

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32006D0679
2006/679/EC: Commission Decision of 28 March 2006 concerning the technical specification for interoperability relating to the control-command and signalling subsystem of the trans-European conventional rail system (notified under document number C(2006) 964) (Text with EEA relevance)
2006/679/CE: Décision de la Commission du 28 mars 2006 relative à la spécification technique d'interopérabilité concernant le sous-système contrôle-commande et signalisation du système ferroviaire transeuropéen conventionnel [notifiée sous le numéro C(2006) 964] (Texte présentant de l'intérêt pour l'EEE)
2006/679/CE: Décision de la Commission du 28 mars 2006 relative à la spécification technique d'interopérabilité concernant le sous-système contrôle-commande et signalisation du système ferroviaire transeuropéen conventionnel [notifiée sous le numéro C(2006) 964] (Texte présentant de l'intérêt pour l'EEE)
OJ L 284, 16.10.2006, p. 1–176
(ES, CS, DA, DE, ET, EL, EN, FR, IT, LV, LT, HU, NL, PL, PT, SK, SL, FI, SV)
OJ L 223M, 25.8.2010, p. 18–193
(MT)
Special edition in Bulgarian: Chapter 13 Volume 054 P. 40 - 215
Special edition in Romanian: Chapter 13 Volume 054 P. 40 - 215
Special edition in Croatian: Chapter 13 Volume 022 P. 163 - 338
 No longer in force, Date of end of validity: 25/01/2012; abrogé par 32012D0088
No longer in force, Date of end of validity: 25/01/2012; abrogé par 32012D0088
|
16.10.2006 |
FR |
Journal officiel de l'Union européenne |
L 284/1 |
DÉCISION DE LA COMMISSION
du 28 mars 2006
relative à la spécification technique d'interopérabilité concernant le sous-système contrôle-commande et signalisation du système ferroviaire transeuropéen conventionnel
[notifiée sous le numéro C(2006) 964]
(Texte présentant de l'intérêt pour l'EEE)
(2006/679/CE)
LA COMMISSION DES COMMUNAUTÉS EUROPÉENNES,
vu le traité instituant la Communauté européenne,
vu la directive 2001/16/CE du Parlement européen et du Conseil du 19 mars 2001 relative à l'interopérabilité du système ferroviaire transeuropéen conventionnel (1), et notamment son article 6, paragraphe 1,
considérant ce qui suit:
|
(1) |
Conformément à l'article 2, point c), de la directive 2001/16/CE, le système ferroviaire transeuropéen conventionnel est subdivisé en sous-systèmes de nature structurelle ou fonctionnelle. Chacun de ces sous-systèmes doit faire l'objet d'une spécification technique d'interopérabilité (STI). |
|
(2) |
Lors de la définition d'une STI, la première étape est l'élaboration d'un projet de STI par l'Association européenne pour l'interopérabilité ferroviaire (AEIF), qui a été désignée comme organisme commun représentatif. |
|
(3) |
L'AEIF a reçu mandat de rédiger un projet de STI relative au sous-système «contrôle-commande et signalisation» conformément à l'article 6, paragraphe 1, de la directive 2001/16/CE. Les paramètres fondamentaux pour ce projet de STI ont été adoptés par la décision 2004/447/CE de la Commission du 29 avril 2004 modifiant l'annexe A de la décision 2002/731/CE du 30 mai 2002 et définissant les caractéristiques principales des systèmes de classe A (ERTMS) du sous-système contrôle-commande et signalisation du système ferroviaire transeuropéen conventionnel visé par la directive 2001/16/CE du Parlement européen et du Conseil (2). |
|
(4) |
Le projet de STI élaboré sur la base des paramètres fondamentaux a été assorti d'un rapport de présentation comportant une analyse des coûts et des avantages, comme prévu à l'article 6, paragraphe 5, de la directive. |
|
(5) |
Le projet de STI a été examiné par le comité institué par la directive 96/48/CE du Conseil du 23 juillet 1996 relative à l'interopérabilité du système ferroviaire transeuropéen à grande vitesse (3). |
|
(6) |
Comme énoncé dans l'article 1er de la directive 2001/16/CE, les conditions pour réaliser l'interopérabilité du système ferroviaire transeuropéen conventionnel concernent la conception, la construction, la mise en service, l'aménagement, le renouvellement ainsi que l'exploitation des infrastructures et du matériel roulant concourant au fonctionnement de ce système, qui seront mis en service. En ce qui concerne les infrastructures et le matériel roulant se trouvant déjà en service au moment où la présente STI entre en vigueur, la STI doit être appliquée à partir du moment où des travaux sont envisagés sur ces infrastructures et ce matériel roulant. Toutefois, le degré d'application de la STI varie en fonction de l'objectif et de l'envergure des travaux prévus et des coûts et des avantages induits par les applications envisagées. Pour que ces travaux partiels permettent la réalisation de la pleine interopérabilité, ils doivent être soutenus par une stratégie de mise en œuvre cohérente. Dans ce but, une distinction doit être faite entre travaux de réaménagement, travaux de renouvellement et substitution liée à une maintenance. |
|
(7) |
La directive 2001/16/CE et les STI s'appliquent aux renouvellements mais pas à la substitution dans le cadre d'une maintenance. Il convient cependant d'inciter les États membres, lorsqu'ils sont en mesure de le faire et lorsque cela est justifié par l'ampleur des travaux liés à une maintenance, à appliquer les STI aux substitutions dans le cadre d'une maintenance. |
|
(8) |
Les lignes et le matériel roulant conventionnels existants sont déjà équipés de systèmes de contrôle-commande et de signalisation qui satisfont aux exigences essentielles de la directive 2001/16/CE. Ces systèmes «existants» ont été conçus et mis en œuvre selon des règles nationales. L'annexe B de la STI fournit des informations de base concernant ces systèmes existants. Étant donné que la vérification de l'interopérabilité des systèmes existants est établie par référence aux exigences des STI, conformément à l'article 16, paragraphe 2, de la directive 2001/16/CE, il est nécessaire, pendant la période de transition entre la publication d'une décision et la pleine application de la STI jointe, de fixer les conditions auxquelles doivent satisfaire les systèmes existants en plus de celles expressément énoncées dans la STI. Chaque État membre doit fournir aux autres États membres et à la Commission des informations concernant les règles techniques nationales pertinentes en vigueur pour réaliser l'interopérabilité dans le respect des exigences essentielles de la directive 2001/16/CE, les organismes qu'il désigne pour effectuer les procédures d'évaluation de la conformité ou de l'aptitude à l'emploi ainsi que les procédures en vigueur pour vérifier l'interopérabilité des sous-systèmes en application de l'article 16, paragraphe 2, de la directive 2001/16/CE. |
|
(9) |
Aux fins de la mise en œuvre de l'article 16, paragraphe 2, les États membres doivent appliquer, dans la mesure du possible, les principes et critères énoncés dans la directive 2001/16/CE, en recourant aux organismes notifiés en vertu de l'article 20 de la directive 2001/16/CE. La Commission doit analyser les informations transmises par les États membres concernant les règles nationales, les procédures, les organismes chargés de mettre en œuvre les procédures et la durée de celles-ci et, le cas échéant, doit discuter avec le comité de la nécessité d'adopter des mesures complémentaires. |
|
(10) |
Une procédure similaire doit également être appliquée eu égard aux questions qualifiées de «points ouverts» dans l'annexe G de la STI. |
|
(11) |
La STI ne doit pas imposer l'utilisation de technologies ou de solutions techniques spécifiques, excepté lorsque cela est strictement nécessaire pour l'interopérabilité du réseau ferroviaire transeuropéen conventionnel. |
|
(12) |
La STI s'appuie sur les meilleures connaissances spécialisées disponibles au moment de la préparation du projet correspondant. Il est possible qu'il faille modifier ou compléter cette STI pour tenir compte de l'évolution des techniques ou des exigences sociales, de fonctionnement ou de sécurité. À cette fin, une procédure de gestion des modifications a été définie pour harmoniser et mettre à jour les dispositions de l'annexe A de la STI. Cette procédure de mise à jour, qui est actuellement placée sous la direction de l'AEIF en tant qu'organisme représentatif commun, sera confiée à l'Agence ferroviaire européenne instituée par le règlement (CE) no 881/2004 du Parlement européen et du Conseil (4), lorsque celle-ci sera en activité. Si nécessaire, une procédure d'examen ou de mise à jour plus approfondie et plus complète entraînant des modifications de la procédure régulière définie dans cette STI sera engagée conformément à l'article 6, paragraphe 3, de la directive 2001/16/CE. |
|
(13) |
L'application de la STI faisant l'objet de la présente décision doit tenir compte de critères spécifiques de compatibilité technique et opérationnelle entre les infrastructures et le matériel roulant à mettre en service et le réseau dans lequel ils s'intègrent. Ces exigences de compatibilité impliquent une analyse technique et économique complexe qui doit être réalisée cas par cas. Cette analyse doit prendre en considération les interfaces entre les différents sous-systèmes visés par la directive 2001/16/CE, les différentes catégories de lignes et de matériel roulant visées par cette directive et les environnements technique et opérationnel du réseau existant. |
|
(14) |
Il est essentiel d'effectuer cette analyse en s'appuyant sur des règles et des directives d'application cohérentes. Pour ce faire, les États membres doivent mettre en œuvre une stratégie nationale pour l'application de la STI faisant l'objet de la présente décision, qui indique les étapes à franchir pour parvenir à un réseau interopérable. Ces stratégies nationales doivent être rassemblées et synthétisées dans un plan directeur pour l'UE qui place les références pour la mise en œuvre des STI dans une perspective communautaire. |
|
(15) |
Le système cible décrit dans la STI jointe (système de classe A) est fondé sur une technologie informatique dont la durée de vie est bien moindre que celle des équipements de télécommunication et de signalisation du système ferroviaire traditionnel actuel. Par conséquent, il convient d'adopter une stratégie de déploiement volontariste plutôt que réactive pour éviter une obsolescence potentielle du système avant qu'il n'atteigne sa maturité. En outre, un déploiement trop fragmenté pour le système ferroviaire européen engendrerait des charges d'exploitation et des coûts supplémentaires importants. L'élaboration d'un plan de mise en œuvre transeuropéen cohérent pour le système cible contribuerait à un développement harmonieux de l'intégralité du système ferroviaire transeuropéen conformément à la stratégie communautaire pour le réseau transeuropéen de transport. Un tel plan doit être fondé sur les plans nationaux de mise en œuvre correspondants et fournir une base de connaissances appropriées pour soutenir la prise de décision par les différentes parties prenantes, notamment par la Commission en ce qui concerne l'octroi d'un soutien financier aux projets ferroviaires. La Commission doit coordonner l'élaboration d'un tel plan, conformément à l'article 155, paragraphe 2, du traité. |
|
(16) |
Pour faciliter la migration vers le système de classe A cible défini dans la STI, des mesures appropriées doivent être adoptées au niveau national. De telles mesures doivent avoir pour objet de permettre l'utilisation de matériel de classe A qui soit compatible avec les systèmes existants ou de faciliter l'application de méthodes volontaristes visant à réduire les délais pour la mise en place des installations de classe A. En ce qui concerne les premières, une attention particulière doit être prêtée aux modules externes de transmission spécifique pour les systèmes nationaux existants de contrôle-commande de classe B. |
|
(17) |
La STI relative au sous-système «contrôle-commande et signalisation» du réseau ferroviaire transeuropéen conventionnel doit donc être adoptée. La décision 2004/447/CE doit donc être modifiée en conséquence. |
|
(18) |
Les mesures prévues par la présente décision sont conformes à l'avis du comité institué par la directive 96/48/CE, |
A ARRÊTÉ LA PRÉSENTE DÉCISION:
Article premier
La spécification technique d'interopérabilité (ci-après appelée «STI») relative au sous-système «contrôle-commande et signalisation» du réseau ferroviaire transeuropéen conventionnel visée à l'article 6, paragraphe 1, de la directive 2001/16/CE est définie dans l'annexe.
Sous réserve des articles 2 et 3 de la présente décision, la STI est pleinement applicable à l'infrastructure et au matériel roulant du système ferroviaire transeuropéen conventionnel définis dans l'annexe I de la directive 2001/16/CE.
Article 2
1. En ce qui concerne les sous-systèmes visés dans l'annexe B de la STI et les questions classées comme «points ouverts» dans l'annexe G de la STI, les conditions à respecter pour la vérification de l'interopérabilité au sens de l'article 16, paragraphe 2, de la directive 2001/16/CE, sont les règles techniques applicables dans l'État membre qui autorise la mise en service du sous-système couvert par la présente décision.
2. Chaque État membre notifie les éléments suivants aux autres États membres et à la Commission, dans un délai de six mois à dater de la notification de la présente décision:
|
a) |
la liste des règles techniques applicables mentionnées au paragraphe 1 des «points ouverts» visés dans l'annexe G de la STI; |
|
b) |
les procédures d'évaluation de la conformité et de vérification à mettre en œuvre en ce qui concerne l'application des règles techniques visées au paragraphe 1; |
|
c) |
les organismes qu'il désigne pour accomplir ces procédures d'évaluation de la conformité et de vérification. |
Article 3
Les États membres établissent un plan national de mise en œuvre de la STI selon les critères indiqués dans le chapitre 7 de l'annexe.
Ils transmettent ce plan de mise en œuvre aux autres États membres et à la Commission, au plus tard un an à compter de la date d'entrée en vigueur de la présente décision.
Sur la base de ces plans nationaux, la Commission établit un plan directeur communautaire en s'appuyant sur les principes énoncés dans le chapitre 7 de l'annexe.
Article 4
Les États membres font en sorte que le champ des fonctionnalités des systèmes de classe B existants visés dans l'annexe B de la STI, ainsi que de leurs interfaces, soit conservé tel qu'il est défini actuellement, à l'exception des modifications qui pourraient être jugées nécessaires pour atténuer les défauts de ces systèmes sur le plan de la sécurité.
Les États membres communiquent les informations concernant leurs systèmes nationaux existants qui sont requises pour les besoins du développement et de la certification en matière de sécurité des appareils permettant l'interopérabilité du matériel de classe A défini dans l'annexe A de la STI avec leurs installations de classe B existantes.
Article 5
Les États membres mettent tout en œuvre pour qu'un module de transmission spécifique (ci-après dénommé «STM») externe, tel qu'il est défini dans le chapitre 7 de l'annexe, pour leurs systèmes existants de contrôle-commande de classe B énumérés dans l'annexe B de la STI soit disponible d'ici au 31 décembre 2007.
Article 6
L'article 2 de la décision no 2004/447/CE est supprimé avec effet à la date à laquelle la présente décision entre en vigueur.
Article 7
La présente décision entre en vigueur six mois après la date de sa notification.
Article 8
Les États membres sont destinataires de la présente décision.
Fait à Bruxelles, le 28 mars 2006.
Par la Commission
Jacques BARROT
Vice-président
(1) JO L 110 du 20.4.2001, p. 1. Directive modifiée par la directive 2004/50/CE (JO L 164 du 30.4.2004, p. 114, rectifiée au JO L 220 du 21.6.2004, p. 40).
(2) JO L 155 du 30.4.2004, p. 65, rectifiée au JO L 193 du 1.6.2004, p. 53.
(3) JO L 235 du 17.9.1996, p. 6. Directive modifiée en dernier lieu par la directive 2004/50/CE.
(4) JO L 164 du 30.4.2004, p. 1, rectifié au JO L 220 du 21.6.2004, p. 3.
ANNEXE
Spécification technique d'interopérabilité concernant le sous-système «contrôle-commande et signalisation» du système ferroviaire transeuropéen conventionnel
TABLE DES MATIÈRES
|
1. |
INTRODUCTION |
|
1.1. |
DOMAINE D'APPLICATION TECHNIQUE |
|
1.2. |
DOMAINE D'APPLICATION GÉOGRAPHIQUE |
|
1.3. |
CONTENU DE LA PRÉSENTE STI |
|
2. |
DÉFINITION ET DOMAINE D'APPLICATION DU SOUS-SYSTÈME |
|
2.1. |
GÉNÉRALITÉS |
|
2.2. |
PRÉSENTATION |
|
2.2.1. |
Interopérabilité |
|
2.2.2. |
Classes des systèmes de contrôle-commande |
|
2.2.3. |
Niveaux d'application |
|
2.2.4. |
Frontières des réseaux d'infrastructure |
|
3. |
EXIGENCES ESSENTIELLES DU SOUS-SYSTÈME «CONTRÔLE-COMMANDE» |
|
3.1. |
GÉNÉRALITÉS |
|
3.2. |
ASPECTS SPÉCIFIQUES DU SOUS-SYSTÈME «CONTRÔLE-COMMANDE» |
|
3.2.1. |
Sécurité |
|
3.2.2. |
Fiabilité et disponibilité |
|
3.2.3. |
Santé |
|
3.2.4. |
Protection de l'environnement |
|
3.2.5. |
Compatibilité technique |
|
4. |
CARACTÉRISATION DU SOUS-SYSTÈME |
|
4.1. |
INTRODUCTION |
|
4.2. |
SPÉCIFICATIONS FONCTIONNELLES ET TECHNIQUES DU SOUS-SYSTÈME |
|
4.2.1. |
Caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité |
|
4.2.2. |
Fonctionnalité de l'ETCS à bord |
|
4.2.3. |
Fonctionnalité de l'ETCS au sol |
|
4.2.4. |
Fonctions EIRENE |
|
4.2.5. |
Interfaces de transmission ETCS et EIRENE |
|
4.2.6. |
Interfaces «bord» internes au contrôle-commande |
|
4.2.7. |
Interfaces «sol» internes au contrôle-commande |
|
4.2.8. |
Gestion des clés |
|
4.2.9. |
Gestion des identifiants (ID) ETCS |
|
4.2.10. |
DBC (détecteur de boîte chaude) |
|
4.2.11. |
Compatibilité avec les systèmes du sol pour la détection des trains |
|
4.2.12. |
Compatibilité électromagnétique |
|
4.2.13. |
DMI (Driver Machine Interface) de l'ETCS |
|
4.2.14. |
DMI (Driver Machine Interface) de l'EIRENE |
|
4.2.15. |
Interface avec les enregistrements de données pour les besoins réglementaires |
|
4.2.16. |
Visibilité des objets au sol du contrôle-commande |
|
4.3. |
SPÉCIFICATIONS FONCTIONNELLES ET TECHNIQUES DES INTERFACES AVEC LES AUTRES SOUS-SYSTÈMES |
|
4.3.1. |
Interface avec le sous-système «exploitation et gestion du trafic» |
|
4.3.2. |
Interface avec le sous-système «matériel roulant» |
|
4.3.3. |
Interfaces avec le sous-système «infrastructure» |
|
4.3.4. |
Interfaces avec le sous-système «énergie» |
|
4.4. |
RÈGLES D'EXPLOITATION |
|
4.5. |
RÈGLES DE MAINTENANCE |
|
4.5.1. |
Responsabilité du fabricant des équipements |
|
4.5.2. |
Responsabilité des entités adjudicatrices |
|
4.5.3. |
Responsabilité du gestionnaire d'infrastructure ou de l'entreprise ferroviaire |
|
4.5.4. |
Plan de maintenance |
|
4.6. |
QUALIFICATIONS PROFESSIONNELLES |
|
4.7. |
CONDITIONS RELATIVES À LA SANTÉ ET À LA SÉCURITÉ |
|
4.8. |
REGISTRES DE L'INFRASTRUCTURE ET DU MATÉRIEL ROULANT |
|
5. |
CONSTITUANTS D'INTEROPÉRABILITÉ |
|
5.1. |
DÉFINITIONS |
|
5.2. |
LISTE DES CONSTITUANTS D'INTEROPÉRABILITÉ |
|
5.2.1. |
Constituants d'interopérabilité de base |
|
5.2.2. |
Groupes de constituants d'interopérabilité |
|
5.3. |
PERFORMANCES DES CONSTITUANTS ET SPÉCIFICATIONS |
|
6. |
ÉVALUATION DE LA CONFORMITÉ ET/OU DE L'APTITUDE À L'EMPLOI DES CONSTITUANTS ET VÉRIFICATION DU SOUS-SYSTÈME |
|
6.0. |
INTRODUCTION |
|
6.1. |
CONSTITUANTS D'INTEROPÉRABILITÉ |
|
6.1.1. |
Procédures d'évaluation |
|
6.1.2. |
Modules |
|
6.2. |
SOUS-SYSTÈME «CONTRÔLE-COMMANDE» |
|
6.2.1. |
Procédures d'évaluation |
|
6.2.2. |
Modules |
|
7. |
MISE EN ŒUVRE DE LA STI «CONTRÔLE-COMMANDE» |
|
7.1. |
GÉNÉRALITÉS |
|
7.2. |
PARTICULARITÉS DE MISE EN ŒUVRE DE LA STI «CONTRÔLE-COMMANDE» |
|
7.2.1. |
Critères généraux de migration |
|
7.2.2. |
Critères de calendrier |
|
7.2.3. |
Mise en œuvre: infrastructures (équipements fixes) |
|
7.2.4. |
Mise en œuvre: matériel roulant (équipements embarqués) |
|
7.2.5. |
Voies de migration spécifiques |
|
7.2.6. |
Conditions dans lesquelles les fonctions optionnelles sont requises |
|
7.3. |
GESTION DES CHANGEMENTS |
|
7.3.1. |
Introduction |
|
7.3.2. |
Système de référence |
|
7.3.3. |
Phase de consolidation ERTMS |
|
7.3.4. |
Version de référence |
|
7.3.5. |
Déploiement de nouvelles références |
|
7.3.6. |
Processus de la gestion des changements — exigences |
|
7.3.7. |
Plan de gestion de la configuration — exigences |
|
7.3.8. |
Gouvernance |
|
7.4. |
CAS SPÉCIFIQUES |
|
7.4.1. |
Introduction |
|
7.4.2. |
Liste des cas spécifiques |
|
7.5. |
DISPOSITIONS TRANSITOIRES |
|
ANNEXE A |
|
ANNEXE A — APPENDICE 1 |
|
ANNEXE A — APPENDICE 2 |
|
ANNEXE B |
|
ANNEXE C |
| EXIGENCES GÉNÉRALES |
| REGISTRE DES INFRASTRUCTURES |
| REGISTRE DU MATÉRIEL ROULANT |
| LISTES DES CARACTÉRISTIQUES ET DES EXIGENCES SPÉCIFIQUES |
|
ANNEXE D |
|
ANNEXE E |
|
ANNEXE F |
|
ANNEXE G |
|
ANNEXE H |
1. INTRODUCTION
1.1. Domaine d'application technique
La présente STI concerne le sous-système «contrôle-commande et signalisation», qui est l'un des sous-systèmes figurant dans la liste reprise à l'annexe II, point 1 de la directive 2001/16/CE. Il est mentionné dans ce document comme le «sous-système contrôle-commande».
De plus amples informations sur le sous-système «contrôle-commande» sont fournies au chapitre 2 (définition et domaine d'application du sous-système).
1.2. Domaine d'application géographique
Le domaine d'application géographique de la présente STI est le système ferroviaire transeuropéen conventionnel tel qu'il est décrit à l'annexe I de la directive 2001/16/CE.
1.3. Contenu de la présente STI
Conformément à l'article 5, paragraphe 3, de la directive 2001/16/CE, la présente STI:
|
a) |
indique le champ d'application visé (partie du réseau ou du matériel roulant indiquée à l'annexe I de la directive; sous-système ou partie du sous-système indiqués à l'annexe II de la directive — chapitre 2 (définition et domaine d'application du sous-système); |
|
b) |
fixe les exigences essentielles du sous-système de contrôle-commande concerné et ses interfaces vis-à-vis des autres sous-systèmes — chapitre 3 (exigences essentielles du sous-système «contrôle-commande»); |
|
c) |
établit les spécifications fonctionnelles et techniques à respecter par le sous-système et ses interfaces vis-à-vis des autres sous-systèmes. Si nécessaire, ces spécifications peuvent différer selon l'utilisation du sous-système, par exemple vis-à-vis des catégories de lignes, de nœuds et/ou du matériel roulant prévu à l'annexe I de la directive — chapitre 4 (caractérisation du sous-système); |
|
d) |
détermine les constituants d'interopérabilité et les interfaces couvertes par les spécifications européennes, y compris les normes européennes, qui sont nécessaires pour obtenir l'interopérabilité du système ferroviaire transeuropéen conventionnel — chapitre 5 (constituants d'interopérabilité); |
|
e) |
définit, dans chaque cas envisagé, les procédures d'évaluation de la conformité ou de l'aptitude à l'emploi. Ceci inclut notamment les modules, définis dans la décision 93/465/CEE ou, lorsqu'elles sont appropriées, les procédures particulières à utiliser pour évaluer soit la conformité, soit l'aptitude à l'emploi des constituants d'interopérabilité, ainsi que les vérifications «CE» des sous-systèmes — chapitre 6 (évaluation de la conformité et/ou de l'aptitude à l'emploi des constituants et vérification du sous-système); |
|
f) |
indique la stratégie de mise en œuvre de la STI. En particulier, il est nécessaire de préciser les étapes à franchir pour passer progressivement de la situation existante à la situation finale où le respect de la STI sera généralisé — chapitre 7 (mise en œuvre de la STI «contrôle-commande»); |
|
g) |
indique, pour le personnel concerné, les qualifications professionnelles et les conditions d'hygiène et de sécurité au travail requises pour l'exploitation et la maintenance du sous-système visé ainsi que pour la mise en œuvre de la STI — chapitre 4 (caractérisation du sous-système). |
En outre, conformément à l'article 5, paragraphe 5, de la directive 2001/16/CE, des cas spécifiques peuvent être prévus pour chaque STI; ceux-ci sont indiqués au chapitre 7 (mise en œuvre de la STI «contrôle-commande»).
Enfin, la présente STI comprend également, au chapitre 4 (caractérisation du sous-système), les règles d'exploitation et de maintenance spécifiques au champ d'application indiqué au point 1.1 (domaine d'application technique) et au point 1.2 (domaine d'application géographique).
2. DÉFINITION ET DOMAINE D'APPLICATION DU SOUS-SYSTÈME
2.1. Généralités
Le sous-système «contrôle-commande» se définit comme l'ensemble des fonctions et leurs modalités d'application qui permettent le mouvement sûr des trains.
La STI «contrôle-commande» définit les exigences essentielles relatives aux parties du sous-système «contrôle-commande» qui sont utiles pour l'interopérabilité et qui sont donc soumises à la déclaration «CE» de vérification.
Les caractéristiques du sous-système contrôle-commande qui sont liées à l'interopérabilité du système ferroviaire transeuropéen conventionnel sont déterminées par:
|
1. |
les FONCTIONS qui sont essentielles pour la commande en sécurité du trafic ferroviaire et celles qui sont essentielles pour l'exploitation, y compris celles requises en conditions dégradées; |
|
2. |
les INTERFACES; |
|
3. |
le niveau de PERFORMANCES requis pour satisfaire aux exigences essentielles. |
Les spécifications relatives à ces fonctions, interfaces et exigences de performance sont fournies au chapitre 4 (caractérisation du sous-système), qui indique également les normes de référence.
2.2. Présentation
L'interopérabilité du réseau ferroviaire transeuropéen conventionnel dépend en partie de l'aptitude des équipements de contrôle-commande embarqués à fonctionner avec les divers équipements au sol.
En raison de la mobilité de la partie embarquée, le sous-système de contrôle-commande est divisé en deux parties: l'ensemble «bord» et l'ensemble «sol» (voir figure 8 à l'annexe D).
2.2.1. Interopérabilité
La présente STI définit les fonctions, interfaces et exigences de performance pour garantir l'interopérabilité technique. L'interopérabilité technique est le préalable à l'interopérabilité opérationnelle dans laquelle la conduite des trains est fondée sur des informations cohérentes affichées dans les cabines et répond aux exigences d'exploitation unifiées définies pour le réseau conventionnel. La présente STI contient également les fonctions qui sont nécessaires à la réalisation de l'interopérabilité opérationnelle (voir le point 4.3.1 — interface avec le sous-système «exploitation et gestion du trafic»).
2.2.2. Classes des systèmes de contrôle-commande
Dans le sous-système de contrôle-commande, sont définies deux classes de systèmes de protection des trains et de communication radio:
|
Classe A: |
système unifié de contrôle-commande. |
|
Classe B: |
systèmes et applications de contrôle-commande existant avant l'entrée en vigueur de la directive 2001/16/CE, limités aux systèmes et aux applications décrits à l'annexe B. |
Afin de parvenir à l'interopérabilité, l'ensemble «bord» du sous-système «contrôle commande» comprendra:
|
— |
les interfaces de classe A de communications «phonie» et «données» avec l'infrastructure, pour les circulations sur les infrastructures de classe A, |
|
— |
les interfaces de classe B de communications «phonie» et «données» avec l'infrastructure, pour les circulations sur les infrastructures de classe B. En ce qui concerne les données de signalisation, l'interopérabilité peut être obtenue grâce au module de transmission spécifique (STM), qui permet le fonctionnement d'équipements embarqués de classe A sur des lignes munies d'un système sol de classe B en utilisant les données de classe B. L'interface entre le système bord de classe A et les STM est définie dans la présente STI. |
Il appartient aux États membres de garantir la gestion des systèmes de classe B pendant leur durée de vie; en particulier, les éventuelles modifications apportées à ces spécifications ne doivent pas compromettre l'interopérabilité.
2.2.3. Niveaux d'application
Les interfaces spécifiées par la présente STI définissent les moyens permettant la transmission de données vers, et parfois depuis, les trains. Les spécifications de classe A prévues par la présente STI fournissent des options à partir desquelles il est possible de choisir les moyens de transmission adaptés aux exigences d'un projet. Trois niveaux d'application sont définis:
|
Niveau 1: |
la transmission des données est réalisée par transmission ponctuelle (Eurobalise) et dans certains cas semi-continue (Euroloop ou Radio in-fill — fonction de réouverture). La localisation des trains est réalisée par des équipements au sol, habituellement des circuits de voie ou des compteurs d'essieux. Les informations relatives à la signalisation sont communiquées au conducteur soit par les équipements dans la cabine de conduite, soit par la signalisation latérale. |
|
Niveau 2: |
la transmission des données est réalisée par transmission radio continue (GSM-R). Pour certaines fonctions, la transmission par radio doit être complétée par une transmission ponctuelle (Eurobalise). La localisation des trains est réalisée par des équipements au sol, habituellement des circuits de voie ou des compteurs d'essieux. Les informations relatives à la signalisation sont communiquées au conducteur par les équipements dans la cabine de conduite et, en option, par la signalisation latérale. |
|
Niveau 3: |
la transmission des données est réalisée par une transmission radio continue (GSM-R). Pour certaines fonctions, la transmission par radio doit être complétée par une transmission ponctuelle (Eurobalise). La détection des trains est réalisée par des équipements à bord, qui rendent compte à l'ensemble «sol» de contrôle-commande. Les informations relatives à la signalisation sont communiquées au conducteur par les équipements dans la cabine de conduite. |
Les exigences de la présente STI s'appliquent à tous les niveaux d'application. La mise en œuvre est traitée au chapitre 7 (mise en œuvre de la STI «contrôle-commande»). Un train équipé d'un système «bord» de classe A pour un niveau d'application donné sera apte à circuler à ce niveau d'application ou à un niveau inférieur.
2.2.4. Frontières des réseaux d'infrastructure
Les interfaces techniques locales entre les ensembles sol de contrôle-commande des infrastructures voisines ne doivent pas restreindre le passage ininterrompu des trains aux frontières des réseaux.
Aucun train à grande vitesse ou train conventionnel équipé d'un système bord de classe A conformément à la STI correspondante ne doit, pour des raisons liées à l'une des deux STI, voir son exploitation restreinte sur une ligne à grande vitesse ou une ligne conventionnelle dont l'infrastructure est munie d'un système sol de classe A conformément à la STI correspondante, dès lors que le registre du matériel roulant de ce train et le registre des infrastructures de cette ligne ont été confrontés pour les fins de l'interopérabilité.
3. EXIGENCES ESSENTIELLES DU SOUS-SYSTÈME «CONTRÔLE-COMMANDE»
3.1. Généralités
L'article 4, paragraphe 1, de la directive 2001/16/CE relative à l'interopérabilité stipule que le système ferroviaire transeuropéen conventionnel, les sous-systèmes et leurs constituants d'interopérabilité, y compris les interfaces, doivent satisfaire aux exigences essentielles définies en termes généraux à l'annexe III de la directive. Les exigences essentielles sont:
|
— |
la sécurité, |
|
— |
la fiabilité et la disponibilité, |
|
— |
la santé, |
|
— |
la protection de l'environnement, |
|
— |
la compatibilité technique. |
Conformément à la directive, les exigences essentielles peuvent s'appliquer d'une manière générale à l'ensemble du système ferroviaire transeuropéen conventionnel ou être spécifiques à chaque sous-système et à ses constituants d'interopérabilité.
Les exigences essentielles sont reprises individuellement ci-dessous. Les exigences relatives aux systèmes de classe B relèvent de la responsabilité de l'État membre concerné.
3.2. Aspects spécifiques du sous-système «contrôle-commande»
3.2.1. Sécurité
Chaque projet auquel la présente spécification est applicable devra mettre en application les mesures nécessaires pour démontrer que le niveau de risque qu'un incident relevant du sous-système de contrôle-commande se produise n'est pas plus élevé que l'objectif fixé pour la desserte. Afin de garantir que les solutions visant à garantir la sécurité ne compromettent l'interopérabilité, les exigences du paramètre fondamental défini au point 4.2.1 (caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité) doivent être respectées.
Pour le système de classe A, l'objectif global de sécurité du sous-système est partagé entre les ensembles «bord» et les ensembles «sol». Les exigences détaillées sont précisées dans le paramètre fondamental défini au point 4.2.1 (caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité). Cette exigence de sécurité doit être satisfaite ainsi que les exigences de disponibilité telles qu'elles sont définies au point 3.2.2 (fiabilité et disponibilité).
Concernant les systèmes de classe B utilisés pour l'exploitation du rail conventionnel, il appartient à l'État membre responsable (défini à l'annexe B) de:
|
— |
garantir que la conception du système de classe B répond aux objectifs nationaux de sécurité, |
|
— |
garantir que l'application du système de classe B répond aux objectifs nationaux de sécurité, |
|
— |
définir les paramètres de sécurité d'exploitation et les conditions d'utilisation du système de classe B (y compris, mais de façon non limitative, la maintenance et les modes dégradés). |
3.2.2. Fiabilité et disponibilité
|
a) |
Pour le système de classe A, les objectifs globaux de fiabilité et de disponibilité relatifs au sous-système sont partagés entre les ensembles bord et sol. Les exigences détaillées sont spécifiées dans le paramètre fondamental défini au point 4.2.1 (caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité). |
|
b) |
La qualité de l'organisation de la maintenance pour tous les systèmes constituant le sous-système «contrôle-commande» doit garantir que le niveau de risque est maîtrisé à mesure que les constituants vieillissent et s'usent. La qualité de la maintenance doit assurer que la sécurité n'est pas compromise du fait de ces activités. Voir point 4.5 (règles de maintenance). |
3.2.3. Santé
Conformément aux réglementations européennes ainsi qu'aux réglementations nationales qui sont compatibles avec la législation européenne, des précautions doivent être prises pour garantir que les sous-systèmes de contrôle-commande, par leurs matériaux de construction et leur conception, ne mettent pas en danger la santé des personnes y ayant accès.
3.2.4. Protection de l'environnement
Conformément aux réglementations européennes et aux réglementations nationales qui sont compatibles avec la législation européenne:
|
— |
les équipements de contrôle-commande ne doivent pas, en cas d'exposition à une chaleur élevée ou au feu, dépasser les seuils d'émissions de fumées ou de gaz dommageables pour l'environnement, |
|
— |
les équipements de contrôle-commande ne doivent pas contenir de substances qui pourraient, en utilisation normale, polluer anormalement l'environnement, |
|
— |
les équipements de contrôle-commande doivent être conformes à la législation européenne en vigueur sur les seuils d'émission de perturbations électromagnétiques et de susceptibilité à ces perturbations aux limites des emprises ferroviaires, |
|
— |
les équipements de contrôle-commande doivent être conformes aux réglementations existantes en matière de pollution sonore, |
|
— |
les équipements de contrôle-commande ne doivent pas entraîner un niveau de vibration inacceptable qui pourrait mettre en péril l'intégrité de l'infrastructure (lorsque l'infrastructure est correctement entretenue). |
3.2.5. Compatibilité technique
La compatibilité technique comprend les fonctions, les interfaces et les performances requises pour obtenir l'interopérabilité.
Les exigences de compatibilité technique sont subdivisées en trois catégories, comme suit:
|
— |
La première catégorie énonce les exigences générales d'ingénierie concernant l'interopérabilité, c'est-à-dire les conditions d'environnement, la compatibilité électromagnétique (CEM) interne dans les limites des emprises ferroviaires et le montage. Ces exigences de compatibilité sont définies dans le présent chapitre. |
|
— |
La deuxième catégorie décrit comment le sous-système de contrôle-commande doit être appliqué et quelles fonctions il doit effectuer pour que l'interopérabilité soit obtenue. Cette catégorie est définie au chapitre 4. |
|
— |
La troisième catégorie décrit comment le sous-système de contrôle-commande doit être exploité pour que l'interopérabilité soit obtenue. Cette catégorie est définie au chapitre 4. |
3.2.5.1. Compatibilité de l'ingénierie
3.2.5.1.1.
Les systèmes répondant aux exigences des systèmes de classe A doivent pouvoir fonctionner dans les conditions climatiques et physiques rencontrées sur le parcours de la partie correspondante du réseau transeuropéen conventionnel. Pour les interfaces avec le matériel roulant, voir le point 4.3.2.5 (conditions physiques d'environnement) et pour les interfaces avec les infrastructures, voir au point 4.3.3.3 (conditions physiques d'environnement).
Les systèmes répondant aux exigences des interfaces de classe B doivent satisfaire au minimum aux spécifications relatives à l'environnement physique applicables au système de classe B correspondant, afin de pouvoir fonctionner dans les conditions climatiques et physiques rencontrées sur le parcours des lignes conventionnelles concernées.
3.2.5.1.2.
Ce paramètre fondamental est décrit au point 4.2.12 (compatibilité électromagnétique). Pour les interfaces avec le matériel roulant, voir au point 4.3.2.6 (compatibilité électromagnétique), pour les interfaces avec l'infrastructure, voir au point 4.3.3.4 (compatibilité électromagnétique) et pour les interfaces avec l'énergie, voir au point 4.3.4.1 (compatibilité électromagnétique).
3.2.5.2. Compatibilité du sous-système «contrôle-commande»
Le chapitre 4, complété par les annexes A et B, définit les exigences relatives à l'interopérabilité du sous-système «contrôle-commande».
En outre, en ce qui concerne le sous-système «contrôle-commande», la présente STI, conjointement avec la STI «contrôle-commande» pour le système ferroviaire transeuropéen à grande vitesse, garantit l'interopérabilité technique entre les systèmes ferroviaires transeuropéens à grande vitesse et conventionnel lorsque tous les deux sont équipés d'un système de classe A.
4. CARACTÉRISATION DU SOUS-SYSTÈME
4.1. Introduction
Le système ferroviaire transeuropéen conventionnel, auquel s'applique la directive 2001/16/CE et dont le sous-système «contrôle-commande» fait partie, est un système intégré dont il faut vérifier la cohérence. Cette cohérence doit être vérifiée en particulier au niveau des spécifications du sous-système, de ses interfaces vis-à-vis du système dans lequel il s'intègre, ainsi que des règles d'exploitation et de maintenance.
Au regard de toutes les exigences essentielles, le sous-système «contrôle-commande» est caractérisé par les paramètres fondamentaux suivants:
|
— |
les caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité (point 4.2.1), |
|
— |
la fonctionnalité bord de l'ETCS (point 4.2.2), |
|
— |
la fonctionnalité sol de l'ETCS (point 4.2.3), |
|
— |
les fonctions de l'EIRENE (point 4.2.4), |
|
— |
les interfaces de transmission de l'ETCS et de l'EIRENE (point 4.2.5), |
|
— |
les interfaces bord internes au contrôle-commande (point 4.2.6), |
|
— |
les interfaces sol internes au contrôle-commande (point 4.2.7), |
|
— |
la gestion des clés (point 4.2.8), |
|
— |
la gestion des identifiants (ID) de l'ETCS (point 4.2.9), |
|
— |
DBC (détecteur de boîte chaude) (point 4.2.10), |
|
— |
compatibilité avec les systèmes de détection des trains du sol (point 4.2.11), |
|
— |
Compatibilité électromagnétique (point 4.2.12), |
|
— |
l'interface DMI (driver machine interface) de l'ETCS (point 4.2.13), |
|
— |
l'interface DMI (driver machine interface) de l'EIRENE (point 4.2.14), |
|
— |
l'interface avec les données enregistrées pour les besoins réglementaires (point 4.2.15), |
|
— |
visibilité des objets au sol du contrôle-commande (point 4.2.16). |
Les exigences énoncées aux points:
|
— |
4.2.10 [DBC (détecteur de boîte chaude)], |
|
— |
4.2.11 (compatibilité avec les systèmes du sol pour la détection des trains), |
|
— |
4.2.12 (compatibilité électromagnétique), |
|
— |
4.2.16 (visibilité des objets au sol du contrôle-commande) |
doivent toujours être appliquées, indépendamment de la classe du système.
Toutes les autres exigences du point 4.2 (spécifications fonctionnelles et techniques du sous-système) doivent toujours être appliquées au système de classe A uniquement. Les exigences relatives aux systèmes de classe B relèvent de la responsabilité de l'État membre concerné. L'annexe B traite des caractéristiques du système de classe B et définit les États membres responsables.
Les STM qui permettent au système bord de classe A de fonctionner sur une infrastructure de classe B sont soumis aux exigences de la classe B.
L'obtention de l'interopérabilité n'impose pas de normaliser toutes les fonctions du sous-système «contrôle-commande» dans son ensemble. Les fonctionnalités de contrôle automatique de la vitesse et de commande automatique des trains étudiées au chapitre 4 sont:
|
— |
des fonctions «bord» normalisées, assurant que chaque train réagira aux informations reçues du sol d'une façon prévisible, |
|
— |
des fonctions «sol» normalisées, capables de traiter les informations en provenance de systèmes non normalisés de commande d'enclenchements d'itinéraires et de signalisation et de traduire ces informations en messages normalisés pour les trains, |
|
— |
des interfaces normalisées pour la communication sol-train et train-sol. |
Les fonctions de contrôle-commande sont classées en catégories en indiquant, par exemple, leur caractère optionnel ou obligatoire. Les catégories sont définies à l'annexe A, index 1, et à l'annexe A, index 32, et la classification des fonctions est indiquée dans le texte correspondant.
L'annexe A, index 3, donne le glossaire des termes et des définitions ETCS utilisés dans les spécifications auxquelles il est fait référence à l'annexe A.
Au vu des exigences essentielles indiquées au chapitre 3, les spécifications fonctionnelles et techniques du sous-système «contrôle-commande» sont les suivantes:
4.2. Spécifications fonctionnelles et techniques du sous-système
4.2.1. Caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité
Ce paramètre fondamental décrit les exigences de sécurité relatives aux ensembles bord ainsi que les exigences de sécurité relatives aux ensembles sol.
En référence à l'exigence essentielle «sécurité» (voir le point 3.2.1, sécurité), ce paramètre fondamental établit les exigences obligatoires pour l'interopérabilité:
|
— |
afin de garantir que les solutions visant l'atteinte de la sécurité ne mettent pas en péril l'interopérabilité, les exigences de l'annexe A, index 47 doivent être respectées, |
|
— |
pour la partie participant à la sécurité d'un ensemble bord donné, ainsi que pour un ensemble sol, l'exigence de sécurité de l'ETCS niveau 1 ou niveau 2 (1) est: taux de risque admissible (TRA) de 10-9/heure (pour les défaillances aléatoires) correspondant au niveau d'intégrité de la sécurité 4. Les exigences détaillées pour les équipements de classe A sont spécifiées à l'annexe A, index 27. Des exigences de sécurité moindres concernant les valeurs du TRA pour les équipements au sol peuvent être adoptées à condition de satisfaire à l'objectif de sécurité du service, |
|
— |
les exigences de fiabilité et de disponibilité de l'annexe A, index 28, doivent être respectées. |
4.2.2. Fonctionnalité de l'ETCS à bord
Ce paramètre fondamental décrit la fonctionnalité de l'ETCS à bord. Il donne toutes les fonctions permettant la circulation d'un train en sécurité. Les performances des fonctions doivent être conformes à l'annexe A, index 14. L'implémentation de ces fonctions doit être conforme à l'annexe A, aux index 1, 2, 4, 13, 23, 24 et 53 et aux spécifications techniques énoncées ci-dessous:
|
— |
la communication avec l'ensemble sol de contrôle-commande. La fonction de transmission de données de réouverture (in-fill) dans les applications ETCS niveau 1 est obligatoire à bord uniquement aux conditions définies au chapitre 7. La fonctionnalité de transmission de données par radio de l'ETCS est obligatoire uniquement pour les applications ETCS niveau 2 ou ETCS niveau 3,
|
|
— |
la communication avec le conducteur:
|
|
— |
la communication avec les STM. Voir annexe A, aux index 8, 25, 26, 36 et 52. Cette fonction comprend:
|
|
— |
la fourniture de la fonction de contrôle de vitesse et la signalisation de cabine. Voir annexe A aux index 6, 7, 31 et 37. Cette fonction comprend:
|
|
— |
la démonstration de la complétude du train (intégrité du train) — obligatoire pour le niveau 3, non exigée pour les niveaux 1 ou 2. |
|
— |
la surveillance de l'état des équipements et l'aide en cas de défaillance. Cette fonction comprend:
|
|
— |
la prise en charge de l'enregistrement des données pour les besoins réglementaires. Voir annexe A, aux index 5, 41 et 55, |
|
— |
la fonction de vigilance. Voir annexe A, index 42. Elle peut être mise en œuvre:
|
4.2.3. Fonctionnalité de l'ETCS au sol
Ce paramètre fondamental décrit la fonctionnalité de l'ETCS au sol. Il donne toutes les fonctions de l'ETCS pour fournir un sillon sûr à un train spécifique. Les performances des fonctions doivent être conformes à l'annexe A, index 14. L'implémentation de ces fonctions doit être conforme à l'annexe A, aux index 1, 2, 4, 13, 23, 24, 31, 37 et 53 ainsi qu'aux spécifications techniques indiquées ci-dessous:
|
— |
communication avec les équipements de signalisation montés en voie (enclenchement d'itinéraires, signal), |
|
— |
localisation d'un train spécifique dans un système de coordonnées Eurobalise (niveaux 2 et 3), |
|
— |
conversion des informations provenant des équipements de signalisation montés en voie en un format normalisé pour l'ensemble bord de contrôle-commande, |
|
— |
génération des autorisations de mouvement, y compris la description des voies et des ordres attribués à un train spécifique, |
|
— |
communication avec l'ensemble bord de contrôle-commande. Ceci comprend:
|
|
— |
la fourniture d'informations de libération de voie à l'enclenchement. Cette fonction est requise uniquement pour le niveau 3. |
4.2.4. Fonctions EIRENE
Ce paramètre fondamental décrit les fonctions de communication «phonie» et «données» de l'EIRENE:
|
— |
les fonctions liées aux appels du conducteur, |
|
— |
les fonctions radio opérationnelles, |
|
— |
la communication des données. |
L'implémentation de ces fonctions doit être conforme aux spécifications techniques indiquées à l'annexe A, aux index 32, 33 et 48, et leurs performances doivent être conformes à l'annexe A, index 54.
4.2.5. Interfaces de transmission ETCS et EIRENE
La spécification complète de ces interfaces se compose de deux parties:
|
— |
la spécification des protocoles relatifs au transport des informations en provenance/à destination des fonctions ERTMS et pour assurer la sécurité de la communication, |
|
— |
la spécification des interfaces entre des parties d'équipement. Les interfaces entre les équipements sont décrites au:
|
Ce paramètre fondamental décrit la transmission entre les ensembles sol et bord de contrôle-commande. Il définit:
|
— |
les valeurs physiques, électriques et électromagnétiques à respecter pour permettre un fonctionnement en sécurité, |
|
— |
le protocole de communication à utiliser, |
|
— |
la disponibilité du canal de communication. |
Les spécifications suivantes s'appliquent aux:
|
— |
communications radio avec le train. Les interfaces de communication radio de classe A fonctionnent dans la bande GSM-R. Voir annexe A, index 35. Les protocoles doivent être conformes à l'annexe A, aux index 10, 18, 19, 39 et 40, |
|
— |
communications Eurobalise et Euroloop avec le train. Les interfaces de communication Eurobalise doivent être conformes à l'annexe A, aux index 9 et 43. Les interfaces de communication Euroloop doivent être conformes à l'annexe A aux index 16 et 50. |
4.2.6. Interfaces «bord» internes au contrôle-commande
Ce paramètre fondamental comprend trois parties.
4.2.6.1. Interface entre l'ETCS et le STM
Le module de transmission spécifique (STM) permet le fonctionnement de l'ETCS bord sur des lignes équipées de systèmes de classe B.
L'interface entre la fonctionnalité ETCS à bord et les STM pour des systèmes de classe B est définie à l'annexe A, aux index 4, 8, 25 et 26. L'annexe A, index 45, spécifie l'interface K. La mise en œuvre de l'interface K est optionnelle mais, dans le cas de son choix, elle doit être faite conformément à l'annexe A, index 45.
4.2.6.2. GSM-R/ETCS
L'interface entre la radio de classe A et la fonctionnalité ETCS à bord. Ces exigences sont spécifiées à l'annexe A, aux index 4, 7, 20, 22 et 34.
4.2.6.3. Odométrie
L'interface entre la fonction odométrie et les fonctions embarquées de l'ERTMS/ETCS doit répondre aux exigences de l'annexe A, index 44. Cette interface ne contribue à ce paramètre fondamental que si les équipements d'odométrie sont fournis en tant que constituant d'interopérabilité (voir le point 5.2.2, groupes de constituants d'interopérabilité).
4.2.7. Interfaces «sol» internes au contrôle-commande
Ce paramètre fondamental comprend six parties.
4.2.7.1. Interface fonctionnelle entre les RBC
Cette interface est utilisée pour définir les données à échanger entre des centres de bloc radio (RBC) voisins pour permettre le mouvement d'un train de façon sûre entre des zones de RBC. Elle décrit:
|
— |
des informations transmises par le RBC «origine» (Handing Over) au RBC «destination» (Accepting), |
|
— |
des informations transmises par le RBC «destination» (Accepting) au RBC «origine» (Handing Over). |
Ces exigences sont spécifiées à l'annexe A, index 12.
4.2.7.2. Interface technique entre les RBC
Il s'agit de l'interface technique entre deux RBC. Ces exigences sont spécifiées à l'annexe A, index 58.
4.2.7.3. GSM-R/RBC
Il s'agit de l'interface entre le système radio de classe A et la fonctionnalité ETCS du sol. Ces exigences sont spécifiées à l'annexe A, index 4, 20, 22 et 34.
4.2.7.4. Eurobalise/LEU
Il s'agit de l'interface entre Eurobalise et l'unité électronique latérale (LEU). Ces exigences sont spécifiées à l'annexe A, index 9. Cette interface contribue à ce paramètre fondamental seulement lorsque Eurobalise et les LEU sont fournis en tant que constituants d'interopérabilité séparés (voir point 5.2.2, groupes de constituants d'interopérabilité).
4.2.7.5. Euroloop/LEU
Il s'agit de l'interface entre Euroloop et la LEU. Ces exigences sont spécifiées à l'annexe A, index 16. Cette interface contribue à ce paramètre fondamental seulement lorsque Euroloop et les LEU sont fournis en tant que constituants d'interopérabilité séparés (voir le point 5.2.2, groupes de constituants d'interopérabilité).
4.2.7.6. Exigences relatives aux pré-équipements ERTMS au sol
Cette interface intervient entre l'équipement sol de classe A et l'infrastructure de contrôle-commande montée en voie. Ces exigences sont spécifiées à l'annexe A, index 59. Cet index décrit les moyens permettant le pré-équipement au sol des équipements de classe A.
4.2.8. Gestion des clés
Ce paramètre fondamental concerne les données liées à la sécurité transmises par radio qui sont protégées par des mécanismes nécessitant des clés cryptographiques. Les gestionnaires d'infrastructure et les entreprises ferroviaires doivent prévoir un système de gestion qui assurera le contrôle et la gestion des clés. Une interface de gestion des clés est nécessaire:
|
— |
entre les systèmes de gestion des clés de différents gestionnaires d'infrastructure, |
|
— |
entre les systèmes de gestion des clés des entreprises ferroviaires et les gestionnaires d'infrastructure, |
|
— |
entre le système de gestion des clés et les équipements ETCS du bord et du sol. |
Les exigences applicables à la gestion des clés entre les systèmes de gestion des clés des régions interopérables sont spécifiées à l'annexe A, index 11.
4.2.9. Gestion des identifiants (ID) ETCS
Ce paramètre fondamental concerne les identifiants ETCS uniques pour les équipements dans les ensembles sol et bord. Les exigences sont spécifiées à l'annexe A, index 23. L'attribution des variables est définie à l'annexe A, index 53.
Les fournisseurs d'équipements bord de contrôle-commande sont responsables de la gestion d'identifiants uniques dans la plage attribuée comme définie à l'annexe A, index 53. Les détenteurs de matériel roulant doivent prévoir un système de gestion qui assurera le contrôle et la gestion des identifiants pendant la durée de vie de l'ensemble.
L'attribution des plages d'identifiants aux États membres est donnée à l'annexe A, index 53. Les États membres sont responsables de la gestion de l'attribution de ces plages aux entités adjudicatrices dans leur pays.
Les entités adjudicatrices des ensembles au sol sont responsables de la gestion d'identifiants uniques dans la plage qui leur est attribuée. Le gestionnaire d'infrastructure doit prévoir un système de gestion qui assurera le contrôle et la gestion des identifiants pendant le cycle de vie de l'ensemble.
4.2.10. DBC (détecteur de boîte chaude)
Ce paramètre fondamental spécifie les exigences concernant les équipements au sol utilisés pour vérifier si la température des paliers d'essieux du matériel roulant circulant dépasse une certaine valeur et pour transmettre l'information correspondante à un centre de contrôle. Les exigences sont spécifiées à l'annexe A, appendice 2.
Le traitement du matériel roulant équipé d'une détection à bord est également décrit au point 4.2.11 de la STI «MR-GV».
4.2.11. Compatibilité avec les systèmes du sol pour la détection des trains
Ce paramètre fondamental décrit les caractéristiques des systèmes du sol pour la détection des trains, qui sont nécessaires pour être activés par du matériel roulant conforme à la STI «matériel roulant».
Le matériel roulant doit posséder les caractéristiques nécessaires au fonctionnement des systèmes du sol pour la détection des trains. Les exigences relatives aux caractéristiques d'un véhicule sont spécifiées à l'annexe A, appendice 1. Ces caractéristiques sont définies dans la STI «matériel roulant-GV» et dans la STI «matériel roulant — wagons de fret» aux points indiqués dans le tableau et seront incluses dans les futures STI pour le matériel roulant.
|
Paramètre |
Appendice 1 STI «contrôle-commande» |
STI «matériel roulant GV» |
STI «matériel roulant — wagons de fret» |
STI «matériel roulant, engins de traction — trains automoteurs, EAE, EAD — et voitures» |
STI «exploitation et gestion du trafic (GV)» |
STI «exploitation et gestion du trafic (GV)» |
|
Distance entre les essieux |
2.1, y compris Fig. 6 |
Non spécifié à ce stade |
4.2.3.2 |
? |
|
— |
|
Géométrie des roues |
2.2 y compris Fig. 7 |
4.2.10 |
5.4.2.3 |
? |
|
— |
|
Masse du véhicule (charge à l'essieu minimale) |
3.1 |
4.1.2 |
4.2.3.2 |
? |
|
— |
|
Espace exempt de métal autour des roues |
3.2 |
Non spécifié à ce stade |
Chapitre 6 (2) |
? |
|
— |
|
Masse métallique du véhicule |
3.3 |
Non spécifié à ce stade |
Point ouvert |
? |
|
— |
|
Matériau des roues |
3.4 |
Non spécifié à ce stade |
5.4.2.3 |
? |
|
— |
|
Impédance entre les roues |
3.5 |
4.2.10e |
4.2.3.3.1 |
? |
|
— |
|
Impédance du véhicule |
3.6 |
Non spécifié à ce stade |
Non |
? |
|
— |
|
Utilisation des équipements de sablage |
4.1 |
Non spécifié à ce stade |
Non |
? |
|
Non traité à ce stade |
|
Utilisation de semelles |
4.2 |
Non spécifié à ce stade |
Point ouvert |
? |
|
— |
|
Courant de traction |
5.1 |
Non spécifié à ce stade |
Non |
? |
|
— |
|
Utilisation de freins électriques/magnétiques |
5.2 |
4.1.5, 4.2.15, 4.3.6 |
Non |
? |
|
|
|
Champs électriques, magnétiques, électromagnétiques |
5.3 |
4.1.9 |
Non |
? |
|
— |
4.2.12. Compatibilité électromagnétique
Ce paramètre fondamental est composé de deux parties.
4.2.12.1. Compatibilité électromagnétique interne du contrôle-commande
Les équipements de contrôle-commande ne doivent pas créer de perturbations avec les autres équipements du contrôle-commande.
4.2.12.2. Compatibilité électromagnétique entre les équipements du matériel roulant et du contrôle-commande du sol
Cette partie contient la plage des rayonnements de compatibilité électromagnétique (CEM) définissant des limites admissibles (pour le courant de traction conduit et induit et d'autres courants créés par le train, pour les caractéristiques de champ électromagnétique ainsi que d'autres champs statiques) que le matériel roulant doit respecter pour assurer le fonctionnement correct des équipements de contrôle-commande du sol. Une description des moyens de mesure des valeurs correspondantes est donnée.
Les systèmes du sol pour la détection des trains doivent présenter les caractéristiques nécessaires pour leur compatibilité avec le matériel roulant répondant aux STI «matériel roulant».
À l'annexe A, l'appendice 1 spécifie les caractéristiques que doivent présenter les systèmes de détection des trains pour être compatibles avec le matériel roulant. Ces caractéristiques seront comprises dans les STI «matériel roulant».
4.2.13. DMI (Driver Machine Interface) de l'ETCS
Ce paramètre fondamental décrit les informations fournies au conducteur par le système ETCS embarqué et les informations entrées par le conducteur dans l'ERTMS/ETCS embarqué. Voir annexe A, index 51.
Il comprend:
|
— |
l'ergonomie (y compris la visibilité), |
|
— |
les fonctions ETCS devant être affichées, |
|
— |
les fonctions ETCS déclenchées par les informations entrées par le conducteur. |
4.2.14. DMI (Driver Machine Interface) de l'EIRENE
Ce paramètre fondamental décrit les informations fournies au conducteur par le système EIRENE embarqué et les informations entrées par le conducteur dans l'EIRENE embarqué. Voir annexe A, aux index 32, 33 et 51.
Les informations couvertes ont trait à:
|
— |
l'ergonomie (comprenant la visibilité), |
|
— |
les fonctions EIRENE devant être affichées, |
|
— |
les informations sortantes relatives à une demande, |
|
— |
les informations entrantes relatives à une demande. |
4.2.15. Interface avec les enregistrements de données pour les besoins réglementaires
Ce paramètre fondamental décrit:
|
— |
l'échange de données entre l'enregistreur juridique et l'outil de téléchargement, |
|
— |
les protocoles de communication, |
|
— |
l'interface physique, |
|
— |
les exigences fonctionnelles relatives à l'enregistrement des données et à l'utilisation de l'enregistrement. |
Les autorités chargées d'enquête dans chaque État membre doivent pouvoir accéder aux données mémorisées qui correspondent aux exigences des enregistrements obligatoires pour les fins officielles et d'investigation.
Voir annexe A, aux index 4, 5, 41 et 55.
4.2.16. Visibilité des objets au sol du contrôle-commande
Ce paramètre fondamental décrit:
|
— |
les caractéristiques des signaux rétroréfléchissants, |
|
— |
le champ de vision extérieur du conducteur. Les objets sol du contrôle-commande qui doivent être vus par le conducteur doivent être placés en tenant compte du champ de vision extérieur du conducteur comme défini dans la STI «exploitation et gestion du trafic». |
4.3. Spécifications fonctionnelles et techniques des interfaces avec les autres sous-systèmes
4.3.1. Interface avec le sous-système «exploitation et gestion du trafic»
Toutes les références à la STI «OPE-RC» sont des points ouverts jusqu'à ce qu'elles soient confirmées lorsque la présente STI sera approuvée.
4.3.1.1. Règles d'exploitation
Le réseau européen conventionnel sera soumis à certaines exigences opérationnelles unifiées qui seront énoncées dans la STI «exploitation et gestion du trafic» du RC (voir également au point 4.4 règles d'exploitation).
STI «OPE-RC»: section 4.4 (à confirmer)
4.3.1.2. Driver Machine Interface de l'ETCS
Cette interface décrit les informations fournies au conducteur par l'ERTMS/ETCS embarqué et entrées par le conducteur dans l'ERTMS ETCS embarqué. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.13 [DMI (Driver Machine Interface) de l'ETCS].
Cette interface s'applique au système de classe A. Les exigences pour les systèmes de classe B sont définies par l'État membre responsable (voir annexe B).
STI «OPE-RC»: point 4.4 (à confirmer)
4.3.1.3. Driver Machine Interface de l'EIRENE
Cette interface décrit les informations fournies au conducteur par l'EIRENE embarqué et entrées par le conducteur dans le système EIRENE embarqué. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.14 [DMI (Driver Machine Interface) de l'EIRENE].
Cette interface s'applique aux systèmes de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «OPE-RC»: point 4.4 (à confirmer)
4.3.1.4. Interface avec les enregistrements de données pour les besoins réglementaires
Cette interface fait référence aux exigences fonctionnelles relatives à l'enregistrement des données et à leur utilisation. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.15 (interface avec les enregistrements de données pour les besoins réglementaires).
Cette interface s'applique aux systèmes de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «OPE-RC»: point 4.2.3.5 (à confirmer)
4.3.1.5. Performances et caractéristiques garanties du système de freinage du train
Le sous-système de contrôle-commande nécessite la fourniture des performances garanties du système de freinage du train. Les règles déterminant les performances garanties du système de freinage d'un train seront définies dans la STI «exploitation et gestion du trafic». La STI «matériel roulant» doit définir la méthode permettant de déterminer la performance de freinage des véhicules.
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «OPE-RC»: point 4.2.2.4 (à confirmer)
4.3.1.6. Isolement de la fonctionnalité de l'ETCS à bord
Cette interface fait référence aux exigences opérationnelles de l'isolement de la fonctionnalité de l'ETCS embarqué en cas de défaillance. Les exigences du contrôle-commande sont définies au point 4.2.2 (fonctionnalité de l'ETCS à bord).
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir annexe B).
STI «OPE-RC»: point 4.4 (à confirmer)
4.3.1.7. Gestion des clés
Cette interface fait référence aux exigences opérationnelles pour la gestion des clés. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.8 (gestion des clés).
Cette interface s'applique au système de classe A.
STI «OPE-RC»: à confirmer
4.3.1.8. Détecteurs de boîtes chaudes
Cette interface fait référence aux exigences opérationnelles pour les détecteurs de boîtes chaudes. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.10 [DBC (détecteur de boîte chaude)].
STI «OPE-RC»: point 4.2.3.5.1 (à confirmer)
4.3.1.9. Vigilance du conducteur
Cette interface fait référence aux exigences opérationnelles pour le dispositif de vigilance du conducteur. Les exigences du contrôle-commande sont définies au point 4.2.2 (fonctionnalité de l'ETCS à bord).
STI «OPE-RC»: point 4.3.3.7 (à confirmer)
4.3.1.10. Utilisation du sablage
Cette interface fait référence aux exigences opérationnelles pour les conducteurs afin que le sable ne nuise pas aux performances de l'équipement de détection des trains au sol. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.11 (compatibilité avec les systèmes du sol pour la détection des trains).
STI «OPE-RC»: à ce stade, non traité dans la STI «OPE» car le niveau de détail est différent: à confirmer
4.3.1.11. Champ de vision extérieur du conducteur
Cette interface fait référence au champ de vision du conducteur à travers la vitre frontale de cabine de conduite. Les exigences s'appliquant au contrôle-commande sont décrites au point 4.2.16 (visibilité des objets au sol du contrôle-commande).
