

EUR-Lex Access to European Union law
This document is an excerpt from the EUR-Lex website
Document 32016R0646
Commission Regulation (EU) 2016/646 of 20 April 2016 amending Regulation (EC) No 692/2008 as regards emissions from light passenger and commercial vehicles (Euro 6) (Text with EEA relevance)
Verordnung (EU) 2016/646 der Kommission vom 20. April 2016 zur Änderung der Verordnung (EG) Nr. 692/2008 hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 6) (Text von Bedeutung für den EWR)
Verordnung (EU) 2016/646 der Kommission vom 20. April 2016 zur Änderung der Verordnung (EG) Nr. 692/2008 hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 6) (Text von Bedeutung für den EWR)
C/2016/1792
OJ L 109, 26.4.2016, p. 1–22
(BG, ES, CS, DA, DE, ET, EL, EN, FR, HR, IT, LV, LT, HU, MT, NL, PL, PT, RO, SK, SL, FI, SV)
 No longer in force, Date of end of validity: 31/12/2021; Stillschweigend aufgehoben durch 32017R1151
No longer in force, Date of end of validity: 31/12/2021; Stillschweigend aufgehoben durch 32017R1151
|
26.4.2016 |
DE |
Amtsblatt der Europäischen Union |
L 109/1 |
VERORDNUNG (EU) 2016/646 DER KOMMISSION
vom 20. April 2016
zur Änderung der Verordnung (EG) Nr. 692/2008 hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 6)
(Text von Bedeutung für den EWR)
DIE EUROPÄISCHE KOMMISSION —
gestützt auf den Vertrag über die Arbeitsweise der Europäischen Union,
gestützt auf die Verordnung (EG) Nr. 715/2007 des Europäischen Parlaments und des Rates vom 20. Juni 2007 über die Typgenehmigung von Kraftfahrzeugen hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 5 und Euro 6) und über den Zugang zu Reparatur- und Wartungsinformationen für Fahrzeuge (1), insbesondere auf Artikel 5 Absatz 3,
in Erwägung nachstehender Gründe:
|
(1) |
Die Verordnung (EG) Nr. 715/2007 ist einer der Einzelrechtsakte für die Zwecke des gemeinschaftlichen Typgenehmigungsverfahrens gemäß der Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates (2). |
|
(2) |
Die Verordnung (EG) Nr. 715/2007 schreibt für neue leichte Nutzfahrzeuge die Einhaltung bestimmter Emissionsgrenzwerte sowie zusätzliche Anforderungen für den Zugang zu Informationen vor. Die zur Durchführung dieser Verordnung erforderlichen speziellen technischen Vorschriften wurden von der Kommission mit der Verordnung (EG) Nr. 692/2008 (3) erlassen. |
|
(3) |
Die Kommission hat hierzu auf der Grundlage eigener Forschung und externer Informationen die Verfahren, Prüfungen und Anforderungen für die Typgenehmigung gemäß der Verordnung (EG) Nr. 692/2008 eingehend analysiert und ist zu dem Schluss gekommen, dass die in der Betriebspraxis mit Fahrzeugen des Typs Euro 5/6 tatsächlich entstehenden Emissionen, insbesondere die NOx-Emissionen von Dieselfahrzeugen, die im vorgeschriebenen Neuen Europäischen Fahrzyklus (NEFZ) gemessenen Emissionen erheblich überschreiten. |
|
(4) |
Durch die Einführung und anschließende Überarbeitung von Euro-Normen wurden die Emissionsanforderungen für die Typgenehmigung für Kraftfahrzeuge nach und nach erheblich verschärft. Zwar wurden für Fahrzeuge im Allgemeinen bei den limitierten Schadstoffen durchweg erhebliche Emissionsverminderungen erreicht, jedoch nicht bei den NOx-Emissionen aus Dieselmotoren (insbesondere von leichten Nutzfahrzeugen). Daher sind Maßnahmen nötig, um diesen Missstand zu beenden. |
|
(5) |
„Abschalteinrichtungen“ im Sinne von Artikel 3 Absatz 10 der Verordnung (EG) Nr. 715/2007 zur Verringerung der Emissionsminderungsleistung sind verboten. Die jüngsten Ereignisse haben deutlich gemacht, dass die Durchsetzung von Rechtsvorschriften in dieser Hinsicht verstärkt werden muss. Daher ist es angemessen, eine bessere Überwachung der vom Hersteller bei der Typgenehmigung angewandten Emissionsminderungsstrategie zu verlangen, gemäß den Grundsätzen, die nach der Verordnung (EG) Nr. 595/2009 und ihren Durchführungsbestimmungen bereits für schwere Nutzfahrzeuge gelten (Euro 6). |
|
(6) |
Maßnahmen zur Verringerung der NOx-Emissionen von Dieselfahrzeugen dürften auch zur Abnahme der gegenwärtig anhaltend hohen Konzentrationen von NO2 in der Umgebungsluft beitragen, die eine erhebliche Gefährdung der menschlichen Gesundheit darstellen. |
|
(7) |
Die Kommission hat im Januar 2011 eine Arbeitsgruppe eingerichtet, in der alle Interessenträger an der Entwicklung eines Prüfverfahrens zur Messung der Emissionen im praktischen Fahrbetrieb (real driving emissions — RDE) mitwirken, das ein realistischeres Bild von den im Fahrbetrieb auf der Straße gemessenen Emissionen vermittelt. Dazu wurde nach ausführlichen Fachdiskussionen der in der Verordnung (EG) Nr. 715/2007 angeregte Weg beschritten, nämlich der Einsatz portabler Emissionsmesssysteme (PEMS) sowie das Regulierungskonzept verbindlicher Höchstwerte (NTE-Grenzwerte). |
|
(8) |
Im Einvernehmen mit den Akteuren des CARS-2020-Prozesses (4) sollten die RDE-Prüfverfahren in zwei Stufen eingeführt werden: Während eines ersten Übergangszeitraums sollten die Prüfverfahren lediglich zu Überwachungszwecken eingesetzt werden, anschließend jedoch in Verbindung mit verbindlichen quantitativen RDE-Anforderungen für alle neuen Typgenehmigungen und neuen Fahrzeuge. |
