ISSN 1977-0685
Diario Oficial
de la Unión Europea
L 349

Edición en lengua española
Legislación
60.° año
29 de diciembre de 2017
|
ISSN 1977-0685 |
||
|
Diario Oficial de la Unión Europea |
L 349 |
|
|
|
||
|
Edición en lengua española |
Legislación |
60.° año |
|
|
|
|
|
(1) Texto pertinente a efectos del EEE. |
|
ES |
Los actos cuyos títulos van impresos en caracteres finos son actos de gestión corriente, adoptados en el marco de la política agraria, y que tienen generalmente un período de validez limitado. Los actos cuyos títulos van impresos en caracteres gruesos y precedidos de un asterisco son todos los demás actos. |
II Actos no legislativos
REGLAMENTOS
|
29.12.2017 |
ES |
Diario Oficial de la Unión Europea |
L 349/1 |
REGLAMENTO (UE) 2017/2400 DE LA COMISIÓN
de 12 de diciembre de 2017
por el que se desarrolla el Reglamento (CE) n.o 595/2009 del Parlamento Europeo y del Consejo en lo relativo a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos pesados, y por el que se modifican la Directiva 2007/46/CE del Parlamento Europeo y del Consejo y el Reglamento (UE) n.o 582/2011 de la Comisión
(Texto pertinente a efectos del EEE)
LA COMISIÓN EUROPEA,
Visto el Tratado de Funcionamiento de la Unión Europea,
Visto el Reglamento (CE) n.o 595/2009 del Parlamento Europeo y del Consejo, de 18 de junio de 2009, relativo a la homologación de los vehículos de motor y los motores en lo concerniente a las emisiones de los vehículos pesados (Euro VI) y al acceso a la información sobre reparación y mantenimiento de vehículos y por el que se modifican el Reglamento (CE) n.o 715/2007 y la Directiva 2007/46/CE y se derogan las Directivas 80/1269/CEE, 2005/55/CE y 2005/78/CE (1), y en particular su artículo 4, apartado 3, y su artículo 5, apartado 4, letra e),
Vista la Directiva 2007/46/CE del Parlamento Europeo y del Consejo, de 5 de septiembre de 2007, por la que se crea un marco para la homologación de los vehículos de motor y de los remolques, sistemas, componentes y unidades técnicas independientes destinados a dichos vehículos (Directiva marco) (2), y en particular su artículo 39, apartado 7,
Considerando lo siguiente:
|
(1) |
El Reglamento (CE) n.o 595/2009 es uno de los actos reglamentarios particulares del procedimiento de homologación de tipo establecido por la Directiva 2007/46/CE. En él se otorgan a la Comisión poderes para adoptar medidas relativas a las emisiones de CO2 y al consumo de combustible de los vehículos pesados. El presente Reglamento tiene como finalidad establecer medidas para la obtención de información exacta sobre las emisiones de CO2 y el consumo de combustible de los vehículos pesados nuevos introducidos en el mercado de la Unión. |
|
(2) |
La Directiva 2007/46/CE contiene los requisitos necesarios a efectos de la homologación de tipo de un vehículo entero. |
|
(3) |
El Reglamento (UE) n.o 582/2011 de la Comisión (3) presenta los requisitos para la homologación de vehículos pesados en lo concerniente a las emisiones y al acceso a la información sobre la reparación y el mantenimiento de los vehículos. Las medidas para la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos pesados nuevos deben formar parte del sistema de homologación de tipo instituido por dicho Reglamento. A fin de obtener las homologaciones mencionadas anteriormente, debe exigirse una licencia para realizar simulaciones encaminadas a determinar las emisiones de CO2 y el consumo de combustible de un vehículo. |
|
(4) |
Las emisiones procedentes de camiones, autobuses y autocares, que son las categorías más representativas de vehículos pesados, representan actualmente en torno al 25 % de las emisiones de CO2 del transporte por carretera, y se espera que sigan aumentando en el futuro. Para alcanzar el objetivo de reducir en un 60 % las emisiones de CO2 procedentes del transporte de aquí a 2050, es preciso introducir medidas eficaces que pongan freno a las emisiones procedentes de los vehículos pesados. |
|
(5) |
Hasta ahora, la legislación de la Unión no ha establecido ningún método común para medir las emisiones de CO2 y el consumo de combustible de los vehículos pesados, lo que ha hecho imposible comparar objetivamente el rendimiento de los vehículos o establecer medidas, ya sea a nivel de la Unión o nacional, que fomenten la introducción de vehículos más eficientes desde el punto de vista energético. En consecuencia, no ha habido en el mercado transparencia alguna en cuanto a la eficiencia energética de los vehículos pesados. |
|
(6) |
El sector de los vehículos pesados está muy diversificado y presenta un número significativo de tipos y modelos diferentes de vehículos, así como un alto grado de personalización. La Comisión ha analizado en profundidad las opciones disponibles para medir las emisiones de CO2 y el consumo de combustible de esos vehículos y ha llegado a la conclusión de que, para obtener datos únicos al menor coste con respecto a cada vehículo fabricado, las emisiones de CO2 y el consumo de combustible de los vehículos pesados deben determinarse mediante software de simulación. |
|
(7) |
Para plasmar la diversidad del sector, los vehículos pesados deben dividirse en grupos de vehículos con una configuración de ejes, una configuración de chasis y una masa máxima en carga técnicamente admisible similares. Esos parámetros definen la finalidad de un vehículo y deben, pues, determinar el conjunto de ciclos de ensayo utilizado a efectos de simulación. |
|
(8) |
Puesto que no existe en el mercado ningún software que cumpla los requisitos necesarios para evaluar las emisiones de CO2 y el consumo de combustible de los vehículos pesados, la Comisión debe desarrollar un software específico a esos efectos. |
|
(9) |
Dicho software debe estar a disposición del público y ser de fuente abierta, descargable y ejecutable. Debe incluir una herramienta de simulación para el cálculo de las emisiones de CO2 y el consumo de combustible de vehículos pesados concretos. La herramienta debe concebirse de modo que utilice como datos de entrada aquellos que reflejen las características de los componentes, las unidades técnicas independientes y los sistemas que tienen un impacto significativo en las emisiones de CO2 y el consumo de combustible de los vehículos pesados: motor, caja de cambios y componentes adicionales de la línea de transmisión, ejes, neumáticos, aerodinámica y accesorios. El software debe incluir también herramientas de preprocesamiento para la verificación y el preprocesamiento de los datos de entrada de la herramienta de simulación relativos al motor y a la resistencia aerodinámica del vehículo, así como una herramienta de hashing para la encriptación de los archivos de entrada y salida de la herramienta de simulación. |
|
(10) |
Para hacer posible una evaluación realista, la herramienta de simulación debe estar provista de una serie de funcionalidades que permitan la simulación de vehículos con diferentes cargas útiles y combustibles a lo largo de ciclos de ensayo específicos asignados a un vehículo en función de su aplicación. |
|
(11) |
Reconociendo que es importante el funcionamiento adecuado del software para poder determinar correctamente las emisiones de CO2 y el consumo de combustible de los vehículos, así como mantenerse al día del progreso tecnológico, la Comisión debe encargarse del mantenimiento del software y de su actualización cada vez que sea necesario. |
|
(12) |
Las simulaciones deben realizarlas los fabricantes de los vehículos antes de la matriculación, la venta o la puesta en servicio de un vehículo nuevo en la Unión. Asimismo, deben establecerse disposiciones para autorizar los procesos de los fabricantes de los vehículos destinados al cálculo de las emisiones de CO2 y el consumo de combustible de los vehículos. Los procesos de manipulación y aplicación de los datos por parte de los fabricantes de los vehículos para el cálculo de las emisiones de CO2 y el consumo de combustible de los vehículos por medio de la herramienta de simulación deben ser sometidos a evaluación y a un estrecho seguimiento por las autoridades de homologación, al objeto de garantizar que las simulaciones se realicen correctamente. Por consiguiente, deben establecerse disposiciones que exijan a los fabricantes de los vehículos obtener una licencia para utilizar la herramienta de simulación. |
|
(13) |
Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas que tienen un impacto significativo en las emisiones de CO2 y el consumo de combustible de los vehículos pesados deben utilizarse como datos de entrada de la herramienta de simulación. |
|
(14) |
Para reflejar las especificidades de los componentes, las unidades técnicas independientes y los sistemas concretos y permitir una determinación más precisa de sus propiedades relacionadas con las emisiones de CO2 y el consumo de combustible, deben establecerse disposiciones para la certificación de esas propiedades sobre la base de ensayos. |
|
(15) |
A fin de limitar los costes de la certificación, los fabricantes deben tener la posibilidad de agrupar en familias los componentes, las unidades técnicas independientes y los sistemas que tengan un diseño similar y similares características en cuanto a emisiones de CO2 y consumo de combustible. Dentro de cada familia debe someterse a ensayo el componente, la unidad técnica independiente o el sistema con las características menos favorables en cuanto a emisiones de CO2 y consumo de combustible, y sus resultados deben ser aplicables a toda la familia. |
|
(16) |
Los costes relacionados con los ensayos pueden constituir un obstáculo significativo especialmente para las empresas que fabrican componentes, unidades técnicas independientes o sistemas en pequeñas cantidades. Para ofrecer una alternativa económicamente viable a la certificación, deben establecerse valores normalizados para determinados componentes, unidades técnicas independientes y sistemas, con la posibilidad de utilizar dichos valores en lugar de los valores certificados determinados sobre la base de ensayos. No obstante, los valores normalizados deben establecerse de manera que animen a los proveedores de componentes, unidades técnicas independientes y sistemas a solicitar la certificación. |
|
(17) |
A fin de garantizar que los resultados relativos a las emisiones de CO2 y al consumo de combustible declarados por los proveedores de componentes, unidades técnicas independientes y sistemas y por los fabricantes de vehículos sean correctos, deben establecerse disposiciones para verificar y garantizar la utilización conforme de la herramienta de simulación y la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas pertinentes. |
|
(18) |
Al objeto de dar un tiempo de preparación suficiente a las autoridades nacionales y a la industria, la obligación de determinar y declarar las emisiones de CO2 y el consumo de combustible de los vehículos nuevos debe implementarse de forma gradual para diferentes grupos de vehículos, empezando por aquellos que más contribuyen a las emisiones de CO2 del sector de los vehículos pesados. |
|
(19) |
Las disposiciones contenidas en el presente Reglamento forman parte del marco establecido por la Directiva 2007/46/CE y complementan las disposiciones para la homologación de tipo con respecto a las emisiones y la información sobre la reparación y el mantenimiento de los vehículos establecidas en el Reglamento (UE) n.o 582/2011. Para establecer una relación clara entre esas disposiciones y el presente Reglamento, procede modificar en consecuencia la Directiva 2007/46/CE y el Reglamento (UE) n.o 582/2011. |
|
(20) |
Las medidas previstas en el presente Reglamento se ajustan al dictamen del Comité Técnico sobre Vehículos de Motor. |
HA ADOPTADO EL PRESENTE REGLAMENTO:
CAPÍTULO 1
DISPOSICIONES GENERALES
Artículo 1
Objeto
El presente Reglamento complementa el marco jurídico para la homologación de tipo de los vehículos de motor y de los motores con respecto a las emisiones y a la información sobre la reparación y el mantenimiento de los vehículos establecido por el Reglamento (UE) n.o 582/2011, fijando las normas para la expedición de licencias que permitan utilizar una herramienta de simulación con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos nuevos que vayan a venderse, matricularse o ponerse en servicio en la Unión, así como para la utilización de dicha herramienta de simulación y la declaración de los valores de emisiones de CO2 y consumo de combustible así determinados.
Artículo 2
Ámbito de aplicación
1. Sin perjuicio de lo dispuesto en el artículo 4, párrafo segundo, el presente Reglamento será de aplicación para los vehículos de la categoría N2, según se define en el anexo II de la Directiva 2007/46/CE, con una masa máxima en carga técnicamente admisible superior a 7 500 kg, y para todos los vehículos de la categoría N3, según se define en dicho anexo.
2. En el caso de homologaciones de tipo multifásicas de los vehículos mencionados en el apartado 1, el presente Reglamento será de aplicación únicamente para los vehículos básicos dotados como mínimo de chasis, motor, transmisión, ejes y neumáticos.
3. El presente Reglamento no será de aplicación para los vehículos todoterreno, los vehículos especiales y los vehículos especiales todoterreno según se definen, respectivamente, en los puntos 2.1, 2.2 y 2.3 de la parte A del anexo II de la Directiva 2007/46/CE.
Artículo 3
Definiciones
A los efectos del presente Reglamento, se entenderá por:
1) «propiedades relacionadas con las emisiones de CO2 y el consumo de combustible»: propiedades específicas calculadas de un componente, una unidad técnica independiente o un sistema que determinan el impacto de la pieza en las emisiones de CO2 y el consumo de combustible de un vehículo;
2) «datos de entrada»: información sobre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un componente, una unidad técnica independiente o un sistema, que es utilizada por la herramienta de simulación para determinar las emisiones de CO2 y el consumo de combustible de un vehículo;
3) «información de entrada»: información relativa a las características de un vehículo, que es utilizada por la herramienta de simulación para determinar las emisiones de CO2 y el consumo de combustible del vehículo y que no forma parte de los datos de entrada;
4) «fabricante»: persona u organismo que es responsable ante la autoridad de homologación de todos los aspectos del proceso de certificación y de garantizar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas; no es esencial que la persona o el organismo participen directamente en todas las fases de fabricación del componente, la unidad técnica independiente o el sistema objeto de certificación;
5) «entidad autorizada»: autoridad nacional autorizada por un Estado miembro para pedir información pertinente a los fabricantes y a los fabricantes de vehículos sobre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un componente concreto, una unidad técnica independiente concreta o un sistema concreto y sobre las emisiones de CO2 y el consumo de combustible de vehículos nuevos, respectivamente;
6) «transmisión»: dispositivo compuesto de al menos dos marchas variables, que cambian el par y la velocidad con relaciones definidas;
7) «convertidor de par»: componente hidrodinámico de arranque en forma de componente independiente de la línea de transmisión o de la transmisión, con flujo de potencia en serie, que adapta la velocidad entre el motor y la rueda y ejerce la multiplicación del par;
8) «otro componente de transferencia de par» u «OTTC»: componente giratorio unido a la línea de transmisión que produce pérdidas de par en función de su propia velocidad de giro;
9) «componente adicional de la línea de transmisión» o «ADC»: componente giratorio de la línea de transmisión que transfiere o distribuye potencia a otros componentes de la línea de transmisión y produce pérdidas de par en función de su propia velocidad de giro;
10) «eje»: árbol central de una rueda o una rueda dentada giratorias, como eje motor de un vehículo;
11) «resistencia aerodinámica»: característica de la configuración de un vehículo relacionada con la fuerza aerodinámica que actúa sobre este en sentido contrario al del flujo de aire, y determinada multiplicando el coeficiente de resistencia y la sección transversal correspondientes a unas condiciones de viento cruzado nulo;
12) «accesorios»: componentes del vehículo, a saber, el ventilador del motor, el sistema de dirección, el sistema eléctrico, el sistema neumático y el sistema de aire acondicionado, cuyas propiedades relacionadas con las emisiones de CO2 y el consumo de combustible se definen en el anexo IX;
13) «familia de componentes», «familia de unidades técnicas independientes» o «familia de sistemas»: agrupamiento realizado por el fabricante de componentes, unidades técnicas independientes o sistemas, respectivamente, que, por su diseño, poseen propiedades relacionadas con las emisiones de CO2 y el consumo de combustible similares;
14) «componente de origen», «unidad técnica independiente de origen» o «sistema de origen»: componente, unidad técnica independiente o sistema, respectivamente, seleccionados entre una familia de componentes, unidades técnicas independientes o sistemas, respectivamente, de manera que sus propiedades relacionadas con las emisiones de CO2 y el consumo de combustible representen el caso más desfavorable de dicha familia de componentes, unidades técnicas independientes o sistemas.
Artículo 4
Grupos de vehículos
A los efectos del presente Reglamento, los vehículos de motor se clasificarán en grupos de vehículos conforme al cuadro 1 del anexo I.
Los artículos 5 a 22 no son de aplicación para los vehículos de motor de los grupos de vehículos 0, 6, 7, 8, 13, 14, 15 y 17.
Artículo 5
Herramientas electrónicas
1. La Comisión proporcionará gratuitamente las siguientes herramientas electrónicas en forma de software descargable y ejecutable:
|
a) |
una herramienta de simulación; |
|
b) |
herramientas de preprocesamiento; |
|
c) |
una herramienta de hashing. |
La Comisión se ocupará del mantenimiento de las herramientas electrónicas y realizará en ellas las modificaciones y actualizaciones necesarias.
2. La Comisión dará acceso a las herramientas electrónicas mencionadas en el apartado 1 a través de una plataforma específica de distribución electrónica de acceso público.
3. La herramienta de simulación se utilizará para determinar las emisiones de CO2 y el consumo de combustible de los vehículos nuevos. Deberá diseñarse de modo que funcione basándose en la información de entrada especificada en el anexo III y en los datos de entrada mencionados en el artículo 12, apartado 1.
4. Las herramientas de preprocesamiento se utilizarán para verificar y recopilar los resultados de los ensayos y para realizar cálculos adicionales relativos a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de determinados componentes, unidades técnicas independientes o sistemas y convertirlos en un formato utilizado por la herramienta de simulación. El fabricante deberá utilizar las herramientas de preprocesamiento tras realizar los ensayos a los que se refieren el punto 4 del anexo V, en el caso de los motores, y el punto 3 del anexo VIII, en el caso de la resistencia aerodinámica.
5. La herramienta de hashing se utilizará para establecer una asociación inequívoca entre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas de un componente, una unidad técnica independiente o un sistema y su respectivo documento de certificación, así como una asociación inequívoca entre un vehículo y el correspondiente archivo de registros de su fabricante según el punto 1 del anexo IV.
CAPÍTULO 2
LICENCIA PARA UTILIZAR LA HERRAMIENTA DE SIMULACIÓN A EFECTOS DE HOMOLOGACIÓN DE TIPO CON RESPECTO A LAS EMISIONES Y A LA INFORMACIÓN SOBRE LA REPARACIÓN Y EL MANTENIMIENTO DE LOS VEHÍCULOS
Artículo 6
Solicitud de la licencia para utilizar la herramienta de simulación con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de vehículos nuevos
1. El fabricante de vehículos deberá presentar a la autoridad de homologación una solicitud de licencia para utilizar la herramienta de simulación a la que se refiere el artículo 5, apartado 3, con vistas a la determinación de las emisiones de CO2 y el consumo de combustible de vehículos nuevos pertenecientes a uno o más grupos de vehículos («licencia»).
2. La solicitud de licencia se hará en forma de ficha de características elaborada siguiendo el modelo del apéndice 1 del anexo II.
3. La solicitud de licencia deberá ir acompañada de una descripción adecuada de los procesos establecidos por el fabricante para determinar las emisiones de CO2 y el consumo de combustible con respecto a todos los grupos de vehículos de que se trate, conforme al punto 1 del anexo II.
Deberá asimismo ir acompañada del informe de evaluación redactado por la autoridad de homologación tras realizar una evaluación de conformidad con el punto 2 del anexo II.
4. El fabricante de vehículos deberá presentar a la autoridad de homologación la solicitud de licencia elaborada de acuerdo con los apartados 2 y 3, a más tardar, juntamente con la solicitud de homologación de tipo CE de un vehículo con un sistema de motor homologado con respecto a las emisiones y al acceso a la información sobre la reparación y el mantenimiento de los vehículos con arreglo al artículo 7 del Reglamento (UE) n.o 582/2011, o con la solicitud de homologación de tipo CE de un vehículo con respecto a las emisiones y al acceso a la información sobre la reparación y el mantenimiento de los vehículos con arreglo al artículo 9 de dicho Reglamento. La solicitud de licencia debe referirse al grupo de vehículos en el que se incluya el tipo de vehículo al que se refiere la solicitud de homologación de tipo CE.
Artículo 7
Disposiciones administrativas para la concesión de la licencia
1. La autoridad de homologación concederá la licencia si el fabricante presenta una solicitud de acuerdo con el artículo 6 y demuestra que se cumplen los requisitos establecidos en el anexo II con respecto a los grupos de vehículos de que se trate.
Si los requisitos establecidos en el anexo II solo se cumplen con respecto a algunos de los grupos de vehículos especificados en la solicitud de licencia, esta solo se concederá con respecto a esos grupos de vehículos.
2. La licencia se expedirá de conformidad con el modelo del apéndice 2 del anexo II.
Artículo 8
Cambios ulteriores en los procesos establecidos para determinar las emisiones de CO2 y el consumo de combustible de los vehículos
1. La licencia se extenderá a grupos de vehículos distintos de aquellos a los que se concedió, de acuerdo con el artículo 7, apartado 1, si el fabricante de vehículos demuestra que los procesos por él establecidos para determinar las emisiones de CO2 y el consumo de combustible de los grupos de vehículos cubiertos por la licencia cumplen plenamente los requisitos del anexo II también con respecto a esos otros grupos de vehículos.
2. El fabricante de vehículos deberá solicitar la extensión de la licencia de conformidad con el artículo 6, apartados 1, 2 y 3.
3. Una vez obtenida la licencia, el fabricante de vehículos deberá notificar sin demora a la autoridad de homologación todo cambio que se introduzca en los procesos por él establecidos para determinar las emisiones de CO2 y el consumo de combustible de los grupos de vehículos cubiertos por la licencia que pueda afectar a la exactitud, la fiabilidad y la estabilidad de esos procesos.
4. Tras recibir la notificación a la que se refiere el apartado 3, la autoridad de homologación informará al fabricante de vehículos acerca de si los procesos afectados por los cambios siguen estando cubiertos por la licencia concedida, de si debe extenderse la licencia de acuerdo con los apartados 1 y 2, o de si debe solicitarse una licencia nueva de conformidad con el artículo 6.
5. Si los cambios no están cubiertos por la licencia, el fabricante deberá solicitar, en el plazo de un mes tras la recepción de la información mencionada en el apartado 4, una extensión de la licencia o una licencia nueva. Si el fabricante no solicita una extensión de la licencia o una licencia nueva en ese plazo, o si se rechaza la solicitud, le será retirada la licencia.
CAPÍTULO 3
UTILIZACIÓN DE LA HERRAMIENTA DE SIMULACIÓN CON VISTAS A LA DETERMINACIÓN DE LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE A EFECTOS DE MATRICULACIÓN, VENTA Y PUESTA EN SERVICIO DE VEHÍCULOS NUEVOS
Artículo 9
Obligación de determinar y declarar las emisiones de CO2 y el consumo de combustible de los vehículos nuevos
1. El fabricante de vehículos deberá determinar las emisiones de CO2 y el consumo de combustible de todo vehículo nuevo que vaya a venderse, matricularse o ponerse en servicio en la Unión utilizando la última versión disponible de la herramienta de simulación a la que se refiere el artículo 5, apartado 3.
El fabricante de vehículos solo podrá utilizar la herramienta de simulación a los efectos del presente artículo si está en posesión de una licencia concedida para el grupo de vehículos en cuestión de conformidad con el artículo 7, o extendida para el grupo de vehículos en cuestión de conformidad con el artículo 8, apartado 1.
2. El fabricante de vehículos deberá registrar los resultados de la simulación realizada conforme al apartado 1, párrafo primero, en el archivo de registros del fabricante elaborado siguiendo el modelo de la parte I del anexo IV.
Estará prohibido efectuar ulteriormente cambios en el archivo de registros del fabricante, excepto en los casos contemplados en el artículo 21, apartado 3, párrafo segundo, y en el artículo 23, apartado 6.
3. El fabricante deberá crear un hash criptográfico del archivo de registros del fabricante utilizando la herramienta de hashing a la que se refiere el artículo 5, apartado 5.
4. Todo vehículo que vaya a venderse, matricularse o ponerse en servicio deberá ir acompañado del archivo de información del cliente elaborado por el fabricante siguiendo el modelo de la parte II del anexo IV.
Todo archivo de información del cliente deberá incluir una marca del hash criptográfico del archivo de registros del fabricante al que se refiere el apartado 3.
5. Todo vehículo que vaya a venderse, matricularse o ponerse en servicio deberá ir acompañado de un certificado de conformidad que incluya una marca del hash criptográfico del archivo de registros del fabricante al que se refiere el apartado 3.
El párrafo primero no será de aplicación en el caso de los vehículos homologados de conformidad con el artículo 24 de la Directiva 2007/46/CE.
Artículo 10
Modificaciones, actualizaciones y mal funcionamiento de las herramientas electrónicas
1. En caso de modificaciones o actualizaciones de la herramienta de simulación, el fabricante de vehículos deberá comenzar a utilizar la herramienta de simulación modificada o actualizada a lo sumo tres meses después de que las modificaciones o las actualizaciones estén disponibles en la plataforma específica de distribución electrónica.
2. Si no se pueden determinar las emisiones de CO2 ni el consumo de combustible de vehículos nuevos de conformidad con el artículo 9, apartado 1, debido a un mal funcionamiento de la herramienta de simulación, el fabricante de vehículos deberá notificárselo sin demora a la Comisión a través de la plataforma específica de distribución electrónica.
3. Si no se pueden determinar las emisiones de CO2 ni el consumo de combustible de vehículos nuevos de conformidad con el artículo 9, apartado 1, debido a un mal funcionamiento de la herramienta de simulación, el fabricante de vehículos deberá realizar la simulación de esos vehículos a lo sumo siete días civiles después de la fecha indicada en el apartado 1. Hasta entonces, quedarán en suspenso las obligaciones derivadas del artículo 9 aplicables a los vehículos cuyo consumo de combustible y cuyas emisiones de CO2 siga siendo imposible determinar.
Artículo 11
Accesibilidad de las entradas y la información de salida de la herramienta de simulación
1. El fabricante de vehículos deberá guardar durante un mínimo de veinte años tras la fabricación del vehículo, y mantener a disposición de la autoridad de homologación y de la Comisión, a petición de estas, el archivo de registros del fabricante junto con los certificados sobre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, los sistemas y las unidades técnicas independientes.
2. A petición de una entidad autorizada de un Estado miembro o a petición de la Comisión, el fabricante de vehículos deberá proporcionarles, en el plazo de 15 días laborables, el archivo de registros del fabricante.
3. A petición de una entidad autorizada de un Estado miembro o a petición de la Comisión, la autoridad de homologación que concedió la licencia de acuerdo con el artículo 7 o que certificó las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un componente, una unidad técnica independiente o un sistema de conformidad con el artículo 17 deberá proporcionarles, en el plazo de 15 días laborables, la ficha de características a la que se refieren, respectivamente, el artículo 6, apartado 2, o el artículo 16, apartado 2.
CAPÍTULO 4
PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS COMPONENTES, LAS UNIDADES TÉCNICAS INDEPENDIENTES Y LOS SISTEMAS
Artículo 12
Componentes, unidades técnicas independientes y sistemas pertinentes a efectos de la determinación de las emisiones de CO2 y el consumo de combustible
1. Los datos de entrada de la herramienta de simulación a los que se refiere el artículo 5, apartado 3, deberán incluir información sobre las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas siguientes:
|
a) |
motores; |
|
b) |
transmisiones; |
|
c) |
convertidores de par; |
|
d) |
otros componentes de transferencia de par; |
|
e) |
componentes adicionales de la línea de transmisión; |
|
f) |
ejes; |
|
g) |
resistencia aerodinámica de la carrocería o el remolque; |
|
h) |
accesorios; |
|
i) |
neumáticos. |
2. Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas mencionados en las letras b) a g) e i) del apartado 1 se basarán o bien en los valores determinados, con respecto a cada familia de componentes, de unidades técnicas independientes o de sistemas, de conformidad con el artículo 14 y certificados de acuerdo con el artículo 17 («valores certificados») o bien, en ausencia de valores certificados, en los valores normalizados determinados de conformidad con el artículo 13.
3. Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los motores se basarán en los valores determinados con respecto a cada familia de motores de conformidad con el artículo 14 y certificados de acuerdo con el artículo 17.
4. Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los accesorios se basarán en los valores normalizados determinados de conformidad con el artículo 13.
5. En el caso de un vehículo básico conforme al artículo 2, apartado 2, las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas mencionados en las letras g) y h) del apartado 1 que no puedan determinarse con respecto a dicho vehículo básico se basarán en los valores normalizados. En relación con los componentes, las unidades técnicas independientes y los sistemas mencionados en la letra h), el fabricante de vehículos deberá seleccionar la tecnología con mayores pérdidas de potencia.
Artículo 13
Valores normalizados
1. Los valores normalizados para las transmisiones se determinarán de acuerdo con el apéndice 8 del anexo VI.
2. Los valores normalizados para los convertidores de par se determinarán de acuerdo con el apéndice 9 del anexo VI.
3. Los valores normalizados para otros componentes de transferencia de par se determinarán de acuerdo con el apéndice 10 del anexo VI.
4. Los valores normalizados para componentes adicionales de la línea de transmisión se determinarán de acuerdo con el apéndice 11 del anexo VI.
5. Los valores normalizados para los ejes se determinarán de acuerdo con el apéndice 3 del anexo VII.
6. Los valores normalizados para la resistencia aerodinámica de una carrocería o un remolque se determinarán de acuerdo con el apéndice 7 del anexo VIII.
7. Los valores normalizados para los accesorios se determinarán de acuerdo con el anexo IX.
8. El valor normalizado para los neumáticos será el correspondiente a los neumáticos C3 según figura en el cuadro 2 de la parte B del anexo II del Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo (4).
Artículo 14
Valores certificados
1. El fabricante de vehículos podrá utilizar los valores determinados de acuerdo con los apartados 2 a 9 como datos de entrada de la herramienta de simulación si están certificados de conformidad con el artículo 17.
2. Los valores certificados para los motores se determinarán de acuerdo con el punto 4 del anexo V.
3. Los valores certificados para las transmisiones se determinarán de acuerdo con el punto 3 del anexo VI.
4. Los valores certificados para los convertidores de par se determinarán de acuerdo con el punto 4 del anexo VI.
5. Los valores certificados para otros componentes de transferencia de par se determinarán de acuerdo con el punto 5 del anexo VI.
6. Los valores certificados para componentes adicionales de la línea de transmisión se determinarán de acuerdo con el punto 6 del anexo VI.
7. Los valores certificados para los ejes se determinarán de acuerdo con el punto 4 del anexo VII.
8. Los valores certificados para la resistencia aerodinámica de una carrocería o un remolque se determinarán de acuerdo con el punto 3 del anexo VIII.
9. Los valores certificados para los neumáticos se determinarán de acuerdo con el anexo X.
Artículo 15
El concepto de familia en relación con componentes, unidades técnicas independientes y sistemas utilizando valores certificados
1. Sin perjuicio de lo dispuesto en los apartados 3 a 6, los valores certificados determinados para un componente de origen, una unidad técnica independiente de origen o un sistema de origen serán válidos, sin necesidad de más ensayos, para todos los miembros de la familia según la definición de familia que figura en:
|
— |
el apéndice 6 del anexo VI, por lo que respecta al concepto de familia de transmisiones, convertidores de par, otros componentes de transferencia de par y componentes adicionales de la línea de transmisión, |
|
— |
el apéndice 4 del anexo VII, por lo que respecta al concepto de familia de ejes, |
|
— |
el apéndice 5 del anexo VIII, por lo que respecta al concepto de familia a efectos de la determinación de la resistencia aerodinámica. |
2. No obstante lo dispuesto en el apartado 1, en el caso de los motores, los valores certificados para todos los miembros de una familia de motores creada conforme a la definición de familia del apéndice 3 del anexo V se calcularán de acuerdo con los puntos 4, 5 y 6 del anexo V.
En el caso de los neumáticos, una familia estará compuesta únicamente por un solo tipo de neumático.
3. Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible del componente de origen, la unidad técnica independiente de origen o el sistema de origen no deberán ser mejores que las de ningún miembro de la misma familia.
4. El fabricante deberá aportar a la autoridad de homologación pruebas de que el componente de origen, la unidad técnica independiente de origen o el sistema de origen representan plenamente a la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas.
Si, en el marco de los ensayos a los efectos del artículo 16, apartado 3, párrafo segundo, la autoridad de homologación determina que el componente de origen, la unidad técnica independiente de origen o el sistema de origen seleccionados no representan plenamente a la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas, podrá seleccionar y ensayar un componente, una unidad técnica independiente o un sistema de referencia alternativos, que pasarán a ser el componente de origen, la unidad técnica independiente de origen o el sistema de origen.
5. A petición del fabricante, y previo acuerdo de la autoridad de homologación, las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un componente concreto, una unidad técnica independiente concreta o un sistema concreto que no sean, respectivamente, un componente de origen, una unidad técnica independiente de origen o un sistema de origen podrán indicarse en el certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de componentes, una familia de unidades técnicas independientes o una familia de sistemas.
Las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de ese componente, esa unidad técnica independiente o ese sistema concretos deberán determinarse de conformidad con el artículo 14.
6. Si las características del componente concreto, la unidad técnica independiente concreta o el sistema concreto, en cuanto a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible determinadas de conformidad con el apartado 5, dan como resultado unos valores de emisiones de CO2 y consumo de combustible superiores a los del componente de origen, la unidad técnica independiente de origen o el sistema de origen, respectivamente, el fabricante deberá excluirlos de la familia existente, asignarlos a una nueva familia y definirlos como el nuevo componente de origen, la nueva unidad técnica independiente de origen o el nuevo sistema de origen de esa familia, o bien solicitar la extensión de la certificación con arreglo al artículo 18.
Artículo 16
Solicitud de certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes o los sistemas
1. La solicitud de certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas deberá presentarse a la autoridad de homologación.
2. La solicitud de certificación se hará en forma de ficha de características elaborada siguiendo el modelo del:
|
— |
apéndice 2 del anexo V, por lo que respecta a los motores, |
|
— |
apéndice 2 del anexo VI, por lo que respecta a las transmisiones, |
|
— |
apéndice 3 del anexo VI, por lo que respecta a los convertidores de par, |
|
— |
apéndice 4 del anexo VI, por lo que respecta a otros componentes de transferencia de par;, |
|
— |
apéndice 5 del anexo VI, por lo que respecta a componentes adicionales de la línea de transmisión, |
|
— |
apéndice 2 del anexo VII, por lo que respecta a los ejes, |
|
— |
apéndice 2 del anexo VIII, por lo que respecta a la resistencia aerodinámica, |
|
— |
apéndice 2 del anexo X, por lo que respecta a los neumáticos. |
3. La solicitud de certificación deberá ir acompañada de una explicación de los elementos de diseño de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas de que se trate que tengan un efecto no desdeñable en las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes o los sistemas en cuestión.
La solicitud deberá asimismo ir acompañada de las actas de ensayo pertinentes expedidas por una autoridad de homologación, de los resultados de los ensayos y de una declaración de cumplimiento emitida por una autoridad de homologación con arreglo al punto 1 del anexo X de la Directiva 2007/46/CE.
Artículo 17
Disposiciones administrativas para la certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas
1. Si se cumplen todos los requisitos aplicables, la autoridad de homologación certificará los valores relativos a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas de que se trate.
2. En el caso al que se refiere el apartado 1, la autoridad de homologación expedirá un certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible siguiendo el modelo del:
|
— |
apéndice 1 del anexo V, por lo que respecta a los motores, |
|
— |
apéndice 1 del anexo VI, por lo que respecta a las transmisiones, los convertidores de par, otros componentes de transferencia de par y los componentes adicionales de la línea de transmisión, |
|
— |
apéndice 1 del anexo VII, por lo que respecta a los ejes, |
|
— |
apéndice 1 del anexo VIII, por lo que respecta a la resistencia aerodinámica, |
|
— |
apéndice 1 del anexo X, por lo que respecta a los neumáticos. |
3. La autoridad de homologación concederá un número de certificación conforme al sistema de numeración del:
|
— |
apéndice 6 del anexo V, por lo que respecta a los motores, |
|
— |
apéndice 7 del anexo VI, por lo que respecta a las transmisiones, los convertidores de par, otros componentes de transferencia de par y los componentes adicionales de la línea de transmisión, |
|
— |
apéndice 5 del anexo VII, por lo que respecta a los ejes, |
|
— |
apéndice 8 del anexo VIII, por lo que respecta a la resistencia aerodinámica, |
|
— |
apéndice 1 del anexo X, por lo que respecta a los neumáticos. |
La autoridad de homologación no deberá asignar el mismo número a otra familia de componentes, familia de unidades técnicas independientes o familia de sistemas. El número de certificación deberá utilizarse como identificador del acta de ensayo.
4. La autoridad de homologación deberá crear, por medio de la herramienta de hashing a la que se refiere el artículo 5, apartado 5, un hash criptográfico del archivo con los resultados de los ensayos, que incluya el número de certificación. El hashing deberá efectuarse inmediatamente después de que se obtengan los resultados de los ensayos. La autoridad de homologación deberá marcar el hash, junto con el número de certificación, en el certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible.
Artículo 18
Extensión para incluir un componente, una unidad técnica independiente o un sistema nuevos en una familia de componentes, una familia de unidades técnicas independientes o una familia de sistemas
1. A petición del fabricante, y previa aprobación de la autoridad de homologación, podrán incluirse un componente, una unidad técnica independiente o un sistema nuevos como miembros de una familia de componentes, de una familia de unidades técnicas independientes o de una familia de sistemas certificadas, si cumplen los criterios de la definición de la familia expuestos en:
|
— |
el apéndice 3 del anexo V, por lo que respecta al concepto de familia de motores, |
|
— |
el apéndice 6 del anexo VI, por lo que respecta al concepto de familia de transmisiones, convertidores de par, otros componentes de transferencia de par y componentes adicionales de la línea de transmisión, |
|
— |
el apéndice 4 del anexo VII, por lo que respecta al concepto de familia de ejes, |
|
— |
el apéndice 5 del anexo VIII, por lo que respecta al concepto de familia a efectos de la determinación de la resistencia aerodinámica. |
En tales casos, la autoridad de homologación expedirá un certificado revisado distinguido por un número de extensión.
El fabricante deberá modificar la ficha de características a la que se refiere el artículo 16, apartado 2, y facilitársela a la autoridad de homologación.
2. Si las características del componente concreto, la unidad técnica independiente concreta o el sistema concreto, en cuanto a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible determinadas de conformidad con el apartado 1, dan como resultado unos valores de emisiones de CO2 y consumo de combustible superiores a los del componente de origen, la unidad técnica independiente de origen o el sistema de origen, respectivamente, el nuevo componente, la nueva unidad técnica independiente o el nuevo sistema pasarán a ser el nuevo componente de origen, la nueva unidad técnica independiente de origen o el nuevo sistema de origen.
Artículo 19
Cambios ulteriores relevantes para la certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas
1. El fabricante deberá notificar a la autoridad de homologación todo cambio en el diseño o en el proceso de fabricación de los componentes, las unidades técnicas independientes o los sistemas en cuestión efectuado tras la certificación de los valores relativos a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas de que se trate con arreglo al artículo 17 y que pueda tener un efecto no desdeñable en las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de esos componentes, unidades técnicas independientes o sistemas.
2. Tras recibir la notificación a la que se refiere el apartado 1, la autoridad de homologación informará al fabricante acerca de si los componentes, las unidades técnicas independientes o los sistemas afectados por los cambios siguen estando cubiertos por el certificado expedido, o de si son necesarios ensayos adicionales de acuerdo con el artículo 14 a fin de verificar el efecto de los cambios en las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes o los sistemas en cuestión.
3. Si los componentes, las unidades técnicas independientes o los sistemas afectados por los cambios no están cubiertos por el certificado, el fabricante deberá solicitar una nueva certificación o una extensión con arreglo al artículo 18 en el plazo de un mes tras la recepción de esa información procedente de la autoridad de homologación. Si el fabricante no solicita una nueva certificación o una extensión en ese plazo, o si se rechaza la solicitud, le será retirado el certificado.
CAPÍTULO 5
UTILIZACIÓN CONFORME DE LA HERRAMIENTA DE SIMULACIÓN Y CONFORMIDAD DE LA INFORMACIÓN DE ENTRADA Y LOS DATOS DE ENTRADA
Artículo 20
Responsabilidades del fabricante de vehículos y de la autoridad de homologación con respecto a la utilización conforme de la herramienta de simulación
1. El fabricante de vehículos deberá tomar las medidas necesarias para garantizar que los procesos establecidos a efectos de la determinación de las emisiones de CO2 y el consumo de combustible de todos los grupos de vehículos cubiertos por la licencia concedida con arreglo al artículo 7 o la extensión de la licencia con arreglo al artículo 8, apartado 1, sigan siendo adecuados para ese fin.
2. Cuatro veces al año, la autoridad de homologación efectuará la evaluación a la que se refiere el punto 2 del anexo II al objeto de verificar si los procesos establecidos por el fabricante a efectos de la determinación de las emisiones de CO2 y el consumo de combustible de todos los grupos de vehículos cubiertos por la licencia siguen siendo adecuados. Como parte de esa evaluación, deberán verificarse la información de entrada y los datos de entrada escogidos y repetirse las simulaciones efectuadas por el fabricante.
Artículo 21
Medidas correctoras para la utilización conforme de la herramienta de simulación
1. Si la autoridad de homologación considera, con arreglo al artículo 20, apartado 2, que los procesos establecidos por el fabricante de vehículos a efectos de la determinación de las emisiones de CO2 y el consumo de combustible de los grupos de vehículos en cuestión no son conformes con la licencia o con el presente Reglamento o pueden llevar a una determinación incorrecta de las emisiones de CO2 y el consumo de combustible de los vehículos afectados, pedirá al fabricante que presente un plan de medidas correctoras a lo sumo 30 días civiles después de recibir tal petición.
Si el fabricante de vehículos demuestra que es preciso más tiempo para presentar el plan de medidas correctoras, la autoridad de homologación podrá concederle una prórroga de hasta 30 días civiles.
2. El plan de medidas correctoras será de aplicación para todos los grupos de vehículos que la autoridad de homologación haya identificado en su petición.
3. La autoridad de homologación aprobará o rechazará el plan de medidas correctoras en los 30 días civiles siguientes a su recepción. La autoridad de homologación notificará al fabricante y a los demás Estados miembros su decisión de aprobar o rechazar el plan de medidas correctoras.
La autoridad de homologación podrá exigir al fabricante de vehículos que expida un archivo de registros del fabricante, un archivo de información del cliente y un certificado de conformidad nuevos basándose en una nueva determinación de las emisiones de CO2 y el consumo de combustible que refleje los cambios implementados de acuerdo con el plan de medidas correctoras aprobado.
4. El fabricante será responsable de ejecutar el plan de medidas correctoras aprobado.
5. Si la autoridad de homologación ha rechazado el plan de medidas correctoras o establece que las medidas correctoras no se están aplicando correctamente, deberá tomar las medidas necesarias para garantizar la utilización conforme de la herramienta de simulación o, de lo contrario, retirar la licencia.
Artículo 22
Responsabilidades del fabricante y de la autoridad de homologación con respecto a la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas
1. El fabricante deberá tomar las medidas necesarias de acuerdo con el anexo X de la Directiva 2007/46/CE para garantizar que las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas enumerados en el artículo 12, apartado 1, que hayan sido certificadas conforme al artículo 17 no se aparten de los valores certificados.
Entre esas medidas deberán estar las siguientes:
|
— |
los procedimientos establecidos en el apéndice 4 del anexo V, por lo que respecta a los motores, |
|
— |
los procedimientos establecidos en el apéndice 7 del anexo VI, por lo que respecta a las transmisiones, |
|
— |
los procedimientos establecidos en los puntos 5 y 6 del anexo VII, por lo que respecta a los ejes, |
|
— |
los procedimientos establecidos en el apéndice 6 del anexo VIII, por lo que respecta a la resistencia aerodinámica de la carrocería o el remolque, |
|
— |
los procedimientos establecidos en el punto 4 del anexo X, por lo que respecta a los neumáticos. |
Si las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de un miembro de una familia de componentes, una familia de unidades técnicas independientes o una familia de sistemas han sido certificadas conforme al artículo 15, apartado 5, el valor de referencia para la verificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible será el que haya sido certificado para ese miembro de la familia.
Si se detecta una desviación respecto de los valores certificados como consecuencia de las medidas a las que se refieren los párrafos primero y segundo, el fabricante deberá informar inmediatamente de ello a la autoridad de homologación.
2. El fabricante deberá proporcionar anualmente a la autoridad de homologación que haya certificado las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas de que se trate las actas de ensayo con los resultados de los procedimientos mencionados en el apartado 1, párrafo segundo. El fabricante deberá poner las actas de ensayo a disposición de la Comisión, a petición de esta.
3. El fabricante deberá hacer que, al menos uno de cada veinticinco procedimientos mencionados en el apartado 1, párrafo segundo, o, a excepción de los neumáticos, al menos un procedimiento al año en relación con una familia de componentes, una familia de unidades técnicas independientes o una familia de sistemas sea supervisado por una autoridad de homologación diferente de la que participó en la certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes o la familia de sistemas de que se trate con arreglo al artículo 16.
4. Toda autoridad de homologación podrá en cualquier momento efectuar verificaciones concernientes a componentes, unidades técnicas independientes y sistemas en cualquier instalación del fabricante y del fabricante de vehículos a fin de verificar si las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de esos componentes, unidades técnicas independientes y sistemas se apartan o no de los valores certificados.
El fabricante y el fabricante de vehículos deberán proporcionar a la autoridad de homologación, en los 15 días laborables siguientes a la petición formulada por dicha autoridad, todos los documentos, muestras y demás materiales pertinentes que estén en su posesión y sean necesarios para efectuar las verificaciones relativas a un componente, una unidad técnica independiente o un sistema.
Artículo 23
Medidas correctoras para la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas
1. Si la autoridad de homologación, con arreglo al artículo 22, no considera adecuadas las medidas tomadas por el fabricante para garantizar que las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los componentes, las unidades técnicas independientes y los sistemas enumerados en el artículo 12, apartado 1, que hayan sido objeto de certificación conforme al artículo 17 no se aparten de los valores certificados, pedirá al fabricante que presente un plan de medidas correctoras a lo sumo 30 días civiles después de recibir tal petición.
Si el fabricante demuestra que es preciso más tiempo para presentar el plan de medidas correctoras, la autoridad de homologación podrá concederle una prórroga de hasta 30 días civiles.
2. El plan de medidas correctoras será de aplicación para todas las familias de componentes, de unidades técnicas independientes o de sistemas que la autoridad de homologación haya identificado en su petición.
3. La autoridad de homologación aprobará o rechazará el plan de medidas correctoras en los 30 días civiles siguientes a su recepción. La autoridad de homologación notificará al fabricante y a los demás Estados miembros su decisión de aprobar o rechazar el plan de medidas correctoras.
La autoridad de homologación podrá pedir a los fabricantes de vehículos que hayan instalado en sus vehículos los componentes, las unidades técnicas independientes y los sistemas en cuestión que expidan un archivo de registros del fabricante, un archivo de información del cliente y un certificado de conformidad nuevos basándose en las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de esos componentes, unidades técnicas independientes y sistemas obtenidas con las medidas mencionadas en el artículo 22, apartado 1.
4. El fabricante será responsable de ejecutar el plan de medidas correctoras aprobado.
5. El fabricante deberá llevar un registro de cada componente, unidad técnica independiente o sistema recuperado y reparado o modificado, así como del taller que efectuó la reparación. La autoridad de homologación tendrá acceso a esos registros, a petición suya, durante la ejecución del plan de medidas correctoras, y durante un período de cinco años después de que haya finalizado su ejecución.
6. Si la autoridad de homologación ha rechazado el plan de medidas correctoras, o establece que las medidas correctoras no se están aplicando correctamente, deberá tomar las medidas necesarias para garantizar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de la familia de componentes, la familia de unidades técnicas independientes y la familia de sistemas de que se trate, o retirar el certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible.
CAPÍTULO 6
DISPOSICIONES FINALES
Artículo 24
Disposiciones transitorias
1. Sin perjuicio de lo dispuesto en el artículo 10, apartado 3, si no se cumplen las obligaciones mencionadas en el artículo 9, los Estados miembros deberán prohibir la matriculación, la venta o la puesta en servicio de:
|
a) |
los vehículos de los grupos 4, 5, 9 y 10, según se definen en el cuadro 1 del anexo I, a partir del 1 de julio de 2019; |
|
b) |
los vehículos de los grupos 1, 2 y 3, según se definen en el cuadro 1 del anexo I, a partir del 1 de enero de 2020; |
|
c) |
los vehículos de los grupos 11, 12 y 16, según se definen en el cuadro 1 del anexo I, a partir del 1 de julio de 2020. |
2. No obstante lo dispuesto en el apartado 1, letra a), las obligaciones mencionadas en el artículo 9 serán de aplicación a partir del 1 de enero de 2019 con respecto a todos los vehículos de los grupos 4, 5, 9 y 10 cuya fecha de fabricación sea el 1 de enero de 2019 o posterior. La fecha de fabricación será la fecha de la firma del certificado de conformidad o la fecha de expedición del certificado de homologación individual.
Artículo 25
Modificación de la Directiva 2007/46/CE
Los anexos I, III, IV, IX y XV de la Directiva 2007/46/CE quedan modificados con arreglo a lo dispuesto en el anexo XI del presente Reglamento.
Artículo 26
Modificación del Reglamento (UE) n.o 582/2011
El Reglamento (UE) n.o 582/2011 queda modificado como sigue:
|
1) |
En el artículo 3, apartado 1, se añade el párrafo siguiente: «Para obtener la homologación de tipo CE de un vehículo con un sistema de motor homologado con respecto a las emisiones y al acceso a la información relativa a la reparación y el mantenimiento del vehículo, o la homologación de tipo CE de un vehículo con respecto a las emisiones y a la información relativa a la reparación y el mantenimiento del vehículo, el fabricante deberá demostrar también que se cumplen los requisitos establecidos en el artículo 6 y el anexo II del Reglamento (UE) 2017/2400 de la Comisión (*1) con respecto al grupo de vehículos de que se trate. No obstante, ese requisito no será de aplicación si el fabricante indica que los vehículos nuevos del tipo que va a homologarse no se matricularán, venderán ni pondrán en servicio en la Unión en las fechas o con posterioridad a las fechas establecidas en el artículo 24, apartado 1, letras a), b) y c), del Reglamento (UE) 2017/2400 con respecto al grupo de vehículos correspondiente. (*1) Reglamento (UE) 2017/2400 de la Comisión, de 12 de diciembre de 2017, por el que se desarrolla el Reglamento (CE) n.o 595/2009 del Parlamento Europeo y del Consejo en lo relativo a la determinación de las emisiones de CO2 y el consumo de combustible de los vehículos pesados, y por el que se modifican la Directiva 2007/46/CE del Parlamento Europeo y del Consejo y el Reglamento (UE) n.o 582/2011 de la Comisión (DO L 349 de 29.12.2017, p. 1).»." |
|
2) |
El artículo 8 se modifica como sigue:
|
|
3) |
El artículo 10 se modifica como sigue:
|
Artículo 27
Entrada en vigor
El presente Reglamento entrará en vigor a los veinte días de su publicación en el Diario Oficial de la Unión Europea.
El presente Reglamento será obligatorio en todos sus elementos y directamente aplicable en cada Estado miembro.
Hecho en Bruselas, el 12 de diciembre de 2017.
Por la Comisión
El Presidente
Jean-Claude JUNCKER
(1) DO L 188 de 18.7.2009, p. 1.
(2) DO L 263 de 9.10.2007, p. 1.
(3) Reglamento (UE) n.o 582/2011 de la Comisión, de 25 de mayo de 2011, por el que se aplica y se modifica el Reglamento (CE) n.o 595/2009 del Parlamento Europeo y del Consejo en lo concerniente a las emisiones de los vehículos pesados (Euro VI) y por el que se modifican los anexos I y III de la Directiva 2007/46/CE del Parlamento Europeo y del Consejo (DO L 167 de 25.6.2011, p. 1).
(4) Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo, de 13 de julio de 2009, relativo a los requisitos de homologación de tipo referentes a la seguridad general de los vehículos de motor, sus remolques y sistemas, componentes y unidades técnicas independientes a ellos destinados (DO L 200 de 31.7.2009, p. 1).
ANEXO I
CLASIFICACIÓN DE LOS VEHÍCULOS EN GRUPOS DE VEHÍCULOS
1. Clasificación de los vehículos a los efectos del presente Reglamento
1.1. Clasificación de los vehículos de la categoría N
Cuadro 1
Grupos de vehículos correspondientes a los vehículos de la categoría N
|
Descripción de los elementos pertinentes para la clasificación en grupos de vehículos |
Grupo de vehículos |
Atribución del perfil de finalidad y configuración del vehículo |
Atribución de carrocería estándar |
||||||||||
|
Configuración de los ejes |
Configuración del chasis |
Masa máxima en carga técnicamente admisible (toneladas) |
Largo recorrido |
Largo recorrido (EMS) |
Reparto regional |
Reparto regional (EMS) |
Reparto urbano |
Servicio municipal |
Construcción |
||||
|
4 × 2 |
Rígido |
> 3,5 – < 7,5 |
(0) |
|
|||||||||
|
Rígido (o tractocamión) (**) |
7,5 – 10 |
1. |
|
|
R |
|
R |
|
|
B1 |
|||
|
Rígido (o tractocamión) (**) |
> 10 – 12 |
2 |
R + T1 |
|
R |
|
R |
|
|
B2 |
|||
|
Rígido (o tractocamión) (**) |
> 12 – 16 |
3 |
|
|
R |
|
R |
|
|
B3 |
|||
|
Rígido |
> 16 |
4 |
R + T2 |
|
R |
|
|
R |
|
B4 |
|||
|
Tractocamión |
> 16 |
5 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
|
|
|||
|
4 × 4 |
Rígido |
7,5 – 16 |
(6) |
|
|||||||||
|
Rígido |
> 16 |
(7) |
|
||||||||||
|
Tractocamión |
> 16 |
(8) |
|
||||||||||
|
6 × 2 |
Rígido |
todos los pesos |
9 |
R + T2 |
R + D + ST |
R |
R + D + ST |
|
R |
|
B5 |
||
|
Tractocamión |
todos los pesos |
10 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
|
|
|||
|
6 × 4 |
Rígido |
todos los pesos |
11 |
R + T2 |
R + D + ST |
R |
R + D + ST |
|
R |
R |
B5 |
||
|
Tractocamión |
todos los pesos |
12 |
T + ST |
T + ST + T2 |
T + ST |
T + ST + T2 |
|
|
R |
|
|||
|
6 × 6 |
Rígido |
todos los pesos |
(13) |
|
|||||||||
|
Tractocamión |
todos los pesos |
(14) |
|
||||||||||
|
8 × 2 |
Rígido |
todos los pesos |
(15) |
|
|||||||||
|
8 × 4 |
Rígido |
todos los pesos |
16 |
|
|
|
|
|
|
R |
(peso genérico + CdxA) |
||
|
8 × 6 8 × 8 |
Rígido |
todos los pesos |
(17) |
|
|||||||||
|
|||||||||||||
(**) En estas clases de vehículos, los tractocamiones se consideran rígidos, pero con su tara específica
|
T |
= |
Tractocamión |
|
R |
= |
Rígido y carrocería estándar |
|
T1, T2 |
= |
Remolques estándar |
|
ST |
= |
Semirremolques estándar |
|
D |
= |
Dolly estándar |
ANEXO II
REQUISITOS Y PROCEDIMIENTOS RELACIONADOS CON LA UTILIZACIÓN DE LA HERRAMIENTA DE SIMULACIÓN
1. Procesos que debe establecer el fabricante de vehículos con vistas a la utilización de la herramienta de simulación
|
1.1. |
El fabricante deberá establecer al menos los siguientes procesos:
|
2. Evaluación por parte de la autoridad de homologación
|
2.1. |
La autoridad de homologación deberá verificar si se han establecido los procesos indicados en el punto 1 relacionados con la utilización de la herramienta de simulación. Asimismo, la autoridad de homologación deberá verificar lo siguiente:
A los efectos de lo dispuesto en la letra a) del párrafo segundo, la verificación deberá incluir la determinación de las emisiones de CO2 y el consumo de combustible de por lo menos un vehículo de cada uno de los grupos de vehículos para los que se haya solicitado la licencia. |
Apéndice 1
MODELO DE FICHA DE CARACTERÍSTICAS A EFECTOS DE LA UTILIZACIÓN DE LA HERRAMIENTA DE SIMULACIÓN CON VISTAS A LA DETERMINACIÓN DE LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS VEHÍCULOS NUEVOS
SECCIÓN I
1. Nombre y dirección del fabricante:
2. Plantas de montaje para las que se han establecido los procesos indicados en el punto 1 del anexo II del Reglamento (UE) 2017/2400 de la Comisión con vistas a la utilización de la herramienta de simulación:
3. Grupos de vehículos cubiertos:
4. Nombre y dirección del representante del fabricante (en su caso)
SECCIÓN II
1. Información adicional
1.1. Descripción de la manipulación de los flujos de datos y de procesos (por ejemplo, diagrama de flujo)
1.2. Descripción del proceso de gestión de la calidad
1.3. Certificados adicionales de gestión de la calidad (en su caso)
1.4. Descripción del aprovisionamiento, la manipulación y el almacenamiento de los datos de la herramienta de simulación
1.5. Documentos adicionales (en su caso)
2. Fecha: …
3. Firma: …
Apéndice 2
MODELO DE LICENCIA PARA UTILIZAR LA HERRAMIENTA DE SIMULACIÓN CON VISTAS A LA DETERMINACIÓN DE LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS VEHÍCULOS NUEVOS
Formato máximo: A4 (210 × 297 mm)
LICENCIA PARA UTILIZAR LA HERRAMIENTA DE SIMULACIÓN CON VISTAS A LA DETERMINACIÓN DE LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE LOS VEHÍCULOS NUEVOS
|
Comunicación relativa a:
|
Sello de la Administración
|
de la licencia para utilizar la herramienta de simulación en relación con el Reglamento (CE) n.o 595/2009, desarrollado por el Reglamento (UE) 2017/2400.
Número de licencia:
Motivo de la extensión: …
SECCIÓN I
0.1. Nombre y dirección del fabricante:
0.2. Plantas de montaje para las que se han establecido los procesos indicados en el punto 1 del anexo II del Reglamento (UE) 2017/2400 de la Comisión con vistas a la utilización de la herramienta de simulación:
0.3. Grupos de vehículos cubiertos:
SECCIÓN II
1. Información adicional
1.1. Acta de evaluación levantada por una autoridad de homologación
1.2. Descripción de la manipulación de los flujos de datos y de procesos (por ejemplo, diagrama de flujo)
1.3. Descripción del proceso de gestión de la calidad
1.4. Certificados adicionales de gestión de la calidad (en su caso)
1.5. Descripción del aprovisionamiento, la manipulación y el almacenamiento de los datos de la herramienta de simulación
1.6. Documentos adicionales (en su caso)
2. Autoridad de homologación encargada de realizar la evaluación
3. Fecha del acta de evaluación
4. Número del acta de evaluación
5. Observaciones (en su caso): véase la adenda
6. Lugar
7. Fecha
8. Firma
(1) Táchese lo que no proceda (en algunos casos no es necesario tachar nada si más de una opción es aplicable).
ANEXO III
INFORMACIÓN DE ENTRADA RELATIVA A LAS CARACTERÍSTICAS DEL VEHÍCULO
1. Introducción
El presente anexo describe la lista de parámetros que debe proporcionar el fabricante de vehículos como información de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
2. Definiciones
|
1) |
«ID del parámetro»: identificador único utilizado en la «herramienta de cálculo del consumo de energía del vehículo» para un parámetro de entrada o un conjunto de datos de entrada en concreto. |
|
2) |
«Tipo»: tipo de datos del parámetro
|
|
3) |
«Unidad»: … unidad física del parámetro |
|
4) |
«Masa real del vehículo corregida»: la masa especificada como «masa real del vehículo» de conformidad con el Reglamento (CE) n.o 1230/2012 (1) de la Comisión, con excepción de los depósitos, que se llenarán por lo menos al 50 % de su capacidad, sin superestructura y corregida por el peso adicional del equipamiento estándar no instalado según se especifica en el punto 4.3 y la masa de una carrocería estándar, un semirremolque estándar o un remolque estándar para simular el vehículo completo o el conjunto vehículo-(semi)remolque completo. Todas las piezas montadas en o sobre el mismo bastidor se consideran piezas de superestructura si solo se instalan para facilitar una superestructura, con independencia de las piezas que son necesarias para las condiciones de orden de marcha. |
3. Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «Vehicle/General»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P235 |
token |
[-] |
|
|
ManufacturerAddress |
P252 |
token |
[-] |
|
|
Model |
P236 |
token |
[-] |
|
|
VIN |
P238 |
token |
[-] |
|
|
Date |
P239 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
LegislativeClass |
P251 |
string |
[-] |
Valores permitidos: «N3» |
|
VehicleCategory |
P036 |
string |
[-] |
Valores permitidos: «Rigid Truck», «Tractor» |
|
AxleConfiguration |
P037 |
string |
[-] |
Valores permitidos: «4x2», «6x2», «6x4», «8x4» |
|
CurbMassChassis |
P038 |
int |
[kg] |
|
|
GrossVehicleMass |
P041 |
int |
[kg] |
|
|
IdlingSpeed |
P198 |
int |
[1/min] |
|
|
RetarderType |
P052 |
string |
[-] |
Valores permitidos: «None», «Losses included in Gearbox», «Engine Retarder», «Transmission Input Retarder», «Transmission Output Retarder» |
|
RetarderRatio |
P053 |
double, 3 |
[-] |
|
|
AngledriveType |
P180 |
string |
[-] |
Valores permitidos: «None», «Losses included in Gearbox», «Separate Angledrive» |
|
PTOShaftsGearWheels |
P247 |
string |
[-] |
Valores permitidos: «none», «only the drive shaft of the PTO», «drive shaft and/or up to 2 gear wheels», «drive shaft and/or more than 2 gear wheels», «only one engaged gearwheel above oil level» |
|
PTOOtherElements |
P248 |
string |
[-] |
Valores permitidos: «none», «shift claw, synchronizer, sliding gearwheel», «multi-disc clutch», «multi-disc clutch, oil pump» |
|
CertificationNumberEngine |
P261 |
token |
[-] |
|
|
CertificationNumberGearbox |
P262 |
token |
[-] |
|
|
CertificationNumberTorqueconverter |
P263 |
token |
[-] |
|
|
CertificationNumberAxlegear |
P264 |
token |
[-] |
|
|
CertificationNumberAngledrive |
P265 |
token |
[-] |
|
|
CertificationNumberRetarder |
P266 |
token |
[-] |
|
|
CertificationNumberTyre |
P267 |
token |
[-] |
|
|
CertificationNumberAirdrag |
P268 |
token |
[-] |
|
Cuadro 2
Parámetros de entrada «Vehicle/AxleConfiguration» por eje de ruedas
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
TwinTyres |
P045 |
booleano |
[-] |
|
|
AxleType |
P154 |
string |
[-] |
Valores permitidos: «VehicleNonDriven», «VehicleDriven» |
|
Steered |
P195 |
booleano |
|
|
Cuadro 3
Parámetros de entrada «Vehicle/Auxiliaries»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Fan/Technology |
P181 |
string |
[-] |
Valores permitidos: «Crankshaft mounted - Electronically controlled visco clutch», «Crankshaft mounted - Bimetallic controlled visco clutch», «Crankshaft mounted - Discrete step clutch», «Crankshaft mounted - On/off clutch», «Belt driven or driven via transm. - Electronically controlled visco clutch», «Belt driven or driven via transm. - Bimetallic controlled visco clutch», «Belt driven or driven via transm. - Discrete step clutch», «Belt driven or driven via transm. - On/off clutch», «Hydraulic driven - Variable displacement pump», «Hydraulic driven - Constant displacement pump», «Electrically driven - Electronically controlled» |
|
SteeringPump/Technology |
P182 |
string |
[-] |
Valores permitidos: «Fixed displacement», «Fixed displacement with elec. control», «Dual displacement», «Variable displacement mech. controlled», «Variable displacement elec. controlled», «Electric» Se requiere una entrada aparte por cada eje de ruedas de dirección |
|
ElectricSystem/Technology |
P183 |
string |
[-] |
Valores permitidos: «Standard technology», «Standard technology - LED headlights, all» |
|
PneumaticSystem/Technology |
P184 |
string |
[-] |
Valores permitidos: «Small», «Small + ESS», «Small + visco clutch» , «Small + mech. clutch», «Small + ESS + AMS», «Small + visco clutch + AMS», «Small + mech. clutch + AMS», «Medium Supply 1-stage», «Medium Supply 1-stage + ESS», «Medium Supply 1-stage + visco clutch», «Medium Supply 1-stage + mech. clutch», «Medium Supply 1-stage + ESS + AMS», «Medium Supply 1-stage + visco clutch + AMS», «Medium Supply 1-stage + mech. clutch + AMS», «Medium Supply 2-stage», «Medium Supply 2-stage + ESS», «Medium Supply 2-stage + visco clutch», «Medium Supply 2-stage + mech. clutch», «Medium Supply 2-stage + ESS + AMS», «Medium Supply 2-stage + visco clutch + AMS», «Medium Supply 2-stage + mech. clutch + AMS», «Large Supply», «Large Supply + ESS», «Large Supply + visco clutch», «Large Supply + mech. clutch», «Large Supply + ESS + AMS», «Large Supply + visco clutch + AMS», «Large Supply + mech. clutch + AMS»; «Vacuum pump» |
|
HVAC/Technology |
P185 |
string |
[-] |
Valores permitidos: «Default» |
Cuadro 4
Parámetros de entrada «Vehicle/EngineTorqueLimits» por marcha (opcional)
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Gear |
P196 |
integer |
[-] |
solo es preciso indicar los números de marcha cuando son aplicables los límites del par motor relacionados con el vehículo de conformidad con el punto 6 |
|
MaxTorque |
P197 |
integer |
[Nm] |
|
4. Masa del vehículo
4.1. La masa del vehículo utilizada como información de entrada de la herramienta de simulación deberá ser la masa real del vehículo corregida.
Esta masa real corregida se basará en los vehículos equipados de manera que cumplan todos los actos reglamentarios de los anexos IV y XI de la Directiva 2007/46/CE aplicables a la clase de vehículos de que se trate.
4.2. Si no se instala todo el equipamiento estándar, el fabricante deberá sumar a la masa real del vehículo corregida el peso de los siguientes elementos constructivos:
|
a) |
protección delantera contra el empotramiento conforme al Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo (2); |
|
b) |
protección trasera contra el empotramiento conforme al Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo; |
|
c) |
protección lateral conforme al Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo; |
|
d) |
quinta rueda conforme al Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo. |
4.3. El peso de los elementos constructivos mencionados en en punto 4.2 será el siguiente:
|
|
Para los vehículos de los grupos 1, 2 y 3
|
|
|
Para los vehículos de los grupos 4, 5, 9 a 12 y 16
|
5. Ejes de accionamiento hidráulico y mecánico
En el caso de vehículos equipados con:
|
a) |
un eje de accionamiento hidráulico, este se considerará no accionable y el fabricante no lo tendrá en cuenta para establecer la configuración de ejes del vehículo; |
|
b) |
un eje de accionamiento mecánico, este se considerará accionable y el fabricante lo tendrá en cuenta para establecer la configuración de ejes del vehículo. |
6. Límites del par motor dependientes de la marcha fijados por el control del vehículo
Con respecto al 50 % más alto de las marchas (es decir, las marchas 7 a 12 de una transmisión de doce marchas), el fabricante de vehículos podrá declarar un límite máximo del par motor dependiente de las marchas que no sea superior al 95 % del par motor máximo.
7. Ralentí específico del vehículo
7.1. El ralentí debe declararse en VECTO con respecto a cada vehículo concreto. Este ralentí declarado del vehículo deberá ser igual o superior al especificado en la aprobación de los datos de entrada del motor.
(1) Reglamento (UE) n.o 1230/2012 de la Comisión de 12 de diciembre de 2012 por el que se desarrolla el Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo en lo que respecta a los requisitos de homologación de tipo relativos a las masas y dimensiones de los vehículos de motor y de sus remolques y por el que se modifica la Directiva 2007/46/CE del Parlamento Europeo y del Consejo(DO L 353 de 21.12.2012, p. 31).
(2) Reglamento (CE) n.o 661/2009 del Parlamento Europeo y del Consejo, de 13 de julio de 2009, relativo a los requisitos de homologación de tipo referentes a la seguridad general de los vehículos de motor, sus remolques y sistemas, componentes y unidades técnicas independientes a ellos destinados (DO L 200 de 31.7.2009, p. 1).
ANEXO IV
MODELO DEL ARCHIVO DE REGISTROS DEL FABRICANTE Y DEL ARCHIVO DE INFORMACIÓN DEL CLIENTE
PARTE I
Emisiones de CO2 y consumo de combustible del vehículo. Archivo de registros del fabricante
El archivo de registros del fabricante será elaborado por la herramienta de simulación y contendrá como mínimo la siguiente información:
1. Datos del vehículo, los componentes, las unidades técnicas independientes y los sistemas
1.1. Datos del vehículo
1.1.1. Nombre y dirección del fabricante
1.1.2. Modelo de vehículo
1.1.3. Número de identificación del vehículo (VIN) …
1.1.4. Categoría de vehículos (N1, N2, N3, M1, M2, M3) …
1.1.5. Configuración de los ejes …
1.1.6. Peso bruto máximo del vehículo (t) …
1.1.7. Grupo de vehículos según el cuadro 1 …
1.1.8. Masa útil real corregida (kg) …
1.2. Especificaciones principales del motor
1.2.1. Modelo de motor
1.2.2. Número de certificación del motor …
1.2.3. Potencia nominal del motor (kW) …
1.2.4. Ralentí (1/min) …
1.2.5. Velocidad nominal del motor (1/min) …
1.2.6. Cilindrada (l) …
1.2.7. Tipo de combustible de referencia del motor (gasóleo/GLP/GNC…) …
1.2.8. Hash del archivo/documento del mapa de combustible …
1.3. Especificaciones principales de la transmisión
1.3.1. Modelo de transmisión
1.3.2. Número de certificación de la transmisión …
1.3.3. Opción principal utilizada para generar los mapas de pérdida (Opción 1 / Opción 2 / Opción 3 / Valores normalizados) …:
1.3.4. Tipo de transmisión (SMT, AMT, APT-S, APT-P) …
1.3.5. Número de marchas …
1.3.6. Relación de transmisión en la última marcha …
1.3.7. Tipo de ralentizador …
1.3.8. Toma de fuerza (sí/no) …
1.3.9. Hash del archivo/documento del mapa de eficiencia …
1.4. Especificaciones del ralentizador
1.4.1. Modelo de ralentizador
1.4.2. Número de certificación del ralentizador …
1.4.3. Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados/medición) …
1.4.4. Hash del archivo/documento del mapa de eficiencia …
1.5. Especificación del convertidor de par
1.5.1. Modelo de convertidor de par
1.5.2. Número de certificación del convertidor de par …
1.5.3. Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados/medición) …
1.5.4. Hash del archivo/documento del mapa de eficiencia …
1.6. Especificaciones del reenvío angular
1.6.1. Modelo de reenvío angular
1.6.2. Número de certificación del eje …
1.6.3. Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados/medición) …
1.6.4. Relación del reenvío angular …
1.6.5. Hash del archivo/documento del mapa de eficiencia …
1.7. Especificaciones del eje
1.7.1. Modelo de eje …
1.7.2. Número de certificación del eje …
1.7.3. Opción de certificación utilizada para generar el mapa de pérdida (valores normalizados/medición) …
1.7.4. Tipo de eje (p. ej., eje motor único estándar) …
1.7.5. Desmultiplicación final …
1.7.6. Hash del archivo/documento del mapa de eficiencia …
1.8. Aerodinámica
1.8.1. Modelo
1.8.2. Opción de certificación utilizada para generar CdxA (valores normalizados/medición) …
1.8.3. Número de certificación de CdxA (si es aplicable) …
1.8.4. Valor CdxA …
1.8.5. Hash del archivo/documento del mapa de eficiencia …
1.9. Especificaciones principales de los neumáticos
1.9.1. Dimensiones de los neumáticos del eje 1 …
1.9.2. Número de certificación de los neumáticos …
1.9.3. CRR específico de todos los neumáticos del eje 1 …
1.9.4. Dimensiones de los neumáticos del eje 2 …
1.9.5. Eje gemelo (sí/no) del eje 2 …
1.9.6. Número de certificación de los neumáticos …
1.9.7. CRR específico de todos los neumáticos del eje 2 …
1.9.8. Dimensiones de los neumáticos del eje 3 …
1.9.9. Eje gemelo (sí/no) del eje 3 …
1.9.10. Número de certificación de los neumáticos …
1.9.11. CRR específico de todos los neumáticos del eje 3 …
1.9.12. Dimensiones de los neumáticos del eje 4 …
1.9.13. Eje gemelo (sí/no) del eje 4 …
1.9.14. Número de certificación de los neumáticos …
1.9.15. CRR específico de todos los neumáticos del eje 4 …
1.10. Especificaciones principales de los accesorios
1.10.1. Tecnología del ventilador de refrigeración del motor …
1.10.2. Tecnología de la bomba de dirección …
1.10.3. Tecnología del sistema eléctrico …
1.10.4. Tecnología del sistema neumático …
1.11. Limitaciones del par motor
1.11.1. Límite del par motor en la marcha 1 (% del par motor máximo) …
1.11.2. Límite del par motor en la marcha 2 (% del par motor máximo) …
1.11.3. Límite del par motor en la marcha 3 (% del par motor máximo) …
1.11.4. Límite del par motor en la marcha … (% del par motor máximo) …
2. Perfil de finalidad y valores dependientes de la carga
2.1. Parámetros de simulación (para cada combinación de perfil, carga y combustible)
2.1.1. Perfil de finalidad (largo recorrido / regional / urbano / municipal / construcción) …
2.1.2. Carga (según se define en la herramienta de simulación) (kg) …
2.1.3. Combustible (gasóleo/gasolina/GLP/GNC/…) …
2.1.4. Masa total del vehículo en la simulación (kg) …
2.2. Desarrollo de la conducción del vehículo e información relacionada para comprobar la calidad de la simulación
2.2.1. Velocidad media (km/h) …
2.2.2. Velocidad instantánea mínima (km/h) …
2.2.3. Velocidad instantánea máxima (km/h) …
2.2.4. Desaceleración máxima (m/s2) …
2.2.5. Aceleración máxima (m/s2) …
2.2.6. Porcentaje de carga plena en el tiempo de conducción …
2.2.7. Número total de cambios de marcha …
2.2.8. Distancia total recorrida (km) …
2.3. Resultados de combustible y CO2
2.3.1. Consumo de combustible (g/km) …
2.3.2. Consumo de combustible (g/t-km) …
2.3.3. Consumo de combustible (g/p-km) …
2.3.4. Consumo de combustible (g/m3-km) …
2.3.5. Consumo de combustible (l/100 km) …
2.3.6. Consumo de combustible (l/t-km) …
2.3.7. Consumo de combustible (l/p-km) …
2.3.8. Consumo de combustible (l/m3-km) …
2.3.9. Consumo de combustible (MJ/km) …
2.3.10. Consumo de combustible (MJ/t-km) …
2.3.11. Consumo de combustible (MJ/p-km) …
2.3.12. Consumo de combustible (MJ/m3-km) …
2.3.13. CO2 (g/km) …
2.3.14. CO2 (g/t-km) …
2.3.15. CO2 (g/p-km) …
2.3.16. CO2 (g/m3-km) …
3. Información sobre el software y el usuario
3.1. Información sobre el software y el usuario
3.1.1. Versión de la herramienta de simulación (X.X.X) …
3.1.2. Fecha y hora de la simulación
3.1.3. Hash de la información de entrada y los datos de entrada de la herramienta de simulación …
3.1.4. Hash del resultado de la herramienta de simulación …
PARTE II
Emisiones de CO2 y consumo de combustible del vehículo. Archivo de información del cliente
1. Datos del vehículo, los componentes, las unidades técnicas independientes y los sistemas
1.1. Datos del vehículo
1.1.1. Número de identificación del vehículo (VIN) …
1.1.2. Categoría de vehículos (N1 N2, N3, M1, M2, M3) …
1.1.3. Configuración de los ejes …
1.1.4. Peso bruto máximo del vehículo (t) …
1.1.5. Grupo de vehículos …
1.1.6. Nombre y dirección del fabricante …
1.1.7. Marca (nombre comercial del fabricante): …
1.1.8. Masa útil real corregida (kg) …
1.2. Datos del componente, la unidad técnica independiente y los sistemas
1.2.1. Potencia nominal del motor (kW) …
1.2.2. Cilindrada (l) …
1.2.3. Tipo de combustible de referencia del motor (gasóleo/GLP/GNC…) …
1.2.4. Valores de transmisión (medidos/normalizados) …
1.2.5. Tipo de transmisión (SMT, AMT, AT-S, AT-S) …
1.2.6. Número de marchas …
1.2.7. Ralentizador (sí/no) …
1.2.8. Desmultiplicación final …
1.2.9. Coeficiente de resistencia a la rodadura (CRR) medio de todos los neumáticos:
PARTE III
Emisiones de CO2 y consumo de combustible del vehículo (correspondientes a cada combinación de carga útil y combustible)
Carga útil baja [kg]:
|
|
Velocidad media del vehículo |
Emisiones de CO2 |
Consumo de combustible |
||||
|
Largo recorrido |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Largo recorrido (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto regional |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto regional (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto urbano |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Servicio municipal |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Construcción |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
Carga útil representativa [kg]:
|
|
Velocidad media del vehículo |
Emisiones de CO2 |
Consumo de combustible |
||||
|
Largo recorrido |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Largo recorrido (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto regional |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto regional (EMS) |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Reparto urbano |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Servicio municipal |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Construcción |
… km/h |
… g/km |
… g/t-km |
… g/m3-km |
… l/100 km |
… l/t-km |
… l/m3-km |
|
Información sobre el software y el usuario |
Versión de la herramienta de simulación |
[X.X.X] |
|
Fecha y hora de la simulación |
[-] |
Hash criptográfico del archivo de salida:
ANEXO V
VERIFICACIÓN DE LOS DATOS DEL MOTOR
1. Introducción
Con el procedimiento de ensayo del motor descrito en el presente anexo se obtendrán los datos de entrada relacionados con el motor para la herramienta de simulación.
2. Definiciones
A los efectos del presente anexo serán de aplicación las definiciones del Reglamento n.o 49 Rev. 06 de la CEPE, además de las siguientes:
1) «familia de motores en función del CO2»: grupo de motores determinado por el fabricante según se define en el punto 1 del apéndice 3;
2) «motor de origen en función del CO2»: motor seleccionado entre una familia de motores en función del CO2 según se especifica en el apéndice 3;
3) «NCV»: poder calorífico neto de un combustible según se especifica en el punto 3.2;
4) «emisiones másicas específicas»: las emisiones másicas totales divididas por el trabajo total del motor durante un período definido, expresadas en g/kWh;
5) «consumo específico de combustible»: el consumo total de combustible dividido por el trabajo total del motor durante un período definido, expresado en g/kWh;
6) «FCMC»: ciclo de mapeo del consumo de combustible;
7) «plena carga»: par/potencia que entrega el motor a una determinada velocidad de este funcionando con la demanda máxima del operador.
No serán de aplicación las definiciones de los puntos 3.1.5 y 3.1.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
3. Requisitos generales
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma ISO/TS 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales o internacionales.
Los motores se agruparán en familias de motores en función del CO2 de acuerdo con el apéndice 3. En el punto 4.1 se explican las rondas de ensayo que deberán realizarse para la certificación de una familia de motores en función del CO2 concreta.
3.1. Condiciones de ensayo
Todas las rondas de ensayo que se realicen para la certificación de una familia de motores en función del CO2 concreta definida de conformidad con el apéndice 3 del presente anexo deberán efectuarse con el mismo motor físico y sin introducir cambio alguno en la configuración del dinamómetro de motores ni en el sistema de motor, aparte de las excepciones definidas en el punto 4.2 del apéndice 3.
3.1.1. Condiciones de ensayo en laboratorio
Los ensayos deberán realizarse en condiciones ambientales que cumplan las siguientes condiciones durante toda la ronda de ensayo:
|
1) |
El parámetro fa, que describe las condiciones de ensayo en laboratorio, determinado conforme al punto 6.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá situarse dentro de los siguientes límites: 0,96 ≤ fa ≤ 1,04. |
|
2) |
La temperatura absoluta (Ta) del aire de admisión del motor, expresada en kelvin y determinada conforme al punto 6.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá situarse dentro de los siguientes límites: 283 K ≤ Ta ≤ 303 K. |
|
3) |
La presión atmosférica, expresada en kPa y determinada conforme al punto 6.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá situarse dentro de los siguientes límites: 90 kPa ≤ ps ≤ 102 kPa. |
Si los ensayos se realizan en celdas de ensayo capaces de simular condiciones barométricas distintas de las existentes en la atmósfera del lugar de ensayo concreto, el valor fa aplicable se determinará con los valores de presión atmosférica simulados por el sistema de acondicionamiento. Deberá utilizarse el mismo valor de referencia de la presión atmosférica simulada para el aire de admisión, la vía de escape y los demás sistemas del motor pertinentes. El valor real de la presión atmosférica simulada para el aire de admisión, la vía de escape y los demás sistemas del motor pertinentes deberá situarse dentro de los límites indicados en el subpunto 3.
Aunque la presión ambiente de la atmósfera en el lugar de ensayo concreto rebase el límite superior de 102 kPa, podrán seguir realizándose ensayos conforme al presente anexo. En tales casos, los ensayos deberán realizarse con la presión del aire ambiente concreta existente en la atmósfera.
En los casos en que la celda de ensayo sea capaz de controlar la temperatura, la presión o la humedad del aire de admisión del motor con independencia de las condiciones atmosféricas, deberán utilizarse los mismos valores de esos parámetros en todas las rondas de ensayo realizadas a efectos de la certificación de una familia de motores en función del CO2 concreta definida de conformidad con el apéndice 3 del presente anexo.
3.1.2. Instalación del motor
El motor de ensayo deberá instalarse conforme a los puntos 6.3 a 6.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
Si los accesorios o los equipos necesarios para el funcionamiento del motor no están instalados como se requiere conforme al punto 6.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, todos los valores de par motor medidos deberán corregirse en función de la potencia necesaria para accionar estos componentes a los efectos del presente anexo de conformidad con el punto 6.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
El consumo de potencia de los siguientes componentes del motor resultante en el par motor necesario para accionarlos deberá determinarse de conformidad con el apéndice 5 del presente anexo:
|
1) |
ventilador; |
|
2) |
accesorios y equipos eléctricos necesarios para el funcionamiento del sistema de motor. |
3.1.3. Emisiones del cárter
En el caso de un cárter cerrado, el fabricante deberá asegurarse de que el sistema de ventilación del motor no permita la emisión de gases del cárter a la atmósfera. Si el cárter es de tipo abierto, las emisiones se medirán y se sumarán a las emisiones del tubo de escape, con arreglo a las disposiciones del punto 6.10 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
3.1.4. Motores con refrigeración del aire de admisión
Durante todas las rondas de ensayo, el sistema de refrigeración del aire de admisión utilizado en el banco de ensayo deberá funcionar en condiciones que sean representativas de la aplicación en el vehículo en las condiciones ambientales de referencia. Las condiciones ambientales de referencia son 293 K de temperatura del aire y 101,3 kPa de presión.
Conviene que la refrigeración del aire de admisión de laboratorio para los ensayos realizados conforme al presente Reglamento cumpla las disposiciones del punto 6.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
3.1.5. Sistema de refrigeración del motor
|
1) |
Durante todas las rondas de ensayo, el sistema de refrigeración del motor utilizado en el banco de ensayo deberá funcionar en condiciones que sean representativas de la aplicación en el vehículo en las condiciones ambientales de referencia. Las condiciones ambientales de referencia son 293 K de temperatura del aire y 101,3 kPa de presión. |
|
2) |
Conviene que el sistema de refrigeración del motor esté provisto de termostatos según especifique el fabricante para la instalación en el vehículo. Si el termostato instalado no es operativo, o si no se utiliza ningún termostato, será de aplicación el subpunto 3. El sistema de refrigeración se ajustará de conformidad con el subpunto 4. |
|
3) |
Si no se utiliza ningún termostato o el termostato instalado no está operativo, el sistema del banco de ensayo deberá reflejar el comportamiento del termostato en todas las condiciones de ensayo. El sistema de refrigeración se ajustará de conformidad con el subpunto 4. |
|
4) |
El caudal de refrigerante del motor (o, de modo alternativo, el diferencial de presión en el lado del motor del cambiador de calor) y la temperatura del refrigerante del motor se fijarán en un valor que sea representativo de la aplicación en el vehículo en las condiciones ambientales de referencia cuando el motor funciona a la velocidad nominal y a plena carga con su termostato en posición completamente abierta. Este ajuste define la temperatura de referencia del refrigerante. En todas las rondas de ensayo realizadas a efectos de la certificación de un motor concreto dentro de una familia de motores en función del CO2, el ajuste del sistema de refrigeración deberá mantenerse sin cambios, tanto en el lado del motor como en el lado del banco de ensayo del sistema de refrigeración. Debe aplicarse el buen juicio técnico para mantener razonablemente constante la temperatura del medio refrigerante del lado del banco de ensayo. La temperatura del medio refrigerante en el lado del banco de ensayo del cambiador de calor no deberá superar la temperatura nominal de apertura del termostato situado después del cambiador de calor. |
|
5) |
En todas las rondas de ensayo realizadas a efectos de la certificación de un motor concreto dentro de una familia de motores en función del CO2, la temperatura del refrigerante del motor deberá mantenerse entre el valor nominal de la temperatura de apertura del termostato declarada por el fabricante y la temperatura de referencia del refrigerante conforme al subpunto 4 tan pronto como el refrigerante del motor haya alcanzado la temperatura declarada de apertura del termostato después del arranque en frío del motor. |
|
6) |
Las condiciones iniciales específicas para el ensayo de arranque en frío WHTC realizado conforme al punto 4.3.3 se indican en los puntos 7.6.1 y 7.6.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Si se simula el comportamiento del termostato de acuerdo con el subpunto 3, no deberá fluir refrigerante a través del cambiador de calor mientras el refrigerante del motor no haya alcanzado la temperatura nominal declarada de apertura del termostato después del arranque en frío. |
3.2. Combustibles
El respectivo combustible de referencia para los sistemas de motor objeto de ensayo se seleccionará entre los tipos de combustible enumerados en el cuadro 1. Las propiedades de los combustibles de referencia enumerados en el cuadro 1 deberán ser las especificadas en el anexo IX del Reglamento (UE) n.o 582/2011 de la Comisión.
Para garantizar que se utilice el mismo combustible de referencia en todas las rondas de ensayo realizadas a efectos de la certificación de una familia de motores en función del CO2 concreta, no deberá rellenarse el depósito ni cambiarse a otro depósito que alimente el sistema de motor. De manera excepcional, podrán permitirse el repostaje o el cambio mencionados si puede garantizarse que el nuevo combustible tiene las mismas propiedades que el utilizado anteriormente (mismo lote de producción).
El NCV del combustible utilizado se determinará mediante dos mediciones separadas conforme a las normas aplicables respectivamente a cada tipo de combustible indicado en el cuadro 1. Las dos mediciones separadas deberán ser realizadas por dos laboratorios diferentes e independientes del fabricante que solicite la certificación. El laboratorio que realice las mediciones deberá cumplir los requisitos de la norma ISO/IEC 17025. La autoridad de homologación deberá asegurarse de que la muestra de combustible utilizada para determinar el NCV se toma del lote de combustible empleado en todas las rondas de ensayo.
Si los dos valores de NCV medidos separadamente difieren en más de 440 julios por gramo de combustible, se considerarán nulos y se volverán a repetir las mediciones.
El valor medio de los dos NCV medidos separadamente que no difieran en más de 440 julios por gramo de combustible se documentará en MJ/kg redondeados al tercer decimal, de conformidad con la norma ASTM E 29-06.
En relación con los combustibles gaseosos, las normas para determinar el NCV conforme al cuadro 1 incluyen el cálculo del poder calorífico basado en la composición del combustible. La composición del combustible gaseoso para la determinación del NCV se tomará del análisis del lote de combustible gaseoso de referencia utilizado en los ensayos de certificación. Para determinar la composición del combustible gaseoso utilizada en la determinación del NCV, se llevará a cabo un único análisis, que será realizado por un laboratorio que sea independiente del fabricante solicitante de la certificación. En el caso de los combustibles gaseosos, el NCV se determinará basándose en ese único análisis, y no en el valor medio de dos mediciones separadas.
Cuadro 1
Combustibles de referencia para los ensayos
|
Tipo de combustible / Tipo de motor |
Tipo de combustible de referencia |
Norma utilizada para determinar el NCV |
|
Gasóleo/CI (encendido por compresión) |
B7 |
como mínimo ASTM D240 o DIN 59100-1 (se recomienda ASTM D4809) |
|
Etanol/CI |
ED95 |
como mínimo ASTM D240 o DIN 59100-1 (se recomienda ASTM D4809) |
|
Gasolina/PI (encendido por chispa) |
E10 |
como mínimo ASTM D240 o DIN 59100-1 (se recomienda ASTM D4809) |
|
Etanol/PI |
E85 |
como mínimo ASTM D240 o DIN 59100-1 (se recomienda ASTM D4809) |
|
GLP/PI |
GLP Combustible B |
ASTM 3588 o DIN 51612 |
|
Gas natural / PI |
G25 |
ISO 6976 o ASTM 3588 |
3.3. Lubricantes
El aceite lubricante empleado en todas las rondas de ensayo realizadas conforme al presente anexo deberá ser un aceite comercialmente disponible, aprobado sin restricciones por el fabricante para las condiciones en servicio normales definidas en el punto 4.2 del anexo 8 del Reglamento n.o 49 Rev. 06 de la CEPE. No se utilizarán en las rondas de ensayo conforme al presente anexo lubricantes cuyo uso esté restringido a determinadas condiciones especiales de funcionamiento del sistema de motor o que tengan un intervalo de cambio de aceite inusualmente corto. Al aceite comercialmente disponible no se le harán modificaciones ni se le añadirán aditivos.
Todas las rondas de ensayo realizadas a efectos de la certificación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de motores en función del CO2 concreta deberán llevarse a cabo con el mismo tipo de aceite lubricante.
3.4. Sistema de medición del flujo de combustible
El sistema de medición del flujo de combustible deberá captar todos los flujos de combustible consumidos por el sistema de motor en su conjunto. Deberán incluirse en la señal de flujo de combustible de todas las rondas de ensayo realizadas los flujos de combustible adicionales que no alimentan directamente el proceso de combustión en los cilindros del motor. Los inyectores de combustible adicionales (por ejemplo, dispositivos de arranque en frío) que no sean necesarios para el funcionamiento del sistema de motor deberán desconectarse de la línea de alimentación de combustible durante todas las rondas de ensayo realizadas.
3.5. Especificaciones del equipo de medición
El equipo de medición deberá cumplir los requisitos del punto 9 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
No obstante los requisitos del punto 9 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, los sistemas de medición enumerados en el cuadro 2 deberán respetar los límites indicados en dicho cuadro.
Cuadro 2
Requisitos de los sistemas de medición
|
|
Linealidad |
|
||||
|
Sistema de medición |
Ordenada en el origen | xmin × (a1 – 1) + a0 | |
Pendiente a1 |
Error típico de la estimación |
Coeficiente de determinación r2 |
Exactitud (1) |
Tiempo de subida (2) |
|
Velocidad del motor |
≤ 0,2 % de la calibración máxima (3) |
0,999 - 1,001 |
≤ 0,1 % de la calibración máxima (3) |
≥ 0,9985 |
0,2 % de la lectura o 0,1 % de la calibración máxima (3) de la velocidad, si este último valor es mayor |
≤ 1 s |
|
Par motor |
≤ 0,5 % de la calibración máxima (3) |
0,995 - 1,005 |
≤ 0,5 % de la calibración máxima (3) |
≥ 0,995 |
0,6 % de la lectura o 0,3 % de la calibración máxima (3) del par, si este último valor es mayor |
≤ 1 s |
|
Flujo másico de combustible, en el caso de combustibles líquidos |
≤ 0,5 % de la calibración máxima (3) |
0,995 - 1,005 |
≤ 0,5 % de la calibración máxima (3) |
≥ 0,995 |
0,6 % de la lectura o 0,3 % de la calibración máxima (3) del flujo, si este último valor es mayor |
≤ 2 s |
|
Flujo másico de combustible, en el caso de combustibles gaseosos |
≤ 1 % de la calibración máxima (3) |
0,99 - 1,01 |
≤ 1 % de la calibración máxima (3) |
≥ 0,995 |
1 % de la lectura o 0,5 % de la calibración máxima (3) del flujo, si este último valor es mayor |
≤ 2 s |
|
Energía eléctrica |
≤ 1 % de la calibración máxima (3) |
0,98 - 1,02 |
≤ 2 % de la calibración máxima (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
|
Corriente |
≤ 1 % de la calibración máxima (3) |
0,98 - 1,02 |
≤ 2 % de la calibración máxima (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
|
Tensión |
≤ 1 % de la calibración máxima (3) |
0,98 - 1,02 |
≤ 2 % de la calibración máxima (3) |
≥ 0,990 |
n.a. |
≤ 1 s |
El valor «xmin», utilizado para calcular la ordenada en el origen del cuadro 2, será 0,9 veces el valor mínimo previsto que se espera obtener en todas las rondas de ensayo con el respectivo sistema de medición.
El índice de generación de señales de los sistemas de medición enumerados en el cuadro 2, excepto el sistema de medición del flujo másico de combustible, será como mínimo de 5 Hz (se recomienda ≥ 10 Hz). El índice de generación de señales del sistema de medición del flujo másico de combustible será como mínimo de 2 Hz.
Todos los datos de medición deberán registrarse con un régimen de muestreo de como mínimo 5 Hz (se recomienda ≥ 10 Hz).
3.5.1. Verificación del equipo de medición
Deberá verificarse que cada sistema de medición cumple los requisitos exigidos en el cuadro 2. Se introducirán en el sistema de medición un mínimo de diez valores de referencia situados entre xmin y el valor de «calibración máxima» definido conforme al punto 3.5, y la respuesta del sistema de medición se registrará como valor medido.
Para la verificar la linealidad, los valores medidos se compararán con los valores de referencia utilizando una regresión lineal según el método de mínimos cuadrados conforme al punto A.3.2 del apéndice 3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4. Procedimiento de ensayo
Todos los datos de medición se determinarán conforme al anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, salvo que se especifique otra cosa en el presente anexo.
4.1. Resumen de las rondas de ensayo que han de realizarse
El cuadro 3 presenta un resumen de las rondas de ensayo que deben realizarse a efectos de la certificación de una familia de motores en función del CO2 concreta definida conforme al apéndice 3.
El ciclo de mapeo del consumo de combustible conforme al punto 4.3.5 y el registro de la curva de arrastre del motor conforme al punto 4.3.2 se omitirán con respecto a todos los motores excepto el motor de origen en función del CO2 de la familia de motores en función del CO2.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, el ciclo de mapeo del consumo de combustible conforme al punto 4.3.5 y el registro de la curva de arrastre del motor conforme al punto 4.3.2 también se llevarán a cabo con respecto al motor concreto de que se trate.
Cuadro 3
Resumen de las rondas de ensayo que han de realizarse
|
Ronda de ensayo |
Referencia al punto |
Exigida para el motor de origen en función del CO2 |
Exigida para otros motores de la familia en función del CO2 |
|
Curva del motor a plena carga |
4.3.1. |
sí |
sí |
|
Curva de arrastre del motor |
4.3.2. |
sí |
no |
|
Ensayo WHTC |
4.3.3. |
sí |
sí |
|
Ensayo WHSC |
4.3.4. |
sí |
sí |
|
Ciclo de mapeo del consumo de combustible |
4.3.5. |
sí |
no |
4.2. Cambios permitidos en el sistema de motor
En todas las rondas de ensayo en las que haya funcionamiento al ralentí se permitirá reducir en la unidad de control electrónico del motor el valor buscado del controlador del ralentí, a fin de evitar interferencias entre el controlador del ralentí y el controlador de la velocidad del banco de ensayo.
4.3. Rondas de ensayo
4.3.1. Curva del motor a plena carga
La curva del motor a plena carga deberá registrarse conforme a los puntos 7.4.1 a 7.4.5 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.2. Curva de arrastre del motor
El registro de la curva de arrastre del motor conforme al presente punto se omitirá con respecto a todos los motores excepto el motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3. De conformidad con el punto 6.1.3, la curva de arrastre del motor registrada con respecto al motor de origen en función del CO2 de la familia de motores en función del CO2 será también aplicable a todos los motores de esa misma familia.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, el registro de la curva de arrastre del motor también se llevará a cabo con respecto al motor concreto de que se trate.
La curva de arrastre del motor deberá registrarse conforme a la opción b) del punto 7.4.7 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Este ensayo determinará el par negativo necesario para arrastrar el motor entre las velocidades máxima y mínima de mapeo con una demanda mínima del operador.
El ensayo deberá realizarse inmediatamente después del mapeo de la curva a plena carga conforme al punto 4.3.1. A petición del fabricante, la curva de arrastre podrá registrarse por separado. En este caso, deberá registrarse la temperatura del aceite del motor al final de la ronda de ensayo llevada a cabo para determinar la curva a plena carga conforme al punto 4.3.1, y el fabricante deberá demostrar a satisfacción de la autoridad de homologación que la temperatura del aceite del motor en el punto inicial de la curva de arrastre coincide con la temperatura antes mencionada, con una tolerancia de ± 2 K.
Al comienzo de la ronda de ensayo para la determinación de la curva de arrastre del motor, este deberá hacerse funcionar con la demanda mínima del operador a la velocidad de mapeo máxima definida en el punto 7.4.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Tan pronto como el valor del par de arrastre se haya estabilizado a ± 5 % de su valor medio durante al menos 10 segundos, comenzará el registro de datos y se reducirá la velocidad del motor a un ritmo medio de 8 ± 1 min-1/s desde la velocidad máxima hasta la velocidad mínima de mapeo, definidas en el punto 7.4.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.3. Ensayo WHTC
El ensayo WHTC deberá realizarse de conformidad con el anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Los resultados del ensayo de emisiones ponderados deberán respetar los límites aplicables definidos en el Reglamento (CE) n.o 595/2009.
La curva del motor a plena carga registrada conforme al punto 4.3.1 se utilizará para la desnormalización del ciclo de referencia y de todos los cálculos de los valores de referencia realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.3.1. Registro de las señales y los datos de medición
Además de lo dispuesto en el anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá registrarse el flujo másico real de combustible consumido por el motor conforme al punto 3.4.
4.3.4. Ensayo WHSC
El ensayo WHSC deberá realizarse de conformidad con el anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Los resultados del ensayo de emisiones deberán respetar los límites aplicables definidos en el Reglamento (CE) n.o 595/2009.
La curva del motor a plena carga registrada conforme al punto 4.3.1 se utilizará para la desnormalización del ciclo de referencia y de todos los cálculos de los valores de referencia realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.4.1. Registro de las señales y los datos de medición
Además de lo dispuesto en el anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá registrarse el flujo másico real de combustible consumido por el motor conforme al punto 3.4.
4.3.5. Ciclo de mapeo del consumo de combustible (FCMC)
El FCMC conforme al presente punto se omitirá con respecto a todos los motores excepto el motor de origen en función del CO2 de la familia de motores en función del CO2. Los datos del mapa de combustible registrados con respecto al motor de origen en función del CO2 de la familia de motores en función del CO2 será también aplicable a todos los motores de esa misma familia.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, el ciclo de mapeo del consumo de combustible también se llevará a cabo con respecto al motor concreto de que se trate.
El mapa de combustible del motor se medirá en una serie de puntos de funcionamiento del motor en condiciones estables, según se definen conforme al punto 4.3.5.2. La métrica de este mapa la constituyen el consumo de combustible en g/h en función de la velocidad del motor en min-1 y el par motor en Nm.
4.3.5.1. Tratamiento de las interrupciones durante el FCMC
Si durante el FCMC se produce una regeneración de postratamiento, en el caso de motores provistos de sistemas de postratamiento del gas de escape regenerados periódicamente según el punto 6.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, serán nulas todas las mediciones efectuadas en ese modo de velocidad del motor. Se completará la regeneración y, a continuación, se proseguirá con el procedimiento según se describe en el punto 4.3.5.1.1.
Si durante el FCMC se producen una interrupción inesperada, un mal funcionamiento o un error, serán nulas todas las mediciones efectuadas en ese modo de velocidad del motor, y el fabricante deberá escoger entre una de las siguientes opciones para continuar:
|
1) |
proseguir con el procedimiento según se describe en el punto 4.3.5.1.1; |
|
2) |
repetir todo el FCMC de acuerdo con los puntos 4.3.5.4 y 4.3.5.5. |
4.3.5.1.1. Disposiciones para proseguir con el FCMC
Se pondrá en marcha el motor y se calentará conforme al punto 7.4.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Tras el calentamiento, se preacondicionará el motor haciéndolo funcionar durante 20 minutos en el modo 9, según se define en el cuadro 1 del punto 7.2.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
La curva del motor a plena carga registrada conforme al punto 4.3.1 se utilizará para la desnormalización de los valores de referencia del modo 9 realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
Inmediatamente después de completarse el preacondicionamiento, los valores deseados de velocidad del motor y par se cambiarán linealmente en un lapso de 20 a 46 segundos hasta el mayor punto de consigna deseado de par en el siguiente punto de consigna deseado de velocidad del motor por encima del punto de consigna deseado de velocidad del motor en el que se produjo la interrupción del FCMC. Si el punto de consigna deseado se alcanza en menos de 46 segundos, el tiempo restante hasta cumplirse los 46 segundos se empleará a efectos de estabilización.
Para la estabilización, el motor seguirá funcionando a partir de ese punto siguiendo la secuencia de ensayo especificada en el punto 4.3.5.5 sin registro de los valores de medición.
Una vez alcanzado el mayor punto de consigna deseado de par en el punto de consigna deseado de velocidad del motor en el que se produjo la interrupción del FCMC, seguirán registrándose los valores de medición siguiendo la secuencia de ensayo especificada en el punto 4.3.5.5.
4.3.5.2. Cuadrícula de puntos de consigna deseados
La cuadrícula de puntos de consigna deseados está fijada de una manera normalizada, y se compone de diez puntos de consigna deseados de velocidad del motor y once puntos de consigna deseados de par. La conversión de la definición de puntos de consigna normalizada a los valores deseados reales de los puntos de consigna de velocidad del motor y de par correspondientes al motor concreto objeto de ensayo se basará en la curva del motor a plena carga, registrada conforme al punto 4.3.1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo.
4.3.5.2.1. Definición de los puntos de consigna deseados de velocidad del motor
Los diez puntos de consigna deseados de velocidad del motor están definidos por cuatro puntos de consigna deseados de velocidad del motor básicos y seis puntos de consigna deseados de velocidad del motor adicionales.
Las velocidades del motor nidle, nlo, npref, n95h y nhi se determinarán a partir de la curva del motor a plena carga, registrada conforme al punto 4.3.1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo, aplicando las definiciones de las velocidades del motor características conforme al punto 7.4.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
La velocidad del motor n57 se determinará con la siguiente ecuación:
n57 = 0,565 × (0,45 × nlo + 0,45 × npref + 0,1 × nhi – nidle) × 2,0327 + nidle
Los cuatro puntos de consigna deseados de velocidad del motor básicos se definen como sigue:
|
1) |
Velocidad del motor básica 1: nidle |
|
2) |
Velocidad del motor básica 2: nA = n57 – 0,05 x (n95h – nidle) |
|
3) |
Velocidad del motor básica 3: nB = n57 + 0,08 x (n95h – nidle) |
|
4) |
Velocidad del motor básica 4: n95h |
Las distancias potenciales entre los puntos de consigna de velocidad se determinarán con las siguientes ecuaciones:
|
1) |
dnidleA_44 = (nA – nidle) / 4 |
|
2) |
dnB95h_44 = (n95h – nB) / 4 |
|
3) |
dnidleA_35 = (nA – nidle) / 3 |
|
4) |
dnB95h_35 = (n95h – nB) / 5 |
|
5) |
dnidleA_53 = (nA – nidle) / 5 |
|
6) |
dnB95h_53 = (n95h – nB) / 3 |
Los valores absolutos de las posibles desviaciones entre las dos secciones se determinarán con las siguientes ecuaciones:
|
1) |
dn44 = ABS(dnidleA_44 – dnB95h_44) |
|
2) |
dn35 = ABS(dnidleA_35 – dnB95h_35) |
|
3) |
dn53 = ABS(dnidleA_53 – dnB95h_53) |
Los seis puntos de consigna deseados de velocidad del motor adicionales se determinarán sobre la base del menor de los tres valores dn44, dn35 y dn53 de acuerdo con las siguientes disposiciones:
|
1) |
Si dn44 es el menor de los tres valores, las seis velocidades del motor deseadas adicionales se determinarán dividiendo cada uno de los dos intervalos, uno de nidle a nA y otro de nB a n95h, en cuatro secciones equidistantes. |
|
2) |
Si dn35 es el menor de los tres valores, las seis velocidades del motor deseadas adicionales se determinarán dividiendo el intervalo de nidle a nA en tres secciones equidistantes y el intervalo de nB a n95h en cinco secciones equidistantes. |
|
3) |
Si dn53 es el menor de los tres valores, las seis velocidades del motor deseadas adicionales se determinarán dividiendo el intervalo de nidle a nA en cinco secciones equidistantes y el intervalo de nB a n95h en tres secciones equidistantes. |
La figura 1 ilustra a modo de ejemplo la definición de los puntos de consigna deseados de velocidad del motor conforme al subpunto 1.
Figura 1
Definición de los puntos de consigna de velocidad

