ZAŁĄCZNIK
Techniczna specyfikacja dla interoperacyjności odnoszącej się do podsystemu sterowania ruchem kolejowym transeuropejskiego systemu kolei konwencjonalnych
SPIS TREŚCI
|
1. |
WPROWADZENIE |
|
1.1. |
ZAKRES TECHNICZNY |
|
1.2. |
ZASIĘG GEOGRAFICZNY |
|
1.3. |
ZAWARTOŚĆ NINIEJSZEJ SPECYFIKACJI TSI |
|
2. |
DEFINICJA PODSYSTEMU I JEGO ZAKRES |
|
2.1. |
INFORMACJE OGÓLNE |
|
2.2. |
CHARAKTERYSTYKA OGÓLNA |
|
2.2.1. |
Interoperacyjność |
|
2.2.2. |
Klasy systemów BKJP |
|
2.2.3. |
Poziomy zastosowań |
|
2.2.4. |
Granice sieci infrastruktury |
|
3. |
WYMAGANIA ZASADNICZE DOTYCZĄCE PODSYSTEMU „STEROWANIE” |
|
3.1. |
INFORMACJE OGÓLNE |
|
3.2. |
SPECYFICZNE ASPEKTY PODSYSTEMU „STEROWANIE” |
|
3.2.1. |
Bezpieczeństwo |
|
3.2.2. |
Niezawodność i dostępność |
|
3.2.3. |
Zdrowie |
|
3.2.4. |
Ochrona środowiska |
|
3.2.5. |
Kompatybilność techniczna |
|
4. |
CHARAKTERYSTYKA PODSYSTEMU |
|
4.1. |
WPROWADZENIE |
|
4.2. |
FUNKCJONALNE I TECHNICZNE SPECYFIKACJE PODSYSTEMU „STEROWANIE” |
|
4.2.1. |
Charakterystyka BKJP w odniesieniu do interoperacyjności |
|
4.2.2. |
Pokładowe funkcje ETCS |
|
4.2.3. |
Funkcje przytorowej części systemu ETCS |
|
4.2.4. |
Funkcje EIRENE |
|
4.2.5. |
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
|
4.2.6. |
Interfejsy pokładowe wewnątrz podsystemu „Sterowanie” |
|
4.2.7. |
Interfejsy przytorowe wewnątrz podsystemu „Sterowanie” |
|
4.2.8. |
Zarządzanie kluczami |
|
4.2.9. |
Zarządzanie ETCS-ID |
|
4.2.10. |
HABD (detektor zagrzanych osi) |
|
4.2.11. |
Kompatybilność z przytorowymi systemami detekcji pociągu |
|
4.2.12. |
Kompatybilność elektromagnetyczna |
|
4.2.13. |
Pokładowy pulpit ETCS (ETCS DMI) |
|
4.2.14. |
Pokładowy pulpit EIRENE (EIRENE DMI) |
|
4.2.15. |
Interfejs do rejestracji danych do celów prawnych |
|
4.2.16. |
Widoczność przytorowych obiektów podsystemu „Sterowanie” |
|
4.3. |
FUNKCJONALNE I TECHNICZNE SPECYFIKACJE INTERFEJSÓW DO INNYCH PODSYSTEMÓW |
|
4.3.1. |
Interfejs do podsystemu „Ruch kolejowy” |
|
4.3.2. |
Interfejs do podsystemu „Tabor kolejowy” |
|
4.3.3. |
Interfejsy do podsystemu „Infrastruktura” |
|
4.3.4. |
Interfejsy do podsystemu „Energia” |
|
4.4. |
PRZEPISY RUCHU KOLEJOWEGO |
|
4.5. |
ZASADY UTRZYMANIA |
|
4.5.1. |
Odpowiedzialność producenta urządzeń |
|
4.5.2. |
Odpowiedzialność podmiotów zamawiających |
|
4.5.3. |
Odpowiedzialność zarządcy infrastruktury lub przewoźnika kolejowego |
|
4.5.4. |
Plan utrzymania |
|
4.6. |
KWALIFIKACJE ZAWODOWE |
|
4.7. |
WARUNKI BHP |
|
4.8. |
REJESTRY INFRASTRUKTURY I TABORU KOLEJOWEGO |
|
5. |
SKŁADNIKI INTEROPERACYJNOŚCI |
|
5.1. |
DEFINICJE |
|
5.2. |
WYKAZ SKŁADNIKÓW INTEROPERACYJNOŚCI |
|
5.2.1. |
Podstawowe składniki interoperacyjności |
|
5.2.2. |
Grupowanie składników interoperacyjności |
|
5.3. |
PARAMETRY I SPECYFIKACJE DOTYCZĄCE SKŁADNIKÓW |
|
6. |
OCENA SKŁADNIKÓW POD WZGLĘDEM ZGODNOŚCI I/LUB PRZYDATNOŚCI DO UŻYTKU ORAZ WERYFIKACJA ZGODNOŚCI PODSYSTEMU |
|
6.0. |
WPROWADZENIE |
|
6.1. |
SKŁADNIKI INTEROPERACYJNOŚCI |
|
6.1.1. |
Procedury oceny |
|
6.1.2. |
Moduły |
|
6.2. |
PODSYSTEM „STEROWANIE” |
|
6.2.1. |
Procedury oceny |
|
6.2.2. |
Moduły |
|
7. |
IMPLEMENTACJA SPECYFIKACJI TSI „STEROWANIE” |
|
7.1. |
INFORMACJE OGÓLNE |
|
7.2. |
SPECYFICZNE ZAGADNIENIA ZWIĄZANE Z IMPLEMENTACJĄ TSI „STEROWANIE” |
|
7.2.1. |
Ogólne kryteria migracji |
|
7.2.2. |
Kryteria czasowe |
|
7.2.3. |
Implementacja: Infrastruktura (urządzenia stacjonarne) |
|
7.2.4. |
Implementacja: Tabor (urządzenia pokładowe) |
|
7.2.5. |
Określone ścieżki migracji |
|
7.2.6. |
Warunki, w których wymagane są funkcje opcjonalne |
|
7.3. |
ZARZĄDZANIE ZMIANĄ |
|
7.3.1. |
Wstęp |
|
7.3.2. |
Wersje podstawowe |
|
7.3.3. |
Faza konsolidacji ERTMS |
|
7.3.4. |
Publikacja wersji podstawowej |
|
7.3.5. |
Wdrożenie nowych wersji podstawowych |
|
7.3.6. |
Proces zarządzania zmianą – wymagania |
|
7.3.7. |
Plan zarządzania konfiguracją – wymagania |
|
7.3.8. |
Kierownictwo |
|
7.4. |
PRZYPADKI SZCZEGÓLNE |
|
7.4.1. |
Wstęp |
|
7.4.2. |
Wykaz przypadków szczególnych |
|
7.5. |
POSTANOWIENIA PRZEJŚCIOWE |
|
ZAŁĄCZNIK A |
|
ZAŁĄCZNIK A – DODATEK 1 |
|
ZAŁĄCZNIK A – DODATEK 2 |
|
ZAŁĄCZNIK B |
|
ZAŁĄCZNIK C |
| WYMAGANIA OGÓLNE |
| REJESTR INFRASTRUKTURY |
| REJESTR TABORU KOLEJOWEGO |
| WYKAZ SPECYFICZNYCH CHARAKTERYSTYK ORAZ WYMAGAŃ |
|
ZAŁĄCZNIK D |
|
ZAŁĄCZNIK E |
|
ZAŁĄCZNIK F |
|
ZAŁĄCZNIK G |
|
ZAŁĄCZNIK H |
1. WPROWADZENIE
1.1. Zakres techniczny
Niniejsza specyfikacja techniczna dla interoperacyjności (TSI) dotyczy podsystemu „Sterowanie”, zamieszczonego w załączniku II do dyrektywy 2001/16/WE, w wykazie znajdującym się w punkcie 1. W dalszym ciągu tego dokumentu będzie on określany nazwą podsystem „Sterowanie” .
Więcej informacji na temat podsystemu „Sterowanie” podano w rozdziale 2 (Definicja i zakres podsystemu).
1.2. Zasięg geograficzny
Zasięg geograficzny niniejszej specyfikacji TSI obejmuje transeuropejski system kolei konwencjonalnej, opisany w załączniku I do dyrektywy 2001/16/WE.
1.3. Zawartość niniejszej specyfikacji TSI
Zgodnie z art. 5 ust. 3 dyrektywy 2001/16/WE niniejsza specyfikacja TSI:
|
a) |
określa zakres tematyczny (część sieci lub taboru kolejowego, o którym mowa w załączniku I do dyrektywy, podsystem lub część podsystemu, o których mowa w załączniku II do dyrektywy) – rozdział 2 (Definicja i zakres podsystemu); |
|
b) |
podaje zasadnicze wymagania dotyczące opisywanego podsystemu „Sterowanie” oraz jego interfejsów do innych podsystemów – rozdział 3 (Podstawowe wymagania dotyczące podsystemu „Sterowanie”); |
|
c) |
określa parametry funkcjonalne i techniczne, jakim muszą odpowiadać podsystem i jego interfejsy do innych podsystemów. W niektórych przypadkach parametry te mogą być różne, w zależności od sposobu wykorzystania podsystemu, na przykład według kategorii linii, węzła i/lub taboru kolejowego, podanych w załączniku I do dyrektywy – rozdział 4 (Charakterystyka podsystemu); |
|
d) |
określa składniki interoperacyjności oraz interfejsy objęte specyfikacją europejską, włącznie z normami europejskimi, które są niezbędne do osiągnięcia interoperacyjności w obrębie transeuropejskiego systemu kolei konwencjonalnej – rozdział 5 (Składniki interoperacyjności); |
|
e) |
podaje procedury, będące w trakcie uzgodnień, dotyczące oceny zgodności lub przydatności do użytku. Dotyczy to w szczególności modułów określonych w decyzji 93/465/EWG lub – odpowiednio – określonych procedur stosowanych do oceny składników interoperacyjności pod względem ich zgodności lub przydatności do użytku oraz weryfikacji zgodności podsystemów przez WE – rozdział 6 (Ocena składników pod względem ich zgodności i/lub przydatności do użytku oraz weryfikacja zgodności podsystemu); |
|
f) |
wskazuje strategię wdrożenia specyfikacji TSI. W szczególności należy określić etapy postępowania w procesie przejścia z istniejącej sytuacji do sytuacji docelowej, w której zgodność ze specyfikacją TSI będzie normą – rozdział 7 (Implementacja specyfikacji TSI „Sterowanie”); |
|
g) |
określa wymagania w zakresie kwalifikacji pracowników oraz warunki bhp wymagane dla eksploatacji i utrzymania opisywanego tutaj podsystemu, jak również wdrożenia specyfikacji TSI – rozdział 4 (Charakterystyka podsystemu). |
Ponadto, zgodnie z art. 5 ust. 5 dyrektywy 2001/16/WE, mogą być określone warunki dla określonych przypadków specyfikacji TSI, które są wyszczególnione w rozdziale 7 (Implementacja specyfikacji TSI „Sterowanie”).
Niniejsza specyfikacja zawiera także, w rozdziale 4 (Charakterystyka podsystemu), zasady eksploatacji i utrzymania, dotyczące zakresu wskazanego w punkcie 1.1 (Zakres techniczny) i punkcie 1.2 (Zasięg geograficzny).
2. DEFINICJA PODSYSTEMU I JEGO ZAKRES
2.1. Informacje ogólne
Podsystem „Sterowanie” jest zdefiniowany jako zestaw funkcji oraz ich zastosowania, które umożliwiają bezpieczny ruch pociągów.
Specyfikacja TSI dla podsystemu „Sterowanie” definiuje zasadnicze wymagania dotyczące tych części podsystemu „Sterowanie”, które mają związek z interoperacyjnością, a tym samym są przedmiotem deklaracji i weryfikacji zgodności WE.
Funkcje podsystemu „Sterowanie” związane z interoperacyjnością transeuropejskiego systemu kolei konwencjonalnej są określane przez niżej wymienione zagadnienia:
|
1. |
FUNKCJE, które są niezbędne do bezpiecznego sterowania ruchem kolejowym oraz konieczne dla jego funkcjonowania, włącznie z tymi, które wymagane są w warunkach awaryjnych sterowania ruchem kolejowym. |
|
2. |
INTERFEJSY. |
|
3. |
Wielkości OSIĄGÓW wymagane dla spełnienia wymagań zasadniczych. |
Specyfikacja tych funkcji, interfejsów oraz wymagań dotyczących funkcjonowania podana jest w rozdziale 4 (Charakterystyka podsystemu), w którym zamieszczono także odniesienia do właściwych norm.
2.2. Charakterystyka ogólna
Interoperacyjność transeuropejskiego systemu kolei konwencjonalnej zależy częściowo od współpracy pokładowych urządzeń BKJP z różnymi urządzeniami przytorowymi.
Z powodu mobilności części pokładowej podsystem „Sterowanie” podzielono na dwie części: zespół pokładowy oraz zespół przytorowy (patrz: rysunek 8 w załączniku D).
2.2.1. Interoperacyjność
Niniejsza specyfikacja TSI definiuje funkcje, interfejsy oraz wymagania funkcjonalne, które zapewniają uzyskanie interoperacyjności technicznej. Interoperacyjność techniczna jest warunkiem wstępnym interoperacyjności eksploatacyjnej, w której prowadzenie pociągu odbywa się w oparciu o informacje wyświetlane w kabinie, i jest ono zgodne ze zunifikowanymi wymaganiami eksploatacyjnymi zdefiniowanymi dla sieci kolei konwencjonalnej. Niniejsza specyfikacja TSI zawiera funkcje konieczne dla uzyskania interoperacyjności eksploatacyjnej (patrz: punkt 4.3.1 Połączenie z podsystemem „Ruch kolejowy”).
2.2.2. Klasy systemów BKJP
W obrębie podsystemu „Sterowanie” zdefiniowano dwie klasy kontroli pociągów oraz systemów łączności radiowej:
|
Klasa A: |
Zunifikowany system BKJP. |
|
Klasa B: |
Systemy BKJP oraz ich zastosowania istniejące przed wejściem w życie dyrektywy 2001/16/WE, ograniczone do wymienionych w załączniku B. |
W celu uzyskania interoperacyjności pokładowe urządzenia BKJP będą wyposażone w następujące elementy:
|
— |
interfejsy klasy A, zapewniające łączność radiową oraz wymianę danych z infrastrukturą, w przypadku współpracy z infrastrukturą klasy A; |
|
— |
interfejsy klasy B zapewniające łączność radiową oraz wymianę danych z infrastrukturą, w przypadku współpracy z infrastrukturą klasy B. W odniesieniu do danych sterowania ruchem kolejowym współpracę taką można zapewnić poprzez zastosowanie specyficznego modułu transmisyjnego (Specific Transmission Module – STM), który umożliwia wykorzystanie systemu pokładowego klasy A na liniach wyposażonych w urządzenia przytorowe funkcjonujące w klasie B. Interfejs między pokładowym systemem klasy A a modułami STM został zdefiniowany w niniejszej specyfikacji TSI. |
Państwa członkowskie są odpowiedzialne za zapewnienie zarządzania systemami klasy B w trakcie ich eksploatacji, a w szczególności za zapewnienie, aby jakiekolwiek zmiany w ich specyfikacji nie uniemożliwiały interoperacyjności.
2.2.3. Poziomy zastosowań
Interfejsy określone przez niniejszą specyfikację TSI definiują środki transmisji danych do pociągów, a czasem także z pociągów. Specyfikacje klasy A opisywane w niniejszej specyfikacji TSI zawierają możliwość wyboru określonych środków transmisji, które odpowiadają wymaganiom danego projektu. Zdefiniowano trzy poziomy zastosowań:
|
Poziom 1: |
Transmisja danych realizowana jest poprzez transmisję punktową (eurobalisa), a w niektórych przypadkach przez transmisję odcinkową (europętla lub uaktualnienie radiowe). Detekcja pociągów realizowana jest za pomocą urządzeń torowych, zwykle obwodów torowych lub liczników osi. Informacje sterowania ruchem kolejowym przesyłane są do kierującego pociągiem za pomocą urządzeń sygnalizacji kabinowej, a także, opcjonalnie, przy użyciu sygnalizatorów przytorowych. |
|
Poziom 2: |
Transmisja danych realizowana jest za pomocą ciągłej transmisji radiowej (GSM-R). Niektóre funkcje wymagają uzupełnienia transmisji radiowej przez transmisję punktową (eurobalisa). Detekcja pociągów realizowana jest za pomocą urządzeń torowych, zwykle obwodów torowych lub liczników osi. Informacje sterowania ruchem kolejowym przesyłane są do kierującego pociągiem za pomocą urządzeń sygnalizacji kabinowej, a także, opcjonalnie, przy użyciu sygnalizatorów przytorowych. |
|
Poziom 3: |
Transmisja danych realizowana jest za pomocą ciągłej transmisji radiowej (GSM-R). Niektóre funkcje wymagają uzupełnienia transmisji radiowej przez transmisję punktową (eurobalisa). Detekcja pociągów realizowana jest za pomocą urządzeń pokładowych wysyłających informacje do przytorowych urządzeń BKJP. Informacje sterowania ruchem kolejowym przesyłane są do kierującego pociągiem za pomocą urządzeń sygnalizacji kabinowej. |
Wymagania niniejszej specyfikacji TSI dotyczą wszystkich poziomów zastosowań. Zagadnienie wdrożenia jest opisane w rozdziale 7 (Implementacja specyfikacji TSI „Sterowanie”). Pociąg wyposażony w system pokładowy klasy A dla danego poziomu zastosowań musi mieć możliwość współpracy na tym poziomie oraz na każdym niższym poziomie.
2.2.4. Granice sieci infrastruktury
Lokalne techniczne interfejsy między urządzeniami przytorowymi BKJP należącymi do sąsiadujących infrastruktur nie powinny stwarzać ograniczeń dla nieprzerwanego ruchu pociągów przekraczających granice tych infrastruktur.
Wszelkie pociągi dużych prędkości lub konwencjonalne wyposażone w systemy pokładowe klasy A, zgodne z odpowiednimi specyfikacjami TSI, nie powinny, w odniesieniu do dowolnej z tych dwóch specyfikacji TSI, być ograniczane pod względem funkcjonowania na jakiejkolwiek trasie dużych prędkości lub konwencjonalnej wyposażonej w infrastrukturę systemu przytorowego klasy A zgodnie z odpowiednią specyfikacją TSI, pod warunkiem że tabor kolejowy danego pociągu oraz infrastruktury danej trasy zostały sprawdzone pod kątem wzajemnej interoperacyjności.
3. WYMAGANIA ZASADNICZE DOTYCZĄCE PODSYSTEMU „STEROWANIE”
3.1. Informacje ogólne
Artykuł 4 ust. 1 dyrektywy 2001/16/WE w sprawie interoperacyjności wymaga, aby transeuropejski system kolei konwencjonalnej, podsystemy oraz składniki interoperacyjności, włącznie z interfejsami, spełniały wymagania zasadnicze określone w warunkach ogólnych w załączniku III do dyrektywy. Wymagania zasadnicze są następujące:
|
— |
bezpieczeństwo, |
|
— |
niezawodność i dostępność, |
|
— |
zdrowie, |
|
— |
ochrona środowiska, |
|
— |
kompatybilność techniczna. |
Dyrektywa pozwala na stosowanie wymagań zasadniczych do całego transeuropejskiego systemu kolei konwencjonalnej lub na wybiórcze stosowanie do każdego podsystemu oraz jego składników interoperacyjności.
Wymagania zasadnicze są kolejno opisane poniżej. Wymagania dotyczące systemów klasy B leżą w zakresie odpowiedzialności odpowiedniego państwa członkowskiego.
3.2. Specyficzne aspekty podsystemu „Sterowanie”
3.2.1. Bezpieczeństwo
Każdy projekt, do którego zastosowanie ma ta specyfikacja, powinien obejmować wdrożenie środków niezbędnych do zapewnienia, aby poziom ryzyka wypadku w zakresie podsystemu „Sterowanie” nie był wyższy niż docelowy dla danego rodzaju pracy. W celu zapewnienia, aby zastosowane rozwiązania nie wpływały negatywnie na interoperacyjność, należy przestrzegać wymagań dotyczących parametrów podstawowych zdefiniowanych w punkcie 4.2.1 (Charakterystyka BKJP w odniesieniu do interoperacyjności).
W systemie klasy A zadanie zapewnienia ogólnego bezpieczeństwa w niniejszym podsystemie zostało podzielone między urządzenia pokładowe a urządzenia przytorowe. Szczegółowe wymagania podane są w parametrach podstawowych, zdefiniowanych w punkcie 4.2.1 (Charakterystyka BKJP w odniesieniu do interoperacyjności). Spełnieniu wymagań dotyczących bezpieczeństwa musi towarzyszyć spełnienie wymagań odnośnie do dostępności, jak to określono w punkcie 3.2.2 (Niezawodność i dostępność).
W odniesieniu do systemów klasy B stosowanych w przypadku kolei konwencjonalnej do obowiązków państw członkowskich (określonych w załączniku B) należy:
|
— |
zapewnienie spełnienia wymagań bezpieczeństwa przez projekt systemu klasy B, zgodnie z przepisami krajowymi, |
|
— |
zapewnienie spełnienia wymagań bezpieczeństwa przez zastosowania systemu klasy B, zgodnie z przepisami krajowymi, |
|
— |
zdefiniowanie parametrów oraz warunków bezpiecznej eksploatacji systemu klasy B (w tym w szczególności utrzymania i trybów pracy awaryjnej). |
3.2.2. Niezawodność i dostępność
|
a) |
W systemie klasy A zadanie zapewnienia ogólnej, docelowej niezawodności i dostępności w niniejszym podsystemie zostało podzielone między urządzenia pokładowe a urządzenia przytorowe. Szczegółowe wymagania podane są w parametrach podstawowych, zdefiniowanych w punkcie 4.2.1 (Charakterystyka BKJP w odniesieniu do interoperacyjności). |
|
b) |
Jakość organizacji utrzymania wszystkich systemów wchodzących w skład podsystemu „Sterowanie” powinna zapewniać kontrolę poziomu ryzyka w odniesieniu do starzenia się i zużycia ich składników. Jakość czynności utrzymaniowych musi zapewniać priorytet dla bezpieczeństwa. Patrz: punkt 4.5 (Zasady utrzymania). |
3.2.3. Zdrowie
Według przepisów europejskich oraz krajowych, które są zgodne z prawodawstwem europejskim, należy zapewnić, aby materiały stosowane w budowie podsystemów „Sterowanie” nie stwarzały zagrożenia dla zdrowia osób mających dostęp do tych podsystemów.
3.2.4. Ochrona środowiska
Według przepisów europejskich oraz krajowych, które pozostają w zgodności z ustawodawstwem europejskim:
|
— |
urządzenia BKJP poddane działaniu silnego ciepła lub ognia nie powinny emitować szkodliwych dla środowiska dymów lub gazów w ilości przekraczającej odpowiednie wartości graniczne, |
|
— |
urządzenia BKJP nie powinny zawierać substancji, które w toku normalnej eksploatacji mogą powodować nadmierne zanieczyszczenie środowiska, |
|
— |
urządzenia BKJP podlegają obowiązującemu ustawodawstwu europejskiemu w zakresie maksymalnych wartości emisji oraz podatności na interferencje elektromagnetyczne wzdłuż granic terenów należących do kolei, |
|
— |
urządzenia BKJP powinny być zgodne z istniejącymi przepisami dotyczącymi emisji hałasu, |
|
— |
urządzenia BKJP nie powinny powodować wzrostu wibracji do niedopuszczalnych wartości, które mogą powodować uszkodzenia infrastruktury (o ile infrastruktura ta jest prawidłowo utrzymywana). |
3.2.5. Kompatybilność techniczna
Kompatybilność techniczna obejmuje funkcje, interfejsy i parametry eksploatacyjne wymagane dla zapewnienia interoperacyjności.
Wymagania dotyczące kompatybilności technicznej podzielone są na następujące trzy kategorie:
|
— |
pierwsza kategoria określa ogólne wymagania techniczne odnośnie do interoperacyjności, takie jak: warunki środowiskowe, wewnętrzna kompatybilność elektromagnetyczna (EMC) w obrębie granic terenu należącego do kolei oraz instalacja. W niniejszym rozdziale zdefiniowano właściwe warunki kompatybilności, |
|
— |
druga kategoria opisuje zastosowania podsystemu „Sterowanie” oraz funkcje, jakie musi realizować ten podsystem w celu zapewnienia interoperacyjności. Kategoria ta jest zdefiniowana w rozdziale 4, |
|
— |
trzecia kategoria obejmuje metody eksploatacji podsystemu „Sterowanie” zapewniające interoperacyjność. Kategoria ta jest zdefiniowana w rozdziale 4. |
3.2.5.1. Kompatybilność urządzeń
3.2.5.1.1.
Systemy zgodne z wymaganiami stawianymi klasie A powinny być zdolne do funkcjonowania w warunkach klimatycznych występujących w odpowiedniej części transeuropejskiego systemu kolei konwencjonalnej. Interfejsy do taboru kolejowego określono w punkcie 4.3.2.5 (Fizyczne warunki środowiskowe), a interfejsy do infrastruktury w punkcie 4.3.3.3 (Fizyczne warunki środowiskowe).
Systemy zgodne z wymaganiami stawianymi klasie B powinny co najmniej spełniać wymagania specyfikacji środowiskowych dotyczących odpowiedniego systemu klasy B, w celu zapewnienia zdolności do funkcjonowania w warunkach klimatycznych i fizycznych występujących w odpowiedniej części linii kolei konwencjonalnej.
3.2.5.1.2.
Ten parametr podstawowy jest opisany w punkcie 4.2.12 (Kompatybilność elektromagnetyczna). Interfejsy do taboru kolejowego opisano w punkcie 4.3.2.6 (Kompatybilność elektromagnetyczna), interfejsy do infrastruktury opisano w punkcie 4.3.3.4 (Kompatybilność elektromagnetyczna), a interfejsy do podsystemu „Energia” opisano w punkcie 4.3.4.1 (Kompatybilność elektromagnetyczna).
3.2.5.1. Kompatybilność podsystemu „Sterowanie”
W rozdziale 4 oraz załącznikach A i B zdefiniowano wymagania dotyczące interoperacyjności podsystemu „Sterowanie”.
Oprócz tego niniejsza specyfikacja TSI wraz ze specyfikacją TSI „Sterowanie” dla transeuropejskiego systemu kolei dużych prędkości zapewniają, w kwestiach odnoszących się do podsystemu „Sterowanie”, interoperacyjność techniczną transeuropejskiego systemu kolei dużych prędkości oraz kolei konwencjonalnej, o ile obydwa rodzaje kolei są wyposażone w system klasy A.
4. CHARAKTERYSTYKA PODSYSTEMU
4.1. Wprowadzenie
Transeuropejski system kolei konwencjonalnej, którego dotyczy dyrektywa 2001/16/WE i którego częścią jest podsystem „Sterowanie”, jest to zintegrowany system, którego spójność musi być poddawana weryfikacji. Spójność należy sprawdzać w szczególności w odniesieniu do podsystemu, jego interfejsów do systemu, z którym jest zintegrowany, jak również zasad jego eksploatacji i utrzymania.
Uwzględniając wszystkie stosowne wymagania zasadnicze, podsystem „Sterowanie” charakteryzuje się następującymi parametrami podstawowymi:
|
— |
charakterystyka BKJP w odniesieniu do interoperacyjności (punkt 4.2.1), |
|
— |
funkcje pokładowego systemu ETCS (punkt 4.2.2), |
|
— |
funkcje przytorowego systemu ETCS (punkt 4.2.3), |
|
— |
funkcje systemu EIRENE (punkt 4.2.4), |
|
— |
interfejsy transmisji bezprzewodowej ETSC i EIRENE (punkt 4.2.5), |
|
— |
interfejsy urządzeń pokładowych wewnątrz podsystemu „Sterowanie” (punkt 4.2.6), |
|
— |
interfejsy urządzeń przytorowych wewnątrz podsystemu „Sterowanie” (punkt 4.2.7), |
|
— |
zarządzanie kluczami (punkt 4.2.8), |
|
— |
zarządzanie ETCS-ID (punkt 4.2.9), |
|
— |
HABD (detektor zagrzanych osi) (punkt 4.2.10), |
|
— |
kompatybilność z przytorowymi systemami detekcji pociągu (punkt 4.2.11), |
|
— |
kompatybilność elektromagnetyczna (punkt 4.2.12), |
|
— |
pokładowy pulpit ETCS – DMI (punkt 4.2.13), |
|
— |
pokładowy pulpit EIRENE – DMI (punkt 4.2.14), |
|
— |
interfejs dla rejestracji danych zgodnie z przepisami (punkt 4.2.15), |
|
— |
widoczność przytorowych obiektów sterowania ruchem kolejowym (punkt 4.2.16). |
Wymagania podane w punktach
|
— |
4.2.10 (HABD (detektor zagrzanych osi)), |
|
— |
4.2.11 (Kompatybilność z przytorowymi systemami detekcji pociągu), |
|
— |
4.2.12 (Kompatybilność elektromagnetyczna), |
|
— |
4.2.16 (Widoczność przytorowych obiektów sterowania ruchem kolejowym) |
obowiązują w każdym przypadku, niezależnie od klasy systemu.
Wszelkie pozostałe wymagania podane w punkcie 4.2 (Funkcjonalne i techniczne specyfikacje podsystemu „Sterowanie”) będą zawsze dotyczyły tylko systemu klasy A. Wymagania dotyczące systemów klasy B leżą w zakresie odpowiedzialności odpowiedniego państwa członkowskiego. Załącznik B zawiera charakterystykę systemu klasy B i definiuje odpowiedzialne państwa członkowskie.
Moduły STM umożliwiające współpracę pokładowych systemów klasy A z infrastrukturą klasy B podlegają wymaganiom dotyczącym klasy B.
W celu uzyskania interoperacyjności nie jest konieczne standaryzowanie wszystkich funkcji w obrębie całego podsystemu „Sterowanie”. Funkcjonalność systemów automatycznej kontroli pociągu (ATP) oraz automatycznego sterowania pociągiem (ATC), opisywanych w rozdziale 4, obejmuje:
|
— |
standardowe funkcje pokładowe, zapewniające przewidywalne reagowanie każdego pociągu na dane odbierane z urządzeń przytorowych, |
|
— |
standardowe funkcje urządzeń przytorowych, pozwalające na przetwarzanie danych odbieranych z krajowych systemów sterowania ruchem kolejowym, oraz ich translację na standardowe komunikaty dla pociągów, |
|
— |
standardowe interfejsy dla łączności tor-pociąg i pociąg-tor. |
Funkcje BKJP klasyfikowane są w kategoriach określających, na przykład, czy są one opcjonalne, czy obowiązkowe. Kategorie zdefiniowane są w załączniku A, indeks 1 i w załączniku A, indeks 32, a klasyfikacja funkcji podana jest w odpowiednim tekście.
Załącznik A, indeks 3 zawiera słowniczek terminologii ETCS oraz definicje stosowane w specyfikacjach opisywanych w załączniku A.
W świetle wymagań zasadniczych podanych w rozdziale 3 specyfikacje funkcjonalne oraz techniczne podsystemu „Sterowanie” przedstawiają się następująco:
4.2. Funkcjonalne i techniczne specyfikacje podsystemu „Sterowanie”
4.2.1. Charakterystyka BKJP w odniesieniu do interoperacyjności
Niniejszy parametr podstawowy opisuje wymagania bezpieczeństwa urządzeń pokładowych oraz urządzeń przytorowych.
W odniesieniu do wymagania zasadniczego „bezpieczeństwo” (patrz: punkt 3.2.1 Bezpieczeństwo) ten parametr podstawowy określa obowiązkowe wymagania dotyczące interoperacyjności:
|
— |
W celu zapewnienia, aby rozwiązania dla bezpieczeństwa nie wpływały negatywnie na interoperacyjność, należy przestrzegać wymagań podanych w załączniku A, indeks 47. |
|
— |
W odniesieniu do części zapewniającej bezpieczeństwo urządzenia pokładowego, jak również urządzenia przytorowego, wymaganie bezpieczeństwa dla systemu ETCS, poziom 1 lub poziom 2 (1), przedstawia się następująco: współczynnik tolerowanego zagrożenia (THR) wynosi 10-9/godzinę (dla uszkodzeń losowych), co odpowiada 4. poziomowi integralności bezpieczeństwa (SIL). Szczegółowe wymagania dla urządzeń klasy A podane są w załączniku A, indeks 27. Mniej restrykcyjne wymagania odnośnie do wartości THR dla urządzeń przytorowych mogą być stosowane pod warunkiem spełnienia wymagań dotyczących bezpieczeństwa eksploatacyjnego. |
|
— |
Należy przestrzegać wymagań dotyczących niezawodności i dostępności, określonych w załączniku A, indeks 28. |
4.2.2. Pokładowe funkcje ETCS
Niniejszy parametr podstawowy opisuje pokładowe funkcje ETSC. Obejmuje on wszystkie funkcje wymagane do bezpiecznego prowadzenia pociągu. Funkcje powinny być realizowane zgodnie z załącznikiem A, indeks 14. Funkcje te są wdrażane zgodnie z załącznikiem A, indeksy 1, 2, 4, 13, 23, 24, 53 oraz niżej wymienionymi specyfikacjami technicznymi.
|
— |
Łączność z przytorowym zespołem BKJP. Funkcja transmisji informacji uaktualniających w 1. poziomie zastosowań systemu ETCS jest obowiązkowa dla urządzeń pokładowych tylko w warunkach zdefiniowanych w rozdziale 7. Funkcje radiowej transmisji danych dla systemu ETCS są obowiązkowe tylko dla ETCS poziom 2 lub ETCS poziom 3.
|
|
— |
Łączność z maszynistą
|
|
— |
Łączność z modułami STM. Patrz: załącznik A, indeksy 8, 25, 26, 36, 52. Funkcja ta obejmuje:
|
|
— |
Realizowanie funkcji automatycznej kontroli pociągu oraz sygnalizacji kabinowej. Patrz: załącznik A, indeksy 6, 7, 31 i 37. Funkcja ta obejmuje:
|
|
— |
Demonstrowanie kompletności pociągu (ciągłość pociągu) – obowiązkowe dla poziomu 3, nie wymagane dla poziomów 1 i 2. |
|
— |
Monitorowanie stanu urządzeń oraz pomoc w trybie awaryjnym. Funkcja ta obejmuje:
|
|
— |
Pomoc w rejestrowaniu danych zgodnie z wymogami przepisów. Patrz: załącznik A, indeksy 5, 41, 55. |
|
— |
Funkcja kontroli czujności. Patrz: załącznik A, indeks 42. Zastosowania mogą być następujące:
|
4.2.3. Funkcje przytorowej części systemu ETCS
Ten parametr podstawowy opisuje funkcje przytorowej części systemu ETSC. Obejmuje on wszystkie funkcje ETCS służące zapewnieniu bezpiecznej drogi dla danego pociągu. Funkcje powinny być realizowane zgodnie z załącznikiem A, indeks 14. Funkcje te są wdrażane zgodnie z załącznikiem A, indeksy 1, 2, 4, 13, 23, 24, 31, 37, 53 oraz niżej podanymi specyfikacjami technicznymi:
|
— |
łączność z przytorowymi urządzeniami sterowania ruchem kolejowym (blokady, sygnalizatory), |
|
— |
lokalizowanie danego pociągu w systemie współrzędnych wyznaczanym przez eurobalisy (poziomy 2 i 3), |
|
— |
translacja informacji od przytorowych urządzeń sterowania ruchem kolejowym do standardowego formatu stosowanego w pokładowych urządzeniach BKJP, |
|
— |
generowanie zezwolenia na jazdę dla danego pociągu, włącznie z opisem toru i poleceniami przypisanymi do danego pociągu, |
|
— |
łączność z pokładowym urządzeniem BKJP. Obejmuje to:
|
|
— |
dostarczanie informacji o wolnym torze do urządzeń sterowania ruchem kolejowym. Funkcja ta dotyczy tylko poziomu 3. |
4.2.4. Funkcje EIRENE
Ten parametr podstawowy opisuje funkcje transmisji głosu i danych EIRENE:
|
— |
funkcje związane z wywoływaniem maszynisty, |
|
— |
funkcje radiołączności eksploatacyjnej, |
|
— |
transmisja danych. |
Funkcje te wdrażane są zgodnie ze specyfikacjami technicznymi określonymi w załączniku A, indeksy 32, 33 i 48, a ich realizacja powinna być zgodna z załącznikiem A, indeks 54.
4.2.5. Interfejsy ETCS i EIRENE z transmisją bezprzewodową
Kompletna specyfikacja tych interfejsów składa się z dwóch części:
|
— |
specyfikacja protokołów dla przesyłania informacji z/do funkcji ERTMS oraz dla zapewnienia bezpieczeństwa łączności, |
|
— |
specyfikacja interfejsów między częściami urządzeń. Interfejsy między urządzeniami opisane są w następujących punktach:
|
Parametr podstawowy opisuje transmisję bezprzewodową między elementami urządzeń pokładowych i przytorowych BKJP. Obejmuje on:
|
— |
wartości fizyczne, elektryczne i elektromagnetyczne, jakie muszą być stosowane dla zapewnienia bezpiecznej pracy urządzeń, |
|
— |
stosowany protokół łączności, |
|
— |
dostępność kanału łączności. |
Stosowane są następujące specyfikacje:
|
— |
Łączność radiowa z pociągiem. Interfejsy dla łączności radiowej klasy A powinny pracować w paśmie GSM-R. Patrz: załącznik A, indeks 35. Protokoły powinny być zgodne z załącznikiem A, indeksy 10, 18, 19, 39, 40. |
|
— |
Łączność z pociągiem przy użyciu eurobalis i europętli. Interfejsy dla łączności przy użyciu eurobalis powinny być zgodne z załącznikiem A, indeksy 9, 43. Interfejsy dla łączności przy użyciu europętli powinny być zgodne z załącznikiem A, indeksy 16, 50. |
4.2.6. Interfejsy pokładowe wewnątrz podsystemu „Sterowanie”
Ten parametr podstawowy składa się z trzech części.
4.2.6.1. Interfejs między ETCS a STM
Specyficzny Moduł Transmisyjny (STM) pozwala na działanie pokładowego systemu ETCS na liniach wyposażonych w systemy klasy B.
Interfejs między pokładowymi funkcjami ETCS a modułami STM dla systemów klasy B zdefiniowany jest w załączniku A, indeksy 4, 8, 25, 26. Załącznik A, indeks 45 określa interfejs K. Zastosowanie interfejsu K jest opcjonalne, ale w przypadku jego użycia musi być on zgodny z załącznikiem A, indeks 45.
4.2.6.2. GSM-R/ETCS
Interfejs między radiem klasy A a funkcjami pokładowego systemu ETCS. Wymagania te są podane w załączniku A, indeksy 4, 7, 20, 22, 34.
4.2.6.3. Odometria
Interfejs między funkcją odometrii a pokładowymi systemami ERTMS/ETCS powinnien spełniać wymagania podane w załączniku A, indeks 44. Interfejs ten należy do parametru podstawowego tylko wtedy, gdy urządzenia odometryczne dostarczane są jako oddzielny składnik interoperacyjności (patrz: punkt 5.2.2 Grupowanie składników interoperacyjności).
4.2.7. Interfejsy przytorowe wewnątrz podsystemu „Sterowanie”
Parametr podstawowy składa się z sześciu części.
4.2.7.1. Interfejs funkcjonalny między centrami sterowania radiowego (RBC)
Interfejs ten jest stosowany w celu zdefiniowania danych, które mają być wymieniane między sąsiadującymi centrami sterowania radiowego (RBC) w celu zapewnienia bezpiecznej jazdy pociągu między jednym RBC a następnym. Opisuje on:
|
— |
informacje od „oddającego” RBC do „przyjmującego” RBC, |
|
— |
informacje od „przyjmującego” RBC do „oddającego” RBC. |
Wymagania te są określone w załączniku A, indeks 12.
4.2.7.2. Interfejs techniczny między centrami sterowania radiowego (RBC)
Jest to techniczny interfejs między dwoma RBC. Wymagania te określono w załączniku A, indeks 58.
4.2.7.3. GSM-R/RBC
Jest to interfejs między systemem radiowym klasy A a funkcjami urządzeń przytorowych systemu ETCS. Wymagania te są podane w załączniku A, indeksy 4, 20, 22, 34.
4.2.7.4. Eurobalisa/LEU
Jest to interfejs między eurobalisą a elektronicznym koderem przytorowym (LEU). Wymagania te określone są w załączniku A, indeks 9. Interfejs ten należy do parametru podstawowego tylko wtedy, gdy eurobalisa i LEU dostarczane są jako oddzielne składniki interoperacyjności (patrz: punkt 5.2.2 Grupowanie składników interoperacyjności).
4.2.7.5. Europętla/LEU
Jest to interfejs między europętlą a LEU. Wymagania te określone są w załączniku A, indeks 16. Interfejs ten należy do parametru podstawowego tylko wtedy, gdy europętla i LEU dostarczane są jako oddzielne składniki interoperacyjności (patrz: punkt 5.2.2 Grupowanie składników interoperacyjności).
4.2.7.6. Wymagania dotyczące wstępnego wyposażania w urządzenia przytorowe ERTMS
Jest to interfejs między przytorowymi urządzeniami klasy A a przytorową infrastrukturą sterowania ruchem kolejowym. Wymagania te określone są w załączniku A, indeks 59. Dokument ten opisuje środki dla wyposażenia wyprzedzającego w urządzenia przytorowe klasy A.
4.2.8. Zarządzanie kluczami
Ten parametr podstawowy dotyczy bezpieczeństwa danych transmitowanych przez radio, realizowanego przy użyciu kluczy kryptograficznych. Zarządcy infrastruktury oraz przewoźnicy kolejowi powinni dostarczyć system zarządzający, który kontroluje te klucze i nimi zarządza. Interfejs zarządzający kluczami jest wymagany:
|
— |
między systemami zarządzania kluczami, należącymi do różnych zarządców infrastruktury, |
|
— |
między systemami zarządzania kluczami, należącymi do przewoźników kolejowych oraz zarządców infrastruktury, |
|
— |
między systemem zarządzania kluczami a pokładowymi oraz przytorowymi urządzeniami ETCS. |
Wymagania dotyczące zarządzania kluczami między systemami zarządzania kluczami należącymi do interoperacyjnych regionów podane są w załączniku A, indeks 11.
4.2.9. Zarządzanie ETCS-ID
Ten parametr podstawowy dotyczy unikalnych identyfikatorów ETCS dla urządzeń pokładowych oraz przytorowych. Wymagania te określone są w załączniku A, indeks 23. Przydział zmiennych definiowany jest w załączniku A, indeks 53.
Dostawcy pokładowych urządzeń BKJP są odpowiedzialni za zarządzanie unikalnymi identyfikatorami w przydzielonym zakresie, zgodnie z definicją podaną w załączniku A, indeks 53. Firmy eksploatujące tabor kolejowy powinny zapewnić system zarządzania, który kontroluje identyfikatory i zarządza nimi w całym cyklu życia danego urządzenia.
W załączniku A, indeks 53 podano przydziały zakresów identyfikatorów dla państw członkowskich. Państwa członkowskie są odpowiedzialne za zarządzanie przydziałem tych zakresów do jednostek organizacyjnych działających na ich terenie.
Jednostki organizacyjne użytkujące urządzenia przytorowe są odpowiedzialne za zarządzanie unikalnymi identyfikatorami w obrębie przydzielonego im zakresu. Zarządca infrastruktury powinien zapewnić system zarządzający, który kontroluje identyfikatory i nimi zarządza w trakcie całego cyklu życia danego urządzenia.
4.2.10. HABD (detektor zagrzanych osi)
Ten parametr podstawowy określa wymagania dotyczące urządzeń przytorowych wykorzystywanych w celu sprawdzania, czy temperatura łożysk osi przejeżdżających składów przekroczyła zadaną wartość, i przesyłania tych informacji do centrum sterowania ruchem. Wymagania te są określone w załączniku A, dodatek 2.
Eksploatacja taboru kolejowego wyposażonego w pokładowe systemy detekcyjne jest także opisana w punkcie 4.2.11 specyfikacji TSI RS HS.
4.2.11. Kompatybilność z przytorowymi systemami detekcji pociągu
Ten parametr podstawowy opisuje charakterystykę przytorowych systemów detekcji pociągów, jaka jest konieczna, by systemy te były uaktywniane przez tabor kolejowy zgodny ze specyfikacją TSI „Tabor kolejowy”.
Tabor kolejowy powinien mieć charakterystykę umożliwiającą funkcjonowanie przytorowych systemów detekcji pociągów. W załączniku A, dodatek 1 określono wymagania dotyczące charakterystyki pojazdu. Charakterystyka ta jest zdefiniowana w podanych w poniższej tabeli punktach specyfikacji TSI taboru kolejowego HS oraz taboru kolejowego towarowego i będzie zawarta w przyszłym wydaniu specyfikacji TSI dla taboru kolejowego.
|
Parametr |
Dodatek 1 TSI „Sterowanie” |
TSI „Tabor kolejowy dużych prędkości” |
TSI „Tabor kolejowy. Wagony towarowe” |
TSI „Tabor kolejowy. Pojazdy trakcyjne” i „Tabor kolejowy. Wagony pasażerskie” |
TSI „Ruch kolejowy” dla kolei dużych prędkości |
TSI „Ruch kolejowy” dla kolei konwencjonalnej |
|
Odległości między osiami |
2.1 z rys. 6 |
Jeszcze nie określono |
4.2.3.2 |
? |
|
– |
|
Geometria kół |
2.2 z rys. 7 |
4.2.10 |
5.4.2.3 |
? |
|
– |
|
Masa pojazdu (min. nacisk na oś) |
3.1 |
4.1.2 |
4.2.3.2 |
? |
|
– |
|
Przestrzeń wokół kół bez części metalowych |
3.2 |
Jeszcze nie określono |
Rozdział 6 (2) |
? |
|
– |
|
Masa metalu pojazdu |
3.3 |
Jeszcze nie określono |
Punkt otwarty |
? |
|
– |
|
Materiał kół |
3.4 |
Jeszcze nie określono |
5.4.2.3 |
? |
|
– |
|
Impedancja między kołami |
3.5 |
4.2.10e |
4.2.3.3.1 |
? |
|
– |
|
Impedancja pojazdu |
3.6 |
Jeszcze nie określono |
Brak |
? |
|
– |
|
Stosowanie urządzeń do piaskowania |
4.1 |
Jeszcze nie określono |
Brak |
? |
|
Jeszcze nie badano |
|
Stosowanie kompozytowych klocków hamulcowych |
4.2 |
Jeszcze nie określono |
Punkt otwarty |
? |
|
– |
|
Prąd trakcyjny |
5.1 |
Jeszcze nie określono |
Brak |
? |
|
– |
|
Stosowanie hamulców elektrycznych/magnetycznych |
5.2 |
4.1.5, 4.2.15, 4.3.6 |
Brak |
? |
|
|
|
Pola elektryczne, magnetyczne, elektromagnetyczne |
5.3 |
4.1.9 |
Brak |
? |
|
– |
4.2.12. Kompatybilność elektromagnetyczna
Ten parametr podstawowy jest podzielony na dwie części.
4.2.12.1. Kompatybilność elektromagnetyczna wewnątrz podsystemu „Sterowanie”
Żadne urządzenie podsystemu „Sterowanie” nie powinno zakłócać pracy innych urządzeń tego podsystemu.
4.2.12.2. Kompatybilność elektromagnetyczna między taborem a urządzeniami przytorowymi podsystemu „Sterowanie”
Obejmuje to szereg parametrów emisji elektromagnetycznej związanej z zagadnieniem kompatybilności elektromagnetycznej (w zakresie prądów trakcyjnych przewodzonych i indukowanych oraz innych prądów wytwarzanych przez pociąg, charakterystykę pól elektromagnetycznych oraz pól statycznych), jakie powinny być przestrzegane przez tabor w celu zapewnienia prawidłowego funkcjonowania przytorowych urządzeń podsystemu „Sterowanie”. Zawiera opis metod pomiarów określonych wartości.
Przytorowe systemy detekcji pociągów powinny mieć charakterystykę niezbędną do zachowania kompatybilności z taborem, który jest zgodny ze specyfikacją TSI dotyczącą taboru.
Załącznik A, dodatek 1 określa charakterystykę systemów detekcji pociągów, jaka jest niezbędna dla zachowania kompatybilności z taborem. Charakterystyka ta będzie zawarta w specyfikacji TSI dla taboru.
4.2.13. Pokładowy pulpit ETCS (ETCS DMI)
Ten parametr podstawowy opisuje informacje podawane maszyniście przez pokładowy system ETCS oraz wprowadzane przez maszynistę do pokładowego systemu ERTMS/ETCS. Patrz: załącznik A, indeks 51.
Obejmuje on:
|
— |
ergonomię (włącznie z widocznością), |
|
— |
wyświetlane funkcje ETCS, |
|
— |
funkcje ETCS wyzwalane działaniami maszynisty. |
4.2.14. Pokładowy pulpit EIRENE (EIRENE DMI)
Ten parametr podstawowy opisuje informacje podawane maszyniście przez pokładowy system EIRENE oraz wprowadzane przez maszynistę do pokładowego systemu EIRENE. Patrz: załącznik A, indeksy 32, 33, 51.
Obejmuje on:
|
— |
ergonomię (włącznie z widocznością), |
|
— |
wyświetlane funkcje EIRENE, |
|
— |
informacje dotyczące połączeń wychodzących, |
|
— |
informacje dotyczące połączeń przychodzących. |
4.2.15. Interfejs do rejestracji danych do celów prawnych
Ten parametr podstawowy opisuje:
|
— |
wymianę danych między rejestratorem prawnym a narzędziem do odczytywania danych, |
|
— |
protokoły łączności, |
|
— |
interfejs fizyczny, |
|
— |
wymagania funkcjonalne dotyczące rejestracji danych oraz korzystania z nich. |
Właściwe organy kontrolne każdego państwa członkowskiego powinny mieć dostęp do zarejestrowanych danych, które spełniają obowiązujące wymagania w zakresie rejestracji danych dla celów urzędowych i dochodzeniowych.
Patrz: załącznik A, indeksy 4, 5, 41, 55.
4.2.16. Widoczność przytorowych obiektów podsystemu „Sterowanie”
Ten parametr podstawowy opisuje:
|
— |
charakterystykę znaków odblaskowych |
|
— |
zewnętrzne pole widzenia maszynisty. Obiekty przytorowe podsystemu „Sterowanie”, które mają być obserwowane przez maszynistę, powinny być zlokalizowane tak, aby uwzględniać zewnętrzne pole widzenia maszynisty, które określone jest w specyfikacji TSI „Ruch kolejowy”. |
4.3. Funkcjonalne i techniczne specyfikacje interfejsów do innych podsystemów
4.3.1. Interfejs do podsystemu „Ruch kolejowy”
Wszelkie odniesienia do TSI OPE CR to punkty otwarte, które wymagają jeszcze potwierdzenia po zatwierdzeniu niniejszej specyfikacji TSI.
4.3.1.1. Przepisy prowadzenia ruchu pociągów
Europejska sieć kolei konwencjonalnej będzie podlegała pewnym zunifikowanym wymaganiom dotyczącym prowadzenia pociągów, które zostaną opisane w specyfikacji TSI „Ruch kolejowy” (patrz także: punkt 4.4 Przepisy ruchu kolejowego).
TSI OPE CR: punkt 4.4 (do potwierdzenia)
4.3.1.2. Pokładowy pulpit ETCS (ETCS DMI)
Jest to interfejs, który opisuje informacje podawane maszyniście przez pokładowy system ERTMS ETCS oraz wprowadzane przez maszynistę do pokładowego systemu ERTMS ETCS. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.13 (Pokładowy pulpit ETCS (ETCS DMI)).
Interfejs ten dotyczy systemu klasy A. Wymagania dla systemów klasy B definiowane są przez właściwe Państwa członkowskie (patrz: załącznik B).
TSI OPE CR: punkt 4.4 (do potwierdzenia)
4.3.1.3. Pokładowy pulpit EIRENE (EIRENE DMI)
Jest to interfejs, który opisuje informacje podawane maszyniście przez pokładowy system EIRENE oraz wprowadzane przez maszynistę do pokładowego systemu EIRENE. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.14 (Pokładowy pulpit EIRENE (EIRENE DMI)).
Interfejs ten dotyczy systemów klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI OPE CR: punkt 4.4 (do potwierdzenia)
4.3.1.4. Interfejs do rejestracji danych do celów prawnych
Interfejs ten dotyczy wymagań funkcjonalnych w zakresie rejestracji danych oraz korzystania z zarejestrowanych danych. Parametr podstawowy podsystemu „Sterowanie” opisano w punkcie 4.2.15 (Interfejs do rejestracji danych do celów prawnych).
