|
13.11.2010 |
DA |
Den Europæiske Unions Tidende |
L 297/183 |
Kun de originale FN/ECE-tekster har retlig virkning i henhold til folkeretten. Dette regulativs nuværende status og ikrafttrædelsesdato bør kontrolleres i den seneste version af FN/ECE's statusdokument TRANS/WP.29/343, der findes på adressen:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Ændringer til regulativ nr. 13 fra De Forenede Nationers Økonomiske Kommission for Europa (FN/ECE) — Ensartede forskrifter for godkendelse af køretøjer i klasse M, N og O, hvad angår bremsesystemet
Ændringsserie 11
Ændringer af regulativ nr. 13 offentliggjort i EUT L 257, 30.9.2010, s. 1.
Omfattende:
|
|
Ændringsserie 11 — Ikrafttrædelsesdato: 11. juli 2008 |
|
|
Revision 6 — Ændring 1 — Korrigendum 1 |
|
|
Revision 6 — Ændring 1 — Korrigendum 2 |
|
|
Supplement 1 til ændringsserie 11 — ikrafttrædelsesdato: 22. juli 2009 |
|
|
Supplement 2 til ændringsserie 11 — ikrafttrædelsesdato: 24. oktober 2009 |
|
|
Korrigendum 2 til ændringsserie 11 — ikrafttrædelsesdato: 24. juni 2009 |
|
|
Supplement 3 til ændringsserie 11 — ikrafttrædelsesdato: 17. marts 2010 |
Ændringer i indholdsfortegnelsen
Overskriften til bilag 16 affattes således:
|
»Bilag 16 — |
Kompatibilitet mellem trækkende køretøj og påhængskøretøj med hensyn til datakommunikation efter ISO 11992 « |
Bilag 19 Der indsættes et nyt tillæg 7 og 8, der affattes således:
|
|
»Bilag 19 — Tillæg 7 — Køretøjsstabilitetsfunktion — informationsdokument |
|
|
Bilag 19 — Tillæg 8 — Køretøjsstabilitetsfunktion — prøvningsrapport « |
De hidtidige tillæg 7 og 8 nummereres som henholdsvis tillæg 9 og 10.
Der indsættes et nyt bilag 21.
|
»Bilag 21 — |
Særlige forskrifter for køretøjer, der er udstyret med køretøjsstabilitetsfunktion Bilag 21 — tillæg 1 — Anvendelse af simulering af dynamisk stabilitet Bilag 21 — tillæg 2 — Værktøj til simulering af dynamisk stabilitet; validering af værktøjet
|
Ændringer af regulativets tekst
I hele regulativ nr. 13 erstattes referencer til »ISO 11992:2003 « med »ISO 11992:2003, inklusive ISO 11992-2:2003 med ændring 1:2007 «.
Som nye punkter indsættes punkt 2.34 til 2.36, der affattes således:
|
»2.34. |
»Køretøjsstabilitetsfunktion«: en elektronisk kontrolfunktion i et køretøj, der forbedrer køretøjets dynamiske stabilitet.
|
|
2.35. |
»Det pågældende påhængskøretøj«: et påhængskøretøj, der repræsenterer den påhængskøretøjstype, for hvilken der ansøges om typegodkendelse. |
|
2.36. |
»Bremsefaktoren (BF)«: bremsens forstærkningsfaktor mellem input og output. « |
Punkt 4.2: »(p.t. 10)« ændres til »(p.t. 11)«.
Der indsættes et nyt punkt 5.1.3.6.1, der affattes således:
|
»5.1.3.6.1. |
Understøttelsen af meddelelser defineret i ISO 11992-2:2003, inklusive ændring 1:2007, er specificeret i bilag 16 til dette regulativ for det trækkende køretøj og påhængskøretøjet.« |
Punkt 5.1.3.6.1 og 5.1.3.6.2 (tidl.), omnummereres som henholdsvis punkt 5.1.3.6.2 og 5.1.3.6.3.
I punkt 5.2.1.30.5 slettes fodnote 12 og referencen til fodnote 12.
Der indsættes et nyt punkt 5.2.1.32, der affattes således (inkl. en ny fodnote 12 og reference til den nye fodnote 12):
|
»5.2.1.32. |
Med forbehold for bestemmelserne i punkt 12.4 i dette regulativ skal alle køretøjer i klasse M2, M3, N2 og N3 (1), som har højst 3 aksler, være udstyret med køretøjsstabilitetsfunktion. Denne skal omfatte væltekontrol og retningskontrol samt opfylde de tekniske forskrifter i bilag 21 til dette regulativ.« |
Punkt 5.2.2.17.1 affattes således (inkl. sletning af bemærkningen):
|
»5.2.2.17.1. |
På påhængskøretøjer, der er udstyret med køretøjsstabilitetsfunktion som defineret i punkt 2.34 i nærværende regulativ, skal tilfælde af svigt eller fejl i påhængskøretøjets stabilitetsfunktion angives ved gult advarselssignal, jf. punkt 5.2.1.29.2 ovenfor, via pol 5 i ISO 7638:1997-forbindelsesstikket. Kontrollampen skal forblive tændt, så længe svigtet eller fejlen er tilstede, og tændingskontakten (startkontakten) er i positionen »On« (kørselsposition).« |
I punkt 5.2.2.22.1 slettes fodnote 19 og referencen til fodnote 19.
I punkt 5.2.2.22.2 nummereres fodnote 20 og referencen til fodnote 20 som fodnote 19, og fodnote 21 og referencen til fodnote 21 slettes.
Der indsættes et nyt punkt 5.2.2.23 (inkl. ny fodnote 20 og reference til ny fodnote 20), der affattes således:
|
»5.2.2.23. |
Med forbehold for bestemmelserne i punkt 12.4 i dette regulativ skal alle køretøjer i klasse O3 og O4 (2), som har højst 3 aksler, og som er udstyret med luftaffjedring, være udstyret med køretøjsstabilitetsfunktion. Denne skal som minimum omfatte væltekontrol og opfylde de tekniske forskrifter i bilag 21 til dette regulativ.« |
Der indsættes et nyt punkt 12.1.6 (inkl. fodnote 21), der affattes således:
|
»12.1.6. |
Efter den officielle ikrafttrædelsesdato for ændringsserie 11 kan ingen af de kontraherende parter, der anvender dette regulativ, nægte at udstede typegodkendelse i henhold til dette regulativ som ændret ved ændringsserie 11 (3). |
Der indsættes et nyt punkt 12.1.7, der affattes således:
|
»12.1.7. |
Supplement 1 til ændringsserie 11 for dette regulativ anvendes som specificeret i punkt 12.4.1.« |
Der indsættes et nyt punkt 12.1.8, der affattes således:
|
»12.1.8. |
Fra den officielle ikrafttrædelsesdato for supplement 2 til ændringsserie 11 for dette regulativ kan ingen kontraherende part, som anvender dette regulativ, nægte at meddele godkendelse i henhold til dette regulativ som ændret ved supplement 2 til ændringsserie 11.« |
Der indsættes et nyt punkt 12.2.6, der affattes således:
|
»12.2.6. |
Fra 48 måneder efter ikrafttrædelsesdatoen for supplement 1 til ændringsserie 11 må kontraherende parter, som anvender dette regulativ, kun udstede godkendelse til køretøjer, som er omfattet af undtagelserne i punkt 5.2.1.32 og 5.2.2.23, inkl. fodnoterne, hvis de opfylder kravene i dette regulativ som ændret ved supplement 1 til ændringsserie 11.« |
Der indsættes et nyt punkt 12.2.7, der affattes således:
|
»12.2.7. |
Fra 48 måneder efter ikrafttrædelsesdatoen for supplement 2 til ændringsserie 11 for dette regulativ må de kontraherende parter, der anvender dette regulativ, kun meddele godkendelse, hvis den køretøjstype, som skal godkendes, opfylder forskrifterne i dette regulativ som ændret ved supplement 2 til ændringsserie 11.« |
Der indsættes et nyt punkt 12.3.2, der affattes således:
|
»12.3.2. |
Fra og med 84 måneder efter ikrafttrædelsesdatoen for supplement 2 til ændringsserie 11 for dette regulativ kan de kontraherende parter, der anvender dette regulativ, nægte den første nationale indregistrering (første ibrugtagning) af et køretøj, som ikke opfylder forskrifterne i dette regulativ som ændret ved supplement 2 til ændringsserie 11.« |
Der indsættes et nyt punkt 12.4 (inkl. fodnote 22), der affattes således:
»12.4. Ufravigelige forskrifter for køretøjer, der er udstyret med stabilitetsfunktion
|
12.4.1. |
Forskrifterne for udstyring af køretøjer med køretøjsstabilitetsfunktion, jf. punkt 5.2.1.32 og 5.2.2.23 i dette regulativ som ændret ved ændringsserie 11, anvendes som følger:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
De hidtidige punkter 12.4 og 12.4.1 nummereres som henholdsvis punkt 12.5 og 12.5.1.
