6.6.2. ESA narrowband type-approval limits
|
6.6.2.1. |
If measurements are made using the method described in Annex 8, the limits shall be 52 to 42 dB microvolts/m in the 30 to 75 MHz frequency band, this limit decreasing logarithmically with frequencies above 30 MHz, and 42 to 53 dB microvolts/m in the 75 to 400 MHz band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 7. In the 400 to 1 000 MHz frequency band the limit remains constant at 53 dB microvolts/m. |
|
6.6.2.2. |
On the ESA representative of its type, the measured value, expressed in dB microvolts/m shall be below the type-approval limits. |
6.7. Specifications concerning immunity of ESAs to electromagnetic radiation
6.7.1. Method(s) of testing
The immunity to electromagnetic radiation of the ESA representative of its type shall be tested by the method(s) chosen from those described in Annex 9.
6.7.2. ESA immunity type-approval limits
|
6.7.2.1. |
If tests are made using the methods described in Annex 9, the immunity test levels shall be 60 volts/m root-mean-square (rms) for the 150 mm stripline testing method, 15 volts/m rms for the 800 mm stripline testing method, 75 volts/m rms for the Transverse Electromagnetic Mode (TEM) cell testing method, 60 mA rms for the bulk current injection (BCI) testing method and 30 volts/m rms for the free field testing method in over 90 per cent of the 20 to 2 000 MHz frequency band, and to a minimum of 50 volts/m rms for the 150 mm stripline testing method, 12,5 volts/m rms for the 800 mm stripline testing method, 62,5 volts/m rms, for the TEM cell testing method, 50 mA rms for the bulk current injection (BCI) testing method and 25 volts/m rms for the free field testing method over the whole 20 to 2 000 MHz frequency band. |
|
6.7.2.2. |
The ESA representative of its type shall be considered as complying with immunity requirements if, during the tests performed in accordance with Annex 9, there shall be no degradation of performance of ‘immunity related functions’. |
6.8. Specifications concerning the immunity of ESAs to transient disturbances conducted along supply lines.
6.8.1. Method of testing
The immunity of ESA representative of its type shall be tested by the method(s) according to ISO 7637-2 (second edition 2004) as described in Annex 10 with the test levels given in Table 1.
Table 1
Immunity of ESA
|
Test pulse number |
Immunity test level |
Functional status for systems: |
|
|
Related to immunity related functions |
Not related to immunity related functions |
||
|
1 |
III |
C |
D |
|
2a |
III |
B |
D |
|
2b |
III |
C |
D |
|
3a/3b |
III |
A |
D |
|
4 |
III |
B (for ESA which must be operational during engine start phases) C (for other ESA) |
D |
6.9. Specifications concerning the emission of transient conducted disturbances generated by ESAs on supply lines.
6.9.1. Method of testing
The emission of ESA representative of its type shall be tested by the method(s) according to ISO 7637-2 (second edition 2004) as described in Annex 10 for the levels given in Table 2.
Table 2
Maximum allowed pulse amplitude
|
Maximum allowed pulse amplitude for |
||
|
Polarity of pulse amplitude |
Vehicles with 12 V systems |
Vehicles with 24 V systems |
|
Positive |
+75 |
+ 150 |
|
Negative |
– 100 |
– 450 |
6.10. Exceptions
6.10.1. Where a vehicle or electrical/electronic system or ESA does not include an electronic oscillator with an operating frequency greater than 9 kHz, it shall be deemed to comply with paragraph 6.3.2 or 6.6.2 and with Annexes 5 and 8.
6.10.2. Vehicles which do not have electrical/electronic systems with ‘immunity related functions’ need not be tested for immunity to radiated disturbances and shall be deemed to comply with paragraph 6.4 and with Annex 6 to this Regulation.
6.10.3. ESAs with no immunity related functions need not be tested for immunity to radiated disturbances and shall be deemed to comply with paragraph 6.7 and with Annex 9 to this Regulation.
6.10.4. Electrostatic discharge
For vehicles fitted with tyres, the vehicle body/chassis can be considered to be an electrically isolated structure. Significant electrostatic forces in relation to the vehicle’s external environment only occur at the moment of occupant entry into or exit from the vehicle. As the vehicle is stationary at these moments, no type-approval test for electrostatic discharge is deemed necessary.
6.10.5. Emission of transient conducted disturbances generated by ESAs on supply lines.
ESAs that are not switched, contain no switches or do not include inductive loads need not be tested for transient conducted emission and shall be deemed to comply with paragraph 6.9.
6.10.6. The loss of function of receivers during the immunity test, when the test signal is within the receiver bandwidth (RF exclusion band) as specified for the specific radio service/product in the harmonised international EMC standard, does not necessarily lead to fail criteria.
6.10.7. RF transmitters shall be tested in the transmit mode. Wanted emissions (e.g. from RF transmitting systems) within the necessary bandwidth and out of band emissions are disregarded for the purpose of this Regulation. Spurious emissions are subject to this Regulation.
|
6.10.7.1. |
‘Necessary Bandwidth’: for a given class of emission, the width of the frequency band which is just sufficient to ensure the transmission of information at the rate and with the quality required under specified conditions (Article 1, No 1.152 of the International Telecommunication Union (ITU) Radio Regulations). |
|
6.10.7.2. |
‘Out-of-band Emissions’: emission on a frequency or frequencies immediately outside the necessary bandwidth which results from the modulation process, but excluding spurious emissions (Article 1, No 1.144 of the ITU Radio Regulations). |
|
6.10.7.3. |
‘Spurious Emission’: in every modulation process additional undesired signals exist. They are summarised under the expression ‘spurious emissions’. Spurious emissions are emissions on a frequency or frequencies, which are outside the necessary bandwidth and the level of which may be reduced without affecting the corresponding transmission of information. Spurious emissions include harmonic emissions, parasitic emissions, intermodulation products and frequency conversion products, but exclude out-of-band emissions (Article 1, No 1.145 of the ITU Radio Regulations). |
7. ADDITIONAL SPECIFICATIONS IN THE CONFIGURATION ‘RESS CHARGING MODE COUPLED TO THE POWER GRID’
7.1. General specifications
7.1.1. A vehicle and its electrical/electronic system(s) shall be so designed, constructed and fitted as to enable the vehicle, in configuration ‘RESS charging mode coupled to the power grid’, to comply with the requirements of this Regulation.
7.1.2. A vehicle in configuration ‘RESS charging mode coupled to the power grid’ shall be tested for radiated emissions, immunity to radiated disturbances, conducted emissions and immunity to conducted disturbances.
7.1.3. Before testing the Technical Service has to prepare a test plan in conjunction with the manufacturer, for the configuration ‘RESS charging mode coupled to the power grid’ configuration which contains at least mode of operation, stimulated function(s), monitored function(s), pass/fail criterion (criteria) and intended emissions.
7.2. Specifications concerning broadband electromagnetic radiation from vehicles
7.2.1. Method of measurement
The electromagnetic radiation generated by the vehicle representative of its type shall be measured using the method described in Annex 4. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
7.2.2. Vehicle broadband type-approval limits
|
7.2.2.1. |
If measurements are made using the method described in Annex 4 using a vehicle-to-antenna spacing of 10,0 ± 0,2 m, the limits shall be 32 dB microvolts/m in the 30 to 75 MHz frequency band and 32 to 43 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 2. In the 400 to 1 000 MHz frequency band the limit remains constant at 43 dB microvolts/m. |
|
7.2.2.2. |
If measurements are made using the method described in Annex 4 using a vehicle-to-antenna spacing of 3,0 ± 0,05 m, the limits shall be 42 dB microvolts/m in the 30 to 75 MHz frequency band and 42 to 53 dB microvolts/m in the 75 to 400 MHz frequency band, this limit increasing logarithmically with frequencies above 75 MHz as shown in Appendix 3. In the 400 to 1 000 MHz frequency band the limit remains constant at 53 dB microvolts/m. On the vehicle representative of its type, the measured values, expressed in dB microvolts/m shall be below the type-approval limits. |
7.3. Specifications concerning emission of harmonics on AC power lines from vehicles
7.3.1. Method of measurement
The harmonics emission on AC power lines generated by the vehicle representative of its type shall be measured using the method described in Annex 11. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
7.3.2. Vehicle type-approval limit
|
7.3.2.1. |
If measurements are made using the method described in Annex 11, the limits for input current ≤ 16 A per phase are those defined in IEC 61000-3-2 (edition 3.2 - 2005 + Amd1: 2008 + Amd2: 2009) and given in Table 3. Table 3 Maximum allowed harmonics (input current ≤ 16 A per phase)
|
||||||||||||||||||||||||||||
|
7.3.2.2. |
If measurements are made using the method described in Annex 11, the limits for input current > 16 A and ≤ 75 A per phase are those defined in IEC 61000-3-12 (edition 1.0 - 2004) and given in Tables 4, 5 and 6. Table 4 Maximum allowed harmonics (input current > 16 A and ≤ 75 A per phase) for equipment other than balanced three-phase equipment
Table 5 Maximum allowed harmonics (input current > 16 A and ≤ 75 A per phase) for balanced three-phase equipment
Table 6 Maximum allowed harmonics (input current > 16 A and ≤ 75 A per phase) for balanced three-phase equipment under specific conditions
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7.4. Specifications concerning emission of voltage changes, voltage fluctuations and flicker on AC power lines from vehicles.
7.4.1. Method of measurement
The emission of voltage changes, voltage fluctuations and flicker on AC power lines generated by the vehicle representative of its type shall be measured using the method described in Annex 12. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
7.4.2. Vehicle type-approval limit
|
7.4.2.1. |
If measurements are made using the method described in Annex 12, the limits for rated current ≤ 16 A per phase and not subjected to conditional connection are those defined in IEC 61000-3-3 (edition 2.0 - 2008) and given in Table 7. Table 7 Maximum allowed voltage changes, voltage fluctuations and flicker (rated current ≤ 16 A per phase and not subjected to conditional connection) Limits Values given in 61000-3-3 clause 5 |
|
7.4.2.2. |
If measurements are made using the method described in Annex 12, the limits for rated current > 16 A and ≤ 75 A per phase and subjected to conditional connection are those defined in IEC 61000-3-11 (edition 1.0 - 2000) and given in Table 8. Table 8 Maximum allowed voltage changes, voltage fluctuations and flicker (rated current > 16 A and ≤ 75 A per phase and subjected to conditional connection) Limits Values given in IEC 61000-3-11 (edition 1.0 - 2000), clause 5 |
7.5. Specifications concerning emission of radiofrequency conducted disturbances on AC or DC power lines from vehicles
7.5.1. Method of measurement
The emission of radiofrequency conducted disturbances on AC or DC power lines generated by the vehicle representative of its type shall be measured using the method described in Annex 13. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
7.5.2. Vehicle type-approval limit
|
7.5.2.1. |
If measurements are made using the method described in Annex 13, the limits on AC power lines are those defined in IEC 61000-6-3 (edition 2.0 - 2006) and given in Table 9. Table 9 Maximum allowed radiofrequency conducted disturbances on AC power lines
|
|
7.5.2.2. |
If measurements are made using the method described in Annex 13, the limits on DC power lines are those defined in IEC 61000-6-3 (edition 2.0 - 2006) and given in Table 10. Table 10 Maximum allowed radiofrequency conducted disturbances on DC power lines
|
7.6. Specifications concerning emission of radiofrequency conducted disturbances on network and telecommunication access from vehicles
7.6.1. Method of measurement
The emission of radiofrequency conducted disturbances on network and telecommunication access generated by the vehicle representative of its type shall be measured using the method described in Annex 14. The method of measurement shall be defined by the vehicle manufacturer in accordance with the Technical Service.
7.6.2. Vehicle type-approval limit
|
7.6.2.1. |
If measurements are made using the method described in Annex 14, the limits on network and telecommunication access are those defined in IEC 61000-6-3 (edition 2.0 - 2006) and given in Table 11. Table 11 Maximum allowed radiofrequency conducted disturbances on network and telecommunication access
|
|||||||||
7.7. Specifications concerning immunity of vehicles to electromagnetic radiation
7.7.1. Method of testing
The immunity to electromagnetic radiation of the vehicle representative of its type shall be tested by the method described in Annex 6.
7.7.2. Vehicle immunity type-approval limits
|
7.7.2.1. |
If tests are made using the method described in Annex 6, the field strength shall be 30 volts/m rms (root mean squared) in over 90 per cent of the 20 to 2 000 MHz frequency band and a minimum of 25 volts/m rms over the whole 20 to 2 000 MHz frequency band. |
|
7.7.2.2. |
The vehicle representative of its type shall be considered as complying with immunity requirements if, during the tests performed in accordance with Annex 6, there shall be no degradation of performance of ‘immunity related functions’, according to paragraph 2.2 of Annex 6. |
7.8. Specifications concerning the immunity of vehicles to electrical fast transient/burst disturbances conducted along AC and DC power lines.
7.8.1. Method of testing
|
7.8.1.1. |
The immunity to electrical fast transient/burst disturbances conducted along AC and DC power lines of the vehicle representative of its type shall be tested by the method described in Annex 15. |
7.8.2. Vehicle immunity type-approval limits
|
7.8.2.1. |
If tests are made using the methods described in Annex 15, the immunity test levels, for AC or DC power lines, shall be: ± 2 kV test voltage in open circuit, with a rise time (Tr) of 5 ns, and a hold time (Th) of 50 ns and a repetition rate of 5 kHz for at least 1 minute. |
|
7.8.2.2. |
The vehicle representative of its type shall be considered as complying with immunity requirements if, during the tests performed in accordance with Annex 15, there shall be no degradation of performance of ‘immunity related functions’, according to paragraph 2.2 of Annex 6. |
7.9. Specifications concerning the immunity of vehicles to surge conducted along AC or DC power lines.
7.9.1. Method of testing
|
7.9.1.1. |
The immunity to surge conducted along AC/DC power lines of the vehicle representative of its type shall be tested by the method described in Annex 16. |
7.9.2. Vehicle immunity type-approval limits
|
7.9.2.1. |
If tests are made using the methods described in Annex 16, the immunity test levels shall be:
|
|
7.9.2.2. |
The vehicle representative of its type shall be considered as complying with immunity requirements if, during the tests performed in accordance with Annex 16, there shall be no degradation of performance of ‘immunity related functions’, according to paragraph 2.2 of Annex 6. |
7.10. Exceptions
7.10.1. When network and telecommunication access of the vehicle uses power line Transmission (PLT) on its AC/DC power lines, Annex 14 shall not be applied.
8. AMENDMENT OR EXTENSION OF A VEHICLE TYPE-APPROVAL FOLLOWING ELECTRICAL/ELECTRONIC SUB-ASSEMBLY (ESA) ADDITION OR SUBSTITUTION
|
8.1. |
Where a vehicle manufacturer has obtained type-approval for a vehicle installation and wishes to fit an additional or substitutional electrical/electronic system or ESA which has already received approval under this Regulation, and which will be installed in accordance with any conditions attached thereto, the vehicle approval may be extended without further testing. The additional or substitutional electrical/electronic system or ESA shall be considered as part of the vehicle for conformity of production purposes. |
|
8.2. |
Where the additional or substitutional part(s) has (have) not received approval pursuant to this Regulation, and if testing is considered necessary, the whole vehicle shall be deemed to conform if the new or revised part(s) can be shown to conform to the relevant requirements of paragraph 6 or if, in a comparative test, the new part can be shown not to be likely to adversely affect the conformity of the vehicle type. |
|
8.3. |
The addition by a vehicle manufacturer to an approved vehicle of standard domestic or business equipment, other than mobile communication equipment, which conforms to other regulations, and the installation, substitution or removal of which is according to the recommendations of the equipment and vehicle manufacturers, shall not invalidate the vehicle approval. This shall not preclude vehicle manufacturers fitting communication equipment in accordance with suitable installation guidelines developed by the vehicle manufacturer and/or manufacturer(s) of such communication equipment. The vehicle manufacturer shall provide evidence (if requested by the test authority) that vehicle performance is not adversely affected by such transmitters. This can be a statement that the power levels and installation are such that the immunity levels of this Regulation offer sufficient protection when subject to transmission alone, i.e. excluding transmission in conjunction with the tests specified in paragraph 6. This Regulation does not authorise the use of a communication transmitter when other requirements on such equipment or its use apply. |
9. CONFORMITY OF PRODUCTION
The conformity of production procedures shall comply with those set out in the Agreement, Appendix 2 (E/ECE/324-E/ECE/TRANS/505/Rev.2), with the following requirements:
|
9.1. |
Vehicles or components or ESAs approved under this Regulation shall be so manufactured as to conform to the type-approved by meeting the requirements set forth in paragraph 6 above. |
|
9.2. |
Conformity of production of the vehicle or component or separate technical unit shall be checked on the basis of the data contained in the communication form(s) for type-approval set out in Annexes 3A and/or 3B to this Regulation. |
|
9.3. |
If the Competent Authority is not satisfied with the checking procedure of the manufacturer, then paragraphs 8.3.1 and 8.3.2 below shall apply. |
|
9.3.1. |
When the conformity of a vehicle, component or ESA taken from the series is being verified, production shall be deemed to conform to the requirements of this Regulation in relation to broadband electromagnetic disturbances and narrowband electromagnetic disturbances if the levels measured do not exceed by more the 2 dB (25 per cent) the reference limits prescribed in paragraphs 6.2.2.1, 6.2.2.2, 6.3.2.1, 6.3.2.2, 7.2.2.1 and 7.2.2.2 (as appropriate). |
|
9.3.2. |
When the conformity of a vehicle, component or ESA taken from the series is being verified, production shall be deemed to conform to the requirements of this Regulation in relation to immunity to electromagnetic radiation if the vehicle ESA does not exhibit any degradation relating to the direct control of the vehicle which could be observed by the driver or other road user when the vehicle is in the state defined in Annex 6, paragraph 4, and is subjected to a field strength, expressed in volts/m, up to 80 per cent of the reference limits prescribed in paragraphs 6.4.2.1 and 7.7.2.1 above. |
|
9.3.3. |
If the conformity of a component, or Separate Technical Unit (STU) taken from the series is being verified, production shall be deemed to conform to the requirements of this Regulation in relation to immunity to conducted disturbances and emission if the component or STU shows no degradation of performance of ‘immunity related functions’ up to levels given in paragraph 6.8.1 and does not exceed the levels given in paragraph 6.9.1. |
10. PENALTIES FOR NON-CONFORMITY OF PRODUCTION
|
10.1. |
The approval granted in respect of a type of vehicle, component or separate technical unit pursuant to this Regulation may be withdrawn if the requirements laid down in paragraph 6 above are not complied with or if the selected vehicles fail to pass the tests provided for in paragraph 6 above. |
|
10.2. |
If a Party to the Agreement which applies this Regulation withdraws an approval it has previously granted, it shall forthwith notify the other Contracting Parties applying this Regulation thereof by means of a communication form conforming to the model in Annexes 3A and 3B to this Regulation. |
11. PRODUCTION DEFINITIVELY DISCONTINUED
If the holder of an approval permanently ceases to manufacture a type of vehicle or ESA approved in accordance with this Regulation, he shall so inform the authority which granted the approval, which shall in turn notify the other Parties to the 1958 Agreement which apply this Regulation, by means of a communication form conforming to the model in Annexes 3A and 3B to this Regulation.
12. MODIFICATION AND EXTENSION OF TYPE-APPROVAL OF A VEHICLE OR ESA
|
12.1. |
Every modification of the vehicle or ESA type shall be notified to the Type Approval Authority which granted approval of the vehicle type. This department may then either:
|
|
12.2. |
Notice of conformation of approval or of refusal of approval, accompanied by particulars of the modifications, shall be communicated by the procedure indicated in paragraph 4 above to the Parties to the Agreement applying this Regulation. |
|
12.3. |
The Competent Authority granting the approval extension shall assign a serial number to the extension and so notify the other Parties to the 1958 Agreement applying this Regulation by means of a communication form conforming to the models in Annexes 3A and 3B to this Regulation. |
13. TRANSITIONAL PROVISIONS
|
13.1. |
As from the official date of entry into force of the 03 series of amendments, no Contracting Party applying this Regulation shall refuse to grant ECE approval under this Regulation as amended by the 03 series of amendments. |
|
13.2. |
As from 12 months after the date of entry into force of this Regulation, as amended by the 03 series of amendments, Contracting Parties applying this Regulation shall grant approvals only if the vehicle type, component or separate technical unit to be approved meets the requirements of this Regulation as amended by the 03 series of amendments. |
|
13.3. |
Contracting Parties applying this Regulation shall not refuse to grant extensions of approval to the preceding series of amendments to this Regulation. |
|
13.4. |
Starting 48 months after the entry into force of the 03 series of amendments to this Regulation, Contracting Parties applying this Regulation may refuse first national registration (first entry into service) of a vehicle, component or separate technical unit which does not meet the requirements of the 03 series of amendments to this Regulation. |
|
13.5. |
As from 36 months after the official date of entry into force of this Regulation, as amended by the 04 series of amendments, Contracting Parties applying this Regulation shall grant approvals only if the vehicle type to be approved meets the requirements of this Regulation as amended by the 04 series of amendments. |
|
13.6. |
Until 36 months after the date of entry into force of the 04 series of amendments, no Contracting Parties shall refuse national or regional approval of a vehicle approved to the preceding series of amendments to this Regulation. |
|
13.7. |
As from 60 months after the date of entry into force of the 04 series of amendments, Contracting Parties may refuse first registration of a new vehicle which does not meet the requirements of the 04 series of amendments to this Regulation. |
|
13.8. |
Notwithstanding paragraphs 13.6 and 13.7 approvals of vehicle granted to the preceding series of amendments to the Regulation, which are not affected by the 04 series of amendments, shall remain valid and Contracting Parties applying the Regulation shall continue to accept them. |
14. NAMES AND ADDRESSES OF TECHNICAL SERVICES CONDUCTING APPROVAL TESTS AND OF TYPE APPROVAL AUTHORITIES
The Parties to the 1958 Agreement applying this Regulation shall communicate to the United Nations Secretariat the names and addresses of the Technical Services conducting approval tests and of the Type Approval Authorities which grant approvals and to which forms certifying approval or extension, refusal or withdrawal of approval, issued in other countries, are to be sent.
(1) As defined in the Consolidated Resolution on the Construction of Vehicles (R.E.3), document ECE/TRANS/WP.29/78/Rev.2, paragraph 2.
(2) The distinguishing numbers of the Contracting Parties to the 1958 Agreement are reproduced in Annex 3 to Consolidated Resolution on the Construction of Vehicles (R.E.3), document ECE/TRANS/WP.29/78/Rev.2/Amend.1.
Appendix 1
List of standards referred to in this Regulation
|
1. |
CISPR 12 ‘Vehicles’, motorboats’ and spark-ignited engine-driven devices’ radio disturbance characteristics — Limits and methods of measurement’, fifth edition 2001 and Amd1: 2005. |
|
2. |
CISPR 16-1-4 ‘Specifications for radio disturbance and immunity measuring apparatus and methods — Part 1: Radio disturbance and immunity measuring apparatus — Antennas and test sites for radiated disturbances measurements’, third edition 2010. |
|
3. |
CISPR 25 ‘Limits and methods of measurement of radio disturbance characteristics for the protection of receivers used on board vehicles’, second edition 2002 and Corrigendum 2004. |
|
4. |
ISO 7637-1 ‘Road vehicles — Electrical disturbance from conduction and coupling — Part 1: Definitions and general considerations’, second edition 2002. |
|
5. |
ISO 7637-2 ‘Road vehicles — Electrical disturbance from conduction and coupling — Part 2: Electrical transient conduction along supply lines only on vehicles with nominal 12 V or 24 V supply voltage’, second edition 2004. |
|
6. |
ISO-EN 17025 ‘General requirements for the competence of testing and calibration laboratories’, second edition 2005 and Corrigendum: 2006. |
|
7. |
ISO 11451 ‘Road vehicles — Electrical disturbances by narrowband radiated electromagnetic energy — Vehicle test methods’:
|
|
8. |
ISO 11452 ‘Road vehicles — Electrical disturbances by narrowband radiated electromagnetic energy — Component test methods’:
|
|
9. |
ITU Radio Regulations, edition 2008. |
|
10. |
IEC 61000-3-2 ‘Electromagnetic Compatibility (EMC) — Part 3-2 — Limits for harmonic current emissions (equipment input current ≤ 16 A per phase)’, edition 3.2 - 2005 + A1: 2008 + A2: 2009. |
|
11. |
IEC 61000-3-3 ‘Electromagnetic Compatibility (EMC) — Part 3-3 — Limits — Limitation of voltage changes, voltage fluctuations and flicker in public low-voltage systems for equipment with rated current ≤ 16 A per phase and not subjected to conditional connection’, edition 2.0 - 2008. |
|
12. |
IEC 61000-3-11 ‘Electromagnetic Compatibility (EMC) — Part 3-11 — Limits — Limitation of voltage changes, voltage fluctuations and flicker in public low-voltage systems — Equipment with rated current ≤ 75 A per phase and subjected to conditional connection’, edition 1.0 - 2000. |
|
13. |
IEC 61000-3-12 ‘Electromagnetic Compatibility (EMC) — Part 3-12 — Limits for harmonic current emissions produced by equipment connected to public low-voltage systems with input current > 16 A and ≤ 75 A per phase’, edition 1.0 - 2004. |
|
14. |
IEC 61000-4-4 ‘Electromagnetic Compatibility (EMC) — Part 4-4 — Testing and measurement techniques — Electrical fast transients/burst immunity test’, edition 2.0 - 2004. |
|
15. |
IEC 61000-4-5 ‘Electromagnetic Compatibility (EMC) — Part 4-5 — Testing and measurement techniques — Surge immunity test’, edition 2.0 - 2005. |
|
16. |
IEC 61000-6-2 ‘Electromagnetic Compatibility (EMC) — Part 6-2 — Generic standards Immunity for industrial environments’, edition 2.0 - 2005. |
|
17. |
IEC 61000-6-3 ‘Electromagnetic Compatibility (EMC) — Part 6-3 — Generic standards Emission standard for residential, commercial and light-industrial environments’, edition 2.0 - 2006. |
|
18. |
CISPR 16-2-1 ‘Specification for radio disturbances and immunity measuring apparatus and methods — Part 2-1 — Methods of measurement of disturbances and immunity — Conducted disturbances measurement’, edition 2.0 - 2008. |
|
19. |
CISPR 22 ‘Information Technology Equipment — Radio disturbances characteristics — Limits and methods of measurement’, edition 6.0 - 2008. |
|
20. |
CISPR 16-1-2 ‘Specification for radio disturbance and immunity measuring apparatus and methods — Part 1-2: Radio disturbance and immunity measuring apparatus — Ancillary equipment — Conducted disturbances’, edition 1.2: 2006. |
Appendix 2
Vehicle broadband reference limits
Antenna-vehicle separation: 10 m
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30 - 75 MHz |
75 - 400 MHz |
400 - 1 000 MHz |
|
E = 32 |
E = 32 + 15,13 log (F/75) |
E = 43 |