Interfejs ten dotyczy systemów klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI OPE CR: punkt 4.2.3.5 (do potwierdzenia)
4.3.1.5. Gwarantowana skuteczność oraz charakterystyka hamowania pociągu
Podsystem „Sterowanie” wymaga zapewnienia gwarantowanej skuteczności hamowania pociągu. Specyfikacja TSI „Ruch kolejowy” zdefiniuje zasady określania gwarantowanej skuteczności hamowania pociągu. Specyfikacja TSI dotycząca taboru powinna definiować metody określania skuteczności hamowania pojazdów.
Ten interfejs dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI OPE CR: punkt 4.2.2.4 (do potwierdzenia)
4.3.1.6. Izolowanie pokładowych funkcji ETCS
Ten interfejs dotyczy wymagań funkcjonalnych odnośnie izolowania pokładowych funkcji ETCS w razie awarii. Wymagania dotyczące podsystemu „Sterowanie” podane są w punkcie 4.2.2 (Pokładowe funkcje ETCS).
Interfejs ten dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI OPE CR: punkt 4.4 (do potwierdzenia)
4.3.1.7. Zarządzanie kluczami
Ten interfejs dotyczy wymagań funkcjonalnych odnośnie do zarządzania kluczami. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.8 (Zarządzanie kluczami).
Interfejs ten dotyczy systemu klasy A.
TSI OPE CR: Do potwierdzenia
4.3.1.8. Detektory zagrzanych osi
Ten interfejs dotyczy wymagań funkcjonalnych odnośnie do detektorów zagrzanych osi. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.10 (HABD (Detektor zagrzanych osi)).
TSI OPE CR: punkt 4.2.3.5.1 (do potwierdzenia)
4.3.1.9. Kontrola czujności maszynisty
Ten interfejs dotyczy wymagań funkcjonalnych odnośnie do kontroli czujności maszynisty. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.2 (Pokładowe funkcje ETCS).
TSI OPE CR: punkt 4.3.3.7 (do potwierdzenia)
4.3.1.10. Stosowanie piaskowania
Ten interfejs dotyczy wymagań eksploatacyjnych kierowanych do maszynistów, aby piasek w sposób niekorzystny nie zakłócił działania przytorowych systemów detekcji pociągów. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.11 (Kompatybilność z przytorowymi systemami detekcji pociągu).
TSI OPE CR: Aktualnie nie jest określony w specyfikacji OPE TSI, ponieważ poziom szczegółowości jest różny: do potwierdzenia
4.3.1.11. Zewnętrzne pole widzenia maszynisty
Ten interfejs dotyczy pola widzenia maszynisty przez szybę przednią kabiny. Wymagania podsystemu „Sterowanie” opisane są w punkcie 4.2.16 (Widoczność przytorowych obiektów podsystemu „Sterowanie”).
TSI OPE CR: punkt 4.3.2.2 (do potwierdzenia)
4.3.2. Interfejs do podsystemu „Tabor kolejowy”
Wszelkie odniesienia do interfejsów dotyczących specyfikacji TSI „Tabor kolejowy. Pojazdy trakcyjne” i „Tabor kolejowy. Wagony pasażerskie” dla kolei konwencjonalnej pozostają punktami otwartymi. Pojazdy trakcyjne to lokomotywy, elektryczne zespoły trakcyjne oraz spalinowe zespoły trakcyjne.
4.3.2.1. Kompatybilność z przytorowymi systemami detekcji pociągu
Przytorowe systemy detekcji pociągów powinny mieć charakterystykę niezbędną, by były uaktywniane przez przejeżdżający tabor zgodny ze specyfikacją TSI „Tabor kolejowy”. Parametr podstawowy podsystemu „Sterowanie” oraz odniesienia do odpowiednich specyfikacji TSI „Tabor kolejowy” opisano w punkcie 4.2.11 (Kompatybilność z przytorowymi systemami detekcji pociągu).
4.3.2.2. Kompatybilność elektromagnetyczna między taborem a urządzeniami przytorowymi podsystemu „Sterowanie”
Jest to interfejs, który obejmuje szereg parametrów emisji elektromagnetycznej związanej z zagadnieniem kompatybilności elektromagnetycznej (w zakresie prądów trakcyjnych przewodzonych i indukowanych oraz innych prądów wytwarzanych przez pociąg, charakterystykę pól elektromagnetycznych oraz pól statycznych), jakie powinny być przestrzegane w celu zapewnienia prawidłowego funkcjonowania przytorowych urządzeń podsystemu „Sterowanie”. Parametr podstawowy podsystemu „Sterowanie” opisano w punkcie 4.2.12.2 (Kompatybilność elektromagnetyczna między taborem a urządzeniami przytorowymi podsystemu „Sterowanie”).
TSI dla wagonów towarowych: nie jest rozpatrywana.
TSI dla taboru dużych prędkości (HS): punkt 4.1.9.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich.
4.3.2.3. Gwarantowana skuteczność oraz charakterystyka hamowania pociągu
Podsystem „Sterowanie” wymaga zapewnienia gwarantowanej skuteczności hamowania pociągu. Specyfikacja TSI dotycząca taboru powinna definiować metody określania skuteczności hamowania pojazdów. Specyfikacja TSI „Ruch kolejowy” zdefiniuje zasady określania gwarantowanej skuteczności hamowania pociągu.
Ten interfejs dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe Państwa członkowskie (patrz: załącznik B).
TSI dla wagonów towarowych: punkt 4.2.4.1.2.
TSI dla taboru dużych prędkości (HS): punkty 4.1.5, 4.3.7, 4.3.9.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.4. Pozycja pokładowych anten systemu BKJP
Pozycje anten do odbioru informacji z eurobalis i europętli na taborze powinny być dobierane w taki sposób, aby zapewnić niezawodną transmisję danych do przejeżdżającego taboru w skrajnych warunkach geometrii toru. Należy uwzględnić ruch oraz zachowanie się taboru na torach. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.2 (Pokładowe funkcje ETCS).
Ten interfejs dotyczy systemu klasy A. Wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
Pozycja anteny GSM-R na dachu pojazdu zależy głównie od pomiarów, jakie muszą być wykonywane dla każdego typu pojazdu, z uwzględnieniem lokalizacji innych anten (nowych lub istniejących). W warunkach testowych sygnał z anteny powinien spełniać wymagania podane w punkcie 4.2.5 (Interfejsy ETCS i EIRENE z transmisją bezprzewodową). Warunki testowe są także opisane w punkcie 4.2.5 (Interfejsy ETCS i EIRENE z transmisją bezprzewodową).
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla taboru dużych prędkości (HS): Załącznik 0, 0.5, punkt 4.2.4.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.5. Fizyczne warunki środowiskowe
Warunki klimatyczne oraz fizyczne dla urządzeń BKJP, jakie mogą występować w pociągu, powinny być zdefiniowane w odniesieniu do rejestrów infrastruktury lub linii, na których dany pociąg ma funkcjonować, oraz w odniesieniu do załącznika A, indeks A4.
TSI dla taboru dużych prędkości (HS): punkt 4.3.12.
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.6. Kompatybilność elektromagnetyczna
W celu zapewnienia uniwersalności stosowania pokładowych urządzeń BKJP na nowym taborze kolejowym, dopuszczonym do użytkowania w transeuropejskiej sieci kolei konwencjonalnej, warunki elektromagnetyczne występujące w pociągu powinny być zdefiniowane zgodnie z załącznikiem A, indeks A6. Dla łączności z wykorzystaniem eurobalis stosowane są szczególne warunki podane w załączniku A, indeks 9.
Wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI dla taboru dużych prędkości (HS):
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.7. Izolowanie pokładowych funkcji ETCS
Jest to interfejs, który dotyczy izolowania pokładowych funkcji systemu ETCS. Wymagania dotyczące podsystemu „Sterowanie” podane są w punkcie 4.2.2 (Pokładowe funkcje ETCS).
Ten interfejs dotyczy systemu klasy A. Odpowiednie wymagania dla podsystemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI dla taboru dużych prędkości (HS): Punkt 4.2.4 (będzie dodany).
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.8. Interfejsy dla danych
Interfejs dla transmisji danych między pociągiem a pokładowym urządzeniem BKJP zdefiniowany jest w załączniku A, indeks 7.
Interfejs ten dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI dla taboru dużych prędkości (HS): Punkty 4.2.4, 4.3.13.
TSI dla taboru towarowego nie jest rozpatrywana odnośnie do ETCS poziom 1 i poziom 2.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
Wymagania dotyczące interfejsu między łącznością radiową a podsystemem „Tabor kolejowy” określone są w załączniku A, indeks 33.
Interfejs ten dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
Odpowiednie specyfikacje określone są w:
|
— |
TSI dla wagonów towarowych: nie jest rozpatrywana. |
|
— |
TSI dla taboru dużych prędkości (HS): punkt. |
|
— |
TSI dla pojazdów trakcyjnych i wagonów pasażerskich: |
4.3.2.9. Detektory zagrzanych osi
Ten interfejs dotyczy wymagań technicznych odnośnie do detektorów zagrzanych osi. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.10 [HABD (Detektor zagrzanych osi)].
Odpowiednie specyfikacje określone są w:
|
— |
TSI dla wagonów towarowych: punkt 4.2.3.3.2. |
|
— |
TSI dla taboru dużych prędkości (HS): punkty 4.2.11, 4.3.13. |
|
— |
TSI dla pojazdów trakcyjnych i wagonów pasażerskich: |
4.3.2.10. Światła główne pojazdu
Ten interfejs dotyczy wymagań technicznych odnośnie do chromatyczności oraz jaskrawości świateł głównych pojazdu, w celu zapewnienia właściwej widoczności przytorowych znaków odblaskowych oraz odzieży odblaskowej. Wymagania dotyczące podsystemu „Sterowanie” opisane są w punkcie 4.2.16 (Widoczność przytorowych obiektów podsystemu „Sterowanie”).
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla taboru dużych prędkości (HS): punkt: 4.2.20.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.11. Kontrola czujności maszynisty
Ten interfejs dotyczy wymagań technicznych odnośnie do kontroli czujności maszynisty. Parametr podstawowy podsystemu „Sterowanie” opisany jest w punkcie 4.2.2 (Pokładowe funkcje ETCS).
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla taboru dużych prędkości (HS): punkt 4.2.2.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.12. Odometria
Jest to interfejs między urządzeniem odometrycznym a funkcją należącą do pokładowego systemu ETCS.
Ten interfejs dla specyfikacji TSI „Tabor” dotyczy tylko parametru podstawowego opisanego w punkcie 4.2.6.3 (Odometria), o ile urządzenia odometryczne dostarczane są jako oddzielny składnik interoperacyjności (patrz: punkt 5.2.2 Grupowanie składników interoperacyjności).
Interfejs ten dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B). TSI dla taboru dużych prędkości (HS): punkt 4.2.4.
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.13. Interfejs do rejestracji danych do celów prawnych
Ten interfejs dotyczy wymagań technicznych odnośnie do rejestracji danych. Parametr podstawowy podsystemu „Sterowanie” opisano w punkcie 4.2.15 (Interfejs do rejestracji danych do celów prawnych).
Interfejs ten dotyczy systemu klasy A. Wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
TSI dla taboru towarowego nie jest rozpatrywana.
TSI dla taboru dużych prędkości (HS): punkt 4.3.13.
TSI dla pojazdów trakcyjnych i wagonów pasażerskich:
4.3.2.14. Wyposażenie wyprzedzające w urządzenia pokładowe
Ten interfejs dotyczy wyposażenia wyprzedzającego taboru kolejowego w urządzenia klasy A, jak opisano w załączniku A, indeks 57.
Interfejs ten dotyczy systemów klasy A.
TSI dla taboru dużych prędkości (HS): punkt 4.2.4.
4.3.3. Interfejsy do podsystemu „Infrastruktura”
4.3.3.1. System detekcji pociągu
Instalacja infrastruktury powinna zapewniać spełnianie przez system detekcji pociągu wymagań podanych w punkcie 4.2.11 (Kompatybilność z przytorowymi systemami detekcji pociągu).
Specyfikacja TSI „Infrastruktura”: w celu zapewnienia spełniania przez infrastrukturę wymagań CCS, w przyszłej specyfikacji TSI znajdzie się odniesienie do CCS TSI.
4.3.3.2. Anteny przytorowe
Anteny podsystemów przytorowych muszą być umieszczone w miejscu zapewniającym niezawodną transmisję danych do przejeżdżającego pociągu w skrajnych przypadkach geometrii toru. Należy uwzględnić ruch oraz zachowanie się taboru na torach. Patrz: punkt 4.2.5 (Interfejsy ETCS i EIRENE z transmisją bezprzewodową).
Ten interfejs dotyczy systemu klasy A. Odpowiednie wymagania dla systemów klasy B definiowane są przez właściwe państwa członkowskie (patrz: załącznik B).
Specyfikacja TSI Infrastruktury: odnośnie do pomiaru.
4.3.3.3. Fizyczne warunki środowiskowe
Warunki klimatyczne i fizyczne, występujące w infrastrukturze, powinny być wskazane w rejestrze infrastruktury, w odniesieniu do załącznika A, indeks A5.
4.3.3.4. Kompatybilność elektromagnetyczna
Warunki kompatybilności elektromagnetycznej występujące w infrastrukturze należy zdefiniować w odniesieniu do załącznika A, indeks A7. Dla łączności z wykorzystaniem eurobalis stosowane są szczególne warunki podane w załączniku A, indeks 9. Pokładowe urządzenie BKJP zgodne z załącznikiem A, indeks 6 oraz szczególnymi wymaganiami dotyczącymi eurobalis, podanymi w załączniku A, indeks 9, powinny być uważane za spełniające odnośne wymagania zasadnicze.
4.3.4. Interfejsy do podsystemu „Energia”
4.3.4.1. Kompatybilność elektromagnetyczna
Warunki kompatybilności elektromagnetycznej występujące w instalacji stacjonarnej należy zdefiniować w odniesieniu do załącznika A, indeks A7. Dla łączności z wykorzystaniem eurobalis stosowane są szczególne warunki podane w załączniku A, indeks 9. Pokładowe urządzenie BKJP zgodne z załącznikiem A, indeks 6 oraz szczególnymi wymaganiami dotyczącymi eurobalis, podanymi w załączniku A, indeks 9, powinny być uważane za spełniające stosowne wymagania zasadnicze.
4.4. Przepisy ruchu kolejowego
Przepisy ruchu kolejowego dotyczące podsystemu „Sterowanie” podane są szczegółowo w specyfikacji TSI „Ruch kolejowy”.
4.5. Zasady utrzymania
Zasady utrzymania podsystemu objęte niniejszą specyfikacją TSI powinny zapewnić utrzymywanie wartości podanych w parametrach podstawowych, podanych w rozdziale 4, w zakresie dopuszczalnych granic przez cały okres eksploatacji urządzeń. Podczas przeprowadzania prac utrzymaniowych prewencyjnych lub naprawczych podsystem może jednak nie zapewniać wartości podanych w parametrach podstawowych; zasady utrzymania powinny zapewnić zachowanie bezpieczeństwa na właściwym poziomie podczas wykonywania tych czynności.
W celu zapewnienia bezpieczeństwa należy przestrzegać następujących zasad:
4.5.1. Odpowiedzialność producenta urządzeń
Producent urządzeń wbudowanych w podsystem powinien określić:
|
— |
wszelkie wymagania oraz procedury dotyczące utrzymania (takie jak: nadzór zapewniający prawidłowe funkcjonowanie, metody diagnozowania i testowania oraz narzędzia) niezbędne dla spełnienia wymagań zasadniczych oraz wartości określonych w obowiązujących wymaganiach niniejszej specyfikacji TSI podczas całego okresu eksploatacji urządzeń (transport i przechowywanie przed instalacją, normalna praca, awarie, czynności naprawcze, przeglądy oraz czynności utrzymaniowe, wycofanie z eksploatacji itp.), |
|
— |
wszelkie zagrożenia dla zdrowia i bezpieczeństwa, na jakie mogą być narażone osoby postronne oraz personel utrzymaniowy, |
|
— |
warunki szybkiego utrzymania doraźnego (tzn. definicję podzespołów do wymiany w warunkach polowych (PWWP), definicję zgodnych wersji sprzętu i oprogramowania, zastępowanie uszkodzonych PWWP oraz np. warunki przechowywania PWWP i naprawy uszkodzonych PWWP), |
|
— |
warunki techniczne dla jazdy pociągu z uszkodzonym urządzeniem aż do końca trasy lub do warsztatu naprawczego (tryb działania w stanie awaryjnym z technicznego punktu widzenia, np. funkcjonowanie częściowe lub całkowite wyłączenie, odizolowanie od innych funkcji itd.), |
|
— |
zasady przeprowadzania przeglądów w przypadku narażenia urządzenia na skrajne warunki pracy (np. przekroczenie parametrów środowiskowych lub skrajnie silne wstrząsy). |
4.5.2. Odpowiedzialność podmiotów zamawiających
Podmioty zamawiające powinny:
|
— |
zapewnić, aby dla wszystkich elementów objętych niniejszą specyfikacją TSI (niezależnie od tego, czy są to składniki interoperacyjności, czy nie) określono wymagania dotyczące utrzymania, zgodnie z opisem podanym w punkcie 4.5.1 (Odpowiedzialność producenta urządzeń), |
|
— |
opracować niezbędne zasady utrzymania w odniesieniu do wszystkich elementów objętych niniejszą specyfikacją TSI, z uwzględnieniem zagrożeń wynikających ze wzajemnych oddziaływań różnych urządzeń należących do podsystemu oraz interfejsów do innymi podsystemów. |
4.5.3. Odpowiedzialność zarządcy infrastruktury lub przewoźnika kolejowego
Zarządca infrastruktury lub przewoźnik kolejowy jest odpowiedzialny za funkcjonowanie urządzeń pokładowych lub przytorowych.
|
— |
Do jego obowiązków należy opracowanie planu utrzymania, zgodnie z informacjami podanymi w punkcie 4.5.4 (Plan utrzymania). |
4.5.4. Plan utrzymania
Plan utrzymania powinien być opracowany na podstawie warunków podanych w punkcie 4.5.1 (Odpowiedzialność producenta urządzeń), punkcie 4.5.2 (Odpowiedzialność podmiotów zamawiających) oraz punkcie 4.5.3 (Odpowiedzialność zarządcy infrastruktury lub przewoźnika kolejowego), i powinien obejmować co najmniej:
|
— |
warunki użytkowania urządzeń, zgodnie z wymaganiami podanymi przez producentów, |
|
— |
specyfikację programów utrzymania (np. definicję kategorii prac utrzymaniowych prewencyjnych lub naprawczych, maksymalne odstępy czasowe między czynnościami utrzymania zapobiegawczego oraz odpowiednie warunki, jakie muszą być przestrzegane dla zapewnienia bezpieczeństwa podsystemu oraz personelu utrzymaniowego, z uwzględnieniem wzajemnego oddziaływania czynności utrzymaniowych z funkcjonowaniem podsystemu „Sterowanie”), |
|
— |
wymagania dotyczące przechowywania części zamiennych, |
|
— |
definicję szybkiego utrzymania doraźnego, |
|
— |
zasady utrzymania urządzeń uszkodzonych, |
|
— |
wymagania dotyczące minimalnych kompetencji personelu utrzymaniowego, z uwzględnieniem zagrożeń dla zdrowia i bezpieczeństwa, |
|
— |
definicje zakresu odpowiedzialności i upoważnień personelu utrzymaniowego (np. dostęp do urządzeń, zarządzanie ograniczeniami i/lub przerwami w funkcjonowaniu systemu, wymiana PWWP, naprawa uszkodzonych PWWP, przywrócenie normalnej pracy systemu), |
|
— |
procedury zarządzania identyfikatorami ETCS. Patrz: punkt 4.2.9 (Zarządzanie identyfikatorami ETCS), |
|
— |
metody informowania producenta urządzeń o krytycznych dla bezpieczeństwa usterkach oraz częstych awariach systemu. |
4.6. Kwalifikacje zawodowe
Kwalifikacje zawodowe wymagane do obsługi podsystemu „Sterowanie” objęte są specyfikacją TSI „Ruch kolejowy”.
Wymagania dotyczące kwalifikacji dla utrzymania podsystemu „Sterowanie” powinny być wyszczególnione w planie utrzymania (patrz: punkt 4.5.4 Plan utrzymania).
4.7. Warunki BHP
Poza wymaganiami określonymi w planach utrzymania, patrz: punkt 4.5 (Zasady utrzymania), należy podjąć odpowiednie działania w celu zapewnienia warunków BHP dla personelu utrzymaniowego i eksploatacyjnego, zgodnie z przepisami europejskimi oraz krajowymi, które są zgodne z ustawodawstwem europejskim.
4.8. Rejestry infrastruktury i taboru kolejowego
Podsystem „Sterowanie” jest traktowany jako dwa zespoły:
|
— |
Zespół pokładowy, |
|
— |
Zespół przytorowy. |
Wymagania dotyczące rejestru infrastruktury kolei konwencjonalnej oraz taboru kolejowego odnośnie do zespołów podsystemu „Sterowanie” określone są w załączniku C (charakterystyka specyficzna dla linii oraz pociągów).
5. SKŁADNIKI INTEROPERACYJNOŚCI
5.1. Definicje
Zgodnie z art. 2 lit. d dyrektywy 2001/16/WE:
Składniki interoperacyjności oznaczają „wszelkie elementarne składniki, grupy części składowych, podzespoły lub pełne zespoły sprzętowe włączone lub mające być włączone do podsystemu, od których bezpośrednio lub pośrednio zależy interoperacyjność transeuropejskiego systemu kolei konwencjonalnych. Pojęcie ‘składnik’ obejmuje zarówno przedmioty materialne, jak i niematerialne, takie jak oprogramowanie.”
Jak opisano w rozdziale 2, podsystem „Sterowanie” podzielony jest na dwa zespoły, zatem ogólna definicja dyrektywy może być dostosowana następująco:
Składnikiem interoperacyjności podsystemu „Sterowanie” jest dowolny elementarny składnik, grupa części składowych lub podzespół włączony lub mający być włączony do zespołu urządzeń pokładowych bądź przytorowych, od którego bezpośrednio lub pośrednio zależy interoperacyjność transeuropejskiego systemu kolei konwencjonalnych. Pojęcie „składnik” obejmuje zarówno przedmioty materialne, jak i niematerialne, takie jak oprogramowanie.
5.2. Wykaz składników interoperacyjności
5.2.1. Podstawowe składniki interoperacyjności
Składniki interoperacyjności podsystemu „Sterowanie” wymienione są w następujących tabelach:
|
— |
tabela 5.1 dla zespołu pokładowego, |
|
— |
tabela 5.2 dla zespołu przytorowego. |
„Platforma bezpieczeństwa” składnika interoperacyjności zdefiniowana jest jako blok konstrukcyjny (produkt ogólnego przeznaczenia, niezależnie od zastosowania) składający się ze sprzętu i oprogramowania (firmware i/lub system operacyjny i/lub narzędzia pomocnicze), który może być wykorzystywany do budowania bardziej złożonych systemów (zastosowania ogólne, tzn. klasy zastosowań).
5.2.2. Grupowanie składników interoperacyjności
Podstawowe składniki interoperacyjności zdefiniowane w tabelach 5.1a oraz 5.2a mogą być łączone, tworząc większe jednostki. Powstała w ten sposób grupa definiowana jest poprzez funkcje wbudowanych składników interoperacyjności oraz pozostałe interfejsy do elementów znajdujących się poza grupą. Grupa utworzona w powyższy sposób powinna być uważana za składnik interoperacyjności.
|
— |
W tabeli 5.1b wymieniono grupy składników interoperacyjności należące do zespołu pokładowego. |
|
— |
W tabeli 5.2b wymieniono grupy składników interoperacyjności należące do zespołu przytorowego. |
Jeżeli dla danego interfejsu nie istnieje obowiązująca specyfikacja TSI, można opracować deklarację zgodności poprzez grupowanie składników interoperacyjności.
5.3. Parametry i specyfikacje dotyczące składników
Tabele w rozdziale 5 zawierają następujące informacje dotyczące każdego podstawowego składnika interoperacyjności lub grupy składników interoperacyjności:
|
— |
w kolumnie 3 wymieniono funkcje i interfejsy. Należy zauważyć, że niektóre składniki interoperacyjności mają opcjonalne funkcje i interfejsy, |
|
— |
w kolumnie 4 podano obowiązkowe specyfikacje dla oceny zgodności każdej funkcji lub interfejsu, odpowiednio do zakresu ich obowiązywania, poprzez odniesienie do właściwego punktu w rozdziale 4, |
|
— |
w kolumnie 5 wymieniono moduły stosowane do oceny zgodności, opisane w rozdziale 6 niniejszej specyfikacji TSI. |
Należy zauważyć, że wymagania podane w punkcie 4.5.1 (Odpowiedzialność producenta urządzeń) dotyczą każdego podstawowego składnika interoperacyjności lub grupy składników interoperacyjności.
Tabela 5.1.a
Podstawowe składniki interoperacyjności należące do pokładowego zespołu BKJP
|
1 |
2 |
3 |
4 |
5 |
|
|
N |
Składnik interoperacyjności IC |
Charakterystyka |
Szczególne wymagania oceniane według rozdziału 4 |
Moduł |
|
|
1 |
Pokładowy ERTMS ETCS |
Bezpieczeństwo |
4.2.1 |
|
|
|
Pokładowe funkcje ETCS |
4.2.2 |
H2 lub B i D lub B i F |
|||
|
Oprócz:
|
|
||||
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
|
|||
|
RBC (poziom 2 i 3) |
|
||||
|
Urządzenie radiowego uaktualniania informacji (opcjonalnie w 1. poziomie) |
|
||||
|
Transmisja bezprzewodowa eurobalisy |
|
||||
|
Transmisja bezprzewodowa europętli (opcjonalnie w 1. poziomie) |
|
||||
|
Interfejsy |
|
||||
|
STM (implementacja interfejsu K jest opcjonalna) |
4.2.6.1 |
||||
|
Pokładowy ERTMS GSM-R |
4.2.6.2 |
||||
|
Odometria |
4.2.6.3 |
||||
|
System zarządzania kluczami |
4.2.8 |
||||
|
Zarządzanie ETCS-ID |
4.2.9 |
||||
|
Pokładowy pulpit ETCS (ETCS DMI) |
4.2.13 |
||||
|
Zarządzanie kluczami |
4.3.1.7 |
||||
|
Fizyczne warunki środowiskowe |
4.3.2.5 |
||||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.2.6 |
||||
|
Interfejsy dla danych. Obejmuje to także kontrolę czujności maszynisty (opcjonalnie) oraz ciągłość składu pociągu (tylko poziom 3) |
4.3.2.8 |
||||
|
Rejestrator danych dotyczących bezpieczeństwa |
brak |
||||
|
2 |
Pokładowa platforma bezpieczeństwa |
Bezpieczeństwo |
4.2.1 |
H2 lub B i D lub B i F |
|
|
3 |
Rejestrator danych dotyczących bezpieczeństwa |
Pokładowe funkcje ETCS |
4.2.2 |
H2 lub B i D lub B i F |
|
|
Tylko rejestrowanie danych do celów prawnych |
|
||||
|
Interfejsy |
|
|
|||
|
Narzędzie do wczytywania danych JRU |
4.2.15 |
||||
|
Pokładowy ERTMS ETCS |
brak |
||||
|
Warunki środowiskowe |
4.3.2.5 |
||||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.2.6 |
||||
|
4 |
Odometria |
Bezpieczeństwo |
4.2.1 |
H2 lub B i D lub B i F |
|
|
Pokładowe funkcje ETCS |
4.2.2 |
||||
|
Tylko odometria |
|
||||
|
Interfejsy |
|
|
|||
|
Pokładowy ERTMS ETCS |
4.2.6.3 |
||||
|
Warunki środowiskowe |
4.3.2.5 |
||||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.2.6 |
||||
|
5 |
Zewnętrzny STM |
Funkcje i bezpieczeństwo |
brak |
H2 lub B i D lub B i F |
|
|
Zgodnie ze specyfikacjami krajowymi |
|
||||
|
Interfejsy |
|
|
|||
|
Pokładowy ERTMS ETCS |
4.2.6.1 |
||||
|
System klasy B z transmisją bezprzewodową Zgodnie ze specyfikacjami krajowymi |
brak |
||||
|
Warunki środowiskowe Zgodnie ze specyfikacjami krajowymi |
brak |
||||
|
Kompatybilność elektromagnetyczna (EMC) Zgodnie ze specyfikacjami krajowymi |
brak |
||||
|
6 |
Pokładowy ERTMS/GSM-R |
Funkcje EIRENE |
4.2.4 |
H2 lub B i D lub B i F |
|
|
Transmisja danych tylko dla poziomów 2 lub 3, albo 1 z radiowym przesyłaniem informacji uaktualniających |
|
||||
|
Interfejsy |
|
|
|||
|
Pokładowy ERTMS ETCS Tylko dla poziomów 2 lub 3, albo 1 z radiowym przesyłaniem informacji uaktualniających |
4.2.6.2 |
||||
|
GSM-R |
4.2.5 |
||||
|
Pokładowy pulpit EIRENE (EIRENE DMI) |
4.2.14 |
||||
|
Warunki środowiskowe |
4.3.2.5 |
||||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.2.6 |
Tabela 5.1.b
Grupy składników interoperacyjności należące do pokładowego zespołu BKJP
Niniejsza tabela jest przykładowa; służy tylko przedstawieniu struktury. Istnieje możliwość proponowania innych grup.
|
1 |
2 |
3 |
4 |
5 |
|
N |
Składnik interoperacyjności IC |
Charakterystyka |
Szczególne wymagania oceniane według rozdziału 4 |
Moduł |
|
1 |
Pokładowa platforma bezpieczeństwa Pokładowy ERTMS ETCS Rejestrator danych dotyczących bezpieczeństwa Odometria |
Bezpieczeństwo |
4.2.1 |
|
|
Pokładowe funkcje ETCS |
4.2.2 |
H2 lub B i D lub B i F |
||
|
Interfejsy ETCS i EIRENE z transmisją radiową |
4.2.5 |
|||
|
RBC (poziom 2 i 3) |
|
|
||
|
Urządzenie radiowego uaktualniania informacji (opcjonalnie w 1. poziomie) |
|
|||
|
Transmisja bezprzewodowa eurobalisy |
|
|||
|
Transmisja bezprzewodowa europętli (opcjonalnie w 1. poziomie) |
|
|||
|
Interfejsy |
|
|||
|
STM (implementacja interfejsu K jest opcjonalna) |
4.2.6.1 |
|||
|
Pokładowy ERTMS GSM-R |
4.2.6.2 |
|||
|
System zarządzania kluczami |
4.2.8 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Pokładowy pulpit ETCS (ETCS DMI) |
4.2.13 |
|||
|
Fizyczne warunki środowiskowe |
4.3.2.5 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.2.6 |
|||
|
Narzędzie do wczytywania danych JRU |
4.2.15 |
|||
|
Interfejs dla danych. Obejmuje to także kontrolę czujności maszynisty (opcjonalnie) oraz ciągłość składu pociągu (tylko poziom 3) |
4.3.2.8 |
Tabela 5.2.a
Podstawowe składniki interoperacyjności należące do przytorowego zespołu BKJP
|
1 |
2 |
3 |
4 |
5 |
|
N |
Składnik interoperacyjności IC |
Charakterystyka |
Szczególne wymagania oceniane według rozdziału 4 |
Moduł |
|
1 |
RBC |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu eurobalis, uaktualniania radiowego i europętli |
|
|||
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
|
||
|
Tylko łączność radiowa z pociągiem |
|
|
||
|
Interfejsy |
|
|
||
|
Sąsiednie RBC |
4.2.7.1, 4.2.7.2 |
|
||
|
Przytorowy ERTMS GSM-R |
4.2.7.3 |
|
||
|
System zarządzania kluczami |
4.2.8 |
|
||
|
Zarządzanie ETCS-ID |
4.2.9 |
|
||
|
Urządzenia sterowania ruchem kolejowym |
brak |
|
||
|
Warunki środowiskowe |
4.3.3.3 |
|
||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|
||
|
2 |
Urządzenie do radiowego przesyłania informacji uaktualniających |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu eurobalis, europętli i funkcji poziomów 2/3 |
|
|||
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
|
||
|
Tylko łączność radiowa z pociągiem |
|
|||
|
Interfejsy |
|
|||
|
Przytorowy ERTMS GSM-R |
4.2.7.3 |
|||
|
System zarządzania kluczami |
4.2.8 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Urządzenia sterowania ruchem kolejowym i LEU |
4.2.3 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
3 |
Eurobalisa |
Bezpieczeństwo |
4.2.1 |
|
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
H2 lub B i D lub B i F |
||
|
Łączność z pociągiem tylko z wykorzystaniem eurobalis |
|
|||
|
Interfejsy |
|
|
||
|
Eurobalisa LEU |
4.2.7.4 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
4 |
Europętla |
Bezpieczeństwo |
4.2.1 |
|
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
H2 lub B i D lub B i F |
||
|
Łączność z pociągiem tylko z wykorzystaniem europętli |
|
|||
|
Interfejsy |
|
|
||
|
Europętla LEU |
4.2.7.5 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
5 |
Eurobalisa LEU |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu uaktualniania radiowego, europętli i funkcji poziomów 2 i 3 |
|
|||
|
Interfejsy |
|
|
||
|
Przytorowe urządzenia sterowania ruchem kolejowym |
brak |
|||
|
Eurobalisa |
4.2.7.4 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
6 |
Europętla LEU |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu uaktualniania radiowego, eurobalis i funkcji poziomów 2 i 3 |
|
|||
|
Interfejsy |
|
|
||
|
Przytorowe urządzenia sterowania ruchem kolejowym |
brak |
|||
|
Europętla |
4.2.7.5 |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
7 |
Przytorowa platforma bezpieczeństwa |
Bezpieczeństwo |
4.2.1 |
H2 lub B i D lub B i F |
Tabela 5.2.b
Grupy składników interoperacyjności należące do przytorowego zespołu BKJP
Niniejsza tabela jest przykładowa; służy tylko przedstawieniu struktury. Istnieje możliwość proponowania innych grup.
|
1 |
2 |
3 |
4 |
5 |
|
N |
Składnik interoperacyjności IC |
Charakterystyka |
Szczególne wymagania oceniane według rozdziału 4 |
Moduł |
|
1 |
Przytorowa platforma bezpieczeństwa Eurobalisa Eurobalisa LEU |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu europętli i funkcji poziomów 2 i 3 |
|
|||
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
|
||
|
Łączność z pociągiem tylko z wykorzystaniem eurobalis |
|
|||
|
Interfejsy |
|
|||
|
Przytorowe urządzenia sterowania ruchem kolejowym |
brak |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
|||
|
2 |
Przytorowa platforma bezpieczeństwa Europętla LEU Europętla |
Bezpieczeństwo |
4.2.1 |
|
|
Funkcje przytorowej części systemu ETCS |
4.2.3 |
H2 lub B i D lub B i F |
||
|
Oprócz łączności przy użyciu eurobalis i funkcji poziomów 2 i 3 |
|
|||
|
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
4.2.5 |
|
||
|
Łączność z pociągiem tylko z wykorzystaniem europętli |
|
|||
|
Interfejsy |
|
|||
|
Przytorowe urządzenia sterowania ruchem kolejowym |
brak |
|||
|
Zarządzanie ETCS-ID |
4.2.9 |
|||
|
Warunki środowiskowe |
4.3.3.3 |
|||
|
Kompatybilność elektromagnetyczna (EMC) |
4.3.3.4 |
6. OCENA SKŁADNIKÓW POD WZGLĘDEM ZGODNOŚCI I/LUB PRZYDATNOŚCI DO UŻYTKU ORAZ WERYFIKACJA ZGODNOŚCI PODSYSTEMU
6.0. Wprowadzenie
W zakresie niniejszej aktualnej specyfikacji TSI spełnienie odpowiednich wymagań zasadniczych podanych w rozdziale 3 niniejszej specyfikacji TSI będzie zapewnione przez zgodność ze specyfikacją określoną w rozdziale 4, a także jej uzupełnieniem w rozdziale 5 w odniesieniu do składników interoperacyjności, co znajdzie swoje odzwierciedlenie w pozytywnym wyniku oceny zgodności i/lub przydatności do użytku składników interoperacyjności oraz weryfikacji zgodności podsystemu, zgodnie z treścią rozdziału 6.
Niemniej jednak w sytuacjach, w których część wymagań zasadniczych jest objęta przepisami krajowymi, co wynika z:
|
a) |
stosowania systemów klasy B (włącznie z krajowymi funkcjami modułów STM); |
|
b) |
punktów otwartych w specyfikacji TSI; |
|
c) |
odstępstw według art. 7 dyrektywy 2001/16/WE; |
|
d) |
przypadków szczególnych opisanych w punkcie 7.3, |
za przeprowadzenie oceny zgodności odpowiedzialne będą właściwe państwa członkowskie, w zakresie wskazanym przez notyfikowane procedury.
6.1. Składniki interoperacyjności
6.1.1. Procedury oceny
Producent składnika interoperacyjności (IC) (i/lub grup składników interoperacyjności) lub jego upoważniony przedstawiciel posiadający siedzibę na terenie Wspólnoty powinien uzyskać deklarację zgodności WE, zgodnie z art. 13.1 oraz załącznikiem IV dyrektywy 2001/16/WE, przed wprowadzeniem go na rynek.
Procedura oceny zgodności składnika interoperacyjności i/lub grup składników interoperacyjności, jak to określono w rozdziale 5 niniejszej specyfikacji TSI, powinna być przeprowadzona poprzez zastosowanie modułów wymienionych w punkcie 6.1.2 (Moduły).
Niektóre fragmenty niniejszej specyfikacji TSI dotyczą funkcji obowiązkowych i/lub opcjonalnych. Jednostka notyfikowana powinna:
|
— |
sprawdzić, czy zaimplementowane są wszystkie obowiązkowe funkcje składnika interoperacyjności, |
|
— |
sprawdzić, które z funkcji opcjonalnych są zaimplementowane, |
i przeprowadzić ocenę zgodności.
Dostawca powinien określić w deklaracji WE, które z funkcji opcjonalnych są zaimplementowane.
Jednostka notyfikowana powinna sprawdzić, czy jakiekolwiek funkcje dodatkowe zaimplementowane w składniku nie prowadzą do konfliktów z zaimplementowanymi funkcjami obowiązkowymi lub opcjonalnymi.
6.1.1.1. Specyficzny moduł transmisyjny (STM)
Moduł STM powinien spełniać wymagania odpowiednich przepisów krajowych, a jego dopuszczenie należy do obowiązków właściwego państwa członkowskiego, jak określono w załączniku B.
Weryfikacja zgodności interfejsu STM do pokładowego ERTMS/ETCS wymaga oceny zgodności przeprowadzonej przez jednostkę notyfikowaną. Jednostka notyfikowana powinna sprawdzić, czy państwo członkowskie dokonało dopuszczenia krajowej części modułu STM.
6.1.1.2. Deklaracja przydatności do użytku WE
Deklaracja przydatności do użytku WE nie jest wymagana dla składników interoperacyjności należących do podsystemu „Sterowanie”.
6.1.2. Moduły
Do oceny składników interoperacyjności należących do podsystemu „Sterowanie” producent lub jego upoważniony przedstawiciel mający siedzibę na terenie Wspólnoty może wybrać niżej wymienione moduły, opisane w tabelach 5.1A, 5.1B, 5.2A i 5.2B:
|
— |
procedura badania typu (Moduł B) dotycząca fazy projektowania i tworzenia prototypu, w połączeniu z procedurą systemu zarządzania jakością produkcji (Moduł D) dla fazy produkcyjnej, lub |
|
— |
procedura badania typu (Moduł B) dotycząca fazy projektowania i tworzenia prototypu, w połączeniu z procedurą weryfikacji wyrobu (Moduł F), lub |
|
— |
pełny system zarządzania jakością z procedurą badania projektu (Moduł H2). |
Opis modułów znajduje się w załączniku E niniejszej specyfikacji TSI.
Moduł D (system zarządzania jakością produkcji) może być wybrany wyłącznie wtedy, gdy producent posiada system jakości dla produkcji, kontroli i testowania wyrobu końcowego, zatwierdzony i kontrolowany przez jednostkę notyfikowaną.
Moduł H2 (pełny system zarządzania jakością produkcji z badaniem projektu) może być wybrany wyłącznie wtedy, gdy producent posiada system jakości dla projektowania, produkcji, kontroli i testowania wyrobu końcowego, zatwierdzony i kontrolowany przez jednostkę notyfikowaną.
Poniższe objaśnienia dodatkowe dotyczą stosowania niektórych modułów:
|
— |
W odniesieniu do rozdziału 4 opisu „Modułu B” (badanie typu) w załączniku E:
|
|
— |
W odniesieniu do rozdziału 3 opisu „Modułu F” (weryfikacja wyrobu) w załączniku E nie jest dozwolona weryfikacja statystyczna, tzn. wszystkie składniki interoperacyjności powinny być badane indywidualnie. |
|
— |
W odniesieniu do punktu 6.3 „Modułu H2” (pełny system zarządzania jakością produkcji z badaniem projektu), wymagane jest wykonanie badania typu. |
Niezależnie od wybranego modułu należy stosować zapisy podane w załączniku A, indeksy 47, A1, A2 i A3, dla certyfikacji składników interoperacyjności, których dotyczy parametr podstawowy „Bezpieczeństwo” (punkt 4.2 Charakterystyka BKJP w odniesieniu do interoperacyjności).
Niezależnie od wybranego modułu należy sprawdzić, czy wskazania wykonawcy utrzymania składnika interoperacyjności są zgodne z wymaganiami podanymi w punkcie 4.5 (Zasady utrzymania) niniejszej specyfikacji TSI.
Stosowanie Modułu B (badanie typu) powinno być realizowane na podstawie badania dokumentacji technicznej (patrz: rozdział 3 i punkt 4.1 opisu Modułu B (badanie typu)).
W przypadku stosowania Modułu H2 (pełny system zarządzania jakością produkcji z badaniem projektu), badanie projektu powinno obejmować wszystkie elementy wspierające dowód, że spełnione są wymagania podane w punkcie 4.5 (Zasady utrzymania) niniejszej specyfikacji TSI.
6.2. Podsystem „Sterowanie”
6.2.1. Procedury oceny
Rozdział ten zawiera informacje dotyczące deklaracji weryfikacji zgodności WE podsystemu „Sterowanie”. Jak podano w rozdziale 2, podsystem „Sterowanie” dzieli się na dwa zespoły:
|
— |
zespół pokładowy, |
|
— |
zespół przytorowy. |
Dla każdego z tych zespołów wymagana jest deklaracja weryfikacji zgodności WE.
Na żądanie podmiotu zamawiającego lub jego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty jednostka notyfikowana przeprowadza weryfikację zgodności WE zespołów pokładowego i przytorowego, zgodnie z załącznikiem VI do dyrektywy 2001/16/WE.
Podmiot zamawiający obowiązany jest uzyskać deklarację WE dotyczącą weryfikacji zgodności zespołu BKJP zgodnie z art. 18 ust. 1 oraz załącznikiem V do dyrektywy 2001/16/WE.
Treść deklaracji weryfikacji zgodności WE powinna być zgodna z załącznikiem V do dyrektywy 2001/16/WE. Obejmuje to sprawdzenie integracji składników interoperacyjności stanowiących część zespołu; tabele 6.1 i 6.2 zawierają definicje charakterystyki podlegającej weryfikacji oraz odniesienie do obowiązujących specyfikacji, które mają być stosowane.
Niektóre fragmenty niniejszej specyfikacji TSI dotyczą funkcji obowiązkowych i/lub opcjonalnych. Jednostka notyfikowana powinna:
|
— |
sprawdzić, czy zaimplementowane są wszystkie obowiązkowe funkcje wymagane dla danego zespołu, |
|
— |
sprawdzić, czy zaimplementowane są wszystkie funkcje wymagane dla specyficznej implementacji zespołu przytorowego lub pokładowego. |
Jednostka notyfikowana powinna sprawdzić, czy jakiekolwiek funkcje dodatkowe zaimplementowane w zespole nie prowadzą do konfliktów z zaimplementowanymi funkcjami obowiązkowymi lub opcjonalnymi.
Informacje dotyczące specyficznych implementacji zespołu przytorowego lub pokładowego powinny być podane w rejestrze infrastruktury oraz rejestrze taboru kolejowego, zgodnie z załącznikiem C.
Deklaracja weryfikacji zgodności WE dotycząca zespołu przytorowego lub pokładowego powinna zawierać informacje wymagane do wprowadzenia do wyżej wymienionych rejestrów. Rejestry te powinny być zarządzane zgodnie z art. 24 Dyrektywy Interoperacyjności 2001/16/WE.
Deklaracja weryfikacji zgodności WE dotycząca zespołów przytorowych i pokładowych, wraz z certyfikatami zgodności, są wystarczające dla zapewnienia, iż zespół przytorowy będzie współpracował z zespołem pokładowym, posiadającym odpowiednią charakterystykę, zdefiniowaną w rejestrze taboru kolejowego oraz rejestrze infrastruktury, bez dodatkowej deklaracji weryfikacji zgodności WE dotyczącej podsystemów.
6.2.1.1. Weryfikacja integracji funkcjonalnej zespołu pokładowego
Weryfikację należy przeprowadzić na zespole pokładowym BKJP zainstalowanym w pojeździe. Odnośnie do urządzeń BKJP, które nie są zdefiniowane wyłącznie jako klasa A (np. pokładowy interfejs STM/ERTMS ETCS), w niniejszej specyfikacji TSI zawarto wymagania dotyczące weryfikacji pod kątem interoperacyjności
Przed przeprowadzeniem jakiejkolwiek weryfikacji funkcjonalnej urządzeń pokładowych, należy, zgodnie z punktem 6.1 powyżej, dokonać oceny składników interoperacyjności zawartych w danym zespole, czego wynikiem powinno być wydanie deklaracji zgodności WE. Jednostka notyfikowana powinna ocenić, czy są one odpowiednie dla danego zastosowania (np. implementacja funkcji opcjonalnych).
Funkcje klasy A uprzednio zweryfikowane na poziomie składnika interoperacyjności nie wymagają dodatkowej weryfikacji.
Należy przeprowadzić testy weryfikacji integracji poszczególnych elementów zespołu w celu sprawdzenia, czy zostały one we właściwy sposób wzajemnie połączone i podłączone do instalacji pociągu oraz czy realizują wymagane funkcje i osiągają odpowiednie parametry pracy dla danego zastosowania. W przypadku zainstalowania identycznych zespołów pokładowych BKJP na identycznych obiektach taboru kolejowego weryfikację integracji należy przeprowadzić tylko raz na jednym z obiektów taboru.
Następujące zagadnienia podlegają weryfikacji:
|
— |
prawidłowość zainstalowania zespołu pokładowego BKJP (np. zgodność z zasadami techniki, współpraca połączonych urządzeń, brak niebezpiecznych oddziaływań oraz, w miarę konieczności, przechowywanie danych specyficznych dla danego zastosowania), |
|
— |
prawidłowość działania w miejscach podłączenia do urządzeń taboru kolejowego (np. hamulce, kontrola czujności maszynisty, ciągłość składu pociągu), |
|
— |
zdolność współpracy z zespołem przytorowym BKJP o odpowiedniej charakterystyce (np. poziom zastosowania ETCS, zainstalowane funkcje opcjonalne), |
|
— |
zdolność odczytu i zapisu wszystkich wymaganych informacji w rejestratorze danych dotyczących bezpieczeństwa (w razie potrzeby wchodzącym także w skład systemów innych niż ETCS). |
Weryfikacja ta może być przeprowadzana w miejscu postoju pojazdów.
Weryfikacja zdolności zespołu pokładowego do współpracy z zespołem przytorowym obejmuje weryfikację możliwości odczytu certyfikowanych eurobalis oraz (jeżeli funkcja ta jest zainstalowana na pokładzie) europętli, a także możliwości realizowania połączeń GSM-R dla transmisji głosowej oraz (jeżeli funkcja ta jest zainstalowana) dla transmisji danych.
Jeżeli pojazd posiada także urządzenia klasy B, jednostka notyfikowana powinna także sprawdzić, czy spełnione są wymagania przepisów danego państwa członkowskiego.
6.2.1.2. Weryfikacja integracji funkcjonalnej zespołu przytorowego
Weryfikację należy przeprowadzić na zespole przytorowym BKJP zainstalowanym w infrastrukturze. Odnośnie do urządzeń BKJP, które nie są zdefiniowane wyłącznie jako klasa A, w niniejszej specyfikacji TSI zdefiniowano tylko wymagania dotyczące weryfikacji pod kątem interoperacyjności (np. kompatybilność elektromagnetyczna – EMC).
Przed przeprowadzeniem jakiejkolwiek weryfikacji funkcjonalnej urządzeń przytorowych należy, zgodnie z punktem 6,1 (składniki interoperacyjności) powyżej, dokonać oceny składników interoperacyjności zawartych w danym zespole, czego wynikiem powinno być wydanie deklaracji zgodności WE. Jednostka notyfikowana powinna sprawdzić, czy są one odpowiednie dla danego zastosowania (np. implementacja funkcji opcjonalnych).
Funkcje klasy A uprzednio zweryfikowane na poziomie składnika interoperacyjności nie wymagają dodatkowej weryfikacji.
Odnośnie do projektu części ERTMS/ETSC należącej do zespołu przytorowego BKJP, wymagania specyfikacji TSI należy uzupełnić przepisami krajowymi, obejmującymi np.:
|
— |
opis linii, charakterystykę, czyli np. gradienty, odległości, pozycje elementów szlakowych oraz eurobalis/europętli, lokalizacje chronione itd., |
|
— |
dane i przepisy sterowania ruchem kolejowym, którymi ma zajmować się ERTMS/ETSC. |
Należy przeprowadzić testy weryfikacji integracji poszczególnych elementów zespołu w celu sprawdzenia, czy zostały one we właściwy sposób wzajemnie połączone i podłączone do krajowego systemu urządzeń przytorowych, w celu zapewnienia, że realizują one wymagane funkcje i osiągają odpowiednie parametry pracy dla danego zastosowania.
Należy uwzględnić następujące interfejsy między urządzeniami przytorowymi:
|
— |
między systemem radiowym klasy A a systemem ERTMS/ETCS (RBC lub jednostka uaktualnianie radiowego, jeśli ma zastosowanie), |
|
— |
między eurobalisą a LEU, |
|
— |
między europętlą a LEU, |
|
— |
między sąsiednimi RBC, |
|
— |
między systemem ERTMS/ETCS (RBC, LEU, jednostka uaktualniania radiowego) a urządzeniami zależnościowymi lub krajowymi systemami sterowania ruchem kolejowym, jeśli mają zastosowanie. |
Następujące zagadnienia podlegają weryfikacji:
|
— |
prawidłowość zainstalowania części ERTMS/ETCS zespołu przytorowego BKJP (np. zgodność z zasadami techniki, współpraca połączonych urządzeń, brak niebezpiecznych oddziaływań oraz, gdy jest to wymagane, przechowywanie danych specyficznych dla danego zastosowania zgodnie z ww. przepisami krajowymi), |
|
— |
prawidłowość działania interfejsów do krajowego systemu urządzeń przytorowych, |
|
— |
możliwość łączenia się z zespołem pokładowym o odpowiedniej charakterystyce (np. poziom zastosowania ETCS). |
6.2.1.3. Ocena w trakcie faz migracji
Wprowadzanie nowych rozwiązań do zespołów przytorowych lub pokładowych BKJP może być przeprowadzane stopniowo, zgodnie z punktami 7.2.3 i 7.2.4. Na każdym etapie uzyskuje się tylko zgodność z odpowiednimi specyfikacjami TSI, natomiast inne wymagania należące do pozostałych etapów nie są spełnione.
Podmiot zamawiający może na tym etapie złożyć wniosek do jednostki notyfikowanej o dokonanie oceny zespołu.
Niezależnie od modułów wybranych przez podmiot zamawiający, jednostka notyfikowana sprawdzi, czy:
|
— |
spełnione są wymagania specyfikacji TSI dla danego etapu, |
|
— |
nie zostały naruszone wcześniej oceniane wymagania specyfikacji TS. |
Funkcje ocenione uprzednio i niezmienione oraz niezakłócone przez aktualny etap nie muszą być ponownie sprawdzane.
Certyfikaty wydane przez jednostkę notyfikowaną po pozytywnej ocenie zespołu uzupełniane są o zastrzeżenia wskazujące ograniczenia działania tych certyfikatów, i określające, które wymagania specyfikacji TSI są spełnione, a które nie.