Ændringer til bilag 2
I bilag 2 indsættes de nye punkter 14.14 og 14.14.1, der affattes således:
|
»14.14. |
Køretøjet er udstyret med en køretøjsstabilitetsfunktion: |
ja/nej (2) |
|
Er svaret ja: … |
|
|
|
Køretøjets stabilitetsfunktion er prøvet i henhold til og opfylder forskrifterne i bilag 21: |
ja/nej (2) |
|
|
Køretøjsstabilitetsfunktionen er valgfrit udstyr: |
ja/nej (2) |
|
|
Køretøjsstabilitetsfunktionen omfatter retningskontrol: |
ja/nej (2) |
|
|
Køretøjsstabilitetsfunktionen omfatter væltekontrol: |
ja/nej (2) |
|
|
14.14.1. |
Hvis der er anvendt en prøvningsrapport efter bilag 19, angives prøvningsrapportens nummer: …« |
|
Ændringer til bilag 10
Bilag 10, punkt 1.3.1, fodnote 2, affattes således:
|
»(2) |
Hvis der er tale om flere aksler, og akselafstanden er større end 2,0 m, skal hver enkelt aksel betragtes som en uafhængig akselgruppe. « |
Ændringer til bilag 11
Bilag 11
Punkt 2 affattes således:
|
»2. |
Ved »identisk « i punkt 1.1, 1.2 og 1.3 forstås, at de i disse punkter nævnte køretøjsdele er indbyrdes overensstemmende med hensyn til geometriske og mekaniske kendetegn og de i disse punkter omtalte anvendte materialers kendetegn. For påhængskøretøjer anses disse krav som opfyldt med hensyn til punkt 1.1 og 1.2 ovenfor, hvis de i tillæg 2, punkt 3.7, nævnte identifikatorer for det pågældende påhængskøretøjs aksel/bremse er indeholdt i rapporten vedrørende en referenceaksel/-bremse. En »referenceaksel/-bremse« er en aksel/bremse, for hvilken der foreligger en prøvningsrapport, jf. tillæg 2, punkt 3.9, i dette bilag.« |
Bilag 11 — Tillæg 1
Tabel I affattes således (inkl. fodnote 1):
|
|
»Køretøjets aksler |
Referenceaksler |
||||
|
Statisk akseltryk (P) (5) |
Nødvendig bremsekraft ved hjul |
Hastighed |
Prøvningsmasse (Pe) (5) |
Udviklet bremsekraft ved hjul |
Hastighed |
|
|
kg |
N |
km/h |
kg |
N |
km/h |
|
|
Aksel 1 |
|
|
|
|
|
|
|
Aksel 2 |
|
|
|
|
|
|
|
Aksel 3 |
|
|
|
|
|
|
|
Aksel 4 |
|
|
|
|
|
|
Tabel III, tredje række, affattes således (inkl. sletning af fodnote 2):
|
|
‘REFERENCEAKSEL … (kopi vedlagt) |
|
|
RAPPORT Nr. … |
|
|
Den … |
|
|
Type I |
Type III |
|
Bremsekraft pr. aksel (N) (jf. punkt 4.2.1 i tillæg 2) |
|
|
|
Aksel 1 |
T1 = … % Fe |
T1 = … % Fe |
|
Aksel 2 |
T2 = … % Fe |
T2 = … % Fe |
|
Aksel 3 |
T3 = … % Fe |
T3 = … % Fe |
|
… |
… |
…’ |
Bilag 11 — Tillæg 2
Der indsættes et nyt punkt 1.2.2, der affattes således:
|
»1.2.2. |
Prøvninger, der er gennemført i overensstemmelse med dette bilag forud for Supplement 2 til ændringsserie 11 til dette regulativ, og som sammen med enhver form for supplerende data fra fabrikanten af køretøjet/akslen/bremsen udgør tilstrækkelig information med henblik på opfyldelse af forskrifterne i Supplement 2 til ændringsserie 11, kan anvendes i en ny rapport eller i et supplement til en eksisterende prøvningsrapport, uden at der kræves foretaget egentlig prøvning.« |
Punkt 2 affattes således:
»2. SYMBOLER OG DEFINITIONER
2.1. Symboler
|
P |
= |
den del af køretøjets masse, der bæres af akslen under statiske forhold |
|
F |
= |
normal reaktionskraft fra vejbelægningen på akslen under statiske forhold = P·g |
|
FR |
= |
samlet normal statisk reaktionskraft fra vejbelægningen på alle påhængskøretøjets hjul |
|
Fe |
= |
akselbelastning ved prøvning |
|
Pe |
= |
Fe / g |
|
g |
= |
tyngdeaccelerationen: g = 9,81 m/s2 |
|
C |
= |
bremseindgangsmoment |
|
C0 |
= |
bremseindgangstærskelmoment, jf. definitionen i punkt 2.2.2 |
|
C0,dec |
= |
opgivet bremseindgangstærskelmoment |
|
Cmax |
= |
opgivet maksimalt bremseindgangsmoment |
|
R |
= |
dækkenes rulningsradius (dynamisk) |
|
T |
= |
bremsekraft ved berøringsfladen mellem dæk og vej |
|
TR |
= |
samlet bremsekraft ved påhængskøretøjets berøringsflade mellem dæk og vej |
|
M |
= |
bremsemoment = T · R |
|
z |
= |
decelerationstal = T/F eller M/(R · F) |
|
s |
= |
stempelvandring (arbejdende stempelvandring + frigang) |
|
sp |
= |
jf. bilag 19, tillæg 9 |
|
ThA |
= |
jf. bilag 19, tillæg 9 |
|
l |
= |
armlængde |
|
r |
= |
bremsetromlernes indre radius eller skivebremsernes effektive radius |
|
p |
= |
bremseaktiveringstrykket |
Bemærk: Symboler med suffikset »e« vedrører parametre i forbindelse med referencebremseprøvningen; suffikset kan føjes til andre symboler, i det omfang det er relevant.
2.2. Definitioner
2.2.1. Skivers og tromlers masse
|
2.2.1.1. |
»Den opgivne masse« er den af fabrikanten opgivne masse, som er repræsentativ for bremseidentifikatoren (jf. punkt 3.7.2.2 i dette tillæg). |
|
2.2.1.2. |
»Den nominelle prøvningsmasse« er den af fabrikanten specificerede masse for den skive eller tromle, med hvilken den relevante prøvning udføres af den tekniske tjeneste. |
|
2.2.1.3. |
»Den faktiske prøvningsmasse« er den masse, der måles af den tekniske tjeneste forud for prøvningen. |
2.2.2. »Bremseindgangstærskelmoment«
|
2.2.2.1. |
Bremseindgangstærskelmomentet, »C0«, er det indgangsmoment, som kræves for at frembringe et måleligt bremsemoment. Dette moment kan bestemmes ved ekstrapolering af målinger inden for et interval, der ikke overstiger 15 % af decelerationstallet eller ved andre ækvivalerende metoder (jf. bilag 10, tillæg 1.3.1.1). |
|
2.2.2.2. |
Bremseindgangstærskelmomentet »C0,dec« er det af fabrikanten opgivne bremseindgangstærskelmoment; det repræsenterer tærsklen for bremsens indgangsmoment (jf. punkt 3.7.2.2.1 i dette tillæg) og er nødvendigt med henblik på udarbejdelse af diagram 2 i bilag 19. |
|
2.2.2.3. |
Bremseindgangstærskelmomentet »C0,e« bestemmes ved den i punkt 2.2.2.1 ovenfor definerede procedure og måles af den tekniske tjeneste ved prøvningens afslutning. |
2.2.3. »Skivens ydre diameter«:
|
2.2.3.1. |
»Den opgivne ydre diameter« er den af fabrikanten opgivne ydre diameter, som er den repræsentative ydre diameter for en bremseskive (jf. punkt 3.7.2.2.1 i dette tillæg). |
|
2.2.3.2. |
»Den nominelle ydre diameter« er den af fabrikanten specificerede ydre diameter for den skive, med hvilken den relevante prøvning udføres af den tekniske tjeneste. |
|
2.2.3.3. |
»Den faktiske ydre diameter« er den ydre diameter som målt af den tekniske tjeneste forud for prøvningen. |
2.2.4. »Bremsenøgleskaftets effektive længde« er afstanden fra bremsenøglens centerlinje til betjeningsarmens centerlinje.«
Punkt 3.4 affattes således:
»3.4. Prøvningsbetingelser (generelle)«
Punkt 3.7 til 3.7.3 slettes.
Der indsættes nye punkter fra 3.7 til 3.9.4, der affattes således:
»3.7. Identifikation
3.7.1. Akslen skal på et synligt sted som minimum være påført følgende identifikationsinformationer; informationerne skal være opstillet samlet i en hvilken som helst orden, være let læselige og må ikke kunne fjernes:
|
a) |
Akselfabrikant og/eller -mærke |
|
b) |
Akselidentifikator (jf. punkt 3.7.2.1 i dette tillæg) |
|
c) |
Bremseidentifikator (jf. punkt 3.7.2.2 i dette tillæg) |
|
d) |
Fe-identifikator (jf. punkt 3.7.2.3 i dette bilag) |
|
e) |
Roden af prøvningsrapportens nummer (jf. punkt 3.9 i dette tillæg). |
Et eksempel:
|
|
|
|
|
|
|
|
|
|
3.7.1.1. En ikke integreret automatisk bremsejusteringsanordning skal på et synligt sted som minimum være påført følgende identifikationsinformationer; informationerne skal være opstillet samlet, være let læselige og ikke kunne fjernes:
|
a) |
Fabrikant og/eller mærke |
|
b) |
Type |
|
c) |
Version. |
3.7.1.2. Bremsebelægningens fabrikat og type skal være synligt, let læseligt og ikke kunne fjernes, når belægningen/bremseklodsen er monteret på bremseskoen/bagpladen.
3.7.2. Identifikatorer
3.7.2.1. Akselidentifikator
Akselidentifikatoren klassificerer en aksels ydeevne som opgivet af fabrikanten med hensyn til bremsekraft/moment.
Akselidentifikatoren skal være alfanumerisk og bestå af de fire karakterer »ID1-« efterfulgt af højst 20 karakterer.
3.7.2.2. Bremseidentifikator
Bremseidentifikatoren skal være alfanumerisk og bestå af de fire karakterer »ID2-« efterfulgt af højst 20 karakterer.