Appendix 3
Vehicle broadband reference limits
Antenna-vehicle separation: 3 m
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30-75 MHz |
75-400 MHz |
400-1 000 MHz |
|
E = 42 |
E = 42 + 15,13 log (F/75) |
E = 53 |

Appendix 4
Vehicle narrowband reference limits
Antenna-vehicle separation: 10 m
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30 - 75 MHz |
75 - 400 MHz |
400 - 1 000 MHz |
|
E = 22 |
E = 22 + 15,13 log (F/75) |
E = 33 |

Appendix 5
Vehicle narrowband reference limits
Antenna-vehicle separation: 3 m
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30-75 MHz |
75-400 MHz |
400-1 000 MHz |
|
E = 32 |
E = 32 + 15,13 log (F/75) |
E = 43 |

Appendix 6
Electrical/electronic sub-assembly
Broadband reference limits
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30-75 MHz |
75-400 MHz |
400-1 000 MHz |
|
E = 62 – 25,13 log (F/30) |
E = 52 + 15,13 log (F/75) |
E = 63 |

Appendix 7
Electrical/electronic sub-assembly
Narrowband reference limits
|
Limit E (dBμV/m) at frequency F (MHz) |
||
|
30-75 MHz |
75-400 MHz |
400-1 000 MHz |
|
E = 52 – 25,13 log (F/30) |
E = 42 + 15,13 log (F/75) |
E = 53 |

ANNEX 1
EXAMPLES OF APPROVAL MARKS
Model A
(See paragraph 5.2 of this Regulation)

The above approval mark affixed to a vehicle or ESA shows that the vehicle type concerned has, with regard to electromagnetic compatibility, been approved in the Netherlands (E4) pursuant to Regulation No 10 under approval No 042439. The approval number indicates that the approval was granted according to the requirements of Regulation No 10 as amended by the 04 series of amendments.
Model B
(See paragraph 5.2 of this Regulation)

The above approval mark affixed to a vehicle or ESA shows that the vehicle type concerned has, with regard to electromagnetic compatibility, been approved in the Netherlands (E4) pursuant to Regulations Nos 10 and 33 (1).
The approval numbers indicate that, at the date when the respective approvals were given, Regulation No 10 included the 04 series of amendments and Regulation No 33 was still in its original form.
(1) The second number is given merely as an example.
ANNEX 2A
Information document for type-approval of a vehicle with respect to electromagnetic compatibility
The following information shall be supplied in triplicate and shall include a list of contents.
Any drawings shall be supplied in appropriate scale and in sufficient detail on size A4 or in a folder of A4 format.
Photographs, if any, shall show sufficient detail.
If the systems, components or separate technical units have electronic controls, information concerning their performance shall be supplied.
GENERAL
|
1. |
Make (trade name of manufacturer): … |
|
2. |
Type: … |
|
3. |
Category of vehicle: … |
|
4. |
Name and address of manufacturer: … Name and address of authorised representative, if any: … |
|
5. |
Address(es) of assembly plant(s): … |
GENERAL CONSTRUCTION CHARACTERISTICS OF THE VEHICLE
|
6. |
Photograph(s) and/or drawing(s) of a representative vehicle: … |
|
7. |
Position and arrangement of the engine: … |
POWER PLANT
|
8. |
Manufacturer: … |
|
9. |
Manufacturer’s engine code as marked on the engine: … |
|
10. |
Internal combustion engine: … |
|
11. |
Working principle: positive ignition/compression ignition, four-stroke/two-stroke (1) |
|
12. |
Number and arrangement of cylinders: … |
|
13. |
Fuel feed: … |
|
14. |
By fuel injection (compression ignition only): yes/no (1). |
|
15. |
Electronic control unit: … |
|
16. |
Make(s): … |
|
17. |
Description of the system: … |
|
18. |
By fuel injection (positive ignition only): yes/no (1). |
|
19. |
Electrical system: … |
|
20. |
Rated voltage: … V, positive/negative ground (1) |
|
21. |
Generator: … |
|
22. |
Type: … |
|
23. |
Ignition: … |
|
24. |
Make(s): … |
|
25. |
Type(s): … |
|
26. |
Working principle: … |
|
27. |
LPG fuelling system: yes/no (1). |
|
28. |
Electronic engine management control unit for LPG fuelling: … |
|
29. |
Make(s): … |
|
30. |
Type(s): … |
|
31. |
NG fuelling system: yes/no (1). |
|
32. |
Electronic engine management control unit for NG fuelling: … |
|
33. |
Make(s): … |
|
34. |
Type(s): … |
|
35. |
Electric motor: … |
|
36. |
Type (winding, excitation): … |
|
37. |
Operating voltage: … |
GAS FUELLED ENGINES (IN THE CASE OF SYSTEMS LAID-OUT IN A DIFFERENT MANNER, SUPPLY EQUIVALENT INFORMATION)
|
38. |
Electronic control unit (ECU): |
|
39. |
Make(s): … |
|
40. |
Type(s): … |
TRANSMISSION
|
41. |
Type (mechanical, hydraulic, electric, etc.): … |
|
42. |
A brief description of the electrical/electronic components (if any): … |
SUSPENSION
|
43. |
A brief description of the electrical/electronic components (if any): … |
STEERING
|
44. |
A brief description of the electrical/electronic components (if any): … |
BRAKES
|
45. |
Anti-lock braking system: yes/no/optional (1) |
|
46. |
For vehicles with anti-lock systems, description of system operation (including any electronic parts), electric block diagram, hydraulic or pneumatic circuit plan: … |
BODYWORK
|
47. |
Type of bodywork: … |
|
48. |
Materials used and methods of construction: … |
|
49. |
Windscreen and other windows: |
|
50. |
A brief description of the electrical/electronic components (if any) of the window lifting mechanism: … |
|
51. |
Rear-view mirrors (state for each mirror): … |
|
52. |
A brief description of the electronic components (if any) of the adjustment system: … |
|
53. |
Safety belts and/or other restraint systems: … |
|
54. |
A brief description of the electrical/electronic components (if any): … |
|
55. |
Suppression of radio interference: |
|
56. |
Description and drawings/photographs of the shapes and constituent materials of the part of the body forming the engine compartment and the part of the passenger compartment nearest to it: … |
|
57. |
Drawings or photographs of the position of the metal components housed in the engine compartment (e.g. heating appliances, spare wheel, air filter, steering mechanism, etc.): … |
|
58. |
Table and drawing of radio interference control equipment: … |
|
59. |
Particulars of the nominal value of the direct current resistance and, in the case of resistive ignition cables, of their nominal resistance per metre: … |
LIGHTING AND LIGHT SIGNALLING DEVICES
|
60. |
A brief description of electrical/electronic components other than lamps (if any): … |
MISCELLANEOUS
|
61. |
Devices to prevent unauthorised use of the vehicle: … |
|
62. |
A brief description of the electrical/electronic components (if any): … |
|
63. |
Table of installation and use of RF transmitters in the vehicle(s), if applicable (see paragraph 3.1.8 of this Regulation): …
|
|
64. |
Vehicle equipped with 24 GHz short-range radar equipment: yes/no/optional (1). The applicant for type-approval must also supply, where appropriate:
|
|
65. |
Charger: onboard/external/without (1) … |
|
66. |
Charging current: direct current/alternating current (number of phases/frequency) (1): … |
|
67. |
Maximal nominal current (in each mode if necessary): |
|
68. |
Nominal charging voltage: … |
|
69. |
Basic vehicle interface functions: e.g. L1/L2/L3/N/E/control pilot: … |
(1) Strike out what does not apply.
ANNEX 2B
Information document for type-approval of an electric/electronic sub-assembly with respect to electromagnetic compatibility
The following information, if applicable, shall be supplied in triplicate and must include a list of contents. Any drawings shall be supplied in appropriate scale and in sufficient detail on size A4 or on a folder of A4 format. Photographs, if any, shall show sufficient detail.
If the systems, components or separate technical units have electronic controls, information concerning their performance shall be supplied.
|
1. |
Make (trade name of manufacturer): … |
|
2. |
Type: … |
|
3. |
Means of identification of type, if marked on the component/separate technical unit (1): |
|
3.1. |
Location of that marking: … |
|
4. |
Name and address of manufacturer: … Name and address of authorised representative, if any: … |
|
5. |
In the case of components and separate technical units, location and method of affixing of the approval mark: … |
|
6. |
Address(es) of assembly plant(s): … |
|
7. |
This ESA shall be approved as a component/STU (1) |
|
8. |
Any restrictions of use and conditions for fitting: … |
|
9. |
Electrical system rated voltage: … V, positive/negative (2) ground. … |
Appendix 1: description of the ESA chosen to represent the type (electronic block diagram and list of main component constituting the ESA (e.g. make and type of microprocessor, crystal, etc.)).
Appendix 2: relevant test report(s) supplied by the manufacturer from a test laboratory accredited to ISO 17025 and recognised by the Approval Authority for the purpose of drawing up the type-approval certificate.
(1) If the means of identification of type contains characters not relevant to describe the component or separate technical unit types covered by this information document, such characters shall be represented in the documentation by the symbol ‘?’ (e.g. ABC??123??).
(2) Delete where not applicable.
ANNEX 3A
COMMUNICATION
(Maximum format: A4 (210 × 297 mm))


ANNEX 3B
COMMUNICATION
(Maximum format: A4 (210 × 297 mm))


ANNEX 4
Method of measurement of radiated broadband electromagnetic emissions from vehicles
1. GENERAL
1.1. The test method described in this annex shall only be applied to vehicles.
This method concerns both configurations of the vehicle:
|
(a) |
Other than ‘RESS in charging mode coupled to the power grid’; |
|
(b) |
‘RESS in charging mode coupled to the power grid’. |
1.2. Test method
This test is intended to measure the broadband emissions generated by electrical or electronic systems fitted to the vehicle (e.g. ignition system or electric motors).
If not otherwise stated in this annex the test shall be performed according to CISPR 12 (fifth edition 2001 and Amd1: 2005).
2. VEHICLE STATE DURING TESTS
2.1. Vehicle in configuration other than ‘RESS in charging mode coupled to the power grid.’
2.1.1. Engine
The engine shall be in operation according to CISPR 12 (fifth edition 2001 and Amd1: 2005)
2.1.2. Other vehicle systems
All equipment capable of generating broadband emissions which can be switched on permanently by the driver or passenger should be in operation in maximum load, e.g. wiper motors or fans. The horn and electric window motors are excluded because they are not used continuously.
2.2. Vehicle in configuration ‘RESS in charging mode coupled to the power grid’.
This vehicle shall be in battery charging mode at rated power until the AC or DC current reached at least 80 per cent of its initial value. The test set-up for the connection of the vehicle in configuration ‘RESS in charging mode coupled to the power grid’ is shown in Figure 3 of the appendix to this annex.
3. MEASURING LOCATION
3.1. As an alternative to the requirements of CISPR 12 (fifth edition 2001 and Amd1: 2005) for vehicles of category L the test surface may be any location that fulfils the conditions shown in Figure 1 of the appendix to this annex. In this case the measuring equipment must lie outside the part shown in Figure 1 of the appendix to this annex.
3.2. Enclosed test facilities may be used if correlation can be shown between the results obtained in the enclosed test facility and those obtained at an outdoor site. Enclosed test facilities do not need to meet the dimensional requirements of the outdoor site other than the distance from the antenna to the vehicle and the height of the antenna.
4. TEST REQUIREMENTS
4.1. The limits apply throughout the frequency range 30 to 1 000 MHz for measurements performed in a semi anechoic chamber or an outdoor test site.
4.2. Measurements can be performed with either quasi-peak or peak detectors. The limits given in paragraphs 6.2 and 6.5 of this Regulation are for quasi-peak detectors. If peak detectors are used a correction factor of 20 dB as defined in CISPR 12 (fifth edition 2001 and Amd1: 2005) shall be applied.
4.3. Measurements
The Technical Service shall perform the test at the intervals specified in the CISPR 12 (fifth edition 2001 and Amd1: 2005) standard throughout the frequency range 30 to 1 000 MHz.
Alternatively, if the manufacturer provides measurement data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may divide the frequency range in 14 frequency bands — 30-34, 34-45, 45-60, 60-80, 80-100, 100-130, 130-170, 170-225, 225-300, 300-400, 400-525, 525-700, 700-850, 850-1 000 MHz — and perform tests at the 14 frequencies giving the highest emission levels within each band to confirm that the vehicle meets the requirements of this annex.
In the event that the limit is exceeded during the test, investigations shall be made to ensure that this is due to the vehicle and not to background radiation.
4.4. Readings
The maximum of the readings relative to the limit (horizontal and vertical polarisation and antenna location on the left and right-hand sides of the vehicle) in each of the 14 frequency bands shall be taken as the characteristic reading at the frequency at which the measurements were made.
Appendix
Figure 1
Clear horizontal surface free of electromagnetic reflection delimitation of the surface defined by an ellipse

Figure 2
Position of antenna in relation to the vehicle
Dipole antenna in position to measure the vertical radiation components

Dipole antenna in position to measure the horizontal radiation components

Figure 3
Vehicle in configuration ‘RESS charging mode’ coupled to the power grid
Elevation


ANNEX 5
Method of measurement of radiated narrowband electromagnetic emissions from vehicles
1. GENERAL
1.1. The test method described in this annex shall only be applied to vehicles.
This method concerns only the configuration of the vehicle other than ‘RESS in charging mode coupled to the power grid’.
1.2. Test method
This test is intended to measure the narrowband electromagnetic emissions such as might emanate from microprocessor-based systems or other narrowband source.
If not otherwise stated in this annex the test shall be performed according to CISPR 12 (fifth edition 2001 and Amd1: 2005) or to CISPR 25 (and Corrigendum: 2004).
1.3. As an initial step the levels of emissions in the Frequency Modulation (FM) band (76 to 108 MHz) shall be measured at the vehicle broadcast radio antenna with an average detector. If the level specified in paragraph 6.3.2.4 of this Regulation is not exceeded, then the vehicle shall be deemed to comply with the requirements of this annex in respect of that frequency band and the full test shall not be carried out.
1.4. As an alternative for vehicles of category L the measurement location can be chosen according to Annex 4, paragraphs 3.1 and 3.2.
2. VEHICLE STATE DURING TESTS
2.1. The ignition switch shall be switched on. The engine shall not be operating.
2.2. The vehicle’s electronic systems shall all be in normal operating mode with the vehicle stationary.
2.3. All equipment which can be switched on permanently by the driver or passenger with internal oscillators > 9 kHz or repetitive signals should be in normal operation.
3. TEST REQUIREMENTS
3.1. The limits apply throughout the frequency range 30 to 1 000 MHz for measurements performed in a semi anechoic chamber or an outdoor test site.
3.2. Measurements shall be performed with an average detector.
3.3. Measurements
The Technical Service shall perform the test at the intervals specified in the CISPR 12 (fifth edition 2001 and Amd1: 2005) standard throughout the frequency range 30 to 1 000 MHz.
Alternatively, if the manufacturer provides measurement data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may divide the frequency range in 14 frequency bands — 30-34, 34-45, 45-60, 60-80, 80-100, 100-130, 130-170, 170-225, 225-300, 300-400, 400-525, 525-700, 700-850, 850-1 000 MHz — and perform tests at the 14 frequencies giving the highest emission levels within each band to confirm that the vehicle meets the requirements of this annex.
In the event that the limit is exceeded during the test, investigations shall be made to ensure that this is due to the vehicle and not to background radiation including broadband radiation from any ESA.
3.4. Readings
The maximum of the readings relative to the limit (horizontal and vertical polarisation and antenna location on the left and right-hand sides of the vehicle) in each of the 14 frequency bands shall be taken as the characteristic reading at the frequency at which the measurements were made.
ANNEX 6
Method of testing for immunity of vehicles to electromagnetic radiation
1. GENERAL
1.1. The test method described in this annex shall only be applied to vehicles. This method concerns both configurations of vehicle:
|
(a) |
Other than ‘RESS in charging mode coupled to the power grid’. |
|
(b) |
‘RESS in charging mode coupled to the power grid’. |
1.2. Test method
This test is intended to demonstrate the immunity of the vehicle electronic systems. The vehicle shall be subject to electromagnetic fields as described in this annex. The vehicle shall be monitored during the tests.
If not otherwise stated in this annex the test shall be performed according to ISO 11451-2, third edition 2005.
1.3. Alternative test methods
The test may be alternatively performed in an outdoor test site for all vehicles. The test facility shall comply with (national) legal requirements regarding the emission of electromagnetic fields.
If a vehicle is longer than 12 m and/or wider than 2,60 m and/or higher than 4,00 m, BCI (bulk current injection) method according to ISO 11451-4 (first edition 1995) can be used in the frequency range 20 to 2 000 MHz with levels defined in paragraph 6.7.2.1 of this Regulation.
2. VEHICLE STATE DURING TESTS
2.1. Vehicle in configuration other than ‘RESS in charging mode coupled to the power grid’.
2.1.1. The vehicle shall be in an unladen condition except for necessary test equipment.
2.1.1.1. The engine shall normally turn the driving wheels at a steady speed of 50 km/h if there is no technical reason due to the vehicle to define a different condition. For vehicles of categories L1 and L2 the steady speed shall normally be turned at 25 km/h. The vehicle shall be on an appropriately loaded dynamometer or alternatively supported on insulated axle stands with minimum ground clearance if no dynamometer is available. Where appropriate, transmission shafts, belts or chains may be disconnected (e.g. trucks, two- and three-wheel vehicles).
2.1.1.2. Basic vehicle conditions
The paragraph defines minimum test conditions (as far as applicable) and failures criteria for vehicle immunity tests. Other vehicle systems, which can affect immunity related functions must be tested in a way to be agreed between manufacturer and Technical Service.
|
‘50 km/h cycle’ vehicle test conditions |
Failure criteria |
|
Vehicle speed 50 km/h (respectively 25 km/h for L1, L2 vehicles) ± 20 per cent (vehicle driving the rollers). If the vehicle is equipped with a cruise control system, it shall be operational. |
Speed variation greater than ± 10 per cent of the nominal speed. In case of automatic gearbox: change of gear ratio inducing a speed variation greater than ± 10 per cent of the nominal speed. |
|
Dipped beams ON (manual mode) |
Lighting OFF |
|
Front wiper ON (manual mode) maximum speed |
Complete stop of front wiper |
|
Direction indicator on driver’s side ON |
Frequency change (lower than 0,75 Hz or greater than 2,25 Hz). Duty cycle change (lower than 25 per cent or greater than 75 per cent). |
|
Adjustable suspension in normal position |
Unexpected significant variation |
|
Driver’s seat and steering wheel in medium position |
Unexpected variation greater than 10 per cent of total range |
|
Alarm unset |
Unexpected activation of alarm |
|
Horn OFF |
Unexpected activation of horn |
|
Airbag and safety restraint systems operational with inhibited passenger airbag if this function exists |
Unexpected activation |
|
Automatic doors closed |
Unexpected opening |
|
Adjustable endurance brake lever in normal position |
Unexpected activation |
|
‘Brake cycle’ vehicle test conditions |
Failure criteria |
|
To be defined in brake cycle test plan. This must include operation of the brake pedal (unless there are technical reasons not to do so) but not necessarily an anti-lock brake system action. |
Stop lights inactivated during cycle Brake warning light ON with loss of function. Unexpected activation |
2.1.1.3. All equipment which can be switched on permanently by the driver or passenger should be in normal operation.
2.1.1.4. All other systems which affect the driver’s control of the vehicle shall be (on) as in normal operation of the vehicle.
2.1.2. If there are vehicle electrical/electronic systems which form an integral part of the direct control of the vehicle, which will not operate under the conditions described in paragraph 2.1, it will be permissible for the manufacturer to provide a report or additional evidence to the Technical Service that the vehicle electrical/electronic system meets the requirements of this Regulation. Such evidence shall be retained in the type-approval documentation.
2.1.3. Only non-perturbing equipment shall be used while monitoring the vehicle. The vehicle exterior and the passenger compartment shall be monitored to determine whether the requirements of this annex are met (e.g. by using (a) video camera(s), a microphone, etc.).
2.2. Vehicle in configuration ‘RESS in charging mode coupled to the power grid’.
2.2.1. The vehicle shall be in an unladen condition except for necessary test equipment.
2.2.1.1. The vehicle shall be immobilised, engine OFF and in charging mode.
2.2.1.2. Basic vehicle conditions
The paragraph defines minimum test conditions (as far as applicable) and failures criteria for vehicle immunity tests. Other vehicle systems, which can affect immunity related functions, must be tested in a way to be agreed between manufacturer and Technical Service.
|
‘RESS in charging mode’ vehicle test conditions |
Failure criteria |
|
The RESS shall be in charging mode. The RESS state of charge shall be agreed between the manufacturer and the Technical Service. |
Vehicle sets in motion |
2.2.1.3. All other equipment which can be switched on permanently by the driver or passenger should be OFF.
2.2.2. Only non-perturbing equipment shall be used while monitoring the vehicle. The vehicle exterior and the passenger compartment shall be monitored to determine whether the requirements of this annex are met (e.g. by using (a) video camera(s), a microphone, etc.).
3. REFERENCE POINT
3.1. For the purposes of this annex, the reference point is the point at which the field strength shall be established and shall be defined as follows:
3.2. For category M, N, O vehicles according to ISO 11451-2, third edition 2005.
3.3. For category L vehicles:
|
3.3.1. |
At least 2 m horizontally from the antenna phase centre or at least 1 m vertically from the radiating elements of a transmission-line-system (TLS); |
|
3.3.2. |
On the vehicle’s centre line (plane of longitudinal symmetry); |
|
3.3.3. |
At a height of 1,0 ± 0,05 m above the plane on which the vehicle rests or 2,0 ± 0,05 m if the minimum height of the roof of any vehicle in the model range exceeds 3,0 m, |
|
3.3.4. |
Either at 1,0 ± 0,2 m behind the vertical centreline of the vehicle’s front wheel (point C in Figure 1 of the appendix to this annex) in the case of three-wheeled vehicles, Or at 0,2 ± 0,2 m behind the vertical centreline of the vehicle’s front wheel (point D in Figure 2 of the appendix to this annex) in the case of two-wheeled vehicles. |
|
3.3.5. |
If it is decided to radiate the rear of the vehicle, the reference point shall be established as in paragraphs 3.3.1 to 3.3.4. The vehicle shall then be installed facing away from the antenna and positioned as if it had been horizontally rotated 180° around its centre point, i.e. such that the distance from the antenna to the nearest part of the outer body of the vehicle remains the same. This is illustrated in Figure 3 of the appendix to this annex. |
4. TEST REQUIREMENTS
4.1. Frequency range, dwell times, polarisation
The vehicle shall be exposed to electromagnetic radiation in the 20 to 2 000 MHz frequency ranges in vertical polarisation.
The test signal modulation shall be:
|
(a) |
AM (amplitude modulation), with 1 kHz modulation and 80 per cent modulation depth in the 20 to 800 MHz frequency range, and |
|
(b) |
PM (pulse modulation), t on 577 μs, period 4 600 μs in the 800 to 2 000 MHz frequency range, |
If not otherwise agreed between Technical Service and vehicle manufacturer.
Frequency step size and dwell time shall be chosen according to ISO 11451-1, third edition 2005 and Amd1: 2008.
4.1.1. The Technical Service shall perform the test at the intervals specified in ISO 11451-1, third edition 2005 and Amd1: 2008 throughout the frequency range 20 to 2 000 MHz.
Alternatively, if the manufacturer provides measurement to data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may choose a reduced number of spot frequencies in the range, e.g. 27, 45, 65, 90, 120, 150, 190, 230, 280, 380, 450, 600, 750, 900, 1 300, and 1 800 MHz to confirm that the vehicle meets the requirements of this annex.
If a vehicle fails the test defined in this annex, it must be verified as having failed under the relevant test conditions and not as a result of the generation of uncontrolled fields.
5. GENERATION OF REQUIRED FIELD STRENGTH
5.1. Test methodology
5.1.1. The substitution method according to ISO 11451-1, third edition 2005 and Amd1: 2008 shall be used to establish the test field conditions.
5.1.2. Calibration
For TLS one field probe at the facility reference point shall be used.
For antennas four field probes at the facility reference line shall be used.
5.1.3. Test phase
The vehicle shall be positioned with the centre line of the vehicle on the facility reference point or line. The vehicle shall normally face a fixed antenna. However, where the electronic control units and the associated wiring harness are predominantly in the rear of the vehicle, the test should normally be carried out with the vehicle facing away from the antenna. In the case of long vehicles (i.e. excluding vehicles of categories L, M1 and N1), which have electronic control units and associated wiring harness predominantly towards the middle of the vehicle, a reference point may be established based on either the right side surface or the left side surface of the vehicle. This reference point shall be at the midpoint of the vehicle’s length or at one point along the side of the vehicle chosen by the manufacturer in conjunction with the Competent Authority after considering the distribution of electronic systems and the layout of any wiring harness.
Such testing may only take place if the physical construction of the chamber permits. The antenna location must be noted in the test report.
Appendix
Figure 1