Zastrzeżenia te należy zapisać odpowiednio w rejestrze taboru kolejowego i/lub rejestrze infrastruktury.
6.2.2. Moduły
Wszystkie niżej wymienione moduły są opisane w załączniku E niniejszej specyfikacji TSI.
6.2.2.1. Zespół pokładowy
W celu weryfikacji zgodności zespołu pokładowego podmiot zamawiający lub jego upoważniony przedstawiciel mający swą siedzibę na terenie Wspólnoty może wybrać:
|
— |
procedurę badania typu (Moduł SB) dotyczącą fazy projektowania i wytwarzania, w połączeniu z procedurą systemu zarządzania jakością produkcji (Moduł SD) dla fazy produkcyjnej, lub |
|
— |
procedurę badania typu (Moduł SB) dotyczącą fazy projektowania i wytwarzania, w połączeniu z procedurą weryfikacji wyrobu (Moduł SF), lub |
|
— |
pełny system zarządzania jakością z procedurą badania projektu (Moduł SH2). |
6.2.2.2. Zespół przytorowy
W celu weryfikacji zgodności zespołu przytorowego podmiot zamawiający lub jego upoważniony przedstawiciel mający siedzibę na terenie Wspólnoty może wybrać:
|
— |
procedurę weryfikacji urządzenia (Moduł SG), lub |
|
— |
procedurę badania typu (Moduł SB) dotyczącą fazy projektowania i wytwarzania, w połączeniu z procedurą systemu zarządzania jakością produkcji (Moduł SD) dla fazy produkcyjnej, lub |
|
— |
procedurę badania typu (Moduł SB) dotyczącą fazy projektowania i wytwarzania, w połączeniu z procedurą weryfikacji wyrobu (Moduł SF), lub |
|
— |
pełny system zarządzania jakością z procedurą badania projektu (Moduł SH2). |
6.2.2.3. Warunki zastosowania modułów dla zespołów pokładowych oraz przytorowych
Moduł SD (system zarządzania jakością produkcji) może być wybrany wyłącznie wtedy, gdy podmiot zamawiający zawiera umowę tylko z producentami, którzy posiadają system jakości dla produkcji, kontroli i testowania wyrobu końcowego, zatwierdzony i kontrolowany przez jednostkę notyfikowaną.
Moduł SH2 (pełny system zarządzania jakością z badaniem projektu) może być wybrany wyłącznie wtedy, gdy wszystkie działania podejmowane w ramach realizacji projektu Podsystemu, jakie mają być poddane weryfikacji (projektowanie, produkcja, montaż, instalacja) objęte są systemem jakości w zakresie projektowania, produkcji, kontroli i testowania wyrobu końcowego, zatwierdzonym i kontrolowanym przez jednostkę notyfikowaną.
Niezależnie od wybranego modułu przegląd projektu obejmuje sprawdzenie, czy spełnione są wymagania podane w punkcie 4.5 (Zasady utrzymania) niniejszej specyfikacji.
Niezależnie od wybranego modułu stosuje się postanowienia podane w załączniku A, indeksy 47 i A1, oraz w odpowiednich sytuacjach także postanowienia indeksów A2 i A3.
W odniesieniu do informacji podanych w rozdziale 4 Modułu SB (badanie typu) wymagany jest przegląd projektu.
W odniesieniu do punktu 4.3 Modułu SH2 (pełny system zarządzania jakością produkcji z badaniem projektu) wymagane jest wykonanie badania typu.
W odniesieniu do:
|
— |
punktu 5.2 dla Modułu SD (system zarządzania jakością produkcji), |
|
— |
rozdziału 7 dla Modułu SF (weryfikacja wyrobu), |
|
— |
rozdziału 4 dla Modułu SG (weryfikacja urządzenia), |
|
— |
punktu 5.2 dla Modułu SH2 (pełny system zarządzania jakością produkcji z badaniem projektu), |
walidacja w pełnych warunkach roboczych zdefiniowana jest poniżej w podpunkcie „Walidacja zespołu pokładowego” oraz w podpunkcie „Walidacja zespołu przytorowego”.
Walidacja zespołu pokładowego
W odniesieniu do zespołu pokładowego walidacją w pełnych warunkach roboczych powinno być badanie typu. Dopuszczalne jest przeprowadzenie badania na pojedynczym egzemplarzu zespołu, przy czym badanie to należy wykonać przy użyciu prób mających na celu sprawdzenie:
|
— |
działania funkcji odometrycznych, |
|
— |
kompatybilności zespołu BKJP z urządzeniami taboru kolejowego oraz środowiskiem roboczym (np. EMC) w celu umożliwienia powielenia danej implementacji zespołu pokładowego w innych lokomotywach tego samego typu, |
|
— |
kompatybilności taboru kolejowego z zespołem przytorowych BKJP (np. aspekty EMC, działanie obwodów torowych oraz liczników osi). |
Próby takie należy przeprowadzić na infrastrukturze umożliwiającej sprawdzenie w warunkach reprezentatywnych dla środowiska eksploatacji sieci europejskiej kolej konwencjonalnej (np. gradienty, prędkość pociągu, wibracje, zasilanie trakcji, temperatura).
Jeżeli próby wykażą, że specyfikacje nie są we wszystkich przypadkach spełnione (np. zgodność ze specyfikacją TSI tylko do określonej prędkości), konsekwencje dotyczące zgodności ze specyfikacją TSI należy zapisać w Certyfikacie zgodności oraz rejestrze taboru kolejowego.
Walidacja zespołu przytorowego
W odniesieniu do zespołu przytorowego walidacja w pełnych warunkach roboczych powinna być przeprowadzana w formie prób taboru kolejowego o znanej charakterystyce, w zakresie umożliwiającym sprawdzenie kompatybilności między taborem kolejowym a zespołem przytorowym BKJP (aspekty EMC, działanie obwodów torowych oraz liczników osi). Próby te należy wykonać przy użyciu odpowiedniego taboru kolejowego o znanej charakterystyce, umożliwiającej weryfikację w warunkach, jakie mogą występować w eksploatacji (np. prędkość pociągu, zasilanie trakcji).
Próby powinny także obejmować walidację kompatybilności informacji podawanych do maszynisty przez zespół przytorowy z fizycznym szlakiem kolejowym (np. ograniczenia prędkości itp.).
Odnośnie do specyfikacji, które są przewidywane, ale jeszcze niedostępne w aktualnej wersji specyfikacji TSI stosowanej do weryfikacji zgodności zespołu przytorowego, zespół przytorowy należy poddać walidacji za pomocą odpowiednich prób roboczych wykonywanych w terenie (powinny być one zdefiniowane przez podmiot zamawiający dany zespół przytorowy).
6.2.2.4. Ocena utrzymania
Ocena zgodności utrzymania leży w zakresie odpowiedzialności organu upoważnionego przez państwo członkowskie. W załączniku F podano procedurę, która jest stosowana przez ten organ w celu sprawdzenia, czy uzgodnienia w zakresie utrzymania spełniają wymagania niniejszej specyfikacji TSI i zapewniają spełnienie podstawowych parametrów oraz wymagań zasadniczych w czasie życia danego podsystemu.
Tabela 6.1
Wymagania dotyczące weryfikacji zgodności zespołu pokładowego BKJP
|
1 |
2 |
2a |
3 |
4 |
5 |
|
N |
Opis |
Uwagi |
Interfejsy Wewnątrz Podsystemu „Sterowanie” |
Powiązane Podsystemy Tsi |
Charakterystyka podlegająca ocenie w odniesieniu do rozdziału 4 niniejszej TSI |
|
1 |
Bezpieczeństwo |
Jednostka notyfikowana powinna zapewnić kompletne przeprowadzenie procesu zatwierdzenia systemu bezpieczeństwa, włącznie z dowodem bezpieczeństwa |
|
|
4.2.1 |
|
2 |
Pokładowe funkcje ETCS |
Funkcje te są realizowane przez IC pokładowych urządzeń ERTMS/ETCS |
|
|
4.2.2 |
|
Uwagi: |
|
|
|
||
|
Kontrola czujności maszynisty |
Nadzór nad czujnością jest zewnętrzny; możliwe jest połączenie między urządzeniem do kontroli czujności a pokładowym systemem ERTMS/ETCS dla celów blokowania |
OPE RST |
4.3.1.9 4.3.2.11 |
||
|
Nadzór ciągłości składu pociągu: w przypadku gdy pociąg skonfigurowany jest dla poziomu 3, nadzór ciągłości jego składu musi być wspierany przez urządzenia detekcyjne po stronie taboru kolejowego |
Interfejs między pokładowym systemem ERTMS/ETCS a urządzeniami detekcyjnymi |
RST |
4.3.2.8 |
||
|
3 |
Funkcje EIRENE |
Funkcje te są realizowane przez IC pokładowych urządzeń ERTMS/GSM-R |
|
|
4.2.4 |
|
Łączność dla danych tylko dla poziomu 1 z uaktualnieniem radiowym (opcjonalnie) lub poziomu 2 i poziomu 3 |
|
|
|
||
|
4 |
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
Funkcje te są realizowane przez IC pokładowych urządzeń ERTMS/ETCS i ERTMS/GSM-R |
Zespół przytorowy BKJP |
|
4.2.5 |
|
Łączność radiowa z pociągiem tylko dla poziomu 1 z uaktualnieniem radiowym (opcjonalnie) lub poziomu 2 i poziomu 3 |
|
|
|
||
|
Łączność z wykorzystaniem europętli jest opcjonalna |
|
|
|
||
|
5 |
Zarządzanie kluczami |
Polityka bezpieczeństwa dla zarządzania kluczami |
|
OPE |
4.2.8 4.3.1.7 |
|
6 |
Zarządzanie ETCS-ID |
Polityka dla zarządzania ETCS-ID |
|
OPE |
4.2.9 |
|
7 |
Interfejsy |
|
|
|
|
|
|
STM |
Jednostka notyfikowana powinna sprawdzić, czy spełnione są wymagania testów integracji, wydane przez odpowiednie państwo członkowskie |
IC urządzeń pokładowych ERTMS/ETCS i zewnętrznego STM |
|
4.2.6.1 |
|
|
Pokładowy ERTMS/GSM-R |
|
IC pokładowych urządzeń ERTMS/ETCS i ERTMS/GSM-R |
|
4.2.6.2 |
|
|
Odometria |
Ten interfejs nie jest stosowany, jeśli urządzenia są dostarczane w postaci grup składników |
IC pokładowych urządzeń ERTMS/ETCS i odometrii |
RST |
4.2.6.3 |
|
4.3.2.12 |
|||||
|
|
ETCS DMI |
Należy do IC pokładowych urządzeń ERTMS/ETCS |
|
OPE |
4.2.13 |
|
|
EIRENE DMI |
Należy do IC pokładowych urządzeń ERTMS/GSM-R |
|
|
4.3.1.2 4.2.14 |
|
|
|
|
OPE |
4.3.1.3 |
|
|
|
Interfejs dla rejestracji danych do celów prawnych |
Należy do IC rejestratora informacji o bezpieczeństwie |
|
|
4.2.15 |
|
|
|
|
OPE RST |
4.3.1.4 4.3.2.13 |
|
|
|
|
|
|||
|
|
Skuteczność hamowania pociągu |
Weryfikacja adaptacji do danego taboru kolejowego |
|
OPE |
4.3.1.5 |
|
|
RST |
4.3.2.3 |
|||
|
|
Izolacja |
|
|
OPE |
4.3.1.6 |
|
|
RST |
4.3.2.7 |
|||
|
|
Instalacja antenowa |
|
|
RST |
4.3.2.4 |
|
|
Warunki środowiskowe |
Weryfikacja prawidłowej pracy zespołu BKJP w różnych warunkach środowiskowych Badanie to należy przeprowadzić w ramach walidacji w pełnych warunkach roboczych |
|
RST |
4.3.2.5 |
|
|
Kompatybilność elektromagnetyczna (EMC) |
Weryfikacja prawidłowej pracy zespołu BKJP w różnych warunkach środowiskowych Badanie to należy przeprowadzić w ramach walidacji w pełnych warunkach roboczych |
|
RST |
4.3.2.6 |
|
|
Interfejs dla danych |
Należy do IC pokładowych urządzeń ERTMS/ETCS |
|
RST |
4.3.2.8; 4.3.2.11 |
|
|
Prawidłowe działanie interfejsu do pociągu Ten interfejs obejmuje kontrolę czujności (opcjonalnie) oraz ciągłości składu pociągu (tylko poziom 3) |
|
OPE |
4.3.1.9 |
Tabela 6.2
Wymagania dotyczące weryfikacji zgodności zespołu przytorowego BKJP
|
1 |
2 |
2a |
3 |
4 |
5 |
|
N |
Opis |
Uwagi |
Interfejsy Wewnątrz Podsystemu „sterowanie” |
Powiązane Podsystemy Tsi |
Charakterystyka podlegająca ocenie w odniesieniu do rozdziału 4 niniejszej TSI |
|
1 |
Bezpieczeństwo |
Jednostka notyfikowana powinna zapewnić kompletne przeprowadzenie procesu zatwierdzenia systemu bezpieczeństwa, włącznie z dowodem bezpieczeństwa |
|
|
4.2.1 |
|
2 |
Funkcje przytorowe ETCS |
Funkcje te są realizowane przez IC RBC, LEU i uaktualniania radiowego, odpowiednio do implementacji |
|
|
4.2.3 |
|
3 |
Funkcje EIRENE |
Transmisja danych tylko dla poziomu 1 z radiowym przesyłaniem informacji uaktualniających lub dla poziomu 2/3 |
|
|
4.2.4 |
|
4 |
Interfejsy ETCS i EIRENE z transmisją bezprzewodową |
Funkcje te są realizowane przez urządzenia RBC, LEU, uaktualniania radiowego, eurobalisy, europętli i przytorowy GSM-R, odpowiednio do implementacji |
Zespół pokładowy BKJP |
|
4.2.5 |
|
Łączność z radiowa z pociągiem tylko dla poziomu 1 z uaktualnieniem radiowym (opcjonalnie) lub poziomu 2/3 |
|
|
|
||
|
Łączność europętli jest opcjonalna |
|
|
|
||
|
5 |
Zarządzanie kluczami |
Polityka bezpieczeństwa dla zarządzania kluczami |
|
OPE |
4.2.8 4.3.1.7 |
|
6 |
Zarządzanie ETCS-ID |
Polityka dla zarządzania ETCS-ID |
|
OPE |
4.2.9 |
|
7 |
HABD |
|
|
OPE |
4.2.10 |
|
RST |
4.3.1.8 4.3.2.9 |
||||
|
8 |
Interfejsy RBC/RBC |
Tylko dla poziomu 2/3 |
Między sąsiednimi RBC |
|
4.2.7.1 |
|
Przytorowe GSM-R |
Tylko dla poziomu 2/3, albo 1 z radiowym przesyłaniem informacji uaktualniających (opcjonalnie) |
Między urządzeniami RBC lub radiowego przesyłania informacji uaktualniających a przytorowymi urządzeniami GSM-R |
|
4.2.7.3 |
|
|
Eurobalisa/LEU |
Ten interfejs nie jest stosowany, jeśli urządzenia są dostarczane w postaci grup składników |
Między IC BKJP |
|
4.2.7.4 |
|
|
Europętla/LEU |
Europętla jest opcjonalna |
Między IC BKJP |
|
4.2.7.5 |
|
|
Ten interfejs nie jest stosowany, jeśli urządzenia są dostarczane w postaci grup składników |
|
|
|
||
|
Instalacja antenowa |
|
|
IN |
4.3.3.2 |
|
|
Warunki środowiskowe |
Weryfikacja prawidłowej pracy zespołu BKJP w różnych warunkach środowiskowych Badanie to należy przeprowadzić w ramach walidacji w pełnych warunkach roboczych |
|
IN |
4.3.3.3 |
|
|
Kompatybilność elektromagnetyczna (EMC) |
Weryfikacja prawidłowej pracy zespołu BKJP w różnych warunkach środowiskowych Badanie to należy przeprowadzić w ramach walidacji w pełnych warunkach roboczych |
|
IN ENE |
4.3.3.4 4.3.4.1 |
|
|
9 |
Kompatybilność systemów detekcji pociągu |
Charakterystyka uruchamiania przez tabor kolejowy |
|
RST |
4.2.11 4.3.1.10 |
|
IN |
4.3.2.1 4.3.3.1 |
||||
|
10 |
Kompatybilność elektromagnetyczna między taborem kolejowym a systemami detekcji pociągu |
|
|
RST |
4.2.12.2 4.3.2.2 |
|
Kompatybilność ze światłami głównymi pociągu |
Charakterystyka odblaskowych znaków przytorowych oraz odzieży |
|
RST |
4.2.16 4.3.2.10 |
|
|
Kompatybilność z zewnętrznym polem widzenia maszynisty |
Instalacja urządzeń przytorowych, które musi widzieć maszynista |
|
OPE |
4.2.16 4.3.1.11 |
7. IMPLEMENTACJA SPECYFIKACJI TSI „STEROWANIE”
7.1. Informacje ogólne
W rozdziale tym nakreślono strategię oraz rozwiązania techniczne związane z implementacją niniejszej specyfikacji TSI, a w szczególności warunki migracji do systemów klasy A. Należy uwzględnić fakt, iż implementacja specyfikacji TSI powinna w pewnych okolicznościach być skoordynowana z implementacją innych specyfikacji.
Rozdziały 2 do 6 oraz szczególne postanowienia podane w punkcie 7.3 poniżej dotyczą w całości podsystemu „Sterowanie”, jak zdefiniowano w dyrektywie 2001/16/WE.
7.2. Specyficzne zagadnienia związane z implementacją TSI „Sterowanie”
7.2.1. Ogólne kryteria migracji
W obrębie podsystemu „Sterowanie” zdefiniowano dwie klasy kontroli pociągów (A i B) oraz systemów łączności radiowej:
Ogólnie uznaje się, że systemy klasy A nie mogą być natychmiast instalowane na istniejących liniach kolei konwencjonalnej, co wynika z powodów ekonomicznych oraz możliwości instalacyjnych. W okresie migracji z aktualnego rozwiązania (przed unifikacją – klasa B) oraz wprowadzeniem klasy A, wprowadzanych będzie kilka rozwiązań interoperacyjnych, które mogą być implementowane w ramach niniejszej specyfikacji TSI. Rozwiązania te dotyczą zarówno infrastruktury europejskiej kolei konwencjonalnej, włącznie z liniami łączącymi, jak również pociągów europejskiej kolei konwencjonalnej. Poniżej podano kilka przykładów dla zilustrowania tego zagadnienia:
|
— |
W ERTMS/ETCS przewidziano miejsce na moduły znane jako STM (Specific Transmission Module – specyficzny moduł transmisyjny), które mogą być dodane do ETCS w celu umożliwienia funkcjonowania pociągu, wyposażonego w odpowiednie moduły STM, w istniejącej infrastrukturze na etapie przedunifikacyjnym. Innym rozwiązaniem jest wyposażenie infrastruktury w obydwa systemy, klasy A i klasy B. |
|
— |
Implementacja krajowych systemów GSM-R już się rozpoczęła w wielu krajach byłej piętnastki UE. Pierwsze połączenia wzajemne tych krajowych sieci spodziewane są w 2004 roku. Pozostałe sieci wkrótce do nich dołączą. Niektóre koleje wybrały rozwiązanie, w którym urządzenia mobilne są zaprojektowane w taki sposób, aby mogły współpracować z obydwoma systemami (tryb Dual = GSM-R i >=1 radio analogowe), a inne zastosowały rozwiązanie podwójnego pokrycia po stronie sieci, ale tylko jeden rodzaj sprzętu na pokładzie pociągu. GSM-R nie zawiera modułów STM. Radiostacje kabinowe, które posiadają dodatkowe interfejsy do systemów radiowych klasy B (tryb Dual), mogą pracować także na liniach klasy B, jeżeli są do tego specjalnie przystosowane. Rozwiązanie to jest tymczasowe i pozwala tylko na szybszą wymianę pociągów międzynarodowych. |
7.2.1.1. Ścieżki migracji
Systemy istniejące, a także przyszłe systemy zunifikowane, zbudowane są z urządzeń znajdujących się po stronie infrastruktury oraz urządzeń pokładowych. Strategie migracji należy więc opracować dla obydwu tych zespołów. W punkcie tym określono ścieżki migracji z klasy B do klasy A na wybranych przykładach.
Strategie migracji muszą zwracać szczególną uwagę na następujące rozróżnienie:
|
— |
radio pokładowe (z klasy B do klasy A), |
|
— |
kontrola pociągu (z klasy B do klasy A), |
|
— |
system detekcji pociągu, |
|
— |
system detekcji zagrzanych osi, |
|
— |
kompatybilność elektromagnetyczna. |
Każde z powyższych zagadnień może mieć własną ścieżkę migracji.
Możliwości migracji z klasy B do klasy A są objaśnione przy użyciu poniższych przykładów dotyczących systemu kontroli pociągu.
Rysunek 1
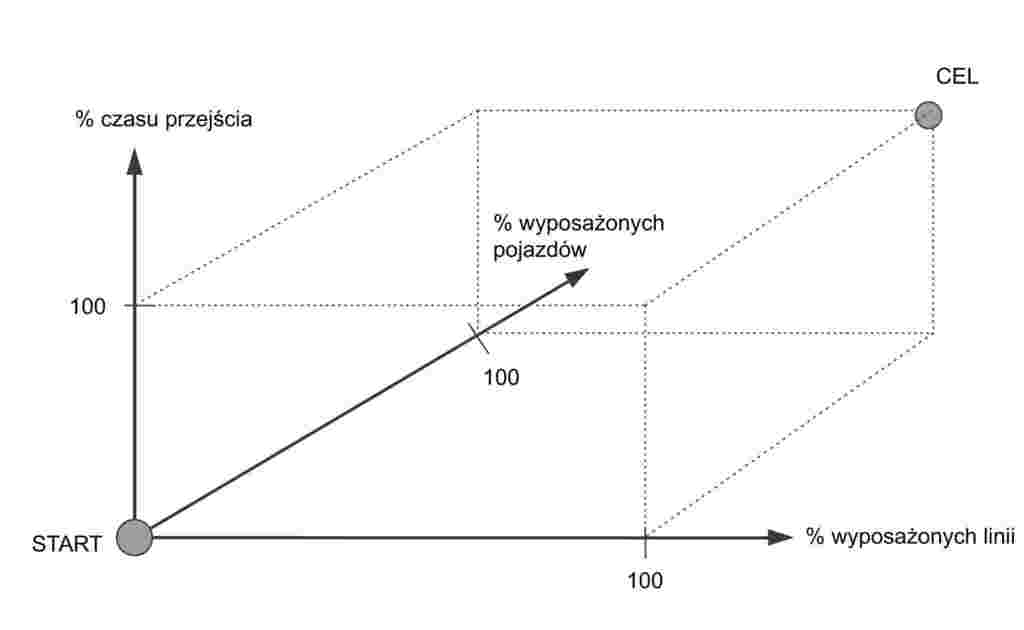
Rysunek 1 przedstawia stan początkowy, gdzie istnieją tylko systemy niekompatybilne (oznaczone START) oraz stan docelowy (oznaczony CEL)
Poniższe dwa rysunki opisują dwie możliwe, skrajne ścieżki migracji od stanu obecnego do stanu przyszłego.
Rysunek 2
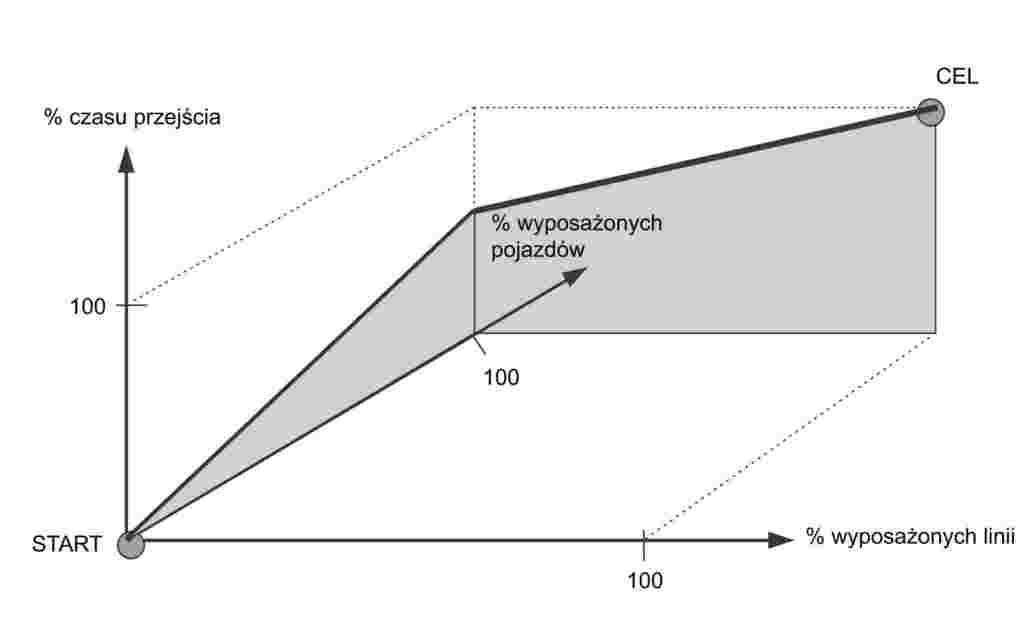
Rysunek 2 przedstawia proces migracji, gdzie wszystkie początkowe inwestycje dotyczą tylko urządzeń pokładowych. Możliwe jest rozwiązanie techniczne zwane STM, które może być podłączone do jądra ETCS na pokładzie i które dokonuje translacji informacji z istniejących systemów do formy, jaka może być przetwarzana przez jądro ETCS. Po zamontowaniu na wszystkich pojazdach rozważanego taboru kolejowego urządzeń zawierających jądro ETCS oraz odpowiednie systemy klasy B można przystąpić do zmiany systemów przytorowych na ETCS, a linie nowo budowane można projektować już pod kątem pracy w systemie ETCS. Istniejące systemy klasy B na tych liniach można zdemontować.
Rysunek 3
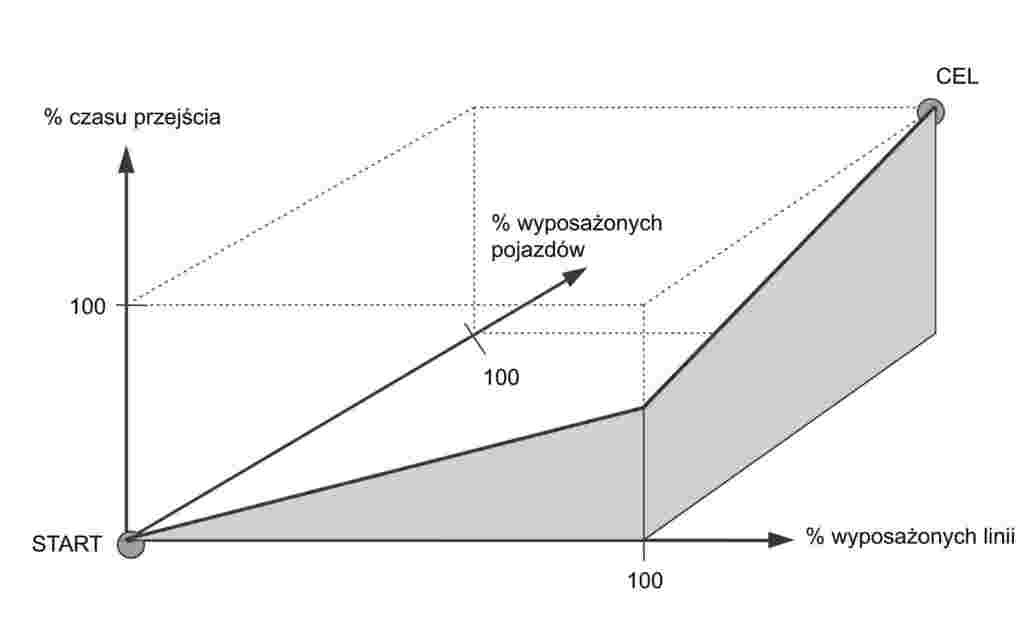
Rysunek 3 przedstawia drugą skrajność procesu migracji. W tym przypadku dana kolej będzie dublowała wyposażenie swoich istniejących linii w dodatkowy system ETCS. Po wprowadzeniu ETCS jako dodatku do systemów krajowych na wszystkich liniach można przystąpić do zmiany wyposażenia pokładowego na ETCS. Kiedy wszystkie rozważane pojazdy wyposażone są już w ETCS, krajowy system działający na liniach kolejowych można zdemontować.
Rysunek 4

Rysunek 4 przedstawia kombinację obydwu skrajnych przypadków opisanych powyżej. Możliwości wyboru ścieżki migracji mieszczą się między tymi dwiema skrajnościami. Z praktycznego punktu widzenia realizowana będzie pewna mieszanka obydwu ścieżek migracji.
Rysunek 5
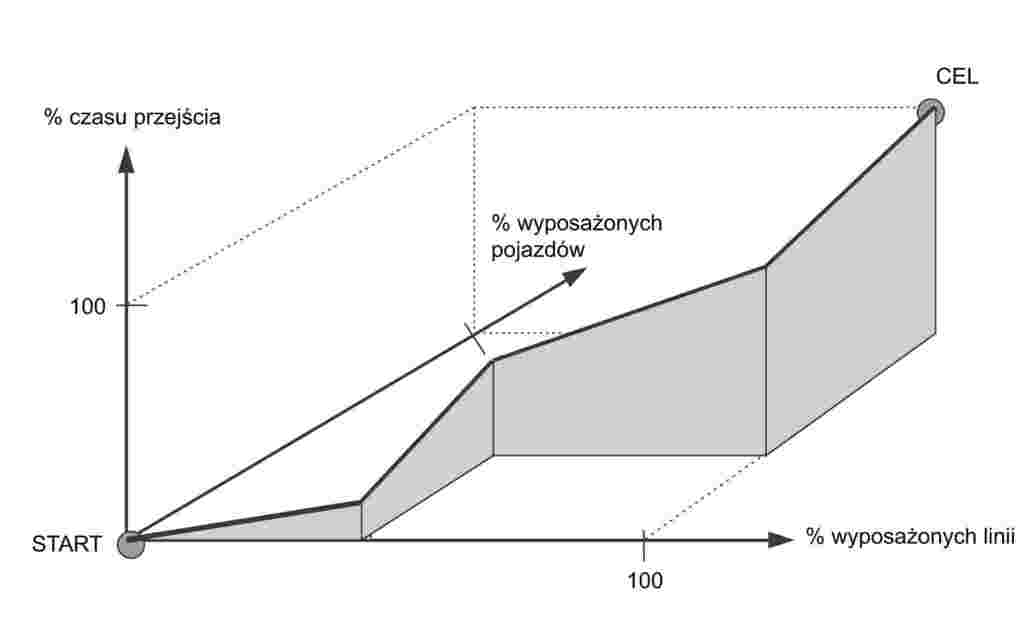
Rysunek 5 przedstawia przykład, w którym urządzenia pokładowe ETCS oraz urządzenia przytorowe ETCS instalowane są na części linii. Metoda ta pozwala na zmniejszenie nakładów inwestycyjnych niezbędnych do wykorzystania zalet systemu jako całości (tzn. urządzeń pokładowych i przytorowych, w miejscach, gdzie są zainstalowane). Z drugiej strony implikuje to określone ograniczenia w wykorzystaniu taboru kolejowego w danej sieci kolejowej.
Wybór najodpowiedniejszej strategii migracji zależy w dużym stopniu od tego, ile w obrębie danego kraju znajduje się linii wyposażonych w nowy sprzęt, taboru wyposażonego w nowy sprzęt, planowanych zakupów nowego taboru oraz instalacji dodatkowego wyposażenia na liniach.
Należy także przy tym uwzględnić korytarze kolejowe dla linii międzynarodowych oraz wykorzystanie taboru kolejowego za granicą. Jeżeli dana linia nie jest przewidziana do migracji i wyposażona jest tylko w sprzęt klasy B, interoperacyjność można zapewnić poprzez zastosowanie modułów STM dla danego systemu klasy B.
Etapy migracji powinny jednak umożliwiać dostęp innych przewoźników kolejowych do danej sieci kolejowej w dowolnym czasie. Pojazd wyposażony w odpowiednie urządzenia pokładowego ETCS oraz istniejący system opisany w załącznikach B i C, muszą zawsze mieć zapewnioną możliwość funkcjonowania na danej linii.
7.2.2. Kryteria czasowe
7.2.2.1. Wprowadzenie
ETCS i GSM-R są systemami komputerowym podlegającymi szybkiej ewolucji technologicznej i potencjalnie o krótszym czasie życia niż tradycyjne kolejowe systemy sterowania ruchem kolejowym i telekomunikacji. W związku z tym wymagają one raczej aktywnej niż pasywnej strategii wdrażania, aby uniknąć potencjalnego zestarzenia się systemu przed jego pełnym wdrożeniem.
Pomimo tego faktu wdrożenie zbyt rozczłonkowanego systemu w całej europejskiej sieci kolejowej, głównie wzdłuż transeuropejskich korytarzy kolejowych, może być przyczyną wzrostu kosztów eksploatacji wynikających z konieczności zapewnienia kompatybilności wstecznej i zdolności łączenia się z różnymi istniejącymi systemami. Ponadto możliwe jest uzyskanie zgody w zakresie czasu, kosztów i redukcji ryzyka w odniesieniu do wspólnych elementów różnych krajowych strategii implementacyjnych – poprzez wspólne inicjatywy zaopatrzeniowe, współpracę w walidacji systemu oraz działaniach certyfikacyjnych.
O ile taka aktywna strategia implementacji nie wydaje się konieczna do przeprowadzenia całego procesu migracji, to aby poszczególne części systemu były adaptowane do konwencjonalnej sieci kolejowej muszą uwzględniać aktualny poziom i planowany postęp we wdrożeniu tych technologii, jak również odpowiednie czynniki ekonomiczne, eksploatacyjne, techniczne i finansowe, które mają wpływ na proces wdrożeniowy.
Wyraźnie zatem widać, że istnieje konieczność dokonania jasnego rozróżnienia między ETCS i GSM-R w kontekście aktualnego stanu migracji w całej Europie, jak również wielkości oraz zasięgu ograniczeń takiej migracji, co stanowi przyczynę różnych przesłanek implementacji GSM-R i ETCS w sieci kolei konwencjonalnej. Takie wyraźne przesłanki będą określone bardziej szczegółowo w następnych punktach.
7.2.2.2. GSM-R – przesłanki wdrożenia
Aktualny stan wdrożenia systemu GSM-R w całej europejskiej sieci kolei konwencjonalnych (obecnie ok. 100 000 km, w 11 z 15 państw byłej piętnastki UE) oraz 4–5-letni horyzont czasowy, jaki ogólnie przyjmuje się do zakończenia prac wdrożeniowych, wskazują, że przy opracowywaniu uwarunkowań należy uwzględnić trzy podstawowe zagadnienia:
|
— |
zapewnienie ciągłości obsługi GSM-R przez granice, aby uniknąć „białych plam” w niektórych regionach Wspólnoty, |
|
— |
uzgodnienie harmonogramów migracji dla całej Europy w celu uzyskania znacznej redukcji kosztów i nakładów czasowych związanych z potencjalną koniecznością utrzymywania dwóch infrastruktur łącznościowych – analogowej i cyfrowej – oraz odpowiednich urządzeń pokładowych, |
|
— |
unikanie tworzenia się dwóch stref prędkości rozwoju w Europie wśród krajów starej piętnastki UE i nowych członków. Potrzeby dostosowawcze powinny stanowić cel wspierany przez bieżące programy modernizacji sieci kolejowych w nowych państwach członkowskich. |
7.2.2.3. GSM-R – Zasady implementacji
Na podstawie podanych wyżej informacji oraz uwzględniając fakt, iż infrastruktura GSM-R jest nośnikiem łączności dla kolei dużych prędkości oraz kolei konwencjonalnej, kryteria implementacji obowiązujące dla wcześniejszych zastosowań powinny w równym stopniu dotyczyć kolei konwencjonalnej, tzn.
Instalacje przytorowe:Zainstalowanie GSM-R jest obowiązkowe w przypadku: — nowych instalacji radiowych należących do zespołu BKJP, — modernizacji już eksploatowanej części radiowej zespołu BKJP, zmieniającej funkcje lub osiągi podsystemu. — nowych instalacji radiowych należących do zespołu BKJP, — modernizacji już eksploatowanej części radiowej zespołu BKJP, zmieniającej funkcje lub osiągi podsystemu.
Instalacje pokładowe:Zainstalowanie GSM-R na taborze kolejowym przeznaczonym do użytkowania na linii, której co najmniej jedna część wyposażona jest w interfejsy klasy A (nawet jeżeli są nałożone na system klasy B), jest obowiązkowe w przypadku:
Systemy istniejące:Państwa członkowskie zapewnią funkcjonalność systemów istniejących, o których mowa w załączniku B do TSI, oraz ich interfejsów zgodnie z obecnymi specyfikacjami, wyłączając te modyfikacje, które mogą być uznane za konieczne dla łagodzenia usterek związanych z bezpieczeństwem tych systemów. Państwa członkowskie udostępniają konieczne informacje dotyczące istniejących u nich systemów, które są konieczne dla potrzeb rozwoju oraz certyfikacji bezpieczeństwa aparatu pozwalającego na interoperacyjność urządzeń klasy A z istniejącymi urządzeniami klasy B.
Aby umożliwić dokonanie aktywnej implementacji, państwa członkowskie są także zachęcane do promowania i wspierania instalowania GSM-R w trakcie wszelkich prac modernizacyjnych lub utrzymaniowych mających wpływ na całą infrastrukturę już eksploatowaną, obejmujących nakłady inwestycyjne co najmniej o rząd wielkości większe niż związane z zainstalowaniem urządzeń GSM-R.
7.2.2.4. ERMS-ETCS – przesłanki wdrożenia
7.2.2.4.1.
Obecnie wdrożenie ERTMS/ETCS na liniach konwencjonalnych musi być uzasadnione innymi przesłankami, które uwzględniają różnorodne komplikacje związane z migracją systemów sterowania ruchem kolejowym, ze związanymi z nią kosztami oraz z ich oczekiwanym dłuższym okresem eksploatacji, w porównaniu z systemem GSM-R. Bariery te nie powinny jednak mieć żadnego wpływu na podstawowe przyczyny wdrożenia tego systemu, przedstawione w punkcie 7.2.2.1, a w szczególności na konieczność zachowania właściwego terminarza implementacji tego systemu w głównych korytarzach kolejowych oraz na liniach magistralnych transeuropejskiego systemu linii kolejowych (TEN).
7.2.2.4.2.
W celu usunięcia widocznego konfliktu celów unikania podejścia fragmentarycznego z obserwowanymi ograniczeniami inwestycyjnymi wydaje się być konieczne zdefiniowanie początkowego rdzenia projektów kolejowych, gdzie wdrożenie ERTMS/ETCS będzie naprawdę uzasadnione „od końca do końca” perspektywą biznesu/usług, nie tworząc jednocześnie niemożliwych do przyjęcia barier wynikających z kosztów implementacji. W świetle takich nadrzędnych celów oraz po konsultacji z sektorem uznano, że rdzeń taki powinien być budowany na bazie spójnego zestawu priorytetowych korytarzy transeuropejskiego systemu kolejowego. Cele do osiągnięcia przy takim podejściu są trojakie:
|
i) |
możliwość utworzenia interoperacyjnej sieci szkieletowej w całej Europie (zwanej dalej ETCS-Net), pozwalającej na wdrożenie nowych oraz lepszej jakości usług kolejowych, które mogą w efekcie podwyższyć profil konkurencyjności transportu kolejowego, zwłaszcza w tych segmentach rynku, gdzie istnieje największy potencjał rozwojowy, np. międzynarodowy transport towarowy; |
|
ii) |
skoncentrowanie działań na międzynarodowej koordynacji wysiłków oraz na koncentracji instrumentów finansowych w świetle przyspieszonego i poszerzonego wdrożenia ERTMS-ETCS na głównych szlakach transeuropejskiego systemu kolejowego; |
|
iii) |
przybliżenie się do stanu „masy krytycznej”, w którym ERTMS/ETCS stanie się naturalnym wyborem rynkowym dla nowych i modernizacyjnych projektów budowy systemów sterowania ruchem kolejowym w sieci kolei konwencjonalnej w Europie. |
Ogólny zarys ETCS-Net przedstawiono poniżej. Szczegółowy wykaz korytarzy objętych tą siecią podano w załączniku H.

W celu zapewnienia spójności budowanej sieci szkieletowej dla rozwoju zaawansowanych usług na całych liniach kolejowych, sieć połączeń ETCS-Net, jak wyżej przedstawiono, budowana będzie na bazie linii dużych prędkości (4) oraz linii konwencjonalnych. Wdrożenie ERTMS/ETCS na tych pierwszych objęte jest decyzją 2002/731/WE, natomiast zasady implementacji podane poniżej dotyczą tych drugich linii.
Mając na względzie, by taka sieć szkieletowa przyczyniła się do gruntownej przebudowy międzynarodowych usług transportowych w horyzoncie czasowym przewidywalnym z perspektywy klienta kolei, konieczne jest przyjęcie ambitnego planu pełnej realizacji przedsięwzięcia. Uwzględniając szereg parametrów, jakie mają wpływ na drugą kwestię (np. poziom zasobów inwestycyjnych, możliwości zarządzania zagadnieniami technicznymi i realizacją tego projektu przez koleje oraz przemysł dostarczający urządzenia, potrzeby w zakresie transgranicznej koordynacji działań), jako ramy czasowe dla realizacji tego celu można przyjąć okres od 10 do 12 lat.
7.2.2.4.3.
Dla wdrożenia całej sieci ETCS-Net w takim horyzoncie czasowym konieczne jest uruchomienie procesu implementacji poprzez wyznaczenie podzbiorów projektów (zwanego dalej „jądrem początkowym”), w których zastosowanie ETCS-Net będzie obowiązkowe. Przyjęcie takiego podejścia zasadniczo powraca do przyjęcia trzypoziomowej perspektywy, jak to zilustrowano poniżej
Aby zredukować finansowe skutki takiego obowiązkowego kroku, kryteria wyboru projektów włączanych w jądro początkowe powinny przede wszystkim uwzględniać dostępność środków finansowych Wspólnoty na poziomie znacznie przekraczającym kwoty, które zazwyczaj przeznaczane są na prace dotyczące sterowania ruchem kolejowym. Zbiór projektów dotyczących kolei konwencjonalnej ustanowionych w ramach wytycznych dla Sieci Transeuropejskich (decyzja 884/2004/WE Parlamentu Europejskiego i Rady (5), a także wszystkie prace budowlane/modernizacyjne finansowane w ramach funduszy strukturalnych (rozporządzenie Rady (WE) nr 1260/1999 (6) i/lub Funduszu Spójności (rozporządzenie Rady (WE) nr 1264/1999 (7) winny być rozpatrywane jako stanowiące „jądro początkowe”.
Jądro początkowe ma stanowić punkt odbicia niezbędny do wprowadzenia w pełnym zakresie scenariusza sieci ETCS-Net zgodnie z opisem powyżej. Jednak realizacja tego ostatniego celu wymaga upublicznienia strategii wdrażania (czas wykonania oraz rozplanowanie prac), która będzie stanowić podstawę dla tych krajowych odcinków rozmaitych korytarzy, których nie obejmują kryteria jądra początkowego. Aby zapewnić takie upublicznienie, państwa członkowskie będą musiały rozwinąć plany wdrożeniowe dotyczące ERTMS i odpowiadające na szerokie spektrum kwestii wdrożeniowych, opisanych w punkcie 7.2.2.6.
Zakres obecnego szkieletu sieci ETCS-Net może podlegać weryfikacji w trakcie kolejnej fazy (potencjalnie podczas przyszłej weryfikacji TSI), która będzie uwzględniać faktyczny postęp procesu wdrożeniowego oraz ciągle zmieniające się potrzeby rynków transportu.
Przesłanki dotyczące taboru muszą uwzględniać fakt, że ERTMS/ETCS jest koncepcją systemu składającego się z infrastruktury oraz elementów pokładowych. W związku z tym niezwykle istotne jest, by każde pojawiające się uzasadnienie wdrażania uwzględniało w sposób spójny oba te elementy, ponieważ oba współdziałają ze sobą, umożliwiając funkcjonowanie systemu. Oprócz tego, podobnie jak w przypadku infrastruktury, należy odpowiednio rozważyć minimalizację skutków finansowych jakiegokolwiek zarządzanego kroku obowiązkowego.
Najlepszą drogą do osiągnięcia takiego celu jest podejście „minimalnego kosztu”, łączące odpowiedniość urządzeń pokładowych systemu ERTMS/ETCS z podstawowymi decyzjami inwestycyjnymi. Dotyczy to przede wszystkim nowych zamówień na tabor lub głównych operacji doposażających, dla których wartość urządzeń sterowania ruchem kolejowym oraz ich instalacji stanowi jedynie niewielki odsetek całej kwoty wdrażanej inwestycji. Przyjęcie takiej strategii w długim terminie przyspieszy realizację scenariusza dla urządzeń pokładowych ETCS jako użytecznej zalety nowego taboru kolejowego.
7.2.2.4.4.
Wyposażenie wyprzedzające obejmuje instalację wszelkich pokładowych lub przytorowych urządzeń ERTMS/ETCS oraz GSM-R lub innego wyposażenia wspomagającego ETCS i GSM-R (np. instalacja okablowania, trasy kablowe, urządzenia mechaniczne, interfejsy, dostawa energii oraz inne, określone urządzenia sterowania ruchem kolejowym lub telekomunikacyjne), które działają na rzecz osiągnięcia określonej gotowości ERTMS bez pełnego wdrożenia wymogów klasy A.
Celem takiego podejścia jest zapewnienie takiej gotowości ERTMS poprzez równoległość działań dotyczących wyposażenia wyprzedzającego z głównymi projektami budowlanymi lub modernizacyjnymi elementów infrastruktury lub elementów taboru wykonanych w fabryce (8). Powinno to zmniejszyć koszt wdrożenia w pełni rozwiniętych rozwiązań ERTMS/ECTS lub GSM-R spełniających wymogi klasy A na etapie późniejszym. Jednak zakres gotowości ERTMS musi zostać ustalony na postawie specyficznych cech każdego projektu, widzianych z perspektywy technicznej, operacyjnej oraz ekonomicznej oraz horyzontu czasowego dla instalacji urządzeń zgodnych z wymogami klasy A.
Dlatego też uznaje się za konieczne ustanowienie podejścia hierarchicznego dla wyposażania wyprzedzającego, w oparciu o pojęcia „etapów wyposażania wyprzedzającego”. Oczekuje się, że będą one obejmować zarezerwowanie przestrzeni, stworzenie tras kablowych oraz wyposażenie w urządzenia mechaniczne (etap 1), aż do instalacji wszystkich komponentów, których nie dotyczy zużycie się w okresie nominalnego czasu życia instalacji (etap 3). Szczegóły wyposażenia wstępnego mają być zdefiniowane przez podzbiór 57 UNISIG (pokładowe) oraz podzbiór 59 UNISIG (przytorowe), dołączony do załącznika A.
7.2.2.5. ERTMS/ETCS – Zasady implementacji
Wszystkie sugestie wyliczone w poprzednim ustępie będą ostatecznie kwalifikowane w sposób następujący:
Instalacje przytorowe:Wyposażenie ERTMS/ETCS jest obowiązkowe w przypadku: — nowych instalacji kontroli pociągu należących do zespołu BKJP, — modernizacji już eksploatowanej części kontroli pociągu zespołu BKJP, zmieniającej funkcje lub sposób funkcjonowania podsystemu, — są częścią priorytetowych projektów kolei konwencjonalnej ustanowionych w ramach wskazówek dla sieci transeuropejskiej zawartych w załączniku II do decyzji nr 884/2004/WE, — nakazują finansowe wsparcie od funduszy strukturalnych (rozporządzenie (WE) nr 1260/1999) i/lub Funduszu Spójności (rozporządzenie (WE) nr 1264/1999) w sumie przekraczającej 30 % łącznego kosztu projektu. — nowych instalacji części kontroli pociągu zespołu BKJP, — modernizacji już eksploatowanej części kontroli pociągu zespołu BKJP, zmieniającej funkcje lub osiągi podsystemu, — jakichkolwiek „ważniejszych doposażeń” eksploatowanego już taboru (9), — nowych instalacji części kontroli pociągu zespołu BKJP, — modernizacji już eksploatowanej części kontroli pociągu zespołu BKJP, zmieniającej funkcje lub osiągi podsystemu,
dla zbioru projektów infrastruktury kolejowej spełniających następujące kryteria:
Dla każdego projektu nowego rozwiązania lub modernizacji, której nie uwzględniają te ostatnie kryteria oraz która jest częścią transeuropejskiej sieci kolei konwencjonalnej, zgodnie z definicją poprawki z dnia 7 czerwca 2004 do decyzji nr 884/2004/WE, należy wykonać wyposażenie wyprzedzające w urządzenia do 1. fazy wyposażania wyprzedzającego, zgodnie z definicją podaną w punktach 7.2.2.4.4 oraz 7.2.3.2. Linie zawierające się w szkielecie sieci ETCS-Net i znajdujące się poza jądrem początkowym powinny być zgodne z założeniami 3. fazy wyposażania wyprzedzającego, w zakresie tego, czego dotyczy takie wyposażanie wyprzedzające.Celem umożliwienia aktywnego wdrożenia państwa członkowskie zachęca się także do promocji i wspierania wyposażenia w urządzenia ERTMS/ETCS podczas wszelkich prac rewitalizycyjnych czy dotyczących utrzymania infrastruktury, które pociągają za sobą nakłady inwestycyjne przynajmniej o jeden rząd wielkości większe niż te związane z instalacją urządzeń ERTMS/ETCS.Instalacje pokładowe:Wyposażenie taboru przeznaczonego do funkcjonowania w infrastrukturach kolei konwencjonalnych tam, gdzie urządzenia ERTMS/ETCS są obowiązkowe, powinno odbywać się zgodnie z krajową strategią migracyjną, po jej pogodzeniu z planem generalnym UE, jak to opisano w punkcie 7.2.2.6. oprócz wyjątku opisanego poniżej.Wyposażenie ERTMS/ETCS uzupełnione tam, gdzie to konieczne, odpowiednimi specyficznymi modułami transmisyjnymi (STM), celem umożliwienia funkcjonowania systemów klasy B, jest obowiązkowe w przypadku:
dla taboru kolejowego dla operacji transgranicznych w ramach jądra początkowego.Wyposażenie wstępne ERTMS/ETCS dla etapu 1 wyposażania wyprzedzającego, jak to zdefiniowano w punktach 7.2.2.4.4 oraz 7.2.4.4 dla
dla taboru kolejowego przeznaczonego dla sieci kolei konwencjonalnej transportu transeuropejskiego, zgodnie z definicją poprawki z dnia 7 czerwca 2004 r. do decyzji nr 884/2004/WE. Etap 3 wyposażenia wstępnego dotyczyć będzie tego taboru, który jest przeznaczony do funkcjonowania w ramach szkieletu sieci ETCS-Net.Systemy istniejące:Państwa członkowskie zapewnią funkcjonalność systemów istniejących, o których mowa w załączniku B do TSI oraz ich interfejsów zgodnie z obecnymi specyfikacjami, wyłączając te modyfikacje, które mogą być uznane za konieczne dla łagodzenia wad związanych z bezpieczeństwem tych systemów. Państwa członkowskie udostępnią konieczne informacje dotyczące istniejących u nich systemów, które są konieczne dla potrzeb rozwoju oraz certyfikacji bezpieczeństwa aparatu pozwalającego na interoperacyjność urządzeń klasy A z istniejącymi urządzeniami klasy B.
7.2.2.6. Krajowe plany wdrożenia ERTMS oraz plan główny UE
Na podstawie powyżej przedstawionych przesłanek wdrożenia oraz obowiązkowych zasad określonych w punktach 7.2.2.3 oraz 7.2.2.5 Państwa członkowskie winny przygotować formalne, krajowe plany wdrożenia ERTMS dla sieci kolei konwencjonalnej, dotyczące wdrożenia zarówno ERTMS/ETCS, jak i GSM-R.