Bremser med samme identifikatorer afviger ikke indbyrdes med hensyn til følgende kriterier:
|
a) |
Bremsetype (f.eks. tromlebremser (med bremsenøgle eller kile, osv.) eller skivebremser (med fast eller flydende åg, med enkel eller dobbelt skive, osv.)) |
|
b) |
Bremseågets, bremseankerets, bremseskivens eller bremsetromlens materiale (f.eks. jernholdigt eller ikke jernholdigt) |
|
c) |
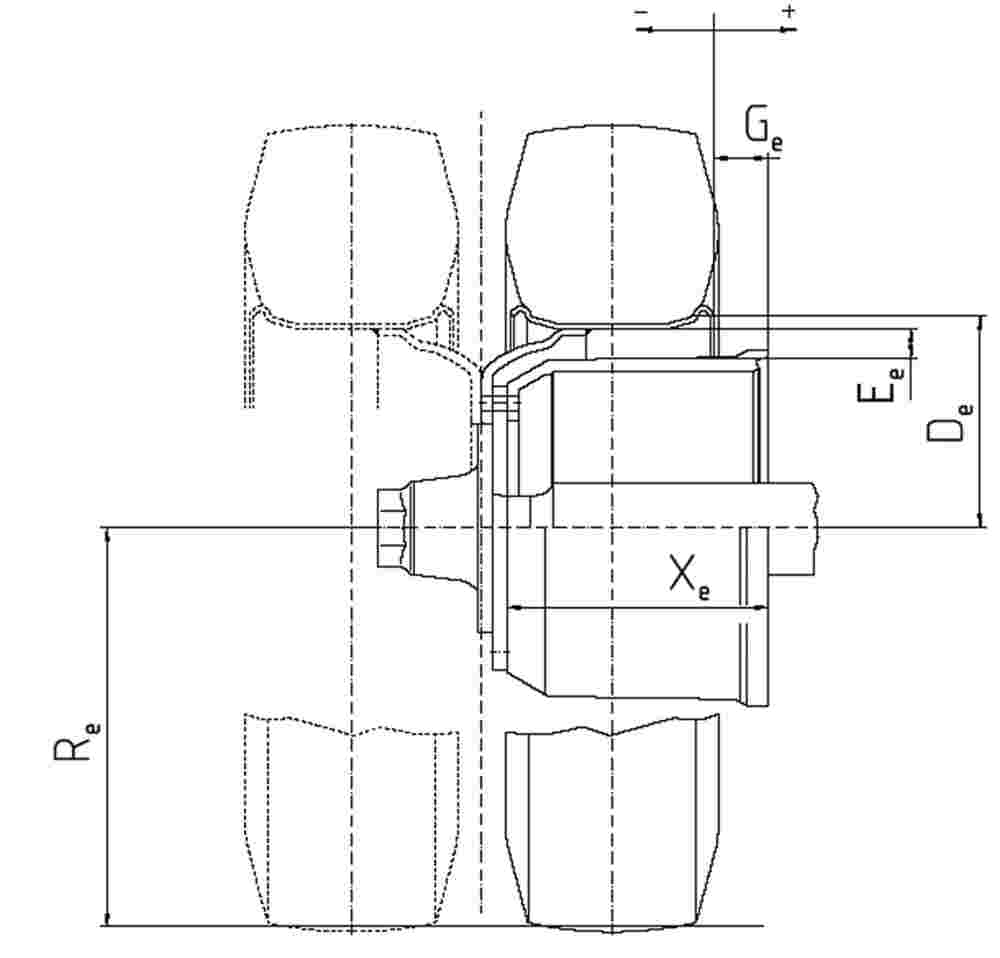
Målene med suffikset »e« på figur 2A og 2B i tillæg 5 til dette bilag |
|
d) |
Grundprincippet i bremsen til frembringelse af bremsekraften |
|
e) |
For skivebremser: skivens fastholdelsesmetode: fast eller flydende åg |
|
f) |
Bremsefaktoren BF |
|
g) |
Forskellige bremseegenskaber med hensyn til forskrifterne i bilag 11, som ikke er omfattet af punkt 3.7.2.2.1. |
3.7.2.2.1. Tilladte variationer inden for én og samme bremseidentifikator
Inden for en bremseidentifikator er forskelle med hensyn til følgende egenskaber tilladt:
|
a) |
Opgivet maksimalt bremseindgangsmoment Cmax: kan øges |
|
b) |
Opgivet masse for bremseskive eller bremsetromle mdec: kan afvige med ± 20 % |
|
c) |
Fastgørelsesmetode for bremsebelægning/bremseklods på bremsesko/bagplade |
|
d) |
For skivebremser: bremsens maksimale aktiveringsevne kan øges |
|
e) |
Bremsenøgleskaftets effektive længde |
|
f) |
Opgivet tærskelmoment, C0,dec |
|
g) |
Opgivet ydre diameter for bremseskive: kan variere ± 5 mm |
|
h) |
Køleprincip for bremseskive (ventileret/ikke ventileret) |
|
i) |
Nav (med/uden integreret nav) |
|
j) |
Skive med integreret tromle (med/uden parkeringsbremsefunktion) |
|
k) |
Det geometriske forhold mellem skivens friktionsoverflade og montering |
|
l) |
Bremsebelægningstype |
|
m) |
Variationer tilladt mht. materialer (herunder ændring af basismaterialet, jf. punkt 3.7.2.2), for hvilke fabrikanten kan bekræfte, at sådanne materialevariationer ikke ændrer ydeevnen med hensyn til den foreskrevne prøvning |
|
n) |
Bagplade og bremsesko. |
3.7.2.3. Fe-identifikator
Fe-identifikatoren angiver akseltrykket ved prøvning. Identifikatoren er en alfanumerisk sekvens bestående af de fire karakterer »ID3-«, efterfulgt af Fe-værdien daN, uden daN-enhedsangivelse.
3.7.2.4. Prøvningsrapportidentifikator
Prøvningsrapportidentifikatoren er en alfanumerisk sekvens bestående af de fire karakterer »ID4-« efterfulgt af roden af prøvningsrapportens nummer.
3.7.3. Automatisk bremsejusteringsanordning (integreret og ikke integreret)
3.7.3.1. Typer af automatisk bremsejusteringsanordning
Bremsejusteringsanordninger af samme type afviger ikke indbyrdes med hensyn til følgende kriterier:
|
a) |
Hoveddel: basismateriale (f.eks. jernholdigt eller ikke jernholdigt, støbejern eller smedejern) |
|
b) |
Højst tilladte bremseakselmoment |
|
c) |
Operativt justeringsprincip, f.eks. efter stempelvandring, efter kraft eller elektronisk/mekanisk. |
3.7.3.2. Versioner af automatisk bremsejusteringsanordning med hensyn til justeringsprincip
Automatiske bremsejusteringsanordninger, som afviger med hensyn til virkning på bremsens spillerum, betragtes som værende forskellige versioner.
3.8. Prøvningskriterier
Prøvningen skal demonstrere opfyldelsen af forskrifterne i tillæg 2 til dette bilag.
Hvis en ny prøvningsrapport eller et supplement til en rapport er påkrævet med henblik på en modificeret aksel/bremse inden for de i punkt 3.7.2.2.1 beskrevne rammer, anvendes følgende kriterier til bestemmelse af nødvendigheden af yderligere prøvning under hensyntagen til de med den tekniske tjeneste aftalte ugunstigste konfigurationer.
|
Følgende forkortelser anvendes i nedenstående tabel: |
|||||||||
|
CT (fuld prøvning, »complete test«) |
Prøvning efter bilag 11, tillæg 2:
Prøve efter bilag 19:
|
||||||||
|
FT (fadingprøvning, »fade test«) |
Prøvning efter bilag 11, tillæg 2:
|
||||||||
|
Forskelle i henhold til punkt 3.7.2.2.1 ovenfor |
Prøvningskriterier |
||||||
|
Ændring tilladt uden yderligere prøvning |
||||||
|
CT: Den letteste variant prøves. Hvis den nominelle prøvningsmasse for en ny variant afviger med mindre end 5 % fra en tidligere prøvet variant med en højere nominel værdi, kan prøvningen af den lettere variant udelades. Prøvningseksemplarets faktiske prøvningsmasse kan variere med ± 5 % fra den nominelle prøvningsmasse. |
||||||
|
Den ugunstigste metode som angivet af fabrikanten og aftalt med den tekniske tjeneste, der står for prøvningen |
||||||
|
Ændring tilladt uden yderligere prøvning |
||||||
|
Den ugunstigste længde betragtes som den med den laveste bremseskaftvridningsfasthed, og den kontrolleres enten ved:
|
||||||
|
Det kontrolleres, at bremsens ydeevne forbliver inden for korridoren i diagram 2 i bilag 19. |
||||||
|
Det ugunstigste tilfælde er den mindste diameter. Prøvningseksemplarets faktiske ydre diameter kan variere ± 1 mm fra den nominelle ydre diameter opgivet af akselfabrikanten. |
||||||
|
Hver type prøves. |
||||||
|
Hver type prøves. |
||||||
|
Der kræves ikke prøvning heraf. |
||||||
|
Der kræves ikke prøvning heraf. |
||||||
|
Enhver type bremsebelægning. |
||||||
|
Der kræves ikke prøvning heraf. |
||||||
|
Prøvning af ugunstigste tilfælde (7): Bagplade: minimal tykkelse Bremsesko: letteste bremsesko |
|
3.8.1. |
Hvis en automatisk bremsejusteringsanordning afviger fra en, der er prøvet efter punkt 3.7.3.1 og 3.7.3.2, er det nødvendigt at gennemføre endnu en prøvning i overensstemmelse med punkt 3.6.2 i dette tillæg. |
3.9. Prøvningsrapport
3.9.1. Prøvningsrapportnummer
Prøvningsrapportnummeret består af to dele: en rod og et suffiks, der angiver prøvningsrapportens emneniveau.
