

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 42016X0218(01)
Regulation No 13 of the Economic Commission for Europe of the United Nations (UN/ECE) — Uniform provisions concerning the approval of vehicles of categories M, N and O with regard to braking [2016/194]
Předpis Evropské hospodářské komise Organizace spojených národů (EHK OSN) č. 13 – Jednotná ustanovení pro schvalování vozidel kategorií M, N a O z hlediska brzdění [2016/194]
Předpis Evropské hospodářské komise Organizace spojených národů (EHK OSN) č. 13 – Jednotná ustanovení pro schvalování vozidel kategorií M, N a O z hlediska brzdění [2016/194]
OJ L 42, 18.2.2016, p. 1–262
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 In force
In force
|
18.2.2016 |
CS |
Úřední věstník Evropské unie |
L 42/1 |
Pouze původní texty EHK OSN mají podle mezinárodního veřejného práva právní účinek. Status a datum vstupu tohoto předpisu v platnost je třeba ověřit v nejnovější verzi dokumentu EHK OSN o statusu TRANS/WP.29/343, který je k dispozici na internetové adrese:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html.
Předpis Evropské hospodářské komise Organizace spojených národů (EHK OSN) č. 13 – Jednotná ustanovení pro schvalování vozidel kategorií M, N a O z hlediska brzdění [2016/194]
Zahrnuje veškerá platná znění až po:
doplněk 13 k sérii změn 11 – datum vstupu v platnost: 8. října 2015
OBSAH
PŘEDPIS
|
1. |
Oblast působnosti |
|
2. |
Definice |
|
3. |
Žádost o schválení |
|
4. |
Schválení |
|
5. |
Specifikace |
|
6. |
Zkoušky |
|
7. |
Změna typu vozidla nebo jeho brzdového systému a rozšíření schválení |
|
8. |
Shodnost výroby |
|
9. |
Postihy za neshodnost výroby |
|
10. |
Definitivní ukončení výroby |
|
11. |
Názvy a adresy schvalovacích orgánů a názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek |
|
12. |
Přechodná ustanovení |
PŘÍLOHY
|
1 |
Brzdová zařízení, metody a podmínky brzdění, na které se nevztahuje tento předpis |
|
2 |
Osvědčení |
|
Dodatek 1 – |
Seznam údajů o vozidle pro účely schválení podle předpisu č. 90 |
|
Dodatek 2 – |
Osvědčení o schválení typu brzdového zařízení vozidla |
|
3 |
Uspořádání značek schválení typu |
|
4 |
Zkoušky brzdění a účinek brzdových systémů |
|
Dodatek – |
Postup sledování stavu nabití baterie |
|
5 |
Doplňková ustanovení pro určitá vozidla, jak je specifikováno v dohodě ADR |
|
6 |
Metoda měření doby náběhu tlaku pro vozidla s pneumatickými brzdovými systémy |
|
Dodatek – |
Příklady simulátoru |
|
7 |
Ustanovení pro zdroje a zásobníky energie (akumulátory energie) |
|
8 |
Specifická ustanovení pro systémy pružinových brzd |
|
9 |
Ustanovení pro systémy parkovacího brzdění s mechanickým blokováním brzdových válců (aktivátory blokování) |
|
10 |
Rozdělení brzdných sil mezi nápravy vozidel a požadavky na kompatibilitu mezi tažným a přípojným vozidlem |
|
11 |
Případy, ve kterých není nutné provádět zkoušky typu I a/nebo typu II (nebo typu IIA) nebo typu III |
|
Dodatek 1 |
|
|
Dodatek 2 – |
Alternativní postupy zkoušek typu I a typu III pro brzdy přípojných vozidel |
|
Dodatek 3 – |
Vzor formuláře zkušebního protokolu stanoveného v bodě 3.9 dodatku 2 k této příloze |
|
Dodatek 4 – |
Vzor formuláře zkušebního protokolu pro alternativní zařízení pro automatické seřizování brzd uvedené v bodě 3.7.3 dodatku 2 k této příloze |
|
Dodatek 5 – |
Informační dokument pro nápravy a brzdy přípojného vozidla s ohledem na alternativní postup typu I a III |
|
12 |
Podmínky, kterými se řídí zkoušky vozidel se setrvačníkovými (nájezdovými) brzdovými systémy |
|
Dodatek 1 |
|
|
Dodatek 2 – |
Protokol o zkouškách ovládacího zařízení nájezdové brzdy |
|
Dodatek 3 – |
Protokol o zkouškách brzdy |
|
Dodatek 4 – |
Protokol o zkouškách kompatibility ovládacího zařízení setrvačníkového brzdění, převodu a brzd na přípojném vozidle |
|
13 |
Požadavky na zkoušky vozidel s protiblokovacími systémy |
|
Dodatek 1 – |
Symboly a definice |
|
Dodatek 2 – |
Využití adheze |
|
Dodatek 3 – |
Brzdný účinek na površích s rozdílnou adhezí |
|
Dodatek 4 – |
Metoda volby povrchu s nízkým součinitelem adheze |
|
14 |
Podmínky, kterými se řídí zkoušky přípojných vozidel s elektrickými brzdovými systémy |
|
Dodatek – |
Kompatibilita poměrného zpomalení přípojného vozidla a středního plného brzdného zpomalení jízdní soupravy tahače / přípojného vozidla (přípojné vozidlo naložené a nenaložené) |
|
15 |
Postup zkoušky brzdových obložení na setrvačníkovém dynamometru |
|
16 |
Kompatibilita mezi tažnými a přípojnými vozidly z hlediska sdělování dat podle normy ISO 11992 |
|
17 |
Postup zkoušek ke zhodnocení funkční kompatibility vozidel s elektrickými ovládacími vedeními |
|
18 |
Zvláštní požadavky týkající se bezpečnostních hledisek komplexních elektronických řídících systémů vozidel |
|
19 |
Zkoušky vlastností konstrukčních částí brzdového systému |
|
Dodatek 1 – |
Vzor ověřovacího protokolu pro membránové brzdové válce |
|
Dodatek 2 – |
Vzor formuláře záznamu výsledků zkoušky pro membránové brzdové válce |
|
Dodatek 3 – |
Vzor ověřovacího protokolu pro pružinové brzdy |
|
Dodatek 4 – |
Vzor formuláře záznamu výsledků zkoušky pro pružinové brzdy |
|
Dodatek 5 – |
Informační dokument o protiblokovacím brzdovém systému přípojného vozidla |
|
Dodatek 6 – |
Protokol o zkoušce protiblokovacího brzdového systému přípojného vozidla |
|
Dodatek 7 – |
Informační dokument o stabilitní funkci vozidla (přípojného vozidla) |
|
Dodatek 8 – |
Protokol o zkoušce stabilitní funkce vozidla (přípojného vozidla) |
|
Dodatek 9 – |
Symboly a definice |
|
Dodatek 10 – |
Dokumentační formulář pro praktickou zkoušku předepsanou v bodě 4.4.2.9 této přílohy |
|
Dodatek 11 – |
Informační dokument o stabilitní funkci vozidla (motorového vozidla) |
|
Dodatek 12 – |
Protokol o zkoušce stabilitní funkce vozidla (motorového vozidla) |
|
20 |
Alternativní postup schválení typu přípojných vozidel |
|
Dodatek 1 – |
Metoda výpočtu výšky těžiště |
|
Dodatek 2 – |
Ověřovací graf k bodu 3.2.1.5 – Návěsy |
|
Dodatek 3 – |
Ověřovací graf k bodu 3.2.1.6 – Přípojná vozidla s nápravami uprostřed |
|
Dodatek 4 – |
Ověřovací graf k bodu 3.2.1.7 – Plná přípojná vozidla |
|
Dodatek 5 – |
Symboly a definice |
|
21 |
Zvláštní požadavky na vozidla vybavená stabilitní funkcí vozidla |
|
Dodatek 1 – |
Použití simulace dynamické stability |
|
Dodatek 2 – |
Simulační nástroj dynamické stability a ověření jeho správnosti |
|
Dodatek 3 – |
Zkušební protokol k simulačnímu nástroji stabilitní funkce vozidla |
|
22 |
Požadavky na elektrické/elektronické brzdové rozhraní automatizovaného konektoru |
1. OBLAST PŮSOBNOSTI
1.1. Tento předpis se použije na vozidla kategorií M2, M3, N a O (1) z hlediska brzdění (2).
1.2. Oblast působnosti tohoto předpisu nezahrnuje:
|
1.2.1. |
vozidla, jejichž konstrukční rychlost nepřesahuje 25 km/h; |
|
1.2.2. |
přípojná vozidla, která se nesmí připojit za motorová vozidla s konstrukční rychlostí přesahující 25 km/h; |
|
1.2.3. |
vozidla uzpůsobená pro řízení osobami se zdravotním postižením. |
1.3. S výhradou použitelných ustanovení tohoto předpisu nejsou do oblasti působnosti předpisu zahrnuty zařízení, metodiky a podmínky vyjmenované v příloze 1.
2. DEFINICE
Pro účely tohoto předpisu se použijí tyto definice:
|
2.1. |
„Schválením vozidla“ se rozumí schválení typu vozidla z hlediska brzdění. |
|
2.2. |
„Typem vozidla“ se rozumí kategorie vozidel, které se neliší v takových podstatných hlediscích, jako:
|
|
2.3. |
„Brzdovým systémem“ se rozumí soubor částí, jejichž funkcí je postupné zmenšování rychlosti jedoucího vozidla nebo jeho zastavení nebo jeho udržení v nehybném stavu, jestliže je již zastaveno; tyto funkce jsou specifikovány v bodě 5.1.2. Systém se skládá z ovladače, převodu a vlastní brzdy. |
|
2.4. |
„Ovladačem“ se rozumí část, kterou řidič (nebo u některých přípojných vozidel závozník) přímo ovládá dodávku energie do převodu brzdy potřebnou pro brzdění nebo jeho ovládání. Touto energií může být svalová energie řidiče nebo jiný zdroj energie ovládaný řidičem, případně pohybová energie přípojného vozidla, nebo kombinace těchto různých druhů energie.
|
|
2.5. |
„Převodem“ se rozumí soubor konstrukčních částí mezi ovladačem a brzdou, který je spojuje funkčním způsobem. Převod může být mechanický, hydraulický, pneumatický, elektrický nebo smíšený. Jestliže je brzdění zajišťováno nebo posilováno zdrojem energie nezávislým na řidiči, zásoba energie, kterou zařízení obsahuje, je rovněž součástí převodu. Převod má dvě navzájem nezávislé funkce: převod ovládání a převod energie. Vždy, když se v tomto předpise použije samotný výraz „převod“, rozumí se jím oba tyto převody, tj. „převod ovládání“ a „převod energie“. Ovládací a přívodní vedení mezi tažnými a přípojnými vozidly se nepokládají za části převodu.
|
|
2.6. |
„Brzdou“ se rozumí konstrukční část, kde se vyvíjejí síly, které kladou odpor pohybu vozidla. Brzda může být třecí (jestliže síly vznikají třením mezi dvěma vzájemně se pohybujícími částmi vozidla), elektrická (jestliže síly vznikají elektromagnetickým účinkem mezi dvěma navzájem se pohybujícími částmi vozidla, které se nedotýkají), hydrodynamická (jestliže síly vznikají účinkem kapaliny, která se nachází mezi dvěma navzájem se pohybujícími částmi vozidla), nebo motorová (jestliže síly vznikají z umělého zvýšení brzdného účinku motoru, který se přenáší na kola). |
|
2.7. |
„Brzdovými systémy různých typů“ se rozumí systémy, které se liší z takových podstatných hledisek, jako jsou:
|
|
2.8. |
„Konstrukční částí brzdového systému“ se rozumí jeden z jednotlivých dílů, jejichž soubor tvoří brzdový systém. |
|
2.9. |
„Průběžným brzděním“ se rozumí brzdění jízdní soupravy zařízením s těmito vlastnostmi:
|
|
2.10. |
„Poloprůběžným brzděním“ se rozumí brzdění jízdní soupravy zařízením s těmito vlastnostmi:
|
|
2.11. |
„Automatickým brzděním“ se rozumí brzdění přípojného vozidla nebo přípojných vozidel, které nastává automaticky při oddělení vozidel spojených do jízdní soupravy, včetně takového oddělení při přetržení spojovacího zařízení, přičemž není dotčen brzdný účinek zbývající části jízdní soupravy. |
|
2.12. |
„Setrvačníkovým (nájezdovým) brzděním“ se rozumí brzdění využitím sil, jež vznikají při najíždění přípojného vozidla na tažné vozidlo. |
|
2.13. |
„Odstupňovatelným brzděním“ se rozumí brzdění, při němž v rámci běžné činnosti brzdového zařízení a při brzdění (viz bod 2.4.1):
|
|
2.14. |
„Fázovaným brzděním“ se rozumí způsob, který lze použít tam, kde se dva nebo více zdrojů energie pro brzdění ovládají společným ovladačem, přičemž jeden ze zdrojů může být použit jako první tím, že použití dalšího zdroje (zdrojů) je zpožděno tak, aby byl k uvedení těchto dalších zdrojů do činnosti zapotřebí větší pohyb ovladače. |
|
2.15. |
„Systémem odlehčovacího brzdění“ se rozumí doplňkový brzdový systém, který má schopnost vyvodit a udržovat brzdný účinek po dlouhou dobu bez podstatnějšího zmenšení tohoto účinku. Pojem „systém odlehčovacího brzdění“ zahrnuje úplný systém, včetně ovládacího zařízení.
|
|
2.16. |
„Naloženým vozidlem“ se rozumí, pokud není uvedeno jinak, vozidlo naložené tak, že dosahuje své „maximální hmotnosti“. |
|
2.17. |
„Maximální hmotností“ se rozumí maximální technicky přípustná hmotnost podle prohlášení výrobce (tato hmotnost může být vyšší, než je „maximální přípustná hmotnost“, stanovená vnitrostátním orgánem). |
|
2.18. |
„Rozdělením hmotnosti mezi nápravy“ se rozumí rozdělení působení tíže na hmotnost vozidla a/nebo na jeho náklad mezi nápravy. |
|
2.19. |
„Zatížením kola/nápravy“ se rozumí svislá statická reakce (síla) na povrchu vozovky v místě styku kola/kol nápravy s vozovkou. |
|
2.20. |
„Maximálním statickým zatížením kola/nápravy“ se rozumí statické zatížení kola nebo nápravy odpovídající podmínkám naloženého vozidla. |
|
2.21. |
„Elektrickým rekuperačním brzdovým systémem“ se rozumí brzdový systém, který při zpomalování zajišťuje přeměnu kinetické energie vozidla na elektrickou energii.
|
|
2.22. |
„Hydraulickým brzdovým systémem s akumulovanou energií“ se rozumí brzdový systém, v němž energii pro jeho činnost dodává tlaková kapalina nahromaděná v jednom nebo ve více akumulátorech, které jsou plněny jedním nebo více tlakovými čerpadly, z nichž každé je opatřeno regulátorem omezujícím tlak na největší určenou hodnotu. Tuto hodnotu stanoví výrobce. |
|
2.23. |
„Současným blokováním předních a zadních kol“ se rozumí situace, kdy časový interval mezi prvním výskytem blokování kola zadní nápravy, které se blokuje jako poslední (jako druhé), a prvním výskytem blokování kola přední nápravy, které se blokuje jako poslední (jako druhé), je menší než 0,1 sekundy. |
|
2.24. |
„Elektrickým ovládacím vedením“ se rozumí elektrické spojení mezi dvěma vozidly, jež zajišťuje ovládací funkci brzdění taženého vozidla v soupravě. Obsahuje elektrickou kabeláž a konektor a zahrnuje části pro přenos dat a elektrické energie do ovládacího převodu přípojného vozidla. |
|
2.25. |
„Přenosem dat“ se rozumí přenos digitálních dat podle řídícího postupu. |
|
2.26. |
„Dvoubodovou“ se rozumí taková topologie komunikační sítě, která má jen dvě jednotky. V každé jednotce je integrován ukončovací odpor pro komunikační linku. |
|
2.27. |
„Řízením síly ve spoji vozidel“ se rozumí systém nebo funkce k automatickému vyrovnávání poměrné brzdné síly tažného a přípojného vozidla. |
|
2.28. |
Definice „jmenovité hodnoty“ pro referenční brzdné účinky se požadují k určení hodnoty přenosové funkce brzdového systému, která je poměrem výstupu ke vstupu, pro jednotlivá vozidla a pro jízdní soupravu.
|
|
2.29. |
„Automaticky ovládaným brzděním“ se rozumí funkce komplexního elektronického řídícího systému, kterou se uvádí do činnosti brzdový systém (brzdové systémy) nebo brzdy určitých náprav za účelem vyvinout zpomalení vozidla přímým působením řidiče nebo bez jeho působení, přičemž aktivování této funkce je výsledkem automatického vyhodnocení informací předaných palubním systémem vozidla. |
|
2.30. |
„Selektivním brzděním“ se rozumí funkce komplexního elektronického řídícího systému, kterou se automatickými prostředky uvádějí do činnosti jednotlivé brzdy, přičemž zpomalení vozidla je sekundární vzhledem ke změně dynamického chování vozidla. |
|
2.31. |
„Referenčními brzdnými silami“ se rozumí brzdné síly jedné nápravy vyvozené na obvodu pneumatik na válcovém zkušebním stavu brzd a vztažené na tlak v brzdovém válci a deklarované při schválení typu. |
|
2.32. |
„Signálem brzdění“ se rozumí logický signál, který udává brzdění, jak je specifikováno v bodě 5.2.1.30. |
|
2.33. |
„Signálem tísňového brzdění“ se rozumí logický signál, který udává tísňové brzdění, jak je specifikováno v bodě 5.2.1.31. |
|
2.34. |
„Stabilitní funkcí vozidla“ se rozumí elektronická řídící funkce vozidla, která zlepšuje dynamickou stabilitu vozidla.
|
|
2.35. |
„Uvažovaným přípojným vozidlem“ se rozumí přípojné vozidlo, které reprezentuje typ přípojného vozidla, pro jehož typ se žádá o schválení. |
|
2.36. |
„Faktorem vnitřního převodu brzdy (BF)“ se rozumí poměr výstupního brzdného momentu k momentu na vstupu brzdy. |
|
2.37. |
„Identifikační kód“ identifikuje brzdové kotouče nebo brzdové bubny, na které se vztahuje schválení brzdového systému podle tohoto předpisu. Uvádí přinejmenším obchodní název výrobce či obchodní značku a identifikační číslo. |
|
2.38. |
„Skupinou náprav“ se rozumí více náprav, u nichž je rozvor mezi jednou nápravou a její sousední nápravou roven nebo menší než 2,0 m. Pokud je rozvor mezi jednou nápravou a její sousední nápravou větší než 2,0 m, považuje se každá jednotlivá náprava za nezávislou skupinu náprav. |
|
2.39. |
„Druhem vozidla“ se rozumí termín popisující vozidlo – tahač návěsu, nákladní automobil, autobus, návěs, plné přípojné vozidlo, přípojné vozidlo s nápravami uprostřed. |
|
2.40. |
„Elektrickým/elektronickým brzdovým rozhraním“ se rozumí část oddělitelného elektrického/elektronického spojovacího vedení mezi tažným vozidlem a taženým vozidlem, která je určena pro brzdový systém. |
|
2.41. |
„Automatizovaným konektorem“ se rozumí systém, jehož prostřednictvím dochází k elektrickému a pneumatickému spojení mezi tažným vozidlem a taženým vozidlem automaticky bez přímého zásahu obsluhy. |
3. ŽÁDOST O SCHVÁLENÍ
3.1. Žádost o schválení typu vozidla z hlediska brzdění předkládá výrobce vozidla nebo jeho řádně pověřený zástupce.
3.2. Žádost musí být doprovázena níže uvedenými doklady v trojím vyhotovení a těmito údaji:
|
3.2.1. |
popis typu vozidla podle položek uvedených v bodě 2.2. Musí být uvedena čísla a/nebo symboly nebo obojí identifikující typ vozidla a v případě motorových vozidel i typ motoru; |
|
3.2.2. |
seznam řádně identifikovaných konstrukčních částí, které tvoří brzdový systém; |
|
3.2.3. |
schéma úplného brzdového systému s vyznačením polohy jeho konstrukčních částí na vozidle; |
|
3.2.4. |
podrobné výkresy každé konstrukční části, které umožní snadno zjistit její polohu a druh. |
3.3. Vozidlo představující typ vozidla určeného ke schválení musí být předáno technické zkušebně provádějící schvalovací zkoušky.
3.4. Před udělením schválení typu ověří schvalovací orgán existenci vyhovujících opatření pro zajištění účinné kontroly shodnosti výroby.
4. SCHVÁLENÍ
4.1. Schválení pro daný typ vozidla se udělí, jestliže vozidlo předané ke schválení podle tohoto předpisu splňuje požadavky bodů 5 a 6.
4.2. Každému schvalovanému typu se přidělí číslo schválení, jehož první dvě číslice (nyní 11) udávají sérii změn, které zahrnují nejnovější podstatné technické změny daného předpisu v době udělení schválení. Táž smluvní strana nesmí udělit totéž číslo témuž typu vozidla vybavenému jiným typem brzdového systému nebo jinému typu vozidla.
4.3. Schválení nebo zamítnutí schválení typu vozidla podle tohoto předpisu se oznámí smluvním stranám dohody, které používají tento předpis, a to prostřednictvím formuláře podle vzoru v příloze 2 tohoto předpisu a souhrnu informací obsažených v dokumentech uvedených v bodech 3.2.1 až 3.2.4, přičemž výkresy dodané žadatelem o schválení musí mít formát maximálně A4 (210 × 297 mm) nebo musí být na tento formát složeny a být ve vhodném měřítku.
4.4. Na každém vozidle shodném s typem vozidla schváleným podle tohoto předpisu se nápadně a na snadno přístupném místě uvedeném ve zprávě o schválení typu vyznačí mezinárodní značka schválení typu, která se skládá z:
|
4.4.1. |
z písmene „E“ v kružnici, za nímž následuje rozlišovací číslo země, která schválení udělila (3), a |
|
4.4.2. |
čísla tohoto předpisu, za nímž následuje písmeno „R“, pomlčka a číslo schválení vpravo od kružnice předepsané v bodě 4.4.1. |
4.5. Pokud však bylo schváleno vozidlo kategorie M2 nebo M3 podle ustanovení přílohy 4 bodu 1.8 tohoto předpisu, následuje za číslem předpisu písmeno „M“.
4.6. Vyhovuje-li vozidlo typu vozidla schválenému podle jednoho nebo více dalších předpisů připojených k dohodě v zemi, která udělila schválení typu podle tohoto předpisu, není třeba symbol předepsaný v bodě 4.4.1 opakovat; v takovém případě se čísla předpisu, čísla schválení typu a doplňkové symboly všech předpisů, podle nichž bylo uděleno schválení typu v zemi, která udělila schválení typu podle tohoto předpisu, musí umístit ve svislých sloupcích vpravo od symbolu předepsaného v bodě 4.4.1.
4.7. Značka schválení musí být jasně čitelná a nesmazatelná.
4.8. Značka schválení typu musí být umístěna blízko štítku, na němž jsou uvedeny údaje o vozidle, nebo na tomto štítku.
4.9. Příklady uspořádání značek schválení typu jsou uvedeny v příloze 3 tohoto předpisu.
5. SPECIFIKACE
5.1. Obecné informace
5.1.1. Brzdový systém
5.1.1.1. Brzdový systém musí být konstruován, vyroben a namontován takovým způsobem, aby za běžných provozních podmínek mohlo vozidlo vyhovět ustanovením tohoto předpisu, a to i při vibracích, kterým může být vystaveno.
5.1.1.2. Zvláště musí být brzdový systém konstruován, vyroben a namontován tak, aby odolával korozi a stárnutí, kterým je vystaven.
5.1.1.3. Brzdová obložení nesmí obsahovat azbest.
5.1.1.4. Účinnost brzdového systému včetně elektrického ovládacího vedení nesmí být nepříznivě ovlivňována magnetickými nebo elektrickými poli. To je nutno prokázat splněním technických požadavků a přechodných ustanovení předpisu č. 10 uplatněním:
|
a) |
Série změn 03 pro vozidla bez propojovacího systému pro nabíjení dobíjecího systému pro uchovávání energie (trakční baterie). |
|
b) |
Série změn 04 pro vozidla s propojovacím systémem pro nabíjení dobíjecího systému pro uchovávání energie (trakční baterie). |
5.1.1.5. Signál zjišťování závad může přerušit na okamžik (< 10 ms) požadovaný signál v ovládacím převodu za předpokladu, že se tím nezmenší brzdný účinek.
5.1.2. Funkce brzdového systému
Brzdový systém vymezený v bodě 2.3 tohoto předpisu musí splňovat tyto funkce:
|
5.1.2.1. |
Systém provozního brzdění Systém provozního brzdění musí umožňovat ovládání pohybu vozidla a jeho zastavení bezpečným, rychlým a účinným způsobem, bez ohledu na rychlost, zatížení nebo velikost sklonu stoupání nebo klesání. Jeho účinek musí být odstupňovatelný. Řidič musí být schopen brzdit ze svého sedadla, aniž sejme ruce z ovladače řízení. |
|
5.1.2.2. |
Systém nouzového brzdění Systém nouzového brzdění musí umožňovat zastavení vozidla v přiměřené vzdálenosti v případě selhání systému provozního brzdění. Jeho účinek musí být odstupňovatelný. Řidič musí být schopen brzdit ze svého sedadla a řídit nadále vozidlo alespoň s jednou rukou na ovladači řízení. Pro účely tohoto ustanovení se má za to, že v systému provozního brzdění se současně nemůže vyskytovat více než jedna porucha. |
|
5.1.2.3. |
Systém parkovacího brzdění Systém parkovacího brzdění musí umožňovat, aby se vozidlo udrželo v nehybném stavu na stoupajícím nebo klesajícím sklonu i v nepřítomnosti řidiče, přičemž brzdící součásti musí být udržovány v poloze pro zabrzdění čistě mechanickým zařízením. Řidič musí mít možnost provést toto brzdění ze svého sedadla, s výjimkou ustanovení bodu 5.2.2.10 tohoto předpisu u přípojných vozidel. Systém vzduchového brzdění přípojného vozidla a systém parkovacího brzdění tažného vozidla se smějí ovládat zároveň za podmínky, že řidič je schopen kdykoli se ujistit, že účinek parkovacího brzdění jízdní soupravy, který je zajišťován systémem parkovacího brzdění výhradně mechanickými částmi, je dostatečný. |
5.1.3. Spojení mezi motorovými a přípojnými vozidly s pneumatickými brzdovými systémy
5.1.3.1. Spojení pneumatických brzdových systémů mezi motorovými a přípojnými vozidly musí být provedeno podle bodu 5.1.3.1.1, 5.1.3.1.2 nebo 5.1.3.1.3:
|
5.1.3.1.1. |
jedno pneumatické přívodní vedení a jedno pneumatické ovládací vedení; |
|
5.1.3.1.2. |
jedno pneumatické přívodní vedení, jedno pneumatické ovládací vedení a jedno elektrické ovládací vedení; |
|
5.1.3.1.3. |
jedno pneumatické přívodní vedení a jedno elektrické ovládací vedení; pro toto řešení platí poznámka pod čarou (4). |
5.1.3.2. Elektrické ovládací vedení motorového vozidla musí zajistit informaci, zda je možno splnit požadavky bodu 5.2.1.18.2 elektrickým ovládacím vedením bez pomoci pneumatického ovládacího vedení. Musí také zajistit informaci, zda je vybaveno podle bodu 5.1.3.1.2 dvojím ovládacím vedením nebo zda je vybaveno podle bodu 5.1.3.1.3 pouze elektrickým ovládacím vedením.
5.1.3.3. Motorové vozidlo vybavené podle bodu 5.1.3.1.3 musí rozpoznat, že připojení přípojného vozidla vybaveného podle bodu 5.1.3.1.1 není kompatibilní. Pokud se taková vozidla elektricky spojí elektrickým ovládacím vedením tažného vozidla, musí být řidič upozorněn optickým červeným výstražným signálem specifikovaným v bodě 5.2.1.29.1.1 a brzdy motorového vozidla se musí automaticky zabrzdit, jakmile se systém uvede pod napětí. Účinek tohoto brzdění musí být nejméně takový, jako je předepsán pro parkovací brzdění podle bodu 2.3.1 přílohy 4 tohoto předpisu.
5.1.3.4. U motorového vozidla vybaveného dvěma ovládacími vedeními podle bodu 5.1.3.1.2, které se spojí elektricky s přípojným vozidlem vybaveným rovněž dvojím ovládacím vedením, musí být splněna tato ustanovení:
|
5.1.3.4.1. |
oba tyto signály musí být přítomny na spojkové hlavici a přípojné vozidlo použije elektrický ovládací signál, s výjimkou případu, kdy se pokládá stav tohoto signálu za poruchový. V tomto případě přepne přípojné vozidlo automaticky na pneumatické ovládací vedení; |
|
5.1.3.4.2. |
každé z vozidel musí splňovat příslušná ustanovení přílohy 10 tohoto předpisu jak pro elektrické ovládací vedení, tak pro pneumatické ovládací vedení; a |
|
5.1.3.4.3. |
když elektrický ovládací signál přesáhne ekvivalent tlaku 100 kPa po dobu delší než 1 sekundu, musí přípojné vozidlo ověřit, že je přítomný pneumatický signál; pokud není pneumatický signál přítomen, musí být řidič varován z přípojného vozidla zvláštním výstražným signálem se světlem žluté barvy specifikovaným v bodě 5.2.1.29.2. |
5.1.3.5. Přípojné vozidlo může být vybaveno podle bodu 5.1.3.1.3 za podmínky, že je lze používat pouze ve spojení s motorovým vozidlem majícím elektrické ovládací vedení splňující požadavky bodu 5.2.1.18.2. Ve všech ostatních případech se přípojné vozidlo, když se připojí elektricky, musí automaticky zabrzdit nebo musí zůstat zabrzděno. Řidič musí být varován zvláštním výstražným signálem se světlem žluté barvy uvedeným v bodě 5.2.1.29.2.
|
a) |
Elektrické ovládací vedení musí splňovat normu ISO 11992-1 a 11992-2:2003 včetně změny 1:2007 a musí být dvoubodovým spojem:
|
|
b) |
Kontakty konektoru podle normy ISO 7368 určené k přenosu dat se musí použít výhradně k přenosu informací pro brzdění (včetně ABS) a pro funkce podvozku (řízení, pneumatiky a zavěšení náprav), jak je specifikováno v normě ISO 11992-2:2003 včetně změny 1:2007. Funkce brzdění mají přednost a zajišťují se při normálním režimu i při režimu poruchy. Přenos informací týkajících se podvozku nesmí způsobit zpoždění funkcí brzdění. |
|
c) |
Elektrické napájení přes konektor podle normy ISO 7638 musí být určeno výhradně pro funkce brzdění a podvozku a pro přenos informací pro přípojné vozidlo nepředávaných elektrickým ovládacím vedením. Ve všech případech však platí ustanovení bodu 5.2.2.18 tohoto předpisu. Elektrické napájení všech ostatních funkcí musí být provedeno jinými prostředky. |
5.1.3.6.1. Předávání a přijímání zpráv definovaných v normě ISO 11992-2:2003 včetně změny 1:2007 v případě tažného nebo přípojného vozidla je specifikováno v příloze 16 tohoto předpisu.
5.1.3.6.2. Funkční kompatibilita tažných a tažených vozidel vybavených elektrickým ovládacím vedením vymezeným výše se v průběhu schvalování typu posuzuje kontrolou, zda jsou splněna příslušná ustanovení normy ISO 11992:2003, včetně ISO 11992-2:2003 a její změny 1:2007, části 1 a 2. Příloha 17 tohoto předpisu uvádí příklady zkoušek, které se mohou použít k provedení tohoto zhodnocení.
5.1.3.6.3. U motorového vozidla vybaveného elektrickým ovládacím vedením a elektricky spojeného s přípojným vozidlem vybaveným elektrickým ovládacím vedením se trvalá porucha (> 40 ms) v elektrickém ovládacím vedení musí zjistit na motorovém vozidle a musí se signalizovat řidiči výstražným zařízením se žlutým světlem uvedeným v bodě 5.2.1.29.1.2, pokud jsou tato vozidla spojena elektrickým ovládacím vedením.
5.1.3.7. Pokud se uvedením systému parkovacího brzdění na motorovém vozidle do činnosti uvede do činnosti také brzdový systém na přípojném vozidle, jak je přípustné podle bodu 5.1.2.3, musí být splněny tyto doplňkové požadavky:
|
5.1.3.7.1. |
u motorových vozidel vybavených podle bodu 5.1.3.1.1 musí uvedení systému parkovacího brzdění na motorovém vozidle do činnosti uvést do činnosti brzdový systém přípojného vozidla, a to pneumatickým ovládacím vedením; |
|
5.1.3.7.2. |
u motorových vozidel vybavených podle bodu 5.1.3.1.2 musí uvedení systému parkovacího brzdění na motorovém vozidle do činnosti uvést do činnosti brzdový systém přípojného vozidla, jak je stanoveno v bodě 5.1.3.7.1. Uvedení systému parkovacího brzdění do činnosti může kromě toho také uvést do činnosti brzdový systém na přípojném vozidle elektrickým ovládacím vedením; |
|
5.1.3.7.3. |
u motorových vozidel vybavených podle bodu 5.1.3.1.3 nebo u motorových vozidel splňujících požadavky bodu 5.2.1.18.2 bez pomoci pneumatického ovládacího vedení a vybavených podle bodu 5.1.3.1.2 musí uvedení systému parkovacího brzdění na motorovém vozidle do činnosti uvést do činnosti brzdový systém na přípojném vozidle elektrickým ovládacím vedením. Jakmile se vypne přívod elektrické energie pro brzdové zařízení na motorovém vozidle, musí se přípojné vozidlo brzdit vyprazdňováním přívodního vedení (pneumatické ovládací vedení může kromě toho zůstat pod tlakem); přívodní vedení se může dále vyprazdňovat jen do té doby, dokud se opět neobnoví přívod elektrické energie do brzdového zařízení motorového vozidla a dokud se tím zároveň neobnoví brzdění přípojného vozidla elektrickým ovládacím vedením. |
5.1.3.8. Nejsou přípustná uzavírací zařízení, která nepracují automaticky.
5.1.3.9. U souprav tahače a návěsu jsou pružné hadice a kabely částí motorového vozidla. Ve všech ostatních případech jsou pružné hadice a kabely částí přípojného vozidla.
V případě automatizovaného konektoru se tento požadavek týkající se umístění pružných hadic a kabelů nepoužije.
5.1.4. Ustanovení pro periodické technické prohlídky brzdových systémů
5.1.4.1. Musí být možné snadno kontrolovat konstrukční části provozní brzdy, které podléhají opotřebení, např. třecí obložení a bubny nebo kotouče (u bubnů nebo kotoučů nemusí být nutně vykonána kontrola opotřebení při periodické technické prohlídce). Metoda k provádění výše uvedené kontroly je uvedena v bodech 5.2.1.11.2 a 5.2.2.8.2 tohoto předpisu.
5.1.4.2. Aby bylo možno určit brzdné síly v provozu u každé nápravy vozidla s pneumatickým brzdovým systémem, požadují se kontrolní přípojky tlaku vzduchu:
|
5.1.4.2.1. |
V každém nezávislém okruhu brzdového systému, v co nejbližší snadno přístupné poloze u brzdového válce, který je umístěn co nejnepříznivěji z hlediska doby náběhu tlaku, uvedené v příloze 6. |
|
5.1.4.2.2. |
V brzdovém systému, který obsahuje zařízení k regulaci tlaku vzduchu, jak je uvedeno v bodě 7.2 přílohy 10, v tlakovém potrubí, v přístupné poloze, jednak co nejblíže ke vstupu do tohoto zařízení a jednak co nejblíže k výstupu z něj. Pokud je toto zařízení ovládáno pneumaticky, vyžaduje se další kontrolní přípojka k simulaci stavu naloženého vozidla. Tam, kde takové zařízení není, opatří se systém jedinou kontrolní přípojkou, která odpovídá výše uvedené přípojce u výstupu ze zařízení. Tyto kontrolní přípojky musí být umístěny tak, aby byly snadno přístupné ze země nebo z vnitřku vozidla. |
|
5.1.4.2.3. |
Ve snadno přístupné poloze co nejblíže k zásobníku energie, který je umístěn nejnepříznivěji ve smyslu bodu 2.4 přílohy 7 části A. |
|
5.1.4.2.4. |
V každém nezávislém okruhu brzdového systému tak, aby bylo možné kontrolovat tlak na vstupu a výstupu celku potrubí brzdového převodu. |
|
5.1.4.2.5. |
Přípojky pro kontrolu tlaku musí odpovídat ustanovení 4 normy ISO 3583:1984. |
5.1.4.3. Přístupnosti požadovaných kontrolních přípojek nesmějí bránit úpravy a montáž doplňků nebo karoserie vozidla.
5.1.4.4. Na stojícím vozidle musí být možné vyvodit maximální brzdné síly na vozidlovém dynamometru nebo na válcovém zkušebním stavu brzd.
5.1.4.5. Údaje o brzdových systémech:
|
5.1.4.5.1. |
údaje o pneumatickém brzdovém systému pro zkoušku funkce a účinků musí být vyznačeny na vozidle v dobře viditelné poloze a nesmazatelným způsobem, nebo být dostupné jinak (např. v příručce, v elektronickém záznamníku dat); |
|
5.1.4.5.2. |
u vozidel s pneumatickým brzdovým systémem se požadují nejméně tyto údaje: Charakteristiky pneumatického systému:
|
||||||||||||||||||||||||||||||||||||||||||||||||||
5.1.4.6. Referenční brzdné síly
5.1.4.6.1. Referenční brzdné síly jsou vymezeny pro vozidla s pneumaticky ovládanými brzdami, která se zkoušejí na válcovém zkušebním stavu brzd.
5.1.4.6.2. Referenční brzdné síly se určí pro každou nápravu pro rozsah tlaků v brzdových válcích v rozmezí od 100 kPa do tlaku, který je v nich za podmínek zkoušky typu 0. Žadatel o schválení typu musí deklarovat referenční brzdné síly pro rozsah tlaků v brzdových válcích, počínaje tlakem 100 kPa. Tyto údaje musí výrobce vozidla sdělit podle bodu 5.1.4.5.1.
5.1.4.6.3. Musí být deklarovány takové referenční brzdné síly, které zajistí, že vozidlo je schopno dosáhnout poměrného zpomalení, které je stanoveno v příloze 4 tohoto předpisu pro příslušnou kategorii vozidla (50 % pro vozidla kategorie M2, M3, N2, N3, O3 a O4 s výjimkou návěsů, 45 % pro návěsy), vždy, když brzdná síla změřená na válcovém zkušebním stavu brzd na každé z náprav, bez ohledu na její zatížení, není menší než referenční brzdná síla při daném tlaku v brzdových válcích v rozmezí deklarovaného rozsahu provozních tlaků (9).
5.1.4.7. Musí být možné často a snadno ověřovat správný stav fungování komplexních elektronických systémů, které řídí brzdění. Jsou-li zapotřebí zvláštní informace, musí k nim být zajištěn volný přístup.
5.1.4.7.1. Pokud je stav fungování oznamován řidiči výstražnými signály, které jsou uvedeny v tomto předpisu, musí být možné při pravidelné technické prohlídce potvrdit správný stav fungování vizuálním pozorováním výstražných signálů následujících po spuštění motoru.
5.1.4.7.2. V průběhu schvalování typu musí být předána důvěrná informace o zavedených prostředcích ochrany proti jednoduché neoprávněné změně funkce kontrolních prostředků zvolených výrobcem (např. výstražný signál).
Alternativně je tento požadavek na ochranu splněn tím, že existuje další prostředek ke kontrole správného stavu fungování.
5.1.5. Požadavky přílohy 18 platí pro bezpečnostní hlediska všech komplexních elektronických řídících systémů vozidla, které zajišťují nebo tvoří část ovládacího převodu funkcí brzdění, včetně funkcí, které používají brzdový systém (brzdové systémy) pro automaticky ovládané brzdění nebo selektivní brzdění.
Avšak systémy nebo funkce, které používají brzdový systém jako prostředek k dosažení cílů na vyšší úrovni, musí splňovat ustanovení přílohy 18 pouze v případě, kdy přímo ovlivňují brzdový systém. Jestliže jsou takové systémy na vozidle, nesmí být při zkouškách schválení typu brzdového systému vyřazeny z činnosti.
5.2. Vlastnosti brzdových systémů
5.2.1. Vozidla kategorií M2, M3 a N
5.2.1.1. Soubor brzdových systémů, jimiž je vozidlo vybaveno, musí splňovat požadavky na provozní, nouzové a parkovací brzdění.
5.2.1.2. Systémy zajišťující provozní, nouzové a parkovací brzdění mohou mít společné konstrukční části, pokud vyhoví následujícím ustanovením:
|
5.2.1.2.1. |
musí mít nejméně dva na sobě nezávislé ovladače snadno dosažitelné řidičem z jeho normálního místa k řízení vozidla. U všech kategorií vozidel, s výjimkou M2 a M3, musí být každý ovladač brzd (s výjimkou ovladače systému odlehčovacího brzdění) konstruován tak, aby se při uvolnění vrátil do výchozí klidové polohy. Tento požadavek neplatí pro ovladač parkovací brzdy (nebo příslušnou část společného ovladače), pokud je mechanicky zajištěn v poloze pro brzdění; |
|
5.2.1.2.2. |
ovladač systému provozního brzdění musí být nezávislý na ovladači systému parkovacího brzdění; |
|
5.2.1.2.3. |
jestliže má systém provozního a systém nouzového brzdění tentýž ovladač, vlastnosti spojení mezi tímto ovladačem a různými konstrukčními částmi převodů se po určité době používání nesmějí změnit; |
|
5.2.1.2.4. |
jestliže má systém provozního a systém nouzového brzdění tentýž ovladač, musí být systém parkovacího brzdění konstruován tak, aby mohl být uveden do činnosti, když je vozidlo v pohybu. Tento požadavek se může splnit i uvedením do činnosti, a to i jen částečné, systému provozního brzdění vozidla prostřednictvím pomocného ovladače; |
|
5.2.1.2.5. |
aniž jsou dotčeny požadavky bodu 5.1.2.3 tohoto předpisu, systémy provozního brzdění a parkovacího brzdění mohou používat společné konstrukční části v jejich převodu (převodech) za podmínky, že při poruše kterékoli části převodu (převodů) je stále zajištěno splnění požadavků na nouzové brzdění; |
|
5.2.1.2.6. |
při poruše kterékoliv konstrukční části jiné, než jsou brzdy (ve smyslu bodu 2.6 tohoto předpisu), nebo konstrukční části uvedené v bodě 5.2.1.2.8, nebo při jakékoliv jiné poruše v systému provozního brzdění (špatná funkce, částečné nebo celkové vyčerpání zásoby energie), musí být ta část systému provozního brzdění, která není dotčena poruchou, schopna zastavit vozidlo za podmínek požadovaných pro nouzové brzdění; |
|
5.2.1.2.7. |
zvláště tehdy, jsou-li ovladač a převod společné pro systém nouzového brzdění i pro systém provozního brzdění:
|
|
5.2.1.2.8. |
určité součásti, jako je pedál a jeho uchycení, hlavní válec a jeho píst nebo písty (u hydraulických systémů), brzdič (u hydraulických a/nebo pneumatických systémů), mechanismus spojující pedál a hlavní válec nebo brzdič, brzdové válce a jejich písty (u hydraulických a/nebo pneumatických systémů) a páky a klíče brzdových ústrojí, se nepovažují za sestavy součástí náchylné k porušení, pokud jsou dostatečně dimenzované, snadno přístupné pro údržbu a vykazují bezpečnostní charakteristiky přinejmenším rovnocenné těm, které jsou požadovány pro jiné důležité konstrukční části vozidel (např. pákoví mechanismu řízení). Pokud by selhání kterékoli z těchto součástí znemožnilo brzdění vozidla s účinkem odpovídajícím nejméně účinku požadovanému pro nouzové brzdění, musí být tato část z kovu nebo z materiálu s rovnocennými vlastnostmi a nesmí se při normální funkci brzdových systémů znatelně deformovat. |
5.2.1.3. Jsou-li ovladače pro systém provozního brzdění a pro systém nouzového brzdění oddělené, nesmí současné uvedení obou ovladačů do činnosti vyřazovat z činnosti zároveň systém provozního a systém nouzového brzdění, a to ani tehdy, když oba brzdové systémy fungují správně, ani tehdy, když jeden z nich má poruchu.
5.2.1.4. Systém provozního brzdění musí být takový (a to ať již má, či nemá společné části se systémem nouzového brzdění), aby v případě poruchy v některé části jeho převodu při působení na ovladač provozního brzdění byl brzděn ještě dostatečný počet kol. Tato kola musí být zvolena tak, aby zbývající účinek systému provozního brzdění splňoval ustanovení bodu 2.4 přílohy 4 tohoto předpisu.
5.2.1.4.1. Tato předchozí ustanovení nicméně neplatí pro tahače návěsů, pokud je převod systému provozního brzdění návěsu nezávislý na převodu systému provozního brzdění tahače.
5.2.1.4.2. Porucha části systému hydraulického převodu musí být signalizována řidiči zařízením udávajícím výstražný signál červeným světlem, jak je specifikováno v bodě 5.2.1.29.1.1. Jako alternativa je přípustné rozsvícení tohoto zařízení, jakmile hladina brzdové kapaliny v nádržce poklesne na úroveň nižší, než je hodnota stanovená výrobcem.
5.2.1.5. Jestliže se používá energie jiné, než je svalová energie řidiče, není třeba použít více zdrojů této jiné energie (hydraulické čerpadlo, vzduchový kompresor atd.), ale prostředek, který je tímto zdrojem, musí být co nejspolehlivější.
5.2.1.5.1. V případě poruchy kterékoliv části převodu brzdového systému musí zůstat zajištěno doplňování energie pro tu část, která není dotčena poruchou, pokud je to nutné pro zastavení vozidla s účinkem předepsaným pro zbývající brzdný účinek a/nebo pro nouzové brzdění. Tato podmínka musí být zajištěna pomocí zařízení, která mohou být snadno uvedena v činnost, když vozidlo stojí, nebo pomocí zařízení s automatickou funkcí.
5.2.1.5.2. Mimoto musí být zásobníky, které jsou v okruhu za tímto zařízením, takové, aby v případě poruchy doplňování energie bylo ještě možné po čtyřech plných zdvizích ovladače provozního brzdění, za podmínek stanovených v bodě 1.2 přílohy 7 tohoto předpisu, při pátém zdvihu zastavit vozidlo s účinkem předepsaným pro nouzové brzdění.
5.2.1.5.3. U hydraulických brzdových systémů s akumulovanou energií se však mohou tyto podmínky pokládat za splněné, pokud jsou splněna ustanovení bodu 1.2.2 části C přílohy 7 tohoto předpisu.
5.2.1.6. Požadavky uvedené v bodech 5.2.1.2, 5.2.1.4 a 5.2.1.5 tohoto předpisu musí být splněny, aniž by bylo použito jakékoli automatické zařízení takového typu, že by jeho neúčinnost nemusela být zpozorována, protože součásti, které jsou běžně v klidové poloze, vstupují v činnost pouze v případě poruchy brzdového systému.
5.2.1.7. Systém provozního brzdění musí působit na všechna kola vozidla a musí vhodně rozdělovat brzdný účinek mezi nápravy.
5.2.1.7.1. V případě, kdy jsou u vozidel s více než dvěma nápravami některé nápravy velmi málo zatíženy, mohou být brzdné síly takových náprav automaticky zmenšeny na nulu, aby se zabránilo blokování kol nebo vytváření sklovitého povrchu na brzdovém obložení. Podmínkou však je, aby vozidla přitom plnila všechny požadavky na brzdné účinky předepsané přílohou 4 tohoto předpisu.
5.2.1.7.2. U vozidel kategorie N1 s elektrickým rekuperačním brzdovým systémem kategorie B může být brzdný výkon jiných zdrojů brzdění vhodně fázován, aby umožnil samostatnou činnost elektrického rekuperačního brzdového systému, pokud jsou splněny obě následující podmínky:
|
5.2.1.7.2.1. |
vnitřní změny brzdného momentu elektrického rekuperačního brzdového systému (např. v důsledku změn stavu nabití trakčních baterií) jsou automaticky kompenzovány příslušnými změnami fázování, pokud jsou splněny požadavky (10) jedné z následujících příloh tohoto předpisu:
|
|
5.2.1.7.2.2. |
vždy, když je to potřebné k zajištění poměrného zpomalení (10) podle požadavku řidiče na brzdění, se musí s ohledem na adhezi mezi pneumatikou a vozovkou automaticky brzdit všemi koly vozidla. |
5.2.1.8. Účinek systému provozního brzdění musí být rozdělen mezi kola jedné a téže nápravy symetricky vzhledem k podélné střední rovině vozidla. Kompenzace a funkce, jako je protiblokovací zařízení, které mohou způsobit odchylky od tohoto symetrického rozdělení, se musí uvést v prohlášení.
5.2.1.8.1. Kompenzace poruchy nebo závady v brzdovém systému prováděná prostřednictvím elektrického ovládacího převodu musí být signalizována řidiči žlutým výstražným signálem specifikovaným v bodě 5.2.1.29.1.2. Tento požadavek platí pro všechny stavy naložení, když kompenzace přesáhne následující meze:
|
5.2.1.8.1.1. |
rozdíl mezi tlaky v brzdových válcích na obou koncích kterékoli nápravy:
|
|
5.2.1.8.1.2. |
individuální hodnota kompenzace na celku kterékoli nápravy:
|
5.2.1.8.2. Kompenzace vymezená výše je přípustná pouze v případě, kdy se začne brzdit při rychlosti vozidla větší než 10 km/h.
5.2.1.9. Závady ve funkci elektrického ovládacího převodu nesmějí uvést do činnosti brzdy bez úmyslu řidiče.
5.2.1.10. Systém provozního brzdění, systém nouzového brzdění a systém parkovacího brzdění musí působit na brzdné plochy trvale připojené ke kolům prostřednictvím konstrukčních částí dostatečně pevné konstrukce.
Jestliže je brzdný moment určité nápravy nebo náprav vyvíjen zároveň systémem třecích brzd a elektrickým rekuperačním brzdovým systémem kategorie B, je přípustné odpojení tohoto rekuperačního systému za podmínky, že systém třecích brzd zůstane trvale v činnosti a že je schopný zajistit kompenzace uvedené v bodě 5.2.1.7.2.1.
V případě přechodných krátkodobých odpojení je však přípustná neúplná kompenzace, avšak tato kompenzace musí dosáhnout během jedné sekundy nejméně 75 % své konečné hodnoty.
V každém případě musí trvale připojený systém třecích brzd zajistit, že systémy provozního i nouzového brzdění zůstanou nadále v činnosti s předepsaným stupněm účinnosti.
Pokud jde o systém parkovacího brzdění, oddělení brzdných povrchů je přípustné pouze za podmínky, že je toto oddělení ovládáno výhradně řidičem, který je na svém sedadle, a to systémem, jenž není možno uvést do činnosti únikem příslušného média.
5.2.1.11. Opotřebení brzd musí být možné snadno vyrovnávat ručním nebo automatickým vyrovnávacím systémem. Kromě toho musí mít ovladač a konstrukční části převodu a brzd rezervu zdvihu a, pokud je to potřebné, vhodné zařízení pro kompenzaci tak, aby po zahřátí brzd nebo po určitém stupni opotřebení obložení byl zajištěn brzdný účinek, aniž by bylo nutno ihned provést vyrovnání.
5.2.1.11.1. Vyrovnávání opotřebení obložení musí být pro provozní brzdy automatické. Avšak montáž zařízení pro automatické seřizování brzd je volitelná pro terénní vozidla kategorií N2 a N3 a pro zadní brzdy vozidel kategorie N1. Brzdy vybavené zařízeními pro automatické seřizování brzd musí po zahřátí, po němž následuje ochlazení, umožňovat volné otáčení kol podle bodu 1.5.4 přílohy 4 po vykonání zkoušky typu I, která je popsána rovněž v uvedené příloze.
5.2.1.11.2. Kontrola opotřebení třecích konstrukčních částí provozní brzdy
5.2.1.11.2.1. Toto opotřebení obložení provozních brzd musí být možné snadno zkontrolovat, a to zvnějšku nebo zespodu vozidla, bez sejmutí kol, prostřednictvím vhodných kontrolních otvorů nebo jiným způsobem. Tuto kontrolu lze provést jednoduchým běžným dílenským nářadím nebo běžným vybavením ke kontrole vozidel.
Jako alternativa je přijatelné snímací zařízení na každém kole (dvojitá kola se považují za jedno kolo), které varuje řidiče na jeho místě k řízení vozidla, když je nutno vyměnit obložení. V případě optického výstražného zařízení lze použít žlutý výstražný signál specifikovaný v bodě 5.2.1.29.1.2.
5.2.1.11.2.2. Kontrola stavu opotřebení třecích ploch brzdových kotoučů nebo bubnů se musí provádět pouze přímým měřením dotčené konstrukční části nebo prohlídkou případných indikátorů opotřebení brzdových kotoučů nebo bubnů, což může vyžadovat určitý stupeň demontáže. Výrobce vozidla proto musí při schválení typu uvést:
|
a) |
způsob, kterým se kontroluje opotřebení třecích ploch bubnů a kotoučů, včetně nutného stupně demontáže a nářadí a postupu k tomu potřebných; |
|
b) |
údaje uvádějící přijatelnou maximální mezní hodnotu opotřebení v okamžiku, kdy se výměna stává nutnou. |
Tyto údaje musí být volně dostupné, například v příručce pro vozidlo nebo na elektronickém nosiči dat.
5.2.1.12. U brzdových systémů s hydraulickým převodem musí být snadno přístupné plnicí otvory nádržek na kapalinu; kromě toho musí být nádržky obsahující zásobu kapaliny konstruovány a vyrobeny tak, aby dovolovaly snadnou kontrolu hladiny zásoby kapaliny, aniž by bylo zapotřebí je otevřít. Není-li splněna tato poslední podmínka, musí zařízení pro výstražnou signalizaci s červeným světlem specifikované v bodě 5.2.1.29.1.1 upozornit řidiče na pokles množství kapaliny, který je schopen způsobit selhání brzdového systému. Druh kapaliny, kterou je nutno použít v brzdových zařízeních s hydraulickým převodem, musí být udán symbolem podle obrázku 1 nebo 2 normy ISO 9128:2006. Symbol musí být vyznačen nesmazatelným způsobem na viditelném místě do vzdálenosti 100 mm od plnicích hrdel nádržek na kapalinu; výrobce může doplnit další informativní údaje.
5.2.1.13. Výstražné zařízení
5.2.1.13.1. Každé vozidlo, které je vybaveno provozní brzdou uváděnou do činnosti energií ze zásobníku energie, musí být opatřeno výstražným zařízením pro případ, že nelze s touto brzdou dosáhnout účinku předepsaného pro nouzové brzdění bez energie ze zásobníku, a to i v případě, že je vozidlo vybaveno manometrem. Toto výstražné zařízení signalizuje opticky nebo akusticky, že hladina akumulované energie v kterékoli části systému poklesla na hodnotu, při které bez doplňování zásobníků a při všech stavech naložení vozidla zůstává ještě možné po čtyřech plných zdvizích ovladače provozního brzdění dosáhnout při pátém zdvihu účinku předepsaného pro nouzové brzdění (přičemž v převodu provozní brzdy není závada a brzdová ústrojí jsou seřízena na co nejmenší zdvih). Toto výstražné zařízení musí být zapojeno přímo a trvalým způsobem do okruhu. Pokud motor pracuje v běžných provozních podmínkách a v brzdovém systému nejsou žádné závady, jako je tomu při zkouškách schválení typu vozidla, nesmí výstražné zařízení dávat signál s výjimkou doby potřebné k doplnění zásobníků energie po nastartování motoru. Jako optická výstražná signalizace se použije červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1.
5.2.1.13.1.1. Avšak u vozidel, která se pokládají za vozidla splňující ustanovení bodu 5.2.1.5.1 tohoto předpisu pouze vzhledem k tomu, že splňují požadavky bodu 1.2.2 části C přílohy 7 tohoto předpisu, musí výstražné zařízení obsahovat kromě optického zařízení také akustické zařízení. Obě tato zařízení nemusí být v činnosti současně za podmínky, že obě zařízení splňují výše uvedené požadavky a že akustický signál nevstupuje do činnosti dříve než optický signál. Jako optická výstražná signalizace se použije červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1.
5.2.1.13.1.2. Toto akustické zařízení může být vyřazeno z činnosti při použití parkovací brzdy a/nebo – podle volby výrobce – je-li ve vozidle s automatickou převodovkou páka předvoliče v poloze „parkování“.
5.2.1.14. Aniž jsou dotčeny požadavky bodu 5.1.2.3 tohoto předpisu, jestliže je pro funkci některého z brzdových systémů nezbytný přídavný zdroj energie, musí být zásoba energie taková, aby v případě zastavení motoru nebo v případě poruchy pohonu zdroje energie zůstal brzdný účinek dostatečný pro zastavení vozidla za předepsaných podmínek. Kromě toho, jestliže je svalové působení řidiče na systém parkovacího brzdění zesilováno posilovým zařízením, musí být činnost parkovacího brzdění zajištěna v případě poruchy tohoto posilovače, v případě nutnosti i s využitím zásoby energie nezávislé na energii, která běžně zajišťuje toto posílení. Tato zásoba energie může být zásobou energie určenou pro systém provozního brzdění.
5.2.1.15. U motorových vozidel, za něž je dovoleno připojovat přípojné vozidlo vybavené brzdou ovládanou řidičem tažného vozidla, musí být systém provozního brzdění tažného vozidla vybaven zařízením konstruovaným tak, že v případě selhání brzdového systému přípojného vozidla nebo v případě přerušení pneumatického spojení (nebo jiného typu použitého spojení) mezi tažným vozidlem a jeho přípojným vozidlem musí být ještě možné brzdit tažné vozidlo s účinkem předepsaným pro nouzové brzdění; za tím účelem je zejména předepsáno, že toto zařízení musí být umístěno na tažném vozidle.
5.2.1.16. Pneumatická/hydraulická pomocná zařízení musí být zásobována energií tak, aby se při jejich činnosti mohlo dosáhnout předepsaných hodnot zpomalení a aby i v případě poškození zdroje energie nemohla pomocná zařízení způsobit, že zásoby energie plnící brzdové systémy poklesnou pod úroveň uvedenou v bodě 5.2.1.13.
5.2.1.17. Jestliže přípojné vozidlo patří do kategorie O3 nebo O4, musí být systém provozního brzdění průběžného nebo poloprůběžného typu.
5.2.1.18. U vozidla, za něž je dovoleno připojovat přípojné vozidlo patřící do kategorie O3 nebo O4, musí brzdové systémy splňovat tyto podmínky:
|
5.2.1.18.1. |
jakmile systém nouzového brzdění tažného vozidla vstoupí do činnosti, musí být zajištěno rovněž odstupňovatelné brzdění přípojného vozidla; |
|
5.2.1.18.2. |
v případě poruchy systému provozního brzdění tažného vozidla, jestliže je tento systém tvořen nejméně dvěma nezávislými okruhy, musí být okruh nebo okruhy, které nejsou dotčeny touto poruchou, schopny uvést plně nebo částečně do činnosti brzdy přípojného vozidla. Jeho účinek musí být odstupňovatelný. Jestliže se tato funkce zajišťuje ventilem, který je běžně v klidové poloze, pak se použití takového ventilu připouští pouze tehdy, když řidič může snadno ověřit jeho správnou funkci bez použití nářadí buď zevnitř kabiny, nebo zvenku na vozidle; |
|
5.2.1.18.3. |
v případě poruchy (např. přetržení nebo netěsnosti) jednoho z pneumatických spojovacích vedení, přerušení nebo poruchy elektrického ovládacího vedení musí mít řidič přesto možnost uvést plně nebo částečně do činnosti brzdy přípojného vozidla, a to buď ovladačem provozního brzdění, nebo ovladačem nouzového brzdění, nebo ovladačem parkovacího brzdění, pokud tato porucha nevyvolá automaticky brzdění přípojného vozidla s účinkem předepsaným v bodě 3.3 přílohy 4 tohoto předpisu; |
|
5.2.1.18.4. |
automatické brzdění podle bodu 5.2.1.18.3 se pokládá za splněné, jsou-li splněny tyto požadavky:
|
|
5.2.1.18.5. |
v případě poruchy v jednom z ovládacích spojení mezi dvěma vozidly vybavenými podle bodu 5.1.3.1.2 musí ovládací vedení, které není dotčeno poruchou, automaticky zajistit brzdný účinek, který je pro přípojné vozidlo předepsaný v bodě 3.1 přílohy 4. |
5.2.1.19. Motorová vozidla vybavená k tažení přípojného vozidla s elektrickým brzdovým systémem podle bodu 1.1 přílohy 14 tohoto předpisu musí splňovat tyto požadavky:
|
5.2.1.19.1. |
zdroje elektrického napájení motorového vozidla (generátor a baterie) musí mít dostatečnou kapacitu, aby mohly napájet elektrický brzdový systém. Když motor běží ve volnoběhu s otáčkami doporučenými výrobcem a všechna elektrická zařízení, která výrobce montuje sériově, jsou v činnosti, nesmí napětí v elektrických okruzích při největším proudu v elektrickém brzdovém systému (15 A) poklesnout pod 9,6 V, přičemž tato hodnota se měří v místě napojení. Elektrické okruhy nesmí mít možnost zkratování ani v případě přetížení; |
|
5.2.1.19.2. |
v případě poruchy systému provozního brzdění na tažném vozidle, kde brzdový systém má nejméně dva na sobě nezávislé okruhy, musí okruh nebo okruhy, jež nejsou dotčeny poruchou, umožňovat, aby se uvedly do činnosti brzdy přípojného vozidla s částečným nebo plným brzdným účinkem; |
|
5.2.1.19.3. |
použití spínače a okruhu brzdových světel pro ovládání elektrického brzdového systému je přípustné pouze v případě, kdy je ovládací vodič zapojen paralelně s brzdovým světlem a spínač a okruh brzdových světel, které jsou na vozidle, mohou toto přetížení snést. |
5.2.1.20. U pneumatických systémů provozního brzdění, které mají dva nebo více nezávislých okruhů, musí být jakýkoli průnik vzduchu mezi těmito okruhy v ovladači nebo za ním trvale odvětráván do atmosféry.
5.2.1.21. U motorových vozidel určených k tažení přípojných vozidel kategorie O3 nebo O4 se smí systém provozního brzdění přípojného vozidla ovládat pouze zároveň se systémem provozního, nouzového nebo parkovacího brzdění motorového vozidla. Činnost samotných brzd přípojného vozidla je nicméně přípustná, pokud tažné vozidlo uvede brzdy přípojného vozidla do činnosti automaticky, a to jen pro účely stabilizace vozidla.
5.2.1.22. Motorová vozidla kategorií M2, M3, N2 a N3 s nejvýše čtyřmi nápravami musí být vybavena protiblokovacím zařízením kategorie 1 podle přílohy 13 tohoto předpisu.
5.2.1.23. Motorová vozidla schválená k tažení přípojného vozidla vybaveného protiblokovacím systémem musí také být vybavena pro elektrický ovládací převod jedním nebo oběma těmito konektory:
|
a) |
zvláštní elektrický konektor podle normy ISO 7638:2003 (11); |
|
b) |
automatizovaný konektor splňující požadavky uvedené v příloze 22. |
5.2.1.24. Doplňkové požadavky na vozidla kategorií M2, N1 a dále kategorie N2 < 5 tun vybavená elektrickým rekuperačním brzdovým systémem kategorie A:
|
5.2.1.24.1. |
U vozidel kategorie N1 se smí elektrické rekuperační brzdění uvést do činnosti jen ovladačem akcelerátoru a/nebo neutrální polohou v převodovce. |
|
5.2.1.24.2. |
Kromě toho u vozidel kategorií M2 a N2 (< 5 tun) může být ovladačem elektrického rekuperačního brzdění zvláštní spínač nebo páka. |
|
5.2.1.24.3. |
Požadavky bodů 5.2.1.25.6 a 5.2.1.25.7 platí také pro rekuperační brzdové systémy kategorie A. |
5.2.1.25. Doplňkové požadavky na vozidla kategorií M2, N1 a dále kategorie N2 < 5 tun vybavená elektrickým rekuperačním brzdovým systémem kategorie B:
|
5.2.1.25.1. |
Nesmí být možné odpojit zčásti nebo úplně část systému provozního brzdění jinak než automatickým zařízením. Nesmí to však být pokládáno za odchylku od požadavků bodu 5.2.1.10. |
|
5.2.1.25.2. |
Systém provozního brzdění musí mít pouze jediné ovládací zařízení. |
|
5.2.1.25.3. |
Pro vozidla s elektrickým rekuperačním brzdovým systémem obou kategorií platí všechna příslušná ustanovení, s výjimkou bodu 5.2.1.24.1. V tom případě se smí elektrické rekuperační brzdění uvést do činnosti ovladačem akcelerátoru a/nebo neutrální polohou v převodovce u vozidel kategorie N1. Kromě toho se působením na ovladač provozního brzdění nesmí zmenšovat výše uvedený brzdný účinek, k němuž došlo uvolněním ovladače akcelerátoru. |
|
5.2.1.25.4. |
Systém provozního brzdění nesmí být nepříznivě ovlivněn odpojením motoru (motorů) nebo zařazením určitého rychlostního stupně. |
|
5.2.1.25.5. |
Pokud se činnost elektrické složky brzd zajišťuje vztahem mezi informací vyslanou ovladačem provozního brzdění a brzdnou silou na příslušných kolech, musí být porucha tohoto vztahu vedoucí ke změně rozdělení brzdných účinků mezi nápravy (příloha 10 nebo 13, v příslušných případech) signalizována řidiči optickým výstražným signálem nejpozději v okamžiku, kdy se zapůsobí na ovladač, a světlo tohoto signálu musí zůstat rozsvíceno, dokud tato porucha trvá a spínač ovládání vozidla („zapalování“) je v poloze „zapnuto“. |
|
5.2.1.25.6. |
Činnost elektrického rekuperačního brzdění nesmí být nepříznivě ovlivňována magnetickými nebo elektrickými poli. |
|
5.2.1.25.7. |
U vozidel vybavených protiblokovacím zařízením musí protiblokovací zařízení řídit elektrický rekuperační brzdový systém. |
5.2.1.26. Zvláštní doplňkové požadavky na elektrický převod systému parkovacího brzdění
5.2.1.26.1. Při poruše v elektrickém převodu se musí zabránit jakémukoli nezamýšlenému uvedení systému parkovacího brzdění do činnosti.
5.2.1.26.2. V případě elektrické poruchy musí být splněny tyto požadavky:
|
5.2.1.26.2.1. |
Vozidla kategorií M2, M3, N2 a N3: V případě elektrické poruchy v ovladači nebo při přerušení kabeláže v elektrickém ovládacím převodu, který je vně elektronického řídícího zařízení (řídících zařízení), a přitom není dotčeno napájení energií, musí být nadále možné uvést do činnosti systém parkovacího brzdění ze sedadla řidiče a udržet jím naložené vozidlo ve stojícím stavu na stoupajícím nebo klesajícím svahu o sklonu 8 %. Alternativně je v tomto případě přípustné automatické uvedení parkovací brzdy do činnosti u stojícího vozidla za podmínky, že se dosáhne výše uvedeného účinku a že parkovací brzda zůstane nadále v činnosti nezávisle na poloze spínače zapalování (startování). Při této alternativě se musí parkovací brzda automaticky uvolnit, jakmile řidič začne uvádět vozidlo opět do pohybu. Musí být také možné odbrzdit systém parkovacího brzdění, když je to nutné, i s použitím nářadí a/nebo pomocného uvolňovacího zařízení, které je ve vozidle uloženo nebo je v něm instalováno. |
|
5.2.1.26.2.2. |
Vozidla kategorie N1: V případě elektrické poruchy v ovladači nebo při přerušení kabeláže v elektrickém ovládacím převodu mezi ovládacím orgánem a elektronickou řídící jednotkou, s kterou je přímo spojen, a přitom není dotčeno napájení energií, musí být nadále možné uvést do činnosti systém parkovacího brzdění ze sedadla řidiče a udržet jím vozidlo ve stojícím stavu na stoupajícím nebo klesajícím svahu o sklonu 8 %. Alternativně je v tomto případě přípustné automatické uvedení parkovací brzdy do činnosti u stojícího vozidla za podmínky, že se dosáhne výše uvedeného účinku a že parkovací brzda zůstane nadále v činnosti nezávisle na poloze spínače zapalování (startování). Při této alternativě se musí parkovací brzda automaticky uvolnit, jakmile řidič začne uvádět vozidlo opět do pohybu. K dosažení výše uvedeného účinku nebo k přispění k jeho dosažení je možné také použít motor a ručně řazenou převodovku nebo automatickou převodovku (parkovací polohu). |
|
5.2.1.26.2.3. |
Přerušení kabeláže v elektrickém ovládacím převodu nebo elektrická porucha ovladače systému parkovacího brzdění musí být signalizovány řidiči žlutým výstražným signálem specifikovaným v bodě 5.2.1.29.1.2. Když je tento signál uveden do činnosti přerušením kabeláže v elektrickém ovládacím převodu systému parkovacího brzdění, musí být tento výstražný signál se žlutým světlem uveden do činnosti okamžitě, jakmile dojde k přerušení. Kromě toho taková elektrická porucha ovladače nebo přerušení kabeláže vně elektronického řídícího zařízení (elektronických řídících zařízení), přičemž není dotčeno napájení energií, musí být signalizována řidiči přerušovaným červeným světlem výstražného signálu specifikovaného v bodě 5.2.1.29.1.1 tak dlouho, dokud je spínač zapalování (startování) v poloze „zapnuto“, včetně doby nejméně 10 sekund potom, a tak dlouho, dokud je ovladač v poloze „zapnuto“ (v činnosti). Jestliže však systém parkovacího brzdění zjistí, že parkovací brzda je správně v činnosti, může být přerušování červeného světla výstražného signálu potlačeno a místo toho může být použit výstražný signál s nepřerušovaným červeným světlem, který indikuje „parkovací brzda zabrzděna“. Pokud je uvedení parkovací brzdy do činnosti běžně signalizováno zvláštním výstražným signálem s červeným světlem, který splňuje všechny požadavky bodu 5.2.1.29.3, musí se ke splnění výše uvedeného požadavku na signalizování červeným světlem použít tento signál. |
5.2.1.26.3. Pomocná zařízení mohou odebírat energii z elektrického převodu systému parkovacího brzdění za podmínky, že přívod energie je postačující k ovládání systému parkovacího brzdění a navíc k napájení všech ostatních elektrických spotřebičů vozidla při bezporuchovém stavu. Kromě toho, pokud zásoba energie slouží také pro systém provozního brzdění, použijí se požadavky bodu 5.2.1.27.7.
5.2.1.26.4. Jakmile se vypne spínač pro zapalování/startování, kterým se ovládá elektrické napájení brzdového zařízení, a/nebo se vyjme klíček, musí být nadále možné zabrzdit vozidlo systémem parkovacího brzdění, přičemž vozidlo nesmí být možné odbrzdit.
5.2.1.27. Zvláštní doplňkové požadavky na systémy provozního brzdění s elektrickým ovládacím převodem
5.2.1.27.1. Systém provozního brzdění musí být při uvolněné parkovací brzdě schopen vyvinout statickou celkovou brzdnou sílu rovnající se nejméně brzdné síle požadované při zkoušce typu 0, a to i když byl vypnut spínač zapalování a startování a/nebo byl vyjmut klíček. Motorová vozidla schválená k tažení přípojných vozidel kategorie O3 nebo O4 musí také zajistit úplný ovládací signál pro systém provozního brzdění přípojného vozidla. Přitom se rozumí, že v převodu energie systému provozního brzdění je dostatečné množství energie.
5.2.1.27.2. Při jediné dočasné poruše (< 40 ms) v elektrickém ovládacím převodu, s výjimkou jeho přívodu energie (např. nepředaný signál nebo chyba v datech), nesmí dojít k žádnému patrnému ovlivnění účinku provozního brzdění.
5.2.1.27.3. Porucha v elektrickém ovládacím převodu (12), s výjimkou jeho zásoby energie, která ovlivňuje funkci a účinky systémů regulovaných tímto předpisem, musí být signalizována řidiči výstražným zařízením s červeným nebo žlutým světlem, specifikovaným v bodech 5.2.1.29.1.1 a 5.2.1.29.1.2, v příslušných případech. Pokud již nelze dosáhnout účinku předepsaného pro provozní brzdění (výstražný signál s červeným světlem), musí být poruchy vzniklé přerušením elektrického spojení (např. zkrat, rozpojení) signalizovány řidiči ihned, jakmile k nim dojde, a musí se dosáhnout brzdného účinku předepsaného pro nouzové brzdění při působení na ovladač provozního brzdění podle bodu 2.4 přílohy 4 tohoto předpisu. Tyto požadavky se nesmí pokládat za výjimku z uplatnění požadavků na nouzové brzdění.
5.2.1.27.4. Motorové vozidlo elektricky spojené s přípojným vozidlem elektrickým ovládacím vedením musí poskytnout řidiči zřetelnou výstrahu, kdykoliv sdělí přípojné vozidlo informaci o poruše indikující, že zásoba energie v kterékoli části systému provozního brzdění na přípojném vozidle poklesla pod hodnotu, při které je nutné dát výstražný signál, jak je specifikováno v bodě 5.2.2.16. Obdobně musí být dán výstražný signál, když trvalá porucha (> 40 ms) v elektrickém ovládacím převodu přípojného vozidla, s výjimkou jeho zásoby energie, znemožňuje, aby přípojné vozidlo dosáhlo účinku předepsaného pro provozní brzdění, jak je specifikováno v bodě 5.2.2.15.2.1. K tomuto účelu se užije výstražné zařízení s červeným světlem specifikované v bodě 5.2.1.29.2.1.
5.2.1.27.5. V případě poruchy zdroje energie pro elektrický ovládací převod musí být zajištěn plný ovládací rozsah systému provozního brzdění po dvaceti za sebou následujících plných zdvizích ovladače provozního brzdění, počínaje jmenovitou hodnotou hladiny energie. V průběhu zkoušky se ovladač brzdění při každé aplikaci plně sešlápne na dobu 20 sekund a uvolní na dobu 5 sekund. Rozumí se, že v průběhu výše uvedené zkoušky je množství energie v převodu energie dostačující, aby se zajistilo plné ovládání systému provozního brzdění. Tento požadavek se nesmí pokládat za výjimku z uplatnění požadavků přílohy 7.
5.2.1.27.6. Pokud napětí baterie poklesne pod hodnotu uvedenou výrobcem, při které již dále nelze zajistit účinek předepsaný pro provozní brzdění a/nebo při které nelze pomocí nejméně dvou nezávislých okruhů systému provozního brzdění dosáhnout účinku, který je předepsaný pro nouzové brzdění, musí být aktivován červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1. Poté, co vstoupil v činnost výstražný signál, musí být možné působením na ovladač provozního brzdění dosáhnout alespoň zbývajícího brzdného účinku předepsaného v bodě 2.4 přílohy 4 tohoto předpisu. Přitom se rozumí, že v převodu energie systému provozního brzdění je dostatečné množství energie. Tento požadavek se nesmí pokládat za výjimku z uplatňování požadavku na nouzové brzdění.
5.2.1.27.7. Jestliže se do pomocných zařízení přivádí energie ze stejné zásoby jako do elektrického ovládacího převodu, musí být zajištěno, aby při motoru běžícím s otáčkami nepřesahujícími 80 % otáček maximálního výkonu byl přívod energie dostatečný k dosažení předepsaných hodnot zpomalení pomocí buď zdroje energie schopného zabránit vyčerpání této zásoby, když jsou všechna pomocná zařízení v činnosti, nebo automatickým vypnutím předvolených pomocných zařízení, jakmile napětí překročí kritický práh uvedený v bodě 5.2.1.27.6 tohoto předpisu, čímž se zabrání dalšímu čerpání této zásoby. Dodržení tohoto požadavku lze prokázat výpočtem nebo praktickou zkouškou. U vozidel schválených k tažení přípojného vozidla kategorie O3 nebo O4 se přihlíží ke spotřebě energie přípojného vozidla hodnotou zatížení 400 W. Tento bod neplatí pro vozidla, u kterých je možné dosáhnout předepsané hodnoty zpomalení bez použití elektrické energie.
5.2.1.27.8. Jestliže se do pomocných zařízení přivádí energie z elektrického ovládacího převodu, musí být splněny tyto požadavky:
5.2.1.27.8.1. v případě poruchy zdroje energie za pohybu vozidla musí energie v zásobníku postačovat k uvedení brzd do činnosti, pokud se působí na ovladač;
5.2.1.27.8.2. v případě poruchy zdroje energie u stojícího vozidla, které je zabrzděno systémem parkovacího brzdění, musí energie v zásobníku postačovat na rozsvícení světel, a to i když se uvedou v činnost brzdy.
5.2.1.27.9. Při poruše elektrického ovládacího převodu systému provozního brzdění tažného vozidla vybaveného elektrickým ovládacím vedením podle bodu 5.1.3.1.2 nebo 5.1.3.1.3 musí zůstat zajištěno ovládání plné činnosti brzd přípojného vozidla.
5.2.1.27.10. Při poruše v elektrickém ovládacím převodu přípojného vozidla, které je připojeno pouze elektricky elektrickým ovládacím vedením podle bodu 5.1.3.1.3, musí být zajištěno brzdění přípojného vozidla podle bodu 5.2.1.18.4.1. Tak tomu musí být vždy, když přípojné vozidlo signalizuje „požadavek na brzdění přívodního vedení“ prostřednictvím části elektrického ovládacího vedení, která slouží k přenosu údajů, nebo když se trvale žádné údaje nepřenášejí. Tento požadavek neplatí pro motorová vozidla, která nemohou být použita k tažení přípojných vozidel připojených jen elektrickým ovládacím vedením, jak je popsáno v bodě 5.1.3.5.
5.2.1.28. Zvláštní požadavky na řízení síly ve spoji vozidel
5.2.1.28.1. Řízení síly ve spoji vozidel je přípustné jen na tažném vozidle.
5.2.1.28.2. Činností řízení síly ve spoji vozidel se zmenšují rozdíly mezi dynamickými poměrnými zpomaleními tažného a taženého vozidla. Funkce tohoto řízení síly ve spoji vozidel se ověří při schválení typu. Metoda, kterou se tato kontrola provádí, se dohodne mezi výrobcem vozidla a technickou zkušebnou. Použitá metoda a výsledky ověření se připojí ke zkušebnímu protokolu pro schválení typu.
5.2.1.28.2.1. Řízení síly ve spoji vozidel může určovat poměrné zpomalení TM/PM a/nebo požadovanou hodnotu (hodnoty) brzdění pro přípojné vozidlo. U tažných vozidel s dvěma ovládacími vedeními podle bodu 5.1.3.1.2 se musí zajistit u obou signálů obdobné působení na toto řízení síly.
5.2.1.28.2.2. Systém řízení síly ve spoji vozidel nesmí znemožnit použití největšího možného tlaku (možných tlaků) v brzdových válcích.
5.2.1.28.3. Vozidlo musí splňovat požadavky na kompatibilitu v naloženém stavu podle přílohy 10, avšak pro účely splnění cílů uvedených v bodě 5.2.1.28.2 se vozidlo může od těchto požadavků odchylovat, když je aktivováno řízení síly ve spojení vozidel.
5.2.1.28.4. Zařízení musí rozpoznat poruchu v systému řízení síly ve spoji vozidel a signalizovat ji řidiči žlutým výstražným signálem specifikovaným v bodě 5.2.1.29.1.2. V případě poruchy musí být splněny příslušné požadavky přílohy 10.
5.2.1.28.5. Kompenzace vykonávaná systémem řízení síly ve spoji vozidel se musí signalizovat žlutým výstražným signálem specifikovaným v bodě 5.2.1.29.1.2, pokud tato kompenzace přesahuje odchylku 150 kPa od jmenovité požadované hodnoty definované v bodě 2.28.3, až do limitu pm o hodnotě 650 kPa (nebo do ekvivalentní požadované digitální hodnoty). Při překročení hladiny 650 kPa je nutno vyslat výstražný signál, pokud kompenzace způsobí, že provozní hodnota leží mimo pásmo kompatibility pro naložené vozidlo, přičemž toto pásmo je specifikované v příloze 10 pro motorové vozidlo.
Schéma 1
Vozidla určená k tažení přípojných vozidel (kromě návěsů)