4.3.5.2.2. Definición de los puntos de consigna deseados de par
Los once puntos de consigna deseados de par están definidos por dos puntos de consigna deseados de par básicos y nueve puntos de consigna deseados de par adicionales. Los dos puntos de consigna deseados de par básicos están definidos por un par motor cero y la plena carga máxima del motor de origen en función del CO2 determinada conforme al punto 4.3.1 (par máximo global Tmax_overall). Los nueve puntos de consigna deseados de par adicionales se determinan dividiendo el intervalo del par cero al par máximo global, Tmax_overall, en diez secciones equidistantes.
Todos los puntos de consigna deseados de par en un determinado punto de consigna deseado de velocidad del motor que superan el valor límite definido por el valor del par a plena carga en ese punto de consigna deseado de velocidad del motor en particular, menos el 5 % de Tmax_overall, se sustituirán por el valor del par a plena carga en ese punto de consigna deseado de velocidad del motor en particular. La figura 2 ilustra a modo de ejemplo la definición de los puntos de consigna deseados de par.
Figura 2
Definición de los puntos de consigna de par

4.3.5.3. Registro de las señales y los datos de medición
Deberán registrarse los siguientes datos de medición:
|
1) |
velocidad del motor; |
|
2) |
par motor corregido conforme al punto 3.1.2; |
|
3) |
flujo másico de combustible consumido por el sistema de motor en su conjunto conforme al punto 3.4; |
|
4) |
contaminantes gaseosos según se definen en el Reglamento n.o 49 Rev. 06 de la CEPE; durante la ronda de ensayo del FCMC no será necesario monitorizar los contaminantes particulados ni las emisiones de amoniaco. |
La medición de los contaminantes gaseosos deberá realizarse conforme a los puntos 7.5.1, 7.5.2, 7.5.3, 7.5.5, 7.7.4, 7.8.1, 7.8.2, 7.8.4 y 7.8.5 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
A los efectos del punto 7.8.4 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, se entenderá por el término «ciclo de ensayo» empleado en dicho punto la secuencia completa desde el preacondicionamiento conforme al punto 4.3.5.4 hasta el final de la secuencia de ensayo conforme al punto 4.3.5.5.
4.3.5.4. Preacondicionamiento del sistema de motor
El sistema de dilución, si procede, y el motor se pondrán en marcha y se calentarán conforme al punto 7.4.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
Una vez completado el calentamiento, se preacondicionarán el motor y el sistema de muestreo haciendo funcionar el motor durante 20 minutos en el modo 9, según se define en el cuadro 1 del punto 7.2.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, mientras se hace funcionar simultáneamente el sistema de dilución.
La curva del motor a plena carga del motor de origen en función del CO2 de la familia de motores en función del CO2 registrada conforme al punto 4.3.1 se utilizará para la desnormalización de los valores de referencia del modo 9 realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
Inmediatamente después de completarse el preacondicionamiento, los valores buscados de velocidad del motor y par se cambiarán linealmente en un lapso de 20 a 46 segundos hasta coincidir con el primer punto de consigna deseado de la secuencia de ensayo conforme al punto 4.3.5.5. Si el primer punto de consigna deseado se alcanza en menos de 46 segundos, el tiempo restante hasta cumplirse los 46 segundos se empleará a efectos de estabilización.
4.3.5.5. Secuencia de ensayo
La secuencia de ensayo consiste en puntos de consigna deseados en condiciones estables con una velocidad del motor y un par definidos en cada punto de consigna deseado de conformidad con el punto 4.3.5.2 y con rampas definidas para pasar de un punto de consigna deseado al siguiente.
El mayor punto de consigna deseado de par a cada velocidad del motor deseada se obtendrá con la demanda máxima del operador.
El primer punto de consigna deseado se define en el mayor punto de consigna deseado de velocidad del motor y el mayor punto de consigna deseado de par.
Para abarcar todos los puntos de consigna deseados deberán seguirse los siguientes pasos:
|
1) |
Se hará funcionar el motor durante 95 ± 3 segundos en cada punto de consigna deseado. Los primeros 55 ± 1 segundos en cada punto de consigna deseado se consideran un período de estabilización. Durante el siguiente período de 30 ± 1 segundos se controlará el valor medio de la velocidad del motor como sigue:
Los valores registrados conforme al punto 4.3.5.3 se almacenarán como valor promediado durante el período de 30 ± 1 segundos. El período restante de 10 ± 1 segundos podrá emplearse para el posprocesamiento y el almacenamiento de los datos, si es necesario. Durante este período deberá mantenerse el punto de consigna deseado del motor. |
|
2) |
Una vez completada la medición en un punto de consigna deseado, el valor deseado de velocidad del motor deberá mantenerse constante, con una tolerancia de ± 20 min-1 respecto del punto de consigna deseado de velocidad del motor, y el valor deseado de par deberá disminuir linealmente en 20 ± 1 segundos hasta coincidir con el siguiente punto de consigna deseado de par inferior. Entonces se realizará la medición conforme al subpunto 1. |
|
3) |
Una vez medido el punto de consigna de par cero en el subpunto 1, la velocidad del motor deseada deberá disminuir linealmente hasta el siguiente punto de consigna deseado de velocidad del motor inferior, al tiempo que el par deseado deberá aumentar linealmente hasta el mayor punto de consigna deseado de par en el siguiente punto de consigna deseado de velocidad del motor inferior, en un lapso de 20 a 46 segundos. Si el siguiente punto de consigna deseado se alcanza en menos de 46 segundos, el tiempo restante hasta cumplirse los 46 segundos se empleará a efectos de estabilización. Se llevará a cabo entonces la medición iniciando el procedimiento de estabilización conforme al subpunto 1 y, a continuación, se ajustarán los puntos de consigna deseados de par a una velocidad del motor deseada constante conforme al subpunto 2. |
La figura 3 ilustra los tres pasos que deben ejecutarse en cada punto de consigna de medición para el ensayo conforme al subpunto 1.
Figura 3
Pasos que deben ejecutarse en cada punto de consigna de medición

La figura 4 ilustra a modo de ejemplo la secuencia de puntos de consigna de medición en condiciones estables que ha de seguirse en el ensayo.
Figura 4
Secuencia de puntos de consigna de medición en condiciones estables
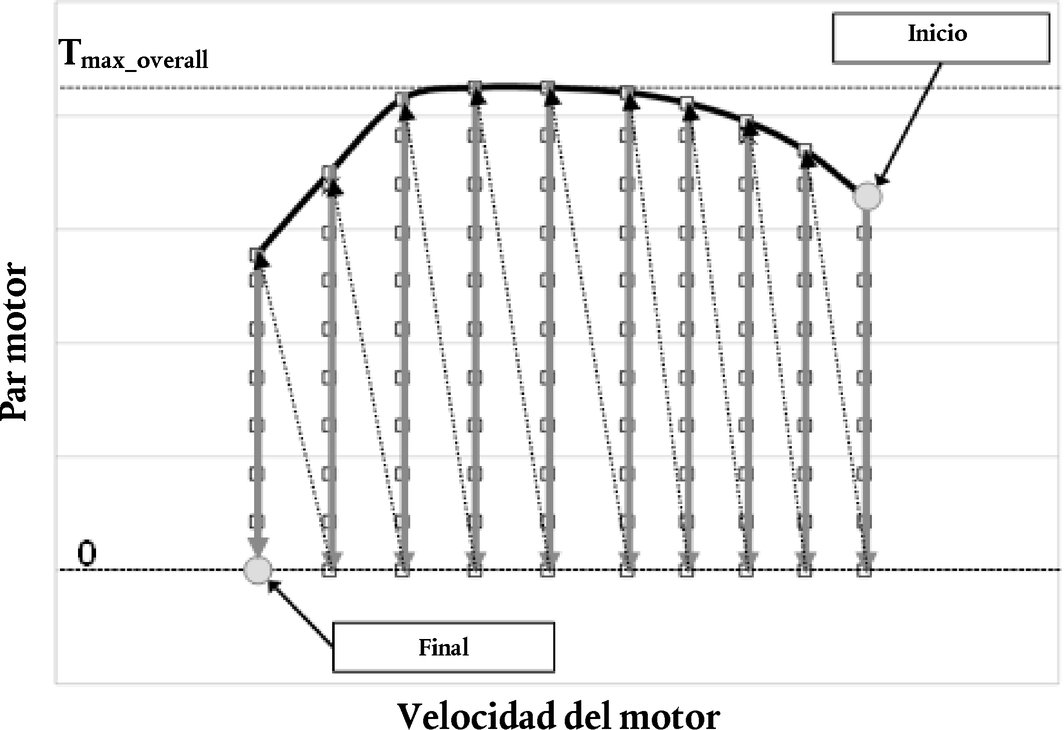
4.3.5.6. Evaluación de los datos para la monitorización de las emisiones
Durante el FCMC deberán monitorizarse los contaminantes gaseosos conforme al punto 4.3.5.3. Serán de aplicación las definiciones de las velocidades del motor características conforme al punto 7.4.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.5.6.1. Definición del área de control
El área de control para la monitorización de las emisiones durante el FCMC se determinará conforme a los puntos 4.3.5.6.1.1 y 4.3.5.6.1.2.
4.3.5.6.1.1. Intervalo de velocidades del motor para el área de control
|
1) |
El intervalo de velocidades del motor para el área de control se definirá sobre la base de la curva del motor a plena carga, registrada conforme al punto 4.3.1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo. |
|
2) |
El área de control deberá incluir todas las velocidades del motor superiores o iguales al 30.o percentil de la distribución acumulativa de velocidades, determinado a partir de todas las velocidades del motor, incluido el ralentí, en orden ascendente, a lo largo del ciclo de ensayo WHTC con arranque en caliente realizado conforme al punto 4.3.3 (n30) para la curva del motor a plena carga a la que se refiere el subpunto 1. |
|
3) |
El área de control deberá incluir todas las velocidades del motor inferiores o iguales al valor nhi determinado a partir de la curva del motor a plena carga a la que se refiere el subpunto 1. |
4.3.5.6.1.2. Intervalo de pares y potencias del motor para el área de control
|
1) |
El límite inferior del intervalo de pares motores para el área de control se definirá sobre la base de la curva del motor a plena carga, registrada conforme al punto 4.3.1, del motor con la menor potencia nominal de todos los miembros de la familia de motores en función del CO2. |
|
2) |
El área de control deberá incluir todos los puntos de carga del motor con un valor de par superior o igual al 30 % del valor de par máximo determinados a partir de la curva del motor a plena carga a la que se refiere el subpunto 1. |
|
3) |
No obstante lo dispuesto en el subpunto 2, se excluirán del área de control los puntos de velocidad y par, determinados a partir de la curva del motor a plena carga a la que se refiere el subpunto 1, que estén por debajo del 30 % del valor de potencia máxima. |
|
4) |
No obstante lo dispuesto en los subpuntos 2 y 3, el límite superior del área de control se basará en la curva del motor a plena carga, registrada conforme al punto 4.3.1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo. El valor de par correspondiente a cada velocidad del motor determinada a partir de la curva a plena carga del motor de origen en función del CO2 se incrementará un 5 % del par máximo global, Tmax_overall, definido conforme al punto 4.3.5.2.2. La curva a plena carga del motor de origen en función del CO2 incrementada se utilizará como límite superior del área de control. |
La figura 5 ilustra a modo de ejemplo la definición del intervalo de velocidades, pares y potencias del motor para el área de control.
Figura 5
Definición a modo de ejemplo del intervalo de velocidades, pares y potencias del motor para el área de control
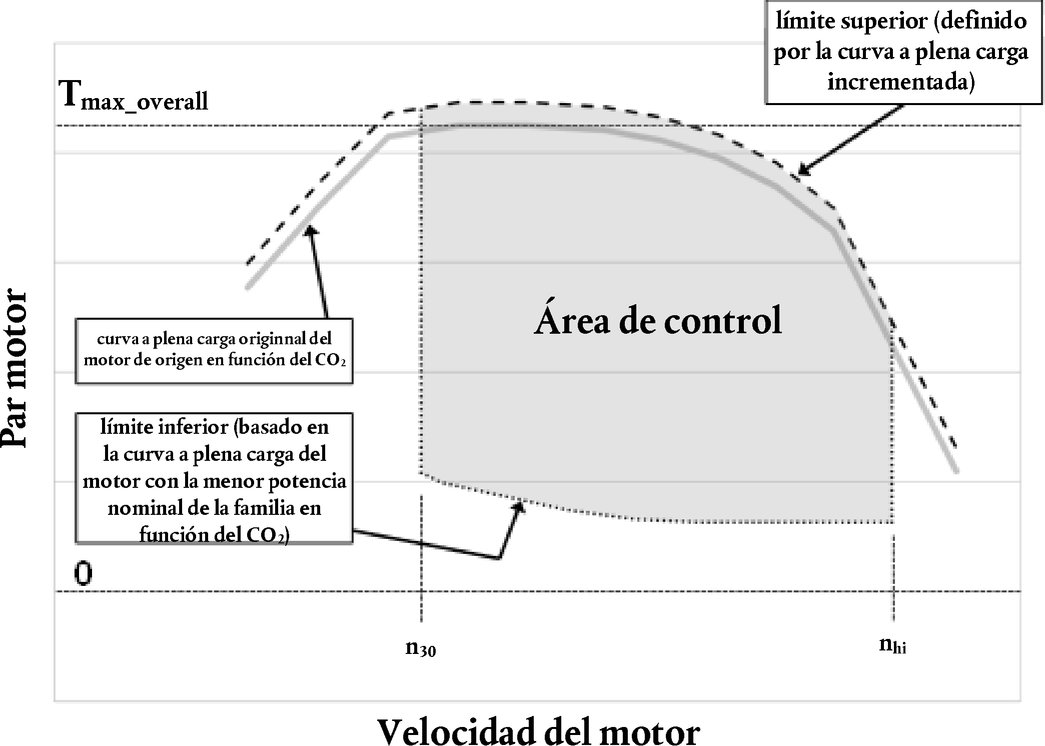
4.3.5.6.2. Definición de los cuadros de la cuadrícula
El área de control definida conforme al punto 4.3.5.6.1 se dividirá en una serie de cuadros de cuadrícula para la monitorización de las emisiones durante el FCMC.
La cuadrícula constará de nueve cuadros para los motores con una velocidad nominal inferior a 3 000 min– 1 y de doce cuadros para los motores con una velocidad nominal superior o igual a 3 000 min– 1. Las cuadrículas se definirán de conformidad con las disposiciones siguientes:
|
1) |
Los límites exteriores se las cuadrículas se alinean con el área de control definida conforme al punto 4.3.5.6.1. |
|
2) |
Para las cuadrículas de nueve cuadros, dos líneas verticales equidistantes entre las velocidades del motor n30 y 1,1 veces n95h, y para las cuadrículas de doce cuadros, tres líneas verticales equidistantes entre las velocidades del motor n30 y 1,1 veces n95h. |
|
3) |
Dos líneas equidistantes del par motor (1/3) en cada línea vertical de velocidad del motor definida por los subpuntos 1 y 2. |
Todos los valores de velocidad del motor, en min-1, y todos los valores de par, en newton metros, que definen los límites de los cuadros de la cuadrícula deberán redondearse a dos decimales conforme a la norma ASTM E 29-06.
La figura 6 ilustra a modo de ejemplo la definición de los cuadros de la cuadrícula para el área de control en el caso de una cuadrícula de nueve cuadros.
Figura 6
Definición a modo de ejemplo de los cuadros de la cuadrícula para el área de control en el caso de una cuadrícula de nueve cuadros

4.3.5.6.3. Cálculo de las emisiones másicas específicas
Las emisiones másicas específicas de contaminantes gaseosos deberán determinarse como valor medio para cada cuadro de la cuadrícula definido conforme al punto 4.3.5.6.2. El valor medio para cada cuadro de la cuadrícula se determinará como media aritmética de las emisiones másicas específicas de todos los puntos de velocidad y par del motor medidos durante el FCMC y situados dentro del mismo cuadro de la cuadrícula.
Las emisiones másicas específicas de la velocidad y el par del motor concretos medidos durante el FCMC se determinarán como valor promediado durante el período de medición de 30 ± 1 segundos definido conforme al subpunto 1 del punto 4.3.5.5.
Si un punto de velocidad y par del motor se sitúa directamente en una línea que separa diferentes cuadros de la cuadrícula, será tenido en cuenta en el cálculo de los valores medios de todos los cuadros de la cuadrícula adyacentes.
El cálculo de las emisiones másicas totales de cada contaminante gaseoso correspondientes a cada punto de velocidad y par del motor medido durante el FCMC, mFCMC,i en gramos, durante el período de medición de 30 ± 1 segundos definido conforme al subpunto 1 del punto 4.3.5.5 se llevará a cabo conforme al punto 8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
El trabajo real del motor correspondiente a cada punto de velocidad y par del motor medido durante el FCMC, mFCMC,i en kWh, durante el período de medición de 30 ± 1 segundos definido conforme al subpunto 1 del punto 4.3.5.5 se determinará a partir de los valores de velocidad y par del motor registrados conforme al punto 4.3.5.3.
Las emisiones másicas específicas de contaminantes gaseosos correspondientes a cada punto de velocidad y par del motor medido durante el FCMC, eFCMC,i en g/kWh, se determinarán mediante la siguiente ecuación:
eFCMC,i = mFCMC,i / WFCMC,i
4.3.5.7. Validez de los datos
4.3.5.7.1. Requisitos de las estadísticas de validación del FCMC
En relación con el FCMC deberá efectuarse un análisis de regresión lineal de los valores reales de velocidad del motor(nact), par motor (Mact) y potencia del motor (Pact) respecto de los respectivos valores de referencia (nref, Mref y Pref). Los valores reales de nact, Mact y Pact se determinarán a partir de los valores registrados conforme al punto 4.3.5.3.
Se excluirán de este análisis de regresión las rampas para pasar de un punto de consigna deseado al siguiente.
Para minimizar el efecto distorsionante del desfase temporal entre los valores del ciclo reales y de referencia, la secuencia completa de señales reales de velocidad y par del motor podrá adelantarse o retrasarse con respecto a la secuencia de velocidad y par de referencia. Si se desplazan las señales reales, tanto la velocidad como el par deberán desplazarse en igual medida y en el mismo sentido.
Para el análisis de regresión deberá utilizarse el método de mínimos cuadrados conforme a los puntos A.3.1 y A.3.2 del apéndice 3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, y la ecuación más adecuada tendrá la forma definida en el punto 7.8.7 de dicho anexo. Se recomienda efectuar este análisis a 1 Hz.
A los efectos únicamente de este análisis de regresión, está permitido omitir puntos cuando así se señala en el cuadro 4 (Puntos que pueden omitirse en el análisis de regresión) del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, antes de efectuar el cálculo de la regresión. Además, a los efectos únicamente de este análisis de regresión, se omitirán todos los valores de par y potencia del motor en los puntos con la demanda máxima del operador. Sin embargo, los puntos omitidos a los efectos del análisis de regresión no se omitirán en ningún otro cálculo conforme al presente anexo. La omisión de puntos podrá aplicarse a todo el ciclo o a cualquiera de sus partes.
Para que los datos se consideren válidos, deberán cumplirse los criterios del cuadro 3 (Tolerancias de la línea de regresión para el WHSC) del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
4.3.5.7.2. Requisitos aplicables a la monitorización de las emisiones
Los datos obtenidos con los ensayos de FCMC son válidos si las emisiones másicas específicas de los contaminantes gaseosos regulados determinadas para cada cuadro de la cuadrícula conforme al punto 4.3.5.6.3 respetan los límites aplicables a los contaminantes gaseosos definidos en el punto 5.2.2 del anexo 10 del Reglamento n.o 49 Rev. 06 de la CEPE. Si en un mismo cuadro de la cuadrícula hay menos de tres puntos de velocidad y par del motor, el presente punto no será de aplicación con respecto a ese cuadro concreto.
5. Posprocesamiento de los datos de medición
Todos los cálculos definidos en el presente punto deberán efectuarse específicamente con respecto a cada motor de una familia de motores en función del CO2.
5.1. Cálculo del trabajo del motor
El trabajo total del motor durante un ciclo o un período definido se determinará a partir de los valores registrados de potencia del motor determinados conforme al punto 3.1.2 y a los puntos 6.3.5. y 7.4.8. del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
El trabajo del motor durante un ciclo de ensayo completo o durante cada subciclo del WHTC se determinará integrando los valores registrados de potencia del motor conforme a la fórmula siguiente:

donde:
|
Wact, i |
= |
trabajo total del motor durante el período de t0 a t1 |
|
t0 |
= |
hora al comienzo del período |
|
t1 |
= |
hora al final del período |
|
n |
= |
número de valores registrados durante el período de t0 a t1 |
|
Pk [0 … n] |
= |
valores de potencia del motor registrados durante el período de t0 a t1 en orden cronológico, donde k va de 0 en t0 a n en t1 |
|
h |
= |
amplitud del intervalo entre dos valores registrados adyacentes, definida por |
5.2. Cálculo del consumo de combustible integrado
Todo valor negativo registrado de consumo de combustible se utilizará directamente y no se igualará a cero en los cálculos del valor integrado.
La masa total de combustible consumida por el motor durante un ciclo de ensayo completo o durante cada subciclo del WHTC se determinará integrando los valores registrados de flujo másico de combustible conforme a la fórmula siguiente:

donde:
|
Σ FCmeas, i |
= |
masa total de combustible consumida por el motor durante el período de t0 a t1 |
|
t0 |
= |
hora al comienzo del período |
|
t1 |
= |
hora al final del período |
|
n |
= |
número de valores registrados durante el período de t0 a t1 |
|
mffuel,k [0 … n] |
= |
valores registrados de flujo másico de combustible durante el período de t0 a t1 en orden cronológico, donde k va de 0 en t0 a n en t1 |
|
h |
= |
amplitud del intervalo entre dos valores registrados adyacentes, definida por: |
5.3. Cálculo de las cifras de consumo específico de combustible
Los factores de corrección y de compensación (CF y BF), que han de suministrarse como datos de entrada de la herramienta de simulación, son calculados por la herramienta de preprocesamiento del motor sobre la base de las cifras medidas de consumo específico de combustible del motor determinadas conforme a los puntos 5.3.1 y 5.3.2.
5.3.1. Cifras de consumo específico de combustible para el factor de corrección WHTC
Las cifras de consumo específico de combustible necesarias para el factor de corrección WHTC se calcularán a partir de los valores reales medidos correspondientes al WHTC con arranque en caliente registrados conforme al punto 4.3.3, del siguiente modo:
|
|
SFCmeas, Urban = Σ FCmeas, WHTC-Urban / Wact, WHTC-Urban |
|
|
SFCmeas, Rural = Σ FCmeas, WHTC- Rural / Wact, WHTC- Rural |
|
|
SFCmeas, MW = Σ FCmeas, WHTC-MW / Wact, WHTC-M) |
donde:
|
SFCmeas, i |
= |
consumo específico de combustible durante el subciclo i del WHTC [g/kWh] |
|
Σ FCmeas, i |
= |
masa total de combustible consumida por el motor durante el subciclo i del WHTC [g] determinada conforme al punto 5.2 |
|
Wact, i |
= |
trabajo total del motor durante el subciclo i del WHTC [kWh] determinado conforme al punto 5.1 |
Los tres subciclos del WHTC —urbano, rural y autopista— se definirán como sigue:
|
1) |
urbano: desde el inicio del ciclo hasta ≤ 900 segundos después del inicio del ciclo |
|
2) |
rural: desde > 900 segundos hasta ≤ 1 380 segundos después del inicio del ciclo |
|
3) |
autopista (MW): desde > 1 380 segundos después del inicio del ciclo hasta el final del ciclo |
5.3.2. Cifras de consumo específico de combustible para el factor de compensación de las emisiones en frío y en caliente
Las cifras de consumo específico de combustible necesarias para el factor de compensación de las emisiones en frío y en caliente se calcularán a partir de los valores reales medidos correspondientes al ensayo WHTC con arranque en caliente y con arranque en frío registrados conforme al punto 4.3.3. Los cálculos se efectuarán por separado para el WHTC con arranque en caliente y con arranque en frío, del modo siguiente:
|
|
SFCmeas, hot = Σ FCmeas, hot / Wact, hot |
|
|
SFCmeas, cold = Σ FCmeas, cold / Wact, cold |
donde:
|
SFCmeas, j |
= |
consumo específico de combustible [g/kWh] |
|
Σ FCmeas, j |
= |
consumo total de combustible durante el WHTC [g] determinado conforme al punto 5.2 del presente anexo |
|
Wact, j |
= |
trabajo total del motor durante el WHTC [kWh] determinado conforme al punto 5.1 del presente anexo |
5.3.3. Cifras de consumo específico de combustible durante el WHSC
El consumo específico de combustible durante el WHSC se calculará a partir de los valores reales medidos correspondientes al WHTC registrados conforme al punto 4.3.4, del siguiente modo:
SFCWHSC = (Σ FCWHSC) / (WWHSC)
donde:
|
SFCWHSC |
= |
consumo específico de combustible durante el WHSC [g/kWh] |
|
Σ FCWHSC |
= |
consumo total de combustible durante el WHSC [g] determinado conforme al punto 5.2 del presente anexo |
|
WWHSC |
= |
trabajo total del motor durante el WHSC [kWh] determinado conforme al punto 5.1 del presente anexo |
5.3.3.1. Cifras corregidas de consumo específico de combustible durante el WHSC
El consumo específico de combustible calculado durante el WHSC, SFCWHSC, determinado conforme al punto 5.3.3, se ajustará a un valor corregido, SFCWHSC,corr, a fin de tener en cuenta la diferencia entre el NCV del combustible utilizado en los ensayos y el NCV estándar para la correspondiente tecnología de combustible del motor, de acuerdo con la siguiente ecuación:

donde:
|
SFCWHSC,corr |
= |
consumo específico de combustible durante el WHSC corregido [g/kWh] |
|
SFCWHSC |
= |
consumo específico de combustible durante el WHSC [g/kWh] |
|
NCVmeas |
= |
NCV del combustible utilizado en los ensayos determinado conforme al punto 3.2 [MJ/kg] |
|
NCVstd |
= |
NCV estándar conforme al cuadro 4 [MJ/kg] |
Cuadro 4
Valores del poder calorífico neto de los tipos de combustible
|
Tipo de combustible / Tipo de motor |
Tipo de combustible de referencia |
NCV estándar [MJ/kg] |
|
Gasóleo/CI (encendido por compresión) |
B7 |
42,7 |
|
Etanol/CI |
ED95 |
25,7 |
|
Gasolina/PI (encendido por chispa) |
E10 |
41,5 |
|
Etanol/PI |
E85 |
29,1 |
|
GLP/PI |
GLP Combustible B |
46,0 |
|
Gas natural / PI |
G25 |
45,1 |
5.3.3.2. Disposiciones especiales aplicables al combustible de referencia B7
Si en los ensayos se ha utilizado combustible de referencia de tipo B7 (gasóleo/CI) conforme al punto 3.2, no se efectuará la corrección de normalización conforme al punto 5.3.3.1, y el valor corregido, SFCWHSC,corr, se ajustará al valor sin corregir, SFCWHSC.
5.4. Factor de corrección para los motores provistos de sistemas de postratamiento del gas de escape con regeneración periódica
En relación con los motores provistos de sistemas de postratamiento del gas de escape con regeneración periódica según se define conforme al punto 6.6.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, el consumo de combustible se ajustará mediante un factor de corrección para tener en cuenta las regeneraciones.
Este factor de corrección, CFRegPer, se determinará conforme al punto 6.6.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
En relación con los motores provistos de sistemas de postratamiento del gas de escape con regeneración continua, definidos conforme al punto 6.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, no se determinará ningún factor de corrección, y el valor del factor CFRegPer se ajustará a 1.
La curva del motor a plena carga registrada conforme al punto 4.3.1 se utilizará para la desnormalización del ciclo de referencia WHTC y de todos los cálculos de los valores de referencia realizada conforme a los puntos 7.4.6, 7.4.7 y 7.4.8 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
Además de lo dispuesto en el anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, deberá registrarse el flujo másico real de combustible consumido por el motor conforme al punto 3.4 con respecto a cada ensayo WHTC con arranque en caliente realizado conforme al punto 6.6.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
El consumo específico de combustible correspondiente a cada ensayo WHTC con arranque en caliente se calculará mediante la ecuación siguiente:
SFCmeas, m = (Σ FCmeas, m) / (Wact, m)
donde:
|
SFCmeas, m |
= |
consumo específico de combustible [g/kWh] |
|
Σ FCmeas,m |
= |
consumo total de combustible durante el WHTC [g] determinado conforme al punto 5.2 del presente anexo |
|
Wact, m |
= |
trabajo total del motor durante el WHTC [kWh] determinado conforme al punto 5.1 del presente anexo |
|
m |
= |
índice que define cada ensayo WHTC con arranque en caliente |
Los valores de consumo específico de combustible correspondientes a cada ensayo WHTC se ponderarán mediante la ecuación siguiente:

donde:
|
n |
= |
número de ensayos WHTC con arranque en caliente sin regeneración |
|
nr |
= |
número de ensayos WHTC con arranque en caliente con regeneración (el número mínimo es un ensayo) |
|
SFCavg |
= |
consumo específico de combustible medio de todos los ensayos WHTC con arranque en caliente sin regeneración [g/kWh] |
|
SFCavg,r |
= |
consumo específico de combustible medio de todos los ensayos WHTC con arranque en caliente con regeneración [g/kWh] |
El factor de corrección, CFRegPer, se calculará mediante la ecuación siguiente:

6. Aplicación de la herramienta de preprocesamiento del motor
La herramienta de preprocesamiento del motor se ejecutará con respecto a cada motor de una familia de motores en función del CO2 utilizando los datos de entrada definidos en el punto 6.1.
Los datos de salida de la herramienta de preprocesamiento del motor constituirán el resultado final del procedimiento de ensayo del motor, y deberán documentarse.
6.1. Datos de entrada de la herramienta de preprocesamiento del motor
Los siguientes datos de entrada serán generados por los procedimientos de ensayo especificados en el presente anexo y constituirán los datos de entrada de la herramienta de preprocesamiento del motor.
6.1.1. Curva a plena carga del motor de origen en función del CO2
Los datos de entrada serán los de la curva a plena carga, registrada conforme al punto 4.3.1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, se utilizarán como datos de entrada los de la curva a plena carga del motor concreto de que se trate registrada conforme al punto 4.3.1.
Los datos de entrada se proporcionarán en el formato de archivo de «valores separados por comas», y el carácter separador será el carácter Unicode «COMMA» (U+002C) («,»). El primer renglón del archivo se utilizará como encabezamiento y no deberá contener ningún dato registrado. Los datos registrados deberán comenzar a partir del segundo renglón del archivo.
La primera columna del archivo será la velocidad del motor en min-1 redondeada al segundo decimal conforme a la norma ASTM E 29-06. La segunda columna será el par en Nm redondeado al segundo decimal conforme a la norma ASTM E 29-06.
6.1.2. Curva a plena carga
Los datos de entrada serán los de la curva del motor a plena carga registrada conforme al punto 4.3.1.
Los datos de entrada se proporcionarán en el formato de archivo de «valores separados por comas», y el carácter separador será el carácter Unicode «COMMA» (U+002C) («,»). El primer renglón del archivo se utilizará como encabezamiento y no deberá contener ningún dato registrado. Los datos registrados deberán comenzar a partir del segundo renglón del archivo.
La primera columna del archivo será la velocidad del motor en min– 1 redondeada al segundo decimal conforme a la norma ASTM E 29-06. La segunda columna será el par en Nm redondeado al segundo decimal conforme a la norma ASTM E 29-06.
6.1.3. Curva de arrastre del motor de origen en función del CO2
Los datos de entrada serán los de la curva de arrastre, registrada conforme al punto 4.3.2, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, se utilizarán como datos de entrada los de la curva de arrastre del motor concreto de que se trate registrada conforme al punto 4.3.2.
Los datos de entrada se proporcionarán en el formato de archivo de «valores separados por comas», y el carácter separador será el carácter Unicode «COMMA» (U+002C) («,»). El primer renglón del archivo se utilizará como encabezamiento y no deberá contener ningún dato registrado. Los datos registrados deberán comenzar a partir del segundo renglón del archivo.
La primera columna del archivo será la velocidad del motor en min– 1 redondeada al segundo decimal conforme a la norma ASTM E 29-06. La segunda columna será el par en Nm redondeado al segundo decimal conforme a la norma ASTM E 29-06.
6.1.4. Mapa de consumo de combustible del motor de origen en función del CO2
Los datos de entrada serán los valores de velocidad del motor, par motor y flujo másico de combustible determinados con respecto al motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo y registrados conforme al punto 4.3.5.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, se utilizarán como datos de entrada los valores de velocidad del motor, par motor y flujo másico de combustible determinados con respecto al motor concreto de que se trate y registrados conforme al punto 4.3.5.
Los datos de entrada consistirán únicamente en los valores de medición medios de la velocidad del motor, el par motor y el flujo másico de combustible durante el período de medición de 30 ± 1 segundos determinado conforme al subpunto 1 del punto 4.3.5.5.
Los datos de entrada se proporcionarán en el formato de archivo de «valores separados por comas», y el carácter separador será el carácter Unicode «COMMA» (U+002C) («,»). El primer renglón del archivo se utilizará como encabezamiento y no deberá contener ningún dato registrado. Los datos registrados deberán comenzar a partir del segundo renglón del archivo.
La primera columna del archivo será la velocidad del motor en min-1 redondeada al segundo decimal conforme a la norma ASTM E 29-06. La segunda columna será el par en Nm redondeado al segundo decimal conforme a la norma ASTM E 29-06. La tercera columna será el flujo másico de combustible en g/h redondeado al segundo decimal conforme a la norma ASTM E 29-06.
6.1.5. Cifras de consumo específico de combustible para el factor de corrección WHTC
Los datos de entrada serán los tres valores correspondientes al consumo específico de combustible durante los distintos subciclos del WHTC —urbano, rural y autopista—, en g/kWh, determinados conforme al punto 5.3.1.
Los valores se redondearán al segundo decimal conforme a la norma ASTM E 29-06.
6.1.6. Cifras de consumo específico de combustible para el factor de compensación de las emisiones en frío y en caliente
Los datos de entrada serán los dos valores correspondientes al consumo específico de combustible durante el WHTC con arranque en caliente y con arranque en frío, en g/kWh, determinados conforme al punto 5.3.2.
Los valores se redondearán al segundo decimal conforme a la norma ASTM E 29-06.
6.1.7. Factor de corrección para los motores provistos de sistemas de postratamiento del gas de escape con regeneración periódica
El dato de entrada será el factor de corrección CFRegPer determinado conforme al punto 5.4.
En relación con los motores provistos de sistemas de postratamiento del gas de escape con regeneración continua, definidos conforme al punto 6.6.1 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, este factor se ajustará a 1 conforme al punto 5.4.
El valor se redondeará al segundo decimal conforme a la norma ASTM E 29-06.
6.1.8. NCV del combustible de ensayo
El dato de entrada será el NCV del combustible de ensayo, en Mj/kg, determinado conforme al punto 3.2.
El valor se redondeará al tercer decimal conforme a la norma ASTM E 29-06.
6.1.9. Tipo de combustible de ensayo
El dato de entrada será el tipo de combustible de ensayo escogido conforme al punto 3.2.
6.1.10. Ralentí del motor de origen en función del CO2
El dato de entrada será el ralentí, nidle, en min– 1, del motor de origen en función del CO2 de la familia de motores en función del CO2 definida conforme al apéndice 3 del presente anexo, declarado por el fabricante en la ficha de características elaborada conforme al modelo del apéndice 2 al solicitar la certificación.
En caso de que, a petición del fabricante, se apliquen las disposiciones del artículo 15, apartado 5, del presente Reglamento, se utilizará como dato de entrada el ralentí del motor concreto de que se trate.
El valor se redondeará al entero más próximo conforme a la norma ASTM E 29-06.
6.1.11. Ralentí
El dato de entrada será el ralentí, nidle, en min– 1, declarado por el fabricante en la ficha de características elaborada conforme al modelo del apéndice 2 del presente anexo al solicitar la certificación.
El valor se redondeará al entero más próximo conforme a la norma ASTM E 29-06.
6.1.12. Cilindrada
El dato de entrada será la cilindrada, en ccm, declarada por el fabricante en la ficha de características elaborada conforme al modelo del apéndice 2 del presente anexo al solicitar la certificación.
El valor se redondeará al entero más próximo conforme a la norma ASTM E 29-06.
6.1.13. Velocidad nominal del motor
El dato de entrada será la velocidad nominal del motor, en min– 1, declarada por el fabricante en el punto 3.2.1.8 de la ficha de características elaborada conforme al modelo del apéndice 2 del presente anexo al solicitar la certificación.
El valor se redondeará al entero más próximo conforme a la norma ASTM E 29-06.
6.1.14. Potencia nominal del motor
El dato de entrada será la potencia nominal del motor, en kW, declarada por el fabricante en el punto 3.2.1.8 de la ficha de características elaborada conforme al modelo del apéndice 2 del presente anexo al solicitar la certificación.
El valor se redondeará al entero más próximo conforme a la norma ASTM E 29-06.
6.1.15. Fabricante
El dato de entrada será el nombre del fabricante del motor como secuencia de caracteres en codificación ISO 8859-1.
6.1.16. Modelo
El dato de entrada será el nombre del modelo de motor como secuencia de caracteres en codificación ISO 8859-1.
6.1.17. ID del informe técnico
El dato de entrada será un identificador único del informe técnico elaborado para la homologación de tipo del motor concreto. Este identificador será una secuencia de caracteres en codificación ISO 8859-1.
(1) Por «exactitud» se entiende la desviación de la lectura del analizador con respecto a un valor de referencia establecido conforme a una norma nacional o internacional.
(2) Por «tiempo de subida» se entiende el tiempo transcurrido entre la respuesta al 10 % y la respuesta al 90 % de la lectura final del analizador (t90 – t10).
(3) Los valores de «calibración máxima» serán 1,1 veces el valor máximo previsto que se espera obtener en todas las rondas de ensayo con el respectivo sistema de medición.
Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO A LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UNA FAMILIA DE MOTORES
|
Comunicación relativa a:
|
Sello de la Administración
|
de un certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de motores de conformidad con el Reglamento (UE) 2017/2400 de la Comisión.
Reglamento (UE) 2017/2400 de la Comisión, modificado en último lugar por …
Número de certificación:
Hash:
Motivo de la extensión:
SECCIÓN I
0.1. Marca (nombre comercial del fabricante):
0.2. Tipo:
0.3. Medio de identificación del tipo:
0.3.1. Ubicación del marcado de certificación:
0.3.2. Método de fijación del marcado de certificación:
0.5. Nombre y dirección del fabricante:
0.6. Nombre y dirección de las plantas de montaje:
0.7. Nombre y dirección del representante del fabricante (en su caso):
SECCIÓN II
1. Información adicional (cuando proceda): véase la adenda
2. Autoridad de homologación encargada de realizar los ensayos:
3. Fecha del acta de ensayo:
4. Número del acta de ensayo:
5. Observaciones (en su caso): véase la adenda
6. Lugar:
7. Fecha:
8. Firma:
Anexos:
Expediente de homologación. Acta de ensayo.
Apéndice 2
Ficha de características del motor
Notas sobre la cumplimentación de los cuadros
Las letras A, B, C, D y E, que corresponden a los miembros de la familia de motores en función del CO2, serán sustituidas por las denominaciones reales de tales miembros.
Cuando, en relación con una determinada característica del motor, se aplique el mismo valor o la misma descripción para todos los miembros de la familia de motores en función del CO2, se unificarán las casillas correspondientes a las letras A-E.
Si la familia de motores en función del CO2 consta de más de cinco miembros, podrán añadirse nuevas columnas.
Deberá copiarse y cumplimentarse el «apéndice de la ficha de características» en relación con cada uno de los motores pertenecientes a una familia de motores en función del CO2.
Al final del presente apéndice figuran notas explicativas.
|
|
|
Motor de origen en función del CO2 |
Miembros de la familia de motores en función del CO2 |
||||
|
A |
B |
C |
D |
E |
|||
|
0. |
Generalidades |
||||||
|
0.l. |
Marca (nombre comercial del fabricante) |
|
|||||
|
0.2. |
Tipo |
|
|||||
|
0.2.1. |
Denominaciones comerciales (si se dispone de ellas) |
|
|
|
|
|
|
|
0.5. |
Nombre y dirección del fabricante |
|
|||||
|
0.8. |
Nombre y dirección de las plantas de montaje |
|
|
|
|
|
|
|
0.9. |
Nombre y dirección del representante del fabricante (en su caso) |
|
|||||
PARTE 1
Características esenciales del motor (de origen) y los tipos de motor de una familia de motores
|
|
|
Motor de origen o tipo de motor |
Miembros de la familia de motores en función del CO2 |
|||||||
|
A |
B |
C |
D |
E |
||||||
|
3.2. |
Motor de combustión interna |
|
|
|
|
|
|
|||
|
3.2.1. |
Información específica sobre el motor |
|
|
|
|
|
|
|||
|
3.2.1.1. |
Principio de funcionamiento: encendido por chispa / por compresión (1) Ciclo de cuatro tiempos / dos tiempos / rotativo (1) |
|
||||||||
|
3.2.1.2. |
Número y disposición de los cilindros |
|
|
|
|
|
|
|||
|
3.2.1.2.1. |
Diámetro de los cilindros (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.2. |
Carrera (3) mm |
|
|
|
|
|
|
|||
|
3.2.1.2.3. |
Orden de encendido |
|
|
|
|
|
|
|||
|
3.2.1.3. |
Cilindrada (4) cm3 |
|
|
|
|
|
|
|||
|
3.2.1.4. |
Relación volumétrica de compresión (5) |
|
|
|
|
|
|
|||
|
3.2.1.5. |
Dibujos de la cámara de combustión, la cabeza del émbolo y, en el caso de los motores de encendido por chispa, de los segmentos |
|
|
|
|
|
|
|||
|
3.2.1.6. |
Ralentí normal (5) min–1 |
|
|
|
|
|
|
|||
|
3.2.1.6.1. |
Ralentí alto (5) min–1 |
|
|
|
|
|
|
|||
|
3.2.1.7. |
Contenido de monóxido de carbono, en volumen, del gas de escape emitido con el motor al ralentí (5): %, declarado por el fabricante (solo en el caso de motores de encendido por chispa) |
|
|
|
|
|
|
|||
|
3.2.1.8. |
Potencia neta máxima (6): … kW a … min–1 (valor declarado por el fabricante) |
|
|
|
|
|
|
|||
|
3.2.1.9. |
Velocidad máxima permitida del motor prescrita por el fabricante (min–1) |
|
|
|
|
|
|
|||
|
3.2.1.10. |
Par neto máximo (6) (Nm) a (min–1) (valor declarado por el fabricante) |
|
|
|
|
|
|
|||
|
3.2.1.11. |
Referencias del fabricante de la documentación exigida en los puntos 3.1, 3.2 y 3.3 del Reglamento n.° 49, revisión 6, de la CEPE que permitan a la autoridad de homologación de tipo evaluar las estrategias de control de las emisiones y los sistemas incorporados al motor para garantizar el funcionamiento correcto de las medidas de control de los NOx |
|
|
|
|
|
|
|||
|
3.2.2. |
Combustible |
|
|
|
|
|
|
|||
|
3.2.2.2. |
Gasóleo/gasolina/GLP/GN-H/GN-L/GN-HL/etanol (ED95)/etanol (E85) (1) para vehículos pesados |
|
|
|
|
|
|
|||
|
3.2.2.2.1. |
Combustibles con los que puede funcionar el motor declarados por el fabricante conforme al punto 4.6.2 del Reglamento n.° 49, revisión 6, de la CEPE (según proceda) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.4. |
Alimentación de combustible |
|
|
|
|
|
|
|||
|
3.2.4.2. |
Por inyección de combustible (solo encendido por compresión): sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.1. |
Descripción del sistema |
|
|
|
|
|
|
|||
|
3.2.4.2.2. |
Principio de funcionamiento: inyección directa / precámara / cámara de turbulencia (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.3. |
Bomba de inyección |
|
|
|
|
|
|
|||
|
3.2.4.2.3.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.2.3.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.2.3.3. |
Alimentación máxima de combustible (1) (5) … mm3 /carrera o ciclo a una velocidad del motor de … min–1 o, alternativamente, diagrama característico. (Si se utiliza un control de sobrealimentación, indíquese la alimentación de combustible característica y la presión de sobrealimentación en función de la velocidad del motor) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.4. |
Regulación de la inyección estática (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.5. |
Curva de avance de la inyección (5) |
|
|
|
|
|
|
|||
|
3.2.4.2.3.6. |
Procedimiento de calibración: banco/motor de ensayo (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4. |
Regulador |
|
|
|
|
|
|
|||
|
3.2.4.2.4.1. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2. |
Punto de corte |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.1. |
Velocidad a la que se inicia el corte en carga (min–1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.2. |
Velocidad máxima sin carga (min–1) |
|
|
|
|
|
|
|||
|
3.2.4.2.4.2.3. |
Ralentí (min-1) |
|
|
|
|
|
|
|||
|
3.2.4.2.5. |
Tuberías de inyección |
|
|
|
|
|
|
|||
|
3.2.4.2.5.1. |
Longitud (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.2. |
Diámetro interno (mm) |
|
|
|
|
|
|
|||
|
3.2.4.2.5.3. |
Conducto común, marca y tipo |
|
|
|
|
|
|
|||
|
3.2.4.2.6. |
Inyectores |
|
|
|
|
|
|
|||
|
3.2.4.2.6.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.2.6.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.2.6.3. |
Presión de apertura (5): |
kPa o diagrama característico (5) |
|
|
|
|
|
|
||
|
3.2.4.2.7. |
Sistema de arranque en frío |
|
|
|
|
|
|
|||
|
3.2.4.2.7.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.2.7.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.2.7.3. |
Descripción |
|
|
|
|
|
|
|||
|
3.2.4.2.8. |
Dispositivo auxiliar de arranque |
|
|
|
|
|
|
|||
|
3.2.4.2.8.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.2.8.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.2.8.3. |
Descripción del sistema |
|
|
|
|
|
|
|||
|
3.2.4.2.9. |
Inyección con control electrónico: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.2.9.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3. |
Descripción del sistema (en el caso de sistemas distintos del de inyección continua, facilítese información equivalente) |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.1. |
Marca y tipo de la unidad de control electrónico |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.2. |
Marca y tipo del regulador de combustible |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.3. |
Marca y tipo del sensor del flujo de aire |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.4. |
Marca y tipo del distribuidor de combustible |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.5. |
Marca y tipo de la caja de la mariposa |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.6. |
Marca y tipo del sensor de la temperatura del agua |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.7. |
Marca y tipo del sensor de la temperatura del aire |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.8. |
Marca y tipo del sensor de la presión del aire |
|
|
|
|
|
|
|||
|
3.2.4.2.9.3.9. |
Números de calibración del software |
|
|
|
|
|
|
|||
|
3.2.4.3. |
Por inyección de combustible (solo encendido por chispa): sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.4.3.1. |
Principio de funcionamiento: colector de admisión (monopunto / multipunto / inyección directa (1)/ otro [especifíquese]): |
|
|
|
|
|
|
|||
|
3.2.4.3.2. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.4.3.3. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.4.3.4. |
Descripción del sistema (en el caso de sistemas distintos del de inyección continua, facilítese información equivalente) |
|
|
|
|
|
|
|||
|
3.2.4.3.4.1. |
Marca y tipo de la unidad de control electrónico |
|
|
|
|
|
|
|||
|
3.2.4.3.4.2. |
Marca y tipo del regulador de combustible |
|
|
|
|
|
|
|||
|
3.2.4.3.4.3. |
Marca y tipo del sensor del flujo de aire |
|
|
|
|
|
|
|||
|
3.2.4.3.4.4. |
Marca y tipo del distribuidor de combustible |
|
|
|
|
|
|
|||
|
3.2.4.3.4.5. |
Marca y tipo del regulador de presión |
|
|
|
|
|
|
|||
|
3.2.4.3.4.6. |
Marca y tipo del microinterruptor |
|
|
|
|
|
|
|||
|
3.2.4.3.4.7. |
Marca y tipo del tornillo de ajuste del ralentí |
|
|
|
|
|
|
|||
|
3.2.4.3.4.8. |
Marca y tipo de la caja de la mariposa |
|
|
|
|
|
|
|||
|
3.2.4.3.4.9. |
Marca y tipo del sensor de la temperatura del agua |
|
|
|
|
|
|
|||
|
3.2.4.3.4.10. |
Marca y tipo del sensor de la temperatura del aire |
|
|
|
|
|
|
|||
|
3.2.4.3.4.11. |
Marca y tipo del sensor de la presión del aire |
|
|
|
|
|
|
|||
|
3.2.4.3.4.12. |
Números de calibración del software |
|
|
|
|
|
|
|||
|
3.2.4.3.5. |
Inyectores: presión de apertura (5) (kPa) o diagrama característico (5) |
|
|
|
|
|
|
|||
|
3.2.4.3.5.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.4.3.5.2. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.4.3.6. |
Regulación de la inyección |
|
|
|
|
|
|
|||
|
3.2.4.3.7. |
Sistema de arranque en frío |
|
|
|
|
|
|
|||
|
3.2.4.3.7.1. |
Principios de funcionamiento |
|
|
|
|
|
|
|||
|
3.2.4.3.7.2. |
Límites/Ajustes de funcionamiento (1) (5) |
|
|
|
|
|
|
|||
|
3.2.4.4. |
Bomba de alimentación |
|
|
|
|
|
|
|||
|
3.2.4.4.1. |
Presión (5): kPa o diagrama característico (5) |
|
|
|
|
|
|
|||
|
3.2.5. |
Sistema eléctrico |
|
|
|
|
|
|
|||
|
3.2.5.1. |
Tensión nominal (V), positivo/negativo a tierra (1) |
|
|
|
|
|
|
|||
|
3.2.5.2. |
Generador |
|
|
|
|
|
|
|||
|
3.2.5.2.1. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.5.2.2. |
Potencia nominal (VA) |
|
|
|
|
|
|
|||
|
3.2.6. |
Sistema de encendido (solo motores de encendido por chispa) |
|
|
|
|
|
|
|||
|
3.2.6.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.6.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.6.3. |
Principio de funcionamiento |
|
|
|
|
|
|
|||
|
3.2.6.4. |
Curva o mapa de avance del encendido (5) |
|
|
|
|
|
|
|||
|
3.2.6.5. |
Regulación del encendido estático (5) (grados antes del punto muerto superior) |
|
|
|
|
|
|
|||
|
3.2.6.6. |
Bujías |
|
|
|
|
|
|
|||
|
3.2.6.6.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.6.6.2. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.6.6.3. |
Distancia entre los electrodos (mm) |
|
|
|
|
|
|
|||
|
3.2.6.7. |
Bobinas de encendido |
|
|
|
|
|
|
|||
|
3.2.6.7.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.6.7.2. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.7. |
Sistema de refrigeración: líquido/aire (1) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.7.2. |
Líquido |
|
|
|
|
|
|
|||
|
3.2.7.2.1. |
Naturaleza del líquido |
|
|
|
|
|
|
|||
|
3.2.7.2.2. |
Bombas de circulación: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.7.2.3. |
Características |
|
|
|
|
|
|
|||
|
3.2.7.2.3.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.7.2.3.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.7.2.4. |
Relaciones de transmisión |
|
|
|
|
|
|
|||
|
3.2.7.3. |
Aire |
|
|
|
|
|
|
|||
|
3.2.7.3.1. |
Ventilador: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.7.3.2. |
Características |
|
|
|
|
|
|
|||
|
3.2.7.3.2.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.7.3.2.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.7.3.3. |
Relaciones de transmisión |
|
|
|
|
|
|
|||
|
3.2.8. |
Sistema de admisión |
|
|
|
|
|
|
|||
|
3.2.8.1. |
Sobrealimentador: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.8.1.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.8.1.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.8.1.3. |
Descripción del sistema (por ejemplo, presión máxima de sobrealimentación: … kPa; válvula de descarga, si procede): |
|
|
|
|
|
|
|||
|
3.2.8.2. |
Intercooler: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.8.2.1. |
Tipo: aire-aire/aire-agua (1) |
|
|
|
|
|
|
|||
|
3.2.8.3. |
Depresión de admisión a la velocidad nominal del motor y con una carga del 100 % (solo motores de encendido por compresión) |
|
|
|
|
|
|
|||
|
3.2.8.3.1. |
Mínimo permitido (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.3.2. |
Máximo permitido (kPa) |
|
|
|
|
|
|
|||
|
3.2.8.4. |
Descripción y dibujos de los tubos de admisión y sus accesorios (cámara impelente, dispositivo de calentamiento, entradas de aire adicionales, etc.) |
|
|
|
|
|
|
|||
|
3.2.8.4.1. |
Descripción del colector de admisión (inclúyanse dibujos o fotografías) |
|
|
|
|
|
|
|||
|
3.2.9. |
Sistema de escape |
|
|
|
|
|
|
|||
|
3.2.9.1. |
Descripción o dibujos del colector de escape |
|
|
|
|
|
|
|||
|
3.2.9.2. |
Descripción o dibujo del sistema de escape |
|
|
|
|
|
|
|||
|
3.2.9.2.1. |
Descripción o dibujo de los elementos del sistema de escape que forman parte del sistema de motor |
|
|
|
|
|
|
|||
|
3.2.9.3. |
Contrapresión máxima permitida de admisión a la velocidad nominal del motor y con el 100 % de la carga (solo motores de encendido por compresión) (kPa) (7) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.9.7. |
Volumen del sistema de escape (dm3) |
|
|
|
|
|
|
|||
|
3.2.9.7.1. |
Volumen aceptable del sistema de escape (dm3) |
|
|
|
|
|
|
|||
|
3.2.10. |
Sección transversal mínima y geometría de las lumbreras de admisión y escape |
|
|
|
|
|
|
|||
|
3.2.11. |
Regulación de las válvulas o datos equivalentes |
|||||||||
|
3.2.11.1. |
Elevación máxima de las válvulas, ángulos de apertura y cierre, o datos de regulación de otros sistemas de distribución alternativos, en relación con los puntos muertos. En caso de sistema de regulación variable, regulación máxima y mínima. |
|
|
|
|
|
|
|||
|
3.2.11.2. |
Intervalo de referencia o ajuste (7) |
|
|
|
|
|
|
|||
|
3.2.12. |
Medidas adoptadas contra la contaminación atmosférica |
|||||||||
|
|
||||||||||
|
3.2.12.1.1. |
Dispositivo para reciclar los gases del cárter: sí/no (1) En caso afirmativo, descripción y dibujos En caso negativo, se exige el cumplimiento del punto 6.10 del anexo 4 del Reglamento n.° 49, revisión 6, de la CEPE |
|
|
|
|
|
|
|||
|
3.2.12.2. |
Dispositivos adicionales de control de la contaminación (si los hay y no están incluidos en otro apartado) |
|
|
|
|
|
|
|||
|
3.2.12.2.1. |
Catalizador: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.1. |
Número de convertidores y elementos catalíticos (facilítese la información siguiente con respecto a cada unidad independiente) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.2. |
Dimensiones, forma y volumen de los convertidores catalíticos |
|
|
|
|
|
|
|||
|
3.2.12.2.1.3. |
Tipo de acción catalítica |
|
|
|
|
|
|
|||
|
3.2.12.2.1.4. |
Carga total de metales preciosos |
|
|
|
|
|
|
|||
|
3.2.12.2.1.5. |
Concentración relativa |
|
|
|
|
|
|
|||
|
3.2.12.2.1.6. |
Substrato (estructura y material) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.7. |
Densidad celular |
|
|
|
|
|
|
|||
|
3.2.12.2.1.8. |
Tipo de carcasa de los convertidores catalíticos |
|
|
|
|
|
|
|||
|
3.2.12.2.1.9. |
Ubicación de los convertidores catalíticos (lugar y distancia de referencia en la línea de escape) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.10. |
Pantalla térmica: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11. |
Descripción de los sistemas o el método de regeneración de los sistemas de postratamiento del gas de escape |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.1.11.5. |
Intervalo normal de temperaturas de funcionamiento (K) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.6. |
Reactivos consumibles: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.7. |
Tipo y concentración del reactivo necesario para la acción catalítica |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.8. |
Intervalo normal de temperaturas de funcionamiento del reactivo (K) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.9. |
Norma internacional |
|
|
|
|
|
|
|||
|
3.2.12.2.1.11.10. |
Frecuencia de reposición del reactivo: continua/mantenimiento (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.1.12. |
Marca del convertidor catalítico |
|
|
|
|
|
|
|||
|
3.2.12.2.1.13. |
Número de identificación de la pieza |
|
|
|
|
|
|
|||
|
3.2.12.2.2. |
Sensor de oxígeno: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.2.1. |
Marca |
|
|
|
|
|
|
|||
|
3.2.12.2.2.2. |
Ubicación |
|
|
|
|
|
|
|||
|
3.2.12.2.2.3. |
Intervalo de control |
|
|
|
|
|
|
|||
|
3.2.12.2.2.4. |
Tipo |
|
|
|
|
|
|
|||
|
3.2.12.2.2.5. |
Número de identificación de la pieza |
|
|
|
|
|
|
|||
|
3.2.12.2.3. |
Inyección de aire: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.3.1. |
Tipo (aire impulsado, bomba de aire, etc.) |
|
|
|
|
|
|
|||
|
3.2.12.2.4. |
Recirculación de los gases de escape (EGR): sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.4.1. |
Características (marca, tipo, flujo, etc.) |
|
|
|
|
|
|
|||
|
3.2.12.2.6. |
Filtro de partículas: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.1. |
Dimensiones, forma y capacidad del filtro de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.2. |
Diseño del filtro de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.3. |
Ubicación (distancia de referencia en la línea de escape) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.4. |
Descripción o dibujo del método o sistema de regeneración |
|
|
|
|
|
|
|||
|
3.2.12.2.6.5. |
Marca del filtro de partículas |
|
|
|
|
|
|
|||
|
3.2.12.2.6.6. |
Número de identificación de la pieza |
|
|
|
|
|
|
|||
|
3.2.12.2.6.7. |
Intervalos normales de temperaturas (K) y presiones (kPa) de funcionamiento |
|
|
|
|
|
|
|||
|
3.2.12.2.6.8. |
En caso de regeneración periódica |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.6.8.1.1. |
Número de ciclos de ensayo WHTC sin regeneración (n) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
3.2.12.2.6.8.2.1. |
Número de ciclos de ensayo WHTC con regeneración (nR) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9. |
Otros sistemas: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.6.9.1. |
Descripción y funcionamiento |
|
|
|
|
|
|
|||
|
3.2.12.2.7. |
Sistema de diagnóstico a bordo (OBD) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.1. |
Número de familias de motores OBD dentro de la familia de motores |
|
||||||||
|
3.2.12.2.7.0.2. |
Lista de las familias de motores OBD (cuando proceda) |
Familia de motores OBD 1 … |
||||||||
|
Familia de motores OBD 2 … |
||||||||||
|
etc … |
||||||||||
|
3.2.12.2.7.0.3. |
Número de la familia de motores OBD a la que pertenece el motor de origen / el motor miembro |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.4. |
Referencias del fabricante de la documentación sobre el sistema OBD exigida por el punto 3.1.4, letra c), y el punto 3.3.4 del Reglamento n.° 49, revisión 6, de la CEPE y especificada en el anexo 9A de dicho Reglamento a efectos de la homologación del sistema OBD |
|
|
|
|
|
|
|||
|
3.2.12.2.7.0.5. |
Cuando proceda, referencia del fabricante de la documentación para instalar en un vehículo un sistema de motor dotado de sistema OBD |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.2. |
Lista y función de todos los componentes monitorizados por el sistema OBD (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3. |
Descripción por escrito (principios generales de funcionamiento) de: |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1. |
Motores de encendido por chispa (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.1. |
Monitorización del catalizador (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.2. |
Detección de fallos de encendido (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.3. |
Monitorización del sensor de oxígeno (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.1.4. |
Otros componentes monitorizados por el sistema OBD |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2. |
Motores de encendido por compresión (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.1. |
Monitorización del catalizador (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.2. |
Monitorización del filtro de partículas (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.3. |
Monitorización del sistema electrónico de alimentación de combustible (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.4. |
Monitorización del sistema DeNOx (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.3.2.5. |
Otros componentes monitorizados por el sistema OBD (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.4. |
Criterios para la activación del indicador de mal funcionamiento (número fijo de ciclos de conducción o método estadístico) (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.5. |
Lista de todos los códigos de salida del sistema OBD y los formatos utilizados (con explicación de cada uno de ellos) (8) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.12.2.7.6.5. |
Protocolo de comunicación normalizado del sistema OBD (8) |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7. |
Referencia del fabricante de la información sobre el sistema OBD exigida por el punto 3.1.4, letra d), y el punto 3.3.4 del Reglamento n.° 49, revisión 6, de la CEPE a fin de cumplir las disposiciones sobre el acceso al sistema OBD del vehículo |
|
|
|
|
|
|
|||
|
3.2.12.2.7.7.1. |
Como alternativa a la referencia del fabricante dispuesta en el punto 3.2.12.2.7.7, referencia del documento adjunto al presente anexo que contiene el siguiente cuadro, una vez cumplimentado de acuerdo con el ejemplo proporcionado: Componente - Código de fallo - Estrategia de monitorización - Criterios de detección de fallos - Criterios de activación del indicador de mal funcionamiento - Parámetros secundarios - Preacondicionamiento - Ensayo de demostración Catalizador SCR - P20EE - Señales de los sensores de NOx 1 y 2 - Diferencia entre las señales de los sensores 1 y 2 - Segundo ciclo - Velocidad del motor, carga del motor, temperatura del catalizador, actividad del reactivo, flujo másico del gas de escape - Un ciclo de ensayo del sistema OBD (WHTC, parte en caliente) - Ciclo de ensayo del sistema OBD (WHTC, parte en caliente) |
|
|
|
|
|
|
|||
|
3.2.12.2.8. |
Otro sistema (descripción y funcionamiento) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.1. |
Sistemas para garantizar el correcto funcionamiento de las medidas de control de los NOx |
|
|
|
|
|
|
|||
|
3.2.12.2.8.2. |
Motor con desactivación permanente de la inducción del conductor, para su uso por los servicios de rescate o en vehículos diseñados y fabricados para su uso por el ejército, protección civil, servicios de bomberos y fuerzas de orden público: sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.12.2.8.3. |
Número de familias de motores OBD dentro de la familia de motores considerada cuando se vela por el correcto funcionamiento de las medidas de control de los NOx |
|
||||||||
|
3.2.12.2.8.4. |
Lista de las familias de motores OBD (cuando proceda) |
Familia de motores OBD 1 … Familia de motores OBD 2 … etc … |
||||||||
|
3.2.12.2.8.5. |
Número de la familia de motores OBD a la que pertenece el motor de origen / el motor miembro |
|
|
|
|
|
|
|||
|
3.2.12.2.8.6. |
Concentración más baja del ingrediente activo presente en el reactivo que no activa el sistema de alerta (CDmin) (% vol): |
|
||||||||
|
3.2.12.2.8.7. |
Cuando proceda, referencia del fabricante de la documentación para instalar en un vehículo los sistemas que garantizan el correcto funcionamiento de las medidas de control de los NOx |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.2.17. |
Información específica relativa a los motores alimentados con gas para vehículos pesados (en caso de sistemas con otra configuración, facilítese información equivalente) |
|
|
|
|
|
|
|||
|
3.2.17.1. |
Combustible: GLP/GN-H/GN-L/GN-HL (1) |
|
|
|
|
|
|
|||
|
3.2.17.2. |
Reguladores de presión o vaporizador / reguladores de presión (1) |
|
|
|
|
|
|
|||
|
3.2.17.2.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.2.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.2.3. |
Número de fases de reducción de la presión |
|
|
|
|
|
|
|||
|
3.2.17.2.4. |
Presión en la fase final, mínima (kPa) – máxima (kPa) |
|
|
|
|
|
|
|||
|
3.2.17.2.5. |
Número de puntos principales de ajuste |
|
|
|
|
|
|
|||
|
3.2.17.2.6. |
Número de puntos de ajuste del ralentí |
|
|
|
|
|
|
|||
|
3.2.17.2.7. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.3. |
Sistema de alimentación de combustible: mezclador / inyección de gas / inyección de líquido / inyección directa (1) |
|
|
|
|
|
|
|||
|
3.2.17.3.1. |
Regulación de la riqueza de la mezcla |
|
|
|
|
|
|
|||
|
3.2.17.3.2. |
Descripción del sistema o diagrama y dibujos |
|
|
|
|
|
|
|||
|
3.2.17.3.3. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.4. |
Mezclador |
|
|
|
|
|
|
|||
|
3.2.17.4.1. |
Número |
|
|
|
|
|
|
|||
|
3.2.17.4.2. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.4.3. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.4.4. |
Ubicación |
|
|
|
|
|
|
|||
|
3.2.17.4.5. |
Posibilidades de ajuste |
|
|
|
|
|
|
|||
|
3.2.17.4.6. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.5. |
Inyección en el colector de admisión |
|
|
|
|
|
|
|||
|
3.2.17.5.1. |
Inyección: monopunto/multipunto (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.2. |
Inyección: continua/simultánea/secuencial (1) |
|
|
|
|
|
|
|||
|
3.2.17.5.3. |
Equipo de inyección |
|
|
|
|
|
|
|||
|
3.2.17.5.3.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.5.3.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.5.3.3. |
Posibilidades de ajuste |
|
|
|
|
|
|
|||
|
3.2.17.5.3.4. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.5.4. |
Bomba de alimentación (si procede) |
|
|
|
|
|
|
|||
|
3.2.17.5.4.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.5.4.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.5.4.3. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.5.5. |
Inyectores |
|
|
|
|
|
|
|||
|
3.2.17.5.5.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.5.5.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.5.5.3. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.6. |
Inyección directa |
|
|
|
|
|
|
|||
|
3.2.17.6.1. |
Bomba de inyección / Regulador de presión (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.1.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.6.1.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.6.1.3. |
Regulación de la inyección |
|
|
|
|
|
|
|||
|
3.2.17.6.1.4. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.6.2. |
Inyectores |
|
|
|
|
|
|
|||
|
3.2.17.6.2.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.6.2.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.6.2.3. |
Presión de apertura o diagrama característico (1) |
|
|
|
|
|
|
|||
|
3.2.17.6.2.4. |
Número de homologación de tipo |
|
|
|
|
|
|
|||
|
3.2.17.7. |
Unidad de control electrónico |
|
|
|
|
|
|
|||
|
3.2.17.7.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.2.17.7.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.2.17.7.3. |
Posibilidades de ajuste |
|
|
|
|
|
|
|||
|
3.2.17.7.4. |
Números de calibración del software |
|
|
|
|
|
|
|||
|
3.2.17.8. |
Equipo específico para GN |
|
|
|
|
|
|
|||
|
3.2.17.8.1. |
Variante 1 (únicamente en el caso de homologaciones de motores para varias composiciones específicas de combustible) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.1. |
¿Característica autoadaptable? sí/no (1) |
|
|
|
|
|
|
|||
|
3.2.17.8.1.0.2. |
Calibración para una composición de gas específica GN-H/GN-L/GN-HL (1) Transformación para una composición de gas específica GN-Ht/GN-Lt/GN-HLt 1 |
|
|
|
|
|
|
|||
|
3.2.17.8.1.1. |
metano (CH4) … básica (% mol) etano (C2H6) … básica (% mol) propano (C3H8) … básica (% mol) butano (C4H10) … básica (% mol) C5/C5+: … básica (% mol) oxígeno (O2) … básica (% mol) inerte (N2, He, etc.) … básica (% mol) |
mín. (% mol) mín. (% mol) mín. (% mol) mín. (% mol) mín. (% mol) mín. (% mol) mín. (% mol) |
máx. (% mol) máx. (% mol) máx. (% mol) máx. (% mol) máx. (% mol) máx. (% mol) máx. (% mol) |
|||||||
|
3.5.5. |
Consumo específico de combustible y factores de corrección |
|
|
|
|
|
|
|||
|
3.5.5.1. |
Consumo específico de combustible durante el WHSC, «SFCWHSC», conforme al punto 5.3.3, g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.2. |
Consumo específico de combustible corregido durante el WHSC, «SFCWHSC, corr», conforme al punto 5.3.3.1: ... g/kWh |
|
|
|
|
|
|
|||
|
3.5.5.3. |
Factor de corrección de la parte urbana del WHTC (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.5.5.4. |
Factor de corrección de la parte rural del WHTC (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.5.5.5. |
Factor de corrección de la parte de autopista del WHTC (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.5.5.6. |
Factor de compensación de las emisiones en frío y en caliente (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.5.5.7. |
Factor de corrección para los motores provistos de sistemas de postratamiento del gas de escape con regeneración periódica, CFRegPer (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.5.5.8. |
Factor de corrección del NCV estándar (a partir de los datos de salida de la herramienta de preprocesamiento del motor) |
|
|
|
|
|
|
|||
|
3.6. |
Temperaturas permitidas por el fabricante |
|
|
|
|
|
|
|||
|
3.6.1. |
Sistema de refrigeración |
|
|
|
|
|
|
|||
|
3.6.1.1. |
Refrigeración por líquido, temperatura máxima en la salida (K) |
|
|
|
|
|
|
|||
|
3.6.1.2. |
Refrigeración por aire |
|
|
|
|
|
|
|||
|
3.6.1.2.1. |
Punto de referencia |
|
|
|
|
|
|
|||
|
3.6.1.2.2. |
Temperatura máxima en el punto de referencia (K) |
|
|
|
|
|
|
|||
|
3.6.2. |
Temperatura máxima en la salida del intercooler de admisión (K) |
|
|
|
|
|
|
|||
|
3.6.3. |
Temperatura máxima del gas de escape en el punto de los tubos de escape adyacente a las bridas externas de los colectores de escape o los turbocompresores (K) |
|
|
|
|
|
|
|||
|
3.6.4. |
Temperatura del combustible, mínima (K) – máxima (K) En el caso de motores diésel, en la entrada de la bomba de inyección, y en el caso de motores alimentados con gas, en la fase final del regulador de presión |
|
|
|
|
|
|
|||
|
3.6.5. |
Temperatura del lubricante mínima (K) – máxima (K) |
|
|
|
|
|
|
|||
|
|
||||||||||
|
3.8. |
Sistema de lubricación |
|
|
|
|
|
|
|||
|
3.8.1. |
Descripción del sistema |
|
|
|
|
|
|
|||
|
3.8.1.1. |
Posición del depósito de lubricante |
|
|
|
|
|
|
|||
|
3.8.1.2. |
Sistema de alimentación (por bomba / inyección en la admisión / mezcla con el combustible, etc.) (1) |
|
|
|
|
|
|
|||
|
3.8.2. |
Bomba de lubricación |
|
|
|
|
|
|
|||
|
3.8.2.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.8.2.2. |
Tipos |
|
|
|
|
|
|
|||
|
3.8.3. |
Mezcla con el combustible |
|
|
|
|
|
|
|||
|
3.8.3.1. |
Porcentaje |
|
|
|
|
|
|
|||
|
3.8.4. |
Refrigerador de aceite: sí/no (1) |
|
|
|
|
|
|
|||
|
3.8.4.1. |
Dibujos |
|
|
|
|
|
|
|||
|
3.8.4.1.1. |
Marcas |
|
|
|
|
|
|
|||
|
3.8.4.1.2. |
Tipos |
|
|
|
|
|
|
|||
Notas:
|
(1) |
Táchese lo que no proceda (en algunos casos no es necesario tachar nada, si más de una opción es aplicable). |
|
(3) |
Redondéese la cifra a la décima de milímetro más próxima. |
|
(4) |
Se calculará este valor y se redondeará al cm3 más próximo. |
|
(5) |
Especifíquese la tolerancia. |
|
(6) |
Determinación conforme a los requisitos del Reglamento n.o 85. |
|
(7) |
Indíquense aquí los valores superior e inferior de cada variante. |
|
(8) |
Indíquese en caso de una sola familia de motores OBD, y si no se indica ya en la documentación contemplada en la fila 3.2.12.2.7.0.4 de la parte 1 del presente apéndice. |
Apéndice de la ficha de características
Información sobre las condiciones de ensayo
1. Bujías
1.1. Marca
1.2. Tipo
1.3. Separación entre los electrodos
2. Bobina de encendido
2.1. Marca
2.2. Tipo
3. Lubricante utilizado
3.1. Marca
3.2. Tipo (indíquese el porcentaje de aceite en la mezcla si se mezclan el lubricante y el combustible)
3.3. Especificaciones del lubricante
4. Combustible de ensayo utilizado
4.1. Tipo de combustible [conforme al punto 6.1.9 del anexo V del Reglamento (UE) 2017/2400 de la Comisión]
4.2. Número de identificación único (número del lote de fabricación) del combustible utilizado
4.3. Poder calorífico neto (NCV) [conforme al punto 6.1.8 del anexo V del Reglamento (UE) 2017/2400 de la Comisión]
5. Equipo accionado por el motor
5.1. Solo será preciso determinar la potencia absorbida por los accesorios/equipos:
|
a) |
si los accesorios/equipos requeridos no están instalados en el motor, o |
|
b) |
si en el motor están instalados accesorios/equipos no requeridos. |
|
Nota: |
los requisitos aplicables al equipo accionado por el motor difieren entre el ensayo de emisiones y el ensayo de potencia. |
5.2. Datos de enumeración e identificación
5.3. Potencia absorbida a velocidades del motor específicas para el ensayo de emisiones
Cuadro 1
Potencia absorbida a velocidades del motor específicas para el ensayo de emisiones
|
Equipos |
|
||||
|
|
Ralentí |
Velocidad baja |
Velocidad alta |
Velocidad preferida (2) |
n95h |
|
Pa Accesorios/Equipos requeridos según el anexo 4, apéndice 6, del Reglamento n.° 49, revisión 6, de la CEPE |
|
|
|
|
|
|
Pb Accesorios/Equipos no requeridos según el anexo 4, apéndice 6, del Reglamento n.° 49, revisión 6, de la CEPE |
|
|
|
|
|
5.4. Constante del ventilador determinada conforme al apéndice 5 del presente anexo (si procede)
5.4.1. Cavg-fan (si procede)
5.4.2. Cind-fan (si procede)
Cuadro 2
Valor de la constante del ventilador Cind-fan correspondiente a diferentes velocidades del motor
|
Valor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
Veloc. motor |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
veloc. motor [min-1] |
|
|
|
|
|
|
|
|
|
|
|
const. ventil. Cind-fan,i |
|
|
|
|
|
|
|
|
|
|
6. Rendimiento del motor (declarado por el fabricante)
6.1. Velocidades de ensayo del motor para el ensayo de emisiones con arreglo al anexo 4 del Reglamento n.o 49, revisión 6, de la CEPE (1)
|
Velocidad baja (nlo) |
… min– 1 |
|
Velocidad alta (nhi) |
… min– 1 |
|
Ralentí |
… min– 1 |
|
Velocidad preferida |
… min– 1 |
|
n95h |
… min– 1 |
6.2. Valores declarados para el ensayo de potencia conforme al Reglamento n.o 85
|
6.2.1. |
Ralentí |
… min– 1 |
|
6.2.2. |
Velocidad a la potencia máxima |
… min– 1 |
|
6.2.3. |
Potencia máxima |
… kW |
|
6.2.4. |
Velocidad con el par máximo |
… min– 1 |
|
6.2.5. |
Par máximo |
… Nm |
(1) Especifíquese la tolerancia, que debe ser de ± 3 % respecto de los valores declarados por el fabricante.
Apéndice 3
Familia de motores en función del CO2
1. Parámetros que definen una familia de motores en función del CO2
La familia de motores en función del CO2, según esté determinada por el fabricante, deberá cumplir los criterios de pertenencia definidos conforme al punto 5.2.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE. Una familia de motores en función del CO2 podrá estar compuesta por un solo motor.
Además de esos criterios de pertenencia, la familia de motores en función del CO2, según esté determinada por el fabricante, deberá cumplir los criterios de pertenencia de los puntos 1.1 a 1.9 del presente apéndice.
Además de los parámetros indicados a continuación, el fabricante podrá introducir criterios adicionales que permitan la definición de familias de tamaño más reducido. No ha de tratarse necesariamente de parámetros que influyan en el nivel de consumo de combustible.
1.1. Datos geométricos importantes para la combustión
1.1.1. Desplazamiento por cilindro
1.1.2. Número de cilindros
1.1.3. Datos del diámetro y la carrera
1.1.4. Geometría y relación de compresión de la cámara de combustión
1.1.5. Diámetro de las válvulas y geometría de las lumbreras
1.1.6. Inyectores de combustible (diseño y ubicación)
1.1.7. Diseño de la culata
1.1.8. Diseño del émbolo y los segmentos
1.2. Componentes importantes para la gestión del aire
1.2.1. Tipo de equipo de sobrealimentación (válvula de descarga, sistema de regulación variable, dos fases, otro) y características termodinámicas
1.2.2. Concepto de la refrigeración del aire de admisión
1.2.3. Concepto de la regulación de las válvulas (fijo, parcialmente flexible, flexible)
1.2.4. Concepto de la EGR (sin/con refrigeración, presión alta/baja, control de la EGR)
1.3. Sistema de inyección
1.4. Concepto de la propulsión de los accesorios/equipos (mecánico, eléctrico, otro)
1.5. Recuperación del calor residual (sí/no; concepto y sistema)
1.6. Sistema de postratamiento
1.6.1. Características del sistema de dosificación del reactivo (concepto del reactivo y la dosificación)
1.6.2. Catalizador y filtro de partículas diésel (disposición, material y revestimiento)
1.6.3. Características del sistema de dosificación de hidrocarburos (diseño y concepto de la dosificación)
1.7. Curva a plena carga
1.7.1. Los valores de par a cada velocidad del motor de la curva a plena carga del motor de origen en función del CO2 determinada conforme al punto 4.3.1 deberán ser iguales o superiores a los de los demás motores de la misma familia en función del CO2 a la misma velocidad del motor en todo el intervalo registrado de velocidades del motor.
1.7.2. Los valores de par a cada velocidad del motor de la curva a plena carga del motor con la menor potencia nominal de la familia de motores en función del CO2 determinada conforme al punto 4.3.1 deberá ser igual o inferior a la de los demás motores de la misma familia en función del CO2 a la misma velocidad del motor en todo el intervalo registrado de velocidades del motor.
1.8. Velocidades de ensayo del motor características
1.8.1. El ralentí, nidle, del motor de origen en función del CO2 declarado por el fabricante en la ficha de características elaborada conforme al apéndice 2 del presente anexo al solicitar la certificación deberá ser igual o inferior al de los demás motores de la misma familia en función del CO2.
1.8.2. La velocidad n95h de todos los motores de la familia en función del CO2 que no sean el motor de origen en función del CO2, determinada a partir de la curva del motor a plena carga registrada conforme al punto 4.3.1 aplicando las definiciones de las velocidades del motor características conforme al punto 7.4.6 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, no deberá diferir más de ± 3 % respecto de la velocidad n95h del motor de origen en función del CO2.
1.8.3. La velocidad n57 de todos los motores de la familia en función del CO2 que no sean el motor de origen en función del CO2, determinada a partir de la curva del motor a plena carga registrada conforme al punto 4.3.1 aplicando las definiciones conforme al punto 4.3.5.2.1, no deberá diferir más de ± 3 % respecto de la velocidad n57 del motor de origen en función del CO2.
1.9. Número mínimo de puntos en el mapa de consumo de combustible
1.9.1. Todos los motores de una misma familia en función del CO2 deberán presentar en el mapa de consumo de combustible un mínimo de cincuenta y cuatro puntos situados por debajo de su respectiva curva del motor a plena carga determinada conforme al punto 4.3.1.
2. Elección del motor de origen en función del CO2
El motor de origen en función del CO2 de la familia en función del CO2 se seleccionará atendiendo al siguiente criterio:
2.1. La mayor potencia nominal de todos los motores de la familia de motores en función del CO2.
Apéndice 4
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible
1. Disposiciones generales
1.1. La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible se comprobará atendiendo a la descripción contenida en los certificados del apéndice 1 del presente anexo y a la descripción contenida en la ficha de características del apéndice 2 del presente anexo.
1.2. Si un certificado de motor ha tenido una o más extensiones, los ensayos se efectuarán con los motores descritos en el expediente de homologación relativo a la extensión de que se trate.
1.3. Los motores sometidos a ensayo se tomarán de la producción en serie que cumpla los criterios de selección conforme al punto 3 del presente apéndice.
1.4. Los ensayos podrán llevarse a cabo con los combustibles comerciales aplicables. No obstante, a petición del fabricante, podrán utilizarse los combustibles de referencia especificados en el punto 3.2.
1.5. Si los ensayos para comprobar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de los motores a gas (gas natural o GLP) se realizan con combustibles comerciales, el fabricante del motor deberá demostrar a la autoridad de homologación que se establece adecuadamente la composición del combustible gaseoso con vistas a la determinación del NCV conforme al punto 4 del presente apéndice aplicando el buen juicio técnico.
2. Número de motores y de familias de motores en función del CO2 que deben ensayarse
2.1. La base para deducir el número de familias de motores en función del CO2 y el número de motores dentro de esas familias que deben ensayarse anualmente para verificar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas la constituirá el 0,05 % de los motores fabricados el año de producción anterior en el ámbito de aplicación del presente Reglamento. La cifra resultante del 0,05 % de todos los motores pertinentes se redondeará al entero más próximo. Tal resultado se denominará nCOP,base.
2.2. No obstante lo dispuesto en el punto 2.1, el valor mínimo de nCOP,base será 30.
2.3. La cifra resultante de nCOP,base, determinada conforme a los puntos 2.1 y 2.2 del presente apéndice, se dividirá por 10, y el resultado se redondeará al entero más próximo a fin de determinar el número de familias de motores en función del CO2 que deben ensayarse anualmente, nCOP,fam, para verificar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.
2.4. En caso de que un fabricante tenga un número de familias en función del CO2 menor que el valor nCOP,fam determinado conforme al punto 2.3, el número de familias en función del CO2 que deberán ensayarse, nCOP,fam, vendrá definido por el número total de familias en función del CO2 del fabricante.
3. Selección de las familias de motores en función del CO2 que deben ensayarse
De las familias de motores en función del CO2 que deban ensayarse conforme al punto 2 del presente apéndice, las dos primeras serán aquellas con los mayores volúmenes de producción.
El resto de las familias de motores en función del CO2 que deban ensayarse se escogerán aleatoriamente entre todas las familias de motores en función del CO2 existentes, previo acuerdo entre el fabricante y la autoridad de homologación.
4. Ronda de ensayo que debe realizarse
El número mínimo de motores que debe ensayarse por cada familia de motores en función del CO2, nCOP,min, se determinará dividiendo nCOP,base por nCOP,fam, valores ambos determinados conforme al punto 2. Si el valor de nCOP,min resultante es menor que 4, se ajustará a 4.
De cada familia de motores en función del CO2 determinada conforme al punto 3 del presente apéndice se someterá a ensayo un número mínimo de nCOP,min motores, a fin de tomar una decisión de aprobación conforme al punto 9 del presente apéndice.
El número de rondas de ensayo que deben realizarse dentro de una familia de motores en función del CO2 se asignará aleatoriamente a los diferentes motores de esa familia, asignación que será acordada entre el fabricante y la autoridad de homologación.
La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se verificará sometiendo los motores al ensayo WHSC conforme al punto 4.3.4.
Serán de aplicación todas las condiciones límite especificadas en el presente anexo para los ensayos de certificación, con excepción de lo que sigue:
|
1) |
Las condiciones de ensayo de laboratorio conforme al punto 3.1.1 del presente anexo. Las condiciones conforme al punto 3.1.1 se recomiendan, pero no serán obligatorias. Como en el lugar de ensayo puede haber desviaciones en determinadas condiciones ambientales, debe aplicarse el buen juicio técnico para minimizarlas. |
|
2) |
Si se utiliza combustible de referencia del tipo B7 (Gasóleo/CI) conforme al punto 3.2 del presente anexo, no será necesario determinar el NCV conforme a dicho punto. |
|
3) |
Si se utiliza combustible comercial o combustible de referencia distinto del B7 (Gasóleo/CI), deberá determinarse el NCV del combustible de acuerdo con las normas aplicables indicadas en el cuadro 1 del presente anexo. Excepto en el caso de los motores a gas, la medición del NCV será realizada por un único laboratorio que sea independiente del fabricante, en lugar de por dos según exige el punto 3.2 del presente anexo. El NCV de los combustibles gaseosos de referencia (G25, GLP combustible B) se calculará, de acuerdo con las normas aplicables indicadas en el cuadro 1 del presente anexo, a partir del análisis del combustible presentado por el proveedor del combustible gaseoso de referencia. |
|
4) |
El aceite lubricante deberá ser el empleado durante la fabricación del motor, y no deberá cambiarse para ensayar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible. |
5. Rodaje de motores recién fabricados
5.1. Los ensayos se realizarán con motores recién fabricados de la producción en serie que tengan un tiempo de rodaje máximo de 15 horas antes de que comience la ronda de ensayo conforme al punto 4 del presente apéndice para la verificación de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.
5.2. A petición del fabricante, los ensayos podrán realizarse con motores que hayan tenido un rodaje de un máximo de 125 horas. En este caso, el procedimiento de rodaje lo efectuará el fabricante, que no deberá realizar ningún ajuste en esos motores.
5.3. Si el fabricante solicita un procedimiento de rodaje conforme al punto 5.2 del presente apéndice, podrá realizarse con cualquiera de los siguientes:
|
a. |
Todos los motores que se sometan a ensayo; |
|
b. |
Un motor recién fabricado, determinando un coeficiente de evolución como sigue:
|
5.4. Si se aplica lo dispuesto en el punto 5.3, letra b), del presente apéndice, los ulteriores motores seleccionados para los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible no se someterán al procedimiento de rodaje, sino que su consumo específico de combustible durante el WHSC determinado con el motor recién fabricado con un tiempo de rodaje máximo de 15 horas conforme al punto 5.1 del presente apéndice se multiplicará por el coeficiente de evolución.
5.5. En el caso descrito en el punto 5.4 del presente apéndice, los valores de consumo específico de combustible durante el WHSC que deberán tomarse serán los siguientes:
|
a. |
en el caso del motor utilizado para determinar el coeficiente de evolución conforme al punto 5.3, letra b), del presente apéndice, el valor obtenido en el segundo ensayo; |
|
b. |
en el caso de los demás motores, los valores determinados con el motor recién fabricado con un tiempo de rodaje máximo de 15 horas conforme al punto 5.1 del presente apéndice, multiplicados por el coeficiente de evolución determinado conforme al punto 5.3, letra b), letra C, del presente apéndice. |
5.6. A petición del fabricante, podrá utilizarse, en lugar de un procedimiento de rodaje conforme a los puntos 5.2 a 5.5 del presente apéndice, un coeficiente de evolución genérico de 0,99. En este caso, el consumo específico de combustible durante el WHSC determinado con el motor recién fabricado con un tiempo de rodaje máximo de 15 horas conforme al punto 5.1 del presente apéndice se multiplicará por el coeficiente de evolución genérico de 0,99.
5.7. Si el coeficiente de evolución conforme al punto 5.3, letra b), del presen te apéndice se determina empleando el motor de origen de una familia de motores conforme a los puntos 5.2.3 y5.2.4 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE, podrá extrapolarse a todos los miembros de cualquier familia en función del CO2 que pertenezcan a la misma familia de motores conforme al punto 5.2.3 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE.
6. Valor deseado en la evaluación de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
El valor deseado para evaluar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas será el consumo específico de combustible corregido durante el WHSC, SFCWHSC,corr, en g/kWh, determinado conforme al punto 5.3.3 y documentado en la ficha de características como parte de los certificados del apéndice 2 del presente anexo del motor concreto ensayado.
7. Valor real en la evaluación de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
7.1. El consumo específico de combustible durante el WHSC, SFCWHSC, se determinará conforme al punto 5.3.3 del presente anexo a partir de las rondas de ensayo realizadas conforme al punto 4 del presente apéndice. A petición del fabricante, el valor determinado de consumo específico de combustible se modificará aplicando lo dispuesto en los puntos 5.3 a 5.6 del presente apéndice.
7.2. Si en los ensayos conforme al punto 1.4 del presente apéndice se utilizó un combustible comercial, el consumo específico de combustible durante el WHSC, SFCWHSC, determinado conforme al punto 7.1 del presente apéndice se ajustará a un valor corregido, SFCWHSC,corr, conforme al punto 5.3.3.1 del presente anexo.
7.3. Si en los ensayos conforme al punto 1.4 del presente apéndice se utilizó un combustible de referencia, se aplicarán al valor determinado conforme al punto 7.1 del presente apéndice las disposiciones especiales del punto 5.3.3.2 del presente anexo.
7.4. La medición de las emisiones de contaminantes gaseosos durante el WHSC realizada conforme al punto 4 se ajustará aplicando los factores de deterioro adecuados para el motor en cuestión registrados en la adenda del certificado de homologación de tipo CE expedido con arreglo al Reglamento (UE) n.o 582/2011 de la Comisión.
8. Límite de conformidad de un solo ensayo
Con respecto a los motores diésel, los valores límite para la evaluación de la conformidad de un solo motor ensayado serán el valor deseado determinado conforme al punto 6, más el 3 %.
Con respecto a los motores de gasolina, los valores límite para la evaluación de la conformidad de un solo motor ensayado serán el valor deseado determinado conforme al punto 6, más el 4 %.
9. Evaluación de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
9.1. Si los resultados de los ensayos de emisiones durante el WHSC, determinados conforme al punto 7.4 del presente apéndice, no respetan los límites aplicables definidos en el anexo I del Reglamento (CE) n.o 595/2009 con respecto a todos los contaminantes gaseosos excepto el amoníaco, el ensayo correspondiente se considerará nulo para la evaluación de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.
9.2. El ensayo de un motor de acuerdo con el punto 4 del presente apéndice se considerará no conforme si el valor real según el punto 7 del presente apéndice supera los valores límite definidos de acuerdo con el punto 8 del presente apéndice.
9.3. En relación con el tamaño de la muestra de motores ensayados dentro de una familia en función del CO2 de acuerdo con el punto 4 del presente apéndice, deberá determinarse la estadística de ensayo que cuantifique, en el enésimo ensayo, el número acumulado de ensayos no conformes según el punto 9.2 del presente apéndice.
|
a. |
Si el número acumulado de ensayos no conformes en el enésimo ensayo, determinado de acuerdo con el punto 9.3 del presente apéndice, es inferior o igual al número de la decisión de aprobación correspondiente al tamaño de la muestra indicado en el cuadro 4 del apéndice 3 del Reglamento n.o 49 Rev. 06 de la CEPE, se adopta una decisión de aprobación. |
|
b. |
Si el número acumulado de ensayos no conformes en el enésimo ensayo, determinado de acuerdo con el punto 9.3 del presente apéndice, es mayor o igual al número de la decisión de rechazo correspondiente al tamaño de la muestra indicado en el cuadro 4 del apéndice 3 del Reglamento n.o 49 Rev. 06 de la CEPE, se adopta una decisión de rechazo. |
|
c. |
De lo contrario, se ensaya otro motor de acuerdo con el punto 4 del presente apéndice y se aplica a la muestra el procedimiento de cálculo conforme al punto 9.3 del presente apéndice, incrementado en una unidad. |
9.4. Si no se adopta una decisión ni de aprobación ni de rechazo, el fabricante podrá decidir en cualquier momento interrumpir los ensayos. En ese caso, se registrará una decisión de rechazo.
Apéndice 5
Determinación del consumo de potencia de los componentes del motor
1. Ventilador
El par motor deberá medirse estando el motor en arrastre con y sin el ventilador conectado, siguiendo el siguiente procedimiento:
|
i. |
Antes de comenzar el ensayo, se instalará el ventilador de acuerdo con las instrucciones del producto. |
|
ii. |
Fase de calentamiento: el motor se calentará siguiendo la recomendación del fabricante y aplicando el buen juicio técnico (por ejemplo, haciéndolo funcionar durante 20 minutos en el modo 9, según se define en el cuadro 1 del punto 7.2.2 del anexo 4 del Reglamento n.o 49 Rev. 06 de la CEPE). |
|
iii. |
Fase de estabilización: después del calentamiento o de la fase de calentamiento opcional (v), se hará funcionar el motor con la demanda mínima del operador (motor en arrastre) a la velocidad del motor npref durante 130 ± 2 segundos con el ventilador desconectado (nfan_disengage < 0,25 * nengine * rfan). Los 60 ± 1 primeros segundos de este período se consideran un período de estabilización, durante el cual la velocidad real del motor deberá mantenerse a ± 5 min– 1 de npref. |
|
iv. |
Fase de medición: durante el siguiente período de 60 ± 1 segundos, la velocidad real del motor deberá mantenerse a ± 2 min– 1 de npref y la temperatura del refrigerante a ± 5 °C, y mientras deberán registrarse el par necesario para arrastrar el motor con el ventilador desconectado, la velocidad del ventilador y la velocidad del motor como valor medio durante este período de 60 ± 1 segundos. El período restante de 10 ± 1 segundos se empleará para el posprocesamiento y el almacenamiento de los datos, si es necesario. |
|
v. |
Fase de calentamiento opcional: A petición del fabricante, y aplicando el buen juicio técnico, podrá repetirse el paso ii) (por ejemplo, si la temperatura ha descendido más de 5 °C) |
|
vi. |
Fase de estabilización: después del calentamiento opcional, se hará funcionar el motor con la demanda mínima del operador (motor en arrastre) a la velocidad del motor npref durante 130 ± 2 segundos con el ventilador conectado (nfan_engage > 0,9 * nengine * rfan). Los 60 ± 1 primeros segundos de este período se consideran un período de estabilización, durante el cual la velocidad real del motor deberá mantenerse a ± 5 min– 1 de npref. |
|
vii. |
Fase de medición: durante el siguiente período de 60 ± 1 segundos, la velocidad real del motor deberá mantenerse a ± 2 min– 1 de npref y la temperatura del refrigerante a ± 5 oC, y mientras se registrarán el par necesario para arrastrar el motor con el ventilador conectado, la velocidad del ventilador y la velocidad del motor como valor medio durante este período de 60 ± 1 segundos. El período restante de 10 ± 1 segundos se empleará para el posprocesamiento y el almacenamiento de los datos, si es necesario. |
|
viii. |
Los pasos iii) a vii) se repetirán a las velocidades del motor n95h y nhi en lugar de npref, con una fase de calentamiento opcional (v) antes de cada fase de estabilización, si es necesario para mantener estable la temperatura del refrigerante (± 5 °C), atendiendo al buen juicio técnico. |
|
ix. |
Si la deviación típica de todos los valores Ci calculados con la ecuación que figura a continuación a las tres velocidades npref, n95h y nhi es igual o superior al 3 %, la medición se llevará a cabo a todas las velocidades del motor que definen la cuadrícula del procedimiento de mapeo del consumo de combustible (FCMC) conforme al punto 4.3.5.2.1. |
La constante real del ventilador se calculará a partir de los datos medidos conforme a la siguiente ecuación:

donde:
|
Ci |
constante del ventilador a una determinada velocidad del motor |
|
MDfan_disengage |
par motor medido estando el motor en arrastre con el ventilador desconectado (Nm) |
|
MDfan_engage |
par motor medido estando el motor en arrastre con el ventilador conectado (Nm) |
|
nfan_engage |
velocidad del ventilador conectado (min– 1) |
|
nfan_disengage |
velocidad del ventilador desconectado (min– 1) |
|
rfan |
relación del ventilador |
Si la desviación típica de todos los valores Ci calculados a las tres velocidades npref, n95h y nhi es inferior al 3 %, se utilizará para la constante del ventilador un valor medio Cavg-fan determinado con las tres velocidades npref, n95h y nhi.
Si la desviación típica de todos los valores Ci calculados a las tres velocidades npref, n95h y nhi es igual o superior al 3 %, se utilizarán para la constante del ventilador Cind-fan,i valores individuales determinados para todas las velocidades del motor conforme al punto ix). El valor de la constante del ventilador correspondiente a la velocidad real del motor Cfan se determinará mediante interpolación lineal entre los valores individuales Cind-fan,i de la constante del ventilador.
El par motor necesario para accionar el ventilador se calculará con la siguiente ecuación:
Mfan = Cfan · nfan 2 · 10– 6
donde:
|
Mfan |
par motor para accionar el ventilador (Nm) |
|
Cfan |
constante del ventilador Cavg-fan o Cind-fan,i correspondiente a nengine |
La potencia mecánica consumida por el ventilador se calculará a partir del par motor necesario para accionar el ventilador y la velocidad real del motor. La potencia mecánica y el par motor se tendrán en cuenta conforme al punto 3.1.2.
2. Componentes/Equipos eléctricos
Deberá medirse la energía eléctrica suministrada desde el exterior a los componentes eléctricos del motor. Este valor medido deberá corregirse respecto de la potencia mecánica dividiéndolo por un valor de eficiencia genérico de 0,65. Esta potencia mecánica y el correspondiente par motor se tendrán en cuenta conforme al punto 3.1.2.
Apéndice 6
1. Marcados
Un motor certificado de conformidad con el presente anexo deberá llevar:
1.1. El nombre del fabricante y la marca.
1.2. La marca y la indicación del tipo identificativo según estén consignados en los puntos 0.1 y 0.2 del apéndice 2 del presente anexo.
1.3. La marca de certificación en forma de rectángulo en torno a la letra minúscula «e» seguida del número distintivo del Estado miembro que ha expedido el certificado:
|
|
1 para Alemania; |
|
|
2 para Francia; |
|
|
3 para Italia; |
|
|
4 para los Países Bajos; |
|
|
5 para Suecia; |
|
|
6 para Bélgica; |
|
|
7 para Hungría; |
|
|
8 para Chequia; |
|
|
9 para España; |
|
|
11 para el Reino Unido; |
|
|
12 para Austria; |
|
|
13 para Luxemburgo; |
|
|
17 para Finlandia; |
|
|
18 para Dinamarca; |
|
|
19 para Rumanía; |
|
|
20 para Polonia; |
|
|
21 para Portugal; |
|
|
23 para Grecia; |
|
|
24 para Irlanda; |
|
|
25 para Croacia; |
|
|
26 para Eslovenia; |
|
|
27 para Eslovaquia; |
|
|
29 para Estonia; |
|
|
32 para Letonia; |
|
|
34 para Bulgaria; |
|
|
36 para Lituania; |
|
|
49 para Chipre; |
|
|
50 para Malta. |
1.4. En la marca de certificación figurará también, cerca del rectángulo, el «número de homologación de base» incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo VII de la Directiva 2007/46/CE, precedido de las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de la letra «E», que indica que la homologación se refiere a un motor.
Para el presente Reglamento, el número secuencial será el 00.
1.4.1. Ejemplo y dimensiones de la marca de certificación (marcado separado)

Esta marca de certificación fijada en un motor indica que el tipo de que se trata ha sido certificado en Polonia (e20) con arreglo al presente Reglamento. Los dos primero dígitos (00) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. La letra siguiente indica que el certificado se ha expedido con relación a un motor (E). Las cuatro últimos dígitos (0004) son los que la autoridad de homologación ha asignado al motor como número de homologación de base.
1.5. Si la certificación conforme al presente Reglamento se concede al mismo tiempo que la homologación de tipo conforme al Reglamento (UE) n.o 582/2011, el marcado exigido en el punto 1.4 podrá ir detrás del marcado exigido por el apéndice 8 del anexo I de dicho Reglamento, separado por una barra «/».
1.5.1. Ejemplo de la marca de certificación (marcado unido)
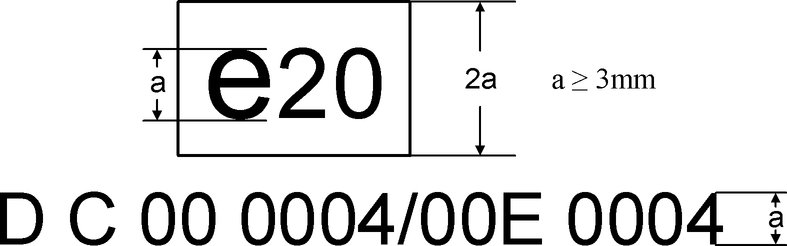
Esta marca de certificación fijada en un motor indica que el tipo de que se trata ha sido certificado en Polonia (e20) con arreglo al Reglamento (UE) n.o 582/2011 [Reglamento (UE) n.o 133/2014]. La letra «D» indica que es un motor diésel, y la letra «C» que la sigue, la fase de emisiones. Los dos dígitos siguientes (00) indican el número secuencial asignado a la última modificación técnica del Reglamento citado, seguidos de cuatro dígitos (0004) que son los asignados al motor por la autoridad de homologación como número de homologación de base a efectos del Reglamento (UE) n.o 582/2011. A continuación de la barra, las dos primeras cifras indican el número secuencial asignado a la última modificación técnica del presente Reglamento, seguidos de la letra «E» correspondiente a motor, y esta seguida de cuatro dígitos asignados por la autoridad de homologación a efectos de certificación de conformidad con el presente Reglamento («número de homologación de base» conforme al presente Reglamento).
1.6. A petición del solicitante de la certificación y previo acuerdo de la autoridad de homologación, podrán utilizarse tamaños de fuente distintos de los indicados en los puntos 1.4.1 y 1.5.1. Esos otros tamaños de fuente deberán seguir siendo claramente legibles.
1.7. Los marcados, las etiquetas, las placas o los adhesivos deben durar toda la vida útil del motor, y ser claramente legibles e indelebles. El fabricante deberá asegurarse de que sea imposible retirar los marcados, las etiquetas, las placas o los adhesivos sin destruirlos ni desfigurarlos.
2. Numeración
2.1. El número de certificación de los motores deberá comprender lo siguiente:
eX*YYY/YYYY*ZZZ/ZZZZ*E*0000*00
|
sección 1 |
sección 2 |
sección 3 |
Letra adicional de la sección 3 |
sección 4 |
sección 5 |
|
Indicación del país que expide la certificación |
Acto relativo a la certificación respecto del CO2 (.../2017) |
Último acto modificativo (zzz/zzzz) |
E: motor |
Número de certificación de base 0000 |
Extensión 00. |
Apéndice 7
Parámetros de entrada de la herramienta de simulación
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de componentes como información de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
El XML es generado automáticamente por la herramienta de preprocesamiento del motor.
Definiciones
1)
2)
string … cadena, secuencia de caracteres en codificación ISO 8859-1
token … testigo, secuencia de caracteres en codificación ISO 8859-1, sin espacios en blanco delante ni detrás
date … fecha y hora UTC con el siguiente formato: AAAA-MM-DDTHH:MM:SSZ con letra cursiva para los caracteres fijos, por ejemplo «2002-05-30T09:30:10Z»
integer … entero, valor con un tipo de datos integral, sin ceros delante, por ejemplo «1800»
double, X … número decimal con exactamente X dígitos tras el signo decimal («.») y sin ceros delante, por ejemplo, para «double, 2»: «2345.67»; para «doble, 4»: «45.6780»
3)
Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «Engine/General»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P200 |
token |
[-] |
|
|
Model |
P201 |
token |
[-] |
|
|
TechnicalReportId |
P202 |
token |
[-] |
|
|
Date |
P203 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P204 |
token |
[-] |
Número de versión de la herramienta de preprocesamiento del motor |
|
Displacement |
P061 |
int |
[cm3] |
|
|
IdlingSpeed |
P063 |
int |
[1/min] |
|
|
RatedSpeed |
P249 |
int |
[1/min] |
|
|
RatedPower |
P250 |
int |
[W] |
|
|
MaxEngineTorque |
P259 |
int |
[Nm] |
|
|
WHTCUrban |
P109 |
double, 4 |
[-] |
|
|
WHTCRural |
P110 |
double, 4 |
[-] |
|
|
WHTCMotorway |
P111 |
double, 4 |
[-] |
|
|
BFColdHot |
P159 |
double, 4 |
[-] |
|
|
CFRegPer |
P192 |
double, 4 |
[-] |
|
|
CFNCV |
P260 |
double, 4 |
[-] |
|
|
FuelType |
P193 |
string |
[-] |
Valores permitidos: «Diesel CI», «Ethanol CI», «Petrol PI», «Ethanol PI», «LPG», «NG» |
Cuadro 2
Parámetros de entrada «Engine/FullloadCurve» para cada punto de la cuadrícula de la curva a plena carga
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
EngineSpeed |
P068 |
double, 2 |
[1/min] |
|
|
MaxTorque |
P069 |
double, 2 |
[Nm] |
|
|
DragTorque |
P070 |
double, 2 |
[Nm] |
|
Cuadro 3
Parámetros de entrada «Engine/FuelMap» para cada punto de la cuadrícula del mapa de combustible
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
EngineSpeed |
P072 |
double, 2 |
[1/min] |
|
|
Torque |
P073 |
double, 2 |
[Nm] |
|
|
FuelConsumption |
P074 |
double, 2 |
[g/h] |
|
Apéndice 8
Pasos y ecuaciones de evaluación importantes de la herramienta de preprocesamiento del motor
En el presente apéndice se describen los pasos de evaluación más importantes y las ecuaciones básicas subyacentes que realiza la herramienta de preprocesamiento del motor. Los pasos siguientes se realizan durante la evaluación de los datos de entrada, en el orden en que se muestran:
1. Lectura de los archivos de entrada y comprobación automática de los datos de entrada.
1.1. Comprobación de los requisitos aplicables a los datos de entrada conforme a las definiciones del punto 6.1 del presente anexo.
1.2. Comprobación de los requisitos aplicables a los datos del FCMC registrados conforme a las definiciones del punto 4.3.5.2 y del subpunto 1 del punto 4.3.5.5 del presente anexo.
2. Cálculo de las velocidades del motor características a partir de las curvas a plena carga del motor de origen y del motor real objeto de certificación conforme a las definiciones del punto 4.3.5.2.1 del presente anexo.
3. Procesamiento del mapa de consumo de combustible (FC)
3.1. Los valores de FC a nidle se copian a la velocidad del motor (nidle – 100 min– 1) en el mapa.
3.2. Los valores de FC a n95h se copian a la velocidad del motor (n95h + 500 min– 1) en el mapa.
3.3. Extrapolación de los valores de FC en todos los puntos de consigna de velocidad del motor a un valor de par de (1,1 veces Tmax_overall) utilizando la regresión lineal según el método de mínimos cuadrados sobre la base de los tres puntos de FC medidos con los mayores valores de par en cada punto de consigna de velocidad del motor del mapa.
3.4. Adición de FC = 0 para los valores de par de arrastre interpolados en todos los puntos de consigna de velocidad del motor del mapa.
3.5. Adición de FC = 0 para el mínimo de los valores de par de arrastre interpolados del subpunto 3.4 menos 100 Nm en todos los puntos de consigna de velocidad del motor del mapa.
4. Simulación del FC y el trabajo del ciclo durante el WHTC y las respectivas subpartes en relación con el motor real objeto de certificación
4.1. Los puntos de referencia del WHTC se desnormalizan utilizando los datos de entrada de la curva a plena carga con la resolución registrada originalmente.
4.2. Se calcula el FC correspondiente a los valores de referencia desnormalizados WHTC de velocidad y par del motor del subpunto 4.1.
4.3. Se calcula el FC con la inercia del motor ajustada en 0.
4.4. Se calcula el FC con la función PT1 estándar (como en la simulación prinicipal del vehículo) para la respuesta del par motor activa.
4.5. El FC correspondiente a todos los puntos de arrastre se ajusta en 0.
4.6. El FC correspondiente a todos los puntos de funcionamiento del motor sin arrastre se calcula a partir del mapa de FC mediante el método de interpolación de Delaunay (como en la simulación principal del vehículo).
4.7. Se calculan el trabajo del ciclo y el FC con las ecuaciones definidas en los puntos 5.1 y 5.2 del presente anexo.
4.8. Los valores de FC específico simulados se calculan de forma análoga a la de las ecuaciones definidas en los puntos 5.3.1 y 5.3.2 del presente anexo para los valores medidos.
5. Cálculo de los factores de corrección del WHTC
5.1. Los valores medidos a partir de los datos de entrada de la herramienta de preprocesamiento y los valores simulados del punto 4 se utilizan conforme a las ecuaciones de los puntos 5.2 a 5.4.
5.2. CFUrban = SFCmeas,Urban / SFCsimu,Urban
5.3. CFRural = SFCmeas,Rural / SFCsimu,Rural
5.4. CFMW = SFCmeas,MW / SFCsimu,MW
5.5. Si el valor calculado para un factor de corrección es inferior a 1, el respectivo factor de corrección se ajusta en 1.
6. Cálculo del factor de compensación de las emisiones en frío y en caliente
6.1. Este factor se calcula con la ecuación del punto 6.2.
6.2. BFcold-hot = 1 + 0,1 x (SFCmeas,cold – SFCmeas,hot) / SFCmeas,hot
6.3. Si el valor calculado para este factor es inferior a 1, el factor se ajusta en 1.
7. Corrección de los valores de FC en el mapa de FC atendiendo al NCV
7.1. Esta corrección se realiza con la ecuación del punto 7.2.
7.2. FCcorrected = FCmeasured,map x NCVmeas / NVCstd
7.3. FCmeasured,map será el valor de FC en los datos de entrada del mapa de FC procesados conforme al punto 3.
7.4. NCVmeas y NVCstd se definirán conforme al punto 5.3.3.1 del presente anexo.
7.5. Si durante los ensayos se utilizó combustible de referencia del tipo B7 (Gasóleo/CI) conforme al punto 3.2 del presente anexo, no se efectuará la corrección conforme a los puntos 7.1 a 7.4.
8. Conversión de los valores de plena carga y par de arrastre del motor real objeto de certificación a una frecuencia de registro de la velocidad del motor de 8 min– 1.
8.1. La conversión se realiza mediante promediado aritmético en intervalos de ± 4 min– 1 del punto de consigna dado correspondiente a los datos de salida sobre la base de los datos de entrada de la curva a plena carga con la resolución registrada originalmente.
ANEXO VI
VERIFICACIÓN DE LOS DATOS RELATIVOS A LAS TRANSMISIONES, LOS CONVERTIDORES DE PAR, OTROS COMPONENTES DE TRANSFERENCIA DE PAR Y LOS COMPONENTES ADICIONALES DE LA LÍNEA DE TRANSMISIÓN
1. Introducción
El presente anexo describe las disposiciones de certificación relativas a las pérdidas de par de las transmisiones, los convertidores de par (TC), otros componentes de transferencia de par (OTTC) y los componentes adicionales de la línea de transmisión (ADC) de los vehículos pesados. Además, define los procedimientos de cálculo de las pérdidas de par normalizadas.
Los TC, OTTC y ADC pueden ensayarse en combinación con una transmisión o como unidades independientes. Si esos componentes se ensayan por separado, son de aplicación las disposiciones de las secciones 4, 5 y 6. Pueden ignorarse las pérdidas de par resultantes del mecanismo de accionamiento entre la transmisión y esos componentes.
2. Definiciones
A los efectos del presente anexo serán de aplicación las siguientes definiciones:
1) «Caja de transferencia»: dispositivo que divide la potencia del motor de un vehículo y la dirige hacia los ejes motores delantero y trasero. Está montada detrás de la transmisión y ambos árboles de transmisión, delantero y trasero, estás conectados a ella. Está compuesta bien por un engranaje, bien por un sistema de transmisión de cadena en el que la potencia se distribuye desde la transmisión a los ejes. Lo característico de la caja de transferencia es que tiene capacidad para cambiar entre el modo de tracción normal (tracción en las ruedas delanteras o traseras), el modo de tracción de la gama de largas (tracción en las ruedas delanteras y traseras), el modo de tracción de la gama de cortas y el modo neutro.
2) «Relación de transmisión»: relación de transmisión hacia delante de la velocidad del árbol de entrada (hacia el motor) respecto de la velocidad del árbol de salida (hacia las ruedas motrices) sin resbalamiento (i = nin/nout ).
3) «Cobertura de relaciones»: relación entre la relación de marchas hacia delante más larga y la relación de marchas hacia delante más corta de una transmisión: φtot = imax/imin .
4) «Transmisión compuesta»: transmisión con un número elevado de marchas hacia delante o una cobertura de relaciones amplia, compuesta de subtransmisiones que se combinan para utilizar las piezas de mayor transferencia de potencia en varias marchas hacia delante.
5) «Sección principal»: subtransmisión con el mayor número de marchas hacia delante de una transmisión compuesta.
6) «Sección de gama»: subtransmisión normalmente conectada en serie con la sección principal de una transmisión compuesta. La sección de gama tiene habitualmente dos marchas hacia delante variables. Las marchas cortas hacia delante de la transmisión completa se introducen utilizando la marcha de gama de cortas. Las marchas largas se introducen utilizando la marcha de gama de largas.
7) «Divisor»: elemento diseñado para dividir las marchas de la sección principal en (normalmente) dos variantes, las marchas cortas y largas, cuyas relaciones de transmisión están próximas en comparación con la cobertura de relaciones de la transmisión. El divisor puede ser una subtransmisión aparte, un dispositivo añadido, integrado en la sección principal, o una combinación de ambas cosas.
8) «Embrague de dientes»: embrague en el que el par se transfiere principalmente mediante fuerzas perpendiculares entre dientes coincidentes. El embrague de dientes puede estar engranado o desengranado. Solo funciona en condiciones sin carga (por ejemplo, en los cambios de marcha de una transmisión manual).
9) «Reenvío angular»: dispositivo que transmite potencia giratoria entre árboles no paralelos, utilizado a menudo con un motor orientado transversalmente y con entrada longitudinal al eje motor.
10) «Embrague de fricción»: embrague para la transferencia de par propulsor, en el que el par se transfiere constantemente mediante fuerzas de fricción. Un embrague de fricción puede transmitir par mientras resbala, por lo que puede (pero no tiene que) accionarse en los arranques y en los cambios de marcha bajo carga (se mantiene la transferencia de potencia durante el cambio de marcha).
11) «Sincronizador»: tipo de embrague de dientes en el que se utiliza un dispositivo de fricción para ecualizar las velocidades de las piezas giratorias que deben engranarse.
12) «Eficiencia de engrane»: relación de la potencia de salida respecto de la potencia de entrada cuando se transmite en un engrane hacia delante con movimiento relativo.
13) «Marcha superlenta»: marcha corta hacia delante (con una relación de reducción de la velocidad que es superior a la de las marchas no superlentas) diseñada para ser utilizada con poca frecuencia, por ejemplo en maniobras a baja velocidad o en arranques ocasionales cuesta arriba.
14) «Toma de fuerza (PTO)»: dispositivo instalado en una transmisión o en un motor al que puede conectarse un dispositivo con accionamiento auxiliar, por ejemplo una bomba hidráulica.
15) «Mecanismo de accionamiento de la toma de fuerza»: dispositivo presente en una transmisión que permite la instalación de una PTO.
16) «Embrague de bloqueo»: embrague de fricción instalado en un convertidor de par hidrodinámico; puede conectar los lados de entrada y de salida, eliminando así el resbalamiento.
17) «Embrague de arranque»: embrague que adapta la velocidad entre el motor y las ruedas motrices cuando el vehículo arranca. Normalmente está situado entre el motor y la transmisión.
18) «Transmisión manual sincronizada (SMT)»: transmisión manual con dos o más relaciones de velocidad seleccionables que se obtienen mediante sincronizadores. El cambio de relación se realiza, por lo general, durante la desconexión temporal de la transmisión respecto del motor por medio de un embrague (habitualmente, el embrague de arranque del vehículo).
19) «Transmisión manual automatizada o transmisión automática de engrane mecánico (AMT)»: transmisión de cambio de marchas automático con dos o más relaciones de velocidad seleccionables que se obtienen mediante embragues de dientes (sincronizados o no sincronizados). El cambio de relación se realiza durante la desconexión temporal de la transmisión respecto del motor. Los cambios de relación son efectuados por un sistema de control electrónico que gestiona la regulación temporal del cambio y el funcionamiento del embrague entre el motor y la caja de cambios, así como la velocidad y el par del motor. El sistema selecciona y engrana automáticamente la marcha hacia delante más adecuada, pero a él se puede superponer el conductor utilizando un modo manual.
20) «Transmisión de doble embrague (DCT)»: transmisión de cambio de marchas automático con dos embragues de fricción y varias relaciones de velocidad seleccionables que se obtienen utilizando embragues de dientes. Los cambios de relación son efectuados por un sistema de control electrónico que gestiona la regulación temporal del cambio y el funcionamiento de los embragues, así como la velocidad y el par del motor. El sistema selecciona automáticamente la marcha más adecuada, pero a él se puede superponer el conductor utilizando un modo manual.
21) «Ralentizador»: dispositivo accesorio de frenado instalado en el tren de potencia del vehículo; está destinado a efectuar un frenado permanente.
22) «Caso S»: montaje en serie de un convertidor de par y las piezas mecánicas conectadas de la transmisión.
23) «Caso P»: montaje en paralelo de un convertidor de par y las piezas mecánicas conectadas de la transmisión (por ejemplo, en las instalaciones con división de potencia).
24) «Transmisión automática bajo carga (powershifting) (APT)»: transmisión de cambio de marchas automático con más de dos embragues de fricción y varias relaciones de velocidad seleccionables que se obtienen principalmente utilizando esos embragues de fricción. Los cambios de relación son efectuados por un sistema de control electrónico que gestiona la regulación temporal del cambio y el funcionamiento de los embragues, así como la velocidad y el par del motor. El sistema selecciona automáticamente la marcha más adecuada, pero a él se puede superponer el conductor utilizando un modo manual. Normalmente, los cambios de marchas se producen sin que se interrumpa la tracción (de embrague de fricción a embrague de fricción).
25) «Sistema de acondicionamiento del aceite»: sistema externo que acondiciona el aceite de la transmisión en los ensayos. El sistema hace circular el aceite hacia y desde la transmisión. De ese modo, el aceite se filtra o se acondiciona térmicamente.
26) «Sistema de lubricación inteligente»: sistema que afectará a las pérdidas independientes de la carga (también llamadas pérdidas de giro o pérdidas por arrastre) de la transmisión en función del par de entrada o del flujo de potencia a través de la transmisión. Cabe citar como ejemplos las bombas de presión hidráulica controlada para los frenos y los embragues de una APT, el nivel variable controlado del aceite de la transmisión y el flujo o la presión variables controlados del aceite para la lubricación y la refrigeración de la transmisión. La lubricación inteligente puede incluir el control de la temperatura del aceite de la transmisión, pero no se tienen en cuenta aquí los sistemas de lubricación inteligente diseñados exclusivamente para controlar la temperatura, ya que las temperaturas de ensayo del procedimiento de ensayo de la transmisión son fijas.
27) «Accesorio eléctrico de la transmisión»: accesorio eléctrico utilizado para el funcionamiento de la transmisión en marcha estable. Un ejemplo típico es el de una bomba eléctrica de refrigeración o lubricación (pero no los actuadores eléctricos del cambio de marchas ni los sistemas de control electrónicos, incluidas las válvulas de solenoide eléctricas, ya que consumen poca energía, en particular durante el funcionamiento estable).
28) «Grado de viscosidad del tipo de aceite»: grado de viscosidad tal como se define en la norma SAE J306.
29) «Aceite de llenado en fábrica»: grado de viscosidad del tipo de aceite que se utiliza para el llenado en la fábrica y que está destinado a permanecer en la transmisión, en el convertidor de par, en otro componente de transferencia de par o en un componente adicional de la línea de transmisión durante el primer intervalo de revisión.
30) «Esquema de marchas»: disposición de los árboles, las ruedas dentadas y los embragues en una transmisión.
31) «Flujo de potencia»: vía de transferencia de la potencia en una transmisión, desde la entrada hasta la salida, a través de los árboles, las ruedas dentadas y los embragues.
3. Procedimiento de ensayo de las transmisiones
Para ensayar las pérdidas de una transmisión, deberá medirse el mapa de pérdida de par de cada tipo de transmisión. Las transmisiones podrán agruparse en familias que presenten datos similares o iguales en cuanto al CO2 atendiendo a lo dispuesto en el apéndice 6 del presente anexo.
Para determinar las pérdidas de par de una transmisión, el solicitante de un certificado deberá aplicar uno de los métodos siguientes a cada una de las marchas hacia delante (excluidas las marchas superlentas):
|
1) |
Opción 1: medición de las pérdidas independientes del par y cálculo de las pérdidas dependientes del par. |
|
2) |
Opción 2: medición de las pérdidas independientes del par, medición de la pérdida de par con el par máximo e interpolación de las pérdidas dependientes del par conforme a un modelo lineal. |
|
3) |
Opción 3: medición de la pérdida total de par. |
3.1. Opción 1: medición de las pérdidas independientes del par y cálculo de las pérdidas dependientes del par.
La pérdida de par Tl ,in en el árbol de entrada de la transmisión se calculará como sigue:
Tl,in (nin , Tin , gear) = T l,in,min_loss + fT * Tin + floss_corr * Tin + T l,in,min_el + fel_corr * Tin
El factor de corrección para las pérdidas de par hidráulico dependientes del par se calculará como sigue:

El factor de corrección para las pérdidas de par eléctrico dependientes del par se calculará como sigue:

La pérdida de par en el árbol de entrada de la transmisión causada por el consumo de energía del accesorio eléctrico de la transmisión se calculará como sigue:
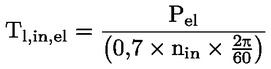
donde:
|
Tl,in |
= |
pérdida de par relacionada con el árbol de entrada [Nm] |
|
Tl,in,min_loss |
= |
pérdida independiente del par al nivel mínimo de pérdida hidráulica (presión principal mínima, flujos de refrigeración o lubricación mínimos, etc.), medida con el árbol de salida girando libremente en los ensayos sin carga [Nm] |
|
Tl,in,max_loss |
= |
pérdida independiente del par al nivel máximo de pérdida hidráulica (presión principal máxima, flujos de refrigeración o lubricación máximos, etc.), medida con el árbol de salida girando libremente en los ensayos sin carga [Nm] |
|
floss_corr |
= |
corrección de la pérdida correspondiente al nivel de pérdida hidráulica dependiente del par de entrada [-] |
|
nin |
= |
velocidad en el árbol de entrada de la transmisión (pospuesto al convertidor de par, si procede) [rpm] |
|
fT |
= |
coeficiente de pérdida de par = 1-ηT |
|
Tin |
= |
par en el árbol de entrada [Nm] |
|
ηT |
= |
eficiencia dependiente del par (debe calcularse); para una marcha directa fT = 0,007 (ηT=0,993) [-] |
|
fel_corr |
= |
corrección de la pérdida correspondiente al nivel de pérdida de energía eléctrica dependiente del par de entrada [-] |
|
Tl,in, el |
= |
pérdida de par adicional en el árbol de entrada por los elementos consumidores eléctricos [Nm] |
|
Tl,in,min_el |
= |
pérdida de par adicional en el árbol de entrada por los elementos consumidores eléctricos correspondiente a la energía eléctrica mínima [Nm] |
|
Tl,in,max_el |
= |
pérdida de par adicional en el árbol de entrada por los elementos consumidores eléctricos correspondiente a la energía eléctrica máxima [Nm] |
|
Pel |
= |
consumo de energía eléctrica de los elementos consumidores eléctricos de la transmisión medido durante los ensayos de pérdida de la transmisión [W] |
|
Tmax,in |
= |
par de entrada máximo permitido en cualquier marcha hacia delante de la transmisión [Nm] |
3.1.1. Las pérdidas dependientes del par de un sistema de transmisión deberán determinarse como se describe a continuación:
Los flujos de potencia múltiples paralelos y nominalmente iguales, por ejemplo, en el caso de árboles secundarios gemelos o de varios satélites en un engranaje epicicloidal, podrán considerarse en esta sección como un solo flujo de potencia.
3.1.1.1. Con respecto a cada marcha indirecta g de transmisiones comunes con un flujo de potencia no dividido y engranajes ordinarios, no epicicloidales, deberán seguirse los siguientes pasos:
3.1.1.2. Con respecto a cada engrane activo, la eficiencia dependiente del par se ajustará en valores constantes de hm:
|
engranes exterior-exterior |
: |
ηm = 0,986 |
|
engranes exterior-interior |
: |
ηm = 0,993 |
|
engranes del reenvío angular |
: |
ηm = 0,97 |
(Las pérdidas de un reenvío angular pueden determinarse, alternativamente, con ensayos aparte según se describe en el punto 6 del presente anexo).
3.1.1.3. El producto de estas eficiencias dependientes del par en engranes activos se multiplicará por una eficiencia de cojinete dependiente del par ηb = 99,5 %.
3.1.1.4. La eficiencia total dependiente del ηTg par correspondiente a la marcha g se calculará como sigue:
η Tg = η b * η m,1 * η m,2 * […] * η m,n
3.1.1.5. El coeficiente de pérdida dependiente del fTg par correspondiente a la marcha g se calculará como sigue:
fTg = 1 – η Tg
3.1.1.6. La pérdida dependiente del Tl,inTg par en el árbol de entrada correspondiente a la marcha g se calculará como sigue:
Tl,inTg = fTg * Tin
3.1.1.7. La eficiencia dependiente del par de la sección de gama epicicloidal en el modo de gama de cortas, en el caso especial de las transmisiones consistentes en una sección principal de tipo árbol secundario conectada en serie con una sección de gama epicicloidal (con corona no giratoria y portasatélites conectado al árbol de salida), podrá calcularse, en lugar de siguiendo el procedimiento del punto 3.1.1.8, como sigue:

donde:
|
ηm,ring |
= |
eficiencia dependiente del par del engrane corona-satélite = 99,3 % [-] |
|
ηm,sun |
= |
eficiencia dependiente del par del engrane satélite-planeta = 98,6 % [-] |
|
zsun |
= |
número de dientes del planeta de la sección de gama [-] |
|
zring |
= |
número de dientes de la corona de la sección de gama [-] |
La sección de gama epicicloidal se considerará un engrane adicional dentro de la sección principal de árbol secundario, y su eficiencia dependiente del par ηlowrange se incluirá en la determinación de las eficiencias totales dependientes del par ηTg correspondientes a las marchas de gama de cortas en el cálculo del punto 3.1.1.4.
3.1.1.8. Con respecto a los demás tipos de transmisión con flujos de potencia divididos o engranajes epicicloidales más complejos (por ejemplo, una transmisión epicicloidal automática convencional), deberá utilizarse el siguiente método simplificado para determinar la eficiencia dependiente del par. El método abarca los sistemas de transmisión compuestos por engranajes ordinarios, no epicicloidales, o engranajes epicicloidales de corona, satélites y planeta. Alternativamente, la eficiencia dependiente del par podrá calcularse sobre la base del Reglamento VDI 2157. Ambos cálculos deberán utilizar los mismos valores constantes de eficiencia de engrane definidos en el punto 3.1.1.2.
En este caso, con respecto a cada marcha indirecta g, deberán seguirse los siguientes pasos:
3.1.1.9. Tomando 1 rad/s de velocidad de entrada y 1 Nm de par de entrada, se creará un cuadro de valores de velocidad (Ni ) y de par (Ti ) correspondientes a todas las ruedas dentadas con eje de giro fijo (planetas, coronas y ruedas dentadas ordinarias) y a los portasatélites. Los valores de velocidad y de par seguirán la regla de la mano derecha, con el giro del motor como dirección positiva.
3.1.1.10. Con respecto a cada engranaje epicicloidal, las velocidades relativas planeta-portasatélites y corona-portasatélites se calcularán como sigue:
|
|
Nsun–carrier = Nsun – Ncarrier |
|
|
Nring–carrier = Nring – Ncarrier |
donde:
|
Nsun |
= |
velocidad de giro del planeta [rad/s] |
|
Nring |
= |
velocidad de giro de la corona [rad/s] |
|
Ncarrier |
= |
velocidad de giro del portasatélites [rad/s] |
3.1.1.11. Las potencias generadoras de pérdidas en los engranes se computarán como sigue:
|
|
Con respecto a cada engranaje ordinario, no epicicloidal, la potencia P se calculará como sigue:
donde:
|
|
|
Con respecto a cada engranaje epicicloidal, la potencia virtual del planeta Pv,sun y la corona Pv,ring se calculará como sigue:
donde:
Si los resultados de la potencia virtual son negativos, significará que sale potencia del engranaje, mientras que, si son positivos, significará que entra potencia en el engranaje. Las potencias de los engranes ajustadas en función de las pérdidas Padj se computarán como sigue: |
|
|
Con respecto a cada engranaje ordinario, no epicicloidal, la potencia negativa se multiplicará por la eficiencia dependiente del par ηm apropiada:
donde:
|
|
|
Con respecto a cada engranaje epicicloidal, la potencia virtual negativa se multiplicará por las eficiencias dependientes del par de los engranes planeta-satélite ηmsun y corona-satélite ηmring :
donde:
|
3.1.1.12. Todos los valores de potencia ajustada en función de las pérdidas se sumarán a la pérdida de potencia del engrane dependiente del par Pm,loss del sistema de transmisión con relación a la potencia de entrada:
Pm,loss = ΣPi,adj
donde:
|
i |
= |
todas las ruedas dentadas con eje de giro fijo [-] |
|
Pm,loss |
= |
pérdida de potencia del engrane dependiente del par del sistema de transmisión [W] |
3.1.1.13. El coeficiente de pérdida dependiente del par correspondiente a los cojinetes,
fT,bear = 1 – ηbear = 1 – 0,995 = 0,005
y el coeficiente de pérdida dependiente del par correspondiente a los engranes

se sumarán para obtener el coeficiente total de pérdida dependiente del par fT del sistema de transmisión:
fT = fT,gearmesh + fT,bear
donde:
|
fT |
= |
coeficiente total de pérdida dependiente del par del sistema de transmisión [-] |
|
fT,bear |
= |
coeficiente de pérdida dependiente del par correspondiente a los cojinetes [-] |
|
fT,gearmesh |
= |
coeficiente de pérdida dependiente del par correspondiente a los engranes [-] |
|
Pin |
= |
potencia de entrada fija de la transmisión; Pin = (1 Nm * 1 rad/s) [W] |
3.1.1.14. Las pérdidas dependientes del par en el árbol de entrada correspondientes a la marcha concreta se calcularán como sigue:
Tl,inT = fT * Tin
donde:
|
Tl,inT |
= |
pérdida dependiente del par relacionada con el árbol de entrada [Nm] |
|
Tin |
= |
par en el árbol de entrada [Nm] |
3.1.2. Las pérdidas independientes del par deberán medirse siguiendo el procedimiento descrito a continuación.
3.1.2.1. Requisitos generales
La transmisión utilizada para las mediciones deberá ser conforme con las especificaciones de dibujo aplicables a las transmisiones de producción en serie, y deberá ser nueva.
Está permitido hacer modificaciones en la transmisión para cumplir los requisitos de ensayo del presente anexo, por ejemplo, incluir sensores de medición o adaptar un sistema externo de acondicionamiento del aceite.
Los límites de tolerancia del presente punto se refieren a los valores de medición sin la incertidumbre del sensor.
El tiempo total de ensayo por ejemplar de transmisión y marcha no deberá exceder de 2,5 veces el tiempo real de ensayo por marcha (si es necesario, pueden repetirse los ensayos de la transmisión en caso de error de la medición o de la instalación).
El mismo ejemplar de transmisión podrá utilizarse para un máximo de diez ensayos diferentes, por ejemplo, ensayos de pérdidas de par de la transmisión en variantes con y sin ralentizador (con diferentes requisitos de temperatura) o con diferentes aceites. Si se utiliza el mismo ejemplar de transmisión para ensayos de diferentes aceites, deberá ensayarse primero el aceite de llenado en fábrica recomendado.
No está permitido realizar varias veces un determinado ensayo para escoger la serie de ensayo con los resultados más bajos.
A petición de la autoridad de homologación, el solicitante de un certificado deberá especificar y demostrar la conformidad con los requisitos del presente anexo.
3.1.2.2. Mediciones diferenciales
Para restar a las pérdidas de par medidas las influencias de la configuración de la instalación de ensayo (por ejemplo, cojinetes y embragues), está permitido efectuar mediciones diferenciales con el fin de determinar estos pares parásitos. Las mediciones se realizarán a las mismas velocidades y con las mismas temperaturas del cojinete de la instalación de ensayo ± 3 K que se utilicen en los ensayos. La incertidumbre de medida del sensor de par deberá ser inferior a 0,3 Nm.
3.1.2.3. Rodaje
A petición del solicitante, la transmisión podrá ser sometida a un procedimiento de rodaje. En el caso de un procedimiento de rodaje, serán de aplicación las disposiciones que siguen.
3.1.2.3.1. El procedimiento no durará más de 30 horas por marcha ni más de 100 horas en total.
3.1.2.3.2. La aplicación del par de entrada se limitará al 100 % del par de entrada máximo.
3.1.2.3.3. La velocidad de entrada máxima estará limitada por la velocidad máxima especificada de la transmisión.
3.1.2.3.4. El perfil de velocidad y de par del procedimiento de rodaje será el especificado por el fabricante.
3.1.2.3.5. El fabricante documentará el procedimiento de rodaje por lo que respecta al tiempo de rodaje, la velocidad, el par y la temperatura del aceite, y se lo comunicará a la autoridad de homologación.
3.1.2.3.6. Los requisitos aplicables a la temperatura ambiente (3.1.2.5.1), la exactitud de la medición (3.1.4), la configuración de ensayo (3.1.8) y el ángulo de instalación (3.1.3.2) no serán de aplicación para el procedimiento de rodaje.
3.1.2.4. Preacondicionamiento
3.1.2.4.1. Está permitido el preacondicionamiento de la transmisión y del equipo de la instalación de ensayo para conseguir temperaturas correctas y estables antes de los procedimientos de rodaje y ensayo.
3.1.2.4.2. El preacondicionamiento se realizará con la marcha de tracción directa sin aplicar par al árbol de salida. Si la transmisión no está provista de una marcha de tracción directa, se utilizará la marcha con la relación más próxima a 1:1.
3.1.2.4.3. La velocidad de entrada máxima estará limitada por la velocidad máxima especificada de la transmisión.
3.1.2.4.4. El tiempo combinado máximo para el preacondicionamiento no deberá exceder de 50 horas en total para una transmisión. Dado que los ensayos completos de una transmisión pueden dividirse en múltiples secuencias de ensayo (por ejemplo, cada marcha ensayada con una secuencia por separado), el preacondicionamiento podrá dividirse en varias secuencias. Ninguna de las secuencias de preacondicionamiento deberá exceder de 60 minutos.
3.1.2.4.5. El tiempo de preacondicionamiento no se considerará parte del espacio de tiempo asignado para los procedimientos de rodaje o de ensayo.
3.1.2.5. Condiciones de ensayo
3.1.2.5.1. Temperatura ambiente
La temperatura ambiente durante el ensayo será de 25 °C ± 10 K.
La temperatura ambiente se medirá a 1 m de distancia de un lado de la transmisión.
El límite de temperatura ambiente no será de aplicación para el procedimiento de rodaje.
3.1.2.5.2. Temperatura del aceite
No se permitirá ninguna calefacción externa, salvo para el aceite.
Durante la medición (exceptuada la estabilización), serán de aplicación los siguientes límites de temperatura:
|
|
Para las transmisiones SMT, AMT y DCT, la temperatura del aceite en el tapón de vaciado no deberá exceder de 83 °C cuando se mida sin ralentizador, ni de 87 °C con el ralentizador montado en la transmisión. Si las mediciones de una transmisión sin ralentizador han de combinarse con mediciones por separado de un ralentizador, se aplicará el límite inferior de temperatura como compensación por el mecanismo de accionamiento y el engranaje multiplicador del ralentizador, y por el embrague, en caso de ralentizador desengranable. |
|
|
En el caso de transmisiones epicicloidales de convertidor de par y de transmisiones con más de dos embragues de fricción, la temperatura del aceite en el tapón de vaciado no deberá exceder de 93 °C sin ralentizador, ni de 97 °C con ralentizador. |
Para aplicar dichos límites de temperatura incrementados en los ensayos con ralentizador, este deberá integrarse en la transmisión o tener con la transmisión un sistema integrado de refrigeración o de aceite.
Durante el rodaje, serán de aplicación las mismas especificaciones de temperatura del aceite que en los ensayos normales.
Se admiten picos excepcionales de temperatura del aceite de hasta 110 °C en las condiciones siguientes:
|
1) |
durante el procedimiento de rodaje, hasta un máximo del 10 % del tiempo de rodaje aplicado; |
|
2) |
durante el tiempo de estabilización. |
La temperatura del aceite deberá medirse en el tapón de vaciado o en el cárter del aceite.
3.1.2.5.3. Calidad del aceite
En el ensayo deberá utilizarse aceite nuevo que sea el recomendado para el primer llenado en el mercado europeo. Podrá utilizarse el mismo llenado de aceite para el rodaje y para la medición del par.
3.1.2.5.4. Viscosidad del aceite
Si para el primer llenado se recomiendan varios aceites, se considerarán iguales si sus viscosidades cinemáticas no se diferencian en más de un 10 % a la misma temperatura (dentro de la banda de tolerancia especificada para KV 100). Se considerará que un aceite que tenga una viscosidad inferior a la del aceite utilizado en el ensayo dará pérdidas inferiores en los ensayos realizados dentro de esta opción. Para ser incluido en el mismo certificado, todo aceite adicional de primer llenado deberá estar dentro de la banda de tolerancia del 10 % o tener una viscosidad inferior a la del aceite utilizado en el ensayo.
3.1.2.5.5. Nivel y acondicionamiento del aceite
El nivel de aceite deberá respetar las especificaciones nominales relativas a la transmisión.
S se utiliza un sistema externo de acondicionamiento del aceite, el aceite que esté dentro de la transmisión deberá mantenerse con el volumen especificado que corresponda al nivel de aceite especificado.
Para garantizar que el sistema externo de acondicionamiento del aceite no influya en el ensayo, un punto de ensayo deberá medirse con el sistema de acondicionamiento encendido y apagado. La desviación entre las dos mediciones de la pérdida de par (= par de entrada) deberá ser inferior al 5 %. El punto de ensayo se especifica como sigue:
|
1) |
marcha = la marcha indirecta más larga, |
|
2) |
velocidad de entrada = 1 600 rpm, |
|
3) |
temperaturas según se especifica en el punto 3.1.2.5. |
En el caso de transmisiones con control de la presión hidráulica o con sistema de lubricación inteligente, las mediciones de las pérdidas independientes del par se realizarán con dos ajustes diferentes: en primer lugar, con la presión del sistema de la transmisión ajustada por lo menos en el valor mínimo correspondiente a las condiciones con la marcha engranada, y, en segundo lugar, con la máxima presión hidráulica posible (véase el punto 3.1.6.3.1).
3.1.3. Instalación
3.1.3.1. La máquina eléctrica y el sensor de par se montarán en el lado de entrada de la transmisión. El árbol de salida girará libremente.
3.1.3.2. La transmisión se instalará con un ángulo de inclinación correspondiente a la instalación en el vehículo, conforme al dibujo de homologación ± 1° o a 0° ± 1°.
3.1.3.3. Deberá incluirse en la transmisión la bomba de aceite interior.
3.1.3.4. Si es opcional que la transmisión lleve un refrigerante del aceite, en el ensayo podrá excluirse dicho refrigerante; en caso de que sea obligatorio, podrá utilizarse cualquier refrigerante del aceite.
3.1.3.5. Los ensayos de la transmisión podrán realizarse con o sin mecanismo de accionamiento de la toma de fuerza, o con o sin toma de fuerza. Para establecer las pérdidas de potencia de las tomas de fuerza o de sus mecanismos de accionamiento, son de aplicación los valores del anexo VII del presente Reglamento. Estos valores presuponen que la transmisión se ensaya sin mecanismo de accionamiento de la toma de fuerza, o sin toma de fuerza.
3.1.3.6. La medición de la transmisión podrá realizarse con embrague en seco único (de uno o dos discos) instalado o no. Los embragues de cualquier otro tipo deberán estar instalados durante el ensayo.
3.1.3.7. Deberá calcularse la influencia de cada carga parásita de cada configuración de la instalación de ensayo y de cada sensor de par, según se describe en el punto 3.1.8.
3.1.4. Equipo de medición
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma ISO/TS 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales (internacionales).
3.1.4.1. Par
La incertidumbre de medida del sensor de par deberá ser inferior a 0,3 Nm.
Se permite el uso de sensores de par con mayores incertidumbres de medida si la parte de la incertidumbre que excede de 3 Nm es calculable y se suma a la pérdida de par medida según se describe en el punto 3.1.8, relativo a la incertidumbre de la medición.
3.1.4.2. Velocidad
La incertidumbre de los sensores de velocidad no deberá exceder de ± 1 rpm.
3.1.4.3. Temperatura
La incertidumbre de los sensores de temperatura para la medición de la temperatura ambiente no deberá exceder de ± 1,5 K.
La incertidumbre de los sensores de temperatura para la medición de la temperatura del aceite no deberá exceder de ± 1,5 K.
3.1.4.4. Presión
La incertidumbre de los sensores de presión no deberá exceder del 1 % de la presión máxima medida.
3.1.4.5. Tensión
La incertidumbre del voltímetro no deberá exceder del 1 % de la tensión máxima medida.
3.1.4.6. Corriente eléctrica
La incertidumbre del amperímetro no deberá exceder del 1 % de la corriente máxima medida.
3.1.5. Registro de las señales y los datos de medición
Durante la medición, deberán registrase por lo menos las siguientes señales:
|
1) |
Pares de entrada [Nm] |
|
2) |
Velocidades de giro de entrada [rpm] |
|
3) |
Temperatura ambiente [°C] |
|
4) |
Temperatura del aceite [°C] |
Si la transmisión está provista de un sistema de cambio de marchas o de embrague controlado por presión hidráulica o de un sistema de lubricación inteligente de accionamiento mecánico, deberá registrarse también lo siguiente:
|
5) |
Presión del aceite [kPa] |
Si la transmisión está provista de accesorio eléctrico, deberá registrarse también lo siguiente:
|
6) |
Tensión del accesorio eléctrico de la transmisión [V] |
|
7) |
Corriente del accesorio eléctrico de la transmisión [A] |
En relación con las mediciones diferenciales para compensar las influencias de la configuración de la instalación de ensayo, deberá registrarse también lo siguiente:
|
8) |
Temperatura del cojinete de la instalación de ensayo [°C] |
El régimen de muestreo y registro deberá ser de 100 Hz o superior.
Para reducir los errores de medición se aplicará un filtro de paso bajo.
3.1.6. Procedimiento de ensayo
3.1.6.1. Compensación de la señal de par cero:
Deberá medirse la señal cero de los sensores de par. Para la medición, los sensores deberán estar instalados en la instalación de ensayo. El tren de transmisión de la instalación de ensayo (entrada y salida) deberá estar sin carga. Deberá compensarse la desviación de la señal medida respecto del cero.
3.1.6.2. Intervalo de velocidades:
La pérdida de par deberá medirse con las siguientes fases de velocidad (velocidad del árbol de entrada): 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, […] rpm hasta la velocidad máxima por marcha según las especificaciones de la transmisión o la última fase de velocidad antes de la velocidad máxima definida.
La rampa de velocidad (tiempo necesario para cambiar entre dos fases de velocidad) no deberá exceder de 20 segundos.
3.1.6.3. Secuencia de medición:
|
3.1.6.3.1. |
Si la transmisión está provista de sistemas de lubricación inteligentes o accesorios eléctricos, la medición deberá efectuarse con dos ajustes de medición de estos sistemas:
|
|
3.1.6.3.2. |
Las mediciones se realizarán empezando desde la velocidad más baja hasta llegar a la velocidad más alta. |
|
3.1.6.3.3. |
En cada fase de velocidad debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 3.1.2.5. Si es necesario, el fabricante podrá ampliar el tiempo de estabilización hasta un máximo de 60 segundos. Durante la estabilización, deberán registrarse la temperatura del aceite y la temperatura ambiente. |
|
3.1.6.3.4. |
Tras el tiempo de estabilización, deberán registrarse durante 05-15 segundos las señales de medición enumeradas en el punto 3.1.5 con respecto al punto de ensayo. |
|
3.1.6.3.5. |
Cada medición deberá realizarse dos veces con cada ajuste de medición. |
3.1.7. Validación de la medición
3.1.7.1. Los valores de las medias aritméticas de par, velocidad, tensión (si procede) y corriente correspondientes a la medición durante 05-15 segundos deberán calcularse con respecto a cada una de las mediciones.
3.1.7.2. La desviación de velocidad promediada deberá estar por debajo de ± 5 rpm respecto del punto de consigna de velocidad en cada punto medido de la serie completa de pérdidas de par.
3.1.7.3. Las pérdidas de par mecánicas y (si procede) el consumo de energía eléctrica deberán calcularse con respecto a cada una de las mediciones como sigue:
|
|
Tloss = Tin |
|
|
Pel = I * U |
Está permitido restar a las pérdidas de par las influencias causadas por la configuración de la instalación de ensayo (3.1.2.2).
3.1.7.4. Las pérdidas de par mecánicas y (si procede) el consumo de energía eléctrica de los dos conjuntos deberán promediarse (valores de las medias aritméticas).
3.1.7.5. La desviación entre las pérdidas de par promediadas de los dos puntos de medición correspondientes a cada ajuste deberá estar por debajo de ± 5 % de la media o de ± 1 Nm, si este último valor es mayor. Se tomará entonces la media aritmética de los dos valores de energía promediados.
3.1.7.6. Si la desviación es mayor, se tomará el mayor valor promediado de pérdida de par, o se repetirá el ensayo con la marcha de que se trate.
3.1.7.7. La desviación entre los valores de consumo de energía eléctrica promediados (tensión*corriente) de las dos mediciones correspondientes a cada ajuste de medición deberá estar por debajo de ± 10 % de la media o de ± 5 W, si este último valor es mayor. Se tomará entonces la media aritmética de los dos valores de energía promediados.
3.1.7.8. Si la desviación es mayor, se tomará el conjunto de valores de tensión y corriente promediados que dé el mayor consumo de energía promediado, o se repetirá el ensayo con la marcha de que se trate.
3.1.8. Incertidumbre de la medición
La parte de la incertidumbre total calculada UT,loss que exceda de 0,3 Nm se sumará a Tloss para la pérdida de par comunicada Tloss,rep . Si UT,loss es inferior a 0,3 Nm, entonces Tloss,rep = Tloss .
Tloss,rep = Tloss + MAX (0, (UT,loss – 0,3 Nm))
La incertidumbre total UT,loss de la pérdida de par se calculará sobre la base de los siguientes parámetros:
|
1) |
Efecto de la temperatura |
|
2) |
Cargas parásitas |
|
3) |
Error de calibración (incluidas la tolerancia de sensibilidad, la linealidad, las histéresis y la repetibilidad) |
La incertidumbre total de la pérdida de par (UT,loss ) se basa en las incertidumbres de los sensores con un nivel de confianza del 95 %. El cálculo se efectuará como la raíz cuadrada de la suma de los cuadrados (ley gaussiana de propagación de errores).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wpara = senspara * ipara |
donde:
|
Tloss |
= |
pérdida de par medida (sin corregir) [Nm] |
|
Tloss,rep |
= |
pérdida de par comunicada (tras la corrección de la incertidumbre) [Nm] |
|
UT,loss |
= |
incertidumbre total expandida de la medición de la pérdida de par con un nivel de confianza del 95 % [Nm] |
|
UT,in |
= |
incertidumbre de la medición de la pérdida de par de entrada [Nm] |
|
uTKC |
= |
incertidumbre por la influencia de la temperatura en la señal de par de corriente [Nm] |
|
wtkc |
= |
influencia de la temperatura en la señal de par de corriente por Kref, declarada por el fabricante del sensor [%] |
|
uTK0 |
= |
incertidumbre por la influencia de la temperatura en la señal de par cero (respecto al par nominal) [Nm] |
|
wtk0 |
= |
influencia de la temperatura en la señal de par cero por Kref (respecto al par nominal), declarada por el fabricante del sensor [%] |
|
Kref |
= |
amplitud del intervalo de temperaturas de referencia para uTKC y uTK0, wtk0 y wtkc, declarado por el fabricante del sensor [K] |
|
ΔK |
= |
diferencia en la temperatura del sensor entre la calibración y la medición [K]; si no puede medirse la temperatura del sensor, se tomará un valor por defecto de ΔK = 15 K |
|
Tc |
= |
valor del par de corriente / par medido en el sensor de par [Nm] |
|
Tn |
= |
valor de par nominal del sensor de par [Nm] |
|
ucal |
= |
incertidumbre por la calibración del sensor de par [Nm] |
|
Wcal |
= |
incertidumbre de calibración relativa (respecto al par nominal) [%] |
|
kcal |
= |
factor de avance de la calibración (si lo declara el fabricante del sensor; de lo contrario = 1) |
|
upara |
= |
incertidumbre por cargas parásitas [Nm] |
|
wpara |
= |
senspara * ipara influencia relativa de las fuerzas y los pares de flexión causados por la desalineación |
|
senspara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto declarada por su fabricante [%]; si el fabricante del sensor no declara ningún valor específico de cargas parásitas, el valor se ajustará en el 1,0 % |
|
ipara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto dependiendo de la configuración de ensayo (A/B/C, según se define a continuación) |
|
|
= |
A) el 10 %, en el caso de cojinetes que aíslan las fuerzas parásitas delante y detrás del sensor y de un acoplamiento flexible (árbol cardánico) instalado funcionalmente cerca del sensor (antepuesto o pospuesto); por otro lado, estos cojinetes podrán estar integrados en una máquina de accionamiento/frenado (por ejemplo, una máquina eléctrica) o en la transmisión, a condición de que las fuerzas ejercidas en la máquina o en la transmisión estén aisladas del sensor. Véase la figura 1. Figura 1 Configuración de ensayo A para la opción 1 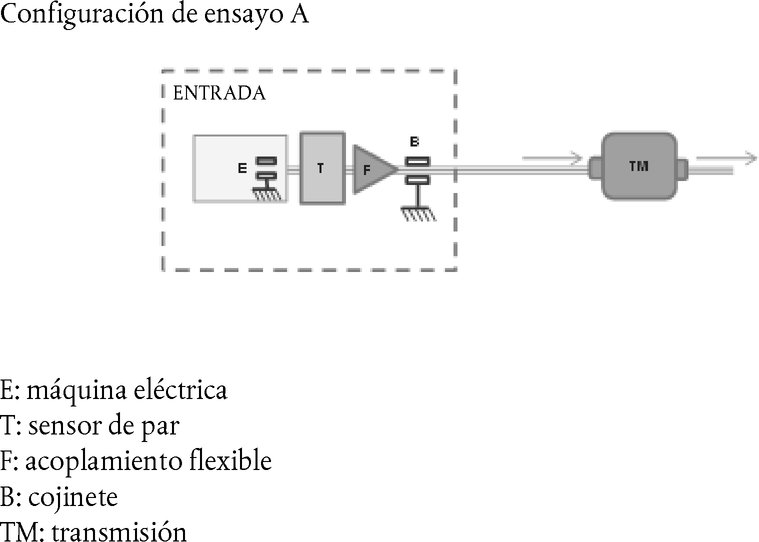
|
|
|
= |
B) el 50 %, en el caso de cojinetes que aíslan las fuerzas parásitas delante y detrás del sensor, sin un acoplamiento flexible instalado funcionalmente cerca del sensor; por otro lado, estos cojinetes podrán estar integrados en una máquina de accionamiento/frenado (por ejemplo, una máquina eléctrica) o en la transmisión, a condición de que las fuerzas ejercidas en la máquina o en la transmisión estén aisladas del sensor. Véase la figura 2. Figura 2 Configuración de ensayo B para la opción 1 
|
|
|
= |
C) el 100 % para otras configuraciones |
3.2. Opción 2: medición de las pérdidas independientes del par, medición de la pérdida de par con el par máximo e interpolación de las pérdidas dependientes del par conforme a un modelo lineal.
La opción 2 describe la determinación de la pérdida de par mediante una combinación de mediciones e interpolación lineal. Se realizarán mediciones de las pérdidas de la transmisión independientes del par y de un punto de carga de las pérdidas dependientes del par (par de entrada máximo). Sobre la base de las pérdidas de par sin carga alguna y con el par de entrada máximo, las pérdidas de par correspondientes a los pares de entrada intermedios se calcularán con el coeficiente de pérdida de par fTlimo .
La pérdida de par Tl,in en el árbol de entrada de la transmisión se calculará como sigue:
Tl,in (nin , Tin , gear) = Tl,in,min_loss + fTlimo * Tin + T l,in,min_el + fel_corr * Tin
El coeficiente de pérdida de par basado en el modelo lineal fTlimo se calculará como sigue:

donde:
|
Tl,in |
= |
pérdida de par relacionada con el árbol de entrada [Nm] |
|
Tl,in,min_loss |
= |
pérdida por par de arrastre en la entrada de la transmisión, medida con el árbol de salida girando libremente en los ensayos sin carga [Nm] |
|
nin |
= |
velocidad en el árbol de entrada [rpm] |
|
fTlimo |
= |
coeficiente de pérdida de par basado en el modelo lineal [-] |
|
Tin |
= |
par en el árbol de entrada [Nm] |
|
Tin,maxT |
= |
par máximo ensayado en el árbol de entrada (normalmente, par de entrada al 100 %, véanse los puntos 3.2.5.2 y 3.4.4) [Nm] |
|
Tl,maxT |
= |
pérdida de par relacionada con el árbol de entrada con Tin = Tin,maxT |
|
fel_corr |
= |
corrección de la pérdida correspondiente al nivel de pérdida de energía eléctrica dependiente del par de entrada [-] |
|
Tl,in,el |
= |
pérdida de par adicional en el árbol de entrada por los elementos consumidores eléctricos [Nm] |
|
Tl,in,min_el |
= |
pérdida de par adicional en el árbol de entrada por los elementos consumidores eléctricos correspondiente a la energía eléctrica mínima [Nm] |
El factor de corrección correspondiente a las pérdidas de par eléctrico dependientes del par fel_corr y la pérdida de par en el árbol de entrada de la transmisión causada por el consumo de energía del accesorio eléctrico de la transmisión Tl,in,el se calcularán como se describe en el punto 3.1.
3.2.1. Las pérdidas de par deberán medirse siguiendo el procedimiento descrito a continuación.
3.2.1.1. Requisitos generales
Según se especifica para la opción 1 en el punto 3.1.2.1.
3.2.1.2. Mediciones diferenciales
Según se especifica para la opción 1 en el punto 3.1.2.2.
3.2.1.3. Rodaje
Según se especifica para la opción 1 en el punto 3.1.2.3.
3.2.1.4. Preacondicionamiento
Según se especifica para la opción 3 en el punto 3.3.2.1.
3.2.1.5. Condiciones de ensayo
3.2.1.5.1. Temperatura ambiente
Según se especifica para la opción 1 en el punto 3.1.2.5.1.
3.2.1.5.2. Temperatura del aceite
Según se especifica para la opción 1 en el punto 3.1.2.5.2.
3.2.1.5.3. Calidad/Viscosidad del aceite
Según se especifica para la opción 1 en los puntos 3.1.2.5.3 y 3.1.2.5.4.
3.2.1.5.4. Nivel y acondicionamiento del aceite
Según se especifica para la opción 3 en el punto 3.3.3.4.
3.2.2. Instalación
Según se especifica para la opción 1 en el punto 3.1.3 para la medición de las pérdidas independientes del par.
Según se especifica para la opción 3 en el punto 3.3.4 para la medición de las pérdidas dependientes del par.
3.2.3. Equipo de medición
Según se especifica para la opción 1 en el punto 3.1.4 para la medición de las pérdidas independientes del par.
Según se especifica para la opción 3 en el punto 3.3.5 para la medición de las pérdidas dependientes del par.
3.2.4. Registro de las señales y los datos de medición
Según se especifica para la opción 1 en el punto 3.1.5 para la medición de las pérdidas independientes del par.
Según se especifica para la opción 3 en el punto 3.3.7 para la medición de las pérdidas dependientes del par.
3.2.5. Procedimiento de ensayo
El mapa de pérdida de par que debe aplicarse a la herramienta de simulación contiene los valores de pérdida de par de una transmisión dependientes de la velocidad de giro de entrada y del par de entrada.
Para determinar el mapa de pérdida de par de una transmisión, los datos del mapa básico de pérdida de par se medirán y calcularán según se especifica en el presente punto. Los resultados de pérdida de par se complementarán con arreglo al punto 3.4 y se formatearán con arreglo al apéndice 12 para su posterior tratamiento con la herramienta de simulación.
3.2.5.1. Las pérdidas independientes del par se determinarán siguiendo el correspondiente procedimiento del punto 3.1.1 para la opción 1, únicamente con el ajuste de nivel bajo de pérdida de los elementos consumidores eléctricos e hidráulicos.
3.2.5.2. Las pérdidas dependientes del par correspondientes a cada marcha deben determinarse siguiendo el procedimiento descrito para la opción 3 en el punto 3.3.6, salvo en lo tocante al intervalo de pares aplicable:
Intervalo de pares:
Las pérdidas de par correspondientes a cada marcha se medirán con el 100 % del par de entrada máximo de la transmisión por marcha.
Si el par de salida excede de 10 kNm (en una teórica transmisión sin pérdidas) o la potencia de entrada excede de la potencia de entrada máxima especificada, será de aplicación el punto 3.4.4.
3.2.6. Validación de la medición
Según se especifica para la opción 3 en el punto 3.3.8.
3.2.7. Incertidumbre de la medición
Según se especifica para la opción 1 en el punto 3.1.8 para la medición de las pérdidas independientes del par.
Según se especifica para la opción 3 en el punto 3.3.9 para la medición de la pérdida dependiente del par.
3.3. Opción 3: medición de la pérdida total de par.
La opción 3 describe la determinación de la pérdida de par mediante la medición íntegra de las pérdidas dependientes del par, incluidas las pérdidas de la transmisión independientes del par.
3.3.1. Requisitos generales
Según se especifica para la opción 1 en el punto 3.1.2.1.
3.3.1.1. Mediciones diferenciales
Según se especifica para la opción 1 en el punto 3.1.2.2.
3.3.2. Rodaje
Según se especifica para la opción 1 en el punto 3.1.2.3.
3.3.2.1. Preacondicionamiento
Según se especifica para la opción 1 en el punto 3.1.2.4, con excepción de lo siguiente:
|
|
El preacondicionamiento se realizará con la marcha de tracción directa sin aplicar par al árbol de salida, o con el par deseado sobre el árbol de salida ajustado en cero. Si la transmisión no está provista de una marcha de tracción directa, se utilizará la marcha con la relación más próxima a 1:1. O bien: Serán de aplicación los requisitos del punto 3.1.2.4, con excepción de lo siguiente: |
|
|
El preacondicionamiento se realizará con la marcha de tracción directa sin aplicar par al árbol de salida, o con el par sobre el árbol de salida ajustado en +/- 50 Nm. Si la transmisión no está provista de una marcha de tracción directa, se utilizará la marcha con la relación más próxima a 1:1. O, si la instalación de ensayo incluye un embrague (maestro de fricción) en el árbol de entrada: Serán de aplicación los requisitos del punto 3.1.2.4, con excepción de lo siguiente: |
|
|
El preacondicionamiento se realizará con la marcha de tracción directa sin aplicar par al árbol de salida, o sin aplicar par al árbol de entrada. Si la transmisión no está provista de una marcha de tracción directa, se utilizará la marcha con la relación más próxima a 1:1. La transmisión se accionaría entonces desde el lado de salida. Estas propuestas podrían también combinarse. |
3.3.3. Condiciones de ensayo
3.3.3.1. Temperatura ambiente
Según se especifica para la opción 1 en el punto 3.1.2.5.1.
3.3.3.2. Temperatura del aceite
Según se especifica para la opción 1 en el punto 3.1.2.5.2.
3.3.3.3. Calidad/Viscosidad del aceite
Según se especifica para la opción 1 en los puntos 3.1.2.5.3 y 3.1.2.5.4.
3.3.3.4. Nivel y acondicionamiento del aceite
Serán de aplicación los requisitos del punto 3.1.2.5.5, con excepción de lo siguiente:
El punto de ensayo para el sistema externo de acondicionamiento del aceite se especifica como sigue:
|
1) |
marcha indirecta más larga, |
|
2) |
velocidad de entrada = 1 600 rpm, |
|
3) |
par de entrada = par de entrada máximo correspondiente a la marcha indirecta más larga |
3.3.4. Instalación
La instalación de ensayo deberá estar accionada por máquinas eléctricas (entrada y salida).
Deberán instalarse sensores de par en los lados de entrada y de salida de la transmisión.
Serán de aplicación otros requisitos especificados en el punto 3.1.3.
3.3.5. Equipo de medición
Respecto a la medición de las pérdidas independientes del par, serán de aplicación los requisitos relativos al equipo de medición especificados para la opción 1 en el punto 3.1.4.
Respecto a la medición de las pérdidas dependientes del par, serán de aplicación los requisitos siguientes:
La incertidumbre de medida de los sensores de par deberá estar por debajo del 5 % de la pérdida de par medida o de 1 Nm (el valor que sea mayor).
Se permite el uso de sensores de par con incertidumbres de medida mayores si las partes de la incertidumbre que exceden del 5 % o de 1 Nm son calculables y la menor de ellas se suma a la pérdida de par medida,
La incertidumbre de la medición del par deberá calcularse e incluirse como se describe en el punto 3.3.9.
Serán de aplicación otros requisitos relativos al equipo de medición especificados para la opción 1 en el punto 3.1.4.
3.3.6. Procedimiento de ensayo
3.3.6.1. Compensación de la señal de par cero:
Según se especifica en el punto 3.1.6.1.
3.3.6.2. Intervalo de velocidades
La pérdida de par deberá medirse con las siguientes fases de velocidad (velocidad del árbol de entrada): 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, […] rpm hasta la velocidad máxima por marcha según las especificaciones de la transmisión o la última fase de velocidad antes de la velocidad máxima definida.
La rampa de velocidad (tiempo necesario para cambiar entre dos fases de velocidad) no deberá exceder de 20 segundos.
3.3.6.3. Intervalo de pares
La pérdida de par deberá medirse respecto a cada fase de velocidad con los siguientes pares de entrada: 0 (árbol de salida girando libremente), 200, 400, 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, 3 500, 4 000, […] Nm hasta el par de entrada máximo por marcha según las especificaciones de la transmisión o la última fase de par antes del par máximo definido o la última fase de par antes del par de salida de 10 kNm.
Si el par de salida excede de 10 kNm (en una teórica transmisión sin pérdidas) o la potencia de entrada excede de la potencia de entrada máxima especificada, será de aplicación el punto 3.4.4.
La rampa de par (tiempo necesario para cambiar entre dos fases de par) no deberá exceder de 15 segundos (180 segundos en el caso de la opción 2).
Para cubrir todo el intervalo de pares de una transmisión en el mapa anteriormente definido, podrán utilizarse en el lado de entrada/salida diferentes sensores de par con intervalos de medida limitados. Por lo tanto, la medición podrá dividirse en secciones, utilizando el mismo conjunto de sensores de par. El mapa general de pérdida de par estará compuesto por estas secciones de medición.
3.3.6.4. Secuencia de medición
3.3.6.4.1. Las mediciones se realizarán empezando desde la velocidad más baja hasta llegar a la velocidad más alta.
3.3.6.4.2. El par de entrada se modificará conforme a las fases de par antes definidas, desde el más bajo hasta el más alto que detecten los sensores de par de corriente en cada fase de velocidad.
3.3.6.4.3. En cada fase de velocidad y de par debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 3.3.3. Si es necesario, el fabricante podrá ampliar el tiempo de estabilización hasta un máximo de 60 segundos (máximo de 180 segundos en el caso de la opción 2). Durante la estabilización, deberán registrarse la temperatura del aceite y la temperatura ambiente.
3.3.6.4.4. El conjunto de mediciones deberá realizarse dos veces en total. Para ello está permitida la repetición secuencial de las secciones utilizando el mismo conjunto de sensores de par.
3.3.7. Registro de las señales y los datos de medición
Durante la medición, deberán registrase por lo menos las siguientes señales:
|
1) |
Pares de entrada y de salida [Nm] |
|
2) |
Velocidades de giro de entrada y de salida [rpm] |
|
3) |
Temperatura ambiente [°C] |
|
4) |
Temperatura del aceite [°C] |
Si la transmisión está provista de un sistema de cambio de marchas o de embrague controlado por presión hidráulica o de un sistema de lubricación inteligente de accionamiento mecánico, deberá registrarse también lo siguiente:
|
5) |
Presión del aceite [kPa] |
Si la transmisión está provista de accesorio eléctrico, deberá registrarse también lo siguiente:
|
6) |
Tensión del accesorio eléctrico de la transmisión [V] |
|
7) |
Corriente del accesorio eléctrico de la transmisión [A] |
En relación con las mediciones diferenciales para compensar las influencias de la configuración de la instalación de ensayo, deberá registrarse también lo siguiente:
|
8) |
Temperatura del cojinete de la instalación de ensayo [°C] |
El régimen de muestreo y registro deberá ser de 100 Hz o superior.
Para evitar los errores de medición se aplicará un filtro de paso bajo.
3.3.8. Validación de la medición
3.3.8.1. Los valores de las medias aritméticas de par y velocidad y, si procede, tensión y corriente, correspondientes a la medición durante 05-15 segundos deberán calcularse con respecto a cada una de las dos mediciones.
3.3.8.2. La velocidad medida y promediada en el árbol de entrada deberá estar por debajo de ± 5 rpm respecto del punto de consigna de velocidad en cada punto de funcionamiento medido de la serie completa de pérdida de par. El par medido y promediado en el árbol de entrada deberá estar por debajo de ± 5 Nm o de ± 5 % respecto del punto de consigna de par, si este último valor es mayor, en cada punto de funcionamiento medido de la serie completa de pérdida de par.
3.3.8.3. Las pérdidas de par mecánicas y (si procede) el consumo de energía eléctrica deberán calcularse con respecto a cada una de las mediciones como sigue:
|
|
|
|
|
Pel = I * U |
Está permitido restar a las pérdidas de par las influencias causadas por la configuración de la instalación de ensayo (3.3.2.2).
3.3.8.4. Las pérdidas de par mecánicas y (si procede) el consumo de energía eléctrica de los dos conjuntos deberán promediarse (valores de las medias aritméticas).
3.3.8.5. La desviación entre las pérdidas de par promediadas de los dos conjuntos de mediciones deberá estar por debajo de ± 5 % de la media o de ± 1 Nm (el valor que sea mayor). Se tomará la media aritmética de los dos valores de pérdida de par promediados. Si la desviación es mayor, se tomará el mayor valor promediado de pérdida de par, o se repetirá el ensayo con la marcha de que se trate.
3.3.8.6. La desviación entre los valores de consumo de energía eléctrica promediados (tensión*corriente) de los dos conjuntos de mediciones deberá estar por debajo de ± 10 % de la media o de ± 5 W, si este último valor es mayor. Se tomará entonces la media aritmética de los dos valores de energía promediados.
3.3.8.7. Si la desviación es mayor, se tomará el conjunto de valores de tensión y corriente promediados que dé el mayor consumo de energía promediado, o se repetirá el ensayo con la marcha de que se trate.
3.3.9. Incertidumbre de la medición
La parte de la incertidumbre total calculada UT,loss que exceda del 5 % de Tloss o de 1 Nm (ΔUT,loss ), tomando el valor de ΔUT,loss que sea menor, se sumará a Tloss para la pérdida de par comunicada Tloss,rep . Si UT,loss es inferior al 5 % de Tloss o a 1 Nm, entonces Tloss,rep = Tloss .
Tloss,rep = Tloss + MAX (0, ΔUT,loss)
ΔUT,loss = MIN ((UT,loss – 5 % * Tloss), (UT,loss – 1 Nm))
Para cada conjunto de mediciones, la incertidumbre total UT,loss de la pérdida de par se calculará sobre la base de los siguientes parámetros:
|
1) |
Efecto de la temperatura |
|
2) |
Cargas parásitas |
|
3) |
Error de calibración (incluidas la tolerancia de sensibilidad, la linealidad, las histéresis y la repetibilidad) |
La incertidumbre total de la pérdida de par (UT,loss ) se basa en las incertidumbres de los sensores con un nivel de confianza del 95 %. El cálculo se efectuará como la raíz cuadrada de la suma de los cuadrados (ley gaussiana de propagación de errores).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wpara = senspara * ipara |
donde:
|
Tloss |
= |
pérdida de par medida (sin corregir) [Nm] |
|
Tloss,rep |
= |
pérdida de par comunicada (tras la corrección de la incertidumbre) [Nm] |
|
UT,loss |
= |
incertidumbre total expandida de la medición de la pérdida de par con un nivel de confianza del 95 % [Nm] |
|
uT,in/out |
= |
incertidumbre de la medición de pérdida de par de entrada/salida separadamente para el sensor de par de entrada y de salida [Nm] |
|
igear |
= |
relación de transmisión [-] |
|
uTKC |
= |
incertidumbre por la influencia de la temperatura en la señal de par de corriente [Nm] |
|
wtkc |
= |
influencia de la temperatura en la señal de par de corriente por Kref, declarada por el fabricante del sensor [%] |
|
uTK0 |
= |
incertidumbre por la influencia de la temperatura en la señal de par cero (respecto al par nominal) [Nm] |
|
wtk0 |
= |
influencia de la temperatura en la señal de par cero por Kref (respecto al par nominal), declarada por el fabricante del sensor [%] |
|
Kref |
= |
amplitud del intervalo de temperaturas de referencia para uTKC y uTK0, wtk0 y wtkc, declarado por el fabricante del sensor [K] |
|
ΔK |
= |
diferencia en la temperatura del sensor entre la calibración y la medición [K]; si no puede medirse la temperatura del sensor, se tomará un valor por defecto de ΔK = 15 K |
|
Tc |
= |
valor del par de corriente / par medido en el sensor de par [Nm] |
|
Tn |
= |
valor de par nominal del sensor de par [Nm] |
|
ucal |
= |
incertidumbre por la calibración del sensor de par [Nm] |
|
Wcal |
= |
incertidumbre de calibración relativa (respecto al par nominal) [%] |
|
kcal |
= |
factor de avance de la calibración (si lo ha declarado el fabricante del sensor; de lo contrario = 1) |
|
upara |
= |
incertidumbre por cargas parásitas [Nm] |
|
wpara |
= |
senspara * ipara influencia relativa de las fuerzas y los pares de flexión causados por la desalineación [%] |
|
senspara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto declarada por su fabricante [%]; si el fabricante del sensor no declara ningún valor específico de cargas parásitas, el valor se ajustará en el 1,0 % |
|
ipara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto dependiendo de la configuración de ensayo (A/B/C, según se define a continuación) |
|
|
= |
A) el 10 %, en el caso de cojinetes que aíslan las fuerzas parásitas delante y detrás del sensor y de un acoplamiento flexible (árbol cardánico) instalado funcionalmente cerca del sensor (antepuesto o pospuesto); por otro lado, estos cojinetes podrán estar integrados en una máquina de accionamiento/frenado (por ejemplo, una máquina eléctrica) o en la transmisión, a condición de que las fuerzas ejercidas en la máquina o en la transmisión estén aisladas del sensor. Véase la figura 3. Figura 3 Configuración de ensayo A para la opción 3 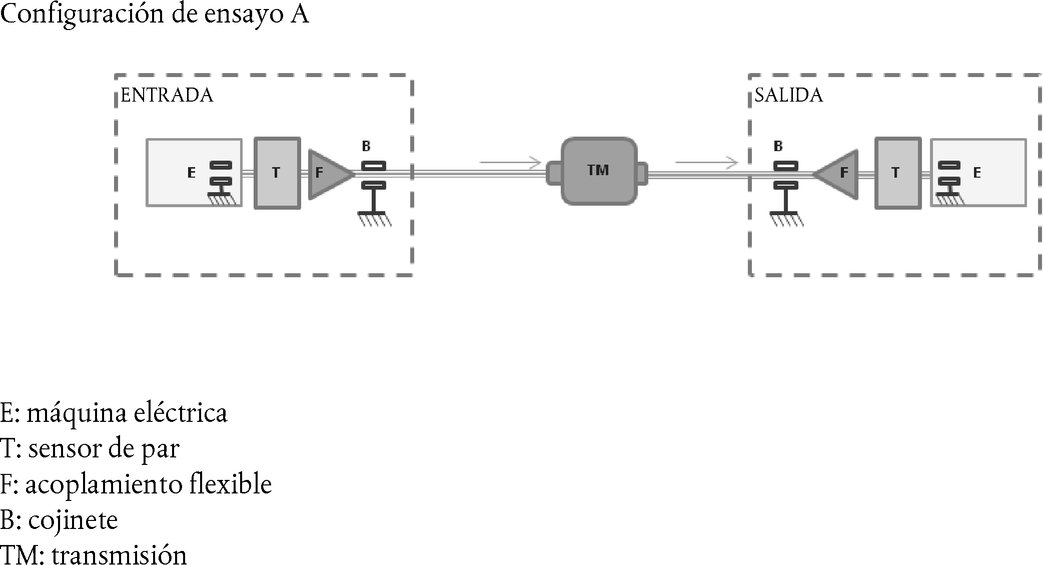
|
|
|
= |
B) el 50 %, en el caso de cojinetes que aíslan las fuerzas parásitas delante y detrás del sensor, sin un acoplamiento flexible instalado funcionalmente cerca del sensor; por otro lado, estos cojinetes podrán estar integrados en una máquina de accionamiento/frenado (por ejemplo, una máquina eléctrica) o en la transmisión, a condición de que las fuerzas ejercidas en la máquina o en la transmisión estén aisladas del sensor. Véase la figura 4. Figura 4 Configuración de ensayo B para la opción 3 
|
|
|
= |
C) el 100 % para otras configuraciones |
3.4. Complementación de los archivos de entrada de la herramienta de simulación
Con respecto a cada marcha deberá determinarse un mapa de pérdida de par que abarque las fases definidas de velocidad de entrada y par de entrada, con una de las opciones de ensayo especificadas o con los valores de pérdida de par normalizados. Para el el archivo de entrada de la herramienta de simulación, este mapa básico de pérdida de par deberá complementarse como se describe a continuación.
3.4.1. En los casos en que la velocidad de entrada ensayada más elevada haya sido la de la última fase de velocidad por debajo de la velocidad máxima admisible definida de la transmisión, se aplicará una extrapolación de la pérdida de par hasta la velocidad máxima por medio de una regresión lineal basada en las dos últimas fases de velocidad medidas.
3.4.2. En los casos en que el par de entrada ensayado más elevado haya sido el de la última fase de par por debajo del par máximo admisible definido de la transmisión, se aplicará una extrapolación de la pérdida de par hasta el par máximo por medio de una regresión lineal basada en las dos últimas fases de par medidas correspondientes a la fase de velocidad respectiva. Con el fin de aplicar las tolerancias de par motor, etc., la herramienta de simulación realizará, si es necesario, una extrapolación de la pérdida de par con pares de entrada situados hasta un 10 % por encima de dicho par máximo admisible definido de la transmisión.
3.4.3. En caso de extrapolación de los valores de pérdida de par para la velocidad de entrada máxima y el par de entrada máximo al mismo tiempo, la pérdida de par correspondiente al punto combinado de la velocidad y el par más elevados se calculará con una extrapolación lineal bidimensional.
3.4.4. Si el par de salida máximo excede de 10 kNm (en una teórica transmisión sin pérdidas), o en relación con todos los puntos de velocidad y de par cuya potencia de entrada exceda de la potencia de entrada máxima especificada, el fabricante podrá optar por tomar los valores de pérdida de par correspondientes a todos los pares superiores a 10 kNm, o a todos los puntos de velocidad y de par cuya potencia de entrada exceda de la potencia de entrada máxima especificada, respectivamente, de una de las siguientes opciones:
|
1) |
Valores de reserva calculados (apéndice 8) |
|
2) |
Opción 1 |
|
3) |
Opciones 2 o 3, en combinación con un sensor de par para pares de salida más elevados (si es preciso) |
En los casos i) y ii) de la opción 2, las pérdidas de par con carga se medirán con el par de entrada que corresponda al par de salida 10 kNm o el par de entrada máximo especificado.
3.4.5. Para velocidades por debajo de la velocidad mínima definida y la fase adicional de velocidad de entrada de 0 rpm, se copiarán las pérdidas de par comunicadas que se hayan determinado para la fase de velocidad mínima.
3.4.6. Al objeto de cubrir el intervalo de pares de entrada negativos durante las desaceleraciones libres del vehículo, los valores de pérdida de par correspondientes a los pares de entrada positivos se copiarán para los pares de entrada negativos relacionados.
3.4.7. Con el acuerdo de una autoridad de homologación, las pérdidas de par correspondientes a las velocidades de entrada por debajo de 1 000 rpm podrán sustituirse por las pérdidas de par a 1 000 rpm cuando la medición sea técnicamente imposible.
3.4.8. Si la medición de los puntos de velocidad es técnicamente imposible (por ejemplo, debido a la frecuencia natural), el fabricante, con el acuerdo de la autoridad de homologación, podrá calcular las pérdidas de par por interpolación o extrapolación (hasta un máximo de una fase de velocidad por marcha).
3.4.9. Los datos del mapa de pérdida de par se formatearán y guardarán como se especifica en el apéndice 12 del presente anexo.
4. Convertidor de par (TC)
Las características del convertidor de par que han de determinarse para los datos de entrada de la herramienta de simulación son Tpum 1000 (el par de referencia a una velocidad de entrada de 1 000 rpm) y μ (la relación de par del convertidor de par). Ambas dependen de la relación de velocidad v (= velocidad de salida (turbina) / velocidad de entrada (bomba) del convertidor de par) del convertidor de par.
Para determinar las características del TC, el solicitante del certificado deberá aplicar el siguiente método, con independencia de la opción escogida para evaluar las pérdidas de par de la transmisión.
A fin de tener en cuenta los dos montajes posibles del TC y las piezas de la transmisión mecánica, será de aplicación la siguiente diferenciación entre el caso S y el caso P:
|
Caso S |
: |
TC y piezas de la transmisión mecánica montados en serie |
|
Caso P |
: |
TC y piezas de la transmisión mecánica montados en paralelo (instalación con división de potencia) |
En relación con los montajes del caso S, las características del TC podrán evaluarse bien por separado de la transmisión mecánica, bien en combinación con ella. En relación con los montajes del caso P, las características del TC solo podrán evaluarse en combinación con la transmisión mecánica. Sin embargo, en este caso, y en relación con los engranajes hidromecánicos objeto de medición, el montaje entero, formado por el convertidor de par y la transmisión mecánica, se considera un TC con curvas características similares a las de un convertidor de par solo.
Para determinar las características del convertidor de par, puede escogerse entre dos opciones de medición:
|
i) |
Opción A: medición a velocidad de entrada constante |
|
ii) |
Opción B: medición con par de entrada constante conforme a la norma SAE J643 |
El fabricante podrá escoger la opción A o la opción B para los montajes del caso S y del caso P.
Para los datos de entrada de la herramienta de simulación, la relación de par μ y el par de referencia Tpum del convertidor de par se medirán respecto de un intervalo de v ≤ 0,95 (= modo de propulsión del vehículo). El intervalo de v ≥ 1,00 (= modo de desaceleración libre del vehículo) podrá o bien medirse o bien cubrirse con los valores normalizados del cuadro 1.
En el caso de mediciones junto con una transmisión mecánica, el punto de freno motor podrá ser diferente de v = 1,00 y, por tanto, el intervalo de relaciones de velocidad medidas deberá ajustarse en consecuencia.
Si se utilizan valores normalizados, los datos sobre las características del convertidor de par suministrados a la herramienta de simulación solo abarcarán el intervalo de v ≤ 0,95 (o la relación de velocidad ajustada). La herramienta de simulación suma automáticamente los valores normalizados para las condiciones de freno motor.
Cuadro 1
Valores por defecto de v ≥ 1,00
|
v |
μ |
Tpum 1000 |
|
1,000 |
1,0000 |
0,00 |
|
1,100 |
0,9999 |
– 40,34 |
|
1,222 |
0,9998 |
– 80,34 |
|
1,375 |
0,9997 |
– 136,11 |
|
1,571 |
0,9996 |
– 216,52 |
|
1,833 |
0,9995 |
– 335,19 |
|
2,200 |
0,9994 |
– 528,77 |
|
2,500 |
0,9993 |
– 721,00 |
|
3,000 |
0,9992 |
– 1 122,00 |
|
3,500 |
0,9991 |
– 1 648,00 |
|
4,000 |
0,9990 |
– 2 326,00 |
|
4,500 |
0,9989 |
– 3 182,00 |
|
5,000 |
0,9988 |
– 4 242,00 |
4.1. Opción A: Características del convertidor de par medidas a velocidad constante
4.1.1. Requisitos generales
El convertidor de par utilizado para las mediciones deberá ser conforme con las especificaciones de dibujo aplicables a los convertidores de par de producción en serie.
Está permitido hacer modificaciones en el TC para cumplir los requisitos de ensayo del presente anexo, por ejemplo, incluir sensores de medición.
A petición de la autoridad de homologación, el solicitante de un certificado deberá especificar y demostrar la conformidad con los requisitos del presente anexo.
4.1.2. Temperatura del aceite
La temperatura del aceite de entrada al TC deberá cumplir los siguientes requisitos:
|
|
La temperatura del aceite para las mediciones del TC separado de la transmisión será de 90 °C + 7 / – 3 K. |
|
|
La temperatura del aceite para las mediciones del TC junto con la transmisión (casos S y P) será de 90 °C + +20 / – 3 K. |
La temperatura del aceite deberá medirse en el tapón de vaciado o en el cárter del aceite.
Si las características del TC se miden por separado de la transmisión, la temperatura del aceite deberá medirse antes de entrar en el tambor/banco de ensayo del convertidor.
4.1.3. Caudal y presión del aceite
El caudal de aceite de entrada del TC y la presión de aceite de salida del TC deberán mantenerse dentro de los límites operativos especificados del convertidor de par, dependiendo del tipo de transmisión relacionada y de la velocidad de entrada máxima ensayada.
4.1.4. Calidad/Viscosidad del aceite
Según se especifica para los ensayos de la transmisión en los puntos 3.1.2.5.3 y 3.1.2.5.4.
4.1.5. Instalación
El convertidor de par deberá instalarse en un banco de ensayo con un sensor de par, un sensor de velocidad y una máquina eléctrica instalada en el árbol de entrada y de salida del TC.
4.1.6. Equipo de medición
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma ISO/TS 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales (internacionales).
4.1.6.1. Par
La incertidumbre de medida de los sensores de par deberá estar por debajo del 1 % del valor de par medido.
Se permite el uso de sensores de par con incertidumbres de medida mayores si la parte de la incertidumbre que excede del 1 % del par medido es calculable y se suma a la pérdida de par medida según se describe en el punto 4.1.7.
4.1.6.2. Velocidad
La incertidumbre de los sensores de velocidad no deberá exceder de ± 1 rpm.
4.1.6.3. Temperatura
La incertidumbre de los sensores de temperatura para la medición de la temperatura ambiente no deberá exceder de ± 1,5 K.
La incertidumbre de los sensores de temperatura para la medición de la temperatura del aceite no deberá exceder de ± 1,5 K.
4.1.7. Procedimiento de ensayo
4.1.7.1. Compensación de la señal de par cero
Según se especifica en el punto 3.1.6.1.
4.1.7.2. Secuencia de medición
4.1.7.2.1. La velocidad de entrada npum del TC se fijará en una velocidad constante dentro del siguiente intervalo:
1 000 rpm ≤ npum ≤ 2 000 rpm
4.1.7.2.2. La relación de velocidad v se ajustará incrementando la velocidad de salida ntur desde 0 rpm hasta el valor fijado de npum .
4.1.7.2.3. La amplitud de fase será de 0,1 para el intervalo de relaciones de velocidad de 0 a 0,6, y de 0,05 para el intervalo de 0,6 a 0,95.
4.1.7.2.4. El fabricante podrá fijar el límite superior de la relación de velocidades en un valor por debajo de 0,95. En este caso, la medición tendrá que abarcar al menos siete puntos distribuidos uniformemente entre v = 0 y un valor de v < 0,95.
4.1.7.2.5. En cada fase debe dejarse transcurrir un tiempo de estabilización mínimo de 3 segundos dentro de los límites de temperatura indicados en el punto 4.1.2. Si es necesario, el fabricante podrá ampliar el tiempo de estabilización hasta un máximo de 60 segundos. Durante la estabilización, deberá registrarse la temperatura del aceite.
4.1.7.2.6. En cada fase deberán registrarse durante 3-15 segundos las señales especificadas en el punto 4.1.8 correspondientes al punto de ensayo.
4.1.7.2.7. La secuencia de medición (puntos 4.1.7.2.1 a 4.1.7.2.6) deberá realizarse dos veces en total.
4.1.8. Registro de las señales y los datos de medición
Durante la medición, deberán registrase por lo menos las siguientes señales:
|
1) |
Par de entrada (bomba) Tc,pum [Nm] |
|
2) |
Par de salida (turbina) Tc,tur [Nm] |
|
3 |
Velocidad de giro de entrada (bomba) npum [rpm] |
|
4) |
Velocidad de giro de salida (turbina) ntur [rpm] |
|
5) |
Temperatura del aceite de entrada del TC KTCin [°C] |
El régimen de muestreo y registro deberá ser de 100 Hz o superior.
Para evitar los errores de medición se aplicará un filtro de paso bajo.
4.1.9. Validación de la medición
4.1.9.1. Los valores de las medias aritméticas de par y velocidad correspondientes a la medición durante 03-15 segundos deberán calcularse con respecto a cada una de las dos mediciones.
4.1.9.2. Los pares y las velocidades medidos de los dos conjuntos deberán promediarse (valores de las medias aritméticas).
4.1.9.3. La desviación entre el par promediado de los dos conjuntos de mediciones deberá estar por debajo de ± 5 % de la media o de ± 1 Nm (el valor que sea mayor). Se tomará la media aritmética de los dos valores de par promediados. Si la desviación es mayor, se tomará el siguiente valor en relación con los puntos 4.1.10 y 4.1.11, o se repetirá el ensayo con el TC de que se trate:
|
— |
para el cálculo de ΔUT,pum/tur: el menor valor de par promediado de Tc,pum/tur |
|
— |
para el cálculo de la relación de par μ: el mayor valor de par promediado de Tc,pum |
|
— |
para el cálculo de la relación de par μ: el menor valor de par promediado de Tc,tur |
|
— |
para el cálculo del par de referencia Tpum1000: el menor valor de par promediado de Tc,pum |
4.1.9.4. La velocidad y el par medidos y promediados en el árbol de entrada deberán estar por debajo de ± 5 rpm y de ± 5 Nm respecto del punto de consigna de velocidad y de par correspondiente a cada punto de funcionamiento medido de la serie completa de relaciones de velocidad.
4.1.10. Incertidumbre de la medición
La parte de la incertidumbre de la medición calculada UT,pum/tur que exceda del 1 % del par medido Tc,pum/tur se utilizará para corregir el valor característico del TC como se define a continuación:
ΔUT,pum/tur = MAX ( 0, (UT,pum/tur - 0,01 * Tc,pum/tur))
La incertidumbre UT,pum/tur de la medición del par se calculará sobre la base de los siguientes parámetros:
|
i) |
Error de calibración (incluidas la tolerancia de sensibilidad, la linealidad, las histéresis y la repetibilidad) |
La incertidumbre UT,pum/tur de la medición del par se basa en las incertidumbres de los sensores con un nivel de confianza del 95 %.
|
|
UT,pum/tur = 2 * ucal |
|
|
|
donde:
|
Tc,pum/tur |
= |
valor del par de corriente / par medido en el sensor de par de entrada/salida (sin corregir) [Nm] |
|
Tpum |
= |
par de entrada (bomba) (tras corregir la incertidumbre) [Nm] |
|
UT,pum/tur |
= |
incertidumbre de la medición del par de entrada/salida con un nivel de confianza del 95 % separadamente para el sensor de par de entrada y de salida [Nm] |
|
Tn |
= |
valor de par nominal del sensor de par [Nm] |
|
ucal |
= |
incertidumbre por la calibración del sensor de par [Nm] |
|
Wcal |
= |
incertidumbre de calibración relativa (respecto al par nominal) [%] |
|
kcal |
= |
factor de avance de la calibración (si lo declara el fabricante del sensor; de lo contrario = 1) |
4.1.11. Cálculo de las características del TC
Con respecto a cada punto de medición, se aplicarán a los datos de medición los cálculos que se indican a continuación.
|
|
La relación de par del TC se calculará como sigue:
|
|
|
La relación de velocidad del TC se calculará como sigue:
|
|
|
El par de referencia a 1 000 rpm se calculará como sigue:
|
donde:
|
μ |
= |
relación de par del TC [-] |
|
v |
= |
relación de velocidad del TC [-] |
|
Tc, pum |
= |
par de entrada (bomba) (corregido) [Nm] |
|
npum |
= |
velocidad de giro de entrada (bomba) [rpm] |
|
ntur |
= |
velocidad de giro de salida (turbina) [rpm] |
|
Tpum1000 |
= |
par de referencia a 1 000 rpm [Nm] |
4.2. Opción B: medición con par de entrada constante (conforme a la norma SAE J643)
4.2.1. Requisitos generales
Según se especifica en el punto 4.1.1.
4.2.2. Temperatura del aceite
Según se especifica en el punto 4.1.2.
4.2.3. Caudal y presión del aceite
Según se especifica en el punto 4.1.3.
4.2.4. Calidad del aceite
Según se especifica en el punto 4.1.4.
4.2.5. Instalación
Según se especifica en el punto 4.1.5.
4.2.6. Equipo de medición
Según se especifica en el punto 4.1.6.
4.2.7. Procedimiento de ensayo
4.2.7.1. Compensación de la señal de par cero
Según se especifica en el punto 3.1.6.1.
4.1.7.2. Secuencia de medición
4.2.7.2.1. El par de entrada Tpum se ajustará en un nivel positivo a npum = 1 000 rpm, manteniendo el árbol de salida del TC sin girar (velocidad de salida ntur = 0 rpm).
4.2.7.2.2. La relación de velocidad v se ajustará incrementando la velocidad de salida ntur desde 0 rpm hasta un valor de ntur que cubra el intervalo utilizable de v con al menos siete puntos de velocidad uniformemente distribuidos.
4.2.7.2.3. La amplitud de fase será de 0,1 para el intervalo de relaciones de velocidad de 0 a 0,6, y de 0,05 para el intervalo de 0,6 a 0,95.
4.2.7.2.4. El fabricante podrá fijar el límite superior de la relación de velocidades en un valor por debajo de 0,95.
4.2.7.2.5. En cada fase debe dejarse transcurrir un tiempo de estabilización mínimo de 5 segundos dentro de los límites de temperatura indicados en el punto 4.2.2. Si es necesario, el fabricante podrá ampliar el tiempo de estabilización hasta un máximo de 60 segundos. Durante la estabilización, deberá registrarse la temperatura del aceite.
4.2.7.2.6. En cada fase deberán registrarse durante 05-15 segundos los valores especificados en el punto 4.2.8 correspondientes al punto de ensayo.
4.2.7.2.7. La secuencia de medición (puntos 4.2.7.2.1 a 4.2.7.2.6) deberá realizarse dos veces en total.
4.2.8. Registro de las señales y los datos de medición
Según se especifica en el punto 4.1.8.
4.2.9. Validación de la medición
Según se especifica en el punto 4.1.9.
4.2.10. Incertidumbre de la medición
Según se especifica en el punto 4.1.9.
4.2.11. Cálculo de las características del TC
Según se especifica en el punto 4.1.11.
5. Otros componentes de transferencia de par (OTTC)
El ámbito de aplicación de la presente sección incluye ralentizadores del motor, ralentizadores de la transmisión, ralentizadores de la línea de transmisión y componentes que se tratan como ralentizadores en la herramienta de simulación. Entre esos componentes se incluyen los dispositivos de arranque del vehículo, como un embrague húmedo único de entrada de la transmisión o un embrague hidrodinámico.
5.1. Métodos para establecer las pérdidas por arrastre del ralentizador
La pérdida por par de arrastre del ralentizador está en función de la velocidad de su rotor. Dado que el ralentizador puede estar integrado en diferentes piezas de la línea de transmisión del vehículo, la velocidad de su rotor depende de la pieza en cuestión (= referencia de velocidad) y de la relación de multiplicación entre dicha pieza y el rotor del ralentizador, como muestra el cuadro 2.
Cuadro 2
Velocidades del rotor del ralentizador
|
Configuración |
Referencia de velocidad |
Cálculo de la velocidad del rotor del ralentizador |
||
|
Velocidad del motor |
nretarder = nengine * istep-up |
||
|
Velocidad del árbol de entrada de la transmisión |
nretarder = ntransm.input * istep-up = ntransm.output * itransm * istep-up |
||
|
Velocidad del árbol de salida de la transmisión |
nretarder = ntransm.output * istep-up |
donde:
|
istep-up |
= |
relación de multiplicación = velocidad del rotor del ralentizador / velocidad de la pieza de la línea de transmisión |
|
itransm |
= |
relación de transmisión = velocidad de entrada de la transmisión / velocidad de salida de la transmisión |
Las configuraciones de ralentizador que estén integradas en el motor y no puedan separarse de este deberán ensayarse en combinación con él. La presente sección no se aplica a estos ralentizadores integrados inseparablemente en el motor.
Se considera que los ralentizadores que pueden desconectarse de la línea de transmisión y del motor mediante cualquier tipo de embrague tienen una velocidad del rotor igual a cero cuando están desconectados y, por tanto, no presentan pérdidas de potencia.
Las pérdidas por arrastre del ralentizador se medirán con uno de los dos métodos siguientes:
|
1) |
Medición en el ralentizador como unidad autónoma |
|
2) |
Medición en combinación con la transmisión |
5.1.1. Requisitos generales
Si las pérdidas se miden en el ralentizador como unidad autónoma, los resultados se verán afectados por las pérdidas de par en los cojinetes de la configuración de ensayo. Se permite medir estas pérdidas de los cojinetes y sustraerlas de las mediciones de pérdidas por arrastre del ralentizador.
El fabricante deberá garantizar que el ralentizador utilizado para las mediciones sea conforme con las especificaciones de dibujo aplicables a los ralentizadores de producción en serie.
Está permitido hacer modificaciones en el ralentizador para cumplir los requisitos de ensayo del presente anexo, por ejemplo, incluir sensores de medición o adaptar un sistema externo de acondicionamiento del aceite.
Tomando como base la familia descrita en el apéndice 6 del presente anexo, las pérdidas por arrastre medidas en una transmisión con ralentizador podrán utilizarse para la misma transmisión (o una equivalente) sin ralentizador.
Está permitido utilizar la misma unidad de transmisión para medir las pérdidas de par de variantes con y sin ralentizador.
A petición de la autoridad de homologación, el solicitante de un certificado deberá especificar y demostrar la conformidad con los requisitos del presente anexo.
5.1.2. Rodaje
A petición del solicitante, el ralentizador podrá ser sometido a un procedimiento de rodaje. En el caso de un procedimiento de rodaje, serán de aplicación las disposiciones que siguen.
5.1.2.1. Si el fabricante aplica al ralentizador un procedimiento de rodaje, el tiempo de rodaje del ralentizador no deberá exceder de 100 horas con un par de aplicación cero del ralentizador. Opcionalmente, podrá incluirse una parte de 6 horas como máximo con par de aplicación del ralentizador.
5.1.3. Condiciones de ensayo
5.1.3.1. Temperatura ambiente
La temperatura ambiente durante el ensayo será de 25 oC ± 10 K.
La temperatura ambiente se medirá a 1 m de distancia del lado del ralentizador.
5.1.3.2. Presión ambiente
En el caso de ralentizadores magnéticos, la presión ambiente mínima deberá ser de 899 hPa conforme a la atmósfera normal internacional ISO 2533.
5.1.3.3. Temperatura del aceite o del agua
Ralentizadores hidrodinámicos:
No se permitirá ninguna calefacción externa, salvo para el fluido.
Si se ensaya como unidad autónoma, la temperatura del fluido del ralentizador (aceite o agua) no deberá exceder de 87 oC.
Si se ensaya en combinación con una transmisión, serán de aplicación los límites de temperatura del aceite de los ensayos de la transmisión.
5.1.3.4. Calidad del aceite o del agua
En el ensayo deberá utilizarse aceite nuevo que sea el recomendado para el primer llenado en el mercado europeo.
En el caso de ralentizadores de agua, la calidad del agua deberá cumplir las especificaciones del fabricante del ralentizador. La presión del agua se ajustará en un valor fijo próximo a la condición del vehículo (presión relativa de 1 ± 0,2 bar en el manguito de entrada del ralentizador).
5.1.3.5. Viscosidad del aceite
Si para el primer llenado se recomiendan varios aceites, se considerarán iguales si sus viscosidades cinemáticas no se diferencian en más de un 50 % a la misma temperatura (dentro de la banda de tolerancia especificada para KV 100).
5.1.3.6. Nivel de aceite o de agua
El nivel de aceite o de agua deberá respetar las especificaciones nominales relativas al ralentizador.
5.1.4. Instalación
La máquina eléctrica, el sensor de par y el sensor de velocidad se montarán en el lado de entrada del ralentizador o de la transmisión.
La instalación del ralentizador (y de la transmisión) se realizará con un ángulo de inclinación correspondiente a la instalación en el vehículo, conforme al dibujo de homologación ± 1°, o a 0° ± 1°.
5.1.5. Equipo de medición
Según se especifica para los ensayos de la transmisión en el punto 3.1.4.
5.1.6. Procedimiento de ensayo
5.1.6.1. Compensación de la señal de par cero:
Según se especifica para los ensayos de la transmisión en el punto 3.1.6.1.
5.1.6.2. Secuencia de medición
La secuencia de medición de las pérdidas de par para los ensayos del ralentizador deberá atenerse a lo dispuesto para los ensayos de la transmisión en los puntos 3.1.6.3.2 a 3.1.6.3.5.
5.1.6.2.1. Medición en el ralentizador como unidad autónoma
Si el ralentizador se ensaya como unidad autónoma, las mediciones de las pérdidas de par se realizarán con los siguientes puntos de velocidad:
200, 400, 600, 900, 1 200, 1 600, 2 000, 2 500, 3 000, 3 500, 4 000, 4 500, 5 000, y así hasta la velocidad máxima del rotor del ralentizador.
5.1.6.2.2. Medición en combinación con la transmisión
5.1.6.2.2.1. Si el ralentizador se ensaya en combinación con una transmisión, la marcha seleccionada deberá permitir al ralentizador funcionar a la velocidad máxima de su rotor.
5.1.6.2.2. La pérdida de par se medirá a las velocidades de funcionamiento indicadas para los ensayos de la transmisión relacionada.
5.1.6.2.2.3. A petición del fabricante, podrán añadirse puntos de medición para velocidades de entrada de la transmisión por debajo de 600 rpm.
5.1.6.2.2.4. El fabricante podrá separar las pérdidas del ralentizador de las pérdidas totales de la transmisión realizando los ensayos en el orden que se indica a continuación:
|
1) |
La pérdida de par independiente de la carga de la transmisión completa, incluido el ralentizador, se medirá según se indica en el punto 3.1.2 para los ensayos de la transmisión, en una de las marchas largas: = Tl,in,withret |
|
2) |
El ralentizador y las piezas relacionadas se sustituirán por las piezas necesarias para la variante de transmisión equivalente sin ralentizador. Se repetirá la medición del punto 1: = Tl,in,withoutret |
|
3) |
La pérdida de par independiente de la carga del sistema de ralentizador se determinará calculando las diferencias entre los dos conjuntos de datos de ensayo: = Tl,in,retsys = Tl,in,withret – Tl,in,withoutret |
5.1.7. Registro de las señales y los datos de medición
Según se especifica para los ensayos de la transmisión en el punto 3.1.5.
5.1.8. Validación de la medición
Todos los datos registrados se comprobarán y procesarán como se indica en el punto 3.1.7 para los ensayos de la transmisión.
5.2. Complementación de los archivos de entrada de la herramienta de simulación
5.2.1. Las pérdidas de par del ralentizador correspondientes a velocidades por debajo de la velocidad de medición más baja se ajustarán en un valor igual al de la pérdida de par medida a esa velocidad de medición más baja.
5.2.2. Si las pérdidas del ralentizador se separan de las pérdidas totales calculando la diferencia en los conjuntos de datos de los ensayos con y sin ralentizador (véase el punto 5.1.6.2.2.4), las velocidades reales del rotor del ralentizador dependerán de la ubicación del ralentizador, o de la relación de transmisión seleccionada y la relación de multiplicación del ralentizador y, por lo tanto, podrán diferir de las velocidades medidas del árbol de entrada de la transmisión. Las velocidades reales del rotor del ralentizador con respecto a los datos de pérdidas por arrastre medidas se calcularán como se indica en el cuadro 2 del punto 5.1.
5.2.3. Los datos del mapa de pérdida de par se formatearán y guardarán como se especifica en el apéndice 12 del presente anexo.
6. Componentes adicionales de la línea de transmisión (ADC) / Reenvío angular
6.1. Métodos para establecer las pérdidas del reenvío angular
Las pérdidas del reenvío angular se determinarán aplicando uno de los casos que se exponen a continuación.
6.1.1. Caso A: Medición en un reenvío angular por separado
Para medir las pérdidas de par de un reenvío angular por separado, serán de aplicación las tres opciones definidas para la determinación de las pérdidas de la transmisión:
|
Opción 1 |
: |
Pérdidas independientes del par medidas y pérdidas dependientes del par calculadas (opción 1 de ensayo de la transmisión) |
|
Opción 2 |
: |
Pérdidas independientes del par medidas y pérdidas dependientes del par medidas a plena carga (opción 2 de ensayo de la transmisión) |
|
Opción 3 |
: |
Puntos de medición a plena carga (opción 3 de ensayo de la transmisión) |
La medición de las pérdidas del reenvío angular seguirá el procedimiento descrito en el punto 3 para la opción de ensayo de la transmisión relacionada, con excepción de los siguientes requisitos:
6.1.1.1. Intervalo de velocidades aplicable:
Desde 200 rpm (en el árbol al que está conectado el reenvío angular) hasta la velocidad máxima según las especificaciones del reenvío angular, o hasta la última fase de velocidad anterior a la velocidad máxima definida.
6.1.1.2. Valor de la fase de velocidad: 200 rpm
6.1.2. Caso B: Medición individual de un reenvío angular conectado a una transmisión
Si el reenvío angular se ensaya en combinación con una transmisión, los ensayos deberán seguir una de las opciones definidas para ensayar la transmisión:
|
Opción 1 |
: |
Pérdidas independientes del par medidas y pérdidas dependientes del par calculadas (opción 1 de ensayo de la transmisión) |
|
Opción 2 |
: |
Pérdidas independientes del par medidas y pérdidas dependientes del par medidas a plena carga (opción 2 de ensayo de la transmisión) |
|
Opción 3 |
: |
Puntos de medición a plena carga (opción 3 de ensayo de la transmisión) |
6.1.2.1. El fabricante podrá separar las pérdidas del reenvío angular de las pérdidas totales de la transmisión realizando los ensayos en el orden que se indica a continuación:
|
1) |
La pérdida de par de la transmisión completa, incluido el reenvío angular, se medirá según se indica para la opción de ensayo aplicable de la transmisión: = Tl,in,withad |
|
2) |
El reenvío angular y las piezas relacionadas se sustituirán por las piezas necesarias para la variante de transmisión equivalente sin reenvío angular. Se repetirá la medición del punto 1: = Tl,in,withoutad |
|
3) |
La pérdida de par del sistema de reenvío angular se determinará calculando las diferencias entre los dos conjuntos de datos de ensayo. = Tl,in,adsys = Tl,in,withad – Tl,in,withoutad |
6.2. Complementación de los archivos de entrada de la herramienta de simulación
6.2.1. Las pérdidas de par correspondientes a velocidades por debajo de la velocidad mínima antes indicada se ajustarán en un valor igual al de la pérdida de par a la velocidad mínima.
6.2.2. En los casos en que la velocidad de entrada ensayada más elevada del reenvío angular haya sido la de la última fase de velocidad por debajo de la velocidad máxima admisible definida del reenvío angular, se aplicará una extrapolación de la pérdida de par hasta la velocidad máxima, por medio de una regresión lineal basada en las dos últimas fases de velocidad medidas.
6.2.3. Para calcular los datos de pérdida de par del árbol de entrada de la transmisión con el que se va a combinar el reenvío angular, se aplicarán la interpolación y la extrapolación lineales.
7. Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
7.1. Las transmisiones, los convertidores de par, otros componentes de transferencia de par y los componentes adicionales de la línea de transmisión deberán fabricarse de manera que sean conformes con el tipo homologado por lo que respecta a la descripción contenida en el certificado y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 12 de la Directiva 2007/46/CE.
7.2. Los convertidores de par, otros componentes de transferencia de par y los componentes adicionales de la línea de transmisión estarán excluidos de las disposiciones de ensayo de conformidad de la producción contenidas en el punto 8 del presente anexo.
7.3. La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción contenida en los certificados del apéndice 1 del presente anexo.
7.4. La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se evaluará de acuerdo con las condiciones específicas establecidas en el presente punto.
7.5. El fabricante ensayará anualmente el número de transmisiones, como mínimo, indicado en el cuadro 3, basándose en sus cifras totales de producción anual de transmisiones. Para establecer las cifras de producción, solo se tomarán en consideración las transmisiones sujetas a los requisitos del presente Reglamento.
7.6. Toda transmisión ensayada por el fabricante deberá ser representativa de una familia concreta. No obstante lo dispuesto en el punto 7.10, solo se ensayará una transmisión por familia.
7.7. Con volúmenes totales de producción anual de 1 001 a 10 000 transmisiones, la elección de la familia con la que se realizarán los ensayos deberá ser acordada entre el fabricante y la autoridad de homologación.
7.8. Con volúmenes totales de producción anual por encima de 10 000 transmisiones, siempre se ensayará la familia de transmisiones con el mayor volumen de producción. El fabricante deberá justificar ante la autoridad de homologación (por ejemplo, mostrándole las cifras de ventas) el número de ensayos realizados y la elección de las familias. Las restantes familias con las que deban realizarse ensayos serán acordadas entre el fabricante y la autoridad de homologación.
Cuadro 3
Tamaño de la muestra para los ensayos de conformidad
|
Producción anual total de transmisiones |
Número de ensayos |
|
0 – 1 000 |
0 |
|
>1 000 -10 000 |
1 |
|
>10 000 – 30 000 |
2 |
|
>30 000 |
3 |
|
>100 000 |
4 |
7.9. A efectos de los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, la autoridad de homologación deberá determinar, junto con el fabricante, los tipos de transmisión que deben ensayarse. La autoridad de homologación deberá asegurarse de que los tipos de transmisión seleccionados se fabriquen conforme a las mismas normas que en la producción en serie.
7.10. Si el resultado de un ensayo realizado conforme al punto 8 es superior al especificado en el punto 8.1.3, deberán ensayarse otra tres transmisiones de la misma familia. Si al menos una de ellas no supera el ensayo, se aplicará lo dispuesto en el artículo 23.
8. Ensayos de conformidad de la producción
Para los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, se aplicará el siguiente método, previo acuerdo entre una autoridad de homologación y el solicitante del certificado:
8.1. Ensayos de conformidad de las transmisiones
8.1.1. La eficiencia de la transmisión se determinará siguiendo el procedimiento simplificado descrito en el presente punto.
8.1.2.1. Serán de aplicación todas las condiciones límite especificadas en el presente anexo para los ensayos de certificación.
Si se aplican otras condiciones límite respecto del tipo de aceite, la temperatura del aceite y el ángulo de inclinación, el fabricante deberá mostrar con claridad la influencia de estas condiciones y las aplicadas para la certificación relativa a la eficiencia.
8.1.2.2. Para la medición se aplicará la misma opción de ensayo que para los ensayos de certificación, limitada a los puntos de funcionamiento especificados en el presente punto.
8.1.2.2.1. Si para los ensayos de certificación se aplicó la opción 1, se medirán las pérdidas independientes del par correspondientes a las dos velocidades indicadas en el punto 8.1.2.2.2, subpunto 3, y se utilizarán para el cálculo de las pérdidas de par en las tres fases de par más elevadas.
Si para los ensayos de certificación se aplicó la opción 2, se medirán las pérdidas independientes del par correspondientes a las dos velocidades indicadas en el punto 8.1.2.2.2, subpunto 3. Las pérdidas dependientes del par con el par máximo se medirán a las dos mismas velocidades. Las pérdidas de par en las tres fases de par más elevadas se interpolarán según describe el procedimiento de certificación.
Si para los ensayos de certificación se aplicó la opción 3, se medirán las pérdidas de par correspondientes a los dieciocho puntos de funcionamiento definidos en el punto 8.1.2.2.2.
8.1.2.2.2. La eficiencia de la transmisión se determinará en relación con los dieciocho puntos de funcionamiento definidos por los siguientes requisitos:
|
1) |
Marchas que deben emplearse: En los ensayos deberán utilizarse las tres marchas más largas de la transmisión. |
|
2) |
Intervalo de pares: Deberán ensayarse las tres fases de par más elevadas, según se hayan comunicado para la certificación. |
|
3) |
Intervalo de velocidades: Deberán ensayarse dos velocidades de entrada de la transmisión: 1 200 rpm y 1 600 rpm. |
8.1.2.3. Con respecto a cada uno de los dieciocho puntos de funcionamiento, se calculará la eficiencia de la transmisión como sigue:

donde:
|
η i |
= |
eficiencia de cada punto de funcionamiento, del 1 al 18 |
|
Tout |
= |
par de salida [Nm] |
|
Tin |
= |
par de entrada [Nm] |
|
nin |
= |
velocidad de entrada [rpm] |
|
nout |
= |
velocidad de salida [rpm] |
8.1.2.4. La eficiencia total durante los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, ηA,CoP , se calculará con el valor de la media aritmética de la eficiencia de los dieciocho puntos de funcionamiento.