STI «OPE-RC»: point 4.3.2.2 (à confirmer)
4.3.2. Interface avec le sous-système «matériel roulant»
Toutes les références aux interfaces avec la STI «matériel roulant, engins de traction et voitures» pour le réseau conventionnel sont des points ouverts. Les engins de traction sont les trains automoteurs, les rames électriques à unités multiples et les rames Diesel à unités multiples.
4.3.2.1. Compatibilité avec les systèmes de détection des trains au sol
Les systèmes de détection des trains au sol doivent posséder les caractéristiques nécessaires pour être actionnés par des matériels roulants répondant à la STI «matériel roulant». Le paramètre fondamental du contrôle-commande et les références aux STI «matériel roulant» pertinentes sont décrites au point 4.2.11 (compatibilité avec les systèmes du sol pour la détection des trains).
4.3.2.2. Compatibilité électromagnétique entre les équipements du matériel roulant et du contrôle-commande du sol
Cette interface représente la plage des émissions de compatibilité électromagnétique (CEM) définissant des limites admissibles (courants de traction conduits et induits et autres courants créés par le train, caractéristiques de champs électromagnétiques et d'autres champs statiques) à respecter par le matériel roulant afin d'assurer le fonctionnement correct des équipements sol du contrôle-commande. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.12.2 (compatibilité électromagnétique entre les équipements du matériel roulant et du contrôle-commande du sol).
STI «wagons de fret du matériel roulant»: non concernée
STI «matériel roulant-GV»: point 4.1.9
STI «matériel roulant, engins de traction et voitures».
4.3.2.3. Performances et caractéristiques garanties du système de freinage du train
Le sous-système de contrôle-commande doit prévoir les performances garanties de freinage du train. La STI «matériel roulant» doit définir la méthode pour déterminer les performances de freinage des véhicules. La STI «exploitation et gestion du trafic» définit les règles pour déterminer les performances garanties d'un train.
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «matériel roulant-wagons de fret»: point 4.2.4.1.2
STI «matériel roulant-GV»: points 4.1.5, 4.3.7 et 4.3.9
STI «matériel roulant, engins de traction et voitures».
4.3.2.4. Position des antennes embarquées du contrôle-commande
La position des antennes Eurobalise et Euroloop sur le matériel roulant doit être telle qu'elle assure une communication fiable des données aux conditions limites des géométries de voie que le matériel roulant pourra rencontrer. Les mouvements dynamiques et le comportement du matériel roulant doivent être pris en compte. Les exigences du contrôle-commande sont définies au point 4.2.2 (fonctionnalité de l'ETCS à bord).
Cette interface s'applique au système de classe A. Les exigences pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
La position de l'antenne GSM-R sur la toiture des véhicules dépend principalement de mesures qui doivent être effectuées pour chaque type de véhicule en tenant également compte de la position des autres antennes (nouvelles ou existantes). Dans des conditions d'essai, la sortie de l'antenne doit être conforme aux exigences décrites au point 4.2.5 (interfaces de transmission ETCS et EIRENE). Les conditions d'essai sont également décrites au point 4.2.5 (interfaces de transmission ETCS et EIRENE).
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant-GV»: annexe 0, 0.5, point 4.2.4
STI «matériel roulant, engins de traction et voitures».
4.3.2.5. Conditions physiques d'environnement
Les conditions climatiques et physiques d'environnement des équipements de contrôle-commande attendues sur le parcours du train doivent être définies au regard des registres des infrastructures des lignes sur lesquelles la circulation du train est prévue et au regard de l'annexe A, index A4.
STI «matériel roulant — grande vitesse»: point 4.3.12
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant, engins de traction et voitures».
4.3.2.6. Compatibilité électromagnétique
Afin de faciliter l'utilisation généralisée des équipements destinés à l'ensemble bord de contrôle-commande sur un nouveau matériel roulant admis en service sur le réseau transeuropéen conventionnel, les conditions électromagnétiques attendues sur le train doivent être définies conformément à l'annexe A, index A6. Pour le système de communication Eurobalise, les dispositions spécifiques de l'annexe A, index 9, s'appliquent.
Les exigences pour les systèmes de classe B sont définies par l'État membre responsable (voir annexe B).
STI «matériel roulant-GV»
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant, engins de traction et voitures».
4.3.2.7. Isolement de la fonctionnalité de l'ETCS embarqué
Cette interface fait référence à l'isolement de la fonctionnalité ETCS à bord. Les exigences du contrôle-commande sont définies au point 4.2.2 (fonctionnalité de l'ETCS à bord).
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les sous-systèmes de classe B sont définies par les États membres responsables (voir l'annexe B).
STI «matériel roulant-GV»: point 4.2.4 (à rajouter)
STI «matériel roulant — wagons de fret»: non concernée
STI «matériel roulant, engins de traction et voitures».
4.3.2.8. Interfaces de données
L'interface de données entre le train et l'ensemble bord du contrôle-commande est définie à l'annexe A, index 7.
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «matériel roulant-GV»: points 4.2.4 et 4.3.13
STI «matériel roulant — wagons de fret» n'est pas concernée pour les niveaux 1 et 2 de l'ETCS.
STI «matériel roulant, engins de traction et voitures».
Les exigences d'interfaçage entre les communications radio et le sous-système «matériel roulant» sont spécifiées à l'annexe A, index 33.
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir annexe B).
La spécification respective correspondante est définie dans
|
— |
STI «matériel roulant — wagons de fret»: non concernée |
|
— |
STI «matériel roulant-GV»: point |
|
— |
STI «matériel roulant, engins de traction et voitures». |
4.3.2.9. Détecteurs de boîtes chaudes
Cette interface fait référence aux exigences opérationnelles pour les détecteurs de boîtes chaudes. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.10 [DBC (détecteur de boîte chaude)].
La spécification respective correspondante est définie dans
|
— |
STI «matériel roulant — wagons de fret»: point 4.2.3.3.2 |
|
— |
STI «matériel roulant-GV»: points 4.2.11 et 4.3.13 |
|
— |
STI «matériel roulant, engins de traction et voitures». |
4.3.2.10. Phares de véhicule
Cette interface fait référence aux exigences techniques de chromaticité et de luminosité des phares de véhicule afin d'assurer la visibilité correcte de la signalisation latérale réfléchissante ainsi que des vêtements réfléchissants. Les exigences du contrôle-commande sont définies au point 4.2.16 (visibilité des objets au sol du contrôle-commande).
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant-GV»: point 4.2.20
STI «matériel roulant, engins de traction et voitures».
4.3.2.11. Vigilance du conducteur
Cette interface fait référence aux exigences techniques relatives à la vigilance du conducteur. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.2 (fonctionnalité de l'ETCS à bord).
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant-GV»: point 4.2.2
STI «matériel roulant, engins de traction et voitures».
4.3.2.12. Odométrie
Il s'agit de l'interface entre le dispositif odométrique et la fonctionnalité d'odométrie requise pour les fonctions «bord» de l'ETCS.
Cette interface avec les STI pour le matériel roulant s'applique uniquement au paramètre fondamental décrit au point 4.2.6.3 (odométrie) lorsque les équipements d'odométrie sont fournis en tant que constituant d'interopérabilité séparé [voir le point 5.2.2 (groupes de constituants d'interopérabilité)].
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B). STI «matériel roulant-GV»: point 4.2.4.
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant, engins de traction et voitures».
4.3.2.13. Interface avec l'enregistrement de données pour les besoins réglementaires
Cette interface fait référence aux exigences techniques relatives à l'enregistrement de données. Le paramètre fondamental du contrôle-commande est décrit au point 4.2.15 (interface avec les enregistrements de données pour les besoins réglementaires).
Cette interface s'applique au système de classe A. Les exigences pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «wagons de fret — matériel roulant»: non concernée
STI «matériel roulant-GV»: point 4.3.13
STI «matériel roulant, engins de traction et voitures».
4.3.2.14. Pré-équipement à bord
Cette interface fait référence à l'étendue du pré-équipement sur le matériel roulant pour ce qui concerne les équipements de classe A, comme décrit à l'annexe A, index 57.
Cette interface s'applique aux systèmes de classe A.
STI «matériel roulant-GV»: point 4.2.4.
4.3.3. Interfaces avec le sous-système «infrastructure»
4.3.3.1. Systèmes de détection des trains
Le montage de l'infrastructure doit assurer que les systèmes de détection des trains respectent les exigences mentionnées au point 4.2.11 (compatibilité avec les systèmes du sol pour la détection des trains).
STI «infrastructure»: une référence à la STI «CCS» sera incluse dans la future STI de manière à ce que les exigences du «CCS» puissent être respectées par l'infrastructure.
4.3.3.2. Antennes embarquées
Les antennes des sous-systèmes au sol doivent être positionnées de manière à assurer une communication fiable des données aux conditions limites des géométries de voie que le matériel roulant pourra rencontrer. Les mouvements dynamiques et le comportement du matériel roulant doivent être pris en compte. Voir le point 4.2.5 (interfaces de transmission ETCS et EIRENE).
Cette interface s'applique au système de classe A. Les exigences équivalentes pour les systèmes de classe B sont définies par l'État membre responsable (voir l'annexe B).
STI «infrastructure»: les exigences relatives au gabarit seront définies ultérieurement.
4.3.3.3. Conditions physiques d'environnement
Les conditions climatiques et physiques de l'environnement auxquelles l'infrastructure sera exposée doivent être indiquées dans le registre des infrastructures, en se référant à l'annexe A, index A5.
4.3.3.4. Compatibilité électromagnétique
Les conditions électromagnétiques prévues sur l'infrastructure doivent être définies en référence à l'annexe A, index A7. En ce qui concerne le système de communication Eurobalise, les dispositions spécifiques énoncées à l'annexe A, index 9, s'appliquent. Un ensemble bord du contrôle-commande conforme à l'annexe A, index A6, et aux exigences spécifiques relatives au système Eurobalise contenues dans l'annexe A, index 9, doit être considéré conforme aux exigences essentielles pertinentes.
4.3.4. Interfaces avec le sous-système «énergie»
4.3.4.1. Compatibilité électromagnétique
Les conditions électromagnétiques prévues des installations fixes doivent être définies en référence à l'annexe A, index A7. En ce qui concerne le système de communication Eurobalise, les dispositions spécifiques de l'annexe A, index 9, s'appliquent. Un ensemble bord de contrôle-commande conforme à l'annexe A, index A6, et aux exigences spécifiques relatives à Eurobalise données dans l'annexe A, index 9, doit être considéré conforme aux exigences essentielles pertinentes.
4.4. Règles d'exploitation
Les règles d'exploitation spécifiques au sous-système «contrôle-commande» sont détaillées dans la STI «exploitation et gestion du trafic».
4.5. Règles de maintenance
Les règles de maintenance du sous-système couvertes par la présente STI doivent garantir le maintien des valeurs citées dans les paramètres fondamentaux indiqués au chapitre 4 dans les limites spécifiées pendant toute la durée de vie des ensembles. Toutefois, pendant des opérations de maintenance préventive ou corrective, il est admis que le sous-système ne puisse pas atteindre les valeurs citées dans les paramètres fondamentaux. Les règles de maintenance doivent assurer que la sécurité n'est pas compromise pendant ces activités.
Pour atteindre ces résultats, les éléments suivants doivent être respectés.
4.5.1. Responsabilité du fabricant des équipements
Le fabricant de l'équipement incorporé dans le sous-système est tenu de spécifier:
|
— |
toutes les exigences et procédures de maintenance (y compris le contrôle du bon fonctionnement, le diagnostic et les méthodes et outils d'essai) nécessaires pour réaliser les exigences essentielles et satisfaire aux valeurs mentionnées dans les exigences obligatoires de la présente STI pendant tout le cycle de vie de l'équipement (transport et stockage avant l'installation, le fonctionnement normal, les défaillances, les actions de réparation, les vérifications et les opérations de maintenance, la mise à l'arrêt définitif, etc.), |
|
— |
tous les risques susceptibles de mettre en cause la santé et la sécurité du public et du personnel de maintenance, |
|
— |
les conditions de la maintenance de première ligne (c'est-à-dire la définition des unités remplaçables en ligne (Line Repleaceable Units, LRU), la définition des versions compatibles homologuées des matériels et des logiciels, le remplacement des LRU défaillantes et, par exemple, les conditions de stockage des LRU ainsi que de réparation des LRU défaillantes, |
|
— |
les conditions techniques pour la conduite d'un train dont l'équipement est défaillant jusqu'à la fin de sa mission ou jusqu'à l'atelier (en mode dégradé d'un point de vue technique, par exemple avec la mise en service partielle ou totale de fonctions, l'isolement d'autres fonctions, etc.), |
|
— |
les vérifications à effectuer dans le cas d'équipement soumis à des efforts exceptionnels (par exemple, des conditions d'environnement excessives ou des chocs anormaux). |
4.5.2. Responsabilité des entités adjudicatrices
Les entités adjudicatrices doivent:
|
— |
assurer, pour tous les composants s'inscrivant dans le champ d'application de la présente STI (s'agissant de constituants d'interopérabilité ou non), que les exigences de maintenance comme décrit au point 4.5.1 (responsabilité du fabricant des équipements) sont définies, |
|
— |
établir les règles de maintenance applicables à tous les composants s'inscrivant dans le champ d'application de la présente STI en tenant compte des risques dus aux interactions des différents équipements dans le sous-système et des interfaces avec les autres sous-systèmes. |
4.5.3. Responsabilité du gestionnaire d'infrastructure ou de l'entreprise ferroviaire
Le gestionnaire d'infrastructure ou l'entreprise ferroviaire responsable du fonctionnement de l'ensemble bord ou sol:
|
— |
doit établir un plan de maintenance comme spécifié au point 4.5.4 (plan de maintenance). |
4.5.4. Plan de maintenance
Le plan de maintenance doit être établi sur la base des dispositions spécifiées au point 4.5.1 (responsabilité du fabricant des équipements), au point 4.5.2 (responsabilité des entités adjudicatrices) ainsi qu'au point 4.5.3 (responsabilité du gestionnaire d'infrastructure ou de l'entreprise ferroviaire). Il doit couvrir au moins:
|
— |
les conditions pour l'utilisation des équipements, selon les exigences indiquées par les fabricants, |
|
— |
la spécification des programmes de maintenances (par exemple, la définition des catégories de maintenance préventive et de maintenance corrective, le délai maximal entre les actions de maintenance préventive et les précautions correspondantes à prendre pour la sécurité du sous-système et du personnel de maintenance, en tenant compte des interférences entre les actions de maintenance et l'exploitation du sous-système de contrôle-commande), |
|
— |
les exigences relatives au stockage des pièces de rechange, |
|
— |
la définition de la maintenance de première ligne, |
|
— |
les règles de la gestion des équipements défaillants, |
|
— |
les exigences concernant la qualification minimale du personnel de maintenance, en référence aux risques pour la santé et la sécurité, |
|
— |
la définition des responsabilités et l'autorisation du personnel de maintenance (par exemple, pour l'accès aux équipements, la gestion des limitations et/ou des interruptions de fonctionnement du système, le remplacement des LRU, le remplacement des LRU défaillantes, le rétablissement du fonctionnement normal du système), |
|
— |
les procédures de gestion des identifiants de l'ETCS. Voir point 4.2.9 [gestion des identifiants (ID) ETCS], |
|
— |
les méthodes concernant les comptes rendus au fabricant des informations relatives aux défauts critiques en sécurité et aux pannes de système fréquentes. |
4.6. Qualifications professionnelles
Les qualifications professionnelles exigées pour l'exploitation du sous-système de contrôle-commande sont couvertes par la STI «exploitation et gestion du trafic».
Les exigences relatives aux compétences en ce qui concerne la maintenance du sous-système de contrôle-commande doivent être détaillées dans le plan de maintenance. [Voir point 4.5.4 plan de maintenance)].
4.7. Conditions relatives à la santé et à la sécurité
Outre les exigences spécifiées dans les plans de maintenance, voir le point 4.5 (règles de maintenance), des précautions doivent être prises pour garantir la santé et la sécurité des personnels de maintenance et d'exploitation, conformément aux réglementations européennes et aux réglementations nationales qui sont compatibles avec la législation européenne.
4.8. Registres de l'infrastructure et du matériel roulant
Le sous-système «contrôle-commande» est traité en deux ensembles:
|
— |
l'ensemble «bord», |
|
— |
l'ensemble «sol». |
Les exigences relatives aux informations devant figurer aux registres de l'infrastructure ferroviaire conventionnelle et au registre du matériel roulant eu égard aux ensembles de contrôle-commande sont spécifiées à l'annexe C (caractéristiques spécifiques aux lignes et caractéristiques spécifiques aux trains).
5. CONSTITUANTS D'INTEROPÉRABILITÉ
5.1. Définitions
Conformément à l'article 2, point d), de la directive 2001/16/CE:
Les constituants d'interopérabilité sont «tout composant élémentaire, groupe de composants, sous-ensembles ou ensemble complet de matériels incorporés ou destinés à être incorporés dans un sous-système, dont dépend directement ou indirectement l'interopérabilité du système ferroviaire transeuropéen conventionnel. La notion de constituant recouvre des objets matériels mais aussi immatériels comme les logiciels».
Comme le décrit le chapitre 2, le sous-système «contrôle-commande» est divisé en deux ensembles. En conséquence, la définition générale de la directive peut être adaptée comme suit:
Les constituants d'interopérabilité sont tout composant élémentaire, groupe de composants ou sous-ensemble de matériels incorporés ou destinés à être incorporés dans un ensemble «bord» et dans un ensemble «sol», dont dépend directement ou indirectement l'interopérabilité du système ferroviaire transeuropéen conventionnel. La notion de constituant recouvre des objets matériels mais aussi immatériels comme les logiciels.
5.2. Liste des constituants d'interopérabilité
5.2.1. Constituants d'interopérabilité de base
Les constituants d'interopérabilité du sous-système «contrôle-commande» sont répertoriés:
|
— |
dans le tableau 5.1.a en ce qui concerne l'ensemble «bord», |
|
— |
dans le tableau 5.2.a en ce qui concerne l'ensemble «sol». |
Le constituant d'interopérabilité «plate-forme de sécurité» est défini en tant que composante (produit générique, indépendant de l'application) fait de matériel et de logiciel de base (le logiciel source et/ou le système d'exploitation et/ou les outils de soutien), qui peut être employé pour la construction de systèmes plus complexes (applications génériques, c'est-à-dire des classes d'applications).
5.2.2. Groupes de constituants d'interopérabilité
Les constituants d'interopérabilité de base du contrôle-commande définis aux tableaux 5.1.a et 5.2.a peuvent être combinés pour former une unité plus grande. Le groupe est alors défini par les fonctions des constituants d'interopérabilité intégrés et par les interfaces restantes à la périphérie du groupe. Si un groupe est formé ainsi, il doit être considéré comme un constituant d'interopérabilité:
|
— |
le tableau 5.1.b répertorie les groupes de constituants d'interopérabilité de l'ensemble «bord», |
|
— |
le tableau 5.2.b répertorie les groupes de constituants d'interopérabilité de l'ensemble «sol». |
Lorsque la présente STI ne donne pas de spécifications obligatoires pour étayer une interface, une déclaration de conformité regroupant les constituants d'interopérabilité peut être fournie.
5.3. Performances des constituants et spécifications
Pour chaque constituant d'interopérabilité de base ou groupe de constituants d'interopérabilité, les tableaux du chapitre 5 décrivent:
|
— |
dans la colonne 3, les fonctions et les interfaces. On notera que certains constituants d'interopérabilité ont des fonctions et/ou des interfaces optionnelles, |
|
— |
dans la colonne 4, les spécifications obligatoires pour l'évaluation de la conformité de chaque fonction ou interface, dans la mesure de leur pertinence, par référence au point correspondant du chapitre 4, |
|
— |
dans la colonne 5, les modules à appliquer pour l'évaluation de la conformité, tels que décrits au chapitre 6 de la présente STI. |
On notera que les exigences du point 4.5.1 (responsabilité du fabricant des équipements) s'appliquent à chaque constituant d'interopérabilité ou groupe de constituants d'interopérabilité.
Tableau 5.1.a
Constituants d'interopérabilité de base dans l'ensemble bord de contrôle-commande
|
1 |
2 |
3 |
4 |
5 |
|
|
No |
Constituant d'interopérabilité (CI) |
Caractéristiques |
Exigences spécifiques à évaluer par référence à l'annexe A, index n |
Module |
|
|
1 |
ERTMS/ETCS embarqué |
Sécurité |
4.2.1 |
|
|
|
Fonctionnalité ETCS à bord |
4.2.2 |
H2 ou B avec D ou B avec F |
|||
|
A l'exclusion de:
|
|
||||
|
interfaces de transmission ETCS et EIRENE |
4.2.5 |
|
|||
|
RBC (niveaux 2 et 3) |
|
||||
|
Unité de réouverture radio (in-fill) (niveau 1 optionnel) |
|
||||
|
Transmission Eurobalise |
|
||||
|
Transmission Euroloop (niveau 1 optionnel) |
|
||||
|
Interfaces |
|
||||
|
STM (implémentation de l'interface K optionnelle) |
4.2.6.1 |
||||
|
ERTMS/GSM-R embarqué |
4.2.6.2 |
||||
|
Odométrie |
4.2.6.3 |
||||
|
Système de gestion des clés |
4.2.8 |
||||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
||||
|
Driver Machine Interface de l'ETCS |
4.2.13 |
||||
|
Gestion des clés |
4.3.1.7 |
||||
|
Conditions physiques d'environnement |
4.3.2.5 |
||||
|
Compatibilité électromagnétique (CEM) |
4.3.2.6 |
||||
|
Interface de données. Cette interface comprend également la vigilance (optionnelle) et l'intégrité du train (uniquement pour le niveau 3) |
4.3.2.8 |
||||
|
Enregistreur d'informations de sécurité |
Néant |
||||
|
2 |
Plate-forme de sécurité embarquée |
Sécurité |
4.2.1 |
H2 ou B avec D ou B avec F |
|
|
3 |
Enregistreur d'informations de sécurité |
Fonctionnalité ETCS à bord |
4.2.2 |
H2 ou B avec D ou B avec F |
|
|
Uniquement l'enregistrement des données pour les besoins réglementaires |
|
||||
|
Interfaces |
|
|
|||
|
Outil de téléchargement de l'enregistreur juridique |
4.2.15 |
||||
|
ERTMS/ETCS embarqué |
Néant |
||||
|
Conditions d'environnement |
4.3.2.5 |
||||
|
Compatibilité électromagnétique (CEM) |
4.3.2.6 |
||||
|
4 |
Odométrie |
Sécurité |
4.2.1 |
H2 ou B avec D ou B avec F |
|
|
Fonctionnalité ETCS à bord |
4.2.2 |
||||
|
Uniquement l'odométrie |
|
||||
|
Interfaces |
|
|
|||
|
ERTMS/ETCS embarqué |
4.2.6.3 |
||||
|
Conditions d'environnement |
4.3.2.5 |
||||
|
CEM |
4.3.2.6 |
||||
|
5 |
STM externe |
Fonctions et sécurité |
Néant |
H2 ou B avec D ou B avec F |
|
|
Selon les spécifications nationales |
|
||||
|
Interfaces |
|
|
|||
|
ERTMS/ETCS embarqué |
4.2.6.1 |
||||
|
Interface (air gap) de système de classe B Selon les spécifications nationales |
Néant |
||||
|
Conditions d'environnement Selon les spécifications nationales |
Néant |
||||
|
CEM Selon les spécifications nationales |
Néant |
||||
|
6 |
ERTMS/GSM-R embarqué |
Fonctions EIRENE |
4.2.4 |
H2 ou B avec D ou B avec F |
|
|
Communication de données uniquement aux niveaux 2 ou 3, ou au niveau 1 avec la réouverture radio (in-fill) |
|
||||
|
Interfaces |
|
|
|||
|
ERTMS/ETCS embarqué Communication de données uniquement aux niveaux 2 ou 3, ou au niveau 1 avec la réouverture radio (in-fill) |
4.2.6.2 |
||||
|
GSM-R |
4.2.5 |
||||
|
Driver Machine Interface de l'EIRENE |
4.2.14 |
||||
|
Conditions d'environnement |
4.3.2.5 |
||||
|
CEM |
4.3.2.6 |
Tableau 5.1.b
Groupes de constituants d'interopérabilité de l'ensemble bord du contrôle-commande
Ce tableau est donné comme exemple de structure. D'autres groupes pourraient être proposés.
|
1 |
2 |
3 |
4 |
5 |
|
No |
Constituant d'interopérabilité (CI) |
Caractéristiques principales |
Exigences spécifiques à évaluer par référence à l'annexe A, index n |
Module |
|
1 |
Plate-forme de sécurité embarquée ERTMS/ETCS embarqué Enregistreur d'informations de sécurité Odométrie |
Sécurité |
4.2.1 |
|
|
Fonctionnalité ETCS à bord |
4.2.2 |
H2 ou B avec D ou B avec F |
||
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
|||
|
RBC (niveaux 2 et 3) |
|
|
||
|
Unité de réouverture radio (in-fill) (niveau 1 optionnel) |
|
|||
|
Transmission (air gap) Eurobalise |
|
|||
|
Transmission (air gap) Euroloop (niveau 1 optionnel) |
|
|||
|
Interfaces |
|
|||
|
STM (implémentation de l'interface K optionnelle) |
4.2.6.1 |
|||
|
ERTMS/GSM-R embarqué |
4.2.6.2 |
|||
|
Système de gestion des clés |
4.2.8 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Driver Machine Interface de l'ETCS |
4.2.13 |
|||
|
Environnement physique |
4.3.2.5 |
|||
|
CEM |
4.3.2.6 |
|||
|
Outil de téléchargement de l'enregistreur juridique |
4.2.15 |
|||
|
Interface de données. Cette interface comprend également la vigilance (optionnelle) et l'intégrité du train (uniquement niveau 3) |
4.3.2.8 |
Tableau 5.2.a
Constituants d'interopérabilité de base de l'ensemble sol de contrôle-commande
|
1 |
2 |
3 |
4 |
5 |
|
No |
Constituant d'interopérabilité (CI) |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
Module |
|
1 |
RBC |
Sécurité |
4.2.1 |
|
|
Fonctionnalité ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par Eurobalise, réouverture radio (in-fill) et Euroloop |
|
|||
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
|
||
|
Uniquement les communications radio avec le train |
|
|
||
|
Interfaces |
|
|
||
|
RBC voisin |
4.2.7.1, 4.2.7.2 |
|
||
|
ERTMS/GSM-R au sol |
4.2.7.3 |
|
||
|
Système de gestion des clés |
4.2.8 |
|
||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|
||
|
Enclenchement des itinéraires |
Néant |
|
||
|
Conditions d'environnement |
4.3.3.3 |
|
||
|
CEM |
4.3.3.4 |
|
||
|
2 |
Unité de réouverture radio (in-fill) |
Sécurité |
4.2.1 |
|
|
Fonctionnalité ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par Eurobalise, Euroloop et la fonctionnalité de niveaux 2/3 |
|
|||
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
|
||
|
Uniquement les communications radio avec le train |
|
|||
|
Interfaces |
|
|||
|
ERTMS/GSM-R au sol |
4.2.7.3 |
|||
|
Système de gestion des clés |
4.2.8 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Enclenchement et LEU |
4.2.3 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
3 |
Eurobalise |
Sécurité |
4.2.1 |
|
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
H2 ou B avec D ou B avec F |
||
|
Uniquement les communications Eurobalise avec le train |
|
|||
|
Interfaces |
|
|
||
|
Eurobalise LEU |
4.2.7.4 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
4 |
Euroloop |
Sécurité |
4.2.1 |
|
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
H2 ou B avec D ou B avec F |
||
|
Uniquement les communications Euroloop avec le train |
|
|||
|
Interfaces |
|
|
||
|
Euroloop LEU |
4.2.7.5 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
5 |
LEU Eurobalise |
Sécurité |
4.2.1 |
|
|
Fonctionnalité de l'ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par réouverture radio (in-fill), Euroloop et la fonctionnalité de niveau 2 et de niveau 3 |
|
|||
|
Interfaces |
|
|
||
|
Signalisation au sol |
Néant |
|||
|
Eurobalise |
4.2.7.4 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
6 |
Euroloop LEU |
Sécurité |
4.2.1 |
|
|
Fonctionnalité de l'ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par réouverture de radio (in-fill), Euroloop et la fonctionnalité de niveau 2 et de niveau 3 |
|
|||
|
Interfaces |
|
|
||
|
Signalisation au sol |
Néant |
|||
|
Euroloop |
4.2.7.5 |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
7 |
Plate-forme de sécurité «sol» |
Sécurité |
4.2.1 |
H2 ou B avec D ou B avec F |
Tableau 5.2.b
Groupes de constituants d'interopérabilité de l'ensemble sol du contrôle-commande
Ce tableau est donné comme exemple de structure. D'autres groupes pourraient être proposés.
|
1 |
2 |
3 |
4 |
5 |
|
No |
Constituant d'interopérabilité (CI) |
Caractéristiques |
Exigences spécifiques à évaluer par référence au chapitre 4 |
Module |
|
1 |
Plate-forme de sécurité «sol» Eurobalise Eurobalise LEU |
Sécurité |
4.2.1 |
|
|
Fonctionnalité ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par Euroloop et la fonctionnalité des niveaux 2 et 3 |
|
|||
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
|
||
|
Uniquement les communications Eurobalise avec le train |
|
|||
|
Interfaces |
|
|||
|
Signalisation au sol |
Néant |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
|||
|
2 |
Plate-forme de sécurité «sol» Euroloop Euroloop LEU |
Sécurité |
4.2.1 |
|
|
Fonctionnalité de l'ETCS au sol |
4.2.3 |
H2 ou B avec D ou B avec F |
||
|
À l'exclusion des communications par Eurobalise et la fonctionnalité des niveaux 2 et 3 |
|
|||
|
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
4.2.5 |
|
||
|
Uniquement les communications Euroloop avec le train |
|
|||
|
Interfaces |
|
|||
|
Signalisation au sol |
Néant |
|||
|
Gestion des identifiants de l'ETCS |
4.2.9 |
|||
|
Conditions d'environnement |
4.3.3.3 |
|||
|
CEM |
4.3.3.4 |
6. ÉVALUATION DE LA CONFORMITÉ ET/OU DE L'APTITUDE À L'EMPLOI DES CONSTITUANTS ET VÉRIFICATION DU SOUS-SYSTÈME
6.0. Introduction
Dans le cadre de la présente STI, la satisfaction des exigences essentielles pertinentes mentionnées au chapitre 3 de la présente STI sera assurée par la conformité aux spécifications reprises au chapitre 4 et, pour le suivi, au chapitre 5 concernant les constituants d'interopérabilité, telle que démontrée par un résultat positif de l'évaluation de la conformité et/ou de l'aptitude à l'emploi du constituant d'interopérabilité ainsi que par la vérification du sous-système comme décrit au chapitre 6.
Néanmoins, lorsque les exigences essentielles sont en partie satisfaites par des règles nationales, en vertu:
|
a) |
de l'utilisation des systèmes de classe B (y compris les fonctions nationales dans les STM); |
|
b) |
de points ouverts dans la présente STI; |
|
c) |
d'une dérogation accordée au titre de l'article 7 de la directive 2001/16/CE; |
|
d) |
de cas spécifiques décrits au point 7.3, |
l'évaluation de conformité correspondante sera alors effectuée selon les procédures notifiées sous la responsabilité de l'État membre concerné.
6.1. Constituants d'interopérabilité
6.1.1. Procédures d'évaluation
Le fabricant d'un constituant d'interopérabilité (CI) (et/ou de groupes de constituants d'interopérabilité) ou son mandataire établi dans la Communauté doit établir une déclaration «CE» de conformité conformément à l'article 13, paragraphe 1, et à l'annexe IV de la directive 2001/16/CE, avant de les mettre sur le marché.
La procédure d'évaluation de la conformité des constituants d'interopérabilité et/ou des groupes de constituants d'interopérabilité tels qu'ils sont définis au chapitre 5 de la présente STI est effectuée par application des modules spécifiés au point 6.1.2 (modules).
Certaines des spécifications dans la présente STI contiennent des fonctions obligatoires et/ou optionnelles. L'organisme notifié:
|
— |
vérifie que toutes les fonctions obligatoires applicables au constituant d'interopérabilité sont implémentées, |
|
— |
vérifie quelles fonctions optionnelles sont implémentées, |
et effectue l'évaluation de conformité.
Le fournisseur doit indiquer dans la déclaration «CE» les fonctions optionnelles implémentées.
L'organisme notifié doit vérifier qu'aucune fonction supplémentaire mise en œuvre dans le constituant n'engendre de conflits avec les fonctions obligatoires ou optionnelles implémentées.
6.1.1.1. Module de transmission spécifique (STM)
Le STM doit répondre aux exigences nationales, et son approbation relève de la responsabilité de l'État membre concerné comme indiqué à l'annexe B.
La vérification de l'interface du STM avec l'ERTMS/ETCS embarqué nécessite une évaluation de conformité effectuée par un organisme notifié. L'organisme notifié vérifiera que l'État membre a approuvé la partie nationale du STM.
6.1.1.2. Déclaration «CE» d'aptitude à l'emploi
La déclaration «CE» d'aptitude à l'emploi n'est pas exigée pour les constituants d'interopérabilité du sous-système «contrôle-commande».
6.1.2. Modules
Pour la procédure d'évaluation des constituants d'interopérabilité compris dans le sous-système «contrôle-commande», le fabricant ou son mandataire établi dans la Communauté peut choisir les modules selon les indications des tableaux 5.1A, 5.1B, 5.2A et 5.2B:
|
— |
soit la procédure d'examen de type (module B) pour la phase de conception et de développement, en association avec la procédure de système de gestion de la qualité de la production (module D) pour la phase de production, |
|
— |
soit la procédure d'examen de type (module B) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module F), |
|
— |
le système de gestion de la qualité complet avec la procédure de contrôle de la conception (module H2). |
La description des modules est donnée à l'annexe E de la présente STI.
Le module D (système de gestion de la qualité de la production) ne peut être choisi que dans le cas où le fabricant applique un système de qualité couvrant la production, l'inspection et les essais finals des produits, approuvé et surveillé par un organisme notifié.
Le module H2 (système de gestion de la qualité complet avec contrôle de la conception) ne peut être choisi que dans le cas où le fabricant applique un système de qualité couvrant la conception, la production, l'inspection et les essais finals des produits, approuvé et surveillé par un organisme notifié.
Les clarifications complémentaires suivantes s'appliquent à l'utilisation de certains modules:
|
— |
en référence au chapitre 4 de la description du «module B» (examen de type) donnée en annexe E:
|
|
— |
en référence au chapitre 3 de la description du «module F» (vérification sur produits) donnée en annexe E, la vérification statistique n'est pas autorisée, c'est-à-dire que tous les constituants d'interopérabilité doivent être examinés individuellement, |
|
— |
en référence au point 6.3 du «module H2» (système de gestion de la qualité complet avec contrôle de la conception), un essai de type est exigé. |
Indépendamment du module choisi, les dispositions de l'annexe A, index 47, index A1, index A2 et index A3 doivent être appliquées pour la certification des constituants d'interopérabilité, pour lesquels les exigences du paramètre fondamental sécurité [section 4.2.1 (caractéristiques de sécurité du contrôle-commande entrant en ligne de compte pour l'interopérabilité)] s'appliquent.
Indépendamment du module choisi, il convient de vérifier que les indications du fournisseur concernant la maintenance du constituant d'interopérabilité répondent aux exigences du point 4.5 (règles de maintenance) de la présente STI.
Si le module B (examen de type) est utilisé, cette vérification doit être effectuée sur la base du contrôle de la documentation technique [voir points 3 et 4.1 de la description du module B (examen de type)].
Si le module H2 (système de qualité complet avec contrôle de la conception) est utilisé, la demande de contrôle de la conception doit comprendre tous les éléments apportant la preuve que les exigences du point 4.5 (règles de maintenance) de la présente STI sont remplies.
6.2. Sous-système «contrôle-commande»
6.2.1. Procédures d'évaluation
Ce paragraphe traite de la déclaration «CE» de vérification du sous-système «contrôle-commande». Comme indiqué au chapitre 2, l'application du sous-système «contrôle-commande» est traitée en deux ensembles:
|
— |
l'ensemble «bord», |
|
— |
l'ensemble «sol». |
Pour chaque ensemble, une déclaration «CE» de vérification est nécessaire.
À la demande de l'entité adjudicatrice ou de son mandataire établi dans la Communauté, l'organisme notifié réalise la vérification «CE» des ensembles bord et sol conformément à l'annexe VI de la directive 2001/16/CE.
L'entité adjudicatrice doit établir une déclaration «CE» de vérification de l'ensemble de contrôle-commande conformément à l'article 18, paragraphe 1, et à l'annexe V de la directive 2001/16/CE.
Le contenu de la déclaration «CE» de vérification doit être conforme à l'annexe V de la directive 2001/16/CE. Ceci comprend la vérification de l'intégration des constituants d'interopérabilité faisant partie de l'ensemble; les tableaux 6.1 et 6.2 définissent les caractéristiques à vérifier et énoncent les spécifications obligatoires à appliquer.
Certaines des spécifications dans la présente STI contiennent des fonctions obligatoires et/ou optionnelles. L'organisme notifié:
|
— |
vérifie que toutes les fonctions obligatoires requises pour l'ensemble sont implémentées, |
|
— |
vérifie que toutes les fonctions optionnelles requises par l'implémentation spécifique au sol ou à bord sont implémentées. |
L'organisme notifié doit vérifier qu'aucune fonction supplémentaire mise en œuvre dans le constituant n'engendre de conflits avec les fonctions obligatoires ou optionnelles mises en œuvre.
Conformément à l'annexe C, les informations relatives à l'implémentation spécifique de l'ensemble sol et de l'ensemble bord doivent être fournies dans le registre des infrastructures et dans le registre du matériel roulant.
La déclaration «CE» de vérification de l'ensemble sol ou de l'ensemble bord doit fournir toutes les informations devant figurer dans les registres susmentionnés. Les registres doivent être gérés conformément à l'article 24 de la directive 2001/16/CE relative à l'interopérabilité.
La déclaration «CE» de vérification des ensembles «bord» et «sol», accompagnée des certificats de conformité, est suffisante pour assurer qu'un ensemble du sol fonctionnera avec un ensemble embarqué équipé des caractéristiques correspondantes définies dans le registre du matériel roulant et dans le registre des infrastructures sans déclaration «CE» supplémentaire de vérification du sous-système.
6.2.1.1. Vérification fonctionnelle de l'intégration de l'ensemble embarqué
La vérification est à effectuer pour un ensemble bord du contrôle-commande installé sur un véhicule. En ce qui concerne les équipements de contrôle-commande qui ne sont pas définis comme relevant de la classe A, seules les exigences de vérification en rapport avec l'interopérabilité (par exemple, l'interface «bord» entre l'ERTMS/ETCS et le STM) sont comprises dans la présente STI.
Avant que la vérification fonctionnelle à bord soit effectuée, les constituants d'interopérabilité compris dans l'ensemble doivent être évalués conformément au point 6.1 ci-dessus et couverts par une déclaration «CE» de conformité. L'organisme notifié doit évaluer qu'ils sont adaptés pour la demande (par exemple, que les fonctions optionnelles sont mises en œuvre).
La fonctionnalité de classe A déjà vérifiée au niveau du constituant d'interopérabilité ne nécessite pas de vérification supplémentaire.
Les essais de vérification d'intégration doivent être effectués pour démontrer que l'interconnexion et l'interfaçage des composants de l'ensemble avec le train ont été réalisés correctement afin de garantir l'atteinte de la fonctionnalité exigée et des performances nécessaires pour cette application de l'ensemble. Lorsque des ensembles «bord» de contrôle-commande identiques sont installés sur des éléments identiques du matériel roulant, la vérification de l'intégration ne doit être effectuée qu'une seule fois sur un élément du matériel roulant.
Les normes suivantes sont d'application:
|
— |
l'installation correcte de l'ensemble «bord» de contrôle-commande (par exemple, la conformité avec les règles d'ingénierie, la coopération des équipements interconnectés, l'absence d'interactions dangereuses et, le cas échéant, le stockage des données spécifiques à l'application), |
|
— |
le fonctionnement correct des interfaces avec le matériel roulant (par exemple, freins du train, vigilance, intégrité du train), |
|
— |
l'aptitude d'interfaçage avec l'ensemble «sol» de contrôle-commande ayant des caractéristiques correspondantes (par exemple, niveau d'application ETCS, fonctions optionnelles installées), |
|
— |
l'aptitude à lire et à sauvegarder toutes les informations requises dans l'enregistreur des données de sécurité (et également les informations fournies par les systèmes non-ETCS, si demandées). |
Cette vérification peut être faite dans un dépôt.
La vérification de l'aptitude à l'interfaçage de l'ensemble bord de contrôle-commande avec l'ensemble sol consiste en la vérification de l'aptitude à lire une Eurobalise certifiée et (si la fonctionnalité est installée à bord) à lire une Euroloop ainsi que l'aptitude à établir des connexions GSM-R de phonie et (si la fonctionnalité est installée) de données.
Si un équipement de classe B est également inclus, l'organisme notifié doit vérifier que les exigences de l'essai d'intégration émises par l'État membre concerné ont été satisfaites.
6.2.1.2. Vérification fonctionnelle de l'intégration de l'ensemble au sol
Les vérifications sont à effectuer pour un ensemble sol de contrôle-commande installé sur une infrastructure. En ce qui concerne les équipements de contrôle-commande qui ne sont pas définis comme relevant de la classe A, seules les exigences de vérification en rapport avec l'interopérabilité (par exemple, la CEM) sont comprises dans la présente STI.
Les constituants d'interopérabilité compris dans l'ensemble doivent avoir été évalués conformément au point 6.1 (constituants d'interopérabilité) ci-dessus et être couverts par une déclaration «CE» de conformité, préalablement à la réalisation de sa vérification fonctionnelle au sol. L'organisme notifié doit vérifier qu'ils sont adaptés pour l'application (notamment, que les fonctions optionnelles sont mises en œuvre).
La fonctionnalité de la classe A déjà vérifiée au niveau du constituant d'interopérabilité ne nécessite pas de vérification supplémentaire.
Concernant la conception de la partie ERTMS/ETCS de l'ensemble «sol» de contrôle-commande, les exigences de la STI doivent être complétées par des spécifications nationales couvrant, par exemple:
|
— |
la description des caractéristiques de la voie telles que rampes, distances, positions d'éléments de ligne et des Eurobalise/Euroloop, positions à protéger, etc., |
|
— |
les informations et les règles de signalisation devant être traitées par le système ERTMS/ETCS. |
Les essais de vérification de l'intégration doivent être réalisés pour démontrer que l'interconnexion et l'interfaçage des composants de l'ensemble avec les équipements nationaux au sol ont été réalisés correctement afin de garantir l'atteinte de la fonctionnalité exigée et la performance de l'ensemble nécessaires pour cette application.
Les interfaces «sol» suivantes doivent être prises en compte:
|
— |
entre le système radio de classe A et l'ERTMS/ETCS [RBC ou unité de réouverture (In-fill) radio, le cas échéant], |
|
— |
entre Eurobalise et LEU, |
|
— |
entre Euroloop et LEU, |
|
— |
entre des RBC voisins, |
|
— |
entre l'ERTMS/ETCS [RBC, LEU, unité de réouverture (In-fill) radio] et le déclenchement d'itinéraires ou la signalisation nationale, selon qu'ils s'appliquent. |
Les normes suivantes sont d'application:
|
— |
l'installation correcte de la partie ERTMS/ETCS de l'ensemble sol de contrôle-commande (par exemple, la conformité avec les règles d'ingénierie, la coopération des éléments d'équipement interconnectés, l'absence d'interactions dangereuses et, le cas échéant, le stockage des données spécifiques à l'application selon les spécifications nationales mentionnées ci-dessus), |
|
— |
le fonctionnement correct des interfaces avec les équipements nationaux au sol, |
|
— |
l'aptitude d'interfaçage avec l'ensemble bord de contrôle-commande ayant des caractéristiques correspondantes (par exemple, le niveau d'application ETCS). |
6.2.1.3. Évaluation au cours des phases de migration
La modernisation d'un ensemble sol ou bord de contrôle-commande existant peut être effectuée au cours d'étapes successives conformément au point 7.2.3 et au point 7.2.4. À chaque étape, seule la conformité avec les exigences de la STI applicables pour cette étape est vérifiée, les autres exigences des étapes restantes ne sont pas remplies.
À cette étape, l'entité adjudicatrice peut introduire une demande pour l'évaluation de l'ensemble par un organisme notifié.
Indépendamment des modules choisis par l'entité adjudicatrice, l'organisme notifié vérifie que:
|
— |
les exigences de la STI applicables pour cette étape sont respectées, |
|
— |
les exigences de la STI déjà évaluées ne sont pas compromises. |
Il n'y a pas lieu de vérifier une nouvelle fois les fonctions déjà évaluées qui ne sont ni modifiées ni remises en cause par cette étape.
Le ou les certificats délivrés par l'organisme notifié à la suite de l'évaluation satisfaisante de l'ensemble sont accompagnés de réserves indiquant les limites du ou des certificat(s), quelles exigences de la STI sont remplies et quelles exigences ne sont pas remplies.
Les réserves doivent être indiquées dans le registre du matériel roulant ou le registre des infrastructures comme il convient.
6.2.2. Modules
Tous les modules indiqués ci-dessous sont spécifiés à l'annexe E de la présente STI.
6.2.2.1. Ensemble «bord»
Pour effectuer la procédure de vérification de l'ensemble «bord», l'entité adjudicatrice ou son mandataire établi dans la Communauté européenne peut choisir:
|
— |
soit la procédure d'examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de système de gestion de la qualité en production (module SD) pour la phase de production, |
|
— |
soit la procédure d'examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module SF), |
|
— |
soit le système de gestion de la qualité complet avec la procédure de contrôle de la conception (module SH2). |
6.2.2.2. Ensemble «sol»
Pour effectuer la procédure de vérification de l'ensemble «sol», l'entité adjudicatrice ou son mandataire établi dans la Communauté européenne peut choisir:
|
— |
soit la procédure de vérification à l'unité (module SG), |
|
— |
soit la procédure d'examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de système de gestion de la qualité en production (module SD) pour la phase de production, |
|
— |
soit la procédure d'examen de type (module SB) pour la phase de conception et de développement, en association avec la procédure de vérification sur produits (module SF), |
|
— |
soit la procédure de système de gestion de la qualité complet avec la procédure de contrôle de la conception (module SH2). |
6.2.2.3. Conditions pour l'utilisation des modules applicables aux ensembles «bord» et «sol»
Le module SD (système de gestion de la qualité en production) peut être choisi uniquement lorsque l'entité adjudicatrice a un contrat seulement avec les fabricants qui appliquent un système de qualité pour la fabrication, l'inspection et les essais finals des produits, approuvé et surveillé par un organisme notifié
Le module SH2 (module de système de gestion de la qualité complet avec procédure d'examen de conception) ne peut être choisi que lorsque toutes les activités concourant au projet du sous-système à vérifier (conception, fabrication, assemblage, installation) sont soumises à un système de qualité pour l'étude, la fabrication, le contrôle final des produits et les essais, approuvé et contrôlé par un organisme notifié.
Quel que soit le module sélectionné, la revue de conception inclut la vérification que les exigences du point 4.5 (règles de maintenance) de la présente STI ont été respectées.
Indépendamment du module choisi, les dispositions de l'annexe A, index 47, index A1 et, lorsqu'il y a lieu, index A2 et index A3 doivent s'appliquer.
En référence au chapitre 4 du module SB (examen de type), une revue de conception est demandée.
En référence au point 4.3 du module SH2 (système de gestion de la qualité complet avec contrôle de la conception), un essai de type est exigé.
Par référence au:
|
— |
point 5.2 du module SD (système de gestion de la qualité en production), |
|
— |
chapitre 7 du module SF (vérification sur produits), |
|
— |
chapitre 4 du module SG (vérification à l'unité), |
|
— |
point 5.2 du module SH2 (système de gestion de la qualité complet avec contrôle de la conception), la validation en vraie grandeur est définie au point 0 (validation de l'ensemble) et au point 0 (validation de l'ensemble sol). |
Validation de l'ensemble «bord»
Pour un ensemble bord, la validation en vraie grandeur doit être un essai de type. Il est admis qu'il soit effectué sur un seul exemplaire de l'ensemble, mais il devra être réalisé sur des parcours d'essais dans le but de vérifier:
|
— |
les performances des fonctions d'odométrie, |
|
— |
la compatibilité de l'ensemble de contrôle-commande avec les équipements du matériel roulant et l'environnement [par exemple, la compatibilité électromagnétique (CEM)] afin de pouvoir multiplier l'ensemble bord sur d'autres locomotives du même type, |
|
— |
la compatibilité du matériel roulant avec l'ensemble sol de contrôle-commande (par exemple, les aspects CEM, le fonctionnement des circuits de voie et des compteurs d'essieux). |
De tels parcours d'essais doivent être effectués sur une infrastructure permettant d'effectuer les vérifications dans des conditions représentatives des caractéristiques qui peuvent être rencontrées sur le réseau ferroviaire européen conventionnel (par exemple, rampes, vitesse du train, vibrations, puissance de traction, température).
Si les tests montrent que les spécifications ne sont pas réalisées dans tous les cas (par exemple, la conformité avec la STI uniquement jusqu'à une certaine vitesse), les conséquences au regard de la conformité avec la STI doivent être inscrites sur le certificat de conformité et dans le registre du matériel roulant.
Validation de l'ensemble «sol»
Pour un ensemble sol, la validation en vraie grandeur sera effectuée sur des parcours d'essais en utilisant un matériel roulant possédant des caractéristiques connues et aura pour objet de vérifier la compatibilité entre le matériel roulant et l'ensemble sol de contrôle-commande (par exemple, aspects CEM, fonctionnement des circuits de voie et des compteurs d'essieux). De tels parcours d'essais doivent être effectués avec un matériel roulant adéquat doté des caractéristiques connues permettant que les vérifications soient faites dans des conditions qui peuvent être rencontrées pendant le service (par exemple, vitesse du train, puissance de traction).
Les parcours d'essais doivent également valider la compatibilité des informations, en comprenant la ligne physique (par exemple, les limites de vitesse, etc.), fournies au conducteur du train par l'ensemble sol.
Si des spécifications concernant la vérification de l'ensemble sol sont prévues mais ne sont pas encore disponibles dans la présente STI, l'ensemble sol doit être validé au moyen d'essais sur le terrain appropriés (à définir par l'entité adjudicatrice de l'ensemble sol en question).
6.2.2.4. Évaluation de la maintenance
L'évaluation de la conformité de la maintenance est la responsabilité d'un organisme notifié mandaté par l'État membre. L'annexe F décrit la procédure par laquelle cet organisme vérifie que les mesures de maintenance satisfont aux dispositions de la présente STI et garantissent le respect des paramètres fondamentaux et des exigences essentielles pendant la durée de vie du sous-système.
Tableau 6.1
Exigences de vérification de l'ensemble «bord» de contrôle-commande
|
1 |
2 |
2a |
3 |
4 |
5 |
|
No |
Description |
Remarques |
Interfaces du contrôle-commande |
Interfaces avec les sous-systèmes faisant l'objet de STI |
Caractéristiques à évaluer par référence au chapitre 4 de la présente STI |
|
1 |
Sécurité |
L'organisme notifié doit s'assurer que le processus d'approbation de sécurité, y compris le dossier de sécurité, est complet |
|
|
4.2.1 |
|
2 |
Fonctionnalité ETCS à bord |
Cette fonctionnalité est réalisée par le CI ERTMS/ETCS embarqué |
|
|
4.2.2 |
|
Commentaires: |
|
|
|
||
|
Contrôle de la vigilance |
Si le contrôle de la vigilance est externe, une interface entre le dispositif de vigilance et l'ERTMS/ETCS embarqué pour suppression peut exister |
OPE MR |
4.3.1.9 4.3.2.11 |
||
|
Intégrité du train: dans le cas où le train est configuré pour le niveau 3, la fonction contrôle de l'intégrité du train devra être supportée via un équipement de détection du côté matériel roulant |
Interface entre l'équipement ERTMS/ETCS embarqué et les équipements de détection |
MR |
4.3.2.8 |
||
|
3 |
Fonctions EIRENE |
Cette fonctionnalité est réalisée par le CI ERTMS/ETCS embarqué |
|
|
4.2.4 |
|
Communication des données uniquement pour le niveau 1 avec la fonction réouverture (in-fill) radio (optionnelle) ou le niveau 2 et le niveau 3 |
|
|
|
||
|
4 |
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
Cette fonctionnalité est réalisée par les CI ERTMS/ETCS embarqué et ERTMS/GSM-R embarqué |
Ensemble «sol» de contrôle-commande |
|
4.2.5 |
|
Communication radio avec le train uniquement pour le niveau 1 avec la fonction réouverture (in-fill) radio (optionnelle) ou le niveau 2 et le niveau 3 |
|
|
|
||
|
La communication Euroloop est optionnelle |
|
|
|
||
|
5 |
Gestion des clés |
Politique de sûreté pour la gestion des clés |
|
OPE |
4.2.8 4.3.1.7 |
|
6 |
Gestion des identifiants de l'ETCS |
Politique de gestion des identifiants (ID) de l'ETCS |
|
OPE |
4.2.9 |
|
7 |
Interfaces |
|
|
|
|
|
|
STM |
L'organisme notifié doit vérifier que les exigences de l'essai d'intégration (établies par l'État membre) ont été satisfaites |
CI ERTMS/ETCS embarqué et CI STM externe |
|
4.2.6.1 |
|
|
ERTMS/GSM-R embarqué |
|
CI ERTMS/ETCS embarqué et CI ERTMS/GSM-R embarqué |
|
4.2.6.2 |
|
|
Odométrie |
Cette interface ne s'applique pas si les équipements sont livrés en tant que groupe de constituants |
CI ERTMS/ETCS embarqué et CI odométrie |
MR |
4.2.6.3 |
|
4.3.2.12 |
|||||
|
|
DMI de l'ETCS |
Partie du CI ERTMS/ETCS embarqué |
|
OPE |
4.2.13 |
|
|
DMI de l'EIRENE |
Partie du CI ERTMS/GSM-R embarqué |
|
|
4.3.1.2 4.2.14 |
|
|
|
|
OPE |
4.3.1.3 |
|
|
|
Interface avec l'enregistrement des données pour les besoins réglementaires |
Partie du CI enregistreur d'informations de sécurité |
|
|
4.2.15 |
|
|
|
|
MR |
4.3.1.4 |
|
|
|
|
|
OPE |
4.3.2.13 |
|
|
|
Performances de freinage du train |
Vérification de l'adaptation au matériel roulant concerné |
|
OPE |
4.3.1.5 |
|
|
MR |
4.3.2.3 |
|||
|
|
Isolement |
|
|
OPE |
4.3.1.6 |
|
|
MR |
4.3.2.7 |
|||
|
|
Installation des antennes |
|
|
RST |
4.3.2.4 |
|
|
Conditions d'environnement |
Vérification du fonctionnement correct de l'ensemble de contrôle-commande dans les conditions d'environnement. Ce contrôle doit être fait dans la validation en vraie grandeur |
|
MR |
4.3.2.5 |
|
|
CEM |
Vérification du fonctionnement correct de l'ensemble de contrôle-commande dans les conditions d'environnement. Ce contrôle doit être fait dans la validation en vraie grandeur |
|
MR |
4.3.2.6 |
|
|
Interface de données |
Partie de l'IC ERTMS/ETCS embarqué |
|
MR |
4.3.2.8; 4.3.2.11 |
|
|
Fonctionnement correct de l'interface avec le train Cette interface comprend la vigilance (optionnelle) et l'intégrité du train (uniquement niveau 3) |
|
OPE |
4.3.1.9 |
Tableau 6.2
Exigences de vérification de l'ensemble «sol» de contrôle-commande
|
1 |
2 |
2a |
3 |
4 |
5 |
|
No |
Description |
Remarques |
Interfaces du contrôle-commande |
Interfaces avec les sous-systèmes faisant l'objet de STI |
Caractéristiques à évaluer par référence au chapitre 4 de la présente STI |
|
1 |
Sécurité |
L'organisme notifié doit s'assurer que le processus d'approbation de sécurité, y compris le dossier de sécurité, est complet |
|
|
4.2.1 |
|
2 |
Fonctionnalité de l'ETCS au sol |
Cette fonctionnalité est effectuée par les RBC, les LEU et les CI d'unités de réouverture (In-fill) radio, selon la mise en œuvre |
|
|
4.2.3 |
|
3 |
Fonctions EIRENE |
Communication des données uniquement pour le niveau 1 avec la fonction de réouverture (in-fill) radio ou les niveaux 2/3 |
|
|
4.2.4 |
|
4 |
Interfaces de transmission (air gap) de l'ETCS et de l'EIRENE |
Cette fonctionnalité est effectuée par les RBC, les unités de réouverture (In-fill) radio, les Eurobalise, les Euroloop et les équipements sol de GSM-R, selon la mise en œuvre |
Ensemble «bord» de contrôle-commande |
|
4.2.5 |
|
Communication radio avec le train uniquement pour le niveau 1 avec la fonction de réouverture (in-fill) radio (optionnelle) ou les niveaux 2/3 |
|
|
|
||
|
La communication Euroloop est optionnelle |
|
|
|
||
|
5 |
Gestion des clés |
Politique de sûreté pour la gestion des clés |
|
OPE |
4.2.8 4.3.1.7 |
|
6 |
Gestion des identifiants (ID) de l'ETCS |
Politique de gestion des clés |
|
OPE |
4.2.9 |
|
7 |
DBC |
|
|
OPE |
4.2.10 |
|
MR |
4.3.1.8 4.3.2.9 |
||||
|
8 |
Interfaces RBC/RBC |
Uniquement pour les niveaux 2/3 |
Entre les RBC voisins |
|
4.2.7.1 |
|
GSM-R «sol» |
Uniquement aux niveaux 2/3 ou au niveau 1 avec la fonction de réouverture (in-fill) radio |
Entre les RBC ou les unités de réouverture (In-fill) radio et GSM-R «sol» |
|
4.2.7.3 |
|
|
Eurobalise et LEU |
Cette interface ne s'applique pas si les équipements sont livrés comme groupe de constituants |
Entre les CI de contrôle-commande |
|
4.2.7.4 |
|
|
Euroloop et LEU |
Euroloop est optionnelle |
Entre les CI de contrôle-commande |
|
4.2.7.5 |
|
|
Cette interface ne s'applique pas si les équipements sont livrés comme groupe de constituants |
|
|
|
||
|
Installation des antennes |
|
|
IN |
4.3.3.2 |
|
|
Conditions d'environnement |
Vérification du fonctionnement correct de l'ensemble de contrôle-commande dans les conditions d'environnement. Ce contrôle doit être fait dans la validation en vraie grandeur |
|
IN |
4.3.3.3 |
|
|
CEM |
Vérification du fonctionnement correct de l'ensemble de contrôle-commande dans les conditions d'environnement. Ce contrôle doit être fait dans la validation en vraie grandeur |
|
IN ENE |
4.3.3.4 4.3.4.1 |
|
|
9 |
Compatibilité des systèmes de détection du train |
Caractéristiques devant être activées par le matériel roulant |
|
MR |
4.2.11 4.3.1.10 |
|
IN |
4.3.2.1 4.3.3.1 |
||||
|
10 |
Compatibilité électromagnétique (CEM) entre matériel roulant et systèmes de détection des trains |
|
|
MR |
4.2.12.2 4.3.2.2 |
|
Compatibilité avec les phares des trains |
Caractéristiques des signaux latéraux rétroréfléchissants et des vêtements rétroréfléchissants |
|
MR |
4.2.16 4.3.2.10 |
|
|
Compatibilité avec le champ de vision extérieur du conducteur |
Installation des équipements sol pour être vus par le conducteur |
|
OPE |
4.2.16 4.3.1.11 |
7. MISE EN ŒUVRE DE LA STI «CONTRÔLE-COMMANDE»
7.1. Généralités
Le présent chapitre décrit la stratégie et les solutions techniques associées pour la mise en œuvre de la STI, en particulier les conditions pour accompagner la migration vers les systèmes de classe A. Il faut tenir compte du fait que la mise en œuvre d'une STI devra occasionnellement être coordonnée avec la mise en œuvre d'autres STI.
Les chapitres 2 à 6 ainsi que toutes dispositions particulières énoncées au point 7.3 ci-dessous s'appliquent en totalité au sous-système de contrôle-commande tel que défini par la directive 2001/16/CE.
7.2. Particularités de mise en œuvre de la STI «contrôle-commande»
7.2.1. Critères généraux de migration
Dans le sous-système de contrôle-commande, il est défini deux classes de systèmes de contrôle de vitesse et de communication radio:
Il est entendu que la classe A ne peut pas être installée tout de suite sur la totalité des liaisons conventionnelles existantes pour des raisons liées, notamment, aux limites des moyens techniques et à des considérations économiques. Au cours de la période de migration séparant la situation actuelle (de préunification) (classe B) et l'application de la classe A, plusieurs solutions d'interopérabilité coexisteront qui pourraient s'appliquer dans le cadre de la présente STI. Ces solutions s'appliqueront tant à l'infrastructure européenne du réseau conventionnel, y compris les lignes de raccordement, qu'aux trains européens conventionnels. Plusieurs exemples à titre illustratif sont donnés ci-après:
|
— |
dans l'ERTMS/ETCS, il est prévu d'ajouter des modules appelés STM (Specific Transmission Modules) au système ETCS pour permettre à un train pourvu des STM nécessaires de circuler sur une infrastructure préunifiée existante. Une autre solution est d'équiper une infrastructure à la fois de systèmes de classe A et de classe B, |
|
— |
la mise en œuvre des systèmes GSM-R à l'échelon national est déjà engagée dans un nombre important des États membres de l'ex-UE à quinze. Les premières interconnexions de ces réseaux nationaux sont prévues en 2004. D'autres réseaux suivront à court terme. Certains réseaux ferroviaires ont choisi une solution où la conception des équipements mobiles est telle que ceux-ci peuvent fonctionner dans les deux systèmes (fonctionnement bimode = GSM-R et >=1 radio analogique), d'autres ont opté pour une solution offrant une double couverture du côté réseau mais des équipements d'un seul type à bord des trains. Les systèmes GSM-R ne disposent pas de «STM». Les radios en cabine qui disposent d'unités d'interface supplémentaires pour les systèmes de radio de classe B (fonctionnement bimode) peuvent également être utilisées sur des lignes dans un réseau de classe B lorsqu'elles sont adaptées à cet effet. Il s'agit d'une solution provisoire pour permettre rapidement des transits de trains dans le trafic international. |
7.2.1.1. Voies de migration
Les systèmes existants ainsi que le futur système unifié comprendront des composants du système côté infrastructure et à bord des trains. Par conséquent, les stratégies de migration doivent être définies pour les deux ensembles. Le présent paragraphe traite des voies d'une migration de la classe B à la classe A à l'appui d'exemples.
Les stratégies de migration doivent accorder une attention particulière aux distinctions entre les systèmes suivants:
|
— |
radio des trains (de la classe B vers la classe A), |
|
— |
contrôle de vitesse des trains (de la classe B vers la classe A), |
|
— |
détection des trains, |
|
— |
détection de boîte chaude, |
|
— |
compatibilité électromagnétique (CEM). |
Chacun des systèmes ci-dessus peut suivre une voie de migration différente des autres systèmes.
Les voies de migration de la classe B vers la classe A prises en compte sont expliquées au moyen des exemples suivants s'appliquant au contrôle de la vitesse.
Figure 1
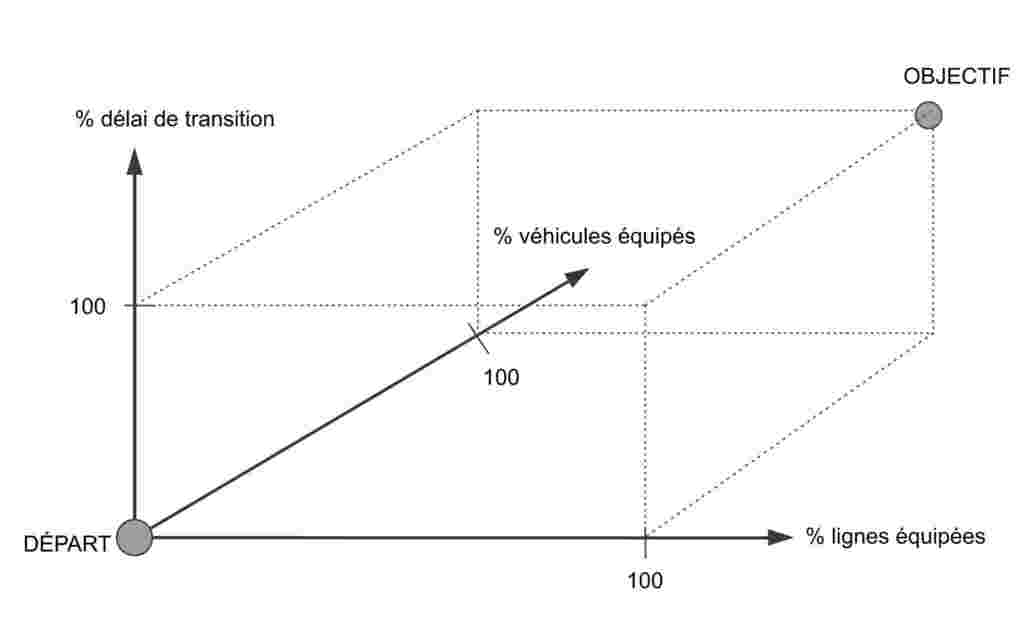
La figure 1 décrit l'état de départ (appelé DÉPART), où seuls les systèmes non compatibles existent, jusqu'à l'état final (appelé OBJECTIF).
Les deux figures suivantes décrivent deux voies extrêmes de migration prises en compte entre l'état actuel et l'état futur.
Figure 2

