ANNEXE III
TABLE DES MATIÈRES
|
1. |
Introduction |
|
1.1. |
Domaine d’application technique |
|
1.2. |
Domaine d’application géographique |
|
1.3. |
Contenu de la présente STI |
|
2. |
Définition et domaine d’application du sous-système |
|
2.1. |
Introduction |
|
2.2. |
Champ d’application |
|
2.3. |
Niveaux d’application (ERTMS/ETCS) |
|
3. |
Exigences essentielles des sous-systèmes de contrôle-commande et de signalisation |
|
3.1. |
Généralités |
|
3.2. |
Aspects spécifiques des sous-systèmes de contrôle-commande et de signalisation |
|
3.2.1. |
Sécurité |
|
3.2.2. |
Fiabilité et disponibilité |
|
3.2.3. |
Santé des personnes |
|
3.2.4. |
Protection de l’environnement |
|
3.2.5. |
Compatibilité technique |
|
3.2.5.1. |
Compatibilité de l’ingénierie |
|
3.2.5.1.1. |
Environnement physique |
|
3.2.5.1.2. |
Compatibilité électromagnétique interne au système ferroviaire |
|
3.2.5.2. |
Compatibilité du sous-système de contrôle-commande et de signalisation |
|
4. |
Caractérisation des sous-systèmes |
|
4.1. |
Introduction |
|
4.2. |
Spécifications fonctionnelles et techniques des sous-systèmes |
|
4.2.1. |
Caractéristiques de sécurité du sous-système de contrôle-commande et de signalisation entrant en ligne de compte pour l’interopérabilité |
|
4.2.1.1. |
Sécurité |
|
4.2.1.2. |
Fiabilité/disponibilité |
|
4.2.2. |
Fonctionnalités «bord» de l’ERTMS/ETCS |
|
4.2.3. |
Fonctionnalités «sol» de l’ERTMS/ETCS |
|
4.2.4. |
Fonctions de communication mobile pour les chemins de fer – GSM-R |
|
4.2.4.1. |
Fonction de communication de base |
|
4.2.4.2. |
Applications de communication vocale et opérationnelle |
|
4.2.4.3. |
Applications de communication de données pour l’ETCS |
|
4.2.5. |
Interfaces de transmission ERTMS/ETCS et GSM-R |
|
4.2.5.1. |
Communications radio avec le train |
|
4.2.5.2. |
Communication Eurobalise avec le train |
|
4.2.5.3. |
Communications Euroloop avec le train |
|
4.2.6. |
Interfaces «bord» internes au sous-système «contrôle-commande et signalisation» |
|
4.2.6.1. |
ERTMS/ETCS et contrôle de vitesse de classe B |
|
4.2.6.2. |
Interface entre GSM-R (communication de données radio) et ERTMS/ETCS |
|
4.2.6.3. |
Odométrie |
|
4.2.7. |
Interfaces «sol» internes au sous-système «contrôle-commande et signalisation» |
|
4.2.7.1. |
Interface fonctionnelle entre les RBC |
|
4.2.7.2. |
RBC/RBC |
|
4.2.7.3. |
GSM-R/ETCS au sol |
|
4.2.7.4. |
Eurobalise/LEU |
|
4.2.7.5. |
Euroloop/LEU |
|
4.2.8. |
Gestion des clés |
|
4.2.9. |
Gestion des identifiants ETCS |
|
4.2.10. |
Systèmes «sol» de détection des trains |
|
4.2.11. |
Compatibilité électronique entre le matériel roulant et les équipements «sol» de contrôle-commande et de signalisation |
|
4.2.12. |
IHM (interface homme-machine) de l’ERTMS/ETCS |
|
4.2.13. |
IHM (interface homme-machine) du GSM-R |
|
4.2.14. |
Interface avec les données enregistrées à des fins réglementaires |
|
4.2.15. |
Visibilité des objets du sous-système de contrôle-commande et de signalisation «sol» |
|
4.2.16. |
Conditions d’environnement |
|
4.3. |
Spécifications fonctionnelles et techniques des interfaces avec les autres sous-systèmes |
|
4.3.1. |
Interface avec le sous-système «exploitation et gestion du trafic» |
|
4.3.2. |
Interface avec le sous-système «matériel roulant» |
|
4.3.3. |
Interfaces avec le sous-système «infrastructure» |
|
4.3.4. |
Interfaces avec le sous-système «énergie» |
|
4.4. |
Règles d’exploitation |
|
4.5. |
Règles de maintenance |
|
4.5.1. |
Responsabilité du fabricant des équipements |
|
4.5.2. |
Responsabilité du demandeur pour la vérification du sous-système |
|
4.6. |
Compétences professionnelles |
|
4.7. |
Conditions relatives à la santé et à la sécurité |
|
4.8. |
Registres |
|
5. |
Constituants d’interopérabilité |
|
5.1. |
Définition |
|
5.2. |
Liste des constituants d’interopérabilité |
|
5.2.1. |
Constituants d’interopérabilité de base |
|
5.2.2. |
Groupes de constituants d’interopérabilité |
|
5.3. |
Performances des constituants et spécifications |
|
6. |
Évaluation de la conformité et/ou de l’aptitude à l’emploi des constituants et vérification des sous-systèmes |
|
6.1. |
Introduction |
|
6.1.1. |
Principes généraux |
|
6.1.2. |
Principes de test de l’ERTMS/ETCS et du GSM-R |
|
6.2. |
Constituants d’interopérabilité |
|
6.2.1. |
Procédures d’évaluation pour les constituants d’interopérabilité de contrôle-commande et de signalisation |
|
6.2.2. |
Modules pour les constituants d’interopérabilité du sous-système «contrôle-commande et signalisation» |
|
6.2.3. |
Exigences d’évaluation |
|
6.2.4. |
Questions spéciales |
|
6.2.4.1. |
ERTMS/ETCS «bord» |
|
6.2.4.2. |
Module de transmission spécifique (STM) |
|
6.2.4.3. |
Contenu de la déclaration de conformité CE |
|
6.3. |
Sous-systèmes de contrôle-commande et de signalisation |
|
6.3.1. |
Procédures d’évaluation pour les sous-systèmes de contrôle-commande et de signalisation |
|
6.3.2. |
Modules pour les sous-systèmes de contrôle-commande et de signalisation |
|
6.3.2.1. |
Sous-système «bord» |
|
6.3.2.2. |
Sous-système «sol» |
|
6.3.2.3. |
Conditions pour l’utilisation des modules applicables aux sous-systèmes «bord» et «sol» |
|
6.3.3. |
Exigences d’évaluation pour un sous-système «bord» |
|
6.3.4. |
Exigences d’évaluation pour un sous-système «sol» |
|
6.4. |
Dispositions en cas de conformité partielle |
|
6.4.1. |
Introduction |
|
6.4.2. |
Évaluation des parties des sous-systèmes de contrôle-commande et de signalisation |
|
6.4.3. |
Conformité partielle des sous-systèmes de contrôle-commande et de signalisation en raison de conditions d’utilisation restreintes de leurs constituants d’interopérabilité 59 |
|
7. |
Mise en œuvre de la STI «contrôle-commande et signalisation» |
|
7.1. |
Introduction |
|
7.2. |
Règles d’application générale |
|
7.2.1. |
Réaménagement ou renouvellement du sous-système «sol» de contrôle-commande ou de parties de ce sous-système |
|
7.2.2. |
Systèmes existants |
|
7.2.3. |
Disponibilité des modules de transmission spécifiques (STM) |
|
7.2.4. |
Équipements supplémentaires de classe B sur une ligne équipée de la classe A |
|
7.2.5. |
Matériel roulant avec des équipements de classe A et de classe B |
|
7.2.6. |
Conditions applicables aux fonctions obligatoires et optionnelles |
|
7.2.7. |
Règles spécifiques de mise en œuvre pour le GSM-R |
|
7.2.7.1. |
Installations «sol»: |
|
7.2.7.2. |
Installations embarquées: |
|
7.2.8. |
Règles de mise en œuvre spécifiques aux systèmes de détection des trains |
|
7.2.9. |
Cas spécifiques |
|
7.2.9.1. |
Introduction |
|
7.2.9.2. |
Belgique |
|
7.2.9.3. |
Royaume-Uni |
|
7.2.9.4. |
France |
|
7.2.9.5. |
Pologne |
|
7.2.9.6. |
Lituanie, Lettonie |
|
7.2.9.7. |
Suède |
|
7.2.9.8. |
Luxembourg |
|
7.3. |
Règles concernant les équipements ERTMS |
|
7.3.1. |
Plan européen de déploiement des équipements ERTMS |
|
7.3.2. |
Mise en œuvre de l’ERTMS au sol |
|
7.3.2.1. |
Corridors |
|
7.3.2.2. |
Connexion aux principaux ports, gares de triage, terminaux de marchandises et zones de transport de marchandises en Europe |
|
7.3.2.3. |
Réseau à grande vitesse |
|
7.3.2.4. |
Projets financés par l’Union européenne |
|
7.3.2.5. |
Notification |
|
7.3.2.6. |
Retards |
|
7.3.3. |
Mise en œuvre de l’ERTMS à bord |
|
7.3.3.1. |
Réseau à grande vitesse |
|
7.3.4. |
Lignes spécifiques constituant des corridors |
|
7.3.5. |
Principaux ports, gares de triage, terminaux de marchandises et zones de transport de marchandises en Europe |
1. INTRODUCTION
1.1. Domaine d’application technique
La présente STI concerne le sous-système de contrôle-commande et de signalisation «bord» et le sous-système de contrôle-commande et de signalisation «sol».
1.2. Domaine d’application géographique
Le domaine d’application géographique de la présente STI est le système ferroviaire transeuropéen, c’est-à-dire les systèmes ferroviaires transeuropéens conventionnel et à grande vitesse tels que définis aux points 1 et 2 de l’annexe I de la directive 2008/57/CE («directive sur l’interopérabilité du système ferroviaire»).
1.3. Contenu de la présente STI
Conformément à l’article 5, paragraphe 3, de la directive sur l’interopérabilité ferroviaire, la présente STI:
|
1) |
indique le champ d’application visé – chapitre 2 (Définition du sous-système et domaine d’application); |
|
2) |
fixe les exigences essentielles des sous-systèmes de contrôle-commande et de signalisation et de leurs interfaces vis-à-vis des autres sous-systèmes — chapitre 3 (Exigences essentielles des sous-systèmes de contrôle-commande et de signalisation); |
|
3) |
établit les spécifications fonctionnelles et techniques à respecter par les sous-systèmes et leurs interfaces vis-à-vis des autres sous-systèmes — chapitre 4 (Caractérisation du sous-système); |
|
4) |
détermine les constituants d’interopérabilité et les interfaces devant faire l’objet de spécifications européennes, dont les normes européennes, qui sont nécessaires pour réaliser l’interopérabilité au sein du système ferroviaire transeuropéen — chapitre 5 (Constituants d’interopérabilité); |
|
5) |
définit, pour chaque cas envisagé, les procédures d’évaluation de la conformité ou de l’aptitude à l’emploi des constituants d’interopérabilité, d’une part, ou la vérification CE du sous-système, d’autre part — chapitre 6 (Évaluation de la conformité et/ou de l’aptitude à l’emploi des constituants et vérification des sous-systèmes); |
|
6) |
indique la stratégie de mise en œuvre de la présente STI — chapitre 7 (Mise en œuvre de la STI pour les sous-systèmes de contrôle-commande et de signalisation); |
|
7) |
indique les compétences professionnelles et les conditions d’hygiène et de sécurité au travail requises pour le personnel d’exploitation et de maintenance de ces sous-systèmes ainsi que pour la mise en œuvre de la STI — chapitre 4 (Caractérisation du sous-système). |
Conformément à l’article 5, paragraphe 5, de la directive sur l’interopérabilité ferroviaire, les dispositions applicables à des cas spécifiques figurent au chapitre 7 (Mise en œuvre de la STI pour le sous-système de contrôle-commande et de signalisation).
La présente STI précise également, au chapitre 4 (Caractérisation des sous-systèmes), les règles d’exploitation et de maintenance spécifiques aux domaines d’application indiqués aux paragraphes 1.1 et 1.2 ci-dessus.
2. DÉFINITION ET DOMAINE D’APPLICATION DU SOUS-SYSTÈME
2.1. Introduction
Les sous-systèmes de contrôle-commande et de signalisation sont définis à l’annexe II de la directive sur l’interopérabilité ferroviaire comme «tous les équipements nécessaires pour assurer la sécurité, la commande et le contrôle des mouvements des trains autorisés à circuler sur le réseau».
Les caractéristiques du sous-système de contrôle-commande et de signalisation sont les suivantes:
|
1) |
les fonctions qui sont essentielles pour la commande en toute sécurité du trafic ferroviaire et celles qui sont essentielles pour l’exploitation, y compris celles requises pour les modes dégradés (1); |
|
2) |
les interfaces; |
|
3) |
le niveau de performances requis pour satisfaire aux exigences essentielles. |
2.2. Champ d’application
La STI relative aux sous-systèmes de contrôle-commande et de signalisation spécifie uniquement les exigences nécessaires à l’interopérabilité du réseau ferroviaire européen et au respect des exigences essentielles.
Les sous-systèmes de contrôle-commande et de signalisation incluent les systèmes suivants:
|
1) |
contrôle de vitesse; |
|
2) |
communication radio; |
|
3) |
détection des trains. |
Le système de contrôle de vitesse de classe A est l’ERTMS/ETCS et le système radio de classe A est le GSM-R.
En ce qui concerne la détection des trains de classe A, la présente STI précise uniquement les conditions d’interface avec d’autres sous-systèmes.
Les systèmes de classe B sont un ensemble limité de systèmes existants de contrôle-commande et de signalisation qui étaient en service avant le 20 avril 2001. Le document technique de l’Agence ferroviaire européenne intitulé «liste des systèmes CCS de classe B», ERA/TD/2011-11, version 1.0, dresse la liste des systèmes de classe B.
Les exigences du sous-système contrôle-commande et signalisation «bord» sont spécifiées par rapport aux systèmes de communication radio et de contrôle de vitesse de classe A.
Les exigences applicables au sous-système de contrôle-commande et de signalisation «sol» sont définies par rapport aux éléments suivants:
|
1) |
le réseau radio de classe A; |
|
2) |
le contrôle de vitesse de classe A; |
|
3) |
les exigences d’interface pour les systèmes de détection des trains, afin de garantir leur compatibilité avec le matériel roulant. |
2.3. Niveaux d’application (ERTMS/ETCS)
Les interfaces spécifiées par la présente STI définissent les modes de transmission de données vers et, le cas échéant, depuis les trains. Les spécifications ERTMS/ETCS requises par la présente STI proposent des niveaux d’application parmi lesquels une mise en œuvre «sol» peut choisir les moyens de transmission adaptés à ses exigences.
La présente STI définit les exigences pour tous les niveaux d’application.
Un train équipé d’un système de contrôle de vitesse embarqué de classe A pour un niveau d’application donné doit être en mesure de circuler à ce niveau-là, ainsi qu’à tout niveau inférieur. En conséquence:
|
— |
un train équipé d’un système embarqué de contrôle de vitesse de classe A pour le niveau 2 doit être en mesure de circuler à ce niveau-là ainsi que sur les lignes de niveau 1, |
|
— |
un train équipé d’un système embarqué de contrôle de vitesse de classe A pour le niveau 1 ne doit pas nécessairement être équipé d’une radio de données GSM-R, mais doit déjà mettre en œuvre toutes les fonctions de niveau 2 afin que la simple connexion d’une radio de données GSM-R à un stade ultérieur suffise à l’équiper pour le niveau 2. |
3. EXIGENCES ESSENTIELLES DES SOUS-SYSTÈMES DE CONTRÔLE-COMMANDE ET DE SIGNALISATION
3.1. Généralités
La directive sur l’interopérabilité ferroviaire exige que les sous-systèmes et les constituants d’interopérabilité, y compris les interfaces, respectent les exigences essentielles définies en termes généraux à l’annexe III de la directive.
Les exigences essentielles sont les suivantes:
|
1) |
sécurité; |
|
2) |
fiabilité et disponibilité; |
|
3) |
santé des personnes; |
|
4) |
protection de l’environnement; |
|
5) |
compatibilité technique. |
Les exigences essentielles pour les systèmes de classe A sont décrites ci-dessous.
Les exigences pour les systèmes de classe B relèvent de la responsabilité de l’État membre concerné.
3.2. Aspects spécifiques des sous-systèmes de contrôle-commande et de signalisation
3.2.1. Sécurité
Chaque projet soumis à la présente spécification doit prendre les mesures nécessaires pour faire en sorte que le niveau de risque qu’un incident relevant des sous-systèmes de contrôle-commande et de signalisation se produise ne soit pas plus élevé que l’objectif fixé pour le service. À cette fin, le règlement (CE) no 352/2009 de la Commission du 24 avril 2009 concernant l’adoption d’une méthode de sécurité commune relative à l’évaluation et à l’appréciation des risques visée à l’article 6, paragraphe 3, point a), de la directive 2004/49/CE du Parlement européen et du Conseil (2) (méthode de sécurité commune) s’applique.
Afin de garantir que les mesures prises pour assurer la sécurité ne compromettent pas l’interopérabilité, les exigences du paramètre fondamental défini au point 4.2.1 (Caractéristiques de sécurité du sous-système de contrôle-commande et de signalisation pertinentes pour l’interopérabilité) devront être respectées.
Pour le système ERTMS/ETCS de classe A, l’objectif de sécurité est réparti entre les sous-systèmes de contrôle-commande et de signalisation «bord» et «sol». Les exigences détaillées sont précisées dans le paramètre fondamental défini au point 4.2.1 (Caractéristiques de sécurité du sous-système de contrôle-commande et de signalisation pertinentes pour l’interopérabilité). Cette exigence de sécurité doit être satisfaite ainsi que les exigences de disponibilité telles qu’elles sont définies au point 3.2.2 (Fiabilité et disponibilité).
3.2.2. Fiabilité et disponibilité
Pour le système de classe A, les objectifs de fiabilité et de disponibilité sont répartis entre les sous-systèmes de contrôle-commande et de signalisation «bord» et «sol». Les exigences détaillées sont précisées dans le paramètre fondamental défini au point 4.2.1 (Caractéristiques de sécurité du sous-système de contrôle-commande et de signalisation pertinentes pour l’interopérabilité).
Le niveau de risque doit être contrôlé à mesure que les constituants vieillissent et s’usent. Les exigences de maintenance figurant au point 4.5 doivent être respectées.
3.2.3. Santé des personnes
Conformément aux règlements européens et aux réglementations nationales compatibles avec la législation européenne, des précautions devront être prises afin de garantir que les matériaux utilisés lors de la conception et de la construction des sous-systèmes de contrôle-commande et de signalisation ne mettent pas en danger la santé des personnes qui y ont accès.