Jeśli chodzi o ERTMS/ETCS, realizacja szkieletu sieci ETCS-Net, zgodnego z opisem w punkcie 7.2.2.4 powinna stanowić wzorzec referencyjny dla takiego planu krajowego. Ostatecznym celem tego ostatniego jest definicja dostosowanych do potrzeb zobowiązań dotyczących wdrażania ERTMS/ETCS „zamiast” ogólnych zarządzeń obecnych w tym momencie dla „jądra początkowego”. Jednak taka wbudowana elastyczność nie może odwracać uwagi od poziomu zobowiązań (10) zawartego już w „jądrze początkowym”.
Plany krajowe powinny w szczególności zapewniać następujące elementy:
|
— |
Linie docelowe: klarowna identyfikacja linii krajowych lub ich odcinków przeznaczonych do wdrożenia systemów. Dotyczy to przede wszystkim krajowych odcinków korytarzy międzynarodowych wyznaczonych w projekcie sieci ETCS (11). Należy odpowiednio uwzględnić plany notyfikowane zgodnie z decyzją 2002/731/WE w części dotyczącej odcinków dużych prędkości, objętych szkieletem sieci ETCS. |
|
— |
Wymagania techniczne: podstawowa charakterystyka techniczna różnych wdrożeń (np. sieć jakości danych lub głosu dla wdrożeń GSM-R, poziomu funkcjonalnego ERTMS/ETCS, instalacji ERTMS/ETCS lub nałożonych na nie). |
|
— |
Strategia i planowanie wdrożenia: zarys planu wdrożeniowego (łącznie z sekwencjonowaniem i harmonogramem robót). |
|
— |
Strategia migracji: strategia przewidziana dla migracji podsystemów infrastruktury oraz taboru kolejowego wyznaczonych linii lub odcinków krajowych (np. złożenie w jedno systemów klasy A oraz B, przejście z urządzeń klasy B do urządzeń klasy A w zaplanowanym momencie, migracja oparta na wdrażaniu rozwiązań wypełniających luki, opartych na ETCS, takich jak SCMT (12) lub Ograniczony Nadzór). |
|
— |
Potencjalne ograniczenia: zarys potencjalnych elementów mogących mieć wpływ na wypełnienie założeń planu wdrożeniowego (np. prace dotyczące sterowania ruchem kolejowym łączące szerszy zakres prac infrastrukturalnych, zapewnienie ciągłości usług po obu stronach granicy). |
Te plany krajowe mają ostatecznie zostać połączone w ramach planu generalnego UE w ciągu sześciu miesięcy od ich notyfikacji. Taki plan generalny powinien stanowić odpowiednią bazę informacji wspomagającą decyzje podejmowane przez różnych uczestników, przede wszystkim Komisję, w zakresie przydzielania wsparcia finansowego projektom kolejowym oraz, tam gdzie jest to konieczne, godzenia różnych wdrożeń krajowych, jeśli chodzi o strategie w nich użyte oraz czas, gdy jest to uznane za konieczne dla osiągnięcia spójnej całości. Cały proces można przedstawić zgodnie z rysunkiem poniżej:

Dodatkowo plan generalny UE będzie zawierał zarys programu taborowego stanowiącego podstawę dla całego zakresu przewidywanych działań wdrożeniowych od planowania do realizacji.
Plan generalny UE będzie załączony do TSI na podstawie procedury weryfikacji rozszerzając zakres wdrożeń obowiązkowych, ograniczony obecnie do jądra początkowego. Następnie
|
— |
wszystkie działania związane z instalacją podsystemów „Sterowanie” muszą zostać uzasadnione przez instytucje przyznające wsparcie na podstawie planu generalnego UE, obok wszystkich innych obowiązujących i stosowanych wymogów legislacyjnych, |
|
— |
państwa członkowskie będą poproszone o punktualne dostosowanie swoich krajowych planów wdrożenia ERTMS, gdy będzie to konieczne ze względu na osiągnięcie spójności z planem generalnym UE. Taka korekta powinna w szczególności zapewniać, by przyjęta przez państwo członkowskie strategia migracyjna (przede wszystkim dla taboru) nie utrudniała realizacji strategicznego celu sieci ETCS-Net oraz dostępu nowych uczestników zgodnie z harmonogramem i wymogami określonymi w planie generalnym UE, |
|
— |
jeśli pogodzenie planu krajowego z planem generalnym UE okaże się niewykonalne, obowiązkowe założenia jądra początkowego powinny pozostać do zastosowania w takim państwie członkowskim. |
Plan generalny UE oraz krajowe plany wdrożenia ERTMS muszą być dokumentami ewoluującymi, które będą uaktualnianie, by móc odzwierciedlać prawdziwy postęp ich realizacji w każdym państwie członkowskim oraz w całej europejskiej sieci kolejowej.
7.2.3. Implementacja: Infrastruktura (urządzenia stacjonarne)
Wymagania te obowiązują dla niżej wymienionych kategorii linii, zdefiniowanych w dyrektywie 2001/16/WE:
|
— |
linie przeznaczone dla ruchu pasażerskiego, |
|
— |
linie przeznaczone dla ruchu mieszanego (pasażerskiego i towarowego), |
|
— |
linie zaprojektowane lub zmodernizowane specjalnie dla usług towarowych; |
|
— |
węzły pasażerskie, |
|
— |
węzły towarowe, w tym terminale intermodalne, |
|
— |
linie łączące składniki wymienione powyżej. |
Podsystem „Sterowanie” dotyczy dwóch klas (A oraz B) systemów ochrony pociągu i komunikacji radiowej. Linie wymienione powyżej, które nie są obecnie wyposażone w urządzenia klasy A, będą wyposażone w:
|
— |
funkcje i interfejsy klasy A zgodnie ze specyfikacjami, o których mowa w załączniku A, lub |
|
— |
funkcje i interfejsy klasy A zgodnie ze specyfikacjami, o których mowa w załączniku A oraz funkcje i interfejsy klasy B zgodnie z załącznikiem B, lub |
|
— |
funkcje i interfejsy klasy B zgodnie z załącznikiem B oraz wyposażone wyprzedzająco dla klasy A, lub |
|
— |
jedynie w funkcje i interfejsy klasy B zgodnie z załącznikiem B. |
W przypadku gdy linie należące do zakresu obecnej TSI nie będą wyposażone w systemy klasy A, państwa członkowskie dołożą wszelkich starań, by zapewnić dostępność zewnętrznych Specyficznych Modułów Transmisji (STM) dla istniejącego systemu lub systemów klasy B. W tym kontekście należy zwrócić szczególną uwagę na zapewnienie otwartego rynku dla STM na uczciwych warunkach. W przypadkach, w których ze względu na przyczyny techniczne lub komercyjne (13) dostępność STM nie może zostać zapewniona w wymaganym czasie (14), zainteresowane państwa członkowskie winny poinformować Komitet o przyczynach takiego problemu oraz środkach zaradczych, które mają zostać podjęte, by umożliwić (przede wszystkim operatorom z zagranicy) dostęp do swojej infrastruktury.
7.2.3.1. Dodatkowe urządzenia klasy B na linii wyposażonej w urządzenia klasy A
Na linii wyposażonej w ETCS i/lub GSM-R dodatkowe urządzenia klasy B są możliwe, by zapewnić funkcjonowanie taboru niespełniającego wymogów klasy A podczas fazy migracji. Istniejące urządzenia pokładowe klasy B mogą być stosowane jako rozwiązanie awaryjne dla systemu klasy A: nie pozwala to zarządcy infrastruktury wymagać do jazdy po takiej linii systemów pokładowych klasy B od pociągów interoperacyjnych.
Tam, gdzie ma miejsce równoczesne wyposażenie w systemy klasy A i B, oba systemy mogą być jednocześnie aktywne jako systemy pokładowe, pod warunkiem że krajowe wymagania techniczne oraz przepisy ruchu przewidują takie działanie i że w związku z tym nie występuje ograniczenie interoperacyjności. Krajowe wymagania techniczne i zasady działania będą przedstawione przez państwo członkowskie.
7.2.3.2. Wyposażenie wyprzedzające dla klasy A
Wstępne wyposażenie przytorowe definiowane jest jako instalacja wszelkiego wyposażenia ETCS i GSM-R lub innego wyposażenia wspierającego ETCS i GSM-R (np. instalacja okablowania dla interfejsów sprzęgających, LEU lub magistrali światłowodowych), które są zainstalowane, lecz niekoniecznie oddane do eksploatacji, która ma na celu redukcję kosztu wdrożenia pełnej wersji urządzeń ERTMS/ETCS lub GSM-R w zgodzie z wymogami klasy A na późniejszym etapie. Dla ETCS, zakres wyposażenia wyprzedzającego trzypoziomowej struktury etapów wyposażania wyprzedzającego, określonych w punkcie 7.2.2.4.4, powinien spełniać założenia indeksu 59 załącznika A (w przygotowaniu).
Zakres wyposażenia wyprzedzającego powinien zostać ustalony podczas planowania implementacji dla urządzeń sterowania ruchem kolejowym i telekomunikacyjnych, które mają zostać uruchomione. Planowanie sieci dla GSM-R na początkowym etapie w szczególności winno uwzględniać włączenie wszelkich usług, które są przewidywane także w przyszłości (głos, dane oprócz krytycznych ze względu na bezpieczeństwo, ETCS).
7.2.3.3. Modernizacja lub odnowienie przytorowych zespołów BKJP lub ich części
Modernizacja lub odnowienie zespołów przytorowych może dotyczyć osobno:
|
— |
systemu radiowego (dla klasy B możliwe jest tylko odnowienie), |
|
— |
systemu ochrony pociągu, |
|
— |
interfejsu systemu detekcji pociągu, |
|
— |
systemu detekcji zagrzanych osi, |
|
— |
charakterystyki EMC. |
Dlatego też różne części przytorowych zespołów BKJP mogą być osobno poddane zabiegom modernizacji lub odnowienia (jeśli nie powoduje to szkody dla interoperacyjności) i dotyczą:
|
— |
funkcji i interfejsów EIRENE (patrz: punkty 4.2.4 i 4.2.5), |
|
— |
funkcji i interfejsów ETCS/ERTMS (patrz: punkty 4.2.1, 4.2.3, 4.2.5, 4.2.7, 4.2.8), |
|
— |
systemu detekcji pociągu (patrz: punkt 4.2.11), |
|
— |
detektora zagrzanych osi (patrz: punkt 4.2.10), |
|
— |
charakterystyki EMC (patrz: punkt 4.2.12). |
Po modernizacji do systemu klasy A, istniejące urządzenia klasy B mogą być w dalszym ciągu wykorzystywane łącznie z systemem klasy A.
7.2.3.4. Rejestry infrastruktury
Rejestr infrastruktury będzie zawierał informacje o klasie A i klasie B dla przewoźników kolejowych, zgodnie z wymogami załącznika C. Rejestr infrastruktury określa, czy funkcje są funkcjami obowiązkowymi czy opcjonalnymi (15). Powinien on także identyfikować ograniczenia konfiguracji pokładowej.
W przypadku gdy specyfikacje europejskie dla niektórych interfejsów pomiędzy podsystemem „Sterowanie” a innymi podsystemami nie są dostępne w momencie instalacji (np. kompatybilność elektromagnetyczna między detekcją pociągu a taborem), rejestr infrastruktury powinien określać odpowiednie cechy charakterystyczne i zastosowane normy. W każdym przypadku powinno to dotyczyć wyłącznie pozycji wymienionych w załączniku C.
7.2.4. Implementacja: Tabor (urządzenia pokładowe)
Zgodnie z dyrektywą 2001/16/WE każda z kategorii taboru, która z dużym prawdopodobieństwem będzie przemieszczać się na wszystkich lub niektórych liniach transeuropejskiej sieci kolei konwencjonalnej, winna być podzielona na:
|
— |
tabor do użytku międzynarodowego, |
|
— |
tabor do użytku krajowego, |
odpowiednio uwzględniając lokalne, regionalne lub dalekobieżne wykorzystanie taboru.
Tabor wymieniony powyżej powinien być wyposażony w:
|
— |
funkcje i interfejsy klasy A zgodnie ze specyfikacjami, o których mowa w załączniku A, lub |
|
— |
funkcje i interfejsy klasy A zgodnie ze specyfikacjami, o których mowa w załączniku A, oraz funkcje i interfejsy klasy B zgodnie z załącznikiem B, lub |
|
— |
funkcje i interfejsy klasy B zgodnie z załącznikiem B oraz wstępnie wyposażone dla klasy A, lub |
|
— |
jedynie w funkcje i interfejsy klasy B zgodnie z załącznikiem B, lub |
|
— |
jak to stanowi punkt 7.2.5.2., |
tak by umożliwić mu poruszanie się na każdej linii, na której przewidywane jest jego funkcjonowanie.
7.2.4.1. Tabor z wyposażeniem wyłącznie klasy A
Zespół klasy A powinien zapewniać, że funkcje pokładowe, interfejsy i minimalne osiągi wymagane przez niniejszą specyfikację TSI są dopasowane do rozważanych linii, jak opisano w załączniku C. Instalacja urządzeń klasy A może wykorzystywać dodatkowe specyfikacje dla interfejsów pomiędzy taborem a BKJP.
7.2.4.2. Tabor z wyposażeniem wyłącznie klasy B
Wyposażenie klasy B powinno zapewniać, że funkcje pokładowe, interfejsy i minimalne osiągi wymagane przez niniejszą specyfikację TSI są dopasowane do rozważanych linii, jak opisano w załączniku C.
7.2.4.3. Tabor z wyposażeniem klasy A i klasy B
Tabor może być wyposażony w systemy klasy A i klasy B celem umożliwienia jego funkcjonowania na wielu liniach. Systemy klasy B mogą być wdrażane
|
— |
przy użyciu STM, który może zostać przyłączony do zespołu klasy A („zewnętrzny STM”), |
|
— |
poprzez wbudowanie w zespół klasy A. |
Oprócz tego system klasy B może być wdrażany niezależnie (lub w przypadku modernizacji lub odnowienia, zostawiony „w stanie obecnym”) w przypadku systemów klasy B, dla których STM nie jest alternatywą realną ekonomicznie z punktu widzenia właściciela taboru. Jeśli jednak STM nie jest stosowany, przewoźnik kolejowy winien zapewnić odpowiednie zarządzanie mimo sytuacji braku „zgodności” (= obsługi przez ETCS przejść między zespołami przytorowymi klasy A i klasy B). Państwa członkowskie mogą wyznaczyć odpowiednie wymogi dotyczące tego aspektu w rejestrze infrastruktury.
Podczas działania na linii, która wyposażona jest w oba systemy, tj. klasy A i klasy B, system klasy B może działać jako rozwiązanie awaryjne dla systemu klasy A, jeśli pociąg wyposażony jest zarówno w systemy klasy A, jak i klasy B. Nie może to stanowić wymogu interoperacyjności i nie dotyczy GSM-R.
7.2.4.4. Wyposażenie wyprzedzające dla klasy A
Pokładowe wyposażenie wyprzedzające definiowane jest jako instalacja wszelkich urządzeń ETCS i GSM-R lub innego wyposażenia wspierającego ETCS i GSM-R (np. instalacja okablowania, anten, czujników, źródeł zasilania lub instalacyjnych elementów mocujących), które są zainstalowane lecz niekoniecznie oddane do eksploatacji, mająca na celu redukcję kosztu wdrożenia pełnej wersji urządzeń ERTMS/ETCS lub GSM-R w zgodzie z wymogami klasy A na późniejszym etapie. Dla ETCS, zakres wstępnego wyposażenia trzypoziomowej struktury etapów wyposażenia wstępnego, określonych w punkcie 7.2.2.4.4, powinien spełniać założenia indeksu 57 załącznika A (w przygotowaniu).
Zakres wstępnego wyposażenia powinien zostać ustalony podczas fazy konstrukcyjnej dla urządzeń sterowania ruchem kolejowym i telekomunikacyjnych. Wyposażenie wstępne może wykorzystywać dodatkowe specyfikacje interfejsów pomiędzy podsystemami „Tabor kolejowy” i „Sterowanie”.
7.2.4.5. Odwrotny STM
Patrz: punkt 7.2.5.2.
7.2.4.6. Modernizacja lub odnowienie zespołu pokładowego BKJP lub jego części
Modernizacja lub odnowienie zespołu pokładowego może dotyczyć osobno:
|
— |
systemu radiowego (klasy B do klasy A), |
|
— |
systemu ochrony pociągu (klasy B do klasy A). |
Dlatego też różne części pokładowych zespołów BKJP mogą być osobno poddane zabiegom modernizacji lub odnowienia (jeśli nie powoduje to szkody dla interoperacyjności) i dotyczą:
|
— |
funkcji i interfejsów EIRENE (patrz: punkty 4.2.4 i 4.2.5), |
|
— |
funkcji i interfejsów ETCS/ERTMS (patrz: punkty 4.2.1, 4.2.3, 4.2.5, 4.2.7, 4.2.8), |
Po podniesieniu standardu do systemu klasy A istniejące urządzenia klasy B mogą być w dalszym ciągu wykorzystywane równocześnie z systemem klasy A.
7.2.4.7. Rejestry taboru
Rejestr taboru winien podawać informacje zgodnie z wymogami załącznika C.
W przypadku gdy wymogi TSI dla niektórych interfejsów pomiędzy podsystemem „Sterowanie” a innymi podsystemami nie są dostępne w momencie instalacji (np. kompatybilność elektromagnetyczna między detekcją pociągu a taborem, warunki klimatyczne oraz warunki fizyczne, w których pociąg może funkcjonować, a także parametry geometryczne, takie jak długość składu, maksymalna odległość między kolejnymi osiami pociągu, długość nosa pierwszego i ostatniego wagonu w składzie, parametry hamulców), rejestr infrastruktury powinien określać cechy charakterystyczne i zastosowane normy. W każdym przypadku będzie to dotyczyć wyłącznie pozycji wymienionych w załączniku C.
Uwaga: dla każdego wdrożenia podsystemu „Sterowanie” na danej linii załącznik C podaje wykaz wymogów dla urządzeń pokładowych, które określać powinny rejestry infrastruktury, zaznaczając, czy wymogi te dotyczą funkcji obowiązkowych czy opcjonalnych (16) i identyfikując ograniczenia dla konfiguracji pociągu.
7.2.5. Określone ścieżki migracji
7.2.5.1. Rozwiązanie szczególne dla częściowego, dodatkowego wykorzystania systemu klasy A
W fazie migracji, kiedy jedynie część floty jest wyposażona w system pokładowy obsługujący klasę A, może wystąpić konieczność posiadania na linii obu systemów, zainstalowanych w całości lub częściowo.
Dla ETCS nie istnieje łącze funkcjonalne miedzy dwoma systemami pokładowymi poza zarządzaniem przejściami podczas działania pociągu (oraz z wyjątkiem spełniania wymogów STM-ów dla systemów klasy B tam, gdzie wykorzystywane są STM-y).
Dla ECTS widzianego z punktu widzenia funkcjonalności może zostać zbudowany system, który łączy elementy systemu zunifikowanego i systemu przed unifikacją. Przykładem takiego połączenia jest poziom 1 ETCS, wykorzystujący eurobalisy jako środek transmisji punktowej oraz funkcję uaktualniania, która nie jest oparta na rozwiązaniu zunifikowanym, ale na systemie krajowym. Rozwiązanie takie wymaga pokładowego łącza danych między systemem zunifikowanym a systemem przed unifikacją. Dlatego też rozwiązanie takie nie jest zgodne z klasą A czy klasą B i nie jest interoperacyjne.
Istnieje jednak możliwość wykorzystania połączenia w postaci krajowego usprawnienia linii interoperacyjnej. Jest to dozwolone jedynie wtedy, gdy pociągi, które nie są wyposażone w łącze danych między obydwoma systemami, mogą działać w systemie zunifikowanym lub w systemie przed unifikacją bez dostępu do informacji z drugiego systemu. Jeśli nie jest to możliwe, linia nie może zostać uznana za interoperacyjną dla podsystemu „Sterowanie”.
7.2.5.2. Szczególne rozwiązania dla częściowego, alternatywnego rozwiązania ETCS klasy A z transmisją bezprzewodową
Infrastruktura może być także wykorzystywana dla ruchu pociągów, które nie spełniają wymogów TSI, zgodnie z art. 5 ust. 6 dyrektywy 2001/16/WE, o ile nie dzieje się tak ze szkodą dla spełnienia wymagań zasadniczych.
Pociągi takie otrzymują informację z infrastruktury sterowania ruchem kolejowym klasy B poprzez komunikację tor-pojazd.
7.2.5.3. Kryteria konkurencyjności
Jakiekolwiek działanie mające na celu umożliwienie ruchu pociągów interoperacyjnych na innych infrastrukturach lub ruchu pociągów, które nie są interoperacyjne, na infrastrukturach interoperacyjnych, winny zapewniać warunki nieskrępowanej konkurencji między dostawcami.
W szczególności należy udostępnić wszystkim zainteresowanym dostawcom wiedzę dotyczącą odpowiednich interfejsów pomiędzy zainstalowanymi już urządzeniami oraz nowymi urządzeniami, które mają zostać zakupione.
7.2.6. Warunki, w których wymagane są funkcje opcjonalne
Zgodnie z charakterystyką przytorowego zespołu BKJP oraz jego interfejsów do innych podsystemów, niektóre funkcjonalności układu przytorowego, które nie są sklasyfikowane jako obowiązkowe, mogą być wymagane do wdrożenia w określonych zastosowaniach, celem spełnienia przez nie wymagań zasadniczych.
Wdrożenie krajowych lub opcjonalnych urządzeń przytorowych nie może uniemożliwiać wjazdu na taką infrastrukturę pociągu, który spełnia jedynie wymagania zasadnicze systemu pokładowego klasy A, za wyjątkiem wymagań dla następujących opcjonalnych funkcji pokładowych:
|
— |
zastosowanie poziomu 3 przytorowego ECTS wymaga pokładowego nadzoru ciągłości składu pociągu, |
|
— |
zastosowanie poziomu 1 przytorowego ECTS z uaktualnianiem wymaga odpowiednich pokładowych funkcji uaktualniania, jeśli maksymalna prędkość dojazdu jest ustawiona na zero ze względów bezpieczeństwa (np. ochrona punktów niebezpiecznych), |
|
— |
tam gdzie ETCS wymaga radiowej transmisji danych, usługi transmisji danych GSM-R muszą spełniać wymogi transmisji danych ECTS, |
|
— |
układ pokładowy, który zawiera KER STM, może wymagać wdrożenia interfejsu K. |
7.3. Zarządzanie zmianą
7.3.1. Wstęp
Zmiana to aspekt towarzyszący każdemu systemowi komputerowemu używanemu w warunkach rzeczywistych. Powoduje ją pojawienie się nowych wymogów lub zmian istniejących wymogów, wynikających albo z błędów zidentyfikowanych podczas funkcjonowania, albo z potrzeby usprawnień działania, albo innych cech niezwiązanych z funkcjami.
Zmianami należy zarządzać, ponieważ tak dyktują względy bezpieczeństwa oraz aspekty krytyczne, a także cele zgodności wstecznej, mające za zadanie spowodować minimalizację czasu oraz kosztów ogólnych związanych z uruchomionymi już urządzeniami ERTMS (17) (tj. istniejącymi urządzeniami ERTMS). Dlatego też niezwykle istotne jest zdefiniowanie przejrzystej strategii dla wdrażania i zarządzania zmianami istniejących urządzeń ERTMS, tak aby zapobiec zakłóceniom ruchu kolejowego bez uszczerbku dla podstawowych celów gwarantowania bezpieczeństwa i interoperacyjności. Definicję takiej strategii określają dwie główne kwestie:
|
— |
ustanowienie ram dla zarządzania konfiguracją, określających normy i procedury dla zarządzania ewolucją systemu. Powinny one zawierać informacje o tym, jak rejestrować i przetwarzać proponowane zmiany systemu, jak odnieść te zmiany do składników systemów oraz jak rejestrować nowe wersje systemów, |
|
— |
polityka publikacji nowych wersji podstawowych dla systemów. |
7.3.2. Wersje podstawowe
Kwestią kluczową jest stabilność systemu, zapewniająca realistyczne wdrożenia i uruchomienia. Potrzeba osiągnięcia stabilności jest właściwa wszystkim stronom:
|
— |
zarządcy infrastruktury oraz operatorzy kolejowi, którzy będą obsługiwać różne wersje ERTMS/ETCS lub GSM-R, |
|
— |
przemysł, który potrzebuje czasu na określenie, rozwinięcie i udokumentowanie trwałej interoperacyjności. |
Koncepcja wersji podstawowej zasadniczo zawiera koncepcję stabilnego jądra w zakresie funkcjonalności systemu, jego osiągów oraz innych, niefunkcjonalnych właściwości (np. RAMS) (18). Jednakże doświadczenia z tego typu systemami pokazują, że konieczna jest pewna liczba nowych, publikowanych wersji (19), aby osiągnąć stabilny oraz odpowiednią do wdrożenia wersję podstawową. Ilustruje to poniższy kaskadowy proces:
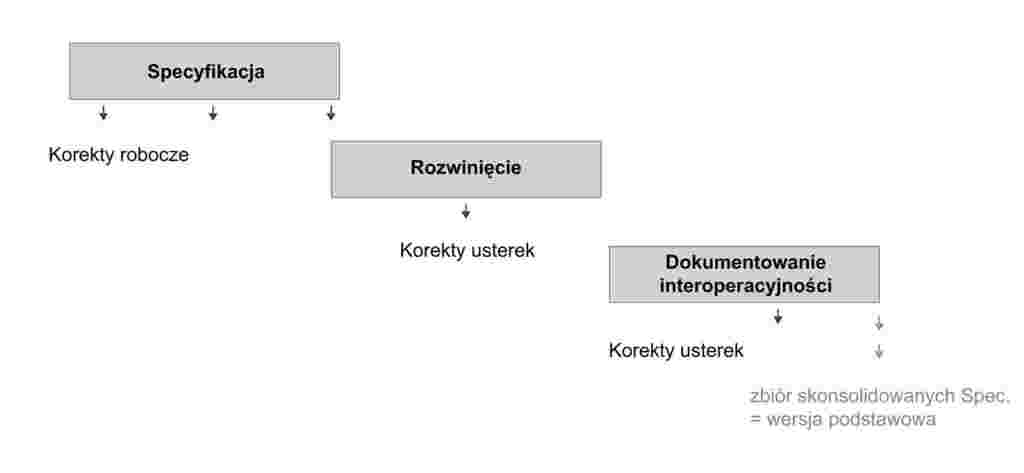
Poprzez pętle informacji zwrotnej elementy takiego procesu są ze sobą ściśle powiązane. Nie dopuszcza to do wdrożenia kilku procesów jednocześnie, co prowadziłoby do sytuacji powodujących chaos oraz utrudnienia operacyjne. Wersje podstawowe muszą być przetwarzane jedna po drugiej raczej niż równolegle, co przedstawia poniższy przypadek ERTMS/ETCS (20):

7.3.3. Faza konsolidacji ERTMS
Pierwsza wersja podstawowa dla specyfikacji ERTMS (zarówno dla ETCS, jak i GSM-R) została załączona do specyfikacji TSI „Sterowanie” dla kolei dużych prędkości (w odniesieniu do decyzji 2002/731/WE). Nowa opublikowana wersja tych specyfikacji została wydana niedawno (decyzja 2004/447/WE). Zawiera ona drobne zmiany funkcjonalne i systemowe, stanowiąc fundament ustrukturyzowanego podejścia do oceny zgodności dla urządzeń pokładowych BKJP.
Obecny, trwający proces konsolidacji dla ERTMS (zarówno ETCS, jak i GSM-R) koncentruje się przede wszystkim na dwóch kwestiach:
|
— |
konsolidacji obecnej wersji podstawowej, aby stała się bardziej stabilnym odniesieniem dla potrzeb interoperacyjności, oraz |
|
— |
zamknięciu kilku wciąż otwartych kwestii operacyjnych i technicznych (punktów otwartych). |
Zadanie to zależy od informacji zwrotnych z obecnych badań pilotażowych, wstępnych zastosowań komercyjnych, a także od ustrukturyzowanego programu wzajemnych testów produktów pochodzących od różnych dostawców. Ostatecznym celem jest publikacja nowej wersji podstawowej w trybie zarządzania konfiguracją w pierwszej połowie 2005 roku.
Podczas tej fazy konieczne może okazać się przygotowanie specjalnych umów między zarządcami infrastruktury a przewoźnikami kolejowymi, dotyczących użytkowania systemów klasy A.
7.3.4. Publikacja wersji podstawowej
Na podstawie dotychczasowych doświadczeń, czas między publikacją kolejnych wersji podstawowych to mniej więcej od czterech do pięciu lat dla ETCS oraz około dwa lata dla GSM-R.
Nowa wersja podstawowa powinna zasadniczo łączyć się z istotnymi modyfikacjami funkcjonalności systemu lub jego osiągów. Może dotyczyć następujących aspektów:
|
— |
włączenia zbioru aktualnych funkcji na poziomie krajowym (tam, gdzie można je uogólnić) w ramy jądra interoperacyjności, |
|
— |
ustanowienia dodatkowych składników interoperacyjności przytorowego i pokładowego ETCS, |
|
— |
usług wartości dodanej opartych na GSM-R. |
Każda wersja podstawowa powinna także zawierać funkcjonalności poprzedniej wersji podstawowej. Wersje usuwające błędy systemowe lub niedociągnięcia w zakresie bezpieczeństwa powinny być zawarte w wersji opublikowanej określonej wersji podstawowej. Jeśli nie uniemożliwią tego względy bezpieczeństwa, takie wersje opublikowane w ramach tej samej wersji podstawowej winny być wstecznie kompatybilne.
Dodanie nowych funkcji, które mogą być zawarte w ramach różnych wersji podstawowych, powoduje, że takie wersje podstawowe nie są wstecznie kompatybilne. Aby jednak ułatwić migrację oraz w zakresie, który jest możliwy z technicznego punktu widzenia, różne wersje podstawowe winny zawierać wspólny rdzeń funkcjonalności, dla którego zapewnić należy kompatybilność wsteczną. Taki wspólny rdzeń powinien wyznaczać minimalne jądro pozwalające na interoperacyjne funkcjonowanie przy akceptowalnych osiągach.
7.3.5. Wdrożenie nowych wersji podstawowych
Zarządcy infrastruktury oraz operatorzy kolejowi nigdy nie będą w stanie przejść od jednej wersji podstawowej z dnia na dzień. Dlatego każda wersja podstawowa powinna być rozwijana łącznie z odpowiednią strategią migracji. Powinno się uwzględnić problemy, takie jak współistnienie urządzeń ETCS oraz GSM-R zgodnych z różnymi wersjami specyfikacji ETCS oraz GSM-R, preferowane ścieżki migracji (tzn. priorytety przytorowe, priorytety taborowe lub oba równocześnie), a także wskazywać przedziały czasowe oraz priorytety migracji.
7.3.6. Proces zarządzania zmianą – wymagania
Jak to opisano powyżej, zmiana to niezbywalny aspekt dużych systemów komputerowych. Dlatego też należy stworzyć procedury zarządzania zmianą, które zapewnią odpowiednią analizę kosztów i korzyści wprowadzenia zmiany, oraz zagwarantować wprowadzenie zmian w sposób kontrolowany. Wymaga to zdefiniowanego procesu zarządzania zmianą oraz towarzyszących mu narzędzi zapewniających rejestrację zmian oraz ich możliwie tanie ujęcie w specyfikacjach. Niezależnie od tego, jakie ostatecznie mogą być konkretne szczegóły takiego procesu, powinien on być ogólnie odwzorowany w ustrukturyzowanym podejściu, jak poniżej:

Plan zarządzania konfiguracją zawierający zbiór norm i procedur dotyczących zarządzania zmianą powinien stanowić podstawę dla całego procesu zarządzania zmianą opisanego powyżej. Ogólne wymagania dla takiego planu opisuje punkt 7.3.7 poniżej. Strategia wdrożenia zatwierdzonych zmian powinna zostać sformalizowana (na podstawie odpowiedniego procesu i dokumentacji) i mieć postać planu zarządzania zmianą, który powinien przede wszystkim zawierać:
|
— |
identyfikację ograniczeń technicznych dotyczących zmiany, |
|
— |
określenie, kto jest odpowiedzialny za procedury wdrażania zmiany, |
|
— |
procedurę walidacji wdrażanych zmian, |
|
— |
politykę zarządzania zmianą, publikacji, migracji oraz końcowego etapu wdrożenia. |
7.3.7. Plan zarządzania konfiguracją – wymagania
Plan zarządzania konfiguracją powinien opisywać zbiór norm i procedur dotyczących zarządzania zmianą i przede wszystkim zawierać:
|
— |
definicję tego, jakie jednostki mają być zarządzane oraz jaki jest formalny program identyfikacji takich jednostek, |
|
— |
określenie, kto jest odpowiedzialny za procedury zarządzania konfiguracją oraz za przedłożenie jednostek nadzorowanych do struktury decyzyjnej zarządzania konfiguracją, |
|
— |
politykę zarządzania konfiguracją, która ma być wykorzystana dla nadzorowania zmian oraz zarządzania wersjami, |
|
— |
opis dokumentacji procesu zarządzania konfiguracją, która powinna być tworzona, |
|
— |
opis narzędzi, które mają być wykorzystane podczas zarządzania konfiguracją, oraz procesów wykorzystania takich narzędzi, |
|
— |
definicję konfiguracyjnej bazy danych, która ma być wykorzystana do tworzenia dokumentacji informacji konfiguracyjnych. |
Szczegóły procesów zarządzania konfiguracją dla ETCS oraz GSM-R powinny być sformalizowane poprzez specyfikacje, które mają być odpowiednio włączone do wykazu w załączniku A, pod indeksem 60 (dla ETCS) oraz indeksem 61 (dla GSM-R).
7.3.8. Kierownictwo
Zarządzanie zmianą specyfikacji ERTMS/ETCS oraz GSM-R powinno odbywać się pod egidą Europejskiej Agencji Kolejowej (ERA), ustanowionej rozporządzeniem (WE) nr 881/2004. ERA jest odpowiedzialna za panowanie nad procesem zarządzania zmianą, łącznie z dostarczeniem specyfikacji, zapewnieniem ich jakości oraz zarządzaniem konfiguracją.
ERA będzie więc odgrywać kluczową rolę organu władzy systemowej, centralizując i zapewniając spójność obecnie rozbitego na fragmenty procesu i działać przy pomocy stron określonych w tabeli poniżej:
|
Zadanie |
ERTMS/ETCS |
GSM-R |
|
Dostarczenie specyfikacji |
Grupa użytkowników ERTMS, UIC oraz UNISIG |
Grupa EIRENE, ERIG oraz grupa branżowa GSM-R |
|
Zapewnianie jakości |
Grupa użytkowników ERTMS |
Grupa EIRENE, ERIG oraz grupa użytkowników ERTMS |
|
Zarządzanie konfiguracją |
AEIF |
|
Pełniąc rolę władzy systemowej ERA zapewni współpracę stron będących reprezentatywnym przekrojem uczestników procesu – tj. zarządców infrastruktury, przewoźników kolejowych, przemysłu dostawczego, jednostek notyfikowanych oraz organów odpowiedzialnych za bezpieczeństwo – w ramach pełnionych przez nie obowiązków. Strony te przede wszystkim powinny:
|
i) |
wnieść swój wkład w proces w postaci:
|
|
ii) |
być częścią komisji zarządzającej zmianami (CCB), która ma zostać powołana dla potrzeb zarządzania wnioskami o zmianę, zgodnie z punktem 7.3.6. CCB powinno zapewniać systemową perspektywę dla zmian, które mają być wprowadzone, oraz globalną ocenę ich skutków. |
Pomiędzy obecnymi strukturami zarządzania prowadzonymi przez AEIF oraz strukturami prowadzonymi przez ERA powinno zapewnić się skoordynowane przejęcie obowiązków. Dla sprawnego przejęcia za kluczowe uznaje się
|
— |
formalizację oraz dokumentację obecnego procesu zarządzania zmianą w ramach dokumentacji określonych w załączniku A, by móc nadać im status wersji podstawowej dla ciągłości i jakości zarządzania zmianą, |
|
— |
uwzględnienie okresu przejściowego około 12 miesięcy, w którym te dwie struktury będą działać równocześnie, zgodnie z trybem działania uzgodnionym między nimi. |
ERA formalnie rozpocznie działania w zakresie zarządzania zmianą, poczynając od wersji podstawowej 2005, powstałej w wyniku fazy konsolidacyjnej opisanej w punkcie 7.3.3.
7.4. Przypadki szczególne
7.4.1. Wstęp
W przypadkach szczególnych opisanych poniżej dozwolone są postanowienia specjalne.
Przypadki szczególne należą do dwóch kategorii: postanowienia specjalne obowiązują na stałe (przypadek „P”) lub przejściowo (przypadek „T”). W przypadkach przejściowych zaleca się, by państwo członkowskie, którego przypadek dotyczy, spełniło wymogi odpowiedniego podsystemu do 2010 r. (przypadek „T1”), cel określony w decyzji nr 1692/96/WE Parlamentu Europejskiego i Rady z dnia 23 lipca 1996 r. w sprawie wytycznych Wspólnoty dla rozwoju transeuropejskiej sieci transportowej (21), lub do 2020 roku (przypadek „T2”) (22).
W TSI przypadek „T3” definiowany jest jako przypadek przejściowy, które będzie wciąż istniał po 2020 r.
7.4.2. Wykaz przypadków szczególnych
7.4.2.1. Kategoria każdego przypadku szczególnego podana jest w załączniku A, dodatek 1.
|
Nr |
Szczególny przypadek |
Uzasadnienie |
Czas trwania |
|
1 |
Wzajemna zależność między odległością osi a średnicą koła pojazdów działających w Niemczech podana jest w załączniku A, dodatek 1, punkt 2.1.5 |
Istniejące urządzenia licznika osi, zidentyfikowane w rejestrze infrastruktury |
P |
|
2 |
Maksymalna długość nawisu pojazdu działającego w Polsce podana jest w załączniku A, dodatek 1, punkt 2.1.6 |
Istniejąca geometria urządzeń obwodów torowych |
T3 |
|
3 |
Minimalne odległości między pierwszymi pięcioma osiami pociągów działających w Niemczech podane są w załączniku A, dodatek 1, punkt 2.1.7 |
Stosuje się na liniach z przejazdami, zgodnie z rejestrem infrastruktury |
T3 |
|
4 |
Minimalna odległość między pierwszą a ostatnią osią pojazdu pojedynczego lub zespołu trakcyjnego działającego na liniach dużej prędkości we Francji i na linii dużych prędkości „L1” w Belgii podana jest w załączniku A, dodatek 1, punkt 2.1.8 |
Istniejące urządzenia obwodów torowych, zidentyfikowane w rejestrze infrastruktury |
Francja T3 Belgia T3 |
|
5. |
Minimalna odległość między pierwszą a ostatnią osią pojazdu pojedynczego lub składu działającego w Belgii podana jest w TSI CCR CR, załącznik A, dodatek 1, punkt 2.1.9 |
Istniejące urządzenia obwodów torowych, zidentyfikowane w rejestrze infrastruktury |
T3 |
|
6. |
Minimalna średnica kół pojazdów działających we Francji podana jest w załączniku A, dodatek 1, punkt 2.2.2 |
Istniejące urządzenia licznika osi, zidentyfikowane w rejestrze infrastruktury. |
T3 |
|
7. |
Minimalny nacisk na oś dla pojazdów działających w Niemczech, Austrii, Szwecji podana jest w załączniku A, dodatek 1, punkt 3.1.3 |
Minimalny nacisk na oś niezbędny do manewrowania na określonych obwodach torowych określony jest w wymaganiu EBA (Eisenbahn-Bundesamt), dotyczy niektórych głównych linii w Niemczech w rejonie dawnej DR (Deutsche Reichsbahn) przy obwodach torowych 42 Hz oraz 100 Hz, zgodnie z rejestrem infrastruktury. Nie podlega odnowieniu. Do uzupełnienia dla Austrii i Szwecji |
T3 |
|
8. |
Minimalna masa pojazdu pojedynczego lub składu działającego na liniach dużych prędkości we Francji oraz na linii dużych prędkości „L1” w Belgii podana jest w załączniku A, dodatek 1, punkt 3.1.4. |
Istniejące urządzenia obwodów torowych |
Francja T3 Belgia T3 |
|
9. |
Minimalna masa pojazdu pojedynczego lub składu działającego na liniach dużych prędkości w Belgii (poza linią dużych prędkości „L1”) podana jest w TSI CCS CR, załącznik A, dodatek 1, punkt 3.1.5 |
Tabor kolejowy jest bardziej jednorodny na liniach dużych prędkości. Powierzchnia główki szyny jest bardziej ograniczona niż w przypadku kolei konwencjonalnej. Detekcja obecności jakiegokolwiek taboru w biegu lub na postoju działa za każdym razem, gdy masa pojazdu pojedynczego lub składu jest większa niż 90 ton |
T3 |
|
10. |
Minimalne wymiary masy metalu oraz warunki zatwierdzenia pojazdów działających w Niemczech i Polsce podane są w załączniku A, dodatek 1, punkt 3.3.1 |
Dotyczy linii z przejazdami z pętlami detekcji zgodnie z rejestrem infrastruktury |
Niemcy P Polska P |
|
11. |
Maksymalna reaktancja pomiędzy powierzchniami główki szyny zestawów kołowych pojazdów działających w Polsce podany jest w załączniku A, dodatek 1, punkt 3.5.3 |
Istniejące urządzenia obwodu trakcyjnego |
T3 |
|
12. |
Maksymalna reaktancja pomiędzy powierzchniami główki szyny zestawów kołowych pojazdów działających we Francji podany jest w załączniku A, dodatek 1, punkt 3.5.4 |
Istniejące urządzenia obwodów torowych |
T3 |
|
13. |
Dodatkowe wymogi dotyczące parametrów manewrowania dla pojazdów działających w Niderlandach podane są w załączniku A, dodatek 1, punkt 3.5.5 |
Istniejące urządzenia obwodów torowych niskiego napięcia, zidentyfikowane w rejestrze infrastruktury |
T3 |
|
14. |
Minimalna impedancja między pantografem a kołami pojazdów działających Belgii podana jest w załączniku A, dodatek 1, punkt 3.6.1 |
Istniejące urządzenia klasy B |
T3 |
|
15. |
Hamulec magnetyczny i hamulec prądu wirowego nie są dozwolone w pierwszym wózku pojazdu działającego w Niemczech, jak określono w załączniku A, dodatek 1, punkt 5.2.3 |
Dotyczy linii z przejazdami zgodnie z rejestrem infrastruktury |
T3 |
|
16. |
Piaskowanie dla potrzeb trakcyjnych na składach wieloczęściowych nie jest dozwolone przed osią prowadzącą poniżej 40 km/h w Zjednoczonym Królestwie, zgodnie z definicją podaną w załączniku A, dodatek 1, punkt 4.1.4 |
Obwody torowe nie mogą być uznane za działające bezpiecznie, gdy występuje piaskowanie przed osią prowadzącą składu wieloczęściowego |
T3 |
7.4.2.2. Szczególny przypadek Grecji
Kategoria „T1” – przejściowe: tabor kolejowy o prześwicie 1 000 mm lub mniej oraz dla linii o prześwicie 1 000 mm lub mniej. Na tych liniach obowiązują przepisy krajowe.
7.4.2.3. Szczególny przypadek krajów bałtyckich (Litwa, Łotwa, Estonia)
Kategoria T otwarta – funkcjonalna oraz techniczna modernizacja istniejących urządzeń klasy B uruchomionych w korytarzach o prześwicie 1 520 mm jest dozwolona, jeśli zostanie to uznane za konieczne dla umożliwienia działania lokomotyw przewoźników kolejowych Federacji Rosyjskiej i Białorusi. Urządzenia pokładowe tych ostatnich wyłączone są z podporządkowania się wymogom punktu 7.2.2.5. Korytarze takie będą wspomniane w rejestrze infrastruktury.
7.5. Postanowienia przejściowe
Punkty otwarte wskazane w TSI będą zamykane w procesie weryfikacji.
(1) Wymagania bezpieczeństwa dla poziomu 3 ERTMS/ETCS wymagają jeszcze ustalenia.
(2) Ten wymóg powinien być przestrzegany jako parametr projektu RS oraz dla oceny podsystemu RS.
(3) Inny poziom specyfikacji: należy do szkolenia maszynistów oraz wiedzy o szlaku kolejowym.
(4) Linie dużych prędkości są oznaczone liniami kropkowanymi.
(5) Dz.U. L 167 z 30.4.2004, str. 1.
(6) Dz.U. L 161 z 26.6.1999, str. 1. Rozporządzenie ostatnio zmienione rozporządzeniem (WE) nr 173/2005 (Dz.U. L 29 z 2.2.2005, str. 3).
(7) Dz.U. L 161 z 26.6.1999, str. 57.
(8) Obejmuje to czynności wyposażania fabrycznego, związane z przedsięwzięciami napraw głównych.
(9) Dla potrzeb wyposażenia w urządzenia ECTS, „ważniejsze doposażenia” definiuje się jako te operacje związane z utrzymaniem, które pociągają za sobą nakłady inwestycyjne przynajmniej dziesięciokrotnej wartości wyposażenia w urządzenia ETCS na tym określonym typie taboru.
(10) Poziom zobowiązań ma być zdefiniowany za pomocą następujących kryteriów: i) znaczenie rynkowe korytarzy, które są celem wdrożenia ERTMS/ETCS; ii) pokrycie linii przez ERTMS/ETCS.
(11) Oczekuje się, że będzie to wynik analiz kolejno wszystkich korytarzy, które będą wspólnie przeprowadzone przez odpowiednie zaangażowane strony – a mianowicie państwa członkowskie, zarządców infrastruktury, przewoźników kolejowych oraz potencjalnie przedstawicieli przemysłu zaopatrującego kolej.
(12) Sistema Controllo Marcia Treno. Włoski system klasy B zbudowany w oparciu o komponenty ETCS.
(13) Na przykład wykonalność koncepcji zewnętrznego STM nie może zostać zagwarantowana pod względem technicznym, lub kwestie dotyczące posiadania praw własności intelektualnej do systemów klasy B uniemożliwiają stworzenie produktu STM w określonym czasie.
(14) Dnia 31 grudnia 2007r.
(15) Klasyfikacja funkcji, patrz: punkt 4.
(16) Klasyfikacja funkcji, patrz: rozdział 4.
(17) Zarówno ERTMS/ETCS, jak i GSM-R.
(18) Wersja podstawowa działa jako początkowy punkt odniesienia dla kontrolowanego zarządzania ewolucją systemu.
(19) Wersja publikowana to wersja systemu przekazywana klientom kolejowym. Wersje systemu mogą posiadać różne funkcjonalności, osiągi lub mogą naprawiać błędy systemu, a także niedociągnięcia dotyczące bezpieczeństwa.
(20) Elementy dodatkowe dotyczące tego wydania zawarte są w punktach poniżej.
(21) Dz.U. L 228 z 9.9.1996, str. 1. Decyzja ostatnio zmieniona decyzją nr 884/2004/WE (Dz.U. L 167 z 30.4.2004, str. 1).
(22) Inne daty (Tx) mogą być określone w zależności od TSI oraz szczególnego przypadku.
ZAŁĄCZNIK A
WYKAZ SPECYFIKACJI OBOWIĄZKOWYCH (1)
|
Index N |
Reference |
Document Name |
Version |
|
1 |
UIC ETCS FRS |
ERTMS/ETCS Functional Requirement Specification |
4.29 (3) |
|
2 |
99E 5362 |
ERTMS/ETCS Functional Statements |
2.0.0 |
|
3 |
UNISIG SUBSET-023 |
Glossary of Terms and Abbreviations |
2.0.0 |
|
4 |
UNISIG SUBSET-026 |
System Requirement Specification |
2.2.2 |
|
5 |
UNISIG SUBSET-027 |
FFFIS Juridical Recorder-Downloading Tool |
2.2.9 |
|
6 |
UNISIG SUBSET-033 |
FIS for Man-Machine Interface |
2.0.0 (2) |
|
7 |
UNISIG SUBSET-034 |
FIS for the Train Interface |
2.0.0 |
|
8 |
UNISIG SUBSET-035 |
Specific Transmission Module FFFIS |
2.1.1 |
|
9 |
UNISIG SUBSET-036 |
FFFIS for Eurobalise |
2.3.0 |
|
10 |
UNISIG SUBSET-037 |
Euroradio FIS |
2.3.0 |
|
11 |
Reserved 05E537 |
Off line key management FIS |
|
|
12 |
UNISIG SUBSET-039 |
FIS for the RBC/RBC Handover |
2.1.2 |
|
13 |
UNISIG SUBSET-040 |
Dimensioning and Engineering rules |
2.1.0 |
|
14 |
UNISIG SUBSET-041 |
Performance Requirements for Interoperability |
2.1.0 |
|
15 |
UNISIG SUBSET-108 |
Interoperability-related consolidation on TSI annex A documents (mainly SUBSET-026 v2.2.2) |
1.0.0 |
|
16 |
UNISIG SUBSET-044 |
FFFIS for Euroloop sub-system |
2.2.0 (4) |
|
17 |
Intentionally Deleted |
|
|
|
18 |
UNISIG SUBSET-046 |
Radio In-fill FFFS |
2.0.0 |
|
19 |
UNISIG SUBSET-047 |
Track-side-Trainborne FIS for Radio In-Fill |
2.0.0 |
|
20 |
UNISIG SUBSET-048 |
Trainborne FFFIS for Radio In-Fill |
2.0.0 |
|
21 |
UNISIG SUBSET-049 |
Radio In-fill FIS with LEU/Interlocking |
2.0.0 |
|
22 |
Intentionally deleted |
|
|
|
23 |
UNISIG SUBSET-054 |
Assignment of Values to ETCS variables |
2.0.0 |
|
24 |
Intentionally deleted |
|
|
|
25 |
UNISIG SUBSET-056 |
STM FFFIS Safe Time Layer |
2.2.0 |
|
26 |
UNISIG SUBSET-057 |
STM FFFIS Safe Link Layer |
2.2.0 |
|
27 |
UNISIG SUBSET-091 |
Safety Requirements for the Technical Interoperability of ETCS in Levels 1 & 2 |
2.2.11 |
|
28 |
Reserved |
Reliability – Availability Requirements |
|
|
29 |
UNISIG SUBSET-102 |
Test specification for Interface „k” |
1.0.0 |
|
30 |
Intentionally deleted |
|
|
|
31 |
UNISIG SUBSET-094 |
Functional Requirements for an On-board Reference Test Facility |
2.0.0 |
|
32 |
EIRENE FRS |
GSM-R Functional Requirements Specification |
7 |
|
33 |
EIRENE SRS |
GSM-R System Requirements Specification |
15 |
|
34 |
A11T6001 12 |
(MORANE) Radio Transmission FFFIS for EuroRadio |
12 |
|
35 |
ECC/DC(02)05 |
ECC Decision of 5 July 2002 on the designation and availability of frequency bands for railway purposes in the 876-880 and 921-925 MHz bands. |
|
|
36a |
Intentionally deleted |
|
|
|
36b |
Intentionally deleted |
|
|
|
36c |
UNISIG SUBSET-074-2 |
FFFIS STM Test cases document |
1.0.0 |
|
37a |
Intentionally deleted |
|
|
|
37b |
UNISIG SUBSET-076-5-2 |
Test cases related to features |
2.2.2 |
|
37c |
UNISIG SUBSET-076-6-3 |
Test sequences |
2.0.0 |
|
37d |
UNISIG SUBSET-076-7 |
Scope of the test specifications |
1.0.0 |
|
37e |
Intentionally deleted |
|
|
|
38 |
Reserved |
Marker boards |
|
|
39 |
UNISIG SUBSET-092-1 |
ERTMS EuroRadio Conformance Requirements |
2.2.5 |
|
40 |
UNISIG SUBSET-092-2 |
ERTMS EuroRadio Test cases Safety Layer |
2.2.5 |
|
41 |
Reserved UNISIG SUBSET 028 |
JRU Test Specification |
|
|
42 |
Intentionally deleted |
|
|
|
43 |
UNISIG SUBSET 085 |
Test Specification for Eurobalise FFFIS |
2.1.2 |
|
44 |
Reserved |
Odometry FIS |
|
|
45 |
UNISIG SUBSET-101 |
Interface „K” Specification |
1.0.0 |
|
46 |
UNISIG SUBSET-100 |
Interface „G” specification |
1.0.1 |
|
47 |
Intentionally deleted |
|
|
|
48 |
Reserved |
Test specification for mobile equipment GSM-R |
|
|
49 |
UNISIG SUBSET-059 |
Performance requirements for STM |
2.1.1 |
|
50 |
Reserved |
Test specification for EUROLOOP |
|
|
51 |
Reserved UNISIG |
Ergonomic aspects of the DMI |
|
|
52 |
UNISIG SUBSET-058 |
FFFIS STM Application Layer |
2.1.1 |
|
53 |
Reserved AEIF-ETCS-Variables-Manual |
AEIF-ETCS-Variables-Manual |
|
|
54 |
Intentionally deleted |
|
|
|
55 |
Reserved |
Juridical recorder baseline requirements |
|
|
56 |
Reserved 05E538 |
ERTMS Key Management Conformance Requirements |
|
|
57 |
Reserved UNISIG SUBSET-107 |
Requirements on pre-fitting of ERTMS on-board equipment |
|
|
58 |
Reserved UNISIG SUBSET-097 |
Requirements for RBC-RBC Safe Communication Interface |
|
|
59 |
Reserved UNISIG SUBSET-105 |
Requirements on pre-fitting of ERTMS track side equipment |
|
|
60 |
Reserved UNISIG SUBSET-104 |
ETCS version management |
|
|
61 |
Reserved |
GSM-R version management |
|
|
62 |
Reserved UNISIG SUBSET-099 |
RBC-RBC Test specification for Safe Communication Interface |
|
|
63 |
Reserved UNISIG SUBSET-098 |
RBC-RBC Safe Communication Interface |
|
WYKAZ OBOWIĄZUJĄCYCH NORM EN
|
Index N |
Reference |
Document Name and comments |
Version |
|
A1 |
EN 50126 |
Railway applications — The specification and demonstration of reliability, availability, maintainability and safety (RAMS) |
1999 |
|
A2 |
EN 50128 |
Railway applications — Communication, signalling and processing systems — Software for railway control and protection systems |
2001 |
|
A3 |
EN 50129 |
Railway applications — Communication, signalling and processing systems — Safety related electronic systems for signalling |
2003 |
|
A4 |
EN 50125-1 |
Railway applications — Environmental conditions for equipment — Part 1: equipment on board rolling stock |
1999 |
|
A5 |
EN 50125-3 |
Railway applications — Environmental conditions for equipment — Part 3: equipment for signalling and telecommunications |
2003 |
|
A6 |
EN 50121-3-2 |
Railway applications — Electromagnetic compatibility — Part 3-2: Rolling stock — Apparatus |
2000 |
|
A7 |
EN 50121-4 |
Railway applications — Electromagnetic compatibility — Part 4: Emission and immunity of the signalling and telecommunications apparatus |
2000 |
|
A8 |
EN 50238 |
Railway applications — Compatibility between rolling stock and train detection systems |
2003 |
WYKAZ SPECYFIKACJI O CHARAKTERZE INFORMACYJNYM
Uwaga:
Specyfikacje typu „1” reprezentują aktualny stan prac na przygotowaniem obowiązującej specyfikacji, która jest nadal „zastrzeżona”.