Roden, der består af højst 20 karakterer, og suffikset skal være klart adskilte, f.eks. ved punktum eller skråstreg.
Roden af prøvningsrapportens nummer må kun omfatte bremser med samme bremseidentifikator og samme bremsefaktor (i henhold til punkt 4 i bilag 19 til dette regulativ).
3.9.2. Prøvningskode
Foruden prøvningsrapportens nummer angiver en »prøvningskode« bestående af indtil otte karakterer (f.eks. ABC123) prøvningsresultaterne for identifikatorer og prøvningseksemplarer, hvilket fremgår detaljeret af punkt 3.7 ovenfor.
3.9.3. Prøvningsresultater
|
3.9.3.1. |
Resultaterne af prøvningerne i punkt 3.5 og 3.6.1 i dette tillæg rapporteres i et skema som vist i tillæg 3 til dette bilag. |
|
3.9.3.2. |
For bremser med andre automatiske bremsejusteringsanordninger anføres resultaterne af prøvninger, der er udført efter punkt 3.6.2 i dette tillæg, i et skema som vist i tillæg 4 til dette bilag. |
3.9.4. Oplysningsskema
Prøvningsrapporten skal indeholde et oplysningsskema fra aksel- eller køretøjsfabrikanten indeholdende som minimum de oplysninger, der er beskrevet i tillæg 5 til dette bilag.
I dette oplysningsskema skal eventuelle varianter af de bremser/aksler, køretøjet er udstyret med, identificeres med hensyn til de væsentlige kriterier, jf. punkt 3.7.2.2.1 ovenfor.«
Punkt 4.1 affattes således:
»4.1. Efterprøvning af komponenter
Bremsespecifikationen for det køretøj, der søges typegodkendt, skal være i overensstemmelse med forskrifterne i punkt 3.7 og 3.8 ovenfor.«
Punkt 4.1.1 til 4.1.7 slettes.
Formlen i punkt 4.3.1.4 affattes således:
Formlen i punkt 4.3.2 affattes således:

Bilag 11 — Tillæg 3
Affattes således (inkl. sletning af figur 1A, 1B, 2A og 2B):
»TILLÆG 3
Model for prøvningsrapport som foreskrevet i punkt 3.9 i tillæg 2 til dette bilag
PRØVNINGSRAPPORT Nr. …
|
|
Rod: ID4- … |
|
|
Suffiks: … |
1. GENERELT
|
1.1. |
Akselfabrikant (navn og adresse): … |
|
1.1.1. |
Akselfabrikat: … |
|
1.2. |
Bremsefabrikant (navn og adresse): … |
|
1.2.1. |
Bremseidentifikator ID2-… |
|
1.2.2. |
Automatisk bremsejusteringsanordning: integreret/ikke integreret (8) |
|
1.3. |
Oplysningsskema fra fabrikanten: … |
2. PRØVNINGSDATA
Følgende data registreres ved hver prøvning:
|
2.1. |
Prøvningskode (jf. punkt 3.9.2 i tillæg 2 til dette bilag): … |
|
2.2. |
Prøveemne: (præcis identificering af den prøvede variant ud fra fabrikantens oplysningsskema. Jf. også punkt 3.9.2 i tillæg 2 til dette bilag) |
|
2.2.1. |
Aksel |
|
2.2.1.1. |
Akselidentifikator: ID1-… |
|
2.2.1.2. |
Identificering af prøvet aksel: … |
|
2.2.1.3. |
Belastning af aksel ved prøvning (Fe): ID3-… daN |
|
2.2.2. |
Bremse |
|
2.2.2.1. |
Bremseidentifikator: ID2-… |
|
2.2.2.2. |
Identificering af prøvet aksel: … |
|
2.2.2.3. |
Maksimal aktiveringsevne for bremsen (9): … |
|
2.2.2.4. |
Bremsenøgleskaftets effektive længde (10): … |
|
2.2.2.5. |
Materialevarianter, jf. punkt 3.8 m) i tillæg 2 til dette bilag: … |
|
2.2.2.6. |
Bremsetromle eller bremseskive (8) |
|
2.2.2.6.1. |
Faktisk prøvningsmasse for skive/tromle (8): … |
|
2.2.2.6.2. |
Nominel udvendig diameter for skive (9): … |
|
2.2.2.6.3. |
Køleprincip for bremseskive (ventileret/ikke ventileret) (8) |
|
2.2.2.6.4. |
Med eller uden integreret nav (8) |
|
2.2.2.6.5. |
Skive med integreret tromle (med/uden parkeringsbremsefunktion) (8) (9) |
|
2.2.2.6.6. |
Geometrisk forhold mellem skivens friktionsoverflade og montering: … |
|
2.2.2.6.7. |
Basismateriale: … |
|
2.2.2.7. |
Bremsebelægning eller -klods (8) |
|
2.2.2.7.1. |
Fabrikant: … |
|
2.2.2.7.2. |
Fabrikat: … |
|
2.2.2.7.3. |
Type: … |
|
2.2.2.7.4. |
Fastgørelsesmetode for bremsebelægning/bremseklods på bremsesko/bagplade (8): … |
|
2.2.2.7.5. |
Bagpladens tykkelse, bremseskoens vægt eller andre oplysninger (fabrikantens oplysningsskema) (8): |
|
2.2.2.7.6. |
Basismateriale for bremsesko/bagplade (8): … |
|
2.2.3. |
Automatisk bremsejusteringsanordning (gælder ikke for integrerede automatiske bremsejusteringsanordninger) (8) |
|
2.2.3.1. |
Fabrikant (navn og adresse): … |
|
2.2.3.2. |
Fabrikat: … |
|
2.2.3.3. |
Type: … |
|
2.2.3.4. |
Version: … |
|
2.2.4. |
Hjul (dimensioner, jf. figur 1A og 1B i tillæg 5 til dette bilag) |
|
2.2.4.1. |
Referencerulningsradius (Re) ved prøvningsakseltryk (Fe): … |
|
2.2.4.2. |
Data for det ved prøvningen monterede hjul:
|
|
2.2.5. |
Armlængde (le): … |
|
2.2.6. |
Bremsecylinder |
|
2.2.6.1. |
Fabrikant: … |
|
2.2.6.2. |
Fabrikat: … |
|
2.2.6.3. |
Type: … |
|
2.2.6.4. |
(Prøvnings)registreringsnummer: … |
|
2.3. |
Prøvningsresultater (justeret for rullemodstand på 0,01·Fe) |
|
2.3.1. |
For køretøjer i klasse O2 og O3
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.2. |
For køretøjer i klasse O4
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.3. |
Dette punkt udfyldes kun, når bremsen har været underkastet den i punkt 4 i bilag 19 til dette regulativ fastsatte prøvningsmetode med henblik på at efterprøve bremsens egenskaber i kold stand ved hjælp af bremsefaktoren (BF). |
|
2.3.3.1. |
Bremsefaktoren BF: |
|
2.3.3.2. |
Opgivet tærskelmoment, C0,dec Nm |
|
2.3.4. |
Ydeevne for den automatiske bremsejusteringsanordning (hvis en sådan findes) |
|
2.3.4.1. |
Friløb ifølge punkt 3.6.3 i bilag 11, tillæg 2: ja/nej (8) |
3. ANVENDELSESOMRÅDE
Anvendelsesområdet angiver de aksel/bremse-variationer, der er omfattet af denne prøvningsrapport, i form af variationer, som er dækket af de enkelte prøvningskoder.
4. Denne prøvning er udført og dens resultater rapporteret i overensstemmelse med tillæg 2 til bilag 11 og eventuelt punkt 4 i bilag 19 til regulativ nr. 13, som senest ændret ved ændringsserie …
Ved afslutningen af prøvningen, jf. punkt 3.6 i bilag 11, tillæg 2 (11), anses kravene i punkt 5.2.2.8.1 i regulativ nr. 13 for at være opfyldt / ikke at være opfyldt (8)
TEKNISK TJENESTE (12), SOM UDFØRER PRØVNINGEN
Underskrift: … Dato: …
5. GODKENDENDE MYNDIGHED (12)
Underskrift: … Dato: …
I Bilag 11 — Tillæg 4,
punkt 1.1, erstattes »Teknisk tilladt akseltryk (Pe)« med »Akseltryk ved prøvning (Fe): ID3-«.