3.2.4. Protection de l’environnement
Conformément aux règlements européens et aux réglementations nationales qui sont compatibles avec la législation européenne:
|
1) |
l’équipement de contrôle-commande et de signalisation ne doit pas, en cas d’exposition à une chaleur élevée ou au feu, dépasser les seuils d’émissions de fumées ou de gaz dommageables pour l’environnement; |
|
2) |
l’équipement de contrôle-commande et de signalisation ne doit pas contenir de substances qui pourraient, en utilisation normale, polluer anormalement l’environnement; |
|
3) |
l’équipement de contrôle-commande et de signalisation doit être conforme à la législation européenne en vigueur sur les seuils d’émission de perturbations électromagnétiques et de sensibilité à ces perturbations aux limites des emprises ferroviaires; |
|
4) |
l’équipement de contrôle-commande et de signalisation doit être conforme à la réglementation en vigueur en matière de pollution sonore; |
|
5) |
l’équipement de contrôle-commande et de signalisation ne doit pas entraîner de niveau de vibrations inacceptable qui pourrait mettre en péril l’intégrité de l’infrastructure (lorsque celle-ci est correctement entretenue). |
3.2.5. Compatibilité technique
La compatibilité technique comprend les fonctions, les interfaces et les performances requises pour obtenir l’interopérabilité.
Les exigences de compatibilité technique sont subdivisées en trois catégories, comme suit:
|
1) |
La première catégorie énonce les exigences générales d’ingénierie concernant l’interopérabilité, c’est-à-dire les conditions d’environnement, la compatibilité électromagnétique (CEM) interne dans les limites des emprises ferroviaires et le montage. Ces exigences de compatibilité sont définies dans le présent chapitre. |
|
2) |
La seconde catégorie décrit la manière dont les sous-systèmes de contrôle-commande et de signalisation doivent être appliqués sur le plan technique ainsi que les fonctions qu’ils doivent remplir pour assurer l’interopérabilité. Cette catégorie est définie au chapitre 4. |
|
3) |
La troisième catégorie décrit la manière dont les sous-systèmes de contrôle-commande et de signalisation doivent être exploités afin d’assurer l’interopérabilité. Cette catégorie est définie au chapitre 4. |
3.2.5.1.
3.2.5.1.1.
L’équipement de contrôle-commande et de signalisation doit pouvoir fonctionner dans les conditions climatiques et physiques qui caractérisent la région dans laquelle se situe la partie concernée du système ferroviaire transeuropéen.
Les exigences du paramètre fondamental 4.2.16 (conditions d’environnement) doivent être respectées.
3.2.5.1.2.
Conformément aux règlements européens ainsi qu’aux réglementations nationales compatibles avec la législation européenne, l’équipement de contrôle-commande et de signalisation ne doit pas causer d’interférences avec d’autres équipements de contrôle-commande et de signalisation ni subir d’interférences de ceux-ci.
Le paramètre fondamental relatif à la compatibilité électromagnétique entre le matériel roulant et l’équipement de contrôle-commande et de signalisation «sol» est décrit au point 4.2.11 (compatibilité électromagnétique).
3.2.5.2.
Le chapitre 4 définit les exigences d’interopérabilité du sous-système de contrôle-commande et de signalisation.
En outre, la présente STI garantit, en ce qui concerne les sous-systèmes de contrôle-commande et de signalisation, l’interopérabilité technique entre les systèmes ferroviaires transeuropéens à grande vitesse et conventionnels lorsque les deux sont dotés de systèmes de classe A.
4. CARACTÉRISATION DES SOUS-SYSTÈMES
4.1. Introduction
Conformément aux exigences essentielles concernées, les sous-systèmes de contrôle-commande et de signalisation sont caractérisés par les paramètres fondamentaux suivants:
|
1) |
caractéristiques de sécurité du sous-système «contrôle-commande et signalisation» entrant en ligne de compte pour l’interopérabilité (point 4.2.1); |
|
2) |
fonctionnalité «bord» de l’ERTMS/ETCS (point 4.2.2); |
|
3) |
fonctionnalité «sol» de l’ERTMS/ETCS (point 4.2.3); |
|
4) |
fonctions de communication mobile pour les chemins de fer – GSM-R (point 4.2.4); |
|
5) |
interfaces de transmission ERTMS/ETCS et GSM-R (point 4.2.5); |
|
6) |
interfaces «bord» interne à l’unité «contrôle-commande et signalisation» (point 4.2.6); |
|
7) |
interfaces «sol» interne à l’unité «contrôle-commande et signalisation» (point 4.2.7); |
|
8) |
gestion des clés (point 4.2.8); |
|
9) |
gestion des identifiants ETCS (ETCS-ID) (point 4.2.9); |
|
10) |
systèmes de détection des trains (point 4.2.10); |
|
11) |
compatibilité électromagnétique entre le matériel roulant et l’équipement «sol» de contrôle-commande et de signalisation (point 4.2.11); |
|
12) |
interface homme-machine (IHM) de l’ERTMS/ETCS (point 4.2.12); |
|
13) |
interface homme-machine (IHM) du GSM-R (point 4.2.13); |
|
14) |
interface avec les données enregistrées à des fins réglementaires (point 4.2.14); |
|
15) |
visibilité des objets «sol» de l’unité «contrôle-commande et signalisation» (point 4.2.15); |
|
16) |
conditions d’environnement (point 4.2.16). |
Toutes les exigences du point 4.2 (Spécifications fonctionnelles et techniques des sous-systèmes) relatives au respect de ces paramètres fondamentaux s’appliquent au système de classe A.
Les exigences applicables aux systèmes de classe B et aux STM (permettant au système «bord» de classe A de fonctionner sur une infrastructure de classe B) sont du ressort de l’État membre concerné.
Cette STI repose sur le principe de permettre la compatibilité entre le sous-système de contrôle-commande et de signalisation «sol» et les sous-systèmes de contrôle-commande et de signalisation «bord» conformes à la STI. Pour y arriver:
|
1) |
les fonctions, interfaces et performances du sous-système de contrôle-commande et de signalisation «bord» sont normalisées de manière à ce que chaque train réagisse de façon prévisible aux données reçues depuis les voies; |
|
2) |
pour le sous-système de contrôle-commande et de signalisation «sol», la présente STI normalise entièrement les communications dans les deux sens entre le train et les voies. Les spécifications référencées aux points ci-dessous permettent d’appliquer la fonctionnalité de contrôle-commande et de signalisation «sol» de façon souple pour l’intégrer de façon optimale au système ferroviaire. Cette flexibilité doit être exploitée sans restreindre la circulation des sous-systèmes «bord» conformes à la STI. |
Les fonctions de contrôle-commande et de signalisation sont classées en catégories en indiquant, par exemple, leur caractère optionnel (O) ou obligatoire (M). Ces catégories sont définies à l’annexe A, paragraphe 4.1a, pour l’ERTMS/ETCS et à l’annexe A, paragraphe 4.1b, pour le GSM-R. Ces textes indiquent également la façon dont ces fonctionnalités sont classées.
L’annexe A, paragraphe 4.1c, contient le glossaire des termes et définitions de l’ERTMS/ETCS utilisés dans les spécifications auxquelles il est fait référence à l’annexe A.
Selon le point 2.2 (Domaine d’application), les sous-systèmes de contrôle-commande et de signalisation comprennent trois parties.
Le tableau suivant indique les paramètres fondamentaux pertinents pour chaque sous-système et pour chaque partie.
|
Sous-système |
Partie |
Paramètres fondamentaux |
|
Contrôle-commande et signalisation «bord» |
contrôle de vitesse |
4.2.1, 4.2.2, 4.2.5, 4.2.6, 4.2.8, 4.2.9, 4.2.12, 4.2.14, 4.2.16 |
|
communication radio |
4.2.4, 4.2.5, 4.2.6, 4.2.13, 4.2.14, 4.2.16 |
|
|
Contrôle-commande et signalisation «sol» |
contrôle de vitesse |
4.2.3, 4.2.5, 4.2.7, 4.2.8, 4.2.9, 4.2.15, 4.2.16 |
|
communication radio |
4.2.4, 4.2.5, 4.2.7, 4.2.16 |
|
|
détection des trains. |
4.2.10, 4.2.11, 4.2.16 |
En ce qui concerne les exigences essentielles indiquées au chapitre 3, les spécifications fonctionnelles et techniques des sous-systèmes de contrôle-commande et de signalisation sont les suivantes.
4.2. Spécifications fonctionnelles et techniques des sous-systèmes
4.2.1. Caractéristiques de sécurité du sous-système de contrôle-commande et de signalisation entrant en ligne de compte pour l’interopérabilité
Ce paramètre fondamental décrit les exigences pour le sous-système de contrôle-commande et de signalisation «bord» et le sous-système de contrôle-commande et de signalisation «sol» en référence au point 3.2.1 (Sécurité) et au point 3.2.2 (Disponibilité et fiabilité).
Pour garantir l’interopérabilité, la mise en œuvre des sous-systèmes de contrôle-commande et de signalisation «sol» et «bord» doit respecter les dispositions suivantes:
|
1) |
La conception, la mise en œuvre et l’utilisation d’un sous-système de contrôle-commande et de signalisation «bord» ou «sol» ne doivent pas exporter d’exigences
|
|
2) |
Les exigences fixées aux points 4.2.1.1 et 4.2.1.2 ci-dessous doivent être respectées. |
4.2.1.1.
Les sous-systèmes de contrôle-commande et de signalisation «bord» et «sol» doivent respecter les exigences applicables à l’équipement et aux installations ERTMS/ETCS énoncées dans cette STI.
Pour le danger «dépassement des limites de vitesse et/ou de distance conseillées à l’ERTMS/ETCS», le taux admissible (TRA) est de 10– 9 h– 1 pour les défaillances aléatoires, pour l’ERTMS/ETCS «bord» et pour l’ERTMS/ETCS «sol». Voir l’annexe A, paragraphe 4.2.1a.
Pour assurer l’interopérabilité, l’ERTMS/ETCS «bord» doit respecter pleinement les exigences spécifiées à l’annexe A, paragraphe 4.2.1. Néanmoins, des exigences de sécurité moins strictes sont acceptables pour l’ERTMS/ETCS «sol» pour autant que, en conjonction avec des sous-systèmes de contrôle-commande et de signalisation «bord» conformes à la STI, le niveau de sécurité imposé pour le service soit respecté.
Les exigences applicables aux dangers liés aux erreurs dans l’interface entre le conducteur et l’ERTMS/ETCS «bord» font l’objet d’un point ouvert.
4.2.1.2.
Les sous-systèmes de contrôle-commande et signalisation «bord» et «sol» doivent respecter les exigences énoncées dans cette STI. Les exigences de disponibilité/de fiabilité sont définies à l’annexe A, paragraphe 4.2.1b.
Le niveau de risque doit être contrôlé tout au long du cycle de vie des matériels. Les exigences de maintenance figurant au point 4.5 (règles de maintenance) doivent être respectées.
4.2.2. Fonctionnalités «bord» de l’ERTMS/ETCS
Le paramètre fondamental de la fonctionnalité «bord» de l’ERTMS/ETCS décrit toutes les fonctions permettant la circulation d’un train en sécurité. La fonction principale est d’assurer le contrôle automatique de vitesse et la signalisation automatique en cabine:
|
1) |
entrée des caractéristiques du train (par ex. vitesse maximale du train, performance de freinage); |
|
2) |
sélection du mode de supervision en fonction des informations reçues du sol; |
|
3) |
réalisation des fonctions d’odométrie; |
|
4) |
localisation du train dans un système de coordonnées fondé sur les localisations Eurobalise; |
|
5) |
calcul du profil dynamique de vitesse pendant la mission du train en fonction des caractéristiques du train et des informations reçues du sol; |
|
6) |
supervision du profil dynamique de vitesse pendant la mission du train; |
|
7) |
fourniture de la fonction d’intervention. |
La mise en œuvre de ces fonctions doit être conforme à l’annexe A, paragraphe 4.2.2b et leurs performances doivent être conformes à l’annexe A, paragraphe 4.2.2a.
Les exigences concernant les essais sont spécifiées à l’annexe A, paragraphe 4.2.2c.
Les identifiants ETCS des équipements doivent être gérés conformément au point 4.2.9 (Gestion des identifiants ETCS).
La fonctionnalité principale est soutenue par d’autres fonctions pour lesquelles l’annexe A, paragraphe 4.2.2a et l’annexe A, paragraphe 4.2.2b, s’appliquent également, ainsi que les spécifications supplémentaires indiquées ci-dessous:
|
1. |
Communication avec le sous-système de contrôle-commande et de signalisation «sol».
|
|
2. |
Communication avec le conducteur. Voir annexe A, paragraphe 4.2.2e et point 4.2.12 (IHM de l’ERTMS/ETCS). |
|
3. |
Communication avec le STM. Voir point 4.2.6.1 (Interface entre l’ERTMS/ETCS et le STM). Cette fonction comprend:
|
|
4. |
Gérer les informations relatives à la complétude du train (intégrité du train) — obligatoire pour le niveau 3, non exigée pour le niveau 1 ou 2. |
|
5. |
La surveillance de l’état des équipements et l’aide en cas de modes dégradés. Cette fonction comprend:
|
|
6. |
Prise en charge de l’enregistrement des données à des fins réglementaires. Voir point 4.2.14 (Interface avec les données enregistrées à des fins réglementaires). |
|
7. |
Transmission d’informations/ordres et réception d’informations d’état du matériel roulant:
|
4.2.3. Fonctionnalités «sol» de l’ERTMS/ETCS
Ce paramètre fondamental décrit la fonctionnalité «sol» de l’ERTMS/ETCS. Il prévoit tous les éléments de la fonctionnalité ERTMS/ETCS permettant à un train donné de circuler sans danger.
La fonctionnalité principale est la suivante:
|
1) |
localisation d’un train spécifique dans un système de coordonnées fondé sur les localisations Eurobalise (niveaux 2 et 3); |
|
2) |
conversion des informations provenant des équipements de signalisation au sol en un format normalisé pour le sous-système de contrôle-commande et de signalisation «bord»; |
|
3) |
envoi des autorisations de mouvement incluant la description de voie et les ordres attribués à un train spécifique. |
Ces fonctions doivent être mises en œuvre conformément à l’annexe A, paragraphe 4.2.3b et leurs performances doivent être conformes à l’annexe A, paragraphe 4.2.3a.
Les exigences concernant les essais sont spécifiées à l’annexe A, paragraphe 4.2.3c.
Les identifiants ETCS des équipements doivent être gérés conformément au point 4.2.9 (Gestion des identifiants ETCS).
La principale fonctionnalité est soutenue par d’autres fonctions pour lesquelles l’annexe A, paragraphe 4.2.3a et l’annexe A, paragraphe 4.2.3b, s’appliquent également, ainsi que les spécifications supplémentaires indiquées ci-dessous:
|
1) |
communication avec le sous-système de contrôle-commande et de signalisation «bord», et notamment:
|
|
2) |
production d’informations/ordres pour l’ERTMS/ETCS «bord», par exemple, informations concernant la fermeture/l’ouverture des clapets d’air (air flaps), l’abaissement/relevage du pantographe, l’ouverture/la fermeture du disjoncteur, le passage du système de traction A au système de traction B; |
|
3) |
gestion des transitions entre les zones supervisées par différents «Radio Block Centres» (RBC) (ne concerne que les niveaux 2 et 3). Voir point 4.2.7.1 (Interface fonctionnelle entre RBC) et point 4.2.7.2 (Interface technique entre RBC). |
4.2.4. Fonctions de communication mobile pour les chemins de fer – GSM-R
Ce paramètre fondamental décrit les fonctions de communication radio. Ces fonctions doivent être mises en œuvre dans les sous-systèmes de contrôle-commande et de signalisation «sol» et «bord» conformément aux spécifications ci-dessous.
4.2.4.1.
Les exigences générales sont spécifiées à l’annexe A, paragraphe 4.2.4a.
En outre, les spécifications suivantes doivent être respectées:
|
1) |
fonctions ASCI; annexe A, paragraphe 4.2.4b; |
|
2) |
carte SIM; annexe A, paragraphe 4.2.4c; |
|
3) |
signalisation entre utilisateurs; annexe A, paragraphe 4.2.4d; |
|
4) |
adressage en fonction de la localisation; annexe A, paragraphe 4.2.4e |
4.2.4.2.
Les exigences générales sont spécifiées à l’annexe A, paragraphe 4.2.4f.
Les exigences relatives aux essais sont spécifiées à l’annexe A, paragraphe 4.2.4 g
En outre, les spécifications suivantes doivent être respectées:
|
1) |
confirmation des appels de haute priorité; annexe A, paragraphe 4.2.4 h; |
|
2) |
adressage fonctionnel; annexe A, paragraphe 4.2.4 j; |
|
3) |
présentation des numéros fonctionnels; annexe A, paragraphe 4.2.4k. |
4.2.4.3.
Les exigences générales sont spécifiées à l’annexe A, paragraphe 4.2.4f.
Les exigences des essais sont spécifiées à l’annexe A, paragraphe 4.2.4 g.
Cette fonctionnalité est obligatoire uniquement dans le cas des applications ETCS niveaux 2 et 3 et de réouverture radio.
4.2.5. Interfaces de transmission ERTMS/ETCS et GSM-R
Ce paramètre fondamental spécifie les exigences relatives à la transmission (air gap) entre les sous-systèmes de contrôle-commande et de signalisation «sol» et «bord». Il doit être pris en compte conjointement avec les exigences applicables aux interfaces entre les équipements ERTMS/ETCS et GSM-R, comme spécifié au point 4.2.6 (interfaces «bord» internes au sous-système «contrôle-commande et signalisation») et au point 4.2.7 (interfaces «sol» internes au sous-système «contrôle-commande et signalisation»).
Ce paramètre fondamental comprend:
|
1) |
les valeurs physiques, électriques et électromagnétiques à respecter pour permettre un fonctionnement en sécurité; |
|
2) |
le protocole de communication à utiliser; |
|
3) |
la disponibilité du canal de communication. |
Les spécifications applicables sont énumérées ci-dessous.
4.2.5.1.
Les interfaces de communication radio de classe A doivent fonctionner dans la bande GSM-R – voir l’annexe A, paragraphe 4.2.5a.
Les protocoles doivent être conformes à l’annexe A, paragraphe 4.2.5b.
En cas de mise en œuvre de la fonction de réouverture radio, les exigences énoncées à l’annexe A, paragraphe 4.2.5c doivent être respectées.
4.2.5.2.
Les interfaces de communication Eurobalise doivent respecter l’annexe A, paragraphe 4.2.5d.
4.2.5.3.
Les interfaces de communication Euroloop doivent respecter l’annexe A, paragraphe 4.2.5e.
4.2.6. Interfaces «bord» internes au sous-système «contrôle-commande et signalisation»
Ce paramètre fondamental comprend trois parties.