Specyfikacje typu „2” zawierają informacje dodatkowe, uzasadniające wymagania zawarte w specyfikacjach obowiązkowych oraz wspomagające ich stosowanie.
Indeks B32 ma na celu zapewnienie stosowania jednolitych odniesień w dokumentach, o których mowa w załączniku A. Ponieważ jest on używany tylko do celów redakcyjnych oraz jako pomoc przy wprowadzaniu zmian w powołanych dokumentach w przyszłości, nie posiada on klasyfikacji „Typ” ani nie jest powiązany z obowiązkowym dokumentem załącznika A.
|
Index N |
Reference |
Document Name |
Version |
Type |
|
B1 |
EEIG 02S126 |
RAM requirements (chapter 2 only) |
6 |
2 (index 28) |
|
B2 |
EEIG 97S066 |
Environmental conditions |
5 |
2 (index A5) |
|
B3 |
UNISIG SUBSET-074-1 |
Methodology for testing FFFIS STM |
1.0.0 |
2 (index 36) |
|
B4 |
EEIG 97E267 |
ODOMETER FFFIS |
5 |
1 (Index 44) |
|
B5 |
O_2475 |
ERTMS GSM-R QoS Test Specification |
1.0.0 |
2 |
|
B6 |
UNISIG SUBSET-038 |
Off-line Key Management FIS |
1 (Index11) |
1. |
|
B7 |
Reserved UNISIG SUBSET-074-3 |
FFFIS STM test specification traceability of test cases with Specific Transmission Module FFFIS |
1.0.0 |
2 (Index 36) |
|
B8 |
UNISIG SUBSET-074-4 |
FFFIS STM Test Specification Traceability of testing the packets specified in the FFFIS STM Application Layer |
1.0.0 |
2 (Index 36) |
|
B9 |
UNISIG SUBSET 076_0 |
ERTMS/ETCS Class 1, Test plan |
2.2.3 |
2 (Index 37) |
|
B10 |
UNISIG SUBSET 076_2 |
Methodology to prepare features |
2.2.1 |
2 (Index 37) |
|
B11 |
UNISIG SUBSET 076_3 |
Methodology of testing |
2.2.1 |
2 (Index 37) |
|
B12 |
UNISIG SUBSET 076_4_1 |
Test sequence generation: Methodology and Rules |
1.0.0 |
2 (Index 37) |
|
B13 |
UNISIG SUBSET 076_4_2 |
ERTMS ETCS Class 1 States for Test Sequences |
1.0.0 |
2 (Index 37) |
|
B14 |
UNISIG SUBSET 076_5_3 |
On-Board Data Dictionary |
2.2.0 |
2 (Index 37) |
|
B15 |
UNISIG SUBSET 076_5_4 |
SRS v.2.2.2 Traceability |
2.2.2 |
2 (Index 37) |
|
B16 |
UNISIG SUBSET 076_6_1 |
UNISIG test data base |
2.2.2. |
2 (Index 37) |
|
B17 |
UNISIG SUBSET 076_6_4 |
Test Cases Coverage |
2.0.0 |
2 (Index 37) |
|
B18 |
|
|
|
|
|
B19 |
UNISIG SUBSET 077 |
UNISIG Causal Analysis Process |
2.2.2 |
2 (Index 27) |
|
B20 |
UNISIG SUBSET 078 |
RBC interface: Failure modes and effects analysis |
2.2.2 |
2 (Index 27) |
|
B21 |
UNISIG SUBSET 079 |
MMI: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B22 |
UNISIG SUBSET 080 |
TIU: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B23 |
UNISIG SUBSET 081 |
Transmission system: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B24 |
UNISIG SUBSET 088 |
ETCS Application Levels 1&2 -Safety Analysis |
2.2.10 |
2 (Index 27) |
|
B25 |
TS50459-1 |
Railway applications -European Rail Traffic Management System — Driver Machine Interface" part 1 — Ergonomic principles of ERTMS/ETCS/GSM-R Information |
2005 |
2 (Index 51) |
|
B26 |
TS50459-2 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 2 — Ergonomic arrangements of ERTMS/ETCS Information |
2005 |
2 (Index 51) |
|
B27 |
TS50459-3 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 3 — Ergonomic arrangements of ERTMS/GSM-R Information |
2005 |
2 (Index 51) |
|
B28 |
TS50459-4 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 4 — Data entry for the ERTMS/ETCS/GSM-R systems |
2005 |
2 (Index 51) |
|
B29 |
TS50459-5 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 5 — Symbols |
2005 |
2 (Index 51) |
|
B30 |
TS50459-6 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 6 — Audible Information |
2005 |
2 (Index 51) |
|
B31 |
EN50xxx |
Railway applications -European Rail Traffic Management System — Driver Machine Interface" part 7 — Specific Transmission Modules |
|
2 (Index 51) |
|
B32 |
Reserved |
Guideline for references |
|
Non |
|
B33 |
EN 310515 |
Global System for Mobile communication (GSM); Requirements for GSM operation in railways. |
2.1.0 |
|
|
B34 |
05E466 |
Operational DMI information |
1 |
1 (Index 51) |
|
B35 |
Reserved UNISIG SUBSET-069 |
ERTMS Key Management Conformance Requirements |
|
1 (Index 56) |
|
B36 |
04E117 |
ETCS/GSM-R Quality of Service user requirements — Operational Analysis |
|
2 (Index 22) |
|
B37 |
UNISIG SUBSET-093 |
GSM-R Interfaces — Class 1 requirements |
2..3.0 |
1 (Index 32, 33) |
|
B38 |
UNISIG SUBSET-107A |
Requirements on pre-fitting of ERTMS on-board equipment |
1.0.0 |
2 (Index 57) |
|
B39 |
UNISIG SUBSET-076-5-1 |
ERTMS ETCS Class 1 Feature List |
2.2.2 |
2 (Index 37) |
|
B40 |
UNISIG SUBSET-076-6-7 |
Test Sequences Evaluation and Validation |
1.0.0 |
2 (Index 37) |
|
B41 |
UNISIG SUBSET-076-6-8 |
Generic train data for test Sequences |
1.0.0 |
2 (Index 37) |
|
B42 |
UNISIG SUBSET-076-6-10 |
Test Sequence Viewer (TSV) |
2.10 |
2 (Index 37) |
|
B43 |
04E083 |
Safety Requirements and Requirements to Safety Analysis for Interoperability for the Control-Command and Signalling Sub-System |
1.0 |
1 |
|
B44 |
04E084 |
Justification Report for the Safety Requirements and Requirements to Safety Analysis for Interoperability for the Control-Command and Signalling Sub-System. |
1.0 |
2(Index B43) |
(1) Referencje dotyczące ERTMS zostaną zweryfikowane po etapie konsolidacji.
(2) Treść tego dokumentu ma zastosowanie tylko w części, w której nie jest sprzeczna z indeksem 51.
(3) Wersja zostanie zaktualizowana (żądanie wprowadzenia zmian dotyczących specyfikacji wymagań funkcjonalnych (FRS) zostało przesłane do Komitetu ds. Zmian (CCM) w TSI „Sterowanie”
(4) Pod warunkiem zatwierdzenia częstotliwości przez CEPT.
Dodatek 1
WYMAGANA CHARAKTERYSTYKA SYSTEMÓW DETEKCJI POCIĄGU W CELU ZAPEWNIENIA KOMPATYBILNOŚCI Z TABOREM KOLEJOWYM
1. INFORMACJE OGÓLNE
|
1.1. |
Systemy detekcji pociągu powinny być zaprojektowane w taki sposób, aby umożliwiać bezpieczne i niezawodne realizowanie detekcji pojazdu w zakresie tolerancji określonych w niniejszym załączniku. Punkt 4.3 (Funkcjonalne i techniczne specyfikacje interfejsów do innych podsystemów) specyfikacji TSI „Sterowanie” zapewnia zgodność pojazdów zbudowanych według specyfikacji z wymaganiami niniejszego dodatku. |
|
1.2. |
Wymiary wzdłużne pojazdu zdefiniowano następująco:
Rysunek 6 przedstawia przykład pojazdu trójosiowego, dwuwózkowego (n=6). |
Rysunek 6

|
1.3. |
Określenie zestaw kołowy dotyczy dowolnej pary kół umieszczonych po przeciwnych stronach pojazdu, nawet nieposiadających wspólnej osi. Wszelkie odniesienia do zestawów kołowych dotyczą środków kół. |
|
1.4. |
Definicja wymiarów kół przedstawionych na rysunku 7 obejmuje następujące określenia:
Inne wymiary widoczne na rysunku 7 nie dotyczą niniejszej specyfikacji TSI |
|
1.5. |
Podane wartości są to bezwzględne wartości graniczne, włącznie ze wszelkimi tolerancjami. |
|
1.6. |
Zarządca infrastruktury może dopuścić stosowanie mniej restrykcyjnych wartości granicznych, co zostanie podane w rejestrze infrastruktury. |
Rysunek 7
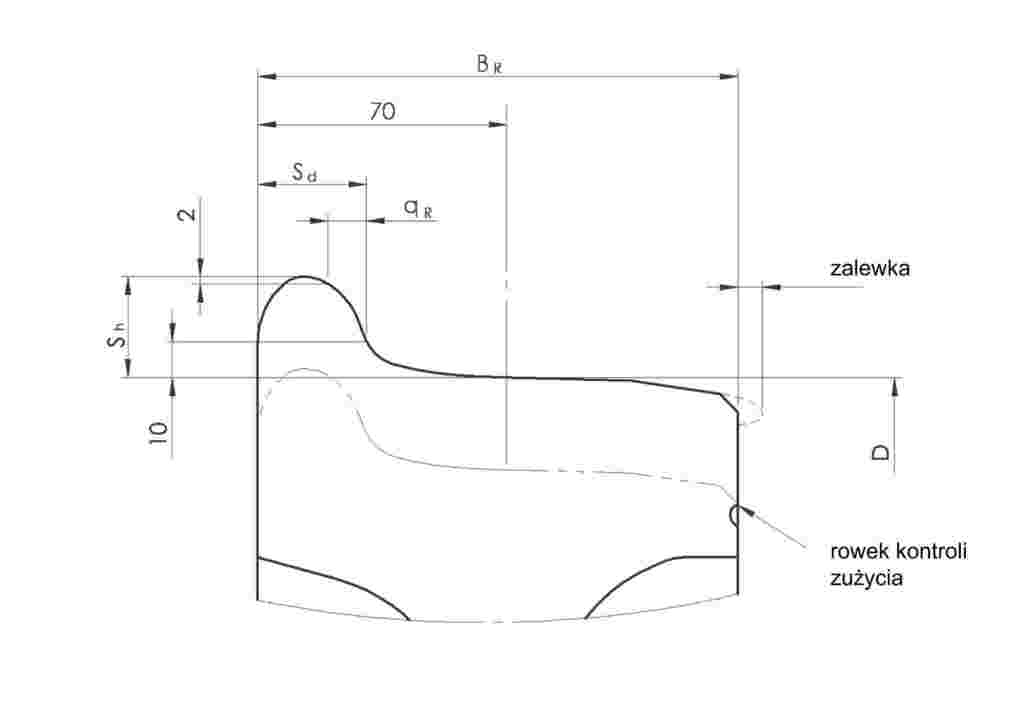

2. GEOMETRIA POJAZDU
2.1. Odległości osi
|
2.1.1. |
Odległość ai (rys. 6) nie powinna przekraczać 17 500 mm dla linii istniejących, 20 000 mm dla nowych linii. |
|
2.1.2. |
Odległość bx (rys. 6) nie powinna przekraczać 4 200 mm. |
|
2.1.3. |
Odległość ai (rys. 6) nie powinna być mniejsza niż: ai = v ×7,2 gdzie v jest maksymalną prędkością pojazdu w km/h, a odległość ai podana jest w mm jeżeli maksymalna prędkość pojazdu nie przekracza 350 km/h; dla wyższych prędkości ograniczenia będą definiowane w miarę konieczności. |
|
2.1.4. |
Odległość L – (b1 + b2) (rys. 6) nie powinna być mniejsza niż 3 000 mm. |
2.1.5. Przypadek szczególny – Niemcy
Należy także zdefiniować zależność między odległością osi (ai, rys. 1) a średnicą koła.
– Punkt otwarty –
2.1.6. Przypadek szczególny – Polska i Belgia
Odległość b× (rys. 6) nie powinna przekraczać 3 500 mm.
2.1.7. Przypadek szczególny – Niemcy
Odległość ai (rys. 6) między każdą z pierwszych 5 osi pociągu (lub wszystkich osi, jeżeli pociąg ma mniej niż 5) powinna być nie mniejsza niż 1 000 m, o ile prędkość nie przekracza 140 km/h; dla wyższych prędkości stosuje się art. 2.1.3.
2.1.8. Przypadek szczególny – Francja – szybka kolej TEN, oraz Belgia – szybka kolej TEN, tylko linia „L1”
Odległość między pierwszą a ostatnią osią samodzielnego pojazdu lub zespołu trakcyjnego nie powinna być mniejsza niż 15 000 mm.
2.1.9. Przypadek szczególny – Belgia
Odległość L – (b1 + b2) (rys. 6) nie powinna być mniejsza niż 6 000 mm.
2.2. Geometria kół
|
2.2.1. |
Wymiar BR (rys. 7) nie powinien być mniejszy niż 133 mm. |
|
2.2.2. |
Wymiar D (rys. 7) nie powinien być mniejszy niż:
|
|
2.2.3. |
Wymiar Sd (rys. 7) nie powinien być mniejszy niż 20 mm. |
|
2.2.4. |
Zakres wymiaru Sh (rys. 7) powinien wynosić 27,5–36 mm.
|
3. KONSTRUKCJA POJAZDU
3.1. Masa pojazdu
|
3.1.1. |
Dla eksploatacji na liniach istniejących obciążenie na oś powinno wynosić co najmniej 5 t, chyba że siła hamowania wytwarzana jest przez klocki hamulcowe, w którym to przypadku obciążenie na oś powinno wynosić co najmniej 3,5 t. |
|
3.1.2. |
Dla eksploatacji na liniach nowych i modernizowanych obciążenie na oś powinno wynosić co najmniej 3,5 t. |
3.1.3. Przypadek szczególny – Austria, Niemcy, Szwecja i Belgia
Obciążenie na oś powinno wynosić co najmniej 5 t na określonych liniach wyszczególnionych w rejestrze infrastruktury.
3.1.4. Przypadek szczególny – Francja – szybka kolej TEN, oraz Belgia – szybka kolej TEN, tylko linia „L1”
Jeżeli odległość między pierwszą a ostatnią osią pojedynczego pojazdu lub zespołu trakcyjnego jest większa lub równa 16 000 mm, masa samodzielnego pojazdu lub zespołu trakcyjnego powinna być większa niż 90 t. Jeżeli odległość ta jest mniejsza niż 16 000 mm oraz większa lub równa 15 000 mm, masa powinna być mniejsza niż 90 t bądź większa lub równa 40 t i pojazd musi być wyposażony w dwie pary kolejowych hamulców ciernych, których rozstaw jest większy lub równy 16 000 mm.
3.1.5. Przypadek szczególny – Belgia – szybka kolej TEN (oprócz linii „L1”)
Masa samodzielnego pojazdu lub zestawu trakcyjnego powinna wynosić co najmniej 90 t.
3.2. Przestrzeń wokół kół bez części metalowych
|
3.2.1. |
Należy zdefiniować przestrzeń, w której mogą być montowane tylko koła oraz ich części (przekładnie, hamulce, rura do piaskowania) lub elementy nieferromagnetyczne. – Punkt otwarty – |
3.3. Masa metalu pojazdu
3.3.1. Przypadek szczególny – Niemcy, Polska
Pojazdy powinny spełniać wymagania dobrze określonej przytorowej pętli testowej, mijanej przez pojazd, lub posiadać między kołami minimalną masę metalu o określonym kształcie, wysokości nad szynami oraz przewodności.
– Punkt otwarty–
3.4. Materiał kół
|
3.4.1. |
Koła powinny mieć charakterystykę ferromagnetyczną. |
3.5. Impedancja między kołami
|
3.5.1. |
Rezystancja między powierzchniami tocznymi kół leżących po przeciwnych stronach wózka nie powinna przekraczać:
|
|
3.5.2. |
Rezystancja mierzona jest przy użyciu napięcia pomiarowego stałego o wartości od 1,8 V do 2,0 V (napięcie przy otwartym obwodzie). |
3.5.3. Przypadek szczególny – Polska
Reaktancja między powierzchniami tocznymi kół zestawu kołowego powinna być mniejsza niż f/100 w miliomach, gdy f leży w zakresie od 500 Hz do 40 kHz, przy prądzie pomiarowym o wartości skutecznej 10 A i napięciu o wartości skutecznej 2 V przy otwartym obwodzie.
3.5.4. Przypadek szczególny – Francja
Reaktancja między powierzchniami tocznymi kół zestawu kołowego powinna być mniejsza niż f/100 w miliomach, gdy f leży w zakresie od 500 Hz do 10 kHz, przy napięciu pomiarowym o wartości skutecznej 2 V (napięcie przy otwartym obwodzie).
3.5.5. Przypadek szczególny – Niderlandy
Oprócz wymagań ogólnych podanych w załączniku A, dodatek 1, mogą być stosowane dodatkowe wymagania odnośnie do lokomotyw oraz zespołów trakcyjnych wykorzystujących obwody torowe. Rejestr infrastruktury określa linie, do których stosuje się powyższe wymagania.
– Punkt otwarty –
3.6. Impedancja pojazdu
|
3.6.1. |
Impedancja minimalna między pantografem a kołami taboru kolejowego musi wynosić:
|
4. EMISJE IZOLACYJNE
4.1. Stosowanie urządzeń do piaskowania
|
4.1.1. |
W celu poprawy hamowania oraz parametrów trakcyjnych dozwolone jest nakładanie piasku na szyny. Dopuszczalna ilość piasku emitowanego przez każde urządzenie do piaskowania w czasie 30 sekund wynosi:
|
|
4.1.2. |
Liczba aktywnych urządzeń do piaskowania nie powinna przekroczyć następującej:
|
4.1.3. Przypadek szczególny – Zjednoczone Królestwo
Piaskowanie dla celów trakcyjnych w wielu jednostkach przed osią wiodącą nie jest dozwolone przy prędkości niższej od 40 km/h.
– Punkt otwarty -
4.2. Stosowanie kompozytowych klocków hamulcowych
|
4.2.1 |
Warunki eksploatacji hamulców kompozytowych będą zdefiniowane przez grupę badawczą do końca 2005 r. – Punkt otwarty – |
5. INTERFERENCJE ELEKTROMAGNETYCZNE
5.1. Prąd trakcji
|
5.1.1. |
Ograniczenia oraz objaśnienia zostaną zamieszczone w oddzielnym dokumencie, który jest aktualnie w opracowaniu – Punkt otwarty – |
5.2. Stosowanie hamulców elektrycznych/magnetycznych
|
5.2.1. |
Stosowanie hamulców magnetycznych oraz hamulców wiroprądowych dozwolone jest tylko w charakterze hamulców bezpieczeństwa lub podczas postoju. Rejestr infrastruktury może zabronić stosowania hamulców magnetycznych oraz wiroprądowych w charakterze hamulców bezpieczeństwa. |
|
5.2.2. |
Jeżeli rejestr infrastruktury tak przewiduje, hamulce wiroprądowe oraz magnetyczne mogą być stosowane jako hamulce służbowe. |
5.2.3. Przypadek szczególny – Niemcy
Hamulce magnetyczne i wiroprądowe są niedozwolone do stosowania na pierwszym wózku pojazdu prowadzącego, chyba że rejestr infrastruktury stanowi inaczej.
5.3. Pola elektryczne, magnetyczne, elektromagnetyczne
|
5.3.1. |
– Punkt otwarty – |
6. CHARAKTERYSTYKA SPECJALNA LINII SZEROKOTOROWEJ 1 520/1 524 mm
|
1. |
Systemy detekcji pociągów zainstalowane na liniach szerokotorowych 1 520/1 524 mm powinny mieć charakterystykę jak podano powyżej, z wyjątkiem danych określonych w tym rozdziale. |
|
2. |
Odległość ai nie powinna przekraczać 19 000 mm. |
|
3. |
Wymiar BR nie powinien być mniejszy niż 130 mm. |
|
4. |
Rezystancja między powierzchniami roboczymi kół leżących po przeciwnych stronach wózka nie powinna przekraczać 0,06 oma. |
|
5. |
Liczba aktywnych urządzeń do piaskowania w pociągach ciągniętych przez lokomotywę nie powinna przekraczać 6 urządzeń na każdą szynę. |
Dodatek 2
Wymagania dotyczące detekcji zagrzanych osi
– Punkt otwarty –
ZAŁĄCZNIK B
KLASA B
SPIS TREŚCI
|
— |
Zastosowanie załącznika B |
|
— |
Część 1: Sterowanie ruchem kolejowym |
|
— |
Część 2: Radiołączność |
|
— |
Część 3: Matryca przejścia |
ZASTOSOWANIE ZAŁĄCZNIKA B
W załączniku tym zamieszczono informacje dotyczące kontroli pociągu, systemów sterowania i ostrzegania oraz systemów łączności radiowej, które poprzedzają wprowadzenie systemów sterowania klasy A oraz systemów łączności radiowej dopuszczonych do stosowania w europejskim systemie kolei dużych prędkości oraz kolei konwencjonalnych, o prędkościach maksymalnych określanych przez właściwe państwa członkowskie. Systemy klasy B nie były opracowane według specyfikacji europejskiej, dlatego prawa do ich specyfikacji mogą być w posiadaniu ich dostawców. Przygotowanie i zmiany tych specyfikacji nie powinny pozostawać w konflikcie z przepisami krajowymi – w szczególności dotyczącymi praw patentowych.
Podczas fazy migracji, w trakcie której systemy te będą stopniowo zastępowane przez systemy zunifikowane, występować będzie konieczność korzystania ze specyfikacji technicznych w celu zapewnienia interoperacyjności. Zagadnienie to pozostaje w zakresie odpowiedzialności danego państwa członkowskiego lub jego przedstawiciela, we współpracy z właściwym dostawcą systemów, zgodnie ze specyfikacjami TSI „Sterowanie” dla transeuropejskiego systemu kolei dużych prędkości oraz kolei konwencjonalnych.
Przewoźnicy kolejowi, którzy muszą zainstalować jeden lub większą liczbę tych systemów w swych pociągach, powinni zwracać się w tej sprawie do właściwego państwa członkowskiego. W załączniku C zamieszczono informacje dotyczące geograficznej struktury każdego systemu, co wymaga korzystania z rejestru infrastruktury dla każdej linii, opisującego typ urządzeń oraz jego układy pracy. Korzystając z rejestru infrastruktury, zarządca infrastruktury może zapewnić spójność między zespołem przytorowym BKJP oraz przepisami ruchu dotyczącymi podległego mu rejonu kolei.
Państwo członkowskie dostarczy przewoźnikowi kolejowemu informacji niezbędnych do bezpiecznego zainstalowania urządzeń zgodnych z wymaganiami specyfikacji TSI oraz załącznika C.
Instalacje klasy B powinny uwzględniać tryby pracy awaryjnej, zgodnie z wymaganiami załącznika C.
W niniejszym załączniku podano podstawowe informacje dotyczące systemów klasy B. Odnośnie do każdego z wymienionych systemów, dane państwo członkowskie powinno gwarantować utrzymanie interoperacyjności oraz dostarczanie informacji wymaganych dla danego układu pracy, w szczególności informacje dotyczące zatwierdzeń.
Część 1: Sterowanie ruchem kolejowym
INDEKS:
|
1. |
ALSN |
|
2. |
ASFA |
|
3. |
ATB |
|
4. |
ATP-VR/RHK |
|
5. |
BACC |
|
6. |
CAWS and ATP |
|
7. |
Crocodile |
|
8. |
Ebicab |
|
9. |
EVM |
|
10. |
GW ATP |
|
11. |
Indusi/PZB |
|
12. |
KVB |
|
13. |
LS |
|
14. |
LZB |
|
15. |
MEMOR II+ |
|
16. |
RETB |
|
17. |
RSDD/SCMT |
|
18. |
SELCAB |
|
19. |
SHP |
|
20. |
TBL |
|
21. |
TPWS |
|
22. |
TVM |
|
23. |
ZUB 123 |
Tylko dla celów informacyjnych – systemy te nie są stosowane w państwach członkowskich:
|
23. |
ZUB 121 |
ALSN
Automatyczna sygnalizacja nieprzerwanej pracy lokomotywy
Автоматическая Локомотивная Сигнализация Непрерывного действия (oryginalna nazwa rosyjska).
Opis:
ALSN jest to system sygnalizacji kabinowej oraz automatycznego hamowania pociągu. Jest on zainstalowany na głównych liniach Kolei Łotewskich oraz w krajach sąsiednich: Litwie i Estonii. (Dla informacji: jest on zainstalowany również na kolei Federacji Rosyjskiej i Białorusi).
System ten składa się z szynowych obwodów kodowych (TC) oraz urządzeń pokładowych.
Obwody szynowe zbudowane są w sposób konwencjonalny, a ich odbiorniki działają w oparciu o przekaźniki.
Linie otwarte wyposażone są w następujące urządzenia:
|
— |
obwody kodowe prądu przemiennego o częstotliwości 50 (1), 75 lub 25 Hz, albo |
|
— |
obwody ciągłe, realizujące włączanie trybu kodowego przy zbliżającym się pociągu, zależnie od jego kierunku jazdy:
|
Stacje wyposażone są w następujące urządzenia:
|
— |
obwody ciągłe, realizujące włączanie trybu kodowego przy zbliżającym się pociągu, zależnie od jego kierunku jazdy:
|
Urządzenia pokładowe składają się ze wzmacniacza elektronicznego; dekodera działającego w oparciu o przekaźniki; zaworu elektropneumatycznego do włączania/wyłączania systemu hamowania; sygnału świetlnego, reprezentującego sygnały z terenu; oraz dźwigni czujności, służącej do potwierdzania odebrania informacji przez maszynistę.
System ten realizuje funkcje bezpieczeństwa, ale nie jest bezpieczny w razie awarii, gdyż stanowi on tylko uzupełnienie sygnalizacji przytorowej, chociaż jest wystarczająco bezpieczny w kwestii nadzorowania maszynisty.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
System jest przystosowany do działania przy prędkościach pociągu do 160 km/h.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Informacje dostępne na pokładzie (poza ALSN): rzeczywista prędkość, długość przejechanej drogi. |
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Hamowanie nagłe uruchamiane jest w przypadku:
|
Odpowiedzialne państwa członkowskie: Łotwa, Estonia, Litwa.
ASFA
Opis:
ASFA jest to sygnalizacja kabinowa oraz system ATP instalowany na większości linii RENFE (1 676 mm), na liniach o szerokości metrowej FEVE oraz na nowej linii NAFA o szerokości europejskiej.
ASFA znajduje się na wszystkich liniach uwzględnianych pod kątem interoperacyjności.
Łączność tor-pociąg działa w oparciu o obwody rezonansowe o sprzężeniu magnetycznym, w taki sposób, że możliwe jest przesyłanie dziewięciu różnych informacji. Przytorowy obwód rezonansowy jest dostrojony do częstotliwości reprezentującej wskazania sygnałów. Pokładowy sterownik PLL o sprzężeniu magnetycznym jest ustawiony na częstotliwość obwodów przytorowych. System ten realizuje funkcje bezpieczeństwa, chociaż nie jest bezpieczny w razie awarii, ale w wystarczającym stopniu nadzoruje pracę maszynisty. Przypomina maszyniście o warunkach sygnalizacyjnych i zobowiązuje go do potwierdzania sygnałów ograniczających.
Obwody przytorowe oraz pokładowe posiadają konstrukcję konwencjonalną.
Ogólna charakterystyka:
|
— |
9 częstotliwości Zakres: 55 kHz do 115 kHz |
|
— |
na pokładzie można wybrać 3 różne kategorie pociągów. |
|
— |
Nadzór:
|
|
— |
Reakcja: W przypadku naruszenia warunków nadzoru uruchamiane jest nagłe hamowanie. Nagłe hamowanie może być zwolnione na postoju. |
Odpowiedzialne państwo członkowskie: Hiszpania.
ATB
ATB występuje w dwóch podstawowych wersjach: ATB pierwszej generacji i ATB nowej generacji.
Opis ATB pierwszej generacji:
System ATB pierwszej generacji instalowany jest na większości linii NS.
System ten składa się z kodowych obwodów szynowych o raczej konwencjonalnej konstrukcji oraz ze skomputeryzowanego (ACEC) lub konwencjonalnego elektronicznego (GRS) sprzętu pokładowego.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Brak charakterystyki pociągu na pokładzie (kod prędkości od strony toru) |
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Hamowanie nagłe jest uruchamiane w przypadku przekroczenia prędkości oraz braku reakcji maszynisty na ostrzeżenie dźwiękowe. |
Odpowiedzialne państwo członkowskie: Niderlandy
Opis ATB nowej generacji:
System ATC jest częściowo zainstalowany na liniach NS.
System ten składa się z przytorowych balis oraz urządzeń pokładowych. Dostępna jest także funkcja przesyłania informacji uaktualniających w oparciu o wykorzystanie pętli kablowej.
Transmisja danych realizowana jest między aktywną balisą a anteną pokładową. System rozpoznaje kierunek jazdy, a balisy są montowane między szynami, z niewielkim odsunięciem od środka.
Sprzęt pokładowy ATBNG jest w pełni interoperacyjny ze sprzętem przytorowym ATB pierwszej generacji.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
Hamowanie nagłe jest uruchamiane w przypadku naruszenia warunków nadzoru ruchu oraz braku reakcji maszynisty na ostrzeżenie dźwiękowe. |
Odpowiedzialne państwo członkowskie: Niderlandy.
ATP-VR/RHK
Automatyczna kontrola pociągu (ATP), Junakulunvalvonta (JKV)
System nazywany jest zwykle „Junakulunvalvonta (JKV)” (fiński odpowiednik automatycznej kontroli pociągu (ATP)).
Opis:
System ATP-VR/RHK stosowany w Finlandii jest to system typu ATP, bezpieczny w przypadku awarii, zbudowany w oparciu o technologię Ebicab 900 z balisami JGA, lub technologię ATSS z balisami Mini-transponder. System ten składa się z przytorowych balis i koderów sygnału lub komputerów oraz skomputeryzowanych urządzeń pokładowych.
Transmisja danych realizowana jest między pasywnymi balisami przytorowymi (2 na każdy punkt balis) a anteną pokładową znajdującą się pod pojazdem, która także w trakcie mijania stanowi źródło zasilania balis w energię. Sprzężenie między balisą a urządzeniami pokładowymi jest indukcyjne.
Ogólna charakterystyka:
|
— |
Balisy zasilające:
|
|
— |
Transmisja danych do pociągu:
|
|
— |
Połączenie:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór: Informacje ogólne: Wszelkie informacje dotyczące sygnałów, przełączeń oraz ograniczeń prędkości, przekazywane są w odległości 2 400 lub 3 600 m (zależnie od maksymalnej prędkości linii) od punktu docelowego. System oblicza krzywe hamowania dla każdego punktu docelowego i podaje najbardziej ograniczające informacje maszyniście.
|
|
— |
Inne funkcje:
|
|
— |
Reakcja:
|
Odpowiedzialne państwo członkowskie: Finlandia.
BACC
Opis:
System BACC jest zainstalowany na wszystkich liniach o prędkości większej niż 200 km/h w sieci FS oraz na innych liniach, które są uwzględniane pod kątem interoperacyjności.
System ten składa się z konwencjonalnych kodowych obwodów szynowych, które funkcjonują na dwóch częstotliwościach nośnych i obsługują dwie klasy pociągów. Urządzenia pokładowe są skomputeryzowane.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Dwie kategorie pociągów na pokładzie (kod prędkości od strony toru) |
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Hamowanie nagłe w przypadku przekroczenia prędkości. |
Odpowiedzialne państwo członkowskie: Włochy.
CAWS I ATP
(zainstalowane w Republice Irlandii)
System ten składa się z szynowych obwodów kodowych oraz urządzeń pokładowych. Transmisja kodu realizowana jest za pomocą cewek odbiorczych zamontowanych w przedniej części pociągu nad każdą szyną.
Kodowe obwody szynowe zainstalowane są na wszystkich szlakach podmiejskich Dublina o wysokiej gęstości ruchu, a także na szlakach Intercity do Cork, Limerick, Athlone oraz do granicy ze Zjednoczonym Królestwem w kierunku Belfastu.
Lokomotywy spalinowe wyposażone są w urządzenia systemu ciągłego ostrzegania automatycznego. System instalowany jest także w pociągach jeżdżących codziennie ze Zjednoczonego Królestwa do Republiki Irlandii. W systemie tym odbierany sygnał kodowy przetwarzany jest na sygnały kolorowe, wyświetlane maszyniście.
Pociągi o napędzie elektrycznym wyposażone są w urządzenia automatycznej kontroli pociągu. W systemie tym odbierany sygnał kodowy przetwarzany jest na maksymalną prędkość, która jest wyświetlana maszyniście. Tabor elektryczny funkcjonuje tylko w zelektryfikowanym obszarze podmiejskim Dublina.
Ogólna charakterystyka: (Zelektryfikowany obszar podmiejski Dublina)
|
— |
Częstotliwość nośna: 83 1/3 Hz. |
|
— |
Kody impulsowe o fali prostokątnej 50, 75, 120, 180, 270 i 420 CPM. Przetwarzane przez ATP jako prędkości 29 km/h, 30 km/h, 50 km/h, 75 km/h, 100 km/h. Przetwarzane przez CAWS na kolory żółty, zielony, żółty, zielony, żółty podwójny, zielony. |
|
— |
Prędkości dozwolone są także podawane na podstawie wyświetlanego wskazania sygnału. Ograniczenie prędkości jest stopniowo redukowane do zera w trakcie zbliżania się do sygnału czerwonego. |
Ogólna charakterystyka: (Poza zelektryfikowanym obszarem podmiejskim Dublina)
|
— |
Częstotliwość nośna: 50 Hz. |
|
— |
3 kody impulsowe o fali prostokątnej 50, 120 i 180 CPM. Przetwarzane przez CAWS na kolory żółty, żółty podwójny, zielony. |
Automatyczna kontrola pociągu (ATP).
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Charakterystyka wprowadzana przez maszynistę:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
|
System ciągłego ostrzegania automatycznego (CAWS)
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Charakterystyka wprowadzana przez maszynistę:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
|
Odpowiedzialne państwo członkowskie: Republika Irlandii.
Crocodile
Opis:
System Crocodile jest zainstalowany na głównych liniach RFF, SNCB i CFL. Na liniach uwzględnianych pod kątem interoperacyjności funkcjonuje system Crocodile.
System działa w oparciu o stalowy pręt w torach, który jest fizycznie łączony z pociągiem za pomocą szczotki umocowanej do pociągu. Pręt jest pod napięciem +/- 20 V, podawanym z akumulatora, odpowiednio do wskazania sygnału. Maszynista otrzymuje odpowiedni sygnał ostrzegawczy, którego odebranie musi potwierdzić. Przy braku potwierdzenia sygnału następuje automatyczne uruchomienie hamowania. System Crocodile nie realizuje nadzoru prędkości ani odległości. Jest to wyłącznie system kontroli czujności maszynisty.
Obwody przytorowe oraz pokładowe posiadają konstrukcję konwencjonalną.
Ogólna charakterystyka:
|
— |
Pręt zasilany napięciem stałym ±20 V. |
|
— |
Brak wprowadzania charakterystyki pociągu do części pokładowej systemu. |
|
— |
Nadzór: Potwierdzenie przez maszynistę. |
|
— |
Reakcja: Przy braku potwierdzenia sygnału ostrzegawczego następuje automatyczne uruchomienie hamowania nagłego. Hamowanie nagłe może być zwolnione po zatrzymaniu pociągu. |
Odpowiedzialne państwa członkowskie: Belgia, Francja, Luksemburg.
Ebicab
System Ebicab występuje w dwóch wersjach: Ebicab 700 i Ebicab 900.
Opis systemu Ebicab 700:
Jest to standardowy system ATP, bezpieczny w razie awarii, funkcjonujący w Szwecji, Norwegii, Portugalii i Bułgarii. Identyczne oprogramowanie stosowane w Szwecji i Norwegii umożliwia płynne przekraczanie granicy bez zmiany maszynistów lub lokomotyw, pomimo istnienia różnych systemów sygnalizacji oraz zasad pracy. Inne oprogramowanie użytkowane jest w Portugalii i Bułgarii.
System ten składa się z przytorowych balis i koderów sygnału lub łączności szeregowej z blokadą elektroniczną oraz skomputeryzowanych urządzeń pokładowych.
Transmisja danych realizowana jest między pasywnymi balisami przytorowymi (2 do 5 na każdy sygnał) a anteną pokładową znajdującą się pod pojazdem, która także w trakcie mijania stanowi źródło zasilania balis w energię. Sprzężenie między balisą a urządzeniami pokładowymi jest indukcyjne.
Ogólna charakterystyka:
|
— |
Balisy zasilające:
|
|
— |
Transmisja danych do pociągu:
|
|
— |
Łączenie:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Ostrzeżenie dźwiękowe przy przekroczeniu prędkości > 5 km/h, uruchomienie hamowania służbowego przy przekroczeniu prędkości > 10 km/h. Maszynista może zwolnić hamowanie służbowe po spadku prędkości poniżej dopuszczalnej wartości. System Ebicab dokona hamowania w stopniu wystarczającym niezależnie od maszynisty. Hamowanie nagłe jest stosowane wyłącznie w razie rzeczywistego zagrożenia, np. gdy hamowanie służbowe jest niewystarczające. Zwolnienie hamowania nagłego możliwe jest po zatrzymaniu pociągu. |
|
— |
Zaimplementowane opcje
|
Odpowiedzialne państwa członkowskie: Portugalia, Szwecja.
Opis systemu Ebicab 900:
System ten składa się z przytorowych balis i koderów sygnału lub łączności szeregowej z blokadą elektroniczną oraz skomputeryzowanych urządzeń pokładowych.
Transmisja danych realizowana jest między pasywnymi balisami przytorowymi (2 do 4 na każdy sygnał) a anteną pokładową znajdującą się pod pojazdem, która także w trakcie mijania stanowi źródło zasilania balis w energię. Sprzężenie między balisą a urządzeniami pokładowymi jest indukcyjne.
Ogólna charakterystyka:
|
— |
Balisy zasilające:
|
|
— |
Transmisja danych do pociągu:
|
|
— |
Podłączenie:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Ostrzeżenie dźwiękowe przy przekroczeniu prędkości > 3 km/h, uruchomienie hamowania służbowego przy przekroczeniu prędkości > 5 km/h. Maszynista może zwolnić hamowanie służbowe po spadku prędkości poniżej dopuszczalnej wartości. System Ebicab dokona hamowania w stopniu wystarczającym niezależnie od maszynisty. |
Odpowiedzialne państwo członkowskie: Hiszpania.
EVM
Opis:
System EVM jest zainstalowany na wszystkich głównych liniach Węgierskich Kolei Państwowych (MÁV). Linie te są uwzględniane pod kątem interoperacyjności. Większość taboru lokomotyw jest wyposażona w ten system.
Część przytorowa systemu składa się z kodowych obwodów szynowych, które funkcjonują na jednej częstotliwości nośnej wykorzystywanej do transmisji danych. Częstotliwość nośna jest kodowana przy użyciu 100 % modulacji amplitudowej m, za pomocą kodera elektronicznego.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
Ogólna charakterystyka:
|
— |
Transmisja danych z toru do pociągu:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
|
|
— |
Funkcje dodatkowe:
|
Odpowiedzialne państwo członkowskie: Węgry.
SCHEMAT GW ATP
Opis:
System GW ATP jest to system automatycznej kontroli pociągu (ATP) stosowany w Zjednoczonym Królestwie na liniach Great Western (GW) między stacjami London (Paddington), Bristol Temple Meads, Bristol Parkway i Newbury. System zbudowany jest w oparciu o urządzenia podobne do systemu TBL stosowanego w Belgii, chociaż występują w nim pewne różnice zarówno od strony technicznej, jak i funkcjonalnej.
System ten stosowany jest tylko do pociągów jeżdżących z prędkościami większymi niż 160 km/h.
System ten realizuje następujące funkcje podstawowe:
|
— |
pełna, automatyczna kontrola pociągu, wyposażonego w odpowiednie urządzenia oraz jadącego po odpowiednio wyposażonej infrastrukturze, |
|
— |
nadzór maksymalnej prędkości pociągu oraz zabezpieczenie przed odtoczeniem, w przypadku pociągu wyposażonego w odpowiednie urządzenia oraz jadącego po niewyposażonej infrastrukturze. |
Dane przesyłane są z urządzeń przytorowych przy użyciu radiolatarni ustawionych przy sygnalizatorach. W niektórych miejscach, w celu poprawy funkcjonowania systemu zainstalowano pętle przesyłające informacje uaktualniające.
Ogólna charakterystyka
|
— |
Transmisja danych do pociągu:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Interfejs dla maszynisty:
|
|
— |
Nadzór
|
Odpowiedzialne państwo członkowskie: Zjednoczone Królestwo.
INDUSI/PZB
(Induktive Zugsicherung/Punktförmige Zugbeeinflussung)
Opis:
System ATP instalowany na liniach w Austrii i Niemczech, uwzględnianych pod kątem interoperacyjności.
Przytorowe oraz pokładowe obwody rezonansowe o sprzężeniu magnetycznym przesyłają 1 z 3 informacji do pociągu. System ten nie jest bezpieczny w razie awarii, ale w wystarczającym stopniu nadzoruje pracę maszynisty. Funkcjonuje on całkowicie w tle, co oznacza, że nie daje on maszyniście żadnych informacji o wskazaniach sygnałów, informuje tylko o tym, że pociąg jest nadzorowany.
Ogólna charakterystyka:
|
— |
3 częstotliwości
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę: Charakterystyka hamowania (procent hamowania oraz reżim hamowania dla 3 kategorii nadzoru). |
|
— |
Nadzór:
|
|
— |
Reakcja: W przypadku naruszenia warunków nadzoru uruchamiane jest nagłe hamowanie. Hamowanie nagłe może być zwolnione w szczególnych warunkach. |
Odpowiedzialne państwa członkowskie: Austria, Niemcy.
KVB
Opis:
Standardowy system ATP działający we Francji w sieci RFF. System obejmuje wszystkie zelektryfikowane linie kolei konwencjonalnej, realizując nadzór prędkości, kontrolę nad miejscami niebezpiecznymi oraz tymczasowe ograniczenia prędkości. Zaimplementowany na 99 % linii konwencjonalnych. Częściowo zainstalowany na liniach dużych prędkości w celu transmisji punktowej oraz nadzoru nad tymczasowymi ograniczeniami prędkości, jeżeli poziomy prędkości nie są podawane przez kody TVM.
System ten składa się z przytorowych balis i koderów sygnału oraz skomputeryzowanych urządzeń pokładowych. System ten jest dodatkową nakładką względem konwencjonalnych urządzeń sterowania ruchem kolejowym.
Transmisja danych realizowana jest między pasywnymi balisami przytorowymi (2 do 9 na każdy sygnał) a anteną pokładową znajdującą się pod pojazdem, która także w trakcie mijania stanowi źródło zasilania balis w energię. Sprzężenie między balisą a urządzeniami pokładowymi jest indukcyjne. Transmisja danych wykorzystywana jest także do przesyłania informacji niezwiązanych z ATP (np. drzwi, kanały radiowe).
Ponadto system KVB może być dodatkowo wyposażony w transmisję ciągłą, umożliwiającą stosowanie funkcji przesyłania informacji uaktualniających (jak np. Europętla).
Przesyłanie informacji uaktualniających realizowane jest przy użyciu transmisji ciągłej. Polega to na wykorzystaniu modulacji z przesunięciem częstotliwości (FSK) z dwiema nośnymi Fp 20 kHz i 25 kHz (po jednej na każdy tor). Dane są przesyłane w formie binarnej, w grupach po 80 bitów (64 bity użyteczne). Wszystkie informacje uaktualniające wymagają trzech elementów z 80 bitów, transmitowanych jeden po drugim. Jest to tzw. długa wiadomość.
Transmisja bitu „1” wykonywana jest poprzez emitowanie częstotliwości Fp + 692 Hz, transmisja bitu „0” – poprzez emitowanie częstotliwości Fp – 750 Hz.
Charakterystyka:
|
— |
Balisy zasilające:
|
|
— |
Transmisja danych do pociągu:
|
|
— |
Poza zespołami trakcyjnymi charakterystykę pociągu musi wprowadzić maszynista:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
W ostatniej wersji system KVB podawane są tylko wskazania mówiące o zbliżaniu się do sygnału niebezpieczeństwa z krótkim wyprzedzeniem (000), „b” i „p” jako komunikaty wstępne. Wskazania dotyczące prędkości nie są podawane w żaden sposób.
|
— |
Nadzór:
|
|
— |
Reakcja: Ostrzeżenie dla maszynisty. W przypadku naruszenia warunków nadzoru ruchu uruchamiane jest nagłe hamowanie. Zwolnienie hamowania nagłego możliwe jest tylko przy całkowicie zatrzymanym pociągu. |
Odpowiedzialne państwo członkowskie: Francja.
LS
Opis:
System LS jest zainstalowany na wszystkich głównych liniach Kolei Czeskich (CD) oraz Kolei Republiki Słowacji (ZSR), a także na innych liniach o prędkości przekraczającej 100 km/h. Linie te są uwzględniane pod kątem interoperacyjności.
Część przytorowa systemu składa się z kodowych obwodów szynowych, które funkcjonują na jednej częstotliwości nośnej. Częstotliwość nośna jest kodowana w 100 % przy użyciu modulacji amplitudowej. Niemal cały tabor lokomotyw wyposażony jest w urządzenia pokładowe. Część pokładowa systemu została unowocześniona i obecnie urządzenia te są częściowo skomputeryzowane.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: Nagłe hamowanie w przypadku braku reakcji maszynisty przy odebraniu informacji o przekroczeniu prędkości dozwolonej |
Odpowiedzialne państwa członkowskie: Republika Czeska, Republika Słowacka.
LZB
(Linienförmige Zugbeeinflussung)
Opis:
System ATC, zainstalowany na wszystkich liniach w Niemczech, o prędkości większej niż 160 km/h, które stanowią znaczący element linii uwzględnianych pod kątem interoperacyjności. System LZB instalowany jest także na liniach w Austrii i Hiszpanii.
System ten składa się z części przytorowej, która z kolei składa się z następujących elementów:
|
— |
urządzenia współpracujące z systemami blokowania oraz transmisją odpowiednich danych, |
|
— |
urządzenia do przetwarzania danych oraz MMI w centrum LZB, |
|
— |
urządzenia do transmisji danych do i z innych centrów LZB, |
|
— |
system transmisji danych do i z pociągów. |
Urządzenia pokładowe zwykle wyposażone z w funkcję Indusi.
Transmisja danych między urządzeniami przytorowymi a pokładowymi odbywa się za pomocą kablowych, przytorowych pętli indukcyjnych oraz pokładowych anten ferrytowych.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Transmisja danych z pociągu:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: W przypadku naruszenia warunków nadzoru ruchu uruchamiane jest nagłe hamowanie. W przypadku przekroczenia prędkości hamowanie nagłe może zostać zwolnione, gdy prędkość mieści się w dopuszczalnych granicach. |
|
— |
Zasady pracy systemu LZB: DB stosuje ten system jako system ATP zorientowany pod kątem bezpieczeństwa; sygnały przytorowe nie są wymagane; w przypadku istnienia sygnałów przytorowych ze względu na pociągi nie wyposażone w system, sygnały te są nieważne dla pociągów sterowanych przy użyciu systemu LZB. System LZB jest zwykle podłączony do układów automatycznego sterowania silnikami oraz hamulcami. |
Odpowiedzialne państwa członkowskie: Austria, Niemcy, Hiszpania.
MEMOR II+
Opis:
System ATP, który jest zainstalowany na wszystkich liniach w sieci kolejowej Luksemburga, stosowany do kontroli niebezpiecznych miejsc oraz tymczasowego ograniczania prędkości. MEMOR II+ jest kompatybilny z systemem Crocodile.
System ten zbudowany jest w oparciu o jeden lub odpowiednio dwa pręty stalowe w torze, które są fizycznie łączone z pociągami za pomocą szczotek na zainstalowanych pokładzie. Pręty są pod napięciem od +/- 12 do +/- 20 V, odpowiednio do wskazania sygnału. System ten nie jest bezpieczny w razie awarii, ale w wystarczającym stopniu nadzoruje pracę maszynisty. Funkcjonuje on całkowicie w tle, co oznacza, że nie daje on maszyniście żadnych informacji o wskazaniach sygnałów, informuje tylko o tym, że pociąg jest nadzorowany.
Ogólna charakterystyka:
|
— |
Pręty pod napięciem stałym w torach (± 12 to +/- 20 V). |
|
— |
Na pokładzie maszynista nie podaje żadnych parametrów charakterystyki pociągu, tylko jedną, zaprogramowaną krzywą prędkości, zapisaną i przechowywaną na pokładzie. |
|
— |
Nadzór:
|
|
— |
Reakcja:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
Perspektywa:
Sieć infrastruktury kolei Luksemburga jest obecnie wyposażana w system ETCS poziomu I. Stopniowo wprowadzany do eksploatacji system ETCS zastąpi systemy MEMOR II oraz Crocodile. Wymaga to okresu przejściowego w celu dostosowania urządzeń pokładowych do systemu ETCS. Ostatecznie system ECTS poziomu I będzie jedynym funkcjonującym systemem w sieci infrastruktury kolei Luksemburga.
Odpowiedzialne państwo członkowskie: Luksemburg.
RETB
Opis:
Radioelektroniczny blok znakowy (RETB) jest to system sterowania ruchem kolejowym stosowany na małej liczbie rzadko używanych linii w Zjednoczonym Królestwie, objętych zasięgiem dyrektywy interoperacyjności (trzy linie w Szkocji i jedna w Walii).