Figure 2
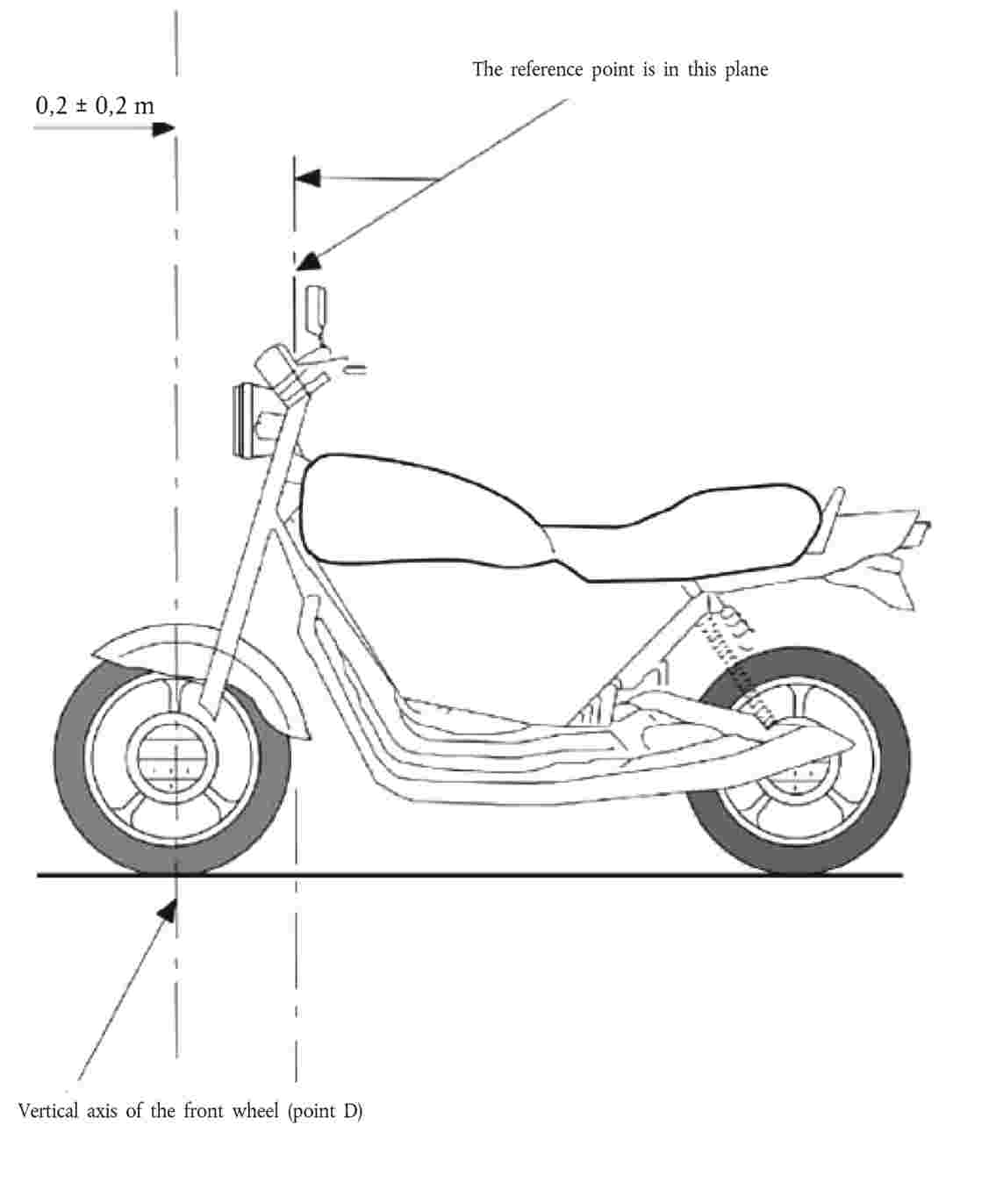
Figure 3

Figure 4
Vehicle in configuration ‘RESS in charging mode coupled to the power grid’

ANNEX 7
Method of measurement of radiated broadband electromagnetic emissions from electrical/electronic sub-assemblies
1. GENERAL
1.1. The test method described in this annex may be applied to ESAs, which may be subsequently fitted to vehicles, which comply with Annex 4.
1.2. Test method
This test is intended to measure broadband electromagnetic emissions from ESAs (e.g. ignition systems, electric motor, etc.).
If not otherwise stated in this annex the test shall be performed according to CISPR 25 (second edition 2002 and Corrigendum 2004).
2. ESA STATE DURING TESTS
2.1. The ESA under test shall be in normal operation mode, preferably in maximum load.
3. TEST ARRANGEMENTS
3.1. The test shall be performed according to CISPR 25 (second edition 2002 and Corrigendum 2004) clause 6.4 — ALSE method.
3.2. Alternative measuring location
As an alternative to an absorber lined shielded enclosure (ALSE) an open area test site (OATS), which complies with the requirements of CISPR 16-1-4 (third edition 2010) may be used (see appendix to this annex).
3.3. Ambient
To ensure that there is no extraneous noise or signal of a magnitude sufficient to affect materially the measurement, measurements shall be taken before or after the main test. In this measurement, the extraneous noise or signal shall be at least 6 dB below the limits of interference given in paragraph 6.5.2.1 of this Regulation, except for intentional narrowband ambient transmissions.
4. TEST REQUIREMENTS
4.1. The limits apply throughout the frequency range 30 to 1 000 MHz for measurements performed in a semi anechoic chamber or an outdoor test site.
4.2. Measurements can be performed with either quasi-peak or peak detectors. The limits given in paragraphs 6.2 and 6.5 of this Regulation are for quasi-peak detectors. If peak detectors are used a correction factor of 20 dB as defined in CISPR 12 (fifth edition 2001 and Amd1: 2005) shall be applied.
4.3. Measurements
The Technical Service shall perform the test at the intervals specified in the CISPR 12 (fifth edition 2001 and Amd1: 2005) standard throughout the frequency range 30 to 1 000 MHz.
Alternatively, if the manufacturer provides measurement to data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may divide the frequency range in 14 frequency bands — 30-34, 34-45, 45-60, 60-80, 80-100, 100-130, 130-170, 170-225, 225-300, 300-400, 400-525, 525-700, 700-850, 850-1 000 MHz — and perform tests at the 14 frequencies giving the highest emission levels within each band to confirm that the ESA meets the requirements of this annex.
In the event that the limit is exceeded during the test, investigations shall be made to ensure that this is due to the ESA and not to background radiation.
4.4. Readings
The maximum of the readings relative to the limit (horizontal/vertical polarisation) in each of the 14 frequency bands shall be taken as the characteristic reading at the frequency at which the measurements were made.
Appendix
Open area test site: electrical/electronic sub-assembly test area boundary
Level clear area free from electromagnetic reflecting surfaces

ANNEX 8
Method of measurement of radiated narrowband electromagnetic emissions from electrical/electronic sub-assemblies
1. GENERAL
1.1. The test method described in this annex may be applied to ESAs, which may be subsequently fitted to vehicles that comply with Annex 4.
1.2. Test method
This test is intended to measure the narrowband electromagnetic emissions such as might emanate from a microprocessor-based system.
If not otherwise stated in this annex the test shall be performed according to CISPR 25 (second edition 2002 and Corrigendum: 2004).
2. ESA STATE DURING TESTS
The ESA under test shall be in normal operation mode.
3. TEST ARRANGEMENTS
3.1. The test shall be performed according to CISPR 25 (second edition 2002 and Corrigendum: 2004) clause 6.4 — ALSE method.
3.2. Alternative measuring location
As an alternative to an absorber lined shielded enclosure (ALSE) an open area test site (OATS) which complies with the requirements of CISPR 16-1-4 (third edition 2010) may be used (see appendix to Annex 7).
3.3. Ambient
To ensure that there is no extraneous noise or signal of a magnitude sufficient to affect materially the measurement, measurements shall be taken before or after the main test. In this measurement, the extraneous noise or signal shall be at least 6 dB below the limits of interference given in paragraph 6.6.2.1 of this Regulation, except for intentional narrowband ambient transmissions.
4. TEST REQUIREMENTS
4.1. The limits apply throughout the frequency range 30 to 1 000 MHz for measurements performed in semi anechoic chambers or outdoor test sites.
4.2. Measurements shall be performed with an average detector.
4.3. Measurements
The Technical Service shall perform the test at the intervals specified in the CISPR 12 (fifth edition 2001 and Amd1: 2005) standard throughout the frequency range 30 to 1 000 MHz.
Alternatively, if the manufacturer provides measurement to data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may divide the frequency range in 14 frequency bands — 30-34, 34-45, 45-60, 60-80, 80-100, 100-130, 130-170, 170-225, 225-300, 300-400, 400-525, 525-700, 700-850, 850-1 000 MHz — and perform tests at the 14 frequencies giving the highest emission levels within each band to confirm that the ESA meets the requirements of this annex. In the event that the limit is exceeded during the test, investigations shall be made to ensure that this is due to the ESA and not to background radiation including broadband radiation from the ESA.
4.4. Readings
The maximum of the readings relative to the limit (horizontal/vertical polarisation) in each of the 14 frequency bands shall be taken as the characteristic reading at the frequency at which the measurements were made.
ANNEX 9
Method(s) of testing for immunity of electrical/electronic sub-assemblies to electromagnetic radiation
1. GENERAL
1.1. The test method(s) described in this annex applies to ESAs.
1.2. Test methods
1.2.1. ESAs may comply with the requirements of any combination of the following test methods at the manufacturer’s discretion provided that this results in the full frequency range specified in paragraph 3.1 of this annex being covered:
|
(a) |
Absorber chamber test according to ISO 11452-2, second edition 2004; |
|
(b) |
TEM cell testing according to ISO 11452-3, third edition 2001; |
|
(c) |
Bulk current injection testing according to ISO 11452-4, third edition 2005 and Corrigendum 1:2009; |
|
(d) |
Stripline testing according to ISO 11452-5, second edition 2002; |
|
(e) |
800 mm stripline according to paragraph 5 of this annex. |
(frequency range and general test conditions shall be based on ISO 11452-1, third edition 2005 and Amd1: 2008).
2. STATE OF ESA DURING TESTS
2.1. The test conditions shall be according to ISO 11452-1, third edition 2005 and Amd1: 2008.
2.2. The ESA under test shall be switched on and must be stimulated to be in normal operation condition. It shall be arranged as defined in this annex unless individual test methods dictate otherwise.
2.3. Any extraneous equipment required to operate the ESA under test shall not be in place during the calibration phase. No extraneous equipment shall be closer than 1 m from the reference point during calibration.
2.4. To ensure reproducible measurement results are obtained when tests and measurements are repeated, the test signal generating equipment and its layout shall be to the same specification as that used during each appropriate calibration phase.
2.5. If the ESA under test consists of more than one unit, the interconnecting cables should ideally be the wiring harnesses as intended for use in the vehicle. If these are not available, the length between the electronic control unit and the AN shall be as defined in the standard. All cables in the wiring harness should be terminated as realistically as possible and preferably with real loads and actuators.
3. GENERAL TEST REQUIREMENTS
3.1. Frequency range, dwell times
Measurements shall be made in the 20 to 2 000 MHz frequency range with frequency steps according to ISO 11452-1, third edition 2005 and Amd1: 2008.
The test signal modulation shall be:
|
(a) |
AM (amplitude modulation), with 1 kHz modulation and 80 per cent modulation depth in the 20 to 800 MHz frequency range; |
|
(b) |
PM (pulse modulation), t on 577 μs, period 4 600 μs in the 800 to 2 000 MHz frequency range; If not otherwise agreed between Technical Service and ESA manufacturer. |
Frequency step size and dwell time shall be chosen according to ISO 11452-1, third edition 2005 and Amd1: 2008.
3.2. The Technical Service shall perform the test at the intervals specified in ISO 11452-1, third edition 2005 and Amd1: 2008 throughout the frequency range 20 to 2 000 MHz.
Alternatively, if the manufacturer provides measurement to data for the whole frequency band from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may choose a reduced number of spot frequencies in the range, e.g. 27, 45, 65, 90, 120, 150, 190, 230, 280, 380, 450, 600, 750, 900, 1 300, and 1 800 MHz to confirm that the ESA meets the requirements of this annex.
3.3. If an ESA fails the tests defined in this annex, it must be verified as having failed under the relevant test conditions and not as a result of the generation of uncontrolled fields.
4. SPECIFIC TEST REQUIREMENTS
4.1. Absorber chamber test
4.1.1. Test method
This test method allows the testing of vehicle electrical/electronic systems by exposing an ESA to electromagnetic radiation generated by an antenna.
4.1.2. Test methodology
The ‘substitution method’ shall be used to establish the test field conditions according to ISO 11452-2, second edition 2004.
The test shall be performed with vertical polarisation.
4.2. TEM cell testing (see Appendix 2 to this annex)
4.2.1. Test method
The TEM (transverse electromagnetic mode) cell generates homogeneous fields between the internal conductor (septum) and housing (ground plane).
4.2.2. Test methodology
The test shall be performed according to ISO 11452-3, third edition 2001.
Depending on the ESA to be tested the Technical Service shall chose the method of maximum field coupling to the ESA or to the wiring harness inside the TEM-cell.
4.3. Bulk current injection testing
4.3.1. Test method
This is a method of carrying out immunity tests by inducing currents directly into a wiring harness using a current injection probe.
4.3.2. Test methodology
The test shall be performed according to ISO 11452-4, third edition 2005 and Corrigendum 1:2009 on a test bench. As an alternative the ESA may be tested while installed in the vehicle according to ISO 11451-4 (first edition 1995) with the following characteristics:
|
(a) |
The injection probe shall be positioned in 150 mm distance to the ESA to be tested; |
|
(b) |
The reference method shall be used to calculate injected currents from forward power; |
|
(c) |
The frequency range of the method is limited by the injection probe specification. |
4.4. Stripline testing
4.4.1. Test method
This test method consists of subjecting the wiring harness connecting the components in an ESA to specified field strengths.
4.4.2. Test methodology
The test shall be performed according to ISO 11452-5, second edition 2002.
4.5. 800 mm stripline testing
4.5.1. Test method
The stripline consists of two parallel metallic plates separated by 800 mm. Equipment under test is positioned centrally between the plates and subjected to an electromagnetic field (see Appendix 1 to this annex).
This method can test complete electronic systems including sensors and actuators as well as the controller and wiring loom. It is suitable for apparatus whose largest dimension is less than one third of the plate separation.
4.5.2. Test methodology
4.5.2.1. Positioning of stripline
The stripline shall be housed in a screened room (to prevent external emissions) and positioned 2 m away from walls and any metallic enclosure to prevent electromagnetic reflections. RF absorber material may be used to damp these reflections. The stripline shall be placed on non-conducting supports at least 0,4 m above the floor.
4.5.2.2. Calibration of the stripline
A field-measuring probe shall be positioned within the central one-third of the longitudinal, vertical and transverse dimensions of the space between the parallel plates with the system under test absent.
The associated measuring equipment shall be sited outside the screen room. At each desired test frequency, a level of power shall be fed into the stripline to produce the required field strength at the antenna. This level of forward power, or another parameter directly related to the forward power required to define the field, shall be used for type-approval tests unless changes occur in the facilities or equipment, which necessitate this procedure being repeated.
4.5.2.3. Installation of the ESA under test
The main control unit shall be positioned within the central one third of the longitudinal, vertical and transverse dimensions of the space between the parallel plates. It shall be supported on a stand made from non-conducting material.
4.5.2.4. Main wiring loom and sensor/actuator cables
The main wiring loom and any sensor/actuator cables shall rise vertically from the control unit to the top ground plate (this helps to maximise coupling with the electromagnetic field). Then they shall follow the underside of the plate to one of its free edges where they shall loop over and follow the top of the ground plate as far as the connections to the stripline feed. The cables shall then be routed to the associated equipment, which shall be sited in an area outside the influence of the electromagnetic field, e.g. on the floor of the screened room 1 m longitudinally away from the stripline.
Appendix 1
Figure 1
800 mm Stripline testing

Figure 2
800 mm stripline dimensions


Appendix 2
Typical TEM cell dimensions
The following table shows the dimensions for constructing a cell with specified upper frequency limits:
|
Upper frequency (MHz) |
Cell form factor W: b |
Cell form factor L/W |
Plate separation b (cm) |
Septum S (cm) |
|
200 |
1,69 |
0,66 |
56 |
70 |
|
200 |
1,00 |
1 |
60 |
50 |
ANNEX 10
Method(s) of testing for immunity to and emission of transients of electrical/electronic sub-assemblies
1. General
This test method shall ensure the immunity of ESAs to conducted transients on the vehicle power supply and limit conducted transients from ESAs to the vehicle power supply.
2. Immunity against transient disturbances conducted along supply lines
Apply the test pulses 1, 2a, 2b, 3a 3b and 4 according to the International Standard ISO 7637-2 (second edition 2004 and Amd1: 2008) to the supply lines as well as to other connections of ESAs which may be operationally connected to supply lines.
3. Emission of transient conducted disturbances generated by ESAs on supply lines
Measurement according to the International Standard ISO 7637-2 (second edition 2004 and Amd1: 2008) on supply lines as well as to other connections of ESAs which may be operationally connected to supply lines.
ANNEX 11
Method(s) of testing for emission of harmonics generated on AC power lines from vehicle
1. GENERAL
1.1. The test method described in this annex shall be applied to vehicles in configuration ‘RESS charging mode coupled to the power grid’
1.2. Test method
This test is intended to measure the level of harmonics generated by vehicle in configuration ‘RESS charging mode coupled to the power grid’ through its AC power lines in order to ensure it is compatible with residential, commercial and light industrial environments.
If not otherwise stated in this annex the test shall be performed according to:
|
(a) |
IEC 61000-3-2 (edition 3.2 - 2005 + Amd1: 2008 + Amd2: 2009) for input current in charging mode ≤ 16 A per phase for class A equipment; |
|
(b) |
IEC 61000-3-12 (edition 1.0 - 2004) for input current in charging mode > 16 A and ≤ 75 A per phase. |
2. VEHICLE STATE DURING TESTS
2.1. The vehicle shall be in configuration ‘RESS charging mode coupled to the power grid’ at rated power until the AC current reached at least 80 per cent of its initial value.
3. TEST ARRANGEMENTS
3.1. The observation time to be used for the measurements shall be as for quasi-stationary equipment as defined in IEC 61000-3-2 (edition 3.2 - 2005 + Amd1: 2008 + Amd2: 2009) Table 4.
3.2. The test set-up for single phase vehicle in configuration ‘RESS charging mode coupled to the power grid’ is shown in Figure 1 of the appendix to this annex.
3.3. The test set-up for three-phase vehicle in configuration ‘RESS charging mode coupled to the power grid’ is shown in Figure 2 of the appendix to this annex.
4. TEST REQUIREMENTS
4.1. The measurements of even and odd current harmonics shall be performed up to the 40th harmonic.
4.2. The limits for single phase or three-phase ‘RESS charging mode coupled to the power grid’ with input current ≤ 16 A per phase are given in paragraph 7.3.2.1, Table 3.
4.3. The limits for single phase ‘RESS charging mode coupled to the power grid’ with input current > 16 A and ≤ 75 A per phase are given in paragraph 7.3.2.2, Table 4.
4.4. The limits for three-phase ‘RESS charging mode coupled to the power grid’ with input current > 16 A and ≤ 75 A per phase are given in paragraph 7.3.2.2, Table 5.
4.5. For three-phase ‘RESS charging mode coupled to the power grid’ with input current > 16 A and ≤ 75 A per phase, when at least one of the three conditions (a), (b) or (c) described in IEC 61000-3-12 (edition 1.0 - 2004) clause 5.2, is fulfilled then the limits given in paragraph 7.3.2.2, Table 6 can be applied.
Appendix
Figure 1
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Single phase charger test set-up

Figure 2
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Three-phase charger test set-up

ANNEX 12
Method(s) of testing for emission of voltage changes, voltage fluctuations and flicker on AC power lines from vehicle
1. General
1.1. The test method described in this annex shall be applied to vehicles in configuration ‘RESS charging mode coupled to the power grid’
1.2. Test method
This test is intended to measure the level of voltage changes, voltage fluctuations and flicker generated by vehicle in configuration ‘RESS charging mode coupled to the power grid’ through its AC power lines in order to ensure it is compatible with residential, commercial and light industrial environments.
If not otherwise stated in this annex the test shall be performed according to:
|
(a) |
IEC 61000-3-3 (edition 2.0 - 2008) for rated current in ‘RESS charging mode’ ≤ 16 A per phase and not subjected to conditional connection, |
|
(b) |
IEC 61000-3-11 (edition 1.0 - 2000) for rated current in ‘RESS charging mode’ > 16 A and ≤ 75 A per phase and subjected to conditional connection. |
2. Vehicle State during Tests
2.1. The vehicle shall be in configuration ‘RESS charging mode coupled to the power grid’ at rated power until the AC current reached at least 80 per cent of its initial value.
3. Test Arrangements
3.1. The tests for vehicle in configuration ‘RESS charging mode coupled to the power grid’ with rated current ≤ 16 A per phase and not subjected to conditional connection shall be performed according to IEC 61000-3-3 (edition 2.0 - 2008) paragraph 4.
3.2. The tests for vehicle in configuration ‘RESS charging mode coupled to the power grid’ with rated current > 16 A and ≤ 75 A per phase and subjected to conditional connection shall be performed according to IEC 61000-3-11 (edition 1.0 - 2000) paragraph 6.
3.3. The test set-up for vehicle in configuration ‘RESS charging mode coupled to the power grid’ is shown in the figure of the appendix to this annex.
4. Test Requirements
4.1. The parameters to be determined in the time-domain are ‘short duration flicker value’, ‘long duration flicker value’ and ‘voltage relative variation’.
4.2. The limits for vehicle in configuration ‘RESS charging mode coupled to the power grid’ with input current ≤ 16 A per phase and not subjected to conditional connection are given in paragraph 7.4.2.1, Table 7.
4.3. The limits for vehicle in configuration ‘RESS charging mode coupled to the power grid’ with input current > 16 A and ≤ 75 A per phase and subjected to conditional connection are given in paragraph 7.4.2.2, Table 8.
Appendix
Vehicle in configuration ‘RESS charging mode coupled to the power grid’