|
(9) |
Die RDE-Prüfverfahren wurden mit der Verordnung (EU) 2016/427 der Kommission (5) eingeführt. Nun müssen quantitative RDE-Anforderungen erlassen werden, um die Auspuffemissionen unter allen normalen Betriebsbedingungen auf die Grenzwerte der Verordnung (EG) Nr. 715/2007 zu begrenzen. Dabei sollten statistische und technische Ungenauigkeiten der Messverfahren berücksichtigt werden. |
|
(10) |
Damit sich die Hersteller allmählich an die RDE-Vorschriften anpassen können, sollten die endgültigen quantitativen RDE-Anforderungen in zwei aufeinanderfolgenden Schritten eingeführt werden. In einem ersten Schritt, der ab vier Jahren nach den verbindlichen Daten für die verbindliche Anwendung von Euro 6 gelten sollte, sollte ein Übereinstimmungsfaktor von 2,1 gelten. Der zweite Schritt sollte ein Jahr und vier Monate nach dem ersten Schritt folgen; dann sollte die vollständige Einhaltung des Emissionsgrenzwertes für NOx von 80 mg/km gemäß der Verordnung (EG) Nr. 715/2007 zuzüglich einer Marge zur Berücksichtigung der zusätzlichen Messunsicherheiten beim Einsatz von portablen Emissionsmesssystemen (PEMS) gelten. |
|
(11) |
Zwar ist es wichtig, dass mit dem RDE-Prüfverfahren möglichst alle Fahrsituationen abgedeckt werden, doch sollte vermieden werden, dass die geprüften Fahrzeuge auf verzerrte Weise gefahren werden, d. h. mit der Absicht, das Bestehen oder Durchfallen des Fahrzeugs bei der Prüfung nicht aufgrund seiner technischen Eigenschaften, sondern aufgrund extremer Fahrmuster zu bewirken. Deshalb werden zusätzliche Randbedingungen für die RDE-Prüfung eingeführt, um auf solche Situationen einzugehen. |
|
(12) |
Es liegt in der Natur der Sache, dass während einzelner PEMS-Fahrten aufgetretene Fahrbedingungen möglicherweise nicht vollständig den „normalen Betriebsbedingungen eines Fahrzeugs“ entsprechen. Die Strenge der Emissionsminderung kann daher bei solchen Fahrten variieren. Infolgedessen, und zur Berücksichtigung der statistischen und technischen Ungewissheiten der Messverfahren, könnte in der Zukunft in Erwägung gezogen werden, in den NTE-Emissionsgrenzwerten einzelner PEMS-Fahrten die Merkmale dieser Fahrten zu berücksichtigen, die anhand bestimmter messbarer Parameter, z. B. im Zusammenhang mit Fahrdynamik und Arbeitslast beschrieben werden. Wenn dieser Grundsatz angewandt wird, sollte es nicht zu einer Schwächung der ökologischen Auswirkungen und der Wirksamkeit der RDE-Prüfverfahren kommen, was anhand einer von Fachleuten überprüften wissenschaftlichen Studie nachgewiesen werden sollte. Außerdem sollten für die Beurteilung der Wirksamkeit der emissionsmindernden Einrichtung während einer PEMS-Fahrt nur Parameter, die durch objektive wissenschaftliche Gründe gerechtfertigt sind und nicht nur aus Gründen der Kalibrierung des Motors oder der emissionsmindernden Einrichtungen oder Systeme, berücksichtigt werden. |
|
(13) |
Im Hinblick auf die notwendige Verringerung der NOx-Emissionen in den Städten sollte dringend geprüft werden, ob die relative Gewichtung der innerorts, außerorts und auf der Autobahn gefahrenen Anteile der RDE-Prüfung so geändert werden kann, dass in der Praxis ein niedriger Konformitätsfaktor sichergestellt wird; dies schafft eine weitere Grenzbedingung für die Fahrdynamik im dritten RDE-Paket, oberhalb dessen die erweiterten Bedingungen ab den Fristen für die Einführung der Stufe 1 gelten. |
|
(14) |
Die Kommission wird die Bestimmungen des RDE-Prüfverfahrens beobachten und diese Bestimmungen anpassen, um neue Fahrzeugtechnologien zu berücksichtigen und um ihre Wirksamkeit zu gewährleisten. Die Kommission wird außerdem die angemessene Höhe des endgültigen Übereinstimmungsfaktors jährlich mit Blick auf den technischen Fortschritt prüfen. Sie wird insbesondere die zwei alternativen Methoden für die Bewertung der PEMS-Emissionsdaten gemäß den Anlagen 5 und 6 zu Anhang IIIA der Verordnung (EG) Nr. 692/2008 im Hinblick auf die Entwicklung eines einheitlichen Verfahrens überprüfen. |
|
(15) |
Es ist deshalb angebracht, die Verordnung (EG) Nr. 692/2008 entsprechend zu ändern. |
|
(16) |
Die Maßnahmen dieser Verordnung stehen im Einklang mit der Stellungnahme des Technischen Ausschusses „Kraftfahrzeuge“ — |
HAT FOLGENDE VERORDNUNG ERLASSEN:
Artikel 1
Die Verordnung (EG) Nr. 692/2008 wird wie folgt geändert:
|
1. |
In Artikel 2 werden die folgenden Nummern 43 und 44 angefügt:
|
|
2. |
Artikel 3 Absatz 10 dritter Unterabsatz erhält folgende Fassung: „Bis zu drei Jahre nach den in Artikel 10 Absatz 4 und vier Jahre nach den in Artikel 10 Absatz 5 der Verordnung (EG) Nr. 715/2007 genannten Daten gelten folgende Bestimmungen:“; |
|
3. |
Artikel 3 Absatz 10 Buchstabe a erhält folgende Fassung: „Die Vorschriften von Nummer 2.1 des Anhangs IIIA finden keine Anwendung.“ |
|
4. |
In Artikel 5 werden die folgenden Absätze 11 und 12 eingefügt:
|
|
5. |
Anlage 6 zu Anhang I wird entsprechend Anhang I dieser Verordnung geändert. |
|
6. |
Anhang IIIA wird entsprechend Anhang II dieser Verordnung geändert. |
Artikel 2
Diese Verordnung tritt am zwanzigsten Tag nach ihrer Veröffentlichung im Amtsblatt der Europäischen Union in Kraft.