System ten realizuje następujące funkcje podstawowe:
|
— |
wydawanie zezwoleń na jazdę z centrum sterowania sygnalizacją do pociągów za pomocą elektronicznych „znaków”, wysyłanych przez radio do urządzeń pokładowych, |
|
— |
wyświetlanie zezwoleń na jazdę dla maszynisty, |
|
— |
anulowanie „znaków” zezwolenia na jazdę po zakończeniu przez pociąg jazdy objętej zezwoleniem. |
System RETB jest użytkowany w połączeniu z procedurami protokołu łączności maszynista-sygnalizator, które stosowane są przy żądaniu, wydawaniu i anulowaniu „znaków” zezwolenia na jazdę.
RETB nie zawiera funkcji kontroli pociągu (zatem nie jest interfejsem między pociągiem a urządzeniami RETB oraz systemem hamowania). Zabezpieczenie przed przejechaniem za daleko jest jednak realizowane za pomocą standardowych urządzeń TPWS, opisanych w innym miejscu załącznika B. Pokładowe urządzenia TPWS realizują funkcje AWS (także opisane w załączniku B), które dostarczają maszyniście informacji dźwiękowych i wizualnych podczas dojeżdżania do granicy zezwolenia na jazdę oraz podczas zbliżania się do miejsca ograniczenia prędkości.
Urządzenia pokładowe
Urządzenia pokładowe obejmują sprzęt radiowy oraz wyświetlacz kabinowy (CDU) systemu RETB.
System radiowy stosowany do transmisji „znaków” zezwolenia na jazdę jest wariantem systemu NRN, który jest eksploatowany w Zjednoczonym Królestwie (opisany w innym miejscu załącznika B). Sprzęt radiowy jest wykorzystywany do transmisji głosu i danych.
CDU składa się z następujących elementów:
|
— |
wyłącznika kluczowego służącego do włączania urządzeń pokładowych w tryb pracy, |
|
— |
przycisku „odbiór” służącego do odbierania znaków zezwolenia na jazdę z centrum sterowania ruchem, pozwalających na rozpoczęcie jazdy, |
|
— |
wyświetlacz alfanumeryczny, który wyświetla nazwę części linii, dla której wydany został znak zezwolenia na jazdę, |
|
— |
przycisk „wysyłanie” służący do odsyłania znaku zezwolenia na jazdę do centrum, po zakończeniu jazdy przez pociąg. |
Pociąg musi także być wyposażony w urządzenie TPWS (także realizujące funkcje AWS), dla celów opisanych powyżej, ale brak połączenia między urządzeniami TPWS a RETB na pokładzie pociągu.
Odpowiedzialne państwo członkowskie: Zjednoczone Królestwo.
RSDD/SCMT
(Ripetizione Segnali Discontinua Digitale/Sistema Controllo Marcia del Treno)
Opis:
RSDD/SCMT jest to system typu ATP; może być stosowany samodzielnie lub nakładany na infrastrukturę BACC.
Sprzęt pokładowy jest zdolny do skoordynowanego zarządzania informacjami pochodzącymi z różnych źródeł.
System ten składa się z balis i koderów oraz anteny pokładowej, która także dostarcza energię do balisy podczas przejazdu pociągu. Sprzężenie jest typu indukcyjnego.
Z logicznego punktu widzenia istnieją dwa rodzaje balis: „balisy systemowe” zawierające informacje dotyczące dalszego odcinka linii oraz „balisy sygnalizacyjne” zawierające informacje dotyczące wskazań sygnałów.
Przewiduje się stosowanie trzech typów balis; wszystkie mają działać na tych samych częstotliwościach dla łączy nadrzędnych i podrzędnych, ale o różnej przepustowości.
|
— |
Częstotliwość zasilania:
|
|
— |
Transmisja danych do pociągu:
|
|
— |
Charakterystyka pociągu: Stała charakterystyka pociągu jest ładowana w warsztatach utrzymania, a dane zależne od składu pociągu wprowadzane są przez maszynistę. Balisy specjalne służą do kalibrowania pokładowego systemu odometrii, przed jego wykorzystaniem do celów nadzoru pociągu. |
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór: W normalnych warunkach (pełny nadzór) kontroli podlegają następujące parametry:
Jeżeli jednego lub większej liczby parametrów linii nie można wysłać do systemu pokładowego (np. awaria), można używać systemu w trybie częściowego nadzoru. W tym przypadku MMI jest wyłączane, a maszynista musi prowadzić pociąg zgodnie z sygnalizacją przytorową. |
|
— |
Reakcja:
|
Odpowiedzialne państwo członkowskie: Włochy.
SELCAB
Opis:
Jest to system typu ATC, zainstalowany na linii dużych prędkości Madryt-Sewilla, jako rozszerzenie systemu LZB w rejonach stacji. Pokładowe urządzenia LZB 80 (Hiszpania) mogą także przetwarzać informacje SELCAB.
Transmisja danych między urządzeniami przytorowymi a pokładowymi odbywa się za pomocą półciągłych, przytorowych pętli indukcyjnych oraz pokładowych anten ferrytowych.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja: W przypadku naruszenia warunków nadzoru ruchu uruchamiane jest nagłe hamowanie. W przypadku przekroczenia prędkości hamowanie nagłe może zostać zwolnione, gdy prędkość mieści się w dopuszczalnych granicach. |
Odpowiedzialne państwa członkowskie: Hiszpania
SHP
Samoczynne Hamowanie Pociągu
Opis:
System typu AWS, zainstalowany w Polsce na liniach przewidzianych do interoperacyjności.
Przytorowe oraz pokładowe obwody rezonansowe o sprzężeniu magnetycznym przesyłają 1 informację do pociągu. System jest uważany za bezpieczny w razie awarii. Jest zintegrowany z pokładowym systemem kontroli czujności. System kontroli czujności zapobiega także niekontrolowanemu ruchowi pojazdu (poślizg) przy prędkości większej o 10 % od jego maksymalnej dozwolonej prędkości. Funkcjonuje on całkowicie w tle, co oznacza, że nie daje on maszyniście żadnych informacji o wskazaniach sygnałów, informuje tylko o tym, że pociąg jest nadzorowany.
Ogólna charakterystyka:
|
— |
Częstotliwość:
|
|
— |
Nadzór:
|
|
— |
Lokalizacja obwodu rezonansowego:
|
Reakcja:
Pokładowa lampka sygnalizacyjna zapala się, gdy pociąg przejeżdża nad obwodem rezonansowym (zamontowanym przy torach), co wymaga potwierdzenia przez maszynistę. Jeżeli potwierdzenie nie zostanie wykonanie w ciągu 3 sekund, włącza się sygnał dźwiękowy. Jeżeli potwierdzenie nie zostanie wykonane w ciągu 2 sekund po włączeniu sygnału dźwiękowego, system uruchamia hamowanie nagłe. Hamowanie nagłe może być zwolnione w szczególnych warunkach.
System kontroli czujności jest włączany, gdy prędkość pojazdu przekroczy 10 % maksymalnej dozwolonej prędkości dla pojazdu. Po 16 sekundach włącza się lampka sygnalizacyjna i wymagane jest potwierdzenie przez maszynistę przy zachowaniu takich samych czasów, jak przy systemie SHP. Następnie potwierdzenie jest wymagane co 60 sekund. Funkcja nadzoru systemu SHP samoczynnie ponawia kontrolę czujności co 60 sekund.
Odpowiedzialne państwo członkowskie: Polska.
TBL 1/2/3
Opis:
System TBL jest to system typu ATC, częściowo zainstalowany na liniach NMBS/SNCB (aktualnie: 1 200 radiolatarni i 120 kompletów pokładowych TBL1, 200 radiolatarni i 300 kompletów pokładowych TBL2; wszystkie linie przystosowane do prędkości powyżej 160 km/h wyposażone są TBL2).
System ten składa się z przytorowych balis przy każdym sygnalizatorze oraz urządzeń pokładowych. TBL1 jest to system ostrzegawczy, a TBL2/3 jest systemem sygnalizacji kabinowej. W systemie TBL2/3 stosowane są balisy przesyłające informacje uaktualniające, dostępne są także pętle kablowe do przesyłania informacji uaktualniających.
Część przytorowa jest oznaczona jako TBL2 w przypadku zastosowania interfejsu z blokadami przekaźnikowymi lub jako i TBL3 w przypadku zastosowania interfejsu z blokadami elektronicznymi.
Urządzenia pokładowe nazywane są TBL2. System ten realizuje funkcje TBL2, TBL1 i systemu Crocodile.
Transmisja danych realizowana jest między aktywną balisą a zestawem anten pokładowych. System rozpoznaje kierunek jazdy, a balisy są montowane są między szynami, z niewielkim odsunięciem od środka.
Ogólna charakterystyka:
|
— |
Transmisja danych do pociągu:
|
|
— |
Charakterystyka pociągu wprowadzana do systemu przez maszynistę (TBL2)
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
|
Odpowiedzialne państwa członkowskie: Belgia.
TPWS
Opis:
System TPWS ma na celu poprawę bezpieczeństwa, zwłaszcza na rozjazdach. Realizuje on funkcje typu AWS, które są wyróżnione czcionką pochyłą. TPWS dotyczy wszystkich linii uwzględnianych pod kątem interoperacyjności.
System ten realizuje następujące funkcje podstawowe:
|
— |
Ostrzeganie maszynisty przy standardowej odległości hamowania przed miejscami, gdzie występują ograniczenia ruchu:
|
|
— |
Kontrola pociągu (zaprogramowana charakterystyka pociągu) w następujących okolicznościach:
|
System ten zbudowany jest w oparciu o magnesy stałe i cewki generujące pola w torze. System nie jest uważany za bezpieczny w razie awarii, ale wyposażony jest w środki i procedury zmniejszające praktycznie do minimum prawdopodobieństwo złego prowadzenia maszynisty.
System TPWS podaje następujące wizualne wskazania dla maszynisty:
|
— |
stan ostatniego magnesu, wolna droga lub ograniczenie (wskaźnik „słonecznikowy”), |
|
— |
przyczyna uruchomienia hamulca, |
|
— |
usterki/stan izolacji. |
Elementy sterujące należące do systemu TPWS:
|
— |
przycisk potwierdzania ostrzeżenia dotyczącego ograniczenia w warunkach jazdy, |
|
— |
przycisk przekazywania sygnału informującego o niebezpieczeństwie, działający tylko przez określony czas po czynności, |
|
— |
sterowniki izolacji. |
Wskazania dźwiękowe systemu TPWS:
|
— |
dźwięk „dzwonka” – sygnał wolnej jazdy, |
|
— |
dźwięk „syreny” – ograniczenia w warunkach jazdy, wymaga potwierdzenia. |
System TPWS połączony jest systemem hamowania pociągu i realizuje pełne uruchomienie hamowania w przypadku:
|
— |
braku potwierdzenia „syreny” przez 2,5 sekundy, |
|
— |
natychmiast po przejechaniu „pułapki prędkości” z nadmierną prędkością, |
|
— |
natychmiast po przejechaniu przez pociąg sygnału informującego o niebezpieczeństwie. |
Technologia ta nie jest zbudowana w oparciu o mikroprocesory, ale ich użycie nie jest wykluczone.
Inne cechy charakterystyczne:
|
— |
Kolejność pól magnetycznych (biegun N, biegun S) podaje informacje o tym, czy sygnał daje wolną drogę, czy nie. |
|
— |
Wybór jednego z sinusoidalnych pól elektromagnetycznych o częstotliwości około 60 kHz dla funkcji pułapki prędkości oraz zatrzymania pociągu (stosuje się maks. 8 częstotliwości). |
|
— |
Charakterystyka pociągu w odniesieniu do wydajności hamowania ustalana jest przy użyciu osprzętu pokładowego i dostarcza informacji odnośnie do maksymalnych prędkości przy pułapkach prędkości. Aktualnie nie stosuje się żadnych charakterystyk pociągów, ale jest to możliwe w przyszłości. |
|
— |
Potwierdzanie przez maszynistę ograniczenia warunków jazdy wymagane jest w ciągu 2,5 sekundy, w przeciwnym razie następuje uruchomienie nagłego hamowania. |
|
— |
Hamowanie nagłe można zwolnić po upływie jednej minuty od jego zadziałania, co także wymaga potwierdzenia. |
Odpowiedzialne państwo członkowskie: Zjednoczone Królestwo
TVM
Opis:
System TVM jest to kabinowy system sterowania ruchem kolejowym. Jest on przeznaczony w szczególności do obsługi linii dużych prędkości RFF. Starsza wersja TVM 300 zainstalowana jest na trasie Paryż-Lyon (LGV SE) oraz Paryż-Tours/Le Mans (LGV A). Późniejsza wersja TVM 430 funkcjonuje na liniach Paryż-Lille-Calais (LGV N), w części SNCB w kierunku Brukseli, na linii Lyon-Marsylia/Nimes (LGV Mediterranée), w Eurotunelu oraz na połączeniu Eurotunelu z liniami kolejowymi Zjednoczonego Królestwa. TVM 430 jest kompatybilny z TVM 300.
TMV 300 i TVM 430 zbudowane są oparciu o kodowe obwody szynowe, wykorzystywane do transmisji ciągłej, oraz pętle indukcyjne lub balisy (typu KVB lub TBL) dla transmisji punktowej.
Transmisja danych między szynowymi obwodami kodowymi a urządzeniami pokładowymi odbywa się za pomocą antenowej cewki indukcyjnej o sprzężeniu powietrznym, znajdującej się nad szynami.
Ogólna charakterystyka:
|
— |
Transmisja danych z toru do pociągu za pomocą obwodów szynowych:
|
|
— |
Transmisja danych z toru do pociągu za pomocą pętli indukcyjnych
|
|
— |
Charakterystyka pociągów wprowadzana jest na pokładzie dla lokomotyw ciągnących składy w Eurotunelu (nie na TGV, gdzie stosowane są wartości stałe). |
|
— |
Informacje wyświetlane dla maszynisty: polecenia dotyczące prędkości przedstawiane są za pomocą kolorowych wskazań sygnałów świetlnych. |
|
— |
Nadzór:
|
|
— |
Reakcja: hamowanie nagłe jest uruchamiane w przypadku przekroczenia prędkości. |
Odpowiedzialne państwa członkowskie: Belgia, Francja, Zjednoczone Królestwo.
ZUB 123
Opis:
System typu ATC, zainstalowany powszechnie w Danii na liniach uwzględnianych pod kątem interoperacyjności.
System ten składa się z następujących części:
|
— |
Urządzenia przytorowe
|
|
— |
Urządzenia pokładowe
|
Pokładowy system ZUB 123 jest uważany za bezpieczny w razie awarii.
Ogólna charakterystyka:
|
— |
3 częstotliwości:
|
|
— |
Tryby transmisji danych:
|
|
— |
Przetwarzanie danych na pokładzie:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Dodatkowe wskaźniki i przyciski |
|
— |
Wprowadzanie danych dotyczących pociągu:
|
|
— |
Nadzór:
|
|
— |
Reakcja:
|
Odpowiedzialne państwo członkowskie: Dania.
ZUB 121
(Tylko dla celów informacyjnych)
Opis:
System typu ATC, zainstalowany powszechnie w Szwajcarii na liniach SBB i BLS, uwzględnianych pod kątem interoperacyjności.
System ten składa się z następujących części:
|
— |
Urządzenia przytorowe:
|
|
— |
Urządzenia pokładowe:
|
Charakterystyka:
|
— |
3 częstotliwości:
|
|
— |
Tryby transmisji danych:
|
|
— |
Informacje wyświetlane dla maszynisty:
|
|
— |
Lampki i syrena:
|
|
— |
Przyciski:
|
|
— |
Wprowadzanie danych dotyczących pociągu: stosuje się pokładowy panel sterowania radiowego. |
|
— |
Nadzór/polecenia:
|
|
— |
Reakcja:
|
Państwo odpowiedzialne: Szwajcaria.
Część 2: Radiołączność
INDEKS:
|
1. |
Radio UIC, rozdziały 1–4 |
|
2. |
Radio UIC, rozdziały 1–4+6 |
|
3. |
Radio UIC, rozdziały 1– 4 + 6 (system irlandzki) |
|
4. |
Radio UIC, rozdziały 1–4+6+7 |
| Wprowadzenie do systemów Zjednoczonego Królestwa |
|
5. |
BR 1845 |
|
6. |
BR 1609 |
|
7. |
FS ETACS i GSM |
|
8. |
Radio UIC, rozdziały 1–4 (system radiowy TTT, zainstalowany na linii Cascais) |
|
9. |
System radiowy TTT CP_N |
|
10. |
System radiowy PKP |
|
11. |
Radiowy system kolejowy VR |
|
12. |
TRS – System radiowy Republiki Czeskiej |
|
13. |
System radiowy LDZ |
|
14. |
CH – system radiowy kolei greckich |
|
16. |
Estoński system radiowy |
|
17. |
Litewski system radiowy |
Powyższe systemy są aktualnie użytkowane w państwach członkowskich. Szczegółowe informacje na temat powyższych systemów można znaleźć w rejestrze infrastruktury, jak podano w załączniku C.
Tylko dla celów informacyjnych – systemy te nie są stosowane w państwach członkowskich:
|
15. |
Radio UIC, rozdział Bułgaria |
Radio UIC, rozdziały 1–4
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r. Jest to podzestaw minimalny, niezbędny dla międzynarodowego ruchu kolejowego.
Radio UIC jest to radio analogowe, składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na jedno- i dwukierunkową łączność głosową oraz stosowanie sygnałów roboczych (tonów), ale nie pozwalają na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie:
|
|
— |
Tony robocze:
|
Odpowiedzialne państwa członkowskie: Francja, Niemcy, Węgry, Luksemburg.
Radio UIC, rozdziały 1–4 + 6
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r.
Radio UIC jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na jedno- i dwukierunkową łączność głosową oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Tony robocze:
|
|
— |
Struktura telegramu:
|
|
— |
Transmisja telegramów:
|
|
— |
Komunikaty (kodowanie wg systemu dziesiątkowego)
|
Odpowiedzialne państwa członkowskie: Austria, Belgia, Dania, Niemcy, Niderlandy, Hiszpania.
Radio UIC, rozdziały 1–4 + 6 (system irlandzki)
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r.
Radio UIC jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na jedno- i dwukierunkową łączność głosową oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie:
|
|
— |
Tony robocze:
|
|
— |
Struktura telegramu:
|
|
— |
Transmisja telegramów:
|
|
— |
Komunikaty:
|
Odpowiedzialne państwa członkowskie: Republika Irlandii, Węgry.
Tylko dla celów informacyjnych: taki sam system radiowy jest stosowany w Norwegii.
Radio UIC, rozdziały 1–4 + 6 + 7
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r. Rozdział 7 został wydany dnia 1.1.1988 r.
Radio UIC jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na jedno- i dwukierunkową łączność głosową oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych. Funkcje transmisji danych zostały w tym systemie rozszerzone. Funkcje te nie są w broszurze UIC określone jako obowiązkowe. Jeżeli nie można ich międzynarodowego stosowania zapewnić poprzez dwustronne lub wielostronne uzgodnienia, należy system ten stosować wyłącznie na terenie danego kraju.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Tony robocze:
|
|
— |
Struktura telegramu:
|
|
— |
Transmisja telegramów:
|
|
— |
Komunikaty (kodowanie wg systemy dziesiątkowego)
|
|
— |
Rozszerzenie telegramu (tylko jeśli jest żądane przez kod 03):
|
Odpowiedzialne państwo członkowskie: Francja.
Wprowadzenie do systemów brytyjskich
System nazywany NRN (National Radio Network – Państwowa Sieć Radiowa) zainstalowany jest na całej kolei w Zjednoczonym Królestwie, włącznie z liniami dużych prędkości, które stanowią szkielet sieci kolei dużych prędkości Zjednoczonego Królestwa. Sieć składa się z następujących linii:
|
— |
Linia główna wybrzeża zachodniego (Londyn–Glasgow) |
|
— |
Linia główna wybrzeża wschodniego (Londyn–Edynburg) |
|
— |
Wielka zachodnia linia główna (Londyn–Bristol/Południowa Walia) |
System nazywany Cab Secure zainstalowany jest na terenach podmiejskich o dużym nasileniu ruchu, w Londynie, Liverpoolu i Glasgow, z czego niektóre linie należą do sieci kolei dużych prędkości. Dodatkowo, wszystkie główne linie na południowym zachodzie, włącznie z istniejącą linią pod kanałem La Manche, biegnącą od wybrzeża do stacji Londyn Waterloo, wyposażone są w system Cab Secure.
Pociągi osobowe jeżdżące na liniach głównych oraz pociągi towarowe wyposażone są w system NRN, a pociągi podmiejskie i część ruchu średniodystansowego, posiadają system CSR. Ogólnie rzecz biorąc, pociągi wyposażone są tylko w jedną formę łączności radiowej, ale kilka pociągów poruszających się w obszarach systemów NRN i CSR wyposażono w obydwa systemy radiowe. Dotyczy to w szczególności pociągów wyposażonych w CSR, ale jeżdżących częściowo poza rejonem działania infrastruktury systemu CSR.
BR 1845 wydania G i H (przytorowe)
BR 1661 wydanie A (pokładowe)
Zwykle nazywane radiem Cab Secure
Opis:
Jest to system łączności radiowej ziemia-pociąg, który zbudowano w oparciu o przepisy techniczne zamieszczone w specyfikacji dla torów kolejowych (Specyfikacja BR 1845, wydania G i H oraz BR 1661 wydanie A).
Radio Cab Secure jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na dwukierunkową łączność głosową (dupleks) oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Tony robocze:
|
|
— |
Struktura telegramu:
|
|
— |
Transmisja telegramów:
|
|
— |
Komunikaty (kodowanie wg systemy dziesiątkowego)
|
Odpowiedzialne państwo członkowskie: Zjednoczone Królestwo.
BR 1609 wydanie 2
System nazywany zwykle National Radio Network (NRN)
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w specyfikacji dla torów kolejowych BR 1609, wydanie 2, sierpień 1987.
Radio NRN to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu, pozwalają na dwukierunkową (dupleks) łączność głosową (przytorowe), jednokierunkową (simpleks) łączność głosową (pokładowe), tryb nadawania ogólnego oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości: podpasmo 2 w paśmie 174 MHz do 225 MHz
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Zakres częstotliwości audio:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Transmisja wiadomości:
|
|
— |
Struktura wiadomości
|
|
— |
Typy wiadomości wysyłanych z pociągu:
|
|
— |
Typy wiadomości wysyłanych do pociągu:
|
Odpowiedzialne państwo członkowskie: Zjednoczone Królestwo.
FS ETACS i GSM
Opis:
Rozwiązanie łączności ziemi z pociągiem funkcjonujące obecnie na FS jest w głównej mierze oparte na zastosowaniu usług oferowanych przez publicznego operatora sieci komórkowych analogowych (ETACS) i cyfrowych (GSM) w paśmie 900 MHz. Sieci te zostały zaimplementowane wraz z zewnętrznym podsystemem, opracowanym przez operatora wraz z FS w celu zarządzania pewnymi specjalnymi funkcjami wymaganymi przez FS, związanymi np. z:
|
— |
adresowaniem połączeń z pociągami i stacjami przy użyciu numerów funkcjonalnych zamiast numeru terminala, |
|
— |
funkcjami grup zamkniętych o specyficznych warunkach, |
|
— |
konfiguracją oraz obsługą wyspecjalizowanych baz danych bezpośrednio przez personel FS, w celu dostosowania praw dostępu do usług dla każdego rodzaju użytkownika itd. |
Dzięki szerokiemu pokryciu radiowemu zapewnianemu przez dwa systemy publicznej telefonii w sieci kolejowej FS pozwala to spełnić podstawowe wymagania łączności pociąg-ziemia.
Funkcje dodatkowe zostały wynegocjowane oraz zaimplementowane przez FS we współpracy z operatorem telefonii publicznej. Są one zaimplementowane przy użyciu niezawodnych systemów komputerowych o wysokim stopniu rozproszenia. Należą zatem do warstwy aplikacyjnej modelu warstw ISO/OSI.
Odpowiedzialne państwo członkowskie: Włochy.
Radio UIC, rozdziały 1-4 (system radiowy TTT, zainstalowany na linii Cascais)
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r. Jest to podzestaw minimalny, niezbędny dla międzynarodowego ruchu kolejowego.
Radio UIC jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na łączność jednokierunkową (simpleks) i pół-dwukierunkową (pół-dupleks) głosową oraz stosowanie sygnałów roboczych (tonów), ale nie pozwalają na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie:
|
|
— |
Tony robocze:
|
Odpowiedzialne państwo członkowskie: Portugalia
System radiowy TTT CP_N
Opis:
Jest to system radiowy typu TTT, specjalnie zaprojektowany, przeznaczony do transmisji głosu i danych zgodnie z wymaganiami CP.
Radio CP_N jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
System radiowy stosuje cyfrowe wywołanie selektywne (zgodnie z MPT 1327 – 1 200 bit/s FFSK) oraz subaudio FSK dla sygnalizacji stacji bazowych.
System ten pozwala na łączność głosową simpleks i pół-dupleks oraz pół-dupleks dla wywołań selektywnych oraz transmisji danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Modulacja radiowa
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie:
|
|
— |
Struktura telegramu:
|
|
— |
Transmisja telegramów:
|
Odpowiedzialne państwo członkowskie: Portugalia.
System radiowy PKP
Opis:
System radiowy zainstalowany w Polsce na liniach przewidzianych do interoperacyjności.
System PKP pracuje w paśmie 150 MHz i jest to radio analogowe składające się z urządzeń przytorowych, pokładowych oraz ręcznych.
Pozwala na łączność głosową simpleks oraz stosowanie sygnałów roboczych (tonów) dla wywołań selektywnych i ogólnie rzecz biorąc, nie dla transmisji danych. System posiada zintegrowaną funkcję RADIOSTOP.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów:
|
|
— |
Zakres częstotliwości audio:
|
|
— |
Tony robocze dla wywołań selektywnych:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Selektywne wywołanie grupy:
|
|
— |
Funkcja RADIOSTOP:
|
|
— |
Sieć wyposażona jest automatyczne posterunki rejestrujące
|
Odpowiedzialne państwo członkowskie: Polska
VR Train Radio,
nazywane zwykle „Linjaradio” (fińskie określenie dla radia liniowego).
Opis:
Jest to specjalnie zaprojektowany system łączności typu ziemia-pociąg, pracujący w paśmie VHF, zbudowany zgodnie z przepisami technicznymi fińskich kolei.
Sieć radia liniowego jest to analogowa sieć radiowa składająca się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe budowane na bazie tego podstawowego podzestawu pozwalają na łączność głosową dupleks (ziemia-pociąg), pół-dupleks (między maszynistami) oraz połączenia maszynisty z kontrolerem przy użyciu tonowych wywołań selektywnych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Tony robocze:
|
|
— |
Tony dla wywołań selektywnych:
|
Odpowiedzialne państwo członkowskie: Finlandia.
TRS – System radiowy Republiki Czeskiej
Opis:
System radiowej łączności kolejowej TRS zaprojektowany jest w celu utworzenia łączności roboczej w układzie dupleks między maszynistą jadącej lokomotywy a kontrolerem ruchu lub sygnalistą, i zrealizowany jest przy użyciu sieci wstęgowej wzdłuż torów.
System TRS pozwala na łączność dupleks dla rozmów, przesyłania rutynowych informacji (polecenia, raporty), transmisji połączeń zwykłych i awaryjnych oraz łączności pół-dupleks między maszynistami poprzez retransmisję w zasięgu pracy stacji bazowych, czyli rozmowy i połączenia awaryjne. Koncepcja tego systemu pozwala na budowanie specjalnych aparatów, które mogą funkcjonować w sieci simpleks w paśmie częstotliwości 160 MHz dla łączności simpleks maszynistów oraz innych abonentów na uprzednio wybranym kanale.
Selektywne połączenia przy użyciu sześciocyfrowych numerów pociągu transmitowane są w kierunku od kontrolera ruchu (sygnalisty) do maszynisty, a identyfikacja wysyłana jest w kierunku pociąg-kontroler (sygnalista).
Rutynowe informacje (polecenia i raporty) przesyłane są przy użyciu telegramów. System TRS realizuje transmisję cyfrową w formie kodowanej, w postaci krótkich telegramów FFSK 1 200 b/s w obydwu kierunkach. Jedno z poleceń jest przydzielone do zdalnego zatrzymania pociągu, które może być uruchomione przez kontrolera ruchu lub sygnalistę, i powoduje zadziałanie hamulca bezpieczeństwa pociągu (jeżeli część pokładowa jest wyposażona w adapter do ATP typu LS 90 lub system kontroli czujności maszynisty).
System TRS jest w pełni kompatybilny na poziomie sygnałów sterujących, zgodnych z obowiązującym zaleceniem UIC 751-3. Oznacza to, że możliwa jest łączność głosowa, połączenia zwykłe oraz awaryjne między systemem TRS a systemami innych producentów. Łączność realizowana jest na czterech częstotliwościach skoordynowanych międzynarodowo w paśmie 450 MHz, zakres A, zgodnie UIC.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Tryby pracy:
|
|
— |
Tony robocze:
|
Państwo odpowiedzialne: Republika Czeska.
System radiowy LDZ
Opis:
System radiowy typu TRS jest analogowym systemem łączności głosowej simpleks i jest stosowany do roboczej obsługi pociągów. Wszystkie części sieci LDZ są wyposażone w ten system.
System TRS jest przeznaczony do współpracy urządzeń przytorowych [rozproszone urządzenia radiowe (DRS) oraz maks. 28 lokalnych urządzeń radiowych (LRS), połączonych wzajemnie za pomocą łącza dwudrutowego) oraz ruchomych (pokładowe urządzenia radiowe (BRS) oraz ręczne radiotelefony (HRS)].
Dla realizacji selektywnych połączeń 28 aparatów LRS system wykorzystuje sześć częstotliwości w paśmie 1 000 – 1 700 Hz.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów:
|
|
— |
Zakres częstotliwości audio:
|
|
— |
Tony robocze dla wywołań selektywnych:
|
|
— |
Odchylenie częstotliwości nadawczej:
|
|
— |
Sieć wyposażona jest w automatyczne posterunki rejestrujące. |
|
— |
Typy anteny LRS:
|
Poza systemem TRS użytkowany jest system wewnątrzstacyjnej łączności radiowej, który obsługuje manewrowanie, prace utrzymaniowo-techniczne oraz łączność specjalną dla sytuacji pogorszonych. System ten jest zaprojektowany w oparciu o zasadę pracy strefowej i funkcjonuje w zakresach 150 i 450 MHz w pasmach po ok. 5–10 MHz.
Odpowiedzialne państwo członkowskie: Łotwa.
CH – system radiowy kolei greckich
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest częściowo zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r. Jest to podzestaw minimalny, niezbędny dla krajowego ruchu kolejowego. Jest to system analogowy obsługujący łączność głosową pół-dupleks. W systemie tym nie stosuje się wywołań selektywnych, sygnałów roboczych (tony) lub transmisji danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość:
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Polaryzacja:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów na pokładzie:
|
Odpowiedzialne państwo członkowskie: Grecja.
Radio UIC, rozdział Bułgaria
(Tylko dla celów informacyjnych)
Opis:
Jest to radiowy system dla łączności ziemia-pociąg, który jest zgodny z przepisami technicznymi podanymi w kodeksie UIC 751-3, wydanie 3, z dnia 1.7.1984 r. Jest to podzestaw minimalny, niezbędny dla międzynarodowego ruchu kolejowego.
Radio UIC jest to radio analogowe składające się z urządzeń przytorowych i ruchomych (pokładowych).
Systemy radiowe zbudowane według tego systemu pozwalają na jedno- i dwukierunkową łączność głosową oraz stosowanie sygnałów roboczych (tonów), a także na korzystanie z wywołań selektywnych oraz transmisję danych.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Odstęp częstotliwości: 25 kHz |
|
— |
Pary częstotliwości dla łączności dupleks: odstęp 10 MHz |
|
— |
Grupowanie po 4 kanały, preferowany kanał 62 ... 65 dla ruchu międzynarodowego |
|
— |
Czułość
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
W tunelach kable stratne lub anteny silnie kierunkowe (radio przytorowe). |
|
— |
Zakończenie rezystorem 50 omów |
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Odchylenie częstotliwości:
|
|
— |
Przełączanie kanałów na pokładzie
|
|
— |
Sygnały robocze:
|
|
— |
Struktura telegramu:
|
Państwo odpowiedzialne: Bułgaria
Sieć łączności estońskich linii kolejowych
Sieć łączności estońskich linii kolejowych została wyposażona zgodnie z deklaracją Ministerstwa Transportu i Łączności Estonii nr 39 z dnia 9.7.1999 r. „Techniczne przepisy eksploatacji kolei”.
Radiowa sieć łączności na kolei składa się z dwóch podsystemów, mianowicie systemu łączności radiowej ziemia-pociąg oraz regionalnego systemu łączności radiowej.
System łączności radiowej ziemia-pociąg realizuje łączność głosową dla wszystkich typów pociągów i lokomotyw na liniach głównych i podrzędnych na obszarze kraju.
Regionalne systemy łączności zapewniają pełne pokrycie obszaru pracy i obejmują zawiadowców stacji kolejowych i maszynistów pociągów.
Zintegrowana sieć łączności radiowej z pociągami obejmuje swoim zasięgiem wszystkie linie i stacje kolejowe w całym kraju.
Główny system łączności radiowej ziemia-pociąg kolei estońskich działa w oparciu o zdecentralizowany, cyfrowy (skanujący) system magistralnej łączności radiowej. Jest to system modułowy i składa się z takich elementów, jak urządzenia centrum kontroli ruchu, wzmacniaki lokalne, terminale radiowe zawiadowców stacji, radiostacje pokładowe w pociągach oraz radiotelefony ręczne.
Podstawowe dane systemu magistralnego:
|
— |
VHF pasmo częstotliwości 146-174 MHz, |
|
— |
14 kanałów dupleks, |
|
— |
praca pół-dupleks. |
Na stacjach kolejowych w łączności lokalnej radiostacje Motorola GM350 oraz GM Pro funkcjonują na kanałach simpleks VHF.
Radiostacje GM350 i GM160 na pokładach pociągów mogą nawiązywać łączność z różnymi infrastrukturami radiowymi zainstalowanymi na terenie kraju, na liniach głównych oraz w obrębie stacji kolejowych.
Personel odpowiedzialny za bezpieczeństwo i prawidłową pracę kolei użytkuje radiotelefony przenośne Motorola GP i P.
W celu kontrolowania ruchu w pociągach jadących z krajów sąsiednich, Łotwy i Rosji, koleje estońskie równolegle do głównej sieci łączności nadal użytkują specjalny system transregionalnej łączności na kanałach simpleks 2 130 kHz i 2 150 kHz.
Odpowiedzialne państwo członkowskie: Estonia.
System łączności radiowej kolei litewskich
Opis:
System radiowy typu TRS jest analogowym systemem łączności głosowej simpleks i jest stosowany do roboczej obsługi pociągów. Wszystkie części sieci LG są wyposażone w ten system.
System TRS jest przeznaczony do współpracy urządzeń przytorowych (rozproszone urządzenia radiowe (DRS)) oraz maks. lokalnych urządzeń radiowych (LRS), połączonych wzajemnie za pomocą łącza dwudrutowego) oraz ruchomych (pokładowe urządzenia radiowe (BRS)).
Do realizacji selektywnych połączeń aparatów LRS system wykorzystuje sześć częstotliwości w paśmie 1 000 — 1 700 Hz.
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość
|
|
— |
Moc nadajnika:
|
|
— |
Charakterystyka anteny:
|
|
— |
Zakończenie rezystorem 50 lub 75 omów, zależnie od typu urządzenia radiowego. |
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów:
|
|
— |
Zakres częstotliwości audio:
|
|
— |
Tony robocze dla wywołań selektywnych:
|
|
— |
Odchylenie częstotliwości nadawczej:
|
|
— |
Sieć wyposażona jest w automatyczne posterunki rejestrujące. |
|
— |
Typy anteny LRS
|
System radiowej łączności manewrowej
Opis:
Do obsługi ruchów manewrowych na większych stacjach kolejowych stosuje się analogowy system łączności radiowej simpleks dla transmisji głosu w paśmie 150 MHz. Radiostacje tego systemu użytkowane są tylko w lokalnych sieciach radiowych, które nie są wzajemnie ze sobą połączone. System ten zapewnia łączność radiową przy użyciu kanałów otwartych między urządzeniami stacjonarnymi (zawiadowcy stacji), ruchomymi (lokomotywy manewrowe) oraz przenośnymi (personel manewrowy).
Ogólna charakterystyka:
|
— |
Częstotliwości:
|
|
— |
Czułość
|
|
— |
Moc nadajnika:
|
|
— |
Polaryzacja:
|
|
— |
Tryby pracy:
|
|
— |
Przełączanie kanałów:
|
|
— |
Odchylenie częstotliwości nadawczej:
|
Odpowiedzialne państwo członkowskie: Litwa.
Część 3: Matryca przejścia między systemami klasy A i B (sterowanie ruchem kolejowym)
CEL MATRYCY
MATRYCA ta ma na celu przedstawienie tekstu dotyczącego zakresu działań przejściowych dotyczących interoperacyjności w europejskich sieciach kolei dużych prędkości i kolei konwencjonalnej.
WPROWADZENIE
Poniższa matryca przedstawia ogólne informacje dotyczące możliwych przejść między różnymi systemami klasy B zdefiniowanymi w niniejszym załączniku oraz między systemami klasy A i klasy B.
Matryca ta nie preferuje żadnych rozwiązań technicznych ani dla systemu ERTMS/ETCS, ani dla odpowiednich modułów STM zdefiniowanych w niniejszym załączniku. Zagadnienia te są udokumentowane w specyfikacjach technicznych podsystemu „Sterowanie” (opisanych w rozdziale 5 odnośnie do specyfikacji TSI „Sterowanie” dla transeuropejskich systemów kolei dużych prędkości i kolei konwencjonalnych) lub w odnośnej dokumentacji krajowej dotyczącej systemów klasy B lub modułów STM. Należy zwrócić uwagę, że matryca ta nie definiuje żadnych dodatkowych wymagań technicznych względem systemu ERTMS/ETCS lub modułów STM. Matryca ta zawiera tylko informacje dotyczące przejść, jakie mogą wystąpić w sieciach kolei dużych prędkości i kolei konwencjonalnych.
Matryca ta może służyć jako narzędzie pomocnicze w trakcie podejmowania decyzji technicznych i ekonomicznych dotyczących implementacji dyrektyw 96/48/WE i 2001/16/WE.
Jeśli chodzi o przejście między dwoma systemami klasy B, rozwiązania techniczne wprowadzane w celu zapewnienia interoperacyjności nie mogą być sprzeczne ze specyfikacjami TSI, a w szczególności powinny one być zgodne z odnośną dokumentacją dotyczącą systemu ERTMS/ETCS. Należy stwierdzić, że aktualna specyfikacja klasy 1 dotyczy tylko przejść w zakresie modułów STM (patrz: SRS punkt 5.10, a szczególnie 5.10.3.11 i 7.4.2.9). Przepisy robocze dotyczące przejść między dwa systemami klasy B leżą w zakresie kompetencji właściwych krajów.
MATRYCA PRZEJŚCIA
Jak odczytywać matrycę
Na przekątnej matrycy znajdują się systemy klasy A i klasy B właściwe dla europejskiego systemu kolei dużych prędkości i kolei konwencjonalnych.
Każde pole matrycy jest wypełnione albo liczbą (oznaczającą, że możliwe jest przejście między systemami dla danej kolumny/wiersza, w których znajduje się dane pole) albo kolorem szarym, oznaczającym, że nie istnieje żadne przejście, ani też nie jest ono przewidywane.
Liczba oznacza kraje odpowiedzialne za specyfikację przejścia oraz związane z tym procedury.
Przejścia między systemami klasy A i klasy B (pierwsza kolumna) powinny odbywać się w sposób opisany w dokumencie PODZBIÓR 035 UNISIG.
Przykład:
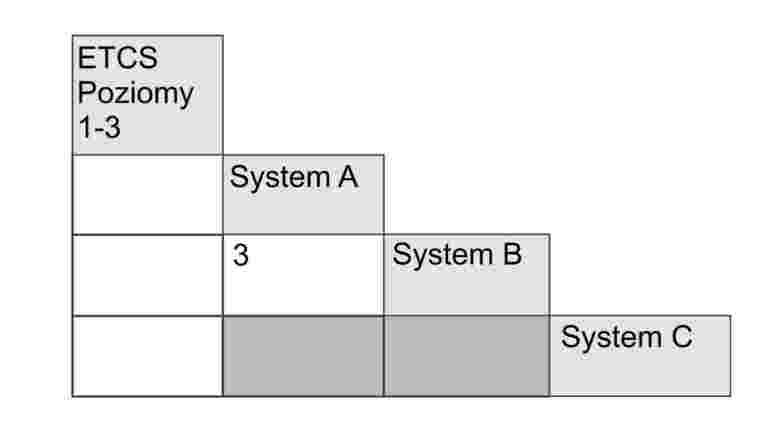
Przejścia między systemami
W przypadku przejścia dokonywanego przez ETCS STM należy stosować warunki zdefiniowane w dokumencie PODZBIÓR 035 UNISIG.
Przejścia między systemami (klasa A i B)
Matryca identyfikuje wymagane przejścia operacyjne. Przejście operacyjne jest to takie przejście, w którym system przejmuje odpowiedzialność za nadzór nad pociągiem od innego systemu. Przy takim przejściu maszynista zwykle spotyka się z następującymi zmianami:
|
— |
zmiana sposobu nadzorowania pociągu, |
|
— |
zmiana współpracy maszynisty z systemem. |
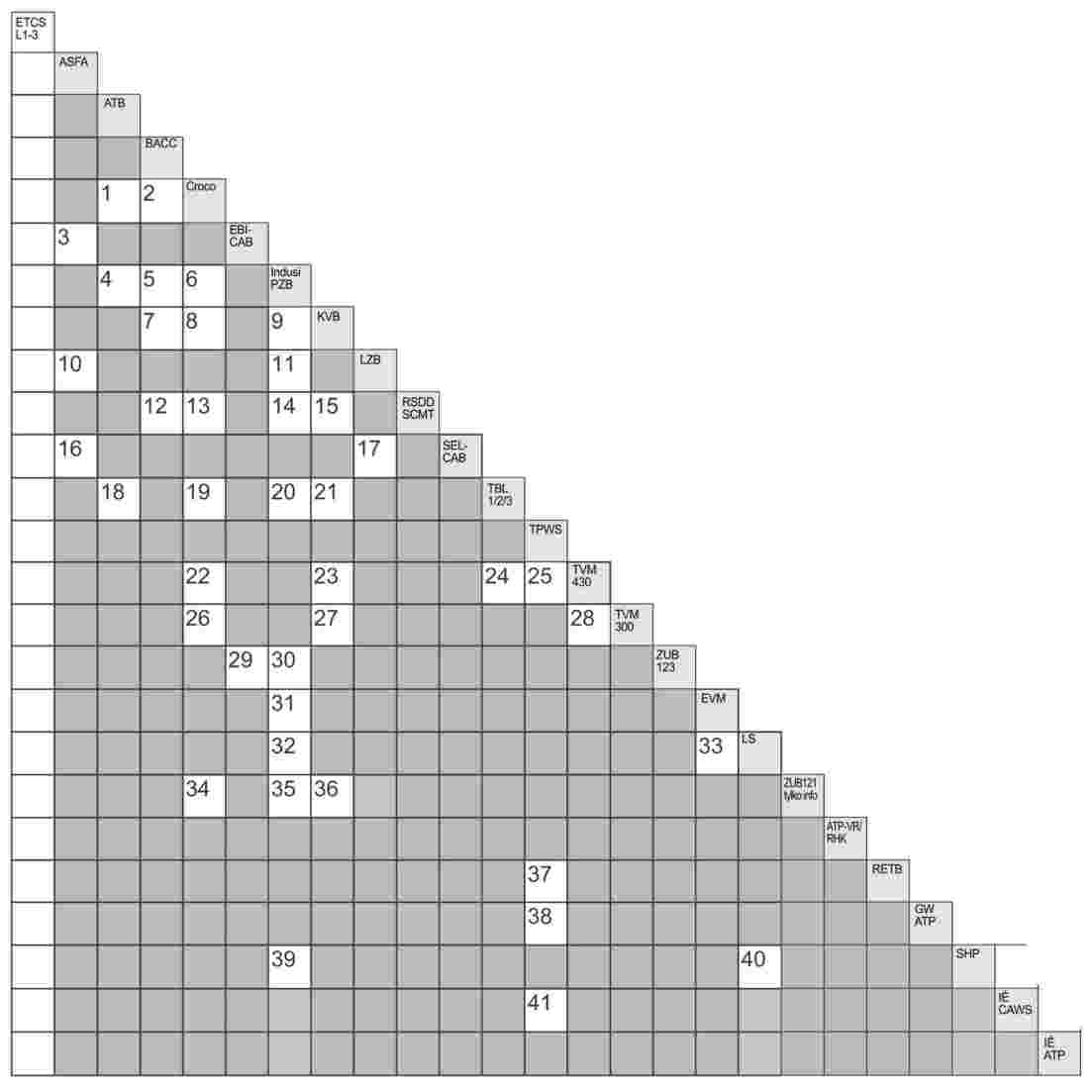
Państwa członkowskie odpowiedzialne za przejście
|
1 |
Niderlandy, Belgia |
|
2 |
Włochy, Francja |
|
3 |
Hiszpania, Portugalia |
|
4 |
Niderlandy, Niemcy |
|
5 |
Włochy, Austria |
|
6 |
Belgia, Francja, Luksemburg, Niemcy |
|
7 |
Włochy, Francja |
|
8 |
Belgia, Francja, Luksemburg |
|
9 |
Francja, Niemcy |
|
10 |
Hiszpania |
|
11 |
Austria, Niemcy |
|
12 |
Włochy |
|
13 |
Włochy, Francja |
|
14 |
Włochy, Austria |
|
15 |
Włochy, Francja |
|
16 |
Hiszpania |
|
17 |
Hiszpania |
|
18 |
Niderlandy, Belgia |
|
19 |
Belgia |
|
20 |
Belgia, Niemcy |
|
21 |
Francja, Belgia |
|
22 |
Francja |
|
23 |
Francja |
|
24 |
Francja, Belgia |
|
25 |
Francja, Zjednoczone Królestwo (przejście w ZK na końcu tunelu pod kanałem La Manche) |
|
26 |
Francja |
|
27 |
Francja |
|
28 |
Francja |
|
29 |
Dania, Szwecja |
|
30 |
Niemcy, Dania |
|
31 |
Austria, Węgry |
|
32 |
Austria, Republika Czeska, Niemcy, Republika Słowacka |
|
33 |
Węgry, Republika Czeska, Republika Słowacka |
|
34 |
Francja, Szwajcaria |
|
35 |
Niemcy, Szwajcaria |
|
36 |
Francja, Szwajcaria |
|
37 |
Zjednoczone Królestwo |
|
38 |
Zjednoczone Królestwo (tylko dla pociągów o prędkości Vmax > 160 km/h) |
|
39 |
Niemcy, Polska |
|
40 |
Polska Republika Czeska, Republika Słowacka |
|
41 |
Republika Irlandii, Zjednoczone Królestwo |
|
42 |
Litwa, Polska (między ALSN a SHP) |
Część 4: Charakterystyka elektromagnetyczna systemów detekcji pociągów stosowanych w państwach członkowskich:
Charakterystyka elektromagnetyczna systemów detekcji pociągów stosowanych w państwach członkowskich podana jest poniżej, włącznie ze specyfikacją testów.
– Punkt otwarty –
(1) W Estonii używane jest wyłącznie 50 Hz.
ZAŁĄCZNIK C
CHARAKTERYSTKA SPECYFICZNA DLA DANEJ LINII ORAZ CHARAKTERYSTKA SPECYFICZNA DLA DANEGO POCIĄGU, KTÓRE PODLEGAJĄ WPISANIU DO REJESTRÓW ZGODNIE Z ART. 24 DYREKTYWY 2001/16/WE
Wymagania ogólne
Jak podano w rozdziale 7, charakterystyka specyficzna dla linii kolejowej zdefiniowana w tym załączniku powinna być zapisana w rejestrze infrastruktury przez zarządcę infrastruktury.
Jak podano w rozdziale 7, charakterystyka specyficzna dla pociągu zdefiniowana w tym załączniku powinna być zapisana w rejestrze taboru kolejowego przez przewoźnika kolejowego.
Jak zapisano w sekcji 6.2 (podsystem „Sterowanie”), wstępnym warunkiem eksploatacji pociągu jest sprawdzenie zawartości odpowiedniego rejestru taboru kolejowego oraz rejestru infrastruktury pod kątem interoperacyjności.
W załączniku C podano informacje dotyczące tych aspektów zespołów BKJP, które nie zostały objęte zasięgiem tematycznym załącznika A ani też załącznika B, jak również opcji dozwolonych dla systemów i interfejsów klasy A i klasy B (patrz: załącznik D, rysunek 8).
Informacje dotyczące specyficznych warunków, jakim musi odpowiadać tabor kolejowy, aby umożliwić działanie systemów detekcji pociągów, muszą być podane w rejestrach.
Rejestr infrastruktury
Niniejsza specyfikacja TSI dopuszcza pewne warianty w zakresie urządzeń, funkcji oraz parametrów infrastruktury. Tam, gdzie wymagania specyfikacji TSI nie obejmują całości zespołu przytorowego BKJP, dopuszczalne jest stosowanie pewnych specjalnych wymagań odnoszących się do istniejących systemów technicznych oraz w szczególności do stosowania specyficznych wymagań funkcjonalnych, co leży w zakresie odpowiedzialności zarządcy infrastruktury.
Informacje takie mogą dotyczyć np.:
|
— |
możliwości wyboru w ramach wymagań kompatybilności technicznej wymienionych w załączniku A, |
|
— |
możliwości wyboru w ramach wymagań kompatybilności technicznej wymienionych w załączniku B, |
|
— |
parametrów kompatybilności elektromagnetycznej (EMC) (z powodu stosowania urządzeń nieobjętych wymaganiami specyfikacji TSI, na przykład liczników osi), |
|
— |
warunków klimatycznych oraz fizycznych występujących wzdłuż danej linii. |
Informacje powinny być udostępniane przewoźnikom kolejowym i wykorzystywane przez w nich formie podręcznika specyficznego dla danej linii kolejowej (rejestr infrastruktury), który może zawierać także inne szczegółowe dane pochodzące z innych specyfikacji TSI (np. „Ruch kolejowy” zawiera w regulaminie (Rule Book) informacje dotyczące systemów odnoszących się do załącznika B oraz trybów pracy awaryjnej).
Rejestr infrastruktury może dotyczyć w szczególności danej linii lub grupy linii kolejowych o takiej samej charakterystyce.
Celem jest uzyskanie zgodności wymagań określonych w rejestrze infrastruktury oraz rejestrze taboru kolejowego ze specyfikacjami TSI; w szczególności nie mogą one ograniczać interoperacyjności.
Rejestr taboru kolejowego
W ramach niniejszej specyfikacji TSI dotyczącej przewoźników kolejowych przewidywane są pewne możliwości wyboru urządzeń, funkcji oraz parametrów odnoszących się do typu pociągu. Ponadto, ponieważ wymagania specyfikacji TSI nie obejmują całości zespołu pokładowego BKJP, zarządca infrastruktury potrzebuje dodatkowych informacji dotyczących stosowania systemów klasy B oraz charakterystyki pociągu, która związana jest systemami przytorowymi nienależącymi do klasy B. Informacje takie mogą dotyczyć np.:
|
— |
możliwości wyboru w ramach wymagań kompatybilności technicznej wymienionych w załączniku A, |
|
— |
możliwości wyboru w ramach wymagań kompatybilności technicznej wymienionych w załączniku B, |
|
— |
parametrów kompatybilności elektromagnetycznej (EMC) (z powodu stosowania na danych liniach kolejowych urządzeń nieobjętych wymaganiami specyfikacji TSI), |
|
— |
parametrów geometrycznych i elektrycznych pociągu, takich jak długość, maksymalne odległości między osiami w pociągu, długość nawisu pierwszego i ostatniego pojazdu w pociągu, maksymalna rezystancja elektryczna między kołami osi (w kontekście załącznika A, dodatek 1 (charakterystyka taboru kolejowego, która musi być zgodna z systemami detekcji pociągów), z powodu cech obwodów przytorowych), |
|
— |
parametrów hamowania dla systemów klasy A, |
|
— |
parametrów hamowania dla systemów klasy B, |
|
— |
ogólnych parametrów hamowania, |
|
— |
typów hamulców, |
|
— |
obecności hamulców wiroprądowych, |
|
— |
obecności hamulców magnetycznych, |
|
— |
warunków klimatycznych oraz fizycznych, w których dany pociąg ma być eksploatowany. |
Informacje te muszą być dostępne dla zarządców infrastruktury oraz wykorzystywane przez nich w formie podręcznika specyficznego dla danego pociągu (rejestr taboru kolejowego), który może także zawierać informacje dotyczące możliwości lub potrzeby stosowania dodatkowych funkcji w pociągu, które mogą być lub będą zarządzane przez funkcje BKJP, np. przejazd przez sekcje bez poboru prądu, zmniejszanie prędkości w szczególnych warunkach, w zależności od charakterystyki pociągu i linii kolejowej (tunele) oraz szczegółowych wymagań innych specyfikacji TSI.