8.1.3. Se supera el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas si se aplica la siguiente condición:
La eficiencia de la transmisión ensayada en el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, ηA,CoP , no deberá ser inferior al X % de la eficiencia de la transmisión de tipo homologado ηA,TA .
ηA,TA – ηA,CoP ≤ X
X se sustituirá por 1,5 % en el caso de las transmisiones MT/AMT/DCT y por 3 % en el de las transmisiones AT o las transmisiones con más de dos embragues de fricción para el cambio de marchas.
Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO A LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UNA FAMILIA DE TRANSMISIONES, CONVERTIDORES DE PAR, OTROS COMPONENTES DE TRANSFERENCIA DE PAR O COMPONENTES ADICIONALES DE LA LÍNEA DE TRANSMISIÓN (1)
|
Comunicación relativa a:
|
Sello de la Administración
|
de un certificado con arreglo al Reglamento (CE) n.o 595/2009, desarrollado por el Reglamento (UE) 2017/2400.
Reglamento (CE) n.o XXXXX y Reglamento(UE) 2017/2400, modificado en último lugar por …
Número de certificación:
Hash:
Motivo de la extensión:
SECCIÓN I
0.1. Marca (nombre comercial del fabricante):
0.2. Tipo:
0.3. Medio de identificación del tipo, si está marcado en el componente
0.3.1. Ubicación del marcado:
0.4. Nombre y dirección del fabricante:
0.5. En el caso de componentes y unidades técnicas independientes, ubicación y método de fijación de la marca de homologación CE:
0.6. Nombre y dirección de las plantas de montaje:
0.7. Nombre y dirección del representante del fabricante (en su caso):
SECCIÓN II
1. Información adicional (cuando proceda): véase la adenda 888
1.1. Opción aplicada para determinar las pérdidas de par
1.1.1. En caso de transmisión: especifíquense por separado para cada marcha de la transmisión los dos intervalos de pares de salida 0-10 kNm y > 10 kNm.
2. Autoridad de homologación encargada de realizar los ensayos:
3. Fecha del acta de ensayo:
4. Número del acta de ensayo:
5. Observaciones (en su caso): véase la adenda
6. Lugar:
7. Fecha:
8. Firma:
Anexos:
|
1. |
Ficha de características |
|
2. |
Acta de ensayo |
(1) Táchese lo que no proceda (en algunos casos no es necesario tachar nada si más de una opción es aplicable).
Apéndice 2
Ficha de características de la transmisión
|
Ficha de características n.° |
Asunto: Fecha de expedición: Fecha de modificación: |
con arreglo a …
Tipo de transmisión:
…
0. INFORMACIÓN GENERAL
0.1. Nombre y dirección del fabricante:
0.2. Marca (nombre comercial del fabricante):
0.3. Tipo de transmisión:
0.4. Familia de transmisiones:
0.5. Tipo de transmisión como unidad técnica independiente / Familia de transmisiones como unidad técnica independiente:
0.6. Denominaciones comerciales (si se dispone de ellas):
0.7. Medio de identificación del modelo, si está marcado en la transmisión:
0.8. En el caso de componentes y unidades técnicas independientes, ubicación y método de fijación de la marca de homologación CE:
0.9. Nombre y dirección de las plantas de montaje:
0.10. Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DE LA TRANSMISIÓN (DE ORIGEN) Y DE LOS TIPOS DE TRANSMISIÓN DENTRO DE UNA FAMILIA DE TRANSMISIONES
|
|
Transmisión de origen |
Miembros de la familia |
|
||
|
|
|||||
|
o tipo de transmisión |
|
||||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. INFORMACIÓN GENERAL
0.1. Marca (nombre comercial del fabricante)
0.2. Tipo
0.3. Denominaciones comerciales (si se dispone de ellas)
0.4. Medio de identificación del tipo
0.5. Ubicación de ese marcado
0.6. Nombre y dirección del fabricante:
0.7. Ubicación y método de fijación de la marca de homologación
0.8. Nombre y dirección de las plantas de montaje
0.9. Nombre y dirección del representante del fabricante (en su caso)
1.0. INFORMACIÓN ESPECÍFICA DE LA TRANSMISIÓN O LA FAMILIA DE TRANSMISIONES
1.1. Relación de transmisión. Esquema de marchas y flujo de potencia
1.2. Distancia entre centros, en el caso de transmisiones de árboles secundarios
1.3. Tipo de cojinetes en las posiciones correspondientes (si están instalados)
1.4. Tipo de elementos de cambio de marchas (embragues de dientes, incluidos sincronizadores, o embragues de fricción) en las posiciones correspondientes (si están instalados)
1.5. Ancho de engranaje único, en la opción 1, o ancho de engranaje único ± 1 mm, en las opciones 2 o 3
1.6. Número total de marchas hacia delante
1.7. Número de embragues de dientes para el cambio de marchas
1.8. Número de sincronizadores
1.9. Número de discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos)
1.10. Diámetro exterior de los discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos)
1.11. Rugosidad superficial de los dientes (incl. dibujos)
1.12. Número de obturadores de árbol dinámicos
1.13. Flujo de aceite de lubricación y refrigeración por revolución del árbol de entrada de la transmisión
1.14. Viscosidad del aceite a 100 °C (± 10 %)
1.15. Presión del sistema en cajas de cambios de control hidráulico
1.16. Nivel especificado de aceite en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha El nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado
1.17. Nivel de aceite especificado (± 1 mm)
1.18. Relaciones de transmisión [-] y par de entrada máximo [Nm], potencia de entrada máxima (kW) y velocidad de entrada máxima [rpm]
|
|
1.a marcha |
|
|
2.a marcha |
|
|
3.a marcha |
|
|
4.a marcha |
|
|
5.a marcha |
|
|
6.a marcha |
|
|
7.a marcha |
|
|
8.a marcha |
|
|
9.a marcha |
|
|
10.a marcha |
|
|
11.a marcha |
|
|
12.a marcha |
|
|
n.a marcha |
LISTA DE DOCUMENTOS ADJUNTOS
|
N.°: |
Descripción: |
Fecha de expedición: |
|
1. |
Información sobre las condiciones de ensayo de la transmisión |
… |
|
2. |
… |
|
Anexo 1 de la ficha de características de la transmisión
Información sobre las condiciones de ensayo (si procede)
|
sí/no |
||
|
sí/no |
||
|
|
||
|
|
Apéndice 3
Ficha de características de un convertidor de par (TC) hidrodinámico
|
Ficha de características n.° |
Asunto: Fecha de expedición: Fecha de modificación: |
con arreglo a …
Tipo de TC:
…
0. INFORMACIÓN GENERAL
0.1. Nombre y dirección del fabricante:
0.2. Marca (nombre comercial del fabricante):
0.3. Tipo de TC:
0.4. Familia de TC:
0.5. Tipo de TC como unidad técnica independiente / Familia de TC como unidad técnica independiente:
0.6. Denominaciones comerciales (si se dispone de ellas):
0.7. Medio de identificación del modelo, si está marcado en el TC:
0.8. En el caso de componentes y unidades técnicas independientes, ubicación y método de fijación de la marca de homologación CE:
0.9. Nombre y dirección de las plantas de montaje:
0.10. Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL TC (DE ORIGEN) Y DE LOS TIPOS DE TC DENTRO DE UNA FAMILIA DE TC
|
|
TC de origen o |
Miembros de la familia |
|
||
|
|
|||||
|
Tipo de TC |
#1 |
#2 |
#3 |
|
|
|
|
|||||
|
|
|||||
|
|
|
|
|
|
|
0.0. INFORMACIÓN GENERAL
0.1. Marca (nombre comercial del fabricante)
0.2. Tipo
0.3. Denominaciones comerciales (si se dispone de ellas)
0.4. Medio de identificación del tipo
0.5. Ubicación de ese marcado
0.6. Nombre y dirección del fabricante:
0.7. Ubicación y método de fijación de la marca de homologación
0,8. Nombre y dirección de las plantas de montaje
0,9. Nombre y dirección del representante del fabricante (en su caso)
1.0. INFORMACIÓN ESPECÍFICA DEL CONVERTIDOR DE PAR O DE LA FAMILIA DE CONVERTIDORES DE PAR
1.1. En el caso de un convertidor de par hidrodinámico sin transmisión mecánica (montaje en serie)
1.1.1. Diámetro de toro exterior
1.1.2. Diámetro de toro interior
1.1.3. Montaje de la bomba, la turbina y el estátor en la dirección del flujo
1.1.4. Anchura del toro
1.1.5. Tipo de aceite según la especificación de ensayo
1.1.6. Diseño del álabe
1.2. En el caso de un convertidor de par hidrodinámico con transmisión mecánica (montaje en paralelo)
1.2.1. Diámetro de toro exterior
1.2.2. Diámetro de toro interior
1.2.3. Montaje de la bomba, la turbina y el estátor en la dirección del flujo
1.2.4. Anchura del toro
1.2.5. Tipo de aceite según la especificación de ensayo
1.2.6. Diseño del álabe
1.2.7. Esquema de marchas y flujo de potencia en el modo de convertidor de par
1.2.8. Tipo de cojinetes en las posiciones correspondientes (si están instalados)
1.2.9. Tipo de bomba de refrigeración o lubricación (con referencia a la lista de piezas)
1.2.10. Tipo de elementos de cambio de marchas (embragues de dientes [incluidos sincronizadores] o embragues de fricción) en las posiciones correspondientes, si están instalados
1.2.11. Nivel de aceite según el dibujo con relación al eje central
LISTA DE DOCUMENTOS ADJUNTOS
|
N.o: |
Descripción: |
Fecha de expedición: |
|
1. |
Información sobre las condiciones de ensayo del convertidor de par |
… |
|
2. |
… |
|
Anexo 1 de la ficha de características del convertidor de par
Información sobre las condiciones de ensayo (si procede)
1. Método de medición
1.1. TC con transmisión mecánica:
sí/no
1.2. TC como unidad independiente:
sí/no
Apéndice 4
Ficha de características de otros componentes de transferencia de par (OTTC)
|
Ficha de características n.o |
Asunto: Fecha de expedición: Fecha de modificación: |
con arreglo a …
Tipo de OTTC:
…
0. INFORMACIÓN GENERAL
0.1. Nombre y dirección del fabricante:
0.2. Marca (nombre comercial del fabricante):
0.3. Tipo de OTTC:
0.4. Familia de OTTC:
0.5. Tipo de OTTC como unidad técnica independiente / Familia de OTTC como unidad técnica independiente:
0.6. Denominaciones comerciales (si se dispone de ellas):
0.7. Medio de identificación del modelo, si está marcado en el OTTC:
0.8. En el caso de componentes y unidades técnicas independientes, ubicación y método de fijación de la marca de homologación CE:
0.9. Nombre y dirección de las plantas de montaje:
0.10. Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL OTTC (DE ORIGEN) Y DE LOS TIPOS DE OTTC DENTRO DE UNA FAMILIA DE OTTC
|
|
OTTC de origen |
Miembro de la familia |
|
||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. INFORMACIÓN GENERAL
0.1. Marca (nombre comercial del fabricante)
0.2. Tipo
0.3. Denominaciones comerciales (si se dispone de ellas)
0.4. Medio de identificación del tipo
0.5. Ubicación de ese marcado
0.6. Nombre y dirección del fabricante:
0.7. Ubicación y método de fijación de la marca de homologación
0.8. Nombre y dirección de las plantas de montaje
0.9. Nombre y dirección del representante del fabricante (en su caso)
1.0. INFORMACIÓN ESPECÍFICA SOBRE EL OTTC
1.1. En en el caso de OTTC / ralentizadores hidrodinámicos
1.1.1. Diámetro de toro exterior
1.1.2. Anchura del toro
1.1.3. Diseño del álabe
1.1.4. Fluido de trabajo
1.1.5. Diámetro de toro exterior - diámetro de toro interior
1.1.6. Número de álabes:
1.1.7. Viscosidad del fluido de trabajo
1.2. En en el caso de OTTC / ralentizadores magnéticos
1.2.1. Diseño del tambor (ralentizador electromagnético o ralentizador magnético permanente)
1.2.2. Diámetro exterior del rotor
1.2.3. Diseño del álabe para refrigeración
1.2.4. Diseño del álabe
1.2.5. Fluido de trabajo
1.2.6. Diámetro exterior del rotor - diámetro interior del rotor
1.2.7. Número de rotores
1.2.8. Número de álabes de refrigeración o álabes
1.2.9. Viscosidad del fluido de trabajo
1.2.10. Número de brazos
1.3. En en el caso de OTTC / Embrague hidrodinámico
1.3.1. Diámetro de toro exterior
1.3.2. Anchura del toro
1.3.3. Diseño del álabe
1.3.4. Viscosidad del fluido de trabajo
1.3.5. Diámetro de toro exterior - diámetro de toro interior
1.3.6. Número de álabes
LISTA DE DOCUMENTOS ADJUNTOS
|
N.o: |
Descripción: |
Fecha de expedición: |
|
1. |
Información sobre las condiciones de ensayo de OTTC |
… |
|
2. |
… |
|
Anexo 1 de la ficha de características de OTTC
Información sobre las condiciones de ensayo (si procede)
1. Método de medición
|
|
con transmisión sí/no |
|
|
con motor sí/no |
|
|
mecanismo de accionamiento sí/no |
|
|
directo sí/no |
2. Velocidad de ensayo máxima del atenuador de par principal del OTTC, por ejemplo el rotor del ralentizador [rpm]
Apéndice 5
Ficha de características de componentes adicionales de la línea de transmisión (ADC)
|
Ficha de características n.o |
Asunto: Fecha de expedición: Fecha de modificación: |
con arreglo a …
Tipo de ADC:
…
0. INFORMACIÓN GENERAL
0.1. Nombre y dirección del fabricante:
0.2. Marca (nombre comercial del fabricante):
0.3. Tipo de ADC:
0.4. Familia de ADC:
0.5. Tipo de ADC como unidad técnica independiente / Familia de ADC como unidad técnica independiente:
0.6. Denominaciones comerciales (si se dispone de ellas):
0.7. Medio de identificación del modelo, si está marcado en el ADC:
0.8. En el caso de componentes y unidades técnicas independientes, ubicación y método de fijación de la marca de homologación CE:
0.9. Nombre y dirección de las plantas de montaje:
0.10. Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL ADC (DE ORIGEN) Y DE LOS TIPOS DE ADC DENTRO DE UNA FAMILIA DE ADC
|
|
ADC de origen |
Miembro de la familia |
|
||
|
|
|||||
|
|
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0. INFORMACIÓN GENERAL
0.1. Marca (nombre comercial del fabricante)
0.2. Tipo
0.3. Denominaciones comerciales (si se dispone de ellas)
0.4. Medio de identificación del tipo
0.5. Ubicación de ese marcado
0.6. Nombre y dirección del fabricante:
0.7. Ubicación y método de fijación de la marca de homologación
0.8. Nombre y dirección de las plantas de montaje
0.9. Nombre y dirección del representante del fabricante (en su caso)
1.0. INFORMACIÓN ESPECÍFICA DEL ADC O EL REENVÍO ANGULAR
1.1. Relación de transmisión y esquema de marchas
1.2. Ángulo entre el árbol de entrada/salida
1.3. Tipo de cojinetes en las posiciones correspondientes
1.4. Número de dientes por rueda dentada
1.5. Ancho de engranaje único
1.6. Número de obturadores de árbol dinámicos
1.7. Viscosidad del aceite (± 10 %)
1.8. Rugosidad superficial de los dientes
1.9. Nivel de aceite específico en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha. El nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado
1.10. Nivel de aceite en (± 1 mm).
LISTA DE DOCUMENTOS ADJUNTOS
|
N.o: |
Descripción: |
Fecha de expedición: |
|
1. |
Información sobre las condiciones de ensayo de ADC |
… |
|
2. |
… |
|
Anexo 1 de la ficha de características del ADC
Información sobre las condiciones de ensayo (si procede)
1. Método de medición
|
con transmisión: |
sí/no |
|
mecanismo de accionamiento: |
sí/no |
|
directo: |
sí/no |
2. Velocidad de ensayo máxima en la entrada del ADC [rpm]
Apéndice 6
Concepto de familia
1. Generalidades
Una familia de transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión se caracteriza por determinados parámetros de diseño y rendimiento. Tales parámetros deberán ser comunes a todos los miembros de la familia. El fabricante podrá decidir qué transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión pertenecen a una familia, siempre que se respeten los criterios de pertenencia contenidos en el presente apéndice. La familia en cuestión deberá ser aprobada por la autoridad de homologación. El fabricante pondrá a disposición de la autoridad de homologación la información adecuada sobre los componentes de los miembros de la familia.
1.1. Casos particulares
En algunos casos puede producirse una interacción entre los parámetros. Esto deberá tomarse en consideración para garantizar que solo se incluyan en una misma familia transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión que tengan características similares. El fabricante deberá identificar estos casos y notificarlos a la autoridad de homologación. Se tendrán luego en cuenta como criterio para crear una nueva familia de transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión.
En el caso de dispositivos o características que no se incluyan en el punto 9 y que influyan significativamente en el nivel de rendimiento, el fabricante identificará este equipo basándose en las buenas prácticas técnicas, y lo notificará a la autoridad de homologación. Se tendrán luego en cuenta como criterio para crear una nueva familia de transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión.
1.2. El concepto de familia define criterios y parámetros que permiten al fabricante agrupar transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión en familias y tipos con datos similares o iguales en relación con el CO2.
2. La autoridad de homologación puede llegar a la conclusión de que lo mejor para caracterizar la pérdida de par más elevada de la familia de transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión es realizar ensayos adicionales. En este caso, el fabricante deberá presentar la información adecuada para determinar los miembros de la familia de transmisiones, convertidores de par, otros componentes de transferencia de par o componentes adicionales de la línea de transmisión que tienen más probabilidades de presentar el mayor nivel de pérdida de par.
Si determinados miembros de la familia poseen otras características que pueda considerarse que afectan a las pérdidas de par, tales características deberán también identificarse y tenerse en cuenta al seleccionar el miembro de origen.
3. Parámetros que definen la familia de transmisiones
3.1. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de transmisiones:
|
a) |
relación de transmisión, esquema de marchas y flujo de potencia (solo respecto de las marchas hacia delante, excluidas las superlentas); |
|
b) |
distancia entre centros, en el caso de transmisiones de árboles secundarios; |
|
c) |
tipo de cojinetes en las posiciones correspondientes (si están instalados); |
|
d) |
tipo de elementos de cambio de marchas (embragues de dientes, incluidos sincronizadores, o embragues de fricción) en las posiciones correspondientes (si están instalados). |
3.2. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de transmisiones. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
ancho de engranaje único ± 1 mm; |
|
b) |
número total de marchas hacia delante; |
|
c) |
número de embragues de dientes para el cambio de marchas; |
|
d) |
número de sincronizadores; |
|
e) |
número de discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos); |
|
f) |
diámetro exterior de los discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos); |
|
g) |
rugosidad superficial de los dientes; |
|
h) |
número de obturadores de árbol dinámicos; |
|
i) |
flujo de aceite de lubricación y refrigeración por revolución del árbol de entrada; |
|
j) |
viscosidad del aceite (± 10 %); |
|
k) |
presión del sistema en cajas de cambios de control hidráulico; |
|
l) |
nivel especificado de aceite en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha; el nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado; |
|
m) |
nivel de aceite especificado (± 1 mm). |
4. Elección de la transmisión de origen
La transmisión de origen se seleccionará atendiendo a los criterios que se enumeran a continuación:
|
a) |
el mayor ancho de engranaje único en la opción 1, o el mayor ancho de engranaje único ± 1 mm en las opciones 2 o 3; |
|
b) |
número total de marchas más elevado; |
|
c) |
número más elevado de embragues de dientes para el cambio de marchas; |
|
d) |
número más elevado de sincronizadores; |
|
e) |
número más elevado de discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos); |
|
f) |
valor más elevado del diámetro exterior de los discos de embrague de fricción (excepto en el caso de embrague en seco único con uno o dos discos); |
|
g) |
valor más elevado de rugosidad superficial de los dientes; |
|
h) |
número más elevado de obturadores de árbol dinámicos; |
|
i) |
valor más elevado del flujo de aceite de lubricación y refrigeración por revolución del árbol de entrada; |
|
j) |
valor más elevado de viscosidad del aceite; |
|
k) |
valor más elevado de presión del sistema en cajas de cambios de control hidráulico; |
|
l) |
valor más elevado del nivel especificado de aceite en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha; el nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado; |
|
m) |
valor más elevado del nivel de aceite especificado (± 1 mm). |
5. Parámetros que definen la familia de convertidores de par
5.1. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de convertidores de par:
5.1.1. En el caso de un convertidor de par hidrodinámico sin transmisión mecánica (montaje en serie)
|
a) |
diámetro de toro exterior; |
|
b) |
diámetro de toro interior; |
|
c) |
montaje de la bomba, la turbina y el estátor en la dirección del flujo; |
|
d) |
anchura del toro; |
|
e) |
tipo de aceite según la especificación de ensayo; |
|
f) |
diseño del álabe. |
5.1.2. En el caso de un convertidor de par hidrodinámico con transmisión mecánica (montaje en paralelo)
|
a) |
diámetro de toro exterior; |
|
b) |
diámetro de toro interior; |
|
c) |
montaje de la bomba, la turbina y el estátor en la dirección del flujo; |
|
d) |
anchura del toro; |
|
e) |
tipo de aceite según la especificación de ensayo; |
|
f) |
diseño del álabe; |
|
g) |
esquema de marchas y flujo de potencia en el modo de convertidor de par; |
|
h) |
tipo de cojinetes en las posiciones correspondientes (si están instalados); |
|
i) |
Tipo de bomba de refrigeración o lubricación (con referencia a la lista de piezas) |
|
j) |
tipo de elementos de cambio de marchas (embragues de dientes [incluidos sincronizadores] o embragues de fricción) en las posiciones correspondientes, si están instalados. |
5.1.3. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de convertidores de par hidrodinámicos con transmisión mecánica (montaje en paralelo). Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
Nivel de aceite según el dibujo con relación al eje central. |
6. Elección del convertidor de par de origen
6.1. En el caso de un convertidor de par hidrodinámico sin transmisión mecánica (montaje en serie).
En la medida en que todos los criterios enumerados en el punto 5.1.1 sean idénticos, podrá seleccionarse como miembro de origen cualquier miembro de la familia de convertidores de par sin transmisión mecánica.
6.2. En el caso de un convertidor de par hidrodinámico con transmisión mecánica.
El convertidor de par hidrodinámico con transmisión mecánica (montaje en paralelo) de origen se seleccionará atendiendo al criterio siguiente:
|
a) |
valor más elevado de aceite según el dibujo con relación al eje central. |
7. Parámetros que definen la familia de otros componentes de transferencia de par
7.1. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de componentes de transferencia de par / ralentizadores hidrodinámicos:
|
a) |
diámetro de toro exterior; |
|
b) |
anchura del toro; |
|
c) |
diseño del álabe. |
|
d) |
fluido de trabajo. |
7.2. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de componentes de transferencia de par / ralentizadores magnéticos:
|
a) |
diseño del tambor (ralentizador electromagnético o ralentizador magnético permanente); |
|
b) |
diámetro exterior del rotor; |
|
c) |
diseño del álabe de refrigeración; |
|
d) |
diseño del álabe. |
7.3. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de componentes de transferencia de par / embragues hidrodinámicos:
|
a) |
diámetro de toro exterior; |
|
b) |
anchura del toro; |
|
c) |
diseño del álabe. |
7.4. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de componentes de transferencia de par / ralentizadores hidrodinámicos. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
diámetro de toro exterior - diámetro de toro interior; |
|
b) |
número de álabes; |
|
c) |
viscosidad del fluido de trabajo (± 50 %). |
7.5. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de componentes de transferencia de par / ralentizadores magnéticos. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
diámetro exterior del rotor - diámetro interior del rotor; |
|
b) |
número de rotores; |
|
c) |
número de álabes de refrigeración o álabes; |
|
d) |
número de brazos. |
7.6. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de componentes de transferencia de par / embragues hidrodinámicos. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
viscosidad del fluido de trabajo (± 10 %); |
|
b) |
diámetro de toro exterior - diámetro de toro interior; |
|
c) |
número de álabes. |
8. Elección del componente de transferencia de par de origen
8.1. El componente de transferencia de par / ralentizador hidrodinámico de origen se seleccionará atendiendo a los criterios que se enumeran a continuación:
|
a) |
valor más elevado: diámetro de toro exterior - diámetro de toro interior; |
|
b) |
número más elevado de álabes; |
|
c) |
valor más elevado de viscosidad del fluido de trabajo. |
8.2. El componente de transferencia de par / ralentizador magnético de origen se seleccionará atendiendo a los criterios que se enumeran a continuación:
|
a) |
valor más elevado de diámetro exterior del rotor - diámetro interior del rotor; |
|
b) |
número más elevado de rotores; |
|
c) |
número más elevado de álabes de refrigeración o álabes; |
|
d) |
número más elevado de brazos. |
8.3. El componente de transferencia de par / embrague hidrodinámico de origen se seleccionará atendiendo a los criterios que se enumeran a continuación:
|
a) |
valor más elevado de viscosidad del fluido de trabajo (± 10 %); |
|
b) |
valor más elevado de diámetro de toro exterior - diámetro de toro interior; |
|
c) |
número más elevado de álabes. |
9. Parámetros que definen la familia de componentes adicionales de la línea de transmisión
9.1. Los siguientes criterios deberán ser los mismos en todos los miembros de una familia de componentes adicionales de la línea de transmisión / reenvíos angulares:
|
a) |
relación de transmisión y esquema de marchas; |
|
b) |
ángulo entre el árbol de entrada/salida; |
|
c) |
tipo de cojinetes en las posiciones correspondientes. |
9.2. Los siguientes criterios deberán ser comunes a todos los miembros de una familia de componentes adicionales de la línea de transmisión / reenvíos angulares. Se permite aplicar un intervalo específico a los parámetros que figuran a continuación, una vez aprobado por la autoridad de homologación:
|
a) |
ancho de engranaje único; |
|
b) |
número de obturadores de árbol dinámicos; |
|
c) |
viscosidad del aceite (± 10 %); |
|
d) |
rugosidad superficial de los dientes; |
|
e) |
nivel especificado de aceite en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha; el nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado. |
10. Elección del componente adicional de la línea de transmisión de origen
10.1. El componente adicional de la línea de transmisión / reenvío angular de origen se seleccionará atendiendo a los criterios que se enumeran a continuación:
|
a) |
valor más elevado del ancho de engranaje único; |
|
a) |
número más elevado de obturadores de árbol dinámicos; |
|
c) |
valor más elevado de viscosidad del aceite (± 10 %); |
|
d) |
valor más elevado de rugosidad superficial de los dientes; |
|
e) |
valor más elevado del nivel especificado de aceite en relación con el eje central y de acuerdo con la especificación de dibujo (basada en el valor medio entre las tolerancias inferior y superior) en condición estática o en marcha; el nivel de aceite se considera igual si todas las piezas giratorias de la transmisión (excepto la bomba de aceite y su mecanismo de accionamiento) se sitúan por encima del nivel de aceite especificado. |
Apéndice 7
Marcados y numeración
1. Marcados
Un componente certificado de conformidad con el presente anexo deberá llevar:
1.1. El nombre del fabricante y la marca.
1.2. La marca y la indicación del tipo identificativo según se hayan consignado en los puntos 0.2 y 0.3 de la parte 1 de los apéndices 2 a 5 del presente anexo.
1.3. La marca de certificación (si procede) en forma de rectángulo en torno a la letra minúscula «e» seguida del número distintivo del Estado miembro que ha expedido el certificado:
|
|
1 para Alemania; |
|
|
2 para Francia; |
|
|
3 para Italia; |
|
|
4 para los Países Bajos; |
|
|
5 para Suecia; |
|
|
6 para Bélgica; |
|
|
7 para Hungría; |
|
|
8 para Chequia; |
|
|
9 para España; |
|
|
11 para el Reino Unido; |
|
|
12 para Austria; |
|
|
13 para Luxemburgo; |
|
|
17 para Finlandia; |
|
|
18 para Dinamarca; |
|
|
19 para Rumanía; |
|
|
20 para Polonia; |
|
|
21 para Portugal; |
|
|
23 para Grecia; |
|
|
24 para Irlanda; |
|
|
25 para Croacia; |
|
|
26 para Eslovenia; |
|
|
27 para Eslovaquia; |
|
|
29 para Estonia; |
|
|
32 para Letonia; |
|
|
34 para Bulgaria; |
|
|
36 para Lituania; |
|
|
49 para Chipre; |
|
|
50 para Malta. |
1.4. En la marca de certificación figurará también, cerca del rectángulo, el «número de homologación de base» incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo VII de la Directiva 2007/46/CE, precedido de las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de un carácter alfanumérico que indica la pieza para la que se ha expedido el certificado.
Para el presente Reglamento, el número secuencial será el 00.
Para el presente Reglamento, el carácter alfanumérico será el establecido en el cuadro 1.
Cuadro 1
|
T |
Transmisión |
|
C |
Convertidor de par |
|
O |
Otro componente de transferencia de par |
|
D |
Componente adicional de la línea de transmisión |
1.5. Ejemplo de marca de certificación:

Esta marca de certificación fijada en una transmisión, un convertidor de par, otro componente de transferencia de par o un componente adicional de la línea de transmisión indica que el tipo en cuestión ha sido certificado en Polonia (e20) con arreglo al presente Reglamento. Los dos primero dígitos (00) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. El carácter siguiente indica que el certificado se ha expedido con relación a una transmisión (T). Las cuatro últimos dígitos (0004) son los que la autoridad de homologación de tipo ha asignado a la transmisión como número de homologación de base.
1.6. A petición del solicitante del certificado y previo acuerdo de la autoridad de homologación, podrán utilizarse tamaños de fuente distintos de los indicados en el punto 1.5. Esos otros tamaños de fuente deberán seguir siendo claramente legibles.
1.7. Los marcados, las etiquetas, las placas o los adhesivos deben durar toda la vida útil de la transmisión, el convertidor de par, el otro componente de transferencia de par o los componentes adicionales de la línea de transmisión, y ser claramente legibles e indelebles. El fabricante deberá asegurarse de que sea imposible retirar los marcados, las etiquetas, las placas o los adhesivos sin destruirlos ni desfigurarlos.
1.8. En caso de que la misma autoridad de homologación expida una certificación por separado para una transmisión, un convertidor de par, otro componente de transferencia de par o un componente adicional de la línea de transmisión y esas piezas se instalen combinadas, bastará con una marca de certificación conforme al punto 1.3. Dicha marca de certificación deberá ir seguida del marcado aplicable según el punto 1.4 a la transmisión, el convertidor de par, el otro componente de transferencia de par o el componente adicional de la línea de transmisión de que se trate, separado por una barra «/».
1.9. La marca de certificación deberá ser visible cuando la transmisión, el convertidor de par, el otro componente de transferencia de par o el componente adicional de la línea de transmisión estén instalados en el vehículo, y se colocará en una pieza necesaria para el funcionamiento normal que, por lo general, no tenga que ser sustituida durante la vida útil del componente.
1.10. En caso de que el convertidor de par u otros componentes de transferencia de par estén fabricados de manera que no sean accesibles ni visibles una vez ensamblados con la transmisión, su marca de certificación se colocará en esta última.
En el caso descrito en el párrafo primero, si el convertidor de par o el otro componente de transferencia de par no han sido certificados, en lugar del número de certificación se colocará en la transmisión el signo «–» junto al carácter alfanumérico especificado en el punto 1.4.
2. Numeración
2.1. El número de certificación de la transmisión, el convertidor de par, el otro componente de transferencia de par o el componente adicional de la línea de transmisión incluirá lo siguiente:
eX*YYY/YYYY*ZZZ/ZZZZ*X*0000*00
|
sección 1 |
sección 2 |
sección 3 |
Letra adicional de la sección 3 |
sección 4 |
sección 5 |
|
Indicación del país que expide el certificado |
Acto relativo a la certificación CO2 (…/2017) |
Último acto modificativo (zzz/zzzz) |
Véase el cuadro 1 del presente apéndice |
Número de certificación de base 0000 |
Extensión 00 |
Apéndice 8
Valores normalizados de la pérdida de par. Transmisión
Valores de reserva calculados sobre la base del par nominal máximo de la transmisión:
|
|
La pérdida de par Tl,in relacionada con el árbol de entrada de la transmisión se calculará como sigue:
donde:
|
|
|
Respecto a las transmisiones con embragues de dientes para el cambio de marchas (transmisiones manuales sincronizadas, transmisiones manuales automatizadas o transmisiones de engrane mecánico automáticas y transmisiones de doble embrague), el par de arrastre Tdx se calcula como sigue:
donde:
|
|
|
Con respecto a las transmisiones con embragues de fricción para el cambio de marchas (> 2 embragues de fricción), el par de arrastre Tdx se calcula como sigue:
En este caso, el término «embrague de fricción» se utiliza en el contexto de un embrague o freno que funciona por fricción, y es necesario para mantener la transferencia de par en al menos una marcha. |
|
|
Para las transmisiones que incluyan un reenvío angular (por ejemplo, un engranaje cónico), el par de arrastre adicional del reenvío angular Taddx se incluirá en el cálculo de Tdx :
(solo si procede) |
Apéndice 9
Modelo genérico. Convertidor de par
Modelo genérico de convertidor de par basado en tecnología estándar:
Para determinar las características del convertidor de par, podrá utilizarse un modelo genérico de convertidor de par en función de las características específicas del motor.
El modelo genérico de TC se basa en los siguientes datos característicos del motor:
|
nrated |
= |
velocidad máxima del motor a la potencia máxima (determinada a partir de la curva del motor a plena carga calculada por la herramienta de preprocesamiento del motor) [rpm] |
|
Tmax |
= |
par motor máximo (determinado a partir de la curva del motor a plena carga calculada por la herramienta de preprocesamiento del motor) [Nm] |
Por lo tanto, las características genéricas del TC solo son válidas para una combinación del TC con un motor que comparta esos mismos datos característicos.
Descripción del modelo de cuatro puntos para la capacidad de par del TC:
Capacidad genérica de par y relación genérica de par:
Figura 1
Capacidad genérica de par
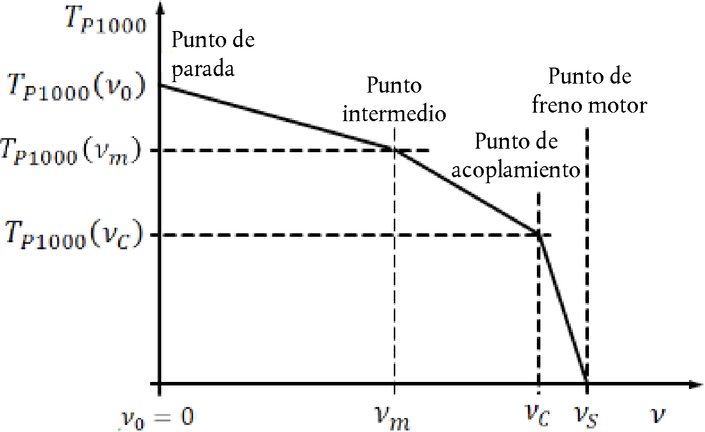
Figura 2
Relación genérica de par

donde:
|
TP1000 |
= |
par de referencia de la bomba |
|
v |
= |
relación de velocidad; |
|
μ |
= |
relación de par; |
|
vs |
= |
relación de velocidad en el punto de freno motor; En el caso de un TC con carcasa giratoria (de tipo Trilock), vs es típicamente 1. En otras concepciones de TC, especialmente las de división de potencia, vs puede tener valores distintos de 1. |
|
vc |
= |
relación de velocidad en el punto de acoplamiento; |
|
v0 |
= |
punto de parada; v0 = 0 [rpm] |
|
vm |
= |
relación de velocidad intermedia; |
El modelo requiere las siguientes definiciones para el cálculo de la capacidad genérica de par:
|
|
Punto de parada:
|
|
|
Punto intermedio:
|
|
|
Punto de acoplamiento:
|
|
|
Punto de freno motor:
|
El modelo requiere las siguientes definiciones para el cálculo de la relación genérica de par:
|
|
Punto de parada:
|
|
|
Punto intermedio:
|
|
|
Punto de acoplamiento:
|
|
|
Punto de freno motor:
|
|
|
Eficiencia: n = μ * v |
Se utilizará la interpolación lineal entre los puntos específicos calculados.
Apéndice 10
Valores normalizados de la pérdida de par. Otros componentes de transferencia de par
Valores normalizados de la pérdida de par calculados para otros componentes de transferencia de par:
|
|
En el caso de ralentizadores hidrodinámicos (aceite o agua), el par de arrastre del ralentizador se calculará como sigue:
|
|
|
En el caso de ralentizadores magnéticos (permanentes o electromagnéticos), el par de arrastre del ralentizador se calculará como sigue:
|
donde:
|
Tretarder |
= |
pérdida por arrastre del ralentizador [Nm] |
|
nretarder |
= |
velocidad del rotor del ralentizador [rpm] (véase el punto 5.1 del presente anexo) |
|
istep-up |
= |
relación de multiplicación = velocidad del rotor del ralentizador / velocidad del componente transmisor (véase el punto 5.1 del presente anexo) |
Apéndice 11
Valores normalizados de la pérdida de par. Reenvío angular engranado
En consonancia con los valores normalizados de la pérdida de par para la combinación de una transmisión con un reenvío angular engranado indicados en el apéndice 8, los valores normalizados de la pérdida de par de un reenvío angular engranado sin transmisión se calcularán como sigue:

donde:
|
Tl,in |
= |
pérdida de par relacionada con el árbol de entrada de la transmisión [Nm] |
|
Taddx |
= |
par de arrastre adicional del engranaje del reenvío angular a x rpm [Nm] (si procede) |
|
nin |
= |
velocidad en el árbol de entrada de la transmisión [rpm] |
|
fT |
= |
1-η; η= eficiencia fT_add = 0,04 para el engranaje del reenvío angular |
|
Tin |
= |
par en el árbol de entrada de la transmisión [Nm] |
|
Tmax,in |
= |
par de entrada máximo permitido en cualquier marcha hacia delante de la transmisión [Nm] |
|
|
= |
max(Tmax,in,gear) |
|
Tmax,in,gear |
= |
par de entrada máximo permitido en la marcha (donde marcha = 1, 2, 3... última marcha) |

Las pérdidas de par normalizadas obtenidas con los cálculos anteriores podrán sumarse a las pérdidas de par de una transmisión obtenidas con las opciones 1-3, a fin de obtener las pérdidas de par correspondientes a la combinación de la transmisión en cuestión con un reenvío angular.
Apéndice 12
Parámetros de entrada de la herramienta de simulación
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de transmisiones, convertidores de par, otros componentes de transferencia de par y componentes adicionales de la línea de transmisión como datos de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
Definiciones
1)
2)
|
string … |
cadena, secuencia de caracteres en codificación ISO 8859-1 |
|
token … |
testigo, secuencia de caracteres en codificación ISO 8859-1, sin espacios en blanco delante ni detrás |
|
date … |
fecha y hora UTC con el siguiente formato: AAAA-MM-DD T HH:MM:SS Z con letra cursiva para los caracteres fijos, por ejemplo «2002-05-30T09:30:10Z» |
|
integer … |
entero, valor con un tipo de datos integral, sin ceros delante, por ejemplo «1800» |
|
double, X … |
número decimal con exactamente X dígitos tras el signo decimal («.») y sin ceros delante, por ejemplo, para «double, 2»: «2345.67»; para «double, 4»: «45.6780» |
3)
Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «Transmission/General»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P205 |
token |
[-] |
|
|
Model |
P206 |
token |
[-] |
|
|
TechnicalReportId |
P207 |
token |
[-] |
|
|
Date |
P208 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P209 |
testigo |
[-] |
|
|
TransmissionType |
P076 |
string |
[-] |
Valores permitidos: «SMT», «AMT», «APT-S», «APT-P» |
|
MainCertificationMethod |
P254 |
string |
[-] |
Valores permitidos: «Option 1», «Option 2», «Option 3», «Standard values» |
Cuadro 2
Parámetros de entrada «Transmission/Gears» por marcha
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
GearNumber |
P199 |
integer |
[-] |
|
|
Ratio |
P078 |
double, 3 |
[-] |
|
|
MaxTorque |
P157 |
integer |
[Nm] |
opcional |
|
MaxSpeed |
P194 |
integer |
[1/min] |
opcional |
Cuadro 3
Parámetros de entrada «Transmission/LossMap» por marcha y para cada punto de la cuadrícula del mapa de pérdida
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
InputSpeed |
P096 |
double, 2 |
[1/min] |
|
|
InputTorque |
P097 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P098 |
double, 2 |
[Nm] |
|
Cuadro 4
Parámetros de entrada «TorqueConverter/General»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P210 |
token |
[-] |
|
|
Model |
P211 |
token |
[-] |
|
|
TechnicalReportId |
P212 |
token |
[-] |
|
|
Date |
P213 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P214 |
string |
[-] |
|
|
CertificationMethod |
P257 |
string |
[-] |
Valores permitidos: «Measured», «Standard values» |
Cuadro 5
Parámetros de entrada «EngineTorqueConverter/Characteristics» para cada punto de la cuadrícula de la curva característica
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
SpeedRatio |
P099 |
double, 4 |
[-] |
|
|
TorqueRatio |
P100 |
double, 4 |
[-] |
|
|
InputTorqueRef |
P101 |
double, 2 |
[Nm] |
|
Cuadro 6
Parámetros de entrada «Angledrive/General» (solo si el componente es aplicable)
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P220 |
token |
[-] |
|
|
Model |
P221 |
token |
[-] |
|
|
TechnicalReportId |
P222 |
token |
[-] |
|
|
Date |
P223 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P224 |
string |
[-] |
|
|
Ratio |
P176 |
double, 3 |
[-] |
|
|
CertificationMethod |
P258 |
string |
[-] |
Valores permitidos: «Option 1», «Option 2», «Option 3», «Standard values» |
Cuadro 7
Parámetros de entrada «Angledrive/LossMap» para cada punto de la cuadrícula del mapa de pérdida (solo si el componente es aplicable)
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
InputSpeed |
P173 |
double, 2 |
[1/min] |
|
|
InputTorque |
P174 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P175 |
double, 2 |
[Nm] |
|
Cuadro 8
Parámetros de entrada «Retarder/General» (solo si el componente es aplicable)
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P225 |
token |
[-] |
|
|
Model |
P226 |
token |
[-] |
|
|
TechnicalReportId |
P227 |
token |
[-] |
|
|
Date |
P228 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P229 |
string |
[-] |
|
|
CertificationMethod |
P255 |
string |
[-] |
Valores permitidos: «Measured», «Standard values» |
Cuadro 9
Parámetros de entrada «Retarder/LossMap» para cada punto de la cuadrícula de la curva característica (solo si el componente es aplicable)
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
RetarderSpeed |
P057 |
double, 2 |
[1/min] |
|
|
TorqueLoss |
P058 |
double, 2 |
[Nm] |
|
ANEXO VII
VERIFICACIÓN DE LOS DATOS DEL EJE
1. Introducción
En el presente anexo se describen las disposiciones de certificación relativas a las pérdidas de par de los ejes de propulsión de los vehículos pesados. Como alternativa a la certificación de los ejes, puede aplicarse el procedimiento de cálculo de la pérdida normalizada de par tal como se define en el apéndice 3 del presente anexo a los efectos de la determinación de las emisiones de CO2 específicas del vehículo.
2. Definiciones
A los efectos del presente anexo se aplicarán las siguientes definiciones
1) «Eje de reducción simple (SR)»: eje motor con un único engranaje reductor, por lo general un engranaje cónico con o sin excentricidad hipoide.
2) «Eje pórtico simple (SP)»: eje que presenta por lo general una excentricidad vertical entre el eje de giro de la corona y el eje de giro de la rueda, debido a la demanda de una mayor altura libre sobre el suelo o de un piso rebajado para autobuses urbanos de piso bajo. Por lo general, la primera reducción es un engranaje cónico y la segunda, un engranaje recto con excentricidad vertical junto a las ruedas.
3) «Eje con reducción de cubo (HR)»: eje motor con dos engranajes reductores. El primero es, por lo general, un engranaje cónico con o sin excentricidad hipoide. El otro es un engranaje epicicloidal, situado por lo general en la zona de los cubos de las ruedas.
4) «Eje tándem de reducción simple (SRT)»: eje motor similar en lo esencial a un eje motor simple, pero que también tiene la finalidad de transferir el par desde la brida de entrada, a través de una brida de salida, hasta otro eje. El par puede transferirse con un engranaje recto junto a la brida de entrada, al objeto de generar una excentricidad vertical para la brida de salida. Otra posibilidad es utilizar un segundo piñón en el engranaje cónico, que disminuye el par en la corona.
5) «Eje tándem con reducción de cubo (HRT)»: eje con reducción de cubo que tiene la posibilidad de transferir el par hacia atrás tal como se describe en relación con el eje tándem de reducción simple (SRT).
6) «Caja del eje»: piezas de la caja que son necesarias para la capacidad estructural, así como para albergar las piezas de la línea de transmisión, los cojinetes y las juntas del eje.
7) «Piñón»: pieza de un engranaje cónico, que habitualmente está compuesto de dos ruedas dentadas. El piñón es la rueda dentada conductora y está conectado a la brida de entrada. En el caso de SRT/HRT, puede instalarse un segundo piñón para disminuir el par de la corona.
8) «Corona»: pieza de un engranaje cónico, que habitualmente está compuesto de dos ruedas dentadas. La corona es la rueda dentada conducida y está conectada al cárter del diferencial.
9) «Reducción de cubo»: engranaje epicicloidal que normalmente se instala fuera del cojinete epicicloidal en los ejes con reducción de cubo. El engranaje está compuesto de tres tipos de ruedas dentadas diferentes. El planeta, los satélites y la corona. El planeta ocupa el centro, los satélites giran alrededor del planeta y están montados en el portasatélites, que está sujeto al cubo. Por lo general, el número de satélites es de entre tres y cinco. La corona no gira y está sujeta al cuerpo fijo del eje.
10) «Satélite»: rueda dentada que gira alrededor del planeta dentro de la corona de un engranaje epicicloidal. Está ensamblada con cojinetes en un portasatélites, que está unido a un cubo.
11) «Grado de viscosidad del tipo de aceite»: grado de viscosidad tal como se define en la norma SAE J306.
12) «Aceite de llenado en fábrica»: grado de viscosidad del tipo de aceite que se utiliza para el llenado en la fábrica y que está destinado a permanecer en el eje durante el primer intervalo de revisión.
13) «Línea de ejes»: grupo de ejes que comparten las mismas funciones básicas de un eje tal como se definen en el concepto de familia.
14) «Familia de ejes»: grupo de ejes del fabricante que, por su concepción, tal como se define en el apéndice 4 del presente anexo, presentan características similares de concepción y similares propiedades en materia de emisiones de CO2 y consumo de combustible.
15) «Par de resistencia»: par necesario para superar la fricción interior de un eje cuando los extremos de la rueda giran libremente con un par de salida de 0 Nm.
16) «Caja del eje invertida»: caja del eje en posición invertida respecto del plano vertical.
17) «Entrada del eje»: lado del eje en que se entrega el par a este.
18) «Salida del eje»: lados del eje en que se entrega el par a las ruedas.
3. Requisitos generales
Los engranajes y todos los cojinetes del eje, excepto los cojinetes de los extremos de las ruedas utilizados para las mediciones, serán nuevos.
A petición del solicitante podrán someterse a ensayo diferentes relaciones de transmisión en una caja del eje utilizando los mismos extremos de rueda.
Podrán medirse diferentes desmultiplicaciones finales de ejes con reducción de cubo y ejes pórtico simples (HR, HRT, SP) cambiando únicamente la reducción de cubo. Serán de aplicación las disposiciones especificadas en el apéndice 4 del presente anexo.
El tiempo total del rodaje opcional y la medición de un eje concreto no rebasarán las 120 horas (excepto en lo relativo a la caja del eje y a los extremos de las ruedas).
Para someter a ensayo las pérdidas de un eje se medirá el mapa de pérdidas de par de cada relación de un eje concreto; sin embargo, los ejes podrán agruparse en familias de ejes con arreglo a las disposiciones del apéndice 4 del presente anexo.
3.1 Rodaje
Previa petición del solicitante, el eje podrá ser sometido a un procedimiento de rodaje. En el caso de un procedimiento de rodaje, serán de aplicación las disposiciones siguientes:
3.1.1 Para el procedimiento de rodaje, solo se utilizará el aceite de llenado en fábrica. El aceite utilizado para el rodaje no será el utilizado para el ensayo descrito en el punto 4.
3.1.2 El perfil de velocidad y de par del procedimiento de rodaje será el especificado por el fabricante.
3.1.3 El fabricante documentará el procedimiento de rodaje en lo relativo al tiempo de rodaje, la velocidad, el par y la temperatura del aceite, lo que se notificará a la autoridad de homologación.
3.1.4 No se aplicarán al procedimiento de rodaje los requisitos aplicables a la temperatura del aceite (4.3.1), la exactitud de la medición (4.4.7) y la configuración de ensayo (4.2).
4. Procedimiento de ensayo de los ejes
4.1 Condiciones de ensayo
4.1.1 Temperatura ambiente
La temperatura en la celda de ensayo se mantendrá a 25 °C ± 10 °C. La temperatura ambiente se medirá a una distancia de 1 m de la caja del eje. El calentamiento forzado del eje solo podrá aplicarse mediante un sistema de acondicionamiento exterior del aceite, tal como se describe en el punto 4.1.5.
4.1.2 Temperatura del aceite
La temperatura del aceite se medirá en el centro del cárter del aceite o en cualquier otro punto adecuado de conformidad con las buenas prácticas técnicas. Como alternativa, en caso de acondicionamiento exterior del aceite, podrá medirse la temperatura del aceite en el conducto de salida desde la caja del eje hasta el sistema de acondicionamiento en los 5 cm siguientes a la salida. En ambos casos, la temperatura del aceite no superará los 70 oC.
4.1.3 Calidad del aceite
Para la medición se utilizarán exclusivamente aceites de llenado en fábrica recomendados, con arreglo a las especificaciones del fabricante del eje. En caso de que se ensayen diferentes variantes de relación de transmisión con una caja de eje, se empleará aceite de llenado nuevo en cada medición.
4.1.4 Viscosidad del aceite
En caso de que se especifiquen diferentes aceites con grados de viscosidad múltiples para el llenado en fábrica, el fabricante elegirá el aceite cuyo grado de viscosidad sea el más elevado para realizar las mediciones sobre el eje de origen.
Si se especifica más de un aceite con el mismo grado de viscosidad dentro de una familia de ejes como aceite de llenado en fábrica, el solicitante podrá elegir uno de dichos aceites para la medición relacionada con la certificación.
4.1.5 Nivel y acondicionamiento del aceite
El nivel de aceite o volumen de llenado se fijarán al nivel máximo definido en las especificaciones de mantenimiento del fabricante.
Se permitirá el uso de un sistema de filtrado y acondicionamiento externo del aceite. La caja del eje podrá ser modificada para incluir el sistema de acondicionamiento del aceite.
El sistema de acondicionamiento del aceite no se instalará de manera que permita cambiar los niveles de aceite del eje con el fin de aumentar la eficiencia o de generar pares de propulsión de conformidad con las buenas prácticas técnicas.
4.2 Configuración de ensayo
Tal como se describe en los puntos 4.2.3 y 4.2.4, se permitirán diferentes configuraciones de ensayo al objeto de medir la pérdida de par.
4.2.1. Instalación del eje
En el caso de un eje tándem, se medirá cada eje por separado. El primer eje con diferencial longitudinal estará bloqueado. El árbol de salida de los ejes de transmisión se instalará de manera que pueda girar libremente.
4.2.2 Instalación de medidores de par
4.2.2.1 Para una configuración de ensayo con dos máquinas eléctricas, los medidores del par se instalarán en la brida de entrada y en el extremo de una rueda, mientras que el otro estará bloqueado.
4.2.2.2 Para una configuración de ensayo con tres máquinas eléctricas, los medidores del par se instalarán en la brida de entrada y en cada extremo de rueda.
4.2.2.3 En una configuración con dos máquinas se permitirán semiejes de diferentes longitudes al objeto de bloquear el diferencial y garantizar que ambos extremos de las ruedas giren.
4.2.3 Configuración de ensayo de «tipo A»
Una configuración de ensayo considerada de «tipo A» consiste en un dinamómetro en el lado de entrada del eje y al menos otro dinamómetro en los lados de salida del eje. Los dispositivos de medición del par se instalarán en el lado de entrada y en los lados de salida del eje. En las configuraciones de ensayo de tipo A con un solo dinamómetro en el lado de salida, el extremo de giro libre del eje estará bloqueado.
Para evitar las pérdidas parásitas, los dispositivos de medición del par deberán colocarse tan cerca como sea posible de los lados de entrada y de salida del eje soportados por los cojinetes adecuados.
Además, podrá aplicarse un aislamiento mecánico de los sensores del par respecto de las cargas parásitas de los árboles, por ejemplo, instalando cojinetes adicionales y un acoplamiento flexible o un eje cardánico ligero entre los sensores y uno de dichos cojinetes. En la figura 1 se muestra un ejemplo de configuración de ensayo de tipo A en una configuración con dos dinamómetros.
En el caso de las configuraciones de ensayo de tipo A, el fabricante presentará un análisis de las cargas parásitas. Basándose en dicho análisis, la autoridad de homologación decidirá sobre la influencia máxima de las cargas parásitas. No obstante, el valor ipara no podrá ser inferior al 10 %.
Figura 1
Ejemplo de configuración de un ensayo de «tipo A»
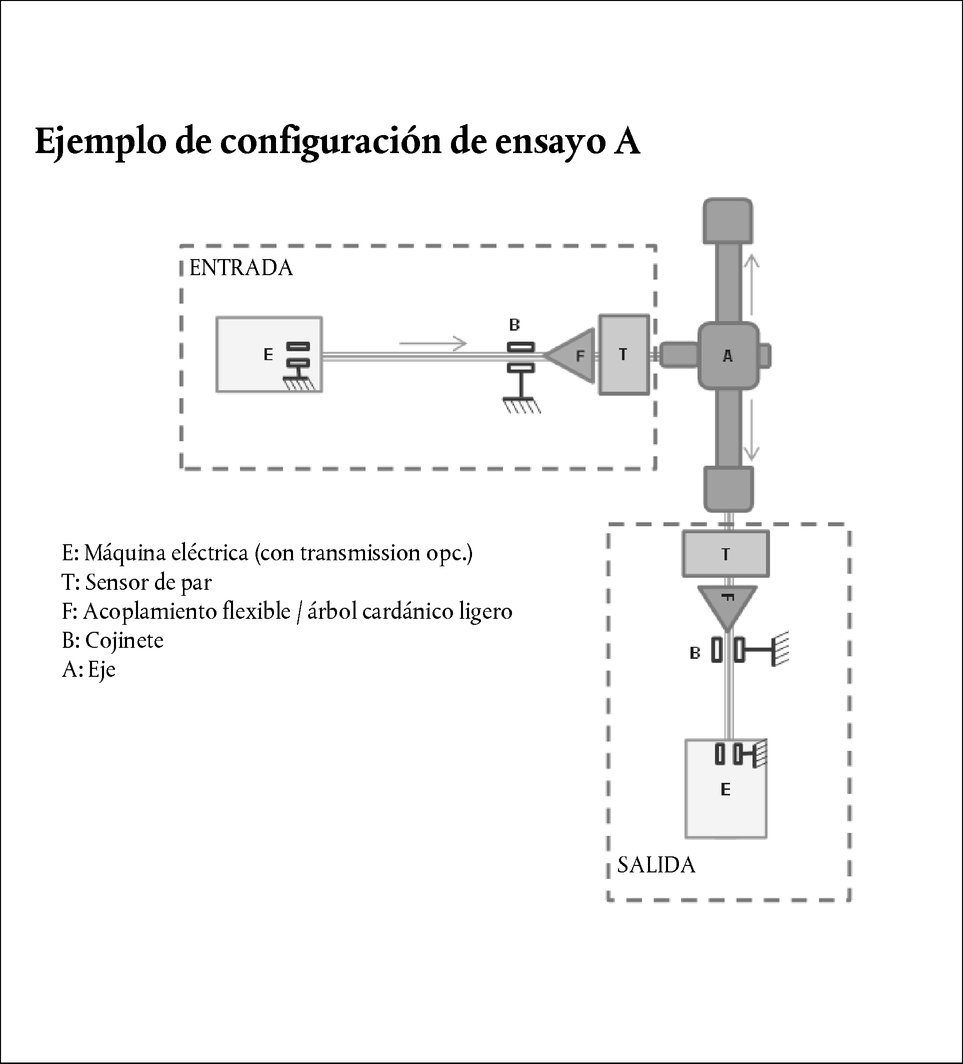 Texto de la imagen
Texto de la imagen
4.2.4 Configuración de ensayo de «tipo B»
Cualquier otra configuración de ensayo se denomina configuración de ensayo de tipo B. La influencia máxima de las cargas parásitas ipara respecto de dichas configuraciones se establecerá en 100 %.
Previo acuerdo con la autoridad de homologación podrán utilizarse valores inferiores para ipara .
4.3 Procedimiento de ensayo
Para determinar el mapa de pérdidas de par de un eje, los datos del mapa básico de pérdida de par se medirán y se calcularán según se especifica en el punto 4.4. Los resultados de pérdida de par se complementarán con arreglo a lo dispuesto en el punto 4.4.8 y se formatearán con arreglo al apéndice 6 para su posterior tratamiento con la herramienta de cálculo del consumo de energía del vehículo.
4.3.1. Equipo de medición
Las instalaciones de los laboratorios de calibración deberán cumplir los requisitos de la norma ISO/TS 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales (internacionales).
4.3.1.1 Medición del par
La incertidumbre de medición del par deberá calcularse e incluirse tal como se describe en el punto 4.4.7.
El régimen de muestreo de los sensores de par se ajustará a lo dispuesto en el punto 4.3.2.1.
4.3.1.2 Velocidad de giro
La incertidumbre de los sensores de la velocidad de giro para la medición de la velocidad de entrada y salida no será superior a ± 2 rpm.
4.3.1.3 Temperaturas
La incertidumbre de los sensores de temperatura para la medición de la temperatura ambiente no será superior a ± 1 °C.
La incertidumbre de los sensores de temperatura para la medición de la temperatura del aceite no será superior a ± 0,5 °C.
4.3.2 Señales de medición y registro de datos
A los efectos del cálculo de las pérdidas de par se registrarán las siguientes señales:
|
i) |
Pares de entrada y de salida [Nm] |
|
ii) |
Velocidades de giro de entrada y/o salida [rpm] |
|
iii) |
Temperatura ambiente [oC] |
|
iv) |
Temperatura del aceite [oC] |
|
v) |
Temperatura en el sensor de par |
4.3.2.1 Se aplicarán las siguientes frecuencias mínimas de muestreo de los sensores:
|
|
Par: 1 kHz |
|
|
Velocidad de giro: 200 Hz |
|
|
Temperaturas: 10 Hz |
4.3.2.2 El régimen de registro de los datos utilizados para determinar los valores medios aritméticos de cada punto de la cuadrícula será de 10 Hz o superior. No será necesario notificar los datos brutos.
Previo acuerdo con la autoridad de homologación podrá aplicarse el filtrado de señales. Se evitará todo efecto de solape.
4.3.3 Intervalo del par:
La magnitud del mapa de pérdida de par que deberá medirse se limitará a:
|
— |
bien un par de salida de 10 kNm, |
|
— |
bien un par de entrada de 5 kNm, |
|
— |
o bien la potencia máxima del motor tolerada por el fabricante para un eje específico o, en caso de múltiples ejes motores, según la distribución de potencia nominal. |
4.3.3.1 El fabricante podrá ampliar la medición hasta 20 kNm de par de salida mediante extrapolación lineal de pérdidas de par o bien realizando mediciones de hasta 20 kNm de par de salida con fases de 2 000 Nm. En cuanto a este intervalo adicional del par, se utilizará otro sensor de par en el lado de salida con un par máximo de 20 kNm (configuración de dos máquinas) o dos sensores de 10 kNm (configuración de tres máquinas).
Si se reduce el radio del neumático más pequeño (p. ej. mediante el desarrollo de productos) tras completar la medición de un eje o cuando se alcancen los límites físicos del banco de ensayo (p. ej. mediante cambios en el desarrollo de productos), el fabricante podrá extrapolar los puntos que falten a partir del mapa existente. Los puntos extrapolados no excederán en más de un 10 % de todos los puntos en el mapa y la penalización por dichos puntos será del 5 % de la pérdida de par que habrá de añadirse a los puntos extrapolados.
4.3.3.2 Fases del par de salida que deben medirse:
|
250 Nm < Tout < 1 000 Nm |
: |
fases de 250 Nm |
|
1 000 Nm < Tout < 2 000 Nm |
: |
fases de 500 Nm |
|
2 000 Nm < Tout < 10 000 Nm |
: |
fases de 1 000 Nm |
|
Tout > 10 000 Nm |
: |
fases de 2 000 Nm |
Si el par de entrada máximo está limitado por el fabricante, la última fase del par que habrá de medirse será la inferior a dicho máximo sin tener en cuenta ninguna pérdida. En tal caso se aplicará una extrapolación del par hasta el par correspondiente a la limitación del fabricante con la regresión lineal basada en las fases del par de la correspondiente fase de velocidad.
4.3.4 Intervalo de velocidades
El intervalo de velocidades de ensayo comprenderá desde 50 rpm de velocidad de la rueda hasta la velocidad máxima. La velocidad máxima de ensayo que debe medirse estará definida bien por la velocidad máxima de entrada del eje o por la velocidad máxima de la rueda, dependiendo de cuál de las siguientes condiciones se dé antes:
|
4.3.4.1 |
La velocidad máxima de entrada del eje aplicable podrá limitarse a la especificación del diseño del eje. |
|
4.3.4.2 |
La velocidad máxima de la rueda se medirá teniendo en cuenta el diámetro del neumático más pequeño aplicable a una velocidad del vehículo de 90 km/h en el caso de los camiones y de 110 km/h en el de los autocares. Si no está definido el diámetro del neumático más pequeño aplicable, se aplicará el punto 4.3.4.1. |
4.3.5 Fases de velocidad de la rueda que deberán medirse
La magnitud de la fase de la velocidad de la rueda para el ensayo será de 50 rpm.
4.4 Medición de los mapas de pérdida del par de los ejes
4.4.1 Secuencia de ensayo del mapa de pérdida del par
Para cada fase de velocidad, la pérdida del par de la rueda se medirá para cada fase del par de salida, comenzando en 250 Nm, aumentando hasta el máximo y disminuyendo hasta el mínimo. Las fases de velocidad podrán efectuarse en cualquier orden.
Estarán permitidas las interrupciones de la secuencia para refrigeración o calentamiento.
4.4.2 Duración de la medición
La duración de la medición para cada punto de la cuadrícula será de 5-15 segundos.
4.4.3 Promedio de los puntos de la cuadrícula
Los valores registrados para cada punto de la cuadrícula dentro del intervalo de 5-15 segundos con arreglo al punto 4.4.2 se promediarán a una media aritmética.
Los cuatro intervalos de promedio de los correspondientes puntos de la cuadrícula de velocidad y par de ambas secuencias medidas cada una de forma ascendente y descendente se promediarán a una media aritmética y darán lugar a un valor de pérdida del par.
4.4.4 La pérdida del par (en el lado de entrada) del eje se calculará como sigue:

donde:
|
Tloss |
= |
Pérdida del par del eje en el lado de entrada [Nm] |
|
Tin |
= |
Par de entrada [Nm] |
|
igear |
= |
Relación de transmisión del eje [-] |
|
Tout |
= |
Par de salida [Nm] |
4.4.5 Validación de la medición
4.4.5.1 Los valores de velocidad promediados por punto de cuadrícula (intervalo de 20 s) no se desviarán de los valores de ajuste en más de ± 5 rpm respecto a la velocidad de salida.
4.4.5.2 Los valores promediados del par de salida descritos en el punto 4.4.3 para cada punto de cuadrícula no se desviarán más de ± 20 Nm o ± 1 % del punto de consigna de par respecto del correspondiente punto de cuadrícula, según el valor que sea mayor.
4.4.5.3 Si no se cumplen los criterios especificados más arriba la medición será nula. En ese caso, se repetirá la medición para toda la fase de velocidad afectada. Tras haber realizado la repetición de la medición, se consolidarán los datos.
4.4.6 Cálculo de incertidumbre
La incertidumbre total UT,loss de la pérdida del par se calculará sobre la base de los siguientes parámetros:
|
i. |
Efecto de la temperatura |
|
ii. |
Cargas parásitas |
|
iii. |
Incertidumbre (incluidas la tolerancia de sensibilidad, la linealidad, las histéresis y la repetibilidad) |
La incertidumbre total de la pérdida de par (UT,loss ) se basa en las incertidumbres de los sensores con un nivel de confianza del 95 %. Se realizará el cálculo para cada sensor aplicado (p. ej. configuración de tres máquinas: UT,in, UT,out,1, UTout,2) como la raíz cuadrada de la suma de los cuadrados («ley gaussiana de propagación de errores»).






wpara = senspara * ipara
donde:
|
UT,in/out |
= |
Incertidumbre de la medición de pérdida del par de entrada/salida separadamente para el par de entrada y de salida; [Nm] |
|
igear |
= |
Relación de transmisión del eje [-] |
|
UTKC |
= |
Incertidumbre por influencia de la temperatura en la señal del par de corriente; [Nm] |
|
wtkc |
= |
Influencia de la temperatura en la señal del par de corriente por Kref, declarada por el fabricante del sensor; [%] |
|
UTK0 |
= |
incertidumbre por la influencia de la temperatura en la señal de par cero (respecto al par nominal) [Nm] |
|
wtk0 |
= |
Influencia de la temperatura en la señal de par cero por Kref (respecto al par nominal), declarada por el fabricante del sensor; [%] |
|
Kref |
= |
Intervalo de temperatura de referencia para tkc y tk0, declarado por el fabricante del sensor; [°C] |
|
ΔK |
= |
Diferencia absoluta en la temperatura del sensor medida en el sensor de par entre la calibración y la medición; si no puede medirse la temperatura del sensor, se tomará un valor por defecto de ΔK = 15 K [°C] |
|
Tc |
= |
valor del par de corriente / par medido en el sensor de par; [Nm] |
|
Tn |
= |
Valor de par nominal del sensor de par; [Nm] |
|
Ucal |
= |
Incertidumbre por calibración del sensor de par; [Nm] |
|
wcal |
= |
Incertidumbre de calibración relativa (respecto al par nominal); [%] |
|
kcal |
= |
factor de avance de la calibración (si lo ha declarado el fabricante del sensor; de lo contrario = 1) |
|
Upara |
= |
Incertidumbre por cargas parásitas; [Nm] |
|
wpara |
= |
senspara * ipara influencia relativa de las fuerzas y los pares de flexión causados por la desalineación |
|
senspara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto declarada por el fabricante del sensor [%]; si el fabricante del sensor no declara ningún valor específico de cargas parásitas, el valor se ajustará en el 1,0 % |
|
ipara |
= |
influencia máxima de las cargas parásitas en el sensor de par concreto, dependiendo de la configuración de ensayo tal como se indica en los puntos 4.2.3 y 4.2.4 del presente anexo. |
4.4.7 Evaluación de la incertidumbre total de la pérdida de par
En caso de que las incertidumbres calculadas UT,in/out sean inferiores a los límites que figuran a continuación, la pérdida de par notificada Tloss,rep se considerará igual a la pérdida de par medida Tloss .
UT,in : 7,5 Nm o 0,25 % del par medido, según cuál sea el mayor valor de incertidumbre permitido
UT,out : 15 Nm o 0,25 % del par medido, según cuál sea el mayor valor de incertidumbre permitido
En caso de mayores incertidumbres calculadas, la parte de la incertidumbre calculada que supere los límites especificados más arriba se añadirá a Tloss para la pérdida de par notificada Tloss,rep como sigue:
Si se exceden los límites de UT,in :
|
|
Tloss,rep = Tloss + ΔUTin |
|
|
ΔUT,in = MIN((UT,in - 0,25 % * Tc) o (UT,in - 7,5 Nm)) |
Si se exceden los límites de UT,out :
|
|
Tloss,rep = Tloss + ΔUT,out /igear |
|
|
ΔUT,out = MIN((UT,out – 0,25 % * Tc) or (UT,out - 15Nm)) |
donde:
|
UT,in/out |
= |
Incertidumbre de la medición de pérdida del par de entrada/salida separadamente para el par de entrada y de salida; [Nm] |
|
igear |
= |
Relación de transmisión del eje [-] |
|
ΔUT |
= |
La parte de la incertidumbre calculada que excede de los límites especificados |
4.4.8 Complemento de los datos del mapa de pérdida de par
4.4.8.1 Si los valores del par exceden el límite del intervalo superior se aplicará una extrapolación lineal. Para la extrapolación se aplicará la pendiente de regresión lineal basada en todas las fases de par medidas con respecto a la correspondiente fase de velocidad.
4.4.8.2 Para los valores del intervalo del par de salida inferiores a 250 Nm se aplicarán los valores de pérdida del par del punto de 250 Nm.
4.4.8.3 Para una velocidad de la rueda de 0 rpm, se aplicarán los valores de pérdida del par de la fase de velocidad de 50 rpm.
4.4.8.4 Para los pares de entrada negativos (p. ej. arrastre, rodadura libre), se aplicará el valor de pérdida de par medido para el par de entrada positivo relacionado.
4.4.8.5 En caso de un eje tándem, se calculará el mapa de pérdidas de par combinadas de ambos ejes a partir de los resultados de los ensayos correspondientes a los ejes individuales.
Tloss,rep,tdm = Tloss,rep, 1 + Tloss,rep, 2
5. Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
5.1. Cada tipo de eje homologado de conformidad con el presente anexo será fabricado de manera que sea conforme al tipo homologado, por lo que respecta a la descripción contenida en el formulario de certificación y sus anexos. Los procedimientos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas deberán cumplir lo dispuesto en el artículo 12 de la Directiva 2007/46/CE.
5.2. La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se comprobará sobre la base de la descripción contenida en el certificado del apéndice 1 del presente anexo y las condiciones específicas establecidas en este punto.
5.3. El fabricante ensayará anualmente el número de ejes indicado en el cuadro 1, basándose en sus cifras de producción anual. Para establecer las cifras de producción, solo se tomarán en consideración los ejes sujetos a los requisitos del presente Reglamento.
5.4. Todo eje ensayado por el fabricante deberá ser representativo de una familia concreta.
5.5. El número de familias de ejes de reducción simples (SR) y otros ejes que serán sometidos a ensayos se indica en el cuadro 1.
Cuadro 1
Tamaño de la muestra de los ensayos de conformidad
|
Cifra de producción |
Número de ensayos de los ejes SR |
Número de ensayos de otros ejes distintos de los ejes SR |
|
0 – 40 000 |
2 |
1 |
|
40 001 – 50 000 |
2 |
2 |
|
50 001 – 60 000 |
3 |
2 |
|
60 001 – 70 000 |
4 |
2 |
|
70 001 – 80 000 |
5 |
2 |
|
80 001 y más |
5 |
3 |
5.6. Siempre se someterán a ensayo las dos familias de ejes con los mayores volúmenes de producción. El fabricante deberá justificar ante la autoridad de homologación (p. ej. presentando las cifras de ventas) el número de ensayos realizados y la elección de las familias. Las restantes familias con las que deban realizarse ensayos serán acordadas entre el fabricante y la autoridad de homologación.
5.7. A efectos de los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, la autoridad de homologación deberá determinar, junto con el fabricante, el tipo o tipos de ejes que deben ensayarse. La autoridad de homologación deberá garantizar que el tipo o tipos de eje seleccionados sean fabricados con arreglo a las mismas normas para la producción en serie.
5.8. Si el resultado de un ensayo realizado conforme al punto 6 es superior al especificado en el punto 6.4, se someterán a ensayo otros tres ejes de la misma familia. Si al menos uno de ellos no supera el ensayo, será de aplicación lo dispuesto en el artículo 23.
6. Ensayos de conformidad de la producción
6.1 Para los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, se aplicará el siguiente método, previo acuerdo entre la autoridad de homologación y el solicitante del certificado:
|
a) |
Medición de la pérdida de par de conformidad con el presente anexo siguiendo el procedimiento completo limitado a los puntos de la cuadrícula descritos en el punto 6.2. |
|
b) |
Medición de la pérdida de par de conformidad con el presente anexo siguiendo el procedimiento completo limitado a los puntos de la cuadrícula descritos en el punto 6.2, con la excepción del procedimiento de rodaje. Al objeto de tener en cuenta las características de rodaje de un eje, podrá aplicarse un factor de corrección. Este factor se determinará de conformidad con el buen juicio técnico y de acuerdo con la autoridad de homologación. |
|
c) |
Medición del par de resistencia de conformidad con el punto 6.3. El fabricante podrá optar por un procedimiento de rodaje de conformidad con el buen juicio técnico hasta un máximo de 100 h. |
6.2 Si la conformidad de la evaluación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se realiza de acuerdo con el punto 6.1, letras a) o b), los puntos de la cuadrícula de esta medida se limitarán a cuatro puntos de la cuadrícula del mapa de pérdidas de par aprobado.
6.2.1 Con tal fin, el mapa de pérdidas de par completo de un eje que haya de ser sometido a ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas será segmentado en tres intervalos de velocidad y tres intervalos de par equidistantes al objeto de definir nueve áreas de control tal como se indica en la figura 2.
Figura 2
Intervalo de velocidad y de par para el ensayo de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas.