4.2.6.1.
En cas d’installation à bord des fonctions de contrôle de vitesse de classe B et de l’ERTMS/ETCS, les transitions entre elles peuvent être gérées avec une interface normalisée, comme spécifié à l’annexe A, paragraphe 4.2.6a.
L’annexe A, paragraphe 4.2.6b, définit l’interface K (permettant à certains STM de lire les informations provenant de balises de classe B grâce à l’antenne ERTMS/ETCS «bord») et l’annexe A, paragraphe 4.2.6c, l’interface G (transmission entre l’antenne ETCS «bord» et les balises de classe B).
La mise en œuvre de l’interface K est optionnelle, mais, si elle est effective, elle doit être conforme à l’annexe A, paragraphe 4.2.6b.
En outre, si l’interface K est mise en œuvre, la fonctionnalité du canal de transmission à bord doit pouvoir traiter les propriétés de l’annexe A, paragraphe 4.2.6c.
Si les transitions entre l’ERTMS/ETCS et le contrôle de vitesse de classe B «bord» ne sont pas gérées au moyen des interfaces normalisées spécifiées à l’annexe A, paragraphe 4.2.6a, il convient de prendre des mesures pour veiller à ce que la méthode utilisée n’impose pas d’exigences supplémentaires au sous-système de contrôle-commande et de signalisation «sol».
4.2.6.2.
Les exigences applicables à l’interface entre la radio de classe A et la fonctionnalité ERTMS/ETCS «bord» sont spécifiées à l’annexe A, paragraphe 4.2.6d.
En cas de mise en œuvre de la réouverture radio, les exigences énoncées à l’annexe A, paragraphe 4.2.6e, doivent être respectées.
4.2.6.3.
L’interface entre la fonction odométrie et les fonctions embarquées de l’ETCS doit répondre aux exigences de l’annexe A, paragraphe 4.2.6f. Cette interface ne contribue à ce paramètre fondamental que si les équipements d’odométrie sont fournis en tant que constituants d’interopérabilité séparés (voir point 5.2.2, Groupes de constituants d’interopérabilité).
4.2.7. Interfaces «sol» internes au sous-système «contrôle-commande et signalisation»
Ce paramètre fondamental comprend cinq parties.
4.2.7.1.
Cette interface définit les données à échanger entre les RBC voisins afin de permettre la circulation d’un train de façon sûre entre des zones de RBC:
|
1) |
des informations transmises par le RBC «Origine» (Handing Over) au RBC «Destination» (Accepting); |
|
2) |
des informations transmises par le RBC «Destination» (Accepting) au RBC «Origine» (Handing Over). |
Ces exigences sont spécifiées à l’annexe A, paragraphe 4.2.7a.
4.2.7.2.
Il s’agit de l’interface technique entre deux RBC. Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.7b.
4.2.7.3.
Il s’agit de l’interface entre le système radio de classe A et la fonctionnalité ETCS au sol. Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.7c.
4.2.7.4.
Il s’agit de l’interface entre Eurobalise et LEU. Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.7d.
Cette interface contribue à ce paramètre fondamental seulement lorsqu’Eurobalise et LEU sont fournis en tant que constituants d’interopérabilité séparés (voir point 5.2.2, Groupes de constituants d’interopérabilité).
4.2.7.5.
Il s’agit de l’interface entre Euroloop et LEU. Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.7e.
Cette interface contribue à ce paramètre fondamental seulement lorsqu’Euroloop et LEU sont fournis en tant que constituants d’interopérabilité séparés (voir point 5.2.2, Groupes de constituants d’interopérabilité).
4.2.8. Gestion des clés
Ce paramètre fondamental spécifie les exigences de gestion des clés cryptographiques utilisées pour protéger les données transmises par radio.
Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.8a. Seules les exigences liées aux interfaces des équipements de contrôle-commande et de signalisation entrent dans le domaine d’application de la présente STI.
4.2.9. Gestion des identifiants ETCS
Ce paramètre fondamental concerne les identifiants (ID) ETCS pour les sous-systèmes de contrôle-commande et de signalisation «sol» et «bord».
Les exigences sont spécifiées à l’annexe A, paragraphe 4.2.9a.
4.2.10. Systèmes «sol» de détection des trains
Ce paramètre fondamental décrit l’interface entre les systèmes «sol» de détection des trains et le matériel roulant.
Les exigences d’interfaçage à respecter par les systèmes de détection des trains sont spécifiées à l’annexe A, paragraphe 4.2.10a.
4.2.11. Compatibilité électronique entre le matériel roulant et les équipements «sol» de contrôle-commande et de signalisation
Ce paramètre fondamental spécifie les exigences de compatibilité électromagnétique entre le matériel roulant et les équipements «sol» de contrôle-commande et de signalisation.
Les exigences d’interfaçage à respecter par le système de détection des trains sont spécifiées à l’annexe A, paragraphe 4.2.11a.
4.2.12. IHM (interface homme-machine) de l’ERTMS/ETCS
Ce paramètre fondamental décrit les informations fournies au conducteur par l’ERTMS/ETCS et entrées dans l’ERTMS/ETCS «bord» par le conducteur. Voir annexe A, paragraphe 4.2.12a.
Il couvre les éléments suivants:
|
1) |
l’ergonomie (comprenant la visibilité); |
|
2) |
les fonctions ERTMS/ETCS devant être affichées; |
|
3) |
les fonctions ERTMS/ETCS déclenchées par les informations entrées par le conducteur. |
4.2.13. IHM (interface homme-machine) du GSM-R
Ce paramètre fondamental décrit les informations fournies au conducteur par le GSM-R embarqué et entrées par le conducteur dans le GSM-R embarqué. Voir annexe A, paragraphe 4.2.13a.
Il couvre les éléments suivants:
|
1) |
l’ergonomie (comprenant la visibilité); |
|
2) |
les fonctions GSM-R devant être affichées; |
|
3) |
les informations sortantes relatives à une demande; |
|
4) |
les informations entrantes relatives à une demande. |
4.2.14. Interface avec les données enregistrées à des fins réglementaires
Ce paramètre fondamental décrit:
|
1) |
les échanges de données entre l’ERTMS/ETCS «bord» et l’appareil enregistreur du matériel roulant; |
|
2) |
les protocoles de communication; |
|
3) |
l’interface physique. |
Voir l’annexe A, paragraphe 4.2.14a.
4.2.15. Visibilité des objets du sous-système de contrôle-commande et de signalisation «sol»
Ce paramètre fondamental décrit:
|
1) |
les caractéristiques des signes rétroréfléchissants pour assurer une visibilité correcte; |
|
2) |
les caractéristiques des panneaux de signalisation interopérables. |
Voir l’annexe A, paragraphe 4.2.15a.
En outre, l’installation d’objets «sol» du sous-système «contrôle-commande et signalisation» doit être compatible avec le champ de vision du conducteur et les exigences d’infrastructure.
4.2.16. Conditions d’environnement
Les conditions d’environnement exigées dans les spécifications visées dans cette STI doivent être respectées.
4.3. Spécifications fonctionnelles et techniques des interfaces avec les autres sous-systèmes
4.3.1. Interface avec le sous-système «exploitation et gestion du trafic»
|
Interface avec la STI «Exploitation et gestion du trafic» |
|||
|
Référence STI CCS |
Référence STI «Exploitation et gestion du trafic» |
||
|
Paramètre |
Clause |
Paramètre |
Clause |
|
Règles d’exploitation (conditions normales et dégradées) |
4.4 |
Livret de procédures |
4.2.1.2.1 |
|
Règles d’exploitation |
4.4 |
||
|
Visibilité des objets du sous-système de contrôle-commande et de signalisation «sol» |
4.2.15 |
Visibilité de la signalisation au sol et des repères |
4.2.2.8 |
|
Performances et caractéristiques du système de freinage du train |
4.2.2 |
Performances du système de freinage |
4.2.2.6 |
|
Utilisation d’équipements de sablage |
|
|
|
|
Graissage des boudins «bord» |
4.2.10 |
Livret de procédures |
4.2.1.2.1 |
|
Utilisation de semelles de freins en matériau composite |
|
|
|
|
Interface avec les données enregistrées à des fins réglementaires |
4.2.14 |
Enregistrement des données «bord» |
4.2.3.5 |
|
IHM de l’ETCS |
4.2.12 |
Numéro de train |
4.2.3.2.1 |
|
IHM du GSM-R |
4.2.13 |
Numéro de train |
4.2.3.2.1 |
4.3.2. Interface avec le sous-système «matériel roulant»
|
Interface avec les STI «Matériel roulant» |
||||
|
Référence STI CCS |
|
Référence STI «Matériel roulant» |
|
|
|
Paramètre |
Clause |
Paramètre |
|
Clause |
|
Compatibilité avec les systèmes «sol» de détection des trains: conception des véhicules |
4.2.10 |
Compatibilité des caractéristiques du matériel roulant avec les systèmes de détection des trains fondés sur les circuits de voie |
STI MR GV |
|
|
charge à l’essieu |
4.2.7.9.2 |
|||
|
sablage |
4.2.3.2 |
|||
|
résistance électrique entre les roues |
4.2.3.10 |
|||
|
electrical resistance between wheels |
4.2.3.3.1 |
|||
|
STI LOC & PAS |
4.2.3.3.1.1 |
|||
|
STI «Wagons de marchandises» |
4.2.3.2 |
|||
|
Compatibilité des caractéristiques du matériel roulant avec les systèmes de détection des trains fondés sur les compteurs d’essieux |
STI MR GV |
|
||
|
géométrie du train de roues |
4.2.7.9.2 |
|||
|
roues |
4.2.7.9.3 |
|||
|
STI LOC & PAS |
4.2.3.3.1.2 |
|||
|
STI «Wagons de marchandises» |
4.2.3.3.1 |
|||
|
Compatibilité des caractéristiques du matériel roulant avec les équipements de la ligne |
STI MR GV |
Néant |
||
|
STI LOC & PAS |
4.2.3.3.1.3 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Compatibilité électromagnétique entre le matériel roulant et les équipements «sol» de contrôle-commande et de signalisation |
4.2.11 |
Compatibilité des caractéristiques du matériel roulant avec les systèmes de détection des trains fondés sur les circuits de voie |
STI MR GV |
4.2.6.6.1 |
|
STI LOC & PAS |
4.2.3.3.1 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Compatibilité des caractéristiques du matériel roulant avec les systèmes de détection des trains fondés sur les compteurs d’essieux |
STI MR GV |
4.2.6.6.1 |
||
|
STI LOC & PAS |
4.2.3.3.2 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Performances et caractéristiques du système de freinage du train |
4.2.2 |
Performances de freinage d’urgence |
STI MR GV |
|
|
Freinage d’urgence |
4.2.4.1 |
|||
|
Freinage de service |
4.2.4.4 |
|||
|
STI LOC & PAS |
|
|||
|
Freinage d’urgence |
4.2.4.5.2 |
|||
|
Freinage de service |
4.2.4.5.3 |
|||
|
STI «Wagons de marchandises» |
4.2.4.1.2 |
|||
|
Position des antennes «bord» du contrôle-commande et signalisation |
4.2.2 |
Gabarit cinématique |
STI MR GV |
4.2.3.1 |
|
STI LOC & PAS |
4.2.3.1 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Isolement de la fonctionnalité ERTMS/ETCS «bord» |
4.2.2 |
Règles d’exploitation |
STI MR GV |
4.2.7.9.1 |
|
STI LOC & PAS |
4.2.12.3 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Interfaces de données |
4.2.2 |
Principe de surveillance et de signalement |
STI MR GV |
4.2.7.10 |
|
STI LOC & PAS |
4.2.1.1 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Visibilité des objets du sous-système de contrôle-commande et de signalisation «sol» |
4.2.15 |
Phares de visibilité externe |
STI MR GV |
4.2.7.4.1.1 |
|
STI LOC & PAS |
4.2.7.1.1 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Champ de vision externe du conducteur |
STI MR GV |
|
||
|
champ de vision |
4.2.2.6 b |
|||
|
vitre frontale |
4.2.2.7 |
|||
|
STI LOC & PAS |
|
|||
|
champ de vision |
4.2.9.1.3.1 |
|||
|
vitre frontale |
4.2.9.2 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Interface avec les données enregistrées à des fins réglementaires |
4.2.14 |
Enregistreur |
STI MR GV |
4.2.7.10 |
|
STI LOC & PAS |
4.2.9.6 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Ordres de commande aux équipements du matériel roulant |
4.2.2 |
Séparation de phases |
STI MR GV |
4.2.8.3.6.7 |
|
4.2.3 |
STI LOC & PAS |
4.2.8.2.9.8 |
||
|
STI «Wagons de marchandises» |
Néant |
|||
|
Ordre de commande du système de freinage d’urgence |
4.2.2 |
Ordre de commande du système de freinage d’urgence |
STI MR GV |
Néant |
|
STI LOC & PAS |
4.2.4.4.1 |
|||
|
STI «Wagons de marchandises» |
Néant |
|||
4.3.3. Interfaces avec le sous-système «infrastructure»
|
Interface avec la STI «infrastructure» |
||||
|
Référence STI CCS |
Référence dans la STI «infrastructure» |
|||
|
Paramètre |
Clause |
Paramètre |
|
Clause |
|
Systèmes de détection des trains (espace pour installation) |
4.2.10 |
Gabarit minimal d’infrastructure |
GV |
4.2.3 |
|
Gabarit |
RC |
4.2.4.1 |
||
|
Communication Eurobalise (espace pour installation) |
4.2.5.2 |
Gabarit minimal d’infrastructure |
GV |
4.2.3 |
|
Gabarit |
RC |
4.2.4.1 |
||
|
Communication Euroloop (espace pour installation) |
4.2.5.3 |
Gabarit minimal d’infrastructure |
GVt |
4.2.3 |
|
Gabarit |
RC |
4.2.4.1 |
||
|
Visibilité des objets du sous-système de contrôle-commande et de signalisation «sol» |
4.2.15 |
Gabarit minimal d’infrastructure |
GV |
4.2.3 |
|
Gabarit |
RC |
4.2.4.1 |
||
4.3.4. Interfaces avec le sous-système «énergie»
|
Interface avec la STI Énergie |
||||
|
Référence STI CCS |
Référence STI Énergie |
|||
|
Paramètre |
Clause |
Paramètre |
|
Clause |
|
Ordres de commande aux équipements du matériel roulant |
4.2.2 |
Sections de séparation de phases |
STI ENE GV |
4.2.21 |
|
4.2.3 |
||||
|
Sections de séparation de systèmes |
4.2.22 |
|||
|
Sections de séparation de phases |
STI ENE RC |
4.2.19 |
||
|
Sections de séparation de systèmes |
4.2.20 |
|||
4.4. Règles d’exploitation
Les règles d’exploitation d’un service ferroviaire avec l’ERTMS/ETCS sont détaillées dans la STI «Exploitation et gestion du trafic».
4.5. Règles de maintenance
Les règles de maintenance des sous-systèmes couverts par la présente STI doivent garantir le maintien des valeurs citées dans les paramètres fondamentaux indiqués au chapitre 4 dans les limites spécifiées, pendant toute la durée de vie des sous-systèmes. Toutefois, pendant les opérations de maintenance préventive ou corrective, il est admis que le sous-système ne puisse pas respecter les valeurs citées dans les paramètres fondamentaux; les règles de maintenance doivent assurer que la sécurité n’est pas compromise pendant ces activités.
L’entité responsable du sous-système «contrôle-commande et signalisation» doit établir des règles de maintenance pour atteindre les objectifs ci-dessus. Pour faciliter la préparation de ces règles, les exigences suivantes doivent être respectées.
4.5.1. Responsabilité du fabricant des équipements
Le fabricant de l’équipement incorporé dans le sous-système est tenu de spécifier:
|
1) |
toutes les exigences et procédures de maintenance (y compris le contrôle du bon état, le diagnostic, les méthodes et outils d’essai, ainsi que les compétences professionnelles) nécessaires pour réaliser les exigences essentielles et satisfaire aux valeurs mentionnées dans les exigences obligatoires de la présente STI pendant tout le cycle de vie des équipements (transport et stockage avant l’installation, fonctionnement normal, défaillances, actions de réparation, vérifications et opérations de maintenance, mise à l’arrêt définitif, etc.); |
|
2) |
les risques susceptibles de mettre en cause la santé et la sécurité du public et du personnel de maintenance; |
|
3) |
les conditions de la maintenance de première ligne, c’est-à-dire la définition des unités remplaçables en ligne (Line Replaceable Units – LRU), la définition des versions compatibles homologuées des matériels et logiciels, les procédures de remplacement des LRU défaillantes, les conditions de stockage des LRU et de réparation des LRU défaillantes; |
|
4) |
les vérifications à effectuer dans le cas d’équipement soumis à des efforts exceptionnels (par exemple, conditions d’environnement néfastes ou chocs anormaux); |
|
5) |
les vérifications à effectuer au cas où des équipements autres que l’équipement «contrôle-commande et signalisation» mais ayant une influence sur le sous-système «contrôle-commande et signalisation» feraient l’objet d’actions de maintenance (par exemple, modification du diamètre des roues…). |
4.5.2. Responsabilité du demandeur pour la vérification du sous-système
Le demandeur doit:
|
1) |
s’assurer que les exigences de maintenance décrites au point 4.5.1 (Responsabilité du fabricant des équipements) sont définies pour tous les composants entrant dans le domaine d’application de la présente STI (qu’il s’agisse ou non de constituants d’interopérabilité); |
|
2) |
répondre aux exigences ci-dessus en tenant compte des risques dus aux interactions des différents équipements se trouvant dans le sous-système et des interfaces avec d’autres sous-systèmes. |
4.6. Compétences professionnelles
Les fabricants des équipements et du sous-système doivent fournir des informations suffisantes pour définir les compétences professionnelles requises pour l’installation, l’inspection finale et la maintenance du sous-système «contrôle-commande et signalisation». Voir point 4.5 (Règles de maintenance).
4.7. Conditions relatives à la santé et à la sécurité
Des précautions doivent être prises pour garantir la santé et la sécurité des personnels de maintenance et d’exploitation, conformément aux réglementations européennes et nationales compatibles avec la législation européenne.
Les fabricants doivent indiquer les risques pour la santé et la sécurité découlant de l’utilisation et de la maintenance de leurs équipements et des sous-systèmes. Voir point 4.4 (Règles d’exploitation) et point 4.5 (Règles de maintenance).
4.8. Registres
Les données à fournir pour les registres visés aux articles 34 et 35 de la directive 2008/57/CE sont les données indiquées dans les décisions d'exécution de la Commission 2011/665/UE (3) et 2011/633/UE (4).