Rejestr taboru kolejowego może być specyficzny dla jednego pociągu lub kategorii pociągów o takiej samej charakterystyce.
Wykaz specyficznych charakterystyk oraz wymagań
Poniżej zamieszczono wykaz obowiązkowych wymagań dotyczących rejestru infrastruktury oraz rejestru taboru kolejowego, w celu dostarczenia wystarczającego opisu charakterystyk i wymagań oraz ułatwienia uzyskania interoperacyjności. Wykaz ten dotyczy tylko zagadnień technicznych, kwestie kontroli ruchu zawarte są w specyfikacji TSI „Ruch kolejowy”.
Wymagania te mogą być spełnione poprzez zastosowanie właściwych norm: W takim przypadku podręczniki te powinny zawierać odnośne informacje.
W przeciwnym razie wszelkie wymagania specjalne (metody pomiaru) należy zamieścić w rejestrze taboru kolejowego oraz rejestrze infrastruktury lub dołączyć do tych rejestrów.
W odniesieniu do systemów klasy B zastosowanie mają środki wdrażane w zakresie działania odpowiedzialnego państwa członkowskiego wskazanego w załączniku B. Rejestr infrastruktury powinien zawierać następujące elementy:
|
— |
odpowiedzialne państwo członkowskie, |
|
— |
nazwę podsystemu opisanego w załączniku B, |
|
— |
wersję i datę wprowadzenia do eksploatacji, |
|
— |
ograniczenia prędkości i inne specyficzne dla klasy B warunki/wymagania, wynikające z ograniczeń danego systemu, |
|
— |
pozostałe informacje, zgodnie z poniższymi wykazami. |
Wykaz specyficznych charakterystyk i wymagań technicznych związanych z interoperacyjnością linii oraz pociągu
|
N |
Rejestr infrastruktury |
Rejestr taboru kolejowego |
||||||||||||||||||||||||||||||||||||||
|
1 |
Dla każdej poszczególnej części zespołu przytorowego BKJP (funkcje i interfejsy EIRENE, funkcje i interfejsy ETCS/ERTMS, system detekcji pociągu, detektor zagrzanych osi, EMC) przy stopniowym instalowaniu:
|
Dla każdej z różnych części zespołu pokładowego BKJP (funkcje i interfejsy EIRENE, funkcje i interfejsy ETCS/ERTMS) przy instalowaniu etapowym:
|
||||||||||||||||||||||||||||||||||||||
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||
|
3 |
Dla ERTMS/ETCS poziom 1 z funkcją informacji uaktualniających: jaka implementacja techniczna jest wymagana dla taboru kolejowego |
Dla ERTMS/ETCS poziom 1 z funkcją informacji uaktualniających: jaka implementacja techniczna jest używana. |
||||||||||||||||||||||||||||||||||||||
|
4 |
Wskazać:
instalowany na linii objętej interoperacyjnością (włącznie z okresem ważności danej wersji, oraz w przypadku konieczności stosowania większej liczby systemów działających jednocześnie – odpowiedzialne państwo członkowskie). |
Wskazać:
instalowany w pociągu objętym interoperacyjnością (włącznie z okresem ważności danej wersji, oraz w przypadku konieczności stosowania większej liczby systemów działających jednocześnie – odpowiedzialne państwo członkowskie). |
||||||||||||||||||||||||||||||||||||||
|
5 |
Specjalne warunki techniczne wymagane dla przełączania między różnymi systemami klasy B automatycznego ostrzegania, sterowania i kontroli jazdy pociągu. Specjalne warunki techniczne wymagane dla przełączania między różnymi systemami ERTMS/ETCS klasy B. |
Specjalne warunki wdrażane na pokładzie w celu przełączania między różnymi systemami klasy B automatycznego ostrzegania, sterowania i kontroli jazdy pociągu. |
||||||||||||||||||||||||||||||||||||||
|
6 |
Specjalne warunki techniczne wymagane w celu przełączania między różnymi systemami radiowymi. |
Specjalne warunki techniczne wdrażane na pokładzie w celu przełączania między różnymi systemami radiowymi. |
||||||||||||||||||||||||||||||||||||||
|
7 |
Tryby pracy awaryjnej:
|
Dostępne tryby pracy awaryjnej dla:
|
||||||||||||||||||||||||||||||||||||||
|
8 |
Ograniczenia prędkości stosowane z powodu niepełnej skuteczności hamowania, np. z powodu dostępnych odległości dla hamowania oraz nachylenia terenu:
Krajowe przepisy techniczne dotyczące eksploatacji systemów klasy B, odnoszące się do pociągów [np. wymagania dot. skuteczności hamowania, dane odpowiadające karcie UIC nr 512 (wyd. 8 z 1.1.79 z 2 poprawkami)...]. |
|
||||||||||||||||||||||||||||||||||||||
|
9 |
Podatność urządzeń przytorowych na emisję z pociągu w zakresie kompatybilności elektromagnetycznej dotyczącej możliwości dopuszczania pociągów. W miarę dostępności należy określić zgodnie z normami europejskimi (pr EN 50238 oraz innymi przyszłymi normami, do ustalenia), w celu spełnienia docelowych parametrów niezawodności/dostępności. Dopuszczalność stosowania hamulców wiroprądowych (typy). Dopuszczalność stosowania hamulców magnetycznych (typy). |
Emisja elektromagnetyczna pociągu odnośnie do możliwości dopuszczania pociągów w określonych warunkach kompatybilności elektromagnetycznej. W miarę dostępności należy określić zgodnie z normami europejskimi (pr EN 50238 oraz innymi przyszłymi normami, do ustalenia), w celu spełnienia docelowych parametrów niezawodności/dostępności. Zainstalowane hamulce wiroprądowe (typ). Zainstalowane hamulce magnetyczne (typ). |
||||||||||||||||||||||||||||||||||||||
|
10 |
Warunki klimatyczne oraz fizyczne występujące wzdłuż danej linii. Zgodnie z załącznikiem A, indeks A5. |
Warunki klimatyczne oraz fizyczne, przy których zespół pokładowy może pracować. Zgodnie z załącznikiem A, indeks A4. |
||||||||||||||||||||||||||||||||||||||
|
11 |
Należy opisać wymagania względem rozwiązań technicznych dotyczących wdrażanych ograniczeń, zgodnych z dyrektywami 96/48/WE i 2001/16/WE. |
Należy opisać zasady tworzenia rozwiązań technicznych dotyczących wdrażanych ograniczeń, zgodnych z dyrektywami 96/48/WE i 2001/16/WE. |
||||||||||||||||||||||||||||||||||||||
|
12 |
HABD (detektor zagrzanych osi) |
|
||||||||||||||||||||||||||||||||||||||
|
13 |
Minimalna długość odcinka toru Maksymalna odległość między końcem odcinka toru a punktem krańcowym Minimalna odległość różnicowa między przeciwnymi końcami przyległych sekcji toru Minimalna czułość manewrowa obwodów torowych Stosowanie hamulców wiroprądowych Stosowanie hamulców magnetycznych Dozwolone nieograniczone piaskowanie (tak lub opis ograniczeń) |
Maksymalna odległość między przyległymi zestawami kołowymi Maksymalna odległość między przednim a tylnym zestawem kołowym Minimalny rozstaw kół Minimalny rozstaw osi Minimalna szerokość koła Minimalna wysokość obręczy Minimalna szerokość obrzeża obręczy Minimalna wysokość obrzeża obręczy Minimalne obciążenie na oś Materiał kół Maksymalna rezystancja między przeciwległymi kołami zestawu kołowego Minimalna impedancja pojazdu Maksymalna wydajność piaskowania Możliwość wyłączenia piaskowania przez maszynistę Stosowanie hamulców wiroprądowych Wyposażenie w dwie pary kolejowych hamulców ciernych, których rozstaw elektryczny jest większy lub równy 16 000 mm. |
||||||||||||||||||||||||||||||||||||||
|
14 |
Szczególne przypadki Ograniczenia w powiązaniach między odległością osi a średnicą koła (Niemcy) Odległość wzdłużna od pierwszej osi lub ostatniej osi do najbliższego końca pojazdu nie większa niż 3 500 mm (Polska, Belgia) Odległość między każdą z pierwszych 5 osi pociągu (lub wszystkich osi, jeżeli pociąg ma mniej niż 5) nie mniejsza niż 1 000 mm (Niemcy) Odległość między pierwszą a ostatnią osią pojazdu nie mniejsza niż 6 000 mm (Belgia) Odległość między pierwszą a ostatnią osią pojazdu samodzielnego pojazdu lub zespołu trakcyjnego większa niż 15 000 mm (Francja, Belgia) Minimalna średnica kół nie mniejsza niż 450 mm (Francja) Minimalne obciążenie na oś nie mniejsze niż 5 t (Niemcy, Austria, Szwecja, Belgia) Minimalna masa pojazdu nie mniejsza niż 90 t (Belgia) Jeżeli odległość między pierwszą a ostatnią osią pojedynczego pojazdu lub zespołu trakcyjnego jest większa lub równa 16 000 mm, masa samodzielnego pojazdu lub zespołu trakcyjnego powinna być większa niż 90 t. Jeżeli odległość ta jest mniejsza niż 16 000 mm oraz większa lub równa 15 000 mm, masa powinna być mniejsza niż 90 t bądź większa lub równa 40 t i pojazd musi być wyposażony w dwie pary kolejowych hamulców ciernych, których rozstaw jest większy lub równy 16 000 mm (Francja, Belgia). Minimalny wymiar masy metalu pojazdu (Niemcy, Polska) Maksymalna reaktancja między ruchomymi powierzchniami zestawu kołowego (Polska, Francja) Dodatkowe wymagania dotyczące parametrów manewrowych pojazdu (Niderlandy) Impedancja wymagana między pantografem a kołami większa niż 1,0 om (indukcyjna) przy 50 Hz, dla napięcia stałego 3 kV (Belgia) Brak piaskowania przed osią wiodącą w zespołach wielokrotnych poniżej 40 km/h (Zjednoczone Królestwo) Hamulce magnetyczne i wiroprądowe są niedozwolone do stosowania na pierwszym wózku pojazdu prowadzącego (Niemcy). |
|
(1) Wyłącznie do celów informacyjnych, będzie to stanowić wprowadzenie do stosownego rejestru i zostanie usunięte, gdy taki rejestr już powstanie.
ZAŁĄCZNIK D
Specyfikacja TSI „Sterowanie” (system kolei konwencjonalnej)
Schemat ten przedstawia tylko zasadę działania.
Rysunek 8
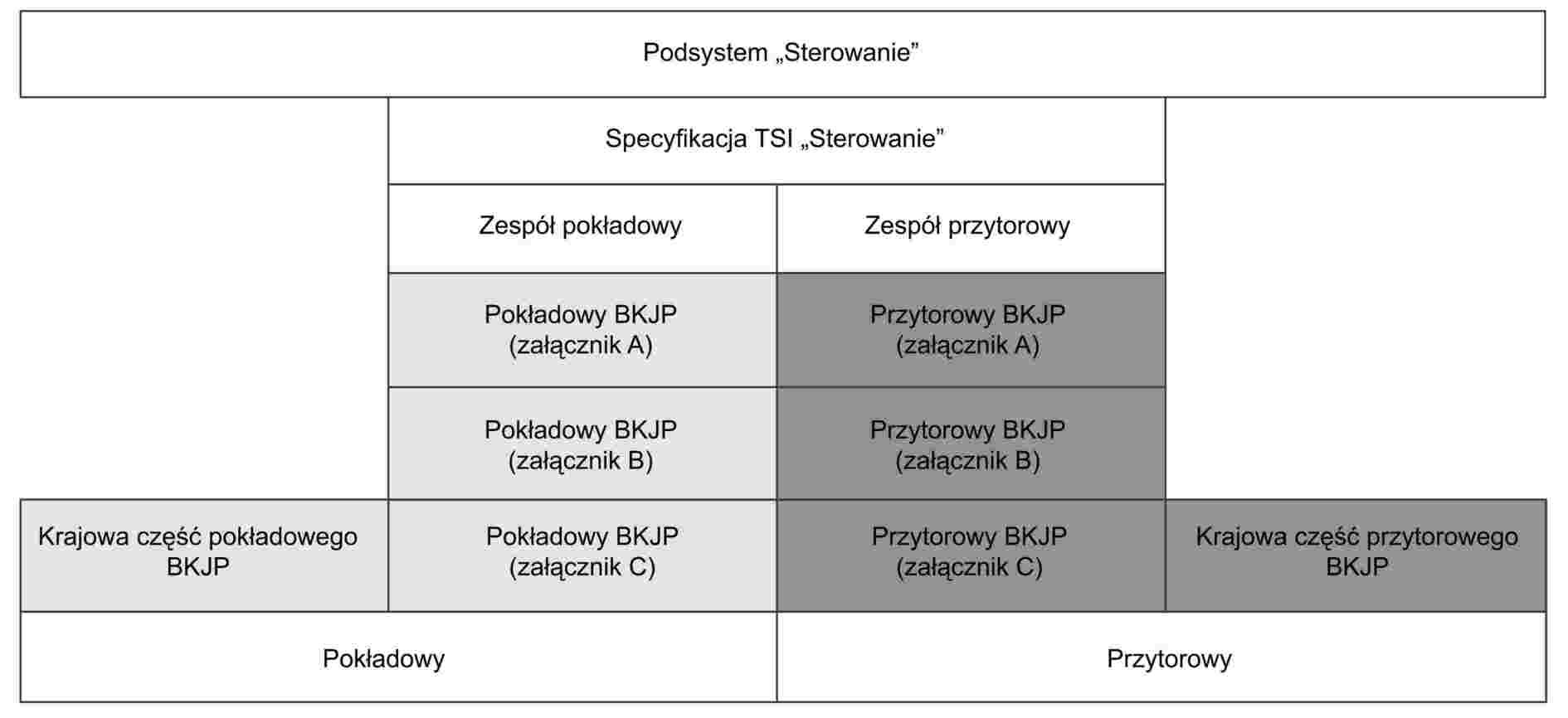
ZAŁĄCZNIK E
MODUŁY DLA SKŁADNIKÓW INTEROPERACYJNOŚCI
Moduł B: Badanie typu
|
1. |
Moduł ten opisuje tę część procedury, za pomocą której jednostka notyfikowana stwierdza i zaświadcza, że typ reprezentatywny dla przewidywanej produkcji spełnia postanowienia specyfikacji TSI, które go dotyczą. |
|
2. |
Wniosek o badanie typu WE powinien zostać złożony przez producenta lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty. Wniosek musi zawierać:
Wnioskodawca winien udostępnić jednostce notyfikowanej próbkę reprezentatywną dla przewidywanej produkcji, zwaną dalej „typem”. Typ może zawierać kilka wersji składnika interoperacyjności, o ile różnice między wersjami nie mają wpływu na postanowienia TSI. Jednostka notyfikowana może zażądać kolejnych próbek, jeśli są one potrzebne do przeprowadzenia programu badań. Jeśli w ramach procedury badania nie są wymagane próby typu, a typ jest wystarczająco zdefiniowany w dokumentacji technicznej, jak to określono w punkcie 3, jednostka notyfikowana może zgodzić się na nieudostępnianie jej żadnych próbek. |
|
3. |
Dokumentacja techniczna musi umożliwiać ocenę zgodności składnika interoperacyjności z wymogami TSI. Musi ona – w zakresie, w jakim odnosi się to do oceny – dotyczyć projektu, produkcji, utrzymania i eksploatacji składnika interoperacyjności. Dokumentacja techniczna powinna zawierać:
|
|
4. |
Jednostka notyfikowana powinna: |
|
4.1. |
zbadać dokumentację techniczną; |
|
4.2. |
sprawdzić, czy wszelkie próbki wymagane do prób zostały wyprodukowane zgodnie z dokumentacją techniczną, oraz przeprowadzić lub zlecić przeprowadzenie prób typu zgodnie z postanowieniami TSI i/lub odpowiednich specyfikacji europejskich; |
|
4.3. |
tam, gdzie w TSI wymagany jest przegląd projektu, przeprowadzić badanie metod, narzędzi oraz wyników projektowych celem ich oceny pod względem możliwości spełnienia wymogów zgodności składnika interoperacyjności na zakończenie procesu projektowego; |
|
4.4. |
tam, gdzie w TSI wymagany jest przegląd procesu produkcji, przeprowadzić badanie procesu produkcji opracowanego dla wytwarzania składnika interoperacyjności w celu oceny udziału tego procesu w zgodności wyrobu i/lub ocenić przegląd przeprowadzony przez producenta na koniec fazy projektowej; |
|
4.5. |
zidentyfikować elementy, które zostały zaprojektowane zgodnie z odpowiednimi postanowieniami TSI i specyfikacji europejskich, oraz elementy, które zostały zaprojektowane bez uwzględnienia odpowiednich postanowień tych specyfikacji europejskich; |
|
4.6. |
wykonać lub zlecić wykonanie odpowiednich badań i niezbędnych prób, zgodnie z punktami 4.2, 4.3 oraz 4.4, celem ustalenia, czy w przypadkach, w których producent wybrał zastosowanie odpowiednich specyfikacji europejskich, faktycznie zostały one zastosowane; |
|
4.7. |
wykonać lub zlecić wykonanie odpowiednich badań i niezbędnych prób, zgodnie z punktami 4.2, 4.3 oraz 4.4, celem ustalenia, czy w przypadkach, w których specyfikacje europejskie nie były stosowane, rozwiązania przyjęte przez producenta spełniają wymogi TSI; |
|
4.8. |
uzgodnić z wnioskodawcą miejsce przeprowadzenia odpowiednich badań i niezbędnych prób. |
|
5. |
Tam, gdzie typ spełnia postanowienia TSI, jednostka notyfikowana wystawia wnioskodawcy certyfikat badania typu. Certyfikat winien zawierać nazwę i adres producenta, wnioski z badania, warunki dla jego ważności oraz dane konieczne do identyfikacji zatwierdzonego typu. Okres ważności nie może przekraczać 5 lat. Wykaz odpowiednich części dokumentacji technicznej winien stanowić załącznik do certyfikatu, a jego kopia powinna być zachowana przez jednostkę notyfikowaną. Jeśli producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty otrzymuje odpowiedź odmowną w sprawie wydania certyfikatu badania typu, jednostka notyfikowana musi podać szczegółowe przyczyny takiej odmowy. Należy opracować klauzulę dla procedury odwoławczej. |
|
6. |
Wnioskodawca winien informować jednostkę notyfikowaną posiadającą dokumentację techniczną dotyczącą certyfikatu badania typu o wszelkich modyfikacjach zatwierdzonego wyrobu, które muszą uzyskać dodatkowe zatwierdzenie, jeśli zmiany takie mogą wpłynąć na zgodność z wymogami TSI lub zalecanymi warunkami użytkowania wyrobu. W takim przypadku jednostka notyfikowana przeprowadza jedynie takie badania i próby, które są istotne i konieczne dla takich zmian. Dodatkowe zatwierdzenie może zostać wydane w formie dodatku do pierwotnego certyfikatu badania typu lub jako nowy certyfikat po wycofaniu starego. |
|
7. |
Jeśli nie zostały dokonane modyfikacje opisane w punkcie 6, ważność wygasającego certyfikatu może zostać przedłużona na kolejny okres. Wnioskodawca będzie ubiegał się o takie przedłużenie, składając pisemne potwierdzenie, że nie dokonano takich modyfikacji, a jednostka notyfikowana wystawia przedłużenie na kolejny okres ważności, jak podano w punkcie 5, jeśli nie ustalono faktów sprzecznych z takim stanem rzeczy. Procedurę taką można powtarzać. |
|
8. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym istotne informacje dotyczące certyfikatów badania typu oraz dodatków, które wystawiła, wycofała lub rozpatrzyła odmownie. |
|
9. |
Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie wystawionych certyfikatów badania typu i/lub dodatków do nich. Załączniki do certyfikatów (patrz: § 5) należy zachować do dyspozycji innych jednostek notyfikowanych. |
|
10. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien wraz z dokumentacją techniczną zachować kopie certyfikatów badania typu wraz z dodatkami do nich przez okres 10 lat po wyprodukowaniu ostatniego składnika interoperacyjności. W przypadku gdy na terytorium Wspólnoty nie istnieje producent lub nie został ustanowiony upoważniony przedstawiciel, zachowanie do wglądu dokumentacji technicznej jest obowiązkiem osoby, która wprowadza składnik interoperacyjności na rynek Wspólnoty. |
Moduł D: System zarządzania jakością produkcji
|
1. |
Moduł ten opisuje procedurę, za pomocą której producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty, który spełnia wymogi punktu 2, zapewnia oraz deklaruje, że dany składnik interoperacyjności jest zgodny z typem opisanym w certyfikacie badania typu oraz że spełnia wymogi TSI, które go dotyczą. |
|
2. |
Producent powinien stosować zatwierdzony system zarządzania jakością dotyczący produkcji, kontroli wyrobu gotowego oraz prób określonych w punkcie 3, a także podlega nadzorowi, jak to określono w punkcie 4. |
|
3. |
System zarządzania jakością |
|
3.1. |
Producent winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o przeprowadzenie oceny jego systemu zarządzania w zakresie danych składników interoperacyjności. Wniosek winien zawierać:
|
|
3.2. |
System zarządzania jakością musi zapewniać zgodność składników interoperacyjności z typem opisanym w certyfikacie badania typu oraz z wymogami TSI, które ich dotyczą. Wszystkie elementy, wymogi oraz postanowienia przyjęte przez producenta winny być udokumentowane w sposób systematyczny i uporządkowany, w formie pisemnych wytycznych, procedur oraz instrukcji. Dokumentacja systemu zarządzania jakością musi pozwalać na spójną interpretację programów, planu, instrukcji oraz dokumentów dotyczących zapewniania jakości. Musi ona w szczególności zawierać odpowiedni opis:
|
|
3.3. |
Jednostka notyfikowana ocenia system zarządzania jakością w celu ustalenia, czy spełnia on wymogi punktu 3.2. Jednostka ta zakłada zgodność z tymi wymogami, jeśli producent wdroży system zapewniania jakości dla procesu produkcji, kontroli wyrobu gotowego oraz jego testowania względem normy EN/ISO 9001-2000, który uwzględnia specyfikę składnika interoperacyjności, dla którego jest wdrażany. Jednostka notyfikowana bierze pod uwagę podczas oceny fakt stosowania przez producenta certyfikowanego systemu zarządzania jakością. Audyt musi dotyczyć określonej kategorii wyrobu, reprezentatywnej dla składnika interoperacyjności. Zespół audytorów musi mieć w swoim składzie przynajmniej jednego członka posiadającego doświadczenie w zakresie oceny technologii danego wyrobu. W trakcie procedury oceny przeprowadzana jest inspekcja obiektów producenta. O decyzji należy poinformować producenta. Powiadomienie winno zawierać wnioski z badań oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
3.4. |
Producent musi podjąć się wypełnienia zobowiązań wynikających z zatwierdzonego systemu zarządzania jakością oraz utrzymywać odpowiedni poziom oraz skuteczność działania systemu. Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty informuje jednostkę notyfikowaną, która zatwierdziła system zarządzania jakością, o wszelkich zamierzonych aktualizacjach systemu zarządzania jakością. Jednostka notyfikowana musi ocenić zaproponowane modyfikacje oraz zdecydować, czy zmodyfikowany system zarządzania jakością spełni wymogi zawarte w punkcie 3.2 oraz czy wymagana jest ponowna ocena. Jednostka notyfikowana musi poinformować o swojej decyzji producenta. Powiadomienie takie winno zawierać wnioski z badania oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
4. |
Nadzór nad systemem zarządzania w ramach obowiązków jednostki notyfikowanej. |
|
4.1. |
Celem sprawowanego nadzoru jest upewnienie się, że producent właściwie wypełnia zobowiązania wynikające z zatwierdzonego systemu zarządzania jakością. |
|
4.2. |
Producent musi zezwolić jednostce notyfikowanej, celem przeprowadzenia przez nią kontroli, na wejście na teren miejsc projektowania, produkcji, kontroli, testowania i magazynowania oraz udostępnia tej jednostce wszelkie niezbędne informacje, w szczególności:
|
|
4.3. |
Jednostka notyfikowana musi okresowo przeprowadzać audyty, aby upewnić się, że producent utrzymuje i wykorzystuje system zarządzania jakością, oraz winna przedstawić producentowi raport z takiego audytu. Audyty przeprowadza się przynajmniej raz w roku. Jednostka notyfikowana bierze pod uwagę podczas sprawowania nadzoru fakt posiadania przez producenta certyfikowanego systemu zarządzania jakością. |
|
4.4. |
Ponadto jednostka notyfikowana może składać producentowi niezapowiedziane wizyty. Podczas takich wizyt jednostka notyfikowana może, jeśli uzna to za konieczne, przeprowadzić lub zlecić wykonanie prób celem sprawdzenia, czy system zarządzania jakością funkcjonuje prawidłowo. Jednostka notyfikowana musi przedstawić producentowi raport z takiej wizyty oraz, jeśli miała miejsce próba, także raport z próby. |
|
5. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym stosowne informacje dotyczące zatwierdzeń dla systemu zarządzania jakością, które zostały wydane, wycofane lub odrzucone. Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie wystawionych zatwierdzeń dla systemów zarządzania jakością. |
|
6. |
Producent winien przez okres 10 lat po wyprodukowaniu ostatniego wyrobu zachować do dyspozycji władz krajowych:
|
|
7. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien sporządzić pisemną deklarację zgodności WE dla składnika interoperacyjności. Deklaracja taka powinna zawierać przynajmniej informacje określone w załączniku IV (3) dyrektyw 96/48/WE lub 2001/16/WE. Deklaracja zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą i podpisem. Deklaracja musi być napisana w tym samym języku co dokumentacja techniczna i musi zawierać, co następuje:
Certyfikaty, do których należy się odnieść, to:
|
|
8. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien zachować kopię deklaracji zgodności WE przez okres 10 lat po wyprodukowaniu ostatniego składnika interoperacyjności. W przypadku gdy na terytorium Wspólnoty nie istnieje producent lub nie został ustanowiony upoważniony przedstawiciel, zachowanie do wglądu dokumentacji technicznej jest obowiązkiem osoby, która wprowadza składnik interoperacyjności na rynek Wspólnoty. |
|
9. |
Jeśli TSI wymaga, oprócz deklaracji zgodności WE, także deklaracji przydatności do stosowania WE dla składnika interoperacyjności, deklaracja taka powinna zostać dodana po jej wystawieniu przez producenta zgodnie z warunkami modułu V. |
Moduł F: Weryfikacja wyrobu
|
1. |
Moduł ten opisuje procedurę, za pomocą której producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty sprawdza oraz zaświadcza, że składnik interoperacyjności, którego procedura dotyczy zgodnie z postanowieniami punktu 3, jest zgodny z typem opisanym w certyfikacie badania typu WE, oraz że spełnia wymogi TSI, które go dotyczą. |
|
2. |
Producent musi podjąć wszelkie konieczne środki, by proces produkcyjny zapewniał zgodność każdego wyprodukowanego składnika interoperacyjności z typem opisanym w certyfikacie badania typu oraz z wymogami TSI, które go dotyczą. |
|
3. |
Jednostka notyfikowana musi przeprowadzić odpowiednie badania i próby celem sprawdzenia zgodności składnika interoperacyjności z typem opisanym w certyfikacie badania typu WE oraz z wymogami TSI. Producent (3) może dokonać wyboru między badaniem i próbą każdego składnika interoperacyjności, jak to określono w punkcie 4, lub statystycznym badaniem i próbą składników interoperacyjności, jak określono w punkcie 5. |
|
4. |
Weryfikacja na podstawie badań i prób każdego składnika interoperacyjności |
|
4.1. |
Każdy wyrób jest badany osobno, przeprowadza się też odpowiednie próby celem weryfikacji zgodności wyrobu z typem opisanym w certyfikacie badania typu oraz wymogami TSI, które go dotyczą. W przypadku gdy próba nie została określona w TSI (lub w normie europejskiej powołanej w TSI), zastosowanie mają odpowiednie specyfikacje europejskie (4) lub równorzędne próby. |
|
4.2. |
Jednostka notyfikowana musi sporządzić na piśmie certyfikat zgodności dla zatwierdzonych wyrobów, odnoszący się do przeprowadzonych prób. |
|
4.3. |
Producent lub jego upoważniony przedstawiciel musi zapewnić możliwość okazania na żądanie certyfikatów zgodności wystawionych przez jednostkę notyfikowaną. |
|
5. |
Weryfikacja statystyczna |
|
5.1. |
Producent musi przedstawić swoje składniki interoperacyjności w postaci jednorodnych partii oraz podjąć wszelkie niezbędne kroki celem zapewnienia jednorodności każdej produkowanej partii. |
|
5.2. |
Wszystkie składniki interoperacyjności muszą być dostępne do weryfikacji w postaci jednorodnych partii. Z każdej partii pobiera się losowo wybraną próbkę. Każdy składnik interoperacyjności w próbce bada się osobno oraz przeprowadza się na nim próby mające na celu zapewnienie zgodności wyrobu z typem opisanym w certyfikacie badania typu oraz wymogami TSI, które go dotyczą, oraz określenie, czy partia będzie przyjęta czy odrzucona. W przypadku gdy próba nie została określona w TSI (lub w normie europejskiej powołanej w TSI), zastosowanie mają odpowiednie specyfikacje europejskie lub równorzędne próby. |
|
5.3. |
Procedura statystyczna powinna wykorzystywać odpowiednie elementy (metoda statystyczna, plan próbkowania itd.) w zależności od cech podlegających ocenie, zgodnie z TSI. |
|
5.4. |
W przypadku partii przyjętych jednostka notyfikowana sporządza na piśmie certyfikat zgodności, odnoszący się do przeprowadzonych prób. Wszystkie składniki interoperacyjności w partii, oprócz tych składników interoperacyjności z próbki, które zostały uznane za niezgodne, mogą być wprowadzone na rynek. W przypadku odrzucenia partii jednostka notyfikowana lub właściwy organ muszą podjąć odpowiednie kroki, aby zapobiec wprowadzeniu takiej partii na rynek. W przypadku częstego odrzucania partii jednostka notyfikowana może zawiesić weryfikację statystyczną. |
|
5.5. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien zapewnić możliwość okazania na żądanie certyfikatów zgodności wystawionych przez jednostkę notyfikowaną. |
|
6. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien sporządzić deklarację zgodności WE dla składnika interoperacyjności. Deklaracja taka musi zawierać przynajmniej informacje określone w załączniku IV (3) dyrektyw 96/48/WE lub 2001/16/WE. Deklaracja zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą i podpisem. Deklaracja powinna być napisana w tym samym języku co dokumentacja techniczna i zawierać, co następuje:
Certyfikaty, do których należy się odnieść, to:
|
|
7. |
Producent lub jego upoważniony przedstawiciel winien zachować kopię deklaracji zgodności WE przez okres 10 lat po wyprodukowaniu ostatniego składnika interoperacyjności. W przypadku gdy na terytorium Wspólnoty nie istnieje producent lub nie został ustanowiony upoważniony przedstawiciel, zachowanie do wglądu dokumentacji technicznej jest obowiązkiem osoby, która wprowadza składnik interoperacyjności na rynek Wspólnoty. |
|
8. |
Jeśli TSI wymaga, oprócz deklaracji zgodności WE, także deklaracji przydatności do stosowania WE dla składnika interoperacyjności, deklaracja taka powinna zostać dodana po wystawieniu jej przez producenta zgodnie z warunkami modułu V. |
Moduł H2: Pełny system zarządzania jakością ze sprawdzeniem projektu
|
1. |
Moduł ten opisuje procedurę, za pomocą której jednostka notyfikowana przeprowadza sprawdzenie projektu składnika interoperacyjności, a producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty, który spełnia zobowiązania podane w punkcie 2, zapewnia oraz deklaruje, że dany składnik interoperacyjności spełnia wymogi TSI, które go dotyczą. |
|
2. |
Producent musi stosować zatwierdzony system zarządzania jakością dotyczący projektowania, produkcji, kontroli wyrobu gotowego oraz prób określonych w punkcie 3, a także podlega nadzorowi, jak to określono w punkcie 4. |
|
3. |
System zarządzania jakością |
|
3.1. |
Producent winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o przeprowadzenie oceny jego systemu zarządzania dotyczącej składników interoperacyjności. Wniosek winien zawierać:
|
|
3.2. |
System zarządzania jakością musi zapewniać zgodność składnika interoperacyjności z wymogami TSI, które go dotyczą. Wszystkie elementy, wymogi oraz postanowienia przyjęte przez producenta winny być udokumentowane w sposób systematyczny i uporządkowany, w formie pisemnych zasad, procedur oraz instrukcji. Dokumentacja systemu zarządzania jakością musi pozwalać na powszechne zrozumienie zasad i procedur jakościowych, takich jak programy, plany, instrukcje oraz dokumenty jakościowe. Musi ona w szczególności zawierać odpowiedni opis:
Zasady oraz procedury dotyczące jakości obejmują w szczególności fazy oceny, takie jak przegląd projektu, przegląd procesów produkcji oraz prób typu, zgodnie z ich opisem w TSI dla różnych cech charakterystycznych oraz parametrów działania danego składnika interoperacyjności. |
|
3.3. |
Jednostka notyfikowana musi ocenić system zarządzania jakością i ustalić, czy spełnia on wymogi punktu 3.2. Jednostka ta zakłada zgodność z tymi wymogami, jeśli producent wdroży system zapewniania jakości dla projektowania, procesu produkcji, kontroli i testowania wyrobu gotowego w zakresie normy EN/ISO 9001-2000, który uwzględnia specyfikę składnika interoperacyjności, dla którego jest wdrażany. Jednostka notyfikowana bierze pod uwagę podczas oceny fakt stosowania przez producenta certyfikowanego systemu zarządzania jakością. Audyt musi dotyczyć określonej kategorii wyrobu, reprezentatywnej dla składnika interoperacyjności. Zespół audytorów musi mieć w swoim składzie przynajmniej jednego członka posiadającego doświadczenie w zakresie oceny technologii danego wyrobu. W trakcie procedury oceny przeprowadzana jest inspekcja obiektów producenta. O decyzji należy poinformować producenta. Powiadomienie winno zawierać wnioski z badań oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
3.4. |
Producent winien podjąć się wypełnienia zobowiązań wynikających z zatwierdzonego systemu zarządzania jakością oraz utrzymywać odpowiedni poziom oraz skuteczność działania systemu. Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty informuje jednostkę notyfikowaną, która zatwierdziła system zarządzania jakością, o wszelkich zamierzonych aktualizacjach systemu zarządzania jakością. Jednostka notyfikowana musi winien ocenić zaproponowane modyfikacje oraz zdecydować, czy zmodyfikowany system zarządzania jakością spełni wymogi zawarte w punkcie 3.2 oraz czy wymagana jest ponowna ocena. Jednostka notyfikowana musi poinformować o swojej decyzji producenta. Powiadomienie takie winno zawierać wnioski z oceny oraz uzasadnioną decyzję o dokonanej ocenie. |
|
4. |
Nadzór nad systemem zarządzania w ramach obowiązków jednostki notyfikowanej |
|
4.1. |
Celem sprawowanego nadzoru jest upewnienie się, że producent właściwie wypełnia zobowiązania wynikające z zatwierdzonego systemu zarządzania jakością. |
|
4.2. |
Producent musi zezwolić jednostce notyfikowanej, celem przeprowadzenia przez nią kontroli, na wejście na teren miejsc projektowania, produkcji, kontroli, testowania i magazynowania oraz udostępnia tej jednostce wszelkie niezbędne informacje, w szczególności:
|
|
4.3. |
Jednostka notyfikowana musi okresowo przeprowadzać audyty, aby upewnić się, że producent utrzymuje i wykorzystuje system zarządzania jakością, oraz przedstawia producentowi raport z takiego audytu. Jednostka notyfikowana bierze pod uwagę podczas sprawowania nadzoru fakt posiadania przez producenta certyfikowanego systemu zarządzania jakością. Audyty przeprowadza się przynajmniej raz w roku. |
|
4.4. |
Ponadto jednostka notyfikowana może składać producentowi niezapowiedziane wizyty. Podczas takich wizyt jednostka notyfikowana może, jeśli uzna to za konieczne, przeprowadzić lub zlecić wykonanie prób celem sprawdzenia, czy system zarządzania jakością funkcjonuje prawidłowo. Jednostka notyfikowana musi przedstawić producentowi raport z takiej wizyty oraz, jeśli miała miejsce próba, także raport z próby. |
|
5. |
Producent winien przez okres 10 lat po wyprodukowaniu ostatniego wyrobu zachować do dyspozycji władz krajowych:
|
|
6. |
Sprawdzenie projektu |
|
6.1. |
Producent winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o przeprowadzenie sprawdzenia projektu składnika interoperacyjności. |
|
6.2. |
Wniosek winien umożliwiać zrozumienie projektu, produkcji, utrzymania oraz funkcjonowania składnika interoperacyjności oraz umożliwiać ocenę zgodności z wymaganiami TSI. Wniosek winien zawierać:
|
|
6.3. |
Wnioskodawca przedstawi wyniki prób (6), łącznie z próbami typu tam, gdzie jest to wymagane, przeprowadzonych przez odpowiednie laboratorium wnioskodawcy lub w jego imieniu. |
|
6.4. |
Jednostka notyfikowana musi zbadać wniosek oraz ocenić wyniki prób. Tam, gdzie projekt spełnia warunki TSI, które go dotyczą, jednostka notyfikowana musi wystawić wnioskodawcy certyfikat sprawdzenia projektu WE. Certyfikat ten zawiera wnioski ze sprawdzenia, warunki jego ważności, dane niezbędne do identyfikacji zatwierdzonego projektu oraz, o ile jest to stosowne, opis funkcjonowania wyrobu. Okres ważności nie może przekraczać 5 lat. |
|
6.5. |
Wnioskodawca winien informować jednostkę notyfikowaną, który wystawiła certyfikat sprawdzenia projektu WE, o wszelkich modyfikacjach zatwierdzonego projektu. Modyfikacje zatwierdzonego projektu muszą uzyskać dodatkowe zatwierdzenie ze strony jednostki notyfikowanej, która wystawił certyfikat sprawdzenia projektu WE, o ile takie zmiany mogą mieć wpływ na zgodność z wymogami TSI lub z ustalonymi warunkami użytkowania wyrobu. W takim przypadku jednostka notyfikowana przeprowadza jedynie takie badania i próby, które są istotne i konieczne dla takich zmian. Dodatkowe zatwierdzenie wydawane jest w formie dodatku do pierwotnego certyfikatu sprawdzenia projektu WE. |
|
6.6. |
Jeśli nie zostały dokonane modyfikacje opisane w punkcie 6.4, ważność wygasającego certyfikatu może zostać przedłużona na kolejny okres. Wnioskodawca będzie ubiegał się o takie przedłużenie, składając pisemne potwierdzenie, że nie dokonano takich modyfikacji, a jednostka notyfikowana wystawia przedłużenie na kolejny okres ważności, jak podano w punkcie 6.3, jeśli nie ustalono faktów sprzecznych z takim stanem rzeczy. Procedurę taką można powtarzać. |
|
7. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym istotne informacje dotyczące zatwierdzeń systemów zarządzania oraz certyfikatów badania projektu WE, które wystawiła, wycofała lub rozpatrzyła odmownie. Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie:
|
|
8. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien sporządzić deklarację zgodności WE dla składnika interoperacyjności. Deklaracja taka zawiera przynajmniej informacje określone w załączniku IV (3) dyrektyw 96/48/WE lub 2001/16/WE. Deklaracja zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą i podpisem. Deklaracja musi być napisana w tym samym języku co dokumentacja techniczna i musi zawierać, co następuje:
Certyfikaty, do których należy się odnieść, to:
|
|
9. |
Producent lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty winien zachować kopię deklaracji zgodności WE przez okres 10 lat po wyprodukowaniu ostatniego składnika interoperacyjności. W przypadku gdy na terytorium Wspólnoty nie istnieje producent lub nie został ustanowiony upoważniony przedstawiciel, zachowanie do wglądu dokumentacji technicznej jest obowiązkiem osoby, która wprowadza składnik interoperacyjności na rynek Wspólnoty. |
|
10. |
Jeśli TSI wymaga, oprócz deklaracji zgodności WE, także deklaracji przydatności do stosowania WE dotyczącej składnika interoperacyjności, deklaracja taka powinna zostać dodana po jej wystawieniu przez producenta zgodnie z warunkami podanymi w module V. |
MODUŁY WERYFIKACJI ZGODNOŚCI WE DLA PODSYSTEMÓW
Moduł SB: Badanie typu
|
1. |
Moduł ten opisuje procedurę weryfikacji zgodności WE, za pomocą której jednostka notyfikowana sprawdza i zaświadcza, na żądanie podmiotu zamawiającego lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty, że typ podsystemu „Sterowanie”, reprezentatywny dla przewidywanej produkcji,
Badanie typu zdefiniowane w tym module może obejmować specyficzne fazy oceny – przegląd projektu, próbę typu lub przegląd procesu produkcji, które są wyszczególnione w odpowiednich specyfikacjach TSI. |
|
2. |
Podmiot zamawiający (9) winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o weryfikację zgodności WE podsystemu (poprzez badanie typu). Wniosek winien zawierać:
|
|
3. |
Wnioskodawca winien udostępnić organowi notyfikowanemu jeden egzemplarz podsystemu (10), reprezentatywny dla przewidywanej produkcji, zwany dalej „typem”. Typ może obejmować kilka wersji podsystemu, o ile różnice między wersjami nie mają wpływu na warunki TSI. Jednostka notyfikowana może zażądać kolejnych egzemplarzy, jeżeli jest to konieczne dla przeprowadzenia programu prób. Jeżeli wymagają tego specyficzne metody przeprowadzania prób lub badań oraz jeżeli określono tak w specyfikacji TSI lub w specyfikacji europejskiej (11) powołanej w specyfikacji TSI, należy dostarczyć egzemplarz lub egzemplarze podzespołu lub zespołu, lub egzemplarz podsystemu w stanie wstępnie zmontowanym. Dokumentacja techniczna oraz egzemplarze muszą umożliwiać zrozumienie projektu, produkcji, utrzymania i eksploatacji podsystemu oraz ocenę zgodności z postanowieniami specyfikacji TSI. Dokumentacja techniczna musi zawierać następujące elementy:
Jeżeli specyfikacja TSI wymaga dalszych informacji lub dokumentacji technicznej,należy je dołączyć. |
|
4. |
Jednostka notyfikowana musi: |
|
4.1. |
zbadać dokumentację techniczną; |
|
4.2. |
sprawdzić, czy egzemplarz (lub egzemplarze) podsystemu lub zespołów bądź podzespołów podsystemu został wyprodukowany zgodnie z dokumentacją techniczną, i przeprowadzić lub zlecić przeprowadzenie prób typu zgodnie z warunkami specyfikacji TSI bądź też odnośnymi specyfikacjami europejskimi. Produkcja ta powinna być poddana weryfikacji przy użyciu odpowiedniego modułu oceny; |
|
4.3. |
tam, gdzie w TSI wymagany jest przegląd projektu, przeprowadzić badanie metod, narzędzi oraz wyników projektowych celem ich oceny pod względem możliwości spełnienia wymogów zgodności podsystemu na zakończenie procesu projektowego; |
|
4.4. |
zidentyfikować elementy, które zostały zaprojektowane zgodnie z odpowiednimi postanowieniami TSI i danych specyfikacji europejskich oraz elementy, które zostały zaprojektowane bez uwzględnienia odpowiednich postanowień tych specyfikacji europejskich; |
|
4.5. |
wykonać lub zlecić wykonanie odpowiednich badań i niezbędnych prób, zgodnie z punktami 4.2, 4.3 oraz 4.4, celem ustalenia, czy w przypadkach, w których wybrano zastosowanie odpowiednich specyfikacji europejskich, faktycznie zostały one zastosowane; |
|
4.6. |
wykonać lub zlecić wykonanie odpowiednich badań i niezbędnych prób, zgodnie z punktami 4.2, 4.3 oraz 4.4, celem ustalenia, czy w przypadkach, w których odpowiednie specyfikacje europejskie nie były stosowane, przyjęte rozwiązania spełniają wymogi TSI; |
|
4.7. |
uzgodnić z wnioskodawcą miejsce przeprowadzenia odpowiednich badań i niezbędnych prób. |
|
5. |
Tam, gdzie typ spełnia postanowienia TSI, jednostka notyfikowana wystawia wnioskodawcy certyfikat badania typu. Certyfikat zawiera nazwę i adres podmiotu zamawiającego oraz producenta lub producentów podanych w dokumentacji technicznej, wnioski z badania, warunki dla jego ważności oraz dane konieczne do identyfikacji zatwierdzonego typu. Wykaz odpowiednich części dokumentacji technicznej winien stanowić załącznik do certyfikatu, a jego kopia powinna być zachowana przez jednostkę notyfikowaną. Jeśli podmiot zamawiający otrzymuje odpowiedź odmowną w sprawie wydania certyfikatu badania typu, jednostka notyfikowana musi podać szczegółowe przyczyny takiej odmowy. Należy opracować klauzulę dla procedury odwoławczej. |
|
6. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym istotne informacje dotyczące certyfikatów badania typu oraz dodatków, które wystawiła, wycofała lub rozpatrzyła odmownie. |
|
7. |
Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie wystawionych certyfikatów badania typu i/lub dodatków do nich. Załączniki do certyfikatów należy zachować do dyspozycji innych jednostek notyfikowanych. |
|
8. |
Podmiot zamawiający winien przechowywać z dokumentacją techniczną kopie certyfikatów badania typu oraz dodatków do nich przez cały okres eksploatacji podsystemu. Na żądanie dokumenty te muszą być wysyłane do każdego z pozostałych państw członkowskich. |
|
9. |
Wnioskodawca winien informować jednostkę notyfikowaną, w której posiadaniu znajduje się dokumentacja techniczna dotycząca certyfikatu badania typu, o wszelkich modyfikacjach, które mogą mieć wpływ na zgodność z wymaganiami specyfikacji TSI lub określonych warunków użytkowania podsystemu. W takich sytuacjach należy uzyskiwać dodatkowe zatwierdzenia dla podsystemu. Dodatkowe zatwierdzenie może zostać wydane w formie dodatku do pierwotnego certyfikatu badania typu lub jako nowy certyfikat po wycofaniu starego. |
Moduł SD: System zarządzania jakością produkcji
|
1. |
Moduł ten opisuje procedurę weryfikacji zgodności WE, za pomocą której jednostka notyfikowana sprawdza oraz zaświadcza, na żądanie podmiotu zamawiającego lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty, że podsystem „Sterowanie”, dla którego jednostka notyfikowana wydała już certyfikat badania typu,
i może być oddany do eksploatacji. |
|
2. |
Jednostka notyfikowana przeprowadza procedurę, pod warunkiem że:
|
|
3. |
W odniesieniu do podsystemu, który podlega procedurze weryfikacji zgodności WE, podmiot zamawiający lub główni wykonawcy, o ile tacy zostali zatrudnieni, stosują zatwierdzony system zarządzania jakością dla produkcji oraz kontroli i testowania wyrobu gotowego, jak określono w punkcie 5, oraz podlegający nadzorowi, jak określono w punkcie 6. Jeżeli podmiot zamawiający jest samodzielnie odpowiedzialny za cały projekt realizacji podsystemu (w szczególności włącznie z integracją podsystemu) lub jest on bezpośrednio zaangażowany w produkcję (włącznie z montażem i instalacją), winien on stosować zatwierdzony system zarządzania jakością dla tych działań, który będzie podlegać nadzorowi, jak określono w punkcie 6. Jeżeli główny wykonawca jest odpowiedzialny za cały projekt realizacji podsystemu (w szczególności włącznie z integracją podsystemu), winien on stosować zatwierdzony system zarządzania jakością dla produkcji i kontroli oraz testowania wyrobu gotowego, który będzie podlegać nadzorowi, jak określono w punkcie 6. |
|
4. |
Procedura weryfikacji zgodności WE |
|
4.1. |
Podmiot zamawiający winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o weryfikację zgodności WE podsystemu (poprzez system zarządzania jakością produkcji), włącznie z koordynacją nadzoru nad systemami zarządzania jakością, zgodnie z punktami 5.3 i 6.5. Podmiot zamawiający winien poinformować zaangażowanych producentów o swym wyborze oraz o złożeniu wniosku. |
|
4.2. |
Wniosek winien umożliwiać zrozumienie projektu, produkcji, montażu, instalacji, utrzymania i eksploatacji podsystemu oraz umożliwia ocenę zgodności z typem, jak opisano w certyfikacie badania typu, oraz z wymaganiami specyfikacji TSI. Wniosek winien zawierać:
oraz, jeżeli nie zostało to załączone do dokumentacji,
|
|
4.3. |
Jednostka notyfikowana w pierwszej kolejności sprawdza wniosek pod kątem ważności badania typu oraz certyfikatu badania typu. Jeżeli jednostka notyfikowana stwierdzi, że certyfikat badania typu nie jest już ważny, lub nie jest odpowiedni, oraz że niezbędne jest przeprowadzenie nowego badania typu, informuje o takiej decyzji wraz z uzasadnieniem. |
|
5. |
System zarządzania jakością |
|
5.1. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy, jeżeli są zatrudnieni, winni złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o przeprowadzenie oceny stosowanych przez nich systemów zarządzania jakością. Wniosek winien zawierać:
Firmom zaangażowanym tylko w część projektu realizacji podsystemu dostarcza się wyłącznie te informacje, które dotyczą części, w której realizację są one zaangażowane. |
|
5.2. |
W odniesieniu do podmiotu zamawiającego lub głównego wykonawcy odpowiedzialnego za cały projekt realizacji podsystemu, stosowane systemy zarządzania jakością powinny zapewniać ogólną zgodność podsystemu z typem opisanym w certyfikacie badania typu oraz ogólną zgodność podsystemu z wymaganiami TSI. W odniesieniu do innych głównych wykonawców, stosowane przez nich systemy zarządzania jakością winny zapewniać zgodność w zakresie ich częściowego udziału w realizacji podsystemu z typem, jak opisano w certyfikacie badania typu, oraz z wymaganiami specyfikacji TSI. Wszystkie elementy, wymogi oraz postanowienia przyjęte przez wnioskodawcę lub wnioskodawców winny być udokumentowane w sposób systematyczny i uporządkowany, w formie pisemnych zasad, procedur oraz instrukcji. Dokumentacja systemu zarządzania jakością musi pozwalać na spójne zrozumienie zasad i procedur dotyczących zapewniania jakości, takich jak programy, plany, instrukcje oraz dokumenty. Musi ona zawierać w szczególności odpowiednie opisy następujących elementów,
Badania, próby i kontrole powinny obejmować następujące etapy:
|
|
5.3. |
Jednostka notyfikowana wybrana przez podmiot zamawiający musi sprawdzić, czy wszystkie etapy podsystemu, jak podano w punkcie 5.2, są w wystarczającym i właściwym stopniu objęte zatwierdzeniem oraz nadzorem nad systemem lub systemami zarządzania jakością wnioskodawcy lub wnioskodawców (15). Jeżeli zgodność podsystemu z typem, jak opisano w certyfikacie badania typu, oraz zgodność podsystemu z wymaganiami specyfikacji TSI wynika z działania w oparciu o więcej niż jeden system zarządzania jakością, jednostka notyfikowana sprawdza w szczególności:
|
|
5.4. |
Jednostka notyfikowana, o której mowa w punkcie 5.1, musi dokonać oceny systemu zarządzania jakością, aby ustalić, czy spełnia on wymogi punktu 5.2 Jednostka notyfikowana zakłada zgodność z tymi wymogami, jeśli producent wdroży system zapewniania jakości dla procesu produkcji, kontroli i testowania wyrobu gotowego pod względem normy EN/ISO 9001-2000, który uwzględnia specyfikę składnika interoperacyjności, dla którego jest wdrażany. Jednostka notyfikowana bierze pod uwagę podczas oceny fakt posiadania przez wnioskodawcę certyfikowanego systemu zarządzania jakością. Audyt jest specyficzny dla danego podsystemu, uwzględniając szczególny udział wnioskodawcy w budowie podsystemu. Zespół audytorów musi mieć w swoim składzie przynajmniej jednego członka posiadającego doświadczenie w zakresie oceny technologii danego podsystemu. W trakcie procedury oceny przeprowadzana jest inspekcja obiektów producenta. O decyzji należy poinformować wnioskodawcę. Powiadomienie winno zawierać wnioski z badań oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