La figure 2 montre un processus de migration, où tous les investissements initiaux sont effectués uniquement du côté bord. Une solution technique éventuelle consiste en des modules, appelés STM, qui peuvent être reliés au noyau de l'ETCS embarqué et traduisent les informations en provenance des systèmes existants en une forme pouvant être traitée par le noyau de l'ETCS. Lorsque tous les véhicules du parc ferroviaire envisagé seront équipés de la combinaison du noyau de l'ETCS et des systèmes de classe B correspondants, les équipements installés en voie pourront être adaptés au système ETCS, ou des lignes nouvellement équipées pourront être construites sur la base du système ETCS. Le système de classe B existant sur ces lignes pourra alors être retiré.
Figure 3

La figure 3 montre l'autre processus de migration extrême. Dans ce cas, le réseau ferroviaire utiliserait un équipement double des lignes existantes avec le système ETCS. Une fois toutes les lignes dotées de l'ETCS en plus du système national, les équipements embarqués du matériel roulant pourront être adaptés au système ETCS. Lorsque tous les véhicules envisagés seront équipés de l'ETCS, les équipements du système national déployés en voie pourront être retirés.
Figure 4

La figure 4 montre une combinaison des deux solutions extrêmes décrites ci-dessus. Les voies de migration possibles doivent s'inscrire entre ces deux limites. Dans la pratique, il en ressortira un mélange des deux manières.
Figure 5

La figure 5 décrit un exemple où les équipements ETCS à bord des véhicules et les équipements ETCS montés en voie sont installés en alternance sur certaines parties des lignes. Cette méthode permet de réduire les investissements initiaux nécessaires pour tirer parti du système dans son ensemble (par exemple, les équipements embarqués et les équipements au sol sur les tronçons où ces équipements sont installés). Cette méthode implique toutefois une certaine restriction dans l'utilisation du matériel roulant sur le réseau.
La sélection de la stratégie de migration appropriée est largement fonction du mélange entre lignes équipées, matériel roulant équipé et acquisition prévue de nouveau matériel roulant et d'équipement supplémentaire des lignes.
Les corridors internationaux ainsi que l'utilisation du matériel roulant à l'échelle internationale devraient également être étudiés. Dans l'hypothèse où la migration d'une ligne n'est pas prévue et que son équipement relève uniquement de la classe B, l'interopérabilité pourra être assurée par un module STM pour le système de la classe B concerné.
Cependant, les étapes de migration doivent permettre à tout moment l'accès d'autres entreprises ferroviaires au réseau. Un véhicule muni de l'équipement ETCS embarqué approprié et le système existant tel que décrit aux annexes B et C doit pouvoir toujours circuler sur la ligne concernée.
7.2.2. Critères de calendrier
7.2.2.1. Introduction
ETCS et GSM-R sont des systèmes assistés par ordinateur avec une évolution technologique plus rapide et potentiellement avec un cycle de vie plus court que les actuels et traditionnels systèmes de signalisation et équipements de télécommunication du chemin de fer. Comme tels, ils appellent une stratégie de déploiement volontariste plutôt que réactive pour éviter une obsolescence potentielle du système avant qu'il n'atteigne sa maturité.
Malgré ce fait, l'adoption d'un déploiement trop fragmenté dans le réseau européen, principalement le long des corridors transeuropéens, provoquerait un accroissement de la plupart des coûts et des charges d'exploitation résultant des besoins d'assurer la compatibilité et l'interconnexion avec une diversité d'équipements existants. De plus, des synergies en termes de temps, de coût et de réduction de risque pourraient être atteintes par la mise en commun des éléments des différentes stratégies nationales de mise en œuvre — notamment par des initiatives d'achats communes, la collaboration pour la validation du système et les activités de certification.
Considérant qu'une stratégie de mise en œuvre aussi volontariste passe pour incontournable dans l'accompagnement du processus de migration global, les modalités particulières dont l'adoption est nécessaire dans le cadre du réseau ferroviaire conventionnel doivent tenir compte du niveau du déploiement actuel et du rythme de déploiement prévu des technologies en question ainsi que des facteurs influant sur une telle mise en œuvre dans les domaines financier, technique, opérationnel et économique.
Dans ce but, une distinction claire doit de façon évidente être établie entre le système ETCS et le système GSM-R dans l'optique du statut actuel de la migration dans tous les pays européens et de l'importance et de l'étendue des obstacles que doit franchir une telle migration. Cette réalité commande d'appuyer sur des analyses différentes la mise en œuvre du système GSM-R et du système ETCS dans le réseau conventionnel. Les paragraphes qui suivent exposent de façon très détaillée les éléments distincts d'une telle analyse:
7.2.2.2. GSM-R — Analyse pour le déploiement
L'importance actuelle des activités pour le déploiement du système GSM-R dans l'ensemble du réseau ferroviaire européen (actuellement environ 100 000 km dans onze des quinze pays de l'ex-UE des quinze) et les perspectives à quatre ou cinq ans dans lesquelles s'inscrit généralement l'achèvement de tels travaux de déploiement indiquent qu'une analyse du déploiement devra confronter trois préoccupations majeures:
|
— |
assurer la continuité du service GSM-R au passage des frontières en empêchant l'établissement de «points noirs» à l'intérieur de certaines régions de la Communauté, |
|
— |
réconcilier les calendriers de migration en Europe afin de réduire de manière significative les frais généraux et délais associés aux besoins potentiels de soutien des infrastructures doubles analogiques et numériques et équipements embarqués, |
|
— |
éviter une «Europe à deux vitesses» entre l'ex-UE à quinze et les nouveaux États membres. Une convergence doit être atteinte, objectif auquel contribuent les programmes en cours visant à des réaménagements majeurs des réseaux ferroviaires dans les nouveaux États membres. |
7.2.2.3. GSM-R — Règles de mise en œuvre
Sur cette toile de fond et en tenant compte du fait qu'une infrastructure GSM-R porte les télécommunications à la fois pour les applications ferroviaires à grande vitesse et les applications ferroviaires conventionnelles, les critères de mise en œuvre désormais en vigueur pour les anciennes applications devraient également s'appliquer au rail conventionnel, à savoir:
Installations au sol:L'installation du système GSM-R est obligatoire dans le cas: — de nouvelles installations dans la partie radio d'un ensemble CCS, — d'un aménagement de la partie radio d'un ensemble CCS déjà en service, modifiant les fonctions ou la performance du sous-système. — nouvelles installations dans la partie radio d'un ensemble CCS, — aménagement de la partie radio d'un ensemble CCS déjà en service, modifiant les fonctions ou la performance du sous-système.
Installations embarquées:L'installation du système GSM-R dans le matériel roulant destiné à être utilisé sur une ligne comprenant au moins un tronçon équipé d'interfaces de classe A (même si elles s'ajoutent à un système de classe B), est obligatoire dans les cas suivants:
Systèmes hérités du passé :Les États membres doivent assurer la satisfaction continue de la fonctionnalité des systèmes hérités du passé repris dans l'annexe B de la STI et leurs interfaces aux spécifications actuelles, abstraction faite des changements qui pourraient être jugés nécessaires dans le but de remédier à des défauts mettant en cause la sécurité dans ces systèmes. Les États membres mettront à disposition les informations relatives à leurs systèmes hérités du passé comme requis pour les besoins de l'élaboration et la certification des appareils permettant l'interopérabilité des équipements de classe A avec les équipements existants de la classe B leur correspondant.
Afin de favoriser une mise en œuvre volontariste, les États membres sont également encouragés à promouvoir et à soutenir l'installation du GSM-R dans tous travaux couvrant la globalité d'une infrastructure déjà en service au titre de son renouvellement ou de son entretien, qui impliquent un investissement d'au moins un ordre de grandeur plus élevé que des investissements se rapportant à l'installation des équipements GSM-R.
7.2.2.4. ERTMS/ETCS — Analyse pour le déploiement
7.2.2.4.1.
Dans l'état actuel des choses, le cas de l'ERTMS/ETCS sur les applications conventionnelles doit s'appuyer sur une analyse du déploiement différente qui tienne compte de la complexité associée à une migration des systèmes de signalisation, à ses coûts correspondants et à la durée de vie présumée plus longue des actifs en comparaison de ceux du système GSM-R. En aucun cas, toutefois, de tels obstacles ne doivent porter atteinte aux principes de déploiement génériques exposés au point 7.2.2.1, en particulier, la nécessité de maintenir le rythme de la mise en œuvre à des niveaux acceptables, notamment sur les corridors et les grandes lignes du réseau ferroviaire transeuropéen (RTE).
7.2.2.4.2.
Afin de réconcilier les objectifs d'apparence conflictuelle pour éviter l'approche fragmentée avec les contraintes présumées en termes d'investissement, il est jugé nécessaire de définir un noyau de démarrage des projets ferroviaire où le déploiement de l'ERTMS/ETCS peut réellement se justifier par une perspective en termes d'activité économique et de services «de bout en bout» sans dresser d'obstacles inacceptables en termes de coût de mise en œuvre. Dans l'optique de ces objectifs primordiaux, et après consultation du secteur concerné, il est entendu qu'un tel noyau devrait être construit sur la base d'un ensemble cohérent de corridors prioritaires du réseau ferroviaire transeuropéen. Avec une telle approche, les objectifs à atteindre sont triples:
|
i. |
permettre la création d'une épine dorsale ferroviaire interopérable entre les pays européens (dénommée ci-après ETCS-Net) rendant possible le développement de nouveaux services ferroviaires de meilleure qualité qui pourront à terme accroître la compétitivité du transport ferroviaire, en particulier dans les segments de marché à fort potentiel, à savoir le transport international de marchandises; |
|
ii. |
constituer un axe centralisateur des efforts de coordination transnationaux et de convergence des instruments financiers dans l'optique d'un déploiement accéléré et plus large de l'ERTMS/ETCS sur les grandes lignes du réseau ferroviaire transeuropéen; |
|
iii. |
se rapprocher des conditions de «masse critique» pour permettre à l'ERTMS/ETCS d'émerger en tant que solution de marché naturelle dans les projets nouveaux et de réaménagement de signalisation du réseau ferroviaire conventionnel dans les pays européens. |
Un schéma de l'ETCS-Net est donné ci-après. Une liste détaillée des corridors inclus sur ce schéma est contenue en annexe H.