I bilag 11 indsættes et nyt tillæg 5, der affattes således:
»TILLÆG 5
Oplysningsskema for aksler og bremser med hensyn til den alternative procedure for type I- og type III-prøvning
1. GENERELT
|
1.1. |
Aksel- eller køretøjsfabrikantens navn og adresse: … |
2. DATA VEDRØRENDE AKSEL
|
2.1. |
Fabrikant (navn og adresse): … |
|
2.2. |
Type/variant: … |
|
2.3. |
Akselidentifikator: ID1-… |
|
2.4. |
Akseltryk ved prøvning (Fe): … daN |
|
2.5. |
Data vedrørende hjul og bremser i henhold til nedenstående figur 1A og 1B: Figur 1A
Figur 1B
|
3. BREMSE
|
3.1. |
Generelle oplysninger |
|
3.1.1. |
Fabrikat: … |
|
3.1.2. |
Fabrikant (navn og adresse): … |
|
3.1.3. |
Bremsetype (f.eks. tromlebremse/skivebremse): … |
|
3.1.3.1. |
Variant (f.eks. med bremsenøgle, med enkelt kile osv.): … |
|
3.1.4. |
Bremseidentifikator: ID2-… |
|
3.1.5. |
Data vedrørende bremser i henhold til nedenstående figur 2A og 2B: Figur 2A
Figur 2B
|
|
3.2. |
Data vedrørende tromlebremse |
|
3.2.1. |
Bremsejusteringsanordning (ekstern/integreret): … |
|
3.2.2. |
Opgivet maksimalt bremseindgangsmoment Cmax: …Nm |
|
3.2.3. |
Mekanisk virkningsgrad: η = … |
|
3.2.4. |
Opgivet bremseindgangstærskelmoment, C0,dec: …Nm |
|
3.2.5. |
Bremsenøgleskaftets effektive længde: … mm |
|
3.3. |
Bremsetromle |
|
3.3.1. |
Friktionsoverfladens maksimale diameter (acceptabel slitage): … mm |
|
3.3.2. |
Basismateriale: … |
|
3.3.3. |
Opgivet masse: … kg |
|
3.3.4. |
Nominel masse: … kg |
|
3.4. |
Bremsebelægning |
|
3.4.1. |
Fabrikant (navn og adresse): … |
|
3.4.2. |
Fabrikat: … |
|
3.4.3. |
Type: … |
|
3.4.4. |
Identifikation (typeidentifikation på bremsebelægning): … |
|
3.4.5. |
Minimal tykkelse (tilladt slitage) … mm |
|
3.4.6. |
Metode for fastgørelse af bremsebelægning på bremsesko: … |
|
3.4.6.1. |
Ugunstigste fastgørelsesmetode (hvis mere end én metode): … |
|
3.5. |
Data vedrørende skivebremse |
|
3.5.1. |
Forbindelse til aksel (aksial, radial, integreret osv.): … |
|
3.5.2. |
Bremsejusteringsanordning (ekstern/integreret): … |
|
3.5.3. |
Maks. stempelvandring i bremsecylinder: … mm |
|
3.5.4. |
Opgivet maksimal aktiveringskraft ThAmax: …daN |
|
3.5.4.1. |
Cmax = ThAmax · le: … Nm |
|
3.5.5. |
Friktionsradius: re = … mm |
|
3.5.6. |
Armlængde: le = … mm |
|
3.5.7. |
Input/output-forhold (le/ee): i = … |
|
3.5.8. |
Mekanisk virkningsgrad: η = … |
|
3.5.9. |
Opgivet bremseindgangstærskelmoment ThA0,dec: …N |
|
3.5.9.1. |
C0,dec = ThA0,dec le: … Nm |
|
3.5.10. |
Minimal rotortykkelse (tilladt slitage): … mm |
|
3.6. |
Data vedrørende bremseskive |
|
3.6.1. |
Beskrivelse af skivetypen: … |
|
3.6.2. |
Forbindelse/montering på nav: … |
|
3.6.3. |
Ventileret (ja/nej): … |
|
3.6.4. |
Opgivet masse: … kg |
|
3.6.5. |
Nominel masse: … kg |
|
3.6.6. |
Opgivet udvendig diameter: … mm |
|
3.6.7. |
Minimal udvendig diameter: … mm |
|
3.6.8. |
Bremseskivens indre diameter: …mm |
|
3.6.9. |
Ventilationskanalens bredde (evt.): … mm |
|
3.6.10. |
Basismateriale: … |
|
3.7. |
Data vedrørende bremseklods |
|
3.7.1. |
Fabrikant (navn og adresse): … |
|
3.7.2. |
Fabrikat: … |
|
3.7.3. |
Type: … |
|
3.7.4. |
Identifikation (typeidentifikation på bremseklodsens bagplade): … |
|
3.7.5. |
Minimal tykkelse (tilladt slitage): …mm |
|
3.7.6. |
Metode for fastgørelse af bremseklods på bagplade: … |
|
3.7.6.1. |
Ugunstigste fastgørelsesmetode (hvis mere end én metode): …« |
Ændringer til bilag 13
Bilag 13, punkt 4.3, affattes således:
|
»4.3. |
Hvis antiblokeringssystemet svigter, jf. punkt 4.1 ovenfor, finder følgende forskrifter anvendelse:
|
Ændringer til bilag 16
Bilag 16 affattes således:
»BILAG 16
Kompatibilitet mellem trækkende køretøj og påhængskøretøj med hensyn til datakommunikation efter ISO 11992
1. GENERELT
|
1.1. |
Forskrifterne i dette bilag finder kun anvendelse på trækkende køretøjer og påhængskøretøjer, som er udstyret med elektronisk kontrolledning som defineret i punkt 2.24 i dette regulativ. |
|
1.2. |
ISO 7638-forbindelsesstikket leverer strøm til påhængskøretøjets bremsesystem eller blokeringsfri bremsesystem. For køretøjer, der er udstyret med elektronisk kontrolledning som defineret i punkt 2.24 i nærværende regulativ, er dette forbindelsesstik også grænseflade for datakommunikation via pol 6 og 7, jf. punkt 5.1.3.6 i nærværende regulativ. |
|
1.3. |
I dette bilag defineres kravene til trækkende køretøjer og påhængskøretøjer med hensyn til understøttelse af meddelelser efter ISO 11992-2:2003, inklusive ændring 1:2007. |
2. De i ISO 11992-2:2003, inklusive ændring 1:2007, definerede parametre, som overføres via den elektroniske kontrolledning, understøttes som følger:
|
2.1. |
Følgende funktioner og hertil knyttede meddelelser, der er specificeret i nærværende regulativ, skal være understøttet af det trækkende køretøj/påhængskøretøjet:
|
|
2.2. |
Når påhængskøretøjet sender følgende meddelelser, skal det trækkende køretøj advare føreren:
|
|
2.3. |
Følgende meddelelser som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, skal være understøttet af det trækkende køretøj/påhængskøretøjet:
|
|
2.4. |
Følgende meddelelser skal være understøttet af det trækkende køretøj/påhængskøretøjet, når der på køretøjet er installeret en funktion, der er forbundet med den pågældende parameter:
|
|
2.5. |
Understøttelse af alle andre meddelelser defineret efter ISO 11992-2:2003, inklusive ændring 1:2007, er optionel for trækkende køretøjer og påhængskøretøjer.« |
Ændringer til bilag 17
Bilag 17
Der indsættes et nyt punkt 3.2.2.6 og 3.2.2.7, der affattes således:
»3.2.2.6. Tænding af stoplygter
Simuler meddelelse EBS 22, byte 4, med bit 5 til 6 sat til 00, og kontroller, at stoplygterne ikke er tændt.
Simuler meddelelse EBS 22, byte 4, med bit 5 til 6 sat til 01, og kontroller, at stoplygterne er tændt.
3.2.2.7. Indgriben fra påhængskøretøjets stabilitetsfunktion
Simuler meddelelse EBS 21, byte 2, med bit 1 til 2 sat til 00, og kontroller, at advarslen til føreren, jf. punkt 2.1.6 i bilag 21, ikke er tændt.
Simuler meddelelse EBS 21, byte 2, med bit 1 til 2 sat til 01, og kontroller, at advarslen til føreren, jf. punkt 2.1.6 i bilag 21, er tændt.«
Der indsættes et nyt punkt 3.2.3.2, der affattes således:
|
»3.2.3.2. |
Bilag 16, punkt 2.4.1, indeholder yderligere meddelelser, som under specifikke omstændigheder skal være understøttet af det trækkende køretøj. Yderligere kontroller kan udføres med henblik på verificering af understøttede meddelelsers status i forhold til kravene i punkt 5.1.3.6.2 i dette regulativ.« |
Der indsættes et nyt punkt 4.2.2.4 til 4.2.2.6, der affattes således:
»4.2.2.4. Bremsefunktion med automatiske kommandoer
Hvis påhængskøretøjet har en funktion, hvis anvendelse medfører indgriben i form af automatisk kommanderet bremsning, skal følgende kontrolleres:
Hvis ingen automatisk kommanderet bremsning foretages, kontrolleres det, at meddelelse EBS 22, byte 4, bit 5 til 6, er sat til 00.
Der simuleres automatisk kommanderet bremsning; når den resulterende deceleration er ≥ 0,7 m/sec2, kontrolleres det, at EBS 22, byte 4, bit 5 til 6, er sat til 01.
4.2.2.5. Køretøjsstabilitetsfunktion
For påhængskøretøjer, der er udstyret med køretøjsstabilitetsfunktion, udføres følgende kontroller:
|
|
Med køretøjets stabilitetsfunktion deaktiveret kontrolleres det, at meddelelse EBS 21, byte 2, bit 1 til 2, er sat til 00. |
|
|
Der simuleres en indgriben af køretøjsstabilitetsfunktion som specificeret i punkt 2.2.4 i bilag 21, og det kontrolleres, at meddelelse EBS 21, byte 2, bit 1 til 2, er sat til 01. |
4.2.2.6. Understøttelse af den elektroniske kontrolledning
Hvis påhængskøretøjets bremsesystem ikke understøtter bremsning via den elektroniske kontrolledning, kontrolleres det, at meddelelsen EBS 22, byte 4, bit 7 til 8, er sat til 00.
Hvis påhængskøretøjets bremsesystem understøtter bremsning via den elektroniske kontrolledning, kontrolleres det, at meddelelsen EBS 22, byte 4, bit 7 til 8, er sat til 01.«
Der indsættes et nyt punkt 4.2.3.2, der affattes således:
|
»4.2.3.2. |
Bilag 16, punkt 2.4.2, indeholder yderligere meddelelser, som under specifikke omstændigheder skal være understøttet af påhængskøretøjet. Yderligere kontroller kan udføres med henblik på verificering af understøttede meddelelsers status i forhold til kravene i punkt 5.1.3.6.2 i dette regulativ.« |
Ændringer til bilag 19
Bilag 19
Der indsættes et nyt punkt 1.1.5, der affattes således:
|
»1.1.5. |
Køretøjsstabilitetsfunktion (jf. punkt 6).« |
Punkt 2.2.3: »tillæg 7« ændres til »tillæg 9«.