Diese Verordnung ist in allen ihren Teilen verbindlich und gilt unmittelbar in jedem Mitgliedstaat.
Brüssel, den 20. April 2016
Für die Kommission
Der Präsident
Jean-Claude JUNCKER
(1) ABl. L 171 vom 29.6.2007, S. 1.
(2) Richtlinie 2007/46/EG des Europäischen Parlaments und des Rates vom 5. September 2007 zur Schaffung eines Rahmens für die Genehmigung von Kraftfahrzeugen und Kraftfahrzeuganhängern sowie von Systemen, Bauteilen und selbständigen technischen Einheiten für diese Fahrzeuge (Rahmenrichtlinie) (ABl. L 263 vom 9.10.2007, S. 1).
(3) Verordnung (EG) Nr. 692/2008 der Kommission vom 18. Juli 2008 zur Durchführung und Änderung der Verordnung (EG) Nr. 715/2007 des Europäischen Parlaments und des Rates über die Typgenehmigung von Kraftfahrzeugen hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 5 und Euro 6) und über den Zugang zu Reparatur- und Wartungsinformationen für Fahrzeuge (ABl. L 199 vom 28.7.2008, S. 1).
(4) Mitteilung der Kommission an das Europäische Parlament, den Rat, den Europäischen Wirtschafts- und Sozialausschuss und den Ausschuss der Regionen CARS 2020: Ein Aktionsplan für eine wettbewerbsfähige und nachhaltige Automobilindustrie in Europa (COM(2012) 636 final).
(5) Verordnung (EU) 2016/427 der Kommission vom 10. März 2016 zur Änderung der Verordnung (EG) Nr. 692/2008 hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (ABl. L 82 vom 31.3.2016, S. 1).
ANHANG I
In Anhang I Anlage 6 der Verordnung (EG) Nr. 692/2008 wird Tabelle 1 wie folgt geändert:
|
(1) |
Die Zeilen ZD, ZE und ZF erhalten folgende Fassung:
|
|
(2) |
Unter der Zeile ZF werden die folgenden Zeilen eingefügt:
|
|
(3) |
in der Erläuterung zur Tabelle werden nach dem Absatz zur Emissionsnorm „Euro 6b“ folgende Absätze angefügt: „Emissionsnorm ‚Euro 6c‘= die vollständigen Emissionsanforderungen der Emissionsnorm ‚Euro 6‘, jedoch ohne die quantitativen RDE-Anforderungen, d. h. die Emissionsnorm ‚Euro 6b‘, endgültige Partikelzahlnormen für PI-Fahrzeuge, die Verwendung von E10- und B7-Bezugskraftstoff (falls zutreffend) anhand des vorgeschriebenen Laborprüfzyklus und die RDE-Prüfung lediglich zu Überwachungszwecken (keine Anwendung von NTE-Emissionsgrenzwerten); Emissionsnorm ‚Euro 6d TEMP‘= die vollständigen Emissionsanforderungen der Emissionsnorm ‚Euro 6‘, d. h. die Emissionsnorm ‚Euro 6b‘, endgültige Partikelzahlnormen für PI-Fahrzeuge, die Verwendung von E10- und B7-Bezugskraftstoff (falls zutreffend) anhand des vorgeschriebenen Laborprüfzyklus und die RDE-Prüfung mit vorläufigen Übereinstimmungsfaktoren;“ |
|
(4) |
in der Erläuterung zur Tabelle erhält der mit „Emissionsnorm Euro 6c“ beginnende Absatz folgende Fassung: „Emissionsnorm ‚Euro 6d‘= die vollständigen Emissionsanforderungen der Emissionsnorm ‚Euro 6‘, d. h. die Emissionsnorm ‚Euro 6b‘, endgültige Partikelzahlnormen für PI-Fahrzeuge, die Verwendung von E10- und B7-Bezugskraftstoff (falls zutreffend) anhand des vorgeschriebenen Laborprüfzyklus und die RDE-Prüfung mit endgültigen Übereinstimmungsfaktoren;“. |
ANHANG II
Anhang IIIA der Verordnung (EG) Nr. 692/2008 wird wie folgt geändert:
|
(1) |
Nummer 2.1 erhält folgende Fassung: „2.1. Verbindliche Emissionsgrenzwerte (NTE) Während der gesamten normalen Lebensdauer eines nach der Verordnung (EG) Nr. 715/2007 genehmigten Fahrzeugtyps dürfen dessen gemäß diesem Anhang bestimmte Emissionen bei keiner gemäß diesem Anhang durchgeführten RDE-Prüfung folgende verbindliche Grenzwerte (NTE-Werte) überschreiten: NTEpollutant = CFpollutant × TF(p1,…, pn) × EURO-6, dabei ist ‚Euro 6‘ der nach Anhang I Tabelle 2 der Verordnung (EG) Nr. 715/2007 für Euro 6 geltende Emissionsgrenzwert.“ |
|
(2) |
Die folgenden Nummern 2.1.1, 2.1.2 und 2.1.3 werden eingefügt: „2.1.1. Endgültige Übereinstimmungsfaktoren Der Übereinstimmungsfaktor CFpollutant für den jeweiligen Schadstoff wird wie folgt festgelegt:
‚Toleranz‘ : ein Parameter, welcher die durch die PEMS-Ausrüstung hinzugekommenen zusätzlichen Messunsicherheiten berücksichtigt, die jährlich überprüft werden und nach einer Verbesserung der Qualität des PEMS-Verfahrens oder technischem Fortschritt zu revidieren sind. 2.1.2. Vorläufige Übereinstimmungsfaktoren Abweichend von den Bestimmungen von Nummer 2.1.1 können auf Antrag des Herstellers bis zu fünf Jahre und vier Monate nach den in Artikel 10 Absätze 4 und 5 der Verordnung (EG) Nr. 715/2007 angegebenen Daten folgende vorläufige Übereinstimmungsfaktoren angewandt werden:
Die Anwendung vorläufiger Übereinstimmungsfaktoren ist in der Übereinstimmungsbescheinigung des Fahrzeugs zu vermerken. 2.1.3. Übertragungsfunktionen Die Übertragungsfunktion TF(p1,…, pn) gemäß Nummer 2.1 erhält für alle Parameter pi (i = 1,…,n) den Wert 1. Wird die Übertragungsfunktion TF(p1,…, pn) geändert, so muss dies auf eine Weise erfolgen, die sich nicht nachteilig auf die Umwelt und auf die Wirksamkeit der RDE-Prüfverfahren auswirkt. Hierbei ist insbesondere folgende Bedingung einzuhalten: ∫ TF (p1,…, pn) * Q (p1,…, pn) dp = ∫ Q (p1,…, pn) dp Dabei gilt:
|
|
(3) |
es wird folgende Nummer 3.1.0 eingefügt:
|
|
(4) |
Nummer 5.3 wird gestrichen; |
|
(5) |
Nummer 5.4 erhält folgende Fassung: „5.4. Dynamische Bedingungen Die dynamischen Bedingungen umfassen den Einfluss der Straßenneigung, des Gegenwindes, der Fahrdynamik (Beschleunigungen, Verzögerungen) sowie von Nebenverbrauchern auf Energieverbrauch und Emissionen des Prüffahrzeugs. Die Nachprüfung der Normalität der dynamischen Bedingungen erfolgt nach Abschluss der Prüfung anhand der aufgezeichneten PEMS-Daten. Diese Nachprüfung ist in 2 Schritten durchzuführen:
|
|
(6) |
Nummer 6.8 erhält folgende Fassung:
|
|
(7) |
unter Nummer 6.11 wird folgender Satz angefügt: „Außerdem muss die proportionale kumulierte positive Höhendifferenz weniger als 1 200 m/100 km betragen und gemäß Anlage 7b ermittelt werden.“; |
|
(8) |
Nummer 9.5 erhält folgende Fassung:
|
|
(9) |
Anlage 1 wird wie folgt geändert:
|
|
(10) |
in Anlage 2 erhält die Fußnote 2 zur Tabelle 4 in Nummer 8 folgende Fassung:
|
|
(11) |
in Anlage 6 Nummer 2 wird die folgende Begriffsbestimmung gestrichen:
|
 , [m/s
, [m/s|
(12) |
in Anlage 6 Nummer 2 werden folgende Begriffsbestimmungen eingefügt:
|

|
(13) |
in Anlage 6 Nummer 3.1 erhält der erste Absatz folgende Fassung: „Die tatsächliche Radleistung Pr,i ist die Gesamtleistung zur Überwindung des Luftwiderstands, des Rollwiderstands, der Straßenneigungen, der Längsträgheit des Fahrzeugs und der Rotationsträgheit der Räder.“ |
|
(14) |
in Anlage 6 erhält Nummer 3.2 folgende Fassung: „3.2 Einteilung der gleitenden Mittelwerte in Fahrten innerorts, außerorts und auf der Autobahn Die Normleistungshäufigkeiten sind für den Stadtverkehr und die gesamte Fahrt festgelegt (siehe Nummer 3.4), und die Emissionen sind gesondert für die gesamte Fahrt und für den Teil ‚Stadt‘ auszuwerten. Die nach Nummer 3.3 berechneten gleitenden 3-Sekunden-Durchschnitte werden daher, wie in Tabelle 1-1 dargestellt, zu einem späteren Zeitpunkt gemäß dem Geschwindigkeitssignal (vi) aus der tatsächlich gefahrenen Sekunde i innerstädtischen und außerstädtischen Fahrbedingungen zugeordnet. Tabelle 1-1: Geschwindigkeitsbereiche zur Zuordnung von Prüfdaten zu den Bedingungen für Fahrten innerorts, außerorts und auf der Autobahn im Zusammenhang mit der Methode der Einstufung in Leistungsklassen
|
|
(15) |
in Anlage 6 erhält Nummer 3.9 folgende Fassung: „3.9 Berechnung des gewichteten entfernungsabhängigen Emissionswerts Die zeitabhängigen gewichteten Durchschnitte der Emissionen in der Prüfung werden einmal für den Stadt-Datensatz und einmal für den gesamten Datensatz wie folgt in entfernungsabhängige Emissionen umgewandelt:
Mit diesen Formeln werden die gewichteten Durchschnitte für die folgenden Schadstoffe für die gesamte Fahrt und für den Teil ‚Stadt‘ berechnet:
|


|
(16) |
folgende Anlagen 7a und 7b werden eingefügt: „Anlage 7a Überprüfung der gesamten Fahrtdynamik 1. EINLEITUNG In dieser Anlage werden die Verfahren zur Überprüfung der gesamten Fahrtdynamik beschrieben, mit denen ermittelt wird, ob insgesamt bei der Fahrt innerorts, außerorts und auf Autobahnen die Dynamik zu groß oder zu gering ist. 2. ZEICHEN
Index (i) bezieht sich auf den Zeitschritt Index (j) bezieht sich auf den Zeitschritt von Datensätzen zur positiven Beschleunigung Index (k) bezieht sich auf die Kategorie (t = insgesamt (total), u = innerorts (urban), r = außerorts (rural), m = Autobahn (motorway)
3. FAHRTINDIKATOREN 3.1. Berechnungen 3.1.1. Vorverarbeitung der Daten Dynamische Parameter wie Beschleunigung, v · apos oder RPA werden mittels eines Geschwindigkeitssignals mit einer Genauigkeit von 0,1 % über 3 km/h und einer Abtastfrequenz von 1 Hz ermittelt. Diese Genauigkeitsanforderung wird in der Regel durch (Dreh-)geschwindigkeitssignale des Rades erfüllt. Die Geschwindigkeitskurve ist auf fehlerhafte oder unplausible Abschnitte zu prüfen. Die Fahrzeuggeschwindigkeitskurve solcher Abschnitte ist durch Schritte, Sprünge, terrassenförmige Kurven oder fehlende Werte gekennzeichnet. Kurze fehlerhafte Abschnitte sind zu korrigieren, beispielsweise durch Interpolation von Daten oder Vergleich mit einem sekundären Geschwindigkeitssignal. Wahlweise können kurze Fahrten mit fehlerhaften Abschnitten von der anschließenden Datenanalyse ausgeschlossen werden. In einem zweiten Schritt werden die Werte der Beschleunigung in aufsteigender Reihenfolge geordnet, um die Beschleunigungsauflösung ares = zu ermitteln (Mindestbeschleunigungswert > 0). Wenn ares ≤ 0,01 m/s 2, ist die Messung der Fahrzeuggeschwindigkeit ausreichend genau. Wenn 0,01 < ares ≤ rmax m/s2, dann Glättung durch Verwendung eines T4253-Hanning-Filters. Wenn ares > rmax m/s2, ist die Fahrt ungültig. Der T4253-Hanning-Filter nimmt die folgenden Berechnungen vor: Der Glätter beginnt mit einem gleitenden Median von 4, der um einen gleitenden Median von 2 herum zentriert ist. Danach werden die Werte durch die Verwendung eines gleitenden Medians von 5 und eines gleitenden Medians von 3 sowie eines Hanning-Filters erneut geglättet (gleitende gewichtete Durchschnittswerte). Die Rückstände werden berechnet, indem die geglättete Serie von der ursprünglichen Serie abgezogen wird. Das gesamte Verfahren wird dann mit den errechneten Rückständen wiederholt. Schließlich werden die geglätteten Rückstände errechnet, indem die bei der ersten Anwendung des Verfahrens erhaltenen geglätteten Werte abgezogen werden. Die korrekte Geschwindigkeitskurve dient als Ausgangspunkt für weitere Berechnungen und das Binning gemäß Absatz 3.1.2. 3.1.2. Berechnung von Strecke, Beschleunigung und v · a Die folgenden Berechnungen sind über die gesamte zeitbasierte Geschwindigkeitskurve (Auflösung von 1 Hz) von Sekunde 1 bis Sekunde tt (letzte Sekunde) vorzunehmen. Die Vergrößerung der Strecke pro Datensatz ist wie folgt zu berechnen: di = vi /3,6, i = 1 bis Nt Dabei gilt:
Die Beschleunigung ist wie folgt zu berechnen: ai = (v i + 1 – v i – 1)/(2 · 3,6), i = 1 bis Nt Dabei gilt: ai ist die Beschleunigung im Zeitschritt i [m/s2] Für i = 1: vi – 1 = 0, für i = Nt : vi + 1 = 0. Das Produkt der Fahrzeuggeschwindigkeit pro Beschleunigung ist wie folgt zu berechnen: (v · a)i = vi · ai /3,6, i = 1 bis Nt Dabei gilt: (v · a)i ist das Produkt der tatsächlichen Fahrzeuggeschwindigkeit pro Beschleunigung im Zeitschritt i [m2/s3 oder W/kg] 3.1.3. Binning der Ergebnisse Nach der Berechnung von ai und (v · a)i sind die Werte vi , di , ai und (v · a)i in aufsteigender Reihenfolge der Fahrzeuggeschwindigkeit zu ordnen. Alle Datensätze mit vi ≤ 60 km/h gehören zum Intervall ‚Geschwindigkeit innerorts‘, alle Datensätze mit 60 km/h < vi ≤ 90 km/h gehören zum Intervall ‚Geschwindigkeit außerorts‘ und alle Datensätze mit vi > 90 km/h gehören zum Intervall ‚Geschwindigkeit auf der Autobahn‘. Die Anzahl der Datensätze mit ai > 0,1 m/s2 muss in jedem Geschwindigkeitsintervall größer oder gleich 150 sein. Für jedes Geschwindigkeitsintervall muss die durchschnittliche Fahrzeuggeschwindigkeit
Dabei gilt: Nk ist die Gesamtzahl der Stichproben für die innerorts, außerorts und auf Autobahnen gefahrenen Anteile 3.1.4. Berechnung von v · apos_[95] pro Geschwindigkeitsintervall Das 95-Perzentil der Werte von v · apos ist wie folgt zu berechnen: Die Werte (v · a) i,k innerhalb jedes Geschwindigkeitsintervalls sind für alle Datensätze mit ai,k ≥ 0,1 m/s2 in aufsteigender Reihenfolge zu ordnen und die Gesamtzahl dieser Stichproben Mk ist zu ermitteln. Dann werden die Perzentilwerte den Werten (v · apos ) j,k mit ai,k ≥ 0,1 m/s2 wie folgt zugeordnet: Der niedrigste Wert v · apos erhält das Perzentil 1/Mk , der zweitniedrigste das Perzentil 2/Mk , der drittniedrigste das Perzentil 3/Mk und der höchste das Perzentil Mk /Mk = 100 %. (v · apos)k _[95] ist der Wert (v · apos ) j,k mit j/Mk = 95 %. Wenn j/Mk = 95 % nicht erreicht/eingehalten werden kann, ist (v · apos ) k _[95] durch lineare Interpolation zwischen den aufeinander folgenden Stichproben j und j + 1 bei j/Mk < 95 % und (j + 1)/Mk > 95 % zu berechnen. Die relative positive Beschleunigung für jedes Geschwindigkeitsintervall ist wie folgt zu berechnen: RPAk = Σ j (Δt · (v · apos ) j,k )/Σ idi,k , j = 1 bis Mk,i = 1 bis Nk,k = u,r,m Dabei gilt: RPAk ist die relative positive Beschleunigung für die innerorts, außerorts und auf Autobahnen gefahrenen Anteile [m/s2 oder kWs/(kg*km)]
4. ÜBERPRÜFUNG DER GÜLTIGKEIT EINER FAHRT 4.1.1. Überprüfung von v*apos_[95] pro Geschwindigkeitsintervall (bei v in [km/h]) Wenn und
zutreffen, ist die Fahrt ungültig. Wenn 4.1.2. Überprüfung der RPA pro Geschwindigkeitsintervall Wenn Wenn Anlage 7b Verfahren zur Ermittlung des kumulierten positiven Höhenunterschieds einer Fahrt 1. EINLEITUNG In diesem Anhang wird das Verfahren zur Bestimmung der Höhe des kumulierten positiven Höhenunterschieds einer RDE-Fahrt beschrieben. 2. ZEICHEN
3. ALLGEMEINE ANFORDERUNGEN Der kumulierte positive Höhenunterschied einer RDE-Fahrt wird anhand von drei Parametern ermittelt: der korrigierten momentanen Fahrzeughöhe hGPS,i [m über dem Meeresspiegel], mit GPS gemessen, der momentanen Fahrzeuggeschwindigkeit v i [km/h], aufgezeichnet mit einer Frequenz von 1 Hz, und der entsprechenden seit Prüfbeginn vergangenen Zeit t [s]. 4. BERECHNUNG DES KUMULIERTEN POSITIVEN HÖHENUNTERSCHIEDS 4.1. Allgemeines Der kumulierte positive Höhenunterschied einer RDE-Fahrt wird durch ein dreistufiges Verfahren wie folgt berechnet: i) Kontrolle der Datenqualität und grundsätzliche Überprüfung der Datenqualität, ii) Korrektur der momentanen Fahrzeughöhendaten und iii) Berechnung des kumulierten positiven Höhenunterschieds. 4.2. Kontrolle und grundsätzliche Überprüfung der Datenqualität Die Daten zur momentanen Fahrzeuggeschwindigkeit sind auf Vollständigkeit zu prüfen. Die Korrektur von fehlenden Daten ist zulässig, wenn Lücken innerhalb der Anforderungen nach Nummer 7 der Anlage 4 bleiben; andernfalls sind die Prüfergebnisse für ungültig zu erklären. Die Daten zur momentanen Fahrzeughöhe sind auf Vollständigkeit zu prüfen. Datenlücken sind durch Dateninterpolation zu füllen. Die Richtigkeit der interpolierten Daten ist anhand einer topografischen Karte zu überprüfen. Es wird empfohlen, interpolierte Daten zu korrigieren, wenn folgende Bedingung zutrifft: |hGPS(t) – hmap(t)| > 40 m Die Höhenkorrektur ist wie folgt anzuwenden: h(t) = hmap(t) Dabei gilt:
4.3. Korrektur der momentanen Fahrzeughöhendaten Die Höhe h(0) bei Beginn der Fahrt bei d(0) ist per GPS zu ermitteln und anhand einer topografischen Karte auf Richtigkeit zu überprüfen. Die Abweichung darf nicht größer als 40 m sein. Alle Daten zur momentanen Fahrzeughöhe h(t) sind zu korrigieren, wenn folgende Bedingung zutrifft: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) Die Höhenkorrektur ist wie folgt anzuwenden: hcorr(t) = hcorr (t-1) Dabei gilt:
Nach Abschluss des Korrekturverfahrens wird ein geeigneter Satz von Höhendaten erstellt. Dieser Datensatz wird für die endgültige Berechnung des kumulierten positiven Höhenunterschieds gemäß Nummer 4.4 verwendet. 4.4. Endgültige Berechnung des kumulierten positiven Höhenunterschieds 4.4.1. Festlegung einer einheitlichen räumlichen Auflösung Die während einer Fahrt zurückgelegte Gesamtstrecke dtot [m] ist als Summe der momentanen Strecken d i zu ermitteln. Die momentane Strecke d i ist zu ermitteln als:
Dabei gilt:
Der kumulierte positive Höhenunterschied ist anhand von Daten mit einer konstanten räumlichen Auflösung von 1 m, beginnend mit der ersten Messung bei Beginn einer Fahrt d(0) zu errechnen. Die diskreten Datenpunkte bei einer Auflösung von 1 m gelten als Wegmarken und werden durch einen bestimmten Streckenwert d (z. B. 0, 1, 2, 3 m…) und die ihm entsprechende Höhe h(d) [m über dem Meeresspiegel] definiert. Die Höhe jeder diskreten Wegmarke d ist durch Interpolation der momentanen Höhe hcorr(t) wie folgt zu berechnen:
Dabei gilt:
4.4.2. Zusätzliche Datenglättung Die für jede diskrete Wegmarke erhaltenen Höhendaten sind mittels eines zweistufigen Verfahrens zu glätten; d a und d e bezeichnen den ersten beziehungsweise letzten Datenpunkt (Abbildung 1). Die erste Glättung ist wie folgt anzuwenden:
h int,sm,1(d) = h int,sm,1(d – 1 m) + road grade,1(d), d = da + 1 to de h int,sm,1(da ) = hint (da ) + road grade,1(da ) Dabei gilt:
Die zweite Glättung ist wie folgt anzuwenden:
Dabei gilt:
Abbildung 1 Darstellung des Verfahrens zur Glättung der interpolierten Höhenlagensignale 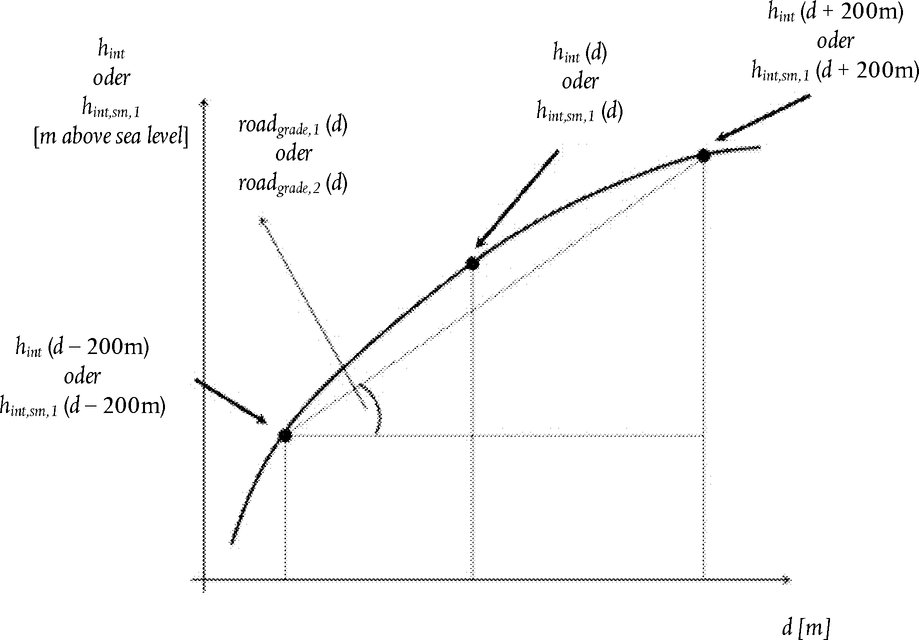
4.4.3. Berechnung des Endergebnisses Der kumulierte positive Höhenunterschied einer Fahrt wird durch Integration aller positiven interpolierten und geglätteten Straßenneigungen berechnet, d. h. roadgrade,2(d). Das Ergebnis sollte anhand der Gesamtprüfstrecke d tot normalisiert und in kumulierten Höhenmetern je einhundert Kilometer Strecke ausgedrückt werden. 5. ZAHLENBEISPIEL In den Tabellen 1 und 2 werden die Schritte gezeigt, die vorgenommen werden, um anhand der während einer PEMS-Prüfung auf der Straße gewonnenen Daten den positiven Höhenunterschied zu berechnen. Der Kürze halber wird hier ein Auszug von 800 m und 160 s vorgestellt. 5.1. Kontrolle und grundsätzliche Überprüfung der Datenqualität Die Kontrolle und grundsätzliche Überprüfung der Datenqualität erfolgt in zwei Schritten. Zuerst werden die Fahrzeuggeschwindigkeitsdaten auf Vollständigkeit überprüft. In dem vorliegenden Datensatz werden keine Lücken hinsichtlich der Fahrzeuggeschwindigkeit entdeckt (siehe Tabelle 1). Als zweites werden die Höhendaten auf Vollständigkeit geprüft; in der Stichprobe fehlen die Höhendaten zu Sekunden 2 und 3. Die Lücken werden gefüllt, indem das GPS-Signal interpoliert wird. Darüber hinaus wird die GPS-Höhe anhand einer topographischen Karte überprüft; diese Prüfung umfasst die Höhe h(0) zu Beginn der Fahrt. Höhendaten für die Sekunden 112-114 werden auf der Grundlage der topografischen Karte berichtigt, damit folgende Bedingung erfüllt wird: hGPS(t) – hmap(t) < – 40 m Nach Durchführung der Datenüberprüfung erhält man die Daten in der fünften Spalte h(t). 