Graf 2
Tahače návěsů

5.2.1.28.6. Systém řízení síly ve spoji vozidel musí řídit jen síly ve spoji vznikající působením systému provozního brzdění motorového a přípojného vozidla. Síly vznikající ve spoji vozidel působením systémů odlehčovacího brzdění se nesmějí kompenzovat systémy provozního brzdění ani motorového vozidla, ani přípojného vozidla. Systémy odlehčovacího brzdění se nepokládají za část systémů provozního brzdění.
5.2.1.29. Porucha brzd a výstražný signál
Všeobecné požadavky na optickou výstražnou signalizaci, jejíž funkcí je signalizovat řidiči určité specifické poruchy (nebo závady) v brzdovém zařízení motorového vozidla, jsou uvedeny v následujících bodech. Na rozdíl od toho, co je uvedeno v bodě 5.2.1.29.6, se tato signalizace musí použít výhradně pro účely stanovené tímto předpisem.
5.2.1.29.1. U motorových vozidel musí být zajištěna následující optická výstražná signalizace poruch a závad brzd:
|
5.2.1.29.1.1. |
červený výstražný signál signalizující poruchy v brzdovém zařízení vozidla vymezené na jiných místech tohoto předpisu, které znemožní dosáhnout účinku předepsaného pro provozní brzdění a/nebo které znemožní činnost nejméně jednoho ze dvou nezávislých okruhů systému provozního brzdění; |
|
5.2.1.29.1.2. |
případně žlutý výstražný signál signalizující elektricky rozpoznanou poruchu v brzdovém zařízení vozidla, která není signalizována červeným výstražným signálem uvedeným v bodě 5.2.1.29.1.1. |
5.2.1.29.2. Motorová vozidla vybavená elektrickým ovládacím vedením a/nebo schválená k tažení přípojného vozidla s elektrickým ovládacím převodem musí být schopna zajistit zvláštní výstražný signál se žlutým světlem upozorňující na závadu v elektrickém ovládacím převodu brzdového zařízení přípojného vozidla. Tento signál se vyvolá z přípojného vozidla přes pól 5 elektrického konektoru podle normy ISO 7638:2003 (13) a v každém případě musí být signál přenášený od přípojného vozidla indikován v tažném vozidle bez významnější prodlevy nebo změny. Tento výstražný signál se nesmí rozsvítit, když se vozidlo spojí s přípojným vozidlem bez elektrického ovládacího vedení a/nebo bez elektrického ovládacího převodu, nebo pokud se nepřipojí žádné přípojné vozidlo. Tato funkce musí být automatická.
5.2.1.29.2.1. Když se motorové vozidlo vybavené elektrickým ovládacím vedením spojí elektricky s přípojným vozidlem, které má elektrické ovládací vedení, musí se také použít červený výstražný signál podle bodu 5.2.1.29.1.1 k signalizaci určitých specifikovaných poruch v brzdovém zařízení přípojného vozidla, kdykoliv je z přípojného vozidla předána odpovídající informace o poruše prostřednictvím části elektrického ovládacího vedení určené pro přenos údajů. Tato signalizace musí představovat doplněk ke žlutému výstražnému signálu uvedenému v bodě 5.2.1.29.2. Místo červeného výstražného signálu specifikovaného v bodu 5.2.1.29.1.1 a doprovázejícího žlutého výstražného signálu uvedeného výše se může alternativně použít na tažném vozidle zvláštní červený výstražný signál k signalizování takové poruchy v brzdovém zařízení přípojného vozidla.
5.2.1.29.3. Výstražné signály musí být viditelné i za denního světla; řidič sedící na svém sedadle musí mít možnost snadno si ověřit, zda signalizační zařízení správně fungují; porucha konstrukční části ve výstražných zařízeních nesmí mít za následek žádné zmenšení účinku brzdových systémů.
5.2.1.29.4. Pokud není uvedeno jinak:
|
5.2.1.29.4.1. |
Výše uvedený výstražný signál (výstražné signály) musí signalizovat řidiči určitou specifikovanou poruchu nebo závadu nejpozději při působení na příslušný ovladač; |
|
5.2.1.29.4.2. |
výstražný signál (výstražné signály) musí svítit tak dlouho, dokud porucha nebo závada trvá a spínač zapalování (startování) je v poloze „zapnuto“; a |
|
5.2.1.29.4.3. |
výstražný signál musí být stálý (nepřerušovaný). |
5.2.1.29.5. Výše uvedený výstražný signál (výstražné signály) se musí rozsvítit, když je elektrické zařízení vozidla (a brzdový systém) uvedeno pod napětí. Brzdový systém u stojícího vozidla ověří, že se nevyskytuje žádná specifikovaná porucha nebo závada dříve, než výstražné signály zhasnou. Specifikované poruchy nebo závady, které mají uvést v činnost výše uvedené výstražné signály a které přitom nejsou u stojícího vozidla rozpoznatelné, se po jejich rozpoznání musí uložit do paměti a musí být signalizovány při spouštění motoru a vždy, když je spínač zapalování (startování) v poloze „zapnuto“, a to tak dlouho, dokud porucha nebo závada trvá.
5.2.1.29.6. Nespecifikované poruchy (nebo závady) nebo jiné informace týkající se brzd a/nebo pojezdového ústrojí motorového vozidla mohou být signalizovány žlutým světlem specifikovaným v bodě 5.2.1.29.1.2, jestliže jsou splněny všechny tyto podmínky:
|
5.2.1.29.6.1. |
vozidlo stojí; |
|
5.2.1.29.6.2. |
po prvním uvedení brzdového zařízení do činnosti udává signál, že podle postupu podrobně popsaného v bodě 5.2.1.29.5 nebyly identifikovány žádné specifikované poruchy (nebo závady); a |
|
5.2.1.29.6.3. |
nespecifikované poruchy nebo jiné informace musí být signalizovány jen přerušovaným výstražným signálem. Výstražný signál musí nicméně zhasnout v okamžiku, kdy rychlost vozidla poprvé přesáhne 10 km/h. |
5.2.1.30. Signalizace brzdění prostřednictvím rozsvícení brzdových svítilen
5.2.1.30.1. Uvedení systému provozního brzdění do činnosti působením řidiče musí vyvolat signál, kterým se rozsvítí brzdové svítilny.
5.2.1.30.2. Požadavky na vozidla, která používají elektronické signály k počátečnímu ovládání systému provozního brzdění a která jsou vybavena systémem odlehčovacího brzdění a/nebo rekuperačním brzdovým systémem kategorie A:
|
Zpomalení systémem odlehčovacího brzdění a/nebo rekuperačním brzdovým systémem kategorie A |
|
|
≤ 1,3 m/s2 |
> 1,3 m/s2 |
|
Signál může být vyvolán |
Signál musí být vyvolán |
5.2.1.30.3. U vozidel vybavených brzdovým systémem s vlastnostmi jinými, než jsou uvedeny v bodě 5.2.1.30.2, může systém odlehčovacího brzdění a/nebo rekuperační brzdový systém kategorie A, pokud je v činnosti, vyvolat signál bez ohledu na dosahované zpomalení.
5.2.1.30.4. Signál nesmí být vyvolán, když dochází ke zpomalení působenému pouze přirozeným brzdným účinkem samotného motoru.
5.2.1.30.5. Uvedení systému provozního brzdění do činnosti „automaticky ovládaným brzděním“ musí vyvolat výše uvedený signál. Avšak je-li generované zpomalení menší než 0,7 m/s2, může být tento signál potlačen (14).
5.2.1.30.6. Uvedení do činnosti části systému provozního brzdění „selektivním brzděním“ nesmí vyvolat výše uvedený signál (15).
5.2.1.30.7. V případě vozidel s elektrickým ovládacím vedením je signál vyvolán motorovým vozidlem, jakmile obdrží z přípojného vozidla prostřednictvím elektrického ovládacího vedení zprávu „rozsvítit brzdové svítilny“.
5.2.1.31. Jestliže je vozidlo vybaveno zařízením k signalizaci nouzového brzdění, musí být uvedení do činnosti a vyřazení z činnosti signálu nouzového brzdění dosaženo pouze tím, že se použije systém provozního brzdění, pokud jsou splněny tyto podmínky (16):
|
5.2.1.31.1. |
Signál se nesmí uvést v činnost, když je zpomalení vozidla menší než hodnoty uvedené v následující tabulce, ale může se uvést v činnost při jakémkoli zpomalení stejném nebo vyšším než uvedené hodnoty, přičemž skutečnou hodnotu určí výrobce vozidla:
Signál se musí vyřadit z činnosti u všech vozidel nejpozději v okamžiku, kdy zpomalení poklesne pod 2,5 m/s2. |
|
5.2.1.31.2. |
Signál se může uvést do činnosti také za následujících podmínek:
Signál se musí vyřadit z činnosti, když protiblokovací systém již plně necykluje. |
5.2.1.32. S výhradou ustanovení bodu 12.3 tohoto předpisu musí být všechna vozidla následujících kategorií vybavena stabilitní funkcí vozidla:
|
a) |
M2, M3, N2 (17); |
|
b) |
N3 (17) s nejvýše 3 nápravami; |
|
c) |
N3 (17) se 4 nápravami a maximální hmotností nepřevyšující 25 t a maximálním kódem průměru kol nepřevyšujícím 19,5. |
Stabilitní funkce vozidla musí obsahovat opatření proti převrácení a směrové řízení a musí splňovat technické požadavky přílohy 21 tohoto předpisu.
5.2.1.33. Vozidla kategorie N1 s nejvýše 3 nápravami smí být vybavena stabilitní funkcí vozidla. Pokud je tato funkce instalována, musí obsahovat opatření proti převrácení a směrové řízení a musí splňovat technické požadavky přílohy 21 tohoto předpisu.
5.2.2. Vozidla kategorie O
5.2.2.1. Přípojná vozidla kategorie O1 nemusí být vybavena systémem provozního brzdění. Pokud však přípojná vozidla této kategorie systémem provozního brzdění vybavena jsou, tento systém musí splňovat tatáž ustanovení jako u vozidel kategorie O2.
5.2.2.2. Přípojná vozidla kategorie O2 musí být vybavena systémem provozního brzdění, který musí být průběžného nebo poloprůběžného nebo setrvačníkového (nájezdového) typu. Poslední uvedený typ je přípustný pouze pro přípojná vozidla s nápravou uprostřed. Je však přípustný elektrický brzdový systém, který splňuje ustanovení přílohy 14 tohoto předpisu.
5.2.2.3. Přípojná vozidla kategorie O3 a O4 musí být vybavena systémem provozního brzdění průběžného nebo poloprůběžného typu.
5.2.2.4. Systém provozního brzdění:
|
5.2.2.4.1. |
musí působit na všechna kola vozidla; |
|
5.2.2.4.2. |
musí rozdělovat brzdný účinek vhodným způsobem mezi nápravy; |
|
5.2.2.4.3. |
musí obsahovat na nejméně jednom ze vzduchojemů zařízení k odvodňování a k vyfukování, a to ve vhodné a snadno přístupné poloze. |
5.2.2.5. Účinek systému provozního brzdění musí být rozdělen mezi kola jedné a téže nápravy symetricky vzhledem k podélné střední rovině vozidla. Kompenzace a funkce, jako je protiblokovací zařízení, které mohou způsobit odchylky od tohoto symetrického rozdělení, se musí uvést v prohlášení.
5.2.2.5.1. Kompenzace poruchy nebo závady v brzdovém zařízení prováděná elektrickým ovládacím převodem musí být signalizována řidiči zvláštním žlutým optickým výstražným signálem podle bodu 5.2.1.29.2. Tento požadavek platí pro všechny stavy naložení, když kompenzace přesáhne následující meze:
|
5.2.2.5.1.1. |
rozdíl mezi tlaky v brzdových válcích na obou koncích kterékoli nápravy:
|
|
5.2.2.5.1.2. |
individuální hodnota kompenzace na celku kterékoli nápravy:
|
5.2.2.5.2. Kompenzace definovaná výše je přípustná pouze v případě, kdy se začne brzdit při rychlosti vozidla větší než 10 km/h.
5.2.2.6. Závady ve funkci elektrického ovládacího převodu nesmějí uvést do činnosti brzdy bez úmyslu řidiče.
5.2.2.7. Brzdné plochy potřebné k dosažení předepsaného účinku musí být trvale připojeny ke kolům, a to napevno nebo součástmi, které jsou odolné proti poruše.
5.2.2.8. Opotřebení brzd musí být možné snadno vyrovnávat ručním nebo automatickým vyrovnávacím systémem. Kromě toho musí mít ovladač a konstrukční části převodu a brzd rezervu zdvihu a, pokud je to nutné, vhodné zařízení pro kompenzaci tak, aby po zahřátí brzd nebo po určitém stupni opotřebení obložení byl zajištěn brzdný účinek, aniž by bylo nutno ihned provést vyrovnání.
5.2.2.8.1. Vyrovnávání opotřebení obložení musí být pro provozní brzdy automatické. Avšak montáž zařízení k automatickému vyrovnání opotřebení je pro vozidla kategorií O1 a O2 volitelná. Brzdy vybavené zařízeními k automatickému vyrovnání opotřebení musí po zahřátí, po němž následuje ochlazení, umožňovat volné otáčení kol podle bodu 1.7.3 přílohy 4 po vykonání, v závislosti na případu, zkoušky typu I nebo typu III, které jsou popsány rovněž v uvedené příloze.
5.2.2.8.1.1. U přípojných vozidel kategorie O4 se pokládají požadavky bodu 5.2.2.8.1 za splněné, jestliže jsou splněny požadavky bodu 1.7.3 přílohy 4.
5.2.2.8.1.2. U přípojných vozidel kategorií O2 a O3 se pokládají požadavky uvedeného bodu 5.2.2.8.1 za splněné, jestliže jsou splněny požadavky bodu 1.7.3 (18) přílohy 4.
5.2.2.8.2. Kontrola opotřebení třecích konstrukčních částí provozní brzdy
5.2.2.8.2.1. Toto opotřebení obložení provozních brzd musí být možné snadno zkontrolovat, a to zvnějšku nebo zespodu vozidla, bez sejmutí kol, prostřednictvím vhodných kontrolních otvorů nebo jiným způsobem. Tuto kontrolu lze provést jednoduchým běžným dílenským nářadím nebo běžným vybavením ke kontrole vozidel.
Jako alternativa je přijatelné snímací zařízení namontované na přípojném vozidle a upozorňující na stav, kdy je nutná výměna obložení, nebo snímač na každém kole (dvoumontáž kol se pokládá za jediné kolo) signalizující řidiči, který je na svém místě k řízení vozidla, že je nutno vyměnit obložení. V případě optického výstražného zařízení se může použít žlutý výstražný signál specifikovaný v bodě 5.2.1.29.2, za podmínky, že signál splňuje požadavky bodu 2.1.29.6.
5.2.2.8.2.2. Kontrola stavu opotřebení třecích ploch brzdových kotoučů nebo bubnů se musí provádět pouze přímým měřením dotčené konstrukční části nebo prohlídkou případných indikátorů opotřebení brzdových kotoučů nebo bubnů, což může vyžadovat určitý stupeň demontáže. Výrobce vozidla proto musí při schválení typu uvést:
|
a) |
způsob, kterým se kontroluje opotřebení třecích ploch bubnů nebo kotoučů, včetně nutného stupně demontáže a nářadí a postupu k tomu potřebných; |
|
b) |
údaje uvádějící přijatelnou maximální mezní hodnotu opotřebení v okamžiku, kdy se výměna stává nutnou. |
Tyto údaje musí být volně dostupné, například v příručce pro vozidlo nebo na elektronickém nosiči dat.
5.2.2.9. Brzdové systémy musí být takové, aby v případě přetržení spojovacího zařízení za jízdy bylo automaticky zajištěno zastavení přípojného vozidla.
5.2.2.10. Na každém přípojném vozidle, které musí být vybaveno systémem provozního brzdění, musí být rovněž zajištěno parkovací brzdění, a to i na přípojných vozidlech odpojených od tažného vozidla. Osoba stojící na zemi musí mít možnost uvést do činnosti systém parkovacího brzdění; avšak u přípojných vozidel určených pro dopravu osob musí být možno uvést tuto brzdu do činnosti z vnitřku přípojného vozidla.
5.2.2.11. Jestliže je na přípojném vozidle zařízení umožňující vyřadit z činnosti pneumatické ovládání brzdového systému jiného než systému parkovacího brzdění, musí být toto zařízení konstruováno a vyrobeno tak, aby bylo nuceně uvedeno do klidové polohy nejpozději při opětném plnění přípojného vozidla tlakovým vzduchem.
5.2.2.12. Přípojná vozidla kategorií O3 a O4 musí splňovat požadavky uvedené v bodě 5.2.1.18.4.2. Za spojkovou hlavicí ovládacího vedení musí být snadno přístupná kontrolní přípojka tlaku.
5.2.2.12.1. U přípojných vozidel vybavených elektrickým ovládacím vedením a elektricky spojených s tažným vozidlem majícím elektrické ovládací vedení může být pozdrženo automatické uvedení brzd do činnosti podle bodu 5.2.1.18.4.2 tak dlouho, dokud tlak ve vzduchojemech přípojného vozidla postačuje k zajištění brzdného účinku podle bodu 3.3 přílohy 4 tohoto předpisu.
5.2.2.13. Přípojná vozidla kategorie O3 musí být vybavena protiblokovacím systémem splňujícím požadavky přílohy 13 tohoto předpisu. Přípojná vozidla kategorie O4 musí být vybavena protiblokovacím brzdovým systémem splňujícím požadavky přílohy 13 tohoto předpisu pro kategorii A.
5.2.2.14. Jestliže se energie do pomocných zařízení dodává ze systému provozního brzdění, musí být systém provozního brzdění chráněn tak, aby zajišťoval, že součet brzdných sil na obvodu kol je nejméně 80 % hodnoty předepsané pro příslušné přípojné vozidlo v bodě 3.1.2.1 přílohy 4 tohoto předpisu. Tento požadavek musí být splněn za obou následujících provozních podmínek:
|
|
během doby, kdy jsou v činnosti pomocná zařízení; a |
|
|
při poruše nebo úniku energie z pomocných zařízení, s výjimkou stavu, kdy taková porucha nebo únik ovlivní ovládací signál uvedený v bodě 6 přílohy 10 tohoto předpisu; v tom případě platí požadavky na brzdný účinek stanovené v uvedeném bodě. |
5.2.2.14.1. Výše uvedená ustanovení se pokládají za splněná, jestliže tlak v zásobníku (zásobnících) systému provozního brzdění je udržován na hodnotě nejméně 80 % tlaku požadovaného v ovládacím vedení nebo ekvivalentní digitální požadované hodnoty vymezené v bodě 3.1.2.2 přílohy 4 tohoto předpisu.
5.2.2.15. Zvláštní doplňkové požadavky na systémy provozního brzdění s elektrickým ovládacím převodem
5.2.2.15.1. Při jediné dočasné poruše (< 40 ms) v elektrickém ovládacím převodu, s výjimkou jeho přívodu energie (např. nepředaný signál nebo chyba v datech), nesmí dojít k žádnému patrnému ovlivnění účinku provozního brzdění.
5.2.2.15.2. V případě závady v elektrickém ovládacím převodu (19) (např. zkrat, rozpojení) musí systém provozního brzdění daného přípojného vozidla vykazovat nadále nejméně 30 % předepsaného účinku. U přípojných vozidel elektricky připojených pouze elektrickým ovládacím vedením podle bodu 5.1.3.1.3 a splňujících ustanovení bodu 5.2.1.18.4.2 s brzdným účinkem předepsaným v bodě 3.3 přílohy 4 tohoto předpisu je postačující použít ustanovení bodu 5.2.1.27.10, když již nadále nelze zajistit účinek provozního brzdění přípojného vozidla ve výši nejméně 30 % předepsané hodnoty ani vysláním signálu „požadavek na brzdění plnicím vedením“ prostřednictvím části elektrického ovládacího vedení sloužící k přenosu dat, ani trvalou nepřítomností tohoto přenosu dat.
5.2.2.15.2.1. Porucha v elektrickém ovládacím převodu přípojného vozidla, která ovlivňuje funkci a účinky systémů, jež jsou regulovány tímto předpisem, a poruchy elektrického napájení konektorem podle normy ISO 7638:2003 (20) musí být signalizovány řidiči zvláštním výstražným zařízením specifikovaným v bodě 5.2.1.29.2 prostřednictvím pólu 5 elektrického konektoru podle normy ISO 7638:2003 (20). Kromě toho přípojná vozidla vybavená elektrickým ovládacím vedením, když jsou elektricky spojena s tažným vozidlem, které má elektrické ovládací vedení, musí zajistit informaci o poruše, která uvede do činnosti červený výstražný signál specifikovaný v bodě 5.2.1.29.2.1, a to prostřednictvím části elektrického ovládacího vedení sloužící k přenosu dat, jestliže již není zajištěn účinek předepsaný pro provozní brzdění přípojného vozidla.
5.2.2.16. Když akumulovaná energie v kterékoliv části systému provozního brzdění přípojného vozidla vybaveného elektricky ovládaným vedením a elektricky spojeného s tažným vozidlem, které má elektrické ovládací vedení, poklesne na hodnotu stanovenou podle následujícího bodu 5.2.2.16.1, musí být řidič tažného vozidla upozorněn výstražným signálem. Tato signalizace se vykoná červeným výstražným signálem podle bodu 5.2.1.29.2.1 a přípojné vozidlo předá informaci o poruše prostřednictvím části elektrického ovládacího vedení, která slouží k přenosu dat. Přitom se také musí uvést do činnosti zvláštní žlutý výstražný signál podle bodu 5.2.1.29.2, a to prostřednictvím pólu 5 elektrického konektoru podle normy ISO 7638:2003 (21). Tento signál upozorňuje řidiče, že na přípojném vozidle nastala situace, kdy je malá zásoba energie.
5.2.2.16.1. Malá zásoba energie uvedená v bodě 5.2.2.16 musí být taková, aby bez doplnění zásoby energie a při jakémkoliv stavu naložení přípojného vozidla již nebylo možné po pátém zdvihu ovladače provozního brzdění následujícím po jeho čtyřech plných zdvizích dosáhnout nejméně 50 % předepsaného brzdného účinku systému provozního brzdění příslušného přípojného vozidla.
5.2.2.17. Přípojná vozidla vybavená elektrickým ovládacím vedením a přípojná vozidla kategorie O3 a O4 vybavená protiblokovacím systémem musí také být vybavena pro elektrický ovládací převod jedním nebo oběma těmito konektory:
|
a) |
zvláštní elektrický konektor pro brzdový systém a/nebo protiblokovací systém podle normy ISO 7638:2003 (21) (22); |
|
b) |
automatizovaný konektor splňující požadavky uvedené v příloze 22. |
Výstražná signalizace poruchy, která je tímto předpisem požadována u přípojného vozidla, se musí uvést do činnosti prostřednictvím výše uvedených konektorů. Na přípojná vozidla se pro přenos výstražných signálů poruchy uplatní v závislosti na případu požadavky pro motorová vozidla stanovená v bodech 5.2.1.29.4, 5.2.1.29.5 a 5.2.1.29.6 tohoto předpisu.
Přípojná vozidla vybavená konektorem podle normy ISO 7638:2003, jak je uvedeno výše, musí mít nesmazatelné označení, které udává funkční stav brzdového systému pro případ, že konektor podle normy ISO 7638:2003 je připojen, a pro případ, že konektor je odpojen (23).
Toto označení musí být umístěno tak, aby bylo viditelné při spojování příslušných pneumatických a elektrických propojovacích částí.
5.2.2.17.1. Přípojná vozidla, která jsou vybavena stabilitní funkcí vozidla vymezenou v bodě 2.34 tohoto předpisu, musí v případě poruchy nebo závady ve stabilitní funkci přípojného vozidla signalizovat poruchu nebo závadu zvláštním výstražným signálem se žlutým světlem, který je specifikován v bodě 5.2.1.29.2 a který je vyvolán přes pól 5 konektoru podle normy ISO 7638:2003.
Výstražný signál musí být stálý a musí svítit tak dlouho, dokud porucha nebo závada trvá a spínač zapalování (startování) je v poloze „zapnuto“ (běh motoru).
5.2.2.17.2. Je přípustné připojit brzdový systém kromě výše uvedeného přívodu konektorem podle normy ISO 7638:2003 k dalšímu přívodu elektrického napájení. Avšak v případě, kdy je použit takový doplňkový přívod napájení, platí pro něj tato ustanovení:
|
a) |
Ve všech případech je přívod elektrického napájení konektorem podle normy ISO 7638:2003 primárním napájecím zdrojem pro brzdový systém, bez ohledu na jakékoli doplňkové napájení, které je připojeno. Doplňkové napájení je určeno jako záloha pro případ poruchy napájení konektorem podle normy ISO 7638:2003. |
|
b) |
Nesmí mít nepříznivé účinky na činnost brzdového systému pracujícího jak v běžném režimu, tak i v režimu s poruchou. |
|
c) |
V případě poruchy elektrického napájení konektorem podle normy ISO 7638:2003 nesmí energie spotřebovávaná brzdovým systémem přesáhnout maximální energii, kterou dodává doplňkové napájení. |
|
d) |
Na přípojném vozidle nesmí být žádné označení nebo štítek, které udávají, že přípojné vozidlo je vybaveno doplňkovým elektrickým napájením. |
|
e) |
Na přípojných vozidlech není přípustné výstražné zařízení k účelům signalizace případu poruchy v brzdovém systému přípojného vozidla, když je brzdový systém napájen z doplňkového zdroje napájení. |
|
f) |
Když je na vozidle doplňkové elektrické napájení, musí být možné ověřit, jak brzdový systém pracuje při napájení z tohoto zdroje energie. |
|
g) |
Jestliže dojde k poruše v elektrickém napájení konektorem podle normy ISO 7638:2003, platí požadavky bodu 5.2.2.15.2.1 a bodu 4.1 přílohy 13 na výstražnou signalizaci v případě poruchy, bez ohledu na to, zda brzdový systém pracuje s doplňkovým elektrickým napájením. |
5.2.2.18. Kdykoliv se elektrický proud dodávaný konektorem ISO 7638:2003 použije pro funkce uvedené v bodě 5.1.3.6, musí mít brzdový systém přednost a musí být chráněn proti přetížení, jež pochází ze zařízení jiných než brzdový systém. Tato ochrana musí být funkcí brzdového systému.
5.2.2.19. V případě poruchy v jednom z ovládacích spojení mezi dvěma vozidly vybavenými podle bodu 5.1.3.1.2 musí přípojné vozidlo použít ovládací spojení nedotčené poruchou k automatickému zajištění brzdného účinku předepsaného pro přípojné vozidlo v bodě 3.1 přílohy 4.
5.2.2.20. Pokud napětí napájení přípojného vozidla klesne pod hodnotu stanovenou výrobcem, při které již nelze zaručit účinek předepsaný pro provozní brzdění, musí se uvést do činnosti zvláštní výstražný signál se žlutým světlem podle bodu 5.2.1.29.2 prostřednictvím pólu 5 konektoru podle normy ISO 7638:2003 (24). Kromě toho, když se přípojné vozidlo mající elektrické ovládací vedení spojí elektricky s tažným vozidlem, které má elektrické ovládací vedení, musí zajistit informaci o poruše, která uvede do činnosti červený výstražný signál specifikovaný v bodě 5.2.1.29.2.1, a to prostřednictvím části elektrického ovládacího vedení sloužící pro přenos dat.
5.2.2.21. Kromě výše uvedených požadavků bodů 5.2.1.18.4.2 a 5.2.1.21 se brzdy přípojného vozidla mohou uvést do činnosti automaticky také v případě, kdy tyto brzdy uvede do činnosti sám brzdový systém přípojného vozidla na základě vyhodnocení informací generovaných palubním systémem.
5.2.2.22. Uvedení systému provozního brzdění do činnosti
5.2.2.22.1. V případě přípojných vozidel s elektrickým ovládacím vedením předává přípojné vozidlo zprávu „rozsvítit brzdové svítilny“ prostřednictvím elektrického ovládacího vedení, když se brzdový systém přípojného vozidla uvede do činnosti „automaticky ovládaným brzděním“ iniciovaným přípojným vozidlem. Avšak je-li generované zpomalení menší než 0,7 m/s2, může být tento signál potlačen (25).
5.2.2.22.2. V případě přípojných vozidel s elektrickým ovládacím vedením nesmí předat přípojné vozidlo zprávu „rozsvítit brzdové svítilny“ prostřednictvím elektrického ovládacího vedení v průběhu „selektivního brzdění“ iniciovaného přípojným vozidlem (26).
5.2.2.23. S výhradou ustanovení bodu 12.3 tohoto předpisu musí být všechna vozidla kategorií O3, a O4 (27), která mají nejvýše 3 nápravy a jsou vybavena vzduchovým odpružením, vybavena stabilitní funkcí vozidla. Tato funkce musí obsahovat alespoň opatření proti převrácení a splňovat technické požadavky přílohy 21 tohoto předpisu.
6. ZKOUŠKY
Zkoušky brzdění, kterým se musí podrobit vozidla předaná ke schválení, jakož i požadované brzdné účinky, jsou popsány v příloze 4 tohoto předpisu.
7. ZMĚNY TYPU VOZIDLA NEBO JEHO BRZDOVÉHO SYSTÉMU A ROZŠÍŘENÍ SCHVÁLENÍ
7.1. Každá změna typu vozidla nebo jeho brzdového zařízení z hlediska charakteristik uvedených v příloze 2 tohoto předpisu se musí oznámit schvalovacímu orgánu, který udělil schválení typu vozidla. Tento orgán pak může buď:
7.1.1. dospět k závěru, že provedené změny pravděpodobně nebudou mít znatelný nepříznivý vliv a že vozidlo stále splňuje požadavky; nebo
|
7.1.2. |
požadovat nový protokol od technické zkušebny pověřené prováděním zkoušek. |
|
7.2. |
Potvrzení nebo zamítnutí schválení, s uvedením změn, se oznámí stranám dohody, které používají tento předpis, podle postupu v bodě 4.3. |
7.3. Schvalovací orgán, který vydává rozšíření schválení, přidělí takovému rozšíření pořadové číslo a informuje o tomto rozšíření ostatní smluvní strany dohody z roku 1958, které používají tento předpis, a to osvědčením na formuláři podle vzoru v příloze 2 tohoto předpisu.
8. SHODNOST VÝROBY (COP)
8.1. Každé vozidlo schválené podle tohoto předpisu musí být vyrobeno tak, aby se shodovalo se schváleným typem tím, že splňuje požadavky bodu 5.
8.2. Splnění požadavků bodu 8.1 se ověřuje vhodnou kontrolou výroby.
8.3. Držitel schválení musí zejména:
|
8.3.1. |
zajistit postupy účinné kontroly jakosti výrobků; |
|
8.3.2. |
mít přístup ke zkušebním zařízením nezbytným pro ověřování shodnosti každého schváleného typu; |
|
8.3.3. |
zajistit, aby byly výsledky zkoušek zaznamenávány a aby připojené doklady byly dostupné po dobu stanovenou schvalovacím orgánem; |
|
8.3.4. |
analyzovat výsledky každého druhu zkoušek s cílem ověřit a zajistit stálost charakteristik výrobku a přitom zohlednit přípustné odchylky průmyslové výroby; |
|
8.3.5. |
zajistit, aby se u každého typu výrobku provedly zkoušky, které jsou předepsány podle tohoto předpisu, nebo některé z nich; |
|
8.3.6. |
zajistit, aby v případě, kdy některý ze vzorků nebo zkoušených prvků prokáže při určité zkoušce neshodnost s typem, byly vybrány nové vzorky a provedena nová zkouška. Musí být podniknuty veškeré nezbytné kroky k obnovení shodnosti dané výroby. |
8.4. Schvalovací orgán, který udělil schválení typu, může kdykoliv ověřit metody kontroly shodnosti používané v každém výrobním zařízení.
8.4.1. Při každé inspekci se musí inspektorovi předložit zkušební knihy a záznamy o sledování výroby.
8.4.2. Inspektor může náhodně odebírat vzorky ke zkoušce v laboratoři výrobce. Minimální počet vzorků může být určen podle výsledků vlastních kontrol výrobce.
8.4.3. Pokud se úroveň kvality jeví jako nevyhovující nebo pokud se zdá být nutné ověřit platnost zkoušek podle bodu 8.4.2, vybere inspektor vzorky, které se odešlou do technické zkušebny, která provedla zkoušky pro schválení typu.
8.4.4. Schvalovací orgán je oprávněn provádět jakékoli zkoušky předepsané v tomto předpisu.
8.4.5. Obvyklá četnost inspekcí, které vykonává schvalovací orgán, je jednou za dva roky. Pokud se při některé z těchto inspekcí zjistí nevyhovující výsledky, schvalovací orgán zajistí, aby se vykonala veškerá opatření nutná k co nejrychlejšímu obnovení shodnosti výroby.
9. POSTIHY ZA NESHODNOST VÝROBY
9.1. Schválení udělené, pokud jde o typ vozidla, v souladu s tímto předpisem lze odejmout v případě, že nejsou dodržovány požadavky podle bodu 8.1.
9.2. Pokud smluvní strana dohody používající tento předpis odejme schválení, které dříve udělila, musí o tom ihned informovat sdělením na formuláři dle vzoru v příloze 2 tohoto předpisu ostatní smluvní strany, které uplatňují tento předpis.
10. DEFINITIVNÍ UKONČENÍ VÝROBY
Pokud držitel schválení zcela ukončí výrobu typu vozidla schváleného podle tohoto předpisu, musí o tom informovat orgán, který schválení typu udělil. Po obdržení příslušného osvědčení o tom tento orgán informuje ostatní smluvní strany dohody, které používají tento předpis, a to prostřednictvím formuláře osvědčení podle vzoru v příloze 2 tohoto předpisu.
11. NÁZVY A ADRESY SCHVALOVACÍCH ORGÁNŮ A NÁZVY A ADRESY TECHNICKÝCH ZKUŠEBEN ODPOVĚDNÝCH ZA PROVÁDĚNÍ SCHVALOVACÍCH ZKOUŠEK
Smluvní strany dohody z roku 1958, které používají tento předpis, sdělí sekretariátu Organizace spojených národů názvy a adresy technických zkušeben odpovědných za zkoušky schválení typu a názvy a adresy schvalovacích orgánů, které udělují schválení typu a kterým je třeba zasílat formuláře potvrzující udělení či rozšíření nebo zamítnutí či odnětí schválení vydané v jiných zemích.
12. PŘECHODNÁ USTANOVENÍ
12.1. Od data vstupu série změn 11 tohoto předpisu v platnost (11. července 2008) nesmí žádná ze smluvních stran používajících tento předpis odmítnout udělit nebo uznat schválení typu podle tohoto předpisu ve znění série změn 11.
12.2. Smluvní strany používající tento předpis udělí schválení typu pouze tehdy, pokud schvalovaný typ vozidla splňuje požadavky tohoto předpisu ve znění série změn 11.
Aniž jsou dotčeny výše uvedené požadavky, splnění požadavků doplňku 7 k sérii změn 11 se nevyžaduje pro všechna nová schválení typu před 28. říjnem 2014.
12.3. Od dat použití uvedených v následující tabulce, pokud jde o sérii změn 11 tohoto předpisu, nejsou smluvní strany používající tento předpis povinny uznávat typ vozidla schválený podle série změn 10 tohoto předpisu.
|
Kategorie vozidla |
Datum použití (od data po vstupu série změn 11 v platnost, 11. července 2008) |
|
|
Vozidla, která nejsou osvobozena od požadavků na řízení stability podle bodů 5.2.1.32 a 5.2.2.23 včetně poznámek pod čarou |
M2 |
84 měsíců (11. července 2015) |
|
M3 (třída III) |
36 měsíců (11. července 2011) |
|
|
M3 < 16 tun (pneumatický převod) |
48 měsíců (11. července 2012) |
|
|
M3 (třída II a B) (hydraulický převod) |
84 měsíců (11. července 2015) |
|
|
M3 (třída III) (hydraulický převod) |
84 měsíců (11. července 2015) |
|
|
M3 (třída III) (pneumatický ovládací převod a hydraulický převod energie) |
96 měsíců (11. července 2016) |
|
|
M3 (třída II) (pneumatický ovládací převod a hydraulický převod energie) |
96 měsíců (11. července 2016) |
|
|
M3 (jiná než výše uvedená) |
48 měsíců (11. července 2012) |
|
|
N2 (hydraulický převod) |
84 měsíců (11. července 2015) |
|
|
N2 (pneumatický ovládací převod a hydraulický převod energie) |
96 měsíců (11. července 2016) |
|
|
N2 (jiná než výše uvedená) |
72 měsíců (11. července 2014) |
|
|
N3 (dvounápravové tahače návěsů) |
36 měsíců (11. července 2011) |
|
|
N3 (dvounápravové tahače návěsů s pneumatickým ovládacím převodem (ABS)) |
60 měsíců (11. července 2013) |
|
|
N3 (3 nápravy s elektrickým ovládacím převodem (EBS)) |
60 měsíců (11. července 2013) |
|
|
N3 (2 nápravy a 3 nápravy s pneumatickým ovládacím převodem (ABS)) |
72 měsíců (11. července 2014) |
|
|
N3 (jiná než výše uvedená) |
48 měsíců (11. července 2013) |
|
|
O3 (kombinované zatížení náprav mezi 3,5 a 7,5 tuny) |
72 měsíců (11. července 2014) |
|
|
O3 (jiná než výše uvedená) |
60 měsíců (11. července 2013) |
|
|
O4 |
36 měsíců (11. července 2011) |
|
|
Vozidla kategorie M, N a O osvobozená od požadavků na řízení stability (podle bodů 5.2.1.32 a 5.2.2.23 včetně poznámek pod čarou), která však nejsou osvobozena od ostatních požadavků série změn 11 |
24. října 2016 |
|
12.4. Aniž jsou dotčeny požadavky bodu 12.3, nesmí do 24. října 2016 žádná ze smluvních stran používajících tento předpis odmítnout uznat schválení typu vozidla, které nesplňuje požadavky doplňku 2 k sérii změn 11 tohoto předpisu.
12.5. Smluvní strany používající tento předpis nesmí odmítnout udělit rozšíření schválení typu pro stávající typy, která byla udělena na základě požadavků platných v době původního schválení.
12.6. Aniž jsou dotčena výše uvedená přechodná ustanovení, nejsou smluvní strany, pro něž vstoupí uplatňování tohoto předpisu v platnost po datu, kdy vstoupí v platnost poslední série změn, povinny uznat schválení, která byla udělena podle kterékoli z předcházejících sérií změn tohoto předpisu.
12.7. Po uplynutí 24 měsíců od vstupu v platnost doplňku 12 k sérii změn 11 udělí smluvní strany používající tento předpis schválení typu typům vozidla pouze tehdy, pokud schvalovaný typ vozidla splňuje požadavky tohoto předpisu ve znění doplňku 12 k sérii změn 11.
(1) Podle definice úplného usnesení o konstrukci vozidel (R.E.3) (dokument ECE/TRANS/WP.29/78/Rev. 3, bod 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html)
(2) V souladu s daty použitelnosti, která jsou uvedena v bodě 12 tohoto předpisu, jsou požadavky na brzdění vozidel kategorie M1 obsaženy výhradně v předpisu č. 13-H. Pro vozidla kategorie N1 uznávají smluvní strany, které uplatňují tento předpis i předpis č. 13-H, že schválení podle jednoho či druhého předpisu mají stejnou platnost.
(3) Rozlišovací čísla smluvních stran dohody z roku 1958 jsou uvedena v příloze 3 úplného usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 3, příloha 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Do doby, než se dohodnou jednotná technická ustanovení, která zajistí kompatibilitu a bezpečnost, nesmějí se použít spojení mezi motorovými a přípojnými vozidly podle bodu 5.1.3.1.3.
(5) Neplatí pro přípojná vozidla.
(6) Neplatí pro vozidla s elektronickým ovládáním brzdových systémů.
(7) Pokud se liší od minimálního řadicího tlaku.
(8) Platí pouze pro přípojná vozidla.
(9) Pro účely periodických technických prohlídek mohou minimální poměrná zpomalení stanovená pro celé vozidlo potřebovat úpravu, aby se zohlednily vnitrostátní nebo mezinárodní požadavky na vozidla v provozu.
(10) Schvalovací orgán musí mít možnost zkontrolovat systém provozního brzdění doplňkovými zkouškami.
(11) Podle potřeby se může použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(12) Do doby, než se dohodnou jednotné zkušební metody, musí výrobce seznámit technickou zkušebnu s analýzou případných závad v řídícím zařízení a s jejich důsledky. Tyto informace budou projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(13) V závislosti na případu lze použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(14) Dodržení těchto požadavků musí být při schválení potvrzeno výrobcem vozidla.
(15) Během „selektivního brzdění“ se funkce může změnit na „automaticky řízené brzdění“.
(16) Dodržení těchto požadavků musí být při schválení potvrzeno výrobcem vozidla.
(17) Terénní vozidla, vozidla ke specializovanému použití (např. pojízdná zařízení, která používají nestandardní podvozky – pojízdné jeřáby, vozidla s hydrostatickým pohonem, která využívají tento pohon i k brzdění a pomocným funkcím, vozidla kategorie N2, která vykazují všechny následující charakteristiky: celková hmotnost vozidla mezi 3,5 a 7,5 tuny, nestandardní podvozek s nízkým rámem, více než 2 nápravy a hydraulický převod), vozidla třídy I, třídy A a kloubová vozidla kategorií M2 a M3, tahače kategorie N2 pro návěsy s celkovou hmotností vozidla mezi 3,5 a 7,5 tuny musí být z tohoto požadavku vyňata.
(18) Do doby, než se dohodnou jednotné postupy vyhodnocení funkce zařízení k automatickému vyrovnání opotřebení, považuje se podmínka volného otáčení kol za splněnou, jestliže je tato podmínka skutečně splněna v průběhu všech zkoušek brzd předepsaných pro přípojné vozidlo.
(19) Do doby, než se dohodnou jednotné zkušební metody, musí výrobce seznámit technickou zkušebnu s analýzou případných závad v řídícím zařízení a s jejich důsledky. Tyto informace budou projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(20) V závislosti na případu lze použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(21) V závislosti na případu lze použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(22) Rozměry průřezu kabelu specifikované v normě ISO 7638:2003 lze zmenšit pro přípojné vozidlo, pokud má takové přípojné vozidlo svou nezávislou pojistku. Tato pojistka musí být dimenzována na takový proud, aby se nepřesáhlo přípustné proudové zatížení vodičů. Tato výjimka neplatí pro přípojná vozidla vybavená k tažení dalšího přípojného vozidla.
(23) U přípojných vozidel vybavených jak konektorem podle normy ISO 7638, tak automatizovaným konektorem musí označení udávat, že konektor podle normy ISO 7638 by neměl být připojen, když se používá automatizovaný konektor.
(24) Podle potřeby se může použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(25) Dodržení těchto požadavků musí být při schvalování typu potvrzeno výrobcem vozidla.
(26) Během „selektivního brzdění“ se funkce může změnit na „automaticky řízené brzdění“.
(27) Na přípojná vozidla pro přepravu mimořádných nákladů a přípojná vozidla s prostorem vyhrazeným pro stojící cestující se tento požadavek nevztahuje.
PŘÍLOHA 1
BRZDOVÁ ZAŘÍZENÍ, METODY A PODMÍNKY BRZDĚNÍ, KTERÉ NEJSOU OBSAŽENY V TOMTO PŘEDPISE
|
1. |
Metoda měření dob náběhu brzdného účinku pro brzdy jiné než pneumatické. |
PŘÍLOHA 2


Dodatek 1 (1)
Seznam údajů o vozidle pro účely schválení podle předpisu č. 90
1. Popis typu vozidla …
1.1. Obchodní název nebo značka vozidla, pokud jsou známy …
1.2. Kategorie vozidla …
1.3. Typ vozidla uvedený ve schválení podle předpisu č. 13: …
1.4. Modely nebo obchodní názvy vozidel tvořících typ vozidla, pokud jsou známy …
1.5. Název a adresa výrobce …
2. Značka a typ brzdových obložení, kotoučů a bubnů:
2.1. Brzdová obložení
2.1.1. Brzdová obložení zkoušená podle všech příslušných ustanovení přílohy 4 …
2.1.2. Alternativní brzdová obložení zkoušená podle přílohy 15 …
2.2. Brzdové kotouče a bubny
2.2.1. Identifikační kód brzdových kotoučů, na které se vztahuje schválení brzdového systému …
2.2.2. Identifikační kód brzdových bubnů, na které se vztahuje schválení brzdového systému …
3. Minimální hmotnost vozidla …
3.1. Rozdělení hmotnosti na každou z náprav (maximální hodnota) …
4. Maximální hmotnost vozidla …
4.1. Rozdělení hmotnosti na každou z náprav (maximální hodnota) …
5. Maximální rychlost vozidla …
6. Rozměry pneumatik a kol …
7. Rozdělení brzdového systému na okruhy (např. na přední a zadní nápravu, diagonální) …
8. Prohlášení o tom, co tvoří systém nouzového brzdění …
9. Specifikace brzdových ventilů (pokud na vozidle jsou) …
9.1. Specifikace seřízení zátěžového regulátoru …
9.2. Nastavení regulátoru tlaku …
10. Konstrukční rozdělení brzdných sil mezi nápravy …
11. Specifikace brzd …
11.1. Typ kotoučové brzdy (např. počet pístů a jejich průměry, větraný nebo plný kotouč) …
11.2. Typ bubnové brzdy (např. duoservo, rozměry pístů a bubnu) …
11.3. U pneumatických brzdových systémů např. druh a velikost brzdových válců, pák atd.: …
12. Druh a velikost hlavního válce …
13. Druh a velikost posilovače …
(1) Na vyžádání žadatele o schválení podle předpisu č. 90 poskytne schvalovací orgán informace podle vzoru v dodatku 1 k této příloze. Tyto informace však neposkytne pro jiné účely, než jsou schválení podle předpisu č. 90.
Dodatek 2
Osvědčení o schválení typu brzdového zařízení vozidla
1. Obecné informace
Jestliže bylo přípojné vozidlo schváleno alternativním postupem specifikovaným v příloze 20 tohoto předpisu, vyplní se následující doplňkové body.
2. Zkušební protokoly podle přílohy 19
|
2.1. |
Membránové brzdové válce: |
Zkušební protokol č. … |
|
2.2. |
Pružinové brzdy: |
Zkušební protokol č. … |
|
2.3. |
Brzdné účinky přípojného vozidla se studenými brzdami: |
Zkušební protokol č. … |
|
2.4. |
Protiblokovací brzdový systém: |
Zkušební protokol č. … |
3. Zkoušky brzdného účinku
|
3.1. |
Přípojné vozidlo splňuje požadavky přílohy 4 bodů 3.1.2 a 1.2.7 (účinek provozního brzdění se studenými brzdami) |
ano/ne (1) |
|
3.2. |
Přípojné vozidlo splňuje požadavky přílohy 4 bodu 3.2 (účinek parkovacího brzdění se studenými brzdami) |
ano/ne (1) |
|
3.3. |
Přípojné vozidlo splňuje požadavky přílohy 4 bodu 3.3 (účinek nouzového/automatického brzdění) |
ano/ne (1) |
|
3.4. |
Přípojné vozidlo splňuje požadavky přílohy 10 bodu 6 (účinek v případě poruchy systému rozdělování brzdného účinku na nápravy) |
ano/ne (1) |
|
3.5. |
Přípojné vozidlo splňuje požadavky bodu 5.2.2.14.1 tohoto předpisu (brzdný účinek v případě úniku tlakového média z pomocných zařízení) |
ano/ne (1) |
|
3.6. |
Přípojné vozidlo splňuje požadavky přílohy 13 (protiblokovací brzdění) |
ano/ne (1) |
(1) Nehodící se škrtněte.
PŘÍLOHA 3
USPOŘÁDÁNÍ ZNAČEK SCHVÁLENÍ TYPU
VZOR A
(Viz bod 4.4 tohoto předpisu)

Výše uvedená značka schválení, kterou je vozidlo opatřeno, udává, že typ tohoto vozidla byl z hlediska brzdění schválen ve Spojeném království (E 11) podle předpisu č. 13 pod číslem schválení 112439. Toto číslo udává, že schválení bylo uděleno podle ustanovení předpisu č. 13 změněného sérií změn 11. U vozidel kategorií M2 a M3 tato značka udává, že tento typ vozidla byl podroben zkoušce typu II.
VZOR B
(Viz bod 4.5 tohoto předpisu)
Výše uvedená značka schválení, kterou je vozidlo opatřeno, udává, že typ tohoto vozidla byl z hlediska brzdění schválen ve Spojeném království (E 11) podle předpisu č. 13. U vozidel kategorií M2 a M3 tato značka znamená, že tento typ vozidla byl podroben zkoušce typu IIA.
VZOR C
(Viz bod 4.6 tohoto předpisu)
Výše uvedená značka schválení, kterou je vozidlo opatřeno, udává, že typ tohoto vozidla byl schválen ve Spojeném království (E 11) podle předpisů č. 13 a 24 (1). (V případě posledně uvedeného předpisu je korigovaná hodnota součinitele absorpce 1,30 m– 1).
(1) Toto číslo je uváděno pouze pro příklad.
PŘÍLOHA 4
ZKOUŠKY BRZDĚNÍ A ÚČINEK BRZDOVÝCH SYSTÉMŮ
1. ZKOUŠKY BRZDĚNÍ
1.1. Obecné informace
1.1.1. Účinek předepsaný pro brzdové systémy je určen brzdnou dráhou a/nebo středním plným brzdným zpomalením. Účinek brzdového systému je určen naměřenou brzdnou dráhou vztaženou k počáteční rychlosti vozidla a/nebo středním plným brzdným zpomalením naměřeným v průběhu zkoušky.
1.1.2. Brzdná dráha je dráha, kterou vozidlo ujede od okamžiku, kdy řidič začne působit na ovladač brzdového systému, až do okamžiku, kdy se vozidlo zastaví; počáteční rychlost je rychlost v okamžiku, kdy řidič začne působit na ovladač brzdového systému; počáteční rychlost nesmí být nižší než 98 % rychlosti předepsané pro příslušnou zkoušku.
Střední plné brzdné zpomalení (dm) se vypočítá jako střední zpomalení, které je funkcí vzdálenosti ujeté v intervalu vb až ve, podle následujícího vzorce:
kde:
|
vo |
= |
počáteční rychlost vozidla v km/h, |
|
vb |
= |
rychlost vozidla při 0,8 vo v km/h, |
|
ve |
= |
rychlost vozidla při 0,1 vo v km/h, |
|
sb |
= |
dráha, kterou vozidlo ujede mezi vo a vb, v metrech, |
|
se |
= |
dráha, kterou vozidlo ujede mezi vo a ve, v metrech. |
Rychlost a dráha se zjišťují přístroji s přesností ± 1% z předepsané zkušební rychlosti. Hodnotu středního plného brzdného zpomalení lze určit i jinými způsoby než měřením rychlosti a dráhy; v takovém případě se střední plné brzdné zpomalení musí určit s přesností ± 3%.
1.2. Pro schválení každého vozidla se měří účinek brzdění při silničních zkouškách a tyto zkoušky se musí provádět za následujících podmínek:
|
1.2.1. |
vozidlo musí odpovídat podmínkám pro hmotnost předepsaným pro každý typ zkoušky a uvedeným ve zkušebním protokolu; |
|
1.2.2. |
zkouší se při rychlostech, které jsou stanoveny pro každý typ zkoušky; jestliže je nejvyšší konstrukční rychlost vozidla nižší než rychlost předepsaná pro zkoušku, zkouší se při nejvyšší rychlosti vozidla; |
|
1.2.3. |
síla, kterou se působí na ovladač brzdy během zkoušky k dosažení předepsaného účinku, nesmí překročit nejvyšší stanovenou hodnotu pro kategorii zkoušeného vozidla; |
|
1.2.4. |
s výhradou jiných ustanovení uvedených v příslušných přílohách musí mít vozovka povrch s dobrými adhezními vlastnostmi; |
|
1.2.5. |
zkouší se, když nefouká vítr, který by mohl ovlivnit výsledky; |
|
1.2.6. |
na počátku zkoušek musí být pneumatiky studené a nahuštěné na tlak předepsaný pro zatížení skutečně nesené koly stojícího vozidla; |
|
1.2.7. |
předepsaného účinku se musí dosáhnout bez blokování kol, aniž vozidlo vybočí z vytčené dráhy a bez abnormálních vibrací (1). |
|
1.2.8. |
u vozidel poháněných zcela nebo zčásti elektromotorem (elektromotory) trvale spojeným (spojenými) s koly se vždy zkouší s tímto elektromotorem (elektromotory) zapojeným (zapojenými); |
|
1.2.9. |
u vozidel vybavených elektrickým rekuperačním brzdovým systémem kategorie A popsaných v bodě 1.2.8 se zkoušky chování vozidla uvedené v bodě 1.4.3.1 této přílohy provedou na zkušební dráze s nízkým součinitelem adheze (vymezeným v bodě 5.2.2 přílohy 13); maximální zkušební rychlost však nesmí překročit maximální zkušební rychlost specifikovanou v bodě 5.3.1 přílohy 13 pro povrch s nízkou adhezí a příslušnou kategorii vozidel;
|
|
1.2.10. |
blokování kol není během zkoušek uvedených v bodech 1.2.9 a 1.2.9.1 přípustné. Jsou však dovoleny korekce řízení, pokud je úhlové natočení volantu během prvních 2 sekund menší než 120° a celkem nepřesáhne 240°; |
|
1.2.11. |
u vozidel s elektricky ovládanými provozními brzdami napájenými z trakčních baterií (nebo z pomocné baterie), které získávají energii jen z nezávislého vnějšího nabíjecího systému, musí být tyto baterie v průběhu zkoušek brzdných účinků ve stavu nabití v průměru ne o více než 5 % vyšším, než je stav, při kterém musí být spuštěn výstražný signál poruchy brzd předepsaný v bodě 5.2.1.27.6. Jestliže tento signál vstoupil do činnosti, je přípustné určité dobití baterií v průběhu zkoušek tak, aby zůstaly v požadovaném rozsahu stavu nabití. |
1.3. Chování vozidla při brzdění
1.3.1. Při zkouškách brzdění, zejména při zkouškách z vysokých rychlostí, je nutno ověřit celkové chování vozidla během brzdění.
1.3.2. Chování vozidla při brzdění na vozovce se sníženou adhezí Chování vozidel kategorií M2, M3, N1, N2, N3, O2, O3 a O4 na vozovce se sníženou adhezí musí splňovat požadavky uvedené v příloze 10 a/nebo v příloze 13 tohoto předpisu.
1.3.2.1. V případě brzdového systému podle bodu 5.2.1.7.2, u kterého se k brzdění určité nápravy (nebo náprav) použije více než jeden zdroj brzdného momentu a každý jednotlivý zdroj se může měnit vzhledem k druhému zdroji (zdrojům), musí vozidlo splňovat požadavky přílohy 10 nebo případně přílohy 13 za všech podmínek, které připouští použitá strategie ovládání (2).
1.4. Zkouška typu 0 (základní zkouška účinnosti brzd za studena)
1.4.1. Obecné informace
1.4.1.1. Brzdy musí být studené; brzda se považuje za studenou, jestliže teplota měřená na kotouči nebo na vnějšku bubnu je nižší než 100 °C.
1.4.1.2. Zkouší se za následujících podmínek:
|
1.4.1.2.1. |
vozidlo musí být naloženo, přičemž rozložení jeho hmotnosti mezi nápravy musí odpovídat údajům výrobce. V případě, že je stanoveno více alternativ rozložení hmotnosti na nápravy, musí být rozložení maximální hmotnosti mezi nápravy takové, aby hmotnost připadající na každou nápravu byla úměrná největší hmotnosti přípustné pro každou nápravu. U tahače návěsů může být zatížení přemístěno přibližně do poloviny vzdálenosti mezi polohou návěsového čepu, vycházející z výše uvedených podmínek zatížení, a střednicí zadní nápravy (zadních náprav); |
|
1.4.1.2.2. |
každou zkoušku je nutno opakovat s nenaloženým vozidlem. V motorových vozidlech může být kromě řidiče na předním sedadle další osoba, která je odpovědná za zaznamenávání výsledků zkoušky. U tahačů návěsů se zkoušky s nenaloženým vozidlem vykonají s tímto vozidlem samotným, včetně hmotnosti představující točnici. Vozidlo bude rovněž obsahovat hmotnost náhradního kola, pokud je specifikováno jako normální výbava vozidla. U vozidel, která jsou předána ke zkouškám jako podvozek s kabinou, se může přidat doplňující zátěž, simulující hmotnost karoserie, se kterou vozidlo nepřesáhne svou minimální hmotnost podle prohlášení výrobce, jež je uvedena v příloze 2 tohoto předpisu. U vozidel s elektrickým rekuperačním systémem závisejí požadavky na kategorii tohoto systému: Kategorie A: Během zkoušky typu 0 se nesmí použít žádný zvláštní ovladač elektrického rekuperačního brzdění. Kategorie B: Podíl elektrického rekuperačního brzdového systému na vyvozené brzdné síle nesmí přesáhnout minimální hladinu, kterou zaručuje konstrukce systému. Tento požadavek se pokládá za splněný, pokud jsou baterie v jednom z následujících stavů nabití, přičemž stav nabití (3) se určí metodou stanovenou v dodatku této přílohy:
|
|
1.4.1.2.3. |
mezní hodnoty předepsané pro minimální účinek, jak při zkouškách vozidla s nákladem tak bez nákladu, jsou uvedeny níže pro každou kategorii vozidel; vozidlo musí splňovat brzdnou dráhu a střední plné zpomalení, které jsou předepsány pro příslušnou kategorii vozidla, avšak není nutné skutečně měřit oba parametry; |
|
1.4.1.2.4. |
zkušební dráha musí být vodorovná. |
1.4.2. Zkouška typu 0 s odpojeným motorem.
Zkouška musí být provedena z rychlosti předepsané pro každou kategorii vozidel; pro číselné hodnoty této rychlosti je přípustná určitá tolerance. Musí být dosaženo minimálního účinku předepsaného pro každou kategorii.
1.4.3. Zkouška typu 0 se zapojeným motorem
1.4.3.1. Musí se rovněž provést zkoušky z různých rychlostí, z nichž nejnižší je rovna 30 % maximální rychlosti vozidla a nejvyšší se rovná 80 % maximální rychlosti. Jestliže je vozidlo vybaveno zařízením pro omezení rychlosti, pokládá se za maximální rychlost vozidla nejvyšší rychlost, kterou dovoluje zařízení pro její omezení. Změří se maximální skutečné brzdné účinky a do protokolu o zkoušce se zaznamená chování vozidla. Tahače návěsů uměle zatížené, aby se simulovaly účinky naloženého návěsu, se nesmějí zkoušet při rychlostech vyšších než 80 km/h.
1.4.3.2. Provedou se další zkoušky se zapojeným motorem z rychlosti předepsané pro kategorii, do které vozidlo patří. Musí se dosáhnout minimálního účinku předepsaného pro každou kategorii. Tažné jednotky návěsů uměle zatížené, aby se simulovaly účinky naloženého návěsu, se nesmějí zkoušet při rychlostech vyšších než 80 km/h.
1.4.4. Zkouška typu 0 pro vozidla kategorie O s pneumatickými brzdovými systémy
1.4.4.1. Brzdný účinek přípojného vozidla se může vypočítat buď z poměrného zpomalení jízdní soupravy a tlakové síly měřené ve spojovacím zařízení vozidel, nebo, v určitých případech, z poměrného zpomalení jízdní soupravy brzděné pouze přípojným vozidlem. Při zkoušce brzdění musí být motor tažného vozidla odpojen.
V případě, kdy se brzdí pouze přípojným vozidlem, se za brzdný účinek považuje střední plné zpomalení, aby se vzaly v úvahu i další zpomalované hmoty.
1.4.4.2. S výjimkou případů uvedených v bodech 1.4.4.3 a 1.4.4.4 této přílohy je nutné pro určení poměrného zpomalení přípojného vozidla měřit poměrné zpomalení jízdní soupravy a tlakovou sílu ve spojovacím zařízení vozidel. Tažné vozidlo musí splňovat požadavky týkající se závislosti mezi poměrem TM/PM a tlakem pm uvedené v příloze 10 tohoto předpisu. Poměrné zpomalení přípojného vozidla se vypočte podle tohoto vzorce:

kde:
|
zR |
= |
poměrné zpomalení přípojného vozidla, |
|
zR+M |
= |
poměrné zpomalení soupravy tažného vozidla a přípojného vozidla, |
|
D |
= |
tlaková síla ve spojovacím zařízení (tažná síla: + D), (tlaková síla: – D), |
|
PR |
= |
celková statická normálová reakce povrchu vozovky působící na kola přípojného vozidla (příloha 10). |
1.4.4.3. Má-li přípojné vozidlo průběžný nebo poloprůběžný brzdový systém, ve kterém se tlak v brzdových válcích při brzdění nemění, i když dochází ke změně dynamického zatížení náprav, a dále u návěsů, lze brzdit pouze přípojné vozidlo. Poměrné zpomalení přípojného vozidla se vypočte podle tohoto vzorce:

kde:
|
R |
= |
hodnota valivého odporu = 0,01, |
|
PM |
= |
celková statická normálová reakce mezi všemi koly tažného vozidla a povrchem vozovky (příloha 10). |
1.4.4.4. Jiným způsobem pro určení poměrného zpomalení přípojného vozidla je brzdění samotného přípojného vozidla. V tomto případě musí být tlak v brzdových válcích tentýž, jako byl změřen v těchto válcích při brzdění jízdní soupravy.
1.5. Zkouška typu I (zkouška slábnutí brzdného účinku)
1.5.1. Zkouška s opakovaným brzděním
1.5.1.1. Systémy provozního brzdění všech motorových vozidel se musí zkoušet vykonáním řady následných brzdění a uvolnění brzd, s naloženým vozidlem podle podmínek uvedených v následující tabulce:
|
Kategorie vozidel |
Podmínky |
|||
|
v1 [km/h] |
v2 [km/h] |
Δt [s] |
n |
|
|
M2 |
80 % vmax ≤ 100 |
1/2 v1 |
55 |
15 |
|
N1 |
80 % vmax ≤ 120 |
1/2 v1 |
55 |
15 |
|
M3, N2, N3 |
80 % vmax ≤ 60 |
1/2 v1 |
60 |
20 |
kde:
|
v1 |
= |
počáteční rychlost, na počátku brzdění |
|
v2 |
= |
rychlost na konci brzdění |
|
vmax |
= |
maximální rychlost vozidla |
|
n |
= |
počet brzdění |
|
Δt |
= |
trvání brzdného cyklu: čas, který uplyne mezi počátkem jednoho brzdění a počátkem následujícího brzdění |
1.5.1.2. Jestliže vlastnosti vozidla nedovolují dodržet předepsané trvání Δt, je možno toto trvání prodloužit; v každém případě musí být k dispozici, kromě času potřebného pro brzdění a zrychlení vozidla, dalších 10 sekund na každý cyklus za účelem stabilizace rychlosti v1.
1.5.1.3. Pro tyto zkoušky musí být síla působící na ovladač seřízena tak, aby se při prvním brzdění dosáhlo středního plného brzdného zpomalení 3 m/s2; tato síla musí zůstat konstantní během všech po sobě následujících brzdění.
1.5.1.4. Během brzdění musí motor zůstat zapojen se zařazeným nejvyšším rychlostním stupněm (s výjimkou rychloběhu atd.).
1.5.1.5. Při rozjíždění po zabrzdění se musí s převodovkou pracovat tak, aby se dosáhlo rychlosti v1 v nejkratší možné době (maximální zrychlení, které dovoluje motor a převodovka).
1.5.1.6. U vozidel, která nejsou schopna provádět samostatně cykly zahřívání brzd, se zkouší při prvním brzdění při předepsané rychlosti a pak se využije maximální zrychlení, kterého je vozidlo schopné, k opětnému dosažení rychlosti a následně se brzdí vždy z rychlosti dosažené na konci každého cyklu, který trvá dobu předepsanou pro příslušnou kategorii vozidla v bodě 1.5.1.1.
1.5.1.7. U vozidel vybavených zařízeními pro automatické seřizování brzd se brzdy před zkouškou typu I musí seřídit podle následujících postupů, v závislosti na případu:
|
1.5.1.7.1. |
U vozidel vybavených brzdami s pneumatickým ovládáním se brzdy musí seřídit tak, aby mohlo fungovat zařízení pro automatické seřizování brzd. K tomuto účelu se zdvih brzdového válce seřídí na: so ≥ 1,1 × sre-adjust (horní mezní hodnota nesmí přesáhnout hodnotu doporučenou výrobcem), kde: sre-adjust je zdvih pro opětovné seřízení podle specifikace výrobce zařízení pro automatické seřizování brzd, tj. zdvih, při kterém začíná opětovné seřízení vůle mezi třecí dvojicí brzdy při tlaku i brzdovém válci rovnajícím se 15 % provozního tlaku v brzdovém systému, avšak nejméně 100 kPa. V případě, kdy je se souhlasem technické zkušebny pokládáno měření zdvihu brzdového válce za obtížné, zvolí se počáteční seřízení po dohodě s technickou zkušebnou. Z výše uvedeného stavu se brzda uvede do činnosti 50krát za sebou s tlakem v brzdovém válci rovnajícím se 30 % provozního tlaku v systému brzdy, avšak nejméně 200 kPa. Potom následuje jediné zabrzdění s tlakem v brzdovém válci ≥ 650 kPa. |
|
1.5.1.7.2. |
U vozidel s hydraulicky ovládanými kotoučovými brzdami se nepokládají za nutné žádné požadavky na seřizování. |
|
1.5.1.7.3. |
U vozidel s hydraulicky ovládanými bubnovými brzdami se brzdy seřídí podle specifikací výrobce. |
1.5.1.8. U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B musí být stav baterií na začátku zkoušky takový, aby podíl brzdné síly vyvíjený elektrickým rekuperačním brzdovým systémem nepřesáhl minimum, které zaručuje konstrukce systému.
Tento požadavek se pokládá za splněný, jestliže jsou baterie v jednom ze stavů nabití uvedených ve čtvrtém podbodě bodu 1.4.1.2.2.
1.5.2. Zkouška s trvalým brzděním
1.5.2.1. Provozní brzdy u kategorií O2 a O3 (pokud přípojné vozidlo kategorie O3 nebylo podrobeno alternativně zkoušce typu III podle bodu 1.7 této přílohy) se musí zkoušet tak, aby se při naloženém vozidle pohlcovala v brzdách tatáž energie, jaká vzniká za stejnou dobu u naloženého vozidla udržovaného ve stabilizované rychlosti 40 km/h na klesání 7 % na vzdálenosti 1,7 km.
1.5.2.2. Zkouška se může vykonat na vodorovné silnici, přičemž přípojné vozidlo je taženo motorovým vozidlem; během zkoušky se musí síla působící na ovladač přizpůsobovat tak, aby udržovala konstantní odpor přípojného vozidla (7 % maximálního statického zatížení náprav přípojného vozidla). Jestliže není k dispozici dostatečný výkon pro tažení přípojného vozidla, může se zkouška vykonat při nižší rychlosti a na delší dráze podle následující tabulky:
|
Rychlost [km/h] |
Vzdálenost [m] |
|
40 |
1 700 |
|
30 |
1 950 |
|
20 |
2 500 |
|
15 |
3 100 |
1.5.2.3. U přípojných vozidel se zařízeními pro automatické seřizování brzd se před výše předepsanou zkouškou typu I seřídí brzdy podle postupu stanoveného v bodě 1.7.1.1 této přílohy.
1.5.3. Brzdný účinek se zahřátými brzdami
1.5.3.1. Na konci zkoušky typu I (popsané v bodě 1.5.1 nebo v bodě 1.5.2 této přílohy) se změří účinek systému provozního brzdění se zahřátými brzdami za stejných podmínek jako při zkoušce typu 0 s odpojeným motorem (a zejména při konstantní síle na ovladač, jež není větší než střední hodnota síly, která se skutečně použila, ovšem teplotní podmínky mohou být odlišné).
1.5.3.1.1. U motorových vozidel tento účinek se zahřátými brzdami nesmí být menší než 80 % účinku předepsaného pro příslušnou kategorii vozidel ani menší než 60 % hodnoty zjištěné při zkoušce typu 0 s odpojeným motorem.
1.5.3.1.2. U vozidel s elektrickým rekuperačním brzdovým systémem kategorie A musí být během jednotlivých brzdění trvale zařazen nejvyšší rychlostní stupeň a nesmí se použít zvláštní ovladač elektrického rekuperačního brzdění, pokud je na vozidle.
1.5.3.1.3. U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B se po provedení zahřívacích cyklů podle bodu 1.5.1.6 této přílohy musí provést zkouška se zahřátými brzdami z maximální rychlosti, kterou vozidlo může dosáhnout na konci zahřívacích cyklů, jestliže není možno dosáhnout rychlosti stanovené v bodě 1.4.2 této přílohy.
Pro srovnání se zopakuje zkouška typu 0 se studenými brzdami při téže rychlosti a s podobným podílem elektrického rekuperačního brzdění daným příslušným stavem nabití baterie, jako byl jeho podíl při zkoušce se zahřátými brzdami.
Před zkouškou je přípustné další obnovení vlastností obložení, aby bylo možno porovnat výsledky této druhé zkoušky typu 0 brzdných účinků se studenými brzdami s účinky dosaženými ve zkoušce se zahřátými brzdami, s použitím kritérií stanovených v bodech 1.5.3.1.1 a 1.5.3.2 této přílohy.
Zkoušky mohou být provedeny bez složky elektrického rekuperačního brzdění. V takovém případě se nepoužije požadavek na stav nabití baterií.
1.5.3.1.4. U přípojných vozidel nesmí být nicméně brzdná síla na obvodu kol se zahřátými brzdami při zkoušce z rychlosti 40 km/h menší než 36 % síly odpovídající největší hmotnosti nesené koly stojícího přípojného vozidla a ani menší než 60 % hodnoty zjištěné při zkoušce typu 0 vykonané s toutéž rychlostí.
1.5.3.2. S motorovým vozidlem, které splňuje požadavek na 60 % účinku uvedený v bodě 1.5.3.1.1, avšak nemůže splnit požadavek na 80 % účinku podle bodu 1.5.3.1.1, se může provést další zkouška brzdného účinku se zahřátými brzdami, přičemž se na ovladač působí silou, jež nepřesahuje hodnotu uvedenou v bodě 2 této přílohy pro příslušnou kategorii vozidla. Výsledky obou zkoušek se uvedou ve zkušebním protokolu.
1.5.4. Zkouška volného otáčení kol
U motorových vozidel se zařízeními pro automatické seřizování brzd se brzdy po vykonání zkoušek stanovených v bodě 1.5.3 nechají ochladit na teplotu představující teplotu studené brzdy (tj. ≤ 100 °C) a ověří se, že vozidlo je schopno volného pohybu tím, že je splněna jedna z následujících podmínek:
|
a) |
kola se otáčejí volně (tj. je možné jimi otáčet rukou); |
|
b) |
jestliže vozidlo jede konstantní rychlostí v = 60 km/h s uvolněnými brzdami a ustálené teploty bubnů nebo kotoučů nepřesáhnou 80 °C, pokládají se zbytkové brzdné momenty za přijatelné. |
1.6. Zkouška typu II (zkouška chování vozidla na dlouhých klesáních)
1.6.1. Naložená motorová vozidla se musí zkoušet tak, aby se pohlcovala tatáž energie, jaká vzniká za stejnou dobu u naloženého vozidla jedoucího střední rychlostí 30 km/h na klesání 6 % na dráze 6 km dlouhé, přičemž je zařazen vhodný převodový stupeň a je použit systém odlehčovacího brzdění, pokud je jím vozidlo vybaveno. Zařazený převodový stupeň se musí zvolit tak, aby otáčky motoru (v min– 1) nepřekročily nejvyšší hodnotu předepsanou výrobcem.
1.6.2. U vozidel, u nichž se energie pohlcuje pouze brzdným účinkem samotného motoru, se připouští tolerance ± 5 km/h na střední rychlost a musí být zařazen převodový stupeň, který dovoluje ustálit rychlost na hodnotě ležící co nejblíže 30 km/h na 6 % klesání. Jestliže se brzdný účinek motoru stanoví měřením zpomalení, stačí, aby naměřené střední zpomalení činilo nejméně 0,5 m/s2.
1.6.3. Na konci této zkoušky se musí změřit účinek systému provozního brzdění se zahřátými brzdami za stejných podmínek jako pro zkoušku typu 0 s odpojeným motorem (teploty mohou být odlišné). Tento účinek se zahřátými brzdami musí být takový, aby brzdná dráha nepřesáhla následující hodnoty a střední plné zpomalení nebylo menší než následující hodnoty, při působení na ovládač silou nepřesahující 70 daN:
Kategorie M3 0,15 v + (1,33 v2/130) (druhý člen vzorce odpovídá střednímu plnému brzdnému zpomalení dm = 3,75 m/s2)
Kategorie N3 0,15 v + (1,33 v2/115) (druhý člen vzorce odpovídá střednímu plnému brzdnému zpomalení dm = 3,3 m/s2)
1.6.4. Vozidla uvedená v bodech 1.8.1.1, 1.8.1.2 a 1.8.1.3 musí splňovat místo zkoušky typu II požadavky zkoušky typu IIA, která je popsána v bodě 1.8.
1.7. Zkouška typu III (zkouška slábnutí brzdného účinku pro naložená vozidla kategorie O4 nebo alternativně kategorie O3).
1.7.1. Zkouška na zkušební dráze
1.7.1.1. Brzdy se před zkouškou typu III musí seřídit podle následujících postupů, v závislosti na případu:
|
1.7.1.1.1. |
U přípojných vozidel vybavených brzdami s pneumatickým ovládáním se brzdy musí seřídit tak, aby mohlo fungovat zařízení pro automatické seřizování brzd. K tomuto účelu se zdvih brzdového válce seřídí na s0 ≥ 1,1 × sre-adjust (horní mezní hodnota nesmí přesáhnout hodnotu doporučenou výrobcem), kde:
V případě, kdy je se souhlasem technické zkušebny pokládáno měření zdvihu brzdového válce za obtížné, zvolí se počáteční seřízení po dohodě s technickou zkušebnou. Z výše uvedeného stavu se brzda uvede do činnosti 50krát za sebou s tlakem v brzdovém válci 200 kPa. Potom následuje jediné zabrzdění s tlakem v brzdovém válci ≥ 650 kPa. |
|
1.7.1.1.2. |
U přípojných vozidel s hydraulicky ovládanými kotoučovými brzdami se nepokládají za nutné žádné požadavky na seřizování. |
|
1.7.1.1.3. |
U přípojných vozidel s hydraulicky ovládanými bubnovými brzdami se brzdy seřídí podle specifikací výrobce. |
1.7.1.2. Jízdní zkouška se vykoná za těchto podmínek:
|
Počet brzdění |
20 |
|
Trvání jednoho brzdného cyklu |
60 s |
|
Počáteční rychlost na začátku brzdění |
60 km/h |
|
Brzdění |
Při těchto zkouškách se musí síla působící na ovladač přizpůsobit tak, aby se při prvním brzdění dosáhlo středního plného zpomalení 3 m/s2, vztaženého na hmotnost přípojného vozidla PR. Tato síla musí zůstat konstantní během všech po sobě následujících brzdění. |
Poměrné zpomalení přípojného vozidla se vypočítá podle vzorce uvedeného v bodě 1.4.4.3 této přílohy:
![]()
Rychlost na konci brzdění je (příloha 11 dodatek 2 bod 3.1.5):
kde:
|
zR |
= |
poměrné zpomalení přípojného vozidla, |
|
zR+M |
= |
poměrné zpomalení jízdní soupravy (motorové a přípojné vozidlo), |
|
R |
= |
hodnota valivého odporu = 0,01, |
|
PM |
= |
celková normálová statická reakce mezi povrchem vozovky a koly tažného vozidla (kg), |
|
PR |
= |
celková normálová statická reakce mezi povrchem vozovky a koly přípojného vozidla (kg), |
|
P1 |
= |
část hmotnosti přípojného vozidla nesená nebrzděnou nápravou (nebrzděnými nápravami) (kg), |
|
P2 |
= |
část hmotnosti přípojného vozidla nesená brzděnou nápravou (brzděnými nápravami) (kg), |
|
v1 |
= |
počáteční rychlost (km/h), |
|
v2 |
= |
konečná rychlost (km/h). |
1.7.2. Brzdný účinek se zahřátými brzdami
Po zkoušce podle bodu 1.7.1 se změří účinek systému provozního brzdění se zahřátými brzdami za stejných podmínek jako při zkoušce typu 0, avšak s rozdílnými teplotami a z počáteční rychlosti 60 km/h. Brzdná síla na obvodu kol se zahřátými brzdami nesmí být menší než odpovídající 40 % maximálního statického zatížení kol a dále nesmí být menší než 60 % hodnoty zjištěné při zkoušce typu 0 z téže rychlosti.
1.7.3. Zkouška volného otáčení kol
Brzdy se po provedení zkoušek stanovených v bodě 1.7.2 nechají ochladit na teplotu představující teplotu studené brzdy (tj. ≤ 100 °C) a ověří se, že přípojné vozidlo je schopné volného pohybu tím, že je splněna jedna z následujících podmínek:
|
a) |
kola se otáčejí volně (tj. je možné jimi otáčet rukou); |
|
b) |
jestliže vozidlo jede konstantní rychlostí v = 60 km/h s uvolněnými brzdami a ustálené teploty bubnů nebo kotoučů nepřesáhnou 80 °C, pokládají se zbytkové brzdné momenty za přijatelné. |
1.8. Zkouška typu IIA (účinek odlehčovacího brzdění)
1.8.1. Zkouška typu IIA se musí provést s vozidly následujících kategorií:
|
1.8.1.1. |
Vozidla kategorie M3 náležející do tříd II, III nebo B podle definice v úplném usnesení o konstrukci vozidel (R.E.3). |
|
1.8.1.2. |
Vozidla kategorie N3 určená k tažení přípojného vozidla kategorie O4. Pokud maximální hmotnost přesahuje 26 tun, omezí se hmotnost při zkoušce na 26 tun nebo, v případě, kdy hmotnost nenaloženého vozidla přesahuje 26 tun, se tato hmotnost zohlední pomocí výpočtu. |
|
1.8.1.3. |
Vozidla, která jsou předmětem dohody ADR (viz příloha 5). |
1.8.2. Podmínky zkoušky a požadavky na účinek
1.8.2.1. Účinek systému odlehčovacího brzdění se zkouší při maximální hmotnosti vozidla nebo jízdní soupravy.
1.8.2.2. Naložená vozidla zkoušejí tak, aby se pohlcovala tatáž energie, jako vzniká za stejnou dobu u naloženého vozidla jedoucího střední rychlostí 30 km/h na 7 % klesání na dráze 6 km dlouhé. Během zkoušky se nesmějí použít systémy provozního, nouzového a parkovacího brzdění. Zařazený převodový stupeň se musí zvolit tak, aby otáčky motoru nepřekročily nejvyšší hodnotu předepsanou výrobcem. Může se použít integrovaný systém odlehčovacího brzdění, pokud je náležitě sfázován tak, že systém provozního brzdění nevstoupí do činnosti. To se může ověřit kontrolou, že tyto brzdy zůstávají studené, jak je definováno v bodě 1.4.1.1 této přílohy.
1.8.2.3. U vozidel, u nichž se energie pohlcuje pouze brzdným účinkem motoru, se připouští tolerance ± 5 km/h na střední rychlost, přičemž musí být zařazen převodový stupeň, který dovoluje na klesání o sklonu 7 % stabilizovat rychlost na hodnotě co nejbližší ke 30 km/h. Jestliže se brzdný účinek motoru stanoví měřením zpomalení, stačí, aby naměřené střední zpomalení činilo nejméně 0,6 m/s2.
2. ÚČINKY BRZDOVÝCH SYSTÉMŮ VOZIDEL KATEGORIÍ M2, M3 A N
2.1. Systém provozního brzdění
2.1.1. Systém provozního brzdění vozidel kategorií M2, M3 a N se zkouší za podmínek uvedených v následující tabulce:
|
|
Kategorie |
M2 |
M3 |
N1 |
N2 |
N3 |
|
Typ zkoušky |
0-I |
0-I-II nebo IIA |
0-I |
0-I |
0-I-II |
|
|
Zkouška typu 0 s odpojeným motorem |
v |
60 km/h |
60 km/h |
80 km/h |
60 km/h |
60 km/h |
|
s ≤ |
|
|||||
|
dm ≥ |
5,0 m/s2 |
|||||
|
Zkouška typu 0 se zapojeným motorem |
v = 0,80 vmax, ale ne více než |
100 km/h |
90 km/h |
120 km/h |
100 km/h |
90 km/h |
|
s ≤ |
|
|||||
|
dm ≥ |
4,0 m/s2 |
|||||
|
|
F ≤ |
70 daN |
||||


kde:
|
v |
= |
zkušební rychlost, v km/h |
|
s |
= |
brzdná dráha v metrech |
|
dm |
= |
střední plné brzdné zpomalení v m/s2 |
|
F |
= |
síla působící na brzdový pedál v daN |
|
vmax |
= |
maximální rychlost vozidla v km/h. |
2.1.2. U motorového vozidla určeného k tažení nebrzděného přípojného vozidla se musí dosáhnout nejméně brzdného účinku předepsaného pro příslušnou kategorii motorového vozidla (při zkoušce typu 0 s odpojeným motorem), s nebrzděným přípojným vozidlem připojeným k motorovému vozidlu a s nebrzděným přípojným vozidlem naloženým na maximální hmotnost podle prohlášení výrobce motorového vozidla.
Brzdný účinek jízdní soupravy se ověří výpočtem z maximálního brzdného účinku, kterého se skutečně dosáhlo se samotným (naloženým) motorovým vozidlem při zkoušce typu 0 s odpojeným motorem, a to podle následující rovnice (nevyžadují se žádné praktické zkoušky s připojeným nebrzděným přípojným vozidlem):
kde:
|
dM+R |
= |
vypočtené střední plné brzdné zpomalení motorového vozidla s připojeným nebrzděným přípojným vozidlem v m/s2 |
|
dM |
= |
maximální střední plné brzdné zpomalení samotného motorového vozidla dosažené při zkoušce typu 0 s odpojeným motorem v m/s2 |
|
PM |
= |
hmotnost motorového vozidla (naloženého) |
|
PR |
= |
maximální hmotnost nebrzděného přípojného vozidla, které lze připojit, podle prohlášení výrobce motorového vozidla. |
2.2. Systém nouzového brzdění
2.2.1. I když se ovladač, který uvádí do činnosti systém nouzového brzdění, používá i k jiným funkcím brzdění, systém nouzového brzdění musí zajišťovat brzdnou dráhu rovnající se nejvýše následujícím hodnotám a střední plné brzdné zpomalení rovnající se nejméně následujícím hodnotám:
Kategorie M2, M3 0,15 v + (2v2/130) (druhý člen vzorce odpovídá střednímu plnému zpomalení dm = 2,5 m/s2)
kategorie N: 0,15 v + (2v2/115) (druhý člen vzorce odpovídá střednímu plnému zpomalení dm = 2,2 m/s2)
2.2.2. Jestliže se nouzové brzdění ovládá ručně, musí se dosáhnout předepsaného účinku silou na ovladač nepřesahující 60 daN a ovladač musí být přitom umístěný tak, aby jej řidič mohl snadno a rychle uchopit.
2.2.3. Jestliže se nouzové brzdění ovládá nohou, musí se dosáhnout předepsaného účinku působením na ovladač silou nepřesahující 70 daN, přičemž ovladač musí být umístěn tak, aby jej řidič mohl snadno a rychle ovládat.
2.2.4. Účinek systému nouzového brzdění se ověří zkouškou typu 0 s odpojeným motorem z následujících počátečních rychlostí:
|
M2: 60 km/h |
M3: 60 km/h |
|
|
N1: 70 km/h |
N2: 50 km/h |
N3: 40 km/h |
2.2.5. Zkouška účinnosti nouzového brzdění se provede simulováním podmínek skutečné poruchy v systému provozního brzdění.
2.2.6. U vozidel s elektrickými rekuperačními brzdovými systémy se rovněž musí ověřit brzdný účinek při následujících dvou druzích poruch:
|
2.2.6.1. |
při úplném selhání elektrické složky provozního brzdění; |
|
2.2.6.2. |
pro případ, kdy porucha způsobí, že elektrická složka vyvozuje maximální brzdnou sílu. |
2.3. Systém parkovacího brzdění
2.3.1. Systém parkovacího brzdění, i když je kombinován s některým z ostatních brzdových systémů, musí udržet stojící naložené vozidlo na stoupání nebo klesání o sklonu 18 %.
2.3.2. U vozidel, která se smějí spojit s přípojným vozidlem, musí systém parkovacího brzdění tažného vozidla udržet stojící jízdní soupravu na stoupání nebo klesání o sklonu 12 %.
2.3.3. Jestliže je ovládání ruční, nesmí síla působící na ovladač přesáhnout 60 daN.
2.3.4. Jestliže je ovládání nožní, nesmí síla působící na ovladač přesáhnout 70 daN.
2.3.5. Lze připustit systém parkovacího brzdění, u kterého je nutno ovládací úkon opakovat několikrát, než se dosáhne předepsaného účinku.
2.3.6. Pro ověření, že jsou splněny požadavky bodu 5.2.1.2.4 tohoto předpisu, se musí provést zkouška typu 0 s odpojeným motorem při počáteční rychlosti 30 km/h. Při brzdění působením na ovladač systému parkovacího brzdění nesmí být střední plné brzdné zpomalení a brzdné zpomalení těsně před zastavením vozidla menší než 1,5 m/s2. Zkouší se s naloženým vozidlem.
Síla, kterou se působí na ovladač, nesmí překročit předepsané hodnoty.
2.4. Zbývající účinek systému provozního brzdění v případě poruchy v převodu brzdy
2.4.1. Zbývající účinek systému provozního brzdění v případě poruchy v části převodu tohoto systému musí být takový, aby brzdné dráhy nebyly delší a střední plné brzdné zpomalení nebylo menší, než jsou následující hodnoty, při působení na ovladač silou nepřesahující 70 daN a při zkoušce typu 0 s odpojeným motorem, z následujících počátečních rychlostí pro příslušnou kategorii vozidla:
Brzdná dráha (m) a střední plné zpomalení (dm) [m/s2]
|
Kategorie vozidla |
v [km/h] |
Brzdná dráha NALOŽENÉHO VOZIDLA [m] |
dm [m/s2] |
Brzdná dráha NENALOŽENÉHO VOZIDLA [m] |
dm [m/s2] |
|
M2 |
60 |
0,15v + (100/30) · (v2/130) |
1,5 |
0,15v + (100/25) · (v2/130) |
1,3 |
|
M3 |
60 |
0,15v + (100/30) · (v2/130) |
1,5 |
0,15v + (100/30) · (v2/130) |
1,5 |
|
N1 |
70 |
0,15v + (100/30) · (v2/115) |
1,3 |
0,15v + (100/25) · (v2/115) |
1,1 |
|
N2 |
50 |
0,15v + (100/30) · (v2/115) |
1,3 |
0,15v + (100/25) · (v2/115) |
1,1 |
|
N3 |
40 |
0,15v + (100/30) · (v2/115) |
1,3 |
0,15v + (100/30) · (v2/115) |
1,3 |
2.4.2. Zkouška zbývajícího brzdného účinku se musí vykonat se simulací podmínek skutečné poruchy v systému provozního brzdění.
3. ÚČINKY BRZDOVÝCH SYSTÉMŮ VOZIDEL KATEGORIE O
3.1. Systém provozního brzdění
3.1.1. Ustanovení pro zkoušky vozidel kategorie O1:
Je-li systém provozního brzdění povinný, jeho účinek musí splňovat požadavky stanovené pro vozidla kategorie O2 a O3.
3.1.2. Ustanovení pro zkoušky vozidel kategorií O2 a O3:
|
3.1.2.1. |
Je-li systém provozního brzdění průběžného nebo poloprůběžného typu, musí se součet brzdných sil na obvodu brzděných kol rovnat nejméně x % síly odpovídající maximální hmotnosti nesené koly při stojícím vozidle. Přitom x má následující hodnoty:
|
|
3.1.2.2. |
Je-li přípojné vozidlo vybaveno pneumatickým brzdovým zařízením, nesmí tlak v přívodním vedení přesáhnout při zkoušce brzdění 700 kPa a hodnota signálu v ovládacím spojení nesmí přesáhnout následující hodnoty, podle druhu zařízení:
Rychlost při zkoušce je 60 km/h. Musí se vykonat doplňková zkouška při 40 km/h s naloženým přípojným vozidlem k porovnání s výsledkem zkoušky typu I. |
|
3.1.2.3. |
Je-li brzdový systém setrvačníkového typu, musí splňovat požadavky přílohy 12 tohoto předpisu. |
|
3.1.2.4. |
Kromě toho se vozidla podrobí zkoušce typu I nebo alternativně zkoušce typu III v případě přípojného vozidla kategorie O3. |
|
3.1.2.5. |
Při zkouškách typu I nebo typu III u návěsu musí být hmotnost, která je brzděna nápravami návěsu, taková, aby odpovídala maximálním hmotnostem připadajícím na nápravu (nebo nápravy) návěsu, bez hmotnosti nesené návěsovým čepem. |
3.1.3. Ustanovení pro zkoušky vozidel kategorie O4:
|
3.1.3.1. |
Je-li systém provozního brzdění průběžný nebo poloprůběžný, musí se součet brzdných sil na obvodu brzděných kol rovnat nejméně x % síly odpovídající maximální hmotnosti nesené koly při stojícím vozidle. Přitom x má následující hodnoty:
|
|
3.1.3.2. |
Má-li přípojné vozidlo pneumatické brzdy, nesmí při zkoušce brzdění tlak v ovládacím vedení přesáhnout 650 kPa a tlak v přívodním vedení nesmí přesáhnout 700 kPa. Rychlost při zkoušce je 60 km/h. |
|
3.1.3.3. |
S vozidly se musí navíc vykonat zkouška typu III. |
|
3.1.3.4. |
Při zkouškách typu III u návěsu musí hmotnost, kterou brzdí jeho náprava (nápravy), odpovídat maximálnímu zatížení nápravy (náprav). |
3.2. Systém parkovacího brzdění
3.2.1. Systém parkovacího brzdění, kterým je vybaveno přípojné vozidlo, musí udržet stojící, naložené a od tažného vozidla odpojené přípojné vozidlo na stoupání nebo klesání o sklonu 18 %. Síla působící na ovladač nesmí přesahovat 60 daN.
3.3. Systém automatického brzdění
3.3.1. Brzdný účinek při automatickém brzdění v případě poruchy, jak je popsáno v bodě 5.2.1.18.3 tohoto předpisu, při zkoušce naloženého vozidla z rychlosti 40 km/h, nesmí být menší, než odpovídá 13,5 % maximálního zatížení kol při stojícím vozidle. Blokování kol při účincích větších než 13,5 % je přípustné.
4. DOBA ODEZVY
4.1. U všech vozidel, kde systém provozního brzdění používá plně nebo částečně zdroje energie jiného než svalovou sílu řidiče, musí být splněny následující požadavky:
|
4.1.1. |
při rychlém (nouzovém) brzdění nesmí doba, která uplyne mezi okamžikem, kdy se počne působit na ovladač a okamžikem, kdy brzdná síla na nápravě umístěné z hlediska náběhu brzdění nejnepříznivěji, dosáhne hodnoty odpovídající předepsanému účinku, přesáhnout 0,6 s; |
|
4.1.2. |
u vozidel s pneumatickými brzdovými systémy se pokládá požadavek bodu 4.1.1 za splněný, jestliže vozidlo splňuje ustanovení přílohy 6 tohoto předpisu; |
|
4.1.3. |
u vozidel s hydraulickými brzdovými systémy se požadavky bodu 4.1.1 pokládají za splněné, jestliže při rychlém (nouzovém) brzdění dosáhne zpomalení vozidla nebo tlak v nejnepříznivěji umístěném brzdovém válci hodnoty odpovídající předepsanému brzdnému účinku do 0,6 s. |
(1) Blokování kol je přípustné tehdy, jestliže je to výslovně uvedeno.
(2) Výrobce musí technické zkušebně poskytnout soubor brzdných křivek, které připouští použitá strategie ovládání. Tyto křivky si může technická zkušebna ověřit.
(3) Po dohodě s technickou zkušebnou není zhodnocení stavu nabití vyžadováno pro vozidla, která mají na palubě zdroj energie k dobíjení trakčních baterií a prostředky pro regulaci jejich stavu nabití.
Dodatek
Postup sledování stavu nabití baterie
Tento postup platí pro baterie vozidel, které se používají k trakci a k rekuperačnímu brzdění.
Tento postup vyžaduje použití dvousměrného měřiče watthodin pro stejnosměrný proud nebo dvousměrného měřiče ampérhodin pro stejnosměrný proud.
1. POSTUP
1.1. Jestliže jsou baterie nové nebo byly dlouhodobě skladovány, musí se s nimi provést cykly doporučené výrobcem. Po dokončení cyklů se musí odstavit na dobu nejméně 8 hodin při teplotě okolí.
1.2. Baterie se úplně nabijí podle postupu doporučeného výrobcem.
1.3. Když se provádějí zkoušky brzdění podle bodů 1.2.11, 1.4.1.2.2, 1.5.1.6 a 1.5.3.1.3 přílohy 4, zaznamenají se watthodiny spotřebované trakčními motory a dodané rekuperačním brzdovým systémem jako souhrn za jízdu, který se pak použije k určení stavu nabití na začátku nebo na konci určité zkoušky.
1.4. K reprodukování stavu nabití baterií pro porovnávací zkoušky, jako jsou zkoušky podle bodu 1.5.3.1.3 přílohy 4, se baterie buď dobijí na tento stav, nebo se nabijí na vyšší úroveň, a pak se vybijí přibližně konstantním zatížením až na požadovaný stav nabití. Alternativně se u vozidel, která mají jen elektrickou trakci napájenou z baterie, může stav nabití upravit jízdou vozidla. Zkoušky, na jejichž začátku je baterie jen částečně nabitá, se musí zahájit co nejdříve po dosažení žádaného stavu nabití.
PŘÍLOHA 5
DOPLŇKOVÁ USTANOVENÍ PRO URČITÁ VOZIDLA, JAK JE SPECIFIKOVÁNO V DOHODĚ ADR
1. OBLAST PŮSOBNOSTI
Tato příloha se použije na určitá vozidla, která jsou předmětem oddílu 9.2.3 přílohy B Evropské dohody o mezinárodní silniční přepravě nebezpečných věcí (ADR).
2. POŽADAVKY
2.1. Obecná ustanovení
Motorová a přípojná vozidla určená pro přepravu nebezpečných věcí musí splňovat všechny příslušné technické požadavky tohoto předpisu. Kromě toho musí splňovat příslušné následující technické požadavky.
2.2. Protiblokovací zařízení přípojných vozidel
2.2.1. Přípojná vozidla kategorie O4 musí být vybavena protiblokovacími systémy kategorie A podle definice v příloze 13 tohoto předpisu.
2.3. Systém odlehčovacího brzdění
2.3.1. Motorová vozidla s maximální hmotností přesahující 16 tun nebo vozidla, která smějí táhnout přípojné vozidlo kategorie O4, musí být vybavena systémem odlehčovacího brzdění podle bodu 2.15 tohoto předpisu a tento systém musí splňovat následující požadavky:
|
2.3.1.1. |
uspořádání ovládání systému odlehčovacího brzdění musí být typu, který je popsán v bodech 2.15.2.1 až 2.15.2.3 tohoto předpisu; |
|
2.3.1.2. |
v případě elektrické poruchy protiblokovacího zařízení se musí automaticky vypnout integrovaný nebo kombinovaný systém odlehčovacího brzdění; |
|
2.3.1.3. |
protiblokovací zařízení musí kontrolovat účinek systému odlehčovacího brzdění tak, aby nápravu (nápravy) brzděnou (brzděné) systémem odlehčovacího brzdění nemohl tento systém zablokovat při rychlostech přesahujících 15 km/h. Tento požadavek se však nepoužije na tu část brzdového systému, kterou tvoří přirozené brzdění motorem; |
|
2.3.1.4. |
systém odlehčovacího brzdění musí obsahovat několik stupňů účinku, včetně dolního stupně vhodného pro nenaložený stav vozidla. Pokud je systém odlehčovacího brzdění motorového vozidla tvořen jeho motorem, pokládají se různé převodové stupně za stupně zajišťující různé stupně účinku; |
|
2.3.1.5. |
účinek systému odlehčovacího brzdění musí být takový, aby splňoval požadavky bodu 1.8 přílohy 4 tohoto předpisu (zkouška typu IIA) pro hmotnost naloženého vozidla skládající se z hmotnosti naloženého motorového vozidla a z maximální přípustné přípojné hmotnosti. Celkem však hmotnost nesmí přesáhnout 44 tun. |
2.3.2. Přípojná vozidla se systémem odlehčovacího brzdění musí, v závislosti na případu, splňovat požadavky bodu 2.3.1.1 až 2.3.1.4.
2.4. Požadavky na brzdění vozidel EX/III kategorií O1 a O2
2.4.1. Aniž jsou dotčena ustanovení bodu 5.2.2.9 tohoto předpisu, musí být vozidla typu EX/III, jak jsou vymezena v předpisu č. 105 a která patří do kategorií O1 a O2, bez ohledu na svou hmotnost vybavena brzdovým systémem, který automaticky zabrzdí přípojné vozidlo až do zastavení, jestliže dojde k porušení spojovacího zařízení a za předpokladu, že se přípojné vozidlo pohybuje.
PŘÍLOHA 6
METODA MĚŘENÍ DOBY NÁBĚHU TLAKU PRO VOZIDLA S PNEUMATICKÝMI BRZDOVÝMI SYSTÉMY
1. OBECNÉ INFORMACE
1.1. Doby náběhu tlaku v systému provozního brzdění se určují na stojícím vozidle, přičemž tlak se měří na vstupu do brzdového válce nejnepříznivěji umístěného z hlediska náběhu. U vozidel s kombinovanými pneumaticko-hydraulickými brzdovými systémy je možné měřit tlak na nejnepříznivěji umístěné pneumatické jednotce. U vozidel vybavených zátěžovými regulátory musí být tyto regulátory nastaveny do polohy „naložené vozidlo“.
1.2. Při zkoušce musí být zdvih brzdových válců jednotlivých náprav takový, aby odpovídal seřízení brzd na co nejmenší zdvih.
1.3. Doby náběhu tlaku určené podle ustanovení této přílohy se zaokrouhlí na nejbližší desetinu sekundy. Pokud je číslo udávající setiny rovné nebo větší než 5, doba náběhu se zaokrouhlí na nejbližší vyšší desetinu.
2. MOTOROVÁ VOZIDLA
2.1. Na počátku každé zkoušky musí být tlak ve vzduchojemech rovný tlaku, při kterém regulátor začíná znovu doplňovat systém. V systémech, které nemají regulátor (např. systémy mající kompresor se samostabilizací tlaku), musí být tlak ve vzduchojemu na začátku každé zkoušky předepsané touto přílohou rovný 90 % tlaku udaného výrobcem a vymezeného v bodě 1.2.2.1 části A přílohy 7 tohoto předpisu a použitého pro zkoušky předepsané v této příloze.
2.2. Doba odezvy v závislosti na době zdvihu (tf) se určí postupnými plnými zdvihy brzdového pedálu, od nejrychlejšího možného zdvihu až do zdvihu trvajícího přibližně 0,4 sekundy. Změřené hodnoty se vynesou do grafu.
2.3. Za výsledek zkoušky se považuje doba odezvy odpovídající době zdvihu brzdového pedálu v délce 0,2 sekundy. Tato doba odezvy se může určit z grafu interpolací.
2.4. Pro dobu zdvihu brzdového pedálu 0,2 s nesmí doba mezi počátkem ovládání pedálu a okamžikem, kdy tlak v brzdovém válci dosáhne 75 % své asymptotické hodnoty, být delší než 0,6 sekundy.
2.5. U motorových vozidel s pneumatickým ovládacím vedením pro přípojná vozidla se kromě požadavků bodu 1.1 této přílohy měří doba náběhu brzdění na konci potrubí délky 2,5 m a vnitřního průměru 13 mm, které se připojí ke spojkové hlavici ovládacího vedení systému provozního brzdění. Při této zkoušce se připojí ke spojkové hlavici přívodního vedení objem 385 cm3 ± 5 cm3 (který se pokládá za odpovídající objemu hadice o délce 2,5 m a vnitřním průměru 13 mm při tlaku 650 kPa).
Tahače návěsů musí být vybaveny ohebným potrubím pro spojení s návěsem. Spojkové hlavice jsou v tomto případě na koncích těchto ohebných trubic. Délka a vnitřní průměr těchto trubic se musí uvést v bodě 14.7.3 dokumentu, jehož vzor je uveden v příloze 2.
V případě automatizovaného konektoru musí být provedeno měření včetně použití hadice o délce 2,5 m a objemu 385 cm3 ± 5 cm3, jak je popsáno výše, s přihlédnutím k rozhraní konektoru, jako jsou spojkové hlavice.
2.6. Doba, která uplyne mezi začátkem působení na brzdový pedál a okamžikem,
|
a) |
kdy tlak měřený ve spojkové hlavici pneumatického ovládacího vedení; |
|
b) |
digitální požadovaná hodnota v elektrickém ovládacím vedení měřená podle normy ISO 11992:2003 včetně normy ISO 11992-2:2003 a její změny 1:2007, |
dosáhne x % své asymptotické, případně konečné hodnoty, nesmí být delší než hodnoty uvedené v následující tabulce:
|
x [%] |
t [s] |
|
10 75 |
0,2 0,4 |
2.7. U motorových vozidel určených k tažení přípojných vozidel kategorie O3 nebo O4 s pneumatickým brzdovým systémem se kromě výše uvedených požadavků musí ověřit plnění ustanovení bodu 5.2.1.18.4.1 tohoto předpisu, a to následující zkouškou:
|
a) |
změřením tlaku na konci hadice 2,5 m dlouhé, s vnitřním průměrem 13 mm, připojené ke spojkové hlavici přívodního vedení; |
|
b) |
simulováním poruchy ovládacího vedení v místě spojkové hlavice; |
|
c) |
sešlápnutím pedálu pro provozní brzdění za 0,2 sekundy, jak je popsáno v bodě 2.3. |
3. PŘÍPOJNÁ VOZIDLA
3.1. Doba náběhu tlaku na přípojných vozidlech se měří bez motorového vozidla. Motorové vozidlo se nahradí simulátorem, k němuž se připojí spojková hlavice přívodního vedení a spojková hlavice pneumatického ovládacího vedení a/nebo konektor elektrického ovládacího vedení.
3.2. Tlak v přívodním vedení musí být 650 kPa.
3.3. Simulátor pneumatického ovládacího vedení musí mít tyto charakteristiky:
|
3.3.1. |
Musí obsahovat zásobník o objemu 30 litrů, naplněný před každou zkouškou vzduchem o tlaku 650 kPa; v průběhu zkoušky se nesmí doplňovat. Simulátor musí obsahovat ve výstupu z ovládacího zařízení brzdy otvor o průměru 4 až 4,3 mm. Objem potrubí měřený od otvoru až ke spojkové hlavici včetně musí být 385 ± 5 cm3 (který se pokládá za odpovídající objemu hadice o délce 2,5 m a vnitřním průměru 13 mm, při tlaku vzduchu 650 kPa). Tlaky v ovládacím vedení uvedené v bodě 3.3.3 se musí měřit těsně za výstupem z otvoru. |
|
3.3.2. |
Ovladač brzdového systému musí být proveden tak, aby jeho funkci nemohla ovlivnit zkoušející osoba. |
|
3.3.3. |
Simulátor musí být seřízen, např. volbou průměru otvoru clonky uvedené v bodě 3.3.1 tak, aby při připojení zásobníku o objemu 385 cm3 ± 5 cm3 doba vzrůstu tlaku z 65 kPa na 490 kPa (tj. z 10 % na 75 % jmenovitého tlaku 650 kPa) byla 0,2 ± 0,01 sekundy. Jestliže se uvedený zásobník nahradí zásobníkem o objemu 1 155 cm3 ± 15 cm3, musí být doba, za kterou vzroste tlak z 65 na 490 kPa bez nového seřízení, rovna 0,38 ± 0,02 sekundy. Mezi těmito dvěma hodnotami musí tlak vzrůstat přibližně lineárně. Potrubí, kterými se tyto zásobníky připojí, nesmějí být ohebná. Spojení mezi zásobníky a spojkovou hlavicí musí mít vnitřní průměr nejméně 10 mm. Seřízení se provede s použitím takového uspořádání spojkové hlavice, které je reprezentativní pro typ instalovaný na přípojném vozidle, pro nějž se žádá o schválení typu. |
|
3.3.4. |
Schémata v dodatku této přílohy znázorňují příklad správného uspořádání simulátoru pro seřízení a zkoušku. |
3.4. Simulátor k ověřování odezvy na signály přenášené elektrickým ovládacím vedením musí mít následující vlastnosti:
|
3.4.1. |
Simulátor musí generovat digitální signál požadované hodnoty v elektrickém ovládacím vedení podle normy ISO 11992-2:2003 a její změny 1:2007 a musí předat příslušné informace přípojnému vozidlu prostřednictvím pólů 6 a 7 konektoru podle normy ISO 7638:2003. Pro účely měření doby odezvy může simulátor na žádost výrobce předat na přípojné vozidlo informaci, že není přítomno žádné pneumatické ovládací vedení a že požadovaný signál procházející elektrickým ovládacím vedením je generován dvěma nezávislými okruhy (viz body 6.4.2.2.24 a 6.4.2.2.25 normy ISO 11992-2:2003 a její změny 1:2007). |
|
3.4.2. |
Ovladač brzdového systému musí být proveden tak, aby jeho funkci nemohla ovlivnit zkoušející osoba. |
|
3.4.3. |
Pro účely měření doby odezvy musí být signál generovaný elektrickým simulátorem rovnocenný lineárnímu nárůstu tlaku vzduchu z 0,0 na 650 kPa v době 0,2 ± 0,01 sekundy. |
|
3.4.4. |
Schémata v dodatku této přílohy znázorňují příklad správného uspořádání simulátoru pro seřízení a zkoušku. |
3.5. Požadavky na brzdný účinek
3.5.1. U přípojných vozidel s pneumatickým ovládacím vedením nesmí doba, která uplyne mezi okamžikem, kdy tlak vyvozený simulátorem v ovládacím vedení dosáhne 65 kPa, a okamžikem, kdy tlak v brzdovém válci přípojného vozidla dosáhne 75 % své asymptotické hodnoty, přesáhnout 0,4 sekundy.
3.5.1.1. Přípojná vozidla s pneumatickým ovládacím vedením, která mají elektrický ovládací převod, musí být při zkoušce elektricky napájena prostřednictvím konektoru podle normy ISO 7638:2003 (s 5 nebo 7 póly).
3.5.2. U přípojných vozidel s elektrickým ovládacím vedením nesmí doba, která uplyne mezi okamžikem, kdy signál vyvozený simulátorem přesáhne ekvivalent hodnoty 65 kPa, a okamžikem, kdy tlak v brzdovém válci přípojného vozidla dosáhne 75 % své asymptotické hodnoty, přesáhnout 0,4 sekundy.
3.5.3. U přípojných vozidel s pneumatickým ovládacím vedením a s elektrickým ovládacím vedením se provede měření doby odezvy zvlášť pro pneumatické vedení a zvlášť pro elektrické vedení podle příslušného postupu, který je popsán výše.
Dodatek
Příklady simulátoru
(viz příloha 6 bod 3)
1. Seřízení simulátoru

2. Zkouška přípojného vozidla

|
A |
= |
Plnicí přípojka s uzavíracím ventilem |
|
C1 |
= |
Tlakový spínač simulátoru, seřízený na 65 kPa a 490 kPa |
|
C2 |
= |
Tlakový spínač, který se připojí k brzdovému válci přípojného vozidla, seřízený na asymptotické hodnoty tlaku v brzdovém válci CF |
|
CF |
= |
Brzdový válec |
|
L |
= |
Vedení, které má mezi otvorem O a spojkovou hlavicí TC (včetně) vnitřní objem 385 ± 5 cm3 při tlaku 650 kPa |
|
M |
= |
Manometr |
|
O |
= |
Otvor o průměru nejméně 4 mm a nejvýše 4,3 mm |
|
PP |
= |
Přípojka pro kontrolu tlaku |
|
R1 |
= |
Zásobník o objemu 30 l s odvodňovacím ventilem |
|
R2 |
= |
Kalibrační zásobník, který má včetně své spojkové hlavice TC vnitřní objem 385 ± 15 cm3 |
|
R3 |
= |
Kalibrační zásobník, který má včetně své spojkové hlavice TC vnitřní objem 1 155 ± 15 cm3 |
|
RA |
= |
Uzavírací ventil |
|
TA |
= |
Spojková hlavice přívodního vedení |
|
V |
= |
Ovládací zařízení brzdového systému |
|
TC |
= |
Spojková hlavice ovládacího vedení |
|
VRU |
= |
Nouzový reléový ventil |
3. Příklad simulátoru pro elektrická ovládací vedení

|
ECL |
= |
Elektrické ovládací vedení podle normy ISO 7638 |
|
SIMU |
= |
Simulátor EBS 11 Byte 3,4 podle normy ISO 11992-2:2003 včetně její změny 1-2007 s výstupními signály při startu, při 65 kPa a při 650 kPa |
|
A |
= |
Plnicí přípojka s uzavíracím ventilem |
|
C2 |
= |
Tlakový spínač, který se připojí k brzdovému válci přípojného vozidla, seřízený na 75 % asymptotické hodnoty tlaku v brzdovém válci CF |
|
CF |
= |
Brzdový válec |
|
M |
= |
Manometr |
|
PP |
= |
Přípojka pro kontrolu tlaku |
|
TA |
= |
Spojková hlavice přívodního vedení |
|
VRU |
= |
Nouzový reléový ventil |
PŘÍLOHA 7
USTANOVENÍ PRO ZDROJE A ZÁSOBNÍKY ENERGIE (AKUMULÁTORY ENERGIE)
A. PNEUMATICKÉ BRZDOVÉ SYSTÉMY
1. KAPACITA ZÁSOBNÍKŮ ENERGIE
1.1. Obecné informace
1.1.1. Vozidla, u nichž je pro činnost brzdového zařízení nutný tlakový vzduch, musí být vybavena zásobníky energie (akumulátory energie) o kapacitě splňující požadavky bodů 1.2 a 1.3 této přílohy (části A).
1.1.2. Zásobníky energie jednotlivých okruhů musí být možné snadno identifikovat.
1.1.3. Na objem zásobníků energie se však nestanoví žádné požadavky, jestliže brzdový systém je takový, že je možné bez jakékoli zásoby energie dosáhnout brzdného účinku nejméně rovného účinku předepsanému pro nouzové brzdění.
1.1.4. Pro ověření, zda jsou splněna ustanovení bodů 1.2 a 1.3, musí být brzdy seřízeny na co nejmenší zdvih.
1.2. Motorová vozidla
1.2.1. Zásobníky energie motorových vozidel musí být takové, aby po osmi plných zdvizích ovladače provozního brzdění nebyl zbývající tlak v zásobníku energie nižší, než je potřebný pro zajištění nouzového brzdění s předepsaným účinkem.
1.2.2. Zkouší se podle následujících požadavků:
|
1.2.2.1. |
Počáteční hladina energie v zásobníku nebo v zásobnících energie musí mít hodnotu udanou výrobcem (1). Tato hodnota musí zajistit brzdný účinek předepsaný pro provozní brzdění. |
|
1.2.2.2. |
Zásobník (zásobníky) se nesmí plnit; kromě toho musí být odpojen (odpojeny) zásobník (zásobníky) energie pomocných zařízení. |
|
1.2.2.3. |
U motorových vozidel, k nimž je přípustné připojit přípojné vozidlo a která mají pneumatické ovládací vedení, se zaslepí přívodní vedení a přímo ke spojkové hlavici pneumatického ovládacího vedení se připojí zásobník o objemu 0,5 l. Před každým zabrzděním se tlak v tomto zásobníku uvede na nulovou hodnotu. Po zkoušce specifikované v bodě 1.2.1 nesmí tlak vzduchu dodávaného do pneumatického ovládacího vedení poklesnout pod polovinu hodnoty, která byla zjištěna při prvním zabrzdění. |
1.3. Přípojná vozidla
1.3.1. Zásobníky energie na přípojných vozidlech musí být takové, aby po osmi plných zdvizích ovládacího prvku systému provozního brzdění tažného vozidla nepoklesl tlak vzduchu dodávaného do pracovních orgánů pod polovinu hodnoty, která byla zjištěna při prvním zabrzdění a aby přitom nevstoupil do činnosti ani systém automatického brzdění, ani systém parkovacího brzdění přípojného vozidla.
1.3.2. Zkouší se podle následujících požadavků:
|
1.3.2.1. |
tlak v zásobnících energie na začátku každé zkoušky musí být 850 kPa; |
|
1.3.2.2. |
přívodní vedení se zaslepí; kromě toho musí být odpojen (odpojeny) zásobník (zásobníky) energie pomocných zařízení. |
|
1.3.2.3. |
v průběhu zkoušky se nesmí zásobníky energie doplňovat; |
|
1.3.2.4. |
při každém zabrzdění musí mít tlak v pneumatickém ovládacím vedení hodnotu 750 kPa; |
|
1.3.2.5. |
při každém zabrzdění musí mít požadovaná digitální hodnota v elektrickém ovládacím vedení hodnotu odpovídající tlaku 750 kPa. |
2. KAPACITA ZDROJŮ ENERGIE
2.1. Obecné informace
Kompresory musí splňovat požadavky dále uvedených bodů.
2.2. Definice
2.2.1. Tlak „p1“ je tlak rovnající se 65 % tlaku p2 definovaného v bodě 2.2.2.
2.2.2. Tlak „p2“ je hodnota určená výrobcem a uvedená v bodě 1.2.2.1.
2.2.3. Čas „t1“ je čas potřebný k tomu, aby přetlak vzrostl z nulové hodnoty na hodnotu p1, a „t2“ je čas potřebný k tomu, aby přetlak vzrostl z nulové hodnoty na hodnotu p2.
2.3. Podmínky měření
2.3.1. Ve všech případech odpovídají otáčky kompresoru otáčkám, při nichž má motor největší výkon nebo při nichž má motor největší otáčky, které dovoluje regulátor.
2.3.2. Během zkoušek, při kterých se určuje čas t1 a čas t2, musí být odpojen (odpojeny) zásobník (zásobníky) energie pomocných zařízení.
2.3.3. U motorových vozidel, k nimž je přípustné připojit přípojné vozidlo, musí být přípojné vozidlo reprezentováno zásobníkem energie, v němž největší přetlak p (vyjádřený v kPa) je největším přetlakem, který může být dodán do přívodního vedení tažného vozidla a jehož objem V (vyjádřený v litrech) je dán vzorcem p × V = 20 R (kde R je největší přípustný součet hmotností připadajících na nápravy přípojného vozidla, vyjádřený v tunách).
2.4. Interpretace výsledků
2.4.1. Čas t1 zaznamenaný pro zásobník energie, který je z hlediska plnění nejnepříznivější, nesmí překročit:
|
2.4.1.1. |
3 minuty pro vozidla, k nimž není přípustné připojit přípojné vozidlo; nebo |
|
2.4.1.2. |
6 minut pro vozidla, k nimž je přípustné připojit přípojné vozidlo. |
2.4.2. Čas t2 zaznamenaný pro zásobník energie, který je z hlediska plnění nejnepříznivější, nesmí překročit:
|
2.4.2.1. |
6 minut pro vozidla, k nimž není přípustné připojit přípojné vozidlo; nebo |
|
2.4.2.2. |
9 minut pro vozidla, k nimž je přípustné připojit přípojné vozidlo. |
2.5. Doplňková zkouška
2.5.1. Pokud má motorové vozidlo pro svá pomocná zařízení jeden nebo více zásobníků energie, jejichž celkový objem je větší než 20 % celkového objemu zásobníků energie pro brzdění, musí se vykonat doplňková zkouška, při které se nesmí provést žádná změna činnosti ventilů ovládajících plnění zásobníků energie pro pomocná zařízení.
2.5.2. Během této zkoušky se musí ověřit, že čas t3, který je potřebný pro vzrůst tlaku z nulové hodnoty na tlak p2 v zásobníku energie pro brzdění, který je z hlediska plnění nejnepříznivější, je kratší než:
|
2.5.2.1. |
8 minut pro vozidla, k nimž není přípustné připojit přípojné vozidlo; nebo |
|
2.5.2.2. |
11 minut pro vozidla, k nimž je přípustné připojit přípojné vozidlo. |
2.5.3. Zkouška musí proběhnout za podmínek stanovených v bodech 2.3.1. a 2.3.3.
2.6. Tažná vozidla
2.6.1. Motorová vozidla, k nimž je přípustné připojit přípojné vozidlo, musí také splňovat výše uvedené požadavky na vozidla, k nimž není přípustné připojit přípojné vozidlo. V takových případech se zkoušky podle bodů 2.4.1 a 2.4.2 (a 2.5.2) této přílohy provedou bez zásobníku energie uvedeného v bodě 2.3.3.
B. PODTLAKOVÉ BRZDOVÉ SYSTÉMY
1. KAPACITA ZÁSOBNÍKŮ ENERGIE (AKUMULÁTORŮ ENERGIE)
1.1. Obecné informace
1.1.1. Vozidla, u nichž je pro funkci brzdového systému nutné použít podtlaku, musí být vybavena zásobníky energie o kapacitě splňující požadavky bodů 1.2 a 1.3 této přílohy (části B).
1.1.2. Na kapacitu zásobníků energie se však nestanoví žádné požadavky, jestliže brzdový systém je takový, že je možné bez jakékoli zásoby energie dosáhnout brzdného účinku nejméně rovného účinku předepsanému pro nouzové brzdění.
1.1.3. Pro ověření, zda jsou splněna ustanovení bodů 1.2 a 1.3, musí být brzdy seřízeny na co nejmenší zdvih.
1.2. Motorová vozidla
1.2.1. Zásobníky energie na motorových vozidlech musí mít takový objem, aby bylo ještě možné zajistit účinek předepsaný pro nouzové brzdění:
|
1.2.1.1. |
po osmi plných zdvizích ovladače systému provozního brzdění, pokud je zdrojem energie vývěva, a |
|
1.2.1.2. |
po čtyřech plných zdvizích ovladače provozního brzdění, pokud je zdrojem energie motor. |
1.2.2. Zkouší se podle následujících požadavků:
|
1.2.2.1. |
Počáteční hladina energie v zásobníku nebo v zásobnících energie musí mít hodnotu udanou výrobcem (2). Tato hodnota musí umožnit dosáhnout účinku předepsaného pro provozní brzdění a nesmí být vyšší než 90 % mezní hodnoty podtlaku, kterou může dodat zdroj energie. |
|
1.2.2.2. |
Zásobník (zásobníky) se nesmí plnit; při zkoušce musí být odpojen zásobník (zásobníky) pro pomocná zařízení; |
|
1.2.2.3. |
U motorových vozidel určených k tažení přípojných vozidel se plnicí vedení zaslepí a k ovládacímu vedení se připojí zásobník o objemu 0,5 l. Po zkoušce uvedené v bodě 1.2.1 nesmí hodnota podtlaku v ovládacím vedení poklesnout pod polovinu hodnoty, kterou měla při prvním zabrzdění. |
1.3. Přípojná vozidla (pouze kategorií O1 a O2)
1.3.1. Zásobníky energie přípojných vozidel musí být takové, aby výše podtlaku v pracovních orgánech nepoklesla pod polovinu hodnoty zjištěné při prvním zabrzdění po zkoušce obsahující čtyři plné zdvihy ovladače provozního brzdění přípojného vozidla.
1.3.2. Zkouší se podle následujících požadavků:
|
1.3.2.1. |
Počáteční hladina energie v zásobníku nebo v zásobnících energie musí mít hodnotu udanou výrobcem (3). Tato hodnota musí umožnit dosáhnout účinku předepsaného pro provozní brzdění. |
|
1.3.2.2. |
Zásobník (zásobníky) se nesmí plnit; při zkoušce musí být odpojen zásobník (zásobníky) pomocných zařízení. |
2. KAPACITA ZDROJŮ ENERGIE
2.1. Obecné informace
2.1.1. Zdroj energie musí být schopen, při výchozím atmosférickém tlaku okolí, vyvodit v zásobníku (zásobnících) energie podtlak o počáteční hodnotě uvedené v bodě 1.2.2.1 za dobu tří minut. Pro motorová vozidla, která jsou schválena pro připojení přípojného vozidla, tato doba smí být nejvýše 6 minut za podmínek uvedených v bodě 2.2.
2.2. Podmínky měření
2.2.1. Otáčky zdroje podtlaku musí být:
|
2.2.1.1. |
pokud je tímto zdrojem motor vozidla, otáčky, které má tento zdroj při stojícím vozidle, při zařazeném neutrálu v převodovce a při volnoběhu; |
|
2.2.1.2. |
pokud je zdrojem podtlaku vývěva, otáčky, které má tento zdroj při otáčkách motoru rovných 65 % otáček, při nichž má motor největší výkon; a |
|
2.2.1.3. |
pokud je zdrojem podtlaku vývěva a motor je opatřen regulátorem, otáčky, které má tento zdroj při otáčkách motoru rovných 65 % nejvyšších regulovaných otáček. |
2.2.2. Pokud je motorové vozidlo určeno k tažení přípojného vozidla, které používá podtlaku pro systém provozního brzdění, toto přípojné vozidlo se nahradí zásobníkem energie, jehož objem V (vyjádřený v litrech) je dán vzorcem V = 15 R (kde R je největší přípustná hmotnost připadající na nápravy přípojného vozidla, vyjádřená v tunách).
C. HYDRAULICKÉ BRZDOVÉ SYSTÉMY S AKUMULOVANOU ENERGIÍ
1. KAPACITA ZÁSOBNÍKŮ ENERGIE (AKUMULÁTORŮ ENERGIE)
1.1. Obecné informace
1.1.1. Vozidla, u nichž brzdové zařízení vyžaduje použití akumulované energie dodávané hydraulickou kapalinou, musí být vybavena zásobníky energie (akumulátory energie) o kapacitě splňující požadavky bodu 1.2 této přílohy (části C).
1.1.2. Pro zásobníky energie se však nepředepisuje kapacita, je-li brzdový systém takový, že bez jakékoli zásoby energie je možné dosáhnout ovladačem provozního brzdění účinku nejméně rovného účinku předepsanému pro systém nouzového brzdění.
1.1.3. Při ověřování, zda jsou splněny požadavky následujících bodů 1.2.1, 1.2.2 a 2.1 této přílohy, musí být brzdy seřízeny na co nejmenší zdvih a podle bodu 1.2.1 musí mezi jednotlivými sešlápnutími brzdového pedálu na plný zdvih být interval nejméně 60 s.
1.2. Motorová vozidla
1.2.1. Motorová vozidla s hydraulickým brzdovým systémem s akumulovanou energií musí splňovat tyto požadavky:
|
1.2.1.1. |
Po osmi sešlápnutích pedálu pro provozní brzdění s plným zdvihem musí být ještě možné při devátém sešlápnutí dosáhnout účinku předepsaného pro nouzové brzdění. |
|
1.2.1.2. |
Zkouší se podle následujících požadavků:
|
1.2.2. Motorová vozidla s hydraulickým brzdovým systémem s akumulovanou energií, která nemohou splnit požadavky bodu 5.2.1.5.1 tohoto předpisu, se pokládají za vyhovující ustanovením tohoto bodu, pokud splňují tyto požadavky:
|
1.2.2.1. |
Po jakékoli poruše v převodu musí být po osmi plných zdvizích ovladače provozního brzdění ještě možné dosáhnout při devátém zdvihu nejméně účinku předepsaného pro systém nouzového brzdění nebo, jestliže se účinku nouzového brzdění vyžadujícího použití akumulované energie dosáhne zvláštním ovladačem, musí být po osmi plných zdvizích ještě možné dosáhnout při devátém zdvihu zbývajícího brzdného účinku předepsaného v bodě 5.2.1.4 tohoto předpisu. |
|
1.2.2.2. |
Zkouší se podle následujících požadavků:
|
2. KAPACITA ZDROJŮ ENERGIE HYDRAULICKÉ KAPALINY
2.1. Zdroje energie musí splňovat požadavky uvedené v následujících bodech:
2.1.1. Definice
2.1.1.1. „p1“ znamená nejvyšší provozní tlak systému v akumulátoru (akumulátorech) energie – (tlak, při kterém regulátor vypíná doplňování), určený výrobcem.
2.1.1.2. „p2“ znamená tlak, kterého se dosáhne po čtyřech plných zdvizích ovladače systému provozního brzdění, z výchozího tlaku p1, bez doplňování akumulátoru (akumulátorů) energie.
2.1.1.3. „t“ znamená dobu potřebnou pro to, aby tlak v akumulátorech energie vzrostl z hodnoty p2 na hodnotu p1, bez použití ovladače systému provozního brzdění.
2.1.2. Podmínky měření
2.1.2.1. Při zkoušce k určení doby t musí být dodávka zdroje energie (výtlak čerpadla) taková, jaká je při motoru běžícím s otáčkami odpovídajícími jeho největšímu výkonu, nebo s nejvyššími regulovanými otáčkami.
2.1.2.2. Při zkoušce k určení doby t se nesmí akumulátor (akumulátory) energie pomocných zařízení odpojit jinak než automaticky.
2.1.3. Interpretace výsledků
2.1.3.1. U všech vozidel, s výjimkou vozidel kategorií M3, N2 a N3, nesmí doba t přesáhnout 20 s.
2.1.3.2. U vozidel kategorií M3, N2 a N3 nesmí doba t přesáhnout 30 s.
3. CHARAKTERISTIKY VÝSTRAŽNÝCH ZAŘÍZENÍ
Při zastaveném motoru a počínaje tlakem, který může být určen výrobcem, avšak nesmí přesáhnout řadicí tlak, nesmí výstražné zařízení vstoupit do činnosti po dvou plných zdvizích ovladače provozního brzdění.
(1) Počáteční tlak musí být uveden v dokumentu o schválení.
(2) Počáteční tlak musí být uveden v dokumentu o schválení.
(3) Počáteční tlak musí být uveden v dokumentu o schválení.
PŘÍLOHA 8
SPECIFICKÁ USTANOVENÍ PRO SYSTÉMY PRUŽINOVÝCH BRZD
1. DEFINICE
1.1. „Systémy pružinových brzd“ se rozumí brzdové systémy, v nichž energii potřebnou pro brzdění dodává jedna nebo více pružin pracujících jako akumulátory energie.
1.1.1. Energie potřebná pro stlačení pružiny, aby se uvolnila brzda, se dodává a řídí „ovladačem“, na který působí řidič (viz definice v bodě 2.4 tohoto předpisu).
1.2. „Komorou, ze které se stlačují pružiny“ se rozumí komora, ve které se mění tlak, kterým se skutečně stlačují pružiny.
1.3. Stlačují-li se pružiny podtlakovým zařízením, termínem „tlak“ se v celé této příloze rozumí záporná hodnota tlaku.
2. OBECNÉ INFORMACE
2.1. Systémy pružinových brzd se nesmějí použít jako systémy provozního brzdění. Avšak v případě poruchy v některé části převodu systému provozního brzdění lze použít systém pružinových brzd pro dosažení zbývajícího účinku předepsaného v bodě 5.2.1.4 tohoto předpisu za podmínky, že řidič může jejich působení odstupňovat. U motorových vozidel, s výjimkou tahačů návěsů splňujících ustanovení bodu 5.2.1.4.1 tohoto předpisu, nesmějí být systémy pružinových brzd jediným zdrojem zbývajícího brzdného účinku. Podtlakové systémy pružinových brzd se nesmějí použít pro přípojná vozidla.
2.2. Při všech úrovních tlaku, které mohou být v okruhu plnění komory, ze které se stlačují pružiny, nesmí mít malá změna tohoto tlaku za následek velkou změnu brzdné síly.
2.3. Pro motorová vozidla se systémem pružinových brzd platí tyto požadavky:
|
2.3.1. |
plnicí okruh komory, ze které se stlačují pružiny, musí buď obsahovat vlastní zásobu energie, nebo musí být plněn z nejméně dvou nezávislých zásob energie. Plnicí vedení přípojného vozidla může být napojeno na tento plnicí přívod za podmínky, že pokles tlaku v plnicím vedení nesmí uvést do činnosti pružinové brzdové válce; |
|
2.3.2. |
pomocná zařízení smějí odebírat energii z plnicího přívodu k pružinovým brzdovým válcům pouze za podmínky, že svou činností, a to i v případě poruchy zdroje energie, nemohou způsobit, aby zásoba energie pro pružinové brzdové válce poklesla pod hodnotu, se kterou je možné jedenkrát odbrzdit brzdy ovládané pružinovými brzdovými válci; |
|
2.3.3. |
v každém případě však při opětném plnění brzdového systému z nulového tlaku musí pružinové brzdy zůstat plně zabrzděny bez ohledu na polohu ovladače, dokud tlak v systému provozního brzdění nepostačuje k zabrzdění naloženého vozidla nejméně s účinkem předepsaným pro nouzové brzdění, když se působí na ovladač systému provozního brzdění; |
|
2.3.4. |
byly-li pružinové brzdy zabrzděny, nesmí se odbrzdit, dokud není v systému provozního brzdění tlak dostatečný k tomu, aby zajistil nejméně předepsaný zbývající brzdný účinek pro naložené vozidlo při působení na ovladač provozního brzdění. |
2.4. U motorových vozidel musí být systém proveden tak, aby bylo možno zabrzdit a uvolnit brzdy nejméně třikrát, přičemž se vychází z počátečního tlaku v komoře, ze které se stlačují pružiny, rovného největšímu provoznímu tlaku. U přípojných vozidel musí být možné uvolnit nejméně třikrát brzdy přípojného vozidla po jeho odpojení, přičemž tlak v přívodním vedení měl před odpojením hodnotu 750 kPa. Před zkouškou se však nouzová brzda musí odbrzdit. Tyto požadavky se musí splnit při seřízení brzd na co nejmenší zdvih. Mimoto musí být možno zabrzdit a uvolnit systém parkovacího brzdění, jak je předepsáno v bodě 5.2.2.10 tohoto předpisu, jakmile se přípojné vozidlo spojí s tažným vozidlem.
2.5. U motorových vozidel nesmí tlak v komoře, z níž se stlačují pružiny, při kterém pružiny začínají uvádět brzdy do činnosti, při seřízení brzd na co nejmenší zdvih, být větší než 80 % nejmenšího tlaku, který je běžně v komoře k dispozici.
U přípojných vozidel tlak v komoře, z níž se stlačují pružiny, při kterém pružiny začínají uvádět brzdy do činnosti, nesmí být větší než tlak, který vznikne po čtyřech plných zdvizích ovladače provozního brzdění podle bodu 1.3 části A přílohy 7 tohoto předpisu. Počáteční tlak je stanoven na 700 kPa.
2.6. Když tlak v přívodu energie ke komoře, z níž se stlačují pružiny – s výjimkou potrubí pomocného zařízení pro odbrzdění, které pracuje s tlakovým médiem – poklesne na hodnotu, při které se začínají pohybovat součásti brzd, musí vstoupit do činnosti optické nebo akustické výstražné zařízení. Výstražným zařízením může být červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1 tohoto předpisu, pokud splňuje tento požadavek. Toto ustanovení neplatí pro přípojná vozidla.
2.7. Je-li motorové vozidlo oprávněné táhnout přípojné vozidlo s průběžným nebo poloprůběžným brzdovým systémem vybaveno systémem pružinových brzd, musí automatický vstup do činnosti tohoto systému pružinových brzd uvést do činnosti rovněž brzdy přípojného vozidla.
2.8. Přípojná vozidla, která používají zásoby energie systému provozního brzdění za účelem splnění požadavků pro automatické brzdění podle bodu 3.3 přílohy 4, musí rovněž splňovat jeden z následujících požadavků, pokud je přípojné vozidlo odpojeno od tažného vozidla a ovladač parkovací brzdy přípojného vozidla je v uvolněné poloze (pružinové brzdy nejsou v činnosti):
|
a) |
pokud se zásoby energie systému provozního brzdění sníží na tlak ne nižší než 280 kPa, tlak v komoře, z níž se stlačují pružiny, se musí snížit na 0 kPa, aby se plně uvedly v činnost pružinové brzdy. Tento požadavek se ověří při stálém tlaku zásob energie systému provozního brzdění o hodnotě 280 kPa; |
|
b) |
pokles tlaku v zásobách energie systému provozního brzdění vede k odpovídajícímu snížení tlaku v komoře, ze které se stlačují pružiny. |
3. SYSTÉM POMOCNÉHO UVOLNĚNÍ
3.1. Systém pružinových brzd musí být konstruován tak, aby v případě poruchy v tomto systému bylo ještě možné uvolnit brzdy. Tento požadavek lze splnit systémem pomocného uvolnění (pneumatickým, mechanickým atd.).
Zařízení pro pomocné uvolnění, jež potřebují pro uvolnění zásobu energie, musí odebírat tuto energii ze zásoby, která je nezávislá na zásobě energie běžně používané pro systém pružinových brzd. Pneumatické nebo hydraulické médium v takovém pomocném zařízení pro uvolnění může působit na tutéž plochu pístu v komoře, ze které se stlačuje pružina, jako slouží k normální funkci pružinových brzd, za podmínky, že zařízení pro pomocné uvolnění má zvláštní vedení. Spojení tohoto vedení s běžným vedením, které spojuje ovládací zařízení s pružinovými brzdovými válci, musí být na každém pružinovém válci bezprostředně před vyústěním do komory, ze které se stlačuje pružina, pokud není již integrováno do tělesa brzdového válce. Toto spojení musí obsahovat zařízení, jež zabraňuje ovlivňování jednoho vedení druhým. Také pro toto zařízení platí požadavky bodu 5.2.1.6 tohoto předpisu.
3.1.1. Pro účely požadavků bodu 3.1 se nepočítá s možností poruchy těch konstrukčních částí převodu brzdy, které se podle bodu 5.2.1.2.7 tohoto předpisu nepokládají za porušitelné, za podmínky, že jsou z kovového materiálu nebo z materiálu s ekvivalentními vlastnostmi a že u nich nedochází k znatelné deformaci při běžné funkci brzd.
3.2. Pokud je pro ovládání pomocného zařízení podle bodu 3.1 nutné nářadí nebo klíč, musí se toto nářadí nebo klíč nalézat ve vozidle.
3.3. Pokud systém pomocného uvolnění používá k uvolnění brzd energii ze zásobníku, platí tyto doplňkové požadavky:
|
3.3.1. |
jestliže je ovladač systému pomocného uvolnění pružinových brzd totožný s ovladačem pro nouzové/parkovací brzdění, platí ve všech případech požadavky uvedené v bodě 2.3; |
|
3.3.2. |
jestliže je ovladač systému pomocného uvolnění pružinových brzd jiný než ovladač pro nouzové/parkovací brzdění, platí požadavky bodu 2.3 pro oba ovladače. Požadavky bodu 2.3.4 však neplatí pro systém pomocného uvolnění pružinových brzd. Kromě toho musí být ovladač pomocného uvolnění umístěn tak, aby na něj nemohl působit řidič ze své běžné polohy při řízení vozidla. |
3.4. Jestliže se v systému pomocného uvolnění používá stlačený vzduch, musí se systém uvádět do činnosti zvláštním ovladačem nezávislým na ovladači pružinových brzd.
PŘÍLOHA 9
USTANOVENÍ PRO SYSTÉMY PARKOVACÍHO BRZDĚNÍ S MECHANICKÝM BLOKOVÁNÍM BRZDOVÝCH VÁLCŮ (AKTIVÁTORY BLOKOVÁNÍ)
1. DEFINICE
„Zařízením k mechanickému blokování brzdových válců“ se rozumí zařízení, které zajišťuje parkovací brzdění tak, že mechanicky zablokuje pístnici brzdového válce. Mechanické blokování se provede tak, že se vypustí tlaková tekutina z blokovací komory; zařízení je provedeno tak, aby se mohlo odblokovat opětným obnovením tlaku v blokovací komoře.
2. ZVLÁŠTNÍ POŽADAVKY
2.1. Jakmile se tlak v blokovací komoře přiblíží hodnotě odpovídající mechanickému blokování, musí vstoupit do činnosti optické nebo akustické výstražné zařízení. Výstražným zařízením může být červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1 tohoto předpisu, pokud splňuje tento požadavek. Toto ustanovení neplatí pro přípojná vozidla.
U přípojných vozidel nesmí tlak odpovídající mechanickému blokování překročit hodnotu 400 kPa. Účinek předepsaný pro parkovací brzdění musí být možno dosáhnout po kterékoli jediné poruše systému provozního brzdění přípojného vozidla. Navíc musí být možné uvolnit nejméně třikrát brzdy odpojeného přípojného vozidla, pokud měl před odpojením přípojného vozidla tlak v přívodním vedení hodnotu 650 kPa. Tyto požadavky se musí splnit při seřízení brzd na co nejmenší zdvih. Mimoto, jakmile se přípojné vozidlo spojí s tažným vozidlem, musí být možné zabrzdit a uvolnit parkovací brzdu, jak je stanoveno v bodě 5.2.2.10 tohoto předpisu.
2.2. V brzdových válcích, které mají zařízení pro mechanické blokování pístnice, musí být možné zajistit pohyb pístu válce ze dvou nezávislých zásobníků energie.
2.3. Zablokovaný brzdový válec smí být možné odblokovat pouze tehdy, pokud je zajištěno, že brzda může být po tomto odblokování znovu uvedena do činnosti.
2.4. V případě selhání zdroje energie, který plní blokovací komoru, musí být zajištěno pomocné odblokovací zařízení (např. mechanické nebo pneumatické, které může pracovat např. se vzduchem z pneumatiky vozidla).
2.5. Ovladač musí být takový, aby v případě, že je uveden do činnosti, zajišťoval dílčí funkce v tomto pořadí: zabrzdění s účinkem požadovaným pro parkovací brzdění, zablokování brzd v zabrzděné poloze a poté zrušení ovládací síly působící na brzdy.
PŘÍLOHA 10
ROZDĚLENÍ BRZDNÝCH SIL MEZI NÁPRAVY VOZIDEL A POŽADAVKY NA KOMPATIBILITU MEZI TAŽNÝM A PŘÍPOJNÝM VOZIDLEM
1. OBECNÉ POŽADAVKY
1.1. Vozidla kategorií M2, M3, N, O2, O3 a O4 musí splňovat všechny požadavky této přílohy. Je-li použito zvláštní zařízení, musí pracovat automaticky (1).
Avšak vozidla výše uvedených kategorií, která jsou vybavena protiblokovacím brzdovým systémem a splňují příslušné požadavky přílohy 13, musí splňovat rovněž všechny příslušné požadavky této přílohy, přičemž se použijí následující výjimky:
|
a) |
Soulad s požadavky na využití adheze podle grafů 1A, 1B nebo 1C, v příslušných případech, se nevyžaduje. |
|
b) |
V případě tažných a přípojných vozidel vybavených pneumatickým brzdovým systémem se nevyžaduje soulad s požadavky na kompatibilitu v nenaloženém stavu podle grafů 2, 3 nebo 4, v příslušných případech. Pro všechny stavy naložení však musí být vyvinut brzdný účinek o hodnotě tlaku 20 kPa a 100 kPa nebo odpovídající digitální požadované hodnotě na spojkové hlavici ovládacího vedení. |
1.1.1. Jestliže je vozidlo vybaveno systémem odlehčovacího brzdění, nebere se v úvahu brzdná síla vyvozovaná tímto systémem k určení vlastností vozidla z hlediska ustanovení této přílohy.
1.2. Požadavky týkající se grafů uvedených v bodech 3.1.5, 3.1.6, 4.1, 5.1 a 5.2 této přílohy platí jak pro vozidla s pneumatickým ovládacím vedením podle bodu 5.1.3.1.1 tohoto předpisu, tak pro vozidla s elektrickým ovládacím vedením podle bodu 5.1.3.1.3 tohoto předpisu. V obou případech je referenční hodnotou (osa úseček v grafech) hodnota tlaku v ovládacím vedení:
|
a) |
u vozidel vybavených podle bodu 5.1.3.1.1 tohoto předpisu to bude skutečný tlak vzduchu v ovládacím vedení (pm); |
|
b) |
u vozidel vybavených podle bodu 5.1.3.1.3 tohoto předpisu to bude tlak odpovídající přenášené digitální požadované hodnotě v elektrickém ovládacím vedení podle normy ISO 11992:2003 a její změny 1:2007. |
Vozidla vybavená podle bodu 5.1.3.1.2 tohoto předpisu (mající jak pneumatické, tak elektrické ovládací vedení) musí splňovat požadavky grafů týkající se obou druhů ovládacího vedení. Identické křivky charakteristik brzdění pro oba druhy ovládacího vedení však nejsou vyžadovány.
1.3. Ověření počátku růstu brzdné síly
1.3.1. Při schválení typu se musí ověřit, že počátek růstu brzdné síly na některé z náprav každé nezávislé skupiny náprav nastane při následujících rozsazích tlaku:
|
a) |
Naložená vozidla:
|
|
b) |
Nenaložená vozidla: Na nejméně jedné nápravě musí nastat počátek růstu brzdné síly, když je tlak ve spojkové hlavici v rozmezí od 20 kPa do 100 kPa nebo na odpovídající digitální požadované hodnotě. |
1.4. V případě, kdy se u vozidel kategorie O s pneumatickými brzdovými systémy použije alternativní postup schválení typu specifikovaný v příloze 20, provedou se příslušné výpočty požadované touto přílohou s použitím charakteristik brzdných účinků převzatých z příslušných ověřovacích protokolů podle přílohy 19 a výšky těžiště zjištěné způsobem uvedeným v příloze 20 dodatku 1.
2. ZNAČKY
|
i |
= |
index označení nápravy (i = 1, přední náprava; i = 2, druhá náprava atd.) |
|
Pi |
= |
normálová reakce povrchu vozovky působící na nápravu i ve statickém stavu |
|
Ni |
= |
normálová reakce povrchu vozovky na nápravu i při brzdění |
|
Ti |
= |
brzdná síla na nápravě i při brzdění za normálních podmínek na vozovce |
|
fi |
= |
Ti/Ni, adheze využitá nápravou i (2) |
|
J |
= |
zpomalení vozidla |
|
g |
= |
gravitační zrychlení: g = 9,81 m/s2 |
|
z |
= |
poměrné zpomalení vozidla = J/g (3) |
|
P |
= |
hmotnost vozidla |
|
h |
= |
výška těžiště nad vozovkou, specifikovaná výrobcem a odsouhlasená technickou zkušebnou |
|
E |
= |
rozvor |
|
k |
= |
teoretický součinitel adheze mezi pneumatikou a vozovkou |
|
Kc |
= |
opravný faktor: naložený návěs |
|
Kv |
= |
opravný faktor: nenaložený návěs |
|
TM |
= |
součet brzdných sil na obvodu všech kol vozidel k tažení přípojných vozidel |
|
PM |
= |
celková normálová statická reakce mezi koly vozidel k tažení přípojných vozidel a vozovkou (4) |
|
pm |
= |
tlak v místě spojkové hlavice ovládacího vedení |
|
TR |
= |
součet brzdných sil na obvodu všech kol přípojného vozidla |
|
PR |
= |
celková normálová statická reakce mezi povrchem vozovky a všemi koly přípojného vozidla (4) |
|
PRmax |
= |
hodnota PR při maximální hmotnosti přípojného vozidla |
|
ER |
= |
vzdálenost mezi návěsným čepem a střednicí nápravy nebo náprav návěsu |
|
hR |
= |
výška těžiště návěsu nad vozovkou, udaná výrobcem a schválená technickou zkušebnou. |
3. POŽADAVKY NA MOTOROVÁ VOZIDLA
3.1. Dvounápravová vozidla
3.1.1. Pro všechny kategorie vozidel a pro hodnoty k v rozsahu od 0,2 do 0,8 (5):
z ≥ 0,10 + 0,85 (k – 0,20)
3.1.2. Pro všechny stavy naložení vozidla nesmí být křivka využití adheze zadní nápravou situována nad křivkou využití adheze přední nápravou:
|
3.1.2.1. |
pro všechna poměrná zpomalení v rozsahu hodnot mezi 0,15 až 0,80 u vozidel kategorie N1, která mají poměr hmotnosti na zadní nápravu v naloženém/nenaloženém stavu nepřesahující 1,5, nebo jejichž maximální hmotnost je menší než 2 t, je v rozsahu hodnot poměrného zpomalení 0,30 až 0,45 přípustný obrácený vzájemný průběh křivek využití adheze za podmínky, že křivka využití adheze zadní nápravou nedosáhne hodnot vyšších než 0,05 nad přímkou definovanou vzorcem k = z (přímka ideálního využití adheze – viz graf 1A v této příloze); |
|
3.1.2.2. |
pro všechna poměrná zpomalení v rozsahu hodnot mezi 0,15 až 0,50 pro ostatní vozidla kategorie N1 se tento požadavek pokládá za splněný, pokud pro poměrná zpomalení v rozsahu 0,15 až 0,30 jsou křivky využití adheze každou nápravou situovány mezi dvěma rovnoběžkami s přímkou ideálního využití adheze, dáno rovnicí k = z ± 0,08, jak je znázorněno v grafu 1C v této příloze, kde křivka využití adheze zadní nápravou může protínat přímku k = z – 0,08, a splňuje pro poměrná zpomalení mezi 0,30 a 0,50 vztah z ≥ k – 0,08 a pro poměrná zpomalení mezi 0,50 a 0,61 vztah z ≥ 0,5 k + 0,21; |
|
3.1.2.3. |
pro vozidla ostatních kategorií pro všechna poměrná zpomalení v rozsahu 0,15 až 0,30 se tento požadavek také pokládá za splněný, pokud křivky využití adheze každou z náprav leží, v rozsahu hodnot poměrného zpomalení 0,15 až 0,30, mezi dvěma rovnoběžkami s přímkou ideálního využití adheze, dáno rovnicí k = z ± 0,08, jak je znázorněno v grafu 1B v této příloze, a přitom křivka využití adheze zadní nápravou pro poměrné zpomalení z ≥ 0,3 splňuje podmínku z ≥ 0,3 + 0,74 (k – 0,38). |
3.1.3. U motorového vozidla schváleného k tažení přípojných vozidel kategorie O3 nebo O4 vybavených pneumatickými brzdovými systémy.
3.1.3.1. Když se zkouší se zastaveným zdrojem energie, s uzavřeným přívodním vedením a se zásobníkem o objemu 0,5 litru připojeným k pneumatickému ovládacímu vedení, s tlaky v systému, při nichž zapíná a vypíná regulátor tlaku, musí tlak ve spojkových hlavicích přívodního vedení a pneumatického ovládacího vedení, při plném zdvihu ovladače brzdění, být mezi 650 a 850 kPa, při jakémkoli stavu naložení vozidla.
3.1.3.2. U vozidel vybavených elektrickým ovládacím vedením musí plný zdvih ovladače systému provozního brzdění zajistit požadovanou digitální hodnotu odpovídající tlaku mezi 650 a 850 kPa (viz norma ISO 11992:2003 včetně normy ISO 11992-2:2003 a její změny 1:2007).
3.1.3.3. Tyto hodnoty musí být prokazatelné na motorovém vozidle při odpojení od přípojného vozidla. Pásma kompatibility v grafech uvedených v bodech 3.1.5, 3.1.6, 4.1, 5.1 a 5.2 této přílohy by neměla přesáhnout 750 kPa a/nebo odpovídající požadovanou digitální hodnotu (viz norma ISO 11992:2003 včetně normy ISO 11992-2:2003 a její změny 1:2007).
3.1.3.4. Ve spojkové hlavici přívodního vedení musí být zajištěn tlak nejméně 700 kPa, jakmile je v systému řadicí tlak. Musí existovat možnost prokázat tento tlak, aniž se přitom použije provozní brzdění.
3.1.4. Ověření požadavků uvedených v bodech 3.1.1 a 3.1.2
3.1.4.1. Pro ověření, že jsou splněny požadavky uvedené v bodech 3.1.1 a 3.1.2 této přílohy, musí výrobce předložit křivky využití adheze předními i zadními nápravami sestrojené z hodnot vypočítaných podle těchto vzorců:

Křivky se musí sestrojit pro oba následující stavy zatížení:
|
3.1.4.1.1. |
Nenaložené vozidlo, v pohotovostním stavu, s řidičem; pokud je vozidlem podvozek s kabinou, může se přidat doplňující zátěž, jež simuluje hmotnost karoserie a nezpůsobí překročení minimální hmotnosti podle prohlášení výrobce, která se uvede v osvědčení podle přílohy 2 tohoto předpisu. |
|
3.1.4.1.2. |
Naložené vozidlo; v případě, kdy je určeno více možností rozdělení zatížení mezi nápravy, vezme se v úvahu stav, při němž je nejvíce zatížena přední náprava. |
3.1.4.2. Pokud není možné u vozidel s (trvale zapojeným) pohonem všech kol vykonat matematické ověření podle bodu 3.1.4.1, může výrobce místo toho ověřit zkouškou pořadí blokování kol, že pro všechna poměrná zpomalení mezi 0,15 a 0,8 dojde k blokování předních kol buď současně s blokováním zadních kol, nebo před ním.
3.1.4.3. Postup k ověření požadavků uvedených v bodě 3.1.4.2.
3.1.4.3.1. Zkouška pořadí blokování kol se provede na vozovkách s povrchem se součinitelem adheze jednak ne větším než 0,3 a jednak okolo 0,8 (suchá silnice), z počátečních zkušebních rychlostí uvedených v bodě 3.1.4.3.2.
3.1.4.3.2. Zkušební rychlosti:
|
|
60 km/h, avšak ne více než 0,8 vmax, pro zpomalení na površích s nízkým součinitelem adheze; |
|
|
80 km/h, avšak ne více než vmax, pro zpomalení na površích s vysokým součinitelem adheze. |
3.1.4.3.3. Síla působící na pedál může přesahovat přípustné ovládací síly na pedálu podle přílohy 4, bodu 2.1.1.
3.1.4.3.4. Síla působící na pedál se postupně zvětšuje tak, aby se druhé kolo na vozidle blokovalo v intervalu mezi 0,5 až 1 vteřiny po začátku brzdění, a dále až do okamžiku, kdy dojde k blokování obou kol jedné nápravy (další kola se mohou během zkoušky také blokovat, např. v případě současného blokování kol).
3.1.4.4. Zkoušky předepsané v bodě 3.1.4.2 se provedou dvakrát na každém z povrchů vozovky. Když je výsledek jedné zkoušky nevyhovující, provede se třetí a rozhodující zkouška.
3.1.4.5. U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B, kde je možnost elektrického rekuperačního brzdění ovlivněna stavem nabití baterie, se křivky sestrojí tak, že se vezme v úvahu složka elektrického rekuperačního brzdění při jednak minimální a jednak maximální brzdné síle. Tento požadavek se nepoužije, pokud je vozidlo vybaveno protiblokovacím zařízením, které řídí kola připojená k elektrickému rekuperačnímu brzdovému zařízení, a musí se pak nahradit požadavky přílohy 13.
3.1.5. Tažná vozidla jiná než tahače návěsů
3.1.5.1. U motorových vozidel určených k tažení přípojných vozidel kategorie O3 nebo O4 s pneumatickým brzdovým systémem musí přípustný poměr mezi poměrnými zpomaleními TM/PM a tlakem pm ležet v pásmech znázorněných na grafu 2 v této příloze, a to pro všechny hodnoty tlaku mezi 20 a 750 kPa.
3.1.6. Tahače návěsů
3.1.6.1. Tahače návěsů s nenaloženým návěsem. Za nenaloženou soupravu se považuje tahač návěsů ve stavu s provozní hmotností, s řidičem a s připojeným nenaloženým návěsem. Dynamické zatížení, kterým působí návěs na tahač, je představováno statickým zatížením Ps působícím v místě návěsového čepu, rovnajícím se číselně 15 % maximální hmotnosti, která zatíží točnici. Regulace brzdných sil musí pokračovat i mezi stavem „tahač návěsů s nenaloženým návěsem“ a stavem „samotný tahač bez návěsu“; přitom se ověřují brzdné síly pro stav „samotný tahač“.
3.1.6.2. Tahače návěsů s naloženým návěsem. Za naloženou soupravu se považuje tahač návěsů ve stavu s provozní hmotností, s řidičem a s připojeným naloženým návěsem. Dynamické zatížení, kterým působí návěs na tahač, je představováno statickým zatížením Ps působícím v místě návěsového čepu a rovnajícím se:
Ps = Pso (1 + 0,45z)
kde:
|
Pso |
je rozdíl mezi maximální hmotností naloženého tahače a jeho hmotností v nenaloženém stavu. |
Za h se dosazuje hodnota:

kde:
|
ho |
je výška těžiště tahače; |
|
hs |
je výška dosedací plochy návěsu na točnici nad vozovkou; |
|
Po |
je hmotnost nenaloženého samotného tahače |
a:
3.1.6.3. U vozidel s pneumatickým brzdovým systémem musí přípustný poměr mezi poměrnými zpomaleními TM/PM a tlakem pm ležet v pásmech znázorněných na grafu 3 v této příloze, a to pro všechny hodnoty tlaku mezi 20 a 750 kPa.
3.2. Vozidla s více než dvěma nápravami
Ustanovení bodu 3.1 této přílohy platí rovněž pro vozidla s více než dvěma nápravami. Požadavky bodu 3.1.2 této přílohy z hlediska pořadí blokování kol se pokládají za splněné, pokud, v rozsahu poměrného zpomalení 0,15 až 0,30, adheze využitá nejméně jednou z předních náprav je větší než adheze využitá nejméně jednou ze zadních náprav.
4. POŽADAVKY NA NÁVĚSY
4.1. Pro návěsy vybavené pneumatickými brzdovými systémy:
|
4.1.1. |
přípustná závislost poměrného zpomalení TR/PR na tlaku pm musí ležet ve dvou pásmech odvozených z grafů 4A a 4B pro všechny hodnoty tlaku mezi 20 a 750 kPa, a to pro naložené i nenaložené vozidlo. Tento požadavek musí být splněn pro všechny přípustné stavy zatížení náprav návěsu; |
|
4.1.2. |
ustanovení bodu 4.1.1 nemusí být splněno, pokud návěs se součinitelem Kc menším než 0,95 splňuje alespoň brzdný účinek specifikovaný v bodě 3.1.2.1, resp. v bodě 3.1.3.1 přílohy 4 tohoto předpisu. |
5. POŽADAVKY NA ÚPLNÁ PŘÍPOJNÁ VOZIDLA A NA PŘÍPOJNÁ VOZIDLA S NÁPRAVAMI UPROSTŘED
5.1. Úplná přípojná vozidla vybavená pneumatickými brzdovými systémy:
|
5.1.1. |
Pro úplná přípojná vozidla se dvěma nápravami platí tyto požadavky:
|
|
5.1.2. |
Úplná přípojná vozidla s více než dvěma nápravami musí splňovat požadavky bodu 5.1.1 této přílohy. Požadavky bodu 5.1.1 této přílohy se pokládají za splněné z hlediska pořadí blokování kol, jestliže v rozsahu hodnot poměrného zpomalení 0,15 až 0,30 je využití adheze nejméně jednou z předních náprav větší než využití adheze nejméně jednou ze zadních náprav. |
|
5.1.3. |
Přípustná závislost poměrného zpomalení TR/PR na tlaku pm musí ležet v pásmech vyznačených na grafu 2 v této příloze pro všechny hodnoty tlaku mezi 20 a 750 kPa, a to pro naložené i nenaložené vozidlo. |
5.2. Přípojná vozidla s nápravami uprostřed vybavená pneumatickými brzdovými systémy:
|
5.2.1. |
Přípustná závislost poměrného zpomalení TR/PR na tlaku pm musí ležet ve dvou pásmech odvozených z grafu 2 v této příloze tak, že svislá stupnice se násobí 0,95. Tento požadavek se musí splnit pro všechny hodnoty tlaku mezi 20 a 750 kPa, a to pro naložený i nenaložený stav vozidla. |
|
5.2.2. |
Pokud požadavky bodu 3.1.2.1 přílohy 4 tohoto předpisu nelze splnit pro nedostatečnou adhezi, pak musí být přípojné vozidlo s nápravami uprostřed opatřeno protiblokovacím systémem splňujícím přílohu 13 tohoto předpisu. |
6. POŽADAVKY, KTERÉ MUSÍ BÝT SPLNĚNY PŘI SELHÁNÍ SYSTÉMU PRO ROZDĚLOVÁNÍ BRZDNÝCH SIL MEZI NÁPRAVY
Jsou-li požadavky této přílohy splněny zvláštním zařízením (např. ovládaným mechanicky od zavěšení náprav vozidla) nebo pokud je vozidlo vybaveno takovým zvláštním zařízením, musí v případě poruchy ovládání tohoto zařízení být možno u motorových vozidel zastavit vozidlo za podmínek požadovaných pro nouzové brzdění. U motorových vozidel určených k tažení přípojného vozidla s pneumatickým brzdovým systémem musí být možno dosáhnout ve spojkové hlavici ovládacího vedení tlaku, jehož hodnota je v rozmezí specifikovaném v bodě 3.1.3 této přílohy. V případě poruchy ovládání zvláštního zařízení musí být u přípojných vozidel dosaženo účinku provozního brzdění o výkonu nejméně 30 % hodnoty předepsané pro uvažované vozidlo.
7. OZNAČENÍ
7.1. Vozidla splňující požadavky této přílohy prostřednictvím zařízení, které je ovládáno mechanicky od zavěšení náprav vozidla, nebo pokud je vozidlo vybaveno takovým zařízením, musí být opatřena označením udávajícím užitečný zdvih zařízení mezi polohami pro nenaložený a naložený stav vozidla a doplňkové informace potřebné pro kontrolu seřízení tohoto zařízení.
7.1.1. Je-li zařízení pro rozdělování brzdného účinku mezi nápravy v závislosti na nákladu ovládané od zavěšení náprav vozidla jiným způsobem než mechanickým, musí být vozidlo opatřeno označením udávajícím informace potřebné pro kontrolu seřízení tohoto zařízení.
7.2. Pokud se požadavky této přílohy splňují zařízením, které upravuje tlak vzduchu v převodu brzd, musí být vozidlo opatřeno označením udávajícím hmotnosti připadající na nápravy, jmenovitý tlak vzduchu na výstupu zařízení a dále tlak na vstupu, který musí být nejméně 80 % největšího jmenovitého tlaku na vstupu udaného výrobcem vozidla, a to pro tyto stavy naložení:
|
7.2.1. |
maximální technicky přípustné zatížení připadající na nápravu nebo nápravy, jimiž se ovládá zařízení; |
|
7.2.2. |
zatížení připadající na nápravu nebo na nápravy, které odpovídá provozní hmotnosti vozidla v nenaloženém stavu, jak je specifikována v bodě 13 přílohy 2 tohoto předpisu; |
|
7.2.3. |
zatížení připadající na nápravu nebo na nápravy, které odpovídá přibližně provozní hmotnosti vozidla s nástavbou (karoserií), kterou bude vozidlo opatřeno, v případě, že zatížení připadající na nápravu nebo na nápravy, které je uvedeno v bodě 7.2.2, se vztahuje na vozidlo v provedení podvozek s kabinou; |
|
7.2.4. |
zatížení připadající na nápravu nebo nápravy udané výrobcem pro kontrolu seřízení zařízení v provozu, pokud jsou tyto hodnoty jiné než hodnoty udané podle bodů 7.2.1 až 7.2.3 této přílohy. |
7.3. V bodě 14.8 přílohy 2 tohoto předpisu se musí uvést údaje, které umožňují kontrolovat, zda jsou splněny požadavky bodů 7.1 a 7.2.
7.4. Označení uvedená v bodech 7.1 a 7.2 této přílohy musí být na dobře viditelném místě a musí být nesmazatelná. Na schématu v grafu 5 v této příloze je příklad označení pro mechanicky ovládané zařízení na vozidle s pneumatickým brzdovým systémem.
7.5. Elektronicky řízené systémy, které rozdělují brzdné síly na nápravy a které nemohou splnit požadavky bodů 7.1, 7.2, 7.3 a 7.4, musí obsahovat zařízení automaticky kontrolující funkce, jež ovlivňují rozdělení brzdných sil na nápravy. Kromě toho když vozidlo stojí, musí být možno provést ověření stanovená v bodě 1.3.1 tak, že se vyvolá požadovaný jmenovitý tlak odpovídající počátku brzdění, a to pro naložený i nenaložený stav vozidla.
8. ZKOUŠENÍ VOZIDLA
Technická zkušebna v průběhu schvalování typu vozidla ověří, zda jsou splněny požadavky této přílohy, a vykoná jakékoliv doplňkové zkoušky, které bude pokládat za potřebné k tomuto účelu.
Graf 1A
Určitá vozidla kategorie N1
(viz bod 3.1.2.1 této přílohy)

Graf 1B
Vozidla jiná než vozidla kategorie N1 a úplná přípojná vozidla
(viz body 3.1.2.3 a 5.1.1.2 této přílohy)

|
Pozn.: |
Dolní hranice pásma vymezeného rovnoběžkou k = z – 0,08 se nepoužije na využití adheze zadní nápravou. |
Graf 1C
Vozidla kategorie N1 (s určitými výjimkami od 1. října 1990)
(viz bod 3.1.2.2 této přílohy)
|
Pozn.: |
Dolní hranice pásma vymezeného rovnoběžkou k = z – 0,08 se nepoužije na využití adheze zadní nápravou. |
Graf 2
Tažná vozidla a přípojná vozidla (s výjimkou tahačů návěsů a s výjimkou návěsů)
(viz bod 3.1.5.1 této přílohy)

|
Pozn.: |
Závislosti požadované grafem se použijí úměrně pro mezilehlé stavy mezi naloženým a nenaloženým stavem a musí jich být dosaženo automaticky. |
Graf 3
Tahače návěsů
(viz bod 3.1.6.3 této přílohy)
|
Pozn.: |
Závislosti požadované grafem se použijí úměrně pro mezilehlé stavy mezi naloženým a nenaloženým stavem a musí jich být dosaženo automaticky. |
Graf 4A
Návěsy
(viz bod 4 této přílohy)
|
Pozn.: |
Závislost mezi poměrným zpomalením TR/PR a tlakem v ovládacím vedení pro naložený a nenaložený stav se určí takto: Součinitel Kc (pro naložený stav) a Kv (pro nenaložený stav) se určí z grafu 4B. Pásmo pro naložený a nenaložený stav se sestrojí tak, že se horní a dolní hranice šrafovaného pásma znázorněného na grafu 4A vynásobí určenými součiniteli Kc a Kv. |
Graf 4B
(viz bod 4 a graf 4A v této příloze)

VYSVĚTLIVKA K POUŽITÍ GRAFU 4B
|
1. |
Graf 4B je sestrojen na základě tohoto vzorce:
|

|
2. |
Popis použití na konkrétním případu
|



Graf 5
Zařízení pro rozdělování brzdného účinku na nápravy v závislosti na hmotnosti nákladu (zátěžový regulátor)
(viz bod 7.4 této přílohy)
|
Údaje pro kontrolu |
Stav zatížení vozidla |
Zatížení na nápravu č. 2 [daN] |
Tlak na vstupu [kPa] |
Jmenovitý tlak na výstupu [kPa] |
|
|
Naložený stav |
10 000 |
600 |
600 |
|
Nenaložený stav |
1 500 |
600 |
240 |

(1) U přípojných vozidel s elektronicky řízeným rozdělováním brzdného účinku na nápravy platí požadavky této přílohy jen tehdy, jestliže je přípojné vozidlo elektronicky připojeno k tažnému vozidlu konektorem podle normy ISO 7638:2003.
(2) „Křivkami využití adheze“ vozidla se rozumí křivky, které pro stanovené naložení vozidla udávají využití adheze každou z náprav i v závislosti na poměrném zpomalení vozidla.
(3) Pro návěsy je „z“ brzdná síla dělená statickým zatížením nápravy (náprav) návěsu.
(4) Podle bodu 1.4.4.3 přílohy 4 tohoto předpisu.
(5) Ustanovení bodu 3.1.1 nebo 5.1.1 nemá vliv na požadavky přílohy 4 tohoto předpisu, pokud jde o brzdný účinek. Pokud se však při ověřování provedeném podle ustanovení bodu 3.1.1 nebo 5.1.1 dosáhne větších brzdných účinků, než je předepsáno v příloze 4, uplatní se požadavky týkající se křivek využití adheze v oblastech znázorněných na grafech 1A, 1B a 1C v této příloze a vymezených přímkami k = 0,8 a z = 0,8.
(6) Ustanovení bodu 3.1.1 nebo 5.1.1 nemá vliv na požadavky přílohy 4 tohoto předpisu, pokud jde o brzdný účinek. Pokud se však při ověřování provedeném podle ustanovení bodu 3.1.1 nebo 5.1.1 dosáhne větších brzdných účinků, než je předepsáno v příloze 4, uplatní se požadavky týkající se křivek využití adheze v oblastech znázorněných na grafech 1A, 1B a 1C v této příloze a vymezených přímkami k = 0,8 a z = 0,8.
PŘÍLOHA 11
PŘÍPADY, VE KTERÝCH NENÍ NUTNÉ PROVÁDĚT ZKOUŠKY TYPU I A/NEBO TYPU II (NEBO TYPU IIA) NEBO TYPU III
1. Zkoušky typu I a/nebo typu II (nebo typu IIA) nebo typu III není nutné provádět na vozidle předaném ke schválení v těchto případech:
|
1.1. |
Dotčeným vozidlem je motorové vozidlo nebo přípojné vozidlo, které, pokud jde o pneumatiky, energii brzdění absorbovanou nápravou a způsob montáže pneumatik a brzd, je identické z hlediska brzdění s motorovým vozidlem nebo s přípojným vozidlem, které:
|
|
1.2. |
Dotčeným vozidlem je motorové vozidlo nebo přípojné vozidlo, jehož náprava nebo nápravy, pokud jde o pneumatiky, energii brzdění absorbovanou nápravou a způsob montáže pneumatik a brzd, jsou identické z hlediska brzdění s nápravou nebo nápravami, které individuálně vyhověly zkoušce typu I a/nebo typu II (nebo typu IIA) nebo typu III pro hmotnosti na nápravách vyšší nebo rovné hmotnostem na nápravách dotčeného vozidla za podmínky, že energie absorbovaná nápravou není větší než energie absorbovaná nápravou při referenční zkoušce nebo zkouškách jednotlivé nápravy samotné. |
|
1.3. |
Dotčené vozidlo je vybaveno systémem odlehčovacího brzdění jiným než motorovou brzdou, identickým se systémem odlehčovacího brzdění, který již byl zkoušen za těchto podmínek:
|
|
1.4. |
Dotčeným vozidlem je přípojné vozidlo s pneumatickým brzdovým systémem a s brzdami s S klíčem nebo s kotoučovými brzdami (1), které splňují požadavky uvedené v dodatku 2 k této příloze, jež se týkají kontroly charakteristik ve srovnání s charakteristikami uvedenými ve zkušebním protokolu o zkoušce referenční nápravy podle vzoru uvedeného v dodatku 3 k této příloze. |
2. Pojem „identický“, použitý v bodech 1.1, 1.2 a 1.3, znamená identický z hlediska geometrických a mechanických charakteristik a materiálů konstrukčních částí vozidla, které jsou předmětem těchto bodů.
V případě přípojných vozidel se pokládají tyto požadavky za splněné z hlediska bodů 1.1 a 1.2, jestliže jsou identifikátory uvedené v bodě 3.7 dodatku 2 k této příloze pro nápravu/brzdu dotčeného přípojného vozidla uvedeny ve zkušebním protokolu k referenční nápravě/brzdě.
„Referenční náprava/brzda“ je náprava/brzda, pro kterou existuje zkušební protokol uvedený v bodě 3.9 dodatku 2 k této příloze.
3. Použije-li se výše uvedených ustanovení, musí osvědčení o schválení (příloha 2 tohoto předpisu) obsahovat tyto údaje:
|
3.1. |
V případě podle bodu 1.1 musí být uvedeno číslo schválení vozidla, se kterým byly vykonány zkoušky typu I a/nebo zkoušky typu II (nebo zkoušky typu IIA) nebo zkoušky typu III, které jsou pro tento případ referenční. |
|
3.2. |
V případě podle bodu 1.2 musí být vyplněna tabulka I v dodatku 1 k této příloze. |
|
3.3. |
V případě podle bodu 1.3 musí být vyplněna tabulka II v dodatku 1 k této příloze. |
|
3.4. |
Použije-li se ustanovení bodu 1.4, musí být vyplněna tabulka III v dodatku 1 k této příloze. |
4. Pokud se žadatel o schválení v některém členském státě dohody, který uplatňuje tento předpis, odvolává na schválení, která byla udělena v jiném členském státě uplatňujícím tento předpis, musí předložit dokumentaci týkající se tohoto schválení.
(1) Jiné konstrukce brzd mohou být schváleny po předložení rovnocenných údajů.
Dodatek 1
Tabulka I
|
|
Nápravy vozidla |
Referenční nápravy |
||||
|
Statická hmotnost (P) (1) |
Brzdná síla potřebná na kolech |
Rychlost |
Hmotnost při zkoušce (Pe) (1) |
Brzdná síla vyvinutá na kolech |
Rychlost |
|
|
kg |
N |
km/h |
kg |
N |
km/h |
|
|
Náprava 1 Náprava 2 Náprava 3 Náprava 4 |
|
|
|
|
|
|
Tabulka II
|
|
Celková hmotnost vozidla předaného ke schválení …kg |
|
|
Brzdná síla potřebná na kolech …N |
|
|
Zpomalující moment potřebný na hlavním hřídeli systému odlehčovacího brzdění …Nm |
|
|
Zpomalující moment získaný na hlavním hřídeli systému odlehčovacího brzdění (podle grafu) …Nm |
Tabulka III
|
Referenční náprava …Zkušební protokol č …Datum: … (kopie přiložena) |
||||
|
|
Typ I |
Typ III |
||
|
Brzdná síla na nápravu (N) (viz bod 4.2.1 dodatku 2) |
||||
|
Náprava 1 |
T1 = …% Fe |
T1 = …% Fe |
||
|
Náprava 2 |
T2 = …% Fe |
T2 = …% Fe |
||
|
Náprava 3 |
T3 = …% Fe |
T3 = …% Fe |
||
|
Vypočtený zdvih brzdového válce (mm) (viz bod 4.3.1.1 dodatku 2) |
||||
|
Náprava 1 |
S1 = … |
s1 = … |
||
|
Náprava 2 |
S2 = … |
s2 = … |
||
|
Náprava 3 |
S3 = … |
s3 = … |
||
|
Střední tlaková síla na pístnici brzdového válce (N) (viz bod 4.3.1.2 dodatku 2) |
||||
|
Náprava 1 |
ThA1 = … |
ThA1 = … |
||
|
Náprava 2 |
ThA2 = … |
ThA2 = … |
||
|
Náprava 3 |
ThA3 = … |
ThA3 = … |
||
|
Brzdný účinek (N) (viz bod 4.3.1.4 dodatku 2) |
||||
|
Náprava 1 |
T1 = … |
T1 = … |
||
|
Náprava 2 |
T2 = … |
T2 = … |
||
|
Náprava 3 |
T3 = … |
T3 = … |
||
|
|
Výsledek zkoušky typu 0 dotčeného přípojného vozidla (E) |
Typ I se zahřátými brzdami (vypočteno) |
Typ III se zahřátými brzdami (vypočteno) |
|
|
Brzdný účinek vozidla (viz bod 4.3.2 dodatku 2) |
||||
|
Požadavky na brzdný účinek se zahřátými brzdami (viz body 1.5.3, 1.6.3 a 1.7.2 přílohy 4) |
|
≥ 0,36 a ≥ 0,60 E |
≥ 0,40 a ≥ 0,60 E |
|
(1) Viz bod 2.1 dodatku 2 k této příloze.
Dodatek 2
Alternativní postupy zkoušek typu I a typu III pro brzdy přípojných vozidel
1. OBECNÉ INFORMACE
1.1. Podle bodu 1.4 této přílohy není nutno při schválení typu vozidla provádět zkoušky typu I nebo typu III, pokud konstrukční části brzdového systému splňují ustanovení tohoto dodatku a pokud vypočtený brzdný účinek splňuje požadavky tohoto předpisu pro danou kategorii vozidla.
1.2. Zkoušky provedené podle metod uvedených v tomto dodatku se považují za zkoušky, jež splňují výše uvedené požadavky.
1.2.1. Zkoušky provedené podle bodu 3.5.1 tohoto dodatku včetně doplňku 7 a následujících doplňků k sérii změn 09, které byly uspokojivé, se pokládají za dostatečný doklad splnění požadavků bodu 3.5.1 tohoto dodatku v jeho posledním znění. Pokud je využito tohoto alternativního postupu, uvede se v protokolu o zkoušce odkaz na původní zkušební protokol, ze kterého byly vzaty výsledky pro nový aktualizovaný zkušební protokol. Nové zkoušky musí být nicméně provedeny podle požadavků poslední verze tohoto předpisu.
1.2.2. Zkoušky provedené v souladu s tímto dodatkem ve znění předcházejícím doplňku 2 k sérii změn 11 tohoto předpisu, které zároveň se všemi podpůrnými údaji od výrobce vozidla/nápravy/brzdy poskytují dostatek informací pro splnění požadavků doplňku 2 k sérii změn 11, se mohou použít pro nový zkušební protokol nebo k rozšíření stávajícího zkušebního protokolu, aniž by bylo nutné provést skutečné zkoušky.
1.3. Zkoušky provedené podle bodu 3.6 tohoto dodatku a výsledky uvedené v oddílu 2 dodatku 3 nebo dodatku 4 k této příloze se pokládají za dostatečný doklad splnění požadavků bodu 5.2.2.8.1 tohoto předpisu.
1.4. Brzda (brzdy) se musí před zkouškou typu III seřídit podle následujících postupů, v závislosti na jednotlivých případech:
|
1.4.1. |
U přípojných vozidel s brzdami s pneumatickým ovládáním se brzdy musí seřídit tak, aby mohlo fungovat zařízení pro automatické seřizování brzd. K tomuto účelu se zdvih brzdového válce seřídí na: s0 > 1,1 · sre-adjust (horní mezní hodnota nesmí přesáhnout hodnotu doporučenou výrobcem), kde: sre-adjust je zdvih pro opětovné seřízení podle specifikace výrobce zařízení pro automatické seřizování brzd, tj. zdvih, při kterém začíná opětovné seřízení vůle mezi třecí dvojicí brzdy při tlaku v brzdovém válci 100 kPa. V případě, kdy je se souhlasem technické zkušebny pokládáno za obtížné měření zdvihu brzdového válce, zvolí se počáteční seřízení po dohodě s technickou zkušebnou. Z výše uvedeného stavu se brzda uvede do činnosti 50krát za sebou s tlakem v brzdovém válci 200 kPa. Potom následuje jediné uvedení brzdy v činnost s tlakem v brzdovém válci ≥ 650 kPa. |
|
1.4.2. |
U přípojných vozidel s hydraulicky ovládanými kotoučovými brzdami se žádné požadavky na seřizování nepokládají za nutné. |
|
1.4.3. |
U přípojných vozidel s hydraulicky ovládanými bubnovými brzdami se brzdy seřídí podle specifikací výrobce. |
1.5. U přípojných vozidel se zařízeními pro automatické seřizování brzd se před níže předepsanou zkouškou typu I seřídí brzdy podle postupu stanoveného v bodě 1.4.
2. SYMBOLY A DEFINICE
2.1. Symboly
|
P |
= |
část hmotnosti vozidla nesená nápravou ve statickém stavu |
|
F |
= |
normálová reakce povrchu vozovky působící na nápravu ve statickém stavu = P · g |
|
FR |
= |
celková normálová statická reakce povrchu vozovky působící na všechna kola přípojného vozidla |
|
Fe |
= |
zatížení působící na zkoušenou nápravu |
|
Pe |
= |
Fe/g |
|
g |
= |
gravitační zrychlení: g = 9,81 m/s2 |
|
C |
= |
vstupní brzdný moment |
|
CO |
= |
prahová hodnota vstupního brzdného momentu, definice viz bod 2.2.2 |
|
C0,dec |
= |
deklarovaná prahová hodnota vstupního brzdného momentu |
|
Cmax |
= |
maximální vstupní brzdný moment |
|
R |
= |
poloměr valení pneumatiky (dynamický) |
|
T |
= |
brzdná síla ve styku pneumatiky s vozovkou |
|
TR |
= |
celková brzdná síla ve styku pneumatiky s vozovkou u přípojného vozidla |
|
M |
= |
brzdný moment = T · R |
|
z |
= |
poměrné zpomalení = T/F nebo M/(R · F) |
|
s |
= |
zdvih pístnice brzdového válce (užitečný zdvih + zdvih naprázdno) |
|
sp |
= |
viz příloha 19 dodatek 9 |
|
ThA |
= |
viz příloha 19 dodatek 9 |
|
l |
= |
délka páky |
|
r |
= |
vnitřní poloměr brzdových bubnů nebo účinný poloměr brzdových kotoučů |
|
p |
= |
tlak v brzdovém válci |
Pozn.: Symboly s indexem „e“ se vztahují k parametrům týkajícím se zkoušek referenční brzdy a tento index se může podle potřeby připojit k jiným symbolům.
2.2. Definice
2.2.1. Hmotnost kotouče nebo bubnu
2.2.1.1. „Deklarovanou hmotností“ se rozumí hmotnost deklarovaná výrobcem, která je reprezentativní hmotností pro identifikátor brzdy (viz bod 3.7.2.2 tohoto dodatku).
2.2.1.2. „Jmenovitou zkušební hmotností“ se rozumí hmotnost, kterou výrobce stanoví pro kotouč nebo buben a s níž technická zkušebna provede příslušnou zkoušku.
2.2.1.3. „Skutečnou hmotností při zkoušce“ se rozumí hmotnost, kterou změří technická zkušebna před zkouškou.
2.2.2. „Prahová hodnota vstupního brzdného momentu“:
|
2.2.2.1. |
Prahová hodnota vstupního brzdného momentu C0 je vstupní brzdný moment nutný k vytvoření měřitelného brzdného momentu. Tento moment lze určit extrapolací měření v rozmezí nepřesahujícím 15 % brzdného zpomalení nebo rovnocennými metodami (např. příloha 10 bod 1.3.1.1). |
|
2.2.2.2. |
Prahová hodnota vstupního brzdného momentu C0,dec je prahová hodnota vstupního brzdného momentu deklarovaná výrobcem, která je reprezentativní prahovou hodnotou vstupního momentu brzdy (viz bod 3.7.2.2.1 tohoto dodatku) a je potřebná k sestrojení grafu 2 v příloze 19 části 1. |
|
2.2.2.3. |
Prahová hodnota vstupního brzdného momentu C0,e se určí postupem stanoveným v bodě 2.2.2.1 a je změřena technickou zkušebnou na konci zkoušky. |
2.2.3. „Vnější průměr kotouče“:
|
2.2.3.1. |
„Deklarovaným vnějším průměrem“ se rozumí vnější průměr kotouče deklarovaný výrobcem, který je reprezentativním vnějším průměrem kotouče (viz bod 3.7.2.2.1 tohoto dodatku). |
|
2.2.3.2. |
„Jmenovitým vnějším průměrem“ se rozumí vnější průměr, který výrobce stanoví pro kotouč, s nímž technická zkušebna provede příslušnou zkoušku. |
|
2.2.3.3. |
„Skutečným vnějším průměrem“ se rozumí vnější průměr, který změří technická zkušebna před zkouškou. |
2.2.4. „Účinná délka hřídele klíče“ je vzdálenost mezi střednicí S klíče a střednicí páky klíče.

3. ZKUŠEBNÍ METODY
3.1. Jízdní zkoušky
3.1.1. Brzdný účinek je třeba zkoušet přednostně jen na jedné nápravě.
3.1.2. Výsledky zkoušek provedených na skupině náprav lze použít ve smyslu bodu 1.1 této přílohy za předpokladu, že každá z náprav se podílí stejným dílem na absorbování brzdné energie při zkouškách brzdného účinku a účinku se zahřátými brzdami.
3.1.2.1. To je zajištěno, pokud má každá náprava tyto shodné vlastnosti: geometrie vlastní brzdy, brzdové obložení, montáž kola, pneumatiky, brzdové válce a rozložení tlaku v brzdových válcích.
3.1.2.2. Jako dokumentovaný výsledek pro skupinu náprav se použije střední hodnota pro počet zkoušených náprav, jako by šlo o nápravu jedinou.
3.1.3. Náprava (nápravy) má (mají) být pokud možno zatížena/y na maximální statické zatížení, i když to není podstatné, pokud je při zkouškách náležitě zohledněn rozdíl ve valivých odporech způsobený rozdílným zatížením zkoušené nápravy (náprav).
3.1.4. U kombinací vozidel užitých při zkoušce je třeba vzít v úvahu vliv zvětšení valivého odporu.
3.1.5. Zkoušky je třeba provádět z předepsané počáteční rychlosti. Konečná rychlost se vypočte ze vzorce:

kde:
|
v1 |
= |
počáteční rychlost (km/h) |
|
v2 |
= |
konečná rychlost (km/h) |
|
Po |
= |
hmotnost tažného vozidla (kg) za podmínek zkoušky |
|
P1 |
= |
část hmotnosti přípojného vozidla nesená nebrzděnou nápravou (nápravami) (kg) |
|
P2 |
= |
část hmotnosti přípojného vozidla nesená brzděnou nápravou (nápravami) (kg). |
3.2. Zkoušky na setrvačníkovém dynamometru
3.2.1. Zkušební stroj musí mít moment setrvačnosti, který představuje tu část lineární setrvačné hmotnosti vozidla, která působí na jedno kolo tak, jak je potřebné pro zkoušky brzdného účinku se studenou brzdou a pro zkoušky brzdného účinku se zahřátou brzdou, a je pro účely zkoušek popsaných v bodech 3.5.2 a 3.5.3 tohoto dodatku schopen fungovat při konstantní rychlosti.
3.2.2. Zkouší se s úplným kolem, včetně pneumatiky, namontovaným na rotující část brzdy jako na vozidle. Setrvačná hmota může být spojena s brzdou buď přímo, nebo prostřednictvím pneumatik a kol.
3.2.3. Ve fázi zahřívání brzdy lze použít ochlazování vzduchem, který proudí rychlostí a ve směru odpovídajícím skutečným podmínkám, přičemž rychlost proudění vzduchu je:
vair = 0,33 v,
kde:
|
v |
= |
zkušební rychlost vozidla na začátku brzdění. |
Teplota chladicího vzduchu se musí rovnat teplotě okolního prostředí.
3.2.4. Pokud při zkoušce není valivý odpor pneumatiky automaticky kompenzován, je třeba korigovat moment působící na brzdu zmenšením o moment odpovídající součiniteli valivého odporu 0,01.
3.3. Zkoušky na válcovém dynamometru
3.3.1. Náprava by měla být pokud možno zatížena na maximální statické zatížení, i když to není nezbytné, pokud je při zkouškách náležitě zohledněn rozdíl ve valivých odporech způsobený rozdílným zatížením zkoušené nápravy.
3.3.2. Ve fázi zahřívání brzdy lze použít ochlazování vzduchem, který proudí rychlostí a ve směru odpovídajícím skutečným podmínkám, přičemž rychlost proudění vzduchu je:
vair = 0,33 v,
kde:
|
v |
= |
zkušební rychlost vozidla na začátku brzdění. |
Teplota chladicího vzduchu se musí rovnat teplotě okolního prostředí.
3.3.3. Doba brzdění musí být 1 sekunda po maximálním náběhu brzdění 0,6 sekundy.
3.4. Podmínky zkoušky (obecně)
3.4.1. Zkoušenou brzdu (brzdy) je nutno vybavit přístroji tak, aby bylo možné:
|
3.4.1.1. |
průběžně registrovat brzdný moment nebo brzdnou sílu na obvodu pneumatiky; |
|
3.4.1.2. |
průběžně registrovat tlak vzduchu v brzdovém válci; |
|
3.4.1.3. |
měřit rychlost vozidla při zkoušce; |
|
3.4.1.4. |
měřit počáteční teplotu na vnějším povrchu brzdového bubnu nebo kotouče; |
|
3.4.1.5. |
měřit zdvih brzdového válce při použití zkoušek typu 0, typu I nebo typu III. |
3.5. Zkušební postupy
3.5.1. Doplňková zkouška brzdného účinku se studenými brzdami
Brzda se připraví podle bodu 4.4.2 přílohy 19 části 1 tohoto předpisu.
V případě, kdy se ověřil faktor vnitřního převodu brzdy BF a prahový moment na vstupu brzdy podle bodu 4.4.3 přílohy 19 části 1 tohoto předpisu, je záběh v postupu doplňkové zkoušky brzdného účinku se studenými brzdami identický s ověřovacím postupem podle bodu 4.4.3 přílohy 19 části 1.
Je přípustné vykonat zkoušky brzdného účinku se studenými brzdami po ověření faktoru vnitřního převodu brzdy BF podle bodu 4 přílohy 19 části 1 tohoto předpisu.
Je také přípustné provést dvě zkoušky slábnutí brzdného účinku, typu I a typu III, jednu po druhé.
Některá zabrzdění podle přílohy 19 části 1 bodu 4.4.2.6 je možno vykonat mezi oběma zkouškami slábnutí brzdného účinku a mezi ověřovacími zkouškami a zkouškami brzdného účinku se studenými brzdami. Počet zabrzdění deklaruje výrobce brzd.
3.5.1.1. Tato zkouška se provede z počáteční rychlosti 40 km/h u zkoušky typu I a 60 km/h u zkoušky typu III, aby se vyhodnotil brzdný účinek se zahřátými brzdami na konci zkoušek typu I a typu III. Zkoušku slábnutí brzdného účinku typu I a/nebo typu III je nutno provést bezprostředně po této zkoušce brzdného účinku se studenými brzdami.
3.5.1.2. Zabrzdí se třikrát s týmž tlakem (p) a z počáteční rychlosti 40 km/h (u zkoušky typu I) nebo z počáteční rychlosti 60 km/h (u zkoušky typu III), s přibližně stejnou počáteční teplotou brzdy, nepřesahující 100 °C, měřenou na vnějším povrchu brzdového bubnu nebo kotouče. Zabrzdění se provedou při tlaku v brzdovém válci, který je potřebný pro vyvinutí brzdného momentu nebo brzdné síly odpovídající poměrnému zpomalení (z) nejméně 50 %. Tlak v brzdovém válci nesmí přesáhnout 650 kPa a moment na vstupu do brzdy (C) nesmí přesáhnout maximální přípustný vstupní brzdný moment (Cmax). Za hodnotu brzdného účinku se studenou brzdou se považuje střední hodnota z výsledků těchto tří měření.
3.5.2. Zkouška slábnutí brzdného účinku (zkouška typu I)
3.5.2.1. Zkouší se při rychlosti 40 km/h a s počáteční teplotou brzdy nepřesahující 100 °C měřenou na vnějším povrchu brzdového bubnu nebo kotouče.
3.5.2.2. Udržuje se poměrné zpomalení 7 %, přičemž se bere v úvahu valivý odpor (viz bod 3.2.4 tohoto dodatku).
3.5.2.3. Zkouška se provádí po dobu 2 minut a 33 sekund nebo projetím 1,7 km při rychlosti vozidla 40 km/h. Pokud zkušební rychlosti nelze dosáhnout v tomto časovém úseku, lze prodloužit trvání zkoušky podle bodu 1.5.2.2 přílohy 4 tohoto předpisu.
3.5.2.4. Nejpozději 60 sekund po ukončení zkoušky typu I se provede zkouška brzdného účinku se zahřátými brzdami podle bodu 1.5.3 přílohy 4 tohoto předpisu z počáteční rychlosti 40 km/h. Použije se tentýž tlak v brzdovém válci jako při zkoušce typu 0.
3.5.3. Zkouška slábnutí brzdného účinku (zkouška typu III)
3.5.3.1. Metody zkoušky s opakovaným brzděním
|
3.5.3.1.1. |
Zkoušky na zkušební dráze (viz příloha 4 bod 1.7) |
|
3.5.3.1.2. |
Zkouška na setrvačníkovém dynamometru Zkoušku na setrvačníkovém dynamometru, jako podle přílohy 11 dodatku 2 bodu 3.2, lze vykonat za stejných podmínek jako pro jízdní zkoušku podle bodu 1.7.1 přílohy 4 tohoto předpisu, přičemž: 
|
|
3.5.3.1.3. |
Zkouška na válcovém dynamometru Zkouška na dynamometru, jako podle přílohy 11 dodatku 2 bodu 3.3, se vykoná za těchto podmínek:
|
3.5.3.2. Nejpozději 60 sekund po ukončení zkoušky typu III se provede zkouška brzdného účinku se zahřátými brzdami podle bodu 1.7.2 přílohy 4 tohoto předpisu. Použije se tentýž tlak v brzdovém válci jako při zkoušce typu 0.
3.6. Požadavky na vlastnosti zařízení pro automatické seřizování brzd
3.6.1. Následující požadavky se použijí na zařízení pro automatické seřizování brzd, které je namontováno na brzdě, jejíž brzdný účinek se ověřuje podle ustanovení tohoto dodatku.
Po provedení zkoušek popsaných v bodech 3.5.2.4 (zkouška typu I) nebo 3.5.3.2 (zkouška typu III) se ověří, zda jsou splněny požadavky bodu 3.6.3.
3.6.2. Následující požadavky se použijí na alternativní zařízení pro automatické seřizování brzd namontované na brzdě, pro kterou již existuje zkušební protokol podle dodatku 3.
3.6.2.1. Brzdný účinek
Po zahřátí brzdy (brzd) provedeném podle postupu stanoveného v bodech 3.5.2 (zkouška typu I) nebo 3.5.3 (zkouška typu III) se použije jedno z následujících ustanovení:
|
a) |
účinek systému provozního brzdění se zahřátými brzdami musí být ≥ 80 % účinku předepsaného pro zkoušku typu 0; nebo |
|
b) |
brzda se musí uvést do činnosti s tlakem v brzdovém válci, který byl použit při zkoušce typu 0; při tomto tlaku se změří celkový zdvih brzdového válce (sA), který musí mít hodnotu ≤ 0,9 efektivního zdvihu sp brzdového válce. |
sp = efektivní zdvih, kterým se rozumí zdvih, při kterém má výstupní tlaková síla hodnotu 90 % střední tlakové síly ThA – viz bod 2 dodatku 2 k příloze 11 tohoto předpisu.
3.6.2.2. Po provedení zkoušek popsaných v bodě 3.6.2.1 se ověří, zda jsou splněny požadavky bodu 3.6.3.
3.6.3. Zkouška volného otáčení kol
Po provedení zkoušek popsaných v bodech 3.6.1 nebo 3.6.2, v závislosti na případu, se brzda (brzdy) nechají ochladit na teplotu představující teplotu studené brzdy (tj. ≤ 100 °C) a ověří se, že přípojné vozidlo / kolo (kola) je (jsou) schopno/a volného pohybu, jestliže je splněna jedna z následujících podmínek:
|
a) |
kola se otáčejí volně (tj. je možné jimi otáčet rukou); |
|
b) |
jestliže vozidlo jede konstantní rychlostí v = 60 km/h s uvolněnou brzdou (brzdami) a asymptotické teploty nepřesáhnou nárůst teploty bubnů/kotoučů o 80 °C, pokládá se zbytkový brzdný moment za přijatelný. |
3.7. Identifikace
3.7.1. Na nápravě musí být na viditelném místě, čitelně a nesmazatelně vyznačeny alespoň následující identifikační údaje, seskupené v jakémkoli pořadí:
|
a) |
výrobce nápravy a/nebo značka; |
|
b) |
identifikátor nápravy (viz bod 3.7.2.1 tohoto dodatku); |
|
c) |
identifikátor brzdy (viz bod 3.7.2.2 tohoto dodatku); |
|
d) |
identifikátor Fe (viz bod 3.7.2.3 tohoto dodatku); |
|
e) |
základní část čísla zkušebního protokolu (viz bod 3.9 tohoto dodatku). |
Například:
|
|
Výrobce nápravy a/nebo značka ABC |
|
|
ID1-XXXXXX |
|
|
ID2-YYYYYY |
|
|
ID3-11200 |
|
|
ID4-ZZZZZZZ |
3.7.1.1. Na neintegrovaném zařízení pro automatické seřizování brzd musí být čitelně a nesmazatelně vyznačeny seskupené alespoň následující identifikační údaje:
|
a) |
výrobce a/nebo značka; |
|
b) |
typ; |
|
c) |
verze. |
3.7.1.2. Když je na čelisti/destičce namontováno obložení, musí údaj o značce a typu každého brzdového obložení zůstat viditelný, čitelný a nesmazatelný.
3.7.2. Identifikátory
3.7.2.1. Identifikátor nápravy
Identifikátor nápravy udává kategorii nápravy vyjádřením její dosažitelné brzdné síly/momentu podle prohlášení výrobce.
Identifikátorem nápravy je alfanumerický kód, který se skládá ze čtyř znaků „ID1-“, za nimiž následuje nejvýše 20 znaků.
3.7.2.2. Identifikátor brzdy
Identifikátorem brzdy je alfanumerický kód, který se skládá ze čtyř znaků „ID2-“, za nimiž následuje nejvýše 20 znaků.
Brzdami se stejným identifikátorem jsou brzdy, které se neliší z hlediska následujících kritérií:
|
a) |
druh brzdy (např. bubnová (s S klíčem, rozpěracím klínem atd.) nebo kotoučová (s pevným nebo plovoucím třmenem, s jednoduchým nebo dvojitým kotoučem atd.)); |
|
b) |
základní materiál (např. železný nebo neželezný), z něhož je zhotoven nosič třmenu, nosič brzdy, brzdový kotouč a brzdový buben; |
|
c) |
rozměry označené indexem „e“ podle obrázků 2A a 2B dodatku 5 této přílohy; |
|
d) |
základní způsob, kterým brzda generuje brzdnou sílu; |
|
e) |
u kotoučových brzd způsob uchycení třecího prstence: pevně nebo plovoucím způsobem; |
|
f) |
faktor vnitřního převodu brzdy BF; |
|
g) |
různé charakteristiky brzdy týkající se požadavků přílohy 11, na něž se nevztahuje bod 3.7.2.2.1. |
3.7.2.2.1. Rozdíly, které jsou přípustné v rámci téhož identifikátoru brzdy
Tentýž identifikátor brzdy může zahrnovat rozdílné vlastnosti brzdy z hlediska následujících kritérií:
|
a) |
zvětšení maximálního deklarovaného vstupního brzdného momentu Cmax; |
|
b) |
odchylka od deklarované hodnoty hmotnosti brzdového kotouče a brzdového bubnu mdec: ± 20 %; |
|
c) |
způsob připevnění obložení k brzdové čelisti/destičce; |
|
d) |
u kotoučových brzd zvětšení maximálního zdvihu v brzdě; |
|
e) |
účinná délka hřídele klíče; |
|
f) |
deklarovaná prahová hodnota momentu C0,dec; |
|
g) |
odchylka ± 5 mm od deklarovaného vnějšího průměru kotouče; |
|
h) |
druh chlazení kotouče (větraný, nevětraný); |
|
i) |
náboj kola (integrovaný nebo neintegrovaný); |
|
j) |
kotouč s integrovaným bubnem – s funkcí parkovací brzdy nebo bez ní; |
|
k) |
geometrický vztah mezi třecími plochami kotouče a uchycením kotouče; |
|
l) |
typ brzdového obložení; |
|
m) |
rozdíly v materiálech (s výjimkou změn základního materiálu, viz bod 3.7.2.2), u nichž výrobce potvrzuje, že tyto rozdíly nemění vlastnosti z hlediska požadovaných zkoušek; |
|
n) |
štít brzdy a čelisti. |
3.7.2.3. Identifikátor Fe
Identifikátor Fe udává zatížení zkoušené nápravy. Je to alfanumerický kód, který se skládá ze čtyř znaků „ID3-“, za nimiž následuje hodnota Fe v daN, avšak bez znaků vyjadřujících jednotku „daN“.
3.7.2.4. Identifikátor zkušebního protokolu
Identifikátorem zkušebního protokolu je alfanumerický kód, který se skládá ze čtyř znaků „ID4-“, za nimiž následuje základní část čísla zkušebního protokolu.
3.7.3. Zařízení pro automatické seřizování brzd (integrované nebo neintegrované)
3.7.3.1. Typy zařízení pro automatické seřizování brzd
Tentýž typ zařízení pro automatické seřizování brzd se nesmí lišit z hlediska následujících kritérií:
|
a) |
těleso: základní materiál (např. železný nebo neželezný, litina nebo kovaná ocel); |
|
b) |
maximální přípustný moment na hřídeli brzdy; |
|
c) |
pracovní princip seřizování, např. závisející na zdvihu (posuvu), závisející na síle nebo elektronický/mechanický. |
3.7.3.2. Verze zařízení pro automatické seřizování brzd z hlediska vlastností při seřizování
Zařízení pro automatické seřizování brzd v rámci jednoho typu, která vytvářejí rozdílnou velikost provozní vůle v brzdě, se pokládají za rozdílné verze.
3.8. Kritéria zkoušky
Zkouška musí prokázat splnění všech požadavků stanovených v dodatku 2 této přílohy.
V případě, že se požaduje pro nápravu/brzdu upravenou v mezích stanovených v bodě 3.7.2.2.1 nový zkušební protokol, nebo rozšíření zkušebního protokolu, použijí se k určení nutnosti dalších zkoušek následující kritéria, přičemž se bere v úvahu případ nejnepříznivější konfigurace podle dohody s technickou zkušebnou.
|
Níže uvedené zkratky jsou použity v následující tabulce: |
|||||||||
|
ÚZ (úplná zkouška) |
Zkouška podle přílohy 11 dodatku 2:
Zkouška podle přílohy 19:
|
||||||||
|
ZS (zkouška slábnutí brzdného účinku) |
Zkouška podle přílohy 11 dodatku 2:
|
||||||||
|
Rozdíly podle bodu 3.7.2.2.1 |
Kritéria zkoušky |
||||||
|
Změna je přípustná bez doplňkové zkoušky |
||||||
|
ÚZ: Zkouší se nejlehčí varianta. Jestliže se jmenovitá zkušební hmotnost nové varianty liší o méně než 5 % od dříve zkoušené varianty s větší jmenovitou hodnotou, pak se od zkoušky lehčí verze může upustit. Skutečná hmotnost při zkoušce zkušebního vzorku se může od jmenovité zkušební hmotnosti lišit o ± 5 %. |
||||||
|
Nejnepříznivější případ specifikovaný výrobcem a odsouhlasený technickou zkušebnou. |
||||||
|
Změna je přípustná bez doplňkové zkoušky |
||||||
|
Za nejnepříznivější případ se pokládá nejmenší torzní tuhost hřídele, která se ověří jedním z těchto způsobů:
|
||||||
|
Musí se ověřit, že brzdný účinek zůstane v mezích znázorněných na grafu 2 v příloze 19 části 1. |
||||||
|
Za nejnepříznivější případ se pokládá nejmenší průměr. Skutečný vnější průměr zkušebního vzorku se smí lišit od jmenovitého vnějšího průměru specifikovaného výrobcem nápravy o ± 1 mm. |
||||||
|
Zkouší se každý druh. |
||||||
|
Zkouší se každý druh. |
||||||
|
Pro tuto vlastnost se zkouška nepožaduje. |
||||||
|
Pro tuto vlastnost se zkouška nepožaduje. |
||||||
|
Zkouška se požaduje pro všechny typy obložení. |
||||||
|
Pro tuto vlastnost se zkouška nepožaduje. |
||||||
|
Podmínky, při nichž nastane nejnepříznivější případ (2):
|
3.8.1. Jestliže se zařízení pro automatické seřizování brzd liší od zkoušeného zařízení z hlediska bodů 3.7.3.1 a 3.7.3.2, je nutné provést doplňující zkoušku podle bodu 3.6.2 tohoto dodatku.
3.9. Zkušební protokol
3.9.1. Číslo zkušebního protokolu
Číslo zkušebního protokolu se skládá ze dvou částí: ze základní části a z připojené části, která identifikuje úroveň předmětu zkušebního protokolu.
Základní část, která má nejvýše 20 znaků, musí být zřetelně oddělena od připojené části, např. tečkou nebo lomítkem.
Základní část čísla zkušebního protokolu se týká jen brzd se stejným identifikátorem brzdy a se stejným faktorem vnitřního převodu brzy (podle bodu 4 přílohy 19 části 1 tohoto předpisu).
3.9.2. Kód zkoušky
Kromě čísla zkušebního protokolu udává „kód zkoušky“, který má nejvýše osm znaků (např. ABC123), výsledky zkoušky použitelné pro identifikátory a zkušební vzorek, jak jsou podrobně popsány v bodě 3.7.
3.9.3. Výsledky zkoušek
3.9.3.1. Výsledky zkoušek provedených podle bodů 3.5 a 3.6.1 tohoto dodatku musí být uvedeny ve formuláři, jehož vzor je uveden v dodatku 3 k této příloze.
3.9.3.2. V případě brzdy, na které je namontováno alternativní zařízení pro automatické seřizování brzd, se výsledky zkoušek provedených podle bodu 3.6.2 tohoto dodatku uvedou ve formuláři, jehož vzor je uveden v dodatku 4 k této příloze.
3.9.4. Informační dokument
Součástí zkušebního protokolu musí být informační dokument dodaný výrobcem nápravy nebo vozidla, který obsahuje alespoň informace uvedené v dodatku 5 k této příloze.
Informační dokument musí v příslušných případech identifikovat různé varianty vybavení brzdy/nápravy z hlediska hlavních kritérií uvedených v bodě 3.7.2.2.1.
4. OVĚŘENÍ
4.1. Ověření konstrukčních částí
Specifikace brzd vozidla, pro jehož typ se žádá schválení, musí splňovat požadavky stanovené v bodech 3.7 a 3.8.
4.2. Ověření energie pohlcené brzdami
4.2.1. Brzdné síly (T) pro každou dotčenou brzdu (pro tentýž tlak pm v ovládacím vedení) potřebné k vyvození předepsaného účinku při zkouškách typu I a typu III nesmějí přesáhnout hodnoty Te uvedené v příloze 11 dodatku 3 bodech 2.3.1 a 2.3.2, které byly vzaty jako základ pro zkoušku referenční brzdy.
4.3. Ověření brzdného účinku se zahřátými brzdami
4.3.1. Brzdná síla (T) pro každou dotčenou brzdu se při daném tlaku (p) v brzdových válcích a při tlaku v ovládacím vedení (pm) použitých při zkoušce typu 0 dotčeného přípojného vozidla určí následovně:
|
4.3.1.1. |
Vypočtený zdvih (s) brzdového válce dotčené brzdy se vypočte takto: 
Tato hodnota nesmí překročit hodnotu sp. Hodnota sp přitom byla ověřena a zaznamenána do protokolu podle postupu stanoveného v bodě 2 přílohy 19 části 1 tohoto předpisu a může být použita pouze v rozsahu tlaků uvedeném v bodě 3.3.1 zkušebního protokolu podle definice v dodatku 1 k příloze 19. |
|
4.3.1.2. |
Změří se střední hodnota tlakové síly (ThA) na pístnici brzdového válce působícího na dotčenou brzdu při tlaku podle bodu 4.3.1. |
|
4.3.1.3. |
Vstupní brzdný moment (C) se vypočte takto: C = ThA · l C nesmí přesáhnout Cmax |
|
4.3.1.4. |
Vypočtený brzdný účinek pro dotčenou brzdu je dán vzorcem: 
R nesmí být menší než 0,8 Re. |
4.3.2. Vypočtený brzdný účinek pro dotčené přípojné vozidlo je dán vzorcem:

4.3.3. Brzdné účinky se zahřátými brzdami po zkouškách typu I nebo typu III se určí podle bodů 4.3.1.1 až 4.3.1.4. Hodnoty vypočtené podle bodu 4.3.2 musí splňovat požadavky tohoto předpisu pro dotčené přípojné vozidlo. Hodnota dosazená za:
„hodnotu zjištěnou ve zkoušce typu 0, jak je stanoveno v příloze 4 bodě 1.5.3 nebo 1.7.2“
musí být hodnotou zjištěnou při zkoušce typu 0 dotčeného přípojného vozidla.
(1) V příslušném případě.
(2) Zkouška se nepožaduje, jestliže výrobce může prokázat, že změna neovlivňuje tuhost.
Dodatek 3
Vzor formuláře zkušebního protokolu stanoveného v bodě 3.9 dodatku 2 k této příloze
|
Zkušební protokol |
č. … |
|
Základní část: |
ID4- … |
|
Připojená část: |
… |
1. Obecné informace …
1.1. Výrobce nápravy (název a adresa): …
1.1.1. Značka výrobce nápravy: …
1.2. Výrobce brzdy (název a adresa): …
1.2.1. Identifikátor brzdy ID2-: …
1.2.2. Zařízení pro automatické seřizování brzd: integrované/neintegrované (1)
1.3. Informační dokument výrobce: …
2. Údaje zaznamenané při zkoušce
U každé zkoušky musí být zaznamenány tyto údaje:
2.1. Kód zkoušky (viz bod 3.9.2 dodatku 2 k této příloze): …
2.2. Zkušební vzorek: (upřesněte identifikaci zkoušené varianty ve vztahu k informačnímu dokumentu výrobce. Viz též bod 3.9.2 dodatku 2 k této příloze)
2.2.1. Náprava
2.2.1.1. Identifikátor nápravy: ID1- …
2.2.1.2. Identifikace zkoušené nápravy: …
2.2.1.3. Zatížení zkoušené nápravy (identifikátor Fe): ID3- …daN
2.2.2. Brzda
2.2.2.1. Identifikátor brzdy: ID2- …
2.2.2.2. Identifikace zkoušené brzdy: …
2.2.2.3. Maximální zdvih v brzdě (2): …
2.2.2.4. Účinná délka hřídele klíče (3): …
2.2.2.5. Rozdíly v materiálech podle bodu 3.8 písm. m) dodatku 2 k této příloze: …
2.2.2.6. Brzdový buben/kotouč (1)
2.2.2.6.1. Skutečná hmotnost kotouče/bubnu při zkoušce (1): …
2.2.2.6.2. Jmenovitý vnější průměr kotouče (4): …
2.2.2.6.3. Druh chlazení kotouče: větraný/nevětraný (5)
2.2.2.6.4. Integrovaný nebo neintegrovaný náboj kola (5)
2.2.2.6.5. Kotouč s integrovaným bubnem – s funkcí parkovací brzdy nebo bez ní (4) (5)
2.2.2.6.6. Geometrický vztah mezi třecími plochami kotouče a uchycením kotouče: …
2.2.2.6.7. Základní materiál: …
2.2.2.7. Brzdové obložení (5)
2.2.2.7.1. Výrobce: …
2.2.2.7.2. Značka: …
2.2.2.7.3. Typ: …
2.2.2.7.4. Způsob připevnění obložení k brzdové čelisti/destičce (5): …
2.2.2.7.5. Tloušťka destičky, hmotnost čelistí nebo další popisné informace (informační dokument výrobce) (5): …
2.2.2.7.6. Základní materiál brzdové čelisti/destičky (5): …
2.2.3. Zařízení pro automatické seřizování brzd (tato položka se nepoužije v případě zařízení pro automatické seřizování brzd, které je integrováno do brzdy) (5)
2.2.3.1. Výrobce (název a adresa): …
2.2.3.2. Značka: …
2.2.3.3. Typ: …
2.2.3.4. Verze: …
2.2.4. Kolo (kola) (rozměry viz obrázky 1A a 1B v dodatku 5 k této příloze)
2.2.4.1. Referenční poloměr valení pneumatiky (Re) při zatížení zkoušené nápravy (Fe): …
2.2.4.2. Údaje o kole namontovaném pro zkoušku: …
|
Rozměr pneumatiky |
Rozměr ráfku |
Xe (mm) |
De (mm) |
Ee (mm) |
Ge (mm) |
|
|
|
|
|
|
|
2.2.5. Délka páky (le): …
2.2.6. Brzdový válec
2.2.6.1. Výrobce: …
2.2.6.2. Značka: …
2.2.6.3. Typ: …
2.2.6.4. Identifikační číslo (zkoušky): …
2.3. Výsledky zkoušek (korigované vzhledem k valivému odporu 0,01 · Fe)
2.3.1. U vozidel kategorií O2 a O3, pokud přípojné vozidlo kategorie O3 bylo podrobeno zkoušce typu I:
|
Typ zkoušky: |
0 |
I |
|
|
Příloha 11 dodatek 2 bod: |
3.5.1.2 |
3.5.2.2./3 |
3.5.2.4 |
|
Zkušební rychlost …km/h |
40 |
40 |
40 |
|
Tlak v brzdovém válci pe …kPa |
|
— |
|
|
Doba brzdění …min |
— |
2,55 |
— |
|
Vyvinutá brzdná síla Te …daN |
|
|
|
|
Brzdný účinek Te/Fe …- |
|
|
|
|
Zdvih brzdového válce se …mm |
|
— |
|
|
Vstupní brzdný moment Ce …Nm |
|
— |
|
|
Prahová hodnota vstupního brzdného momentu C0, e …Nm |
|
|
|
2.3.2. U vozidel kategorií O3 a O4, pokud přípojné vozidlo kategorie O3 bylo podrobeno zkoušce typu III:
|
Typ zkoušky: |
0 |
III |
|
|
Příloha 11 dodatek 2 bod: |
3.5.1.2 |
3.5.3.1 |
3.5.3.2 |
|
Zkušební rychlost počáteční …km/h |
60 |
|
60 |
|
Zkušební rychlost konečná …km/h |
|
|
|
|
Tlak v brzdovém válci pe …kPa |
|
— |
|
|
Počet brzdění …- |
— |
20 |
— |
|
Trvání brzdného cyklu …s |
— |
60 |
— |
|
Vyvinutá brzdná síla Te …daN |
|
|
|
|
Brzdný účinek Te/Fe …- |
|
|
|
|
Zdvih brzdového válce se …mm |
|
— |
|
|
Vstupní brzdný moment Ce …Nm |
|
— |
|
|
Prahový vstupní brzdný moment C0,e …Nm |
|
— |
|
2.3.3. Tato položka se vyplní pouze tehdy, pokud se s brzdou provedl postup zkoušky podle bodu 4 přílohy 19 části 1 tohoto předpisu, aby se ověřily vlastnosti brzdného účinku se studenými brzdami prostřednictvím faktoru vnitřního převodu brzdy (BF).
2.3.3.1. Faktor vnitřního převodu brzdy BF;
2.3.3.2. Deklarovaná prahová hodnota momentu C0,dec …Nm
2.3.4. Vlastnosti zařízení pro automatické seřizování brzd (v příslušných případech)
2.3.4.1. Volné otáčení kola podle bodu 3.6.3 dodatku 2 k příloze 11: ano/ne (6)
3. Rozsah použití
Rozsah použití specifikuje varianty nápravy/brzdy, na které se vztahuje tento zkušební protokol tím, že udává, které variabilní hodnoty jsou pokryty jednotlivými kódy zkoušek.
4. Tato zkouška byla provedena a výsledky byly uvedeny ve zkušebním protokolu podle dodatku 2 k příloze 11 a v příslušných případech podle bodu 4 přílohy 19 části 1 předpisu č. 13 naposledy změněného sérií změn …
Na konci zkoušky popsané v bodě 3.6 dodatku 2 k příloze 11 (7) bylo konstatováno, že požadavky bodu 5.2.2.8.1 předpisu č. 13 byly splněny / nebyly splněny (7).
Technická zkušebna (8), která provádí zkoušky.
Podpis: …Datum: …
5. Schvalovací orgán (8)
Podpis: …Datum: …
(1) Nehodící se škrtněte.
(2) Týká se jen kotoučových brzd.
(3) Týká se jen bubnových brzd.
(4) Týká se jen kotoučových brzd.
(5) Nehodící se škrtněte.
(6) Nehodící se škrtněte.
(7) Vyplní se jen tehdy, když je instalováno zařízení pro automatické seřizování brzd.
(8) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 4
Vzor formuláře zkušebního protokolu pro alternativní zařízení pro automatické seřizování brzd uvedené v bodě 3.7.3 dodatku 2 k této příloze
Zkušební protokol č.: …
1. Identifikace
1.1. Náprava:
Značka: …
Typ: …
Model: …
Zatížení zkoušené nápravy (identifikátor Fe): ID3- …daN
Číslo zkušebního protokolu podle přílohy 11 dodatku 3: …
1.2. Brzda:
Značka: …
Typ: …
Model: …
Brzdové obložení: …
Značka/typ: …
1.3. Brzdový válec:
Výrobce: …
Typ válce (pístový/membránový) (1) …
Model: …
Délka páky (l): …mm
1.4. Zařízení pro automatické seřizování brzd:
Výrobce (název a adresa): …
Značka: …
Typ: …
Verze: …
2. Výsledky zkoušek
2.1. Funkce zařízení pro automatické seřizování brzd
2.1.1. Brzdné účinky systémů provozního brzdění se zahřátými brzdami podle zkoušky stanovené v bodě 3.6.2.1 písm. a) dodatku 2 k příloze 11: …%
nebo
zdvih sA brzdového válce určený podle zkoušky stanovené v bodě 3.6.2.1 písm. b) dodatku 2 k příloze 11: …mm
2.1.2. Volné otáčení kola podle bodu 3.6.3 dodatku 2 k příloze 11: ano/ne (2)
3. Název technické zkušebny / schvalovacího orgánu (2), který provedl zkoušku:
4. Datum zkoušky:
5. Tato zkouška byla provedena a její výsledky byly zaznamenány v protokolu podle ustanovení přílohy 11 dodatku 2 bodu 3.6.2 předpisu č. 13 naposledy pozměněného sérií změn ….
6. Na konci zkoušky popsané v bodě 5 bylo konstatováno, že požadavky bodu 5.2.2.8.1 předpisu č. 13: byly splněny / nebyly splněny (2)
7. Technická zkušebna (3), která provádí zkoušky.
Podpis: …Datum: …
8. Schvalovací orgán (3)
Podpis: …Datum: …
(1) Nehodící se škrtněte.
(2) Nehodící se škrtněte.
(3) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 5
Informační dokument pro nápravy a brzdy přípojného vozidla s ohledem na alternativní postup typu I a III
1. Obecné informace
1.1. Název a adresa výrobce nápravy nebo vozidla: …
2. Údaje o nápravě
2.1. Výrobce (název a adresa): …
2.2. Typ/varianta: …
2.3. Identifikátor nápravy: ID1- …
2.4. Zatížení zkoušené nápravy (Fe): …daN
2.5. Údaje o kole a brzdě podle následujících obrázků 1A a 1B …
Obrázek 1A
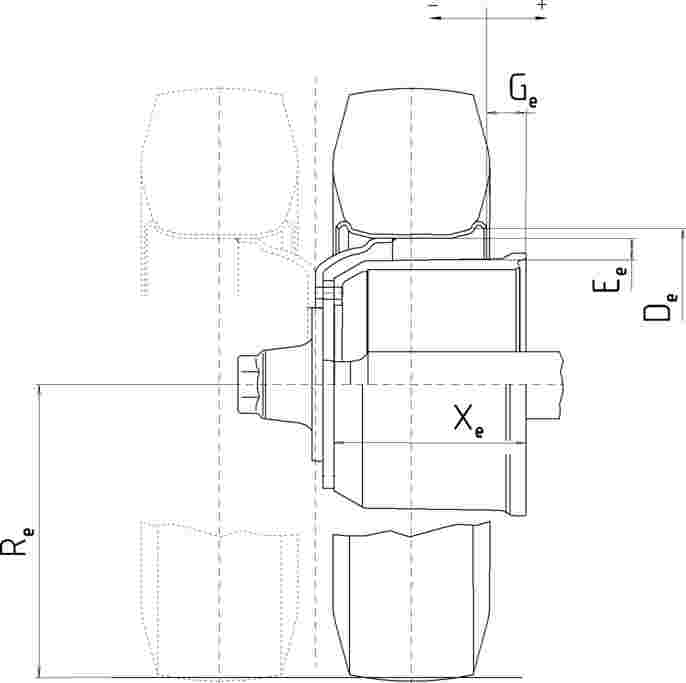
Obrázek 1B