6.2.2 Se seleccionará, medirá y evaluará un punto para cuatro áreas de control, de conformidad con el procedimiento completo descrito en el punto 4.4. Cada punto de control será seleccionado de la manera siguiente:
|
i) |
Las áreas de control serán seleccionadas en función de la línea de ejes:
|
|
ii) |
El punto seleccionado estará situado en el centro del área relativa al intervalo de velocidad y el intervalo de par aplicable para la velocidad correspondiente. |
|
iii) |
Con el fin de disponer de un punto correspondiente para la comparación con el mapa de pérdidas medido para la certificación, el punto seleccionado se moverá al punto medido más cercano del mapa homologado. |
6.2.3 Para cada punto medido del ensayo de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas y su correspondiente punto del mapa homologado, la eficiencia se calculará con:

donde:
|
ηi |
= |
eficiencia del punto de la cuadrícula de cada área de control 1 a 9 |
|
Tout |
= |
par de salida [Nm] |
|
Tin |
= |
par de entrada [Nm] |
|
iaxle |
= |
desmultiplicación final [-] |
6.2.4 La eficiencia media del área de control se calculará de la manera siguiente:
|
|
Para los ejes SR:
|
|
|
Para los ejes HR:
|
donde:
|
ηavr,low speed |
= |
eficiencia media a baja velocidad |
|
ηavr,mid speed |
= |
eficiencia media a velocidad media |
|
ηavr,high speed |
= |
eficiencia media a alta velocidad |
|
ηavr,total |
= |
eficiencia media simplificada por eje |
6.2.5 Si la conformidad de la evaluación de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se realiza de conformidad con el punto 6.1, letra c), el par de resistencia del eje de origen de la familia a la que pertenezca el eje ensayado se determinará durante la certificación. Ello podrá hacerse antes del procedimiento de rodaje o tras este de conformidad con el punto 3.1, o bien por extrapolación lineal de todos los valores del mapa de par para cada fase de velocidad descendiendo hasta 0 Nm.
6.3 Determinación del par de resistencia
6.3.1. Para la determinación del par de resistencia de un eje se requiere una configuración de ensayo simplificada con una máquina eléctrica y un sensor de par en el lado de entrada.
6.3.2 Se aplicarán las condiciones de ensayo de conformidad con el punto 4.1. Podrá omitirse el cálculo de la incertidumbre relativa al par.
6.3.3 El par de resistencia se medirá en el intervalo de velocidad del tipo homologado de conformidad con el punto 4.3.4 teniendo en cuenta las fases de velocidad con arreglo al punto 4.3.5.
6.4. Evaluación del ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
6.4.1 Se considerará superado un ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible si se da una de las siguientes condiciones:
|
a) |
Si se lleva a cabo una medición de pérdida de par de conformidad con el punto 6.1, letras a) y b), la eficiencia media del eje ensayado durante el procedimiento de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas no se desviará más de un 1,5 % para los ejes SR y un 2,0 % para todas los demás líneas de ejes. |
|
b) |
Si se lleva a cabo una medición del par de resistencia de conformidad con el punto 6.1, letra c), la desviación del par de resistencia del eje ensayado durante el procedimiento de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas no será superior a la indicada en el cuadro 2. |
Cuadro 2
|
Línea de ejes |
Tolerancias para los ejes medidas en conformidad de la producción después del rodaje Comparación con Td0 |
Tolerancias para los ejes medidas en conformidad de la producción sin rodaje Comparación con Td0 |
||||||
|
para i |
tolerancia Td0_input [Nm] |
para i |
tolerancia Td0_input [Nm] |
para i |
tolerancia Td0_input [Nm] |
para i |
tolerancia Td0_input [Nm] |
|
|
SR |
≤ 3 |
15 |
> 3 |
12 |
≤ 3 |
25 |
> 3 |
20 |
|
SRT |
≤ 3 |
16 |
> 3 |
13 |
≤ 3 |
27 |
> 3 |
21 |
|
SP |
≤ 6 |
11 |
> 6 |
10 |
≤ 6 |
18 |
> 6 |
16 |
|
HR |
≤ 7 |
10 |
> 7 |
9 |
≤ 7 |
16 |
> 7 |
15 |
|
HRT |
≤ 7 |
11 |
> 7 |
10 |
≤ 7 |
18 |
> 7 |
16 |
|
i |
= |
relación de transmisión |
Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO A LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UNA FAMILIA DE EJES
|
Comunicación relativa a:
|
Sello de la Administración
|
de un certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de ejes de conformidad con el Reglamento (UE) 2017/2400 de la Comisión.
Reglamento (UE) 2017/2400 de la Comisión, modificado en último lugar por …
Número de certificación:
Hash:
Motivo de la extensión:
SECCIÓN I
0.1 Marca (nombre comercial del fabricante):
0.2 Tipo:
0.3 Medio de identificación del tipo de eje, si está marcado en él
0.3.1 Ubicación de las marcas:
0.4 Nombre y dirección del fabricante:
0.5 En el caso de componentes y unidades técnicas independientes, localización y método de fijación de la marca de certificación CE:
0.6 Nombre y dirección de las plantas de montaje:
0.7 Nombre y dirección del representante del fabricante (en su caso)
SECCIÓN II
1. Información adicional (cuando proceda): véase la adenda
2. Autoridad de homologación responsable de realizar los ensayos:
3. Fecha del acta de ensayo
4. Número del acta de ensayo
5. Observaciones (en su caso): véase la adenda
6. Lugar
7. Fecha
8. Firma
Anexos:
|
1. |
Ficha de características |
|
2. |
Acta de ensayo |
(1) Táchese lo que no proceda (en algunos casos no es necesario tachar nada si más de una opción es aplicable)
Apéndice 2
Ficha de características del eje
|
Ficha de características n.°: |
Asunto: Fecha de expedición: Fecha de modificación: |
en virtud de...
Tipo de eje:
…
0. INFORMACIÓN GENERAL
0.1 Nombre y dirección del fabricante:
0.2 Marca (nombre comercial del fabricante):
0.3 Tipo de eje:
0.4 Familia de ejes (si procede):
0.5 Tipo de eje como unidad técnica independiente / Familia de ejes como unidad técnica independiente:
0.6 Denominaciones comerciales (si se dispone de ellas):
0.7 Medio de identificación del tipo de eje, si está marcado en él:
0.8 En el caso de componentes y unidades técnicas independientes, emplazamiento y método de colocación de la marca de certificación:
0.9 Nombre y dirección de las plantas de montaje:
0.10 Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DEL EJE (DE ORIGEN) Y LOS TIPOS DE EJES DENTRO DE UNA FAMILIA DE EJES
|
|
Eje de origen |
Miembro de la familia |
|
||
|
|
|||||
|
o tipo de eje |
#1 |
#2 |
#3 |
|
|
|
|
|||||
0.0 INFORMACIÓN GENERAL
0.1 Marca (nombre comercial del fabricante)
0.2 Tipo
0.3 Denominaciones comerciales (si se dispone de ellas)
0.4 Medio de identificación del tipo
0.5 Localización de estas marcas
0.6 Nombre y dirección del fabricante
0.7 Lugar y método de colocación de la marca de homologación
0.8 Nombre y dirección de las plantas de montaje
0.9. Nombre y dirección del representante del fabricante (en su caso)
1.0 INFORMACIÓN ESPECÍFICA SOBRE EL EJE
|
1.1. |
Línea del eje (SR, HR, SP, SRT, HRT) |
… |
|
… |
… |
… |
|
|
1.2 |
Relación de transmisión del eje |
|
… |
|
… |
… |
… |
|
1.3 |
Caja del eje (número/ID/dibujo) |
|
… |
|
… |
… |
… |
|
1.4 |
Especificaciones del engranaje |
… |
|
… |
… |
|
|
|
1.4.1 |
Diámetro de la corona [mm] |
|
… |
|
… |
|
|
|
1.4.2 |
Piñón/corona con excentricidad vertical [mm] |
… |
|
|
|
|
|
1.4.3 Ángulo del piñón con respecto al plano horizontal [o]
1.4.4 Solamente para ejes pórtico:
Ángulo entre el eje del piñón y el eje de la corona [o]
1.4.5 Número de dientes del piñón
1.4.6 Número de dientes de la corona
1.4.7 Excentricidad horizontal del piñón [mm]
1.4.8 Excentricidad horizontal de la corona [mm]
1.5 Volumen de aceite; [cm3]
1.6 Nivel de aceite; [mm]
1.7 Especificaciones del aceite
1.8 Tipo de cojinetes (número/ID/dibujo)
1.9 Tipo de junta (diámetro principal, número de labios) [mm]
1.10 Extremos de ruedas (número/ID/dibujo)
1.10.1 Tipo de cojinetes (número/ID/dibujo)
1.10.2 Tipo de junta (diámetro principal, número de labios) [mm]
1.10.3 Tipo de grasa
1.11 Número de satélites / engranajes rectos
1.12 Anchura menor de los satélites / los engranajes rectos [mm]
1.13 Relación de transmisión con reducción de cubo
LISTA DE DOCUMENTOS ADJUNTOS
|
N.°: |
Descripción: |
Fecha de expedición: |
|
1 |
… |
… |
|
2 |
… |
|
Apéndice 3
Cálculo de la pérdida normalizada de par
En el cuadro 1 se indican las pérdidas normalizadas de par relativas a los ejes. Los valores normalizados del cuadro consisten en la suma de un valor constante de eficiencia genérico que abarca las pérdidas dependientes de la carga y la pérdida genérica del par de resistencia básico al objeto de abarcar las pérdidas de resistencia con cargas bajas.
Los ejes tándem se calcularán utilizando un valor de eficiencia combinada para un eje incluyendo la transmisión (SRT, HRT) más el correspondiente eje único (SR, HR).
Cuadro 1
Eficiencia genérica y pérdida de resistencia
|
Función básica |
Eficiencia genérica η |
Par de resistencia (lado de la rueda) Td0 = T0 + T1 * igear |
|
Eje de reducción simple (SR) |
0,98 |
T0 = 70 Nm T1 = 20 Nm |
|
Eje tándem de reducción simple (SRT) / eje pórtico simple (SP) |
0,96 |
T0 = 80 Nm T1 = 20 Nm |
|
Eje con reducción de cubo (HR) |
0,97 |
T0 = 70 Nm T1 = 20 Nm |
|
Eje tándem con reducción de cubo (HRT) |
0,95 |
T0 = 90 Nm T1 = 20 Nm |
El par de resistencia básico (lado de la rueda) Td0 se calculará como sigue:
Td0 = T0 + T1 * igear
utilizando los valores del cuadro 1.
La pérdida normalizada de par Tloss,std en el lado de la rueda del eje se calculará como sigue:
donde:
|
Tloss,std |
= |
pérdida normalizada de par en el lado de la rueda [Nm] |
|
Td0 |
= |
par de resistencia básico en el intervalo de velocidades completo [Nm] |
|
igear |
= |
relación de transmisión del eje [-] |
|
η |
= |
Eficiencia genérica para pérdidas dependientes de la carga [-] |
|
Tout |
= |
Par de salida [Nm] |
Apéndice 4
Concepto de familia
1. El solicitante de un certificado presentará a la autoridad de homologación una solicitud de certificado para una familia de ejes basada en el criterio de familia, tal como se indica en el punto 3.
Una familia de ejes se caracteriza por una serie de parámetros de diseño y rendimiento. Tales parámetros deberán ser comunes a todos los ejes de una familia. El fabricante de los ejes podrá decidir cuál de estos pertenece a una familia de ejes, siempre y cuando se respeten los criterios de familia establecidos en el punto 4. Además de los parámetros indicados en el punto 4, el fabricante de ejes podrá introducir criterios adicionales que permitan la definición de familias de tamaño más reducido. Estos parámetros no deben tener necesariamente una influencia en el nivel de rendimiento. La familia de ejes será aprobada por la autoridad de homologación. El fabricante pondrá a disposición de la autoridad de homologación la información adecuada sobre el rendimiento de los miembros de la familia de ejes.
2. Casos particulares
En algunos casos puede producirse una interacción entre los parámetros. Ello deberá tenerse en cuenta al objeto de garantizar que solo los ejes que tengan características similares estén incluidos en una misma familia de ejes. El fabricante deberá identificar estos casos y notificarlos a la autoridad de homologación. Se tendrán en cuenta como criterio para la creación de una nueva familia de ejes.
En el caso de parámetros que no se incluyan en el punto 3 y que influyan significativamente en el nivel de rendimiento, el fabricante identificará estos parámetros basándose en las buenas prácticas técnicas, y lo notificará a la autoridad de homologación.
3. Parámetros que definen una familia de ejes:
3.1 Categoría del eje
|
a) |
Eje de reducción simple (SR) |
|
b) |
Eje con reducción de cubo (HR) |
|
c) |
Eje pórtico simple (SP) |
|
d) |
Eje tándem de reducción simple (SRT) |
|
e) |
Eje tándem con reducción de cubo (HRT) |
|
f) |
Idéntica geometría interior de la caja del eje entre los cojinetes del diferencial y el plano horizontal del centro del árbol del piñón de acuerdo con la especificación del dibujo [excepción en el caso de ejes pórtico simples (SP)]. Se permitirán cambios de geometría debidos a la integración opcional de un bloqueo del diferencial dentro de la misma familia de ejes. En caso de cajas de ejes invertidas, los ejes invertidos podrán combinarse en la misma familia de ejes que los ejes de origen, a condición de que los engranajes cónicos estén adaptados al otro sentido de la marcha (cambio del sentido de la espiral) |
|
g) |
Diámetro de la corona (+ 1,5 / - 8 % con respecto al mayor diámetro de dibujo) |
|
h) |
Piñón/corona con excentricidad hipoide vertical a ± 2 mm |
|
i) |
En caso de ejes pórtico simples (SP): Ángulo del piñón respecto del plano horizontal a ± 5o |
|
j) |
En caso de ejes pórtico simples (SP): Ángulo entre el eje del piñón y el eje de la rueda a ± 3,5o |
|
k) |
En caso de ejes con reducción de cubo y de pórtico simples (HR, HRT, FHR, SP): Igual número de satélites y engranajes rectos |
|
l) |
Coeficiente de transmisión de cada fase de transmisión en un eje en un intervalo de 1, siempre y cuando solamente se cambie un engranaje |
|
m) |
Nivel de aceite con una tolerancia de ± 10 mm o volumen de aceite de ± 0,5 litros en relación con la especificación del dibujo y la posición de la instalación en el vehículo |
|
n) |
Idéntico grado de viscosidad del tipo de aceite (aceite de llenado en fábrica recomendado) |
|
o) |
Para todos los cojinetes: igual diámetro (interior/exterior) de la circunferencia de rodadura/deslizamiento del cojinete y anchura con una tolerancia de ± 2 mm en relación con el dibujo |
|
p) |
Igual tipo de junta (diámetros principales, aceite, número de labios) con una tolerancia de ± 0,5 mm en relación con el dibujo |
4. Elección del eje de origen
4.1 El eje de origen dentro de una familia de ejes se determinará como el eje con la desmultiplicación final más elevada. En caso de que más de dos ejes tengan la misma desmultiplicación, el fabricante deberá presentar un análisis con el fin de determinar el eje más desfavorable como eje de origen.
4.2 La autoridad de homologación podrá considerar que la mejor manera de caracterizar el caso más desfavorable de la familia en cuanto a pérdida de par es someter a ensayo otros ejes. En ese caso, el fabricante del eje presentará la información adecuada para determinar qué eje de la familia tiene probablemente el nivel más alto de pérdida de par.
4.3 Si otros ejes de la familia poseen otras características que pudieran afectar a las pérdidas de par, dichas características también deberán identificarse y tenerse en consideración para seleccionar el eje de origen.
Apéndice 5
Marcados y numeración
1. Marcados
Un eje homologado de conformidad con el presente anexo deberá llevar:
|
1.1 |
El nombre del fabricante y la marca registrada. |
|
1.2 |
La marca y la indicación del tipo identificativo según estén consignados en los puntos 0.2 y 0.3 del apéndice 2 del presente anexo. |
|
1.3 |
La marca de certificación en forma de rectángulo en torno a la letra minúscula «e» seguida del número distintivo del Estado miembro que ha expedido el certificado:
|
1.4 En la marca de certificación figurará también, cerca del rectángulo, el «número de certificación de base» incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo VII de la Directiva 2007/46/CE, precedido por las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de la letra «L» que indica que el certificado se refiere a un eje.
Para el presente Reglamento, el número secuencial será el 00.
1.4.1 Ejemplos y dimensiones de la marca de certificación

Esta marca de certificación fijada en un eje indica que el tipo de que se trata ha sido homologado en Polonia (e20) con arreglo al presente Reglamento. Los dos primeros dígitos (00) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. La letra siguiente indica que el certificado se ha expedido con relación a un eje (L). Los cuatro últimos dígitos (0004) son los que la autoridad de homologación de tipo ha asignado al eje como número de certificación de base.
1.5 A petición del solicitante del certificado y previo acuerdo de la autoridad de homologación de tipo, podrán utilizarse tamaños de fuente distintos de los indicados en el punto 1.4.1. Esos otros tamaños de fuente deberán seguir siendo claramente legibles.
1.6 Los marcados, las etiquetas, las placas o los adhesivos deben poder durar toda la vida útil del eje, y deben ser claramente legibles e indelebles. El fabricante deberá asegurarse de que sea imposible retirar los marcados, las etiquetas, las placas o los adhesivos sin destruirlos ni desfigurarlos.
1.7 El número de certificación será visible cuando el eje esté instalado en el vehículo y se colocará en una pieza necesaria para el funcionamiento normal que, por lo general, no necesite ser sustituida durante la vida útil del componente.
2. Numeración:
2.1 El número de certificación de los ejes deberá comprender lo siguiente:
eX*YYY/YYYY*ZZZ/ZZZZ*L*0000*00
|
Sección 1 |
Sección 2 |
Sección 3 |
Letra adicional de la sección 3 |
Sección 4 |
Sección 5 |
|
Indicación del país que expide el certificado |
Acto relativo a la certificación respecto del CO2 (.../2017) |
Último acto modificativo (zzz/zzzz) |
L = Eje |
Número de certificación de base 0000 |
Extensión 00 |
Apéndice 6
Parámetros de entrada para la herramienta de simulación
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de vehículos como información de entrada para la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y ejemplos de datos.
Definiciones
1)
2)
string … cadena, secuencia de caracteres en codificación ISO 8859-1
token … testigo, secuencia de caracteres en codificación ISO 8859-1, sin espacios en blanco delante ni detrás
date … fecha y hora UTC con el siguiente formato: AAAA-MM-DD T HH:MM:SS Z con letra cursiva para los caracteres fijos, por ejemplo «2002-05-30T09:30:10Z»
integer … entero, valor con un tipo de datos integral, sin ceros delante, por ejemplo «1800»
double, X … número decimal con exactamente X dígitos tras el signo decimal («,») y sin ceros delante, por ejemplo, para «double, 2»: «2345,67»; para «double, 4»: «45,6780»
3)
Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «Axlegear/General»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P215 |
token |
[-] |
|
|
Model |
P216 |
token |
[-] |
|
|
TechnicalReportId |
P217 |
token |
[-] |
|
|
Date |
P218 |
dateTime |
[-] |
Fecha y hora de creación del hash del componente |
|
AppVersion |
P219 |
token |
[-] |
|
|
LineType |
P253 |
string |
[-] |
Valores permitidos: «Single reduction axle», «Single portal axle», «Hub reduction axle», «Single reduction tandem axle», «Hub reduction tandem axle» |
|
Ratio |
P150 |
double, 3 |
[-] |
|
|
CertificationMethod |
P256 |
string |
[-] |
Valores permitidos: «Measured», «Standard values» |
Cuadro 2
Parámetros de entrada «Axlegear/LossMap» para cada punto de la cuadrícula del mapa de pérdidas
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
InputSpeed |
P151 |
double, 2 |
[1/min] |
|
|
InputTorque |
P152 |
double, 2 |
[Nm] |
|
|
TorqueLoss |
P153 |
double, 2 |
[Nm] |
|
ANEXO VIII
VERIFICACIÓN DE LOS DATOS DE RESISTENCIA AERODINÁMICA
1. Introducción
En el presente anexo se expone el procedimiento de ensayo para verificar los datos de resistencia aerodinámica.
2. Definiciones
A los efectos del presente anexo se aplicarán las siguientes definiciones:
1) «Dispositivo aerodinámico activo»: elementos activados por medio de una unidad de control para reducir la resistencia aerodinámica del vehículo entero.
2) «Accesorios aerodinámicos»: dispositivos opcionales cuya finalidad es influir en el flujo de aire alrededor del vehículo entero.
3) «Montante A»: conexión mediante una estructura de apoyo entre el techo de la cabina y la mampara delantera.
4) «Geometría de la carrocería en bruto»: estructura de apoyo, incluido el parabrisas de la cabina.
5) «Montante B»: conexión mediante una estructura de apoyo entre el piso de la cabina y el techo de esta en el centro de ella.
6) «Fondo de la cabina»: estructura de apoyo del piso de la cabina.
7) «Cabina sobre bastidor»: distancia desde el bastidor al punto de referencia de la cabina en la vertical Z. La distancia se mide desde el borde superior del bastidor horizontal hasta el punto de referencia de la cabina en la vertical Z.
8) «Punto de referencia de la cabina»: punto de referencia (X/Y/Z = 0/0/0) del sistema de coordenadas CAD de la cabina o un punto claramente definido del paquete de la cabina, p. ej. el punto del tacón.
9) «Anchura de la cabina»: distancia horizontal entre los montantes B izquierdo y derecho de la cabina.
10) «Ensayo de velocidad constante»: procedimiento de medición que debe llevarse a cabo en una pista de ensayo con el fin de determinar la resistencia aerodinámica.
11) «Conjunto de datos»: datos registrados durante una única pasada por una sección de medición.
12) «EMS»: sistema modular europeo (EMS), de conformidad con lo dispuesto en la Directiva 96/53/CE del Consejo.
13) «Altura del bastidor»: distancia desde el centro de la rueda hasta el borde superior del bastidor horizontal en Z.
14) «Punto del tacón»: punto que representa la ubicación del tacón del zapato al presionar el revestimiento del piso, cuando la suela del zapato está en contacto con el pedal del acelerador sin pisarlo y el ángulo del tobillo es de 87° (ISO 20176:2011).
15) «Áreas de medición»: partes designadas de la pista de ensayo que consisten como mínimo en una sección de medición precedida de una sección de estabilización.
16) «Sección de medición»: parte designada de la pista de ensayo que es pertinente para el registro y la evaluación de los datos.
17) «Altura del techo»: distancia en la vertical Z desde el punto de referencia de la cabina hasta el punto más alto del techo sin techo corredizo.
3. Determinación de la resistencia aerodinámica
A fin de determinar las características de resistencia aerodinámica, se aplicará el procedimiento de ensayo de velocidad constante. Durante el ensayo de velocidad constante, las principales señales de medición del par motor, velocidad del vehículo, velocidad del flujo de aire y ángulo de guiñada se medirán a dos velocidades constantes del vehículo distintas (baja y alta velocidad) en condiciones definidas en la pista de ensayo. Los datos de medición registrados durante el ensayo de velocidad constante se introducirán en la herramienta de preprocesamiento de la resistencia aerodinámica que determina el producto del coeficiente de resistencia por la sección transversal en unas condiciones de viento cruzado nulo Cd · Acr (0) como datos de entrada de la herramienta de simulación. El solicitante de un certificado declarará un valor Cd · Adeclared en un intervalo entre igual y un máximo de + 0,2 m2 superior a Cd · Acr (0). El valor Cd · Acr (0) será el dato de entrada de la herramienta de simulación y el valor de referencia para el ensayo de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible.
Los vehículos cuyas mediciones no se efectúen mediante el ensayo de velocidad constante utilizarán los valores normalizados para Cd · Adeclared , tal como se describe en el apéndice 7 del presente anexo. En dicho caso, no se presentarán datos de entrada sobre la resistencia aerodinámica. La asignación de los valores normalizados será efectuada automáticamente por la herramienta de simulación.
3.1. Requisitos de la pista de ensayo
3.1.1. La geometría de la pista de ensayo será:
|
i. |
Una pista de circuito (con un sentido de conducción (*): con dos áreas de medición, una en cada parte recta, con una desviación máxima inferior a 20 grados;
o bien |
|
ii. |
Una pista de circuito o de línea recta (con los dos sentidos de conducción): con un área de medición (o dos con la desviación máxima mencionada arriba); dos opciones: alternancia de sentidos de conducción tras cada sección de ensayo; o tras un conjunto seleccionable de secciones de ensayo, p. ej. diez veces de conducción en el sentido de conducción 1, seguido de diez veces de conducción en sentido de conducción 2. |
3.1.2. Secciones de medición
Se definirán una o varias secciones de medición de una longitud de 250 m con una tolerancia de ± 3 m en la pista de ensayo.
3.1.3. Áreas de medición
Un área de medición consistirá en al menos una sección de medición y una sección de estabilización. La primera sección de medición de un área de medición irá precedida de una sección de estabilización para estabilizar la velocidad y el par. La sección de estabilización tendrá una longitud mínima de 25 m. El diseño de la pista de ensayo permitirá que el vehículo entre ya en la sección de estabilización a la máxima velocidad prevista del vehículo durante el ensayo.
La latitud y la longitud del punto de salida y del punto final de cada sección de medición serán determinadas con una precisión de mejor o igual a 0,15 m 95 % de error circular probable (precisión del GPS diferencial).
3.1.4. Forma de las secciones de medición
La sección de medición y la sección de estabilización deberán ser una línea recta.
3.1.5. Pendiente longitudinal de las secciones de medición
La pendiente longitudinal media de cada medición y la sección de estabilización no excederá de ± 1 %. Las variaciones de la pendiente de la sección de medición no conducirán a variaciones de velocidad y de par superiores a los umbrales especificados en el punto 3.10.1.1, incisos vii) y viii) del presente anexo.
3.1.6. Pavimento de la pista
La pista de ensayo estará compuesta de asfalto u hormigón. Las secciones de medición tendrán un pavimento. Las secciones de medición distintas podrán tener distintos pavimentos.
3.1.7. Zona de parada
La pista de ensayo tendrá una zona de parada en la que se podrá detener el vehículo para llevar a cabo la puesta a cero y el control de la desviación del sistema de medición del par.
3.1.8. Distancia a obstáculos en carretera y altura libre
No existirán obstáculos a 5 m de distancia a ambos lados del vehículo. Se permitirán barreras de seguridad hasta una altura de 1 m con más de 2,5 m de distancia al vehículo. No se permitirán puentes o construcciones similares sobre las secciones de medición. La pista de ensayo deberá tener la suficiente altura libre para permitir la instalación del anemómetro en el vehículo tal como se especifica en el punto 3.4.7 del presente anexo.
3.1.9. Perfil de altitud
El fabricante especificará si debe aplicarse la corrección por altitud en la evaluación del ensayo. En caso de que se aplique dicha corrección por altitud, deberá disponerse de un perfil de altitud en cada medición. Los datos deberán cumplir los requisitos siguientes:
|
i. |
El perfil de altitud se medirá a una distancia de la cuadrícula inferior o igual a 50 m en el sentido de conducción. |
|
ii. |
Para cada punto de la cuadrícula se medirán la longitud, la latitud y la altitud en un punto como mínimo («punto de medición de la altitud») a cada lado de la línea central del carril y, a continuación, se procesarán a un valor medio para el punto de la cuadrícula. |
|
iii. |
Los puntos de la cuadrícula suministrados a la herramienta de procesamiento de la resistencia aerodinámica tendrán una distancia inferior a 1 m respecto de la línea central de la sección de medición. |
|
iv. |
La ubicación de los puntos de medición de la altitud respecto de la línea central del carril (distancia perpendicular, número de puntos) se elegirá de forma que el perfil de altitud resultante sea representativo del gradiente recorrido por el vehículo de ensayo. |
|
v. |
El perfil de altitud tendrá una exactitud de ± 1 cm o superior. |
|
vi. |
Los datos de las mediciones no deberán tener más de 10 años de antigüedad. La renovación del pavimento de la zona de medición exige una nueva medición del perfil de altitud. |
3.2. Requisitos relativos a las condiciones ambientales
3.2.1. Las condiciones ambientales se medirán con el equipo especificado en el punto 3.4.
3.2.2. La temperatura ambiente deberá situarse dentro del intervalo de 0 °C a 25 °C. Este criterio será objeto de control mediante la herramienta de preprocesamiento de la resistencia aerodinámica basándose en la señal de la temperatura ambiente medida en el vehículo. Este criterio solo se aplica a los conjuntos de datos registrados en la secuencia baja velocidad-alta velocidad-baja velocidad, y no al ensayo de desalineación ni a las fases de calentamiento.
3.2.3. La temperatura del suelo no deberá superar los 40 °C. Este criterio será objeto de control mediante la herramienta de preprocesamiento de la resistencia aerodinámica basándose en la señal de la temperatura del suelo medida en el vehículo mediante un sensor infrarrojo. Este criterio solo se aplica a los conjuntos de datos registrados en la secuencia baja velocidad-alta velocidad-baja velocidad, y no al ensayo de desalineación ni a las fases de calentamiento.
3.2.4. La superficie de la pista deberá estar seca durante la secuencia baja velocidad-alta velocidad-baja velocidad, al objeto de proporcionar coeficientes comparables de resistencia a la rodadura.
3.2.5. Las condiciones de viento deberán situarse dentro del siguiente intervalo:
|
i. |
Velocidad media del viento: ≤ 5 m/s |
|
ii. |
Velocidad de la ráfaga de viento (1 s media móvil central): ≤ 8 m/s Los incisos i) y ii) son aplicables a los conjuntos de datos registrados en el ensayo de alta velocidad y en el ensayo de calibración de la desalineación, pero no a los ensayos de baja velocidad. |
|
iii. |
Promedio del ángulo de guiñada (β):
|
La validez de las condiciones del viento se comprobará mediante el preprocesamiento de la resistencia aerodinámica sobre la base de las señales registradas en el vehículo tras la aplicación de la corrección de la capa límite. Los datos de medición recogidos en condiciones que rebasen los límites antes mencionados estarán automáticamente excluidos del cálculo.
3.3. Instalación del vehículo
3.3.1. El chasis del vehículo se ajustará a las dimensiones de la carrocería o semirremolque estándar tal como se define en el apéndice 5 del presente anexo.
3.3.2. La altura del vehículo determinada de acuerdo con el punto 3.5.3.1, inciso vii), estará comprendida dentro de los límites especificados en el apéndice 4 del presente anexo.
3.3.3. La distancia mínima entre la cabina y la caja o el semirremolque será conforme a los requisitos del fabricante y a las instrucciones de este en materia de carrocería.
3.3.4. La cabina y los accesorios aerodinámicos (p. ej. los deflectores) se adaptarán para ajustarse de la mejor manera posible a la carrocería o al semirremolque estándar definidos.
3.3.5. El vehículo deberá cumplir los requisitos legales para una homologación de tipo de un vehículo entero. Equipo necesario para llevar a cabo el ensayo de velocidad constante (p. ej. la altura global del vehículo incluyendo el anemómetro queda excluida de la presente disposición).
3.3.6. La configuración del semirremolque será la que se define en el anexo 4 del presente anexo.
3.3.7. El vehículo estará equipado con neumáticos que reúnan los siguientes criterios:
|
i. |
La mejor clasificación, o la segunda mejor, que figura en la etiqueta en cuanto a resistencia a la rodadura disponible en el momento en que se efectúe el ensayo |
|
ii. |
Profundidad máxima de la banda de rodadura de 10 mm en el vehículo entero, incluido el remolque |
|
iii. |
Neumáticos inflados a la presión máxima permitida por el fabricante del neumático |
3.3.8. La alineación del eje se ajustará a las especificaciones del fabricante.
3.3.9. No se permitirán sistemas de control activo de la presión de los neumáticos durante las mediciones de los ensayos de baja velocidad-alta velocidad-baja velocidad.
3.3.10. Si el vehículo está equipado con un dispositivo aerodinámico activo deberá demostrarse a la autoridad de homologación que:
|
i. |
El dispositivo está siempre activado y es eficaz para reducir la resistencia aerodinámica del vehículo a una velocidad superior a los 60 km/h. |
|
ii. |
El dispositivo está instalado y su eficacia es similar en todos los vehículos de la familia. |
Si no son aplicables los incisos i) ni ii), el dispositivo aerodinámico activo deberá estar totalmente desactivado durante el ensayo de velocidad constante.
3.3.11. El vehículo no deberá tener ninguna característica, modificación o dispositivo provisionales cuyo objetivo sea solamente reducir el valor de resistencia aerodinámica, p. ej. espacios sellados. Se permitirán las modificaciones que tengan por objeto adaptar las características aerodinámicas del vehículo sometido a ensayo a las condiciones definidas para el vehículo de origen (p. ej. sellado de los orificios de montaje de los techos corredizos).
3.3.12. Todas las piezas extraíbles añadidas, como viseras, bocinas, faros frontales adicionales, luces de señalización o barras parachoques, no se tendrán en cuenta en lo relativo a la resistencia aerodinámica a los efectos del Reglamento sobre el CO2. Todas las partes extraíbles añadidas de esa índole se retirarán del vehículo antes de la medición de la resistencia aerodinámica.
3.3.13. El vehículo se medirá sin carga útil.
3.4. Equipo de medición
El laboratorio de calibración deberá cumplir los requisitos de la norma ISO/TS 16949, de la serie ISO 9000 o de la norma ISO/IEC 17025. Todos los equipos de medición de referencia de los laboratorios que se utilicen para la calibración o la verificación deberán ajustarse a normas nacionales (internacionales).
3.4.1. Par
3.4.1.1. El par directo en todos los ejes motores se medirá mediante uno de los siguientes sistemas de medición:
|
a. |
Medidor del par de cubo |
|
b. |
Medidor del par de llanta |
|
c. |
Medidor del par de semieje |
3.4.1.2. Un único medidor de par por calibración reunirá los siguientes requisitos de sistema:
|
i. |
No linealidad: < ± 6 Nm |
|
ii. |
Repetibilidad: < ± 6 Nm |
|
iii. |
Diafonía: < ± 1 % FSO (aplicable solamente a medidores del par de llanta) |
|
iv. |
Régimen de medición: ≥ 20 Hz |
donde:
|
|
«No linealidad» significa la desviación máxima entre las características ideales y reales de la señal de salida en relación con el mensurando en un intervalo específico de medición. |
|
|
«Repetibilidad» significa el grado de concordancia entre los resultados de sucesivas mediciones del mismo mensurando realizadas en las mismas condiciones de medición. |
|
|
«Diafonía» significa toda señal en la salida principal de un sensor (My), producida por un mensurando (Fz) que actúa sobre el sensor, diferente del mensurando asignado a dicha salida. La asignación del sistema de coordenadas se definirá de conformidad con la norma ISO 4130. |
|
|
«FSO» significa salida de plena escala de un intervalo calibrado. |
Los datos de par registrados se corregirán teniendo en cuenta el margen de error determinado por el proveedor.
3.4.2. Velocidad del vehículo
La velocidad del vehículo será determinada mediante la herramienta de preprocesamiento de la resistencia aerodinámica basándose en la señal del eje delantero del bus de la red de zona del controlador (CAN) que se calibrará con arreglo a una de las dos opciones siguientes:
|
Opción a) |
: |
una velocidad de referencia calculada por un tiempo delta desde dos barreras fijas optoelectrónicas (véase el punto 3.4.4 del presente anexo) y la longitud o longitudes conocidas de las secciones de medición. |
|
Opción b) |
: |
una señal de velocidad determinada por un tiempo delta desde la señal de posición de un GPS diferencial y la longitud o longitudes conocidas de las secciones de medición, derivadas por las coordenadas del GPS diferencial. |
Para la calibración de la velocidad del vehículo se utilizarán los datos registrados durante el ensayo de alta velocidad.
3.4.3. Señal de referencia para el cálculo de la velocidad de giro de las ruedas en el eje motor
Para calcular la velocidad de giro de las ruedas en el eje motor se dispondrá de la señal CAN de velocidad del motor junto con las relaciones de transmisión (marchas para el ensayo de baja velocidad y el ensayo de alta velocidad, desmultiplicación final). En cuanto a la señal CAN de velocidad del motor se demostrará que la señal proporcionada a la herramienta de preprocesamiento de la resistencia aerodinámica es idéntica a la señal que haya de utilizarse para el ensayo en servicio, tal como se establece en el anexo I del Reglamento (UE) n.o 582/2011.
En cuanto a los vehículos equipados con convertidor de par que no sean capaces de conducir el ensayo de baja velocidad con el embrague de bloqueo cerrado, se transmitirá además a la herramienta de preprocesamiento la señal de velocidad del árbol cardánico y la señal de desmultiplicación final o la señal de la velocidad media de las ruedas del eje motor. Se demostrará que la velocidad del motor calculada a partir de esta señal adicional se encuentra dentro del intervalo del 1 % en comparación con la velocidad CAN del motor. Ello se demostrará para el valor medio en una sección de medición conducida a la velocidad más baja posible en el modo de convertidor de par bloqueado y a la velocidad aplicable del vehículo para el ensayo de alta velocidad.
3.4.4. Barreras optoelectrónicas
Se proporcionará la señal de las barreras a la herramienta de preprocesamiento de la resistencia aerodinámica al objeto de activar el comienzo y el final de la sección de medición y la calibración de la señal de velocidad del vehículo. El régimen de medición de la señal de activación será superior o igual a 100 Hz. Como alternativa, podrá utilizarse el sistema GPS diferencial.
3.4.5. Sistema GPS diferencial
Opción a) solo para la medición de la posición: GPS
Precisión requerida:
|
i. |
: |
Posición |
: |
< 3 m 95 % de error circular probable |
|
ii. |
: |
Régimen de actualización |
: |
≥ 4 Hz |
Opción b) para la calibración de la velocidad del vehículo y la medición de la posición: Sistema GPS diferencial
Precisión requerida:
|
i. |
: |
Posición |
: |
0,15 m 95 % de error circular probable |
|
ii. |
: |
Régimen de actualización |
: |
≥ 100 Hz |
3.4.6. Estación meteorológica fija
La presión ambiental y la humedad del aire ambiente se determinarán a partir de una estación meteorológica fija. Este instrumental meteorológico se colocará a una distancia inferior a 2 000 m de una de las áreas de medición, y estará situado a una altitud superior o igual a la de las áreas de medición.
Precisión requerida:
|
i. |
: |
Temperatura |
: |
± 1oC |
|
ii. |
: |
Humedad |
: |
± 5 % HR |
|
iii. |
: |
Presión |
: |
± 1 mbar |
|
iv. |
: |
Régimen de actualización |
: |
≤ 6 minutos |
3.4.7. Anemómetro móvil
Para medir las condiciones del flujo de aire se utilizará un anemómetro móvil, es decir, la velocidad del flujo del aire y del ángulo de guiñada (β) entre el flujo de aire total y el eje longitudinal del vehículo.
3.4.7.1. Requisitos de precisión
El anemómetro será calibrado en la instalación de conformidad con la norma ISO 16622. Deberán reunirse los requisitos de precisión de conformidad con el cuadro 1:
Cuadro 1
Requisitos de precisión del anemómetro
|
Intervalo de velocidad del aire [m/s] |
Precisión de la velocidad del aire [m/s] |
Precisión del ángulo de guiñada en un intervalo de ángulo de guiñada de 180 ± 7 grados [grados] |
|
20 ± 1 |
± 0,7 |
± 1,0 |
|
27 ± 1 |
± 0,9 |
± 1,0 |
|
35 ± 1 |
± 1,2 |
± 1,0 |
3.4.7.2. Posición de la instalación
El anemómetro móvil deberá instalarse en el vehículo en la posición prescrita:
|
i. |
Posición X: camión: cara delantera ± 0,3 m del semirremolque o carrocería de la caja |
|
ii. |
Posición Y: Plano de simetría con una tolerancia de ± 0,1 m |
|
iii. |
Posición Z: La altura de la instalación sobre el vehículo será de un tercio de la altura total del vehículo, con una tolerancia de 0,0 m a + 0,2 m. |
La colocación del instrumental se realizará con la mayor exactitud posible, utilizando ayudas geométricas/ópticas. Toda desalineación restante estará sujeta a la calibración de la desalineación, que deberá efectuarse de conformidad con lo dispuesto en el punto 3.6 del presente anexo.
3.4.7.3. El régimen de actualización del anemómetro será igual o superior a 4 Hz.
3.4.8. Transductor de temperatura de la temperatura ambiente en el vehículo
La temperatura del aire ambiente se medirá en el mástil del anemómetro móvil. La altura de la instalación será de 600 mm como máximo debajo del anemómetro móvil. El sensor estará protegido del sol.
Precisión requerida: ± 1 oC
Régimen de actualización: ≥ 1 Hz
3.4.9. Temperatura del terreno de ensayo
La temperatura del terreno de ensayo se registrará en el vehículo por medio de un sensor infrarrojo de banda ancha sin contacto (8 a 14 μm). En lo relativo al asfalto y al hormigón se utilizará un factor de emisividad de 0,90. El sensor infrarrojo se calibrará de acuerdo con la norma ASTM E2847.
Precisión requerida en la calibración: Temperatura: ± 2,5 oC
Régimen de actualización: ≥ 1 Hz
3.5. Procedimiento de ensayo de velocidad constante
En cada combinación aplicable de sección de medición y sentido de la conducción, el procedimiento de ensayo de velocidad constante consistente en una secuencia de baja velocidad, alta velocidad y baja velocidad tal como se especifica más adelante se efectuará en el mismo sentido.
3.5.1. La velocidad media dentro de una sección de medición en el ensayo de baja velocidad estará comprendida en un intervalo de 10 a 15 km/h.
3.5.2. La velocidad media dentro de una sección de medición en el ensayo de alta velocidad estará comprendida en el siguiente intervalo:
|
|
velocidad máxima: 95 km/h; |
|
|
velocidad mínima: 85 km/h o 3 km/h menos que la velocidad máxima del vehículo a la que este puede funcionar en la pista de ensayo, según cuál sea el valor inferior. |
3.5.3. El ensayo será realizado en rigurosa conformidad con la secuencia especificada en los puntos 3.5.3.1 a 3.5.3.9 del presente anexo.
3.5.3.1. Preparación del vehículo y de los sistemas de medición
|
i. |
Instalación de los medidores del par en los ejes motores del vehículo de ensayo y comprobación de la instalación y de los datos de las señales de conformidad con la especificación del fabricante. |
|
ii. |
Documentación de los datos generales pertinentes del vehículo para el formulario de ensayo, de conformidad con el punto 3.7 del presente anexo. |
|
iii. |
Para el cálculo de la corrección de la aceleración por la herramienta de preprocesamiento de la resistencia aerodinámica, se determinará el peso real del vehículo antes del ensayo dentro de un intervalo de ± 500 kg. |
|
iv. |
Comprobación de la presión máxima admisible de inflado de los neumáticos y documentación de los valores de la presión de estos. |
|
v. |
Preparación de las barreras optoelectrónicas en la sección o secciones de medición o verificación del funcionamiento correcto del sistema de GPS diferencial. |
|
vi. |
Instalación del anemómetro móvil en el vehículo y/o control de la instalación, posición y orientación. Cada vez que vuelva a montarse el anemómetro en el vehículo deberá llevarse a cabo un ensayo de calibración de la desalineación. |
|
vii. |
Control de la configuración del vehículo en lo relativo a la altura máxima y la geometría, con el motor en funcionamiento. La altura máxima del vehículo se determinará mediante la medición de las cuatro esquinas de la caja / del semirremolque. |
|
viii. |
Ajuste de la altura del semirremolque al valor deseado y nueva determinación de la altura máxima del vehículo en caso necesario. |
|
ix. |
Los retrovisores o sistemas ópticos, el carenado del techo y otros dispositivos aerodinámicos deberán estar en sus condiciones de conducción habituales. |
3.5.3.2. Fase de calentamiento
Al objeto de calentar el sistema, deberá conducirse el vehículo un mínimo de 90 minutos a la velocidad deseada del ensayo de alta velocidad. El tiempo de repetición del calentamiento (p. ej. tras una modificación de la configuración, un ensayo no válido, etc.) será como mínimo igual a la duración de la parada. La fase de calentamiento podrá utilizarse para llevar a cabo un ensayo de calibración de la desalineación tal como se especifica en el punto 3.6 del presente anexo.
3.5.3.3. Puesta a cero de los medidores de par
La puesta a cero de los medidores de par se realizará como sigue:
|
i. |
Se parará el vehículo |
|
ii. |
Se levantarán del suelo las ruedas con el instrumental de medición |
|
iii. |
Se pondrá a cero el amplificador de lectura de los medidores del par |
La fase de parada no excederá de 10 minutos.
3.5.3.4. Deberá conducirse otra fase de calentamiento de un mínimo de 10 minutos a la velocidad deseada del ensayo de alta velocidad.
3.5.3.5. Primer ensayo de baja velocidad
Deberá realizarse la primera medición a baja velocidad Se velará por que:
|
i. |
El vehículo se conduzca por la sección de medición a lo largo de una línea tan recta como sea posible |
|
ii. |
La velocidad media de conducción sea conforme al punto 3.5.1 del presente anexo en relación con la sección de medición y la precedente sección de estabilización |
|
iii. |
La estabilidad de la velocidad de conducción dentro de las secciones de medición y las secciones de estabilización sea conforme al punto 3.10.1.1, inciso vii), del presente anexo |
|
iv. |
La estabilidad del par medido dentro de las secciones de medición y las secciones de estabilización será conforme al punto 3.10.1.1, inciso viii), del presente anexo |
|
v. |
El comienzo y el final de las secciones de medición serán claramente reconocibles en los datos de medición por medio de una señal de activación grabada (barreras optoelectrónicas más datos de GPS grabados) o mediante el uso de un sistema de GPS diferencial |
|
vi. |
La conducción en las partes de la pista de ensayo fuera de las secciones de medición y las secciones de estabilización precedentes se efectuará sin demora alguna. Deberán evitarse todas las maniobras innecesarias durante dichas fases (p. ej. conducción en líneas sinuosas) |
|
vii. |
La duración máxima del ensayo a baja velocidad no excederá de 20 minutos, con vistas a evitar el enfriamiento de los neumáticos. |
3.5.3.6. Deberá conducirse otra fase de calentamiento de un mínimo de 5 minutos a la velocidad deseada del ensayo de alta velocidad.
3.5.3.7. Ensayo a alta velocidad
La medición se efectuará a alta velocidad. Se velará por que:
|
i. |
El vehículo se conduzca por la sección de medición a lo largo de una línea tan recta como sea posible |
|
ii. |
La velocidad media de conducción sea conforme al punto 3.5.2 del presente anexo en relación con la sección de medición y la precedente sección de estabilización |
|
iii. |
La estabilidad de la velocidad de conducción dentro de las secciones de medición y las secciones de estabilización sea conforme al punto 3.10.1.1, inciso vii), del presente anexo |
|
iv. |
La estabilidad del par medido dentro de las secciones de medición y las secciones de estabilización será conforme al punto 3.10.1.1, inciso viii), del presente anexo |
|
v. |
El comienzo y el final de las secciones de medición serán claramente reconocibles en los datos de medición por medio de una señal de activación grabada (barreras optoelectrónicas más datos de GPS grabados) o mediante el uso de un sistema de GPS diferencial |
|
vi. |
En las fases de conducción fuera de las secciones de medición y las precedentes secciones de estabilización se evitarán todas las maniobras innecesarias (p. ej. conducir en líneas sinuosas, aceleraciones o desaceleraciones innecesarias) |
|
vii. |
La distancia entre el vehículo objeto de medición y otro vehículo conducido en la pista de ensayo será de al menos 500 m |
|
viii. |
Se registrarán un mínimo de 10 pasadas válidas por cada rumbo |
El ensayo de alta velocidad podrá utilizarse para determinar la falta de alineación del anemómetro si se reúnen los criterios establecidos en el punto 3.6.
3.5.3.8. Segundo ensayo a baja velocidad
Deberá realizarse la segunda medición a baja velocidad inmediatamente después del ensayo de alta velocidad. Se cumplirán criterios similares a los del primer ensayo de baja velocidad.
3.5.3.9. Control de la desviación de los medidores del par
Inmediatamente después de la finalización del segundo ensayo de baja velocidad, se llevará a cabo el control de la desviación de los medidores del par, de conformidad con el siguiente procedimiento:
|
1. |
Se parará el vehículo |
|
2. |
Se levantarán del suelo las ruedas con el instrumental de medición |
|
3. |
La desviación de cada medidor de par calculada a partir de la media de la secuencia mínima de 10 segundos será inferior a 25 Nm. |
Si se rebasa dicho límite, el ensayo no será válido.
3.6. Ensayo de calibración de la desalineación
La desalineación del anemómetro se determinará mediante un ensayo de calibración de la desalineación en la pista de ensayo.
3.6.1. Se realizarán al menos 5 pasadas válidas en una sección recta de 250 ± 3 m conducidas en cada sentido con el vehículo a alta velocidad.
3.6.2. Se aplicarán los criterios de validez aplicables a las condiciones de viento especificados en el punto 3.2.5 del presente anexo y los criterios de la pista de ensayo especificados en el punto 3.1 del presente anexo.
3.6.3. La herramienta de preprocesamiento de la resistencia aerodinámica utilizará los datos registrados durante la calibración de la desalineación para calcular el error de desalineación y efectuar la corrección pertinente. En la evaluación no se utilizarán las señales de par de las ruedas y velocidad del motor.
3.6.4. El ensayo de calibración podrá realizarse independientemente del procedimiento de ensayo de velocidad constante. Si el ensayo de calibración de la desalineación se lleva a cabo por separado se realizará como sigue:
|
i. |
Deberán prepararse las barreras optoelectrónicas en la sección de 250 m ± 3 m o verificar el buen funcionamiento del sistema del GPS diferencial. |
|
ii. |
Se comprobará la configuración del vehículo en lo relativo a la altura y la geometría, de conformidad con el punto 3.5.3.1 del presente anexo. En caso necesario, se ajustará la altura del semirremolque a los requisitos especificados en el apéndice 4 del presente anexo. |
|
iii. |
No serán aplicables las prescripciones de calentamiento. |
|
iv. |
Deberá realizarse el ensayo de calibración de la desalineación con un mínimo de 5 pasadas válidas tal como se describe más arriba. |
3.6.5. En los siguientes casos se efectuará un nuevo ensayo de desalineación:
|
a. |
cuando el anemómetro haya sido desmontado del vehículo |
|
b. |
cuando el anemómetro haya sido desplazado |
|
c. |
cuando se utilicen un tractor o un camión diferentes |
|
d. |
cuando se haya modificado la familia de cabinas |
3.7. Formulario de ensayo
Además del registro de los datos modales de medición, el ensayo se documentará en un formulario que contendrá al menos los siguientes datos:
|
i. |
Descripción general del vehículo (para las especificaciones, véase el apéndice 2: ficha de características) |
|
ii. |
Altura máxima real del vehículo determinada de acuerdo con el punto 3.5.3.1, inciso vii) |
|
iii. |
Hora de comienzo y fecha del ensayo |
|
iv. |
Masa del vehículo en un intervalo de ± 500 kg |
|
v. |
Presión de los neumáticos |
|
vi. |
Nombres de los archivos de los datos de medición |
|
vii. |
Documentación de acontecimientos extraordinarios (con la hora y el número de las secciones de medición), p. ej.
|
3.8. Tratamiento de los datos
3.8.1. Los datos registrados deberán estar sincronizados y adaptados a una resolución temporal de 100 Hz, ya sea mediante media aritmética, vecino más próximo o interpolación lineal.
3.8.2. Se comprobarán todos los datos registrados al objeto de descartar errores. Los datos de medición quedarán excluidos de toda consideración en los siguientes casos:
|
— |
Si los conjuntos de datos quedan invalidados debido a acontecimientos ocurridos durante la medición (véase el punto 3.7, inciso vii) |
|
— |
Si se saturan los instrumentos durante las secciones de medición (p. ej. fuertes ráfagas de viento que podrían haber provocado la saturación de la señal del anemómetro) |
|
— |
Mediciones en las que se hayan rebasado los límites permitidos de la desviación del medidor de par |
3.8.3. En la evaluación de los ensayos de velocidad constante, será obligatorio aplicar la versión disponible más reciente de la herramienta de preprocesamiento de la resistencia aerodinámica. Además del tratamiento de datos antes mencionado, todas las fases de evaluación, incluidas las comprobaciones de validez (exceptuando la lista especificada más arriba), serán realizadas por la herramienta de preprocesamiento de la resistencia aerodinámica.
3.9. Datos de entrada de la herramienta de cálculo del consumo de energía del vehículo-herramienta de resistencia aerodinámica
Los siguientes cuadros muestran los requisitos relativos al registro de los datos de medición y el tratamiento preparatorio de datos con vistas a su introducción en la herramienta de preprocesamiento de la resistencia aerodinámica:
|
|
Cuadro 2 en relación con el archivo de datos del vehículo |
|
|
Cuadro 3 en relación con el archivo de condiciones ambientales |
|
|
Cuadro 4 en relación con el archivo de configuración de la sección de medición |
|
|
Cuadro 5 en relación con el archivo de datos de medición |
|
|
Cuadro 6 en relación con los archivos de perfil de altitud (datos de entrada opcionales) |
En la documentación técnica de la herramienta de cálculo del consumo de energía del vehículo-herramienta de resistencia aerodinámica, se puede encontrar una descripción detallada de los formatos de datos, los archivos de entrada y los principios de evaluación solicitados. El tratamiento de datos se efectuará tal como se especifica en el punto 3.8 del presente anexo.
Cuadro 2
Datos de entrada para la herramienta de preprocesamiento de resistencia aerodinámica; archivo de datos del vehículo
|
Datos de entrada |
Unidad |
Observaciones |
|
Código del grupo de vehículos: |
[-] |
1 - 17 para los camiones |
|
Configuración del vehículo con remolque |
[-] |
si el vehículo se ha medido sin remolque (entrada «No») o con remolque, es decir como una combinación camión-remolque o una combinación tractocamión-semirremolque (entrada «Sí») |
|
Masa de ensayo del vehículo |
[kg] |
Masa real durante las mediciones |
|
Masa bruta del vehículo |
[kg] |
masa bruta del vehículo del rígido o tractocamión (sin remolque o semirremolque) |
|
Desmultiplicación final |
[-] |
|
|
Relación de transmisión de alta velocidad |
[-] |
relación de transmisión de la marcha engranada durante el ensayo de alta velocidad (1) |
|
Relación de transmisión de baja velocidad |
[-] |
relación de transmisión de la marcha engranada durante el ensayo de baja velocidad (1) |
|
Altura del anemómetro |
[m] |
altura del punto de medición del anemómetro instalado respecto del suelo |
|
Altura del vehículo |
[m] |
altura máxima del vehículo según el punto 3.5.3.1, inciso vii) |
|
Tipo de caja de cambios |
[-] |
transmisión manual o automática: «MT_AMT» transmisión automática con convertidor de par: «AT» |
|
Velocidad máxima del vehículo |
[km/h] |
velocidad máxima a la que el vehículo puede funcionar en la práctica en la pista de ensayo (3) |
Cuadro 3
Datos de entrada para la herramienta de preprocesamiento de resistencia aerodinámica; archivo de condiciones ambientales
|
Señal |
Identificador de columna en el archivo de entrada |
Unidad |
Régimen de medición |
Observaciones |
|
Hora |
<t> |
[s] desde el día de comienzo (primer día) |
— |
— |
|
Temperatura ambiente |
<t_amb_stat> |
[°C] |
Al menos 1 valor medio cada 6 minutos |
Estación meteorológica fija |
|
Presión ambiente |
<p_amb_stat> |
[mbar] |
Estación meteorológica fija |
|
|
Humedad relativa del aire |
<rh_stat> |
[%] |
Estación meteorológica fija |
Cuadro 4
Datos de entrada de la herramienta de cálculo del consumo de energía del vehículo-herramienta de resistencia aerodinámica; archivo de configuración de la sección de medición
|
Datos de entrada |
Unidad |
Observaciones |
|
Señal de activación utilizada |
[-] |
1 = señal de activación utilizada 0 = señal de activación no utilizada |
|
ID sección de medición |
[-] |
número de ID definido por el usuario |
|
ID sentido de la marcha |
[-] |
número de ID definido por el usuario |
|
Rumbo |
[°] |
rumbo de la sección de medición |
|
Longitud de la sección de medición |
[m] |
— |
|
Latitud del punto de inicio de la sección |
grados decimales o bien minutos decimales |
GPS estándar, unidades de grados decimales: Mínimo de 5 dígitos tras el separador decimal |
|
Longitud del punto de inicio de la sección |
GPS estándar, unidades de minutos decimales: Mínimo de 3 dígitos tras el separador decimal |
|
|
Latitud del punto final de la sección |
GPS diferencial, unidades de grados decimales Mínimo de 7 dígitos tras el separador decimal |
|
|
Longitud del punto final de la sección |
GPS diferencial, unidades de minutos decimales: Mínimo de 5 dígitos tras el separador decimal |
|
|
Itinerario y/o nombre del archivo de altitud |
[-] |
Solo es necesario para los ensayos de velocidad constante (no el ensayo de desalineación) y si la corrección de la altitud está activada. |
Cuadro 5
Datos de entrada para la herramienta de preprocesamiento de la resistencia aerodinámica; archivo de datos de medición
|
Señal |
Identificador de columna en el archivo de entrada |
Unidad |
Régimen de medición |
Observaciones |
|
Hora |
<t> |
[s] desde el día de comienzo (primer día) |
100 Hz |
régimen fijado a 100 Hz; señal temporal utilizada para establecer una correlación con los datos meteorológicos y para el control de la frecuencia |
|
Latitud del GPS diferencial |
<lat> |
grados decimales o bien minutos decimales |
GPS: ≥ 4 Hz GPS diferencial: ≥ 100 Hz |
GPS estándar, unidades de grados decimales: Mínimo de 5 dígitos tras el separador decimal |
|
Longitud del GPS diferencial |
<long> |
GPS estándar, unidades de minutos decimales: Mínimo de 3 dígitos tras el separador decimal GPS diferencial, unidades de grados decimales Mínimo de 7 dígitos tras el separador decimal GPS diferencial, unidades de minutos decimales: Mínimo de 5 dígitos tras el separador decimal |
||
|
Rumbo del GPS diferencial |
<hdg> |
[°] |
≥ 4 Hz |
|
|
Velocidad del GPS diferencial |
<v_veh_GPS> |
[km/h] |
≥ 20 Hz |
|
|
Velocidad del vehículo |
<v_veh_CAN> |
[km/h] |
≥ 20 Hz |
Señal bruta del bus de la CAN del eje delantero |
|
Velocidad del aire |
<v_air> |
[m/s] |
≥ 4 Hz |
datos en bruto (lectura de la herramienta) |
|
Ángulo de aflujo (beta) |
<beta> |
[°] |
≥ 4 Hz |
datos en bruto (lectura de la herramienta) «180°» se refiere al flujo de aire desde la parte frontal |
|
Velocidad del motor o velocidad cardánica |
<n_eng> o <n_card> |
[rpm] |
≥ 20 Hz |
velocidad cardánica de vehículos con convertidor de par no bloqueado durante el ensayo a baja velocidad |
|
Medidor del par (rueda izquierda) |
<tq_l> |
[Nm] |
≥ 20 Hz |
— |
|
Medidor del par (rueda derecha) |
<tq_r> |
[Nm] |
≥ 20 Hz |
|
|
Temperatura ambiente en el vehículo |
<t_amb_veh> |
[°C] |
≥ 1 Hz |
|
|
Señal de activación |
<trigger> |
[-] |
100 Hz |
señal opcional; necesaria si las secciones de medida se identifican mediante barreras optoelectrónicas (opción «trigger_used=1») |
|
Temperatura del terreno de ensayo |
<t_ground> |
[°C] |
≥ 1 Hz |
|
|
Validez |
<valid> |
[-] |
— |
Señal opcional (1 = válido; 0 = no válido) |
Cuadro 6
Datos de entrada para la herramienta de preprocesamiento de la resistencia aerodinámica; archivo de perfil de altitud
|
Datos de entrada |
Unidad |
Observaciones |
|
Latitud |
Grados decimales o Minutos decimales |
unidades de grados decimales: Mínimo de 7 dígitos tras el separador decimal |
|
Longitud |
unidades de minutos decimales: Mínimo de 5 dígitos tras el separador decimal |
|
|
Altitud |
[m] |
Mínimo de 2 dígitos tras el separador decimal |
3.10. Criterios de validez
En esta sección se establecen los criterios para obtener resultados válidos mediante la herramienta de preprocesamiento de la resistencia aerodinámica.
3.10.1. Criterios de validez en relación con el ensayo de velocidad constante
3.10.1.1. La herramienta de preprocesamiento de la resistencia aerodinámica acepta conjuntos de datos registrados durante el ensayo de velocidad constante en caso de que se reúnan los siguientes criterios de validez:
|
i. |
La velocidad media del vehículo está dentro de los criterios definidos en el punto 3.5.2 |
|
ii. |
La temperatura ambiente está dentro del intervalo descrito en el punto 3.2.2. Este criterio será objeto de control mediante la herramienta de preprocesamiento de la resistencia aerodinámica basándose en la temperatura ambiente medida en el vehículo. |
|
iii. |
La temperatura del terreno de ensayo se encuentra dentro del intervalo descrito en el punto 3.2.3 |
|
iv. |
las condiciones de velocidad media del viento son válidas de conformidad con el punto 3.2.5, inciso i) |
|
v. |
las condiciones de velocidad de la ráfaga de viento son válidas de conformidad con el punto 3.2.5, inciso ii) |
|
vi. |
las condiciones del promedio del ángulo de guiñada son válidas de conformidad con el punto 3.2.5, inciso iii) |
|
vii. |
Criterios de estabilidad en relación con la velocidad del vehículo:
|
|
viii. |
Criterios de estabilidad en relación con el par del vehículo:
|
|
ix. |
rumbo válido del vehículo al pasar una sección de medición (< 10o de desviación del rumbo deseado aplicable al ensayo a baja velocidad, el ensayo a alta velocidad y el ensayo de desalineación) |
|
x. |
la distancia conducida dentro de la sección de medición calculada a partir de la velocidad del vehículo calibrada no difiere de la distancia deseada en más de 3 metros (aplicable al ensayo a baja velocidad y al ensayo a alta velocidad) |
|
xi. |
comprobación de la plausibilidad de la velocidad del motor o de la velocidad cardánica según proceda:
La comprobación de la plausibilidad de la velocidad cardánica se efectúa de manera análoga sustituyendo neng,1s por ncard,1s (1 s de media central móvil de velocidad cardánica en la sección de medición de alta velocidad) y sustituyendo neng,float por ncard,float (media central móvil de velocidad cardánica con Xms segundos de base de tiempo en la sección de medición de baja velocidad) y con igear situado en un valor de 1. |
|
xii. |
la parte específica de los datos de medición no estaba marcada como «no válida» en el archivo de entrada de la herramienta de preprocesamiento de la resistencia aerodinámica. |
3.10.1.2. La herramienta de preprocesamiento de la resistencia aerodinámica excluirá conjuntos de datos únicos de la evaluación en caso de que haya un número desigual de conjuntos de datos para una combinación específica de la sección de medición y el sentido de dirección en el primer y en el segundo ensayo de baja velocidad. En este caso, se excluirán los primeros conjuntos de datos de la conducción de baja velocidad con el mayor número de conjuntos de datos.
3.10.1.3. La herramienta de preprocesamiento de la resistencia aerodinámica excluirá combinaciones únicas de secciones de medición y sentidos de conducción si:
|
i. |
no está disponible un conjunto de datos válido del ensayo de baja velocidad 1 y/o del ensayo de baja velocidad 2 |
|
ii. |
están disponibles menos de dos conjuntos de datos válidos del ensayo de alta velocidad |
3.10.1.4. La herramienta de preprocesamiento de la resistencia aerodinámica considerará no válido el ensayo completo de velocidad constante en los siguientes casos:
|
i. |
no se reúnen los requisitos relativos a la pista de ensayo descritos en 3.1.1 |
|
ii. |
están disponibles menos de 10 conjuntos de datos por rumbo (ensayo de alta velocidad) |
|
iii. |
están disponibles menos de 5 conjuntos de datos por rumbo (ensayo de calibración de la desalineación) |
|
iv. |
los coeficientes de resistencia a la rodadura (CRR) para el primer y el segundo ensayo de baja velocidad difieren en más de 0,40 kg/t. Este criterio será comprobado para cada combinación de sección de medición y sentido de conducción por separado. |
3.10.2. Criterios de validez en relación con el ensayo de desalineación
3.10.2.1. La herramienta de preprocesamiento de la resistencia aerodinámica acepta conjuntos de datos registrados durante el ensayo de desalineación en caso de que se reúnan los siguientes criterios de validez:
|
i. |
la velocidad media del vehículo está dentro de los criterios definidos en el punto 3.5.2 para el ensayo de alta velocidad |
|
ii. |
las condiciones de velocidad media del viento son válidas de conformidad con el punto 3.2.5, inciso i) |
|
iii. |
las condiciones de velocidad de la ráfaga de viento son válidas de conformidad con el punto 3.2.5, inciso ii) |
|
iv. |
las condiciones del promedio del ángulo de guiñada son válidas de conformidad con el punto 3.2.5, inciso iii) |
|
v. |
Criterios de estabilidad en relación con la velocidad del vehículo: 
donde:
|
3.10.2.2. La herramienta de preprocesamiento de la resistencia aerodinámica considerará no válidos los datos de una única sección de medición en los siguientes casos:
|
i. |
las velocidades medias del vehículo de todos los conjuntos de datos válidos de cada sentido de conducción difieren en más de 2 km/h. |
|
ii. |
están disponibles menos de 5 conjuntos de datos por rumbo |
3.10.2.3. La herramienta de preprocesamiento de la resistencia aerodinámica considerará no válido el ensayo completo de desalineación en caso de que no exista un resultado válido para una sección de medición única
3.11. Declaración del valor de la resistencia aerodinámica
El valor de base para la declaración del valor de resistencia aerodinámica es el resultado final para Cd · Acr (0) calculado por la herramienta de preprocesamiento de resistencia aerodinámica. El solicitante de un certificado declarará un valor Cd · Adeclared en un intervalo entre igual y un máximo de + 0,2 m2 superior a Cd · Acr (0). Esta tolerancia tendrá en cuenta las incertidumbres en la selección de los vehículos de origen más desfavorables para todos los miembros de la familia que puedan someterse a ensayo. El valor Cd · Adeclared será el dato de entrada de la herramienta de simulación y el valor de referencia para el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 certificadas y el consumo de combustible certificadas.
Podrán crearse más familias con diferentes valores declarados Cd · Adeclared sobre la base de una única medición Cd · Acr (0) en tanto en cuanto se reúnan las disposiciones relativas a la familia de conformidad con el apéndice 5, punto 4.
(1) especificación de las relaciones de transmisión con un mínimo de 3 dígitos tras el separador decimal
(2) si se proporciona la señal de velocidad de la rueda a la herramienta de preprocesamiento de la resistencia aerodinámica (opción para vehículos con convertidores de par, véase el punto 3.4.3) la desmultiplicación final se situará en «1,000»
(3) solo se requiere dato de entrada si el valor es inferior a 88 km/h
Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO A LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UNA FAMILIA DE RESISTENCIA AERODINÁMICA
|
Comunicación relativa a:
|
Sello de la Administración
|
de un certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de resistencia aerodinámica de conformidad con el Reglamento (UE) 2017/2400 de la Comisión.
Reglamento (UE) 2017/2400 de la Comisión, modificado en último lugar por …
Número de certificación:
Hash:
Motivo de la extensión:
SECCIÓN I
0.1. Marca (nombre comercial del fabricante):
0.2. Carrocería del vehículo y tipo/familia de resistencia aerodinámica (si procede):
0.3. Carrocería del vehículo y miembro de la familia de resistencia aerodinámica (en caso de familia):
0.3.1. Carrocería del vehículo y resistencia aerodinámica de origen:
0.3.2. Carrocería del vehículo y tipos de resistencia aerodinámica dentro de la familia:
0.4. Medios de identificación del tipo, si están marcados:
0.4.1. Ubicación de las marcas:
0.5. Nombre y dirección del fabricante:
0.6. En el caso de componentes y unidades técnicas independientes, localización y método de colocación de la marca de certificación CE:
0.7. Nombre y dirección de las plantas de montaje:
0.9. Nombre y dirección del representante del fabricante (en su caso)
SECCIÓN II
1. Información adicional (cuando proceda): véase la adenda
2. Autoridad de homologación responsable de realizar los ensayos:
3. Fecha del acta de ensayo:
4. Número del acta de ensayo:
5. Observaciones (en su caso): véase la adenda
6. Lugar:
7. Fecha:
8. Firma:
Anexos:
Expediente de homologación. Acta de ensayo.
Apéndice 2
Ficha de características de la carrocería y la resistencia aerodinámica del vehículo
|
Ficha de características n.°: |
Asunto: del: Modificación: |
|
en virtud de … Tipo o familia de carrocería y resistencia aerodinámica del vehículo (si procede): Observación general: Para los datos de entrada de la herramienta de cálculo del consumo de energía del vehículo debe definirse un formato de archivo electrónico que pueda utilizarse con vistas a la importación de datos a la herramienta de cálculo del consumo de energía del vehículo. Los datos de entrada de la herramienta de cálculo del consumo de energía del vehículo pueden diferir de los datos solicitados en la ficha de características y viceversa (pendiente de definición). Cuando deba gestionarse un gran volumen de datos, como los mapas de eficiencia, es especialmente necesario un archivo de datos (no es necesaria la transferencia/introducción manual). … |
0.0. INFORMACIÓN GENERAL
0.1. Nombre y dirección del fabricante:
0.2. Marca (nombre comercial del fabricante):
0.3. Carrocería del vehículo y tipo de resistencia aerodinámica (familia, si procede):
0.4. Denominaciones comerciales (si se dispone de ellas):
0.5. Medios de identificación del tipo, si están marcados en el vehículo:
0.6. En el caso de componentes y unidades técnicas independientes, emplazamiento y método de colocación de la marca de certificación:
0.7. Nombre y dirección de las plantas de montaje:
0.8. Nombre y dirección del representante del fabricante:
PARTE 1
CARACTERÍSTICAS ESENCIALES DE LA CARROCERÍA DEL VEHÍCULO Y DE LA RESISTENCIA AERODINÁMICA (DE ORIGEN)
Tipos dentro de una familia de carrocería y resistencia aerodinámica de un vehículo
|
Configuración de origen del vehículo |
||
|
1.0. |
INFORMACIÓN ESPECÍFICA RELATIVA A LA RESISTENCIA AERODINÁMICA |
|
|
1.1.0 |
VEHÍCULO |
|
|
1.1.1 |
Grupo de vehículos pesados (HDV) según el programa HDV CO2 |
|
|
1.2.0. |
Modelo de vehículo |
|
|
1.2.1. |
Configuración de los ejes |
|
|
1.2.2. |
Peso bruto máximo del vehículo |
|
|
1.2.3. |
Línea de la cabina |
|
|
1.2.4. |
Anchura de la cabina (valor máximo en sentido Y) |
|
|
1.2.5. |
Longitud de la cabina (valor máximo en sentido X) |
|
|
1.2.6. |
Altura del techo |
|
|
1.2.7. |
Batalla |
|
|
1.2.8. |
Altura de la cabina sobre el bastidor |
|
|
1.2.9. |
Altura del bastidor |
|
|
1.2.10. |
Accesorios y añadidos aerodinámicos (p. ej. deflector del techo, carenados y faldones laterales, carenados de esquina) |
|
|
1.2.11. |
Dimensiones de los neumáticos del eje delantero |
|
|
1.2.12. |
Dimensiones de los neumáticos del eje o ejes motores |
|
|
1.3. |
Especificaciones de la carrocería (con arreglo a la definición de carrocería estándar) |
|
|
1.4. |
Características del (semir)remolque [con arreglo a la especificación de (semir)remolque por carrocería estándar] |
|
|
1.5. |
Parámetros que definen la familia de conformidad con la descripción del solicitante (criterios de origen y criterios de la familia que se apartan) |
|
LISTA DE DOCUMENTOS ADJUNTOS
|
N.°: |
Descripción |
Fecha de expedición |
|
1 |
Información sobre las condiciones de ensayo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Anexo 1 de la ficha de características
Información sobre las condiciones de ensayo (si procede)
Pista de ensayo en la que se han realizado los ensayos:
Masa total del vehículo durante la medición [kg]:
Altura máxima del vehículo durante la medición [m]:
Condiciones ambientales medias durante el primer ensayo de baja velocidad [°C]:
Velocidad media del vehículo durante los ensayos de alta velocidad [km/h]:
Producto del coeficiente de resistencia aerodinámica (Cd ) por la sección transversal (Ac r) en unas condiciones de viento cruzado nulo Cd · Acr(0) [m2]:
Producto del coeficiente de resistencia aerodinámica (Cd ) por la sección transversal (Acr ) en unas condiciones de viento cruzado medio Cd · Acr(β) [m2] durante el ensayo de velocidad constante:
Ángulo de guiñada medio durante el ensayo de velocidad constante β [°]:
Valor de resistencia aerodinámica declarado Cd · declared [m2]:
Apéndice 3
Requisitos relativos a la altura del vehículo
|
1. |
Los vehículos medidos en el ensayo de velocidad constante de conformidad con la sección 3 del presente anexo deberán reunir los requisitos relativos a la altura del vehículo que figuran en el cuadro 7. |
|
2. |
La altura del vehículo se determinará tal como se describe en el punto 3.5.3.1, inciso vii). |
|
3. |
Los vehículos de los grupos de vehículos que no figuran en el cuadro 7 no estarán sometidos al ensayo de velocidad constante. |
Cuadro 7
Requisitos relativos a la altura del vehículo
|
Grupo de vehículos |
Altura mínima del vehículo [m] |
Altura máxima del vehículo [m] |
|
1 |
3,40 |
3,60 |
|
2 |
3,50 |
3,75 |
|
3 |
3,70 |
3,90 |
|
4 |
3,85 |
4,00 |
|
5 |
3,90 |
4,00 |
|
9 |
Valores similares a los del rígido con el mismo peso bruto máximo del vehículo (grupo 1, 2, 3 o 4) |
|
|
10 |
3,90 |
4,00 |
Apéndice 4
Configuraciones de la carrocería y del semirremolque estándar
|
1. |
Los vehículos medidos en el ensayo de velocidad constante con arreglo a la sección 3 del presente anexo deberán reunir los requisitos relativos a la carrocería estándar y al semirremolque estándar descritos en el presente apéndice. |
|
2. |
La carrocería estándar o el semirremolque estándar aplicables se determinarán a partir del cuadro 8. Cuadro 8 Asignación de carrocerías y semirremolques estándar para ensayos de velocidad constante
|
|
3. |
Las carrocerías estándar B1, B2, B3, B4 y B5 se construirán como carrocerías rígidas con un diseño de caja para carga seca. Estarán equipadas con dos puertas traseras, sin ninguna puerta lateral. Las carrocerías estándar no estarán equipadas con plataformas elevadoras, deflectores frontales ni carenados laterales para la reducción de la resistencia aerodinámica. Las especificaciones de las carrocerías estándar se exponen en:
Las indicaciones sobre la masa que se dan en los cuadros 9 a 13 no estarán sometidas a inspección en lo relativo a los ensayos de resistencia aerodinámica. |
|
4. |
Los requisitos de tipo y chasis relativos al semirremolque estándar ST1 se enumeran en el cuadro 14. Las especificaciones del producto se recogen en el cuadro 15. |
|
5. |
Todas las dimensiones y masas sin tolerancias mencionadas explícitamente serán conformes al Reglamento (UE) n.o 1230/2012, anexo 1, apéndice 2 (es decir, en un intervalo de ± 3 % del valor deseado). Cuadro 9 Especificaciones de la carrocería estándar «B1»
Cuadro 10 Especificaciones de la carrocería estándar «B2»
Cuadro 11 Especificaciones de la carrocería estándar «B3»
Cuadro 12 Especificaciones de la carrocería estándar «B4»
Cuadro 13 Especificaciones de la carrocería estándar «B5»
Cuadro 14 Tipo y configuración del chasis del semirremolque estándar «ST1»
Cuadro 15 Especificaciones del remolque estándar «ST1»
|
Apéndice 5
Familia de resistencia aerodinámica en relación con los camiones
1. Generalidades
Una familia de resistencia aerodinámica se caracteriza por una serie de parámetros de diseño y rendimiento. Tales parámetros deberán ser comunes a todos los vehículos de la familia. El fabricante podrá decidir cuál de estos pertenece a una familia de resistencia aerodinámica, siempre y cuando se respeten los criterios de pertenencia enumerados en el punto 4. La familia de resistencia aerodinámica será aprobada por la autoridad de homologación. El fabricante pondrá a disposición de la autoridad de homologación la información adecuada sobre la resistencia aerodinámica de los miembros de la familia de resistencia aerodinámica.
2. Casos particulares
En algunos casos puede producirse una interacción entre los parámetros. Ello deberá tenerse en cuenta al objeto de garantizar que solo los vehículos que tengan características similares estén incluidos en una misma familia de resistencia aerodinámica. El fabricante deberá identificar estos casos y notificarlos a la autoridad de homologación. Se tendrán en cuenta como criterio para la creación de una nueva familia de resistencia aerodinámica.
Además de los parámetros indicados en el punto 4, el fabricante podrá introducir criterios adicionales que permitan la definición de familias de tamaño más reducido.
3. Todos los vehículos dentro de una familia tendrán el mismo valor de resistencia aerodinámica que el correspondiente «vehículo de origen» de la familia. La resistencia aerodinámica deberá medirse en el vehículo de origen de conformidad con el procedimiento de ensayo de velocidad constante que se describe en la sección 3 de la parte principal del presente anexo.
4. Parámetros que definen la familia de resistencia aerodinámica:
4.1. Los vehículos podrán agruparse en una familia si se reúnen los siguientes criterios:
|
a) |
Igual anchura de cabina y geometría de la carrocería en bruto hasta el montante B y encima del punto del tacón, excluido el fondo de la cabina (p. ej. túnel motor). Todos los miembros de la familia se situarán en un intervalo de ± 10 mm respecto del vehículo de origen. |
|
b) |
Igual altura del techo en la vertical Z. Todos los miembros de la familia se situarán en un intervalo de ± 10 mm respecto del vehículo de origen. |
|
c) |
Igual altura de la cabina sobre el bastidor. Se considerará que se cumple este criterio si la diferencia de altura de las cabinas sobre el bastidor se sitúa dentro del intervalo Z < 175 mm. |
El cumplimiento de los requisitos del concepto de familia quedará demostrado mediante datos de diseño asistido por ordenador (CAD).
Figura 1
Definición de familia