5.2. Korrektur der momentanen Fahrzeughöhendaten Im nächsten Schritt werden die Höhendaten h(t) der Sekunden 1 bis 4, 111 bis 112 und 159 bis 160 unter Annahme der Höhenwerte der Sekunden 0, 110 beziehungsweise 158 korrigiert, da folgende Bedingung gilt: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) Nach Durchführung der Datenkorrektur erhält man die Daten hcorr(t) in der sechsten Spalte. Die Auswirkungen der angewandten Überprüfungs- und Korrekturmaßnahmen an den Höhendaten werden in Abbildung 2 dargestellt. 5.3. Berechnung des kumulierten positiven Höhenunterschieds 5.3.1. Festlegung einer einheitlichen räumlichen Auflösung Die momentane Strecke di wird berechnet, indem die in km/h gemessene momentane Fahrzeuggeschwindigkeit durch 3,6 geteilt wird (Spalte 7 in Tabelle 1). Die Höhendaten werden neu berechnet, um eine gleichmäßige räumliche Auflösung von 1 m zu erhalten; so ergeben sich diskrete Wegmarken d (Spalte 1 in Tabelle 2) mit den entsprechenden Höhenwerten hint(d) (Spalte 7 in Tabelle 2). Die Höhe jeder diskreten Wegmarke d ist durch Interpolation der momentanen Höhe hcorr(t) wie folgt zu berechnen:
5.3.2. Zusätzliche Datenglättung In Tabelle 2 sind die erste und die letzte diskrete Wegmarke folgende: d a = 0 m beziehungsweise d e = 799 m. Die Höhendaten einer jeden diskreten Wegmarke sind mittels eines zweistufigen Verfahrens zu glätten. Die erste Glättung besteht aus:
ausgewählt zum Nachweis der Glättung für d ≤ 200m
ausgewählt zum Nachweis der Glättung für 200m < d < (599m)
ausgewählt zum Nachweis der Glättung für d ≥ (599m) Die geglättete und interpolierte Höhe wird wie folgt berechnet: h int,sm,1(0) = hint (0) + road grade,1(0) = 120,3 + 0,0033 ≈ 120,3033 m h int,sm,1(799) = h int,sm,1(798) + road grade,1(799) = 121,2550 – 0,0220 = 121,2330 m Zweite Glättung:
ausgewählt zum Nachweis der Glättung für d ≤ 200m
ausgewählt zum Nachweis der Glättung für 200m < d < (599)
ausgewählt zum Nachweis der Glättung für d ≥ (599m) 5.3.3. Berechnung des Endergebnisses Der kumulierte positive Höhenunterschied einer Fahrt wird durch Integration aller positiven interpolierten und geglätteten Straßenneigungen berechnet, d. h. roadgrade,2(d). Im dargestellten Beispiel war die gesamte zurückgelegte Strecke dtot = 139,7 km und alle positiven interpolierten und geglätteten Straßenneigungen beliefen sich auf 516 m. Somit ergab sich ein kumulierter positiver Höhenunterschied von 516 × 100/139,7 = 370 m/100 km. Tabelle 1 Korrektur der momentanen Fahrzeughöhendaten
Tabelle 2 Berechnung der Straßenneigung
Abbildung 2 Auswirkung der Datenüberprüfung und -korrektur — Mit GPS gemessenes Höhenprofil hGPS(t), Höhenprofil anhand topografischer Karte hmap(t), nach Kontrolle und grundsätzlicher Überprüfung der Datenqualität erlangtes Höhenprofil h(t) und Korrektur hcorr(t) der Daten in Tabelle 1 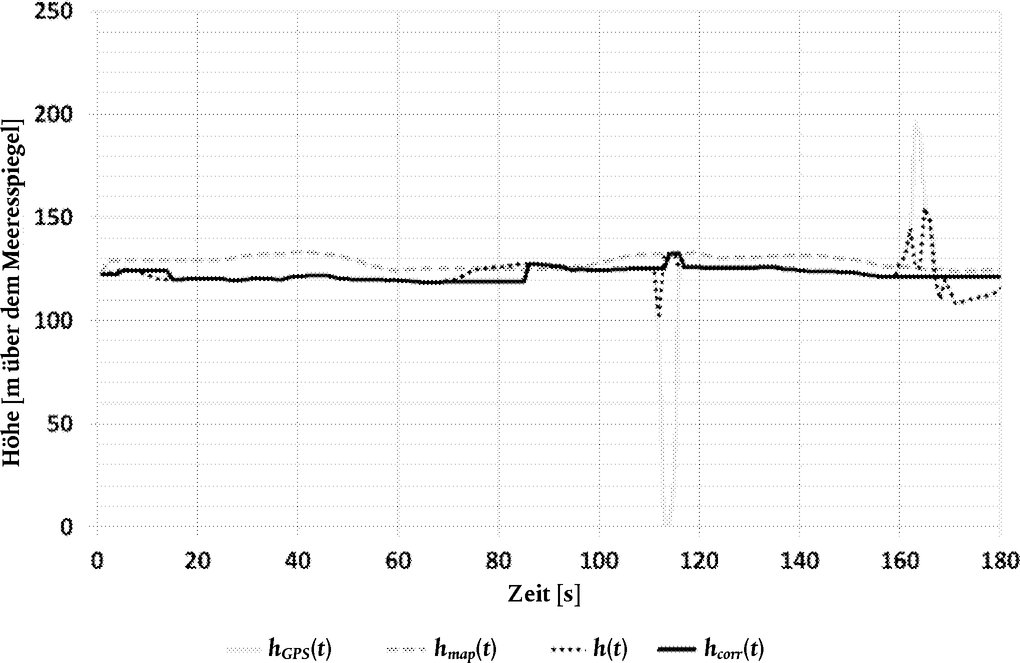
Abbildung 3 Vergleich zwischen korrigiertem Höhenprofil hcorr(t) und der geglätteten und interpolierten Höhe hint,sm,1 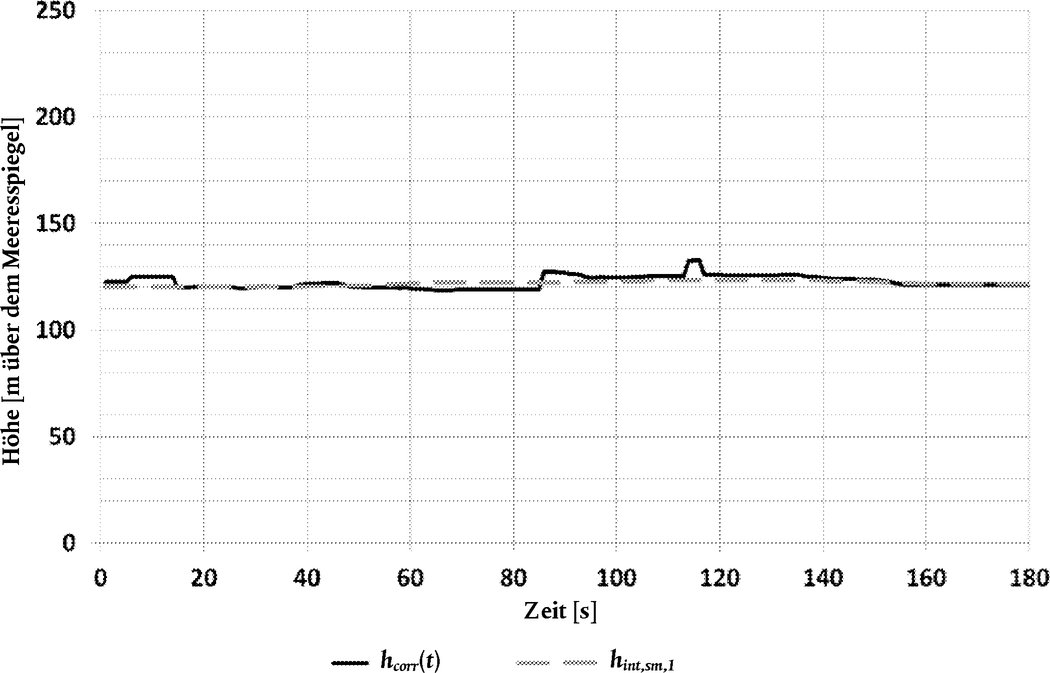
Tabelle 2 Berechnung des positiven Höhenunterschieds
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 wie folgt berechnet werden:
wie folgt berechnet werden: ,
, 

 und
und  zutreffen, ist die Fahrt ungültig.
zutreffen, ist die Fahrt ungültig. und
und  zutreffen, ist die Fahrt ungültig.
zutreffen, ist die Fahrt ungültig. und RPA
und RPA















(1) Die CO-Emissionen sind bei RDE-Prüfungen zu messen und aufzuzeichnen.
(2) Die CO-Emissionen sind bei RDE-Prüfungen zu messen und aufzuzeichnen.