3. Brzda
3.1. Obecné informace
3.1.1. Značka: …
3.1.2. Výrobce (název a adresa): …
3.1.3. Druh brzdy (např. bubnová/kotoučová): …
3.1.3.1. Varianta (např. s S klíčem, s jedním rozpěracím klínem atd.) …
3.1.4. Identifikátor brzdy: ID2- …
3.1.5. Údaje o brzdě podle následujících obrázků 2A a 2B: …
Obrázek 2A
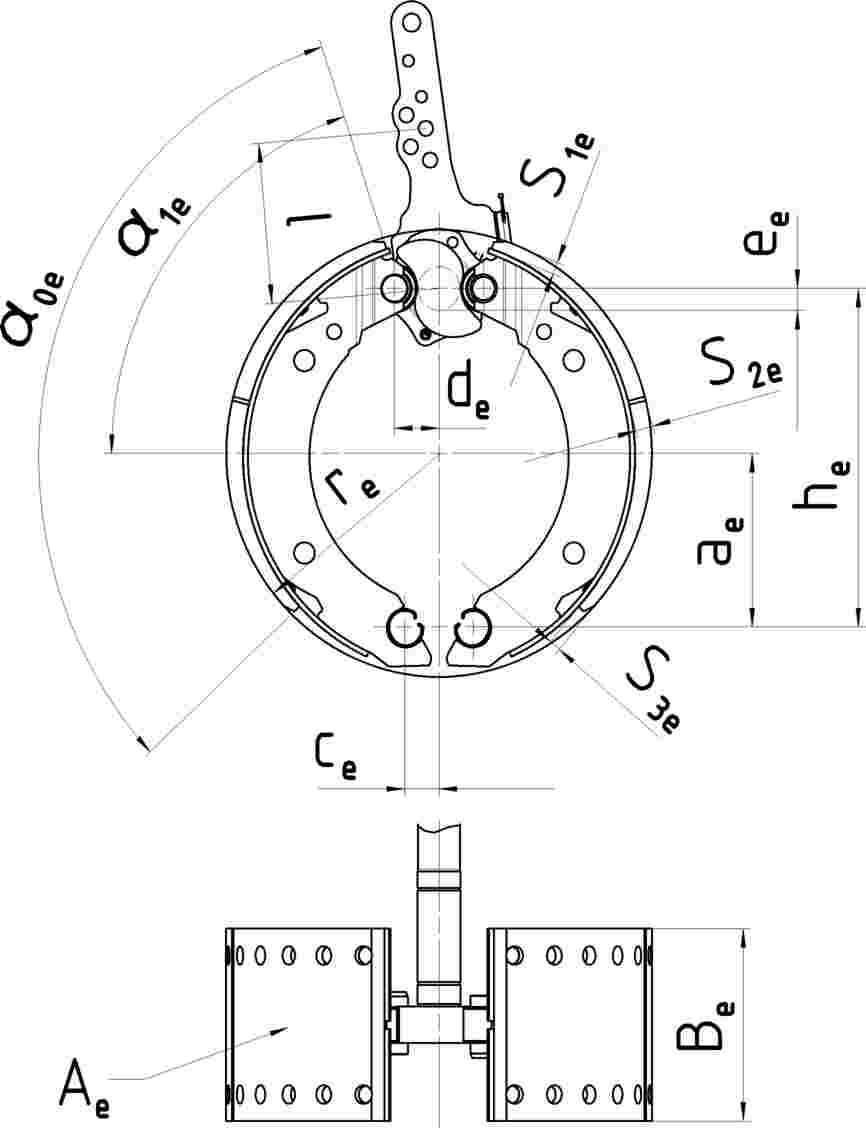
Obrázek 2B


|
xe (mm) |
ae (mm) |
he (mm) |
ce (mm) |
de (mm) |
ee (mm) |
α0e |
α1e |
be (mm) |
re (mm) |
Ae (cm2) |
S1e (mm) |
S2e (mm) |
S3e (mm) |
3.2. Údaje o bubnové brzdě
3.2.1. Zařízení pro seřizování brzd (externí/integrované): …
3.2.2. Deklarovaný maximální vstupní brzdný moment Cmax: …Nm
3.2.3. Mechanická účinnost: η = …
3.2.4. Deklarovaná prahová hodnota vstupního brzdného momentu C0,dec: …Nm
3.2.5. Účinná délka hřídele klíče: …mm
3.3. Brzdový buben
3.3.1. Maximální průměr třecí plochy (hranice opotřebení): …mm
3.3.2. Základní materiál: …
3.3.3. Deklarovaná hmotnost: …kg
3.3.4. Jmenovitá hmotnost: …kg
3.4. Brzdové obložení
3.4.1. Název a adresa výrobce: …
3.4.2. Značka: …
3.4.3. Typ: …
3.4.4. Identifikace (identifikace typu na obložení): …
3.4.5. Minimální tloušťka (hranice opotřebení): …mm
3.4.6. Způsob připevnění třecího materiálu k brzdové čelisti: …
3.4.6.1. Nejnepříznivější způsob připevnění (je-li způsobů více): …
3.5. Údaje o kotoučové brzdě
3.5.1. Druh připevnění k nápravě (axiální, radiální, integrované atd.): …
3.5.2. Zařízení pro seřizování brzd (externí/integrované): …
3.5.3. Maximální zdvih pístu: …mm
3.5.4. Deklarovaná maximální vstupní síla ThAmax: …daN
3.5.4.1. Cmax = ThAmax · le: …Nm
3.5.5. Třecí poloměr: re = …mm
3.5.6. Délka páky: le = …mm
3.5.7. Poměr vstup/výstup (le/ee): i = …
3.5.8. Mechanická účinnost: η = …
3.5.9. Deklarovaná prahová hodnota vstupní síly ThA0,dec: …N
3.5.9.1. C0,dec = ThA0,dec · le: …Nm
3.5.10. Minimální tloušťka rotoru (hranice opotřebení): …mm
3.6. Údaje o brzdovém kotouči: …
3.6.1. Popis druhu kotouče: …
3.6.2. Spojení s nábojem kola / montáž k náboji: …
3.6.3. Větrání (ano/ne): …
3.6.4. Deklarovaná hmotnost: …kg
3.6.5. Jmenovitá hmotnost: …kg
3.6.6. Deklarovaný vnější průměr: …mm
3.6.7. Minimální vnější průměr: …mm
3.6.8. Vnitřní průměr třecího prstence: …mm
3.6.9. Šířka větracího kanálu (připadá-li v úvahu): …mm
3.6.10. Základní materiál: …
3.7. Údaje o brzdové destičce: …
3.7.1. Název a adresa výrobce: …
3.7.2. Značka: …
3.7.3. Typ: …
3.7.4. Identifikace (identifikace typu na destičce s obložením): …
3.7.5. Minimální tloušťka (hranice opotřebení): …mm
3.7.6. Způsob připevnění třecího materiálu k destičce: …
3.7.6.1. Nejnepříznivější způsob připevnění (je-li způsobů více): …
PŘÍLOHA 12
PODMÍNKY, KTERÝMI SE ŘÍDÍ ZKOUŠKY VOZIDEL SE SETRVAČNÍKOVÝMI (NÁJEZDOVÝMI) BRZDOVÝMI SYSTÉMY
1. OBECNÁ USTANOVENÍ
1.1. Zařízení pro setrvačníkové (nájezdové) brzdění přípojného vozidla se skládá z ovládacího zařízení, z převodu a z brzdových ústrojí v kolech, která jsou dále nazývána „brzdami“.
1.2. Ovládací zařízení je soubor konstrukčních částí, které tvoří s hlavicí zařízení pro spojení vozidel jeden celek (spojková hlavice).
1.3. Převod je soubor konstrukčních částí, které jsou mezi poslední částí spojkové hlavice a první částí brzdy.
1.4. „Brzdou“ se rozumí ústrojí, v němž se vyvozují síly, které působí proti pohybu vozidla. První částí brzdy je buď páka působící na klíč brzdy nebo podobné konstrukční části (nájezdová brzdová zařízení s mechanickým převodem), nebo brzdový válec (nájezdová brzdová zařízení s hydraulickým převodem).
1.5. Brzdové systémy, ve kterých je vedena z tažného vozidla na přípojné vozidlo akumulovaná energie (např. elektrická, pneumatická nebo hydraulická), jež je řízena pouze tlakovou silou v zařízení pro spojení vozidel, nejsou zařízeními pro nájezdové brzdění ve smyslu tohoto předpisu.
1.6. Zkoušky
1.6.1. Určení podstatných konstrukčních částí brzdy
1.6.2. Určení podstatných konstrukčních částí ovládacího zařízení a ověření, že ovládací zařízení splňuje ustanovení tohoto předpisu.
1.6.3. Zkoušky na vozidle:
|
a) |
kompatibilita ovládacího zařízení s brzdou; a |
|
b) |
ověření převodu. |
2. SYMBOLY A DEFINICE
2.1. Použité jednotky
2.1.1. hmotnost: kg;
2.1.2. síla: N;
2.1.3. gravitační zrychlení: g = 9,81 m/s2
2.1.4. momenty: Nm;
2.1.5. pásma: cm2;
2.1.6. tlaky: kPa;
2.1.7. délky: jednotky, které jsou specifikovány v každém případě zvlášť.
2.2. Symboly platné pro všechny druhy brzd (viz obrázek 1 v dodatku 1 k této příloze):
2.2.1. GA : maximální technicky přípustná hmotnost přípojného vozidla udaná výrobcem;
2.2.2. G′A : maximální hmotnost přípojného vozidla, kterou je možno brzdit ovládacím zařízením, podle údaje výrobce;
2.2.3. GB : maximální hmotnost přípojného vozidla, kterou je možno brzdit společnou činností všech brzd přípojného vozidla
GB = n · GBo
2.2.4. GBo : část přípustné maximální hmotnosti přípojného vozidla, kterou je možné brzdit jednou brzdou, podle údaje výrobce;
2.2.5. B*: požadovaná brzdná síla;
2.2.6. B: požadovaná brzdná síla s přihlédnutím k valivému odporu;
2.2.7. D*: přípustná tlaková síla v zařízení pro spojení vozidel;
2.2.8. D: tlaková síla v zařízení pro spojení vozidel;
2.2.9. P′: síla na výstupu z ovládacího zařízení;
2.2.10. K: doplňková síla působící v ovládacím zařízení, konvenčně se použije její hodnota jako rovnající se síle D, dané průsečíkem extrapolované křivky závislosti P′ na D s osou úseček, měřeno při zařízení v poloze poloviny zdvihu (viz obrázky 2 a 3 v dodatku 1 k této příloze);
2.2.11. KA : práh citlivosti ovládacího zařízení, tj. maximální tlaková síla působící na spojkovou hlavici, jejímž působením během krátké doby nevznikne žádná síla na výstupu z ovládacího zařízení. Jako konvenční hodnota KA se použije síla, která se naměří na počátku zatlačování spojkové hlavice rychlostí od 10 mm/s do 15 mm/s, přičemž převod je odpojený od ovládacího zařízení;
2.2.12. D1 : maximální síla, která působí na spojkovou hlavici při jejím zatlačování rychlostí „s“ mm/s ± 10 %, převod je přitom odpojen;
2.2.13. D2 : maximální síla, která působí na spojkovou hlavici při jejím vytahování rychlostí „s“ mm/s ± 10 %, počínaje z polohy největšího zatlačení, převod je přitom odpojen;
2.2.14. ηHo : účinnost setrvačníkového ovládacího zařízení;
2.2.15. ηH1 : účinnost převodu;
2.2.16. ηH : celková účinnost ovládacího zařízení a převodu ηH = ηHo · ηH1;
2.2.17. s: zdvih ovládacího zařízení v mm;
2.2.18. s′: užitečný zdvih ovládacího zařízení v mm, určený způsobem uvedeným dále v bodě 9.4 této přílohy;
2.2.19. s″: zdvih hlavního brzdového válce naprázdno, měřený v mm na spojkové hlavici;
2.2.19.1. sHz : zdvih hlavního válce v mm podle obrázku 8 v dodatku 1 k této příloze;
2.2.19.2. s″Hz : zdvih hlavního válce naprázdno v mm, na pístnici, podle obrázku 8;
2.2.20. so : ztrátový zdvih, tj. zdvih spojkové hlavice v mm, když se touto hlavicí vykývne z polohy 300 mm nad horizontálou do polohy 300 mm pod horizontálou, při zablokovaném převodu;
2.2.21. 2sB : zdvih brzdových čelistí v mm, při uvedení brzdy do činnosti, změřený na průměru, který je rovnoběžný s rozvíracím zařízením, a to bez seřizování brzd v průběhu zkoušky;
2.2.22. 2sB*: nejmenší zdvih středu brzdových čelistí při uvedení brzdy do činnosti (v mm) u bubnových brzd
2r je průměr brzdového bubnu, vyjádřený v mm; (viz obrázek 4 v dodatku 1 k této příloze).
U kotoučových brzd s hydraulickým převodem
kde:
V60 = objem kapaliny spotřebovaný jednou brzdou v kole při tlaku odpovídajícím brzdné síle 1,2 B* = 0,6 · GBo a při maximálním poloměru pneumatiky
a
2rA = vnější průměr brzdového kotouče.
(V60 v cm3, FRZ v cm2 a rA v mm)
2.2.23. M*: brzdný moment specifikovaný výrobcem v bodě 5 dodatku 3. Tento brzdný moment musí vyvodit nejméně brzdnou sílu, která se rovná předepsané brzdné síle B*;
2.2.23.1. MT : zkušební brzdný moment v případě, kdy není namontováno žádné ochranné zařízení proti přetížení (podle bodu 6.2.1);
2.2.24. R: dynamický poloměr valení pneumatiky (m);
2.2.25. n: počet brzd.
2.2.26. Mr : maximální brzdný moment, který se vyvodí při maximálním přípustném zdvihu sr nebo při maximálním přípustném objemu kapaliny Vr, když se přípojné vozidlo pohybuje dozadu (včetně valivého odporu = 0,01 · g · GBo);
2.2.27. sr : maximální přípustný zdvih páky klíče brzdy, když se přípojné vozidlo pohybuje dozadu;
2.2.28. Vr : maximální přípustný objem kapaliny spotřebovaný jedním brzděným kolem, když se přípojné vozidlo pohybuje dozadu.
2.3. Symboly platné pro brzdové systémy s mechanickým převodem (viz obrázek 5 v dodatku 1 k této příloze);
2.3.1. iHo : převodový poměr mezi zdvihem spojkové hlavice a zdvihem páky na výstupu ovládacího zařízení;
2.3.2. iH1 : převodový poměr mezi zdvihem páky na výstupu ovládacího zařízení a zdvihem páky klíče brzdy (převodový poměr převodu);
2.3.3. iH : převodový poměr mezi zdvihem spojkové hlavice a zdvihem páky klíče brzd:
iH = iHo · iH1
2.3.4. ig : převodový poměr mezi zdvihem páky brzdového klíče a zdvihem středu brzdových čelistí (zdvih při uvedení do činnosti) (viz obrázek 4 v dodatku 1 k této příloze);
2.3.5. P: síla působící na páku klíče brzd (viz obrázek 4 v dodatku 1 k této příloze);
2.3.6. Po : vratná síla v brzdě, když se přípojné vozidlo pohybuje dopředu; tj. v grafickém znázornění průběhu M = f(P) hodnota síly P v průsečíku extrapolovaného průběhu této funkce s osou úseček (viz obrázek 6 v dodatku 1 k této příloze);
2.3.6.1. Por : vratný brzdný tlak, když se přípojné vozidlo pohybuje dozadu (viz obrázek 6 v dodatku 1 k této příloze);
2.3.7. P*: síla působící na páku klíče brzdy, která vyvodí brzdnou sílu B*;
2.3.8. PT : zkušební síla podle bodu 6.2.1;
2.3.9. ρ: součinitel vnitřního převodu brzdy, když se přípojné vozidlo pohybuje dopředu, definovaný vzorcem:
M = ρ (P – Po)
2.3.9.1. ρr : součinitel vnitřního převodu brzdy, když se přípojné vozidlo pohybuje dozadu, definovaný vzorcem:
Mr = ρr (Pr – Por)
2.3.10. scf : zdvih zadního kabelu nebo oje na kompenzátoru, když brzdy působí směrem vpřed (1)
2.3.11. scr : zdvih zadního kabelu nebo oje na kompenzátoru, když brzdy působí směrem vzad (1)
2.3.12. scd : diferenciální zdvih na kompenzátoru, když pouze jedna brzda působí směrem vpřed a druhá působí opačným směrem (1)
kde: scd = scr – scf (viz obrázek 5A v dodatku 1)
2.4. Symboly platné pro hydraulické brzdové systémy (viz obrázek 8 v dodatku 1 k této příloze)
2.4.1. ih : převodový poměr mezi zdvihem spojkové hlavice a zdvihem pístu hlavního válce;
2.4.2. i′g : převodový poměr mezi zdvihem bodu, ve kterém působí brzdové válce na čelisti, a zdvihem středu čelistí, při uvedení brzdy do činnosti;
2.4.3. FRZ : u bubnových brzd plocha pístu jednoho brzdového válce; u kotoučových brzd součet ploch pístů ve třmenu na jedné straně kotouče;
2.4.4. FHZ : plocha pístu hlavního válce;
2.4.5. p: hydraulický tlak v brzdovém válci;
2.4.6. po : tlak v brzdovém válci vyjadřující vratný brzdný tlak, když se přípojné vozidlo pohybuje dopředu; tj. v grafickém znázornění závislosti M = f(p) hodnota tlaku p v průsečíku extrapolovaného průběhu této funkce s osou úseček (viz obrázek 7 v dodatku 1 k této příloze);
2.4.6.1. por : tlak vyjadřující vratný brzdný tlak, když se přípojné vozidlo pohybuje dozadu (viz obrázek 7 v dodatku 1 k této příloze);
2.4.7. p*: hydraulický tlak v brzdovém válci, který vyvodí brzdnou sílu B*;
2.4.8. pT : zkušební tlak podle bodu 6.2.1;
2.4.9. ρ′: součinitel vnitřního převodu brzdy, když se přípojné vozidlo pohybuje dopředu, definovaný vzorcem:
M = ρ′ (p – po)
2.4.9.1. ρ′r: součinitel vnitřního převodu brzdy, když se přípojné vozidlo pohybuje dozadu, definovaný vzorcem:
Mr = ρ′r (pr – por)
2.5. Symboly platné pro požadavky na brzdění týkající se ochranného zařízení proti přetížení
2.5.1. Dop : síla na vstupu ovládacího zařízení, při které vstoupí do činnosti ochranné zařízení proti přetížení;
2.5.2. Mop : brzdný moment, při kterém vstoupí do činnosti zařízení proti přetížení (podle prohlášení výrobce);
2.5.3. MTop : minimální zkušební brzdný moment v případě, kdy je namontováno ochranné zařízení proti přetížení (podle bodu 6.2.2.2);
2.5.4. Pop_min: síla působící na brzdu, při které vstoupí do činnosti ochranné zařízení proti přetížení (podle bodu 6.2.2.1);
2.5.5. Pop_max: maximální síla (když je dřík spojkové hlavice zcela zatlačen do svého vedení), kterou působí ochranné zařízení proti přetížení na brzdu (podle bodu 6.2.2.3);
2.5.6. pop_min: tlak působící na brzdu, při kterém vstoupí do činnosti ochranné zařízení proti přetížení (podle bodu 6.2.2.1);
2.5.7. pop_max: maximální hydraulický tlak (když je dřík spojkové hlavice zcela zatlačen do svého vedení), kterým působí ochranné zařízení proti přetížení na brzdový válec (podle bodu 6.2.2.3);
2.5.8. PTop : minimální zkušební brzdná síla v případě, kdy je namontováno ochranné zařízení proti přetížení (podle bodu 6.2.2.2);
2.5.9. pTop : minimální zkušební tlak v případě, kdy je namontováno ochranné zařízení proti přetížení (podle bodu 6.2.2.2).
3. OBECNÉ POŽADAVKY
3.1. Přenos síly mezi spojkovou hlavicí a brzdami přípojného vozidla musí být zajištěn buď pákovým mechanismem, nebo jednou či několika kapalinami. Část převodu však může být provedena lanem v lanovodu (lanem bovdenového typu); tato část musí být co možno nejkratší. Ovládací tyče a kabely se nesmí dotýkat rámu přípojného vozidla nebo jiných ploch, které mohou ovlivnit uvedení brzdy v činnost nebo její uvolnění.
3.2. Všechny čepy kloubových spojů musí být náležitě chráněny. Tyto kloubové spoje musí být buď samomazné, nebo snadno přístupné pro mazání.
3.3. Zařízení pro nájezdové brzdění musí být uspořádáno tak, aby v případě, kdy je využit plný zdvih spojkové hlavice, nedošlo k zaklínění, trvalé deformací nebo lomu jakékoli části převodu. Při ověření, jak je plněn tento požadavek, se musí odpojit konec převodu od pák ovladače brzdy.
3.4. Nájezdový brzdový systém musí umožnit přípojnému vozidlu s tažným vozidlem couvat, aniž by toto zařízení vyvinulo odporující sílu přesahující 0,08 g.GA. Zařízení použitá k tomuto účelu musí pracovat automaticky a musí se vypnout automaticky, jakmile se přípojné vozidlo pohybuje dopředu.
3.5. Každé zvláštní zařízení, které je namontováno pro splnění požadavku bodu 3.4, musí být takové, aby nebyl nepříznivě ovlivněn účinek parkovacího brzdění, když je přípojné vozidlo na svahu.
3.6. Nájezdové brzdové systémy mohou obsahovat ochranné zařízení proti přetížení. Toto zařízení nesmí vstoupit do činnosti při síle menší než Dop = 1,2 · D* (když je namontováno v ovládacím zařízení) nebo při síle menší než Pop = 1,2 · P* nebo při tlaku menším než pop = 1,2 · p* (když je namontováno na brzdě v kole), přičemž síla P* nebo tlak p* odpovídají brzdné síle B* = 0,5 · g · GBo.
4. POŽADAVKY NA OVLÁDACÍ ZAŘÍZENÍ
4.1. Posuvné části ovládacího zařízení musí být dostatečně dlouhé, aby umožňovaly využití plného zdvihu, i když je připojeno přípojné vozidlo.
4.2. Posuvné části musí být chráněny měchem nebo jiným ekvivalentním zařízením. Musí být mazány nebo být provedeny ze samomazných materiálů. Třecí plochy musí být z takového materiálu, aby se nevytvářela elektrochemická dvojice, ani aby se nevytvářela nevhodná mechanická dvojice, při které by mohlo docházet k zaklínění nebo zadření kluzných částí.
4.3. Práh citlivosti (KA) ovládacího zařízení musí být nejméně 0,02 g · G′A a nejvýše 0,04 g · G′A.
4.4. Největší síla při zatlačování D1 nesmí překročit 0,10 g · G′A pro přípojná vozidla s nevýkyvnou ojí a 0,067 g · G′A pro vícenápravová přípojná vozidla s výkyvnou ojí.
4.5. Největší tažná síla D2 musí mít hodnotu nejméně 0,1 g · G′A a nejvýše 0,5 g · G′A.
5. ZKOUŠKY A MĚŘENÍ, KTERÉ SE PROVÁDĚJÍ NA OVLÁDACÍCH ZAŘÍZENÍCH
5.1. Ovládací zařízení předložená technické zkušebně provádějící zkoušky se musí ověřit z hlediska požadavků bodů 3 a 4 této přílohy.
5.2. U všech druhů brzd se měří:
|
5.2.1. |
zdvih s a užitečný zdvih s′; |
|
5.2.2. |
doplňková síla K; |
|
5.2.3. |
práh citlivosti KA; |
|
5.2.4. |
síla při zatlačování D1; |
|
5.2.5. |
tažná síla D2. |
5.3. U nájezdových brzdových systémů s mechanickým převodem se určí:
|
5.3.1. |
převodový poměr iHo ve střední poloze zdvihu ovládacího zařízení; |
|
5.3.2. |
síla P′ na výstupu ovládacího zařízení v závislosti na tlakové síle D působící na oj. Z křivky měřených hodnot vyjadřující tuto závislost se odvodí doplňková síla K a určí se účinnost (viz obrázek 2 v dodatku 1 k této příloze) |
5.4. U nájezdových brzdových systémů s hydraulickým převodem se určí:
|
5.4.1. |
převodový poměr ih ve střední poloze zdvihu ovládacího zařízení; |
|
5.4.2. |
tlak p na výstupu z hlavního válce v závislosti na tlakové síle D působící na oj a na ploše FHZ pístu hlavního válce, podle údaje výrobce. Z křivky měřených hodnot vyjadřující tuto závislost se odvodí doplňková síla K a určí se účinnost 
(viz obrázek 3 v dodatku 1 k této příloze); |
|
5.4.3. |
zdvih naprázdno s″ hlavního válce, jak je uvedeno v bodě 2.2.19 této přílohy; |
|
5.4.4. |
plocha FHZ pístu v hlavním válci; |
|
5.4.5. |
zdvih sHz hlavního válce (v mm); |
|
5.4.6. |
zdvih naprázdno s″Hz hlavního válce (v mm). |
5.5. V případě nájezdových brzdových systémů na vícenápravových přípojných vozidlech s výkyvnou ojí se změří ztrátový zdvih so, který je uveden v bodě 10.4.1 této přílohy.
6. POŽADAVKY NA BRZDY
6.1. Výrobce musí kromě brzd ke zkouškám předložit technické zkušebně výkresy brzd s uvedením typu, rozměrů a materiálu zásadních konstrukčních částí s údaji o značce a typu obložení. V případě hydraulických brzd musí tyto výkresy obsahovat údaje o ploše FRZ pístů brzdových válců. Výrobce musí rovněž udat brzdný moment M* a hmotnost GBo definovanou v bodě 2.2.4 této přílohy.
6.2. Zkušební podmínky
6.2.1. V případě, že do setrvačníkového (nájezdového) brzdového systému není namontováno žádné ochranné zařízení proti přetížení ani není tento systém určen k jeho namontování, zkouší se brzda v kole s následujícími zkušebními silami nebo tlaky:
PT = 1,8 P* nebo pT = 1,8 p* a MT = 1,8 M* v závislosti na případu.
6.2.2. V případě, že do setrvačníkového (nájezdového) brzdového systému je namontováno ochranné zařízení proti přetížení nebo je systém určen k jeho namontování, zkouší se brzda v kole s následujícími zkušebními silami nebo tlaky:
|
6.2.2.1. |
minimální konstrukční hodnoty pro ochranné zařízení proti přetížení specifikuje výrobce a tyto hodnoty nesmějí být menší než Pop = 1,2 P* nebo pop = 1,2 p* |
|
6.2.2.2. |
rozsahy minimální zkušební síly PTop nebo minimálního zkušebního tlaku pTop a minimálního zkušebního momentu MTop jsou:
|
|
6.2.2.3. |
Maximální hodnoty (Pop_max nebo pop_max) pro ochranné zařízení proti přetížení musí specifikovat výrobce a nesmějí být větší než PT nebo pT, v závislosti na případu. |
7. ZKOUŠKY A MĚŘENÍ, KTERÉ SE PROVÁDĚJÍ NA BRZDÁCH
7.1. Brzdy a konstrukční části předložené technické zkušebně se musí odzkoušet, aby se ověřilo, zda splňují požadavky bodu 6 této přílohy.
7.2. Určí se:
|
7.2.1. |
minimální zdvih brzdových čelistí, 2sB*; |
|
7.2.2. |
zdvih středu brzdových čelistí 2sB (jenž musí být větší než 2sB*). |
7.3. U mechanických brzdových systémů se určí:
|
7.3.1. |
převodový poměr ig (viz obrázek 4 v dodatku 1 k této příloze); |
|
7.3.2. |
síla P* pro brzdný moment M*; |
|
7.3.3. |
moment M* jako funkce síly P* působící na páku klíče v systémech s mechanickým převodem. Otáčky brzdných ploch musí odpovídat počáteční rychlosti vozidla 60 km/h, když se přípojné vozidlo pohybuje dopředu, a 6 km/h, když se přípojné vozidlo pohybuje dozadu. Z křivky získané z těchto měření se odvodí následující hodnoty (viz obrázek 6 v dodatku 1 k této příloze):
|
7.4. U hydraulických brzdových systémů se určí:
|
7.4.1. |
převodový poměr ig′ (viz obrázek 8 v dodatku 1 k této příloze); |
|
7.4.2. |
tlak p* pro brzdný moment M*; |
|
7.4.3. |
moment M* jako funkce tlaku p* působícího v brzdovém válci v systémech s hydraulickým převodem. Otáčky brzdných ploch musí odpovídat počáteční rychlosti vozidla 60 km/h, když se přípojné vozidlo pohybuje dopředu, a 6 km/h, když se přípojné vozidlo pohybuje dozadu. Z křivky získané z těchto měření se odvodí následující hodnoty (viz obrázek 7 v dodatku 1 k této příloze):
|
|
7.4.4. |
Plocha FRZ pístu v brzdovém válci. |
7.5. Alternativní postup zkoušky typu I
7.5.1. Zkouška typu I podle přílohy 4 bodu 1.5 se neprovede na vozidle předaném ke schvalovací zkoušce, jestliže se s konstrukčními částmi brzdového systému vykonají zkoušky na setrvačníkovém zkušebním stroji, aby se ověřilo plnění požadavků přílohy 4 bodů 1.5.2 a 1.5.3.
7.5.2. Alternativní postup pro zkoušku typu I se provede podle ustanovení přílohy 11 dodatku 2 bodu 3.5.2 (analogicky lze použít také pro kotoučové brzdy).
8. SIMULOVANÁ DIFERENCIÁLNÍ SÍLA SYSTÉMU PARKOVACÍHO BRZDĚNÍ NA SVAHU
8.1. Metoda výpočtu
8.1.1. Body otáčení v kompenzátoru musí ležet v přímce s parkovací brzdou v klidové poloze.

Může být použito alternativní uspořádání, pokud zajišťuje rovnocenné pnutí v obou zadních kabelech, i když existují rozdíly ve zdvihu zadních kabelů.
8.1.2. Musí být poskytnuty výkresy k doložení toho, že artikulace kompenzátoru je dostatečná k tomu, aby se zajistilo rovnocenné pnutí u každého ze zadních kabelů. Kompenzátor musí mít dostatečnou vzdálenost na šířku, aby se usnadnil zdvih diferenciálu zleva doprava. Čelisti třmenů musí být rovněž dostatečně hluboko ve vztahu ke své šířce, aby se zajistilo, že nezabrání artikulaci, když se kompenzátor nachází v šikmé poloze.
Diferenční zdvih na kompenzátoru (scd) se odvodí z:
scd ≥ 1,2 · (Scr – Sc′)
kde:
|
|
Sc′ = S′/iH (zdvih na kompenzátoru – působení směrem vpřed) a Sc′ = 2 · SB/ig |
|
|
Scr = Sr/iH (zdvih na kompenzátoru – působení směrem vzad) |
9. ZKUŠEBNÍ PROTOKOLY
K žádostem o schválení přípojných vozidel s nájezdovými brzdovými systémy se musí připojit protokoly o zkouškách ovládacího zařízení a o zkouškách brzd a zkušební protokol o kompatibilitě nájezdového ovládacího zařízení, převodu a brzd přípojného vozidla, přičemž tyto protokoly musí obsahovat nejméně údaje uvedené v dodatcích 2, 3 a 4 této přílohy.
10. KOMPATIBILITA MEZI OVLÁDACÍM ZAŘÍZENÍM A BRZDAMI VOZIDLA
10.1. Na vozidle se musí ověřit, se zohledněním charakteristik ovládacího zařízení (dodatek 2) a charakteristik brzd (dodatek 3) a dále charakteristik přípojného vozidla uvedených v bodě 4 dodatku 4 této přílohy, zda nájezdový brzdový systém na tomto přípojném vozidle splňuje předepsané požadavky.
10.2. Všeobecná ověření u všech typů brzd
10.2.1. Části převodu, které nebyly zkoušeny zároveň s ovládacím zařízením nebo brzdami, musí být ověřeny na vozidle. Výsledky tohoto ověření se uvedou v dodatku 4 (např. iH1 a ηH1).
10.2.2. Hmotnost
10.2.2.1. Maximální hmotnost GA přípojného vozidla nesmí přesahovat maximální hmotnost G′A, pro kterou je zkoušené ovládací zařízení schváleno.
10.2.2.2. Maximální hmotnost GA přípojného vozidla nesmí překročit maximální hmotnost GB, která může být brzděna společným působením všech brzd přípojného vozidla.
10.2.3. Síly
10.2.3.1. Práh citlivosti KA nesmí mít hodnotu nižší než 0,02 g · GA a vyšší než 0,04 g · GA.
10.2.3.2. Největší síla při zatlačování D1 nesmí překročit 0,10 g · GA pro přípojná vozidla s nevýkyvnou ojí a 0,067 g · GA pro vícenápravová přípojná vozidla s výkyvnou ojí.
10.2.3.3. Největší tažná síla D2 musí mít hodnotu nejméně 0,1 g · GA a nejvýše 0,5 g · GA.
10.3. Ověření brzdného účinku
10.3.1. Součet brzdných sil působících na obvodu kol přípojného vozidla musí být nejméně B* = 0,50 g · GA, v čemž je zahrnut valivý odpor o velikosti 0,01 g · GA: to odpovídá brzdné síle B = 0,49 g · GA. V tomto případě činí maximální přípustná tlaková síla ve spoji vozidel:
|
|
D* = 0,067 g · GA u vícenápravových přípojných vozidel s výkyvnou ojí; a |
|
|
D* = 0,10 g · GA u přípojných vozidel s nevýkyvnou ojí. |
Splnění těchto podmínek se ověří následujícími nerovnostmi:
|
10.3.1.1. |
U nájezdových brzdových systémů s mechanickým převodem: 
|
|
10.3.1.2. |
U nájezdových brzdových systémů s hydraulickým převodem: 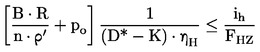
|
10.4. Ověření zdvihu ovládacího zařízení
10.4.1. U ovládacích zařízení vícenápravových přípojných vozidel s výkyvnou ojí, kde je pákoví brzdového zařízení ovlivňováno polohou oje, zdvih s ovládacího zařízení musí být delší než účinný (užitečný) zdvih s′ tohoto zařízení nejméně o ztrátový zdvih so. Ztrátový zdvih so nesmí překročit 10 % užitečného zdvihu s′.
10.4.2. Účinný (užitečný) zdvih s′ ovládacího zařízení se určí pro jednonápravová a vícenápravová přípojná vozidla takto:
|
10.4.2.1. |
je-li brzdové tyčové ústrojí ovlivňováno úhlovou polohou oje, pak: s′ = s – s0 |
|
10.4.2.2. |
nedochází-li k žádnému ztrátovému zdvihu, pak: s′ = s |
|
10.4.2.3. |
U hydraulických brzdových systémů: s′ = s – s |
10.4.3. Následujícími nerovnostmi se ověří, zda je zdvih ovládacího zařízení postačující:
10.4.3.1. U nájezdových brzdových systémů s mechanickým převodem:
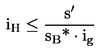
10.4.3.2. U nájezdových brzdových systémů s hydraulickým převodem:
10.5. Doplňková ověření
10.5.1. U nájezdových brzdových systémů s mechanickým převodem se ověří, zda pákoví, kterým se přenášejí síly z ovládacího zařízení do brzd, je správně namontováno.
10.5.2. U nájezdových brzdových systémů s hydraulickým převodem se ověří, zda zdvih hlavního válce není menší než s/ih. Menší hodnota není přípustná.
10.5.3. Celkové chování vozidla při brzdění se musí ověřit jízdní zkouškou, která se vykoná z různých rychlostí a s různými brzdnými silami a s různým počtem zabrzdění. Samobuzené netlumené kmitání se nepřipouští.
11. OBECNÉ POZNÁMKY
Výše uvedená ustanovení platí pro nejběžnější provedení nájezdových brzdových systémů s mechanickým nebo hydraulickým převodem, zejména u nichž jsou všechna kola přípojného vozidla opatřena týmž typem brzdy a týmž typem pneumatiky. K ověření méně obvyklých provedení se musí výše uvedená ustanovení přizpůsobit konkrétnímu případu.
(1) Body 2.3.10, 2.3.11 a 2.3.12 se použijí pouze na metodu výpočtu diferenciálního zdvihu parkovací brzdy.
Dodatek 1
Obrázek 1
Symboly platné pro všechny typy brzd
(viz bod 2.2 této přílohy)
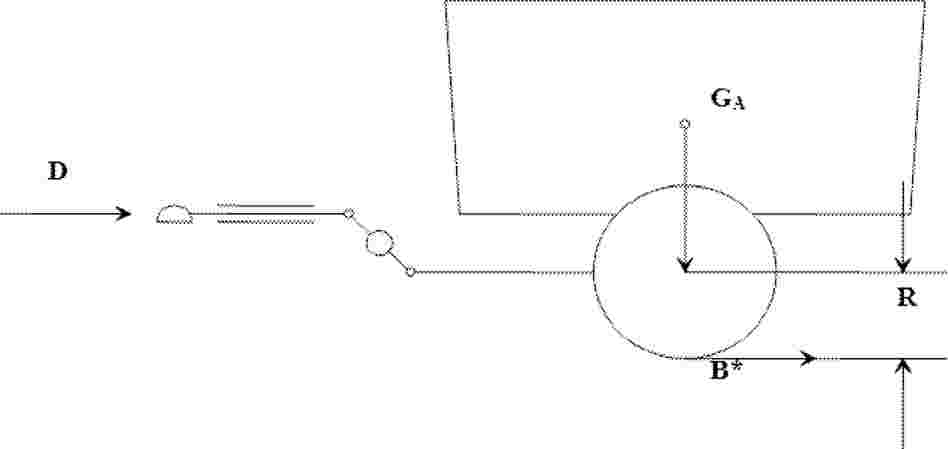
Obrázek 2
Mechanický převod
(viz body 2.2.10 a 5.3.2 této přílohy)
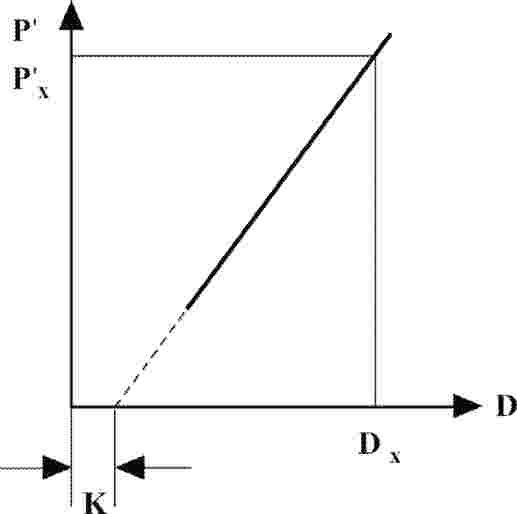
![]()
Obrázek 3
Hydraulický převod
(viz body 2.2.10 a 5.4.2 této přílohy)

Obrázek 4
Ověření brzd
(viz body 2.2.22 a 2.3.4 této přílohy)

Obrázek 5
Brzdový systém s mechanickým převodem
(viz bod 2.3 této přílohy)

Obrázek 5A
Brzdový systém s mechanickým převodem
(viz bod 2.3 této přílohy)

Obrázek 6
Mechanická brzda
(viz bod 2 této přílohy)

Obrázek 7
Hydraulická brzda
(viz bod 2 této přílohy)

Obrázek 8
Brzdový systém s hydraulickým převodem
(viz bod 2 této přílohy)

Dodatek 2
Protokol o zkouškách ovládacího zařízení nájezdové brzdy
1. Výrobce …
2. Tovární značka …
3. Typ: …
4. Údaje o přípojných vozidlech, pro něž výrobce určil ovládací zařízení:
|
4.1. |
Hmotnost G′A = …kg |
|
4.2. |
Přípustná statická svislá síla na hlavici pro spojení vozidel …N |
|
4.3. |
Přípojné vozidlo s nevýkyvnou ojí / vícenápravové přípojné vozidlo s výkyvnou ojí (1) |
5. Stručný popis
(seznam schémat a přiložených rozměrových výkresů)
6. Schéma principu ovládacího zařízení
7. Zdvih s = …mm
8. Převodový poměr ovládacího zařízení:
|
8.1. |
pro mechanický převod (1) iHo = od …do … (2) |
|
8.2. |
pro hydraulický převod (1) ih = od …do … (2) FHZ = …cm2 Zdvih hlavního válce sHz …mm Zdvih naprázdno hlavního válce s″Hz …mm |
9. Výsledky zkoušek: …
9.1. Brzdné účinky
pro mechanický převod (1) ηH = …
pro hydraulický převod (1) ηH = …
9.2. Doplňková síla K = …N
9.3. Maximální tlaková síla D1 = …N
9.4. Maximální tažná síla D2 = …N
9.5. Práh citlivosti KA = …N
9.6. Ztrátový zdvih a zdvih naprázdno: …
v případě, kdy poloha oje má vliv s0 (1) = …mm
při hydraulickém převodu s″ (1) = s″Hz · ih = …mm
9.7. Užitečný (účinný) zdvih ovládacího zařízení s′ = …mm
9.8. Ochranné zařízení proti přetížení podle bodu 3.6 této přílohy je/není k dispozici (3) …
9.8.1. Jestliže je ochranné zařízení proti přetížení namontováno před převodovou pákou ovládacího zařízení: …
9.8.1.1. Prahová síla ochranného zařízení proti přetížení Dop = …N
9.8.1.2. Jestliže je ochranné zařízení proti přetížení mechanické (3), je maximální síla, kterou může vyvinout nájezdové ovládací zařízení
P′max/iHo = Pop_max = …N
9.8.1.3. Jestliže je ochranné zařízení proti přetížení hydraulické (3), je tlak, který může vyvinout nájezdové ovládací zařízení
p′max/ih = pop_max = …N/cm2
9.8.2. Jestliže je ochranné zařízení proti přetížení namontováno za převodovou pákou ovládacího zařízení …
9.8.2.1. Prahová síla ochranného zařízení proti přetížení, jestliže je ochranné zařízení proti přetížení mechanické (3) …
Dop · iHo = …N
Jestliže je ochranné zařízení proti přetížení hydraulické (3)
Dop · ih = …N
9.8.2.2. Jestliže je ochranné zařízení proti přetížení mechanické (3), je maximální síla, kterou může nájezdové ovládací zařízení vyvinout
P′max = Pop_max = …N
9.8.2.3. Jestliže je ochranné zařízení proti přetížení hydraulické (3), je tlak, který může vyvinout nájezdové ovládací zařízení
p′max = pop_max = …N/cm2
10. Výše popsané ovládací zařízení splňuje/nesplňuje (3) požadavky bodů 3, 4 a 5 této přílohy.
Podpis: …Datum: …
11. Tato zkouška byla provedena a její výsledky byly zaznamenány v protokolu podle příslušných ustanovení přílohy 12 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (4), která provádí zkoušky.
Podpis: …Datum: …
12. Schvalovací orgán (4)
Podpis: …Datum: …
(1) Nehodící se škrtněte.
(2) Uveďte délky, jejichž poměr se použil k určení iHo nebo ih.
(3) Nehodící se škrtněte.
(4) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 3
Protokol o zkouškách brzdy
1. Výrobce …
2. Tovární značka …
3. Typ: …
4. Přípustná „maximální hmotnost“ připadající na kolo GBo = …kg
5. Brzdný moment M* (specifikovaný výrobcem podle bodu 2.2.23 této přílohy) = …Nm
6. Dynamický poloměr valení pneumatiky
Rmin = …m; Rmax = …m
7. Stručný popis
(seznam přiložených kótovaných výkresů a schémat)
8. Schéma principu brzdy
9. Výsledek zkoušky:
|
|
Mechanická brzda (1) |
|
Hydraulická brzda (1) |
|
9.1. |
Převodový poměr |
9.1.A. |
Převodový poměr |
|
ig = … (2) |
i′g = … (2) |
||
|
9.2. |
Zdvih pro rozevření čelistí |
9.2.A. |
Zdvih pro rozevření čelistí |
|
sB = …mm |
sB = …m |
||
|
9.3. |
Předepsaná hodnota zdvihu |
9.3.A. |
Předepsaná hodnota zdvihu |
|
(předepsaná hodnota pro rozevření čelistí) sB* = …mm |
(předepsaná hodnota pro rozevření čelistí) sB* = …mm |
||
|
9.4. |
Vratná síla |
9.4.A. |
Tlak vyjadřující vratnou sílu |
|
Po = …N |
po= …N/cm2 |
||
|
9.5. |
Součinitel vnitřního převodu brzdy |
9.5.A. |
Součinitel vnitřního převodu brzdy |
|
ρ = …m |
ρ′ = …m |
||
|
9.6 |
Ochranné zařízení proti přetížení podle bodu 3.6 této přílohy je/není k dispozici (1) |
9.6.A. |
Ochranné zařízení proti přetížení podle bodu 3.6 této přílohy je/není k dispozici (1) |
|
9.6.1. |
Brzdný moment uvádějící do činnosti ochranné zařízení proti přetížení |
9.6.1.A. |
Brzdný moment uvádějící do činnosti ochranné zařízení proti přetížení |
|
Mop = …Nm |
Mop = …Nm |
||
|
9.7. |
Síla pro M* |
9.7.A. |
Tlak pro M* |
|
P* = …N |
p* = …N/cm2 |
||
|
9.8. |
|
9.8.A. |
Plocha pístu brzdového válce FRZ = …cm2 |
|
9.9. |
|
9.9.A. |
Spotřeba objemu kapaliny (pro kotoučové brzdy) V60 = …cm3 |
9.10. Účinek provozního brzdění, když se přípojné vozidlo pohybuje dozadu (viz obrázky 6 a 7 v dodatku 1 k této příloze)
9.10.1. Maximální brzdný moment Mr podle obrázku 6 = …Nm
9.10.1.A. Maximální brzdný moment Mr podle obrázku 7 = …Nm
9.10.2. Maximální přípustný zdvih sr = …mm
9.10.2.A. Maximální přípustný objem spotřebované kapaliny Vr = …cm3
9.11. Další charakteristické údaje o brzdě, když se přípojné vozidlo pohybuje dozadu (viz obrázky 6 a 7 v dodatku 1 k této příloze)
9.11.1. Vratná síla v brzdě Por = …N
9.11.1.A. Tlak vyjadřující vratnou sílu v brzdě por = …N/cm2
9.11.2. Součinitel vnitřního převodu brzdy ρr = …m
9.11.2.A. Součinitel vnitřního převodu brzdy ρ′r = …m
9.12. Popřípadě zkoušky podle bodu 7.5 této přílohy (korigované valivým odporem odpovídajícím hodnotě 0,01 · g · GBo)
9.12.1. Zkouška brzd typu 0
Rychlost při zkoušce = …km/h
Poměrné zpomalení = …%
Ovládací síla = …N
9.12.2. Zkouška brzd typu I
Rychlost při zkoušce = …km/h
Udržované poměrné zpomalení = …%
Doba brzdění = …min
Brzdný účinek se zahřátými brzdami = …%
(vyjádřený jako % účinku zjištěného při zkoušce typu 0, který je uveden v bodě 9.12.1)
Ovládací síla = …N
10. Výše popsaná brzda splňuje/nesplňuje (3) požadavky bodů 3 a 6 pro vozidla s nájezdovými brzdovými systémy podle této přílohy.
Tato brzda se smí/nesmí (3) použít pro nájezdový brzdový systém bez ochranného zařízení proti přetížení.
Datum: …
Podpis: …
11. Tato zkouška byla provedena a její výsledky byly zaznamenány v protokolu podle příslušných ustanovení přílohy 12 předpisu EHK č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (4), která provádí zkoušky.
Datum: …
Podpis: …
12. Schvalovací orgán (5)
Datum: …
Podpis: …
(1) Nehodící se škrtněte.
(2) Uveďte délky použité k určení ig nebo i′g.
(3) Nehodící se škrtněte.
(4) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
(5) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 4
Protokol o zkouškách kompatibility ovládacího zařízení nájezdového brzdění, převodu a brzd na přípojném vozidle
1. Ovládací zařízení jak je popsáno v připojeném zkušebním protokolu (viz dodatek 2 k této příloze)
Zvolený převodový poměr:
iHo (1) = … (2) nebo ih (1) = … (2)
(musí být v mezích uvedených v bodě 8.1 nebo 8.2 dodatku 2 k této příloze)
2. Brzdy jak je popsáno v připojeném zkušebním protokolu (viz dodatek 3 k této příloze)
3. Převody na přípojném vozidle
3.1. Stručný popis se schématem principu
3.2. Převodový poměr a účinnost mechanického převodu na přípojném vozidle
ηH1 (1) = …
4. Přípojné vozidlo
4.1. Výrobce …
4.2. Značka …
4.3. Typ: …
4.4. Druh oje: přípojné vozidlo s nevýkyvnou ojí / vícenápravové přípojné vozidlo s výkyvnou ojí (1)
4.5. Počet brzd n = …
4.6. Maximální technicky přípustná hmotnost GA = …kg
4.7. Dynamický poloměr valení pneumatiky R = …m
4.8. Přípustná tlaková síla ve spoji vozidel
D* = 0,10 g GA (1) = …N
nebo
D* = 0,067 g GA (1) = …N
4.9. Požadovaná brzdná síla B* = 0,50 g GA = …N
4.10. Brzdná síla B = 0,49 g GA = …N
5. Kompatibilita – výsledky zkoušek …
5.1. Práh citlivosti 100 · KA/(g · GA) = …
(musí být mezi 2 a 4)
5.2. Maximální tlaková síla 100 · D1/(g · GA) = …
(nesmí přesáhnout 10 u přípojných vozidel s nevýkyvnou ojí nebo 6,7 u vícenápravových přípojných vozidel s výkyvnou ojí)
5.3. Maximální tahová síla 100 · D2/(g · GA) = …
(musí být mezi 10 a 50)
5.4. Maximální technicky přípustná hmotnost pro nájezdové ovládací zařízení
G′A = …kg
(nesmí být menší než GA)
5.5. Maximální technicky přípustná hmotnost pro všechny brzdy přípojného vozidla
GB = n · GBo = …kg
(nesmí být menší než GA)
5.6. Brzdný moment brzd …
n · M* /(B · R) = …
(musí být nejméně 1,0)
5.6.1. Ochranné zařízení proti přetížení podle bodu 3.6 této přílohy je/není (3) včleněno do nájezdového ovládacího zařízení / do brzd (3)
5.6.1.1. jestliže ochranné zařízení proti přetížení namontované do nájezdového ovládacího zařízení je mechanické (3)
n · P* /(iH1 · ηH1 · P′max)= …
(musí být nejméně 1,2)
5.6.1.2. jestliže ochranné zařízení proti přetížení namontované do nájezdového ovládacího zařízení je hydraulické (3)
p* / p′max = …
(musí být nejméně 1,2)
5.6.1.3. jestliže ochranné zařízení proti přetížení je namontováno do nájezdového ovládacího zařízení:
prahová síla Dop/D* = …
(musí být nejméně 1,2)
5.6.1.4. jestliže ochranné zařízení proti přetížení je namontováno do brzdového ústrojí:
prahový moment n · Mop/(B · R) = …
(musí být nejméně 1,2)
5.7. Nájezdový brzdový systém s mechanickým převodem (3)
5.7.1. iH = iHo · iH1 = …
5.7.2. ηH = ηHo · ηH1 = …

(nesmí být větší než: iH)

(nesmí být menší než: iH)
5.7.5. Poměr s′/iH = …, když se přípojné vozidlo pohybuje dozadu (nesmí přesáhnout hodnotu: sr)
5.7.6. Brzdný moment, když se přípojné vozidlo pohybuje dozadu, včetně valivého odporu
0,08 · g · GA · R = …Nm
(nesmí být větší než: n · Mr)
5.8. Nájezdový brzdový systém s hydraulickým převodem (4)
5.8.1. ih/FHZ = …

(nesmí být větší než: ih/FHZ)

(nesmí být menší než: ig/FHZ)
5.8.4. s/ih = …
(nesmí být vetší než zdvih hlavního válce podle bodu 8.2 dodatku 2 k této příloze)
5.8.5. Poměr s′/FHZ = …když se přípojné vozidlo pohybuje dozadu (nesmí přesáhnout hodnotu: vr)
5.8.6. Brzdný moment, když se přípojné vozidlo pohybuje dozadu, včetně valivého odporu
0,08 · g · GA · R = …Nm
(nesmí být větší než: n · Mr)
6. Diferenciální zdvih na kompenzátoru parkovací brzdy
6.1.1. Maximální přípustný zdvih kompenzátoru (směrem vpřed) scf = …mm
6.1.2. Maximální přípustný zdvih kompenzátoru (směrem vzad) scr = …mm
6.1.3. Maximální přípustný diferenciální zdvih kompenzátoru scd = …mm
7. Výše uvedený nájezdový brzdový systém splňuje/nesplňuje (4) požadavky bodů 3 až 10 této přílohy.
Podpis: …Datum: …
8. Tato zkouška byla provedena a její výsledky zaznamenány v protokolu podle příslušných ustanovení přílohy 12 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna provádějící zkoušky.
Podpis: …Datum: ….
(1) Nehodící se škrtněte.
(2) Uveďte délky použité k určení iHo nebo ih.
(3) Nehodící se škrtněte.
(4) Nehodící se škrtněte.
PŘÍLOHA 13
POŽADAVKY NA ZKOUŠKY VOZIDEL S PROTIBLOKOVACÍMI SYSTÉMY
1. OBECNÉ INFORMACE
1.1. Tato příloha vymezuje požadavky na brzdné účinky silničních vozidel vybavených protiblokovacím brzdovým systémem (systémy).
1.2. Protiblokovací systémy známé v současné době obsahují jedno nebo více čidel, jedno nebo více řídících zařízení a jeden nebo více modulátorů. Jakákoliv zařízení jiné koncepce, která mohou být zavedena v budoucnu, nebo zařízení, v nichž je protiblokovací funkce integrována do jiného systému, se považují za protiblokovací brzdový systém ve smyslu této přílohy a přílohy 10 tohoto předpisu, pokud jsou jejich účinky rovnocenné účinkům požadovaným touto přílohou.
2. DEFINICE
2.1. „Protiblokovacím systémem“ se rozumí část systému provozního brzdění, která automaticky řídí míru skluzu kola ve směru jeho rotace na jednom nebo více kolech vozidla při brzdění.
2.2. „Čidlem“ se rozumí konstrukční část určená k identifikaci stavu rotace kola (kol) nebo dynamického stavu vozidla a k předání příslušných údajů do řídícího zařízení.
2.3. „Řídícím zařízením“ se rozumí konstrukční část určená k vyhodnocení údajů předaných čidlem (čidly) a k předání signálu do modulátoru.
2.4. „Modulátorem“ se rozumí konstrukční část určená k změně brzdné síly (brzdných sil) podle signálu, který byl předán ze řídícího zařízení.
2.5. „Přímo řízeným kolem“ se rozumí kolo, jehož brzdná síla se reguluje dle údajů vyslaných nejméně jeho vlastním čidlem (1).
2.6. „Nepřímo řízeným kolem“ se rozumí kolo, jehož brzdná síla se reguluje podle údajů vyslaných čidlem nebo čidly jiného kola nebo jiných kol (1).
2.7. „Plným cyklováním“ se rozumí, že protiblokovací systém opakovaně řídí brzdnou sílu, aby zabránil blokování přímo řízených kol. Brzdění, při němž k takovému řízení dojde jen jednou v průběhu zabrzdění do zastavení vozidla, se nepovažuje za brzdění splňující tuto definici.
U přípojných vozidel s pneumatickým brzdovým systémem je zajištěno plné cyklování protiblokovacího systému jen tehdy, když tlak, který je k dispozici pro brzdový válec každého přímo řízeného kola, je o více než 100 kPa větší, než je maximální tlak při cyklování v průběhu dané zkoušky. Tlak v přívodním vedení se nesmí zvýšit nad hodnotu 800 kPa.
3. DRUHY PROTIBLOKOVACÍCH SYSTÉMŮ
3.1. Motorové vozidlo se pokládá za vybavené protiblokovacím systémem ve smyslu bodu 1 přílohy 10 tohoto předpisu, je-li opatřeno některým z následujících systémů:
|
3.1.1. |
Protiblokovací systém kategorie 1 Vozidlo vybavené protiblokovacím systémem kategorie 1 musí splňovat všechna příslušná ustanovení této přílohy. |
|
3.1.2. |
Protiblokovací systém kategorie 2 Vozidlo vybavené protiblokovacím systémem kategorie 2 musí splňovat všechna příslušná ustanovení této přílohy, s výjimkou bodu 5.3.5. |
|
3.1.3. |
Protiblokovací systém kategorie 3 Vozidlo vybavené protiblokovacím systémem kategorie 3 musí splňovat všechna příslušná ustanovení této přílohy, s výjimkou bodů 5.3.4 a 5.3.5. Na takových vozidlech musí každá jednotlivá náprava (nebo skupina náprav), jež neobsahuje alespoň jedno přímo řízené kolo, splňovat z hlediska poměrného zpomalení a zatížení požadavky na využití adheze a na pořadí blokování kol podle přílohy 10 tohoto předpisu. Plnění těchto ustanovení lze ověřit zkouškami na dráze s vysokým anebo s nízkým součinitelem adheze (přibližně 0,8 a nejvýše 0,3), přičemž se působí vhodnou silou na ovladač provozního brzdění. |
3.2. Přípojné vozidlo se považuje za vybavené protiblokovacím systémem ve smyslu bodu 1 přílohy 10 tohoto předpisu, pokud nejméně dvě kola umístěná na opačných stranách vozidla jsou přímo řízena protiblokovacím systémem a všechna zbývající kola jsou tímto systémem řízena buď přímo, nebo nepřímo. U úplných přípojných vozidel musí být přímo řízena nejméně dvě kola na jedné z předních náprav a dvě kola na jedné ze zadních náprav, přičemž každá z těchto náprav musí mít nejméně jeden nezávislý modulátor, a všechna ostatní kola musí být buď přímo, nebo nepřímo řízena. Přípojné vozidlo s protiblokovacím zařízením musí kromě toho splňovat jeden z následujících požadavků:
|
3.2.1. |
Protiblokovací systém kategorie A Přípojné vozidlo s protiblokovacím systémem kategorie A musí splňovat všechny příslušné požadavky této přílohy. |
|
3.2.2. |
Protiblokovací systém kategorie B Přípojné vozidlo s protiblokovacím systémem kategorie B musí splňovat všechny příslušné požadavky této přílohy, s výjimkou bodu 6.3.2. |
4. OBECNÉ POŽADAVKY
4.1. Poruchy v elektrickém ovládacím převodu protiblokovacího brzdového systému (2), které ovlivňují tento systém, pokud jde o funkční požadavky a požadavky na brzdné účinky stanovené v této příloze, musí být signalizovány řidiči zvláštním optickým výstražným signálem. K tomuto účelu se použije výstražné zařízení se žlutým světlem specifikované v bodě 5.2.1.29.1.2 tohoto předpisu.
4.1.1. Poruchy čidel, které nemohou být zjištěny ve statickém stavu, musí být zjištěny dříve, než rychlost vozidla překročí 10 km/h (3). Aby se však zabránilo chybné signalizaci, když čidlo nemůže udávat rychlost, protože se neotáčí určité kolo, může se ověření odložit, avšak porucha musí být zjištěna dříve, než rychlost vozidla překročí 15 km/h.
4.1.2. Jakmile se protiblokovací systém uvede pod napětí při stojícím vozidle, musí také elektricky ovládaný ventil (ventily) pneumatického modulátoru nejméně jednou cyklovat.
4.2. Motorová vozidla s protiblokovacím systémem, která jsou schválena k tažení přípojných vozidel vybavených takovým systémem, musí být opatřena zvláštním výstražným zařízením pro protiblokovací systém přípojného vozidla, splňujícím požadavky bodu 4.1 této přílohy. K tomuto účelu se použije zvláštní výstražné zařízení se žlutým světlem specifikované v bodě 5.2.1.29.2 tohoto předpisu, uváděné do činnosti prostřednictvím pólu 5 elektrického konektoru podle normy ISO 7638:2003 (4).
4.3. V případě poruchy uvedené v bodě 4.1 platí následující požadavky:
|
|
Motorová vozidla: Zbývající brzdný účinek musí být takový, jak je předepsán pro dotyčné vozidlo v případě poruchy některé části převodu systému provozního brzdění, jak je uvedeno v bodě 5.2.1.4 tohoto předpisu. Tento požadavek se nesmí interpretovat jako odchylka od ustanovení o nouzovém brzdění. |
|
|
Přípojná vozidla: Zbývající brzdný účinek musí být takový, jak je vymezen v bodě 5.2.2.15.2 tohoto předpisu. |
4.4. Funkce protiblokovacího systému nesmí být narušena působením magnetických nebo elektrických polí. To je nutno prokázat splněním požadavků předpisu č. 10, jak požaduje bod 5.1.1.4 tohoto předpisu.
4.5. Zakazuje se ruční zařízení k vyřazení protiblokovacího systému z činnosti nebo ke změně způsobu jeho ovládání (5), s výjimkou terénních motorových vozidel kategorií N2 nebo N3. Pokud terénní vozidla kategorie N2 nebo N3 mají takové zařízení, musí být splněny tyto podmínky:
|
4.5.1. |
Motorové vozidlo, u kterého byl odpojen protiblokovací systém nebo zařízením uvedeným v bodě 4.5 změněn způsob ovládání, musí splňovat všechna příslušná ustanovení přílohy 10 tohoto předpisu. |
|
4.5.2. |
Optické výstražné zařízení musí informovat řidiče, že protiblokovací systém byl odpojen nebo byl změněn způsob jeho ovládání; k tomuto účelu se může použít žlutý výstražný signál k signalizaci poruchy protiblokovacího systému specifikovaný v bodě 5.2.1.29.1.2 tohoto předpisu. Tento výstražný signál může být dáván nepřerušovaným světlem nebo přerušovaným světlem. |
|
4.5.3. |
Protiblokovací systém se musí automaticky znovu zapnout nebo uvést do nastavení „silniční provoz“, když se spínač zapalování (startování) opět uvede do polohy „zapnuto“. |
|
4.5.4. |
Příručka uživatele určená výrobcem uživateli vozidla musí upozornit řidiče na následky ručního vypnutí protiblokovacího systému nebo změny způsobu jeho ovládání. |
|
4.5.5. |
Zařízení uvedené v bodě 4.5 může zároveň s tažným vozidlem vypnout i protiblokovací systém přípojného vozidla nebo změnit způsob jeho ovládání. Samostatné zařízení pro vlastní přípojné vozidlo není přípustné. |
4.6. Vozidla s integrovaným systémem odlehčovacího brzdění musí být také vybavena protiblokovacím systémem působícím nejméně na provozní brzdy nápravy, která je řízena systémem odlehčovacího brzdění, a dále na sám systém odlehčovacího brzdění, a tato vozidla musí splňovat požadavky této přílohy.
5. ZVLÁŠTNÍ USTANOVENÍ PRO MOTOROVÁ VOZIDLA
5.1. Spotřeba energie
Motorová vozidla s protiblokovacími systémy si musí uchovat svůj brzdný účinek při dlouhotrvajícím brzdění s plným zdvihem ovladače provozního brzdění. Splnění tohoto požadavku se ověří následujícími zkouškami:
5.1.1. Postup zkoušek
5.1.1.1. Počáteční hladina energie v zásobníku nebo v zásobnících energie musí mít hodnotu udanou výrobcem. Tato hladina energie musí být nejméně taková, aby zajišťovala účinek předepsaný pro provozní brzdění při naloženém vozidle.
Zásobník nebo zásobníky energie pro pneumatická pomocná zařízení musí být odpojeny.
5.1.1.2. Brzdí se s plným zdvihem ovladače z počáteční rychlosti nejméně 50 km/h na povrchu vozovky o součiniteli adheze rovném nebo menším než 0,3 (6), s naloženým vozidlem po dobu t, přičemž se musí zvážit energie spotřebovaná během této doby všemi nepřímo řízenými koly a protiblokovací systém musí po tuto dobu nadále řídit všechna přímo řízená kola.
5.1.1.3. Následně se zastaví motor vozidla nebo se přeruší doplňování zásobníku (zásobníků) převodu energie.
5.1.1.4. Provedou se čtyři za sebou následující plné zdvihy ovladače provozního brzdění při stojícím vozidle.
5.1.1.5. Při pátém zabrzdění musí být možné brzdit vozidlo s účinkem nejméně takovým, jaký je předepsán pro nouzové brzdění naloženého vozidla.
5.1.1.6. V průběhu zkoušek motorového vozidla oprávněného táhnout přípojné vozidlo s pneumatickým brzdovým systémem musí být přívodní vedení zaslepeno a k pneumatickému ovládacímu vedení – pokud je na vozidle – připojen zásobník o objemu 0,5 litru (jak požaduje bod 1.2.2.3 části A přílohy 7 tohoto předpisu). Při pátém zabrzdění podle bodu 5.1.1.5 nesmí být tlak vzduchu dodaného do ovládacího vedení nižší než polovina tlaku, který vznikne při jednom zabrzdění s plným zdvihem ovladače, vycházeje z počáteční hodnoty tlaku.
5.1.2. Dodatečné požadavky
5.1.2.1. Součinitel adheze povrchu vozovky se určí s tímtéž vozidlem, s kterým se konají zkoušky, podle metody uvedené v bodě 1.1 dodatku 2 k této příloze.
5.1.2.2. Zkouška brzdění se provede s odpojeným motorem, při volnoběhu a s naloženým vozidlem.
5.1.2.3. Doba brzdění t se určí ze vzorce:
 (but not less than 15 seconds)
(but not less than 15 seconds)
kde doba t je vyjádřena v sekundách a vmax znamená maximální konstrukční rychlost vozidla v km/h s horní hranicí 160 km/h.
5.1.2.4. Pokud nelze dosáhnout doby t v jediné fázi brzdění, připouštějí se další fáze brzdění až do počtu celkem nejvýše čtyři.
5.1.2.5. Pokud se zkouší ve více fázích, nesmí se mezi jednotlivými fázemi zkoušky doplňovat žádná energie.
Počínaje druhou fází se může vzít v úvahu energie spotřebovaná při prvním zabrzdění tím, že se odečte jedno zabrzdění s plným zdvihem od čtyř zabrzdění s plným zdvihem, předepsaných v bodě 5.1.1.4 (a bodech 5.1.1.5, 5.1.1.6 a 5.1.2.6) této přílohy, pro každou z druhé, třetí a čtvrté fáze, které se použily ve zkoušce stanovené bodem 5.1.1 této přílohy, v závislosti na případu.
5.1.2.6. Účinek předepsaný v bodě 5.1.1.5 této přílohy se pokládá za splněný, pokud na konci čtvrtého brzdění, na stojícím vozidle, má hladina energie v zásobníku (zásobnících) hodnotu rovnou hladině energie potřebné k dosažení účinku předepsaného pro nouzové brzdění s naloženým vozidlem nebo vyšší.
5.2. Využití adheze
5.2.1. Využití adheze protiblokovacím systémem odpovídá skutečnému přírůstku brzdné dráhy vzhledem k teoretické minimální hodnotě brzdné dráhy. Protiblokovací systém se pokládá za vyhovující, pokud je splněna podmínka ε ≥ 0,75, kde ε vyjadřuje využití adheze, jak je vymezeno v bodě 1.2 dodatku 2 k této příloze.
5.2.2. Využití adheze ε se zjišťuje na drahách se součinitelem adheze nejvýše 0,3 (7), a pak o hodnotě okolo 0,8 (suchá vozovka), z počáteční rychlosti 50 km/h. Aby se vyloučily vlivy rozdílů teplot mezi brzdami, doporučuje se určit hodnotu zAL dříve než hodnotu „k“.
5.2.3. Postup zkoušky pro určení součinitele adheze (k) a způsob výpočtu využití adheze ε jsou uvedeny v dodatku 2 k této příloze.
5.2.4. Využití adheze protiblokovacím systémem se ověřuje na úplných vozidlech vybavených protiblokovacími systémy kategorií 1 nebo 2. U vozidel vybavených systémy kategorie 3 musí splnit tento požadavek pouze náprava (nebo nápravy) s nejméně jedním přímo řízeným kolem.
5.2.5. Požadavek ε ≥ 0,75 se ověří pro naložené i nenaložené vozidlo (8).
Zkouška naloženého vozidla na povrchu s vysokým součinitelem adheze se může vypustit, pokud s předepsanou silou působící na ovladač nelze dosáhnout plného cyklování protiblokovacího systému.
Při zkoušce s nenaloženým vozidlem se může síla působící na ovladač zvětšit až na 100 daN, pokud při působení plnou předepsanou silou neproběhne úplný cyklus (9). Pokud síla 100 N nepostačuje k tomu, aby systém začal cyklovat, pak se tato zkouška může vypustit. U pneumatických brzdových systémů se pro účely této zkoušky nesmí tlak vzduchu zvětšit nad hodnotu tlaku, při němž vypíná regulátor.
5.3. Doplňková ověření
Následující doplňková ověření se vykonají s odpojeným motorem a s vozidlem jednak naloženým a jednak nenaloženým.
5.3.1. Kola přímo řízená protiblokovacím systémem se nesmějí blokovat, jestliže se náhle zapůsobí na ovladač plnou silou (9), a to na površích vozovky uvedených v bodě 5.2.2 této přílohy, při počáteční rychlosti 40 km/h a při vysoké počáteční rychlosti uvedené v následující tabulce (10) (11):
|
|
Kategorie vozidla |
Maximální rychlost při zkoušce |
|
Povrch s vysokou adhezí |
Všechny kategorie, kromě N2, N3 naložená |
0,8 vmax ≤ 120 km/h |
|
N2, N3 naložená |
0,8 vmax ≤ 80 km/h |
|
|
Povrch s nízkou adhezí |
N1 |
0,8 vmax ≤ 120 km/h |
|
M2, M3, N2 kromě tahačů návěsů |
0,8 vmax ≤ 80 km/h |
|
|
N3 a N2 tahače návěsů |
0,8 vmax ≤ 70 km/h |
5.3.2. Když náprava přejíždí z povrchu s vysokým součinitelem adheze (kH) na povrch s nízkým součinitelem adheze (kL), přičemž kH ≥ 0,5 a kH / kL ≥ 2 (12), a při působení plné síly (9) na ovládací zařízení se přímo řízená kola nesmí blokovat. Rychlost vozidla a okamžik začátku brzdění se určí tak, aby při protiblokovacím systému v plné činnosti na povrchu s vysokým součinitelem adheze proběhl přejezd z jednoho povrchu na druhý jednak vysokou a jednak nízkou rychlostí, za podmínek stanovených v bodě 5.3.1 této přílohy (11).
5.3.3. Když vozidlo přejíždí z povrchu s nízkým součinitelem adheze (kL) na povrch s vysokým součinitelem adheze (kH), přičemž kH ≥ 0,5 a kH / kL ≥ 2 (12), a při působení plné síly (9) na ovládací zařízení, zpomalení vozidla musí vzrůst na příslušně vysokou hodnotu za přiměřenou dobu a vozidlo se nesmí vychýlit ze svého počátečního směru. Rychlost vozidla a okamžik začátku brzdění se určí tak, aby při protiblokovacím systému v plné činnosti na povrchu s nízkým součinitelem adheze přejezd z jednoho povrchu na druhý proběhl rychlostí přibližně 50 km/h.
5.3.4. Jsou-li u vozidel s protiblokovacími systémy kategorií 1 nebo 2 kola na pravé a levé straně vozidla na površích s rozdílnými součiniteli adheze (kH a kL), přičemž kH ≥ 0,5 a kH/kL ≥ 2 (13), nesmí se přímo řízená kola blokovat, jestliže se při rychlosti vozidla 50 km/h náhle zapůsobí plnou silou (14) na ovládací zařízení.
5.3.5. Kromě toho naložená vozidla s protiblokovacím systémem kategorie 1 musí za podmínek stanovených v bodě 5.3.4 dosáhnout poměrného zpomalení předepsaného v dodatku 3 k této příloze.
5.3.6. Při zkouškách stanovených v bodech 5.3.1, 5.3.2, 5.3.3, 5.3.4 a 5.3.5 této přílohy se však připouštějí krátkodobá blokování kol. Kromě toho je blokování kol přípustné při rychlosti vozidla nižší než 15 km/h a rovněž blokování nepřímo řízených kol je přípustné při jakékoli rychlosti vozidla, avšak nesmí být přitom narušena směrová stabilita a řiditelnost vozidla.
5.3.7. Při zkouškách podle bodů 5.3.4 a 5.3.5 této přílohy je přípustná korekce směru řízením, pokud je úhlové natočení volantu menší než 120° v prvních dvou sekundách a celkem nepřesáhne 240°. Kromě toho musí na začátku těchto zkoušek podélná střední rovina vozidla procházet rozhraním mezi povrchy s vysokým a nízkým součinitelem adheze a během těchto zkoušek nesmí žádná část pneumatik (vnějších) toto rozhraní překročit.
6. ZVLÁŠTNÍ USTANOVENÍ PRO PŘÍPOJNÁ VOZIDLA
6.1. Spotřeba energie
Přípojná vozidla s protiblokovacím systémem musí být konstruována tak, aby i po určité době brzdění s plným zdvihem ovladače provozního brzdění zůstalo na vozidle dostatek energie k zastavení vozidla na přiměřené vzdálenosti.
6.1.1. Splnění výše uvedeného požadavku se ověří níže uvedeným postupem při nenaloženém vozidle, na přímé a vodorovné dráze na vozovce s vysokým součinitelem adheze (15), s brzdami seřízenými na co nejmenší zdvih a se zátěžovým regulátorem (pokud je na vozidle namontován) udržovaným v průběhu zkoušky v nastavení pro naložené vozidlo.
6.1.2. U pneumatických brzdových systémů musí počáteční hladina energie v zásobníku nebo v zásobnících převodu energie odpovídat tlaku 800 kPa ve spojkové hlavici přívodního vedení přípojného vozidla.
6.1.3. Z počáteční rychlosti nejméně 30 km/h se brzdí s plným zdvihem ovladače po dobu t = 15 s; přitom musí všechna kola zůstat regulována protiblokovacím systémem. V průběhu této zkoušky se nesmí doplňovat zásobník nebo zásobníky převodu energie.
Pokud nelze dosáhnout doby t = 15 s v jediné fázi brzdění, je možno provést další fáze brzdění. Během těchto fází se nesmí doplňovat energie do zásobníku nebo do zásobníků převodu energie a počínaje druhou fází se přihlédne k doplňkové spotřebě energie potřebné k naplnění brzdových válců, např. následujícím zkušebním postupem.
Na začátku první fáze musí být tlak v zásobníku nebo v zásobnících takový, jak stanoví bod 6.1.2 této přílohy. Na začátku následující fáze nebo následujících fází nesmí být po zabrzdění tlak v zásobníku nebo v zásobnících menší než tlak, který byl v zásobníku nebo v zásobnících na konci předcházející fáze.
V následující fázi (fázích) se přihlédne k času pouze od okamžiku, v němž tlak v zásobníku (zásobnících) má stejnou hodnotu jako na konci předcházející fáze.
6.1.4. Na konci brzdění se při stojícím vozidle vykonají čtyři plné zdvihy ovladače provozního brzdění. Při pátém zdvihu musí být tlak v okruhu dostačující pro vyvinutí celkové brzdné síly na obvodu kol ne menší než 22,5 % síly odpovídající maximální hmotnosti nesené koly při stojícím vozidle a aniž by automaticky uvedl do činnosti kterýkoli brzdový systém, jenž není řízen protiblokovacím systémem.
6.2. Využití adheze
6.2.1. Brzdové systémy s protiblokovacím systémem se pokládají za vyhovující, pokud je splněn požadavek ε ≥ 0,75, kde ε vyjadřuje využití adheze podle definice v bodě 2 dodatku 2 k této příloze. Tato podmínka se musí ověřit při nenaloženém vozidle, na vodorovné a přímé dráze, na vozovce s vysokým součinitelem adheze (16) (17).
6.2.2. Aby se vyloučily vlivy rozdílných teplot brzd, doporučuje se určit zRAL dříve než kR.
6.3. Doplňková ověření
6.3.1. Kola přímo řízená protiblokovacím systémem se nesmějí blokovat, jestliže se náhle zapůsobí na ovladač tažného vozidla plnou silou (18) při rychlostech přesahujících 15 km/h. Uvedená skutečnost se musí ověřit za podmínek stanovených v bodě 6.2 této přílohy, při zkouškách z počátečních rychlostí 40 km/h a 80 km/h.
6.3.2. Ustanovení tohoto bodu platí pouze pro přípojná vozidla s protiblokovacím systémem kategorie A. Když jsou kola na pravé a levé straně vozidla na površích, na kterých dosahují rozdílná největší poměrná zpomalení (zRALH a zRALL), kde:
 and
and 
nesmějí se přímo řízená kola blokovat, když se náhle zapůsobí plnou silou (18) na ovladač tažného vozidla při rychlosti 50 km/h. Poměr zRALH/zRALL lze získat postupem podle bodu 2 dodatku 2 k této příloze nebo výpočtem poměru zRALH/zRALL. Za této podmínky musí nenaložené vozidlo splňovat poměrná zpomalení předepsaná v dodatku 3 k této příloze (17).
6.3.3. Při rychlostech vozidla ≥ 15 km/h se připouštějí krátkodobá blokování přímo řízených kol, při rychlostech nižších než 15 km/h se však připouští jakékoli blokování. Nepřímo řízená kola se smějí blokovat při jakýchkoliv rychlostech, avšak nikdy nesmí dojít ke zhoršení směrové stability vozidla.
(1) Za protiblokovací systémy s regulací horní selekcí se pokládají systémy obsahující jak přímo řízená, tak nepřímo řízená kola; v systémech s regulací dolní selekcí se pokládají za přímo řízená všechna kola, z nichž čidla snímají signály.
(2) Do doby, než budou odsouhlaseny jednotné postupy zkoušek, musí výrobce seznámit technickou zkušebnu s analýzou případných závad v řídícím zařízení a s jejich důsledky. Tyto informace budou projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(3) Pokud nedošlo k žádné poruše, může se výstražný signál znovu rozsvítit u stojícího vozidla za podmínky, že opět zhasne dříve, než vozidlo dosáhne rychlosti 10 km/h nebo 15 km/h, v závislosti na případu.
(4) V závislosti na případu lze použít konektor podle normy ISO 7638:2003 s 5 nebo 7 póly.
(5) Rozumí se, že bod 4.5 této přílohy se nevztahuje na zařízení měnící způsob ovládání protiblokovacího systému, pokud jsou při změněném způsobu ovládání splněny všechny požadavky na protiblokovací systémy určité kategorie, které jsou na vozidle. V tom případě musí být nicméně splněny požadavky bodů 4.5.2, 4.5.3 a 4.5.4 této přílohy.
(6) Do doby, než budou všeobecně dostupné zkušební dráhy s takovými povrchy, může technická zkušebna rozhodnout, že se použijí pneumatiky na hranici opotřebení a povrchy s vyššími součiniteli adheze až do hodnoty 0,4. Skutečně zjištěné hodnoty a typ pneumatik a typ povrchu dráhy se musí zaznamenat.
(7) Do doby, než budou všeobecně dostupné zkušební dráhy s takovými povrchy, může technická zkušebna rozhodnout, že se použijí pneumatiky na hranici opotřebení a povrchy s vyššími součiniteli adheze až do hodnoty 0,4. Skutečně zjištěné hodnoty a typ pneumatik a typ povrchu dráhy se musí zaznamenat.
(8) Do doby, než bude vytvořen jednotný postup zkoušek, mohou být zkoušky požadované tímto bodem opakovány s vozidly s elektrickým rekuperačním brzdovým systémem, aby se určil vliv různých hodnot rozdělení brzdného účinku daných automatickými funkcemi na vozidle.
(9) „Plnou silou“ se rozumí maximální síla stanovená v příloze 4 pro danou kategorii vozidla; větší sílu lze použít, pokud je potřebná k uvedení protiblokovacího systému do činnosti.
(10) Ustanovení tohoto bodu platí od 13. března 1992 (rozhodnutí Pracovní skupiny pro konstrukci vozidel, TRANS/SC.1/WP.29/341, odst. 23).
(11) Účelem těchto zkoušek je ověřit, že kola se neblokují a že vozidlo zůstává směrově stabilní; proto není nutné na povrchu s nízkým součinitelem adheze brzdit až do zastavení vozidla.
(12) kH a kL se určí měřením uvedeným v dodatku 2 k této příloze.
(13) kH a kL se určí měřením uvedeným v dodatku 2 k této příloze.
(14) „Plnou silou“ se rozumí maximální síla stanovená v příloze 4 pro danou kategorii vozidla; větší sílu lze použít, pokud je potřebná k uvedení protiblokovacího systému do činnosti.
(15) Je-li součinitel adheze zkušební dráhy příliš vysoký, takže nedojde k plnému cyklování protiblokovacího systému, je možno zkoušku vykonat na povrchu s nižším součinitelem adheze.
(16) Je-li součinitel adheze zkušební dráhy příliš vysoký, takže nedojde k plnému cyklování protiblokovacího systému, je možno zkoušku vykonat na povrchu s nižším součinitelem adheze.
(17) U přípojných vozidel se zátěžovým regulátorem se může zvýšit nastavený tlak zařízení tak, aby zajistil plné regulování.
(18) „Plnou silou“ se rozumí maximální síla stanovená v příloze 4 pro danou kategorii vozidla; větší sílu lze použít, pokud je potřebná k uvedení protiblokovacího systému do činnosti.
Dodatek 1
Symboly a definice
|
Symboly |
Definice |
|
E |
Rozvor |
|
ER |
Vzdálenost mezi návěsným čepem a osou nápravy nebo středem skupiny náprav návěsu (nebo vzdálenost mezi okem oje a osou nápravy nebo středem skupiny náprav přípojného vozidla s nápravami uprostřed) |
|
ε |
Využití adheze vozidlem: podíl největšího poměrného zpomalení s protiblokovacím systémem zapnutým (zAL) a součinitelem adheze (k) |
|
εi |
Hodnota ε změřená na nápravě i (u motorového vozidla s protiblokovacím systémem kategorie 3) |
|
εH |
Hodnota ε na povrchu s vysokým součinitelem adheze |
|
εL |
Hodnota ε na povrchu s nízkým součinitelem adheze |
|
F |
Síla [N] |
|
FbR |
Brzdná síla přípojného vozidla s protiblokovacím systémem v nečinnosti |
|
FbRmax |
Maximální hodnota FbR |
|
FbRmaxi |
Hodnota FbRmax, když je brzděna jen náprava i přípojného vozidla |
|
FbRAL |
Brzdná síla přípojného vozidla s protiblokovacím systémem v činnosti |
|
FCnd |
Celková normálová reakce povrchu vozovky působící na nebrzděné a nepoháněné nápravy soupravy ve statickém stavu |
|
FCd |
Celková normálová reakce povrchu vozovky působící na nebrzděné a poháněné nápravy jízdní soupravy ve statickém stavu |
|
Fdyn |
Normálová reakce povrchu vozovky, v dynamickém stavu, s protiblokovacím systémem v činnosti |
|
Fidyn |
Fdyn na nápravě i u motorových vozidel nebo úplných přípojných vozidel |
|
Fi |
Normálová reakce povrchu vozovky působící na nápravu i ve statickém stavu |
|
FM |
Celková normálová statická reakce povrchu vozovky působící na všechna kola motorového (tažného) vozidla |
|
FMnd (1) |
Celková normálová statická reakce povrchu vozovky působící na nebrzděné a nepoháněné nápravy motorového vozidla |
|
FMd (1) |
Celková normálová statická reakce povrchu vozovky působící na nebrzděné a poháněné nápravy motorového vozidla |
|
FR |
Celková normálová statická reakce povrchu vozovky působící na všechna kola přípojného vozidla |
|
FRdyn |
Celková normálová dynamická reakce, kterou působí povrch vozovky na nápravu nebo nápravy návěsu nebo přípojného vozidla s nápravami uprostřed |
|
FWM (1) |
0,01 FMnd + 0,015 FMd |
|
g |
Gravitační zrychlení (9,81 m/s2) |
|
h |
Výška těžiště nad vozovkou, specifikovaná výrobcem a potvrzená technickou zkušebnou |
|
hD |
Výška oje nad vozovkou (kloubu, kterým je oj připojena k přípojnému vozidlu) |
|
hK |
Výšková poloha točnice (návěsného čepu) |
|
hR |
Výška těžiště přípojného vozidla |
|
k |
Součinitel adheze mezi pneumatikou a vozovkou |
|
kf |
Hodnota součinitele k pro jednu přední nápravu |
|
kH |
Hodnota součinitele k zjištěná na povrchu s vysokým součinitelem adheze |
|
kI |
Hodnota součinitele k zjištěná pro nápravu i na vozidle s protiblokovacím systémem kategorie 3 |
|
kL |
Hodnota součinitele k zjištěná na povrchu s nízkým součinitelem adheze |
|
klock |
Hodnota adheze pro skluz 100 % |
|
kM |
Hodnota součinitele k pro motorové vozidlo |
|
kpeak |
Maximální hodnota křivky „součinitele adheze v závislosti na skluzu“ |
|
kr |
Hodnota součinitele k pro jednu zadní nápravu |
|
kR |
Hodnota součinitele k pro přípojné vozidlo |
|
P |
Hmotnost jednotlivého vozidla [kg] |
|
R |
Poměr kpeak vůči klock |
|
t |
Časový interval [s] |
|
tm |
Střední hodnota t |
|
tmin |
Minimální hodnota t |
|
z |
Poměrné zpomalení |
|
zAL |
Poměrné zpomalení „z“ vozidla s protiblokovacím systémem v činnosti |
|
zC |
Poměrné zpomalení „z“ soupravy vozidel, když je brzděno jen přípojné vozidlo a protiblokovací systém je nečinný |
|
zCAL |
Poměrné zpomalení „z“ soupravy vozidel, když je brzděno jen přípojné vozidlo a protiblokovací systém je v činnosti |
|
zCmax |
Maximální hodnota zC |
|
zCmaxi |
Maximální hodnota zC, když je brzděna jen náprava i přípojného vozidla |
|
zm |
Střední poměrné zpomalení |
|
zmax |
Maximální hodnota „z“ |
|
zMALS |
zAL motorového vozidla na površích s rozdílnou adhezí |
|
zR |
Poměrné zpomalení „z“ přípojného vozidla s protiblokovacím systémem v nečinnosti |
|
zRAL |
Hodnota zAL přípojného vozidla při brzdění všemi nápravami, tažném vozidle nebrzděném a jeho motoru odpojeném |
|
zRALH |
Hodnota zRAL na povrchu s vysokým součinitelem adheze |
|
zRALL |
Hodnota zRAL na povrchu s nízkým součinitelem adheze |
|
zRALS |
Hodnota zRAL na povrchu s rozdílnou adhezí |
|
zRH |
Hodnota zR na povrchu s vysokým součinitelem adheze |
|
zRL |
Hodnota zR na povrchu s nízkým součinitelem adheze |
|
zRHmax |
Maximální hodnota zRH |
|
zRLmax |
Maximální hodnota zRL |
|
zRmax |
Maximální hodnota zR |
(1) FMnd a FMd v případě motorových vozidel se dvěma nápravami: tyto symboly lze zjednodušit odpovídajícími symboly Fi.
Dodatek 2
Využití adheze
1. METODA MĚŘENÍ PRO MOTOROVÁ VOZIDLA
1.1. Určení součinitele adheze k
1.1.1. Součinitel adheze k se určí jako podíl největších brzdných sil bez blokování kol a příslušného dynamického zatížení brzděné nápravy.
1.1.2. Zkoušené vozidlo se brzdí pouze jednou nápravou, z počáteční rychlosti 50 km/h. Brzdné síly musí být rozděleny mezi kola nápravy tak, aby se dosáhlo největšího brzdného účinku. Protiblokovací systém musí být vypnut nebo být mimo činnost při rychlosti mezi 40 km/h a 20 km/h.
1.1.3. Ke stanovení největšího poměrného zpomalení vozidla zmax se vykoná větší počet zkoušek, přičemž pro každou z nich se vždy zvýší tlak v ovládacím vedení. Při každé zkoušce se udržuje konstantní síla na pedálu a poměrné zpomalení se určí s přihlédnutím k času t potřebnému ke snížení rychlosti ze 40 km/h na 20 km/h podle vzorce:

zmax je největší z hodnot z; čas t je vyjádřen v sekundách.
1.1.3.1. Kola se smějí blokovat při rychlostech nižších než 20 km/h.
1.1.3.2. Začne se s minimální měřenou hodnotou t, která se nazve tmin, pak se zvolí tři hodnoty t, které jsou mezi tmin a 1,05 tmin, a vypočte se jejich aritmetický průměr tm, pak se vypočte:

Pokud se prokáže, že z praktických důvodů nelze získat tři výše uvedené hodnoty, je možno užít hodnotu minimálního času tmin. Avšak stále platí ustanovení dále uvedeného bodu 1.3.
1.1.4. Brzdné síly se vypočítají ze změřeného poměrného zpomalení s uvažováním valivého odporu nebrzděné nápravy (náprav), který činí 0,015 statického zatížení nápravy pro hnací nápravu a 0,010 statického zatížení pro nepoháněnou nápravu.
1.1.5. Dynamické zatížení nápravy se určí dle vzorců uvedených v příloze 10 tohoto předpisu.
1.1.6. Hodnota k se zaokrouhlí na tři desetinná místa.
1.1.7. Zkouška se pak opakuje s další nápravou (dalšími nápravami), jak je uvedeno v bodech 1.1.1 až 1.1.6 (výjimky jsou uvedeny v bodech 1.4 a 1.5).
1.1.8. Například pro dvounápravové vozidlo s poháněnou zadní nápravou a s brzděnou přední nápravou (1) se součinitel adheze k určí podle vzorce:

1.1.9. Určí se jeden součinitel pro přední nápravu kf a jeden pro zadní nápravu kr.
1.2. Určení využití adheze (ε)
1.2.1. Využití adheze (ε) je vymezeno jako podíl největšího poměrného zpomalení s protiblokovacím systémem v činnosti (zAL) a součinitele adheze (kM), tj.

1.2.2. Největší poměrné zpomalení zAL se měří z počáteční rychlosti vozidla 55 km/h, s protiblokovacím systémem plně cyklujícím, jako průměrná hodnota ze tří zkoušek, jak je uvedeno v bodě 1.1.3 tohoto dodatku, přičemž se přihlédne k času potřebnému ke snížení rychlosti vozidla ze 45 km/h na 15 km/h, podle následujícího vzorce:

1.2.3. Součinitel adheze kM se určí jako vážená hodnota s použitím dynamických zatížení náprav.

kde:


1.2.4. Hodnota ε se zaokrouhlí na dvě desetinná místa.
1.2.5. U vozidla s protiblokovacím systémem kategorie 1 nebo 2 se hodnota zAL týká celého vozidla, s protiblokovacím systémem v činnosti, přičemž využití adheze (ε) je dáno týmž vzorcem, který je uveden v bodě 1.2.1 tohoto dodatku.
1.2.6. U vozidla s protiblokovacím systémem kategorie 3 se hodnota zAL měří pro každou nápravu, která má nejméně jedno přímo řízené kolo. Například pro dvounápravové vozidlo s protiblokovacím systémem působícím pouze na zadní nápravu (2), je využití adheze (ε) dáno vzorcem:
Tento výpočet se provede pro každou nápravu mající nejméně jedno přímo řízené kolo.
1.3. Pokud ε > 1,00, měří se součinitele adheze znovu. Připouští se tolerance 10 %.
1.4. U motorových vozidel se třemi nápravami lze při stanovení hodnoty „k“ vozidla opomenout veškeré nápravy, které jsou propojeny konstrukčními částmi pro zavěšení, a tím reagují na přenos hmotnosti během brzdění nebo pohánění (1).
1.5. U vozidel kategorie N2 a N3 s rozvorem kratším než 3,80 m a s h/E ≥ 0,25 se vypouští určení součinitele adheze zadní nápravy.
1.5.1. V tomto případě se využití adheze (ε) vymezí jako podíl největšího poměrného zpomalení (zAL) s protiblokovacím systémem v činnosti a součinitele adheze (kf), tj.

2. METODA MĚŘENÍ PRO PŘÍPOJNÁ VOZIDLA
2.1. Obecné informace
2.1.1. Součinitel adheze (k) se určí jako podíl maximálních brzdných sil bez blokování kol a příslušného dynamického zatížení brzděné nápravy.
2.1.2. Brzdí se jen jedna náprava zkoušeného přípojného vozidla, z počáteční rychlosti 50 km/h. Brzdné síly musí být rozděleny mezi kola nápravy tak, aby se dosáhlo maximálního brzdného účinku. Protiblokovací systém musí být vypnut nebo být mimo činnost při rychlosti mezi 40 km/h a 20 km/h.
2.1.3. Ke zjištění maximálního poměrného zpomalení soupravy vozidel zCmax brzděné pouze přípojným vozidlem se provede více zkoušek, každá z nich s vyšším tlakem v ovládacím vedení než při předcházející zkoušce. Při každé zkoušce se udržuje konstantní síla na pedálu a poměrné zpomalení se určí s přihlédnutím k času t potřebnému ke snížení rychlosti ze 40 km/h na 20 km/h podle vzorce:

2.1.3.1. Kola se smějí blokovat při rychlostech nižších než 20 km/h.
2.1.3.2. Začne se s minimální měřenou hodnotou t, která se nazve tmin, pak se zvolí tři hodnoty t, které jsou mezi tmin a 1,05 tmin, a vypočte se jejich aritmetický průměr tm, pak se vypočte:

Pokud se prokáže, že z praktických důvodů nelze získat tři výše uvedené hodnoty, je možno užít hodnotu minimálního času tmin.
2.1.4. Využití adheze (ε) se vypočítá podle vzorce:

Hodnota k se určí podle bodu 2.2.3 tohoto dodatku pro plná přípojná vozidla nebo podle bodu 2.3.1 tohoto dodatku pro návěsy.
2.1.5. Pokud ε > 1,00, změří se součinitele adheze znovu. Připouští se tolerance 10 %.
2.1.6. Maximální poměrné zpomalení (zRAL) se změří s protiblokovacím systémem plně cyklujícím a s nebrzděným tažným vozidlem na základě průměrné hodnoty ze tří zkoušek podle bodu 2.1.3 tohoto dodatku.
2.2. Plná přípojná vozidla
2.2.1. Hodnota k se měří pro přední a pro zadní nápravu (s protiblokovacím systémem odpojeným nebo nečinným, v rozsahu rychlostí mezi 40 km/h a 20 km/h).
Pro jednu přední nápravu i:
FbRmaxi = zCmaxi(FM + FR) – 0,01 FCnd – 0,015 FCd

Pro jednu zadní nápravu i:
FbRmaxi = zCmaxi · (FM + FR) – 0,01 FCnd – 0,015 FCd

2.2.2. Hodnoty kf a kr se zaokrouhlí na tři desetinná místa.
![]()
2.2.3. Součinitel adheze kR se určí jako vážená střední hodnota s použitím dynamických zatížení náprav.
2.2.4. Hodnota zRAL (s protiblokovacím systémem v činnosti)
![]()
Hodnota zRAL se zjišťuje na povrchu s vysokým součinitelem adheze a u vozidel s protiblokovacím systémem kategorie A také na povrchu s nízkým součinitelem adheze.
2.3. Návěsy a přípojná vozidla s nápravou uprostřed
2.3.1. Hodnota součinitele k se měří (s protiblokovacím systémem odpojeným nebo nečinným, při rychlostech mezi 40 km/h a 20 km/h) s koly jen na jedné nápravě, přičemž kola další nápravy (dalších náprav) jsou odmontována.
FbRmax = zCmax(FM + FR) – FWM
![]()
![]()
2.3.2. Hodnota zRAL (s protiblokovacím systémem v činnosti) se měří se všemi koly na vozidle.
FbRAL = zCAL · (FM + FR) – FWM
![]()
![]()
Hodnota zRAL se zjišťuje na povrchu s vysokým součinitelem adheze a u vozidel s protiblokovacím systémem kategorie A také na povrchu s nízkým součinitelem adheze.
(1) Do doby, než se dohodne jednotná zkušební metoda, projednají se zkoušky vozidel s více než třemi nápravami a zkoušky speciálních vozidel s technickou zkušebnou.
Dodatek 3
Brzdný účinek na površích s rozdílnou adhezí
1. MOTOROVÁ VOZIDLA
1.1. Předepsané poměrné zpomalení uvedené v bodě 5.3.5 této přílohy lze vypočítat s odkazem na změřený součinitel adheze obou povrchů, na nichž se provádí zkouška. Tyto dva povrchy musí splňovat požadavky uvedené v bodě 5.3.4 této přílohy.
1.2. Součinitele adheze kH a kL pro povrchy s vysokou a nízkou adhezí se určí podle bodu 1.1 dodatku 2 k této příloze.
1.3. Poměrné zpomalení (zMALS) pro naložená motorová vozidla musí být:
 a zMALS ≥ kL
a zMALS ≥ kL
2. PŘÍPOJNÁ VOZIDLA
2.1. Poměrné zpomalení uvedené v bodě 6.3.2 této přílohy lze vypočítat ze změřených poměrných zpomalení zRALH a zRALL na dvou druzích povrchu, na nichž se provedou zkoušky s protiblokovacím systémem v činnosti. Tyto dva povrchy musí splňovat požadavky uvedené v bodě 6.3.2 této přílohy.
2.2. Poměrné zpomalení zRALS musí být:

a

Pokud je εH > 0,95, použije se εH = 0,95
Dodatek 4
Metoda volby povrchu s nízkým součinitelem adheze
1. Technická zkušebna musí mít k dispozici podrobnosti o součiniteli adheze zvoleného povrchu, jak je uvedeno v bodě 5.1.1.2 této přílohy.
1.1. Tyto údaje musí zahrnovat křivku součinitele adheze v závislosti na skluzu (od 0 do 100 % skluzu) pro rychlost přibližně 40 km/h (1).
1.1.1. Maximální hodnota křivky se označí symbolem kpeak a hodnota při 100 % skluzu klock.
1.1.2. Poměr R se určí jako podíl kpeak a klock.

1.1.3. Hodnota R se zaokrouhlí na jedno desetinné místo.
1.1.4. Povrch, který se použije, musí mít hodnotu poměru R mezi 1,0 a 2,0 (2).
2. Před zkouškami se technická zkušebna musí ujistit, že zvolený povrch splňuje stanovené požadavky, a musí mít k dispozici následující informace:
|
a) |
zkušební metoda, podle které byla stanovena hodnota R; |
|
b) |
typ vozidla (motorové vozidlo, přípojné vozidlo, …); |
|
c) |
zatížení jednotlivých náprav a typ pneumatik (musí se provést zkoušky s různými zatíženími náprav a s různými typy pneumatik a výsledky se musí předložit technické zkušebně, která rozhodne, zda jsou reprezentativní pro vozidlo, které se má schválit). |
2.1. Hodnota R se uvede ve zkušebním protokolu.
Povrch zkušební dráhy se musí přezkoušet nejméně jednou ročně, a to reprezentativním vozidlem, aby se ověřilo, zda hodnota R zůstává konstantní.
(1) Do doby, než se vytvoří jednotná zkušební metoda k určení křivky adheze pro vozidla s maximální hmotností přesahující 3,5 t, může se použít křivka zjištěná pro osobní automobily. V tomto případě se pro taková vozidla stanoví poměr kpeak/klock s použitím hodnoty kpeak vymezené v dodatku 2 k této příloze. Se souhlasem technické zkušebny se může součinitel adheze uvedený v tomto bodě určit jiným způsobem, je-li možné prokázat rovnocennost hodnot kpeak a klock.
(2) Do doby, než budou takové zkušební dráhy všeobecně dostupné, lze přijmout poměr R až do hodnoty 2,5, pokud s tím technická zkušebna souhlasí.
PŘÍLOHA 14
PODMÍNKY, KTERÝMI SE ŘÍDÍ ZKOUŠKY PŘÍPOJNÝCH VOZIDEL S ELEKTRICKÝMI BRZDOVÝMI SYSTÉMY
1. OBECNÉ INFORMACE
1.1. Pro účely následujících ustanovení se elektrickými brzdovými systémy rozumějí systémy provozního brzdění skládající se z ovládacího zařízení, elektromechanického převodu a třecích brzd. Elektrické ovládací zařízení, které řídí napětí pro přípojné vozidlo, musí být umístěno na přípojném vozidle.
1.2. Elektrickou energii potřebnou pro elektrický brzdový systém dodává přípojnému vozidlu motorové vozidlo.
1.3. Elektrický brzdový systém se uvádí do činnosti ovládáním systému provozního brzdění motorového vozidla.
1.4. Jmenovité napětí je 12 V.
1.5. Největší proud nesmí přesáhnout 15 A.
1.6. Elektrické spojení elektrického brzdového systému s motorovým vozidlem je provedeno zvláštním spojem s vidlicí a zásuvkou podle … (1), přičemž vidlice nesmí být zasunutelná do zásuvek zařízení pro osvětlení vozidla. Vidlice s kabelem je umístěna na přípojném vozidle.
2. POŽADAVKY NA PŘÍPOJNÉ VOZIDLO
2.1. Je-li na přípojném vozidle baterie napájená ze zdroje na motorovém vozidle, musí se při provozním brzdění přípojného vozidla přerušit spojení této baterie s přívodem energie.
2.2. U přípojných vozidel, jejichž hmotnost v nenaloženém stavu je nižší než 75 % jejich maximální hmotnosti, se musí brzdná síla automaticky regulovat v závislosti na zatížení přípojného vozidla.
2.3. Elektrické brzdové systémy musí být takové, aby se i v případě poklesu napětí v přívodních kabelech na hodnotu 7 V dosáhlo brzdné síly rovnající se 20 % síly odpovídající součtu maximálních zatížení náprav přípojného vozidla ve statickém stavu.
2.4. Zařízení pro regulaci brzdné síly, která reagují na sklon vozidla ve směru jízdy (zařízení s kyvadlem, s odpruženou hmotou, spínačem, na který působí setrvačnost kapaliny), musí být, pokud má přípojné vozidlo více než jednu nápravu a vertikálně seřizovatelnou polohu závěsného zařízení, namontována na rámu vozidla. U jednonápravových přípojných vozidel a u přípojných vozidel s nápravami umístěnými těsně vedle sebe, u nichž je rozvor menší než 1 m, musí být tato regulační zařízení vybavena ukazatelem horizontální polohy (např. vodováhou) a musí být ručně seřiditelná tak, aby se mechanismus mohl nastavit do vodorovné polohy ve směru jízdy vozidla.
2.5. Relé, které ovládá proud pro brzdění podle bodu 5.2.1.19.2 tohoto předpisu, jež je napojeno na ovládací okruh, musí být umístěno na přípojném vozidle.
2.6. Na přípojném vozidle musí být nezapojená zásuvka, do níž lze zasunout vidlici.
2.7. Na ovládacím zařízení musí být optický sdělovač, který se rozsvítí při každém brzdění a signalizuje správnou funkci elektrického brzdového systému na přípojném vozidle.
3. ČINNOST
3.1. Elektrické brzdové systémy musí vstupovat do činnosti při zpomalení soupravy tahače / přípojného vozidla, které není větší než 0,4 m/s2.
3.2. Brzdný účinek může začít s počáteční brzdnou silou, která nesmí být větší než 10 % síly odpovídající součtu maximálních zatížení náprav přípojného vozidla ve statickém stavu a také nesmí být větší než 13 % síly odpovídající součtu zatížení náprav nenaloženého přípojného vozidla ve statickém stavu.
3.3. Brzdná síla se může také zvětšovat po stupních. Při hodnotách brzdných sil větších, než jaké jsou uvedeny v bodě 3.2 této přílohy, nesmějí být tyto stupně větší než 6 % síly odpovídající součtu maximálních zatížení náprav přípojného vozidla ve statickém stavu ani větší než 8 % síly odpovídající součtu zatížení náprav nenaloženého přípojného vozidla ve statickém stavu.
Avšak u jednonápravových přípojných vozidel o celkové hmotnosti nepřesahující 1,5 t nesmí první stupeň přesahovat 7 % síly odpovídající maximálnímu zatížení nápravy přípojného vozidla ve statickém stavu. Pro následující stupně se připouští přírůstek ve výši 1 % této hodnoty (např.: 1. stupeň 7 %, 2. stupeň 8 %, 3. stupeň 9 % atd.; žádný z dalších stupňů nesmí přesáhnout 10 %). Pro účely těchto ustanovení se dvounápravové přípojné vozidlo s rozvorem kratším než 1 m považuje za jednonápravové přípojné vozidlo.
3.4. Předepsanou brzdnou sílu přípojného vozidla o hodnotě nejméně 50 % síly odpovídající součtu maximálních zatížení náprav je nutno dosáhnout při zatížení přípojného vozidla na maximální hmotnost, při středním plném zpomalení soupravy tahače / přípojného vozidla ne větším než 5,9 m/s2 u jednonápravových přípojných vozidel a ne větším než 5,6 m/s2 u vícenápravových přípojných vozidel. Ve smyslu těchto ustanovení se považují přípojná vozidla s nápravami o rozvoru kratším než 1 m za jednonápravová přípojná vozidla. Mimoto je nutné splnit mezní hodnoty uvedené v dodatku k této příloze. Pokud je brzdná síla řízena po stupních, musí tyto stupně ležet v rozsahu vymezeném v dodatku k této příloze.
3.5. Zkouška se vykoná z počáteční rychlosti 60 km/h.
3.6. Musí být zajištěno automatické brzdění přípojného vozidla podle ustanovení bodu 5.2.2.9 tohoto předpisu. Pokud toto automatické brzdění vyžaduje elektrickou energii, je nutné zajistit brzdnou sílu přípojného vozidla o velikosti nejméně 25 % síly odpovídající součtu maximálních zatížení náprav přípojného vozidla po dobu nejméně 15 minut, aby byl splněn výše uvedený požadavek.
(1) Je ve stavu zpracování. Do doby, než budou určeny specifikace tohoto zvláštního spojení, se použije spojení, které určí vnitrostátní schvalovací orgán udělující schválení typu.
Dodatek
Kompatibilita poměrného zpomalení přípojného vozidla a středního plného brzdného zpomalení soupravy tahače / přípojného vozidla (přípojné vozidlo naložené a nenaložené)

Poznámky:
|
1. |
Mezní hodnoty znázorněné v diagramu platí pro naložená a nenaložená přípojná vozidla. Pokud hmotnost nenaloženého přípojného vozidla přesahuje 75 % jeho maximální hmotnosti, použijí se pouze mezní hodnoty pro „naložený stav“. |
|
2. |
Mezní hodnoty znázorněné v grafu nijak neovlivňují ustanovení této přílohy o požadovaných minimálních brzdných účincích. Avšak pokud jsou brzdné účinky zjištěné při zkoušce podle ustanovení bodu 3.4 této přílohy vyšší než požadované účinky, nesmějí účinky zjištěné při zkoušce přesahovat mezní hodnoty znázorněné v grafu.
|
PŘÍLOHA 15
POSTUP ZKOUŠKY BRZDOVÝCH OBLOŽENÍ NA SETRVAČNÍKOVÉM DYNAMOMETRU
1. OBECNÉ INFORMACE
1.1. Postup popsaný v této příloze lze použít v případě úpravy typu vozidla, k níž došlo montáží jiného typu brzdových obložení na vozidlo, které již bylo schváleno podle tohoto předpisu.
1.2. Brzdová obložení jiného typu se musí ověřit tím, že se jejich účinky porovnají s účinky dosaženými s obloženími, kterými bylo vozidlo vybaveno při schválení a odpovídajícími konstrukčním částem uvedeným v příslušném informačním dokumentu, jehož vzor je stanoven v příloze 2 tohoto předpisu.
1.3. Technická zkušebna může požadovat, pokud to pokládá za účelné, aby se porovnání účinků brzdových obložení provedlo v souladu s ustanoveními obsaženými v příloze 4 tohoto předpisu.
1.4. Žádost o schválení, jejímž předmětem je porovnání účinků, předloží výrobce vozidla nebo jeho pověřený zástupce.
1.5. V této příloze se pojmem „vozidlo“ rozumí typ vozidla, který byl schválen podle tohoto předpisu a pro nějž se požaduje, aby porovnání účinků bylo považováno za vyhovující.
2. ZKUŠEBNÍ ZAŘÍZENÍ
2.1. Pro zkoušky se musí použít setrvačníkový dynamometr s následujícími charakteristikami:
|
2.1.1. |
Musí být možné nastavit na něm setrvačné hmoty předepsané v bodě 3.1 této přílohy a musí být schopen splňovat požadavky uvedené v bodech 1.5, 1.6 a 1.7 přílohy 4 tohoto předpisu, pokud jde o zkoušky typu I, typu II a typu III. |
|
2.1.2. |
Zkoušené brzdy musí být identické s originálními brzdami příslušného typu vozidla. |
|
2.1.3. |
Zařízení pro ochlazování vzduchem, pokud je instalováno, musí splňovat požadavky uvedené v bodě 3.4 této přílohy. |
|
2.1.4. |
Pro zkoušky musí mít dynamometr přístrojové vybavení poskytující alespoň tyto údaje:
|
3. PODMÍNKY ZKOUŠKY
3.1. Setrvačníkový dynamometr musí být nastaven tak, aby s tolerancí ± 5 % reprodukoval co nejvěrněji rotační moment setrvačnosti odpovídající té části celkové setrvačné hmoty vozidla, jež je brzděna daným kolem (koly), a to podle tohoto vzorce:
I = MR2
kde:
|
I |
= |
rotační moment setrvačnosti (kg × m2) |
|
R |
= |
dynamický poloměr valení pneumatiky [m] |
|
M |
= |
část maximální hmotnosti vozidla, která je brzděna daným kolem (koly). V případě dynamometru s jedním měřicím koncem se vypočte tato část hmotnosti pro vozidla kategorií M2, M3 a N na základě jmenovitého rozdělení brzdných účinků při brzdění se zpomalením odpovídajícím příslušné hodnotě uvedené v bodě 2.1 přílohy 4 tohoto předpisu. U vozidel kategorie O (přípojná vozidla) odpovídá hodnota M zatížení, kterým působí dané kolo na vozovku při stojícím vozidle a zatíženém na maximální hmotnost. |
3.2. Počáteční otáčky setrvačníkového dynamometru musí odpovídat rychlosti vozidla, která je předepsána v příloze 4 tohoto předpisu, a musí se vypočítat na základě dynamického poloměru valení pneumatiky.
3.3. Brzdová obložení musí být zaběhnuta nejméně na 80 % a během záběhu nesmí jejich teplota přesáhnout 180 °C, nebo alternativně, na žádost výrobce, musí být zaběhnuta podle jeho doporučení.
3.4. Lze použít ochlazování vzduchem; proud vzduchu musí směřovat na brzdu kolmo k ose rotace. Rychlost proudění vzduchu na brzdě musí být:
vair = 0,33 v
kde:
|
v |
= |
zkušební rychlost vozidla na začátku brzdění. |
Teplota chladicího vzduchu se rovná teplotě okolního prostředí.
4. POSTUP ZKOUŠEK
4.1. Srovnávacím zkouškám se podrobí pět sad vzorků brzdového obložení; musí se porovnávat s pěti sadami obložení shodnými s původními obloženími, která jsou specifikována v informačním dokumentu pro první schválení dotčeného typu vozidla.
4.2. Rovnocennost brzdových obložení se zjišťuje porovnáním výsledků dosažených zkušebními postupy předepsanými v této příloze a podle následujících požadavků.
4.3. Zkouška brzdného účinku typu 0 se studenou brzdou
4.3.1. Zabrzdí se třikrát s počáteční teplotou nižší než 100 °C. Teplota se měří podle ustanovení bodu 2.1.4.4 této přílohy.
4.3.2. S brzdovými obloženími určenými k použití na vozidlech kategorií M2, M3 a N se vykonají zabrzdění z počátečních otáček odpovídajících počáteční rychlosti při zkoušce stanovené v bodě 2.1 přílohy 4 tohoto předpisu, přičemž brzda se použije tak, aby bylo dosaženo středního brzdného momentu rovnocenného zpomalení předepsanému v uvedeném bodě. Kromě toho je třeba také provést zkoušky z různých počátečních otáček, přičemž nejnižší odpovídají 30 % maximální rychlosti vozidla a nejvyšší 80 % této rychlosti.
4.3.3. S brzdovými obloženími určenými k použití na vozidlech kategorie O se vykonají zkoušky z počátečních otáček odpovídajících rychlosti 60 km/h, přičemž brzda se použije tak, aby bylo dosaženo středního brzdného momentu rovnocenného požadavku stanovenému v bodě 3.1 přílohy 4 tohoto předpisu. Provede se doplňující zkouška se studenou brzdou z počátečních otáček odpovídajících 40 km/h pro porovnání s výsledky zkoušek typu I, jak je uvedeno v bodě 3.1.2.2 přílohy 4 tohoto předpisu.
4.3.4. Střední brzdný moment registrovaný v průběhu výše uvedených zkoušek účinku brzdy za studena, provedených na zkoušených obloženích za účelem zjištění rovnocennosti, musí zůstat při zkoušce pro tutéž vstupní hodnotu v rozmezí ± 15 % od středního brzdného momentu registrovaného pro brzdová obložení typu, který odpovídá konstrukční části uvedené v příslušné žádosti o schválení typu vozidla.
4.4. Zkouška typu I (zkouška slábnutí brzdného účinku)
4.4.1. Zkouška s opakovaným brzděním
4.4.1.1. Brzdová obložení určená k použití na vozidlech kategorií M2, M3 a N se zkoušejí podle postupu uvedeného v bodě 1.5.1 přílohy 4 tohoto předpisu.
4.4.2. Zkouška s trvalým brzděním
4.4.2.1. Brzdová obložení určená k použití na přípojných vozidlech (kategorie O) se zkoušejí podle postupu uvedeného v bodě 1.5.2 přílohy 4 tohoto předpisu.
4.4.3. Brzdný účinek se zahřátými brzdami
4.4.3.1. Po provedení zkoušek podle bodů 4.4.1 a 4.4.2 této přílohy se provede zkouška brzdného účinku se zahřátými brzdami předepsaná v bodě 1.5.3 přílohy 4 tohoto předpisu.
4.4.3.2. Střední brzdný moment zaznamenaný v průběhu výše uvedených zkoušek brzdného účinku se zahřátými brzdami, provedených na zkoušených obloženích za účelem zjištění rovnocennosti, musí zůstat při zkoušce při stejné vstupní hodnotě v rozmezí ± 15 % od středního brzdného momentu zaznamenaného pro brzdová obložení typu, který odpovídá konstrukční části uvedené v příslušné žádosti o schválení daného typu vozidla.
4.5. Zkouška typu II (zkouška reakce vozidla při dlouhých klesáních)
4.5.1. Tato zkouška se provede pouze tehdy, pokud se na daném typu vozidla použijí pro zkoušky typu II třecí brzdy.
4.5.2. S brzdovými obloženími určenými k použití na vozidlech kategorie M3 (s výjimkou vozidel, pro něž je předepsána v bodě 1.6.4 přílohy 4 tohoto předpisu zkouška typu IIA), na vozidlech kategorie N3 a na přípojných vozidlech kategorie O4 se provede zkouška podle postupu v bodě 1.6.1 přílohy 4 tohoto předpisu.
4.5.3. Brzdný účinek se zahřátými brzdami
4.5.3.1. Po provedení zkoušky podle bodu 4.5.1 této přílohy se provede zkouška brzdného účinku se zahřátými brzdami předepsaná v bodě 1.6.3 přílohy 4 tohoto předpisu.
4.5.3.2. Střední brzdný moment zaznamenaný v průběhu výše uvedených zkoušek brzdného účinku se zahřátými brzdami, provedených na zkoušených obloženích za účelem zjištění rovnocennosti, musí zůstat při zkoušce při stejné vstupní hodnotě v rozmezí ± 15 % od středního brzdného momentu zaznamenaného pro brzdová obložení typu, který odpovídá konstrukční části uvedené v příslušné žádosti o schválení daného typu vozidla.
4.6. Zkouška typu III (zkouška slábnutí brzdného účinku)
4.6.1. Zkouška opakovaným brzděním
4.6.1.1. Brzdová obložení pro přípojná vozidla kategorie O4 se zkoušejí podle postupu stanoveného v bodech 1.7.1 a 1.7.2 přílohy 4 tohoto předpisu.
4.6.2. Brzdný účinek se zahřátými brzdami
4.6.2.1. Po provedení zkoušek požadovaných body 4.6.1 a 4.6.2 této přílohy se provede zkouška brzdného účinku se zahřátými brzdami stanovená v bodě 1.7.2 přílohy 4 tohoto předpisu.
4.6.2.2. Střední brzdný moment během výše uvedených zkoušek se zahřátými brzdami, provedených na zkoušených obloženích za účelem zjištění rovnocennosti, musí zůstat při zkoušce při stejné vstupní hodnotě v rozmezí ± 15 % od středního brzdného momentu zaznamenaného pro brzdová obložení typu, který odpovídá konstrukční části uvedené v příslušné žádosti o schválení daného typu vozidla.
5. PROHLÍDKA BRZDOVÝCH OBLOŽENÍ
5.1. Po všech výše uvedených zkouškách se musí brzdová obložení vizuálně zkontrolovat, aby se ověřilo, že jsou ještě v dostatečně dobrém stavu, aby se mohla nadále na vozidle v běžném provozu používat.
PŘÍLOHA 16
KOMPATIBILITA MEZI TAŽNÝMI A PŘÍPOJNÝMI VOZIDLY Z HLEDISKA SDĚLOVÁNÍ DAT PODLE NORMY ISO 11992
1. OBECNÉ INFORMACE
1.1. Požadavky této přílohy se použijí pouze na tažná vozidla a přípojná vozidla vybavená elektrickým ovládacím vedením, které je vymezeno v bodě 2.24 tohoto předpisu.
1.2. Konektor podle normy ISO 7638 zajišťuje přívod elektrické energie do brzdového systému nebo protiblokovacího brzdového systému přípojného vozidla. U vozidel vybavených elektrickým ovládacím vedením vymezeným v bodě 2.24 tohoto předpisu slouží tento konektor také jako rozhraní pro sdělování dat prostřednictvím pólu 6 a 7 – viz bod 5.1.3.6 tohoto předpisu.
1.3. Tato příloha stanoví požadavky na tažné vozidlo a přípojné vozidlo z hlediska předávání a přijímání zpráv vymezených v normě ISO 11992-2:2003 a její změně 1:2007.
2. PARAMETRY VYMEZENÉ V NORMĚ ISO 11992-2:2003 A JEJÍ ZMĚNĚ 1:2007, KTERÉ JSOU PŘENÁŠENY ELEKTRICKÝM OVLÁDACÍM VEDENÍM, SE PODPORUJÍ TAKTO:
|
2.1. |
Následující funkce a s nimi spojené zprávy, jak jsou definovány v tomto předpisu, musí být předávány a přijímány tažným vozidlem nebo, v příslušných případech, přípojným vozidlem:
|
|
2.2. |
Když přípojné vozidlo předává následující zprávy, musí tažné vozidlo uvést do činnosti výstražný signál pro řidiče:
|
|
2.3. |
Následující zprávy vymezené v normě ISO 11992-2:2003 a její změně 1:2007 musí být předávány a přijímány tažným vozidlem nebo přípojným vozidlem:
|
|
2.4. |
Následující zprávy musí být v příslušných případech předávány a přijímány tažným vozidlem nebo přípojným vozidlem, když je na vozidle nainstalována funkce spojená s uvedeným parametrem:
|
|
2.5. |
Předávání a přijímání všech ostatních zpráv vymezených v normě ISO 11992-2:2003 a její změně 1:2007 je pro tažné vozidlo a přípojné vozidlo volitelné. |
(1) VDC (Vehicle Dynamic Control), tj. dynamické řízení vozidla, vymezené v normě ISO 11992-2:2003 a její změně 1:2007, je vymezeno v tomto předpisu jako stabilitní funkce vozidla – viz bod 2.34 tohoto předpisu.
(2) VDC (Vehicle Dynamic Control), tj. dynamické řízení vozidla, vymezené v normě ISO 11992-2:2003 a její změně 1:2007, je vymezeno v tomto předpisu jako stabilitní funkce vozidla – viz bod 2.34 tohoto předpisu.
(3) VDC (Vehicle Dynamic Control), tj. dynamické řízení vozidla, vymezené v normě ISO 11992-2:2003 a její změně 1:2007, je vymezeno v tomto předpisu jako stabilitní funkce vozidla – viz bod 2.34 tohoto předpisu.
(4) ROP (Roll Over Protection), tj. ochrana proti převrácení, vymezená v normě ISO 11992-2:2003 a její změně 1:2007, je vymezena v tomto předpisu jako opatření proti převrácení – viz bod 2.34.2.2 tohoto předpisu.
(5) YC (Yaw Control), tj. ovládání stáčení, vymezené v normě ISO 11992-2:2003 a její změně 1:2007, je vymezeno v tomto předpisu jako směrové řízení – viz bod 2.34.2.1 tohoto předpisu.
(6) ROP (Roll Over Protection), tj. ochrana proti převrácení, vymezená v normě ISO 11992-2:2003 a její změně 1:2007, je vymezena v tomto předpisu jako opatření proti převrácení – viz bod 2.34.2.2 tohoto předpisu.
(7) YC (Yaw Control), tj. ovládání stáčení, vymezené v normě ISO 11992-2:2003 a její změně 1:2007, je vymezeno v tomto předpisu jako směrové řízení – viz bod 2.34.2.1 tohoto předpisu.
PŘÍLOHA 17
POSTUP ZKOUŠEK KE ZHODNOCENÍ FUNKČNÍ KOMPATIBILITY VOZIDEL S ELEKTRICKÝMI OVLÁDACÍMI VEDENÍMI
1. OBECNÉ INFORMACE
1.1. Tato příloha vymezuje postupy, které se použijí k ověření, zda tažná a tažená vozidla s elektrickým ovládacím vedením splňují funkční požadavky a požadavky na výkon stanovené v bodě 5.1.3.6.1 tohoto předpisu. Technická zkušebna může použít jiné postupy, jestliže mají rovnocennou úroveň spolehlivosti.
1.2. Odkazy na normu ISO 7638 v této příloze se vztahují na normu ISO 7638-1:2003 u systémů s napětím 24 V a na normu ISO 7638-2:2003 u systémů s napětím 12 V.
2. INFORMAČNÍ DOKUMENT
2.1. Výrobce vozidla / dodavatel systému musí předat technické zkušebně informační dokument, který obsahuje alespoň tyto údaje:
|
2.1.1. |
schéma brzdového systému vozidla; |
|
2.1.2. |
důkazy, že rozhraní, včetně fyzikální vrstvy, spojovací vrstva dat a aplikační vrstva a příslušné umístění přiváděných zpráv a parametrů splňuje požadavky normy ISO 11992; |
|
2.1.3. |
seznam podporovaných zpráv a parametrů; a |
|
2.1.4. |
specifikace motorového vozidla z hlediska počtu řídících okruhů, které předávají signály pneumatickými a/nebo elektrickými ovládacími vedeními. |
3. TAŽNÁ VOZIDLA
3.1. Simulátor přípojného vozidla podle normy ISO 11992
Simulátor musí:
|
3.1.1. |
mít konektor splňující požadavky normy ISO 7638:2003 (sedmipólový) k připojení zkoušeného vozidla. Póly 6 a 7 se musí použít k předávání a přijímání zpráv podle normy ISO 11992:2003 a její změny 1:2007; |
|
3.1.2. |
být schopen přijímat všechny zprávy předávané motorovým vozidlem, jehož typ se má schválit, a být schopen předávat všechny zprávy přípojného vozidla vymezené v normě ISO 11992-2:2003 a její změně 1:2007; |
|
3.1.3. |
zajišťovat přímé nebo nepřímé čtení zpráv, se znázorňováním parametrů v poli dat ve správném chronologickém pořadí; a |
|
3.1.4. |
obsahovat zařízení k měření doby prodlevy ve spojkové hlavici podle bodu 2.6 přílohy 6 tohoto předpisu. |
3.2. Postup kontroly
3.2.1. Ověří se, zda informační dokument předaný výrobcem/dodavatelem splňuje ustanovení normy ISO 11992 z hlediska fyzikální vrstvy, spojovací vrstvy dat a aplikační vrstvy.
3.2.2. Se simulátorem připojeným k motorovému vozidlu prostřednictvím rozhraní podle normy ISO 7638 a během přenosu všech zpráv přípojného vozidla příslušejících rozhraní se ověří následující funkce:
3.2.2.1. Signály předávané ovládacím vedením
3.2.2.1.1. Parametry definované v EBS 12 byte 3 podle normy ISO 11992-2:2003 se kontrolují z hlediska specifikace vozidla takto:
|
Signály předávané ovládacím vedením |
EBS 12 Byte 3 |
|
|
Bits 1 – 2 |
Bits 5 – 6 |
|
|
Požadavek na provozní brzdění generovaný jedním elektrickým okruhem |
00b |
|
|
Požadavek na provozní brzdění generovaný dvěma elektrickými okruhy |
01b |
|
|
Vozidlo není vybaveno pneumatickým ovládacím vedením (1) |
|
00b |
|
Vozidle je vybaveno pneumatickým ovládacím vedením |
|
01b |
3.2.2.2. Požadavek na provozní/nouzové brzdění
3.2.2.2.1 Parametry definované v EBS 11 podle normy ISO 11992-2:2003 se ověří následujícím způsobem:
|
Podmínka při zkoušce |
Byte |
Hodnota signálu elektrického ovládacího vedení |
|
Pedál provozní brzdy a ovladač nouzové brzdy uvolněny |
3 – 4 |
0 |
|
Pedál provozní brzdy plně sešlápnut |
3 – 4 |
33280d až 43520d (650 až 850 kPa) |
|
Nouzová brzda uvedena do plné činnosti (2) |
3 – 4 |
33280d až 43520d (650 až 850 kPa) |
3.2.2.3. Výstražná signalizace poruchy:
|
3.2.2.3.1. |
Simuluje se trvalá porucha ve spojovacím vedení k pólu 6 konektoru podle normy ISO 7638 a ověří se, zda vstoupil do činnosti žlutý výstražný signál specifikovaný v bodě 5.2.1.29.1.2 tohoto předpisu. |
|
3.2.2.3.2. |
Simuluje se trvalá porucha ve spojovacím vedení k pólu 7 konektoru podle normy ISO 7638 a ověří se, zda vstoupil do činnosti žlutý výstražný signál specifikovaný v bodě 5.2.1.29.1.2 tohoto předpisu. |
|
3.2.2.3.3. |
Simuluje se zpráva EBS 22, byte 2 s bits 3 – 4, nastavena na 01b a ověří se, zda vstoupil do činnosti červený výstražný signál specifikovaný v bodě 5.2.1.29.1.1 tohoto předpisu. |
3.2.2.4. Požadavek přívodního vedení na brzdění
U motorových vozidel, která se mohou provozovat s přípojnými vozidly připojenými pouze elektrickým ovládacím vedením:
Smí být připojeno pouze elektrické ovládací vedení.
Simuluje se zpráva EBS 22, byte 4 s bits 3 – 4, nastavena na 01b a ověří se, zda tlak v přívodním vedení poklesne na hodnotu 150 kPa během následujících dvou sekund, když se působí plným účinkem na ovladač provozního brzdění, nouzového brzdění nebo parkovacího brzdění.
Simuluje se trvalá nepřítomnost přenosu dat a ověří se, zda tlak v přívodním vedení poklesne na hodnotu 150 kPa během následujících dvou sekund, když se působí plným účinkem na ovladač provozního brzdění, nouzového brzdění nebo parkovacího brzdění.
3.2.2.5. Doba odezvy:
3.2.2.5.1. Ověří se, zda bez přítomnosti jakékoli poruchy jsou splněny požadavky na odezvu ovládacího vedení vymezené v bodě 2.6 přílohy 6 tohoto předpisu.
3.2.2.6. Rozsvícení brzdových svítilen
Simuluje se zpráva EBS 22 byte 4 bits 5 – 6, nastavena na 00 a zkontroluje se, že brzdové svítilny nejsou rozsvíceny.
Simuluje se zpráva EBS 22 byte 4 bits 5 – 6, nastavena na 01 a zkontroluje se, že brzdové svítilny jsou rozsvíceny.
3.2.2.7. Intervence stabilitní funkce přípojného vozidla
Simuluje se zpráva EBS 21 byte 2 s bits 1 až 2, nastavena na 00 a zkontroluje se, že výstražná signalizace pro řidiče vymezená v bodě 2.1.6 přílohy 21 není rozsvícena.
Simuluje se zpráva EBS 21 byte 2 s bits 1 až 2, nastavena na 01 a zkontroluje se, že výstražná signalizace pro řidiče vymezená v bodě 2.1.6 přílohy 21 je rozsvícena.
3.2.3. Doplňková ověření
3.2.3.1. Technická zkušebna může podle svého rozhodnutí opakovat výše uvedené postupy ověření se zprávami jinými, než týkajícími se brzdění a příslušnými danému rozhraní, a ověřit je v různých stavech nebo ve vypnutém stavu.
3.2.3.2. Bod 2.4.1 přílohy 16 vymezuje doplňkové zprávy, které zajišťuje tažné vozidlo za specifických podmínek. Je možné provést doplňkové kontroly k ověření stavu předávaných a přijímaných zpráv, kterými se zajistí plnění požadavku bodu 5.1.3.6.2 tohoto předpisu.
4. PŘÍPOJNÁ VOZIDLA
4.1. Simulátor tažného vozidla podle normy ISO 11992
Simulátor musí:
|
4.1.1. |
mít konektor splňující požadavky normy ISO 7638:2003 (sedmipólový) k připojení zkoušeného vozidla. Póly 6 a 7 se musí použít k předávání a přijímání zpráv podle normy ISO 11992:2003 a její změny 1:2007; |
|
4.1.2. |
mít displej výstražného signálu poruchy a přívod elektrického napájení přípojného vozidla; |
|
4.1.3. |
být schopen přijímat všechny zprávy předávané přípojným vozidlem, jehož typ se má schválit, a být schopen předávat všechny zprávy motorového vozidla vymezené v normě ISO 11992-2:2003 a její změně 1:2007; |
|
4.1.4. |
zajišťovat přímé nebo nepřímé čtení zpráv, se znázorňováním parametrů v poli dat ve správném chronologickém pořadí; a |
|
4.1.5. |
obsahovat zařízení k měření doby prodlevy brzdového systému podle bodu 3.5.2 přílohy 6 tohoto předpisu. |
4.2. Postup kontroly
4.2.1. Ověří se, zda informační dokument předaný výrobcem/dodavatelem splňuje ustanovení normy ISO 11992:2003 a její změny 1:2007 z hlediska fyzikální vrstvy, spojovací vrstvy dat a aplikační vrstvy.
4.2.2. Ověří se následující funkce se simulátorem připojeným k přípojnému vozidlu prostřednictvím rozhraní podle normy ISO 7638, když se předávají všechny zprávy motorového vozidla příslušející rozhraní.
4.2.2.1. Funkce systému provozního brzdění
4.2.2.1.1. Odezva přípojného vozidla na parametry vymezené v EBS 11 normy ISO 11992-2:2003 a její změny 1:2007 se ověří následujícím způsobem:
Tlak v přívodním vedení na začátku každé zkoušky musí být ≥ 700 kPa a vozidlo musí být naloženo (pro účely této zkoušky je možno naložený stav simulovat).
4.2.2.1.1.1. U přípojných vozidel s pneumatickým a elektrickým ovládacím vedením:
|
|
musí být připojena obě ovládací vedení; |
|
|
obě ovládací vedení musí přenášet signály zároveň; |
|
|
simulátor musí předávat zprávu EBS 12 byte 3, bits 5-6, |
|
|
nastavenou na 01b, aby se pro přípojné vozidlo indikovalo, že je nutno připojit pneumatické ovládací vedení. |
Ověří se tyto parametry:
|
Zpráva předaná simulátorem |
Tlak v brzdových válcích |
|
|
Byte |
Digitální požadovaná hodnota |
|
|
3 – 4 |
0 |
0 kPa |
|
3 – 4 |
33280d (650 kPa) |
Tlak, který definoval výrobce ve výpočtu brzdění vozidla |
4.2.2.1.1.2. U přípojných vozidel s pneumatickým a elektrickým ovládacím vedením nebo pouze s elektrickým ovládacím vedením:
připojí se pouze elektrické ovládací vedení;
simulátor musí předávat tyto zprávy:
EBS 12 byte 3, bits 5-6, nastavena na 00b, aby přípojnému vozidlu bylo udáno, že není připojeno pneumatické ovládací vedení, a EBS 12 byte 3, bits 1-2, nastavena na 01b, aby přípojnému vozidlu bylo udáno, že signál přenesený elektrickým ovládacím vedením je generován dvěma elektrickými okruhy.
Ověří se tyto parametry:
|
Zpráva předaná simulátorem |
Tlak v brzdových válcích |
|
|
Byte |
Digitální požadovaná hodnota |
|
|
3 – 4 |
0 |
0 kPa |
|
3 – 4 |
33280d (650 kPa) |
Tlak, který definoval výrobce ve výpočtu brzdění vozidla |
4.2.2.1.2. U přípojných vozidel vybavených pouze elektrickým ovládacím vedením se odezva na zprávy vymezené v EBS 12 normy ISO 11992-2:2003 ověří následujícím způsobem:
|
|
V pneumatickém přívodním vedení musí být na začátku každé zkoušky tlak ≥ 700 kPa. |
|
|
Elektrické ovládací vedení musí být připojeno k simulátoru; |
simulátor musí předávat tyto zprávy:
|
|
EBS 12 byte 3, bits 5-6 je nastavena na 01b, aby přípojnému vozidlu bylo udáno, že je možné připojit pneumatické ovládací vedení. |
|
|
EBS 11 byte 3-4 je nastavena na 0 (není žádný požadavek na provozní brzdění). |
Ověří se odezva na následující zprávy:
|
EBS 12, Byte 3, bit 1-2 |
Tlak v brzdových válcích nebo reakce přípojného vozidla |
|
01b |
0 kPa (provozní brzda uvolněna) |
|
00b |
Přípojné vozidlo je brzděno automaticky, aby se ukázalo, že vozidla soupravy nejsou kompatibilní. Také se musí přenášet signál pólem 5 konektoru podle normy ISO 7638:2003 (žlutý výstražný signál). |
4.2.2.1.3. U přípojných vozidel připojených pouze elektrickým ovládacím vedením se ověřuje odezva přípojného vozidla na poruchu v elektrickém ovládacím převodu přípojného vozidla, která má za následek zmenšení brzdného účinku na nejméně 30 % předepsané hodnoty, a sice následujícím postupem:
|
|
V pneumatickém přívodním vedení musí být na začátku každé zkoušky tlak ≥ 700 kPa. |
|
|
Elektrické ovládací vedení musí být připojeno k simulátoru; |
|
|
EBS 12 byte 3, bits 5-6 je nastavena na 00b, aby přípojnému vozidlu bylo udáno, že není možné připojit pneumatické ovládací vedení. |
|
|
EBS 12 byte 3, bits 1-2 je nastavena na 01b, aby přípojnému vozidlu bylo udáno, že signál přenesený elektrickým ovládacím vedením je generován dvěma elektrickými okruhy. |
Ověří se tyto body:
|
Podmínka při zkoušce |
Odezva brzdového systému |
|
V brzdovém systému přípojného vozidla není žádná porucha |
Ověří se, že brzdový systém komunikuje se simulátorem a že EBS 22 byte 4, bits 3-4 je nastavena na 00b. |
|
Do elektrického ovládacího převodu brzdového systému přípojného vozidla se zavede porucha, která znemožní, aby se udržovalo nejméně 30 % předepsaného brzdného účinku |
Ověří se, zda EBS 22 byte 4, bits 3-4 je nastavena na 01b, nebo sdělování dat do simulátoru bylo ukončeno. |
4.2.2.2. Výstražná signalizace poruchy
4.2.2.2.1. Ověří se, zda se za následujících podmínek přenáší příslušná výstražná zpráva nebo signál.
|
4.2.2.2.1.1. |
Jestliže trvalá porucha v elektrickém ovládacím převodu brzdového systému přípojného vozidla znemožňuje dosáhnout požadovaného účinku systému provozního brzdění, simuluje se taková porucha a ověří se, zda zpráva EBS 22 byte 2, bits 3-4 předávaná přípojným vozidlem je nastavena na 01b. Pólem 5 konektoru podle normy ISO 7638 musí být také předáván signál (žlutý výstražný signál). |
|
4.2.2.2.1.2. |
Na pólech 1 a 2 konektoru podle normy ISO 7638 se sníží napětí pod výrobcem stanovenou hodnotu, která znemožňuje dosáhnout požadovaného účinku systému provozního brzdění, a ověří se, zda zpráva EBS 22 byte 2, bits 3-4 předávaná přípojným vozidlem je nastavena na 01b. Pólem 5 konektoru podle normy ISO 7638 by měl být také předáván signál (žlutý výstražný signál). |
|
4.2.2.2.1.3. |
Uzavřením přívodního vedení se ověří, zda jsou splněna ustanovení bodu 5.2.2.16 tohoto předpisu. Tlak v zásobnících přípojného vozidla se sníží na hodnotu udanou výrobcem. Ověří se, zda zpráva EBS 22 byte 2, bits 3-4 předávaná přípojným vozidlem je nastavena na 01b a zda EBS 23 byte 1, bits 7-8 je nastavena na 00. Pólem 5 konektoru podle normy ISO 7638 musí být také předáván signál (žlutý výstražný signál). |
|
4.2.2.2.1.4. |
Když se elektrická část brzdového zařízení uvede poprvé pod napětí, ověří se, zda zpráva EBS 22 byte 2, bits 3-4 předávaná přípojným vozidlem je nastavena na 01b. Jakmile brzdový systém ověřil, že není přítomna žádná závada, která vyžaduje identifikaci červeným výstražným signálem, nastaví se výše uvedená zpráva na 00b. |
4.2.2.3. Ověření doby prodlevy
4.2.2.3.1. Ověří se, zda ve stavu bez jakékoli poruchy jsou splněny požadavky na prodlevu brzdového systému vymezené v bodě 3.5.2 přílohy 6 tohoto předpisu.
4.2.2.4. Automaticky ovládané brzdění
Pokud je přípojné vozidlo vybaveno funkcí, jejíž činnost vyvolá intervenci automaticky ovládaného brzdění, ověří se následující:
Pokud se negeneruje žádná intervence automaticky ovládaného brzdění, ověří se, že zpráva EBS 22 byte 4, bits 5-6 je nastavena na 00.
Simuluje se intervence automaticky ovládaného brzdění a když je výsledné zpomalení ≥ 0,7 m/s2, ověří se, že zpráva EBS 22 byte 4, bits 5-6 je nastavena na 01.
4.2.2.5. Stabilitní funkce vozidla
Pokud je přípojné vozidlo vybaveno stabilitní funkcí vozidla, ověří se následující:
Pokud je stabilitní funkce vozidla mimo činnost, ověří se, že zpráva EBS 21 byte 2, bits 1-2 je nastavena na 00.
Simuluje se intervence stabilitní funkce vozidla, jak je specifikováno v bodě 2.2.4 přílohy 21, a ověří se, že zpráva EBS 21 byte 2, bits 1-2 je nastavena na 01.
4.2.2.6. Podpora elektrického ovládacího vedení
Pokud brzdový systém přípojného vozidla nepodporuje brzdění prostřednictvím elektrického ovládacího vedení, ověří se, že zpráva EBS 22 byte 4, bits 7-8 je nastavena na 00.
Pokud brzdový systém přípojného vozidla podporuje brzdění prostřednictvím elektrického ovládacího vedení, ověří se, že zpráva EBS 22 byte 4, bits 7-8 je nastavena na 01.
4.2.3. Doplňková ověření
4.2.3.1. Technická zkušebna může podle svého rozhodnutí opakovat výše uvedené postupy ověření se zprávami jinými, než týkajícími se brzdění a příslušnými danému rozhraní, a ověřit je v různých stavech nebo ve vypnutém stavu.
Když se opakují měření dob náběhu účinku brzdového systému, může dojít k rozdílům ve změřených hodnotách vzhledem k reakci pneumatického systému vozidla. Ve všech případech musí být předepsané požadavky na doby náběhu brzdného účinku splněny.
4.2.3.2. Bod 2.4.2 přílohy 16 vymezuje doplňkové zprávy, které musí přípojné vozidlo za specifických podmínek podporovat. Je možné provést doplňkové kontroly k ověření stavu předávaných a přijímaných zpráv, kterými se zajistí plnění požadavku bodu 5.1.3.6.2 tohoto předpisu.
(1) Toto provedení vozidla je poznámkou pod čarou 4 k bodu 5.1.3.1.3 tohoto předpisu zakázáno.
(2) Volitelné u tažných vozidel s elektrickým a pneumatickým ovládacím vedením, když pneumatické ovládací vedení splňuje příslušné požadavky na nouzové brzdění.
PŘÍLOHA 18
ZVLÁŠTNÍ POŽADAVKY TÝKAJÍCÍ SE BEZPEČNOSTNÍCH HLEDISEK KOMPLEXNÍCH ELEKTRONICKÝCH ŘÍDÍCÍCH SYSTÉMŮ VOZIDEL
1. OBECNÉ INFORMACE
Tato příloha specifikuje zvláštní požadavky na dokumentaci, na strategie týkající se poruch a ověřování bezpečnostních hledisek komplexních elektronických řídících systémů vozidel (bod 2.3), které se vztahují k tomuto předpisu.
Na tuto přílohu mohou také odkazovat určité body tohoto předpisu ve vztahu k funkcím týkajícím se bezpečnosti, které jsou řízeny elektronickým systémem (elektronickými systémy).
Tato příloha nespecifikuje kritéria účinků „daného systému“, avšak je metodickým prostředkem při tvorbě koncepce systému a informací o něm, které musí být předloženy technické zkušebně pro účely schválení typu.
Tyto informace musí prokázat, že „daný systém“ za standardních podmínek a v poruchovém stavu splňuje všechny příslušné požadavky na brzdný účinek uvedené jinde v tomto předpise.
2. DEFINICE
Pro účely této přílohy se použijí tyto definice:
|
2.1. |
„Koncepcí bezpečnosti“ se rozumí popis opatření začleněných do systému, např. v rámci elektronických jednotek, aby zajistila integritu systému, a tím bezpečný provoz i v případě elektrické poruchy. Částí bezpečnostní koncepce může být možnost přechodu k částečnému fungování nebo dokonce k nouzovému systému pro zásadně důležité funkce vozidla. |
|
2.2. |
„Elektronickým řídícím systémem“ se rozumí kombinace jednotek konstruovaná k tomu, aby podporovala zajištění stanovené funkce ovládání vozidla pomocí zpracování elektronických dat. Takové systémy, často softwarově ovládané, se skládají z jednotlivých funkčních konstrukčních částí, jako jsou čidla, elektronické řídící jednotky a akční členy, a jsou propojeny přenosovými spoji. Mohou zahrnovat mechanické, elektropneumatické či elektrohydraulické prvky. „Daným systémem“, na který se zde odkazuje, se rozumí systém, pro který se požaduje schválení typu. |
|
2.3. |
„Komplexními elektronickými řídícími systémy vozidel“ se rozumí elektronické řídící systémy, na které se vztahuje hierarchie ovládání, ve které může být ovládaná funkce potlačena systémem/funkcí elektronického ovládání vyšší úrovně. Určitá funkce, která je podřízena jiné funkci, se stává částí komplexního systému. |
|
2.4. |
„Řídícími systémy nebo funkcemi vyšší úrovně“ se rozumí systémy nebo funkce, které používají doplňkové procesy ke snímání a/nebo zpracování za účelem změnit chování vozidla vyvoláním změn normální funkce (funkcí) řídícího systému vozidla. To komplexním systémům umožňuje automaticky měnit své účinky s prioritou, jež závisí na zjištěných okolnostech. |
|
2.5. |
„Jednotkami“ se rozumí nejmenší části jednotlivých konstrukčních částí systému, jimiž se tato příloha zabývá, protože tyto kombinace konstrukčních částí budou pro účely identifikace, analýzy či výměny považovány za samostatné objekty. |
|
2.6. |
„Přenosovými spoji“ se rozumí prostředky využívané k propojení různě rozmístěných jednotek za účelem přenosu signálů, provozních dat či přívodu energie. Tato zařízení jsou všeobecně elektrická, avšak mohou být v určitých částech optická, pneumatická, hydraulická nebo mechanická. |
|
2.7. |
„Rozsahem ovládání“ se odkazuje na výstupní veličinu a vymezuje se rozsah, v rámci něhož systém pravděpodobně uplatní funkce ovládání. |
|
2.8. |
„Hranicí funkčního provozu“ se vymezují hranice vnějších fyzických možností, v rámci nichž je systém schopen udržet kontrolu. |
3. DOKUMENTACE
3.1. Požadavky
Výrobce musí předložit soubor dokumentace, který udává přehled o základní koncepci „daného systému“ a o prostředcích, pomocí kterých je tento systém propojen s ostatními systémy vozidla a kterými přímo ovládá výstupní veličiny.
Dokumentace musí vysvětlovat funkci (funkce) „daného systému“ a bezpečnostní koncepci, jak je definoval výrobce.
Dokumentace musí být stručná, avšak musí dokládat, že v rámci konstrukce a vývoje bylo využito odborných znalostí ze všech oblastí daného systému, jež jsou zahrnuty.
Pro účely periodických technických prohlídek musí dokumentace popisovat, jak je možno kontrolovat stav fungování „daného systému“.
3.1.1. Dokumentace musí obsahovat dvě části:
|
a) |
Složka formální dokumentace pro účely schválení, která obsahuje podklady uvedené v bodě 3 (s výjimkou podkladů uvedených v bodě 3.4.4) a musí být předložena technické zkušebně při podání žádosti o schválení typu. Toto bude považováno za základní odkaz pro postup ověřování stanovený v bodě 4 této přílohy. |
|
b) |
Další údaje a data z analýzy podle bodu 3.4.4, které musí výrobce uchovat a které je možno ověřovat při schválení typu. |
3.2. Popis funkcí „daného systému“
Je nutno předložit popis, který vysvětluje jednoduchým způsobem všechny řídící funkce „daného systému“ a metody, které byly použity k dosažení cílů, a zejména popis mechanismu (mechanismů), kterými se řídící funkce vykonávají.
3.2.1. Musí být předložen seznam všech vstupních a zjištěných veličin, jakož i jejich vymezený pracovní rozsah.
3.2.2. Popis dále musí obsahovat seznam všech výstupních proměnných veličin, které jsou řízeny „daným systémem“, a pro každý případ musí být uvedeno, zda jsou řízeny přímo, nebo prostřednictvím jiného systému vozidla. Musí být vymezen rozsah ovládání (bod 2.7) uplatněný u každé této veličiny.
3.2.3. Musí být uvedeny faktory vymezující hranice funkčního provozu (bod 2.8), jestliže jsou pro účinky systému relevantní.
3.3. Uspořádání a schéma systému
3.3.1. Seznam konstrukčních částí
Musí být předložen seznam obsahující všechny jednotky „daného systému“ a musí být uvedeny ostatní systémy vozidla, které jsou potřebné k vykonávání dané řídící funkce.
Musí být předložen základní přehled, jenž tyto jednotky schematicky znázorní v jejich vzájemném spojení, přičemž z něj musí jasně vyplývat rozmístění jednotlivých zařízení i jejich vzájemná propojení.
3.3.2. Funkce jednotek
Musí být uvedena funkce každé jednotky „daného systému“ a signály, které ji spojují s jinými jednotkami nebo s jinými systémy vozidla. Tento přehled lze předložit v podobě označeného blokového nebo jiného schématu či formou popisu doplněného takovým schématem.
3.3.3. Propojení
Propojení uvnitř „daného systému“ se znázorní schématem zapojení elektrických přenosových spojení, schématem optických vláken u optických spojení, schématem potrubí u pneumatických nebo hydraulických převodů a zjednodušeným schématem sestavy u mechanických spojení.
3.3.4. Tok signálu a priority
Mezi uvedenými přenosovými spoji a signály přenášenými mezi jednotlivými jednotkami musí existovat jasný soulad.
Priority signálů na multiplexovaných datových cestách musí být uvedeny všude, kde může priorita představovat problém ovlivňující účinnost či bezpečnost, pokud jde o tento předpis.
3.3.5. Identifikace jednotek
Každá jednotka musí být jasně a jednoznačně identifikovatelná (např. pomocí označení pro hardware a pomocí označení nebo softwarového výstupu pro softwarový obsah), aby jí bylo možné přiřadit odpovídající hardware a dokumentaci.
V případech, kdy jsou funkce kombinovány v rámci jediné jednotky nebo ve skutečnosti v rámci jediného počítače, avšak z důvodu srozumitelnosti a názornosti znázorněny ve více blocích v blokovém schématu, použije se pouze jediné identifikační označení hardwaru.
Výrobce použitím tohoto označení potvrzuje, že dodané zařízení je v souladu s odpovídajícím dokumentem.
3.3.5.1. Označení vymezuje verzi hardwaru a softwaru, přičemž v případě změny verze softwaru, např. za účelem změny funkce jednotky, pokud jde o tento předpis, se změní i toto označení.
3.4. Bezpečnostní koncepce výrobce
3.4.1. Výrobce předloží prohlášení, kterým potvrzuje, že strategie, kterou zvolil k dosažení cílů „daného systému“, neohrozí v bezporuchovém stavu bezpečnou funkci systémů, pro které platí ustanovení tohoto předpisu.
3.4.2. Vysvětlí se základní architektura softwaru použitého v „daném systému“ a uvedou se použité metody a nástroje. Výrobce musí být připraven na vyžádání předložit doklady o prostředcích, jejichž pomocí v průběhu procesu návrhu a vývoje stanovil provedení logiky systému.
3.4.3. Výrobce musí předložit technickým zkušebnám vysvětlení koncepčních charakteristik integrovaných do „daného systému“ k zajištění bezpečnosti fungování ve stavu poruchy. Možné konstrukční charakteristiky v případě poruchy „daného systému“ mohou být např. následující:
|
a) |
omezení na provoz za použití pouze určité části systému; |
|
b) |
přepnutí na samostatný záložní systém; |
|
c) |
vyřazení funkcí vyšší úrovně. |
V případě poruchy musí být řidič upozorněn např. pomocí výstražného signálu nebo zobrazeného hlášení. Není-li systém deaktivován řidičem, např. otočením spínače zapalování do pozice „vypnuto“ nebo vypnutím příslušné funkce, je-li za tímto účelem k dispozici zvláštní vypínač, musí být výstraha patrná po celou dobu trvání poruchového stavu.
3.4.3.1. V případě, že se pomocí vybraného opatření zvolí provozní režim částečné účinnosti za určitých podmínek poruchového stavu, musí být tyto podmínky uvedeny a musí být vymezena výsledná omezení účinnosti.
3.4.3.2. V případě, že se pomocí vybraného opatření zvolí pro dosažení požadovaného účinku řídícího systému vozidla druhotné (záložní) prostředky, musí být vysvětleny zásady mechanismu přepínání, logika a úroveň rezervy a veškeré prvky kontroly zálohy a musí být vymezena výsledná omezení účinnosti zálohy.
3.4.3.3. V případě, že se pomocí vybraného opatření zvolí vypnutí nadřazené funkce, musí být blokovány všechny příslušné výstupní řídící signály vázané na tuto funkci, a to tak, aby se omezila přechodová rušení.
3.4.4. K dokumentaci musí být přiložena analýza, která celkově znázorní, jak se systém bude chovat v případě výskytu jakékoli z uvedených poruch souvisejících s účinností ovládání vozidla či bezpečností.
Tato analýza může být založena na analýze způsobů selhání a jejich následků (FMEA), analýze stromové struktury příčin (FTA) nebo na jakémkoli jiném podobném postupu vhodném z hlediska aspektů bezpečnosti systému.
Zvolený analytický přístup (přístupy) musí být vymezen(y) a aktualizován(y) výrobcem a musí být dostupný(é) ke kontrole technickou zkušebnou při schválení typu.
3.4.4.1. V této dokumentaci musí být uvedeny parametry, které se sledují, a pro každý druh poruchy definované v bodě 3.4.4 musí být uveden výstražný signál pro řidiče a/nebo pro pracovníky servisu nebo pracovníky provádějící technické prohlídky.
4. OVĚŘENÍ A ZKOUŠKA
4.1. Funkční provoz „daného systému“, jak je stanoven v dokumentech požadovaných bodem 3, se zkouší takto:
4.1.1. Ověření funkce „daného systému“
Ověření účinnosti systému vozidla za podmínek bezporuchového stavu jako prostředek pro vytvoření běžných provozních úrovní se provede podle základních specifikací výrobce pro zkušební test, není-li toto ověření předmětem stanovené zkoušky účinnosti jako součásti postupu schvalování podle tohoto nebo jiného předpisu.
4.1.2. Ověření koncepce bezpečnosti podle bodu 3.4
Podle rozhodnutí schvalovacího orgánu se kontroluje reakce „daného systému“ ve stavu poruchy v kterékoli jednotlivé jednotce použitím výstupních signálů příslušných elektrickým jednotkám nebo mechanickým prvkům za účelem simulovat účinky vnitřních poruch v jednotce.
4.1.2.1. Výsledky ověření se musí shodovat s doloženým shrnutím analýzy poruchy na úrovni celkového účinku tak, aby byly koncepce bezpečnosti a její realizace potvrzeny jako přiměřené.
PŘÍLOHA 19
ZKOUŠKY VLASTNOSTÍ KONSTRUKČNÍCH ČÁSTÍ BRZDOVÉHO SYSTÉMU
ČÁST 1
Zkoušky vlastností konstrukčních částí brzdového systému přípojných vozidel
1. OBECNÉ INFORMACE
1.1. Část 1 stanoví postupy zkoušek k určení vlastností následujících konstrukčních částí:
|
1.1.1. |
Membránové brzdové válce (viz bod 2). |
|
1.1.2. |
Pružinové brzdy (viz bod 3). |
|
1.1.3. |
Brzdy přípojných vozidel – brzdné účinky se studenými brzdami (viz bod 4). |
|
1.1.4. |
Protiblokovací brzdové systémy (viz bod 5). Pozn.: postupy k určení slábnutí brzdného účinku brzd přípojných vozidel a zařízení k automatickému vyrovnávání opotřebení brzdových obložení jsou stanoveny v příloze 11 tohoto předpisu. |
|
1.1.5. |
Stabilitní funkce vozidla (viz bod 6). |
1.2. Výše uvedené zkušební protokoly lze použít podle postupu stanoveného v příloze 20 tohoto předpisu nebo při posuzování přípojného vozidla, s kterým se provádí skutečná zkouška brzdného účinku předepsaná pro toto vozidlo.
2. VLASTNOSTI MEMBRÁNOVÝCH BRZDOVÝCH VÁLCŮ
2.1. Obecné informace
2.1.1. Tento oddíl stanoví postup, kterým se určují závislosti tlakové síly / zdvihu / tlaku u membránových brzdových válců, jež se používají v pneumatických brzdových systémech (1) k vyvození sil potřebných v brzdách s mechanickým ovládáním.
Pro účely tohoto ověřovacího postupu se považuje část kombinovaného pružinového brzdového válce, která slouží k provoznímu brzdění, za membránový brzdový válec.
2.1.2. Ověřené vlastnosti, které deklaroval výrobce, se použijí ve všech výpočtech k požadavkům na kompatibilitu brzdových systémů podle přílohy 10, k požadavkům na účinky provozního brzdění za studena (zkouška typu 0) podle přílohy 20 a k určení zdvihu brzdového válce, který je k dispozici, pro ověření brzdných účinků se zahřátými brzdami podle přílohy 11.
2.2. Postup zkoušek
2.2.1. U brzdového válce se za nulovou polohu pokládá poloha, kdy ve válci není tlak.
2.2.2. Při zvyšování jmenovitého tlaku o ≤ 100 kPa v rozsahu tlaků od 100 do ≥ 800 kPa se sleduje tlaková síla vyvozovaná v celém rozsahu zdvihu, který je k dispozici, při rychlosti zdvihu ≤ 10 mm/s nebo po krocích zdvihu ≤ 10 mm, přičemž odchylka působícího tlaku nesmí přesáhnout ± 5 kPa.
2.2.3. Pro každý přírůstek tlaku se určí odpovídající střední tlaková síla (ThA) a efektivní zdvih (sp) podle dodatku 9 k této příloze.
2.3. Ověření
2.3.1. S odkazem na dodatek 1 k této příloze body 3.1, 3.2, 3.3 a 3.4 se zkouší nejméně šest vzorků a ověřovací protokol se vydá za podmínky, že jsou splněny požadavky bodů 2.3.2, 2.3.3 a 2.3.4.
2.3.2. K ověření střední tlakové síly (ThA) – f(p) se podle vzoru znázorněného na grafu 1 sestrojí graf, který definuje přijatelné kolísání hodnot účinků a který vychází ze závislosti tlakové síly na tlaku, kterou deklaroval výrobce. Výrobce také určí kategorii přípojného vozidla, pro kterou se může použít brzdový válec, a odpovídající pásmo dovolených odchylek.
2.3.3 Ověří se tlak (p15), s dovolenou odchylkou ± 10 kPa, který je potřebný k posuvu pístnice o 15 mm z nulové polohy, podle jednoho z následujících postupů zkoušky:
|
2.3.3.1 |
S použitím deklarované funkce tlakové síly (ThA) – f(p) se vypočte prahová hodnota tlaku (p15) v brzdovém válci pro stav ThA = 0. Následně se ověří, že při použití tlaku o této prahové hodnotě dojde k posuvu pístnice uvedenému v bodě 2.3.3. |
|
2.3.3.2. |
Výrobce deklaruje prahovou hodnotu (p15) v brzdovém válci a ověří se, že při použití tohoto tlaku dojde k posuvu pístnice uvedenému v bodě 2.3.3. |
2.3.4. Při ověření efektivního zdvihu (sp) – f(p) nesmí být měřená hodnota menší o více než – 4 % charakteristických hodnot sp v rozsahu tlaků, který deklaroval výrobce. Tato hodnota se zaznamená a uvede se v bodu 3.3.1 dodatku 1 k této příloze. Mimo tento rozsah tlaků může dovolená odchylka přesahovat – 4 %.
Graf 1