5. CONSTITUANTS D’INTEROPÉRABILITÉ
5.1. Définition
Selon l’article 2, point f) de la directive sur l’interopérabilité ferroviaire, les «constituants d’interopérabilité» désignent «tout composant élémentaire, groupe de composants, sous-ensemble ou ensemble complet de matériels incorporés ou destinés à être incorporés dans un sous-système, dont dépend directement ou indirectement l’interopérabilité du système ferroviaire. La notion de constituant recouvre des objets matériels mais aussi immatériels comme les logiciels.»
5.2. Liste des constituants d’interopérabilité
5.2.1. Constituants d’interopérabilité de base
Les constituants d’interopérabilité de base du sous-système «contrôle-commande et signalisation» sont définis:
|
1) |
dans le tableau 5.1.a en ce qui concerne le sous-système de contrôle-commande et de signalisation «bord»; |
|
2) |
dans le tableau 5.2.a en ce qui concerne le sous-système de contrôle-commande et de signalisation «sol»; |
5.2.2. Groupes de constituants d’interopérabilité
Les fonctions des constituants d’interopérabilité de base peuvent être combinées pour former un groupe. Ce groupe est alors défini par ces fonctions et par les interfaces restantes à la périphérie du groupe. Si un groupe est formé ainsi, il doit être considéré comme un constituant d’interopérabilité.
|
1. |
Le tableau 5.1.b répertorie les groupes de constituants d’interopérabilité du sous-système de contrôle-commande et de signalisation «bord». |
|
2. |
Le tableau 5.2.b répertorie les groupes de constituants d’interopérabilité du sous-système de contrôle-commande et de signalisation «sol». |
5.3. Performances des constituants et spécifications
Pour chaque constituant d’interopérabilité de base ou groupe de constituants d’interopérabilité, les tableaux du chapitre 5 décrivent:
|
1) |
dans la colonne 3, les fonctions et les interfaces. On notera que certains constituants d’interopérabilité ont des fonctions et/ou des interfaces optionnelles; |
|
2) |
dans la colonne 4, les spécifications obligatoires pour l’évaluation de la conformité de chaque fonction ou interface, dans la mesure de leur pertinence, par référence au point correspondant du chapitre 4; |
Tableau 5.1.a
Constituants d’interopérabilité de base du sous-système de contrôle-commande et de signalisation «bord»
|
N |
Constituant d’interopérabilité CI |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
|
1 |
ERTMS/ETCS «bord» |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité de l’ETCS «bord» (sauf odométrie) |
4.2.2 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R |
4.2.5 |
||
|
4.2.5.1 |
||
|
4.2.5.1 |
||
|
4.2.5.2 |
||
|
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.6.1 |
||
|
4.2.6.2 |
||
|
4.2.6.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.12 |
||
|
4.2.2 |
||
|
4.2.14 |
||
|
Conditions d’environnement physique |
4.2.16 |
||
|
2 |
Équipement d’odométrie |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité de l’ERTMS/ETCS «bord»: odométrie uniquement |
4.2.2 |
||
|
Interfaces |
|
||
|
4.2.6.3 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
3 |
Interface du STM externe |
Interfaces |
|
|
4.2.6.1 |
||
|
4 |
Radio de cabine vocale GSM-R Remarque: la carte SIM, l’antenne, les câbles de connexion et les filtres ne font pas partie de ce constituant d’interopérabilité |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) Remarque: pas d’exigence pour la sécurité |
4.2.1 4.5.1 |
|
Fonctions de communication de base |
4.2.4.1 |
||
|
Applications de communication vocale et opérationnelle |
4.2.4.2 |
||
|
Interfaces |
|
||
|
4.2.5.1 |
||
|
4.2.13 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
5 |
GSM-R ETCS – uniquement la transmission de données radio Remarque: la carte SIM, l’antenne, les câbles de connexion et les filtres ne font pas partie de ce constituant d’interopérabilité |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) Remarque: pas d’exigence pour la sécurité |
4.2.1 4.5.1 |
|
Fonctions de communication de base |
4.2.4.1 |
||
|
Applications de communication de données ETCS |
4.2.4.3 |
||
|
Interfaces |
|
||
|
4.2.6.2 |
||
|
4.2.5.1 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
6 |
Carte SIM GSM-R |
Fonctions de communication de base |
4.2.4.1 |
|
Conditions d’environnement |
4.2.16 |
Tableau 5.1.b
Groupes de constituants d’interopérabilité du sous-système de contrôle-commande et de signalisation «bord»
Ce tableau est donné comme exemple de structure. D’autres groupes sont permis.
|
N |
Groupes de constituants d’interopérabilité |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
|
1 |
ERTMS/ETCS «bord» Équipement d’odométrie |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalités «bord» de l’ERTMS/ETCS |
4.2.2 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R |
4.2.5 |
||
|
4.2.5.1 |
||
|
4.2.5.1 |
||
|
4.2.5.2 |
||
|
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.6.1 |
||
|
4.2.6.2 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.12 |
||
|
4.2.2 |
||
|
4.2.14 |
||
|
Conditions d’environnement physique |
4.2.16 |
Tableau 5.2.a
Constituants d’interopérabilité de base du sous-système de contrôle-commande et de signalisation «sol»
|
N |
Constituant d’interopérabilité CI |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
|
1 |
RBC |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications par Eurobalise, réouverture radio (in-fill) et Euroloop |
4.2.3 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications radio avec le train |
4.2.5.1 |
||
|
Interfaces |
|
||
|
4.2.7.1, 4.2.7.2 |
||
|
4.2.7.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
2 |
Unité de réouverture radio (in-fill). |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications par Eurobalises, Euroloop et la fonctionnalité de niveau 2/3 |
4.2.3 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications radio avec le train |
4.2.5.1 |
||
|
Interfaces |
|
||
|
4.2.7.3 |
||
|
4.2.8 |
||
|
4.2.9 |
||
|
4.2.3 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
3 |
Eurobalise |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications Eurobalise avec le train |
4.2.5.2 |
||
|
Interfaces |
|
||
|
4.2.7.4 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
4 |
Euroloop |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications Euroloop avec le train |
4.2.5.3 |
||
|
Interfaces |
|
||
|
4.2.7.5 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
5 |
LEU Eurobalise |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications par réouverture radio (in-fill), Euroloop et la fonctionnalité des niveaux 2 et 3 |
4.2.3 |
||
|
Interfaces |
|
||
|
4.2.7.4 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
6 |
LEU Euroloop |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications par réouverture radio (in-fill), Eurobalise et la fonctionnalité des niveaux 2 et 3 |
4.2.3 |
||
|
Interfaces |
|
||
|
4.2.7.5 |
||
|
Conditions d’environnement |
4.2.16 |
Tableau 5.2.b
Groupes de constituants d’interopérabilité du sous-système de contrôle-commande et de signalisation «sol»
Ce tableau est donné comme exemple de structure. D’autres groupes sont permis.
|
N |
Groupe de constituants d’interopérabilité |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
|
1 |
Eurobalise LEU Eurobalise |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications Euroloop et la fonctionnalité des niveaux 2 et 3 |
4.2.3 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications Eurobalise avec le train |
4.2.5.2 |
||
|
Conditions d’environnement |
4.2.16 |
||
|
2 |
Euroloop LEU Euroloop |
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
4.2.1 4.5.1 |
|
Fonctionnalité ERTMS/ETCS au sol, à l’exclusion des communications Eurobalise et la fonctionnalité des niveaux 2 et 3 |
4.2.3 |
||
|
Interfaces de transmission ERTMS/ETCS et GSM-R uniquement les communications Euroloop avec le train |
4.2.5.3 |
||
|
Conditions d’environnement |
4.2.16 |
6. ÉVALUATION DE LA CONFORMITÉ ET/OU DE L’APTITUDE À L’EMPLOI DES CONSTITUANTS ET VÉRIFICATION DES SOUS-SYSTÈMES
6.1. Introduction
6.1.1. Principes généraux
La satisfaction des exigences essentielles pertinentes mentionnées dans le chapitre 3 de la présente STI est assurée par la conformité avec les paramètres fondamentaux spécifiés au chapitre 4.
Cette conformité est démontrée par:
|
1) |
l’évaluation de la conformité des constituants d’interopérabilité spécifiés au chapitre 5 (voir point 6.2); |
|
2) |
la vérification des sous-systèmes (voir point 6.3). |
Dans certains cas toutefois, certaines exigences essentielles peuvent être satisfaites par les règles nationales en raison:
|
1) |
de l’utilisation de systèmes de classe B; |
|
2) |
de points ouverts dans la STI; |
|
3) |
de dérogations au titre de l’article 9 de la directive sur l’interopérabilité ferroviaire; |
|
4) |
de cas spécifiques décrits au point 7.2.9. |
Dans de tels cas, l’évaluation de conformité correspondante sera alors effectuée selon les procédures notifiées sous la responsabilité de l’État membre concerné.
6.1.2. Principes de test de l’ERTMS/ETCS et du GSM-R
Un sous-système de contrôle-commande et de signalisation «bord» pour lequel une déclaration de vérification CE a été délivrée doit pouvoir fonctionner sur tout sous-système de contrôle-commande et de signalisation «sol» pour lequel une déclaration de vérification CE a été délivrée, dans les conditions spécifiées dans cette STI, sans vérifications supplémentaires.
La réalisation de cet objectif est facilitée par:
|
1) |
des règles de conception et d’installation des sous-systèmes de contrôle-commande et de signalisation «bord» et «sol»; |
|
2) |
des spécifications de tests visant à prouver la conformité avec les exigences de la présente STI et la compatibilité des sous-systèmes «bord» et «sol». |
Afin de renforcer l’efficacité de l’évaluation de conformité des équipements ERTMS/ETCS et GSM-R pour atteindre l’objectif susmentionné, chaque État membre doit s’assurer que les scénarios de tests opérationnels liés à la vérification de la partie ERTMS/ETCS et GSM-R du sous-système «sol» qui interagit avec la partie correspondante du sous-système «bord» sont mis à la disposition de la Commission européenne. Les scénarios de test concernés:
|
1) |
doivent être conformes aux spécifications référencées dans cette STI et doivent donner une description technique des fonctions et performances (par exemple, les temps de réaction) dans la mesure où elles concernent l’interaction entre les sous-systèmes «bord» et «sol»; |
|
2) |
doivent être communiqués dans un format standard. Voir l’annexe A, paragraphe 4.2.2c; |
|
3) |
doivent, sauf disposition contraire à l’annexe A, paragraphe 4.2.2c, couvrir au moins le début de la mission, la transition entre les niveaux, la transition entre les modes susceptibles d’être utilisés sur la ligne, les principales conditions dégradées identifiées, l’envoi de messages d’urgence et tout autre aspect pertinent propre à la ligne. |
L’Agence ferroviaire européenne doit:
|
1) |
faire une publication préliminaire des scénarios de tests opérationnels pour permettre à toutes les parties intéressées de faire des commentaires sur la cohérence des scénarios de tests avec les spécifications référencées dans cette STI et leur impact sur d’autres applications ou développements. Le délai à respecter pour ces commentaires sera défini dans chaque publication et n’excédera pas 6 mois; |
|
2) |
en cas de commentaires négatifs, soutenir les parties concernées et coordonner leur action afin de trouver un accord, par exemple une modification des scénarios de tests opérationnels; |
|
3) |
progressivement constituer et mettre à la disposition du public une base de données de scénarios de tests ayant franchi de manière concluante l’étape décrite ci-dessus et représentant les situations correspondant à différentes applications; |
|
4) |
utiliser la base de données de scénarios de tests pour évaluer l’opportunité de compléter les spécifications de tests obligatoires et de définir des règles techniques supplémentaires pour les sous-systèmes «bord» et «sol». |
6.2. Constituants d’interopérabilité
6.2.1. Procédures d’évaluation pour les constituants d’interopérabilité de contrôle-commande et de signalisation
Le fabricant d’un constituant d’interopérabilité (et/ou de groupes de constituants d’interopérabilité) ou son mandataire établi dans l’Union doit rédiger une déclaration de conformité CE conformément à l’article 13, paragraphe 1, et à l’annexe IV de la directive sur l’interopérabilité ferroviaire avant de le mettre sur le marché.
La procédure d’évaluation doit s’appuyer sur l’application de modules, comme spécifiés au point 6.2.2 (Modules pour les constituants d’interopérabilité du sous-système «contrôle-commande et signalisation»).
Une déclaration d’aptitude à l’emploi CE n’est pas exigée pour les constituants d’interopérabilité du sous-système «contrôle-commande et signalisation», dans la mesure où ils doivent être en totale conformité avec tous les paramètres fondamentaux pertinents. Cette conformité est démontrée par la déclaration de conformité CE et est suffisante pour leur mise sur le marché (5).
6.2.2. Modules pour les constituants d’interopérabilité du sous-système «contrôle-commande et signalisation»
Pour évaluer les constituants d’interopérabilité du sous-système «contrôle-commande et signalisation», le fabricant, ou son mandataire établi dans la Communauté, peut choisir:
|
1) |
la procédure d’examen de type (module CB) pour la phase de conception et de développement, en association avec la procédure de gestion de la qualité de la production (module CD) pour la phase de production; ou |
|
2) |
la procédure d’examen de type (module CB) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module CF); ou |
|
3) |
le système complet de gestion de la qualité avec la procédure d’examen de la conception (module CH1). |
De plus, et seulement pour le constituant d’interopérabilité de la carte SIM, la sélection du module CA est permise.
Les modules sont décrits en détail dans la décision 2010/713/UE de la Commission du 9 novembre 2010 relative à des modules pour les procédures concernant l’évaluation de la conformité, l’aptitude à l’emploi et la vérification CE à utiliser dans le cadre des spécifications techniques d’interopérabilité adoptées en vertu de la directive 2008/57/CE du Parlement européen et du Conseil (6).
Les clarifications suivantes s’appliquent à l’utilisation de certains modules:
|
1) |
en référence au chapitre 2 du module CB, un examen de type CE doit être effectué par une combinaison de type de production et de type de conception; |
|
2) |
en référence au chapitre 3 du module CF (vérification sur produits), la vérification statistique n’est pas autorisée, c’est-à-dire que tous les constituants d’interopérabilité doivent être examinés individuellement. |
6.2.3. Exigences d’évaluation
Indépendamment du module sélectionné:
|
1) |
les exigences énoncées au point 6.2.4.1 de la présente STI doivent être respectées pour le constituant d’interopérabilité ERTMS/ETCS «bord»; |
|
2) |
les activités illustrées dans le tableau 6.1 doivent être menées pour l’évaluation de conformité d’un constituant d’interopérabilité ou d’un groupe de constituants d’interopérabilité, comme défini au chapitre 5 de la présente STI. Toutes les vérifications doivent être effectuées par référence au tableau applicable du chapitre 5 et aux paramètres fondamentaux qui y sont indiqués. |
Tableau 6.1
|
Aspect |
Quoi évaluer |
Preuves à l’appui |
||||||||||||||||||||
|
Fonctions, interfaces et performances |
Vérifier la mise en œuvre de toutes les fonctions obligatoires, les interfaces et les performances décrites dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 et leur conformité avec les exigences de la présente STI |
documents de conception, réalisation de tests élémentaires et scénarios de test, comme décrit dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 |
||||||||||||||||||||
|
Vérifier quelles interfaces et fonctions optionnelles décrites dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 sont mises en œuvre et leur conformité avec les exigences de la présente STI |
documents de conception, réalisation de tests élémentaires et scénarios de test, comme décrit dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 |
|||||||||||||||||||||
|
Vérifier quelles interfaces et fonctions supplémentaires (non spécifiées dans cette STI) sont mises en œuvre et qu’elles n’entraînent pas de conflits avec les fonctions mises en œuvre spécifiées dans cette STI |
Analyse d’impact |
|||||||||||||||||||||
|
Environnement |
Vérifier le respect des conditions d’environnement obligatoires, lorsqu’elles sont spécifiées dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 |
tests, pour s’assurer que les exigences des paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5 sont respectées |
||||||||||||||||||||
|
De plus, vérifier le bon fonctionnement dans les conditions d’environnement pour lesquelles le constituant d’interopérabilité est conçu |
tests conformes aux spécifications du demandeur |
|||||||||||||||||||||
|
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
Vérifier le respect des exigences de sécurité décrites dans les paramètres fondamentaux référencés dans le tableau pertinent du chapitre 5
|
Note: La norme utilisée doit satisfaire au moins les exigences suivantes:
Voir l’annexe A, tableau A3. |
||||||||||||||||||||
|
Vérifier que l’objectif de fiabilité quantitatif indiqué par le demandeur est atteint |
Calculs |
|||||||||||||||||||||
|
Vérifier le respect des exigences concernant la maintenance – point 4.5.1 |
Contrôler les documents |
6.2.4. Questions spéciales
6.2.4.1.
Il faudra accorder une attention particulière à l’évaluation de la conformité du constituant d’interopérabilité du sous-système ERTMS/ETCS «bord» en raison de sa complexité et de sa forte pertinence pour la réalisation de l’interopérabilité.
Indépendamment de la sélection du module CB ou CH1, l’organisme notifié doit s’assurer qu’un spécimen du constituant d’interopérabilité a été soumis, avec succès, à l’ensemble complet de tests obligatoires référencés au point 4.2.2 (fonctionnalité de l’ERTMS/ETCS «bord»), dans un laboratoire accrédité pour ce type de tests conformément au règlement (CE) no 765/2008 du Parlement européen et du Conseil du 9 juillet 2008 fixant les prescriptions relatives à l’accréditation et à la surveillance du marché pour la commercialisation des produits et abrogeant le règlement (CEE) no 339/93 (7).
De plus, pour avoir une plus grande confiance dans le bon fonctionnement de l’ERTMS/ETCS «bord» avec différentes applications «sol», il est recommandé de tester l’ERTMS/ETCS «bord» avec des scénarios provenant de la base de données gérée par l’Agence et ne faisant pas partie des spécifications de tests obligatoires; voir point 6.1.2 (Principes de test de l’ERTMS/ETCS et du GSM-R). Les documents accompagnant le certificat doivent indiquer les scénarios de la base de données selon lesquels le constituant d’interopérabilité a été vérifié.
6.2.4.2.
La vérification de la conformité d’un STM avec les exigences nationales relève de l’État membre concerné.
La vérification de l’interface STM du sous-système ERTMS/ETCS «bord» exige qu’une évaluation de conformité soit effectuée par un organisme notifié.
6.2.4.3.
En ce qui concerne le contenu de la déclaration de conformité CE spécifiée à l’annexe IV de la directive sur l’interopérabilité ferroviaire, les descriptions auxquelles répond le constituant d’interopérabilité doivent indiquer:
|
1) |
quelles fonctions optionnelles et supplémentaires sont mises en œuvre; |
|
2) |
les conditions d’environnement applicables. |
6.3. Sous-systèmes de contrôle-commande et de signalisation
6.3.1. Procédures d’évaluation pour les sous-systèmes de contrôle-commande et de signalisation
Ce chapitre traite de la déclaration de vérification CE du sous-système de contrôle-commande et de signalisation «bord» et de la déclaration CE de vérification du sous-système de contrôle-commande et de signalisation «sol».