Afin de permettre l'élaboration d'un réseau cohérent fournissant une épine dorsale pour le développement de services améliorés de bout en bout, l'ETCS-Net, dans la forme présentée ci-dessus, s'appuie à la fois sur les lignes à grande vitesse (4) et sur les lignes conventionnelles. Le déploiement du système ERTMS/ETCS sur les lignes à grande vitesse est régi par la décision 2002/731/CE, tandis que les principes de mise en œuvre exposés ci-dessous s'appliquent aux lignes conventionnelles.
Afin que cette épine dorsale favorise une restructuration importante des services de transport ferroviaire internationaux à un horizon crédible du point de vue de l'usager, il est nécessaire de fixer un calendrier relativement ambitieux couvrant sa réalisation totale. En tenant compte de l'ensemble des paramètres associés à cette réalisation (par exemple, niveau des ressources d'investissements, capacités de l'industrie ferroviaire et de ses fournisseurs en termes de projet/gestion, besoins en termes de coordination transfrontalière des travaux), un délai indicatif de dix à douze ans peut être avancé pour atteindre un tel objectif.
7.2.2.4.3.
Pour la réalisation de la mise en œuvre de l'ETCS-Net dans son ensemble dans un tel délai, il est jugé nécessaire de «déclencher» le processus de déploiement par la nomination d'un sous-ensemble de projets (dénommé ci-après «noyau de conception») comprenant l'obligation de déployer l'ETCS. L'adoption de cette approche revient au fond au déploiement d'une perspective en trois phases comme décrit ci-dessous:

Afin de réduire l'impact financier de cette étape obligatoire, les critères de sélection appliqués à l'intégration des projets dans ce noyau initial doivent notamment tenir compte de la disponibilité d'un concours financier communautaire pour des enveloppes largement supérieures au soutien financier pouvant normalement être consacré à des travaux de signalisation. L'ensemble des projets prioritaires pour le système ferroviaire conventionnel établis dans le cadre des orientations communautaires pour le réseau transeuropéen (décision no 884/2004/CE du Parlement européen et du Conseil (5) ainsi que tous les travaux majeurs de construction et de réaménagement ferroviaires financés au titre des fonds structurels [règlement (CE) no 1260/1999 du Conseil (6)] et/ou du Fonds de cohésion [règlement (CE) no 1264/1999 du Conseil (7)] sont à envisager comme formant ce «noyau initial».
Le noyau initial doit constituer un relais dans la réalisation du scénario de déploiement complet de l'ETCS-Net tel qu'il est décrit ci-dessus. Toutefois, atteindre cet objectif exige la visibilité de la stratégie de déploiement (calendrier et planification des travaux) qui soutiendra les tronçons nationaux des différents corridors non inclus dans le critère du «noyau initial». Afin de fournir une telle visibilité, les États membres devront élaborer des plans nationaux de réalisation de l'ERTMS qui aborderont une série de questions sur le déploiement énumérées au point 7.2.2.6.
L'étendue de l'épine dorsale actuelle de l'ETCS-Net pourra être révisée dans une phase ultérieure (éventuellement lors d'une future révision de la présente STI) afin de suivre les progrès réels de sa mise en œuvre et de tenir compte des besoins en constante évolution des marchés du transport.
L'analyse, en ce qui concerne le matériel roulant, doit tenir compte du fait que l'ERTMS/ETCS est un concept de système composé des infrastructures et des éléments embarqués. À ce titre, il est essentiel que toute analyse de déploiement émergente considère ces deux composantes du système d'une manière cohérente car elles concourent toutes les deux à habiliter le fonctionnement du système. Par ailleurs, comme dans le cas des infrastructures, une attention suffisante doit être accordée à la diminution de l'impact financier de toute étape obligatoire qui pourrait s'imposer.
Une approche de «coût marginal», établissant un lien entre l'équipement du système ERTMS/ETCS à bord des trains et les principales décisions d'investissement, est la meilleure voie possible pour atteindre cet objectif. Cette approche s'applique notamment aux achats du nouveau matériel roulant ou aux opérations importantes sur du matériel existant, où la valeur de l'équipement de signalisation et son installation représentent seulement un faible pourcentage de l'ensemble des investissements à mettre en place. L'adoption d'une telle politique entraînera à plus long terme l'inscription du scénario des équipements embarqués de l'ETCS à l'actif comme patrimoine au regard du matériel roulant nouveau.
7.2.2.4.4.
Le pré-équipement couvre l'installation de tout équipement bord ou sol des systèmes ERTMS/ETCS et GSM/R ou autre équipement habilitant les systèmes ETCS et GSM-R (par exemple, installation de câbles, de connexions, de caniveaux, de matériels fixes, d'interfaces, alimentation en énergie ou autres installations de signalisation ou de télécommunications spécifiques) dans le but de permettre un certain niveau de préparation à l'installation d'ERTMS sans appliquer pleinement les exigences de classe A.
L'objectif d'une telle approche est d'assurer cette aptitude ERTMS par «piggybacking» de ces activités de pré-équipement sur des constructions ou des réaménagements majeurs d'actifs des infrastructures ou sur des montages en usine d'actifs (8) du matériel roulant. Cette approche doit permettre une réduction des coûts liés à la mise en œuvre d'équipements complets du système ERTMS/ETCS ou du système GSM-R répondant aux exigences de classe A dans une phase ultérieure. Toutefois, le champ de l'aptitude ERTMS doit être rapporté aux spécificités de chaque projet d'un point de vue technique, opérationnel, et économique ainsi qu'aux délais prévus pour l'installation des équipements conformes à la classe A.
Il est donc jugé nécessaire de définir une approche hiérarchisée du pré-équipement sur la base de la notion de «paliers de pré-équipement». Ceux-ci pourraient avoir une couverture allant de la simple réservation d'espace en incluant les gaines et l'adaptation des matériels fixes (palier 1) jusqu'à l'installation de tous les équipements qui ne seront pas frappés d'obsolescence dans le laps de temps correspondant à la durée de vie théorique de l'équipement (palier 3). Les détails du pré-équipement sont à définir dans le subset 57 (équipements du bord) et dans le subset 59 (équipements du sol) à ajouter à l'annexe A.
7.2.2.5. ERTMS/ETCS — Règles de mise en œuvre
Toutes les implications répertoriées dans le paragraphe précédent seront à qualifier dans les catégories suivantes:
Installations au sol:L'installation d'ERTMS/ETCS est obligatoire dans le cas: — de nouvelles installations de la partie contrôle de vitesse d'un ensemble CCS, — d'aménagement de la partie contrôle de vitesse d'un ensemble CCS déjà en service, modifiant les fonctions ou la performance du sous-système, — faisant partie de l'ensemble des projets prioritaires du chemin de fer conventionnel établis conformément aux orientations pour le réseau transeuropéen données à l'annexe II de la décision no 884/2004/CE, — requérant un soutien financier au titre des fonds structurels [règlement (CE) no 1260/1999] et/ou du Fonds de cohésion [règlement (CE) no 1264/1999] d'un montant supérieur à 30 % du coût total du projet. — les nouvelles installations de la partie contrôle de vitesse d'un ensemble CCS, — un aménagement de la partie contrôle de vitesse d'un ensemble CCS déjà en service, modifiant les fonctions et la performance du sous-système, — toute «opération majeure» sur du matériel roulant déjà en service (9), — des nouvelles installations de la partie contrôle de vitesse d'un ensemble CCS, — un aménagement de la partie contrôle de vitesse d'un ensemble CCS déjà en service, modifiant les fonctions ou la performance du sous-système,
pour l'ensemble des projets d'infrastructure relevant de l'un des critères suivants:
En ce qui concerne tous les autres projets, nouveaux ou d'aménagement, ne répondant pas à ces derniers critères mais faisant partie du réseau ferroviaire transeuropéen conventionnel, comme défini dans le rectificatif du 7 juin 2004 à la décision no 884/2004/CE, le pré-équipement, selon le palier 1 du pré-équipement, est effectué tel qu'il est spécifié aux paragraphes 7.2.2.4.4 et 7.2.3.2. Les lignes faisant partie de l'épine dorsale ETCS-NET mais non incluses dans le noyau initial doivent être conformes au palier 3 au regard du pré-équipement.Afin de permettre une mise en œuvre volontariste, les États membres sont également encouragés à promouvoir et à soutenir l'équipement d'ERTMS/ETCS dans tous les travaux en relation avec le renouvellement ou l'entretien sur les infrastructures et impliquant des investissements supérieurs d'au moins un ordre de grandeur à ceux associés à l'installation des équipements ERTMS/ETCS.Installations embarquées:L'équipement du matériel roulant destiné aux infrastructures du chemin de fer conventionnel pour lesquelles l'installation d'ERTMS/ETCS est obligatoire doit être en conformité avec la stratégie de migration nationale après sa synthèse avec le schéma directeur européen décrit au paragraphe 7.2.2.6, sauf l'exception reprise ci-dessous.Pour permettre le fonctionnement des systèmes de classe B, l'installation d'ERTMS/ETCS, complétée au besoin par les modules de transmission spécifiques (STM) pertinents, est obligatoire sur :
pour le matériel roulant destiné à un service transfrontalier à l'intérieur du noyau initial.Un pré-équipement ERTMS/ETCS selon le palier 1 du pré-équipement comme défini aux points 7.2.2.4.4 et 7.2.4.4 sur:
pour le matériel roulant désigné pour une exploitation sur le réseau ferroviaire transeuropéen conventionnel comme défini par le rectificatif du 7 juin 2004 à la décision no 884/2004/CE. Le palier 3 du pré-équipement s'applique au matériel roulant désigné pour une exploitation dans l'épine dorsale ETCS-Net.Système de suiviLes États membres doivent assurer la satisfaction continue de la fonctionnalité des systèmes hérités du passé indiqués à l'annexe B de la STI et leurs interfaces aux spécifications actuelles, abstraction faite des changements qui pourraient être jugés nécessaires afin de remédier à des défauts mettant en cause la sécurité de ces systèmes. Les États membres mettront à disposition les informations nécessaires relatives à leurs systèmes hérités du passé comme requis pour les besoins de l'élaboration et la certification de sécurité des appareils permettant l'interopérabilité des équipements de classe A avec les équipements existants de la classe B leur correspondant.
7.2.2.6. Plans de mise en œuvre et schéma directeur européen
Au regard de l'exposé relatif à la justification du déploiement et des règles obligatoires spécifiées aux points 7.2.2.3 et 7.2.2.4.4, les États membres doivent élaborer un plan formel de réalisation ERTMS pour le réseau ferroviaire conventionnel afin de répondre au déploiement tant de l'ERTMS/ETCS que du GSM-R à l'échelon national.
Concernant l'ERTMS/ETCS, la réalisation de l'épine dorsale ETCS-Net comme décrit au point 7.2.2.4 doit constituer la base de référence pour l'élaboration d'un tel plan national. L'objectif à terme de ce plan est de définir un ensemble d'obligations adaptées pour le déploiement ERTMS/ETCS à la place des prescriptions génériques actuellement intégrées dans le «noyau initial». Toutefois, une telle flexibilité intégrée ne peut pas abaisser le niveau d'obligation (10) déjà inclus dans le «noyau initial».
Les plans nationaux doivent en particulier prévoir les éléments suivants:
|
— |
lignes ciblées: une identification claire des lignes nationales ou des tronçons nationaux désignés pour la mise en œuvre. Cet aspect s'applique en particulier aux tronçons nationaux des corridors transnationaux nommés dans le projet ETCS-Net (11). Dans ce but, une attention suffisante devra être accordée aux plans nationaux de réalisation ERTMS/ETCS notifiés par la décision 2002/731/CE en ce qui concerne les tronçons à grande vitesse couverts par l'épine dorsale ETCS-Net, |
|
— |
exigences techniques: les caractéristiques techniques essentielles des mises en œuvre différentes (par exemple, réseau de transmission voix et données pour les implémentations GSM-R, niveau fonctionnel de l'ERTMS/ETCS, installations ERTMS/ETCS uniquement ou installations superposées), |
|
— |
stratégie de déploiement et planification: un cadre pour le plan de mise en œuvre (comprenant la séquence et le calendrier des travaux), |
|
— |
stratégie de migration: la stratégie considérée pour la migration à la fois du sous-système d'infrastructure et du sous-système de matériel roulant des lignes nationales ou des tronçons nationaux désignés à l'échelon national (par exemple, superposition des systèmes de classe A et de classe B, commutation des installations de la classe B vers la classe A à une date planifiée, migration fondée sur la mise en œuvre de solutions fondées sur la mise en œuvre ETCS telles que SCMT (12) ou «Limited Supervision» pour combler les lacunes), |
|
— |
contraintes éventuelles: un aperçu des éléments potentiels qui pourraient avoir une incidence sur la réalisation du plan de mise en œuvre (par exemple, travaux de signalisation incorporant des travaux d'infrastructure de large portée, assurance de la continuité des services au franchissement des frontières). |
Ces plans nationaux seront enfin fusionnés au sein d'un schéma directeur européen dans les six mois suivant leur notification. Un tel schéma directeur devrait fournir une base de connaissances pour soutenir la prise de décision par les parties prenantes — notamment par la Commission pour l'octroi d'un soutien financier aux projets ferroviaires — et, au besoin, rapprocher les calendriers et stratégies des différentes mises en œuvre nationales là où il sera jugé nécessaire pour la réalisation d'un ensemble cohérent. Ce processus complet peut être représenté comme décrit ci-dessous:

En outre, le schéma directeur européen doit comprendre l'ébauche d'un programme de roulement pour étayer l'ensemble des activités de mise en œuvre prévues depuis leur planification jusqu'à leur réalisation.
Le schéma directeur européen sera ajouté à la présente STI suivant une procédure de révision en remplacement du champ des mises en œuvre obligatoires définies actuellement dans le noyau initial. Par conséquent:
|
— |
toutes les activités liées à l'installation des sous-systèmes de contrôle-commande doivent être justifiées par les entités chargées de leur évaluation au regard de ce schéma directeur européen en plus de toutes les autres exigences applicables en vigueur, |
|
— |
les États membres seront appelés à adapter ponctuellement leurs plans nationaux de réalisation ERTMS, là où il sera jugé nécessaire, afin d'assurer leur synthèse avec le schéma directeur européen. En particulier, une telle révision doit assurer que la stratégie de migration adoptée par un État membre — notamment pour le matériel roulant — ne freine pas la réalisation de l'objectif stratégique de l'ETCS-Net et n'entrave pas l'accès des nouveaux entrants conformément aux calendriers et aux exigences imposés par le schéma directeur européen, |
|
— |
lorsque la synthèse d'un plan national avec le schéma directeur européen n'est pas faisable, les exigences obligatoires du noyau initial restent d'application pour cet État membre particulier. |
Le schéma directeur européen et les plans de réalisation ERTMS sont nécessairement des documents évolutifs qui devront être mis à jour afin de refléter l'évolution réelle du déploiement dans chaque État membre et partout sur le réseau ferroviaire européen.
7.2.3. Mise en œuvre: infrastructures (équipements fixes)
Les exigences suivantes s'appliquent aux catégories de lignes définies par la directive 2001/16/CE:
|
— |
lignes prévues pour le trafic «voyageurs», |
|
— |
lignes prévues pour le trafic mixte (voyageurs et marchandises), |
|
— |
lignes spécialement conçues ou aménagées pour le trafic «marchandises», |
|
— |
nœuds «voyageurs», |
|
— |
nœuds «fret», y compris les terminaux intermodaux, |
|
— |
lignes de raccordement entre les éléments ci-dessus. |
Le sous-système de contrôle-commande est composé de deux classes (A et B) de systèmes de contrôle de vitesse et de communication radio. Les lignes ci-dessus actuellement non équipées de la classe A doivent être équipées:
|
— |
soit de fonctions et d'interfaces de classe A répondant aux spécifications reprises en annexe A, |
|
— |
soit de fonctions et d'interfaces de classe A répondant aux spécifications indiquées à l'annexe A, ainsi que de fonctions et d'interfaces de classe B répondant aux spécifications indiquées à l'annexe B, |
|
— |
soit de fonctions et d'interfaces de classe B répondant aux spécifications reprises en annexe B et du pré-équipement pour la classe A, |
|
— |
soit uniquement de fonctions et d'interfaces de classe B conformément à l'annexe B. |
Dans l'hypothèse où les lignes comprises dans le champ d'application de la présente STI ne sont pas équipées de systèmes de classe A, l'État membre fait le nécessaire pour mettre à disposition un STM externe pour son ou ses systèmes existants de classe B. Dans ce but, il convient d'assurer un marché des STM ouvert dans des conditions commerciales loyales. Dans les cas où, pour des raisons techniques ou commerciales (13), la disponibilité d'un STM ne peut pas être garantie dans le délai correspondant (14), l'État membre concerné doit informer le comité des raisons sous-tendant ce problème et des mesures d'atténuation qu'il prévoit de mettre en place afin de permettre l'accès — notamment par les opérateurs étrangers — à son infrastructure.
7.2.3.1. Équipements de classe B sur une ligne équipée de la classe A
Sur une ligne équipée des systèmes ETCS et/ou GSM-R, il est possible d'avoir des équipements de classe B supplémentaires afin de permettre l'utilisation du matériel roulant non compatible avec la classe A pendant la phase de migration. L'utilisation d'équipements existants de classe B à bord est autorisée comme solution de repli par rapport au système de classe A: elle ne permet pas au gestionnaire d'infrastructure d'imposer la présence de systèmes de classe B à bord des trains interopérables pour circuler sur une ligne de ce type.
Dans le cas d'un équipement double avec des systèmes de classe A et de classe B et d'un fonctionnement bimode, les deux systèmes peuvent alors être activés simultanément à bord, à la condition que les exigences techniques et règles d'exploitation au niveau national puissent le supporter et que l'interopérabilité ne soit pas compromise. Les exigences techniques nationales et les règles d'exploitation sont fournies par l'État membre.
7.2.3.2. Pré-équipement pour la classe A
Le pré-équipement en voie est défini comme l'installation de tout équipement ETCS et GSM-R ou tout autre équipement habilitant le système ETCS et le système GSM-R (par exemple, installation de câbles et d'interconnexions, interfaces de déclenchement d'itinéraires, LEU ou dorsales à fibre optique) qui est monté mais pas nécessairement mis en service afin de réduire les coûts d'implémentation d'équipements ERTMS/ETCS ou GSM-R complets répondant aux exigences de classe A dans une phase ultérieure. Concernant l'ETCS, le champ d'application du pré-équipement par rapport à la structure en trois paliers des niveaux de pré-équipement, définis au point 7.2.2.4.4, doit respecter les exigences énoncées à l'annexe A, index 59 (en attente).
L'ampleur du pré-équipement à réaliser doit être fixée lors de la planification de la mise en œuvre des installations de signalisation et de télécommunication à déployer. En particulier, la planification du réseau pour le système GSM-R doit tenir compte précocement de l'intégration de tous les services devant être prévus dans le futur (phonie, données non critiques pour la sécurité, ETCS).
7.2.3.3. Réaménagement ou renouvellement de l'ensemble sol de contrôle-commande ou de parties de l'ensemble
Le réaménagement ou le renouvellement de l'ensemble sol peut concerner séparément:
|
— |
les systèmes radio (pour la classe B, seul le renouvellement est possible), |
|
— |
le système de contrôle de vitesse, |
|
— |
l'interface du système de détection des trains, |
|
— |
le système de détection de boîte chaude, |
|
— |
les caractéristiques CEM. |
Par conséquent, différentes parties de l'ensemble sol de contrôle-commande peuvent être réaménagées ou renouvelées individuellement (si l'interopérabilité n'est pas compromise) et, en particulier:
|
— |
les fonctions et interfaces EIRENE (voir points 4.2.4 et 4.2.5), |
|
— |
les fonctions et interfaces ETCS/ERTMS (voir points 4.2.1, 4.2.3, 4.2.5, 4.2.7 et 4.2.8), |
|
— |
le système de détection des trains (voir point 4.2.11), |
|
— |
les caractéristiques CEM (voir point 4.2.12). |
Après l'aménagement en système de classe A, l'équipement existant de classe B peut rester en service en même temps que l'équipement de classe A.
7.2.3.4. Registres des infrastructures
Le registre des infrastructures doit fournir aux entreprises ferroviaires les informations relatives à la classe A et à la classe B conformément aux exigences de l'annexe C. Le registre des infrastructures indique si les fonctions obligatoires ou optionnelles (15) sont concernées, et les contraintes de la configuration à bord doivent être identifiées.
Dans l'hypothèse où les spécifications européennes d'une ou de plusieurs interfaces entre le sous-système «contrôle-commande et signalisation» et d'autres sous-systèmes ne sont pas disponibles au moment de l'installation (par exemple, la compatibilité électromagnétique entre la détection des trains et le matériel roulant), les caractéristiques correspondantes et les normes appliquées sont indiquées dans les registres des infrastructures. En toute hypothèse, cette possibilité existe uniquement pour les éléments énumérés à l'annexe C.
7.2.4. Mise en œuvre: matériel roulant (équipements embarqués)
Conformément à la directive 2001/16/CE, chaque catégorie de matériel roulant susceptible de circuler sur tout ou partie du réseau ferroviaire transeuropéen conventionnel doit être subdivisée en:
|
— |
matériel roulant à usage international, |
|
— |
matériel roulant à usage national, |
en tenant compte de l'utilisation locale, régionale ou à longue distance du matériel.
Le matériel roulant mentionné ci-dessus doit être équipé:
|
— |
soit de fonctions et d'interfaces de classe A répondant aux spécifications reprises en annexe A, |
|
— |
soit de fonctions et d'interfaces de classe A répondant aux spécifications indiquées à l'annexe A ainsi que de fonctions et d'interfaces de classe B répondant aux spécifications indiquées à l'annexe B, |
|
— |
soit de fonctions et d'interfaces de classe B conformément à l'annexe B et du pré-équipement pour la classe A, |
|
— |
soit uniquement de fonctions et d'interfaces de classe B conformément à l'annexe B, |
|
— |
soit, comme au point 7.2.5.2, |
de manière à permettre sa circulation sur toute ligne sur laquelle son exploitation est prévue.
7.2.4.1. Matériel roulant avec des équipements de classe A uniquement
L'ensemble de classe A doit garantir que les fonctions embarquées, interfaces et performances minimales requises par la présente STI correspondent aux lignes concernées comme décrit en annexe C. L'installation des équipements de classe A peut tirer parti de spécifications supplémentaires d'interface entre le matériel roulant et le contrôle-commande.
7.2.4.2. Matériel roulant avec des équipements de classe B uniquement
Les équipements de classe B doivent garantir que les fonctions embarquées, interfaces et performances minimales requises par la présente STI correspondent aux lignes concernées comme décrit en annexe C.
7.2.4.3. Matériel roulant avec des équipements de classe A et de classe B
Le matériel roulant peut également être équipé à la fois de systèmes de classe A et de classe B pour permettre sa circulation sur plusieurs lignes. L'implémentation des systèmes de classe B peut être effectuée:
|
— |
avec l'utilisation d'un STM pouvant être branché dans l'ensemble de classe A («STM externe»), ou |
|
— |
en les intégrant dans l'ensemble de classe A. |
De même, les systèmes de classe B pourraient être mis en œuvre de manière indépendante (ou, dans le cas d'un réaménagement ou d'un renouvellement, être laissés «en l'état»), dans le cas de systèmes de classe B pour lesquels, du point de vue du propriétaire du matériel roulant, un STM ne représente pas une option économiquement viable. Toutefois, si un STM n'est pas utilisé, l'entreprise ferroviaire doit assurer que l'absence d'un «protocole de reconnaissance» (= traitement, au moyen d'ETCS, des transitions entre les équipements de classe A et de classe B déployés en voie) n'en est pas moins correctement gérée. L'État membre est autorisé à définir des exigences en relation avec cet aspect dans le registre des infrastructures.
Lorsqu'ils circulent sur une ligne équipée à la fois de systèmes de classe A et de classe B, les systèmes de classe B peuvent constituer une solution de repli par rapport aux systèmes de classe A si le train est équipé à la fois de systèmes de classe A et de classe B. Ceci ne peut pas être une exigence d'interopérabilité et n'est pas valable pour le système GSM-R.
7.2.4.4. Pré-équipement pour la classe A
Le pré-équipement à bord est défini comme l'installation de tout équipement ETCS et GSM-R ou de tout autre équipement habilitant les systèmes ETCS et GSM-R (par exemple, installation de câbles et d'interconnexions, d'antennes, de détecteurs, alimentation électrique ou installations fixes) qui est monté mais pas nécessairement mis en service dans le but de réduire les coûts de mise en œuvre d'équipements ERTMS/ETCS ou GSM-R complets répondant aux exigences de classe A dans une phase ultérieure. Pour ETCS, le champ d'application du pré-équipement par rapport à la structure en trois paliers des niveaux de pré-équipement, définis au point 7.2.2.4.4, doit respecter les exigences énoncées à l'annexe A, index 57 (en attente)
L'ampleur du pré-équipement à réaliser doit être fixée lors de la phase de conception des installations de signalisation ou de télécommunications embarquées. Le pré-équipement peut tirer parti de spécifications supplémentaires d'interfaçage entre le sous-système «matériel roulant» et le sous-système «contrôle-commande».
7.2.4.5. STM réversible
Voir point 7.2.5.2.
7.2.4.6. Réaménagement ou renouvellement de l'ensemble bord de contrôle-commande ou de parties de l'ensemble
Le réaménagement ou le renouvellement de l'ensemble bord peut concerner séparément:
|
— |
les systèmes radio (classe B vers classe A), |
|
— |
le système de contrôle de vitesse (classe B vers classe A). |
Par conséquent, différentes parties de l'ensemble bord de contrôle-commande peuvent être réalisées ou renouvelées individuellement (si l'interopérabilité n'est pas compromise) et, en particulier:
|
— |
les fonctions et interfaces EIRENE (voir points 4.2.4 et 4.2.5), |
|
— |
les fonctions et interfaces ETCS/ERTMS (voir points 4.2.1, 4.2.3, 4.2.5, 4.2.7 et 4.2.8). |
Après l'aménagement en système de classe A, l'équipement existant de classe B peut rester en service en même temps que l'équipement de classe A.
7.2.4.7. Registre du matériel roulant
Le registre du matériel roulant doit fournir les informations conformément aux exigences de l'annexe C.
Dans l'hypothèse où les spécifications de la STI pour une ou plusieurs interfaces entre le sous-système «contrôle-commande et signalisation» et d'autres sous-systèmes ne sont pas disponibles au moment de l'installation (par exemple, la compatibilité électromagnétique entre la détection des trains et le matériel roulant, les conditions climatiques et physiques dans lesquelles le train peut fonctionner, les paramètres géométriques du train comme la longueur, la distance maximale des essieux du train, la longueur du nez de la première et de la dernière voiture du train, les paramètres de freinage), les caractéristiques correspondantes et les normes appliquées sont indiquées dans les registres du matériel roulant. Cette possibilité existe uniquement pour les éléments énumérés à l'annexe C.
Remarque: pour chaque mise en œuvre du sous-système «contrôle-commande» sur une ligne donnée, l'annexe C fournit la liste des exigences applicables à l'équipement embarqué, qui doivent être mentionnées dans le registre des infrastructures en précisant si ces exigences concernent des fonctions obligatoires ou optionnelles (16) et en identifiant les contraintes de configuration du train.
7.2.5. Voies de migration spécifiques
7.2.5.1. Solution spécifique pour une utilisation partielle complémentaire du système de classe A
Lors d'une phase de migration, si une partie seulement du parc de véhicules est équipée d'un système embarqué compatible avec la classe A, il peut se révéler nécessaire de faire installer en totalité ou en partie les deux systèmes sur une ligne.
Pour ETCS, il n'existe pas de lien fonctionnel entre les deux systèmes embarqués, si ce n'est pour gérer les transitions lors de la marche du train (et, le cas échéant, pour répondre aux besoins des STM éventuellement utilisés par les systèmes de classe B).
Pour ETCS, d'un point de vue purement fonctionnel, il est également possible de construire un système combinant des éléments du système unifié et d'un système préunifié. Par exemple, la combinaison d'un système ETCS de niveau 1 utilisant Eurobalise pour la transmission ponctuelle et une fonction de réouverture (in-fill) qui n'est pas fondée sur une solution unifiée mais sur un système national. Cette solution exige une liaison des données du bord entre le système unifié et le système préunifié. Cette solution ne répond donc aux conditions ni de la classe A ni de la classe B et n'est pas interopérable.
La combinaison peut néanmoins être utilisée dans le but d'améliorer à l'échelon national une ligne interopérable. Cette option n'est permise que si les trains qui ne disposent pas de la liaison des données entre les deux systèmes peuvent circuler soit sur le système unifié, soit sur le système préunifié, sans recevoir d'informations en provenance de l'autre système. Si ce n'est pas le cas, la ligne ne peut pas être déclarée interopérable au regard du sous-système «contrôle-commande».
7.2.5.2. Solution spécifique pour une utilisation partielle en alternance de la transmission de classe A de l'ETCS
Une infrastructure peut également être utilisée pour les déplacements de trains qui ne répondent pas aux exigences de la présente STI, conformément à l'article 5, paragraphe 6, de la directive 2001/16/CE, à la condition que cette utilisation ne porte pas atteinte au respect des exigences essentielles.
Ces trains reçoivent des informations en provenance d'une infrastructure de signalisation de classe B par l'intermédiaire de la communication voie-train de classe A.
7.2.5.3. Critères de concurrence
Toute action de nature à permettre le mouvement de trains interopérables sur d'autres infrastructures ou le mouvement de trains non interopérables sur des infrastructures interopérables doit s'effectuer sans nuire à la libre concurrence entre les fournisseurs.
En particulier, les informations concernant les interfaces appropriées entre les équipements déjà installés et les nouveaux équipements à acquérir sont mises à la disposition de tous les fournisseurs intéressés.
7.2.6. Conditions dans lesquelles les fonctions optionnelles sont requises
En fonction des caractéristiques de l'ensemble sol du contrôle-commande et de ses interfaces avec d'autres sous-systèmes, il peut se révéler nécessaire que certaines fonctionnalités du sol non classées comme obligatoires soient implémentées dans certaines applications pour répondre aux exigences essentielles.
L'implémentation en voie des fonctions nationales ou optionnelles ne doit pas empêcher l'accès à cette infrastructure pour un train qui satisfait uniquement aux exigences obligatoires des systèmes embarqués de classe A, sauf comme requis pour les fonctions embarquées optionnelles suivantes:
|
— |
une application «sol» du niveau 3 de l'ETCS nécessite une surveillance de l'intégrité du train à bord, |
|
— |
une application «sol» du niveau 1 de l'ETCS avec fonction de réouverture nécessite une fonctionnalité correspondante de réouverture à bord si la vitesse d'exécution est fixée à zéro pour des raisons de sécurité (par exemple, protection des points à risque), |
|
— |
lorsque l'ETCS nécessite la transmission de données par radio, les services de transmission de données du GSM-R doivent remplir les exigences de transmission de données ETCS, |
|
— |
un ensemble «bord» qui intègre un STM KER peut nécessiter la mise en œuvre de l'interface K. |
7.3. Gestion des changements
7.3.1. Introduction
Les changements sont une facette inhérente à tout type de système assisté par ordinateur utilisé dans des environnements du monde réel. Ils sont commandés par l'émergence de nouvelles exigences ou par des modifications apportées aux exigences en vigueur, à cause soit d'erreurs rapportées pendant l'exploitation, soit de la nécessité d'améliorer les performances ou d'autres caractéristiques non fonctionnelles.
Toutefois, il convient de gérer les changements car ils sont assortis de considérations critiques en matière de sécurité et d'objectifs de compatibilité avec l'existant, de manière à minimiser les pertes de temps et les frais généraux dans l'exploitation des équipements (17) ERTMS déjà déployés (c'est-à-dire, les installations ERTMS existantes). Il est donc essentiel de définir une stratégie claire de mise en œuvre et de gestion des changements dans les équipements ERTMS existants afin d'éviter la rupture de l'exploitation des trains sans porter atteinte aux objectifs sous-jacents de garantie de la sécurité et de l'interopérabilité. Deux questions essentielles sous-tendent la définition d'une telle stratégie:
|
— |
l'établissement d'un cadre de gestion de configuration définissant les normes et procédures permettant de gérer l'évolution des systèmes. Cet aspect doit englober les méthodes pour enregistrer et traiter les changements proposés sur les systèmes, pour établir un lien entre ces changements et les composants et pour permettre le suivi des versions du système, |
|
— |
une politique pour publier les références de système. |
7.3.2. Système de référence
La stabilité du système est essentielle pour permettre une mise en œuvre et un déploiement effectifs réalistes. Ce besoin de stabilité est de même nature pour toutes les parties:
|
— |
les gestionnaires d'infrastructures et les opérateurs ferroviaires qui auront à prendre en charge les diverses versions du système ERTMS/ETCS ou du système GSM-R, |
|
— |
l'industrie, qui a besoin de temps pour spécifier, mettre au point et démontrer une interopérabilité continue. |
Par principe, une référence englobe la notion d'un noyau stable en termes de fonctionnalité du système, de performances et d'autres caractéristiques non fonctionnelles (par exemple, FDMS) (18). Toutefois, l'expérience accumulée avec ce type de systèmes a révélé que plusieurs versions ou révisions (19) sont nécessaires pour obtenir une référence stable et adaptée à une mise en œuvre. Ceci peut être illustré par un processus en cascade comme suit:

Par ses boucles de rétroaction, un tel processus est très imbriqué. Ceci exclut une approche par mise en parallèle de plusieurs de ces processus qui générerait des situations instables, confuses et de blocage sur un plan opérationnel. Des références doivent donc être traitées en série plutôt qu'en parallèle comme illustré ci-dessous pour le cas spécifique ERTMS/ETCS (20):

7.3.3. Phase de consolidation ERTMS
La première référence des spécifications du système ERTMS (à la fois ETCS et GSM-R) a été ajoutée à la STI «contrôle-commande et signalisation» à grande vitesse (décision no 2002/731/CE). Une nouvelle version de ces spécifications a été émise récemment (décision no 2004/447/CE). Si elle contient des modifications fonctionnelles et de système peu significatives, elle fixe en revanche la base d'une approche structurée pour l'évaluation de conformité des équipements embarqués de contrôle-commande.
Le processus de consolidation en cours pour le système ERTMS (à la fois le système ETCS et le système GSM-R) est centré de façon explicite sur deux questions essentielles:
|
— |
la consolidation de la référence dans son niveau en vigueur afin qu'elle devienne une référence plus robuste pour l'interopérabilité, et |
|
— |
la clôture de plusieurs points ouverts opérationnels et techniques encore à l'étude. |
Ces travaux s'appuient sur les retours d'information des actions pilotes en cours, des premières applications commerciales, ainsi qu'un programme structuré d'essais de vérification sur des produits provenant de différents fabricants. Ils doivent aboutir à l'émission d'une nouvelle référence devant être intégrée à la gestion de configuration pendant le premier semestre 2005.
Au cours de cette phase, des accords mutuels spécifiques pourraient être nécessaires entre les gestionnaires d'infrastructure et les entreprises ferroviaires concernant l'utilisation des systèmes de classe A.
7.3.4. Version de référence
Sur la base de l'expérience acquise, le laps de temps entre deux références peut être estimé à environ quatre à cinq ans en ce qui concerne le système ETCS et à environ deux ans en ce qui concerne le système GSM-R.
L'émission d'une référence doit en principe être liée à des modifications significatives de la fonctionnalité ou de la performance du système. Ces modifications pourraient comprendre des aspects tels que:
|
— |
l'incorporation d'une série de fonctions nationales actuelles lorsque celles-ci peuvent être généralisées, au sein du noyau initial, |
|
— |
la mise en place de constituants d'interopérabilité complémentaires sur le système ETCS du bord et du sol, |
|
— |
des services à valeur ajoutée fondés sur le système GSM-R. |
Chaque référence doit également reprendre la fonctionnalité de la précédente référence. Les versions de débogage pour remédier aux défauts ou aux lacunes de sécurité doivent être gérées comme la nouvelle version d'une référence particulière. À moins d'un empêchement lié à des incidences en matière de sécurité, chaque version nouvelle d'une référence doit présenter une compatibilité en amont.
La fonctionnalité ajoutée susceptible d'être incorporée dans différentes références implique nécessairement l'absence de compatibilité en amont des différentes références. Afin de faciliter la migration et dans la mesure permise d'un point de vue technique, les différentes références doivent toutefois comprendre un ensemble commun de fonctionnalité garantissant une compatibilité en amont. Un tel ensemble commun doit fournir un noyau minimal pour permettre le fonctionnement interopérable avec une performance acceptable.
7.3.5. Déploiement de nouvelles références
Les gestionnaires d'infrastructures et opérateurs ferroviaires ne seront jamais confrontés à une situation de passage d'une référence à une autre du jour au lendemain. De là, chaque référence de base doit être élaborée conjointement avec une stratégie de migration appropriée. Des problèmes sont ainsi évités, tels que la coexistence d'installations ETCS et d'installations GSM-R correspondant à différentes versions des spécifications ETCS ou GSM-R, les préférences de voies de migration (à savoir la priorité sol, la priorité matériel roulant ou leur priorité simultanée) ainsi que les calendriers indicatifs et les priorités au regard de la migration.
7.3.6. Processus de la gestion des changements — exigences
Comme décrit précédemment, les changements sont une réalité de l'exploitation de systèmes d'envergure fondés sur un logiciel. De là, les procédures de gestion des changements doivent être conçues en veillant à ce que les coûts et avantages des changements soient analysés correctement et que les changements soient mis en œuvre selon une manière contrôlée. Cet aspect exige du processus de gestion des changements fixé et des outils associés qu'ils permettent l'enregistrement des changements et leur application aux spécifications selon un rapport coût/efficacité satisfaisant. Quels que soient les détails particuliers à un tel processus, celui-ci doit être représenté à un large niveau dans une approche structurée comme suit:

Un plan de gestion de la configuration englobant le jeu des normes et des procédures relatives à la gestion des changements doit étayer l'ensemble du processus de gestion des changements comme décrit ci-dessus. Les exigences génériques pour un tel plan sont décrites au point 7.3.7 ci-dessous. La stratégie de mise en œuvre relative aux changements approuvés doit être formalisée (sur la base d'un processus régulier et d'une documentation en bonne et due forme) dans un plan de configuration des changements qui comprend notamment:
|
— |
l'identification des contraintes techniques appuyant le changement, |
|
— |
une déclaration désignant le responsable des procédures de mise en œuvre des changements, |
|
— |
la procédure de validation des changements à mettre en œuvre, |
|
— |
la politique de gestion des changements, de révision, de migration et de déploiement. |
7.3.7. Plan de gestion de la configuration — exigences
La gestion de la configuration doit décrire le jeu des normes et procédures régissant la gestion des changements, comprenant notamment:
|
— |
la définition des entités à gérer et un schéma formel identifiant ces entités, |
|
— |
une déclaration désignant le responsable des procédures de la gestion de configuration et de la soumission des entités contrôlées à la structure en charge de la décision de gestion de configuration, |
|
— |
les politiques de la gestion de configuration à utiliser pour la maîtrise des changements et la gestion des versions, |
|
— |
une description des dossiers du processus de gestion de configuration devant être entretenus, |
|
— |
une description des outils à utiliser pour la gestion de configuration et le processus à appliquer en relation avec l'utilisation de ces outils, |
|
— |
une définition de la base de données de configuration devant être utilisée pour enregistrer les informations de configuration. |
Les détails spécifiques des processus de la gestion de configuration pour les systèmes ETCS et GSM-R seront formalisés par les spécifications à incorporer sur la liste donnée à l'annexe A de la présente STI, aux index 60 (pour ETCS) et 61 (pour GSM-R).
7.3.8. Gouvernance
La gestion des changements des spécifications ERTMS/ETCS et GSM-R doit être placée sous l'égide de l'Agence ferroviaire européenne (AFE) instituée par le règlement (CE) no 881/2004 du Parlement européen et du Conseil. L'AFE aura la charge de la maîtrise du processus de gestion des changements, comprenant la délivrance des spécifications, son assurance qualité et la gestion de configuration.
De cette manière, l'AFE jouera un rôle central en tant qu'autorité responsable du système, centralisant et veillant à la cohérence globale d'un processus qui est actuellement fragmenté entre plusieurs différentes parties comme le montre le tableau ci-dessous:
|
Responsabilité |
ERTMS/ETCS |
GSM-R |
|
Délivrance des spécifications |
Groupe d'utilisateurs ERTMS, UIC et UNISIG |
Groupe EIRENE, ERIG et «Industry Group» GSM-R |
|
Assurance qualité |
Groupe d'utilisateurs ERTMS |
Groupe EIRENE, ERIG et groupe d'utilisateurs ERTMS |
|
Gestion de configuration |
AEIF |
|
Dans son rôle d'autorité responsable du système, l'AFE veillera à la coopération d'un groupe mixte représentatif des parties prenantes au processus — à savoir, gestionnaires d'infrastructures, entreprises ferroviaires, fournisseurs des équipements ferroviaires, organismes notifiés et autorités de sécurité — pour le bon accomplissement de ses tâches. Ces parties doivent notamment:
|
i. |
fournir des informations pour le processus concernant:
|
|
ii. |
faire partie de la Commission de modification (CCB) devant être instituée pour assurer la gestion des demandes de changement, comme indiqué au point 7.3.6. La CCB doit veiller à ce qu'une approche du système soit prise en compte dans les changements soumis et effectuer une évaluation d'ensemble de leurs incidences. |
Un transfert coordonné doit être permis entre l'actuelle Association européenne pour l'interopérabilité ferroviaire (AEIF) et les structures de gestion des changements de l'AFE. Afin que ce transfert se déroule harmonieusement, il est jugé essentiel:
|
— |
de formaliser et de documenter le processus de gestion des changements actuel dans le contenu de l'ensemble de la documentation reprise à l'annexe A afin qu'il soit admis comme référence dans un souci de continuité et de qualité des travaux relatifs à la gestion des changements, |
|
— |
de prévoir une période de transition d'environ douze mois pendant lesquels les deux structures fonctionneront en parallèle selon un «modus operandi» convenu entre les deux parties. |
L'AFE doit démarrer son activité de la gestion formelle des changements à compter de la délivrance de la référence 2005 issue de la phase de consolidation comme repris au point 7.3.3.
7.4. Cas spécifiques
7.4.1. Introduction
Les dispositions particulières suivantes sont autorisées dans les cas spécifiques ci-dessous.
Ces cas spécifiques appartiennent à deux catégories: les dispositions s'appliquent soit de manière permanente (cas «P»), soit de manière temporaire (cas «T»). Pour certains cas temporaires, il est recommandé aux États membres concernés de se conformer au sous-système pertinent, soit d'ici à 2010 (cas «T1»), objectif inscrit dans la décision no 1692/96/CE du Parlement européen et du Conseil du 23 juillet 1996 relative aux orientations communautaires pour le développement du réseau transeuropéen de transport (21), soit d'ici à 2020 (cas «T2» (22).
Dans la présente STI, le cas provisoire «T3» est défini pour les cas provisoires qui perdureront après 2020.
7.4.2. Liste des cas spécifiques
7.4.2.1. La catégorie de chaque cas spécifique est donnée en annexe A, appendice 1.
|
No |
Cas spécifique |
Justification |
Durée |
|
1 |
L'interdépendance entre la distance entre essieux et le diamètre des roues des véhicules circulant en Allemagne est donnée en annexe A, appendice 1, point 2.1.5 |
Équipement de compteur d'essieux existant identifié dans le registre des infrastructures. |
P |
|
2 |
La longueur maximale de la partie en porte-à-faux (nez) du véhicule circulant en Pologne est donnée en annexe A, appendice 1, point 2.1.6 |
Géométrie existante de l'équipement de circuits de voie |
T3 |
|
3 |
Les distances minimales entre les cinq premiers essieux des trains circulant en Allemagne sont données en annexe A, appendice 1, point 2.1.7 |
Pertinent sur les lignes ayant des passages à niveau conformément au registre des infrastructures |
T3 |
|
4 |
La distance minimale entre le premier et le dernier essieu d'un véhicule isolé ou d'une rame circulant sur les lignes à grande vitesse en France et sur la ligne à grande vitesse «L1» en Belgique est donnée en annexe A, appendice 1, point 2.1.8 |
Équipement de circuits de voie existant, identifié dans le registre des infrastructures |
France T3 Belgique T3 |
|
5. |
La distance minimale entre le premier et le dernier essieu d'un véhicule isolé ou d'une rame circulant en Belgique est donnée en annexe A, appendice 1, point 2.1.9 de la STI «CCS-RC» |
Équipement de circuits de voie existant, identifié dans le registre des infrastructures |
T3 |
|
6. |
Le diamètre minimal des roues des véhicules circulant en France est donné en annexe A, appendice 1, point 2.2.2 |
Équipement de compteur d'essieux existant, identifié dans le registre des infrastructures |
T3 |
|
7. |
La charge minimale à l'essieu pour les véhicules circulant en Allemagne, en Autriche et en Suède est donnée en annexe A, appendice 1, point 3.1.3 |
La charge minimale à l'essieu nécessaire pour shunter certains circuits de voie est déterminée dans une exigence de l'EBA (Eisenbahn-Bundesamt) et s'applique sur certaines grandes lignes en Allemagne dans la zone de l'ex-DR (Deutsche Reichsbahn) ayant des circuits de voie de 42 Hz et de 100 Hz en fonction du registre des infrastructures. Pas de renouvellement. À compléter en ce qui concerne l'Autriche et la Suède. |
T3 |
|
8. |
La masse minimale d'un véhicule isolé ou d'une rame circulant sur les lignes à grande vitesse en France et sur les lignes à grande vitesse «L1» en Belgique est donnée en annexe A, appendice 1, point 3.1.4. |
Équipement de circuits de voie existant |
France T3 Belgique T3 |
|
9. |
La masse minimale d'un véhicule isolé ou d'une rame circulant sur les lignes à grande vitesse en Belgique (à l'exclusion de la ligne à grande vitesse «L1») est donnée en annexe A, appendice 1, point 3.1.5 de la STI «CCS-RC». |
Le matériel roulant est plus homogène sur les lignes à grande vitesse. La surface de roulement sur le rail est plus limitée que sur le réseau conventionnel. La détection de tout type de circulation concernant un train qui roule ou est à l'arrêt est fournie à tout moment si la masse d'un véhicule isolé ou d'une rame est supérieure à 90 tonnes. |
T3 |
|
10. |
Les dimensions minimales de masse métallique des véhicules circulant en Allemagne et en Pologne sont données en annexe A, appendice 1, point 3.3.1 |
Pertinent sur les lignes avec des passages à niveau avec des boucles de détection conformément au registre des infrastructures. |
Allemagne P Pologne P |
|
11. |
La réactance maximale entre les surfaces de roulement d'un train (paire) de roues des véhicules circulant en Pologne est donnée en annexe A, appendice 1, point 3.5.3 |
Équipement de circuits de voie existant |
T3 |
|
12. |
La réactance maximale entre les surfaces de roulement d'un train (paire) de roues des véhicules circulant en France est donnée en annexe A, appendice 1, point 3.5.4 |
Équipement de circuits de voie existant |
T3 |
|
13. |
Les exigences complémentaires s'appliquant aux paramètres de shuntage d'un véhicule circulant aux Pays-Bas sont données en annexe A, appendice 1, point 3.5.5 |
Équipement existant de circuits de voie basse tension, identifié dans le registre des infrastructures. |
T3 |
|
14. |
L'impédance minimale entre le pantographe et les roues des véhicules circulant en Belgique est donnée en annexe A, appendice 1, point 3.6.1 |
Équipements de classe B existants |
T3 |
|
15. |
Les freins magnétiques et à courants de Foucault ne sont pas autorisés sur le premier bogie d'un véhicule de tête circulant en Allemagne, comme défini à l'annexe A, appendice 1, point 5.2.3 |
Pertinent sur les lignes comportant des passages à niveau conformément au registre des infrastructures. |
T3 |
|
16. |
Le sablage pour la traction avec des éléments automoteurs n'est pas autorisé devant l'essieu avant aux vitesses inférieures à 40 km/h au Royaume-Uni, comme défini à l'annexe A, appendice 1, point 4.1.4 |
Les circuits de voie ne suffisent pas pour une circulation en sécurité dans le cas de sablage en aval d'un train avant d'un élément automoteur. |
T3 |
7.4.2.2. Cas spécifique pour la Grèce
Catégorie «T1» — temporaire: matériel roulant pour un écartement de voie de 1 000 mm ou inférieur et pour les lignes ayant un écartement de voie de 1 000 mm ou inférieur. Les règles nationales s'appliquent à ces lignes.
7.4.2.3. Cas spécifique pour les États baltes (Estonie, Lettonie et Lituanie)
Catégorie T ouvert — le réaménagement fonctionnel et technique des installations existantes de classe B déployées le long des corridors ayant un écartement de voie de 1 520 mm est autorisé si cela est jugé nécessaire pour permettre la circulation des trains automoteurs des entreprises ferroviaires ressortissantes de la Fédération de Russie et du Belarus. Les équipements embarqués de ces derniers ne sont pas soumis aux exigences de conformité définies au point 7.2.2.5. Ces corridors doivent être mentionnés dans le registre des infrastructures.
7.5. Dispositions transitoires
Les points indiqués comme ouverts dans la présente STI seront gérés au cours du processus de révision.
(1) Les exigences de sécurité pour l'ERTMS/ETCS niveau 3 sont encore à établir.
(2) Cette exigence doit être respectée au titre de paramètre de conception du MR et pour évaluation du sous-système MR.
(3) Niveau de spécification différent: doit figurer dans la formation du conducteur et la connaissance des lignes.
(4) Les lignes à grande vitesse sont reconnaissables par un motif en pointillé.
(5) JO L 167 du 30.4.2004, p. 1, rectifiée au JO L 201 du 7.6.2004, p. 1.
(6) JO L 161 du 26.6.1999, p. 1. Règlement modifié par le règlement (CE) no 173/2005 (JO L 29 du 2.2.2005, p. 3).
(7) JO L 161 du 26.6.1999, p. 57.
(8) Ceci inclut les opérations de montage en usine associées à des opérations de maintenance majeures.
(9) Pour les besoins d'installation des équipements ETCS, on entend par «opération majeure» les opérations d'entretien entraînant un investissement représentant au moins dix fois la valeur de l'installation des équipements sur ce type particulier de matériel roulant.
(10) Le niveau d'obligation est à définir en vertu des critères suivants: i) intérêt que présentent les corridors ciblés dans la réalisation de l'ERTMS/ETCS pour le marché; ii) couverture ERTMS/ETCS des lignes.
(11) Attendu comme le résultat à venir d'une analyse corridor par corridor devant être effectuée conjointement par les parties intéressées concernées — notamment les États membres, les gestionnaires d'infrastructure, les entreprises ferroviaires et, éventuellement, les fournisseurs d'équipements ferroviaires.
(12) Sistema Controllo Marcia Treno. Un système de classe A italien fondé sur les composants ETCS.
(13) Par exemple, la faisabilité de la notion de STM externe ne peut pas être garantie sur un plan technique, ou des problèmes potentiels en relation avec les droits en matière de propriété intellectuelle des systèmes de classe B empêchent la mise au point d'un produit STM dans les délais.
(14) 31 décembre 2007.
(15) Classification des fonctions: voir chapitre 4.
(16) Classification des fonctions: voir chapitre 4.
(17) ERTMS/GSM-R et GSM-R.
(18) Une référence (baseline) fournit un point de départ d'une gestion maîtrisée de l'évolution d'un système.
(19) Une version (révision) est une variante du système qui est distribuée auprès des acheteurs ferroviaires. Les versions d'un système peuvent comporter des fonctionnalités, des performances différentes ou peuvent remédier à des erreurs du système ou à des lacunes de sécurité ou d'intégrité.
(20) Des éléments complémentaires en ce qui concerne cette question sont contenus dans les paragraphes ci-dessous.
(21) JO L 228 du 9.9.1996, p. 1. Décision modifiée en dernier lieu par la décision no 884/2004/CE (JO L 167 du 30.4.2004, p. 1, rectifiée au JO L 201 du 7.6.2004, p. 1).
(22) D'autres dates (Tx) peuvent être spécifiées en fonction de la STI et du cas spécifique.
ANNEXE A
LISTE DES SPÉCIFICATIONS OBLIGATOIRES (1)
|
Index N |
Reference |
Document Name |
Version |
|
1 |
UIC ETCS FRS |
ERTMS/ETCS Functional Requirement Specification |
4.29 (3) |
|
2 |
99E 5362 |
ERTMS/ETCS Functional Statements |
2.0.0 |
|
3 |
UNISIG SUBSET-023 |
Glossary of Terms and Abbreviations |
2.0.0 |
|
4 |
UNISIG SUBSET-026 |
System Requirement Specification |
2.2.2 |
|
5 |
UNISIG SUBSET-027 |
FFFIS Juridical Recorder-Downloading Tool |
2.2.9 |
|
6 |
UNISIG SUBSET-033 |
FIS for Man-Machine Interface |
2.0.0 (2) |
|
7 |
UNISIG SUBSET-034 |
FIS for the Train Interface |
2.0.0 |
|
8 |
UNISIG SUBSET-035 |
Specific Transmission Module FFFIS |
2.1.1 |
|
9 |
UNISIG SUBSET-036 |
FFFIS for Eurobalise |
2.3.0 |
|
10 |
UNISIG SUBSET-037 |
Euroradio FIS |
2.3.0 |
|
11 |
Reserved 05E537 |
Off line key management FIS |
|
|
12 |
UNISIG SUBSET-039 |
FIS for the RBC/RBC Handover |
2.1.2 |
|
13 |
UNISIG SUBSET-040 |
Dimensioning and Engineering rules |
2.1.0 |
|
14 |
UNISIG SUBSET-041 |
Performance Requirements for Interoperability |
2.1.0 |
|
15 |
UNISIG SUBSET-108 |
Interoperability-related consolidation on TSI annex A documents (mainly SUBSET-026 v2.2.2) |
1.0.0 |
|
16 |
UNISIG SUBSET-044 |
FFFIS for Euroloop sub-system |
2.2.0 (4) |
|
17 |
Intentionally Deleted |
|
|
|
18 |
UNISIG SUBSET-046 |
Radio In-fill FFFS |
2.0.0 |
|
19 |
UNISIG SUBSET-047 |
Track-side-Trainborne FIS for Radio In-Fill |
2.0.0 |
|
20 |
UNISIG SUBSET-048 |
Trainborne FFFIS for Radio In-Fill |
2.0.0 |
|
21 |
UNISIG SUBSET-049 |
Radio In-fill FIS with LEU/Interlocking |
2.0.0 |
|
22 |
Intentionally deleted |
|
|
|
23 |
UNISIG SUBSET-054 |
Assignment of Values to ETCS variables |
2.0.0 |
|
24 |
Intentionally deleted |
|
|
|
25 |
UNISIG SUBSET-056 |
STM FFFIS Safe Time Layer |
2.2.0 |
|
26 |
UNISIG SUBSET-057 |
STM FFFIS Safe Link Layer |
2.2.0 |
|
27 |
UNISIG SUBSET-091 |
Safety Requirements for the Technical Interoperability of ETCS in Levels 1 & 2 |
2.2.11 |
|
28 |
Reserved |
Reliability — Availability Requirements |
|
|
29 |
UNISIG SUBSET-102 |
Test specification for Interface «k» |
1.0.0 |
|
30 |
Intentionally deleted |
|
|
|
31 |
UNISIG SUBSET-094 |
Functional Requirements for an On-board Reference Test Facility |
2.0.0 |
|
32 |
EIRENE FRS |
GSM-R Functional Requirements Specification |
7 |
|
33 |
EIRENE SRS |
GSM-R System Requirements Specification |
15 |
|
34 |
A11T6001 12 |
(MORANE) Radio Transmission FFFIS for EuroRadio |
12 |
|
35 |
ECC/DC(02)05 |
ECC Decision of 5 July 2002 on the designation and availability of frequency bands for railway purposes in the 876-880 and 921-925 MHz bands. |
|
|
36a |
Intentionally deleted |
|
|
|
36b |
Intentionally deleted |
|
|
|
36c |
UNISIG SUBSET-074-2 |
FFFIS STM Test cases document |
1.0.0 |
|
37a |
Intentionally deleted |
|
|
|
37b |
UNISIG SUBSET-076-5-2 |
Test cases related to features |
2.2.2 |
|
37c |
UNISIG SUBSET-076-6-3 |
Test sequences |
2.0.0 |
|
37d |
UNISIG SUBSET-076-7 |
Scope of the test specifications |
1.0.0 |
|
37e |
Intentionally deleted |
|
|
|
38 |
Reserved |
Marker boards |
|
|
39 |
UNISIG SUBSET-092-1 |
ERTMS EuroRadio Conformance Requirements |
2.2.5 |
|
40 |
UNISIG SUBSET-092-2 |
ERTMS EuroRadio Test cases Safety Layer |
2.2.5 |
|
41 |
Reserved UNISIG SUBSET 028 |
JRU Test Specification |
|
|
42 |
Intentionally deleted |
|
|
|
43 |
UNISIG SUBSET 085 |
Test Specification for Eurobalise FFFIS |
2.1.2 |
|
44 |
Reserved |
Odometry FIS |
|
|
45 |
UNISIG SUBSET-101 |
Interface «K» Specification |
1.0.0 |
|
46 |
UNISIG SUBSET-100 |
Interface «G» specification |
1.0.1 |
|
47 |
Intentionally deleted |
|
|
|
48 |
Reserved |
Test specification for mobile equipment GSM-R |
|
|
49 |
UNISIG SUBSET-059 |
Performance requirements for STM |
2.1.1 |
|
50 |
Reserved |
Test specification for EUROLOOP |
|
|
51 |
Reserved UNISIG |
Ergonomic aspects of the DMI |
|
|
52 |
UNISIG SUBSET-058 |
FFFIS STM Application Layer |
2.1.1 |
|
53 |
Reserved AEIF-ETCS-Variables-Manual |
AEIF-ETCS-Variables-Manual |
|
|
54 |
Intentionally deleted |
|
|
|
55 |
Reserved |
Juridical recorder baseline requirements |
|
|
56 |
Reserved 05E538 |
ERTMS Key Management Conformance Requirements |
|
|
57 |
Reserved UNISIG SUBSET-107 |
Requirements on pre-fitting of ERTMS on-board equipment |
|
|
58 |
Reserved UNISIG SUBSET-097 |
Requirements for RBC-RBC Safe Communication Interface |
|
|
59 |
Reserved UNISIG SUBSET-105 |
Requirements on pre-fitting of ERTMS track side equipment |
|
|
60 |
Reserved UNISIG SUBSET-104 |
ETCS version management |
|
|
61 |
Reserved |
GSM-R version management |
|
|
62 |
Reserved UNISIG SUBSET-099 |
RBC-RBC Test specification for Safe Communication Interface |
|
|
63 |
Reserved UNISIG SUBSET-098 |
RBC-RBC Safe Communication Interface |
|
LISTE DES NORMES OBLIGATOIRES
|
Index N |
Reference |
Document Name and comments |
Version |
|
A1 |
EN 50126 |
Railway applications — The specification and demonstration of reliability, availability, maintainability and safety (RAMS) |
1999 |
|
A2 |
EN 50128 |
Railway applications — Communication, signalling and processing systems — Software for railway control and protection systems |
2001 |
|
A3 |
EN 50129 |
Railway applications — Communication, signalling and processing systems — Safety related electronic systems for signalling |
2003 |
|
A4 |
EN 50125-1 |
Railway applications — Environmental conditions for equipment — Part 1: equipment on board rolling stock |
1999 |
|
A5 |
EN 50125-3 |
Railway applications — Environmental conditions for equipment — Part 3: equipment for signalling and telecommunications |
2003 |
|
A6 |
EN 50121-3-2 |
Railway applications — Electromagnetic compatibility — Part 3-2: Rolling stock — Apparatus |
2000 |
|
A7 |
EN 50121-4 |
Railway applications — Electromagnetic compatibility — Part 4: Emission and immunity of the signalling and telecommunications apparatus |
2000 |
|
A8 |
EN 50238 |
Railway applications — Compatibility between rolling stock and train detection systems |
2003 |
LISTE DES SPÉCIFICATIONS INFORMATIVES
Note:
Les spécifications de Type «1» représentent l'état actuel des travaux de préparation d'une norme obligatoire qui est encore réservée.
Les spécifications de Type. «2» donnent des informations supplémentaires, justifiant les exigences des spécifications obligatoires et apportant de l'aide pour leur application.
L'index B32 est destiné à garantir des références uniques dans les documents de l'annexe A. Cet index étant utilisé à des fins rédactionnelles et uniquement en appui de futures modifications des documents référencés, il n'est pas classifié comme «type» et il n'est pas lié à un document obligatoire de l'annexe A.
|
Index N |
Reference |
Document Name |
Version |
Type |
|
B1 |
EEIG 02S126 |
RAM requirements (chapter 2 only) |
6 |
2 (Index 28) |
|
B2 |
EEIG 97S066 |
Environmental conditions |
5 |
2 (Index A5) |
|
B3 |
UNISIG SUBSET-074-1 |
Methodology for testing FFFIS STM |
1.0.0 |
2 (Index 36) |
|
B4 |
EEIG 97E267 |
ODOMETER FFFIS |
5 |
1 (Index 44) |
|
B5 |
O_2475 |
ERTMS GSM-R QoS Test Specification |
1.0.0 |
2 |
|
B6 |
UNISIG SUBSET-038 |
Off-line Key Management FIS |
1 (Index11) |
1. |
|
B7 |
Reserved UNISIG SUBSET-074-3 |
FFFIS STM test specification traceability of test cases with Specific Transmission Module FFFIS |
1.0.0 |
2 (Index 36) |
|
B8 |
UNISIG SUBSET-074-4 |
FFFIS STM Test Specification Traceability of testing the packets specified in the FFFIS STM Application Layer |
1.0.0 |
2 (Index 36) |
|
B9 |
UNISIG SUBSET 076_0 |
ERTMS/ETCS Class 1, Test plan |
2.2.3 |
2 (Index 37) |
|
B10 |
UNISIG SUBSET 076_2 |
Methodology to prepare features |
2.2.1 |
2 (Index 37) |
|
B11 |
UNISIG SUBSET 076_3 |
Methodology of testing |
2.2.1 |
2 (Index 37) |
|
B12 |
UNISIG SUBSET 076_4_1 |
Test sequence generation: Methodology and Rules |
1.0.0 |
2 (Index 37) |
|
B13 |
UNISIG SUBSET 076_4_2 |
ERTMS ETCS Class 1 States for Test Sequences |
1.0.0 |
2 (Index 37) |
|
B14 |
UNISIG SUBSET 076_5_3 |
On-Board Data Dictionary |
2.2.0 |
2 (Index 37) |
|
B15 |
UNISIG SUBSET 076_5_4 |
SRS v.2.2.2 Traceability |
2.2.2 |
2 (Index 37) |
|
B16 |
UNISIG SUBSET 076_6_1 |
UNISIG test data base |
2.2.2 |
2 (Index 37) |
|
B17 |
UNISIG SUBSET 076_6_4 |
Test Cases Coverage |
2.0.0 |
2 (Index 37) |
|
B18 |
|
|
|
|
|
B19 |
UNISIG SUBSET 077 |
UNISIG Causal Analysis Process |
2.2.2 |
2 (Index 27) |
|
B20 |
UNISIG SUBSET 078 |
RBC interface: Failure modes and effects analysis |
2.2.2 |
2 (Index 27) |
|
B21 |
UNISIG SUBSET 079 |
MMI: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B22 |
UNISIG SUBSET 080 |
TIU: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B23 |
UNISIG SUBSET 081 |
Transmission system: Failure Modes and Effects Analysis |
2.2.2 |
2 (Index 27) |
|
B24 |
UNISIG SUBSET 088 |
ETCS Application Levels 1&2 -Safety Analysis |
2.2.10 |
2 (Index 27) |
|
B25 |
TS50459-1 |
Railway applications -European Rail Traffic Management System — Driver Machine Interface" part 1 — Ergonomic principles of ERTMS/ETCS/GSM-R Information |
2005 |
2 (Index 51) |
|
B26 |
TS50459-2 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 2 — Ergonomic arrangements of ERTMS/ETCS Information |
2005 |
2 (Index 51) |
|
B27 |
TS50459-3 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 3 — Ergonomic arrangements of ERTMS/GSM-R Information |
2005 |
2 (Index 51) |
|
B28 |
TS50459-4 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 4 — Data entry for the ERTMS/ETCS/GSM-R systems |
2005 |
2 (Index 51) |
|
B29 |
TS50459-5 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 5 — Symbols |
2005 |
2 (Index 51) |
|
B30 |
TS50459-6 |
Railway applications — Communication, signalling and processing systems -European Rail Traffic Management System — Driver Machine Interface" part 6 — Audible Information |
2005 |
2 (Index 51) |
|
B31 |
EN50xxx |
Railway applications -European Rail Traffic Management System — Driver Machine Interface" part 7 — Specific Transmission Modules |
|
2 (Index 51) |
|
B32 |
Reserved |
Guideline for references |
|
Non |
|
B33 |
EN 310515 |
Global System for Mobile communication (GSM); Requirements for GSM operation in railways. |
2.1.0 |
|
|
B34 |
05E466 |
Operational DMI information |
1 |
1 (Index 51) |
|
B35 |
Reserved UNISIG SUBSET-069 |
ERTMS Key Management Conformance Requirements |
|
1 (Index 56) |
|
B36 |
04E117 |
ETCS/GSM-R Quality of Service user requirements — Operational Analysis |
|
2 (Index 22) |
|
B37 |
UNISIG SUBSET-093 |
GSM-R Interfaces — Class 1 requirements |
2.3.0 |
1 (Index 32, 33) |
|
B38 |
UNISIG SUBSET-107A |
Requirements on pre-fitting of ERTMS on-board equipment |
1.0.0 |
2 (Index 57) |
|
B39 |
UNISIG SUBSET-076-5-1 |
ERTMS ETCS Class 1 Feature List |
2.2.2 |
2 (Index 37) |
|
B40 |
UNISIG SUBSET-076-6-7 |
Test Sequences Evaluation and Validation |
1.0.0 |
2 (Index 37) |
|
B41 |
UNISIG SUBSET-076-6-8 |
Generic train data for test Sequences |
1.0.0 |
2 (Index 37) |
|
B42 |
UNISIG SUBSET-076-6-10 |
Test Sequence Viewer (TSV) |
2.10 |
2 (Index 37) |
|
B43 |
04E083 |
Safety Requirements and Requirements to Safety Analysis for Interoperability for the Control-Command and Signalling Sub-System |
1.0 |
1 |
|
B44 |
04E084 |
Justification Report for the Safety Requirements and Requirements to Safety Analysis for Interoperability for the Control-Command and Signalling Sub-System. |
1.0 |
2 (Index B43) |
(1) Les références de l'ERTMS seront réexaminées après la phase de consolidation.
(2) Le contenu de ce document est valable uniquement pour la partie qui n'est pas en contradiction avec l'index 51.
(3) Version à actualiser (demandes de changements de la STI Contrôle-Commande RC concernant les FRS transmises au CCM).
(4) Conditionné à l'approbation de la fréquence par le CEPT.
Appendice 1
CARACTÉRISTIQUES NÉCESSAIRES DES SYSTÈMES DE DÉTECTION DES TRAINS POUR LA COMPATIBILITÉ AVEC LE MATÉRIEL ROULANT
1. MISE EN ŒUVRE
|
1.1. |
Les systèmes de détection des trains doivent être conçus de façon à être capables de localiser de manière sûre et fiable un véhicule dans les valeurs limites spécifiées dans le présent appendice. Le point 4.3 (spécifications fonctionnelles et techniques des interfaces avec les autres sous-systèmes) de la STI «CCS» assure la conformité des véhicules répondant à la STI aux exigences du présent appendice. |
|
1.2. |
Les dimensions longitudinales du véhicule sont définies comme suit:
La figure 6 montre un exemple d'un véhicule à double bogies à trois essieux (n=6). |
Figure 6

|
1.3. |
La désignation «train (ou paire) de roues» s'appliquera à toute paire de roues réunies ou non par un essieu-axe. Toute référence à un train (ou paire) de roues concerne le centre des roues (toile). |
|
1.4. |
La figure 7 donne la définition des dimensions des roues
Les autres cotes de la figure 7 ne sont pas pertinentes pour la présente STI. |
|
1.5. |
Les valeurs indiquées sont des limites absolues et comprennent les éventuelles tolérances de mesure. |
|
1.6. |
Le gestionnaire d'infrastructure peut admettre des limites moins restrictives, qui doivent alors être déclarées dans le registre des infrastructures. |
Figure 7