2.3.5. Zaznamenané výsledky zkoušek se uvedou na formuláři, jehož vzor je v dodatku 2 k této příloze, a uvedou se v ověřovacím protokolu, jehož podrobnosti jsou stanoveny v bodě 2.4.
2.4. Ověřovací protokol
2.4.1. Vlastnosti, které deklaroval výrobce a které byly ověřeny výsledky zkoušek zaznamenanými podle bodu 2.3.2, se uvedou na formuláři, jehož vzor je v dodatku 1 k této příloze.
3. CHARAKTERISTIKY BRZDNÉHO ÚČINKU PRUŽINOVÝCH BRZD
3.1. Obecné informace
3.1.1. Tento oddíl stanoví postup, kterým se určují závislosti tlakové síly / zdvihu / tlaku u pružinových brzd (2), které se používají v pneumatických brzdových systémech k vyvození sil potřebných v brzdách s mechanickým ovládáním.
Pro účely tohoto ověřovacího postupu se považuje část kombinovaného pružinového brzdového válce, která slouží jako pružinová brzda, za pružinový brzdový válec.
3.1.2. Charakteristiky brzdného účinku, které výrobce deklaroval, se použijí ve všech výpočtech k požadavkům na účinky parkovacího brzdění podle přílohy 20.
3.2. Postup zkoušek
3.2.1. U pružinové brzdy se za nulovou polohu pokládá poloha, kdy je v komoře, ze které se stlačují pružiny, plný tlak.
3.2.2. Při jmenovitých přírůstcích zdvihu o ≤ 10 mm se sleduje odpovídající vyvozovaná tlaková síla v průběhu celého rozsahu zdvihu až do poklesu tlaku na nulu.
3.2.3. Pak se tlak postupně zvyšuje na hodnotu, při níž zdvih dosáhne hodnoty 10 mm od polohy při nulovém tlaku, a tento tlak, který se pokládá za tlak uvolňování, se zaznamená.
3.2.4. Pak se tlak zvýší na hodnotu 850 kPa, nebo na maximální pracovní tlak deklarovaný výrobcem, podle toho, která hodnota je nižší.
3.3. Ověření:
3.3.1. K účelům ověření bodů 2.1, 3.1, 3.2 a 3.3 dodatku 3 k této příloze se musí ke zkoušce předložit nejméně šest vzorků a ověřovací protokol se vydá za podmínky, že jsou splněny následující požadavky:
|
3.3.1.1. |
v rozsahu zdvihů od 10 mm do 2/3 maximálního zdvihu se žádný z výsledků měření podle bodu 3.2.2 neodchýlí o více než 6 % od deklarovaných hodnot; |
|
3.3.1.2. |
žádná z výsledných hodnot změřených podle bodu 3.2.3 nepřesáhne deklarované hodnoty; |
|
3.3.1.3. |
všechny pružinové brzdy budou i po provedení zkoušek podle bodu 3.2.4 nadále správně fungovat. |
3.3.2. Zaznamenané výsledky zkoušky se uvedou na formuláři, jehož vzor je uveden v dodatku 4 k této příloze a který se přiloží k ověřovacímu protokolu uvedenému podrobně v bodě 3.4.
3.4. Ověřovací protokol
3.4.1. Vlastnosti, které deklaroval výrobce a které byly ověřeny výsledky zkoušek zaznamenanými podle bodu 3.3.2, se uvedou na formuláři, jehož vzor je v dodatku 3 k této příloze.
4. BRZDNÉ ÚČINKY BRZD PŘÍPOJNÝCH VOZIDEL ZA STUDENA
4.1. Obecné informace
4.1.1. Tento postup platí pro zkoušky brzdných účinků„za studena“ u pneumaticky ovládaných brzd s S-klíčem a kotoučových brzd (3), které jsou na přípojných vozidlech.
4.1.2. Charakteristiky brzdného účinku, které výrobce deklaroval, se použijí ve všech výpočtech k požadavkům na kompatibilitu brzdových systémů podle přílohy 10, k požadavkům na účinky provozního brzdění za studena (zkouška typu 0) a na účinky parkovacího brzdění podle přílohy 20.
4.2. Faktor vnitřního převodu brzdy a prahová hodnota vstupního brzdného momentu
4.2.1. Brzda se připraví podle bodu 4.4.2 této přílohy.
4.2.2. Faktor vnitřního převodu brzdy se určí následujícím vzorcem:
![]()
a ověří se pro každý z materiálů brzdového obložení uvedených v bodě 4.3.1.3.
4.2.3. Prahová hodnota vstupního brzdného momentu se vyjádří způsobem, který se pokládá za platný i při kolísání hodnoty vstupního momentu, a označuje se jako Co.
4.2.4. Hodnoty BF musí zůstat platné při kolísání hodnot následujících parametrů:
|
4.2.4.1. |
hmotnost připadající na brzdu, až do hodnoty uvedené v bodě 4.3.1.5; |
|
4.2.4.2. |
rozměry a vlastnosti vnějších konstrukčních částí k ovládání brzdy; |
|
4.2.4.3. |
rozměry kola/pneumatiky. |
4.3. Informační dokument
4.3.1. Výrobce brzdy předloží technické zkušebně alespoň tyto informace:
|
4.3.1.1 |
popis typu brzdy, modelu, rozměrů atd.; |
|
4.3.1.2 |
podrobnosti o geometrii brzdy; |
|
4.3.1.3. |
značka a typ brzdových obložení; |
|
4.3.1.4. |
materiál brzdového bubnu nebo kotouče; |
|
4.3.1.5. |
maximální technicky přípustná hmotnost připadající na brzdu. |
4.3.2. Další informace
4.3.2.1. rozměry kola a pneumatiky, které se použijí při zkoušce;
4.3.2.2. deklarovaný faktor vnitřního převodu brzdy BF;
4.3.2.3. deklarovaná prahová hodnota momentu C0,dec;
4.4. Postup zkoušek
4.4.1. Příprava
4.4.1.1. Sestrojí se graf přípustného kolísání brzdného účinku podle vzoru znázorněného na grafu 2 s použitím faktoru vnitřního převodu brzdy deklarovaného výrobcem.
4.4.1.2. Účinky zařízení, kterým se ovládá brzda, se kalibrují s přesností 1 %.
4.4.1.3. Určí se dynamický poloměr pneumatiky při zkušebním zatížení, jak předepisuje zkušební metoda.
4.4.2. Postup záběhu (obrušování)
4.4.2.1. U bubnových brzd se zkoušky zahájí s novými brzdovými obloženími a s novým bubnem (bubny). Brzdová obložení musí být opracována, aby se dosáhlo co největšího počátečního styku mezi obloženími a bubnem (bubny).
4.4.2.2. U kotoučových brzd se zkoušky zahájí s novými brzdovými obloženími a novým kotoučem (kotouči). O opracování obložení rozhodne výrobce brzd.
4.4.2.3. Provede se 20 zabrzdění z počáteční rychlosti 60 km/h se vstupním brzdným momentem, který teoreticky při zkoušce vyvodí účinek rovnající se 0,3 TR / hmotnost při zkoušce. Počáteční teplota ve styčné ploše mezi obložením a bubnem nebo kotoučem nesmí před každým zabrzděním přesáhnout 100 °C.
4.4.2.4. Provede se 30 zabrzdění z rychlosti 60 km/h na rychlost 30 km/h se vstupním brzdným momentem, který vyvodí účinek rovnající se 0,3 TR / hmotnost při zkoušce, s intervaly mezi brzděními 60 sekund (4). Počáteční teplota ve styčné ploše mezi obložením a bubnem nebo kotoučem nesmí před každým zabrzděním přesáhnout 100 °C.
4.4.2.5. Po vykonání 30 zabrzdění podle bodu 4.4.2.4 a po uplynutí 120 s se provede 5 zabrzdění z rychlosti 60 km/h na rychlost 30 km/h se vstupním brzdným momentem, který vyvodí účinek rovnající se 0,3 TR / hmotnost při zkoušce, s intervaly mezi brzděními 120 sekund (4).
4.4.2.6. Provede se 20 zabrzdění z počáteční rychlosti 60 km/h se vstupním brzdným momentem, který při zkoušce vyvodí účinek rovnající se 0,3 TR / hmotnost při zkoušce. Počáteční teplota ve styčné ploše mezi obložením a bubnem nebo kotoučem nesmí před každým zabrzděním přesáhnout 150 °C.
4.4.2.7. Kontrolní zkouška se provede následujícím postupem:
|
4.4.2.7.1. |
Vypočte se vstupní brzdný moment, kterým se vyvodí teoretický brzdný účinek rovnající se 0,2, 0,35 a 0,5 + 0,05 TR / hmotnost při zkoušce. |
|
4.4.2.7.2. |
Jakmile se určí vstupní brzdný moment pro každou hodnotu poměrného zpomalení, musí tato hodnota zůstat konstantní při každém následujícím brzdění (např. konstantní tlak). |
|
4.4.2.7.3. |
Provede se zabrzdění z počáteční rychlosti 60 km/h s každým ze vstupních brzdných momentů určených podle bodu 4.4.2.7.1. Počáteční teplota ve styčné ploše mezi obložením a bubnem nebo kotoučem nesmí před každým zabrzděním přesáhnout 100 °C. |
4.4.2.8. Opakují se postupy stanovené v bodech 4.4.2.6 a 4.4.2.7.3, přičemž bod 4.4.2.6 je volitelný, do doby, než se ustálí brzdné účinky v pěti za sebou následujících nemonotónních měřeních při konstantní vstupní hodnotě, která vyvodí účinek rovnající se 0,5 TR / hmotnost při zkoušce, a to s dovolenou odchylkou – 10 % maximální hodnoty.
4.4.2.9. Jestliže výrobce může na základě výsledků praktických zkoušek prokázat, že po tomto záběhu není faktor vnitřního převodu brzdy stejný, jako se ustálil v provozu na silnici, je přípustná doplňující stabilizační zkouška.
V průběhu tohoto doplňujícího záběhu nesmí maximální teplota brzd, měřená ve styčné ploše mezi obložením a bubnem nebo kotoučem, překročit 500 °C u bubnových brzd a 700 °C u kotoučových brzd.
Touto praktickou zkouškou musí být zkouška stálosti brzdného účinku, která se provede se stejným typem a modelem brzdy, jako se zaznamenává do zkušebního protokolu podle přílohy 11 dodatku 3. Podkladem pro stanovení, zda je přípustné další stabilizování, jsou výsledky nejméně 3 zkoušek podle bodu 4.4.3.4 vykonaných v průběhu praktické zkoušky za podmínek zkoušky typu 0 s naloženým vozidlem. Tyto zkoušky brzdění se zdokumentují, jak je předepsáno v dodatku 8 k této příloze.
Údaje o všech doplňujících stabilizacích se musí zaznamenat a připojit k položce týkající se faktoru vnitřního převodu brzdy BF v bodě 2.3.1 dodatku 3 k příloze 11, např. specifikováním následujících parametrů zkoušky:
|
a) |
tlak v brzdovém válci, vstupní brzdný moment nebo výstupní brzdný moment; |
|
b) |
rychlost na začátku a na konci brzdění; |
|
c) |
doba trvání brzdění v případě konstantní rychlosti; |
|
d) |
teplota na začátku a na konci brzdění nebo brzdného cyklu. |
4.4.2.10. Jestliže se tento postup provádí na setrvačníkovém dynamometru nebo na vozidlovém dynamometru, připouští se neomezené množství chladicího vzduchu.
4.4.3. Ověřovací zkouška
4.4.3.1. Na začátku každého brzdění nesmí počáteční teplota ve styčné ploše mezi obložením a bubnem nebo kotoučem přesáhnout 100 °C.
4.4.3.2. Prahová hodnota vstupního brzdného momentu se určí ze změřené hodnoty vstupního momentu s použitím výsledků kalibrovaného vstupního zařízení.
4.4.3.3. Počáteční rychlost při všech brzděních je 60 ± 2 km/h.
4.4.3.4. Provede se nejméně šest za sebou následujících zabrzdění s účinkem od 0,15 TR / (hmotnost při zkoušce) do 0,55 TR / (hmotnost při zkoušce), se stoupajícími přírůstky ovládacího tlaku, po nichž následuje šest zabrzdění s týmiž ovládacími tlaky, ale v sestupných krocích.
4.4.3.5. U každého zabrzdění podle bodu 4.4.3.4 se vypočte poměrné zpomalení, koriguje se valivým odporem a zanese se do grafu specifikovaného v bodě 4.4.1.1 této přílohy.
4.5. Zkušební metody
4.5.1. Zkouška na zkušební dráze
4.5.1.1. Zkouška brzdných účinků se provede jen na jedné nápravě.
4.5.1.2. Zkoušky se provedou na přímé a vodorovné dráze s povrchem s dobrou adhezí a vykonají se pouze při takové síle větru, která nemůže ovlivnit výsledky.
4.5.1.3. Přípojné vozidlo musí být naloženo (co nejpřesněji) na svou maximální technicky přípustnou hmotnost připadající na každou brzdu. Jestliže je to nutné, může však být přidána i doplňková hmotnost, aby se zajistila hmotnost připadající na zkoušenou nápravu dostatečná k dosažení poměrného zpomalení o hodnotě 0,55 TR / (maximální technicky přípustná hmotnost připadající na brzdu) bez blokování kol.
4.5.1.4. Dynamický poloměr valení pneumatiky se musí ověřit za nízké rychlosti < 10 km/h měřením ujeté vzdálenosti v závislosti na počtu otáček kola. Minimální počet otáček kola požadovaný k určení dynamického poloměru valení je 10.
4.5.1.5. Odpor valení jízdní soupravy se určí změřením doby potřebné ke snížení rychlosti vozidla z 55 km/h na 45 km/h a ujeté vzdálenosti. Přitom se zkouší ve stejném směru, ve kterém se provede ověřovací zkouška, a s odpojeným motorem a s odpojeným systémem odlehčovacího brzdění.
4.5.1.6. Do činnosti se uvedou jen brzdy zkoušené nápravy a ve vstupním ovládacím zařízení brzdy se dosáhne tlak (po době stoupání tlaku nejvýše 0,7 s) o hodnotě 90 ± 3 % jeho asymptotické hodnoty. Zkouška se provede s odpojeným motorem a s odpojeným systémem odlehčovacího brzdění.
4.5.1.7. Na začátku zkoušky musí být brzdy seřízeny na co nejmenší zdvih.
4.5.1.8. Vstupní brzdný moment se určí k účelům výpočtu jeho prahové hodnoty tak, že se zdvihne kolo a postupně se zvětšuje ovládací účinek na brzdu, přičemž se kolo otáčí rukou, dokud se nezjistí odpor.
4.5.1.9. Konečná rychlost v2 se určí podle přílohy 11 dodatku 2 bodu 3.1.5.
4.5.1.10. Brzdný účinek zkoušené nápravy se určí výpočtem zpomalení zjištěného přímým měřením rychlosti a ujeté dráhy v rozmezí 0,8 v1 a v2, kde v2 nesmí být menší než 0,1 v1. Toto zpomalení se pokládá za rovnocenné střednímu plnému brzdnému zpomalení vymezenému v příloze 4 tohoto předpisu.
4.5.2. Zkouška na setrvačníkovém dynamometru
4.5.2.1. Zkouška se provede s jedním celkem brzdy.
4.5.2.2. Na zkušebním stroji musí být možné nastavit moment setrvačnosti požadovaný bodem 4.5.2.5 této přílohy.
4.5.2.3. Zkušební stroj musí být kalibrován z hlediska otáček a výstupního brzdného momentu s přesností 2 %.
4.5.2.4. Pro zkoušky musí mít dynamometr přístrojové vybavení poskytující alespoň tyto údaje:
|
4.5.2.4.1. |
nepřetržitý záznam ovládacího tlaku nebo ovládací síly na brzdě; |
|
4.5.2.4.2. |
nepřetržitý záznam výstupního brzdného momentu; |
|
4.5.2.4.3. |
nepřetržitý záznam teploty měřené ve styčné ploše mezi obložením a bubnem nebo kotoučem; |
|
4.5.2.4.4. |
rychlost v průběhu zkoušky. |
4.5.2.5. Rotační moment setrvačnosti (IT) dynamometru musí být nastaven co nejpřesněji, s dovolenou odchylkou ± 5 %, se započtením vnitřního tření dynamometru, aby odpovídal té části celkové lineární setrvačné hmoty vozidla, která připadá na jedno kolo při brzdném účinku 0,55 TR / (maximální technicky přípustná hmotnost) podle tohoto vzorce:
IT = Pd · R2
kde:
|
IT |
= |
skutečný rotační moment setrvačnosti (kgm2) |
|
R |
= |
poloměr valení pneumatiky definovaný vzorcem 0,485 D |
|
D |
= |
d + 2H (5) |
|
d |
= |
smluvené číslo označující průměr ráfku (mm) |
|
H |
= |
jmenovitá výška průřezu (mm) = S1 × 0,01 Ra |
|
S1 |
= |
šířka průřezu (mm) |
|
Ra |
= |
jmenovité profilové číslo |
|
Pd |
= |
maximální technicky přípustná hmotnost připadající na brzdu, jak je vymezena v bodě 4.3.1.5 |
4.5.2.6. Může se použít chladicí vzduch, který má teplotu okolí a který proudí na brzdu rychlostí nepřesahující 0,33 v ve směru kolmém k její ose otáčení.
4.5.2.7. Na začátku zkoušky musí být brzda seřízena na co nejmenší zdvih.
4.5.2.8. Vstupní brzdný moment se určí k účelům výpočtu jeho prahové hodnoty tak, že se postupně zvětšuje ovládací účinek na brzdu, dokud se nezjistí vznik brzdného momentu.
4.5.2.9. Brzdný účinek se určí podle následujícího vzorce, do kterého se dosadí změřený brzdný moment:

braking rate
|
Mt |
= |
průměrný výstupní brzdný moment (Nm) – zjištěný z ujeté dráhy |
|
g |
= |
gravitační zrychlení (m/s2) |
Průměrný výstupní brzdný moment Mt se vypočte ze zpomalení určeného přímým měřením rychlosti a ujeté dráhy v rozmezí 0,8 v1 a 0,1 v1. Toto zpomalení se pokládá za rovnocenné střednímu plnému brzdnému zpomalení vymezenému v příloze 4 tohoto předpisu.
4.5.3. Zkouška na vozidlovém dynamometru
4.5.3.1. Zkouška se provede s jednou nápravou, s jednou nebo dvěma brzdami.
4.5.3.2. Zkušební stroj musí mít kalibrované zařízení k zatěžování, kterým se simuluje požadovaná hmotnost připadající na zkoušenou brzdu (brzdy).
4.5.3.3. Zkušební stroj musí být kalibrován z hlediska otáček a výstupního brzdného momentu s přesností 2 %, přičemž se musí přihlédnout k účinkům vnitřního tření. Dynamický poloměr valení pneumatiky (R) se určí změřením otáček válce dynamometru a nebrzděných kol zkoušené nápravy při rychlosti rovnající se 60 km/h a vypočte se ze vzorce:

kde:
|
RR |
= |
poloměr válce dynamometru |
|
nD |
= |
otáčky válce dynamometru |
|
nw |
= |
otáčky nebrzděných kol nápravy |
4.5.3.4. Může se použít chladicí vzduch, který má teplotu okolí a který proudí na brzdu (brzdy) rychlostí nepřesahující 0,33 v.
4.5.3.5. Na začátku zkoušky musí být brzda (brzdy) seřízena na co nejmenší zdvih.
4.5.3.6. Ovládací vstupní brzdný moment se určí k účelům výpočtu jeho prahové hodnoty tak, že se postupně zvětšuje ovládací účinek na brzdu, dokud se nezjistí vznik brzdného momentu.
4.5.3.7. Brzdný účinek se určí změřením brzdné síly na obvodu pneumatiky a tato síla se přepočte na poměrné zpomalení, přičemž se vezme v úvahu odpor valení. Odpor valení zatížené nápravy se určí změřením síly na obvodu pneumatiky při rychlosti 60 km/h.
Střední výstupní brzdný moment (Mt) vychází ze změřených hodnot mezi okamžikem, kdy ovládací tlak/síla dosáhne své asymptotické hodnoty od začátku stoupání tlaku ve vstupním zařízení brzdy, a okamžikem, kdy absorbovaná energie dosáhne hodnoty W60, která je vymezena v bodě 4.5.3.8.
4.5.3.8. K určení poměrného zpomalení se musí použít absorbovaná energie W60, která se rovná kinetické energii hmoty připadající na zkoušenou brzdu při brzdění ze 60 km/h do zastavení.
kde:

4.5.3.8.1. Jestliže v průběhu měření poměrného zpomalení podle bodu 4.5.3.8 není možné udržet zkušební rychlost na 60 km/h ± 2 km/h, určí se poměrné zpomalení přímým měřením brzdné síly FB a/nebo výstupního brzdného momentu Mt, přičemž měření tohoto parametru (těchto parametrů) se musí provést tak, aby nebylo ovlivněno dynamickými silami setrvačných hmot vozidlového dynamometru.
4.6. Ověřovací protokol
4.6.1. Vlastnosti, které deklaroval výrobce a které byly ověřeny výsledky zkoušek zaznamenanými podle bodu 4.4.3, se uvedou na formuláři, jehož vzor je v dodatku 3 k příloze 11.
Graf 2

5. PROTIBLOKOVACÍ BRZDOVÉ SYSTÉMY (ABS)
5.1. Obecné informace
5.1.1. Tento bod určuje postup ke zjištění účinků protiblokovacího brzdového systému přípojného vozidla.
5.1.2. Zkoušky provedené s přípojnými vozidly kategorie O4 se pokládají za zkoušky platné také pro požadavky na přípojná vozidla kategorie O3.
5.2. Informační dokument
5.2.1. Výrobce ABS předá technické zkušebně informační dokument k systému (systémům), jehož účinky se mají ověřovat. Tento dokument musí obsahovat alespoň informace uvedené v dodatku 5 k této příloze.
5.3. Definice zkoušených vozidel
5.3.1. Na základě údajů sdělených v informačním dokumentu, zejména údajů o typech přípojných vozidel uvedených v bodě 2.1 dodatku 5, provede technická zkušebna zkoušky s reprezentativními přípojnými vozidly, která mají až tři nápravy a jsou vybavena příslušným protiblokovacím systémem / konfigurací systému. Kromě toho se při výběru přípojných vozidel za účelem vyhodnocení musí vzít v úvahu parametry definované v následujících bodech.
5.3.1.1. Druh zavěšení náprav: metoda k vyhodnocení účinků protiblokovacího brzdového systému vzhledem k druhu zavěšení se zvolí následujícím způsobem:
|
|
Návěsy: pro každou skupinu zavěšení náprav, např. s mechanickým vyrovnáváním atd., se vyhodnotí reprezentativní návěs. |
|
|
Plná přípojná vozidla: vyhodnocení se provede na reprezentativním přípojném vozidle vybaveném jakýmkoli druhem zavěšení náprav. |
5.3.1.2. Rozvor: u návěsů není rozvor omezujícím faktorem, avšak u plných přípojných vozidel se musí vyhodnotit přípojné vozidlo s nejkratším rozvorem.
5.3.1.3. Druh brzdy: schválení se omezí na brzdy s S-klíčem nebo kotoučové brzdy, avšak pokud se budou používat jiné druhy, mohou se požadovat srovnatelné zkoušky.
5.3.1.4. Zátěžový regulátor: využití adheze se určí se zátěžovým regulátorem nastaveným pro naložený stav a nenaložený stav. Ve všech případech platí požadavky bodu 2.7 přílohy 13 tohoto předpisu.
5.3.1.5. Ovládání brzdy: rozdíly v ovládacím účinku se musí zaznamenat pro vyhodnocení při zkouškách k určení využití adheze. Výsledky zkoušek na jednom přípojném vozidle se mohou použít pro jiná přípojná vozidla téhož typu.
5.3.2. Aby se prokázala shoda, musí se pro každý typ zkoušeného přípojného vozidla předat dokumentace dokládající kompatibilitu brzdových systémů podle přílohy 10 tohoto předpisu (grafy 2 a 4).
5.3.3. Pro účely schválení se návěsy a přípojná vozidla s nápravami uprostřed považují za tentýž typ vozidla.
5.4. Rozvrh zkoušky
5.4.1. Technická zkušebna provede následující zkoušky na vozidle (vozidlech) vymezeném (vymezených) v bodě 5.3 této přílohy pro každou konfiguraci ABS a vezme přitom v úvahu seznam aplikací uvedený v bodě 2.1 dodatku 5 k této příloze. Křížové odkazy na nejnepříznivější případy však mohou některé zkoušky vyloučit. Jestliže se zkoušelo metodou nejnepříznivějšího případu, musí to být uvedeno ve zkušebním protokolu.
5.4.1.1. Využití adheze – zkoušky se musí provést postupem stanoveným v bodě 6.2 přílohy 13 tohoto předpisu pro každou konfiguraci ABS a každý typ přípojného vozidla, jak je uvedeno v informačním dokumentu výrobce (viz bod 2.1 dodatku 5 k této příloze).
5.4.1.2. Spotřeba energie
5.4.1.2.1. Zatížení náprav – zkoušené přípojné vozidlo (vozidla) musí být naloženo tak, aby hmotnost na nápravu byla 2 500 kg +/– 200 kg nebo 35 % +/– 200 kg přípustné hmotnosti na nápravu, podle toho, která z těchto hodnot je menší.
5.4.1.2.2. Musí být zajištěno, aby se dosáhlo „plného cyklování“ protiblokovacího systému v celém průběhu dynamických zkoušek stanovených bodem 6.1.3 přílohy 13 tohoto předpisu.
5.4.1.2.3. Zkouška spotřeby energie – zkouška se provede postupem stanoveným bodem 6.1 přílohy 13 tohoto předpisu pro každou konfiguraci ABS.
5.4.1.2.4. Aby se mohlo ověřit, že přípojná vozidla předaná k schválení splňují požadavky na spotřebu energie protiblokovacím systémem (viz bod 6.1 přílohy 13), vykonají se následující ověření:
|
5.4.1.2.4.1. |
Brzdy bez zařízení k automatickému vyrovnávání opotřebení se před začátkem zkoušky spotřeby energie (bod 5.4.1.2.3) seřídí tak, aby poměr R1 zdvihu sT pístnice brzdového válce k délce lT páky byl 0,2. Tento poměr se určí pro tlak v brzdovém válci 650 kPa. Příklad:
Brzdy, v nichž je zařízení k automatickému vyrovnávání opotřebení, se seřídí na běžnou provozní vůli podle specifikace výrobce. Výše uvedené seřízení brzd se provede, když jsou brzdy studené (< 100 °C). |
|
5.4.1.2.4.2. |
Zátěžový regulátor se nastaví na naložený stav a počáteční hladina energie se nastaví podle bodu 6.1.2 přílohy 13 tohoto předpisu; pak se přeruší další doplňování vzduchu do zásobníku (zásobníků) energie. Brzdy se uvedou do činnosti ovládacím tlakem 650 kPa ve spojkové hlavici a pak se uvolní. Provedou se další zabrzdění, dokud tlak v brzdových válcích nebude mít stejnou hodnotu jako tlak získaný po skončení zkoušek vymezených v bodech 6.1.3 a 6.1.4 přílohy 13 tohoto předpisu. Zaznamená se počet ekvivalentních zabrzdění (ner). Ekvivalentní počet zabrzdění za statického stavu (ne) se zaznamená do zkušebního protokolu, přičemž ne = 1,2 · ner a zaokrouhlí se na nejbližší celé číslo. |
5.4.1.3. Zkouška na površích s rozdílnou adhezí – aby se protiblokovací brzdový systém pokládal za systém kategorie A, musí všechny jeho konfigurace splňovat požadavky bodu 6.3.2 přílohy 13 tohoto předpisu.
5.4.1.4. Vlastnosti při nízké a vysoké rychlosti
5.4.1.4.1. S přípojným vozidlem připraveným k vyhodnocení využití adheze se ověří vlastnosti při nízké a vysoké rychlosti podle bodu 6.3.1 přílohy 13 tohoto předpisu.
5.4.1.4.2. Pokud existuje dovolená odchylka mezi počtem zubů impulsního kotouče a obvodem pneumatiky, provedou se funkční ověření v extrémních bodech dovolené odchylky podle bodu 6.3 přílohy 13 tohoto předpisu. To lze provést použitím rozdílných rozměrů pneumatik nebo zhotovením speciálních impulsních kotoučů k simulaci frekvenčních extrémů.
5.4.1.5. Doplňková ověření
Provedou se následující doplňková ověření s nebrzděným tažným vozidlem a s nenaloženým přípojným vozidlem.
5.4.1.5.1. Když náprava nebo skupina náprav přejíždí z povrchu s vysokým součinitelem adheze kH na povrch s nízkým součinitelem adheze kL, kde je kH ≥ 0,5 a kH/kL ≥ 2, s ovládacím tlakem ve spojkové hlavici 650 kPa, nesmějí se přímo řízená kola blokovat. Zkušební rychlost a okamžik, kdy se uvedou do činnosti brzdy přípojného vozidla, se musí vypočítat tak, aby se s protiblokovacím brzdovým systémem plně cyklujícím na povrchu s vysokým součinitelem adheze vykonal přejezd z jednoho povrchu na druhý při rychlosti přibližně 80 km/h a při rychlosti 40 km/h.
5.4.1.5.2. Když přípojné vozidlo přejíždí z povrchu s nízkým součinitelem adheze kL na povrch s vysokým součinitelem adheze kH, kde je kH ≥ 0,5 a kH/kL ≥ 2, s ovládacím tlakem ve spojkové hlavici 650 kPa, musí tlak v brzdových válcích vzrůst na příslušnou vyšší hodnotu za přiměřenou dobu a přípojné vozidlo se nesmí vychýlit ze své počáteční trajektorie. Zkušební rychlost a okamžik, kdy se uvedou do činnosti brzdy, se musí vypočítat tak, aby se s protiblokovacím brzdovým systémem plně cyklujícím na povrchu s nízkým součinitelem adheze vykonal přejezd z jednoho povrchu na druhý při rychlosti přibližně 50 km/h.
5.4.1.6. Dokumentace, která se týká řídícího zařízení (řídících zařízení), musí být k dispozici, jak je požadováno bodem 5.1.5 předpisu a bodem 4.1 přílohy 13 tohoto předpisu, včetně poznámky pod čarou 12.
5.5. Protokol o schválení
5.5.1. Musí se vypracovat protokol o schválení podle dodatku 6 k této příloze.
6. STABILITNÍ FUNKCE VOZIDLA
6.1. Obecné informace
6.1.1. Tento oddíl definuje postup zkoušek k určení dynamických vlastností vozidla vybaveného stabilitní funkcí vozidla, která se skládá alespoň z jedné z následujících funkcí:
|
a) |
směrové řízení; |
|
b) |
opatření proti převrácení. |
6.2. Informační dokument
6.2.1. Výrobce systému/vozidla předá technické zkušebně informační dokument k řídící funkci (funkcím), jejíž (jejichž) vlastnosti se mají ověřovat. Tento dokument musí obsahovat alespoň informace uvedené v dodatku 7 k této příloze.
6.3. Definice zkoušeného vozidla (vozidel)
6.3.1. Technická zkušebna ověří vlastnosti na základě stabilitní řídící funkce (funkcí) a jejího (jejích) použití podle informačního dokumentu výrobce. Toto ověření může zahrnovat jeden nebo více dynamických manévrů uvedených v bodě 2.2.3 přílohy 21 tohoto předpisu a vykonaných s přípojným vozidlem (vozidly) majícím(i) nejvýše tři nápravy, které je (která jsou) reprezentativní pro použití, jež jsou uvedena v bodě 2.1 informačního dokumentu výrobce.
6.3.1.1. Při výběru přípojného vozidla (vozidel) k hodnocení se musí vzít v úvahu také toto:
|
a) |
druh zavěšení náprav: pro každou skupinu zavěšení náprav, např. vyvážené vzduchové, se vyhodnotí přípojné vozidlo takto vybavené; |
|
b) |
rozvor: rozvor není omezujícím faktorem; |
|
c) |
druh brzdy: schválení se omezí na přípojná vozidla s S-klíčem nebo s kotoučovými brzdami, avšak pokud se budou používat jiné druhy, mohou se požadovat srovnatelné zkoušky; |
|
d) |
brzdový systém: brzdový systém přípojného vozidla (vozidel), které (která) se hodnotí, musí splňovat všechny příslušné požadavky tohoto předpisu. |
6.4. Rozvrh zkoušky
6.4.1. Zkoušky použité k hodnocení stabilitní řídící funkce vozidla se dohodnou mezi výrobcem systému/vozidla a technickou zkušebnou a jejich součástí musí být podmínky vztahující se k hodnocené funkci a které by bez intervence stabilitní řídící funkce vedly ke ztrátě ovládání směru jízdy nebo k převrácení. Dynamické manévry, podmínky zkoušky a výsledky se uvedou ve zkušebním protokolu.
6.5. Tažné vozidlo
6.5.1. Tažné vozidlo použité k hodnocení vlastností stabilitní funkce (přípojného) vozidla musí mít potřebné pneumatické a elektrické spojovací vedení, a pokud je tažné vozidlo vybaveno stabilitní funkcí vozidla podle bodu 2.34 tohoto předpisu, musí být tato funkce vyřazena z činnosti.
6.6. Zkušební protokol
6.6.1. Vypracuje se zkušební protokol, který musí obsahovat alespoň informace uvedené v dodatku 8 k této příloze.
ČÁST 2
Zkoušky vlastností konstrukčních částí brzdového systému motorových vozidel
1. OBECNÉ INFORMACE
Tato příloha stanoví postupy k určení vlastností následujících konstrukčních částí:
1.1. Stabilitní funkce vozidla
1.1.1. Obecné informace
1.1.1.1. Tento oddíl vymezuje postup k určení dynamických vlastností vozidla vybaveného stabilitní funkcí vozidla, jak je specifikováno v bodě 5.2.1.32 tohoto předpisu:
1.1.2. Informační dokument
1.1.2.1. Výrobce systému předá technické zkušebně informační dokument ke stabilitní funkci (funkcím) vozidla, jejíž (jejichž) vlastnosti se mají ověřovat. Tento dokument musí obsahovat alespoň informace vymezené v dodatku 11 k této příloze a musí být připojen jako dodatek ke zkušebnímu protokolu.
1.1.3. Definice zkoušeného vozidla (vozidel)
1.1.3.1. Technická zkušebna ověří u vozidla vlastnosti na základě stabilitní řídící funkce (funkcí) a jejího (jejich) použití podle informačního dokumentu výrobce systému. Toto ověření musí zahrnovat jeden nebo více dynamických manévrů uvedených v bodě 2.1.3 přílohy 21 tohoto předpisu a vykonaných s motorovým vozidlem (vozidly), které je (která jsou) reprezentativní pro použití, jež jsou uvedena v bodě 2.1 informačního dokumentu výrobce systému.
1.1.3.2. Při výběru motorového vozidla (vozidel) k hodnocení se musí vzít v úvahu také tyto prvky:
|
a) |
brzdový systém: brzdový systém motorového vozidla (vozidel), které (která) se hodnotí, musí splňovat všechny příslušné požadavky tohoto předpisu; |
|
b) |
vozidlo kategorie M2, M3, N2; N3; |
|
c) |
druh vozidla; |
|
d) |
konfigurace vozidla (např. 4 × 2, 6 × 2 atd.): hodnotí se každá konfigurace; |
|
e) |
strana směru provozu (levostranný nebo pravostranný provoz): není omezujícím faktorem – hodnocení se nevyžaduje; |
|
f) |
řízení jediné přední nápravy: není omezujícím faktorem – hodnocení se nevyžaduje (viz písmena g) a h)); |
|
g) |
nápravy s doplňkovým řízením (např. s nuceným řízením, samořiditelné): hodnotí se; |
|
h) |
převodový poměr řízení: hodnotí se – programování konců průběhu nebo samoučící se systémy nejsou omezujícím faktorem; |
|
i) |
hnací nápravy: vezmou se v úvahu z hlediska použití (ztráty) detekce otáček kola při určování rychlosti vozidla; |
|
j) |
zdvihatelné nápravy: detekce zdvihatelné nápravy / hodnotí se ovládání a zdvižený stav; |
|
k) |
řízení motoru: hodnotí se kompatibilita komunikace; |
|
l) |
typ převodovky (např. s ručním ovládáním, s automatizovaným ručním ovládáním, poloautomatická, automatická): hodnotí se; |
|
m) |
volitelná zařízení v hnacím ústrojí (např. odlehčovací brzda): hodnotí se; |
|
n) |
druh diferenciálu (např. standardní nebo samosvorný): hodnotí se; |
|
o) |
uzávěr (uzávěry) diferenciálu (podle volby řidiče): hodnotí se; |
|
p) |
druh brzdového systému (např. vzduchohydraulický, plně vzduchový): hodnotí se; |
|
q) |
druh brzd (kotoučové, bubnové (s jedním rozpěracím klínem, s dvojitým klínem, s S-klíčem): není omezujícím faktorem, avšak pokud se stanou dostupnými jiné druhy brzd, mohou se požadovat srovnávací zkoušky; |
|
r) |
konfigurace protiblokovacího systému: hodnotí se; |
|
s) |
rozvor: hodnotí se. V případě, kdy v době zkoušky nejsou k dispozici vozidla mající minimální a maximální rozvor specifikovaný v informačním dokumentu, může se vykonat ověření s minimálním a maximálním rozvorem s použitím údajů ze zkoušek výrobce systému na reálných vozidlech s rozvorem v rozmezí 20 % hodnot vozidel s aktuálním minimálním a maximálním rozvorem, která zkoušela technická zkušebna; |
|
t) |
typ kola (s jednoduchou montáží pneumatik nebo s dvojitou montáží): bude zahrnuto v informačním dokumentu výrobce systému; |
|
u) |
typ pneumatiky (např. podle struktury, kategorie použití, velikosti): bude zahrnuto v informačním dokumentu výrobce systému; |
|
v) |
rozchod kol: není omezujícím faktorem – je pokryto kolísáním ve vyhodnocení polohy těžiště; |
|
w) |
typ zavěšení (např. vzduchové, mechanické, pryžové): hodnotí se; |
|
x) |
výška těžiště: hodnotí se. V případě, kdy v době zkoušky nejsou k dispozici vozidla mající maximální výšku těžiště specifikovanou v informačním dokumentu, může se vykonat ověření s maximální výškou těžiště s použitím údajů ze zkoušek výrobce systému na reálných vozidlech s výškou těžiště v rozmezí + 20 % aktuálních hodnot maximální výšky těžiště vozidel, která zkoušela technická zkušebna; |
|
y) |
poloha snímače bočního zrychlení: hodnotí se instalační oblast specifikovaná výrobcem systému; |
|
z) |
poloha snímače rychlosti stáčení: hodnotí se instalační oblast specifikovaná výrobcem systému. |
1.1.4. Rozvrh zkoušky
1.1.4.1. Zkoušky použité k hodnocení stabilitní řídící funkce vozidla se dohodnou mezi výrobcem systému a technickou zkušebnou a jejich součástí musí být podmínky vztahující se k hodnocené funkci a které by bez intervence stabilitní řídící funkce vedly ke ztrátě ovládání směru jízdy nebo ovládání převrácení. Dynamické manévry, podmínky zkoušky a výsledky se uvedou ve zkušebním protokolu.
Hodnocení musí případně zahrnovat tyto činnosti:
|
1.1.4.1.1. |
Nápravy s doplňkovým řízením: Vyhodnotí se jejich vliv porovnáním výsledku s nápravou v jejím běžném řídicím režimu a se stavem se zablokovaným řízením, takže náprava se stane tuhou nápravou, s výjimkou stavu, kdy to je parametrem programování konců průběhu. |
|
1.1.4.1.2. |
Převodový poměr řízení: Zkoušky, které musí být provedeny k určení účinnosti jakéhokoli programování konců průběhu nebo učení se s použitím určitého počtu vozidel s různými převodovými poměry řízení, nebo je schválení omezeno na převodové poměry řízení, které byly skutečně zkoušeny |
|
1.1.4.1.3. |
Zdvihatelná náprava: Zkoušky, které se vykonají se zdvihatelnou nápravou ve zdvižené poloze a ve spuštěné poloze, se snímáním polohy a s vyhodnocováním přenosu signálu ke zjištění, že byla rozpoznána změna rozvoru. |
|
1.1.4.1.4. |
Řízení motoru: Řízení motoru nebo jiného zdroje (zdrojů) hnací síly, aby se ukázalo, že je nezávislé na požadavku řidiče. |
|
1.1.4.1.5. |
Volitelná zařízení v hnacím ústrojí: Je nutné ukázat účinek jakýchkoli volitelných zařízení, např. (v případě odlehčovací brzdy) že ovládání odlehčovací brzdy je nezávislé na řidiči. |
|
1.1.4.1.6. |
Druh diferenciálu / uzávěr (uzávěry) diferenciálu: Je nutné ukázat účinek samostatně fungujícího uzávěru nebo řidičem zvoleného uzávěru, např. funkce se udržuje v činnosti, redukuje se nebo se vypíná. |
|
1.1.4.1.7. |
Konfigurace protiblokovacího systému: Každá konfigurace protiblokovacího systému se zkouší na nejméně jednom vozidle. Jestliže stabilitní funkce vozidla pokrývá různé systémy (např. ABS, EBS), provedou se zkoušky na vozidlech majících různé touto funkcí pokryté systémy. |
|
1.1.4.1.8. |
Druh zavěšení náprav: Vozidla se vyberou na základě druhu zavěšení náprav (např. vzduchové, mechanické, pryžové) u každé nápravy nebo skupiny náprav. |
|
1.1.4.1.9. |
Výška těžiště: Zkoušky se provedou na vozidlech, kde je možné nastavit výšku těžiště tak, aby se prokázalo, že opatření proti převrácení je schopno se přizpůsobit změnám ve výšce těžiště. |
|
1.1.4.1.10. |
Poloha snímače bočního zrychlení: Vyhodnotí se vliv instalování snímače bočního zrychlení v různých polohách na tomtéž vozidle, aby se potvrdila oblast instalace, kterou specifikoval výrobce systému. |
|
1.1.4.1.11. |
Poloha snímače rychlosti stáčení: Vyhodnotí se vliv instalování snímače rychlosti stáčení v různých polohách na tomtéž vozidle, aby se potvrdila oblast instalace, kterou specifikoval výrobce systému. |
|
1.1.4.1.12. |
Naložení vozidla: Vozidla se zkoušejí jak v naloženém stavu, tak v nenaloženém / zčásti naloženém stavu, aby se prokázalo, že stabilitní funkce vozidla je schopna se přizpůsobit rozdílnému stavu naložení. U tahače návěsů se zkoušky provedou takto:
|
1.1.4.2. Hodnocení autobusů
Jako alternativa pro autobusy se mohou při hodnocení použít nákladní automobily, které mají stejný typ brzdového systému. Avšak do zkoušek a následujícího zkušebního protokolu musí být zahrnut nejméně jeden autobus.
1.1.5. Zkušební protokol
1.1.5.1. Vypracuje se zkušební protokol, který musí obsahovat alespoň informace uvedené v dodatku 12 k této příloze.
(1) Jiné konstrukce brzdových válců mohou být schváleny po předložení rovnocenných údajů.
(2) Jiné konstrukce pružinových brzd mohou být schváleny po předložení rovnocenných údajů.
(3) Jiné konstrukce brzd mohou být schváleny po předložení rovnocenných údajů.
(4) Jestliže se použije metoda zkoušky na zkušební dráze nebo na vozidlovém dynamometru, použijí se vstupní brzdné momenty rovnocenné momentům zde uvedeným.
(5) Vnější průměr pneumatiky vymezený v předpisu č. 54.
Dodatek 1
Vzor ověřovacího protokolu pro membránové brzdové válce
Zkušební protokol č. …
1. Identifikace …
1.1. Výrobce: (název a adresa) …
…
1.2. Značka: … (1)
1.3. Typ: … (1)
1.4. Číslo dílu: … (1)
2. Pracovní podmínky:
2.1. Maximální pracovní tlak:
3. Charakteristické vlastnosti podle prohlášení výrobce:
3.1. Maximální zdvih (smax) při 650 kPa … (2)
3.2. Střední tlaková síla (ThA) – f (p) … (2)
3.3. Efektivní zdvih (sp) – f (p) … (2)
3.3.1. Rozsah tlaku, ve kterém platí výše uvedený efektivní zdvih: (viz bod 2.3.4 přílohy 19 – části 1).
3.4. Tlak potřebný k vyvození zdvihu pístnice 15 mm (p15), s použitím funkce ThA – f(p) nebo deklarované hodnoty (2) (3).
4. Rozsah použití
Brzdové válce se mohou použít na přípojných vozidlech kategorie O3 a O4 ano/ne
Brzdové válce se mohou použít pouze na přípojných vozidlech kategorie O3 ano/ne
5. Název technické zkušebny / schvalovacího orgánu, která (který) provedl(a) zkoušku:
6. Datum zkoušky: …
7. Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle přílohy 19 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (4), která zkoušku provedla
Podpis: …Datum: …
8. Schvalovací orgán (5)
Podpis: …Datum: …
9. Zkušební dokumenty:
Dodatek 2, …, …
(1) Vyznačí se na brzdovém válci, avšak ve zkušebním protokolu se vyžaduje uvedení jen základního čísla dílu, není třeba uvádět varianty modelu.
(2) Identifikace se musí změnit, jestliže dojde ke změnám, které mají vliv na charakteristické vlastnosti, body 3.1, 3.2 a 3.3 tohoto dodatku.
(3) K účelům použití charakteristik uvedených v tomto zkušebním protokolu pro přílohu 10 se předpokládá, že průběh mezi p15 a deklarovanou hodnotou funkce ThA – f(p) při tlaku 100 kPa je lineární.
(4) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
(5) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 2
Vzor formuláře záznamu výsledků zkoušky pro membránové brzdové válce
Zkušební protokol č. …
|
1. |
Záznam výsledků zkoušky (1) pro díl číslo … |
|
Tlak (2) p – (kPa) |
Střední tlaková síla ThA – (N) |
Efektivní zdvih sp – (mm) |
|
|
|
|
(1) Vypracuje se pro každý ze šesti zkoušených vzorků.
(2) Tlakem „p“ jsou skutečné hodnoty tlaku použité v průběhu zkoušky podle bodu 2.2.2 této přílohy.
Dodatek 3
Vzor ověřovacího protokolu pro pružinové brzdy
Zkušební protokol č. …
1. Identifikace: …
1.1. Výrobce: (název a adresa) …
…
1.2. Značka: … (1)
1.3. Typ: … (1)
1.4. Číslo dílu: … (1)
2. Pracovní podmínky:
2.1. Maximální pracovní tlak:
3. Charakteristické vlastnosti podle prohlášení výrobce:
3.1. Maximální zdvih (smax …) (2)
3.2. Tlaková síla pružiny (Ths) – f (s) … (2)
3.3. Tlak, při kterém se brzda uvolňuje (při zdvihu 10 mm) … (2)
4. Datum zkoušky: …
5. Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle přílohy 19 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (3), která zkoušku provedla
Podpis: …Datum: …
6. Schvalovací orgán (3)
Podpis: …Datum: …
7. Zkušební dokumenty:
Dodatek 4, …, …
(1) Vyznačí se na pružinovém válci, avšak ve zkušebním protokolu se vyžaduje uvedení jen základního čísla dílu, není třeba uvádět varianty modelu.
(2) Identifikace se musí změnit, jestliže dojde ke změnám, které mají vliv na charakteristické vlastnosti, body 3.1, 3.2 a 3.3 tohoto dodatku.
(3) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 4
Vzor formuláře záznamu výsledků zkoušky pro pružinové brzdy
Zkušební protokol č. …
|
1. |
Záznam výsledků zkoušky (1) pro díl číslo: … |
|
Zdvih (2) S – (mm) |
Tlaková síla Ths – (N) |
|
|
|
Tlak, při kterém se brzda uvolňuje (při zdvihu 10 mm) …kPa
(1) Vypracuje se pro každý ze šesti zkoušených vzorků.
(2) Zdvihem „s“ jsou skutečné hodnoty zdvihu použité v průběhu zkoušky podle bodu 3.2.2 této přílohy.
Dodatek 5
Informační dokument o protiblokovacím brzdovém systému přípojného vozidla
1. Obecné informace
1.1. Název výrobce
1.2. Název systému
1.3. Varianty systému
1.4. Konfigurace systému (např. 2S/1M, 2S/2M atd.)
1.5. Vysvětlení základní funkce a/nebo principu systému.
2. Použití
2.1. Seznam typů přípojných vozidel a konfigurací protiblokovacího systému, pro které se žádá o schválení typu.
2.2. Schématické grafy konfigurací systému instalovaných na přípojných vozidlech uvedených v bodě 2.1 a obsahující následující parametry:
|
|
umístění čidel |
|
|
umístění modulátorů |
|
|
Zdvihatelné nápravy |
|
|
řízené nápravy |
|
|
trubice: druh – vnitřní průměr (průměry) a délky. |
2.3. Poměr obvodu pneumatiky k počtu zubů impulsního kotouče, včetně dovolených odchylek.
2.4. Dovolená odchylka obvodu pneumatiky mezi jednou nápravou a další nápravou se stejným impulsním kotoučem.
2.5. Oblast použití z hlediska druhu zavěšení náprav:
Vzduchové zavěšení: všechny typy pneumatického zavěšení s „vlečeným ramenem“ s vyvážením
Ostatní druhy zavěšení: podle definice výrobce, model a typ (s vyvážením / bez vyvážení)
2.6. Doporučení rozdílů (pokud existují) vstupního brzdného momentu v závislosti na konfiguraci ABS a uspořádání skupiny náprav přípojného vozidla.
2.7. Popřípadě doplňkové údaje k žádosti o schválení typu protiblokovacího systému.
3. Popis konstrukčních částí
3.1. Čidlo (čidla)
Funkce
Identifikace (např. čísla dílů)
3.2. Řídící zařízení
Celkový popis a funkce
Identifikace (např. čísla dílů)
Bezpečnostní vlastnosti řídícího zařízení (řídících zařízení)
Doplňkové vlastnosti (např. ovládání odlehčovací brzdy, automatická konfigurace, proměnné parametry, diagnostika).
3.3. Modulátor (modulátory)
Celkový popis a funkce
Identifikace (např. čísla dílů)
Omezení (např. maximální průtočné objemy, které mají být regulovány)
3.4. Elektrické zařízení
Schémata obvodů
Způsoby napájení
Sekvence rozsvěcování výstražného sdělovače
3.5. Pneumatické okruhy
Schémata brzdového zařízení zahrnující konfigurace ABS používané na typech přípojných vozidel definovaných v bodě 2.1.
Omezení týkající se potrubí, jeho průměrů a délek, které ovlivňují vlastnosti systému (např. mezi modulátorem a brzdovým válcem).
3.6. Elektromagnetická kompatibilita
3.6.1. Dokumentace prokazující splnění ustanovení bodu 4.4 přílohy 13 tohoto předpisu.
Dodatek 6
Protokol o zkoušce protiblokovacího brzdového systému přípojného vozidla
Zkušební protokol č.: …
1. Identifikace
1.1. Výrobce protiblokovacího systému (jméno a adresa)
1.2. Název/model systému
2. Schválený systém (systémy) a instalace
2.1. Schválená konfigurace systému (např. 2S/1M, 2S/2M atd.):
2.2. Rozsah použití (typ přípojného vozidla a počet náprav):
2.3. Způsoby přívodu energie: ISO 7638, ISO 1185 atd.
2.4. Identifikace schválených čidel, řídicích zařízení a modulátorů:
2.5. Spotřeba energie – ekvivalentní počet zabrzdění ve statickém stavu.
2.6. Doplňkové vlastnosti, např. ovládání odlehčovací brzdy, konfigurace zdvihatelné nápravy atd.:
3. Údaje a výsledky zkoušek
3.1. Údaje o zkoušeném vozidle:
3.2. Údaje o povrchu zkušební dráhy:
3.3. Výsledky zkoušek:
3.3.1. Využití adheze:
3.3.2. Spotřeba energie:
3.3.3. Zkouška na površích s rozdílným součinitelem adheze:
3.3.4. Brzdné účinky při nízké rychlosti:
3.3.5. Brzdné účinky při vysoké rychlosti:
3.3.6. Doplňková ověření:
3.3.6.1. Přejezd z povrchu s vysokým součinitelem adheze na povrch s nízkým součinitelem adheze:
3.3.6.2. Přejezd z povrchu s nízkým součinitelem adheze na povrch s vysokým součinitelem adheze:
3.3.7. Simulace možností poruch:
3.3.8. Funkční ověření doplňkových spojů přívodu energie:
3.3.9. Elektromagnetická kompatibilita
4. Omezení týkající se montáže
4.1. Poměr obvodu pneumatiky k počtu zubů impulsního kotouče:
4.2. Dovolená odchylka obvodu pneumatiky mezi jednou nápravou a jinými nápravami se stejným impulsním kotoučem:
4.3. Druh zavěšení náprav:
4.4. Rozdíl(y) ve vstupním momentu brzd ve skupině náprav na přípojném vozidle:
4.5. Rozvor plného přípojného vozidla:
4.6. Druh brzdy:
4.7. Rozměry a délky trubic
4.8. Použití zátěžového regulátoru:
4.9. Sekvence světelných výstražných signálů:
4.10. Konfigurace systému a jeho použití, které splňuje požadavky na kategorii A.
4.11. Jiná doporučení/omezení (např. umístění čidel, modulátorů, zdvihatelných náprav, řízených náprav):
5. Datum zkoušky:
Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle přílohy 19 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (1), která zkoušku provedla
Podpis: …Datum: …
6. Schvalovací orgán (1)
Podpis: …Datum: …
Příloha: Informační dokument výrobce
(1) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 7
Informační dokument o stabilitní funkci vozidla (přípojného vozidla)
1. Obecné informace
1.1. Název výrobce
1.2. Název systému
1.3. Varianty systému
1.4. Řídící funkce (směrové řízení / opatření proti převrácení / obojí) včetně vysvětlení základní funkce a/nebo principů řídící funkce
1.5. Konfigurace systému (v příslušných případech)
1.6. Identifikace systému
2. Použití
2.1. Seznam typů přípojných vozidel a konfigurací, pro které se žádá schválení.
2.2. Schématické grafy jednotlivých konfigurací instalovaných na přípojných vozidlech uvedených v bodě 2.1 a obsahující následující parametry:
|
a) |
zdvihatelné nápravy; |
|
b) |
řízené nápravy; |
|
c) |
konfigurace protiblokovacího systému. |
2.3. Oblast použití z hlediska druhu zavěšení náprav:
a) vzduchové zavěšení: všechny typy pneumatického zavěšení s „vlečeným ramenem“ s vyvážením;
b) ostatní druhy zavěšení: podle definice výrobce, model a typ (s vyvážením / bez vyvážení).
2.4. Popřípadě doplňkové informace k použití funkce (funkcí) směrového řízení a/nebo opatření proti převrácení
3. Popis konstrukční části
3.1. Čidla vně řídícího zařízení
|
a) |
funkce; |
|
b) |
omezení týkající se umístění čidel; |
|
c) |
identifikace, např. čísla dílů. |
3.2. Řídící zařízení
|
a) |
celkový popis a funkce; |
|
b) |
identifikace, např. čísla dílů; |
|
c) |
omezení týkající se umístění řídícího (řídících) zařízení; |
|
d) |
další prvky. |
3.3. Modulátory
|
a) |
celkový popis a funkce; |
|
b) |
identifikace; |
|
c) |
omezení. |
3.4. Elektrické zařízení
|
a) |
schémata obvodů; |
|
b) |
způsoby napájení. |
3.5. Pneumatické okruhy
Schémata systému, včetně konfigurací protiblokovacího systému použitých u typu přípojných vozidel definovaných v bodě 6.2.1 této přílohy.
3.6 Hlediska bezpečnosti elektronického systému podle přílohy 18 tohoto předpisu
3.7. Elektromagnetická kompatibilita
3.7.1. Dokumentace prokazující splnění požadavků předpisu č. 10, jak požaduje bod 5.1.1.4.
Dodatek 8
Protokol o zkoušce stabilitní funkce vozidla (přípojného vozidla)
Zkušební protokol č.: …
1. Identifikace
1.1. Výrobce systému stabilitní funkce vozidla (název a adresa)
1.2. Název/model systému
1.3. Řídící funkce
2. Schválený systém (systémy) a schválené instalace:
2.1. Konfigurace protiblokovacího systému (v příslušných případech)
2.2. Rozsah použití (typ přípojného vozidla a počet náprav)
2.3. Identifikace systému
2.4. Doplňkové vlastnosti
3. Údaje a výsledky zkoušek
3.1. Údaje o zkoušeném vozidle (včetně specifikace a funkčních vlastností tažného vozidla)
3.2. Informace o povrchu zkušební dráhy
3.3. Další informace
3.4. Demonstrační zkoušky/simulace použité k hodnocení směrového řízení a opatření proti převrácení, v příslušných případech.
3.5. Výsledky zkoušek
3.6. Hodnocení podle přílohy 18 tohoto předpisu
4. Omezení týkající se montáže
4.1. Druh zavěšení náprav
4.2. Druh brzdy
4.3. Umístění konstrukčních částí na přípojném vozidle
4.4. Konfigurace protiblokovacího systému
4.5. Ostatní doporučení/omezení (např. zdvihatelné nápravy, řízené nápravy atd.)
5. Připevnění
6. Datum zkoušky:
7. Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle přílohy 19 předpisu EHK č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (1), která zkoušku provedla
Podpis: …Datum: …
8. Schvalovací orgán (1)
Podpis: …Datum: …
(1) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
Dodatek 9
Symboly a definice
|
Symbol |
Definice |
|
BF |
Brzdný faktor (poměr zesílení výstupního momentu ke vstupnímu momentu) |
|
CO |
Prahová hodnota brzdného momentu (nejmenší moment potřebný k vytvoření měřitelného brzdného momentu) |
|
D |
Vnější průměr pneumatiky (celkový průměr nahuštěné nové pneumatiky) |
|
d |
Smluvené číslo označující jmenovitý průměr ráfku a odpovídající průměru ráfku vyjádřenému buď v palcích, nebo v mm |
|
FB |
Brzdná síla |
|
H |
Jmenovitá výška průřezu pneumatiky (vzdálenost rovnající se polovině rozdílu mezi vnějším průměrem pneumatiky a jmenovitým průměrem ráfku) |
|
I |
Rotační moment setrvačnosti |
|
lT |
Délka páky klíče brzdy referenčního zkušebního přípojného vozidla |
|
Mt |
Střední výstupní brzdný moment |
|
ne |
Ekvivalentní počet brzdění ve statickém stavu pro účel schválení typu |
|
ner |
Ekvivalentní počet brzdění ve statickém stavu v průběhu zkoušky |
|
nD |
Otáčky válce vozidlového dynamometru |
|
nW |
Otáčky nebrzděných kol nápravy |
|
Pd |
Maximální technicky přípustná hmotnost připadající na brzdu |
|
p |
Tlak |
|
P15 |
Tlak v brzdovém válci potřebný k posuvu pístnice o 15 mm z nulové polohy |
|
R |
Dynamický poloměr valení pneumatiky (vypočte se s použitím 0,485 D) |
|
Ra |
Jmenovité profilové číslo pneumatiky (stonásobek čísla získaného dělením čísla, které vyjadřuje jmenovitou výšku průřezu v milimetrech, číslem vyjadřujícím jmenovitou šířku průřezu v milimetrech) |
|
Rl |
Poměr sT/lT |
|
RR |
Poloměr válce dynamometru |
|
S1 |
Šířka průřezu pneumatiky (lineární vzdálenost mezi vnějšími okraji bočnic nahuštěné pneumatiky, bez výčnělků vytvořených označením, zdobením nebo ochrannými pásy nebo žebry) |
|
s |
Zdvih pístnice brzdového válce (užitečný zdvih + zdvih naprázdno) |
|
smax |
Celkový zdvih pístnice brzdového válce |
|
sp |
Efektivní zdvih, tj. zdvih, při němž se tlaková síla na pístnici brzdového válce rovná 90 % střední tlakové síly ThA |
|
sT |
Zdvih pístnice brzdového válce referenčního zkušebního přípojného vozidla v mm |
|
ThA |
Střední tlaková síla (střední tlaková síla se určí integrací hodnot mezi jednou třetinou a dvěma třetinami celkového zdvihu smax) |
|
THS |
Tlaková síla pružiny pružinové brzdy |
|
TR |
Součet brzdných sil na obvodu všech kol přípojného vozidla nebo návěsu |
|
V |
Zkušební rychlost na obvodu válce dynamometru |
|
v1 |
Počáteční rychlost na začátku brzdění |
|
v2 |
Rychlost na konci brzdění |
|
W60 |
Pohlcená energie, ekvivalent kinetické energie odpovídající hmotnosti připadající na zkoušenou brzdu při brzdění ze 60 km/h do zastavení |
|
Z |
Poměrné zpomalení vozidla |
Dodatek 10
Dokumentační formulář pro praktickou zkoušku předepsanou v bodě 4.4.2.9 této přílohy
1. Identifikace
1.1. Brzda:
Výrobce …
Značka …
Typ …
Model …
Bubnová brzda nebo kotoučová brzda (1)
Údaje k identifikaci zkoušeného předmětu …
Technicky přípustný vstupní brzdný moment Cmax …
Zařízení pro automatické seřizování brzd: integrované/neintegrované (1)
1.2. Brzdový buben nebo kotouč:
Vnitřní průměr bubnu nebo vnější průměr kotouče …
Účinný poloměr (2) …
Tloušťka …
Hmotnost …
Materiál …
Údaje k identifikaci zkoušeného předmětu …
1.3. Brzdové obložení:
Výrobce …
Typ …
Identifikace …
Šířka …
Tloušťka …
Činná plocha …
Způsob připevnění …
Údaje k identifikaci zkoušeného předmětu …
1.4. Brzdový válec:
Výrobce …
Značka …
Velikost …
Typ …
Údaje k identifikaci zkoušeného předmětu …
1.5. Zařízení pro automatické seřizování brzd (3)
Výrobce …
Značka …
Typ …
Verze …
Údaje k identifikaci zkoušeného předmětu …
1.6. Údaje o zkoušeném vozidle
|
|
Tažné vozidlo:
|
|
|
Přípojné vozidlo:
|
|
|
Montáž jednoduchá/dvojitá (4)
|
2. Údaje a výsledky zkoušek
2.1. Praktická zkouška:
Celkový popis zahrnující: ujetou vzdálenost, dobu trvání a místo zkoušky
2.2. Zkouška brzdění:
2.2.1. Údaje o povrchu zkušební dráhy …
2.2.2. Postup zkoušek …
2.3. Výsledky zkoušek:
|
|
Brzdný faktor
|
|
|
Grafy |
(1) Nehodící se škrtněte.
(2) Týká se jen kotoučových brzd.
(3) Tato položka se nepoužije v případě zařízení pro automatické seřizování brzd, které je integrováno do brzdy.
(4) Nehodící se škrtněte.
Dodatek 11
Informační dokument o stabilitní funkci vozidla (motorového vozidla)
1. Obecné informace
1.1. Název výrobce
1.2. Systém
1.3. Varianty systému
1.4. Volby systému
1.4.1. Řídící funkce (směrové řízení / opatření proti převrácení / obojí) včetně vysvětlení základní funkce a/nebo principů řídící funkce
1.5. Konfigurace systému (v příslušných případech)
1.6. Identifikace systému, včetně identifikátoru úrovně softwaru
2. Použití
2.1. Seznam motorových vozidel s popisem a uvedením konfigurací, na které se vztahuje informační dokument
2.2. Schématické grafy jednotlivých konfigurací instalovaných na motorových vozidlech uvedených v bodě 2.1 a obsahující následující parametry:
|
a) |
zdvihatelné nápravy |
|
b) |
řízené nápravy |
|
c) |
konfigurace protiblokovacího systému |
2.3. Oblast použití z hlediska zavěšení náprav:
|
a) |
vzduchové |
|
b) |
mechanické |
|
c) |
pryžové |
|
d) |
smíšené |
|
e) |
příčné stabilizátory |
2.4. Popřípadě doplňkové informace k použití funkce (funkcí) směrového řízení a/nebo opatření proti převrácení, např.:
|
a) |
rozvor, rozchod, výška těžiště |
|
b) |
druh kola (s jednoduchou montáží nebo s dvojitou montáží) a druh pneumatiky (např. struktura, kategorie použití, velikost) |
|
c) |
druh převodovky (např. s ručním ovládáním, s automatizovaným ručním ovládáním, poloautomatická, automatická) |
|
d) |
volitelná zařízení v hnacím ústrojí (např. odlehčovací brzda) |
|
e) |
druh/uzávěr (uzávěry) diferenciálu (např. standardní nebo samosvorný, řazený automaticky nebo řidičem) |
|
f) |
řízení motoru nebo jiného zdroje (zdrojů) hnací síly |
|
g) |
druh brzdy |
3. Popis konstrukční části:
3.1. Čidla vně řídícího zařízení
|
a) |
funkce |
|
b) |
omezení týkající se umístění čidel |
|
c) |
identifikace, např. čísla dílů |
3.2. Řídící zařízení
|
a) |
celkový popis a funkce |
|
b) |
popřípadě fungování interních čidel |
|
c) |
identifikace hardwaru (např. čísla dílů) |
|
d) |
identifikace softwaru |
|
e) |
omezení týkající se umístění řídícího (řídících) zařízení |
|
f) |
doplňkové vlastnosti |
3.3. Modulátory
|
a) |
celkový popis a funkce |
|
b) |
identifikace hardwaru (např. čísla dílů) |
|
c) |
popřípadě identifikace softwaru |
|
d) |
omezení |
3.4. Elektrické zařízení
|
a) |
schémata obvodů |
|
b) |
způsoby napájení |
3.5. Pneumatické okruhy
Schémata systému, včetně konfigurací protiblokovacího systému použitých u typů motorových vozidel vymezených v bodě 2.1 tohoto dodatku.
3.6. Hlediska bezpečnosti elektronického systému podle přílohy 18 tohoto předpisu
3.7. Elektromagnetická kompatibilita
3.7.1. Dokumentace prokazující splnění požadavků předpisu č. 10, jak požaduje bod 5.1.1.4 tohoto předpisu
Dodatek 12
Protokol o zkoušce stabilitní funkce vozidla (motorového vozidla)
Zkušební protokol č.: …
1. Identifikace:
1.1. Výrobce systému stabilitní funkce vozidla (název a adresa)
1.2. Žadatel (pokud je jiný než výrobce)
1.3. Systémy
1.3.1. Varianty systému
1.3.2. Volby systému
1.3.2.1. Řídící funkce
2. Systém (systémy) a instalace:
2.1. Konfigurace protiblokovacího systému
2.2. Použití na vozidle
2.2.1. Kategorie vozidla (např. N2, N3 atd.)
2.2.2. Druh vozidla
2.2.3. Konfigurace vozidla (např. 4 × 2, 6 × 2 atd.):
2.2.4. Programování konců průběhu
2.3. Identifikace systému
2.4. Popis funkcí
2.4.1. Směrové řízení
2.4.2. Opatření proti převrácení
2.4.3. Provoz při nízkých rychlostech
2.4.4. Terénní režim
2.4.5. Volitelná zařízení v hnacím ústrojí
2.5. Konstrukční části
2.6. Detekování a funkce přípojného vozidla
2.7. Výstražná signalizace zásahu
2.8. Výstražná signalizace poruchy
2.9. Rozsvícení brzdových svítilen
3. Hodnocené proměnné vozidla:
3.1. Obecné informace
3.2. Druh brzdového systému
3.3. Druh brzdy
3.4. Těžiště
3.5. Řízení motoru nebo jiného zdroje (zdrojů) hnací síly
3.6. Druh převodovky
3.7. Konfigurace instalace
3.8. Zdvihatelné nápravy
3.9. Vliv změn naložení vozidla
3.9.1. Opatření proti převrácení
3.9.2. Směrové řízení
3.10. Převodový poměr řízení
3.11. Nápravy s doplňkovým řízením
3.12. Zavěšení
3.13. Rozchod kol
3.14. Snímač (snímače) rychlosti stáčení a bočního zrychlení
3.15. Rozvor
3.16. Druh kola, druh pneumatiky, velikost pneumatiky
4. Omezení týkající se instalace:
4.1. Druh zavěšení náprav
4.2. Druh brzdy
4.3. Umístění konstrukčních částí
4.3.1. Poloha snímače (snímačů) rychlosti stáčení a bočního zrychlení
4.4. Konfigurace protiblokovacího systému
4.5. Náprava s doplňkovým řízením
4.6. Ostatní doporučení a omezení
4.6.1. Druh brzdového systému
4.6.2. Řízení motoru nebo jiného zdroje (zdrojů) hnací síly
4.6.3. Zdvihatelné nápravy
5. Údaje o zkouškách a výsledky zkoušek:
5.1. Údaje o zkoušeném vozidle (včetně specifikace a funkčních vlastností přípojného vozidla (vozidel) použitých při zkoušce (zkouškách))
5.2. Informace o povrchu zkušební dráhy
5.2.1. Povrch s vysokým součinitelem adheze
5.2.2. Povrch s nízkým součinitelem adheze
5.3. Měření a sběr údajů
5.4. Zkušební podmínky a postupy
5.4.1. Zkoušky na vozidle
5.4.1.1. Směrové řízení
5.4.1.2. Opatření proti převrácení
5.5. Další informace
5.6. Výsledky zkoušek
5.6.1. Zkoušky na vozidle
5.6.1.1. Směrové řízení
5.6.1.2. Opatření proti převrácení
5.7. Hodnocení podle přílohy 18 tohoto předpisu
5.8. Splnění požadavků předpisu č. 10
6. Přílohy (1):
7. Datum zkoušky:
8. Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle přílohy 19 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (2), která zkoušku provedla
Podpis: …Datum: …
9. Schvalovací orgán (2)
Podpis: …Datum: …
(1) Připojí se údaje ze zkoušek dodavatele systému na podporu přípustné odchylky, jak je stanoveno v bodě 1.1.3.2 písm. s) a bodě 1.1.3.2 písm. x) části 2 přílohy 19.
(2) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
PŘÍLOHA 20
ALTERNATIVNÍ POSTUP SCHVÁLENÍ TYPU PŘÍPOJNÝCH VOZIDEL
1. OBECNÉ INFORMACE
1.1. Tato příloha definuje alternativní postup schválení typu přípojných vozidel s použitím údajů ze zkušebních protokolů vydaných podle příloh 11 a 19.
1.2. Po provedení ověřovacího postupu popsaného v bodech 3, 4, 5, 6, 7 a 8 této přílohy vydá technická zkušebna / schvalovací orgán osvědčení o OSN schválení typu podle vzoru v příloze 2 dodatku 1 tohoto předpisu.
1.3. Pro účely výpočtů definovaných v této příloze se určí výška těžiště podle metody uvedené v dodatku 1 k této příloze.
2. ŽÁDOST O SCHVÁLENÍ TYPU
2.1. Žádost o OSN schválení typu přípojného vozidla z hlediska brzdového zařízení předkládá výrobce přípojného vozidla. Výrobce přípojného vozidla předloží technické zkušebně k žádosti o schválení nejméně tyto náležitosti:
|
2.1.1. |
výtisk osvědčení o OSN nebo EU schválení typu a informační dokument pro přípojné vozidlo (dále jen „referenční přípojné vozidlo“), k němuž se bude vztahovat porovnání brzdných účinků provozního brzdění. S tímto přípojným vozidlem byly provedeny skutečné zkoušky definované v příloze 4 tohoto předpisu pro příslušné přípojné vozidlo nebo zkoušky podle rovnocenné směrnice EU. Přípojné vozidlo, které bylo schváleno podle alternativního postupu uvedeného v této příloze, se nesmí použít jako referenční přípojné vozidlo; |
|
2.1.2. |
výtisky zkušebních protokolů podle přílohy 11 a přílohy 19; |
|
2.1.3 |
složka dokumentace, která obsahuje údaje o příslušných ověřeních, včetně výpočtů, v příslušných případech, pro následující položky:
|
|
2.1.4. |
přípojné vozidlo, které je reprezentativní pro typ přípojného vozidla, jenž se má schválit (dále jen „uvažované přípojné vozidlo“). |
2.2. Výrobce „referenčního přípojného vozidla“ a „uvažovaného přípojného vozidla“ musí být tentýž.
3. ALTERNATIVNÍ POSTUP K PROKÁZÁNÍ ÚČINKU PROVOZNÍHO BRZDĚNÍ ZKOUŠKOU TYPU 0 SE STUDENÝMI BRZDAMI
3.1. Aby se prokázal účinek provozního brzdění se studenými brzdami zkouškou typu 0, musí se ověřit výpočtem, že „uvažované přípojné vozidlo“ má brzdnou sílu TR postačující k dosažení předepsaného účinku provozního brzdění a že na suché vozovce může využít dostatečnou adhezi k použití této brzdné síly (za předpokladu, že vozovka má součinitel adheze 0,8).
3.2. Ověření
3.2.1. Požadavky přílohy 4 bodů 1.2.7, 3.1.2 a 3.1.3 (požadavky na brzdné účinky se studenými brzdami a jejich dosažení bez blokování kol, vychýlení ze směru nebo abnormálních vibrací) se pokládají za splněné uvažovaným přípojným vozidlem, jestliže toto vozidlo splňuje kritéria pro ověření popsaná v následujících bodech, a to v naloženém i nenaloženém stavu:
|
3.2.1.1. |
Rozvor uvažovaného přípojného vozidla nesmí být menší než 0,8 rozvoru referenčního přípojného vozidla. |
|
3.2.1.2. |
Jakýkoli rozdíl mezi vstupními brzdnými momenty mezi nápravami ve skupině náprav uvažovaného přípojného vozidla se nesmí lišit od rozdílu, který je u referenčního přípojného vozidla. |
|
3.2.1.3. |
Počet a uspořádání náprav, tj. zdvihatelné nápravy, řízené nápravy atd., u uvažovaného přípojného vozidla se nesmí lišit od referenčního přípojného vozidla. |
|
3.2.1.4. |
Rozložení statického zatížení na naloženou nápravu uvažovaného přípojného vozidla se nesmí lišit od rozložení zatížení u referenčního přípojného vozidla o více než 10 %. |
|
3.2.1.5. |
Pro návěsy se sestrojí graf podle dodatku 2 a podle tohoto grafu se ověří, že:
|
|
3.2.1.6. |
Pro přípojná vozidla s nápravami uprostřed se sestrojí graf podle dodatku 3 a podle tohoto grafu se ověří, že:
|
|
3.2.1.7. |
Pro plná přípojná vozidla se sestrojí graf podle dodatku 4 a podle tohoto grafu se ověří, že:
|
4. ALTERNATIVNÍ POSTUP K PROKÁZÁNÍ ÚČINKU PARKOVACÍHO BRZDĚNÍ
4.1. Obecné informace
4.1.1. Tento postup představuje alternativu ke skutečnému zkoušení přípojných vozidel na sklonu a zajišťuje, že přípojná vozidla opatřená mechanismem parkovacího brzdění s pružinovými brzdami splňují předepsaný účinek parkovacího brzdění. Tento postup se nesmí použít na přípojná vozidla opatřená mechanismem parkovacího brzdění, na který působí jiné prostředky než pružinové brzdy. S takovými přípojnými vozidly se musí provést skutečné zkoušky předepsané v příloze 4.
4.1.2. Předepsaný účinek parkovacího brzdění se prokáže výpočtem podle vzorců uvedených v bodech 4.2 a 4.3.
4.2. Účinek parkovacího brzdění
4.2.1. Brzdná síla parkovacího brzdění na obvodu pneumatik nápravy (náprav) brzděné parkovacím mechanismem s pružinovými brzdami se vypočte podle následujícího vzorce:
Tpi = ( Ths × l – Co ) × n × BF/Rs
4.2.2. Normálová reakce povrchu vozovky na nápravy stojícího přípojného vozidla směřujícího nahoru a dolů na sklonu 18 % se vypočte podle následujících vzorců:
|
4.2.2.1. |
U plných přípojných vozidel:
|






|
4.2.2.2. |
U přípojných vozidel s nápravami uprostřed:
|



|
4.2.2.3. |
U návěsů:
|




4.3. Ověření
4.3.1. Účinek parkovacího brzdění přípojného vozidla se ověří podle následujících vzorců:

a:

5. ALTERNATIVNÍ POSTUP K PROKÁZÁNÍ ÚČINKU NOUZOVÉHO/ AUTOMATICKÉHO BRZDĚNÍ
5.1. Obecné informace
5.1.1. K prokázání plnění požadavků na účinek automatického brzdění se provede buď porovnání mezi tlakem v brzdovém válci potřebným k dosažení specifikovaného účinku a asymptotickým tlakem v brzdovém válci po odpojení přívodního vedení podle bodu 5.2.1, nebo se ověří, že brzdná síla, kterou působí náprava (nápravy) opatřená (opatřené) pružinovými brzdami, je dostatečná k dosažení specifikovaného účinku podle bodu 5.2.2.
5.2. Ověření
5.2.1. Požadavky přílohy 4 bodu 3.3 se považují za splněné uvažovaným přípojným vozidlem, jestliže asymptotický tlak (pc) v brzdovém válci po odpojení přívodního vedení je větší než tlak (pc) v brzdovém válci, aby se dosáhlo brzdné síly odpovídající 13,5 % maximální hmotnosti nesené koly stojícího vozidla. Před odpojením se tlak v přívodním vedení stabilizuje na hodnotu 700 kPa.
5.2.2. Požadavky přílohy 4 bodu 3.3 se považují za splněné uvažovaným přípojným vozidlem opatřeným pružinovými brzdami, jestliže:
ΣTpi ≥ 0,135 ( PR )( g )
kde:
Tpi je vypočteno podle bodu 4.2.1.
6. ALTERNATIVNÍ POSTUP K PROKÁZÁNÍ BRZDNÉHO ÚČINKU V PŘÍPADĚ PORUCHY SYSTÉMU PRO ROZDĚLENÍ BRZDNÉHO ÚČINKU NA NÁPRAVY
6.1. Obecné informace
6.1.1. K prokázání plnění požadavků na brzdný účinek v případě poruchy systému rozdělování brzdného účinku na nápravy se provede porovnání mezi tlakem v brzdovém válci potřebným k dosažení specifikovaného účinku a tlakem, který je v brzdovém válci při poruše systému rozdělování brzdného účinku na nápravy.
6.2. Ověření
6.2.1. Požadavky přílohy 10 bodu 6 dodatku se pokládají za splněné uvažovaným přípojným vozidlem, jestliže tlak vymezený v bodě 6.2.1.1 je větší než tlak vymezený v bodě 6.2.1.2 nebo rovný tomuto tlaku, a to v naloženém i nenaloženém stavu.
6.2.1.1. Tlak v brzdovém válci (pc) uvažovaného přípojného vozidla, když pm = 650 kPa, tlak v přívodním vedení = 700 kPa a v systému rozdělování brzdného účinku na nápravy je porucha.
6.2.1.2. Tlak v brzdovém válci (pc) potřebný k dosažení poměrného zpomalení rovnajícího se 30 % účinku provozního brzdění předepsaného pro uvažované přípojné vozidlo.
7. ALTERNATIVNÍ POSTUP K PROKÁZÁNÍ ÚČINKU PROTIBLOKOVACÍHO BRZDOVÉHO SYSTÉMU
7.1. Obecné informace
7.1.1. Při schválení typu přípojného vozidla se nemusí provádět zkoušky podle přílohy 13 tohoto předpisu za podmínky, že protiblokovací brzdový systém (ABS) splňuje požadavky přílohy 19 tohoto předpisu.
7.2. Ověření
7.2.1. Ověření konstrukčních částí a instalace
Specifikace ABS instalovaného na přípojném vozidle, jehož typ se má schválit, se ověří splněním každého z následujících kritérií:
|
Bod |
Kritéria |
|||
|
7.2.1.1. |
|
Není přípustná žádná změna |
||
|
Není přípustná žádná změna |
|||
|
Není přípustná žádná změna |
|||
|
7.2.1.2. |
Rozměry a délky trubic |
|
||
|
|
|||
|
Minimální vnitřní průměr |
Může být větší |
|||
|
Maximální celková délka |
Může být menší |
|||
|
|
|||
|
Vnitřní průměr |
Není přípustná žádná změna |
|||
|
Maximální celková délka |
Může být menší |
|||
|
7.2.1.3. |
Sekvence výstražného signálu |
Není přípustná žádná změna |
||
|
7.2.1.4. |
Rozdíly ve vstupním brzdném momentu ve skupině náprav |
Přípustné jsou popřípadě jen schválené rozdíly |
||
|
7.2.1.5. |
K ostatním omezením viz bod 4 zkušebního protokolu popsaného v dodatku 6 k příloze 19 tohoto předpisu. |
Instalace musí zůstat v rámci definovaných omezení – žádná odchylka není přípustná |
||
7.3. Ověření velikosti zásobníků
7.3.1. Protože brzdové systémy a pomocná zařízení používané na přípojných vozidlech jsou velmi rozdílné, není možné sestavit tabulku doporučených objemů zásobníků. K ověření, že je instalován postačující objem zásobníků, se mohou provést zkoušky podle bodu 6.1 přílohy 13 tohoto předpisu, nebo podle následujícího postupu:
|
7.3.1.1. |
U brzd, v kterých není integrováno zařízení k automatickému vyrovnávání opotřebení, musí být brzdy uvažovaného přípojného vozidla seřízeny na stav, kdy poměr (R 1 ) zdvihu pístnice (sT) brzdového válce k délce páky (l T) je 0,2. Příklad:
|
|
7.3.1.2. |
U brzd, v kterých je integrováno zařízení k automatickému vyrovnávání opotřebení, musí být brzdy seřízeny na běžný provozní zdvih. |
|
7.3.1.3. |
Výše uvedené seřízení brzd se vykoná, když jsou brzdy studené (≤ 100 °C). |
|
7.3.1.4. |
Brzdy se seřídí podle příslušného postupu uvedeného výše, zátěžový regulátor (regulátory) se nastaví na naložený stav, počáteční hladina energie se seřídí podle bodu 5.4.1.2.4.2 přílohy 19 – části 1 tohoto předpisu a uzavře se další přívod energie do zásobníku (zásobníků). Zabrzdí se ovládacím tlakem 650 kPa ve spojkové hlavici a pak se brzdy zcela uvolní. Provedou se další zabrzdění až do počtu ne určeného ze zkoušky provedené podle bodu 5.4.1.2.4.2 přílohy 19 tohoto předpisu a uvedeného v bodu 2.5 protokolu o zkoušce schválení typu protiblokovacího brzdového systému. V průběhu tohoto brzdění musí být tlak v provozním okruhu dostatečný k vyvinutí celkové brzdné síly na obvodu kol odpovídající nejméně 22,5 % maximálního statického zatížení kol a aniž by došlo k automatickému uvedení do činnosti kteréhokoli brzdového systému, který není řízen protiblokovacím brzdovým systémem. |
7.4. U přípojných vozidel s více než 3 nápravami je možné použít zkušební protokol pro ABS podle přílohy 19, pokud jsou splněny následující požadavky:
|
7.4.1. |
Bez ohledu na druh přípojného vozidla musí nejméně jedna třetina náprav ve skupině náprav mít všechna kola přímo řízena, přičemž kola zbývajících náprav jsou řízena nepřímo (1). |
|
7.4.2. |
Využití adheze: minimální hodnota využití adheze stanovená v bodě 6.2 přílohy 13 tohoto předpisu se pokládá za dosaženou, pokud jsou splněny následující podmínky:
|
|
7.4.3. |
Spotřeba energie: počet ekvivalentních zabrzdění ve statickém stavu uvedený v bodě 2.5 zkušebního protokolu se může použít ve spojení s postupem ověření podle bodu 7.3 této přílohy. Alternativně lze použít zkušební postup stanovený v bodě 6.1 přílohy 13 tohoto předpisu; |
|
7.4.4. |
Brzdné účinky při nízké rychlosti: doplňující ověření se nepožaduje. |
|
7.4.5. |
Brzdné účinky při vysoké rychlosti: doplňující ověření se nepožaduje. |
|
7.4.6. |
Brzdné účinky kategorie A: požadavky na brzdění na površích s rozdílnou adhezí stanovené v bodě 6.3.2 přílohy 13 tohoto předpisu se považují za splněné, jestliže počet kol, která jsou řízena nezávisle na pravé a levé straně vozidla, je nejméně takový jako počet řízených kol s regulací dolní selekcí. |
|
7.4.7. |
Brzdné účinky při přejezdu z jednoho povrchu na druhý: doplňující ověření se nepožaduje. |
|
7.4.8. |
Omezení z hlediska instalace: ve všech případech platí následující omezení:
|
8. ALTERNATIVNÍ POSTUP K DEMONSTRACI VLASTNOSTÍ PŘÍPOJNÉHO VOZIDLA VYBAVENÉHO STABILITNÍ FUNKCÍ VOZIDLA.
8.1. Při schválení typu přípojného vozidla lze upustit od hodnocení přípojného vozidla podle bodu 2 přílohy 21 tohoto předpisu za podmínky, že stabilitní funkce vozidla splňuje příslušné požadavky přílohy 19 tohoto předpisu.
8.2. Ověření
8.2.1. Ověření konstrukčních částí a instalace
Specifikace brzdového systému, do kterého je integrována stabilitní řídící funkce a který je instalován na přípojném vozidle, jehož typ se má schválit, se ověří zjištěním, zda je splněno každé z následujících kritérií:
|
Podmínka |
Kritéria |
|||
|
8.2.1.1. |
|
Není přípustná žádná změna |
||
|
Není přípustná žádná změna |
|||
|
Není přípustná žádná změna |
|||
|
8.2.1.2. |
Typy přípojných vozidel uvedené ve zkušebním protokolu |
Není přípustná žádná změna |
||
|
8.2.1.3. |
Konfigurace instalace uvedené ve zkušebním protokolu |
Není přípustná žádná změna |
||
|
8.2.1.4. |
K ostatním omezením viz bod 4 zkušebního protokolu popsaného v dodatku 8 k příloze 19 tohoto předpisu. |
Není přípustná žádná změna |
||
9. KONTROLY FUNKČNOSTI A MONTÁŽE
9.1. Technická zkušebna / schvalovací orgán provede ověření funkce a instalace, která jsou uvedena v následujících bodech:
9.1.1. Funkce protiblokovacího systému
9.1.1.1. Ověření se omezí na dynamickou zkoušku protiblokovacího brzdového systému. Aby se zajistilo plné cyklování, může být nutné seřídit zátěžový regulátor nebo použít povrch s nízkým součinitelem adheze. Jestliže protiblokovací systém nebyl schválen podle přílohy 19, provede se s přípojným vozidlem zkouška podle přílohy 13, při které přípojné vozidlo musí splnit příslušné požadavky uvedené přílohy.
9.1.2. Měření času odezvy
9.1.2.1. Technická zkušebna ověří, že uvažované přípojné vozidlo splňuje požadavky přílohy 6.
9.1.3. Spotřeba statické energie
9.1.3.1. Technická zkušebna ověří, že uvažované přípojné vozidlo splňuje požadavky přílohy 7 a přílohy 8, v příslušných případech.
9.1.4. Funkce provozního brzdění
9.1.4.1. Technická zkušebna ověří, že v průběhu brzdění nedochází k žádným abnormálním vibracím.
9.1.5. Funkce parkovacího brzdění
9.1.5.1. Technická zkušebna uvede do činnosti parkovací brzdu a uvolní ji, aby se ujistila o správné funkci této brzdy.
9.1.6. Funkce nouzového/automatického brzdění
9.1.6.1. Technická zkušebna ověří, že uvažované přípojné vozidlo splňuje požadavky bodu 5.2.1.18.4.2 tohoto předpisu.
9.1.7. Ověření identifikace vozidla a jeho konstrukčních částí
9.1.7.1. Technická zkušebna ověří, že uvažované přípojné vozidlo odpovídá údajům uvedeným v osvědčení o schválení typu.
9.1.8. Stabilitní funkce vozidla
9.1.8.1. Z praktických důvodů se ověření stabilitní funkce vozidla omezí na kontrolu instalace podle ustanovení bodu 8.2 a na pozorování správného sledu výstražného signálu udávající, že v systému nejsou žádné závady.
9.1.9. Doplňková ověření
9.1.9.1. Technická zkušebna může v případě potřeby požadovat provedení doplňkových ověření.
(1) Když se počet náprav ve skupině náprav dělí třemi a výsledné číslo je menší než 1, musí být nejméně jedna náprava řízena přímo. Když se počet náprav ve skupině náprav dělí třemi a výsledné číslo není celým číslem, musí být přímo řízena další náprava navíc k počtu náprav, pro které platí celé číslo.
Dodatek 1
Metoda výpočtu výšky těžiště
Výšku těžiště úplného vozidla (naloženého a nenaloženého) lze vypočítat následujícím způsobem:
|
h1 |
= |
výška těžiště celku nápravy (náprav) (včetně pneumatik, pružin atd.) = R · 1,1 |
|
h2 |
= |
výška těžiště rámu (u naloženého vozidla) = (h6 + h8) · 0,5 |
|
h3 |
= |
výška těžiště nákladu a karoserie (u naloženého vozidla) = (h7 · 0,3) + h6 |
|
h4 |
= |
výška těžiště rámu (u nenaloženého vozidla) = h2 + s |
|
h5 |
= |
výška těžiště karoserie (u nenaloženého vozidla) = (h7 · 0,5) + h6 + s |
kde:
|
h6 |
= |
výška horního obrysu rámu |
|
h7 |
= |
rozměry vnitřku karoserie |
|
h8 |
= |
výška spodního obrysu rámu |
|
P |
= |
celková hmotnost přípojného vozidla |
|
PR |
= |
celková hmotnost působící na všechna kola návěsu nebo přípojného vozidla s nápravami uprostřed |
|
R |
= |
poloměr pneumatiky |
|
s |
= |
průhyb pružiny mezi stavem naloženého vozidla a stavem nenaloženého vozidla |
|
W1 |
= |
hmotnost celku nápravy (náprav) (včetně pneumatik, pružin atd.) = P · 0,1 |
|
W2 |
= |
hmotnost rámu = (Punl – W1) · 0,8 |
|
W3 |
= |
hmotnost nákladu a karoserie |
|
W4 |
= |
hmotnost karoserie = (Punl – W1) · 0,2 |
|
Naložený stav: |
Nenaložený stav: |
|
|
|


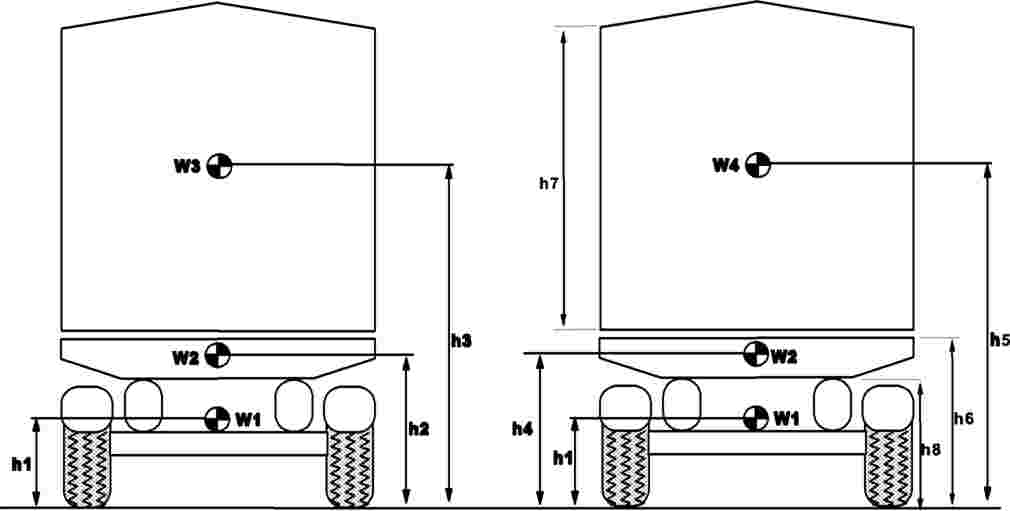
Poznámky:
|
1) |
U valníkových přípojných vozidel se použije maximální výška 4 m. |
|
2) |
U přípojných vozidel, u nichž není známa přesná výška těžiště nákladu, se tato výška pokládá za 0,3násobek vnitřních rozměrů karoserie. |
|
3) |
U přípojných vozidel s pneumatickým odpružením se výška „s“ pokládá za rovnou nule. |
|
4) |
U návěsů a přípojných vozidel s nápravami uprostřed se nahradí veličina P veličinou PR vždy, když je to potřebné. |
Dodatek 2
Ověřovací graf k bodu 3.2.1.5 – Návěsy

|
1) |
= |
TRmax, kde pm = 650 kPa a tlak v přívodním vedení = 700 kPa. |
|
2) |
= |
FRdyn · 0,8 = TRL |
|
3) |
= |
0,45 · FR = TRpr |
kde:
![]()
hodnota zc se vypočte pomocí tohoto vzorce:

Poznámky:
|
1) |
Výše uvedená hodnota 7 000 představuje hmotnost tažného vozidla bez přípojného vozidla. |
|
2) |
Pro účely těchto výpočtů lze nápravy umístěné těsně vedle sebe (s rozvorem menším než 2 m) považovat za jedinou nápravu. |
Dodatek 3
Ověřovací graf k bodu 3.2.1.6 – Přípojná vozidla s nápravami uprostřed
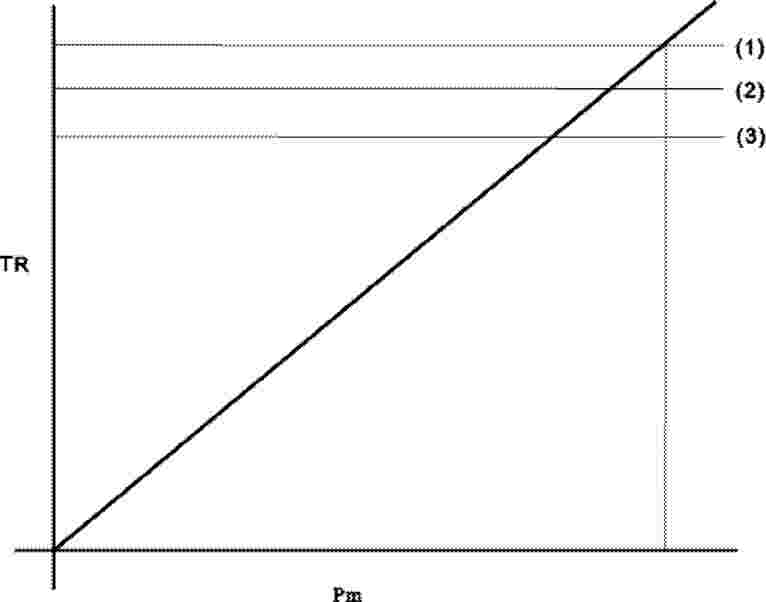
|
1) |
= |
TRmax, kde pm = 650 kPa a tlak v přívodním vedení = 700 kPa. |
|
2) |
= |
FRdyn · 0,8 = TRL |
|
3) |
= |
0,5 · FR = TRpr |
kde:
![]()
hodnota zc se vypočte pomocí tohoto vzorce:

Poznámky:
|
1) |
Výše uvedená hodnota 7 000 představuje hmotnost tažného vozidla bez přípojného vozidla. |
|
2) |
Pro účely těchto výpočtů lze nápravy umístěné těsně vedle sebe (s rozvorem menším než 2 m) považovat za jedinou nápravu. |
Dodatek 4
Ověřovací graf k bodu 3.2.1.7 – Plná přípojná vozidla
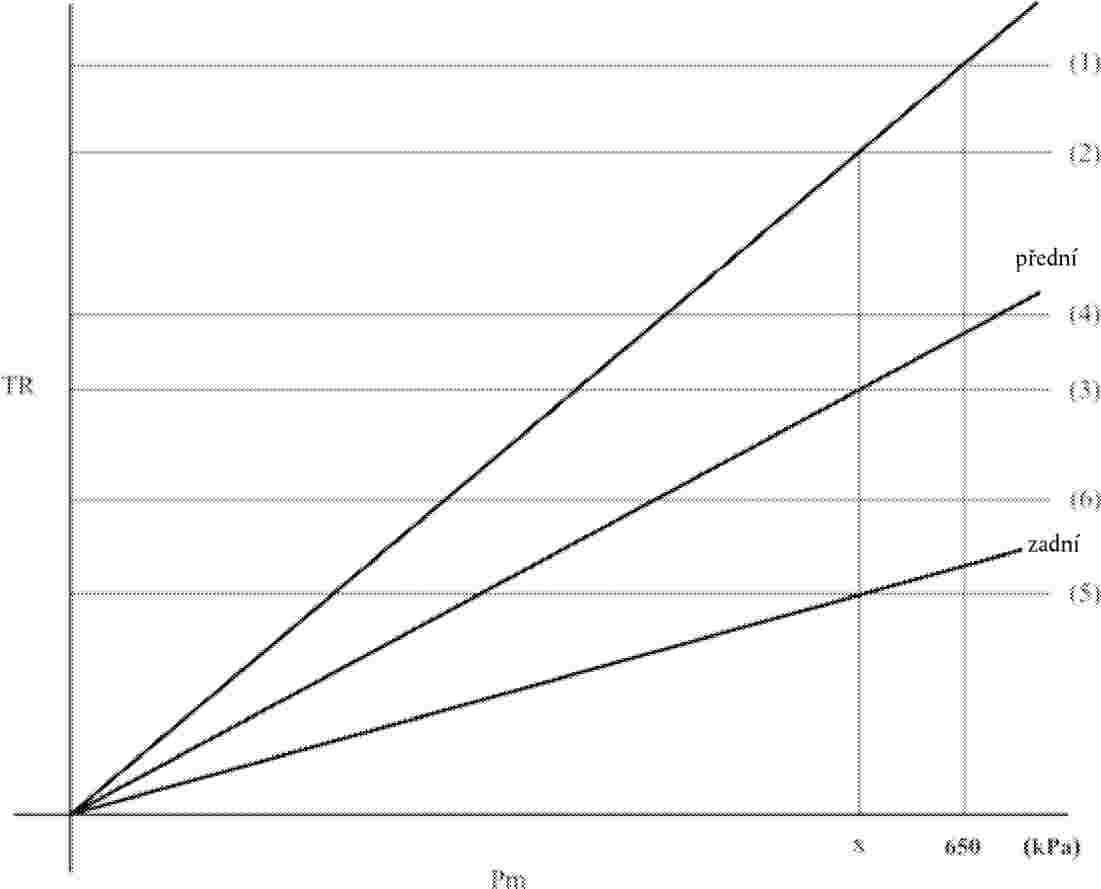
|
1) |
= |
TRmax, kde pm = 650 kPa a tlak v přívodním vedení = 700 kPa. |
|
2) |
= |
0,5 · FR = TRpr |
|
3) |
= |
TRprf = TRf, kde pm = x |
|
4) |
= |
Ffdyn · 0,8 = TRLf |
|
5) |
= |
TRprr = TRr, kde pm = x |
|
6) |
= |
Frdyn · 0,8 = TRLr |
kde:

a

hodnota zc se vypočte pomocí tohoto vzorce:

Poznámky:
|
1) |
Výše uvedená hodnota 7 000 představuje hmotnost tažného vozidla bez přípojného vozidla. |
|
2) |
Pro účely těchto výpočtů lze nápravy umístěné těsně vedle sebe (s rozvorem menším než 2 m) považovat za jedinou nápravu. |
Dodatek 5
Symboly a definice
|
Symboly |
Definice |
||||||||||||
|
ADi |
Tpi, přičemž Tpi ≤ 0,8 NFDi pro přední nápravy, nebo 0,8 NFDi, přičemž Tpi > 0,8 NFDi pro přední nápravy |
||||||||||||
|
BDi |
Tpi, přičemž Tpi < 0,8 NRDi pro zadní nápravy, nebo 0,8 NRDi, přičemž Tpi > 0,8 NRDi pro zadní nápravy |
||||||||||||
|
AUi |
Tpi, přičemž Tpi < 0,8 NFUi pro přední nápravy, nebo 0,8 NFUi, přičemž Tpi > 0,8 NFUi pro přední nápravy |
||||||||||||
|
BUi |
Tpi, přičemž Tpi < 0,8 NRUi pro zadní nápravy, nebo 0,8 NRUi, přičemž Tpi > 0,8 NRUi pro zadní nápravy |
||||||||||||
|
BF |
brzdný faktor |
||||||||||||
|
Co |
prahová hodnota vstupního momentu na hřídeli klíče (nejmenší moment na hřídeli klíče potřebný k vytvoření měřitelného brzdného momentu) |
||||||||||||
|
E |
rozvor |
||||||||||||
|
EL |
vzdálenost mezi podpěrou oje se spojovacím zařízením nebo opěrnými nohami a střednicí nápravy (náprav) přípojného vozidla s nápravami uprostřed nebo návěsu |
||||||||||||
|
ER |
vzdálenost mezi návěsným čepem a střednicí nápravy nebo náprav návěsu |
||||||||||||
|
F |
síla (vyjádřená v N) |
||||||||||||
|
Ff |
celková normálová statická reakce povrchu vozovky na přední nápravu (nápravy) |
||||||||||||
|
Ffdyn |
celková normálová dynamická reakce povrchu vozovky na přední nápravu (nápravy) |
||||||||||||
|
Fr |
celková normálová statická reakce povrchu vozovky na zadní nápravu (nápravy) |
||||||||||||
|
Frdyn |
celková normálová dynamická reakce povrchu vozovky na zadní nápravu (nápravy) |
||||||||||||
|
FR |
celková normálová statická reakce povrchu vozovky na všechna kola přípojného vozidla nebo návěsu |
||||||||||||
|
FRdyn |
celková normálová dynamická reakce povrchu vozovky na všechna kola přípojného vozidla nebo návěsu |
||||||||||||
|
g |
gravitační zrychlení (9,81 m/s2) |
||||||||||||
|
h |
výška těžiště nad vozovkou |
||||||||||||
|
hK |
výška točnice (návěsného čepu) |
||||||||||||
|
hr |
výška těžiště přípojného vozidla |
||||||||||||
|
i |
index označující nápravu |
||||||||||||
|
iF |
počet předních náprav |
||||||||||||
|
iR |
počet zadních náprav |
||||||||||||
|
l |
délka páky |
||||||||||||
|
n |
počet pružinových brzdových válců na nápravu |
||||||||||||
|
NFD |
celková normálová reakce povrchu vozovky na přední nápravu (nápravy), když vozidlo směřuje dolů na sklonu 18 % |
||||||||||||
|
NFDi |
normálová reakce povrchu vozovky na přední nápravu „i“, když vozidlo směřuje dolů na sklonu 18 % |
||||||||||||
|
NFU |
celková normálová reakce povrchu vozovky na přední nápravu (nápravy), když vozidlo směřuje nahoru na sklonu 18 % |
||||||||||||
|
NFUi |
normálová reakce povrchu vozovky na přední nápravu „i“, když vozidlo směřuje nahoru na sklonu 18 % |
||||||||||||
|
NRD |
celková normálová reakce povrchu vozovky na zadní nápravu (nápravy), když vozidlo směřuje dolů na sklonu 18 % |
||||||||||||
|
NRDi |
normálová reakce povrchu vozovky na zadní nápravu „i“, když vozidlo směřuje dolů na sklonu 18 % |
||||||||||||
|
NRU |
celková normálová reakce povrchu vozovky na zadní nápravu (nápravy), když vozidlo směřuje nahoru na sklonu 18 % |
||||||||||||
|
NRUi |
normálová reakce povrchu vozovky na zadní nápravu „i“, když vozidlo směřuje nahoru na sklonu 18 % |
||||||||||||
|
pm |
tlak v místě spojkové hlavice ovládacího vedení |
||||||||||||
|
pc |
tlak v brzdovém válci |
||||||||||||
|
P |
hmotnost jednotlivého vozidla |
||||||||||||
|
Ps |
statická hmotnost působící na točnici při hmotnosti návěsu P |
||||||||||||
|
PR |
celková normálová statická reakce povrchu vozovky působící na kola přípojného vozidla nebo návěsu |
||||||||||||
|
PRF |
celková normálová statická reakce povrchu vozovky působící na přední nápravy na vodorovné vozovce |
||||||||||||
|
PRR |
celková normálová statická reakce povrchu vozovky působící na zadní nápravy na vodorovné vozovce |
||||||||||||
|
Rs |
statický poloměr zatížené pneumatiky vypočtený podle tohoto vzorce: Rs = kde:
|
||||||||||||
|
Tpi |
brzdná síla na obvodu všech kol nápravy „i“ vyvozovaná pružinovou brzdou (pružinovými brzdami) |
||||||||||||
|
Ths |
tlaková síla, kterou působí pružina v pružinové brzdě |
||||||||||||
|
TR |
součet brzdných sil na obvodu všech kol přípojného vozidla nebo návěsu |
||||||||||||
|
TRf |
součet brzdných sil na obvodu všech kol přední nápravy (předních náprav) |
||||||||||||
|
TRr |
součet brzdných sil na obvodu všech kol zadní nápravy (zadních náprav) |
||||||||||||
|
TRmax |
součet maximálních brzdných sil dosažitelných na obvodu všech kol přípojného vozidla nebo návěsu |
||||||||||||
|
TRL |
součet brzdných sil na obvodu všech kol přípojného vozidla nebo návěsu, při nichž je dosaženo mezní hodnoty adheze |
||||||||||||
|
TRLf |
součet brzdných sil na obvodu všech kol přední nápravy (předních náprav), při nichž je dosaženo mezní hodnoty adheze |
||||||||||||
|
TRLr |
součet brzdných sil na obvodu všech kol zadní nápravy (zadních náprav), při nichž je dosaženo mezní hodnoty adheze |
||||||||||||
|
TRpr |
součet brzdných sil na obvodu všech kol přípojného vozidla nebo návěsu, který je potřebný k dosažení předepsaného brzdného účinku |
||||||||||||
|
TRprf |
součet brzdných sil na obvodu všech kol přední nápravy (předních náprav), který je potřebný k dosažení předepsaného brzdného účinku |
||||||||||||
|
TRprr |
součet brzdných sil na obvodu všech kol zadní nápravy (zadních náprav), který je potřebný k dosažení předepsaného brzdného účinku |
||||||||||||
|
zc |
poměrné zpomalení jízdní soupravy, ve které je brzděno jen přípojné vozidlo |
||||||||||||
|
cos P |
kosinus úhlu, který svírá sklon 18 % s vodorovnou rovinou = 0,98418 |
||||||||||||
|
tan P |
tangens úhlu, který svírá sklon 18 % s vodorovnou rovinou = 0,18 |
PŘÍLOHA 21
ZVLÁŠTNÍ POŽADAVKY NA VOZIDLA VYBAVENÁ STABILITNÍ FUNKCÍ VOZIDLA
1. OBECNÉ INFORMACE
1.1. Tato příloha stanoví zvláštní požadavky na vozidla vybavená stabilitní funkcí vozidla podle bodů 5.2.1.32, 5.2.1.33 a 5.2.2.23 tohoto předpisu.
1.2. Při plnění požadavků této přílohy se nesmějí „jiná vozidla“, která jsou uvedena v bodech 2.1.3 a 2.2.3, lišit nejméně z následujících podstatných hledisek:
|
1.2.1. |
druh vozidla; |
|
1.2.2. |
u motorových vozidel konfigurace náprav (např. 4 × 2, 6 × 2, 6 × 4); |
|
1.2.3. |
u přípojných vozidel počet a uspořádání náprav; |
|
1.2.4. |
u motorových vozidel převodový poměr řízení přední nápravy, když stabilitní funkce vozidla neobsahuje tento poměr s programovatelnými konci průběhu nebo jako samoučící se systém; |
|
1.2.5. |
nápravy s doplňkovým řízením u motorových vozidel a řízené nápravy u přípojných vozidel; |
|
1.2.6. |
zdvihatelné nápravy. |
2. POŽADAVKY
2.1. Motorová vozidla
2.1.1. Když je vozidlo vybaveno stabilitní funkcí vozidla vymezenou v bodě 2.4 tohoto předpisu, platí následující ustanovení:
|
|
U směrového řízení musí mít tato funkce schopnost automaticky řídit otáčky levého a pravého kola na každé nápravě nebo na nápravě každé skupiny náprav selektivním brzděním, které je založeno na hodnocení skutečného chování vozidla v porovnání se stanoveným chováním vozidla, jež je požadováno řidičem (1). |
|
|
U opatření proti převrácení musí mít tato funkce schopnost automaticky řídit otáčky kol u nejméně dvou kol každé nápravy nebo skupiny náprav selektivním brzděním nebo automaticky ovládaným brzděním, které je založeno na hodnocení skutečného chování vozidla, jež může vést k převrácení vozidla (1). |
|
|
U obou případů se funkce nepožaduje:
|
2.1.2. Aby se zajistilo výše uvedené fungování vozidla, musí mít stabilitní funkce vozidla kromě selektivního brzdění a/nebo automaticky ovládaného brzdění alespoň následující vlastnosti:
|
a) |
Schopnost řídit výkon motoru. |
|
b) |
U směrového řízení: určení skutečného chování vozidla z hodnot rychlosti stáčení, bočního zrychlení, otáček kol a z řídících vstupů od řidiče do brzdového systému a systému řízení a do motoru. Smějí se použít jen údaje generované ve vozidle. Jestliže se tyto hodnoty neměří přímo, musí se při schvalování prokázat technické zkušebně příslušné korelace s přímo měřenými hodnotami za všech jízdních podmínek (např. včetně jízdy v tunelu). |
|
c) |
U opatření proti převrácení: určení skutečného chování vozidla z hodnot svislé síly působící na pneumatiku (pneumatiky) (nebo alespoň z hodnot bočního zrychlení a otáček kol) a z řídících vstupů od řidiče do brzdového systému a systému řízení a do motoru. Smějí se použít jen údaje generované ve vozidle. Jestliže se tyto hodnoty neměří přímo, musí se při schvalování prokázat technické zkušebně příslušné korelace s přímo měřenými hodnotami za všech jízdních podmínek (např. včetně jízdy v tunelu). |
|
d) |
U tažného vozidla vybaveného podle bodu 5.1.3.1 tohoto předpisu: schopnost použít provozní brzdy přípojného vozidla prostřednictvím příslušného ovládacího (příslušných ovládacích) vedení, nezávisle na řidiči. |
2.1.3. Stabilitní funkce vozidla musí být prokázána technické zkušebně při dynamických manévrech s jedním vozidlem, které má tutéž stabilitní funkci vozidla jako typ vozidla, který má být schválen. To se může provést porovnáním výsledků zjištěných pro dané podmínky zatížení se stabilitní funkcí vozidla v činnosti a mimo činnost. Jako alternativu k vykonání dynamických manévrů u jiných vozidel a pro jiné podmínky zatížení u vozidel vybavených stejným stabilitním systémem vozidla je možno předložit výsledky ze zkoušek skutečného vozidla nebo výsledky počítačových simulací.
Jako alternativa k výše uvedenému se může použít zkušební protokol podle přílohy 19 části 2 bodu 1.1.
Ustanovení pro použití simulace jsou uvedena v dodatku 1 k této příloze.
Specifikace a ověření správnosti simulace jsou uvedeny v dodatku 2 k této příloze.
Do doby, než budou dohodnuty jednotné zkušební postupy, se výrobce vozidla a technická zkušebna dohodnou na metodě, kterou bude provedena tato demonstrace a která musí obsahovat kritické podmínky pro směrové řízení a pro opatření proti převrácení, jež odpovídají stabilitní funkci vozidla instalované ve vozidle. Tato metoda demonstrace a výsledky se přiloží ke zkušebnímu protokolu pro schválení typu. To lze provést jindy než přímo při schvalování typu.
Jako prostředek k demonstraci stabilitní funkce vozidla se použije kterýkoli z následujících dynamických manévrů (2):
|
Směrové řízení |
Opatření proti převrácení |
|
Zkouška na zmenšujícím se poloměru |
Zkouška ustálenou jízdou po kružnici |
|
Zkouška se skokovým natočením volantu |
Zkouška průjezdem zatáčky J |
|
Zkouška s natočením volantu probíhajícím po sinusovce s vloženou konstantní částí |
|
|
Zkouška průjezdem zatáčky J |
|
|
Změna součinitele adheze v jednom jízdním pruhu m |
|
|
Předjížděcí manévr |
|
|
Zkouška s natočením volantu a s bezprostředně následujícím natočením do opačného směru |
|
|
Zkouška s natočením volantu probíhajícím v asymetrické periodě po sinusovce nebo skokově |
|
K prokázání reprodukovatelnosti se provede s vozidlem druhá demonstrační zkouška s použitím vybraného manévru (manévrů).
2.1.4. Na intervenci stabilitní funkce vozidla musí být řidič upozorněn blikajícím optickým výstražným signálem splňujícím příslušné technické požadavky předpisu č. 121. Tento signál musí být v činnosti po celou dobu, kdy je stabilitní funkce vozidla v režimu intervence. K tomuto účelu není možno použít výstražný signál uvedený v bodě 5.2.1.29.1.2 tohoto předpisu.
Kromě toho mohou být řidiči tímto blikajícím optickým výstražným zařízením signalizovány také intervence systémů přidružených ke stabilitní funkci vozidla (včetně regulace trakční síly, systému stabilizace přípojného vozidla, regulace brzdění v zatáčce a jiných podobných funkcí, které používají akcelerátor a/nebo individuální regulaci točivého momentu k ovládání a sdílení konstrukčních částí společných se stabilitní funkcí vozidla).
Intervence stabilitní funkce vozidla, které se použijí v některém průzkumném postupu k určení provozních vlastností vozidla, nesmějí generovat výše uvedený signál.
Signál musí být pro řidiče viditelný i za denního světla a zařízení musí být takové, aby řidič mohl ze svého sedadla snadno ověřit správnou funkci signalizace.
2.1.5. Porucha nebo závada stabilitní funkce vozidla musí být zjištěna a řidič na ni musí být upozorněn blikajícím optickým výstražným signálem splňujícím příslušné technické požadavky předpisu č. 121.
K tomuto účelu není možno použít výstražný signál uvedený v bodě 5.2.1.29.1.2 tohoto předpisu.
Výstražný signál musí být stálý a musí svítit tak dlouho, dokud porucha nebo závada trvá a spínač zapalování (startování) je v poloze „zapnuto“ (běh motoru).
2.1.6. U motorového vozidla vybaveného elektrickým ovládacím vedením a elektricky spojeného s přípojným vozidlem, které má elektrické ovládací vedení, musí být řidič varován zvláštním optickým výstražným signálem vždy, když přípojné vozidlo vyšle informaci „stabilitní funkce vozidla v činnosti“ prostřednictvím části elektrického ovládacího vedení sloužící k přenosu dat. K tomuto účelu je možno použít optický signál uvedený v bodě 2.1.4.
2.2. Přípojná vozidla
2.2.1. Když je přípojné vozidlo vybaveno stabilitní funkcí vozidla definovanou v bodě 2.34 tohoto předpisu, platí následující ustanovení:
|
|
U směrového řízení musí mít tato funkce schopnost automaticky řídit otáčky levého a pravého kola na každé nápravě nebo na nápravě každé skupiny náprav selektivním brzděním, které je založeno na hodnocení skutečného chování přípojného vozidla v porovnání s příslušným chováním tažného vozidla (3). |
|
|
U opatření proti převrácení musí mít tato funkce schopnost automaticky řídit otáčky kol u nejméně dvou kol každé nápravy nebo skupiny náprav selektivním brzděním nebo automaticky ovládaným brzděním, které je založeno na hodnocení skutečného chování přípojného vozidla, jež může vést k převrácení (4). |
2.2.2. Aby se zajistilo výše uvedené fungování vozidla, musí mít stabilitní funkce vozidla kromě automaticky ovládaného brzdění a případně selektivního brzdění alespoň následující vlastnosti:
Určení skutečného chování přípojného vozidla z hodnot svislé síly působící na pneumatiku (pneumatiky), nebo alespoň z hodnot bočního zrychlení a otáček kol. Smějí se použít jen údaje generované ve vozidle. Jestliže se tyto hodnoty neměří přímo, musí se při schvalování prokázat technické zkušebně příslušné korelace s přímo měřenými hodnotami za všech jízdních podmínek (např. včetně jízdy v tunelu).
2.2.3. Stabilitní funkce vozidla musí být prokázána technické zkušebně při dynamických manévrech s jedním vozidlem, které má tutéž stabilitní funkci vozidla jako typ vozidla, který má být schválen. To se může provést porovnáním výsledků zjištěných pro dané podmínky zatížení se stabilitní funkcí vozidla v činnosti a mimo činnost. Jako alternativu k vykonání dynamických manévrů u jiných vozidel a pro jiné podmínky zatížení u vozidel vybavených stejným stabilitním systémem vozidla je možno předložit výsledky ze zkoušek skutečného vozidla nebo výsledky počítačových simulací.
Jako alternativa k výše uvedenému se může použít zkušební protokol podle přílohy 19 části 1 bodu 6.
Ustanovení pro použití simulace jsou uvedena v dodatku 1 k této příloze.
Specifikace a ověření správnosti simulace jsou uvedeny v dodatku 2 k této příloze.
Do doby, než budou dohodnuty jednotné zkušební postupy, se výrobce přípojného vozidla a technická zkušebna dohodnou na metodě, kterou bude provedena tato demonstrace a která musí obsahovat kritické podmínky pro opatření proti převrácení a pro směrové řízení, jež odpovídají stabilitní funkci vozidla instalované v přípojném vozidle. Tato metoda prokázání a výsledky se přiloží ke zkušebnímu protokolu pro schválení typu. Je to možné provést jindy než přímo při schvalování typu.
Jako prostředek k demonstraci stabilitní funkce vozidla se použije kterýkoli z následujících dynamických manévrů (5):
|
Směrové řízení |
Opatření proti převrácení |
|
Zkouška na zmenšujícím se poloměru |
Zkouška ustálenou jízdou po kružnici |
|
Zkouška se skokovým natočením volantu |
Zkouška průjezdem zatáčky J |
|
Zkouška s natočením volantu probíhajícím po sinusovce s vloženou konstantní částí |
|
|
Zkouška průjezdem zatáčky J |
|
|
Změna součinitele adheze v jednom jízdním pruhu m |
|
|
Předjížděcí manévr |
|
|
Zkouška s natočením volantu a s bezprostředně následujícím natočením do opačného směru |
|
|
Zkouška s natočením volantu probíhajícím v asymetrické periodě po sinusovce nebo skokově |
|
K prokázání reprodukovatelnosti se provede s vozidlem druhá demonstrační zkouška s použitím vybraného manévru (manévrů).
2.2.4. Přípojná vozidla vybavená elektrickým ovládacím vedením a elektricky spojená s tažným vozidlem, které má elektrické ovládací vedení, musí vysílat informaci „stabilitní funkce vozidla v činnosti“ prostřednictvím části elektrického ovládacího vedení určené k přenosu dat. Intervence stabilitní funkce vozidla, které se použijí v některém průzkumném postupu k určení provozních vlastností přípojného vozidla, nesmějí generovat výše uvedené informace.
2.2.5. Aby se maximalizovaly vlastnosti přípojných vozidel, která používají regulaci s „dolní selekcí“, je přípustné u takových přípojných vozidel změnit režim regulace na „horní selekci“ po dobu trvání intervence „stabilitní funkce vozidla“.
(1) Doplňková interakce s jinými systémy nebo konstrukčními částmi vozidla je přípustná. Jestliže pro tyto systémy nebo konstrukční části platí zvláštní předpisy, musí taková interakce splňovat požadavky těchto předpisů, např. interakce se systémem řízení musí splňovat požadavky stanovené předpisem č. 79 pro funkci korektivního řízení.
(2) Jestliže použití některého z výše uvedených manévrů nevede ke ztrátě směrového řízení, resp. k převrácení, může se po dohodě s technickou zkušebnou použít alternativní manévr.
(3) Doplňková interakce s jinými systémy nebo konstrukčními částmi vozidla je přípustná. Jestliže pro tyto systémy nebo konstrukční části platí zvláštní předpisy, musí taková interakce splňovat požadavky těchto předpisů, např. interakce se systémem řízení musí splňovat požadavky stanovené předpisem č. 79 pro funkci korektivního řízení.
(4) Doplňková interakce s jinými systémy nebo konstrukčními částmi vozidla je přípustná. Jestliže pro tyto systémy nebo konstrukční části platí zvláštní předpisy, musí taková interakce splňovat požadavky těchto předpisů, např. interakce se systémem řízení musí splňovat požadavky stanovené předpisem č. 79 pro funkci korektivního řízení.
(5) Jestliže použití některého z výše uvedených manévrů nevede ke ztrátě směrového řízení, resp. k převrácení, může se po dohodě s technickou zkušebnou použít alternativní manévr.
Dodatek 1
Použití simulace dynamické stability
Účinnost stabilitní řídící funkce směrového řízení a/nebo opatření proti převrácení motorových vozidel a přípojných vozidel kategorií M, N a O je možno určit počítačovou simulací.
1. POUŽITÍ SIMULACE
1.1. Výrobce vozidla demonstruje schvalovacímu orgánu nebo technické zkušebně vlastnosti stabilitní funkce vozidla stejným dynamickým manévrem (dynamickými manévry) jako při praktické demonstraci podle bodů 2.1.3 nebo 2.2.3 této přílohy.
1.2. Simulace je prostředek, kterým lze demonstrovat stabilitní vlastnosti vozidla se stabilitní funkcí vozidla v činnosti a mimo činnost a s naloženým nebo nenaloženým vozidlem.
1.3. Simulace se musí provést s nástrojem modelování a se simulačním nástrojem, u nichž byla ověřena jejich správnost. Simulační nástroj lze použít pouze tehdy, pokud byl každý relevantní parametr vozidla, jehož typ má být schválen, jak je uvedeno v bodě 1.1 dodatku 2 k této příloze, zahrnut do simulačního nástroje a pokud hodnota každého parametru spadá do jeho příslušného ověřeného rozsahu. Ověření se provede s použitím stejného manévru (manévrů), jak jsou vymezeny v bodě 1.1 dodatku k této příloze.
Metoda, kterou se ověří správnost simulačního nástroje, je uvedena v dodatku 2 k této příloze.
1.3.1. Výrobce vozidla používající ověřený simulační nástroj, který nebyl ověřen přímo jím pro účely schválení typu vozidla, musí provést alespoň jednu potvrzovací zkoušku.
Tato potvrzovací zkouška musí být provedena ve spojení s technickou zkušebnou a musí spočívat v porovnání mezi zkouškou skutečného vozidla a simulací s použitím jednoho z manévrů vymezených v bodě 1.1 tohoto dodatku.
Potvrzovací zkoušku je nutno v případě jakékoli změny simulačního nástroje zopakovat (1).
Výsledky potvrzovací zkoušky musí být přiloženy k dokumentaci týkající se schválení typu.
1.4. Software pro simulační nástroj, až po použitou verzi softwaru, musí zůstat k dispozici po dobu nejméně 10 let od data schválení vozidla.
(1) Potřeba potvrzovací zkoušky musí být předmětem diskuse mezi výrobcem vozidla, technickou zkušebnou a schvalovacím orgánem.
Dodatek 2
Simulační nástroj dynamické stability a ověření jeho správnosti
1. SPECIFIKACE SIMULAČNÍHO NÁSTROJE
1.1. Simulační nástroj musí vzít v úvahu hlavní faktory, které ovlivňují směrový a klopný pohyb vozidla.
1.1.1. Simulační nástroj musí vzít v úvahu následující parametry vozidla (v příslušných případech) (1):
|
a) |
kategorie vozidla; |
|
b) |
druh vozidla; |
|
c) |
druh převodovky (např. s ručním ovládáním, s automatizovaným ručním ovládáním, poloautomatická, automatická); |
|
d) |
druh diferenciálu (např. standardní nebo samosvorný); |
|
e) |
uzávěr (uzávěry) diferenciálu (podle volby řidiče); |
|
f) |
druh brzdového systému (např. vzduchohydraulický, plně vzduchový); |
|
g) |
druh brzd (kotoučové, bubnové (s jedním rozpěracím klínem, s dvojitým klínem, s S-klíčem)); |
|
h) |
druh pneumatiky (např. podle struktury, kategorie použití, velikosti); |
|
i) |
druh zavěšení (např. vzduchové, mechanické, pryžové). |
1.1.2. Simulační model musí zahrnovat přinejmenším tyto parametry (v příslušných případech) (1):
|
a) |
konfigurace vozidla (např. 4 × 2, 6 × 2 atd., s identifikací funkce nápravy (např. volně se otáčející, poháněná, zdvihatelná, řízená) a její polohy); |
|
b) |
řízené nápravy (pracovní princip); |
|
c) |
převodový poměr řízení; |
|
d) |
hnací náprava (nápravy (účinek na detekci otáček kola a rychlost vozidla); |
|
e) |
zdvihatelná náprava (zdvihatelné nápravy) (detekce / ovládání a účinek na změnu rozvoru ve zdvižené poloze); |
|
f) |
řízení motoru (komunikace, ovládání a odezva); |
|
g) |
charakteristiky převodovky; |
|
h) |
volitelná zařízení v hnacím ústrojí (např. odlehčovací brzda, rekuperační brzdění, pomocný pohonný systém); |
|
i) |
charakteristiky brzdy; |
|
j) |
konfigurace protiblokovacího systému; |
|
k) |
rozvor; |
|
l) |
rozchod kol; |
|
m) |
výška těžiště; |
|
n) |
poloha snímače bočního zrychlení; |
|
o) |
poloha snímače rychlosti stáčení; |
|
p) |
naložení vozidla. |
1.1.3. Technická zkušebna provádějící ověření musí mít k dispozici informační dokument pokrývající přinejmenším položky uvedené v bodech 1.1.1 a 1.1.2.
1.2. Stabilitní funkce vozidla se připojí k simulačnímu modelu prostřednictvím:
|
a) |
subsystému (softwarového modelu) simulačního nástroje jakožto softwaru v uzavřeném okruhu; nebo |
|
b) |
aktuální elektronické řídící jednotky v konfiguraci hardwaru v uzavřeném okruhu. |
1.3. U přípojného vozidla se simulace provede s přípojným vozidlem připojeným k reprezentativnímu tažnému vozidlu.
1.4. Podmínka naložení vozidla
1.4.1. Simulační nástroj musí být schopen pracovat s vozidlem v naloženém a nenaloženém stavu.
1.4.2. Simulační nástroj musí splňovat minimálně tato kritéria:
|
a) |
dané zatížení; |
|
b) |
daná hmotnost; |
|
c) |
dané rozložení hmotnosti; a |
|
d) |
daná výška těžiště. |
2. OVĚŘENÍ SPRÁVNOSTI SIMULAČNÍHO NÁSTROJE
2.1. Správnost použitého nástroje modelování a simulačního nástroje se ověří prostřednictvím porovnání s praktickou zkouškou (zkouškami) vozidla. Zkouška (zkoušky) použitá (použité) pro účely ověření musí být taková (takové), aby bez zásahu ovládání způsobila (způsobily) ztrátu směrového řízení (nedotáčivost a přetáčivost) a/nebo opatření proti převrácení, v závislosti na stabilitní funkci řízení instalované na vozidle.
V průběhu zkoušky (zkoušek) se zaznamenají nebo vypočtou následující proměnné vyjadřující pohyb, které jsou vhodné, a to podle normy ISO 15037 část 1:2006 nebo část 2:2002:
|
a) |
rychlost stáčení; |
|
b) |
boční zrychlení; |
|
c) |
zatížení kola nebo zdvižení kola; |
|
d) |
dopředná rychlost; |
|
e) |
zásah řidiče. |
2.2. Cílem je ukázat, že simulované chování vozidla a činnost stabilitní funkce vozidla jsou srovnatelné s tím, co bylo zjištěno praktickými zkouškami vozidla.
Schopnost simulačního nástroje být použit s parametry, jež nebyly ověřeny praktickou zkouškou vozidla, musí být prokázána provedením simulací s proměnlivými hodnotami parametrů. Výsledky těchto simulací se zkontrolují, aby byly logické a podobné v porovnání s výsledky známých praktických zkoušek vozidla.
2.3. Simulační nástroj se pokládá za ověřený, když je jeho výstup srovnatelný s výsledky praktické zkoušky, které byly dosaženy s týmž vozidlem (týmiž vozidly) v průběhu manévru (manévrů) vybraných z manévrů vymezených v bodě 2.1.3 nebo 2.2.3 této přílohy, podle případu.
Simulační nástroj lze použít pouze s ohledem na charakteristiky, pro něž bylo provedeno srovnání mezi výsledky zkoušek se skutečným vozidlem a výsledky simulačního nástroje. Srovnání musí být provedena v naloženém a nenaloženém stavu, aby se ukázalo, že různé stavy zatížení lze přizpůsobit, a aby se potvrdilo, že lze simulovat extrémní parametry, např.:
|
a) |
vozidlo s nejkratším rozvorem a nejvyšším těžištěm; |
|
b) |
vozidlo s nejdelším rozvorem a nejvyšším těžištěm; |
V případě zkoušky jízdou po kružnici ustálenou rychlostí je prostředkem srovnání gradient nedotáčivosti.
V případě dynamického manévru je prostředkem porovnání poměr uvedení do činnosti a sled stabilitní funkce vozidla při simulaci a při praktické zkoušce vozidla.
2.4. Fyzikální parametry, které jsou rozdílné u referenčního vozidla a u simulovaných konfigurací vozidla, se musí v simulaci příslušně změnit.
2.5. Musí se vypracovat zkušební protokol o simulačním nástroji, jehož vzor je uveden v dodatku 3 k této příloze, a jeho kopie se musí přiložit k protokolu pro schválení vozidla.
2.5.1. Ověření simulačního nástroje provedené v souladu s dodatkem 2 a dodatkem 3 k této příloze před vstupem doplňku 10 k sérii změn 11 tohoto předpisu v platnost lze nadále používat pro nové schválení stabilitní funkce vozidla nebo pro rozšíření stávajícího schválení stabilitní funkce vozidla, pokud jsou splněny příslušné technické požadavky a oblast použití.
(1) Nezahrnuté parametry musí omezit použití simulačního nástroje.
Dodatek 3
Zkušební protokol k simulačnímu nástroji stabilitní funkce vozidla
Číslo zkušebního protokolu: …
1. Identifikace
1.1. Název a adresa výrobce simulačního nástroje
1.2. Identifikace simulačního nástroje: název/model/číslo (hardware a software)
2. Simulační nástroj
2.1. Metoda simulace (celkový popis, s přihlédnutím k požadavkům bodu 1.1 dodatku 2 k této příloze)
2.2. Hardware/software v uzavřeném okruhu (viz bod 1.2 dodatku 2 k této příloze)
2.3. Stav naložení vozidla (viz bod 1.4 dodatku 2 k této příloze)
2.4. Ověření (viz bod 2 dodatku 2 k této příloze)
2.5. Proměnné pohybu (viz bod 2.1 dodatku 2 k této příloze)
3. Oblast použití:
3.1. Kategorie vozidla:
3.2. Druh vozidla:
3.3. Konfigurace vozidla:
3.4. Řízené nápravy:
3.5 Převodový poměr řízení:
3.6. Hnací nápravy:
3.7. Zdvihatelné nápravy:
3.8. Řízení motoru:
3.9. Druh převodovky:
3.10. Volitelná zařízení v hnacím ústrojí:
3.11. Druh diferenciálu:
3.12. Uzávěr (uzávěry) diferenciálu:
3.13. Druh brzdového systému:
3.14. Druh brzdy:
3.15. Charakteristiky brzdy;
3.16. Konfigurace protiblokovacího systému:
3.17. Rozvor:
3.18. Druh pneumatiky:
3.19. Rozchod kol:
3.20. Druh zavěšení náprav:
3.21. Výška těžiště:
3.22. Poloha snímače bočního zrychlení:
3.23. Poloha snímače rychlosti stáčení:
3.24. Naložení vozidla:
3.25. Omezující faktory:
3.26. Manévr (manévry), pro který (které) byl ověřen simulační nástroj:
4. Ověřovací zkouška (zkoušky) vozidla
4.1. Popis vozidla (vozidel), včetně tažného vozidla v případě, kdy se zkouší přípojné vozidlo:
4.1.1. Identifikace vozidla (vozidel): značka/ model/VIN
4.1.1.1. Nestandardní vybavení:
4.1.2. Popis vozidla, včetně konfigurace náprav / zavěšení náprav / kol, motor a hnací ústrojí, brzdový systém (systémy) a obsah stabilitní funkce vozidla (směrové řízení / opatření proti převrácení), systém řízení, s uvedením značky/modelu/čísla:
4.1.3. Údaje o vozidle použité při simulaci (explicitně)
4.2. Popis zkoušky (zkoušek), včetně místa (míst), vlastnosti povrchu silnice / zkušební plochy, teplota a datum (data):
4.3. Výsledky pro naložený a nenaložený stav, se stabilitní funkcí vozidla v činnosti a mimo činnost, včetně proměnných veličin pohybu, které jsou uvedeny v bodě 2.1 dodatku 2 k této příloze, podle případu:
5. Výsledky simulace
5.1. Parametry vozidla a hodnoty použité v simulaci, které nebyly vzaty ze skutečně zkoušeného vozidla (implicitní):
5.2. Výsledky pro naložený a nenaložený stav, se stabilitní funkcí vozidla v činnosti a mimo činnost pro každou zkoušku provedenou podle bodu 4.2 tohoto dodatku, včetně proměnných veličin pohybu, které jsou uvedeny v bodě 2.1 dodatku 2 k této příloze, podle případu:
6. Závěrečné prohlášení
Simulované chování vozidla a činnost stabilitní funkce vozidla jsou srovnatelné s tím, co bylo zjištěno praktickými zkouškami vozidla.
Ano/Ne
7. Omezující faktory
8. Tato zkouška byla provedena a její výsledky byly zaznamenány podle dodatku 2 k příloze 21 předpisu č. 13 naposledy pozměněného sérií změn …
Technická zkušebna, která zkoušku provedla (1)
Podpis: …Datum: …
Schvalovací orgán (1)
(1) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací.
PŘÍLOHA 22
POŽADAVKY NA ELEKTRICKÉ/ELEKTRONICKÉ BRZDOVÉ ROZHRANÍ AUTOMATIZOVANÉHO KONEKTORU
1. OBECNÉ INFORMACE
Tato příloha vymezuje požadavky použitelné pro instalace, kde k zapojení a odpojení elektrického/elektronického brzdového rozhraní mezi tažným vozidlem a taženým vozidlem dochází pomocí automatizovaného konektoru.
Tato příloha se vztahuje i na případ, kdy je vozidlo vybaveno jak konektorem podle normy ISO 7638, tak automatizovaným konektorem.
2. KATEGORIE AUTOMATIZOVANÝCH KONEKTORŮ
Automatizované konektory se řadí do několika kategorií (1):
|
Kategorie A |
: |
Automatizovaný konektor pro soupravy tahač/návěs musí splňovat požadavky dodatku 2 k této příloze. Veškeré automatizované konektory v této kategorii jsou vzájemně kompatibilní. |
|
Kategorie B |
: |
Automatizované konektory pro soupravy tahač/návěs, které nesplňují všechny požadavky dodatku 2. Nejsou kompatibilní s kategorií A. Rozhraní kategorie B nemusí být nutně kompatibilní se všemi typy rozhraní v této kategorii. |
|
Kategorie C |
: |
Automatizované konektory pro soupravy jiné než tahač/návěs musí splňovat požadavky dodatku 3 k této příloze (2). Veškeré automatizované konektory v této kategorii jsou vzájemně kompatibilní. |
|
Kategorie D |
: |
Automatizované konektory pro soupravy jiné než tahač/návěs, které nesplňují všechny požadavky dodatku 3. Nejsou kompatibilní s kategorií C. Rozhraní kategorie D nemusí být nutně kompatibilní se všemi typy rozhraní v této kategorii. |
3. POŽADAVKY
Elektrické/elektronické brzdové rozhraní automatizovaného konektoru musí splňovat tytéž funkční požadavky jako požadavky stanovené pro konektor podle normy ISO 7638 v tomto předpise a jeho přílohách.
3.1. Kontakty (kolíčky a zásuvky) pro elektrické/elektronické brzdové rozhraní musí mít tytéž elektrické vlastnosti a funkce jako kontakty podle normy ISO 7638.
3.1.1. Kontakty elektrického/elektronického brzdového rozhraní sloužící k přenosu dat musí být používány výhradně k přenosu informací pro funkce brzdění (včetně ABS) a pro funkce podvozku (řízení, pneumatiky a zavěšení náprav), jak je specifikováno v normě ISO 11992-2:2003 včetně změny 1:2007. Funkce brzdění mají přednost a zajišťují se při normálním režimu i při režimu poruchy. Přenos informací týkajících se podvozku nesmí způsobit zpoždění funkcí brzdění.
3.1.2. Elektrické napájení elektrického/elektronického brzdového rozhraní musí být používáno výhradně pro funkce brzdění a pro funkce podvozku a pro přenos informací pro přípojné vozidlo nepředávaných elektrickým ovládacím vedením. Ve všech případech však platí ustanovení bodu 5.2.2.18 tohoto předpisu. Elektrické napájení všech ostatních funkcí musí být provedeno jinými prostředky.
3.2. V případě souprav s návěsem vybavených automatizovaným konektorem musí být maximální délka kabelu pro přenos dat o brzdění takováto:
|
a) |
tahač: 21 m; |
|
b) |
návěs: 19 m; |
v režimu jízdy.
Ve všech ostatních případech se použijí podmínky bodů 5.1.3.6 a 5.1.3.8 tohoto předpisu s ohledem na maximální délky kabelů.
3.3. Vozidla vybavená jak konektorem podle normy ISO 7638, tak automatizovaným konektorem musí být konstruována tak, aby pro fungování elektrického ovládacího převodu nebo při předávání informací v souladu s normou ISO 11992-2:2003 včetně změny 1:2007 byla možná pouze jediná cesta. Příklady jsou uvedeny v dodatku 1 k této příloze.
V případě volby automatizované cesty musí být dána přednost automatizovanému konektoru.
3.4. Jakékoli přípojné vozidlo vybavené automatizovaným konektorem musí být vybaveno systémem pružinových brzd podle přílohy 8 tohoto předpisu.
3.5. Výrobce žádající o schválení typu předloží informační dokument popisující funkce a jakákoli omezení týkající se použití automatizovaného konektoru a veškerého souvisejícího zařízení, včetně informací o kategorii podle bodu 2 této přílohy.
V případě konektorů kategorií B a D musí být rovněž popsány prostředky k identifikaci typu automatizovaného konektoru, aby se zajistila identifikace kompatibility.
3.6. Příručka uživatele poskytnutá výrobcem musí upozorňovat řidiče na následky absence kontroly kompatibility automatizovaného konektoru mezi tažným vozidlem a přípojným vozidlem. Případně musí být poskytnuty rovněž informace o kombinovaném způsobu.
Aby řidič mohl zkontrolovat kompatibilitu, musí být vozidla vybavená automatizovaným konektorem opatřena označením uvádějícím kategorii podle bodu 2 této přílohy. U kategorií B a D musí být uveden rovněž typ instalovaného automatizovaného konektoru. Toto označení musí být nesmazatelné a čitelné pro řidiče stojícího na zemi vedle vozidla.
(1) Nové kategorie spojovacích zařízení lze doplnit později pro nová/inovativní technická řešení, jakmile budou vymezena a dohodnuta standardní rozhraní.
(2) Než bude vymezen a dohodnut standard, není vymezen žádný automatizovaný konektor spadající do kategorie C.
Dodatek 1
Příklady uspořádání automatizovaného spojení mezi vozidly
Vozidla vybavená automatizovaným spojením a manuálním spojením: požadavky na sběrnici údajů.
Grafy pro elektrické spoje ukazují směrování signálů pólů 6 a 7 podle normy ISO 7638.
LEGENDA
ELEKTRICKÉ
|
E1 |
Uzel podle normy ISO 11992-2 u tahače, např. ECU ABS/EBS |
|
E2 |
Zásuvka u tahače podle normy ISO 7638 |
|
E3 |
Vidlice pro automatizovaný konektor u tahače podle normy ISO 7638 |
|
E4 |
Část automatizovaného konektoru na tahači |
|
E5 |
Vidlice pro automatizovaný konektor u přípojného vozidla podle normy ISO 7638 |
|
E6 |
Zásuvka u přípojného vozidla podle normy ISO 7638 |
|
E7 |
Část automatizovaného konektoru na přípojném vozidle |
|
E8 |
Vinutý kabel podle normy ISO 7638 |
|
E9 |
Zásuvka podle normy ISO 7638 |
|
E10 |
Uzel podle normy ISO 11992-2 u přípojného vozidla, např. ECU ABS/EBS |
|
I |
Kabel od E1 k E2 |
|
II |
Kabel od E10 k E6 |
|
III |
Kabel od E5 k E7 |
|
IV |
Kabel od E3 k E4 |
PNEUMATICKÉ
|
P1 |
Brzdič přípojného vozidla namontovaný na tahači |
|
P2 |
Díl ve tvaru T |
|
P3 |
Pneumatická spojková hlavice na tahači (ovládání a napájení) |
|
P4 |
Část automatizovaného konektoru na tahači |
|
P5 |
Pneumatická spojková hlavice na přípojném vozidle (ovládání a napájení) |
|
P6 |
Pneumatický ventil pro uzavření nepoužívané koncovky (ventil s dvojí kontrolou) (ovládání a napájení) |
|
P7 |
Část automatizovaného konektoru na přípojném vozidle |
|
P8 |
Pneumatické vinuté potrubí (ovládání a napájení) |
|
P9 |
Pneumatická zásuvka (ovládání a napájení) |
PŘÍKLADY TAHAČŮ A NÁVĚSŮ
I. Vozidla vybavená automatizovaným spojením a manuálním spojením
Režim automatizovaného spojení
Obrázek A
Spojení z bodu do bodu mezi ECU tahače (E1) a ECU přípojného vozidla (E10) prostřednictvím ACV. Režim automatizovaného spojení: bez připojených vinutých kabelů, spojení mezi E1 a E10, přičemž jsou propojeny E4 a E7 (tj. když je spřaženo páté kolo)

Režim manuálního spojení
Obrázek B
Spojení z bodu do bodu mezi ECU tahače (E1) a ECU přípojného vozidla (E10) prostřednictvím vinutého kabelu. Manuální spojení: vinuté kabely připojeny, spojení mezi E3 a E4 i mezi E5 a E7 není použito

II. Pouze jedna část soupravy vozidel je vybavena automatizovaným spojením
Manuální režim A (pouze tahač je vybaven automatizovaným spojením)
Obrázek C
Spojení z bodu do bodu mezi ECU tahače (E1) a ECU přípojného vozidla (E10), když je páté kolo odpojeno. Vinuté kabely připojeny, spojení mezi E3 a E4 není použito

Manuální režim B (pouze návěs je vybaven automatizovaným spojením)
Obrázek D
Spojení z bodu do bodu mezi ECU tahače (E1) a ECU přípojného vozidla (E10). Vinuté kabely připojeny, spojení mezi E5 a E7 není použito

Režim automatizovaného spojení
Obrázek E
Pneumatické spojení tahače a přípojného vozidla prostřednictvím ACV. Režim automatizovaného spojení: bez připojených vinutých kabelů, spojení mezi tahačem a přípojným vozidlem, přičemž jsou propojeny P4 a P7 (tj. když je spřaženo páté kolo)
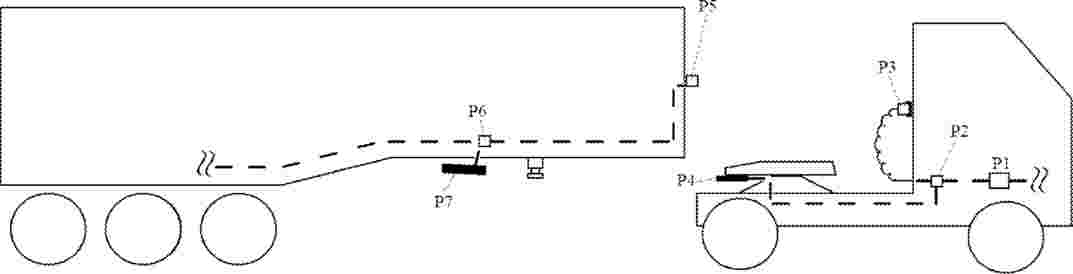
Manuální režim A (pouze tahač je vybaven automatizovaným spojením)
Obrázek F
Pneumatické spojení tahače a přípojného vozidla prostřednictvím vinutého potrubí. Vinuté potrubí připojeno, spojení mezi P2 a P5

Manuální režim B (pouze návěs je vybaven automatizovaným spojením)
Obrázek G
Pneumatické spojení tahače a přípojného vozidla prostřednictvím vinutého potrubí. Vinuté potrubí připojeno, spojení mezi P1 a P5

Dodatek 2
Spojovací zařízení kategorie A musí splňovat příslušná ustanovení normy ISO 13044-2:2013, aby byla zajištěna kompatibilita brzdových systémů tahače a návěsu
Dodatek 3
(Vyhrazeno).
Bude vymezeno později.