À la requête du demandeur, l’organisme notifié réalise la vérification CE d’un sous-système de contrôle-commande et de signalisation «bord» ou «sol» conformément à l’annexe VI de la directive sur l’interopérabilité ferroviaire.
Le demandeur doit établir une déclaration CE de vérification du sous-système de contrôle-commande et de signalisation «bord» ou «sol» conformément à l’article 18, paragraphe 1, et à l’annexe V de la directive sur l’interopérabilité ferroviaire.
Le contenu de la déclaration CE de vérification doit être conforme à l’annexe V de la directive sur l’interopérabilité ferroviaire.
La procédure d’évaluation est effectuée par application de modules, comme spécifié au point 6.3.2 (Modules pour les systèmes de contrôle-commande et de signalisation).
La déclaration de vérification CE des sous-systèmes de contrôle-commande et de signalisation «bord» et «sol» ainsi que les certificats de conformité sont suffisants pour garantir la compatibilité des sous-systèmes dans les conditions précisées dans la présente STI.
6.3.2. Modules pour les sous-systèmes de contrôle-commande et de signalisation
Tous les modules indiqués ci-dessous sont spécifiés dans la décision 2010/713/UE.
6.3.2.1.
Pour la vérification du sous-système de contrôle-commande et de signalisation «bord», le demandeur peut choisir:
|
1) |
la procédure d’examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de système de gestion de la qualité de la production (module SD) pour la phase de production; ou |
|
2) |
la procédure d’examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module SF); ou |
|
3) |
le système de gestion de la qualité complet avec la procédure de contrôle de la conception (module SH1). |
6.3.2.2.
Pour la vérification du sous-système de contrôle-commande et de signalisation «sol», le demandeur peut choisir:
|
1) |
la procédure de vérification à l’unité (module SG); ou |
|
2) |
la procédure d’examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de système de gestion de la qualité de la production (module SD) pour la phase de production; ou |
|
3) |
la procédure d’examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module SF); ou |
|
4) |
le système de gestion de la qualité complet avec la procédure de contrôle de la conception (module SH1). |
6.3.2.3.
En référence au point 4.2 du module SB (examen de type), une revue de conception est demandée.
En référence au point 4.2 du module SH1 (système de gestion de la qualité complet avec contrôle de la conception), un essai de type est exigé.
6.3.3. Exigences d’évaluation pour un sous-système «bord»
Le tableau 6.2 indique les contrôles qui doivent être effectués pour la vérification d’un sous-système de contrôle-commande et de signalisation «bord» et les paramètres fondamentaux qui doivent être respectés.
Indépendamment du module choisi:
|
1) |
la vérification doit démontrer la conformité avec les paramètres fondamentaux lorsque le sous-système de contrôle-commande et de signalisation «bord» est intégré dans le véhicule; |
|
2) |
la fonctionnalité et les performances des constituants d’interopérabilité déjà couverts par leur déclaration de conformité CE n’ont pas besoin de contrôles supplémentaires. |
Tableau 6.2
|
Aspect |
Quoi évaluer |
Preuves à l’appui |
||||
|
Utilisation des constituants d’interopérabilité |
Vérifier l’existence de la déclaration de conformité CE et du certificat correspondant pour tous les constituants d’interopérabilité à intégrer au sous-système |
Existence et contenu des documents |
||||
|
Vérifier les restrictions d’utilisation des constituants d’interopérabilité par rapport aux caractéristiques du sous-système et de l’environnement |
Analyse par contrôle des documents |
|||||
|
En cas de certification de constituants d’interopérabilité par rapport à d’anciennes versions de la STI CCS (contrôle-commande et signalisation), vérifier que le certificat garantit toujours la conformité avec les exigences de la STI en vigueur |
Analyse d’impact par contrôle des documents |
|||||
|
Intégration des constituants d’interopérabilité dans le sous-système |
Vérifier la conformité de l’installation et le bon fonctionnement des interfaces internes du sous-système – paramètres fondamentaux 4.2.6 |
Contrôles selon les spécifications |
||||
|
Vérifier que les fonctions supplémentaires (non spécifiées dans cette STI) n’ont pas d’incidence sur les fonctions obligatoires |
Analyse d’impact |
|||||
|
Vérifier que les valeurs des identifiants ETCS se situent dans la plage autorisée – paramètre fondamental 4.2.9 |
Contrôle des spécifications de conception |
|||||
|
Intégration avec le matériel roulant |
Vérifier la bonne installation des équipements – paramètres fondamentaux 4.2.2, 4.2.4, 4.2.14 et conditions d’installation des équipements, comme spécifié par le fabricant |
Résultats des contrôles (conformément aux spécifications référencées dans les paramètres fondamentaux et les règles d’installation du fabricant) |
||||
|
Vérifier la compatibilité des équipements du sous-système «contrôle-commande et signalisation» avec l’environnement du matériel roulant |
Contrôle des documents (certificats des constituants d’interopérabilité et solutions d’intégration possibles par rapport aux caractéristiques du matériel roulant) |
|||||
|
Vérifier la bonne configuration des paramètres (par exemple, paramètres de freinage) et qu’ils se situent dans la plage autorisée |
Contrôle des documents (valeurs des paramètres par rapport aux caractéristiques du matériel roulant) |
|||||
|
Intégration avec la classe B |
Vérifier que le STM externe est connecté à l’ERTMS/ETCS «bord» avec des interfaces conformes à la STI |
Rien à tester: l’interface standard a déjà été testée au niveau du constituant d’interopérabilité. Son fonctionnement a déjà été testé au niveau de l’intégration des constituants d’interopérabilité dans le sous-système |
||||
|
Vérifier que les fonctions de classe B mises en œuvre dans l’ERTMS/ETCS «bord» – paramètre fondamental 4.2.6.1 – n’entraînent pas de nouvelles exigences pour le sous-système de contrôle-commande et de signalisation «sol» en raison des transitions |
Rien à tester: tout a déjà été testé au niveau du constituant d’interopérabilité |
|||||
|
Vérifier que les équipements séparés de classe B non connectés à l’ERTMS/ETCS «bord» – paramètre fondamental 4.2.6.1 – n’entraînent pas de nouvelles exigences pour le sous-système de contrôle-commande et de signalisation «sol» en raison des transitions |
Rien à tester: pas d’interface (8) |
|||||
|
Vérifier que les équipements séparés de classe B connectés à l’ERTMS/ETCS «bord» avec des interfaces (partiellement) non compatibles avec la STI – paramètre fondamental 4.2.6.1 – n’entraînent pas de nouvelles exigences pour le sous-système de contrôle-commande et de signalisation «sol» en raison des transitions. Vérifier également que les fonctions de l’ERTMS/ETCS ne sont pas affectées |
Analyse d’impact |
|||||
|
Intégration avec les sous-systèmes de contrôle-commande et de signalisation «sol» |
Vérifier la capacité de lire les télégrammes Eurobalise (le domaine d’application de ce test est limité au contrôle de la bonne installation de l’antenne. Les tests déjà effectués au niveau du constituant d’interopérabilité ne doivent pas être répétés) – paramètre fondamental 4.2.5 |
Test au moyen d’une Eurobalise certifiée: la preuve à l’appui est la capacité à lire correctement le télégramme. |
||||
|
Vérifier la capacité de lire les télégrammes Euroloop (le cas échéant) – paramètre fondamental 4.2.5 |
Test au moyen d’une Euroloop certifiée: la preuve à l’appui est la capacité à lire correctement le télégramme. |
|||||
|
Vérifier la capacité de l’équipement à gérer un appel GSM-R en phonie et pour la transmission de données (le cas échéant) – paramètre fondamental 4.2.5 |
Test au moyen d’un réseau GSM-R certifié. La preuve à l’appui est la capacité d’établir, de maintenir et d’interrompre une connexion. |
|||||
|
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
Vérifier le respect des exigences de sécurité – paramètre fondamental 4.2.1 |
Application de procédures spécifiées dans la méthode de sécurité commune |
||||
|
Vérifier que l’objectif quantitatif de fiabilité est atteint – paramètre fondamental 4.2.1 |
Calculs |
|||||
|
Vérifier le respect des exigences concernant la maintenance – point 4.5.2 |
Contrôle des documents |
|||||
|
Intégration avec les sous-systèmes de contrôle-commande et de signalisation «sol» et d’autres sous-systèmes: tests dans les conditions de fonctionnement |
Tester le comportement de l’ensemble dans différentes conditions opérationnelles (déclivité de la ligne, vitesse du train, vibrations, puissance de traction, conditions climatiques, conception de la fonctionnalité du CCS «sol»). Ce test doit permettre de vérifier:
Ces tests amélioreront également la confiance en l’absence de défaillances systématiques. Le domaine d’application de ces tests exclut les tests déjà effectués dans des étapes antérieures: les tests réalisés au niveau des constituants d’interopérabilité et les tests effectués sur le sous-système dans un environnement simulé doivent être pris en compte. La réalisation de tests dans les conditions opérationnelles n’est pas nécessaire pour l’équipement de transmission en phonie du GSM-R «bord». |
Rapports des parcours d’essais. Note: indiquer dans le certificat les conditions qui ont été testées, les normes qui ont été appliquées et les critères utilisés pour considérer que les essais sont terminés |
6.3.4. Exigences d’évaluation pour un sous-système «sol»
L’objectif des évaluations effectuées dans le cadre de la présente STI est de vérifier que l’équipement est conforme aux exigences indiquées au chapitre 4.
Toutefois, pour la conception de la partie ERTMS/ETCS du sous-système de contrôle-commande et de signalisation «sol», des informations spécifiques à l’application sont nécessaires, par exemple:
|
1) |
la description des caractéristiques de la voie telles que les pentes, distances, positions d’éléments de ligne et des Eurobalises/Euroloop, positions à protéger, etc.; |
|
2) |
les informations et les règles de signalisation devant être traitées par le système ERTMS/ETCS. |
La présente STI ne couvre pas l’évaluation de l’exactitude des informations spécifiques à l’application.
Indépendamment du module choisi:
|
1) |
le tableau 6.3 indique les contrôles à effectuer pour vérifier un sous-système de contrôle-commande et de signalisation «sol» et les paramètres fondamentaux à respecter; |
|
2) |
la fonctionnalité et les performances déjà contrôlées au niveau des constituants d’interopérabilité n’ont pas besoin de contrôles supplémentaires. |
Tableau 6.3
|
Aspect |
Quoi évaluer |
Preuves à l’appui |
||||
|
Utilisation des constituants d’interopérabilité |
Vérifier l’existence de la déclaration de conformité CE et du certificat correspondant pour tous les constituants d’interopérabilité à intégrer au sous-système |
Existence et contenu des documents |
||||
|
Vérifier les restrictions d’utilisation des constituants d’interopérabilité par rapport aux caractéristiques du sous-système et de l’environnement |
Analyse d’impact par contrôle des documents |
|||||
|
En cas de certification de constituants d’interopérabilité par rapport à d’anciennes versions de la STI CCS (contrôle-commande et signalisation), vérifier que le certificat garantit toujours la conformité avec les exigences de la STI en vigueur |
Analyse d’impact par comparaison des spécifications référencées dans la STI et certificats des constituants d’interopérabilité |
|||||
|
Utilisation des systèmes de détection des trains |
Vérifier que les types sélectionnés sont conformes aux exigences de la STI concernant le sous-système «contrôle-commande et signalisation» - paramètres fondamentaux 4.2.10, 4.2.11 |
Contrôle des documents |
||||
|
Intégration des constituants d’interopérabilité dans le sous-système |
Vérifier l’installation conforme et le bon fonctionnement des interfaces internes du sous-système – paramètres fondamentaux 4.2.5, 4.2.7 |
Contrôles selon les spécifications |
||||
|
Vérifier que les fonctions supplémentaires (non spécifiées dans cette STI) n’ont pas d’incidence sur les fonctions obligatoires |
Analyse d’impact |
|||||
|
Vérifier que les valeurs des identifiants ETCS se situent dans la plage autorisée – paramètre fondamental 4.2.9 |
Contrôle des spécifications de conception |
|||||
|
Intégration avec l’infrastructure |
Vérifier la bonne installation des équipements – paramètres fondamentaux 4.2.3, 4.2.4 et conditions d’installation spécifiées par le fabricant |
Résultats des contrôles (conformément aux spécifications référencées dans les paramètres fondamentaux et les règles d’installation du fabricant) |
||||
|
Vérifier la compatibilité des équipements du sous-système «sol» avec l’environnement au sol |
Contrôle des documents (certificats des constituants d’interopérabilité et solutions d’intégration possibles par rapport aux caractéristiques de l’équipement au sol) |
|||||
|
Intégration avec la signalisation «sol» |
Vérifier que toutes les fonctions exigées par l’application sont mises en œuvre conformément aux spécifications référencées dans cette STI – paramètre fondamental 4.2.3 |
Contrôle des documents (spécification de conception du demandeur et certificats des constituants d’interopérabilité) |
||||
|
Vérifier la bonne configuration des paramètres (télégrammes Eurobalise, messages RBC, positions des panneaux de signalisation, etc.) |
Contrôle des documents (valeurs des paramètres par rapport aux caractéristiques des équipements «sol» et de la signalisation) |
|||||
|
Vérifier la bonne installation et le bon fonctionnement des interfaces |
Contrôle de la conception et tests conformément aux informations fournies par le demandeur |
|||||
|
Vérifier le fonctionnement correct du sous-système de contrôle-commande et de signalisation «sol» conformément aux informations aux interfaces avec la signalisation «sol» (par exemple, la production appropriée de télégrammes Eurobalise par un LEU ou de messages par le RBC) |
Contrôle de la conception et tests conformément aux informations fournies par le demandeur |
|||||
|
Intégration avec les sous-systèmes de contrôle-commande et de signalisation «bord» et avec le matériel roulant |
Vérifier la couverture GSM-R – paramètre fondamental 4.2.4 |
Mesures sur site |
||||
|
Vérifier la conformité des systèmes de détection des trains avec les exigences de la présente STI – paramètre fondamental 4.2.10 |
Mesures sur site |
|||||
|
Vérifier la conformité des systèmes de détection des trains avec les exigences de compatibilité énoncées dans cette STI – paramètres fondamentaux 4.2.10 et 4.2.11 |
Contrôle des preuves provenant d’installations existantes (pour les systèmes déjà utilisés); réalisation des tests conformément aux normes pour les nouveaux types |
|||||
|
Vérifier que toutes les fonctions exigées par l’application sont mises en œuvre conformément aux spécifications référencées dans cette STI – paramètres fondamentaux 4.2.3, 4.2.4 et 4.2.5 |
Rapports des tests des scénarios opérationnels précisés au point 6.1.2 avec différents sous-systèmes de contrôle-commande et de signalisation «bord». Le rapport doit indiquer les scénarios opérationnels testés, les équipements embarqués utilisés, et préciser si les essais ont été effectués en laboratoire, sur des lignes d’essai ou dans des conditions de fonctionnement réelles. |
|||||
|
Fiabilité, disponibilité, maintenabilité, sécurité (FDMS) |
Vérifier le respect des exigences de sécurité – paramètre fondamental 4.2.1 |
Application de procédures spécifiées dans la méthode de sécurité commune |
||||
|
Vérifier que les objectifs quantitatifs de fiabilité sont atteints – paramètre fondamental 4.2.1 |
Calculs |
|||||
|
Vérifier le respect des exigences concernant la maintenance – point 4.5.2 |
Contrôler les documents |
|||||
|
Intégration avec les sous-systèmes de contrôle-commande et de signalisation «bord» et avec le matériel roulant: tests dans les conditions de fonctionnement |
Tester le comportement du sous-système dans différentes conditions opérationnelles (telles que la vitesse du train, le nombre de trains sur la ligne, les conditions climatiques). Ce test doit permettre de vérifier:
Ces tests amélioreront également la confiance en l’absence de défaillances systématiques. Le domaine d’application de ces tests exclut les tests déjà effectués lors d’étapes antérieures: les tests réalisés au niveau des constituants d’interopérabilité et les tests effectués sur le sous-système dans un environnement simulé doivent être pris en compte. |
Rapports des parcours d’essais. Note: indiquer dans le certificat les conditions qui ont été testées, les normes qui ont été appliquées et les critères utilisés pour considérer que les essais sont terminés. |
6.4. Dispositions en cas de conformité partielle
6.4.1. Introduction
Selon l’article 18, paragraphe 4, de la directive sur l’interopérabilité ferroviaire, «l’organisme notifié peut délivrer des déclarations de vérification intermédiaires pour couvrir certains stades de la procédure de vérification ou certaines parties du sous-système».
Comme indiqué au point 2.2 (Domaine d’application), les sous-systèmes de contrôle-commande et de signalisation comprennent trois parties définies au point 4.1 (Introduction).
Le point 6.4.2 porte sur la vérification de ces parties des sous-systèmes de contrôle-commande et de signalisation.
Le point 6.4.3 porte sur la vérification de la conformité partielle des sous-systèmes de contrôle-commande et de signalisation en cas de conditions d’utilisation restreintes de ses constituants d’interopérabilité.
6.4.2. Évaluation des parties des sous-systèmes de contrôle-commande et de signalisation
L’évaluation de la conformité avec les exigences de la présente STI d’un sous-système de contrôle-commande et de signalisation «sol» ou «bord» peut s’effectuer en étapes successives – une étape pour chacune des trois parties. À chaque étape, l’évaluateur vérifie uniquement si une partie donnée respecte les exigences de la STI.
Quel que soit le module choisi, l’organisme notifié vérifie que:
|
1) |
les exigences de la STI applicables à la partie concernée sont respectées; |
|
2) |
les exigences de la STI déjà évaluées ne sont pas compromises. |
Il n’y a pas lieu de vérifier une nouvelle fois les fonctions déjà évaluées qui ne sont ni modifiées ni remises en cause par cette étape.
6.4.3. Conformité partielle des sous-systèmes de contrôle-commande et de signalisation en raison de conditions d’utilisation restreintes de leurs constituants d’interopérabilité
Un certificat de conformité partielle peut être délivré pour un constituant d’interopérabilité même si une fonction, une interface ou une performance n’a pas été mise en œuvre, pour autant que:
|
1) |
la fonction, l’interface ou la performance non mise en œuvre n’est pas nécessaire pour l’intégration du constituant d’interopérabilité dans un sous-système en raison de conditions spécifiques d’utilisation, par exemple (9):
|
|
2) |
le certificat indique quelles fonctions, interfaces et performances ne sont pas mises en œuvre, ainsi que les restrictions d’utilisation correspondantes pour le constituant d’interopérabilité. Ces informations permettront d’identifier les conditions dans lesquelles le constituant d’interopérabilité peut être utilisé, ainsi que les restrictions s’appliquant à l’interopérabilité d’un sous-système intégrant ce dernier. |
En tout état de cause, les conditions de délivrance de certificats comportant des restrictions doivent être coordonnées entre les organismes notifiés et l’Agence, conformément à l’article 21 bis, paragraphe 5, du règlement (CE) no 881/2004 du Parlement européen et du Conseil du 29 avril 2004 instituant une Agence ferroviaire européenne («règlement instituant une Agence») (10).