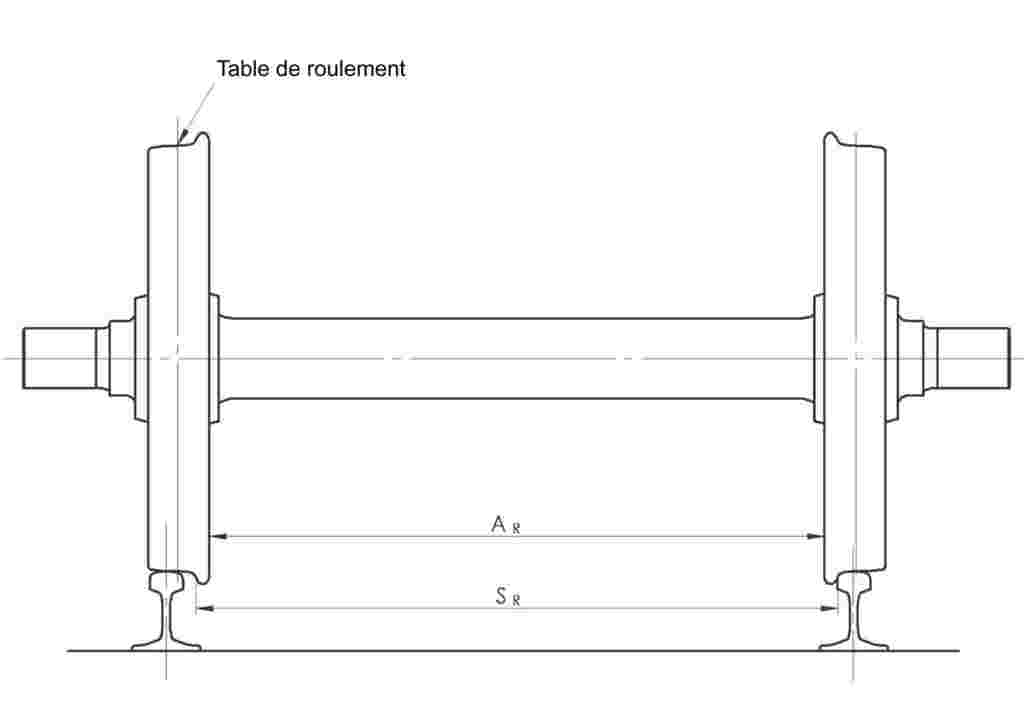
2. GÉOMÉTRIE DU VÉHICULE
2.1. Distance entre les essieux
|
2.1.1. |
La distance ai (figure 6) ne doit pas être supérieure à 17 500 mm pour les lignes existantes et à 20 000 mm pour utilisation sur des lignes nouvelles. |
|
2.1.2. |
La distance bx (figure 6) ne doit pas être supérieure à 4 200 mm. |
|
2.1.3. |
La distance ai (figure 6) ne doit pas être inférieure à: ai = v ×7,2 où v est la vitesse maximale du véhicule en km/h et où la distance ai est exprimée en millimètres, si la vitesse maximale du véhicule ne dépasse pas 350 km/h; pour des vitesses supérieures, les limites devront être spécifiées lorsque cela est nécessaire. |
|
2.1.4. |
La distance L - (b1 + b2) (figure 6) ne doit pas être inférieure à 3 000 mm. |
2.1.5. Cas spécifique Allemagne
Les limitations applicables à la relation entre la distance entre essieux (ai, figure 1) et le diamètre des roues sont encore à définir.
Point ouvert
2.1.6. Cas spécifique Pologne et Belgique
La distance bx (figure 6) ne doit pas dépasser 3 500 mm.
2.1.7. Cas spécifique Allemagne
La distance ai (figure 6) entre chacun des cinq premiers essieux d'un train (ou tous les essieux si le train en a moins de cinq) ne doit pas être inférieure à 1 000 mm, si la vitesse ne dépasse pas 140 km/h; pour des vitesses supérieures, le point 2.1.3 s'applique.
2.1.8. Cas spécifique France RTE grande vitesse et Belgique RTE grande vitesse «L1» uniquement
La distance entre le premier et le dernier essieu d'un véhicule long ou d'une rame ne doit pas être inférieure à 15 000 mm.
2.1.9. Cas spécifique Belgique
La distance L - (b1 + b2) (figure 6) ne doit pas être inférieure à 6 000 mm.
2.2. Géométrie des roues
|
2.2.1. |
La dimension BR (figure 7) ne doit pas être inférieure à 133 mm. |
|
2.2.2. |
La dimension D (figure 7) ne doit pas être inférieure à:
|
|
2.2.3. |
La dimension Sd (figure 7) ne doit pas être inférieure à 20 mm. |
|
2.2.4. |
La plage de la dimension Sh (figure 7) doit être de 27,5 - 36 mm.
|
3. CONCEPTION DU VÉHICULE
3.1. Masse du véhicule
|
3.1.1. |
La charge à l'essieu doit être d'au moins 5 t à moins que la force de freinage du véhicule soit fournie par des sabots de frein; auquel cas la charge à l'essieu doit être d'au moins 3,5 t pour utilisation sur les lignes existantes. |
|
3.1.2. |
La charge à l'essieu doit être d'au moins 3,5 t pour utilisation sur des lignes nouvelles ou réaménagées. |
3.1.3. Cas spécifique Autriche, Allemagne, Suède et Belgique
La charge à l'essieu doit être d'au moins 5 t sur certaines lignes spécifiées dans le registre des infrastructures.
3.1.4. Cas spécifique France RTE à grande vitesse et Belgique RTE à grande vitesse «L1» uniquement
Si la distance entre le premier et le dernier essieu d'un véhicule isolé ou d'une rame est supérieure ou égale à 16 000 mm, la masse du véhicule isolé ou de la rame doit être supérieure à 90 t. Lorsque cette distance est inférieure à 16 000 mm, et supérieure ou égale à 15 000 mm, la masse doit être inférieure à 90 t et supérieure ou égale à 40 t, le véhicule doit être équipé de deux paires de patins de freins électromagnétiques sur rails dont la base électrique est supérieure ou égale à 16 000 mm.
3.1.5. Cas spécifique Belgique RTE à grande vitesse (à l'exclusion de «L1»)
La masse d'un véhicule isolé ou d'une rame doit être d'au moins 90 t.
3.2. Espace exempt de métal autour des roues
|
3.2.1. |
Les espaces où seules des roues et leurs accessoires (boîtes d'engrenage, organes de freinage, tubes de sablage…) ou des organes non ferreux magnétiques peuvent être montés doivent être définis. Point ouvert |
3.3. Masse métallique du véhicule
3.3.1. Cas spécifique Allemagne, Pologne
Le véhicule doit, soit satisfaire aux exigences d'un essai de boucle de voie bien spécifié lorsqu'il passe la boucle, soit avoir une masse métallique minimale entre roues d'une certaine forme, une hauteur minimale au-dessus du champignon de rail et une conductance minimale.
Point ouvert
3.4. Matériau des roues
|
3.4.1. |
Les roues doivent avoir des caractéristiques ferromagnétiques. |
3.5. Impédance entre les roues
|
3.5.1. |
La résistance électrique entre les bandes de roulement de roues opposées d'un essieu donné ne doit pas dépasser:
|
|
3.5.2. |
La résistance est mesurée par une tension de mesure comprise entre 1,8 Vcc et 2,0 Vcc (tension ouverte). |
3.5.3. Cas spécifique Pologne
La réactance entre les bandes de roulement d'une paire de roues doit être inférieure à f/100 en milliohms lorsque f est compris entre 500 Hz et 40 kHz, pour un courant de mesure d'au moins 10 Aeff et une tension ouverte de 2 Veff.
3.5.4. Cas spécifique France
La réactance entre les bandes de roulement d'une paire de roues doit être inférieure à f/100 en milliohms lorsque f est compris entre 500 Hz et 10 kHz, pour une tension de mesure de 2 Veff (tension ouverte).
3.5.5. Cas spécifique Pays-Bas
Outre les exigences générales de l'annexe A, appendice 1, des exigences supplémentaires peuvent s'appliquer aux locomotives et aux éléments automoteurs sur les circuits de voie. Le registre des infrastructures identifie les lignes sur lesquelles ces exigences s'appliquent.
Point ouvert
3.6. Impédance du véhicule
|
3.6.1. |
L'impédance minimale entre pantographe et roues du matériel roulant doit être:
|
4. ISOLATION DES ÉMISSIONS
4.1. Utilisation des équipements de sablage
|
4.1.1. |
Afin d'améliorer les performances de freinage et de traction, il est admis d'appliquer du sable sur les voies. La quantité de sable par équipement de sable autorisée dans un délai de 30 s est:
|
|
4.1.2. |
Le nombre de dispositifs de sablage en activité ne doit pas dépasser les valeurs suivantes:
|
4.1.3. Cas spécifique Royaume-Uni
Aux fins de la traction, le sable sur des éléments automoteurs n'est pas autorisé en aval de l'essieu avant à des vitesses inférieures à 40 km/h.
Point ouvert
4.2. Utilisation de semelles de frein en matériau composite
|
4.2.1. |
Les conditions d'utilisation de semelles composites devront être définies par un groupe d'experts d'ici à la fin 2005. Point ouvert |
5. INTERFÉRENCES ÉLECTROMAGNÉTIQUES
5.1. Courant de traction
|
5.1.1. |
Les limites applicables ainsi que les explications d'accompagnement feront l'objet d'un document séparé actuellement en cours d'élaboration. Point ouvert |
5.2. Utilisation de freins électriques/magnétiques
|
5.2.1. |
L'utilisation des freins magnétiques et des freins à courants de Foucault n'est admissible que pour un freinage ou un arrêt d'urgence. Le registre des infrastructures peut interdire l'utilisation des freins magnétiques et des freins à courants de Foucault pour un freinage d'urgence. |
|
5.2.2. |
Si cela est indiqué dans le registre des infrastructures, les freins à courants de Foucault et les freins magnétiques peuvent être utilisés pour le freinage de service. |
5.2.3. Cas spécifique Allemagne
Les freins magnétiques et à courants de Foucault ne sont pas acceptés sur le premier bogie d'un véhicule de tête, à moins que cela ne soit défini dans le registre des infrastructures.
5.3. Champs électriques, magnétiques, électromagnétiques
|
5.3.1. |
Point ouvert. |
6. CARACTÉRISTIQUES SPÉCIFIQUES SUR LES LIGNES AVEC UN ÉCARTEMENT DE VOIE DE 1 520/1 524 mm
|
1. |
Les systèmes de détection des trains installés sur des lignes ayant un écartement de voie de 1 520/1 524 mm doivent posséder les caractéristiques énumérées ci-dessus à l'exclusion de celles données dans ce chapitre. |
|
2. |
La distance ai doit être supérieure à 19 000 mm. |
|
3. |
La dimension BR ne doit pas être inférieure à 130 mm. |
|
4. |
La résistance électrique entre les bandes de roulement des roues opposées d'un train (paire) de roues ne doit pas dépasser 0,06 ohm. |
|
5. |
Le nombre des dispositifs de sablage en activité dans des rames tractées par locomotive ne doit pas dépasser six par rail. |
Appendice 2
Exigences relatives à la détection de boîte chaude
Point ouvert
ANNEXE B
CLASSE B
TABLE DES MATIÈRES
|
— |
Utilisation de l'annexe B |
|
— |
Partie 1: signalisation |
|
— |
Partie 2: radio |
|
— |
Partie 3: matrice de transition |
UTILISATION DE L'ANNEXE B
L'annexe B présente les systèmes de contrôle de vitesse, de commande des trains et d'annonce en cabine et les systèmes de radio antérieurs à l'introduction des systèmes de commande et des systèmes de radio des trains de classe A et qui sont autorisés sur le réseau à grande vitesse et le réseau conventionnel européens jusqu'aux limites de vitesse définies par l'État membre responsable. Ces systèmes de classe B n'ont pas été développés dans le cadre des spécifications européennes unifiées, et leurs fournisseurs peuvent donc être détenteurs de droits de propriété industrielle sur leurs spécifications. La fourniture et le maintien à jour de ces spécifications ne doivent pas contrevenir aux réglementations nationales, notamment à celles concernant les brevets.
Lors de la phase de migration au cours de laquelle ces systèmes seront progressivement remplacés par le système unifié, il sera nécessaire de gérer les spécifications techniques dans l'intérêt de l'interopérabilité. Cette tâche incombe à l'État membre concerné ou à son représentant, en collaboration avec le fournisseur du système concerné, conformément aux deux STI «contrôle-commande» pour le système ferroviaire transeuropéen à grande vitesse et pour le système ferroviaire transeuropéen conventionnel.
Les entreprises ferroviaires ayant besoin d'installer un ou plusieurs de ces systèmes sur leurs trains doivent s'adresser à l'État membre concerné. L'annexe C définit la couverture géographique de chaque système en requérant pour chaque ligne un registre des infrastructures décrivant le type d'équipement et les contraintes d'exploitation associées. Au moyen du registre des infrastructures, le gestionnaire de l'infrastructure assure la cohérence entre l'ensemble de contrôle-commande du sol et le livret de procédures (rule book) relevant de sa compétence.
L'État membre doit fournir à l'entreprise ferroviaire les informations et conseils nécessaires pour que l'installation réponde aux règles de sécurité et soit compatible avec les dispositions des deux STI et de l'annexe C.
Les installations de classe B doivent comprendre les solutions de repli prévues à l'annexe C.
Les informations de base sur les systèmes de classe B sont données dans la présente annexe B. Pour chaque système répertorié, l'État membre doit s'engager à maintenir son interopérabilité et à fournir les informations requises pour les besoins de son application, en particulier les informations relatives aux approbations.
Partie 1: signalisation
INDEX:
|
1. |
ALSN |
|
2. |
ASFA |
|
3. |
ATB |
|
4. |
ATP-VR/RHK |
|
5. |
BACC |
|
6. |
CAWS et ATP |
|
7. |
Crocodile |
|
8. |
Ebicab |
|
9. |
EVM |
|
10. |
GW ATP |
|
11. |
Indusi/PZB |
|
12. |
KVB |
|
13. |
LS |
|
14. |
LZB |
|
15. |
MEMOR II+ |
|
16. |
RETB |
|
17. |
RSDD/SCMT |
|
18. |
SELCAB |
|
19. |
SHP |
|
20. |
TBL |
|
21. |
TPWS |
|
22. |
TVM |
|
23. |
ZUB 123 |
Pour information seulement, systèmes non utilisés dans les États membres:
|
23. |
ZUB 121 |
ALSN
Signalisation automatique des trains automoteurs en marche continue
Автоматическая Локомотивная Сигнализация Непрерывного действия (nom dans la langue d'origine: russe),
Description:
ALSN est un système de signalisation en cabine d'équipement d'arrêt automatique des trains. Il est installé sur les grandes lignes des chemins de fer de Lettonie et des pays voisins: l'Estonie et la Lituanie (pour information seulement: il est installé également sur les réseaux de la Fédération de Russie et du Belarus).
Le système est constitué de circuits de voie codés (TC) et d'un équipement embarqué.
Les circuits de voie sont d'une conception plutôt classique, avec des récepteurs de type à relais.
Les lignes en campagne sont équipées de:
|
— |
circuits de voie codés à courant alternatif à une fréquence de 50 (1), 75 ou 25 Hz, ou |
|
— |
circuits de voie continus qui assurent l'activation du mode de codage à l'approche d'un train en fonction du sens de la marche du train:
|
Les gares sont équipées de:
|
— |
circuits de voie continus qui assurent l'activation du mode de codage à l'approche d'un train en fonction du sens de la marche du train:
|
L'équipement embarqué est constitué d'un amplificateur électronique, d'un décodeur de type à relais, d'une vanne électro-pneumatique pour activer/désactiver le système de freinage; un signal lumineux représentant les aspects des signaux déployés en voie et un dispositif de vigilance pour confirmer les informations reçues par un conducteur.
Le système participe à la sécurité mais n'est pas de sécurité intrinsèque étant donné qu'il est un complément aux signaux déployés en voie. Il est toutefois suffisamment sûr pour la surveillance du conducteur.
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Le système est destiné à fonctionner à des vitesses de mouvement de train inférieures ou égales à 160 km/h.
Caractéristiques principales:
|
— |
Transmission des données avec le train:
|
|
— |
Informations disponibles à bord (hors ALSN): vitesse effective, distance parcourue |
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: Freinage d'urgence en cas de:
|
États membres responsables: Lettonie, Estonie et Lituanie
ASFA
Description:
L'ASFA est un système de signalisation en cabine et de contrôle de vitesse installé sur la plupart des lignes de la RENFE (1 676 mm), ainsi que sur les lignes à voie métrique de la FEVE et sur la ligne nouvelle NAFA à écartement européen.
L'ASFA se trouve sur toutes les lignes envisagées pour l'interopérabilité.
La communication sol-train est fondée sur des circuits résonnants à couplage magnétique permettant la transmission de neuf informations différentes. Le circuit résonnant installé en voie est accordé à une fréquence représentant l'aspect du signal. Le circuit du type boucle à saut de phase (PLL) à couplage magnétique du bord est verrouillé sur la fréquence de la signalisation latérale. Le système participe à la sécurité mais n'est pas de sécurité intrinsèque. Il est toutefois suffisamment sûr pour la surveillance du conducteur. Il rappelle à celui-ci l'état de la signalisation et l'oblige à actionner des boutons-poussoirs en cas d'aspect restrictif.
Les unités du sol et du bord sont de conception classique.
Caractéristiques principales:
|
— |
9 fréquences Plage: 55 kHz à 115 kHz |
|
— |
Trois catégories de train différentes peuvent être sélectionnées à bord |
|
— |
Surveillance:
|
|
— |
Réaction: Freinage d'urgence pour toute violation de la loi de surveillance. Le frein d'urgence peut être libéré à l'arrêt |
État membre responsable: Espagne
ATB
L'ATB existe en deux versions de base, l'ATB première génération et l'ATB nouvelle génération.
Description de l'ATB première génération:
L'ATB première génération est installé sur la grande majorité des lignes NS.
Le système est constitué de circuits de voie codés de conception assez classique et d'un équipement embarqué informatisé (ACEC) ou à électronique classique (GRS).
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Pas de caractéristiques du train dans l'équipement embarqué (taux de vitesse fourni par le sol) |
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de dépassement de vitesse et si le conducteur ne réagit pas à un signal d'avertissement acoustique |
État membre responsable: Pays-Bas
Description de l'ATB nouvelle génération
Système de commande des trains partiellement installé sur des lignes NS.
Le système comprend des balises au sol et un équipement embarqué. Une fonction de réouverture (in-fill) fondée sur une boucle de câble est également disponible.
La transmission des données se fait entre la balise active et une antenne embarquée. Le système prend en compte le sens de marche, les balises sont montées entre les rails avec un léger décalage par rapport à l'axe.
L'équipement «bord» de l'ATB NG est entièrement interopérable avec les équipements «sol» de l'ATB première génération.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Caractéristiques du train entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction:
Freinage d'urgence en cas de violation de la loi de surveillance du mouvement ou si le conducteur ne réagit pas à un signal acoustique |
État membre responsable: Pays-Bas
ATP-VR/RHK
Contrôle de vitesse (ATP), Junakulunvalvonta (JKV)
Communément appelé «Junakulunvalvonta (JKV)» [désignation finnoise signifiant le contrôle de vitesse (ATP)].
Description:
Le système ATP-VR/RHK est un système de contrôle de vitesse de sécurité intrinsèque normalisé en Finlande. Il est fondé soit sur la technologie de l'Ebicab 900 avec balises JGA, soit sur la technologie ATSS avec mini-transpondeurs. Le système est constitué de balises au sol et de dispositifs de codage de signaux ou d'ordinateurs et d'un équipement informatisé embarqué.
La transmission des données entre les balises latérales passives (deux par site équipé) et une antenne embarquée, installée sous le véhicule, qui fournit également l'énergie à la balise lors du passage. Le couplage entre la balise et le bord est inductif.
Caractéristiques principales:
|
— |
Téléalimentation des balises:
|
|
— |
Transmission des données aux trains:
|
|
— |
Chaînage:
|
|
— |
Caractéristiques du train entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance: De manière générale: toutes les informations relatives aux signaux, aux déviations et aux limites de vitesse sont transférées à une distance de 2 400 ou de 3 600 m (en fonction de la vitesse limite de ligne) par rapport au point-but. Le système calcule les courbes de freinage jusqu'à chaque point cible et indique les informations les plus restrictives possibles au conducteur:
|
|
— |
Autres fonctions:
|
|
— |
Réaction:
|
État membre responsable: Finlande
BACC
Description:
Le BACC est installé sur toutes les lignes aptes à plus de 200 km/h du réseau FS ainsi que sur d'autres lignes, ce qui représente la plupart des lignes envisagées pour l'interopérabilité.
Le système est constitué de circuits de voie codés classiques, qui fonctionnent sur deux fréquences porteuses pour prendre en compte deux classes de trains. Les équipements embarqués sont informatisés.
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Deux catégories de train prises en compte par les équipements du bord (taux de vitesse depuis le sol) |
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de dépassement de vitesse |
État membre responsable: Italie
CAWS ET ATP
(installés sur Iarnród Éireann)
Le système est constitué de circuits de voie codés et d'un équipement embarqué. La transmission des codes se fait au moyen de bobines de captage montées en tête de train au-dessus de chaque rail.
Les circuits de voie couplés sont installés sur toutes les sections de banlieue de Dublin et sur les tronçons interurbains à destination de Cork, de Limerick, d'Athlone et jusqu'à la frontière avec le Royaume-Uni vers Belfast.
Le parc de véhicules diesel est équipé d'un dispositif d'arrêt automatique des trains continu. Les trains partant quotidiennement du Royaume-Uni vers l'Irlande en font partie. Ce système convertit les signaux codés reçus en une indication en couleur du signal qui est affiché en cabine.
Le parc de véhicules électriques est équipé d'un dispositif de contrôle de vitesse. Ce système convertit les signaux codés reçus en une indication en couleur du signal qui est affiché en cabine. Le parc de véhicules électriques dessert uniquement la zone suburbaine électrifiée de Dublin.
Caractéristiques principales (zone suburbaine électrifiée de Dublin):
|
— |
fréquence porteuse 83 1/3 Hz |
|
— |
codes en signaux carrés 50, 75, 120, 180, 270 et 420 CPM. traduits par l'ATP comme 29 km/h, 30 km/h, 50 km/h, 50 km/h, 75 km/h, 100 km/h, traduits par le CAWS comme jaune, vert, jaune, vert, double jaune, vert |
|
— |
les vitesses autorisées sont également fondées sur l'aspect du signal qui est affiché. La vitesse limite est réduite à zéro par paliers à l'approche d'un signal rouge |
Caractéristiques principales (hors de la zone suburbaine électrifiée de Dublin):
|
— |
fréquence porteuse 50 Hz |
|
— |
3 codes en signaux carrés de 50, de 120 et de 180 CPM traduits par le CAWS comme jaune, double jaune, vert |
Contrôle de vitesse automatique:
|
— |
Affichage en cabine:
|
|
— |
Caractéristiques entrées par le conducteur:
|
|
— |
Surveillance:
|
|
— |
Réaction:
|
Système d'arrêt automatique des trains continu
|
— |
Affichage en cabine:
|
|
— |
Caractéristiques entrées par le conducteur:
|
|
— |
Surveillance:
|
|
— |
Réaction:
|
État membre responsable: Irlande
Crocodile
Description:
Le crocodile est installé sur toutes les lignes principales de la SNCF, de la SNCB et des CFL. Crocodile se trouve sur toutes les lignes envisagées pour l'interopérabilité.
Le système est fondé sur une barre en fer montée en voie qui est physiquement contactée par une brosse portée par le train. La barre est parcourue par une tension de ± 20 V, fournie par une batterie, en fonction de l'aspect du signal. Une indication est donnée au conducteur qui doit acquitter l'avertissement. Faute d'acquittement, une action de freinage automatique est déclenchée. Le crocodile ne surveille ni la vitesse ni la distance. Il agit uniquement comme un système de vigilance.
Les unités du sol et du bord sont de conception classique.
Caractéristiques principales:
|
— |
barre alimentée en courant continu (± 20 V) |
|
— |
pas de caractéristiques du train entrées à bord |
|
— |
surveillance: acquittement par le conducteur |
|
— |
Réaction: freinage d'urgence si l'avertissement n'est pas acquitté. Le freinage d'urgence peut être désactivé après l'arrêt |
États membres responsables: Belgique, France, Luxembourg
Ebicab
Ebicab existe en deux versions: Ebicab 700 et Ebicab 900.
Description d'Ebicab 700
Système de contrôle de vitesse, sécuritaire, normalisé en Suède, en Norvège, au Portugal et en Bulgarie. Des logiciels identiques en Suède et en Norvège permettent l'interpénétration sans changement de conducteur ou de locomotive malgré des systèmes et des règles de signalisation différents. Logiciels différents au Portugal et en Bulgarie.
Le système consiste en un équipement «sol», balises et codeurs de signaux ou communication série avec la commande électronique d'enclenchement d'itinéraires, et en un équipement «bord» informatisé.
La transmission des données se fait entre des balises en voie passives (2 à 5 par signal) et une antenne embarquée, installée sous caisse, qui alimente également la balise lors de son franchissement. Le couplage entre la balise et le bord est inductif.
Caractéristiques principales
|
— |
Téléalimentation des balises:
|
|
— |
Transmission des données aux trains:
|
|
— |
Chaînage:
|
|
— |
Caractéristiques du train pouvant être entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: avertissement acoustique dans le cas d'un dépassement de vitesse excédant 5 km/h; freinage de service dans le cas d'un dépassement de vitesse excédant 10 km/h. Le frein de service peut être désactivé par le conducteur une fois la vitesse revenue dans les limites autorisées. Ebicab assurera un freinage suffisant quelle que soit l'action du conducteur. Le freinage d'urgence est utilisé seulement en urgence réelle, par exemple si le freinage de service n'est pas suffisant. Désactivation du frein d'urgence une fois la rame à l'arrêt. |
|
— |
Options mises en œuvre:
|
États membres responsables: Suède, Portugal
Description d'Ebicab 900:
Le système consiste en un équipement «sol», balises et codeurs de signaux ou communication série avec la commande électronique d'enclenchement d'itinéraires, et en un équipement «bord» informatisé.
La transmission des données se fait entre des balises en voie passives (deux à quatre par signal) et une antenne embarquée, installée sous caisse, qui alimente également la balise lors de son franchissement. Le couplage entre la balise et le bord est inductif.
Caractéristiques principales:
|
— |
Téléalimentation des balises:
|
|
— |
Transmission des données aux trains:
|
|
— |
Chaînage:
|
|
— |
Caractéristiques du train pouvant être entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: Avertissement acoustique dans le cas d'un déplacement de vitesse excédant 3 km/h; freinage de service dans le cas d'un dépassement de vitesse excédant 5 km/h. Le frein de service peut être désactivé par le conducteur une fois la vitesse revenue dans les limites autorisées. Ebicab assurera un freinage suffisant quelle que soit l'action du conducteur. |
État membre responsable: Espagne
EVM
Description:
L'EVM est installé sur toutes les grandes lignes du réseau des Chemins de fer nationaux hongrois (MÁV). Ces lignes sont envisagées pour l'interopérabilité. La majorité des locomotives est équipée de la partie «bord».
Pour la transmission des informations, la partie «voie» du système est constituée de circuits de voie codés qui commandent une fréquence porteuse. Celle-ci est codée par modulation d'impulsion au moyen d'un codeur électronique.
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction:
|
|
— |
Fonctions supplémentaires:
|
État membre responsable: Hongrie
SYSTÈME GW ATP (GW ATP SCHEME)
Description:
Le GW ATP est un système de contrôle de vitesse (ATP) utilisé au Royaume-Uni sur les lignes «Great Western» (GW) entre Londres (Paddington), Bristol Temple Meads, Bristol Parkway et Newbury. Le système est fondé sur un matériel (hardware) similaire à celui du système TBL utilisé en Belgique, malgré quelques différences tant sur le plan technique que sur le plan de son fonctionnement.
Le système est applicable uniquement pour les trains qui circulent à une vitesse supérieure à 160 km/h.
Le système assure les fonctions de base suivantes:
|
— |
contrôle de vitesse du train entièrement automatique lorsque le train est équipé et circule sur une infrastructure équipée, |
|
— |
surveillance de la vitesse maximale du véhicule et protection antidérive lorsque le train est équipé et circule sur une infrastructure non équipée. |
Les données sont transmises à partir de la voie par des balises disposées adjacentes aux signaux. Des boucles de réouverture (in-fill) sont prévues quand il y a lieu afin d'améliorer les performances de fonctionnement.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Caractéristiques du train entrées par le conducteur:
|
|
— |
Interface conducteur:
|
|
— |
Surveillance:
|
État membre responsable: Royaume-Uni
INDUSI/PZB
(Induktive Zugsicherung/Punktförmige Zugbeeinflussung)
Description:
Système de contrôle de vitesse installé sur les lignes des réseaux autrichien et allemand envisagées pour l'interopérabilité.
Des circuits résonnants à couplage magnétique, en voie et à bord, transmettent une information parmi trois au train. Le système n'est pas considéré comme étant de sécurité intrinsèque, mais il est suffisamment sûr pour la surveillance du conducteur. Il agit entièrement en arrière-plan, c'est-à-dire qu'il ne donne au conducteur aucune indication sur les aspects des signaux, il indique seulement que le train est sous surveillance.
Caractéristiques principales:
|
— |
trois fréquences:
|
|
— |
caractéristiques du train pouvant être entrées par le conducteur: Caractéristiques de freinage (pourcentage de freinage et régime de freinage pour trois catégories de surveillance) |
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de violation de la loi de surveillance. Le freinage d'urgence peut être libéré dans certaines conditions spéciales |
États membres responsables: Autriche, Allemagne
KVB
Description:
Système de contrôle de vitesse standard en France sur le réseau SNCF. Toutes les lignes électrifiées en sont équipées pour la surveillance de la vitesse, la protection des points dangereux et les limitations de vitesse temporaires. Installé à 99 % sur les lignes conventionnelles. Partiellement installé sur les lignes à grande vitesse pour des transmissions ponctuelles et pour la surveillance de limitations de vitesse temporaires quand les taux de vitesse ne sont pas fournis par les codes TVM.
Le système est constitué de balises en voie comprenant des codeurs de signaux et d'un équipement informatique embarqué. Il se superpose aux équipements de signalisation classiques.
La transmission des données se fait entre des balises en voie passives (deux à neuf par signal) et une antenne embarquée, installée sous caisse, qui alimente également la balise lors de son franchissement. Le couplage entre la balise et le bord est inductif. La transmission de données est également utilisée pour transmettre des informations ponctuelles ne se rapportant pas au contrôle de vitesse (ATP) (par exemple, portes, canaux radio, etc.).
Par ailleurs, le KVB peut être complété par une transmission continue, en vue de permettre la fonctionnalité de réouverture (in-fill) (comme Euroloop):
La réouverture (in-fill) est réalisée via une transmission continue. Cette transmission est effectuée par une modulation par déplacement de fréquence (FSK) avec deux porteuses Fp à 20 kHz et 25 kHz (une pour chaque voie). Les données à transmettre sont du type binaire, en groupes de 80 bits (64 sont utiles). Un message de réouverture (in-fill) nécessite trois éléments de 80 bits, transmis successivement. Il s'agit d'un message appelé «long».
La transmission d'un bit défini à «1» est effectuée en émettant la fréquence Fp + 692 Hz, tandis que la transmission d'un bit défini à «0» est effectuée en émettant la fréquence Fp - 750 Hz.
Caractéristiques:
|
— |
Téléalimentation des balises:
|
|
— |
Transmission des données aux trains:
|
|
— |
Sauf pour les rames, les caractéristiques du train doivent être entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
Dans la dernière version du KVB, les indications fournies sont uniquement celles correspondant à l'approche d'un signal de danger avec une petite distance (000), «b» et «p» pour la préannonce. Les indications de vitesse ne sont fournies en aucun cas.
|
— |
Surveillance:
|
|
— |
Réaction: Avertissement au conducteur. Freinage d'urgence en cas de violation de la loi de surveillance du mouvement. Désactivation du frein d'urgence uniquement une fois le train à l'arrêt. |
État membre responsable: France
LS
Description:
Le système LS est installé sur toutes les grandes lignes des Chemins de fer tchèques (CD) et des Chemins de fer de la République slovaque (ZSR) ainsi que sur d'autres lignes aptes à des vitesses supérieures à 100 km/h. Ces lignes sont envisagées pour l'interopérabilité.
La partie «sol» du système est constituée de circuits de voie codés qui exploitent une fréquence porteuse. Celle-ci est codée par modulation d'amplitude à 100 %. La quasi-totalité du parc de locomotives est équipée de la partie «bord». Celle-ci a été modernisée, et l'équipement est ainsi partiellement informatisé.
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas d'absence de réaction du conducteur sur réception de la limite de vitesse |
États membres responsables: République tchèque, Slovaquie
LZB
(Linienförmige Zugbeeinflussung)
Description:
Système de commande des trains installé en Allemagne sur toutes les lignes parcourables à plus de 160 km/h, celles-ci représentant une part appréciable des lignes envisagées pour l'interopérabilité. Le LZB est également installé sur certaines lignes en Autriche et en Espagne.
Le système est constitué d'une partie «voie» qui comprend les dispositions suivantes:
|
— |
adaptation aux systèmes d'enclenchements d'itinéraires et transmission des données correspondantes |
|
— |
traitement des données et IHM au centre LZB |
|
— |
transmission de données en provenance/à destination des autres centres LZB |
|
— |
système de transmission de données en provenance/à destination des trains |
L'équipement embarqué a normalement une fonction Indusi incorporée.
La transmission de données entre le sol et le bord se fait au moyen de boucles de câble inductives et d'antennes à ferrite embarquées.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Transmission des données depuis les trains:
|
|
— |
Caractéristiques du train pouvant être entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de violation de la loi de surveillance du mouvement. Le freinage d'urgence en cas de survitesse peut être désactivé une fois la vitesse revenue dans les limites autorisées. |
|
— |
Règles d'exploitation pour le LZB: la DB utilise le système comme un contrôle automatique du train tout à fait pertinent du point de vue de la sécurité; la signalisation latérale n'est pas nécessaire lorsqu'une signalisation latérale existe en raison de trains non équipés, ces signaux ne sont plus valides pour les trains sous LZB. Le LZB est normalement connecté à la commande automatique de traction et de freinage. |
États membres responsables: Autriche, Allemagne, Espagne
MEMOR II+
Description:
Le système ATP, qui est installé sur toutes les lignes du réseau des chemins de fer du Luxembourg, est utilisé pour la protection des points dangereux et les limitations de vitesse temporaires. Le MEMOR II+ est complémentaire au système Crocodile.
Le système utilise une ou deux barres en fer placées dans la voie, qui entrent en contact physique avec des brosses installées à bord des trains. Les barres sont parcourues par une tension de à +/- 12 à +/- 20 V en fonction de l'aspect du signal. Le système n'est pas considéré comme étant de sécurité intrinsèque, mais il est suffisamment sûr pour la surveillance du conducteur. Il agit entièrement en arrière-plan, c'est-à-dire qu'il ne donne au conducteur aucune indication sur les aspects des signaux, il indique seulement que le train est sous surveillance.
Caractéristiques principales:
|
— |
Barres montées en voie alimentées en courant continu (± 12 à +/- 20 V) |
|
— |
Pas d'entrées des caractéristiques du train à bord par le conducteur, seulement une courbe de vitesse prédéfinie stockée à bord |
|
— |
Surveillance:
|
|
— |
Réaction:
|
|
— |
Affichage en cabine:
|
Perspectives:
l'équipement du réseau de l'infrastructure ferroviaire du Luxembourg avec l'ECTS niveau I est en cours. La mise en service par paliers de l'ECTS remplacera le système MEMOR II et le système Crocodile. Cette stratégie requiert une période de transition pour l'adaptation des systèmes côté engin à l'ETCS. Le système ECTS niveau I sera, en fin de compte, le seul système valide utilisé dans le réseau de l'infrastructure ferroviaire du Luxembourg.
État membre responsable: Luxembourg
RETB
Description:
Le Radio Electronic Token Block (RETB) est un système de signalisation utilisé sur un petit nombre de lignes moins fréquentées du Royaume-Uni, dans les limites d'application de la directive relative à l'interopérabilité conventionnelle (trois lignes en Écosse, et une au Pays de Galles).
Le système assure les fonctions de base suivantes:
|
— |
délivrance d'autorisations de mouvements par le centre de contrôle de la signalisation au train, au moyen de «jetons» électroniques envoyés par radio à l'équipement embarqué, |
|
— |
affichage de l'autorisation de mouvement au conducteur, |
|
— |
libération du «jeton» d'autorisation de mouvement une fois que le train a effectué le mouvement autorisé. |
Le système RETB est exploité en liaison avec les procédures du protocole de communication conducteur-signaleur, qui sont appliquées lorsque des «jetons» sont demandés, délivrés et libérés.
Le RETB ne comprend pas la fonctionnalité de contrôle de vitesse du train (par conséquent, il n'y a pas d'interface entre l'équipement RETB du train et le système de freinage). Toutefois, le contrôle de la vitesse du train par rapport aux franchissements de signaux est fourni par l'équipement TPWS standard, qui est décrit à l'annexe B. L'équipement TPWS embarqué comprend la fonctionnalité AWS (également décrite à l'annexe B), qui fournit au conducteur des indications sonores et visuelles à l'approche des limites d'une autorisation de mouvement ainsi qu'à l'approche de limitations de vitesse.
Équipement embarqué
L'équipement embarqué comprend l'équipement radio et l'unité d'affichage en cabine (Cab Display Unit, CDU) du RETB.
Le système radio utilisé pour la transmission des «jetons» d'autorisation de mouvement est une variante du système NRN qui est utilisé au Royaume-Uni (décrite à un autre endroit dans l'annexe B). L'équipement radio est utilisé tant pour la transmission en phonie que pour la transmission de données.
La CDU comprend:
|
— |
une serrure à contacts pour commuter l'équipement embarqué en un mode opérationnel |
|
— |
un bouton «receive» permettant de recevoir les «jetons» d'autorisation de mouvement envoyés par le centre de contrôle afin qu'un mouvement de train puisse avoir lieu |
|
— |
un affichage alphanumérique qui affiche le nom de la section de la ligne pour laquelle un jeton d'autorisation de mouvement a été délivré |
|
— |
un bouton «send» permettant de renvoyer le jeton d'autorisation de mouvement au centre de contrôle lorsque le train a terminé son mouvement |
Le train doit également être équipé d'un équipement TPWS (comprenant aussi la fonctionnalité AWS), pour les besoins décrits ci-dessus, mais il n'y a pas d'interface entre le TPWS et l'équipement RETB à bord du train.
État membre responsable: Royaume-Uni
RSDD/SCMT
(Ripetizione Segnali Discontinua Digitale/Sistema Controllo Marcia del Treno)
Description:
Le RSDD/SCMT est un système de contrôle de vitesse qui peut être utilisé seul ou qui peut se superposer au système BACC.
L'équipement embarqué est capable de gérer de façon coordonnée des informations de différentes provenances.
Le système est constitué de balises et de codeurs en voie et d'une antenne embarquée qui téléalimente les balises au passage. Le couplage est inductif.
Du point de vue logique, on distingue deux types de balises: les «balises système», qui contiennent des informations relatives à la ligne en aval et les «balises de signalisation», contenant des informations sur l'aspect des signaux.
Trois types de balises sont prévus, qui utilisent tous les mêmes fréquences pour la liaison montante et la liaison descendante, mais avec une capacité différente:
|
— |
Fréquence de téléalimentation:
|
|
— |
Transmission des données aux trains:
|
|
— |
Caractéristiques du train: les caractéristiques fixes du train sont chargées dans les établissements de maintenance, tandis que les données qui dépendent de la composition du train sont entrées par le conducteur. Des balises spéciales sont utilisées pour étalonner le système d'odométrie embarqué avant qu'il puisse être utilisé pour la surveillance du train |
|
— |
Affichage en cabine:
|
|
— |
Surveillance: dans les conditions normales (surveillance complète), le train contrôle les caractéristiques suivantes:
Si jamais une ou plusieurs caractéristiques de la ligne ne peuvent pas être transmises à l'équipement embarqué (par exemple, un défaut, etc.), le système peut être utilisé en surveillance partielle. Dans ce cas, l'IHM est désactivée et le conducteur doit observer la signalisation latérale |
|
— |
Réactions:
|
État membre responsable: Italie
SELCAB
Description:
Système de commande des trains installé sur la ligne à grande vitesse Madrid-Séville en complément du LZB dans les zones des gares. L'équipement embarqué LZB 80 (Espagne) peut également traiter les informations de SELCAB.
La transmission des données entre la voie et le bord se fait par boucle inductive au sol semi-continue et antenne à ferrite embarquée.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Caractéristiques du train pouvant être entrées par le conducteur:
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de violation de la loi de surveillance du mouvement. Le frein d'urgence activé pour dépassement de vitesse peut être désactivé une fois la vitesse revenue dans l'enveloppe autorisée. |
État membre responsable: Espagne
SHP
Samoczynne Hamowanie Pociągu
Description:
Le système AWS, qui est installé en Pologne sur les lignes envisagées pour l'interopérabilité
Des circuits résonnants à couplage magnétique, en voie et à bord, transmettent une information au train. Le système est considéré comme étant de sécurité intrinsèque. Il est intégré dans le système de vigilance active embarqué. Le système de vigilance protège également contre des mouvements incontrôlés du véhicule (glissement) lorsque la vitesse dépasse de 10 % la vitesse maximale autorisée. Il agit entièrement en arrière-plan, c'est-à-dire qu'il ne donne au conducteur aucune indication sur les aspects des signaux, il indique seulement que le train est sous surveillance.
Caractéristiques principales:
|
— |
Fréquence:
|
|
— |
Surveillance:
|
|
— |
Implantation des circuits résonants:
|
Réaction:
une lampe (représentant le signal) s'allume à bord lorsque le train franchit un circuit résonant (monté en voie), pour demander la confirmation du conducteur. Sans réception de la confirmation dans un délai de trois secondes, un signal sonore est activé. Si une confirmation n'est pas reçue dans le délai de deux secondes après l'activation du signal sonore, le système déclenche un freinage d'urgence. Le freinage d'urgence peut être désactivé dans certaines conditions spéciales.
Le système de vigilance actif est activé lorsque la vitesse du véhicule dépasse de 10 % la vitesse maximale autorisée. Après seize secondes, la lampe (représentant le signal) s'allume et la confirmation est demandée au conducteur dans le même laps de temps que pour la fonction SHP. Puis, la confirmation est demandée toutes les soixante secondes. La surveillance SHP redéclenche le contrôle de vigilance toutes les soixante secondes.
État membre responsable: Pologne
TBL 1/2/3
Description:
La TBL est un système de contrôle de vitesse partiellement installé sur les lignes du réseau belge (actuellement 1 200 balises et 120 équipements embarqués TBL1, 200 balises et 300 équipements embarqués TBL2, toutes les lignes parcourues à plus de 160 km/h sont équipées de la TBL2).
Le système est constitué d'une balise en voie installée à chaque signal et d'un équipement embarqué. La TBL1 est un système d'avertissement, la TBL2/3 est un système de signalisation en cabine. Pour la TBL2/3, il y a des balises de réouverture (in-fill), et une boucle de câble de réouverture est également disponible.
La partie «sol» est appelée TBL 2 en cas d'interface avec des enclenchements à relais et TBL3 en cas d'interface série avec des enclenchements à commande électronique.
L'équipement embarqué est appelé TBL2. Il comprend les fonctions TBL2, TBL1 et crocodile.
La transmission des données se fait entre la balise active et un ensemble embarqué d'antennes de captage à couplage inductif. Le système prend en compte le sens de marche, les balises sont montées entre les rails avec un léger décalage par rapport à l'axe.
Caractéristiques principales:
|
— |
Transmission des données aux trains:
|
|
— |
Caractéristiques du train entrées par le conducteur (TBL2):
|
|
— |
Affichage en cabine:
|
|
— |
Surveillance:
|
|
— |
Réaction:
|
État membre responsable: Belgique
TPWS
Description:
Le TPWS a pour but d'améliorer la sécurité, principalement aux bifurcations. Il comprend les fonctionnalités de l'AWS, indiquées en italique. Le TPWS est installé sur toutes les lignes envisagées pour l'interopérabilité.
Le système assure les fonctions suivantes:
|
— |
Avertissement au conducteur, à la distance de freinage standard, de l'existence des conditions restrictives suivantes:
|
|
— |
Contrôle de vitesse (caractéristiques du train prédéterminées) dans les circonstances suivantes:
|
Le système est fondé sur des aimants permanents et des bobines qui génèrent des champs sur la voie. Il n'est pas considéré comme étant de sécurité intrinsèque, mais il intègre des dispositions et des principes qui réduisent la probabilité d'une fausse indication donnée au conducteur à un niveau aussi faible que raisonnablement possible.
Le TPWS indique visuellement au mécanicien:
|
— |
l'état du dernier aimant de voie: «voie libre» ou «restrictif» (indicateur «tournesol»), |
|
— |
le déclenchement d'un freinage automatique par le système, |
|
— |
l'état en défaut/isolé du système. |
Les dispositifs de commande du TPWS sont:
|
— |
une touche d'acquittement pour l'annonce d'une condition restrictive, |
|
— |
une touche pour franchir un signal d'arrêt, valide uniquement pendant une durée limitée après l'actionnement, |
|
— |
des commandes d'isolement. |
Les indications acoustiques du TPWS sont:
|
— |
un «bruit de cloche»: signal voie libre, |
|
— |
un «klaxon»: condition restrictive nécessitant d'être surveillée. |
Le système TPWS s'interface avec le système de freinage du train et déclenche un freinage d'urgence:
|
— |
si le signal «klaxon» n'est pas vigilé dans un délai de 2,5 secondes, |
|
— |
immédiatement après franchissement d'une restriction de vitesse à une vitesse excessive, |
|
— |
immédiatement au franchissement d'un signal d'arrêt. |
La technologie n'est pas à base de microprocesseur, mais cela n'est pas exclu.
Autres caractéristiques:
|
— |
séquence de champs magnétiques (pôle nord, pôle sud) donnant les détails du signal (libre ou restrictif) |
|
— |
un champ parmi une sélection de champs magnétiques sinusoïdaux aux environs de 60 Hz pour les fonctions «restriction de vitesse» et «arrêt imposé» (jusqu'à huit fréquences utilisées) |
|
— |
les caractéristiques du train en ce qui concerne la capacité de freinage sont définies par la ligne de train et donnent différentes vitesses maximales pour le franchissement des signaux d'arrêt imposé au train. L'entrée des caractéristiques du train n'est pas actuellement prévue, mais est envisageable |
|
— |
acquittement par le mécanicien d'un signal restrictif dans un délai de 2,5 secondes, sinon le freinage d'urgence est déclenché |
|
— |
le frein d'urgence est libérable une minute après son déclenchement à condition que la demande de freinage ait été également acquittée |
État membre responsable: Royaume-Uni
TVM
Description:
TVM est un système de contrôle-commande de signalisation en cabine. Il est dédié spécifiquement aux lignes à grande vitesse de la SNCF. L'ancienne version TVM 300 est installée sur la ligne Paris-Lyon (LGV-SE) et sur les lignes Paris-Tours/Le Mans (LGV-A). La version suivante TVM 430 sur la ligne Paris-Lille-Calais (TGV N), sur la partie SNCB vers Bruxelles, sur la ligne Lyon-Marseille/Nîmes (TGV Méditerranée) ainsi que dans le tunnel transmanche et sur la liaison ferroviaire transmanche au Royaume-Uni. La TVM 430 est compatible avec la TVM 300.
La TVM 300 et la TVM 430 sont fondées sur des circuits de voie codés servant aux transmissions continues et sur des balises ou des boucles inductives (type KVB ou TBL) pour les transmissions ponctuelles.
La transmission de données entre les circuits de voie codés et l'équipement embarqué se fait au moyen d'antennes de captage à couplage inductif au-dessus des rails.
Caractéristiques principales:
|
— |
Transmission des données aux trains via les circuits de voie:
|
|
— |
Transmission des données aux trains par boucles inductives:
|
|
— |
Caractéristiques du train introduites à bord sur les locomotives des rames tractées empruntant le réseau Eurotunnel (pas sur les rames TGV où des valeurs fixes sont utilisées). |
|
— |
Affichage en cabine: Taux de vitesse associés aux aspects des signaux lumineux |
|
— |
Surveillance:
|
|
— |
Réaction: freinage d'urgence en cas de dépassement de vitesse |
États membres responsables: Belgique, France, Royaume-Uni
ZUB 123
Description:
Système de commande des trains largement installé sur les lignes du Danemark envisagées pour l'interopérabilité.
Le système est constitué comme suit.
|
— |
Équipements en voie:
|
|
— |
Équipements embarqués:
|
L'équipement embarqué ZUB 123 est considéré comme étant de sécurité intrinsèque.
Caractéristiques principales:
|
— |
trois fréquences
|
|
— |
Modes de transmission des données:
|
|
— |
Traitement des données à bord:
|
|
— |
Affichages en cabine:
|
|
— |
Indicateurs et touches auxiliaires |
|
— |
Entrée des données du train:
|
|
— |
Surveillance:
|
|
— |
Réaction:
|
État membre responsable: Danemark
ZUB 121
(Pour information uniquement)
Description:
Système de commande des trains qui est largement installé en Suisse sur les lignes des CFF et du BLS envisagées pour l'interopérabilité.
Le système est constitué comme suit:
|
— |
Équipements en voie:
|
|
— |
Équipements embarqués:
|
Caractéristiques principales:
|
— |
trois fréquences
|
|
— |
Modes de transmission des données:
|
|
— |
Affichages en cabine:
|
|
— |
Indicateurs lumineux et klaxon:
|
|
— |
Touches:
|
|
— |
Entrée des données du train: La platine de commande de la radio du bord est utilisée |
|
— |
Surveillance et ordres de commande:
|
|
— |
Réaction:
|
État responsable: Suisse
Partie 2: Radio
INDEX
|
1. |
Radio UIC, chapitres 1-4 |
|
2. |
Radio UIC, chapitres 1-4 + 6 |
|
3. |
Radio UIC, chapitres 1-4 + 6 (système irlandais) |
|
4. |
Radio UIC, chapitres 1-4 + 6 + 7 |
| Introduction aux systèmes britanniques |
|
5. |
BR 1845 |
|
6. |
BR 1609 |
|
7. |
ETACS et GSM des FS |
|
8. |
UIC Radio Chapitre 1-4 (TTT système radio installé sur la ligne de Cascais) |
|
9. |
TTT Système Radio CP_N |
|
10. |
PKP Système Radio |
|
11. |
VR Radio Train |
|
12. |
TRS — le système radio des chemins de fer tchèques |
|
13. |
LDZ — système radio |
|
14. |
CH — système radio des chemins de fer grecs |
|
16. |
Le système radio estonien |
|
17. |
Le système radio lituanien |
Ces systèmes sont actuellement utilisés dans les États membres. Pour de plus amples informations, se reporter au registre des infrastructures défini à l'annexe C.
Pour information seulement, systèmes non utilisés dans les États membres:
|
15. |
Radio UIC Chapitre Bulgarie |
Radio UIC, chapitres 1-4
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984. C'est un sous-ensemble minimal nécessaire pour le trafic ferroviaire international.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en simplex et en duplex et l'utilisation de signaux opératoires (tonalités) mais ne permettent pas les appels sélectifs ni la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
États membres responsables: Luxembourg, Allemagne, France, Hongrie
UIC Radio chapitres 1- 4 + 6
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en simplex et en duplex et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
|
— |
Structure du télégramme:
|
|
— |
Transmission du télégramme:
|
|
— |
messages (codage donné en représentation hexadécimale):
|
États membres: Allemagne, Danemark, Autriche, Espagne, Belgique, Pays-Bas
UIC Radio chapitres 1-4 + 6 (système irlandais)
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en simplex et en duplex et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation de canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
|
— |
Structure des télégrammes:
|
|
— |
Transmission des télégrammes:
|
|
— |
Messages:
|
États membres responsables: Irlande, Hongrie
Pour information uniquement: le même système est utilisé en Norvège
UIC Radio chapitres 1-4 + 6 + 7
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984, chapitre 7 édition du 1.1.1988.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en simplex et en duplex et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données. Les capacités de transmission de données sont augmentées. Cette caractéristique n'est pas considérée comme obligatoire dans la fiche UIC. Si elle ne peut pas être assurée par accord bilatéral ou multilatéral, elle ne devra être utilisée qu'au plan national.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
|
— |
Structure des télégrammes:
|
|
— |
Transmission des télégrammes:
|
|
— |
Messages (codage donné en représentation hexadécimale):
|
|
— |
Extension de télégramme (uniquement si demandé par le code 03):
|
État membre responsable: France
Introduction aux systèmes britanniques
Le système appelé NRN (National Radio Network) est installé sur l'ensemble du réseau ferré du Royaume-Uni, y compris sur les lignes grande vitesse sur lesquelles s'articule le réseau à grande vitesse britannique. Ces lignes sont les suivantes:
|
— |
West Coast Main Line (Londres-Glasgow) |
|
— |
East Coast Main Line (Londres-Édimbourg) |
|
— |
Great Western Main Line (Londres-Bristol/sud du Pays de Galles) |
Le système appelé Cab Secure est installé dans les zones suburbaines à fort trafic des agglomérations de Londres, de Liverpool et de Glasgow, certaines lignes dans ces zones pouvant faire partie du réseau à grande vitesse. En outre, toutes les grandes lignes de la région sud-est, y compris la ligne Channel Tunnel Route entre la Manche et Londres-Waterloo, sont équipées du Cab Secure System.
Les trains de voyageurs des grandes lignes et les trains de marchandises sont équipés du NRN, tandis que les trains de banlieue et certains trains de trafic intermédiaire sont équipés du CSR. En général, les trains sont équipés d'une seule forme de radio, mais quelques trains voyageant dans les zones couvertes à la fois par le NRN et le CSR sont équipés des deux formes de radio. Ceci s'applique en particulier aux trains équipés du CSR mais qui passent certaines parties de leur cycle d'exploitation en dehors de la zone équipée de l'infrastructure CSR.
BR 1845, éditions G et H (partie sol), et
BR 1661, édition A (partie embarquée),
communément appelée Cab Secure Radio
Description:
Cette radio sol-train est conçue selon les réglementations techniques définies dans les spécifications de Railtrack (spécification BR 1845, éditions G et H, et spécification BR 1661, édition A).
La radio Cab Secure est une radio analogique comprenant un équipement «voie» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en duplex et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
|
— |
Structure des télégrammes:
|
|
— |
Transmission des télégrammes:
|
|
— |
Messages (codage donné en représentation hexadécimale):
|
État membre responsable: Royaume-Uni
Radio à la spécification BR 1609, édition 2
communément appelée National Radio Network (NRN)
Description:
Cette radio sol-train est conçue selon les réglementations techniques définies dans la spécification de Railtrack BR 1609, édition 2, août 1987.
La radio National Radio Network est une radio analogique comprenant un équipement «voie» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en duplex (sol), la communication phonie en simplex (embarqué), le mode diffusion générale et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences: sous-bande 2 de la bande 174 MHz à 225 MHz
|
|
— |
Sensibilité:
|
|
— |
Puissance d'émission:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Plage des fréquences audio:
|
|
— |
Déviation de fréquence:
|
|
— |
Transmission des messages:
|
|
— |
Structure des messages:
|
|
— |
Types de message provenant du train:
|
|
— |
Types de message vers le train:
|
État membre responsable: Royaume-Uni
ETACS et GSM des FS
Description:
La solution utilisée aujourd'hui par les FS pour le fonctionnement de la radio sol-train s'appuie essentiellement sur les services fournis par l'opérateur public sur les réseaux de radio cellulaire mobile de types analogique (ETACS) et numérique (GSM) dans la bande 900 MHz. Ces réseaux ont été mis en œuvre à l'aide d'un sous-système externe développé en collaboration entre l'opérateur et les FS afin de prendre en charge certaines caractéristiques particulières demandées par les FS, telles que:
|
— |
adressage des appels des trains et des gares par des numéros fonctionnels au lieu du numéro de raccordement, |
|
— |
groupe fermé d'usagers avec des conditions d'exclusion spécifiques, |
|
— |
configuration et gestion des bases de données spécialisées assurées directement par du personnel FS pour caractériser les droits d'accès aux services par type d'utilisateurs, etc. |
La large couverture radio du réseau ferroviaire FS réalisée par les deux systèmes cellulaires publics permet de satisfaire les besoins généraux de communication entre le sol et les trains.
Les caractéristiques additionnelles ont été négociées et mises en œuvre par les FS en collaboration avec l'opérateur public. Ces caractéristiques sont implémentées dans des systèmes informatiques distribués de grande fiabilité. Elles font donc partie de la couche «applications» du modèle OSI de l'ISO.
État membre responsable: Italie
UIC Radio Chapitre 1-4 (TTT système radio installé sur la ligne de Cascais)
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984. C'est un sous-ensemble minimal nécessaire pour le trafic ferroviaire international.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes de radio de ce sous-système de base permettent la transmission unidirectionnelle et la communication de voix semi-duplex et l'utilisation de signaux d'exploitation (tonalités), mais pas les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Commutation des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
État membre responsable: Portugal
TTT Système Radio CP_N
Description:
Ce système de radio TTT est un système façonné, conçu pour la voix et les transmissions de données et selon des exigences CP.
La radio CP_N est une radio analogique, qui consiste en équipements sol et en équipements «mobiles» (embarqués).
Le système radio utilise l'appel digital sélectif (selon MPT 1327 -1 200 bit/s FFSK) et 50 bauds FSK infra-audible pour la signalisation de la station de base.
La radio permet la transmission unidirectionnelle et la communication de voix semi-duplex ainsi que la transmission semi-duplex pour les appels sélectifs et les données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Modulation RF
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Changement des canaux à bord:
|
|
— |
Structure du télégramme:
|
|
— |
Transmission du télégramme:
|
État membre responsable: Portugal
Le système radio PKP
Description:
Le système radio qui est installé en Pologne sur les lignes envisagées pour l'interopérabilité.
La radio PKP 150 MHz est une radio analogique, qui comprend un équipement sol, un équipement embarqué et un équipement portatif.
Le système radio permet la communication de la voix en simplex et utilise des signaux (tonalités) opératoires pour les appels sélectifs, mais généralement pas pour la transmission de données. Le système possède une fonction Radiostop intégrée.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Modes d'exploitation:
|
|
— |
Changement de canaux:
|
|
— |
Plage des fréquences audio:
|
|
— |
Tonalités de fonctionnement pour appels sélectifs:
|
|
— |
Déviation de fréquence:
|
|
— |
Appel de groupe sélectif:
|
|
— |
Fonction Radiostop:
|
|
— |
Réseau équipé de postes d'enregistrement automatiques:
|
État membre responsable: Pologne
VR Train Radio
communément appelé «Linjaradio» (désignation finnoise pour «radio de ligne»).
Description:
Cette radio sol-train est un système façonné de radio VHF et suit les règles techniques utilisées dans les chemins de fer finlandais.
Le réseau de radio de ligne est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-ensemble de base permettent la communication phonie en duplex (entre le sol et le train), la communication phonie en semi-duplex (entre les conducteurs) ainsi que les appels du conducteur au contrôleur au moyen de tonalités d'appel sélectives.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Modes d'exploitation:
|
|
— |
Changement des canaux à bord:
|
|
— |
Tonalités de fonctionnement:
|
|
— |
Tonalités d'appel sélectives:
|
État membre responsable: Finlande
TRS — Le système radio des chemins de fer tchèques
Description:
Le système TRS de liaison radio avec les trains est conçu pour les communications opérationnelles en duplex entre le conducteur de train et un agent de contrôle (dispatching) des trains ou aiguilleur au moyen d'un réseau à longs rails soudés le long de la voie.
Le système TRS permet la communication en duplex de phonie, les informations de routine (commandes, rapports), la transmission des appels généraux et des appels d'urgence ainsi que la communication en semi-duplex entre les conducteurs par retransmission dans la couverture de la station de base, notamment la transmission en phonie et des appels d'urgence. Le concept du système permet la création du jeu d'équipements spéciaux qui peuvent fonctionner sur le réseau simplex, dans des fréquences de bande 160 MHz pour la communication en simplex des conducteurs de train et autres abonnés sur un canal sélectionné préalablement.
L'appel sélectif avec le numéro de train à six chiffres doit être transmis dans le sens agent de contrôle (dispatching) des trains (ou aiguilleur) vers conducteur, l'identification (par le numéro de train) doit être transmise dans le sens train — agent de contrôle (dispatching) (ou aiguilleur).
La transmission des informations de routine (commandes et rapports) est réalisée au moyen d'un télégramme. Le système TRS est doté d'une transmission numérique sous la forme codée d'un télégramme court en modulation FSK de 1 200 bits/s dans les deux sens. Une des commandes est assignée à l'arrêt à distance du train, qui peut être activé par un agent de contrôle (dispatching) des trains ou un aiguilleur et entraîne le freinage d'urgence du véhicule (s'il est prévu un équipement de contrôle de vitesse du type LS 90 ou de vigilance du conducteur à bord).
Le système TRS est entièrement compatible au niveau des signaux de commande conformément à la recommandation obligatoire UIC 751-3. Cela signifie que des échanges vocaux, des appels généraux ainsi que des appels d'urgence peuvent être effectués entre le TRS et d'autres systèmes d'autres fabricants. La communication s'effectue sur quatre fréquences coordonnées à l'échelle internationale dans la plage A de la bande 450 MHz conformément à l'UIC.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Modes d'exploitation:
|
|
— |
Tonalités de fonctionnement:
|
État responsable: République tchèque
LDZ — Système radio
Description:
Le système radio de train (TRS) est un système de communication phonie analogique en simplex utilisé pour l'exploitation opérationnelle du train. Toutes les sections du réseau LDZ sont équipées de ce système.
Le TRS est conçu pour une utilisation avec des équipements sol [postes de radio distributifs (DRS), et jusqu'à vingt-huit postes de radio locaux (LRS), reliés entre eux par un canal de communication à deux fils] ainsi qu'un équipement mobile [postes de radio à bord (BRS) et postes de radio portatifs (HRS)].
Six fréquences dans la bande 1 000 à 1 700 Hz sont utilisées pour la connexion sélective des 28 LRS.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Modes d'exploitation:
|
|
— |
Changement de canaux:
|
|
— |
Plage des fréquences audio:
|
|
— |
Tonalités de fonctionnement pour appels sélectifs:
|
|
— |
Déviation de fréquence de transmission:
|
|
— |
Réseau équipé de postes d'enregistrement automatiques |
|
— |
Types d'antenne LRS:
|
Outre le TRS, un système de radiocommunication intra-stations, qui comprend le shuntage, la communication technologique et de communication spéciale de maintenance pour les conditions d'urgence. La conception du système est fondée sur le principe de zone et fonctionne dans les plages de fréquence 150 et 450 MHz dans des bandes d'environ 5 à 10 MHz.
État membre responsable: Lettonie
CH — Le système radio des chemins de fer grecs
Description:
Cette radio sol-train reprend partiellement les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984. C'est un sous-ensemble minimal nécessaire pour le trafic ferroviaire national. C'est un système analogique prenant en charge la communication phonie en semi-duplex. Les appels sélectifs, les signaux opératoires (tonalités) et la transmission de données n'ont pas été utilisés.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
Polarisation:
|
|
— |
Déviation de fréquence:
|
|
— |
Mode de fonctionnement:
|
|
— |
Changement des canaux à bord:
|
État membre responsable: Grèce
Radio UIC Chapitre Bulgarie
(Pour information uniquement)
Description:
Cette radio sol-train reprend les règles techniques énoncées dans le code UIC 751-3, troisième édition, 1.7.1984, C'est un sous-ensemble minimal nécessaire pour le trafic ferroviaire international.
La radio UIC est une radio analogique qui comprend un équipement «sol» et un équipement «mobile» (embarqué).
Les systèmes radio utilisant ce sous-système de base permettent la communication phonie en simplex et en duplex et l'utilisation de signaux opératoires (tonalités) et permettent également les appels sélectifs et la transmission de données.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
écartement des fréquences: 25 kHz |
|
— |
couples de fréquence en duplex séparés de 10 MHz |
|
— |
groupement de quatre canaux: de préférence 62-65 pour le trafic international |
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
dans les tunnels: câbles rayonnants ou antennes très directives (sol) |
|
— |
résistance terminale 50 ohms |
|
— |
Polarisation:
|
|
— |
Modes de fonctionnement:
|
|
— |
Déviation de fréquence:
|
|
— |
Changement de canaux à bord:
|
|
— |
Signaux de fonctionnement:
|
|
— |
Structure des télégrammes:
|
État responsable: Bulgarie
Réseau de communication radio avec les trains des chemins de fer estoniens
Le réseau de communication radio des chemins de fer estoniens a été équipé conformément à la déclaration no 39 du 9.7.1999 relative aux «règles techniques de l'exploitation ferroviaire» émise par le ministère estonien des transports et des communications.
Le réseau de communication radio avec les trains est constitué de deux sous-systèmes, notamment le système de communication radio sol-train et les systèmes de communication radio par zone (ou régionaux).
Le système de communication radio sol-train fournit la communication en phonie avec tous les types de trains et de locomotives sur les lignes principales et secondaires dans le pays.
Les systèmes de communication radio fournissent une couverture radio complète à l'intérieur de la zone d'exploitation des gares pour les agents de gare et les conducteurs de locomotive.
Avec le réseau de communication intégré avec les trains, toutes les lignes et gares dans le pays sont couvertes.
Le système principal pour les communications sol-train des chemins de fer estoniens utilise le système de communication radio à agrégation de ports numérique décentralisé (principe du balayage) SmarTrunk II. Ce système modulaire comprend des composants tels que des équipements centraux de contrôle (dispatching) des trains, des répéteurs de site, des terminaux radio des agents de gare, des radios mobiles à bord des trains et des radios portables.
Données principales du système à agrégation de ports:
|
— |
VHF bande de fréquence 146-174 Mhz |
|
— |
quatorze canaux duplex |
|
— |
fonctionnement en semi-duplex |
En gare, des radios de base Motorola GM350 et de la série GM Pro fonctionnent sur des canaux simplex VHF.
Les radios Motorola GM350 et GM160 à bord des trains peuvent communiquer avec les différentes infrastructures radio installées dans le pays, sur les grandes lignes et dans les zones de gare.
Le personnel en charge de l'exploitation ferroviaire sûre et efficace utilise des radios portables de la série Motorola GP et série P.
Pour le contrôle du trafic en provenance des pays voisins, la Lettonie et la Fédération de Russie, les chemins de fer estoniens continuent d'exploiter un système de communication transrégional avec les trains utilisant des canaux simplex 2 130 kHz et 2 150 kHz en parallèle avec le réseau de communication principal.
État membre responsable: Estonie
Système de radio avec les trains des chemins de fer lituaniens
Description:
Le système radio de train (TRS) est un système de communication phonie analogique en simplex utilisé pour l'exploitation opérationnelle du train. Toutes les sections du réseau LG sont équipées de ce système.
Le TRS est conçu pour une utilisation avec des équipements du sol [postes de radio distributifs (DRS), et les postes de radio locaux (LRS), reliés entre eux par un canal de communication à deux fils] ainsi qu'un équipement mobile [postes de radio à bord (BRS)].
Six fréquences dans la bande 1 000 à 1 700 Hz sont utilisées pour la connexion sélective des LRS.
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Caractéristiques de l'antenne:
|
|
— |
résistance terminale 50 ou 75 ohms en fonction du type de poste radio |
|
— |
Polarisation:
|
|
— |
Modes de fonctionnement:
|
|
— |
Changement de canaux:
|
|
— |
Plage des fréquences audio:
|
|
— |
Tonalités de fonctionnement pour appels sélectifs:
|
|
— |
Déviation de fréquence de transmission:
|
|
— |
Réseau équipé de postes d'enregistrement automatiques |
|
— |
Types d'antenne LRS:
|
Système de communication radio de manœuvres
Description:
Pour les manœuvres dans les grandes gares, le système de communication radio analogique simplex est utilisé pour la transmission de la voix dans un diapason de 150 MHz. Les postes de radio de ce système sont utilisés uniquement dans les réseaux de radio locaux qui ne sont pas interconnectés. Le système permet la communication radio par canal ouvert entre les objets fixes (agents de contrôle du trafic), mobiles (locomotives de manœuvres) et portables (équipe chargée des manœuvres).
Caractéristiques principales:
|
— |
Fréquences:
|
|
— |
Sensibilité:
|
|
— |
Puissance radiative:
|
|
— |
Polarisation:
|
|
— |
Modes de fonctionnement:
|
|
— |
changement de canaux:
|
|
— |
Déviation de fréquence de transmission:
|
État membre responsable: Lituanie
Partie 3: matrice de transition entre les systèmes de classe A et de classe B (signalisation)
BUT DE LA MATRICE
La MATRICE doit fournir un texte concernant la portée des transitions pertinentes pour l'interopérabilité sur les réseaux ferroviaires européens à grande vitesse et conventionnels.
INTRODUCTION
La matrice suivante donne un aperçu des transitions possibles entre différents systèmes de classe B tels que définis dans la présente annexe et entre des systèmes de classe A et de classe B.
La matrice ne mentionne aucune solution technique pour le système ERTMS/ETCS ou les STM concernés définis dans la présente annexe. Ces solutions techniques sont documentées dans les spécifications techniques du sous-système «contrôle-commande» (visé au chapitre 5 des deux STI «contrôle-commande» relatives aux réseaux ferroviaires transeuropéens à grande vitesse et conventionnel) ou dans la documentation nationale pertinente des systèmes de classe B ou des modules STM, respectivement. Il est important de noter que la matrice ne définit aucune exigence technique supplémentaire pour l'ERTMS/ETCS ou les STM. La matrice fournit uniquement des informations relatives aux transitions qui pourraient se produire sur le réseau ferroviaire à grande vitesse ou sur le réseau ferroviaire conventionnel.
La matrice peut servir d'outil d'aide aux décisions techniques et économiques relatives à la mise en œuvre des directives 96/48/CE et 2001/16/CE.
En ce qui concerne les transitions entre deux systèmes de classe B, l'exigence d'interopérabilité est que la solution technique pour la transition ne soit pas en contradiction avec les STI et soit notamment conforme à la documentation de référence du système ERTMS/ETCS. Il convient de signaler que la spécification de classe 1 actuelle supporte uniquement les transitions STM (voir la SRS, au point 5.10, en particulier le point 5.10.3.11 et le point 7.4.2.9). La règle d'exploitation relative à la transition entre deux systèmes de classe B est considérée comme une question nationale.
MATRICE DE TRANSITION
Comment lire la matrice
La diagonale de la matrice liste les systèmes de classe A et tous les systèmes de classe B pertinents pour les réseaux ferroviaires transeuropéens à grande vitesse et conventionnels.
Chaque champ de la matrice est complété soit par un numéro (indiquant qu'une transition est possible entre les systèmes dans la colonne/rangée où le champ apparaît) ou par la couleur grise pour indiquer qu'aucune transition n'existe ou n'est prévue.
Le numéro indique les pays responsables de la spécification de la transition et les procédures associées.
Les transitions entre les systèmes de classe A et de classe B (première colonne) seront effectuées comme décrit dans le document SUBSET 035.
Exemple:
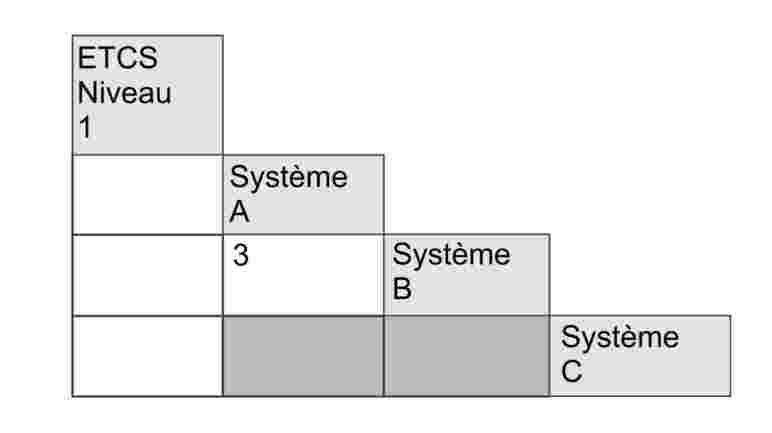
Transitions entre systèmes
Lorsqu'une transition est effectuée par les STM de l'ETCS, les termes définis dans le document SUBSET-035 devraient être utilisés.
Transitions des systèmes (classe A et classe B)
La matrice identifie les transitions d'exploitation requises. Une transition opérationnelle est une transition dans laquelle un système reprend la responsabilité du contrôle du train à un autre système. Lors de cette transition, le conducteur remarque généralement un ou plusieurs effets comme suit:
|
— |
un changement dans la manière selon laquelle les mouvements de trains sont supervisés, |
|
— |
un changement dans la manière selon laquelle le conducteur interagit avec le système. |