4.2. Una familia de resistencia aerodinámica consta de miembros que pueden someterse a ensayo y de configuraciones de vehículo que no pueden ser sometidas a ensayo de conformidad con el presente Reglamento.
4.3. Los miembros de una familia que pueden someterse a ensayo son configuraciones de vehículos que reúnen los requisitos de instalación definidos en el punto 3.3 de la parte principal del presente anexo.
5. Elección del vehículo de origen en relación con la resistencia aerodinámica
5.1. El vehículo de origen de cada familia será seleccionado de acuerdo con los siguientes criterios:
5.2. El chasis del vehículo se ajustará a las dimensiones de la carrocería o semirremolque estándar tal como se define en el apéndice 4 del presente anexo.
5.3. Todos los miembros de la familia que puedan someterse a ensayo tendrán un valor igual o inferior al valor Cd · Adeclared declarado para el vehículo de origen.
5.4. El solicitante de un certificado deberá poder demostrar que la selección del vehículo de origen reúne las disposiciones establecidas en el punto 5.3 basándose en métodos científicos, p. ej. CFD, resultados del túnel de viento o buenas prácticas técnicas. Esta disposición se aplicará a todas las variantes del vehículo que puedan ser sometidas a ensayo mediante el procedimiento de velocidad constante tal como se describe en el presente anexo. Otras configuraciones del vehículo (p. ej. alturas de vehículo no conformes con las disposiciones del apéndice 4, batallas incompatibles con las dimensiones de la carrocería estándar del apéndice 5) obtendrán el mismo valor de resistencia aerodinámica que el vehículo de origen que pueda someterse a ensayo dentro de la familia, sin más demostración. Dado que los neumáticos se consideran parte del equipo de medición, su influencia quedará excluida para demostrar el caso más desfavorable.
5.5. Los valores de resistencia aerodinámica podrán ser utilizados para crear familias en otras clases de vehículos si se cumplen los criterios de familia de conformidad con el punto 5 del presente apéndice sobre la base de las disposiciones previstas en el cuadro 16.
Cuadro 16
Disposiciones relativas a la transferencia de valores de resistencia aerodinámica a otras clases de vehículos
|
Grupo de vehículos |
Fórmula de transferencia |
Observaciones |
|
1 |
Grupo de vehículos 2 – 0,2 m2 |
Solo se permite si se ha medido el valor de la familia correspondiente en el grupo 2 |
|
2 |
Grupo de vehículos 3 – 0,2 m2 |
Solo se permite si se ha medido el valor de la familia correspondiente en el grupo 3 |
|
3 |
Grupo de vehículos 4 – 0,2 m2 |
|
|
4 |
No se permite la transferencia |
|
|
5 |
No se permite la transferencia |
|
|
9 |
Grupo de vehículos 1, 2, 3, 4 + 0,1 m2 |
El grupo aplicable a la transferencia debe corresponder con el peso bruto del vehículo. Se permite la transferencia de valores ya transferidos. |
|
10 |
Grupo de vehículos 1, 2, 3, 5 + 0,1 m2 |
|
|
11 |
Grupo de vehículos 9 |
Se permite la transferencia de valores ya transferidos |
|
12 |
Grupo de vehículos 10 |
Se permite la transferencia de valores ya transferidos |
|
16 |
No se permite la transferencia |
Solo se aplica el valor del cuadro |
Apéndice 6
Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
|
1. |
La conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas será verificada mediante ensayos de velocidad constante tal como se establece en la sección 3 de la parte principal del presente anexo. Respecto de la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se aplicarán las siguientes disposiciones adicionales:
Todos los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas serán supervisados por la autoridad de homologación. |
|
2. |
Se considerará que un vehículo no supera el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas si el valor medido Cd Acr (0) es superior al valor declarado Cd · Adeclared correspondiente al vehículo de origen más un 7,5 % de margen de tolerancia. Si no supera un primer ensayo, se podrán efectuar otros dos ensayos adicionales con el mismo vehículo en días diferentes. Si el valor medio medido Cd Acr (0) de todos los ensayos efectuados es superior al valor declarado Cd · Adeclared correspondiente al vehículo de origen más un 7,5 % de margen de tolerancia, se aplicará el artículo 23 del presente Reglamento. |
|
3. |
El número de vehículos que deberán someterse al ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas por año de producción será determinado de conformidad con el cuadro 17. Cuadro 17 Número de vehículos que deberán someterse al ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas por año de producción
A los efectos de establecer las cifras de producción, solo se tendrán en cuenta los datos de resistencia aerodinámica que entren dentro de los requisitos del presente Reglamento y que no hayan obtenido valores normalizados de resistencia aerodinámica de conformidad con el apéndice 8 del presente anexo. |
|
4. |
En cuanto a la selección de vehículos para los ensayos de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas se aplicarán las siguientes disposiciones:
|
|
5. |
Una vez que un vehículo haya sido seleccionado para el ensayo de conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, el fabricante deberá verificar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas en un plazo de 12 meses. El fabricante podrá solicitar a la autoridad de homologación que amplíe dicho plazo otros 6 meses si puede demostrar que la verificación no ha sido posible dentro del plazo exigido debido a las condiciones meteorológicas. |
Apéndice 7
Valores normalizados
|
1. |
Los valores normalizados relativos al valor de resistencia aerodinámica declarado Cd · Adeclared se definirán de conformidad con el cuadro 18. En caso de que se apliquen valores normalizados, no se introducirán datos de entrada sobre la resistencia aerodinámica en la herramienta de simulación. En ese caso, la asignación de los valores normalizados será efectuada automáticamente por la herramienta de simulación. Cuadro 18 Valores normalizados de Cd · Adeclared
|
|
2. |
En el caso de las configuraciones de vehículos «rígido + remolque», el valor global de resistencia aerodinámica será calculado por la herramienta de simulación, añadiendo al valor Cd · Adeclared relativo al rígido valores delta normalizados correspondientes a la influencia del remolque, tal como se especifica en el cuadro 19. Cuadro 19 Valores delta normalizados de resistencia aerodinámica correspondientes a la influencia del remolque
|
|
3. |
En cuanto a las configuraciones de vehículo EMS, el valor de resistencia aerodinámica de la configuración global del vehículo se calculará mediante la herramienta de simulación añadiendo los valores delta normalizados correspondientes a la influencia EMS, tal como se especifican en el cuadro 20, al valor de resistencia aerodinámica de la configuración del vehículo de referencia. Cuadro 20 Valores delta normalizados C d A cr (0) correspondientes a la influencia EMS
|
Apéndice 8
Marcados
En el caso de un vehículo homologado de conformidad con el presente anexo, la cabina deberá llevar:
|
1.1 |
El nombre del fabricante y la marca registrada. |
|
1.2 |
La marca y la indicación del tipo identificativo según estén consignados en los puntos 0.2 y 0.3 del apéndice 2 del presente anexo. |
|
1.3 |
La marca de certificación en forma de rectángulo en torno a la letra minúscula «e» seguida del número distintivo del Estado miembro que ha expedido el certificado:
|
|
1.4 |
En la marca de certificación figurará también, cerca del rectángulo, el «número de certificación de base» incluido en la sección 4 del número de homologación de tipo al que se refiere el anexo VII de la Directiva 2007/46/CE, precedido de las dos cifras que indican el número secuencial asignado a la última modificación técnica del presente Reglamento y de la letra «P», que indica que la homologación se refiere a una resistencia aerodinámica. Para el presente Reglamento, el número secuencial será el 00. 1.4.1 Ejemplos y dimensiones de la marca de certificación
Esta marca de certificación fijada en una cabina indica que el tipo de que se trata ha sido homologado en Polonia (e20) con arreglo al presente Reglamento. Los dos primeros dígitos (00) indican el número secuencial asignado a la última modificación técnica del presente Reglamento. La letra siguiente indica que el certificado se ha expedido con relación a una resistencia aerodinámica (P). Los cuatro últimos dígitos (0004) son los que la autoridad de homologación de tipo ha asignado al motor como número de certificación de base. |
|
1.5 |
La marca de certificación se colocará en la cabina de manera que sea indeleble y claramente legible. Será visible cuando la cabina esté instalada en el vehículo y se colocará en una pieza necesaria para el funcionamiento normal de la cabina que normalmente no necesite ser sustituida durante la vida útil de aquella. Los marcados, las etiquetas, las placas o los adhesivos deben poder durar toda la vida útil de la resistencia aerodinámica, y deben ser claramente legibles e indelebles. El fabricante deberá asegurarse de que sea imposible retirar los marcados, las etiquetas, las placas o los adhesivos sin destruirlos ni desfigurarlos. |
2 Numeración
2.1 El número de certificación de la resistencia aerodinámica deberá comprender lo siguiente:
eX*YYY/YYYY*ZZZ/ZZZZ*P*0000*00
|
Sección 1 |
Sección 2 |
Sección 3 |
Letra adicional de la sección 3 |
Sección 4 |
Sección 5 |
|
Indicación del país que expide el certificado |
Acto relativo a la certificación respecto del CO2 (.../2017) |
Último acto modificativo (zzz/zzzz) |
P = resistencia aerodinámica |
Número de certificación de base 0000 |
Extensión 00 |
Apéndice 9
Parámetros de entrada para la herramienta de cálculo del consumo de energía del vehículo
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de vehículos como información de entrada de la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y algunos ejemplos de datos.
El XML es generado automáticamente por la herramienta de cálculo del consumo de energía del vehículo-herramienta de resistencia aerodinámica
Definiciones
1)
2)
string … cadena, secuencia de caracteres en codificación ISO 8859-1
token … testigo, secuencia de caracteres en codificación ISO 8859-1, sin espacios en blanco delante ni detrás
date … fecha y hora UTC con el siguiente formato: AAAA-MM-DD T HH:MM:SS Z con letra cursiva para los caracteres fijos, por ejemplo «2002-05-30T09:30:10Z»
integer … entero, valor con un tipo de datos integral, sin ceros delante, por ejemplo «1800»
double, X … número decimal con exactamente X dígitos tras el signo decimal («,») y sin ceros delante, por ejemplo, para «double, 2»: «2345,67»; para «double, 4»: «45,6780»
3)
Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «AirDrag»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P240 |
token |
|
|
|
Model |
P241 |
token |
|
|
|
TechnicalReportId |
P242 |
token |
|
Identificador del componente utilizado en el proceso de certificación |
|
Date |
P243 |
date |
|
Fecha y hora de creación del hash del componente |
|
AppVersion |
P244 |
token |
|
Número de identificación de la versión de la herramienta de preprocesamiento de la resistencia aerodinámica |
|
CdxA_0 |
P245 |
double, 2 |
[m2] |
Resultado final de la herramienta de preprocesamiento de la resistencia aerodinámica. |
|
TransferredCdxA |
P246 |
double, 2 |
[m2] |
CdxA_0 transferido a las familias correspondientes en otros grupos de vehículos de conformidad con el cuadro 18 del apéndice 5. En caso de que se haya aplicado ninguna regla de no transferencia, deberá proporcionarse CdxA_0. |
|
DeclaredCdxA |
P146 |
double, 2 |
[m2] |
Valor de resistencia aerodinámica declarado |
En caso de que se utilicen valores normalizados de conformidad con el apéndice 7 en la herramienta de cálculo del consumo de energía del vehículo, no se proporcionarán datos de entrada para el componente de resistencia aerodinámica. Los valores normalizados serán asignados automáticamente de conformidad con el cuadro del grupo de vehículos.
ANEXO IX
VERIFICACIÓN DE LOS DATOS RELATIVOS A LOS DISPOSITIVOS AUXILIARES DE LOS CAMIONES
1. Introducción
En el presente anexo se describen las disposiciones relativas al consumo de potencia de los dispositivos auxiliares de los vehículos pesados a los efectos de la determinación de las emisiones de CO2 específicas de un vehículo.
El consumo de potencia de los siguientes dispositivos auxiliares se tendrá en cuenta dentro de la herramienta de cálculo del consumo de energía del vehículo, utilizando los valores normalizados medios de potencia específicos de cada tecnología:
|
a) |
Ventilador |
|
b) |
Sistema de dirección |
|
c) |
Sistema eléctrico |
|
d) |
Sistema neumático |
|
e) |
Sistema de aire acondicionado |
|
f) |
Toma de fuerza de la transmisión (PTO) |
Los valores normalizados se integrarán en la herramienta de cálculo del consumo de energía del vehículo y se utilizarán automáticamente eligiendo la correspondiente tecnología.
2. Definiciones
A los efectos del presente anexo se aplicarán las siguientes definiciones:
1) «Ventilador montado en el cigüeñal»: instalación del ventilador en que este se mueve en la prolongación del cigüeñal, habitualmente gracias a una brida.
2) «Ventilador movido por correa o transmisión»: ventilador instalado en una posición en que es necesaria una correa, un sistema de tensión o una transmisión adicional.
3) «Ventilador hidráulico»: ventilador movido mediante aceite hidráulico, a menudo instalado lejos del motor. Un sistema hidráulico con sistema de aceite, bomba y válvulas influye en las pérdidas y en la eficiencia del sistema.
4) «Ventilador eléctrico»: un ventilador impulsado por un motor eléctrico. Se tiene en cuenta la eficiencia de la conversión total de energía, incluyendo en la batería o a partir de esta.
5) «Embrague viscoso con control electrónico»: embrague en el que se utilizan una serie de datos del sensor junto con lógica computacional para accionar electrónicamente el flujo de fluido en el embrague viscoso.
6) «Embrague viscoso con control bimetálico»: embrague en el que se utiliza una conexión bimetálica para transformar un cambio de la temperatura en un desplazamiento mecánico. De ese modo, el desplazamiento mecánico sirve para accionar el embrague viscoso.
7) «Embrague discontinuo»: un dispositivo mecánico que solo puede accionarse en etapas distintas (variable no continua).
8) «Embrague conectado/desconectado»: un embrague mecánico totalmente engranado o bien totalmente desengranado.
9) «Bomba de desplazamiento variable»: un dispositivo que transforma la energía mecánica en energía de fluido hidráulico. La cantidad de fluido bombeado por cada revolución de la bomba puede modificarse mientras esta se encuentra en funcionamiento.
10) «Bomba de desplazamiento constante»: un dispositivo que transforma la energía mecánica en energía de fluido hidráulico. La cantidad de fluido bombeado por cada revolución de la bomba no puede modificarse mientras esta se encuentra en funcionamiento.
11) «Control de motor eléctrico»: utilización de un motor eléctrico para impulsar el ventilador. La máquina eléctrica convierte la energía eléctrica en energía mecánica. La potencia y la velocidad son controladas mediante la tecnología convencional de los motores eléctricos.
12) «Bomba de desplazamiento fijo (tecnología por defecto)»: bomba cuyo caudal tiene una limitación interna.
13) «Bomba de desplazamiento fijo con control electrónico»: bomba que utiliza un control electrónico del caudal.
14) «Bomba de desplazamiento dual»: bomba con dos cámaras (con idéntico o distinto desplazamiento) que pueden combinarse o de las que puede utilizarse solo una; Se caracteriza por una limitación interna del caudal.
15) «Bomba de desplazamiento variable con control mecánico»: bomba en que el desplazamiento se controla internamente de forma mecánica (escalas de presión interna).
16) «Bomba de desplazamiento variable con control electrónico»: bomba en que el desplazamiento se controla internamente de forma mecánica (escalas de presión interna); además, el caudal se controla electrónicamente por medio de una válvula.
17) «Bomba de dirección eléctrica»: bomba que utiliza un sistema eléctrico sin fluido.
18) «Compresor de aire de base»: un compresor de aire convencional sin tecnología alguna de ahorro de combustible.
19) «Compresor de aire con sistema de ahorro de energía (ESS)»: un compresor que reduce el consumo de potencia durante la descarga, p. ej. cerrando el lado de la admisión; el ESS está controlado por la presión del aire del sistema.
20) «Embrague del compresor (viscoso)»: compresor que puede desembragarse en el que el embrague está controlado por la presión del sistema de aire (sin estrategia inteligente); puede registrar pérdidas menores durante el desembrague causadas por el embrague viscoso.
21) «Embrague del compresor (mecánico)»: compresor que puede desembragarse en el que el embrague está controlado por la presión del sistema de aire (sin estrategia inteligente).
22) «Sistema de gestión del aire con regeneración optimizada (AMS)»: unidad electrónica de tratamiento del aire que combina un secador de aire controlado electrónicamente para optimizar la regeneración del aire y el caudal de aire preferido en condiciones de freno motor (exige un embrague o ESS).
23) «Diodos emisores de luz (LED)»: dispositivos semiconductores que emiten luz visible cuando los atraviesa una corriente eléctrica.
24) «Sistema de aire acondicionado»: sistema consistente en un circuito refrigerante con un compresor e intercambiadores de calor destinado a enfriar el interior de la cabina de un camión o la carrocería de un autobús.
25) «Toma de fuerza (PTO)»: dispositivo instalado en una transmisión o en un motor al que puede conectarse un dispositivo con accionamiento auxiliar, por ejemplo una bomba hidráulica; habitualmente, una toma de fuerza es opcional.
26) «Mecanismo de accionamiento de la toma de fuerza»: dispositivo presente en una transmisión que permite la instalación de una PTO.
27) «Embrague de dientes»: embrague (maniobrable) en el que el par se transfiere principalmente mediante fuerzas perpendiculares entre dientes coincidentes. El embrague de dientes puede estar engranado o desengranado. Solo funciona en condiciones sin carga (p. ej. en los cambios de marcha de una transmisión manual).
28) «Sincronizador»: tipo de embrague de dientes en el que se utiliza un dispositivo de fricción para ecualizar las velocidades de las piezas giratorias que deben engranarse.
29) «Embrague multidisco»: embrague en el que se colocan en paralelo varios forros de fricción de manera que todas las parejas de fricción reciban la misma fuerza de presión. Los embragues multidisco son compactos y pueden ser engranados y desengranados en condiciones de carga. Se pueden concebir como embragues secos o húmedos.
30) «Rueda dentada desplazable»: una corona utilizada como elemento del cambio de marchas, en el que el cambio se realiza desplazando la corona sobre su árbol dentro o fuera del engrane de la rueda conjugada.
3. Determinación de los valores normalizados medios de potencia específicos de cada tecnología
3.1 Ventilador
En cuanto a la potencia del ventilador, se utilizarán los valores normalizados que se indican en el cuadro 1, dependiendo del perfil de finalidad y de la tecnología:
Cuadro 1
Demanda de potencia mecánica del ventilador
|
Grupo de accionamiento del ventilador |
Control del ventilador |
Consumo de potencia del ventilador [W] |
||||
|
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
||
|
Montado en el cigüeñal |
Embrague viscoso con control electrónico |
618 |
671 |
516 |
566 |
1 037 |
|
Embrague viscoso con control bimetálico |
818 |
871 |
676 |
766 |
1 277 |
|
|
Embrague discontinuo |
668 |
721 |
616 |
616 |
1 157 |
|
|
Embrague conectado/desconectado |
718 |
771 |
666 |
666 |
1 237 |
|
|
Movido por correa o movido por transmisión |
Embrague viscoso con control electrónico |
989 |
1 044 |
833 |
933 |
1 478 |
|
Embrague viscoso con control bimetálico |
1 189 |
1 244 |
993 |
1 133 |
1 718 |
|
|
Embrague discontinuo |
1 039 |
1 094 |
983 |
983 |
1 598 |
|
|
Embrague conectado/desconectado |
1 089 |
1 144 |
1 033 |
1 033 |
1 678 |
|
|
Accionamiento hidráulico |
Bomba de desplazamiento variable |
938 |
1 155 |
832 |
917 |
1 872 |
|
Bomba de desplazamiento constante |
1 200 |
1 400 |
1 000 |
1 100 |
2 300 |
|
|
Accionamiento eléctrico |
Electrónicamente |
700 |
800 |
600 |
600 |
1 400 |
Si una nueva tecnología dentro de un grupo de accionamiento del ventilador (p. ej. montado en el cigüeñal) no figura en la lista, se aplicarán los valores de potencia más elevados dentro de dicho grupo. Si una nueva tecnología no figura en ningún grupo se aplicarán los valores de la tecnología más desfavorable (bomba de desplazamiento constante de accionamiento hidráulico).
3.2 Sistema de dirección
En lo referente a la potencia de la bomba de dirección, se utilizarán los valores normalizados [W] que se indican en el cuadro 2, dependiendo de la aplicación en combinación con los factores de corrección:
Cuadro 2
Demanda de potencia mecánica de la bomba de dirección
|
Identificación de la configuración del vehículo |
|
Consumo de potencia de la dirección P [W] |
|||||||||||||||||
|
Número de ejes |
Configuración de los ejes |
Configuración del chasis |
Masa máxima en carga técnicamente admisible (toneladas) |
Clase del vehículo |
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
||||||||||
|
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
U+F |
B |
S |
|||||
|
2 |
4 × 2 |
Rígido + (tractocamión) |
7,5 t - 10 t |
1 |
|
|
|
240 |
20 |
20 |
220 |
20 |
30 |
|
|
|
|
|
|
|
|
Rígido + (tractocamión) |
> 10 t - 12 t |
2 |
340 |
30 |
0 |
290 |
30 |
20 |
260 |
20 |
30 |
|
|
|
|
|
|
|
|
|
Rígido + (tractocamión) |
> 12 t - 16 t |
3 |
|
|
|
310 |
30 |
30 |
280 |
30 |
40 |
|
|
|
|
|
|
|
|
|
Rígido |
> 16 t |
4 |
510 |
100 |
0 |
490 |
40 |
40 |
|
|
|
430 |
30 |
50 |
|
|
|
|
|
|
Tractocamión |
> 16 t |
5 |
600 |
120 |
0 |
540 |
90 |
40 |
480 |
80 |
60 |
|
|
|
|
|
|
|
|
4 × 4 |
Rígido |
7,5 t - 16 t |
6 |
— |
|||||||||||||||
|
|
Rígido |
> 16 t |
7 |
— |
|||||||||||||||
|
|
Tractocamión |
> 16 t |
8 |
— |
|||||||||||||||
|
3 |
6 × 2 / 2-4 |
Rígido |
Todas |
9 |
600 |
120 |
0 |
490 |
60 |
40 |
|
|
|
430 |
30 |
50 |
|
|
|
|
|
Tractocamión |
Todas |
10 |
450 |
120 |
0 |
440 |
90 |
40 |
|
|
|
|
|
|
|
|
|
|
|
6 × 4 |
Rígido |
Todas |
11 |
600 |
120 |
0 |
490 |
60 |
40 |
|
|
|
430 |
30 |
50 |
640 |
50 |
80 |
|
|
|
Tractocamión |
Todas |
12 |
450 |
120 |
0 |
440 |
90 |
40 |
|
|
|
|
|
|
640 |
50 |
80 |
|
|
6 × 6 |
Rígido |
Todas |
13 |
— |
|||||||||||||||
|
|
Tractocamión |
Todas |
14 |
||||||||||||||||
|
4 |
8 × 2 |
Rígido |
Todas |
15 |
— |
||||||||||||||
|
8 × 4 |
Rígido |
Todas |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
640 |
50 |
80 |
|
|
8 × 6 / 8 × 8 |
Rígido |
Todas |
17 |
— |
|||||||||||||||
donde:
|
U |
= |
Sin carga: bombeo de aceite sin demanda de presión del sistema de dirección |
|
F |
= |
Fricción: fricción en la bomba |
|
B |
= |
Inclinación: corrección de la dirección debida al peralte de la carretera o a viento lateral |
|
S |
= |
Dirección: demanda de potencia de la bomba de dirección debida a curvas y a maniobras |
Para tener en cuenta el efecto de diferentes tecnologías, se aplicarán los factores de escala dependiendo de la tecnología tal como se indica en los cuadros 3 y 4.
Cuadro 3
Factores de escala dependiendo de la tecnología
|
|
Factor cl dependiendo de la tecnología |
||
|
Tecnología |
c1,U + F |
c1,B |
c1,S |
|
Desplazamiento fijo |
1 |
1 |
1 |
|
Desplazamiento fijo con control electrónico |
0,95 |
1 |
1 |
|
Desplazamiento dual |
0,85 |
0,85 |
0,85 |
|
Desplazamiento variable, control mecánico |
0,75 |
0,75 |
0,75 |
|
Desplazamiento variable, control elecrónico |
0,6 |
0,6 |
0,6 |
|
Electrónica |
0 |
1,5/ηalt |
1/ηalt |
con eficiencia del alternador = const. = 0,7
Si una nueva tecnología no figura en la lista, se tendrá en cuenta en la herramienta de cálculo del consumo de energía la tecnología «desplazamiento fijo».
Cuadro 4
Factor de escala dependiendo del número de ejes de dirección
|
|
Factor c2 dependiendo del número de ejes de dirección |
||||||||||||||
|
Número de ejes de dirección |
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
||||||||||
|
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
c2,U+F |
c2,B |
c2,S |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
2 |
1 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
1,0 |
0,7 |
0,7 |
|
3 |
1 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
|
4 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
1,0 |
0,5 |
0,5 |
La demanda final de potencia se calculará por:
Si se utilizan diferentes tecnologías para ejes multidireccionales, se utilizarán los valores medios de los correspondientes factores c1.
La demanda final de potencia se calculará por:
Ptot = Σi(PU+F*media(c1,U+F)*(c2i,U+F)) + Σi(PB*media(c1,B)*(c2i,B)) + Σi(PS*media(c1,S)*(c2i,S))
donde:
|
Ptot |
= |
Demanda total de potencia [W] |
|
P |
= |
Demanda de potencia [W] |
|
c1 |
= |
Factor de corrección dependiendo de la tecnología |
|
c2 |
= |
Factor de corrección dependiendo del número de ejes de dirección |
|
U+F |
= |
Sin carga + fricción [-] |
|
B |
= |
Inclinación [-] |
|
S |
= |
Dirección [-] |
|
i |
= |
Número de ejes de dirección [-] |
3.3 Sistema eléctrico
Para la alimentación del sistema eléctrico, se utilizarán los valores normalizados [W] tal como se indica en el cuadro 5, dependiendo de la aplicación y la tecnología, en combinación con la eficiencia del alternador:
Cuadro 5
Demanda de energía eléctrica del sistema eléctrico
|
Tecnologías que influyen en el consumo de potencia |
Consumo de energía eléctrica [W] |
||||
|
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
|
|
Energía eléctrica de tecnología normal [W] |
1 200 |
1 000 |
1 000 |
1 000 |
1 000 |
|
Faros delanteros principales LED |
– 50 |
– 50 |
– 50 |
– 50 |
– 50 |
Para calcular la potencia mecánica, se aplicará un factor de eficiencia dependiente de la tecnología del alternador, como se indica en el cuadro 6.
Cuadro 6
Factor de eficiencia del alternador
|
Tecnologías del alternador (conversión de la potencia) Valores de eficiencia genérica para tecnologías específicas |
Eficiencia ηalt |
||||
|
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
|
|
Alternador estándar |
0,7 |
0,7 |
0,7 |
0,7 |
0,7 |
Si no figura en la lista la tecnología utilizada en el vehículo, se tendrá en cuenta la tecnología «alternador estándar» en la herramienta de cálculo del consumo de energía del vehículo.
La demanda final de potencia se calculará de la siguiente manera:

donde:
|
Ptot |
= |
Demanda total de potencia [W] |
|
Pel |
= |
Demanda de energía eléctrica [W] |
|
ηalt |
= |
Eficiencia del alternador [-] |
3.4 Sistema neumático
Respecto de los sistemas neumáticos que funcionan con sobrepresión, se utilizarán los valores normalizados de potencia [W], tal como se indica en el cuadro 7, dependiendo de la aplicación y la tecnología.
Cuadro 7
Demanda de potencia mecánica de los sistemas neumáticos (sobrepresión)
|
Volumen de suministro de aire |
Tecnología |
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
|
Pmean |
Pmean |
Pmean |
Pmean |
Pmean |
||
|
[W] |
[W] |
[W] |
[W] |
[W] |
||
|
Pequeñas cilind. ≤ 250 cm3 1 cil. 2 cil. |
Base de referencia |
1 400 |
1 300 |
1 200 |
1 200 |
1 300 |
|
+ ESS |
–500 |
– 500 |
– 400 |
– 400 |
– 500 |
|
|
+ embrague viscoso |
– 600 |
– 600 |
– 500 |
– 500 |
– 600 |
|
|
+ embrague mecánico |
– 800 |
– 700 |
– 550 |
– 550 |
– 700 |
|
|
+ AMS |
– 400 |
– 400 |
– 300 |
– 300 |
– 400 |
|
|
Medio 250 cm3 < cil. ≤ 500 cm3 1 cil. 2 cil. 1 fase |
Base de referencia |
1 600 |
1 400 |
1 350 |
1 350 |
1 500 |
|
+ ESS |
– 600 |
– 500 |
– 450 |
– 450 |
– 600 |
|
|
+ embrague viscoso |
– 750 |
– 600 |
– 550 |
– 550 |
– 750 |
|
|
+ embrague mecánico |
– 1 000 |
– 850 |
– 800 |
– 800 |
– 900 |
|
|
+ AMS |
– 400 |
– 200 |
– 200 |
– 200 |
– 400 |
|
|
Medio 250 cm3 < cil. ≤ 500 cm3 1 cil. 2 cil. 2 fases |
Base de referencia |
2 100 |
1 750 |
1 700 |
1 700 |
2 100 |
|
+ ESS |
– 1 000 |
– 700 |
– 700 |
– 700 |
– 1 100 |
|
|
+ embrague viscoso |
– 1 100 |
– 900 |
– 900 |
– 900 |
– 1 200 |
|
|
+ embrague mecánico |
– 1 400 |
– 1 100 |
– 1 100 |
– 1 100 |
– 1 300 |
|
|
+ AMS |
– 400 |
– 200 |
– 200 |
– 200 |
– 500 |
|
|
Grandes cil. > 500 cm3 1 cil. 2 cil. 1 fase / 2 fases |
Base de referencia |
4 300 |
3 600 |
3 500 |
3 500 |
4 100 |
|
+ ESS |
– 2 700 |
– 2 300 |
– 2 300 |
– 2 300 |
– 2 600 |
|
|
+ embrague viscoso |
– 3 000 |
– 2 500 |
– 2 500 |
– 2 500 |
– 2 900 |
|
|
+ embrague mecánico |
– 3 500 |
– 2 800 |
– 2 800 |
– 2 800 |
– 3 200 |
|
|
+ AMS |
– 500 |
– 300 |
– 200 |
– 200 |
– 500 |
Para sistemas neumáticos que funcionan en vacío (presión negativa) se utilizarán los valores normalizados de potencia [W], tal como se indica en el cuadro 8.
Cuadro 8
Demanda de potencia mecánica de los sistemas neumáticos (presión de vacío)
|
|
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
|
Pmean |
Pmean |
Pmean |
Pmean |
Pmean |
|
|
[W] |
[W] |
[W] |
[W] |
[W] |
|
|
Bomba de vacío |
190 |
160 |
130 |
130 |
130 |
Podrán tenerse en cuenta las tecnologías de ahorro de combustible, sustrayendo la correspondiente demanda de potencia de la demanda de potencia del compresor de referencia.
No se tendrán en cuenta las siguientes combinaciones de tecnologías:
|
a) |
ESS y embragues |
|
b) |
Embrague viscoso y embrague mecánico |
En caso de un compresor de dos fases, el volumen de la primera fase se utilizará para describir el tamaño del sistema de compresión del aire.
3.5 Sistema de aire acondicionado
Para los vehículos que tengan un sistema de aire acondicionado, se utilizarán los valores normalizados [W], tal como se indica en el cuadro 9, dependiendo de la aplicación.
Cuadro 9:
Demanda de potencia mecánica del sistema AC
|
Identificación de la configuración del vehículo |
|
Consumo de potencia del AC [W] |
|||||||
|
Número de ejes |
Configuración de los ejes |
Configuración del chasis |
Masa máxima en carga técnicamente admisible (toneladas) |
Clase del vehículo |
Largo recorrido |
Reparto regional |
Reparto urbano |
Servicio municipal |
Construcción |
|
2 |
4 × 2 |
Rígido + (tractocamión) |
7,5 t - 10 t |
1 |
|
150 |
150 |
|
|
|
|
Rígido + (tractocamión) |
> 10 t - 12 t |
2 |
200 |
200 |
150 |
|
|
|
|
|
Rígido + (tractocamión) |
> 12 t - 16 t |
3 |
|
200 |
150 |
|
|
|
|
|
Rígido |
> 16 t |
4 |
350 |
200 |
|
300 |
|
|
|
|
Tractocamión |
> 16 t |
5 |
350 |
200 |
|
|
|
|
|
4 × 4 |
Rígido |
7,5 t - 16 t |
6 |
— |
|||||
|
|
Rígido |
> 16 t |
7 |
— |
|||||
|
|
Tractocamión |
> 16 t |
8 |
— |
|||||
|
3 |
6 × 2 / 2-4 |
Rígido |
Todas |
9 |
350 |
200 |
|
300 |
|
|
|
Tractocamión |
Todas |
10 |
350 |
200 |
|
|
|
|
|
6 × 4 |
Rígido |
Todas |
11 |
350 |
200 |
|
300 |
200 |
|
|
|
Tractocamión |
Todas |
12 |
350 |
200 |
|
|
200 |
|
|
6 × 6 |
Rígido |
Todas |
13 |
— |
|||||
|
|
Tractocamión |
Todas |
14 |
||||||
|
4 |
8 × 2 |
Rígido |
Todas |
15 |
— |
||||
|
8 × 4 |
Rígido |
Todas |
16 |
|
|
|
|
200 |
|
|
8 × 6 / 8 × 8 |
Rígido |
Todas |
17 |
— |
|||||
3.6 Toma de fuerza de la transmisión (PTO)
Para los vehículos con toma de fuerza PTO y/o mecanismo de accionamiento de la toma de fuerza PTO instalado en la transmisión, el consumo de potencia se tendrá en cuenta por medio de valores normalizados determinados. Los valores normalizados correspondientes representan estas pérdidas de energía en modo de tracción normal cuando la PTO está desconectada/desengranada. Los consumos de energía relacionados con la aplicación cuando la PTO está engranada se añadirán por la herramienta de cálculo del consumo de energía del vehículo y no se describen a continuación.
Cuadro 10
Demanda de potencia mecánica de toma de fuerza desconectada/desengranada
|
Variantes de concepción relativas a las pérdidas de potencia (en comparación con una transmisión sin PTO y/o mecanismo de tracción PTO) |
|
|
|
|
Otras piezas afectadas por la pérdida de arrastre |
PTO incl. mecanismo de accionamiento |
únicamente mecanismo de accionamiento PTO |
|
|
Árboles / ruedas dentadas |
Otros elementos |
Pérdida de potencia [W] |
Pérdida de potencia [W] |
|
solo una corona engranada situada encima del nivel de aceite especificado (sin engrane adicional) |
— |
— |
0 |
|
solo el árbol de transmisión de la PTO |
embrague de dientes (incl. sincronizador) o corona desplazable |
50 |
50 |
|
solo el árbol de transmisión de la PTO |
embrague multidisco |
1 000 |
1 000 |
|
solo el árbol de transmisión de la PTO |
embrague multidisco y bomba de aceite |
2 000 |
2 000 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague de dientes (incl. sincronizador) o corona desplazable |
300 |
300 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague multidisco |
1 500 |
1 500 |
|
árbol de transmisión y/o hasta 2 coronas engranadas |
embrague multidisco y bomba de aceite |
3 000 |
3 000 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague de dientes (incl. sincronizador) o corona desplazable |
600 |
600 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague multidisco |
2 000 |
2 000 |
|
árbol de transmisión y/o más de 2 coronas engranadas |
embrague multidisco y bomba de aceite |
4 000 |
4 000 |
ANEXO X
PROCEDIMIENTO DE CERTIFICACIÓN DE LOS NEUMÁTICOS
1. Introducción
El presente anexo describe las disposiciones de certificación de los neumáticos en lo relativo a su coeficiente de resistencia a la rodadura. Para el cálculo de la resistencia del vehículo a la rodadura que ha de utilizarse como dato de entrada de la herramienta de simulación, el solicitante de la homologación del neumático declarará el coeficiente de resistencia de rodadura del neumático Cr aplicable a cada neumático suministrado a los fabricantes de equipo original y la correspondiente carga de ensayo del neumático FZTYRE.
2. Definiciones
A los efectos del presente anexo, además de las definiciones contempladas en los Reglamentos n.o 54 y n.o 117 de la CEPE, serán de aplicación las siguientes:
1) «Coeficiente de resistencia a la rodadura Cr»: relación entre la resistencia a la rodadura y la carga soportada por el neumático;
2) «Carga soportada por el neumático FZTYRE»: carga aplicada al neumático durante el ensayo de resistencia a la rodadura;
3) «Tipo de neumático»: gama de neumáticos que no difieren en características como:
|
a) |
nombre del fabricante; |
|
b) |
marca o marca registrada; |
|
c) |
clase de neumático [de conformidad con el Reglamento (CE) n.o 661/2009]; |
|
d) |
designación del tamaño de los neumáticos; |
|
e) |
estructura de los neumáticos (diagonal, radial); |
|
f) |
categoría de uso (neumático normal, neumático de nieve, neumático de uso especial) tal como se define en el Reglamento n.o 117 de la CEPE; |
|
g) |
categoría de velocidad (categorías); |
|
h) |
índice de capacidad de carga (índices); |
|
i) |
denominación comercial/nombre comercial; |
|
j) |
coeficiente declarado de resistencia del neumático a la rodadura. |
3. Requisitos generales
3.1. La fábrica de neumáticos estará certificada con arreglo a la norma ISO/TS 16949.
3.2. Coeficiente de resistencia a la rodadura del neumático
El coeficiente de resistencia a la rodadura del neumático es el valor medido y armonizado de conformidad con el Reglamento (CE) n.o 1222/2009, anexo I, parte A, expresado en N/kN y redondeado al primer decimal, de conformidad con la norma ISO 80000-1, anexo B, sección B.3, regla B (ejemplo 1).
3.3. Disposiciones de medición
El fabricante de neumáticos procederá al ensayo bien en un laboratorio de servicios técnicos, tal como se definen en el artículo 41 de la Directiva 2007/46/CE, que realice en sus propias instalaciones el ensayo al que se refiere el punto 3.2, o bien en las instalaciones del fabricante en el caso:
|
i) |
de la presencia y bajo la responsabilidad de un representante de un servicio técnico designado por una autoridad de homologación, o |
|
ii) |
de que el fabricante del neumático sea designado servicio técnico de categoría A de conformidad con la Directiva 2007/46/CE, artículo 41. |
3.4. Marcado y trazabilidad
3.4.1. El neumático será claramente identificable en lo relativo al certificado que lo avale respecto del correspondiente coeficiente de resistencia a la rodadura por medio de las marcas habituales en los neumáticos colocadas en el flanco del neumático, tal como se describe en el anexo 1 del presente anexo.
3.4.2. En caso de que no sea posible realizar la identificación única del coeficiente de resistencia a la rodadura con los marcados indicados en el punto 3.4.1, el fabricante del neumático colocará un identificador adicional en este. La identificación adicional constituirá un vínculo único entre el neumático y su coeficiente de resistencia a la rodadura. Podrá tener la forma de:
|
— |
un código de respuesta rápida (QR), |
|
— |
un código de barras, |
|
— |
una identificación por radiofrecuencia (RFID), |
|
— |
un marcado adicional, o bien de |
|
— |
otra herramienta que cumpla los requisitos establecidos en el punto 3.4.1. |
3.4.3. En caso de utilizar un identificador adicional, este deberá ser legible hasta el momento de la venta del vehículo.
3.4.4. De conformidad con el artículo 19, apartado 2, de la Directiva 2007/46/CE, no se exigirá marca de homologación de tipo para los neumáticos certificados con arreglo al presente Reglamento.
4. Conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas
4.1. Todo neumático certificado con arreglo al presente Reglamento será conforme con el valor de resistencia a la rodadura declarado, tal como se establece en el punto 3.2 del presente anexo;
4.2. Al objeto de verificar la conformidad de las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible certificadas, se tomarán aleatoriamente muestras de producción en serie y se someterán a ensayo con arreglo a las disposiciones del punto 3.2.
4.3. Frecuencia de los ensayos
4.3.1 La resistencia del neumático a la rodadura de al menos un neumático de un tipo específico destinado a la venta a los fabricantes de equipo original se someterá a ensayo cada 20 000 unidades de dicho tipo por año (p. ej. 2 verificaciones de conformidad al año del tipo cuyo volumen de ventas a los fabricantes de equipo original oscile entre 20 001 y 40 001 unidades).
4.3.2 En caso de que los suministros de un tipo de neumático específico destinado a la venta a los fabricantes de equipo original oscilen entre las 500 y las 20 000 unidades por año, se efectuará como mínimo una verificación de conformidad del tipo cada año.
4.3.3 En caso de que los suministros de un tipo específico de neumático para las ventas a los fabricantes de equipo original sean inferiores a 500 unidades, se efectuará como mínimo una verificación de conformidad cada dos años tal como se describe en el punto 4.4.
4.3.4 Si el volumen de neumáticos suministrado a los fabricantes de equipo original indicado en el punto 4.3.1 se alcanza en 31 días civiles, el número máximo de verificaciones de conformidad tal como se describe en el punto 4.3 se limitará a uno cada 31 días civiles.
4.3.5 El fabricante deberá justificar ante la autoridad de homologación (p. ej., mostrándole las cifras de ventas) el número de ensayos realizados.
4.4 Procedimiento de verificación
4.4.1 Se someterá a ensayo un único neumático de conformidad con el punto 3.2. Por defecto, la ecuación de armonización de la máquina será la que sea válida en la fecha del ensayo de verificación. El fabricante de neumáticos podrá solicitar la aplicación de la ecuación de armonización utilizada durante el ensayo de certificación y consignada en la ficha de características.
4.4.2 En caso de que el valor medido sea inferior o igual al valor declarado más 0,3 N/kN, el neumático se considerará conforme.
4.4.3. En caso de que el valor medido rebase el valor declarado en más de 0,3 N/kN, se someterán a ensayo otros tres neumáticos. Si el valor de la resistencia a la rodadura de al menos uno de los tres tipos rebasa el valor declarado en más de 0,4 N/kN, se aplicarán las disposiciones del artículo 23.
Apéndice 1
MODELO DE CERTIFICADO DE COMPONENTE, UNIDAD TÉCNICA INDEPENDIENTE O SISTEMA
Formato máximo: A4 (210 × 297 mm)
CERTIFICADO RELATIVO A LAS PROPIEDADES RELACIONADAS CON LAS EMISIONES DE CO2 Y EL CONSUMO DE COMBUSTIBLE DE UNA FAMILIA DE NEUMÁTICOS
|
Comunicación relativa a
|
Sello de la Administración
|
de un certificado relativo a las propiedades relacionadas con las emisiones de CO2 y el consumo de combustible de una familia de neumáticos de conformidad con el Reglamento (UE) 2017/2400 de la Comisión.
Número de certificación: …
Motivo de la extensión: …
|
1. |
Nombre y dirección del fabricante: … |
|
2. |
Si procede, nombre y dirección del representante del fabricante: … |
|
3. |
Marca/Marca registrada: … |
|
4. |
Descripción del tipo de neumático: …
|
|
5. |
Código(s) de identificación del neumático y tecnología(s) utilizada(s) para proporcionar el (los) código(s) de identificación, si procede:
|
|
6. |
Servicio técnico y, dado el caso, laboratorio de ensayo autorizado a efectos de homologación o comprobación de los ensayos de conformidad: |
|
7. |
Valores declarados:
|
|
8. |
Observaciones: |
|
9. |
Lugar: … |
|
10. |
Fecha: … |
|
11. |
Firma: … |
|
12. |
Se adjunta a la presente notificación: … |
(1) Táchese lo que no proceda
Apéndice 2
Ficha de información del coeficiente de resistencia a la rodadura del neumático
SECCIÓN I
0.1. Nombre y dirección del fabricante:
0.2 Marca (nombre comercial del fabricante)
0.3 Nombre y dirección del solicitante
0.4 Marca o denominación comercial
0.5 Clase de neumático [de conformidad con el Reglamento (CE) n.o 661/2006]
0.6 Designación del tamaño de los neumáticos
0.7 Estructura de los neumáticos (diagonal, radial)
0.8 Categoría de utilización: neumático de uso normal, neumático de nieve y neumático de uso especial
0.9 Categoría de velocidad (categorías)
0.10 Índice de capacidad de carga (índices)
0.11 Denominación comercial / nombre comercial
0.12 Coeficiente declarado de resistencia a la rodadura del neumático
0.13 Herramienta(s) para proporcionar el código adicional de identificación de resistencia a la rodadura (en su caso)
0.14 Nivel de resistencia a la rodadura del neumático [expresado en N/kN y redondeado al primer decimal, de conformidad con la norma ISO 80000-1, anexo B, sección B.3, regla B (ejemplo 1)] Cr, … [N/kN]
0.15 Carga FZTYRE: … [N]
0.16 Ecuación de armonización: …
SECCIÓN II
1. Autoridad de homologación o servicio técnico (o laboratorio acreditado):
2. N.o de acta de ensayo:
3. Observaciones (en su caso):
4. Fecha del ensayo:
5. Identificación de la máquina de ensayo y diámetro/superficie del tambor:
6. Información sobre los neumáticos sometidos a ensayo:
|
6.1. |
Designación del tamaño y descripción de servicio de los neumáticos: |
|
6.2. |
Marca/denominación comercial de los neumáticos: |
|
6.3. |
Presión de inflado de referencia: kPa |
7. Datos del ensayo:
|
7.1. |
Método de medición: |
|
7.2. |
Velocidad de ensayo: km/h |
|
7.3. |
Carga FZTYRE : N |
|
7.4. |
Presión de inflado de ensayo (inicial): kPa |
|
7.5. |
Distancia desde el eje del neumático a la superficie externa del tambor en condiciones estabilizadas, rL: m |
|
7.6. |
Anchura y material de la llanta de ensayo: |
|
7.7. |
Temperatura ambiente: oC |
|
7.8. |
Carga del ensayo con carga mínima (excepto para el método de deceleración): N |
8. Coeficiente de resistencia a la rodadura:
|
8.1 |
Valor inicial (o media en el caso de más de un valor): N/kN |
|
8.2. |
Temperatura corregida:… N/kN |
|
8.3. |
Con corrección de la temperatura y del diámetro del tambor: N/kN |
|
8.4. |
Con corrección y armonización de la temperatura y del diámetro del tambor con la red de laboratorios de la UE, Cr E : N/kN |
9. Fecha del ensayo:
Apéndice 3
Parámetros de entrada para la herramienta de cálculo del consumo de energía del vehículo
Introducción
El presente apéndice describe la lista de parámetros que debe proporcionar el fabricante de vehículos como información de entrada para la herramienta de simulación. En la plataforma específica de distribución electrónica están disponibles el esquema XML aplicable y algunos ejemplos de datos.
Definiciones
1)
2)
string … cadena, secuencia de caracteres en codificación ISO 8859-1
token … testigo, secuencia de caracteres en codificación ISO 8859-1, sin espacios en blanco delante ni detrás
date … fecha y hora UTC con el siguiente formato: AAAA-MM-DD T HH:MM:SS Z con letra cursiva para los caracteres fijos, por ejemplo «2002-05-30T09:30:10Z»
integer … entero, valor con un tipo de datos integral, sin ceros delante, por ejemplo «1800»
double, X … número decimal con exactamente X dígitos tras el signo decimal («,») y sin ceros delante, por ejemplo, para «double, 2»: «2345,67»; para «double, 4»: «45,6780»
3)
Conjunto de parámetros de entrada
Cuadro 1
Parámetros de entrada «Tyre»
|
Nombre del parámetro |
ID del parámetro |
Tipo |
Unidad |
Descripción/Referencia |
|
Manufacturer |
P230 |
token |
|
|
|
Model |
P231 |
token |
|
Nombre comercial del fabricante |
|
TechnicalReportId |
P232 |
token |
|
|
|
Date |
P233 |
date |
|
Fecha y hora de creación del hash del componente |
|
AppVersion |
P234 |
token |
|
Número de identificación de la versión de la herramienta de evaluación |
|
RRCDeclared |
P046 |
double, 4 |
[N/N] |
|
|
FzISO |
P047 |
integer |
[N] |
|
|
Dimension |
P108 |
string |
[-] |
Valores permitidos: «9.00 R20», «9 R22.5», «9.5 R17.5», «10 R17.5», «10 R22.5», «10.00 R20», «11 R22.5», «11.00 R20», «11.00 R22.5», «12 R22.5», «12.00 R20», «12.00 R24», «12.5 R20», «13 R22.5», «14.00 R20», «14.5 R20», «16.00 R20», «205/75 R17.5», «215/75 R17.5», «225/70 R17.5», «225/75 R17.5», «235/75 R17.5», «245/70 R17.5», «245/70 R19.5», «255/70 R22.5», «265/70 R17.5», «265/70 R19.5», «275/70 R22.5», «275/80 R22.5», «285/60 R22.5», «285/70 R19.5», «295/55 R22.5», «295/60 R22.5», «295/80 R22.5», «305/60 R22.5», «305/70 R19.5», «305/70 R22.5», «305/75 R24.5», «315/45 R22.5», «315/60 R22.5», «315/70 R22.5», «315/80 R22.5», «325/95 R24», «335/80 R20», «355/50 R22.5», «365/70 R22.5», «365/80 R20», «365/85 R20», «375/45 R22.5», «375/50 R22.5», «375/90 R22.5», «385/55 R22.5», «385/65 R22.5», «395/85 R20», «425/65 R22.5», «495/45 R22.5», «525/65 R20.5» |
Apéndice 4
Numeración
1. Numeración:
2.1 El número de certificación de los neumáticos deberá comprender lo siguiente:
eX*YYY/YYYY*ZZZ/ZZZZ*T*0000*00
|
Sección 1 |
Sección 2 |
Sección 3 |
Letra adicional de la sección 3 |
Sección 4 |
Sección 5 |
|
Indicación del país que expide el certificado |
Acto relativo a la certificación respecto del CO2 (.../2017) |
Último acto modificativo (zzz/zzzz) |
T = Neumático |
Número de certificación de base 0000 |
Extensión 00 |
ANEXO XI
MODIFICACIONES DE LA DIRECTIVA 2007/46/CE
|
1) |
En el anexo I, se inserta el siguiente punto 3.5.7: 3.5.7. Certificación relativa a las emisiones y al consumo de combustible [para vehículos pesados, tal como se especifica en el artículo 6 del Reglamento (UE) 2017/2400 de la Comisión]. 3.5.7.1 Número de licencia de la herramienta de simulación:» |
|
2) |
En el anexo III, parte I, sección A (categorías M y N), se insertan los siguientes puntos 3.5.7 y 3.5.7.1: 3.5.7. Certificación relativa a las emisiones y al consumo de combustible [para vehículos pesados, tal como se especifica en el artículo 6 del Reglamento (UE) 2017/2400 de la Comisión]. 3.5.7.1 Número de licencia de la herramienta de simulación:» |
|
3) |
En el anexo IV, la parte I queda modificada como sigue:
|
|
4) |
El anexo IX queda modificado como sigue:
|
|
5) |
En el anexo XV, punto 2, se inserta la siguiente fila:
|



















 [Nm]
[Nm] [-]
[-] [-]
[-] [-]
[-] [-]
[-] [-]
[-]