5.5. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą podjąć się wypełnienia zobowiązań wynikających z zatwierdzonego systemu zarządzania jakością oraz utrzymywać odpowiedni poziom oraz skuteczność działania systemu. Muszą oni informować jednostkę notyfikowaną, która zatwierdziła system zarządzania jakością, o wszelkich znaczących zmianach, które mogą mieć wpływ na wymagania TSI dotyczące podsystemu. Jednostka notyfikowana musi ocenić zaproponowane modyfikacje oraz zdecydować, czy zmodyfikowany system zarządzania jakością spełni wymogi zawarte w punkcie 5.2 oraz czy konieczna jest ponowna ocena. Jednostka notyfikowana musi poinformować o swojej decyzji wnioskodawcę. Powiadomienie takie zawierać wnioski z badania oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
6. |
Nadzór nad systemami zarządzania jakością w ramach obowiązków jednostki notyfikowanej |
|
6.1. |
Celem sprawowanego nadzoru jest upewnienie się, że podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy właściwie wypełniają obowiązki wynikające z zatwierdzonego systemu zarządzania jakością. |
|
6.2. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą wysłać do jednostki notyfikowanej, o której mowa w punkcie 5.1, wszystkie dokumenty wymagane do tego celu (lub zlecić ich wysłanie), włącznie z planami wdrożenia oraz protokołami technicznymi dotyczącymi podsystemu (o ile dotyczą one specyficznego udziału wnioskodawców w budowie podsystemu), a w szczególności:
|
|
6.3. |
Jednostka notyfikowana musi okresowo przeprowadzać audyty, aby upewnić się, że podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy utrzymują i stosują system zarządzania jakością; oraz musi przedstawić im raport z takiego audytu. Jednostka notyfikowana bierze pod uwagę podczas sprawowania nadzoru fakt stosowania przez nich certyfikowanego systemu zarządzania jakością. Audyty przeprowadza się przynajmniej raz w roku, z tym, że co najmniej jeden audyt powinien być przeprowadzony w trakcie wykonywania odnośnych działań (produkcja, montaż lub instalacja) przy podsystemie będącym przedmiotem procedury weryfikacji zgodności WE, o której mowa w punkcie 8. |
|
6.4. |
Ponadto jednostka notyfikowana może składać w obiektach wnioskodawców niezapowiedziane wizyty. Podczas takich wizyt jednostka notyfikowana może, jeśli uzna to za konieczne, przeprowadzić częściowe lub pełne audyty lub wykonywać lub zlecić wykonanie prób w celu sprawdzenia, czy system zarządzania jakością funkcjonuje prawidłowo. Jednostka notyfikowana musi przedstawić wnioskodawcom raport z takiej wizyty oraz, jeśli miały miejsce audyt lub próba, także raport z audytu i/lub próby. |
|
6.5. |
Jeżeli wybrana przez podmiot zamawiający jednostka notyfikowana, odpowiedzialna za weryfikację zgodności WE, nie sprawuje nadzoru nad wszystkimi właściwymi systemami zarządzania jakością, musi koordynować czynności nadzoru prowadzone przez inną jednostkę notyfikowaną, odpowiedzialną za dane zadanie, w celu:
W ramach tej koordynacji jednostka notyfikowana posiada następujące uprawnienia:
|
|
7. |
Jednostka notyfikowana, o której mowa w punkcie 5.1, musi mieć dostęp, dla celów prowadzenia kontroli, audytu i nadzoru, do placów budowy, zakładów produkcyjnych, miejsc montażu i instalacji, magazynów oraz – w miarę potrzeb – do miejsc prefabrykacji i przeprowadzania prób, a także – mówiąc ogólniej – do wszystkich pomieszczeń, które uzna za właściwe do wykonywania swych zadań, w zakresie odpowiadającym konkretnemu udziałowi wnioskodawcy w projekcie podsystemu. |
|
8. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą przez okres 10 lat po wyprodukowaniu ostatniego podsystemu zachować do dyspozycji władz krajowych:
|
|
9. |
Jeżeli podsystem spełnia wymagania specyfikacji TSI, jednostka notyfikowana musi następnie, w oparciu o badanie typu oraz zatwierdzenie i nadzór nad systemami zarządzania jakością, sporządzić certyfikat zgodności, przeznaczony dla podmiotu zamawiającego, który z kolei sporządza deklarację weryfikacji zgodności WE przeznaczoną dla organu nadzorczego państwa członkowskiego, w którym dany podsystem się znajduje i/lub funkcjonuje. Deklaracja zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą i podpisem. Deklaracja musi być napisana w tym samym języku co dokumentacja techniczna i musi obejmować co najmniej te informacje, które są zawarte w załączniku V do dyrektywy. |
|
10. |
Jednostka notyfikowana wybrana przez podmiot zamawiający jest odpowiedzialna za skompletowanie akt technicznych, które będą załączone do deklaracji weryfikacji zgodności WE. Akta techniczne obejmują co najmniej informacje określone w art. 18 ust. 3 dyrektywy, a w szczególności, co następuje:
|
|
11. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym stosowne informacje dotyczące zatwierdzeń dla systemu zarządzania jakością, które wystawiła, wycofała lub rozpatrzyła odmownie. Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie wystawionych zatwierdzeń dla systemów zarządzania jakością. |
|
12. |
Protokoły załączone do certyfikatu zgodności muszą być przechowywane u podmiotu zamawiającego. Podmiot zamawiający mający swą siedzibę na terenie Wspólnoty winien przechowywać kopię akt technicznych przez cały okres eksploatacji podsystemu. Na żądanie kopia taka musi być wysyłana do każdego z pozostałych państw członkowskich. |
Moduł SF: Weryfikacja wyrobu
|
1. |
Moduł ten opisuje procedurę weryfikacji zgodności WE, za pomocą której jednostka notyfikowana sprawdza oraz zaświadcza, na żądanie podmiotu zamawiającego lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty, że podsystem „Sterowanie”, dla którego jednostka notyfikowana wydała już certyfikat badania typu,
|
|
2. |
Podmiot zamawiający (18) winien złożyć w wybranej przez siebie jednostce notyfikowanej wniosek o weryfikację zgodności WE podsystemu (poprzez weryfikację wyrobu). Wniosek winien zawierać:
|
|
3. |
W ramach tej procedury podmiot zamawiający sprawdza i zaświadcza, że dany podsystem jest zgodny z typem opisanym w certyfikacie badania typu i spełnia wymogi specyfikacji TSI, które go dotyczą. Jednostka notyfikowana przeprowadza tę procedurę pod warunkiem, że wydany przed dokonaniem oceny certyfikat badania typu dotyczący danego podsystemu, który jest przedmiotem wniosku, jest nadal ważny. |
|
4. |
Podmiot zamawiający musi podjąć wszelkie niezbędne działania, aby proces produkcji (włącznie z montażem oraz integracją składników interoperacyjności przez głównych wykonawców (19), jeżeli są zaangażowani) zapewniał zgodność podsystemu z typem opisanym w certyfikacie badania typu, oraz z wymogami specyfikacji TSI, które go dotyczą. |
|
5. |
Wniosek musi umożliwiać zrozumienie projektu, produkcji, instalacji, utrzymania i eksploatacji podsystemu i powinien umożliwiać ocenę zgodności z typem, jak opisano w certyfikacie badania typu oraz w wymaganiach specyfikacji TSI. Wniosek winien zawierać następujące elementy:
oraz, jeżeli nie zostało to załączone do dokumentacji:
Jeżeli specyfikacja TSI wymaga dalszych informacji lub dokumentacji technicznej, należy je dołączyć. |
|
6. |
Jednostka notyfikowana w pierwszej kolejności sprawdza wniosek pod względem ważności badania typu oraz certyfikatu badania typu. W przypadku stwierdzenia, że certyfikat badania typu nie jest już ważny lub nie jest odpowiedni oraz że niezbędne jest przeprowadzenie nowego badania typu, jednostka notyfikowana uzasadnia swoją decyzję. Jednostka notyfikowana musi przeprowadzić odpowiednie badania i próby w celu sprawdzenia zgodności podsystemu z typem, jak opisano w certyfikacie badania typu, oraz z wymaganiami specyfikacji TSI. Jednostka notyfikowana przeprowadza badania i próby każdego wyprodukowanego podsystemu jako wyrobu seryjnego, jak podano w punkcie 4. |
|
7. |
Weryfikacja poprzez badania i próby każdego podsystemu (jako wyrobu seryjnego) |
|
7.1. |
Jednostka notyfikowana musi przeprowadzić badania, próby i weryfikacje, aby zapewnić zgodność podsystemów, jako produktów seryjnych, jak postanowiono w specyfikacji TSI. Badania, próby i kontrole powinny obejmować etapy realizacji określone w specyfikacji TSI. |
|
7.2. |
Każdy podsystem (jako produkt seryjny) musi być indywidualnie zbadany, poddany próbom i zweryfikowany (20) w celu potwierdzenia jego zgodności z typem, jak opisano w certyfikacie badania typu, oraz z wymaganiami odnośnej specyfikacji TSI, które go dotyczą. W przypadku gdy próba nie została określona w TSI (lub w normie europejskiej powołanej w TSI), zastosowanie mają odpowiednie specyfikacje europejskie lub równoważne próby. |
|
8. |
Jednostka notyfikowana może uzgodnić z podmiotem zamawiającym (oraz głównymi wykonawcami) miejsca, gdzie zostaną przeprowadzone próby, i może uzgodnić, aby próby końcowe podsystemu oraz, o ile jest to wymagane przez specyfikację TSI, próby lub walidacja w pełnych warunkach eksploatacyjnych były przeprowadzone przez podmiot zamawiający pod bezpośrednim nadzorem jednostki notyfikowanej i z jej udziałem. Jednostka notyfikowana ma dostęp, dla celów prób i weryfikacji, do zakładów produkcyjnych, miejsc montażu i instalowania, a także, w miarę potrzeb, do obiektów prefabrykacji i przeprowadzania prób, w celu wykonywania swych zadań, zgodnie ze specyfikacją TSI. |
|
9. |
Jeżeli podsystem spełnia wymagania specyfikacji TSI, jednostka notyfikowana musi sporządzić certyfikat zgodności, przeznaczony dla podmiotu zamawiającego, który z kolei sporządzi deklarację weryfikacji zgodności WE przeznaczoną dla organu nadzorczego państwa członkowskiego, w którym dany podsystem się znajduje i/lub funkcjonuje. Działania jednostki notyfikowanej powinny być oparte na badaniach typu i próbach, weryfikacjach i kontrolach przeprowadzonych na wszystkich produktach seryjnych, jak określono w punkcie 7, oraz wymaganych przez specyfikację TSI i/lub odpowiednią specyfikację europejską. Deklaracja weryfikacji zgodności WE oraz związane z nią dokumenty towarzyszące muszą być opatrzone datą oraz podpisane. Deklaracja ta musi być napisana w tym samym języku co akta techniczne i musi obejmować co najmniej te informacje, które są zawarte w załączniku V do dyrektywy. |
|
10. |
Jednostka notyfikowana jest odpowiedzialna za skompletowanie akt technicznych, które muszą być załączone do deklaracji weryfikacji zgodności WE. Akta techniczne będą zawierały co najmniej informacje określone w art. 18, ust. 3 dyrektywy, a w szczególności, co następuje:
|
|
11. |
Protokoły załączone do certyfikatu zgodności muszą być przechowywane przez podmiot zamawiający. Podmiot zamawiający musi przechowywać kopię akt technicznych przez cały okres eksploatacji podsystemu. Na żądanie kopia taka musi być wysyłana do każdego z pozostałych państw członkowskich. |
Moduł SH2: Pełny system zarządzania jakością ze sprawdzeniem projektu
|
1. |
Moduł ten opisuje procedurę weryfikacji zgodności WE, za pomocą której jednostka notyfikowana sprawdza oraz zaświadcza, na żądanie podmiotu zamawiającego lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty, że podsystem „Sterowanie”:
|
|
2. |
Jednostka notyfikowana przeprowadza procedurę, włącznie ze sprawdzeniem projektu podsystemu, pod warunkiem że podmiot zamawiający (23) oraz główni zaangażowani wykonawcy spełniają zobowiązania podane w punkcie 3. Określenie „główni wykonawcy” dotyczy firm, których działania przyczyniają się do spełnienia zasadniczych wymagań specyfikacji TSI. Dotyczy to:
Nie dotyczy to dostawców producenta dostarczających podzespoły oraz składniki interoperacyjności. |
|
3. |
W odniesieniu do podsystemu, który podlega procedurze weryfikacji zgodności WE, podmiot zamawiający lub główni wykonawcy, o ile tacy zostali zaangażowani, stosują zatwierdzony system zarządzania jakością dla projektowania, produkcji oraz kontroli i prób wyrobu gotowego, jak określono w punkcie 5, i którzy podlegają nadzorowi, jak określono w punkcie 6. Główny wykonawca odpowiedzialny za cały projekt realizacji podsystemu (w szczególności włącznie z odpowiedzialnością za integrację podsystemu) musi stosować w każdym przypadku zatwierdzony system zarządzania jakością dla projektowania, produkcji i kontroli oraz prób wyrobu gotowego, który podlega nadzorowi, jak określono w punkcie 6. W przypadku gdy podmiot zamawiający jest samodzielnie odpowiedzialny za cały projekt realizacji podsystemu (w szczególności włącznie z odpowiedzialnością za integrację podsystemu), lub gdy podmiot zamawiający jest bezpośrednio zaangażowany w projektowanie i/lub produkcję (włącznie z montażem i instalacją), musi on stosować zatwierdzony system zarządzania jakością dla tych działań, które będą podlegać nadzorowi, jak określono w punkcie 6. Wnioskodawcy, którzy biorą udział tylko w montażu i instalacji, mogą stosować zatwierdzony system zarządzania jakością obejmujący tylko produkcję oraz kontrolę i próby wyrobu gotowego. |
|
4. |
Procedura weryfikacji zgodności WE |
|
4.1. |
Podmiot zamawiający winien złożyć do wybranej przez siebie jednostki notyfikowanej wniosek o weryfikację zgodności WE podsystemu (poprzez pełny system zarządzania jakością ze sprawdzeniem projektu), włącznie z koordynacją nadzoru nad systemami zarządzania jakością, zgodnie z punktami 5.4 i 6.6. Podmiot zamawiający musi poinformować zaangażowanych producentów o swym wyborze oraz o złożeniu wniosku. |
|
4.2. |
Wniosek musi umożliwiać zrozumienie projektu, produkcji, montażu, instalacji, utrzymania i eksploatacji podsystemu i powinien umożliwiać ocenę zgodności z wymaganiami specyfikacji TSI. Wniosek winien zawierać:
|
|
4.3. |
Podmiot zamawiający przedstawia wyniki badań, kontroli i prób (24), włącznie z próbami typu, jeśli były wymagane, przeprowadzonych przez jego właściwe laboratorium lub w jego imieniu. |
|
4.4. |
Jednostka notyfikowana musi sprawdzić wniosek dotyczący sprawdzenia projektu i ocenić wyniki prób. Jeżeli projekt spełnia postanowienia dyrektywy oraz stosownych specyfikacji TSI, które go dotyczą, musi ona wydać wnioskodawcy raport ze sprawdzenia projektu. Raport ten zawiera wnioski ze sprawdzenia projektu, warunki jego ważności, dane niezbędne dla identyfikacji sprawdzonego projektu oraz, w miarę potrzeb, opis funkcjonowania podsystemu. Jeśli podmiotowi zamawiającemu odmawia się wystawienia raportu ze sprawdzenia projektu, jednostka notyfikowana musi podać przyczyny takiej odmowy. Należy opracować klauzulę procedury odwoławczej. |
|
5. |
System zarządzania jakością |
|
5.1. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy, jeżeli są zatrudnieni, muszą złożyć wniosek o ocenę stosowanych przez nich systemów zarządzania jakością, do wybranej przez siebie jednostki notyfikowanej. Wniosek winien zawierać:
Firmom zaangażowanym tylko w część projektu realizacji podsystemu, dostarcza się jedynie te informacje, które dotyczą części, w której realizację są one zaangażowane. |
|
5.2. |
W odniesieniu do podmiotu zamawiającego lub głównego wykonawcy odpowiedzialnego za cały projekt realizacji podsystemu, system zarządzania jakością powinien zapewniać ogólną zgodność podsystemu z wymaganiami specyfikacji TSI. Systemy zarządzania jakością stosowane przez innych głównych wykonawców powinny zapewniać zgodność ich udziału w realizacji podsystemu z wymaganiami specyfikacji TSI. Wszystkie elementy, wymagania i postanowienia stosowane przez wnioskodawców winny być udokumentowane w sposób systematyczny i uporządkowany, w formie pisemnych zasad, procedur i instrukcji. Dokumentacja systemu zarządzania jakością musi pozwalać na spójne zrozumienie zasad i procedur jakości, takich jak programy, plany, instrukcje oraz protokoły dotyczące jakości. System musi w szczególności zawierać wystarczający opis następujących elementów:
Sprawdzenia, próby i kontrole powinny obejmować wszystkie następujące etapy:
|
|
5.3. |
Jednostka notyfikowana wybrana przez podmiot zamawiający musi sprawdzić, czy wszystkie etapy podsystemu, jak podano w punkcie 5.2, są wystarczająco i prawidłowo objęte przez zatwierdzony oraz nadzorowany system lub systemy zarządzania jakością wnioskodawcy lub wnioskodawców (26). Jeżeli zgodność podsystemu z wymaganiami specyfikacji TSI jest oparta na więcej niż jednym systemie zarządzania jakością, jednostka notyfikowana powinna w szczególności sprawdzić:
|
|
5.4. |
Jednostka notyfikowana wymieniona w punkcie 5.1 musi ocenić system zarządzania jakością w celu sprawdzenia, czy spełnia on wymagania podane w punkcie 5.2. Zakłada ona zgodność z tymi wymaganiami, jeżeli producent wdroży system zapewniania jakości dla projektowania, procesu produkcji, kontroli i prób wyrobu gotowego pod względem zharmonizowanej normy EN/ISO 9001-2000, który uwzględnia specyfikę składnika interoperacyjności, dla którego jest on wdrażany. Jeżeli wnioskodawca stosuje zatwierdzony certyfikatem system zarządzania jakością, jednostka notyfikowana uwzględnia to w trakcie przeprowadzania oceny. Audyt prowadzi się w sposób specyficzny dla rozpatrywanego podsystemu, uwzględniając szczególny udział wnioskodawcy w podsystemie. Zespół audytorów musi mieć w swoim składzie co najmniej jednego członka posiadającego doświadczenie w zakresie oceny technologii danego podsystemu. Procedura oceny powinna obejmować inspekcję obiektów wnioskodawcy. O decyzji należy poinformować wnioskodawcę. Powiadomienie winno zawierać wnioski z badań oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
5.5. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą podjąć się wypełnienia zobowiązań wynikających z zatwierdzonego systemu zarządzania jakością oraz utrzymywać go, zapewniając prawidłowe oraz skuteczne działanie. Muszą oni na bieżąco informować jednostkę notyfikowaną, która wydała zatwierdzenie systemu zarządzania jakością, o wszelkich istotnych zmianach, które będą miały wpływ na spełnianie wymagań przez podsystem. Jednostka notyfikowana musi dokonać oceny proponowanych modyfikacji oraz zdecydować, czy zmodyfikowany system zarządzania jakością spełni wymogi zawarte w punkcie 5.2 lub czy wymagana jest ponowna ocena. Jednostka notyfikowana informuje o swej decyzji wnioskodawcę. Powiadomienie takie zawiera wnioski z badania oraz uzasadnioną decyzję dotyczącą dokonanej oceny. |
|
6. |
Nadzór nad systemami zarządzania jakością w ramach odpowiedzialności jednostki notyfikowanej |
|
6.1. |
Celem sprawowania nadzoru jest zapewnienie, że podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy rzetelnie wypełniają zobowiązania wynikające ze stosowania zatwierdzonych systemów zarządzania jakością. |
|
6.2. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą wysłać do jednostki notyfikowanej wymienionej w punkcie 5.1 (lub muszą zlecić wysłanie) wszelkich dokumentów wymaganych do tego celu, a w szczególności planów implementacji oraz protokołów technicznych dotyczących podsystemu (o ile dotyczą one szczególnego udziału wnioskodawcy w realizację podsystemu), a w tym:
|
|
6.3. |
Jednostka notyfikowana musi okresowo przeprowadzać audyty, aby upewnić się, czy podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy utrzymują i stosują system zarządzania jakością; do obowiązków jednostki notyfikowanej należy dostarczenie im raportu z audytu. Jeżeli wyżej wymienieni stosują zatwierdzony certyfikatem system zarządzania jakością, jednostka notyfikowana uwzględnia to w trakcie przeprowadzania nadzoru. Audyty przeprowadza się nie rzadziej niż raz na rok, przy czym co najmniej jeden audyt powinien być przeprowadzony w trakcie wykonywania odnośnych działań (projektowanie, produkcja, montaż lub instalacja) przy podsystemie będącym przedmiotem procedury weryfikacji zgodności WE, o której mowa w punkcie 7. |
|
6.4. |
Dodatkowo jednostka notyfikowana może składać niezapowiedziane wizyty we właściwych miejscach wnioskodawców, o których mowa w punkcie 5.2. Podczas takich wizyt jednostka notyfikowana może, jeżeli uzna to za konieczne, przeprowadzić pełne lub częściowe autyty i może wykonać lub zlecić wykonanie prób celem sprawdzenia, czy system zarządzania jakością funkcjonuje prawidłowo. Jednostka notyfikowana musi przedstawić wnioskodawcy raport z takiej kontroli oraz, jeśli miały miejsce audyt i/lub próba, także odpowiednie raporty. |
|
6.5. |
Jeżeli wybrana przez podmiot zamawiający jednostka notyfikowana odpowiedzialna za weryfikację zgodności WE nie sprawuje nadzoru nad wszystkimi właściwymi systemami zarządzania jakością, o których mowa w punkcie 5, musi ona koordynować czynności nadzoru prowadzone przez inne jednostki notyfikowane odpowiedzialne za dane zadanie, w celu:
W ramach tej koordynacji jednostka notyfikowana posiada następujące uprawnienia:
|
|
7. |
Jednostka notyfikowana wymieniona w punkcie 5.1 musi mieć dostęp, dla celów prowadzenia kontroli, audytu i nadzoru, do budynków, biur projektowych, zakładów produkcyjnych, miejsc montażu i instalacji, magazynów oraz – w miarę potrzeb – do obiektów prefabrykacji i przeprowadzania prób, a także – bardziej ogólnie – do wszystkich pomieszczeń, które uzna za niezbędne dla swojego zadania, w zakresie odpowiadającym określonemu udziałowi wnioskodawcy w projekcie podsystemu. |
|
8. |
Podmiot zamawiający, jeżeli jest zaangażowany, oraz główni wykonawcy muszą przez okres 10 lat po wyprodukowaniu ostatniego podsystemu przechowywać do dyspozycji odpowiednich władz krajowych następujące dokumenty:
|
|
9. |
Jeżeli podsystem spełnia wymagania niniejszej specyfikacji TSI, jednostka notyfikowana musi następnie, w oparciu o sprawdzenie projektu oraz zatwierdzenie i nadzór nad systemami zarządzania jakością, sporządzić certyfikat zgodności, przeznaczony dla podmiotu zamawiającego, który z kolei sporządza deklarację weryfikacji zgodności WE przeznaczoną dla organu nadzorującego państwa członkowskiego, w którym dany podsystem się znajduje i/lub funkcjonuje. Deklaracja weryfikacji zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą i podpisem. Deklaracja ta musi być napisana w tym samym języku co akta techniczne i zawierać co najmniej te informacje, które są zawarte w załączniku V do dyrektywy. |
|
10. |
Jednostka notyfikowana wybrana przez podmiot zamawiający jest odpowiedzialna za skompletowanie akt technicznych, które muszą towarzyszyć deklaracji weryfikacji zgodności WE. Akta techniczne zawierają co najmniej informacje określone w art. 18 ust. 3 dyrektywy, a w szczególności, co następuje:
|
|
11. |
Każda jednostka notyfikowana musi przekazywać innym jednostkom notyfikowanym stosowne informacje dotyczące zatwierdzeń dla systemów zarządzania jakością oraz raportach WE ze sprawdzenia projektu, które zostały wydane, wycofane lub odrzucone. Inne jednostki notyfikowane mogą na żądanie otrzymywać kopie następujących dokumentów:
|
|
12. |
Protokoły załączone do certyfikatu zgodności muszą być przechowywane przez podmiot zamawiający. Podmiot zamawiający powinien przechowywać kopię akt technicznych przez cały okres eksploatacji podsystemu. Na żądanie kopia taka musi być wysyłana do każdego z pozostałych państw członkowskich. |
Moduł SG: Weryfikacja produkcji jednostkowej
|
1. |
Moduł ten opisuje procedurę weryfikacji zgodności WE, za pomocą której jednostka notyfikowana sprawdza oraz zaświadcza, na żądanie podmiotu zamawiającego lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty, że podsystem „Sterowanie”:
i może być oddany do eksploatacji. |
|
2. |
Podmiot zamawiający (29) winien złożyć w wybranej przez siebie jednostce notyfikowanej wniosek o weryfikację zgodności WE podsystemu (poprzez weryfikację produkcji jednostkowej). Wniosek winien zawierać:
|
|
3. |
Dokumentacja techniczna musi umożliwiać zrozumienie projektu, produkcji, instalacji i eksploatacji podsystemu, a także pozwala na ocenę zgodności z wymaganiami specyfikacji TSI. Dokumentacja techniczna musi zawierać następujące elementy:
Jeżeli specyfikacja TSI wymaga dalszych informacji dotyczących dokumentacji technicznej, należy je dołączyć. |
|
4. |
Jednostka notyfikowana musi sprawdzić wniosek i dokumentację techniczną oraz zidentyfikować elementy, które zostały zaprojektowane zgodnie z odpowiednimi postanowieniami specyfikacji TSI oraz specyfikacji europejskich, jak również elementy, które zostały zaprojektowane bez stosowania odnośnych postanowień tych specyfikacji. Jednostka notyfikowana musi przeprowadzić badanie podsystemu i wykonać (lub wziąć udział w wykonaniu) odpowiednie i niezbędne próby w celu ustalenia, czy w przypadku wyboru odnośnych specyfikacji europejskich zostały one rzeczywiście zastosowane lub czy zastosowane rozwiązania spełniają wymagania specyfikacji TSI, jeżeli specyfikacje europejskie nie zostały zastosowane; Badania, próby i kontrole powinny obejmować następujące etapy realizacji określone w specyfikacji TSI:
Jednostka notyfikowana uwzględnia wcześniej przeprowadzone sprawdzenia lub próby, które zostały wykonane z wynikiem pozytywnym i w porównywalnych warunkach przez inne jednostki niezależne i kompetentne (31). Jednostka notyfikowana zdecyduje następnie na tej podstawie, czy wykorzysta wyniki tych sprawdzeń lub prób. Jeżeli zostaną one przyjęte, jednostka notyfikowana bada dowody z tych wcześniej przeprowadzonych sprawdzeń lub prób i ustala, czy ich wyniki są zgodne z wymaganiami specyfikacji TSI. W każdym przypadku jednostka notyfikowana bierze za nie pełną odpowiedzialność. |
|
5. |
Jednostka notyfikowana może uzgodnić z podmiotem zamawiającym miejsca, gdzie zostaną przeprowadzone próby, i może uzgodnić, aby próby końcowe podsystemu oraz, o ile jest to wymagane przez specyfikację TSI, próby w pełnych warunkach eksploatacyjnych były przeprowadzone przez podmiot zamawiający pod bezpośrednim nadzorem i z udziałem jednostki notyfikowanej. |
|
6. |
Jednostka notyfikowana musi mieć dostęp, dla celów prób i weryfikacji, do biur projektowych, zakładów produkcyjnych, miejsc montażu i instalowania, a także, w miarę potrzeb, do obiektów prefabrykacji i przeprowadzania prób, w celu wykonywania swych zadań, zgodnie ze specyfikacją TSI. |
|
7. |
Jeżeli podsystem spełnia wymagania specyfikacji TSI, jednostka notyfikowana musi następnie, w oparciu o próby, weryfikacje i sprawdzenia wykonane zgodnie ze specyfikacją TSI i/lub zgodnie z odnośnymi specyfikacjami europejskimi, sporządzić certyfikat zgodności, przeznaczony dla podmiotu zamawiającego, który z kolei sporządza deklarację weryfikacji zgodności WE przeznaczoną dla organu nadzorczego państwa członkowskiego, w którym dany podsystem się znajduje i/lub funkcjonuje. Deklaracja weryfikacji zgodności WE oraz dokumenty towarzyszące muszą być opatrzone datą oraz podpisem. Deklaracja powinna być napisana w tym samym języku co akta techniczne i musi zawierać co najmniej te informacje, które są zawarte w załączniku V do dyrektywy. |
|
8. |
Jednostka notyfikowana odpowiada za skompletowanie akt technicznych, które muszą towarzyszyć deklaracji weryfikacji zgodności WE. Akta techniczne powinny zawierać co najmniej informacje określone w art. 18, ust. 3 dyrektywy, a w szczególności co następuje:
|
|
9. |
Protokoły załączone do certyfikatu zgodności muszą być przechowywane u podmiotu zamawiającego. Podmiot zamawiający powinien przechowywać kopię akt technicznych przez cały okres eksploatacji podsystemu. Na żądanie kopia taka musi być wysyłana do każdego z pozostałych państw członkowskich. |
(1) Definicja specyfikacji europejskiej podana jest w dyrektywach 96/48/WE oraz 2001/16/WE. Wskazówki dotyczące zastosowania TSI HS wyjaśniają sposób wykorzystania specyfikacji europejskich
(2) Definicja specyfikacji europejskiej podana jest w dyrektywach 96/48/WE oraz 2001/16/WE. Wskazówki dotyczące zastosowania TSI HS wyjaśniają sposób wykorzystania specyfikacji europejskich.
(3) Swoboda wyboru producenta może być w przypadku niektórych TSI ograniczona.
(4) Definicja specyfikacji europejskiej podana jest w dyrektywach 96/48/WE oraz 01/16/WE. Wskazówki dotyczące zastosowania TSI HS wyjaśniają sposób wykorzystania specyfikacji europejskich.
(5) Definicja specyfikacji europejskiej podana jest w dyrektywach 96/48/WE oraz 2001/16/WE. Wskazówki dotyczące zastosowania TSI HS wyjaśniają sposób wykorzystania specyfikacji europejskich.
(6) Okazanie wyników prób może mieć miejsce w tym samym czasie co składanie wniosku lub później.
(7) Wymagania zasadnicze odzwierciedlone są w parametrach technicznych, interfejsach i wymaganiach funkcjonalnych, które są podane w rozdziale 4 niniejszej specyfikacji TSI.
(8) Moduł ten może być wykorzystywany w przyszłości, przy okazji uaktualniania specyfikacji TSI dla kolei dużych prędkości do dyrektywy 96/48/WE.
(9) W tym module „podmiot zamawiający” oznacza „podmiot zamawiający podsystem, zgodnie z definicją podaną w dyrektywie, lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty”.
(10) Odpowiednia sekcja specyfikacji TSI może definiować specyficzne wymagania w tym względzie.
(11) Definicja specyfikacji europejskich podana jest w dyrektywach 96/48/WE i 2001/16/WE. Przewodnik stosowania specyfikacji TSI dla kolei dużych prędkości (HS) wyjaśnia sposób stosowania specyfikacji europejskich.
(12) Wymagania zasadnicze odzwierciedlone są w parametrach technicznych, interfejsach i wymaganiach funkcjonalnych podanych w rozdziale 4 niniejszej specyfikacji TSI.
(13) Moduł ten może być wykorzystywany w przyszłości, przy okazji uaktualniania specyfikacji TSI dla kolei dużych prędkości do dyrektywy 96/48/WE.
(14) W tym module „podmiot zamawiający” oznacza „podmiot zamawiający podsystem, zgodnie z definicją zawartą w dyrektywie, lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty”.
(15) W odniesieniu do specyfikacji TSI dotyczącej taboru kolejowego, jednostka notyfikowana może brać udział do końca w teście użytkowym lokomotyw lub zespołu trakcyjnego, według warunków podanych w odnośnym rozdziale specyfikacji TSI.
(16) Wymagania zasadnicze odzwierciedlone są w parametrach technicznych, interfejsach i wymaganiach funkcjonalnych podanych w rozdziale 4 niniejszej specyfikacji TSI.
(17) Moduł ten może być wykorzystywany w przyszłości, przy okazji uaktualniania specyfikacji TSI dla kolei dużych prędkości do dyrektywy 96/48/WE.
(18) W tym module „podmiot zamawiający” oznacza „podmiot zamawiający podsystem, zgodnie z definicją zawartą w dyrektywie, lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty”.
(19) Określenie „główni wykonawcy” dotyczy firm, których działania mają związek z wypełnieniem zasadniczych wymagań specyfikacji TSI. Dotyczy to firm, które są odpowiedzialne za cały projekt realizacji podsystemu, lub innych firm zaangażowanych tylko w część projektu (wykonujących np. montaż lub instalację podsystemu).
(20) W szczególności, odnośnie do specyfikacji TSI dotyczącej taboru kolejowego, jednostka notyfikowana będzie brać udział w końcowych próbach eksploatacyjnych taboru lub zespołu pociągowego. Informacja o tym zostanie podana w odpowiednim rozdziale specyfikacji TSI.
(21) Zasadnicze wymagania odzwierciedlone są w parametrach technicznych, interfejsach i wymaganiach funkcjonalnych, które są podane w rozdziale 4 niniejszej specyfikacji TSI.
(22) Moduł ten może być wykorzystywany w przyszłości, przy okazji uaktualniania specyfikacji TSI dla kolei dużych prędkości do dyrektywy 96/48/WE.
(23) W tym module „podmiot zamawiający” oznacza „podmiot zamawiający podsystem, zgodnie z definicją zawartą w dyrektywie, lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty”.
(24) Okazanie wyników prób może mieć miejsce w tym samym czasie co składanie wniosku lub później.
(25) Definicja specyfikacji europejskich podana jest w dyrektywach 96/48/WE i 01/16/WE oraz w wytycznych dotyczących stosowania TSI dla kolei dużych prędkości (HS).
(26) W odniesieniu do specyfikacji TSI dotyczącej taboru kolejowego, jednostka notyfikowana może brać udział do końca w teście użytkowym taboru kolejowego lub zespołu trakcyjnego, według warunków podanych w odnośnym rozdziale specyfikacji TSI.
(27) Zasadnicze wymagania odzwierciedlone są w parametrach technicznych, interfejsach i wymaganiach funkcjonalnych, które są podane w rozdziale 4 niniejszej specyfikacji TSI.
(28) Moduł ten może być wykorzystywany w przyszłości, przy okazji uaktualniania specyfikacji TSI dla kolei dużych prędkości do dyrektywy 96/48/WE.
(29) W tym module „podmiot zamawiający” oznacza „podmiot zamawiający podsystem, zgodnie z definicją dyrektywy, lub jego upoważniony przedstawiciel mający swą siedzibę na terytorium Wspólnoty”.
(30) Definicja specyfikacji europejskich podana jest w dyrektywach 96/48/WE i 2001/16/WE oraz wytycznych dotyczących stosowania specyfikacji TSI dla kolei dużych prędkości (HS).
(31) Warunkiem uwzględnienia wcześniejszych sprawdzeń i prób powinno być zachowanie podobnych warunków, stosowanych przez jednostkę notyfikowaną względem podwykonawców (patrz: § 6.5 „Niebieskiego przewodnika po nowym podejściu”); w szczególności jednostka notyfikowana może uwzględnić odpowiednie dowody wyłącznie wtedy, gdy przeprowadzające je organy stosują te same kryteria niezależności i kompetencji, co jednostki notyfikowane.
ZAŁĄCZNIK F
PROCEDURA OCENY ZGODNOŚCI
Ocena planów utrzymania
|
1. |
Niniejsza procedura oceny zgodności opisuje tę część procedury, za pomocą której jednostka upoważniona przez państwo członkowskie sprawdza i zaświadcza, że plany utrzymania, reprezentatywne dla przewidywanego utrzymania, spełniają postanowienia odnośnej specyfikacji TSI i zapewniają zachowanie podstawowych parametrów i zasadniczych wymagań podczas eksploatacji systemu. |
|
2. |
Wniosek o dokonanie oceny planów utrzymania musi być złożony przez podmiot zamawiający (lub jego upoważnionego przedstawiciela mającego swą siedzibę na terytorium Wspólnoty), który przedstawia plany utrzymania do jednostki autoryzowanej przez dane państwo członkowskie. Wniosek winien zawierać:
Złożona we wniosku kopia dokumentacji planów utrzymania powinna stanowić ostateczną wersję zatwierdzoną przez wnioskodawcę. Jednostka upoważniona przez państwo członkowskie może zażądać większej liczby kopii w celu przeprowadzenia oceny. |
|
3. |
Dokumentacja planów utrzymania powinna zawierać co najmniej następujące elementy:
|
|
4. |
Dokumentacja techniczna musi umożliwiać dokonanie oceny zgodności planów utrzymania z postanowieniami specyfikacji TSI. Musi ona, w zakresie odnoszącym się do takiej oceny, obejmować różne fazy tworzenia planów utrzymania. Dokumentacja techniczna, która stanowi uzupełnienie dla planów utrzymania, powinna zawierać następujące elementy:
|
|
5. |
Jednostka upoważniona przez państwo członkowskie musi:
|
|
6. |
Jeżeli plany utrzymania spełniają postanowienia specyfikacji TSI, jednostka upoważniona przez państwo członkowskie wydaje wnioskodawcy raport z badania planów utrzymania. Raport ten zawiera nazwę i adres podmiotu zamawiającego, wnioski z badania, warunki jego ważności, informacje o podsystemie podlegającym utrzymaniu oraz informacje niezbędne dla identyfikacji planów utrzymania. Odnośne części dokumentacji technicznej, włącznie z opisem planów utrzymania oraz ich warunków i wdrożenia, muszą być załączone do raportu, a ich kopia powinna być przechowywana przez jednostkę upoważnioną przez państwo członkowskie. Jeżeli podmiot zamawiający spotyka się z odmową wydania raportu z badania planów utrzymania, jednostka upoważniona przez państwo członkowskie musi podać szczegółowe przyczyny takiej odmowy. Należy opracować klauzulę dla procedury odwoławczej. |
(1) W tym celu plany utrzymania powinny definiować np.:
|
— |
procedury i instrukcje implementacji, |
|
— |
potrzeby w zakresie szkoleń i kwalifikacji, |
|
— |
kontrole, walidacje, nadzór, inspekcje, próby, protokoły oraz kryteria przyjęcia podsystemu, gdy powinny być przeprowadzone różne etapy czynności utrzymania, |
|
— |
warunki użycia specjalnych narzędzi lub środków dla celów utrzymania lub prób. |
ZAŁĄCZNIK G
PUNKTY OTWARTE
PRIORYTETY PUNKTÓW OTWARTYCH
Wyróżnia się dwa rodzaje priorytetów:
Priorytet 1 (P1): Część najbardziej pilna
Priorytet 2 (P1): Część najmniej pilna
Interfejsy
Sekcja 4.3
Funkcje przejazdu kolejowego (P1)
Interfejsy do OPE TSI (P1)
Interfejsy do TSI „Tabor kolejowy. Pojazdy trakcyjne” i „Tabor kolejowy. Wagony pasażerskie” (P1)
Załącznik A
|
Indeks 1 |
FRS (dla tematu przejazd kolejowy) (P1 dotyczące LX) |
|
Indeks 16 |
FFFIS dla europętli jest aktualnie dostępna tylko jako projekt (Podzbiór 044 UNISIG wersja 2.1.0) z powodu zmiany pasma częstotliwości. Zacznie obowiązywać po rozwiązaniu kwestii punktów otwartych (np. przydział częstotliwości, kompatybilność z istniejącymi systemami, testy współpracy) oraz wyprodukowaniu wersji ostatecznej. Wszystkie strony zaangażowane w to przedsięwzięcie dokładają starań, aby wersja finalna była dostępna w połowie 2005 roku. |
|
Indeks 24 |
Wyjaśnienie i poprawka do specyfikacji dotycząca aktywacji (P1) |
|
Indeks B32 |
Zasady stosowania odsyłaczy (P1) |
|
Indeks 36 |
Specyfikacja testowania modułów STM (P1) |
|
Indeks 28 |
Wymagania dotyczące niezawodności – dostępności (P1) |
|
Indeks 41 |
Specyfikacja testów rejestratora prawnego JRU (P1) związana z indeksem 55 |
|
Indeks 42 |
Wymagania dotyczące kontroli czujności (P2) |
|
Indeks 44 |
FIS dla odometrii (P2) |
|
Indeks 45 |
Interfejs K (P1) |
|
Indeks 47 |
Wymagania dotyczące analizy ryzyka i zagrożeń odnośnie do interoperacyjności (P1) |
|
Indeks 48 |
Specyfikacja testu dla urządzeń mobilnych GSM-R (P1) |
|
Indeks 50 |
Specyfikacja testu dla EUROPĘTLI (P1) |
|
Indeks 51 |
Ergonomiczne aspekty pokładowego pulpitu DMI (P1) |
|
Indeks 53 |
Wartości ETCS dla zmiennych sterowanych przez UIC (P1) |
|
Indeks 54 |
Wymagania jakości usług dla użytkownika (warunkowo) (P1) |
|
Indeks 55 |
Wymagania dotyczące wersji podstawowej rejestratora prawnego (P1 na całość) |
|
Indeks 57 |
Wymagania dotyczące wyposażania wyprzedzającego w urządzenia pokładowe ERTMS (P1) |
|
Indeks 58 |
Interfejs RBC – RBC (P1) |
|
Indeks 59 |
Wymagania dotyczące wyposażania wyprzedzającego w urządzenia przytorowe ERTMS (P1) |
|
Indeks 60 |
Zarządzanie wersjami ETCS (P1) |
|
Indeks 61 |
Zarządzanie wersjami GSM-R (P1) |
GSM-R
Połączenia wzajemne oraz roaming między sieciami GSM-R (P1)
Przekraczanie granic (P1)
Definicja przepisów eksploatacji dla GSM-R (P1)
GPRS i ASCI (P2)
Zarządzanie wersjami GSM-R (zarządzanie zmianą) (P1)
Załącznik A, Dodatek 1: (P1)
|
2.1.5. |
Zależności między odległościami osi a średnicą kół |
|
3.2.1. |
Przestrzeń wokół kół wolna od części metalowych |
|
3.3.1. |
Masa metalu pojazdu |
|
3.5.5. |
Dodatkowe wymagania dotyczące lokomotyw i zespołów trakcyjnych |
|
4.1. |
Stosowanie urządzeń do piaskowania |
|
4.2.1. |
Stosowanie kompozytowych klocków hamulcowych |
|
5.1.1. |
Interferencja elektromagnetyczna (prąd trakcji) |
|
5.3.1. |
Interferencja elektromagnetyczna (pola elektryczne, magnetyczne, elektromagnetyczne) |
Załącznik A, Dodatek 2: (P1)
HABD
Załącznik B, część 4.
Punkty otwarte dotyczące CCM ETCS Klasa 1
Specyfikacja niektórych zmiennych ETCS (P1)
Dodatkowe interfejsy
Interfejsy pomiędzy systemami ochrony ludzi a systemem sterowania ruchem kolejowym oraz funkcje tych systemów (P2)
Interfejs hamowania służbowego. Zagadnienie to będzie zbadane podczas opracowania specyfikacji TSI dla taboru kolejowego.
ZAŁĄCZNIK H
WYKAZ KORYTARZY SIECI ETCS-NET
Odcinki kolei konwencjonalnej w sieci ETCS-Net podane według załącznika II do decyzji nr 884/2004/WE (1)
Oś kolejowa Berlin-Verona/Mediolan-Bolonia-Neapol-Mesyna-Palermo
|
— |
Halle/Lipsk-Norymberga |
|
— |
Norymberga-Monachium |
|
— |
Monachium-Kufstein |
|
— |
Kufstein-Innsbruck |
|
— |
Tunel Brenner, odcinek transgraniczny |
|
— |
Verona-Neapol |
|
— |
Mediolan-Bolonia |
Linia Betuwe
Oś kolejowa Lyon-Trieste-Divaea/Koper-Divaea-Lublana-Budapeszt-granica Ukrainy
|
— |
Lyon-St Jean de Maurienne |
|
— |
Tunel Mont-Cenis, odcinek transgraniczny |
|
— |
Bussoleno-Turyn |
|
— |
Turyn-Wenecja |
|
— |
Wenecja-Ronchi Sud-Trieste Divaea |
|
— |
Koper-Divaea-Lublana |
|
— |
Lublana-Budapeszt |
Intermodalna oś Portugalia/Hiszpania-reszta Europy
|
— |
La Coruna-Porto |
|
— |
Porto-Valladolid |
Oś kolejowo-drogowa trójkąta nordyckiego
|
— |
Projekty kolejowe w Szwecji, w tym Sztokholm-Malmö, Sztokholm-Charlottenberg (granica Norwegii) i Kornsjö (granica Norwegii)-Göteborg-Malmö |
|
— |
Kerava-Lahti |
|
— |
Helsinki-Vainikkala (granica Rosji) |
Towarowa oś kolejowa Sines-Madryt-Paryż
|
— |
Nowa oś kolejowa o wysokiej przepustowości przez Pireneje |
|
— |
Sines-Badajoz |
|
— |
Algeciras-Bobadilla |
Oś kolejowa Paryż-Strasburg-Stuttgart-Wiedeń-Bratysława
|
— |
Baudrecourt-Strasburg-Stuttgart z mostem Kehl jako odcinkiem przez granicę |
|
— |
Stuttgart-Ulm |
|
— |
Monachium-Salzburg, odcinek transgraniczny |
|
— |
Salzburg-Wiedeń |
|
— |
Wiedeń-Bratysława, odcinek transgraniczny |
Oś kolejowa Cieśniny Fehmarn
|
— |
Stała kolej przez Cieśninę Fehmarn/połączenie drogowe |
|
— |
Dojazd koleją w Danii z Öresund |
|
— |
Dojazd koleją w Niemczech z Hamburga |
|
— |
Kolej Hanower-Hamburg/Brema |
Oś kolejowa Ateny-Sofia-Budapeszt-Wiedeń-Praga-Norymberga/Drezno
|
— |
Granica Grecja/Bułgaria-Kulata-Sofia-Vidin/Calafat |
|
— |
Curtici-Brasov (w kierunku Bukaresztu i Constanty) |
|
— |
Budapeszt-Wiedeń, odcinek transgraniczny |
|
— |
Bøeclav-Praga-Norymberga, z odcinkiem Norymberga-Praga przez granicę |
|
— |
Oś kolejowa Praga-Linz |
Oś kolejowa Gdańsk-Warszawa-Brno/Bratysława-Wiedeń
|
— |
Linia kolejowa Gdańsk-Warszawa-Katowice |
|
— |
Linia kolejowa Katowice-Boeclav |
|
— |
Linia kolejowa Katowice-Zilina-Nove Mesto n.V. |
Oś kolejowa Lyon/Genewa-Bazylea-Duisburg-Rotterdam/Antwerpia
|
— |
Lyon-Mulhouse-Mülheim (2), z odcinkiem Mulhouse-Mülheim przez granicę |
|
— |
Genewa-Mediolan/Novara-granica Szwajcarii |
|
— |
Bazylea-Karlsruhe |
|
— |
Frankfurt (lub Moguncja)-Mannheim |
|
— |
Duisburg-Emmerich |
|
— |
„Iron Rhine” Rheidt-Antwerpen, odcinek transgraniczny |
Kolej/droga na osi Irlandia/Zjednoczone Królestwo/kontynent europejski
|
— |
Felixstowe-Nuneaton |
|
— |
Crewe-Holyhead |
Oś „Rail Baltica” Warszawa-Kowno-Ryga-Tallin-Helsinki
|
— |
Warszawa-Kowno-Wilno |
|
— |
Kowno-Ryga |
|
— |
Ryga-Tallin |
„Eurocaprail” na osi kolejowej Bruksela-Luksemburg-Strasburg
|
— |
Bruksela-Luksemburg-Strasburg (2012) |
Odcinki kolei konwencjonalnej w sieci ETCS-Net nieobjęte załącznikiem II do decyzji nr 884/2004/WE. Zestaw I (3)
Korytarz II TEN – E20, na osi Berlin-Warszawa, Polska
Korytarz III TEN – E30 między granicą zachodnią (Zgorzelec) a Krakowem, Polska
Linia dwutorowa CE-59 TINA/AGTC – ruch w kierunku północ-południe ze Skandynawii na Bałkany, Polska
Budapeszt–Bukareszt–Constanta (część Paneuropejskiego Korytarza IV)
Lublana–Zagrzeb/Belgrad/Bar/Skopje–Saloniki (część Paneuropejskiego Korytarza X)
Odcinki kolei konwencjonalnej w sieci ETCS-Net nieobjęte załącznikiem II do decyzji nr 884/2004/WE. Zestaw II
Antwerpia-Athus/Bettembourg-Bazylea-Mediolan
Hallsberg/Mjölby, Szwecja
ETCS na połączeniu Oresund przez Danię do połączenia nad cieśniną Storebelt
Akwizgran-Horka/Frankfurt (O), Niemcy
Niemcy
|
— |
Kehl-Salzburg |
|
— |
Flensburg-Kufstein |
|
— |
Emmerich-Bazylea, częściowo przez Niemcy |
|
— |
Hamburg-Bad Schandau |
|
— |
Darmstadt-Passau |
Francja
|
— |
Metz-Dijon-Lion-Avignon-Perpignan (granica Hiszpanii) |
|
— |
Le Havre-Rouen-Amien-Arras |
|
— |
Paryż-Tours-Bordeaux-Dax |
|
— |
Paryż-Remis-Metz (TGV EST) |
|
— |
Paryż-Macon-Lion (TGV Sud-Est) |
|
— |
Calais-Metz |
Sztokholm-Nyland-Umea
Odcinki kolei dużych prędkości w sieci ETCS-Net (4)
Oś kolei dużych prędkości Paryż-Bruksela-Kolonia-Amsterdam-Londyn
|
— |
Tunel pod kanałem La Manche-Londyn |
|
— |
Bruksela-Liege-Kolonia |
|
— |
Bruksela-Rotterdam-Amsterdam |
Oś kolei dużych prędkości w Europie Południowo-Zachodniej
|
— |
Lizbona/Porto-Madryt |
|
— |
Madryt-Barcelona |
|
— |
Cordoba-Sewilla |
|
— |
Barcelona-Figueras-Perpignan |
|
— |
Perpignan-Montpellier |
|
— |
Montpellier-Nîmes |
|
— |
Madryt-Vitoria-Irún/Hendaye |
|
— |
Irún/Hendaye-Dax, odcinek transgraniczny |
|
— |
Dax-Bordeaux |
|
— |
Bordeaux-Tours |
Wschodnia część kolei dużych prędkości
|
— |
Paryż-Baudrecourt |
|
— |
Metz-Luksemburg |
|
— |
Saarbrücken-Mannheim |
Główna linia zachodniego wybrzeża
Interoperacyjność linii dużych prędkości na Półwyspie Iberyjskim
|
— |
Madryt-Andaluzja |
|
— |
Północ-wschód |
|
— |
Madryt-Levante i Morze Śródziemne |
|
— |
Korytarz północny/północno-zachodni, włącznie z odcinkiem Vigo-Porto |
|
— |
Extremadura |
(1) Implementacja ERTMS/ETCS na odcinkach kolei dużych prędkości podanych w tym wykazie objęta jest decyzją 2002/731/WE.
(2) Włącznie z TGV Rhin-Rhône, minus gałąź zachodnia.
(3) Projekty w całości lub częściowo usytuowane w państwach członkowskich, gdzie stosowane są postanowienia rozporządzeń (WE) nr 1260/1999 oraz (WE) nr 1264/1999 (Fundusze Spójności).
(4) Implementacja objęta jest decyzją 2002/731/WE.