Si, lorsque le constituant d’interopérabilité est intégré dans un sous-système de contrôle-commande et de signalisation, les fonctions, interfaces et performances absentes ne permettent pas d’évaluer la compatibilité totale avec les exigences de la présente STI, seule une déclaration de vérification intermédiaire peut être délivrée. Elle indiquera quelles exigences ont été évaluées et précisera les restrictions correspondantes d’utilisation du sous-système et sa compatibilité avec les autres sous-systèmes.
7. MISE EN ŒUVRE DE LA STI «CONTRÔLE-COMMANDE ET SIGNALISATION»
7.1. Introduction
Ce chapitre donne les grandes lignes de la stratégie et des solutions techniques associées pour la mise en œuvre de la STI, notamment des conditions sous-tendant la migration vers des systèmes de classe A.
Il faut tenir compte du fait que la mise en œuvre d’une STI devra occasionnellement être coordonnée avec la mise en œuvre d’autres STI.
7.2. Règles d’application générale
7.2.1. Réaménagement ou renouvellement du sous-système «sol» de contrôle-commande ou de parties de ce sous-système
Le réaménagement ou le renouvellement du sous-système de contrôle-commande et de signalisation «sol» peut concerner séparément:
|
1) |
le contrôle de la vitesse du train; |
|
2) |
les communications radio; |
|
3) |
la détection des trains. |
Par conséquent, différentes parties du sous-système de contrôle-commande et de signalisation «sol» peuvent être réaménagées ou renouvelées individuellement (si l’interopérabilité n’est pas compromise). Le travail concernera en particulier:
|
1) |
les fonctions et interfaces GSM-R; |
|
2) |
les fonctions et interfaces ERTMS/ETCS; |
|
3) |
la compatibilité du système de détection des trains avec le matériel roulant. |
Pour la définition des paramètres fondamentaux de chaque partie concernée, voir le chapitre 4.1 (Introduction).
7.2.2. Systèmes existants
Les États membres doivent s’assurer que la fonctionnalité des systèmes existants et leurs interfaces restent inchangées, abstraction faite des changements qui pourraient être jugés nécessaires afin de remédier à des défauts mettant en cause la sécurité de ces systèmes.
7.2.3. Disponibilité des modules de transmission spécifiques (STM)
Dans l’hypothèse où les lignes entrant dans le domaine d’application de la présente STI ne seraient pas équipées de systèmes de contrôle de vitesse de classe A, l’État membre doit faire le nécessaire pour mettre à disposition un STM externe pour son ou ses systèmes existants de contrôle de vitesse de classe B.
Dans ce but, il convient d’assurer un marché des STM ouvert dans des conditions commerciales loyales. Dans les cas où, pour des raisons techniques ou commerciales (11), la disponibilité d’un STM ne peut pas être garantie dans le délai, l’État membre concerné doit informer le comité des raisons de ce problème et des mesures d’atténuation qu’il prévoit de mettre en place afin de permettre l’accès — notamment par les opérateurs étrangers — à son infrastructure.
7.2.4. Équipements supplémentaires de classe B sur une ligne équipée de la classe A
Sur une ligne équipée des systèmes ERTMS/ETCS et/ou GSM-R, il est possible d’avoir des équipements de classe B supplémentaires afin de permettre l’utilisation du matériel roulant non compatible avec la classe A pendant la phase de migration. L’utilisation d’équipements de classe B à bord est autorisée comme solution de repli par rapport au système de classe A. Cependant, elle ne permet pas au gestionnaire d’infrastructure d’imposer la présence de systèmes de classe B à bord des trains interopérables pour circuler sur une ligne de ce type.
En outre, l’équipement au sol doit soutenir les transitions entre classe A et classe B sans imposer d’exigences supplémentaires à celles spécifiées dans la présente STI au sous-système de contrôle-commande et de signalisation «bord».
7.2.5. Matériel roulant avec des équipements de classe A et de classe B
Le matériel roulant peut également être équipé à la fois de systèmes de classe A et de classe B pour permettre sa circulation sur plusieurs lignes.
L’État membre concerné peut restreindre l’utilisation d’un système de classe B embarqué sur les lignes où un système correspondant n’est pas installé au sol.
Lorsqu’ils circulent sur une ligne équipée à la fois de systèmes de classe A et de classe B, les systèmes de classe B peuvent constituer une solution de repli par rapport au système de classe A si le train est équipé à la fois de systèmes de classe A et de classe B. Ceci ne peut être une exigence d’interopérabilité.
La mise en œuvre des systèmes de classe B peut être effectuée:
|
1) |
au moyen d’un STM fonctionnant via l’interface standard («STM externe»); ou |
|
2) |
en les intégrant dans l’équipement ERTMS/ETCS ou en les connectant via une interface non standard; ou |
|
3) |
indépendamment de l’équipement ERTMS/ETCS, par exemple via un système permettant de passer d’un équipement à l’autre. Dans ce cas, l’entreprise ferroviaire doit veiller à ce que les transitions entre les systèmes de contrôle de la vitesse de classe A et de classe B soient conformes aux exigences de la présente STI et aux règles internationales applicables au système de classe B. |
7.2.6. Conditions applicables aux fonctions obligatoires et optionnelles
En fonction des caractéristiques du sous-système de contrôle-commande et de signalisation «sol» et de ses interfaces avec d’autres sous-systèmes, il peut être nécessaire que certaines fonctionnalités «sol» non classées comme obligatoires soient mises en œuvre dans certaines applications pour répondre aux exigences essentielles.
La mise en œuvre au sol des fonctions nationales ou optionnelles ne doit pas empêcher l’accès à cette infrastructure d’un train qui satisfait uniquement aux exigences obligatoires des systèmes embarqués de classe A, sauf dans la mesure où cela est exigé pour les fonctions embarquées optionnelles suivantes:
|
— |
une application «sol» du niveau 3 de l’ETCS nécessite une surveillance de l’intégrité du train à bord, |
|
— |
une application «sol» du niveau 1 de l’ETCS avec fonction de réouverture nécessite une fonctionnalité correspondante de réouverture à bord si la vitesse d’exécution est fixée à zéro pour des raisons de sécurité (par exemple, protection des points à risque), |
|
— |
lorsque l’ETCS nécessite la transmission de données par radio, les services de transmission de données du GSM-R doivent remplir les exigences de transmission de données ETCS, |
|
— |
un ensemble «bord» qui intègre un STM KER peut nécessiter la mise en œuvre de l’interface K. |
7.2.7. Règles spécifiques de mise en œuvre pour le GSM-R
7.2.7.1.
L’installation du système GSM-R est obligatoire dans le cas:
|
1) |
de nouvelles installations de la partie radio d’un sous-système CCS «sol»; |
|
2) |
d’un réaménagement de la partie radio d’un sous-système CCS «sol» déjà en service, qui modifie les fonctions ou les performances du sous-système, à l’exception des modifications pouvant être jugées nécessaires pour atténuer les défauts liés à la sécurité dans l’installation existante. |
7.2.7.2.
L’installation du GSM-R dans du matériel roulant destiné à être utilisé sur une ligne comportant au moins un tronçon équipé d’interfaces de classe A (même en superposition à un système de classe B), est obligatoire dans le cas:
|
1) |
de nouvelles installations de la partie radio d’un sous-système CCS «bord»; |
|
2) |
d’un réaménagement de la partie radio d’un sous-système CCS «bord» déjà en service, qui modifie les fonctions ou les performances du sous-système, à l’exception des modifications pouvant être jugées nécessaires pour atténuer les défauts liés à la sécurité dans l’installation existante. |
7.2.8. Règles de mise en œuvre spécifiques aux systèmes de détection des trains
Dans le cadre de la présente STI, un système de détection des trains est un équipement installé sur la ligne, qui assure la détection physique de la présence ou de l’absence de véhicules et auquel s’appliquent les exigences de compatibilité mécanique et électromagnétique définies dans cette STI.
Les systèmes «sol» (par exemple, les systèmes d’enclenchement d’itinéraires ou de passages à niveau) utilisant des informations fournies par ces équipements ne sont pas considérés comme des parties du système de détection des trains.
La présente STI spécifie les exigences applicables à l’interface avec le matériel roulant uniquement dans la mesure nécessaire pour garantir la compatibilité entre le matériel roulant conforme à la STI et l’infrastructure.
La mise en œuvre des systèmes de détection des trains conformes aux exigences de la présente STI peut s’effectuer indépendamment de l’installation d’un ERTMS/ETCS ou d’un GSM-R, mais peut dépendre des systèmes de signalisation de classe B énumérés dans l’annexe B ou d’exigences particulières, par exemple, pour l’équipement de passages à niveau.
Les exigences de la présente STI concernant les systèmes de détection des trains doivent être respectées dans chacun des cas suivants:
|
1) |
réaménagement du système de détection des trains; |
|
2) |
renouvellement du système de détection des trains, pour autant que le respect de l’exigence de la présente STI ne nécessite pas de modifications ou de réaménagements indésirables d’autres systèmes «sol» ou «bord»; |
|
3) |
renouvellement du système de détection des trains, lorsque ce renouvellement est requis par le réaménagement ou le renouvellement de systèmes «sol» utilisant des informations en provenance du système de détection des trains; |
|
4) |
élimination de systèmes de contrôle de vitesse de classe B (lorsque le système de détection des trains est intégré au contrôle de vitesse). |
En phrase de migration, il convient de prendre des précautions pour faire en sorte que l’installation d’un système de détection des trains conforme à la STI ait un impact négatif minimal sur le matériel roulant existant non conforme à la STI.
Pour y parvenir, il est recommandé au gestionnaire d’infrastructure de sélectionner un système de détection des trains conforme à la STI qui soit également compatible avec le matériel roulant non conforme à la STI qui fonctionne déjà sur l’infrastructure concernée.
7.2.9. Cas spécifiques
7.2.9.1.
Les dispositions particulières ci-après sont acceptées pour les cas particuliers mentionnés ci-dessous.
Ces cas spécifiques appartiennent à deux catégories: les dispositions s’appliquent soit de manière permanente (cas «P»), soit de manière temporaire (cas «T»).
Dans la présente STI, le cas provisoire «T3» est défini pour les cas provisoires qui perdureront après 2020.
Les cas spécifiques décrits aux points 7.2.9.2 à 7.2.9.7 doivent être lus en conjonction avec les points pertinents du chapitre 4 et/ou avec les spécifications qui y sont référencées.
Les cas spécifiques remplacent les exigences correspondantes énoncées au chapitre 4.
Lorsque les exigences fixées au point concerné du chapitre 4 ne font pas l’objet d’un cas spécifique, ces exigences n’ont pas été reproduites aux points 7.2.9.2 à 7.2.9.7 et continuent de s’appliquer de façon inchangée.
7.2.9.2.
|
Cas spécifique |
Catégorie |
Notes |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.2.4: La distance entre le premier et le dernier essieu L - (b1 + b2) (Fig. 1) est d’au moins 15 000 mm |
T3 |
Applicable à L1 GV Ce cas spécifique est lié à l’utilisation de TVM |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.8:
|
T3 |
Applicable à GV L1, L2, L3, L4 Ce cas spécifique est lié à l’utilisation de TVM |
7.2.9.3.
|
Cas spécifique |
Catégorie |
Notes |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.2.4: La distance entre le premier et le dernier essieu L - (b1 + b2) (Fig. 1) est d’au moins 15 000 mm |
T3 |
Applicable à GV L1 Ce cas spécifique est lié à l’utilisation de TVM |
||||
|
4.2.10 – Systèmes «sol» de détection des trains Index 77, point 3.1.4.1: Outre les exigences du point 3.1.4.1, le sablage à des fins de motricité sur des unités multiples:
|
T3 |
|
||||
|
4.2.12 IHM (interface homme-machine) de l’ERTMS/ETCS Index 51: Il est autorisé d’utiliser un clavier alphanumérique pour saisir le numéro du train si la règle technique notifiée à cette fin exige la prise en charge de numéros de train alphanumériques. |
T3 |
Ce cas spécifique est nécessaire dès que le point ouvert lié à la spécification de l’IHM est clôturé. Il n’y a pas d’impact sur l’interopérabilité |
||||
|
4.2.12 IHM (interface homme-machine) de l’ERTMS/ETCS Index 51: L’IHM de l’ETCS peut afficher les informations dynamiques de vitesse du train en miles par heure (et indiquer «mph») lorsque le train roule sur certaines parties du réseau principal britannique. |
T3 |
Ce cas spécifique est nécessaire dès que le point ouvert lié à la spécification de l’IHM est clôturé. Il n’y a pas d’impact sur l’interopérabilité |
7.2.9.4.
|
Cas spécifique |
Catégorie |
Notes |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.2.4: La distance entre le premier et le dernier essieu L - (b1 + b2) (Fig. 1) est d’au moins 15 000 mm |
T3 |
Ce cas spécifique est lié à l’utilisation de TVM |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.9:
|
T3 |
Ce cas spécifique pourra être révisé une fois que le point ouvert relatif à la gestion des fréquences pour les circuits de voie sera fermé |
||||
|
4.2.10 – Systèmes «sol» de détection des trains Index 77, point 3.1.8:
|
T3 |
Ce cas spécifique est lié à l’utilisation de TVM |
||||
|
4.2.10 – Systèmes «sol» de détection des trains Index 77, point 3.1.3.2:
|
5 ans |
|
7.2.9.5.
|
Cas spécifique |
Catégorie |
Notes |
||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.9:
|
T3 |
Ce cas spécifique pourra être révisé une fois que le point ouvert relatif à la gestion des fréquences pour les circuits de voie sera fermé |
7.2.9.6.
|
Cas spécifique |
Catégorie |
Notes |
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.3.4: La plage de la dimension Sh (figure 2) doit être au moins égale à 26,25 mm. |
T3 |
Ce cas spécifique est nécessaire aussi longtemps que des locomotives ČME roulent sur le réseau de 1 520 mm de Lituanie. |
7.2.9.7.
|
Cas spécifique |
Catégorie |
Notes |
|
4.2.4 Fonctions de communication mobile pour les chemins de fer – GSM-R Index 65, affirmation 4.2.3: Il est autorisé de mettre en service des sous-systèmes de contrôle-commande et de signalisation «bord» comprenant des radios vocales de cabine GSM-R de 2 watts et des radios «données uniquement» ETCS. Ces sous-systèmes doivent pouvoir fonctionner sur des réseaux de -82 dBm. |
P |
Pas d’impact sur l’interopérabilité |
7.2.9.8.
|
Cas spécifique |
Catégorie |
Notes |
||||||||
|
4.2.10 Systèmes «sol» de détection des trains Index 77, point 3.1.2.4:
|
T3 |
|
7.3. Règles concernant les équipements ERTMS
7.3.1. Plan européen de déploiement des équipements ERTMS
Ce point donne les grandes lignes de la stratégie de mise en œuvre (plan de déploiement européen de l’ERTMS) de la STI. Il précise les étapes à parcourir pour une transition progressive de la situation existante à la situation finale dans laquelle la conformité avec les STI sera la norme.
Le plan européen de déploiement de l’ERTMS ne s’applique pas aux lignes situées sur le territoire d’un État membre dont le réseau ferroviaire est enclavé ou isolé par la mer ou séparé du réseau ferroviaire du reste de la Communauté en raison de conditions géographiques spécifiques ou par un écartement de voie différent.
7.3.2. Mise en œuvre de l’ERTMS au sol
L’objectif du plan de déploiement européen de l’ERTMS est de garantir que les locomotives, les automotrices et autre véhicules ferroviaires équipés de l’ERTMS ont progressivement accès à un nombre croissant de lignes, de ports, de terminaux et de gares de triage sans devoir être munis d’un équipement répondant aux normes nationales, en plus de l’ERTMS.
Le plan de déploiement n’exige pas, pour ce faire, le retrait des systèmes de classe B existants sur les lignes sur lesquelles il porte. Cependant, à la date indiquée dans le plan de mise en œuvre, le fait d’être équipé d’un système de classe B ne doit pas constituer une condition d’accès par le réseau aux lignes incluses dans le plan de déploiement pour les locomotives, automotrices et autres véhicules ferroviaires équipés de l’ERTMS.
Les zones terminales, comme les ports ou certaines lignes spécifiques dans un port, par exemple, respectent les exigences fixées au point 7.3.2.2 pour autant que les véhicules ferroviaires aient accès à ces zones terminales sans qu’aucune exigence ne soit imposée en matière d’équipement au moyen d’un système de protection automatique des trains.
En ce qui concerne les lignes comportant au moins deux voies, la ligne est considérée comme équipée dès lors qu’une double voie est équipée. Lorsqu’il y a plus d’une ligne dans un tronçon de corridor, au moins une ligne doit être équipée sur le tronçon et le corridor entier est considéré comme équipé dès lors qu’au moins une ligne est équipée sur la totalité de la longueur du corridor.
7.3.2.1.
Les six corridors décrits au point 7.3.4 doivent être équipés de l’ERTMS conformément au calendrier indiqué à ce point (12).
7.3.2.2.
Les ports, gares de triage, terminaux de marchandises et zones de transport de marchandises énumérés au point 7.3.5 doivent être reliés à au moins un des six corridors mentionnés au point 7.3.4 à la date et selon les conditions prévues au point 7.3.5.
7.3.2.3.
L’installation d’un sous-système ERTMS/ETCS «sol» est obligatoire:
|
1) |
en cas de nouvelles installations de la partie contrôle de vitesse d’un sous-système CCS «sol» (avec ou sans sous-système de classe B); ou |
|
2) |
lorsque la partie contrôle de vitesse existante d’un sous-système CCS «sol» est réaménagée et que cela modifierait les fonctions, les performances et/ou les interfaces concernant l’interopérabilité (air-gaps) du système existant, à l’exception des modifications pouvant être jugées nécessaires pour atténuer les défauts liés à la sécurité dans l’installation existante. |
L’installation d’un ERTMS/ETCS est recommandée chaque fois que le sous-système «infrastructure» ou «énergie» d’un tronçon de ligne déjà en service doit être réaménagé, renouvelé ou entretenu et que l’installation de l’ERTMS/ETCS sur ce tronçon de ligne représente moins de 10 % de l’investissement total consacré au réaménagement, au renouvellement ou à la maintenance.
7.3.2.4.