ANNEX 13
Method(s) of testing for emission of radiofrequency conducted disturbances on AC or DC power lines from vehicle
1. GENERAL
1.1. The test method described in this annex shall be applied to vehicles in configuration ‘RESS charging mode coupled to the power grid’.
1.2. Test method
This test is intended to measure the level of radio frequency conducted disturbances generated by vehicle in configuration ‘RESS charging mode coupled to the power grid’ through its AC or DC power lines in order to ensure it is compatible with residential, commercial and light industrial environments.
If not otherwise stated in this annex the test shall be performed according to CISPR 16-2-1 (edition 2.0 - 2008).
2. VEHICLE STATE DURING TESTS
2.1. The vehicle shall be in configuration ‘RESS charging mode coupled to the power grid’ at rated power until the AC or DC current reached at least 80 per cent of its initial value.
3. TEST ARRANGEMENTS
3.1. The test shall be performed according to CISPR 16-2-1 (edition 2.0 - 2008) clause 7.4.1 as floor-standing equipments.
3.2. The artificial mains network to be used for the measurement on vehicle is defined in CISPR 16-1-2 (edition 1.2: 2006), clause 4.3.
3.3. The test set-up for the connection of the vehicle in configuration ‘RESS charging mode coupled to the power grid’ is shown in the figure of the appendix to this annex.
3.4. The measurements shall be performed with a spectrum analyser or a scanning receiver. The parameters to be used are respectively defined in CISPR 25 (second edition 2002 and Corrigendum 2004) clause 4.5.1 (Table 1) and 4.5.2 (Table 2).
4. TEST REQUIREMENTS
4.1. The limits apply throughout the frequency range 0,15 to 30 MHz for measurements performed in a semi anechoic chamber or an outdoor test site.
4.2. Measurements shall be performed with average and either quasi-peak or peak detectors. The limits are given in paragraph 7.5, Table 9 for AC lines and Table 10 for DC lines. If peak detectors are used a correction factor of 20 dB as defined in CISPR 12 (fifth edition, 2001 and Amd1: 2005) shall be applied.
Appendix
Vehicle in configuration ‘RESS charging mode coupled to the power grid’

ANNEX 14
Method(s) of testing for emission of radiofrequency conducted disturbances on network and telecommunication access from vehicle
1. GENERAL
1.1. The test method described in this annex shall be applied to vehicles in configuration ‘RESS charging mode coupled to the power grid’.
1.2. Test method
This test is intended to measure the level of radio frequency conducted disturbances generated by vehicle in configuration ‘RESS charging mode coupled to the power grid’ through its network and telecommunication access in order to ensure it is compatible with residential, commercial and light industrial environments.
If not otherwise stated in this annex the test shall be performed according to CISPR 22 (edition 6.0 - 2008).
2. VEHICLE/ ESA STATE DURING TESTS
2.1. The vehicle shall be in configuration ‘RESS charging mode coupled to the power grid’ at rated power until the AC or DC current reached at least 80 per cent of its initial value.
3. TEST ARRANGEMENTS
3.1. The test set-up shall be performed according to CISPR 22 (edition 6.0 - 2008) paragraph 5 for conducted emissions.
3.2. The impedance stabilisation to be used for the measurement on vehicle is defined in CISPR 22 (edition 6.0 - 2008) paragraph 9.6.2.
3.3. The test set-up for the connection of the vehicle in configuration ‘RESS charging mode coupled to the power grid’ is shown in the figure of the appendix to this annex.
3.4. The measurements shall be performed with a spectrum analyser or a scanning receiver. The parameters to be used are respectively defined in CISPR 25 (second edition 2002 and Corrigendum 2004) clause 4.5.1 (Table 1) and 4.5.2 (Table 2).
4. TEST REQUIREMENTS
4.1. The limits apply throughout the frequency range 0,15 to 30 MHz for measurements performed in a semi anechoic chamber or an outdoor test site.
4.2. Measurements shall be performed with average and either quasi-peak or peak detectors. The limits are given in paragraph 7.6, Table 11. If peak detectors are used a correction factor of 20 dB as defined in CISPR 12 (fifth edition 2001 and Amd1: 2005) shall be applied.
Appendix
Vehicle in configuration ‘RESS charging mode coupled to the power grid’

ANNEX 15
Method(s) of testing for immunity of vehicles to electrical fast transient/burst disturbances conducted along AC and DC power lines
1. GENERAL
1.1. The test method described in this annex shall only be applied to vehicles. This method concerns only the configuration of the vehicle with ‘RESS in charging mode coupled to the power grid’.
1.2. Test method
This test is intended to demonstrate the immunity of the vehicle electronic systems. The vehicle shall be subject to electrical fast transient/burst disturbances conducted along AC and DC power lines of the vehicle as described in this annex. The vehicle shall be monitored during the tests.
If not otherwise stated in this annex the test shall be performed according to IEC 61000-4-4: 2nd edition 2004.
2. VEHICLE STATE DURING TESTS IN CONFIGURATION ‘RESS IN CHARGING MODE COUPLED TO THE POWER GRID’
2.1. The vehicle shall be in an unladen condition except for necessary test equipment.
2.1.1. The vehicle shall be immobilised, engine OFF and in charging mode.
2.1.2. Basic vehicle conditions
It defines minimum test conditions (as far as applicable) and failures criteria for vehicle immunity tests. Other vehicle systems, which can affect immunity related functions, must be tested in a way to be agreed between manufacturer and Technical Service.
|
‘RESS in charging mode’ vehicle test conditions |
Failure criteria |
|
The RESS shall be in charging mode. The RESS state of charge shall be agreed between the manufacturer and the Technical Service. |
Vehicle sets in motion |
2.1.3. All other equipment which can be switched on permanently by the driver or passenger should be OFF.
2.2. Only non-perturbing equipment shall be used while monitoring the vehicle. The vehicle exterior and the passenger compartment shall be monitored to determine whether the requirements of this annex are met (e.g. by using (a) video camera(s), a microphone, etc.).
3. TEST EQUIPMENTS
3.1. The test equipments is composed of a reference ground plane (a shielded room is not required), a transient/burst generator, coupling/decoupling network (CDN) and capacitive coupling clamp.
3.2. The transient/burst generator shall meet the condition defined in paragraph 6.1 of IEC 61000-4-4: 2nd edition, 2004.
3.3. The coupling/decoupling network shall meet the condition defined in paragraph 6.2 of IEC 61000-4-4: 2nd edition, 2004. When the coupling/decoupling network cannot be used on AC or DC power lines, the capacitive coupling clamp defined in paragraph 6.3 of IEC 61000-4-4: 2nd edition, 2004, can be used.
4. TEST SETUP
4.1. The vehicle test setup is based on the laboratory type setup as described in paragraph 7.2 of IEC 61000-4-4: 2nd edition, 2004.
4.2. The vehicle shall be placed directly on the ground plane.
4.3. The Technical Service shall perform the test as specified in paragraph 7.7.2.1.
Alternatively, if the manufacturer provides measurement from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may choose not to perform the test to confirm that the vehicle meets the requirements of this annex.
Appendix
Vehicle in configuration ‘RESS charging mode’ coupled to the power grid coupling on AC/DC power lines

ANNEX 16
Method(s) of testing for immunity of vehicles to surges conducted along AC and DC power lines
1. GENERAL
1.1. The test method described in this annex shall only be applied to vehicles. This method concerns only the configuration of the vehicle with ‘RESS in charging mode coupled to the power grid’.
1.2. Test method
This test is intended to demonstrate the immunity of the vehicle electronic systems. The vehicle shall be subject to surges conducted along AC and DC power lines of the vehicle as described in this annex. The vehicle shall be monitored during the tests.
If not otherwise stated in this annex the test shall be performed according to IEC 61000-4-5: 2nd edition 2005.
2. VEHICLE STATE DURING TESTS IN CONFIGURATION ‘RESS IN CHARGING MODE COUPLED TO THE POWER GRID’
2.1. The vehicle shall be in an unladen condition except for necessary test equipment.
2.1.1. The vehicle shall be immobilised, engine OFF and in charging mode.
2.1.2. Basic vehicle conditions
It defines minimum test conditions (as far as applicable) and failures criteria for vehicle immunity tests. Other vehicle systems, which can affect immunity related functions, must be tested in a way to be agreed between manufacturer and Technical Service.
|
‘RESS in charging mode’ vehicle test conditions |
Failure criteria |
|
The RESS shall be in charging mode. The RESS state of charge shall be agreed between the manufacturer and the Technical Service. |
Vehicle sets in motion |
2.1.3. All other equipment which can be switched on permanently by the driver or passenger should be OFF.
2.2. Only non-perturbing equipment shall be used while monitoring the vehicle. The vehicle exterior and the passenger compartment shall be monitored to determine whether the requirements of this annex are met (e.g. by using (a) video camera(s), a microphone, etc.).
3. TEST EQUIPMENTS
3.1. The test equipments is composed of a reference ground plane (a shielded room is not required), a surge generator and a coupling/decoupling network (CDN).
3.2. The surge generator shall meet the condition defined in paragraph 6.1 of IEC 61000-4-5: 2nd edition, 2005.
3.3. The coupling/decoupling network shall meet the condition defined in paragraph 6.3 of IEC 61000-4-5: 2nd edition, 2005.
4. TEST SETUP
4.1. The vehicle test setup is based on the setup described in paragraph 7.2 of IEC 61000-4-5: 2nd edition, 2005.
4.2. The vehicle shall be placed directly on the ground plane.
4.3. The Technical Service shall perform the test as specified in paragraph 7.8.2.1.
Alternatively, if the manufacturer provides measurement from a test laboratory accredited to the applicable parts of ISO 17025 (second edition 2005 and Corrigendum: 2006) and recognised by the Approval Authority, the Technical Service may choose not to perform the test to confirm that the vehicle meets the requirements of this annex.
5. GENERATION OF REQUIRED TEST LEVEL
5.1. Test methodology
5.1.1. The test method according to IEC 61000-4-5: 2nd edition 2005 shall be used to establish the test level requirements.
5.1.2. Test phase
The vehicle shall be positioned on the ground plane. The electrical surge shall be applied on the vehicle on the AC/DC power lines between each line and earth and between lines by using CDN as described in the appendix to this annex.
Appendix
Figure 1
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Coupling between line and for DC or AC (single phase) power lines

Figure 2
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Coupling between each line and earth for DC or AC (single phase) power lines

Figure 3
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Coupling between lines for AC (three phases) power lines

Figure 4
Vehicle in configuration ‘RESS charging mode coupled to the power grid’ — Coupling between each line and earth for AC (three phases) power lines