Punkt 4.2.2 affattes således:
|
»4.2.2. |
Bremsefaktoren bestemmes ved følgende formel:
og efterprøves for hvert af de bremsebelægnings- eller bremseklodsmaterialer, der er specificeret i punkt 4.3.1.3.« |
Punkt 4.3.2.3 affattes således:
|
»4.3.2.3. |
Det opgivne tærskelmoment C0,dec« |
Der indsættes nye punkter fra 6 til 6.6.1, der affattes således:
»6. Køretøjsstabilitetsfunktion
6.1. Generelt
|
6.1.1. |
I dette afsnit beskrives en prøvningsprocedure til bestemmelse af de dynamiske egenskaber for et køretøj, der er udstyret med køretøjsstabilitetsfunktion med mindst én af følgende funktioner:
|
6.2. Oplysningsskema
|
6.2.1. |
Fabrikanten af systemet/køretøjet leverer til den tekniske tjeneste et oplysningsskema vedrørende de kontrolfunktioner, hvis ydeevne skal efterprøves. Dette dokument skal mindst indeholde de i tillæg 7 til dette bilag specificerede oplysninger. |
6.3. Beskrivelse af prøvekøretøj(er)
|
6.3.1. |
På grundlag stabilitetskontrolfunktionen/-erne og deres anvendelse/-r som defineret i fabrikantens oplysningsskema gennemfører den tekniske tjeneste en efterprøvning af ydeevnen. Dette kan omfatte en eller flere dynamiske manøvrer som defineret i punkt 2.2.3 i bilag 21 til dette regulativ, med påhængskøretøjer med indtil tre aksler, som er repræsentative for den/de i punkt 2.1 i fabrikantens oplysningsskema definerede anvendelse/-r. |
|
6.3.1.1. |
Ved udvælgelsen af den/de påhængskøretøjer, der skal evalueres, bør følgende overvejes:
|
6.4. Prøvningens udførelse
|
6.4.1. |
Med henblik på evalueringen af køretøjsstabilitetskontrolfunktionen skal de anvendte prøvninger aftales mellem fabrikanten af systemet/køretøjet og den tekniske tjeneste, og de skal indeholde prøvningsbetingelser, der er relevante for den funktion, der prøves, som uden indgriben fra stabilitetskontrolfunktionen ville resultere i tab af retningskontrol eller i væltning. De dynamiske manøvrer, prøvningsbetingelserne og resultaterne skal indgå i prøvningsrapporten. |
6.5. Det trækkende køretøj
|
6.5.1. |
Det trækkende køretøj, der anvendes til evaluering af ydeevnen for køretøjets (påhængskøretøjets) stabilitetsfunktion, skal være udstyret med de nødvendige pneumatiske og elektriske forbindelser, og hvis det trækkende køretøj er udstyret med en køretøjsstabilitetsfunktion som defineret i punkt 2.34 i dette regulativ, skal denne funktion være deaktiveret. |
6.6. Prøvningsrapport
|
6.6.1. |
Der udfærdiges en prøvningsrapport, der som minimum indeholder de i tillæg 8 til dette bilag specificerede punkter.« |
I bilag 19 indsættes et nyt tillæg 7, der affattes således:
»TILLÆG 7
Oplysningsskema for køretøjsstabilitetsfunktion
1. GENERELT
|
1.1. |
Fabrikantens navn |
|
1.2. |
Systemets betegnelse |
|
1.3. |
Systemvarianter |
|
1.4. |
Kontrolfunktion (retningskontrol/væltekontrol/begge), herunder en forklaring af basisfunktionen og/eller kontrolprincippet |
|
1.5. |
Systemkonfigurationer (hvis nødvendigt) |
|
1.6. |
Systemidentifikation |
2. ANVENDELSER
|
2.1. |
Liste over de typer påhængskøretøj og de konfigurationer, der søges godkendelse for |
|
2.2. |
Skematisk tegning af de respektive konfigurationer, der er monteret på de i punkt 2.1 ovenfor anførte påhængskøretøjer, med angivelse af følgende:
|
|
2.3. |
Anvendelsesområde, for så vidt angår hjulophængstype:
|
|
2.4. |
Yderligere oplysninger (om nødvendigt) om anvendelse af retningskontrol- og/eller væltekontrolfunktionen/-erne |
3. KOMPONENTBESKRIVELSE
3.1. Følere uden for kontrolanordningen
|
a) |
Funktion |
|
b) |
Begrænsninger vedrørende anbringelsen af følere |
|
c) |
Identifikation, f.eks. komponentnummer/-numre |
3.2. Kontrolanordning(er)
|
a) |
Generel beskrivelse og funktion |
|
b) |
Identifikation, f.eks. komponentnummer/-numre |
|
c) |
Begrænsninger vedrørende anbringelsen af kontrolanordningen/-erne |
|
d) |
Andre funktioner |
3.3. Modulatorer
|
a) |
Generel beskrivelse og funktion |
|
b) |
Identifikation |
|
c) |
Begrænsninger |
3.4. Elektrisk udstyr
|
a) |
Kredsløbsdiagrammer |
|
b) |
Energitilførsel |
3.5. Pneumatiske kredse
Systemdiagrammer, herunder konfigurationer for blokeringsfrie bremser, der er forbundet med de i punkt 6.2.1 i dette bilag definerede påhængskøretøjstyper.
3.6. Sikkerhedsaspekter ved det elektroniske system i overensstemmelse med bilag 18 til dette regulativ
3.7. Elektromagnetisk kompatibilitet
|
3.7.1. |
Dokumentation, hvoraf det fremgår, at forskrifterne i regulativ nr. 10, ændringsserie 02, er overholdt.« |
I bilag 19 indsættes et nyt tillæg 8, der affattes således:
»TILLÆG 8
Prøvningsrapport for køretøjsstabilitetsfunktion
PRØVNINGSRAPPORT Nr.: …
1. IDENTIFIKATION
|
1.1. |
Fabrikant af køretøjsstabilitetsfunktionen (navn og adresse) … |
|
1.2. |
Systemets betegnelse/model: … |
|
1.3. |
Kontrolfunktion: … |
2. GODKENDT(E) SYSTEM(ER) OG ANLÆG
|
2.1. |
Konfigurationer for blokeringsfrie bremser (om nødvendigt): … |
|
2.2. |
Anvendelsesområde (type påhængskøretøj og akselantal: … |
|
2.3. |
Systemidentifikation: … |
|
2.4. |
Andre funktioner: … |
3. PRØVNINGSDATA OG RESULTATER
|
3.1. |
Prøvningsdata for køretøjet (inklusive det trækkende køretøjs specifikationer og funktionaliteter: … |
|
3.2. |
Oplysninger om prøvningsoverflade: … |
|
3.3. |
Yderligere oplysninger: … |
|
3.4. |
Demonstrationsprøvning/-simulering anvendt med henblik på evaluering af retningskontrol og/eller væltningskontrol: … |
|
3.5. |
Prøvningsresultater: … |
|
3.6. |
Bedømmelse i overensstemmelse med bilag 18 i dette regulativ: … |
4. BEGRÆNSNINGER VEDRØRENDE MONTERING
|
4.1. |
Hjulophængstype: … |
|
4.2. |
Bremsetype: … |
|
4.3. |
Komponenternes placering på påhængskøretøjet: … |
|
4.4. |
Konfigurationer for blokeringsfrie bremser: … |
|
4.5. |
Andre anbefalinger/begrænsninger (f.eks. løftbare aksler, styrende aksler osv.: … |
5. BILAG: …
6. PRØVNINGSDATO: …
7. Denne prøvning er udført og dens resultater rapporteret i henhold til bilag 19 til FN/ECE-regulativ nr. 13, som senest ændret ved ændringsserie …
TEKNISK TJENESTE (19), DER FORESTÅR PRØVNINGEN
Underskrift: …Dato: …
8. GODKENDENDE MYNDIGHED (19)
Underskrift: …Dato: …
Tillæg 7 og 8 nummereres som henholdsvis tillæg 9 og 10.
Ændringer til bilag 20
Bilag 20
Punkt 2.1.3 affattes således:
|
»2.1.3. |
En dokumentationspakke indeholdende de relevante efterprøvningsdata, herunder de relevante beregninger, vedrørende:
|
Der indsættes nye punkter fra 8 til 8.2.1.4, der affattes således:
8. Alternativ procedure til demonstration af præstationerne for et påhængskøretøj, der er udstyret med køretøjsstabilitetsfunktion.
8.1. Evaluering af et påhængskøretøj efter forskrifterne i punkt 2 i bilag 21 til dette regulativ kan undlades i forbindelse med typegodkendelse af påhængskøretøjet, hvis køretøjsstabilitetsfunktionen opfylder de relevante forskrifter i bilag 19 til dette regulativ.