Sans préjudice des points 7.3.2.1, 7.3.2.2 et 7.3.2.3, pour les projets d’infrastructures ferroviaires bénéficiant d’une aide financière au titre du Fonds européen de développement régional, du Fonds de cohésion [règlement (CE) no 1083/2006 du Conseil du 11 juillet 2006 portant dispositions générales sur le Fonds européen de développement régional, le Fonds social européen et le Fonds de cohésion (13)] et/ou du Fonds TEN-T [décision no 1692/96/CE du Parlement européen et du Conseil (14)], l’installation d’un équipement ERTMS/ETCS est obligatoire en cas:
|
1) |
de nouvelles installations de la partie contrôle de vitesse d’un sous-système CCS; ou |
|
2) |
de réaménagement de la partie contrôle de vitesse d’un sous-système CCS déjà en service, modifiant les fonctions ou les performances du sous-système. |
7.3.2.5.
Pour chaque corridor mentionné au point 7.3.4, les États membres notifient à la Commission un calendrier détaillé pour l’installation de l’ERTMS sur le tronçon de corridor ou bien confirment que le tronçon en question est déjà équipé. L’information est communiquée à la Commission au plus tard trois ans avant la date butoir pour l’installation de l’équipement sur le tronçon de corridor mentionné au point 7.3.4.
Pour chaque port, gare de triage, terminal de marchandises ou zone de transport de marchandises indiqué au point 7.3.5, les États membres précisent quelles lignes exactement vont être utilisées pour assurer la connexion avec l’un des corridors recensés au point 7.3.4. Cette information est notifiée à la Commission au plus tard trois ans avant la date fixée au point 7.3.5 et indique la date butoir pour l’installation de l’équipement pour ce port, cette gare de triage, ce terminal de marchandises ou cette zone de transport de marchandises. Si besoin est, la Commission peut demander des adaptations, notamment pour garantir la cohérence avec des lignes équipées aux frontières. Les États membres notifient à la Commission un calendrier détaillé pour l’installation de l’ERTMS sur ces lignes déterminées ou bien confirment que ces lignes déterminées sont déjà équipées de l’ERTMS. Cette information est notifiée à la Commission au plus tard trois ans avant la date fixée au point 7.3.5 et la notification indique la date butoir pour l’installation de l’équipement pour ce port, cette gare de triage, ce terminal de marchandises ou cette zone de transport de marchandises.
Les calendriers détaillés doivent indiquer notamment la date à laquelle l’appel d’offres pour l’équipement de la ligne est clos, les procédures mises en place pour garantir l’interopérabilité avec les pays voisins le long du corridor, ainsi que les principales étapes d’exécution du projet. Les États membres informent une fois par an la Commission des progrès accomplis dans l’équipement de ces lignes en envoyant un calendrier actualisé.
7.3.2.6.
Lorsqu’un État membre peut raisonnablement s’attendre à des retards par rapport aux dates limites prévues dans la présente décision, il en informe immédiatement la Commission. Il soumet à la Commission un dossier contenant une description technique du projet et un plan de mise en œuvre actualisé. Dans ce dossier, il explique également les raisons du retard et les mesures correctrices mises en œuvre.
Un délai supplémentaire de trois ans maximum peut être accordé à un État membre lorsque le retard est dû à des causes échappant à son contrôle, comme une défaillance des fournisseurs ou des problèmes liés aux procédures d’autorisation résultant de l’absence de véhicules d’essais appropriés. Cette extension de délai ne peut être demandée par un État membre que lorsque les conditions suivantes sont satisfaites:
|
1) |
les notifications visées au point 7.3.2.5 ont été reçues en temps voulu et étaient complètes; |
|
2) |
le dossier visé au point 7.3.2.6, premier paragraphe, contient des éléments montrant clairement que les causes du retard échappaient au contrôle de l’État membre; |
|
3) |
une autorité compétente est responsable de la coordination des fournisseurs d’équipements «bord» et «sol» ainsi que de l’intégration et de l’essai des produits; |
|
4) |
les laboratoires existants ont été utilisés à bon escient; |
|
5) |
des éléments montrent que des mesures appropriées ont été mises en œuvre pour réduire autant que possible le délai supplémentaire. |
La Commission analyse le dossier et les mesures proposées par l’État membre et informe le comité visé à l’article 29 de la directive 2008/57/CE des résultats de son analyse.
7.3.3. Mise en œuvre de l’ERTMS à bord
Les locomotives, autorails et autres véhicules ferroviaires neufs capables de circuler sans traction, équipés d’une cabine de conduite, commandés après le 1er janvier 2012 ou mis en service après le 1er janvier 2015, sont équipés de l’ERTMS.
Cette disposition ne s’applique pas aux locomotives de manœuvre neuves, ni aux autres locomotives, autorails et autres véhicules ferroviaires neufs munis d’une cabine de conduite, s’ils sont conçus uniquement pour le service national ou le service régional transfrontalier. Les États membres peuvent toutefois introduire de nouvelles exigences au niveau national, notamment en vue de:
|
1) |
restreindre l’accès des lignes équipées de l’ERTMS aux locomotives équipées de l’ERTMS, de façon à ce que les systèmes nationaux existants puissent être mis hors service; |
|
2) |
demander que les locomotives de manœuvre neuves ou tout autre véhicule ferroviaire neuf muni d’une cabine de conduite, même conçus uniquement pour le service national ou le service régional transfrontalier, soient équipés de l’ERTMS. |
7.3.3.1.
L’installation d’un équipement ERTMS/ETCS à bord est obligatoire lors:
|
1) |
de l’installation d’une nouvelle partie contrôle de vitesse d’un sous-système de contrôle-commande et de signalisation «bord»; ou |
|
2) |
du réaménagement de toute partie contrôle de vitesse existante d’un sous-système de contrôle-commande et de signalisation «bord» si cela modifie les fonctions, les performances et/ou les interfaces d’interopérabilité du système existant, à l’exception des modifications pouvant être jugées nécessaires pour atténuer les défauts liés à la sécurité dans le système existant. |
7.3.4. Lignes spécifiques constituant des corridors
Corridor A – à équiper d’ici à 2015

Corridor B (15)

Corridor C (16)
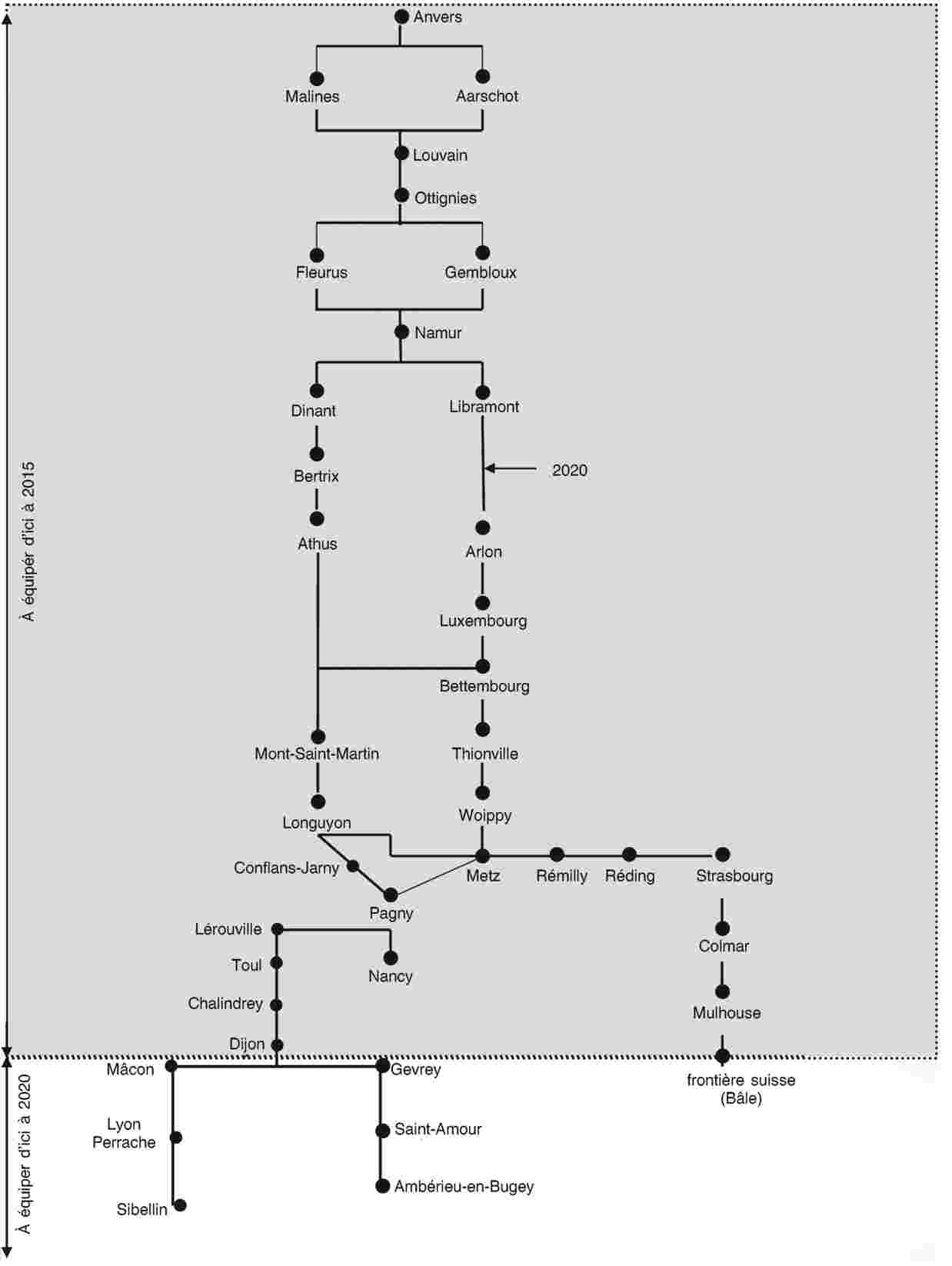
Corridor D (17)

Corridor E
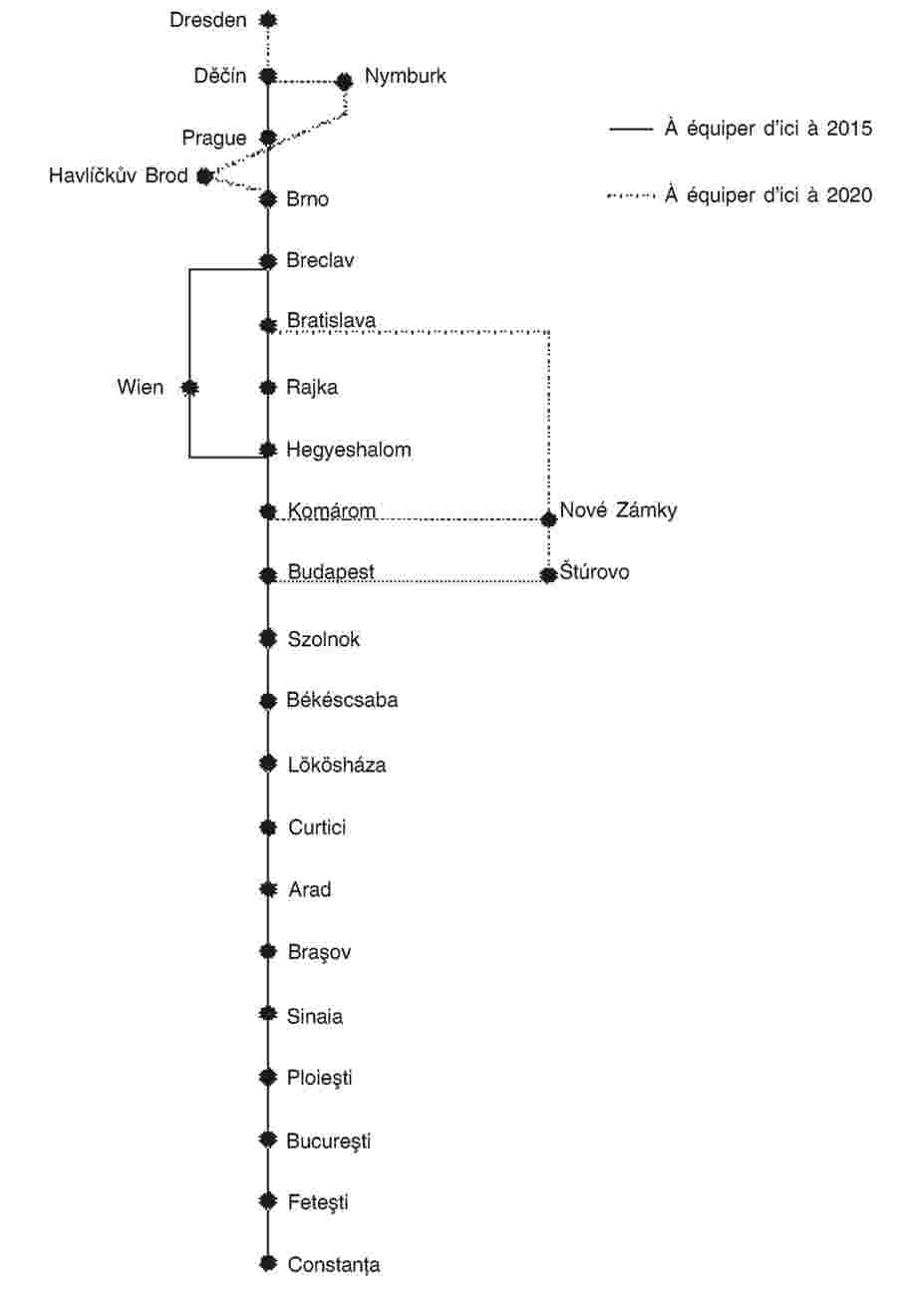
Corridor F

7.3.5. Principaux ports, gares de triage, terminaux de marchandises et zones de transport de marchandises en Europe
|
Pays |
Zone de transport de marchandises |
Date |
Observation |
|
Belgique |
Anvers |
31.12.2015 |
Une liaison avec Rotterdam est aussi prévue à l’horizon 2020 |
|
Gand |
31.12.2020 |
|
|
|
Zeebruges |
31.12.2020 |
|
|
|
Bulgarie |
Burgas |
31.12.2020 |
La connexion au corridor E nécessite d’équiper le tronçon Bourgas-Sofia et Sofia-Vidin-Calafat et Calafat-Curtici en Roumanie (PP22) |
|
République tchèque |
Prague |
31.12.2015 |
|
|
Lovosice |
31.12.2020 |
|
|
|
Danemark |
Taulov |
31.12.2020 |
La connexion à ce terminal nécessite de choisir comme ligne à équiper de l’ERTMS la ligne Flensburg-Padborg – voir la note en bas de page concernant le corridor B. |
|
Allemagne |
Dresde (18) |
31.12.2020 |
D’ici à 2020, une liaison directe doit également être mise en place entre le corridor E et le corridor F (de Dresde à Hanovre). |
|
Lübeck |
31.12.2020 |
|
|
|
Duisburg |
31.12.2015 |
|
|
|
Hambourg (19) |
31.12.2020 |
|
|
|
Cologne |
31.12.2015 |
|
|
|
Munich |
31.12.2015 |
|
|
|
Hanovre |
31.12.2015 |
|
|
|
Rostock |
31.12.2015 |
|
|
|
Ludwigshafen/Mannheim |
31.12.2015 |
|
|
|
Nuremberg |
31.12.2020 |
|
|
|
Grèce |
Le Pirée |
31.12.2020 |
La connexion au corridor E nécessite d’équiper le tronçon Kulata-Sofia en Bulgarie. |
|
Espagne |
Algesiras |
31.12.2020 |
|
|
Madrid |
31.12.2020 |
|
|
|
Pampelune |
31.12.2020 |
Trois connexions sont nécessaires. Une connexion vers Paris via Hendaye, une connexion de Pampelune à Madrid et une connexion de Pampelune au corridor D via Saragosse. |
|
|
Saragosse |
31.12.2020 |
|
|
|
Tarragone |
31.12.2020 |
|
|
|
Barcelone |
31.12.2015 |
|
|
|
Valence |
31.12.2020 |
|
|
|
France |
Marseille |
31.12.2020 |
|
|
Perpignan |
31.12.2015 |
|
|
|
Avignon |
31.12.2015 |
|
|
|
Lyon |
31.12.2015 |
|
|
|
Le Havre |
31.12.2020 |
|
|
|
Lille |
31.12.2020 |
|
|
|
Dunkerque |
31.12.2020 |
|
|
|
Paris |
31.12.2020 |
Les connexions suivantes seront prêtes d’ici à 2020: i) Hendaye; ii) Tunnel sous la Manche; iii) Dijon; iv) Metz via Épernay et Châlons-en-Champagne. |
|
|
Italie |
La Spezia |
31.12.2020 |
|
|
Gênes |
31.12.2015 |
|
|
|
Gioia Tauro |
31.12.2020 |
|
|
|
Vérone |
31.12.2015 |
|
|
|
Milan |
31.12.2015 |
|
|
|
Tarente |
31.12.2020 |
|
|
|
Bari |
31.12.2020 |
|
|
|
Padoue |
31.12.2015 |
|
|
|
Trieste |
31.12.2015 |
|
|
|
Novare |
31.12.2015 |
|
|
|
Venise |
31.12.2020 |
|
|
|
Bologne |
31.12.2020 |
|
|
|
Rome |
31.12.2020 |
|
|
|
Luxembourg |
Bettembourg |
31.12.2015 |
|
|
Hongrie |
Budapest |
31.12.2015 |
|
|
Pays-Bas |
Amsterdam |
31.12.2020 |
|
|
Rotterdam |
31.12.2015 |
Une liaison avec Anvers est aussi prévue à l’horizon 2020. |
|
|
Autriche |
Graz |
31.12.2020 |
|
|
Vienne |
31.12.2020 |
|
|
|
Pologne |
Gdynia |
31.12.2015 |
|
|
Katowice |
31.12.2020 |
|
|
|
Wrocław |
31.12.2015 |
D’ici à 2020, la ligne Wrocław-Legnica doit être équipée de manière à garantir une liaison directe vers la frontière allemande (Gorlitz) |
|
|
Gliwice |
31.12.2015 |
|
|
|
Poznań |
31.12.2015 |
|
|
|
Varsovie |
31.12.2015 |
|
|
|
Portugal |
Sines |
31.12.2020 |
|
|
Lisbonne |
31.12.2020 |
|
|
|
Roumanie |
Constanța |
31.12.2015 |
|
|
Slovénie |
Koper |
31.12.2015 |
|
|
Ljubljana |
31.12.2015 |
|
|
|
Slovaquie |
Bratislava |
31.12.2015 |
|
|
Royaume-Uni |
Bristol |
|
Ce terminal sera connecté étant donné que le corridor C est prolongé jusqu’au tunnel sous la Manche |
(1) Les modes dégradés sont des modes de fonctionnement prévus pour faire face aux défaillances. Ils ont été pris en considération pour la conception des sous-systèmes de contrôle-commande et signalisation.