|
20.9.2012 |
EN |
Official Journal of the European Union |
L 254/77 |
Only the original UN/ECE texts have legal effect under international public law. The status and date of entry into force of this Regulation should be checked in the latest version of the UN/ECE status document TRANS/WP.29/343, available at:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Regulation No 94 of the Economic Commission for Europe of the United Nations (UN/ECE) — Uniform provisions concerning the approval of vehicles with regard to the protection of the occupants in the event of a frontal collision
Incorporating all valid text up to:
|
|
Supplement 4 to the 01 series of amendments — Date of entry into force: 26 July 2012 |
|
|
Supplement 2 to the 02 series of amendments — Date of entry into force: 26 July 2012 |
CONTENTS
REGULATION
|
1. |
Scope |
|
2. |
Definitions |
|
3. |
Application for approval |
|
4. |
Approval |
|
5. |
Specifications |
|
6. |
Instructions for users of vehicles equipped with airbags. |
|
7. |
Modification and extension of approval of the vehicle type |
|
8. |
Conformity of production |
|
9. |
Penalties for non-conformity of production |
|
10. |
Production definitely discontinued |
|
11. |
Transitional provisions |
|
12. |
Names and addresses of technical services responsible for conducting approval tests, and of administrative departments |
ANNEXES
|
Annex 1 — |
Communication concerning the approval or extension or refusal or withdrawal of approval or production definitely discontinued of a vehicle type with regard to the protection of the occupants in the event of a frontal collision, pursuant to Regulation No 94 |
|
Annex 2 — |
Arrangements of the approval mark |
|
Annex 3 — |
Test procedure |
|
Annex 4 — |
Determination of performance criteria |
|
Annex 5 — |
Arrangement and installation of dummies and adjustment of restraint systems |
|
Annex 6 — |
Procedure for determining the ‘H’ point and the actual torso angle for seating positions in motor vehicles |
|
Appendix 1 — |
Description of the three-dimensional ‘H’ point machine |
|
Appendix 2 — |
Three-dimensional reference system |
|
Appendix 3 — |
Reference data concerning seating positions |
|
Annex 7 — |
Test procedure with trolley |
|
Appendix — |
Equivalence curve — Tolerance band for curve ΔV = f(t) |
|
Annex 8 — |
Technique of measurement in measurement tests: instrumentation |
|
Annex 9 — |
Definition of the deformable barrier |
|
Annex 10 — |
Certification procedure for the dummy lower leg and foot |
|
Annex 11 — |
Test Procedures for the protection of the occupants of vehicles operating on electrical power from high voltage and electrolyte spillage |
|
Appendix — |
Jointed test finger (IPXXB) |
1. SCOPE
1.1. This Regulation applies to vehicles of category M1 (1) of a total permissible mass not exceeding 2,5 tonnes; other vehicles may be approved at the request of the manufacturer.
1.2. It shall apply at the request of the manufacturer for the approval of a vehicle type with regard to the protection of the occupants of the front outboard seats in the event of a frontal collision.
2. DEFINITIONS
For the purposes of this Regulation:
2.1. ‘Protective system’ means interior fittings and devices intended to restrain the occupants and contribute towards ensuring compliance with the requirements set out in paragraph 5 below;
2.2. ‘Type of protective system’ means a category of protective devices which do not differ in such essential respects as:
|
|
Their technology; |
|
|
Their geometry; |
|
|
Their constituent materials; |
2.3. ‘Vehicle width’ means the distance between two planes parallel to the longitudinal median plane (of the vehicle) and touching the vehicle on either side of the said plane but excluding the rear-view mirrors, side marker lamps, tyre pressure indicators, direction indicator lamps, position lamps, flexible mud-guards and the deflected part of the tyre side-walls immediately above the point of contact with the ground;
2.4. ‘Overlap’ means the percentage of the vehicle width directly in line with the barrier face;
2.5. ‘Deformable barrier face’ means a crushable section mounted on the front of a rigid block;
2.6. ‘Vehicle type’ means a category of power-driven vehicles which do not differ in such essential respects as:
|
2.6.1. |
The length and width of the vehicle, in so far as they have a negative effect on the results of the impact test prescribed in this Regulation; |
|
2.6.2. |
The structure, dimensions, lines and materials of the part of the vehicle forward of the transverse plane through the ‘R’ point of the driver’s seat, in so far as they have a negative effect on the results of the impact test prescribed in this Regulation; |
|
2.6.3. |
The lines and inside dimensions of the passenger compartment and the type of protective system, in so far as they have a negative effect on the results of the impact test prescribed in this Regulation; |
|
2.6.4. |
The siting (front, rear or centre) and the orientation (transversal or longitudinal) of the engine, in so far as they have a negative effect on the result of the impact test procedure as prescribed in this Regulation; |
|
2.6.5. |
The unladen mass, in so far as there is a negative effect on the result of the impact test prescribed in this Regulation; |
|
2.6.6. |
The optional arrangements or fittings provided by the manufacturer, in so far as they have a negative effect on the result of the impact test prescribed in this Regulation; |
|
2.6.7. |
The locations of the RESS, in so far as they have a negative effect on the result of the impact test prescribed in this Regulation. |
2.7. Passenger compartment
2.7.1. ‘Passenger compartment with regard to occupant protection’ means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing and front bulkhead and the plane of the rear compartment bulkhead or the plane of the rear-seat back support;
2.7.2. ‘Passenger compartment for electric safety assessment’ means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing, front bulkhead and rear bulkhead, or rear gate, as well as by the electrical protection barriers and enclosures provided for protecting the power train from direct contact with high voltage live parts.
2.8. ‘ “R” point’ means a reference point defined for each seat by the manufacturer in relation to the vehicle’s structure, as indicated in Annex 6;
2.9. ‘ “H” point’ means a reference point determined for each seat by the testing service responsible for approval, in accordance with the procedure described in Annex 6;
2.10. ‘Unladen kerb mass’ means the mass of the vehicle in running order, unoccupied and unladen but complete with fuel, coolant, lubricant, tools and a spare wheel (if these are provided as standard equipment by the vehicle manufacturer).
2.11. ‘Airbag’ means a device installed to supplement safety belts and restraint systems in power-driven vehicles, i.e. systems which, in the event of a severe impact affecting the vehicle, automatically deploy a flexible structure intended to limit, by compression of the gas contained within it, the gravity of the contacts of one or more parts of the body of an occupant of the vehicle with the interior of the passenger compartment.
2.12. ‘Passenger airbag’ means an airbag assembly intended to protect occupant(s) in seats other than the driver’s in the event of a frontal collision.
2.13. ‘Child restraint’ means an arrangement of components which may comprise a combination of straps or flexible components with a securing buckle, adjusting devices, attachments, and in some cases a supplementary chair and/or an impact shield, capable of being anchored to a power driven vehicle. It is so designed as to diminish the risk of injury to the wearer, in the event of a collision or of abrupt deceleration of the vehicle by limiting the mobility of the wearer’s body.
2.14. ‘Rearward-facing’ means facing in the direction opposite to the normal direction of travel of the vehicle.
2.15. ‘High Voltage’ means the classification of an electric component or circuit, if its working voltage is > 60 V and ≤ 1 500 V direct current (DC) or > 30 V and ≤ 1 000 V alternating current (AC) root – mean – square (rms),
2.16. ‘Rechargeable energy storage system (RESS)’ means the rechargeable energy storage system which provides electrical energy for propulsion,
2.17. ‘Electrical Protection Barrier’ means the part providing protection against any direct contact to the high voltage live parts,
2.18. ‘Electrical power train’ means the electrical circuit which includes the traction motor(s), and may also include the RESS, the electrical energy conversion system, the electronic converters, the associated wiring harness and connectors, and the coupling system for charging the RESS,
2.19. ‘Live parts’ means conductive part(s) intended to be electrically energised in normal use,
2.20. ‘Exposed conductive part’ means the conductive part which can be touched under the provisions of the protection IPXXB and which becomes electrically energised under isolation failure conditions. This includes parts under a cover that can be removed without using tools,
2.21. ‘Direct contact’ means the contact of persons with high voltage live parts,
2.22. ‘Indirect contact’ means the contact of persons with exposed conductive parts,
2.23. ‘Protection IPXXB’ means protection from contact with high voltage live parts provided by either an electrical protection barrier or an enclosure and tested using a jointed test finger (IPXXB) as described in paragraph 4 of Annex 11,
2.24. ‘Working voltage’ means the highest value of an electrical circuit voltage root-mean-square (rms), specified by the manufacturer, which may occur between any conductive parts in open circuit conditions or under normal operating conditions. If the electrical circuit is divided by galvanic isolation, the working voltage is defined for each divided circuit, respectively.
2.25. ‘Coupling system for charging the rechargeable energy storage system (RESS)’ means the electrical circuit used for charging the RESS from an external electrical power supply including the vehicle inlet,
2.26. ‘Electrical chassis’ means a set made of conductive parts electrically linked together, whose electrical potential is taken as reference,
2.27. ‘Electrical circuit’ means an assembly of connected high voltage live parts which is designed to be electrically energised in normal operation,
2.28. ‘Electrical energy conversion system’ means a system (e.g. fuel cell) that generates and provides electrical energy for electrical propulsion,
2.29. ‘Electronic converter’ means a device capable of controlling and/or converting electrical power for electrical propulsion,
2.30. ‘Enclosure’ means the part enclosing the internal units and providing protection against any direct contact,
2.31. ‘High Voltage Bus’ means the electrical circuit, including the coupling system for charging the RESS that operates on a high voltage,
2.32. ‘Solid insulator’ means the insulating coating of wiring harnesses, provided in order to cover and prevent the high voltage live parts from any direct contact. This includes covers for insulating the high voltage live parts of connectors; and varnish or paint for the purpose of insulation,
2.33. ‘Automatic disconnect’ means a device that when triggered, galvanically separates the electrical energy sources from the rest of the high voltage circuit of the electrical power train,
2.34. ‘Open type traction battery’ means a type of battery requiring liquid and generating hydrogen gas released to the atmosphere.
3. APPLICATION FOR APPROVAL
3.1. The application for approval of a vehicle type with regard to the protection of the occupants of the front seats in the event of a frontal collision shall be submitted by the vehicle manufacturer or by his duly accredited representative.
3.2. It shall be accompanied by the undermentioned documents in triplicate and following particulars:
|
3.2.1. |
A detailed description of the vehicle type with respect to its structure, dimensions, lines and constituent materials; |
|
3.2.2. |
Photographs, and/or diagrams and drawings of the vehicle showing the vehicle type in front, side and rear elevation and design details of the forward part of the structure; |
|
3.2.3. |
Particulars of the vehicle’s unladen kerb mass; |
|
3.2.4. |
The lines and inside dimensions of the passenger compartment; |
|
3.2.5. |
A description of the interior fittings and protective systems installed in the vehicle. |
|
3.2.6. |
A general description of the electrical power source type, location and the electrical power train (e.g. hybrid, electric). |
3.3. The applicant for approval shall be entitled to present any data and results of tests carried out which make it possible to establish that compliance with the requirements can be achieved with a sufficient degree of confidence.
3.4. A vehicle which is representative of the type to be approved shall be submitted to the technical service responsible for conducting the approval tests.
3.4.1. A vehicle not comprising all the components proper to the type may be accepted for test provided that it can be shown that the absence of the components omitted has no detrimental effect on the results of the test in so far as the requirements of this Regulation are concerned.
3.4.2. It shall be the responsibility of the applicant for approval to show that the application of paragraph 3.4.1 is compatible with compliance with the requirements of this Regulation.
4. APPROVAL
4.1. If the vehicle type submitted for approval pursuant to this Regulation meets the requirements of this Regulation, approval of that vehicle type shall be granted.
4.1.1. The technical service appointed in accordance with paragraph 10 below shall check whether the required conditions have been satisfied.
4.1.2. In case of doubt, account shall be taken, when verifying the conformity of the vehicle to the requirements of this Regulation, of any data or test results provided by the manufacturer which can be taken into consideration in validating the approval test carried out by the technical service.
4.2. An approval number shall be assigned to each type approved. Its first two digits (at present 01 corresponding to the 01 series of amendments) shall indicate the series of amendments incorporating the most recent major technical amendments made to the Regulation at the time of issue of the approval. The same Contracting Party may not assign the same approval number to another vehicle type.
4.3. Notice of approval or of refusal of approval of a vehicle type pursuant to this Regulation shall be communicated by the Parties to the Agreement which apply this Regulation by means of a form conforming to the model in Annex 1 to this Regulation and photographs and/or diagrams and drawings supplied by the applicant for approval, in a format not exceeding A4 (210 x 297 mm) or folded to that format and on an appropriate scale.
4.4. There shall be affixed, conspicuously and in a readily accessible place specified on the approval form, to every vehicle conforming to a vehicle type approved under this Regulation, an international approval mark consisting of:
|
4.4.1. |
A circle surrounding the letter ‘E’ followed by the distinguishing number of the country which has granted approval (2); |
|
4.4.2. |
The number of this Regulation, followed by the letter ‘R’, a dash and the approval number, to the right of the circle prescribed in paragraph 4.4.1. |
4.5. If the vehicle conforms to a vehicle type approved, under one or more other Regulations annexed to the Agreement, in the country which has granted approval under this Regulation, the symbol prescribed in paragraph 4.4.1 need not be repeated; in such a case the Regulation and approval numbers and the additional symbols of all the Regulations under which approval has been granted in the country which has granted approval under this Regulation shall be placed in vertical columns to the right of the symbol prescribed in paragraph 4.4.1.
4.6. The approval mark shall be clearly legible and be indelible.
4.7. The approval mark shall be placed close to or on the vehicle data plate affixed by the manufacturer.
4.8. Annex 2 to this Regulation gives examples of approval marks.
5. SPECIFICATIONS
5.1. General specifications applicable to all tests
5.1.1. The ‘H’ point for each seat shall be determined in accordance with the procedure described in Annex 6.
5.1.2. When the protective system for the front seating positions includes belts, the belt components shall meet the requirements of Regulation No 16.
5.1.3. Seating positions where a dummy is installed and the protective system includes belts, shall be provided with anchorage points conforming to Regulation No 14.
5.2. Specifications
The test of the vehicle carried out in accordance with the method described in Annex 3 shall be considered satisfactory if all the conditions set out in paragraphs 5.2.1 to 5.2.6 below are all satisfied at the same time.
Additionally, vehicles equipped with electric power train shall meet the requirements of paragraph 5.2.8. This can be met by a separate impact test at the request of the manufacturer and after validation by the Technical Service, provided that the electrical components do not influence the occupant protection performance of the vehicle type as defined in paragraphs 5.2.1 to 5.2.5 of this Regulation. In case of this condition the requirements of paragraph 5.2.8 shall be checked in accordance with the methods set out in Annex 3 to this Regulation, except paragraphs 2, 5 and 6 of Annex 3. But a dummy corresponding to the specifications for Hybrid III (see footnote 1 of Annex 3) fitted with a 45° angle and meeting the specifications for its adjustment shall be installed in each of the front outboard seats.
5.2.1. The performance criteria recorded, in accordance with Annex 8, on the dummies in the front outboard seats shall meet the following conditions:
|
5.2.1.1. |
The head performance criterion (HPC) shall not exceed 1 000 and the resultant head acceleration shall not exceed 80 g for more than 3 ms. The latter shall be calculated cumulatively, excluding rebound movement of the head; |
|
5.2.1.2. |
The neck injury criteria (NIC) shall not exceed the values shown in Figures 1 and 2; Figure 1 Neck tension criterion
Figure 2 Neck shear criterion
|
|
5.2.1.3. |
The neck bending moment about the y axis shall not exceed 57 Nm in extension (3); |
|
5.2.1.4. |
The thorax compression criterion (ThCC) shall not exceed 50 mm; |
|
5.2.1.5. |
The viscous criterion (V * C) for the thorax shall not exceed 1,0 m/s; |
|
5.2.1.6. |
The femur force criterion (FFC) shall not exceed the force-time performance criterion shown in Figure 3; Figure 3 Femur force criterion
|
|
5.2.1.7. |
The tibia compression force criterion (TCFC) shall not exceed 8 kN; |
|
5.2.1.8. |
The tibia index (TI), measured at the top and bottom of each tibia, shall not exceed 1,3 at either location; |
|
5.2.1.9. |
The movement of the sliding knee joints shall not exceed 15 mm. |
5.2.2. Residual steering wheel displacement, measured at the centre of the steering wheel hub, shall not exceed 80 mm in the upwards vertical direction and 100 mm in the rearward horizontal direction.
5.2.3. During the test no door shall open;
5.2.4. During the test no locking of the locking systems of the front doors shall occur;
5.2.5. After the impact, it shall be possible, without the use of tools, except for those necessary to support the weight of the dummy:
|
5.2.5.1. |
To open at least one door, if there is one, per row of seats and, where there is no such door, to move the seats or tilt their backrests as necessary to allow the evacuation of all the occupants; this is, however, only applicable to vehicles having a roof of rigid construction; |
|
5.2.5.2. |
To release the dummies from their restraint system which, if locked, shall be capable of being released by a maximum force of 60 N on the centre of the release control; |
|
5.2.5.3. |
To remove the dummies from the vehicle without adjustment of the seats. |
5.2.6. In the case of a vehicle propelled by liquid fuel, no more than slight leakage of liquid from the fuel feed installation shall occur on collision;
5.2.7. If there is continuous leakage of liquid from the fuel-feed installation after the collision, the rate of leakage shall not exceed 30 g/min; if the liquid from the fuel-feed system mixes with liquids from the other systems and the various liquids cannot easily be separated and identified, all the liquids collected shall be taken into account in evaluating the continuous leakage.
5.2.8. Following the test conducted in accordance with the procedure defined in Annex 3 to this Regulation, the electrical power train operating on high voltage, and the high voltage components and systems, which are galvanically connected to the high voltage bus of the electric power train, shall meet the following requirements:
5.2.8.1. Protection against electrical shock
After the impact at least one of the four criteria specified in paragraph 5.2.8.1.1 through paragraph 5.2.8.1.4.2 shall be met.
If the vehicle has an automatic disconnect function, or device(s) that galvanically divide the electric power train circuit during driving condition, at least one of the following criteria shall apply to the disconnected circuit or to each divided circuit individually after the disconnect function is activated.
However criteria defined in paragraph 5.2.8.1.4 shall not apply if more than a single potential of a part of the high voltage bus is not protected under the conditions of protection IPXXB.
In the case that the test is performed under the condition that part(s) of the high voltage system are not energised, the protection against electrical shock shall be proved by either paragraph 5.2.8.1.3 or paragraph 5.2.8.1.4 for the relevant part(s).
5.2.8.1.1. Absence of high voltage
The voltages Vb, V1 and V2 of the high voltage buses shall be equal or less than 30 VAC or 60 VDC as specified in paragraph 2 of Annex 11.
5.2.8.1.2. Low electrical energy
The total energy (TE) on the high voltage buses shall be less than 2,0 joules when measured according to the test procedure as specified in paragraph 3 of Annex 11 with the formula (a). Alternatively the total energy (TE) may be calculated by the measured voltage Vb of the high voltage bus and the capacitance of the X-capacitors (Cx) specified by the manufacturer according to formula (b) of paragraph 3 of Annex 11.
The energy stored in the Y-capacitors (TEy1, TEy2) shall also be less than 2,0 joules. This shall be calculated by measuring the voltages V1 and V2 of the high voltage buses and the electrical chassis, and the capacitance of the Y-capacitors specified by the manufacturer according to formula (c) of paragraph 3 of Annex 11.
5.2.8.1.3. Physical protection
For protection against direct contact with high voltage live parts, the protection IPXXB shall be provided.
In addition, for protection against electrical shock which could arise from indirect contact, the resistance between all exposed conductive parts and the electrical chassis shall be lower than 0,1 ohm when there is current flow of at least 0,2 ampere.
This requirement is satisfied if the galvanic connection has been made by welding.
5.2.8.1.4. Isolation resistance
The criteria specified in the paragraphs 5.2.8.1.4.1 and 5.2.8.1.4.2 below shall be met.
The measurement shall be conducted in accordance with paragraph 5 of Annex 11.
5.2.8.1.4.1. Electrical power train consisting of separate DC- or AC-buses
If the AC high voltage buses and the DC high voltage buses are galvanically isolated from each other, isolation resistance between the high voltage bus and the electrical chassis (Ri, as defined in paragraph 5 of Annex 11) shall have a minimum value of 100 Ω/V of the working voltage for DC buses, and a minimum value of 500 Ω/V of the working voltage for AC buses.
5.2.8.1.4.2. Electrical power train consisting of combined DC- and AC-buses
If the AC high voltage buses and the DC high voltage buses are galvanically connected isolation resistance between the high voltage bus and the electrical chassis (Ri, as defined in paragraph 5 of Annex 11) shall have a minimum value of 500 Ω/V of the working voltage.
However, if the protection IPXXB is satisfied for all AC high voltage buses or the AC voltage is equal or less than 30 V after the vehicle impact, the isolation resistance between the high voltage bus and the electrical chassis (Ri, as defined in paragraph 5 of Annex 11) shall have a minimum value of 100 Ω/V of the working voltage.
5.2.8.2. Electrolyte spillage
In the period from the impact until 30 minutes after no electrolyte from the RESS shall spill into the passenger compartment and no more than 7 per cent of electrolyte shall spill from the RESS except open type traction batteries outside the passenger compartment. For open type traction batteries no more than 7 per cent with a maximum of 5,0 litres shall spill outside the passenger compartment.
The manufacturer shall demonstrate compliance in accordance with paragraph 6 of Annex 11.
5.2.8.3. RESS retention
RESS located inside the passenger compartment shall remain in the location in which they are installed and RESS components shall remain inside RESS boundaries.
No part of any RESS that is located outside the passenger compartment for electric safety assessment shall enter the passenger compartment during or after the impact test.
The manufacturer shall demonstrate compliance in accordance with paragraph 7 of Annex 11.
6. INSTRUCTIONS FOR USERS OF VEHICLES EQUIPPED WITH AIRBAGS
6.1. The vehicle shall carry information to the effect that it is equipped with airbags for seats.
6.1.1. For a vehicle fitted with an airbag assembly intended to protect the driver, this information shall consist of the inscription ‘AIRBAG’ located in the interior of the circumference of the steering wheel; this inscription shall be durably affixed and easily visible.
6.1.2. For a vehicle fitted with a passenger airbag intended to protect occupants other than the driver, this information shall consist of the warning label described in paragraph 6.2 below.
6.2. A vehicle fitted with one or more passenger frontal protection airbags shall carry information about the extreme hazard associated with the use of rearward-facing child restraints on seats equipped with airbag assemblies.
6.2.1. As a minimum, this information shall consist of a label containing clear warning pictograms as indicated below.
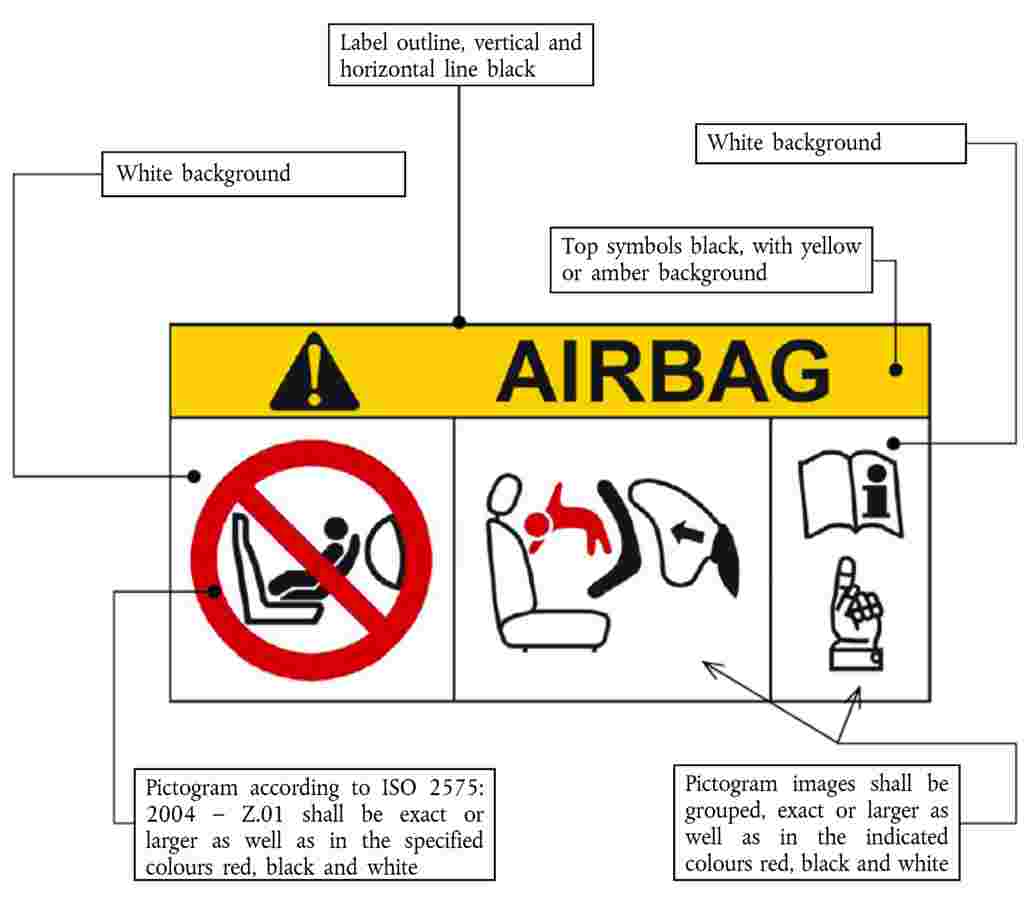
The overall dimensions shall be at least 120 x 60 mm or the equivalent area.
The label shown above may be adapted in such a way that the layout differs from the example above; however, the content shall meet the above prescriptions.
6.2.2. In the case of a frontal protection airbag on the front passenger seat, the warning shall be durably affixed to each face of the passenger front sun visor in such a position that at least one warning on the sun visor is visible at all times, irrespective of the position of the sun visor. Alternatively, one warning shall be located on the visible face of the stowed sun visor and a second warning shall be located on the roof behind the visor, so, at least one warning is visible all times. It shall not be possible to easily remove the warning label from the visor and the roof without any obvious and clearly visible damage remaining to the visor or the roof in the interior of the vehicle.
In the case of a frontal protection airbag for other seats in the vehicle, the warning must be directly ahead of the relevant seat, and clearly visible at all times to someone installing a rear-facing child restraint on that seat. The requirements of paragraphs 6.2.1 and 6.2.2 do not apply to those seating positions equipped with a device which automatically deactivates the frontal protection airbag assembly when any rearward facing child restraint is installed.
6.2.3. Detailed information, making reference to the warning, shall be contained in the owner’s manual of the vehicle; as a minimum, the following text in all official languages of the country or countries where the vehicle could reasonably be expected to be registered (e.g. within the territory of the European Union, in Japan, in Russian Federation or in New Zealand, etc.), shall at least include:
‘NEVER use a rearward facing child restraint on a seat protected by an ACTIVE AIRBAG in front of it, DEATH or SERIOUS INJURY to the CHILD can occur’
The text shall be accompanied by an illustration of the warning label as found in the vehicle. The information shall be easily found in the owner’s manual (e.g. specific reference to the information printed on the first page, identifying page tab or separate booklet, etc.).
The requirements of paragraph 6.2.3 do not apply to vehicles of which all passenger seating positions are equipped with a device which automatically deactivates the frontal protection airbag assembly when any rearward facing child restraint is installed.
7. MODIFICATION AND EXTENSION OF APPROVAL OF THE VEHICLE TYPE
7.1. Any modification affecting the structure, the number of seats, the interior trim or fittings, or the position of the vehicle controls or of mechanical parts which might affect the energy-absorption capability of the front of the vehicle shall be brought to the notice of the administrative department granting approval. The department may then either:
7.1.1. Consider that the modifications made are unlikely to have an appreciable adverse effect and that in any case the vehicle still complies with the requirements; or
7.1.2. Require the technical service responsible for conducting the tests to carry out a further test, among those described below, according to the nature of the modifications;
7.1.2.1. Any modification of the vehicle affecting the general form of the structure of the vehicle and/or any increase in mass greater than 8 per cent which in the judgement of the authority would have a marked influence on the results of the tests shall require a repetition of the test as described in Annex 3;
7.1.2.2. If the modifications concern only the interior fittings, if the mass does not differ by more than 8 percent and if the number of front seats initially provided in the vehicle remains the same, the following shall be carried out:
|
7.1.2.2.1. |
A simplified test as provided for in Annex 7 and/or, |
|
7.1.2.2.2. |
A partial test as defined by the technical service in relation to the modifications made. |
7.2. Confirmation or refusal of approval, specifying the alterations, shall be communicated by the procedure specified in paragraph 4.3 above to the Parties to the Agreement which apply this Regulation.
7.3. The competent authority issuing the extension of approval shall assign a series number for such an extension and inform thereof the other Parties to the 1958 Agreement applying this Regulation by means of a communication form conforming to the model in Annex 1 to this Regulation.
8. CONFORMITY OF PRODUCTION
The conformity of production procedures shall comply with those set out in the Agreement, Appendix 2 (E/ECE/324-E/ECE/TRANS/505/Rev.2) with the following requirements:
|
8.1. |
Every vehicle approved under this Regulation shall conform to the vehicle type approved, as regards features contributing to the protection of the occupants of the vehicle in the event of a frontal collision. |
|
8.2. |
The holder of the approval shall ensure that for each type of vehicle at least the tests concerning the taking of measurements are carried out. |
|
8.3. |
The authority which has granted type approval may at any time verify the conformity control methods applied in each production facility. The normal frequency of these verifications shall be once every two years. |
9. PENALTIES FOR NON-CONFORMITY OF PRODUCTION
9.1. The approval granted in respect of a vehicle type pursuant to this Regulation may be withdrawn if the requirement laid down in paragraph 8.1 above is not complied with or if the vehicle or vehicles selected have failed to pass the checks prescribed in paragraph 8.2 above.
9.2. If a Contracting Party to the Agreement applying this Regulation withdraws an approval it has previously granted, it shall forthwith so notify the other Contracting Parties applying this Regulation, by means of a communication form conforming to the model in Annex 1 to this Regulation.
10. PRODUCTION DEFINITELY DISCONTINUED
If the holder of the approval completely ceases to manufacture the type of vehicle approved in accordance with the Regulation, he shall so inform the authority which granted the approval. Upon receiving the relevant communication that authority shall inform thereof the other Parties to the 1958 Agreement applying this Regulation by means of a communication form conforming to the model in Annex 1 to this Regulation.
11. TRANSITIONAL PROVISIONS
11.1. As from the official date of entry into force of Supplement 1 to the 01 series of amendments, no Contracting Party applying this Regulation shall refuse to grant ECE approval under this Regulation as amended by Supplement 1 to the 01 series of amendments.
11.2. As from 1 October 2002, Contracting Parties applying this Regulation shall grant ECE approvals only to those types of vehicles which comply with the requirements of this Regulation as amended by Supplement 1 to the 01 series of amendments.
11.3. As long as there are no requirements in this Regulation with regard to the protection of the occupants by means of a full frontal impact test, Contracting Parties may continue to apply the requirements already in force for that purpose at the time of acceding to this Regulation.
11.4. As from the official date of entry into force of the 02 series of amendments, no Contracting Party applying this Regulation shall refuse to grant ECE approval under this Regulation as amended by the 02 series of amendments.
11.5. As from 24 months after the official date of entry into force of the 02 series of amendments, Contracting Parties applying this Regulation shall grant ECE approvals only to those types of vehicle which comply with the requirements of this Regulation as amended by the 02 series of amendments.
However, in the case of vehicles having an electrical power train operating on high voltage, an additional period of 12 months is granted provided that the manufacturer demonstrates, to the satisfaction of the Technical Service, that the vehicle provides equivalent levels of safety to those required by this Regulation as amended by the 02 series of amendments.
11.6. Contracting Parties applying this Regulation shall not refuse to grant extensions of approvals issued to the preceding series of amendments to this Regulation, when this extension does not entail any change to the propulsion system of the vehicle.
However, as from 48 months after the official date of entry into force of the 02 series of amendments, extensions to approvals issued to the previous series of amendments shall not be granted in respect of vehicles having an electrical power train operating on high voltage.
11.7. Where at the time of entry into force of the 02 series of amendments to this Regulation, national requirements exist to address the safety provisions of vehicles having an electrical power train operating on high voltage, those Contracting Parties applying this Regulation may refuse national approval of such vehicles not meeting the national requirements, unless these vehicles are approved to the 02 series of amendments to this Regulation.
11.8. As from 48 months after the entry into force of the 02 series of amendments to this Regulation, Contracting Parties applying this Regulation may refuse national or regional type approval and may refuse first national or regional registration (first entry into service) of a vehicle having an electrical power train operating on high voltage which does not meet the requirements of the 02 series of amendments to this Regulation.
11.9. Approvals of the vehicles to the 01 series of amendments to this Regulation which are not affected by the 02 series of amendments shall remain valid and Contracting Parties applying the Regulation shall continue to accept them.
12. NAMES AND ADDRESSES OF TECHNICAL SERVICES RESPONSIBLE FOR CONDUCTING APPROVAL TESTS, AND OF ADMINISTRATIVE DEPARTMENTS
The Contracting Parties to the Agreement applying this Regulation shall communicate to the United Nations secretariat the names and addresses of the technical services responsible for conducting approval tests, of manufacturers authorised to carry out tests and of the administrative departments which grant approval and to which forms certifying approval or refusal or withdrawal of approval, issued in other countries, are to be sent.
(1) As defined in Annex 7 to the Consolidated Resolution on the Construction of Vehicles (R.E.3), (TRANS/WP.29/78/Rev.1/Amend.2 as last amended by its Amendment 4).
(2) The distinguishing numbers of the Contracting Parties to the 1958 Agreement are reproduced in Annex 3 to the Consolidated Resolution on the Construction of Vehicles (R.E.3), document ECE/TRANS/WP.29/78/Rev.2/Amend.1.
(3) Until 1 October 1998, the values obtained for the neck shall not be pass/fail criteria for the purposes of granting approval. The results obtained shall be recorded in the test report and be collected by the approval authority. After this date, the values specified in this paragraph shall apply as pass/fail criteria unless or until alternative values are adopted.
ANNEX 1
(maximum format: A4 (210 × 297 mm))
COMMUNICATION


ANNEX 2
ARRANGEMENTS OF THE APPROVAL MARK
Model A
(See paragraph 4.4 of this Regulation)

The above approval mark affixed to a vehicle shows that the vehicle type concerned has, with regard to the protection of the occupants in the event of a frontal collision, been approved in the Netherlands (E4) pursuant to Regulation No 94 under approval number 021424. The approval number indicates that the approval was granted in accordance with the requirements of Regulation No 94 as amended by the 02 series of amendments.
Model B
(See paragraph 4.5 of this Regulation)