8.2. Efterprøvning
8.2.1. Efterprøvning af komponenter og installation
Specifikationerne for det bremsesystem, hvori køretøjsstabilitetsfunktionen er integreret, og som er monteret på det påhængskøretøj, der søges typegodkendt, efterprøves for opfyldelse af hvert af følgende kriterier:
|
|
Tilstand |
Kriterier |
||
|
8.2.1.1. |
|
Ingen ændring tilladt |
||
|
Ingen ændring tilladt |
|||
|
Ingen ændring tilladt |
|||
|
8.2.1.2. |
Type påhængskøretøj som defineret i prøvningsrapporten |
Ingen ændring tilladt |
||
|
8.2.1.3. |
Installationskonfiguration som defineret i prøvningsrapporten |
Ingen ændring tilladt |
||
|
8.2.1.4. |
Se punkt 4 i prøvningsrapporten med hensyn til andre begrænsninger (jf. tillæg 8 til bilag 19 til dette regulativ) |
Ingen ændring tilladt« |
Det hidtidige punkt 8 til 8.1.7.1 nummereres som punkt 9 til 9.1.7.1.
De hidtidige punkter 8.1.8 og 8.1.8.1 nummereres som henholdsvis punkt 9.1.9 og 9.1.9.1.
Der indsættes nye punkter 9.1.8 og 9.1.8.1, der affattes således:
»9.1.8. Køretøjsstabilitetsfunktion
|
9.1.8.1. |
Af praktiske grunde begrænses efterprøvningen af køretøjsstabilitetsfunktionen til en kontrol af installationen, jf. punkt 8.2 ovenfor, med observation for korrekt advarselssignalsekvens til sikring af, at der ikke forekommer fejl.« |
Der indsættes et nyt bilag 21 (inkl. tillæg 1 til 3), der affattes således:
BILAG 21
Særlige forskrifter for køretøjer, der er udstyret med køretøjsstabilitetsfunktion
1. GENERELT
Dette bilag indeholder særlige forskrifter for køretøjer, der er udstyret med køretøjsstabilitetsfunktion i henhold til punkt 5.2.1.32 og 5.2.2.23 i dette regulativ.
2. FORSKRIFTER
2.1. Motorkøretøjer
|
2.1.1. |
Følgende bestemmelser finder anvendelse på køretøjer, der er udstyret med køretøjsstabilitetsfunktion som defineret i punkt 2.34 i dette regulativ:
|
|
2.1.2. |
Med henblik på realisering af den ovenfor definerede funktionalitet skal køretøjsstabilitetsfunktionen foruden selektiv bremsefunktion og/eller bremsefunktion med automatiske kommandoer som minimum omfatte følgende:
|
|
2.1.3. |
Køretøjsstabilitetsfunktionen skal demonstreres for den tekniske tjeneste ved gennemførelse af dynamiske manøvrer med et køretøj. Dette kan gennemføres ved sammenligning af de resultater, der opnås med køretøjsstabilitetsfunktionen henholdsvis aktiveret og deaktiveret ved en bestemt belæsningstilstand. Som alternativ til dynamiske manøvrer med andre køretøjer udstyret med samme køretøjsstabilitetssystem og ved andre belæsningstilstande kan resultaterne fra egentlige køretøjsprøvninger eller computersimuleringer vedlægges. Anvendelsen af simulator er defineret i tillæg 1 til dette bilag. Simulatorens specifikationer og dens validering er defineret i tillæg 2 til dette bilag. Indtil der er opnået enighed om fælles prøvningsprocedurer, aftales den metode, hvormed demonstrationen udføres, mellem køretøjets fabrikant og den tekniske tjeneste; den skal omfatte betingelser, der er kritiske for retningskontrollen/væltekontrollen i det stabilitetssystem, der er monteret på køretøjet, og demonstrationsmetoden og resultaterne skal vedlægges typegodkendelsesrapporten. Dette kan udføres på andre tidspunkter end tidspunktet for typegodkendelsen. Til demonstration af køretøjsstabilitetsfunktionen kan enhver af følgende dynamiske manøvrer anvendes (22):
Til demonstration af prøvningens gentagelighed underkastes køretøjet endnu en demonstration med de udvalgte manøvrer. |
|
2.1.4. |
Indgriben fra køretøjsstabilitetsfunktionen skal tilkendegives over for føreren ved et særligt optisk advarselssignal. Signalet skal være aktivt, så længe køretøjsstabilitetsfunktionen er i interventionsfunktionsmåde. De advarselssignaler, der er angivet i punkt 5.2.1.29 i dette regulativ, må ikke anvendes til dette formål. Hvis køretøjsstabilitetsfunktionens indgriben anvendes i en læringsproces til bestemmelse af køretøjets operationelle karakteristika, må ovennævnte signal ikke genereres. Signalet skal være klart synligt for føreren, også i dagslys, således at denne med lethed kan forvisse sig om dets tilfredsstillende funktion uden skal skulle forlade førersædet. |
|
2.1.5. |
Fejl eller svigt i en køretøjsstabilitetsfunktion skal detekteres og tilkendegives over for føreren ved gult advarselssignal, jf. punkt 5.2.1.29.1.2 i dette regulativ. Advarselssignalet skal lyse konstant og forblive tændt, så længe svigtet eller fejlen er tilstede, og tændingskontakten (startkontakten) er i positionen »On« (kørselsposition). |
|
2.1.6. |
Ved motorkøretøjer, der er udstyret med elektroniske kontrolledning, og som er elektrisk forbundet med et påhængskøretøj via en elektronisk kontrolledning, skal føreren advares ved hjælp af et særligt optisk advarselssignal, når påhængskøretøjet leverer informationen »VDC aktiveret« via datakommunikationsdelen af den elektroniske kontrolledning. Det optiske signal defineret i punkt 2.1.4 ovenfor kan anvendes til dette formål. |
2.2. Påhængskøretøjer
|
2.2.1. |
Følgende bestemmelser finder anvendelse på påhængskøretøjer, der er udstyret med køretøjsstabilitetsfunktion som defineret i punkt 2.34 i dette regulativ:
|
|
2.2.2. |
Med henblik på realisering af den ovenfor definerede funktionalitet skal køretøjsstabilitetsfunktionen foruden bremsefunktion med automatiske kommandoer og i påkrævet fald selektiv bremsefunktion som minimum omfatte følgende:
|
|
2.2.3. |
Køretøjsstabilitetsfunktionen skal demonstreres for den tekniske tjeneste ved gennemførelse af dynamiske manøvrer med et køretøj. Dette kan gennemføres ved sammenligning af de resultater, der opnås med køretøjsstabilitetsfunktionen henholdsvis aktiveret og deaktiveret ved en bestemt belæsningstilstand. Som alternativ til dynamiske manøvrer med andre køretøjer udstyret med samme køretøjsstabilitetssystem og ved andre belæsningstilstande kan resultaterne fra egentlige køretøjsprøvninger eller computersimuleringer vedlægges. Anvendelsen af simulator er defineret i tillæg 1 til dette bilag. Simulatorens specifikationer og dens validering er defineret i tillæg 2 til dette bilag. Indtil der er opnået enighed om fælles prøvningsprocedurer, aftales den metode, hvormed demonstrationen udføres, mellem påhængskøretøjets fabrikant og den tekniske tjeneste; den skal omfatte betingelser, der er kritiske for væltekontrollen/retningskontrollen i det køretøjsstabilitetssystem, der er monteret på påhængskøretøjet, og demonstrationsmetoden og resultaterne skal vedlægges typegodkendelsesrapporten. Dette kan udføres på andre tidspunkter end tidspunktet for typegodkendelsen. Til demonstration af køretøjsstabilitetsfunktionen kan enhver af følgende dynamiske manøvrer anvendes (22):
Til demonstration af prøvningens gentagelighed underkastes køretøjet endnu en demonstration med de udvalgte manøvrer. |
|
2.2.4. |
Påhængskøretøjer, der er udstyret med elektronisk kontrolledning, og som er elektrisk forbundet med et trækkende køretøj ved en elektronisk kontrolledning, skal levere meddelelsen »VDC aktiveret« via datakommunikationsdelen af den elektroniske kontrolledning, når køretøjsstabilitetsfunktionen er i interventionsfunktionsmåde. Hvis køretøjsstabilitetsfunktionens indgriben anvendes i en læringsproces til bestemmelse af påhængskøretøjets operationelle karakteristika, må ovennævnte signal ikke genereres. |
|
2.2.5. |
Med henblik på optimering af præstationerne for påhængskøretøjer i lavselektiv funktionsmåde er det tilladt sådanne påhængskøretøjer at skifte funktionsmåde i forbindelse med indgriben fra køretøjsstabilitetsfunktionen. |
TILLÆG 1
Anvendelse af simulering af dynamisk stabilitet
Effektiviteten af retnings- og/eller væltekontrollen i stabilitetskontrolfunktionen i køretøjer og påhængskøretøjer i klasse M, N og O kan bestemmes ved computersimulering.