États membres responsables de la transition:
|
1. |
Pays-Bas, Belgique |
|
2. |
Italie, France |
|
3. |
Espagne, Portugal |
|
4. |
Pays-Bas, Allemagne |
|
5. |
Italie, Autriche |
|
6. |
France, Belgique, Luxembourg, Allemagne |
|
7. |
Italie, France |
|
8. |
France, Belgique, Luxembourg |
|
9. |
France, Allemagne |
|
10. |
Espagne |
|
11. |
Allemagne, Autriche |
|
12. |
Italie |
|
13. |
Italie, France |
|
14. |
Autriche, Italie |
|
15. |
France, Italie |
|
16. |
Espagne |
|
17. |
Espagne |
|
18. |
Pays-Bas, Belgique |
|
19. |
Belgique |
|
20. |
Belgique, Allemagne |
|
21. |
France, Belgique |
|
22. |
France |
|
23. |
France |
|
24. |
Belgique, France |
|
25. |
France, Royaume-Uni (la transition se fait du côté britannique du tunnel sous la Manche) |
|
26. |
France |
|
27. |
France |
|
28. |
France |
|
29. |
Danemark, Suède |
|
30. |
Allemagne, Danemark |
|
31. |
Autriche, Hongrie |
|
32. |
Autriche, République tchèque, Allemagne, Slovaquie |
|
33. |
Hongrie, Slovaquie, République tchèque |
|
34. |
France, Suisse |
|
35. |
Allemagne, Suisse |
|
36. |
France, Suisse |
|
37. |
Royaume-Uni |
|
38. |
Royaume-Uni (uniquement pour les trains avec Vmax > 160 km/h) |
|
39. |
Allemagne, Pologne |
|
40. |
Pologne, République tchèque, Slovaquie |
|
41. |
Irlande, Royaume-Uni |
|
42. |
Lituanie, Pologne (entre ALSN et SHP) |
Partie 4: caractéristiques électromagnétiques des systèmes de détection des trains utilisés dans les États membres
Les caractéristiques des systèmes de détection des trains utilisés dans les États membres sont énumérées ici en incluant la spécification d'essai.
Point ouvert
(1) En Estonie, la fréquence utilisée est 50 Hz seulement.
ANNEXE C
CARACTÉRISTIQUES SPÉCIFIQUES AUX LIGNES ET CARACTÉRISTIQUES SPÉCIFIQUES AUX TRAINS À ENTRER DANS LES REGISTRES SUIVANT L'ARTICLE 24 DE LA DIRECTIVE 2001/16/CE
Exigences générales
Selon le chapitre 7, les caractéristiques spécifiques aux lignes définies dans la présente annexe doivent être indiquées dans le registre des infrastructures par le gestionnaire de l'infrastructure.
Selon le chapitre 7, les caractéristiques spécifiques aux trains définies dans la présente annexe doivent être indiquées dans le registre du matériel roulant par l'entreprise ferroviaire.
Selon le point 6.2 (sous-système «contrôle-commande»), en préalable à l'exploitation d'un train, les documents concernés (registre du matériel roulant et registre des infrastructures) doivent être confrontés aux fins de l'interopérabilité.
L'annexe C porte sur les parties des ensembles de contrôle-commande qui ne sont couvertes ni par l'annexe A ni par l'annexe B et sur les choix autorisés pour les systèmes et les interfaces des classes A et B (voir annexe D, figure 8).
Les informations relatives aux conditions spécifiques du MR pour le fonctionnement des systèmes de détection des trains doivent figurer dans les registres.
Registre des infrastructures
Il est donc prévu, dans le cadre de la présente STI, certains choix d'équipements, de fonctions et de valeurs ayant trait à l'infrastructure. En outre, lorsque les STI ne couvrent pas la totalité de l'ensemble «sol» de contrôle-commande, des exigences spéciales liées aux systèmes techniques existants, et en particulier l'utilisation d'exigences opérationnelles particulières, peuvent exister et sont de la responsabilité du gestionnaire d'infrastructure.
Ces informations comprennent, par exemple:
|
— |
les choix dans le cadre des exigences de compatibilité technique énoncées à l'annexe A, |
|
— |
les choix dans le cadre des exigences de compatibilité technique énoncées à l'annexe B, |
|
— |
les valeurs de CEM (en raison de l'utilisation d'équipements non couverts par les exigences des STI, par exemple les systèmes compteurs d'essieux), |
|
— |
les conditions climatiques et physiques rencontrées sur le parcours de la ligne. |
Ces informations doivent être consultables et utilisables par les entreprises ferroviaires au moyen d'un livret spécifique aux lignes (registre des infrastructures) qui peut également contenir d'autres particularités des autres STI (par exemple, la STI «exploitation et gestion du trafic» contient dans le règlement les systèmes de l'annexe B et les modes dégradés).
Le registre des infrastructures peut être particulier à une ligne ou à un groupe de lignes ayant les mêmes caractéristiques.
L'objectif est que les exigences et les caractéristiques précisées dans le registre des infrastructures et dans le registre du matériel roulant soient compatibles avec les STI; en particulier, elles ne doivent pas être un frein à l'interopérabilité.
Registre du matériel roulant
La présente STI prévoit par ailleurs certains choix au niveau des équipements, des fonctions et des valeurs liés aux types de trains qui relèvent de l'entreprise ferroviaire. En outre, parce que les exigences de la STI ne couvrent pas la totalité de l'ensemble «bord» de contrôle-commande, le gestionnaire de l'infrastructure a besoin d'informations complémentaires en ce qui concerne l'utilisation de systèmes de classe B et les caractéristiques du train qui s'appliquent aux systèmes sol non de classe B. Ces informations comprennent par exemple:
|
— |
les choix dans le cadre des exigences de compatibilité technique énoncées à l'annexe A, |
|
— |
les choix dans le cadre des exigences de compatibilité technique énoncées à l'annexe B, |
|
— |
les valeurs de CEM (en raison de l'utilisation d'équipements non encore couverts par les exigences de la STI sur les lignes concernées), |
|
— |
les paramètres géométriques du train comme la longueur, la distance maximale entre essieux du train, la longueur du porte-à-faux du nez des deux véhicules d'extrémité de la rame, la résistance électrique maximale entre roues opposées d'un essieu [en lien avec l'annexe A, appendice 1 (caractéristiques du matériel roulant nécessaires pour être compatibles avec les systèmes de détection des train) en raison de la conception des circuits de voie], |
|
— |
paramètres de freinage pour système de classe A, |
|
— |
paramètres de freinage pour les systèmes de classe B, |
|
— |
paramètres de freinage généraux, |
|
— |
types de freins, |
|
— |
frein à courants de Foucault installé, |
|
— |
frein magnétique, |
|
— |
conditions climatiques et conditions physiques compatibles avec le fonctionnement du train. |
Afin de permettre aux gestionnaires d'infrastructure de prendre connaissance et d'utiliser ces informations, celles-ci doivent être consignées dans un livret spécifique aux trains (registre du matériel roulant) qui pourra également contenir la possibilité ou le besoin de fonctions auxiliaires du train gérables ou gérées par les fonctions de contrôle-commande, par exemple, pour le passage de sections neutres, la réduction de vitesse dans des circonstances spéciales, en fonction du train et des caractéristiques de ligne (tunnels), et les particularités d'autres STI.
Le registre du matériel roulant peut être spécifique à un train ou spécifique à une catégorie de trains possédant les mêmes caractéristiques.
Listes des caractéristiques et des exigences spécifiques
La liste suivante constitue une exigence obligatoire à suivre pour établir les «états descriptifs des lignes interopérables» et les registres du matériel roulant et pour décrire suffisamment les caractéristiques et les exigences spécifiques et pour faciliter l'interopérabilité. La liste traite uniquement des questions techniques, les questions d'exploitation sont contenues dans la STI «exploitation et gestion du trafic».
La satisfaction de ces exigences peut résulter de l'application d'une norme. Dans ce cas, la référence concernée doit figurer dans ces manuels.
Sinon, toutes les exigences spéciales (méthodes de mesure) seront insérées dans le registre du matériel roulant et dans le registre des infrastructures ou annexées à ces documents.
Pour les systèmes de classe B, les mesures relevant de l'État membre responsable indiqué à l'annexe B s'appliquent. Le registre des infrastructures doit également comprendre les éléments suivants:
|
— |
État membre responsable, |
|
— |
nom du sous-système visé à l'annexe B, |
|
— |
version et date de mise en service, |
|
— |
limitations de vitesse et autres conditions et/ou exigences spécifiques de classe B, en raison des limitations du système, |
|
— |
autres détails conformément aux listes ci-après. |
Liste des caractéristiques techniques spécifiques et des exigences qu'elles entraînent pour une ligne interopérable et pour un train interopérable
|
No |
Registre des infrastructures |
Registre du matériel roulant |
||||||||||||||||||||||||||||||||||||||
|
1 |
Pour chacune des différentes parties de l'ensemble «sol» du contrôle-commande et de signalisation (fonctions et interfaces EIRENE, fonctions et interfaces ETCS/ERTMS, système de détection du train, détecteur de boîte chaude, CEM) lorsqu'elles sont installées par étapes:
|
Pour chacune des différentes parties de l'ensemble «bord» du contrôle-commande et signalisation (fonctions EIRENE et interfaces, fonctions ETCS/ERTMS et interfaces) lorsqu'elles sont installées par étapes:
|
||||||||||||||||||||||||||||||||||||||
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||
|
3 |
Pour l'ERTMS/ETCS niveau 1 avec fonction de réouverture (in-fill): préciser le mode de mise en œuvre technique requis pour le matériel roulant |
Pour l'ERTMS/ETCS niveau 1 avec fonction de réouverture (in-fill): préciser le mode de mise en œuvre technique utilisé. |
||||||||||||||||||||||||||||||||||||||
|
4 |
Indiquer,
installés sur la ligne interopérable, les versions (y compris leurs dates de validité et s'il faut qu'il y ait plus d'un système en service simultanément ainsi que l'État membre responsable). |
Indiquer,
installés sur la ligne interopérable, les versions (y compris leurs dates de validité et s'il faut qu'il y ait plus qu'un seul système en service simultanément ainsi que l'État membre responsable). |
||||||||||||||||||||||||||||||||||||||
|
5 |
Conditions particulières requises pour la commutation entre des systèmes de contrôle de vitesse, de commande des trains et d'annonces en cabine de classe B différents. Conditions particulières pour la commutation entre des systèmes ERTMS/ETCS et des systèmes de classe B. |
Conditions particulières implémentées à bord pour la commutation entre des systèmes de contrôle de vitesse, de commande des trains et d'annonces en cabine de classe B différents. |
||||||||||||||||||||||||||||||||||||||
|
6 |
Conditions particulières pour la commutation entre des systèmes de radio différents. |
Conditions particulières implémentées à bord pour la commutation entre des systèmes de radio différents. |
||||||||||||||||||||||||||||||||||||||
|
7 |
Modes techniques dégradés des systèmes suivants:
|
Possibilité de modes techniques dégradés pour les systèmes suivants:
|
||||||||||||||||||||||||||||||||||||||
|
8 |
Limitations de vitesse liées aux performances de freinage elles-mêmes limitées, par exemple à cause de la distance de freinage disponible ou la déclivité de la voie:
Les règles nationales relatives à l'exploitation des systèmes de classe B, applicables pour les trains [par exemple, les exigences relatives aux performances de freinage, les données correspondants à la fiche UIC 512 (huitième édition du 1.1.1979 ainsi que ses deux modificatifs), etc.]. |
|
||||||||||||||||||||||||||||||||||||||
|
9 |
Susceptibilité des équipements de contrôle-commande du sol pour l'admission des trains du point de vue de la compatibilité électromagnétique. À spécifier de façon standardisée (prEN 50238 et autres normes futures — à définir) pour répondre aux objectifs de sécurité et de fiabilité/disponibilité. Possibilité d'utiliser des freins à courants de Foucault (types) Possibilité d'utiliser des freins magnétiques (types) |
Émissions électromagnétiques du train pour l'admission des trains du point de vue de la compatibilité électromagnétique. À spécifier conformément aux normes européennes (prEN 50238 et autres normes futures — à définir) pour répondre aux objectifs de sécurité et de fiabilité/disponibilité. frein à courants de Foucault installé (type) frein magnétique (type) |
||||||||||||||||||||||||||||||||||||||
|
10 |
Les conditions climatiques et physiques rencontrées sur le parcours de la ligne. conformément à l'annexe A, index A5 |
Conditions climatiques et conditions physiques dans lesquelles l'ensemble bord peut fonctionner suivant l'annexe A, index A4 |
||||||||||||||||||||||||||||||||||||||
|
11 |
Les exigences relatives aux solutions techniques concernant les dérogations mises en œuvre en application de la directive 96/48/CE et de la directive 2001/16/CE doivent être précisées. |
Les règles relatives aux solutions techniques concernant les dérogations mises en œuvre en application de la directive 96/48/CE et de la directive 2001/16/CE doivent être précisées. |
||||||||||||||||||||||||||||||||||||||
|
12 |
DBC |
|
||||||||||||||||||||||||||||||||||||||
|
13 |
Longueur minimale de la partie de voie Distance minimale entre l'extrémité de partie de voie et le garage franc Distance différentielle minimale entre extrémités opposées de parties de voies adjacentes Sensibilité minimale au shuntage d'un circuit de voie Utilisation de freins à courants de Foucault Utilisation de freins magnétiques Sablage illimité autorisé (oui ou description des limites) |
Distance la plus longue entre deux trains de roues adjacents, Distance la plus longue entre extrémité frontale et essieux Empattement minimal Entraxe minimal Largeur minimale de roue Hauteur minimale du bandage Largeur minimale du boudin Hauteur minimale du boudin Charge minimale à l'essieu Matériau des roues Résistance maximale entre roues opposées d'un essieu Impédance minimale de véhicule Puissance maximale de sablage Possibilité de neutralisation du sablage par le conducteur Utilisation de freins à courants de Foucault Équipement de deux paires de patins dont la base électrique est supérieure ou égale à 16 000 mm. |
||||||||||||||||||||||||||||||||||||||
|
14 |
Cas spécifiques Limitations de la relation entre la distance entre essieux et le diamètre des roues (Allemagne) Distance longitudinale entre le premier ou le dernier essieu et l'extrémité la plus proche du véhicule ne dépassant pas 3 500 mm (Pologne, Belgique) La distance entre chacun des cinq premiers essieux d'un train (ou de tous les essieux si le train en a moins de cinq) non inférieure à 1 000 mm (Allemagne) La distance entre le premier et le dernier essieu d'un véhicule non inférieure à 6 000 mm (Belgique) La distance entre le premier et le dernier essieu d'un véhicule isolé ou d'une rame non supérieure à 15 000 mm (France, Belgique) Diamètre minimal des roues non inférieur à 450 mm (France) Charge minimale à l'essieu non inférieure à 5 t (Allemagne, Autriche, Suède, Belgique) Masse minimale de véhicule non inférieur à 90 t (Belgique) Lorsque la distance entre le premier et le dernier essieu d'un véhicule isolé ou d'une rame est supérieure ou égale à 16 000 mm, la masse d'un véhicule isolé ou d'une rame doit être supérieure à 90 t. Lorsque cette distance est inférieure à 16 000 mm et supérieure ou égale à 15 000 mm, la masse doit être inférieure à 90 t et supérieure ou égale à 40 t, le véhicule doit être équipé de deux paires de patins dont la base électrique est supérieure ou égale à 16 000 mm (France, Belgique) Dimension minimale de la masse métallique d'un véhicule (Allemagne, Pologne) Réactance maximale entre les surfaces de roulement d'un train de roues (Pologne, France) Exigences complémentaires relatives au paramètre de shuntage d'un véhicule (Pays-Bas) Impédance requise entre le pantographe et les roues supérieure à 1,0 ohm inductif à 50 Hz pour 3 kV de courant continu (Belgique) Pas de sablage en aval de l'axe avant des éléments automoteurs à une vitesse inférieure à 40 km/h (Royaume-Uni) Le frein magnétique et le frein à courants de Foucault ne sont pas autorisés sur le premier bogie d'un véhicule de tête (Allemagne). |
|
(1) À titre informatif uniquement, ceci figurera dans l'introduction du registre pertinent et sera supprimé lorsque le registre existera.
ANNEXE D
STI «contrôle-commande» (système ferroviaire conventionnel)
Cette figure est seulement l'illustration du principe.
Figure 8