(2) JO L 108 du 29.4.2009, p. 4.
(3) JO L 264 du 8.10.2011, p. 32.
(4) JO L 256 du 1.10.2011, p. 1.
(5) Le contrôle d’utilisation appropriée d’un constituant d’interopérabilité fait partie de la vérification CE des sous-systèmes «bord» et «sol», comme indiqué en 6.3.3 et 6.3.4.
(6) JO L 319 du 4.12.2010, p. 1.
(7) JO L 218 du 13.8.2008, p. 30.
(8) Dans ce cas, l’évaluation de la gestion des transitions se fera conformément aux spécifications nationales.
(9) Les procédures décrites au présent chapitre ne préjugent pas la possibilité de grouper des constituants.
(10) JO L 164 du 30.4.2004, p. 1.
(11) Par exemple, la faisabilité du concept STM externe ne peut être techniquement garantie ou des questions potentielles concernant la propriété des droits de propriété intellectuelle des systèmes de classe B empêchent la mise au point en temps opportun d’un produit STM.
(12) Le point 7.3.4 fixe les délais pour équiper ces corridors, avec comme objectif d’édifier étape par étape un réseau ERTMS cohérent. Dans un certain nombre de cas, un délai antérieur a été volontairement accepté.
(13) JO L 210 du 31.7.2006, p. 25.
(14) JO L 228 du 9.9.1996, p. 1.
(15) Sans préjudice des dispositions législatives applicables au réseau transeuropéen à grande vitesse, des liaisons peuvent être mises en place au moyen de sections à grande vitesse, à condition qu’un sillon soit alloué aux trains de marchandises. Au moins une liaison équipée de l’ERTMS sera disponible, d’ici à 2020, entre le Danemark et l’Allemagne (Flensburg-Hambourg ou Rødby — Puttgarden), mais pas deux nécessairement. Le tunnel de base du Brenner sera équipé de l’ERTMS une fois les travaux d’infrastructure achevés (date limite prévue: 2020).
(16) Une liaison entre Nancy et Réding sera mise en place avant 2020.
(17) Deux branches supplémentaires seront équipées d’ici à 2020: Montmélian – Grenoble – Valence et Lyon – Valence – Arles – Miramas (rive gauche du Rhône).
(18) L’Allemagne fera son possible pour équiper plus tôt le tronçon du corridor E — Dresde — frontière tchèque.
(19) L’Allemagne fera en sorte d’équiper une ligne ferroviaire à destination de Hambourg, mais il se peut que la zone portuaire ne soit équipée qu’en partie d’ici à 2020.
ANNEXE A
Références
Pour chaque référence faite dans les paramètres fondamentaux (chapitre 4 de la présente STI), le tableau ci-dessous indique les spécifications obligatoires correspondantes via l’index du tableau 2.
Tableau A 1
|
Référence au chapitre 4 |
Numéro d’index (voir le tableau A 2) |
|
4.1 |
|
|
4.1a |
1 |
|
4.1b |
32 |
|
4.1c |
3 |
|
|
|
|
4.2.1 |
|
|
4.2.1 a |
27, 78 |
|
4.2.1 b |
28 |
|
|
|
|
4.2.2 |
|
|
4.2.2.a |
14 |
|
4.2.2.b |
1, 4, 13, 15 |
|
4.2.2.c |
31, 37 |
|
4.2.2.d |
18, 20 |
|
4.2.2.e |
6, |
|
4.2.2.f |
7 |
|
|
|
|
4.2.3 |
|
|
4.2.3 a |
14 |
|
4.2.3 b |
1, 4, 13, 15 |
|
4.2.3 c |
31, 37 b, c, d |
|
4.2.3 d |
18, 21 |
|
|
|
|
4.2.4 |
|
|
4.2.4 a |
64, 65 |
|
4.2.4 b |
66 |
|
4.2.4 c |
67 |
|
4.2.4 d |
68 |
|
4.2.4 e |
73, 74 |
|
4.2.4 f |
32, 33 |
|
4.2.4 g |
48 |
|
4.2.4 h |
69, 70 |
|
4.2.4 j |
71, 72 |
|
4.2.4 k |
75, 76 |
|
|
|
|
4.2.5 |
|
|
4.2.5 a |
64, 65 |
|
4.2.5 b |
10, 39, 40 |
|
4.2.5c |
19, 20 |
|
4.2.5 d |
9, 43 |
|
4.2.5 e |
16, 50 |
|
|
|
|
4.2.6 |
|
|
4.2.6 a |
8, 25, 26, 49 |
|
4.2.6 b |
45 |
|
4.2.6 c |
46 |
|
4.2.6 d |
34 |
|
4.2.6 e |
20 |
|
4.2.6 f |
44 |
|
|
|
|
4.2.7 |
|
|
4.2.7 a |
12 |
|
4.2.7 b |
62, 63 |
|
4.2.7 c |
34 |
|
4.2.7 d |
9 |
|
4.2.7 e |
16 |
|
|
|
|
4.2.8 |
|
|
4.2.8 a |
11, |
|
|
|
|
4.2.9 |
|
|
4.2.9 a |
23 |
|
|
|
|
4.2.10 |
|
|
4.2.10 a |
77 (point 3.1) |
|
|
|
|
4.2.11 |
|
|
4.2.11 a |
77 (point 3.2) |
|
|
|
|
4.2.12 |
|
|
4.2.12 a |
51 |
|
|
|
|
4.2.13 |
|
|
4.2.13 a |
32, 33, 51 |
|
|
|
|
4.2.14 |
|
|
4.2.14 a |
5 |
|
|
|
|
4.2.15 |
|
|
4.2.15 a |
38 |
Spécifications
Aux fins de l’application de la présente STI, toutes les spécifications figurant dans le tableau A 2 ci-dessous sont juridiquement contraignantes dans la version indiquée au tableau A 2. Les documents mentionnés dans une spécification figurant dans le tableau A 2 doivent être considérés comme des documents informatifs, sauf s’ils figurent explicitement dans le tableau A 2.
En cas de contradiction entre les spécifications énumérées dans le tableau A 2 et les dispositions susmentionnées, ces dernières prévalent.
|
Note: |
les spécifications renseignées comme «réservées» dans le tableau A 2 correspondent aux points ouverts énumérés à l’annexe G. |
Tableau A 2
Liste des spécifications obligatoires
|
Index N |
Référence |
Nom de la spécification |
Version |
Notes |
|
1 |
ERA/ERTMS/003204 |
ERTMS/ETCS Functional requirement specification |
5.0 |
|
|
2 |
Supprimé intentionnellement |
|
|
|
|
3 |
UNISIG SUBSET-023 |
Glossary of terms and abbreviations |
2.0.0 |
|
|
4 |
UNISIG SUBSET-026 |
System requirement specification |
2.3.0 |
|
|
5 |
UNISIG SUBSET-027 |
FFFIS Juridical recorder-downloading tool |
2.3.0 |
Note 1 |
|
6 |
UNISIG SUBSET-033 |
FIS for man-machine interface |
2.0.0 |
|
|
7 |
UNISIG SUBSET-034 |
FIS for the train interface |
2.0.0 |
|
|
8 |
UNISIG SUBSET-035 |
Specific transmission module FFFIS |
2.1.1 |
|
|
9 |
UNISIG SUBSET-036 |
FFFIS for Eurobalise |
2.4.1 |
|
|
10 |
UNISIG SUBSET-037 |
EuroRadio FIS |
2.3.0 |
|
|
11 |
UNISIG SUBSET-038 |
Offline key management FIS |
2.3.0 |
|
|
12 |
UNISIG SUBSET-039 |
FIS for the RBC/RBC handover |
2.3.0 |
|
|
13 |
UNISIG SUBSET-040 |
Dimensioning and engineering rules |
2.3.0 |
|
|
14 |
UNISIG SUBSET-041 |
Performance requirements for interoperability |
2.1.0 |
|
|
15 |
ERA SUBSET-108 |
Interoperability related consolidation on TSI Annex A documents |
1.2.0 |
|
|
16 |
UNISIG SUBSET-044 |
FFFIS for Euroloop subsystem |
2.3.0 |
|
|
17 |
Supprimé intentionnellement |
|
|
|
|
18 |
UNISIG SUBSET-046 |
Radio infill FFFS |
2.0.0 |
|
|
19 |
UNISIG SUBSET-047 |
Track-side-trainborne FIS for radio infill |
2.0.0 |
|
|
20 |
UNISIG SUBSET-048 |
Trainborne FFFIS for radio infill |
2.0.0 |
|
|
21 |
UNISIG SUBSET-049 |
Radio infill FIS with LEU/interlocking |
2.0.0 |
|
|
22 |
Supprimé intentionnellement |
|
|
|
|
23 |
UNISIG SUBSET-054 |
Assignment of values to ETCS variables |
2.1.0 |
|
|
24 |
Supprimé intentionnellement |
|
|
|
|
25 |
UNISIG SUBSET-056 |
STM FFFIS SAFE time layer |
2.2.0 |
|
|
26 |
UNISIG SUBSET-057 |
STM FFFIS SAFE link layer |
2.2.0 |
|
|
27 |
UNISIG SUBSET-091 |
Safety requirements for the technical interoperability of ETCS in levels 1 and 2 |
2.5.0 |
|
|
28 |
Réservé |
Reliability — availability requirements |
|
|
|
29 |
UNISIG SUBSET-102 |
Test specification for interface «k» |
1.0.0 |
|
|
30 |
Supprimé intentionnellement |
|
|
|
|
31 |
UNISIG SUBSET-094 |
Functional requirements for an onboard reference test facility |
2.0.2 |
|
|
32 |
EIRENE FRS |
GSM-R Functional requirements specification |
7 |
|
|
33 |
EIRENE SRS |
GSM-R System requirements specification |
15 |
|
|
34 |
A11T6001 12 |
(MORANE) Radio transmission FFFIS for EuroRadio |
12 |
|
|
35 |
Supprimé intentionnellement |
|
|
|
|
36 a |
Supprimé intentionnellement |
|
|
|
|
36 b |
Supprimé intentionnellement |
|
|
|
|
36 c |
UNISIG SUBSET-074-2 |
FFFIS STM Test cases document |
1.0.0 |
|
|
37 a |
Supprimé intentionnellement |
|
|
|
|
37 b |
UNISIG SUBSET-076-5-2 |
Test cases related to features |
2.3.1 |
|
|
37 c |
UNISIG SUBSET-076-6-3 |
Test sequences |
2.3.1 |
|
|
37 d |
UNISIG SUBSET-076-7 |
Scope of the test specifications |
1.0.2 |
|
|
37 e |
Supprimé intentionnellement |
|
|
|
|
38 |
06E068 |
ETCS Marker-board definition |
2.0 |
|
|
39 |
UNISIG SUBSET-092-1 |
ERTMS EuroRadio conformance requirements |
2.3.0 |
|
|
40 |
UNISIG SUBSET-092-2 |
ERTMS EuroRadio test cases safety layer |
2.3.0 |
|
|
41 |
Supprimé intentionnellement |
|
|
|
|
42 |
Supprimé intentionnellement |
|
|
|
|
43 |
UNISIG SUBSET 085 |
Test specification for Eurobalise FFFIS |
2.2.2 |
|
|
44 |
Réservé |
Odometry FIS |
|
|
|
45 |
UNISIG SUBSET-101 |
Interface «K» specification |
1.0.0 |
|
|
46 |
UNISIG SUBSET-100 |
Interface «G» specification |
1.0.1 |
|
|
47 |
Supprimé intentionnellement |
|
|
|
|
48 |
Réservé |
Test specification for mobile equipment GSM-R |
|
|
|
49 |
UNISIG SUBSET-059 |
Performance requirements for STM |
2.1.1 |
|
|
50 |
UNISIG SUBSET-103 |
Test specification for Euroloop |
1.0.0 |
|
|
51 |
Réservé |
Ergonomic aspects of the DMI |
|
|
|
52 |
UNISIG SUBSET-058 |
FFFIS STM Application layer |
2.1.1 |
|
|
53 |
Supprimé intentionnellement |
|
|
|
|
54 |
Supprimé intentionnellement |
|
|
|
|
55 |
Supprimé intentionnellement |
|
|
|
|
56 |
Supprimé intentionnellement |
|
|
|
|
57 |
Supprimé intentionnellement |
|
|
|
|
58 |
Supprimé intentionnellement |
|
|
|
|
59 |
Supprimé intentionnellement |
|
|
|
|
60 |
Supprimé intentionnellement |
|
|
|
|
61 |
Supprimé intentionnellement |
|
|
|
|
62 |
Réservé UNISIG SUBSET-099 |
RBC-RBC Test specification for safe communication interface |
|
|
|
63 |
UNISIG SUBSET-098 |
RBC-RBC SAFE communication interface |
1.0.0 |
|
|
64 |
EN 301 515 |
Global System for Mobile Communication (GSM); Requirements for GSM operation on railways |
2.3.0 |
Note 2 |
|
65 |
TR 102 281 |
Detailed requirements for GSM operation on railways |
1.0.0 |
Note 3 |
|
66 |
(MORANE) A 01 T 0004 1 |
ASCI Options for Interoperability |
1 |
|
|
67 |
(MORANE) P 38 T 9001 |
FFFIS for GSM-R SIM Cards |
4.1 |
|
|
68 |
ETSI TS 102 610 |
Railway Telecommunication; GSM; Usage of the UUIE for GSM operation on railways |
1.1.0 |
|
|
69 |
(MORANE) F 10 T 6002 |
FFFS for Confirmation of High Priority Calls’ |
4 |
|
|
70 |
(MORANE) F 12 T 6002 |
FIS for Confirmation of High Priority Calls |
4 |
|
|
71 |
(MORANE) E 10 T 6001 |
FFFS for Functional Addressing |
4 |
|
|
72 |
(MORANE) E 12 T 6001 |
FIS for Functional Addressing |
5.1 |
|
|
73 |
(MORANE) F 10 T6001 |
FFFS for Location Dependent Addressing |
4 |
|
|
74 |
(MORANE) F 12 T6001 |
FIS for Location Dependent Addressing |
3 |
|
|
75 |
(MORANE) F 10 T 6003 |
FFFS for Presentation of Functional Numbers to Called and Calling Parties |
4 |
|
|
76 |
(MORANE) F 12 T 6003 |
FIS for Presentation of Functional Numbers to Called and Calling Parties |
4 |
|
|
77 |
ERA/ERTMS/033281 |
Interfaces between CCS track-side and other subsystems |
1.0 |
|
|
78 |
Réservé |
Safety requirements for ETCS DMI functions |
|
|
|
Note 1: |
seule la description fonctionnelle des informations à enregistrer est obligatoire, et non les caractéristiques techniques de l’interface. |
|
Note 2: |
les spécifications énumérées au point 2.1 de la norme EN 301 515 sont obligatoires. |
|
Note 3: |
les demandes de changements figurant dans les tableaux 1 et 2 de la norme TR 102 281 sont obligatoires. |
Tableau A 3
Liste des normes obligatoires
Sans préjudice des dispositions des chapitres 4 et 6 de la présente STI, les normes figurant dans le tableau ci-dessous doivent être appliquées dans la procédure de certification.
|
No |
Référence |
Intitulé du document et observations |
Version |
|
A1 |
EN 50126 |
Applications ferroviaires — Spécification et démonstration de la fiabilité, de la disponibilité, de la maintenabilité et de la sécurité (FDMS) |
1999 |
|
A2 |
EN 50128 |
Applications ferroviaires — Systèmes de signalisation, de télécommunications et de traitement — Logiciels pour systèmes de commande et de protection ferroviaire |
2001 |
|
A3 |
EN 50129 |
Applications ferroviaires — Systèmes de signalisation, de télécommunications et de traitement — Systèmes électroniques de sécurité pour la signalisation |
2003 |
|
A4 |
EN 50159-1 |
Applications ferroviaires – Systèmes de signalisation, de télécommunications et de traitement – Partie 1: |
2001 |
|
A5 |
EN 50159-2 |
Applications ferroviaires – Systèmes de signalisation, de télécommunications et de traitement – Partie 2: Communication de sécurité sur des systèmes de transmission ouverts |
2001 |
ANNEXE B
Supprimée intentionnellement
ANNEXE C
Supprimée intentionnellement
ANNEXE D
Supprimée intentionnellement
ANNEXE E
Supprimée intentionnellement
ANNEXE F
Supprimée intentionnellement
ANNEXE G
POINTS OUVERTS
|
Point ouvert |
Notes |
|
Aspects liés au freinage |
Ce point ouvert sera résolu par l’ERTMS/ETCS référence 3 («baseline 3»). Le modèle de freinage harmonisé est déjà mentionné pour information à l’annexe A, tableau A 2, index 15. |
|
Index 28 Disponibilité |
L’apparition fréquente de situations dégradées sous l’effet de défaillances de l’équipement de CCS diminuera la sécurité du système. Pour l’éviter, il faudra spécifier des exigences minimales de fiabilité/disponibilité. |
|
Index 78 Exigences de sécurité pour les fonctions IHM de l’ETCS |
Ce point ouvert concerne l’interface entre l’ETCS «bord» et le conducteur, c’est-à-dire les erreurs d’affichage des informations et de saisie des données et des commandes. |
|
Index 51 Aspects ergonomiques de l’IHM |
Ce point ouvert sera résolu par l’ERTMS/ETCS référence 3 («baseline 3»). Il existe déjà une spécification pour information. |
|
Diamètre minimal des roues pour les vitesses supérieures à 350 km/h |
Voir l’annexe A, tableau A 2, index 77 |
|
Écartement minimal entre les essieux pour les vitesses supérieures à 350 km/h |
Voir l’annexe A, tableau A 2, index 77 |
|
Espace exempt de composants métalliques et inductifs autour des roues |
Voir l’annexe A, tableau A 2, index 77 Ceci n’est pas un point ouvert pour les wagons de marchandises. |
|
Caractéristiques du sable utilisé sur les voies |
Voir l’annexe A, tableau A 2, index 77 |
|
Masse métallique du véhicule |
Voir l’annexe A, tableau A 2, index 77 |
|
Combinaison de caractéristiques du matériel roulant aux fins d’une impédance de manœuvre dynamique adéquate |
Voir l’annexe A, tableau A 2, index 77 |
|
Interférences électromagnétiques (courant de traction) |
Voir l’annexe A, tableau A 2, index 77 |
|
Interférences électromagnétiques (champs électromagnétiques) |
Voir l’annexe A, tableau A 2, index 77 Ceci n’est pas un point ouvert pour les systèmes d’alimentation électrique autres que les systèmes CC |
|
Composants CC et basse fréquence du courant de traction |
Voir l’annexe A, tableau A 2, index 77 |
|
Utilisation de freins magnétiques/à courant de Foucault |
Voir l’annexe A, tableau A 2, index 77 |