The above approval mark affixed to a vehicle shows that the vehicle type concerned has been approved in the Netherlands (E4) pursuant to Regulations Nos 94 and 11 (1). The first two digits of the approval numbers indicate that, at the dates when the respective approvals were granted, Regulation No 94 incorporated the 02 series of amendments and Regulation No 11 incorporated the 02 series of amendments.
(1) The latter number is given only as an example.
ANNEX 3
TEST PROCEDURE
1. INSTALLATION AND PREPARATION OF THE VEHICLE
1.1. Testing ground
The test area shall be large enough to accommodate the run-up track, barrier and technical installations necessary for the test. The last part of the track, for at least 5 m before the barrier, shall be horizontal, flat and smooth.
1.2. Barrier
The front face of the barrier consists of a deformable structure as defined in Annex 9 of this Regulation. The front face of the deformable structure is perpendicular within ± 1° to the direction of travel of the test vehicle. The barrier is secured to a mass of not less than 7 x 104 kg, the front face of which is vertical within ± 1°. The mass is anchored in the ground or placed on the ground with, if necessary, additional arresting devices to restrict its movement.
1.3. Orientation of the barrier
The orientation of the barrier is such that the first contact of the vehicle with the barrier is on the steering-column side. Where there is a choice between carrying out the test with a right-hand or left-hand drive vehicle, the test shall be carried out with the less favourable hand of drive as determined by the technical service responsible for the tests.
1.3.1. Alignment of the vehicle to the barrier
The vehicle shall overlap the barrier face by 40 per cent ± 20 mm.
1.4. State of vehicle
1.4.1. General specification
The test vehicle shall be representative of the series production, shall include all the equipment normally fitted and shall be in normal running order. Some components may be replaced by equivalent masses where this substitution clearly has no noticeable effect on the results measured under paragraph 6.
It shall be allowed by agreement between manufacturer and Technical Service to modify the fuel system so that an appropriate amount of fuel can be used to run the engine or the electrical energy conversion system.
1.4.2. Mass of vehicle
1.4.2.1. For the test, the mass of the vehicle submitted shall be the unladen kerb mass;
1.4.2.2. The fuel tank shall be filled with water to mass equal to 90 per cent of the mass of a full load of fuel as specified by the manufacturer with a tolerance of ± 1 per cent;
This requirement does not apply to Hydrogen fuel tanks.
1.4.2.3. All the other systems (brake, cooling, etc.) may be empty in this case, the mass of the liquids shall be carefully compensated;
1.4.2.4. If the mass of the measuring apparatus on board the vehicle exceeds the 25 kg allowed, it may be compensated by reductions which have no noticeable effect on the results measured under paragraph 6 below;
1.4.2.5. The mass of the measuring apparatus shall not change each axle reference load by more than 5 %, each variation not exceeding 20 kg.
1.4.2.6. The mass of the vehicle resulting from the provisions of paragraph 1.4.2.1 above shall be indicated in the report.
1.4.3. Passenger compartment adjustments
1.4.3.1. Position of steering wheel
The steering wheel, if adjustable, shall be placed in the normal position indicated by the manufacturer or, failing that, midway between the limits of its range(s) of adjustment. At the end of propelled travel, the steering wheel shall be left free, with its spokes in the position which according to the manufacturer corresponds to straight-ahead travel of the vehicle.
1.4.3.2. Glazing
The movable glazing of the vehicle shall be in the closed position. For test measurement purposes and in agreement with the manufacturer, it may be lowered, provided that the position of the operating handle corresponds to the closed position.
1.4.3.3. Gear-change lever
The gear-change lever shall be in the neutral position.
1.4.3.4. Pedals
The pedals shall be in their normal position of rest. If adjustable, they shall be set in their mid position unless another position is specified by the manufacturer.
1.4.3.5. Doors
The doors shall be closed but not locked.
1.4.3.6. Opening roof
If an opening or removable roof is fitted, it shall be in place and in the closed position. For test measurement purposes and in agreement with the manufacturer, it may be open.
1.4.3.7. Sun-visor
The sun-visors shall be in the stowed position.
1.4.3.8. Rear-view mirror
The interior rear-view mirror shall be in the normal position of use.
1.4.3.9. Arm-rests
Arm-rests at the front and rear, if movable, shall be in the lowered position, unless this is prevented by the position of the dummies in the vehicles.
1.4.3.10. Head restraints
Head restraints adjustable for height shall be in their uppermost position.
1.4.3.11. Seats
1.4.3.11.1. Position of front seats
Seats adjustable longitudinally shall be placed so that their ‘H’ point, determined in accordance with the procedure set out in Annex 6 is in the middle position of travel or in the nearest locking position thereto, and at the height position defined by the manufacturer (if independently adjustable for height). In the case of a bench seat, the reference shall be to the ‘H’ point of the driver’s place.
1.4.3.11.2. Position of the front seat-backs
If adjustable, the seat-backs shall be adjusted so that the resulting inclination of the torso of the dummy is as close as possible to that recommended by the manufacturer for normal use or, in the absence of any particular recommendation by the manufacturer, to 25° towards the rear from the vertical.
1.4.3.11.3. Rear seats
If adjustable, the rear seats or rear bench seats shall be placed in the rearmost position.
1.4.4. Electrical power train adjustment
1.4.4.1. The RESS shall be at any state of charge, which allows the normal operation of the power train as recommended by the manufacturer.
1.4.4.2. The electrical power train shall be energised with or without the operation of the original electrical energy sources (e.g. engine-generator, RESS or electric energy conversion system), however:
1.4.4.2.1. By the agreement between Technical Service and manufacturer it shall be permissible to perform the test with all or parts of the electrical power train not being energised in so far as there is no negative influence on the test result. For parts of the electrical power train not energised, the protection against electrical shock shall be proved by either physical protection or isolation resistance and appropriate additional evidence.
1.4.4.2.2. In the case where an automatic disconnect is provided, at the request of the manufacturer it shall be permissible to perform the test with the automatic disconnect being triggered. In this case it shall be demonstrated that the automatic disconnect would have operated during the impact test. This includes the automatic activation signal as well as the galvanic separation considering the conditions as seen during the impact.
2. DUMMIES
2.1. Front seats
2.1.1. A dummy corresponding to the specifications for HYBRID III (1) fitted with a 45° ankle and meeting the specifications for its adjustment shall be installed in each of the front outboard seats in accordance with the conditions set out in Annex 5. The ankle of the dummy shall be certified in accordance with the procedures in Annex 10.
2.1.2. The car will be tested with restraint systems, as provided by the manufacturer.
3. PROPULSION AND COURSE OF VEHICLE
3.1. The vehicle shall be propelled either by its own engine or by any other propelling device.
3.2. At the moment of impact the vehicle shall no longer be subject to the action of any additional steering or propelling device.
3.3. The course of the vehicle shall be such that it satisfies the requirements of paragraphs 1.2 and 1.3.1.
4. TEST SPEED
Vehicle speed at the moment of impact shall be 56 – 0, +1 km/h. However, if the test was performed at a higher impact speed and the vehicle met the requirements, the test shall be considered satisfactory.
5. MEASUREMENTS TO BE MADE ON DUMMY IN FRONT SEATS
5.1. All the measurements necessary for the verification of the performance criteria shall be made with measurement systems corresponding to the specifications of Annex 8.
5.2. The different parameters shall be recorded through independent data channels of the following CFC (Channel Frequency Class):
5.2.1. Measurements in the head of the dummy
The acceleration (a) referring to the centre of gravity is calculated from the triaxial components of the acceleration measured with a CFC of 1 000.
5.2.2. Measurements in the neck of the dummy
5.2.2.1. The axial tensile force and the fore/aft shear force at the neck/head interface are measured with a CFC of 1 000.
5.2.2.2. The bending moment about a lateral axis at the neck/head interface are measured with a CFC of 600.
5.2.3. Measurements in the thorax of the dummy
The chest deflection between the sternum and the spine is measured with a CFC of 180.
5.2.4. Measurements in the femur and tibia of the dummy
5.2.4.1. The axial compressive force and the bending moments are measured with a CFC of 600.
5.2.4.2. The displacement of the tibia with respect to the femur is measured at the knee sliding joint with a CFC of 180.
6. MEASUREMENTS TO BE MADE ON THE VEHICLE
6.1. To enable the simplified test described in Annex 7 to be carried out, the deceleration time history of the structure shall be determined on the basis of the value of the longitudinal accelerometers at the base of the ‘B’ pillar on the struck side of the vehicle with a CFC of 180 by means of data channels corresponding to the requirements set out in Annex 8;
6.2. The speed time history which will be used in the test procedure described in Annex 7 shall be obtained from the longitudinal accelerometer at the ‘B’ pillar on the struck side.
(1) The technical specifications and detailed drawings of Hybrid III, corresponding to the principal dimensions of a fiftieth percentile male of the United States of America, and the specifications for its adjustment for this test are deposited with the Secretary-General of the United Nations and may be consulted on request at the secretariat of the Economic Commission for Europe, Palais des Nations, Geneva, Switzerland.
ANNEX 4
DETERMINATION OF PERFORMANCE CRITERIA
1. HEAD PERFORMANCE CRITERION (HPC) AND 3 ms HEAD ACCELERATION
|
1.1. |
The head performance criterion (HPC) is considered to be satisfied when, during the test, there is no contact between the head and any vehicle component. |
|
1.2. |
If, during the test, there is contact between the head and any vehicle component, a calculation of HPC is made, on the basis of the acceleration (a), measured according to paragraph 5.2.1 of Annex 3, by the following expression:
in which:
|
|
1.3. |
The value of the resultant head acceleration during forward impact which is exceeded for 3 ms cumulatively is calculated from the resultant head acceleration measured according to paragraph 5.2.1 of Annex 3. |
2. NECK INJURY CRITERIA (NIC)
|
2.1. |
These criteria are determined by the compressive axial force, the axial tensile force and the fore/aft shear forces at the head/neck interface, expressed in kN and measured according to paragraph 5.2.2 of Annex 3 and by the duration of these forces expressed in ms. |
|
2.2. |
The neck bending moment criterion is determined by the bending moment, expressed in Nm, about a lateral axis at the head/neck interface and measured according to paragraph 5.2.2 of Annex 3. |
|
2.3. |
The neck flexion bending moment, expressed in Nm, shall be recorded. |
3. THORAX COMPRESSION CRITERION (ThCC) AND VISCOUS CRITERION (V * C)
|
3.1. |
The thorax compression criterion is determined by the absolute value of the thorax deformation, expressed in mm and measured according to paragraph 5.2.3 of Annex 3. |
|
3.2. |
The viscous criterion (V * C) is calculated as the instantaneous product of the compression and the rate of deflection of the sternum, measured according to paragraph 6 and also paragraph 5.2.3 of Annex 3. |
4. FEMUR FORCE CRITERION (FFC)
|
4.1. |
This criterion is determined by the compression load expressed in kN, transmitted axially on each femur of the dummy and measured according to paragraph 5.2.4 of Annex 3 and by the duration of the compressive load expressed in ms. |
5. TIBIA COMPRESSIVE FORCE CRITERION (TCFC) AND TIBIA INDEX (TI)
|
5.1. |
The tibia compressive force criterion is determined by the compressive load (Fz) expressed in kN, transmitted axially on each tibia of the dummy and measured according to paragraph 5.2.4 of Annex 3. |
|
5.2. |
The tibia index is calculated on the basis of the bending moments (Mx and My) measured according to paragraph 5.1 by the following expression:
where:
The tibia index is calculated for the top and the bottom of each tibia; however, Fz may be measured at either location. The value obtained is used for the top and bottom TI calculations. Moments Mx and My are both measured separately at both locations. |
6. PROCEDURE FOR CALCULATING THE VISCOUS CRITERIA (V * C) FOR HYBRID III DUMMY
|
6.1. |
The viscous criterion is calculated as the instantaneous product of the compression and the rate of deflection of the sternum. Both are derived from the measurement of sternum deflection. |
|
6.2. |
The sternum deflection response is filtered once at CFC 180. The compression at time t is calculated from this filtered signal as:
The sternum deflection velocity at time t is calculated from the filtered deflection as:
where D(t) is the deflection at time t in metres and δt is the time interval in seconds between the measurements of deflection. The maximum value of δt shall be 1,25 x 10–4 seconds. This calculation procedure is shown diagrammatically below:
|
ANNEX 5
ARRANGEMENT AND INSTALLATION OF DUMMIES AND ADJUSTMENT OF RESTRAINT SYSTEMS
1. ARRANGEMENT OF DUMMIES
1.1. Separate seats
The plane of symmetry of the dummy shall coincide with the vertical median plane of the seat.
1.2. Front bench seat
1.2.1. Driver
The plane of symmetry of the dummy shall lie in the vertical plane passing through the steering wheel centre and parallel to the longitudinal median plane of the vehicle. If the seating position is determined by the shape of the bench, such seat shall be regarded as a separate seat.
1.2.2. Outer passenger
The plane of symmetry of the dummy shall be symmetrical with that of the driver dummy relative to the longitudinal median plane of the vehicle. If the seating position is determined by the shape of the bench, such seat shall be regarded as a separate seat.
1.3. Bench seat for front passengers (not including driver)
The planes of symmetry of the dummy shall coincide with the median planes of the seating positions defined by the manufacturer.
2. INSTALLATION OF DUMMIES
2.1. Head
The transverse instrumentation platform of the head shall be horizontal within 2,5° degree. To level the head of the test dummy in vehicles with upright seats with non-adjustable backs, the following sequences must be followed. First adjust the position of the ‘H’ point within the limits set forth in paragraph 2.4.3.1 below to level the transverse instrumentation platform of the head of the test dummy. If the transverse instrumentation platform of the head is still not level, then adjust the pelvic angle of the test dummy within the limits provided in paragraph 2.4.3.2 below. If the transverse instrumentation platform of the head is still not level, then adjust the neck bracket of the test dummy the minimum amount necessary to ensure that the transverse instrumentation platform of the head is horizontal within 2,5°.
2.2. Arms
2.2.1. The driver’s upper arms shall be adjacent to the torso with the centrelines as close to a vertical plane as possible.
2.2.2. The passenger’s upper arms shall be in contact with the seat back and the sides of the torso.
2.3. Hands
2.3.1. The palms of the driver test dummy shall be in contact with the outer part of the steering wheel rim at the rim’s horizontal centreline. The thumbs shall be over the steering wheel rim and shall be lightly taped to the steering wheel rim so that if the hand of the test dummy is pushed upward by a force of not less than 9 N and not more than 22N, the tape shall release the hand from the steering wheel rim.
2.3.2. The palms of the passenger test dummy shall be in contact with outside of thigh. The little finger shall be in contact with the seat cushion.
2.4. Torso
2.4.1. In vehicles equipped with bench seats, the upper torso of the driver and passenger test dummies shall rest against the seat back. The mid-sagittal plane of the driver dummy shall be vertical and parallel to the vehicle’s longitudinal centreline, and pass through the centre of the steering wheel rim. The mid-sagittal plane of the passenger dummy shall be vertical and parallel to the vehicle’s longitudinal centreline and the same distance from the vehicle’s longitudinal centreline as the mid-sagittal plane of the driver dummy.
2.4.2. In vehicles equipped with individual seat(s), the upper torso of the driver and passenger test dummies shall rest against the seat back. The mid-sagittal plane of the driver and the passenger dummy shall be vertical and shall coincide with the longitudinal centreline of the individual seat(s).
2.4.3. Lower torso
2.4.3.1. ‘H’ point
The ‘H’ point of the driver and passenger test dummies shall coincide within 13 mm in the vertical dimension and 13 mm in the horizontal dimension, with a point 6 mm below the position of the ‘H’ point determined using the procedure described in Annex 6 except that the length of the lower leg and thigh segments of the ‘H’ point machine shall be adjusted to 414 and 401 mm, instead of 417 and 432 mm respectively.
2.4.3.2. Pelvic angle
As determined using the pelvic angle gauge (GM) drawing 78051-532 incorporated by reference in Part 572 which is inserted into the ‘H’ point gauging hole of the dummy, the angle measured from the horizontal on the 76,2 mm flat surface of the gauge shall be 22 1/2 degrees plus or minus 2 1/2 degrees.
2.5. Legs
The upper legs of the driver and passenger test dummies shall rest against the seat cushion to the extent permitted by placement of the feet. The initial distance between the outboard knee clevis flange surface shall be 270 mm ± 10 mm. To the extent practicable, the left leg of the driver dummy and both legs of the passenger dummy shall be in vertical longitudinal planes. To the extent practicable, the right leg of the driver dummy shall be in a vertical plane. Final adjustment to accommodate placement of feet in accordance with paragraph 2.6 for various passenger compartment configurations is permitted.
2.6. Feet
2.6.1. The right foot of the driver test dummy shall rest on the undepressed accelerator with the rearmost point of the heel on the floor surface in the plane of the pedal. If the foot cannot be placed on the accelerator pedal, it shall be positioned perpendicular to the tibia and placed as far forward as possible in the direction of the centreline of the pedal with the rearmost point of the heel resting on the floor surface. The heel of the left foot shall be placed as far forward as possible and shall rest on the floor pan. The left foot shall be positioned as flat as possible on the toeboard. The longitudinal centreline of the left foot shall be placed as parallel as possible to the longitudinal centreline of the vehicle.
2.6.2. The heels of both feet of the passenger test dummy shall be placed as far forward as possible and shall rest on the floor pan. Both feet shall be positioned as flat as possible on the toeboard. The longitudinal centreline of the feet shall be placed as parallel as possible to the longitudinal centreline of the vehicle.
2.7. The measuring instruments installed shall not in any way affect the movement of the dummy during impact.
2.8. The temperature of the dummies and the system of measuring instruments shall be stabilised before the test and maintained so far as possible within a range between 19 °C and 22 °C.
2.9. Dummy clothing
2.9.1. The instrumented dummies will be clothed in formfitting cotton stretch garments with short sleeves and mid-calf length trousers specified in FMVSS 208, drawings 78051-292 and 293 or their equivalent.
2.9.2. A size 11XW shoe, which meets the configuration size, sole and heel thickness specifications of the US military standard MIL S 13192, revision P and whose weight is 0,57 ± 0,1 kg, shall be placed and fastened on each foot of the test dummies.
3. ADJUSTMENT OF RESTRAINT SYSTEM
With the test dummy at its designated seating position as specified by the appropriate requirements of paragraphs 2.1 through 2.6, place the belt around the test dummy and fasten the latch. Remove all slack from the lap belt. Pull the upper torso webbing out of the retractor and allow it to retract. Repeat this operation four times. Apply a 9 to 18 N tension load to the lap belt. If the belt system is equipped with a tension-relieving device, introduce the maximum amount of slack into the upper torso belt that is recommended by the manufacturer for normal use in the owner’s manual for the vehicle. If the belt system is not equipped with a tension-relieving device, allow the excess webbing in the shoulder belt to be retracted by the retractive force of the retractor.
ANNEX 6
PROCEDURE FOR DETERMINING THE ‘H’ POINT AND THE ACTUAL TORSO ANGLE FOR SEATING POSITIONS IN MOTOR VEHICLES
1. PURPOSE
The procedure described in this Annex is used to establish the ‘H’ point location and the actual torso angle for one or several seating positions in a motor vehicle and to verify the relationship of measured data to design specifications given by the vehicle manufacturer (1).
2. DEFINITIONS
For the purposes of this Annex:
|
2.1. |
‘Reference data’ means one or several of the following characteristics of a seating position:
|
|
2.2. |
‘Three-dimensional “H” point machine’ (3-D H machine) means the device used for the determination of ‘H’ points and actual torso angles. This device is described in Appendix 1 to this Annex; |
|
2.3. |
‘“H” point’ means the pivot centre of the torso and the thigh of the 3-D H machine installed in the vehicle seat in accordance with paragraph 4 below. The ‘H’ point is located in the centre of the centreline of the device which is between the ‘H’ point sight buttons on either side of the 3-D H machine. The ‘H’ point corresponds theoretically to the ‘R’ point (for tolerances see paragraph 3.2.2 below). Once determined in accordance with the procedure described in paragraph 4, the ‘H’ point is considered fixed in relation to the seat-cushion structure and to move with it when the seat is adjusted; |
|
2.4. |
‘“R” point’ or ‘seating reference point’ means a design point defined by the vehicle manufacturer for each seating position and established with respect to the three-dimensional reference system; |
|
2.5. |
‘Torso-line’ means the centreline of the probe of the 3-D H machine with the probe in the fully rearward position; |
|
2.6. |
‘Actual torso angle’ means the angle measured between a vertical line through the ‘H’ point and the torso line using the back angle quadrant on the 3-D H machine. The actual torso angle corresponds theoretically to the design torso angle (for tolerances see paragraph 3.2.2 below); |
|
2.7. |
‘Design torso angle’ means the angle measures between a vertical line through the ‘R’ point and the torso line in a position which corresponds to the design position of the seat-back established by the vehicle manufacturer; |
|
2.8. |
‘Centreplane of occupant’ (C/LO) means the median plane of the 3-D H machine positioned in each designated seating position; it is represented by the coordinate of the ‘H’ point on the ‘Y’ axis. For individual seats, the centreplane of the seat coincides with the centreplane of the occupant. For other seats, the centreplane of the occupant is specified by the manufacturer; |
|
2.9. |
‘Three-dimensional reference system’ means a system as described in Appendix 2 to this Annex; |
|
2.10. |
‘Fiducial marks’ are physical points (holes, surfaces, marks or indentations) on the vehicle body as defined by the manufacturer; |
|
2.11. |
‘Vehicle measuring attitude’ means the position of the vehicle as defined by the coordinates of fiducial marks in the three-dimensional reference system. |
3. REQUIREMENTS
3.1. Data presentation
For each seating position where reference data are required in order to demonstrate compliance with the provisions of the present Regulation, all or an appropriate selection of the following data shall be presented in the form indicated in Appendix 3 to this Annex:
|
3.1.1. |
the coordinates of the ‘R’ point relative to the three-dimensional reference system; |
|
3.1.2. |
the design torso angle; |
|
3.1.3. |
all indications necessary to adjust the seat (if it is adjustable) to the measuring position set out in paragraph 4.3 below. |
3.2. Relationship between measured data and design specifications
3.2.1. The coordinates of the ‘H’ point and the value of the actual torso angle obtained by the procedure set out in paragraph 4 below shall be compared, respectively, with the coordinates of the ‘R’ point and the value of the design torso angle indicated by the vehicle manufacturer.
3.2.2. The relative positions of the ‘R’ point and the ‘H’ point and the relationship between the design torso angle and the actual torso angle shall be considered satisfactory for the seating position in question if the ‘H’ point, as defined by its coordinates, lies within a square of 50 mm side length with horizontal and vertical sides whose diagonals intersect at the ‘R’ point, and if the actual torso angle is within 5° of the design torso angle.
3.2.3. If these conditions are met, the ‘R’ point and the design torso angle, shall be used to demonstrate compliance with the provisions of this Regulation.
3.2.4. If the ‘H’ point or the actual torso angle does not satisfy the requirements of paragraph 3.2.2 above, the ‘H’ point and the actual torso angle shall be determined twice more (three times in all). If the results of two of these three operations satisfy the requirements, the conditions of paragraph 3.2.3 above shall apply.
3.2.5. If the results of at least two of the three operations described in paragraph 3.2.4 above do not satisfy the requirements of paragraph 3.2.2 above, or if the verification cannot take place because the vehicle manufacturer has failed to supply information regarding the position of the ‘R’ point or regarding the design torso angle, the centroid of the three measured points or the average of the three measured angles shall be used and be regarded as applicable in all cases where the ‘R’ point or the design torso angle is referred to in this Regulation.
4. PROCEDURE FOR ‘H’ POINT AND ACTUAL TORSO ANGLE DETERMINATION
4.1. The vehicle shall be preconditioned at the manufacturer’s discretion, at a temperature of 20 ± 10 °C to ensure that the seat material reached room temperature. If the seat to be checked has never been sat upon, a 70 to 80 kg person or device shall sit on the seat twice for one minute to flex the cushion and back. At the manufacturer’s request, all seat assemblies shall remain unloaded for a minimum period of 30 min prior to installation of the 3-D H machine.
4.2. The vehicle shall be at the measuring attitude defined in paragraph 2.11 above.
4.3. The seat, if it is adjustable, shall be adjusted first to the rearmost normal driving or riding position, as indicated by the vehicle manufacturer, taking into consideration only the longitudinal adjustment of the seat, excluding seat travel used for purposes other than normal driving or riding positions. Where other modes of seat adjustment exist (vertical, angular, seat-back, etc.) these will then be adjusted to the position specified by the vehicle manufacturer. For suspension seats, the vertical position shall be rigidly fixed corresponding to a normal driving position as specified by the manufacturer.
4.4. The area of the seating position contacted by the 3-D H machine shall be covered by a muslin cotton, of sufficient size and appropriate texture, described as a plain cotton fabric having 18,9 threads per cm2 and weighing 0,228 kg/m2 or knitted or non-woven fabric having equivalent characteristics. If the test is run on a seat outside the vehicle, the floor on which the seat is placed shall have the same essential characteristics (2) as the floor of the vehicle in which the seat is intended to be used.
4.5. Place the seat and back assembly of the 3-D H machine so that the centreplane of the occupant (C/LO) coincides with the centreplane of the 3-D H machine. At the manufacturer’s request, the 3-D H machine may be moved inboard with respect to the C/LO if the 3-D H machine is located so far outboard that the seat edge will not permit levelling of the 3-D H machine.
4.6. Attach the foot and lower leg assemblies to the seat pan assembly, either individually or by using the T-bar and lower leg assembly. A line through the ‘H’ point sight buttons shall be parallel to the ground and perpendicular to the longitudinal centreplane of the seat.
4.7. Adjust the feet and leg positions of the 3-D H machine as follows:
4.7.1. Designated seating position: driver and outside front passenger
|
4.7.1.1. |
Both feet and leg assemblies shall be moved forward in such a way that the feet take up natural positions on the floor, between the operating pedals if necessary. Where possible the left foot shall be located approximately the same distance to the left of the centreplane of the 3-D H machine as the right foot is to the right. The spirit level verifying the transverse orientation of the 3-D H machine is brought to the horizontal by readjustment of the seat pan if necessary, or by adjusting the leg and foot assemblies towards the rear. The line passing through the ‘H’ point sight buttons shall be maintained perpendicular to the longitudinal centreplane of the seat. |
|
4.7.1.2. |
If the left leg cannot be kept parallel to the right leg and the left foot cannot be supported by the structure, move the left foot until it is supported. The alignment of the sight buttons shall be maintained. |
4.7.2. Designated seating position: outboard rear
For rear seats or auxiliary seats, the legs are located as specified by the manufacturer. If the feet then rest on parts of the floor which are at different levels, the foot which first comes into contact with the front seat shall serve as a reference and the other foot shall be so arranged that the spirit level giving the transverse orientation of the seat of the device indicates the horizontal.
4.7.3. Other designated seating positions:
The general procedure indicated in paragraph 4.7.1 above shall be followed except that the feet shall be placed as specified by the vehicle manufacturer.
4.8. Apply lower leg and thigh weights and level the 3-D H machine.
4.9. Tilt the back pan forward against the forward stop and draw the 3-D H machine away from the seat-back using the T-bar. Reposition the 3-D H machine on the seat by one of the following methods:
|
4.9.1. |
If the 3-D H machine tends to slide rearward, use the following procedure. Allow the 3-D H machine to slide rearward until a forward horizontal restraining load on the T-bar is no longer required i.e. until the seat pan contacts the seat-back. If necessary, reposition the lower leg. |
|
4.9.2. |
If the 3-D H machine does not tend to slide rearward, use the following procedure. Slide the 3-D H machine rearwards by applying a horizontal rearward load to the T-bar until the seat pan contacts the seat-back (see Figure 2 of Appendix 1 to this Annex). |
4.10. Apply a 100 ± 10 N load to the back and pan assembly of the 3-D H machine at the intersection of the hip angle quadrant and the T-bar housing. The direction of load application shall be maintained along a line passing by the above intersection to a point just above the thigh bar housing (see Figure 2 of Appendix 1 to this Annex). Then carefully return the back pan to the seat-back. Care must be exercised throughout the remainder of the procedure to prevent the 3-D H machine from sliding forward.
4.11. Install the right and left buttock weights and then, alternately, the eight torso weights. Maintain the 3-D H machine level.
4.12. Tilt the back pan forward to release the tension on the seat-back. Rock the 3-D H machine from side to side through a 10° arc (5° to each side of the vertical centreplane) for three complete cycles to release any accumulated friction between the 3-D H machine and the seat.
During the rocking action, the T-bar of the 3-D H machine may tend to diverge from the specified horizontal and vertical alignment. The T-bar must therefore be restrained by applying an appropriate lateral load during the rocking motions. Care shall be exercised in holding the T-bar and rocking the 3-D H machine to ensure that no inadvertent exterior loads are applied in a vertical or fore and aft direction.
The feet of the 3-D H machine are not to be restrained or held during this step. If the feet change position, they should be allowed to remain in that attitude for the moment.
Carefully return the back pan to the seat-back and check the two spirits levels for zero position. If any movement of the feet has occurred during the rocking operation of the 3-D H machine, they must be repositioned as follows:
Alternately, lift each foot off the floor the minimum necessary amount until no additional foot movement is obtained. During this lifting, the feet are to be free to rotate; and no forward or lateral loads are to be applied. When each foot is placed back in the down position, the heel is to be in contact with the structure designed for this.
Check the lateral spirit level for zero position; if necessary, apply a lateral load to the top of the back pan sufficient to level the 3-D H machine’s seat pan on the seat.
4.13. Holding the T-bar to prevent the 3-D H machine from sliding forward on the seat cushion, proceed as follows:
|
(a) |
return the back pan to the seat-back; |
|
(b) |
alternately apply and release a horizontal rearward load, not to exceed 25 N, to the back angle bar at a height approximately at the centre of the torso weights until the hip angle quadrant indicates that a stable position has been reached after load release. Care shall be exercised to ensure that no exterior downward or lateral loads are applied to the 3-D H machine. If another level adjustment of the 3-D H machine is necessary, rotate the back pan forward, re-level, and repeat the procedure from paragraph 4.12. |
4.14. Take all measurements:
|
4.14.1. |
The coordinates of the ‘H’ point are measured with respect to the three-dimensional reference system. |
|
4.14.2. |
The actual torso angle is read at the back angle quadrant of the 3-D H machine with the probe in its fully rearward position. |
4.15. If a re-run of the installation of the 3-D H machine is desired, the seat assembly should remain unloaded for a minimum period of 30 min prior to the re-run. The 3-D H machine should not be left loaded on the seat assembly longer than the time required to perform the test.
4.16. If the seats in the same row can be regarded as similar (bench seat, identical seats, etc.) only one ‘H’ point and one ‘actual torso angle’ shall be determined for each row of seats, the 3-D H machine described in Appendix 1 to this Annex being seated in a place regarded as representative for the row. This place shall be:
|
4.16.1. |
in the case of the front row, the driver’s seat; |
|
4.16.2. |
in the case of the rear row or rows, an outer seat. |
(1) In any seating position other than front seats where the ‘H’ point cannot be determined using the ‘Three-dimensional “H” point machine’ or procedures, the ‘R’ point indicated by the manufacturer may be taken as a reference at the discretion of the competent authority.
(2) Tilt angle, height difference with a seat mounting, surface texture, etc.
Appendix 1
Description of the three-dimensional ‘H’ point machine (1)
(3-D H machine)
1. BACK AND SEAT PANS
The back and seat pans are constructed of reinforced plastic and metal; they simulate the human torso and thigh and are mechanically hinged at the ‘H’ point. A quadrant is fastened to the probe hinged at the ‘H’ point to measure the actual torso angle. An adjustable thigh bar, attached to the seat pan, establishes the thigh centreline and serves as a baseline for the hip angle quadrant.
2. BODY AND LEG ELEMENTS
Lower leg segments are connected to the seat pan assembly at the T-bar joining the knees, which is a lateral extension of the adjustable thigh bar. Quadrants are incorporated in the lower leg segments to measure knee angles. Shoe and foot assemblies are calibrated to measure the foot angle. Two spirit levels orient the device in space. Body element weights are placed at the corresponding centres of gravity to provide seat penetration equivalent to a 76 kg male. All joints of the 3-D H machine should be checked for free movement without encountering noticeable friction.
The machine corresponds to that described in ISO Standard 6549-1980.