ANNEXE E
MODULES POUR LES CONSTITUANTS D'INTEROPÉRABILITÉ
Module B: examen de type
|
1. |
Ce module décrit la partie de la procédure par laquelle un organisme notifié constate et atteste qu'un type, représentatif de la production considérée, satisfait aux dispositions de la STI qui s'y appliquent. |
|
2. |
La demande d'examen de type est introduite par le fabricant ou par son mandataire établi dans la Communauté. Cette demande doit comprendre:
Le demandeur met à la disposition de l'organisme notifié un spécimen représentatif de la production considérée, ci-après dénommé «type». Un type peut couvrir plusieurs versions du constituant d'interopérabilité à la condition que les différences entre les versions ne mettent pas en cause les dispositions de la STI. L'organisme notifié peut demander d'autres spécimens si le programme d'essai le requiert. Si la procédure de l'examen de type ne demande pas d'essais de type et si le type est suffisamment défini par la documentation technique visée au point 3, l'organisme notifié peut accepter qu'il n'y ait pas de spécimens mis à sa disposition. |
|
3. |
La documentation technique doit permettre l'évaluation de la conformité du constituant d'interopérabilité avec les exigences de la STI à évaluer. Elle devra couvrir, dans la mesure nécessaire à cette évaluation, la conception, la fabrication, la maintenance et le fonctionnement du constituant d'interopérabilité. La documentation technique contient:
|
|
4. |
L'organisme notifié: |
|
4.1. |
examine la documentation technique; |
|
4.2. |
vérifie que le ou les spécimens nécessaire(s) pour l'essai a (ont) été fabriqué(s) conformément à la documentation technique et il effectue ou fait effectuer les essais de type conformément aux dispositions de la STI et/ou des spécifications européennes applicables; |
|
4.3. |
si une revue de la conception est prévue dans la STI, il examine les méthodes, outils et résultats de la conception afin d'évaluer leur capacité à satisfaire les exigences de conformité du constituant d'interopérabilité à la fin du processus de conception; |
|
4.4. |
lorsqu'une revue du processus de fabrication est demandée dans la STI, il examine le processus de fabrication prévu pour la fabrication du constituant d'interopérabilité afin d'évaluer sa contribution à la conformité du produit et/ou il examine la revue effectuée par le fabricant à la fin du processus de conception; |
|
4.5. |
identifie les éléments qui ont été conçus conformément aux dispositions applicables de la STI et des spécifications européennes ainsi que les éléments dont la conception ne s'appuie pas sur les dispositions correspondantes desdites spécifications européennes; |
|
4.6. |
effectue ou fait effectuer les contrôles appropriés et les essais nécessaires prévus aux points 4.2, 4.3 et 4.4 pour vérifier si, dans le cas où le fabricant a choisi d'appliquer les spécifications européennes entrant en ligne de compte, celles-ci ont été réellement appliquées; |
|
4.7. |
effectue ou fait effectuer les contrôles appropriés et les essais nécessaires prévus conformément aux points 4.2, 4.3 et 4.4 pour établir si, dans le cas où les spécifications européennes entrant en ligne de compte n'ont pas été appliquées, les solutions adoptées par le fabricant répondent aux exigences de la STI; |
|
4.8. |
convient avec le demandeur de l'endroit où les contrôles et les essais nécessaires seront effectués. |
|
5. |
Lorsque le type satisfait aux dispositions de la STI, l'organisme notifié délivre un certificat d'examen de type au demandeur. Le certificat comporte le nom et l'adresse du fabricant, les conclusions du contrôle, les conditions de validité du certificat et les données nécessaires à l'identification du type approuvé. La durée de validité ne peut pas excéder cinq ans. Une liste des parties significatives de la documentation technique est annexée au certificat, et une copie est conservée par l'organisme notifié. S'il refuse de délivrer un certificat d'examen de type au fabricant ou à son mandataire établi dans la Communauté, l'organisme notifié motive d'une façon détaillée ce refus. Une procédure de recours doit être prévue. |
|
6. |
Le demandeur avise l'organisme notifié qui détient la documentation technique relative au certificat d'examen de type de toutes les modifications au produit approuvé qui nécessitent une nouvelle approbation, lorsque ces modifications peuvent remettre en cause la conformité aux exigences de la STI ou aux conditions d'utilisation prévues du produit. Dans ce cas, l'organisme notifié ne réalisera que les contrôles et essais nécessaires et appropriés à cette (ces) modification(s). Cette approbation complémentaire est délivrée sous la forme d'un complément au certificat initial d'examen de type, ou bien un nouveau certificat est délivré après le retrait de l'ancien certificat. |
|
7. |
Si aucune modification relevant du point 6 n'a été apportée, la validité d'un certificat arrivant à expiration peut être reconduite pour une nouvelle période. Le demandeur sollicite la reconduction en donnant confirmation écrite qu'aucune modification n'a été faite et, en l'absence d'information contraire, l'organisme notifié proroge la validité de la durée visée au point 5. Cette procédure est renouvelable. |
|
8. |
Chaque organisme notifié communique aux autres organismes notifiés les informations utiles concernant les certificats d'examen de type et les compléments qu'il a délivrés, retirés ou refusés. |
|
9. |
Les autres organismes notifiés reçoivent sur demande une copie des certificats d'examen de type et/ou de leurs compléments. Les annexes des certificats (voir § 5) sont tenues à la disposition des autres organismes notifiés. |
|
10. |
Le fabricant ou son mandataire établi dans la Communauté conserve avec la documentation technique une copie des certificats d'examen de type et de leurs compléments pendant une durée de dix ans à compter de la dernière date de fabrication du constituant d'interopérabilité. Lorsque ni le fabricant ni son mandataire ne sont établis dans la Communauté, cette obligation de tenir la documentation technique à disposition incombe à la personne responsable de la mise du constituant d'interopérabilité sur le marché communautaire. |
Module D: système de gestion de la qualité de la production
|
1. |
Ce module décrit la procédure par laquelle le fabricant ou son mandataire établi dans la Communauté, qui remplit les obligations prévues au point 2, assure et déclare que le constituant d'interopérabilité concerné est conforme au type décrit dans le certificat d'examen de type et satisfait aux exigences de la STI qui lui sont applicables. |
|
2. |
Le fabricant applique un système de gestion de la qualité approuvé qui doit couvrir la fabrication et l'inspection et les essais finals du produit, comme spécifié au point 3, et qui sera soumis à la surveillance visée au point 4. |
|
3. |
Système de gestion de la qualité |
|
3.1. |
Le fabricant introduit une demande d'évaluation de son système de gestion de la qualité auprès d'un organisme notifié de son choix, pour les constituants d'interopérabilité concernés. Cette demande doit comprendre:
|
|
3.2. |
Le système de gestion de la qualité doit garantir la conformité des constituants d'interopérabilité avec le type décrit dans l'attestation d'examen de type et avec les exigences de la STI qui leur sont applicables. Tous les éléments, exigences et dispositions adoptés par le fabricant doivent être réunis de manière systématique et ordonnée dans une documentation sous la forme de politiques, de procédures et d'instructions écrites. Cette documentation relative au système de gestion de la qualité doit permettre une interprétation uniforme des programmes, des plans, des manuels et des dossiers de qualité. Les points suivants, en particulier, sont décrits d'une façon suffisante dans cette documentation:
|
|
3.3. |
L'organisme notifié évalue le système de gestion de la qualité pour déterminer s'il satisfait aux exigences visées au point 3.2. Il présume la conformité à ces exigences si le fabricant applique un système qualité de la production, une inspection et des essais finals du produit en vertu de la norme EN/ISO 9001-2000, en tenant compte de la spécificité du constituant d'interopérabilité pour lequel il est mis en œuvre. Dans le cas où un demandeur applique un système de gestion de la qualité certifié, l'organisme notifié en tient compte dans l'évaluation. L'audit doit être spécifique à la catégorie de produits qui est représentative du constituant d'interopérabilité. L'équipe d'auditeurs comportera au moins un membre expérimenté dans l'évaluation de la technologie du produit concerné. La procédure d'évaluation comporte une visite d'inspection chez le fabricant. La décision est notifiée au fabricant. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
3.4. |
Le fabricant s'engage à remplir les obligations découlant du système de gestion de la qualité tel qu'il est approuvé et à le maintenir, de sorte qu'il demeure adéquat et efficace. Le fabricant ou son mandataire établi dans la Communauté fait connaître à l'organisme notifié qui a approuvé le système de gestion de la qualité toute adaptation envisagée du système de gestion de la qualité. L'organisme notifié évalue tous les changements proposés et décide si le système modifié de gestion de la qualité continuera à répondre aux exigences visées au point 3.2 ou s'il y a lieu de procéder à une nouvelle évaluation. Il notifie sa décision au fabricant. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
4. |
Surveillance du système de gestion de la qualité sous la responsabilité de l'organisme notifié. |
|
4.1. |
Le but de la surveillance est d'assurer que le fabricant remplit correctement les obligations découlant du système approuvé de gestion de la qualité. |
|
4.2. |
Le fabricant accorde à l'organisme notifié l'accès, à des fins d'inspection, aux lieux de fabrication, d'inspection, d'essais et de stockage et lui fournit toutes les informations nécessaires, notamment:
|
|
4.3. |
L'organisme notifié effectue périodiquement des audits afin de s'assurer que le fabricant maintient et applique le système de gestion de la qualité. Il fournit un rapport d'audit au fabricant. Les audits sont menés au moins une fois par an. Dans le cas où un demandeur applique un système de gestion de la qualité certifié, l'organisme notifié en tient compte dans la surveillance. |
|
4.4. |
En outre, l'organisme notifié peut effectuer des visites inopinées chez le fabricant. À l'occasion de ces visites, l'organisme notifié peut effectuer ou faire effectuer des essais pour vérifier le bon fonctionnement du système de gestion de la qualité là où il le juge nécessaire. Il fournit au fabricant un rapport de la visite et, s'il y a eu essai, un rapport d'essai. |
|
5. |
Chaque organisme notifié communique aux autres organismes notifiés les informations utiles concernant les approbations qu'il a délivrées, retirées ou refusées pour le système de gestion de la qualité. Les autres organismes notifiés reçoivent sur demande une copie des approbations délivrées pour les systèmes de gestion de la qualité. |
|
6. |
Le fabricant tient à la disposition des autorités nationales, pendant une durée de dix ans à compter de la date de la dernière fabrication du produit:
|
|
7. |
Le fabricant ou son mandataire établi dans la Communauté prépare une déclaration «CE», établit une déclaration «CE» de conformité du constituant d'interopérabilité. Le contenu de cette déclaration doit inclure au moins les informations indiquées à l'annexe IV, point 3, des directives 96/48/CE ou 2001/16/CE. La déclaration «CE» de conformité et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que la documentation technique et comprendre les éléments suivants:
Les certificats visés sont:
|
|
8. |
Le fabricant ou son mandataire établi dans la Communauté conserve une copie de la déclaration «CE» de conformité pendant une période de dix ans à compter de la date de la dernière fabrication du constituant d'interopérabilité. Lorsque ni le fabricant ni son mandataire ne sont établis dans la Communauté, cette obligation de tenir la documentation technique à disposition incombe à la personne responsable de la mise du constituant d'interopérabilité sur le marché communautaire. |
|
9. |
Si, en plus de la déclaration «CE» de conformité, une déclaration «CE» d'aptitude à l'emploi du constituant d'interopérabilité est requise par la STI, cette déclaration devra être ajoutée après avoir été établie par le fabricant dans les conditions du module V. |
Module F: vérification sur produits
|
1. |
Ce module décrit la procédure par laquelle le fabricant ou son mandataire établi dans la Communauté vérifie et déclare que le constituant d'interopérabilité concerné, sous réserve des dispositions du point 3, est conforme au type décrit dans le certificat d'examen de type et satisfait aux exigences de la STI qui lui sont applicables. |
|
2. |
Le fabricant prend toutes les mesures nécessaires pour que le procédé de fabrication assure la conformité de chaque constituant d'interopérabilité avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI qui s'y appliquent. |
|
3. |
L'organisme notifié doit effectuer les examens et essais appropriés afin de vérifier la conformité du constituant d'interopérabilité avec le type décrit dans le certificat «CE» d'examen de type et avec les exigences de la STI. Le fabricant (3) peut choisir une des procédures suivantes: le contrôle et l'essai de chaque constituant d'interopérabilité indiqué au point 4, ou le contrôle et l'essai des constituants d'interopérabilité sur une base statistique comme spécifié au point 5. |
|
4. |
Vérification par contrôle et essai de chaque constituant d'interopérabilité |
|
4.1. |
Chaque produit doit être contrôlé individuellement, et des essais appropriés sont effectués afin de s'assurer de sa conformité au type, comme décrit dans le certificat d'examen de type et aux exigences de la STI applicables. Lorsqu'il n'est pas défini d'essai dans la STI (ou dans une norme européenne citée dans la STI), les spécifications européennes pertinentes (4) ou des essais équivalents s'appliquent. |
|
4.2. |
L'organisme notifié établit un certificat de conformité écrit pour les produits approuvés relative aux essais effectués. |
|
4.3. |
Le fabricant ou son mandataire établi dans la Communauté doit être en mesure de présenter sur demande les certificats de conformité de l'organisme notifié. |
|
5. |
Vérification statistique |
|
5.1. |
Le fabricant présente ses constituants d'interopérabilité sous la forme de lots homogènes et prend toutes les mesures nécessaires pour que le processus de fabrication assure l'homogénéité de chaque lot produit. |
|
5.2. |
Tous les constituants d'interopérabilité sont disponibles à des fins de vérification sous la forme de lots homogènes. Un échantillon est prélevé au hasard sur chaque lot. Tous les constituants d'interopérabilité formant un échantillon sont examinés individuellement, et des essais appropriés sont effectués pour vérifier la conformité des produits avec le certificat d'examen de type et avec les exigences de la STI qui leur sont applicables et pour déterminer l'acceptation ou le rejet du lot. Lorsqu'il n'est pas défini d'essai dans la STI (ou dans une norme européenne citée dans la STI), les spécifications européennes pertinentes, ou des essais équivalents, sont à utiliser. |
|
5.3. |
La procédure statistique utilise les éléments appropriés (méthode statistique, plan d'échantillonnage, etc.) en fonction des caractéristiques à évaluer spécifiées dans la STI. |
|
5.4. |
Pour les lots acceptés, l'organisme notifié établit un certificat écrit de conformité relatif aux essais effectués. Tous les constituants d'interopérabilité du lot peuvent être mis sur le marché, à l'exception des constituants d'interopérabilité de l'échantillon dont on a constaté qu'ils n'étaient pas conformes. Si un lot est rejeté, l'organisme notifié ou l'autorité compétente prend les mesures appropriées pour empêcher la mise sur le marché de ce lot. En cas de rejet fréquent de lots, l'organisme notifié peut suspendre la vérification statistique. |
|
5.5. |
Le fabricant ou son mandataire établi dans la Communauté doit être en mesure de présenter sur demande les certificats de conformité de l'organisme notifié. |
|
6. |
Le fabricant ou son mandataire établi dans la Communauté prépare une déclaration «CE» de conformité du constituant d'interopérabilité. Le contenu de cette déclaration doit inclure au moins les informations indiquées à l'annexe IV, point 3, des directives 96/48/CE ou 2001/16/CE. La déclaration «CE» de conformité et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que la documentation technique et comprendre les éléments suivants:
Les attestations visées sont:
|
|
7. |
Le fabricant ou son mandataire établi dans la Communauté conserve une copie de la déclaration «CE» de conformité pendant une période de dix ans à compter de la dernière date de fabrication du constituant d'interopérabilité. Lorsque ni le fabricant ni son mandataire ne sont établis dans la Communauté, cette obligation de tenir la documentation technique à disposition incombe à la personne responsable de la mise du constituant d'interopérabilité sur le marché communautaire. |
|
8. |
Si, en plus de la déclaration «CE» de conformité, une déclaration «CE» d'aptitude à l'emploi du constituant d'interopérabilité est requise par la STI, cette déclaration devra être ajoutée après avoir été établie par le fabricant dans les conditions du module V. |
Module H2: système de gestion de la qualité complet avec contrôle de la conception
|
1. |
Ce module décrit la procédure par laquelle un organisme notifié effectue un contrôle de la conception d'un constituant d'interopérabilité et par laquelle le fabricant ou son mandataire établi dans la Communauté qui remplit les obligations du point 2 assure et déclare que le constituant d'interopérabilité considéré satisfait aux exigences de la STI qui lui sont applicables. |
|
2. |
Le fabricant met en œuvre un système de gestion de la qualité approuvé qui doit couvrir la conception, la production et l'inspection et les essais finals des produits, comme spécifié au point 3, et qui sera soumis à la surveillance visée au point 4. |
|
3. |
Système de gestion de la qualité |
|
3.1. |
Le fabricant introduit une demande d'évaluation de son système de gestion de la qualité auprès d'un organisme notifié de son choix, pour les constituants d'interopérabilité concernés. Cette demande doit comprendre:
|
|
3.2. |
Le système de gestion de la qualité doit garantir la conformité du constituant d'interopérabilité avec les exigences de la STI qui lui sont applicables. Tous les éléments, exigences et dispositions adoptés par le fabricant doivent être réunis de manière systématique et ordonnée dans une documentation sous la forme de politiques, de procédures et d'instructions écrites. Cette documentation relative au système de gestion de la qualité doit permettre une interprétation uniforme des politiques et des procédures de qualité telles que les programmes, plans, manuels et dossiers relatifs à la qualité. Les points suivants, en particulier, sont décrits d'une façon suffisante dans cette documentation:
Les politiques et procédures de qualité doivent couvrir, en particulier, les phases d'évaluation, telles que revue de la conception, revue du procédé de fabrication et essais de type, spécifiées dans la STI pour les différentes caractéristiques et performances du constituant d'interopérabilité. |
|
3.3. |
L'organisme notifié évalue le système de gestion de la qualité pour déterminer s'il satisfait aux exigences visées au point 3.2. Il présume la conformité à ces exigences si le fabricant applique un système qualité de la production, une inspection et des essais finals du produit en vertu de la norme EN/ISO 9001-2000, en tenant compte de la spécificité du constituant d'interopérabilité pour lequel il est mis en œuvre. Dans le cas où un demandeur applique un système de gestion de la qualité certifié, l'organisme notifié en tient compte dans l'évaluation. L'audit doit être spécifique à la catégorie de produits qui est représentative du constituant d'interopérabilité. L'équipe d'auditeurs comportera au moins un membre expérimenté dans l'évaluation de la technologie du produit concerné. La procédure d'évaluation comporte une visite d'évaluation chez le fabricant. La décision est notifiée au fabricant. La notification contient les conclusions de l'audit et la décision d'évaluation motivée. |
|
3.4. |
Le fabricant s'engage à remplir les obligations découlant du système de gestion de la qualité tel qu'il est approuvé et à le maintenir de sorte qu'il demeure adéquat et efficace. Le fabricant ou son mandataire établi dans la Communauté fait connaître à l'organisme notifié qui a approuvé le système de gestion de la qualité toute adaptation envisagée du système de gestion de la qualité. L'organisme notifié évalue tous les changements proposés et décide si le système modifié de gestion de la qualité continuera à répondre aux exigences visées au point 3.2 ou s'il y a lieu de procéder à une nouvelle évaluation. Il notifie sa décision au fabricant. La notification contient les conclusions de l'évaluation et la décision d'évaluation motivée. |
|
4. |
Surveillance du système de gestion de la qualité sous la responsabilité de l'organisme notifié. |
|
4.1. |
Le but de la surveillance est d'assurer que le fabricant remplit correctement les obligations découlant du système approuvé de gestion de la qualité. |
|
4.2. |
Le fabricant accorde à l'organisme notifié l'accès, à des fins d'inspection, aux lieux de conception, de fabrication, d'inspection, d'essais et de stockage et lui fournit toutes les informations nécessaires, dont:
|
|
4.3. |
L'organisme notifié effectue périodiquement des audits afin de s'assurer que le fabricant maintient et applique le système de gestion de la qualité. Il fournit un rapport d'audit au fabricant. Dans le cas où un demandeur applique un système de gestion de la qualité certifié, l'organisme notifié en tient compte dans la surveillance. Les audits sont menés au moins une fois par an. |
|
4.4. |
En outre, l'organisme notifié peut effectuer des visites inopinées chez le fabricant. À l'occasion de ces visites, l'organisme notifié peut effectuer ou faire effectuer des essais pour vérifier le bon fonctionnement du système de gestion de la qualité là où il le juge nécessaire. Il fournit au fabricant un rapport de la visite et, s'il y a eu essai, un rapport d'essai. |
|
5. |
Le fabricant tient à la disposition des autorités nationales, pendant une durée de dix ans à compter de la date de la dernière fabrication du produit:
|
|
6. |
Contrôle de la conception |
|
6.1. |
Le fabricant introduit une demande de contrôle de la conception du constituant d'interopérabilité auprès d'un organisme notifié. |
|
6.2. |
La demande doit permettre de comprendre la conception, la fabrication, la maintenance et le fonctionnement du constituant d'interopérabilité et d'évaluer la conformité aux exigences de la STI. Elle comprend:
|
|
6.3. |
L'entité adjudicatrice doit présenter les résultats des essais (6), y compris, si nécessaire, les essais de type, réalisés par son propre laboratoire compétent ou pour son compte. |
|
6.4. |
L'organisme notifié examine la demande et évalue les résultats des essais. Lorsque la conception est conforme aux dispositions applicables de la STI, l'organisme notifié délivre un certificat «CE» d'examen de la conception au demandeur. Le certificat contient les conclusions de l'examen, les conditions de sa validité, les données nécessaires à l'identification de la conception approuvée et, le cas échéant, une description du fonctionnement du produit. La durée de validité ne peut pas excéder cinq ans. |
|
6.5. |
Le demandeur avise l'organisme notifié qui a délivré le certificat «CE» d'examen de la conception de toute modification apportée à la conception approuvée. Ces modifications reçoivent une approbation complémentaire de l'organisme notifié qui a délivré le certificat «CE» d'examen de la conception lorsqu'elles peuvent remettre en cause la conformité aux exigences de la STI ou aux conditions prescrites pour l'utilisation du produit. Dans ce cas, l'organisme notifié ne réalisera que les contrôles et essais nécessaires et appropriés à la ou aux modifications. Cette approbation complémentaire est donnée sous la forme d'un complément au certificat «CE» primitif d'examen de la conception. |
|
6.6. |
Si aucune modification relevant du point 6.4 n'est apportée, la validité d'un certificat arrivant à expiration peut être reconduite pour une nouvelle période. Le demandeur demande la reconduction en donnant confirmation écrite qu'aucune modification n'a été faite, et l'organisme notifié proroge la validité de la durée visée au point 6.3 en l'absence d'information contraire. Cette procédure est renouvelable. |
|
7. |
Chaque organisme notifié communique aux autres organismes notifiés les informations pertinentes concernant les approbations du système de gestion de la qualité et les certificats «CE» d'examen de la conception qui ont été délivrés, retirés ou refusés. Les autres organismes notifiés reçoivent sur demande une copie:
|
|
8. |
Le fabricant ou son mandataire établi dans la Communauté prépare une déclaration «CE» de conformité du constituant d'interopérabilité. Le contenu de cette déclaration doit inclure au moins les informations indiquées à l'annexe IV, point 3, de la directive 96/48/CE ou 2001/16/CE. La déclaration «CE» de conformité et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que la documentation technique et comprendre les éléments suivants:
Les attestations visées sont:
|
|
9. |
Le fabricant ou son mandataire établi dans la Communauté conserve une copie de la déclaration «CE» de conformité pendant une période de dix ans à compter de la dernière date de fabrication du constituant d'interopérabilité. Lorsque ni le fabricant ni son mandataire ne sont établis dans la Communauté, cette obligation de tenir la documentation technique à disposition incombe à la personne responsable de la mise du constituant d'interopérabilité sur le marché communautaire. |
|
10. |
Si, outre la déclaration «CE» de conformité, une déclaration «CE» d'aptitude à l'emploi du constituant d'interopérabilité est requise par la STI, cette déclaration devra être ajoutée après avoir été établie par le fabricant dans les conditions du module V. |
MODULES POUR LA VÉRIFICATION «CE» DE SOUS-SYSTÈMES
Module SB: examen de type
|
1. |
Ce module décrit la procédure de vérification «CE» par laquelle un organisme notifié vérifie et atteste, à la demande d'une entité adjudicatrice ou de son mandataire établi dans la Communauté, qu'un type d'un sous-système de contrôle-commande, représentatif de la production considérée:
L'examen de type défini par le présent module pourrait couvrir des phases d'évaluation spécifiques — revue de conception, essai de type ou revue du processus de fabrication — spécifiées dans la STI correspondante. |
|
2. |
L'entité adjudicatrice (9) introduit une demande de vérification «CE» du sous-système (par la procédure d'examen de type), auprès d'un organisme notifié de son choix. Cette demande doit comprendre:
|
|
3. |
Le demandeur met à la disposition de l'organisme notifié un spécimen du sous-système (10) représentatif de la production considérée, ci-après dénommé «type». Un type peut couvrir plusieurs versions du sous-système à la condition que les différences entre les versions ne mettent pas en cause les dispositions de la STI. L'organisme notifié peut demander d'autres échantillons si le programme d'essai le requiert. Si cela est requis pour les besoins de méthodes spécifiques d'essai ou d'examen et est spécifié dans la STI ou dans la spécification européenne (11) visée dans la STI, un ou plusieurs spécimens d'un sous-ensemble ou d'un ensemble, ou bien un spécimen du sous-système dans l'état préassemblé devront également être livrés. La documentation technique et l'(les) échantillon(s) doivent permettre de comprendre la conception, la fabrication, l'installation, la maintenance et le fonctionnement du sous-système et d'évaluer la conformité aux exigences de la STI. La documentation technique doit contenir:
Si la STI exige que la documentation technique comporte d'autres informations, celles-ci doivent être incluses. |
|
4. |
L'organisme notifié: |
|
4.1. |
examine la documentation technique; |
|
4.2. |
vérifie que le ou les spécimens du sous-système ou des ensembles ou des sous-ensembles du sous-système, a (ont) été fabriqué(s) conformément à la documentation technique, et il effectue ou fait effectuer les essais de type conformément aux dispositions de la STI et des spécifications européennes appropriées. Cette fabrication sera vérifiée en utilisant un module d'évaluation approprié; |
|
4.3. |
si une revue du processus de conception est prévue dans la STI, il examine les méthodes, outils et résultats de la conception afin d'évaluer leur capacité à satisfaire les exigences de conformité du sous-système à la fin du processus de conception; |
|
4.4. |
identifie les éléments qui ont été conçus conformément aux dispositions applicables de la STI et des spécifications européennes ainsi que les éléments dont la conception ne s'appuie pas sur les dispositions appropriées desdites spécifications européennes; |
|
4.5. |
effectue ou fait effectuer les contrôles appropriés et les essais nécessaires prévus conformément aux points 4.2 et 4.3 pour vérifier, lorsque les spécifications européennes pertinentes ont été choisies, si elles ont réellement été appliquées; |
|
4.6. |
effectue ou fait effectuer les contrôles appropriés et les essais nécessaires prévus conformément aux points 4.2 et 4.3 pour établir si les solutions adoptées satisfont les exigences de la STI lorsque les spécifications européennes n'ont pas été appliquées. |
|
4.7. |
convient avec le demandeur de l'endroit où les contrôles et les essais nécessaires seront effectués. |
|
5. |
Lorsque le type satisfait aux dispositions de la STI, l'organisme notifié délivre un certificat d'examen de type au demandeur. Le certificat comporte le nom et l'adresse de l'entité adjudicatrice et du ou des fabricants indiqués dans la documentation technique, les conclusions de l'examen, les conditions de validité du certificat et les données nécessaires à l'identification du type approuvé. Une liste des parties significatives de la documentation technique est annexée au certificat, et une copie est conservée par l'organisme notifié. S'il refuse de délivrer un certificat d'examen de type à l'entité adjudicatrice, l'organisme notifié motive d'une façon détaillée ce refus. Une procédure de recours doit être prévue. |
|
6. |
Chaque organisme notifié communique aux autres organismes notifiés les informations utiles concernant les certificats d'examen de type qu'il a délivrés, retirés ou refusés. |
|
7. |
Les autres organismes notifiés reçoivent sur demande une copie des certificats d'examen de type et/ou de leurs compléments. Les annexes des certificats sont tenues à la disposition des autres organismes notifiés. |
|
8. |
L'entité adjudicatrice conserve avec la documentation technique une copie des certificats d'examen de type et de leurs compléments pendant toute la durée de vie du sous-système. Le dossier doit être communiqué aux autres États membres qui en font la demande. |
|
9. |
Le demandeur avise l'organisme notifié qui détient la documentation technique relative au certificat d'examen de type de toutes les modifications susceptibles de remettre en cause la conformité aux exigences de la STI ou aux conditions d'utilisation prescrites pour le sous-système. Le système doit recevoir une nouvelle approbation dans de tels cas. Cette nouvelle approbation est délivrée sous la forme d'un complément au certificat primitif d'examen de type, ou un nouveau certificat est délivré après retrait de l'ancien certificat. |
Module SD: système de gestion de la qualité en production
|
1. |
Ce module décrit la procédure de vérification «CE» par laquelle un organisme notifié vérifie et atteste, à la demande d'une entité adjudicatrice ou de son mandataire établi dans la Communauté, qu'un sous-système de contrôle-commande pour lequel un certificat d'examen de type a déjà été émis par un organisme notifié:
et peut être mis en service. |
|
2. |
L'organisme notifié exécute la procédure à la condition que:
|
|
3. |
Pour le sous-système objet de la procédure de vérification CE, l'entité adjudicatrice ou les maîtres d'œuvre, s'ils sont employés, doivent appliquer un système de gestion de la qualité approuvé qui doit couvrir la fabrication et l'inspection et les essais finals du produit spécifiés au point 5 et qui sera soumis à la surveillance visée au point 6. Dans le cas où l'entité adjudicatrice elle-même a la responsabilité du projet de sous-système complet (notamment la responsabilité de l'intégration du sous-système), ou si l'entité adjudicatrice est directement impliquée dans la production (y compris l'assemblage et l'installation), elle doit appliquer un système de gestion de la qualité approuvé pour ces activités, qui sera soumis à la surveillance visée au point 6. Si le maître d'œuvre a la responsabilité du projet de sous-système complet (notamment la responsabilité de l'intégration du sous-système), il doit appliquer dans tous les cas un système de gestion de la qualité approuvé pour la fabrication et l'inspection et les essais finals du produit, et qui sera soumis à la surveillance visée au point 6. |
|
4. |
Procédure de vérification «CE» |
|
4.1. |
L'entité adjudicatrice doit introduire une demande de vérification «CE» du sous-système (par la procédure du système de gestion de la qualité de la production), y compris la coordination de la surveillance des systèmes de gestion de la qualité prévue aux points 5.3 et 6.5 auprès d'un organisme notifié de son choix. L'entité adjudicatrice informe les fabricants concernés de ce choix et de la demande. |
|
4.2. |
La demande doit permettre de comprendre la conception, la fabrication, l'assemblage, l'installation, la maintenance et le fonctionnement du sous-système et d'évaluer la conformité au type décrit dans le certificat d'examen de type et aux exigences de la STI. Cette demande doit comprendre:
et, si ces éléments ne sont pas déjà inclus dans la documentation:
|
|
4.3. |
L'organisme notifié examine tout d'abord la demande en ce qui concerne la validité de l'examen de type et du certificat d'examen de type. Si l'organisme notifié juge que le certificat d'examen de type n'est plus valable ou n'est pas approprié et qu'un nouvel examen de type est nécessaire, il justifie sa position. |
|
5. |
Système de gestion de la qualité |
|
5.1. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre, s'ils sont employés, introduisent une demande d'évaluation de leur système de gestion de la qualité auprès d'un organisme notifié de leur choix. Cette demande doit comprendre:
Pour ceux qui n'interviennent que pour une partie du projet de sous-système, ces informations sont à fournir uniquement pour la partie en question. |
|
5.2. |
Pour l'entité adjudicatrice ou le maître d'œuvre responsable de l'ensemble du projet de sous-système, le système de gestion de la qualité doit assurer la conformité globale du sous-système avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI. Pour les autres maîtres d'œuvre, le(s) système(s) de qualité doit (doivent) assurer la conformité de leur contribution au sous-système avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI. Tous les éléments, les exigences et les dispositions adoptés par le(s) demandeur(s) doivent être réunis de manière systématique et ordonnée dans une documentation sous la forme de politiques, de procédures et d'instructions écrites. Cette documentation relative au système de gestion de la qualité doit permettre une interprétation uniforme des politiques et des procédures de qualité telles que les programmes, plans, manuels et dossiers relatifs à la qualité. Les points suivants, en particulier, sont décrits d'une façon suffisante dans cette documentation:
Les examens, les essais et les contrôles couvrent toutes les étapes suivantes:
|
|
5.3. |
L'organisme notifié choisi par l'entité adjudicatrice contrôle ensuite si toutes les étapes du sous-système mentionnées au point 5.2 sont suffisamment et convenablement couvertes par l'approbation et la surveillance du ou des systèmes de gestion de la qualité du ou des demandeurs (15). Si la conformité du sous-système avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI est fondée sur plusieurs systèmes de gestion de la qualité, l'organisme notifié doit vérifier en particulier:
|
|
5.4. |
L'organisme notifié indiqué au point 5.1 évalue le système de gestion qualité pour déterminer s'il satisfait aux exigences visées au point 5.2. Il présume la conformité à ces exigences si le fabricant applique un système qualité de la production, une inspection et des essais finals du produit en vertu de la norme EN/ISO 9001-2000, en tenant compte de la spécificité du sous-système pour lequel elle est mise en œuvre. Dans le cas où un demandeur applique un système de gestion de la qualité, l'organisme notifié en tient compte dans l'évaluation. L'audit doit être spécifique au sous-système concerné tout en prenant en compte la contribution spécifique du demandeur au sous-système. L'équipe d'auditeurs comportera au moins un membre expérimenté dans l'évaluation de la technologie du sous-système concerné. La procédure d'évaluation comporte une visite d'évaluation chez le demandeur. La décision doit être notifiée au demandeur. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
5.5. |
L'entité adjudicatrice, si elle est concernée, s'engage à remplir les obligations découlant du système de gestion de la qualité tel qu'il est approuvé et à le maintenir de sorte qu'il demeure adéquat et efficace. Ils doivent tenir l'organisme notifié ayant approuvé le système de gestion de la qualité informé de tout changement significatif qui affectera le respect des exigences de la STI par le sous-système. L'organisme notifié évalue les changements proposés et décide si le système modifié de gestion de la qualité continuera à répondre aux exigences visées au point 5.2 ou s'il y a lieu de procéder à une nouvelle évaluation. Il doit notifier sa décision au demandeur. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
6. |
Surveillance du système ou des systèmes de gestion de la qualité sous la responsabilité de l'organisme notifié. |
|
6.1. |
Le but de la surveillance est d'assurer que l'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre remplissent correctement les obligations découlant du (des) système(s) de gestion de la qualité approuvé(s). |
|
6.2. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre remettent (ou font remettre) à l'organisme notifié visé au point 5.1 tous les documents nécessaires à cette fin et, en particulier, les plans de mise en œuvre et les dossiers techniques se rapportant au sous-système [dans la mesure où ils concernent la contribution spécifique du (des) demandeur(s) au sous-système], en particulier:
|
|
6.3. |
L'organisme notifié effectue périodiquement des audits afin de s'assurer que l'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre maintiennent et appliquent le système de gestion de la qualité et doit à ce titre leur fournir un rapport d'audit. Dans le cas où ceux-ci appliquent un système de gestion de la qualité certifié, l'organisme notifié en tient compte pour la surveillance. Les audits sont menés au moins une fois par an, et un audit au moins est effectué durant l'exécution des activités (fabrication, assemblage ou installation) se rapportant au sous-système objet de la procédure de vérification CE visée au point 8. |
|
6.4. |
En outre, l'organisme notifié peut effectuer des visites inopinées sur les sites pertinents du ou des demandeurs. À l'occasion de ces visites, l'organisme notifié peut exécuter des audits partiels ou complets et effectuer ou faire effectuer des essais pour vérifier le bon fonctionnement du système de gestion de la qualité là où il le juge nécessaire. Il fournit au(x) demandeur(s) un rapport d'inspection ainsi que des rapports d'audit et/ou d'essai s'il y a lieu. |
|
6.5. |
L'organisme notifié choisi par l'entité adjudicatrice est chargé de la vérification CE, s'il ne pratique pas la surveillance du ou des systèmes de gestion de la qualité concerné(s), coordonne les activités de surveillance des autres organismes notifiés chargés de cette tâche afin:
Cette coordination comprend le droit de l'organisme notifié:
|
|
7. |
L'organisme notifié visé au point 5.1 dispose d'un droit d'accès, à des fins d'inspection, d'audit et de surveillance, aux chantiers de construction, aux ateliers de fabrication, aux lieux de montage et d'installation, aux zones de stockage et, le cas échéant, aux installations de préfabrication ou d'essais et, d'une manière plus générale, à tous les lieux qu'il juge nécessaire à sa mission eu égard à la contribution spécifique du demandeur au projet de sous-système. |
|
8. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre tiennent à la disposition des autorités nationales, pendant une durée de dix ans à compter de la date de la dernière fabrication du sous-système:
|
|
9. |
Lorsque le sous-système satisfait aux exigences de la STI, l'organisme notifié, sur la base de l'examen de type et de l'approbation et de la surveillance du ou des systèmes de gestion de la qualité, établit le certificat de conformité à l'intention de l'entité adjudicatrice qui, une fois en possession du certificat, établit la déclaration CE de vérification destinée à l'autorité de tutelle de l'État membre dans lequel le sous-système est situé et/ou fonctionne. La déclaration «CE» de vérification et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que le dossier technique et comprendre au moins les informations figurant à l'annexe V de ladite directive. |
|
10. |
L'organisme notifié choisi par l'entité adjudicatrice est responsable de la constitution du dossier technique devant accompagner la déclaration CE de vérification. Ce dossier technique doit contenir au moins les informations indiquées à l'article 18, paragraphe 3, de la directive, et en particulier:
|
|
11. |
Chaque organisme notifié communique aux autres organismes notifiés les informations utiles concernant les approbations qu'il a octroyées, retirées ou refusées pour le système de gestion de la qualité. Les autres organismes notifiés reçoivent sur demande une copie des approbations délivrées pour les systèmes de gestion de la qualité. |
|
12. |
Le dossier complet accompagnant le certificat de conformité est déposé auprès de l'entité adjudicatrice. L'entité adjudicatrice au sein de la Communauté doit conserver une copie du dossier technique pendant toute la durée de vie du sous-système; le dossier doit être communiqué aux autres États membres qui en font la demande. |
Module SF: vérification sur produits
|
1. |
Ce module décrit la procédure de vérification «CE» par laquelle un organisme notifié vérifie et atteste, à la demande d'une entité adjudicatrice ou de son mandataire établi dans la Communauté, qu'un sous-système de contrôle-commande pour lequel un certificat d'examen de type a déjà été émis par un organisme notifié:
|
|
2. |
L'entité adjudicatrice (18) introduit une demande de vérification CE du sous-système (par la procédure de la vérification sur produits), auprès d'un organisme notifié de son choix. Cette demande doit comprendre:
|
|
3. |
Dans cette partie de la procédure, l'entité adjudicatrice contrôle et atteste que le sous-système concerné est conforme au type décrit dans le certificat d'examen de type et satisfait aux exigences de la STI qui s'y appliquent. L'organisme notifié exécute la procédure, à condition que le certificat d'examen de type délivré avant l'évaluation reste valide pour le sous-système faisant l'objet de la demande. |
|
4. |
L'entité adjudicatrice prend toutes les mesures nécessaires pour que le procédé de fabrication [y compris l'assemblage et l'intégration des constituants d'interopérabilité par les maîtres d'œuvre (19) s'ils sont employés] assure la conformité du sous-système avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI qui lui sont applicables. |
|
5. |
La demande doit permettre de comprendre la conception, la fabrication, l'installation, la maintenance et le fonctionnement du sous-système et d'évaluer la conformité au type décrit dans le certificat d'examen de type et aux exigences de la STI. Cette demande doit comprendre:
et, si ces éléments ne sont pas déjà inclus dans cette documentation:
Si la STI exige que la documentation technique comporte d'autres informations, celles-ci doivent être incluses. |
|
6. |
L'organisme notifié examine tout d'abord la demande en ce qui concerne la validité de l'examen de type et du certificat d'examen de type. Si l'organisme notifié juge que le certificat d'examen de type n'est plus valable ou n'est pas approprié et qu'un nouvel examen de type est nécessaire, il justifie sa position. L'organisme notifié doit effectuer les examens et essais appropriés afin de vérifier la conformité du sous-système avec le type décrit dans le certificat d'examen de type et avec les exigences de la STI. L'organisme notifié examinera et testera tout sous-système fabriqué comme un produit de série, comme spécifié au point 4. |
|
7. |
Vérification par contrôle et essai de chaque sous-système (en tant que produit de série) |
|
7.1. |
L'organisme notifié effectue les essais, contrôles et vérifications nécessaires pour s'assurer de la conformité du sous-système, en tant que produit de série comme spécifié dans la STI. Les examens, essais et contrôles couvrent les phases prévues dans la STI: |
|
7.2. |
Chaque sous-système (en tant que produit de série) doit être contrôlé individuellement, soumis aux essais et vérifié (20) afin de s'assurer de sa conformité au type, comme décrit dans le certificat d'examen de type et aux exigences de la STI applicables. Lorsqu'il n'est pas défini d'essai dans la STI (ou dans une norme européenne citée dans la STI), les spécifications européennes correspondantes, ou des essais équivalents, sont à utiliser. |
|
8. |
L'organisme notifié peut s'entendre avec l'entité adjudicatrice (et les maîtres d'œuvre) pour déterminer où les essais auront lieu et peut convenir que les essais finals du sous-système et, si prévu par la STI, les essais ou la validation en grandeur nature soient effectués par l'entité adjudicatrice sous la surveillance directe et en présence de l'organisme notifié. L'organisme notifié dispose d'un droit d'accès, à des fins d'essais et de vérification, aux ateliers de fabrication, aux lieux de montage et d'installation et, le cas échéant, aux installations de préfabrication et d'essais pour l'accomplissement de sa mission conformément à la STI. |
|
9. |
Lorsque le sous-système satisfait aux exigences de la STI, l'organisme notifié établit le certificat de conformité à l'intention de l'entité adjudicatrice qui, une fois en possession du certificat, établit la déclaration CE de vérification destinée à l'autorité de tutelle de l'État membre dans lequel le sous-système est situé et/ou fonctionne. Les activités de l'organisme notifié sont fondées sur l'examen de type et les essais, vérifications et contrôles effectués sur tous les produits de série tels qu'indiqués au point 7 et requis dans la STI et/ou dans la spécification européenne pertinente. La déclaration «CE» de vérification et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que le dossier technique et comprendre au moins les informations figurant à l'annexe V de ladite directive. |
|
10. |
L'organisme notifié est responsable de la constitution du dossier technique devant accompagner la déclaration CE de vérification. Ce dossier technique doit contenir au moins les informations indiquées à l'article 18, paragraphe 3, desdites directives, et en particulier les informations comme suit:
|
|
11. |
Le dossier complet accompagnant le certificat de conformité est déposé auprès de l'entité adjudicatrice. L'entité adjudicatrice doit conserver une copie du dossier technique pendant toute la durée de vie du sous-système; le dossier doit être communiqué aux autres États membres qui en font la demande. |
Module SH2: système de gestion de la qualité complet avec contrôle de la conception
|
1. |
Ce module décrit la procédure de vérification «CE» par laquelle un organisme notifié vérifie et atteste, à la demande d'une entité adjudicatrice ou de son mandataire établi dans la Communauté, qu'un sous-système de contrôle-commande:
|
|
2. |
L'organisme notifié exécute la procédure, y compris un contrôle de la conception du sous-système, à la condition que l'entité adjudicatrice (23) et les maîtres d'œuvre impliqués satisfassent aux obligations du point 3. Les termes «maître d'œuvre» désignent les sociétés dont les activités contribuent à satisfaire aux exigences essentielles de la STI. Ils désignent la société:
Il ne désigne pas les sous-traitants du fabricant qui fournissent des composants ou des constituants d'interopérabilité. |
|
3. |
Pour le sous-système objet de la procédure de vérification CE, l'entité adjudicatrice ou les maîtres d'œuvre, s'ils sont employés, doivent appliquer un système de gestion de la qualité approuvé qui doit couvrir la conception, la fabrication et l'inspection et les essais finals du produit spécifiés au point 5. Ce système sera en outre soumis à la surveillance visée au point 6. Le maître d'œuvre, qui a la responsabilité du projet de sous-système complet (notamment la responsabilité de l'intégration du sous-système), doit appliquer dans tous les cas un système de gestion de la qualité approuvé qui doit couvrir la conception, la fabrication et l'inspection et les essais finals du produit, et qui sera soumis à la surveillance visée au point 6. Dans le cas où l'entité adjudicatrice elle-même a la responsabilité du projet de sous-système complet (notamment la responsabilité de l'intégration du sous-système) ou si l'entité adjudicatrice est directement impliquée dans la conception et/ou la production (y compris l'assemblage et l'installation), elle doit appliquer un système de gestion de la qualité approuvé pour ces activités qui sera soumis à la surveillance visée au point 6. Les demandeurs uniquement impliqués dans l'assemblage et l'installation peuvent uniquement appliquer un système de gestion de la qualité approuvé qui doit couvrir la fabrication et l'inspection et les essais finals du produit. |
|
4. |
Procédure de vérification CE |
|
4.1. |
L'entité adjudicatrice doit introduire une demande de vérification CE du sous-système (par la procédure du système de gestion complet de la qualité avec contrôle de la conception), y compris la coordination de la surveillance des systèmes de gestion de la qualité prévue aux points 5.4 et 6.6, auprès d'un organisme notifié de son choix. L'entité adjudicatrice informe les fabricants concernés de son choix et de la demande. |
|
4.2. |
La demande permet de comprendre la conception, la fabrication, l'assemblage, l'installation, la maintenance et le fonctionnement du sous-système et permet d'évaluer la conformité aux exigences de la STI. Cette demande doit comprendre:
|
|
4.3. |
L'entité adjudicatrice doit présenter les résultats des examens, des contrôles et des essais (24), y compris si nécessaire les essais de type, réalisés par son propre laboratoire compétent ou pour son compte. |
|
4.4. |
L'organisme notifié doit examiner la demande concernant l'examen de conception et évaluer les résultats des essais. Lorsque la conception est conforme aux dispositions applicables de ladite directive et de la STI, l'organisme notifié délivre un rapport d'examen de la conception au demandeur. Le rapport contient les conclusions du contrôle de la conception, ses conditions de validité, les indications nécessaires pour l'identification de la conception contrôlée et, le cas échéant, une description du fonctionnement du sous-système. S'il refuse de délivrer un rapport d'examen de la conception à l'entité adjudicatrice, l'organisme notifié motive d'une façon détaillée ce refus. Une procédure de recours doit être prévue. |
|
5. |
Système de gestion de la qualité |
|
5.1. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre, s'ils sont employés, introduisent une demande d'évaluation de leur système de gestion de la qualité auprès d'un organisme notifié de leur choix. Cette demande doit comprendre:
Pour ceux qui n'interviennent que pour une partie du projet de sous-système, ces informations sont à fournir uniquement pour la partie en question. |
|
5.2. |
Pour l'entité adjudicatrice ou le maître d'œuvre responsable de l'ensemble du projet de sous-système, le système de gestion de la qualité doit assurer la conformité globale du sous-système avec les exigences de la STI. Pour l'autre (les autres) maître(s) d'œuvre, le(s) système(s) de gestion de la qualité doit (doivent) assurer la conformité de sa (leur) contribution au sous-système avec les exigences de la STI. Tous les éléments, les exigences et les dispositions adoptés par le demandeur doivent être réunis de manière systématique et ordonnée dans une documentation sous la forme de politiques, de procédures et d'instructions écrites. Cette documentation relative au système de gestion de la qualité doit permettre une interprétation uniforme des politiques et des procédures de qualité telles que les programmes, plans, manuels et enregistrements relatifs à la qualité. Le système doit comprendre, en particulier, une description adéquate des points suivants:
Les examens, les essais et les contrôles couvrent toutes les étapes suivantes:
|
|
5.3. |
L'organisme notifié choisi par l'entité adjudicatrice contrôle ensuite si toutes les étapes du sous-système mentionnées au point 5.2 sont suffisamment et convenablement couvertes par l'approbation et la surveillance du ou des systèmes de gestion de la qualité du ou des demandeurs (26). Si la conformité du sous-système aux exigences de la STI est fondée sur plusieurs systèmes de gestion de la qualité, l'organisme notifié s'assure en particulier:
|
|
5.4. |
L'organisme notifié indiqué au point 5.1 évalue le système de gestion qualité pour déterminer s'il satisfait aux exigences visées au point 5.2. Il présume la conformité à ces exigences si le fabricant applique un système qualité pour la conception, la production, l'inspection et les essais finals du produit en vertu de la norme harmonisée EN/ISO 9001-2000, qui tient compte de la spécificité du constituant d'interopérabilité pour lequel il est mis en œuvre. Dans le cas où un demandeur utilise un système de gestion de la qualité, l'organisme notifié en tient compte dans l'évaluation. L'audit doit être spécifique au sous-système concerné tout en prenant en compte la contribution spécifique du demandeur au sous-système. L'équipe d'auditeurs comportera au moins un membre expérimenté dans l'évaluation de la technologie du sous-système concerné. La procédure d'évaluation comporte une visite d'évaluation chez le fabricant. La décision doit être notifiée au demandeur. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
5.5. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre s'engagent à remplir les obligations découlant du système de gestion de la qualité tel qu'il est approuvé et à le maintenir de sorte qu'il demeure adéquat et efficace. Ils doivent tenir informé l'organisme notifié ayant approuvé leur système de gestion de la qualité de tout changement significatif qui affectera le respect des exigences de la STI par le sous-système. L'organisme notifié évalue tous les changements proposés et décide si le système modifié de gestion de la qualité continuera à répondre aux exigences visées au point 5.2 ou s'il y a lieu de procéder à une nouvelle évaluation. Il notifie sa décision au demandeur. La notification contient les conclusions du contrôle et la décision d'évaluation motivée. |
|
6. |
Surveillance du système ou des systèmes de gestion de la qualité sous la responsabilité de l'organisme notifié. |
|
6.1. |
Le but de la surveillance est d'assurer que l'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre remplissent correctement les obligations découlant du (des) système(s) de gestion de la qualité approuvé(s). |
|
6.2. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre doivent communiquer à l'organisme notifié désignés au point 5.1 (ou avoir communiqué) tous les documents nécessaires à cette fin et, en particulier, les plans de mise en œuvre et les dossiers techniques se rapportant au sous-système (dans la mesure où ils concernent la contribution spécifique du demandeur au sous-système), dont:
|
|
6.3. |
L'organisme notifié effectue périodiquement des audits afin de s'assurer que l'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre maintiennent et appliquent le système de gestion de la qualité et doit à ce titre leur fournir un rapport d'audit. Dans le cas où ceux-ci appliquent un système de gestion de la qualité certifié, l'organisme notifié en tient compte pour la surveillance. Les audits sont menés au moins une fois par an, et un audit au moins est effectué pendant l'exécution des activités (conception, fabrication, montage ou installation) portant sur le sous-système objet de la procédure de vérification «CE» visée au point 7. |
|
6.4. |
En outre, l'organisme notifié peut effectuer des visites inopinées sur les sites mentionnés au point 5.2 du ou des demandeurs. À l'occasion de ces visites, l'organisme notifié peut exécuter des audits partiels ou complets et effectuer ou faire effectuer des essais pour vérifier le bon fonctionnement du système de gestion de la qualité là où il le juge nécessaire. Il fournit au(x) demandeur(s) un rapport d'inspection ainsi que des rapports d'audit et/ou d'essai s'il y a lieu. |
|
6.5. |
L'organisme notifié choisi par l'entité adjudicatrice et chargé de la vérification CE, s'il ne pratique pas la surveillance du ou des systèmes de gestion de la qualité visé(s) au point 5, coordonne les activités de surveillance des autres organismes notifiés chargés de cette tâche afin:
Cette coordination comprend le droit de l'organisme notifié:
|
|
7. |
L'organisme notifié visé au point 5.1 dispose d'un droit d'accès, à des fins d'inspection, d'audit et de surveillance, aux bureaux d'étude, aux chantiers de construction, aux ateliers de fabrication, aux lieux de montage et d'installation, aux zones de stockage et, le cas échéant, aux installations de préfabrication ou d'essais et, d'une manière plus générale, à tous les lieux qu'il juge nécessaire à sa mission eu égard à la contribution spécifique du demandeur au projet de sous-système. |
|
8. |
L'entité adjudicatrice, si elle est concernée, et les maîtres d'œuvre tiennent à la disposition des autorités nationales pendant une durée de dix ans à compter de la date de la dernière fabrication du sous-système:
|
|
9. |
Lorsque le sous-système satisfait aux exigences de la STI, l'organisme notifié, sur la base de l'examen de type et de l'approbation et de la surveillance du ou des systèmes de gestion de la qualité, établit le certificat de conformité à l'intention de l'entité adjudicatrice qui, une fois en possession du certificat, établit la déclaration CE de vérification destinée à l'autorité de tutelle de l'État membre dans lequel le sous-système est situé et/ou fonctionne. La déclaration «CE» de vérification et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que le dossier technique et comprendre au moins les informations figurant à l'annexe V de ladite directive. |
|
10. |
L'organisme notifié choisi par l'entité adjudicatrice est responsable de la constitution du dossier technique devant accompagner la déclaration CE de vérification. Ce dossier technique doit contenir au moins les informations indiquées à l'article 18, paragraphe 3, de la directive, et en particulier:
|
|
11. |
Chaque organisme notifié communique aux autres organismes notifiés les informations pertinentes concernant les approbations du système de gestion de la qualité et les rapports CE d'examen de la conception qui ont été délivrées, retirées ou refusées. Les autres organismes notifiés reçoivent sur demande une copie:
|
|
12. |
Le dossier complet accompagnant le certificat de conformité est déposé auprès de l'entité adjudicatrice. L'entité adjudicatrice doit conserver une copie du dossier technique pendant toute la durée de vie du sous-système; le dossier doit être communiqué aux autres États membres qui en font la demande. |
Module SG: vérification à l'unité
|
1. |
Ce module décrit la procédure de vérification «CE» par laquelle un organisme notifié vérifie et atteste, à la demande d'une entité adjudicatrice ou de son mandataire établi dans la Communauté, qu'un sous-système de contrôle-commande:
et peut être mis en service. |
|
2. |
L'entité adjudicatrice (29) introduit une demande de vérification «CE» du sous-système (par la procédure de vérification à l'unité), auprès d'un organisme notifié de son choix. Cette demande doit comprendre:
|
|
3. |
La documentation technique doit permettre de comprendre la conception, la fabrication, l'installation et le fonctionnement du sous-système et d'évaluer la conformité aux exigences de la STI. La documentation technique doit contenir:
Si la STI exige que la documentation technique comporte d'autres informations, celles-ci doivent être incluses. |
|
4. |
L'organisme notifié doit examiner l'application et la documentation technique et identifier les éléments qui ont été conçus conformément aux dispositions applicables de la STI et aux spécifications européennes ainsi que les éléments dont la conception ne s'appuie pas sur les dispositions pertinentes de ces spécifications européennes. L'organisme notifié doit examiner le sous-système et effectuer les essais appropriés et nécessaires (ou être présent aux essais) pour établir, quand les spécifications européennes pertinentes ont été choisies, si elles sont effectivement appliquées ou si les solutions adoptées répondent aux exigences de la STI si les spécifications européennes n'ont pas été appliquées. Les examens, essais et contrôles couvrent les phases suivantes prévues dans la STI:
L'organisme notifié tient compte des bons résultats des contrôles ou des essais antérieurs conduits par d'autres organismes indépendants et compétents dans des conditions comparables (31). L'organisme notifié décide ensuite s'il doit utiliser les résultats de ces contrôles ou essais. En cas d'acceptation, l'organisme notifié étudie ensuite les preuves de ces contrôles ou essais antérieurs et établit la conformité de leurs résultats avec les exigences de la STI. Dans tous les cas, l'organisme notifié est responsable en dernier lieu. |
|
5. |
L'organisme notifié peut s'entendre avec l'entité adjudicatrice pour déterminer où les essais auront lieu et peut convenir que les essais finals du sous-système et, si prévu par la STI, les essais en vraie grandeur soient effectués par l'entité adjudicatrice sous la surveillance directe et en présence de l'organisme notifié. |
|
6. |
L'organisme notifié dispose d'un droit d'accès, à des fins d'essais et de vérification, aux bureaux d'étude, aux chantiers de construction, aux ateliers de fabrication, aux lieux de montage et d'installation et, le cas échéant, aux installations de préfabrication et d'essais pour l'accomplissement de sa mission conformément à la STI. |
|
7. |
Lorsque le sous-système satisfait aux exigences de la STI, l'organisme notifié, sur la base des essais, des vérifications et des contrôles effectués conformément à la STI et/ou aux spécifications européennes correspondantes, établit le certificat de conformité à l'intention de l'entité adjudicatrice qui, une fois en possession du certificat, établit la déclaration «CE» de vérification destinée à l'autorité de tutelle de l'État membre dans lequel le sous-système est situé et/ou fonctionne. La déclaration «CE» de vérification et les documents qui l'accompagnent doivent être datés et signés. La déclaration doit être rédigée dans la même langue que le dossier technique et comprendre au moins les informations figurant à l'annexe V de la directive. |
|
8. |
L'organisme notifié est responsable de la constitution du dossier technique devant accompagner la déclaration «CE» de vérification. Ce dossier technique doit contenir au moins les informations indiquées à l'article 18, paragraphe 3 de la directive, et en particulier:
|
|
9. |
Le dossier complet accompagnant le certificat de conformité est déposé auprès de l'entité adjudicatrice. L'entité adjudicatrice doit conserver une copie du dossier technique pendant toute la durée de vie du sous-système; le dossier doit être communiqué aux autres États membres qui en font la demande. |
(1) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE. Le guide d'application des STI grande vitesse explique la manière d'utiliser les spécifications européennes.
(2) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE. Le guide d'application des STI grande vitesse explique la manière d'utiliser les spécifications européennes.
(3) La diligence du fabricant peut être limitée dans des STI spécifiques.
(4) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE. Le guide d'application des STI grande vitesse explique la manière d'utiliser les spécifications européennes.
(5) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE. Le guide d'application des STI grande vitesse explique la manière d'utiliser les spécifications européennes.
(6) La présentation des résultats d'essais peut être faite en même temps que la demande ou ultérieurement.
(7) Les exigences essentielles sont reflétées dans les paramètres techniques, interfaces et exigences de performance énoncés au chapitre 4 de la STI.
(8) Le présent module pourrrait être utilisé dans le futur avec la mise à jour des STI grande vitesse de la directive 96/48/CE.
(9) Dans le module, «l'entité adjudicatrice» signifie «entité adjudicatrice du sous-système, comme défini dans la directive, ou son mandataire établi dans la Communauté».
(10) Les exigences spécifiques à cet égard pourront être définies dans une partie pertinente d'une STI.
(11) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE. Le guide d'application des STI grande vitesse explique la manière d'utiliser les spécifications européennes.
(12) Les exigences essentielles sont reflétées dans les paramètres techniques, interfaces et exigences de performance énoncés au chapitre 4 de la STI.
(13) Le présent module pourrrait être utilisé dans le futur avec la mise à jour des STI de la directive 96/48/CE grande vitesse.
(14) Dans le module, «l'entité adjudicatrice» signifie «l'entité adjudicatrice du sous-système, comme défini dans ladite directive ou son mandataire établi dans la Communauté».
(15) Concernant la STI «matériel roulant», l'organisme notifié pourra participer à l'essai final des trains automoteurs ou d'une en service dans les conditions spécifiées au chapitre pertinent de la STI.
(16) Les exigences essentielles sont refletées dans les paramètres techniques, interfaces et exigences de performance énoncés au chapitre 4 de la présente STI.
(17) Le présent module pourrrait être utilisé dans le futur lors de mises à jour des STI de la directive 96/48/CE à grande vitesse.
(18) Dans le module, «l'entité adjudicatrice» signifie «l'entité adjudicatrice du sous-système comme définie dans ladite directive ou son mandataire établi dans la Communauté».
(19) Les termes «maître d'œuvre» désignent les sociétés dont les activités contribuent à satisfaire les exigences essentielles de la STI. Il fait référence à l'entreprise qui peut être responsable du projet du sous-système dans son ensemble ou à d'autres entreprises, uniquement impliquées dans une partie du projet de sous-système (qui réalise, par exemple, le montage ou l'installation du sous-système).
(20) En particulier, pour la STI matériel roulant, l'organisme notifié participera à l'essai en service final du matériel roulant ou de la rame. Ceci sera indiqué dans le chapitre pertinent de la STI.
(21) Les exigences essentielles sont reflétées dans les paramètres techniques, interfaces et exigences de performance énoncés au chapitre 4 de la STI.
(22) Le présent module pourrrait être utilisé dans le futur avec la mise à jour des STI de la directive 96/48/CE pour le système ferroviaire à grande vitesse.
(23) Dans le module, «l'entité adjudicatrice» signifie «l'entité adjudicatrice du sous-système comme défini dans ladite directive ou son mandataire établi dans la Communauté».
(24) La présentation des résultats d'essais peut être faite en même temps que la demande ou ultérieurement.
(25) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE ainsi que dans les orientations relatives à l'application des STI grande vitesse.
(26) Concernant la STI «matériel roulant», l'organisme notifié pourra participer à l'essai final des locomotives ou d'une rame en service dans les conditions spécifiées au chapitre pertinent de la STI.
(27) Les exigences essentielles sont reflétées dans les paramètres techniques, interfaces et exigences de performance énoncés au chapitre 4 de la STI.
(28) Le présent module pourrrait être utilisé dans le futur avec la mise à jour des STI grande vitesse de la directive 96/48/CE.
(29) Dans le module, «l'entité adjudicatrice» signifie «l'entité adjudicatrice du sous-système comme définie dans ladite directive ou son mandataire établi dans la Communauté».
(30) La définition d'une spécification européenne est donnée dans les directives 96/48/CE et 2001/16/CE ainsi que dans les orientations relatives à l'application des STI grande vitesse.
(31) Les conditions du renvoi aux contrôles ou aux essais antérieurs sont similaires aux conditions, respectées par un organisme notifié en matière de sous-traitance (voir § 6.5 du guide bleu relatif à la nouvelle approche); en particulier, l'organisme notifié ne peut tenir compte de ces preuves appropriées qu'à la condition que les organimes en question répondent aux mêmes critères d'indépendance et de compétence que ceux qui s'appliquent aux organismes notifiés.
ANNEXE F
PROCÉDURE D'ÉVALUATION DE LA CONFORMITÉ
Dispositions pour l'évaluation de la maintenance
|
1. |
La présente procédure d'évaluation de la conformité décrit la partie de la procédure par laquelle un organisme autorisé par l'État membre vérifie et atteste que les mesures de maintenance représentatives de la maintenance considérée satisfont les dispositions de la STI pertinente et assurent le respect des paramètres fondamentaux et les exigences essentielles pendant la durée de vie du sous-système. |
|
2. |
La demande pour l'évaluation des mesures de maintenance doit être introduite par l'entité adjudicatrice (ou son mandataire établi dans la Communauté) qui propose les mesures de maintenance, auprès de l'organisme autorisé par l'État membre. Cette demande doit comprendre:
La copie de la documentation des mesures de maintenance soumise doit être la version finale approuvée par le demandeur. L'organisme autorisé par l'État membre peut demander d'autres copies qui seraient nécessaires pour effectuer l'évaluation. |
|
3. |
La documentation des mesures de maintenance contient au moins les éléments suivants:
|
|
4. |
La documentation technique permet l'évaluation de la conformité des mesures de maintenance aux spécifications de la STI. Elle devra couvrir, dans la mesure nécessaire à cette évaluation, les différentes phases du développement des mesures de maintenance. La documentation technique qui justifie les mesures de maintenance comprend:
|
|
5. |
L'organisme autorisé par l'État membre:
|
|
6. |
Lorsque les mesures de maintenance sont conformes à la STI, l'organisme autorisé par l'État membre doit délivrer un rapport d'examen des mesures de maintenance au demandeur. Le rapport comporte le nom et l'adresse de l'entité adjudicatrice, les conclusions du contrôle, les conditions de sa validité, la référence au sous-système soumis à la maintenance et les données nécessaires à l'identification des mesures de maintenance. Les parties pertinentes de la documentation technique, y compris la description des mesures de maintenance et de leurs conditions de mise en œuvre, doivent être ajoutées au rapport, et une copie doit être conservée par l'organisme autorisé par l'État membre. S'il refuse de délivrer un rapport d'examen des mesures de maintenance à l'entité adjudicatrice, l'organisme autorisé par l'État membre motive d'une façon détaillée ce refus. Une procédure de recours doit être prévue. |
(1) À cet effet, il est nécessaire que les mesures de maintenance définissent, par exemple:
|
— |
les procédures et les instructions pour la mise en œuvre, |
|
— |
les besoins en termes de formation ou de qualification, |
|
— |
les contrôles, la validation, la surveillance, les inspections, les essais, les dossiers et les critères d'acceptation du sous-système lorsque les différentes phases des opérations de maintenance doivent être exécutées, |
|
— |
les conditions d'utilisation des outils spécifiques ou utilitaires permettant les opérations ou essais de maintenance. |
ANNEXE G
POINTS OUVERTS
PRIORITÉ D'UN POINT OUVERT
Deux priorités sont à distinguer:
Priorité 1 (P1): la plus urgente
Priorité 2 (P2): la moins urgente
Interfaces
Point 4.3
Fonctionnalité des passages à niveau (P1)
Interfaces avec la STI «exploitation et gestion du trafic»
Interfaces avec la STI «matériel roulant — engins de traction et voitures» (P1)
Annexe A
|
Index 1 |
FRS (relative aux passages à niveau) (P1 liée à LX) |
|
Index 16 |
La FFFIS relative à Euroloop est actuellement disponible en tant qu'avant-projet (UNISIG SUBSET-044 version 2.1.0) en raison du déplacement de la bande de fréquence. Elle prendra un caractère juridiquement contraignant lorsque des solutions auront été apportées aux questions ouvertes (notamment concernant l'allocation des fréquences, la compatibilité avec les systèmes existants, les essais de mélange) et qu'une version finale aura été produite. Toutes les parties concernées contribuent aux travaux afin d'obtenir une version finale d'ici à la mi-2005. |
|
Index 24 |
Clarifications et spécification modifiée, pour l'éveil (P1) |
|
Index B32 |
Orientations relatives aux références (P1) |
|
Index 36 |
Spécification d'essai STM (P1) |
|
Index 28 |
Exigences de fiabilité — disponibilité (P1) |
|
Index 41 |
Spécification d'essai JRU (P1) en relation avec l'index 55 |
|
Index 42 |
Exigences pour la vigilance (P2) |
|
Index 44 |
FIS odométrie (P2) |
|
Index 45 |
Interface K (P1) |
|
Index 47 |
Exigences relatives à l'analyse des risques et des dangers pour l'interopérabilité (P1) |
|
Index 48 |
Spécification d'essai pour l'équipement mobile GSM-R (P1) |
|
Index 50 |
Spécification d'essai pour EUROLOOP (P1) |
|
Index 51 |
Aspects ergonomiques de la DMI (P1) |
|
Index 53 |
Valeurs ETCS des variables sous le contrôle de l'UIC (P1) |
|
Index 54 |
Exigences de qualité de service aux utilisateurs (à titre provisoire) (P1) |
|
Index 55 |
Exigences de référence de l'enregistreur juridique (P1 pour la totalité) |
|
Index 57 |
Exigences relatives au pré-équipement des équipements ERTMS à bord (P1) |
|
Index 58 |
Interface RBC — RBC (P1) |
|
Index 59 |
Exigences relatives au pré-équipement des équipements ERTMS au sol (P1) |
|
Index 60 |
Gestion des versions de l'ETCS (P1) |
|
Index 61 |
Gestion des versions du GSM-R (P1) |
GSM-R
Interconnexion et itinérance entre réseaux GSM-R (P1)
Interpénétration aux frontières (P1)
Définition des règles opérationnelles pour le GSM-R (P1)
GPRS et ASCI (P2)
Gestion des versions du GSM-R (gestion du contrôle des changements) (P1)
Annexe A — Appendice 1 (P1)
|
2.1.5. |
Relation entre la distance entre essieux et le diamètre des roues |
|
3.2.1. |
Espace exempt de métal autour des routes |
|
3.3.1. |
Masse métallique d'un véhicule |
|
3.5.5. |
Exigences supplémentaires applicables aux locomotives et aux éléments automoteurs |
|
4.1. |
Utilisation des équipements de sablage |
|
4.2.1. |
Utilisation de semelles de freins en matériau composite |
|
5.1.1. |
Interférences électromagnétiques (courant de traction) |
|
5.3.1. |
Interférences électromagnétiques (champs électriques, magnétiques, électromagnétiques) |
Annexe A — Appendice 2 (P1)
DBC
Annexe B, partie 4
Points ouverts concernant le CCM ETCS classe 1
Spécification de certaines des variables de l'ETCS (P1)
Interfaces supplémentaires
Fonctionnalité et interfaces des systèmes de protection du personnel avec le système de signalisation (P2)
Interface avec le freinage de service. Cet aspect devra être étudié pendant l'élaboration de la STI pour le matériel roulant.
ANNEXE H
SYNTHÈSE DES CORRIDORS DE L'ETCS-NET
Tronçons du réseau ferroviaire conventionnel de l'ETCS-Net énumérés à l'annexe II de la décision no 884/2004/CE (1)
Axe ferroviaire Berlin-Verona/Milano-Bologna-Napoli-Messina-Palermo
|
— |
Halle/Leipzig-Nürnberg |
|
— |
Nürnberg-München |
|
— |
München-Kufstein |
|
— |
Kufstein-Innsbruck |
|
— |
Tunnel du Brenner, tronçon transfrontalier |
|
— |
Verona-Napoli |
|
— |
Milano-Bologna |
Ligne de la Betuwe
Axe ferroviaire Lyon-Trieste-Divaèa/Koper-Divaèa-Ljubljana-Budapest-frontière ukrainienne
|
— |
Lyon-St-Jean-de-Maurienne |
|
— |
Tunnel du Mont-Cenis, tronçon transfrontalier |
|
— |
Bussoleno-Torino |
|
— |
Torino-Venezia |
|
— |
Venezia-Ronchi Sud-Trieste-Divaèa |
|
— |
Koper-Divaèa-Ljubljana |
|
— |
Ljubljana-Budapest |
Axe multimodal Portugal/Espagne-reste de l'Europe
|
— |
La Coruña–Porto |
|
— |
Porto-Valladolid |
Axe ferroviaire/routier triangulaire nordique
|
— |
Projets ferroviaires en Suède comprenant Stockholm-Malmö, Stockholm-Charlottenberg (frontière norvégienne) et Kornsjö (frontière norvégienne)-Göteborg-Malmö. |
|
— |
Kerava-Lahti |
|
— |
Helsinki-Vainikkala (frontière avec la Russie) |
Axe ferroviaire de fret Sines-Madrid-Paris
|
— |
Nouvel axe ferroviaire à grande capacité transpyrénéen; |
|
— |
Sines-Badajoz |
|
— |
Algeciras-Bobadilla |
Axe ferroviaire Paris-Strasbourg-Stuttgart-Wien-Bratislava
|
— |
Baudrecourt-Strasbourg-Stuttgart avec le pont de Kehl comme tronçon transfrontalier |
|
— |
Stuttgart-Ulm |
|
— |
München-Salzburg, tronçon transfrontalier |
|
— |
Salzburg-Wien |
|
— |
Wien-Bratislava, tronçon transfrontalier |
Axe ferroviaire Femer Baelt
|
— |
Liaison fixe rail/route du Femer Baelt |
|
— |
Chemin de fer d'accès au Danemark à partir de l'Öresund |
|
— |
Chemin de fer d'accès en Allemagne à partir de Hamburg |
|
— |
Chemin de fer Hannover-Hamburg/Bremen |
Axe ferroviaire Athina-Sofia-Budapest-Wien-Praha-Nürnberg/Dresden
|
— |
Chemin de fer frontière Grèce/Bulgarie-Kulata-Sofia-Vidin/Calafat |
|
— |
Curtici-Brasov (vers Bucuresti et Constanta) |
|
— |
Budapest-Wien, tronçon transfrontalier |
|
— |
Bøeclav-Praha-Nürnberg, avec Nürnberg-Praha comme tronçon transfrontalier |
|
— |
Axe ferroviaire Praha-Linz |
Axe ferroviaire Gdansk-Warszawa-Brno/Bratislava-Wien
|
— |
Chemin de fer Gdansk-Warszawa-Katowice |
|
— |
Chemin de fer Katowice-Bøeclav |
|
— |
Chemin de fer Katowice-Zilina-Nove Mesto n.V. |
Axe ferroviaire Lyon/Genova-Basel-Duisburg-Rotterdam/Antwerpen
|
— |
Lyon-Mulhouse-Mülheim (2), avec Mulhouse-Mülheim comme tronçon transfrontalier |
|
— |
Genève-Milano/Novara-frontière suisse |
|
— |
Basel-Karlsruhe |
|
— |
Frankfurt (ou Mainz)-Mannheim |
|
— |
Duisburg-Emmerich |
|
— |
«Rhin de fer» Rheidt-Antwerpen, tronçon transfrontalier |
Axe ferroviaire/routier Irlande/Royaume-Uni/Europe continentale
|
— |
Felixstowe-Nuneaton |
|
— |
Crewe-Holyhead |
«Rail Baltica» axe Warsaw-Kaunas-Riga-Tallinn-Helsinki
|
— |
Warsaw-Kaunas — Vilnius |
|
— |
Kaunas-Riga |
|
— |
Riga-Tallinn |
«Eurocaprail» sur l'axe ferroviaire Bruxelles-Luxembourg-Strasbourg
|
— |
Bruxelles-Luxembourg-Strasbourg (2012). |
Tronçons du réseau ferroviaire conventionnel de l'ETCS-Net non couverts par l'annexe II de la décision no 884/2004/CE. Section I (3)
Corridor II du RTE — E20 dans l'axe Berlin-Warsaw, Pologne
Corridor III du RTE– E30 entre la frontière occidentale (Zgorzelec) et Cracow, Pologne
Ligne à double voie CE-59 du TINA/AGTC — trafic nord-sud à partir de la Scandinavie jusqu'aux Balkans, Pologne.
Budapest — Bukuresti — Constanta (partie du corridor paneuropéen IV).
Ljubljana — Zagreb/Belgrade/Bar/Skoppie — Thessaloniki (partie du corridor paneuropéen X).
Tronçons du réseau ferroviaire conventionnel de l'ETCS-Net non couverts par l'annexe II de la décision no 884/2004/CE. Section II
Antwerp-Athus/Bettembourg-Basel-Milano
Hallsberg/Mjölby, Suède
ETCS sur le raccordement avec le Danemark à partir de l'Öresund via la liaison Storebelt
Aachen — Horka/Frankfurt (O), Allemagne
Allemagne
|
— |
Kehl-Salzburg |
|
— |
Flensburg — Kufstein |
|
— |
Emmerich — Basel dont certaines parties via l'Allemagne |
|
— |
Hamburg — Bad Schandau |
|
— |
Darmstart — Passau |
France
|
— |
Metz — Dijon — Lyon — Avignon — Perpignan (frontière avec l'Espagne) |
|
— |
Le Havre — Rouen — Amiens — Arras |
|
— |
Paris — Tours — Bordeaux — Dax |
|
— |
Paris — Reims — Metz (TGV EST) |
|
— |
Paris — Mâcon — Lyon (TGV Sud-Est) |
|
— |
Calais — Metz |
Stockholm-Nyland-Umea
Tronçons des axes ferroviaires à grande vitesse de l'ETCS-Net (4)
Axe ferroviaire à grande vitesse Paris-Bruxelles/Brussel-Köln-Amsterdam-London
|
— |
Tunnel sous la Manche-London |
|
— |
Bruxelles/Brussel-Liège-Köln |
|
— |
Bruxelles/Brussel-Rotterdam-Amsterdam |
Axe ferroviaire à grande vitesse du Sud-Ouest de l'Europe
|
— |
Lisboa/Porto-Madrid |
|
— |
Madrid-Barcelona |
|
— |
Cordoba — Sevilla |
|
— |
Barcelona-Figueras-Perpignan |
|
— |
Perpignan-Montpellier |
|
— |
Montpellier-Nîmes |
|
— |
Madrid-Vitoria-Irún/Hendaye |
|
— |
Irún/Hendaye-Dax, tronçon transfrontalier |
|
— |
Dax-Bordeaux |
|
— |
Bordeaux-Tours |
Axe ferroviaire à grande vitesse Est
|
— |
Paris-Baudrecourt |
|
— |
Metz-Luxembourg |
|
— |
Saarbrücken-Mannheim |
West Coast Main Line (Londres-Glasgow)
Interopérabilité des lignes ferroviaires à grande vitesse dans la péninsule ibérique
|
— |
Madrid-Andalucía |
|
— |
North-East |
|
— |
Madrid-Levante et Mediterranean |
|
— |
Corridor nord/nord-ouest, y compris Vigo-Porto |
|
— |
Extremadura |
(1) La mise en œuvre de l'ERTMS/ETCS sur les tronçons du réseau ferroviaire à grande vitesse des projets énumérés sur cette liste est couverte par la décision 2002/731/CE.
(2) Comprenant le TGV Rhin-Rhône, sans la branche Ouest.
(3) Projets situés en tout ou en partie dans les États membres où le règlement (CE) no 1260/1999 et le règlement (CE) 1264/1999 du Conseil (Fonds de cohésion) s'appliquent.
(4) Mise en œuvre couverte par la décision 2002/731/CE.