1. ANVENDELSE AF SIMULERING
|
1.1. |
Køretøjets stabilitetsfunktion demonstreres af køretøjets fabrikant over for den typegodkendende myndighed eller den tekniske tjeneste ved de samme dynamiske manøvrer som dem, der anvendes til de praktiske demonstrationer bilag 21, punkt 2.1.3 eller 2.2.3. |
|
1.2. |
Simuleringen er en metode, hvorved køretøjets stabilitet kan demonstreres med køretøjsstabilitetsfunktionen aktiveret eller deaktiveret og i belæsset og ubelæsset stand. |
|
1.3. |
Simuleringerne gennemføres med et valideret modellerings- og simuleringsværktøj. Efterprøvningen udføres ved hjælp af de i punkt 1.1 ovenfor definerede manøvrer. Den metode, der anvendes til validering af simuleringsværktøjet, er angivet i tillæg 2 til bilag 21. |
TILLÆG 2
Værktøj til simulering af dynamisk stabilitet; validering af værktøjet
1. SPECIFIKATIONER FOR SIMULERINGSVÆRKTØJET
1.1. Simuleringsmetoden skal inddrage de vigtigste faktorer, der har indflydelse på køretøjets retnings- og væltebevægelser. En typisk model kan inddrage følgende køretøjsparametre eksplicit og implicit:
|
a) |
Aksel/hjul |
|
b) |
Hjulophæng |
|
c) |
Dæk |
|
d) |
Chassis/karosseri |
|
e) |
Fremdriftssystem/kraftoverførsel, hvis relevant |
|
f) |
Bremsesystem |
|
g) |
Nyttelast |
1.2. Køretøjets stabilitetsfunktion skal inddrages i simuleringsmodellen ved brug af
|
a) |
et delsystem (softwaremodel) under simuleringsværktøjet eller |
|
b) |
en elektronisk kontrolboks i en hardware-in-the-loop-konfiguration. |
1.3. For påhængskøretøjer udføres simuleringen med påhængskøretøjet tilkoblet et repræsentativt trækkende køretøj.
1.4. Køretøjets belæsningstilstand
|
1.4.1. |
Simulatoren skal kunne tage hensyn til belæsset eller ubelæsset stand. |
|
1.4.2. |
Lasten betragtes som fast med egenskaber (masse, massens fordeling og tyngdepunktets maksimale højde) som specificeret af fabrikanten. |
2. VALIDERING AF SIMULERINGSVÆRKTØJET
|
2.1. |
Gyldigheden af det anvendte modellerings- og simuleringsværktøj skal efterprøves ved sammenligninger med praktiske køretøjsprøvninger. De prøvninger, der anvendes til valideringen, skal være prøvninger, der uden betjeningsindgreb medfører tab af retningskontrol (understyring og overstyring) eller væltning, alt efter funktionaliteten i den stabilitetskontrolfunktion, der er monteret på et repræsentativt køretøj. I løbet af prøverne skal følgende bevægelsesvariabler, i det omfang de er relevante, inddrages eller beregnes i overensstemmelse med ISO 15037, Del 1:2005: General conditions for passenger cars eller Del 2:2002: General conditions for heavy vehicles and buses (alt efter køretøjsklasse):
|
|
2.2. |
Formålet er at vise, at køretøjets simulerede opførsel og driften af køretøjets stabilitetsfunktion er sammenlignelig med den, der ses ved praktiske køretøjsprøvninger. |
|
2.3. |
Simulatoren anses for valideret, hvis dens output er sammenligneligt med de praktiske prøvningsresultater for en bestemt køretøjstype ved de dynamiske manøvrer i bilag 21, punkt 2.1.3 eller 2.2.3. Ved steady state-cirkulær prøvning skal understyringshældningen anvendes til sammenligningen. Ved dynamiske manøvrer foretages sammenligningen ved aktivering og sekventiering af køretøjets stabilitetsfunktion i simuleringen og i den praktiske køretøjsprøvning. |
|
2.4. |
De fysiske parametre, hvorved referencekøretøjet adskiller sig fra det simulerede køretøjs konfiguration, rettes i overensstemmelse hermed i simuleringen. |
|
2.5. |
Der udarbejdes simulatorprøvningsrapport (model vedlagt i tillæg 3 til dette bilag), som vedlægges køretøjets godkendelsesrapport i kopi. |
TILLÆG 3
Prøvningsrapport for simuleringsværktøj for køretøjets stabilitetskontrol
PRØVNINGSRAPPORT Nr.: …
1. IDENTIFIKATION
|
1.1. |
Navn og adresse på simuleringsværktøjets fabrikant |
|
1.2. |
Identificering af simuleringsværktøj: navn/model/nummer (hardware og software) |
2. ANVENDELSESOMRÅDE
|
2.1. |
Køretøjstype (f.eks. lastbil, sættevognstrækker, bus, sættevogn, kærre, påhængsvogn) |
|
2.2. |
Køretøjskonfigurationer: (f.eks. 4 × 2, 4 × 4, 6 × 2, 6 × 4, 6 × 6) |
|
2.3. |
Begrænsende faktorer: (f.eks. kun mekanisk hjulophæng) |
|
2.4. |
Manøvrer, for hvilke simulatoren er valideret: |
3. EFTERPRØVNING AF KØRETØJSPRØVNING
|
3.1. |
Ved prøvning påhængskøretøjer: beskrivelse af køretøj/-er, inkl. det trækkende køretøj: |
|
3.1.1. |
Identificering af køretøj(er) mærke/model/identifikationsnummer |
|
3.1.1.1. |
Ikke-standardiserede installationer: |
|
3.1.2. |
Beskrivelse af køretøjet, herunder af akselkonfiguration/hjulophæng/hjul, motor og kraftoverførsel, bremsesystem(er) og køretøjsstabilitetsfunktionens omfang (retningskontrol/væltekontrol), styresystem, navn/model/nummer: |
|
3.1.3. |
Køretøjsdata anvendt i simulationen (eksplicit): |
|
3.2. |
Beskrivelse af prøvningen, herunder lokalitet(er), vejens/prøvningsområdets overfladeegenskaber, temperatur og dato(er): |
|
3.3. |
Resultater med køretøjets stabilitetsfunktion slået til og fra, herunder de i bilag 21, tillæg 2, punkt 2.1, nævnte bevægelsesvariabler, i det omfang, de er relevante: |
4. SIMULATIONSRESULTATER
|
4.1. |
Køretøjsparametre og værdier anvendt ved simuleringen, som ikke er indhentet fra prøvningskøretøjet (implicit): |
|
4.2. |
Resultater i belæsset og ubelæsset stand med køretøjets stabilitetsfunktion slået til og fra for hver prøvning gennemført efter punkt 3.2 i dette tillæg, herunder de i bilag 21, tillæg 2, punkt 2.1, nævnte bevægelsesvariabler, i det omfang, de er relevante: |
5. Denne prøvning er udført og dens resultater rapporteret i henhold til bilag 21, tillæg 2, til FN/ECE-regulativ nr. 13 som senest ændret ved ændringsserie …
Teknisk tjeneste, der forestår prøvningen (23): …
Underskrift: … Dato: …
Godkendende myndighed (23): …
Underskrift: … Dato: …
(1) Terrængående køretøjer, specialkøretøjer (f.eks. mobile anlæg med ikke-standardiseret køretøjschassis — herunder kraner — og hydrostatiske køretøjer med hydraulisk drev, der også anvendes til bremsning og hjælpefunktioner), busser i kategori I og A i klasse M2 og M3, ledbusser og rutebiler, sættevognstrækkere i N2 til sættevogn med en bruttomasse på mellem 3,5 ton og 7,5 ton, er ikke omfattet af dette krav.
(2) Påhængskøretøjer til kørsel med særtransport og påhængskøretøjer med ståpladser er undtaget fra dette krav.
(3) Dette stykke forhindrer ikke Danmark i fortsat at stille krav om en køretøjsstabilitetsfunktion, der opfylder forskrifterne i dette regulativ.«
(4) Gruppe III som defineret i regulativ nr. 107.«
(5) Jf. punkt 2.1 i tillæg 2 til dette bilag.«
(6) Hvis relevant.
(7) Der kræves ikke prøvning, hvis fabrikanten kan demonstrere, at en ændring ikke påvirker stivheden.
(8) Det ikke gældende overstreges.
(9) Gælder kun for skivebremser.
(10) Gælder kun for tromlebremser.
(11) Udfyldes kun, når der er monteret automatisk bremsejusteringsanordning.
(12) Skal underskrives af flere forskellige personer, selv hvis den tekniske tjeneste og den godkendende myndighed er en og samme organisation, eller der alternativt udstedes en særskilt bemyndigelse fra den godkendende myndighed sammen med rapporten.
(13) VDC (Vehicle Dynamic Control) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, i nærværende regulativ betegnet som køretøjsstabilitetsfunktion (Vehicle Stability Function — VSF), jf. punkt 2.34 i dette regulativ.
(14) VDC (Vehicle Dynamic Control) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, i nærværende regulativ betegnet som køretøjsstabilitetsfunktion (Vehicle Stability Function — VSF), jf. punkt 2.34 i dette regulativ.
(15) ROP (Roll Over Protection) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, i dette regulativ betegnet som væltningskontrol, jf. punkt 2.32.2.2 i dette regulativ.
(16) YC (Yaw Control) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, i dette regulativ betegnet som retningskontrol — jf. punkt 2.32.2.1 i dette regulativ.
(17) ROP (Roll Over Protection) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, er i dette regulativ betegnet som væltekontrol, jf. punkt 2.32.2.2 i dette regulativ.
(18) YC (Yaw Control) som defineret i ISO 11992-2:2003, inklusive ændring 1:2007, er i dette regulativ betegnet som retningskontrol, jf. punkt 2.32.2.1 i dette regulativ.
(19) Skal underskrives af flere forskellige personer, selv hvis den tekniske tjeneste og den godkendende myndighed er en og samme organisation, eller der alternativt udstedes en særskilt bemyndigelse fra den godkendende myndighed sammen med rapporten.
(20) Hvis der er tale om flere aksler, og akselafstanden er større end 2 m, skal hver enkelt aksel betragtes som en uafhængig akselgruppe.
(21) Yderligere interaktion med andre af køretøjets systemer eller komponenter er tilladt. Hvis disse systemer eller komponenter er underlagt særlige regulativer, skal denne interaktion være i overensstemmelse med forskrifterne i disse regulativer; f.eks. skal interaktionen med styresystemet være i overensstemmelse med forskrifterne i regulativ nr. 79 om korrektiv styring.
(22) Hvis anvendelsen af ovennævnte manøvrer ikke resulterer i tab af retningskontrol eller i væltning, kan der efter aftale med den tekniske tjeneste anvendes en alternativ manøvre.
(23) Underskrives af forskellige personer, hvis den tekniske tjeneste og den godkendende myndighed ikke er en og samme organisation.