(1) For details of the construction of the 3-D H machine refer to Society of Automobile Engineers (SAE), 400 Commonwealth Drive, Warrendale, Pennsylvania 15096, United States of America.
Appendix 2
Three-dimensional reference system
|
1. |
The three-dimensional reference system is defined by three orthogonal planes established by the vehicle manufacturer (see figure) (1). |
|
2. |
The vehicle measuring attitude is established by positioning the vehicle on the supporting surface such that the coordinates of the fiducial marks correspond to the values indicated by the manufacturer. |
|
3. |
The coordinates of the ‘R’ point and the ‘H’ point are established in relation to the fiducial marks defined by the vehicle manufacturer. |

(1) The reference system corresponds to ISO standard 4130, 1978.
Appendix 3
Reference data concerning seating positions
1. Coding of reference data
Reference data are listed consecutively for each seating position. Seating positions are identified by a two-digit code. The first digit is an Arabic numeral and designates the row of seats, counting from the front to the rear of the vehicle. The second digit is a capital letter which designates the location of the seating position in a row, as viewed in the direction of forward motion of the vehicle; the following letters shall be used:
|
L |
= |
left |
|
C |
= |
centre |
|
R |
= |
right |
2. Description of vehicle measuring attitude
2.1. Coordinates of fiducial marks
|
|
X … |
|
|
Y … |
|
|
Z … |
3. List of reference data
3.1. Seating position: …
3.1.1. Coordinates of ‘R’ point
|
|
X … |
|
|
Y … |
|
|
Z … |
3.1.2. Design torso angle: …
3.1.3. Specifications for seat adjustment (1)
horizontal: …
vertical: …
angular: …
torso angle: …
Note: List reference data for further seating positions under 3.2, 3.3, etc.
(1) Strike out what does not apply.
ANNEX 7
TEST PROCEDURE WITH TROLLEY
1. TEST INSTALLATION AND PROCEDURE
1.1. Trolley
The trolley shall be so constructed that no permanent deformation appears after the test. It shall be so guided that, during the impact phase, the deviation in the vertical plane does not exceed 5° and 2° in the horizontal plane.
1.2. State of the structure
1.2.1. General
The structure tested shall be representative of the series production of the vehicles concerned. Some components may be replaced or removed where such replacement or removal clearly has no effect on the test results.
1.2.2. Adjustments
Adjustments shall conform to those set out in paragraph 1.4.3 of Annex 3 to this Regulation, taking into account what is stated in paragraph 1.2.1.
1.3. Attachment of the structure
1.3.1. The structure shall be firmly attached to the trolley in such a way that no relative displacement occurs during the test.
1.3.2. The method used to fasten the structure to the trolley shall not have the effect of strengthening the seat anchorages or restraint devices, or of producing any abnormal deformation of the structure.
1.3.3. The attachment device recommended is that whereby the structure rests on supports placed approximately in the axis of the wheels or, if possible, whereby the structure is secured to the trolley by the fastenings of the suspension system.
1.3.4. The angle between the longitudinal axis of the vehicle and the direction of motion of the trolley shall be 0° ± 2°.
1.4. Dummies
The dummies and their positioning shall conform to the specifications in Annex 3, paragraph 2.
1.5. Measuring apparatus
1.5.1. Deceleration of the structure
The position of the transducers measuring the deceleration of the structure during the impact shall be parallel to the longitudinal axis of the trolley according to the specifications of Annex 8 (CFC 180).
1.5.2. Measurements to be made on the dummies
All the measurements necessary for checking the listed criteria are set out in Annex 3, paragraph 5.
1.6. Deceleration curve of the structure
The deceleration curve of the structure during the impact phase shall be such that the ‘variation of speed in relation to time’ curve obtained by integration at no point differs by more than ± 1 m/s from the ‘variation of speed in relation to time’ reference curve of the vehicle concerned as defined in appendix to this Annex. A displacement with regard to the time axis of the reference curve may be used to obtain the structure velocity inside the corridor.
1.7. Reference curve ΔV = f(t) of the vehicle concerned
This reference curve is obtained by integration of the deceleration curve of the vehicle concerned measured in the frontal collision test against a barrier as provided for in paragraph 6 of Annex 3 to this Regulation.
1.8. Equivalent method
The test may be performed by some other method than that of deceleration of a trolley, provided that such method complies with the requirement concerning the range of variation of speed described in paragraph 1.6.
Appendix
Equivalence curve — tolerance band for curve ΔV = f(t)

ANNEX 8
TECHNIQUE OF MEASUREMENT IN MEASUREMENT TESTS: INSTRUMENTATION
1. DEFINITIONS
1.1. Data channel
A data channel comprises all the instrumentation from a transducer (or multiple transducers whose outputs are combined in some specified way) up to and including any analysis procedures that may alter the frequency content or the amplitude content of data.
1.2. Transducer
The first device in a data channel used to convert a physical quantity to be measured into a second quantity (such as an electrical voltage) which can be processed by the remainder of the channel.
1.3. Channel amplitude class: CAC
The designation for a data channel that meets certain amplitude characteristics as specified in this Annex. The CAC number is numerically equal to the upper limit of the measurement range.
1.4. Characteristic frequencies FH, FL, FN
These frequencies are defined in the figure.
1.5. Channels frequency class: CFC
The channel frequency class is designated by a number indicating that the channel frequency response lies within the limits specified in the figure. This number and the value of the frequency FH in Hz are numerically equal.
1.6. Sensitivity coefficient
The slope of the straight line representing the best fit to the calibration values determined by the method of least square within the channel amplitude class.
1.7. Calibration factor of a data channel
The mean value of the sensitivity coefficients evaluated over frequencies which are evenly spaced on a logarithmic scale between FL and FH/2,5
1.8. Linearity error
The ratio, in per cent, of the maximum difference between the calibration value and the corresponding value read on the straight line defined in paragraph 1.6 at the upper limit of the channel amplitude class.
1.9. Cross sensitivity
The ratio of the output signal to the input signal, when an excitation is applied to the transducer perpendicular to the measurement axis. It is expressed as a percentage of the sensitivity along the measurement axis.
1.10. Phase delay time
The phase delay time of a data channel is equal to the phase delay (in radians) of a sinusoidal signal, divided by the angular frequency of that signal (in radians/second).
1.11. Environment
The aggregate, at a given moment, of all external conditions and influences to which the data channel is subjected.
2. PERFORMANCE REQUIREMENTS
2.1. Linearity error
The absolute value of the linearity error of a data channel at any frequency in the CFC, shall be equal to or less than 2,5 per cent of the value of the CAC, over the whole measurement range.
2.2. Amplitude against frequency
The frequency response of a data channel shall lie within the limiting curves given in the figure. The zero dB line is determined by the calibration factor.
2.3. Phase delay time
The phase delay time between the input and the output signals of a data channel shall be determined and shall not vary by more than 1/10 FH seconds between 0,03 FH and FH.
2.4. Time
2.4.1. Time base
A time base shall be recorded and shall at least give 1/100 s with an accuracy of 1 per cent.
2.4.2. Relative time delay
The relative time delay between the signal of two or more data channels, regardless of their frequency class, must not exceed 1 ms excluding delay caused by phase shift.
Two or more data channels of which the signals are combined shall have the same frequency class and shall not have relative time delay greater than 1/10 FH seconds.
This requirement applies to analogue signals as well as to synchronisation pulses and digital signals.
2.5. Transducer cross sensitivity
The transducer cross sensitivity shall be less than 5 per cent in any direction.
2.6. Calibration
2.6.1. General
A data channel shall be calibrated at least once a year against reference equipment traceable to known standards. The methods used to carry out a comparison with reference equipment shall not introduce an error greater than 1 per cent of the CAC. The use of the reference equipment is limited to the frequency range for which they have been calibrated. Subsystems of a data channel may be evaluated individually and the results factored into the accuracy of the total data channel. This can be done for example by an electrical signal of known amplitude simulating the output signal of the transducer which allows a check to be made on the gain factor of the data channel, excluding the transducer.
2.6.2. Accuracy of reference equipment for calibration
The accuracy of the reference equipment shall be certified or endorsed by an official metrology service.
2.6.2.1. Static calibration
2.6.2.1.1. Accelerations
The errors shall be less than ± 1,5 per cent of the channel amplitude class.
2.6.2.1.2. Forces
The error shall be less than ± 1 per cent of the channel amplitude class.
2.6.2.1.3. Displacements
The error shall be less than ± 1 per cent of the channel amplitude class.
2.6.2.2. Dynamic calibration
2.6.2.2.1. Accelerations
The error in the reference accelerations expressed as a percentage of the channel amplitude class shall be less than ± 1,5 per cent below 400 Hz, less than ± 2 per cent between 400 Hz and 900 Hz, and less than ± 2,5 per cent above 900 Hz.
2.6.2.3. Time
The relative error in the reference time shall be less than 10–5.
2.6.3. Sensitivity coefficient and linearity error
The sensitivity coefficient and the linearity error shall be determined by measuring the output signal of the data channel against a known input signal for various values of this signal. The calibration of the data channel shall cover the whole range of the amplitude class.
For bi-directional channels, both the positive and negative values shall be used.
If the calibration equipment cannot produce the required input owing to the excessively high values of the quantity to be measured, calibrations shall be carried out within the limits of the calibration standards and these limits shall be recorded in the test report.
A total data channel shall be calibrated at a frequency or at a spectrum of frequencies having a significant value between FL and (FH/2,5)
2.6.4. Calibration of the frequency response
The response curves of phase and amplitude against frequency shall be determined by measuring the output signals of the data channel in terms of phase and amplitude against a known input signal, for various values of this signal varying between FL and 10 times the CFC or 3 000 Hz, whichever is lower.
2.7. Environmental effects
A regular check shall be made to identify any environmental influence (such as electric or magnetic flux, cable velocity, etc.). This can be done for instance by recording the output of spare channels equipped with dummy transducers. If significant output signals are obtained corrective action shall be taken, for instance by replacement of cables.
2.8. Choice and designation of the data channel
The CAC and CFC define a data channel.
The CAC shall be 1, 2 or 5 to a power of ten.
3. MOUNTING OF TRANSDUCERS
Transducers should be rigidly secured so that their recordings are affected by vibration as little as possible. Any mounting having a lowest resonance frequency equal to at least 5 times the frequency FH of the data channel considered shall be considered valid. Acceleration transducers in particular should be mounted in such a way that the initial angle of the real measurement axis to the corresponding axis of the reference axis system is not greater than 5° unless an analytical or experimental assessment of the effect of the mounting on the collected data is made. When multi-axial accelerations at a point are to be measured, each acceleration transducer axis should pass within 10 mm of that point, and the centre of seismic mass of each accelerometer should be within 30 mm of that point.
4. RECORDING
4.1. Analogue magnetic recorder
Tape speed should be stable to within not more than 0,5 per cent of the tape speed used. The signal-to-noise ratio of the recorder should not be less than 42 dB at the maximum tape speed. The total harmonic distortion should be less than 3 per cent and the linearity error should be less than 1 per cent of the measurement range.
4.2. Digital magnetic recorder
Tape speed should be stable to within not more than 10 per cent of the tape speed used.
4.3. Paper tape recorder
In case of direct data recording the paper speed in mm/s should be at least 1,5 times the number expressing FH in Hz. In other cases the paper speed should be such that equivalent resolution is obtained.
5. DATA PROCESSING
5.1. Filtering
Filtering corresponding to the frequencies of the data channel class may be carried out during either recording or processing of data. However, before recording, analogical filtering at a higher level than CFC should be effected in order to use at least 50 per cent of the dynamic range of the recorder and to reduce the risk of high frequencies saturating the recorder or causing aliasing errors in the digitalising process.
5.2. Digitalising
5.2.1. Sampling frequency
The sampling frequency should be equal to at least 8 FH. In the case of analogical recording, when the recording and reading speeds are different, the sampling frequency can be divided by the speed ratio.
5.2.2. Amplitude resolution
The size of digital words should be at least 7 bits and a parity bit.
6. PRESENTATION OF RESULTS
The results should be presented on A4 size paper (ISO/R 216). Results presented as diagrams should have axes scaled with a measurement unit corresponding to a suitable multiple of the chosen unit (for example, 1, 2, 5, 10, 20 millimetres). SI units shall be used, except for vehicle velocity, where km/h may be used, and for accelerations due to impact where g, with g = 9,81 m/s2, may be used.
Frequency response curve

ANNEX 9
DEFINITION OF DEFORMABLE BARRIER
1. COMPONENT AND MATERIAL SPECIFICATIONS
The dimensions of the barrier are illustrated in Figure 1 of this Annex. The dimensions of the individual components of the barrier are listed separately below.
1.1. Main honeycomb block
Dimensions:
|
Height |
: |
650 mm (in direction of honeycomb ribbon axis) |
|
Width |
: |
1 000 mm |
|
Depth |
: |
450 mm (in direction of honeycomb cell axes) |
All above dimensions should allow a tolerance of ± 2,5 mm
|
Material |
: |
Aluminium 3003 (ISO 209, Part 1) |
|
Foil Thickness |
: |
0,076 mm ± 15 % |
|
Cell Size |
: |
19,1 mm ± 20 % |
|
Density |
: |
28,6 kg/m3 ± 20 % |
|
Crush Strength |
: |
0,342 MPa + 0 % – 10 % (1) |
1.2. Bumper element
Dimensions:
|
Height |
: |
330 mm (in direction of honeycomb ribbon axis) |
|
Width |
: |
1 000 mm |
|
Depth |
: |
90 mm (in direction of honeycomb cell axes) |
All above dimensions should allow a tolerance of ± 2,5 mm
|
Material |
: |
Aluminium 3003 (ISO 209, Part 1) |
|
Foil Thickness |
: |
0,076 mm ± 15 % |
|
Cell Size |
: |
6,4 mm ± 20 % |
|
Density |
: |
82,6 kg/m3 ± 20 % |
|
Crush Strength |
: |
1,711 MPa + 0 % – 10 % (1) |
1.3. Backing sheet
Dimensions
|
Height |
: |
800 mm ± 2,5 mm |
|
Width |
: |
1 000 mm ± 2,5 mm |
|
Thickness |
: |
2,0 mm ± 0,1 mm |
1.4. Cladding sheet
Dimensions
|
Length |
: |
1 700 mm ± 2,5 mm |
|
Width |
: |
1 000 mm ± 2,5 mm |
|
Thickness |
: |
0,81 ± 0,07 mm |
|
Material |
: |
Aluminium 5251/5052 (ISO 209, part 1) |
1.5. Bumper facing sheet
|
|
Dimensions
|
|
|
Adhesive The adhesive to be used throughout should be a two-part polyurethane (such as Ciba-Geigy XB5090/1 resin with XB5304 hardener, or equivalent). |
2. ALUMINIUM HONEYCOMB CERTIFICATION
A complete testing procedure for certification of aluminium honeycomb is given in NHTSA TP-214D. The following is a summary of the procedure that should be applied to materials for the frontal impact barrier, these materials having a crush strength of 0,342 MPa and 1,711 MPa respectively.
2.1. Sample locations
To ensure uniformity of crush strength across the whole of the barrier face, eight samples shall be taken from four locations evenly spaced across the honeycomb block. For a block to pass certification, seven of these eight samples shall meet the crush strength requirements of the following sections.
The location of the samples depends on the size of the honeycomb block. First, four samples, each measuring 300 mm × 300 mm × 50 mm thick shall be cut from the block of barrier face material. Please refer to Figure 2 for an illustration of how to locate these sections within the honeycomb block. Each of these larger samples shall be cut into samples for certification testing (150 mm × 150 mm × 50 mm). Certification shall be based on the testing of two samples from each of these four locations. The other two should be made available to the applicant, upon request.
2.2. Sample size
Samples of the following size shall be used for testing:
|
Length |
: |
150 mm ± 6 mm |
|
Width |
: |
150 mm ± 6 mm |
|
Thickness |
: |
50 mm ± 2 mm |
The walls of incomplete cells around the edge of the sample shall be trimmed as follows:
|
|
In the ‘W’ direction, the fringes shall be no greater than 1,8 mm (see Figure 3). |
|
|
In the ‘L’ direction, half the length of one bonded cell wall (in the ribbon direction) shall be left at either end of the specimen (see Figure 3). |
2.3. Area measurement
The length of the sample shall be measured in three locations, 12,7 mm from each end and in the middle, and recorded as L1, L2 and L3 (Figure 3). In the same manner, the width shall be measured and recorded as W1, W2 and W3 (Figure 3). These measurements shall be taken on the centreline of the thickness. The crush area shall then be calculated as:

2.4. Crush rate and distance
The sample shall be crushed at a rate of not less than 5,1 mm/min and not more than 7,6 mm/min. The minimum crush distance shall be 16,5 mm.
2.5. Data collection
Force versus deflection data are to be collected in either analog or digital form for each sample tested. If analog data are collected then a means of converting this to digital shall be available. All digital data shall be collected at a rate of not less than 5 Hz (5 points per second).
2.6. Crush strength determination
Ignore all data prior to 6,4 mm of crush and after 16,5 mm of crush. Divide the remaining data into three sections or displacement intervals (n = 1, 2, 3) (see Figure 4) as follows:
|
(1) |
06,4 mm - 09,7 mm inclusive, |
|
(2) |
09,7 mm - 13,2 mm exclusive, |
|
(3) |
13,2 mm - 16,5 mm inclusive. |
Find the average for each section as follows:
 ; m = 1,2,3
; m = 1,2,3
where m represents the number of data points measured in each of the three intervals. Calculate the crush strength of each section as follows:
 ; n = 1,2,3
; n = 1,2,3
2.7. Sample crush strength specification
For a honeycomb sample to pass this certification, the following conditions shall be met:
|
|
0,308 MPa ≤ S(n) ≤ 0,342 MPa for 0,342 MPa material |
|
|
1,540 MPa ≤ S(n) ≤ 1,711 MPa for 1,711 MPa material |
|
|
n = 1, 2, 3. |
2.8. Block crush strength specification
Eight samples are to be tested from four locations, evenly spaced across the block. For a block to pass certification, seven of the eight samples shall meet the crush strength specification of the previous section.
3. ADHESIVE BONDING PROCEDURE
3.1. Immediately before bonding, aluminium sheet surfaces to be bonded shall be thoroughly cleaned using a suitable solvent, such as 1-1-1 Trichloroethane. This is to be carried out at least twice or as required to eliminate grease or dirt deposits. The cleaned surfaces shall then be abraded using 120 grit abrasive paper. Metallic/Silicon Carbide abrasive paper is not to be used. The surfaces shall be thoroughly abraded and the abrasive paper changed regularly during the process to avoid clogging, which may lead to a polishing effect. Following abrading, the surfaces shall be thoroughly cleaned again, as above. In total, the surfaces shall be solvent cleaned at least four times. All dust and deposits left as a result of the abrading process shall be removed, as these will adversely affect bonding.
3.2. The adhesive should be applied to one surface only, using a ribbed rubber roller. In cases where honeycomb is to be bonded to aluminium sheet, the adhesive should be applied to the aluminium sheet only.
A maximum of 0,5 kg/m2 shall be applied evenly over the surface, giving a maximum film thickness of 0,5 mm.
4. CONSTRUCTION
4.1. The main honeycomb block shall be bonded to the backing sheet with adhesive such that the cell axes are perpendicular to the sheet. The cladding shall be bonded to the front surface of the honeycomb block. The top and bottom surfaces of the cladding sheet shall not be bonded to the main honeycomb block but should be positioned closely to it. The cladding sheet shall be adhesively bonded to the backing sheet at the mounting flanges.
4.2. The bumper element shall be adhesively bonded to the front of the cladding sheet such that the cell axes are perpendicular to the sheet. The bottom of the bumper element shall be flush with the bottom surface of the cladding sheet. The bumper facing sheet shall be adhesively bonded to the front of the bumper element.
4.3. The bumper element shall then be divided into three equal sections by means of two horizontal slots. These slots shall be cut through the entire depth of the bumper section and extend the whole width of the bumper. The slots shall be cut using a saw; their width shall be the width of the blade used and shall not exceed 4,0 mm.
4.4. Clearance holes for mounting the barrier are to be drilled in the mounting flanges (shown in Figure 5). The holes shall be of 9,5 mm diameter. Five holes shall be drilled in the top flange at a distance of 40 mm from the top edge of the flange and five in the bottom flange, 40 mm from the bottom edge of that flange. The holes shall be at 100 mm, 300 mm, 500 mm, 700 mm, 900 mm from either edge of the barrier. All holes shall be drilled to ± 1 mm of the nominal distances. These hole locations are a recommendation only. Alternative positions may be used which offer at least the mounting strength and security provided by the above mounting specifications
5. MOUNTING
5.1. The deformable barrier shall be rigidly fixed to the edge of a mass of not less than 7 × 104 kg or to some structure attached thereto. The attachment of the barrier face shall be such that the vehicle shall not contact any part of the structure more than 75 mm from the top surface of the barrier (excluding the upper flange) during any stage of the impact (2). The front face of the surface to which the deformable barrier is attached shall be flat and continuous over the height and width of the face and shall be vertical ± 1° and perpendicular ± 1° to the axis of the run-up track. The attachment surface shall not be displaced by more than 10 mm during the test. If necessary, additional anchorage or arresting devices shall be used to prevent displacement of the concrete block. The edge of the deformable barrier shall be aligned with the edge of the concrete block appropriate for the side of the vehicle to be tested.
5.2. The deformable barrier shall be fixed to the concrete block by means of ten bolts, five in the top mounting flange and five in the bottom. These bolts shall be of at least 8 mm diameter. Steel clamping strips shall be used for both the top and bottom mounting flanges (see Figures 1 and 5). These strips shall be 60 mm high and 1 000 mm wide and have a thickness of at least 3 mm. The edges of the clamping strips should be rounded-off to prevent tearing of the barrier against the strip during impact. The edge of the strip should be located no more than 5 mm above the base of the upper barrier-mounting flange, or 5 mm below the top of the lower barrier-mounting flange. Five clearance holes of 9,5 mm diameter must be drilled in both strips to correspond with those in the mounting flange on the barrier (see paragraph 4). The mounting strip and barrier flange holes may be widened from 9,5 mm up to a maximum of 25 mm in order to accommodate differences in back-plate arrangements and/or load cell wall hole configurations. None of the fixtures shall fail in the impact test. In the case where the deformable barrier is mounted on a load cell wall (LCW) it should be noted that the above dimensional requirements for mountings are intended as a minimum. Where a LCW is present, the mounting strips may be extended to accommodate higher mounting holes for the bolts. If the strips are required to be extended, then thicker gauge steel should be used accordingly, such that the barrier does not pull away from the wall, bend or tear during the impact. If an alternative method of mounting the barrier is used, it should be at least as secure as that specified in the above paragraphs.
Figure 1
Deformable barrier for frontal impact testing

Figure 2
Locations of samples for certification


Figure 3
Honeycomb axes and measured dimensions

Figure 4
Crush force and displacement

Figure 5
Positions of holes for barrier mounting

(1) In accordance with the certification procedure described in paragraph 2 of this Annex.
(2) A mass, the end of which is between 125 mm and 925 mm high and at least 1 000 mm deep, is considered to satisfy this requirement.
ANNEX 10
CERTIFICATION PROCEDURE FOR THE DUMMY LOWER LEG AND FOOT
1. UPPER FOOT IMPACT TEST
1.1. The objective of this test is to measure the response of the Hybrid III foot and ankle to well-defined, hard faced pendulum impacts.
1.2. The complete Hybrid III lower leg assembly, left (86-5001-001 ) and right (86-5001-002), equipped with the foot and ankle assembly, left (78051-614) and right (78051-615), shall be used, including the knee assembly.
The load cell simulator (78051-319 Rev A) shall be used to secure the knee assembly (79051-16 Rev B) to the test fixture.
1.3. Test procedure
|
1.3.1. |
Each leg assembly shall be maintained (soaked) for four hours prior to the test at a temperature of 22 °C ± 3 °C and a relative humidity of 40 ± 30 per cent. The soak period shall not include the time required to reach steady state conditions. |
|
1.3.2. |
Clean the impact surface of the skin and also the impactor face with isopropyl alcohol or equivalent prior to the test. Dust with talc. |
|
1.3.3. |
Align the impactor accelerometer with its sensitive axis parallel to the direction of impact at contact with the foot. |
|
1.3.4. |
Mount the leg assembly to the fixture shown in Figure 1. The test fixture shall be rigidly secured to prevent movement during impact. The centre line of the femur load cell simulator (78051-319) shall be vertical with a tolerance of ± 0,5°. Adjust the mount such that the line joining the knee clevis joint and the ankle attachment bolt is horizontal with a tolerance of ± 3°, with the heel resting on two sheets of a flat low friction (PTFE sheet) surface. Ensure that the tibia flesh is located fully towards the knee end of the tibia. Adjust the ankle such that the plane of the underside of the foot is vertical and perpendicular to the direction of impact with a tolerance of ± 3° and such that the mid sagittal plane of the foot is aligned with the pendulum arm. Adjust the knee joint to 1,5 ± 0,5 g range before each test. Adjust the ankle joint so that it is free and then tighten just sufficiently to keep the foot stable on the PTFE sheet. |
|
1.3.5. |
The rigid impactor comprises a horizontal cylinder diameter 50 ± 2 mm and a pendulum support arm diameter 19 ± 1 mm (Figure 4). The cylinder has a mass of 1,25 ± 0,02 kg including instrumentation and any part of the support arm within the cylinder. The pendulum arm has a mass of 285 ± 5 g. The mass of any rotating part of the axle to which the support arm is attached should not be greater than 100 g. The length between the central horizontal axis of the impactor cylinder and the axis of rotation of the whole pendulum shall be 1 250 ± 1 mm. The impact cylinder is mounted with its longitudinal axis horizontal and perpendicular to the direction of impact. The pendulum shall impact the underside of the foot, at a distance of 185 ± 2 mm from the base of the heel resting on the rigid horizontal platform, so that the longitudinal centre line of the pendulum arm falls within 1° of a vertical line at impact. The impactor shall be guided to exclude significant lateral, vertical or rotational movement. |
|
1.3.6. |
Allow a period of at least 30 minutes between successive tests on the same leg. |
|
1.3.7. |
The data acquisition system, including transducers, shall conform to the specifications for CFC 600, as described in Annex 8. |
1.4. Performance specification
|
1.4.1. |
When each ball of the foot is impacted at 6,7 (± 0,1) m/s in accordance with paragraph 1.3, the maximum lower tibia bending momentum about the y axis (My) shall be 120 ± 25 Nm. |
2. LOWER FOOT IMPACT TEST WITHOUT SHOE
2.1. The objective of this test is to measure the response of the Hybrid III foot skin and insert to well-defined, hard faced pendulum impacts.
2.2. The complete Hybrid III lower leg assembly, left (86-5001-001) and right (86-5001-002), equipped with the foot and ankle assembly, left (78051-614) and right (78051-615), shall be used, including the knee assembly.
The load cell simulator (78051-319 Rev A) shall be used to secure the knee assembly (79051-16 Rev B) to the test fixture.
2.3. Test procedure
|
2.3.1. |
Each leg assembly shall be maintained (soaked) for four hours prior to the test at a temperature of 22 ± 3 °C and a relative humidity of 40 ± 30 per cent. The soak period shall not include the time required to reach steady state conditions. |
|
2.3.2. |
Clean the impact surface of the skin and also the impactor face with isopropyl alcohol or equivalent prior to the test. Dust with talc. Check that there is no visible damage to the energy absorbing insert to the heel. |
|
2.3.3. |
Align the impactor accelerometer with its sensitive axis parallel to the impactor longitudinal centre line. |
|
2.3.4. |
Mount the leg assembly to the fixture shown in Figure 2. The test fixture shall be rigidly secured to prevent movement during impact. The centre line of the femur load cell simulator (78051-319) shall be vertical with a tolerance of ± 0,5°. Adjust the mount such that the line joining the knee clevis joint and the ankle attachment bolt is horizontal with a tolerance of ± 3° with the heel resting on two sheets of a flat low friction (PTFE sheet) surface. Ensure that the tibia flesh is located fully towards the knee end of the tibia. Adjust the ankle such that the plane of the underside of the foot is vertical and perpendicular to the direction of the impact with a tolerance of ± 3° and such that the mid sagittal plane of the foot is aligned with the pendulum arm. Adjust the knee joint to 1,5 ± 0,5 g range before each test. Adjust the ankle joint so that it is free and then tighten just sufficiently to keep the foot stable on the PTFE sheet. |
|
2.3.5. |
The rigid impactor comprises a horizontal cylinder diameter 50 ± 2 mm and a pendulum support arm diameter 19 ± 1 mm (Figure 4). The cylinder has a mass of 1,25 ± 0,02 kg including instrumentation and any part of the support arm within the cylinder. The pendulum arm has a mass of 285 ± 5 g. The mass of any rotating part of the axle to which the support arm is attached should not be greater than 100 g. The length between the central horizontal axis of the impactor cylinder and the axis of rotation of the whole pendulum shall be 1 250 ± 1 mm. The impact cylinder is mounted with its longitudinal axis horizontal and perpendicular to the direction of impact. The pendulum shall impact the underside of the foot, at a distance of 62 ± 2 mm from the base of the heel resting on the rigid horizontal platform, so that the longitudinal centre line of the pendulum arm falls within 1° of a vertical line at impact. The impactor shall be guided to exclude significant lateral, vertical or rotational movement. |
|
2.3.6. |
Allow a period of at least 30 minutes between successive tests on the same leg. |
|
2.3.7. |
The data acquisition system, including transducers, shall conform to the specifications for CFC 600, as described in Annex 8. |
2.4. Performance specification
|
2.4.1. |
When each heel of the foot is impacted at 4,4 ± 0,1 m/s in accordance with paragraph 2.3, the maximum impactor acceleration shall be 295 ± 50 g. |
3. LOWER FOOT IMPACT TEST (WITH SHOE)
3.1. The objective of this test is to control the response of the Shoe and Hybrid III heel flesh and ankle joint to well-defined hard faced pendulum impacts.
3.2. The complete Hybrid III lower leg assembly, left (86-5001-001) and right (86-5001-002), equipped with the foot and ankle assembly, left (78051-614) and right (78051-615), shall be used, including the knee assembly. The load cell simulator (78051-319 Rev A) shall be used to secure the knee assembly (79051-16 Rev B) to the test fixture. The foot shall be fitted with the shoe specified in Annex 5, paragraph 2.9.2.
3.3. Test procedure
|
3.3.1. |
Each leg assembly shall be maintained (soaked) for four hours prior to the test at a temperature of 22 ± 3 °C and a relative humidity of 40 ± 30 per cent. The soak period shall not include the time required to reach steady state conditions. |
|
3.3.2. |
Clean the impact surface of the underside of the shoe with a clean cloth and the impactor face with isopropyl alcohol or equivalent prior to the test. Check that there is no visible damage to the energy absorbing insert to the heel. |
|
3.3.3. |
Align the impactor accelerometer with its sensitive axis parallel to the impactor longitudinal centre line. |
|
3.3.4. |
Mount the leg assembly to the fixture shown in Figure 3. The test fixture shall be rigidly secured to prevent movement during impact. The centre line of the femur load cell simulator (78051-319) shall be vertical with a tolerance of ± 0,5°. Adjust the mount such that the line joining the knee clevis joint and the ankle attachment bolt is horizontal with a tolerance of ± 3°, with the heel of the shoe resting on two sheets of a flat low friction (PTFE sheet) surface. Ensure that the tibia flesh is located fully towards the knee end of the tibia. Adjust the ankle such that a plane in contact with the heel and sole of the underside of the shoe is vertical and perpendicular to the direction of impact with a tolerance of ± 3° and such that the mid sagittal plane of the foot, and shoe is aligned with the pendulum arm. Adjust the knee joint to 1,5 ± 0,5 g range before each test. Adjust the ankle joint so that it is free and then tighten just sufficiently to keep the foot stable on the PTFE sheet. |
|
3.3.5. |
The rigid impactor comprises a horizontal cylinder diameter 50 ± 2 mm and a pendulum support arm diameter 19 ± 1 mm (Figure 4). The cylinder has a mass of 1,25 ± 0,02 kg including instrumentation and any part of the support arm within the cylinder. The pendulum arm has a mass of 285 ± 5 g. The mass of any rotating part of the axle to which the support arm is attached should not be greater than 100 g. The length between the central horizontal axis of the impactor cylinder and the axis of rotation of the whole pendulum shall be 1 250 ± 1 mm. The impact cylinder is mounted with its longitudinal axis horizontal and perpendicular to the direction of impact. The pendulum shall impact the heel of the shoe in a horizontal plane which is a distance of 62 ± 2 mm above the base of the dummy heel when the shoe is resting on the rigid horizontal platform, so that the longitudinal centre line of the pendulum arm falls within one degree of a vertical line at impact. The impactor shall be guided to exclude significant lateral, vertical or rotational movement. |
|
3.3.6. |
Allow a period of at least 30 minutes between successive tests on the same leg. |
|
3.3.7. |
The data acquisition system, including transducers, shall conform to the specifications for CFC 600, as described in Annex 8. |
3.4. Performance specification
|
3.4.1. |
When the heel of the shoe is impacted at 6,7 ± 0,1 m/s in accordance with paragraph 3.3, the maximum Tibia compressive force (Fz) shall be 3,3 ± 0,5 kN. |
Figure 1
Upper foot impact test
Test set-up specifications

Figure 2
Lower foot impact test (without shoe)
Test set-up specifications

Figure 3
Lower foot impact test (with shoe)
Test set-up specifications

Figure 4
Pendulum impactor
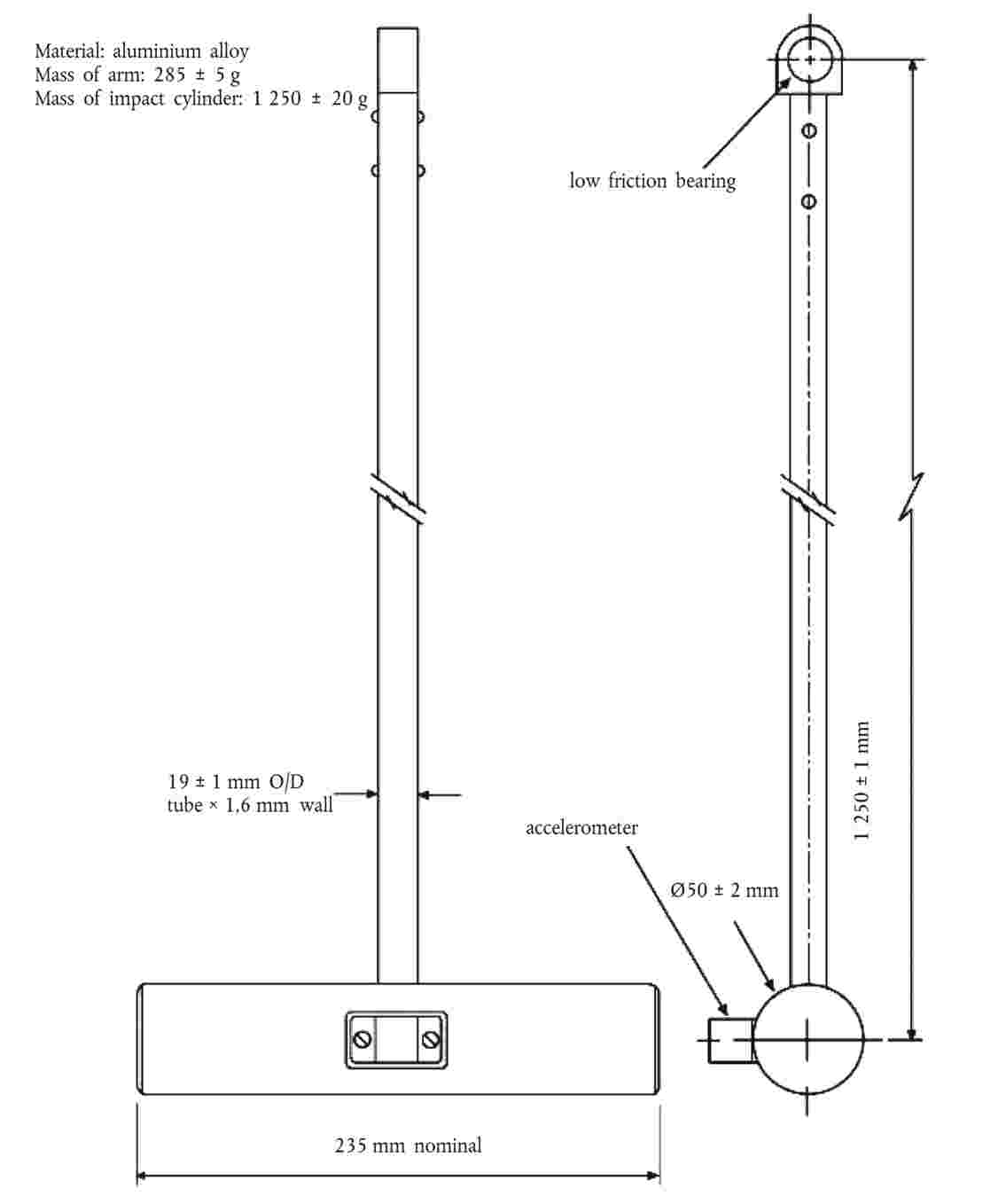
ANNEX 11
TEST PROCEDURES FOR THE PROTECTION OF THE OCCUPANTS OF VEHICLES OPERATING ON ELECTRICAL POWER FROM HIGH VOLTAGE AND ELECTROLYTE SPILLAGE
This Annex describes test procedures to demonstrate compliance to the electrical safety requirements of paragraph 5.2.8. For example, megohmmeter or oscilloscope measurements are an appropriate alternative to the procedure described below for measuring isolation resistance. In this case it may be necessary to deactivate the on-board isolation resistance monitoring system.
Before the vehicle impact test conducted, the high voltage bus voltage (Vb) (see Figure 1) shall be measured and recorded to confirm that it is within the operating voltage of the vehicle as specified by the vehicle manufacturer.
1. TEST SETUP AND EQUIPMENT
If a high voltage disconnect function is used, measurements are to be taken from both sides of the device performing the disconnect function.
However, if the high voltage disconnect is integral to the RESS or the energy conversion system and the high-voltage bus of the RESS or the energy conversion system is protected according to protection IPXXB following the impact test, measurements may only be taken between the device performing the disconnect function and the electrical loads.
The voltmeter used in this test shall measure DC values and have an internal resistance of at least 10 MΩ.
2. THE FOLLOWING INSTRUCTIONS MAY BE USED IF VOLTAGE IS MEASURED
After the impact test, determine the high voltage bus voltages (Vb, V1, V2) (see Figure 1).
The voltage measurement shall be made not earlier than 5 seconds, but, not later than 60 seconds after the impact.
This procedure is not applicable if the test is performed under the condition where the electric power train is not energised.
Figure 1
Measurement of Vb, V1, V2

3. ASSESSMENT PROCEDURE FOR LOW ELECTRICAL ENERGY
Prior to the impact a switch S1 and a known discharge resistor Re is connected in parallel to the relevant capacitor (ref. Figure 2).
Not earlier than 5 seconds and not later than 60 seconds after the impact the switch S1 shall be closed while the voltage Vb and the current Ie are measured and recorded. The product of the voltage Vb and the current Ie shall be integrated over the period of time, starting from the moment when the switch S1 is closed (tc) until the voltage Vb falls below the high voltage threshold of 60 V DC (th). The resulting integration equals the total energy (TE) in joules.
|
(a) |
|
When Vb is measured at a point in time between 5 seconds and 60 seconds after the impact and the capacitance of the X-capacitors (Cx) is specified by the manufacturer, total energy (TE) shall be calculated according to the following formula:
|
(b) |
TE = 0,5 × Cx × (Vb 2 – 3 600) |
When V1 and V2 (see Figure 1) are measured at a point in time between 5 seconds and 60 seconds after the impact and the capacitances of the Y-capacitors (Cy1, Cy2) are specified by the manufacturer, total energy (TEy1, TEy2) shall be calculated according to the following formulas:
|
(c) |
TEy1 = 0,5 × Cy1 × (V1 2 – 3 600) TEy2 = 0,5 × Cy2 × (V2 2 – 3 600) |
This procedure is not applicable if the test is performed under the condition where the electric power train is not energised.
Figure 2
E.g. measurement of high voltage bus energy stored in X-capacitors

4. PHYSICAL PROTECTION
Following the vehicle impact test any parts surrounding the high voltage components shall be, without the use of tools, opened, disassembled or removed. All remaining surrounding parts shall be considered part of the physical protection.
The jointed test finger described in the figure of the Appendix shall be inserted into any gaps or openings of the physical protection with a test force of 10 N ± 10 per cent for electrical safety assessment. If partial or full penetration into the physical protection by the jointed test finger occurs, the jointed test finger shall be placed in every position as specified below.
Starting from the straight position, both joints of the test finger shall be rotated progressively through an angle of up to 90 degrees with respect to the axis of the adjoining section of the finger and shall be placed in every possible position.
Internal electrical protection barriers are considered part of the enclosure.
If appropriate a low-voltage supply (of not less than 40 V and not more than 50 V) in series with a suitable lamp should be connected, between the jointed test finger and high voltage live parts inside the electrical protection barrier or enclosure.
4.1. Acceptance conditions
The requirements of paragraph 5.2.8.1.3 shall be considered to be met if the jointed test finger described in the figure of the Appendix is unable to contact high voltage live parts.
If necessary a mirror or a fiberscope may be used in order to inspect whether the jointed test finger touches the high voltage buses.
If this requirement is verified by a signal circuit between the jointed test finger and high voltage live parts, the lamp shall not light.
5. ISOLATION RESISTANCE
The isolation resistance between the high voltage bus and the electrical chassis may be demonstrated either by measurement or by a combination of measurement and calculation.
The following instructions should be used if the isolation resistance is demonstrated by measurement.
Measure and record the voltage (Vb) between the negative and the positive side of the high voltage bus (see Figure 1);
Measure and record the voltage (V1) between the negative side of the high voltage bus and the electrical chassis (see Figure 1);
Measure and record the voltage (V2) between the positive side of the high voltage bus and the electrical chassis (see Figure 1);
If V1 is greater than or equal to V2, insert a standard known resistance (Ro) between the negative side of the high voltage bus and the electrical chassis. With Ro installed, measure the voltage (V1’) between the negative side of the high voltage bus and the vehicle electrical chassis (see Figure 3). Calculate the isolation resistance (Ri) according to the formula shown below.
Ri = Ro*(Vb/V1’ – Vb/V1) or Ri = Ro*Vb*(1/V1’ – 1/V1)
Divide the result Ri, which is the electrical isolation resistance value in ohm (Ω), by the working voltage of the high voltage bus in volt (V).
Ri (Ω/V) = Ri (Ω)/Working voltage (V)
Figure 3
Measurement of V1’

If V2 is greater than V1, insert a standard known resistance (Ro) between the positive side of the high voltage bus and the electrical chassis. With Ro installed, measure the voltage (V2’) between the positive side of the high voltage bus and the electrical chassis (see Figure 4).
Calculate the isolation resistance (Ri) according to the formula shown below.
Ri = Ro*(Vb/V2’ – Vb/V2) or Ri = Ro*Vb*(1/V2’ – 1/V2)
Divide the result Ri, which is the electrical isolation resistance value in ohm (Ω), by the working voltage of the high voltage bus in volt (V).
Ri (Ω/V) = Ri (Ω)/Working voltage (V)
Figure 4
Measurement of V2’

Note: The standard known resistance Ro (in Ω) should be the value of the minimum required isolation resistance (Ω/V) multiplied by the working voltage (V) of the vehicle plus/minus 20 per cent. Ro is not required to be precisely this value since the equations are valid for any Ro; however, a Ro value in this range should provide a good resolution for the voltage measurements.
6. ELECTROLYTE SPILLAGE
Appropriate coating shall be applied, if necessary, to the physical protection in order to confirm any electrolyte leakage from the RESS after the impact test.
Unless the manufacturer provides means to differentiate between the leakage of different liquids, all liquid leakage shall be considered as the electrolyte.
7. RESS RETENTION
Compliance shall be determined by visual inspection.
Appendix
Jointed test finger (IPXXB)
Jointed test finger

Material: metal, except where otherwise specified
Linear dimensions in millimetres
Tolerances on dimensions without specific tolerance:
|
(a) |
On angles: 0/– 10° |
|
(b) |
On linear dimensions: up to 25 mm: 0/– 0,05 mm over 25 mm: ± 0,2 mm |
Both joints shall permit movement in the same plane and the same direction through an angle of 90° with a 0 to + 10° tolerance.









